ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1], ą║ą░čüą░čÄčēąĄą╣čüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (dynamic power management, DPM ) ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ADSP-BF538 . ąÉą┐ą┐ą░čĆą░čéčāčĆą░ DPM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ:
ŌĆó ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čÅą┤čĆą░ ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
[ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ]
ąÆčģąŠą┤ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (ąĮąŠąČą║ą░ CLKIN ), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ čćą░čüč鹊čéčā čüąĖą│ąĮą░ą╗ą░, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą▓čüčéčĆąŠąĄąĮąĮąŠą╝ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆ ą▒ą╗ąŠą║ąĄ čāą╝ąĮąŠąČąĄąĮąĖčÅ čćą░čüč鹊čéčŗ (ą╝ąŠą┤čāą╗čī čäą░ąĘąŠą▓ąŠą╣ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ čćą░čüč鹊čéčŗ, phase-locked loop ąĖą╗ąĖ čüąŠą║čĆą░čēąĄąĮąĮąŠ PLL ). ąÆąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé PLL ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ čćą░čüč鹊čéčŗ CLKIN. ąĀąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖą╣ čāą╝ąĮąŠąČąĄąĮąĮčŗą╣ ą┐ąŠ čćą░čüč鹊č鹥 čüąĖą│ąĮą░ą╗ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (voltage controlled oscillator, VCO ). ąŚą░č鹥ą╝ čćą░čüč鹊čéą░ VCO ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąŠą▒čĆą░ąĘčāąĄčéčüčÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (core clock, CCLK ).
ąĢčēąĄ ąŠą┤ąĖąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ąĘą░ą┤ą░ąĄčé ą┤ąĄą╗ąĄąĮąĖąĄ čćą░čüč鹊čéčŗ VCO ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (system clock, SCLK , ąŠąĮą░ ąČąĄ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čłąĖąĮčŗ). ąĪąĖą│ąĮą░ą╗ SCLK čéą░ą║čéąĖčĆčāąĄčé čĆą░ą▒ąŠčéčā čłąĖąĮčŗ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ (peripheral access bus, PAB), čłąĖąĮčŗ ą┐čĆčÅą╝ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ (DMA bus, DAB), ą▓ąĮąĄčłąĮąĄą╣ čłąĖąĮčŗ ą░ą┤čĆąĄčüą░ (external address bus, EAB), ąĖ ą▒ą╗ąŠą║ą░ ąĖąĮč鹥čĆč乥ą╣čüą░ ą▓ąĮąĄčłąĮąĄą╣ čłąĖąĮčŗ (external bus interface unit, EBIU).
ąŁčéąĖ čłąĖąĮčŗ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čćą░čüč鹊č鹥 PLL, ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠą╣ ąĮą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé 1..15 (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą┤ąŠą╝ąĄąĮ SCLK). ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ SSEL ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ PLL (PLL divide register) ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ čćą░čüč鹊čéą░ ą┤ąĄą╗ąĖč鹥ą╗čÅ, čćč鹊ą▒čŗ čŹčéąĖ čłąĖąĮčŗ ą╝ąŠą│ą╗ąĖ čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹥 SCLK (ą║ąŠč鹊čĆą░čÅ čāą║ą░ąĘą░ąĮą░ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F) ąĖą╗ąĖ ąĮąĖąČąĄ.
ą¦č鹊ą▒čŗ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖ čĆą░čüčüąĄąĖą▓ą░ąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ, ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą┐ąŠą╝ąĄąĮčÅčéčī čćą░čüč鹊čéčŗ čÅą┤čĆą░ ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (CCLK ąĖ SCLK), čü ą│čĆčāą▒ąŠą╣ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąŠą╣. ąöą╗čÅ č鹊čćąĮąŠą╣ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ ąĮčāąČąĮąŠ čéą░ą║ąČąĄ ą┐ąŠą╝ąĄąĮčÅčéčī čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā PLL.
PLL ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ . ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗąĄ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ ą┤ą╗čÅ čÅą┤čĆą░ ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ, ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé PLL ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╣ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣.
PLL ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čłąĖčĆąŠą║ąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹč鹊ą╣ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒čŖąĄą┤ąĖąĮąĖčéčī ą▓ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ąĖ ą┐ąĄčĆąĄąĮąŠčüąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ ąĮąĖąĘą║čāčÄ čüč鹊ąĖą╝ąŠčüčéčī ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą▓ čüąŠč湥čéą░ąĮąĖąĖ čü ą▓čŗčüąŠą║ąĖą╝ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄą╝, ą┐čĆąĖč湥ą╝ ąĮąĄ č鹥čĆčÅąĄčéčüčÅ ą│ąĖą▒ą║ąŠčüčéčī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąĀą░ąĘą╗ąĖčćąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čéčĆąĄą▒čāčÄčé ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čćą░čüč鹊čé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÆčģąŠą┤ąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ą┤ą╗čÅ PLL ąŠą▒čŗčćąĮąŠ čüą╗čāąČąĖčé čüąĖą│ąĮą░ą╗ ąŠčé ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░.
PLL ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāąĄčé čü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (dynamic power management controller, DPMC ), čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čäčāąĮą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ DPMC čüą╝. čĆą░ąĘą┤ąĄą╗ "ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DPM (DPMC)".
ą×ą▒ąĘąŠčĆ PLL . ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ VCO, čüąĖčüč鹥ą╝ą░ PLL ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ CLKIN. ą¦č鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī čłąĖčĆąŠą║ąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ čāą╝ąĮąŠąČąĄąĮąĖčÅ, ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╣ ą▓ čüčģąĄą╝ąĄ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ PLL ąĖ ą▒ą╗ąŠą║ą░čģ ą▓čŗčģąŠą┤ąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
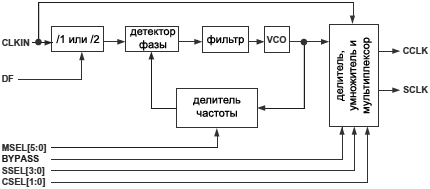
ąØą░ čĆąĖčüčāąĮą║ąĄ 8-1 ą┐ąŠą║ą░ąĘą░ąĮą░ ą║ąŠąĮčåąĄą┐čéčāą░ą╗čīąĮą░čÅ ą╝ąŠą┤ąĄą╗čī čüčģąĄą╝ąŠč鹥čģąĮąĖą║ąĖ PLL, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čģąŠą┤ąŠą▓, ąĖ ą┐ąŠą╗čāčćą░čÄčēąĖąĄčüčÅ ą▓čŗčģąŠą┤čŗ. ąØą░ čĆąĖčüčāąĮą║ąĄ VCO čŹč鹊 ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░, ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ CCLK ąĖ čćą░čüč鹊čéą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ SCLK.
ąĀąĖčü. 8-1. ąæą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ PLL.
ąÜąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ PLL . ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL control register, PLL_CTL) ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠč鹊ą╣ PLL. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ čĆąĄą│ąĖčüčéčĆ PLL_CTL čüą╝. ą▓čĆąĄąĘą║čā "PLL_CTL".
ąæąĖčé ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ (divide frequency, DF) ąĖ ą┐ąŠą╗ąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ čāą╝ąĮąŠąČąĄąĮąĖčÅ (multiplier select, MSEL[5:0]) ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┤ąĄą╗ąĖč鹥ą╗ąĖ čéą░ą║č鹊ą▓ PLL:
ŌĆó DF čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĄą╗ąĖč鹥ą╗čÅ (ą▓ą║ą╗čÄčćą░ąĄčé ą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░ 2).
ąŚąĮą░č湥ąĮąĖąĄ MSEL ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čĆą░ą▓ąĮąŠ 0xA. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ą║ąŠą┤ąŠą╝ ąĘą░ą┐čāčüą║ą░ ąĖ ąĘą░ą│čĆčāąĘą║ąĖ (startup).
ąÆ čéą░ą▒ą╗ąĖčåąĄ 8-1 ą┐ąŠą║ą░ąĘą░ąĮčŗ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ VCO ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĮą░čüčéčĆąŠąĄą║ MSEL ąĖ DF.
ąóą░ą▒ą╗ąĖčåą░ 8-1. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ąĘąĮą░č湥ąĮąĖą╣ MSEL ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ čāą╝ąĮąŠąČąĄąĮąĖčÅ.
MSEL[5:0] ą¦ą░čüč鹊čéą░ VCO
DF = 0 DF = 1
0
x 64
x 32
1
x 1
x 0.5
2
x 2
x 1
N = 3..62
x N
x 0.5N
63
x 63
x 31.5
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ, čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ MSEL[5:0] ąĖ DF ą╝ąŠą│čāčé ą┤ą░ą▓ą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ čćą░čüč鹊čéčŗ VCO. ąöą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąŠą┤ąĮą░ ąĖąĘ ą║ąŠą╝ą▒ąĖąĮą░čåąĖą╣ ą╝ąŠąČąĄčé ą┤ą░čéčī ą╝ąĄąĮčīčłąĄąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ąĖą╗ąĖ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹥 VCO. ąÆ ąŠą▒čŗčćąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ čāčüčéą░ąĮąŠą▓ą║ą░ DF ą▓ 1 ąŠą▒čŗčćąĮąŠ ą┤ą░ąĄčé čāą╝ąĄąĮčīčłąĄąĮąĖąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ. ąĪą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗčģ ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗčģ čćą░čüč鹊čé ą┤ą╗čÅ CLKIN, CCLK ąĖ VCO.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄą╝ čćą░čüč鹊čé CCLK/SCLK . ąÆ čéą░ą▒ą╗ąĖčåąĄ 8-2 ąŠą┐ąĖčüą░ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā čćą░čüč鹊č鹊ą╣ VCO ąĖ čćą░čüč鹊č鹊ą╣ čÅą┤čĆą░ CCLK. ąóą░ą▒ą╗ąĖčåą░ 8-3 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā čćą░čüč鹊č鹊ą╣ VCO ąĖ čćą░čüč鹊č鹊ą╣ čłąĖąĮčŗ SCLK. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮąŠ ą┤ą╗čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ čćą░čüč鹊čéčŗ SCLK ą┤ąŠ ą┐čĆąĄą┤ąĄą╗ą░, ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ą┐ąŠ ą┤ą░čéą░čłąĖčéčā ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F. ą¦ą░čüč鹊čéą░ SCLK ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čüąĖąĮčģčĆąŠąĮąĮąŠčüčéčī ą▓čüąĄą╣ ą╗ąŠą│ąĖą║ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čüąĖčüč鹥ą╝ąĮąŠą╝ čāčĆąŠą▓ąĮąĄ.
ąæąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ą╝ąĖ ą┤ąĄą╗ąĄąĮąĖčÅ CSEL ąĖ SSEL ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╝ PLL (PLL divide register, PLL_DIV). ąśąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ čŹč鹊ą╝čā čĆąĄą│ąĖčüčéčĆčā čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ "PLL_DIV". ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ B ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1] "System MMR Assignments" ą┤ą░ąĮą░ ą┐čĆąĖą▓čÅąĘą║ą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ ą░ą┤čĆąĄčüąĮąŠą╝čā ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓čā ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ąŚąĮą░č湥ąĮąĖąĄ čüą▒čĆąŠčüą░ CSEL[1:0] čĆą░ą▓ąĮąŠ 0x0 (/1), ąĖ ąĘąĮą░č湥ąĮąĖąĄ čüą▒čĆąŠčüą░ ą┤ą╗čÅ SSEL[3:0] čĆą░ą▓ąĮąŠ 0x5. ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą▓ ą╝ąŠą╝ąĄąĮčé čüčéą░čĆčéą░ ą║ąŠą┤ą░ ąĘą░ą│čĆčāąĘą║ąĖ (startup).
ą¤čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ PLL_DIV ą╝ąŠąČąĮąŠ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą┐ąŠą╝ąĄąĮčÅčéčī ąĘąĮą░č湥ąĮąĖčÅ CSEL ąĖ SSEL. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ CCLK ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ SCLK (čé. ąĄ. čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ CCLK ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ čćą░čüč鹊č鹥 čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ SCLK. ą×ą▒čŗčćąĮąŠ čćą░čüč鹊čéą░ čÅą┤čĆą░ ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą▒ąŠą╗čīčłąĄ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ). ąĢčüą╗ąĖ čĆąĄą│ąĖčüčéčĆ PLL_DIV ą▒čŗą╗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ, ą┤ąĄą╗ąĖč鹥ą╗čī SCLK ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą▓ąĄą╗ąĖčćąĖčéčüčÅ čéą░ą║, čćč鹊ą▒čŗ ąŠąĮ ą▒čŗą╗ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĄąĮ ą┤ąĄą╗ąĖč鹥ą╗čÄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░.
ąĀąĄą│ąĖčüčéčĆ PLL_DIV ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą▓ ą╗čÄą▒ąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą┤ąĄą╗ąĄąĮąĖčÅ CCLK ąĖ SCLK, ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓ą▓ąŠą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle).
ąóą░ą▒ą╗ąĖčåą░ 8-2. ąÜąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░.
CSEL[1:0] ąĪąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą¤čĆąĖą╝ąĄčĆčŗ čüąŠąŠčéąĮąŠčłąĄąĮąĖą╣ čćą░čüč鹊čé (ą£ąōčå)
VCO CCLK
00
1
200
300
01
2
600
300
10
4
600
150
11
8
400
50
ą¤ąŠą║ą░ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą▒ąĖčéčŗ MSEL ąĖ DF ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL ąŠčüčéą░čÄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ąĖ, PLL ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąĘą░čģą▓ą░čéą░.
ąóą░ą▒ą╗ąĖčåą░ 8-3. ąÜąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ.
SSEL[3:0] ąĪąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą¤čĆąĖą╝ąĄčĆčŗ čüąŠąŠčéąĮąŠčłąĄąĮąĖą╣ čćą░čüč鹊čé (ą£ąōčå)
VCO SCLK
0000
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
-
-
0001
1
100
100
0010
2
200
100
0011
3
400
133
0100
4
500
125
0101
5
600
120
0110
6
600
100
N = 7..15
N
600
600/N
ąĢčüą╗ąĖ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čłąĖąĮčŗ ąĘą░ą┐ąĖčüčīčÄ ąĮąŠą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠą╗čÅ SSEL ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_DIV, ą┐ąŠąĘą░ą▒ąŠčéčīč鹥čüčī ąŠ č鹊ą╝, čćč鹊ą▒čŗ ąĮą░ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ ą▓ čĆą░ą▒ąŠčéčā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖą╗ąĖ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮčŗąĄ ą┐čĆąŠčåąĄčüčüčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąÆ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠč鹥čĆčÅąĮčŗ ąĖąĘ-ąĘą░ ą┐čĆąŠčåąĄčüčüą░ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čćą░čüč鹊čéčŗ SCLK.
[ąĀąĄą│ąĖčüčéčĆčŗ PLL ]
ąśąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL čüąŠčüč鹊ąĖčé ąĖąĘ č湥čéčŗčĆąĄčģ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓:
ŌĆó ąĀąĄą│ąĖčüčéčĆ ą┤ąĄą╗ąĖč鹥ą╗čÅ PLL (PLL_DIV)
ąÆčüąĄ čŹčéąĖ 4 čĆąĄą│ąĖčüčéčĆą░ MMR čÅą▓ą╗čÅčÄčéčüčÅ 16-ą▒ąĖčéąĮčŗą╝ąĖ, ąĖ ą║ ąĮąĖą╝ ą┤ąŠą╗ąČąĄąĮ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ 16-ą▒ąĖčéąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ.
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąĄą╗ąĖč鹥ą╗čÅą╝ąĖ PLL (PLL divide register, PLL_DIV) čāą┐čĆą░ą▓ą╗čÅąĄčé ą┤ąĄą╗ąĄąĮąĖąĄą╝ ą▓čŗčģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ PLL ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ (CCLK) ąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (SCLK). ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░čģą▓ą░čéą░ PLL. ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╝ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝ąĖ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖą╣ CCLK ąĖ SCLK čŹč鹊 čāčüą╗ąŠą▓ąĖąĄ, čćč鹊 čćą░čüč鹊čéą░ CCLK ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ SCLK, ąĖ čćą░čüč鹊čéą░ SCLK ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┐ą░ą┤ą░čéčī ą▓ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┐ąŠ ą┤ą░čéą░čłąĖčéčā ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F. ąĢčüą╗ąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ CCLK ąĖ SCLK ąĮąĄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčé čŹčéąĖą╝ čāčüą╗ąŠą▓ąĖčÅą╝, č鹊 ąĘąĮą░č湥ąĮąĖąĄ čćą░čüč鹊čéčŗ SCLK ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ čéą░ą║, čćč鹊ą▒čŗ ąŠą║ą░ąĘą░čéčīčüčÅ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠą╣ čćą░čüč鹊čéčŗ CCLK. ąĀąĖčü. 8-2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ PLL_DIV.
ąĀąĖčü. 8-2. PLL Divide Register (PLL_DIV).
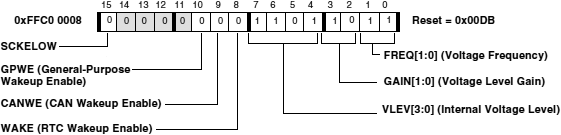
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL control register, PLL_CTL) ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ PLL (čüą╝. čĆąĖčü. 8-3). ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL ąĮąĄ ą▓čüčéčāą┐ą░čÄčé ą▓ čüąĖą╗čā ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ (ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ąĘą░čģą▓ą░čéą░ PLL). ą×ą▒čŗčćąĮąŠ čüąĮą░čćą░ą╗ą░ čĆąĄą│ąĖčüčéčĆ PLL_CTL ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ąĮąŠą▓čŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ, ąĖ ą┐ąŠč鹊ą╝ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čüčéčāą┐ąĖą╗ąĖ ą▓ čüąĖą╗čā. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. "ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL".
ąĀąĖčü. 8-3. PLL Control Register (PLL_CTL).
ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL:
MSEL[5:0] . ą¤ąŠą╗ąĄ ą▓čŗą▒ąŠčĆą░ ą╝ąĮąŠąČąĖč鹥ą╗čÅ (multiplier select, MSEL) ąĘą░ą┤ą░ąĄčé ą╝ąĮąŠąČąĖč鹥ą╗čī, ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗą╣ ą║ ą▓čģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčā ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ VCO (čāą╝ąĮąŠąČąĄąĮąĖąĄ CLKIN ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ VCO).
BYPASS . ąŁč鹊čé ą▒ąĖčé ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą┐čāčüą║ą░ (bypass) čüąĖčüč鹥ą╝čŗ PLL. ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé BYPASS, CLKIN ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓ čÅą┤čĆąŠ ąĖ ąĮą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
OUTDELAY[1:0] . ąŁčéąĖ ą▒ąĖčéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ, ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ (čüąĖą│ąĮą░ą╗čŗ ą░ą┤čĆąĄčüą░, ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ) ą▒čāą┤čāčé ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ CLKOUT. ąŚąĮą░č湥ąĮąĖąĄ 00 ą║ąŠą┤ąĖčĆčāąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗčģąŠą┤ąŠą▓. ąÆčŗčģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┐ą░ą╝čÅčéąĖ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčāčÄ ą║ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║čā 200 ą┐čü ąĖą╗ąĖ 400 ą┐čü, ąĖą╗ąĖ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī čāą╝ąĄąĮčīčłąĄąĮąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā ąĮą░ 200 ą┐čü ą╝ąĄąĮčīčłąĄ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┐ąŠą╗čÅ OUTDELAY čĆą░ą▓ąĮąŠ 01, čćč鹊 ą▓čŗą▒ąĖčĆą░ąĄčé ąĘą░ą┤ąĄčƹȹ║čā 400 ą┐čü, ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčāčÄ ą║ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĄ.
00: ąĮąŠą╝ąĖąĮą░ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čŗąĘąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, ą┐ąŠą┤ą░ą▓ą░ąĄą╝čŗčģ ąĮą░ SDRAM
INDELAY[1:0] . ąŁčéąĖ ą▒ąĖčéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ ą╝ąŠą╝ąĄąĮčéą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ (čćč鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ) ą▒čāą┤čāčé ąŠčåąĖčäčĆąŠą▓ą░ąĮčŗ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ CLKOUT. ąŚąĮą░č湥ąĮąĖąĄ 00 ą┐ąŠą╗čÅ INDELAY ą║ąŠą┤ąĖčĆčāąĄčé ą▓čŗą▒ąŠčĆ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ. ąóąŠčćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ ą▓čģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĘą░ą┤ąĄčƹȹ░ąĮą░ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ ąĮą░ 200 ą┐čü, ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą╝ąŠą╝ąĄąĮčéą░ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą╝ąĄąĮčīčłąĄąĮą░ ąĘą░ą┤ąĄčƹȹ║ą░ ąĮą░ 200 ą┐čü ąĖą╗ąĖ 400 ą┐čü ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĄ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┐ąŠą╗čÅ INDELAY čĆą░ą▓ąĮąŠ 00, čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓čŗą▒ąŠčĆ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ.
00: ąĮąŠą╝ąĖąĮą░ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ąŠčé SDRAM (ą┤ą░ąĮąĮčŗąĄ)
PDWN . ąŁč鹊 ą▒ąĖčé ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (power down, PDWN), ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓ čĆąĄąČąĖą╝ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░ (deep sleep operating mode). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ čüą╝. čüąĄą║čåąĖčÄ "ąĀą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ".
STOPCK . ąæąĖčé ąŠčüčéą░ąĮąŠą▓ą║ąĖ čéą░ą║č鹊ą▓ (stop clock, STOPCK) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ/ąĘą░ą┐čĆąĄčéą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ CCLK.
PLL_OFF . ąŁč鹊čé ą▒ąĖčé ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ/ąĘą░ą┐čĆąĄčéą░ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ PLL.
DF . ąæąĖčé ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ (divide frequency, DF) čāą┐čĆą░ą▓ą╗čÅąĄčé ą▓čģąŠą┤ąĮčŗą╝ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╝ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ PLL, ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║čāčÄ ą▓čģąŠą┤ąĮčāčÄ čćą░čüč鹊čéčā ą┐ąŠą╗čāčćąĖčé ą▒ą╗ąŠą║ PLL, CLKIN ąĖą╗ąĖ CLKIN/2.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ PLL (PLL status register, PLL_STAT) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ PLL ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (čüą╝. čĆąĖčü. 8-4). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ąĀą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ".
ąĀąĖčü. 8-4. PLL Status Register (PLL_STAT).
ąÆ čĆąĄą│ąĖčüčéčĆąĄ PLL_STAT ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ:
PLL_LOCKED . ąŁč鹊 ą┐ąŠą╗ąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ 1, ą║ąŠą│ą┤ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüč湥čéčćąĖą║ ąĘą░čģą▓ą░čéą░ PLL (PLL lock counter) ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüč湥čéčćąĖą║ą░ ąĘą░čģą▓ą░čéą░ PLL (PLL lock count register, PLL_LOCKCNT). ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ PLL_LOCKCNT.
ACTIVE_PLLDISABLED . ąŁč鹊 ą┐ąŠą╗ąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 1, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ čü ą▓čŗą║ą╗čÄč湥ąĮąĮčŗą╝ ą▒ą╗ąŠą║ąŠą╝ PLL.
FULL_ON . ąŁč鹊 ą┐ąŠą╗ąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 1, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ (full on).
ACTIVE_PLLENABLED . ąŁč鹊 ą┐ąŠą╗ąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 1, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ, ąĖ ą▒ą╗ąŠą║ PLL ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ.
ąÜąŠą│ą┤ą░ ąĖąĘą╝ąĄąĮčÅčÄčéčüčÅ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ ą▓ PLL, ą║ąŠąĮčéčāčĆ ąĘą░čģą▓ą░čéą░ PLL čéčĆąĄą▒čāąĄčé ąĮąĄą║ąŠč鹊čĆąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖčÄ čćą░čüč鹊čéčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░, čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝. ąŁč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠąĄ ą▓čĆąĄą╝čÅ ą▓čģąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░čģą▓ą░čéą░, ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ PLL čüčéą░ąĮąŠą▓ąĖčéčüčÅ čüčéą░ą▒ąĖą╗čīąĮąŠą╣, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ąĮąŠą▓ąŠą╝čā ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ.
ąĀąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ąĘą░čģą▓ą░čéą░ PLL (PLL lock count register, PLL_LOCKCNT) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓ SCLK, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠą╣čéąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠčåąĄčüčüąŠčĆ čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé PLL_LOCKED ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_STAT. ąÜąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL, ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüč湥čéčćąĖą║ ąĘą░čģą▓ą░čéą░ PLL ąĮą░čćąĖąĮą░ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖąĮčüčéčĆčāą║čåąĖąĖ IDLE. ąĪč湥čéčćąĖą║ ąĘą░čģą▓ą░čéą░ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ 1 ąĘą░ ą║ą░ąČą┤čŗą╣ čéą░ą║čé SCLK. ąÜąŠą│ą┤ą░ čüč湥čéčćąĖą║ ąĘą░čģą▓ą░čéą░ ą┤ąŠą╣ą┤ąĄčé ą┤ąŠ ą▓ąĄą╗ąĖčćąĖąĮčŗ, ąĘą░ą┤ą░ąĮąĮąŠą╣ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_LOCKCNT, ą▒ąĖčé PLL_LOCKED čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ.
ąĪą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ PLL ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ čĆąĄąČąĖą╝čŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čüą╝. čüąĄą║čåąĖčÄ "ąĀą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ". ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL čüą╝. čüąĄą║čåąĖčÄ "ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL".
ąĀąĖčü. 8-5. PLL Lock Count Register (PLL_LOCKCNT).
[ą×ąĮą╗ą░ą╣ąĮ-ą║ą░ą╗čīą║čāą╗čÅč鹊čĆ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé ]
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ čāą┤ąŠą▒ąĮčŗą╣ ą║ą░ą╗čīą║čāą╗čÅč鹊čĆ, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą▒čĆą░čéčī ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĄą╣ čĆąĄą│ąĖčüčéčĆąŠą▓ PLL_DIV ąĖ PLL_CTL, ąĖ ą┐ąŠą┤ąŠą▒čĆą░čéčī čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ CCLK ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ SCLK.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ PLL_DIV ąĖ PLL_CTL ąĘą░ą┐ąŠą╗ąĮąĄąĮčŗ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆčŗąĄ ąŠąĮąĖ ą┐ąŠą╗čāčćą░čÄčé ą┐čĆąĖ čüą▒čĆąŠčüąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
[ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DPM (DMPC) ]
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (dynamic power management controller, DPMC) čĆą░ą▒ąŠčéą░ąĄčé čüąŠą▓ą╝ąĄčüčéąĮąŠ čü PLL, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī čüą║ąŠčĆąŠčüčéčīčÄ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ąĄą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝. DPMC ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┤ą╗čÅ čŹčéąĖčģ čåąĄą╗ąĄą╣:
ŌĆó ąØąĄčüą║ąŠą╗čīą║ąŠ čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ąŠą▓ ŌĆō ą┐čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ č湥čéčŗčĆąĄčģ čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ą░čģ, čā ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüą▓ąŠąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĖ ąĖ ą┐čĆąŠčäąĖą╗čÅą╝ čĆą░čüčüąĄąĖą▓ą░ąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ąĀą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ".
ŌĆó ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ŌĆō čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą║ą╗čÄč湥ąĮ, ą║ąŠą│ą┤ą░ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
ŌĆó ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ŌĆō ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ąĖą╝ą┐čāą╗čīčüąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆąĄą│čāą╗čÅč鹊čĆą░, ą║ąŠč鹊čĆčŗą╣, čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą▓ąĮąĄčłąĮąĖą╝ąĖ ą┤ąŠą▒ą░ą▓ąŠčćąĮčŗą╝ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ąĖ, ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čāčĆąŠą▓ąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, ą┐ąŠą╗čāčćą░čÅ ą┐ąĖčéą░ąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ Vdd (VDDEXT ).
ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠčéčĆąĄą▒ąĮąŠčüč鹥ą╣ čüąĖčüč鹥ą╝čŗ, ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą╝ąĄąĮčīčłąĄąĮąŠ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ!), čćč鹊ą▒čŗ 菹║ąŠąĮąŠą╝ąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓čĆąĄąĘą║čā VR_CTL.
ąĀą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ . ą¤čĆąŠčåąĄčüčüąŠčĆ čĆą░ą▒ąŠčéą░ąĄčé ą▓ 4 čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ą░čģ, čā ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī čāąĮąĖą║ą░ą╗čīąĮąŠąĄ čüąŠč湥čéą░ąĮąĖąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ ąĖ 菹║ąŠąĮąŠą╝ąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 8-4 čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆą░ą▒ąŠčćąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ čĆąĄąČąĖą╝ą░.
ąóą░ą▒ą╗ąĖčåą░ 8-4. ąĀą░ą▒ąŠčćąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čĆąĄąČąĖą╝ąŠą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF538/ADSP-BF538F.
ąĀąĄąČąĖą╝ ąŁą║ąŠąĮąŠą╝ąĖčÅ PLL CCLK SCLK ąöąŠčüčéčāą┐ DMA
ąÆą║ą╗čÄč湥ąĮąŠ Bypass
Full On
-
ą┤ą░
ąĮąĄčé
čĆą░ąĘčĆąĄčłąĄąĮąŠ
čĆą░ąĘčĆąĄčłąĄąĮąŠ
ą┐ą░ą╝čÅčéčī L1
Active
čüčĆąĄą┤ąĮčÅčÅ
ą┤ą░1
ą┤ą░
čĆą░ąĘčĆąĄčłąĄąĮąŠ
čĆą░ąĘčĆąĄčłąĄąĮąŠ
ą┐ą░ą╝čÅčéčī L1
Sleep
ą▓čŗčüąŠą║ą░čÅ
ą┤ą░
ąĮąĄčé
ąĘą░ą┐čĆąĄčēąĄąĮąŠ
čĆą░ąĘčĆąĄčłąĄąĮąŠ
-
Deep Sleep
ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ
ąĮąĄčé
-
ąĘą░ą┐čĆąĄčēąĄąĮąŠ
ąĘą░ą┐čĆąĄčēąĄąĮąŠ
-
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ PLL čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮ.
ąĪąŠčüč鹊čÅąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DPMC . ąĪąŠčüč鹊čÅąĮąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ čŹč鹊 čüąĖąĮąŠąĮąĖą╝čŗ čüąŠčüč鹊čÅąĮąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL. ąĪąŠčüč鹊čÅąĮąĖąĄ DPMC/PLL ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░ PLL (PLL status register, čüą╝. ą▓čĆąĄąĘą║čā PLL_STAT). ąÆąŠ ą▓čüąĄčģ čĆąĄąČąĖą╝ą░čģ, ą║čĆąŠą╝ąĄ sleep ąĖ deep sleep, čÅą┤čĆąŠ ą╝ąŠąČąĄčé ą╗ąĖą▒ąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĖąĮčüčéčĆčāą║čåąĖąĖ, ą╗ąĖą▒ąŠ ąĮą░čģąŠą┤ąĖčéčīčüčÅ čā čüąŠčüč鹊čÅąĮąĖąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čÅą┤čĆą░ (Idle). ąĢčüą╗ąĖ čÅą┤čĆąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Idle, č鹊 ąŠąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮąŠ.
ąÆąŠ ą▓čüąĄčģ čĆąĄąČąĖą╝ą░čģ, ą║čĆąŠą╝ąĄ active, čćą░čüč鹊čéą░ SCLK ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ VCO, ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ ą▓ ą┐ąŠą╗ąĄ SSEL čĆąĄą│ąĖčüčéčĆą░ PLL_DIV. ąÆ čĆąĄąČąĖą╝ąĄ sleep, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čÅą┤čĆą░ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, SCLK ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐ąŠčüčéčāą┐ą░čéčī čü čćą░čüč鹊č鹊ą╣, ąĘą░ą┤ą░ąĮąĮąŠą╣ ą▓ SSEL.
ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ čüąŠčüč鹊čÅąĮąĖčÅ DPMC/PLL ąŠą┐ąĖčüą░ąĮčŗ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮąĖ ą║ą░čüą░čÄčéčüčÅ čäčāąĮą║čåąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DPMC.
Full On . ąĀąĄąČąĖą╝ Full on ą┤ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▒ą╗ąŠą║ PLL čĆą░ąĘčĆąĄčłąĄąĮ ąĖ ąĄą│ąŠ čĆą░ą▒ąŠčéą░ ąĮąĄ ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ (not bypassed). ąĀąĄąČąĖą╝ Full on čŹč鹊 ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖ ą▓čüąĄ ąĄą│ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ąöąŠčüčéčāą┐ DMA ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī čü ą┐ą░ą╝čÅčéčīčÄ čāčĆąŠą▓ąĮčÅ L1. ąśąĘ čĆąĄąČąĖą╝ą░ full on ą┐čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą╣čéąĖ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓ čĆąĄąČąĖą╝čŗ active, sleep ąĖą╗ąĖ deep sleep, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 8-6.
Active . ąÆ čĆąĄąČąĖą╝ąĄ active ą▒ą╗ąŠą║ PLL čĆą░ąĘčĆąĄčłąĄąĮ, ąĮąŠ ąĄą│ąŠ čĆą░ą▒ąŠčéą░ ą┐čĆąŠą┐čāčēąĄąĮą░ (bypassed). ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąĖ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (CCLK), ąĖ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (SCLK) ąŠą▒ąĄ čĆą░ą▓ąĮčŗ ą▓čģąŠą┤ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 (CLKIN). ąöąŠčüčéčāą┐ DMA ą▓ąŠąĘą╝ąŠąČąĄąĮ ą║ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ L1.
ąÆ čĆąĄąČąĖą╝ąĄ active ą╝ąŠąČąĮąŠ ąĮąĄ č鹊ą╗čīą║ąŠ ą┐čĆąŠą┐čāčüą║ą░čéčī PLL (bypass), ąĮąŠ čéą░ą║ąČąĄ ąĘą░ą┐čĆąĄčéąĖčéčī PLL. ąĢčüą╗ąĖ PLL ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ąĮąŠą▓ąŠ čĆą░ąĘčĆąĄčłąĄąĮ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝čŗ full on ąĖą╗ąĖ sleep.
ąśąĘ čĆąĄąČąĖą╝ą░ active ą┐čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąĄčĆąĄą╣čéąĖ ą▓ čĆąĄąČąĖą╝ full on, sleep ąĖą╗ąĖ deep sleep (čüą╝. čĆąĖčü. 8-6).
Sleep . ąĀąĄąČąĖą╝ Sleep ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą╝ąĄąĮčīčłą░ąĄčé čĆą░čüčüąĄąĖą▓ą░ąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 čÅą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ (idle). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ CCLK ąĘą░ą┐čĆąĄčēąĄąĮą░, ąŠą┤ąĮą░ą║ąŠ čćą░čüč鹊čéą░ SCLK ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐ąŠčüčéčāą┐ą░čéčī ąĮą░ čüą║ąŠčĆąŠčüčéąĖ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ą░ą╝ąĖ ą▒ąĖč鹊ą▓ MSEL ąĖ SSEL. ą¤ąŠčüą║ąŠą╗čīą║čā CCLK ąĘą░ą┐čĆąĄčēąĄąĮą░, č鹊 ą┤ąŠčüčéčāą┐ DMA ą▓ čĆąĄąČąĖą╝ąĄ sleep ą▓ąŠąĘą╝ąŠąČąĄąĮ č鹊ą╗čīą║ąŠ ą║ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. ąśąĘ čĆąĄąČąĖą╝ą░ sleep čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up event) ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąĄčĆąĄčģąŠą┤čā ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ąŠą┤ąĖąĮ ąĖąĘ čŹčéąĖčģ čĆąĄąČąĖą╝ąŠą▓:
ŌĆó Active, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé BYPASS ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL.
ą¤čĆąŠčåąĄčüčüąŠčĆ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ čü ą╝ąĄčüčéą░, ąŠą▒ąŠąĘąĮą░č湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ čüč湥čéčćąĖą║ąŠą╝, ą║ąŠč鹊čĆąŠąĄ ąŠčüčéą░ą╗ąŠčüčī ą▓ ąĮąĄą╝ čüčĆą░ąĘčā ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ sleep.
ąæąĖčé STOPCK ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ čüąŠčüč鹊čÅąĮąĖčÅ, čéą░ą║ čćč鹊 ąŠąĮ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝ čüąŠ čüč鹊čĆąŠąĮčŗ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ (wakeup). ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ čÅą▓ąĮąŠ čüą▒čĆąŠčüąĖčéčī ą▒ąĖčé STOPCK čüą╗ąĄą┤čāčÄčēąĄą╣ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ PLL_CTL, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ sleep.
Deep Sleep . ąĀąĄąČąĖą╝ Deep sleep ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąŠčüčéąĖčćčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ čüąĮąĖąČąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ ą┐čāč鹥ą╝ ąĘą░ą┐čĆąĄčéą░ PLL, CCLK ąĖ SCLK. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĘą░ą┐čĆąĄčēąĄąĮčŗ čÅą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ą▓čüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║čĆąŠą╝ąĄ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time clock, RTC). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ DMA ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ.
ąśąĘ čĆąĄąČąĖą╝ą░ Deep sleep ą╝ąŠąČąĮąŠ ą▓čŗą╣čéąĖ č鹊ą╗čīą║ąŠ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé RTC, ąĖą╗ąĖ ąŠčé čüąŠą▒čŗčéąĖčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüą▒čĆąŠčüą░. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ RTC ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąĄčĆąĄčģąŠą┤čā ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ čĆąĄąČąĖą╝ active; ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüą▒čĆąŠčüą░. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝ čüą▒čĆąŠčüąĄ čüą╝. čĆą░ąĘą┤ąĄą╗ "Hardware Reset" [1].
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ RTC ą▓ čĆąĄąČąĖą╝ąĄ deep sleep ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗čÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL control register, PLL_CTL). ąĪą╝. čéą░ą▒ą╗ąĖčåčā 8-5.
ąÜąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ deep sleep, čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ SDRAM ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ. ą¤ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ deep sleep, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą▓ą░ąČąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ąĮą░čģąŠą┤čÅčēą░čÅčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ SDRAM, ą▒čŗą╗ą░ čüąŠčģčĆą░ąĮąĄąĮą░ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ.
ąóą░ą▒ą╗ąĖčåą░ 8-5. ąŚąĮą░č湥ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL ą┐ąŠčüą╗ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ RTC Wake-up.
ą¤ąŠą╗ąĄ ąŚąĮą░č湥ąĮąĖąĄ
PLL_OFF
0
STOPCK
0
PDWN
0
BYPASS
1
Hibernate State . ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ čü čüą░ą╝čŗą╝ ąĮąĖąĘą║ąĖą╝ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ čĆą░čüčüąĄąĖą▓ą░ąĮąĖąĄą╝ ą╝ąŠčēąĮąŠčüčéąĖ, ąŠąĮąŠ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓ą║ą╗čÄčćąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ą┐ąĖčéą░ąĮąĖąĄ (VDDINT ), čü čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ čāąĘą╗ąŠą▓ ą▓ą▓ąŠą┤ą░ ą▓čŗą▓ąŠą┤ą░ (I/O supply, VDDEXT ). ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ čĆą░ą▒ąŠčćąĖą╝ čĆąĄąČąĖą╝ąŠą╝ ą║ą░ą║ čéą░ą║ąŠą▓čŗą╝, ąĄą│ąŠ ą▓čüąĄ-čéą░ą║ąĖ čüč鹊ąĖčé čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą▓čüąĄčģ čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ąŠą▓, ąŠą┐ąĖčüą░ąĮąĮčŗčģ čĆą░ąĮąĄąĄ (čüą╝. čĆąĖčü. 8-6). ą¤ąŠčüą║ąŠą╗čīą║čā čäčāąĮą║čåąĖčÅ Hibernate čüą▓čÅąĘą░ąĮą░ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čŹč鹊 ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ čÅą┤čĆą░ (čüąŠčüč鹊čÅąĮąĖąĄ Hibernate)".
[ą¤ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ ]
ąĀąĖčü. 8-6 ą│čĆą░čäąĖč湥čüą║ąĖ ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ ąĖ ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā ąĮąĖą╝ąĖ. ąØą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ 菹╗ą╗ąĖą┐čüčŗ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ. ąĪčéčĆąĄą╗ą║ąĖ ą╝ąĄąČą┤čā 菹╗ą╗ąĖą┐čüą░ą╝ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ą┐ąĄčĆąĄčģąŠą┤čŗ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ ą║ą░ąČą┤čŗą╣ čĆąĄąČąĖą╝ ąĖ ą▓čŗčģąŠą┤ą░ ąĖąĘ ąĮąĄą│ąŠ.
ąĀąĖčü. 8-6. ą¤ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ.
ąóąĄą║čüčé ą▓ąŠąĘą╗ąĄ ą║ą░ąČą┤ąŠą╣ čüčéčĆąĄą╗ą║ąĖ ą┐ąĄčĆąĄčģąŠą┤ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą╗čÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL_CTL), ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ, čćč鹊ą▒čŗ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą┐ąĄčĆąĄčģąŠą┤. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĄčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ full on ą▓ čĆąĄąČąĖą╝ sleep ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▒ąĖčé STOPCK ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1 ąĖ ą▒ąĖčé PDWN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą▓ 0. ąśąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā č鹊ą│ąŠ, ą║ą░ą║ čŹčäč乥ą║čéąĖą▓ąĮąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ą░ą╝ąĖ, čüą╝. ą▓ čüąĄą║čåąĖąĖ "ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄčģąŠą┤ąŠą▓ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ".
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą┐ąĄčĆąĄčģąŠą┤ą░ą╝ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╝ąĖ ąĮą░ čĆąĖčü. 8-6, PLL ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ active. ą¤ąĖčéą░ąĮąĖąĄ PLL ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą║ą╗čÄč湥ąĮąŠ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąŠ, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠą▓ą░čÅ ą▓čģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ą┤ą╗čÅ VCO (CLKIN ą┤ą╗čÅ VCO) ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ. ąÜą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┤ą░ą╗ąĄąĄ, čŹčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┤ą╗čÅ PLL ąĮąĄ ą╝ąŠą│čāčé ą▓čüčéčāą┐ąĖčéčī ą▓ čüąĖą╗čā ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ. ąÜą░ą║ čü ą┐ąĄčĆąĄčģąŠą┤ą░ą╝ąĖ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐ąŠą╗čāčćąĖčéčī čŹčäč乥ą║čé ąŠčé čŹčéąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣(čüą╝. čüąĄą║čåąĖčÄ "ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL").
ŌĆó PLL ąĘą░ą┐čĆąĄčēąĄąĮąŠ: ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ č鹊ą╝čā, čćč鹊 ą▒ą╗ąŠą║ PLL ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą┐čāčēąĄąĮ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮčÅč鹊 ą┐ąĖčéą░ąĮąĖąĄ PLL. ąÜąŠą│ą┤ą░ ą┐ąĖčéą░ąĮąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąŠ ąŠčé PLL, ą╝ąŠąČąĮąŠ ąĄčēąĄ čüąĮąĖąĘąĖčéčī 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ, čģąŠčéčÅ čŹą║ąŠąĮąŠą╝ąĖčÅ ąŠčé čŹč鹊ą│ąŠ ą┐ąŠą╗čāčćąĖčéčüčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĄą▒ąŠą╗čīčłą░čÅ. ą¦č鹊ą▒čŗ čüąĮčÅčéčī ą┐ąĖčéą░ąĮąĖąĄ čü PLL, čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé PLL_OFF ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL, ąĖ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL.
ŌĆó PLL čĆą░ąĘčĆąĄčłąĄąĮąŠ: ą║ąŠą│ą┤ą░ PLL ą▓čŗą║ą╗čÄč湥ąĮąŠ, ąĮą░ ąĮąĄą│ąŠ čüąĮąŠą▓ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą░ąĮąŠ ą┐ąĖčéą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąŠčé ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ąŠčüčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ.
ą¤ąĖčéą░ąĮąĖąĄ ą┤ą╗čÅ PLL ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąŠ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ full ąĖą╗ąĖ sleep. ą¦č鹊ą▒čŗ ą┐ąŠą┤ą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ PLL, čüą▒čĆąŠčüčīč鹥 ą▒ąĖčé PLL_OFF ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL, ąĖ ąĘą░č鹥ą╝ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL.
ŌĆó ąØąŠą▓čŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ active: ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠą▓ą░čÅ ą▓čģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ą┤ą╗čÅ VCO ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ (čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ CLKIN ą║ VCO) ą▓ čĆąĄąČąĖą╝ąĄ active.
ąźąŠčéčÅ čŹčäč乥ą║čé ąŠčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāą╝ąĮąŠąČąĄąĮąĖčÅ čćą░čüč鹊čéčŗ ą▓ VCO ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ąĮąĖą║ą░ą║ ąĮąĄ ą┐ąŠą▓ą╗ąĖčÅąĄčé ąĮą░ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĘą░čģą▓ą░čé PLL čü ąĮąŠą▓čŗą╝ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ą╝ąĖ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ full on čüąĮąĖąČą░ąĄčé ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄčģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ ą┐ąŠą╗ąĮąŠą│ąŠ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 PLL čāąČąĄ ąŠą║ą░ąČąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąĘą░čģą▓ą░čéą░ čü ąĮąŠą▓čŗą╝ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ą╝ąĖ. ą¦č鹊ą▒čŗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĮąŠą▓čŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą╝ąĄąČą┤čā CLKIN ąĖ VCO, ąĘą░ą┐ąĖčłąĖč鹥 ąĮąŠą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ MSEL[5:0] ąĖ/ąĖą╗ąĖ DF ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL; ąĘą░č鹥ą╝ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL.
ŌĆó ąØąŠą▓čŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ full on: ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ full on.
ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüąŠčüč鹊čÅąĮąĖąĄ PLL ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ active, ą┐ąŠą║ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠčåąĄčüčü ąĘą░čģą▓ą░čéą░ PLL. ą¤ąŠčüą╗ąĄ ąĘą░čģą▓ą░čéą░ PLL ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ full on. ąöą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąŠą▓čŗčģ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ čāą╝ąĮąŠąČąĄąĮąĖčÅ CLKIN ą║ VCO, ąĘą░ą┐ąĖčłąĖč鹥 ąĮąŠą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┐ąŠą╗čÅ MSEL[5:0] ąĖ/ąĖą╗ąĖ DF čĆąĄą│ąĖčüčéčĆą░ PLL_CTL; ąĘą░č鹥ą╝ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL (see ŌĆ£ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLLŌĆØ on page 8-19).
ąÆ čéą░ą▒ą╗ąĖčåąĄ 8-6 čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ.
ą¤ąŠą┐čŗčéą║ą░ ą┐čĆąĖą╝ąĄąĮąĖčéčī ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗčģ ąĮąĄčé ą▓ čéą░ą▒ą╗ąĖčåąĄ 8-6, ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠą╝čā ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÄ čüąĖčüč鹥ą╝čŗ.
ąóą░ą▒ą╗ąĖčåą░ 8-6. ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ą░ą╝ąĖ.
ąØąŠą▓čŗą╣ čĆąĄąČąĖą╝ ąóąĄą║čāčēąĖą╣ čĆąĄąČąĖą╝
Full On Active Sleep Deep Sleep
Full On
-
čĆą░ąĘčĆąĄčłąĄąĮąŠ
čĆą░ąĘčĆąĄčłąĄąĮąŠ
-
Active
čĆą░ąĘčĆąĄčłąĄąĮąŠ
-
čĆą░ąĘčĆąĄčłąĄąĮąŠ
čĆą░ąĘčĆąĄčłąĄąĮąŠ
Sleep
čĆą░ąĘčĆąĄčłąĄąĮąŠ
čĆą░ąĘčĆąĄčłąĄąĮąŠ
-
-
Deep Sleep
čĆą░ąĘčĆąĄčłąĄąĮąŠ
čĆą░ąĘčĆąĄčłąĄąĮąŠ
-
-
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄčģąŠą┤ąŠą▓ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ . ąĀą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖč鹊ą▓ PLL_OFF, BYPASS, STOPCK ąĖ PDWN čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL_CTL). ą¤čĆąŠčüč鹊ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ PLL_CTL ąĮąĄ ą┐ąŠą╝ąĄąĮčÅąĄčé čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ąĖą╗ąĖ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ PLL. ąśąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL čüčéą░ąĮąŠą▓čÅčéčüčÅ čĆąĄą░ą╗ąĖąĘčāąĄą╝čŗą╝ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ąŠą┤ą░, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ąøąĖčüčéąĖąĮą│ąĄ 8-1. ąŁčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą║ąŠą┤ą░ čüąĮą░čćą░ą╗ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą┐ąŠą╝ąĄčēąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ąĖąĘą▓ąĄčüčéąĮąŠąĄ, ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąŠ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, PLL čĆą░čüą┐ąŠąĘąĮą░ąĄčé čŹč鹊 ąĖ ą░ą║čéąĖą▓ąĖąĘąĖčĆčāąĄčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, čüą┤ąĄą╗ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čüčéčāą┐ąĖą╗ąĖ ą▓ čüąĖą╗čā, ą┐čĆąŠčåąĄčüčüąŠčĆ čĆą░ą▒ąŠčéą░ąĄčé čü ąĮąŠą▓čŗą╝ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ą╝ąĖ, ą▓ą║ą╗čÄčćą░čÅ ąĮąŠą▓čŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝, ąĄčüą╗ąĖ ąŠąĮ ą▒čŗą╗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL . ąĢčüą╗ąĖ ąĮąŠą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▒čŗą╗ąĖ ą┐čĆąĖčüą▓ąŠąĄąĮčŗ ą▒ąĖčéą░ą╝ MSEL ąĖą╗ąĖ DF ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL_CTL), č鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĖąĮčüčéčĆčāą║čåąĖą╣, ą┐ąŠą║ą░ąĘą░ąĮąĮą░čÅ ą▓ ąøąĖčüčéąĖąĮą│ąĄ 8-1, ą▓ą▓ąŠą┤ąĖčé čŹčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ čüąĖą╗čā. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL čéą░ą║ąČąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┤ąĄą╗ą░čÄčéčüčÅ ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ.
ąśąĘą╝ąĄąĮąĄąĮąĖčÅ ą▒ąĖč鹊ą▓ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą┤ąĄą╗ąĄąĮąĖčÅ CSEL ąĖ SSEL ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ; čŹčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮąĄ čéčĆąĄą▒čāčÄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL.
; ąøąĖčüčéąĖąĮą│ 8-1. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL.
CLI R0; /* ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ */
IDLE; /* ąŠą┐čāčüč鹊賹Ėčéčī ą║ąŠąĮą▓ąĄą╣ąĄčĆ ąĖ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ čÅą┤čĆąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (IDLE) */
STI R0; /* ą┐ąŠčüą╗ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĘą░ąĮąŠą▓ąŠ čĆą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ */
ą¤ąĄčĆą▓čŗąĄ ą┤ą▓ąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą▓ čŹč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐ąĄčĆąĄą▓ąŠą┤čÅčé čÅą┤čĆąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čü ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ; ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (IMASK) čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ R0, ąĖ ą║ąŠąĮą▓ąĄą╣ąĄčĆ ąĖąĮčüčéčĆčāą║čåąĖą╣ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ. ąŚą░č鹥ą╝ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ PLL ąĘą░ą│čĆčāąČą░ąĄčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ PLL_CTL ą▓ ą▒ą╗ąŠą║ PLL.
ąĢčüą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ PLL_CTL ą▓ą║ą╗čÄčćą░čÄčé ąĮąŠą▓čŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą╝ąĮąŠąČąĄąĮąĖčÅ CLKIN ą║ VCO, ąĖą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┐čĆąĖą▓ąĄą┤čāčé ą║ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÄ ą┐ąŠą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ PLL, č鹊 čüąĖčüč鹥ą╝ą░ PLL čéčĆąĄą▒čāąĄčé ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ ąĘą░čģą▓ą░čéą░ ą┐ąĄčéą╗ąĖ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ čćą░čüč鹊čéčŗ. ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐ąŠą▓č鹊čĆąĮčŗą╣ ąĘą░čģą▓ą░čé, čüąĮą░čćą░ą╗ą░ ąŠčćąĖčēą░ąĄčéčüčÅ čüč湥čéčćąĖą║ ąĘą░čģą▓ą░čéą░ PLL (PLL lock counter), ąĖ ąĘą░č鹥ą╝ ąŠąĮ ąĮą░čćąĖąĮą░ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ čü ą║ą░ąČą┤čŗą╝ čéą░ą║č鹊ą╝ SCLK. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüč湥čéčćąĖą║ ąĘą░čģą▓ą░čéą░ PLL ą┤ąŠčüčéąĖą│ąĮąĄčé ąĘąĮą░č湥ąĮąĖčÅ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĘą░čģą▓ą░čéą░ čüč湥čéą░ PLL (PLL Lock count register, PLL_LOCKCNT), čüąĖčüč鹥ą╝ą░ PLL čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé PLL_LOCKED ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ PLL (PLL_STAT), ąĖ PLL ą▓čŗčüčéą░ą▓ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ PLL (PLL wake-up).
ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ čĆąĄą│ąĖčüčéčĆ PLL_CTL, ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąŠą╣ą┤ąĄčé ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąĖąĘ 4 ą┐čāč鹥ą╣:
ŌĆó ąĢčüą╗ąĖ čĆąĄą│ąĖčüčéčĆ PLL_CTL ą▒čŗą╗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą╗ąĖą▒ąŠ ą▓ čĆąĄąČąĖą╝ active, ą╗ąĖą▒ąŠ ą▓ čĆąĄąČąĖą╝ full on, č鹊 PLL ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up), ąĖ ąĘą░č鹥ą╝ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ čü ąĖąĮčüčéčĆčāą║čåąĖąĖ STI ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 8-1 čéą░ą║, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüąĄą║čåąĖąĖ "ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL".
ąÜąŠą│ą┤ą░ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąĄčĆąĄčģąŠą┤čā ą▓ čĆąĄąČąĖą╝ full on ąĖąĘ čĆąĄąČąĖą╝ą░ active, ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ active ąĖąĘ čĆąĄąČąĖą╝ą░ full on, č鹊 PLL čüą░ą╝ąŠ ą┐ąŠ čüąĄą▒ąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ wake-up, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čÅą┤čĆą░ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ. ąĪąĖą│ąĮą░ą╗ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ wake-up ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüą░ą╝ąĖą╝ ą╝ąŠą┤čāą╗ąĄą╝ PLL ąĖą╗ąĖ ą┤čĆčāą│ąĖą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ - čüč鹊čĆąŠąČąĄą▓čŗą╝ čéą░ą╣ą╝ąĄčĆąŠą╝ (watchdog) ąĖą╗ąĖ ą┤čĆčāą│ąĖą╝ čéą░ą╣ą╝ąĄčĆąŠą╝, RTC ąĖą╗ąĖ ą┤čĆčāą│ąĖą╝ ąĖčüč鹊čćąĮąĖą║ąŠą╝. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüąŠą▒čŗčéąĖčÅą╝, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé čĆą░ąĘą▒čāą┤ąĖčéčī ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, čüą╝. čĆą░ąĘą┤ąĄą╗ "System Interrupt Wake-Up Enable (SIC_IWRx) Registers" čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ [1].
ŌĆó ąĢčüą╗ąĖ čĆąĄą│ąĖčüčéčĆ PLL_CTL ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ sleep, ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ čüąĮą░ ąĖ ąČą┤ąĄčé čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą┐ąŠčüą╗ąĄ ąĮąĄą│ąŠ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ąÜąŠą│ą┤ą░ ą▓čŗčüčéą░ą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up) ą┐ąŠč鹊ą║ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ čü ąĖąĮčüčéčĆčāą║čåąĖąĖ STI, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüąĄą║čåąĖąĖ "ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL", čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąĄčĆąĄčģąŠą┤čā ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ čĆąĄąČąĖą╝čŗ:
- Active, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé BYPASS ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_CTL
ŌĆó ąĢčüą╗ąĖ čĆąĄą│ąĖčüčéčĆ PLL_CTL ą▒čŗą╗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ deep sleep, ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░, ąĖ ą▒čāą┤ąĄčé ąČą┤ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ RTC ąĖą╗ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čüą▒čĆąŠčüą░:
- ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ RTC ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝, ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ąŠą┤ ąŠčé ąĖąĮčüčéčĆčāą║čåąĖąĖ STI, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ąĮąĖąČąĄ ą▓ čüąĄą║čåąĖąĖ "ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL".
ŌĆó ąĢčüą╗ąĖ ąĮąĄ ą▒čŗą╗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ čĆą░ą▒ąŠčćąĖą╝ čĆąĄąČąĖą╝ą░ą╝, č鹊 PLL ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up), ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ čü ąĖąĮčüčéčĆčāą║čåąĖąĖ STI, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čüąĄą║čåąĖąĖ.
ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL . ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĖąĮčüčéčĆčāą║čåąĖą╣, ą┐ąŠą║ą░ąĘą░ąĮąĮą░čÅ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 8-1, ą┐čĆąŠą┤ąŠą╗ąČąĖčé čüą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čü ąĖąĮčüčéčĆčāą║čåąĖąĖ STI. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąĮąŠą▓ą░ ą▒čāą┤čāčé čĆą░ąĘčĆąĄčłąĄąĮčŗ, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ IMASK ą▒čāą┤ąĄčé ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ąĖąĮčüčéčĆčāą║čåąĖąĄą╣ STI, ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčüčÅ ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ ą┐ąŠč鹊ą║ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą┐ąŠą▒ąŠčćąĮčāčÄ ą░ą║čéąĖą▓ąĮąŠčüčéčī, DMA ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čŹč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣.
[ą¤čĆąĖą╝ąĄčĆčŗ ]
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ čŹčäč乥ą║čéąĖą▓ąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ą░ą╝ąĖ. ąØąĄą║ąŠč鹊čĆčŗą╣ ą║ąŠą┤ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ čÅčüąĮąŠčüčéąĖ ą▒čŗą╗ čāą┤ą░ą╗ąĄąĮ, ąĖ čüą┤ąĄą╗ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ:
ŌĆó P0 čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL_CTL). P1 čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čĆąĄą│ąĖčüčéčĆ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╣ PLL (PLL_DIV).
ąÆ ą╗ąĖčüčéąĖąĮą│ąĄ 8-2 ą┐ąŠą║ą░ąĘą░ąĮ ą┐ąĄčĆąĄčģąŠą┤ ąĖąĘ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░ ą▓ čĆąĄąČąĖą╝ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ.
; ąøąĖčüčéąĖąĮą│ 8-2. ą¤ąĄčĆąĄčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ Active ą▓ čĆąĄąČąĖą╝ Full On.
CLI R2; /* ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ IMASK ą▓ čĆąĄą│ąĖčüčéčĆ R2 */
R1.L = 0x3E00 ; /* ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ BYPASS */
W[P0] = R1; /* ąĖ ąĘą░ą┐ąĖčüčī ą▓ PLL_CTL */
IDLE; /* ąŠą┐čāčüč鹊賹ĄąĮąĖąĄ ą║ąŠąĮą▓ąĄą╣ąĄčĆą░, ą▓čģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé čüąĖą│ąĮą░ą╗ą░ PLL wakeup */
STI R2; /* ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ PLL wakeup, ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ IMASK */
... /* č鹥ą┐ąĄčĆčī ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Full On */
ąÆ ą╗ąĖčüčéąĖąĮą│ąĄ 8-3 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą║ąŠą┤ ą┤ą╗čÅ ą┐ąĄčĆąĄčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄąČąĖą╝.
; ąøąĖčüčéąĖąĮą│ 8-3. ą¤ąĄčĆąĄčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ Full On ą▓ čĆąĄąČąĖą╝ Active.
CLI R2; /* ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ IMASK ą▓ čĆąĄą│ąĖčüčéčĆ R2 */
R1.L = 0x3F00 ; /* čāčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ BYPASS */
W[P0] = R1; /* ąĖ ąĘą░ą┐ąĖčüčī ą▓ PLL_CTL */
IDLE; /* ąŠą┐čāčüč鹊賹ĄąĮąĖąĄ ą║ąŠąĮą▓ąĄą╣ąĄčĆą░, ą▓čģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé čüąĖą│ąĮą░ą╗ą░ PLL wakeup */
STI R2; /* ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ PLL wakeup, ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ IMASK */
... /* č鹥ą┐ąĄčĆčī ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Active */
ąÆ ą╗ąĖčüčéąĖąĮą│ąĄ 8-4 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą╝ąĄąĮčÅąĄčé čāą╝ąĮąŠąČąĖč鹥ą╗čī CLKIN ą║ VCO čü ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ 31x ąĮą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé 2x, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ (full on).
; ąøąĖčüčéąĖąĮą│ 8-4. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ čāą╝ąĮąŠąČąĄąĮąĖčÅ čćą░čüč鹊čéčŗ CLKIN ą║ VCO.
CLI R2; /* ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ IMASK ą▓ čĆąĄą│ąĖčüčéčĆ R2 */
R1.L = 0x0400 ; /* ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ VCO ąĮą░ 2x */
W[P0] = R1; /* ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ PLL_CTL */
IDLE; /* ąŠą┐čāčüč鹊賹ĄąĮąĖąĄ ą║ąŠąĮą▓ąĄą╣ąĄčĆą░, ą▓čģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé čüąĖą│ąĮą░ą╗ą░ PLL wakeup */
STI R2; /* ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ PLL wakeup, ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ IMASK */
... /* č鹥ą┐ąĄčĆčī ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Full On, čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ 2x čāą╝ąĮąŠąČąĄąĮąĖčÅ CLKIN ą║ VCO */
[ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ ]
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ čéą░ą║č鹊ą▓čŗą╝ąĖ čćą░čüč鹊čéą░ą╝ąĖ, ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ čÅą┤čĆą░ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ą¤ąŠčüą║ąŠą╗čīą║čā čĆą░čüčüąĄąĖą▓ą░ąĄą╝ą░čÅ ąĮą░ ą║čĆąĖčüčéą░ą╗ą╗ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą╝ąŠčēąĮąŠčüčéčī ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮą░ ą║ą▓ą░ą┤čĆą░čéčā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, č鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąĘąĮą░čćąĖč鹥ą╗čīąĮą░čÅ čŹą║ąŠąĮąŠą╝ąĖčÅ čŹąĮąĄčĆą│ąĖąĖ ąĮą░ ąĮąĖąĘą║ąĖčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅčģ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░.
ą¤čĆąŠčåąĄčüčüąŠčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé 3 ą┤ąŠą╝ąĄąĮą░ ą┐ąĖčéą░ąĮąĖčÅ. ąŁčéąĖ ą┤ąŠą╝ąĄąĮčŗ ą┐ąĖčéą░ąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 8-7. ąÜą░ąČą┤čŗą╣ ą┤ąŠą╝ąĄąĮ ąĖą╝ąĄąĄčé ąŠčéą┤ąĄą╗čīąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ VDD . ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ą▒ąŠą╗čīčłą░čÅ čćą░čüčéčī ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣. ąĪą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┤ąŠą╝ąĄąĮą░ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ą┤ą░ąĮąĮčŗą╝ ą┐ąŠ čĆą░čüčüąĄąĖą▓ą░ąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ.
ąóą░ą▒ą╗ąĖčåą░ 8-7. ąöąŠą╝ąĄąĮčŗ ą┐ąĖčéą░ąĮąĖčÅ.
ąöąŠą╝ąĄąĮ ą┐ąĖčéą░ąĮąĖčÅ ąöąĖą░ą┐ą░ąĘąŠąĮ VDD
ąÆčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░, ą║čĆąŠą╝ąĄ RTC
ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ RTC ąĖ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░
ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ
ąÆčüąĄ ą┤čĆčāą│ąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░
ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ
[ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ ]
ą¤čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą▓ą╝ąĄčüč鹥 čü ąĮąĄą║ąŠč鹊čĆčŗą╝ąĖ ą▓ąĮąĄčłąĮąĖą╝ąĖ ą┤ąĄčéą░ą╗čÅą╝ąĖ (čüąĖą╗ąŠą▓ąŠą╣ čéčĆą░ąĮąĘąĖčüč鹊čĆąĮčŗą╣ ą║ą╗čÄčć ąĖ LC-čäąĖą╗čīčéčĆ) ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čāčĆąŠą▓ąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čüčģąĄą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąŁąĮąĄčĆą│ąĖčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüčéčāą┐ą░ąĄčé čü ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ VDDEXT č湥čĆąĄąĘ ą▓ąĮąĄčłąĮąĖą╣ ą╝ąŠčēąĮčŗą╣ ą║ą╗čÄč湥ą▓ąŠą╣ čéčĆą░ąĮąĘąĖčüč鹊čĆ, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 8-7. ąōąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮąĖąČąĄąĮ ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé 菹║čüą┐ą╗čāą░čéą░čåąĖąŠąĮąĮčŗčģ ą┐ąŠčéčĆąĄą▒ąĮąŠčüč鹥ą╣ čĆą░ą▒ąŠčéą░čÄčēąĄą╣ čüąĖčüč鹥ą╝čŗ.
ąĀąĖčü. 8-7. ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ąÜąŠą│ą┤ą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ VDDINT čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ, ą▓ąĮąĄčłąĮąĖą╣ čüąĖą╗ąŠą▓ąŠą╣ ą┐ąŠą╗ąĄą▓ąŠą╣ čéčĆą░ąĮąĘąĖčüč鹊čĆ external ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ąĮą░ ą▒ąŠą╗ąĄąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠą╝čā čüąŠčüč鹊čÅąĮąĖčÄ. ąśčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ VDDEXT ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖąĄ ąĄą╝ą║ąŠčüčéąĖ, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┤ąŠčüčéą░č鹊čćąĮčŗą╣ č鹊ą║ ą▒ąĄąĘ ą┐ą░ą┤ąĄąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ čüąĖą╗ąŠą▓ąŠą╣ čéčĆą░ąĮąĘąĖčüč鹊čĆ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąŠ ą▓ą║ą╗čÄč湥ąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ.
ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ą╗ąŠą│ąĖą║čā čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ VDDINT . ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (voltage regulator control register, VR_CTL) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čĆą░ą▒ąŠčéčā čĆąĄą│čāą╗čÅč鹊čĆą░ (čüą╝. čĆąĖčü. 8-8). ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ VR_CTL ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ ąĘą░čģą▓ą░čéą░ PLL.
ąĀąĖčü. 8-8. Voltage Regulator Control Register (VR_CTL).
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ VR_CTL ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ:
SCKELOW . ąæąĖčé ą┐ąĄčĆąĄą▓ąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ SCKE ą▓ ą╗ąŠą│. 0 ą▓ąŠ ą▓čĆąĄą╝čÅ čüą▒čĆąŠčüą░ (SCKELOW) ąĘą░čēąĖčēą░ąĄčé ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĖ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗą▓ąŠą┤ąŠą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ EBIU ą▓ ąĮąĄą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĄčüą╗ąĖ SDRAM ą▒čŗą╗ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ąĖ ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮąŠ ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh mode), ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ hibernate. ą×čłąĖą▒ąŠčćąĮą░čÅ ąĮąĄ čāčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▓čŗą▓ąŠą┤ SCKE ą┐ąĄčĆąĄą╣ą┤ąĄčé ą┐čĆąĖ čüą▒čĆąŠčüąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ą╗ąŠą│. 1, čćč鹊 ą▓čŗą▓ąĄą┤ąĄčé SDRAM ąĖąĘ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čÅč湥ą╣ą║ąĖ SDRAM ąŠą║ą░ąČčāčéčüčÅ čĆą░ąĘčĆčÅąČąĄąĮąĮčŗą╝ąĖ ąĖąĘ-ąĘą░ ą┐ąŠč鹥čĆąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĘą░čĆčÅą┤ą░, ąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ SDRAM ą▒čāą┤čāčé ąĖčüą┐ąŠčĆč湥ąĮčŗ.
ąÆčŗą▓ąŠą┤ SCKE ą▒čāą┤ąĄčé ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą▓ č鹥č湥ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ hibernate. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ SCKELOW ą▓ čĆąĄą│ąĖčüčéčĆąĄ VR_CTL ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ hibernate, ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SCKE ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĮąĖąČąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ (pull-down), čćč鹊ą▒čŗ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SCKE čüąŠčģčĆą░ąĮčÅą╗čüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin ąĖą╝ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé.
CANWE . ąæąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN (CANWE) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate (FREQ = b#00), ą║ąŠą│ą┤ą░ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüą┐ą░ą┤ ąĮą░ ą▓čģąŠą┤ąĮąŠą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐čĆąĖąĄą╝ą░ CANRX.
GPWE . ąæąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (general-purpose wake-up enable, GPWE) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate (FREQ = b#00), ą║ąŠą│ą┤ą░ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüą┐ą░ą┤ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ GPW.
ąÆčŗą▓ąŠą┤ GPW čÅą▓ą╗čÅąĄčéčüčÅ č鹊ą╗ąĄčĆą░ąĮčéąĮčŗą╝ ą┐ąŠ ą▓čģąŠą┤čā ą║ čāčĆąŠą▓ąĮčÄ ą╗ąŠą│ąĖą║ąĖ 5V.
WAKE . ąæąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up enable, WAKE) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate (FREQ = b#00), ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé RTC.
FREQ[1:0] . ą¤ąŠą╗ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊č鹊ą╣ (FREQ) ąĘą░ą┤ą░ąĄčé čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¦ąĄą╝ ą▓čŗčłąĄ čćą░čüč鹊čéą░ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ, č鹥ą╝ čéčĆąĄą▒čāčÄčéčüčÅ ą╝ąĄąĮčīčłąĖąĄ ąĮąŠą╝ąĖąĮą░ą╗čŗ ą┤ą╗čÅ ąĄą╝ą║ąŠčüčéąĖ ąĖ ąĖąĮą┤čāą║čéąĖą▓ąĮąŠčüčéąĖ LC-čäąĖą╗čīčéčĆą░ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░, čģąŠčéčÅ ą┐ąŠą▓čŗčłąĄąĮąĮą░čÅ čćą░čüč鹊čéą░ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗčģ ą┐ąŠą╝ąĄčģ (electromagnetic interference, EMI).
ą¦č鹊ą▒čŗ ą▓čŗą║ą╗čÄčćąĖčéčī (bypass) ą▓čüčéčĆąŠąĄąĮąĮąŠąĄ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 ąĘąĮą░č湥ąĮąĖąĄ b#00 ą▓ ą┐ąŠą╗ąĄ FREQ ąĖ ąŠčüčéą░ą▓čīč鹥 ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ ą▓čŗą▓ąŠą┤čŗ VROUT.
GAIN[1:0] . ą¤ąŠą╗ąĄ čāčüąĖą╗ąĄąĮąĖčÅ (GAIN) čāą┐čĆą░ą▓ą╗čÅąĄčé ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą┐ąĄčéą╗ąĄ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ; čŹč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ąĮą░čüą║ąŠą╗čīą║ąŠ ą▒čŗčüčéčĆąŠ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čŗčģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą║ čüą▓ąŠąĄą╝čā ą║ąŠąĮąĄčćąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ. ą×ą▒čŗčćąĮąŠ č湥ą╝ ą▒ąŠą╗čīčłąĄ čāčüąĖą╗ąĄąĮąĖąĄ ą▓ ą┐ąĄčéą╗ąĄ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ, č鹥ą╝ ą▒čŗčüčéčĆąĄąĄ ą▒čāą┤ąĄčé ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮą░ čāčüčéą░ąĮąŠą▓ą║ą░, ąŠą┤ąĮą░ą║ąŠ čŹč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ čāčüąĖą╗ąĄąĮąĖčÄ ą┐ąĄčĆąĄčģąŠą┤ąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠą▓ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ.
VLEV[3:0] . ą¤ąŠą╗ąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (voltage level, VLEV) ąĘą░ą┤ą░ąĄčé ąĮąŠą╝ąĖąĮą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ ą┤ą░čéą░čłąĖčéčā ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F ą┤ą╗čÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ VLEV ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüą▓čÅąĘą░ąĮąĮčŗą╝ čü ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅą╝ąĖ ą┤ąŠą┐čāčüą║ą░ą╝.
ąÆ čéą░ą▒ą╗ąĖčåąĄ 8-8 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą║ąŠą┤ąĖčĆąŠą▓ą║ąĖ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą┤ą╗čÅ ąĘąĮą░č湥ąĮąĖą╣ VLEV[3:0].
ąóą░ą▒ą╗ąĖčåą░ 8-8. ąØą░ą┐čĆčÅąČąĄąĮąĖčÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ VLEV.
VLEV adi_pwr.h ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ
0000-0101 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
0110 ADI_PWR_VLEV_085 0.85V
0111 ADI_PWR_VLEV_090 0.90V
1000 ADI_PWR_VLEV_095 0.95V
1001 ADI_PWR_VLEV_100 1.00V
1010 ADI_PWR_VLEV_105 1.05V
1011 ADI_PWR_VLEV_110 1.10V
1100 ADI_PWR_VLEV_115 1.15V
1101 ADI_PWR_VLEV_120 1.20V (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ)
1110 ADI_PWR_VLEV_125 1.25V
1111 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
ąÆ čéą░ą▒ą╗ąĖčåąĄ 8-9 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗąĄ ą▒ąĖčéą░ą╝ąĖ FREQ[1:0].
ąóą░ą▒ą╗ąĖčåą░ 8-9. ą¦ą░čüč鹊čéčŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ, ąĘą░ą┤ą░ą▓ą░ąĄą╝čŗąĄ ą▒ąĖčéą░ą╝ąĖ FREQ.
FREQ ąŚąĮą░č湥ąĮąĖąĄ
00 ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ (bypass, ą┐čĆąŠą┐čāčüą║) ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
01 333 ą║ąōčå
10 667 ą║ąōčå
11 1 ą£ąōčå
ąÆ čéą░ą▒ą╗ąĖčåąĄ 8-10 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ čāčĆąŠą▓ąĮąĖ čāčüąĖą╗ąĄąĮąĖčÅ ą▓ ą┐ąĄčéą╗ąĄ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ, ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗąĄ ą▒ąĖčéą░ą╝ąĖ GAIN[1:0].
ąóą░ą▒ą╗ąĖčåą░ 8-10. ąØą░čüčéčĆąŠą╣ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ ą┐ąĄčéą╗ąĖ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ GAIN.
GAIN ąŚąĮą░č湥ąĮąĖąĄ
00 5
01 10
10 20
11 50
[ą×ąĮą╗ą░ą╣ąĮ-ą║ą░ą╗čīą║čāą╗čÅč鹊čĆ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ VR_CTL ]
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ VR_CTL ą┐čĆąŠčüčéą░ą▓ą╗ąĄąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆčŗąĄ ąŠąĮąĖ ą┐ąŠą╗čāčćą░čÄčé ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ.
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ . ąØąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮčŗ ą▒ąĄąĘ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ čüąŠą▒ą╗čÄą┤ąĄąĮąĖčÅ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ čāčüą╗ąŠą▓ąĖą╣ ąĖą╗ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ą┤ąĄą╣čüčéą▓ąĖą╣ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ. ąĪą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┤ąŠą┐čāčüą║ą░ą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ąĖ ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ čćą░čüč鹊čéą░ą╝ čĆą░ą▒ąŠčéčŗ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣.
ąĪąĮąĖąČąĄąĮąĖąĄ čĆą░ą▒ąŠč湥ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┤ą╗čÅ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠą│ąŠ čüąĮąĖąČąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ąĖą╗ąĖ ą┐ąŠą▓čŗčłąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠą│ąŠ čāčüą║ąŠčĆąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčéčĆąĄą▒čāąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ą┐ąĖčéą░čÄčēąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą╝ąĄąĮčÅąĄčéčüčÅ čĆą░ą▒ąŠč湥ąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┐čĆąŠčåąĄčüčüąŠčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮ ą▓ ąĖąĘą▓ąĄčüčéąĮąŠąĄ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĄčĆąĄą┤ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĄą╣ čĆą░ą▒ąŠč湥ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ą░čÅ ą┐čĆąŠčåąĄą┤čāčĆą░ ą┤ąŠą╗ąČąĮą░ čüą╗ąĄą┤ąŠą▓ą░čéčī ąĘą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PLL, ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ. ą¤ąŠčüą╗ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ VR_CTL, ą▒ą╗ąŠą║ PLL ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓ąŠą╣ą┤ąĄčé ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄąČąĖą╝, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ. ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ, ąĖ PLL ą▓čŗą┐ąŠą╗ąĮąĖčé ą┐ąŠą▓č鹊čĆąĮčŗą╣ ąĘą░čģą▓ą░čé čāąČąĄ ąĮą░ ąĮąŠą▓ąŠą╝ čāčĆąŠą▓ąĮąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¤ąŠčüą┤ąĄ ąĖčüč鹥č湥ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░čģą▓ą░čéą░ (ą║ąŠč鹊čĆąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PLL_LOCKCNT ąĖ čćą░čüč鹊č鹊ą╣ čéą░ą║č鹊ą▓ SCLK), ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ (full on). ą¤čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ PLL_LOCKCNT ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąŠą▒čŗčćąĮąŠ, ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ą┐čĆąŠčüčéčŗą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ čćą░čüč鹊čéčŗ PLL. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąĖąĘą╝ąĄąĮąĄąĮąŠ ąĮą░ ąĮąŠą▓čŗą╣ čāčĆąŠą▓ąĄąĮčī, ą┐čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ą▓ąĄčĆąĮčāčéčīčüčÅ ą▓ ą╗čÄą▒ąŠą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝, ą┐ąŠą║ą░ čĆą░ą▒ąŠčćąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, čéą░ą║ąĖąĄ ą║ą░ą║ čćą░čüč鹊čéą░ čÅą┤čĆą░ (CCLK), ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ą┐čĆąĄą┤ąĄą╗ą░čģ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538/ADSP-BF538F ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĮąŠą▓ąŠą│ąŠ čĆą░ą▒ąŠč湥ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ čÅą┤čĆą░ (čüąŠčüč鹊čÅąĮąĖąĄ Hibernate) . ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ą┐ąĖčéą░ąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮ ąĘą░ą┐ąĖčüčīčÄ 00 ą▓ ą▒ąĖčéčŗ ą┐ąŠą╗čÅ FREQ čĆąĄą│ąĖčüčéčĆą░ VR_CTL. ąŁč鹊 ąĘą░ą┐čĆąĄčéąĖčé ąŠą▒ąĄ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ - ąĖ CCLK, ąĖ SCLK. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čŹč鹊 čāčüčéą░ąĮąŠą▓ąĖčé ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ (VDDINT ) ą▓ 0V, čāčüčéčĆą░ąĮčÅčÅ č鹊ą║ąĖ, ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝. ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą▒čāąČąĄąĮ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą▓čŗą▒ąĖčĆą░ąĄą╝čŗą╝ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ čüąŠą▒čŗčéąĖčÅą╝ąĖ, ą▓čüąĄ ąĖąĘ ąĮąĖčģ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ VR_CTL:
ŌĆó ąÆčŗčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ RESET ą▓čüąĄą│ą┤ą░ ą▓čŗą▓ąĄą┤ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate, ąĖ čŹč鹊 ąĮąĄ ą┐ąŠčéčĆąĄą▒čāąĄčé ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣ čĆąĄą│ąĖčüčéčĆą░ VR_CTL.
ąĢčüą╗ąĖ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ (bypassed), čéą░ą║ čćč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ VDDINT ą┐ąŠą┤ą░ąĄčéčüčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ, č鹊 ą▓čŗą║ą╗čÄčćąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ čüąĮčÅčéąĖąĄą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ VDDINT ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░.
ąÜąŠą│ą┤ą░ čÅą┤čĆąŠ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ, čāčĆąŠą▓ąĄąĮčī VDDINT čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 0V, ąĖ čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąŠč鹥čĆąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ VR_CTL. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╗čÄą▒ą░čÅ ą║čĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, čüąŠčģčĆą░ąĮąĄąĮąĮą░čÅ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ (ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ą░ą╝čÅčéąĖ, čĆąĄą│ąĖčüčéčĆą░čģ ąĖ čé. ą┤.) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮą░ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé čüąĮčÅč鹊 ą┐ąĖčéą░ąĮąĖąĄ. ąŻą┤ąŠčüč鹊ą▓ąĄčĆčīč鹥čüčī, čćč鹊 čāčüčéą░ąĮąŠą▓ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ąĖčé SCKELOW (ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┤ą░ąĄčé ą▓čŗą▓ąŠą┤ ą╗ąŠą│. 0 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SCKE ą┐čĆąĖ čüą▒čĆąŠčüąĄ) ą▓ čĆąĄą│ąĖčüčéčĆąĄ VR_CTL, čćč鹊ą▒čŗ ąĘą░čēąĖčéąĖčéčī ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĖ čüą▒čĆąŠčüąĄ ą▓čŗą▓ąŠą┤ąŠą▓ EBIU ąŠčé ą┐ąĄčĆąĄčģąŠą┤ą░ ą▓ ąĮąĄą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ą×čłąĖą▒ąŠčćąĮą░čÅ ą▓ ąĮąĄ čāčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▓čŗą▓ąŠą┤ SCKE ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1 ą▓ąŠ ą▓čĆąĄą╝čÅ čüą▒čĆąŠčüą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░, čćč鹊 ą▓čŗą▓ąĄą┤ąĄčé SDRAM ąĖąĘ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą┤ą░ąĮąĮčŗąĄ čÅč湥ąĄą║ SDRAM čĆą░ąĘčĆčÅą┤čÅčéčüčÅ ąĖ ą▒čāą┤čāčé ą┐ąŠč鹥čĆčÅąĮčŗ.
ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ VDDINT ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ VDDEXT . ą¤ąŠą║ą░ VDDEXT ą▓čüąĄ ąĄčēąĄ ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ, ą▓ąĮąĄčłąĮąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▒čāą┤čāčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ąĄčüą╗ąĖ ąĮąĄ ą▒čŗą╗ąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ąĮąĄčćč鹊 ąĖąĮąŠąĄ.
ą¦č鹊ą▒čŗ ą▓čŗą║ą╗čÄčćąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ:
1 . ąŚą░ą┐ąĖčłąĖč鹥 0 ą▓ čĆąĄą│ąĖčüčéčĆčŗ SIC_IWRx, čćč鹊ą▒čŗ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ą┐čĆąĄčĆą▓ą░ą╗ąĖ ą┐čĆąŠčåąĄčüčü ą▓čģąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ hibernate.
2 . ąŚą░ą┐ąĖčłąĖč鹥 ą▓ čĆąĄą│ąĖčüčéčĆ VR_CTL ąĘąĮą░č湥ąĮąĖąĄ, ą│ą┤ąĄ ą┐ąŠą╗ąĄ FREQ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ b#00, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (CANWE, GPWE, WAKE) ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 1. ą×ą┐čåąĖąŠąĮą░ą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé SCKELOW ą▓ ą╗ąŠą│. 1, ąĄčüą╗ąĖ ąŠčüčéą░ą▓ą╗čÅąĄč鹥 SDRAM ą▓ čĆąĄąČąĖą╝ąĄ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą▓ąŠą┤ąĖč鹥 ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ hibernate.
ąÆčŗą▓ąŠą┤ SCKE ą▓ čüąŠčüč鹊čÅąĮąĖąĖ hibernate ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ (ąŠčéą║ą╗čÄč湥ąĮąĮąŠą╝) čüąŠčüč鹊čÅąĮąĖąĖ. ą¤ąŠčŹč鹊ą╝čā ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ SCKELOW čĆąĄą│ąĖčüčéčĆą░ VR_CTL ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ hibernate, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą▓ąĮąĄčłąĮąĖą╣ ąĮąĖąČąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SCKE, ą║ą░ą║ čŹč鹊 čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ čŹč鹊ą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0, ą┐ąŠą║ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin ąĖą╝ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé.
3 . ąÆčŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą║ąŠą┤ą░:
4 . ąÜąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┤ąŠčüčéąĖą│ąĮąĄčé čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, VDDINT ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čāčĆąŠą▓ąĄąĮčī 0V.
5 . ąÜąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąŠą▒čāąČą┤ą░ąĄčéčüčÅ (ą╗ąĖą▒ąŠ ąŠčé RTC, ą╗ąĖą▒ąŠ ąŠčé čłąĖąĮčŗ CAN, ą╗ąĖą▒ąŠ ąŠčé ą▓čŗą▓ąŠą┤ą░ GPW, ą╗ąĖą▒ąŠ ąŠčé ą▓čŗą▓ąŠą┤ą░ RESET), ą▒ą╗ąŠą║ PLL ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐ąŠą▓č鹊čĆąĮčŗą╣ ąĘą░čģą▓ą░čé, ąĖ ą▓čüčéčāą┐ą░ąĄčé ą▓ čüąĖą╗čā ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ ą▓ąĮąĄčłąĮąĖą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ BMODE[1:0].
[ąĪą╗ąŠą▓ą░čĆąĖą║ ]
CCLK čćą░čüč鹊čéą░, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čĆą░ą▒ąŠčéą░ąĄčé čÅą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin.
CLKIN ą▓čģąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ą▓ąĮąĄčłąĮąĄą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ. ąŁčéą░ čćą░čüč鹊čéą░ čü ą┐ąŠą╝ąŠčēčīčÄ čüąĖčüč鹥ą╝čŗ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╣, čāą╝ąĮąŠąČąĖč鹥ą╗ąĄą╣ ąĖ ą┐ąĄčéą╗ąĖ PLL ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé ą┐čĆąŠčåąĄčüčüąŠčĆą░.
DAB DMA bus, čłąĖąĮą░ DMA.
DF ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ PLL_CTL. ąĢčüą╗ąĖ ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ (DF=1), č鹊 ą▒ą╗ąŠą║ PLL ą┐ąŠą╗čāčćąĖčé ąĮą░ ą▓čģąŠą┤ąĄ čćą░čüč鹊čéčā CLKIN (čćą░čüč鹊čéčā ą║ą▓ą░čĆčåą░), ą┐ąŠą┤ąĄą╗ąĄąĮąĮčāčÄ ąĮą░ 2. ąĢčüą╗ąĖ čüą▒čĆąŠčłąĄąĮ (DF=0), č鹊 čćą░čüč鹊čéą░ ąĮą░ ą▓čģąŠą┤ąĄ PLL čĆą░ą▓ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čćą░čüč鹊č鹥 CLKIN.
DMA ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüč鹊ą╣čüčéą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin.
DPM dynamic power management, ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝.
DPMC DMP controller.
EAB external access bus, čłąĖąĮą░ ą┤ąŠčüčéčāą┐ą░ ą║ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ.
EBIU external bus interface unit, ą▒ą╗ąŠą║ ąĖąĮč鹥čĆč乥ą╣čüą░ ą▓ąĮąĄčłąĮąĄą╣ čłąĖąĮčŗ.
MSEL ą┐ąŠą╗ąĄ čĆąĄą│ąĖčüčéčĆą░ PLL_CTL, ą║ąŠč鹊čĆąŠąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ čāą╝ąĮąŠąČąĄąĮąĖčÅ čćą░čüč鹊čéčŗ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┐ą░ą┤ą░ąĄčé ąĮą░ ą▓čģąŠą┤ PLL (čŹč鹊 čćą░čüč鹊čéą░ CLKIN ąĖą╗ąĖ CLKIN/2, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčéą░ DF). ą×čé čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖč鹊ą▓ DF ąĖ MSEL ąĘą░ą▓ąĖčüąĖčé čćą░čüč鹊čéą░ čĆą░ą▒ąŠčéčŗ čÅą┤čĆą░ CCLK.
PAB peripheral access bus, čłąĖąĮą░ ą┤ąŠčüčéčāą┐ą░ ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin.
PLL Phase Locked Loop, čäą░ąĘąŠą▓ą░čÅ ą░ą▓č鹊ą┐ąŠą┤čüčéčĆąŠą╣ą║ą░ čćą░čüč鹊čéčŗ, ążąÉą¤ą¦.
RTC Real Time Clock, čćą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąĀą░ą▒ąŠčéą░čÄčé ąŠčé ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ 32768 ąōčå.
SCLK čćą░čüč鹊čéą░, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čĆą░ą▒ąŠčéą░čÄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ąĖ ą▓ąĮąĄčłąĮčÅčÅ ą┐ą░ą╝čÅčéčī SDRAM.
SSEL ą┐ąŠą╗ąĄ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ PLL_DIV, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĄčé ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ VCO ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ SCLK.
VCO voltage controlled oscillator, ą│ąĄąĮąĄčĆą░č鹊čĆ, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝. ąÆčģąŠą┤ąĖčé ą▓ čüąŠčüčéą░ą▓ čüąĖčüč鹥ą╝čŗ PLL, čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠč鹊čĆąŠą╣ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ. ą¦ą░čüč鹊čéą░ VCO čĆą░ą▓ąĮą░ čćą░čüč鹊č鹥 CCLK, ą║ąŠč鹊čĆąŠą╣ čéą░ą║čéąĖčĆčāąĄčéčüčÅ čÅą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin.
[ąĪčüčŗą╗ą║ąĖ ]
1 . ADSP-BF538/ADSP-BF538F Blackfin┬« Processor Hardware Reference site:analog.com .2 . ąĪą╗čāąČą▒ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin .