BitBang . ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ BitBang ą┤ą╗čÅ čćąĖą┐ąŠą▓ FTDI ąŠąĘąĮą░čćą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮąŠąČą║ą░ą╝ąĖ čćąĖą┐ą░ č湥čĆąĄąĘ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ USB. ąØą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ą║ąŠč鹊čĆą░čÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ąŠą▓ čäčāąĮą║čåąĖą╣ ąĖąĘ čäąĖčĆą╝ąĄąĮąĮąŠą╣ DLL FTDI ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą╗ąŠą│ąĖč湥čüą║ąĖą╝ąĖ čāčĆąŠą▓ąĮčÅą╝ąĖ ą▓čŗą▓ąŠą┤ąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FTDI, ąĖ ą╝ąŠąČąĄčé čćąĖčéą░čéčī ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ą░čģ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąŠąČą║ąĖ čćąĖą┐ą░ FTDI čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą┐ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ GPIO, ąĮąŠ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąŠąĮąĖ ąĮąĄ ąĖąĘ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ BitBang, ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ D2XX Direct Drivers [1] ąĖ čéčāą┤ą░ ąŠčéąĮąŠčüąĖčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ DLL (FTD2XX.DLL), ą║ąŠč鹊čĆčāčÄ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, čćč鹊ą▒čŗ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ą▓čŗąĘčŗą▓ą░čéčī čäčāąĮą║čåąĖąĖ BitBang (FT_SetBitMode, FT_GetBitMode). ąØą░ čüą░ą╣č鹥 FTDI ąĄčüčéčī ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ą┤ą╗čÅ C++ Builder, C#, Delphi, LabVIEW, Visual Basic, Visual C++ ąĖ ą┤čĆčāą│ąĖčģ ą┐ą╗ą░čéč乊čĆą╝ [2]. ąöą░ą╗ąĄąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ FTDI "D2XX Programmer's Guide" [1].
D2XX . ąśąĮč鹥čĆč乥ą╣čü D2XX čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮąŠą╣ (ąĘą░ą║čĆčŗč鹊ą╣) čĆą░ąĘčĆą░ą▒ąŠčéą║ąŠą╣ ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI, čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮąŠą╣ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ čü čćąĖą┐ą░ą╝ąĖ čŹč鹊ą╣ ą║ąŠą╝ą┐ą░ąĮąĖąĖ. ąśčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ D2XX ąĖ FTD2XX.DLL.
VCP . Virtual COM Port - ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé (COM-ą┐ąŠčĆčé), ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows, ą║ąŠą│ą┤ą░ ą║ ąĮąĄą╣ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ą╗ą░čüčüą░ USB CDC. ą¦ąĖą┐čŗ ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI čćą░čüč鹊 čĆą░ą▒ąŠčéą░čÄčé ąĖą╝ąĄąĮąĮąŠ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ USB CDC.
CDM . ąŁčéą░ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ Combined Driver Model. ą¤ą░ą║ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ Windows, ą▓ ą║ąŠč鹊čĆąŠą╝ čüąŠčüčĆąĄą┤ąŠč鹊č湥ąĮčŗ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ D2XX, ąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP.
CDM v2.12.00 WHQL Certified.exe čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣, ąĄą┤ąĖąĮčŗą╣ ą┐ą░ą║ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ VCP ąĖ D2XX ą┤ą╗čÅ ą▓čüąĄčģ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ čüąĄą╝ąĄą╣čüčéą▓ą░ Windows, 32-ą▒ąĖčéąĮčŗčģ ąĖ 64 ą▒ąĖčéąĮčŗčģ (ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ Windows RT ąĖ Windows CE)
FTD2XX_NET_v1.0.14.zip FTD2XX_NET.dll, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ managed wrapper DLL, ąĖ XML-čäą░ą╣ą╗ ą┤ą╗čÅ Intellisense ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą▓ čüčĆąĄą┤ąĄ Visual Studio
D2XX Programmer's Guide ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ FTD2XX.DLL
[ąÆą▓ąĄą┤ąĄąĮąĖąĄ ]
ąÜąŠą╝ą┐ą░ąĮąĖčÅ FTDI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 2 ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┤ą╗čÅ čüą▓ąŠąĖčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ USB-UART ąĖ USB-FIFO. ą×ą┤ąĖąĮ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé Virtual COM Port (VCP), ą║ąŠč鹊čĆčŗą╣ čüąĖčüč鹥ą╝ą░ Windows ą▓ąĖą┤ąĖčé ą║ą░ą║ ąŠą▒čŗčćąĮčŗą╣ COM-ą┐ąŠčĆčé. ąÆč鹊čĆąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü, D2XX, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮčāčÄ DLL (FTD2XX.DLL). ąśąĮč鹥čĆč乥ą╣čü D2XX ą┤ą░ąĄčé ą┤ąŠčüčéčāą┐ ą║ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ čäčāąĮą║čåąĖčÅą╝, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝ API COM-ą┐ąŠčĆčéą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, čéą░ą║ąĖą╝ ą║ą░ą║ čāčüčéą░ąĮąŠą▓ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI ą▓ čĆą░ąĘąĮčŗąĄ čĆąĄąČąĖą╝čŗ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéčī EEPROM čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆ čüą╗čāčćą░ąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ FTDI ą┤ą╗čÅ Windows, ąŠą▒ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ D2XX ąĖ VCP čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčÅčÄčéčüčÅ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąŠąĮąĮąŠą╝ ą┐ą░ą║ąĄč鹥 (čüą╝. čüčüčŗą╗ą║ąĖ [1]), čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠą╝ Combined Driver Model (CDM) package (ąĮą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ą┐ąĄčĆąĄą▓ąŠą┤ą░ čŹč鹊 ą▒čŗą╗ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ ąĖąĮčüčéą░ą╗ą╗čÅč鹊čĆ CDM v2.12.00 WHQL Certified.exe). ąØą░ čĆąĖčü. 2.1 ą┐ąŠą║ą░ąĘą░ąĮą░ Windows CDM Driver Architecture (ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ Windows CDM).
ąĀąĖčü. 2.1. Windows CDM Driver Architecture.
ąöą╗čÅ Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖčģ) ąĖ Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖčģ) ą┤čĆą░ą╣ą▓ąĄčĆčŗ D2XX ąĖ VCP čÅą▓ą╗čÅčÄčéčüčÅ ą▓ąĘą░ąĖą╝ąŠąĖčüą║ą╗čÄčćą░čÄčēąĖą╝ąĖ ąŠą┐čåąĖčÅą╝ąĖ, čé. ąĄ. č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čéąĖą┐ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB (device ID). ąÆ čüą╗čāčćą░ąĄ čüąĖčüč鹥ą╝čŗ Windows, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čĆą░ą▒ąŠčéą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ CDM, ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗ąĖą▒ąŠ D2XX, ą╗ąĖą▒ąŠ VCP ąĖąĮč鹥čĆč乥ą╣čü ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆčāą│ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ąĮąŠ ą▓čüąĄ-čéą░ą║ąĖ ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą▒ą░ ąĖąĮč鹥čĆč乥ą╣čüą░ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
ą¤ąŠčüą║ąŠą╗čīą║čā ąĖąĮč鹥čĆč乥ą╣čü ą┤čĆą░ą╣ą▓ąĄčĆą░ VCP čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ čŹą╝čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ COM-ą┐ąŠčĆčéą░, č鹊 FTDI ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ, ą│ą┤ąĄ ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ąŠą▒ą╝ąĄąĮ ą╝ąĄąČą┤čā ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ VCP ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝; čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą╝ąŠąČąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ čüą┐čĆą░ą▓ąŠčćąĮąŠą│ąŠ ą╝ą░č鹥čĆąĖą░ą╗ą░ ąĖ ą│ąŠč鹊ą▓ąŠą│ąŠ ą║ąŠą┤ą░ ą┐ąŠ č鹥ą╝ąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ.
ąÆ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü D2XX ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI. ą×ą┐ąĖčüą░ąĮčŗ čäčāąĮą║čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ FTD2XX ą║ąŠč鹊čĆčŗąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ čüą▓ąŠąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ.
[3. ąÜą╗ą░čüčüąĖč湥čüą║ąĖąĄ čäčāąĮą║čåąĖąĖ D2XX ]
ążčāąĮą║čåąĖąĖ, ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čüąŠ ą▓čüąĄą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ FTDI.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąÜąŠą╝ą░ąĮą┤ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║čāčÄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ VID ąĖ PID ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čéą░ą▒ą╗ąĖčåąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčā čĆą░ą▒ąŠčéą░čéčī č湥čĆąĄąĘ čāą║ą░ąĘą░ąĮąĮčāčÄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ VID ąĖ PID.
FT_STATUS FT_SetVIDPID (DWORD dwVID, DWORD dwPID);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
dwVID Device Vendor ID, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (VID)dwPID Device Product ID, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠą┤čāą║čéą░ (PID)
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤čĆą░ą╣ą▓ąĄčĆ ą▒čāą┤ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ ąĮą░ą▒ąŠčĆ VID ąĖ PID, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ (č鹊ą╗čīą║ąŠ VID 0x0403 čü PID-ą░ą╝ąĖ 0x6001, 0x6010, 0x6006). ą¦č鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ čü ą┤čĆčāą│ąĖą╝ąĖ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅą╝ąĖ VID ąĖ PID, ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ FT_SetVIDPID, ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║ąĖąĄ čäčāąĮą║čåąĖąĖ ą║ą░ą║ FT_ListDevices, FT_Open, FT_OpenEx ąĖą╗ąĖ FT_CreateDeviceInfoList.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąÜąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé č鹥ą║čāčēčāčÄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ VID ąĖ PID ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čéą░ą▒ą╗ąĖčåčŗ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_GetVIDPID (DWORD * pdwVID, DWORD * pdwPID);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
pdwVID čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ DWORD, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ VID čāčüčéčĆąŠą╣čüčéą▓ą░pdwPID čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ DWORD, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ PID čāčüčéčĆąŠą╣čüčéą▓ą░
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ FT_SetVIDPID.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŁčéą░ čäčāąĮą║čåąĖčÅ čüčéčĆąŠąĖčé čüą┐ąĖčüąŠą║ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ą░čģ, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ D2XX, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čüąĖčüč鹥ą╝ąĄ. ąÆ čüą┐ąĖčüą║ąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ąĮąĄ ąŠčéą║čĆčŗčéčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ (ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą║ą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ) ąĖ ąŠą▒ ąŠčéą║čĆčŗčéčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ (čü ą║ąŠč鹊čĆčŗą╝ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą▓ąĄą┤ąĄčéčüčÅ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ).
FT_STATUS FT_CreateDeviceInfoList (LPDWORD lpdwNumDevs);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
lpdwNumDevs čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čćąĖčüą╗ąŠ čéąĖą┐ą░ unsigned long, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čāčüčéčĆąŠą╣čüčéą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čüąĖčüč鹥ą╝ąĄ. ążčāąĮą║čåąĖčÅ ą▓čŗą┤ąĄą╗čÅąĄčé ą╝ąĄčüč鹊 ą┤ą╗čÅ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮąŠą│ąŠ čüą┐ąĖčüą║ą░ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠč鹊ą╝ ą╝ąŠąČąĮąŠ ąŠą┐čĆąŠčüąĖčéčī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ FT_GetDeviceInfoList ąĖą╗ąĖ FT_GetDeviceInfoDetailFT_GetDeviceInfoDetail.
ąĢčüą╗ąĖ ą▓ čüąĖčüč鹥ą╝ąĄ ą▒čŗą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓, č鹊 ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗą╣ čüą┐ąĖčüąŠą║ čāčüčéčĆąŠą╣čüčéą▓ ąĮąĄ ąĖąĘą╝ąĄąĮąĖčéčüčÅ, ą┐ąŠą║ą░ čäčāąĮą║čåąĖčÅ FT_CreateDeviceInfoList ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ ąĘą░ąĮąŠą▓ąŠ. ą¤čĆąĖą╝ąĄčĆ:
FT_STATUS ftStatus;
DWORD numDevs;
// ąĪąŠąĘą┤ą░ąĮąĖąĄ device information list:
ftStatus = FT_CreateDeviceInfoList(& numDevs);if (ftStatus == FT_OK)
{
printf("ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ %d \n " , numDevs);
}else
{
// ą×čłąĖą▒ą║ą░ ą▓čŗąĘąŠą▓ą░ FT_CreateDeviceInfoList
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čüą┐ąĖčüąŠą║ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ą░čģ, ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ D2XX ą▓ čŹč鹊ą╝ čüą┐ąĖčüą║ąĄ.
FT_STATUS FT_GetDeviceInfoList (FT_DEVICE_LIST_INFO_NODE * pDest,
LPDWORD lpdwNumDevs);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
*pDest čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ą░čüčüąĖą▓ čüčéčĆčāą║čéčāčĆ FT_DEVICE_LIST_INFO_NODE.lpdwNumDevs čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą▓ ą╝ą░čüčüąĖą▓ąĄ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ FT_CreateDeviceInfoList. ąĢčüą╗ąĖ ą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅčģ čāčüčéčĆąŠą╣čüčéą▓ čüąŠ čüč鹊čĆąŠąĮčŗ čüąĖčüč鹥ą╝čŗ ą▒čŗą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, č鹊 ąŠąĮąĖ ąĮąĄ ąŠčéčĆą░ąĘčÅčéčüčÅ ą▓ čüą┐ąĖčüą║ąĄ device info list, ą┐ąŠą║ą░ čäčāąĮą║čåąĖčÅ FT_CreateDeviceInfoList ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ ąĘą░ąĮąŠą▓ąŠ.
ąśąĮč乊čĆą╝ą░čåąĖčÅ Location ID ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ąĮąĄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąŠčéą║čĆčŗčéčŗ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░ FT_CreateDeviceInfoList.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąĮąĄ ą▒čāą┤ąĄčé ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąŠčéą║čĆčŗčéčŗ ą▓ ą┤čĆčāą│ąĖčģ ą┐čĆąŠčåąĄčüčüą░čģ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆ Flags ą▓ čüčéčĆčāą║čéčāčĆąĄ FT_DEVICE_LIST_INFO_NODE ą┐ąŠą║ą░ąČąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║čĆčŗč鹊, ąĮąŠ ą▓ ą┤čĆčāą│ąĖčģ ą┐ąŠą╗čÅčģ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĮąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ.
ąŚąĮą░č湥ąĮąĖąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ 4-ą▒ą░ą╣čéąĮąŠą╣ ą║ą░čĆč鹊ą╣ ą▒ąĖčé, čüąŠą┤ąĄčƹȹ░čēąĄą╣ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ Appendix A ŌĆō Type Definitions. ąæąĖčé 0 (čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣) čŹč鹊ą│ąŠ čćąĖčüą╗ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐ąŠčĆčé ąŠčéą║čĆčŗčé (open, 1) ąĖą╗ąĖ ąĘą░ą║čĆčŗčé (closed, 0). ąæąĖčé 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠčłą╗ąŠ 菹Įčāą╝ąĄčĆą░čåąĖčÄ - ą║ą░ą║ high-speed USB device (1) ąĖą╗ąĖ full-speed USB device (0). ą×čüčéą░ą╗čīąĮčŗąĄ ą▒ąĖčéčŗ (2 - 31) ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
ą£ą░čüčüąĖą▓ FT_DEVICE_LIST_INFO_NODES čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā ą▓ čüąĖčüč鹥ą╝ąĄ. ąĪčéčĆčāą║čéčāčĆą░ FT_DEVICE_LIST_INFO_NODES ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ. ą£ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüą┐ąĖčüą║ą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą┤ąĄą╗ąĄąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ čäčāąĮą║čåąĖąĄą╣ FT_CreateDeviceInfoList.
ąÜąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ Visual Basic, LabVIEW ąĖą╗ąĖ ą┐ąŠą┤ąŠą▒ąĮčŗčģ čÅąĘčŗą║ą░čģ, ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ FT_GetDeviceInfoDetail ą▓ą╝ąĄčüč鹊 čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 Linux, Mac OS X ąĖ Windows CE ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ (location ID). ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ čŹčéąĖčģ čüąĖčüč鹥ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆ Location ID ą▓ čüčéčĆčāą║čéčāčĆąĄ ą▒čāą┤ąĄčé ą┐čāčüčé.
ą¤čĆąĖą╝ąĄčĆ:
FT_STATUS ftStatus;
FT_DEVICE_LIST_INFO_NODE * devInfo;
DWORD numDevs;
// ąĪąŠąĘą┤ą░ąĮąĖąĄ device information list:
ftStatus = FT_CreateDeviceInfoList(& numDevs);
if (ftStatus == FT_OK)
{
printf("ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ %d \n " , numDevs);
}
if (numDevs > 0 )
{
// ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüą┐ąĖčüą║ą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ numDevs:
devInfo = (FT_DEVICE_LIST_INFO_NODE* )malloc(sizeof (FT_DEVICE_LIST_INFO_NODE)* numDevs);
// ą¤ąŠą╗čāč湥ąĮąĖąĄ device information list:
ftStatus = FT_GetDeviceInfoList(devInfo,& numDevs);
if (ftStatus == FT_OK)
{
for (int i = 0 ; i < numDevs; i++ )
{
printf("Dev %d: \n " , i);
printf(" Flags=0x%x \n " , devInfo[i].Flags);
printf(" Type=0x%x \n " , devInfo[i].Type);
printf(" ID=0x%x \n " , devInfo[i].ID);
printf(" LocId=0x%x \n " , devInfo[i].LocId);
printf(" SerialNumber=%s \n " , devInfo[i].SerialNumber);
printf(" Description=%s \n " , devInfo[i].Description);
printf(" ftHandle=0x%x \n " , devInfo[i].ftHandle);
}
}
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ą▒ąĄčĆąĄčé ąŠą┤ąĮčā ąĘą░ą┐ąĖčüčī ąĖąĘ čüą┐ąĖčüą║ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ą░čģ.
FT_STATUS FT_GetDeviceInfoDetail (DWORD dwIndex,
LPDWORD lpdwFlags,
LPDWORD lpdwType,
LPDWORD lpdwID,
LPDWORD lpdwLocId,
PCHAR pcSerialNumber,
PCHAR pcDescription,
FT_HANDLE * ftHandle);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
dwIndex ąĖąĮą┤ąĄą║čü ąĘą░ą┐ąĖčüąĖ ą▓ čüą┐ąĖčüą║ąĄ device info list.lpdwFlags čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned long, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ čäą╗ą░ą│ąŠą▓.lpdwType čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned long ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwID čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned long ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ device ID.lpdwLocId čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned long ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ device location ID.pcSerialNumber čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ą░ą║ ASCIIZ čüčéčĆąŠą║ąĖ (null-terminated string, čüčéčĆąŠą║ą░ ąŠą║ą░ąĮčćąĖą▓ą░čÄčēą░čÅčüčÅ ąĮčāą╗ąĄą╝).pcDescription čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąŠą┐ąĖčüą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ą░ą║ ASCIIZ čüčéčĆąŠą║ąĖ (null-terminated string, čüčéčĆąŠą║ą░ ąŠą║ą░ąĮčćąĖą▓ą░čÄčēą░čÅčüčÅ ąĮčāą╗ąĄą╝).*ftHandle čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ FT_HANDLE, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ čģąĄąĮą┤ą╗.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ FT_CreateDeviceInfoList. ąĢčüą╗ąĖ ą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅčģ čāčüčéčĆąŠą╣čüčéą▓ čüąŠ čüč鹊čĆąŠąĮčŗ čüąĖčüč鹥ą╝čŗ ą▒čŗą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, č鹊 ąŠąĮąĖ ąĮąĄ ąŠčéčĆą░ąĘčÅčéčüčÅ ą▓ čüą┐ąĖčüą║ąĄ device info list, ą┐ąŠą║ą░ čäčāąĮą║čåąĖčÅ FT_CreateDeviceInfoList ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ ąĘą░ąĮąŠą▓ąŠ.
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĖąĮą┤ąĄą║čüą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü 0.
ąŚąĮą░č湥ąĮąĖąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ 4-ą▒ą░ą╣čéąĮąŠą╣ ą║ą░čĆč鹊ą╣ ą▒ąĖčé, čüąŠą┤ąĄčƹȹ░čēąĄą╣ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ Appendix A ŌĆō Type Definitions. ąæąĖčé 0 (čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣) čŹč鹊ą│ąŠ čćąĖčüą╗ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐ąŠčĆčé ąŠčéą║čĆčŗčé (open, 1) ąĖą╗ąĖ ąĘą░ą║čĆčŗčé (closed, 0). ąæąĖčé 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠčłą╗ąŠ 菹Įčāą╝ąĄčĆą░čåąĖčÄ - ą║ą░ą║ high-speed USB device (1) ąĖą╗ąĖ full-speed USB device (0). ą×čüčéą░ą╗čīąĮčŗąĄ ą▒ąĖčéčŗ (2 - 31) ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
ąśąĮč乊čĆą╝ą░čåąĖčÅ Location ID ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ąĮąĄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąŠčéą║čĆčŗčéčŗ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░ FT_CreateDeviceInfoList.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąĮąĄ ą▒čāą┤ąĄčé ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąŠčéą║čĆčŗčéčŗ ą▓ ą┤čĆčāą│ąĖčģ ą┐čĆąŠčåąĄčüčüą░čģ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆ Flags ą▓ čüčéčĆčāą║čéčāčĆąĄ FT_DEVICE_LIST_INFO_NODE ą┐ąŠą║ą░ąČąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║čĆčŗč鹊, ąĮąŠ ą▓ ą┤čĆčāą│ąĖčģ ą┐ąŠą╗čÅčģ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĮąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ.
ąöą╗čÅ ą▓ąŠąĘą▓čĆą░čéą░ ą▓čüąĄą│ąŠ čüą┐ąĖčüą║ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ą░ą║ ą╝ą░čüčüąĖą▓ą░ čüčéčĆčāą║čéčāčĆ FT_DEVICE_LIST_INFO_NODE ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 FT_CreateDeviceInfoList.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 Linux, Mac OS X ąĖ Windows CE ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ (location ID). ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ čŹčéąĖčģ čüąĖčüč鹥ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆ Location ID ą▓ čüčéčĆčāą║čéčāčĆąĄ ą▒čāą┤ąĄčé ą┐čāčüčé.
ą¤čĆąĖą╝ąĄčĆ:
FT_STATUS ftStatus;
FT_HANDLE ftHandleTemp;
DWORD numDevs;
DWORD Flags;
DWORD ID;
DWORD Type;
DWORD LocId;
char SerialNumber[16 ];char Description[64 ];
// ąĪąŠąĘą┤ą░ąĮąĖąĄ device information list:
ftStatus = FT_CreateDeviceInfoList(& numDevs);if (ftStatus == FT_OK)
{
printf("ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ %d \n " ,numDevs);
}
if (numDevs > 0 )
{
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ 0:
ftStatus = FT_GetDeviceInfoDetail(0 , & Flags, & Type, & ID, & LocId,
SerialNumber, Description, & ftHandleTemp);
if (ftStatus == FT_OK)
{
printf("Dev 0: \n " );
printf(" Flags=0x%x \n " , Flags);
printf(" Type=0x%x \n " , Type);
printf(" ID=0x%x \n " , ID);
printf(" LocId=0x%x \n " , LocId);
printf(" SerialNumber=%s \n " , SerialNumber);
printf(" Description=%s \n " , Description);
printf(" ftHandle=0x%x \n " , ftHandleTemp);
}
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāčćą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ą░čģ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čüąĖčüč鹥ą╝ąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé. ążčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▓ąĄčĆąĮčāčéčī čéą░ą║čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ą║ą░ą║ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ location ID ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
FT_STATUS FT_ListDevices (PVOID pvArg1, PVOID pvArg2, DWORD dwFlags);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
pvArg1 ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé dwFlags.pvArg2 ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé dwFlags.dwFlags ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé č乊čĆą╝ą░čé ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čĆą░ąĘą╗ąĖčćąĮąŠą│ąŠ čéąĖą┐ą░. ąæąŠą╗ąĄąĄ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗą╣ čüą┐ąŠčüąŠą▒, č湥ą╝ čŹčéą░ čäčāąĮą║čåąĖčÅ - ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī FT_CreateDeviceInfoList, FT_GetDeviceInfoList ąĖ FT_GetDeviceInfoDetail, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ą▓ąŠąĘą▓čĆą░čēą░čÄčé ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ą░čģ.
ąÆ čŹč鹊ą╣ čāą┐čĆąŠčēąĄąĮąĮąŠą╣ č乊čĆą╝ąĄ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čāčüčéčĆąŠą╣čüčéą▓. ąĢčüą╗ąĖ ą▓ dwFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FT_LIST_NUMBER_ONLY, č鹊 ą┐ą░čĆą░ą╝ąĄčéčĆ pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ DWORD ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čāčüčéčĆąŠą╣čüčéą▓.
ążčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą┤ą╗čÅ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ: ąĄčüą╗ąĖ ą▓ dwFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ FT_OPEN_BY_SERIAL_NUMBER, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ čüčéčĆąŠą║ą░ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░; ąĄčüą╗ąĖ ą▓ dwFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FT_OPEN_BY_DESCRIPTION, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ čüčéčĆąŠą║ą░ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠą┤čāą║čéą░; ąĄčüą╗ąĖ ą▓ dwFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FT_OPEN_BY_LOCATION, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ Location ID; ąĄčüą╗ąĖ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮąĖ ąŠą┤ąĖąĮ ąĖąĘ čŹčéąĖčģ ą▒ąĖč鹊ą▓, č鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ čüčéčĆąŠą║ą░ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░.
ążčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▓ąŠąĘą▓čĆą░čéą░ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ą▓ dwFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▒ąĖčéčŗ FT_LIST_BY_INDEX ąĖ FT_OPEN_BY_SERIAL_NUMBER ąĖą╗ąĖ FT_OPEN_BY_DESCRIPTION, č鹊 ą┐ą░čĆą░ą╝ąĄčéčĆ pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ąĖąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ pvArg2 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĖąĮčÅčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čüčéčĆąŠą║čā. ąśčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĖąĮą┤ąĄą║čüčŗ ą┐ąŠ ą▒ą░ąĘąĄ 0, ąĖ ą┤ą╗čÅ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ąĖąĮą┤ąĄą║čüą░ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT_DEVICE_NOT_FOUND.
ążčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▓ąŠąĘą▓čĆą░čéą░ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ą▓čüąĄčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąĢčüą╗ąĖ ą▓ dwFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▒ąĖčéčŗ FT_LIST_ALL ąĖ FT_OPEN_BY_SERIAL_NUMBER ąĖą╗ąĖ FT_OPEN_BY_DESCRIPTION, č鹊 ą┐ą░čĆą░ą╝ąĄčéčĆ pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ą░čüčüąĖą▓ čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ąĮą░ ą▒čāč乥čĆčŗ, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüčéčĆąŠą║ąĖ, ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ pvArg2 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ DWORD, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čāčüčéčĆąŠą╣čüčéą▓. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā ą┤ą╗čÅ pvArg1, čćč鹊 ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ąĘą░ą┐ąĖčüčī ą▓ ą╝ą░čüčüąĖą▓ąĄ čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ąĮą░ ą▒čāč乥čĆčŗ ą┤ąŠą╗ąČąĮą░ čüąŠą┤ąĄčƹȹ░čéčī NULL-čāą║ą░ąĘą░č鹥ą╗čī, čéą░ą║ čćč鹊 ą▓ ą╝ą░čüčüąĖą▓ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĘą░ą┐ąĖčüąĄą╣, č湥ą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ location ID čāčüčéčĆąŠą╣čüčéą▓ą░, ąĄčüą╗ąĖ ą▓ dwFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▒ąĖčéčŗ FT_LIST_BY_INDEX ąĖ FT_OPEN_BY_LOCATION. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆ pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ąĖąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ pvArg2 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ long, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ location ID. ąśčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĖąĮą┤ąĄą║čüčŗ ą┐ąŠ ą▒ą░ąĘąĄ 0, ąĖ ą┤ą╗čÅ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ąĖąĮą┤ąĄą║čüą░ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT_DEVICE_NOT_FOUND. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 Windows CE ąĖ Linux ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ location ID.
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ location ID ą▓čüąĄčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮčŗ, ąĄčüą╗ąĖ ą▓ dwFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▒ąĖčéčŗ FT_LIST_ALL ąĖ FT_OPEN_BY_LOCATION. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ą░čüčüąĖą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čéąĖą┐ą░ long, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ location ID, ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ pvArg2 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ DWORD, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čāčüčéčĆąŠą╣čüčéą▓.
ą¤čĆąĖą╝ąĄčĆ 1. ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
FT_STATUS ftStatus;
DWORD numDevs;
ftStatus = FT_ListDevices(& numDevs, NULL , FT_LIST_NUMBER_ONLY);
if (ftStatus == FT_OK)
{
// FT_ListDevices OK, ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ numDevs čüąŠą┤ąĄčƹȹĖčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓.
}else
{
// čäčāąĮą║čåąĖčÅ FT_ListDevices ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čü ąŠčłąĖą▒ą║ąŠą╣
}
ą¤čĆąĖą╝ąĄčĆ 2. ą¤ąŠą╗čāč湥ąĮąĖąĄ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS ftStatus;
DWORD numDevs;
DWORD devIndex = 0 ; // ą┐ąĄčĆą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ
char Buffer[64 ]; // ą╝ąĄčüč鹊 ą┐ąŠą┤ čüčéčĆąŠą║čā čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ!
ftStatus = FT_ListDevices((PVOID)devIndex, Buffer,
FT_LIST_BY_INDEX| FT_OPEN_BY_SERIAL_NUMBER);
if (ftStatus == FT_OK)
{
// FT_ListDevices OK, ą▓ Buffer ąĮą░čģąŠą┤ąĖčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
}else
{
// čäčāąĮą║čåąĖčÅ FT_ListDevices ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čü ąŠčłąĖą▒ą║ąŠą╣
}
ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 ąĖąĮą┤ąĄą║čüčŗ ą▒ą░ąĘąĖčĆčāčÄčéčüčÅ ąĮą░ ąĮčāą╗ąĄ. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, č鹊 ąĖąĮą║čĆąĄą╝ąĄąĮčé devIndex ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąŠą╗čāč湥ąĮąĖčÄ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ čé. ą┤.
ą¤čĆąĖą╝ąĄčĆ 3. ą¤ąŠą╗čāč湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮąĖą╣ ą▓čüąĄčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
FT_STATUS ftStatus;
DWORD numDevs;
char * BufPtrs[3 ]; // čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ą░čüčüąĖą▓ ąĖąĘ 3 čāą║ą░ąĘą░č鹥ą╗ąĄą╣ char Buffer1[64 ]; // ą▒čāč乥čĆ ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ąĄčĆą▓ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ char Buffer3[64 ]; // ą▒čāč乥čĆ ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą▓č鹊čĆąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą╝ą░čüčüąĖą▓ą░ čāą║ą░ąĘą░č鹥ą╗ąĄą╣:
BufPtrs[0 ] = Buffer1;
BufPtrs[1 ] = Buffer2;
BufPtrs[2 ] = NULL ; // ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ąĘą░ą┐ąĖčüčī ą▓ ą╝ą░čüčüąĖą▓ąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī NULL
ftStatus = FT_ListDevices(BufPtrs, & numDevs, FT_LIST_ALL| FT_OPEN_BY_DESCRIPTION);
if (ftStatus == FT_OK)
{
// FT_ListDevices OK, ąŠą┐ąĖčüą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą▒čāč乥čĆą░čģ Buffer1 ąĖ Buffer2,
// ąĖ numDevs čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓
}else
{
// čäčāąĮą║čåąĖčÅ FT_ListDevices ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čü ąŠčłąĖą▒ą║ąŠą╣
}
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ą║ čüąĖčüč鹥ą╝ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ 2 čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čāčüčéčĆąŠą╣čüčéą▓ ą▒ąŠą╗čīčłąĄ, č鹊 čĆą░ąĘą╝ąĄčĆ ą╝ą░čüčüąĖą▓ą░ čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāą▓ąĄą╗ąĖč湥ąĮ, ąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüąŠąĘą┤ą░ąĮąŠ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ čüčéčĆąŠą║.
ą¤čĆąĖą╝ąĄčĆ 4. ą¤ąŠą╗čāč湥ąĮąĖąĄ čĆą░ąĘą╝ąĄčēąĄąĮąĖą╣ (location) ą▓čüąĄčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
FT_STATUS ftStatus;
DWORD numDevs;
long locIdBuf[16 ];
ftStatus = FT_ListDevices(locIdBuf, & numDevs, FT_LIST_ALL| FT_OPEN_BY_LOCATION);
if (ftStatus == FT_OK)
{
// FT_ListDevices OK, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ location ID ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ locIdBuf,
// ąĖ ą▓ numDevs čüąŠą┤ąĄčƹȹĖčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
}else
{
// čäčāąĮą║čåąĖčÅ FT_ListDevices ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čü ąŠčłąĖą▒ą║ąŠą╣
}
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ą║ čüąĖčüč鹥ą╝ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄ ą▒ąŠą╗ąĄąĄ 16 čāčüčéčĆąŠą╣čüčéą▓. ąĢčüą╗ąĖ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čāčüčéčĆąŠą╣čüčéą▓ ą▒ąŠą╗čīčłąĄ, č鹊 čĆą░ąĘą╝ąĄčĆ ą╝ą░čüčüąĖą▓ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāą▓ąĄą╗ąĖč湥ąĮ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą×čéą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čģąĄąĮą┤ą╗, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā.
FT_STATUS FT_Open (int iDevice, FT_HANDLE * ftHandle);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
iDevice ąĖąĮą┤ąĄą║čü ą┐ąŠ ą▒ą░ąĘąĄ 0 ą┤ą╗čÅ ąŠčéą║čĆčŗą▓ą░ąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.ftHandle čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ FT_HANDLE, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ čģąĄąĮą┤ą╗. ąŁč鹊čé čģąĄąĮą┤ą╗ ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąźąŠčéčÅ čŹčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą┤ą╗čÅ ąŠčéą║čĆčŗčéąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ iDevice ą▓ 0, 1, 2 ąĖ čé. ą┤., čā ąĮąĄčæ ąĮąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąŠčéą║čĆčŗčéčī čüą┐ąĄčåąĖčäąĖč湥čüą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¦č鹊ą▒čŗ ąŠčéą║čĆčŗčéčī ąĖą╝ąĄąĮąŠą▓ą░ąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čäčāąĮą║čåąĖčÄ FT_OpenEx.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus == FT_OK)
{
// FT_Open OK, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ftHandle ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝
}else
{
// FT_Open ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ą┐ąŠ ąŠčłąĖą▒ą║ąĄ
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą×čéą║čĆčŗą▓ą░ąĄčé čāą║ą░ąĘą░ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čģąĄąĮą┤ą╗ ą║ ąĮąĄą╝čā, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ ą┐ąŠ čüąĄčĆąĖą╣ąĮąŠą╝čā ąĮąŠą╝ąĄčĆčā, ą┐ąŠ ąŠą┐ąĖčüą░ąĮąĖčÄ ąĖą╗ąĖ ą┐ąŠ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÄ (location).
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠčéą║čĆčŗčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. ąØąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ ą┐ąŠ čüąĄčĆąĖą╣ąĮąŠą╝čā ąĮąŠą╝ąĄčĆčā, ąŠą┐ąĖčüą░ąĮąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ location ID (ąĖąĮč乊čĆą╝ą░čåąĖčÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ, ą┐ąŠą╗čāč湥ąĮąĮą░čÅ ąŠčé čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą╝ąĄčüčéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ USB). ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ Location ID ą┤ą╗čÅ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖčģ ą┐ąŠčĆč鹊ą▓ USB ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ čāčéąĖą╗ąĖč鹊ą╣ USBView ąĖ ą┤ą░ąĮą░ ą▓ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą╝ č乊čĆą╝ą░č鹥. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ Location ID ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čüąĖčüč鹥ą╝ąĄ, ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮčŗ ą▓čŗąĘąŠą▓ąŠą╝ FT_GetDeviceInfoList ąĖą╗ąĖ FT_ListDevices čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ čäą╗ą░ą│ą░ą╝ąĖ.
FT_STATUS FT_OpenEx (PVOID pvArg1, DWORD dwFlags, FT_HANDLE * ftHandle);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
pvArg1 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą░čĆą│čāą╝ąĄąĮčé, čéąĖą┐ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ dwFlags. ą×ą▒čŗčćąĮąŠ ąŠąĮ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ASCIIZ-čüčéčĆąŠą║čā.dwFlags FT_OPEN_BY_SERIAL_NUMBER, FT_OPEN_BY_DESCRIPTION ąĖą╗ąĖ FT_OPEN_BY_LOCATION.ftHandle čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ FT_HANDLE, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ čģąĄąĮą┤ą╗. ąŁč鹊čé čģąĄąĮą┤ą╗ ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤ą░čĆą░ą╝ąĄčéčĆ ą▓ pvArg1 ąĘą░ą▓ąĖčüąĖčé ąŠčé dwFlags: ąĄčüą╗ąĖ dwFlags FT_OPEN_BY_SERIAL_NUMBER, č鹊 pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēčāčÄ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░; ąĄčüą╗ąĖ dwFlags FT_OPEN_BY_DESCRIPTION, č鹊 pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēčāčÄ ąŠą┐ąĖčüą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░; ąĄčüą╗ąĖ dwFlags FT_OPEN_BY_LOCATION, č鹊 pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ long, ą║ąŠč鹊čĆąŠąĄ čüąŠą┤ąĄčƹȹĖčé location ID čāčüčéčĆąŠą╣čüčéą▓ą░. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 Windows CE ąĖ Linux ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ location ID.
ą¤čĆąĖą╝ąĄčĆ 1. ą×čéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ čü čüąĄčĆąĖą╣ąĮčŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ "FT000001".
FT_STATUS ftStatus;
FT_HANDLE ftHandle1;
ftStatus = FT_OpenEx("FT000001" , FT_OPEN_BY_SERIAL_NUMBER, & ftHandle1);
if (ftStatus == FT_OK)
{
// čāčüčéčĆąŠą╣čüčéą▓ąŠ "FT000001" čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗč鹊
}else
{
// ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī
}
ą¤čĆąĖą╝ąĄčĆ 2. ą×čéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ "USB Serial Converter".
FT_STATUS ftStatus;
FT_HANDLE ftHandle1;
ftStatus = FT_OpenEx("USB Serial Converter" , FT_OPEN_BY_DESCRIPTION, & ftHandle1);
if (ftStatus == FT_OK)
{
// čāčüčéčĆąŠą╣čüčéą▓ąŠ čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗč鹊
}else
{
// ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī
}
ą¤čĆąĖą╝ąĄčĆ 3. ą×čéą║čĆčŗčéčī 2 čāčüčéčĆąŠą╣čüčéą▓ą░ čü čüąĄčĆąĖą╣ąĮčŗą╝ąĖ ąĮąŠą╝ąĄčĆą░ą╝ąĖ "FT000001" ąĖ "FT999999".
FT_STATUS ftStatus;
FT_STATUS ftStatus2;
FT_HANDLE ftHandle1;
FT_HANDLE ftHandle2;
ftStatus = FT_OpenEx("FT000001" , FT_OPEN_BY_SERIAL_NUMBER, & ftHandle1);
ftStatus2 = FT_OpenEx("FT999999" , FT_OPEN_BY_SERIAL_NUMBER, & ftHandle2);
if (ftStatus == FT_OK && ftStatus2 == FT_OK)
{
// ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čŗą╗ąĖ čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗčéčŗ
}else
{
// ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąŠčéą║čĆčŗčéčī ąŠą┤ąĮąŠ ąĖą╗ąĖ ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░
}
ą¤čĆąĖą╝ąĄčĆ 4. ą×čéą║čĆčŗčéčī 2 čāčüčéčĆąŠą╣čüčéą▓ą░ čü ąŠą┐ąĖčüą░ąĮąĖčÅą╝ąĖ "USB Serial Converter" ąĖ "USB Pump Controller".
FT_STATUS ftStatus;
FT_STATUS ftStatus2;
FT_HANDLE ftHandle1;
FT_HANDLE ftHandle2;
ftStatus = FT_OpenEx("USB Serial Converter" , FT_OPEN_BY_DESCRIPTION, & ftHandle1);
ftStatus2 = FT_OpenEx("USB Pump Controller" , FT_OPEN_BY_DESCRIPTION, & ftHandle2);
if (ftStatus == FT_OK && ftStatus2 == FT_OK)
{
// ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čŗą╗ąĖ čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗčéčŗ
}else
{
// ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąŠčéą║čĆčŗčéčī ąŠą┤ąĮąŠ ąĖą╗ąĖ ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░
}
ą¤čĆąĖą╝ąĄčĆ 5. ą×čéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ čü location 23.
FT_STATUS ftStatus;
FT_HANDLE ftHandle1;
long dwLoc;
dwLoc = 0x23 ;
ftStatus = FT_OpenEx(dwLoc, FT_OPEN_BY_LOCATION, & ftHandle1);
if (ftStatus == FT_OK)
{
// čāčüčéčĆąŠą╣čüčéą▓ąŠ čü location 23 čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗč鹊
}else
{
// ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī
}
ą¤čĆąĖą╝ąĄčĆ 6. ą×čéą║čĆčŗčéčī 2 čāčüčéčĆąŠą╣čüčéą▓ą░ čü location 23 ąĖ 31.
FT_STATUS ftStatus;
FT_STATUS ftStatus2;
FT_HANDLE ftHandle1;
FT_HANDLE ftHandle2;
long dwLoc;
dwLoc = 0x23 ;
ftStatus = FT_OpenEx(dwLoc, FT_OPEN_BY_LOCATION, & ftHandle1);
dwLoc = 0x31 ; ftStatus2 = FT_OpenEx(dwLoc, FT_OPEN_BY_LOCATION, & ftHandle2);
if (ftStatus == FT_OK && ftStatus2 == FT_OK)
{
// ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čŗą╗ąĖ čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗčéčŗ
}else
{
// ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąŠčéą║čĆčŗčéčī ąŠą┤ąĮąŠ ąĖą╗ąĖ ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą║čĆčŗą▓ą░ąĄčé ąŠčéą║čĆčŗč鹊ąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā čģąĄąĮą┤ą╗čā.
FT_STATUS FT_Close (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus == FT_OK)
{
// FT_Open OK, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ftHandle ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā
...
// ą║ąŠą│ą┤ą░ ąĘą░ą║ąŠąĮčćąĖč鹥, č鹊 ą▓čŗąĘąŠą▓ąĖč鹥 FT_Close:
FT_Close(ftHandle);
}else
{
// ąŠčłąĖą▒ą║ą░ FT_Open
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¦ąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_Read (FT_HANDLE ftHandle,
LPVOID lpBuffer,
DWORD dwBytesToRead,
LPDWORD lpdwBytesReturned);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpBuffer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖą╝ąĄčé ą┤ą░ąĮąĮčŗąĄ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░.dwBytesToRead ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwBytesReturned čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ DWORD, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ FT_IO_ERROR.
FT_Read ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé ą▓ lpdwBytesReturned ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ ą▓ ą▒čāč乥čĆ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ dwBytesToRead ą▒ą░ą╣čé. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_GetStatus ąĖą╗ąĖ FT_GetQueueStatus, ąĖ ą┐ąĄčĆąĄą┤ą░ąĮąŠ čäčāąĮą║čåąĖąĖ FT_Read ą║ą░ą║ ą┐ą░čĆą░ą╝ąĄčéčĆ dwBytesToRead, čćč鹊ą▒čŗ čäčāąĮą║čåąĖčÅ ą┐čĆąŠčćąĖčéą░ą╗ą░ ą┤ą░ąĮąĮčŗąĄ ąĖ čüą┤ąĄą╗ą░ą╗ą░ ą▓ąŠąĘą▓čĆą░čé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ.
ąÜąŠą│ą┤ą░ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ą▓čŗąĘąŠą▓ąŠą╝ FT_SetTimeouts ą▒čŗą╗ čāą║ą░ąĘą░ąĮ čéą░ą╣ą╝ą░čāčé, FT_Read ą▓ąŠąĘą▓čĆą░čéąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąĖčüč鹥č湥čé čéą░ą╣ą╝ą░čāčé, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ dwBytesToRead ą▒ą░ą╣čé - ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ čŹčéąĖčģ ą┤ą▓čāčģ čüą╗čāčćą░ąĄą▓, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▒čŗčüčéčĆąĄąĄ. ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čéą░ą╣ą╝ą░čāčé, č鹊 FT_Read ą┐čĆąŠčćąĖčéą░ąĄčé ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ ą▒čāč乥čĆ ąĖ ą▓ąĄčĆąĮąĄčé FT_OK.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ ąĖ ąĘąĮą░č湥ąĮąĖąĄ lpdwBytesReturned, ą║ąŠą│ą┤ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą▒čāč乥čĆ. ąĢčüą╗ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ FT_OK, ąĖ lpdwBytesReturned čĆą░ą▓ąĮą░ dwBytesToRead, č鹊 FT_Read ą▒čŗą╗ą░ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ą┤ąŠ ąĖčüč鹥č湥ąĮąĖčÅ čéą░ą╣ą╝ą░čāčéą░. ąĢčüą╗ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ FT_OK, ąĖ lpdwBytesReturned ą╝ąĄąĮčīčłąĄ dwBytesToRead, č鹊 ą▒čŗą╗ čéą░ą╣ą╝ą░čāčé, ąĖ čćč鹥ąĮąĖąĄ ą▒čŗą╗ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ č鹊ą╗čīą║ąŠ čćą░čüčéąĖčćąĮąŠ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čéą░ą╣ą╝ą░čāčé, ąĖ ąĮąĄ ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ, č鹊 ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą▒čāą┤ąĄčé FT_OK.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ FT_IO_ERROR ą│ąŠą▓ąŠčĆąĖčé ąŠą▒ ąŠčłąĖą▒ą║ąĄ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ, ąĖą╗ąĖ ąŠ čäą░čéą░ą╗čīąĮąŠą╣ ąŠčłąĖą▒ą║ąĄ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠčé USB.
ą¤čĆąĖą╝ąĄčĆ 1. ąÜą░ą║ ą┐čĆąŠčćąĖčéą░čéčī ą▓čüąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┤ą░ąĮąĮčŗąĄ.
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
DWORD EventDWord;
DWORD TxBytes;
DWORD RxBytes;
DWORD BytesReceived;
char RxBuffer[256 ];
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
FT_GetStatus(ftHandle, & RxBytes, & TxBytes, & EventDWord);if (RxBytes > 0 )
{
ftStatus = FT_Read(ftHandle, RxBuffer, RxBytes, & BytesReceived);
if (ftStatus == FT_OK)
{
// FT_Read OK
}
else
{
// ąŠčłąĖą▒ą║ą░ FT_Read
}
}
FT_Close(ftHandle);
ą¤čĆąĖą╝ąĄčĆ 2. ąÜą░ą║ čćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ čü čéą░ą╣ą╝ą░čāč鹊ą╝ 5 čüąĄą║čāąĮą┤.
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
DWORD RxBytes = 10 ;
DWORD BytesReceived;
char RxBuffer[256 ];
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
FT_SetTimeouts(ftHandle, 5000 , 0 );
ftStatus = FT_Read(ftHandle, RxBuffer, RxBytes, & BytesReceived);if (ftStatus == FT_OK)
{
if (BytesReceived == RxBytes)
{
// FT_Read OK
}
else
{
// čéą░ą╣ą╝ą░čāčé FT_Read
}
}else
{
// ąŠčłąĖą▒ą║ą░ FT_Read
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
FT_STATUS FT_Write (FT_HANDLE ftHandle,
LPVOID lpBuffer,
DWORD dwBytesToWrite,
LPDWORD lpdwBytesWritten);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpBuffer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.dwBytesToRead ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.lpdwBytesReturned čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ DWORD, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
DWORD BytesWritten;
char TxBuffer[256 ]; // čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_Write(ftHandle, TxBuffer, sizeof (TxBuffer), & BytesWritten);if (ftStatus == FT_OK)
{
// FT_Write OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_Write
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ (baud rate) ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_SetBaudRate (FT_HANDLE ftHandle, DWORD dwBaudRate);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwBaudRate čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░, ą▒ąŠą┤.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_SetBaudRate(ftHandle, 115200 ); // čāčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ 115200 ą▒ąŠą┤ if (ftStatus == FT_OK)
{
// FT_SetBaudRate OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetBaudRate
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ą▓ą╗ąĖčÅąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéčī (baud rate) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ąŠą▒ą╝ąĄąĮą░.
FT_STATUS FT_SetDivisor (FT_HANDLE ftHandle, USHORT usDivisor);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.usDivisor ą┤ąĄą╗ąĖč鹥ą╗čī.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĮą░, ą┐ąŠč鹊ą╝čā čćč鹊 FT_SetBaudRate čüą░ą╝ą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗčćąĖčüą╗ąĖčé čéčĆąĄą▒čāąĄą╝čŗą╣ ą┤ąĄą╗ąĖč鹥ą╗čī ą┤ą╗čÅ ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čüą║ąŠčĆąŠčüčéąĖ. ąÆ ą░ą┐ąĮąŠčāč鹥 "Setting baud rates for the FT8U232AM" (ą┤ąŠčüčéčāą┐ąĄąĮ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ Application čüą░ą╣čéą░ ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI) ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ą▓čŗčćąĖčüą╗čÅčéčī ą┤ąĄą╗ąĖč鹥ą╗čī ą┤ą╗čÅ ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ąŠą▒ą╝ąĄąĮą░.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ č乊čĆą╝ą░čéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_SetDataCharacteristics (FT_HANDLE ftHandle,
UCHAR uWordLength,
UCHAR uStopBits,
UCHAR uParity);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.uWordLength ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ąĮą░ čüą╗ąŠą▓ąŠ (čäčĆąĄą╣ą╝) - čéčāčé ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘąĮą░č湥ąĮąĖąĄ FT_BITS_8 ąĖą╗ąĖ FT_BITS_7.uStopBits ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüč鹊ą┐-ą▒ąĖčé - ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī FT_STOP_BITS_1 ąĖą╗ąĖ FT_STOP_BITS_2.uParity č湥čéąĮąŠčüčéčī - ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī FT_PARITY_NONE, FT_PARITY_ODD, FT_PARITY_EVEN, FT_PARITY_MARK ąĖą╗ąĖ FT_PARITY SPACE.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}// ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, 1 čüč鹊ą┐-ą▒ąĖčé, ą▒ąĄąĘ č湥čéąĮąŠčüčéąĖ:
ftStatus = FT_SetDataCharacteristics(ftHandle, FT_BITS_8, FT_STOP_BITS_1, FT_PARITY_NONE);if (ftStatus == FT_OK)
{
// FT_SetDataCharacteristics OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetDataCharacteristics
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čéą░ą╣ą╝ą░čāčéčŗ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_SetTimeouts (FT_HANDLE ftHandle,
DWORD dwReadTimeout,
DWORD dwWriteTimeout);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwReadTimeout čéą░ą╣ą╝ą░čāčé čćč鹥ąĮąĖčÅ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ.dwWriteTimeout čéą░ą╣ą╝ą░čāčé ąĘą░ą┐ąĖčüąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}// ąŻčüčéą░ąĮąŠą▓ą║ą░ čéą░ą╣ą╝ą░čāčéą░ čćč鹥ąĮąĖčÅ 5 čüąĄą║čāąĮą┤, ąĘą░ą┐ąĖčüąĖ 1 čüąĄą║čāąĮą┤ą░
ftStatus = FT_SetTimeouts(ftHandle, 5000 , 1000 );if (ftStatus == FT_OK)
{
// FT_SetTimeouts OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetTimeouts
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗčģ (flow control) čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_SetFlowControl (FT_HANDLE ftHandle,
USHORT usFlowControl,
UCHAR uXon,
UCHAR uXoff);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.usFlowControl ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┤ąĮąĖą╝ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ FT_FLOW_NONE, FT_FLOW_RTS_CTS, FT_FLOW_DTR_DSR ąĖą╗ąĖ FT_FLOW_XON_XOFF.uXon čüąĖą╝ą▓ąŠą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą║ą░ą║ čüąĖą│ąĮą░ą╗ Xon. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▓ą░čĆąĖą░ąĮčéą░ FT_FLOW_XON_XOFF.uXoff čüąĖą╝ą▓ąŠą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą║ą░ą║ čüąĖą│ąĮą░ą╗ Xoff. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▓ą░čĆąĖą░ąĮčéą░ FT_FLOW_XON_XOFF.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}// ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čéąĖą┐ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ RTS/CTS:
ftStatus = FT_SetFlowControl(ftHandle, FT_FLOW_RTS_CTS, 0x11 , 0x13 );if (ftStatus == FT_OK)
{
// FT_SetFlowControl OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetFlowControl
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Data Terminal Ready (DTR).
FT_STATUS FT_SetDtr (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_SetDtr(ftHandle);if (ftStatus == FT_OK)
{
// FT_SetDtr OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetDtr
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąĪą▒čĆą░čüčŗą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Data Terminal Ready (DTR).
FT_STATUS FT_ClrDtr (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_ClrDtr(ftHandle);if (ftStatus == FT_OK)
{
// FT_ClrDtr OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_ClrDtr
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Request To Send (RTS).
FT_STATUS FT_SetRts (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_SetRts(ftHandle);if (ftStatus == FT_OK)
{
// FT_SetRts OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetRts
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąĪą▒čĆą░čüčŗą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Request To Send (RTS).
FT_STATUS FT_ClrRts (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_ClrRts(ftHandle);if (ftStatus == FT_OK)
{
// FT_ClrRts OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_ClrRts
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāčćą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąŠą┤ąĄą╝ą░ ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąĖąĮąĖąĖ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_GetModemStatus (FT_HANDLE ftHandle, LPDWORD lpdwModemStatus);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwModemStatus čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ DWORD, ą▓ ą║ąŠč鹊čĆčāčÄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąŠą┤ąĄą╝ą░ ąĖ ą╗ąĖąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą£ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé lpdwModemStatus čüąŠą┤ąĄčƹȹĖčé čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąŠą┤ąĄą╝ą░. ąØą░ Windows ąĖ Windows CE, čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąĖąĮąĖąĖ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ąĘą░ čüą░ą╝čŗą╝ ą╝ą╗ą░ą┤čłąĖą╝ ą┐ąŠ čüčéą░čĆčłąĖąĮčüčéą▓čā ą▒ą░ą╣č鹥 lpdwModemStatus.
ąĪąŠčüč鹊čÅąĮąĖąĄ ą╝ąŠą┤ąĄą╝ą░ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ąĮą░ą▒ąŠčĆąŠą╝ čäą╗ą░ą│ąŠą▓, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗčģ ą┐ąŠ ą╝ą░čüą║ą░ą╝: Clear To Send (CTS) = 0x10, Data Set Ready (DSR) = 0x20, Ring Indicator (RI) = 0x40, Data Carrier Detect (DCD) = 0x80.
ąĪąŠčüč鹊čÅąĮąĖąĄ ą╗ąĖąĮąĖąĖ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ąĮą░ą▒ąŠčĆąŠą╝ čäą╗ą░ą│ąŠą▓, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗčģ ą┐ąŠ ą╝ą░čüą║ą░ą╝: Overrun Error (OE) = 0x02, Parity Error (PE) = 0x04, Framing Error (FE) = 0x08, Break Interrupt (BI) = 0x10.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
DWORD dwModemStatus = 0 ;
DWORD dwLineStatus = 0 ;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_GetModemStatus(ftHandle, & dwModemStatus);if (ftStatus == FT_OK)
{
// FT_GetModemStatus OK
// ąĪąŠčüč鹊čÅąĮąĖąĄ ą╗ąĖąĮąĖąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąŠ ą▓č鹊čĆąŠą╝ ą▒ą░ą╣č鹥 dwModemStatus:
dwLineStatus = ((dwModemStatus >> 8 ) & 0x000000FF );
// ąóąĄą┐ąĄčĆčī ą╝ą░čüą║ąŠą╣ ą▓čŗą┤ąĄą╗ąĖą╝ ą▒ą░ą╣čé čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠą┤ąĄą╝ą░:
dwModemStatus = (dwModemStatus & 0x000000FF );
}else
{
// ąŠčłąĖą▒ą║ą░ FT_GetModemStatus
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāčćą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░.
FT_STATUS FT_GetQueueStatus (FT_HANDLE ftHandle, LPDWORD lpdwAmountInRxQueue);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwAmountInRxQueue čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ DWORD, ą▓ ą║ąŠč鹊čĆčāčÄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
DWORD RxBytes;
DWORD BytesReceived;
char RxBuffer[256 ];
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
FT_GetQueueStatus(ftHandle,& RxBytes);if (RxBytes > 0 )
{
ftStatus = FT_Read(ftHandle, RxBuffer, RxBytes, & BytesReceived);
if (ftStatus == FT_OK)
{
// FT_Read OK
}
else
{
// ąŠčłąĖą▒ą║ą░ FT_Read
}
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāčćą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ ąŠčéą║čĆčŗč鹊ą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ.
FT_STATUS FT_GetDeviceInfo (FT_HANDLE ftHandle,
FT_DEVICE * pftType,
LPDWORD lpdwID,
PCHAR pcSerialNumber,
PCHAR pcDescription,
PVOID pvDummy);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pftType čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned long ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwID čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned long ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ device ID.pcSerialNumber čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ą░ą║ null-terminated string.pcDescription čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ą░ą║ null-terminated string.pvDummy ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ - čüčÄą┤ą░ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī NULL.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓ąŠąĘą▓čĆą░čéą░ čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (device ID), ąŠą┐ąĖčüą░č鹥ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ device ID ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮ ą▓ DWORD - čüčéą░čĆčłą░čÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ ą┤ą▓ąŠą╣ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ (čüčéą░čĆčłąĄąĄ čüą╗ąŠą▓ąŠ, 2 ą▒ą░ą╣čéą░) čüąŠą┤ąĄčƹȹĖčé vendor ID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ, VID), ą╝ą╗ą░ą┤čłą░čÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ ą┤ą▓ąŠą╣ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ (ą╝ą╗ą░ą┤čłąĄąĄ čüą╗ąŠą▓ąŠ, 2 ą▒ą░ą╣čéą░) čüąŠą┤ąĄčƹȹĖčé product ID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠą┤čāą║čéą░, PID). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮčŗą╣ ID 0x04036001 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé device ID VID_0403&PID_6001.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_DEVICE ftDevice;
FT_STATUS ftStatus;
DWORD deviceID;
char SerialNumber[16 ];char Description[64 ];
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// FT_Open failed
return ;
}
ftStatus = FT_GetDeviceInfo( ftHandle,
& ftDevice,
& deviceID,
SerialNumber,
Description,
NULL );if (ftStatus == FT_OK)
{
if (ftDevice == FT_DEVICE_232H)
; // čŹč鹊 FT232H
else if (ftDevice == FT_DEVICE_4232H)
; // čŹč鹊 FT4232H
else if (ftDevice == FT_DEVICE_2232H)
; // čŹč鹊 FT2232H
else if (ftDevice == FT_DEVICE_232R)
; // čŹč鹊 FT232R
else if (ftDevice == FT_DEVICE_2232C)
; // čŹč鹊 FT2232C/L/D
else if (ftDevice == FT_DEVICE_BM)
; // čŹč鹊 FTU232BM
else if (ftDevice == FT_DEVICE_AM)
; // čŹč鹊 FT8U232AM
else
; // ąĮąĄąĖąĘą▓ąĄčüčéąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (čŹč鹊 ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗą╗ąŠ čüą╗čāčćąĖčéčīčüčÅ!)
// deviceID čüąŠą┤ąĄčƹȹĖčé ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ encoded device ID
// SerialNumber, Description čüąŠą┤ąĄčƹȹ░čé 0-terminated čüčéčĆąŠą║ąĖ
}else
{
// ąŠčłąĖą▒ą║ą░ FT_GetDeviceType!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąÆąŠąĘą▓čĆą░čēą░ąĄčé ąĮąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ D2XX.
FT_STATUS FT_GetDriverVersion (FT_HANDLE ftHandle, LPDWORD lpdwDriverVersion);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwDriverVersion čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĮąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ (unsigned long, 4 ą▒ą░ą╣čéą░) čüąŠą┤ąĄčƹȹĖčé ą▓ čüąĄą▒ąĄ čćą░čüčéąĖ major, minor ąĖ build. ąæą░ą╣čé 0 (čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣) čüąŠą┤ąĄčƹȹĖčé ą▓ąĄčĆčüąĖčÄ čüą▒ąŠčĆą║ąĖ (build version), ą▒ą░ą╣čé 1 čüąŠą┤ąĄčƹȹĖčé minor version, ąĖ ą▒ą░ą╣čé 2 čüąŠą┤ąĄčƹȹĖčé major version. ąæą░ą╣čé 3 ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ąĄčĆčüąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ "2.04.06" ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ą║ą░ą║ 0x00020406. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčéą║čĆčŗč鹊 ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
DWORD dwDriverVer;
ftStatus = FT_Open(0 ,& ftHandle);
if (ftStatus == FT_OK)
{
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░:
ftStatus = FT_GetDriverVersion(ftHandle, & dwDriverVer);
if (ftStatus == FT_OK)
printf("ąÆąĄčĆčüąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ = 0x%x \n " , dwDriverVer);
else
printf ("ąŠčłąĖą▒ą║ą░ čćč鹥ąĮąĖčÅ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ \n " );
FT_Close(ftHandle);
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąÆąŠąĘą▓čĆą░čēą░ąĄčé ąĮąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ DLL.
FT_STATUS FT_GetLibraryVersion (LPDWORD lpdwDLLVersion);
ą¤ą░čĆą░ą╝ąĄčéčĆ:
lpdwDLLVersion čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĮąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ DLL.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ (unsigned long, 4 ą▒ą░ą╣čéą░) čüąŠą┤ąĄčƹȹĖčé ą▓ čüąĄą▒ąĄ čćą░čüčéąĖ major, minor ąĖ build. ąæą░ą╣čé 0 (čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣) čüąŠą┤ąĄčƹȹĖčé ą▓ąĄčĆčüąĖčÄ čüą▒ąŠčĆą║ąĖ (build version), ą▒ą░ą╣čé 1 čüąŠą┤ąĄčƹȹĖčé minor version, ąĖ ą▒ą░ą╣čé 2 čüąŠą┤ąĄčƹȹĖčé major version. ąæą░ą╣čé 3 ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ąĄčĆčüąĖčÅ D2XX DLL "3.01.15" ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ą║ą░ą║ 0x00030115. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ ąĮąĄčé čģąĄąĮą┤ą╗ą░, čéą░ą║ čćč鹊 ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ.
ą¤čĆąĖą╝ąĄčĆ:
FT_STATUS ftStatus;
DWORD dwLibraryVer;
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą▓ąĄčĆčüąĖąĖ DLL:
ftStatus = FT_GetLibraryVersion(& dwLibraryVer);if (ftStatus == FT_OK)
printf("ąÆąĄčĆčüąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ = 0x%x \n " ,dwLibraryVer);else
printf ("ąŠčłąĖą▒ą║ą░ čćč鹥ąĮąĖčÅ ą▓ąĄčĆčüąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ \n " );
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąÆąŠąĘą▓čĆą░čēą░ąĄčé ąĮąŠą╝ąĄčĆ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą│ąŠ COM-ą┐ąŠčĆčéą░, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ čāčüčéčĆąŠą╣čüčéą▓čā.
FT_STATUS FT_GetComPortNumber (FT_HANDLE ftHandle, LPLONG lplComPortNumber);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lplComPortNumber čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ LONG, ą▓ ą║ąŠč鹊čĆčāčÄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ąĮąŠą╝ąĄčĆ COM-ą┐ąŠčĆčéą░, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ążčāąĮą║čåąĖčÅ ą┤ąŠčüčéčāą┐ąĮą░ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆ Windows CDM, čéą░ą║ čćč鹊 ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┤čĆą░ą╣ą▓ąĄčĆčŗ D2XX ąĖ VCP.
ąĢčüą╗ąĖ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ąĮąĄ ą┐čĆąĖą▓čÅąĘą░ąĮ COM-ą┐ąŠčĆčé, č鹊 lplComPortNumber ą┐ąŠą╗čāčćąĖčé ąĘąĮą░č湥ąĮąĖąĄ -1.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čģąĄąĮą┤ą╗, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą┐ąŠą╗čāč湥ąĮ ą▓čŗąĘąŠą▓ąŠą╝ FT_OpenEx
FT_STATUS ftStatus;
LONG lComPortNumber;
ftStatus = FT_GetComPortNumber(ftHandle, & lComPortNumber);
if (status == FT_OK)
{
if (lComPortNumber == - 1 )
{
// ąŻčüčéčĆąŠą╣čüčéą▓čā ąĮąĄ ąĮą░ąĘąĮą░č湥ąĮ COM-ą┐ąŠčĆčé
}
else
{
// ąØą░ąĘąĮą░č湥ąĮąĮčŗą╣ COM-ą┐ąŠčĆčé čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ lComPortNumber
}
}else
{
// ąŠčłąĖą▒ą║ą░ FT_GetComPortNumber!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāčćą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą▓ą║ą╗čÄčćą░čÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠą▒čŗčéąĖą╣ (event status).
FT_STATUS FT_GetStatus (FT_HANDLE ftHandle,
LPDWORD lpdwAmountInRxQueue,
LPDWORD lpdwAmountInTxQueue,
LPDWORD lpdwEventStatus);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwAmountInRxQueue čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ DWORD, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░.lpdwAmountInTxQueue čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ DWORD, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ.lpdwEventStatus čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ DWORD, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠą▒čŗčéąĖą╣ (event status).
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ, čüą╝. ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ čäčāąĮą║čåąĖąĖ FT_SetEventNotification.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāčüą╗ąŠą▓ąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÅą╝ (event notification).
FT_STATUS FT_SetEventNotification (FT_HANDLE ftHandle,
DWORD dwEventMask,
PVOID pvArg);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čāčüą╗ąŠą▓ąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą┐ąŠč鹊ą║, ą┐ąŠą║ą░ ąĮąĄ ąĮą░čüčéčāą┐ąĖčé ąŠą┤ąĮąŠ ąĖąĘ čāčüą╗ąŠą▓ąĖą╣. ą×ą▒čŗčćąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čüąŠąĘą┤ą░ąĄčé čüąŠą▒čŗčéąĖąĄ, ą▓čŗąĘčŗą▓ą░ąĄčé čŹčéčā čäčāąĮą║čåąĖčÄ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ą┐ąŠč鹊ą║ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ. ąÜąŠą│ą┤ą░ čāčüą╗ąŠą▓ąĖąĄ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąŠą▒čŗčéąĖąĄ, ąĖ ą┐ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ.
dwEventMask čÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ą▒ąŠčĆąŠą╝ ą▒ąĖč鹊ą▓, ąĘą░ą┤ą░ąĮąĮčŗčģ ą╝ą░čüą║ąŠą╣, ą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĖčüčŗą▓ą░čÄčé čüąŠą▒čŗčéąĖčÅ, ąĖąĮč鹥čĆąĄčüčāčÄčēąĖąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. pvArg ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗą╣ čüąŠąĘą┤ą░ąĄčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ąĢčüą╗ąĖ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠą┤ąĮąŠ ąĖąĘ ąĘą░ą┤ą░ąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, č鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąŠą▒čŗčéąĖąĄ.
ąĢčüą╗ąĖ ą▓ dwEventMask čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FT_EVENT_RXCHAR, č鹊 čüąŠą▒čŗčéąĖąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąĖą╝ąĄčé čüąĖą╝ą▓ąŠą╗.
ąĢčüą╗ąĖ ą▓ dwEventMask čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FT_EVENT_MODEM_STATUS, č鹊 čüąŠą▒čŗčéąĖąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą▒ąĮą░čĆčāąČąĖčé ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ ą╝ąŠą┤ąĄą╝ą░.
ąĢčüą╗ąĖ ą▓ dwEventMask čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FT_EVENT_LINE_STATUS, č鹊 čüąŠą▒čŗčéąĖąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą▒ąĮą░čĆčāąČąĖčé ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ čüąŠčüč鹊čÅąĮąĖčÅ ą╗ąĖąĮąĖąĖ.
ą¤čĆąĖą╝ąĄčĆ 1. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┤ąŠą┐čāčüčéąĖą╝ ą┤ą╗čÅ Windows ąĖ Windows CE, ąĖ ąŠąĮ ą┐ąŠą║ą░ąČąĄčé, ą║ą░ą║ ąČą┤ą░čéčī čüąŠą▒čŗčéąĖčÅ ą┐čĆąĖąĄą╝ą░ čüąĖą╝ą▓ąŠą╗ą░ ąĖą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠą┤ąĄą╝ą░.
// ąĪąĮą░čćą░ą╗ą░ ąĮčāąČąĮąŠ čüąŠąĘą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ ąĖ ą▓čŗąĘą▓ą░čéčī FT_SetEventNotification.
FT_HANDLE ftHandle; // čģąĄąĮą┤ą╗ ą┤ą╗čÅ ąŠčéą║čĆčŗč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░
FT_STATUS ftStatus;
HANDLE hEvent;
DWORD EventMask;
hEvent = CreateEvent( NULL ,
false , // auto-reset event
false , // non-signalled state
"" );
EventMask = FT_EVENT_RXCHAR | FT_EVENT_MODEM_STATUS;
ftStatus = FT_SetEventNotification(ftHandle,EventMask,hEvent);
...
// ąōą┤ąĄ-č鹊 ą┐ąŠąĘąČąĄ ą┐ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ. ąŚą░č鹥ą╝, // ą║ąŠą│ą┤ą░ čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░, ą║ą░ą║ąŠąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ // čüąŠą▒čŗčéąĖąĄ, ąĖ ą▒čāą┤ąĄčé čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┤čģąŠą┤čÅčēą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖčÅ.
WaitForSingleObject(hEvent, INFINITE);
//ąÆ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą┐ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ą╗čüčÅ čüąŠą▒čŗčéąĖąĄą╝.
DWORD EventDWord;
DWORD RxBytes;
DWORD TxBytes;
FT_GetStatus(ftHandle, & RxBytes, & TxBytes, & EventDWord);
if (EventDWord & FT_EVENT_MODEM_STATUS)
{
// ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠą┤ąĄą╝ą░,
// ą┐ąŠą╗čāč湥ąĮąĖąĄ č鹥ą║čāčēąĄą│ąŠ čüąŠčüč鹊čÅąĖčÅ ą╝ąŠą┤ąĄą╝ą░:
FT_GetModemStatus(ftHandle, & Status);
if (Status & 0x00000010 )
{
// CTS == 1
}
else
{
// CTS == 0
}
if (Status & 0x00000020 )
{
// DSR == 1
}
else
{
// DSR == 0
}
}if (RxBytes > 0 )
{
// ą×ą▒ąĮą░čĆčāąČąĄąĮąŠ ąĮą░ą╗ąĖčćąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░, ą╝ąŠąČąĮąŠ ą▓čŗąĘą▓ą░čéčī
// FT_Read(), čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĖąĮčÅčéčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
}
ą¤čĆąĖą╝ąĄčĆ 2. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┤ąŠą┐čāčüčéąĖą╝ ą┤ą╗čÅ Linux, ąĖ ąŠąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ą░ą║ ąČą┤ą░čéčī ą┐čĆąĖąĄą╝ą░ čüąĖą╝ą▓ąŠą╗ą░ ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠą┤ąĄą╝ą░.
// ąĪąĮą░čćą░ą╗ą░ ąĮčāąČąĮąŠ čüąŠąĘą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ ąĖ ą▓čŗąĘą▓ą░čéčī FT_SetEventNotification.
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
EVENT_HANDLE eh;
DWORD EventMask;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// FT_Open failed
return ;
}
pthread_mutex_init(& eh.eMutex, NULL );
pthread_cond_init(& eh.eCondVar, NULL );
EventMask = FT_EVENT_RXCHAR | FT_EVENT_MODEM_STATUS;
ftStatus = FT_SetEventNotification(ftHandle, EventMask, (PVOID)& eh);
...
// ąōą┤ąĄ-č鹊 ą┐ąŠąĘąČąĄ ą┐ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▒čāą┤ąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ, // ąĘą░č鹥ą╝ ą║ąŠą│ą┤ą░ čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą▒čāą┤ąĄčé ą┐čĆąŠą▓ąĄčĆąĄąĮąŠ, ą║ą░ą║ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, // ąĖ čüąŠą▒čŗčéąĖąĄ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
pthread_mutex_lock(& eh.eMutex);
pthread_cond_wait(& eh.eCondVar, & eh.eMutex);
pthread_mutex_unlock(& eh.eMutex);
// ąÆ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą┐ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖą╗ čĆą░ą▒ąŠčéčā, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ.
DWORD EventDWord;
DWORD RxBytes;
DWORD TxBytes;
DWORD Status;
FT_GetStatus(ftHandle, & RxBytes, & TxBytes, & EventDWord);
if (EventDWord & FT_EVENT_MODEM_STATUS)
{
// ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠą┤ąĄą╝ą░,
// ą┐ąŠą╗čāč湥ąĮąĖąĄ č鹥ą║čāčēąĄą│ąŠ čüąŠčüč鹊čÅąĖčÅ ą╝ąŠą┤ąĄą╝ą░:
FT_GetModemStatus(ftHandle, & Status);
if (Status & 0x00000010 )
{
// CTS == 1
}
else
{
// CTS == 0
}
if (Status & 0x00000020 )
{
// DSR == 1
}
else
{
// DSR == 0
}
}if (RxBytes > 0 )
{
// ą×ą▒ąĮą░čĆčāąČąĄąĮąŠ ąĮą░ą╗ąĖčćąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░, ą╝ąŠąČąĮąŠ ą▓čŗąĘą▓ą░čéčī
// FT_Read(), čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĖąĮčÅčéčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą┐ąĄčåčüąĖą╝ą▓ąŠą╗čŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_SetChars (FT_HANDLE ftHandle,
UCHAR uEventCh,
UCHAR uEventChEn,
UCHAR uErrorCh,
UCHAR uErrorChEn);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.uEventCh čüąĖą╝ą▓ąŠą╗ čüąŠą▒čŗčéąĖčÅ (event character).uEventChEn 0 ąĄčüą╗ąĖ event character ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖąĮą░č湥 ąĮąĄ ąĮąŠą╗čī.uErrorCh čüąĖą╝ą▓ąŠą╗ ąŠčłąĖą▒ą║ąĖ (error character).uErrorChEn 0 ąĄčüą╗ąĖ error character ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖąĮą░č湥 ąĮąĄ ąĮąŠą╗čī.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čüčéą░ą▓ą╗čÅčéčī čāą║ą░ąĘą░ąĮąĮčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ ą▓ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ, čćč鹊ą▒čŗ čüąŠąŠą▒čēą░čéčī ąŠ čüąŠą▒čŗčéąĖčÅčģ ąĖą╗ąĖ ąŠčłąĖą▒ą║ą░čģ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čāčüą╗ąŠą▓ąĖąĄ ąŠą▒čĆčŗą▓ą░ ą┐ąŠč鹊ą║ą░ (BREAK condition).
FT_STATUS FT_SetBreakOn (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // čĆą░ą▒ąŠčćąĖą╣ čģąĄąĮą┤ą╗, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą▓čŗąĘąŠą▓ąŠą╝ FT_OpenEx
FT_STATUS ftStatus;
ftStatus = FT_SetBreakOn(ftHandle);
if (ftStatus == FT_OK)
{
// FT_SetBreakOn OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetBreakOn
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąĪą▒čĆą░čüčŗą▓ą░ąĄčé BREAK condition ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_SetBreakOff (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // čĆą░ą▒ąŠčćąĖą╣ čģąĄąĮą┤ą╗, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą▓čŗąĘąŠą▓ąŠą╝ FT_OpenEx
FT_STATUS ftStatus;
ftStatus = FT_SetBreakOff(ftHandle);
if (ftStatus == FT_OK)
{
// FT_SetBreakOff OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetBreakOff
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ą▓čŗčćąĖčēą░ąĄčé ą▒čāč乥čĆčŗ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_Purge (FT_HANDLE ftHandle, DWORD dwMask);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.uEventCh ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą╝ą░čüąŠą║ čäą╗ą░ą│ąŠą▓ FT_PURGE_RX ąĖ FT_PURGE_TX.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // čĆą░ą▒ąŠčćąĖą╣ čģąĄąĮą┤ą╗, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą▓čŗąĘąŠą▓ąŠą╝ FT_OpenEx
FT_STATUS ftStatus;// ąĪą▒čĆąŠčü čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą▒čāč乥čĆąŠą▓ Rx ąĖ Tx
ftStatus = FT_Purge(ftHandle, FT_PURGE_RX | FT_PURGE_TX);
if (ftStatus == FT_OK)
{
// FT_Purge OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_Purge
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓čā ą║ąŠą╝ą░ąĮą┤čā čüą▒čĆąŠčüą░.
FT_STATUS FT_ResetDevice (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // čĆą░ą▒ąŠčćąĖą╣ čģąĄąĮą┤ą╗, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą▓čŗąĘąŠą▓ąŠą╝ FT_OpenEx
FT_STATUS ftStatus;
ftStatus = FT_ResetDevice(ftHandle);
if (ftStatus == FT_OK)
{
// FT_ResetDevice OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_ResetDevice
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠčĆčéčā ą║ąŠą╝ą░ąĮą┤čā čüą▒čĆąŠčüą░.
FT_STATUS FT_ResetPort (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┐čŗčéą║ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ąŠčĆčéą░ ą┐ąŠčüą╗ąĄ ąŠčłąĖą▒ą║ąĖ. ą×ąĮą░ ąĮąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮą░ čüąŠą▒čŗčéąĖčÄ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ-ą┐ąĄčĆąĄą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ (unplug-replug event). ąÆ ą║ą░č湥čüčéą▓ąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéą░ unplug-replug event ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 FT_CyclePort.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // čĆą░ą▒ąŠčćąĖą╣ čģąĄąĮą┤ą╗, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą▓čŗąĘąŠą▓ąŠą╝ FT_OpenEx
FT_STATUS ftStatus;
ftStatus = FT_ResetPort(ftHandle);
if (ftStatus == FT_OK)
{
// ą¤ąŠčĆčé ą▒čŗą╗ čüą▒čĆąŠčłąĄąĮ
}else
{
// ąŠčłąĖą▒ą║ą░ FT_ResetPort!
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠčĆčéčā USB ą║ąŠą╝ą░ąĮą┤čā cycle.
FT_STATUS FT_CyclePort (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčäč乥ą║čé ąŠčé čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čéą░ą║ąŠą╣ ąČąĄ, ą║ą░ą║ ąŠčé ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┐ąŠčĆčéčā USB. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ ą▓ čüą╗čāčćą░ąĄ čäą░čéą░ą╗čīąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ, ą║ąŠą│ą┤ą░ čüą╗ąŠąČąĮąŠ, ąĖą╗ąĖ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ, ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčéčī čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą▒ąĄąĘ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą┐ąĄčĆąĄą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ą░ą▒ąĄą╗čÅ USB. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ EEPROM, čćč鹊ą▒čŗ ąĘą░čüčéą░ą▓ąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ FTDI ą┐čĆąŠčćąĖčéą░čéčī ąĮąŠą▓čŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖąĘ EEPROM, čćč鹊 ąĖąĮą░č湥 ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ąŠ ą▒čŗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ/ą┐ąĄčĆąĄą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ.
ąóą░ą║ ą║ą░ą║ č鹥ą║čāčēą░čÅ čüąĄčüčüąĖčÅ ąĮąĄ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░ąĄčéčüčÅ, č鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ čāą╝ąĄčéčī ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ąĮąŠčĆą╝ą░ą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą║čĆčŗčéčī č鹥ą║čāčēąĖą╣ čģąĄąĮą┤ą╗ ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ FT_CyclePort.
ążčāąĮą║čåąĖčÅ FT_CyclePort ą┐čĆąĖą╝ąĄąĮąĖą╝ą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ FT4232H, FT2232H ąĖ FT2232, ąĖ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ ąĮą░ Windows XP ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖčģ ą▓ąĄčĆčüąĖčÅčģ.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // čĆą░ą▒ąŠčćąĖą╣ čģąĄąĮą┤ą╗, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą▓čŗąĘąŠą▓ąŠą╝ FT_OpenEx
FT_STATUS ftStatus;
ftStatus = FT_CyclePort(ftHandle);
if (ftStatus == FT_OK)
{
// ąŻčüą┐ąĄčłąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ cycle.
// ąŚą░ą║čĆčŗčéčī čģąĄąĮą┤ą╗, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮ ą▒ąŠą╗čīčłąĄ ąĮąĄą┤ąĄą╣čüčéą▓ąĖč鹥ą╗ąĄąĮ:
ftStatus = FT_Close(ftHandle);
}else
{
// ąŠčłąĖą▒ą║ą░ FT_CyclePort!
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĄąĘąĮąŠą╣ ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčéčī čĆą░ą▒ąŠčéčā čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
FT_STATUS FT_Rescan (void );
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąÆčŗąĘąŠą▓ FT_Rescan 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗą▒ąŠčĆčā "Scan for hardware changes" (čüą║ą░ąĮąĖčĆąŠą▓ą░čéčī ą▓ ą┐ąŠąĖčüą║ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ) ą▓ Device Manager (ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓). ąöą╗čÅ ąĮąŠą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ USB. ąæčāą┤čāčé ą┐čĆąŠčüą║ą░ąĮąĖčĆąŠą▓ą░ąĮčŗ ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ąĮąĄ č鹊ą╗čīą║ąŠ FTDI.
ą¤čĆąĖą╝ąĄčĆ:
FT_STATUS ftstatus;
ftStatus = FT_Rescan();
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Rescan!
return ;
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčé ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü čāą║ą░ąĘą░ąĮąĮčŗą╝ąĖ VID ąĖ PID.
FT_STATUS FT_Reload (WORD wVID, WORD wPID);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
wVID Vendor ID čāčüčéčĆąŠą╣čüčéą▓.wPID Product ID čāčüčéčĆąŠą╣čüčéą▓.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąÆčŗąĘąŠą▓ FT_Reload ą┐čĆąĖąĮčāąČą┤ą░ąĄčé ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčāčÄ čüąĖčüč鹥ą╝čā ą▓čŗą│čĆčāąĘąĖčéčī ąĖ ą┐ąŠą▓č鹊čĆąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü čāą║ą░ąĘą░ąĮąĮčŗą╝ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ. ąĢčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ VID ąĖ PID čĆą░ą▓ąĮčŗ null, č鹊 ą▒čāą┤čāčé ą┐ąĄčĆąĄąĘą░ą│čĆčāąČąĄąĮčŗ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ą╗čÅ ą║ąŠčĆąĮąĄą▓čŗčģ čģą░ą▒ąŠą▓ USB (USB root hub), čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 čā ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ą▒čāą┤čāčé ą┐ąĄčĆąĄąĘą░ą│čĆčāąČąĄąĮčŗ ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆčŗ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ą▒čāą┤ąĄčé ą║ąŠčĆčĆąĄą║čéąĮąŠ čĆą░ą▒ąŠčéą░čéčī ąĮą░ 64-ą▒ąĖčéąĮąŠą╣ Windows, ą║ąŠą│ą┤ą░ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĖąĘ 32-ą▒ąĖčéąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ 1. ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą▓čŗąĘą▓ą░čéčī FT_Reload, čćč鹊ą▒čŗ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ FT232R (VID 0x0403, PID 0x6001).
FT_STATUS ftstatus;
WORD wVID = 0x0403 ;
WORD wPID = 0x6001 ;
ftStatus = FT_Reload(wVID,wPID);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Reload!
return ;
}
ą¤čĆąĖą╝ąĄčĆ 2. ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą▓čŗąĘą▓ą░čéčī FT_Reload, čćč鹊ą▒čŗ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ USB.
FT_STATUS ftstatus;
WORD wVID = 0x0000 ;
WORD wPID = 0x0000 ;
ftStatus = FT_Reload(wVID,wPID);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Reload!
return ;
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ResetPipeRetryCount.
FT_STATUS FT_SetResetPipeRetryCount (FT_HANDLE ftHandle, DWORD dwCount);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwCount čćąĖčüą╗ąŠ unsigned long, čüąŠą┤ąĄčƹȹ░čēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ResetPipeRetryCount.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ResetPipeRetryCount čāą┐čĆą░ą▓ą╗čÅąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą┐ąŠą┐čŗč鹊ą║ ą┤čĆą░ą╣ą▓ąĄčĆą░ čüą▒čĆąŠčüąĖčéčī ą║ą░ąĮą░ą╗ (pipe), ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĘąĮą░č湥ąĮąĖąĄ ResetPipeRequestRetryCount čĆą░ą▓ąĮąŠ 50. ąÆ čāčüą╗ąŠą▓ąĖčÅčģ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą┐ąŠą╝ąĄčģ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ čāą▓ąĄą╗ąĖčćąĖčéčī čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą╝ąĮąŠą│ąŠ ąŠčłąĖą▒ąŠą║ USB.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // čĆą░ą▒ąŠčćąĖą╣ čģąĄąĮą┤ą╗, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą▓čŗąĘąŠą▓ąŠą╝ FT_OpenEx
FT_STATUS ftStatus;
DWORD dwRetryCount;
dwRetryCount = 100 ;
ftStatus = FT_SetResetPipeRetryCount(ftHandle, dwRetryCount);
if (ftStatus == FT_OK)
{
// ResetPipeRetryCount čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ 100
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetResetPipeRetryCount!
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘą░ą┤ą░čćčā IN ą┤čĆą░ą╣ą▓ąĄčĆą░.
FT_STATUS FT_StopInTask (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą▓ąŠą┤ą░ ąĘą░ą┤ą░čćąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ IN (čćč鹥ąĮąĖąĄ, read) ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (wait state). ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čüąĖčéčāą░čåąĖčÅčģ, ą║ąŠą│ą┤ą░ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠčćąĖčüčéąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒ąĄąĘ ą┐čĆąĖąĄą╝ą░ ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┤ą░ąĮąĮčŗčģ. ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü FT_RestartInTask, ą║ąŠč鹊čĆą░čÅ čüąĮąŠą▓ą░ ą░ą║čéąĖą▓ąĖčĆčāąĄčé ąĘą░ą┤ą░čćčā IN.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}do
{
ftStatus = FT_StopInTask(ftHandle);
}while (ftStatus != FT_OK);
// // ąŚą┤ąĄčüčī ą┤ąĄą╗ą░ąĄą╝ čćč鹊-č鹊, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠą┐ąĄčĆą░čåąĖčÄ purge ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ //
do
{
ftStatus = FT_RestartInTask(ftHandle);
}while (ftStatus != FT_OK);
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąÉą║čéąĖą▓ąĖčĆčāąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčāčÄ ąĘą░ą┤ą░čćčā IN ą┤čĆą░ą╣ą▓ąĄčĆą░.
FT_STATUS FT_RestartInTask (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ ąĘą░ą┤ą░čćąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ IN (ą┤ą╗čÅ čćč鹥ąĮąĖčÅ) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┤ą░čćą░ IN ą▒čŗą╗ą░ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓čŗąĘąŠą▓ąŠą╝ FT_StopInTask.
ąöą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüą╝. čäčāąĮą║čåąĖčÄ FT_StopInTask.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┐čĆąŠčü USB ą╝ąŠąČąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
FT_STATUS FT_SetDeadmanTimeout (FT_HANDLE ftHandle, DWORD dwDeadmanTimeout);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwDeadmanTimeout ąĘąĮą░č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ deadman ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 5000.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąóą░ą╣ą╝ą░čāčé deadman ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗą╝ ąŠą┐čåąĖčÅą╝ ą┤čĆą░ą╣ą▓ąĄčĆą░ (Advanced Driver Options), ąŠą┐ąĖčüą░ąĮąĮčŗą╝ ą▓ ą░ą┐ąĮąŠčāč鹥 AN232B-10, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ąĮą░ čüą░ą╣č鹥 ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI. ąŁč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ čéą░ą╣ą╝ą░čāčé USB. ą£ą░ą╗ąŠą▓ąĄčĆąŠčÅčéąĮąŠ, čćč鹊 čŹčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
DWORD dwDeadmanTimeout = 6000 ;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_SetDeadmanTimeout(ftHandle, dwDeadmanTimeout);if (ftStatus == FT_OK)
{
// Deadman Timer čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ 6 čüąĄą║čāąĮą┤
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetDeadmanTimeout!
}
FT_Close(ftHandle);
ąØąĄą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čäčāąĮą║čåąĖąĖ.
[4. ążčāąĮą║čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ EEPROM ]
ąŁąĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ą░čÅ ą┐ą░ą╝čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI (EEPROM) ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮą░ ąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖą╣, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¦ąĖčéą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ EEPROM ą▓ čāą║ą░ąĘą░ąĮąĮąŠą╝ ą╝ąĄčüč鹥.
FT_STATUS FT_ReadEE (FT_HANDLE ftHandle, DWORD dwWordOffset, LPWORD lpwValue);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwWordOffset ąŠčéą║čāą┤ą░ čćąĖčéą░čéčī.lpwValue čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ WORD, ą║čāą┤ą░ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ EEPROM.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤ą░ą╝čÅčéčī EEPROM ą▓ čāčüčéčĆąŠą╣čüčéą▓ą░čģ FTDI ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮą░ ą┐ąŠ čüą╗ąŠą▓ą░ą╝ (WORD), čéą░ą║ čćč鹊 ą║ą░ąČą┤ąŠąĄ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 16-ą▒ąĖčéąĮąŠąĄ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą▓ EEPROM.
FT_STATUS FT_WriteEE (FT_HANDLE ftHandle, DWORD dwWordOffset, WORD wValue);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwWordOffset ą║čāą┤ą░ ą┐ąĖčüą░čéčī.lpwValue ąĘąĮą░č湥ąĮąĖąĄ WORD, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ EEPROM.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą¤ą░ą╝čÅčéčī EEPROM ą▓ čāčüčéčĆąŠą╣čüčéą▓ą░čģ FTDI ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮą░ ą┐ąŠ čüą╗ąŠą▓ą░ą╝ (WORD), čéą░ą║ čćč鹊 ą║ą░ąČą┤ąŠąĄ ąĘą░ą┐ąĖčüą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 16-ą▒ąĖčéąĮąŠąĄ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą×čćąĖčēą░ąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ EEPROM čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS FT_EraseEE (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠčćąĖčēą░ąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ EEPROM, ą▓ą║ą╗čÄčćą░čÅ ąŠą▒ą╗ą░čüčéčī ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ą░ FT232R ąĖ FT245R čüąŠą┤ąĄčƹȹ░čé ą▓ čüąĄą▒ąĄ ą▓čüčéčĆąŠąĄąĮąĮčāčÄ ą┐ą░ą╝čÅčéčī EEPROM, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮą░.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¦ąĖčéą░ąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ EEPROM.
FT_STATUS FT_EE_Read (FT_HANDLE ftHandle, PFT_PROGRAM_DATA pData);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pData čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā čéąĖą┐ą░ FT_PROGRAM_DATA.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ążčāąĮą║čåąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ pData ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā čéąĖą┐ą░ FT_PROGRAM_DATA, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ EEPROM.
ążčāąĮą║čåąĖčÅ ąĮąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ąĮąĖą║ą░ą║ąĖąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ čĆą░ąĘą╝ąĄčĆčŗ ą▒čāč乥čĆąŠą▓, čéą░ą║ čćč鹊 ą▒čāč乥čĆčŗ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ą▓ čüčéčĆčāą║čéčāčĆąĄ FT_PROGRAM_DATA, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, čćč鹊ą▒čŗ čĆą░ąĘą╝ąĄčüčéąĖčéčī ąŠąČąĖą┤ą░ąĄą╝čŗąĄ čüčéčĆąŠą║ąĖ (ą▓ą║ą╗čÄčćą░čÅ ąĘą░ą▓ąĄčĆčłą░čÄčēąĖąĄ null-č鹥čĆą╝ąĖąĮą░č鹊čĆčŗ). ąĀą░ąĘą╝ąĄčĆčŗ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ, ą▒ąŠą╗ąĄąĄ č湥ą╝ ą░ą┤ąĄą║ą▓ą░čéąĮčŗąĄ, ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čāą╝ąĄąĮčīčłąĄąĮčŗ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊 ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (Manufacturer string) ą┐ą╗čÄčü ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ (Description string) ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ 40 čüąĖą╝ą▓ąŠą╗ą░ą╝.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 DLL ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░ąĮą░ ąŠ ą▓ąĄčĆčüąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ 菹╗ąĄą╝ąĄąĮčéčŗ čüčéčĆčāą║čéčāčĆčŗ Signature1, Signature2 ąĖ Version. Signature1 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 0x00000000, Signature2 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 0xFFFFFFFF, ąĖ Version ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ čéčā ą▓ąĄčĆčüąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąĮčāąČąĮą░. ąöą╗čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ ą▓čüąĄą╝ąĖ č鹥ą║čāčēąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ Version ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ FTD2XX.h.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus = FT_Open(0 , & ftHandle);if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open!
return ;
}
FT_PROGRAM_DATA ftData;
char ManufacturerBuf[32 ];char ManufacturerIdBuf[16 ];char DescriptionBuf[64 ];char SerialNumberBuf[16 ];
ftData.Signature1 = 0x00000000 ;
ftData.Signature2 = 0xffffffff ;
ftData.Version = 0x00000005 ; // čüčéčĆčāą║čéčāčĆą░ EEPROM čü čĆą░čüčłąĖčĆąĄąĮąĖčÅą╝ąĖ FT232H
ftData.Manufacturer = ManufacturerBuf;
ftData.ManufacturerId = ManufacturerIdBuf;
ftData.Description = DescriptionBuf;
ftData.SerialNumber = SerialNumberBuf;
ftStatus = FT_EE_Read(ftHandle, & ftData);
if (ftStatus == FT_OK)
{
// FT_EE_Read OK, ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ ftData
}else
{
// ąŠčłąĖą▒ą║ą░ FT_EE_Read!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¦č鹥ąĮąĖąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ EEPROM ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ čüčéčĆąŠą║ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ.
FT_STATUS FT_EE_ReadEx (FT_HANDLE ftHandle,
PFT_PROGRAM_DATA pData,
char * Manufacturer,
char * ManufacturerId,
char * Description,
char * SerialNumber);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pData čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā čéąĖą┐ą░ FT_PROGRAM_DATA.*Manufacturer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąĖą╝čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ.*ManufacturerId čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ.*Description čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąŠą┐ąĖčüą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.*SerialNumber čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ ą▓ąĄčĆčüąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čäčāąĮą║čåąĖąĖ FT_EE_Read ą▒čŗą╗ą░ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čéą░ą║ąĖčģ čÅąĘčŗą║ąŠą▓, ą║ą░ą║ LabVIEW, ą│ą┤ąĄ ąĄčüčéčī ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü čāą║ą░ąĘą░č鹥ą╗čÅą╝ąĖ ąĮą░ čüčéčĆąŠą║ąĖ, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą▓ čüčéčĆčāą║čéčāčĆąĄ.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ pData ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā FT_PROGRAM_DATA, ą│ą┤ąĄ ąĄčüčéčī ą╝ąĄčüč鹊 ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ EEPROM.
ążčāąĮą║čåąĖčÅ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĖą║ą░ą║ąĖąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ čĆą░ąĘą╝ąĄčĆčŗ ą▒čāč乥čĆąŠą▓, ą┐ąŠčŹč鹊ą╝čā ą▒čāč乥čĆčŗ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓ąĄą╗ąĖą║ąĖ, čćč鹊ą▒čŗ čĆą░ąĘą╝ąĄčüčéąĖčéčī ą▓ čüąĄą▒ąĄ ąŠąČąĖą┤ą░ąĄą╝čŗąĄ čüčéčĆąŠą║ąĖ (ą▓ą║ą╗čÄčćą░čÅ ąĖčģ null-č鹥čĆą╝ąĖąĮą░č鹊čĆčŗ).
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 DLL ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░ąĮą░ ąŠ ą▓ąĄčĆčüąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ 菹╗ąĄą╝ąĄąĮčéčŗ čüčéčĆčāą║čéčāčĆčŗ Signature1, Signature2 ąĖ Version. Signature1 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 0x00000000, Signature2 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 0xFFFFFFFF, ąĖ Version ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ čéčā ą▓ąĄčĆčüąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąĮčāąČąĮą░. ąöą╗čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ ą▓čüąĄą╝ąĖ č鹥ą║čāčēąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ Version ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ FTD2XX.h.
ąĪčéčĆąŠą║ąŠą▓čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓ čüčéčĆčāą║čéčāčĆąĄ FT_PROGRAM_DATA ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą║ą░ą║ DWORD, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąĄčĆąĄčüąĄč湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąÆčüąĄ čāą║ą░ąĘą░č鹥ą╗ąĖ čüčéčĆąŠą║ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ ąŠčé čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé (ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé) EEPROM.
FT_STATUS FT_EE_Program (FT_HANDLE ftHandle, PFT_PROGRAM_DATA pData);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pData čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā čéąĖą┐ą░ FT_PROGRAM_DATA.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ pData ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā FT_PROGRAM_DATA, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹ░čéčīčüčÅ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ EEPROM. ąöą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ EEPROM, ąĘą░č鹥ą╝ ą▓čŗčćąĖčéčŗą▓ą░čÄčéčüčÅ ąĖ ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ.
ąĢčüą╗ąĖ ą┐ąŠą╗ąĄ SerialNumber ą▓ FT_PROGRAM_DATA čĆą░ą▓ąĮąŠ NULL, ąĖą╗ąĖ SerialNumber čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ NULL-čüčéčĆąŠą║čā, č鹊 ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĮą░ ąŠčüąĮąŠą▓ąĄ ManufacturerId ąĖ č鹥ą║čāčēąĖčģ ą┤ą░čéčŗ/ą▓čĆąĄą╝ąĄąĮąĖ. ąöą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ Manufacturer ą┐ą╗čÄčü ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ Description ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ 40 čüąĖą╝ą▓ąŠą╗ą░ą╝.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 DLL ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░ąĮą░ ąŠ ą▓ąĄčĆčüąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ 菹╗ąĄą╝ąĄąĮčéčŗ čüčéčĆčāą║čéčāčĆčŗ Signature1, Signature2 ąĖ Version. Signature1 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 0x00000000, Signature2 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 0xFFFFFFFF, ąĖ Version ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ čéčā ą▓ąĄčĆčüąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąĮčāąČąĮą░. ąöą╗čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ ą▓čüąĄą╝ąĖ č鹥ą║čāčēąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ Version ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ FTD2XX.h.
ąĢčüą╗ąĖ pData čĆą░ą▓ąĄąĮ NULL, č鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ąĄčĆčüąĖčÅ čüčéčĆčāą║čéčāčĆčŗ ą▒čāą┤ąĄčé 0 (ą║ą░ą║ ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╣ čüąĄčĆąĖąĖ BM) ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čāą┤ąĄčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąÆ ą┐čĆąĖą╝ąĄčĆąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī EEPROM čāčüčéčĆąŠą╣čüčéą▓ą░ FT232B. ą×čüčéą░ą╗čīąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čéąĖą┐ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓.
// ąĪčéčĆčāą║čéčāčĆą░ ą▓ąĄčĆčüąĖąĖ 4 ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąĄčĆąĖąĖ BM. // ąöčĆčāą│ąĖąĄ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ ą┤ąŠą╗ąČąĮčŗ čüąŠą┤ąĄčƹȹ░čéčī ąĮąĄąĮčāą╗ąĄą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ FT2232, FT232R, // FT245R, FT2232H ąĖą╗ąĖ FT4232H.
FT_PROGRAM_DATA ftData =
{
0x00000000 , // ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ - čéčāčé ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘąĮą░č湥ąĮąĖąĄ 0x00000000
0xFFFFFFFF , // ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ - čéčāčé ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘąĮą░č湥ąĮąĖąĄ 0xffffffff
0x00000004 , // ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ - čéčāčé ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ąĄčĆčüąĖčÅ FT_PROGRAM_DATA
0x0403 , // VID
0x6001 , // PID
"FTDI" , // čüčéčĆąŠą║ą░ ąĖą╝ąĄąĮąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (Manufacturer)
"FT" , // ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (Manufacturer ID)
"USB HS Serial Converter" , // čüčéčĆąŠą║ą░ ąŠą┐ąĖčüą░ąĮąĖčÅ (Description)
"FT000001" , // čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
44 , // ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ą░čÅ ą╝ąŠčēčīąĮąŠčüčéčī ąŠčé čłąĖąĮčŗ (MaxPower)
1 , // PnP
0 , // ąĄčüą╗ąĖ ąĮąĄ 0, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╝ąĄąĄčé čüą▓ąŠą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ (SelfPowered)
1 , // ąĄčüčéčī ą╗ąĖ čäčāąĮą║čåąĖčÅ čāą┤ą░ą╗ąĄąĮąĮąŠą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (RemoteWakeup)
1 , // ąĮąĄ 0, ąĄčüą╗ąĖ čćąĖą┐ Rev4, ąĖąĮą░č湥 0
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ in endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ out endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
1 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ čćąĖą┐ ąĖčüą┐ąŠą╗čīąĘčāąĄčé USBVersion
0x0110 // BCD (0x0200 => USB2)
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ ą┤ą╗čÅ FT2232C (čĆą░ąĘčĆąĄčłąĄąĮčŗ, ąĄčüą╗ąĖ Version = 1 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ)
//
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ čćąĖą┐ Rev5, ąĖąĮą░č湥 0
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ in endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ in endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ out endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ out endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ pull down čĆą░ąĘčĆąĄčłąĄąĮ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ čćąĖą┐ ąĖčüą┐ąŠą╗čīąĘčāąĄčé USBVersion
0x0 , // BCD (0x0200 => USB2)
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ą▒ąŠą╗čīčłąŠą╣ č鹊ą║
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ą▒ąŠą╗čīčłąŠą╣ č鹊ą║
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ ą┤ą╗čÅ FT232R (čĆą░ąĘčĆąĄčłąĄąĮčŗ, ąĄčüą╗ąĖ Version = 2 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ)
//
0 , // ąĄčüą╗ąĖ ąĮąĄ 0, č鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĮąĄčłąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ
0 , // ąĄčüą╗ąĖ ąĮąĄ 0, č鹊 I/O čü ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ
0 , // čĆą░ąĘą╝ąĄčĆ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗą╣ TXD
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗą╣ RXD
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗą╣ RTS
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗą╣ CTS
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗą╣ DTR
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗą╣ DSR
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗą╣ DCD
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗą╣ RI
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆčŗ D2XX
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ Rev 7 (FT2232H, čĆą░ąĘčĆąĄčłąĄąĮčŗ, ąĄčüą╗ąĖ Version = 3 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ)
//
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BCBUS7 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ ą▓ čüčģąĄą╝ą░čģ
// čü čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╝ ą┐ąĖčéą░ąĮąĖąĄą╝ (self-powered)
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ Rev 8 (FT4232H, čĆą░ąĘčĆąĄčłąĄąĮčŗ ąĄčüą╗ąĖ Version = 4)
//
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ port A ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ port B ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ port C ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ port D ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ Rev 9 (FT232H, čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĄčüą╗ąĖ Version = 5)
//
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AC ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AC ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AD ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą╝ą░ą╗čāčÄ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ AD ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░
0 , // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ Cbus (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control))
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü FT1248
0 , // ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ FT1248 - čāčĆąŠą▓ąĄąĮčī ąŠąČąĖą┤ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ (clock idle) ą▓čŗčüąŠą║ąĖą╣ (1)
// ąĖą╗ąĖ ąĮąĖąĘą║ąĖą╣ (0)
0 , // ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ FT1248, čüąĮą░čćą░ą╗ą░ LSB (1) ąĖą╗ąĖ MSB (0)
0 , // čĆą░ąĘčĆąĄčłąĄąĮąŠ ą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control) FT1248
0 , // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
0 // ąĮąĄ 0, ąĄčüą╗ąĖ ACBUS7 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ ą▓ čüčģąĄą╝ą░čģ
// čü čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╝ ą┐ąĖčéą░ąĮąĖąĄą╝ (self-powered)
FT_HANDLE ftHandle;
FT_STATUS ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus == FT_OK)
{
ftStatus = FT_EE_Program(ftHandle, & ftData);
if (ftStatus == FT_OK)
{
// FT_EE_Program OK!
}
else
{
// ąŠčłąĖą▒ą║ą░ FT_EE_Program!
}
FT_Close(ftHandle);
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé EEPROM, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ čüčéčĆąŠą║ąĖ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ.
FT_STATUS FT_EE_ProgramEx (FT_HANDLE ftHandle,
PFT_PROGRAM_DATA pData,
char * Manufacturer,
char * ManufacturerId,
char * Description,
char * SerialNumber);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pData čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā čéąĖą┐ą░ FT_PROGRAM_DATA.*Manufacturer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąĖą╝čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ.*ManufacturerId čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ.*Description čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąŠą┐ąĖčüą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.*SerialNumber čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁč鹊 ą▓ąĄčĆčüąĖčÅ čäčāąĮą║čåąĖąĖ FT_EE_Program ą▒čŗą╗ą░ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čéą░ą║ąĖčģ čÅąĘčŗą║ąŠą▓, ą║ą░ą║ LabVIEW, ą│ą┤ąĄ ąĄčüčéčī ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü čāą║ą░ąĘą░č鹥ą╗čÅą╝ąĖ ąĮą░ čüčéčĆąŠą║ąĖ, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą▓ čüčéčĆčāą║čéčāčĆąĄ.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ pData ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā FT_PROGRAM_DATA, ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ EEPROM. ąöą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ EEPROM, ąĘą░č鹥ą╝ ą▓čŗčćąĖčéčŗą▓ą░čÄčéčüčÅ ąĖ ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ.
ąĪčéčĆąŠą║ąŠą▓čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓ čüčéčĆčāą║čéčāčĆąĄ FT_PROGRAM_DATA ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą║ą░ą║ DWORD, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąĄčĆąĄčüąĄč湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąÆčüąĄ čāą║ą░ąĘą░č鹥ą╗ąĖ čüčéčĆąŠą║ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ ąŠčé čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA.
ąĢčüą╗ąĖ ą┐ąŠą╗ąĄ SerialNumber ą▓ FT_PROGRAM_DATA čĆą░ą▓ąĮąŠ NULL, ąĖą╗ąĖ SerialNumber čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ NULL-čüčéčĆąŠą║čā, č鹊 ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĮą░ ąŠčüąĮąŠą▓ąĄ ManufacturerId ąĖ č鹥ą║čāčēąĖčģ ą┤ą░čéčŗ/ą▓čĆąĄą╝ąĄąĮąĖ. ąöą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ Manufacturer ą┐ą╗čÄčü ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ Description ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ 40 čüąĖą╝ą▓ąŠą╗ą░ą╝.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 DLL ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░ąĮą░ ąŠ ą▓ąĄčĆčüąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ 菹╗ąĄą╝ąĄąĮčéčŗ čüčéčĆčāą║čéčāčĆčŗ Signature1, Signature2 ąĖ Version. Signature1 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 0x00000000, Signature2 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 0xFFFFFFFF, ąĖ Version ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ čéčā ą▓ąĄčĆčüąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąĮčāąČąĮą░. ąöą╗čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ ą▓čüąĄą╝ąĖ č鹥ą║čāčēąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ Version ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ čüčéčĆčāą║čéčāčĆčŗ FT_PROGRAM_DATA, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ FTD2XX.h.
ąĢčüą╗ąĖ pData čĆą░ą▓ąĄąĮ NULL, č鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ąĄčĆčüąĖčÅ čüčéčĆčāą║čéčāčĆčŗ ą▒čāą┤ąĄčé 0 (ą║ą░ą║ ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╣ čüąĄčĆąĖąĖ BM) ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čāą┤ąĄčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāčćą░ąĄčé ą┤ąŠčüčéčāą┐ąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ EEPROM.
FT_STATUS FT_EE_UASize (FT_HANDLE ftHandle, LPDWORD lpdwSize);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwSize čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ DWORD, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą┤ąŠčüčéčāą┐ąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ ą▒ą░ą╣čéą░čģ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą×ą▒ą╗ą░čüčéčī ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ EEPROM čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĄą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░čģ. ąŁčéą░ ąŠą▒ą╗ą░čüčéčī ą┤ąŠčüčéčāą┐ąĮą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ čéčāą┤ą░ ą╗čÄą▒ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, čüą┐ąĄčåąĖčäąĖčćąĮąŠą╣ ą┤ą╗čÅ ąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĀą░ąĘą╝ąĄčĆ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┤ą╗ąĖąĮčŗ čüčéčĆąŠą║ Manufacturer, ManufacturerId, Description ąĖ SerialNumber, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą▓ EEPROM.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open!
return ;
}
DWORD EEUA_Size;
ftStatus = FT_EE_UASize(ftHandle, & EEUA_Size);
if (ftStatus == FT_OK)
{
// FT_EE_UASize OK
// EEUA_Size čüąŠą┤ąĄčƹȹĖčé čĆą░ąĘą╝ąĄčĆ ąŠą▒ą╗ą░čüčéąĖ EEUA ą▓ ą▒ą░ą╣čéą░čģ
}else
{
// ąŠčłąĖą▒ą║ą░ FT_EE_UASize!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¦ąĖčéą░ąĄčé ąĖąĘ EEPROM čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
FT_STATUS FT_EE_UARead (FT_HANDLE ftHandle,
PUCHAR pucData,
DWORD dwDataLen,
LPDWORD lpdwBytesRead);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pucData čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą╝ąĄčüč鹊 ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ.dwDataLen čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą▓ ą▒ą░ą╣čéą░čģ.lpdwBytesRead čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ DWORD, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ pucData ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒ą░ą╣č鹊ą▓čŗą╣ ą╝ą░čüčüąĖą▓ čĆą░ąĘą╝ąĄčĆąŠą╝ dwDataLen, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą┐ą░čüčéčī ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąöąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ DWORD, ąĮą░ ą║ąŠč鹊čĆąŠąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé lpdwBytesRead.
ąĢčüą╗ąĖ dwDataLen ą╝ąĄąĮčīčłąĄ, č湥ą╝ čĆą░ąĘą╝ąĄčĆ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ EEPROM, č鹊 dwDataLen ą▒ą░ą╣čé ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ ą▓ ą▒čāč乥čĆ. ąśąĮą░č湥 ą▓ ą▒čāč乥čĆ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮą░ ą▓čüčÅ ąŠą▒ą╗ą░čüčéčī ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąĀą░ąĘą╝ąĄčĆ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą▓čŗąĘąŠą▓ąŠą╝ FT_EE_UASize.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ čäčāąĮą║čåąĖąĄą╣ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ lpdwBytesRead, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓ąŠąĘą▓čĆą░čé ąĖąĘ FT_EE_UARead.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open!
return ;
}
unsigned char Buffer[64 ];
DWORD BytesRead;
ftStatus = FT_EE_UARead(ftHandle, Buffer, 64 , & BytesRead);
if (ftStatus == FT_OK)
{
// FT_EE_UARead OK,
// ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗čīąĘą▓ą░č鹥ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą▒čāč乥čĆąĄ Buffer,
// ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé ąĖąĘ EEUA čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ BytesRead
}else
{
// ąŠčłąĖą▒ą║ą░ FT_EE_UARead!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ ąŠą▒ą╗ą░čüčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ EEPROM.
FT_STATUS FT_EE_UAWrite (FT_HANDLE ftHandle, PUCHAR pucData, DWORD dwDataLen);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pucData čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.dwDataLen čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą▓ ą▒ą░ą╣čéą░čģ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ pucData ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒ą░ą╣č鹊ą▓čŗą╣ ą╝ą░čüčüąĖą▓ čĆą░ąĘą╝ąĄčĆąŠą╝ dwDataLen, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ ąŠą▒ą╗ą░čüčéčī ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ EEPROM. ąĢčüą╗ąĖ dwDataLen ą▒čāą┤ąĄčé ą▒ąŠą╗čīčłąĄ čĆą░ąĘą╝ąĄčĆą░ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ EEPROM, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąöąŠčüčéčāą┐ąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą▓čŗąĘąŠą▓ąŠą╝ FT_EE_UASize.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open!
return ;
}
char * buffer = "Hello, World" ;
ftStatus = FT_EE_UAWrite(ftHandle, (unsigned char * )buffer, 12 );if (ftStatus == FT_OK)
{
// FT_EE_UAWRITE OK
}else
{
// ąŠčłąĖą▒ą║ą░ FT_EE_UAWRITE
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (XP ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¦ąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ EEPROM. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą▓čüąĄčģ čüčāčēąĄčüčéą▓čāčÄčēąĖčģ čćąĖą┐čüąĄčéą░čģ FTDI, ąĖ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąĄčĆąĖąĖ FT-X.
FT_STATUS FT_EEPROM_Read (FT_HANDLE ftHandle,
void * eepromData,
DWORD eepromDataSize,
char * Manufacturer,
char * ManufacturerId,
char * Description,
char * SerialNumber);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.*eepromData čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹčéą░ čüčéčĆčāą║čéčāčĆą░ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░.epromDataSize čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ eepromData.*Manufacturer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ą╝ąĄčüč鹊 ą┤ą╗čÅ ąĖą╝ąĄąĮąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ.*ManufacturerId čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ą╝ąĄčüč鹊 ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (manufacturer ID).*Description čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ą╝ąĄčüč鹊 ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░.*SerialNumber čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ą╝ąĄčüč鹊 ą┤ą╗čÅ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ *eepromDATA ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čéąĖą┐čā čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
PFT_EEPROM_232B čŹč鹊 čüčéčĆčāą║čéčāčĆą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ FT2xxB.
ążčāąĮą║čåąĖčÅ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┐čĆąŠą▓ąĄčĆąŠą║ ąĮą░ čĆą░ąĘą╝ąĄčĆčŗ ą▒čāč乥čĆąŠą▓, čéą░ą║ čćč鹊 čĆą░ąĘą╝ąĄčĆčŗ ą▒čāč乥čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ čüčéčĆčāą║čéčāčĆąĄ eepromDATA, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓ąĄą╗ąĖą║ąĖ, čćč鹊ą▒čŗ ą▓ą╝ąĄčüčéąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüčéčĆąŠą║ąĖ (ą▓ą║ą╗čÄčćą░čÅ null-č鹥čĆą╝ąĖąĮą░č鹊čĆčŗ). ąĀą░ąĘą╝ąĄčĆčŗ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ, ą▒ąŠą╗ąĄąĄ č湥ą╝ ą░ą┤ąĄą║ą▓ą░čéąĮčŗąĄ, ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čāą╝ąĄąĮčīčłąĄąĮčŗ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊 ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (Manufacturer string) ą┐ą╗čÄčü ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ (Description string) ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ 40 čüąĖą╝ą▓ąŠą╗ą░ą╝.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 DLL ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░ąĮą░ ąŠ ą▓ąĄčĆčüąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čüčéčĆčāą║čéčāčĆčŗ eepromDATA. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ čüčéčĆčāą║čéčāčĆčā PFT_EEPROM_HEADER. ą¤ąĄčĆą▓čŗą╣ 菹╗ąĄą╝ąĄąĮčé čüčéčĆčāą║čéčāčĆčŗ deviceType, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī FT_DEVICE_BM, FT_DEVICE_AM, FT_DEVICE_2232C, FT_DEVICE_232R, FT_DEVICE_2232H, FT_DEVICE_4232H, FT_DEVICE_232H ąĖą╗ąĖ FT_DEVICE_X_SERIES, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą▓ FTD2XX.h.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE fthandle;
FT_STATUS status;
char Manufacturer[64 ];char ManufacturerId[64 ];char Description[64 ];char SerialNumber[64 ];
FT_EEPROM_HEADER ft_eeprom_header;
// čéąĖą┐ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐:
ft_eeprom_header.deviceType = FT_DEVICE_2232H;
FT_EEPROM_2232H ft_eeprom_2232h;
ft_eeprom_2232h.common = ft_eeprom_header;
ft_eeprom_2232h.common.deviceType = FT_DEVICE_2232H;
status = FT_Open(0 , & fthandle);
if (status != FT_OK)
{
printf("ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ąŠčéą║čĆčŗč鹊 ąĮą░ ą┤ąŠčüčéčāą┐, čüčéą░čéčāčü %d \n " , status);
return ;
}
status = FT_EEPROM_Read(fthandle,
& ft_eeprom_2232h,
sizeof (ft_eeprom_2232h),
Manufacturer,
ManufacturerId,
Description,
SerialNumber);
if (status != FT_OK)
{
printf("ą×čłąĖą▒ą║ą░ EEPROM_Read, čüčéą░čéčāčü %d \n " , status);
}else
{
printf("VendorID = 0x%04x \n " , ft_eeprom_2232h.common.VendorId);
printf("ProductID = 0x%04x \n " , ft_eeprom_2232h.common.ProductId);
...
...
}
FT_Close(fthandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Windows (XP ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ EEPROM. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą▓čüąĄčģ čüčāčēąĄčüčéą▓čāčÄčēąĖčģ čćąĖą┐čüąĄčéą░čģ FTDI, ąĖ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąĄčĆąĖąĖ FT-X.
FT_STATUS FT_EEPROM_Program (FT_HANDLE ftHandle,
void * eepromData,
DWORD eepromDataSize,
char * Manufacturer,
char * ManufacturerId,
char * Description,
char * SerialNumber);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.*eepromData čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ. ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹčéą░ čüčéčĆčāą║čéčāčĆą░ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░.epromDataSize čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ eepromData.*Manufacturer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ąĖą╝čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ.*ManufacturerId čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (manufacturer ID).*Description čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ąŠą┐ąĖčüą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.*SerialNumber čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ null-terminated čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ *eepromDATA ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čéąĖą┐čā čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
PFT_EEPROM_232B čŹč鹊 čüčéčĆčāą║čéčāčĆą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ FT2xxB.
ążčāąĮą║čåąĖčÅ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┐čĆąŠą▓ąĄčĆąŠą║ ąĮą░ čĆą░ąĘą╝ąĄčĆčŗ ą▒čāč乥čĆąŠą▓, čéą░ą║ čćč鹊 čĆą░ąĘą╝ąĄčĆčŗ ą▒čāč乥čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ čüčéčĆčāą║čéčāčĆąĄ eepromDATA, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓ąĄą╗ąĖą║ąĖ, čćč鹊ą▒čŗ ą▓ą╝ąĄčüčéąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüčéčĆąŠą║ąĖ (ą▓ą║ą╗čÄčćą░čÅ null-č鹥čĆą╝ąĖąĮą░č鹊čĆčŗ). ąĀą░ąĘą╝ąĄčĆčŗ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ, ą▒ąŠą╗ąĄąĄ č湥ą╝ ą░ą┤ąĄą║ą▓ą░čéąĮčŗąĄ, ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čāą╝ąĄąĮčīčłąĄąĮčŗ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊 ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (Manufacturer string) ą┐ą╗čÄčü ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ (Description string) ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ 40 čüąĖą╝ą▓ąŠą╗ą░ą╝.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 DLL ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░ąĮą░ ąŠ ą▓ąĄčĆčüąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čüčéčĆčāą║čéčāčĆčŗ eepromDATA. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ čüčéčĆčāą║čéčāčĆčā PFT_EEPROM_HEADER. ą¤ąĄčĆą▓čŗą╣ 菹╗ąĄą╝ąĄąĮčé čüčéčĆčāą║čéčāčĆčŗ deviceType, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī FT_DEVICE_BM, FT_DEVICE_AM, FT_DEVICE_2232C, FT_DEVICE_232R, FT_DEVICE_2232H, FT_DEVICE_4232H, FT_DEVICE_232H ąĖą╗ąĖ FT_DEVICE_X_SERIES, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą▓ FTD2XX.h.
ą¤čĆąĖą╝ąĄčĆ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą┐ąŠą╝ąŠčēčīčÄ FT_EEPROM_Read ąĖ FT_EEPROM_Program (ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čüčéą░čéčāčüą░ ąŠčłąĖą▒ą║ąĖ ą┤ą╗čÅ ąĮąĖčģ ąŠą┐čāčēąĄąĮčŗ):
FT_HANDLE fthandle;
FT_STATUS status;
char Manufacturer[64 ];char ManufacturerId[64 ];char Description[64 ];char SerialNumber[64 ];
FT_EEPROM_HEADER ft_eeprom_header;
// ąóąĖą┐ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐:
ft_eeprom_header.deviceType = FT_DEVICE_2232H;
FT_EEPROM_2232H ft_eeprom_2232h;
ft_eeprom_2232h.common = ft_eeprom_header;
ft_eeprom_2232h.common.deviceType = FT_DEVICE_2232H;
status = FT_Open(0 , & fthandle);
if (status != FT_OK)
{
printf("ą×čłąĖą▒ą║ą░ ąŠčéą║čĆčŗčéąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, čüčéą░čéčāčü %d \n " , status);
return ;
}
status = FT_EEPROM_Read(fthandle,
& ft_eeprom_2232h,
sizeof (ft_eeprom_2232h),
Manufacturer,
ManufacturerId,
Description,
SerialNumber);
strcpy(SerialNumber, "FT000001" );
status = FT_EEPROM_Program(fthandle,
& ft_eeprom_2232h,
sizeof (ft_eeprom_2232h),
Manufacturer,
ManufacturerId,
Description,
SerialNumber);
FT_Close(fthandle);
[5. ążčāąĮą║čåąĖąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ API ]
ąóą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ čäčāąĮą║čåąĖąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ API (extended API) ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ FT8U232AM ąĖą╗ąĖ FT8U245AM. ą£ąĖą║čĆąŠčüčģąĄą╝čŗ FTDI, ąĮąĄ ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ USB-UART ąĖ USB-FIFO (FT2232H, FT4232H, FT232R, FT245R, FT2232, FT232B ąĖ FT245B) ą╝ąŠą│čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čŹčéąĖ čäčāąĮą║čåąĖąĖ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ čŹčéąĖčģ čäčāąĮą║čåąĖą╣ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ą║ąŠąĮą║čĆąĄčéąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ (latency timer).
FT_STATUS FT_SetLatencyTimer (FT_HANDLE ftHandle, UCHAR ucTimer);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.ucTimer čéčĆąĄą▒čāąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ ą┤ą╗čÅ latency timer. ąöąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 2 .. 255.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąÆ čāčüčéčĆąŠą╣čüčéą▓ą░čģ FT8U232AM ąĖ FT8U245AM čéą░ą╣ą╝ą░čāčé ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ čüą▒čĆąŠčüą░ (flush) ąŠčüčéą░ą▓čłąĖčģčüčÅ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, ą▒čŗą╗ čäąĖą║čüąĖčĆąŠą▓ą░ąĮ ąĮą░ 16 ą╝čü. ąÆąŠ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ FTDI čŹč鹊čé čéą░ą╣ą╝ą░čāčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čü čłą░ą│ąŠą╝ 1 ą╝čü ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ 2 ą╝čü .. 255 ą╝čü. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╗čāčćčłąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ ą┐čĆąŠč鹊ą║ąŠą╗čŗ, čéčĆąĄą▒čāčÄčēąĖąĄ čāčüą║ąŠčĆąĄąĮąĮąŠą│ąŠ ąŠčéą▓ąĄčéą░ ąĮą░ ą║ąŠčĆąŠčéą║ąĖąĄ ą┐ą░ą║ąĄčéčŗ ą┤ą░ąĮąĮčŗčģ.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
UCHAR LatencyTimer = 10 ;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_SetLatencyTimer(ftHandle, LatencyTimer);if (ftStatus == FT_OK)
{
// LatencyTimer čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ 10 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤
}
else
{
// ąŠčłąĖą▒ą║ą░ FT_SetLatencyTimer!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāč湥ąĮąĖąĄ č鹥ą║čāčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ latency timer.
FT_STATUS FT_GetLatencyTimer (FT_HANDLE ftHandle, PUCHAR pucTimer);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pucTimer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned char, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ latency timer.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąÆ čāčüčéčĆąŠą╣čüčéą▓ą░čģ FT8U232AM ąĖ FT8U245AM čéą░ą╣ą╝ą░čāčé ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ čüą▒čĆąŠčüą░ (flush) ąŠčüčéą░ą▓čłąĖčģčüčÅ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, ą▒čŗą╗ čäąĖą║čüąĖčĆąŠą▓ą░ąĮ ąĮą░ 16 ą╝čü. ąÆąŠ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ FTDI čŹč鹊čé čéą░ą╣ą╝ą░čāčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čü čłą░ą│ąŠą╝ 1 ą╝čü ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ 2 ą╝čü .. 255 ą╝čü. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╗čāčćčłąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ ą┐čĆąŠč鹊ą║ąŠą╗čŗ, čéčĆąĄą▒čāčÄčēąĖąĄ čāčüą║ąŠčĆąĄąĮąĮąŠą│ąŠ ąŠčéą▓ąĄčéą░ ąĮą░ ą║ąŠčĆąŠčéą║ąĖąĄ ą┐ą░ą║ąĄčéčŗ ą┤ą░ąĮąĮčŗčģ.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
UCHAR LatencyTimer;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_GetLatencyTimer(ftHandle, & LatencyTimer);if (ftStatus == FT_OK)
{
// LatencyTimer čüąŠą┤ąĄčƹȹĖčé č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ
}else
{
// ąŠčłąĖą▒ą║ą░ FT_GetLatencyTimer!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąĀą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓ čćąĖą┐ą░.
FT_STATUS FT_SetBitmode (FT_HANDLE ftHandle, UCHAR ucMask, UCHAR ucMode);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.
0x0 = Reset (čüą▒čĆąŠčü)
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ FT232R čüą╝. ą▓ ą░ą┐ąĮąŠčāč鹥 "Bit Bang Modes for the FT232R and FT245R" (ą┐ąĄčĆąĄą▓ąŠą┤ ąĮą░ čĆčāčüčüą║ąĖą╣ čÅąĘčŗą║ [4]).
ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ FT2232 čüą╝. ą▓ ą░ą┐ąĮąŠčāč鹥 "Bit Mode Functions for the FT2232".
ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ Bit Bang ą┤ą╗čÅ FT232B ąĖ FT245B čüą╝. ą░ą┐ąĮąŠčāčé "FT232B/FT245B Bit Bang Mode".
ąÉą┐ąĮąŠčāčéčŗ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĮą░ čüą░ą╣č鹥 ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ CBUS Bit Bang ą▓ FT232R, CBUS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ č湥čĆąĄąĘ EEPROM ą┤ą╗čÅ CBUS Bit Bang.
ąśą╝ąĄą╣č鹥 čéą░ą║ąČąĄ ą▓ ą▓ąĖą┤čā, čćč鹊 ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ Single Channel Synchronous 245 FIFO ą┤ą╗čÅ FT2232H, channel A ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ č湥čĆąĄąĘ EEPROM ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ FT245 FIFO.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
UCHAR Mask = 0xff ;
UCHAR Mode = 1 ; // čāčüčéą░ąĮąŠą▓ąĖčéčī asynchronous bit-bang mode
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_SetBitMode(ftHandle, Mask, Mode);
if (ftStatus == FT_OK)
{
// ąĘąĮą░č湥ąĮąĖąĄ 0xff ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetBitMode!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąØąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠąĄ ą┐ąŠą╗čāč湥ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čü čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ.
FT_STATUS FT_GetBitmode (FT_HANDLE ftHandle, PUCHAR pucMode);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.pucMode čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned char, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čü čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ FT232R čüą╝. ą▓ ą░ą┐ąĮąŠčāč鹥 "Bit Bang Modes for the FT232R and FT245R" (ą┐ąĄčĆąĄą▓ąŠą┤ ąĮą░ čĆčāčüčüą║ąĖą╣ čÅąĘčŗą║ čüą╝. ą▓ [4]). ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ FT2232 čüą╝. ą▓ ą░ą┐ąĮąŠčāč鹥 "Bit Mode Functions for the FT2232". ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ Bit Bang ą┤ą╗čÅ FT232B ąĖ FT245B čüą╝. ą░ą┐ąĮąŠčāčé "FT232B/FT245B Bit Bang Mode". ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ FT4232H ąĖ FT2232H čüą╝. ą▓ ą░ą┐ąĮąŠčāč鹥 ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čā (ą┐ąĄčĆąĄą▓ąŠą┤ ąĮą░ čĆčāčüčüą║ąĖą╣ čÅąĘčŗą║ čüą╝. ą▓ [3]).
ąÉą┐ąĮąŠčāčéčŗ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĮą░ čüą░ą╣č鹥 ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
UCHAR BitMode;
FT_STATUS ftStatus;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_GetBitMode(ftHandle, & BitMode);if (ftStatus == FT_OK)
{
// BitMode čüąŠą┤ąĄčƹȹĖčé č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ
}else
{
// ąŠčłąĖą▒ą║ą░ FT_GetBitMode!
}
FT_Close(ftHandle);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆą░ąĘą╝ąĄčĆ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ USB.
FT_STATUS FT_SetUSBParameters (FT_HANDLE ftHandle,
DWORD dwInTransferSize,
DWORD dwOutTransferSize);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwInTransferSize čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ USB IN.dwOutTransferSize čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ USB OUT.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: FT_OK ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ FT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čĆą░ąĘą╝ąĄčĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čć ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 4096, čćč鹊ą▒čŗ ą╗čāčćčłąĄ ą┐ąŠą┤čģąŠą┤ąĖčéčī ą║ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĀą░ąĘą╝ąĄčĆčŗ ą┐ąĄčĆąĄą┤ą░čć ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą║ą░ą║ čćąĖčüą╗ąŠ, ą║čĆą░čéąĮąŠąĄ 64 ą▒ą░ą╣čéą░ą╝, ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 64 ą▒ą░ą╣čé ą┤ąŠ 65536 ą▒ą░ą╣čé.
ąÜąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ FT_SetUSBParameters, ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čüčéčāą┐čÅčé ą▓ čüąĖą╗čā ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ąĖ ą╗čÄą▒čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čāą┤ąĄčƹȹĖą▓ą░ą╗ąĖčüčī ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą▒čāą┤čāčé ą┐ąŠč鹥čĆčÅąĮčŗ.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ dwInTransferSize.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle;
FT_STATUS ftStatus;
DWORD InTransferSize = 16384 ;
ftStatus = FT_Open(0 , & ftHandle);
if (ftStatus != FT_OK)
{
// ąŠčłąĖą▒ą║ą░ FT_Open
return ;
}
ftStatus = FT_SetUSBParameters(ftHandle, InTransferSize, 0 );if (ftStatus == FT_OK)
{
// čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░čćąĖ IN čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ 16 ą║ąĖą╗ąŠą▒ą░ą╣čé
}else
{
// ąŠčłąĖą▒ą║ą░ FT_SetUSBParameters!
}
FT_Close(ftHandle);
[6. ążčāąĮą║čåąĖąĖ FT-Win32 API ]
ążčāąĮą║čåąĖąĖ, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ Win32, čĆą░ą▒ąŠčéą░čÄčēąĖčģ čü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ą┐ąŠčĆč鹊ą╝. ąŁčéąĖ čäčāąĮą║čåąĖąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĮą░ ąĮąĄ-Windows ą┐ą╗ą░čéč乊čĆą╝ą░čģ, čćč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąŠą▒ą╗ąĄą│čćą░ąĄčé ą┐ąĄčĆąĄąĮąŠčü čüčāčēąĄčüčéą▓čāčÄčēąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĖąĘ Windows. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą║ą╗ą░čüčüąĖč湥čüą║ąĖąĄ čäčāąĮą║čåąĖąĖ D2XX ąĖ čäčāąĮą║čåąĖąĖ Win32 D2XX ąĮąĄ ą┤ąŠą╗ąČąĮčŗ čüą╝ąĄčłąĖą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ąŠą▒čĆą░čéąĮąŠąĄ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą×čéą║čĆąŠąĄčé čāą║ą░ąĘą░ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ ą▓ąŠąĘą▓čĆą░čéąĖčé čģąĄąĮą┤ą╗, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┤ąŠčüčéčāą┐ą░. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ ą┐ąŠ čüą▓ąŠąĄą╝čā čüąĄčĆąĖą╣ąĮąŠą╝čā ąĮąŠą╝ąĄčĆčā, ąŠą┐ąĖčüą░ąĮąĖčÄ ąĖą╗ąĖ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÄ ąĮą░ čłąĖąĮąĄ USB (location).
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ą▓ąŠą┤/ą▓čŗą▓ąŠą┤ čü ą┐ąĄčĆąĄą║čĆčŗčéąĖąĄą╝ (overlapped I/O).
FT_HANDLE FT_W32_CreateFile (PVOID pvArg1,
DWORD dwAccess,
DWORD dwShareMode,
LPSECURITY_ATTRIBUTES lpSecurityAttributes,
DWORD dwCreate,
DWORD dwAttrsAndFlags,
HANDLE hTemplate);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
pvArg1 ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé dwAttrsAndFlags. ą£ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░č鹥ą╗ąĄą╝ ąĮą░ null-terminated čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖą╗ąĖ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖą╗ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī location čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮčŗ ąĖąĘ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖą╣ FT_CreateDeviceInfoList, FT_GetDeviceInfoDetail ąĖą╗ąĖ FT_ListDevices.dwAccess čéąĖą┐ ą┤ąŠčüčéčāą┐ą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā. ą£ąŠąČąĄčé ą▒čŗčéčī GENERIC_READ, GENERIC_WRITE ąĖą╗ąĖ ąŠą▒ą░ ą▓ą╝ąĄčüč鹥. ą¤ą░čĆą░ą╝ąĄčéčĆ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ ą▓ Linux.dwShareMode ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0.lpSecurityAttributes čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░, ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ NULL.dwCreate čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ OPEN_EXISTING. ą¤ą░čĆą░ą╝ąĄčéčĆ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ ą▓ Linux.dwAttrsAndFlags ą░čéčĆąĖą▒čāčéčŗ ąĖ čäą╗ą░ą│ąĖ čäą░ą╣ą╗ą░. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ čÅą▓ą╗čÅąĄčéčüčÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĄą╣ FILE_ATTRIBUTE_NORMAL, FILE_FLAG_OVERLAPPED ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ overlapped I/O, FT_OPEN_BY_SERIAL_NUMBER ąĄčüą╗ąĖ pvArg1 čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ FT_OPEN_BY_DESCRIPTION ąĄčüą╗ąĖ pvArg1 ąŠą┐ąĖčüą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.hTemplate čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī NULL.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ čģąĄąĮą┤ą╗, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ Win32 INVALID_HANDLE_VALUE.
ąŚąĮą░č湥ąĮąĖąĄ pvArg1 ąĘą░ą▓ąĖčüąĖčé ąŠčé dwAttrsAndFlags: ąĄčüą╗ąĖ čéą░ą╝ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ FT_OPEN_BY_SERIAL_NUMBER ąĖą╗ąĖ FT_OPEN_BY_DESCRIPTION, č鹊 pvArg1 čüąŠą┤ąĄčƹȹĖčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ null-terminated čüčéčĆąŠą║čā čü čüąĄčĆąĖą╣ąĮčŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ ąĖą╗ąĖ ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░; ąĄčüą╗ąĖ ą▓ dwAttrsAndFlags čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ FT_OPEN_BY_LOCATION, č鹊 pvArg1 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ long, čüąŠą┤ąĄčƹȹ░čēąĄąĄ location ID čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤ą░čĆą░ą╝ąĄčéčĆ dwAccess ą╝ąŠąČąĄčé ą▒čŗčéčī GENERIC_READ, GENERIC_WRITE ąĖą╗ąĖ ąŠą▒ą░ čüčĆą░ąĘčā; dwShareMode ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0; lpSecurityAttributes ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ NULL; dwCreate ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ OPEN_EXISTING; ą║ą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, dwAttrsAndFlags čÅą▓ą╗čÅąĄčéčüčÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĄą╣ FILE_ATTRIBUTE_NORMAL, FILE_FLAG_OVERLAPPED ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ overlapped I/O, FT_OPEN_BY_SERIAL_NUMBER, ąĖą╗ąĖ FT_OPEN_BY_DESCRIPTION, ąĖą╗ąĖ FT_OPEN_BY_LOCATION; hTemplate ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī NULL.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 Linux, Mac OS X ąĖ Windows CE ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĮąĖ overlapped IO, ąĮąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ location ID.
ą¤čĆąĖą╝ąĄčĆ 1. ą×čéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ overlapped I/O ą┐ąŠ ąĄą│ąŠ čüąĄčĆąĖą╣ąĮąŠą╝čā ąĮąŠą╝ąĄčĆčā.
FT_STATUS ftStatus;
FT_HANDLE ftHandle;
char Buf[64 ];
ftStatus = FT_ListDevices(0 , Buf, FT_LIST_BY_INDEX| FT_OPEN_BY_SERIAL_NUMBER);
ftHandle = FT_W32_CreateFile(Buf,GENERIC_READ| GENERIC_WRITE,
0 ,
0 ,
OPEN_EXISTING,
FILE_ATTRIBUTE_NORMAL | FILE_FLAG_OVERLAPPED | FT_OPEN_BY_SERIAL_NUMBER,
0 );
if (ftHandle == INVALID_HANDLE_VALUE)
; // ąŠčłąĖą▒ą║ą░ FT_W32_CreateDevice
ą¤čĆąĖą╝ąĄčĆ 2. ą×čéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĮąĄ overlapped I/O ą┐ąŠ ąĄą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÄ.
FT_STATUS ftStatus;
FT_HANDLE ftHandle;
char Buf[64 ];
ftStatus = FT_ListDevices(0 , Buf, FT_LIST_BY_INDEX| FT_OPEN_BY_DESCRIPTION);
ftHandle = FT_W32_CreateFile(Buf,
GENERIC_READ| GENERIC_WRITE,
0 ,
0 ,
OPEN_EXISTING,
FILE_ATTRIBUTE_NORMAL | FT_OPEN_BY_DESCRIPTION,
0 );
if (ftHandle == INVALID_HANDLE_VALUE)
; // ąŠčłąĖą▒ą║ą░ FT_W32_CreateDevice
ą¤čĆąĖą╝ąĄčĆ 3. ą×čéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĮąĄ overlapped I/O ą┐ąŠ ąĄą│ąŠ location.
FT_STATUS ftStatus;
FT_HANDLE ftHandle;
char Buf[64 ];long locID;
ftStatus = FT_ListDevices(0 , & locID, FT_LIST_BY_INDEX| FT_OPEN_BY_LOCATION);
ftHandle = FT_W32_CreateFile((PVOID) locID,
GENERIC_READ| GENERIC_WRITE,
0 ,
0 ,
OPEN_EXISTING,
FILE_ATTRIBUTE_NORMAL | FT_OPEN_BY_LOCATION,
0 );
if (ftHandle == INVALID_HANDLE_VALUE)
; // ąŠčłąĖą▒ą║ą░ FT_W32_CreateDevice
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą║čĆčŗčéčī čāą║ą░ąĘą░ąĮąĮčŗą╣ čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.
BOOL FT_W32_CloseHandle (FT_HANDLE ftHandle);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ą¤čĆąĖą╝ąĄčĆ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĘą░ą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮąŠ ą▒čŗą╗ąŠ ąŠčéą║čĆčŗč鹊 ą┤ą╗čÅ non-overlapped I/O ą┐ąŠ ąŠą┐ąĖčüą░ąĮąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░.
FT_STATUS ftStatus;
FT_HANDLE ftHandle;char Buf[64 ];
ftStatus = FT_ListDevices(0 , Buf, FT_LIST_BY_INDEX| FT_OPEN_BY_DESCRIPTION);
ftHandle = FT_W32_CreateFile(Buf,
GENERIC_READ| GENERIC_WRITE,
0 ,
0 ,
OPEN_EXISTING,
FILE_ATTRIBUTE_NORMAL | FT_OPEN_BY_DESCRIPTION,
0 );if (ftHandle == INVALID_HANDLE_VALUE)
{
// ąŠčłąĖą▒ą║ą░ FT_W32_CreateDevice
}else
{
// FT_W32_CreateFile OK, čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮąĄą║čāčÄ čĆą░ą▒ąŠčéčā,
// ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą╝ąŠąČąĮąŠ ąĘą░ą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ.
...
FT_W32_CloseHandle(ftHandle);
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¦ąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.
BOOL FT_W32_ReadFile (FT_HANDLE ftHandle,
LPVOID lpBuffer,
DWORD dwBytesToRead,
LPDWORD lpdwBytesReturned,
LPOVERLAPPED lpOverlapped);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpBuffer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║čāą┤ą░ ą┐ąŠčüčéčāą┐čÅčé ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.dwBytesToRead ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwBytesReturned čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒ą░ą╣čé.lpOverlapped čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā "ą┐ąĄčĆąĄą║čĆčŗčéąĖčÅ".
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą║ą░ą║ non-overlapped, čéą░ą║ ąĖ overlapped I/O, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹊ą│ąŠ, čćč鹊 Linux, Mac OS X ąĖ Windows CE ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé č鹊ą╗čīą║ąŠ non-overlapped I/O.
Non-overlapped I/O . ą¤ą░čĆą░ą╝ąĄčéčĆ lpOverlapped ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī NULL.
ążčāąĮą║čåąĖčÅ ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé ą▓ lpdwBytesReturned ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé.
ążčāąĮą║čåąĖčÅ ąĮąĄ ą▓ąĄčĆąĮąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą┐ąŠą║ą░ ą▓ ą▒čāč乥čĆ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ dwBytesToRead ą▒ą░ą╣čé. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_GetStatus ąĖą╗ąĖ FT_GetQueueStatus, ąĖ ą┐ąĄčĆąĄą┤ą░č湥ą╣ čŹč鹊ą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą║ą░ą║ dwBytesToRead, čćč鹊ą▒čŗ čäčāąĮą║čåąĖčÅ ą┐čĆąŠčćąĖčéą░ą╗ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ čüčĆą░ąĘčā čüą┤ąĄą╗ą░ą╗ą░ ą▓ąŠąĘą▓čĆą░čé.
ąÜąŠą│ą┤ą░ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čéą░ą╣ą╝ą░čāčé čćč鹥ąĮąĖčÅ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_SetCommTimeouts, čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓čĆąĄą╝čÅ čéą░ą╣ą╝ąĄčĆą░ ąĖčüč鹥č湥čé, ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ dwBytesToRead ą▒ą░ą╣čé, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, čćč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čĆą░ąĮčīčłąĄ. ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čéą░ą╣ą╝ą░čāčé, č鹊 ą╗čÄą▒čŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ą▓ lpBuffer, ąĖ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
ą¤čĆąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą▒čāč乥čĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ ąĖ lpdwBytesReturned. ąĢčüą╗ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ 0 (čāčüą┐ąĄčłąĮčŗą╣ ą▓ąŠąĘą▓čĆą░čé), ąĖ lpdwBytesReturned čĆą░ą▓ąĮąŠ dwBytesToRead, č鹊 ą▒čŗą╗ąŠ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ. ąĢčüą╗ąĖ ąČąĄ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ 0 (čāčüą┐ąĄčłąĮčŗą╣ ą▓ąŠąĘą▓čĆą░čé), ąĖ lpdwBytesReturned ą╝ąĄąĮčīčłąĄ, č湥ą╝ dwBytesToRead, č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĖčüč鹥ą║ čéą░ą╣ą╝ą░čāčé, ąĖ ąĘą░ą┐čĆąŠčü čćč鹥ąĮąĖčÅ ą▒čŗą╗ ą▓čŗą┐ąŠą╗ąĮąĄąĮ č鹊ą╗čīą║ąŠ čćą░čüčéąĖčćąĮąŠ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čéą░ą╣ą╝ą░čāčé, ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĮąĖą║ą░ą║ąĖčģ ą┤ą░ąĮąĮčŗčģ, č鹊 ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą▒čāą┤ąĄčé ąĮąĄąĮčāą╗ąĄą▓čŗą╝.
ąÆąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ FT_IO_ERROR ą│ąŠą▓ąŠčĆąĖčé ąŠą▒ ąŠčłąĖą▒ą║ąĄ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ, ąĖą╗ąĖ čäą░čéą░ą╗čīąĮąŠą╣ ąŠčłąĖą▒ą║ąĄ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé USB.
Overlapped I/O . ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║čĆčŗč鹊 ą┤ą╗čÅ overlapped I/O, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▓čŗčüčéą░ą▓ąĖčéčī ąĘą░ą┐čĆąŠčü, ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĮąĄą║čāčÄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā, ą┐ąŠą║ą░ ąĘą░ą┐čĆąŠčü ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ. ąŁč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé non-overlapped I/O, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓čŗą┤ą░ąĄčé ąĘą░ą┐čĆąŠčü, ąĖ ą▓ąŠąĘą▓čĆą░čéąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮ ąĘą░ą┐čĆąŠčü.
ąÆ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ lpOverlapped ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčāčÄ čüčéčĆčāą║čéčāčĆčā OVERLAPPED.
ąĢčüą╗ąĖ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčēąĄąĄ ąĘą░ą┐čĆąŠčüčā, č鹊 ąĘą░ą┐čĆąŠčü ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĖ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą▒čāą┤ąĄčé ąĮąĄąĮčāą╗ąĄą▓čŗą╝. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ lpdwBytesReturned.
ąĢčüą╗ąĖ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą┐čĆąĖąĄą╝ąĄ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüčā, č鹊 ąĘą░ą┐čĆąŠčü ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ąĖ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą▒čāą┤ąĄčé 0, čćč鹊 čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠą▒ ąŠčłąĖą▒ą║ąĄ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▓čŗąĘą▓ą░čéčī FT_W32_GetLastError, čćč鹊ą▒čŗ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ ą┐čĆąĖčćąĖąĮąĄ ąŠčłąĖą▒ą║ąĖ. ąĢčüą╗ąĖ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ERROR_IO_PENDING, č鹊 čüąĄą╣čćą░čü ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ overlapped-ąŠą┐ąĄčĆą░čåąĖčÅ, ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐ąŠą║ą░ ąĘą░ąĮčÅčéčīčüčÅ ą┤čĆčāą│ąŠą╣ čĆą░ą▒ąŠč鹊ą╣. ąÆčĆąĄą╝čÅ ąŠčé ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī čĆąĄąĘčāą╗čīčéą░čé overlapped-ąĘą░ą┐čĆąŠčüą░ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_GetOverlappedResult.
ąÆ čüą╗čāčćą░ąĄ čāčüą┐ąĄčģą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ lpdwBytesReturned.
ą¤čĆąĖą╝ąĄčĆ 1. ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą┐čĆąŠčćąĖčéą░čéčī 256 ą▒ą░ą╣čé ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖčüą┐ąŠą╗čīąĘčāčÅ non-overlapped I/O.
FT_HANDLE ftHandle; // ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĮą░čüčéčĆąŠąĄąĮą░ č湥čĆąĄąĘ FT_W32_CreateFile ą┤ą╗čÅ non-overlapped I/O
char Buf[256 ];
DWORD dwToRead = 256 ;
DWORD dwRead;
if (FT_W32_ReadFile(ftHandle, Buf, dwToRead, & dwRead, & osRead))
{
if (dwToRead == dwRead)
{
// FT_W32_ReadFile OK
}
else
{
// čéą░ą╣ą╝ą░čāčé FT_W32_ReadFile
}
}else
{
// ąŠčłąĖą▒ą║ą░ FT_W32_ReadFile
}
ą¤čĆąĖą╝ąĄčĆ 2. ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą┐čĆąŠčćąĖčéą░čéčī 256 ą▒ą░ą╣čé ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖčüą┐ąŠą╗čīąĘčāčÅ overlapped I/O.
FT_HANDLE ftHandle; // ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĮą░čüčéčĆąŠąĄąĮą░ č湥čĆąĄąĘ FT_W32_CreateFile ą┤ą╗čÅ overlapped I/O char Buf[256 ];
DWORD dwToRead = 256 ;
DWORD dwRead;
OVERLAPPED osRead = { 0 };
osRead.hEvent = CreateEvent (NULL , FALSE, FALSE, NULL );
if (! FT_W32_ReadFile(ftHandle, Buf, dwToRead, & dwRead, & osRead))
{
if (FT_W32_GetLastError(ftHandle) == ERROR_IO_PENDING)
{
// čćč鹥ąĮąĖąĄ ąŠčéą╗ąŠąČąĄąĮąŠ, čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą║ą░ ą┤ąĄą╗ą░čéčī čćč鹊-č鹊 ąĄčēąĄ
...
if (! FT_W32_GetOverlappedResult(ftHandle, & osRead, & dwRead, FALSE))
{
// ąŠčłąĖą▒ą║ą░
}
else
{
if (dwToRead == dwRead)
{
// FT_W32_ReadFile OK
}
else
{
// čéą░ą╣ą╝ą░čāčé FT_W32_ReadFile
}
}
}
}else
{
// FT_W32_ReadFile OK
}
CloseHandle (osRead.hEvent);
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
BOOL FT_W32_WriteFile (FT_HANDLE ftHandle,
LPVOID lpBuffer,
DWORD dwBytesToWrite,
LPDWORD lpdwBytesWritten,
LPOVERLAPPED lpOverlapped);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpBuffer čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.dwBytesToWrite ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆąŠąĄ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.lpdwBytesWritten čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.lpOverlapped čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā ą┐ąĄčĆąĄą║čĆčŗčéąĖčÅ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą║ą░ą║ non-overlapped, čéą░ą║ ąĖ overlapped I/O, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹊ą│ąŠ, čćč鹊 Linux, Mac OS X ąĖ Windows CE ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé č鹊ą╗čīą║ąŠ non-overlapped I/O.
Non-overlapped I/O . ą¤ą░čĆą░ą╝ąĄčéčĆ lpOverlapped ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī NULL.
ążčāąĮą║čåąĖčÅ ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé ą▓ lpdwBytesWritten ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé.
ążčāąĮą║čåąĖčÅ ąĮąĄ ą▓ąĄčĆąĮąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą┐ąŠą║ą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ dwBytesToRead ą▒ą░ą╣čé.
ąÜąŠą│ą┤ą░ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čéą░ą╣ą╝ą░čāčé ąĘą░ą┐ąĖčüąĖ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_SetCommTimeouts, čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓čĆąĄą╝čÅ čéą░ą╣ą╝ąĄčĆą░ ąĖčüč鹥č湥čé, ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ dwBytesToWrite ą▒ą░ą╣čé, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, čćč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čĆą░ąĮčīčłąĄ. ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čéą░ą╣ą╝ą░čāčé, č鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ą┐ąŠą╝ąĄčēąĄąĮąŠ ą▓ lpdwBytesWritten, ąĖ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▓čüąĄą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ ąĖ lpdwBytesWritten. ąĢčüą╗ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ 0 (čāčüą┐ąĄčłąĮčŗą╣ ą▓ąŠąĘą▓čĆą░čé), ąĖ lpdwBytesWritten čĆą░ą▓ąĮąŠ dwBytesToWrite, č鹊 ą▒čŗą╗ąŠ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ. ąĢčüą╗ąĖ ąČąĄ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ 0 (čāčüą┐ąĄčłąĮčŗą╣ ą▓ąŠąĘą▓čĆą░čé), ąĖ lpdwBytesWritten ą╝ąĄąĮčīčłąĄ, č湥ą╝ dwBytesToWrite, č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĖčüč鹥ą║ čéą░ą╣ą╝ą░čāčé, ąĖ ąĘą░ą┐čĆąŠčü ąĘą░ą┐ąĖčüąĖ ą▒čŗą╗ ą▓čŗą┐ąŠą╗ąĮąĄąĮ č鹊ą╗čīą║ąŠ čćą░čüčéąĖčćąĮąŠ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čéą░ą╣ą╝ą░čāčé, ąĖ ąĮąĄ ą▒čŗą╗ąŠ ąĘą░ą┐ąĖčüą░ąĮąŠ ąĮąĖą║ą░ą║ąĖčģ ą┤ą░ąĮąĮčŗčģ, č鹊 ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą▒čāą┤ąĄčé ąĮąĄąĮčāą╗ąĄą▓čŗą╝.
Overlapped I/O . ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║čĆčŗč鹊 ą┤ą╗čÅ overlapped I/O, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▓čŗčüčéą░ą▓ąĖčéčī ąĘą░ą┐čĆąŠčü, ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĮąĄą║čāčÄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā, ą┐ąŠą║ą░ ąĘą░ą┐čĆąŠčü ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ. ąŁč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé non-overlapped I/O, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓čŗą┤ą░ąĄčé ąĘą░ą┐čĆąŠčü, ąĖ ą▓ąŠąĘą▓čĆą░čéąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮ ąĘą░ą┐čĆąŠčü.
ąÆ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ lpOverlapped ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčāčÄ čüčéčĆčāą║čéčāčĆčā OVERLAPPED.
ąĢčüą╗ąĖ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčēąĄąĄ ąĘą░ą┐čĆąŠčüčā, č鹊 ąĘą░ą┐čĆąŠčü ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĖ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą▒čāą┤ąĄčé ąĮąĄąĮčāą╗ąĄą▓čŗą╝. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ lpdwBytesReturned.
ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ąĖ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą▒čāą┤ąĄčé 0, čćč鹊 čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠą▒ ąŠčłąĖą▒ą║ąĄ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▓čŗąĘą▓ą░čéčī FT_W32_GetLastError, čćč鹊ą▒čŗ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ ą┐čĆąĖčćąĖąĮąĄ ąŠčłąĖą▒ą║ąĖ. ąĢčüą╗ąĖ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ERROR_IO_PENDING, č鹊 čüąĄą╣čćą░čü ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ overlapped-ąŠą┐ąĄčĆą░čåąĖčÅ, ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐ąŠą║ą░ ąĘą░ąĮčÅčéčīčüčÅ ą┤čĆčāą│ąŠą╣ čĆą░ą▒ąŠč鹊ą╣. ąÆčĆąĄą╝čÅ ąŠčé ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī čĆąĄąĘčāą╗čīčéą░čé overlapped-ąĘą░ą┐čĆąŠčüą░ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_GetOverlappedResult.
ąÆ čüą╗čāčćą░ąĄ čāčüą┐ąĄčģą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ lpdwBytesWritten.
ą¤čĆąĖą╝ąĄčĆ 1. ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ąĘą░ą┐ąĖčüą░čéčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ 128 ą▒ą░ą╣čé, ąĖčüą┐ąŠą╗čīąĘčāčÅ non-overlapped I/O.
FT_HANDLE ftHandle; // ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĮą░čüčéčĆąŠąĄąĮą░ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile ą┤ą╗čÅ non-overlapped I/O
char Buf[128 ]; // čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ
DWORD dwToWrite = 128 ;
DWORD dwWritten;
if (FT_W32_WriteFile(ftHandle, Buf, dwToWrite, & dwWritten, & osWrite))
{
if (dwToWrite == dwWritten)
{
// FT_W32_WriteFile OK
}
else
{
// čéą░ą╣ą╝ą░čāčé FT_W32_WriteFile
}
}else
{
// ąŠčłąĖą▒ą║ą░ FT_W32_WriteFile
}
ą¤čĆąĖą╝ąĄčĆ 2. ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ąĘą░ą┐ąĖčüą░čéčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ 128 ą▒ą░ą╣čé, ąĖčüą┐ąŠą╗čīąĘčāčÅ overlapped I/O.
FT_HANDLE ftHandle; // ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĮą░čüčéčĆąŠąĄąĮą░ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile ą┤ą╗čÅ overlapped I/O
char Buf[128 ]; // čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ
DWORD dwToWrite = 128 ;
DWORD dwWritten;
OVERLAPPED osWrite = { 0 };
if (! FT_W32_WriteFile(ftHandle, Buf, dwToWrite, & dwWritten, & osWrite))
{
if (FT_W32_GetLastError(ftHandle) == ERROR_IO_PENDING)
{
// ąĘą░ą┐ąĖčüčī ąŠčéą╗ąŠąČąĄąĮą░ čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą║ą░ ą┤ąĄą╗ą░čéčī ą┤čĆčāą│čāčÄ čĆą░ą▒ąŠčéčā
...
if (! FT_W32_GetOverlappedResult(ftHandle, & osWrite, & dwWritten, FALSE))
{
// ąŠčłąĖą▒ą║ą░
}
else
{
if (dwToWrite == dwWritten)
{
// FT_W32_WriteFile OK
}
else
{
// čéą░ą╣ą╝ą░čāčé FT_W32_WriteFile
}
}
}
}else
{
// FT_W32_WriteFIle OK
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé čĆąĄąĘčāą╗čīčéą░čé overlapped-ąŠą┐ąĄčĆą░čåąĖąĖ.
BOOL FT_W32_GetOverlappedResult (FT_HANDLE ftHandle,
LPOVERLAPPED lpOverlapped,
LPDWORD lpdwBytesTransferred,
BOOL bWait);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ ą║ čāčüčéčĆąŠą╣čüčéą▓čā.lpOverlapped čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ overlapped čüčéčĆčāą║čéčāčĆčā.lpdwBytesTransferred čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ą▒ą░ą╣čé ąĘą░ ą▓čĆąĄą╝čÅ overlapped-ąŠą┐ąĄčĆą░čåąĖąĖ.bWait čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ TRUE, ąĄčüą╗ąĖ čäčāąĮą║čåąĖčÅ ąĮąĄ ą┤ąŠą╗ąČąĮą░ čüą┤ąĄą╗ą░čéčī ą▓ąŠąĘą▓čĆą░čé, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčé čĆą░ą▒ąŠčéčā.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ overlapped I/O, ąĖ ąŠąĮą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ Linux, Mac OS X ąĖą╗ąĖ Windows CE. ą¤čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüą╝. ą▓ ąŠą┐ąĖčüą░ąĮąĖčÅčģ čäčāąĮą║čåąĖą╣ FT_W32_ReadFile ąĖ FT_W32_WriteFile.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąÆčŗą┐ąŠą╗ąĮčÅąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąĮą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝ ą┐ąŠčĆč鹥.
BOOL FT_W32_EscapeCommFunction (FT_HANDLE ftHandle, DWORD dwFunc);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwFunc čĆą░čüčłąĖčĆąĄąĮąĮą░čÅ čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąŠą┤ąĮąŠ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ąĘąĮą░č湥ąĮąĖą╣:
CLRDTR ŌĆō ąŠčćąĖčüčéą║ą░ čüąĖą│ąĮą░ą╗ą░ DTR
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
FT_W32_EscapeCommFunction(ftHandle, CLRDTS); // čüą▒čĆąŠčü DTR ą▓ ą╗ąŠą│. 0
FT_W32_EscapeCommFunction(ftHandle, SETRTS); // čāčüčéą░ąĮąŠą▓ą║ą░ RTS ą▓ ą╗ąŠą│. 1
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą┤ąĄą╝ą░.
BOOL FT_W32_GetCommModemStatus (FT_HANDLE ftHandle, LPDWORD lpdwStat);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.
MS_CTS_ON ŌĆō Clear To Send (CTS) ą▓ ą╗ąŠą│. 1
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
DWORD dwStatus;
if (FT_W32_GetCommModemStatus(ftHandle, & dwStatus))
{
// FT_W32_GetCommModemStatus ok
if (dwStatus & MS_CTS_ON)
; // CTS == 1
if (dwStatus & MS_DSR_ON)
; // DSR == 1
if (dwStatus & MS_RI_ON)
; // RI == 1
if (dwStatus & MS_RLSD_ON)
; // RLSD == 1
}else
; // ąŠčłąĖą▒ą║ą░ FT_W32_GetCommModemStatus
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒čāč乥čĆčŗ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ.
BOOL FT_W32_SetupComm (FT_HANDLE ftHandle,
DWORD dwReadBufferSize,
DWORD dwWriteBufferSize);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwReadBufferSize ą┤ą╗ąĖąĮą░ ą▒čāč乥čĆą░ čćč鹥ąĮąĖčÅ ą▓ ą▒ą░ą╣čéą░čģ.dwWriteBufferSize ą┤ą╗ąĖąĮą░ ą▒čāč乥čĆą░ ąĘą░ą┐ąĖčüąĖ ą▓ ą▒ą░ą╣čéą░čģ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ążčāąĮą║čåąĖčÅ ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░. ąÆ ąĘąŠąĮąĄ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠčüčéąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓čŗą┤ąĄą╗ąĖčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ąĘą░ą┐čĆąŠčüąŠą▓ I/O.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čüąŠą┤ąĄčƹȹĖą╝čŗą╝ ą▒ą╗ąŠą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (device control block, DCB).
BOOL FT_W32_SetCommState (FT_HANDLE ftHandle, LPFTDCB lpftDcb);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpftDcb čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā FTDCB.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ą¤čĆąĖą╝ąĄčĆ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ č湥čĆąĄąĘ DCB:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
FTDCB ftDCB;
if (FT_W32_GetCommState(ftHandle, & ftDCB))
{
// FT_W32_GetCommState ok, čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ftDCB
ftDCB.BaudRate = 921600 ; // ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ
if (FT_W32_SetCommState(ftHandle,& ftDCB))
; // FT_W32_SetCommState ok
else
; // ąŠčłąĖą▒ą║ą░ FT_W32_SetCommState
}else
; // ąŠčłąĖą▒ą║ą░ FT_W32_GetCommState
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.
BOOL FT_W32_GetCommState (FT_HANDLE ftHandle, LPFTDCB lpftDcb);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpftDcb čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā FTDCB.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ąóąĄą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĄą│ąŠ ąĮą░čüčéčĆąŠą╣ą║ąĖ) ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ čüčéčĆčāą║čéčāčĆąĄ device control block (DCB).
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüą╝. ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ čäčāąĮą║čåąĖąĖ FT_W32_SetCommState.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čéą░ą╣ą╝ą░čāčéą░ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüąŠą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O).
BOOL FT_W32_SetCommTimeouts (FT_HANDLE ftHandle, LPFTTIMEOUTS lpftTimeouts);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpftTimeouts čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā FTTIMEOUTS, ą│ą┤ąĄ ąĖą╝ąĄąĄčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ čéą░ą╣ą╝ą░čāčéą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ąóą░ą╣ą╝ą░čāčéčŗ ą▓čŗčćąĖčüą╗čÅčÄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą▓ čüčéčĆčāą║čéčāčĆąĄ FTTIMEOUTS.
ąöą╗čÅ ąĘą░ą┐čĆąŠčüąŠą▓ čćč鹥ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čāą╝ąĮąŠąČą░ąĄčéčüčÅ ąĮą░ ąŠą▒čēąĖą╣ ą╝ąĮąŠąČąĖč鹥ą╗čī čéą░ą╣ą╝ą░čāčéą░, ąĖ ą║ čŹč鹊ą╝čā ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ąŠą▒čēą░čÅ ą║ąŠąĮčüčéą░ąĮčéą░ čéą░ą╣ą╝ą░čāčéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ TS čŹč鹊 čüčéčĆčāą║čéčāčĆą░ FTTIMEOUTS, ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čŹč鹊 dwToRead, č鹊 čéą░ą╣ą╝ą░čāčé čćč鹥ąĮąĖčÅ rdTO ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą▓čŗčĆą░ąČąĄąĮąĖčÄ:
rdTO = (dwToRead * TS.ReadTotalTimeoutMultiplier) + TS.ReadTotalTimeoutConstant
ąöą╗čÅ ąĘą░ą┐čĆąŠčüąŠą▓ ąĘą░ą┐ąĖčüąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą▒ą░ą╣čé čāą╝ąĮąŠąČą░ąĄčéčüčÅ ąĮą░ ąŠą▒čēąĖą╣ ą╝ąĮąŠąČąĖč鹥ą╗čī čéą░ą╣ą╝ą░čāčéą░, ąĖ ą║ čŹč鹊ą╝čā ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ąŠą▒čēą░čÅ ą║ąŠąĮčüčéą░ąĮčéą░ čéą░ą╣ą╝ą░čāčéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ TS čŹč鹊 čüčéčĆčāą║čéčāčĆą░ FTTIMEOUTS, ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ čŹč鹊 dwToWrite, č鹊 čéą░ą╣ą╝ą░čāčé ąĘą░ą┐ąĖčüąĖ wrTO ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą▓čŗčĆą░ąČąĄąĮąĖčÄ:
wrTO = (dwToWrite * TS.WriteTotalTimeoutMultiplier) + TS.WriteTotalTimeoutConstant
Linux ąĖ Mac OS X ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąĖą│ąĮąŠčĆąĖčĆčāčÄčé ReadIntervalTimeout, ReadTotalTimeoutMultiplier ąĖ WriteTotalTimeoutMultiplier.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
FTTIMEOUTS ftTS;
ftTS.ReadIntervalTimeout = 0 ;
ftTS.ReadTotalTimeoutMultiplier = 0 ;
ftTS.ReadTotalTimeoutConstant = 100 ;
ftTS.WriteTotalTimeoutMultiplier = 0 ;
ftTS.WriteTotalTimeoutConstant = 200 ;
if (FT_W32_SetCommTimeouts(ftHandle, & ftTS))
; // FT_W32_SetCommTimeouts OK else
; // ąŠčłąĖą▒ą║ą░ FT_W32_SetCommTimeouts
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ą┐ąŠą╗čāčćą░ąĄčé č鹥ą║čāčēąĖąĄ čéą░ą╣ą╝ą░čāčéčŗ ąĘą░ą┐čĆąŠčüąŠą▓ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
BOOL FT_W32_GetCommTimeouts (FT_HANDLE ftHandle, LPFTTIMEOUTS lpftTimeouts);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpftTimeouts čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā FTTIMEOUTS, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ čéą░ą╣ą╝ą░čāčéą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ąĪą╝čŗčüą╗ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▒čāą┤ąĄčé ą┐ąŠąĮčÅč鹥ąĮ, ąĄčüą╗ąĖ ą┐čĆąŠčćąĖčéą░čéčī ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ FT_W32_SetCommTimeouts.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
FTTIMEOUTS ftTS;
if (FT_W32_GetCommTimeouts(ftHandle, & ftTS))
; // FT_W32_GetCommTimeouts OK else
; // ąŠčłąĖą▒ą║ą░ FT_W32_GetCommTimeouts
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąĄčĆąĄą▓ąŠą┤ąĖčé ą╗ąĖąĮąĖčÄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ BREAK.
BOOL FT_W32_SetCommBreak (FT_HANDLE ftHandle);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
if (! FT_W32_SetCommBreak(ftHandle))
; // ąŠčłąĖą▒ą║ą░ FT_W32_SetCommBreak else
; // FT_W32_SetCommBreak OK
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąĄčĆąĄą▓ąŠą┤ąĖčé ą╗ąĖąĮąĖčÄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ non-BREAK.
BOOL FT_W32_ClearCommBreak (FT_HANDLE ftHandle);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
if (! FT_W32_ClearCommBreak(ftHandle))
; // ąŠčłąĖą▒ą║ą░ FT_W32_ClearCommBreak else
; // FT_W32_ClearCommBreak OK
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ąĘą░ą┤ą░ąĄčé čüąŠą▒čŗčéąĖčÅ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ čĆąĄą░ą│ąĖčĆąŠą▓ą░čéčī.
BOOL FT_W32_SetCommMask (FT_HANDLE ftHandle, DWORD dwMask);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwMask ą╝ą░čüą║ą░, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēą░čÅ čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą╝ąŠąĮąĖč鹊čĆąĖčéčī. ąŚą┤ąĄčüčī ą╝ąŠąČąĄčé ą▒čŗčéčī ąśąøąś-ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ čüą╗ąĄą┤čāčÄčēąĖčģ ą║ąŠąĮčüčéą░ąĮčé:
EV_BREAK ŌĆō BREAK condition (čüąŠą▒čŗčéąĖąĄ ąŠčüčéą░ąĮąŠą▓ą░ ą┐ąŠč鹊ą║ą░ ąĮą░ ą╗ąĖąĮąĖąĖ)
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ążčāąĮą║čåąĖčÅ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčīčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ FT_W32_WaitCommEvent, čćč鹊ą▒čŗ ąČą┤ą░čéčī ąĮą░čüčéčāą┐ą╗ąĄąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
DWORD dwMask = EV_CTS | EV_DSR;
if (! FT_W32_SetCommMask(ftHandle, dwMask))
; // ąŠčłąĖą▒ą║ą░ FT_W32_SetCommMask else
; // FT_W32_SetCommMask OK
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ.
BOOL FT_W32_GetCommMask (FT_HANDLE ftHandle, LPDWORD lpdwEventMask);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwEventMask čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ DWORD, ą▓ ą║ąŠč鹊čĆčāčÄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮą░ ą╝ą░čüą║ą░, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēą░čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝čŗąĄ čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┤ą╗čÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ą£ą░čüą║ą░ ą╝ąŠąČąĄčé čüąŠčüč鹊čÅčéčī ąĖąĘ ąśąøąś-ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ąŠą┤ąĮąŠą╣ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ąŠąĮčüčéą░ąĮčé:
EV_BREAK ŌĆō BREAK condition (čüąŠą▒čŗčéąĖąĄ ąŠčüčéą░ąĮąŠą▓ą░ ą┐ąŠč鹊ą║ą░ ąĮą░ ą╗ąĖąĮąĖąĖ)
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ąÆčŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī, ąĮą░čüčéčāą┐ą╗ąĄąĮąĖąĄ ą║ą░ą║ąĖčģ čüąŠą▒čŗčéąĖą╣ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą£ąŠąĮąĖč鹊čĆąĖąĮą│ čŹčéąĖčģ čüąŠą▒čŗčéąĖą╣ čĆą░ąĮąĄąĄ ą▒čŗą╗ čĆą░ąĘčĆąĄčłąĄąĮ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ FT_W32_SetCommMask.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
DWORD dwMask;
if (! FT_W32_GetCommMask(ftHandle, & dwMask))
; // ąŠčłąĖą▒ą║ą░ FT_W32_GetCommMask else
; // FT_W32_GetCommMask OK
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ąČą┤ąĄčé ąĮą░čüčéčāą┐ą╗ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ.
BOOL FT_W32_WaitCommEvent (FT_HANDLE ftHandle,
LPDWORD lpdwEvent,
LPOVERLAPPED lpOverlapped);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.lpdwEvent čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ, čüąŠą┤ąĄčƹȹ░čēčāčÄ ą╝ą░čüą║čā čüą╗čāčćąĖą▓čłąĖčģčüčÅ čüąŠą▒čŗčéąĖą╣.lpOverlapped čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā overlapped.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ążčāąĮą║čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą║ą░ą║ non-overlapped, čéą░ą║ ąĖ overlapped I/O, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ Windows CE ąĖ Linux, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé č鹊ą╗čīą║ąŠ non-overlapped I/O.
Non-overlapped I/O . ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆ lpOverlapped ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ą▓ąĄąĮ NULL.
ążčāąĮą║čåąĖčÅ ąĮąĄ ą▓ąĄčĆąĮąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ, ąĘą░ą┤ą░ąĮąĮąŠąĄ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_SetCommMask. ąĪąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąĖ, ą▒čāą┤čāčé ą▓ąŠąĘą▓čĆą░čēąĄąĮčŗ čŹč鹊ą╣ čäčāąĮą║čåąĖąĄą╣ ą▓ čÅč湥ą╣ą║ąĄ, ąĮą░ ą║ąŠč鹊čĆčāčÄ čāą║ą░ąĘčŗą▓ą░ąĄčé lpdwEvent.
Overlapped I/O . ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čŗą╗ąŠ ąŠčéą║čĆčŗč鹊 ą┤ą╗čÅ overlapped I/O, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▓čŗčüčéą░ą▓ąĖčéčī ąĘą░ą┐čĆąŠčü ąĖ ą┤ą░ą╗ąĄąĄ ą▒ąĄąĘ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ą░ą║čāčÄ-č鹊 ą┤čĆčāą│čāčÄ čĆą░ą▒ąŠčéčā, ą┐ąŠą║ą░ ąĘą░ą┐čĆąŠčü ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ. ąŁč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čüą╗čāčćą░čÅ non-overlapped I/O, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓čŗčüčéą░ą▓ą╗čÅąĄčé ąĘą░ą┐čĆąŠčü, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ (ąĮą░čüčéčāą┐ą╗ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ).
ą¤ą░čĆą░ą╝ąĄčéčĆ lpOverlapped ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčāčÄ čüčéčĆčāą║čéčāčĆčā OVERLAPPED.
ąĢčüą╗ąĖ čüąŠą▒čŗčéąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ čĆą░ąĮąĄąĄ ąĘą░ą┤ą░ąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_SetCommMask, čāąČąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, č鹊 ąĘą░ą┐čĆąŠčü ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ąĖ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą▒čāą┤ąĄčé ąĮąĄąĮčāą╗ąĄą▓čŗą╝. ą¤čĆąŠąĖąĘąŠčłąĄą┤čłąĖąĄ čüąŠą▒čŗčéąĖčÅ ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠ ąĘąĮą░č湥ąĮąĖčÄ, čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╝čā ą▓ lpdwEvent.
ąĢčüą╗ąĖ čüąŠą▒čŗčéąĖąĄ ą┐ąŠą║ą░ ąĄčēąĄ ąĮąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, č鹊 ąĘą░ą┐čĆąŠčü ą▓čüąĄ čĆą░ą▓ąĮąŠ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ą║ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą▒čāą┤ąĄčé 0, čćč鹊 čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠą▒ ąŠčłąĖą▒ą║ąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▓čŗąĘą▓ą░čéčī FT_W32_GetLastError, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓ąĖą┤ ąŠčłąĖą▒ą║ąĖ. ąĢčüą╗ąĖ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ERROR_IO_PENDING, č鹊 overlapped-ąŠą┐ąĄčĆą░čåąĖčÅ ą▓čüąĄ ąĄčēąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┤čĆčāą│čāčÄ čĆą░ą▒ąŠčéčā. ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čĆąĄąĘčāą╗čīčéą░čé overlapped-ąĘą░ą┐čĆąŠčüą░, ą▓čŗąĘčŗą▓ą░čÅ FT_W32_GetOverlappedResult. ąĪąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąĖ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą▒čāą┤čāčé ą▓ąŠąĘą▓čĆą░čēąĄąĮčŗ ąĖ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ lpdwEvent.
ą¤čĆąĖą╝ąĄčĆ 1. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĘą░ą┐ąĖčüą░čéčī 128 ą▒ą░ą╣čé, ąĖčüą┐ąŠą╗čīąĘčāčÅ non-overlapped I/O.
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile ą┤ą╗čÅ non-overlapped I/O
DWORD dwEvents;
if (FT_W32_WaitCommEvent(ftHandle, & dwEvents, NULL ))
; // FT_W32_WaitCommEvents OK else
; // ąŠčłąĖą▒ą║ą░ FT_W32_WaitCommEvents
ą¤čĆąĖą╝ąĄčĆ 2. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĘą░ą┐ąĖčüą░čéčī 128 ą▒ą░ą╣čé, ąĖčüą┐ąŠą╗čīąĘčāčÅ overlapped I/O.
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile ą┤ą╗čÅ overlapped I/O
DWORD dwEvents;
DWORD dwRes;
OVERLAPPED osWait = { 0 };
if (! FT_W32_WaitCommEvent(ftHandle, & dwEvents, & osWait))
{
if (FT_W32_GetLastError(ftHandle == ERROR_IO_PENDING)
{
// ąĘą░ą┐čĆąŠčü ą▓čŗčüčéą░ą▓ą╗ąĄąĮ, ąĮąŠ ą┐ąŠą║ą░ čéąĮąĄ ąĘą░ą▓ąĄčĆčłąĖą╗čüčÅ, čéą░ą║ čćč鹊
// ą╝ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ą░ą║čāčÄ-č鹊 ą┤čĆčāą│čāčÄ čĆą░ą▒ąŠčéčā
...
if (! FT_W32_GetOverlappedResult(ftHandle, & osWait, & dwRes, FALSE))
; // ąŠčłąĖą▒ą║ą░
else
; // FT_W32_WaitCommEvent OK
// ąĪąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąĖ, čüąŠčģčĆą░ąĮąĄąĮčŗ ą║ą░ą║ ą╝ą░čüą║ą░ ą▓ dwEvents
}
}else
{
// FT_W32_WaitCommEvent OK
// ąĪąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąĖ, čüąŠčģčĆą░ąĮąĄąĮčŗ ą║ą░ą║ ą╝ą░čüą║ą░ ą▓ dwEvents
}
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ążčāąĮą║čåąĖčÅ ąŠčćąĖčēą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ.
BOOL FT_W32_PurgeComm (FT_HANDLE ftHandle, DWORD dwFlags);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.dwFlags čāą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝ąŠąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ. ą£ąŠąČąĄčé ą▒čŗčéčī ąśąøąś-ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĄą╣ čüą╗ąĄą┤čāčÄčēąĖčģ ą║ąŠąĮčüčéą░ąĮčé:
PURGE_TXABORT ŌĆō ąŠą▒ąŠčĆą▓ą░čéčī č鹥ą║čāčēąĖąĄ overlapped-ąĘą░ą┐ąĖčüąĖ
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ą¤čĆąĖą╝ąĄčĆ:
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
if (FT_W32_PurgeComm(ftHandle, PURGE_TXCLEAR| PURGE_RXCLEAR))
; // FT_W32_PurgeComm OK else
; // ąŠčłąĖą▒ą║ą░ FT_W32_PurgeComm
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāčćą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠąĖąĘąŠčłą╗ą░ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
DWORD FT_W32_GetLastError (FT_HANDLE ftHandle);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ąŁč鹊 čäčāąĮą║čåąĖčÅ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ overlapped I/O, ąĖ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ Windows CE. ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ, čüą╝. ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ą┤ą╗čÅ FT_W32_ReadFile ąĖ FT_W32_WriteFile. ąÆ Linux ąĖ Mac OS X čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé DWORD, ą║ąŠč鹊čĆčŗą╣ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ FT Errors (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮąŠą╝ąĄčĆ ąŠčłąĖą▒ą║ąĖ FT_INVALID_HANDLE).
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą×ąĪ: Linux, Mac OS X (10.4 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows (2000 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ), Windows CE (4.2 ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĖąĄ).
ą¤ąŠą╗čāčćą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ ąŠą▒ą╝ąĄąĮą░ ąĖ č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.
BOOL FT_W32_ClearCommError (FT_HANDLE ftHandle,
LPDWORD lpdwErrors,
LPFTCOMSTAT lpftComstat);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
ftHandle čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čüąĄ ą┐čĆąŠčłą╗ąŠ čāą┤ą░čćąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0.
ą¤čĆąĖą╝ąĄčĆ:
static COMSTAT oldCS = {0 };static DWORD dwOldErrors = 0 ;
FT_HANDLE ftHandle; // ąĮą░čüčéčĆąŠąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ FT_W32_CreateFile
COMSTAT newCS;
DWORD dwErrors;
BOOL bChanged = FALSE;
if (! FT_W32_ClearCommError(ftHandle, & dwErrors, (FTCOMSTAT * )& newCS))
; // ąŠčłąĖą▒ą║ą░ FT_W32_ClearCommError
if (dwErrors != dwOldErrors)
{
bChanged = TRUE;
dwErrorsOld = dwErrors;
}
if (memcmp(& oldCS, & newCS, sizeof (FTCOMSTAT)))
{
bChanged = TRUE;
oldCS = newCS;
}
if (bChanged)
{
if (dwErrors & CE_BREAK)
; // ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ąŠčüčéą░ąĮąŠą▓ą░ (BREAK condition)
if (dwErrors & CE_FRAME)
; // ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ ąŠčłąĖą▒ą║ą░ čäčĆąĄą╣ą╝ą░
if (dwErrors & CE_RXOVER)
; // ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░
if (dwErrors & CE_TXFULL)
; // ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮ
if (dwErrors & CE_OVERRUN)
; // ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒čāč乥čĆą░ čüąĖą╝ą▓ąŠą╗ą░
if (dwErrors & CE_RXPARITY)
; // ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ ąŠčłąĖą▒ą║ą░ č湥čéąĮąŠčüčéąĖ
if (newCS.fCtsHold)
; // ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ąČą┤ąĄčé CTS
if (newCS.fDsrHold)
; // ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ąČą┤ąĄčé DSR
if (newCS.fRlsdHold)
; // ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ąČą┤ąĄčé RLSD
if (newCS.fXoffHold)
; // ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ąČą┤ąĄčé, ą┐ąŠč鹊ą╝čā čćč鹊 ą▒čŗą╗ ą┐čĆąĖąĮčÅčé XOFF
if (newCS.fXoffSent)
; // ą▒čŗą╗ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ XOFF
if (newCS.fEof)
; // ą┐čĆąĖąĮčÅčé čüąĖą╝ą▓ąŠą╗ ą║ąŠąĮčåą░ čäą░ą╣ą╗ą░ (End of file, EOF)
if (newCS.fTxim)
; // čüąĖą╝ą▓ąŠą╗ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮ ą▓ ąŠč湥čĆąĄą┤čī ą┐ąĄčĆąĄą┤ą░čćąĖ
// newCS.cbInQue čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐čĆąĖąĄą╝ą░
// newCS.cbOutQue čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ
}
[Appendix A ŌĆō Type Definitions (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čéąĖą┐ąŠą▓) ]
UCHAR unsigned char (1 ą▒ą░ą╣čé)PUCHAR čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned char (4 ą▒ą░ą╣čéą░)PCHAR čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ char (4 ą▒ą░ą╣čéą░)DWORD unsigned long (4 ą▒ą░ą╣čéą░)LPDWORD čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ unsigned long (4 ą▒ą░ą╣čéą░)FT_HANDLE DWORD
FT_OK = 0
FT_INVALID_HANDLE = 1
FT_DEVICE_NOT_FOUND = 2
FT_DEVICE_NOT_OPENED = 3
FT_IO_ERROR = 4
FT_INSUFFICIENT_RESOURCES = 5
FT_INVALID_PARAMETER = 6
FT_INVALID_BAUD_RATE = 7
FT_DEVICE_NOT_OPENED_FOR_ERASE = 8
FT_DEVICE_NOT_OPENED_FOR_WRITE = 9
FT_FAILED_TO_WRITE_DEVICE = 10
FT_EEPROM_READ_FAILED = 11
FT_EEPROM_WRITE_FAILED = 12
FT_EEPROM_ERASE_FAILED = 13
FT_EEPROM_NOT_PRESENT = 14
FT_EEPROM_NOT_PROGRAMMED = 15
FT_INVALID_ARGS = 16
FT_NOT_SUPPORTED = 17
FT_OTHER_ERROR = 18
FT_LIST_NUMBER_ONLY = 0x80000000
FT_LIST_BY_INDEX = 0x40000000
FT_LIST_ALL = 0x20000000
FT_OPEN_BY_SERIAL_NUMBER = 1
FT_OPEN_BY_DESCRIPTION = 2
FT_OPEN_BY_LOCATION = 4
FT_DEVICE_232BM = 0
FT_DEVICE_232AM = 1
FT_DEVICE_100AX = 2
FT_DEVICE_UNKNOWN = 3
FT_DEVICE_2232C = 4
FT_DEVICE_232R = 5
FT_DEVICE_2232H = 6
FT_DEVICE_4232H = 7
FT_DEVICE_232H = 8
FT_DEVICE_X_SERIES = 9
FT_DRIVER_TYPE_D2XX = 0
FT_DRIVER_TYPE_VCP = 1
FT_BITS_8 = 8
FT_BITS_7 = 7
FT_STOP_BITS_1 = 0
FT_STOP_BITS_2 = 2
FT_PARITY_NONE = 0
FT_PARITY_ODD = 1
FT_PARITY_EVEN = 2
FT_PARITY_MARK = 3
FT_PARITY_SPACE = 4
FT_FLOW_NONE = 0x0000
FT_FLOW_RTS_CTS = 0x0100
FT_FLOW_DTR_DSR = 0x0200
FT_FLOW_XON_XOFF = 0x0400
FT_PURGE_RX = 1
FT_PURGE_TX = 2
FT_EVENT_RXCHAR = 1
FT_EVENT_MODEM_STATUS = 2
FT_EVENT_LINE_STATUS = 4
CTS = 0x10
DSR = 0x20
RI = 0x40
DCD = 0x80
OE = 0x02
PE = 0x04
FE = 0x08
BI = 0x10
FT_BITMODE_RESET = 0x00
FT_BITMODE_ASYNC_BITBANG = 0x01
FT_BITMODE_MPSSE = 0x02
FT_BITMODE_SYNC_BITBANG = 0x04
FT_BITMODE_MCU_HOST = 0x08
FT_BITMODE_FAST_SERIAL = 0x10
FT_BITMODE_CBUS_BITBANG = 0x20
FT_BITMODE_SYNC_FIFO = 0x40
ąŁčéąĖ ąŠą┐čåąĖąĖ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ ą┤ą╗čÅ FT245R.
FT_232R_CBUS_TXDEN = 0x00
FT_232R_CBUS_PWRON = 0x01
FT_232R_CBUS_RXLED = 0x02
FT_232R_CBUS_TXLED = 0x03
FT_232R_CBUS_TXRXLED = 0x04
FT_232R_CBUS_SLEEP = 0x05
FT_232R_CBUS_CLK48 = 0x06
FT_232R_CBUS_CLK24 = 0x07
FT_232R_CBUS_CLK12 = 0x08
FT_232R_CBUS_CLK6 = 0x09
FT_232R_CBUS_IOMODE = 0x0A
FT_232R_CBUS_BITBANG_WR = 0x0B
FT_232R_CBUS_BITBANG_RD = 0x0C
FT_232H_CBUS_TRISTATE = 0x00
FT_232H_CBUS_RXLED = 0x01
FT_232H_CBUS_TXLED = 0x02
FT_232H_CBUS_TXRXLED = 0x03
FT_232H_CBUS_PWREN = 0x04
FT_232H_CBUS_SLEEP = 0x05
FT_232H_CBUS_DRIVE_0 = 0x06
FT_232H_CBUS_DRIVE_1 = 0x07
FT_232H_CBUS_IOMODE = 0x08
FT_232H_CBUS_TXDEN = 0x09
FT_232H_CBUS_CLK30 = 0x0A
FT_232H_CBUS_CLK15 = 0x0B
FT_232H_CBUS_CLK7_5 = 0x0C
FT_X_SERIES_CBUS_TRISTATE = 0x00
FT_X_SERIES_CBUS_RXLED = 0x01
FT_X_SERIES_CBUS_TXLED = 0x02
FT_X_SERIES_CBUS_TXRXLED = 0x03
FT_X_SERIES_CBUS_PWREN = 0x04
FT_X_SERIES_CBUS_SLEEP = 0x05
FT_X_SERIES_CBUS_DRIVE_0 = 0x06
FT_X_SERIES_CBUS_DRIVE_1 = 0x07
FT_X_SERIES_CBUS_IOMODE = 0x08
FT_X_SERIES_CBUS_TXDEN = 0x09
FT_X_SERIES_CBUS_CLK24 = 0x0A
FT_X_SERIES_CBUS_CLK12 = 0x0B
FT_X_SERIES_CBUS_CLK6 = 0x0C
FT_X_SERIES_CBUS_BCD_CHARGER = 0x0D
FT_X_SERIES_CBUS_BCD_CHARGER_N = 0x0E
FT_X_SERIES_CBUS_I2C_TXE = 0x0F
FT_X_SERIES_CBUS_I2C_RXF = 0x10
FT_X_SERIES_CBUS_VBUS_SENSE = 0x11
FT_X_SERIES_CBUS_BITBANG_WR = 0x12
FT_X_SERIES_CBUS_BITBANG_RD = 0x13
FT_X_SERIES_CBUS_TIMESTAMP = 0x14
FT_X_SERIES_CBUS_KEEP_AWAKE = 0x15
typedef struct _ft_device_list_info_node
{
DWORD Flags;
DWORD Type;
DWORD ID;
DWORD LocId;
char SerialNumber[16 ];
char Description[64 ];
FT_HANDLE ftHandle;
} FT_DEVICE_LIST_INFO_NODE;
FT_FLAGS_OPENED = 0x00000001
typedef struct ft_program_data
{
DWORD Signature1; // ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ - čéčāčé ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 0x0000000
DWORD Signature2; // ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ - čéčāčé ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 0xffffffff
DWORD Version; // ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ - ą▓ąĄčĆčüąĖčÅ FT_PROGRAM_DATA
// 0 = ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ (FT232B)
// 1 = čĆą░čüčłąĖčĆąĄąĮąĖčÅ FT2232
// 2 = čĆą░čüčłąĖčĆąĄąĮąĖčÅ FT232R
// 3 = čĆą░čüčłąĖčĆąĄąĮąĖčÅ FT2232H
// 4 = čĆą░čüčłąĖčĆąĄąĮąĖčÅ FT4232H
// 5 = čĆą░čüčłąĖčĆąĄąĮąĖčÅ FT232H
WORD VendorId; // 0x0403
WORD ProductId; // 0x6001
char * Manufacturer; // "FTDI"
char * ManufacturerId; // "FT"
char * Description; // "USB HS Serial Converter"
char * SerialNumber; // "FT000001" ąĄčüą╗ąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ, ąĖą╗ąĖ NULL
WORD MaxPower; // 0 < MaxPower < = 500
WORD PnP; // 0 = ąĘą░ą┐čĆąĄčēąĄąĮąŠ, 1 = čĆą░ąĘčĆąĄčłąĄąĮąŠ
WORD SelfPowered; // 0 = ą┐ąĖčéą░ąĮąĖąĄ ąŠčé čłąĖąĮčŗ USB, 1 = čüą▓ąŠą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ
WORD RemoteWakeup; // 0 = ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ, 1 = ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ ą┤ą╗čÅ Rev4 (FT232B)
//
UCHAR Rev4; // ąĮąĄ 0, ąĄčüą╗ąĖ čćąĖą┐ Rev4, ąĖąĮą░č湥 0
UCHAR IsoIn; // ąĮąĄ 0, ąĄčüą╗ąĖ IN endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
UCHAR IsoOut; // ąĮąĄ 0, ąĄčüą╗ąĖ OUT endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
UCHAR PullDownEnable;// ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
UCHAR SerNumEnable; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
UCHAR USBVersionEnable; // ąĮąĄ 0, ąĄčüą╗ąĖ čćąĖą┐ ąĖčüą┐ąŠą╗čīąĘčāąĄčé USBVersion
WORD USBVersion; // BCD (0x0200 => USB2)
//
// ąĀą░čüčłąĖąĮąĄąĮąĖčÅ ą┤ą╗čÅ Rev 5 (FT2232)
//
UCHAR Rev5; // ąĮąĄ 0, ąĄčüą╗ąĖ čćąĖą┐ Rev5, ąĖąĮą░č湥 0
UCHAR IsoInA; // ąĮąĄ 0, ąĄčüą╗ąĖ IN endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
UCHAR IsoInB; // ąĮąĄ 0, ąĄčüą╗ąĖ IN endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
UCHAR IsoOutA; // ąĮąĄ 0, ąĄčüą╗ąĖ OUT endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
UCHAR IsoOutB; // ąĮąĄ 0, ąĄčüą╗ąĖ OUT endpoint ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ
UCHAR PullDownEnable5; // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
UCHAR SerNumEnable5; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
UCHAR USBVersionEnable5; // ąĮąĄ 0, ąĄčüą╗ąĖ čćąĖą┐ ąĖčüą┐ąŠą╗čīąĘčāąĄčé USBVersion
WORD USBVersion5; // BCD (0x0200 => USB2)
UCHAR AIsHighCurrent; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü čü ą▓čŗčüąŠą║ąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ (high current)
UCHAR BIsHighCurrent; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü čü ą▓čŗčüąŠą║ąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ (high current)
UCHAR IFAIsFifo; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR IFAIsFifoTar; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR IFAIsFastSer; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR AIsVCP; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
UCHAR IFBIsFifo; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR IFBIsFifoTar; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR IFBIsFastSer; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR BIsVCP; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
//
// ąĀą░čüčłąĖąĮąĄąĮąĖčÅ ą┤ą╗čÅ Rev 6 (FT232R)
//
UCHAR UseExtOsc; // ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ
UCHAR HighDriveIOs; // ą▓ą▓ąŠą┤/ą▓čŗą▓ąŠą┤ čü ą▓čŗčüąŠą║ąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ (High Drive I/O)
UCHAR EndpointSize; // čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ (endpoint size)
UCHAR PullDownEnableR; // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
UCHAR SerNumEnableR; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
UCHAR InvertTXD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ TXD
UCHAR InvertRXD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RXD
UCHAR InvertRTS; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RTS
UCHAR InvertCTS; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ CTS
UCHAR InvertDTR; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DTR
UCHAR InvertDSR; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DSR
UCHAR InvertDCD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DCD
UCHAR InvertRI; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RI
UCHAR Cbus0; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus1; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus2; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus3; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus4; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR RIsD2XX; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆ D2XX
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ ą┤ą╗čÅ Rev 7 (FT2232H)
//
UCHAR PullDownEnable7; // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
UCHAR SerNumEnable7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
UCHAR ALSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ALSchmittInput;// ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ALDriveCurrent;// ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR AHSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR AHSchmittInput;// ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR AHDriveCurrent;// ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR BLSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR BLSchmittInput;// ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR BLDriveCurrent;// ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR BHSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR BHSchmittInput;// ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR BHDriveCurrent;// ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR IFAIsFifo7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR IFAIsFifoTar7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR IFAIsFastSer7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR AIsVCP7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
UCHAR IFBIsFifo7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR IFBIsFifoTar7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR IFBIsFastSer7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR BIsVCP7; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
UCHAR PowerSaveEnable; // ąĮąĄ 0, ąĄčüą╗ąĖ BCBUS7 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ
// 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą▓ čüą╗čāčćą░ąĄ čüą▓ąŠąĄą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ ą┤ą╗čÅ Rev 8 (FT4232H)
//
UCHAR PullDownEnable8; // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
UCHAR SerNumEnable8; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
UCHAR ASlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ASchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ADriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR BSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR BSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR BDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR CSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR CSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR CDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR DSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR DSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR DDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR ARIIsTXDEN; // ąĮąĄ 0, ąĄčüą╗ąĖ port A ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
UCHAR BRIIsTXDEN; // ąĮąĄ 0, ąĄčüą╗ąĖ port B ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
UCHAR CRIIsTXDEN; // ąĮąĄ 0, ąĄčüą╗ąĖ port C ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
UCHAR DRIIsTXDEN; // ąĮąĄ 0, ąĄčüą╗ąĖ port D ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
UCHAR AIsVCP8; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
UCHAR BIsVCP8; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
UCHAR CIsVCP8; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
UCHAR DIsVCP8; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
//
// ąĀą░čüčłąĖčĆąĄąĮąĖčÅ ą┤ą╗čÅ Rev 9 (FT232H)
//
UCHAR PullDownEnableH; // ąĮąĄ 0, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ pull down
UCHAR SerNumEnableH; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
UCHAR ACSlowSlewH; // ąĮąĄ 0, ąĄčüą╗ąĖ AC ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ACSchmittInputH; // ąĮąĄ 0, ąĄčüą╗ąĖ AC ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ACDriveCurrentH; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR ADSlowSlewH; // ąĮąĄ 0, ąĄčüą╗ąĖ AD ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ADSchmittInputH; // ąĮąĄ 0, ąĄčüą╗ąĖ AD ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ADDriveCurrentH; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR Cbus0H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus1H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus2H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus3H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus4H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus5H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus6H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus7H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus8H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus9H; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR IsFifoH; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR IsFifoTarH; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR IsFastSerH; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR IsFT1248H; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü FT1248
UCHAR FT1248CpolH; // FT1248 ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ - clock idle ą╗ąŠą│. 1 (1) ąĖą╗ąĖ ą╗ąŠą│. 0 (0)
UCHAR FT1248LsbH; // FT1248 ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, čüąĮą░čćą░ą╗ą░ LSB (1) ąĖą╗ąĖ MSB (0)
UCHAR FT1248FlowControlH; // FT1248 čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ąŠą╝ (flow control)
UCHAR IsVCPH; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP
UCHAR PowerSaveEnableH; // ąĮąĄ 0, ąĄčüą╗ąĖ ACBUS7 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ
// 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą▓ čüą╗čāčćą░ąĄ čüą▓ąŠąĄą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ
} FT_PROGRAM_DATA, * PFT_PROGRAM_DATA;
typedef struct ft_eeprom_header
{
FT_DEVICE deviceType;// čéąĖą┐ čāčüčéčĆąŠą╣čüčéą▓ą░ FTxxxx ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ
// ą×ą┐čåąĖąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░
WORD VendorId; // 0x0403
WORD ProductId; // 0x6001
UCHAR SerNumEnable; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ
// ą×ą┐čåąĖąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
WORD MaxPower; // 0 < MaxPower < = 500
UCHAR SelfPowered; // 0 = ą┐ąĖčéą░ąĮąĖąĄ ąŠčé čłąĖąĮčŗ USB, 1 = čüą▓ąŠą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ
UCHAR RemoteWakeup; // 0 = ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ, 1 = ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ
// ą×ą┐čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
UCHAR PullDownEnable;// ąĮąĄ 0, ąĄčüą╗ąĖ ą▓ suspend (ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░) čĆą░ąĘčĆąĄčłąĄąĮ pull down
} FT_EEPROM_HEADER, * PFT_EEPROM_HEADER;
ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĮčāąČąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü FT_EEPROM_Read ąĖ FT_EEPROM_Program.
typedef struct ft_eeprom_232b
{
// ą×ą▒čēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║
FT_EEPROM_HEADER common; // ąŠą▒čēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ EEPROM ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓
} FT_EEPROM_232B, * PFT_EEPROM_232B;
ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĮčāąČąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü FT_EEPROM_Read ąĖ FT_EEPROM_Program.
typedef struct ft_eeprom_2232
{
// ą×ą▒čēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║
FT_EEPROM_HEADER common;// ąŠą▒čēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ EEPROM ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓
// ą×ą┐čåąĖąĖ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ
UCHAR AIsHighCurrent; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü čü ą▓čŗčüąŠą║ąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ (high current)
UCHAR BIsHighCurrent; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü čü ą▓čŗčüąŠą║ąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ (high current)
// ą×ą┐čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
UCHAR AIsFifo; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR AIsFifoTar; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR AIsFastSer; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR BIsFifo; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR BIsFifoTar; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR BIsFastSer; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
// ą×ą┐čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░
UCHAR ADriverType;
UCHAR BDriverType;
} FT_EEPROM_2232, * PFT_EEPROM_2232;
ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĮčāąČąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü FT_EEPROM_Read ąĖ FT_EEPROM_Program.
typedef struct ft_eeprom_232r
{
// ą×ą▒čēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║
FT_EEPROM_HEADER common;// ąŠą▒čēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ EEPROM ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓
// ą×ą┐čåąĖąĖ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ
UCHAR IsHighCurrent; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü čü ą▓čŗčüąŠą║ąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ (high current)
// ą×ą┐čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
UCHAR UseExtOsc; // ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ
UCHAR InvertTXD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ TXD
UCHAR InvertRXD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RXD
UCHAR InvertRTS; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RTS
UCHAR InvertCTS; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ CTS
UCHAR InvertDTR; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DTR
UCHAR InvertDSR; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DSR
UCHAR InvertDCD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DCD
UCHAR InvertRI; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RI
UCHAR Cbus0; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus1; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus2; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus3; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus4; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
// ą×ą┐čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░
UCHAR DriverType;
} FT_EEPROM_232R, * PFT_EEPROM_232R;
ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĮčāąČąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü FT_EEPROM_Read ąĖ FT_EEPROM_Program.
typedef struct ft_eeprom_2232h
{
// ą×ą▒čēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║
FT_EEPROM_HEADER common;// ąŠą▒čēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ EEPROM ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓
// ą×ą┐čåąĖąĖ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ
UCHAR ALSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ALSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ AL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ALDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR AHSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR AHSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ AH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR AHDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR BLSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR BLSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ BL ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR BLDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR BHSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR BHSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ BH ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR BHDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
// ą×ą┐čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
UCHAR AIsFifo; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR AIsFifoTar; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR AIsFastSer; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR BIsFifo; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR BIsFifoTar; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR BIsFastSer; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR PowerSaveEnable; // ąĮąĄ 0, ąĄčüą╗ąĖ BCBUS7 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ
// 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą▓ čüą╗čāčćą░ąĄ čüą▓ąŠąĄą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ
// ą×ą┐čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░
UCHAR ADriverType;
UCHAR BDriverType;
} FT_EEPROM_2232H, * PFT_EEPROM_2232H;
ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĮčāąČąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü FT_EEPROM_Read ąĖ FT_EEPROM_Program.
typedef struct ft_eeprom_4232h
{
// ą×ą▒čēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║
FT_EEPROM_HEADER common;// ąŠą▒čēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ EEPROM ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓
// ą×ą┐čåąĖąĖ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ
UCHAR ASlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ A ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ASchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ A ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ADriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR BSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ B ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR BSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ B ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR BDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR CSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ C ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR CSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ C ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR CDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR DSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ D ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR DSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ D ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR DDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
// ą×ą┐čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
UCHAR ARIIsTXDEN; // ąĮąĄ 0, ąĄčüą╗ąĖ port A ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
UCHAR BRIIsTXDEN; // ąĮąĄ 0, ąĄčüą╗ąĖ port B ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
UCHAR CRIIsTXDEN; // ąĮąĄ 0, ąĄčüą╗ąĖ port C ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
UCHAR DRIIsTXDEN; // ąĮąĄ 0, ąĄčüą╗ąĖ port D ąĖčüą┐ąŠą╗čīąĘčāąĄčé RI ą║ą░ą║ RS485 TXDEN
// ą×ą┐čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░
UCHAR ADriverType;
UCHAR BDriverType;
UCHAR CDriverType;
UCHAR DDriverType;
} FT_EEPROM_4232H, * PFT_EEPROM_4232H;
ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĮčāąČąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü FT_EEPROM_Read ąĖ FT_EEPROM_Program.
typedef struct ft_eeprom_232h
{
// ą×ą▒čēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║
FT_EEPROM_HEADER common;// ąŠą▒čēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ EEPROM ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓
// ą×ą┐čåąĖąĖ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ
UCHAR ACSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AC bus ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ACSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ AC bus ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ACDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR ADSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AD bus ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ADSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ AD bus ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ADDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
// ą×ą┐čåąĖąĖ CBUS
UCHAR Cbus0; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus1; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus2; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus3; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus4; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus5; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus6; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus7; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus8; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus9; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
// FT1248 options
UCHAR FT1248Cpol; // FT1248 ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ - clock idle ą╗ąŠą│. 1 (1) ąĖą╗ąĖ ą╗ąŠą│. 0 (0)
UCHAR FT1248Lsb; // FT1248 ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, čüąĮą░čćą░ą╗ą░ LSB (1) ąĖą╗ąĖ MSB (0)
UCHAR FT1248FlowControl;// FT1248 čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ąŠą╝ (flow control)
// ą×ą┐čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
UCHAR IsFifo; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO
UCHAR IsFifoTar; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü 245 FIFO CPU target
UCHAR IsFastSer; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü Fast serial
UCHAR IsFT1248 // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü FT1248
UCHAR PowerSaveEnable;
// ą×ą┐čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░
UCHAR DriverType;
} FT_EEPROM_232H, * PFT_EEPROM_232H;
ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ąĮčāąČąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü FT_EEPROM_Read ąĖ FT_EEPROM_Program.
typedef struct ft_eeprom_x_series
{
// ą×ą▒čēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║
FT_EEPROM_HEADER common;// ąŠą▒čēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ EEPROM ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓
// ą×ą┐čåąĖąĖ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ
UCHAR ACSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AC bus ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ACSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ AC bus ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ACDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
UCHAR ADSlowSlew; // ąĮąĄ 0, ąĄčüą╗ąĖ AD bus ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮąĖąĘą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
UCHAR ADSchmittInput; // ąĮąĄ 0, ąĄčüą╗ąĖ AD bus ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░
UCHAR ADDriveCurrent; // ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4 ą╝ąÉ, 8 ą╝ąÉ, 12 ą╝ąÉ, 16 ą╝ąÉ
// ą×ą┐čåąĖąĖ CBUS
UCHAR Cbus0; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus1; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus2; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus3; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus4; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus5; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
UCHAR Cbus6; // čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąŠą╝ CBUS (Cbus Mux control)
// ą×ą┐čåąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓ UART
UCHAR InvertTXD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ TXD
UCHAR InvertRXD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RXD
UCHAR InvertRTS; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RTS
UCHAR InvertCTS; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ CTS
UCHAR InvertDTR; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DTR
UCHAR InvertDSR; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DSR
UCHAR InvertDCD; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ DCD
UCHAR InvertRI; // ąĮąĄ 0, ąĄčüą╗ąĖ ąĖąĮą▓ąĄčĆčüąĖčÅ RI
// ą×ą┐čåąĖąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░čĆčÅą┤ą░ ą▒ą░čéą░čĆąĄąĖ (Battery Charge Detect)
UCHAR BCDEnable; // čĆą░ąĘčĆąĄčłąĖčéčī Battery Charger Detection
UCHAR BCDForceCbusPWREN;// ą▓čŗčüčéą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ power enable ąĮą░ CBUS, ą║ąŠą│ą┤ą░
// ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą┐ąŠčĆčé ąĘą░čĆčÅą┤ą║ąĖ
UCHAR BCDDisableSleep; // ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĘą░ą┐čĆąĄčēą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓čā ą┐ąĄčĆąĄčģąŠą┤ąĖčéčī ą▓ sleep mode
// ą×ą┐čåąĖąĖ I2C
WORD I2CSlaveAddress; // ąÉą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ I2C (I2C slave device address)
DWORD I2CDeviceId; // ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ I2C (I2C device ID)
UCHAR I2CDisableSchmitt;// ąŚą░ą┐čĆąĄčé čéčĆąĖą│ą│ąĄčĆą░ ą©ą╝ąĖčéčéą░ ąĮą░ čłąĖąĮąĄ I2C
// FT1248 options
UCHAR FT1248Cpol; // FT1248 ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ - clock idle ą╗ąŠą│. 1 (1),
// ąĖą╗ąĖ ą╗ąŠą│. 0 (0)
UCHAR FT1248Lsb; // FT1248 ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, čüąĮą░čćą░ą╗ą░ LSB (1) ąĖą╗ąĖ MSB (0)
UCHAR FT1248FlowControl;// FT1248 čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ąŠą╝ (flow control)
// ą×ą┐čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
UCHAR RS485EchoSuppress;
UCHAR PowerSaveEnable;
// ą×ą┐čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░
UCHAR DriverType;
} FT_EEPROM_X_SERIES, * PFT_EEPROM_X_SERIES;
OPEN_EXISTING = 3
FILE_ATTRIBUTE_NORMAL = 0x00000080
FILE_FLAG_OVERLAPPED = 0x40000000
GENERIC_READ = 0x80000000
GENERIC_WRITE = 0x40000000
typedef struct _OVERLAPPED
{
ULONG_PTR Internal;
ULONG_PTR InternalHigh;
union
{
struct
{
DWORD Offset;
DWORD OffsetHigh;
};
PVOID Pointer;
};
HANDLE hEvent;
} OVERLAPPED, * LPOVERLAPPED;
CLRDTR = 6 // ąĪą▒čĆąŠčü čüąĖą│ąĮą░ą╗ą░ DTR
CLRRTS = 4 // ąĪą▒čĆąŠčü čüąĖą│ąĮą░ą╗ą░ RTS
SETDTR = 5 // ąŻčüčéą░ąĮąŠą▓ą║ą░ čüąĖą│ąĮą░ą╗ą░ DTR
SETRTS = 3 // ąŻčüčéą░ąĮąŠą▓ą║ą░ čüąĖą│ąĮą░ą╗ą░ RTS
SETBREAK = 8 // ąŻčüčéą░ąĮąŠą▓ą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčüčéą░ąĮąŠą▓ą░ (BREAK condition)
CLRBREAK = 9 // ąĪą▒čĆąŠčü čüąŠčüč鹊čÅąĮąĖčÅ ąŠčüčéą░ąĮąŠą▓ą░ (non-BREAK condition)
MS_CTS_ON = 0x0010 // ąĪąĖą│ąĮą░ą╗ Clear To Send (CTS) ą▓ ą╗ąŠą│. 1
MS_DSR_ON = 0x0020 // ąĪąĖą│ąĮą░ą╗ Data Set Ready (DSR) ą▓ ą╗ąŠą│. 1
MS_RING_ON = 0x0040 // ąĪąĖą│ąĮą░ą╗ Ring Indicator (RI) ą▓ ą╗ąŠą│. 1
MS_RLSD_ON = 0x0080 // Receive Line Signal Detect (RLSD) ą▓ ą╗ąŠą│. 1
typedef struct _FTDCB
{
DWORD DCBlength; // sizeof(FTDCB)
DWORD BaudRate; // ąĪą║ąŠčĆąŠčüčéčī
DWORD fBinary: 1 ; // Binary Mode (ą┐čĆąŠą┐čāčüą║ ą┐čĆąŠą▓ąĄčĆą║ąĖ EOF)
DWORD fParity: 1 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ č湥čéąĮąŠčüčéčī
DWORD fOutxCtsFlow: 1 ;// ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą╝ CTS handshaking
DWORD fOutxDsrFlow: 1 ;// ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą╝ DSR handshaking
DWORD fDtrControl: 2 ; // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ DTR
DWORD fDsrSensitivity: 1 ; // ą¦čāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī DSR
DWORD fTXContinueOnXoff: 1 ;// ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ TX, ą║ąŠą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ Xoff
DWORD fOutX: 1 ; // ąĀą░ąĘčĆąĄčłąĖčéčī ąĮą░ ą▓čŗčģąŠą┤ąĄ X-ON/X-OFF
DWORD fInX: 1 ; // ąĀą░ąĘčĆąĄčłąĖčéčī ąĮą░ ą▓čģąŠą┤ąĄ X-ON/X-OFF
DWORD fErrorChar: 1 ; // ąĀą░ąĘčĆąĄčłąĖčéčī ąĘą░ą╝ąĄąĮčā ą┐čĆąĖ ąŠčłąĖą▒ą║ąĄ (Err Replacement)
DWORD fNull: 1 ; // ąĀą░ąĘčĆąĄčłąĖčéčī Null stripping
DWORD fRtsControl: 2 ; // ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ RTS
DWORD fAbortOnError: 1 ; // ą×ą▒ąŠčĆą▓ą░čéčī ą▓čüąĄ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┐čĆąĖ ąŠčłąĖą▒ą║ąĄ
DWORD fDummy2: 17 ; // ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
WORD wReserved; // ą¤ąŠą║ą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
WORD XonLim; // ą¤ąŠčĆąŠą│ ą┐ąĄčĆąĄą┤ą░čćąĖ X-ON
WORD XoffLim; // ą¤ąŠčĆąŠą│ ą┐ąĄčĆąĄą┤ą░čćąĖ X-OFF
BYTE ByteSize; // ąĀą░ąĘą╝ąĄčĆ čäčĆąĄą╣ą╝ą░ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą▓ ą▒ą░ą╣č鹥), 7-8
BYTE Parity; // 0..4: None, Odd, Even, Mark, Space
BYTE StopBits; // 0, 2: 1, 2
char XonChar; // ąĪąĖą╝ą▓ąŠą╗ X-ON ą┤ą╗čÅ Tx ąĖ Rx
char XoffChar; // ąĪąĖą╝ą▓ąŠą╗ X-OFF ą┤ą╗čÅ Tx ąĖ Rx
char ErrorChar; // ąĪąĖą╝ą▓ąŠą╗ ąĘą░ą╝ąĄąĮčŗ ą┐čĆąĖ ąŠčłąĖą▒ą║ąĄ (Error replacement char)
char EofChar; // ąĪąĖą╝ą▓ąŠą╗ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą▓ą▓ąŠą┤ą░ (End of Input character)
char EvtChar; // ąĪąĖą╝ą▓ąŠą╗ ą┐čĆąĖąĄą╝ą░ čüąŠą▒čŗčéąĖčÅ (Received Event character)
WORD wReserved1; // ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
} FTDCB, * LPFTDCB;
typedef struct _FTTIMEOUTS
{
DWORD ReadIntervalTimeout; // max ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā čćąĖčéą░ąĄą╝čŗą╝ąĖ čüąĖą╝ą▓ąŠą╗ą░ą╝ąĖ
DWORD ReadTotalTimeoutMultiplier; // ą╝ąĮąŠąČąĖč鹥ą╗čī ą┤ą╗čÅ čüąĖą╝ą▓ąŠą╗ąŠą▓
DWORD ReadTotalTimeoutConstant; // ą║ąŠąĮčüčéą░ąĮčéą░ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ
DWORD WriteTotalTimeoutMultiplier; // ą╝ąĮąŠąČąĖč鹥ą╗čī ą┤ą╗čÅ čüąĖą╝ą▓ąŠą╗ąŠą▓
DWORD WriteTotalTimeoutConstant; // ą║ąŠąĮčüčéą░ąĮčéą░ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ
} FTTIMEOUTS, * LPFTTIMEOUTS;
EV_BREAK = 0x0040 // ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ BREAK condition
EV_CTS = 0x0008 // ąĖąĘą╝ąĄąĮąĖą╗čüčÅ Clear To Send (CTS)
EV_DSR = 0x0010 // ąĖąĘą╝ąĄąĮąĖą╗čüčÅ Data Set Ready (DSR)
EV_ERR = 0x0080 // ąŠčłąĖą▒ą║ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąĖąĮąĖąĖ
EV_RING = 0x0100 // ąĖąĘą╝ąĄąĮąĖą╗čüčÅ Ring Indicator (RI)
EV_RLSD = 0x0020 // ąĖąĘą╝ąĄąĮąĖą╗čüčÅ Receive Line Signal Detect (RLSD)
EV_RXCHAR = 0x0001 // ą┐čĆąĖąĮčÅčé čüąĖą╝ą▓ąŠą╗
EV_RXFLAG = 0x0002 // čüąŠą▒čŗčéąĖąĄ ą┐čĆąĖąĄą╝ą░ čüąĖą╝ą▓ąŠą╗ą░
EV_TXEMPTY = 0x0004 // ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┐čāčüčé
PURGE_TXABORT = 0x0001 // ąŠą▒ąŠčĆą▓ą░čéčī č鹥ą║čāčēąĖąĄ overlapped-ąĘą░ą┐ąĖčüąĖ
PURGE_RXABORT = 0x0002 // ąŠą▒ąŠčĆą▓ą░čéčī č鹥ą║čāčēąĖąĄ overlapped-čćč鹥ąĮąĖčÅ
PURGE_TXCLEAR = 0x0004 // ąŠčćąĖčüčéą║ą░ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ
PURGE_RXCLEAR = 0x0008 // ąŠčćąĖčüčéą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░
typedef struct _FTCOMSTAT
{
DWORD fCtsHold: 1 ;
DWORD fDsrHold: 1 ;
DWORD fRlsdHold: 1 ;
DWORD fXoffHold: 1 ;
DWORD fXoffSent: 1 ;
DWORD fEof: 1 ;
DWORD fTxim: 1 ;
DWORD fReserved: 25 ;
DWORD cbInQue;
DWORD cbOutQue;
} FTCOMSTAT, * LPFTCOMSTAT;
[ąĪčüčŗą╗ą║ąĖ ]
1 . D2XX Direct Drivers site:ftdichip.com .2 . Code Examples site:ftdichip.com .3 . FT2232H: ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮą░čÅ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮą░čÅ USB ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┤ą╗čÅ I/O .4 . ąĀąĄąČąĖą╝čŗ BitBang ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ FT232R ąĖ FT245R .



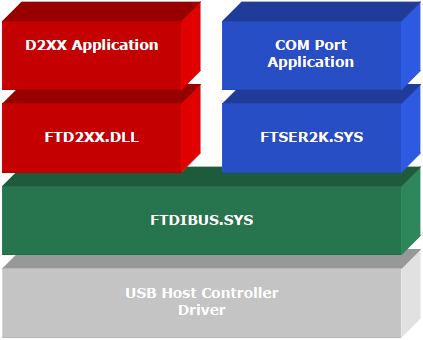

ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ą╝ąŠąČąĮąŠ ą║ąŠąĮąĄčćąĮąŠ čćč鹊-č鹊 čüą┤ąĄą╗ą░čéčī. ąØąŠ čüąĮą░čćą░ą╗ą░ ąĮą░ą┤ąŠ ą┐ąŠąĮčÅčéčī, ą▓ č湥ą╝ ą┐čĆąĖčćąĖąĮą░. ąĪą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ, ą┐čĆąŠčüč鹊 ą┐ą╗ąŠčģąŠ čćąĖą┐ ąĘą░ą┐ą░čÅą╗ąĖ, ąĖ ą│ą┤ąĄ-č鹊 ąĮąĄą┐čĆąŠą┐ą░ą╣ ąĖą╗ąĖ ąĘą░ą╝čŗą║ą░ąĮąĖąĄ.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ