|
CANopen čŹč鹊 ą┐čĆąŠč鹊ą║ąŠą╗, ąŠčüąĮąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ čłąĖąĮąĄ Controller Area Network (CAN). ąÜą░ą║ ą┐ąŠą┤čüą║ą░ąĘčŗą▓ą░ąĄčé ąĖą╝čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░, čŹč鹊 ąŠčéą║čĆčŗčéčŗą╣ čüąĄč鹥ą▓ąŠą╣ čüčéą░ąĮą┤ą░čĆčé, ą┐čĆąĖąĮčÅčéčŗą╣ ą▓ąŠ ą▓čüąĄą╝ ą╝ąĖčĆąĄ. ąźąŠčéčÅ CANopen ą▒čŗą╗ąŠ čüąŠąĘą┤ą░ąĮ ą┤ą╗čÅ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮąŠą╣ ą░ą▓č鹊ą╝ą░čéąĖąĘą░čåąĖąĖ, ąŠąĮ ąĮą░čłąĄą╗ čłąĖčĆąŠą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ąĖ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ, ąĮąĄ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣.
ąśą╝ąĄąĄčéčüčÅ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ CANopen. ąŁčéą░ čüčéą░čéčīčÅ č乊ą║čāčüąĖčĆčāąĄčéčüčÅ ąĮą░ ąŠą┐ąĖčüą░ąĮąĖąĖ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ DS-301 [2, 6], čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮąŠą╣ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĄą╣ CAN in Automation (CiA). ążą░ą║čéąĖč湥čüą║ąĖ ą▒ąŠą╗čīčłą░čÅ čćą░čüčéčī ą┤ąĖčüą║čāčüčüąĖąĖ ąŠą│čĆą░ąĮąĖč湥ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ ąŠą▒ą╗ą░čüčéčÅą╝ąĖ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ, čü ą░ą║čåąĄąĮč鹊ą╝ ąĮą░ ą┐ąŠąĮąĖą╝ą░ąĮąĖąĖ, ą║ą░ą║ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé čĆą░ąĘčĆą░ą▒ąŠčéą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüč鹥ą║ą░ CANopen. ą¦č鹊ą▒čŗ ą┐ąŠą╝ąŠčćčī ąĖą╗ą╗čÄčüčéčĆąĖčĆąŠą▓ą░čéčī čŹčéąĖ ą▓ąŠą┐čĆąŠčüčŗ, ą▒čŗą╗ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ą┐čĆąŠčüč鹊ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĖą╝ąĄčĆą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ CiA DS-401 - ąŠą▒čŗčćąĮčŗą╣ ą╝ąŠą┤čāą╗čī ą▓ą▓ąŠą┤ą░ ą▓čŗą▓ąŠą┤ą░ (Generic I/O Module). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą║ąŠą┤ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ ą┤ą╗čÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĘą┤ąĄčüčī ąĮąĄčé ą┤ąĄčéą░ą╗čīąĮąŠą│ąŠ ąŠą▒čüčāąČą┤ąĄąĮąĖčÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą│ąŠ ą║ąŠą┤ą░. ą×ą┤ąĮą░ą║ąŠ ąĘą┤ąĄčüčī ą▒čāą┤čāčé čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ čü ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖčÅą╝ąĖ ąĖąĘ čŹč鹊ą│ąŠ ą┤ąĄą╝ąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ąĘą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą░ą┐ąĮąŠčāčéą░ AN945 [1], ą│čĆčāą▒čŗąĄ čüą╝čŗčüą╗ąŠą▓čŗąĄ ąŠą┐ąĄčćą░čéą║ąĖ ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮčŗ). ąØąĄąĘąĮą░ą║ąŠą╝čŗąĄ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčŗ ąĖ č鹥čĆą╝ąĖąĮčŗ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąĪą╗ąŠą▓ą░čĆąĖą║" čüčéą░čéčīąĖ [5].
ąÆąĄčüčī ą║ąŠą┤, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥, ą▒čŗą╗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ čüąĄą╝ąĄą╣čüčéą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIC18F8680 ąĖ PIC18F4680, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé ąĮą░ ą▒ąŠčĆčéčā ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ECAN. ąÜąŠą┤ ąĮą░ą┐ąĖčüą░ąĮ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ Microchip C18 v2.30 (ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĄą╣ ą▓ąĄčĆčüąĖąĖ). ąźąŠčéčÅ ą║ąŠą┤ čĆą░čüčüčćąĖčéą░ąĮ ąĮą░ čŹčéąĖ 2 čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░čéčī ąĖ ąĮą░ ą┤čĆčāą│ąĖąĄ čüąĄą╝ąĄą╣čüčéą▓ą░ PIC18, ąĮą░ ą▒ąŠčĆčéčā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī CAN.
ą×ąČąĖą┤ą░ąĄčéčüčÅ, čćč鹊 čćąĖčéą░č鹥ą╗čī čāąČąĄ ąĖą╝ąĄąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĘąĮą░ąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CANopen, ąĖą╗ąĖ ąĖą╝ąĄąĄčé ą┤ąŠčüčéčāą┐ ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ čüčéą░ąĮą┤ą░čĆčéą░ą╝ CANopen (ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗą╝ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ąĪčüčŗą╗ą║ąĖ), čćč鹊ą▒čŗ ą┐čĆąŠčÅčüąĮąĖčéčī ą┤ą╗čÅ čüąĄą▒čÅ č鹥ąŠčĆąĖčÄ ąĖ/ąĖą╗ąĖ ą║čĆąĖčéąĖč湥čüą║čāčÄ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖčÄ. ąśąĮč乊čĆą╝ą░čåąĖčÅ, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮą░čÅ ą▓ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥, čüą║ą╗ąŠąĮčÅąĄčéčüčÅ ą║ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤ąĄą╝ąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ąĮą░ ąĄčæ ąŠčüąĮąŠą▓ąĄ, ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ čüąŠčüčĆąĄą┤ąŠčéą░čćąĖą▓ą░čéčīčüčÅ ąĮą░ ą╝ąĮąŠą│ąĖčģ ą┤ąĄčéą░ą╗čÅčģ CANopen.
[ą×ą▒ąĘąŠčĆ čüč鹥ą║ą░]
ąĪč鹥ą║ CANopen ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĖąČąĮąĖąĄ čüą╗ąŠąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąŁč鹊čé ą┤ąĖąĘą░ą╣ąĮ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ:
ŌĆó ąÆčüčéčĆąŠąĄąĮąĮčāčÄ ą╝ą░čłąĖąĮčā čüąŠčüč鹊čÅąĮąĖą╣ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą╝ąĄąČą┤čā ą▓čüąĄą╝ąĖ čāąĘą╗ą░ą╝ąĖ ąĖ ąŠą▒čŖąĄą║čéą░ą╝ąĖ.
ŌĆó ąĪąĄčĆą▓ąĄčĆ čüąĄčĆą▓ąĖčüąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (Default Service Data Object, SDO).
ŌĆó ąöąŠ 4 ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ ąĖ 4 ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖčģ ąŠą▒čŖąĄą║čéą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ (Process Data Objects), čüąŠą║čĆą░čēąĄąĮąĮąŠ TPDO ąĖ RPDO.
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čÅą▓ąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ čüąŠąŠą▒čēąĄąĮąĖą╣ (Explicit Messaging) ąĖ čüąĄą│ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ (Segmented Messaging).
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ PDO ą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (PDO mapping).
ŌĆó ąĪčéčĆčāą║čéčāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čüą╗ąŠą▓ą░čĆčī ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓ PDO ąĖ SDO.
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ Node Guard / Life Guard.
ŌĆó ą¤ąŠčéčĆąĄą▒ąĖč鹥ą╗čī čüąŠąŠą▒čēąĄąĮąĖą╣ SYNC.
ŌĆó ąōąĄąĮąĄčĆą░č鹊čĆ "čüąĄčĆą┤čåąĄą▒ąĖąĄąĮąĖčÅ" (Heartbeat Producer).
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ECAN.
ąÜą░ą║ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ąĖąĘ čŹč鹊ą│ąŠ čüą┐ąĖčüą║ą░, čüč鹥ą║ CANopen, ąŠą▒čüčāąČą┤ą░ąĄą╝čŗą╣ ąĘą┤ąĄčüčī, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▓ąĄą┤čāčé čüąĄą▒čÅ ą▓ čüąĄčéąĖ ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗąĄ (slave) čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁč鹊čé ą┤ąĖąĘą░ą╣ąĮ čüčéą░čéąĖč湥ąĮ ą┐ąŠ čüą▓ąŠąĄą╣ ą┐čĆąĖčĆąŠą┤ąĄ, čćč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą╗čāčćąĖčéčī ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą║ąŠą┤ą░.
ąöąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮčŗą╣ ą║ąŠą┤ CANopen, ąĮą░ą┐ąĖčüą░ąĮąĮčŗą╣ ąĮą░ čÅąĘčŗą║ąĄ C, ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čĆą░ąĘą▒ąĖčé ąĮą░ ąŠčéą┤ąĄą╗čīąĮčŗąĄ čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĖ ąĘą░ą│ąŠą╗ąŠą▓ą║ąŠą▓. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ą▓čŗą▒čĆą░čéčī ą┤ą╗čÅ čüąĄą▒čÅ ąĮčāąČąĮčŗąĄ čüą╗čāąČą▒čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ čüąĄą╗ąĄą║čéąĖą▓ąĮąŠ čüąŠą▒čĆą░čéčī ą┤ą╗čÅ čüąĄą▒čÅ ą┐čĆąŠąĄą║čé, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčēąĖą╣ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝. ą¤ąŠą╗ąĮčŗą╣ čüą┐ąĖčüąŠą║ čäą░ą╣ą╗ąŠą▓ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 1.
ąÜąŠąĮąĄčćąĮąŠ, čĆąĄą░ą╗čīąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą░čüą┐ąĄą║čéčŗ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą▓čüąĄ ąĄčēąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ čüč鹥ą║ CANopen Stack ą┤ą░ąĄčé ą▒ą░ąĘčā, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ą╝ąŠąČąĮąŠ ą┐ąŠčüčéčĆąŠąĖčéčī čüą▓ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
ąóą░ą▒ą╗ąĖčåą░ 1.
| ąśą╝čÅ čäą░ą╣ą╗ą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CO_CANDRV.c |
ą£ąŠą┤čāą╗čī ą┤čĆą░ą╣ą▓ąĄčĆą░ ECAN. ąŁčéąĖ čäą░ą╣ą╗čŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą╝ąĄąĮąĄąĮčŗ ą┤čĆčāą│ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. |
| CO_CANDRV.h |
| CO_COMM.c |
ąĪą╗čāąČą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ (Communication Management). ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. |
| CO_COMM.h |
| CO_DEV.c |
ążą░ą╣ą╗čŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ (čāąĘą╗ą░ čüąĄčéąĖ CANopen). ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąŠčéčĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čŹčéąĖ čäą░ą╣ą╗čŗ, čćč鹊ą▒čŗ čāč湥čüčéčī čüą┐ąĄčåąĖčäąĖą║čā čāčüčéčĆąŠą╣čüčéą▓ą░. |
| CO_DEV.h |
| CO_DICT.c |
ąĪą╗ąŠą▓ą░čĆčī ąŠą▒čŖąĄą║č鹊ą▓ (Object Dictionary, OD). ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. |
| CO_DICT.h |
| CO_DICT.def |
| CO_MAIN.c |
ą×čüąĮąŠą▓ąĮčŗąĄ čüą╗čāąČą▒čŗ CANopen. ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. |
| CO_MAIN.h |
| CO_MEMIO.c |
ążčāąĮą║čåąĖąĖ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ OD. ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. |
| CO_MEMIO.h |
| CO_NMT.c |
ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĄčéčīčÄ CANopen. |
| CO_NMT.h |
| CO_NMTE.c |
ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ Node Guard, Heartbeat ąĖ Boot-up. |
| CO_NMTE.h |
| CO_PDO.c |
ą×čüąĮąŠą▓ąĮčŗąĄ čüą╗čāąČą▒čŗ PDO. |
| CO_PDO.h |
| CO_PDO1.c |
ąÜąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░ PDO. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą▓ č乊čĆą╝ą░č鹥 čłą░ą▒ą╗ąŠąĮą░, ą║ąŠč鹊čĆčŗą╣ čéčĆąĄą▒čāąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čćč鹊ą▒čŗ čāč湥čüčéčī čüą┐ąĄčåąĖčäąĖą║čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąöąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ą╝ąĄčüč鹥 čü ąŠčüąĮąŠą▓ąĮčŗą╝ąĖ čäą░ą╣ą╗ą░ą╝ąĖ čüą╗čāąČą▒ PDO. |
| CO_PDO1.h |
| CO_PDO2.c |
| CO_PDO2.h |
| CO_PDO3.c |
| CO_PDO3.h |
| CO_PDO4.c |
| CO_PDO4.h |
| CO_SDO1.c |
ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüąĄčĆą▓ąĄčĆą░ SDO. |
| CO_SDO1.h |
| CO_SYNC.c |
ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
|
| CO_SYNC.h |
| CO_TOOLS.c |
ąśąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č乊čĆą╝ą░č鹊ą▓ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ą╝ąĄąČą┤čā čüčéą░ąĮą┤ą░čĆč鹊ą╝ Microchip ąĖ čüčéą░ąĮą┤ą░čĆč鹊ą╝ CANopen. ą¦č鹊ą▒čŗ čāą╗čāčćčłąĖčéčī ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┐čĆąŠčåąĄčüčüą░, ą▓čüąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ COB-ID čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄ ą▓ č乊čĆą╝ą░č鹥 Microchip. ąÜąŠą│ą┤ą░ COB-ID ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ ąĘą░ą┐čĆąŠčüčā, ąŠąĮ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓čŗą▓ą░ąĄčéčüčÅ ą▓ č乊čĆą╝ą░čé CANopen. |
| CO_TOOLS.h |
| CO_ABERR.h |
ą×ą▒čēąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąŠčłąĖą▒ąŠą║. ąóčĆąĄą▒čāąĄčéčüčÅ ą▓čüąĄą╝ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝ąĖ. |
[ą£ąŠą┤ąĄą╗čī ą║ąŠą┤ą░ firmware CANopen]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (firmware) čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ą▓ 3 čāčĆąŠą▓ąĮčÅčģ, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 1. ąĪą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī čŹč鹊 ą┤čĆą░ą╣ą▓ąĄčĆ ECAN, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣ ą░ą▒čüčéčĆą░ą│ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ CAN. ąŻčĆąŠą▓ąĄąĮčī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ čŹč鹊 ą│ą╗ą░ą▓ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ą║ą░ąČą┤ąŠą╣ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
ą¤ąŠą╝ąĖą╝ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖą╝ąĄąĄčéčüčÅ čéą░ą║ąČąĄ čüą╗ąŠą▓ą░čĆčī ąŠą▒čŖąĄą║č鹊ą▓ CANopen (OD). ąÆ čüčāčēąĮąŠčüčéąĖ ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĘą░ ą┐čĆąĄą┤ąĄą╗ą░ą╝ąĖ ąŠą▒čŖąĄą║čéą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ, ąĖ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ SDO.

ąĀąĖčü. 1. ąæą░ąĘąŠą▓ą░čÅ ą╝ąŠą┤ąĄą╗čī firmware čüč鹥ą║ą░ CANopen.
ąöčĆą░ą╣ą▓ąĄčĆ. ąØą░ ąĮąĖąČąĮąĄą╝ čāčĆąŠą▓ąĮąĄ čüč鹥ą║ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆ ECAN ą║ąŠč鹊čĆčŗą╣ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčéčüčÅ ą║ą░ą║ ą░ą▒čüčéčĆą░ą│ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü. ą×ąĮ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ ąĖčüčģąŠą┤ąĮčŗčģ čäą░ą╣ą╗ą░čģ CO_CANDRV.c ąĖ CO_CANDRV.h.
ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüčÄ čüą▓čÅąĘą░ąĮąĮčāčÄ čü ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ ECAN čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī, ąĖ čāą┤ąŠą▒ąĮąŠ ą░ą▒čüčéčĆą░ą│ąĖčĆčāąĄčéčüčÅ ąŠčé ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN. ąöą░ą╗čīčłąĄ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÅą╝ąĖ. ą£ąĄąĮąĄą┤ąČąĄčĆ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ ąŠą▒čēąĄą│ąŠ ąŠą▒čŖąĄą║čéą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ą×ąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĘą░čģą▓ą░čé ą╗čÄą▒čŗčģ čüąŠą▒čŗčéąĖą╣ ąĖąĘ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖ ą▓ąĄčĆčģąĮąĖčģ čāčĆąŠą▓ąĮąĄą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ ą┤ąĖčüą┐ąĄčéč湥čĆąĖąĘąĖčĆčāąĄčé ąĖčģ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╝ąĖ sub-ąŠą▒čŖąĄą║čéą░ą╝ąĖ ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ. ąÆ čüčāčēąĮąŠčüčéąĖ ąŠčéą║čĆčŗčéąĖąĄ, ąĘą░ą║čĆčŗčéąĖąĄ, ą┐ąĄčĆąĄą┤ą░čćą░ ą▓ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā ąĖ ą┐čĆąĖąĄą╝ ąĖąĘ ąĮąĄčæ - ą▓čüąĄ čŹč鹊 ąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą╝ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, ą║ąŠč鹊čĆčŗą╣ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čäą░ą╣ą╗ą░čģ CO_COMM.c ąĖ CO_COMM.h.
ą£ąĄąĮąĄą┤ąČąĄčĆ ąĘąĮą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą║ą░ą║ ą║ą░ąČą┤ąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, čéą░ą║ ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠąĮ ą╝ąŠąČąĄčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ ą║ąŠąĮąĄčćąĮčŗą╝ č鹊čćą║ą░ą╝, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĮą░ ąŠčüąĮąŠą▓ą░ąĮąĖąĖ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ąĖą╗ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ.
ąöčĆčāą│ą░čÅ čäčāąĮą║čåąĖčÅ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ - ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą┤ąĮąŠą▒ą░ą╣čéąĮąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ "handle", ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, čćč鹊ą▒čŗ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░čéčī čüąŠą▒čŗčéąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŁč鹊čé handle ąĖą╝ąĄąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčāčÄ čüčéčĆčāą║čéčāčĆčā, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčāčÄ ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ; ąŠąĮą░ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāčüą║ąŠčĆčÅąĄčé ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ 11-ą▒ąĖčéąĮąŠą│ąŠ ąĖą╗ąĖ 29-ą▒ąĖčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ CAN, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ą░čÅ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĮčāąČąĮą░ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąÜąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ. ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ CANopen ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║. ąØąĖąČąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ 5 ąŠą▒čŖąĄą║č鹊ą▓ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, ą║ąŠč鹊čĆčŗąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ; ą▓ ą▒čāą┤čāčēąĄą╝ ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąŠčüčéčāą┐ąĮčŗ ąĖ ą┤čĆčāą│ąĖąĄ ąŠą▒čŖąĄą║čéčŗ.
ŌĆó ąĪąĄčĆą▓ąĄčĆ SDO ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (Default Server SDO)
ŌĆó ąöąŠ 4 čüčéą░čéąĖč湥čüą║ąĖčģ PDO
ŌĆó ą¤ąŠčéčĆąĄą▒ąĖč鹥ą╗čī čüąŠąŠą▒čēąĄąĮąĖą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
ŌĆó ą¤ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ NMT
ŌĆó Node Guard ąĖą╗ąĖ Heartbeat
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čüąĄčĆą▓ąĄčĆ SDO ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąóąĄčĆą╝ąĖąĮ "čüąĄčĆą▓ąĄčĆ" ą▓ ą┤ą░ąĮąĮąŠą╝ ą║ąŠąĮč鹥ą║čüč鹥 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ąŠą┤ čüąĄčĆą▓ąĄčĆą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ą░ą║ąĖąĄ-č鹊 ąĘą░ą┐čĆąŠčüčŗ ą║ą╗ąĖąĄąĮčéą░ SDO (ąŠą▒čŗčćąĮąŠ čŹč鹊 ą╝ą░čüč鹥čĆ čüąĄčéąĖ CANopen). ą¤čāčéčī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ SDO ą┐čĆčÅą╝ąŠ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ OD; čüąŠąŠą▒čēąĄąĮąĖčÅ SDO čüąŠą┤ąĄčƹȹ░čé ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ čüą▓čÅąĘčŗą▓ą░ąĄčé SDO čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ąŠą▒čŖąĄą║č鹊ą╝. ąöą░ąĮąĮčŗąĄ ą║ą░ąČą┤ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ąĄą║ąŠą┤ąĖčĆčāčÄčéčüčÅ, ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ ąĮą░ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéčī ąĖ (ąĄčüą╗ąĖ ąŠąĮąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ) ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą║ą░ą║ čüąŠą▒čŗčéąĖąĄ.
ąÆ čüčāčēąĮąŠčüčéąĖ ąĘą┤ąĄčüčī čĆą░ą▒ąŠčéą░čÄčé 2 ąŠčüąĮąŠą▓ąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ: čćč鹥ąĮąĖąĄ (read) ąĖ ąĘą░ą┐ąĖčüčī (write). ąÜą░ąČą┤ą░čÅ ą┐ąŠą╗ąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ SDO (ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé čüąŠčüč鹊čÅčéčī ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣) ą▒čāą┤ąĄčé ą╗ąĖą▒ąŠ čćąĖčéą░čéčī, ą╗ąĖą▒ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąŠą┤ąĖąĮ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé OD. ą×ą▒čŖąĄą║čé SDO ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĖčüčģąŠą┤ąĮčŗčģ čäą░ą╣ą╗ą░čģ CO_SDO1.c ąĖ CO_SDO1.h.
ą¤čāčéčī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO (Process Data Object) ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąŠč鹊ą▒čĆą░ąČąĄąĮ ąĮą░ ąŠą▒čŖąĄą║čé (ąĖą╗ąĖ ąŠą▒čŖąĄą║čéčŗ) ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐čāčéčī ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ąĖ ą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąĮąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ąĮąĖą║ą░ą║ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐čāčéąĖ. ąÆ čüčāčēąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗąĄ PDO ą▓ąĮčāčéčĆąĄąĮąĮąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮčŗ ąĮą░ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čŖąĄą║č鹊ą▓ (ą┐ąŠ-čĆčāčüčüą║ąĖ ą╝ąŠąČąĮąŠ čüą║ą░ąĘą░čéčī čéą░ą║: ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĄčüčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ąĖ ą┤ą░ąĮąĮčŗąĄ čŹčéąĖčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą┐čĆąĖčüčāčüčéą▓čāčÄčé ą▓ PDO). ąöą░ąĮąĮčŗąĄ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ą╗ąĖą▒ąŠ čüčéą░čéąĖč湥čüą║ąĖ (ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąŠąĄą║čéą░), ą╗ąĖą▒ąŠ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ (ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╝ą░ąĮą┤, ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ čüąĄčĆą▓ąĄčĆčā SDO). ą×ą┤ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ą▓ čüąĄą▒ąĄ ą┤ą░ąĮąĮčŗąĄ ą▒ąŠą╗ąĄąĄ č湥ą╝ ąŠą┤ąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąÜąŠą┤ firmware, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╣ čü čŹčéąĖą╝ ą░ą┐ąĮąŠčāč鹊ą╝, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 4 ąŠą▒čŖąĄą║čéą░ PDO ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąÆčüąĄ čüą╗čāąČą▒čŗ PDO ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą▓ ąĖčüčģąŠą┤ąĮčŗčģ čäą░ą╣ą╗ą░čģ CO_PDO.c ąĖ CO_PDO.h. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäą░ą╣ą╗čŗ CO_PDOn.c ąĖ CO_PDOn.h (ąĘą┤ąĄčüčī n ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī ąĘąĮą░č湥ąĮąĖąĄ ąŠčé 1 ą┤ąŠ 4) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąŠčéą┤ąĄą╗čīąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ PDO. ą×ąĮąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą▓ č乊čĆą╝ąĄ čłą░ą▒ą╗ąŠąĮą░, ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ ą┤ą╗čÅ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĄąĮąĖčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄąĄ ą║ąŠą╝ą░ąĮą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĄčéčīčÄ (Network Management, čüąŠą║čĆą░čēąĄąĮąĮąŠ NMT), ą║ą░ą║ čŹč鹊ą│ąŠ čéčĆąĄą▒čāąĄčé čüčéą░ąĮą┤ą░čĆčé CANopen. ą×ą▒čŖąĄą║čé NMT ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖą╗ąĖ čüą▒čĆąŠčüą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ/ąĖą╗ąĖ ąĄą│ąŠ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ąØą░ čĆąĖčü. 2 ą┐ąŠą║ą░ąĘą░ąĮą░ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ CANopen, ą░ čéą░ą║ąČąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘčŗą▓ą░čÄčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄčģąŠą┤ąŠą▓ ą╝ąĄąČą┤čā čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ.
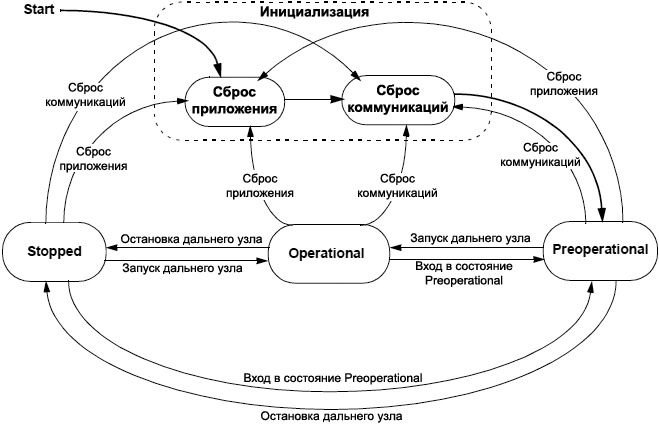
ąĀąĖčü. 2. ąÉą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ą░čÅ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ CANopen.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄ čüąĮą░ą▒ąČąĄąĮąĮčŗąĄ ą╝ąĄčéą║ą░ą╝ąĖ ą┐ąĄčĆąĄčģąŠą┤čŗ (ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▒ąŠą╗ąĄąĄ č湥čĆąĮčŗą╝ąĖ ą╗ąĖąĮąĖčÅą╝ąĖ) čÅą▓ą╗čÅčÄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╝ąĖ ąĖ ąĮąĄ čéčĆąĄą▒čāčÄčé ą▓ąĮąĄčłąĮąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ.
ą×ą▒čĆą░ą▒ąŠčéą║ą░ NMT ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą▓ ąĖčüčģąŠą┤ąĮčŗčģ čäą░ą╣ą╗ą░čģ CO_NMT.c ąĖ CO_NMT.h.
ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅą╝ąĖ CANopen čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ ą▒čŗą╗ą░ ąŠą┤ąĮą░ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ Node Guard ąĖą╗ąĖ Heartbeat (čŹč鹊 2 čĆą░ąĘąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĮąĖčģ). ąśą╝ąĄąĄčéčüčÅ ą║ąŠą┤ ąŠą▒ąŠąĖčģ čŹčéąĖčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓; ąŠą┤ąĮą░ą║ąŠ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ąĘčĆąĄčłąĄąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ąĖąĘ čŹčéąĖčģ ą╝ąĄč鹊ą┤ąŠą▓ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ čāąĘą╗ąŠą▓ čüąĄčéąĖ (čŹč鹊 čéą░ą║ąČąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅą╝ąĖ).
ążčāąĮą║čåąĖąŠąĮą░ą╗ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ Node Guard ąĖ Heartbeat ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą▓ ąĖčüčģąŠą┤ąĮčŗčģ čäą░ą╣ą╗ą░čģ CO_NMTE.c ąĖ CO_NMTE.h.
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąŠą┤ąĖąĮ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čī čüąŠąŠą▒čēąĄąĮąĖą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (synchronization consumer, SYNC). ąĪąŠąŠą▒čēąĄąĮąĖąĄ SYNC ą┐čĆąŠčüč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ čüąŠą▒čŗčéąĖąĄ, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą╗čÄą▒čŗąĄ čüąĖąĮčģčĆąŠąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ PDO.
ąśčüčģąŠą┤ąĮčŗąĄ čäą░ą╣ą╗čŗ CO_SYNC.c ąĖ CO_SYNC.h čüąŠą┤ąĄčƹȹ░čé ą▓ čüąĄą▒ąĄ ąŠą▒čŖąĄą║čé SYNC.
[ąĪą╗ąŠą▓ą░čĆčī ąŠą▒čŖąĄą║č鹊ą▓ CANopen (OD)]
ążčāąĮą║čåąĖąĖ OD ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čåąĄąĮčéčĆą░ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčāčÄ ą▒ą░ąĘčā ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜą░ąČą┤čŗą╣ ąŠą▒čŖąĄą║čé ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą▓ OD ą┐ąŠ ąĖąĮą┤ąĄą║čüčā, sub-ąĖąĮą┤ąĄą║čüčā, ą▓ą╝ąĄčüč鹥 čü ąĮąĄą║ąŠč鹊čĆąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠ ą┤ąŠčüčéčāą┐ąĄ. ą×ą▒čŖąĄą║č鹊ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ ą┐čĆąŠčüčéčŗą╝ ą▒ą░ą╣č鹊ą╝, čéą░ą║ ąĖ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮąŠą╣ čüčéčĆčāą║čéčāčĆąŠą╣ ą┤ą░ąĮąĮčŗčģ. ąóą░ą▒ą╗ąĖčåą░ 2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▒ą░ąĘąŠą▓čŗąĄ ąŠą▒ą╗ą░čüčéąĖ OD, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā, ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ CANopen.
ąóą░ą▒ą╗ąĖčåą░ 2. ąöąĖą░ą┐ą░ąĘąŠąĮčŗ ąĖąĮą┤ąĄą║čüąŠą▓ ąŠą▒ą╗ą░čüč鹥ą╣ ą▓ąĮčāčéčĆąĖ OD.
| ąśąĮą┤ąĄą║čü |
ą×ą▒čŖąĄą║čé |
| 0001-001F |
ąĪčéą░čéąĖč湥čüą║ąĖą╣ čéąĖą┐ ą┤ą░ąĮąĮčŗčģ. |
| 0020-003F |
ąÜąŠą╝ą┐ą╗ąĄą║čüąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ. |
| 0040-005F |
ąóąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. |
| 0060-007F |
ąĪčéą░čéąĖč湥čüą║ąĖąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠčäąĖą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| 0080-009F |
ąÜąŠą╝ą┐ą╗ąĄą║čüąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠčäąĖą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| 00A0-0FFF |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
| 1000-1FFF |
ą×ą▒ą╗ą░čüčéčī ą┐čĆąŠčäąĖą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ. |
| 2000-5FFF |
ą×ą▒ą╗ą░čüčéčī ą┐čĆąŠčäąĖą╗čÅ, čüą┐ąĄčåąĖčäąĖčćąĮąŠą│ąŠ ą┤ą╗čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. |
| 6000-9FFF |
ą×ą▒ą╗ą░čüčéčī čüčéą░ąĮą┤ą░čĆčéąĖąĘąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐čĆąŠčäąĖą╗čÅ. |
| A000-FFFF |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąŠą▒čŖąĄą║č鹊ą▓ čüą╗ąŠą▓ą░čĆčÅ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ą×ą▒čŖąĄą║čéčŗ ąĖ OD".
ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĖąĮą┤ąĄą║čüą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮ ą┤ąŠčüčéčāą┐ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ąŠą▒čŖąĄą║čéčā. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ čüąĄčéąĖ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┤ąŠčüčéčāą┐ ą║ ąŠą▒čŖąĄą║čéčā ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā SDO ąĖą╗ąĖ PDO, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 1. ążčāąĮą║čåąĖąŠąĮą░ą╗ čüą╗ąŠą▓ą░čĆčÅ CANopen čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čäą░ą╣ą╗ą░čģ:
ŌĆó CO_DICT.c
ŌĆó CO_DICT.h
ŌĆó CO_DICT.def
ŌĆó CO_STD.def
ŌĆó CO_MFTR.def
ŌĆó CO_PDO.def
ą×ą▒čŖąĄą║čéčŗ SDO. ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ čéčĆąĄą▒čāčÄčéčüčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ "čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąŠą▒čŖąĄą║čéčŗ čāčüčéčĆąŠą╣čüčéą▓ą░" (Standard Device Objects, SDO), čģąŠčéčÅ ąŠąĮąĖ ąĮąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 1. ąŁčéąĖ ąŠą▒čŖąĄą║čéčŗ SDO ą▓ą║ą╗čÄčćą░čÄčé ą▓ čüąĄą▒ąĄ čéą░ą║ąĖąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ą░ą║ čüčéą░čéčāčü, ąĖą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą▓ąĄčĆčüąĖąĖ.
SDO ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą▓ ąĖčüčģąŠą┤ąĮčŗčģ čäą░ą╣ą╗ą░čģ CO_DEV.c ąĖ CO_DEV.h.
[ą×ą▒čŖąĄą║čéčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ]
ąØą░ ą▓ąĄčĆčģąĮąĄą╝ čāčĆąŠą▓ąĮąĄ čüč鹥ą║ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ąŠą▒čŖąĄą║čé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čü čāč湥č鹊ą╝ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ ą▓ą║ą╗čÄč湥ąĮ ą▓ OD. ąĀąĄą░ą╗čīąĮčŗąĄ ąŠą▒čŖąĄą║čéčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ ąĖ ą┐ąĖčłčāčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ąĖ ą┤ą╗čÅ čüą┐ąĄčåąĖčäąĖą║ąĖ ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąöčĆčāą│ąŠą╣ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą║ąŠą┤ Firmware. ąśą╝ąĄčÄčéčüčÅ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤čĆčāą│ąĖąĄ čäą░ą╣ą╗čŗ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čéąĖą┐ąŠą▓ ą┤ą░ąĮąĮčŗčģ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║, ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čäčāąĮą║čåąĖą╣ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ COB-ID. ąÆąŠčé ąŠąĮąĖ:ŌĆó CO_TOOLS.c
ŌĆó CO_TOOLS.h
ŌĆó CO_MEMIO.c
ŌĆó CO_MEMIO.h
ŌĆó CO_ABERR.h
ŌĆó CO_TYPES.h
[ąØą░čüčéčĆąŠą╣ą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ]
ąÆčüąĄą│ąŠ ąĖą╝ąĄąĄčéčüčÅ 40 ąŠą┐čåąĖą╣ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░, čāčćąĖčéčŗą▓ą░čÄčēąĖčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ čŹčéąĖčģ ąŠą┐čåąĖą╣ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ą║č鹊čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčé čüą║ąŠčĆąŠčüčéčīčÄ ą▒ąĖčé CAN (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ čüąĄą│ą╝ąĄąĮčéą░ čäą░ąĘčŗ, čłąĖčĆąĖąĮą░ čüą║ą░čćą║ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čüą║ąŠčĆąŠčüčéąĖ, ąĖ čé. ą┤.). ąÆčüąĄ čŹčéąĖ ąŠą┐čåąĖąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3.
ąóą░ą▒ą╗ąĖčåą░ 3. ą×čüąĮąŠą▓ąĮčŗąĄ ąŠą┐čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ.
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_BITRATE0_BRGCON1 |
ąØą░čüčéčĆąŠą╣ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖčÅ BRGCON čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅą╝ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ BRGCON, ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą▓čüąĄ čéčĆąĄą▒čāąĄą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ą╗čÅ čüą║ąŠčĆąŠčüčéąĖ čłąĖąĮčŗ CAN. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čüą╗ąĄą┤čāąĄčé ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝čā ą┤ą░čéą░čłąĖčéčā ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÄ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓. |
| CAN_BITRATE0_BRGCON2 |
| CAN_BITRATE0_BRGCON3 |
| CAN_BITRATEn_BRGCON1 |
ąØą░čüčéčĆąŠą╣ą║ą░ čüą║ąŠčĆąŠčüčéąĖ n, ą│ą┤ąĄ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┤ą╗čÅ n čüąŠčüčéą░ą▓ą╗čÅąĄčé ąŠčé 1 ą┤ąŠ 8. ąŁčéąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ą╝ąĄčüč鹊 ąĮą░čüčéčĆąŠąĄą║ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąóą░ą║ ąČąĄ, ą║ą░ą║ ąĖ čü ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĘą┤ąĄčüčī ąĘąĮą░č湥ąĮąĖčÅ BRGCON čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ BRGCON. |
| CAN_BITRATEn_BRGCON2 |
| CAN_BITRATEn_BRGCON3 |
| CAN_BITRATEn |
ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░čüčéčĆąŠą╣ą║čā čüą║ąŠčĆąŠčüčéąĖ n. |
| CAN_MAX_RCV_ENDP |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ą┐čĆąĖąĄą╝ą░ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ 8, čćč鹊ą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓čüąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą┐čĆąĖąĄą╝ą░ čüč鹥ą║ą░ CANopen. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 16. |
| CO_NUM_OF_PDO |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ PDO. ąöąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠčé 1 ą┤ąŠ 4. |
| CO_SPEED_UP_CODE |
ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ čāčćą░čüčéą║ąĖ ą║ąŠą┤ą░ ą▓ ą▓ąĖą┤ąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą│ąŠ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čāčüčéą░ąĮąŠą▓ą║ąĖ čŹč鹊ą╣ ąŠą┐čåąĖąĖ ą┐ąŠą▓čŗčłą░ąĄčéčüčÅ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░. |
| CO_SDO1_MAX_RX_BUF |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą▒čāč乥čĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ąŠą▒čŖąĄą║č鹊ą╝ SDO ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąźąŠčĆąŠčłąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĘą░ą┤ą░ąĄčéčüčÅ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā čüą░ą╝ąŠą│ąŠ ą▒ąŠą╗čīčłąŠą│ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠą│ąŠ ąŠą▒čŖąĄą║čéą░. |
| CO_SDO1_MAX_SEG_TIME |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ SDO. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĮąŠą│ąŠ čüąĄą│ą╝ąĄąĮčéą░ ą┐ąĄčĆąĄą┤ čüą▒čĆąŠčüąŠą╝ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖčÅ SDO. |
ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ. ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ CANopen ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čŖąĄą║č鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāčÄčé ą║ąŠąĮą║čĆąĄčéąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąśąĮč乊čĆą╝ą░čåąĖčÅ, čüą┐ąĄčåąĖčäąĖč湥čüą║ą░čÅ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą┐čĆąŠčüč鹊ą╣ ąĮą░ą▒ąŠčĆ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ OD. ąŁčéą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ą║ą╗čÄč湥ąĮą░ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ąóą░ą▒ą╗ąĖčåą░ 4 ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé čŹčéąĖ ąŠą▒čŖąĄą║čéčŗ.
ąóą░ą▒ą╗ąĖčåą░ 4. ąĪčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąŠą▒čŖąĄą║čéčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ (Standard Device Objects, SDO).
| ąśą╝čÅ ąŠą▒čŖąĄą║čéą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| rom unsigned long rCO_DevType |
ąóąĖą┐ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| rom unsigned char rCO_DevName[] |
ąśą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| rom unsigned char rCO_DevHardwareVer[] |
ąÆąĄčĆčüąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. |
| rom unsigned char rCO_DevSoftwareVer[] |
ąÆąĄčĆčüąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ. |
| rom unsigned char rCO_DevIdentityIndx |
ąśąĮą┤ąĄą║čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| rom unsigned long rCO_DevVendorID |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. |
| rom unsigned long rCO_DevProductCode |
ąÜąŠą┤ ąĖąĘą┤ąĄą╗ąĖčÅ. |
| rom unsigned long rCO_DevRevNo |
ąØąŠą╝ąĄčĆ čĆąĄą▓ąĖąĘąĖąĖ. |
| rom unsigned long rCO_DevSerialNo |
ąĪąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| unsigned char uCO_DevErrReg |
ąĀąĄą│ąĖčüčéčĆ ąŠčłąĖą▒ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| unsigned long uCO_DevManufacturerStatReg |
ąĀąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░, čüą┐ąĄčåąĖčäąĖčćąĮčŗą╣ ą┤ą╗čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. |
[ąØą░ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ]
ą¤čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąŠą┤ąĄą╗ą░ąĮą░ ąĘąĮą░čćąĖč鹥ą╗čīąĮą░čÅ čĆą░ą▒ąŠčéą░, ą║ą░čüą░čÄčēą░čÅčüčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅą╝ąĖ CANopen. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą║ąŠą┤ čāą┐čĆąŠčēą░ąĄčé čŹč鹊čé čéčĆčāą┤, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ąŠą▒čĆą░ą▒ąŠčéą║čā ąĮąĄą║ąŠč鹊čĆčŗčģ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ąÜčĆąŠą╝ąĄ čĆą░ą▒ąŠčéčŗ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čüą░ą╝ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čéą░ą║ąČąĄ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą║ąŠą┤ą░:
ŌĆó ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąŠą▒čŖąĄą║č鹊ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ OD
ŌĆó ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┤ą╗čÅ čüą╗ąŠąČąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓
ŌĆó ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ čäčāąĮą║čåąĖą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ čüąŠą▒čŗčéąĖą╣ CANopen
ŌĆó ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ PDO
ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąĮą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝ąŠą╝ firmware. ą×ą┐ąĖčüą░ąĮčŗ ą▓čüąĄ čäčāąĮą║čåąĖąĖ čüąŠą▒čŗčéąĖą╣ ąĖ čüą╗čāąČą▒čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą×čüąĮąŠą▓ąĮčŗąĄ čüą╗čāąČą▒čŗ. ą¤čĆąŠč鹊ą║ąŠą╗ CANopen ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ mCO_InitAll(). ą×ąĮą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüą▒čĆąŠčü ą┤čĆą░ą╣ą▓ąĄčĆą░ CAN, ąĖ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĘą░ą│čĆčāąĘą║ąĖ (boot-up message). ą×ą┤ąĮą░ą║ąŠ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CANopen ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ąĮą░ą┤ą╗ąĄąČą░čēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čüą┐ąĄčåąĖčäąĖą║ąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĘąĮą░č湥ąĮąĖčÅ node_id (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čāąĘą╗ą░) ąĖ baudrate (čüą║ąŠčĆąŠčüčéčī ą┐ąŠ čłąĖąĮąĄ CAN) ą║čĆąĖčéąĖčćąĮčŗ ą┤ą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ. ąÜ ą┤čĆčāą│ąĖą╝ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ ąŠčéąĮąŠčüčÅčéčüčÅ ąŠą┐čåąĖąĖ Node Guard / Heartbeat, ąŠą▒čŖąĄą║čé ąŠčłąĖą▒ąŠą║ čāčüčéčĆąŠą╣čüčéą▓ą░, ą░ čéą░ą║ąČąĄ čüą┐ąĄčåąĖčäąĖčćąĮčŗą╣ ą┤ą╗čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ čüčéą░čéčāčü.
ą¤ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą▓čüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č湥čĆąĄąĘ čäčāąĮą║čåąĖąĖ mCO_ProcessAllEvents() ąĖ mCO_ProcessAllTimeEvents(). ą¤ąĄčĆą▓ą░čÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ąĖą╗ ą┐čĆąĖąĄą╝ąŠą╝ čüąŠąŠą▒čēąĄąĮąĖą╣ CAN ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ąÆč鹊čĆą░čÅ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÄ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║, ą║ąŠč鹊čĆą░čÅ ąĖą╝ąĄąĄčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čéą░ą║ąĖąĄ ą║ą░ą║ NMTE (Heartbeat/Node Guard) ąĖ ą╗čÄą▒ą░čÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ PDO. ążčāąĮą║čåąĖčÅ mCO_ProcessAllEvents() ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┤ąŠčüčéą░č鹊čćąĮąŠ čćą░čüč鹊, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą╝ąŠąČąĮąŠ ąĘą░čģą▓ą░čéąĖčéčī ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░. ążčāąĮą║čåąĖčÅ mCO_ProcessAllTimeEvents() ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ čü ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ 1 ą╝čü.
ąÆ ąŠą┐ąĖčüą░ąĮąĮąŠą╝ čüč鹥ą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą▓ąŠą╣ č乊čĆą╝ą░čé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ CAN, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗą╣ ą║ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ CAN ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIC, čŹč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ č乊čĆą╝ą░čé MCHP (ąĖą╗ąĖ č乊čĆą╝ą░čé Microchip). ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą▓ č乊čĆą╝ą░č鹥 CANopen ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą▓ č乊čĆą╝ą░č鹥 MCHP ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ.
ąæą░ą╣čé: B3 B2 B1 B0
-------- -------- -------- --------
ążąŠčĆą╝ą░čé CANopen 28 .. 24 23 .. 16 15 .. 8 7 .. 0
nmtxxxxx xxxxxxxx xxxxxxxx xxxxxxxx
MCHP format 7 .. 0 15 .. 8 20 .. 16 28 .. 21
xxxxxxxx xxxxxxxx xxxntmxx xxxxxxxx
ążąŠčĆą╝ą░čé CANopen 10 .. 8 7 .. 0
nmt----- -------- -----xxx xxxxxxxx
MCHP format 3 .. 0 10 .. 3
-------- -------- xxxntm-- xxxxxxxx
n = ą▒ąĖčé ąŠą┐čåąĖą╣ 1
m = ą▒ąĖčé ąŠą┐čåąĖą╣ 2
t = čéąĖą┐ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (standard = 0, extended = 1)
void mCO_ProcessAllEvents(void)
ąŁč鹊 ąŠčüąĮąŠą▓ąĮą░čÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ. ą×čéčüčÄą┤ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆąĄ ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ čéą░ą║ čćą░čüč鹊, ą║ą░ą║ čŹč鹊 č鹊ą╗čīą║ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą╗čÄą▒čŗąĄ čüąŠą▒čŗčéąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ. ąØą░čüą║ąŠą╗čīą║ąŠ čćą░čüč鹊 čŹč鹊 ąĮčāąČąĮąŠ - čüąĖą╗čīąĮąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąŠčéą▓ąĄčéąĖčéčī ąĮą░ ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ąŠ ąĮą░čüčéčāą┐ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ:
void main(void)
{
// ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą╗čÄą▒ąŠą╣ čüą┐ąĄčåąĖčäąĖčćąĮąŠą╣ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ:
TimerInit(); // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░
mSYNC_SetCOBID(0x12); // ąŻčüčéą░ąĮąŠą▓ą║ą░ SYNC COB-ID (ą▓ č乊čĆą╝ą░č鹥 MCHP)
mCO_SetNodeID(0x01); // ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čāąĘą╗ą░
mCO_SetBaud(0x00); // ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ
mNMTE_SetHeartBeat(0x00); // ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ heartbeat
mNMTE_SetGuardTime(0x00); // ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ guard time
mNMTE_SetLifeFactor(0x00); // ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ life time
mCO_InitAll(); // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ CANopen ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░
while(1)
{
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖą╣ CANopen:
mCO_ProcessAllEvents();
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čäčāąĮą║čåąĖą╣
...
if (TimerIsOverflowEvent())
{
// ąĪąŠą▒čŗčéąĖąĄ čéą░ą╣ą╝ąĄčĆą░: čüčÄą┤ą░ ą┐ąŠą┐ą░ą┤ą░ąĄą╝ ą║ą░ąČą┤čāčÄ 1 ą╝čü.
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüą▓čÅąĘą░ąĮąĮčŗčģ čü čéą░ą╣ą╝ąĄčĆąŠą╝ čüąŠą▒čŗčéąĖą╣:
mCO_ProcessAllTimeEvents();
// ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗčģ ą║ ąŠčéčüč湥čéčā čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ:
...
}
}
}
void mCO_ProcessAllTimeEvents(void)
ąŁč鹊 ąŠčüąĮąŠą▓ąĮą░čÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čĆąĄą░ą╗čīąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ąĮąĖąĘą║ąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ čü ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ 1 ą╝čü. ąĪąŠą▒čŗčéąĖčÅ ą▓čŗčüąŠą║ąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ (ąŠą▒čŗčćąĮąŠ ą▓ ąŠą▒ą╗ą░čüčéąĖ ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤) ą┤ąŠą╗ąČąĮčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ. ąÆąĮčāčéčĆąĄąĮąĮąĄ čŹčéą░ čäčāąĮą║čåąĖčÅ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓čüąĄ ąŠą▒čŖąĄą║čéčŗ čüč鹥ą║ą░, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐ąŠą╗čāčćąĖą╗ąĖ čüą▓ąŠąĄ čüąŠą▒čŗčéąĖąĄ čéąĖą║ą░.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ ą▓čĆąĄąĘą║ąĄ, ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ mCO_ProcessAllEvents.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čüąĄčģ ąĮą░čćą░ą╗čīąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠą▒čŖąĄą║č鹊ą▓. ą×ąĮą░ ą▓čŗą┤ą░ąĄčé čüą▒čĆąŠčü ą┤čĆą░ą╣ą▓ąĄčĆčā CAN, ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé ąŠčéą║čĆčŗčéąĖąĄ čéčĆąĄą▒čāąĄą╝čŗčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓čŗąĘąŠą▓ą░ čāąĘąĄą╗ ą┐ąŠčÅą▓ąĖčéčüčÅ ą▓ čüąĄčéąĖ, ąĖ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ boot-up.
ążčāąĮą║čåąĖčÅ mCO_InitAll ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čÅą▓ą╗čÅąĄčéčüčÅ ą╝ą░ą║čĆąŠčüąŠą╝-ąŠą▒ąĄčĆčéą║ąŠą╣ ąĮą░ą┤ čäčāąĮą║čåąĖąĄą╣ _CO_COMMResetEventManager. ą×ąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ ą│ą╗ą░ą▓ąĮčŗą╣ čåąĖą║ą╗ main ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤čĆąĖą╝ąĄčĆ:
void main(void)
{
// ąÆ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ
// (ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO, ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąĖ čé. ą┐.):
...
TimerInit(); // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░
mSYNC_SetCOBID(0x1000); // ąŻčüčéą░ąĮąŠą▓ą║ą░ SYNC COB-ID (ą▓ č乊čĆą╝ą░č鹥 MCHP)
mCO_SetNodeID(0x02); // ąŻčüčéą░ąĮąŠą▓ą║ą░ Node ID
mCO_SetBaud(0x00); // ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ CAN
mNMTE_SetHeartBeat(20000); // ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ heartbeat
mNMTE_SetGuardTime(0000); // ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ guard time
mNMTE_SetLifeFactor(0x00); // ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ life time
DemoInit(); // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ AN945
mCO_InitAll(); // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüč鹥ą║ą░ CANopen ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░, ą▒čāą┤ąĄčé
// ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ boot-up
while(1)
{
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖą╣ CANopen:
mCO_ProcessAllEvents();
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖą╣, čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
DemoProcessEvents();
// ąĪąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąŠąĖčüčģąŠą┤čÅčé čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ 1 ą╝čü:
if (TimerIsOverflowEvent())
{
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖą╣, čüą▓čÅąĘą░ąĮąĮčŗčģ čü čéą░ą╣ą╝ąĄčĆąŠą╝
mCO_ProcessAllTimeEvents();
}
}
}
void mCO_SetNodeID(unsigned char node_id)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čāąĘą╗ą░ node_id. ąŚąĮą░č湥ąĮąĖąĄ node_id ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čéąĖą┐ą░ unsigned char, ą│ą┤ąĄ čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ą▒ąĖčé čüą▒čĆąŠčłąĄąĮ (ąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ CANopen čĆąĄąĘąĄčĆą▓ąĖčĆčāąĄčé ąĘąĮą░č湥ąĮąĖąĄ 00h ą┤ą╗čÅ NodeID. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čāąĘą╗ą░ node_id ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 01h .. 7Fh ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ mCO_InitAll().
ą¤ą░čĆą░ą╝ąĄčéčĆ:
unsigned char node_id: ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čŹč鹊ą│ąŠ čāąĘą╗ą░, ą┤ąŠą┐čāčüčéąĖą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 01h ą┤ąŠ 7Fh.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ, ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ mCO_ProcessAllEvents.
unsigned char node_id mCO_GetNodeID(void)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ č鹥ą║čāčēąĄą│ąŠ ID, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čüč鹥ą║ąŠą╝. ąŚąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą║ą░ą║ unsigned char, ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 01h..7Fh.
void mCO_SetBaud(unsigned char bitrate)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī čüą║ąŠčĆąŠčüčéčī ą┐ąŠ čłąĖąĮąĄ ą┤ą╗čÅ čāąĘą╗ą░. ąŚąĮą░č湥ąĮąĖąĄ bitrate ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0..8 ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ. ąøčÄą▒ąŠąĄ ą┤čĆčāą│ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0. ąöąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą║ąŠąĮčüčéą░ąĮčéą░ą╝ąĖ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ CAN. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ mCO_InitAll().
ą¤ą░čĆą░ą╝ąĄčéčĆ:
unsigned char bitrate: ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čüą║ąŠčĆąŠčüčéąĖ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0..8.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ, ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ mCO_ProcessAllEvents.
unsigned char mCO_SetBaud(void)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī č鹥ą║čāčēčāčÄ ąĮą░čüčéčĆąŠą╣ą║čā čüą║ąŠčĆąŠčüčéąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ čŹčéąĖą╝ čāąĘą╗ąŠą╝. ąØą░čüčéčĆąŠą╣ą║ą░ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ unsigned char. ąóąŠčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ čüą║ąŠčĆąŠčüč鹥ą╣, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĄ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ CAN (čüą╝. čĆą░ąĘą┤ąĄą╗ "ąöčĆą░ą╣ą▓ąĄčĆ ECANŌäó").
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ, ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ mCO_ProcessAllEvents.
[ąĪąŠą▒čŗčéąĖčÅ ąĖ čüą╗čāąČą▒čŗ PDO]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüą░ąĮčŗ čäčāąĮą║čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ PDO. ąÆčüąĄ ąŠąĮąĖ ąĮčāąČąĮčŗ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čéą░ą║ąĖčģ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, ą║ą░ą║ ąŠčéą║čĆčŗčéąĖąĄ, ąĘą░ą║čĆčŗčéąĖąĄ ąĖ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čüąŠ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╝ąĖ ą║ąŠąĮąĄčćąĮčŗą╝ąĖ č鹊čćą║ą░ą╝ąĖ PDO.
ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ PDO. ąÜčĆąĖčéąĖč湥čüą║ąŠą╣ ąĘą░ą┤ą░č湥ą╣ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ CANopen čÅą▓ą╗čÅąĄčéčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ ąŠą▒čŖąĄą║č鹊ą▓ PDO. ąöąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĖąĮčÅčéčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ čĆąĄčłąĄąĮąĖčÅ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā č鹊ą│ąŠ, ą║ą░ą║ąĖąĄ čäčāąĮą║čåąĖąĖ ąĮčāąČąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī: ą▓čŗą▒ąŠčĆ ą╝ąĄąČą┤čā ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╝ ąĖ čüčéą░čéąĖč湥čüą║ąĖą╝ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄą╝ PDO (PDO mapping), ą▓čŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ąĮčāąČąĮąŠ ą╗ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓čĆąĄą╝čÅ ąĘą░ą┐čĆąĄčéą░ (inhibit time). ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ čŹč鹊ą│ąŠ čüč鹥ą║ą░ CANopen ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ą░ąĘąŠą▓čŗą╣ ąĮą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ PDO ą┤ą╗čÅ čéą░ą║ąŠą│ąŠ ą▓ąĖą┤ą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣, čü ą║ąŠč鹊čĆčŗą╝ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠą▒čĆą░ąĮ ą┐čĆąŠąĄą║čé.
ąÜčĆąĖčéąĖč湥čüą║ąĖą╝ąĖ ą╝ąŠą╝ąĄąĮčéą░ą╝ąĖ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ PDO čÅą▓ą╗čÅąĄčéčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ ą║ąŠą┤ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüą╗ąĄą┤čāčÄčēąĖčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓:
ŌĆó ąĪąŠą▒čŗčéąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO
ŌĆó ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ PDO (PDO Mapping)
ŌĆó ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ PDO
ŌĆó ąĪąŠą▒čŗčéąĖąĄ PDO (PDO Event) ąĖ ą▓čĆąĄą╝čÅ ąĘą░ą┐čĆąĄčéą░ (Inhibit time)
ąĪąŠą▒čŗčéąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO. ąŻ ą║ą░ąČą┤ąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą│ąŠ PDO ą▒čāą┤čāčé ą▓ ąĮą░ą╗ąĖčćąĖąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ čüąŠą▒čŗčéąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čéąĖą┐ąŠą▓čŗčģ ą░čüą┐ąĄą║č鹊ą▓ PDO. ąĪąŠą▒čŗčéąĖčÅ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ čŹč鹊 čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (callback), čāą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ OD ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ą░čüč鹥čĆ čüąĄčéąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąĘą░ą┐čĆąŠčü č湥čĆąĄąĘ SDO ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā, čćč鹊ą▒čŗ ą┐ąŠą╝ąĄąĮčÅčéčī čéąĖą┐ PDO (čüą╝. čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ čüčéą░ąĮą┤ą░čĆčéą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čéąĖą┐ą░ą╝ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ). ąŚą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ą▓ąĄčĆčģ č湥čĆąĄąĘ čüč鹥ą║ ą║ čüą╗ąŠą▓ą░čĆčÄ, ąĖ ą▓ ą║ąŠąĮąĄčćąĮąŠą╝ čüč湥č鹥 ą┐ąŠą┐ą░ą┤ą░ąĄčé ą║ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┤ąŠčüčéčāą┐ ą║ čéąĖą┐čā.
ą¤čĆąĖą╝ąĄčĆ 1 ąĖ ą¤čĆąĖą╝ąĄčĆ 2 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčé čüą▓čÅąĘčī ą╝ąĄąČą┤čā čüą╗ąŠą▓ą░čĆąĄą╝ OD ąĖ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠą╣ čäčāąĮą║čåąĖąĄą╣ CO_COMM_TPDO1_TypeAccessEvent(). ą¤čĆąĖą╝ąĄčĆ 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 菹╗ąĄą╝ąĄąĮčé čüą╗ąŠą▓ą░čĆčÅ. ą¤čĆąĖą╝ąĄčĆ 2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮčāčÄ callback-čäčāąĮą║čåąĖčÄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖą╝ąĄčĆ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čéąĖą┐ąŠą▓ 0..240, 254 ąĖ 255 (čéąĖą┐čŗ ą┐ąĄčĆąĄą┤ą░čć PDO ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 5). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĖ ąŠą┤ąĮąŠ ąĖąĘ čüąŠą▒čŗčéąĖą╣ ąĮąĄ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ čüąŠąĘą┤ą░čÄčéčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓ ą║ąŠą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░.
ą¤čĆąĖą╝ąĄčĆ 1, 菹╗ąĄą╝ąĄąĮčé PDO čüą╗ąŠą▓ą░čĆčÅ:
{0x1800,0x00,CONST,1,{(rom unsigned char *)&uDemoTPDO1Len}},\
{0x1800,0x01,RW | FUNC,4,{(rom unsigned char *)&CO_COMM_TPDO1_COBIDAccessEvent}},\
{0x1800,0x02,RW | FUNC,1,{(rom unsigned char *)&CO_COMM_TPDO1_TypeAccessEvent}}
ą¤čĆąĖą╝ąĄčĆ 2, ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ čüąŠą▒čŗčéąĖčÅ:
void CO_COMM_TPDO1_TypeAccessEvent(void)
{
unsigned char tempType;
switch (mCO_DictGetCmd())
{
//case DICT_OBJ_INFO:// ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ąŠą▒čŖąĄą║č鹥.
// // ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā ą▓ąĄčéą║čā
// // ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čüčéčĆčāą║čéčāčĆčŗ ą┤ą╗ąĖąĮąŠą╣, ą┤ąŠčüčéčāą┐ąŠą╝
// // ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ.
// break;
case DICT_OBJ_READ: // ą¦č鹥ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░.
// ąŚą░ą┐ąĖčüčī čéąĖą┐ą░ ą▓ ą▒čāč乥čĆ
*(uDict.obj->pReqBuf) = uDemoSyncSet;
break;
case DICT_OBJ_WRITE: // ąŚą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░.
tempType = *(uDict.obj->pReqBuf);
if ((tempType >= 0) && (tempType <= 240))
{
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮąŠą▓ąŠą│ąŠ čéąĖą┐ą░ ąĖ ą┐ąŠą▓č鹊čĆąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ:
uDemoSyncCount = uDemoSyncSet = tempType;
}
else if ((tempType == 254) || (tempType == 255))
{
uDemoSyncSet = tempType;
}
else
{
mCO_DictSetRet(E_PARAM_RANGE); //ąŠčłąĖą▒ą║ą░
}
break;
}
}
ąóą░ą▒ą╗ąĖčåą░ 5. ąóąĖą┐čŗ ą┐ąĄčĆąĄą┤ą░čć PDO.
| ąóąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ |
ąĪąĖą╝ą▓ąŠą╗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO |
| ą”ąĖą║ą╗ąĖč湥čüą║ąĖą╣ |
ąØąĄ čåąĖą║ą╗ąĖč湥čüą║ąĖą╣ |
ąĪąĖąĮčģčĆąŠąĮąĮčŗą╣ |
ąÉčüąĖąĮčģčĆąŠąĮąĮčŗą╣ |
RTR |
| 0 |
|
x |
x |
|
|
| 1..240 |
x |
|
x |
|
|
| 241..251 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 252 |
|
|
x |
|
x |
| 253 |
|
|
|
x |
x |
| 254 |
|
|
|
x |
|
| 255 |
|
|
|
x |
|
ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ PDO (PDO Mapping). ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ PDO ąĮą░ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čüčéą░čéąĖč湥čüą║ąŠąĄ ąĖą╗ąĖ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ. ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ čŹčéąĖčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ąĮąĖą║ą░ą║ąŠą│ąŠ ą║ąŠą┤ą░. ą×ą┤ąĮą░ą║ąŠ ąĮąĖą║ą░ą║ąŠą╣ ą║ąŠą┤ ą▓ čĆąĄą░ą╗čīąĮąŠčüčéąĖ ąĮąĄ ąĮčāąČąĄąĮ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüčéą░čéąĖč湥čüą║ąĖą╣ ą║ąŠą┤ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠčēąĄ, ąĖ čéčĆąĄą▒čāąĄčé ą╝ąĄąĮčīčłąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą╗čÅ čüą▓ąŠąĄą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ. ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ PDO ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮąŠąĄ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 čéčĆąĄą▒čāąĄčé čüčüčŗą╗ąŠą║ ąĮą░ čüą╗ąŠą▓ą░čĆčī ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘ ąĮą░ ąŠą┤ąĖąĮ ąŠą▒čŖąĄą║čé PDO. ąÆ čŹč鹊ą╝ ą▓ą░čĆąĖą░ąĮč鹥 čüč鹥ą║ą░ CANopen ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ čüčéą░čéąĖč湥čüą║ąŠąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ.
ą¤čĆąĖą╝ąĄčĆ 3 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 菹╗ąĄą╝ąĄąĮčé ą▓ čüą╗ąŠą▓ą░čĆąĄ. ąöąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ čŹč鹊 č鹊ą╗čīą║ąŠ ą┤ą░ąĮąĮčŗąĄ ROM, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 4. ąøčÄą▒čŗąĄ ąĘą░ą┐čĆąŠčüčŗ ą║ SDO ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą▓ čüą╗ąŠą▓ą░čĆąĄ ą▒čāą┤čāčé ą┐čĆąĖą▓ąŠą┤ąĖčéčī ą║ čćč鹥ąĮąĖčÄ čüčéą░čéąĖč湥čüą║ąĖčģ ą┤ą░ąĮąĮčŗčģ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĖąĘ ROM. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 čüčéą░čéąĖč湥čüą║ąĖąĄ ą┤ą░ąĮąĮčŗąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ ROM, ąĖą╝ąĄčÄčé č乊čĆą╝ą░čé ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 3, ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ CANopen.

ąĀąĖčü. 3. ążąŠčĆą╝ą░čé ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ROM.
ą¤čĆąĖą╝ąĄčĆ 3, 菹╗ąĄą╝ąĄąĮčé ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ PDO:
#define DICTIONARY_PDO1_RX_MAP \
{0x1600,0x00,CONST,1,{(rom unsigned char *)&rMaxIndex2}}, \
{0x1600,0x01,CONST,4,{(rom unsigned char *)&uRPDO1Map}}, \
{0x1600,0x02,CONST,4,{(rom unsigned char *)&uPDO1Dummy}}, \
{0x1600,0x03,CONST,4,{(rom unsigned char *)&uPDO1Dummy}}, \
{0x1600,0x04,CONST,4,{(rom unsigned char *)&uPDO1Dummy}}, \
{0x1600,0x05,CONST,4,{(rom unsigned char *)&uPDO1Dummy}}, \
{0x1600,0x06,CONST,4,{(rom unsigned char *)&uPDO1Dummy}}, \
{0x1600,0x07,CONST,4,{(rom unsigned char *)&uPDO1Dummy}}, \
{0x1600,0x08,CONST,4,{(rom unsigned char *)&uPDO1Dummy}}
ą¤čĆąĖą╝ąĄčĆ 4, čüčéčĆčāą║čéčāčĆą░ čüą╗ąŠą▓ą░čĆčÅ:
rom unsigned long uTPDO1Map = 0x60000108;
rom unsigned long uRPDO1Map = 0x62000108;
rom unsigned long uPDO1Dummy = 0x00000008;
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ PDO. ą×ą▒čŖąĄą║čéčŗ PDO ą╝ąŠą│čāčé ą▒čŗčéčī čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ą┐čāč鹥ą╝ ą┐čĆąĖą▓čÅąĘą║ąĖ ąĖčģ čäčāąĮą║čåąĖą╣ ą║ ąŠą▒čŖąĄą║čéčā SYNC. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé čéąĖą┐ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąóąĖą┐čŗ ą┐ąĄčĆąĄą┤ą░čć ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 5 (čüą╝. ą▓čĆąĄąĘą║čā "ąĪąŠą▒čŗčéąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO").
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐čĆąŠčüč鹊 ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čäčāąĮą║čåąĖąĖ CO_COMMSyncEvent() ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ PDO. ąŁč鹊 ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▓ čüąĄą║čåąĖąĖ čüąŠą▒čŗčéąĖą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, čüą╝. čĆą░ąĘą┤ąĄą╗ "ąĪąŠą▒čŗčéąĖčÅ ąĖ čüą╗čāąČą▒čŗ SYNC".
ąóą░ą╣ą╝ąĄčĆčŗ. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čéą░ą╣ą╝ąĄčĆ čüąŠą▒čŗčéąĖą╣ (event timer), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čéą░ą╣ą╝ąĄčĆ ąĘą░ą┐čĆąĄčéą░ (inhibit timer) ąŠčüčéą░ą▓ą╗ąĄąĮ ąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąĖąĘą░ą╣ąĮąĄčĆčā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 čéčĆąĄą▒čāąĄčéčüčÅ ą▒ąŠą╗ąĄąĄ č鹊čćąĮą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (100 ą╝ą║čü). ąĢčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ čéčĆąĄą▒čāąĄčéčüčÅ čéą░ą╣ą╝ąĄčĆ čüąŠą▒čŗčéąĖą╣, ą╝ąŠąČąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░čéčī CO_PDO1LSTimerEvent(), čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čüąŠą▒čŗčéąĖčÅ čéąĖą║ą░ 1 ą╝čü.
void mRPDOOpen(const unsigned char PDOnum)
ą×čéą║čĆčŗą▓ą░ąĄčé ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā RPDO ą┐ąŠ ąĄčæ ąĮąŠą╝ąĄčĆčā. ąŚą┤ąĄčüčī ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ 4 ąŠą▒čŖąĄą║čéą░ PDO. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą▒čŗ ą▓čŗąĘą▓ą░ąĮą░ ą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠą╝ čüąŠą▒čŗčéąĖąĖ ąĘą░ą┐ąĖčüąĖ ąŠą▒čŖąĄą║čéą░ RPDO. ąÆ čüčāčēąĮąŠčüčéąĖ čüąŠą▒čŗčéąĖąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ąŠą▒čŖąĄą║čéą░ PDO ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāąĘąĄą╗ čüąĄčéąĖ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčé ąĮą░ ąĘą░ą┐čāčüą║ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 1 ą┤ąŠ 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ:
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ COB-ID
void CO_COMM_RPDO1_COBIDAccessEvent(void)
{
switch (mCO_DictGetCmd())
{
case DICT_OBJ_READ: // ą¦č鹥ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░.
// ąóčĆą░ąĮčüą╗čÅčåąĖčÅ č乊čĆą╝ą░čéą░ MCHP COB ą▓ č乊čĆą╝ą░čé CANopen COB:
mTOOLS_MCHP2CO(mRPDOGetCOB(1));
// ąÆąŠąĘą▓čĆą░čé COB-ID
*(unsigned long *)(uDict.obj->pReqBuf) = mTOOLS_GetCOBID();
break;
case DICT_OBJ_WRITE: // ąŚą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░.
// ąóčĆą░ąĮčüą╗čÅčåąĖčÅ COB ą▓ č乊čĆą╝ą░čé MCHP:
mTOOLS_CO2MCHP(*(unsigned long *)(uDict.obj->pReqBuf));
// ąĢčüą╗ąĖ čŹč鹊 ąĘą░ą┐čĆąŠčü ąŠčüčéą░ąĮąŠą▓ą║ąĖ PDO:
if ((*(UNSIGNED32 *)(&mTOOLS_GetCOBID())).PDO_DIS)
{
// ąś ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčéčŗą╣ COB čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╝čā COB ąĖ čéąĖą┐čā, č鹊 ąĘą░ą║čĆčŗčéčī
if (!((mTOOLS_GetCOBID() ^ mRPDOGetCOB(1)) & 0xFFFFEFFF))
{
// ąØąŠ ąĘą░ą║čĆčŗčéčī č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ PDO ą▒čŗą╗ą░ ąŠčéą║čĆčŗčéą░
if (mRPDOIsOpen(1))
{
mRPDOClose(1);
}
// ą¤ąŠą║ą░ąĘą░čéčī ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ąŠą▒čŖąĄą║čéčā, čćč鹊 čŹč鹊čé PDO ąĘą░ą┐čĆąĄčēąĄąĮ
(*(UNSIGNED32 *)(&mRPDOGetCOB(1))).PDO_DIS = 1;
}
else
{
mCO_DictSetRet(E_PARAM_RANGE); //ąŠčłąĖą▒ą║ą░
}
}
// ąśąĮą░č湥 ąĄčüą╗ąĖ RPDO ąĮąĄ ąŠčéą║čĆčŗčé, č鹊 ąĘą░ą┐čāčüčéąĖčéčī RPDO
else
{
// ąś ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčéčŗą╣ COB čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╝čā COB ąĖ čéąĖą┐čā, č鹊 ąŠčéą║čĆąŠąĄą╝
if (!((mTOOLS_GetCOBID() ^ mRPDOGetCOB(1)) & 0xFFFFEFFF))
{
// ąĮąŠ ąŠčéą║čĆąŠąĄą╝ č鹊ą╗čīą║ąŠ ąĄą╗čüąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ PDO ą▒čŗą╗ą░ ąĘą░ą║čĆčŗčéą░
if (!mRPDOIsOpen(1))
{
mRPDOOpen(1);
}
// ą¤ąŠą║ą░ąĘą░čéčī ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ąŠą▒čŖąĄą║čéčā, čćč鹊 čŹč鹊čé PDO čĆą░ąĘčĆąĄčłąĄąĮ
(*(UNSIGNED32 *)(&mRPDOGetCOB(1))).PDO_DIS = 0;
}
else
{
mCO_DictSetRet(E_PARAM_RANGE); //ąŠčłąĖą▒ą║ą░
}
}
break;
}
}
BOOL mRPDOIsOpen(const unsigned char PDOnum)
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé, ąŠčéą║čĆčŗčé ą╗ąĖ RPDO. ą×ą▒čŗčćąĮąŠ čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮąŠ ą▓ čüąŠą▒čŗčéąĖąĖ ąŠą▒čŖąĄą║čéą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 1 ą┤ąŠ 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: RPDO ąŠčéą║čĆčŗčé ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ.
FALSE: RPDO ąĘą░ą║čĆčŗčé ąĖ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOOpen.
void mRPDOClose(const unsigned char PDOnum)
ąŚą░ą║čĆčŗą▓ą░ąĄčé ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā RPDO. ą×ą▒čŗčćąĮąŠ čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮąŠ ą▓ čüąŠą▒čŗčéąĖąĖ ąŠą▒čŖąĄą║čéą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 1 ą┤ąŠ 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOOpen.
BOOL mRPDOnIsGetRdy(const unsigned char PDOnum)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čā ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, ą▒čŗą╗ ą╗ąĖ ą┐čĆąĖąĮčÅčé ąĮąŠą▓čŗą╣ PDO ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ąĮąŠą╝ąĄčĆčā.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 1 ą┤ąŠ 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ ąĖ ą│ąŠč鹊ą▓čŗ ą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ.
FALSE: ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ą┐ąŠą║ą░ ą┐čĆąĖąĮčÅčéčŗ.
ą¤čĆąĖą╝ąĄčĆ:
void DemoProcessEvents(void)
{
unsigned char change;
unsigned char rise;
unsigned char fall;
// ą¤čĆąŠčćąĖčéą░čéčī ąĮąŠąČą║ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░
(*(UNSIGNED8 *)uLocalXmtBuffer).bits.b0 = PORTBbits.RB5;
(*(UNSIGNED8 *)uLocalXmtBuffer).bits.b1 = PORTBbits.RB4;
// ą×ą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī ą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ ąĮąĖčģ
change = uIOinDigiInOld ^ uLocalXmtBuffer[0];
// ą×ą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▒čŗą╗ąĖ ą╗ąĖ čüąŠą▒čŗčéąĖčÅ ąĮą░čĆą░čüčéą░ąĮąĖčÅ
rise = (uIOinIntRise & change) & uLocalXmtBuffer[0];
// ą×ą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▒čŗą╗ąĖ ą╗ąĖ čüąŠą▒čŗčéąĖčÅ čüą┐ą░ą┤ą░
fall = (uIOinIntFall & change) & ~uLocalXmtBuffer[0];
// ą×ą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▒čŗą╗ąĖ ą╗ąĖ čüąŠą▒čŗčéąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ
change = (uIOinIntChange & change);
// ą¤čĆąĖčüą▓ąŠąĖčéčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüčéą░čĆąŠą╝čā
uIOinDigiInOld = uLocalXmtBuffer[0];
// ąĢčüą╗ąĖ ą╗čÄą▒ąŠąĄ ąĖąĘ čŹč鹊ą│ąŠ ą▓ąĄčĆąĮąŠ, č鹊 ą┐ąŠą║ą░ąĘą░čéčī čāčüą╗ąŠą▓ąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
if (uIOinIntEnable & (change | rise | fall))
uDemoState.bits.b1 = 1;
if (uDemoState.bits.b1)
{
switch (uDemoSyncSet)
{
case 0: // ąØąĄ čåąĖą║ą╗ąĖč湥čüą║ą░čÅ čüąĖąĮčģčĆąŠąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░.
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čäą╗ą░ą│ą░ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ
uDemoState.bits.b2 = 1;
break;
case 254: // ąÉčüąĖąĮčģčĆąŠąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░
case 255:
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čäą╗ą░ą│ą░ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ
uDemoState.bits.b0 = 1;
break;
}
}
// ąĢčüą╗ąĖ ą│ąŠč鹊ą▓čŗ ą║ ą┐ąĄčĆąĄą┤ą░č湥
if (mTPDOIsPutRdy(1) && uDemoState.bits.b0)
{
// ąĪą║ą░ąĘą░čéčī čüč鹥ą║čā, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ąĘą░ą│čĆčāąČąĄąĮčŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ:
mTPDOWritten(1);
// ąĪą▒čĆąŠčü ą╗čÄą▒čŗčģ čüąĖąĮčģčĆąŠąĮąĮčŗčģ ąĖą╗ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮčŗčģ čäą╗ą░ą│ąŠą▓:
uDemoState.bits.b0 = 0;
uDemoState.bits.b1 = 0;
}
// ąĢčüą╗ąĖ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ
if (mRPDOIsGetRdy(1))
{
// ąŚą░ą┐ąĖčüą░čéčī ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ą▒čāč乥čĆą░
LATD = uLocalRcvBuffer[0];
// ą¦č鹥ąĮąĖąĄ PDO, ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤čĆčāą│ąĖčģ ą┤ą░ąĮąĮčŗčģ
mRPDORead(1);
}
}
void mRPDORead(const unsigned char PDOnum)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ą£ąĄąĮąĄą┤ąČąĄčĆčā ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, čćč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖ ąĮą░ą┤ą╗ąĄąČą░čēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆčā ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą┐čĆąĖąĮčÅčéčī ą┤čĆčāą│ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ PDO ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠčüč鹊 čüą┤ąĄą╗ą░čéčī ą║ąŠą┐ąĖčÄ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ą┤ą░ąČąĄ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą╗ąĄčéčā.
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 1 ą┤ąŠ 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOIsGetRdy.
void mRPDOSetCOB(const unsigned char PDOnum, unsigned long rpdoCOB)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé RPDO COB-ID (ą┐ą░čĆą░ą╝ąĄčéčĆ rpdoCOB), PDO čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ ąĮąŠą╝ąĄčĆčā (ą┐ą░čĆą░ą╝ąĄčéčĆ PDOnum, ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 1 ą┤ąŠ 4). ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┐ąĄčĆąĄą┤ ąŠčéą║čĆčŗčéąĖąĄą╝ PDO. COB-ID ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą▓ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝ č乊čĆą╝ą░č鹥 Microchip (č乊čĆą╝ą░čé MCHP).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
unsigned long rpdoCOB: COB-ID ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗą╣ čŹčéąĖą╝ PDO.
ą¤čĆąĖą╝ąĄčĆ:
void DemoInit(void)
{
// ą¤ąŠčĆčé D ą▓ąĄčüčī čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤
LATD = 0;
TRISD = 0;
uDemoSyncSet = 255;
uIOinFilter = 0;
uIOinPolarity = 0;
uIOinIntChange = 1;
uIOinIntRise = 0;
uIOinIntFall = 0;
uIOinIntEnable = 1;
uIOinDigiInOld = uLocalXmtBuffer[0] = 0;
uLocalRcvBuffer[1] = uLocalXmtBuffer[1] = 0;
uLocalRcvBuffer[2] = uLocalXmtBuffer[2] = 0;
uLocalRcvBuffer[3] = uLocalXmtBuffer[3] = 0;
uLocalRcvBuffer[4] = uLocalXmtBuffer[4] = 0;
uLocalRcvBuffer[5] = uLocalXmtBuffer[5] = 0;
uLocalRcvBuffer[6] = uLocalXmtBuffer[6] = 0;
uLocalRcvBuffer[7] = uLocalXmtBuffer[7] = 0;
// ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą▓ č乊čĆą╝ą░čé MCHP
mTOOLS_CO2MCHP(mCOMM_GetNodeID().byte + 0xC0000180L);
// ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ COB
mTPDOSetCOB(1, mTOOLS_GetCOBID());
// ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą▓ č乊čĆą╝ą░čé MCHP
mTOOLS_CO2MCHP(mCOMM_GetNodeID().byte + 0xC0000200L);
// ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ COB
mRPDOSetCOB(1, mTOOLS_GetCOBID());
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą▒čāč乥čĆčŗ
mTPDOSetTxPtr(1, (unsigned char *)(&uLocalXmtBuffer[0]));
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą▒čāč乥čĆčŗ
mRPDOSetRxPtr(1, (unsigned char *)(&uLocalRcvBuffer[0]));
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗ąĖąĮčŗ
mTPDOSetLen(1, 8);
}
unsigned long mRPDOGetCOB(const unsigned char PDOnum)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé COB-ID, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąŠą▒čŖąĄą║č鹊ą╝ RPDO.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOOpen.
unsigned char mRPDOGetLen(const unsigned char PDOnum)
ąÆąŠą▓ąĘčĆą░čēą░ąĄčé ą┤ą╗ąĖąĮčā ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ PDO (ą┤ą╗ąĖąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..8).
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
unsigned char * mRPDOGetRxPtr(const unsigned char PDOnum)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ąŻą║ą░ąĘą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ ąŠčéą║čĆčŗčéąĖąĄą╝ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ čü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣. ąÜąŠą│ą┤ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąŠčéą║čĆčŗčéčŗ, č鹊 ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé čüąŠčģčĆą░ąĮąĄąĮčŗ ą┐ąŠ ą╝ąĄčüčéčā, ąĮą░ ą║ąŠč鹊čĆąŠąĄ čüčüčŗą╗ą░ąĄčéčüčÅ čŹč鹊čé čāą║ą░ąĘą░č鹥ą╗čī.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
void mRPDOSetRxPtr(const unsigned char PDOnum, unsigned char *pRXBUF)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ąŁč鹊čé čāą║ą░ąĘą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ ąŠčéą║čĆčŗčéąĖąĄą╝ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ čü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣. ąÜąŠą│ą┤ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąŠčéą║čĆčŗčéčŗ, č鹊 ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé čüąŠčģčĆą░ąĮąĄąĮčŗ ą┐ąŠ ą╝ąĄčüčéčā, ąĮą░ ą║ąŠč鹊čĆąŠąĄ čüčüčŗą╗ą░ąĄčéčüčÅ čŹč鹊čé čāą║ą░ąĘą░č鹥ą╗čī.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
unsigned char *pRXBUF: ą▒čāč乥čĆ ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣ (čĆą░ąĘą╝ąĄčĆ ąĮąĄ ą╝ąĄąĮąĄąĄ 8 ą▒ą░ą╣čé).
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOSetCOB.
void mTPDOnOpen(const unsigned char PDOnum)
ą×čéą║čĆčŗą▓ą░ąĄčé ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā TPDO. ąŚą┤ąĄčüčī ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ 4 ąŠą▒čŖąĄą║čéą░ PDO. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ čü ąŠą▒čŖąĄą║č鹊ą╝ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ TPDO ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ ąĘą░ą┐ąĖčüąĖ ąŠą▒čŖąĄą║čéą░. ąÆ čüčāčēąĮąŠčüčéąĖ čüąŠą▒čŗčéąĖąĄ ąŠą▒čŖąĄą║čéą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāąĘąĄą╗ čüąĄčéąĖ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ąĘą░ą┐čāčüą║ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ:
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖą╣ ą┤ąŠčüčéčāą┐ą░ ą║ COB-ID
void CO_COMM_TPDO1_COBIDAccessEvent(void)
{
switch (mCO_DictGetCmd())
{
case DICT_OBJ_READ: // ą¦č鹥ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░
// ąóčĆą░ąĮčüą╗čÅčåąĖčÅ COB č乊čĆą╝ą░čéą░ MCHP ą▓ COB č乊čĆą╝ą░čéą░ CANopen
mTOOLS_MCHP2CO(mTPDOGetCOB(1));
// ąÆąŠąĘą▓čĆą░čé COBID
*(unsigned long *)(uDict.obj->pReqBuf) = mTOOLS_GetCOBID();
break;
case DICT_OBJ_WRITE: // ąŚą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░
// ąóčĆą░ąĮčüą╗čÅčåąĖčÅ COB ą▓ č乊čĆą╝ą░čé MCHP
mTOOLS_CO2MCHP(*(unsigned long *)(uDict.obj->pReqBuf));
// ąĢčüą╗ąĖ ą▒čŗą╗ ąĘą░ą┐čĆąŠčü ąŠčüčéą░ąĮąŠą▓ąĖčéčī PDO
if ((*(UNSIGNED32 *)(&mTOOLS_GetCOBID())).PDO_DIS)
{
// ąś ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčéčŗą╣ COB čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╝ COB ąĖ čéąĖą┐ąŠą╝, č鹊 ąĘą░ą║čĆčŗą▓ą░ąĄą╝
if (!((mTOOLS_GetCOBID() ^ mTPDOGetCOB(1)) & 0xFFFFEFFF))
{
// ąØąŠ ąĘą░ą║čĆčŗą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ PDO ą▒čŗą╗ą░ ąŠčéą║čĆčŗčéą░
if (mTPDOIsOpen(1))
{
mTPDOClose(1);
}
// ą¤ąŠą║ą░ąĘą░čéčī ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ąŠą▒čŖąĄą║čéčā, čćč鹊 čŹč鹊čé PDO ąĘą░ą┐čĆąĄčēąĄąĮ
(*(UNSIGNED32 *)(&mTPDOGetCOB(1))).PDO_DIS = 1;
}
else
{
mCO_DictSetRet(E_PARAM_RANGE); //ą×čłąĖą▒ą║ą░
}
}
// ąśąĮą░č湥 ąĄčüą╗ąĖ TPDO ąĮąĄ ąŠčéą║čĆčŗčé, č鹊 ąĘą░ą┐čāčüą║ą░ąĄą╝ TPDO
else
{
// ąś ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčéčŗą╣ COB čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╝ COB ąĖ čéąĖą┐ąŠą╝, č鹊 ąŠčéą║čĆčŗą▓ą░ąĄą╝
if (!((mTOOLS_GetCOBID() ^ mTPDOGetCOB(1)) & 0xFFFFEFFF))
{
// ąØąŠ ąŠčéą║čĆčŗą▓ą░ąĄą╝ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ PDO ą▒čŗą╗ą░ ąĘą░ą║čĆčŗčéą░
if (!mTPDOIsOpen(1))
{
mTPDOOpen(1);
}
// ą¤ąŠą║ą░ąĘą░čéčī ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ąŠą▒čŖąĄą║čéčā, čćč鹊 čŹč鹊čé PDO čĆą░ąĘčĆąĄčłąĄąĮ
(*(UNSIGNED32 *)(&mTPDOGetCOB(1))).PDO_DIS = 0;
}
else
{
mCO_DictSetRet(E_PARAM_RANGE); //ą×čłąĖą▒ą║ą░
}
}
break;
}
}
BOOL mTPDOIsOpen(const unsigned char PDOnum)
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé, ąŠčéą║čĆčŗčé ą╗ąĖ TPDO. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ą▓ čüąŠą▒čŗčéąĖąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ąŠą▒čŖąĄą║čéą░ PDO.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: ą£ąĄąĮąĄą┤ąČąĄčĆ ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą│ąŠč鹊ą▓ ą┐čĆąĖąĮčÅčéčī ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
FALSE: ą£ąĄąĮąĄą┤ąČąĄčĆ ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ąĘą░ąĮčÅčé ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mTPDOOpen().
void mTPDOClose(const unsigned char PDOnum)
ąŚą░ą║čĆčŗą▓ą░ąĄčé ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā TPDO. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą▓ čüąŠą▒čŗčéąĖąĖ ąŠą▒čŖąĄą║čéą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ PDO.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mTPDOOpen().
BOOL mTPDOIsPutRdy(const unsigned char PDOnum)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, ą┤ąŠčüčéčāą┐ąĄąĮ ą╗ąĖ čüą╗ąŠčé ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé true, ąĄčüą╗ąĖ ą£ąĄąĮąĄą┤ąČąĄčĆ ą│ąŠč鹊ą▓ ą┐čĆąĖąĮčÅčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐ąŠ čłąĖąĮąĄ.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: ą£ąĄąĮąĄą┤ąČąĄčĆ ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą│ąŠč鹊ą▓ ą┐čĆąĖąĮčÅčéčī ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
FALSE: ą£ąĄąĮąĄą┤ąČąĄčĆ ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ąĘą░ąĮčÅčé ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOIsGetRdy.
void mTPDOWritten(const unsigned char PDOnum)
ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆčā ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒čŗą╗ąŠ ąĘą░ą│čĆčāąČąĄąĮąŠ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆčā ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą┐ąŠčüčéą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ąŠč湥čĆąĄą┤čī ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ążčāąĮą║čåąĖčÅ čüąŠą▒čŗčéąĖčÅ CO_PDOTXFinEvent() ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ąĮą░ čłąĖąĮčā.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOIsGetRdy.
void mTPDOSetCOB(const unsigned char PDOnum, unsigned long tpdoCOB)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé TPDO COB-ID. ą×ąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄą┤ą░č湥ą╣ TPDO. COB-ID ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝ č乊čĆą╝ą░č鹥 Microchip.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
unsigned long tpdoCOB: COB-ID ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOSetCOB.
unsigned long mTPDOnGetCOB(const unsigned char PDOnum)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé COB-ID, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąŠą▒čŖąĄą║č鹊ą╝ TPDO.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOSetCOB.
unsigned long mTPDOnSetLen(const unsigned char PDOnum, unsigned char length)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤ą╗ąĖąĮčā ą┤ą░ąĮąĮčŗčģ TPDO. ąöą╗ąĖąĮą░ (length) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0 ą┤ąŠ 8.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
unsigned char length: ą┤ą╗ąĖąĮą░ PDO, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0 .. 8.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOSetCOB.
unsigned char * mTPDOGetTxPtr(const unsigned char PDOnum)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą╗čāčćą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣čüčÅ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĖąĘ ą╝ąĄčüčéą░, ąĮą░ ą║ąŠč鹊čĆąŠąĄ čüčüčŗą╗ą░ąĄčéčüčÅ čŹč鹊čé čāą║ą░ąĘą░č鹥ą╗čī.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
void mTPDOnSetTxPtr(const unsigned char PDOnum)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĖąĘ ą╝ąĄčüčéą░, ąĮą░ ą║ąŠč鹊čĆąŠąĄ čüčüčŗą╗ą░ąĄčéčüčÅ čŹč鹊čé čāą║ą░ąĘą░č鹥ą╗čī.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
const unsigned char PDOnum: ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1 .. 4. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, ąĮąĄ ą╝ą░ą║čĆąŠčü.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mRPDOIsGetRdy.
void CO_PDOnLSTimerEvent(void)
ąŁč鹊 čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (callback) čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆą░. ą×ąĮą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čü ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ 1 ą╝čü, ąĄčüą╗ąĖ ąŠą▒čŖąĄą║čé PDO čĆą░ąĘčĆąĄčłąĄąĮ. ą×ą▒čŗčćąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹč鹊 čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ čüąŠą▒čŗčéąĖčÅ PDO, ą║ą░ą║ čŹč鹊 čāą║ą░ąĘą░ąĮąŠ ą▓ čüčéą░ąĮą┤ą░čĆč鹥 CANopen.
void CO_PDOnTxFinEvent(void)
ąŁč鹊 callback-čäčāąĮą║čåąĖčÅ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▓ ąŠč湥čĆąĄą┤čī ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, ą▒čŗą╗ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąŠ čłąĖąĮąĄ CAN.
[ąĪąŠą▒čŗčéąĖčÅ ąĖ čüą╗čāąČą▒čŗ SYNC]
ąśą╝ąĄąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čüąŠą▒čŗčéąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĮą░čüčéčāą┐ą░ąĄčé ąĖąĘ ąŠą▒čŖąĄą║čéą░ SYNC: CO_COMMSyncEvent(). ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ SYNC, ąĖ čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ PDO. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ ą▓ ą║ąŠą┤ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą│ą┤ąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ PDO.
ąĢčüčéčī č鹊ą╗čīą║ąŠ 2 čüą╗čāąČą▒čŗ, ą┐ąŠą╗ąĄąĘąĮčŗąĄ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąŠą▒čŖąĄą║čéą░ SYNC. ąĪą░ą╝ą░čÅ ą▓ą░ąČąĮą░čÅ čćą░čüčéčī ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ COB-ID ą┤ą╗čÅ ąŠą▒čŖąĄą║čéą░ SYNC ą┐ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ CANopen, ą┐ąŠčüą║ąŠą╗čīą║čā ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą║čĆčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ.
void CO_COMMSyncEvent(void)
ąŁč鹊 ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ čüąŠą▒čŗčéąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąŠą▒čŖąĄą║čé SYNC. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ SYNC, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ PDO.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čéąĖą┐ą░ PDO, ą║ąŠč鹊čĆą░čÅ ą┐ąŠ čüą▓ąŠąĄą╣ ą┐čĆąĖčĆąŠą┤ąĄ čÅą▓ą╗čÅąĄčéčüčÅ čåąĖą║ą╗ąĖč湥čüą║ąŠą╣. ąóąĖą┐ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░ąĄčéčüčÅ ą▓ PDO Type (ą┐ą░čĆą░ą╝ąĄčéčĆ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ TPDO ą┐ąŠ sub-ąĖąĮą┤ąĄą║čüčā 2), ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1 .. 240 ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ.
void CO_COMMSyncEvent(void)
{
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝
if ((uDemoSyncSet == 0) && (uDemoState.bits.b2))
{
// ąĪą▒čĆąŠčü čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐ąĄčĆąĄčģąŠą┤ ą║ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥
uDemoState.bits.b2 = 0;
uDemoState.bits.b0 = 1;
}
else if ((uDemoSyncSet >= 1) && (uDemoSyncSet <= 240))
{
// ą¤ąŠą┤čüčéčĆąŠą╣ą║ą░ čüč湥čéčćąĖą║ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
uDemoSyncCount--;
// ąĢčüą╗ąĖ ąĮą░čüčéčāą┐ąĖą╗ąŠ ą▓čĆąĄą╝čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ:
if (uDemoSyncCount == 0)
{
// ąĪą▒čĆąŠčü čüč湥čéčćąĖą║ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
uDemoSyncCount = uDemoSyncSet;
// ąŚą░ą┐čāčüą║ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO
uDemoState.bits.b0 = 1;
}
}
}
void mSYNC_SetCOBID(unsigned long SYNC_COB)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ COB-ID ąŠą▒čŖąĄą║čéą░ SYNC. ą×ąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 1 čĆą░ąĘ ą┐ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣, čćč鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī COB-ID ą▓ firmware čüąĖčüč鹥ą╝čŗ.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
unsigned long SYNC_COB: ąĘąĮą░č湥ąĮąĖąĄ COB-ID ą▓ č乊čĆą╝ą░č鹥 Microchip.
ą¤čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mCO_ProcessAllEvents.
unsigned long mSYNC_GetCOBID(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī COB-ID ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąŠą▒čŖąĄą║č鹊ą╝ SYNC.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
unsigned long SYNC_COB: ąĘąĮą░č湥ąĮąĖąĄ COB-ID ą▓ č乊čĆą╝ą░č鹥 Microchip (MCHP).
[ąĪąŠą▒čŗčéąĖčÅ ąĖ čüą╗čāąČą▒čŗ NMT]
ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĄčéčīčÄ (Network management) č湥čĆąĄąĘ ąŠą▒čŖąĄą║čé NMT, ą║ąŠč鹊čĆčŗą╣ ą▓ čüčāčēąĮąŠčüčéąĖ ąŠčģą▓ą░čéčŗą▓ą░ąĄčé ą╝ą░čłąĖąĮčā čüąŠčüč鹊čÅąĮąĖą╣ čāąĘą╗ą░ (čüą╝. čĆąĖčü. 2).
ąŁčéą░ čüą╗čāąČą▒ą░ ą┐ąŠą╗ąĄąĘąĮą░ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ čāąĘąĄą╗ čüąĄčéąĖ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ą×ą┤ąĮą░ą║ąŠ čüąŠčüč鹊čÅąĮąĖąĄ ą▒čāą┤ąĄčé ą╝ąĄąĮčÅčéčīčüčÅ č湥čĆąĄąĘ ąŠą▒čŗčćąĮčŗąĄ čüąĄč鹥ą▓čŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ąĘą░ą┐čĆąŠčüčŗ ąŠčé ą╝ą░čüč鹥čĆą░ NMT. ąÜąŠą│ą┤ą░ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī ą┐ąŠ ąĘą░ą┐čĆąŠčüčā ą╝ą░čüč鹥čĆą░, ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąŠą▒čŗčéąĖąĄ. ąØąĖąČąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ ąĖ čüą╗čāąČą▒čŗ NMT.
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ. ą×ą▒čŗčćąĮąŠ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ NMT ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ NMT ąŠčé ą╝ą░čüč鹥čĆą░, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čāąĘą╗ą░.
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ čāąĘą╗ą░, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖą╗čüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Operational ąĖą╗ąĖ Pre-operational. ą×ą▒čŗčćąĮąŠ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ NMT ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ NMT ąŠčé ą╝ą░čüč鹥čĆą░, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čāąĘą╗ą░.
void mNMT_GotoPreopState(void)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ čāąĘąĄą╗ čüąĄčéąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Pre-operational. ą×ą▒čŗčćąĮąŠ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ NMT ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ NMT ąŠčé ą╝ą░čüč鹥čĆą░, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čāąĘą╗ą░.
void mNMT_GotoOperState(void)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ čāąĘąĄą╗ čüąĄčéąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Operational. ą×ą▒čŗčćąĮąŠ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ NMT ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ NMT ąŠčé ą╝ą░čüč鹥čĆą░, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čāąĘą╗ą░.
BOOL mNMT_StateIsStopped(void)
ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ čüąĄą╣čćą░čü čāąĘąĄą╗ ą▓ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: ąĄčüą╗ąĖ čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ STOPPED.
FALSE: ąĄčüą╗ąĖ čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ PREOPERATIONAL ąĖą╗ąĖ OPERATIONAL.
BOOL mNMT_StateIsOperational(void)
ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ čüąĄą╣čćą░čü čāąĘąĄą╗ ą▓ čĆą░ą▒ąŠč湥ą╝ (Operational) čüąŠčüč鹊čÅąĮąĖąĖ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: ąĄčüą╗ąĖ čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ OPERATIONAL.
FALSE: ąĄčüą╗ąĖ čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ STOPPED ąĖą╗ąĖ PREOPERATIONAL.
BOOL mNMT_StateIsPreOperational(void)
ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ čüąĄą╣čćą░čü čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Pre-Operational.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: ąĄčüą╗ąĖ čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ PREOPERATIONAL.
FALSE: ąĄčüą╗ąĖ čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ STOPPED ąĖą╗ąĖ OPERATIONAL.
void CO_NMTStateChangeEvent(void)
ąŁčéą░ callback-čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čüąŠčüč鹊čÅąĮąĖąĄ čüąĖčüč鹥ą╝čŗ ą╝ąĄąĮčÅąĄčéčüčÅ ą┐čĆąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ ąĘą░ą┐čĆąŠčüą░ NMT.
void CO_NMTResetEvent(void)
ąŁčéą░ callback-čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖčłąĄą╗ ąĘą░ą┐čĆąŠčü ąĮą░ čüą▒čĆąŠčü ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ą¤ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čŹč鹊ą│ąŠ čüąŠą▒čŗčéąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ.
void CO_NMTAppResetRequest(void)
ąŁčéą░ callback-čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖčłąĄą╗ ąĘą░ą┐čĆąŠčü ąĮą░ čüą▒čĆąŠčü ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąÜą░ą║ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ čŹč鹊čé ąĘą░ą┐čĆąŠčü - ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┤ąĖąĘą░ą╣ąĮą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čŹč鹊ą│ąŠ čüąŠą▒čŗčéąĖčÅ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ CO_COMMResetEvent(). ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖčÅ CO_COMMResetEvent().
[ąĪąŠą▒čŗčéąĖčÅ ąĖ čüą╗čāąČą▒čŗ Node Guard/Heartbeat]
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé Node Guard/Heartbeat, ą║ą░ą║ čŹč鹊ą│ąŠ čéčĆąĄą▒čāąĄčé čüčéą░ąĮą┤ą░čĆčé. ąöą╗čÅ ąĮąĄą│ąŠ ąĖą╝ąĄąĄčéčüčÅ ąĮąĄą▒ąŠą╗čīčłąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗čāąČą▒ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĖ ą┐ąŠą╗čāč湥ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ąŠą▒čŖąĄą║č鹥.
ąöą╗čÅ ąŠą▒čŖąĄą║čéą░ Node Guard/Heartbeat ąĖą╝ąĄąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠąĄ čüąŠą▒čŗčéąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąŠčéąĮąŠčüąĖčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą║ ą┐ąŠą╗ąŠą▓ąĖąĮą║ąĄ node guard ąŠą▒čŖąĄą║čéą░. ążčāąĮą║čåąĖčÅ CO_NMTENodeGuardErrEvent() ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĄą▓čŗčłąĄąĮąŠ ą▓čĆąĄą╝čÅ ąČąĖąĘąĮąĖ (lifetime) ąŠą▒čŖąĄą║čéą░. ąÆčĆąĄą╝čÅ ąČąĖąĘąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą║ą░ą║ čĆąĄąĘčāą╗čīčéą░čé ą┐ąĄčĆąĄą╝ąĮąŠąČąĄąĮąĖčÅ lifetime factor ąĖ guard time.
void mNMTE_SetHeartBeat(unsigned long HeartBeat)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ Heartbeat. ą¤ą░čĆą░ą╝ąĄčéčĆ Heartbeat čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ unsigned long ą▓ č乊čĆą╝ą░č鹥 čüčéą░ąĮą┤ą░čĆčéą░ CANopen. ą×ąĮ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣.
unsigned long mNMTE_GetHeartBeat(void)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī č鹥ą║čāčēąĄąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ Heartbeat (čćąĖčüą╗ąŠ unsigned long ą▓ č乊čĆą╝ą░č鹥 čüčéą░ąĮą┤ą░čĆčéą░ CANopen).
void mNMTE_SetGuardTime(unsigned long GuardTime)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ guard time. ą¤ą░čĆą░ą╝ąĄčéčĆ GuardTime čŹč鹊 čćąĖčüą╗ąŠ unsigned long ą▓ č乊čĆą╝ą░č鹥 čüčéą░ąĮą┤ą░čĆčéą░ CANopen. ą×ąĮ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣.
unsigned long mNMTE_GetGuardTime(void)
ąÆčŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī č鹥ą║čāčēąĄąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ guard time (čćąĖčüą╗ąŠ unsigned long ą▓ č乊čĆą╝ą░č鹥 čüčéą░ąĮą┤ą░čĆčéą░ CANopen).
void mNMTE_SetLifeFactor(unsigned char LifeFactor)
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĮąŠąČąĖč鹥ą╗čÅ ą▓čĆąĄą╝ąĄąĮąĖ ąČąĖąĘąĮąĖ (ą┐ą░čĆą░ą╝ąĄčéčĆ LifeFactor).
unsigned char mNMTE_GetLifeFactor(void)
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĮąŠąČąĖč鹥ą╗čÅ ą▓čĆąĄą╝ąĄąĮąĖ ąČąĖąĘąĮąĖ.
void CO_NMTENodeGuardErrEvent(void)
ąŁčéą░ callback-čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ąĘą░čēąĖčéčŗ čāąĘą╗ą░ (node guard event). ąŁč鹊 ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ąĮąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čüąŠą▒čŗčéąĖąĄ node guard ą▓ č鹥č湥ąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąČąĖąĘąĮąĖ lifetime (čĆąĄąĘčāą╗čīčéą░čé čāą╝ąĮąŠąČąĄąĮąĖčÅ life time factor ąĖ guard time). ąÜą░ą║ ą▒čāą┤ąĄčé čŹč鹊 čüąŠą▒čŗčéąĖąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ - ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
[ą×ą▒čŖąĄą║čéčŗ ąĖ OD]
ąÆ čŹč鹊ą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą║ą░ąČą┤čŗą╣ 菹╗ąĄą╝ąĄąĮčé čüą╗ąŠą▓ą░čĆčÅ ąŠą▒čŖąĄą║č鹊ą▓ (Object Dictionary, OD) čŹč鹊 čüčéčĆčāą║čéčāčĆą░ ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝. ąÆąĮčāčéčĆąĖ ą║ą░ąČą┤ąŠą╣ čéą░ą║ąŠą╣ čüčéčĆčāą║čéčāčĆčŗ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░čÅ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ ąŠą▒čŖąĄą║čéą░ ąĖ ąĄą│ąŠ ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ. ąśą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąŠąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą│ąĖą▒ą║ąĖąĄ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čĆą░ąĘą╗ąĖčćą░čéčī ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą┐čĆąŠčüčéčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ, ą╝ą░čüčüąĖą▓čŗ ąĖ čüčéčĆčāą║čéčāčĆčŗ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą▒čŖąĄą║č鹊ą▓ OD. ąóą░ą║ąČąĄ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą▒čŖąĄą║čéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čäčāąĮą║čåąĖčÅ, ąĖ čŹč鹊 ą┤ą░ąĄčé ąĮą░čüč鹊čÅčēčāčÄ ą│ąĖą▒ą║ąŠčüčéčī ą┤ą╗čÅ čüą╗ąŠąČąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓.
ąĪčéčĆčāą║čéčāčĆą░ ąŠą▒čŖąĄą║čéą░. ą×ą▒čŖąĄą║čé, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓ OD, čģčĆą░ąĮąĖčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░; čüčéčĆčāą║čéčāčĆą░ ąŠą▒čŖąĄą║čéą░ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą¤čĆąĖą╝ąĄčĆąĄ 5. ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ čüąŠą┤ąĄčƹȹĖčé ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, čćč鹊ą▒čŗ ąŠą┐ąĖčüą░čéčī ą╗čÄą▒ąŠą╣ ąŠą▒čŖąĄą║čé:
ŌĆó index: ąĖąĮą┤ąĄą║čü ąŠą▒čŖąĄą║čéą░.
ŌĆó subindex: sub-ąĖąĮą┤ąĄą║čü ąŠą▒čŖąĄą║čéą░.
ŌĆó ctl: ą▒ą░ą╣čé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ą×ąĮ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéąĖą┐ ąŠą▒čŖąĄą║čéą░.
ŌĆó len: ą┤ą╗ąĖąĮą░ ąŠą▒čŖąĄą║čéą░ ą▓ ą▒ą░ą╣čéą░čģ.
ŌĆó *pROM: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒čŖąĄą║čé ąĖą╗ąĖ čäčāąĮą║čåąĖčÄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░. ąŁč鹊čé čāą║ą░ąĘą░č鹥ą╗čī ą▓čüąĄą│ą┤ą░ ą┐čĆąĖą▓ąŠą┤ąĖčéčüčÅ ą║ čéąĖą┐čā unsigned char *.
ą¤čĆąĖą╝ąĄčĆ 5, čüčéčĆčāą║čéčāčĆą░ ąŠą▒čŖąĄą║čéą░ čüą╗ąŠą▓ą░čĆčÅ:
typedef struct _DICTIONARY_OBJECT_TEMPLATE
{
unsigned int index;
unsigned char subindex;
unsigned char ctl;
unsigned int len;
rom unsigned char * pROM;
}DICT_OBJECT_TEMPLATE;
ąōčĆčāą┐ą┐čŗ ąŠą▒čŖąĄą║č鹊ą▓. OD čĆą░ąĘą▒ąĖčé ąĮą░ ą│čĆčāą┐ą┐čŗ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ ą┐ąŠąĖčüą║ą░ ą┐ąŠ čüą╗ąŠą▓ą░čĆčÄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ą░ąČą┤čŗą╣ 菹╗ąĄą╝ąĄąĮčé OD ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮ ą▓ ą┐ąŠą┤čģąŠą┤čÅčēąĄą╣ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą│čĆčāą┐ą┐ąĄ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 6 ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ ą▓čüąĄ ą│čĆčāą┐ą┐čŗ. ąøčÄą▒ąŠą╣ 菹╗ąĄą╝ąĄąĮčé OD ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮ ą▓ čćąĖčüą╗ąŠą▓ąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą│čĆčāą┐ą┐čŗ.
ąóą░ą▒ą╗ąĖčåą░ 6. ąōčĆčāą┐ą┐čŗ ąŠą▒čŖąĄą║č鹊ą▓ OD.
| ąśą╝čÅ ą│čĆčāą┐ą┐čŗ ąŠą▒čŖąĄą║č鹊ą▓ |
ąśąĮą┤ąĄą║čü |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| DICTIONARY_DATA_TYPES |
0000h |
ąóąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓ OD. ąźąŠčéčÅ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ OD, ą▓ čüčéą░ąĮą┤ą░čĆč鹥 čāą║ą░ąĘą░ąĮąŠ, čćč鹊 ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čŹčéąĖčģ čéąĖą┐ąŠą▓ čüąŠ čüč鹊čĆąŠąĮčŗ čüą╗ąŠą▓ą░čĆčÅ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ. |
| DICTIONARY_DEVICE_INFO |
1000h |
ąŁčéą░ ą│čĆčāą┐ą┐ą░ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ čüąĄą║čåąĖąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ CANopen, ąĖ ąŠąĮą░ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ, čüą┐ąĄčåąĖčäąĖčćąĮčāčÄ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ (čāąĘą╗ą░ čüąĄčéąĖ), ą▓ą║ą╗čÄčćą░čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ COB-ID, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ąĖ čüčéą░čéčāčü. |
| DICTIONARY_SDO |
1200h |
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ąŠą┤ąĮą░ ą│čĆčāą┐ą┐ą░ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SDO. |
| DICTIONARY_PDO1_RX_COMM |
1400h |
ą×čéą┤ąĄą╗čīąĮčŗąĄ ą│čĆčāą┐ą┐čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ 4 RPDO. |
| DICTIONARY_PDO2_RX_COMM |
1401h |
| DICTIONARY_PDO3_RX_COMM |
1402h |
| DICTIONARY_PDO4_RX_COMM |
1403h |
| DICTIONARY_PDO1_RX_MAP |
1600h |
ą×čéą┤ąĄą╗čīąĮčŗąĄ ą│čĆčāą┐ą┐čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ 4 RPDO. |
| DICTIONARY_PDO2_RX_MAP |
1601h |
| DICTIONARY_PDO3_RX_MAP |
1602h |
| DICTIONARY_PDO4_RX_MAP |
1603h |
| DICTIONARY_PDO1_TX_COMM |
1800h |
ą×čéą┤ąĄą╗čīąĮčŗąĄ ą│čĆčāą┐ą┐čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ 4 TPDO. |
| DICTIONARY_PDO2_TX_COMM |
1801h |
| DICTIONARY_PDO3_TX_COMM |
1802h |
| DICTIONARY_PDO4_TX_COMM |
1803h |
| DICTIONARY_PDO1_TX_MAP |
1A00h |
ą×čéą┤ąĄą╗čīąĮčŗąĄ ą│čĆčāą┐ą┐čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ 4 TPDO. |
| DICTIONARY_PDO2_TX_MAP |
1A01h |
| DICTIONARY_PDO3_TX_MAP |
1A02h |
| DICTIONARY_PDO4_TX_MAP |
1A03h |
| DICTIONARY_MANUFACTURER_SPECIFIC_1 |
2000h |
ąŁčéąĖ ą│čĆčāą┐ą┐čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓, čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. |
| DICTIONARY_MANUFACTURER_SPECIFIC_2 |
3000h |
| DICTIONARY_MANUFACTURER_SPECIFIC_3 |
4000h |
| DICTIONARY_MANUFACTURER_SPECIFIC_4 |
5000h |
| DICTIONARY_STANDARD_1 |
6000h |
ąŁčéąĖ ą│čĆčāą┐ą┐čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ąŠą▒čŖąĄą║č鹊ą▓ CANopen. |
| DICTIONARY_STANDARD_2 |
7000h |
| DICTIONARY_STANDARD_3 |
8000h |
| DICTIONARY_STANDARD_4 |
9000h |
ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą▒ąĖčéčŗ ąŠą▒čŖąĄą║čéą░. ąÜą░ą║ ąŠą▒čŖąĄą║čé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ, ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĄą│ąŠ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (object control bits). ą×ą▒čŖąĄą║čé ą╝ąŠąČąĄčé ą▒čŗčéčī čćąĖčéą░ąĄą╝čŗą╣/ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗą╣, č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, ąĖą╗ąĖ ą┤ą░ąČąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┤ą╗čÅ ą┐čĆąĖčüą┐ąŠčüąŠą▒ą╗ąĄąĮąĖčÅ ą║ ąŠč湥ąĮčī čāąĮąĖą║ą░ą╗čīąĮčŗą╝ ąŠą▒čŖąĄą║čéą░ą╝. ąóą░ą▒ą╗ąĖčåą░ 7 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░ ąŠą▒čŖąĄą║čéą░ (object control byte).
ąóą░ą▒ą╗ąĖčåą░ 7. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą▒ąĖč鹊ą▓.
| ąæąĖčé |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
RD_BIT |
ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ ą║ ąŠą▒čŖąĄą║čéčā. ąĢčüą╗ąĖ ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąŠą▒čŖąĄą║čé ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ąĖąĘ ą┤čĆčāą│ąŠą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ. |
| 1 |
WR_BIT |
ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą║ ąŠą▒čŖąĄą║čéčā. ąĢčüą╗ąĖ ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąŠą▒čŖąĄą║čé ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ąĖąĘ ą┤čĆčāą│ąŠą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ. |
| 2 |
ROM_BIT |
ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 ąŠą▒čŖąĄą║čé čĆą░ąĘą╝ąĄčēąĄąĮ ą▓ ą¤ąŚąŻ. ąŻčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąĮąĄ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ąŠą▒čŖąĄą║čé ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ. ą×ąĮ č鹊ą╗čīą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ąĄčüč鹊 čģčĆą░ąĮąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░. |
| 3 |
EE_BIT |
ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 ąŠą▒čŖąĄą║čé ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ EEPROM. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą┤ąŠčüčéčāą┐ą░ ą║ EEPROM. ąĢčüą╗ąĖ ą▒ąĖčé EE_BIT čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 č鹊ą│ą┤ą░ ą▒ąĖčé FDEF_BIT čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čćč鹊ą▒čŗ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ą┤ąŠčüčéčāą┐ą░ ą║ OD ąĘąĮą░ą╗, čćč鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ą╗ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┤ąŠčüčéčāą┐ą░ ą║ EEDATA č湥čĆąĄąĘ čüą▓ąŠčÄ čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ čäčāąĮą║čåąĖčÄ. |
| 4 |
FDEF_BIT |
ąŁč鹊čé ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąŠą▒čŖąĄą║čé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ. ą×ą▒čŗčćąĮąŠ ąŠą▒čŖąĄą║čéčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ, ąĄčüą╗ąĖ ą┤ą╗čÅ ąĮąĄą│ąŠ čüčāčēąĄčüčéą▓čāčÄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą┐čĆą░ą▓ąĖą╗ą░ ą┤ąŠčüčéčāą┐ą░, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ ą║ ą┐čĆąŠčüč鹊ą╝čā čüčéą░čéąĖč湥čüą║ąŠą╝čā čéąĖą┐čā. ąØą░ą┐čĆąĖą╝ąĄčĆ čŹč鹊 ąŠą▒čŖąĄą║čé, ą║ąŠč鹊čĆčŗą╣ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĮą░ čüąŠą▒čŗčéąĖąĖ, č鹊ą│ą┤ą░ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ. ąśą╗ąĖ ą┤čĆčāą│ąŠą╣ ą┐čĆąĖą╝ąĄčĆ - čā ąŠą▒čŖąĄą║čéą░ ą╝ąŠą│čāčé ą╝ąĄąĮčÅčéčīčüčÅ ą┐čĆą░ą▓ąĖą╗ą░ ą┤ąŠčüčéčāą┐ą░ čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ąŠą▒čŖąĄą║čé č鹊ąČąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ. ąóą░ą║ąČąĄ ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą▓čüąĄ ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░, ą║čĆąŠą╝ąĄ ą▒ąĖčéą░ FSUB_BIT. |
| 5 |
MAP_BIT |
ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąŠą▒čŖąĄą║čé ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠč鹊ą▒čĆą░ąČąĄąĮ ąĮą░ PDO. |
| 6 |
FSUB_BIT |
ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╗ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓ąĄčüčī ą╝ą░čüčüąĖą▓ sub-ąĖąĮą┤ąĄą║čüąŠą▓. ąó. ąĄ. ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ąĖąĮą┤ąĄą║čüą░ ą▓ čüą╗ąŠą▓ą░čĆąĄ ą▒čāą┤ąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ąĘą░ą┐ąĖčüčī. ąś ą▓čüąĄ ąĘą░ą┐čĆąŠčüčŗ ą┤ąŠčüčéčāą┐ą░ ą║ ą╗čÄą▒ąŠą╝čā sub-ąĖąĮą┤ąĄą║čüčā ą▒čāą┤čāčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ čäčāąĮą║čåąĖąĄą╣ ą┤ąŠčüčéčāą┐ą░ ą║ ąŠą▒čŖąĄą║čéčā. ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓, čā ą║ąŠč鹊čĆčŗčģ ą▓čüąĄ sub-ąĖąĮą┤ąĄą║čüčŗ ąĖą╝ąĄčÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗, ąĮąŠ čéčĆąĄą▒čāčÄčé čĆą░ąĘąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ OD ą┤ą╗čÅ ąŠą▒čŖąĄą║čéą░ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ąĘą░ą┐ąĖčüčī. |
| 7 |
- |
ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čŹč鹊čé ą▒ąĖčé ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮ. |
ą¦č鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖčÄ ąŠčéą┤ąĄą╗čīąĮčŗą╝ąĖ ą▒ąĖčéą░ą╝ąĖ ą▒ą░ą╣čéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ čüąĄčĆąĖčÅ čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║ąĖčģ ą╝ąŠą┤ąĖčäąĖą║ą░č鹊čĆąŠą▓ ą▒ąĖč鹊ą▓. ąóą░ą▒ą╗ąĖčåą░ 8 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąŠą┤ąĖčäąĖą║ą░č鹊čĆčŗ ą╗ąŠą│ąĖč湥čüą║ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ąś (AND) ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒čŖąĄą║č鹊ą╝. ą×ąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮčŗ ą▓čĆčāčćąĮčāčÄ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą┐ąĄčåąĖčäąĖčćąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 8. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ ąś ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą▒ąĖčé.
| ąæąĖčé |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| RD |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ čćč鹥ąĮąĖąĄ. |
| N_RD |
ą¦č鹥ąĮąĖąĄ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ. |
| WR |
ąĀą░ąĘčĆąĄčłąĄąĮą░ ąĘą░ą┐ąĖčüčī. |
| N_WR |
ąŚą░ą┐ąĖčüčī ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮą░. |
| ROM |
ą×ą▒čŖąĄą║čé ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ ą¤ąŚąŻ. |
| N_ROM |
ą×ą▒čŖąĄą║čé ąĮąĄ ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ ą¤ąŚąŻ. |
| EE |
ą×ą▒čŖąĄą║čé ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ EEPROM. |
| N_EE |
ą×ą▒čŖąĄą║čé ąĮąĄ ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ EEPROM. |
| FDEF |
ą×ą▒čŖąĄą║čé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ. |
| N_FDEF |
ą×ą▒čŖąĄą║čé ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ. |
| MAP |
ą×ą▒čŖąĄą║čé ąŠč鹊ą▒čĆą░ąČą░ąĄą╝čŗą╣. |
| N_MAP |
ą×ą▒čŖąĄą║čé ąŠč鹊ą▒čĆą░ąĘąĖčéčī ąĮąĄą╗čīąĘčÅ. |
| FSUB |
Sub-ąĖąĮą┤ąĄą║čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ. |
| N_FSUB |
Sub-ąĖąĮą┤ąĄą║čü ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ. |
ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēąĖą╣ ąŠą┐ąĄčĆą░č鹊čĆ ąĘą░ą┤ą░ąĄčé, čćč鹊 ąŠą▒čŖąĄą║čé ą╝ąŠąČąĮąŠ čćąĖčéą░čéčī, ąĘą░ą┐ąĖčüčŗą▓ą░čéčī, ąŠąĮ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ą░ą║ čäčāąĮą║čåąĖčÅ, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠč鹊ą▒čĆą░ąČąĄąĮ ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ (mappable):
RD & WR & N_ROM & N_EE & FDEF & MAP & N_FSUB
ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ čéą░ą▒ą╗ąĖčåąĄ 9 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ čéąĖą┐ąĖčćąĮčŗąĄ ą╝ąŠą┤ąĖčäąĖą║ą░č鹊čĆčŗ ą╗ąŠą│ąĖč湥čüą║ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ąśąøąś (OR) ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒čŖąĄą║č鹊ą╝. ą×ąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čéą░ą║ąČąĄ čüą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮčŗ čü ąĖą╝ąĄąĮą░ą╝ąĖ ą▒ąĖčé, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╝ąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ 8.
ąóą░ą▒ą╗ąĖčåą░ 9. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ ąśąøąś ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą▒ąĖčé.
| ąæąĖčé |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CONST |
ą×ą▒čŖąĄą║čé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, ą▒ą░ąĘąĖčĆčāčÄčēąĖą╣čüčÅ ą▓ ROM. |
| RW |
ą×ą▒čŖąĄą║čé ą╝ąŠąČąĮąŠ čćąĖčéą░čéčī ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī. |
| RO |
ą×ą▒čŖąĄą║čé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. |
| WO |
ą×ą▒čŖąĄą║čé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ. |
| RW_EE |
ą×ą▒čŖąĄą║čé, čĆą░ąĘą╝ąĄčēąĄąĮąĮčŗą╣ ą▓ EEPROM, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ čćąĖčéą░čéčī ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī. |
| RO_EE |
ą×ą▒čŖąĄą║čé, čĆą░ąĘą╝ąĄčēąĄąĮąĮčŗą╣ ą▓ EEPROM, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ čćąĖčéą░čéčī. |
| WO_EE |
ą×ą▒čŖąĄą║čé, čĆą░ąĘą╝ąĄčēąĄąĮąĮčŗą╣ ą▓ EEPROM, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī. |
| FUNC |
ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé. |
ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēąĖą╣ ąŠą┐ąĄčĆą░č鹊čĆ ąĘą░ą┤ą░ąĄčé, čćč鹊 ąŠą▒čŖąĄą║čé ą╝ąŠąČąĮąŠ čćąĖčéą░čéčī, ąĘą░ą┐ąĖčüčŗą▓ą░čéčī, ąŠąĮ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ą░ą║ čäčāąĮą║čåąĖčÅ, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠč鹊ą▒čĆą░ąČąĄąĮ ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ (č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ):
RW | FUNC | MAP_BIT
ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą╝ąŠą┤ąĖčäąĖą║ą░č鹊čĆąŠą▓ ą▒ąĖčé ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ ą¤čĆąĖą╝ąĄčĆąĄ 6, 菹╗ąĄą╝ąĄąĮčéčŗ čüą╗ąŠą▓ą░čĆčÅ 4, 8, 9 ąĖ 10.
ą¤čĆąĖą╝ąĄčĆ 6, ąĘą░ą┐ąĖčüąĖ OD:
#define DICTIONARY_DEVICE_INFO \
{0x1000,0x00,CONST,4,{(rom unsigned char *)&rCO_DevType}}, \
{0x1001,0x00,RO,1,{(rom unsigned char *)&uCO_DevErrReg}}, \
{0x1002,0x00,RO,4,{(rom unsigned char *)&uCO_DevManufacturerStatReg}}, \
{0x1005,0x00,FUNC | RW,4,{(rom unsigned char *)&_CO_COMM_SYNC_COBIDAccessEvent}}, \
{0x1008,0x00,CONST,24,{(rom unsigned char *)&rCO_DevName}}, \
{0x1009,0x00,CONST,4,{(rom unsigned char *)&rCO_DevHardwareVer}}, \
{0x100A,0x00,CONST,4,{(rom unsigned char *)&rCO_DevSoftwareVer}}, \
{0x100C,0x00,FUNC | RW,2,{(rom unsigned char *)&_CO_COMM_NMTE_GuardTimeAccessEvent}}, \
{0x100D,0x00,FUNC | RW,1,{(rom unsigned char *)&_CO_COMM_NMTE_LifeFactorAccessEvent}} \
{0x1017,0x00,FUNC | RW,2,{(rom unsigned char *)&_CO_COMM_NMTE_HeartBeatAccessEvent}}, \
{0x1018,0x00,CONST,1,{(rom unsigned char *)&rCO_DevIdentityIndx}}, \
{0x1018,0x01,CONST,4,{(rom unsigned char *)&rCO_DevVendorID}}, \
{0x1018,0x02,CONST,4,{(rom unsigned char *)&rCO_DevProductCode}}, \
{0x1018,0x03,CONST,4,{(rom unsigned char *)&rCO_DevRevNo}}, \
{0x1018,0x04,CONST,4,{(rom unsigned char *)&rCO_DevSerialNo}}
ą¤čĆąŠčüčéčŗąĄ ąŠą▒čŖąĄą║čéčŗ. OD ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą┐čĆąŠčüčéčŗčģ ąŠą▒čŖąĄą║č鹊ą▓. ą¤čĆąŠčüč鹊ą╣ ąŠą▒čŖąĄą║čé ą▓ čüčāčēąĮąŠčüčéąĖ čŹč鹊 čéą░ą║ąŠą╣ ąŠą▒čŖąĄą║čé, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą║ą░ą║ ąŠą▒čŗčćąĮčŗą╣ čéąĖą┐ ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ą▓ą║ą╗čÄčćą░ąĄčé ą╗čÄą▒ąŠą╣ čéąĖą┐ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆąŠą╝, ą░ čéą░ą║ąČąĄ ą╝ą░čüčüąĖą▓čŗ.
ą¤čĆąŠčüč鹊ą╣ ąŠą▒čŖąĄą║čé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▓ OD ą┐ąŠ čüčüčŗą╗ą║ąĄ ą▓ąĮčāčéčĆąĖ čüą╗ąŠą▓ą░čĆčÅ. ąŁč鹊 ąĖą╗ą╗čÄčüčéčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐ąŠ ą┐ąĄčĆą▓ąŠą╝čā 菹╗ąĄą╝ąĄąĮčéčā čüą╗ąŠą▓ą░čĆčÅ ą▓ ą¤čĆąĖą╝ąĄčĆąĄ 7. ąŚą░ą┐čĆąŠčü ąĮą░ čćč鹥ąĮąĖąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąŠą▒čŖąĄą║čéą░ ą▓ąĄčĆąĮąĄčé ą┤ą░ąĮąĮčŗąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ uCO_DevManufacturerStatReg; ąĘą░ą┐čĆąŠčü ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ąŠąĘą▓čĆą░čéąĖčé ąŠčłąĖą▒ą║čā, ą┐ąŠčüą║ąŠą╗čīą║čā čŹč鹊 ąŠą▒čŖąĄą║čé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ 7, čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą▓ąĖą┤čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░:
//ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐čĆąŠčüč鹊ą│ąŠ ąŠą▒čŖąĄą║čéą░:
{0x1002,0x00,RO,4,{(rom unsigned char *)&uCO_DevManufacturerStatReg}}
//ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé:
{0x1005,0x00,FUNC | RW,4,{(rom unsigned char *)&_CO_COMM_SYNC_COBIDAccessEvent}
ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé. ą×ą▒čŖąĄą║čéčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ čäčāąĮą║čåąĖąĄą╣, ą║ąŠą│ą┤ą░ čā ąĮąĄą│ąŠ ąĄčüčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ čüą▓ąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝čā čéąĖą┐čā ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ą╝ą░čüčüąĖą▓čā, ą║ą░ą║ ąŠąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ąĮą░ čÅąĘčŗą║ąĄ C. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ unsigned char MyObj, čā ą║ąŠč鹊čĆąŠą╣ ąĮąĄčé ąĮąĄąŠą▒čŗčćąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, ąĮąĄ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ čäčāąĮą║čåąĖąĄą╣; ąŠą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ą▓ MyObj ą▒ąĖčé 7 čĆą░ąĘčĆąĄčłą░ąĄčé ąĘą░ą┐ąĖčüčī ą▓ MyObj, č鹊 čŹč鹊 ą┐ąŠčéčĆąĄą▒čāąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ąĖ ąŠą▒čŖąĄą║čé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čäčāąĮą║čåąĖąĄą╣, ą┐ąŠą┤ąŠą▒ąĮąŠ č鹊ą╝čā, ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░ąĮąŠ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ COB-ID.
ą×ą▒čŖąĄą║čé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┐ąŠ čäčāąĮą║čåąĖąĖ, ą║ąŠą│ą┤ą░ ą▓ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╝ ą▒ą░ą╣č鹥 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FDEF_BIT. ąŁč鹊 ą┐čĆąŠą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆąŠą▓ą░ąĮąŠ ą▓ąŠ ą▓č鹊čĆąŠą╝ 菹╗ąĄą╝ąĄąĮč鹥 ą¤čĆąĖą╝ąĄčĆą░ 7, ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé COB-ID ą┤ą╗čÅ ąŠą▒čŖąĄą║čéą░ SYNC. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čäčāąĮą║čåąĖčÅ _CO_COMM_SYNC_COBIDAccessEvent() ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐čĆąŠčü ąĮą░ ą┤ąŠčüčéčāą┐ ą║ ąŠą▒čŖąĄą║čéčā ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 1005h, sub-ąĖąĮą┤ąĄą║čüčā 0.
ą¤čĆą░ą▓ąĖą╗ą░ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░. ąÜ ąŠą▒čŖąĄą║čéčā ąŠą▒čĆą░čēą░čÄčéčüčÅ č湥čĆąĄąĘ SDO, PDO ąĖą╗ąĖ ą║ą░ą║ąĖą╝-ą╗ąĖą▒ąŠ ą┤ąŠčüčéčāą┐ąŠą╝ ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ ąŠą▒čŖąĄą║čé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┐ąŠ čäčāąĮą║čåąĖąĖ, č鹊 ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą▒čĆą░čēąĄąĮąĖąĄ ą║ ąŠą▒čŖąĄą║čéčā, ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ ą▓ OD ą┤ą╗čÅ čŹč鹊ą│ąŠ ąŠą▒čŖąĄą║čéą░. ąĢčüčéčī 3 ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░ ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąŠą▒čĆą░čēąĄąĮąĖąĄ ą║ ąŠą▒čŖąĄą║čéčā:
ŌĆó Read control: čćč鹥ąĮąĖąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą▒ąĖčé, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čŹč鹊ą╣ čäčāąĮą║čåąĖąĄą╣. ąŁč鹊 ąŠčéąĮąŠčüąĖčéčüčÅ ą║ąŠ ą▓čüąĄą╝ ą▒ąĖčéą░ą╝, ą║čĆąŠą╝ąĄ FSUB_BIT ąĖ FDEF_BIT; čŹčéąĖ ą▒ąĖčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ OD ą┤ą╗čÅ ąŠą▒čŖąĄą║čéą░.
ŌĆó Read: čćč鹥ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░, ąĄčüą╗ąĖ ąŠąĮ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
ŌĆó Write: ąĘą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░, ąĄčüą╗ąĖ ąŠąĮ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ.
ą¤čĆąĖą╝ąĄčĆ 8 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ą▓čŗą│ą╗čÅą┤ąĖčé čéąĖą┐ąĖčćąĮą░čÅ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░. ą¤čĆąĖą╝ąĄčĆ 9 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┤ą╗čÅ ąŠą▒čŖąĄą║čéą░ TPDO1 COB-ID.
ą¤čĆąĖą╝ąĄčĆ 8, ąŠą▒čēąĖą╣ ą▓ąĖą┤ (čłą░ą▒ą╗ąŠąĮ) ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░:
void MyObjectHandlingFunction(void)
{
switch (mCO_DictGetCmd())
{
case DICT_OBJ_INFO: // ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ąŠą▒čŖąĄą║č鹥.
// ąÜąŠą┤ ą▓ čŹč鹊ą╝ čéąĖą┐ąĄ ąĘą░ą┐čĆąŠčüą░ ą┤ąŠą╗ąČąĄąĮ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī čéąĖą┐ ą┤ąŠčüčéčāą┐ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ,
// ąĄčüą╗ąĖ ąŠą▒čŖąĄą║čé ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčī RO ąĮą░ RW ąĮą░ ąŠčüąĮąŠą▓ą░ąĮąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ
// čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, č鹊 ąĘą┤ąĄčüčī ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮą░ čŹčéą░ čüąĖčéčāą░čåąĖčÅ
// ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čéąĖą┐ą░ ą┤ąŠčüčéčāą┐ą░. ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüąĖčéčāą░čåąĖą╣ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī
// ąŠą┐čāčēąĄąĮąŠ, ą┐ąŠčüą║ąŠą╗čīą║čā ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒ ąŠą▒čŖąĄą║č鹥 čüčéą░čéąĖčćąĮą░; čüčéą░čéąĖčćąĮą░čÅ
// ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┤ą░ąĮąĮčŗą╝ąĖ OD.
break;
case DICT_OBJ_READ: // ą¦č鹥ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░.
// ąŁč鹊 ąĘą░ą┐čĆąŠčü čćč鹥ąĮąĖčÅ ąŠą▒čŖąĄą║čéą░. ąÜąŠą┤ ą▓ čŹč鹊ą╝ čéąĖą┐ąĄ ąĘą░ą┐čĆąŠčüą░ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░ą▒ąŠčéą░čéčī
// ą╗čÄą▒čŗąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĖ/ąĖą╗ąĖ čüąŠą▒čŗčéąĖčÅ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čćč鹥ąĮąĖčÄ.
break;
case DICT_OBJ_WRITE: // ąŚą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░.
// ąŁč鹊 ąĘą░ą┐čĆąŠčü ąĘą░ą┐ąĖčüąĖ ąŠą▒čŖąĄą║čéą░. ąÜąŠą┤ ą▓ čŹč鹊ą╝ čéąĖą┐ąĄ ąĘą░ą┐čĆąŠčüą░ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░ą▒ąŠčéą░čéčī
// ą╗čÄą▒čŗąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĖ/ąĖą╗ąĖ čüąŠą▒čŗčéąĖčÅ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ąĘą░ą┐ąĖčüąĖ.
break;
}
}
ą¤čĆąĖą╝ąĄčĆ 9, čĆąĄą░ą╗čīąĮą░čÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŠą▒čŖąĄą║čéą░:
void CO_COMM_TPDO1_COBIDAccessEvent(void)
{
switch (mCO_DictGetCmd())
{
case DICT_OBJ_READ: // ą¦č鹥ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░.
// ąóčĆą░ąĮčüą╗čÅčåąĖčÅ č乊čĆą╝ą░čéą░ MCHP COB ą▓ č乊čĆą╝ą░čé CANopen COB
mTOOLS_MCHP2CO(mTPDOGetCOB(1));
// ąÆąŠąĘą▓čĆą░čé COB-ID
*(unsigned long *)(uDict.obj->pReqBuf) = mTOOLS_GetCOBID();
break;
case DICT_OBJ_WRITE: // ąŚą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░.
// ąóčĆą░ąĮčüą╗čÅčåąĖčÅ COB ą▓ č乊čĆą╝ą░čé MCHP
mTOOLS_CO2MCHP(*(unsigned long *)(uDict.obj->pReqBuf));
// ąĢčüą╗ąĖ čŹč鹊 ąĘą░ą┐čĆąŠčü ąŠčüčéą░ąĮąŠą▓ą║ąĖ PDO
if ((*(UNSIGNED32 *)(&mTOOLS_GetCOBID())).PDO_DIS)
{
// ąś ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčéčŗą╣ COB čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╝ COB ąĖ čéąĖą┐ąŠą╝, č鹊 ąĘą░ą║čĆąŠąĄą╝ PDO
if (!((mTOOLS_GetCOBID() ^ mTPDOGetCOB(1)) & 0xFFFFEFFF))
{
// ąĮąŠ ąĘą░ą║čĆąŠąĄą╝ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ PDO ą▒čŗą╗ą░ ąŠčéą║čĆčŗčéą░
if (mTPDOIsOpen(1)) {mTPDOClose(1);}
// ą┐ąŠą║ą░ąĘą░čéčī ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ąŠą▒čŖąĄą║čéčā, čćč鹊 PDO ąĘą░ą┐čĆąĄčēąĄąĮ
(*(UNSIGNED32 *)(&mTPDOGetCOB(1))).PDO_DIS = 1;
}
else
{
mCO_DictSetRet(E_PARAM_RANGE); //ą×čłąĖą▒ą║ą░
}
}
// ąśąĮą░č湥 ąĄčüą╗ąĖ TPDO ąĮąĄ ąŠčéą║čĆčŗčé, č鹊 ąĘą░ą┐čāčüą║ TPDO
else
{
// ąś ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčéčŗą╣ COB čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╝ COB ąĖ čéąĖą┐ąŠą╝, č鹊 ąŠčéą║čĆąŠąĄą╝ PDO
if (!((mTOOLS_GetCOBID() ^ mTPDOGetCOB(1)) & 0xFFFFEFFF))
{
// ąĮąŠ ąŠčéą║čĆąŠąĄą╝ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ PDO ą▒čŗą╗ą░ ąĘą░ą║čĆčŗčéą░
if (!mTPDOIsOpen(1))
{
mTPDOOpen(1);
}
// ą┐ąŠą║ą░ąĘą░čéčī ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ąŠą▒čŖąĄą║čéčā, čćč鹊 PDO čĆą░ąĘčĆąĄčłąĄąĮ
(*(UNSIGNED32 *)(&mTPDOGetCOB(1))).PDO_DIS = 0;
}
else
{
mCO_DictSetRet(E_PARAM_RANGE); //ą×čłąĖą▒ą║ą░
}
}
break;
}
}
ążčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü čäčāąĮą║čåąĖčÅą╝ąĖ ąĖ čüčéčĆčāą║čéčāčĆąŠą╣ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą░ą┐čĆąŠčüąŠą▓ ą║ ąŠą▒čŖąĄą║čéčā ąĖ ąŠčé ąĮąĄą│ąŠ. ąŁč鹊 čäčāąĮą║čåąĖąĖ mCO_DictGetCmd() ąĖ mCO_DictSetRet(). ą¤ąĄčĆą▓ą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ, ąĖ ą▓č鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓ąŠąĘą▓čĆą░čéą░ ą╗čÄą▒čŗčģ ąŠčłąĖą▒ąŠą║ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĄą╝čā ą║ąŠą┤čā. ąóą░ą▒ą╗ąĖčåą░ 11 ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ąŠčłąĖą▒ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮčŗ. ąÆ čüą╗čāčćą░ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ ąĮąĖą║ą░ą║ąŠą╣ ąŠčéą▓ąĄčé ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ; OD ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé čāčüą┐ąĄčģ.
ąŚą░ą┐čĆą░čłąĖą▓ą░čÄčēąĖą╣ ą║ąŠą┤ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ą▓ čüą╗ąŠą▓ą░čĆąĄ (uDict.obj) ąĮą░ čüą▓ąŠčÄ ą╗ąŠą║ą░ą╗čīąĮčāčÄ čüčéčĆčāą║čéčāčĆčā DICT_OBJ. ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą║ą░ą║ ąŠą▒ ąŠą▒čŖąĄą║č鹥, čéą░ą║ ąĖ ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĄą╝ ą║ąŠą┤ąĄ (čüčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ 10). ą¤čĆąĖą╝ąĄčĆ 8 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé čłą░ą▒ą╗ąŠąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüčéčĆčāą║čéčāčĆčŗ ą▓ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░.
ąóą░ą▒ą╗ąĖčåą░ 10. ąĪčéčĆčāą║čéčāčĆą░ DICT_OBJ UDICT.
| ąŁą╗ąĄą╝ąĄąĮčé |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| pReqBuf |
unsigned char * |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĄą│ąŠ ą║ąŠą┤ą░. ąŁč鹊čé čāą║ą░ąĘą░č鹥ą╗čī čüčüčŗą╗ą░ąĄčéčüčÅ ąĮą░ ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ą░ą╝čÅčéąĖ, ą║ąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░. ąÜąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čćč鹥ąĮąĖąĄ, čŹč鹊čé čāą║ą░ąĘą░č鹥ą╗čī čüčüčŗą╗ą░ąĄčéčüčÅ ąĮą░ ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą▒čāč乥čĆą░, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą╗ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĖą╣ ą║ąŠą┤. |
| reqLen |
unsigned int |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗčģ ą▒ą░ą╣čé. ąŁč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą▓čŗčłą░čéčī ą┤ą╗ąĖąĮčŗ ąŠą▒čŖąĄą║čéą░. |
| reqOffst |
unsigned int |
ąØą░čćą░ą╗čīąĮą░čÅ č鹊čćą║ą░ ąĘą░ą┐čĆąŠčüą░. ąŁč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąŠčĆčåąĖąŠąĮąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┐ąŠ ą┐čĆąĖčćąĖąĮąĄ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą┐ąŠą┤ ą▒čāč乥čĆ. ąŁč鹊 ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüąŠą▓ čćč鹥ąĮąĖčÅ; ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüąŠą▓ ąĘą░ą┐ąĖčüąĖ čŹč鹊 ą▓čĆčÅą┤ ą╗ąĖ ąĮčāąČąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ čćą░čüčéąĖčćąĮą░čÅ ąĘą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░ ąĮąĄ ą▒čāą┤ąĄčé ąČąĄą╗ą░č鹥ą╗čīąĮą░. ąóą░ą║ąČąĄ čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĮąĄ ąĮčāąČąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī, ąĄčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ ąŠą▒čŖąĄą║č鹥 PDO ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 8 (ą┤ą╗čÅ ąŠą▒čŖąĄą║čéą░ SDO čŹč鹊 4 ą▒ą░ą╣čéą░). |
| index |
unsigned int |
ąśąĮą┤ąĄą║čü CANopen. |
| subindex |
unsigned char |
Sub-ąĖąĮą┤ąĄą║čü CANopen. |
| ctl |
enum DICT_CTL |
ąóąĖą┐ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ. |
| len |
unsigned int |
ąĀą░ąĘą╝ąĄčĆ ąŠą▒čŖąĄą║čéą░ ą▓ ą▒ą░ą╣čéą░čģ. |
| p |
union DICT_PTRS |
ąŻą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ ąŠą▒čŖąĄą║čéčŗ |
ąóą░ą▒ą╗ąĖčåą░ 11. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║.
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| E_SUCCESS |
ąŻčüą┐ąĄčłąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ, ąŠčłąĖą▒ąŠą║ ąĮąĄčé. |
| E_TOGGLE |
ąæąĖčé toggle ąĮąĄ ą┐ąŠą╝ąĄąĮčÅą╗ čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. |
| E_SDO_TIME |
ąóą░ą╣ą╝ą░čāčé ą┐čĆąŠč鹊ą║ąŠą╗ą░ SDO. |
| E_CS_CMD |
ąĪą┐ąĄčåąĖčäąĖą║ą░č鹊čĆ ą║ąŠą╝ą░ąĮą┤čŗ ą║ą╗ąĖąĄąĮčé/čüąĄčĆą▓ąĄčĆ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ ąĖą╗ąĖ ąĮąĄąĖąĘą▓ąĄčüč鹥ąĮ. |
| E_MEMORY_OUT |
ąØąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ą░ą╝čÅčéąĖ. |
| E_UNSUPP_ACCESS |
ąØąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗą╣ ą┤ąŠčüčéčāą┐ ą║ ąŠą▒čŖąĄą║čéčā. |
| E_CANNOT_READ |
ą¤ąŠą┐čŗčéą║ą░ čćč鹥ąĮąĖčÅ ąŠą▒čŖąĄą║čéą░, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ. |
| E_CANNOT_WRITE |
ą¤ąŠą┐čŗčéą║ą░ ąĘą░ą┐ąĖčüąĖ ąŠą▒čŖąĄą║čéą░, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. |
| E_OBJ_NOT_FOUND |
ą×ą▒čŖąĄą║čé ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé ą▓ OD. |
| E_OBJ_CANNOT_MAP |
ą×ą▒čŖąĄą║čé ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠč鹊ą▒čĆą░ąČąĄąĮ ąĮą░ PDO. |
| E_OBJ_MAP_LEN |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĖ ą┤ą╗ąĖąĮą░ ąŠą▒čŖąĄą║č鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠč鹊ą▒čĆą░ąČąĄąĮčŗ, ą┐čĆąĄą▓čŗčüąĖą╗ąĖ ą▒čŗ ą┤ą╗ąĖąĮčā PDO. |
| E_GEN_PARAM_COMP |
ą×ą▒čēą░čÅ ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī ą┐ą░čĆą░ą╝ąĄčéčĆą░. |
| E_GEN_INTERNAL_COMP |
ą×ą▒čēą░čÅ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ. |
| E_HARDWARE |
ąĪą▒ąŠą╣ ą┤ąŠčüčéčāą┐ą░ ąĖąĘ-ąĘą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ. |
| E_LEN_SERVICE |
ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé, ą┤ą╗ąĖąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čüą╗čāąČą▒čŗ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé. |
| E_LEN_SERVICE_HIGH |
ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé, ą┤ą╗ąĖąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čüą╗čāąČą▒čŗ čüą╗ąĖčłą║ąŠą╝ ą▓ąĄą╗ąĖą║ą░. |
| E_LEN_SERVICE_LOW |
ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé, ą┤ą╗ąĖąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čüą╗čāąČą▒čŗ čüą╗ąĖčłą║ąŠą╝ ą╝ą░ą╗ą░. |
| E_SUBINDEX_NOT_FOUND |
Sub-ąĖąĮą┤ąĄą║čü ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé. |
| E_PARAM_RANGE |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą▓čŗčłą╗ąŠ ąĖąĘ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ąĮą░ ąĘą░ą┐ąĖčüčī). |
| E_PARAM_HIGH |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čüą╗ąĖčłą║ąŠą╝ ą▓ąĄą╗ąĖą║ąŠ. |
| E_PARAM_LOW |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čüą╗ąĖčłą║ąŠą╝ ą╝ą░ą╗ąŠ. |
| E_MAX_LT_MIN |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ. |
| E_GENERAL |
ą×ą▒čēą░čÅ ąŠčłąĖą▒ą║ą░. |
| E_TRANSFER |
ąöą░ąĮąĮčŗąĄ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮčŗ ąĖą╗ąĖ čüąŠčģčĆą░ąĮąĄąĮčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. |
| E_LOCAL_CONTROL |
ąöą░ąĮąĮčŗąĄ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮčŗ ąĖą╗ąĖ čüąŠčģčĆą░ąĮąĄąĮčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ ąĖąĘ-ąĘą░ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. |
| E_DEV_STATE |
ąöą░ąĮąĮčŗąĄ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮčŗ ąĖą╗ąĖ čüąŠčģčĆą░ąĮąĄąĮčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ ąĖąĘ-ąĘą░ č鹥ą║čāčēąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░. |
ąĪą╗čāąČą▒čŗ OD. ąĢčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą╗čāąČą▒ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüą╗ąŠą▓ą░čĆčÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣ SDO. ąĢčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, čŹč鹊 čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ PDO (dynamic PDO mapping).
void mCO_DictObjectRead(DICT_OBJ myObj)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čćąĖčéą░ąĄčé ąŠą▒čŖąĄą║čé, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ č湥čĆąĄąĘ myObj. ą¦č鹊ą▒čŗ čŹč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒čŖąĄą║čéą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮą░ ą╗ąŠą║ą░ą╗čīąĮąŠ ą║ą░ą║ čüčéčĆčāą║čéčāčĆą░ DICT_OBJ, ą║ąŠą│ą┤ą░ ąŠąĮą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ mCO_DictObjectRead(). ąÆąĮčāčéčĆąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ čüčüčŗą╗ą║ą░.
ąÆ čüčéčĆčāą║čéčāčĆąĄ DICT_OBJ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ ąĖąĘ ąŠą▒čŖąĄą║čéą░. ąØąĄą║ąŠč鹊čĆą░čÅ čćą░čüčéčī čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą▓čŗąĘčŗą▓ą░čÄčēąĄą╣ čäčāąĮą║čåąĖąĄą╣, ąĖ ą┤čĆčāą│ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ąĖąĘ OD. ążčāąĮą║čåąĖčÅ mCO_DictObjectDecode() ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ mCO_DictObjectRead(), čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ąĖ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüčüčŗą╗ą║ąĖ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ OD. ąöčĆčāą│ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝. ąÆ čéą░ą▒ą╗ąĖčåąĄ 12 ąŠą┐ąĖčüą░ąĮą░ čüčéčĆčāą║čéčāčĆą░ ąĖ ąĖčüč鹊čćąĮąĖą║ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░.
ąóą░ą▒ą╗ąĖčåą░ 12. ąĪčéčĆčāą║čéčāčĆą░ DICT_OBJ.
| ąŁą╗ąĄą╝ąĄąĮčé |
ąóąĖą┐ |
ąÜąĄą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| pReqBuf |
unsigned char * |
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĄą│ąŠ ą║ąŠą┤ą░. |
| reqLen |
unsigned int |
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗčģ ą▒ą░ą╣čé. |
| reqOffst |
unsigned int |
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī |
ąØą░čćą░ą╗čīąĮą░čÅ č鹊čćą║ą░ ąĘą░ą┐čĆąŠčüą░. |
| index |
unsigned int |
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī. |
ąśąĮą┤ąĄą║čü CANopen. |
| subindex |
unsigned char |
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī. |
Sub-ąĖąĮą┤ąĄą║čü CANopen. |
| ctl |
enum DICT_CTL |
mCO_DictObjectDecode() |
ąóąĖą┐ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ. |
| len |
unsigned int |
mCO_DictObjectDecode() |
ąĀą░ąĘą╝ąĄčĆ ąŠą▒čŖąĄą║čéą░ ą▓ ą▒ą░ą╣čéą░čģ. |
| p |
union DICT_PTRS |
mCO_DictObjectDecode() |
ąŻą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ ąŠą▒čŖąĄą║čéčŗ |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DICT_OBJ myObj: čüčéčĆčāą║čéčāčĆą░ ąŠą▒čŖąĄą║čéą░, ą┐ąŠą║ą░ąĘą░ąĮąĮą░čÅ ą▓ čéą░ą▒ą╗ąĖčåąĄ 12, čüą╝. ą▓čĆąĄąĘą║čā čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mCO_DictObjectRead.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠčéčüčāčéčüčéą▓čāčÄčé. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 mCO_DictGetRet() ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠą┤ą░ ąŠčłąĖą▒ą║ąĖ.
ą¤čĆąĖą╝ąĄčĆ:
void MyFunc(void)
{
DICT_OBJ myLocalObj;
unsigned char localArray[20];
// ąŻą║ą░ąĘą░ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░
myLocalObj.index = 0x1008L;
myLocalObj.subindex = 0x00;
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╣ ą▓ čüą╗ąŠą▓ą░čĆąĄ OD
mCO_DictObjectDecode(myLocalObj);
// ąŻą║ą░ąĘą░čéčī ą╗ąŠą║ą░ą╗čīąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ąĖ čćč鹊 ąĮčāąČąĮąŠ čćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ
myLocalObj.pReqBuf = localArray;
myLocalObj.reqLen = 0x8;
myLocalObj.reqOffst = 0x0;
// ą¦č鹥ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░
mCO_DictObjectRead(myLocalObj);
}
void mCO_DictObjectWrite(DICT_OBJ myObj)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąŠą▒čŖąĄą║čé, ąĘą░ą┤ą░ąĮąĮčŗą╣ č湥čĆąĄąĘ myObj. ą¦č鹊ą▒čŗ čŹč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒čŖąĄą║čéą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮą░ ą╗ąŠą║ą░ą╗čīąĮąŠ ą║ą░ą║ čüčéčĆčāą║čéčāčĆą░ DICT_OBJ ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą┤ą░ąĮą░ ą▓ čäčāąĮą║čåąĖčÄ mCO_DictObjectWrite(). ąÆąĮčāčéčĆąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ čüčüčŗą╗ą║ą░.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
DICT_OBJ myObj: čüčéčĆčāą║čéčāčĆą░ ąŠą▒čŖąĄą║čéą░, ą┐ąŠą║ą░ąĘą░ąĮąĮą░čÅ ą▓ čéą░ą▒ą╗ąĖčåąĄ 12, čüą╝. ą▓čĆąĄąĘą║čā čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mCO_DictObjectRead.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠčéčüčāčéčüčéą▓čāčÄčé. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 mCO_DictGetRet() ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠą┤ą░ ąŠčłąĖą▒ą║ąĖ.
ąæą░ąĘąŠą▓ąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ ą┐ąŠą┤ąŠą▒ąĮąŠ č鹊ą╝čā, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ą▓čĆąĄąĘą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ mCO_DictObjectRead.
void mCO_DictObjectDecode(DICT_OBJ myObj)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą╗čÄą▒ąŠą╣ čüčéą░čéąĖč湥čüą║ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ OD. ą×ą▒čŖąĄą║čé ąĘą░ą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ myObj, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╗ąŠą║ą░ą╗čīąĮąŠ ąĖ ą┐ąĄčĆąĄą┤ą░ąĮ ą▓ čŹčéčā čäčāąĮą║čåąĖčÄ. ążčāąĮą║čåąĖčÅ ą▓ąŠąĘčīą╝ąĄčé ąĖąĮą┤ąĄą║čü ąĖ sub-ąĖąĮą┤ąĄą║čü ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ąŠą▒čŖąĄą║čéą░ ą▓ OD. ą×ą▒čŖąĄą║čé ąĮą░ą╣ą┤ąĄąĮ, č鹊 čāą║ą░ąĘą░č鹥ą╗čī, ą┤ą╗ąĖąĮą░ ąĖ ąĮąĄą║ąŠč鹊čĆą░čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮą░ ą▓ čüčéčĆčāą║čéčāčĆčā myObj (čüą╝. čéą░ą▒ą╗ąĖčåčā 12 ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mCO_DictObjectRead). ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ čüčéą░čéčāčüą░, ąĖ ąŠąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ mCO_DictGetRet().
ą¤ą░čĆą░ą╝ąĄčéčĆ:
DICT_OBJ myObj: čüčéčĆčāą║čéčāčĆą░ ąŠą▒čŖąĄą║čéą░, ą║ą░ą║ ąŠąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ 12 (čüą╝. ą▓čĆąĄąĘą║čā čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ mCO_DictObjectRead).
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠčéčüčāčéčüčéą▓čāąĄčé. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 mCO_DictGetRet() ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠą┤ą░ ąŠčłąĖą▒ą║ąĖ.
ąæą░ąĘąŠą▓ąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ ą┐ąŠą┤ąŠą▒ąĮąŠ č鹊ą╝čā, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ą▓čĆąĄąĘą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ mCO_DictObjectRead.
enum _DICT_OBJECT_REQUEST mCO_DictGetCmd(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ąŠą▒čŖąĄą║čéą░. ąśą╝ąĄąĄčéčüčÅ č鹊ą╗čīą║ąŠ 3 ą║ąŠą╝ą░ąĮą┤čŗ: DICT_OBJ_INFO, DICT_OBJ_READ ąĖ DICT_OBJ_WRITE.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
DICT_OBJ_INFO: čćč鹥ąĮąĖąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čŖąĄą║čéą░.
DICT_OBJ_READ: čćč鹥ąĮąĖąĄ ąŠą▒čŖąĄą║čéą░.
DICT_OBJ_WRITE: ąĘą░ą┐ąĖčüčī ąŠą▒čŖąĄą║čéą░.
ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ čüą╝. ą▓ ą¤čĆąĖą╝ąĄčĆąĄ 9 čüąĄą║čåąĖąĖ "ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé".
unsigned char mCO_DictGetRet(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüčéą░čéčāčüą░ ą▓ąŠąĘą▓čĆą░čéą░ ąŠą┐ąĄčĆą░čåąĖąĖ OD.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: ą▓čüąĄ ąŠąĮąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 11 (čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé").
void mCO_DictSetRet(unsigned char retVal)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüčéą░čéčāčüą░ ą▓ąŠąĘą▓čĆą░čéą░ ąŠą┐ąĄčĆą░čåąĖąĖ OD. ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŖąĄą║čéą░.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
unsigned char retVal: čüčéą░čéčāčü ą▓ąŠąĘą▓čĆą░čéą░ ąĘą░ą┐čĆąŠčüą░ ąŠą▒čŖąĄą║čéą░. ąÆčüąĄ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 11 (čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé").
ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ čüą╝. ą▓ ą¤čĆąĖą╝ąĄčĆąĄ 9 čüąĄą║čåąĖąĖ "ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠą▒čŖąĄą║čé".
[ąöčĆą░ą╣ą▓ąĄčĆ ECANŌäó]
ążčāąĮą║čåąĖąĖ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčé čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤čĆą░ą╣ą▓ąĄčĆą░ ECAN. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤čĆą░ą╣ą▓ąĄčĆ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ čü čŹčéąĖą╝ čüč鹥ą║ąŠą╝ CANopen, čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ PIC18F, ąĮą░ ą▒ąŠčĆčéčā ą║ąŠč鹊čĆčŗčģ ąĖą╝ąĄąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ECAN. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║ąČąĄ ą▓ąĮąĄčłąĮąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN, čü ą┤čĆčāą│ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ąĖ ą┤čĆčāą│ąĖą╝ąĖ ą▓čŗąĘąŠą▓ą░ą╝ąĖ čäčāąĮą║čåąĖą╣. ąÆ čŹč鹊ą╝ čüąŠą▒čŗčéąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ.
void mCANEventManager(void)
ąŁč鹊 čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čüąŠą▒čŗčéąĖčÅ. ąÆčüąĄ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ ąŠč湥čĆąĄą┤čī čüąŠą▒čŗčéąĖčÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓ąĮčāčéčĆąĖ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ čüč鹥ą║ą░ CANopen, ą║ąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ CO_ProcessAllEvents.
void mCANReset(unsigned char CANBitRate)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čüą▒čĆą░čüčŗą▓ą░ąĄčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ CAN, ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąŠ čłąĖąĮąĄ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ čüč鹥ą║ą░ CANopen, ą║ąŠą│ą┤ą░ ą┐ąŠą╗čāč湥ąĮ ąĘą░ą┐čĆąŠčü čüą▒čĆąŠčüą░ ą╗ąĖą▒ąŠ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą╗ąĖą▒ąŠ ąŠčé ą╝ą░čüč鹥čĆą░ NMT.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠčéą║čĆčŗą▓ą░ąĄčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ CAN, ąĄčæ čüą╗ąĄą┤čāąĄčé čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ą║ą░ą║ ąĘą░ą┐čĆąŠčü. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ, ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄ ąŠčéą║čĆčŗčéčŗ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą║čĆčŗą▓ą░ąĄčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ CAN.
BOOL mCANIsCommOpen(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ą┤čĆą░ą╣ą▓ąĄčĆą░: ą▒čŗą╗ąĖ ąĖą╗ąĖ ąĮąĄčé ąŠčéą║čĆčŗčéčŗ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąŠčéą║čĆčŗčéčŗ.
FALSE: ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąĘą░ą║čĆčŗčéčŗ.
void mCANErrIsOverFlow(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąŠčüąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ: ą▒čŗą╗ąŠ ą╗ąĖ čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░. ąĢčüą╗ąĖ ąĮą░ą╣ą┤ąĄąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, č鹊 ąŠąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┤ą░ą╗ąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ mCANErrClearOverFlow. ąÜąŠą│ą┤ą░ čüą╗čāčćąĖą╗ąŠčüčī čāčüą╗ąŠą▓ąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, č鹊 ąŠą┤ąĮąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▒čŗą╗ąŠ ą┐ąŠč鹥čĆčÅąĮąŠ. ąÜą░ą║ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čŹčéčā čüąĖčéčāą░čåąĖčÄ - ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ; čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ CANopen ąĮąĄ čéčĆąĄą▒čāąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čŹč鹊ą│ąŠ čāčüą╗ąŠą▓ąĖčÅ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
TRUE: ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░.
FALSE: ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░.
void mCANErrClearOverFlow(void)
ąŻą┤ą░ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ čāčüą╗ąŠą▓ąĖąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░.
void mCANSetBitRate(unsigned char CANBitRate)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą▒ąĖčé (bitrate) čłąĖąĮčŗ CAN. ąĪą║ąŠčĆąŠčüčéčī ąĮąĄ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, čŹč鹊 ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ čüčéą░ą▓ąĖčéčüčÅ ą▓ ąŠč湥čĆąĄą┤čī ą┤čĆą░ą╣ą▓ąĄčĆą░, ą┐ąŠą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆ ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ CAN ąĮąĄ ą▒čāą┤čāčé ą│ąŠč鹊ą▓čŗ ą┐čĆąĖąĮčÅčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ 1 čĆą░ąĘ ą▓ ą╝ąŠą╝ąĄąĮčé čüčéą░čĆčéą░.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
unsigned char CANBitRate: ąĘą┤ąĄčüčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ; ąŠą┤ąĮą░ą║ąŠ čüčćąĖčéą░čÄčéčüčÅ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮčŗą╝ąĖ č鹊ą╗čīą║ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0 .. 8. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąĖą▓ąĄą┤čāčé ą║ čāčüčéą░ąĮąŠą▓ą║ąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąĘą░ą┤ą░ąĄčéčüčÅ ąŠą┐čåąĖąĄą╣ 0. ąÆčüąĄ 9 ąŠą┐čåąĖą╣ čüą║ąŠčĆąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čäą░ą╣ą╗ąĄ CO_DEFS.DEF.
unsigned char mCANGetBitRate(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé č鹥ą║čāčēąĖą╣ ą▒ąĖčéčĆąĄą╣čé, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
unsigned char: č鹥ą║čāčēąĖą╣ ą▒ąĖčéčĆąĄą╣čé. ąöąŠčüč鹊ą▓ąĄčĆąĮčŗą╝ąĖ ą▒čāą┤čāčé č鹊ą╗čīą║ąŠ ąĘąĮą░č湥ąĮąĖčÅ 0 .. 8; ąŠą┤ąĮą░ą║ąŠ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▓ąĄčĆąĮčāčéčī ą┤čĆčāą│ąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĄčüą╗ąĖ ą▓ ą▓čŗąĘąŠą▓ mCANSetBitRate() ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ, ąŠčéą╗ąĖčćą░čÄčēąĄąĄčüčÅ ąŠčé ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ 0 .. 8.
void mCANOpenMessage(unsigned char MsgTyp, unsigned long COBID, unsigned char hRet)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čüą║ą░ąĮąĖčĆčāąĄčé ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą┐ąŠčćč鹊ą▓čŗąĄ čÅčēąĖą║ąĖ ą▓ ą┐ąŠąĖčüą║ąĄ ąŠčéą║čĆčŗč鹊ą│ąŠ čüą╗ąŠčéą░. ąöąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN ą▓ą╝ąĄčüč鹥 čü čāąĮąĖą║ą░ą╗čīąĮčŗą╝ ąĮąĄąĮčāą╗ąĄą▓čŗą╝ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą╝ (handle) ą║ čŹč鹊ą╝čā ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā. ąĢčüą╗ąĖ ąĮą░ą╣ą┤ąĄąĮ čüą╗ąŠčé, č鹊 ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN, ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ, ąĖ čŹč鹊čé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÆ ą▓čŗąĘčŗą▓ą░čÄčēąĖą╣ ą║ąŠą┤ čéą░ą║ąČąĄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ, ąĄčüą╗ąĖ čüą╗ąŠčé ąĮą░ą╣ą┤ąĄąĮ; ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ 0. ąÆčŗąĘčŗą▓ą░čÄčēą░čÅ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ čģčĆą░ąĮąĖčéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ, ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą▒čŗą╗ą░ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮą░ ą┐ąŠąĘąČąĄ ą▒ąĄąĘ čüą▒čĆąŠčüą░.
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ, ąĮąŠ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ, ą┐ąŠą║ą░ čłąĖąĮą░ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ą▒čāą┤čāčé ą│ąŠč鹊ą▓čŗ. ąÆ ą▒čāą┤čāčēąĖčģ ą╝ąŠą┤čāą╗čÅčģ CAN čŹčéą░ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ąŠč湥čĆąĄą┤ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┤ą░ą╗ąĄąĮą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
unsigned char MsgTyp: čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (handle) ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąöąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮąĄąĮčāą╗ąĄą▓čŗą╝.
unsigned long COBID: ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
unsigned char hRet: čüčéą░čéčāčü ą▓ąŠąĘą▓čĆą░čéą░. ąŚą┤ąĄčüčī ą▒čāą┤ąĄčé 0 ą╗ąĖą▒ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (handle).
void mCANCloseMessage(unsigned char hMsg)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čüą║ą░ąĮąĖčĆčāąĄčé ą┐ąŠčćč鹊ą▓čŗąĄ čÅčēąĖą║ąĖ ą▓ ą┐ąŠąĖčüą║ąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ (handle). ąĢčüą╗ąĖ ąĮą░ą╣ą┤ąĄąĮ, č鹊 ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN čāą┤ą░ą╗čÅąĄčéčüčÅ ąĖąĘ čüą┐ąĖčüą║ą░ ą┐čĆąĖąĄą╝ą░.
ą¤čĆąŠąĖčüčģąŠą┤ąĖčé č鹊ą╗čīą║ąŠ ą┐ąŠčüčéą░ąĮąŠą▓ą║ą░ ą▓ ąŠč湥čĆąĄą┤čī ąĘą░ą┐čĆąŠčüą░ čāą┤ą░ą╗ąĄąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ CAN ąĖąĘ čüą┐ąĖčüą║ą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│čāčé ą┐čĆąĖąĮąĖą╝ą░čéčīčüčÅ, ą┐ąŠą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ą▒čāą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čāą┤ą░ą╗ąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN ąĖąĘ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. ąÆ ą▒čāą┤čāčēąĖčģ ą╝ąŠą┤čāą╗čÅčģ CAN čŹčéą░ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ąŠč湥čĆąĄą┤ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┤ą░ą╗ąĄąĮą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
unsigned char hMsg: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (handle) ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ ąĮą░ čāčüą╗ąŠą▓ąĖąĄ RTR č鹥ą║čāčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤ąĄčĆąĄą┤ čŹčéąĖą╝ ąĘą░ą┐čĆąŠčüąŠą╝ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ mCANIsGetReady ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ č鹥ą║čāčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
void mCANIsGetReady(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąŠą▒čŗčéąĖąĄ ą┐čĆąĖąĄą╝ą░. ąĢčüą╗ąĖ ąŠąĮąŠ ąĮą░ą╣ą┤ąĄąĮąŠ, č鹊 čüą▓čÅąĘą░ąĮąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (handle) ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░, ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│ąĖčüčéčĆ, ą║ ą║ąŠč鹊čĆąŠą╝čā ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ mCANFetchRetStat. ąśąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0. ąĢčüą╗ąĖ ąŠąČąĖą┤ą░ąĄčé ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, č鹊 ąŠąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ ą┐ąĄčĆąĄą┤ ą┐ąŠą▓č鹊čĆąĮčŗą╝ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ.
ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ą┤ąŠčüčéčāą┐ ą║ ą▒čāč乥čĆčā ąĮą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą▓čŗąĘąŠą▓ą░čģ ą┐čĆąĖąĄą╝ą░, čé. ąĄ. ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┤ą╗čÅ čüą▓čÅąĘą░ąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ čćč鹥ąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓čŗąĘąŠą▓čŗ čäčāąĮą║čåąĖą╣ mCANGetDataLen() ąĖ mCANGetDataByten() ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčé, čćč鹊 ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ąĮą░ąĖą▒ąŠą╗ąĄąĄ č鹥ą║čāčēąĖąĄ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ.
void mCANReadMessage(void)
ąÆčŗąĘąŠą▓ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčā, čćč鹊 č鹥ą║čāčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ, ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ č鹥ą┐ąĄčĆčī ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▒čāč乥čĆ ą┤ą╗čÅ ąĮąŠą▓ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ążčāąĮą║čåąĖčÅ mCANIsGetReady ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ čŹčéąĖą╝ ąĘą░ą┐čĆąŠčüąŠą╝, ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ č鹥ą║čāčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
unsigned char * mCANGetPtrRxCOB(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ č鹥ą║čāčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ. ą×ąĮ čéą░ą║ąČąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ ą▓ č乊čĆą╝ą░č鹥 Microchip.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
unsigned char *: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐čĆąĖąĮčÅčéčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN.
unsigned char * mCANGetPtrRxData(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ č鹥ą║čāčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ.
unsigned char mCANGetDataLen(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ą┤ą╗ąĖąĮčā č鹥ą║čāčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐čĆąŠčüą░ RTR.
unsigned char mCANGetDataByten(void)
ą¤čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé 8 čäčāąĮą║čåąĖą╣, ą│ą┤ąĄ čüčāčäčäąĖą║čü n ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąŠčé 0 ą┤ąŠ 7. ąÜą░ąČą┤ą░čÅ ąĖąĘ čŹčéąĖčģ čäčāąĮą║čåąĖą╣ ą▓ąĄčĆąĮąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
void mCANIsPutReady(putHndl)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čüą║ą░ąĮąĖčĆčāąĄčé ą▓ ą┐ąŠąĖčüą║ąĄ ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░. ąÆ čüą╗čāčćą░ąĄ čāčüą┐ąĄčģą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ą▓ čäčāąĮą║čåąĖčÄ, ą▒čāą┤ąĄčé čéą░ą║ąŠą╣ ąČąĄ, čćč鹊 ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮčŗą╣; ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ 0. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ mCANFetchRetStat.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
unsigned char putHndl: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (handle) čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ ą╗čÄą▒ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą┐ąŠą╝ąĄčēąĄąĮąŠ ąĮą░ čłąĖąĮčā, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (handle) ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ mCANFetchRetStat.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÆčŗąĘąŠą▓ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓č鹊čĆąŠą╣ čĆą░ąĘ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ą╝ąŠąČąĄčé ąĮąĄ ą▓ąŠąĘą▓čĆą░čéąĖčéčī č鹊čé ąČąĄ čüą░ą╝čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ.
void mCANSendMessage(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆčā, čćč鹊 ą┤ą░ąĮąĮčŗąĄ, ą┤ą╗ąĖąĮą░ ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN ą▒čŗą╗ąĖ ąĘą░ą│čĆčāąČąĄąĮčŗ ąĖ ą│ąŠč鹊ą▓čŗ ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ.
unsigned char * mCANGetPtrTxCOB(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN.
unsigned char * mCANGetPtrTxData(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
void mCANPutDataLen(unsigned char CANlen)
ąŁčéą░ čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤ą╗ąĖąĮčā ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ą┤ą╗ąĖąĮčā ąĘą░ą┐čĆąŠčüą░ RTR.
void mCANPutDataByten(unsigned char CANDat)
ąŁč鹊 ąĖą╝čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé 8 čäčāąĮą║čåąĖą╣, ą│ą┤ąĄ čüčāčäčäąĖą║čü n ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠčé 0 ą┤ąŠ 7. ąÜą░ąČą┤ą░čÅ ąĖąĘ čŹčéąĖčģ čäčāąĮą║čåąĖą╣ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆ:
unsigned char CANDat: ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
unsigned char mCANFetchRetStat(void)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüčéą░čéčāčüą░ ąŠą┐ąĄčĆą░čåąĖąĖ č鹥čģ čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ čéą░ą║ąŠą╣ čüčéą░čéčāčü ą▓ąŠąĘą▓čĆą░čēą░čÄčé. ąÆ ąŠą┐ąĖčüą░ąĮąĖąĖ čäčāąĮą║čåąĖą╣ čāą║ą░ąĘą░ąĮąŠ, ą▓ąŠąĘą▓čĆą░čēą░čÄčé ą╗ąĖ ąŠąĮąĖ čüčéą░čéčāčü.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
unsigned char: čüčéą░čéčāčü ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ąŠą┐ąĄčĆą░čåąĖąĖ.
[ąŚą░ą║ą╗čÄčćąĖč鹥ą╗čīąĮčŗąĄ čāą║ą░ąĘą░ąĮąĖčÅ ą┐ąŠ čüąŠąĘą┤ą░ąĮąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ]
ąĀą░ąĘčāą╝ąĄąĄčéčüčÅ, čéčĆąĄą▒čāąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ CAN ą┤ąĄčéą░ą╗ąĖ. ąÆąŠčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ, ąŠ ą║ąŠč鹊čĆčŗčģ ąĮčāąČąĮąŠ ą┐ąŠą╝ąĮąĖčéčī:
ŌĆó ą×ą▒čŖąĄą║čéčŗ: ąŠą┐čĆąĄą┤ąĄą╗ąĖč鹥 ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą░ą╣č鹥 ą▓čüąĄ ąŠą▒čŖąĄą║čéčŗ ąĖ čäčāąĮą║čåąĖąĖ ąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ąĖ ą┐čĆąĖą▓čÅąČąĖč鹥 ąĖčģ ą║ OD. ą×ą▒čŖąĄą║čéčŗ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ, ą┐ąŠčéčĆąĄą▒čāčÄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čéčĆąĄą▒čāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ; ąŠą┤ąĮą░ą║ąŠ čŹčéąĖ čéąĖą┐čŗ ąŠą▒čŖąĄą║č鹊ą▓ ąŠč湥ąĮčī ą│ąĖą▒ą║ąĖ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
ŌĆó OD: ą┐ąŠą╝ąĄčüčéąĖč鹥 ą▓čüąĄ ąŠą▒čŖąĄą║čéčŗ ą▓ čüą▓ąŠąĄ čüąŠą▒čüčéą▓ąĄąĮąĮąŠąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ą╝ąĄčüč鹊 ą▓ąĮčāčéčĆąĖ čüą╗ąŠą▓ą░čĆčÅ. ą¤čĆą░ą▓ąĖą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖč鹥 ąĖąĮč乊čĆą╝ą░čåąĖčÄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┤ą╗ąĖąĮčŗ ąĖ čüčüčŗą╗ą║ąĖ ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓.
ŌĆó ą×ą▒čŖąĄą║čéčŗ PDO: ąŠąĮąĖ ą▓čüąĄ ąĄčēąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ. ą¤ąŠą╝ąĮąĖč鹥 ąŠ č鹊ą╝, čćč鹊 ąŠą▒čŖąĄą║čéčŗ PDO ą╝ąŠą│čāčé ą▒čŗčéčī čüčéą░čéąĖč湥čüą║ąĖą╝ąĖ ąĖą╗ąĖ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╝ąĖ; čüčéą░čéąĖč湥čüą║ąĖąĄ ą▓čüąĄą│ą┤ą░ ą▒čāą┤čāčé čŹčäč乥ą║čéąĖą▓ąĮąĄąĄ ą┐ąŠ ą║ąŠą┤čā ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ, ąĮąŠ ąŠč湥ą▓ąĖą┤ąĮąŠ ąĮąĄ čéą░ą║ąĖąĄ ą│ąĖą▒ą║ąĖąĄ, ą║ą░ą║ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖąĄ ąŠą▒čŖąĄą║čéčŗ PDO. ąŚą┤ąĄčüčī ąĄčüčéčī čéą░ą║ąČąĄ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą┐ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą▓ąĖčüčÅčé ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤ąŠ čŹčéąĖą╝ ą┐čĆąĖčćąĖąĮą░ą╝ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ č鹊ą╗čīą║ąŠ ą▒ą░ąĘąŠą▓čŗą╣ ąĮą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ, čéą░ą║ čćč鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą╝ąŠąČąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą░čéčī ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ŌĆó ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ: ą┐čĆąĄą┤ąŠčüčéą░ą▓čīč鹥 ą▒ą░ąĘąŠą▓čŗą╣ ąŠčéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĖą╗ąĖ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą▓ąĮąĄčłąĮąĖčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čüąŠą▒čŗčéąĖą╣ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
ŌĆó ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ: čĆą░ąĘčĆą░ą▒ąŠčéą░ą╣č鹥 ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą║ąŠą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ. ą£ąĮąŠą│ąĖąĄ ąŠą▒čŖąĄą║čéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ąĖąĘ ą║ą░ą║ąŠą│ąŠ-ąĮąĖą▒čāą┤čī čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┤ą░ąĮąĮčŗčģ, čéą░ą║ąŠą│ąŠ ą║ą░ą║ ROM, EEPROM ąĖą╗ąĖ ą┤ą░ąČąĄ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ąŠ ą▓čģąŠą┤ąĮčŗą╝ ąĮąŠąČą║ą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ŌĆó ąÜąŠą┤ ą▓ čäčāąĮą║čåąĖąĖ main: čĆą░ąĘčĆą░ą▒ąŠčéą░ą╣č鹥 čŹčäč乥ą║čéąĖą▓ąĮčŗą╣ ą║ąŠą┤, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ą║ąŠąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠčüčéąĖ, čćč鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░čģą▓ą░čéąĖčéčī ąĖ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ.
ŌĆó ąĪąŠą▒čŗčéąĖčÅ: ąĖą╝ąĄąĄčéčüčÅ ą╝ąĮąŠąČąĄčüčéą▓ąŠ čüąŠą▒čŗčéąĖą╣ (events). ąōą░čĆą░ąĮčéąĖčĆčāą╣č鹥 ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā čéą░ą╝, ą│ą┤ąĄ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĘą░ą┐čĆąŠčüčŗ čüą▒čĆąŠčüą░, ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ č湥čĆąĄąĘ čüąĄčéčī, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą║ą░ą║ čüąŠą▒čŗčéąĖčÅ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąØą░ čāčüą╝ąŠčéčĆąĄąĮąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąŠčüčéą░ą▓ą╗ąĄąĮąŠ, ą║ą░ą║ ąĮčāąČąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĘą░ą┐čĆąŠčü čüą▒čĆąŠčüą░ (Reset request).
ŌĆó ąØą░čüčéčĆąŠą╣ą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ: čāčüčéą░ąĮąŠą▓ąĖč鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąŠą┐čåąĖąĖ, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čĆąĄčüčāčĆčüąŠą▓ ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ.
[ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čĆąĄčüčāčĆčüąŠą▓]
ąĪą║ąŠą╗čīą║ąŠ ą▒čāą┤ąĄčé ąĘą░čéčĆą░č湥ąĮąŠ ą╝ąĄčüčéą░ ą┐ąŠą┤ čüč鹥ą║ CANopen, čüąĖą╗čīąĮąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąŠą┐čåąĖą╣ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, ą░ čéą░ą║ąČąĄ ąŠčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗčģ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ąŠąČąĖą┤ą░čéčī, čćč鹊 ą║ąŠą┤ čüč鹥ą║ą░ čü ą▓ą║ą╗čÄč湥ąĮąĮąŠą╣ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ ąĘą░ą╣ą╝ąĄčé ąŠą║ąŠą╗ąŠ 7000 .. 10000 ą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĖ 300 ą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ ą┤ą░ąĮąĮčŗčģ.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čüąĄčģ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖą╣ ą┤ąŠčüčéčāą┐ąĮąŠ ą▓ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆąĄ MPLAB┬« C18 (v2.30.01), ąĖ ą┤ąĄą╝ąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ čü čŹčéąĖą╝ ą░ą┐ąĮąŠčāč鹊ą╝, ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ąŠ 7434 ą▒ą░ą╣čéą░ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (ROM) ąĖ 314 ą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ ą┤ą░ąĮąĮčŗčģ (RAM).
[ąĪčüčŗą╗ą║ąĖ]
1. AN945: A CANopen Stack for PIC18 ECANTM Microcontrollers site:microchip.com.
2. DS-301 (v 4.02), "CANopen Communication Profile for Industrial Systems Based on CAL". Erlangen: CAN in Automation e.V., 2002.
3. M. Farsi and M. Barbosa, CAN Implementation: Applications to Industrial Networks. Baldock, Hertfordshire: Research Studies Press, 2000.
4. 170711CANopen-IAR-AT91SAM7X.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ.
5. ą×ą▒ąĘąŠčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CANopen.
6. CiA301: čüą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ą┐čĆąŠčäąĖą╗čī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ CANopen. |



