| CANopen на процессоре Blackfin ADSP-BF504F |
|
| Добавил(а) microsin |
|
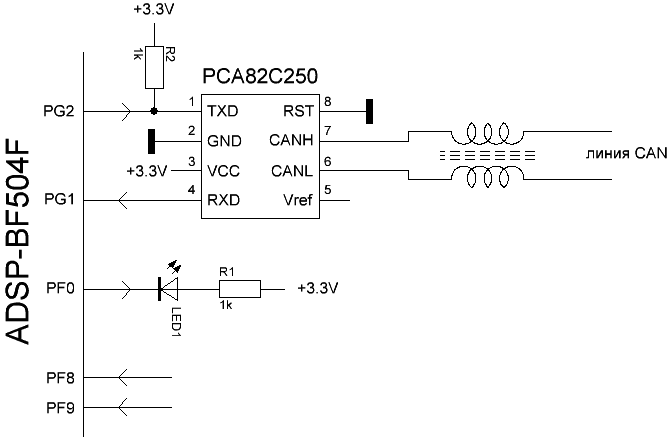
В этой статье кратко описывается портирование стека CANopen апноута AN945 от Microship [1] на процессор ADSP-BF504 (ранее этот стек портировал на ARM AT91SAM7X [2]). Описывается простое устройство CANopen, которое имеет один TPDO, один RPDO, поддерживает чтение/запись словаря объектов через SDO и демонстрирует обмен данными пакетов PDO в обоих направлениях. [Утилиты, которые использовались для тестирования] В качестве главного устройства сети (мастера CANopen) использовался USB-адаптер SYSTEC [4] вместе с программой CANopen DeviceExplorer 2.6.2. Для проверки словаря использовалась утилита Vector CANeds 3.6.92 SP3. Для анализа пакетов, передаваемых по сети, использовался анализатор CANalyst-II [5]. Утилиты CANopen DeviceExplorer, CANeds и рабочий проект для VisualDSP++ 5.0 можно скачать по ссылке [6]. [Описание работы устройства CANopen] Демонстрационное устройство узла CANopen работает на скорости 125 килобит/сек (можно поменять скорость переназначением макроса CAN_BAUDRATE). Такая скорость была выбрана потому, что оценочная (не лицензионная) версия CANopen DeviceExplorer позволяет работать только на скорости 125 килобит/сек. Устройству назначен номер узла 2 (задается значением переменной _uCO_nodeID), и оно может зажигать тестовый светодиод (подключен к ножке PF0) по значению первого байта в пакете RPDO, и может передавать в пакете TPDO значения ножек входов портов PF8 и PF9.
[Проблемы, которые пришлось решить при портировании] В качестве исходного кода был взят порт [2], и в него были внесены изменения, касающиеся привязки к аппаратуре ADSP-BF50x (в основном это коснулось модуля CO_CANDRV.c, см. врезку ниже). Нашел одну из ошибок при обработке SDO и выдаче данных из словаря: перечисление DICT_CTL обрабатывалось компилятором Blackfin как u16, и DICT_CTL ctl в структуре DICT_OBJ не соответствовало u8 ctl в структуре DICT_OBJECT_TEMPLATE. Исправил структуру DICT_OBJ, заменив в ней DICT_CTL ctl на u8 ctl. Еще одна проблема, с которой долго провозился: код ISR приема не хотел работать, если у него включена оптимизация. Если код обработчика CAN_RX_HANDLER обрамить директивами #pragma optimize_off и #pragma optimize_as_cmd_line, то все работет нормально, а иначе не работает. С остальным кодом такой проблемы не было (нормально работает и в конфигурации Debug, и в конфигурации Release с настройками по умолчанию). Оказалось, что нужно читать регистр CAN_MBRIF1 в переменную с модификатором volatile, после такого исправления проблема исчезла. /*****************************************************************************
* Низкоуровневый драйвер стека CANopen (портировано на ADSP-BF50x
* с кода ECAN чипа PIC18F Microchip из апноута AN945).
*****************************************************************************
* Company: Microchip Technology Incorporated
* FileName: CO_CANDRV.C
* Author Date Comment
*~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
* Ross Fosler 11/13/03 ...
*****************************************************************************/
//#include "CO_DEFS.DEF" // Глобальные определения
#include < services_types.h >
#include < cdefBF504F.h >
#include < builtins.h >
#include < sys\exception.h >
#include "CO_TYPES.H"
#include "CO_CANDRV.H" // Службы драйвера #include "CO_NMTE.H"
#include "CO_COMM.H"
#include "CO_SDO1.H"
#include "CO_PDO.H"
#include "CO_NMT.H"
#include "CO_SYNC.h" #include "pins.h"
////////////////////////////////////////////////////////////////
// Обработчик прерывания приема CAN
//#pragma optimize_off
//EX_INTERRUPT_HANDLER(CAN_RX_HANDLER) EX_REENTRANT_HANDLER(CAN_RX_HANDLER) { u16 bit_pos = 0; char mbID; CANmessage m; // содержит сообщение CAN //Внимание: эта переменная обязательно должна быть volatile, // иначе код ISR будет работать только при отключенной // оптимизации. volatile u16 mbim_status = *pCAN_MBRIF1; while (!(mbim_status & 0x8000)) { mbim_status << = 1; bit_pos++; } mbID = (15 - bit_pos); m.cob_id = (*(u16*)CAN_MB_ID1(mbID) & BASEID) >> 2; //11-битный ID m.rtr = (*(u16*)CAN_MB_ID1(mbID) & RTR)?true:false; m.len = *(u16*)CAN_MB_LENGTH(mbID) & DLC; *(u16*)(&m.data[6]) = SWAPBYTES(*(u16*)CAN_MB_DATA0(mbID)); *(u16*)(&m.data[4]) = SWAPBYTES(*(u16*)CAN_MB_DATA1(mbID)); *(u16*)(&m.data[2]) = SWAPBYTES(*(u16*)CAN_MB_DATA2(mbID)); *(u16*)(&m.data[0]) = SWAPBYTES(*(u16*)CAN_MB_DATA3(mbID)); // Если как минимум состояние pre-operational, и если хендл допустимый, // то декодируем сообщение и генерируем соответствующее событие. if (COMM_STATE_PREOP) { switch(m.cob_id >> 7) { case NMT: //proceedNMTstateChange(d,m); if (COMM_NETCTL_NMT_EN) { _CO_COMM_NMT_RXEvent(&m); } break; case SYNCcode: if (COMM_NETCTL_SYNC_EN) { if (!COMM_STATE_STOP) _CO_COMM_SYNC_RXEvent(&m); } break; case TIME_STAMP: //if (COMM_NETCTL_TMSTP_EN) //{ // if (!COMM_STATE_STOP) // _CO_COMM_TIME_RXEvent(); //} break; case PDO1tx: break; case PDO1rx: _CO_COMM_PDO1_RXEvent(&m); break; case PDO2tx: case PDO2rx: case PDO3tx: case PDO3rx: case PDO4tx: case PDO4rx: break; case SDOtx: break; case SDOrx: if (!COMM_STATE_STOP) { if (COMM_SDO_1_EN) { _CO_COMM_SDO1_RXEvent(&m); } } break; case NODE_GUARD: if (COMM_NETCTL_NMTE_EN) { //proceedNODE_GUARD(d,m); _CO_COMM_NMTE_RXEvent(&m); } break; default: break; } } *pCAN_MBRIF1 = (1 << mbID); ssync(); } //#pragma optimize_as_cmd_line
void canInit (u16 baudrate) { //Инициализация ножек CAN: *pPORTG_FER |= (PG1 | PG2); *pPORTG_MUX |= PG3; *pPORTG_MUX &= ~PG2; *pPORTG_MUX |= PG5; *pPORTG_MUX &= ~PG4; ssync(); //Установка скорости: *pCAN_TIMING = _TIMING; *pCAN_CLOCK = CANBPR; ssync(); //Настройка и разрешение работы ящиков: *pCAN_MD1 = 0xFFFF; // ящики 0-15 на прием *pCAN_MD2 = 0x0000; // ящики 16-31 на передачу *pCAN_MC1 = 0xFFFF; // разрешить ящики 0-15 *pCAN_MC2 = 0xFFFF; // разрешить ящики 16-31 ssync(); u8 mbID; //Настройка передающих ящиков: for (mbID = 16; mbID < 32; mbID++) { //Очистка регистра CAN_MBxx_ID0 (расширенный ID): //*(pCAN_Ptr + 12) = 0; *(u16*)CAN_MB_ID0(mbID) = 0; } //Настройка идентификаторов ящиков приема: for (mbID = 0; mbID < 16; mbID++) { //Очистка регистра CAN_MBxx_ID0 (расширенный ID): *(u16*)CAN_MB_ID0(mbID) = 0; //Установка регистра CAN_MBxx_ID1 (базовый ID, AME): *(u16*)CAN_MB_ID1(mbID) = AME; } // установка масок для приема: volatile u16* pCAN_Ptr = pCAN_AM00L; int i; for(i=0; i < 16; ++i) { //Настройка регистра маски CAN_AMxxL: *pCAN_Ptr = 0; //Настройка регистра маски CAN_AMxxH: //*(pCAN_Ptr+2) = BASEID; //всеразрешающая маска по базовому ID // Биты ID узла должны совпадать: *(pCAN_Ptr+2) = (~(0x007F << 2) | (_uCO_nodeID << 2)) & BASEID; pCAN_Ptr+=4; } //Инициализация прерывания, привязка CAN к приоритету IVG: *pSIC_IAR3 |= PX_IVG(CAN_RX_Peripheral, CAN_RX_IVG); register_handler(CAN_RX_IVG, CAN_RX_HANDLER); *pSIC_IMASK0 |= IRQ_CAN_RX; // Запрет режима конфигурации CAN (очистка бита CCR) *pCAN_CONTROL = 0; ssync(); //Ожидание завершения режима конфигурирования (ожидание выхода из него): while(*pCAN_STATUS & CCA); *pCAN_MBIM1 = 0xFFFF; // разрешить прерывания ящиков 0-15 (прием) ssync(); } /*********************************************************************
* Overview: Эта функция используется, чтобы показать драйверу,
* что данные, длина и идентификатор CAN были загружены
* и готовы к отправке.
* Портированная версия: передает сразу через первый свободный ящик.
*
* 1. Ищется первый свободный передающий ящик.
* 2. В зависимости от event создается пакет и отправляется
********************************************************************/
void mCANSendMessage (TEventTX event) { //Поиск свободного ящика для отправки: u16 mask=1; u16 mbID; TUnion32 data; for(mbID=16; mbID < 32; ++mbID) { if((mask & *pCAN_TRS2)==0) break; mask << = 1; } if (0 == mask) { // Нет свободных ящиков для отправки return; } switch(event) { case NMTE_BootTXEvent: // Установка COB-ID: setCAN_MBxx_ID1(mbID, 0x700L + _uCO_nodeID); // Установка длины 1: setCAN_MBxx_LENGTH(mbID, 1); // Загрузка данных (byte0=0): setCAN_MBxx_DATA3(mbID, ((u16)0) << 8); // Запуск отправки: *pCAN_TRS2 |= mask; ssync(); break; case NMTE_NetCtlTXEvent: // Установка COB-ID: setCAN_MBxx_ID1(mbID, 0x700L + _uCO_nodeID); // Установка длины 1: setCAN_MBxx_LENGTH(mbID, 1); //Подготовка данных: _uNMTELocalState.byte = _uNMTELocalState.byte & 0x80; if (NMTE_NODE_GUARD_EN) { _uNMTELocalState.bits.b7 = (~_uNMTELocalState.bits.b7); } else { _uNMTELocalState.bits.b7 = 0; } if (COMM_STATE_STOP) _uNMTELocalState.byte = _uNMTELocalState.byte | 4; else if (COMM_STATE_OPER) _uNMTELocalState.byte = _uNMTELocalState.byte | 5; else if (COMM_STATE_PREOP) _uNMTELocalState.byte = _uNMTELocalState.byte | 127; // Загрузка данных (byte0, младший байт данных ящика): setCAN_MBxx_DATA3(mbID, ((u16)_uNMTELocalState.byte) << 8); // Запуск отправки: *pCAN_TRS2 |= mask; ssync(); break; case SDO1_TXEvent: // Установка COB-ID setCAN_MBxx_ID1(mbID, 0x580L + _uCO_nodeID); // Установка длины 8: setCAN_MBxx_LENGTH(mbID, 8); // Загрузка данных if (_uSDO1ACode == E_SUCCESS) { // Перенос данных в буфер передачи: setCAN_MBxx_DATA0(mbID, SWAPBYTES(*(u16*)(_uSDO1TxBuf+6))); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, SWAPBYTES(*(u16*)(_uSDO1TxBuf+4))); //Байты 4, 5 setCAN_MBxx_DATA2(mbID, SWAPBYTES(*(u16*)(_uSDO1TxBuf+2))); //Байты 2, 3 setCAN_MBxx_DATA3(mbID, SWAPBYTES(*(u16*)(_uSDO1TxBuf+0))); //Байты 0, 1 } else { // Установка кода abort data.bytes[0] = (u8)0x80; // Установка мультиплексора data.bytes[1] = _uSDO1Dict.index.bytes[0]; setCAN_MBxx_DATA3(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 0, 1 data.bytes[2] = _uSDO1Dict.index.bytes[1]; data.bytes[3] = _uSDO1Dict.subindex; setCAN_MBxx_DATA2(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 2, 3 switch (_uSDO1ACode) { case E_TOGGLE: // Бит Toggle не переключился data.word = 0x05030000L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_SDO_TIME: // Таймаут протокола SDO data.word = 0x05040000L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_CS_CMD: // Спецификатор команды клиент/сервер недопустим или неизвестен data.word = 0x05040001L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_MEMORY_OUT: // Не хватает памяти data.word = 0x05040005L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_UNSUPP_ACCESS: // Не поддерживаемый доступ к объекту data.word = 0x06010000L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_CANNOT_READ: // Попытка прочитать объект, у которого доступ только на запись data.word = 0x06010001L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_CANNOT_WRITE: // Попытка записать объект, у которого доступ только на чтение data.word = 0x06010002L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_OBJ_NOT_FOUND: // Объект не существует в OD data.word = 0x06020000L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_OBJ_CANNOT_MAP: // Объект не может быть отображен (привязан к) на PDO data.word = 0x06040041L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_OBJ_MAP_LEN: // Количество и длина привязанных объектов превысили длину PDO data.word = 0x06040042L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_GEN_PARAM_COMP: // Причина в общей несовместимости параметра data.word = 0x06040043L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_GEN_INTERNAL_COMP: // Общая внутренняя несовместимость в устройстве data.word = 0x06040047L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_HARDWARE: // Ошибочный доступ из-за аппаратной ошибки data.word = 0x06060000L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_LEN_SERVICE: // Не соответствует тип данных, не соответствует длина параметра службы data.word = 0x06070010L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_LEN_SERVICE_HIGH: // Не соответствует тип данных, длина параметра службы слишком велика data.word = 0x06070012L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_LEN_SERVICE_LOW: // Не соответствует тип данных, длина параметра службы слишком мала data.word = 0x06070013L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_SUBINDEX_NOT_FOUND: // Sub-индекс не существует data.word = 0x06090011L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_PARAM_RANGE: // Превышен диапазон значения параметра data.word = 0x06090030L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_PARAM_HIGH: // Значение записываемого параметра слишком велико data.word = 0x06090031L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_PARAM_LOW: // Значение записываемого параметра слишком мало data.word = 0x06090032L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_MAX_LT_MIN: // Максимальное значение меньше, чем минимальное data.word = 0x06090036L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_GENERAL: // Общая ошибка data.word = 0x08000000L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_TRANSFER: // Данные не могут быть переданы или сохранены в приложение data.word = 0x08000020L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_LOCAL_CONTROL: // Данные не могут быть переданы или сохранены в приложение из-за локального управления data.word = 0x08000021L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; case E_DEV_STATE: // Данные не могут быть переданы или сохранены в приложение из-за текущего состояния устройства data.word = 0x08000022L; setCAN_MBxx_DATA0(mbID, (((u16)data.bytes[2]) << 8)|data.bytes[3]); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, (((u16)data.bytes[0]) << 8)|data.bytes[1]); //Байты 4, 5 break; } } // Запуск отправки: *pCAN_TRS2 |= mask; ssync(); break; case PDO1_TXEvent: // Установка COB-ID: setCAN_MBxx_ID1(mbID, uTPDOComm1.word); //Установка длины: setCAN_MBxx_LENGTH(mbID, _uPDO1.TPDO.len); // Загрузка данных для передачи setCAN_MBxx_DATA0(mbID, SWAPBYTES(*(u16*)(_uPDO1.TPDO.buf+6))); //Байты 6, 7 setCAN_MBxx_DATA1(mbID, SWAPBYTES(*(u16*)(_uPDO1.TPDO.buf+4))); //Байты 4, 5 setCAN_MBxx_DATA2(mbID, SWAPBYTES(*(u16*)(_uPDO1.TPDO.buf+2))); //Байты 2, 3 setCAN_MBxx_DATA3(mbID, SWAPBYTES(*(u16*)(_uPDO1.TPDO.buf+0))); //Байты 0, 1 // Запуск отправки: *pCAN_TRS2 |= mask; ssync(); break; #if CO_NUM_OF_PDO > 1 case PDO2_TXEvent: break; #endif
#if CO_NUM_OF_PDO > 2 case PDO3_TXEvent: break; #endif
#if CO_NUM_OF_PDO > 3 case PDO4_TXEvent: break; #endif
}
}
Весь проект целиком вместе с сервисными утилитами можно скачать по ссылке [6]. [Ссылки] 1. AN945: A CANopen Stack for PIC18 ECANTM Microcontrollers site:microchip.com. |