|
TCA8418 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, čü ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĘą░čēąĖč鹊ą╣ ąŠčé čüčéą░čéąĖč湥čüą║ąŠą│ąŠ 菹╗ąĄą║čéčĆąĖč湥čüčéą▓ą░ (ESD). ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1.65V .. 3.6V, ąĖą╝ąĄąĄčé 18 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ ąĮąŠąČąĄą║ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (GPIO), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą┤ąŠ 80 ą║ąĮąŠą┐ąŠą║. ąÜąĮąŠą┐ą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮčŗ ą▓ ą╝ą░čéčĆąĖčåčā, ąĖą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ąĮąŠąČą║ą░ą╝ GPIO. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ąĮą░ąČą░čéąĖčÅčģ ą║ąĮąŠą┐ąŠą║ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü I2C (ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ I2C).
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ čüą║ą░ąĮąĖčĆčāąĄčé ą║ąĮąŠą┐ą║ąĖ čü ąĘą░čēąĖč鹊ą╣ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░, ąĖ čüąŠčģčĆą░ąĮčÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ąĮą░ąČą░čéąĖčÅčģ ą▓ čüč鹥ą║ FIFO čĆą░ąĘą╝ąĄčĆąŠą╝ 10 ą▒ą░ą╣čé. ąŻ čŹč鹊ą│ąŠ čüč鹥ą║ą░ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą┐ąŠ ą║čĆčāą│čā ą▓ą▓ąŠą┤ąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (overflow wrap), čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐ąŠą╝ąĖąĮą░čéčī čüą░ą╝čŗąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ ą░ą║čéčāą░ą╗čīąĮčŗąĄ ąĮą░ąČą░čéąĖčÅ. ąØąŠąČą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ~INT ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą▓ąĮąĄčłąĮąĄą╝čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ąŠ čüąŠą▒čŗčéąĖčÅčģ ąĮą░ąČą░čéąĖą╣ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖą╣ ą║ą╗ą░ą▓ąĖčł ą╗ąĖą▒ąŠ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, ą╗ąĖą▒ąŠ čü čćą░čüč鹊č鹊ą╣, ąĮąĄ ą▒ąŠą╗čīčłąĄą╣ ąĘą░ą┤ą░ąĮąĮąŠą╣.
ą×čüąĮąŠą▓ąĮčŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ TCA8418:
ŌĆó ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą┐ąĖčéą░ąĮąĖčÅ 1.65V .. 3.6V.
ŌĆó ąĪ ą┐ąŠą╝ąŠčēčīčÄ 18 ąĮąŠąČąĄą║ ą┐ąŠčĆč鹊ą▓ GPIO ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąŠą┐čĆąŠčü ą┤ąŠ 80 ą║ąĮąŠą┐ąŠą║.
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čĆąĄąČąĖą╝ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ QWERTY ą┐ą╗čÄčü čĆą░čüčłąĖčĆąĄąĮąĖąĄ ą┐ąŠčĆč鹊ą▓ GPIO (QWERTY Keypad Operation Plus GPIO Expansion).
ŌĆó ąØąĖąĘą║ąĖą╣ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (Idle): 3 ą╝ą║ąÉ.
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▒čŗčüčéčĆčŗą╣ čĆąĄąČąĖą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ I2C: 1 ą£ąōčå.
ŌĆó FIFO ąĖąĘ 10 ą▒ą░ą╣čé ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠčģčĆą░ąĮąĖčéčī 10 ąĮą░ąČą░čéąĖą╣ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖą╣ ą║ąĮąŠą┐ąŠą║.
ŌĆó ąÆčŗčģąŠą┤ ąĮąŠąČą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ~INT čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝.
ŌĆó ąÆčüčéčĆąŠąĄąĮąĮąŠąĄ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░ čü ą▓čĆąĄą╝ąĄąĮąĄą╝ 50 ą╝ą║čü.
ŌĆó ąóčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░ ą┐ąŠ ą▓čģąŠą┤ą░ą╝ SDA ąĖ SCL ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą╝ąĄą┤ą╗ąĖčéčī ą┐ąĄčĆąĄą┐ą░ą┤čŗ ąĮą░ ą▓čģąŠą┤ąĄ ąĖ ą┐ąŠą▓čŗčüąĖčéčī čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ąĖą╝ą┐čāą╗čīčüą░ą╝ ą┐ąŠą╝ąĄčģ. ąóąĖą┐ąŠą▓ąŠą╣ ą│ąĖčüč鹥čĆąĄąĘąĖčü ąĮą░ čāčĆąŠą▓ąĮąĄ ą┐ąŠčĆąŠą│ą░ 1.8V čüąŠčüčéą░ą▓ą╗čÅąĄčé 0.18V.
ą×ą▒ą╗ą░čüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ TCA8418:
ŌĆó ąĪą╝ą░čĆčéč乊ąĮčŗ
ŌĆó ą¤ą╗ą░ąĮčłąĄčéčŗ
ŌĆó ą¤ą░ąĮąĄą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄą╝ HMI (Human-Machine Interface)
ŌĆó ąŻčüčéčĆąŠą╣čüčéą▓ą░ GPS
ŌĆó MP3-ą┐ą╗ąĄąĄčĆčŗ
ŌĆó ą”ąĖčäčĆąŠą▓čŗąĄ ą║ą░ą╝ąĄčĆčŗ
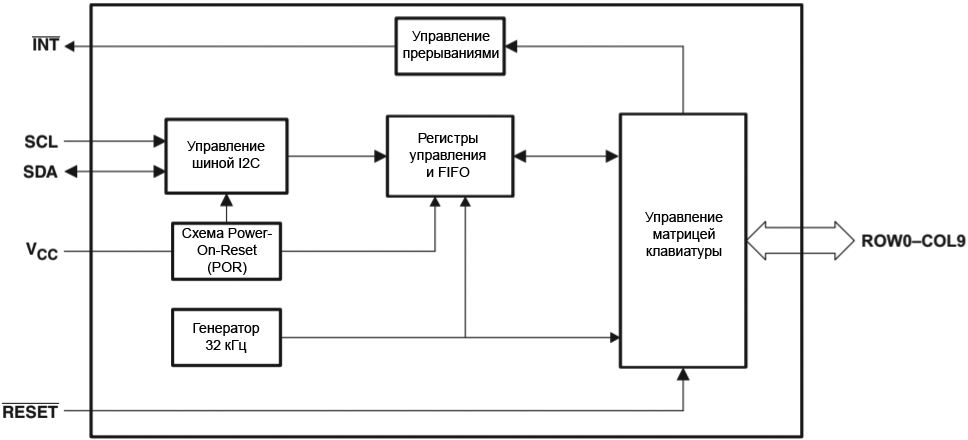
ąŻą┐čĆąŠčēąĄąĮąĮą░čÅ čüčģąĄą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TCA8418:
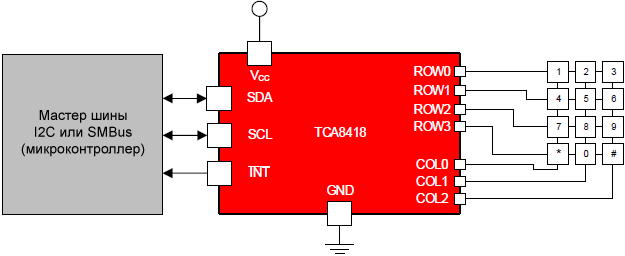
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮą░ čĆąĖčü. 1 ą┐ąŠą║ą░ąĘą░ąĮąŠ č鹊ą╗čīą║ąŠ 7 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ GPIO ą┤ą╗čÅ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ą░čéčĆąĖčåčŗ ą║ąĮąŠą┐ąŠą║, čģąŠčéčÅ ą▓čüąĄą│ąŠ ąĖą╝ąĄąĄčéčüčÅ 18 ą┐ąŠčĆč鹊ą▓ GPIO.
[ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą║ąŠčĆą┐čāčüą░ ąĖ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓]
ąÜąŠčĆą┐čāčü WQFN24, ą▓ąĖą┤ čüą▓ąĄčĆčģčā:
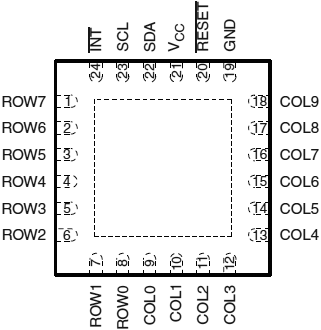
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓:
| Ōä¢ |
ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 1 |
ROW7 |
I/O |
ąøąĖą▒ąŠ ą┐ąŠčĆčé GPIO, ą╗ąĖą▒ąŠ čüčéčĆąŠą║ą░ ą▓ ą╝ą░čéčĆąĖčåąĄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĮąŠąČą║ąĖ ROWx ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéčŗ ą║ VCC č湥čĆąĄąĘ pull-up čĆąĄąĘąĖčüč鹊čĆ. |
| 2 |
ROW6 |
| 3 |
ROW5 |
| 4 |
ROW4 |
| 5 |
ROW3 |
| 6 |
ROW2 |
| 7 |
ROW1 |
| 8 |
ROW0 |
| 9 |
COL0 |
ąøąĖą▒ąŠ ą┐ąŠčĆčé GPIO, ą╗ąĖą▒ąŠ čüč鹊ą╗ą▒ąĄčå ą▓ ą╝ą░čéčĆąĖčåąĄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĮąŠąČą║ąĖ COLx ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéčŗ ą║ VCC č湥čĆąĄąĘ pull-up čĆąĄąĘąĖčüč鹊čĆ. |
| 10 |
COL1 |
| 11 |
COL2 |
| 12 |
COL3 |
| 13 |
COL4 |
| 14 |
COL5 |
| 15 |
COL6 |
| 16 |
COL7 |
| 17 |
COL8 |
| 18 |
COL9 |
| 19 |
GND |
- |
ąŚąĄą╝ą╗čÅ, ą╝ąĖąĮčāčü ą┐ąĖčéą░ąĮąĖčÅ, ąŠą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤ ą┤ą╗čÅ ą▓čüąĄčģ čüąĖą│ąĮą░ą╗ąŠą▓. |
| 20 |
~RESET |
I |
ąÆčģąŠą┤ čüą▒čĆąŠčüą░, ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. ąĢčüą╗ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, č鹊 čüąŠąĄą┤ąĖąĮąĖč鹥 čü VCC č湥čĆąĄąĘ pull-up čĆąĄąĘąĖčüč鹊čĆ. |
| 21 |
VCC |
- |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé +1.65V ą┤ąŠ +3.6V. |
| 22 |
SDA |
I/O |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüą░. ąĪąŠąĄą┤ąĖąĮąĖč鹥 čü VCC č湥čĆąĄąĘ pull-up čĆąĄąĘąĖčüč鹊čĆ. |
| 23 |
SCL |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ čéą░ą║čéčŗ ąĖąĮč鹥čĆč乥ą╣čüą░. ąĪąŠąĄą┤ąĖąĮąĖč鹥 čü VCC č湥čĆąĄąĘ pull-up čĆąĄąĘąĖčüč鹊čĆ. |
| 24 |
~INT |
O |
ąÆčŗčģąŠą┤ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. ąĪąŠąĄą┤ąĖąĮąĖč鹥 čü VCC č湥čĆąĄąĘ pull-up čĆąĄąĘąĖčüč鹊čĆ. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čüč鹊ą╗ą▒čåąĄ ąóąĖą┐ čāą║ą░ąĘą░ąĮ čéąĖą┐ ą▓čŗą▓ąŠą┤ą░. I/O ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ą▓čģąŠą┤ ąĖ ą▓čŗčģąŠą┤, I ą▓čģąŠą┤, O ą▓čŗčģąŠą┤.
[ą¤čĆąĄą┤ąĄą╗čīąĮčŗąĄ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ(1)]
| ąśą╝čÅ |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣
|
min |
MAX |
ąĢą┤. |
| VCC |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ. |
-0.5 |
4.6 |
V |
| VI |
ąöąĖą░ą┐ą░ąĘąŠąĮ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ(2) |
-0.5 |
4.6 |
| VO |
ąöąĖą░ą┐ą░ąĘąŠąĮ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą░ąĮąŠ ąĮą░ ą▓čŗčģąŠą┤, ą║ąŠą│ą┤ą░ ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ąĖą╗ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ(2) |
-0.5 |
4.6 |
| ąöąĖą░ą┐ą░ąĘąŠąĮ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ čüąŠčüč鹊čÅąĮąĖčÅčģ ą╗ąŠą│. 0 ąĖą╗ąĖ ą╗ąŠą│. 1(2) |
-0.5 |
4.6 |
| IIK |
ąÆčģąŠą┤ąĮąŠą╣ č鹊ą║ |
VI < 0 |
|
┬▒20 |
ą╝ąÉ |
| IOK |
ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ |
VO < 0 |
|
┬▒20 |
| IOL |
ąØąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ ą╗ąŠą│. 0 |
ą┐ąŠčĆčé, SDA |
VO = 0V .. VCC |
|
50 |
| ~INT |
|
25 |
| IOH |
ąØąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ ą╗ąŠą│. 1 |
ą┐ąŠčĆčé |
|
50 |
| Tstg |
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆą░ čģčĆą░ąĮąĄąĮąĖčÅ |
-65 |
150 |
┬░C |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąĪčéčĆąĄčüčüąŠą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2, ą╝ąŠą│čāčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄąŠą▒čĆą░čéąĖą╝ąŠą╝čā ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čāą║ą░ąĘą░ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüą┐čĆą░ą▓ą║ąĖ, ąĮąĄ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čéą░ą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ ąĖą╗ąĖ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ, ąŠčéą╗ąĖčćą░čÄčēąĖčģčüčÅ ąŠčé čĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ąĮąĮčŗčģ (čüą╝. ą┤ą░ą╗ąĄąĄ čéą░ą▒ą╗ąĖčåčā 4). ąöą╗ąĖč鹥ą╗čīąĮą░čÅ čĆą░ą▒ąŠčéą░ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2, ą╝ąŠąČąĄčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ ąĮą░ą┤ąĄąČąĮąŠčüčéčī čāčüčéčĆąŠą╣čüčéą▓ą░.
(2) ą¤čĆąĄą┤ąĄą╗čŗ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą▓čŗčłąĄąĮčŗ, ąĄčüą╗ąĖ ąĮą░ą▒ą╗čÄą┤ą░čÄčéčüčÅ ą┐čĆąĄą┤ąĄą╗čīąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ ąĖ ą▓čŗčģąŠą┤ąĮčŗąĄ č鹊ą║ąĖ.
[ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĘą░čēąĖčéčŗ ąŠčé ESD]
| ąśą╝čÅ |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
MAX |
ąĢą┤. |
| VESD |
ą£ąŠą┤ąĄą╗čī č鹥ą╗ą░ č湥ą╗ąŠą▓ąĄą║ą░ (Human Body Model, HBM), ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéčā ANSI/ESDA/JEDEC JS-001, ą▓čüąĄ ą▓čŗą▓ąŠą┤čŗ(1) |
┬▒2000 |
V |
| Charged Device Model (CDM), ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéčā JEDEC JESD22-C101, ą▓čüąĄ ą▓čŗą▓ąŠą┤čŗ(2) |
┬▒1000 |
|
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąöąŠą║čāą╝ąĄąĮčé JEDEC JEP155 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé, čćč鹊 500V HBM ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▒ąĄąĘąŠą┐ą░čüąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąŠ čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ą║ąŠąĮčéčĆąŠą╗ąĄą╝ ESD.
(2) ąöąŠą║čāą╝ąĄąĮčé JEDEC JEP157 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé, čćč鹊 250V CDM ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▒ąĄąĘąŠą┐ą░čüąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąŠ čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ą║ąŠąĮčéčĆąŠą╗ąĄą╝ ESD.
[ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ čĆą░ą▒ąŠčćąĖąĄ čāčüą╗ąŠą▓ąĖčÅ]
| ąśą╝čÅ |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣
|
min |
MAX |
ąĢą┤. |
| VCC |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ. |
1.65 |
3.6 |
V |
| VIH |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 1 ąĮą░ ą▓čģąŠą┤ąĄ |
SCL, SDA, ROW0ŌĆō7, COL0ŌĆō9, ~RESET |
0.7 ├Ś VCC |
3.6 |
| VIL |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 0 ąĮą░ ą▓čģąŠą┤ąĄ |
ŌĆō0.5 |
0.3 ├Ś VCC |
| IOH |
ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ ą╗ąŠą│. 1 |
ROW0ŌĆō7, COL0ŌĆō9 |
|
10 |
ą╝ąÉ |
| IOL |
ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ ą╗ąŠą│. 0 |
|
25 |
| TA |
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆą░ ąŠą║čĆčāąČą░čÄčēąĄą╣ čüčĆąĄą┤čŗ |
-40 |
125 |
┬░C |
[ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ]
| ąśą╝čÅ |
ąóąĄčĆą╝ą░ą╗čīąĮą░čÅ ą╝ąĄčéčĆąĖą║ą░(1) |
TCA8418
RTW (WQFN)
24 ą▓čŗą▓ąŠą┤ą░ |
ąĢą┤. |
| R╬ĖJA |
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║čĆąĖčüčéą░ą╗ą╗ - ąŠą║čĆčāąČą░čÄčēą░čÅ čüčĆąĄą┤ą░
|
38.9 |
┬░C/W |
| R╬ĖJC(top) |
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║čĆąĖčüčéą░ą╗ą╗ - ą║ąŠčĆą┐čāčü (ą▓ąĄčĆčģąĮčÅčÅ čüč鹊čĆąŠąĮą░)
|
40.6 |
| R╬ĖJB |
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║čĆąĖčüčéą░ą╗ą╗ - ą┐ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░ |
17.2 |
| ŽłJT |
ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖč湥čüą║ąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ ą║čĆąĖčüčéą░ą╗ą╗ - ą▓ąĄčĆčģąĮčÅčÅ čüč鹊čĆąŠąĮą░ |
0.9 |
| ŽłJB |
ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖč湥čüą║ąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ ą║čĆąĖčüčéą░ą╗ą╗ - ą┐ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░ |
17.2 |
| R╬ĖJC(bot) |
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║čĆąĖčüčéą░ą╗ą╗ - ą║ąŠčĆą┐čāčü (ąĮąĖąČąĮčÅčÅ čüč鹊čĆąŠąĮą░) |
6.6 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╝ ą╝ąĄčéčĆąĖą║ą░ą╝ čüą╝. ą┤ąŠą║čāą╝ąĄąĮčé SPRA953 [3].
[ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ]
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čāą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ VCC ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1.65V .. 3.6V, ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ąĮąĄčćč鹊 ąĖąĮąŠąĄ.
| ąśą╝čÅ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ
|
VCC |
min |
Typ |
MAX |
ąĢą┤. |
| VIK |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą▓čģąŠą┤ąĮąŠą╝ ąĘą░čēąĖčéąĮąŠą╝ ą┤ąĖąŠą┤ąĄ |
II = -18 ą╝ąÉ |
1.65 .. 3.6V |
-1.2 |
|
81.92 |
V |
| VPORR |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠčĆąŠą│ą░ čüą▒čĆąŠčüą░ POR ą┐čĆąĖ ąĮą░čĆą░čüčéą░ąĮąĖąĖ VCC |
VI = VCC ąĖą╗ąĖ GND, IO = 0 |
1.03 |
|
1.43 |
| VPORF |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠčĆąŠą│ą░ čüą▒čĆąŠčüą░ POR ą┐čĆąĖ čüą┐ą░ą┤ąĄ VCC |
0.76 |
|
1.15 |
| VOH |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 1 ą┤ą╗čÅ ą▓čŗčģąŠą┤ąŠą▓ ROW0ŌĆō7, COL0ŌĆō9 |
IOH = ŌĆō1 ą╝ąÉ |
1.65V |
1.25 |
|
|
| IOH = ŌĆō8 ą╝ąÉ |
1.65V |
1.2 |
|
|
| 2.3V |
1.8 |
|
|
| 3V |
2.6 |
|
|
| IOH = ŌĆō10 ą╝ąÉ |
1.65V |
1.1 |
|
|
| 2.3V |
1.7 |
|
|
| 3V |
2.5 |
|
|
| VOL |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 0 ą┤ą╗čÅ ą▓čŗčģąŠą┤ąŠą▓ ROW0ŌĆō7, COL0ŌĆō9 |
IOL = 1 ą╝ąÉ |
1.65V |
|
|
0.4 |
| IOL = 8 ą╝ąÉ |
1.65V |
|
|
0.45 |
| 2.3V |
|
|
0.25 |
| 3V |
|
|
0.25 |
| IOL = 10 ą╝ąÉ |
1.65V |
|
|
0.6 |
| 2.3V |
|
|
0.3 |
| 3V |
|
|
0.25 |
| IOL |
SDA |
VOL = 0.4V |
1.65 .. 3.6V |
3 |
|
|
ą╝ąÉ |
| |
~INT ąĖ ~CAD_INT |
3 |
|
|
| II |
SCL, SDA, ROW0ŌĆō7, COL0ŌĆō9, ~RESET |
VI = VCCI ąĖą╗ąĖ GND |
|
|
1 |
ą╝ą║ąÉ |
| RINT |
ąŚąĮą░č湥ąĮąĖąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ ą┐ąŠą┤čéčÅąČą║ąĖ (pull-up) |
ROW0ŌĆō7, COL0ŌĆō9 |
|
|
105 |
|
ą║ą×ą╝ |
| ICC |
ą¤ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗą╣ č鹊ą║ |
VI ąĮą░ SDA, ROW0ŌĆō7, COL0-9 čĆą░ą▓ąĮąŠ VCC ąĖą╗ąĖ GND, IO = 0, I/O ą▓čģąŠą┤čŗ |
fSCL = 0 ą║ąōčå |
ąōąĄąĮąĄčĆ. OFF |
1.65 .. 3.6V |
|
|
10 |
ą╝ą║ąÉ |
| ąōąĄąĮąĄčĆ. ON |
|
|
18 |
| fSCL = 400 ą║ąōčå |
1 ąĮą░ąČą░čéąĖąĄ ą║ąĮąŠą┐ą║ąĖ |
1.65V |
|
|
60 |
| 3.6V |
|
|
90 |
| fSCL = 1 ą£ąōčå |
1.65V |
|
|
65 |
| 3.6V |
|
|
153 |
| fSCL = 400 ą║ąōčå |
GPI ą▓ ą╗ąŠą│. 0 (čĆą░ąĘčĆąĄčłąĄąĮčŗ pull-up)(1) |
1.65 .. 3.6V |
|
|
55 |
| fSCL = 1 ą£ąōčå |
|
|
65 |
| fSCL = 400 ą║ąōčå |
GPI ą▓ ą╗ąŠą│. 0 (pull-up ąĘą░ą┐čĆąĄčēąĄąĮčŗ) |
|
|
15 |
| fSCL = 1 ą£ąōčå |
|
|
24 |
| fSCL = 400 ą║ąōčå |
ąÉą║čéąĖą▓ąĄąĮ 1 ą▓čŗčģąŠą┤ GPO |
|
|
55 |
| fSCL = 1 ą£ąōčå |
|
|
65 |
| CI |
SCL |
VI = VCCI ąĖą╗ąĖ GND |
1.65 .. 3.6V |
|
6 |
8 |
ą┐ąż |
| CIO |
SDA |
VIO = VCC ąĖą╗ąĖ GND |
|
10 |
12.5 |
| ROW0ŌĆō7, COL0ŌĆō9 |
|
5 |
6 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 čĆą░ąĘčĆąĄčłąĄąĮ ąŠą┤ąĖąĮ GPIO.
[ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą║ ąĖąĮč鹥čĆč乥ą╣čüčā I2C]
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ čĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ ąŠą║čĆčāąČą░čÄčēąĄą╣ čüčĆąĄą┤čŗ. ąöąĖą░ą│čĆą░ą╝ą╝čŗ čüą╝. ąĮą░ čĆąĖčü. 16.
ą¤ą░čĆą░ą╝ąĄčéčĆ
|
STANDARD MODE |
FAST MODE
|
HIGH-SPEED MODE(2) |
ąĢą┤.
|
| min |
MAX |
min |
MAX |
min |
MAX |
| ąĀą░ą▒ąŠčćą░čÅ čćą░čüč鹊čéą░ SCL |
fSCL |
0 |
100 |
0 |
400 |
0 |
1000 |
ą║ąōčå |
| ąÆčĆąĄą╝čÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą╗ąŠą│. 1 SCL |
tsch |
4 |
|
0.6 |
|
0.26 |
|
ą╝ą║čü |
| ąÆčĆąĄą╝čÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą╗ąŠą│. 0 SCL |
tscl |
4.7 |
|
1.3 |
|
0.5 |
|
| ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī "ąĖą│ąŠą╗ą║ąĖ" |
tsp |
|
50 |
|
50 |
|
50 |
ąĮčü |
| ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ |
tsds |
250 |
|
100 |
|
50 |
|
| ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ |
tsdh |
0 |
|
0 |
|
0 |
|
| ąÆčĆąĄą╝čÅ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ |
ticr |
|
1000 |
20 + 0.1Cb(1) |
300 |
|
120 |
| ąÆčĆąĄą╝čÅ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ |
ticf |
|
300 |
|
| ąÆčĆąĄą╝čÅ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ; ąĄą╝ą║ąŠčüčéčī čłąĖąĮčŗ 10 ą┐ąż .. 400 ą┐ąż |
tocf |
|
300 |
300 |
|
120 |
ą╝ą║čü |
| ąÆčĆąĄą╝čÅ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čłąĖąĮčŗ (idle) ą╝ąĄąČą┤čā čüąĖą│ąĮą░ą╗ą░ą╝ąĖ STOP ąĖ START |
tbuf |
4.7 |
|
1.3 |
|
0.5 |
|
| ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ START ąĖą╗ąĖ REPEATED START |
tsts |
4.7 |
|
0.6 |
|
0.26 |
|
| ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ START ąĖą╗ąĖ REPEATED START |
tsth |
4 |
|
0.6 |
|
0.26 |
|
| ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ STOP |
tsps |
4 |
|
0.6 |
|
0.26 |
|
| ąÆčĆąĄą╝čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ąŠčé SCL=0 ą┤ąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ SDA |
tvd(data) |
|
1 |
|
0.9 |
|
0.45 |
| ąÆčĆąĄą╝čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ACK; čüąĖą│ąĮą░ą╗ ACK ąŠčé SCL = 0 ą┤ąŠ SDA (ą▓čŗčģąŠą┤) = 0 |
tvd(ack) |
|
1 |
|
0.9 |
|
0.45 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) Cb = ąŠą▒čēą░čÅ ąĄą╝ą║ąŠčüčéčī ąŠą┤ąĮąŠą╣ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ ą▓ ą┐ąż.
(2) ąöčĆčāą│ąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ FAST MODE PLUS (FM+).
[ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ čüą▒čĆąŠčüą░]
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ čĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ ąŠą║čĆčāąČą░čÄčēąĄą╣ čüčĆąĄą┤čŗ. ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ čüą╝. ąĮą░ čĆąĖčü. 19.
| ąśą╝čÅ |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣
|
min |
MAX |
ąĢą┤. |
| tW |
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░ |
120(1) |
|
ą╝ą║čü |
| tREC |
ąÆčĆąĄą╝čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čüą▒čĆąŠčüą░ |
| tRESET |
ąÆčĆąĄą╝čÅ ą┤ąŠ čüą▒čĆąŠčüą░ |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): čüčģąĄą╝ą░ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ GPIO (debounce) ą┐čĆąŠą┐čāčüą║ą░ąĄčé ą║ą░ąČą┤čāčÄ ąĮąŠąČą║čā ą▓čģąŠą┤ą░ GPIO č湥čĆąĄąĘ ą┤ą▓čāčģą║ą░čüą║ą░ą┤ąĮčāčÄ čüčģąĄą╝čā čĆąĄą│ąĖčüčéčĆąŠą▓. ą×ą▒ą░ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░ čéą░ą║čéąĖčĆčāčÄčéčüčÅ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣, ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą╣, čü ąĮąŠą╝ąĖąĮą░ą╗čīąĮčŗą╝ ą┐ąĄčĆąĖąŠą┤ąŠą╝ 50 ą╝ą║čü. ąÜąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ ą╝ąĄąĮčÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ, ąĮąŠą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą┐ąĄčĆą▓ąŠą╝ ą║ą░čüą║ą░ą┤ąĄ ą▓ ąŠą┤ąĮąŠą╝ ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║č鹊ą▓. ąĢčüą╗ąĖ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čéą░ą║č鹥 ąŠą▒ą░ čüąŠčüč鹊čÅąĮąĖčÅ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ, č鹊 ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĮą░ ą▓č鹊čĆąŠą╣ čĆąĄą│ąĖčüčéčĆ, ąĖ ą┤ą░ą╗ąĄąĄ ąĮą░ ąŠčüčéą░ą╗čīąĮčŗąĄ čüčģąĄą╝čŗ. ą¤ąŠčüą║ąŠą╗čīą║čā čüąŠčüč鹊čÅąĮąĖčÅ ą▓čģąŠą┤ąŠą▓ ąĖąĘą╝ąĄąĮčÅčÄčéčüčÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓, ą╝ąŠąČąĄčé ą┐čĆąŠą╣čéąĖ ą╗čÄą▒ąŠąĄ ą▓čĆąĄą╝čÅ ąŠčé 0 ą┤ąŠ 50 ą╝ą║čü ą┤ąŠ ąĘą░ą┐ąŠą╝ąĖąĮą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą▓ ą┐ąĄčĆą▓ąŠą╝ ą║ą░čüą║ą░ą┤ąĄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą▒čēąĄąĄ ą▓čĆąĄą╝čÅ ą┤ąĄą▒ąŠčāąĮčüąĖąĮą│ą░ ą╝ąŠąČąĄčé ą┤ąŠčģąŠą┤ąĖčéčī ą┤ąŠ 100 ą╝ą║čü. ąś ąĄčüą╗ąĖ čāčćąĖčéčŗą▓ą░čéčī ą┐ąŠąĮąĖąČąĄąĮąĖąĄ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓, čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ąĘą░ą┤ąĄčƹȹ║ąĖ čĆą░čüčłąĖčĆčÅąĄčéčüčÅ ą┤ąŠ 120 ą╝ą║čü.
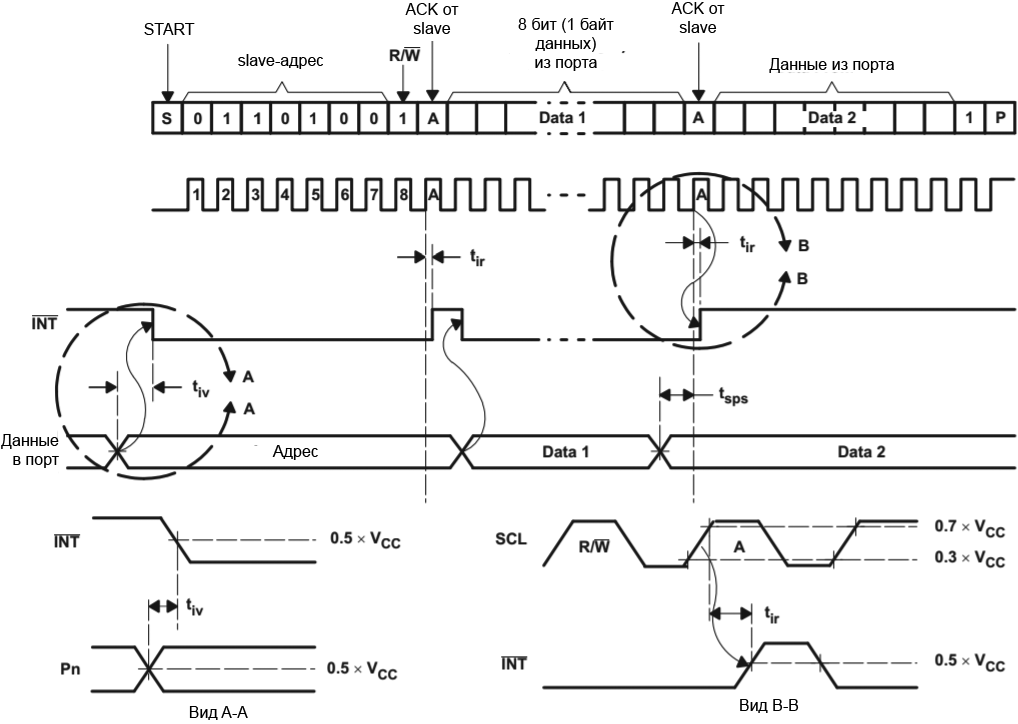
[ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ]
| ąśą╝čÅ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
|
ąŠčé |
ą┤ąŠ |
min |
MAX |
ąĢą┤. |
| tIV |
ąÆčĆąĄą╝čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ |
ąĪąŠą▒čŗčéąĖąĄ ą║ąĮąŠą┐ą║ąĖ, ąĖą╗ąĖ ą║ąĮąŠą┐ą║ąĖ, čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, ąĖą╗ąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ FIFO |
ROW0ŌĆō7, COL0-9 |
~INT |
20 |
60 |
ą╝ą║čü |
| GPI_INT čü čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┤čĆąĄą▒ąĄąĘą│ą░ |
40 |
120 |
| GPI_INT čü ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╝ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┤čĆąĄą▒ąĄąĘą│ą░ |
10 |
30 |
| tIR |
ąÆčĆąĄą╝čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ čüą▒čĆąŠčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ |
SCL |
~INT |
|
200 |
ąĮčü |
| tPV |
ąÆčĆąĄą╝čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
SCL |
ROW0ŌĆō7, COL0-9 |
|
400 |
| tPS |
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
ą┐ąŠčĆčé |
SCL |
0 |
|
| tPH |
ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
ą┐ąŠčĆčé |
SCL |
300 |
|
[ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║(1)]
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
min |
MAX |
ąĢą┤. |
| ąÆčĆąĄą╝čÅ ąŠčé ąĮą░ąČą░čéąĖčÅ ą┤ąŠ ąĄą│ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ |
|
25 |
ą╝ą║čü |
| ąÆčĆąĄą╝čÅ ąŠčé ąŠčéą┐čāčüą║ą░ąĮąĖčÅ ą┤ąŠ ąĄą│ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ |
|
25 |
| ąóą░ą╣ą╝ąĄčĆ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ (keypad unlock timer) |
|
7 |
čüąĄą║ |
| ąóą░ą╣ą╝ąĄčĆ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ (keypad interrupt mask timer) |
|
31 |
| ą¤ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░ ą║ąŠąĮčéą░ą║č鹊ą▓ |
|
60 |
ą╝čü |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ min ąĖ MAX ąĖąĮč鹥čĆą▓ą░ą╗čŗ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ąŠą║ ą┤ąĄą╣čüčéą▓čāčÄčé ą┤ą╗čÅ ą▓čüąĄčģ čĆąĄąČąĖą╝ąŠą▓ čüą║ąŠčĆąŠčüč鹥ą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ I2C.
[ąóąĖą┐ąŠą▓čŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ]
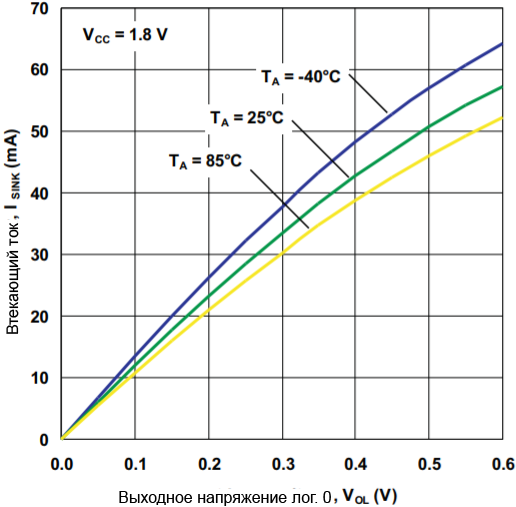
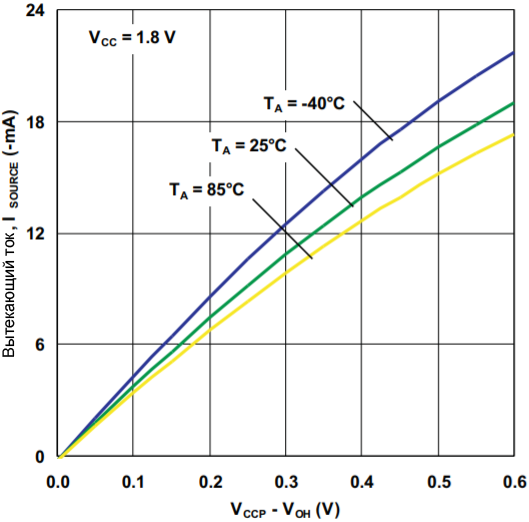
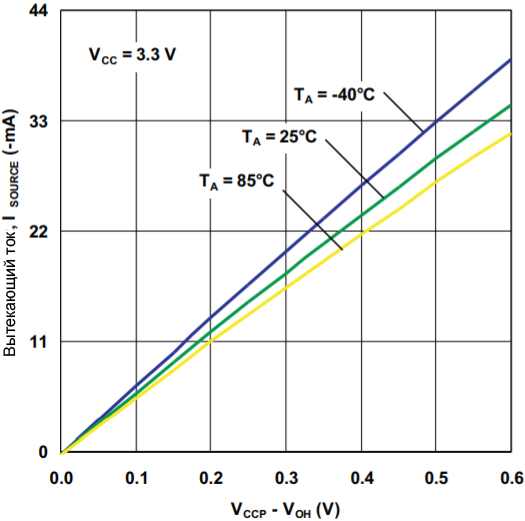
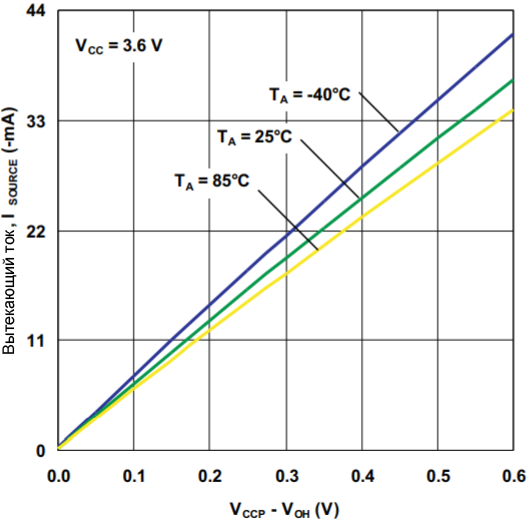
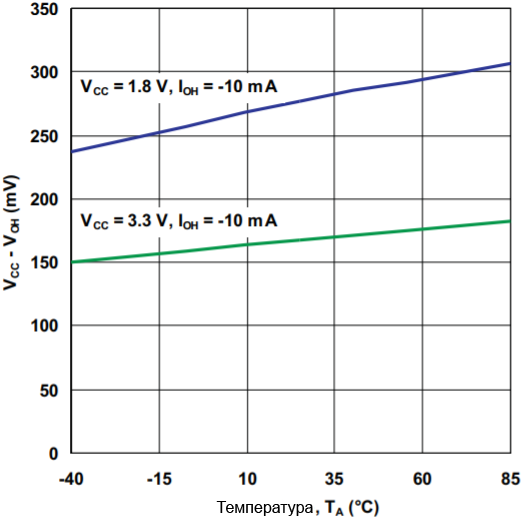
ąōčĆą░čäąĖą║ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ čāą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ TA = 25┬░C (ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ąĮąĄčćč鹊 ąĖąĮąŠąĄ).
 |
 |
| ąĀąĖčü. 1. ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. |
ąĀąĖčü. 2. ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ Standby ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. |
 |
 |
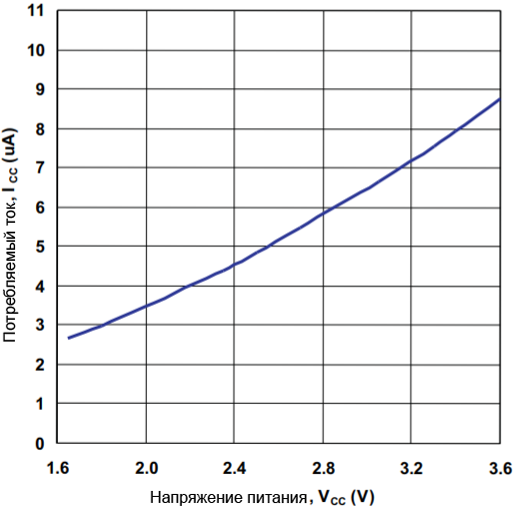
| ąĀąĖčü. 3. ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. |
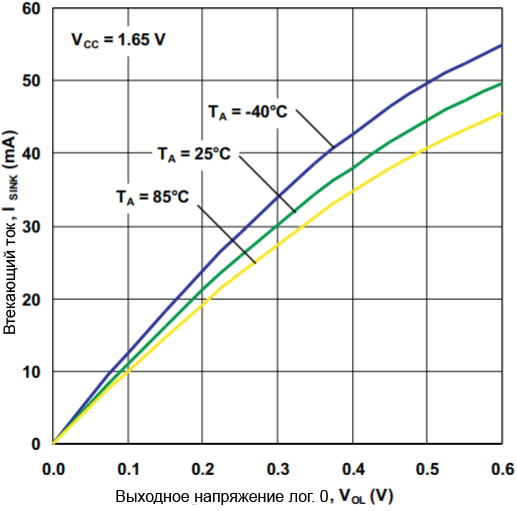
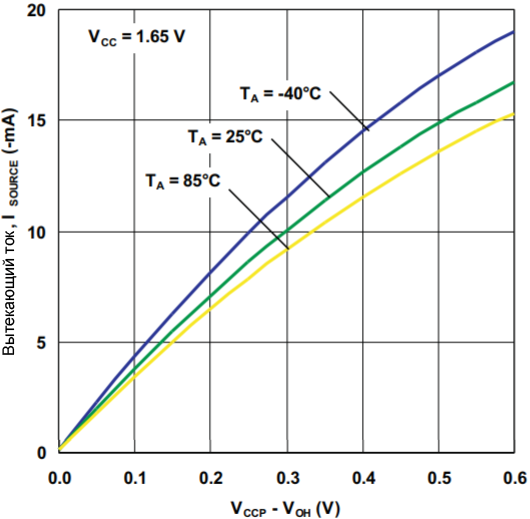
ąĀąĖčü. 4. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╗ąŠą│. 0 ąŠčé ą▓č鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O (ą┐čĆąĖ VCC = 1.65V). |
 |
 |
| ąĀąĖčü. 5. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╗ąŠą│. 0 ąŠčé ą▓č鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O (ą┐čĆąĖ VCC = 1.8V). |
ąĀąĖčü. 6. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╗ąŠą│. 0 ąŠčé ą▓č鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O (ą┐čĆąĖ VCC = 2.5V). |
 |
 |
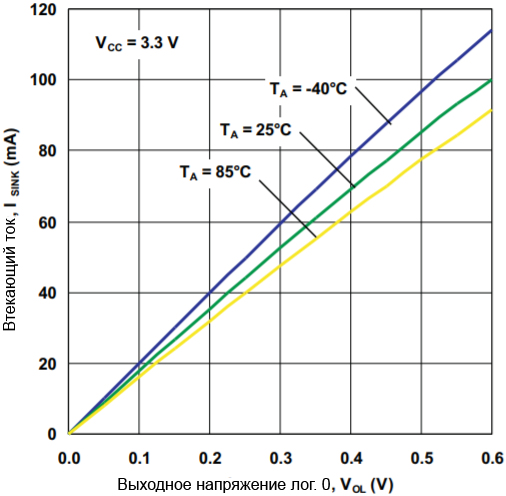
| ąĀąĖčü. 7. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╗ąŠą│. 0 ąŠčé ą▓č鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O (ą┐čĆąĖ VCC = 3.3V). |
ąĀąĖčü. 8. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╗ąŠą│. 0 ąŠčé ą▓č鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O (ą┐čĆąĖ VCC = 3.6V). |
 |
 |
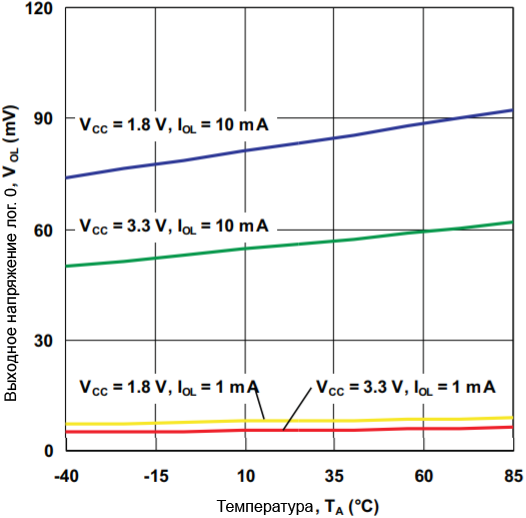
| ąĀąĖčü. 9. ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 0 ąĮąŠąČą║ąĖ IO ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. |
ąĀąĖčü. 10. ąÆąĘą░ąĖą╝ąŠąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗč鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 1 (VCC = 1.65V). |
 |
 |
| ąĀąĖčü. 11. ąÆąĘą░ąĖą╝ąŠąĘą░ą▓ąĖčüą╝ąŠčüčéčī ą▓čŗč鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 1 (VCC = 1.8V). |
ąĀąĖčü. 12. ąÆąĘą░ąĖą╝ąŠąĘą░ą▓ąĖčüą╝ąŠčüčéčī ą▓čŗč鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 1 (VCC = 2.5V). |
 |
 |
| ąĀąĖčü. 13. ąÆąĘą░ąĖą╝ąŠąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗč鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 1 (VCC = 3.3V). |
ąĀąĖčü. 14. ąÆąĘą░ąĖą╝ąŠąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗč鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ ąĮąŠąČą║ąĖ I/O ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 1 (VCC = 3.6V). |
 |
ąĀąĖčü. 15. ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 1 ąĮąŠąČą║ąĖ I/O
ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. |
[ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠčé ąĖąĘą╝ąĄčĆąĄąĮąĖąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓]
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮą░ą│čĆčāąĘą║ąĖ ąĮąŠąČą║ąĖ SDA:
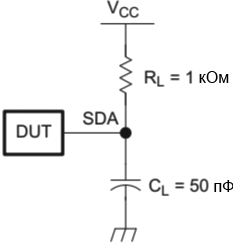

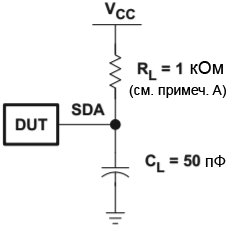
ąĀąĖčü. 16. ąöąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ (ą▒ą░ą╣čé 1 ą░ą┤čĆąĄčü I2C, ą▒ą░ą╣čéčŗ 2 ąĖ 3 ą┤ą░ąĮąĮčŗąĄ P-ą┐ąŠčĆčéą░) ą┐čĆąĖ ąĮą░ą│čĆčāąČąĄąĮąĮąŠą╣ ąĮąŠąČą║ąĄ SDA.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(A) CL ą▓ą║ą╗čÄčćą░ąĄčé ąĄą╝ą║ąŠčüčéčī ą┐čĆąŠą▒ąĮąĖą║ą░ ąĖ ąĄą╝ą║ąŠčüčéčī jig. tocf ąĖąĘą╝ąĄčĆąĄąĮąŠ čü CL 10 ą┐ąż ąĖą╗ąĖ 400 ą┐ąż.
(B) ąØą░ ą▓čüąĄ ą▓čģąŠą┤čŗ ą┐ąŠą┤ą░čÄčéčüčÅ čüąĖą│ąĮą░ą╗čŗ ąŠčé ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ: PRR Ōēż 10 ą£ąōčå, ZO = 50 ą×ą╝, tr/tf Ōēż 30 ąĮčü.
(C) ąÆčüąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ ą║ąŠ ą▓čüąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝.
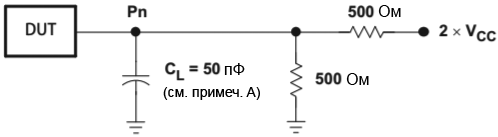
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąŠąČą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ~INT:
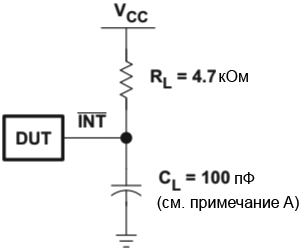
ąĀąĖčü. 17. ążąŠčĆą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ čüčģąĄą╝ąĄ ąĮą░ą│čĆčāąĘą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(A) CL ą▓ą║ą╗čÄčćą░ąĄčé ąĄą╝ą║ąŠčüčéčī ą┐čĆąŠą▒ąĮąĖą║ą░ ąĖ ąĄą╝ą║ąŠčüčéčī jig.
(B) ąĪąĖą│ąĮą░ą╗čŗ ąĮą░ ą▓čüąĄčģ ą▓čģąŠą┤ą░čģ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ą╝ąĖ čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ: PRR Ōēż 10 ą£ąōčå, ZO = 50 ą×ą╝, tr /tf Ōēż 30 ąĮčü.
(C) ąÆčüąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ ą║ąŠ ą▓čüąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮą░ą│čĆčāąĘą║ąĖ P-ą┐ąŠčĆčéą░:
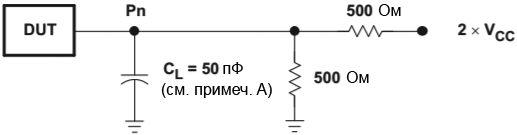
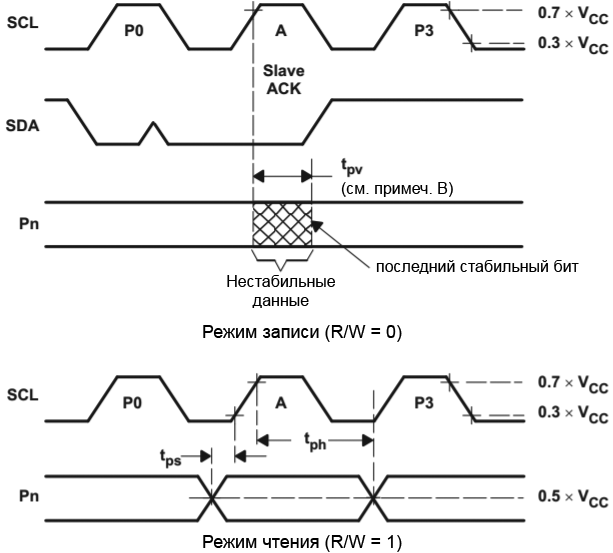
ąĀąĖčü. 18. ążąŠčĆą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ čüčģąĄą╝ąĄ ąĮą░ą│čĆčāąĘą║ąĖ P-ą┐ąŠčĆčéą░.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮą░ą│čĆčāąĘą║ąĖ ąĮąŠąČą║ąĖ SDA:
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮą░ą│čĆčāąĘą║ąĖ P-ą┐ąŠčĆčéą░:
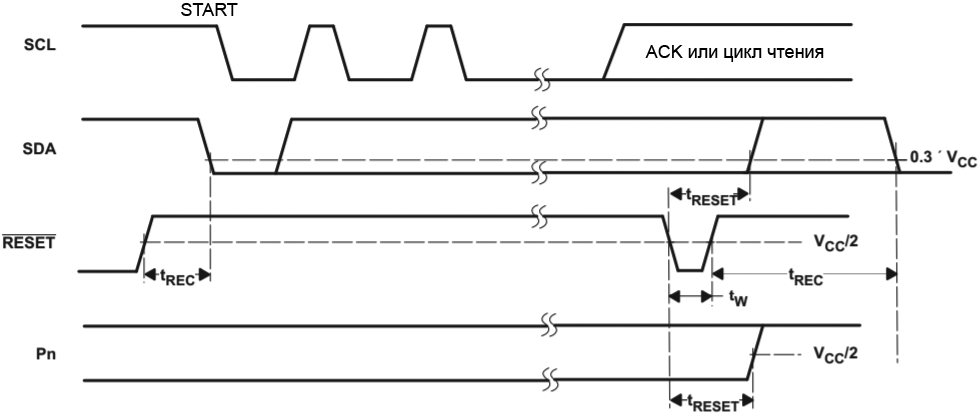
ąĀąĖčü. 19. ążąŠčĆą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ čüčģąĄą╝ąĄ ąĮą░ą│čĆčāąĘą║ąĖ čüą▒čĆąŠčüą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(A) CL ą▓ą║ą╗čÄčćą░ąĄčé ąĄą╝ą║ąŠčüčéčī ą┐čĆąŠą▒ąĮąĖą║ą░ ąĖ ąĄą╝ą║ąŠčüčéčī jig.
(B) ąĪąĖą│ąĮą░ą╗čŗ ąĮą░ ą▓čüąĄčģ ą▓čģąŠą┤ą░čģ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ą╝ąĖ čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ: PRR Ōēż 10 ą£ąōčå, ZO = 50 ą×ą╝, tr /tf Ōēż 30 ąĮčü.
(C) ąÆčŗčģąŠą┤čŗ ąĖąĘą╝ąĄčĆčÅą╗ąĖčüčī ą┐ąŠ ąŠą┤ąĮąŠą╝čā, čü ąŠą┤ąĮąĖą╝ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ąĮą░ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ.
(D) ąØąŠąČą║ąĖ I/O čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą▓čģąŠą┤čŗ.
(E) ąÆčüąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ ą║ąŠ ą▓čüąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝.
[ą×ą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░]
TCA8418 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┤ąŠ 10 čüč鹊ą╗ą▒čåąŠą▓ ąĖ ą┤ąŠ 8 čüčéčĆąŠą║ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, ą┤ą░ą▓ą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┤ąŠ ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝čŗčģ 80 ą║ąĮąŠą┐ąŠą║. ąöą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą╗čÄą▒ą░čÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ąĖąĘ čŹčéąĖčģ čüč鹊ą╗ą▒čåąŠą▓ ąĖ čüčéčĆąŠą║. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ą░čéčĆąĖčåčŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą╗ąŠą│. 1 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ čüč鹊ą╗ą▒čåąŠą▓ ąĖ čüčéčĆąŠą║ (čĆąĄą│ąĖčüčéčĆčŗ KP_GPIO, čüą╝. čéą░ą▒ą╗ąĖčåčā 9). ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüč鹊ą╗ą▒čåčŗ ąĖ čüčéčĆąŠą║ąĖ, čüąŠąĄą┤ąĖąĮąĄąĮąĮčŗąĄ čü ą╝ą░čéčĆąĖčåąĄą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, ą▒čŗą╗ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TCA8418 ą▒čāą┤ąĄčé ąŠą┐čĆą░čłąĖą▓ą░čéčī čŹč鹊čé ą╝ą░čüčüąĖą▓ ą║ąĮąŠą┐ąŠą║, ąĖ čéą░ą║ąČąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī čü ą╗čÄą▒čŗą╝ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą║ą░ą║ ą▓čģąŠą┤čŗ ąĮąŠąČą║ą░ą╝ąĖ GPIO.
ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą▒ą╗ąŠą║-čüčģąĄą╝ą░ TCA8418:
Key Event Table. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TCA8418 ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą╝ąĮąŠą│ąĖčģ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆ. ąÆčüąĄ 18 ąĮąŠąČąĄą║ GPIO ą┤ą╗čÅ čüčéčĆąŠą║ ąĖ čüč鹊ą╗ą▒čåąŠą▓ ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą╣ ą╝ą░čéčĆąĖčåčŗ ą╝ąŠą│čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą┤ąŠ 80 ą║ąĮąŠą┐ąŠą║ (čĆąĄąČąĖą╝ ą╝ą░čéčĆąĖčåčŗ). ąöčĆčāą│ąŠą╣ ą▓ą░čĆąĖą░ąĮčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝čŗčģ ą║ąĮąŠą┐ąŠą║ - ą▒ąĄąĘ ą╝ą░čéčĆąĖčåčŗ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ 18 ąĮąŠąČąĄą║ GPIO ą║ą░ą║ ą▓čģąŠą┤čŗ (čĆąĄąČąĖą╝ GPI) ą┤ą╗čÅ ą┐čĆčÅą╝ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ąŠ 18 ą║ąĮąŠą┐ąŠą║, ą┐čĆąŠčüč鹊 ąĘą░ą╝čŗą║ą░čÄčēąĖčģ ą▓čģąŠą┤ ąĮą░ GND. ąóą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĮą░ ą╗čÄą▒ą░čÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą╣ ą╝ą░čéčĆąĖčåčŗ - ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ą░čéčĆąĖčåą░ ą║ąĮąŠą┐ąŠą║ 3 x 4, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠčüčéą░ą▓čłąĖčģčüčÅ 11 ąĮąŠąČąĄą║ GPIO ą┐ąŠą┤ ą╗čÄą▒čŗąĄ čåąĄą╗ąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░.
ąöą╗čÅ ąŠą▒ąŠąĖčģ čéąĖą┐ąŠą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ąĮąŠą┐ąŠą║ (ą╝ą░čéčĆąĖčåą░ ąĖ GPI) ą▓ čüč鹥ą║ čüąŠą▒čŗčéąĖą╣ FIFO ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąŠ čüąŠą▒čŗčéąĖąĄ ą║ąĮąŠą┐ą║ąĖ (key event). ąŚąĮą░čćąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą▒ą░ą▓ą╗čÅčÄčéčüčÅ ą▓ FIFO, ąĘą░ą▓ąĖčüčÅčé ąŠčé ąĮą░čüčéčĆąŠąĄąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (ą╝ą░čéčĆąĖčåą░ ąĖą╗ąĖ GPI), ąĖ ąĮą░ ą║ą░ą║ąŠą╝ ą┐ąŠčĆč鹥 ą▒čŗą╗ąŠ ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĮą░ąČą░čéąĖąĄ. ąóą░ą▒ą╗ąĖčåčŗ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąŠą▒ąŠąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅą╝ (Key Event Table, čéą░ą▒ą╗ąĖčåą░ čüąŠą▒čŗčéąĖą╣ ą║ąĮąŠą┐ąŠą║).
ąŚąĮą░č湥ąĮąĖąĄ ą║ąŠą┤ąŠą▓ ą║ąĮąŠą┐ąŠą║ ąĮąĖąČąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą┤ąĄčüčÅčéąĖčćąĮčŗą╝ąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐ąŠąĘąĖčåąĖčÅ ą┤ąĄčüčÅčéą║ąŠą▓ ą▓ ą║ąŠą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒ąŠąĘąĮą░č湥ąĮąĖčÅ čüčéčĆąŠą║ąĖ, ą░ ą┐ąŠąĘąĖčåąĖčÅ ąĄą┤ąĖąĮąĖčå ą┤ą╗čÅ ąŠą▒ąŠąĘąĮą░č湥ąĮąĖčÅ čüč鹊ą╗ą▒čåą░. ąŁč鹊 čüą░ą╝čŗą╣ ą┐ąŠąĮčÅčéąĮčŗą╣ ąĖ čāą┤ąŠą▒ąĮčŗą╣ čüą┐ąŠčüąŠą▒ ąĮčāą╝ąĄčĆą░čåąĖąĖ ą║ąŠą┤ąŠą▓ ą║ąĮąŠą┐ąŠą║.
ąóą░ą▒ą╗ąĖčåą░ 1. Key Event Table, čéą░ą▒ą╗ąĖčåą░ čüąŠą▒čŗčéąĖą╣ ą║ąĮąŠą┐ąŠą║ (čĆąĄąČąĖą╝ ą╝ą░čéčĆąĖčåčŗ, ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠąĘąĖčåąĖą╣ ą║ąĮąŠą┐ąŠą║).
| |
C0 |
C1 |
C2 |
C3 |
C4 |
C5 |
C6 |
C7 |
C8 |
C9 |
| R0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
| R1 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
| R2 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
| R3 |
31 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
| R4 |
41 |
42 |
43 |
44 |
45 |
46 |
47 |
48 |
49 |
50 |
| R5 |
51 |
52 |
53 |
54 |
55 |
56 |
57 |
58 |
59 |
60 |
| R6 |
61 |
62 |
63 |
64 |
65 |
66 |
67 |
68 |
69 |
70 |
| R7 |
71 |
72 |
73 |
74 |
75 |
76 |
77 |
78 |
79 |
80 |
ąóą░ą▒ą╗ąĖčåą░ 2. ąóą░ą▒ą╗ąĖčåą░ čüąŠą▒čŗčéąĖą╣ ą║ąĮąŠą┐ąŠą║ (čĆąĄąČąĖą╝ GPI, čüąŠą▒čŗčéąĖčÅ čüčéčĆąŠą║).
| R0 |
R1 |
R2 |
R3 |
R4 |
R5 |
R6 |
R7 |
| 97 |
98 |
99 |
100 |
101 |
102 |
103 |
104 |
ąóą░ą▒ą╗ąĖčåą░ 3. ąóą░ą▒ą╗ąĖčåą░ čüąŠą▒čŗčéąĖą╣ ą║ąĮąŠą┐ąŠą║ (čĆąĄąČąĖą╝ GPI, čüąŠą▒čŗčéąĖčÅ čüč鹊ą╗ą▒čåąŠą▓).
| C0 |
C1 |
C2 |
C3 |
C4 |
C5 |
C6 |
C7 |
C8 |
C9 |
| 105 |
106 |
107 |
108 |
109 |
110 |
111 |
112 |
113 |
114 |
ąĪąŠą▒čŗčéąĖčÅ GPI. ąĪč鹊ą╗ą▒čåčŗ ąĖą╗ąĖ ą▓čģąŠą┤čŗ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą║ą░ą║ GPI, ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą▓čģąŠąČą┤ąĄąĮąĖčÅ ą║ą░ą║ čćą░čüčéčī ą▓ Key Event Table, čćč鹊ą▒čŗ ąŠąĮąĖ ą╝ąŠą│ą╗ąĖ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ą║ąĮąŠą┐ą║ąĖ (Key Event Interrupt). ąóąŠą│ą┤ą░ Key Event Interrupt, ą▓čŗąĘą▓ą░ąĮąĮąŠąĄ GPI, ą▒čāą┤ąĄčé čüą╗ąĄą┤ąŠą▓ą░čéčī čéą░ą║ąŠą╝čā ąČąĄ ą┐čĆąŠčåąĄčüčüčā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ą║ą░ą║ ąĖ Key Event Interrupt, ą▓čŗąĘą▓ą░ąĮąĮąŠąĄ ąĮą░ąČą░čéąĖąĄą╝ ą║ą╗ą░ą▓ąĖčłąĖ ą▓ ą╝ą░čéčĆąĖčåąĄ.
GPI, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą║ą░ą║ čćą░čüčéčī Key Event Table, ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą╝ąŠąĮąĖč鹊čĆąĖčéčī ąŠą┤ąĖąĮąŠčćąĮčŗąĄ ą║ąĮąŠą┐ą║ąĖ čéą░ą║ ąČąĄ, ą║ą░ą║ ą┤čĆčāą│ąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ąŠą▓ GPI. ąÜą░ą║ čćą░čüčéčī čéą░ą▒ą╗ąĖčåčŗ čüąŠą▒čŗčéąĖą╣, GPI ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą┤ąĄčüčÅčéąĖčćąĮčŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąŠčé 97 ą┤ąŠ 114. ąĪčéčĆąŠą║ąĖ R0-R7 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą║ąŠą┤ą░ą╝ąĖ 97 .. 104, ąĖ čüč鹊ą╗ą▒čåčŗ C0-C9 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą║ąŠą┤ą░ą╝ąĖ 105 .. 114.
ąöą╗čÅ ąĮąŠąČąĄą║ GPI, ą║ąŠč鹊čĆčŗąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą░ą║čéąĖą▓ąĮčŗą╝ąĖ ąĮą░ ą╗ąŠą│. 1, ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą▓ Key Event Table, ą║ąŠąĮąĄčćąĮčŗą╣ ą░ą▓č鹊ą╝ą░čé ą▒čāą┤ąĄčé ą┤ąŠą▒ą░ą▓ą╗čÅčéčī čüąŠą▒čŗčéąĖąĄ ą║ čüč湥čéčćąĖą║čā čüąŠą▒čŗčéąĖą╣ ą║ąŠą┤ ą▓ čéą░ą▒ą╗ąĖčåčā čüąŠą▒čŗčéąĖą╣ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čŹčéą░ ąĮąŠąČą║ą░ GPI ą┐ąĄčĆąĄą╣ą┤ąĄčé ąŠčé ą╗ąŠą│. 0 ą║ ą╗ąŠą│. 1. ąĢčüą╗ąĖ ąĮąŠąČą║ą░ GPI čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą░ą║čéąĖą▓ąĮąŠą╣ ąĮą░ ą╗ąŠą│. 0, č鹊 ą┐ąĄčĆąĄčģąŠą┤ čŹč鹊ą╣ ąĮąŠąČą║ąĖ ąŠčé ą╗ąŠą│. 1 ą║ ą╗ąŠą│. 0 ą▒čāą┤ąĄčé čüčćąĖčéą░čéčīčüčÅ ąĮą░ąČą░čéąĖąĄą╝, ąĖ čŹč鹊 čüąŠą▒čŗčéąĖąĄ čéą░ą║ąČąĄ ą▒čāą┤ąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąŠ ą║ čüč湥čéčćąĖą║čā čüąŠą▒čŗčéąĖą╣ ąĖ ą▓ čéą░ą▒ą╗ąĖčåčā čüąŠą▒čŗčéąĖą╣. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ čāčüą╗ąŠą▓ąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ čāčüčéą░ąĮąŠą▓ąĖčé ą▓ąĮčāčéčĆąĖ čüąĄą▒čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ čĆąĄą│ąĖčüčéčĆ, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąŠą┐čĆąŠčüą░ ą┤ą╗čÅ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ, 菹║ąŠąĮąŠą╝čÅ č鹥ą╝ čüą░ą╝čŗą╝ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗą╣ č鹊ą║. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ąŠ ą┤ąŠčüčéąĖą│ąĮčāč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ, ąŠąĮąŠ ą▒čāą┤ąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąŠ ą║ čéą░ą▒ą╗ąĖčåąĄ čüąŠą▒čŗčéąĖą╣. ąØą░ąČą░čéąĖąĄ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖąĄ ą▓čüąĄ ąĄčēąĄ ą▒čāą┤čāčé ąĖąĮą┤ąĖčåąĖčĆąŠą▓ą░čéčīčüčÅ ą▒ąĖč鹊ą╝ 7 ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠą▒čŗčéąĖą╣.
ąĪąŠą▒čŗčéąĖčÅ GPI čéą░ą║ąČąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé GPI_EM, čüąŠą▒čŗčéąĖčÅ GPI ąĮąĄ ą▒čāą┤čāčé ąŠčéčüą╗ąĄąČąĖą▓ą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░. ąÜąŠą│ą┤ą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░, ą▒ąĖčé GPI_EM ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ ą┤ą╗čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝čŗčģ čüąŠą▒čŗčéąĖą╣ GPI, čćč鹊ą▒čŗ ąŠąĮąĖ ą┐ąŠą┐ą░ą┤ą░ą╗ąĖ ą▓ čüč湥čéčćąĖą║ čüąŠą▒čŗčéąĖą╣ ąĖ čéą░ą▒ą╗ąĖčåčā čüąŠą▒čŗčéąĖą╣.
ą¦č鹥ąĮąĖąĄ čüąŠą▒čŗčéąĖą╣ ą║ąĮąŠą┐ąŠą║ (FIFO). TCA8418 čüąŠą┤ąĄčƹȹĖčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ 10-ą▒ą░ą╣čéąĮčŗą╣ event FIFO, ą│ą┤ąĄ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą╗čÄą▒čŗąĄ ąĮą░ąČą░čéąĖčÅ ąĖą╗ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ ą║ąĮąŠą┐ąŠą║, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą▓ Key Event Table. ąÆčüąĄ čüčéčĆąŠą║ąĖ (ROW) ąĖ čüč鹊ą╗ą▒čåčŗ (COL), ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ ą╝ą░čéčĆąĖčåčā ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ KP_GPIO1-KP_GPIO3, ą▒čāą┤čāčé ą┤ąŠą▒ą░ą▓ą╗čÅčéčī čüąŠą▒čŗčéąĖčÅ ą▓ čŹč鹊čé FIFO. ąøčÄą▒čŗąĄ ąĮąŠąČą║ąĖ GPI, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčīčÄ ą╗ąŠą│. 1 ą▓ čĆąĄą│ąĖčüčéčĆčŗ GPI_EM1-GPI_EM3, čéą░ą║ąČąĄ ą▒čāą┤čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąŠą▒čŗčéąĖčÅ ą┤ą╗čÅ FIFO.
ąÜąŠą│ą┤ą░ čģąŠčüčéčā (I2C master) ąĮčāąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī FIFO, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čüą╗ąĄą┤ąŠą▓ą░čéčī ąŠą┐ąĖčüą░ąĮąĮąŠą╣ ąĮąĖąČąĄ ą┐čĆąŠčåąĄą┤čāčĆąĄ.
1. ą¤čĆąŠčćąĖčéą░čéčī čĆąĄą│ąĖčüčéčĆ INT_STAT (0x02), čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▓čŗčüčéą░ą▓ą╗ąĄąĮ ą╗ąĖ čüąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ~INT. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ GPI_INT ąĖą╗ąĖ K_INT, č鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ ą║ąĮąŠą┐ą║ąĖ, ąĖ ąŠąĮąŠ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ FIFO.
2. ą¤čĆąŠčćąĖčéą░čéčī čĆąĄą│ąĖčüčéčĆ KEY_LCK_EC (0x03), ąĄą│ąŠ ą▒ąĖčéčŗ [3:0] ą┐ąŠą║ą░ąČčāčé, čüą║ąŠą╗čīą║ąŠ čüąŠą▒čŗčéąĖą╣ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ FIFO.
3. ą¤čĆąŠčćąĖčéą░čéčī čĆąĄą│ąĖčüčéčĆ čüąŠą▒čŗčéąĖą╣ KEY_EVENT_A (0x04). ąŚąĮą░č湥ąĮąĖąĄ 0 ą▒ąĖčéą░ 7 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąŠčéą┐čāčüą║ą░ąĮąĖąĄ ą║ąĮąŠą┐ą║ąĖ, 1 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąĮą░ąČą░čéąĖąĄ. ąæąĖčéčŗ [6:0] ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ą░čÅ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░ ą║ąĮąŠą┐ą║ą░ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ Key Event Table. ąÜą░ąČą┤ąŠąĄ čéą░ą║ąŠąĄ čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüąŠą▒čŗčéąĖą╣ ą▒čāą┤ąĄčé čāą╝ąĄąĮčīčłą░čéčī ąĮą░ 1 ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣ ą▓ KEY_LCK_EC[3:0], ąĖ čüąŠą▒čŗčéąĖčÅ ą▒čāą┤čāčé ąĖąĘą▓ą╗ąĄą║ą░čéčīčüčÅ ąĖąĘ FIFO.
4. ą¤ąŠą▓č鹊čĆčÅčéčī čłą░ą│ 3 ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ąŠą▒ąĮčāą╗ąĖčéčüčÅ ą┐ąŠą╗ąĄ ą▒ąĖčé čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣ (KEY_LCK_EC[3:0] = 0), ąĖą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ čüčéą░ąĮąĄčé ąĮčāą╗ąĄą╝ čĆąĄą│ąĖčüčéčĆ čüąŠą▒čŗčéąĖą╣ (KEY_EVENT_A = 0). ąŁč鹊 ą▒čāą┤ąĄčé ąŠąĘąĮą░čćą░čéčī, čćč鹊 FIFO ą┐čāčüčé.
5. ąĪą▒čĆąŠčüąĖčéčī čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ INT_STAT, ą║ąŠč鹊čĆčŗą╣ ą▓čŗąĘą▓ą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ 1 ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé.
ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ čĆą░čüčüą╝ąŠčéčĆąĖą╝ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĮą░ąČą░čéąĖčÅ ą║ąĮąŠą┐ąŠą║ (čéą░ą▒ą╗ąĖčåą░ 4).
ąóą░ą▒ą╗ąĖčåą░ 4. ą¤čĆąĖą╝ąĄčĆ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ.
| ąØąŠą╝ąĄčĆ čüąŠą▒čŗčéąĖčÅ |
Key (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ) |
ąØą░ąČą░čéąĖąĄ/ąŠčéą┐čāčüą║ą░ąĮąĖąĄ |
| 1 |
1 |
ąØą░ąČą░čéąĖąĄ |
| 2 |
32 |
ąØą░ąČą░čéąĖąĄ |
| 3 |
1 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
| 4 |
32 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
| 5 |
23 |
ąØą░ąČą░čéąĖąĄ |
| 6 |
23 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
| 7 |
45 |
ąØą░ąČą░čéąĖąĄ |
| 8 |
41 |
ąØą░ąČą░čéąĖąĄ |
| 9 |
41 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
| 10 |
45 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
ąĢčüą╗ąĖ ąĖą╝ąĄą╗ą░ ą╝ąĄčüč鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čüąŠą▒čŗčéąĖą╣ ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ 4, č鹊 ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ čłą░ą│ąŠą▓ ą┐ąŠ čćč鹥ąĮąĖčÄ FIFO čģąŠčüčé čāą▓ąĖą┤ąĖčé čüą╗ąĄą┤čāčÄčēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ (čéą░ą▒ą╗ąĖčåą░ 5). ąśąĮč乊čĆą╝ą░čåąĖčÅ ąĮą░ ą▓ąĄčĆčłąĖąĮąĄ čüą┐ąĖčüą║ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠą╝čā čćč鹥ąĮąĖčÄ čĆąĄą│ąĖčüčéčĆą░ KEY_LCK_EC[3:0].
ąóą░ą▒ą╗ąĖčåą░ 5. ą¤čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ čüąŠą▒čŗčéąĖą╣ ąĖąĘ FIFO.
| ąŚąĮą░č湥ąĮąĖąĄ KEY_LCK_EC[3:0] |
ąŚąĮą░č湥ąĮąĖąĄ KEY_EVENT_A (BIN/HEX) |
Key (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ) |
ąØą░ąČą░čéąĖąĄ/ąŠčéą┐čāčüą║ą░ąĮąĖąĄ |
| 10 |
N/A |
N/A |
N/A |
| 9 |
1 000 0001 / 0x81 |
1 |
ąØą░ąČą░čéąĖąĄ |
| 8 |
1 010 0000 / 0xA0 |
32 |
ąØą░ąČą░čéąĖąĄ |
| 7 |
0 000 0001 / 0x01 |
1 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
| 6 |
0 010 0000 / 0x20 |
32 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
| 5 |
1 001 0111 / 0x97 |
23 |
ąØą░ąČą░čéąĖąĄ |
| 4 |
0 001 0111 / 0x17 |
23 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
| 3 |
1 010 1101 / 0xAD |
45 |
ąØą░ąČą░čéąĖąĄ |
| 2 |
1 010 1001 / 0xA9 |
41 |
ąØą░ąČą░čéąĖąĄ |
| 1 |
0 010 1001 / 0x29 |
41 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
| 0 |
0 010 1101 / 0x2D |
45 |
ą×čéą┐čāčüą║ą░ąĮąĖąĄ |
Key Event Overflow(1). TCA8418 ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ key event FIFO. ąóą░ą║ąŠąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓ąŠąĘąĮąĖą║ąĮąĄčé, ą║ąŠą│ą┤ą░ FIFO ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ čüąŠą▒čŗčéąĖčÅą╝ąĖ (ą▓ ąĮąĄą│ąŠ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ 10 čüąŠą▒čŗčéąĖą╣ ą║ąĮąŠą┐ąŠą║), ąĖ ą▓ąŠąĘąĮąĖą║ą╗ąŠ ąĮąŠą▓ąŠąĄ čüąŠą▒čŗčéąĖąĄ. ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 TCA8418 ąĮąĄ ą╝ąŠąČąĄčé ąĘą░ą┐ąŠą╝ąĮąĖčéčī ą▓ čüą▓ąŠąĄą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝ ą▒čāč乥čĆąĄ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ąĮą░ąČą░čéąĖčÅčģ. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čéą░ą║ąŠąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé OVR_FLOW_INT ą▓ čĆąĄą│ąĖčüčéčĆąĄ INT_STAT, ąĖ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé OVR_FLOW_IEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ CFG, č鹊 ą▓čŗčģąŠą┤ ~INT čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0 ą┤ą╗čÅ ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čģąŠčüčéą░ ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ FIFO.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čüčéą░čĆčłąĖą╣ ą▒ąĖčé ąĘąĮą░č湥ąĮąĖčÅ KEY_EVENT_A ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąĮą░ąČą░čéąĖąĄ ąĖą╗ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖąĄ ą║ąĮąŠą┐ą║ąĖ. 1 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąĮą░ąČą░čéąĖąĄ, 0 ąŠčéą┐čāčüą║ą░ąĮąĖąĄ.
TCA8418 ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠą┤ąĮąĖą╝ ąĖąĘ ą┤ą▓čāčģ ą╝ąĄč鹊ą┤ąŠą▓, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ OVR_FLOW_M ą▓ čĆąĄą│ąĖčüčéčĆąĄ CFG (čéą░ą▒ą╗ąĖčåą░ 6). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą╝. čüąĄą║čåąĖčÄ Overflow Errata.
ąóą░ą▒ą╗ąĖčåą░ 6. ąæąĖčé OVR_FLOW_M.
| ąŚąĮą░č湥ąĮąĖąĄ OVR_FLOW_M |
ąĀąĄąČąĖą╝ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ |
ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮ |
ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąĖąĄą┤ąĄčé ą║ čüą┤ą▓ąĖą│čā ą▓čüąĄčģ ą┤ą░ąĮąĮčŗčģ čüąŠą▒čŗčéąĖą╣ čéą░ą║, čćč鹊 ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ ą┐ąŠą┐ą░ą┤čāčé ą▓ FIFO, ą░ čüą░ą╝čŗąĄ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ąŠčéą▒čĆąŠčłąĄąĮčŗ. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮ |
ąöą░ąĮąĮčŗąĄ, ą▓čŗąĘą▓ą░ą▓čłąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ, ąĮąĄ ą┐ąŠą┐ą░ą┤čāčé ą▓ FIFO ąĖ ą▒čāą┤čāčé ąŠčéą▒čĆąŠčłąĄąĮčŗ. |
ąĀą░čüčüą╝ąŠčéčĆąĖą╝ čüą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąĖą╝ąĄčĆ: FIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ąĮą░ąČą░čéąĖčÅą╝ąĖ, ąĖ ąŠą▒čĆą░ąĘąŠą▓ą░ą╗ąŠčüčī ąĮąŠą▓ąŠąĄ ąĮą░ąČą░čéąĖąĄ. ąŁč鹊 ąĮąŠą▓ąŠąĄ ąĮą░ąČą░čéąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą║ąĮąŠą┐ą║ąĄ 2 (0x82 ą▓ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ ąĮą░ąČą░čéąĖčÅ ą║ąĮąŠą┐ą║ąĖ 2). ąóąŠą│ą┤ą░ čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüą╝. čéą░ą▒ą╗ąĖčåčā 7:
ąóą░ą▒ą╗ąĖčåą░ 7. ą¤čĆąĖą╝ąĄčĆ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ Key Event Overflow.
ąĀąĄą│ąĖčüčéčĆ FIFO
|
ą×čĆąĖą│ąĖąĮą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
|
ą¤ąŠčüą╗ąĄ čüąŠą▒čŗčéąĖčÅ ąĮą░ąČą░čéąĖčÅ Key 1 (0x82) |
| OVR_FLOW_M = 1 |
OVR_FLOW_M = 0 |
| A |
0x81 |
0xA0 |
0x81 |
| B |
0xA0 |
0x01 |
0xA0 |
| C |
0x01 |
0x20 |
0x01 |
| D |
0x20 |
0x97 |
0x20 |
| E |
0x97 |
0x17 |
0x97 |
| F |
0x17 |
0xAD |
0x17 |
| H |
0xAD |
0xA9 |
0xAD |
| I |
0xA9 |
0x29 |
0xA9 |
| J |
0x29 |
0x2D |
0x29 |
| K |
0x2D |
0x82 |
0x2D |
Keypad Lock/Unlock. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą║ą╗ą░ą▓ąĖą░čéčāčĆčā čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ lock/unlock. ąÜą╗ą░ą▓ąĖą░čéčāčĆą░ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ BIT6 ą▓ čĆąĄą│ąĖčüčéčĆąĄ KEY_LCK_EC, čćč鹊 ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą▓čŗą┤ą░čćčā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĖ ąŠčéą║ą╗čÄčćąĖčéčī ąĘą░ą┐ąĖčüčī čüąŠą▒čŗčéąĖą╣. ąĀą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ą║ąĮąŠą┐ąŠą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ą╗čÄą▒čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ ą║ąĮąŠą┐ą║ąĖ ą▓ ą╝ą░čéčĆąĖčåąĄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĖą╗ąĖ ą╗čÄą▒čŗą╝ ąĖąĘ ą▓čģąŠą┤ąŠą▓ (GPI), ą║ąŠč鹊čĆčŗąĄ ą▓ą▓ąĄą┤ąĄąĮčŗ ą▓ Key Event Table. ąÜąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĮąĄ čĆą░ą▓ąĄąĮ 0, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ ąĮą░ąČą░čéčī 2 čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą║ą╗ą░ą▓ąĖčłąĖ, ą┐čĆąĄąČą┤ąĄ č湥ą╝ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ keylock ąĖą╗ąĖ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ čüąŠą▒čŗčéąĖčÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ą║ąĮąŠą┐ą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╝ ąĮą░ąČą░čéąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĮą░ ą╗čÄą▒čāčÄ ą║ąĮąŠą┐ą║čā. ąŁč鹊 ą┐ąĄčĆą▓ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ LCD ąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ąŚą░č鹥ą╝ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąŠčćąĖčéą░ąĄčé čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ (lock status register) čćč鹊ą▒čŗ čāą▓ąĖą┤ąĄčéčī, ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ą╗ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░d. ąĪą╗ąĄą┤čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (keylock interrupt) ąĮąĄ ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąŠą▒ąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ąĮąŠą┐ąŠą║ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĮąĄ ą▒čāą┤čāčé ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ąĖ. ąĢčüą╗ąĖ ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ ą║ąĮąŠą┐ą║ąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĮąĄ ą▒čŗą╗ąĖ ąĮą░ąČą░čéčŗ ą┤ąŠ ąĖčüč鹥č湥ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą╝ą░čüą║ąĖ, č鹊 ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ąĮą░čćą░ą╗čā čŹč鹊ą╣ ą┐čĆąŠčåąĄą┤čāčĆčŗ.
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēčāčÄ ą┐čĆąŠčåąĄą┤čāčĆčā ą┤ą╗čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ:
1. ą×ą┐čĆąĄą┤ąĄą╗ąĖčéčīčüčÅ, ą║ą░ą║ąĖąĄ ą║ąĮąŠą┐ą║ąĖ ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ ą▓ čĆąĄą│ąĖčüčéčĆčŗ UNLOCK1 ąĖ UNLOCK2 ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ą║ąĮąŠą┐ąŠą║ ąĖąĘ Key Event Table.
2. ąöąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čéą░ą╣ą╝ąĄčĆą░ ąŠčé UNLOCK1 ą┤ąŠ UNLOCK2 ą▓ą▓ąŠą┤ąŠą╝ ąČąĄą╗ą░ąĄą╝ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ čüąĄą║čāąĮą┤ą░čģ (ą┤ąŠą┐čāčüčéąĖą╝čŗ ąĘąĮą░č湥ąĮąĖčÅ ąŠčé 0 ą┤ąŠ 7 čüąĄą║čāąĮą┤) ą▓ ą┐ąŠą╗ąĄ ą▒ąĖčé [2:0] čĆąĄą│ąĖčüčéčĆą░ KP_LCK_TMR.
3. ąĢčüą╗ąĖ ąĮčāąČąĮą░ ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (čüą╝. ą┤ą░ą╗ąĄąĄ čüąĄą║čåąĖčÄ "Keypad Lock Interrupt Mask Timer"), č鹊 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ą▓ąĄą┤ąĄąĮą░ ąČąĄą╗ą░ąĄą╝ą░čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 0 ą┤ąŠ 31 čüąĄą║čāąĮą┤) ą▓ ą┐ąŠą╗ąĄ ą▒ąĖčé [7:3] čĆąĄą│ąĖčüčéčĆą░ KP_LCK_TMR.
4. ąÜąŠą│ą┤ą░ čģąŠčüčé ą│ąŠč鹊ą▓ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą║ą╗ą░ą▓ąĖą░čéčāčĆčā, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī 1 ą▓ ą▒ąĖčé K_LCK_EN bit (BIT6) čĆąĄą│ąĖčüčéčĆą░ KEY_LCK_EC. ąŁč鹊 ą┤ąĄą╣čüčéą▓ąĖąĄ ąĘą░ą▒ą╗ąŠą║ąĖčĆčāąĄčé ą║ą╗ą░ą▓ąĖą░čéčāčĆčā.
5. ąĢčüą╗ąĖ čģąŠčüčéčā ąĮą░ą┤ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą║ą╗ą░ą▓ąĖą░čéčāčĆčā (ą▒ąĄąĘ ąĮą░ąČą░čéąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĮčāąČąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ąĮąŠą┐ąŠą║), ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī 0 ą▓ ą▒ąĖčé K_LCK_EN bit (BIT6) čĆąĄą│ąĖčüčéčĆą░ KEY_LCK_EC. ąŁč鹊 ą┤ąĄą╣čüčéą▓ąĖąĄ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčé ą║ą╗ą░ą▓ąĖą░čéčāčĆčā.
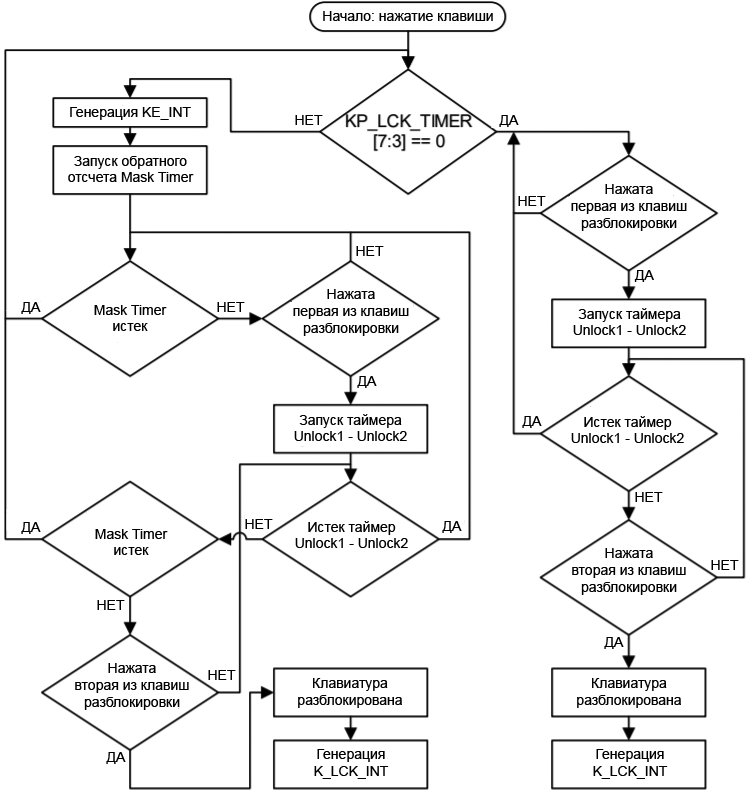
ąĀąĖčü. 20. ąÉą╗ą│ąŠčĆąĖčéą╝ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ.
Keypad Lock Interrupt Mask Timer. ążčāąĮą║čåąĖčÅ Keypad Lock/Unlock ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TCA8418 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┐čĆąĄą║čĆą░čéąĖčéčī ą│ąĄąĮąĄčĆą░čåąĖčÄ čüąŠą▒čŗčéąĖą╣ ą║ąĮąŠą┐ąŠą║ ą┐čāč鹥ą╝ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ąĪ čŹčéąĖą╝ čüą▓čÅąĘą░ąĮą░ čäčāąĮą║čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (interrupt mask timer) ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ąŠąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░ ąŠą┤ąĮą░ ą┐ąĄčĆą▓ą░čÅ ą║ą╗ą░ą▓ąĖčłą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ą×ą▒čŗčćąĮąŠąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ - ą┤ą░čéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┐ąŠąĮčÅčéčī, čćč鹊 ą┐čĆąĖą▒ąŠčĆ ąĮąĄ ąĘą░ą▓ąĖčü, ą┐čĆąŠčüč鹊 ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐čāč鹥ą╝ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąŠą┤čüą▓ąĄčéą║ąĖ LCD ąĖ/ąĖą╗ąĖ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą║ą╗ą░ą▓ąĖą░čéčāčĆčā). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊čé interrupt mask timer ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ ą▓čĆąĄą╝ąĄąĮąĖ.
ąĀą░ąĘčĆąĄčłą░ąĄčéčüčÅ interrupt mask timer ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ ą▒ąĖčé [7:3] čĆąĄą│ąĖčüčéčĆą░ KP_LCK_TIMER. ąŚąĮą░č湥ąĮąĖąĄ ą▓ čŹč鹊ą╝ ą┐ąŠą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒čŗą╝ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0 ą┤ąŠ 31 čüąĄą║čāąĮą┤ (ąĘąĮą░č湥ąĮąĖąĄ 0 ąĘą░ą┐čĆąĄčéąĖčé čŹčéčā čäčāąĮą║čåąĖčÄ interrupt mask). ąÜąŠą│ą┤ą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░, ąĖ interrupt mask timer čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, č鹊 čŹč鹊 čĆą░ąĘčĆąĄčłąĖčé čäčāąĮą║čåąĖčÄ čéą░ą╣ą╝ąĄčĆą░ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąŁčéą░ ą╝ą░čüą║ą░ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ą×ą▒čŗčćąĮąŠ čŹčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąŠą▓ą╝ąĄčüčéąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ Keypad Lock/Unlock, čćč鹊ą▒čŗ ąĘą░ąČąĄčćčī 菹║čĆą░ąĮ LCD ąĖ ą▓čŗą▓ąĄčüčéąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ "ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░". ą¤čĆąŠčēąĄ ą▓čüąĄą│ąŠ ąŠą▒čŖčÅčüąĮąĖčéčī čĆą░ą▒ąŠčéčā čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ. ą¤čĆąĄą┤čüčéą░ą▓ąĖą╝ čüąĄą▒ąĄ ą╝ąŠą▒ąĖą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čü 菹║čĆą░ąĮąŠą╝ LCD, ą┐ąŠą┤čüą▓ąĄčéą║ą░ ą║ąŠč鹊čĆąŠą│ąŠ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ 10 ą┐čĆąĄą║čĆą░čēąĄąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ). ą×ą▒čŗčćąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čüąĮąŠą▓ą░ ą▓ą║ą╗čÄčćąĖčé ą┐ąŠą┤čüą▓ąĄčéą║čā LCD. ąæąĄąĘ čäčāąĮą║čåąĖąĖ interrupt mask timer ą║ąŠą│ą┤ą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ąĮąĄčæ ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ, ąĖ ą┐ąŠą┤čüą▓ąĄčéą║ą░ 菹║čĆą░ąĮą░ ąĮąĄ ą▓ą║ą╗čÄčćąĖčéčüčÅ. ąöą╗čÅ čĆą░čüčüą╝ąŠčéčĆąĄąĮąĖčÅ ą┐čĆąĖą╝ąĄčĆą░ ąĮąĖąČąĄ čüą╝. ą░ą╗ą│ąŠčĆąĖčéą╝ ąĮą░ čĆąĖčü. 20:
1. ą¤ąŠčüą║ąŠą╗čīą║čā ą┐ąŠą┤čüą▓ąĄčéą║ą░ ą▓čŗą║ą╗čÄčćąĖčéčüčÅ č湥čĆąĄąĘ 10 čüąĄą║čāąĮą┤, ąĄčüą╗ąĖ ąĮąĄ ą┐ąŠčüčéčāą┐ą░čÄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, interrupt mask timer (KP_LCK_TIMER[7:3]) ą┐ąŠą╗čāčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ 10 čüąĄą║čāąĮą┤. ąŚą░č鹥ą╝ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ.
2. ąÜąŠą│ą┤ą░ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ą┐ąĄčĆą▓ąŠąĄ ąĮą░ąČą░čéąĖąĄ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TCA8418 ą┐ąŠčłą╗ąĄčé čģąŠčüčéčā ąŠą┤ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, čģąŠčüčé ąĘą░ą┐čāčüčéąĖčéčüčÅ ąĖ ąĮą░čćąĮąĄčé ąŠą▒čĆą░čéąĮčŗą╣ ąŠčéčüč湥čé 10 čüąĄą║čāąĮą┤.
3. ąĢčüą╗ąĖ ą▓ č鹥č湥ąĮąĖąĄ 10 čüąĄą║čāąĮą┤ ąĮąĄ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░ čéčĆąĄą▒čāąĄą╝ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, ąĮąĖą║ą░ą║ąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čģąŠčüčéčā ą┐ąŠčüčŗą╗ą░čéčīčüčÅ ąĮąĄ ą▒čāą┤čāčé, ąĖ ą┐ąŠą┤čüą▓ąĄčéą║ą░ čüąĮąŠą▓ą░ ą▓čŗą║ą╗čÄčćąĖčéčüčÅ.
4. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĖčüč鹥č湥čé ą▓čĆąĄą╝čÅ 10 čüąĄą║čāąĮą┤ čéą░ą╣ą╝ąĄčĆą░, ąĄčüą╗ąĖ ą▒čŗą╗ąŠ ą┤čĆčāą│ąŠąĄ ąĮą░ąČą░čéąĖąĄ ąĮą░ ą║ąĮąŠą┐ą║čā, ą║ąŠą│ą┤ą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ (ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą║ąŠčĆčĆąĄą║čéąĮą░čÅ ą╗ąĖ čŹč鹊 ą║ąĮąŠą┐ą║ą░ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, ąĖą╗ąĖ ąĮąĄčé), ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤čĆčāą│ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (ąĖ č鹊ą╗čīą║ąŠ ąŠąĮąŠ ąŠą┤ąĮąŠ), ąĖ 10-čüąĄą║čāąĮą┤ąĮčŗą╣ ąŠą▒čĆą░čéąĮčŗą╣ ąŠčéčüč湥čé ąĮą░čćąĮąĄčéčüčÅ čüąĮąŠą▓ą░.
ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ Control-Alt-Delete. ąÆą╝ąĄčüč鹥 čü ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ąŠą▒čŗčćąĮčŗčģ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮčŗčģ ąĮą░ąČą░čéąĖą╣ TCA8418 ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čäčāąĮą║čåąĖčÄ ąĮą░ąČą░čéąĖčÅ ą║ą╗ą░ą▓ąĖčł Ctrl-Alt-Del (CAD). ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čģąŠčüčéčā čĆą░čüą┐ąŠąĘąĮą░čéčī čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ ą║ą╗ą░ą▓ąĖčł ąĖ ąŠčéčĆąĄą░ą│ąĖčĆąŠą▓ą░čéčī ąĮą░ ąĮąĄčæ ą┤ąŠą╗ąČąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝. TCA8418 čĆą░čüą┐ąŠąĘąĮą░ąĄčé ąĮą░ąČą░čéąĖąĄ Ctrl-Alt-Del, ąĄčüą╗ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▒čŗą╗ąĖ ąĮą░ąČą░čéčŗ ą║ąĮąŠą┐ą║ąĖ 1, 11 ąĖ 21. ąŁčéąĖ ą║ąĮąŠą┐ą║ąĖ čüą▓čÅąĘą░ąĮčŗ čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą║ą╗ą░ą▓ąĖčł, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓ Key Event Table. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹčéą░ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą║ąĮąŠą┐ąŠą║, ą║ąŠč鹊čĆą░čÅ ą▓čŗąĘčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ CAD, ąĮąĄ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ, čéą░ą║ čćč鹊 ą┤ą╗čÅ ąĮąĄčæ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮą░ąĘąĮą░čćą░čÄčéčüčÅ ą║ąĮąŠą┐ą║ąĖ 1, 11 ąĖ 21. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čüąĄą║čåąĖčÄ "CAD Interrupt Errata".
ąÆčŗčģąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ąĮąŠąČą║ą░ ~INT). ą¤ąŠ ą╗čÄą▒ąŠą╝čā ąĮą░čĆą░čüčéą░ąĮąĖčÄ ąĖą╗ąĖ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░, ąĮą░čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ čĆąĄąČąĖą╝ ą▓ą▓ąŠą┤ą░, ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ą¤ąŠčüą╗ąĄ ą▓čĆąĄą╝ąĄąĮąĖ tiv čüąĖą│ąĮą░ą╗ ~INT čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝. ąĪą▒čĆąŠčü čüčģąĄą╝čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą┐ąŠčĆč鹥 ą╝ąĄąĮčÅčÄčéčüčÅ ąĮą░ čüą▓ąŠąĄ ąĖčüčģąŠą┤ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠčĆčéą░, ą║ąŠč鹊čĆčŗą╣ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąĪą▒čĆąŠčü ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ąĄ čüčćąĖčéčŗą▓ą░ąĮąĖčÅ ąĮą░ ą▒ąĖč鹥 ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (ACK) ąĖą╗ąĖ ąĮą░ ą▒ąĖč鹥 ąŠčéčüčāčéčüčéą▓ąĖčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (NACK) ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ąĮąĄą│ąŠ čäčĆąŠąĮčéą░ čüąĖą│ąĮą░ą╗ą░ SCL. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ąŠąĘąĮąĖą║ą╗ąĖ ą▓ ą╝ąŠą╝ąĄąĮčéą░ čéą░ą║č鹊ą▓ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ ą▒ąĖčéą░ ACK ąĖą╗ąĖ NACK, ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠč鹥čĆčÅąĮčŗ (ąĖą╗ąĖ ą▒čŗčéčī ąŠč湥ąĮčī ą║ąŠčĆąŠčéą║ąĖą╝ąĖ ą┐ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ) ąĖąĘ-ąĘą░ čüą▒čĆąŠčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą│ąŠ ąĖą╝ą┐čāą╗čīčüą░. ąÜą░ąČą┤ąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ I/O ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą║ą░ą║ ~INT.
ą¦č鹥ąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī ą▓ ą┤čĆčāą│ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čüčģąĄą╝čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖ ąĮąŠąČą║ą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą║ą░ą║ ą▓čŗčģąŠą┤, ąĮąĄ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ą¤ąĄčĆąĄą▓ąŠą┤ ąĮąŠąČą║ąĖ I/O ąĖąĘ čĆąĄąČąĖą╝ą░ ą▓čŗčģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ ą▓čģąŠą┤ą░ ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī ą╗ąŠąČąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĄčüą╗ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠą╝čā čĆąĄą│ąĖčüčéčĆą░ ą▓čģąŠą┤ą░ ą┐ąŠčĆčéą░.
ąØąŠąČą║ą░ ą▓čŗčģąŠą┤ą░ ~INT čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą║ą░ą║ ąŠčéą║čĆčŗčéčŗą╣ čüč鹊ą║, ąĖ čéčĆąĄą▒čāąĄčé ą▓ąĄčĆčģąĮąĄą│ąŠ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĄą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ (pull-up) ąĮą░ čłąĖąĮčā ą┐ąĖčéą░ąĮąĖčÅ VCC, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗ ~INT ą┐ąŠą┤ą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ąĮą░ čģąŠčüčé, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ SCL ą┤ą╗čÅ TCA8418, č鹊 ąĮąŠąČą║ą░ ~INT ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéą░ ą║ VCC. ąĢčüą╗ąĖ ąĮąĄčé, č鹊 ąĮąŠąČą║ą░ ~INT ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéą░ ą║ VCC.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 50 ą╝ą║čü. TCA8418 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüąĮčÅčéčī čüąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ č湥čĆąĄąĘ 50 ą╝ą║čü, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąÜąŠą│ą┤ą░ ą▒ąĖčé INT_CFG ą▓ čĆąĄą│ąĖčüčéčĆąĄ 0x01 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą╗čÄą▒ą░čÅ ą┐ąŠą┐čŗčéą║ą░ ąŠčćąĖčüčéąĖčéčī ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĮąŠąČą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüąĮčÅčéąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ č湥čĆąĄąĘ 50 ą╝ą║čü. ąÜąŠą│ą┤ą░ ą▒ąĖčé INT_CFG ąŠčćąĖčēąĄąĮ ~INT ąŠčüčéą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝, ąĄčüą╗ąĖ čģąŠčüčé ą┐čŗčéą░ąĄčéčüčÅ ąŠčćąĖčüčéąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą▒čŗčćąĮąŠ ą┐ąŠą╗ąĄąĘąĮą░ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ firmware čģąŠčüčéą░ ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤čā.
[ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ čĆąĄąČąĖą╝čŗ TCA8418]
Power-On Reset (POR). ąÜąŠą│ą┤ą░ ą┐ąŠą┤ą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ VCC (ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ VCC ąĮą░čĆą░čüčéą░ąĄčé, ąĮą░čćąĖąĮą░čÅčüčī ąŠčé 0V), ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ čüčģąĄą╝ą░ čüą▒čĆąŠčüą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ (power-on reset) čāą┤ąĄčƹȹĖą▓ą░ąĄčé TCA8418 ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░, ą┐ąŠą║ą░ čāčĆąŠą▓ąĄąĮčī VCC ąĮąĄ ą┤ąŠčüčéąĖą│ąĮąĄčé VPORR. ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé čüąŠčüč鹊čÅąĮąĖąĄ čüą▒čĆąŠčüą░ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ, ąĖ čĆąĄą│ąĖčüčéčĆčŗ TCA8418 ąĖ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖčÅ I2C/SMBus ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ą▓ čüą▓ąŠąĖ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ VCC ą┤ąŠą╗ąČąĮąŠ ąŠą┐čāčüčéąĖčéčīčüčÅ ąĮąĖąČąĄ VPORF ąĖ ą┐ąŠą┤ąĮčÅčéčīčüčÅ ąŠą┐čÅčéčī ą┤ąŠ čĆą░ą▒ąŠč湥ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ąĮąŠą▓čŗą╣ čåąĖą║ą╗ čüą▒čĆąŠčüą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ. ąĪą╝. čüąĄą║čåąĖčÄ "ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ ąĖčüč鹊čćąĮąĖą║čā ą┐ąĖčéą░ąĮąĖčÅ" ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ą║ čüą▒čĆąŠčüčā ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ.
Powered (Key Scan Mode). TCA8418 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ GPI ąŠčé ąŠą┤ąĖąĮąŠčćąĮčŗčģ ą║ąĮąŠą┐ąŠą║, ąĖą╗ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą▓ čĆąĄąČąĖą╝ąĄ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ą░čéčĆąĖčåčŗ ą║ąĮąŠą┐ąŠą║. ąÆ čĆąĄąČąĖą╝ąĄ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čüčāčēąĄčüčéą▓čāąĄčé 2 čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ - Idle Key Scan Mode ąĖ Active Key Scan Mode.
Idle Key Scan Mode. ąÜą░ą║ č鹊ą╗čīą║ąŠ TCA8418 ą▒čŗą╗ą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą╝ą░čéčĆąĖčåčā ą║ąĮąŠą┐ąŠą║, ąŠąĮą░ ą▓čģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle mode) ą║ąŠą│ą┤ą░ ąĮąĄ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░ ąĮąĖ ąŠą┤ąĮą░ ąĖąĘ ą║ąĮąŠą┐ąŠą║. ąÆčüąĄ čüč鹊ą╗ą▒čåčŗ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą┐čŗąĄ ą║ą░ą║ čćą░čüčéčī ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, ą┐ąĄčĆąĄą▓ąŠą┤čÅčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ ą▓ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0, ąĖ ą▓čüąĄ čüčéčĆąŠą║ąĖ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą║ą░ą║ čćą░čüčéčī č鹊ą╣ ąČąĄ ą╝ą░čéčĆąĖčåčŗ, ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤čŗ, čü čĆą░ąĘąĄčłąĄąĮąĮčŗą╝ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ pullup-čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ. ąÆąŠ ą▓čĆąĄą╝čÅ idle mode ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ, čéą░ą║ čćč鹊 ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ą░čÅ ą╝ąŠčēąĮąŠčüčéčī ąŠčé ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąŠč湥ąĮčī ą╝ą░ą╗ąŠą╣. ąÆ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąŠąČąĖą┤ą░ąĄčé ąĮą░ąČą░čéąĖąĄ ąĮą░ ą║ąĮąŠą┐ą║čā ą▓ ą╝ą░čéčĆąĖčåąĄ.
Active Key Scan Mode. ąÜąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TCA8418 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ idle key scan, ąŠąĮ ąŠąČąĖą┤ą░ąĄčé ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ąĮąŠą┐ą║čā. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą║ąĮąŠą┐ą║ą░ ą▓ ą╝ą░čéčĆąĖčåąĄ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░, ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čģąŠą┤ąĄ čüčéčĆąŠą║ąĖ (ROW), čüąŠąŠčéą▓ąĄčéčüą▓čāčÄčēąĄą╝ ą║ąĮąŠą┐ą║ąĄ, čĆą░ąĘą▒čāą┤ąĖčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, ąĖ TCA8418 ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ active key scan mode. ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé TCA8418 ąĮą░čćąĮąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą░ą╗ą│ąŠčĆąĖčéą╝ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ą░ą║ą░čÅ ą║ąĮąŠą┐ą║ą░ ąĮą░ąČą░čéą░, ąĖ čŹč鹊čé ąČąĄ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą┐ąŠą┤ą░ą▓ą╗ąĄąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ ą║ąŠąĮčéą░ą║č鹊ą▓ (debouncing). ąÜąŠą│ą┤ą░ ą▓čüąĄ ą║ąĮąŠą┐ą║ąĖ ąŠčéą┐čāčēąĄąĮčŗ, TCA8418 ą▓ąŠąĘą▓čĆą░čéąĖčéčüčÅ ą▓ idle key scan mode.
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ]
TCA8418 čüąĮą░ą▒ąČąĄąĮ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C, ąĖ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ (slave) čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čłąĖąĮčŗ I2C (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čģąŠčüčéą░, čāčüčéčĆąŠą╣čüčéą▓ąŠ master I2C). ą¦ąĄčĆąĄąĘ I2C ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TCA8418 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖąĄ. ąÜą░ąČą┤ąŠąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ I2C ąĖą╝ąĄąĄčé čüą▓ąŠą╣ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą░ą┤čĆąĄčü, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ ą║ą░ąČą┤ąŠą╝čā ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ I2C ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ (ą║ ąŠą┤ąĮąŠą╣ čłąĖąĮąĄ I2C ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓).
ążąĖąĘąĖč湥čüą║ąĖ ąĖąĮč鹥čĆč乥ą╣čü I2C čüąŠčüč鹊ąĖčé ąĖąĘ 2 čüąĖą│ąĮą░ą╗ąŠą▓ - ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ čéą░ą║čéčŗ (SCL) ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (SDA). ą×ą▒ą░ čŹčéąĖčģ čüąĖą│ąĮą░ą╗ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéčŗ ą║ čāčĆąŠą▓ąĮčÄ ą┐ąĖčéą░ąĮąĖčÅ VCC č湥čĆąĄąĘ pull-up čĆąĄąĘąĖčüč鹊čĆčŗ. ąØąŠą╝ąĖąĮą░ą╗ čŹčéąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ą░čĆą░ąĘąĖčéąĮąŠą╣ ąĄą╝ą║ąŠčüčéčīčÄ čüąĖą│ąĮą░ą╗ąŠą▓ I2C ąĖ čüą║ąŠčĆąŠčüčéčīčÄ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ čłąĖąĮąĄ (ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÄ ąĮąŠą╝ąĖąĮą░ą╗ąŠą▓ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ą┐ąŠą┤čéčÅąČą║ąĖ čüą╝. ą┤ą░čéą░čłąĖčé SLVA689 [2]). ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čłąĖąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle). ąĪąŠčüč鹊čÅąĮąĖąĄ idle čłąĖąĮčŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą║ą░ą║ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ąĮą░čģąŠąČą┤ąĄąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╣ SDA ąĖ SCL ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čāčüčéą░ąĮąŠą▓ąĖą╗ąĖčüčī ą▓ ą╗ąŠą│. 1 ą┐ąŠčüą╗ąĄ čüąĖą│ąĮą░ą╗ą░ STOP.
ąöą╗čÅ ą┤ąŠčüčéčāą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ master ą║ čāčüčéčĆąŠą╣čüčéą▓čā slave ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēą░čÅ ąŠą▒čēą░čÅ ą┐čĆąŠčåąĄą┤čāčĆą░.
1. ąĢčüą╗ąĖ master ą┤ąŠą╗ąČąĄąĮ ą┐ąŠčüą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą║ slave:
ŌĆō Master ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ START ąĖ ąŠą▒čĆą░čēą░ąĄčéčüčÅ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā slave ą┐ąĄčĆąĄą┤ą░č湥ą╣ čāąĮąĖą║ą░ą╗čīąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░.
ŌĆō Master ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓čā slave, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé ą║ą░ąČą┤čŗą╣ ą▒ą░ą╣čé čüąĖą│ąĮą░ą╗ąŠą╝ ACK.
ŌĆō Master ąĘą░ą▓ąĄčĆčłą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ą░ STOP.
2. ąĢčüą╗ąĖ master ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą╗čāčćąĖčéčī (ą┐čĆąŠčćąĖčéą░čéčī) ą┤ą░ąĮąĮčŗąĄ ąĖąĘ slave:
ŌĆō Master ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ START ąĖ ąŠą▒čĆą░čēą░ąĄčéčüčÅ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā slave ą┐ąĄčĆąĄą┤ą░č湥ą╣ čāąĮąĖą║ą░ą╗čīąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░.
ŌĆō Master ą┐ąŠčüčŗą╗ą░ąĄčé ąĮąŠą╝ąĄčĆ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ slave, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ.
ŌĆō Master ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąŠčé slave, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé ą║ą░ąČą┤čŗą╣ ą▒ą░ą╣čé čüąĖą│ąĮą░ą╗ąŠą╝ ACK.
ŌĆō Master ąĘą░ą▓ąĄčĆčłą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ąŠą▓ NACK ąĖ STOP.
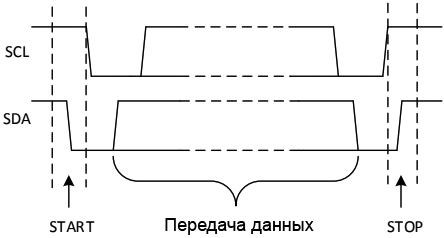
ąĀąĖčü. 21. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ START ąĖ STOP.
ąóčĆą░ąĮąĘą░ą║čåąĖąĖ čłąĖąĮčŗ. ąöą░ąĮąĮčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čéčŗčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą▓ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą┐čĆąĖąĮčÅčéčŗ ąŠčé ąĮąĖčģ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ąĖą╗ąĖ čćč鹥ąĮąĖčÅ ąĖčģ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓.
ąĀąĄą│ąĖčüčéčĆčŗ ą╝ąŠąČąĮąŠ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ą║ą░ą║ čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ slave, ą▓ ą║ąŠč鹊čĆčŗčģ čüąŠą┤ąĄčƹȹĖčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ - ą╗ąĖą▒ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ, ą╗ąĖą▒ąŠ ą║ą░ą║ą░čÅ-č鹊 ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ąĮčāąČąĮą░ čāčüčéčĆąŠą╣čüčéą▓čā master. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ master ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą▓ čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ, čćč鹊ą▒čŗ ąĖąĮčüčéčĆčāą║čéąĖčĆąŠą▓ą░čéčī slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
ąźąŠčéčÅ ąĮą░ą╗ąĖčćąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ - ąŠą▒čŗčćąĮąŠąĄ ą┤ąĄą╗ąŠ ą┤ą╗čÅ slave-čāčüčéčĆąŠą╣čüčéą▓ I2C, čüą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ąĮąĄ ą▓čüąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ I2C čüąĮą░ą▒ąČąĄąĮčŗ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ. ąØąĄą║ąŠč鹊čĆąŠąĄ ąŠč湥ąĮčī ą┐čĆąŠčüčéčŗąĄ, ąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé č鹊ą╗čīą║ąŠ 1 čĆąĄą│ąĖčüčéčĆ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ ąĮą░ą┐čĆčÅą╝čāčÄ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ slave-ą░ą┤čĆąĄčüą░ I2C, ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą░ą┤čĆąĄčüą░čåąĖčÅ čåąĄą╗ąĄą▓ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąĮąĄ ąĮčāąČąĮą░. ą¤čĆąĖą╝ąĄčĆąŠą╝ čéą░ą║ąŠą│ąŠ ąŠą┤ąĮąŠčĆąĄą│ąĖčüčéčĆąŠą▓ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé čüą╗čāąČąĖčéčī 8-ą▒ąĖčéąĮčŗą╣ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆ, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ I2C, ąĖą╗ąĖ 菹╗ąĄą║čéčĆąŠąĮąĮčŗą╣ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ.
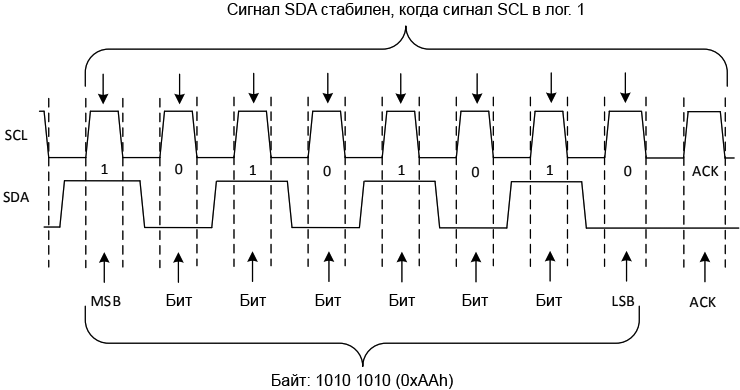
ąĀąĖčü. 22. ąóčĆą░ąĮąĘą░ą║čåąĖčÅ ąĮą░ čłąĖąĮąĄ I2C (ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠč鹊ą║ą░ ą▒ąĖčé).
ą×ą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ. ąöą╗čÅ ąĘą░ą┐ąĖčüąĖ ą┐ąŠ čłąĖąĮąĄ I2C, čāčüčéčĆąŠą╣čüčéą▓ąŠ master ąŠčéą┐čĆą░ą▓ąĖčé čüąĖą│ąĮą░ą╗ START ą┤ą░ą╗ąĄąĄ slave-ą░ą┤čĆąĄčü ą▓ą╝ąĄčüč鹥 čü ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ąĄą│ąŠ ą▒ąĖč鹊ą╝, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0 (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ R/W ą▒ąĖčé, ąĄą│ąŠ 0 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąĮą░čćą░ą╗ąŠ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ slave ą┐ąŠčüčŗą╗ą░ąĄčé ą▓ ąŠčéą▓ąĄčé ą▒ąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ACK, ąĖ master ąĘą░č鹥ą╝ ąŠčéą┐čĆą░ą▓ąĖčé ą░ą┤čĆąĄčü ąĮčāąČąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░, ą║čāą┤ą░ ąŠąĮ čģąŠč湥čé ąĘą░ą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ slave čüąĮąŠą▓ą░ ą▓čŗą┤ą░čüčé ą▓ ąŠčéą▓ąĄčé ą▒ąĖčé ACK, ą┤ą░ą▓ą░čÅ ą┐ąŠąĮčÅčéčī čāčüčéčĆąŠą╣čüčéą▓čā master, čćč鹊 ąŠąĮąŠ ą│ąŠč鹊ą▓ąŠ ą║ ą┐čĆąĖąĄą╝čā ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ master ąĮą░čćąĮąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ slave, ą┐ąŠą║ą░ ąĮąĄ ąŠčéą┐čĆą░ą▓ąĖčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ (ą║ąŠč鹊čĆčŗąĄ ąĖąĮąŠą│ą┤ą░ ą╝ąŠą│čāčé ą▒čŗčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĮąĖą╝ ą▒ą░ą╣č鹊ą╝). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ master ąĘą░ą▓ąĄčĆčłąĖčé ą┐ąĄčĆąĄą┤ą░čćčā ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ą░ STOP.
ąØą░ čĆąĖčü. 23 ąĖ 24 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ąĘą░ą┐ąĖčüąĖ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ą▓ čĆąĄą│ąĖčüčéčĆ.
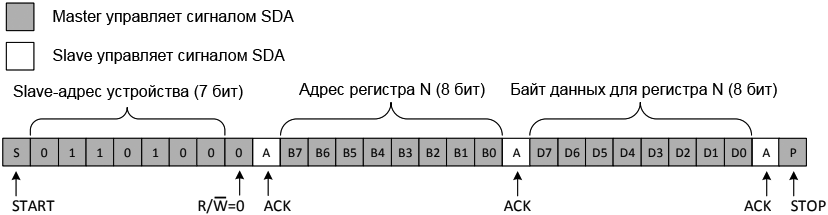
ąĀąĖčü. 23. ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ.

ąĀąĖčü. 24. ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (01h).
ą×ą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ. ą¦č鹥ąĮąĖąĄ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮąŠ ą┐ąŠčģąŠąČąĄ ąĮą░ ąĘą░ą┐ąĖčüčī, ąĮąŠ ąĘą┤ąĄčüčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čłą░ą│ąĖ. ą¦č鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī ąĖąĘ slave, čāčüčéčĆąŠą╣čüčéą▓ąŠ master čüąĮą░čćą░ą╗ą░ ą┤ąŠą╗ąČąĮąŠ čāą║ą░ąĘą░čéčī ą┤ą╗čÅ slave, ą║ą░ą║ąŠą╣ čĆąĄą│ąĖčüčéčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣ ąĘą░ą┐ąĖčüąĖ ą░ą┤čĆąĄčüą░ ąĮčāąČąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ (ąŠčéą┐čĆą░ą▓ą║ą░ slave-ą░ą┤čĆąĄčüą░ čü ą▒ąĖč鹊ą╝ R/W = 0, ąĘą░č鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ą░ ą░ą┤čĆąĄčüą░ čćąĖčéą░ąĄą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░). ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ slave ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčé ACK ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░, čāčüčéčĆąŠą╣čüčéą▓ąŠ master čüąĮąŠą▓ą░ ą┐ąŠčłą╗ąĄčé čüąĖą│ąĮą░ą╗ START (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗ REPEATED START), ąĘą░č鹥ą╝ slave-ą░ą┤čĆąĄčü, ąĮąŠ ąĘą┤ąĄčüčī ą▒ąĖčé R/W = 1 (ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąŠą┐ąĄčĆą░čåąĖčÄ čćč鹥ąĮąĖčÅ). ąŻčüčéčĆąŠą╣čüčéą▓ąŠ slave ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčé čüąĖą│ąĮą░ą╗ąŠą╝ ACK ąĘą░ą┐čĆąŠčü ąĮą░ čćč鹥ąĮąĖąĄ, master ąŠčüą▓ąŠą▒ąŠą┤ąĖčé čüąĖą│ąĮą░ą╗ SDA ąĖ ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čéą░ą║čéčŗ SCL, ą┐ąŠ ą║ąŠč鹊čĆčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ą▒čāą┤ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░. ąÆąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą╣ čćą░čüčéąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąĄąĮčÅčÄčéčüčÅ ą╝ąĄčüčéą░ą╝ąĖ - master čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé ą║ą░ą┤čĆ ą┤ą░ąĮąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą╝ ACK, ą░ slave čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ, ąĖ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čéą░ą║čéą░ą╝ SCL ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ master ąĮąĄ ąŠčüčéą░ąĮąŠą▓ąĖčé ą┐ąĄčĆąĄą┤ą░čćčā čüąĖą│ąĮą░ą╗ą░ą╝ąĖ NACK ąĖ STOP.
ąĀąĖčü. 25 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ slave-čāčüčéčĆąŠą╣čüčéą▓ą░.
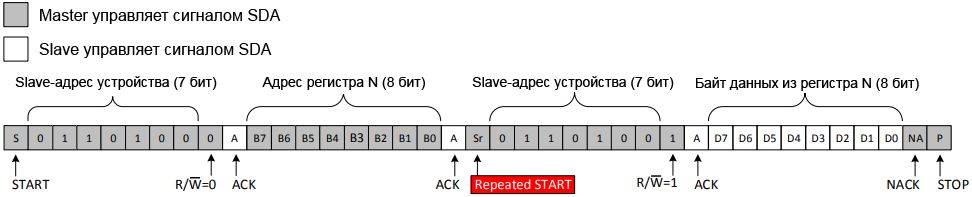
ąĀąĖčü. 25. ą¦č鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░.
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TCA8418 ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ slave-ą░ą┤čĆąĄčü 0x34 (0110100), ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 8.
ąóą░ą▒ą╗ąĖčåą░ 8. ąÉą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ TCA8418.
| ąæą░ą╣čé |
ąæąĖčé |
| 7 (MSB) |
6 |
5 |
4 |
3 |
2 |
1 |
0 (LSB) |
| Slave-ą░ą┤čĆąĄčü I2C |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
R/W |
ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé slave-ą░ą┤čĆąĄčüą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąŠą┐ąĄčĆą░čåąĖčÄ (čćč鹥ąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī). ąøąŠą│. 1 ą▓čŗą▒ąĖčĆą░ąĄčé čćč鹥ąĮąĖąĄ (Read), ą╗ąŠą│. 0 ąĘą░ą┐ąĖčüčī (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ R/W ą▒ąĖčé).
[ąÜą░čĆčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓]
Control Register ąĖ Command Byte. ąŚą░ čāčüą┐ąĄčłąĮčŗą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄą╝ ą▒ą░ą╣čéą░ ą░ą┤čĆąĄčüą░ master ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ (Command Byte), ą║ąŠč鹊čĆčŗą╣ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (Control Register) ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ TCA8418. Command Byte ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ąŠą╣ čĆąĄą│ąĖčüčéčĆ ą▒čāą┤ąĄčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣. ąÆčüąĄ čĆąĄą│ąĖčüčéčĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ master (ąŠą▒čŗčćąĮąŠ čŹč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ).
ąóą░ą▒ą╗ąĖčåą░ 9 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ąĖ ąĖčģ ą║čĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čā ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čĆą░ą▓ąĮąŠ 0.
ąóą░ą▒ą╗ąĖčåą░ 9. ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ TCA8418.
| ąÉą┤čĆ. |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x00 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
|
|
|
|
|
|
|
|
|
| 0x01 |
CFG |
ąĀąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čģąŠčüčéą░) |
AI |
GPI_E_CGF |
OVR_FLOW_M |
INT_CFG |
OVR_FLOW_IEN |
K_LCK_IEN |
GPI_IEN |
KE_IEN |
| 0x02 |
INT_STAT |
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ |
N/A
0 |
N/A
0 |
N/A
0 |
CAD_INT |
OVR_FLOW_INT |
K_LCK_INT |
GPI_INT |
K_ INT |
| 0x03 |
KEY_LCK_EC |
ąĀąĄą│ąĖčüčéčĆ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĖ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣ |
N/A
0 |
K_LCK_EN |
LCK2 |
LCK1 |
KLEC3 |
KLEC2 |
KLEC1 |
KLEC0 |
| 0x04 |
KEY_EVENT_A |
ąĀąĄą│ąĖčüčéčĆ A čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEA7
0 |
KEA6
0 |
KEA5
0 |
KEA4
0 |
KEA3
0 |
KEA2
0 |
KEA1
0 |
KEA0
0 |
| 0x05 |
KEY_EVENT_B |
ąĀąĄą│ąĖčüčéčĆ B čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEB7
0 |
KEB6
0 |
KEB5
0 |
KEB4
0 |
KEB3
0 |
KEB2
0 |
KEB1
0 |
KEB0
0 |
| 0x06 |
KEY_EVENT_C |
ąĀąĄą│ąĖčüčéčĆ C čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEC7
0 |
KEC6
0 |
KEC5
0 |
KEC4
0 |
KEC3
0 |
KEC2
0 |
KEC1
0 |
KEC0
0 |
| 0x07 |
KEY_EVENT_D |
ąĀąĄą│ąĖčüčéčĆ D čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KED7
0 |
KED6
0 |
KED5
0 |
KED4
0 |
KED3
0 |
KED2
0 |
KED1
0 |
KED0
0 |
| 0x08 |
KEY_EVENT_E |
ąĀąĄą│ąĖčüčéčĆ E čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEE7
0 |
KEE6
0 |
KEE5
0 |
KEE4
0 |
KEE3
0 |
KEE2
0 |
KEE1
0 |
KEE0
0 |
| 0x09 |
KEY_EVENT_F |
ąĀąĄą│ąĖčüčéčĆ F čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEF7
0 |
KEF6
0 |
KEF5
0 |
KEF4
0 |
KEF3
0 |
KEF2
0 |
KEF1
0 |
KEF0
0 |
| 0x0A |
KEY_EVENT_G |
ąĀąĄą│ąĖčüčéčĆ G čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEG7
0 |
KEG6
0 |
KEG5
0 |
KEG4
0 |
KEG3
0 |
KEG2
0 |
KEG1
0 |
KEG0
0 |
| 0x0B |
KEY_EVENT_H |
ąĀąĄą│ąĖčüčéčĆ H čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEH7
0 |
KEH6
0 |
KEH5
0 |
KEH4
0 |
KEH3
0 |
KEH2
0 |
KEH1
0 |
KEH0
0 |
| 0x0C |
KEY_EVENT_I |
ąĀąĄą│ąĖčüčéčĆ I čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEI7
0 |
KEI6
0 |
KEI5
0 |
KEI4
0 |
KEI3
0 |
KEI2
0 |
KEI1
0 |
KEI0
0 |
| 0x0D |
KEY_EVENT_J |
ąĀąĄą│ąĖčüčéčĆ J čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KEJ7
0 |
KEJ6
0 |
KEJ5
0 |
KEJ4
0 |
KEJ3
0 |
KEJ2
0 |
KEJ1
0 |
KEJ0
0 |
| 0x0E |
KP_LCK_TIMER |
ąóą░ą╣ą╝ąĄčĆ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ą░čāčéą░ ąŠąĮ ąĮą░ąČą░čéąĖčÅ ą┐ąĄčĆą▓ąŠą╣ ą║ąĮąŠą┐ą║ąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą┤ąŠ ąĮą░ąČą░čéąĖčÅ ą▓č鹊čĆąŠą╣ ą║ąĮąŠą┐ą║ąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ |
KL7 |
KL6 |
KL5 |
KL4 |
KL3 |
KL2 |
KL1 |
KL0 |
| 0x0F |
UNLOCK1 |
ąÜąĮąŠą┐ą║ą░ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ 1 |
UK1_7 |
UK1_6 |
UK1_5 |
UK1_4 |
UK1_3 |
UK1_2 |
UK1_1 |
UK1_0 |
| 0x10 |
UNLOCK2 |
ąÜąĮąŠą┐ą║ą░ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ 2 |
UK2_7 |
UK2_6 |
UK2_5 |
UK2_4 |
UK2_3 |
UK2_2 |
UK2_1 |
UK2_0 |
| 0x11 |
GPIO_INT_STAT1 |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ GPIO |
R7IS
0 |
R6IS
0 |
R5IS
0 |
R4IS
0 |
R3IS
0 |
R2IS
0 |
R1IS
0 |
R0IS
0 |
| 0x12 |
GPIO_INT_STAT2 |
C7IS
0 |
C6IS
0 |
C5IS
0 |
C4IS
0 |
C3IS
0 |
C2IS
0 |
C1IS
0 |
C0IS
0 |
| 0x13 |
GPIO_INT_STAT3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
C9IS
0 |
C8IS
0 |
| 0x14 |
GPIO_DAT_STAT1 |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ GPIO (ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ ąĮą░ą┤ąŠ ą┐čĆąŠčćąĖčéą░čéčī ą┤ą▓ą░ąČą┤čŗ) |
R7DS
0 |
R6DS
0 |
R5DS
0 |
R4DS
0 |
R3DS
0 |
R2DS
0 |
R1DS
0 |
R0DS
0 |
| 0x15 |
GPIO_DAT_STAT2 |
C7DS
0 |
C6DS
0 |
C5DS
0 |
C4DS
0 |
C3DS
0 |
C2DS
0 |
C1DS
0 |
C0DS
0 |
| 0x16 |
GPIO_DAT_STAT3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
C9DS
0 |
C8DS
0 |
| 0x17 |
GPIO_DAT_OUT1 |
ąÆčŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ GPIO |
R7DO
0 |
R6DO
0 |
R5DO
0 |
R4DO
0 |
R3DO
0 |
R2DO
0 |
R1DO
0 |
R0DO
0 |
| 0x18 |
GPIO_DAT_OUT2 |
C7DO
0 |
C6DO
0 |
C5DO
0 |
C4DO
0 |
C3DO
0 |
C2DO
0 |
C1DO
0 |
C0DO
0 |
| 0x19 |
GPIO_DAT_OUT3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
C9DO
0 |
C8DO
0 |
| 0x1A |
GPIO_INT_EN1 |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ GPIO |
R7IE
0 |
R6IE
0 |
R5IE
0 |
R4IE
0 |
R3IE
0 |
R2IE
0 |
R1IE
0 |
R0IE
0 |
| 0x1B |
GPIO_INT_EN2 |
C7IE
0 |
C6IE
0 |
C5IE
0 |
C4IE
0 |
C3IE
0 |
C2IE
0 |
C1IE
0 |
C0IE
0 |
| 0x1C |
GPIO_INT_EN3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
C9IE
0 |
C8IE
0 |
| 0x1D |
KP_GPIO1 |
ąÆčŗą▒ąŠčĆ keypad ąĖą╗ąĖ GPIO.
0: GPIO
1: ą╝ą░čéčĆąĖčåą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
ROW7
0 |
ROW6
0 |
ROW5
0 |
ROW4
0 |
ROW3
0 |
ROW2
0 |
ROW1
0 |
ROW0
0 |
| 0x1E |
KP_GPIO2 |
COL7
0 |
COL6
0 |
COL5
0 |
COL4
0 |
COL3
0 |
COL2
0 |
COL1
0 |
COL0
0 |
| 0x1F |
KP_GPIO3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
COL9
0 |
COL8
0 |
| 0x20 |
GPI_EM1 |
GPI event mode 1 |
ROW7
0 |
ROW6
0 |
ROW5
0 |
ROW4
0 |
ROW3
0 |
ROW2
0 |
ROW1
0 |
ROW0
0 |
| 0x21 |
GPI_EM2 |
GPI event mode 2 |
COL7
0 |
COL6
0 |
COL5
0 |
COL4
0 |
COL3
0 |
COL2
0 |
COL1
0 |
COL0
0 |
| 0x22 |
GPI_EM3 |
GPI event mode 3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
COL9
0 |
COL8
0 |
| 0x23 |
GPIO_DIR1 |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ GPIO.
0: ą▓čģąŠą┤
1: ą▓čŗčģąŠą┤ |
R7DD
0 |
R6DD
0 |
R5DD
0 |
R4DD
0 |
R3DD
0 |
R2DD
0 |
R1DD
0 |
R0DD
0 |
| 0x24 |
GPIO_DIR2 |
C7DD
0 |
C6DD
0 |
C5DD
0 |
C4DD
0 |
C3DD
0 |
C2DD
0 |
C1DD
0 |
C0DD
0 |
| 0x25 |
GPIO_DIR3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
C9DD
0 |
C8DD
0 |
| 0x26 |
GPIO_INT_LVL1 |
ąĪąŠą▒čŗčéąĖąĄ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤čā/čāčĆąŠą▓ąĮčÄ GPIO.
0: čüą┐ą░ą┤, ą╗ąŠą│. 0
1: čäčĆąŠąĮčé, ą╗ąŠą│. 1 |
R7IL
0 |
R6IL
0 |
R5IL
0 |
R4IL
0 |
R3IL
0 |
R2IL
0 |
R1IL
0 |
R0IL
0 |
| 0x27 |
GPIO_INT_LVL2 |
C7IL
0 |
C6IL
0 |
C5IL
0 |
C4IL
0 |
C3IL
0 |
C2IL
0 |
C1IL
0 |
C0IL
0 |
| 0x28 |
GPIO_INT_LVL3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
C9IL
0 |
C8IL
0 |
| 0x29 |
DEBOUNCE_DIS1 |
ąŚą░ą┐čĆąĄčé ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░.
0: ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ
1: ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░ ąĘą░ą┐čĆąĄčēąĄąĮąŠ |
R7DD
0 |
R6DD
0 |
R5DD
0 |
R4DD
0 |
R3DD
0 |
R2DD
0 |
R1DD
0 |
R0DD
0 |
| 0x2A |
DEBOUNCE_DIS2 |
C7DD
0 |
C6DD
0 |
C5DD
0 |
C4DD
0 |
C3DD
0 |
C2DD
0 |
C1DD
0 |
C0DD
0 |
| 0x2B |
DEBOUNCE_DIS3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
C9DD
0 |
C8DD
0 |
| 0x2C |
GPIO_PULL1 |
ąŚą░ą┐čĆąĄčé ą▓ąĄčĆčģąĮąĖčģ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ GPIO.
0: GPIO pull-up čĆą░ąĘčĆąĄčłąĄąĮ
1: GPIO pull-up ąĘą░ą┐čĆąĄčēąĄąĮ |
R7PD
0 |
R6PD
0 |
R5PD
0 |
R4PD
0 |
R3PD
0 |
R2PD
0 |
R1PD
0 |
R0PD
0 |
| 0x2D |
GPIO_PULL2 |
C7PD
0 |
C6PD
0 |
C5PD
0 |
C4PD
0 |
C3PD
0 |
C2PD
0 |
C1PD
0 |
C0PD
0 |
| 0x2E |
GPIO_PULL3 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
N/A
0 |
C9PD
0 |
C8PD
0 |
| 0x2F |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
|
|
|
|
|
|
|
|
|
| ąæąĖčé |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąśą╝čÅ |
AI |
GPI_E_CFG |
OVR_FLOW_M |
INT_CFG |
OVR_FLOW_IEN |
K_LCK_IEN |
GPI_IEN |
KE_IEN |
AI (ą▒ąĖčé 7): čĆą░ąĘčĆąĄčłą░ąĄčé ą░ą▓č鹊ąĖąĮą║čĆąĄą╝ąĄąĮčé ą░ą┤čĆąĄčüą░ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ. 0 ą░ą▓č鹊ąĖąĮą║čĆąĄą╝ąĄąĮčé ąĘą░ą┐čĆąĄčēąĄąĮ, 1 čĆą░ąĘčĆąĄčłąĄąĮ.
ąæąĖčé 7 (AI) ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąĢčüą╗ąĖ ąŠąĮ čĆą░ą▓ąĄąĮ 0, č鹊 ą▓čüąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ č鹊čé čĆąĄą│ąĖčüčéčĆ, ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ. ąĢčüą╗ąĖ ąŠąĮ čĆą░ą▓ąĄąĮ 1, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▒ą░ą╣čéą░ ą║ąŠą╝ą░ąĮą┤čŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü ą║ą░ąČą┤čŗą╝ ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ ą▒ą░ą╣č鹊ą╝, ąĖ čüą╗ąĄą┤čāčÄčēąĖą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ. ąĀąĄą│ąĖčüčéčĆčŗ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ, ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╣ ą▓ čéą░ą▒ą╗ąĖčåąĄ 9. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ ąĘą░ą┐ąĖčüą░ąĮ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆąĄą│ąĖčüčéčĆ GPIO_PULL3 (0x2E), ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ čüąĮąŠą▓ą░ čüčéą░ąĮąĄčé čĆą░ą▓ąĮčŗą╝ 0. ąĀąĄą│ąĖčüčéčĆčŗ 0 ąĖ 2F ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ, ąĖ ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čŹčéąĖą╝ čĆąĄą│ąĖčüčéčĆą░ą╝, ąĮąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ TCA8418.
GPI_E_CFG (ą▒ąĖčé 6): ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ čüąŠą▒čŗčéąĖą╣ GPI. 0 čüąŠą▒čŗčéąĖčÅ GPI ąŠčéčüą╗ąĄąČąĖą▓ą░čÄčéčüčÅ, ą║ąŠą│ą┤ą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░, 1 ąĮąĄ ąŠčéčüą╗ąĄąČąĖą▓ą░čÄčéčüčÅ.
OVR_FLOW_M (ą▒ąĖčé 5): Overflow mode. 0 ąĘą░ą┤ą░ąĄčé, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ąĮą░ąČą░čéąĖą╣/ąŠčéą┐čāčüą║ą░ąĮąĖą╣ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ FIFO ą▒čāą┤čāčé č鹥čĆčÅčéčīčüčÅ. 1 ąĘą░ą┤ą░ąĄčé, čćč鹊 ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┤ą░ąĮąĮčŗąĄ FIFO ą▒čāą┤čāčé čüą╝ąĄčēą░čéčīčüčÅ: čüčéą░čĆčŗąĄ čüą░ą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čāą┤ą░ą╗ąĄąĮčŗ, ą░ ąĮąŠą▓čŗąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ.
INT_CFG (ą▒ąĖčé 4): ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. 0 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čģąŠčüčéą░ ąŠčüčéą░ąĄčéčüčÅ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĮčŗą╝ (ąĮąŠąČą║ą░ ~INT ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0), ąĄčüą╗ąĖ čģąŠčüčé ą┐čŗčéą░ąĄčéčüčÅ ąŠčćąĖčüčéąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▓čüąĄ ąĄčēąĄ ąŠąČąĖą┤ą░čÄčé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĮą░ąČą░čéąĖčÅ ą║ąĮąŠą┐ąŠą║, ąŠčéą┐čāčüą║ą░ąĮąĖčÅ ą║ąĮąŠą┐ąŠą║ ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ GPI. 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čģąŠčüčéą░ čüąĮąĖą╝ą░ąĄčéčüčÅ č湥čĆąĄąĘ 50 ą╝ą║čü, ąĖ ą┐ąĄčĆąĄčāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čü ąŠąČąĖą┤ą░čÄčēąĖą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ.
OVR_FLOW_IEN (ą▒ąĖčé 3): čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ FIFO. 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ, čüąĖą│ąĮą░ą╗ ~INT ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗčüčéą░ą▓ą╗ąĄąĮ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ FIFO. 1 čĆą░ąĘčĆąĄčłąĄąĮąŠ, ~INT ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ FIFO.
K_LCK_IEN (ą▒ąĖčé 2): Keypad lock interrupt enable. 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ~INT ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĮą░ąČą░čéąĖą╣ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ. 1 čĆą░ąĘčĆąĄčłąĄąĮąŠ, ~INT ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĮą░ąČą░čéąĖą╣ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ.
Keypad lock interrupt enable ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą▒čāą┤ąĄčé ą╗ąĖ ą░ą║čéąĖą▓ąĮą░ ąĮąŠąČą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖčéą░čéčāčĆčŗ (ą▒ąĖčé key lock interrupt, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ Interrupt Status Register).
GPI_IEN (ą▒ąĖčé 1): čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ GPI ą┤ą╗čÅ čģąŠčüčéą░. 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ~INT ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ čāčĆąŠą▓ąĮčÅ GPI. 1 čĆą░ąĘčĆąĄčłąĄąĮąŠ, ~INT ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ čāčĆąŠą▓ąĮčÅ GPI.
KE_IEN (ą▒ąĖčé 0): čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüąŠą▒čŗčéąĖą╣ ą║ąĮąŠą┐ąŠą║ ą┤ą╗čÅ čģąŠčüčéą░. 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ~INT ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ ą║ąĮąŠą┐ą║ąĖ (ąĮą░ąČą░čéąĖąĄ ąĖą╗ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖąĄ). 1 čĆą░ąĘčĆąĄčłąĄąĮąŠ, ~INT ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ ą║ąĮąŠą┐ą║ąĖ.
ąĀąĄą│ąĖčüčéčĆ INT_STAT ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ, ą║ą░ą║ąŠąĄ ąĖą╝ąĄąĮąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓čŗąĘą▓ą░ą╗ąŠ ą░ą║čéąĖą▓ą░čåąĖčÄ ąĮąŠąČą║ąĖ ~INT. ąĢčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčéčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ Configuration Register, č鹊 ąĘąĮą░č湥ąĮąĖąĄ 1 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▒ąĖč鹥 čĆąĄą│ąĖčüčéčĆą░ INT_STAT ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąĄčĆąĄą▓ąŠą┤čā čüąĖą│ąĮą░ą╗ą░ ~INT ą▓ ą╗ąŠą│. 0. ąśčüą║ą╗čÄč湥ąĮąĖąĄ ąĖąĘ čŹč鹊ą│ąŠ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąĖčé CAD_INT, ą║ąŠč鹊čĆčŗą╣ ą▓čŗčüčéą░ą▓ąĖčé ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CAD_INT ą┤ą╗čÅ ą║ąŠčĆą┐čāčüąŠą▓ YFP.
ą¦č鹥ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą▓ąŠąĘą▓čĆą░čéąĖčé čéąĖą┐čŗ ą┐čĆąŠąĖąĘąŠčłąĄą┤čłąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąŚą░ą┐ąĖčüčī 1 ą▓ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ INT_STAT ąŠčćąĖčüčéąĖčé ąĄą│ąŠ, ąĮąŠ ą▒ąĖčé ąĮąĄ ąŠčćąĖčüčéąĖčéčüčÅ, ąĄčüą╗ąĖ ą▓ FIFO ą▓čüąĄ ąĄčēąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ ą║ąĮąŠą┐ąŠą║).
| ąæąĖčé |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąśą╝čÅ |
N/A |
N/A |
N/A |
CAD_INT |
OVR_FLOW_INT |
K_LCK_INT |
GPI_INT |
K_INT |
ąÆčüąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ąĮąĖąČąĄ čäą╗ą░ą│ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāčüčéą░ąĮąŠą▓čÅčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ. ąöą╗čÅ ąŠčćąĖčüčéą║ąĖ čäą╗ą░ą│ą░ ąĮčāąČąĮąŠ ą▓ ąĮąĄą│ąŠ ąĘą░ą┐ąĖčüą░čéčī 1, ąĘą░ą┐ąĖčüčī 0 ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ.
N/A ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▒ąĖčéčŗ, ąŠąĮąĖ ą▓čüąĄą│ą┤ą░ čĆą░ą▓ąĮčŗ 0.
CAD_INT (ą▒ąĖčé 4): CTRL-ALT-DEL key sequence status, čüčéą░čéčāčü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ą╗ą░ą▓ąĖčł CTRL-ALT-DEL. ąøąŠą│. 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ąĮą░ąČą░čéąĖąĄ čŹčéąĖčģ ą║ą╗ą░ą▓ąĖčł.
OVR_FLOW_INT (ą▒ąĖčé 3): Overflow interrupt status. ąŻčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĄčüą╗ąĖ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ FIFO.
K_LCK_INT (ą▒ąĖčé 2): Keypad lock interrupt status. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čģąŠčüčéą░ - čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ąĮą░čćą░ą╗ą░čüčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī keypad lock.
GPI_INT (ą▒ąĖčé 1): GPI interrupt status. ąŻčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ąŠą▒ąĮą░čĆčāąČąĄąĮą░ ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ ą▓čģąŠą┤ą░čģ GPI.
K_INT (ą▒ąĖčé 0): Key events interrupt status. ąŻčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĄčüą╗ąĖ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ čüąŠą▒čŗčéąĖąĄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ.
| ąæąĖčé |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąśą╝čÅ |
N/A |
K_LCK_EN |
LCK2 |
LCK1 |
KEC3 |
KEC2 |
KEC1 |
KEC0 |
N/A ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▒ąĖčé, ąŠąĮ ą▓čüąĄą│ą┤ą░ čĆą░ą▓ąĄąĮ 0.
K_LCK_EN (ą▒ąĖčé 6): Key lock enable, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. 0 ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ąĘą░ą┐čĆąĄčēąĄąĮą░, ąĘą░ą┐ąĖčüčī ą▓ čŹč鹊čé ą▒ąĖčé 0 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčé ą║ą╗ą░ą▓ąĖą░čéčāčĆčā. 1 ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ čĆą░ąĘčĆąĄčłąĄąĮą░, ąĘą░ą┐ąĖčüčī 1 ą▓ čŹč鹊čé ą▒ąĖčé ą▒ą╗ąŠą║ąĖčĆčāąĄčé ą║ą╗ą░ą▓ąĖą░čéčāčĆčā.
LCK2 (ą▒ąĖčé 5): Keypad lock status, čüąŠčüč鹊čÅąĮąĖąĄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. 0 čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąŠ (ąĄčüą╗ąĖ LCK1 čéą░ą║ąČąĄ 0). 1 ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąŠ (ąĄčüą╗ąĖ LCK1 čéą░ą║ąČąĄ 1).
LCK1 (ą▒ąĖčé 4): Keypad lock status, čüąŠčüč鹊čÅąĮąĖąĄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. 0 čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąŠ (ąĄčüą╗ąĖ LCK2 čéą░ą║ąČąĄ 0). 1 ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąŠ (ąĄčüą╗ąĖ LCK2 čéą░ą║ąČąĄ 1).
KEC3 .. KEC0 (ą▒ąĖčéčŗ 3 .. 0): Key event count, čüč湥čéčćąĖą║ čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. KEC[3:0] ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čüą║ąŠą╗čīą║ąŠ čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ FIFO. ąØą░ą┐čĆąĖą╝ąĄčĆ, KEC[3:0] = 0b0000 = 0 čüąŠą▒čŗčéąĖą╣, KEC[3:0] = 0b0001 = 1 čüąŠą▒čŗčéąĖąĄ, ąĖ KEC[3:0] = 0b1010 = 10 čüąŠą▒čŗčéąĖą╣. ą¤čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖą╣ (ąĮą░ąČą░čéąĖąĄ ąĖą╗ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖąĄ ą║ąĮąŠą┐ą║ąĖ) čüč湥čéčćąĖą║ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
| ąæąĖčé |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąśą╝čÅ |
KEA7 |
KEA6 |
KEA5 |
KEA4 |
KEA3 |
KEA2 |
KEA1 |
KEA0 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą║ą░ąĘą░ąĮ č鹊ą╗čīą║ąŠ čĆąĄą│ąĖčüčéčĆ KEY_EVENT_A.
ąĀąĄą│ąĖčüčéčĆčŗ KEY_EVENT_A - KEY_EVENT_J čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ čüč鹥ą║ FIFO, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čģčĆą░ąĮąĖčéčī ą▓ čüąĄą▒ąĄ ą┤ąŠ 10 čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖčł - ąĮą░ąČą░čéąĖą╣ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖą╣. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čĆąĄą│ąĖčüčéčĆ INT_STAT, čćč鹊ą▒čŗ čāąĘąĮą░čéčī, ą▒čŗą╗ąĖ ą╗ąĖ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĢčüą╗ąĖ ą▒čŗą╗ąĖ, č鹊 čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĖ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣ (KEY_LCK_EC, ą░ą┤čĆąĄčü 0x03), čćč鹊ą▒čŗ čāą▓ąĖą┤ąĄčéčī, čüą║ąŠą╗čīą║ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ. ąŚą░č鹥ą╝ INT_STAT čüąĮąŠą▓ą░ ą┐čĆąŠčćąĖčéčŗą▓ą░ąĄčéčüčÅ, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą▒ąŠą╗čīčłąĄ ąĮąŠą▓čŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĮąĄ ą▒čŗą╗ąŠ. ąĀąĄą│ąĖčüčéčĆ KEY_EVENT_A ąĘą░č鹥ą╝ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ čüč鹊ą╗čīą║ąŠ čĆą░ąĘ, čüą║ąŠą╗čīą║ąŠ ą▒čŗą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▒čŗą╗ąŠ čüčćąĖčéą░ąĮąŠ ąĖąĘ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣). ą¤čĆąĖ ą║ą░ąČą┤ąŠą╝ čćč鹥ąĮąĖąĖ čĆąĄą│ąĖčüčéčĆą░ KEY_EVENT_A čüč湥čéčćąĖą║ ą▓ čĆąĄą│ąĖčüčéčĆąĄ KEY_LCK_EC čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ąĮą░ 1. ąöą░ąĮąĮčŗąĄ ą▓ čüč鹥ą║ąĄ FIFO čéą░ą║ąČąĄ čüą╝ąĄčēą░čÄčéčüčÅ ą▓ čüč鹊čĆąŠąĮčā čĆąĄą│ąĖčüčéčĆą░ KEY_EVENT_A ąĮą░ ąŠą┤ąĮčā ą┐ąŠąĘąĖčåąĖčÄ (ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąŠčé KEY_EVENT_J ą║ KEY_EVENT_A). ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ, čüč湥čéčćąĖą║ čüąŠą▒čŗčéąĖą╣ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮčāą╗ąĄą╝, ąĖ ą▒ąĖčé KE_INT ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮ ąĘą░ą┐ąĖčüčīčÄ ą▓ ąĮąĄą│ąŠ ą╗ąŠą│. 1.
ąÆ čĆąĄą│ąĖčüčéčĆąĄ KEY_EVENT_A ą▒ąĖčéčŗ KEA[6:0] ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮąŠą╝ąĄčĆ ą║ą╗ą░ą▓ąĖčłąĖ, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░ ąĖą╗ąĖ ąŠčéą┐čāčēąĄąĮą░. ąŚąĮą░č湥ąĮąĖąĄ ąŠčé 0 ą┤ąŠ 80 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ą░čÅ ą║ą╗ą░ą▓ąĖčłą░ ą▓ ą╝ą░čéčĆąĖčåąĄ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░ ąĖą╗ąĖ ąŠčéą┐čāčēąĄąĮą░. ąŚąĮą░č湥ąĮąĖčÅ ąŠčé 97 ą┤ąŠ 114 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé čüąŠą▒čŗčéąĖčÅą╝ GPI.
ąĪčéą░čĆčłąĖą╣ ą▒ąĖčé KEA[7] ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ąŠąĄ ąĖą╝ąĄąĮąĮąŠ čüąŠą▒čŗčéąĖąĄ ą║ą╗ą░ą▓ąĖčłąĖ (čü ą║ąŠą┤ąŠą╝ KEA[6:0]) ą┐čĆąŠąĖąĘąŠčłą╗ąŠ - ąŠčéą┐čāčüą║ą░ąĮąĖąĄ ąĖą╗ąĖ ąĮą░ąČą░čéąĖąĄ. 0 ąŠąĘąĮą░čćą░ąĄčé ąŠčéą┐čāčüą║ą░ąĮąĖąĄ ą║ą╗ą░ą▓ąĖčłąĖ, 1 ąĮą░ąČą░čéąĖąĄ (čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą║ąŠą┤ ąĮą░ąČą░č鹊ą╣ ą║ą╗ą░ą▓ąĖčłąĖ, čüčéą░čĆčłąĖą╣ ą▒ąĖčé ą┐čĆąĖ čćč鹥ąĮąĖąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮ).
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▒čŗą╗ąĖ ąĮą░ąČą░čéčŗ 3 ą║ą╗ą░ą▓ąĖčłąĖ, ąĖ č鹊ą│ą┤ą░ ą▓ FIFO ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ 6 ą▒ą░ą╣čé, 3 ąĮą░ąČą░čéąĖčÅ ąĖ 3 ąŠčéą┐čāčüą║ą░ąĮąĖčÅ. ą¤čĆąĖ čćč鹥ąĮąĖąĖ ą║ą░ąČą┤ąŠą│ąŠ čüą╗ąŠą▓ą░ ą▒čāą┤ąĄčé ą┐ąŠąĮčÅčéąĮąŠ, čćč鹊 ąŠąĮąŠ ąŠąĘąĮą░čćą░ąĄčé - ąĮą░ąČą░čéąĖąĄ ąĖą╗ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖąĄ, ąĖ ą║ą░ą║ą░čÅ čŹč鹊 ą▒čŗą╗ą░ ą║ą╗ą░ą▓ąĖčłą░. ąØą░ąČą░čéąĖčÅ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ CTRL+ALT+DEL čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą║ą░ą║ 3 ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĮą░ąČą░čéąĖčÅ. ąØą░ąČą░čéąĖčÅ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ ą║ą╗ą░ą▓ąĖčł ą│ąĄąĮąĄčĆąĖčĆčāčÄčé čüąŠą▒čŗčéąĖčÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ (key event interrupts). ąæąĖčé KE_INT ąĮąĄ ąŠčćąĖčüčéąĖčéčüčÅ ąĖ ąĮąŠąČą║ą░ ~INT ąĮąĄ ą▒čāą┤ąĄčé ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮą░ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ FIFO ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ ąŠčé ą▓čüąĄčģ čüąŠą▒čŗčéąĖą╣.
ą£ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ąŠčé KEY_EVENT_A ą┤ąŠ KEY_EVENT_J, ąŠą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā FIFO (First Input First Output, ą┐ąĄčĆą▓čŗą╝ ą▓ąŠčłąĄą╗ - ą┐ąĄčĆą▓čŗą╝ ą▓čŗčłąĄą╗) ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ čüčćąĖčéčŗą▓ą░čéčī č鹊ą╗čīą║ąŠ čĆąĄą│ąĖčüčéčĆ KEY_EVENT_A. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ ą▓ FIFO ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ, čĆąĄą│ąĖčüčéčĆ KEY_EVENT_A ą▒čāą┤ąĄčé čüčćąĖčéčŗą▓ą░čéčīčüčÅ ą║ą░ą║ 0.
| ąæąĖčé |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąśą╝čÅ |
KL7 |
KL6 |
KL5 |
KL4 |
KL3 |
KL2 |
KL1 |
KL0
|
KL[2:0]: čŹčéąĖ ą▒ąĖčéčŗ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ ąŠčéčüč湥čéą░ ą▓čĆąĄą╝ąĄąĮąĖ ąŠčé Lock1 ą┤ąŠ Lock2.
KL[7:3]: čŹčéąĖ ą▒ąĖčéčŗ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt mask timer).
ąŚąĮą░č湥ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ KL[2:0] ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮąĄ ąĮčāą╗ąĄą▓čŗą╝ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ąŚąĮą░č湥ąĮąĖąĄ KL[2:0] ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║čāąĮą┤, ą┐čĆąŠčłąĄą┤čłąĄąĄ ą╝ąĄąČą┤čā ąĮą░ąČą░čéąĖąĄą╝ ą║ą╗ą░ą▓ąĖčł čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ 2 ąĖ 1 (unlock key 2 ąĮą░ąČąĖą╝ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ unlock key 1), čŹč鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ą░čāčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║čā ąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║čā ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "Keypad Lock/Unlock".
ąĢčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ (keypad lock interrupt mask timer) ąĮąĄ čĆą░ą▓ąĄąĮ 0, ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą║ąĮąŠą┐ą║ąĖ (key event interrupt, K_INT) č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąĄčĆą▓ąŠą╝ ąĮą░ąČą░čéąĖąĖ ąĮą░ ą╗čÄą▒čāčÄ ą║ąĮąŠą┐ą║čā. ąÆč鹊čĆąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (K_LCK_IN) ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą║ąŠčĆčĆąĄą║čéąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ (unlock sequence). ąĢčüą╗ąĖ čéą░ą╣ą╝ą░čāčé ą╗čÄą▒ąŠą│ąŠ ąĖąĘ čéą░ą╣ą╝ąĄčĆąŠą▓ KL[2:0] ąĖą╗ąĖ KL[7:3] ąĖčüč鹥ą║, č鹊 ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ ąĖčüčģąŠą┤ąĮąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ.
ąÜąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮ (0), ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ąĮąŠą┐ąŠą║ ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą║ąŠčĆčĆąĄą║čéąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ.
ąóą░ą╣ą╝ąĄčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ ą▓čĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ ąŠčéą▓ąŠą┤ąĖčéčüčÅ ąĮą░ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čŹą║čĆą░ąĮą░ LCD. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "Keypad Lock Interrupt Mask Timer".
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x0F |
Unlock1 |
UK1_7 |
UK2_6 |
UK2_5 |
UK2_4 |
UK2_3 |
UK2_2 |
UK2_1 |
UK2_0 |
| 0x10 |
Unlock2 |
UK2_7 |
UK2_6 |
UK2_5 |
UK2_4 |
UK2_3 |
UK2_2 |
UK2_1 |
UK2_0 |
UK1[6:0] čüąŠą┤ąĄčƹȹĖčé ąĮąŠą╝ąĄčĆ ą║ąĮąŠą┐ą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ ą║ą╗ą░ą▓ąĖčłąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ 1.
UK2[6:0] čüąŠą┤ąĄčƹȹĖčé ąĮąŠą╝ąĄčĆ ą║ąĮąŠą┐ą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ ą║ą╗ą░ą▓ąĖčłąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ 2.
0 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĘą░ą┐čĆąĄčéąĖčé čĆą░ą▒ąŠčéčā čäčāąĮą║čåąĖąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ.
ąĀąĄą│ąĖčüčéčĆčŗ GPIO_INT_STAT1, GPIO_INT_STAT2, GPIO_INT_STAT3 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąŠąČąĄą║ GPIO. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé GPI_INT ą▓ čĆąĄą│ąĖčüčéčĆąĄ INT_STAT, č鹊 ąĮąŠąČą║ą░ GPI, ą║ąŠč鹊čĆą░čÅ čāčüčéą░ąĮąŠą▓ąĖą╗ą░ čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą▒čāą┤ąĄčé ą┐ąŠą╝ąĄč湥ąĮą░ 1 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ. ą¦č鹊ą▒čŗ ąŠčćąĖčüčéąĖčéčī ą▒ąĖčé GPI_INT, ąĘąĮą░č湥ąĮąĖąĄ ą▓čüąĄčģ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0x00. ą¦č鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ GPIO_INT_STAT1 - GPIO_INT_STAT3 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčé ąĄą│ąŠ.
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x11 |
GPIO_INT_STAT1 |
R7IS |
R6IS |
R5IS |
R4IS |
R3IS |
R2IS |
R1IS |
R0IS |
| 0x12 |
GPIO_INT_STAT2 |
C7IS |
C6IS |
C5IS |
C4IS |
C3IS |
C2IS |
C1IS |
C0IS |
| 0x13 |
GPIO_INT_STAT3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
C9IS |
C8IS |
ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé čüąŠčüč鹊čÅąĮąĖąĄ GPIO, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čüčćąĖčéčŗą▓ą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čģąŠą┤ąŠą▓ ąĖ ą▓čŗčģąŠą┤ąŠą▓. ąöą╗čÅ ąŠčćąĖčüčéą║ąĖ ąĖčģ ąĮčāąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ą┤ą▓ą░ąČą┤čŗ.
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x14 |
GPIO_DAT_STAT1 |
R7DS |
R6DS |
R5DS |
R4DS |
R3DS |
R2DS |
R1DS |
R0DS |
| 0x15 |
GPIO_DAT_STAT2 |
C7DS |
C6DS |
C5DS |
C4DS |
C3DS |
C2DS |
C1DS |
C0DS |
| 0x16 |
GPIO_DAT_STAT3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
C9DS |
C8DS
|
ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ čüąŠą┤ąĄčƹȹ░čé ą┤ą░ąĮąĮčŗąĄ GPIO ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ. ąØą░ ą▓čģąŠą┤čŗ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▓ą╗ąĖčÅčÄčé. ąöą░ąĮąĮčŗąĄ čāčüčéą░ąĮąŠą▓čÅčé ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ąĮąŠąČą║ąĖ ą▓čŗčģąŠą┤ą░ GPIO.
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x17 |
GPIO_DAT_OUT1 |
R7DO |
R6DO |
R5DO |
R4DO |
R3DO |
R2DO |
R1DO |
R0DO |
| 0x18 |
GPIO_DAT_OUT2 |
C7DO |
C6DO |
C5DO |
C4DO |
C3DO |
C2DO |
C1DO |
C0DO |
| 0x19 |
GPIO_DAT_OUT3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
C9DO |
C8DO
|
ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ čĆą░ąĘčĆąĄčłą░čÄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ąĘąĮą░č湥ąĮąĖąĄą╝ 1 ą▒ąĖčéą░) ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░čÄčé ąĖčģ (ąĘąĮą░č湥ąĮąĖąĄą╝ 0 ą▒ąĖčéą░) č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▓čģąŠą┤ąŠą▓ (GPI). ąĢčüą╗ąĖ ą▓čģąŠą┤, ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ą║ą░ą║ GPI, ą┐ąŠą╝ąĄąĮčÅąĄčé čüą▓ąŠą╣ čāčĆąŠą▓ąĄąĮčī, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé GPI_INT ą▓ čĆąĄą│ąĖčüčéčĆąĄ INT_STAT.
ąŚąĮą░č湥ąĮąĖąĄ 0 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé ąĘą░ą┐čĆąĄčéąĖčé ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ąĮąŠąČą║ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ čüąŠčüč鹊čÅąĮąĖąĄ ąĄčæ ą▓čģąŠą┤ą░ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąŚąĮą░č湥ąĮąĖąĄ 1 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé čĆą░ąĘčĆąĄčłąĖčé ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ąĮąŠąČą║ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ čüąŠčüč鹊čÅąĮąĖąĄ ąĄčæ ą▓čģąŠą┤ą░ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī.
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x1A |
GPIO_INT_EN1 |
R7IE |
R6IE |
R5IE |
R4IE |
R3IE |
R2IE |
R1IE |
R0IE |
| 0x1B |
GPIO_INT_EN2 |
C7IE |
C6IE |
C5IE |
C4IE |
C3IE |
C2IE |
C1IE |
C0IE |
| 0x1C |
GPIO_INT_EN3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
C9IE |
C8IE
|
ąŚąĮą░č湥ąĮąĖąĄ 0 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąĮąŠąČą║čā ą▓ čĆąĄąČąĖą╝ GPIO, čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąØąŠąČą║ą░ ą▓ čĆąĄąČąĖą╝ąĄ GPIO ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čŗčģąŠą┤, ą┐čāč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ GPIO_DIR1-3.
ąŚąĮą░č湥ąĮąĖąĄ 1 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąĮąŠąČą║čā ą▓ čĆąĄąČąĖą╝ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖ ąŠąĮą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čüąŠčüčéą░ą▓ąĄ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮąŠą╣ ą╝ą░čéčĆąĖčåčŗ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąĮąŠąČą║ą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ čĆą░ąĘčĆčÅą┤ čüčéčĆąŠą║ąĖ ąĖą╗ąĖ čüč鹊ą╗ą▒čåą░ (čŹč鹊 čāąČąĄ ąĮąĄ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ).
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x1D |
KP_GPIO1 |
ROW7 |
ROW6 |
ROW5 |
ROW4 |
ROW3 |
ROW2 |
ROW1 |
ROW0 |
| 0x1E |
KP_GPIO2 |
COL7 |
COL6 |
COL5 |
COL4 |
COL3 |
COL2 |
COL1 |
COL0 |
| 0x1F |
KP_GPIO3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
COL9 |
COL8
|
ąŚąĮą░č湥ąĮąĖąĄ 0 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĮąŠąČą║ą░ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čāčćą░čüčéąĖąĄ ą▓ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ čüąŠą▒čŗčéąĖą╣ FIFO. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąŚąĮą░č湥ąĮąĖąĄ 1 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ ąĮąŠąČą║ą░, ąĮą░čüčéčĆąŠąĄąĮąĮą░čÅ ąĮą░ ą▓čģąŠą┤ (GPI), ą▒čāą┤ąĄčé čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░čéčī čüąŠą▒čŗčéąĖčÅ ą┤ą╗čÅ FIFO. ąóąŠą│ą┤ą░ čŹčéą░ ąĮąŠąČą║ą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆčÅą╝ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ąĮąŠą┐ą║ąĖ ąĖ ąĘą░ą┐ąĖčüąĖ ą▓ FIFO čüąŠą▒čŗčéąĖą╣ ąĮą░ąČą░čéąĖčÅ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "Key Event Table".
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x20 |
GPI_EM1 |
ROW7 |
ROW6 |
ROW5 |
ROW4 |
ROW3 |
ROW2 |
ROW1 |
ROW0 |
| 0x21 |
GPI_EM2 |
COL7 |
COL6 |
COL5 |
COL4 |
COL3 |
COL2 |
COL1 |
COL0 |
| 0x22 |
GPI_EM3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
COL9 |
COL8
|
ąŚąĮą░č湥ąĮąĖąĄ 0 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé čāčüčéą░ąĮąŠą▓ąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąĮąŠąČą║čā ą║ą░ą║ ą▓čģąŠą┤. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąŚąĮą░č湥ąĮąĖąĄ 1 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé čāčüčéą░ąĮąŠą▓ąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąĮąŠąČą║čā ą║ą░ą║ ą▓čŗčģąŠą┤.
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x23 |
GPIO_DIR1 |
R7DD |
R6DD |
R5DD |
R4DD |
R3DD |
R2DD |
R1DD |
R0DD |
| 0x24 |
GPIO_DIR2 |
C7DD |
C6DD |
C6DD |
C4DD |
C3DD |
C2DD |
C1DD |
C0DD |
| 0x25 |
GPIO_DIR3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
C9DD |
C8DD |
ąŚąĮą░č湥ąĮąĖąĄ 0 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąĄčĆąĄčģąŠą┤ą░čģ ąŠčé 1 ą║ 0 ąĖ ąŠčé 0 ą║ 1 ąĮą░ ą▓čģąŠą┤ą░čģ, ą║ąŠą│ą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ ąĮąŠąČą║ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ GPIO. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąŚąĮą░č湥ąĮąĖąĄ 0 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐čĆąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ ąŠčé 0 ą║ 1 ąĖ ą┐čĆąĖ čāčĆąŠą▓ąĮąĄ 1 ąĮą░ ą▓čģąŠą┤ą░čģ, ą║ąŠą│ą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ ąĮąŠąČą║ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ GPIO.
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x26 |
GPIO_INT_LVL1 |
R7IL |
R6IL |
R5IL |
R4IL |
R3IL |
R2IL |
R1IL |
R0IL |
| 0x27 |
GPIO_INT_LVL2 |
C7IL |
C6IL |
C5IL |
C6IL |
C3IL |
C2IL |
C1IL |
C0IL |
| 0x28 |
GPIO_INT_LVL3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
C9IL |
C8IL |
ąŁč鹊 čĆąĄą│ąĖčüčéčĆčŗ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░, ąĖčģ ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ąĮąŠąČąĄą║, ą║ąŠč鹊čĆčŗąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą▓čģąŠą┤čŗ. ąŚąĮą░č湥ąĮąĖąĄ 0 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé čĆą░ąĘčĆąĄčłą░ąĄčé ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░, čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąŚąĮą░č湥ąĮąĖąĄ 1 ą┤ą╗čÅ ą▒ąĖčéą░ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░.
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x29 |
DEBOUNCE_DIS1 |
R7DD |
R6DD |
R5DD |
R4DD |
R3DD |
R2DD |
R1DD |
R0DD |
| 0x2A |
DEBOUNCE_DIS2 |
C7DD |
C6DD |
C5DD |
C4DD |
C3DD |
C2DD |
C1DD |
C0DD |
| 0x2B |
DEBOUNCE_DIS3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
C9DD |
C8DD |
ąŚą░ą┐čĆąĄčé ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ ą┤ą░ąĄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ čŹčäč乥ą║čé ąĖ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ GPI ą▓čģąŠą┤ąŠą▓, ąĖ ą┤ą╗čÅ čüčéčĆąŠą║, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čĆą░ą▒ąŠčéą░čÄčé ą▓ čüąŠčüčéą░ą▓ąĄ čüą║ą░ąĮąĖčĆčāąĄą╝ąŠą╣ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ąŻ ą▓čģąŠą┤ą░ ~RESET ą▓čüąĄą│ą┤ą░ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą▓čĆąĄą╝čÅ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ 50 ą╝ą║čü.
ąśąĮč鹥čĆą▓ą░ą╗ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ ą║ąŠąĮčéą░ą║č鹊ą▓ (ą║ąŠč鹊čĆčŗą╣ čüąŠčüčéą░ą▓ą╗čÅąĄčé 50 ą╝ą║čü) ąĮąĄąŠą▒čģąŠą┤ąĖą╝ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čģąŠą┤ąĄ čüčéą░ą╗ čüčéą░ą▒ąĖą╗čīąĮčŗą╝.
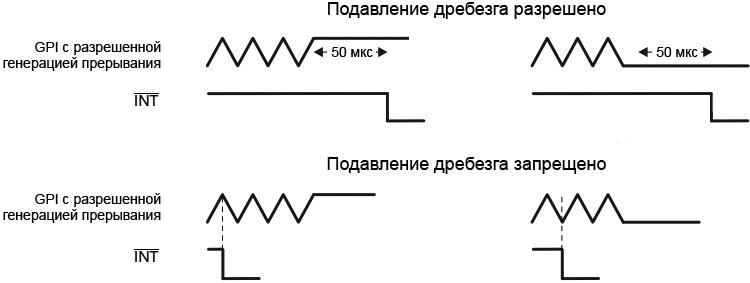
ąÆčĆąĄą╝čÅ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ ą┤ą╗čÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüč鹊ą╗ą▒čåąŠą▓. ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé 25 ą╝čü. ąÆčüąĄ čüč鹊ą╗ą▒čåčŗ čüą║ą░ąĮąĖčĆčāčÄčéčüčÅ ąŠą┤ąĖąĮ čĆą░ąĘ ą║ą░ąČą┤čŗąĄ 25 ą╝čü, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮą░ąČą░čéąĖčÅ ą║ąĮąŠą┐ąŠą║. ąóčĆąĄą▒čāąĄčéčüčÅ 2 ą┐ąŠą╗ąĮčŗčģ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▒čŗą╗ą░ ą╗ąĖ ąĮą░ąČą░čéą░ ą╗čÄą▒ą░čÅ ą║ąĮąŠą┐ą║ą░. ąĢčüą╗ąĖ ą┐ąĄčĆą▓ąŠąĄ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒čŗą╗ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĮą░ąČą░čéąĖčÅ, č鹊 ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čŹč鹊ą│ąŠ ąĮą░ąČą░čéąĖčÅ ąĘą░ą╣ą╝ąĄčé ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ 25 ą╝čü. ąĢčüą╗ąĖ ą┐ąĄčĆą▓ąŠąĄ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąĮą░ą╝ąĮąŠą│ąŠ ą┐ąŠąĘąČąĄ ąĮą░ąČą░čéąĖčÅ ą║ą╗ą░ą▓ąĖčłąĖ, č鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čŹč鹊ą│ąŠ ąĮą░ąČą░čéąĖčÅ ąĘą░ą╣ą╝ąĄčé ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ 40 ą╝čü.
ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ čĆą░ąĘčĆąĄčłą░čÄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░čÄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą▓ąĄčĆčģąĮąĖąĄ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ (pull-up) ą┤ą╗čÅ ą▓čģąŠą┤ąŠą▓. ąŚąĮą░č湥ąĮąĖąĄ 0 ą▒ąĖčéą░ čĆą░ąĘčĆąĄčłą░ąĄčé pullup-čĆąĄąĘąĖčüč鹊čĆ, čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąŚąĮą░č湥ąĮąĖąĄ ą▒ąĖčéą░ 1 ąĘą░ą┐čĆąĄčēą░ąĄčé pullup-čĆąĄąĘąĖčüč鹊čĆ.
| ąÉą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| 0x2C |
GPIO_PULL1 |
R7PD |
R6PD |
R5PD |
R4PD |
R3PD |
R2PD |
R1PD |
R0PD |
| 0x2D |
GPIO_PULL2 |
C7PD |
C6PD |
C5PD |
C4PD |
C3PD |
C2PD |
C1PD |
C0PD |
| 0x2E |
GPIO_PULL3 |
N/A |
N/A |
N/A |
N/A |
N/A |
N/A |
C9PD |
C8PD
|
[CAD Interrupt Errata]
ąÆ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, (Interrupt Status Register, INT_STAT čü ą░ą┤čĆąĄčüąŠą╝ 0x02, čüą╝. ą▓čŗčłąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą▓čĆąĄąĘą║čā), ą▒ąĖčé 4 CAD_INT ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĮą░ąČą░čéąĖčÅ ą║ą╗ą░ą▓ąĖčł CTRL-ALT-DEL. ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĮą░ąČą░čéąĖą╣ ą║ą╗ą░ą▓ąĖčł čāčüčéą░ąĮąŠą▓čÅčé ą▒ąĖčé CAD_INT ąŠčłąĖą▒ąŠčćąĮąŠ.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ąĮą░ąČą░čéąĖą╣ ą║ą╗ą░ą▓ąĖčł ą┐čĆąĖą▓ąĄą┤čāčé ą║ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĄ CAD_INT:
1 + 11
1 + 21
21 + 1 + 11
ąöą╗čÅ čŹč鹊ą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé čüą┐ąŠčüąŠą▒ą░ ąĖąĘą▒ąĄąČą░čéčī ąŠčłąĖą▒ąŠčćąĮąŠą│ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAD_INT.
[Overflow Errata]
TCA8418 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒ąĮą░čĆčāąČąĖčéčī ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ 10-ą▒ą░ą╣čéąĮąŠą│ąŠ FIFO ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ ąĮą░ąČą░čéąĖčÅ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ ą║ą╗ą░ą▓ąĖčł. ą¦č鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, ąŠą▒ą░ ą▒ąĖčéą░ - ą▒ąĖčé 3 (OVR_FLOW_IEN) ąĖ ą▒ąĖčé 5 (OVR_FLOW_M) ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (čüą╝. ą▓čŗčłąĄ ą▓čĆąĄąĘą║čā "Configuration Register (0x01)") ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ą╗ąŠą│. 1. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ č鹊ą╗čīą║ąŠ ą▒ąĖčé 3 (OVR_FLOW_IEN), č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ąĮąĄ ą▒čāą┤ąĄčé.
ąĪą┐ąŠčüąŠą▒ ąŠą▒čģąŠą┤ą░ ą┐čĆąŠą▒ą╗ąĄą╝čŗ: čüč鹥ą║ FIFO ą┤ąŠą╗ąČąĄąĮ čüčćąĖčéčŗą▓ą░čéčīčüčÅ ą┐ąŠ ą╝ąĄčĆąĄ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą▓ ąĮąĄą╝ ąĮąŠą▓ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. ą¤ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāą┤čāčé ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮčŗ, ą║ąŠą│ą┤ą░ čüč鹥ą║ ąĮą░čćą░ą╗ ą┐ąĄčĆąĄą┐ąŠą╗ąĮčÅčéčīčüčÅ, čŹč鹊 ą▒čāą┤ąĄčé ąŠąĘąĮą░čćą░čéčī, čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐ąŠč鹥čĆčÅąĮčŗ.
[ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÄ]
Ghosting (ą┤ą▓ąŠąĄąĮąĖąĄ). ąŁčéąĖą╝ č鹥čĆą╝ąĖąĮąŠą╝ ąĮą░ąĘčŗą▓ą░čÄčé ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮąŠąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą║ą╗ą░ą▓ąĖčł ą▓ čüą╗čāčćą░ąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĮą░ąČą░čéąĖą╣ (ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ, ąĮąĄ čüčāčēąĄčüčéą▓čāčÄčēąĄą│ąŠ ąĮą░ąČą░čéąĖčÅ), čüą▓čÅąĘą░ąĮąĮąŠąĄ čü čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄą╝ ą║ą╗ą░ą▓ąĖčł ą▓ ą╝ą░čéčĆąĖčåąĄ. ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 TCA8418 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĮą░ąČą░čéąĖą╣ ą║ąĮąŠą┐ąŠą║ ą▓ ą╝ą░čéčĆąĖčåąĄ, ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, čéčĆąĄą▒čāčÄčēąĖčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĘą░ą┤ą░ąĮąĮčŗčģ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ą║ąŠą╝ą▒ąĖąĮą░čåąĖą╣ ąĮą░ąČą░čéąĖą╣ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Ctrl-Alt-Del) čéčĆąĄą▒čāąĄčéčüčÅ čāą┤ąĄą╗ąĖčéčī ąŠčüąŠą▒ąŠąĄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ. ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊ą▒čŗ čŹčéąĖ ą║ąĮąŠą┐ą║ąĖ ą▓ ą╝ą░čéčĆąĖčåąĄ ąĘą░ąĮąĖą╝ą░ą╗ąĖ ąŠčüąŠą▒ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ.
ąöą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą╝ą░čéčĆąĖčåčā 3x4 (3 čüč鹊ą╗ą▒čåą░ C0-C2 ąĖ 4 čüčéčĆąŠą║ąĖ R0-R3), čüą╝. čĆąĖčü. 26. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čüąĖčéčāą░čåąĖąĖ ghosting ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĄą╝ąŠą│ąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĮą░ąČą░čéąĖčÅ čéčĆąĄčģ ą║ąĮąŠą┐ąŠą║, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čŹčéąĖ čéčĆąĖ ą║ąĮąŠą┐ą║ąĖ čĆą░ąĘą╝ąĄčüčéąĖčéčī ąĮą░ čĆą░ąĘąĮčŗčģ čüčéčĆąŠą║ą░čģ ąĖ čüč鹊ą╗ą▒čåą░čģ.
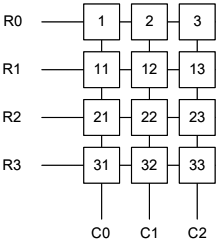
ąĀąĖčü. 26. ą¤čĆąĖą╝ąĄčĆ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮąŠą╣ ą╝ą░čéčĆąĖčåčŗ.
ąöą╗čÅ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĮą░ čĆąĖčü. 26 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓čŗą▓ąŠą┤čŗ ROW0-ROW3 ą┤ą╗čÅ čüčéčĆąŠą║ ąĖ COL0-COL2 ą┤ą╗čÅ čüč鹊ą╗ą▒čåąŠą▓. ąÆčüąĄ čüčéčĆąŠą║ąĖ (ROWx) čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą▓čģąŠą┤čŗ čü pullup-čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ. ąĪč鹊ą╗ą▒čåčŗ (COLx) čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮą░ąČą░čéąĖąĄ ąĮą░ ą║ąĮąŠą┐ą║čā, ą▓čģąŠą┤čŗ ROWx ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčéčüčÅ ą║ ą╗ąŠą│. 0, ąĖąĮč乊čĆą╝ąĖčĆčāčÅ č鹥ą╝ čüą░ą╝čŗą╝ TCA8418, čćč鹊 ą▒čŗą╗ą░ ąĮą░ąČą░čéą░ ą║ąĮąŠą┐ą║ą░, ąĖ č鹊ą│ą┤ą░ TCA8418 ąĘą░ą┐čāčüą║ą░ąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ą░čéčĆąĖčåčŗ. ą¤čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ čŹč鹊ą│ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ TCA8418 ą▒čāą┤ąĄčé čüą┤ą▓ąĖą│ą░čéčī ą╗ąŠą│. 0 ą┐ąŠ čüč鹊ą╗ą▒čåą░ą╝, ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┤ą░ą▓ą░čÅ ą╗ąŠą│. 0 č鹊ą╗čīą║ąŠ ąĮą░ 1 čüč鹊ą╗ą▒ąĄčå. ą¤čĆąĖ ą┐ąŠą┤ą░č湥 ą╗ąŠą│. 0 ąĮą░ ą║ą░ąČą┤čŗą╣ čüč鹊ą╗ą▒ąĄčå TCA8418 čüčćąĖčéčŗą▓ą░ąĄčé čāčĆąŠą▓ąĮąĖ ąĮą░ ą▓čģąŠą┤ą░čģ čüčéčĆąŠą║ ROWx, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ą░čÅ ąĖąĘ ą║ąĮąŠą┐ąŠą║ ą▓ čüč鹊ą╗ą▒čåąĄ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░.
ąØą░ čĆąĖčü. 27 ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ čüąĖčéčāą░čåąĖąĖ ghosting, ą║ąŠą│ą┤ą░ ą▒čŗą╗ąĖ ąĮą░ąČą░čéčŗ č鹊ą╗čīą║ąŠ ą║ąĮąŠą┐ą║ąĖ, ąĘą░ą║čĆą░čłąĄąĮąĮčŗąĄ ą║čĆą░čüąĮčŗą╝, ąĮąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąŠą▒ąĮą░čĆčāąČąĖą╗ąŠčüčī, čćč鹊 čÅą║ąŠą▒čŗ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░ č湥čéą▓ąĄčĆčéą░čÅ ą║ąĮąŠą┐ą║ą░, ą║ąŠč鹊čĆą░čÅ ąĘą░ą║čĆą░čłąĄąĮą░ ąČąĄą╗čéčŗą╝.
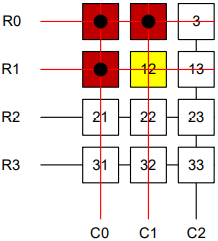
ąĀąĖčü. 27. ąØąĄą║ąŠčĆčĆąĄą║čéąĮąŠ čüčćąĖčéčŗą▓ą░ąĄą╝ą░čÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĮą░ąČą░čéąĖčÅ 3 ą║ą╗ą░ą▓ąĖčł.
ą×č湥ą▓ąĖą┤ąĮąŠ, čćč鹊 ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ąĮą░ąČą░čéąĖąĄ ą║ąĮąŠą┐ąŠą║ 1, 2 ąĖ 11 čüąŠąĘą┤ą░ąĄčé ghosting-ą┐čĆąŠą▒ą╗ąĄą╝čā. ą¤ąŠčüą║ąŠą╗čīą║čā R1 ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠą┤čéčÅąĮčāčéčŗą╝ ą║ GND ą║ąĮąŠą┐ą║ąŠą╣ 1 (č湥čĆąĄąĘ ą║ąĮąŠą┐ą║čā 2, ą║ąŠą│ą┤ą░ ąĮą░ C1 ą▒čŗą╗ ą▓čŗą┤ą░ąĮ ą╗ąŠą│. 0), ą║ąŠą│ą┤ą░ C1 ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ 0, TCA8418 čāą▓ąĖą┤ąĖčé ą╗ąŠą│. 0 ąĮą░ ąŠą▒ąŠąĖčģ čüčéčĆąŠą║ą░čģ R0 ąĖ R1. ąŁč鹊 ąŠčłąĖą▒ąŠčćąĮąŠ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖčÄ ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ąĮąŠą┐ą║ąĄ 12 (ąŠąĮą░ ą┐ąŠą┤ą║čĆą░čłąĄąĮą░ ąČąĄą╗čéčŗą╝).
ą¤čĆąĖčćąĖąĮą░ ąŠčłąĖą▒ą║ąĖ ą▓ č鹊ą╝, čćč鹊 ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮčŗąĄ ą╝ą░čéčĆąĖčåčŗ ąĘą░ą╝čŗą║ą░čÄčé ą┤čĆčāą│ ąĮą░ ą┤čĆčāą│ą░ čüč鹊ą╗ą▒čåčŗ ąĖ čüčéčĆąŠą║ąĖ. ąÜąŠą│ą┤ą░ C1 ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ 0, čŹč鹊čé 0 ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĮą░ R0 č湥čĆąĄąĘ ą║ąĮąŠą┐ą║čā 2. ąØą░ąČą░čéą░čÅ ą║ąĮąŠą┐ą║ą░ 1 čéą░ą║ąČąĄ ąĘą░ą╝čŗą║ą░ąĄčé C0 ąĮą░ GND. ąØą░ąČą░čéą░čÅ ą║ąĮąŠą┐ą║ą░ 11 č鹊ą│ą┤ą░ ąĘą░ą╝ą║ąĮąĄčé R1 ąĮą░ C0. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čŹč鹊ą│ąŠ ą┐čĆąŠčåąĄčüčüą░ R1 ąĘą░ą╝ą║ąĮąĄčéčüčÅ ąĮą░ C1, ąĖ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ghosting ą┤ą╗čÅ ą║ąĮąŠą┐ą║ąĖ 12.
ą£ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ą╝ąŠą│čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĮą░ąČą░čéąĖą╣, ąĄčüą╗ąĖ ą▒čŗą╗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮ ą▓čŗą▒ąŠčĆ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čŹčéąĖčģ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĮą░ąČą░čéąĖą╣ ą▓ ą╝ą░čéčĆąĖčåąĄ. ąØą░ čĆąĖčü. 28 ą╝čŗ ą▓ąĖą┤ąĖą╝ čüąĖčéčāą░čåąĖčÄ, ą║ąŠą│ą┤ą░ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ 3 ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĮą░ąČą░čéąĖą╣ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠąČąĖą┤ą░ąĄą╝ąŠ. ąŚą┤ąĄčüčī ąĮą░ąČą░čéčŗ ą║ąĮąŠą┐ą║ąĖ 1, 11 ąĖ 21, ąĖ ą┐čĆąĖ čŹč鹊ą╝ čüąĖčéčāą░čåąĖčÅ ghosting ąĮąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé. ąÜąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą║ąĮąŠą┐ąŠą║ 1, 11 ąĖ 21 čéą░ą║ąČąĄ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ ąĘą░ą┤ą░ąĮą░ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Ctrl-Alt-Del, ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ Control-Alt-Delete".

ąĀąĖčü. 28. ąÜąŠčĆčĆąĄą║čéąĮąŠąĄ čĆą░čüą┐ąŠąĘąĮą░ą▓ą░ąĮąĖąĄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ąĮą░ąČą░čéąĖčÅ 3 ą║ąĮąŠą┐ąŠą║.
ąĀąĖčü. 29 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéąĖą┐ąĖčćąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ą╗čÅ TCA8418 - čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ čåąĖčäčĆąŠą▓ą░čÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĖąĘ 12 ą║ąĮąŠą┐ąŠą║ (čåąĖčäčĆčŗ ąŠčé 0 ą┤ąŠ 9, ą║ąĮąŠą┐ą║ąĖ * ąĖ #).
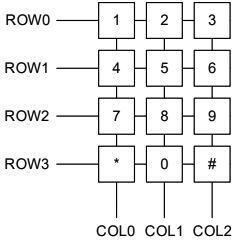
ąĀąĖčü. 29. ą¤čĆąĖą╝ąĄčĆ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╝ą░čéčĆąĖčåčŗ čåąĖčäčĆąŠą▓ąŠą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ.
ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā čüą╗ąĄą┤čāąĄčé čāč湥čüčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą╝ąŠą╝ąĄąĮčéčŗ ą┤ą╗čÅ čüą▓ąŠąĄą╣ čüąĖčüč鹥ą╝čŗ ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ TCA8418.
ŌĆó ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą╗ą░ą▓ąĖčł.
ŌĆó ąöąŠą╗ąČąĮčŗ ą╗ąĖ ą║ą╗ą░ą▓ąĖčłąĖ ą▒čŗčéčī ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮčŗ.
ŌĆó ąĀą░ąĘą▓ąŠą┤ą║ą░ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāąĄą╝čŗčģ ą║ą╗ą░ą▓ąĖčł.
ŌĆó ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą║ą╗ą░ą▓ąĖčłąĖ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčéčüčÅ ą║ VCC č湥čĆąĄąĘ pullup-čĆąĄąĘąĖčüč鹊čĆ (10 ą║ą×ą╝).
ą¤ąĄčĆą▓čŗąĄ čłą░ą│ąĖ ą▓ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą╝ą░čüčüąĖą▓ą░ ą║ą╗ą░ą▓ąĖčł - ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąČąĄą╗ą░ąĄą╝ąŠą╣ ą║ąŠą╝ą┐ąŠąĮąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą║ą░ąČą┤ąŠą╣ ą║ąĮąŠą┐ą║ąĖ ąĮą░ ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ą▓ FIFO. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ąĮąĄ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ, čćč鹊 ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤čĆčāą│ąĖąĄ ą▓čŗą▓ąŠą┤čŗ TCA8418, ąĮąĄ ą▓čģąŠą┤čÅčēąĖąĄ ą▓ ą╝ą░čéčĆąĖčåčā.
ą¤čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ ąČąĄą╗ą░ąĄą╝ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ:
ŌĆó ąÆ FIFO ą┤ąŠą╗ąČąĮčŗ ą┤ąŠą▒ą░ą▓ą╗čÅčéčīčüčÅ čüąŠą▒čŗčéąĖčÅ ąĮą░ąČą░čéąĖčÅ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ ą▓čüąĄčģ ą║ąĮąŠą┐ąŠą║ ą▓ ą╝ą░čéčĆąĖčåąĄ.
ŌĆó ą¤ąŠą┐čŗčéą║ą░ ąŠčćąĖčüčéąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠčćąĖčēąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ, ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüąĮčÅčéąĖčÄ čüąĖą│ąĮą░ą╗ą░ ~INT ąĮą░ 50 ą╝ą║čü, ąĖ ąĘą░č鹥ą╝ ą║ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ą░ą║čéąĖą▓ą░čåąĖąĖ ~INT.
ŌĆó ąØąĖą║ą░ą║ąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, ą║čĆąŠą╝ąĄ č鹥čģ, čćč鹊 ą▓čģąŠą┤čÅčé ą▓ ą╝ą░čéčĆąĖčåčā ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ.
ŌĆó ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ (Keypad lock), ą║ąŠč鹊čĆą░čÅ čéčĆąĄą▒čāąĄčé ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ąĮą░ąČą░čéąĖą╣ # ąĖ 1, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░ąČą░čéčŗ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 2 čüąĄą║čāąĮą┤ ąŠą┤ąĮąŠ ąĘą░ ą┤čĆčāą│ąĖą╝.
ŌĆó ąŚą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮ Keypad lock interrupt mask timer ąĮą░ 10 čüąĄą║čāąĮą┤, čćč鹊ą▒čŗ ą┐ąŠą┤čüą▓ąĄčéą║ą░ 菹║čĆą░ąĮą░ ą▓čŗą║ą╗čÄčćąĖą╗ą░čüčī č湥čĆąĄąĘ 10 čüąĄą║čāąĮą┤, ąĖ ą▓ č鹥č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ą║ąĮąŠą┐ąŠą║ ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗ąĖčüčī.
ŌĆó ąĀą░ąĘčĆąĄčłąĄąĮą░ ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ ą║ąŠąĮčéą░ą║č鹊ą▓ (hardware debouncing).
ą¤ąŠčüą║ąŠą╗čīą║čā TCA8418 čüąŠąŠą▒čēą░ąĄčé ąŠ ąĮą░ąČą░čéąĖčÅčģ ą║ą╗ą░ą▓ąĖčł ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą▓ čüą▓ąŠąĄą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čéą░ą▒ą╗ąĖčåą░ (key value table), ą▓ą░ąČąĮąŠ ąĘą░čĆą░ąĮąĄąĄ ąĘąĮą░čéčī, ą║ą░ą║ąŠą▓čŗ ą▒čāą┤čāčé čŹčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĖąĘ ą║ąĮąŠą┐ą║ąĖ ą▓ ą╝ą░čéčĆąĖčåąĄ.
ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü Key Event Table ąĮą░ąČą░čéąĖčÅ ą║ą╗ą░ą▓ąĖčł ąĮą░ąĘąĮą░čćą░čÄčéčüčÅ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 12.
ąóą░ą▒ą╗ąĖčåą░ 12. ąÜąŠą┤čŗ, ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅą╝ ą║ą╗ą░ą▓ąĖčł ą▓ ą╝ą░čéčĆąĖčåąĄ.
| ąÜąĮąŠą┐ą║ą░ ąĮą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĄ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
* |
0 |
# |
| ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ čüąŠą▒čŗčéąĖą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ (ą┤ąĄčüčÅčéąĖčćąĮčŗąĄ) |
1 |
2 |
3 |
11 |
12 |
13 |
21 |
22 |
23 |
31 |
32 |
33 |
ąĪčģąĄą╝ą░ ą┤ą╗čÅ čŹč鹊ą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 30 ą▓ą╝ąĄčüč鹥 čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą║ąŠą┤ąŠą▓ ą║ą╗ą░ą▓ąĖčł. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ ąŠčéčüčāčéčüčéą▓ąĖąĄ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ą┐ąŠą┤čéčÅąČą║ąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ ą┐ąŠą┤čéčÅąČą║ąĖ TCA8418.
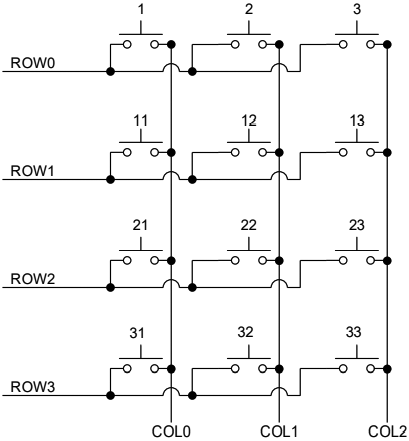
ąĀąĖčü. 30. ąĪčģąĄą╝ą░ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čłą░ą│ ą▓ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ - ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ TCA8418. ąĀąĄą│ąĖčüčéčĆčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ.
| ą©ą░ą│ |
ąśąĘą╝ąĄąĮčÅąĄą╝čŗąĄ čĆąĄą│ąĖčüčéčĆčŗ |
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čüčéčĆąŠą╣ą║ą░ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KP_GPIO1 (0x1D) |
0x0F |
ąŻčüčéą░ąĮąŠą▓ą║ą░ čüčéčĆąŠą║ ROW0-ROW3 ą┤ą╗čÅ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. |
| KP_GPIO2 (0x1E) |
0x07 |
ąŻčüčéą░ąĮąŠą▓ą║ą░ čüč鹊ą╗ą▒čåąŠą▓ COL0-COL2 ą┤ą╗čÅ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. |
| KP_GPIO3 (0x1F) |
0x00 |
ąŻčüčéą░ąĮąŠą▓ą║ą░ čüč鹊ą╗ą▒čåąŠą▓ COL8-COL9 ą┤ą╗čÅ ą╝ą░čéčĆąĖčåčŗ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. |
| ąØą░čüčéčĆąŠą╣ą║ą░ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĮą░ ąĮąŠąČą║ąĄ ~INT |
CFG (0x01) |
0x95 |
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčé KE_IEN, K_LCK_IEN, INT_CFG ąĖ AI. |
| ąØą░čüčéčĆąŠą╣ą║ą░ ą║ą╗ą░ą▓ąĖčł ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
UNLOCK1 (0x0F) |
0x21 |
ą¤ąĄčĆą▓ą░čÅ ą║ą╗ą░ą▓ąĖčłą░ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čü ą║ąŠą┤ąŠą╝ 33 (== 0x21). |
| UNLOCK2 (0x10) |
0x01 |
ąÆč鹊čĆą░čÅ ą║ą╗ą░ą▓ąĖčłą░ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čü ą║ąŠą┤ąŠą╝ 1 (== 0x01). |
| ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆąŠą▓ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ |
KP_LCK_TIMER (0x0E) |
0x52 |
ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĖąĮč鹥čĆą▓ą░ą╗ą░ 2 čüąĄą║čāąĮą┤čŗ ąŠčé ąĮą░ąČą░čéąĖčÅ ą┐ąĄčĆą▓ąŠą╣ ą║ą╗ą░ą▓ąĖčłąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą┤ąŠ ąĮą░ąČą░čéąĖčÅ ą▓č鹊čĆąŠą╣ ą║ą╗ą░ą▓ąĖčłąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ. ąóą░ą╣ą╝ąĄčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ 10 čüąĄą║čāąĮą┤. |
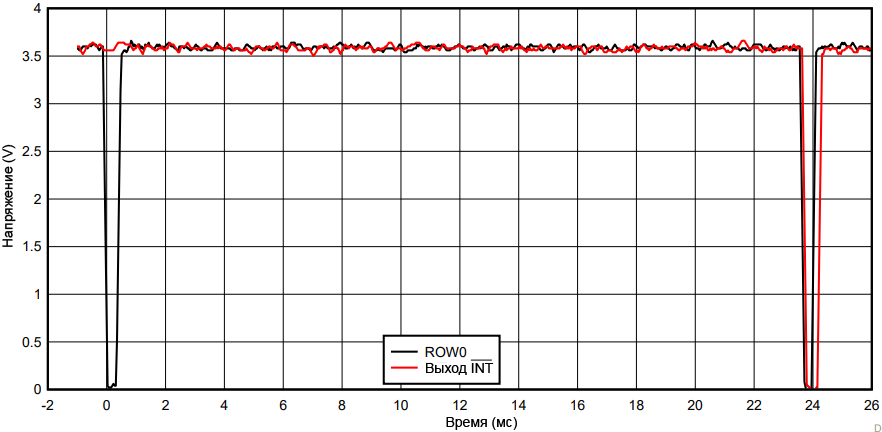
ąĀąĖčü. 31. ąĪąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ~INT ą┐čĆąĖ ąĮą░čćą░ą╗čīąĮąŠą╝ ąĮą░ąČą░čéąĖąĖ ąĮą░ ą║ąĮąŠą┐ą║čā.
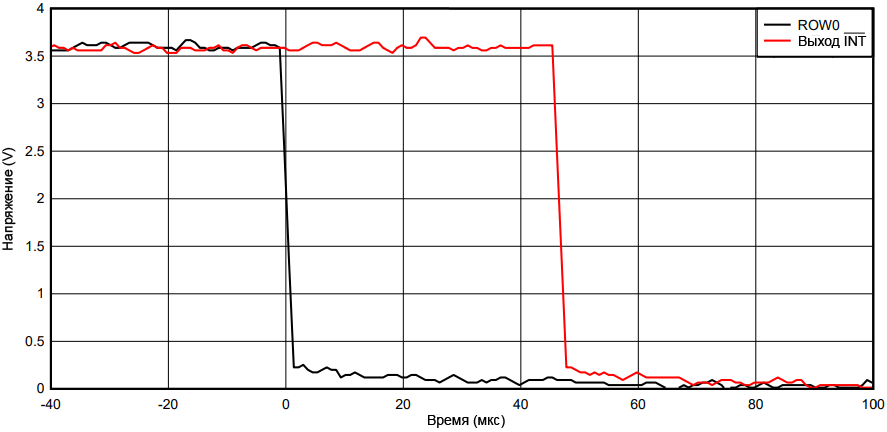
ąĀąĖčü. 32. ąöąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓č鹊čĆąŠą│ąŠ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.
[ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ ąĖčüč鹊čćąĮąĖą║čā ą┐ąĖčéą░ąĮąĖčÅ]
ąÆ čüą╗čāčćą░ąĄ čüą▒ąŠčÅ ąĖą╗ąĖ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TCA8418 ą╝ąŠąČąĄčé ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ čüą▒čĆąŠčüą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ (power-on reset, POR). Power-on reset čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠčłą╗ąŠ ą▓ąĄčüčī čåąĖą║ą╗ čüą┐ą░ą┤ą░ ąĖ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, čćč鹊ą▒čŗ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą┐ąŠą╗ąĮčŗą╣ čüą▒čĆąŠčü. ąŁč鹊čé čüą▒čĆąŠčü čéą░ą║ąČąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ č鹊ą╗čīą║ąŠ čćč鹊 ą┐ąŠą╗čāčćąĖą╗ąŠ ą┐ąĖčéą░ąĮąĖąĄ ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╝ ą▓ą║ą╗čÄč湥ąĮąĖąĖ.
ąöą▓ą░ čéąĖą┐ą░ čüą▒čĆąŠčüą░ power-on reset ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 33 ąĖ 34.
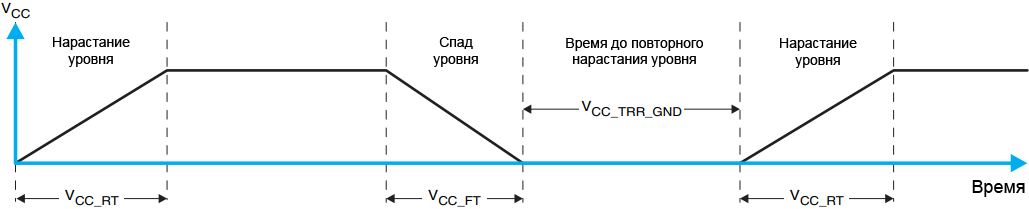
ąĀąĖčü. 33. VCC ą┐ąŠąĮąĖąĘąĖą╗ąŠčüčī ą┤ąŠ čāčĆąŠą▓ąĮčÅ ąĮąĖąČąĄ 0.2V ąĖą╗ąĖ ą┤ąŠ 0V, ąĖ ąĘą░č鹥ą╝ ą▓ąŠąĘčĆąŠčüą╗ąŠ ą┤ąŠ VCC.

ąĀąĖčü. 34. VCC ą┐ąŠąĮąĖąĘąĖą╗ąŠčüčī ą┤ąŠ čāčĆąŠą▓ąĮčÅ ąĮąĖąČąĄ ą┐ąŠčĆąŠą│ą░ POR, ąĖ ąĘą░č鹥ą╝ ą▓ąŠąĘčĆąŠčüą╗ąŠ ąŠą▒čĆą░čéąĮąŠ ą┤ąŠ VCC.
ąóą░ą▒ą╗ąĖčåą░ 13 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ power-on reset ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čéą░ą║ąĖčģ čéąĖą┐ąŠą▓ čüą▒čĆąŠčüą░.
ąóą░ą▒ą╗ąĖčåą░ 13. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐ąŠą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ(1).
| ąśą╝čÅ |
ą¤ą░čĆą░ą╝ąĄčéčĆ
|
min |
Typ |
MAX |
ąĢą┤. |
| VCC_GH |
ąŻčĆąŠą▓ąĄąĮčī, ą┤ąŠ ą║ąŠč鹊čĆąŠą│ąŠ VCC ą╝ąŠąČąĄčé ą┐ą░ą┤ą░čéčī, ąĮąŠ ąĮąĄ ą▓čŗąĘčŗą▓ą░čéčī ąĮą░čĆčāčłąĄąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖ VCCX_GW = 1 ą╝ą║čü. |
ąĪą╝. čĆąĖčü. 35 |
|
|
1.2 |
V |
| VCC_GW |
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüą▒ąŠčÅ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĮą░čĆčāčłąĄąĮąĖčÄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖ VCCX_GH = 0.5 x VCCx. |
ąĪą╝. čĆąĖčü. 35 |
|
|
10 |
ą╝ą║čü |
| VPORF |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠčĆąŠą│ą░ čüą▒čĆąŠčüą░ POR ą┐čĆąĖ čüą┐ą░ą┤ąĄ VCC. |
|
0.76 |
|
1.15 |
V |
| VPORR |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠčĆąŠą│ą░ čüą▒čĆąŠčüą░ POR ą┐čĆąĖ ąĮą░čĆą░čüčéą░ąĮąĖčÅ VCC. |
|
1.03 |
|
1.43 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠą║čĆčāąČą░čÄčēąĄą╣ čüčĆąĄą┤čŗ TA = ŌĆō40┬░C .. 85┬░C (ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ąĮąĄčćč鹊 ąĖąĮąŠąĄ).
ąĪą▒ąŠąĖ ą▓ ą▒ą╗ąŠą║ąĄ ą┐ąĖčéą░ąĮąĖčÅ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī TCA8418 ą┐čĆąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ čüą▒čĆąŠčüą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ. ą©ąĖčĆąĖąĮą░ (VCC_GW) ąĖ ą▓čŗčüąŠčéą░ (VCC_GH) ąĖą╝ą┐čāą╗čīčüą░ ą┐čĆąŠą▓ą░ą╗ą░ ąĘą░ą▓ąĖčüčÅčé ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░. ąæą╗ąŠą║ąĖčĆčāčÄčēą░čÅ ąĄą╝ą║ąŠčüčéčī, ąĖą╝ą┐ąĄą┤ą░ąĮčü ąĖčüč鹊čćąĮąĖą║ą░ ąĖ ąĖą╝ą┐ąĄą┤ą░ąĮčü čāčüčéčĆąŠą╣čüčéą▓ą░ čÅą▓ą╗čÅčÄčéčüčÅ čäą░ą║č鹊čĆą░ą╝ąĖ, ą▓ą╗ąĖčÅčÄčēąĖą╝ąĖ ąĮą░ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čüą▒čĆąŠčüą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ. ąØą░ čĆąĖčü. 35 ąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ 13 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ č鹊ą╝, ą║ą░ą║ ąĖąĘą╝ąĄčĆčÅčéčī čŹčéąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ.
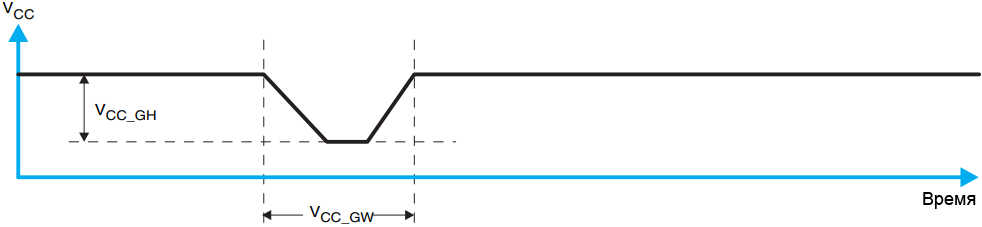
ąĀąĖčü. 35. ą©ąĖčĆąĖąĮą░ ąĖ ą▓čŗčüąŠčéą░ ą┐čĆąŠą▓ą░ą╗ą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ.
VPOR ą║čĆąĖčéąĖčćąĮąŠ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą▒čĆąŠčüą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ. ąŁč鹊 čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ čüąŠčüč鹊čÅąĮąĖąĄ čüą▒čĆąŠčüą░ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ, ąĖ ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ą╝ąĄčüč鹥 čü ą╝ą░čłąĖąĮąŠą╣ čüąŠčüč鹊čÅąĮąĖčÅ I2C/SMBus ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąŚąĮą░č湥ąĮąĖąĄ VPOR ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą┐ąŠąĮąĖąČą░ąĄčéčüčÅ ą╗ąĖ VCC, ąĖą╗ąĖ ąČąĄ ąĮą░čĆą░čüčéą░ąĄčé ąŠčé 0V. ąĀąĖčü. 36 ąĖ čéą░ą▒ą╗ąĖčåą░ 13 ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüčŗą▓ą░čÄčé čŹčéąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ.
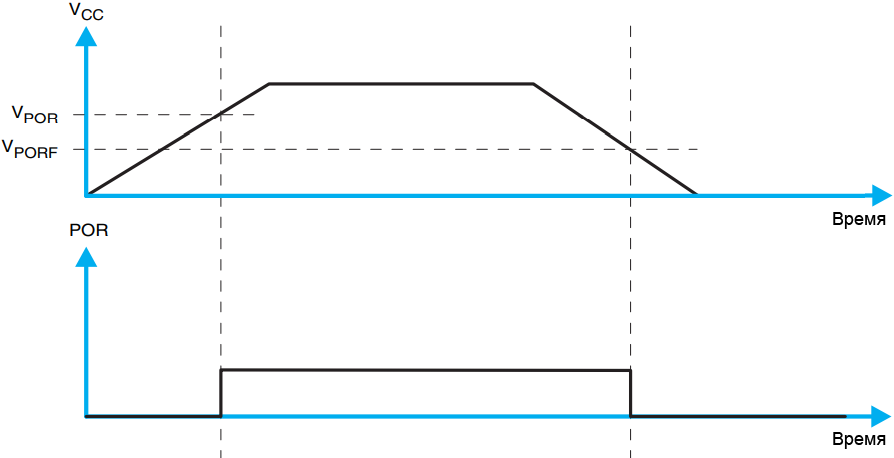
ąĀąĖčü. 36. VPOR.
ą¦č鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čĆą░ą▒ąŠčéą░ą╗ čüą▒čĆąŠčü ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ, čüąŠą▒ą╗čÄą┤ą░ą╣č鹥 ą▓čŗčłąĄą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ąĮą░ čĆąĖčüčāąĮą║ą░čģ 33-36 ąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ 13.
ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ, ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ, ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąĘą░ą║čāą┐ą║ąĄ, čĆą░ąĘą╝ąĄčĆą░ą╝ ą║ąŠčĆą┐čāčüąŠą▓ ąĖ ą┐ąŠčüą░ą┤ąŠčćąĮčŗčģ ą╝ąĄčüčé TCA8418 čüą╝. ą▓ ą┤ą░čéą░čłąĖč鹥 [1].
[ą¤čĆąĖą╝ąĄčĆ čĆą░ą▒ąŠčéčŗ čü TCA8418]
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ čüą║ąĄčéčćą░ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ [4].
#include < Wire.h>
#include < tca8418.h>
KEYS Keypad;
volatile bool KeyInt=false;
void KeyISR(void) { // ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮąŠą╣ ą╝ą░čéčĆąĖčåčŗ
KeyInt = true;
}
void setup() {
Serial.begin(9600);
Wire.begin();
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ą░čéčĆąĖčåčŗ 4x4 ąĮą░ COL0-COL3, ROW0-ROW3,
// ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
Keypad.begin(ROW0|ROW1|ROW2|ROW3, COL0|COL1|COL2|COL3,
CFG_KE_IEN|CFG_OVR_FLOW_IEN|CFG_INT_CFG|CFG_OVR_FLOW_M);
// ą¤ąĄčĆą▓čŗą╣ ą░čĆą│čāą╝ąĄąĮčé čŹč鹊 ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ Arduino ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ
// ą║ čüąĖą│ąĮą░ą╗čā ~INT ąŠčé TCA8418, ą▓č鹊čĆąŠą╣ ą░čĆą│čāą╝ąĄąĮčé čŹč鹊 ą░ą┤čĆąĄčü ISR:
Keypad.enableInterrupt(2, KeyISR);
}
void loop() {
// ą¤čĆąŠą▓ąĄčĆą║ą░ čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ą░
if(KeyInt) {
uint8_t key;
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ąŠą┤ą░ ą║ąĮąŠą┐ą║ąĖ ąĖąĘ FIFO TCA8418:
key=Keypad.readKeypad();
// ą¤ąĄčćą░čéčī HEX-ą║ąŠą┤ą░ ą║ąĮąŠą┐ą║ąĖ ...
Serial.print("Keyboard ISR...Key:");
Serial.print((key&0x7F), HEX);
// ... ąĖ čüąŠą▒čŗčéąĖčÅ ąĮą░ąČą░čéąĖčÅ ąĖą╗ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ (ą┐ąŠ ą▒ąĖčéčā 7):
if(key & 0x80) {
Serial.println(" key down");
} else {
Serial.println(" key up");
}
KeyInt=false; // ąĪą▒čĆąŠčü ąĮą░čłąĄą│ąŠ čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
// ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░ TCA8418:
Keypad.clearInterruptStatus();
}
// ąóčāčé ą╝ąŠąČąĮąŠ ą▓čüčéą░ą▓ąĖčéčī ą┤čĆčāą│čāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā:
;
}
[ąÜą░ą║ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąŠčüčéą╗ąĄąČąĖą▓ą░ąĮąĖąĄ ą░ą▓č鹊ą┐ąŠą▓č鹊čĆą░]
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą║ąŠą┤, ą│ą┤ąĄ čü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ TCA8418 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą░ą▓č鹊ą┐ąŠą▓č鹊čĆ ą║ąĮąŠą┐ąŠą║ ą┐čĆąĖ ąĖčģ čāą┤ąĄčƹȹ░ąĮąĖąĖ.
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ TCA8418auto.h:
#pragma once
#include < stdbool.h>
#include < stdint.h>
#include "FreeRTOS.h"
#include "queue.h"
#define KEY_THREAD_SLEEP_MS 30
#define NO_KEY_PRESS_TIMEOUT_MS 15000
// ąĪąŠčüč鹊čÅąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░:
// I ą░ąĮą│ą╗ąĖą╣čüą║ąĖąĄ ą▒čāą║ą▓čŗ, II čĆčāčüčüą║ąĖąĄ, III čåąĖčäčĆčŗ ąĖ čüąĖą╝ą▓ąŠą╗čŗ
typedef enum
{
KM1_low = 0, // I
KM2_low = 2, // II
KM3_low = 4, // III
}TKeyMode;
// ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ:
typedef enum
{
KA_NONE,
KA_SHIFT_ONCE,
KA_SHIFT_PERMANENT,
KA_MENU,
KA_ENTER,
KA_BACK,
KA_DEL,
KA_UP,
KA_LEFT,
KA_RIGHT,
KA_DOWN,
KA_III,
KA_II,
KA_I,
KA_VOLUME_MINUS,
KA_VOLUME_PLUS
}TKeyboardAction;
// ąĪąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą┤ą░čćąĖ ą▒ąŠą╗čīčłąĖčģ ąĖą╗ąĖ ą╝ą░ą╗ąĄąĮčīą║ąĖčģ ą▒čāą║ą▓:
typedef enum
{
SHIFT_NONE = 0, // ą▓čüąĄą│ą┤ą░ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ą▒čāą║ą▓čŗ
SHIFT_ONCE, // ą▒ąŠą╗čīčłą░čÅ ą▒čāą║ą▓ą░ 1 čĆą░ąĘ
SHIFT_PERMANENT // ą▒ąŠą╗čīčłąĖąĄ ą▒čāą║ą▓čŗ ą┐ąŠčüč鹊čÅąĮąĮąŠ
}TShiftState;
// ąĪąŠčüč鹊čÅąĮąĖčÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ ą░ą▓č鹊ą┐ąŠą▓č鹊čĆą░ ąĖ ąĮą░ąČą░čéąĖčÅ SHIFT:
typedef enum
{
KEYAUTO_NONE = 0,
KEYAUTO_PRESS_INIT,
KEYAUTO_PRESS_PULSE,
KEYAUTO_SHIFT_PRESS_INIT
}TKeyAutoState;
// ąĪčéčĆčāą║čéčāčĆą░, ą│ą┤ąĄ čģčĆą░ąĮąĖčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ čäčāąĮą║čåąĖąĖ
// ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ ą░ą▓č鹊ą┐ąŠą▓č鹊čĆą░ AutoRepeatHandler:
typedef struct
{
uint8_t scancode;
TKeyAutoState state;
uint32_t counter;
}TKeyInfo;
extern TKeyboardAction keybaction;
extern TKeyMode km;
extern TShiftState shiftstate;
void keypadtask(void const * argument);
ą£ąŠą┤čāą╗čī TCA8418auto.c:
#include "keyapp.h"
#include "beeper.h"
#include "screenthread.h"
#include "modes.h"
#include "guiapp.h"
#include "editor.h"
#include "TCA8418.h"
static int16_t key_press_timeout = NO_KEY_PRESS_TIMEOUT_MS; // 30 ą╝čü
TShiftState shiftstate = SHIFT_NONE;
static SemaphoreHandle_t keybsem;
static TKeyInfo kinfo = {0, KEYAUTO_NONE, 0};
TKeyboardAction keybaction = KA_NONE;
// ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ąĮąŠąČą║ąĖ ~INT ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ TCA8418.
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
static BaseType_t xHigherPriorityTaskWoken;
xSemaphoreGiveFromISR(keybsem, &xHigherPriorityTaskWoken);
}
// ąóą░ą▒ą╗ąĖčåą░ ą┐ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ąĖ čüą║ą░ąĮą║ąŠą┤ąŠą▓ TCA8418 ą▓ čüąĖą╝ą▓ąŠą╗čŗ ASCII.
static uint8_t KeyMap[KEYMAP_TOT_KEYS][KEYMAP_TOT_MODES] =
{ // ąĀąĄą│ąĖčüčéčĆčŗ: ą▓ąĄčĆčģąĮąĖą╣, čüčĆąĄą┤ąĮąĖą╣, ąĮąĖąČąĮąĖą╣
{ 'q', 'Q', 'ą╣', 'ąÖ', '1', '1'},
{ 'w', 'W', 'čå', 'ą”', '2', '2'},
{ 'e', 'E', 'čā', 'ąŻ', '3', '3'},
{ 'r', 'R', 'ą║', 'ąÜ', '4', '4'},
{ 't', 'T', 'ąĄ', 'ąĢ', '5', '5'},
{ 'y', 'Y', 'ąĮ', 'ąØ', '6', '6'},
{ 'u', 'U', 'ą│', 'ąō', '7', '7'},
{ 'i', 'I', 'čł', 'ą©', '8', '8'},
{ 'o', 'O', 'čē', 'ą®', '9', '9'},
{ 'p', 'P', 'ąĘ', 'ąŚ', '0', '0'},
{ 'a', 'A', 'čä', 'ąż', '?', '?'},
{ 's', 'S', 'čŗ', 'ą½', '!', '!'},
{ 'd', 'D', 'ą▓', 'ąÆ', '$', '$'},
{ 'f', 'F', 'ą░', 'ąÉ', '#', '#'},
{ 'g', 'G', 'ą┐', 'ą¤', '%', '%'},
{ 'h', 'H', 'čĆ', 'ąĀ', '(', '('},
{ 'j', 'J', 'ąŠ', 'ą×', ')', ')'},
{ 'k', 'K', 'ą╗', 'ąø', '+', '+'},
{ 'l', 'L', 'ą┤', 'ąö', '-', '-'},
{ '\a', '\a', '\a', '\a', '\a', '\a'}, // TX
{ 'z', 'Z', 'čÅ', 'ą»', '`', '`'},
{ 'x', 'X', 'čć', 'ą¦', ';', ';'},
{ 'c', 'C', 'čü', 'ąĪ', ':', ':'},
{ 'v', 'V', 'ą╝', 'ą£', '@', '@'},
{ 'b', 'B', 'ąĖ', 'ąś', '"', '"'},
{ 'n', 'N', 'čé', 'ąó', '/', '/'},
{ 'm', 'M', 'čī', 'ą¼', '< ', '< '},
{ '\a', '\a', 'ą▒', 'ąæ', '>', '>'},
{ '\a', '\a', 'čÄ', 'ą«', '=', '='},
{ '\a', '\a', '\a', '\a', '\a', '\a'}, // RX
{ '.', '.', 'čģ', 'čģ', 'čŖ', 'ą¬'},
{ ',', ',', 'ąČ', 'ą¢', '*', '*'},
{ '&', '&', 'čŹ', 'ąŁ', 'čæ', 'ąü'},
{ ' ', ' ', ' ', ' ', ' ', ' '},
{ '\a', '\a', '\a', '\a', '\a', '\a'}, // M1
{ '\a', '\a', '\a', '\a', '\a', '\a'}, // M2
{ '\a', '\a', '\a', '\a', '\a', '\a'}, // M3
{ '\a', '\a', '\a', '\a', '\a', '\a'}, // SHIFT
{ '\a', '\a', '\a', '\a', '\a', '\a'}, // MENU
{ '\a', '\a', '\a', '\a', '\a', '\a'}, // ENTER
};
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ąĖ čüą║ą░ąĮą║ąŠą┤ąŠą▓ TCA8418.
static char fullkeysdecode (uint8_t scancode)
{
char key = 0;
switch(scancode)
{
case 0xC5:
keybaction = KA_MENU;
break;
case 0xC6: // ENTER
keybaction = KA_ENTER;
break;
case 0xC7: // BACK
keybaction = KA_BACK;
break;
case 0xC8: // DEL
keybaction = KA_DEL;
break;
case 0xC9: // UP
keybaction = KA_UP;
break;
case 0xCA: // LEFT
keybaction = KA_LEFT;
break;
case 0xCB: // RIGHT
keybaction = KA_RIGHT;
break;
case 0xCC: // DOWN
keybaction = KA_DOWN;
break;
case 0xCE:
// mode III
km = KM3_low;
keybaction = KA_III;
break;
case 0xCF:
// mode II
km = KM2_low;
keybaction = KA_II;
break;
case 0xBA:
case 0xBB:
// ąÜąĮąŠą┐ą║ąĖ čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ąĖ ą│čĆąŠą╝ą║ąŠčüčéąĖ:
keybaction = (TKeyboardAction)(KA_VOLUME_MINUS + (scancode - 0xBA));
break;
case 0xD0:
// mode I
km = KM1_low;
keybaction = KA_I;
break;
default:
// ąÆčŗą┤ą░čćą░ čüąĖą╝ą▓ąŠą╗ą░ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄą│ąĖčüčéčĆą░ ąĖ čüąŠčüč鹊čÅąĮąĖčÅ SHIFT:
if (SHIFT_ONCE==shiftstate)
{
key = KeyMap[scancode-0x9F][km+1];
shiftstate = SHIFT_NONE;
UpdateAtScreen(SCR_UPDATE_RUS_ENG);
}
else if (SHIFT_PERMANENT==shiftstate)
key = KeyMap[scancode-0x9F][km+1];
else
key = KeyMap[scancode-0x9F][km];
}
return key;
}
// ą×čéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ, čüą║ąŠą╗čīą║ąŠ ąĮąĄ ą▒čŗą╗ąŠ ąĮą░ąČą░čéąĖą╣ ąĮą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĄ.
static bool KeyTimeout (void)
{
bool result = false;
switch(appmode)
{
case MODE_MAIN_MENU:
case MODE_MENU_SETTINGS:
key_press_timeout -= KEY_THREAD_SLEEP_MS;
if (key_press_timeout < 0)
result = true;
break;
default:
key_press_timeout = NO_KEY_PRESS_TIMEOUT_MS;
}
return result;
}
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ I2C STM32 ą▓ čĆąĄąČąĖą╝ąĄ master ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝
// ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ TCA8418.
static void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0; // ąöą╗čÅ čĆąĄąČąĖą╝ą░ master I2C
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
HALerrorHandler(__FILE__, __LINE__);
}
// ąĢčüą╗ąĖ ąĮą░ ą║ąĮąŠą┐ą║ąĄ čĆą░ą▒ąŠčéą░ąĄčé ą░ą▓č鹊ą┐ąŠą▓č鹊čĆ, č鹊 ą▓ąĄčĆąĮąĄčé true.
static bool IsRepeatKey (uint8_t scancode)
{
switch (scancode)
{
case 0xC4: // SHIFT
case 0xC5: // MENU
case 0xC6: // ENTER
case 0xC7: // BACK
case 0xC8: // DEL
case 0xCE: // III
case 0xCF: // II
case 0xD0: // I
return false;
default:
return true;
}
}
// ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čĆąĄą░ą╗ąĖąĘčāąĄčé čĆą░ą▒ąŠčéčā ą░ą▓č鹊ą┐ąŠą▓č鹊čĆą░ ąĖ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą║ąĮąŠą┐ą║ąĖ
// SHIFT. ą¦č鹊ą▒čŗ ąŠčéčüą╗ąĄąČąĖą▓ą░ą╗čüčÅ ą░ą▓č鹊ą┐ąŠą▓č鹊čĆ, čŹčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ
// čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ ą┐ąŠčĆčÅą┤ą║ą░ 30 ą╝čü (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮą░ ą▓čģąŠą┤ąĄ scancode == 0),
// ą╗ąĖą▒ąŠ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą╗čāč湥ąĮąĖčÅ čüą║ą░ąĮą║ąŠą┤ą░ ąŠčé TCA8418 (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ
// ąĮą░ ą▓čģąŠą┤ąĄ 8-ą▒ąĖčéąĮčŗą╣ čüą║ą░ąĮą║ąŠą┤, ą╗ąŠą│. 1 ą▓ čüčéą░čĆčłąĄą╝ čĆą░ąĘčĆčÅą┤ąĄ ą║ąŠč鹊čĆąŠą│ąŠ
// ąŠąĘąĮą░čćą░ąĄčé ąĮą░ąČą░čéąĖąĄ, ą╗ąŠą│. 0 ąŠčéą┐čāčüą║ą░ąĮąĖąĄ). ąØą░ ą▓čŗčģąŠą┤ąĄ čéą░ą║ąČąĄ ą▓čŗą┤ą░ąĄčé čüą║ą░ąĮą║ąŠą┤.
//
// ąĢčüą╗ąĖ ą║ąĮąŠą┐ą║ą░ čāą┤ąĄčƹȹĖą▓ą░ą╗ą░čüčī ą┤ąŠą╗čīčłąĄ 1 čüąĄą║čāąĮą┤čŗ, č鹊 čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ
// ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą▓čŗą┤ą░čćčā čüą║ą░ąĮą║ąŠą┤ąŠą▓ čŹč鹊ą╣ ą║ąĮąŠą┐ą║ąĖ ą║ą░ąČą┤čŗąĄ 30 ą╝čü ą┤ą╗čÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ąĖ
// ą│čĆąŠą╝ą║ąŠčüčéąĖ, ąĖ (30*8) ą╝čü ą┤ą╗čÅ čüąĖą╝ą▓ąŠą╗čīąĮčŗčģ ą║ąĮąŠą┐ąŠą║. ąĢčüą╗ąĖ ą┤ąĄą╣čüčéą▓ąĖąĄ ąĮą░ ą▓čŗčģąŠą┤ąĄ
// ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, č鹊 ąĮą░ ą▓čŗčģąŠą┤ąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé 0.
static uint8_t AutoRepeatHandler (uint8_t scancode)
{
bool press = (scancode & 0x80) ? true : false;
switch (kinfo.state)
{
case KEYAUTO_NONE:
if (press)
{
if (IsRepeatKey(scancode))
{
kinfo.scancode = scancode;
kinfo.counter = 0;
kinfo.state = KEYAUTO_PRESS_INIT;
}
else if (0xC4 == scancode)
{
kinfo.scancode = scancode;
scancode = 0;
kinfo.counter = 0;
if (MODE_EDIT_TX_MESSAGE == appmode)
kinfo.state = KEYAUTO_SHIFT_PRESS_INIT;
else
kinfo.state = KEYAUTO_NONE;
}
}
else
scancode = 0;
break;
case KEYAUTO_PRESS_INIT:
if (0 == scancode)
{
if (kinfo.counter > 500)
{
scancode = kinfo.scancode;
kinfo.state = KEYAUTO_PRESS_PULSE;
}
else
{
kinfo.counter += KEY_THREAD_SLEEP_MS;
}
}
else if (press)
{
if (IsRepeatKey(scancode))
{
kinfo.scancode = scancode;
kinfo.counter = 0;
}
else if (0xC4 == scancode)
{
kinfo.scancode = scancode;
scancode = 0;
kinfo.counter = 0;
if (MODE_EDIT_TX_MESSAGE == appmode)
kinfo.state = KEYAUTO_SHIFT_PRESS_INIT;
else
kinfo.state = KEYAUTO_NONE;
}
}
else
{
scancode = 0;
kinfo.state = KEYAUTO_NONE;
}
break;
case KEYAUTO_PRESS_PULSE:
if (0 == scancode)
{
kinfo.counter++;
if (IsVolumeAction(kinfo.scancode))
{
scancode = kinfo.counter % 2 ? kinfo.scancode : 0;
}
else
{
scancode = (7 == (kinfo.counter % 8)) ? kinfo.scancode : 0;
}
}
else if (press)
{
if (IsRepeatKey(scancode))
{
kinfo.scancode = scancode;
kinfo.counter = 0;
}
else if (0xC4 == scancode)
{
kinfo.scancode = scancode;
scancode = 0;
kinfo.counter = 0;
if (MODE_EDIT_TX_MESSAGE == appmode)
kinfo.state = KEYAUTO_SHIFT_PRESS_INIT;
else
kinfo.state = KEYAUTO_NONE;
}
}
else
{
scancode = 0;
kinfo.state = KEYAUTO_NONE;
}
break;
case KEYAUTO_SHIFT_PRESS_INIT:
if (0 == scancode)
{
if (kinfo.counter < 1000)
{
kinfo.counter += KEY_THREAD_SLEEP_MS;
}
else
{
Beep(100);
osDelay(100);
Beep(100);
// ą¤ąŠą╝ąĄąĮčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ SHIFT "ąĮą░ ą┐ąŠčüč鹊čÅąĮą║čā".
if (SHIFT_PERMANENT == shiftstate)
{
keybaction = KA_NONE;
shiftstate = SHIFT_NONE;
UpdateAtScreen(SCR_UPDATE_RUS_ENG);
}
else
{
keybaction = KA_SHIFT_PERMANENT;
shiftstate = SHIFT_PERMANENT;
UpdateAtScreen(SCR_UPDATE_RUS_ENG);
}
kinfo.scancode = scancode = 0;
kinfo.counter = 0;
kinfo.state = KEYAUTO_NONE;
}
}
else if (press)
{
if (IsRepeatKey(scancode))
{
kinfo.scancode = scancode;
kinfo.counter = 0;
if (MODE_EDIT_TX_MESSAGE == appmode)
kinfo.state = KEYAUTO_SHIFT_PRESS_INIT;
else
kinfo.state = KEYAUTO_NONE;
}
else if (0xC4 == scancode)
{
kinfo.scancode = scancode;
scancode = 0;
kinfo.counter = 0;
if (MODE_EDIT_TX_MESSAGE == appmode)
kinfo.state = KEYAUTO_SHIFT_PRESS_INIT;
else
kinfo.state = KEYAUTO_NONE;
}
}
else
{
if (scancode = kinfo.scancode)
{
// ą¤ąŠą╝ąĄąĮčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ SHIFT ąŠą┤ąĮąŠą║čĆą░čéąĮąŠ.
Beep(100);
if (SHIFT_PERMANENT == shiftstate || (SHIFT_ONCE == shiftstate))
shiftstate = SHIFT_NONE;
else
{
shiftstate = SHIFT_ONCE;
keybaction = KA_SHIFT_ONCE;
}
UpdateAtScreen(SCR_UPDATE_RUS_ENG);
}
kinfo.scancode = scancode = 0;
kinfo.counter = 0;
kinfo.state = KEYAUTO_NONE;
}
break;
}
return scancode;
}
// ą¤ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮčŗąĄ ąĮą░ąČą░čéąĖčÅ:
void keypadtask(void const * argument)
{
uint8_t scancode;
keybsem = xSemaphoreCreateBinary();
if( NULL == keybsem )
FreeRTOSerrorHandler(__FILE__, __LINE__);
MX_I2C1_Init();
TCA8418_configure();
for(;;)
{
// ą”ąĖą║ą╗ ą┐čĆąŠą║čĆčāčćąĖą▓ą░ąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TCA8418
// ą▓čŗą┤ą░ąĄčé čüą║ą░ąĮą║ąŠą┤, ą╗ąĖą▒ąŠ ą║ą░ąČą┤čŗąĄ KEY_THREAD_SLEEP_MS ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤.
if (pdTRUE == xSemaphoreTake(keybsem, KEY_THREAD_SLEEP_MS))
{
scancode = TCA8418_getState();
TCA8418_clearFlag();
}
else
{
scancode = 0;
if (KeyTimeout())
{
SetAppMode(MODE_RX_SCREEN, SCR_UPDATE_RX_SCREEN_TEXT
|SCR_UPDATE_RX_SCREEN_WATERFALL);
}
}
scancode = AutoRepeatHandler (scancode);
if (scancode)
{
TWork* pwork = &work[idxwork++];
idxwork &= WORKCMDMASK;
pwork->cmd = CMD_KEY;
pwork->scancode = fullkeysdecode(scancode | 0x80);
xQueueSend( work_queue, &pwork, 0 );
key_press_timeout = NO_KEY_PRESS_TIMEOUT_MS;
}
}
}
[ąĪčüčŗą╗ą║ąĖ]
1. TCA8418 I2C Controlled Keypad Scan IC With Integrated ESD Protection site:ti.com.
2. SLVA689 I2C Bus Pullup Resistor Calculation site:ti.com.
3. SPRA953 Semiconductor and IC Package Thermal Metrics site:ti.com.
4. phishman TCA8418 I2C Keypad Controller Arduino Library site:github.com. |



