|
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ, ą║ą░čüą░čÄčēąĄą╣čüčÅ čüą╗čāąČą▒čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Service ąĖą╗ąĖ ą╝ąŠą┤čāą╗čī Power Management, PM) - čĆą░ąĘą┤ąĄą╗ "POWER MANAGEMENT MODULE" ąĖąĘ ą┤ą░čéą░čłąĖčéą░ [1]. ąŁčéą░ čüą╗čāąČą▒ą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ SSL (System Services Library) ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin. ąĀą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ąŠą┐čĆąŠčüčŗ:
ŌĆó ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą╝ąŠą┤čāą╗čī PM - ą▒čŗčüčéčĆčŗą╣ čüčéą░čĆčé
ŌĆó Power Management API
ŌĆó ą¤čāą▒ą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ PM
ŌĆó ą£ą░ą║čĆąŠčüčŗ ą╝ąŠą┤čāą╗čÅ PM
ą£ąŠą┤čāą╗čī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (power management, ą┤ą░ą╗ąĄąĄ ą┐čĆąŠčüč鹊 čüąŠą║čĆą░čēąĄąĮąĮąŠ PM) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ą║ąŠ ą▓čüąĄą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ (dynamic power management):
ŌĆó ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░ (full-on, active, sleep, deep sleep ąĖ hibernate) ą▓ ą┤čĆčāą│ąŠą╣.
ŌĆó ąöąĖąĮą░ą╝ąĖč湥čüą║ą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤čüčéčĆąŠąĄąĮąŠ ą┐ąŠą┤ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝.
ŌĆó ąĪąŠą▓ą╝ąĄčüčéąĮąŠ čü ą╝ąŠą┤čāą╗ąĄą╝ EBIU ą╝ąŠą┤čāą╗čī PM čĆą░ąĘčĆąĄčłą░ąĄčé ą┐ąŠą┤čüčéčĆąŠą╣ą║čā ąŠą┐čåąĖą╣ SDRAM ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ (SCLK), čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┐ąŠą╗čāč湥ąĮąĖąĄ ąĮą░ąĖą╗čāčćčłąĄą│ąŠ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ ą┤ą╗čÅ ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą╝ąŠą┤čāą╗čÄ EBIU čüą╝. čĆą░ąĘą┤ąĄą╗ "External Bus Interface Unit Module" ą▓ [1], ą░ čéą░ą║ąČąĄ [5].
ą£ąŠą┤čāą╗čī PM ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 2 čüčéčĆą░č鹥ą│ąĖąĖ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čćą░čüč鹊čé čÅą┤čĆą░ (core clock, CCLK, ąŠąĮą░ ąČąĄ čćą░čüč鹊čéą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░) ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ (system clock, SCLK, ąŠąĮą░ ąČąĄ čćą░čüč鹊čéą░ čłąĖąĮčŗ):
ŌĆó ąöą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ CCLK čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ čüą░ą╝čāčÄ ą▓čŗčüąŠą║čāčÄ ą┤ąŠą┐čāčüčéąĖą╝čāčÄ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čćą░čüč鹊čéčā. ą¦ą░čüč鹊čéą░ čüąĖčüč鹥ą╝čŗ SCLK čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ŌĆó ąöą╗čÅ ąĖą╝ąĄčÄčēąĄą╣čüčÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čćą░čüč鹊čé CCLK ąĖ SCLK ą▒čāą┤čāčé ą▓čŗą▒čĆą░ąĮčŗ ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą▒ą╗ąĖąĘą║ąĖąĄ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĮąĖą╝ąĖ ą▒čāą┤ąĄčé ą┐ąŠą┤čüčéčĆąŠąĄąĮ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ąÆ ąŠą▒ąŠąĖčģ čüą╗čāčćą░čÅčģ ąĮą░ ą▓čüąĄčģ čüčéą░ą┤ąĖčÅčģ ąĮą░čüčéčĆąŠąĄą║ ą┤ąĄą╗ą░čÄčéčüčÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ, ą│ą░čĆą░ąĮčéąĖčĆčāčÄčēąĖąĄ, čćč鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮąĄ ą▒čāą┤ąĄčé ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĖą╗ąĖ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮ. ąÆ čĆą░ąĘą┤ąĄą╗ąĄ "ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą╝ąŠą┤čāą╗čī PM - ą▒čŗčüčéčĆčŗą╣ čüčéą░čĆčé" ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čüčéą░ą┤ąĖąĖ ą▒ą░ąĘąŠą▓čŗčģ ąŠą┐ąĄčĆą░čåąĖą╣, čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ PM.
ą£ąŠą┤čāą╗čī PM ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮąĄą┤ą▓čāčüą╝čŗčüą╗ąĄąĮąĮčāčÄ čüąĖčüč鹥ą╝čā čüąŠą│ą╗ą░čłąĄąĮąĖčÅ ąĖą╝ąĄąĮąŠą▓ą░ąĮąĖą╣, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą║ąŠąĮčäą╗ąĖą║č鹊ą▓ čü ą┤čĆčāą│ąĖą╝ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ąĖ ą║ą░ą║ ąŠčé Analog Devices, čéą░ą║ ąĖ ąŠčé ą┤čĆčāą│ąĖčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣ enum, ą╝ą░ą║čĆąŠąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ #define ąĖ ąŠą┐ąĄčĆą░č鹊čĆčŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čéąĖą┐ąŠą▓ typedef ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐čĆąĄčäąĖą║čü ADI_PWR_, ą░ čäčāąĮą║čåąĖąĖ ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ ą┐čĆąĄčäąĖą║čü adi_pwr_ ą▓ ąĮąĖąČąĮąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ.
ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čüčāčēąĄčüčéą▓čāąĄčé 2 ą▓ąĄčĆčüąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ. ąÆ č鹥ą║čāčēąĄą╣ ą▓ąĄčĆčüąĖąĖ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ VisualDSP++ ąŠąĮąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅą╝ ąŠčéą╗ą░ą┤ą║ąĖ (debug) ąĖ čĆąĄą╗ąĖąĘą░ (release). ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ąŠą▒čŗčćąĮčŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ debug, čäčāąĮą║čåąĖąĖ API ą▓čŗą┐ąŠą╗ąĮčÅčÄčé ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą░čĆą│čāą╝ąĄąĮč鹊ą▓ ąĖ čüąŠąŠą▒čēą░čÄčé ąŠą▒ ąŠčłąĖą▒ą║ą░čģ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ ą║ąŠą┤ą░ą╝ąĖ ą▓ąŠąĘą▓čĆą░čéą░, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ąÆ ą▓ąĄčĆčüąĖąĖ release ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čäčāąĮą║čåąĖą╣ ą▓ąŠąĘą▓čĆą░čéčÅčé ąŠą┤ąĖąĮ ąĖąĘ 2 ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░: ADI_PWR_RESULT_SUCCESS ą┐čĆąĖ čāčüą┐ąĄčłąĮąŠą╝ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ, ąĖą╗ąĖ ADI_PWR_RESULT_NOT_INITIALIZED ą║ąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ.
ą¦č鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąōąĄčĆčåčŗ (Hz) ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ąĄą┤ąĖąĮąĖčå ąĘąĮą░č湥ąĮąĖą╣ čćą░čüč鹊čé, ą░ ąĮąĄ ą╝ąĄą│ą░ą│ąĄčĆčåčŗ (MHz). ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą▓čĆąĄąĘą║čā čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_pwr_Init.
[ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą╝ąŠą┤čāą╗čī PM - ą▒čŗčüčéčĆčŗą╣ čüčéą░čĆčé]
ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąĖą╝ąĄčĆ ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ PM ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ 600 ą£ąōčå ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF533 ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ EZ-KIT Lite board, čćč鹊ą▒čŗ ąŠąĮ čĆą░ą▒ąŠčéą░ą╗ ąĮą░ ąĘą░ą┤ą░ąĮąĮčŗčģ čćą░čüč鹊čéą░čģ čÅą┤čĆą░ ąĖ čłąĖąĮčŗ (CCLK ąĖ SCLK), ąĖą╗ąĖ čćč鹊ą▒čŗ ąŠąĮ čüąĮąĖąĘąĖą╗ čüą▓ąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą┐čāč鹥ą╝ čüąĮąĖąČąĄąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ąŠ 0.95V.
ą©ą░ą│ 1: ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ EBIU ą┤ą╗čÅ ąĮą░čüčéčĆąŠąĄą║ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SDRAM, ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāą╣č鹥 ą╝ąŠą┤čāą╗čī EBIU ą▓čŗąĘąŠą▓ąŠą╝ adi_ebiu_Init(). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą╝ąŠą┤čāą╗čÄ EBIU čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "External Bus Interface Unit Module" [1].
ą©ą░ą│ 2: ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāą╣č鹥 ą╝ąŠą┤čāą╗čī PM ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_pwr_Init, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ ąĄą╣ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ADSP-BF533 EZ-KIT Lite.
ADI_PWR_COMMAND_PAIR power_init_table[] =
{
// ąÆą░čĆąĖą░ąĮčé 600 MHz ADSP-BF533:
{ ADI_PWR_CMD_SET_PROC_VARIANT, (void*)ADI_PWR_PROC_BF533SKBC600 },
// ą▓ ą║ąŠčĆą┐čāčüąĄ MBGA:
{ ADI_PWR_CMD_SET_PACKAGE, (void*)ADI_PWR_PACKAGE_MBGA },
// ą▓ąĮąĄčłąĮąĄąĄ ą┐ąĖčéą░ąĮąĖąĄ ą┤ą╗čÅ čĆąĄą│čāą╗čÅč鹊čĆą░ 3.3V:
{ ADI_PWR_CMD_SET_VDDEXT, (void*)ADI_PWR_VDDEXT_330 },
// ą▓čģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ą║ą▓ą░čĆčåą░ 25 ą£ąōčå:
{ ADI_PWR_CMD_SET_CLKIN, (void*) 25 },
// ą╝ą░čĆą║ąĄčĆ ą║ąŠąĮčåą░ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤:
{ ADI_PWR_CMD_END, 0 }
};
adi_pwr_Init(power_init_table);
ą©ą░ą│ 3: ą▓čŗą▒ąĄčĆąĖč鹥 čüčéčĆą░č鹥ą│ąĖčÄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēąĖąĄ čüąĄą│ą╝ąĄąĮčéčŗ ą║ąŠą┤ą░ ą┐ąŠą║ą░ąČčāčé, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą╝ąŠą┤čāą╗čī PM ą┤ą╗čÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ąĖą╗ąĖ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ.
ą×ą┐čéąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą╝ąŠą┤čāą╗čī PM čāčüčéą░ąĮąŠą▓ąĖčé čćą░čüč鹊čéčŗ čÅą┤čĆą░ ąĖ čłąĖąĮčŗ ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ.
adi_pwr_SetFreq (0, /* čćą░čüč鹊čéą░ čÅą┤čĆą░ (CCLK) */
0, /* čćą░čüč鹊čéą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (SCLK) */
ADI_PWR_DF_ON /* ąĮąĄ ąĮą░čüčéčĆą░ąĖą▓ą░čéčī ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĄą╗ąĖč鹥ą╗čī PLL */);
ą×ą┐čéąĖą╝ą░ą╗čīąĮąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ. ąĪą╗ąĄą┤čāčÄčēąĖąĄ ąŠą┐ąĄčĆą░č鹊čĆčŗ ą┤ą░čÄčé ąĘą░ą┤ą░ąĮąĖąĄ ą╝ąŠą┤čāą╗čÄ PM čāčüčéą░ąĮąŠą▓ąĖčéčī čéą░ą║ąĖąĄ čćą░čüč鹊čéčŗ čÅą┤čĆą░ ąĖ čłąĖąĮčŗ, čćč鹊ą▒čŗ ąŠąĮąĖ ą▒čŗą╗ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗ ą┤ą╗čÅ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 0.85 V.
adi_pwr_SetMaxFreqForVolt (ADI_PWR_VLEV_085);
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL ą┤ą╗čÅ ą┤ą▓čāčģčŖčÅą┤ąĄčĆąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ ąŠą▒ą░ čÅą┤čĆą░ ą▒čŗą╗ąĖ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą║ čüąŠčüč鹊čÅąĮąĖčÄ ąŠąČąĖą┤ą░ąĮąĖčÅ (IDLE state), ą║ąŠą│ą┤ą░ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ PLL ąĖ VR. ąöą▓čāčģčŖčÅą┤ąĄčĆąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĮą░ ą║ą░ąČą┤ąŠą╝ čÅą┤čĆąĄ, ąĖą╗ąĖ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ čÅą┤čĆąĄ. ąÜąŠą│ą┤ą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠą▒ą░ čÅčĆą░, čéčĆąĄą▒čāąĄčéčüčÅ ą╝ąĄčģą░ąĮąĖąĘą╝ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čÅą┤ąĄčĆ, čćč鹊ą▒čŗ ąŠąĮąĖ ą┐ąĄčĆąĄčłą╗ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ IDLE, ąĖ ąŠčüčéą░ą▓ą░ą╗ąĖčüčī ą▓ ąĮąĄą╝, ą┐ąŠą║ą░ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čĆąĄą│ąĖčüčéčĆčŗ. ą£ąŠą┤čāą╗čī PM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĄčģą░ąĮąĖąĘą╝, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, čćč鹊ą▒čŗ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī čÅą┤čĆą░ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL. ąŁč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ ą▓ąŠą▓ą╗ąĄą║ą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ adi_pwr_Init() ąĮą░ ąŠą▒ąŠąĖčģ čÅą┤čĆą░čģ, ąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą║ąŠą╝ą░ąĮą┤čŗ ADI_PWR_CMD_SET_AUTO_SYNC_ENABLED čü NULL ą▓ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮčéą░, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ ą┤ą╗čÅ ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ADSP-BF561 EZ-KIT Lite.
ADI_PWR_COMMAND_PAIR power_init_table[] =
{
// 500 MHz ADSP-BF561:
{ ADI_PWR_CMD_SET_PROC_VARIANT, (void*)ADI_PWR_PROC_BF561SKBCZ500X },
// ą║ąŠčĆą┐čāčü MBGA:
{ ADI_PWR_CMD_SET_PACKAGE, (void*)ADI_PWR_PACKAGE_MBGA },
// ą▓ąĮąĄčłąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 3.3 V ą┤ą╗čÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ą┐ąĖčéą░ąĮąĖčÅ:
{ ADI_PWR_CMD_SET_VDDEXT, (void*)ADI_PWR_VDDEXT_330 },
// ą▓čģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ 30 ą£ąōčå:
{ ADI_PWR_CMD_SET_CLKIN, (void*) 30 },
// čĆą░ąĘčĆąĄčłąĖčéčī ą░ą▓č鹊čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ:
{ ADI_PWR_CMD_SET_AUTO_SYNC_ENABLED, NULL },
// ą╝ą░čĆą║ąĄčĆ ą║ąŠąĮčåą░ čéą░ą▒ą╗ąĖčåčŗ ą║ąŠą╝ą░ąĮą┤:
{ ADI_PWR_CMD_END, 0 }
};
adi_pwr_Init(power_init_table);
ąóčĆąĄą▒ąŠą▓ą░ąĮąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąöą▓čāčģčŖčÅą┤ąĄčĆąĮčŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ąŠą┤ąĮąŠą╝ čÅą┤čĆąĄ, ą║ąŠą│ą┤ą░ ą▓č鹊čĆąŠąĄ čÅą┤čĆąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle). ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ EBIU čéčĆąĄą▒čāčÄčé ą┐ąŠą╝ąĄčēąĄąĮąĖčÅ ąŠą▒ąŠąĖčģ čÅą┤ąĄčĆ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ IDLE, ą║ąŠą│ą┤ą░ ą┤ąĄą╗ą░ąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ ąĖ ą╝ąĄąĮčÅčÄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ EBIU. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī EBIU ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ, ąĖ ą▒čŗą╗ą░ ąĖąĘą╝ąĄąĮąĄąĮą░ čćą░čüč鹊čéą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ, č鹊 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖą│ąĮą░ą╗ąŠą▓ SDRAM ą▒čāą┤čāčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤čüčéčĆąŠąĄąĮčŗ. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ SDRAM, ą╝ąĄčģą░ąĮąĖąĘą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čÅą┤ąĄčĆ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą▓čŗą▓ąŠą┤ąĖčé ąŠą▒ą░ čÅą┤čĆą░ ą▓ ąŠą▒ą╗ą░čüčéčī ą▓ąĮąĄ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ SDRAM, ą┐ąŠą║ą░ ąŠą▒ąĮąŠą▓ą╗čÅčÄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ SDRAM.
ąŚą┤ąĄčüčī ą▓ąŠąĘą╝ąŠąČąĮčŗ 2 čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ą░: čĆą░ą▒ąŠčéą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮą░ ąŠą┤ąĮąŠą╝ čÅą┤čĆąĄ, ąĖ čĆą░ą▒ąŠčéą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĮą░ ąŠą▒ąŠąĖčģ čÅą┤čĆą░čģ.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ čÅą┤čĆąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┤ąĮąŠ čÅą┤čĆąŠ (core A), ąĖ ą┤čĆčāą│ąŠąĄ čÅą┤čĆąŠ (core B) ąĘą░ą┐čĆąĄčēąĄąĮąŠ. ą¤čĆąĖ čüą▒čĆąŠčüąĄ čÅą┤čĆąŠ B ąŠčüčéą░ąĮąĄčéčüčÅ ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╝, ą┐ąŠą║ą░ ą║ąŠą┤, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ąĮą░ čÅą┤čĆąĄ A, ąĮą░ ąĘą░ą┐čāčüčéąĖčé čÅą┤čĆąŠ B ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ ą▒ąĖčéą░ 5 čĆąĄą│ąĖčüčéčĆą░ SICA_SYSCR. ąØą░ą┐čĆąĖą╝ąĄčĆ:
*pSICA_SYSCR &= 0xFFDF; // ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ 5, čćč鹊ą▒čŗ čÅą┤čĆąŠ B ąĮą░čćą░ą╗ąŠ čĆą░ą▒ąŠčéą░čéčī
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąĮąĄ čĆą░ąĘą▒čāą┤ąĖčé čÅą┤čĆąŠ B, ąĄčüą╗ąĖ ąŠąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ IDLE. ąŁč鹊 ą▓čüąĄą│ąŠ ą╗ąĖčłčī čĆą░ąĘčĆąĄčłąĖčé ą┤ą╗čÅ čÅą┤čĆą░ B ąĮą░čćąĖąĮą░čéčī ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ (startup). ą¦č鹊ą▒čŗ čĆą░ąĘą▒čāą┤ąĖčéčī čÅą┤čĆąŠ B ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ IDLE, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┤ąĮąŠ ąĖąĘ ą┤ą▓čāčģ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (supplemental interrupt 0 ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčéčüčÅ čüąĖčüč鹥ą╝ąĮčŗą╝ąĖ čüą╗čāąČą▒ą░ą╝ąĖ, ąŠčüčéą░ą▓ą╗čÅčÅ supplemental interrupt 1 ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣).
ą×ą┤ąĮąŠčÅą┤ąĄčĆąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ąĖąĘ flash-ą┐ą░ą╝čÅčéąĖ ąĖą╗ąĖ č湥čĆąĄąĘ ą┐ąŠčĆčé SPI, čćč鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖčéčī ą▓čŗčłąĄčāą┐ąŠą╝čÅąĮčāčéčŗą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▒ąĄąĘ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ ą┤ą░ą╗čīąĮąĄą╣čłąĄą│ąŠ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ą░. ą×ą┤ąĮą░ą║ąŠ čüąĄčüčüąĖčÅ čŹą╝čāą╗čÅč鹊čĆą░ ą▓ VisualDSP++ ąĮąĄąĖąĘą▒ąĄąČąĮąŠ čĆą░ąĘą▒čāą┤ąĖčé čÅą┤čĆąŠ B. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą▓ąŠąĘą▓čĆą░čéąĖčéčī čÅą┤čĆąŠ B ą▓ ąĘą░ą┐čĆąĄčēąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, čćč鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL. ąĢčüčéčī 2 čüą┐ąŠčüąŠą▒ą░ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čŹč鹊. ą¤čĆąŠčüč鹥ą╣čłąĖą╣ ąĖąĘ ąĮąĖčģ čüąŠčüč鹊ąĖčé ą▓ ąĘą░ą┐čāčüą║ąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą║ąŠą┤ą░ ąĮą░ čÅąĘčŗą║ąĄ C ąĮą░ čÅą┤čĆąĄ B:
void main()
{
while(1)
{
asm("IDLE;");
}
}
ąÆčüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čÅą┤čĆąŠ B ą┐čĆąŠčüąĮąĄčéčüčÅ (ąĖąĘ-ąĘą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL, ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╣ čüą╗čāąČą▒ąŠą╣ PM), ąŠąĮąŠ ą▒čāą┤ąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠą╝ąĄčēąĄąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ IDLE.
ąöčĆčāą│ąŠą╣ ą╝ąĄč鹊ą┤ čüąŠčüč鹊ąĖčé ą▓ ąĘą░ą┐čĆąĄč鹥 ą▒ąĖčéą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé PLL (PLL wakeup bit) ą▓ čĆąĄą│ąĖčüčéčĆąĄ SICB_IWR0, ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ IDLE. ąĢčüą╗ąĖ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ąĮą░ čÅąĘčŗą║ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░, č鹊 čüą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮ ą▓ ą║ąŠą┤ ąĘą░ą┐čāčüą║ą░ (startup code):
#include < defBF561.h >
.section program;
start:
P0.H = HI(SICB_IWR0); P0.L = LO(SICB_IWR0);
R0 = 0;
[P0] = R0;
IDLE;
.start.end:
.global start;
.type start,STT_FUNC;
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ąŠą▒ąŠąĖčģ čÅą┤čĆą░čģ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąŠą▒ą░ čÅą┤čĆą░ ą▓čŗą┐ąŠą╗ąĮčÅčÄčé ą║ąŠą┤. ą»ą┤čĆą░ą╝ ąĮčāąČąĮąŠ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ąŠą▒ą░ čÅą┤čĆą░ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ IDLE ąĖ, ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ, ąĮąĄ ą▒čŗą╗ąŠ ą▓čŗčģąŠą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ąĖąĘ SDRAM, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ąŠą┐ąĖčüą░ąĮąŠ ą▓ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮčŗčģ ą▓čŗčłąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅčģ. ąŚą┤ąĄčüčī ąĄčüčéčī 2 ą▓čŗą▒ąŠčĆą░: 1) ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüą▓ąŠčÄ čüąŠą▒čüčéą▓ąĄąĮąĮčāčÄ čüčéčĆą░č鹥ą│ąĖčÄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĖą╗ąĖ 2) ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüčéčĆąŠąĄąĮąĮčāčÄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čāčÄ ą╝ąŠą┤čāą╗ąĄą╝ PM (čćč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣).
ą¦č鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüčéčĆąŠąĄąĮąĮčāčÄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ, ą▓ą║ą╗čÄčćąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ą░čĆčā ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ ą▓ čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ ą┤ą╗čÅ adi_pwr_Init() ąĮą░ ąŠą▒ąŠąĖčģ čÅą┤čĆą░čģ:
{ ADI_PWR_CMD_SET_AUTO_SYNC_ENABLED, NULL }
ąæčāą┤čāčćąĖ ą░ą║čéąĖą▓ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą╣, ą▓čüčéčĆąŠąĄąĮąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐ąŠą╗čāčćąĖčé 菹║čüą║ą╗čĹʹĖą▓ąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗čī ąĮą░ą┤ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ 0 ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčé ą▓ čåąĄą┐ąŠčćą║čā ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮą░ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ čāčĆąŠą▓ąĄąĮčī IVG čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ą¤čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąŁč鹊 ąĘą░čēąĖčéąĖčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąĄąČą┤čā čÅą┤čĆą░ą╝ąĖ. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 1 ą▓čüąĄ ąĄčēąĄ ąŠčüčéą░ąĄčéčüčÅ ą┤ąŠčüčéčāą┐ąĮčŗą╝ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ąĮąĄ čüąĖčüč鹥ą╝ąĮčŗčģ čüą╗čāąČą▒ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čÅą┤ąĄčĆ. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ, čćč鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (čüą╝. čéą░ą▒ą╗ąĖčåčā 3-1).
ąóą░ą▒ą╗ąĖčåą░ 3-1. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą░ą┤ą░ą┐čéą░čåąĖąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąÜąŠą╝ą░ąĮą┤ą░ ą┤ąŠčüčéčāą┐ąĮą░ ąĮą░ čÅą┤čĆąĄ A ąĖ ąĮą░ čÅą┤čĆąĄ B
|
| ADI_PWR_CMD_SET_SYNC_LOCK_VARIABLE |
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĘą░čģą▓ą░čéą░ (lock variable) ą▓ ą┐ą░ą╝čÅčéąĖ L2 ą║ą░ą║ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓čā ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĘą░čģą▓ą░čéą░ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ adi_pwr_lockvar). ą×ą▒čŗčćąĮąŠ čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ. |
| ąÜąŠą╝ą░ąĮą┤ą░ ą┤ąŠčüčéčāą┐ąĮą░ č鹊ą╗čīą║ąŠ ąĮą░ čÅą┤čĆąĄ B |
| ADI_PWR_CMD_SET_COREB_SUPP_INT0_IVG |
ąŚą░ą┤ą░ąĄčé čāčĆąŠą▓ąĄąĮčī IVG, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (supplemental interrupt) 0 ąĮą░ čÅą┤čĆąĄ B. ą×ą▒čŗčćąĮąŠ čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ. |
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą╝ąĄąČą┤čā čÅą┤čĆą░ą╝ąĖ. ąøčÄą▒ąŠąĄ čÅą┤čĆąŠ ą╝ąŠąČąĄčé ą┐čĆąĄčĆą▓ą░čéčī ą┤čĆčāą│ąŠąĄ čÅą┤čĆąŠ, ąĖčüą┐ąŠą╗čīąĘčāčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (supplemental interrupt). ąöą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF561 ąĄčüčéčī ą┤ą▓ą░ čéą░ą║ąĖčģ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ: 0 ąĖ 1. ą×ą▒čēą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čĆą░ąĘą╝ąĄčēąĄąĮą░ ą▓ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą╝ąĄąČą┤čā čÅą┤čĆą░ą╝ąĖ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą╝ąĄč鹊ą┤ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ čÅą┤čĆąŠ A ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ą╗ąŠ ą▓čüąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą┐ąĖčéą░ąĮąĖąĄą╝, čü čÅą┤čĆąŠą╝ B, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ąĮą░ ąŠčéą▓ąĄčé ąĮą░ čüąŠą▒čŗčéąĖąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 0, ą║ąŠč鹊čĆąŠąĄ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé čÅą┤čĆąŠ A. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čŹč鹊ą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ čüą░ą╝ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ PM. ąóą░ą▒ą╗ąĖčåą░ 3-2 ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ąóą░ą▒ą╗ąĖčåą░ 3-2. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąĄąČą┤čā čÅą┤čĆą░ą╝ąĖ.
| ą»ą┤čĆąŠ A |
ą»ą┤čĆąŠ B |
ąŚą░ą┐čāčüą║ą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 0, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąŠą▒čēčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąĘą░čģą▓ą░čéą░ adi_pwr_lockvar ąĖ ąČą┤ąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠčé čÅą┤čĆą░ B.
|
ą×čéą▓ąĄčćą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄą╝čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ 0 ą┐čāč鹥ą╝ ą▓čģąŠą┤ą░ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| ąŚą░ą┐čāčüą║ą░ąĄčé (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ą┐ąĄčĆą▓čāčÄ callback-čäčāąĮą║čåąĖčÄ. |
| ą¤čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé SDC. |
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ IDLE. |
| ą¤čĆąŠą▒čāąČą┤ą░ąĄčéčüčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ PLL wakeup ąĖ ąŠąČąĖą┤ą░ąĄčé ąŠčćąĖčüčéą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĘą░čģą▓ą░čéą░. |
| ąŚą░ą▓ąĄčĆčłą░ąĄčé ą┐čĆąŠčåąĄčüčü ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĘą░čģą▓ą░čéą░. |
ąŚą░ą┐čāčüą║ą░ąĄčé (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ą▓č鹊čĆčāčÄ callback-čäčāąĮą║čåąĖčÄ. |
ąÆčüčéčĆąŠąĄąĮąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ (Lock Variable) ąĖ čüąŠą│ą╗ą░čłąĄąĮąĖčÅ ąŠ ą╗ąĖąĮą║ąŠą▓ą║ąĄ. ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ adi_pwr_lockvar ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčéčüčÅ ą▓ čäą░ą╣ą╗ąĄ Blackfin \ lib \ src \ services \ pwr \ adi_pwr_lockvar.c čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
section ("l2_shared") testset_t adi_pwr_lockvar = 0;
ą│ą┤ąĄ ą▓čģąŠą┤ąĮą░čÅ čüąĄą║čåąĖčÅ ą┐ą░ą╝čÅčéąĖ l2_shared ą┐čĆąĖą▓čÅąĘą░ąĮą░ ą║ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĄą║čåąĖąĖ MEM_L2_SRAM ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ čäą░ą╣ą╗ą░čģ ąŠą┐ąĖčüą░ąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╗ąĖąĮą║ąĄčĆą░ (linker description files, .ldf).
ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ A čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ C/C++ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ ą▓ čüąĖčüč鹥ą╝ąĄ VisualDSP++ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin [2], ąĄčüčéčī ą┤ą▓ą░ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čüą┐ąŠčüąŠą▒ą░ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ ąŠą▒ąŠąĖčģ čÅą┤čĆą░čģ.
ŌĆó ą×ą┤ąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮą░ čÅą┤čĆąŠ, ą│ą┤ąĄ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗąĄ ą║ąŠą┤čŗ čüąŠą▒ąĖčĆą░čÄčéčüčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čÅą┤čĆą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ ą┐čĆąŠčģąŠą┤ąŠą▓ ą╗ąĖąĮą║ąĄčĆą░.
ŌĆó ą×ą┤ąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąĮą░ ą┤ą▓čāčģ čÅą┤čĆą░čģ, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą│čĆčāą┐ą┐ą░ ąĖąĘ 5 ą┐čĆąŠąĄą║č鹊ą▓, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┤ąĖąĮ ą┐čĆąŠčģąŠą┤ ą╗ąĖąĮą║ąĄčĆą░ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗčģ ą║ąŠą┤ąŠą▓ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓.
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čüą┐ąŠčüąŠą▒ ą┐čĆąĖą▓čÅąĘčŗą▓ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ ą┐ą░ą╝čÅčéąĖ L2, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąŠą▒ąŠąĖą╝ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ą╝ąĖ ą▒ąĄąĘ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąĪą┐ąŠčüąŠą▒ "ąŠą┤ąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮą░ čÅą┤čĆąŠ" čéčĆąĄą▒čāąĄčé ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą▒čŗą╗ą░ ą┐čĆąĖą▓čÅąĘą░ąĮą░ ąĮą░ ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ L2 ą▓ ą║ą░ąČą┤ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ąŁč鹊 ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┐ąĄčĆą░č鹊čĆą░ RESOLVE ą▓ čäą░ą╣ą╗ąĄ .ldf, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą░ą┤čĆąĄčüą░ čüąĖą╝ą▓ąŠą╗ą░ ą▓ ą┐ą░ą╝čÅčéąĖ, ąĮą░ąĘąĮą░č湥ąĮąĮąŠą╝ ą▓ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą╝ čäą░ą╣ą╗ąĄ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čÅą┤čĆą░.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗąĄ čäą░ą╣ą╗čŗ .ldf ą┤ą╗čÅ čÅą┤čĆą░ B čüąŠą┤ąĄčƹȹ░čé čüą╗ąĄą┤čāčÄčēąĄąĄ:
/* $VDSG< customize-shared-symbols > */
/* ąŁč鹊čé ą║ąŠą┤ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ, ąĄčüą╗ąĖ LDF ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĘą░ąĮąŠą▓ąŠ. */
/////////////////////////////////////////////////////////////
// ldf_shared_symbols
/* ą×ą┐ąĄčĆą░č鹊čĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┤ą╗čÅ ąŠą▒čēąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗčģ ą▓ čÅą┤čĆąĄ A.
** ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ.
*/
#if defined(OTHERCORE) /* OTHERCORE čŹč鹊 ą╝ą░ą║čĆąŠčü, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣
ą┤ą╗čÅ ąĖą╝ąĄąĮąĖ CoreA DXE */
#include < shared_symbols.h > /* ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ C runtime
ą┤ą╗čÅ ąŠą▒čēąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčé
ą╝ą░ą║čĆąŠčü OTHERCORE. */
#if 0
/* ą┐čĆąĖą╝ąĄčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┤ą╗čÅ ąŠą▒čēąĖčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ */
RESOLVE(_a_shared_datum, OTHERCORE)
#endif
#endif /* OTHERCORE */
/* $VDSG< customize-shared-symbols > */
ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ shared_symbols.h čüąŠą┤ąĄčƹȹĖčé ąŠą┐ąĄčĆą░č鹊čĆčŗ RESOLVE ą┤ą╗čÅ ąŠą▒čēąĖčģ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ C/C++, ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ services/services_shared_symbols.h, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąŠą┐ąĄčĆą░č鹊čĆčŗ RESOLVE ą┤ą╗čÅ ąŠą▒čēąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ čüąĖčüč鹥ą╝ąĮčŗčģ čüą╗čāąČą▒. ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čüąĖčüč鹥ą╝ąĮčŗąĄ čüą╗čāąČą▒čŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ąŠą▒čēąĖą╣ čüąĖą╝ą▓ąŠą╗ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ adi_pwr_lockvar.
ąÆčüąĄ, čćč鹊 čéčĆąĄą▒čāąĄčéčüčÅ, čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī OTHERCORE ą▓ ą▒ą╗ąŠą║ąĄ ąĮą░čüčéčĆąŠąĄą║ LDF, ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāąĄą╝ąŠą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą│ą┤ąĄ čŹč鹊 ą┐čĆąŠą▓ąĄčĆąĄąĮąŠ (ąĖą╗ąĖ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ č湥čĆąĄąĘ čüčéčĆą░ąĮąĖčåčā Link: LDF Preprocessing ąŠą║ąĮą░ ą┤ąĖą░ą╗ąŠą│ą░ ąĮą░čüčéčĆąŠąĄą║ ą┐čĆąŠąĄą║čéą░ (Project Options VisualDSP++). ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ ąŠą┤ąĮąŠą│ąŠ čÅą┤čĆą░ CoreA.dxe, č鹊 ą┤ą╗čÅ čÅą┤čĆą░ A ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ Release, č鹊 čüąŠčüąĄą┤ąĮąĄąĄ čü čŹčéąĖą╝ čÅą┤čĆąŠą╝ CoreB ą▓ ąĄą│ąŠ ą║ą░čéą░ą╗ąŠą│ąĄ ą┐čĆąŠąĄą║čéą░ čéčĆąĄą▒čāąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ OTHERCORE ą║ą░ą║ ..\CoreA\Release\CoreA.dxe. ą¤čĆąĖą╝ąĄčĆ:
#define OTHERCORE ..\CoreA\Release\CoreA.dxe#if defined(OTHERCORE)
...
ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĖ A čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ [2] ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą┐ąŠ ą╗ąĖąĮą║ąĄčĆčā ąĖ čāčéąĖą╗ąĖčéą░ą╝ čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ VisualDSP++ 5.0.
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ SDRAM ą┐ąĄčĆąĄą┤ ąĘą░ą│čĆčāąĘą║ąŠą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą│ąŠ ą║ąŠą┤ą░. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą║ąŠą┤ą░ (ąĖ/ąĖą╗ąĖ ą┤ą░ąĮąĮčŗčģ) ą▓ SDRAM ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą│čĆčāąĘą║ąĖ čéčĆąĄą▒čāčÄčé, čćč鹊ą▒čŗ čüąĮą░čćą░ą╗ą░ ą▒čŗą╗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ SDRAM) ą▒čŗą╗ ą┐čĆąŠąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SDRAM. ąŁč鹊 čüą╗čāčćą░ą╣ ą┤ą╗čÅ ą▓čüąĄčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą║čŹčłąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖąĮčüčéčĆčāą║čåąĖą╣ ąĖ/ąĖą╗ąĖ ą┤ą░ąĮąĮčŗčģ. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ adi_ebiu_Init() ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüą╗čāąČą▒čŗ EBIU ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
ąĢčüčéčī ą┤ą▓ą░ čüą┐ąŠčüąŠą▒ą░ ąĘą░ą│čĆčāąĘąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ čÅą┤čĆąŠ:
ŌĆó ą¦ąĄčĆąĄąĘ čüąĄčüčüąĖčÄ čŹą╝čāą╗čÅč鹊čĆą░ (ąŠčéą╗ą░ą┤čćąĖą║ą░ JTAG), ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ VisualDSP++.
ŌĆó ą¦ąĄčĆąĄąĘ ą┐ą░ą╝čÅčéčī FLASH ąĖą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ č湥čĆąĄąĘ ą┐ąŠčĆčé SPI, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ (ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ).
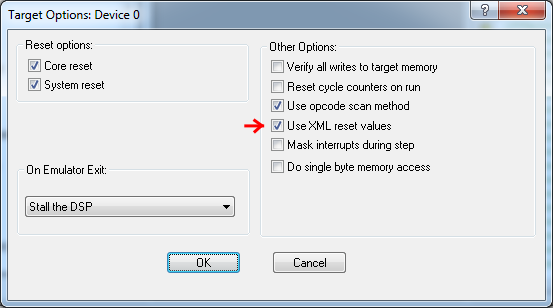
ąÆ ą┐ąĄčĆą▓ąŠą╝ čüą╗čāčćą░ąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓čŗą▒čĆą░ąĮąĮą░čÅ ąŠą┐čåąĖčÅ Use XML reset values ą▓ ąŠą║ąĮąĄ ą┤ąĖą░ą╗ąŠą│ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą▓ąŠą╣čüčéą▓ čåąĄą╗ąĄą▓ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (ą┤ąĖą░ą╗ąŠą│ Target Options, ą┤ąŠčüčéčāą┐ąĮčŗą╣ č湥čĆąĄąĘ ą╝ąĄąĮčÄ Settings, ą┐ąŠčÅą▓ą╗čÅčÄčēąĄąĄčüčÅ ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ čüąĄčüčüąĖąĖ ąŠčéą╗ą░ą┤ą║ąĖ, čüą╝. čüą║čĆąĖąĮčłąŠčéčŗ ąĮąĖąČąĄ).
ąóą░ą║ąČąĄ čéčĆąĄą▒čāąĄčéčüčÅ čāą║ą░ąĘą░čéčī ą╝ąĄčüč鹊 čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čäą░ą╣ą╗ą░ XML ą┤ą╗čÅ ąĘą░ą│čĆčāąČą░ąĄą╝ąŠą╣ čüąĄčüčüąĖąĖ ąŠčéą╗ą░ą┤ą║ąĖ (ą╝ąĄąĮčÄ Settings -> Session..., čüą╝. čüą║čĆąĖąĮčłąŠčéčŗ ąĮąĖąČąĄ).
ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 SDRAM ą║ąŠčĆčĆąĄą║čéąĮąŠ (ą┐čāčüčéčī ą┤ą░ąČąĄ ąĮąĄ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠ) ą▒čāą┤ąĄčé čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▓ SRAM ąĘą░ą│čĆčāąĘąĖčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖ ąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ. ąæčāą┤čāčćąĖ ąĘą░ą│čĆčāąČąĄąĮąĮčŗą╝, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüą╗čāąČą▒čŗ PM ąĖ EBIU ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 SDRAM ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠ.
ąÜąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮąĄ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĖąĘ čüąĄčüčüąĖąĖ 菹╝čāą╗čÅč鹊čĆą░, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĮą░ą┐ąĖčüą░čéčī ąĘą░ą│čĆčāąĘčćąĖą║, ą║ąŠč鹊čĆčŗą╣ čåąĄą╗ąĖą║ąŠą╝ čĆą░ąĘą╝ąĄčēą░ąĄčéčüčÅ ą▓ SRAM, ąĖ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé SDRAM, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮąŠ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ [4]. ąŁč鹊 ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ą╗ąŠą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą┐ąŠ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░čĆčÄ ąĖ čāčéąĖą╗ąĖčéčŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░ VisualDSP++ 5.0 [2], ą│ą┤ąĄ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĖą╝ąĄčĆ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ SDRAM (čüą╝. čéą░ą║ąČąĄ [3, 4]).
ąŁč鹊čé ą▒ą╗ąŠą║ ą║ąŠą┤ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ ą║ąŠą┤, ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĘą░ą│čĆčāąĘčćąĖą║čā č湥čĆąĄąĘ ąŠą┐čåąĖčÄ ŌĆōinit filename ąĖą╗ąĖ ą▓ ą┐ąŠą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ Load: Options ąĮą░ čüčéčĆą░ąĮąĖčåąĄ ą┤ąĖą░ą╗ąŠą│ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą▓ąŠą╣čüčéą▓ ą┐čĆąŠąĄą║čéą░ (Project Options) VisualDSP++. ąöą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą│ąŠ ą▒ą╗ąŠą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą┐čĆąŠąĄą║čé. ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠąĄą║čéą░ ą┤ą╗čÅ ą▒ą╗ąŠą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüą╝. ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠą┤ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ą║ą░čéą░ą╗ąŠą│ą░ Blackfin\ldr\init_code ą▓ ą┐ą░ą┐ą║ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ VisualDSP++. ąŚąĮą░č湥ąĮąĖčÅ, čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SDRAM ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ čäą░ą╣ą╗ą░ .xml ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ ADSP-BF533-proc.xml, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ System\Arch-Def ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ VisualDSP++.
ąÜąŠą│ą┤ą░ čéčĆąĄą▒čāčÄčéčüčÅ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ (ąŠčéą╗ąĖčćą░čÄčēąĖąĄčüčÅ ąŠčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ą╝ąĄčüč鹥 čü čüąĖčüč鹥ą╝ą░ą╝ąĖ ąŠčåąĄąĮąŠčćąĮčŗčģ ą┐ą╗ą░čé EZ-KIT Lite), ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┐čĆąĖą┤ąĄčéčüčÅ ą┐ąŠčĆą░ą▒ąŠčéą░čéčī ąĮą░ą┤ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣. ąÜąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĖąĘ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ VisualDSP++ č湥čĆąĄąĘ ąŠčéą╗ą░ą┤čćąĖą║, č鹊 ą╗ąĖą▒ąŠ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čäąĖčćčā Custom Board Support, ą┤ąŠčüčéčāą┐ąĮčāčÄ ą▓ VisualDSP++5.0 (ąŠą┐ąĖčüą░ąĮąĖąĄ čüą╝. ą▓ Help -> Graphical Environment -> Custom Board Support), ąĖą╗ąĖ ą┐čĆąŠčüč鹊 ąŠčéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čäą░ą╣ą╗ąĄ .xml ą┐ąŠčüą╗ąĄ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠą┐ąĖąĖ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą│ąŠ čäą░ą╣ą╗ą░.
[Power Management API]
ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (API) ą╝ąŠą┤čāą╗čÅ PM.
ążčāąĮą║čåąĖčÅ adi_pwr_AdjustFreq() ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ čÅą┤čĆą░ ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (CCLK ąĖ SCLK), čāą║ą░ąĘčŗą▓ą░čÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ čÅą┤čĆą░ ąĖ čüąĖčüč鹥ą╝čŗ CSEL ąĖ SSEL, ąĮą░čģąŠą┤čÅčēąĖąĄčüčÅ ą▓ ą┐ąŠą╗čÅčģ čĆąĄą│ąĖčüčéčĆą░ PLL_DIV. ą¤čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (ąĮąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ).
ADI_PWR_RESULT adi_pwr_AdjustFreq (ADI_PWR_CSEL csel,
ADI_PWR_SSEL ssel);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| csel |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_CSEL, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą▒čāą┤ąĄčé ą┐ąŠą┤ąĄą╗ąĄąĮą░ čćą░čüč鹊čéą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ (voltage core oscillator), čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĮąŠą▓čāčÄ čćą░čüč鹊čéčā čÅą┤čĆą░. ąŚąĮą░č湥ąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąĄą▓čŗčłą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ssel. ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ADI_PWR_CSEL. |
| ssel |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_SSEL, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą▒čāą┤ąĄčé ą┐ąŠą┤ąĄą╗ąĄąĮą░ čćą░čüč鹊čéą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ (voltage core oscillator), čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĮąŠą▓čāčÄ čćą░čüč鹊čéčā čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ. ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ADI_PWR_SSEL. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ą¤čĆąŠčåąĄčüčü ąĘą░ą▓ąĄčĆčłąĖą╗čüčÅ čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
| ADI_PWR_RESULT_INVALID_CSEL |
ąŻą║ą░ąĘą░ąĮąŠ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ CSEL. |
| ADI_PWR_RESULT_INVALID_SSEL |
ąŻą║ą░ąĘą░ąĮąŠ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ SSEL. |
| ADI_PWR_INVALID_CSEL_SSEL_COMBINATION |
ąŚąĮą░č湥ąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüčéčŗ čÅą┤čĆą░ (CSEL) ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąĘąĮą░č湥ąĮąĖąĄ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (SSEL), ąĖą╗ąĖ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čŹčéąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čāą║ą░ąĘą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ADI_PWR_CSEL_NONE ąĖ ADI_PWR_SSEL_NONE. |
ążčāąĮą║čåąĖčÅ adi_pwr_Control() čĆą░ąĘčĆąĄčłą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ ąĖą╗ąĖ čüčćąĖčéčŗą▓ą░čéčī ąĖčģ ąĘąĮą░č湥ąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čüą┐ąĖčüą║ąŠą▓ ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ (čüą╝. ą▓čĆąĄąĘą║čā ADI_PWR_COMMAND_PAIR), ąĘą░ą┤ą░ąĮąĮčŗčģ ąŠą┤ąĮąĖą╝ ąĖąĘ čéčĆąĄčģ čüą┐ąŠčüąŠą▒ąŠą▓:
1) ąæčāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮą░ ąŠą┤ąĮą░ ą┐ą░čĆą░ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ.
adi_pwr_Control (ADI_PWR_CMD_SET_INPUT_DELAY,
(void*)ADI_PWR_INPUT_DELAY_ENABLE);
2) ąæčāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮą░ čüčéčĆčāą║čéčāčĆą░ ADI_PWR_COMMAND_PAIR čü ąŠą┤ąĮąŠą╣ ą┐ą░čĆąŠą╣ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ.
ADI_PWR_COMMAND_PAIR cmd =
{
ADI_PWR_CMD_SET_INPUT_DELAY,
(void*)ADI_PWR_INPUT_DELAY_ENABLE,
};
adi_pwr_Control (ADI_PWR_CMD_PAIR, (void*)&cmd);
3) ąæčāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮą░ čéą░ą▒ą╗ąĖčåą░ ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ čéąĖą┐ą░ ą▓ ą▓ąĖą┤ąĄ čüą┐ąĖčüą║ą░ čüčéčĆčāą║čéčāčĆ ADI_PWR_COMMAND_PAIR. ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ ąĘą░ą┐ąĖčüčī ą▓ čüą┐ąĖčüą║ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čü ą║ąŠą╝ą░ąĮą┤ąŠą╣ ą┐čĆąĖąĘąĮą░ą║ą░ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čüą┐ąĖčüą║ą░ ADI_PWR_CMD_END.
ADI_PWR_COMMAND_PAIR table[] =
{
{ ADI_PWR_CMD_SET_INPUT_DELAY, (void*)ADI_PWR_INPUT_DELAY_ENABLE },
{ ADI_PWR_CMD_SET_OUTPUT_DELAY, (void*)ADI_PWR_OUTPUT_DELAY_ENABLE },
{ ADI_PWR_CMD_END, 0}
};
adi_pwr_Control(ADI_PWR_CMD_TABLE,(void*)table);
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓čĆąĄąĘą║čā ADI_PWR_COMMAND ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ą¤čāą▒ą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ PM", ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąŠą╗ąĮčŗą╣ čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ ąĖ čüą▓čÅąĘą░ąĮąĮčŗčģ čü ąĮąĖą╝ąĖ ąĘąĮą░č湥ąĮąĖą╣.
ADI_PWR_RESULT adi_pwr_Control (ADI_PWR_COMMAND Command,
void *Value);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| Command |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_COMMAND, ąŠąĘąĮą░čćą░čÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā. ąÜąŠą╝ą░ąĮą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüą╝čŗčüą╗ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą░čĆą│čāą╝ąĄąĮčéą░ ą║ąŠą╝ą░ąĮą┤čŗ Value. |
| Value |
ąóčĆąĄą▒čāąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, čüą╝. ą▓čĆąĄąĘą║čā ADI_PWR_COMMAND. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_BAD_COMMAND |
ąæčŗą╗ą░ čāą║ą░ąĘą░ąĮą░ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
| ADI_PWR_RESULT_INVALID_INPUT_DELAY |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čģąŠą┤ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ. |
| ADI_PWR_RESULT_INVALID_OUTPUT_DELAY |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ. |
| ADI_PWR_RESULT_INVALID_LOCKCNT |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ ąĘą░čģą▓ą░čéą░ PLL (PLL lock count). |
ążčāąĮą║čåąĖčÅ adi_pwr_GetConfigSize() ą▓ąŠąĘą▓čĆą░čéąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, čéčĆąĄą▒čāąĄą╝čŗčģ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ č鹥ą║čāčēąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĮąŠ č湥čĆąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą╝ą░ą║čĆąŠčüą░ ADI_PWR_SIZEOF_CONFIG. ąÆąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ adi_pwr_GetConfigSize ąĖ čŹč鹊ą│ąŠ ą╝ą░ą║čĆąŠčüą░ ADI_PWR_SIZEOF_CONFIG, ąŠą▒čŖąĄą┤ąĖąĮčÅąĄčé čĆą░ąĘą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠą┤čāą╗čÅ EBIU, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą▓čĆąĄą╝ąĄąĮąĖ ąĄą│ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ.
size_t adi_pwr_GetConfigSize (void);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: čĆą░ąĘą╝ąĄčĆ čüčéčĆčāą║čéčāčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ążčāąĮą║čåąĖčÅ adi_pwr_GetFreq() ą▓ąŠąĘą▓čĆą░čéąĖčé č鹥ą║čāčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čćą░čüč鹊čé CCLK, SCLK (čćą░čüč鹊čéą░ čÅą┤čĆą░ ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ), ą░ čéą░ą║ąČąĄ čćą░čüč鹊čéčā čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░.
ADI_PWR_RESULT adi_pwr_GetFreq (u32 *fcclk,
u32 *fsclk,
u32 *fvco);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| fcclk |
ąÉą┤čĆąĄčü čÅč湥ą╣ą║ąĖ, ą║čāą┤ą░ ąĮčāąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ CCLK (ąōčå). |
| fsclk |
ąÉą┤čĆąĄčü čÅč湥ą╣ą║ąĖ, ą║čāą┤ą░ ąĮčāąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ SCLK (ąōčå). |
| fvco |
ąÉą┤čĆąĄčü čÅč湥ą╣ą║ąĖ, ą║čāą┤ą░ ąĮčāąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čćą░čüč鹊čéčŗ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░ (ąōčå). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ą¤čĆąŠčåąĄčüčü ąĘą░ą▓ąĄčĆčłąĖą╗čüčÅ čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ą║ą░ą║ ą╝ąĮąĄ ą║ą░ąČąĄčéčüčÅ, ą▓ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čüąŠą┤ąĄčƹȹĖčéčüčÅ ąŠčłąĖą▒ą║ą░. ąŚą░ą║ą╗čÄčćą░ąĄčéčüčÅ ąŠąĮą░ ą▓ č鹊ą╝, čćč鹊 č鹥ą║čāčēąĖąĄ čćą░čüč鹊čéčŗ čÅą┤čĆą░ ąĖ čłąĖąĮčŗ (CCLK ąĖ SCLK) ą▓čŗčćąĖčüą╗čÅčÄčéčüčÅ ą▓ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ąĮąĄ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ PLL_CTL ąĖ PLL_DIV (ą║ą░ą║ čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī), ą░ ą┐ąŠč湥ą╝čā-č鹊 ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠą╗ąĄą╣ pll_ctl ąĖ pll_div čüčéčĆčāą║čéčāčĆčŗ adi_pwr_active_config. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąĖąĮąŠą│ą┤ą░ (ąĄčüą╗ąĖ adi_pwr_active_config ąĘą░ą┐ąŠą╗ąĮąĄąĮą░ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ), čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ čäčāąĮą║čåąĖčÅ adi_pwr_GetFreq ą▓čŗčćąĖčüą╗čÅąĄčé ąĮąĄą▓ąĄčĆąĮąŠ.
ąØąĄ ąĮą░čłąĄą╗ ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąĖ ą┐čĆąĖą╝ąĄčĆą░čģ ąŠą▒čŖčÅčüąĮąĄąĮąĖčÅ čŹč鹊ą│ąŠ čäą░ą║čéą░. ą¦č鹊ą▒čŗ čĆąĄčłąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā, čā ąĮą░čü ąĄčüčéčī ą┤ą▓ą░ ą▓ą░čĆąĖą░ąĮčéą░ - ą╗ąĖą▒ąŠ ą▓ąĮąĄčüčéąĖ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_GetFreq, ą║ąŠč鹊čĆą░čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╝ąŠą┤čāą╗ąĄ adi_pwr.c, ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą┐čĆąŠąĄą║č鹥 ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé, ą╗ąĖą▒ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┐ąŠą╗ąĮąĖčéčī ą┐ąŠą╗čÅ pll_ctl ąĖ pll_div čüčéčĆčāą║čéčāčĆčŗ adi_pwr_active_config. ą» ą▓čŗą▒čĆą░ą╗ ą▓č鹊čĆąŠą╣ ą▓ą░čĆąĖą░ąĮčé:
extern ADI_PWR_CONFIG adi_pwr_active_config;
// ą¤ąŠą╗čāč湥ąĮąĖąĄ čćą░čüč鹊čé PLL. ąæąĄąĘ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ čŹčéąĖčģ ą┐ąŠą╗ąĄą╣
// čäčāąĮą║čåąĖčÅ adi_pwr_GetFreq ąŠčéčĆą░ą▒ąŠčéą░ąĄčé ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ!
adi_pwr_active_config.pll_ctl = *(ADI_PWR_PLL_CTL_REG*)pPLL_CTL;
adi_pwr_active_config.pll_div = *(ADI_PWR_PLL_DIV_REG*)pPLL_DIV;
adi_pwr_GetFreq(&fcclk, &fsclk, &fvco);
ążčāąĮą║čåąĖčÅ adi_pwr_GetPowerMode() ą▓ąŠąĘą▓čĆą░čéąĖčé č鹥ą║čāčēąĖą╣ čĆąĄąČąĖą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čĆąĄąČąĖą╝ąŠą▓ full-on ąĖ active).
ADI_PWR_MODE adi_pwr_GetPowerMode (void);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: č鹥ą║čāčēąĖą╣ čĆąĄąČąĖą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ ADI_PWR_MODE.
ążčāąĮą║čåąĖčÅ adi_pwr_GetPowerSaving() ą▓čŗčćąĖčüą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ 菹║ąŠąĮąŠą╝ąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ č鹥ą║čāčēąĄą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ PLL ąĖ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░, ą┐ąŠ č乊čĆą╝čāą╗ą░ą╝ ąĖąĘ ą┤ą░čéą░čłąĖčéą░ čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓ ą┐ąĖčéą░ąĮąĖčÅ.
u32 adi_pwr_GetPowerSaving (void);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĮą░ čüą║ąŠą╗čīą║ąŠ ą┐čĆąŠčåąĄąĮč鹊ą▓ 菹║ąŠąĮąŠą╝ąĖčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ.
ążčāąĮą║čåąĖčÅ adi_pwr_Init() ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą╝ąŠą┤čāą╗čī PM. ąöą╗čÅ čāčüą┐ąĄčłąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ąÆą░čĆąĖą░ąĮčé ą┐čĆąŠčåąĄčüčüąŠčĆą░ |
ąŚąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ ADI_PWR_PROC_KIND (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ. |
| ąóąĖą┐ ą║ąŠčĆą┐čāčüą░ |
ąŚąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ ADI_PWR_PACKAGE_KIND (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĄčé ą▓ąĖą┤ ą║ąŠčĆą┐čāčüą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░ (VDDINT) |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VLEV, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ąŠąĄ ą║ čÅą┤čĆčā ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¤čĆąĖ čŹč鹊ą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ (bypassed, čé. ąĄ. ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ). ą×čéčüčāčéčüčéą▓ąĖąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą║ąŠą╝ą░ąĮą┤ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąöą╗čÅ ą▓ą░čĆąĖą░ąĮčéą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF533SKBC750 čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮąĄ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 1.4V, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čŹč鹊ą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĮą░ čćą░čüč鹊č鹥 750 ą£ąōčå. |
| ąÆąĮąĄčłąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ (VDDEXT) |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VDDEXT, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĄčé ą▓ąĮąĄčłąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ąŠąĄ ą║ čĆąĄą│čāą╗čÅč鹊čĆčā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ą╝ąĄčüč鹥 čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠ ą║ąŠčĆą┐čāčüąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą┤ąŠčüčéčāą┐ąĮčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (SCLK). ąĪą╝. ą▓čĆąĄąĘą║čā ADI_PWR_VDDEXT. |
| CLKIN |
ą¦ą░čüč鹊čéą░ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ą┐čĆąŠčåąĄčüčüąŠčĆčā (čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą£ąōčå ąĖą╗ąĖ ą▓ ąōčå). |
ą×ą▒ą╝ąĄąĮ čü čäčāąĮą║čåąĖąĄą╣ adi_pwr_Init ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č湥čĆąĄąĘ ą┐ąĄčĆąĄą┤ą░čćčā čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čéą░ą▒ą╗ąĖčåčā ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ. ąóą░ą▒ą╗ąĖčåą░ ą┤ąŠą╗ąČąĮą░ ąĘą░ą▓ąĄčĆčłą░čéčīčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ADI_PWR_CMD_END.
ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēą░čÅ čéą░ą▒ą╗ąĖčåą░ ADI_PWR_COMMAND_PAIR ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┤ą╗čÅ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ EZ-KIT Lite:
ADI_PWR_COMMAND_PAIR ezkit_init[] =
{
{ ADI_PWR_CMD_SET_PROC_VARIANT, ADI_PWR_PROC_BF533SKBC600 },
{ ADI_PWR_CMD_SET_PACKAGE, ADI_PWR_PACKAGE_MBGA },
{ ADI_PWR_CMD_SET_VDDEXT, ADI_PWR_VDDEXT_330 },
{ ADI_PWR_CMD_SET_CLKIN, 25 /* ą£ąōčå */ },
{ ADI_PWR_CMD_END, 0 }
};
ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-3 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ.
ąóą░ą▒ą╗ąĖčåą░ 3-3. ą¤ą░čĆčŗ Command-Value ą┤ą╗čÅ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤ čäčāąĮą║čåąĖąĖ adi_pwr_Init.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ADI_PWR_CMD_SET_CCLK_TABLE |
ąÉą┤čĆąĄčü čéą░ą▒ą╗ąĖčåčŗ, čüąŠą┤ąĄčƹȹ░čēąĄą╣ ąĘąĮą░č湥ąĮąĖčÅ ADI_PWR_NUM_VLEVS čéąĖą┐ą░ u16, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čćą░čüč鹊čéčā CCLK ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ADI_PWR_VLEV. ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ą╝ąĄčüč鹊 ąĘąĮą░č湥ąĮąĖą╣ ąĖąĘ ą┤ą░čéą░čłąĖčéą░. |
| ADI_PWR_CMD_SET_PROC_VARIANT |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_PROC_KIND (ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠąĄ, čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ąĘą░ą┤ą░čÄčēąĄąĄ ą▓ą░čĆąĖą░ąĮčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ADI_PWR_CMD_SET_PACKAGE |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_PACKAGE_KIND (ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠąĄ, čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čüčüčŗą╗ą║čā), ąĘą░ą┤ą░čÄčēąĄąĄ čéąĖą┐ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą║ąŠčĆą┐čāčüą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ADI_PWR_CMD_SET_CLKIN |
ąŚąĮą░č湥ąĮąĖąĄ u16 (ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠąĄ), ąĘą░ą┤ą░čÄčēąĄąĄ ą▓ąĮąĄčłąĮčÄčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā CLKIN, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčāčÄ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ADI_PWR_CMD_SET_VDDINT |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VLEV (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ąĘą░ą┤ą░čÄčēąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ čäčāąĮą║čåąĖąĖ adi_pwr_Init č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čéą░ą║ ą║ą░ą║ ąĮą░ą╗ąĖčćąĖąĄ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą║ąŠą╝ą░ąĮą┤ ąĘą░ą┤ą░ąĄčé ąŠčéą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_VDDEXT |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VDDEXT (ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠąĄ, čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ąĘą░ą┤ą░čÄčēąĄąĄ ą▓ąĮąĄčłąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ąŠąĄ ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝čā čĆąĄą│čāą╗čÅč鹊čĆčā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_IVG |
ąŚąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ interrupt_kind (čüą╝. exception.h), ąĘą░ą┤ą░čÄčēąĄąĄ čāčĆąŠą▓ąĄąĮčī IVG ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ PLL_WAKEUP. |
| ADI_PWR_CMD_SET_INPUT_DELAY |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_INPUT_DELAY (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ą║ąŠč鹊čĆąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą┤ąŠą▒ą░ą▓ąĖčéčī ą╗ąĖ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 200 ą┐čü ąĘą░ą┤ąĄčƹȹ║ąĖ ą┤ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤čŗ ą▒čāą┤čāčé ąĘą░čēąĄą╗ą║ąĮčāčéčŗ ąĮą░ ą▓ąĮąĄčłąĮąĄą╝ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_CMD_SET_OUTPUT_DELAY |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_CMD_SET_OUTPUT_DELAY (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ą║ąŠč鹊čĆąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą┤ąŠą▒ą░ą▓ąĖčéčī ą╗ąĖ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 200 ą┐čü ąĘą░ą┤ąĄčƹȹ║ąĖ ą┤ą╗čÅ ą▓čŗčģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ. |
ążčāąĮą║čåąĖčÄ adi_pwr_Init ą╝ąŠąČąĮąŠ ą▓čŗąĘą▓ą░čéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ. ą¤ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▓čŗąĘąŠą▓čŗ adi_pwr_Init ą▒čāą┤čāčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčīčüčÅ čü ą║ąŠą┤ąŠą╝ ą▓ąŠąĘą▓čĆą░čéą░ ADI_PWR_RESULT_ALREADY_INITIALIZED.
ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-4 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┤ą▓čāčģčŖčÅą┤ąĄčĆąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF561.
ąóą░ą▒ą╗ąĖčåą░ 3-4. ą¤ą░čĆčŗ Command-Value ą┤ą╗čÅ ADSP-BF561 Dual-Core Processor.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąÜąŠą╝ą░ąĮą┤čŗ ąŠčéąĮąŠčüčÅčéčüčÅ č鹊ą╗čīą║ąŠ ą║ ą┤ą▓čāčģčŖčÅą┤ąĄčĆąĮąŠą╝čā ą┐čĆąŠčåąĄčüčüąŠčĆčā ADSP-BF561
|
| ADI_PWR_CMD_SET_AUTO_SYNC_ENABLED |
ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé ą╝ąŠą┤čāą╗čī PM ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čÅą┤ąĄčĆ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ ąĮą░čüčéčĆąŠąĄą║ PLL. ąöą╗čÅ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 NULL. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init() ąĮą░ ąŠą▒ąŠąĖčģ čÅą┤čĆą░čģ. |
| ADI_PWR_CMD_SET_COREB_SUPP_INT0_IVG |
ąŻčĆąŠą▓ąĄąĮčī IVG, ą║ąŠč鹊čĆčŗą╣ ąĮą░ąĘąĮą░čćą░ąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (supplemental interrupt) 0 ąĮą░ čÅą┤čĆąĄ B. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init() č鹊ą╗čīą║ąŠ ąĮą░ čÅą┤čĆąĄ B. |
| ADI_PWR_CMD_SET_SYNC_LOCK_VARIABLE |
ąÉą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĘą░čģą▓ą░čéą░ (lock variable) ą▓ ą┐ą░ą╝čÅčéąĖ L2, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ adi_pwr_lockvar. |
| ADI_PWR_CMD_SET_FIRST_CLIENT_CALLBACK |
ąÉą┤čĆąĄčü čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčāčÄ ą▓čŗąĘąŠą▓ąĄčé čÅą┤čĆąŠ B ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤čāčé čüą┤ąĄą╗ą░ąĮčŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ PLL. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init() č鹊ą╗čīą║ąŠ ąĮą░ čÅą┤čĆąĄ B. |
| ADI_PWR_CMD_SET_SECOND_CLIENT_CALLBACK |
ąÉą┤čĆąĄčü čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčāčÄ ą▓čŗąĘąŠą▓ąĄčé čÅą┤čĆąŠ B ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ PLL. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init() č鹊ą╗čīą║ąŠ ąĮą░ čÅą┤čĆąĄ B. |
| ADI_PWR_CMD_SET_CLIENT_HANDLE |
ąŚąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ void*/ą░ą┤čĆąĄčü, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čäčāąĮą║čåąĖąĖ callback. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init() č鹊ą╗čīą║ąŠ ąĮą░ čÅą┤čĆąĄ B. |
ą¤čĆąŠč鹊čéąĖą┐ čäčāąĮą║čåąĖąĖ:
ADI_PWR_RESULT adi_pwr_Init (const ADI_PWR_COMMAND_PAIR *table);
ąÉčĆą│čāą╝ąĄąĮčé:
| ConfigData |
ąÉą┤čĆąĄčü čéą░ą▒ą╗ąĖčåčŗ ą║ąŠą╝ą░ąĮą┤ čü ą┐ą░čĆą░ą╝ąĖ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ (čüą╝. ą▓čĆąĄąĘą║čā ADI_PWR_COMMAND_PAIR). ą¤ąŠčüą╗ąĄą┤ąĮąĄą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ą▓ čŹč鹊ą╣ čéą░ą▒ą╗ąĖčåąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ąŠą╝ą░ąĮą┤ą░ ADI_EBIU_CMD_END (ą╝ą░čĆą║ąĄčĆ ą║ąŠąĮčåą░ čéą░ą▒ą╗ąĖčåčŗ). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: ą▓ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ adi_pwr_Init ą▓ąĄčĆąĮąĄčé ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ąĮąĖąČąĄ. ąśąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ą╗ąĖą▒ąŠ ADI_PWR_RESULT_SUCCESS, ą╗ąĖą▒ąŠ ADI_PWR_RESULT_ALREADY_INITIALIZED (ą║ąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī PM čāąČąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ).
ą¦č鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, ąĄą┤ąĖąĮąĖčåą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ čćą░čüč鹊čéčŗ ą┐čĆąĖ ąŠą▒ą╝ąĄąĮąĄ čü čäčāąĮą║čåąĖčÅą╝ąĖ PM ąĘą░ą┤ą░čÄčéčüčÅ ą▓ ąōąĄčĆčåą░čģ (ąōčå), ą░ ąĮąĄ ą▓ ą╝ąĄą│ą░ą│ąĄčĆčåą░čģ (ą£ąōčå).
ąĢčüą╗ąĖ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čéčĆąĄą▒čāąĄčéčüčÅ ąĄą┤ąĖąĮąĖčåčŗ čćą░čüč鹊čé ą▓ ą£ąōčå, ą░ ąĮąĄ ąōčå, č鹊 čüą╗čāąČą▒ą░ PM ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą▓ č乊čĆą╝ą░č鹥 čćą░čüč鹊čé ą╝ąĄą│ą░ą│ąĄčĆčå čü ą┐ąŠą╝ąŠčēčīčÄ ąĮąŠą▓ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ADI_PWR_CMD_SET_FREQ_AS_MHZ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_pwr_Init(). ąĪ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ čüąŠą┐čĆąŠą▓ąŠąČą┤ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą▒čāą┤ąĄčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčīčüčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čéą░ą▒ą╗ąĖčåą░ ą║ąŠą╝ą░ąĮą┤ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init(), č鹊 ą▓ ąĮąĄčæ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░:
{ ADI_PWR_CMD_SET_FREQ_AS_MHZ, NULL },
ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-5 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĖ ąŠą▒čŖčÅčüąĮąĄąĮčŗ ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░.
ąóą░ą▒ą╗ąĖčåą░ 3-5. ąÜąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ adi_pwr_Init.
| ADI_PWR_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_BAD_COMMAND |
ąæčŗą╗ą░ čāą║ą░ąĘą░ąĮą░ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░. |
| ADI_PWR_RESULT_ALREADY_INITIALIZED |
ą£ąŠą┤čāą╗čī PM čāąČąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
| ADI_PWR_RESULT_INVALID_VLEV |
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░. |
| ADI_PWR_RESULT_INVALID_VDDEXT |
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī ą▓ąĮąĄčłąĮąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_RESULT_VDDINT_MUST_BE_SUPPLIED |
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, č鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠąĄ čüąĮą░čĆčāąČąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ VDDINT ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init. |
| ADI_PWR_RESULT_INVALID_PROCESSOR |
ąŻą║ą░ąĘą░ąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čéąĖą┐ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ADI_PWR_RESULT_INVALID_IVG |
ąŻą║ą░ąĘą░ąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī IVG. |
| ADI_PWR_RESULT_INVALID_INPUT_DELAY |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čģąŠą┤ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ąĮąĄčłąĮąĄą╣ čłąĖąĮčŗ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_RESULT_INVALID_OUTPUT_DELAY |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ąĮąĄčłąĮąĄą╣ čłąĖąĮčŗ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_RESULT_INVALID_LOCKCNT |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąĘą░čģą▓ą░čéą░ PLL (PLL lock count). |
| ADI_PWR_RESULT_INVALID_EZKIT |
ąŚą░ą┤ą░ąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čéąĖą┐ ą┤ą╗čÅ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ EZ-KIT. |
| ADI_PWR_RESULT_CANT_HOOK_SUPPLEMENTAL_INTERRUPT |
ąØąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ą┐ąŠą┤čåąĄą┐ąĖčéčī ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (supplemental interrupt) ą┤ą╗čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆčāą│ąŠą│ąŠ čÅą┤čĆą░ (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ą▓čāčģą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ čÅą┤čĆą░). |
ążčāąĮą║čåąĖčÅ adi_pwr_LoadConfig() ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé č鹥ą║čāčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖąĘ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ąĮą░ ą║ąŠč鹊čĆčāčÄ čāą║ą░ąĘčŗą▓ą░ąĄčé ą░čĆą│čāą╝ąĄąĮčé hConfig. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PLL ąĖ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī EBIU ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ, čŹčéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║ąČąĄ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ, ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SDRAM.
ADI_PWR_RESULT adi_pwr_LoadConfig (const ADI_PWR_CONFIG_HANDLE hConfig,
const size_t szConfig);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| hConfig |
ąÉą┤čĆąĄčü ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ąŠčéą║čāą┤ą░ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮą░ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ą░čÅ č鹥ą║čāčēą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ. |
| szConfig |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ čäčāąĮą║čåąĖąĖ adi_pwr_GetConfigSize(). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_NO_MEMORY |
ąØąĄą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ, čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ szConfig. |
| ADI_PWR_RESULT_FAILED |
ąÉą┤čĆąĄčü hConfig čĆą░ą▓ąĄąĮ 0. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
ążčāąĮą║čåąĖčÅ adi_pwr_Reset() čüą▒čĆą░čüčŗą▓ą░ąĄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PLL ą▓ čüą▓ąŠąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą┐čĆąĖ čüą▒čĆąŠčüąĄ.
void adi_pwr_Reset (void);
ążčāąĮą║čåąĖčÅ adi_pwr_SaveConfig() čüąŠčģčĆą░ąĮčÅąĄčé č鹥ą║čāčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ, ąĮą░ ą║ąŠč鹊čĆčāčÄ čāą║ą░ąĘčŗą▓ą░ąĄčé ą░čĆą│čāą╝ąĄąĮčé hConfig. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī EBIU ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ, č鹊 ąĄą│ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ čéą░ą║ąČąĄ; ąĖąĮą░č湥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐ąŠą╗čÅ ąĄą│ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąŠčüčéą░ąĮčāčéčüčÅ ąĮąĄąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╝ąĖ (ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ).
ADI_PWR_RESULT adi_pwr_SaveConfig (ADI_PWR_CONFIG_HANDLE hConfig,
const size_t szConfig);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| hConfig |
ąÉą┤čĆąĄčü ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮą░ čüąŠčģčĆą░ąĮčÅąĄą╝ą░čÅ č鹥ą║čāčēą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ. |
| szConfig |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ čäčāąĮą║čåąĖąĖ adi_pwr_GetConfigSize(). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_NO_MEMORY |
ąØąĄą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ, čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ szConfig. |
| ADI_PWR_RESULT_FAILED |
ąÉą┤čĆąĄčü hConfig čĆą░ą▓ąĄąĮ 0. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
ążčāąĮą║čåąĖčÅ adi_pwr_SetFreq() ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PLL ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊čé CCLK ąĖ SCLK čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąĖą╝ąĖ ą║ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╝ (čāą║ą░ąĘą░ąĮąĮčŗą╝ ą▓ ąōčå). ąĢčüą╗ąĖ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮąĄ ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 ąĄą│ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▒čāą┤ąĄčé ą┐ąŠą┤čüčéčĆąŠąĄąĮą░ (ą▓ čüą╗čāčćą░ąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ) ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗąĄ čćą░čüč鹊čéčŗ.
ą¤čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle), čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ąŠčłą╗ąĖ ą▓ čüąĖą╗čā.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čüąĄą│ą┤ą░ ąĮą░čģąŠą┤ąĖčé čéą░ą║ąŠąĄ čĆąĄčłąĄąĮąĖąĄ, ą│ą┤ąĄ ą┤ąĄą╗ąĖč鹥ą╗čī CSEL ą▓ ą┤ąĄą╗ąĖč鹥ą╗čī čĆąĄą│ąĖčüčéčĆą░ PLL_DIV ąĄą┤ąĖąĮąĖčåą░. ąĢčüą╗ąĖ ąĘą░ą┐čĆąŠčłąĄąĮ ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĄą╗ąĖč鹥ą╗čī PLL, č鹊 ą▒čāą┤ąĄčé ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮą░ čĆą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ.
ą¦č鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ čĆąĄą░ą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čŹč鹊ą╣ čäčāąĮą║čåąĖąĄą╣, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čäčāąĮą║čåąĖčÄ adi_pwr_GetFreq.
ADI_PWR_RESULT adi_pwr_SetFreq (const u32 fcclk,
const u32 fsclk,
const ADI_PWR_DF df);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| fcclk |
ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ CCLK (ąōčå). ąĢčüą╗ąĖ ąĘą┤ąĄčüčī ąĘą░ą┤ą░ąĮąŠ 0, č鹊 čäčāąĮą║čåąĖčÅ adi_pwr_SetFreq ą┤ą░ąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čćą░čüč鹊čéčŗ SCLK, ąĖ ą▓čŗčüčéą░ą▓ą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ CCLK ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╣ čćą░čüč鹊č鹥 ą┤ą╗čÅ č鹥ą║čāčēąĄą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░. |
| fsclk |
ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ SCLK (ąōčå). |
| df |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_DF (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ, ą┤ąŠą╗ąČąĮą░ ą╗ąĖ čäčāąĮą║čåąĖčÅ ą▓ą║ą╗čÄčćąĖčéčī ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĄą╗ąĖč鹥ą╗čī PLL, čćč鹊ą▒čŗ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĖąĄ ą╝ąĄąČą┤čā ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ ąĖ čĆąĄą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░. ąÆą║ą╗čÄč湥ąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ čüąĮąĖąČąĄąĮąĖčÄ čĆą░čüčüąĄąĖą▓ą░ąĄą╝ąŠą╣ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ą╝ąŠčēąĮąŠčüčéąĖ. ą¤ąĄčĆąĄą┤ą░čćą░ ADI_PWR_DF_ON čāą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĄą╗ąĖč鹥ą╗čī PLL čāąČąĄ ą▒čŗą╗ čĆą░ąĘčĆąĄčłąĄąĮ. ą¤ąĄčĆąĄą┤ą░čćą░ ADI_PWR_DF_NONE čāą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą╝ąŠąČąĄčé čĆą░ąĘčĆąĄčłąĖčéčī čŹčéčā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ą╗čāčćčłąĄą╣ ą│čĆą░ąĮčāą╗čÅčĆąĮąŠčüčéąĖ (ą▓ čŹč鹊ą╝ ą║ąŠąĮč鹥ą║čüč鹥 ADI_PWR_DF_OFF ąĮąĄ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ą░). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ą¤čĆąŠčåąĄčüčü ąĘą░ą▓ąĄčĆčłąĖą╗čüčÅ čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
ążčāąĮą║čåąĖčÅ adi_pwr_SetMaxFreqForVolt() čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (voltage regulator control register, VR_CTL), ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čéčĆąĄą▒čāąĄą╝čŗą╝ čāčĆąŠą▓ąĮąĄą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄčé čćą░čüč鹊čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ CCLK ąĖ SCLK, čćč鹊ą▒čŗ ąŠąĮąĖ ą▒čŗą╗ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ąĖ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
ą¦č鹊ą▒čŗ ą┐čĆąĖą╝ąĄąĮąĖą╗ąĖčüčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle).
ADI_PWR_RESULT adi_pwr_SetMaxFreqForVolt (const ADI_PWR_VLEV vlev);
ąÉčĆą│čāą╝ąĄąĮčé:
| vlev |
ąóčĆąĄą▒čāąĄą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝čŗą╣ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VLEV (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_INVALID_VLEV |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ vlev. |
| ADI_PWR_RESULT_VR_BYPASSED |
ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠčéą║ą╗čÄč湥ąĮ (bypassed). ą¤ąĄčĆąĄą┤ čŹčéąĖą╝ ą▓čŗąĘąŠą▓ąŠą╝ čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗąĘąŠą▓ adi_dma_SetVoltageRegulator čü ąĮąĄ ąĮčāą╗ąĄą▓čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ (čüą╝. ą▓čĆąĄąĘą║čā čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_dma_SetVoltageRegulator). |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
ążčāąĮą║čåąĖčÅ adi_pwr_SetPowerMode() čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄąČąĖą╝ ą┐ąĖčéą░ąĮąĖčÅ (power mode) ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąśą╝ąĄąĄčéčüčÅ 5 čĆąĄąČąĖą╝ąŠą▓:
Full-On. ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ (CCLK) ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (SCLK) ąĖą╝ąĄčÄčé ąĘąĮą░č湥ąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ čäčāąĮą║čåąĖčÅą╝ąĖ adi_pwr_SetFreq ąĖą╗ąĖ adi_pwr_SetVoltageRegulator. ąĀą░ąĘčĆąĄčłąĄąĮ ą┐ąŠą╗ąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┤ą╗čÅ DMA.
Active. ąæą╗ąŠą║ PLL ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ, čéą░ą║ čćč鹊 čÅą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ čüąĖčüč鹥ą╝ąĮą░čÅ čłąĖąĮą░ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ ą▓čģąŠą┤ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 CLKIN (čćą░čüč鹊čéą░ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░). ąöąŠčüčéčāą┐ DMA čĆą░ą▒ąŠčéą░ąĄčé ą┤ą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ L1.
Sleep. ą»ą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle), ąĖą╗ąĖ čüąŠčüč鹊čÅąĮąĖąĖ čüąĮą░. ąĪąĖčüč鹥ą╝ąĮą░čÅ čćą░čüč鹊čéą░ (čćą░čüč鹊čéą░ čłąĖąĮčŗ SCLK) ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐ąŠčüčéčāą┐ą░čéčī ąĮą░ čüą║ąŠčĆąŠčüčéąĖ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ čäčāąĮą║čåąĖčÅą╝ąĖ adi_pwr_SetFreq ąĖą╗ąĖ adi_pwr_SetVoltageRegulator functions. ąĀą░ą▒ąŠčéą░ DMA ąŠą│čĆą░ąĮąĖč湥ąĮą░ ą┤ąŠčüčéčāą┐ąŠą╝ ą║ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. ąĪą╝. ąĮąĖąČąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖą╣ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (wakeup), čćč鹊ą▒čŗ ą▓čŗą▓ąĄčüčéąĖ ąĄą│ąŠ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░.
Deep Sleep. ąōą╗čāą▒ąŠą║ąĖą╣ čüąŠąĮ, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ ąĘą░ą┐čĆąĄčēąĄąĮą░ čĆą░ą▒ąŠčéą░ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ą▓čüąĄčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą▒ą╗ąŠą║ą░ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time clock, RTC). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ DMA ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ. SDRAM čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh mode). ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ąŠčé RTC ąĖą╗ąĖ ąŠčé čüąŠą▒čŗčéąĖčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüą▒čĆąŠčüą░. ąÆ ąŠą▒ąŠąĖčģ čüą╗čāčćą░čÅčģ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čüą▒čĆąŠčüą░ čÅą┤čĆą░.
Hibernate. ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ. SDRAM čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ąŠčé ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüą▒čĆąŠčüą░. ąĪą╝. ąĮąĖąČąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┐ąŠ ą▓čŗą▒ąŠčĆčā čüą┐ąŠčüąŠą▒ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖąĘ čĆąĄąČąĖą╝ą░ hibernate.
ą¤ąŠą║ą░ SDRAM ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ąĖ ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┤ą╗čÅ ąĮąĄčæ ą▓čŗą▒čĆą░ąĮą░ ą┐ąŠą┤čģąŠą┤čÅčēą░čÅ čćą░čüč鹊čéą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (refresh rate), ą┤ą░ąĮąĮčŗąĄ ą▓ SDRAM ą▒čāą┤čāčé č鹥čĆčÅčéčīčüčÅ. ąŁč鹊 čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ hibernate ąĖą╗ąĖ deep sleep ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüą▒čĆąŠčüą░. ąöą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮčŗčģ čÅą┤ąĄčĆ ADSP-BF531, ADSP-BF532 ąĖ ADSP-BF533 ą▓čŗą▓ąŠą┤ SCKE ą┐čĆąŠčåąĄčüčüąŠčĆą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐čĆąĖ čüą▒čĆąŠčüąĄ, č湥ą╝ SDRAM ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąóą░ą║ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čÅą▓ą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čüčéą▓ąĖąĄą╝ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ čüčéą░ąĮą┤ą░čĆčéčā ą┐ą░ą╝čÅčéąĖ PC-133. ąöą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą▓ą║ą╗čÄčćą░čÅ čüąĄą╝ąĄą╣čüčéą▓ą░ ADSP-BF537 ąĖ ADSP-BF527, čŹč鹊 ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ą╝ąŠąČąĮąŠ ąŠą▒ąŠą╣čéąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą▒ąĖčéą░ CKELOW ą▓ čĆąĄą│ąĖčüčéčĆąĄ VR_CTL (čüą╝. ą▓čĆąĄąĘą║čā adi_pwr_SetVoltageRegulator). ąŁč鹊ą│ąŠ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ą┤ąŠčüčéąĖčćčī ą▓čüčéą░ą▓ą║ąŠą╣ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ ą▓ čéą░ą▒ą╗ąĖčåčā ą║ąŠą╝ą░ąĮą┤ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_pwr_Init:
{ ADI_PWR_CMD_SET_PC133_COMPLIANCE, 0 }
ą¦č鹊ą▒čŗ čāą║ą░ąĘą░čéčī ą╝ąĄč鹊ą┤ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wakeup) ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ sleep ąĖą╗ąĖ hibernate:
1. ąÆčŗąĘąŠą▓ąĖč鹥 adi_int_SICGlobalWakeup ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ą▓čüąĄčģ čüąŠą▒čŗčéąĖą╣ wakeup.
2. ąÆčŗąĘąŠą▓ąĖč鹥 adi_int_SICWakeup ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ wakeup, ą║ąŠč鹊čĆčŗą╣ ąŠčüčéą░ąĮąĄčéčüčÅ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝, ą┐ąŠą║ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ąĮąĖąĘą║ąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (low power mode).
3. ąÆčŗąĘąŠą▓ąĖč鹥 adi_pwr_SetVoltageRegulator, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ wakeup ą▓ čĆąĄą│ąĖčüčéčĆąĄ VR_CTL (ąĄčüą╗ąĖ čŹč鹊 ą┐ąŠą║ą░ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ).
4. ąÆčŗąĘąŠą▓ąĖč鹥 adi_pwr_SetPowerMode ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (power mode).
5. ą¤čĆąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖč鹥 wakeup-čĆąĄą│ąĖčüčéčĆčŗ ą▓ čüą▓ąŠąĄ ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗąĘąŠą▓ąŠą╝ adi_int_SICGlobalWakeup.
ą¤čĆąŠč鹊čéąĖą┐ čäčāąĮą║čåąĖąĖ:
ADI_PWR_RESULT adi_pwr_SetPowerMode (const ADI_PWR_MODE mode);
ąÉčĆą│čāą╝ąĄąĮčé:
| mode |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_MODE (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ (čĆąĄąČąĖą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ), ą▓ ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄą╣čéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ą¤čĆąŠčåąĄčüčü ąĘą░ą▓ąĄčĆčłąĖą╗čüčÅ čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
| ADI_PWR_RESULT_INVALID_MODE |
ąøąĖą▒ąŠ ąĘą░ą┤ą░ąĮ ąĮąĄą║ąŠčĆčĆąĄą║čéąĮčŗą╣ čĆąĄąČąĖą╝, ą╗ąĖą▒ąŠ ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāčé ąĖąĘ č鹥ą║čāčēąĄą│ąŠ čĆąĄąČąĖą╝ą░. |
ążčāąĮą║čåąĖčÅ adi_pwr_SetVoltageRegulator() čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (voltage regulator control register, VR_CTL), ąĮą░čüčéčĆą░ąĖą▓ą░čÅ ąŠą┤ąĮąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĄą│ąŠ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠą╗ąĄą╣.
| VLEV |
ąóčĆąĄą▒čāąĄą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ ą▓ąĖą┤ąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VLEV. |
| FREQ |
ąóčĆąĄą▒čāąĄą╝ą░čÅ čćą░čüč鹊čéą░ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┤ą╗čÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ ą▓ąĖą┤ąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_FREQ. |
| GAIN |
ąóčĆąĄą▒čāąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāčüąĖą╗ąĄąĮąĖčÅ ą▓ ą║ąŠąĮčéčāčĆąĄ čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ ą▓ąĖą┤ąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_GAIN. |
| WAKE |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_WAKE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ power-down, ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé RTC ąĖą╗ąĖ ą┐ąŠčüčéčāą┐ą░ąĄčé ą┐ąĄčĆąĄą┐ą░ą┤ ą▓ ą╗ąŠą│. 0 ąĮą░ ą▓čŗą▓ąŠą┤ RESET#. |
| PHYWE |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_PHYWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ power-down ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ Ethernet PHY. |
| CANWE |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CANWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ power-down ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN. |
| CLKBUFOE |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CLKBUFOE, čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ, ą┤ąŠą╗ąČąĮčŗ ą╗ąĖ ą┤čĆčāą│ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ Ethernet PHY) čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčé ą▓čģąŠą┤ą░ CLKIN. ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ Ethernet PHY ąĮą░ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ADSP-BF537 EZ-KIT Lite. |
| CKELOW |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CKELOW, čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ, ą┤ąŠą╗ąČąĮąŠ ą╗ąĖ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüą▒čĆąŠčüą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▓čŗą▓ąŠą┤ąŠą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ EBIU ą▓ čüą▓ąŠąĄ ąĮąĄą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ SDRAM ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh mode) ą┐čĆąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ čĆąĄąČąĖą╝ hibernate. |
| USBWE |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_USBWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ power-down ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ USB. |
ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_SetVoltageRegulator č湥čĆąĄąĘ ąŠą┤ąĮčā ą┐ą░čĆčā ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ ąĖą╗ąĖ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ą░čĆ ą▓ ą▓ąĖą┤ąĄ čéą░ą▒ą╗ąĖčåčŗ, ą║ąŠč鹊čĆčāčÄ ąĘą░ą▓ąĄčĆčłą░ąĄčé ą║ąŠą╝ą░ąĮą┤ą░ ADI_PWR_CMD_END - č鹊čćąĮąŠ čéą░ą║ąĖą╝ ąČąĄ čüą┐ąŠčüąŠą▒ąŠą╝, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ą╗ąŠčüčī ą▓ čäčāąĮą║čåąĖąĖ adi_pwr_Control. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓čĆąĄąĘą║čā adi_pwr_Control.
ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ ą┐čĆąŠą┐čāčüčéąĖčéčī ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤:
adi_pwr_SetVoltageRegulator (ADI_PWR_SET_VR_FREQ,
(void*) ADI_PWR_VR_FREQ_POWERDOWN);
ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-6 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ą░čĆčŗ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čü čäčāąĮą║čåąĖąĄą╣ adi_pwr_SetVoltageRegulator. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤čĆčāą│ąĖčģ ą┐ą░čĆ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠ.
ąóą░ą▒ą╗ąĖčåą░ 3-6. ą¤ą░čĆčŗ Command-Value ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_pwr_SetVoltageRegulator.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ ąĖ čüą▓čÅąĘą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą║ąŠą╝ą░ąĮą┤čŗ |
| ADI_PWR_CMD_END |
ąŁč鹊 ą╝ą░čĆą║ąĄčĆ ą║ąŠąĮčåą░ čéą░ą▒ą╗ąĖčåčŗ ą║ąŠą╝ą░ąĮą┤. ąŚąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤čŗ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. |
| ADI_PWR_CMD_PAIR |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ čüąŠąŠą▒čēąĖčéčī čäčāąĮą║čåąĖąĖ adi_pwr_SetVoltageRegulator, čćč鹊 ą┐ąĄčĆąĄą┤ą░ąĮą░ ąŠą┤ąĮą░ ą┐ą░čĆą░ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ. |
| ADI_PWR_CMD_TABLE |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ čüąŠąŠą▒čēąĖčéčī čäčāąĮą║čåąĖąĖ adi_pwr_SetVoltageRegulator, čćč鹊 ą┐ąĄčĆąĄą┤ą░ąĮą░ čéą░ą▒ą╗ąĖčåą░ ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ. |
| ADI_PWR_CMD_SET_VR_VLEV |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VLEV, ąĘą░ą┤ą░čÄčēąĄąĄ čéčĆąĄą▒čāąĄą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī ą┤ą╗čÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_VR_FREQ |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_FREQ, ąĘą░ą┤ą░čÄčēąĄąĄ čéčĆąĄą▒čāąĄą╝čāčÄ čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĘąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_FREQ_POWERDOWN ą┤ą╗čÅ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ (bypass) ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_VR_GAIN |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_GAIN, ąĘą░ą┤ą░čÄčēąĄąĄ čāčüąĖą╗ąĄąĮąĖąĄ ą▓ ą┐ąĄčéą╗ąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝ąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_VR_WAKE |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_WAKE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé WAKE. |
| ADI_PWR_CMD_SET_VR_PHYWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_PHYWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé PHYWE. |
| ADI_PWR_CMD_SET_VR_CANWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CANWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CANWE. |
| ADI_PWR_CMD_SET_VR_CLKBUFOE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CLKBUFOE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CLKBUFOE. |
| ADI_PWR_CMD_SET_VR_CKELOW |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CKELOW, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CKELOW. |
| ADI_PWR_CMD_SET_VR_USBWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_USBWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé USB. |
ą¦ą░čüč鹊čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ CCLK ąĖ SCLK ąĮąĄ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ. ąÜąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle), čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┐čĆąĖčłą╗ąĖ ą▓ čüąĖą╗čā. ąĢčüą╗ąĖ ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ č鹥ą║čāčēąĖčģ ąĘąĮą░č湥ąĮąĖą╣ čćą░čüč鹊čé, č鹊 čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ąŠčłąĖą▒ą║čā ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║.
ą¤čĆąŠč鹊čéąĖą┐ čäčāąĮą║čåąĖąĖ:
ADI_PWR_RESULT adi_pwr_SetVoltageRegulator (ADI_PWR_COMMAND Command, void *Value);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| Command |
ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_COMMAND, ąŠąĘąĮą░čćą░čÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā. ąÜąŠą╝ą░ąĮą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüą╝čŗčüą╗ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą░čĆą│čāą╝ąĄąĮčéą░ ą║ąŠą╝ą░ąĮą┤čŗ Value. |
| Value |
ąóčĆąĄą▒čāąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_INVALID_VLEV |
ąÉčĆą│čāą╝ąĄąĮčé VLEV ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ ąĖą╗ąĖ ąĮąĄą┤ąŠčüčéą░č鹊č湥ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ č鹥ą║čāčēąĖčģ čćą░čüč鹊čé čÅą┤čĆą░ ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ. |
| ADI_PWR_RESULT__INVALID_VR_FREQ |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ FREQ. |
| ADI_PWR_RESULT__INVALID_VR_GAIN |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ GAIN. |
| ADI_PWR_RESULT__INVALID_VR_WAKE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ WAKE. |
| ADI_PWR_RESULT_INVALID_VR_PHYWE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ PHYWE. |
| ADI_PWR_RESULT_INVALID_VR_CANWE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CANWE. |
| ADI_PWR_RESULT_INVALID_VR_CLKBUFOE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CLKBUFOE. |
| ADI_PWR_RESULT_INVALID_VR_CKELOW |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CKELOW. |
| ADI_PWR_RESULT_INVALID_VR_USBWE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ USB wakeup. |
| ADI_PWR_RESULT_BAD_COMMAND |
ąÉčĆą│čāą╝ąĄąĮčé Command ąĮąĄ čĆą░čüą┐ąŠąĘąĮą░ąĮ. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ą£ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
ążčāąĮą║čåąĖčÅ adi_pwr_Terminate() ąĘą░ą▓ąĄčĆčłą░ąĄčé čĆą░ą▒ąŠčéčā ą╝ąŠą┤čāą╗čÅ PM, čüą▒čĆą░čüčŗą▓ą░ąĄčé čäą╗ą░ą│ "ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ", ąĖ ąŠčéčåąĄą┐ą╗čÅąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą▓čāčģčŖčÅą┤ąĄčĆąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ.
ADI_PWR_RESULT adi_pwr_Terminate (void);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
| ADI_PWR_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ. |
[ą¤čāą▒ą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ PM]
ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čāą▒ą╗ąĖčćąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣ PM.
ąóąĖą┐ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_COMMAND ąŠą┐ąĖčüčŗą▓ą░ąĄčé čéąĖą┐ ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ čüčéčĆčāą║čéčāčĆąĄ ADI_PWR_COMMAND_PAIR. ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-7 ąŠą┐ąĖčüą░ąĮčŗ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĖ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą║ąŠąĮč鹥ą║čüčé ą┤ą╗čÅ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 3-7. ąöąŠčüčéčāą┐ąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ADI_PWR_COMMAND.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ ąĖ čüą▓čÅąĘą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą║ąŠą╝ą░ąĮą┤čŗ |
| ąÜąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅą╝ąĖ adi_pwr_Init, adi_pwr_Control, ąĖ adi_pwr_SetVoltageRegulator |
| ADI_PWR_CMD_END |
ąŁč鹊 ą╝ą░čĆą║ąĄčĆ ą║ąŠąĮčåą░ čéą░ą▒ą╗ąĖčåčŗ ą║ąŠą╝ą░ąĮą┤. ąŚąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤čŗ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. |
| ąÜąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ čäčāąĮą║čåąĖąĄą╣ adi_pwr_Control, ą╗ąĖą▒ąŠ čäčāąĮą║čåąĖąĄą╣ adi_pwr_SetVoltageRegulator |
| ADI_PWR_CMD_PAIR |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ čüąŠąŠą▒čēąĖčéčī čäčāąĮą║čåąĖąĖ, čćč鹊 ą┐ąĄčĆąĄą┤ą░ąĮą░ ąŠą┤ąĮą░ ą┐ą░čĆą░ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ. |
| ADI_PWR_CMD_TABLE |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ čüąŠąŠą▒čēąĖčéčī čäčāąĮą║čåąĖąĖ, čćč鹊 ą┐ąĄčĆąĄą┤ą░ąĮą░ čéą░ą▒ą╗ąĖčåą░ ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ ą║ąŠą╝ą░ąĮą┤ą░-ąĘąĮą░č湥ąĮąĖąĄ. |
| ąÜąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ čäčāąĮą║čåąĖąĄą╣ adi_pwr_Init, ą╗ąĖą▒ąŠ čäčāąĮą║čåąĖąĄą╣ adi_pwr_Control |
| ADI_PWR_CMD_INSTALL_CLK_CLIENT_CALLBACK |
ąŚąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ pADI_PWR_CALLBACK_ENTRY, čāą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ ąĮą░ čüčéčĆčāą║čéčāčĆčā ADI_PWR_CALLBACK_ENTRY, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé callback-čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓ą╝ąĄčüč鹥 čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ClientHandle, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▓ callback-čäčāąĮą║čåąĖčÄ. |
| ADI_PWR_CMD_SET_INPUT_DELAY |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_INPUT_DELAY, čāą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ ą┤ąŠą▒ą░ą▓ąĖčéčī ąĘą░ą┤ąĄčƹȹ║čā ą▓ąĄą╗ąĖčćąĖąĮąŠą╣ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 200 ą┐čü ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĮąĖ čüąĖą│ąĮą░ą╗ą░ ą▓čģąŠą┤ąŠą▓ ą▒čāą┤čāčé ąĘą░čģą▓ą░č湥ąĮčŗ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_CMD_SET_OUTPUT_DELAY |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_OUTPUT_DELAY, čāą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ ą┤ąŠą▒ą░ą▓ąĖčéčī ąĘą░ą┤ąĄčƹȹ║čā ą▓ąĄą╗ąĖčćąĖąĮąŠą╣ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 200 ą┐čü ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĮąĖ čüąĖą│ąĮą░ą╗ą░ ą▓čŗčģąŠą┤ąŠą▓ ą┐ąŠčÅą▓čÅčéčüčÅ ąĮą░ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_CMD_SET_PLL_LOCKCNT |
ąŚąĮą░č湥ąĮąĖąĄ u16, ąĘą░ą┤ą░čÄčēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓ SCLK, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠą╣čéąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čüčéą░ą┤ąĖąĖ IDLE ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┐čĆąŠčåąĄčüčüąŠčĆ čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé PLL_LOCKED ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_STAT. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_LOCKCNT. |
| ąÜąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ čäčāąĮą║čåąĖąĄą╣ adi_pwr_Init |
| ADI_PWR_CMD_SET_PROC_VARIANT |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_PROC_KIND, ąĘą░ą┤ą░čÄčēąĄąĄ čéąĖą┐ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ADI_PWR_CMD_SET_PACKAGE |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_PACKAGE_KIND, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĄąĄ čéąĖą┐ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą║ąŠčĆą┐čāčüą░ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ADI_PWR_CMD_SET_CLKIN |
ąŚąĮą░č湥ąĮąĖąĄ u16, čāą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ą┐ąŠą┤ą░ą▓ą░ąĄą╝ąŠą╣ ąĮą░ ą▓čģąŠą┤ CLKIN. ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą£ąōčå ąĖą╗ąĖ ąōčå. |
| ADI_PWR_CMD_SET_VDDINT |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VLEV, čāą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╣ ą▓ąĮąĄčłąĮąĖą╝ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_VDDEXT |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VDDEXT, čāą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ čāčĆąŠą▓ąĄąĮčī ą▓ąĮąĄčłąĮąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐ąŠą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ ąĮą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_FORCE_DATASHEET_VALUES |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐čĆąĄą┤ąĄą╗čŗ čćą░čüč鹊čéčŗ čÅą┤čĆą░ CCLK ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī ą┤ą░čéą░čłąĖčéčā (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ). |
| ADI_PWR_CMD_SET_CCLK_TABLE |
ąÉą┤čĆąĄčüčāąĄčé čéą░ą▒ą╗ąĖčåčā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ąĘąĮą░č湥ąĮąĖčÅ ADI_PWR_NUM_VLEVS čéąĖą┐ą░ u16, ąĘą░ą┤ą░čÄčēąĖąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čćą░čüč鹊čéčā CCLK ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ADI_PWR_VLEV. ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ą╝ąĄčüč鹊 ąĘąĮą░č湥ąĮąĖą╣ ą┤ą░čéą░čłąĖčéą░. |
| ADI_PWR_CMD_SET_IVG |
ąŚąĮą░č湥ąĮąĖąĄ u16, ąĘą░ą┤ą░čÄčēąĄąĄ čāčĆąŠą▓ąĄąĮčī IVG ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ PLL_WAKEUP. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 7. |
| ADI_PWR_CMD_SET_PC133_COMPLIANCE |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_PC133_COMPLIANCE, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĄčé, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé ą╗ąĖ SDRAM čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ PC-133. ąØąĄčüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ čéčĆąĄą▒čāąĄčé čĆą░ąĘčĆąĄčłąĖčéčī ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ąĄčĆąĮčāčéčīčüčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ hybernate ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ SDRAM. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé čĆą░ąĘčĆčÅą┤ą║čā čÅč湥ąĄą║ SDRAM ą▓ąŠ ą▓čĆąĄą╝čÅ čüą▒čĆąŠčüą░, č湥ą╝ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ SDRAM ą┐čĆąĖ č湥čĆąĄąĘ čüą▒čĆąŠčü hybernate ąĖą╗ąĖ čüą▒čĆąŠčü ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░ (čŹčéčā ą║ąŠą╝ą░ąĮą┤čā ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░ ą▓čüąĄčģ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ). |
| ADI_PWR_CMD_SET_FREQ_AS_MHZ |
ąÜąŠą╝ą░ąĮą┤ą░ ąĘą░ą┤ą░ąĄčé čāą║ą░ąĘčŗą▓ą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čćą░čüč鹊čé ąĮąĄ ą▓ ą│ąĄčĆčåą░čģ, ą░ ą▓ ą╝ąĄą│ą░ą│ąĄčĆčåą░čģ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čćą░čüč鹊čéčŗ čāą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ą▓ ą│ąĄčĆčåą░čģ). |
| ąÜąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ čäčāąĮą║čåąĖąĄą╣ adi_pwr_SetVoltageRegulator |
| ADI_PWR_CMD_SET_VR_VLEV |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VLEV, ąĘą░ą┤ą░čÄčēąĄąĄ čéčĆąĄą▒čāąĄą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī ą┤ą╗čÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_VR_FREQ |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_FREQ, ąĘą░ą┤ą░čÄčēąĄąĄ čéčĆąĄą▒čāąĄą╝čāčÄ čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĘąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_FREQ_POWERDOWN ą┤ą╗čÅ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ (bypass) ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_VR_GAIN |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_GAIN, ąĘą░ą┤ą░čÄčēąĄąĄ čāčüąĖą╗ąĄąĮąĖąĄ ą▓ ą┐ąĄčéą╗ąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝ąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_SET_VR_WAKE |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_WAKE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘą▒čāą┤ąĖčéčī čĆąĄą│čāą╗čÅč鹊čĆ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čĆąĄąČąĖą╝ą░ power-down ą┐čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé RTC ąĖą╗ąĖ ą┐čĆąĖ čüą┐ą░ą┤ąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ RESET#. |
| ADI_PWR_CMD_SET_VR_PHYWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_PHYWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé PHYWE (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī čŹč鹊čé ą▒ąĖčé). |
| ADI_PWR_CMD_SET_VR_CANWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CANWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CANWE (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ąĖąĮč鹥čĆč乥ą╣čü CAN). |
| ADI_PWR_CMD_SET_VR_CLKBUFOE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CLKBUFOE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CLKBUFOE (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī čéą░ą║ąŠą╣ ą▒ąĖčé). |
| ADI_PWR_CMD_SET_VR_CKELOW |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CKELOW, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CKELOW (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī čéą░ą║ąŠą╣ ą▒ąĖčé). |
| ADI_PWR_CMD_SET_VR_USBWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_USBWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé USB. |
| ADI_PWR_CMD_SET_VR_GPWE_MXVRWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_GPWE_MXVRWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé GPWE (MXVRWE). ą¤čĆąĖą╝ąĄąĮąĖą╝ąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą▒ąĖčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé GPIO ąĖą╗ąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ MXVR. |
| ąÜąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Control |
| ADI_PWR_CMD_GET_VDDINT |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VLEV, čüąŠą┤ąĄčƹȹ░čēąĄąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░. |
| ADI_PWR_CMD_GET_VR_VLEV |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VLEV, čüąŠą┤ąĄčƹȹ░čēąĄąĄ č鹥ą║čāčēąĖą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąØąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ, ą║ąŠą│ą┤ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąŠčéą║ą╗čÄč湥ąĮ (bypassed). |
| ADI_PWR_CMD_GET_VR_FREQ |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_FREQ, čüąŠą┤ąĄčƹȹ░čēąĄąĄ č鹥ą║čāčēčāčÄ čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_GET_VR_GAIN |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_GAIN, čüąŠą┤ąĄčƹȹ░čēąĄąĄ čāčüąĖą╗ąĄąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ąĄčéą╗ąĖ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_CMD_GET_VR_WAKE |
ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_VR_WAKE, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĄčé, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ power-down ąŠčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ RTC ąĖą╗ąĖ ą┐čĆąĖ čüą┐ą░ą┤ąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ RESET#. |
| ADI_PWR_CMD_GET_VR_PHYWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_PHYWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ / ąĘą░ą┐čĆąĄčēąĄąĮ ą▒ąĖčé PHYWE (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī čŹč鹊čé ą▒ąĖčé). |
| ADI_PWR_CMD_GET_VR_CANWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CANWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CANWE (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ąĖąĮč鹥čĆč乥ą╣čü CAN). |
| ADI_PWR_CMD_GET_VR_USBWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_USBWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé USB (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ąĖąĮč鹥čĆč乥ą╣čü USB). |
| ADI_PWR_CMD_GET_VR_GPWE_MXVRWE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_GPWE_MXVRWE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé GPWE (MXVRWE). ą¤čĆąĖą╝ąĄąĮąĖą╝ąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą▒ąĖčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé GPIO ąĖą╗ąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ MXVR. |
| ADI_PWR_CMD_GET_VR_CLKBUFOE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CLKBUFOE, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CLKBUFOE (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī čéą░ą║ąŠą╣ ą▒ąĖčé). |
| ADI_PWR_CMD_GET_VR_CKELOW |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_VR_CKELOW, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ, ąĮčāąČąĮąŠ ą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą▒ąĖčé CKELOW (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī čéą░ą║ąŠą╣ ą▒ąĖčé). |
| ADI_PWR_CMD_GET_PLL_LOCKCNT |
ąŚąĮą░č湥ąĮąĖąĄ u16, ą║ąŠč鹊čĆąŠąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_LOCKCNT. |
| ADI_PWR_CMD_REMOVE_CLK_CLIENT_CALLBACK |
ąŚąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ ADI_PWR_CALLBACK_FN, čāą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ čāą┤ą░ą╗čÅąĄą╝čāčÄ callback-čäčāąĮą║čåąĖčÄ. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą▒ą╗ąĖčåčŗ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą║ąŠą╝ą░ąĮą┤. ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ ą╝ąŠą┤čāą╗čÄ PM č湥čĆąĄąĘ čäčāąĮą║čåąĖąĖ adi_pwr_Init, adi_pwr_SetVoltageRegulator ąĖ adi_pwr_Control:
typedef struct _ADI_PWR_COMMAND_PAIR
{
ADI_PWR_COMMAND kind;
void *value;
} ADI_PWR_COMMAND_PAIR;
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓čĆąĄąĘą║čā ADI_PWR_COMMAND ą┤ą╗čÅ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą╗čÅ.
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąŠą╗ąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_DIV. ąöąŠą┐čāčüčéąĖą╝čŗ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_CSEL_1 |
ąöąĄą╗ąĖčé ąĮą░ 1 čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░. |
| ADI_PWR_CSEL_2 |
ąöąĄą╗ąĖčé ąĮą░ 2 čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░. |
| ADI_PWR_CSEL_4 |
ąöąĄą╗ąĖčé ąĮą░ 4 čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░. |
| ADI_PWR_CSEL_8 |
ąöąĄą╗ąĖčé ąĮą░ 8 čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą▒ąĖčéą░ DF ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL. ąŚąĮą░č湥ąĮąĖąĄ ADI_PWR_DF_ON ąŠąĘąĮą░čćą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ą▓ąĄą╗ąĖčćąĖąĮčŗ CLKIN/2 ą▓ ą╝ąŠą┤čāą╗čī PLL. ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF533, čŹč鹊 ą▓ą▓ąĄą┤ąĄčé ą║ čüąĮąĖąČąĄąĮąĖčÄ čĆą░čüčüąĄąĖą▓ą░ąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ.
| ADI_PWR_DF_NONE |
ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĘą░ą┤ą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĄą╗ąĖč鹥ą╗čÅ PLL ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ. |
| ADI_PWR_DF_OFF |
ąØą░ PLL ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ CLKIN. |
| ADI_PWR_DF_ON |
ąØą░ PLL ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ CLKIN/2. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ ą▓čģąŠą┤ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL.
| ADI_PWR_INPUT_DELAY_DISABLE |
ąØąĄ ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓čģąŠą┤ąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā ąĮą░ čüąĖą│ąĮą░ą╗ą░čģ čłąĖąĮčŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_INPUT_DELAY_ENABLE |
ąöąŠą▒ą░ą▓ąĖčéčī ąĘą░ą┤ąĄčƹȹ║čā ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą┐čĆąĖą╝ąĄčĆąĮąŠ 200 ą┐čü ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗čŗ ąĮą░ ą▓čģąŠą┤ą░čģ ąĖąĮč鹥čĆč乥ą╣čüą░ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ ą▒čāą┤čāčé ąĘą░čģą▓ą░č湥ąĮčŗ. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┤ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ ą▓čŗčģąŠą┤ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL.
| ADI_PWR_OUTPUT_DELAY_DISABLE |
ąØąĄ ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓čŗčģąŠą┤ąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā ąĮą░ čüąĖą│ąĮą░ą╗ą░čģ čłąĖąĮčŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_OUTPUT_DELAY_ENABLE |
ąöąŠą▒ą░ą▓ąĖčéčī ąĘą░ą┤ąĄčƹȹ║čā ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą┐čĆąĖą╝ąĄčĆąĮąŠ 200 ą┐čü ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ą┐ąŠčÅą▓čÅčéčüčÅ čüąĖą│ąĮą░ą╗čŗ ąĮą░ ą▓čŗčģąŠą┤ą░čģ ąĖąĮč鹥čĆč乥ą╣čüą░ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (power mode). ąöąŠą┐čāčüčéąĖą╝čŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_MODE_FULL_ON |
ą¤čĆąŠčåąĄčüčüąŠčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╝. |
| ADI_PWR_MODE_ACTIVE |
ą¤čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ č鹊ą╗čīą║ąŠ DMA ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ L1. ąóą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ CCLK ąĖ SCLK čüąĮąĖąČąĄąĮčŗ ą┤ąŠ čćą░čüč鹊čéčŗ CLKIN, čéą░ą║ ą║ą░ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PLL ą┐čĆąŠą┐čāčēąĄąĮ, čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüčĆąĄą┤ąĮąĄąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ. |
| ADI_PWR_MODE_ACTIVE_PLLDISABLED |
ą¤čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ č鹊ą╗čīą║ąŠ DMA ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ L1. ąóą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ CCLK ąĖ SCLK čüąĮąĖąČąĄąĮčŗ ą┤ąŠ čćą░čüč鹊čéčŗ CLKIN, čéą░ą║ ą║ą░ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PLL ą┐čĆąŠą┐čāčēąĄąĮ ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ, čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüčĆąĄą┤ąĮąĄąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ. |
| ADI_PWR_MODE_SLEEP |
ą¤čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░ (sleep mode). ą×ąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ ą╗čÄą▒čŗą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ (č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ SIC_IWR), čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠąĄ čüąĮąĖąČąĄąĮąĖąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ. |
| ADI_PWR_MODE_DEEP_SLEEP |
ą¤čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░ (deep sleep mode). ą×ąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ č鹊ą╗čīą║ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ RTC ąĖą╗ąĖ ąŠčé čüą▒čĆąŠčüą░, čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłčāčÄ čŹą║ąŠąĮąŠą╝ąĖčÄ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ. |
| ADI_PWR_MODE_HIBERNATE |
ą¤čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ hibernate. ą×ąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ č鹊ą╗čīą║ąŠ čüąĖčüč鹥ą╝ąĮčŗą╝ čüą▒čĆąŠčüąŠą╝, čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠąĄ čüąĮąĖąČąĄąĮąĖąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéąĖą┐ ą║ąŠčĆą┐čāčüą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą×čéąĮąŠčüąĖčéčüčÅ ą║ ą▓ąĮąĄčłąĮąĄą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ (čüą╝. ą▓čĆąĄąĘą║čā ADI_PWR_VDDEXT). ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠ čĆą░čüčüąĄąĖą▓ą░ąĮąĖčÄ č鹥ą┐ą╗ą░ ą║ąŠčĆą┐čāčüąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
| ADI_PWR_PACKAGE_MBGA |
MBGA. ąŻ ą║ąŠčĆą┐čāčüą░ ą┐ąŠą╗čāčüč乥čĆąĖč湥čüą║ąĖąĄ ą║ąŠąĮčéą░ą║čéčŗ ą▓čŗą▓ąŠą┤ąŠą▓, ąĮą░čģąŠą┤čÅčēąĖąĄčüčÅ ą┐ąŠą┤ ą┐ą╗ąŠčüą║ąŠčüčéčīčÄ ą║ąŠčĆą┐čāčüą░. |
| ADI_PWR_PACKAGE_LQFP |
LQFP. ąŻ ą║ąŠčĆą┐čāčüą░ ą▒ąŠą║ąŠą▓čŗąĄ ą║ąŠąĮčéą░ą║čéčŗ, čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĮčŗąĄ ą┐ąŠ ą┐ąĄčĆąĖą╝ąĄčéčĆčā ą║ąŠčĆą┐čāčüą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ąĮą░čüčéčĆąŠąĄą║, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čü PC-133, ąĖą╗ąĖ ą┤čĆčāą│ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé, ą▒čāą┤ąĄčé ą╗ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ ą▓čŗą▓ąŠą┤ SCKE ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐čĆąĖ ąĄą│ąŠ čüą▒čĆąŠčüąĄ.
| ADI_PWR_PC133_COMPLIANCE_DISABLED |
ą¤čĆąĖ čüą▒čĆąŠčüąĄ čüąĖą│ąĮą░ą╗ SCKE ą▓čŗčüčéą░ą▓ą╗čÅąĄčéčüčÅ; čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ SDRAM čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝. |
| ADI_PWR_PC133_COMPLIANCE_ENABLED |
ą¤čĆąĖ čüą▒čĆąŠčüąĄ čüąĖą│ąĮą░ą╗ SCKE ąĮąĄ ą▓čŗčüčéą░ą▓ą╗čÅąĄčéčüčÅ; čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ SDRAM čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓ą░čĆąĖą░ąĮčé ą┐čĆąŠčåąĄčüčüąŠčĆą░, čćč鹊 čāą┐čĆą░ą▓ą╗čÅąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ ą┐čĆąĄą┤ąĄą╗ą░ą╝ąĖ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čüą║ąŠčĆąŠčüčéąĖ. ą×ąĮ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init() ą▓ą╝ąĄčüč鹥 čü ą║ąŠą╝ą░ąĮą┤ąŠą╣ ADI_PWR_CMD_SET_PROC_VARIANT.
ąóąĄą║čāčēąĖą╣ čüą┐ąĖčüąŠą║ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠą║ą░ąĘą░ąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3-8. ą¤ąŠčüą║ąŠą╗čīą║čā ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ąĮąŠą▓čŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ, č鹊 čüą░ą╝ą░čÅ ą░ą║čéčāą░ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą╣ą┤ąĄąĮą░ ą▓ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĖ ADI_PWR_PROC_KIND, čüą│čĆčāą┐ą┐ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą┐ąŠ čüąĄą╝ąĄą╣čüčéą▓ą░ą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ (ą║ąŠąĮąĄčćąĮąŠ ą┐čĆąĖ čāčüą╗ąŠą▓ąĖąĖ, čćč鹊 čüąĖčüč鹥ą╝ą░ VisualDSP++ ą┐ąŠą╗čāčćą░ą╗ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ). ąŁč鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ adi_pwr.h (Power Management Service API). ąÆą░čĆąĖą░ąĮčéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ąĘą┤ąĄčüčī, ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠ ą░ąĮą░ą╗ąŠą│ąĖąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ą░ą║čĆąŠčüą░ ą▓ čüąĄą║čåąĖąĖ "equivalent values" čäą░ą╣ą╗ą░ adi_pwr.h. ąĪą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ą║ąŠąĮą║čĆąĄčéąĮčāčÄ ą╝ąŠą┤ąĄą╗čī ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ą┐ąŠ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 ąĖ ą┐ąĖčéą░ąĮąĖčÄ.
ąóą░ą▒ą╗ąĖčåą░ 3-8. ąÆą░čĆąĖą░ąĮčéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ |
| ADI_PWR_PROC_BF561SKBCZ_6A |
ADSP-BF561SKBCZ-6A 600 ą£ąōčå |
| ADI_PWR_PROC_BF561SKBCZ500X |
ADSP-BF561SKBCZ500X 500 ą£ąōčå |
| ADI_PWR_PROC_BF561SKBCZ600X |
ADSP-BF561SKBCZ600X 600 ą£ąōčå |
| ADI_PWR_PROC_BF561SBB600 |
ADSP-BF561SBB600 600 ą£ąōčå |
| ADI_PWR_PROC_BF533SKBC750 |
ADSP-BF533SKBC750 750 ą£ąōčå |
| ADI_PWR_PROC_BF533SKBC600 |
ADSP-BF533SKBC600 600 ą£ąōčå |
| ADI_PWR_PROC_BF533SBBC500 |
ADSP-BF533SBBC500 500 ą£ąōčå |
| ADI_PWR_PROC_BF531_OR_BF532 |
ąÆčüąĄ čéąĖą┐čŗ ą║ąŠčĆą┐čāčüąŠą▓ ąĖ ą▓čüąĄ ą║ą▓ą░ą╗ąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSP-BF531 ąĖ ADSP-BF532 |
| ADI_PWR_PROC_BF533SKBC600_6V |
ADSP-BF533SKBC600-6V 600 ą£ąōčå |
| ADI_PWR_PROC_BF537SKBC1600 |
ADSP-BF537SKBC1600 600 ą£ąōčå |
| ADI_PWR_PROC_BF537SBBC1500 |
ADSP-BF537SBBC1500 500 ą£ąōčå |
| ADI_PWR_PROC_BF536SBBC1400 |
ADSP-BF536SBBC1400 400 ą£ąōčå |
| ADI_PWR_PROC_BF536SBBC1300 |
ADSP-BF536SBBC1300 300 ą£ąōčå |
| ADI_PWR_PROC_BF537BBCZ_5AV |
ADSP-BF537BBCZ-5AV 500 ą£ąōčå |
| ADI_PWR_PROC_BF548SKBC1600 |
ADSP-BF548SKBC1600 600 ą£ąōčå |
| ADI_PWR_PROC_BF548SBBC1533 |
ADSP-BF548SBBC1533 533 ą£ąōčå |
| ADI_PWR_PROC_BF548SBBC1400 |
ADSP-BF548SBBC1400 400 ą£ąōčå |
| ADI_PWR_PROC_BF538BBCZ500 |
ADSP-BF538BBCZ500 500 ą£ąōčå |
| ADI_PWR_PROC_BF538BBCZ400 |
ADSP-BF538BBCZ400 400 ą£ąōčå |
| ADI_PWR_PROC_BF539BBCZ500 |
ADSP-BF539BBCZ500 500 ą£ąōčå |
| ADI_PWR_PROC_BF539BBCZ400 |
ADSP-BF539BBCZ400 400 ą£ąōčå |
| ADI_PWR_PROC_BF527SBBC1600 |
ADSP-BF527SBBC1600 600 ą£ąōčå |
| ADI_PWR_PROC_BF527SBBC1533 |
ADSP-BF527SBBC1533 533 ą£ąōčå |
| ADI_PWR_PROC_BF526SBBC1400 |
ADSP-BF526SBBC1400 400 ą£ąōčå |
| ADI_PWR_PROC_BF512SBBC1300 |
ADSP-BF512SBBC1300 300 ą£ąōčå |
| ADI_PWR_PROC_BF512SBBC1400 |
ADSP-BF512SBBC1400 400 ą£ąōčå |
ą£ąŠą┤čāą╗čī PM ą▓ąĄčĆąĮąĄčé ą║ąŠą┤ čĆąĄąĘčāą╗čīčéą░čéą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą▓ ą▓ąĖą┤ąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ čéąĖą┐ą░ ADI_PWR_RESULT. ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-9 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĖ ąŠą┐ąĖčüą░ąĮčŗ čŹčéąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 3-9. ąÜąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ API-čäčāąĮą║čåąĖą╣ ą╝ąŠą┤čāą╗čÅ PM.
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ą¦č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé |
| ADI_PWR_RESULT_SUCCESS |
API-čäčāąĮą║čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ. |
| ADI_PWR_RESULT_FAILED |
ą×ą▒čēąĄąĄ ąĮąĄčāą┤ą░čćąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ. |
| ADI_PWR_RESULT_NO_MEMORY |
ąØąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣. |
| ADI_PWR_RESULT_BAD_COMMAND |
ąÜąŠą╝ą░ąĮą┤ą░ ąĮąĄ čĆą░čüą┐ąŠąĘąĮą░ąĮą░. |
| ADI_PWR_RESULT_NOT_INITIALIZED |
ąÆčŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ą▒čŗą╗ ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮ (ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąŠ ąĮąĄ ą▒čŗą╗ąŠ), ą┐ąŠč鹊ą╝čā čćč鹊 ą╝ąŠą┤čāą╗čī PM ąĮąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
| ADI_PWR_RESULT_ALREADY_INITIALIZED |
ąÆčŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ adi_pwr_Init ą▒čŗą╗ ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮ (ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąŠ ąĮąĄ ą▒čŗą╗ąŠ), ą┐ąŠč鹊ą╝čā čćč鹊 ą╝ąŠą┤čāą╗čī PM čāąČąĄ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
| ADI_PWR_RESULT_INVALID_VDDEXT |
ąŻą║ą░ąĘą░ąĮąŠ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_RESULT_VDDINT_MUST_BE_SUPPLIED |
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮčÅčÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą▓ čäčāąĮą║čåąĖčÄ adi_pwr_Init ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ čüąĮą░čĆčāąČąĖ VDDINT. |
| ADI_PWR_RESULT_INVALID_PROCESSOR |
ąŻą║ą░ąĘą░ąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čéąĖą┐ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ADI_PWR_RESULT_INVALID_IVG |
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī IVG ą┤ą╗čÅ PLL wakeup. |
| ADI_PWR_RESULT_INVALID_INPUT_DELAY |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą▓čģąŠą┤ąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ąĮą░ čłąĖąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_RESULT_INVALID_OUTPUT_DELAY |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą▓čŗčģąŠą┤ąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ąĮą░ čłąĖąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. |
| ADI_PWR_RESULT_INVALID_LOCKCNT |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąĘą░čģą▓ą░čéą░ PLL (PLL lock count). |
| ADI_PWR_RESULT_INVALID_MODE |
ąŻą║ą░ąĘą░ąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ADI_PWR_RESULT_INVALID_CSEL |
ąŻą║ą░ąĘą░ąĮąŠ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CSEL. |
| ADI_PWR_RESULT_INVALID_SSEL |
ąŻą║ą░ąĘą░ąĮąŠ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ SSEL. |
| ADI_PWR_INVALID_CSEL_SSEL_COMBINATION |
ąŚąĮą░č湥ąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąĘąĮą░č湥ąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ čćą░čüč鹊čéčŗ čłąĖąĮčŗ, ąĖą╗ąĖ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╣ čāą║ą░ąĘą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ADI_PWR_CSEL_NONE ąĖ ADI_PWR_SSEL_NONE. |
| ADI_PWR_RESULT_VOLTAGE_REGULATOR_BYPASSED |
ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮ ą▓čŗą║ą╗čÄč湥ąĮ (bypassed). |
| ADI_PWR_RESULT_INVALID_VLEV |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░čĆą│čāą╝ąĄąĮčé VLEV, ąĖą╗ąĖ ąĄą│ąŠ ąĮąĄ čģą▓ą░čéą░ąĄčé ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ č鹥ą║čāčēąĖčģ čćą░čüč鹊čé čÅą┤čĆą░ ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ. |
| ADI_PWR_RESULT_INVALID_VR_FREQ |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ FREQ. |
| ADI_PWR_RESULT_INVALID_VR_GAIN |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ GAIN. |
| ADI_PWR_RESULT_INVALID_VR_WAKE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ WAKE. |
| ADI_PWR_RESULT_INVALID_VR_PHYWE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ PHYWE. |
| ADI_PWR_RESULT_INVALID_VR_CANWE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CANWE. |
| ADI_PWR_RESULT_INVALID_VR_USBWE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ USBWE. |
| ADI_PWR_RESULT_INVALID_VR_GPWE_MXVRWE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé GPIO ąĖą╗ąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ MXVR. |
| ADI_PWR_RESULT_INVALID_VR_CLKBUFOE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CLKBUFOE. |
| ADI_PWR_RESULT_INVALID_VR_CKELOW |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CKELOW. |
| ADI_PWR_RESULT_CANT_HOOK_SUPPLEMENTAL_INTERRUPT |
ąØąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ą┐ąŠą┤čåąĄą┐ąĖčéčī ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (halt) ą┤čĆčāą│ąŠą│ąŠ čÅą┤čĆą░ (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ą▓čāčģčŖčÅą┤ąĄčĆąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓). |
| ADI_PWR_RESULT_NO_CALLBACK_INSTALLED |
ąæčŗą╗ą░ ą┐ąŠą┐čŗčéą║ą░ čāą┤ą░ą╗ąĖčéčī callback, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ. |
| ADI_PWR_RESULT_EXCEEDED_MAX_CALLBACKS |
Callback ąĮąĄ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐ąŠč鹊ą╝čā čćč鹊 čāąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ callback-ąŠą▓. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąŠą╗ąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_DIV. ąöąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_PWR_SSEL_1 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 1. |
| ADI_PWR_SSEL_2 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 2. |
| ADI_PWR_SSEL_3 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 3. |
| ADI_PWR_SSEL_4 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 4. |
| ADI_PWR_SSEL_5 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 5. |
| ADI_PWR_SSEL_6 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 6. |
| ADI_PWR_SSEL_7 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 7. |
| ADI_PWR_SSEL_8 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 8. |
| ADI_PWR_SSEL_9 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 9. |
| ADI_PWR_SSEL_10 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 10. |
| ADI_PWR_SSEL_11 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 11. |
| ADI_PWR_SSEL_12 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 12. |
| ADI_PWR_SSEL_13 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 13. |
| ADI_PWR_SSEL_14 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 14. |
| ADI_PWR_SSEL_15 |
ąöąĄą╗ąĖčéčī čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą┤čĆą░ ąĮą░ 15. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓ąĮąĄčłąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ (VDDEXT), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ ą┤ą╗čÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
| ADI_PWR_VDDEXT_330 |
3.3V |
| ADI_PWR_VDDEXT_250 |
2.5V |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ čāčĆąŠą▓ąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSP-BF533 ąĖ ADSP-BF561 čüą╗ąĄą┤čāčÄčēąĖąĄ:
| ADI_PWR_VLEV_085 |
0.85V |
| ADI_PWR_VLEV_090 |
0.90V |
| ADI_PWR_VLEV_095 |
0.95V |
| ADI_PWR_VLEV_100 |
1.00V |
| ADI_PWR_VLEV_105 |
1.05V |
| ADI_PWR_VLEV_110 |
1.10V |
| ADI_PWR_VLEV_115 |
1.15V |
| ADI_PWR_VLEV_120 |
1.20V (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ) |
| ADI_PWR_VLEV_125 |
1.25V |
| ADI_PWR_VLEV_130 |
1.30V |
| ADI_PWR_VLEV_135 |
1.35V |
| ADI_PWR_VLEV_140 |
1.4V |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą▒ąĖčéą░ CANWE ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ power-down č湥čĆąĄąĘ ą░ą║čéąĖą▓ąĮąŠčüčéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN.
| ADI_PWR_VR_CANWE_DISABLED |
ąŚą░ą┐čĆąĄčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN. |
| ADI_PWR_VR_CANWE_ENABLED |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą▒ąĖčéą░ CKELOW ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 ą▓čŗą▓ąŠą┤ SCKE ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0 ą┐čĆąĖ čüą▒čĆąŠčüąĄ čüąĖčüč鹥ą╝čŗ, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą┤ą╗čÅ SDRAM ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh mode).
| ADI_PWR_VR_PHYWE_DISABLED |
ą¤čĆąĖ čüą▒čĆąŠčüąĄ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ SCKE ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ SDRAM ą┐čĆąĖ čŹč鹊ą╝ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝. |
| ADI_PWR_VR_PHYWE_ENABLED |
ą¤čĆąĖ čüą▒čĆąŠčüąĄ SCKE ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ SDRAM čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┤ą░ąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą▒ąĖčéą░ CLKBUFOE ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 čüąĖą│ąĮą░ą╗ CLKIN ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ąŠčüąŠą▒ąĄąĮąĮąŠ Ethernet PHY.
| ADI_PWR_VR_CLKBUFOE_DISABLED |
ąŚą░ą┐čĆąĄčé čüąŠą▓ą╝ąĄčüčéąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ CLKIN. |
| ADI_PWR_VR_CLKBUFOE_ENABLED |
ąĀą░ąĘčĆąĄčłąĖčéčī čüąŠą▓ą╝ąĄčüčéąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ CLKIN. |
ąŁč鹊čé čéąĖą┐ą░ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┤ą╗čÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąŁč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čüą▓čÅąĘą░ąĮąŠ čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ ąĖ ąĖąĮą┤čāą║čéąĖą▓ąĮąŠčüčéąĖ ą▓ čüąĖą╗ąŠą▓ąŠą╝ čäąĖą╗čīčéčĆąĄ čĆąĄą│čāą╗čÅč鹊čĆą░. ą¦ąĄą╝ ą▓čŗčłąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čćą░čüč鹊čéą░, č鹥ą╝ ą╝ąŠą│čāčé ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĄą╝ą║ąŠčüčéąĖ ąĖ ąĖąĮą┤čāą║čéąĖą▓ąĮąŠčüčéąĖ. ąöąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin:
| ADI_PWR_VR_FREQ_POWERDOWN |
ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ (bypass, ą┐čĆąŠą┐čāčüą║) ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. |
| ADI_PWR_VR_FREQ_333KHZ |
333 ą║ąōčå |
| ADI_PWR_VR_FREQ_667KHZ |
667 ą║ąōčå |
| ADI_PWR_VR_FREQ_1MHZ |
1 ą£ąōčå (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ) |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čāčüąĖą╗ąĄąĮąĖčÅ (gain) ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ąĄčéą╗ąĄ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░. ąŻčüąĖą╗ąĄąĮąĖąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé č鹥ą╝, ąĮą░čüą║ąŠą╗čīą║ąŠ ą▒čŗčüčéčĆąŠ ą▓čŗčģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ čéčĆąĄą▒čāąĄą╝ąŠąĄ ą║ąŠąĮąĄčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ą¦ąĄą╝ ą▓čŗčłąĄ čāčüąĖą╗ąĄąĮąĖąĄ, č鹥ą╝ ą║ąŠčĆąŠč湥 ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ. ąĪą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāčüąĖą╗ąĄąĮąĖčÅ ą┐čĆąĖą▓ąŠą┤čÅčé ą║ ą┐ąŠą▓čŗčłąĄąĮąĮčŗą╝ ą┐ąĄčĆąĄčģąŠą┤ąĮčŗą╝ ą┐čĆąŠčåąĄčüčüą░ą╝ ą┐čĆąĖ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĖ.
| ADI_PWR_VR_GAIN_5 |
5 |
| ADI_PWR_VR_GAIN_10 |
10 |
| ADI_PWR_VR_GAIN_20 |
20 (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ) |
| ADI_PWR_VR_GAIN_50 |
50 |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (GPWE, general-purpose wakeup) ąĖą╗ąĖ ą▒ąĖčé MXVR ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓. ąĢčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ (ADI_PWR_VR_GPWE_MXVRWE_ENABLED), č鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čĆąĄą│čāą╗čÅč鹊čĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate ą┐čĆąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ ąŠčé general-purpose wakeup ąĖą╗ąĖ MXVR.
| ADI_PWR_VR_GPWE_MXVRWE_DISABLED |
ąŚą░ą┐čĆąĄčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé GPIO. |
| ADI_PWR_VR_GPWE_MXVRWE_ENABLED |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé GPIO. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą▒ąĖčéą░ PHYWE ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ power-down ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ čüąŠ čüč鹊čĆąŠąĮčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ PHY.
| ADI_PWR_VR_PHYWE_DISABLED |
ąŚą░ą┐čĆąĄčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ PHY. |
| ADI_PWR_VR_PHYWE_ENABLED |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ PHY. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą▒ąĖčéą░ USBWE ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ power-down ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ ąĖąĮč鹥čĆč乥ą╣čüą░ USB.
| ADI_PWR_VR_USBWE_DISABLED |
ąŚą░ą┐čĆąĄčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ USB. |
| ADI_PWR_VR_USBWE_ENABLED |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ USB. |
ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą▒ąĖčéą░ WAKE ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ (ADI_PWR_VR_WAKE_ENABLED), č鹊 čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ power-down (ADI_PWR_VR_FREQ_POWERDOWN) ą┐čĆąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ RTC ąĖą╗ąĖ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤čā ą▓ ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗą▓ąŠą┤ąĄ RESET.
| ADI_PWR_VR_WAKE_DISABLED |
ąŚą░ą┐čĆąĄčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé RTC ąĖ RESET. |
| ADI_PWR_VR_WAKE_ENABLED |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé RTC ąĖ RESET. |
[ą£ą░ą║čĆąŠčüčŗ ą╝ąŠą┤čāą╗čÅ PM]
ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-10 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĖ ąŠą┐ąĖčüą░ąĮčŗ ą╝ą░ą║čĆąŠčüčŗ ą╝ąŠą┤čāą╗čÅ PM (power management, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝). ąŚą┤ąĄčüčī ąĮąĄ ą┐ąŠą║ą░ąĘą░ąĮ čüą┐ąĖčüąŠą║ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą║ąŠč鹊čĆčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ čüą┐ąĖčüą║čā ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_PWR_PROC_KIND. ą¤ąŠčüą║ąŠą╗čīą║čā ą╝ąŠą│čāčé ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ąĮąŠą▓čŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ, č鹊 ą┐čĆąŠčüą╝ąŠčéčĆąĖč鹥 ą╝ą░ą║čĆąŠčüčŗ ą▓ čüąĄą║čåąĖąĖ "equivalent values" ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą│ąŠ čäą░ą╣ą╗ą░ adi_pwr.h (Power Management Service API), čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┐ąŠą╗ąĮčŗą╣ čüą┐ąĖčüąŠą║ "菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗčģ" ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ąóą░ą▒ą╗ąĖčåą░ 3-10. ą£ą░ą║čĆąŠčüčŗ ą╝ąŠą┤čāą╗čÅ PM.
| ą£ą░ą║čĆąŠčü |
ąöą╗čÅ č湥ą│ąŠ ąĮčāąČąĄąĮ |
| ADI_PWR_VLEV_DEFAULT |
ąŻčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ / ą┐čĆąĖ čüą▒čĆąŠčüąĄ ADI_PWR_VLEV_130. |
| ADI_PWR_VLEV_MIN |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ADI_PWR_VLEV_085. |
| ADI_PWR_VLEV_MAX |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ADI_PWR_VLEV_120. |
| ADI_PWR_VOLTS(V) |
ąÆąŠąĘą▓čĆą░čéąĖčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▓ ą▓ąŠą╗čīčéą░čģ ą║ą░ą║ čćąĖčüą╗ąŠ float ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ. |
| ADI_PWR_MILLIVOLTS(V) |
ąÆąŠąĘą▓čĆą░čéąĖčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▓ ą╝ąĖą╗ą╗ąĖą▓ąŠą╗čīčéą░čģ ą║ą░ą║ čćąĖčüą╗ąŠ int ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ. |
| ADI_PWR_VR_FREQ_DEFAULT |
ą¦ą░čüč鹊čéą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ / ą┐čĆąĖ čüą▒čĆąŠčüąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ADI_PWR_FREQ_1MHZ. |
| ADI_PWR_VR_FREQ_MIN |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ADI_PWR_FREQ_POWERDOWN. |
| ADI_PWR_VR_FREQ_MAX |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ADI_PWR_FREQ_1MHZ. |
| ADI_PWR_VR_GAIN_DEFAULT |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ / ą┐čĆąĖ čüą▒čĆąŠčüąĄ ą┤ą╗čÅ čāčüąĖą╗ąĄąĮąĖčÅ ą┐ąĄčéą╗ąĖ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ADI_PWR_GAIN_20. |
| ADI_PWR_VR_GAIN_MIN |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čāčüąĖą╗ąĄąĮąĖčÅ ą┐ąĄčéą╗ąĖ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ADI_PWR_GAIN_5. |
| ADI_PWR_VR_GAIN_MAX |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čāčüąĖą╗ąĄąĮąĖčÅ ą┐ąĄčéą╗ąĖ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ADI_PWR_GAIN_50. |
| ADI_PWR_PACKAGE_PBGA |
ąŁą║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ čéąĖą┐ ą║ąŠčĆą┐čāčüą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┤ą╗čÅ ADI_PWR_PACKAGE_MBGA. |
[ąĪčüčŗą╗ą║ąĖ]
1. VisualDSP++ 5.0 Device Drivers and System Services Manual for Blackfin® Processors site:analog.com.
2. VisualDSP++ 5.0 C/C++ Compiler and Library Manual for Blackfin® Processors site:analog.com.
3. Blackfin: ą┐čĆą░ą║čéąĖč湥čüą║ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (bootloader).
4. Blackfin: čāčéąĖą╗ąĖčéą░ elfloader.exe.
5. ADSP-BF538: ą▒ą╗ąŠą║ ąĖąĮč鹥čĆč乥ą╣čüą░ ą▓ąĮąĄčłąĮąĄą╣ čłąĖąĮčŗ.
6. ADSP-BF538: ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝. |