|
ąÆ čŹč鹊ą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ (ą┐ąĄčĆąĄą▓ąŠą┤ čüčéą░čéčīąĖ [1]) ą╝čŗ čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą▓čüčéčĆąŠąĄąĮąĮąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ I2C ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (MCU) STM32. ąØą░čćąĮąĄą╝ čü ą║čĆą░čéą║ąŠą│ąŠ ą▓ą▓ąĄą┤ąĄąĮąĖčÅ ą▓ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ čłąĖąĮčŗ Inter-Integrated Circuit (I2C), ąĖ ą┐ąŠą┤čĆąŠą▒ąĮąŠ čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą╝ąŠą┤čāą╗čī STM32 I2C, ąĄą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗, čĆąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ, ąŠą┐čåąĖąĖ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąæčāą┤čāčé čĆą░čüčüą╝ąŠčéčĆąĄąĮčŗ čüąĖą│ąĮą░ą╗čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą░ą┐ą┐ą░čĆą░čéčāčĆą░ STM32 I2C hardware. ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆąŠą▓ čĆą░čüčüą╝ąŠčéčĆąĖą╝ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čĆąĄąČąĖą╝čŗ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ I2C - polling (čü ąŠą┐čĆąŠčüąŠą╝ čäą╗ą░ą│ąŠą▓), interrupt (ą┐ąŠą╗čāč湥ąĮąĖąĄ čüčéą░čéčāčüą░ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝) - ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C master, čéą░ą║ ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C slave. ąÆ ąĘą░ą║ą╗čÄč湥ąĮąĖąĄ ą╝čŗ ą┐čĆąŠą▓ąĄčĆąĖą╝ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ I2C, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą▓ ą│ąĄąĮąĄčĆą░č鹊čĆąĄ ą║ąŠą┤ą░ STM32CubeMX [2], čĆą░čüčüą╝ąŠčéčĆąĖą╝ čüą┐ąŠčüąŠą▒čŗ čĆą░ą▒ąŠčéčŗ čü ą┐ąĄčĆąĖč乥čĆąĖąĄą╣ I2C č湥čĆąĄąĘ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ HAL API, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗąĄ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ STMicroelectronics.
[ąÆą▓ąĄą┤ąĄąĮąĖąĄ ą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┐ąŠ čłąĖąĮąĄ I2C]
ą©ąĖąĮą░ I2C ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ Philips Semiconductors (č鹥ą┐ąĄčĆčī NXP) ą▓ 1982 ą│ąŠą┤čā. ąÆ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ MCU ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Atmel AVR ąĖąĮč鹥čĆč乥ą╣čü I2C čćą░čüč鹊 ąĮą░ąĘčŗą▓ą░čÄčé ą║ą░ą║ TWI (ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ ąŠčé Two Wire Interface). I2C čÅą▓ą╗čÅąĄčéčüčÅ čüąĖąĮčģčĆąŠąĮąĮąŠą╣, ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą╣, ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮąŠą╣ čłąĖąĮąŠą╣. ą×ąĮą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą│ą╗ą░ą▓ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ąĮą░ čłąĖąĮąĄ ąĖ ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (multi-master), ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ąĮą░ čłąĖąĮąĄ ąĖ ąŠą┤ąĮąĖą╝ ą│ą╗ą░ą▓ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (multi-slave). ą×ą┤ąĮą░ą║ąŠ čćą░čēąĄ ą▓čüąĄą│ąŠ ą▓čüčéčĆąĄčćą░ąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ multi-slave, ą║ąŠą│ą┤ą░ ąŠą┤ąĮąŠ ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (master) čāą┐čĆą░ą▓ą╗čÅąĄčé ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ąĖ (slave) čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. I2C čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠą╣ ąĖ ą▒čŗč鹊ą▓ąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ ąĮą░ ąĮąĄą▒ąŠą╗čīčłąĖčģ čĆą░čüčüč鹊čÅąĮąĖčÅčģ, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮčŗ ąĮą░ ąŠą┤ąĮąŠą╣ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥 ąĖą╗ąĖ ą▓ ąŠą┤ąĮąŠą╝ ą║ąŠčĆą┐čāčüąĄ 菹╗ąĄą║čéčĆąŠąĮąĮąŠą│ąŠ ą┐čĆąĖą▒ąŠčĆą░.
ąĀąĄąČąĖą╝čŗ ąĖ čüą║ąŠčĆąŠčüčéąĖ I2C. ą¤ąŠąĮą░čćą░ą╗čā čüą║ąŠčĆąŠčüčéčī I2C ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ą╗ą░čüčī 100 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║ (čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SCL 100 ą║ąōčå). ąĪąŠ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÄ ą▒čŗą╗ąŠ ą▓ąĮąĄčüąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖą╣, čéą░ą║ čćč鹊 č鹥ą┐ąĄčĆčī čüčāčēąĄčüčéą▓čāąĄčé 5 ą║ą░č鹥ą│ąŠčĆąĖą╣ čĆą░ą▒ąŠčćąĖčģ čüą║ąŠčĆąŠčüč鹥ą╣. ąÜą░č鹥ą│ąŠčĆąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ Standard-mode, Fast-mode (Fm), Fast-mode Plus (Fm+) ąĖ High-speed mode (Hs-mode) ąŠą▒čĆą░čéąĮąŠ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ ą┤čĆčāą│ąŠą╝, čé. ąĄ. ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ master ąĖą╝ąĄąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čü ą╝ąĄąĮąĄąĄ čüą║ąŠčĆąŠčüčéąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ąĮą░ čłąĖąĮąĄ. ąŻčüčéčĆąŠą╣čüčéą▓ą░ Ultra Fast-mode ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ ą▓ąĄčĆčüąĖą╣, ą┐ąŠčüą║ąŠą╗čīą║čā čéą░ą║ą░čÅ čłąĖąĮą░ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
ą©ąĖąĮą░ I2C čü ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čĆąĄąČąĖą╝ą░čģ (ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čü):
Standard-Mode (Sm), čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠ 100 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║
Fast-Mode (Fm), čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠ 400 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║
Fast-Mode Plus (Fm+), čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠ 1 ą£ąĄą│ą░ą▒ąĖčé/čüąĄą║
High-speed Mode (Hs-mode), čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠ 3.4 ą£ąĄą│ą░ą▒ąĖčé/čüąĄą║
ą×ą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮą░čÅ čłąĖąĮą░ I2C:
Ultra Fast-Mode (UFm), čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠ 5 ą£ąĄą│ą░ą▒ąĖčé/čüąĄą║
ąÉą┐ą┐ą░čĆą░čéčāčĆą░ STM32 čłčéą░čéąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆąĄąČąĖą╝čŗ čüą║ąŠčĆąŠčüč鹥ą╣ Sm ąĖ Fm. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą╝ąŠąČąĮąŠ ą┤ąŠą▒ąĖčéčīčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čĆąĄąČąĖą╝ą░ Fm+.
ążąĖąĘąĖč湥čüą║ąĖą╣ čüą╗ąŠą╣ I2C. ą©ąĖąĮą░ I2C ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ (ąŠčéą║čĆčŗčéčŗą╣ ą║ąŠą╗ą╗ąĄą║č鹊čĆ) ą┤ą╗čÅ čüą▓ąŠąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ SDA ąĖ SCL. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüąĖą│ąĮą░ą╗čŗ čłąĖąĮčŗ SDA ąĖ SCL ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéčŗ ą║ + ą┐ąĖčéą░ąĮąĖčÅ (Vcc) č湥čĆąĄąĘ ą▓ąĮąĄčłąĮąĖąĄ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ (pull-up). ąóąĖą┐ąĖčćąĮčŗą╣ ąĮąŠą╝ąĖąĮą░ą╗ ą┤ą╗čÅ pull-up ąŠčé 4.7 ą║ą×ą╝ ą┤ąŠ 10 ą║ą×ą╝, ąĮąŠ čŹč鹊 ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┤ą╗ąĖąĮčŗ ą╗ąĖąĮąĖą╣ čüąĖą│ąĮą░ą╗ąŠą▓ SDA ąĖ SCL. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ čüąŠčüč鹊čÅąĮąĖąĄą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ čłąĖąĮčŗ (IDLE, ąĮąĖą║ą░ą║ąĖąĄ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ) čüčćąĖčéą░ąĄčéčüčÅ ą╗ąŠą│. 1 ąĮą░ ąŠą▒ąŠąĖčģ čüąĖą│ąĮą░ą╗ą░čģ SDA ąĖ SCL, ą║ąŠą│ą┤ą░ ą▓čüąĄ čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĘą░ą║čĆčŗčéčŗ. ąĢčüą╗ąĖ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ąĖąĘ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą▓ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąŠčéą║čĆąŠąĄčéčüčÅ, č鹊 ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čüąĖą│ąĮą░ą╗ąĄ čłąĖąĮčŗ ą┐ąŠčÅą▓ąĖčéčüčÅ ą╗ąŠą│. 0.
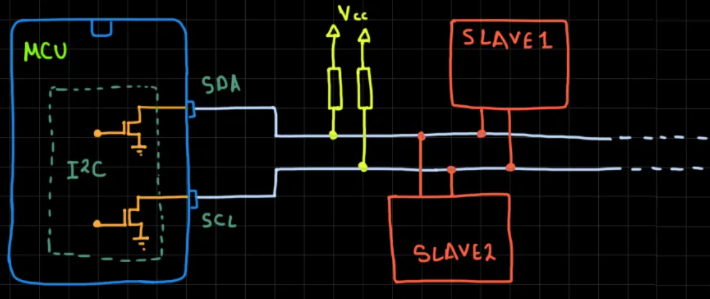
ąĀąĖčü. 1. ążąĖąĘąĖč湥čüą║ą░čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÅ čłąĖąĮčŗ I2ąĪ.
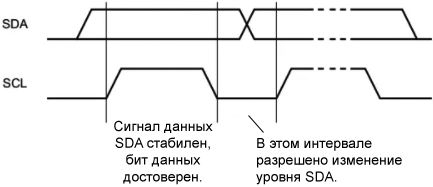
ą¦č鹊ą▒čŗ ąĘą░ą┐ąĖčüą░čéčī ąĮą░ čłąĖąĮčā čüąĖą│ąĮą░ą╗ ą╗ąŠą│. 0, ą╝čŗ ą▓ą║ą╗čÄčćą░ąĄą╝ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ, ą┐ąĄčĆąĄą▓ąŠą┤čÅ č鹥ą╝ čüą░ą╝čŗą╝ čüąĖą│ąĮą░ą╗čīąĮčāčÄ ą╗ąĖąĮąĖčÄ ą▓ ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī (LOW). ąöą╗čÅ ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│. 1 ą▓čŗą║ą╗čÄčćą░ąĄą╝ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ, ąĖ ą╗ąĖąĮąĖčÅ ą▒čāą┤ąĄčé ą┐ąŠą┤ąĮčÅčéą░ ąĮą░ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī (HIGH) ą┐ąŠą┤ ą┤ąĄą╣čüčéą▓ąĖąĄą╝ ą▓ąĮąĄčłąĮąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓. ą×čéą║čĆčŗčéčŗą╣ čüč鹊ą║ čłąĖąĮčŗ I2C ą┤ąĄą╗ą░ąĄčé ąĄčæ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą╣, ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ I2C ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ąŠą╗ą╗ąĖąĘąĖą╣ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠą│ą┤ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą┐čŗčéą░čÄčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┤ąŠčüčéčāą┐ ą║ čłąĖąĮąĄ. ąøčÄą▒ąŠąĄ ąĖąĘ master-čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆą▓čŗą╝ ąŠčéą║čĆąŠąĄčé čüą▓ąŠą╣ čéčĆą░ąĮąĘąĖčüč鹊čĆ, ą▓čŗą▓ąĄą┤čÅ ąĮą░ čłąĖąĮčā ą╗ąŠą│. 0, ą▓čŗąĖą│čĆą░ąĄčé č鹥ą╝ čüą░ą╝čŗą╝ ą░čĆą▒ąĖčéčĆą░ąČ, ąĖ ą┤čĆčāą│ąŠąĄ master-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčé čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ čłąĖąĮčŗ.
SDA ąĖ SCL, ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ. ążąĖąĘąĖč湥čüą║ąĖ ąŠą▒ąĄ ą╗ąĖąĮąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓ SDA ąĖ SCL čÅą▓ą╗čÅčÄčéčüčÅ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ąĖ. ąÜąŠą│ą┤ą░ čłąĖąĮą░ čüą▓ąŠą▒ąŠą┤ąĮą░, ąĮą░ ąŠą▒ąŠąĖčģ čŹčéąĖčģ čüąĖą│ąĮą░ą╗ą░čģ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé čāčĆąŠą▓ąĄąĮčī HIGH. ąÆčŗčģąŠą┤ąĮčŗąĄ ą║ą░čüą║ą░ą┤čŗ ą▓čüąĄčģ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čłąĖąĮąĄ čāčüčéčĆąŠą╣čüčéą▓ ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ą▓čŗčģąŠą┤ čü ąŠą▒čēąĖą╝ čüč鹊ą║ąŠą╝, čĆąĄą░ą╗ąĖąĘčāčÅ č鹥ą╝ čüą░ą╝čŗą╝ ą╗ąŠą│ąĖč湥čüą║čāčÄ čäčāąĮą║čåąĖčÄ "ą┐čĆąŠą▓ąŠą┤ąĮąŠąĄ ąś" (wired-AND).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠąĄ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ ąĖą╝ą┐čāą╗čīčüą░ čéą░ą║č鹊ą▓ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (clock stretching) ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čü ąŠą┤ąĮąĖą╝ master, č鹊 ąĮą░ čłąĖąĮąĄ I2C čüąĖą│ąĮą░ą╗ SCL ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝, ąĖ ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ SCL čā slave-čāčüčéčĆąŠą╣čüčéą▓ čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ ą║ą░ą║ ą▓čģąŠą┤. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čŗčģąŠą┤ SCL čāčüčéčĆąŠą╣čüčéą▓ą░ master ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ą▓čāčģčéą░ą║čéąĮčŗą╝, ą┐ąŠč鹊ą╝čā čćč鹊 ąĄą│ąŠ čāčĆąŠą▓ąĮąĄą╝ ą▓čüąĄą│ą┤ą░ čāą┐čĆą░ą▓ą╗čÅąĄčé ąŠą┤ąĮąŠ ąĖ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ - master. ąĪąĖą│ąĮą░ą╗ SDA ą┐ąŠ-ą┐čĆąĄąČąĮąĄą╝čā ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ ą║ą░ą║ čā čāčüčéčĆąŠą╣čüčéą▓ą░ master, čéą░ą║ ąĖ čā ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ slave.
ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą║ čłąĖąĮąĄ I2C ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĮčŗąĄ ą┐ąŠ čĆą░ąĘąĮčŗą╝ č鹥čģąĮąŠą╗ąŠą│ąĖčÅą╝ (CMOS, NMOS, TTL), čāčĆąŠą▓ąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą┤ą╗čÅ ą╗ąŠą│. 0 (LOW) ąĖ ą╗ąŠą│. 1 (HIGH) ąĮąĄ ąČąĄčüčéą║ąŠ čäąĖą║čüąĖčĆąŠą▓ą░ąĮčŗ, ąŠą┤ąĮą░ą║ąŠ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ čāčĆąŠą▓ąĮčÄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ VDD (ą▓čüąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ čłąĖąĮąĄ I2C, ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ). ą¤ąŠčĆąŠą│ąŠą▓čŗąĄ čāčĆąŠą▓ąĮąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ąĮą░ 30% ąĖ 70% ąŠčé VDD. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╗ąŠą│. 0 (LOW) ą┤ąŠą╗ąČąĄąĮ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčīčüčÅ čāčĆąŠą▓ąĮąĄą╝ VIL = 0.3VDD, ąĖ ą╗ąŠą│. 1 (HIGH) čāčĆąŠą▓ąĮąĄą╝ VIH = 0.7VDD. ąöą░ąĮąĮčŗąĄ ąĮą░ SDA ą┤ąŠą╗ąČąĮčŗ ąŠčüčéą░ą▓ą░čéčīčüčÅ čüčéą░ą▒ąĖą╗čīąĮčŗą╝ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░ HIGH ąĮą░ čüąĖą│ąĮą░ą╗ąĄ čéą░ą║č鹊ą▓ SCL. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ HIGH ąĖą╗ąĖ LOW čüąĖą│ąĮą░ą╗ą░ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ SCL ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ čāčĆąŠą▓ąĮąĄ LOW. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ ą┐ąŠ čłąĖąĮąĄ ą▒ąĖčéą░ SDA ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąŠą┤ąĖąĮ ą┐ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓ SCL.
ąĀąĖčü. 2. ą¤ąĄčĆąĄą┤ą░čćą░ ą▒ąĖčéą░ ą┐ąŠ čłąĖąĮąĄ I2C.
ąŁą╗ąĄą╝ąĄąĮčéčŗ čéčĆą░ąĮąĘą░ą║čåąĖą╣ I2C. ąóąĖą┐ąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ I2C čüąŠčüč鹊ąĖčé ąĖąĘ ąĮąĄą║ąŠč鹊čĆąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ąĘąŠą▓čŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ (čüąĖą│ąĮą░ą╗ąŠą▓), ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čłąĖąĮčŗ. ą¤ąĄčĆą▓čŗą╣ ą▒ą░ąĘąŠą▓čŗą╣ 菹╗ąĄą╝ąĄąĮčé, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ čłąĖąĮąĄ - čüąĖą│ąĮą░ą╗ čüčéą░čĆčéą░ (start condition, ą┤ą░ą╗ąĄąĄ čüąŠą║čĆą░čēąĄąĮąĮąŠ START, ąĖą╗ąĖ S). ąŚą░ čüąĖą│ąĮą░ą╗ąŠą╝ START ąĖą┤ąĄčé ą┤čĆčāą│ąŠą╣ ą▒ą░ąĘąŠą▓čŗą╣ 菹╗ąĄą╝ąĄąĮčé - ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (ąŠą▒čŗčćąĮąŠ 7-čĆą░ąĘčĆčÅą┤ąĮčŗą╣, ąĮąŠ ąĖąĮąŠą│ą┤ą░ 10 čĆą░ąĘčĆčÅą┤ąĮčŗą╣), ąĘą░č鹥ą╝ ąĖą┤ąĄčé ąŠą┤ąĖąĮ R/W-ą▒ąĖčé, ą║ąŠč鹊čĆčŗą╣ ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čéąĖą┐ ąŠą┐ąĄčĆą░čåąĖąĖ, ą║ąŠč鹊čĆčāčÄ master ąĘą░ą║ą░ąĘą░ą╗ ąĮą░ čłąĖąĮąĄ. ąĢčüą╗ąĖ ą▒ąĖčé R/W čĆą░ą▓ąĄąĮ 0, č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé ąŠą┐ąĄčĆą░čåąĖčÄ ąĘą░ą┐ąĖčüąĖ (write), ą░ ąĄčüą╗ąĖ čĆą░ą▓ąĄąĮ 1, č鹊 ąŠą┐ąĄčĆą░čåąĖčÄ čćč鹥ąĮąĖčÅ (read). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ, ąĄčüą╗ąĖ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ čü ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╝ ą░ą┤čĆąĄčüąŠą╝ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĮą░ čłąĖąĮąĄ ąĖ čĆą░ą▒ąŠčéą░ąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠ, č鹊 ąŠąĮąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé čüą▓ąŠąĄ ą┐čĆąĖčüčāčéčüčéą▓ąĖąĄ čüąĖą│ąĮą░ą╗ąŠą╝ ą▓ ą▒ąĖč鹥 ACK (Acknowledge), ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÅ čłąĖąĮčā SDA ą║ ą╗ąŠą│. 0. ąĢčüą╗ąĖ ąČąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čü čāą║ą░ąĘą░ąĮąĮčŗą╝ ą░ą┤čĆąĄčüąŠą╝ ąĮąĄčé ąĮą░ čłąĖąĮąĄ, ąĖą╗ąĖ ąŠąĮąŠ ąĮąĄ ą│ąŠč鹊ą▓ąŠ ą║ ąŠą▒ą╝ąĄąĮčā, čłąĖąĮą░ SDA ąŠčüčéą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ NACK (Negative Acknowledge).
ąĢčüą╗ąĖ ą▒čŗą╗ą░ ąĘą░ą║ą░ąĘą░ąĮą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ, ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ master ą┐ąĄčĆąĄą┤ą░ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé čüąĖą│ąĮą░ą╗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠčé slave-čāčüčéčĆąŠą╣čüčéą▓ą░. ąöą░ą╗ąĄąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą░ą╣čé. ą¤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ master ą╝ąŠąČąĄčé ą┐čĆąĄčĆą▓ą░čéčī ąŠą▒ą╝ąĄąĮ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĄčēąĄ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ąĘąŠą▓ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ - čüąĖą│ąĮą░ą╗ą░ ąŠčüčéą░ąĮąŠą▓ą║ąĖ (Stop Condition, ą┤ą░ą╗ąĄąĄ čüąŠą║čĆą░čēąĄąĮąĮąŠ STOP, ąĖą╗ąĖ P).
Master ą┤ą╗čÅ ąĖąĮąĖčåąĖą░čåąĖąĖ ąĮąŠą▓ąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī ą┐ąŠą▓č鹊čĆąĮąŠ čüąĖą│ąĮą░ą╗ čüčéą░čĆčéą░ - REPEATED START (ą┤ą░ą╗ąĄąĄ ą┐ąŠ č鹥ą║čüčéčā čüąŠą║čĆą░čēąĄąĮąĮąŠ Sr), ą▒ąĄąĘ ą▓čŗą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ STOP (P).
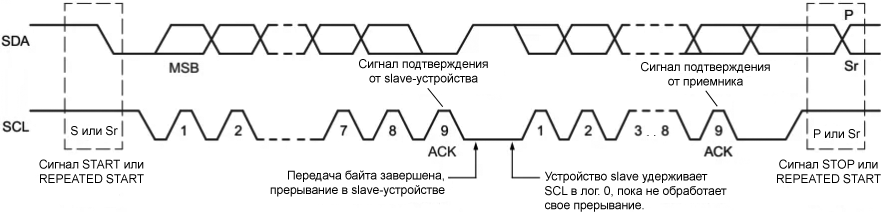
ąĀąĖčü. 3. ąóąĖą┐ąŠą▓ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ą░ąĘąŠą▓čŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čĆą░ąĘą╗ąĖčćą░čÄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą▒ą░ąĘąŠą▓čŗąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C:
ŌĆó ąĪąĖą│ąĮą░ą╗ ąĘą░ą┐čāčüą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, Start Condition (START, S)
ŌĆó ąĪąĖą│ąĮą░ą╗ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, Stop Condition (STOP, P)
ŌĆó ąĪąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, Repeated Start (Restart) Condition (REPEATED START, Sr)
ŌĆó ą¤ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ, Acknowledge (ACK, A)
ŌĆó ą×čéčüčāčéčüčéą▓ąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, Not Acknowledge (NACK, ~A)
ŌĆó ąÉą┤čĆąĄčü ąĖ ą▒ąĖčé R/W
ŌĆó ąæą░ą╣čé ą┤ą░ąĮąĮčŗčģ
ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ čĆą░ą▒ąŠčéčā čłąĖąĮčŗ I2C ąĖ ąĄčæ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą╝ąŠąČąĮąŠ ą┐ąŠčćąĖčéą░čéčī ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐čāą▒ą╗ąĖą║ą░čåąĖčÅčģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ ąĖą╗ąĖ čüčéą░čéčīąĄ [3].
[ąÉą┐ą┐ą░čĆą░čéčāčĆą░ STM32 I2C]
ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ STM32 I2C:
ŌĆó ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ Multimaster: ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ąĖąĮč鹥čĆč乥ą╣čü ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ Master ąĖą╗ąĖ Slave.
ŌĆó ążčāąĮą║čåąĖąĖ I2C Master: ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ ą│ąĄąĮąĄčĆą░čåąĖčÅ čéą░ą║č鹊ą▓, čüąĖą│ąĮą░ą╗ąŠą▓ START ąĖ STOP.
ŌĆó ążčāąĮą║čåąĖąĖ I2C Slave: ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą░ą┤čĆąĄčü I2C čü ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ 2 ą░ą┤čĆąĄčüąŠą▓ (čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčīčÄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┤ą▓čāčģ slave-ą░ą┤čĆąĄčüąŠą▓), ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ STOP.
ŌĆó ąōąĄąĮąĄčĆą░čåąĖčÅ ąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ 7-ą▒ąĖčéąĮąŠą╣/10-ą▒ąĖčéąĮąŠą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ ąĖ ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░ ą┐ąŠ čłąĖąĮąĄ (General Call).
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čüą║ąŠčĆąŠčüč鹥ą╣ ąŠą▒ą╝ąĄąĮą░:
ŌĆō Standard Speed (ą┤ąŠ 100 ą║ąōčå)
ŌĆō Fast Speed (ą┤ąŠ 400 ą║ąōčå)
ŌĆó ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čäąĖą╗čīčéčĆ ą┐ąŠą╝ąĄčģ (Analog noise filter).
ŌĆó 2 ą▓ąĄą║č鹊čĆą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
ŌĆō 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čāčüą┐ąĄčłąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą░ą┤čĆąĄčüąŠą╝ / ą┤ą░ąĮąĮčŗą╝ąĖ.
ŌĆō 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čüąĖčéčāą░čåąĖąĖ ąŠčłąĖą▒ą║ąĖ.
ŌĆó ą×ą┐čåąĖąŠąĮą░ą╗čīąĮąŠąĄ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ ąĖą╝ą┐čāą╗čīčüą░ čéą░ą║č鹊ą▓ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (clock stretching) ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝.
ŌĆó 1-ą▒ą░ą╣čéąĮčŗą╣ ą▒čāč乥čĆ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ DMA.
ŌĆó ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ą░čÅ čäčāąĮą║čåąĖčÅ PEC (packet error checking) ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖą╗ąĖ ą┐čĆąŠą▓ąĄčĆą║ąĖ.
ŌĆó ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü čłąĖąĮąŠą╣ SMBus 2.0.
ŌĆó ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü čłąĖąĮąŠą╣ PMBus.
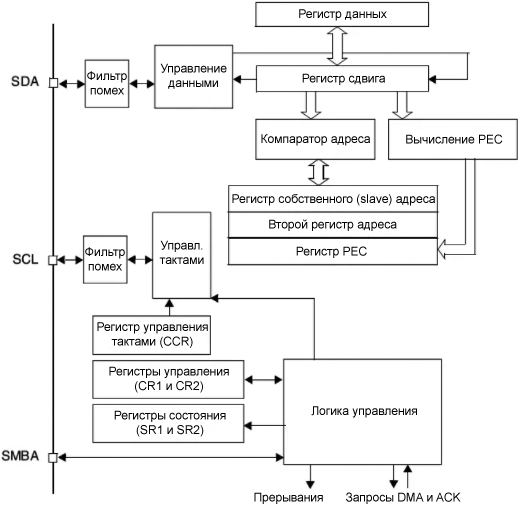
ąĀąĖčü. 4. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ STM32 I2C.
ąÜą░ą║ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ąĖąĘ čüčģąĄą╝čŗ ąĮą░ čĆąĖčü. 4, ąĘą┤ąĄčüčī ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą│ą╗ą░ą▓ąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┤ą░ąĮąĮčŗčģ, čĆąĄą│ąĖčüčéčĆ ą▒čāč乥čĆą░ ąĖ ąĮąĄą║ąŠč鹊čĆą░čÅ ą╗ąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąŠą▒čüą╗čāąČąĖą▓ą░čÄčēą░čÅ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣ čłą░ą│ąŠą▓ čéčĆą░ąĮąĘą░ą║čåąĖąĖ I2C. ąøąŠą│ąĖą║ą░ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ą░ą┤čĆąĄčüą░, ą│ąĄąĮąĄčĆą░čåąĖčÄ čüąĖą│ąĮą░ą╗ą░ SCL, čäąĖą╗čīčéčĆą░čåąĖčÄ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠčé ą┐ąŠą╝ąĄčģ, ą┐čĆąŠą▓ąĄčĆą║čā ąŠčłąĖą▒ąŠą║ ąĖ čé. ą┤.
ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ I2C. ąśąĮč鹥čĆč乥ą╣čü STM32 I2C ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ 4 čĆąĄąČąĖą╝ąŠą▓:
ŌĆó Slave transmitter (ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝).
ŌĆó Slave receiver (ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝).
ŌĆó Master transmitter (ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą│ą╗ą░ą▓ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝).
ŌĆó Master receiver (ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą│ą╗ą░ą▓ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝).
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąĄčĆąĖč乥čĆąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ slave. ąśąĮč鹥čĆč乥ą╣čü ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčüčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ slave ą▓ čĆąĄąČąĖą╝ master ą┐ąŠčüą╗ąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ START, ąĖ ąĖąĘ čĆąĄąČąĖą╝ą░ master ą▓ čĆąĄąČąĖą╝ slave, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąŠč鹥čĆčÅ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą╗ąĖ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ STOP. ąóą░ą║ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī multi-master. ąöą░ą╗ąĄąĄ ą╝čŗ čüąŠąĘą┤ą░ą┤ąĖą╝ 4 čĆą░ą▒ąŠčćąĖčģ ą┐čĆąĖą╝ąĄčĆą░, ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčēąĖčģ čĆą░ą▒ąŠčéčā ą┐ąĄčĆąĖč乥čĆąĖąĖ I2C ą▓ čŹčéąĖčģ čĆąĄąČąĖą╝ą░čģ.
STM32 I2C ą▓ čĆąĄąČąĖą╝ąĄ Slave. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ I2C ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ slave. ąöą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ master ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ą░ START. ąöą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą║ąŠčĆčĆąĄą║čéąĮčŗčģ čéą░ą╣ą╝ąĖąĮą│ąŠą▓ čłąĖąĮčŗ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ą▓ čĆąĄą│ąĖčüčéčĆ I2C_CR2. ąśčüčģąŠą┤ąĮą░čÅ ą▓čģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝:
ŌĆó 2 ą£ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čüą║ąŠčĆąŠčüčéąĖ Sm (čĆąĄąČąĖą╝ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ 100 ą║ąōčå)
ŌĆó 4 ą£ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čüą║ąŠčĆąŠčüčéąĖ Fm (čĆąĄąČąĖą╝ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ 400 ą║ąōčå)
ą¤čĆąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĖ čüąĖą│ąĮą░ą╗ą░ START ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ master ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗą╣ ą░ą┤čĆąĄčü čü čüąĖą│ąĮą░ą╗ą░ SDA ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą┐ąŠčüčéčāą┐ą░ąĄčé ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░. ąŚą░č鹥ą╝ ąŠąĮ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ (ą▓ čĆąĄą│ąĖčüčéčĆą░čģ (I2C_OAR1 ąĖ (I2C_OAR2) ą░ą┤čĆąĄčüą░ą╝ąĖ. ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą░ą┤čĆąĄčüą░ ąĖąĮč鹥čĆč乥ą╣čü slave-čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą▒ą░ą╣čéčŗ č湥čĆąĄąĘ čüąĖą│ąĮą░ą╗ SDA ą▓ čĆąĄą│ąĖčüčéčĆ I2C_DR. ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▒ą░ą╣čéą░ ąĖąĮč鹥čĆč乥ą╣čü ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĖą╝ą┐čāą╗čīčü ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ACK.
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ RxNE, ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ I2C_DR ą┤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé BTF ąĖ ąĖąĮč鹥čĆč乥ą╣čü ą▒čāą┤ąĄčé ąŠąČąĖą┤ą░čéčī, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ ą▒ąĖčé BTF ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ I2C_SR1, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ I2C_DR. ą¤ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ ą▒ąĖčé BTF, ąĖąĮč鹥čĆč乥ą╣čü slave ą▒čāą┤ąĄčé čĆą░čüčéčÅą│ąĖą▓ą░čéčī čüąĖą│ąĮą░ą╗ SCL (ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÅ ąĄą│ąŠ ą║ čāčĆąŠą▓ąĮčÄ LOW), ą┤ą░ą▓ą░čÅ č鹥ą╝ čüą░ą╝čŗą╝ čāčüčéčĆąŠą╣čüčéą▓čā master čüąĖą│ąĮą░ą╗ ąĮąĄą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąŠą╗čāč湥ąĮąĖčÄ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ ą┤ą░ąĮąĮčŗčģ. ąöą░ą╗čīąĮąĄą╣čłą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤ąĄčé ąĮąĄą▓ąŠąĘą╝ąŠąČąĮą░, ą┐ąŠą║ą░ slave ąĮąĄ ąŠčüą▓ąŠą▒ąŠą┤ąĖčé ą╗ąĖąĮąĖčÄ čüąĖą│ąĮą░ą╗ą░ SCL. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ čüą╗ąĄą┤čāąĄčé ą▒čŗčéčī ąŠčüč鹊čĆąŠąČąĮčŗą╝ čü čäčāąĮą║čåąĖąĄą╣ clock stretching ą▓ čāčüčéčĆąŠą╣čüčéą▓ą░čģ slave.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░ąĮ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ, master ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ STOP. ąśąĮč鹥čĆč乥ą╣čü ąŠą┐čĆąĄą┤ąĄą╗ąĖčé čŹč鹊čé čüąĖą│ąĮą░ą╗, čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé STOPF ąĖ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ITEVFEN. ąæąĖčé STOPF ąŠčćąĖčēą░ąĄčéčüčÅ ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ SR1, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé ąĘą░ą┐ąĖčüčī čĆąĄą│ąĖčüčéčĆą░ CR1.
STM32 I2C ą▓ čĆąĄąČąĖą╝ąĄ Master. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĖąĮč鹥čĆč乥ą╣čü ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ SCL. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą▓čüąĄą│ą┤ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü čüąĖą│ąĮą░ą╗ą░ START, ąĖ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ STOP. ąĀąĄąČąĖą╝ Master ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ čüčĆą░ąĘčā, ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĮą░ čłąĖąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąĖą│ąĮą░ą╗ START. ąöą░ą╗čīąĮąĄą╣čłą░čÅ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą▒ą░ąĘąŠą▓čŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ąĄ master.
ąóąĖą┐ąŠą▓ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąĄą╣čüčéą▓ąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čĆą░ą▒ąŠčéčŗ ą▓ čĆąĄąČąĖą╝ąĄ master:
ŌĆó ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą▓čģąŠą┤ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C ą▓ čĆąĄą│ąĖčüčéčĆąĄ I2C_CR2, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ čéą░ą╣ą╝ąĖąĮą│ąĖ čłąĖąĮčŗ I2C.
ŌĆó ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéą░ą║čéą░ą╝ąĖ.
ŌĆó ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ.
ŌĆó ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ I2C_CR1, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C.
ŌĆó ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé START ą▓ čĆąĄą│ąĖčüčéčĆąĄ I2C_CR1, čćč鹊ą▒čŗ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ START.
ąśčüčģąŠą┤ąĮą░čÅ ą▓čģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ (čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ čéą░ą║ąĖąĄ ąČąĄ, ą║ą░ą║ ąĖ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ slave):
ŌĆó 2 ą£ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čüą║ąŠčĆąŠčüčéąĖ Sm (čĆąĄąČąĖą╝ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ 100 ą║ąōčå)
ŌĆó 4 ą£ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čüą║ąŠčĆąŠčüčéąĖ Fm (čĆąĄąČąĖą╝ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ 400 ą║ąōčå)
STM32 I2C PEC. ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ PEC čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ Packet Error Checking, čé. ąĄ. čŹč鹊 čäčāąĮą║čåąĖčÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ. ąÆ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ I2C čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą║ą░ą╗čīą║čāą╗čÅč鹊čĆ PEC, čćč鹊ą▒čŗ čāą╗čāčćčłąĖčéčī ąĮą░ą┤ąĄąČąĮąŠčüčéčī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą┐ąŠ čłąĖąĮąĄ I2C. PEC ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąŠą╗ąĖąĮąŠą╝ą░ C(x) = x8 + x2 + x + 1 CRC-8 , ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą▒ąĖč鹥. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā PEC, č鹊 ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąŠą▓ąĄčĆčÅčéčī ąĮą░ą╗ąĖčćąĖąĄ ąŠčłąĖą▒ąŠą║ ą▓ ą▒ąŠą╗čīčłąĖčģ čéčĆą░ąĮąĘą░ą║čåąĖčÅčģ ą┤ą░ąĮąĮčŗčģ, ą▒ąĄąĘ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ąĮą░ą║ą╗ą░ą┤ąĮčŗčģ čĆą░čüčģąŠą┤ąŠą▓ ą┐ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą╝čā ą▓čĆąĄą╝ąĄąĮąĖ MCU (ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ PEC ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą░ą┐ą┐ą░čĆą░čéąĮąŠ).
ą×ą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé čāčćąĖčéčŗą▓ą░čéčī, čćč鹊 ąĄčüą╗ąĖ master ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą┐čĆąŠąĖą│čĆą░ąĄčé ą░čĆą▒ąĖčéčĆą░ąČ, č鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÄ PEC. ąś ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąĄčĆąĮąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čĆąĄąČąĖą╝ slave, ą▒čāą┤ąĄčé ąŠąČąĖą┤ą░čéčī, ą┐ąŠą║ą░ ą▓čŗąĖą│čĆą░ą▓čłąĖą╣ ą░čĆą▒ąĖčéčĆą░ąČ master ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčé čüą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąóąŠą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ąĘą░ąĮąŠą▓ąŠ ąĮą░čćą░čéčī ą┐čĆąŠčåąĄčüčü ą┐ąĄčĆąĄą┤ą░čćąĖ čüą▓ąŠąĖčģ ą┤ą░ąĮąĮčŗčģ ąĖ ąĘą░ąĮąŠą▓ąŠ ąĮą░čćą░čéčī ą┐ąŠą┤čüč湥čé PEC ą┤ą╗čÅ ąĮąĖčģ.
[ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ąŠą║ STM32 I2C]
ąØą░ čłąĖąĮąĄ ą╝ąŠą│čāčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ čüąŠą▒čŗčéąĖčÅ ąŠčłąĖą▒ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ąĄč鹥ą║čéąĖčĆčāčÄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C, čćč鹊ą▒čŗ ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░čģ, ą▓ąŠąĘąĮąĖą║ą░čÄčēąĖčģ ąĮą░ čāčĆąŠą▓ąĮąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąŠčüč鹊 ą╝ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čŹčéąĖ čüąĖčéčāą░čåąĖąĖ ąŠčłąĖą▒ą║ąĖ ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą▒ąĖčé ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąŠčłąĖą▒ą║ąĖ. ąĪąĖčéčāą░čåąĖąĖ ąŠčłąĖą▒ą║ąĖ ą▓ą║ą╗čÄčćą░čÄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čüą╗čāčćą░ąĖ:
Bus Error (BERR). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą║ąŠą│ą┤ą░ ąĖąĮč鹥čĆč乥ą╣čü I2C ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓ąĮąĄčłąĮąĖą╣ (ąĮąĄąŠąČąĖą┤ą░ąĮąĮčŗą╣ ą▓ ą┤ą░ąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé) čüąĖą│ąĮą░ą╗ STOP ąĖą╗ąĖ START, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą┤ą░čćą░ ą░ą┤čĆąĄčüą░ ąĖą╗ąĖ ą┤ą░ąĮąĮčŗčģ.
Acknowledge Failure (AF). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą║ąŠą│ą┤ą░ ąĖąĮč鹥čĆč乥ą╣čü ąŠą┐čĆąĄą┤ąĄą╗ąĖčé ą▒ąĖčé ąŠčéčüčāčéčüčéą▓ąĖčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (non-acknowledge, NACK).
Arbitration Lost (ARLO). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą║ąŠą│ą┤ą░ ąĖąĮč鹥čĆč乥ą╣čü ąŠą┐čĆąĄą┤ąĄą╗ąĖčé ą┐ąŠč鹥čĆčÄ ą░čĆą▒ąĖčéčĆą░ąČą░.
Overrun/Underrun Error (OVR). ąĪąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĮą░ ą┐čĆąĖąĄą╝ąĄ (Overrun) ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą▓ čĆąĄąČąĖą╝ąĄ slave, ąĄčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ (clock stretching). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąĖąĮčÅą╗ ą┤ą░ąĮąĮčŗąĄ, ąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ DR ąĮąĄ ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┤ąŠ ą┐čĆąĖąĄą╝ą░ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░. ąĪąŠą▒čŗčéąĖąĄ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ (Underrun) ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą▓ čĆąĄąČąĖą╝ąĄ slave, ą║ąŠą│ą┤ą░ čéą░ą║ąČąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓, ąĖ ąĖąĮč鹥čĆč乥ą╣čü I2C ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄ ąŠą▒ąĮąŠą▓ąĖą╗ą░ čĆąĄą│ąĖčüčéčĆ DR čüą╗ąĄą┤čāčÄčēąĖą╝ ą▒ą░ą╣č鹊ą╝ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą┐ąŠčüčéčāą┐ąĖą╗ąĖ čéą░ą║čéčŗ čāąČąĄ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░.
[ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ STM32 I2C]
ąĀą░ąĘą╗ąĖčćąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ I2C ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ąŠą┤ąĮąŠą╝čā ąĖ č鹊ą╝čā ąČąĄ ą▓ąĄą║č鹊čĆčā, čéą░ą║ čćč鹊 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR) ą┤ą╗čÅ I2C ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī čäą╗ą░ą│ąĖ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüąŠą▒čŗčéąĖąĄ (ą┐čĆąĖčćąĖąĮčā) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁčéąĖ čüąŠą▒čŗčéąĖčÅ ą│ąĄąĮąĄčĆąĖčĆčāčÄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 1. ąŚą░ą┐čĆąŠčüčŗ ąĮą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ I2C.
| ąĪąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ |
ążą╗ą░ą│ čüąŠą▒čŗčéąĖčÅ |
ąæąĖčé, čĆą░ąĘčĆąĄčłą░čÄčēąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ |
| ą×čéą┐čĆą░ą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ START (čĆąĄąČąĖą╝ master) |
SB |
ITEVFEN |
| ą×čéą┐čĆą░ą▓ą╗ąĄąĮ ą░ą┤čĆąĄčü (čĆąĄąČąĖą╝ master), ąĖą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ (čĆąĄąČąĖą╝ slave) |
ADDR |
| ą×čéą┐čĆą░ą▓ą╗ąĄąĮ 10-ą▒ąĖčéąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ (čĆąĄąČąĖą╝ master) |
ADD10 |
| ą¤čĆąĖąĮčÅčé čüąĖą│ąĮą░ą╗ STOP (čĆąĄąČąĖą╝ slave) |
STOPF |
| ąŚą░ą▓ąĄčĆčłąĄąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ |
BTF |
| ąæčāč乥čĆ ą┐čĆąĖąĄą╝ą░ ąĮąĄ ą┐čāčüčé |
RxNE |
ITEVFEN ąĖ ITBUFEN |
| ąæčāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čāčüčé |
TxE |
[ą¤ąĄčĆąĄą┤ą░čćą░ ąĖ ą┐čĆąĖąĄą╝ STM32 I2C]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą╝čŗ čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čéčĆą░ąĮąĘą░ą║čåąĖą╣ I2C ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ firmware ą┤ą╗čÅ STM32.
I2C Polling. ą¤ąĄčĆą▓čŗą╣ ąĖ čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ą┤ąĄą╗ą░čéčī č湥ą│ąŠ-ąĮąĖą▒čāą┤čī ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ - ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ, čü ąĮčāąČąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ąŠą┐čĆą░čłąĖą▓ą░čéčī (poll) ą░ą┐ą┐ą░čĆą░čéčāčĆčā ąĖąĮč鹥čĆč乥ą╣čüą░, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą╣čéąĖ ą║ čüą╗ąĄą┤čāčÄčēąĄą╝čā čłą░ą│čā. ą×ą┤ąĮą░ą║ąŠ čŹč鹊 čüą░ą╝čŗą╣ ąĮąĄčŹčäč乥ą║čéąĖą▓ąĮčŗą╣ ą╝ąĄč鹊ą┤, ą┐ąŠč鹊ą╝čā čćč鹊 ą▒ąĄčüą┐ąŠą╗ąĄąĘąĮąŠ čéčĆą░čéąĖčéčüčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ MCU ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čåąĖą║ą╗ąŠą▓ ąŠąČąĖą┤ą░ąĮąĖčÅ.
ąÆčüąĄ čŹč鹊 ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ą░ą║ ą║ ą┐ąĄčĆąĄą┤ą░č湥, čéą░ą║ ąĖ ą║ ą┐čĆąĖąĄą╝čā. ąĢčüą╗ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čćą░, č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąČą┤ąĄčé ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ č鹥ą║čāčēąĄą│ąŠ ą▒ą░ą╣čéą░, čćč鹊ą▒čŗ ą┐ąŠč鹊ą╝ ąĘą░ą┐čāčüčéąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░. ąĢčüą╗ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čĆąĖąĄą╝, č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąČą┤ąĄčé ą┐čĆąĖąĄą╝ą░ ą▒ą░ą╣čéą░, ą┐ąŠčüą╗ąĄ ąĄą│ąŠ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĄą│ąŠ (ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ ą▒čāč乥čĆ ą┐ą░ą╝čÅčéąĖ), čüąĮąŠą▓ą░ ąČą┤ąĄčé, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ.
I2C Interrupt. ąöą╗čÅ ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ MCU ą╝čŗ ą╝ąŠąČąĄą╝ čĆą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ I2C. ąóąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▒čāą┤ąĄčé ą┐ąŠą╗čāčćą░čéčī čüąĖą│ąĮą░ą╗čŗ ąŠčé ąĮčāąČąĮčŗčģ čüąŠą▒čŗčéąĖą╣, ąĖ ąĘą░ą┐čāčüą║ą░čéčī ISR ą┤ą╗čÅ ąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ąŁč鹊 ą╝ąŠąČąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĖą╗ąĖ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ. ą¦č鹊 菹║ąŠąĮąŠą╝ąĖčé ą╝ąĮąŠą│ąŠ čĆąĄčüčāčĆčüąŠą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓ č乊ąĮąŠą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ ą╝ąŠąČąĄčé ąĘą░ąĮąĖą╝ą░čéčīčüčÅ ą┤čĆčāą│ąĖą╝ąĖ ą┤ąĄą╣čüčéą▓ąĖčÅą╝ąĖ, ąĮąĄ čéčĆą░čéčÅ ą▓čĆąĄą╝čÅ ąĮą░ čåąĖą║ą╗čŗ ąŠą┐čĆąŠčüą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ.
ą×ą┤ąĮą░ą║ąŠ ąĖ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ čüą╗ąĄą┤čāąĄčé ą▒čŗčéčī ąŠčüč鹊čĆąŠąČąĮčŗą╝ąĖ, ą║ąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąČąĄčüčéą║ąŠą│ąŠ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▒čŗčüčéčĆąŠ, ą▓ čüčéčĆąŠą│ąŠ ąĘą░ą┤ą░ąĮąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą│ąĖčĆąŠą▓ą░čéčī ąĮą░ ą║čĆąĖčéąĖč湥čüą║ąĖąĄ ą▓ąĮąĄčłąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ - ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ąĮčāąČąĮąŠąĄ ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čüąĖą│ąĮą░ą╗ ą┤ą░čéčćąĖą║ą░ čüč鹊ą╗ą║ąĮąŠą▓ąĄąĮąĖčÅ ąĖ ą▓ąŠą▓čĆąĄą╝čÅ čĆą░čüą║čĆčŗčéčī ą┐ąŠą┤čāčłą║čā ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čÅ. ą£čŗ ąĮąĄ ą╝ąŠąČąĄą╝ ąĘąĮą░čéčī ąĘą░čĆą░ąĮąĄąĄ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ą░ą║ąŠą╣ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ąĮą░čćą░čéčī ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą║ąŠą┤ ąĄą│ąŠ ISR. ą¤čĆąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝ ąĮą░ąĘąĮą░č湥ąĮąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ąĮąĄą▒čĆąĄąČąĮąŠą│ąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĘą░ą┤ą░čć ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąĮąĄą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ.
I2C čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ DMA. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čüąŠą▒čŗčéąĖą╣ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ I2C ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓ąŠą▓čĆąĄą╝čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī ą┤ą░ąĮąĮčŗąĄ, ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ą░ ąĮčāąČąĮąŠ ą▓ąŠą▓čĆąĄą╝čÅ čüčćąĖčéčŗą▓ą░čéčī ą┐ąŠčüčéčāą┐ąĖą▓čłąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ąöą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ I2C ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ DMA (Direct Memory Access, ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ), čĆąĄą░ą╗ąĖąĘčāčÄčēčāčÄ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ąĘą░ą┐čĆąŠčü/ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ.
ąŚą░ą┐čĆąŠčüčŗ DMA ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ ąŠą┐čāčüč鹊賹░ąĄčéčüčÅ, ąĖ ą║ąŠą│ą┤ą░ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ ąŠąĮ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ DMA čéą░ą║ąČąĄ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ MCU, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖ ą┐ą░ą╝čÅčéčīčÄ ą┐čĆąŠąĖčüčģąŠą┤čÅčé ą░ą┐ą┐ą░čĆą░čéąĮąŠ. DMA čüčćąĖčéą░ąĄčéčüčÅ čüą░ą╝čŗą╝ čŹčäč乥ą║čéąĖą▓ąĮčŗą╝ ą╝ąĄč鹊ą┤ąŠą╝ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ.
[ą¦č鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ I2C]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą╝čŗ čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą┐ąŠą╗ąĄąĘąĮčŗąĄ čäčāąĮą║čåąĖąĖ HAL API ą┤ą╗čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ I2C, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čćąĖčéą░čéčī ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą┐ą░ą╝čÅčéąĖ. ążčāąĮą║čåąĖąĖ HAL_I2C_Mem_Write() ąĖ HAL_I2C_Mem_Read() čĆąĄą░ą╗ąĖąĘčāčÄčé čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┐ą░ą╝čÅčéąĖ čü ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ.
ąĪčāčēąĄčüčéą▓čāčÄčé ąĖ ą┤čĆčāą│ąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖčćąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčé čéčā ąČąĄ čüą░ą╝čāčÄ čĆą░ą▒ąŠčéčā ą▒ąĄąĘ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ (čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ + DMA). ąØąŠ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą┤ą░ą▓ą░ą╣č鹥 čĆą░ąĘą▒ąĄčĆąĄą╝, ą║ą░ą║ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠčåąĄčüčü čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ą┐ą░ą╝čÅčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąØą░ą╝, ą║ą░ą║ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝, ąŠą▒čŗčćąĮąŠ ąĮąĄ ąĮčāąČąĮąŠ čćč鹊-č鹊 ą┤ąĄą╗ą░čéčī ąĮą░ ąĮąĖąĘą║ąŠą╝ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝ čāčĆąŠą▓ąĮąĄ, ą║ąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠ ąŠą▒ą╝ąĄąĮčā ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąØčāąČąĮąŠ ą┐čĆąŠčüč鹊 ąĖą╝ąĄčéčī ąŠą▒čēąĄąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄ ąŠ č鹊ą╝, ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé čłąĖąĮą░, ąĖ ą┐ąŠą╝ąĮąĖčéčī ąŠ č鹊ą╝, čćč鹊 ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C ą╝ąŠąČąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą░ą┐ą┐ą░čĆą░čéčāčĆą░ MCU, ąĮą░ą╝ ą▓čüąĄą│ąŠ ą╗ąĖčłčī ąĮčāąČąĮąŠ ąĄčæ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ čäą╗ą░ą│ąŠą▓ I2C. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ čüčāčēąĄčüčéą▓čāčÄčé ą│ąŠč鹊ą▓čŗąĄ čäčāąĮą║čåąĖąĖ HAL (Hardware Abstraction Layer), ą║ąŠč鹊čĆčŗąĄ čāą┐čĆąŠčēą░čÄčé ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ čü čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ I2C.
ąæą░ąĘąŠą▓čŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┐ąŠ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ I2C ą▓ ą║ą░č湥čüčéą▓ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ Master ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüą╗ąĄą┤čāčÄčēą░čÅ HAL-čäčāąĮą║čåąĖčÅ HAL_I2C_Master_Transmit(). ą×ąĮą░ ą┐ąĄčĆąĄą┤ą░ąĄčé ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ I2C ą▓ čāą║ą░ąĘą░ąĮąĮčŗą╣ ą░ą┤čĆąĄčü slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ (ąĄčüą╗ąĖ čŹč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĮą░ čłąĖąĮąĄ) ą▓ ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĄą╝ čĆąĄąČąĖą╝ąĄ.
ąÆ č湥ą╝ ąČąĄ čĆą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā čäčāąĮą║čåąĖčÅą╝ąĖ I2C_Transmit ąĖ I2C_Mem_Write? ąöą╗čÅ ąŠčéą▓ąĄčéą░ ąĮą░ čŹč鹊čé ą▓ąŠą┐čĆąŠčü čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą┐čĆąĖą╝ąĄčĆ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ MPU6050 IMU (čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ Inertial Measurement Unit, čé. ąĄ. čŹč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖąĮąĄčĆčåąĖą░ą╗čīąĮąŠą│ąŠ ą│ąĖčĆąŠčüą║ąŠą┐ą░, ąĖą╗ąĖ ą┤ą░čéčćąĖą║ą░ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ).
ąŻ IMU ąĄčüčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ I2C, čćč鹊ą▒čŗ ą╗čÄą▒ąŠą╣ master čłąĖąĮčŗ ą╝ąŠą│ ą┐ąŠ ąĮąĄą╝čā ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ ą╝ąŠą┤čāą╗čÄ čüąĄąĮčüąŠčĆą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ MPU6050. ąÆąĮčāčéčĆąĖ MPU6050 ąĄčüčéčī čĆąĄą│ąĖčüčéčĆčŗ čü ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ čāąĮąĖą║ą░ą╗čīąĮčŗą╝ąĖ ą░ą┤čĆąĄčüą░ą╝ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čüąĄąĮčüąŠčĆąŠą╝ IMU ąĮą░ą╝ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī (ąĘą░ą┐ąĖčüą░čéčī) ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ MPU6050 (čćč鹊ą▒čŗ ąĄčæ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī), ąĖ ąĘą░č鹥ą╝ čüčćąĖčéčŗą▓ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ ą┤čĆčāą│ąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ MPU6050, ą▓ ą║ąŠč鹊čĆčŗčģ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą┤ą░ąĮąĮčŗąĄ IMU.
ąśčéą░ą║, ąĄčüą╗ąĖ čā ą▓ą░čü ąĄčüčéčī master STM32, ąĖ čģąŠčéąĖč鹥 ą┐ąŠą╗čāčćąĖčéčī ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ MPU6050 IMU, č鹊 ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čāą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 2. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ą░ąĘąŠą▓čŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░.
| Master |
S |
AD+W |
|
RA |
|
S |
AD+R |
|
|
NACK |
P |
| Slave |
|
|
ACK |
|
ACK |
|
|
ACK |
DATA |
|
|
ąÜą░ą║ ą╝ąŠąČąĮąŠ ą▓ąĖą┤ąĄčéčī, čāčüčéčĆąŠą╣čüčéą▓ąŠ master (STM32 MCU) ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī čéčĆą░ąĮąĘą░ą║čåąĖčÄ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüąĖą│ąĮą░ą╗ą░ START (S). ąŚą░č鹥ą╝ master ą┤ąŠą╗ąČąĄąĮ ąŠčéą┐čĆą░ą▓ąĖčéčī ą░ą┤čĆąĄčü čü ą┐čĆąĖąĘąĮą░ą║ąŠą╝ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ (AD+W, ą░ą┤čĆąĄčü ąĘą┤ąĄčüčī čŹč鹊 ą░ą┤čĆąĄčü I2C čüą░ą╝ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ MPU6050). ąŚą░č鹥ą╝ master ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ MPU6050 (RA), čŹč鹊 č鹊čé čĆąĄą│ąĖčüčéčĆ, ą║ąŠč鹊čĆčŗą╣ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąŠčćąĖčéą░čéčī. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ slave (ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ MPU6050) ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčé čŹčéčā ą║ąŠą╝ą░ąĮą┤čā (ACK), ąĖ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąŠą┐ąĄčĆą░čåąĖčÄ čćč鹥ąĮąĖčÅ (ą┐ąŠą▓č鹊čĆąĮą░čÅ ąŠčéą┐čĆą░ą▓ą║ą░ S ąĖ ą░ą┤čĆąĄčüą░ čü ą┐čĆąĖąĘąĮą░ą║ąŠą╝ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ AD+R) ąŠčéą┐čĆą░ą▓ąĖčé ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čŹč鹊ą╝ čāą║ą░ąĘą░ąĮąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ master ą┐čĆąĄčĆą▓ąĄčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÄ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüąĖą│ąĮą░ą╗ąŠą▓ NACK ąĖ STOP (P).
ąÉąĮą░ą╗ąŠą│ąĖčćąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠ ą╝ąĮąŠą│ąĖą╝ąĖ ą┤čĆčāą│ąĖą╝ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C, ąŠčéą╗ąĖčćą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą░ą┤čĆąĄčü I2C ąĖ ą░ą┤čĆąĄčüą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖą╗ąĖ čÅč湥ąĄą║ ą┐ą░ą╝čÅčéąĖ.
ąÆčŗ ą╝ąŠąČąĄč鹥 ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░ ą▒ą░ąĘąŠą▓čŗčģ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗčģ čäčāąĮą║čåąĖą╣ HAL API (I2C_Transmit, I2C_Receive), ąĖą╗ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗčģ čäčāąĮą║čåąĖą╣ (Mem_Write, Mem_Read), čĆą░ąĘąĮčŗčģ ą▓ąĄčĆčüąĖą╣, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖčģ ą▓čüąĄ čĆąĄąČąĖą╝čŗ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ STM32 (blocking, interrupt, DMA).
ąĀą░ąĘą▒ąĄčĆąĄą╝ ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F429ZITx (ą┐ą╗ą░čéą░ 32F429IDISCOVERY, ąĖą╗ąĖ STM32F429I-DISC1 [4]) ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ TCA8418 [5]. ąæčāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī I2C1 ąĖ ąĄą│ąŠ ą▓čŗą▓ąŠą┤čŗ PB8 SCL, PB9 SDA, čĆą░ą▒ąŠčéčā čü I2C ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ (ą▒ąĄąĘ DMA).
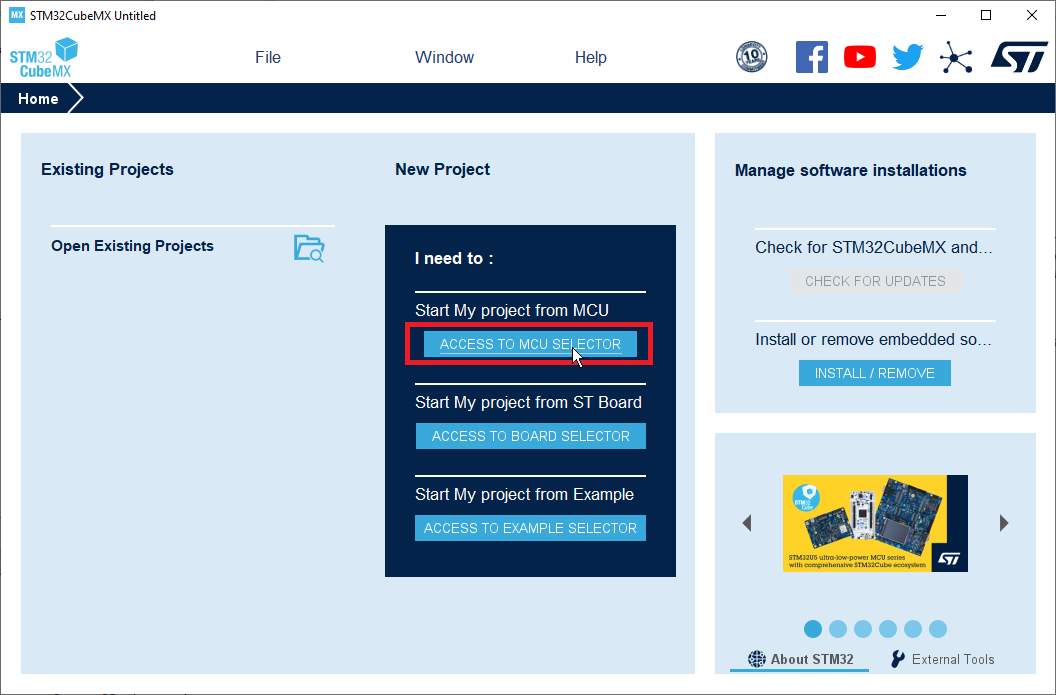
ą©ą░ą│ 1. ąŚą░ą┐čāčüčéąĖč鹥 ą│ąĄąĮąĄčĆą░č鹊čĆ ą║ąŠą┤ą░ STM32CubeMX, ą▓čŗą▒ąĄčĆąĖč鹥 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ą║ąĮąŠą┐ą║ą░ ACCESS TO MCU SELECTOR).

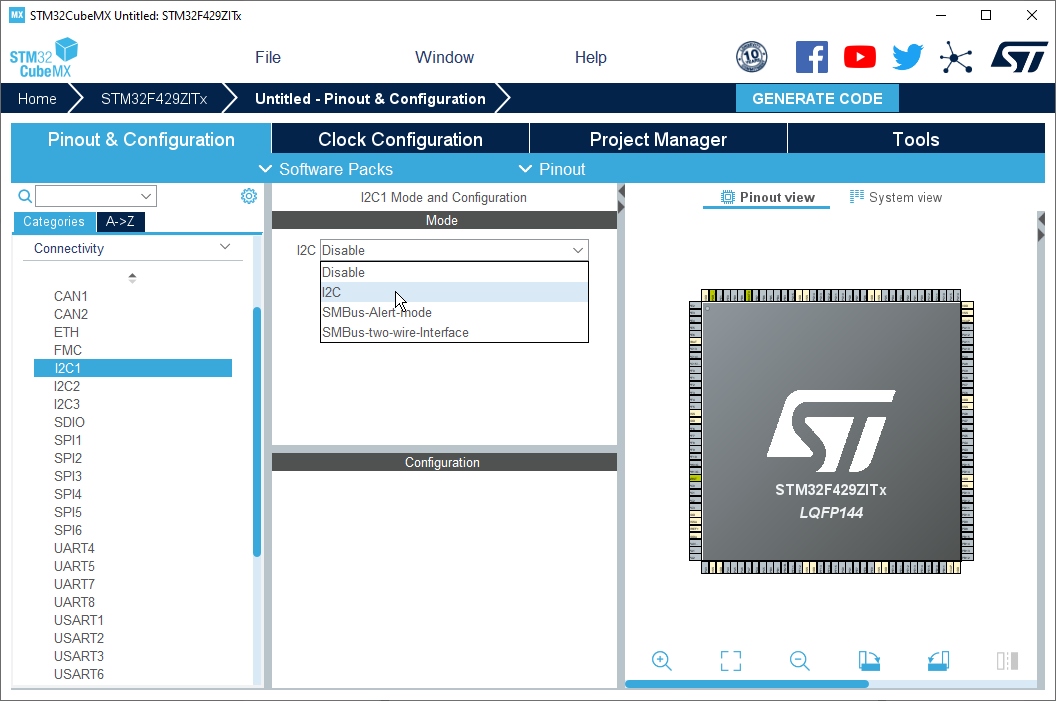
ą©ą░ą│ 2. ąØą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Pinout & Configuration čĆą░ąĘą▓ąĄčĆąĮąĖč鹥 ą▓čŗą┐ą░ą┤ą░čÄčēąĖą╣ čüą┐ąĖčüąŠą║ Connectivity, ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 I2C1. ąÆ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą╝ čüą┐ąĖčüą║ąĄ I2C ą┐ąŠą╝ąĄąĮčÅą╣č鹥 ą▓čŗą▒ąŠčĆ čü Disable ąĮą░ I2C.
ą©ą░ą│ 3. ąóąĄą┐ąĄčĆčī ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī ąĮąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ ą┤ą╗čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ I2C1. ąöą╗čÅ ąĮąŠąČąĄą║ ą┐ąŠčĆč鹊ą▓ GPIO ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F429 ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. [6]). ąöą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĮąŠąČąĄą║ ą╝čŗ ą▓ąŠčüą┐ąŠą╗čīąĘčāąĄą╝čüčÅ čāą┤ąŠą▒ąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą║ąŠą┤ą░ STM32CubeMX.
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą│ąĄąĮąĄčĆą░č鹊čĆ ą║ąŠą┤ą░ ąĮą░ąĘąĮą░čćąĖą╗ ą┤ą╗čÅ I2C1 ąĮąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ PB6 (čüąĖą│ąĮą░ą╗ SCL) ąĖ PB7 (čüąĖą│ąĮą░ą╗ SDA). ąØą░ą╝ ąČąĄ ąĮčāąČąĮčŗ ąĮąŠąČą║ąĖ PB8 ą┤ą╗čÅ SCL ąĖ PB9 ą┤ą╗čÅ SDA. ąöą╗čÅ čŹč鹊ą│ąŠ ą▓ ą┐čĆą░ą▓ąŠą╣ čćą░čüčéąĖ ąŠą║ąĮą░ STM32CubeMX, ą│ą┤ąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą▓ąĖą┤ ąĮą░ ą║ąŠčĆą┐čāčü LQFP144 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą┐ąĄčĆąĄą▓ąĄą┤ąĖč鹥 ą▓ąĖą┤ ąĮą░ ą▓čŗą▓ąŠą┤čŗ PB7 ąĖ PB6 (ą┐čĆąĖą▒ą╗ąĖąČą░čéčī ą╝ąŠąČąĮąŠ ą║ąŠą╗ąĄčüąĖą║ąŠą╝ ą╝čŗčłąĖ čü čāą┤ąĄčƹȹ░ąĮąĖąĄą╝ ą║ą╗ą░ą▓ąĖčłąĖ Ctrl, ą░ ą┐ąĄčĆąĄą╝ąĄčēą░čéčī ą║ą░čĆčéąĖąĮą║čā ą╝ąŠąČąĮąŠ čāą┤ąĄčƹȹĖą▓ą░čÅ ą┐čĆą░ą▓čāčÄ ą║ąĮąŠą┐ą║čā ą╝čŗčłąĖ). ąÜą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą▓čŗą▓ąŠą┤ PB7, ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 Reset_State. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüą▒čĆąŠčüąĖčéčüčÅ, ąĖ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą┤čĆčāą│ąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░.
ąÜą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB8, ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 ą┤ą╗čÅ ąĮąĄą│ąŠ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčāčÄ čäčāąĮą║čåąĖčÄ I2C1_SCL.

ąóą░ą║ąĖą╝ ąČąĄ čüą┐ąŠčüąŠą▒ąŠą╝ ą▓čŗą▒ąĄčĆąĖč鹥 ą┤ą╗čÅ PB9 ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčāčÄ čäčāąĮą║čåąĖčÄ I2C1_SDA. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ ąĮą░čüčéčĆąŠąĄą║ GPIO Settings ą┐ąŠčÅą▓čÅčéčüčÅ ąĮąŠą▓čŗąĄ ą▓čŗą▒čĆą░ąĮąĮčŗąĄ ąĮąŠąČą║ąĖ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ SCL ąĖ SDA.

ą©ą░ą│ 4. ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ čĆą░ąĘą┤ąĄą╗ ąĮą░čüčéčĆąŠąĄą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (NVIC Settings). ą¤ąŠčüčéą░ą▓čīč鹥 ą│ą░ą╗ąŠčćą║ąĖ I2C1 event interrupt (ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŠčüąĮąŠą▓ąĮčŗčģ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ) ąĖ I2C1 error interrupt (ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖą╣ ąŠčłąĖą▒ą║ąĖ).

ąĢčüą╗ąĖ ąÆčŗ ą┐ą╗ą░ąĮąĖčĆčāąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī DMA, č鹊 ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ DMA Settings ą╝ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĘą░ą┐čĆąŠčüčŗ DMA.
ą©ą░ą│ 5. ąóąĄą┐ąĄčĆčī ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ą░čĆąĖą░ąĮčé čüą║ąŠčĆąŠčüčéąĖ I2C (Standard Mode ąĖą╗ąĖ Fast Mode) ąĖ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ master. ąÆčŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā ąĮą░čüčéčĆąŠąĄą║ Parameter Settings, čāčüčéą░ąĮąŠą▓ąĖč鹥 čĆąĄąČąĖą╝ Fast Mode, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ I2C 400 ą║ąōčå. ąŚą┤ąĄčüčī ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąĖ ą┤čĆčāą│ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, čéą░ą║ąĖąĄ ą║ą░ą║ čüą║ą▓ą░ąČąĮąŠčüčéčī čéą░ą║č鹊ą▓, ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░, ąĘą░ą┐čĆąĄčé ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░.

ąĢčüą╗ąĖ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ I2C STM32 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ slave, č鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčī Primary slave address ąĖ ąĄą│ąŠ ą┤ą╗ąĖąĮčā. ąóą░ą║ąČąĄ ą┤ą╗čÅ slave-čĆąĄąČąĖą╝ą░ ą╝ąŠąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ąĖ ą┤čĆčāą│ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ.
ą©ą░ą│ 6. ąóąĄą┐ąĄčĆčī ąĮčāąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ąŠą▒čēčāčÄ čüąĖčüč鹥ą╝čā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ STM32. ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ čĆą░ąĘą┤ąĄą╗ ąĮą░čüčéčĆąŠąĄą║ System Core, ą▓čŗą▒ąĄčĆąĖč鹥 RCC, ąĖ ą▓ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą╝ čüą┐ąĖčüą║ąĄ High Speed Clock (HSE) ą▓čŗą▒ąĄčĆąĖč鹥 Crystal/Ceramic Resonator.
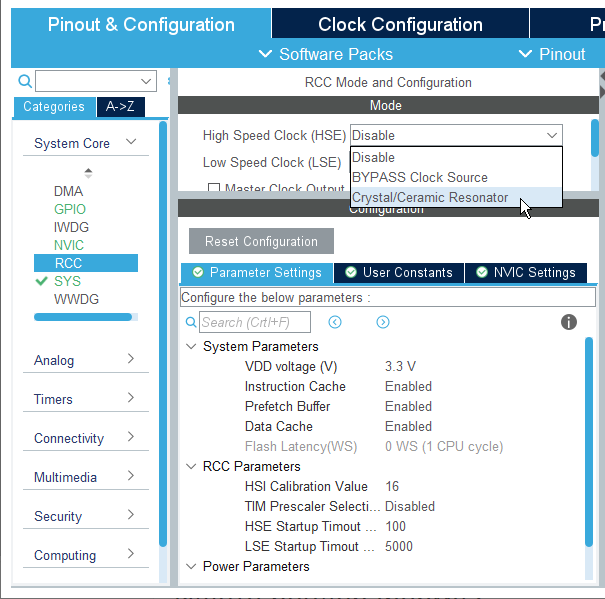
ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║čā Clock Configuration, ą┐ąĄčĆąĄą║ą╗čÄčćąĖč鹥 ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆ čéą░ą║č鹊ą▓ ą▓ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ HSE, ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 čćą░čüč鹊čéčā ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ 8 ą£ąōčå (čéą░ą║ąŠą╣ ą║ą▓ą░čĆčå čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ ą┐ą╗ą░č鹥 STM32F429 DISCOVERY). ą×čüčéą░ą╗čīąĮčŗąĄ ąŠą┐čåąĖąĖ ąĘą┤ąĄčüčī ą╝ąŠąČąĮąŠ ąŠčüčéą░ą▓ąĖčéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.

ą©ą░ą│ 7. ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║čā Project Manager. ąÆ čĆą░ąĘą┤ąĄą╗ąĄ ąĮą░čüčéčĆąŠąĄą║ ą┐čĆąŠąĄą║čéą░ (ą║ąĮąŠą┐ą║ą░ Project) ą▓čŗą▒ąĄčĆąĖč鹥 ąĖą╝čÅ ą┤ą╗čÅ ą┐čĆąŠąĄą║čéą░ (ą┐ąŠą╗ąĄ ą▓ą▓ąŠą┤ą░ Project Name), ą╝ąĄčüč鹊 čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ą░ą┐ą║ąĖ ą┐čĆąŠąĄą║čéą░ (Project Location), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ (Toolchain / IDE) ąĖ ąĄą│ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčāčÄ ą▓ąĄčĆčüąĖčÄ (Min Version). ą×čüčéą░ą╗čīąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąŠąČąĮąŠ ąŠčüčéą░ą▓ąĖčéčī ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ.

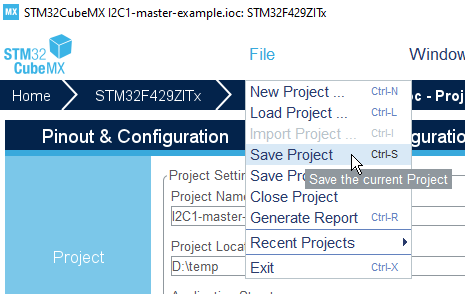
ąĪąŠčģčĆą░ąĮąĖč鹥 ą┐čĆąŠąĄą║čé ą▓čŗą▒ąŠčĆąŠą╝ ą▓ ą╝ąĄąĮčÄ File -> Save Project (Ctrl+S).
ą©ą░ą│ 8. ąÜą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā GENERATE CODE (ąĮą░čģąŠą┤ąĖčéčüčÅ čüą┐čĆą░ą▓ą░ ą▓ą▓ąĄčĆčģčā). ąĢčüą╗ąĖ ąÆčŗ čĆą░ąĮčīčłąĄ ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗ąĖ ą┐čĆąŠąĄą║čéčŗ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, č鹊 ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮ ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąĘą░ą│čĆčāąĘą║ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ ą┐ą░ą║ąĄčéą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║. ą¤ąŠą┤čéą▓ąĄčĆą┤ąĖč鹥, ąĮą░čćąĮąĄčéčüčÅ ą┐čĆąŠčåąĄčüčü ąĘą░ą│čĆčāąĘą║ąĖ ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ.
ą¤ąŠčüą╗ąĄ ąĘą░ą│čĆčāąĘą║ąĖ ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ą░ą║ąĄč鹊ą▓ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ą║ąŠą┤ ą┐čĆąŠąĄą║čéą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ąŠčüąĮąŠą▓čā ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ąŠ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąŠčłąĖą▒ą║ą░ "Target directory allready exists". ąŁč鹊 čüčéą░čĆą░čÅ ą▒ąŠą╗čÅčćą║ą░ STM32CubeMX, čĆąĄčłąĖčéčī čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╗ąĄą│ą║ąŠ, čüą╝. [8].
[ą¤čĆąĖą╝ąĄčĆ čĆą░ą▒ąŠčéčŗ master I2C]
ą¤čĆąĖą╝ąĄčĆ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ I2C:
I2C_HandleTypeDef hi2c1;
void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
}
ąóąĄą┐ąĄčĆčī ą┐čĆąĄą┤čüč鹊ąĖčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆčŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TCA8418, čćč鹊ą▒čŗ ąŠąĮą░ ą▒čŗą╗ą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą╝ą░čéčĆąĖčåąĄą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ.
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą╝ą░čéčĆąĖčåčā ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ 5x8 (ROW0-ROW4, COL0-COL7):
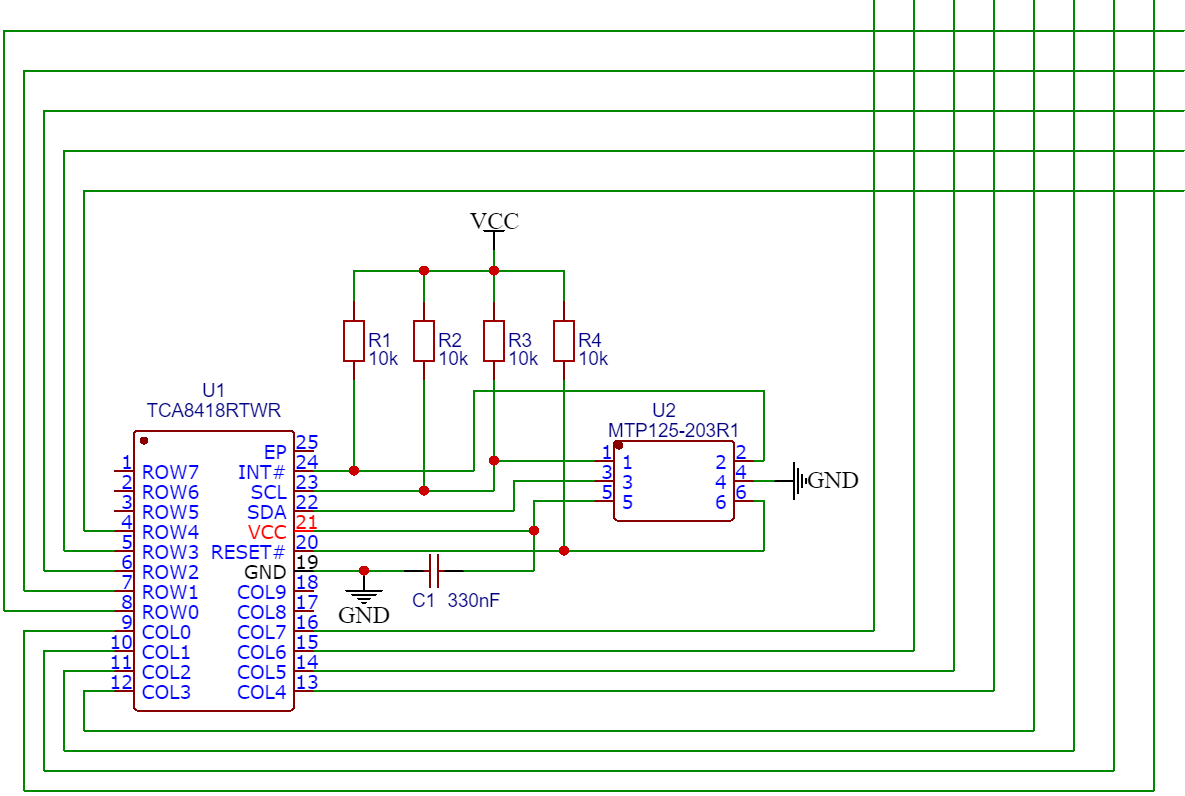
ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ TCA8418 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī čüą╗ąĄą┤čāčÄčēąĖą╣ ą╝ą░čüčüąĖą▓ ą┤ą░ąĮąĮčŗčģ TCA8418cfg:
// ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ TCA8418:
#define TCA8418_REG_CFG 0x01
#define TCA8418_REG_INT_STAT 0x02
#define TCA8418_REG_KEY_EVENT_A 0x04
#define TCA8418_REG_KP_GPIO1 0x1D
#define TCA8418_REG_KP_GPIO2 0x1E
#define TCA8418_REG_KP_GPIO3 0x1F
static const uint8_t TCA8418cfg [] =
{
TCA8418_REG_KP_GPIO1, 0x1F, // ąĀąĄąČąĖą╝ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ROW0-ROW4
TCA8418_REG_KP_GPIO2, 0xFF, // ąĀąĄąČąĖą╝ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ COL0-COL7
// ą×čüąĮąŠą▓ąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ TCA8418:
TCA8418_REG_CFG, 0xF1, // 11110001
// ąĀą░čüčłąĖčäčĆąŠą▓ą║ą░ 0xF1 = 11110001b:
// AI=1: ą░ą▓č鹊ąĖąĮą║čĆąĄą╝ąĄąĮčé ą░ą┤čĆąĄčüą░ čĆą░ąĘčĆąĄčłąĄąĮ
// GPI_E_CFG=1: čüąŠą▒čŗčéąĖčÅ GPI ąĮąĄ ąŠčéčüą╗ąĄąČąĖą▓ą░čÄčéčüčÅ, ą║ąŠą│ą┤ą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░
// OVR_FLOW_M=1: čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ čāą┤ą░ą╗čÅčÄčéčüčÅ
// INT_CFG=1: čüąĖą│ąĮą░ą╗ ~INT čüąĮąĖą╝ą░ąĄčéčüčÅ č湥čĆąĄąĘ 50 ą╝ą║čü
// OVR_FLOW_IEN=0: ~INT ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ
// K_LCK_IEN=0: ~INT ą┐čĆąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ
// GPI_IEN=0: ~INT ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ GPI ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ
// KE_IEN: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ~INT ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ
// ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ OVR_FLOW_INT, K_LCK_INT, GPI_INT, K_INT:
TCA8418_REG_INT_STAT, 0x0F
};
ą×čéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ:
#define TCA8418_DEV_ADDR (0x34 << 1)
HAL_StatusTypeDef halstatus;
for(uint8_t i = 0; i < 9; i += 2)
{
// ą¤ąĄčĆąĄą┤ą░čćą░ ą┐ą░čĆ ą▒ą░ą╣čé "ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░, ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░":
halstatus = HAL_I2C_Master_Transmit(&hi2c1,
TCA8418_DEV_ADDR,
(uint8_t*)TCA8418cfg+i,
2,
I2Cx_TIMEOUT_MAX_KB);
if (HAL_OK != halstatus)
{
// ąóčāčé ąĮčāąČąĮąŠ ą▓čüčéą░ą▓ąĖčéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ąŠčłąĖą▒ą║ąĖ:
..
}
}
ą¤čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ ą║ąŠą┤ą░ ąĮą░ąČą░č鹊ą╣ ą║ą╗ą░ą▓ąĖčłąĖ, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ą┐ąŠ čüąĖą│ąĮą░ą╗čā ~INT:
uint8_t keycode = 0;
uint8_t data8;
// ąĘą░ą┐čĆąŠčü 1 ą▒ą░ą╣čéą░ ąĖąĘ FIFO:
data8 = TCA8418_REG_KEY_EVENT_A;
halstatus = HAL_I2C_Master_Transmit(&hi2c1,
TCA8418_DEV_ADDR,
&data8,
1,
I2Cx_TIMEOUT_MAX_KB);
if (HAL_OK != halstatus)
{
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ą║ąĖ
..
}
halstatus = HAL_I2C_Master_Receive(&hi2c1,
TCA8418_DEV_ADDR,
&data8,
1,
I2Cx_TIMEOUT_MAX_KB);
if (HAL_OK != halstatus)
{
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ą║ąĖ
..
}
// ąÆ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ keycode ąĮą░čģąŠą┤ąĖčéčüčÅ ą║ąŠą┤ ąĮą░ąČą░č鹊ą╣ ą║ą╗ą░ą▓ąĖčłąĖ,
// ą▓ čüčéą░čĆčłąĄą╝ ą▒ąĖč鹥 keycode ąĄą┤ąĖąĮąĖčåą░ ąŠąĘąĮą░čćą░ąĄčé ąĮą░ąČą░čéąĖąĄ,
// ąĮąŠą╗čī ąŠčéą┐čāčüą║ą░ąĮąĖąĄ:
keycode = data8;
ąØąĖąČąĄ čĆą░čüčüą╝ąŠčéčĆąĄąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ STM32 I2C1 ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, čü ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ čüąŠą▒čŗčéąĖą╣ I2C ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝.
ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ I2C:
static void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
// ąÉą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C:
hi2c1.Init.OwnAddress1 = 16;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
}
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ I2C ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
void HAL_I2C_MspInit(I2C_HandleTypeDef* hi2c)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
// ąÆ ą║ą░č湥čüčéą▓ąĄ ą╝ą░čüč鹥čĆą░ I2C čā ąĮą░čü ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ATmega328.
__HAL_RCC_GPIOB_CLK_ENABLE();
/** ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ I2C1:
PB8 ------> I2C1_SCL
PB9 ------> I2C1_SDA
*/
GPIO_InitStruct.Pin = I2C1_SCL_Pin|I2C1_SDA_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ I2C: */
__HAL_RCC_I2C1_CLK_ENABLE();
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ */
HAL_NVIC_SetPriority(I2C1_EV_IRQn, KEYB_EV_INTERRUPT_PRIORITY, 0);
HAL_NVIC_EnableIRQ(I2C1_EV_IRQn);
HAL_NVIC_SetPriority(I2C1_ER_IRQn, KEYB_ER_INTERRUPT_PRIORITY, 0);
HAL_NVIC_EnableIRQ(I2C1_ER_IRQn);
}
ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖą╣ I2C:
void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *hi2c)
{
static BaseType_t xHigherPriorityTaskWoken;
// ą¤ąŠ čüąĄą╝ą░č乊čĆčā keybsem čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ ą┐ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣
// ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ąŠą▒ą╝ąĄąĮ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ master:
xSemaphoreGiveFromISR(keybsem, &xHigherPriorityTaskWoken);
}
ąÜąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą╗čāčćą░ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ master:
halstatus = HAL_I2C_Slave_Receive_IT(&hi2c1, &data8, 1);
[ąæą╗ąŠą║ąĖčĆčāčÄčēąĖąĄ HAL-čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ STM32 I2C]
"ąæą╗ąŠą║ąĖčĆčāčÄčēąĖą╝ąĖ" ąĮą░ąĘčŗą▓ą░čÄčé čéą░ą║ąĖąĄ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░čÄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĖąĘ čüą▓ąŠąĄą│ąŠ č鹥ą╗ą░ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąĖčģ ąĘą░ą┤ą░čćą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░, ąĖą╗ąĖ ą┐ąŠą║ą░ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░). ąó. ąĄ. čŹčéąĖ čäčāąĮą║čåąĖąĖ ą▒ą╗ąŠą║ąĖčĆčāčÄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░, ąĖąĘ ą║ąŠč鹊čĆąŠą│ąŠ ąŠąĮąĖ ą▒čŗą╗ąĖ ą▓čŗąĘą▓ą░ąĮčŗ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čéą░ą║ąĖčģ čäčāąĮą║čåąĖą╣ ą▓ą┐ąŠą╗ąĮąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠ ą▓ ą┐čĆąŠčüčéčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą║ąŠą│ą┤ą░ ąĮąĄ ąĮčāąČąĮąŠ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┤čĆčāą│ąĖąĄ ąĘą░ą┤ą░čćąĖ, ą╗ąĖą▒ąŠ ą▓ ą╝ąĮąŠą│ąŠą┐ąŠč鹊čćąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čü ą▓čŗč鹥čüąĮąĄąĮąĖąĄą╝ (ąĮą░ ąŠčüąĮąŠą▓ąĄ RTOS), ą║ąŠą│ą┤ą░ ą▓ čüą╗čāčćą░ąĄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą┐ąŠč鹊ą║ą░ ąĮą░ čäčāąĮą║čåąĖąĖ ą┤čĆčāą│ąĖąĄ ą┐ąŠč鹊ą║ąĖ ą╝ąŠą│čāčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ čüą┐ąĖčüąŠą║ ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĖčģ čäčāąĮą║čåąĖą╣.
ą¤ąĄčĆąĄą┤ą░čćą░ master:
HAL_StatusTypeDef HAL_I2C_Master_Transmit (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint8_t* pData,
uint16_t Size,
uint32_t Timeout);
ą¤čĆąĖąĄą╝ master:
HAL_StatusTypeDef HAL_I2C_Master_Receive (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint8_t* pData,
uint16_t Size,
uint32_t Timeout);
ą¤ąĄčĆąĄą┤ą░čćą░ slave:
HAL_StatusTypeDef HAL_I2C_Slave_Transmit (I2C_HandleTypeDef* hi2c,
uint8_t* pData,
uint16_t Size,
uint32_t Timeout);
ą¤čĆąĖąĄą╝ slave:
HAL_StatusTypeDef HAL_I2C_Slave_Receive (I2C_HandleTypeDef* hi2c,
uint8_t* pData,
uint16_t Size,
uint32_t Timeout);
ąŚą░ą┐ąĖčüčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ:
HAL_StatusTypeDef HAL_I2C_Mem_Write (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint16_t MemAddress,
uint16_t MemAddSize,
uint8_t* pData,
uint16_t Size,
uint32_t Timeout);
ą¦č鹥ąĮąĖąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ:
HAL_StatusTypeDef HAL_I2C_Mem_Read (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint16_t MemAddress,
uint16_t MemAddSize,
uint8_t* pData,
uint16_t Size,
uint32_t Timeout);
ąÆčüąĄ čŹčéąĖ čäčāąĮą║čåąĖąĖ ą▓ąŠąĘą▓čĆą░čēą░čÄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ HAL_StatusTypeDef (ą▓ čüą╗čāčćą░ąĄ čāčüą┐ąĄčģą░ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ HAL_OK, ąĖąĮą░č湥 ąŠą┤ąĖąĮ ąĖąĘ ą║ąŠą┤ąŠą▓ ąŠčłąĖą▒ą║ąĖ). ąÆ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čäčāąĮą║čåąĖą╣.
ąóą░ą▒ą╗ąĖčåą░ 3. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ HAL-čäčāąĮą║čåąĖą╣ STM32 I2C.
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ |
| I2C_HandleTypeDef* hi2c |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C. |
| uint16_t DevAddress |
ąÉą┤čĆąĄčü I2C ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ. |
| uint8_t* pData |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéąĖ. |
| uint16_t Size |
ąĀą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗčģ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé). |
| uint32_t Timeout |
ąóą░ą╣ą╝ą░čāčé ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ. |
| uint16_t MemAddress |
ąÉą┤čĆąĄčü ą▓ąĮčāčéčĆąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. |
| uint16_t MemAddSize |
ąĀą░ąĘą╝ąĄčĆ ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. |
| uint32_t Trials |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠą▓ąĄčĆąŠą║ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ. |
[HAL-čäčāąĮą║čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą╗čÅ STM32 I2C]
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ą▓ ąĮąĄą▒ą╗ąŠą║ąĖčĆčāčÄčēąĄą╝ čĆąĄąČąĖą╝ąĄ - ąŠąĮąĖ ą▓ąŠąĘą▓čĆą░čēą░čÄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅčÄčé ą▓čüčÄ čĆą░ą▒ąŠčéčā ą┐ąŠ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ I2C, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR). ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ čéą░ą║ąŠą│ąŠ ą┐čĆąĖąĮčåąĖą┐ą░ čĆą░ą▒ąŠčéčŗ ą▓ č鹊ą╝, čćč鹊 ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ I2C ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮąĄ ą┐čĆąŠčüčéą░ąĖą▓ą░ąĄčé ąĮą░ čåąĖą║ą╗ą░čģ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĖ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┤čĆčāą│čāčÄ čĆą░ą▒ąŠčéčā.
ą¤ąĄčĆąĄą┤ą░čćą░ master:
HAL_StatusTypeDef HAL_I2C_Master_Transmit_IT (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint8_t* pData,
uint16_t Size);
ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ HAL_I2C_Master_Transmit_IT ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ I2C ąĮą░čćąĮąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą▓čüąĄ ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆąĄ pData ąŠą┤ąĖąĮ ąĘą░ ą┤čĆčāą│ąĖą╝, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ Size ą▒ą░ą╣čé ąĖąĘ ą▒čāč乥čĆą░. ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮą░ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ HAL_I2C_MasterTxCpltCallback (čüą╝. ąĮąĖąČąĄ). ąĢčüą╗ąĖ ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, č鹊 ą┤ą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą▓čüčéą░ą▓ąĖčéčī ą▓ č鹥ą╗ąŠ čäčāąĮą║čåąĖąĖ HAL_I2C_MasterTxCpltCallback ą╗čÄą▒ąŠą╣ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ ą║ąŠą┤. ążčāąĮą║čåąĖčÅ HAL_I2C_MasterTxCpltCallback ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ą╝ąŠą┤čāą╗ąĄ stm32f4xx_hal_i2c.c ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čü ą╝ąŠą┤ąĖčäąĖą║ą░č鹊čĆąŠą╝ __weak [7], ąĖ ą┐ąŠčŹč鹊ą╝čā ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĄčĆąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ą╝ąŠą┤čāą╗ąĄą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ main.c):
void HAL_I2C_MasterTxCpltCallback (I2C_HandleTypeDef * hi2c)
{
// ą¤ąĄčĆąĄą┤ą░čćą░ I2C ąĘą░ą▓ąĄčĆčłąĄąĮą░. ąĪčÄą┤ą░ ą╝ąŠąČąĮąŠ ą▓čüčéą░ą▓ąĖčéčī ą║ą░ą║ąŠą╣-ąĮąĖą▒čāą┤čī ą║ąŠą┤,
// ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▒čāč乥čĆą░ ąĖ ą┐ąŠą▓č鹊čĆąĮčŗą╣ ąĘą░ą┐čāčüą║ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
..
}
ą¤čĆąĖąĄą╝ master:
HAL_StatusTypeDef HAL_I2C_Master_Receive_IT (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint8_t* pData,
uint16_t Size);
ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ HAL_I2C_Master_Receive_IT ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ I2C ąĮą░čćąĮąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ ąŠčé slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ, ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąĖčģ ąŠą┤ąĖąĮ ąĘą░ ą┤čĆčāą│ąĖą╝ ą▓ ą▒čāč乥čĆ pData, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 Size ą▒ą░ą╣čé. ąÜąŠą│ą┤ą░ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ, ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ callback-čäčāąĮą║čåąĖčÅ HAL_I2C_MasterRxCpltCallback. ąĢčüą╗ąĖ ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, č鹊 ą┤ą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą▓čüčéą░ą▓ąĖčéčī ą▓ č鹥ą╗ąŠ čäčāąĮą║čåąĖąĖ HAL_I2C_MasterRxCpltCallback ą╗čÄą▒ąŠą╣ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ ą║ąŠą┤. ążčāąĮą║čåąĖčÅ HAL_I2C_MasterRxCpltCallback ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ą╝ąŠą┤čāą╗ąĄ stm32f4xx_hal_i2c.c ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čü ą╝ąŠą┤ąĖčäąĖą║ą░č鹊čĆąŠą╝ __weak [7], ąĖ ą┐ąŠčŹč鹊ą╝čā ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĄčĆąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ą╝ąŠą┤čāą╗ąĄą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ main.c):
void HAL_I2C_MasterRxCpltCallback (I2C_HandleTypeDef * hi2c)
{
// ą¤čĆąĖąĄą╝ I2C ąĘą░ą▓ąĄčĆčłąĄąĮ. ąĪčÄą┤ą░ ą╝ąŠąČąĮąŠ ą▓čüčéą░ą▓ąĖčéčī ą║ą░ą║ąŠą╣-ąĮąĖą▒čāą┤čī ą║ąŠą┤,
// ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ.
..
}
ą¤ąŠą┤ąŠą▒ąĮčŗąĄ API-čäčāąĮą║čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čéą░ą║ąČąĄ ąĖ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ I2C.
[HAL-čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ STM32 I2C čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ DMA]
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ čéą░ą║ąČąĄ ąĮąĄ ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĖąĄ, ąĖ ą║čĆąŠą╝ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čäčāąĮą║čåąĖčÄ ą┐čĆčÅą╝ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ (Direct Memory Access, DMA), ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čĆą░ąĘą│čĆčāąČą░čÄčēčāčÄ ą┐čĆąŠčåąĄčüčüąŠčĆ ąŠčé ąŠą┐ąĄčĆą░čåąĖą╣ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┐ą░ą╝čÅčéčī (ąĖą╗ąĖ ą▓ ąŠą▒čĆą░čéąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ).
ą¤ąĄčĆąĄą┤ą░čćą░ master:
HAL_StatusTypeDef HAL_I2C_Master_Transmit_DMA (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint8_t* pData,
uint16_t Size);
ą¤čĆąĖąĄą╝ master:
HAL_StatusTypeDef HAL_I2C_Master_Receive_DMA (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint8_t* pData,
uint16_t Size);
ąŁčéąĖ čäčāąĮą║čåąĖąĖ čĆą░ą▒ąŠčéą░čÄčé ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠ čüą▓ąŠąĖą╝ *_IT ą░ąĮą░ą╗ąŠą│ą░ą╝, ąŠą┐ąĖčüą░ąĮąĮčŗą╝ ą▓čŗčłąĄ. ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ *_DMA ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ I2C ąĮą░čćąĮąĄčé čĆą░ą▒ąŠčéčā ą┐ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÄ ąĘą░ą║ą░ąĘą░ąĮąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą▒čāč乥čĆąŠą╝ ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ I2C ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, čü ą┐ąŠą╝ąŠčēčīčÄ DMA. ąÜąŠą│ą┤ą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮą░ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ HAL_I2C_MasterTxCpltCallback (ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ) ąĖą╗ąĖ HAL_I2C_MasterRxCpltCallback (ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░), čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓čŗčłąĄ.
ą¤ąŠą┤ąŠą▒ąĮčŗąĄ API-čäčāąĮą║čåąĖąĖ DMA čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čéą░ą║ąČąĄ ąĖ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ I2C.
[ą¤čĆąŠą▓ąĄčĆą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ STM32 I2C]
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ, ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąĖ ąĮą░ čłąĖąĮąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ čü ą░ą┤čĆąĄčüąŠą╝ DevAddress, ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ ąŠąĮąŠ ą▓ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠą╝ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čüąŠčüč鹊čÅąĮąĖąĖ:
HAL_StatusTypeDef HAL_I2C_IsDeviceReady (I2C_HandleTypeDef* hi2c,
uint16_t DevAddress,
uint32_t Trials,
uint32_t Timeout);
[ąĪčüčŗą╗ą║ąĖ]
1. STM32 I2C HAL Code Examples Slave & Master DMA Interrupt site:deepbluembedded.com.
2. STM32CubeMX site:st.com.
3. AT24C64: Serial EEPROM čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C (TWI).
4. STM32F429 Discovery.
5. TCA8418: ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ.
6. STM32F429: GPIO ąĖ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ.
7. ą¦č鹊 čéą░ą║ąŠąĄ weak-čäčāąĮą║čåąĖčÅ?
8. ą×čłąĖą▒ą║ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ą░ą║ąĄčéą░ ą▓ STM32 CubeMX. |



