|
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF50x (ADSP-BF504, ADSP-BF504F, ADSP-BF506) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN, ąŠą▒čüą╗čāąČąĖą▓ą░čÄčēąĖą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā Controller Area Network (CAN) V2.0B. ąŁč鹊 ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ ąĖ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ. CAN čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮ čüą┐ąŠčüąŠą▒ąĄąĮ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ąĮą░ą┤ąĄąČąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą┐čĆąŠą▓ąĄčĆą║ąŠą╣ ąĖčģ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ ą║ąŠą┤ą░ą╝ąĖ CRC, čéčĆąĄą║ąĖąĮą│ąŠą╝ čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ąŠčéą║ą░ąĘą░ čāąĘą╗ą░ čüąĄčéąĖ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą×ąŚąŻ ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ąŠą▓ (mailbox RAM), čüąŠčüč鹊čÅčēąĄą╝ ąĖąĘ 32 čÅč湥ąĄą║ (8 čÅčēąĖą║ąŠą▓ č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, 8 č鹊ą╗čīą║ąŠ ąĮą░ ą┐čĆąĖąĄą╝, ąĖ ąĄčēąĄ 16 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗčģ ą▓ ą╗čÄą▒ąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ), ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č乊čĆą╝ą░čéčŗ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ (11 ą▒ąĖčé) ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ (29 ą▒ąĖčé) ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ (ID) čüąŠąŠą▒čēąĄąĮąĖą╣, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN revision 2.0 part B, ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗčģ ą┤ąŠ 1 ą╝ąĄą│ą░ą▒ąĖčéą░/čüąĄą║. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čéą░ą║ąŠą╝čā ą▒ąŠą╗čīčłąŠą╝čā ą║ąŠą╗ąĖč湥čüčéą▓čā ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čÅčēąĖą║ąŠą▓ ąĖ ą▓čŗčüąŠą║ąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ Blackfin ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠčéą┐ą░ą┤ą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ą▒čāč乥čĆąĖąĘą░čåąĖąĖ ą┐čĆąĖąĄą╝ą░ ąĖ/ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąÜą░ąČą┤čŗą╣ mailbox čüąŠčüč鹊ąĖčé ąĖąĘ ą▓ąŠčüčīą╝ąĖ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ. ąöą░ąĮąĮčŗąĄ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ ąĮą░ ą┐ąŠą╗čÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ą║ą╗čÄčćą░čÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ (message identifier), ą╝ąĄčéą║čā ą▓čĆąĄą╝ąĄąĮąĖ (time stamp), čüč湥čéčćąĖą║ ą▒ą░ą╣čé (byte count), ą┤ąŠ 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąÜą░ąČą┤čŗą╣ čāąĘąĄą╗ CAN ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┐ąŠ čüąĄčéąĖ. ąÜą░ąČą┤čŗą╣ čÅčēąĖą║ ąĖą╝ąĄąĄčé ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčāčÄ ą╝ą░čüą║čā ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠ ąĄą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā. ąĢčüą╗ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ, čüąŠą▓ą┐ą░ą╗ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ mailbox (ą┐ąŠą┐ą░ą╗ ą┐ąŠą┤ čāčüą╗ąŠą▓ąĖčÅ ą▓čŗą▒ąŠčĆą░, ąĘą░ą┤ą░ą▓ą░ąĄą╝ąŠąĄ ą╝ą░čüą║ąŠą╣), č鹊 ą╝ąŠą┤čāą╗čī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ąĮąĄą│ąŠ, ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox, ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą░ąĄčé čüąĖą│ąĮą░ą╗ ą┐čĆąŠčåąĄčüčüąŠčĆčā ąŠ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąÆ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▓čüčéčĆąŠąĄąĮą░ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓ą║ą╗čÄčćą░ąĄą╝ą░čÅ) čäąĖą╗čīčéčĆą░čåąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ ą┐ąĄčĆą▓čŗą╝ 2 ą▒ą░ą╣čéą░ą╝ ą┤ą░ąĮąĮčŗčģ, čćč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐čĆąĖąĄą╝ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ DeviceNetŌäó. ąĢčüčéčī čĆąĄą│ąĖčüčéčĆčŗ čüąŠčüč鹊čÅąĮąĖčÅ ąĖ čĆąĄą│ąĖčüčéčĆčŗ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ, čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ ą╝ąŠą┤čāą╗čī čüč湥čéčćąĖą║ą░. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé čüčćąĖčéčŗą▓ą░čéčī ą╗ąŠą│ąĖč湥čüą║ąĖąĄ čāčĆąŠą▓ąĮąĖ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ (sleep mode) ą┐čāč鹥ą╝ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up event), čéą░ą║ čćč鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąŠąĮ ąČą┤ąĄčé ą┐čĆąĖčģąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ CAN wake-up event ą╝ąŠąČąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą▓čŗą▓ąĄčüčéąĖ ąĄą│ąŠ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ "ą▓čŗą║ą╗čÄč湥ąĮąŠ" (powered-down hibernate state).
ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ čüąĄč鹥ą▓ąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą║ą░ą║ ą┐čĆą░ą▓ąĖą╗ąŠ ąŠč湥ąĮčī ąČąĄčüčéą║ąĖąĄ. ą¤ąŠčŹč鹊ą╝čā ąĖąĮč鹥čĆč乥ą╣čü CAN ąŠą▒čŗčćąĮąŠ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 2 čćą░čüčéąĖ: ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖ čéčĆą░ąĮčüąĖą▓ąĄčĆ (ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║). ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą╝čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čĆą░ąĘąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ąĖ čéąĖą┐čŗ čüąĄč鹥ą╣ CAN. ą£ąŠą┤čāą╗čī CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF50x ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čćą░čüčéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąĢą│ąŠ čüąĄč鹥ą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ čüąŠčüč鹊ąĖčé ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ ą▓čŗčģąŠą┤ą░ ąĖ ąŠą┤ąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ąĮąŠą│ąŠ ą▓čģąŠą┤ą░, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ čéčĆą░ąĮčüąĖą▓ąĄčĆčā ą╗ąĖąĮąĖąĖ CAN.
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ CAN ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąŠčé čéą░ą║č鹊ą▓ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (SCLK) č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą┤ąĄą╗ąĖč鹥ą╗čī, čéą░ą║ čćč鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ.
[ą×ą▒ąĘąŠčĆ ą╝ąŠą┤čāą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN]
ąśąĮč鹥čĆč乥ą╣čü čü čłąĖąĮąŠą╣ CAN čŹč鹊 ą┐čĆąŠčüčéą░čÅ ą┤ą▓čāčģą┐čĆąŠą▓ąŠą┤ąĮą░čÅ ą╗ąĖąĮąĖčÅ. ąØą░ čĆąĖčü. 17-1 ą┐ąŠą║ą░ąĘą░ąĮąŠ čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║ąŠąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN čü čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝ CAN, ąĖ ąĮą░ čĆąĖčü. 17-2 ą┐ąŠą║ą░ąĘą░ąĮą░ ą▒ą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą╝ąŠą┤čāą╗čÅ CAN. ąÆčŗčģąŠą┤ (CANTX) ąĖ ą▓čģąŠą┤ (CANRX) ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ ą▓ąĮąĄčłąĮąĄą╝čā čéčĆą░ąĮčüąĖą▓ąĄčĆčā CAN čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ č湥čĆąĄąĘ ąĄą│ąŠ ą▓čŗą▓ąŠą┤čŗ TX and RX. ąÆčŗą▓ąŠą┤čŗ CANTX ąĖ CANRX čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čāčĆąŠą▓ąĮčÅčģ TTL, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĖą╝ ąŠą┐ąĄčĆą░čåąĖąĖ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ ąĮą░ čäąĖąĘąĖč湥čüą║ąŠą╝ čüą╗ąŠąĄ čłąĖąĮčŗ CAN čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé čüčéą░ąĮą┤ą░čĆčéčā ISO/DIS 11898.
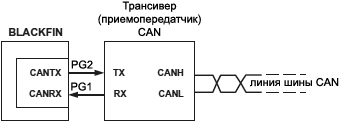
ąĀąĖčü. 17-1. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF50x ą║ čéčĆą░ąĮčüąĖą▓ąĄčĆčā.
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮ čéčĆą░ąĮčüąĖą▓ąĄčĆ: ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čłąĖąĮčŗ CAN ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ čāčĆąŠą▓ąĮąĄą╝ ą▓ čüą╗čāčćą░ąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čüą┤ąĄą╗ą░čéčī ą┐ąŠą┤čéčÅąČą║čā PG2 (CANTX) ą║ čāčĆąŠą▓ąĮčÄ ą╗ąŠą│. 1. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PG2 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ) ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą║ą░ą║ ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ GPIO, čĆą░ą▒ąŠčéą░čÄčēą░čÅ ąĮą░ ą▓čģąŠą┤, ą┐ąŠčŹč鹊ą╝čā ąĮą░ ą▓čģąŠą┤ąĄ TX čéčĆą░ąĮčüąĖą▓ąĄčĆą░ ą╝ąŠąČąĄčé ąŠą▒čĆą░ąĘąŠą▓ą░čéčīčüčÅ ą╗ąŠą│. 0 (ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī), čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĄ čłąĖąĮčŗ.
ą£ąŠąČąĮąŠ čéą░ą║ąČąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄčéčī ą┤čĆčāą│ąŠą╣ čüą┐ąŠčüąŠą▒ ąŠčéą╝ąĄąĮčŗ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čłąĖąĮčŗ ą┐čĆąĖ čüą▒čĆąŠčüąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, čéčĆą░ąĮčüąĖą▓ąĄčĆ PCA82C250 ą║ąŠą╝ą┐ą░ąĮąĖąĖ NXP ąĖą╝ąĄąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą▓čģąŠą┤ Rs ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéčīčÄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ą░ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ STANDBY. ąŁč鹊čé ą▓čģąŠą┤ ą╝ąŠąČąĮąŠ ą┐ąŠą┤čéčÅąĮčāčéčī ą║ ą╗ąŠą│. 1 čĆąĄąĘąĖčüč鹊čĆąŠą╝ pull-up, ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ ąĮąĄą╝čā ąŠą┤ąĖąĮ ąĖąĘ čüą▓ąŠą▒ąŠą┤ąĮčŗčģ ą┐ąŠčĆč鹊ą▓ GPIO ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą¤čĆąĖ čüą▒čĆąŠčüąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ Rs ąŠą▒čĆą░ąĘčāąĄčéčüčÅ ą╗ąŠą│. 1, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ąŠčĆčé GPIO ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą║ą░ą║ ą▓čģąŠą┤, čćč鹊 ąŠčéą║ą╗čÄčćąĖčé čéčĆą░ąĮčüąĖą▓ąĄčĆ ąŠčé čłąĖąĮčŗ CAN. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠčåąĄčüčüąŠčĆ ą▒čāą┤ąĄčé ą│ąŠč鹊ą▓ ą║ čĆą░ą▒ąŠč鹥, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ąĮą░čüčéčĆąŠąĖčéčī čüą▓ąŠą╣ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ Rs, ą║ą░ą║ ą▓čŗčģąŠą┤, ąĖ ą┐ąŠą┤ą░čéčī ąĮą░ ąĮąĄą│ąŠ ą╗ąŠą│. 0. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čéčĆą░ąĮčüąĖą▓ąĄčĆ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčüčÅ ą║ čłąĖąĮąĄ CAN.
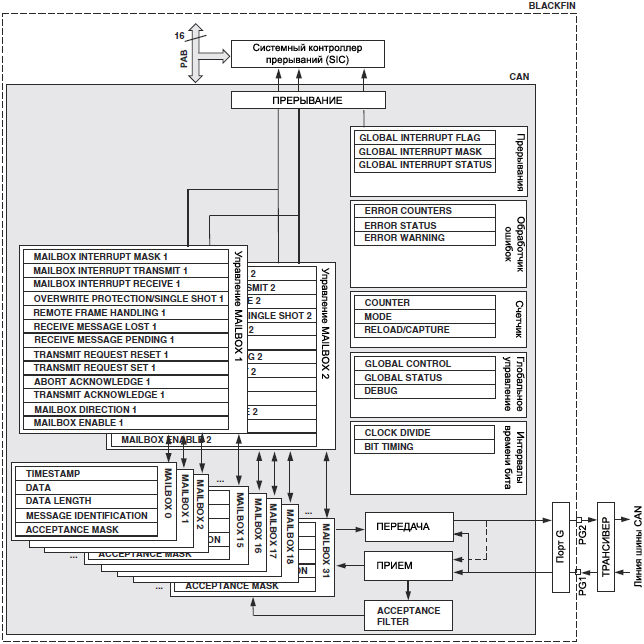
ąĀąĖčü. 17-2. ąæą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą╝ąŠą┤čāą╗čÅ CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF50x.
ąĪąĖą│ąĮą░ą╗čŗ CANRX ąĖ CANTX ąĮą░čģąŠą┤čÅčéčüčÅ ąĮą░ GPIO Port G, ą▓čŗą▓ąŠą┤čŗ PG1 ąĖ PG2 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąŻčĆąŠą▓ąĄąĮčī ą┤ą░ąĮąĮčŗčģ CAN ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╗ąĖą▒ąŠ ą║ą░ą║ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ (ą╗ąŠą│. 0), ą╗ąĖą▒ąŠ ą║ą░ą║ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ (ą╗ąŠą│. 1). ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ CANTX - čĆąĄčåąĄčüčüąĖą▓ąĮąŠąĄ. ą¦č鹊 čéą░ą║ąŠąĄ "ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣" ąĖ "čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣" čāčĆąŠą▓ąĮąĖ - ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąĮąĖąČąĄ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąæą░ąĘąŠą▓čŗąĄ čüą▓ąĄą┤ąĄąĮąĖčÅ ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CAN".
ąÆčŗą▓ąŠą┤ PG1 (ą▓čģąŠą┤ CANRX) čéą░ą║ąČąĄ ą▓ąĮčāčéčĆąĖ čćąĖą┐ą░ čĆą░ąĘą▓ąĄą┤ąĄąĮ ąĮą░ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ ą▓čģąŠą┤ ąĘą░čģą▓ą░čéą░ čéą░ą╣ą╝ąĄčĆą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ 5 (alternated capture input TACI5 GP timer 5). ąŁč鹊 ą┤ą░ąĄčé čüą┐ąŠčüąŠą▒ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą╣ą╝ąĄčĆ 5 ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN ąĖ ąĄčæ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ.
[ą×ą▒ą╗ą░čüčéčī CAN Mailbox]
ą¤ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĖą╝ąĄąĄčé ąĮą░ ą▒ąŠčĆčéčā 32 ą▒čāč乥čĆą░ ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąĮą░ąĘčŗą▓ą░čÄčé ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CAN ą┐ąŠčćč鹊ą▓čŗą╝ąĖ čÅčēąĖą║ą░ą╝ąĖ (mailboxes). 8 čÅčēąĖą║ąŠą▓ ąČąĄčüčéą║ąŠ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčēąĄ 8 č鹊ą╗čīą║ąŠ ąĮą░ ą┐čĆąĖąĄą╝, ąĖ ąĄčēąĄ 16 ą╝ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą▓ ą╗čÄą▒ąŠąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą╝ąŠą┤čāą╗čÅ CAN ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ mailbox RAM ąĖąĘ 32 čÅč湥ąĄą║ ą┐ą░ą╝čÅčéąĖ. ąÜ čÅčēąĖą║ą░ą╝ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü CAN ąĖą╗ąĖ č湥čĆąĄąĘ ą┤ąŠčüčéčāą┐ čüąŠ čüč鹊čĆąŠąĮčŗ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin. ąÜą░ąČą┤čŗą╣ čÅčēąĖą║ čüąŠčüč鹊ąĖčé ąĖąĘ ą▓ąŠčüčīą╝ąĖ 16-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąĖ ą┤ą▓čāčģ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗčģ 16-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ą░čüą║ąĖ ą┐čĆąĖąĄą╝ą░ (acceptance mask registers), ą║ą░ąČą┤čŗą╣ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čÅčēąĖą║ ą▒čāą┤ąĄčé čĆą░ąĘčĆąĄčłąĄąĮ. ą¤ąŠčüą║ąŠą╗čīą║čā ąŠą▒ą╗ą░čüčéčī čÅčēąĖą║ąŠą▓ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą║ą░ą║ RAM, ąĘąĮą░č湥ąĮąĖčÅ ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝. ąöą░ąĮąĮčŗąĄ ą┤ąĄą╗čÅčéčüčÅ ąĮą░ ą┐ąŠą╗čÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ą║ą╗čÄčćą░čÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą╝ąĄčéą║čā ą▓čĆąĄą╝ąĄąĮąĖ, čüč湥čéčćąĖą║ ą▒ą░ą╣čé ąĖ ą┤ąŠ 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ, ąĖ čéą░ą║ąČąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (čüą╝. čĆąĖčü. 17-3).
ąĀąĄą│ąĖčüčéčĆąŠą▓čŗąĄ ą┐ą░čĆčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čÅčēąĖą║ą░ (CAN mailbox identification, CAN_MBxx_ID0/CAN_MBxx_ID1) ą▓ą║ą╗čÄčćą░čÄčé:
ŌĆó 29-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ (ą▒ą░ąĘąŠą▓ą░čÅ čćą░čüčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ BASEID ą┐ą╗čÄčü čćą░čüčéčī, ąŠčéąĮąŠčüčÅčēą░čÅčüčÅ ą║ čĆą░čüčłąĖčĆąĄąĮąĮąŠą╝čā ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā EXTID_LO/EXTID_HI).
ŌĆó ąæąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą╝ą░čüą║ąĖ ą┐čĆąĖąĄą╝ą░ (acceptance mask enable, AME).
ŌĆó ąæąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čü ą┤ą░ą╗čīąĮąĄą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ (remote transmission request, RTR).
ŌĆó ąæąĖčé čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (identifier extension, IDE).
ąÆąĮąĖą╝ą░ąĮąĖąĄ: ąĮąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ą╣č鹥 ą▓ ąŠą▒čŖąĄą║čé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ čÅčēąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ (čé. ąĄ. ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé CAN_MCx).

ąĀąĖčü. 17-3. CAN Mailbox Area (čĆąĄą│ąĖčüčéčĆčŗ čÅčēąĖą║ą░ CAN).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: xx ą▓ ąĖą╝ąĄąĮą░čģ čĆąĄą│ąĖčüčéčĆąŠą▓ (CAN_MBxx_ID0, CAN_MBxx_ID1 ąĖ ą┤čĆčāą│ąĖčģ) ąŠąĘąĮą░čćą░čÄčé ą┤ąĄčüčÅčéąĖčćąĮčŗą╣ ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ ąŠčé 00 ą┤ąŠ 32.
ąöčĆčāą│ąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ čÅčēąĖą║ą░ čüąŠą┤ąĄčƹȹ░čé:
ŌĆó ąÜąŠą┤ ą┤ą╗ąĖąĮčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ (data length code, DLC) ą▓ CAN_MBxx_LENGTH. ąĪčéą░čĆčłąĖąĄ 12 ą▒ąĖčé CAN_MBxx_LENGTH ą║ą░ąČą┤ąŠą│ąŠ mailbox ą┐ąŠą╝ąĄč湥ąĮčŗ ą║ą░ą║ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ. ąŁčéąĖ 12 ą▒ąĖčé ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čüąĄą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0. ąĢčüą╗ąĖ DLC ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĄą▓čŗčłą░ąĄčé 8, č鹊 ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüą▒čĆą░čüčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ DLC ą▓ 8.
ŌĆó ąöąŠ 8 ą▒ą░ą╣čé ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ čüčéą░čĆčłąĖą╝ ą▒ą░ą╣č鹊ą╝ (MSB). ą×ąĮąĖ ąĮą░čģąŠą┤čÅčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_MBxx_DATA3, CAN_MBxx_DATA2, CAN_MBxx_DATA1, CAN_MBxx_DATA0, ą┤ą░ąĮąĮčŗąĄ čćąĖčéą░čÄčéčüčÅ ąŠčéčéčāą┤ą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣č鹊ą▓, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓ ą┐ąŠą╗ąĄ DLC. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮ ąĖą╗ąĖ ą┐čĆąĖąĮčÅčé č鹊ą╗čīą║ąŠ 1 ą▒ą░ą╣čé (DLC=1), č鹊 ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ ąĖąĘ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ čĆąĄą│ąĖčüčéčĆą░ CAN_MBxx_DATA3.
ŌĆó 2 ą▒ą░ą╣čéą░ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (time stamp value, TSV) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBxx_TIMESTAMP.
ą×čüčéą░ą▓čłąĖąĄčüčÅ čĆąĄą│ąĖčüčéčĆčŗ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ ą╝ą░čüą║ąĄ ą┐čĆąĖąĄą╝ą░ (acceptance mask registers, CAN_AMxxH ąĖ CAN_AMxxL). ąĀą░ą▒ąŠčéą░ ą╝ą░čüą║ąĖ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBxx_ID1 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé AME. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ą▒ą░ą╣čéą░ą╝ ą┤ą░ąĮąĮčŗčģ "filtering on data field" (ą║ąŠą│ą┤ą░ DNM=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL, ąĖ FDF=1 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą╝ą░čüą║ąĄ ą┐čĆąĖąĄą╝ą░), č鹊 ą▒ąĖčéčŗ EXTID_HI[15:0] čĆąĄą│ąĖčüčéčĆą░ CAN_MBxx_ID0 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ą║ąŠą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (acceptance code, DFC) ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ čäąĖą╗čīčéčĆą░čåąĖčÄ ą┐ąŠ ID ąĖ ą┤ą░ąĮąĮčŗą╝ čüą╝. čĆą░ąĘą┤ąĄą╗ "ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĖąĄą╝".
[ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ CAN Mailbox]
ą»čēąĖą║ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ MMR-čĆąĄą│ąĖčüčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüčéą░čéčāčüą░ ą┤ą╗čÅ 32 čÅčēąĖą║ąŠą▓. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąŠą┤ąĖąĮ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čÅčēąĖą║. ą¤ąŠčüą║ąŠą╗čīą║čā MMR-čĆąĄą│ąĖčüčéčĆčŗ CAN ą▓čüąĄ 16-ą▒ąĖčéąĮčŗąĄ, č鹊 ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ ą┤ą╗čÅ ą▓čüąĄčģ 32 čÅčēąĖą║ąŠą▓ čéčĆąĄą▒čāčÄčéčüčÅ ą┐ą░čĆčŗ čéą░ą║ąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ą»čēąĖą║ąĖ 0-15 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ / ą╝ąŠąĮąĖč鹊čĆčÅčéčüčÅ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ, čā ą║ąŠč鹊čĆčŗčģ ąĖą╝ąĄąĮą░ čü čüčāčäčäąĖą║čüąŠą╝ 1. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čÅčēąĖą║ąĖ 16-31 ąĖčüą┐ąŠą╗čīąĘčāčÄčé č鹥 ąČąĄ ąĖą╝ąĄąĮą░ čĆąĄą│ąĖčüčéčĆąŠą▓, ąĮąŠ čü čüčāčäčäąĖą║čüąŠą╝ 2. ąØą░ą┐čĆąĖą╝ąĄčĆ, čĆąĄą│ąĖčüčéčĆčŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (CAN mailbox direction registers, CAN_MDx) ą┤ąŠą╗ąČąĮčŗ čāą┐čĆą░ą▓ą╗čÅčéčī čÅčēąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 17-4.

ąĀąĖčü. 17-4. ą¤ą░čĆčŗ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN.
ąśą╝ąĄčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆčŗ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čÅčēąĖą║ą░ą╝ąĖ:
CAN_MC1,
CAN_MC2 |
ąĀąĄą│ąĖčüčéčĆčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ (mailbox enable registers). |
CAN_MD1,
CAN_MD2 |
ąĀąĄą│ąĖčüčéčĆčŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (mailbox direction registers). |
CAN_TA1,
CAN_TA2 |
ąĀąĄą│ąĖčüčéčĆčŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit acknowledge registers). |
CAN_AA1,
CAN_AA2 |
ąĀąĄą│ąĖčüčéčĆčŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą▒čĆčŗą▓ą░ (abort acknowledge registers). |
CAN_TRS1,
CAN_TRS2 |
ąĀąĄą│ąĖčüčéčĆčŗ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (transmit request set registers). |
CAN_TRR1,
CAN_TRR2 |
ąĀąĄą│ąĖčüčéčĆčŗ čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (transmit request reset registers). |
CAN_RMP1,
CAN_RMP2 |
ąĀąĄą│ąĖčüčéčĆčŗ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (receive message pending registers). |
CAN_RML1,
CAN_RML2 |
ąĀąĄą│ąĖčüčéčĆčŗ ą┐ąŠč鹥čĆąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮą░ ą┐čĆąĖąĄą╝ąĄ (receive message lost registers). |
CAN_RFH1,
CAN_RFH2 |
ąĀąĄą│ąĖčüčéčĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čäčĆąĄą╣ą╝ą░ RTR (remote frame handling registers). |
CAN_OPSS1,
CAN_OPSS2 |
ąĀąĄą│ąĖčüčéčĆčŗ ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ / ąŠą┤ąĖąĮąŠčćąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (overwrite protection/single shot transmission registers). |
CAN_MBIM1,
CAN_MBIM2 |
ąĀąĄą│ąĖčüčéčĆčŗ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (mailbox interrupt mask registers). |
CAN_MBTIF1,
CAN_MBTIF2 |
ąĀąĄą│ąĖčüčéčĆčŗ čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (mailbox transmit interrupt flag registers). |
CAN_MBRIF1,
CAN_MBRIF2 |
ąĀąĄą│ąĖčüčéčĆčŗ čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (mailbox receive interrupt flag registers). |
ą¤ąŠčüą║ąŠą╗čīą║čā čÅčēąĖą║ąĖ 24ŌĆō31 čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, ąĖ čÅčēąĖą║ąĖ 0ŌĆō7 č鹊ą╗čīą║ąŠ ąĮą░ ą┐čĆąĖąĄą╝, č鹊 ą╝ą╗ą░ą┤čłąĖąĄ 8 ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆą░čģ čü čüčāčäčäąĖą║čüąŠą╝ "1" ąĖ čüčéą░čĆčłąĖąĄ 8 ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆą░čģ čü čüčāčäčäąĖą║čüąŠą╝ "2" ąĖąĮąŠą│ą┤ą░ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ, ąĖ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
[ąæą░ąĘąŠą▓čŗąĄ čüą▓ąĄą┤ąĄąĮąĖčÅ ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CAN]
ąźąŠčéčÅ ą▓čŗą▓ąŠą┤čŗ CANRX ąĖ CANTX čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ TTL-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ, ą┤čĆą░ą╣ą▓ąĄčĆ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą░čüąĖą╝ą╝ąĄčéčĆąĖčćąĮčŗą╣ (čüą╝. čĆąĖčü. 17-1). ą¤ąŠą┤čéčÅąČą║ą░ ą║ ą╗ąŠą│. 0 (ąĮąĖąČąĮąĖą╣ ą║ą╗čÄčć ą┤čĆą░ą╣ą▓ąĄčĆą░) ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ CANTX ą╝ąŠčēąĮą░čÅ (ą▓čŗą┤ąĄčƹȹĖą▓ą░ąĄčé ą▒ąŠą╗čīčłąŠą╣ ą▓ąĮąĄčłąĮąĖą╣ ą▓č鹥ą║ą░čÄčēąĖą╣ č鹊ą║), ą░ ą┐ąŠą┤čéčÅąČą║ą░ ą║ ą╗ąŠą│. 1 (ą▓ąĄčĆčģąĮąĖą╣ ą║ą╗čÄčć ą┤čĆą░ą╣ą▓ąĄčĆą░) čüą╗ą░ą▒ą░čÅ (ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄą╝čŗą╣ ą▓čŗč鹥ą║ą░čÄčēąĖą╣ č鹊ą║ ą╝ą░ą╗). ąŁč鹊 čüą┤ąĄą╗ą░ąĮąŠ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┤ą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠą│ąŠ ą╝ąŠąĮčéą░ąČąĮąŠą│ąŠ ąśąøąś ą┐čĆąĖ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ ą▓čŗčģąŠą┤ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 0 čüą▓čÅąĘčŗą▓ą░ąĄčéčüčÅ čü "ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝" čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčéą░, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮąŠ ąŠčéą╝ąĄąĮčÅąĄčé ą╗čÄą▒ąŠą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1, ąĖ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 čüą▓čÅąĘčŗą▓ą░ąĄčéčüčÅ čü "čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝" čüąŠčüč鹊čÅąĮąĖąĄą╝, ą┐ąŠč鹊ą╝čā čćč鹊 ąĄą│ąŠ ą╝ąŠąČąĄčé ąŠčéą╝ąĄąĮąĖčéčī čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ą┐ą░čüčüąĖą▓ąĮčŗą╣, č鹊 ą▓čŗą▓ąŠą┤ CANTX ą▓čüąĄą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1. ąĢčüą╗ąĖ 2 čāąĘą╗ą░ čłąĖąĮčŗ CAN ą┐ąĄčĆąĄą┤ą░čÄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, č鹊 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣.
ą¤čĆąŠč鹊ą║ąŠą╗ CAN ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 ą▓čüąĄ čāąĘą╗čŗ ą┐čŗčéą░čÄčéčüčÅ ąŠčéą┐čĆą░ą▓ąĖčéčī čüą▓ąŠą╣ čäčĆąĄą╣ą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠ čłąĖąĮąĄ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ, čćč鹊 čłąĖąĮą░ CAN čüčéą░ą╗ą░ čüą▓ąŠą▒ąŠą┤ąĮą░. ąśąĮą┤ąĖą║ą░č鹊čĆ start of frame (SOF) čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠ ąĮą░čćą░ą╗ąĄ ąĮąŠą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░. ąóąŠą│ą┤ą░ ą║ą░ąČą┤čŗą╣ čāąĘąĄą╗ CAN ąĮą░čćąĖąĮą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā čüą▓ąŠąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĮą░čćąĖąĮą░čÅ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ID. ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą▓čŗą▓ąŠą┤ CANRX, čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊 ąĄą│ąŠ čāčĆąŠą▓ąĄąĮčī čéą░ą║ąŠą╣ ąČąĄ, ą║ą░ą║ ąĖą╝ ą▒čŗą╗ ą▓čŗčüčéą░ą▓ą╗ąĄąĮ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CANTX. ąŁč鹊 ą║ą░ą║ čĆą░ąĘ č鹊 ą╝ąĄčüč鹊, ą│ą┤ąĄ ąŠą┐čĆą░ą▓ą┤čŗą▓ą░čÄčé čüą▓ąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ ąĖą╝ąĄąĮą░ čāčĆąŠą▓ąĮąĄą╣. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ čāąĘąĄą╗ ą┐ąŠą╝ąĄčēą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčāčÄ ą╗ąŠą│. 1 ąĮą░ CANTX, ąĖ ą┐čĆąĖ čŹč鹊ą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ 0 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CANRX, č鹊 ąĄą╝čā ąĖąĘą▓ąĄčüčéąĮąŠ, čćč鹊 ą┤čĆčāą│ąŠą╣ čāąĘąĄą╗ ą┐ąŠą╝ąĄčüčéąĖą╗ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ąĮą░ čłąĖąĮčā, ąĖ čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čā ą┤čĆčāą│ąŠą│ąŠ čāąĘą╗ą░ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ čāąĘą╗ąŠą╝ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ CANRX čéą░ą║ąŠąĄ ąČąĄ, ą║ą░ą║ ą▒čŗą╗ąŠ ąĖą╝ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąŠ ąĮą░ CANTX, č鹊 čāąĘąĄą╗ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā, ąĖąĮą░č湥 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čāąĘą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 ąĮą░ čŹč鹊ą╝ čäčĆąĄą╣ą╝ąĄ ą░čĆą▒ąĖčéčĆą░ąČ ą┐ąŠč鹥čĆčÅąĮ, ą┐čĆąĄą║čĆą░čēą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ąĖ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠ ąŠąČąĖą┤ą░ąĮąĖčÄ ą┐ąŠą┐čŗčéą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čüą▓ąŠąĄą│ąŠ čäčĆąĄą╣ą╝ą░ ą▓ čüą╗ąĄą┤čāčÄčēąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čłąĖąĮą░ CAN ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčüčÅ. ąĪą╝. čĆąĖčü. 17-5, ą│ą┤ąĄ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮą░ čüčéčĆčāą║čéčāčĆą░ čäčĆąĄą╣ą╝ą░ CAN.

ąĀąĖčü. 17-5. ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäčĆąĄą╣ą╝ CAN.
SOF Start Of Frame, čüąĖą│ąĮą░ą╗ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (ąŠą┤ąĖąĮ ą▒ąĖčé = 0).
RTR Remote Transmission Request, ąĘą░ą┐čĆąŠčü ą┤ą░ą╗čīąĮąĄą│ąŠ čüąĄč鹥ą▓ąŠą│ąŠ čāąĘą╗ą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ą╗ąŠą║ą░ą╗čīąĮčŗą╝ čāąĘą╗ąŠą╝ (REMOTE FRAME = 1).
IDE IDentifier Extension (ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ = 1).
r0 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĖčÅ ą▓ ą▒čāą┤čāčēąĄą╝.
DLC Data Length Control (ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą▓ čäčĆąĄą╣ą╝ąĄ).
CRC ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ ą▒ąĖčé čäčĆąĄą╣ą╝ą░.
ACK ACKnowledge (ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ą╗čÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą▓čŗčüčéą░ą▓ą╗čÅąĄčé ąĘą┤ąĄčüčī ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé).
EOF End Of Frame, ą║ąŠąĮąĄčå čäčĆąĄą╣ą╝ą░ (ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĖąĘ 7 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé = 1111111).
IFS InterFrame Space, ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ (3 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčéą░ = 111).
ąĀąĖčü. 17-5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▒ą░ąĘąŠą▓čŗą╣ čäčĆąĄą╣ą╝ čü 11-ą▒ąĖčéąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝. ą¤ąŠčüą╗ąĄ SOF ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ąĖą┤ąĄčé ą▒ąĖčé RTR, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čüąŠą┤ąĄčƹȹĖčé ą╗ąĖ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗąĄ (data frame), ąĖą╗ąĖ ąČąĄ čŹč鹊 ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ąŠ čäčĆąĄą╣ą╝ąĄ, ą║ąŠč鹊čĆčŗą╣ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ (remote frame).
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąĖąĘ-ąĘą░ ąĮąĄąŠčéčŖąĄą╝ą╗ąĄą╝ąŠą╣ ą┐čĆąĖčĆąŠą┤čŗ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą▓ ą┐ąŠą╗ąĄ RTR ą▓čŗąĖą│čĆą░ąĄčé ą░čĆą▒ąĖčéčĆą░ąČ čā ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ą╗čīąĮąĄą│ąŠ čāąĘą╗ą░ (remote frame request, RTR=1) ą┤ą╗čÅ č鹊ą│ąŠ ąČąĄ čüą░ą╝ąŠą│ąŠ ID čüąŠąŠą▒čēąĄąĮąĖčÅ, čéą░ą║ čćč鹊 čäčĆąĄą╣ą╝ RTR ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ąĮąĖąČąĄ, č湥ą╝ ąŠą▒čŗčćąĮčŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ.
ąĪą╗ąĄą┤čāčÄčēąĄąĄ ą┐ąŠą╗ąĄ čŹč鹊 IDE. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čŹč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ čü čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ čäčĆąĄą╣ą╝ąŠą╝, čā ą║ąŠč鹊čĆąŠą│ąŠ ąĮąĄ 11-ą▒ąĖčéąĮčŗą╣, ą░ 29-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ. ąÆ čĆą░čüčłąĖčĆąĄąĮąĮąŠą╝ čäčĆąĄą╣ą╝ąĄ (extended frame) ą┐ąĄčĆą▓ą░čÅ čćą░čüčéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 17-6.

ąĀąĖčü. 17-6. ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čäčĆąĄą╣ą╝ CAN čü 29-ą▒ąĖčéąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ (ą┐ąŠą║ą░ąĘą░ąĮą░ ą┐ąĄčĆą▓ą░čÅ čćą░čüčéčī čäčĆąĄą╣ą╝ą░, ąŠčéą╗ąĖčćą░čÄčēą░čÅčüčÅ ąŠčé čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ čü 11-ą▒ąĖčéąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝).
ąÜą░ą║ čŹč鹊 ą▒čŗą╗ąŠ čü ą┐ąŠą╗ąĄą╝ RTR, ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą▓ ą┐ąŠą╗ąĄ IDE ą▓čŗąĖą│čĆą░ąĄčé ą░čĆą▒ąĖčéčĆą░ąČ ą┐ąĄčĆąĄą┤ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ čäčĆąĄą╣ą╝ąŠą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čäčĆąĄą╣ą╝čŗ ąĖą╝ąĄčÄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čäčĆąĄą╣ą╝čŗ. ąæąĖčé, ąĘą░ą╝ąĄąĮčÅčÄčēąĖą╣ ą▒ąĖčé RTR (substitute remote request, SRR, ą║ąŠč鹊čĆčŗą╣ ą▓čüąĄą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ą░ą║ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣), čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ r0 ąĖ r1 (ą▓čüąĄą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą║ą░ą║ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗąĄ) ąĖ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ (CRC) ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣.
[ąĀą░ą▒ąŠčéą░ CAN]
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą│ąĖą▒ąĄčĆąĮą░čåąĖąĖ. ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ą¤ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣ čüą░ą╝ąĖčģ čÅčēąĖą║ąŠą▓ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčéą░ CAN, čćč鹊ą▒čŗ čüą║ąŠčĆąŠčüčéčī čĆą░ą▒ąŠčéčŗ CAN ą▒čŗą╗ą░ ąŠąČąĖą┤ą░ąĄą╝ąŠą╣, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą┤čĆčāą│ąĖą╝ čāąĘą╗ą░ą╝, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą║ čłąĖąĮąĄ CAN.
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčéą░. ąŻ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ąĮąĄčé čüą▓ąŠąĄą│ąŠ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ CAN ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĖąĘ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (SCLK) ąĮą░ ąŠčüąĮąŠą▓ą░ąĮąĖąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą║ą▓ą░ąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ (time quanta). ą¤ą░čĆą░ą╝ąĄčéčĆ Time Quantum (TQ) ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ TQ = (BRP+1)/SCLK, ą│ą┤ąĄ BRP čŹč鹊 10-ą▒ąĖčéąĮąŠąĄ ą┐ąŠą╗ąĄ BRP čĆąĄą│ąĖčüčéčĆą░ CAN_CLOCK. ąźąŠčéčÅ ą┐ąŠą╗ąĄ BRP ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ ą╗čÄą▒ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ ą▒ąŠą╗čīčłąĄąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠąĄ 4, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮą░ą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▒ąĖčéą░, ą║ąŠą│ą┤ą░ BRP ą╝ąĄąĮčīčłąĄ 4.
ąĀąĄą│ąĖčüčéčĆ CAN_CLOCK ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ TQ, ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą▓ą░ąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠčüčéą░ą▓ą╗čÅčÄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčéą░ ąĮą░ čłąĖąĮąĄ CAN. ąĀąĄą│ąĖčüčéčĆ CAN_TIMING čāą┐čĆą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĖąĮą░ą╗čīąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą▒ąĖčéą░ ąĖ č鹊čćą║čā ą▓čŗą▒ąŠčĆą║ąĖ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CAN. ąĀąĖčü. 17-7 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 3 čäą░ąĘčŗ ą▒ąĖčéą░ CAN - čüąĄą│ą╝ąĄąĮčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, čüąĄą│ą╝ąĄąĮčé ą┐ąĄčĆąĄą┤ č鹊čćą║ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ ąĖ čüąĄą│ą╝ąĄąĮčé ą┐ąŠčüą╗ąĄ č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ.

ąĀąĖčü. 17-7. ąóčĆąĖ čäą░ąĘčŗ ą▒ąĖčéą░ CAN.
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąĄą│ą╝ąĄąĮčéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓čüąĄą│ą┤ą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čĆą░ą▓ąĮą░ 1 TQ. ąŁč鹊 čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čāąĘą╗ąŠą▓ ąĮą░ čłąĖąĮąĄ CAN. ąÆčüąĄ ą┐ąĄčĆąĄą┐ą░ą┤čŗ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠąČąĖą┤ą░čÄčéčüčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čŹč鹊ą│ąŠ čüąĄą│ą╝ąĄąĮčéą░.
ą¤ąŠą╗čÅ TSEG1 ąĖ TSEG2 čĆąĄą│ąĖčüčéčĆą░ CAN_TIMING čāą┐čĆą░ą▓ą╗čÅčÄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ TQ, ą║ąŠč鹊čĆčŗąĄ ą▓čģąŠą┤čÅčé ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▒ąĖčé CAN, ąĖ ąŠčé čŹč鹊ą│ąŠ ąĘą░ą▓ąĖčüąĖčé ą┐ąŠą╗čāč湥ąĮąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą▒ąĖčé CAN. ąØąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
tBIT = TQ * (1 + (1 + TSEG1) + (1 + TSEG2))
ąöą╗čÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ą▓ čäąĖąĘąĖč湥čüą║ąĖčģ čüąĄčéčÅčģ č鹊čćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą┐ąŠą╗ąĄą╝ TSEG1. ą¤ąŠą╗ąĄ TSEG2 čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ TQ, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░. ą¦ą░čüč鹊 čüą░ą╝ą░čÅ ą╗čāčćčłą░čÅ ąĮą░ą┤ąĄąČąĮąŠčüčéčī ą┤ąŠčüčéąĖąČąĖą╝ą░ čü č鹊čćą║ą░ą╝ąĖ ą▓čŗą▒ąŠčĆą║ąĖ, čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĮčŗą╝ąĖ ą▓ ą▓ąĄčĆčģąĮąĄą╝ 80% ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąĄąĮčīčłąĄ 50%. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, TSEG1 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čüąĄą│ą┤ą░ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮčŗą╝ TSEG2.
ą£ąŠą┤čāą╗čī CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĮąĄ čĆą░ąĘą╗ąĖčćą░ąĄčé čüąĄą│ą╝ąĄąĮčé čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ (propagation segment) ąĖ čüąĄą│ą╝ąĄąĮčé čäą░ąĘčŗ 1 (phase segment 2), ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ čüčéą░ąĮą┤ą░čĆč鹥. ąŚąĮą░č湥ąĮąĖąĄ TSEG1 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čŹčéąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąŚąĮą░č湥ąĮąĖąĄ TSEG2 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĄą│ą╝ąĄąĮčéą░ čäą░ąĘčŗ 2 (phase segment 2).
ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą┐ąĄčĆąĄčģąŠą┤ ąŠčé čĆąĄčåąĄčüčüąĖą▓ąĮąŠą│ąŠ ą║ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą╝čā ą▒ąĖčéčā ą▓ąĮąĄ čüąĄą│ą╝ąĄąĮčéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, č鹊 ąŠąĮ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄąĮąŠčüąĖčé č鹊čćą║čā ą▓čŗą▒ąŠčĆą║ąĖ čéą░ą║, čćč鹊 ą▒čāą┤ąĄčé ą▓čüąĄ ąĄčēąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ ą▒ąĖčé CAN. ą¤ąŠą╗ąĄ čłąĖčĆąĖąĮčŗ ą┐čĆčŗąČą║ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (synchronization jump width, SJW) ąĘą░ą┤ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ TQ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 1 ą┤ąŠ 4 (SJW + 1), č湥ą╝ čĆą░ąĘčĆąĄčłą░čÄčéčüčÅ ą┐ąŠą┐čŗčéą║ąĖ ą┐ąŠą▓č鹊čĆąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąŚąĮą░č湥ąĮąĖąĄ SJW ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą▓čŗčłą░čéčī TSEG2 ąĖą╗ąĖ TSEG1. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čäčāąĮą┤ą░ą╝ąĄąĮčéą░ą╗čīąĮąŠąĄ ą┐čĆą░ą▓ąĖą╗ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ CAN_TIMING čüą╗ąĄą┤čāčÄčēąĄąĄ:
SJW Ōēż TSEG2 Ōēż TSEG1
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čŹč鹊ą╝čā čäčāąĮą┤ą░ą╝ąĄąĮčéą░ą╗čīąĮąŠą╝čā ą┐čĆą░ą▓ąĖą╗čā čüąĄą│ą╝ąĄąĮčé čäą░ąĘčŗ 2 čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĄąĮ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (Information Processing Time, IPT). ąŁč鹊 ą▓čĆąĄą╝čÅ, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą╗ąŠą│ąĖą║ąŠą╣ ą┤ą╗čÅ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą▓čģąŠą┤ą░ CANRX. ąØą░ ą╝ąŠą┤čāą╗ąĄ CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin čŹč鹊 ą▓čĆąĄą╝čÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé 3 čéą░ą║čéą░ SCLK. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąĮą░ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ TSEG2, ąĄčüą╗ąĖ čā ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą║č鹊ą▓ BRP ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄąĮčīčłąĄ 2. ąĢčüą╗ąĖ BRP čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, ą┐ąŠą╗ąĄ TSEG2 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 2. ąĢčüą╗ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ TSEG2 ą▒čāą┤ąĄčé 1.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ą▓čüąĄ čāąĘą╗čŗ ąĮą░ čłąĖąĮąĄ CAN ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čāčÄ ąĮąŠą╝ąĖąĮą░ą╗čīąĮčāčÄ čüą║ąŠčĆąŠčüčéčī ą▒ąĖčé.
ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓čüąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ, čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüąŠąŠą▒čĆą░ąČąĄąĮąĖąĄ ąŠ č鹊ą╝, ą║ą░ą║ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą▓čŗą▒ąŠčĆą║čā ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ (ąŠčåąĖčäčĆąŠą▓ą║ą░, sampling). ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┤ąĄą╗ą░ąĄčé ą▓čŗą▒ąŠčĆą║čā ą▒ąĖčéą░ CAN ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ, ąŠą┐ąĖčüą░ąĮąĮąŠą╣ čĆąĄą│ąĖčüčéčĆąŠą╝ CAN_TIMING, čćč鹊 čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ SAM. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ą▒ąĖčé SAM čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄą┤ąĖčüą║čĆąĄčéąĖąĘąĖčĆčāąĄčéčüčÅ čéčĆąĄčģą║čĆą░čéąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąŠą╣ čü čćą░čüč鹊č鹊ą╣ SCLK čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ąĮą░ąĖą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▓čŗą▒ąŠčĆąŠą║ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ čāčĆąŠą▓ąĮąĄ (ąĄčüą╗ąĖ ąĖąĘ čŹčéąĖčģ čéčĆąĄčģ ą▓čŗą▒ąŠčĆąŠą║ ą▒čŗą╗ąŠ ą▒ąŠą╗čīčłąĄ ąĄą┤ąĖąĮąĖčå, č鹊 čüčćąĖčéą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčéą░ ąĘą░ ąĄą┤ąĖąĮąĖčåčā, ąĄčüą╗ąĖ ą▒ąŠą╗čīčłąĄ ąĮčāą╗ąĄą╣, č鹊 ąĮąŠą╗čī). ąÆčüąĄą│ą┤ą░ ąŠčüčéą░ą▓ą╗čÅą╣č鹥 ą▒ąĖčé SAM čüą▒čĆąŠčłąĄąĮąĮčŗą╝, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ BRP ą╝ąĄąĮčīčłąĄ 4.
ąÆąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ąĮąĄ ą┐čŗčéą░ą╣č鹥čüčī ą╝ąĄąĮčÅčéčī čĆąĄą│ąĖčüčéčĆčŗ CAN_CLOCK ąĖą╗ąĖ CAN_TIMING. ąöą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čüąĄą│ą┤ą░ čüąĮą░čćą░ą╗ą░ ą▓čģąŠą┤ąĖč鹥 ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŚą░ą┐ąĖčüčī ą▓ čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ąĮąĄ ą┤ą░čüčé čŹčäč乥ą║čéą░, ąĄčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąĄ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖą╗ąĖ ąŠčéą╗ą░ą┤ą║ąĖ. ąĢčüą╗ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮąĄ ą▓čŗčģąŠą┤ąĖą╗ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą│ąĖą▒ąĄčĆąĮą░čåąĖąĖ, č鹊 ą▓ą▓ąĄą┤ąĖč鹥 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ CCR ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (master control, CAN_CONTROL) ąĖ ąŠą┐čĆą░čłąĖą▓ą░ą╣č鹥 čĆąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüčéą░čéčāčüą░ CAN (CAN_STATUS) ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ CCA.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ą┐ąŠą╗ąĄ TSEG1 ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ą▓ 0, č鹊 ą╝ąŠą┤čāą╗čī CAN ąĮąĄ ą▓čŗą╣ą┤ąĄčé ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąÆąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠą┤čāą╗čī ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN. ąÆčŗą▓ąŠą┤ ą▓čŗčģąŠą┤ą░ CANTX ąŠčüčéą░ąĄčéčüčÅ ą▓ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąĖ ą╝ąŠą┤čāą╗čī ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ąĖ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖą╗ąĖ čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ (error frames). ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓čŗčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą▓čüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ čÅą┤čĆą░ CAN ąĖ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ CAN čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čüą▓ąŠąĄ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü (software reset) ąĮąĄ ą╝ąĄąĮčÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN_CLOCK ąĖ CAN_TIMING. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐čĆąŠąĖčüčģąŠą┤čÅčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ č湥čĆąĄąĘ čłąĖąĮčā CAN ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠą▓čĆąĄąČą┤ąĄąĮą░ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ ąĖą╗ąĖ ąĖąĮąĖčåąĖą░čåąĖąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ (SRS=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL).
[ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćą░]
ąĀąĖčü. 17-8 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN. ą»čēąĖą║ąĖ 24-31 ąĮą░ąĘąĮą░č湥ąĮčŗ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╝ąĖ. ą»čēąĖą║ąĖ 8-23 ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖąĄ ąĘą░ą┐ąĖčüčīčÄ 0 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ CAN_MDx. ą¤ąŠčüą╗ąĄ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą▓ ąŠą▒ą╗ą░čüčéčī čÅčēąĖą║ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé čĆą░ąĘčĆąĄčłąĄąĮ čÅčēąĖą║ n (MCn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCx) ąĖ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit request, TRSn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TRSx).
ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░, ąŠčćąĖčēą░čÄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ čĆąĄą│ąĖčüčéčĆąĄ čüą▒čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit request reset, TRRn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TRRx). ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮą░, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit acknowledge, TAn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TAx). ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ ąĖąĘ-ąĘą░ ą┐čĆąŠąĖą│čĆčŗčłą░ ą░čĆą▒ąĖčéčĆą░ąČą░ ą┐ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéčā ąĖą╗ąĖ ąŠčłąĖą▒ą║ąĖ CAN, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą▒čĆčŗą▓ą░ (abort acknowledge, AAn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_AAx). ąŚą░ą┐čĆąŠčłąĄąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒ąŠčĆą▓ą░ąĮą░ ą▓čĆčāčćąĮčāčÄ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ TRRn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TRRx.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą╝ąŠąČąĮąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖčé CAN_TRSx, ąĖ čŹčéąĖ ą▒ąĖčéčŗ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ą╗ąĖą▒ąŠ ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą╗ąĖą▒ąŠ ą┐ąŠčüą╗ąĄ ąŠą▒ąŠčĆą▓ą░ąĮąĮąŠą╣. ąæąĖčéčŗ TRSn čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ CAN, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (auto-transmit mode) čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąŠąĖą│čĆą░ą╗ąŠ ą░čĆą▒ąĖčéčĆą░ąČ ąĖ ą▒ąĖčé ąŠą┤ąĖąĮąŠčćąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ (single-shot bit, OPSSn=0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_OPSSx), ąĖą╗ąĖ ą▓ čüąŠą▒čŗčéąĖąĖ RTR (remote frame request). ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čÅčēąĖą║ąŠą▓ ą┐čĆąĖąĄą╝ą░/ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ remote frame (RFHn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_RFHx).
ąĪą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ čāą┤ąĄą╗čÅčéčīčüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ąŠą▒ą╗ą░čüčéąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ čÅčēąĖą║ą░, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TRSn. ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą║ čÅčēąĖą║čā čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ TRSn čĆą░ąĘčĆąĄčłąĄąĮ, ąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ čéą░ą║ąŠą╝ čÅčēąĖą║ąĄ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čŗą╝ ą┤ą░ąĮąĮčŗą╝ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąÆą║ą╗čÄč湥ąĮąĖąĄ ąĖ ąŠčéą║ą╗čÄč湥ąĮąĖąĄ čÅčēąĖą║ąŠą▓ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ ąĘą░ą┐čĆąŠčüčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ TRSn, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╝ čÅčēąĖą║ąŠą╝, ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąŠčłąĖą▒ąŠčćąĮąŠą╝čā ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÄ. ąóąŠčćąĮąŠ čéą░ą║ ąČąĄ ąĘą░ą┐čĆąĄčé čÅčēąĖą║ą░ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ ą▒čāą┤ąĄčé čüą▒čĆąŠčłąĄąĮ ą▒ąĖčé TRSn, ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čŗą╝ čĆąĄąĘčāą╗čīčéą░čéą░ą╝.
Retransmission (ą┐ąŠą▓č鹊čĆąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░). ą×ą▒čŗčćąĮąŠ č鹥ą║čāčēąĖą╣ ąŠą▒čŖąĄą║čé čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĮąŠą▓ą░ ą┐ąŠčüą╗ąĄ ą┐čĆąŠąĖą│čĆčŗčłą░ ą░čĆą▒ąĖčéčĆą░ąČą░, ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠčćąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ąĮą░ čłąĖąĮąĄ CAN. ąĢčüą╗ąĖ ąŠąČąĖą┤ą░ąĄčé čüą▓ąŠąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ čüąŠąŠą▒čēąĄąĮąĖčÅ, č鹊 ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ, čÅčēąĖą║ ą║ąŠč鹊čĆąŠą│ąŠ ąĖą╝ąĄąĄčé ą▒ąŠą╗čīčłąĖą╣ ąĮąŠą╝ąĄčĆ (čüą╝. čĆąĖčü. 17-8). ą×ą▒ąŠčĆą▓ą░ąĮąĮą░čÅ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą╗čÄą▒čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝.

ąĀąĖčü. 17-8. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ, ąĮąĄ ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ ą┤čĆčāą│ąĖą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ ą┐ąŠčćč鹊ą▓čŗą╣ čÅčēąĖą║. ą¤ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ - č鹊, ą║ąŠč鹊čĆąŠąĄ čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąŠ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ą▒čāč乥čĆ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ čÅą┤čĆą░ CAN. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ą▒čāč乥čĆąĄ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą╝ąĄąĮąĄąĮąŠ ą┐ąŠą║ą░ ąŠąĮąŠ ąĮąĄ ą▒čāą┤ąĄčé čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, ą┐čĆąŠąĖą│čĆą░ąĮ ą░čĆą▒ąĖčéčĆą░ąČ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN, ąĖą╗ąĖ ą┐ąŠčÅą▓ąĖčéčüčÅ čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ą×ą┤ąĖąĮąŠčćąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ (Single Shot Transmission). ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ (OPSSn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_OPSSx), č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TRSn ąŠčćąĖčēą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĖą╗ąĖ ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ ąĖąĘ-ąĘą░ ą┐čĆąŠąĖą│čĆčŗčłą░ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą╗ąĖ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ čäčĆąĄą╣ą╝ą░ ąŠčłąĖą▒ą║ąĖ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▒ąŠą╗čīčłąĄ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠą┐čŗč鹊ą║ čüąĮąŠą▓ą░ ą┐ąĄčĆąĄą┤ą░čéčī čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĄčüą╗ąĖ ą┐ąĄčĆą▓ą░čÅ ą┐ąŠą┐čŗčéą║ą░ ą▒čŗą╗ą░ ąĮąĄčāą┤ą░čćąĮąŠą╣, ąĖ ąŠą▒ čŹč鹊ą╝ čüąŠąŠą▒čēą░ąĄčéčüčÅ čäą╗ą░ą│ąŠą╝ ąŠčłąĖą▒ą║ąĖ ąŠą▒čĆčŗą▓ą░ (abort error, AAn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_AAx).
ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ (Auto-Transmission). ąÆ čĆąĄąČąĖą╝ąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ čÅčēąĖą║ąĄ 11 ą╝ąŠąČąĄčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░. ąŁč鹊čé čĆąĄąČąĖą╝ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ čüąĄčĆą┤čåąĄą▒ąĖąĄąĮąĖčÅ (broadcast heartbeats), ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ąĮą░ ą▓čüąĄ čāąĘą╗čŗ CAN. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ čéą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒čŗčćąĮąŠ ąĖą╝ąĄčÄčé ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé.
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_UCRC. ąÜąŠą│ą┤ą░ čŹč鹊čé čĆąĄąČąĖą╝ čĆą░ąĘčĆąĄčłąĄąĮ (čāčüčéą░ąĮąŠą▓ą║ąŠą╣ UCCNF[3:0]=0x3 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNF), č鹊 čüč湥čéčćąĖą║ (čĆąĄą│ąĖčüčéčĆ CAN_UCCNT) ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ CAN_UCRC. ąĪč湥čéčćąĖą║ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé CAN ą┤ąŠ 0, ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ CAN_UCRC. ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ ą┤ąŠčüčéąĖą│ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ 0, ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé TRS11, ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖąĘ čÅčēąĖą║ą░ 11.
ąöą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čÅčēąĖą║ 11 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣, ąĖ ą┤ąŠą╗ąČąĄąĮ čüąŠą┤ąĄčƹȹ░čéčī ą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą┤ą░ąĮąĮčŗąĄ) ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čüč湥čéčćąĖą║ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ ą┤ąŠčüčćąĖčéą░ąĄčé ą┤ąŠ 0, ą║ąŠą│ą┤ą░ čŹč鹊čé čĆąĄąČąĖą╝ čĆą░ąĘčĆąĄčłąĄąĮ.
[ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĖąĄą╝]
ąÉą┐ą┐ą░čĆą░čéčāčĆą░ CAN ą░ą▓č鹊ąĮąŠą╝ąĮąŠ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ, ąŠčéą▒čĆą░čüčŗą▓ą░čÅ ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ą┐čĆąĖąĮčÅč鹊, ą╗ąŠą│ąĖą║ą░ ą┐čĆąĖąĄą╝ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ą▓čüąĄ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ąĮą░ ą┐čĆąĖąĄą╝ čÅčēąĖą║ąĖ ąŠčé čÅčēąĖą║ą░ 23 ą▓ąĮąĖąĘ, ą┤ąŠ čÅčēąĖą║ą░ 0, ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖąĮč鹥čĆąĄčü ą┤ą╗čÅ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čāąĘą╗ą░, ąĖą╗ąĖ ąĮąĄčé.
ąÜą░ąČą┤čŗą╣ ą▓čģąŠą┤čÅčēąĖą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čüąŠ ą▓čüąĄą╝ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╝ąĖ ą▓ ą░ą║čéąĖą▓ąĮčŗčģ čÅčēąĖą║ą░čģ ą┐čĆąĖąĄą╝ą░ (MDn=1 ąĖ MCn=1), ąĖ ą┤ą╗čÅ ą▓čüąĄčģ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ čÅčēąĖą║ą░čģ, čā ą║ąŠč鹊čĆčŗčģ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ remote frame (RFHn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_RFHx).
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü ą▒ąĖč鹊ą╝ čĆą░čüčłąĖčĆąĄąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (identifier extension, IDE) ąĖ ą▒ąĖč鹊ą╝ ąĘą░ą┐čĆąŠčüą░ remote transmission (RTR) čüčĆą░ą▓ąĮąĖą▓ą░čÄčéčüčÅ čü ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ąČą┤ąŠą│ąŠ čÅčēąĖą║ą░. ąĢčüą╗ąĖ ą▒ąĖčé AME ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠ ą▒ąĖčéą░ą╝ IDE, RTR ąĖ ą▓čüąĄą╝ ą▒ąĖčéą░ą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé AME, č鹊 čĆąĄą│ąĖčüčéčĆčŗ ą╝ą░čüą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ (acceptance mask) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ą║ą░ą║ąŠą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąĖ ą▒ąĖčéčŗ IDE ąĖ RTR ąĮčāąČą┤ą░čÄčéčüčÅ ą▓ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĖ. ąØą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ą░čÅ ą╗ąŠą│ąĖą║ą░: Received Message XNOR CAN_IDx ąĖą╗ąĖ AME AND CAN_AMx. ąĢą┤ąĖąĮąĖčåą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą▒ąĖč鹊ą▓ąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ą░čüą║ąĖ CAN_AMxx ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĖ, ą║ąŠą│ą┤ą░ AME=1. ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ čÅčēąĖą║ ą┐ąŠą╗čāčćą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąĖąĮąĖą╝ą░čéčī ą│čĆčāą┐ą┐čŗ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ ąĖčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ ą║ąŠąĮč鹥ą║čüč鹥 čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ID čüąŠąŠą▒čēąĄąĮąĖčÅ ąĄčüčéčī ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ą┐ąŠč湥ą╝čā-č鹊 ąĮąĄ ąŠą┐ąĖčüą░ąĮąĮąŠąĄ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčā ADSP-BF50x. ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ, čüąŠąŠą▒čēąĄąĮąĖąĄ čü ąĮčāą╗ąĄą▓čŗą╝ ID ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 ą▓čüąĄą│ą┤ą░.
ąóą░ą▒ą╗ąĖčåą░ 17-1. ą»čēąĖą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ą▓čģąŠą┤ąĮąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ ą╝ą░čüą║ąĄ (Acceptance Mask Filtering).
| MCn |
MDn |
RFHn |
ą»čēąĖą║ n |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
| 0 |
x |
x |
ąśą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ |
ą»čēąĖą║ n ąĘą░ą┐čĆąĄčēąĄąĮ |
| 1 |
0 |
0 |
ąśą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ |
ą»čēąĖą║ n čĆą░ąĘčĆąĄčłąĄąĮ
ą»čēąĖą║ n čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ
ą×ą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ą░ remote ąĘą░ą┐čĆąĄčēąĄąĮą░ |
| 1 |
0 |
1 |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
ą»čēąĖą║ n čĆą░ąĘčĆąĄčłąĄąĮ
ą»čēąĖą║ n čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ
ą×ą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ą░ remote čĆą░ąĘčĆąĄčłąĄąĮą░ |
| 1 |
1 |
x |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
ą»čēąĖą║ n čĆą░ąĘčĆąĄčłąĄąĮ
ą»čēąĖą║ n čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ |
ąĢčüą╗ąĖ čäąĖą╗čīčéčĆ ą┐čĆąĖąĄą╝ą░ ąĮą░ą╣ą┤ąĄčé ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, č鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąĄą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čÅčēąĖą║ąĄ. ą¤čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐čĆąĖąĄą╝ąĮčŗčģ čÅčēąĖą║ąŠą▓ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą▒čāą┤ąĄčé ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝. ąĢčüą╗ąĖ č鹥ą║čāčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ąĮąĖ ą┤ą╗čÅ ą║ą░ą║ąŠą│ąŠ čÅčēąĖą║ą░, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ.
ąĀąĖčü. 17-9 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąĄčĆąĄą▓ąŠ ą┐čĆąĖąĮčÅčéąĖčÅ čĆąĄčłąĄąĮąĖčÅ ą╗ąŠą│ąĖą║ąĖ ą┐čĆąĖąĄą╝ą░, ą║ąŠą│ą┤ą░ ąĖą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŠčéą┤ąĄą╗čīąĮčŗčģ čÅčēąĖą║ąŠą▓.

ąĀąĖčü. 17-9. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖąĄą╝ą░ CAN.
ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą┤ą╗čÅ čÅčēąĖą║ą░, ąĖ čŹč鹊čé čÅčēąĖą║ ą▓čüąĄ ąĄčēąĄ čüąŠą┤ąĄčƹȹĖčé ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (RMPn=1), č鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī čĆąĄčłą░ąĄčé, ą┤ąŠą╗ąČąĮąŠ ą╗ąĖ ą▒čŗčéčī čüčéą░čĆąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ ąĮąŠą▓čŗą╝, ąĖą╗ąĖ ąĮąĄčé. ąĢčüą╗ąĖ OPSSn=0, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą┐ąŠč鹥čĆąĖ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (receive message lost, ą▒ąĖčé RMLn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_RMLx), ąĖ čüčéą░čĆąŠąĄ čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ ą▓ čÅčēąĖą║ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ. ąŁč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠč鹥čĆąĖ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (RMLIS=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIS). ąĢčüą╗ąĖ OPSSn=1, č鹊 ą▒čāą┤čāčé ą┐čĆąŠą▓ąĄčĆąĄąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ čÅčēąĖą║ąĖ ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ą┐ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā. ąĢčüą╗ąĖ čéą░ą║ąŠąĄ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ąĮąĄ ą▒čŗą╗ąŠ ąĮą░ą╣ą┤ąĄąĮąŠ, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠčéą▒čĆąŠčłąĄąĮąŠ, ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄčģąŠą┤ ą║ ą┐čĆąŠą▓ąĄčĆą║ąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ čÅčēąĖą║ ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 ą┐čĆąĖčłąĄą┤čłąĄąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ čÅčēąĖą║ą░ ą▒čāą┤ąĄčé ą┐ąŠč鹥čĆčÅąĮąŠ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą▓č鹊čĆąŠą╣ čÅčēąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ č鹊ą│ąŠ ąČąĄ čüą░ą╝ąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░.
ążąĖą╗čīčéčĆ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ (Data Acceptance Filter). ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ DeviceNet (DNM=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL), ąĖ čÅčēąĖą║ ąĮą░čüčéčĆąŠąĄąĮ ąĮą░ čäąĖą╗čīčéčĆą░čåąĖčÄ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ, čäąĖą╗čīčéčĆą░čåąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ ą┐ąŠą╗čÄ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ID ąĖ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅ. ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ą┐ąŠ ą┐ąĄčĆą▓ąŠą╝čā ą▒ą░ą╣čéčā, ą╗ąĖą▒ąŠ ą┐ąŠ ą┐ąĄčĆą▓čŗą╝ ą┤ą▓čāą╝ ą▒ą░ą╣čéą░ą╝, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 17-2.
ąóą░ą▒ą╗ąĖčåą░ 17-2. ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅ (Data Field Filtering).
FDF
ążąĖą╗čīčéčĆ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ |
FMD
ą¤ąŠą╗ąĮą░čÅ ą╝ą░čüą║ą░ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
0 |
ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮą░. |
| 0 |
1 |
ąØąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ. FMD ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 0, ąĄčüą╗ąĖ FDF=0. |
| 1 |
0 |
ążąĖą╗čīčéčĆ č鹊ą╗čīą║ąŠ ą┐ąŠ ą┐ąĄčĆą▓ąŠą╝čā ą▒ą░ą╣čéčā ą┤ą░ąĮąĮčŗčģ. |
| 1 |
1 |
ążąĖą╗čīčéčĆ ą┐ąŠ ą┤ą▓čāą╝ ą▒ą░ą╣čéą░ą╝ ą┤ą░ąĮąĮčŗčģ. |
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FDF ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_AMxxH, č鹊 čĆąĄą│ąĖčüčéčĆ CAN_AMxxL čüąŠą┤ąĄčƹȹĖčé ą╝ą░čüą║čā čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ (data field mask, DFM[15:0]). ąĢčüą╗ąĖ ą▒ąĖčé FDF ąŠčćąĖčēąĄąĮ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_AMxxH, č鹊 čĆąĄą│ąĖčüčéčĆ CAN_AMxxL čüąŠą┤ąĄčƹȹĖčé ą╝ą░čüą║čā ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (extended identifier mask, EXTID_HI[15:0]).
ą×ą▒čĆą░ą▒ąŠčéą║ą░ RTR (Remote Frame Handling). ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ąŠą▓ remote ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░/ąĘą░ą┐čĆąĄčēąĄąĮą░ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ/ąŠčćąĖčüčéą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ remote frame (CAN_RFHx) ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ čÅčēąĖą║ą░.
ążčĆąĄą╣ą╝čŗ remote čŹč鹊 čäčĆąĄą╣ą╝čŗ ą┤ą░ąĮąĮčŗčģ, čā ą║ąŠč鹊čĆčŗčģ ąĮąĄčé ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ, ąĖ čā ą║ąŠč鹊čĆčŗčģ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé RTR. ąÜąŠą┤ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ (data length code, DLC) ąŠčéą▓ąĄčćą░čÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ ą░ąĮąĮčāą╗ąĖčĆčāąĄčéčüčÅ ą║ąŠą┤ąŠą╝ DLC ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ remote. ąÜąŠą┤ DLC ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąŠčé 0 ą┤ąŠ 15, ąĮąŠ ąĘąĮą░č湥ąĮąĖčÅ DLC ą▒ąŠą╗čīčłąĄ 8 čüčćąĖčéą░čÄčéčüčÅ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ 8. ążčĆąĄą╣ą╝ remote čüąŠą┤ąĄčƹȹĖčé:
ŌĆó ąæąĖčéčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░.
ŌĆó ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą┐ąŠą╗ąĄ DLC.
ŌĆó ąæąĖčé ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā čü ą┤ą░ą╗čīąĮąĄą│ąŠ čāąĘą╗ą░ (remote transmission request, RTR).
ążčĆąĄą╣ą╝čŗ remote ą╝ąŠą│čāčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī č鹊ą╗čīą║ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗąĄ čÅčēąĖą║ąĖ 8ŌĆō23, ąĮąŠ ą▓čüąĄ čÅčēąĖą║ąĖ ą╝ąŠą│čāčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĘą░ą┐čĆąŠčüčŗ remote frame. ąÜąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ remote frame, čĆąĄą│ąĖčüčéčĆ CAN_OPSSx ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ą╗ąĖčÅąĮąĖčÅ. ąÆčüąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čÅčēąĖą║ą░ ą▓čüąĄą│ą┤ą░ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓čģąŠą┤čÅčēąĖą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčé čäčĆąĄą╣ą╝ remote, č鹊 DLC čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čÅčēąĖą║ą░ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖąĮčÅčéčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝.
ą£ąŠąČąĄčé ą▒čŗčéčī ąŠčłąĖą▒ąŠčćąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ą▒ąĖčé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ą░ remote (RFHn), ąĖ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čÅčēąĖą║. ąĪą╝. ą┤ą░ą╗ąĄąĄ čĆą░ąĘą┤ąĄą╗ "ąÆčĆąĄą╝ąĄąĮąĮčŗą╣ ąĘą░ą┐čĆąĄčé čÅčēąĖą║ąŠą▓" ą┤ą╗čÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čÅčēąĖą║ą░.
ąĪč鹊čĆąŠąČąĄą▓ąŠą╣ čĆąĄąČąĖą╝ (Watchdog Mode). ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ. ąŁč鹊 čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī, čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čāąĘąĄą╗ ą▓ čüąĄčéąĖ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠ, ąĖ ąĄčüą╗ąĖ čŹč鹊 ąĮąĄ čéą░ą║, č鹊 ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī čŹč鹊 ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čéą░ą║ąŠą╣ čüą╗čāčćą░ą╣ ąŠčéą║ą░ąĘą░.
ąĪąŠą│ą╗ą░čüąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ ą▓ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čĆąĄąČąĖą╝ (čāčüčéą░ąĮąŠą▓ą║ą░ UCCNF[3:0]=0x2 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNF), čüč湥čéčćąĖą║ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNT ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĘą░čĆą░ąĮąĄąĄ ąĘą░ą┤ą░ąĮąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮąŠą╣, čüąŠą┤ąĄčƹȹ░čēąĄą╣čüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ/ąĘą░čģą▓ą░čéą░ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ CAN (universal counter reload/capture, CAN_UCRC). ąŚą░č鹥ą╝ čŹč鹊čé čüč湥čéčćąĖą║ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ ą▒ąĖčé CAN. ąĢčüą╗ąĖ ą▒ąĖčéčŗ UCCT ąĖ UCRC ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNF čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ, ąĖ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ čÅčēąĖą║ 4 ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čüč湥čéčćąĖą║ ą┤ąŠčüčćąĖčéą░ąĄčé ą▓ąĮąĖąĘ ą┤ąŠ 0, čüč湥čéčćąĖą║ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_UCRC ąĖ ą┐čĆąŠą┤ąŠą╗ąČąĖčé čüč湥čé ą▓ąĮąĖąĘ. ąĢčüą╗ąĖ ąČąĄ čüč湥čéčćąĖą║ ą┤ąŠčüčćąĖčéą░ą╗ ą┤ąŠ 0 ą▒ąĄąĘ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ čÅčēąĖą║ 4, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé UCEIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (CAN_GIS), ąĖ čüč湥čéčćąĖą║ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄąĘą░ą│čĆčāąČąĄąĮ ąĘąĮą░č湥ąĮąĖąĄą╝ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ CAN_UCRC. ąĢčüą╗ąĖ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ąĮčāąČąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé UCEIM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIM. ąĪ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝ ą╝ą░čüą║ąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, č鹊 čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé UCEIF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF.
ąĪč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą│čĆčāąČąĄąĮ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ CAN_UCRC ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_UCCNF.
ą¤ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ąŠ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝, ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_UCRC.
[ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ]
ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĖąĮą┤ąĖą║ą░čåąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčé čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║ CAN ą▓ čĆąĄąČąĖą╝ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (time stamp mode, čāčüčéą░ąĮąŠą▓ą║ą░ UCCNF[3:0]=0x1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNF). ąóąŠą│ą┤ą░ 16-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čüą▓ąŠą▒ąŠą┤ąĮąŠ čüčćąĖčéą░čÄčēąĄą│ąŠ čüč湥čéčćąĖą║ą░ (čĆąĄą│ąĖčüčéčĆ CAN_UCCNT) ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_MBxx_TIMESTAMP čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čÅčēąĖą║ą░, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ ąĖą╗ąĖ ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ.
ąŚąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ ą▒ąĖčéą░ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (start of frame, SOF) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ ąĖą╗ąĖ čāčģąŠą┤čÅčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤ąŠąĘąČąĄ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_MBxx_TIMESTAMP čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čÅčēąĖą║ą░.
ąĢčüą╗ąĖ čÅčēąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ąŠą▓ remote, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ (ą▓ čÅčēąĖą║, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ) ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ (čÅčēąĖą║, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░).
ąĪč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮ (čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▓ 1 ą▒ąĖčéą░ UCRC) ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ (čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▓ 0 ą▒ąĖčéą░ UCE) ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_UCCNF. ąĪč湥čéčćąĖą║ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ čüą░ą╝ čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ (CAN_UCCNT).
ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąŠčćąĖčüčéąĖčéčī čüč湥čéčćąĖą║ (CAN_UCCNT) ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ čÅčēąĖą║ 4 (čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą▓čüąĄčģ čüč湥čéčćąĖą║ąŠą▓ ą╝ąĄč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ čüąĖčüč鹥ą╝ąĄ). ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ UCCT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNF.
ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (ą▒ąĖčé UCEIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIS). ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ CAN ą╝ąŠąČąĄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐čāč鹥ą╝ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą╝ą░čüą║ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (ą▒ąĖčé UCEIM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIM). ąĢčüą╗ąĖ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮ, č鹊 čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (ą▒ąĖčé UCEIF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF).
[ąÆčĆąĄą╝ąĄąĮąĮčŗą╣ ąĘą░ą┐čĆąĄčé čÅčēąĖą║ąŠą▓]
ąĢčüą╗ąĖ čŹč鹊čé čÅčēąĖą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ąŠą▓ remote, č鹊 ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ ą▓ ąĮąĄą╝ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąŠ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą▓čģąŠą┤čÅčēąĄą│ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ remote, ąĖ ą▒ąĄąĘ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī čÅčēąĖą║, čćč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ čÅčēąĖą║ą░ (mailbox temporary disable, čĆąĄą│ąĖčüčéčĆ CAN_MBTD).
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╣ čÅčēąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ ą▓ ą▒ąĖčéčŗ TDPTR[4:0] čĆąĄą│ąĖčüčéčĆą░ CAN_MBTD, ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ čÅčēąĖą║ą░ (temporary disable request, TDR). ąÆąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ ą▒čāą┤ąĄčé ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ čÅčēąĖą║ą░ (temporary disable, TDA).
ąĢčüą╗ąĖ čÅčēąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ (MDn=0), ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TDA, č鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ čŹč鹊ą│ąŠ čÅčēąĖą║ą░ ą╝ąŠąČąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅčéčī. ąĢčüą╗ąĖ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą┐čĆąĖą┤ąĄčé ąĘą░ą┐čĆąŠčü čäčĆąĄą╣ą╝ą░ remote, ą┐ąŠą║ą░ čÅčēąĖą║ ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (TRSn) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣, ąĖ ą║ąŠą┤ DLC ą┐čĆąĖčłąĄą┤čłąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĘą░ą┐ąĖčłąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čÅčēąĖą║. ą×ą┤ąĮą░ą║ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ ąĘą░ą┐čĆąŠčü ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ (TDR=0). ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓čüąĄ ąĘą░ą┐čĆąŠčüčŗ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą╗čÅ ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗčģ čÅčēąĖą║ąŠą▓ ą▒čāą┤čāčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░ ąŠčćąĖčüčéą║ąĖ TDR. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤ąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠą▒ąŠčĆą▓ą░ąĮą░, ąĄčüą╗ąĖ čÅčēąĖą║ ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TRRn ą┤ą╗čÅ čŹč鹊ą│ąŠ čÅčēąĖą║ą░.
ąĢčüą╗ąĖ čÅčēąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐čĆąĖąĄą╝ (MDn=1), čäą╗ą░ą│ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĖ čŹč鹊čé čÅčēąĖą║ ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ. ąĢčüą╗ąĖ ą┐čĆąĖčłą╗ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ čÅčēąĖą║ą░ n, ą║ąŠč鹊čĆčŗą╣ ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ ąČą┤ąĄčé ą┤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ąĄčüčéčī ąŠčłąĖą▒ą║ą░ čłąĖąĮčŗ CAN ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ TDA. ąÜą░ą║ č鹊ą╗čīą║ąŠ TDA čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čÅčēąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą┐čĆąĄčēąĄąĮ (MCn=0) ą▒ąĄąĘ čĆąĖčüą║ą░ ą┐ąŠč鹥čĆąĖ ą▓čģąŠą┤čÅčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąæąĖčé ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ąĘą░ą┐čĆąĄčé (TDR) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ čéą░ą║ ą▒čŗčüčéčĆąŠ, ą║ą░ą║ čŹč鹊 č鹊ą╗čīą║ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠ.
ąÜąŠą│ą┤ą░ ą▒ąĖčé TDA čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ čÅčēąĖą║ą░, ą╝ąŠąČąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅčéčī č鹊ą╗čīą║ąŠ ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ čŹč鹊ą│ąŠ čÅčēąĖą║ą░. ąöąŠčüčéčāą┐ ą║ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą▒ąĖčéą░ą╝ ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā ąĘą░ą┐čĆąĄčēąĄąĮ.
[ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN]
ą£ąŠą┤čāą╗čī CAN ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 3 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ: 2 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅčēąĖą║ą░ (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ čÅčēąĖą║ą░ MBRIRQ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čÅčēąĖą║ą░ MBTIRQ), ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ CAN GIRQ. ąŚąĮą░č湥ąĮąĖčÅ čŹčéąĖčģ čéčĆąĄčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅčēąĖą║ą░. ąÜą░ąČą┤čŗą╣ ąĖąĘ 32 čÅčēąĖą║ąŠą▓ ą╝ąŠą┤čāą╗čÅ CAN ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čÅčēąĖą║ą░. ą¦č鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čÅčēąĖą║čā ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, čāčüčéą░ąĮąŠą▓ąĖč鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBIMn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBIMx.
ąĢčüą╗ąĖ čÅčēąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐čĆąĖąĄą╝, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ (MBRIFn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBRIFx) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čÅčēąĖą║ n (RMPn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_RMPx). ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ą░ remote, č鹊 čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ ą▓ čÅčēąĖą║. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą╗čÄą▒ąŠą╣ ą▒ąĖčé MBRIFn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBRIFx, č鹊 ą▓čŗčģąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ MBRIRQ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_INTR. ą¦č鹊ą▒čŗ ąŠčćąĖčüčéąĖčéčī ąĘą░ą┐čĆąŠčü ąĮą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ MBRIRQ, ą▓čüąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą▒ąĖčéčŗ MBRIFn ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠčćąĖčēąĄąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąĘą░ą┐ąĖčüčīčÄ 1 ą▓ čŹčéąĖ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_MBRIFx.
ąĢčüą╗ąĖ čÅčēąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (MBTIFn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBTIFx) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ čÅčēąĖą║ąĄ n ą▒čāą┤ąĄčé čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ (TAn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TAx). ąæąĖčéčŗ TAn čüąŠčģčĆą░ąĮčÅčé čüąŠčüč鹊čÅąĮąĖąĄ ą┤ą░ąČąĄ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čÅčēąĖą║ n ąĘą░ą┐čĆąĄčēąĄąĮ (MCn=0). ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ą░ remote, čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ąĖąĘ čŹč鹊ą│ąŠ čÅčēąĖą║ą░. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą╗čÄą▒ąŠą╣ ą▒ąĖčé MBTIFn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBTIFx, ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ą▓čŗčģąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ MBTIRQ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_INTR. ą¦č鹊ą▒čŗ ąŠčćąĖčüčéąĖčéčī ąĘą░ą┐čĆąŠčü ąĮą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ MBTIRQ, ą▓čüąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą▒ąĖčéčŗ MBTIFn ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠčćąĖčēąĄąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąĘą░ą┐ąĖčüčīčÄ 1 ą▓ čŹčéąĖ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_MBTIFx.
ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüčéą░čéčāčüą░ CAN. ąøąŠą│ąĖą║ą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ CAN (global CAN status interrupt) čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ čü čéčĆąĄą╝čÅ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ - čĆąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (global CAN interrupt mask, CAN_GIM), ą│ą┤ąĄ ą║ą░ąČą┤čŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ; ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN (global CAN interrupt status, CAN_GIS); ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN (global CAN interrupt flag, CAN_GIF). ąæąĖčéčŗ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ą╗ąĖčÅčÄčé č鹊ą╗čīą║ąŠ ąĮą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čäą╗ą░ą│ąŠą▓ CAN (CAN_GIF). ąĢčüą╗ąĖ ą▒ąĖčé ą╝ą░čüą║ąĖ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čäą╗ą░ą│ą░ ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ. ą×ą┤ąĮą░ą║ąŠ ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIS) ą▓čüąĄ čĆą░ą▓ąĮąŠ čāčüčéą░ąĮąŠą▓čÅčéčüčÅ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖčé ą╝ą░čüą║ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▒ąĖčéčŗ čüčéą░čéčāčüą░ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ąĮą░ą╗ąĖčćąĖčÅ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąæąĖčé ą▓čŗčģąŠą┤ą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN (global CAN status interrupt output, GIRQ) ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (čĆąĄą│ąĖčüčéčĆ CAN_GIS) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF. ąæąĖčé GIRQ ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝, ą┐ąŠą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čģąŠčéčÅ ą▒čŗ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ CAN_GIF. ąÆčüąĄ ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčüčéą░ąĮčāčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ, ą┐ąŠą║ą░ ąŠąĮąĖ ąĮąĄ ą▒čāą┤čāčé ąŠčćąĖčēąĄąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, ąĖą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR) ąĘą░čēąĄą╗ą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčćąĖčēąĄąĮą░ ąŠą┐ąĄčĆą░čåąĖąĄą╣ ąĘą░ą┐ąĖčüąĖ W1C ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ CAN_GIS. ąŁč鹊 ąŠčćąĖčüčéąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ ą▓ ąŠą▒ąŠąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ CAN_GIS ąĖ CAN_GIF.
ąØąĄčüą║ąŠą╗čīą║ąŠ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ GIRQ:
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčéą░ ą┤ąŠčüčéčāą┐ą░ (access denied interrupt, ADIM, ADIS, ADIF). ąÜą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą┤ąŠčüčéčāą┐ ą║ RAM čÅčēąĖą║ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ą▓čŗčģąŠą┤ą░ (external trigger output interrupt, EXTIM, EXTIS, EXTIF). ą¤čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ čéčĆąĖą│ą│ąĄčĆą░.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ (universal counter exceeded interrupt, UCEIM, UCEIS, UCEIF). ąæčŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ (ą▓ čĆąĄąČąĖą╝ąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ time stamp ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą┤čüč湥čéą░ čüąŠą▒čŗčéąĖą╣ event counter) ąĖą╗ąĖ čüč湥čéčćąĖą║ ą┤ąŠčüčéąĖą│ ąĘąĮą░č湥ąĮąĖčÅ 0x0000 (ą▓ čüč鹊čĆąŠąČąĄą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ, watchdog mode).
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠč鹥čĆąĖ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (receive message lost interrupt, RMLIM, RMLIS, RMLIF). ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą┤ą╗čÅ čÅčēąĖą║ą░, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹ░ą╗ ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąŻčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 1 ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ ą┐ąŠč鹥čĆčÅąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (receive message lost, CAN_RMLx). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ CAN_RMLx ą▓čüąĄ ąĄčēąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąĪąĖą│ąĮą░ą╗ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĄąĮ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮąŠą▓čŗą╣ ą▒ąĖčé ą▓ CAN_RMLx.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą▒čĆčŗą▓ą░ (abort acknowledge interrupt, AAIM, AAIS, AAIF). ąŻčüčéą░ąĮąŠą▓ąĖą╗čüčÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé AAn ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą▒čĆčŗą▓ą░ (abort acknowledge, CAN_AAx). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ CAN_AAx ą▓čüąĄ ąĄčēąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ čüąĖą│ąĮą░ą╗ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĄąĮ č鹊ą╗čīą║ąŠ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ąĮąŠą▓ąŠą│ąŠ ą▒ąĖčéą░ ą▓ CAN_AAx. ąæąĖčéčŗ AAn čüąŠčģčĆą░ąĮčÅčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┤ą░ąČąĄ ą┐ąŠčüą╗ąĄ ąĘą░ą┐čĆąĄčéą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čÅčēąĖą║ą░ n (MCn=0).
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ą┤ąŠčüčéčāą┐ą░ ą║ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā (access to unimplemented address interrupt, UIAIM, UIAIS, UIAIF). ąæčŗą╗ ą┤ąŠčüčéčāą┐ čüąŠ čüč鹊čĆąŠąĮčŗ CPU ą║ ą░ą┤čĆąĄčüčā, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ ą╝ąŠą┤čāą╗ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wakeup interrupt, WUIM, WUIS, WUIF). ą£ąŠą┤čāą╗čī CAN ą▓čŗčłąĄą╗ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░, ą┐ąŠč鹊ą╝čā čćč鹊 ą▒čŗą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ (Bus-Off interrupt, BOIM, BOIS, BOIF). ą£ąŠą┤čāą╗čī CAN ą▓ąŠčłąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ bus-off. ąŁč鹊čé ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĄąĮ, ąĄčüą╗ąĖ čüčéą░čéčāčü čÅą┤čĆą░ CAN ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī ąŠčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░ (normal operation mode) ą║ čĆąĄąČąĖą╝čā ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ (bus-off mode). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ čüąŠčüč鹊čÅąĮąĖąĄ čĆąĄąČąĖą╝ą░ bus-off ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĮąŠ, č鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąĮąŠą▓ą░. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą▓čŗą╣ą┤ąĄčé ąĖąĘ čĆąĄąČąĖą╝ą░ bus-off, č鹊 ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (Error-Passive interrupt, EPIM, EPIS, EPIF). ą£ąŠą┤čāą╗čī CAN ą▓ąŠčłąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ error-passive. ąŁč鹊čé ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą░ą║čéąĖą▓ąĄąĮ, ąĄčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ą┐ąŠą╝ąĄąĮčÅą╗ čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčé čĆąĄąČąĖą╝ą░ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (error-active mode) ąĮą░ čĆąĄąČąĖą╝ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (error-passive mode). ąĢčüą╗ąĖ ą▒ąĖčé CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ čĆąĄąČąĖą╝ error-passive ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĄąĮ, č鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą▓čŗą╣ą┤ąĄčé ąĖąĘ čĆąĄąČąĖą╝ą░ error-passive, ą▒ąĖčé CAN_GIS (ąĖ CAN_GIF) ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą┐čĆąĖąĄą╝ą░ (Error warning receive interrupt, EWRIM, EWRIS, EWRIF). ąĪč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ CAN (CAN receive error counter, RXECNT) ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ čĆąĄąČąĖą╝ error warning ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĄąĮ, č鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą▓čŗą╣ą┤ąĄčé ąĖąĘ čĆąĄąČąĖą╝ą░ error warning, č鹊 ą▒ąĖčé CAN_GIS (ąĖ CAN_GIF) ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (Error warning transmit interrupt, EWTIM, EWTIS, EWTIF). ąĪč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN (CAN transmit error counter, TXECNT) ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ čĆąĄąČąĖą╝ error warning ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĄąĮ, čŹč鹊čé ą▒ąĖčé ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą▓čŗą╣ą┤ąĄčé ąĖąĘ čĆąĄąČąĖą╝ą░ error warning, ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
[ąĪč湥čéčćąĖą║ čüąŠą▒čŗčéąĖą╣]
ąöą╗čÅ ą┤ąĖą░ą│ąĮąŠčüčéąĖč湥čüą║ąĖčģ čäčāąĮą║čåąĖą╣ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║ CAN ą║ą░ą║ čüč湥čéčćąĖą║ čüąŠą▒čŗčéąĖą╣ (event counter). ąĪč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ 4-ą▒ąĖčéąĮčŗą╝ ą┐ąŠą╗ąĄą╝ UCCNF[3:0] čĆąĄą│ąĖčüčéčĆą░ CAN_UCCNF čćč鹊ą▒čŗ ąŠąĮ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ą╗čüčÅ ą┐čĆąĖ ąŠą┤ąĮąŠą╝ ąĖąĘ čŹčéąĖčģ čüąŠą▒čŗčéąĖą╣:
ŌĆó UCCNF[3:0] = 0x6 ŌĆō CAN error frame. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ.
ŌĆó UCCNF[3:0] = 0x7 ŌĆō CAN overload frame. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čäčĆąĄą╣ą╝ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ (overload frame).
ŌĆó UCCNF[3:0] = 0x8 ŌĆō Lost arbitration. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠąĖą│čĆčŗčł ą░čĆą▒ąĖčéčĆą░ąČą░ ąĮą░ ą╗ąĖąĮąĖąĖ CAN ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ŌĆó UCCNF[3:0] = 0x9 ŌĆō Transmission aborted. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠąĖą│čĆčŗčł ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą╗ąĖ ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąŠčéą╝ąĄąĮąĄąĮ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ AAn).
ŌĆó UCCNF[3:0] = 0xA ŌĆō Transmission succeeded. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą▒ąĄąĘ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║ (čāčüą┐ąĄčłąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ TAn).
ŌĆó UCCNF[3:0] = 0xB ŌĆō Receive message rejected. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ąŠą║, ąĮąŠ ąŠąĮąŠ ąĮąĄ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čÅčēąĖą║ąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮąĄ ą▒čŗą╗ąŠ ąĮą░ą╣ą┤ąĄąĮąŠ čüąŠą▓ą┐ą░ą┤ą░čÄčēąĖčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓.
ŌĆó UCCNF[3:0] = 0xC ŌĆō Receive message lost. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ąŠą║, ąĮąŠ ąŠąĮąŠ ąĮąĄ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čÅčēąĖą║ąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 čÅčēąĖą║ čüąŠą┤ąĄčƹȹĖčé ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ RMLn).
ŌĆó UCCNF[3:0] = 0xD ŌĆō Message received. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║, ą▒čŗą╗ąŠ ą╗ąĖ ąŠąĮąŠ ąŠčéą▒čĆąŠčłąĄąĮąŠ ąĖą╗ąĖ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čÅčēąĖą║ąĄ.
ŌĆó UCCNF[3:0] = 0xE ŌĆō Message stored. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║, ąĖą╝ąĄąĄčéčüčÅ čüąŠą▓ą┐ą░ą┤ą░čÄčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąĮą░ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą╝ čÅčēąĖą║ąĄ, ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ ą┐čĆąĖąĄą╝ąĮąŠą╝ čÅčēąĖą║ąĄ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ RMPn).
ŌĆó UCCNF[3:0] = 0xF ŌĆō Valid message. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN ą▒čŗą╗ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ ąĖą╗ąĖ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
[ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąĖ ąŠčłąĖą▒ą║ąĖ CAN]
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąĖ ąŠčłąĖą▒ą║ąĖ CAN čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ CAN_CEC, CAN_ESR ąĖ CAN_EWR.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ ą┐čĆąĄą┤ąĄą╗čŗ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖą╣ (Programmable Warning Limits). ą£ąŠąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖą╣ čĆą░ąĘą┤ąĄą╗čīąĮąŠ ą┤ą╗čÅ EWTIS (error warning transmit interrupt status) ąĖ EWRIS (error warning receive interrupt status) ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ ą┐ąŠą╗čÅ čāčĆąŠą▓ąĮčÅ čüč湥čéčćąĖą║ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖą╣ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ (EWLREC) ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (EWLTEC) ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāčĆąŠą▓ąĮčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ CAN (CAN_EWR). ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆ CAN_EWR čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ čüą▓ąŠą╣ čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖą╣ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 96 ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║. ą¤ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąĮąĄ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ.
CAN Error Handling (ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ąŠą║ CAN). ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčłąĖą▒ą║ą░ą╝ąĖ čÅą▓ą╗čÅąĄčéčüčÅ ąĖąĮč鹥ą│čĆą░ą╗čīąĮąŠą╣ čćą░čüčéčīčÄ čüčéą░ąĮą┤ą░čĆčéą░ CAN. ą¤čĆąĖ ą┐ąĄčĆąĄą┤ą░čćą░čģ ą╝ąŠą│čāčé ą▓ąŠąĘąĮąĖą║ą░čéčī 5 čĆą░ąĘąĮčŗčģ ą▓ąĖą┤ąŠą▓ ąŠčłąĖą▒ąŠą║:
ŌĆó Bit error (ąŠčłąĖą▒ą║ą░ ą▒ąĖčéą░). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╝ čāąĘą╗ąŠą╝. ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čāąĘąĄą╗ ą┐ąĄčĆąĄą┤ą░ąĄčé, ąŠąĮ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą╝ąŠąĮąĖč鹊čĆąĖčé ą▓čŗą▓ąŠą┤ ą┐čĆąĖąĄą╝ą░ (CANRX) ąĖ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčé ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ čü ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╝ąĖ. ąÆąŠ ą▓čĆąĄą╝čÅ čäą░ąĘčŗ ą░čĆą▒ąĖčéčĆą░ąČą░ čāąĘąĄą╗ ą┐čĆąŠčüč鹊 ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā, ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčéčŗąĄ ąĖ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé (ą┐čĆąĖ ąĮąĄčüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĖ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ą┐ąŠč鹥čĆčÅ ą░čĆą▒ąĖčéčĆą░ąČą░). ą×ą┤ąĮą░ą║ąŠ ą┐ąŠčüą╗ąĄ čäą░ąĘčŗ ą░čĆą▒ąĖčéčĆą░ąČą░ (čé. ąĄ. ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒ąĖčé RTR ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ), ąŠčłąĖą▒ą║ą░ ą▒ąĖčéą░ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą▓ ą╗čÄą▒ąŠąĄ ą▓čĆąĄą╝čÅ ąŠčé č鹊ą╝, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ CANRX ąĮąĄ čĆą░ą▓ąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╝čā č湥čĆąĄąĘ CANTX.
ŌĆó Form error (ąŠčłąĖą▒ą║ą░ č乊čĆą╝čŗ). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ą╗čÄą▒ąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ą┐ąŠąĘąĖčåąĖčÅ ą▒ąĖčéą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ č乊čĆą╝čŗ ą▓ąŠ čäčĆąĄą╣ą╝ąĄ CAN čüąŠą┤ąĄčƹȹĖčé ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗčģ ą▒ąĖčé, čé. ąĄ. ą║ąŠą│ą┤ą░ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ąĮą░ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗ąĄ (delimiter) ąĖą╗ąĖ ą▓ ą┐ąŠąĘąĖčåąĖąĖ ą▒ąĖčé ą║ąŠąĮčåą░ čäčĆąĄą╣ą╝ą░ (end-of-frame).
ŌĆó Acknowledge error (ąŠčłąĖą▒ą║ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, ąĮąŠ ąĮąĖ ąŠą┤ąĖąĮ ąĖąĘ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ ąĮąĄ ą┐čĆąĖčéčÅąĮčāą╗ ą║ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ ą▒ąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (acknowledge bit).
ŌĆó CRC error (ąŠčłąĖą▒ą║ą░ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗčćąĖčüą╗ąĖą╗ CRC ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ ąĖ ąŠą▒ąĮą░čĆčāąČąĖą╗ čĆą░ąĘą╗ąĖčćąĖąĄ ą▓ CRC, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą┐ąŠ čłąĖąĮąĄ.
ŌĆó Stuff error (ąŠčłąĖą▒ą║ą░ ą▓čüčéą░ą▓ą║ąĖ ą▒ąĖčéą░). ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ CAN čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą▓čüčéą░ą▓ą╗čÅą╗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą▒ąĖčé (stuff bit) ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ 5 ą▒ąĖčé ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ. ą¤čĆąĖąĄą╝ąĮąĖą║ ąĖą│ąĮąŠčĆąĖčĆčāąĄčé čŹčéąĖ stuff-ą▒ąĖčéčŗ. ą×ą┤ąĮą░ą║ąŠ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐ąĄčĆąĄą┐ą░ą┤čŗ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ą┤ą╗čÅ čāč鹊čćąĮąĄąĮąĖčÅ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąŠ čüąĖą│ąĮą░ą╗čā. ą×čłąĖą▒ą║ą░ stuff ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╣ čāąĘąĄą╗ ąŠą▒ąĮą░čĆčāąČąĖą▓ą░ąĄčé 6 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▒ąĖčé ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą╝ąŠą┤čāą╗čī CAN ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ą╗čÄą▒čāčÄ ąĖąĘ ą▓čŗčłąĄąŠą┐ąĖčüą░ąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║, ąŠąĮ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ ąŠčłąĖą▒ą║ąĖ CAN_ESR, ą░ čéą░ą║ąČąĄ čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ CAN_CEC. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ąŠčłąĖą▒ą║ą░ą╝ čĆąĄą│ąĖčüčéčĆ CAN_ESR ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäą╗ą░ą│, ą║ąŠč鹊čĆčŗą╣ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ CANRX ąĘą░ą╗ąĖą┐ ąĮą░ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠąĄ ą║ąŠčĆąŠčéą║ąŠąĄ ąĘą░ą╝čŗą║ą░ąĮąĖąĄ ą┐čĆąŠą▓ąŠą┤ąŠą▓ ą╗ąĖąĮąĖąĖ.
Error Frames (čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ). ą¤ąĄčĆą▓ąŠąŠč湥čĆąĄą┤ąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĖą╝ąĄąĄčé č鹊čé čäą░ą║čé, čćč鹊 ą▓čüąĄ čāąĘą╗čŗ ąĮą░ čłąĖąĮąĄ CAN ąĖą│ąĮąŠčĆąĖčĆčāčÄčé čäčĆąĄą╣ą╝čŗ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ąŠą┤ąĖąĮ ąĖąĘ čāąĘą╗ąŠą▓ ąĮąĄ čüą╝ąŠą│ ą┐čĆąĖąĮčÅčéčī. ą¦č鹊ą▒čŗ čŹč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī, ą║ą░ąČą┤čŗą╣ čāąĘąĄą╗ ą┐ąŠčüčŗą╗ą░ąĄčé čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ, ą║ą░ą║ č鹊ą╗čīą║ąŠ ąŠąĮ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ąŠčłąĖą▒ą║čā (čüą╝. čĆąĖčü. 17-10).
ąÜą░ą║ č鹊ą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ąŠ ąŠčłąĖą▒ą║čā, ąŠąĮąŠ ą▓čüąĄ ąĄčēąĄ ąĘą░ą▓ąĄčĆčłą░ąĄčé ąĖčüčģąŠą┤čÅčēąĖą╣ ą▒ąĖčé, ąĖ ąĖąĮąĖčåąĖąĖčĆčāąĄčé čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ 6 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé ąĖ 8 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé ąĮą░ čłąĖąĮąĄ. ąŁč鹊 ąĮą░čĆčāčłą░ąĄčé ą┐čĆą░ą▓ąĖą╗ąŠ ą▒ąĖčé-čüčéą░čäčäąĖąĮą│ą░, ąĖ ąĖąĮč乊čĆą╝ąĖčĆčāąĄčé ą▓čüąĄ čāąĘą╗čŗ, čćč鹊 ąĖčüčģąŠą┤čÅčēąĖą╣ čäčĆąĄą╣ą╝ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčéą▒čĆąŠčłąĄąĮ.
ąÆčüąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ąĖ ąŠčłąĖą▒ą║čā ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐čĆąĄąČą┤ąĄ ą▓čüąĄą│ąŠ č鹥ą┐ąĄčĆčī ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ąŠčłąĖą▒ą║čā stuff-ą▒ąĖčéą░. ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ čĆą░ąĮčīčłąĄ ą╝ąŠąČąĄčé ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī ąŠą▒čŗčćąĮčāčÄ ąŠčłąĖą▒ą║čā ą▒ąĖčéą░. ą×ąĮ ąŠą▒ąŠčĆą▓ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ąĖčüčģąŠą┤čÅčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░, ąĖ ą┐ąŠą┐čĆąŠą▒čāąĄčé ąĄą│ąŠ čüąĮąŠą▓ą░ ąŠčéą┐čĆą░ą▓ąĖčéčī ą┐ąŠąĘąČąĄ.
ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą▓čüąĄ čāąĘą╗čŗ ąĮą░ čłąĖąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčé ąŠčłąĖą▒ą║čā. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą▓čüąĄ ąŠąĮąĖ čéą░ą║ąČąĄ ą┐ąŠčłą╗čÄčé 6 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ąĖ 8 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé ąĮą░ čłąĖąĮčā. ą¤ąŠą╗čāčćąĖą▓čłąĖą╣čüčÅ čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ čĆą░ąĘąĮčŗčģ ą┐ąŠą╗ąĄą╣. ą¤ąĄčĆą▓ąŠąĄ ą┐ąŠą╗ąĄ ą┐ąŠą╗čāč湥ąĮąŠ ą┐čāč鹥ą╝ ąĮą░ą╗ąŠąČąĄąĮąĖčÅ čäą╗ą░ą│ąŠą▓ ąŠčłąĖą▒ą║ąĖ, ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ąŠčé čĆą░ąĘąĮčŗčģ čüčéą░ąĮčåąĖą╣, ąĖ čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ ąĖąĘ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé, ąŠčé 6 ą┤ąŠ 12. ąÆč鹊čĆąŠąĄ ą┐ąŠą╗ąĄ čŹč鹊 čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī ąŠčłąĖą▒ą║ąĖ, ąĖ ąŠąĮąŠ čüąŠčüč鹊ąĖčé ąĖąĘ 8 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖčģ ą║ąŠąĮąĄčå čäčĆąĄą╣ą╝ą░.
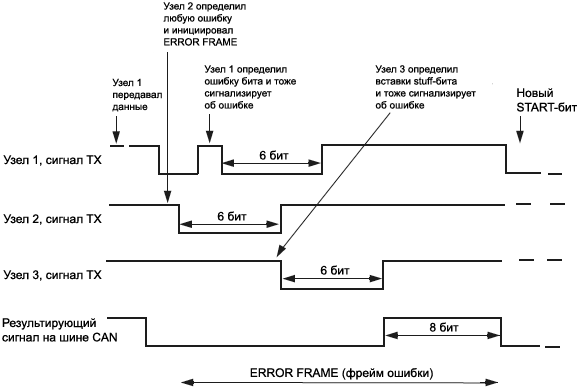
ąĀąĖčü. 17-10. ą¤čĆąĖą╝ąĄčĆ čüčåąĄąĮą░čĆąĖčÅ ąŠčłąĖą▒ą║ąĖ CAN.
ąöą╗čÅ ąŠčłąĖą▒ąŠą║ CRC čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą▓ ą║ąŠąĮčåąĄ čäčĆąĄą╣ą╝ą░, ą▓ą╝ąĄčüč鹊 ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠą╣ ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐ąŠčüą╗ąĄ ąŠčłąĖą▒ąŠčćąĮąŠą│ąŠ ą▒ąĖčéą░.
ą¤ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ 8 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé ą║ą░ąČą┤čŗą╣ ąĖąĘ čāąĘą╗ąŠą▓ ąĘąĮą░ąĄčé, čćč鹊 čāčüą╗ąŠą▓ąĖąĄ ąŠčłąĖą▒ą║ąĖ čĆą░ąĘčĆąĄčłąĖą╗ąŠčüčī, ąĖ ąĮą░čćąĮčāčé ą┐ąĄčĆąĄą┤ą░čćčā, ąĄčüą╗ąĖ ąĖą╝ąĄčÄčéčüčÅ ąŠąČąĖą┤ą░čÄčēąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤čĆąĄąČąĮąĖą╣ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║, ą║ąŠč鹊čĆčŗą╣ ąŠą▒ąŠčĆą▓ą░ą╗ čüą▓ąŠčÄ čĆą░ą▒ąŠčéą║čā, ą┤ąŠą╗ąČąĄąĮ čüąĮąŠą▓ą░ ą▓čŗąĖą│čĆą░čéčī ą░čĆą▒ąĖčéčĆą░ąČ, ąĖąĮą░č湥 ąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠčéą╗ąŠąČąĄąĮąŠ, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéčā.
ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ąĄčĆąĄą┤ą░čćą░ error frame čĆą░ąĘčĆčāčłą░ąĄčé čäčĆąĄą╣ą╝ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąŠčéą║ą░ąĘą░ą▓čłąĖą╣ čāąĘąĄą╗ ąŠčłąĖą▒ąŠčćąĮąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ą▓čłąĖą╣ ąŠčłąĖą▒ą║čā, ą╝ąŠąČąĄčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī čłąĖąĮčā. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąĄčüčéčī 2 čüąŠčüč鹊čÅąĮąĖčÅ čāąĘą╗ą░, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą┐čĆą░ą▓ąŠ čāąĘą╗ą░ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ąŠą▒ ąŠčłąĖą▒ą║ąĄ - error active ąĖ error passive. Error active čāąĘą╗čŗ čŹč鹊 č鹥, čā ą║ąŠč鹊čĆčŗčģ čćą░čüč鹊čéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║ ąĮąĖąČąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą╗ąĖą╝ąĖčéą░. ąŁčéąĖ čāąĘą╗čŗ ą┐čĆąĖčéčÅą│ąĖą▓ą░čÄčé čäą╗ą░ą│ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (active error flag) ąĖąĘ 6 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé.
ąŻąĘą╗čŗ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠą╣ čćą░čüč鹊č鹊ą╣ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ąŠą║ ą┐ąŠą┤ąŠąĘčĆąĄą▓ą░čÄčéčüčÅ ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ čā ąĮąĖčģ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┐čĆąŠą▒ą╗ąĄą╝, ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čā ąĮąĖčģ ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠąĄ ą┐čĆą░ą▓ąŠ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ąŠą▒ ąŠčłąĖą▒ą║ą░čģ. ąŁč鹊 čāąĘą╗čŗ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (error passive nodes), ą║ąŠč鹊čĆčŗąĄ ą▓čŗą┤ą░čÄčé čäą╗ą░ą│ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (passive error flag), čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ 6 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ čāąĘąĄą╗ čü ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąŠą╣ ą▓čüąĄ ąĄčēąĄ ą╝ąŠąČąĄčé ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░čéčī ą┤čĆčāą│ąĖąĄ čāąĘą╗čŗ ąŠą▒ ąŠą▒čĆčŗą▓ąĄ čüą▓ąŠąĄą│ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ čäčĆąĄą╣ą╝ą░, ąĮąŠ ąŠąĮ ą▒ąŠą╗čīčłąĄ ąĮąĄ ą╝ąŠąČąĄčé čāąĮąĖčćč鹊ąČą░čéčī čüąŠą▓ą╝ąĄčüčéąĮąŠ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗąĄ čäčĆąĄą╣ą╝čŗ ąŠčé ą┤čĆčāą│ąĖčģ čāąĘą╗ąŠą▓.
Error Levels (čāčĆąŠą▓ąĮąĖ ąŠčłąĖą▒ąŠą║). ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ CAN čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ ą║ą░ąČą┤čŗą╣ čāąĘąĄą╗ ą▓ čüąĖčüč鹥ą╝ąĄ čĆą░ą▒ąŠčéą░ą╗ ąĮą░ ąŠąĮąŠą╝ ąĖąĘ 3 čāčĆąŠą▓ąĮąĄą╣ (čüą╝. čéą░ą▒ą╗ąĖčåčā 17-3). ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║čā čāąĘą╗ą░ą╝ąĖ ą▓čüąĄą╣ čüąĄčéąĖ ą┐čĆąĖ ą▓čŗčüąŠą║ąŠą╣ čćą░čüč鹊č鹥 ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠčłąĖą▒ą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮčŗ ą╗ąŠą║ą░ą╗čīąĮčŗą╝ąĖ ąĮąĄąĖčüą┐čĆą░ą▓ąĮąŠčüčéčÅą╝ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ čāąĘą╗ą░. ą£ąŠą┤čāą╗čī CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (TEC), ąĖ čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ (REC). ąĀąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ CAN (error count register, CAN_CEC) čĆą░ąĘą╝ąĄčēą░ąĄčé ą▓ čüąĄą▒ąĄ ąŠą▒ą░ čŹčéąĖčģ čüč湥čéčćąĖą║ą░.
ą¤ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąŠą▒ą░ čüč湥čéčćąĖą║ą░, ąĖ TEC ąĖ REC, čüąŠą┤ąĄčƹȹ░čé 0. ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░, ąŠą┤ąĖąĮ ąĖąĘ čŹčéąĖčģ čüč湥čéčćąĖą║ąŠą▓ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ą╗ąĖą▒ąŠ ąĮą░ 1, ą╗ąĖą▒ąŠ ąĮą░ 8, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąĖčéčāą░čåąĖąĖ ąŠčłąĖą▒ą║ąĖ (ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąŠ ą▓ ą▓ąĄčĆčüąĖąĖ 2.0 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ CAN). ąŻčüą┐ąĄčłąĮą░čÅ čĆą░ą▒ąŠčéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čüč湥čéčćąĖą║ ąĮą░ 1.
ąĢčüą╗ąĖ ą╗čÄą▒ąŠą╣ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ą┐čĆąĄą▓čŗčüąĖčé ąĘąĮą░č湥ąĮąĖąĄ 127, č鹊 ą╝ąŠą┤čāą╗čī CAN ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą┐ą░čüčüąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą┐ą░čüčüąĖą▓ąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ CAN (error passive mode, EP) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čāąĘą╗čā ąĮąĄ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ ą┐ąŠčüčŗą╗ą░čéčī ą░ą║čéąĖą▓ąĮčŗąĄ čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ (čüąŠą┤ąĄčƹȹ░čēąĖąĄ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗąĄ ą▒ąĖčéčŗ). ą×ą┤ąĮą░ą║ąŠ čāąĘą╗čā ą▓čüąĄ ąĄčēąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī čäčĆąĄą╣ą╝ą░ą╝ąĖ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ą▓ č鹥čģ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠč鹥čĆą┐ąĄą╗ą░ ąĮąĄčāą┤ą░čćčā ąĖąĘ-ąĘą░ ąŠčłąĖą▒ą║ąĖ ą▒ąĖčéą░ (bit error).
ąĢčüą╗ąĖ ąŠą┤ąĖąĮ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ą┐čĆąĄą▓čŗčüąĖčé 255 (čé. ąĄ. ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ 8-ą▒ąĖčéąĮčŗą╣ čüč湥čéčćąĖą║ ąŠčłąĖą▒ą║ąĖ), č鹊 ą╝ąŠą┤čāą╗čī CAN ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ ąŠčé čłąĖąĮčŗ. ą×ąĮ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ (bus-off mode), ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé CAN error bus-off mode (EBO) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS. ąöą╗čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čŹč鹊ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 17-3. ą×ą┐ąĖčüą░ąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╣ ąŠčłąĖą▒ą║ąĖ CAN (CAN Error Level).
| ąŻčĆąŠą▓ąĄąĮčī |
ąŻčüą╗ąŠą▓ąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Error Active |
ąĪč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ < 128 |
ąŁč鹊 ąĮą░čćą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čāčüą╗ąŠą▓ąĖčÅ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║. ą¤ąŠą║ą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčłąĖą▒ąŠą║ ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ą╝ąĄąĮčīčłąĄ 128, čāąĘąĄą╗ ą▒čāą┤ąĄčé ą▓čŗą┤ą░ą▓ą░čéčī čäą╗ą░ą│ąĖ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (čü ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ąĖ čāčĆąŠą▓ąĮčÅą╝ąĖ) ą▓ąŠ ą▓čĆąĄą╝čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čäčĆąĄą╣ą╝ąŠą▓ ąŠčłąĖą▒ą║ąĖ. |
| Error Passive |
ąĪč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ Ōēź 128, ąĮąŠ ą╝ąĄąĮčīčłąĄ 256. |
ą×čłąĖą▒ą║ąĖ ąĮą░ą║ąŠą┐ąĖą╗ąĖčüčī ą┤ąŠ čāčĆąŠą▓ąĮčÅ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ čāąĘąĄą╗ ą▓čŗą┤ą░ąĄčé čäą╗ą░ą│ąĖ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (čü čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝ąĖ čāčĆąŠą▓ąĮčÅą╝ąĖ) ą▓ąŠ ą▓čĆąĄą╝čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čäčĆąĄą╣ą╝ąŠą▓ ąŠčłąĖą▒ą║ąĖ. |
| Bus Off |
ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĖą╗čüčÅ ą╗čÄą▒ąŠą╣ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (ą┐čĆąĖ ąĖąĮą║čĆąĄą╝ąĄąĮč鹥 ąĘąĮą░č湥ąĮąĖčÅ 255 čüč湥čéčćąĖą║ą░). |
ą£ąŠą┤čāą╗čī CAN ą┐ąĄčĆąĄčłąĄą╗ ą▓ čĆąĄąČąĖą╝ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ. |
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čŹčéąĖą╝ čāčĆąŠą▓ąĮčÅą╝ ą╝ąŠą┤čāą╗čī CAN čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĄčģą░ąĮąĖąĘą╝ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗą╣ čĆą░čüčłąĖčĆčÅąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÄ CAN. ąĢčüčéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖčæą╝ą░. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠą│ą┤ą░ ąŠą┤ąĖąĮ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ą┐čĆąĄą▓čŗčüąĖčé 96, ą┐ąŠčüčéčāą┐ą░ąĄčé čüąĖą│ąĮą░ą╗ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS ą╗ąĖą▒ąŠ ą▒ąĖč鹊ą╝ čäą╗ą░ą│ą░ CAN receive warning (WR), ą╗ąĖą▒ąŠ ą▒ąĖč鹊ą╝ čäą╗ą░ą│ą░ CAN transmit warning (WT). ąŻčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ (error warning register, CAN_EWR). ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąŠą┐ąĖčüą░ąĮ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ "ąĀąĄą│ąĖčüčéčĆčŗ ąŠčłąĖą▒ą║ąĖ".
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ą▓čüąĄčģ čŹčéąĖčģ čāčĆąŠą▓ąĮąĄą╣ ą┐čāč鹥ą╝ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖčģ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (CAN interrupt mask register, CAN_GIM), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ "ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ CAN". ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ą║ą╗čÄčćą░čÄčé: bus-off interrupt (BOIM), error-passive interrupt (EPIM), error warning receive interrupt (EWRIM) ąĖ error warning transmit interrupt (EWTIM).
ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ (bus-off), ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ (CCR=1), ą┐ąŠčŹč鹊ą╝čā čÅą┤čĆąŠ ą╝ąŠą┤čāą╗čÅ CAN ąĮąĄ ą▓čŗą╣ą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĘ čĆąĄąČąĖą╝ą░ bus-off. ąæąĖčé CCR ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ bus-off.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊 ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ąŠąČąĮąŠ ąŠčéą╝ąĄąĮąĖčéčī čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čłąĖąĮąĄ (auto-bus on, ABO) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL. ą¤ąŠčüą╗ąĄ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ bus-off ąĖą╗ąĖ ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ CAN čüą▒čĆąŠčüčÅčéčüčÅ.
ą£ąŠą┤čāą╗čī CAN čüąŠą┤ąĄčƹȹĖčé čäčāąĮą║čåąĖąĖ čĆąĄąČąĖą╝ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╝ąŠą│ą░čÄčé ą▓ ąŠčéą╗ą░ą┤ą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąĖ čüąĖčüč鹥ą╝čŗ CAN. ąøąĖčüčéąĖąĮą│ 17-1 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĖą╝ąĄčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čäčāąĮą║čåąĖą╣ ąŠčéą╗ą░ą┤ą║ąĖ CAN.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čŹčéąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ, ą╝ąŠą┤čāą╗čī CAN ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ą╝ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ CAN. ąÆčüąĄ čĆąĄąČąĖą╝čŗ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮčŗ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (CCA=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS) ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode, CSA=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS).
ąæąĖčé CDE ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ąŠ ą▓čüąĄą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ ąŠčéą╗ą░ą┤ą║ąĖ. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ ą┐ąĄčĆą▓čŗą╝ ą┐ąĄčĆąĄą┤ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĘą░ą┐ąĖčüčÅą╝ąĖ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_DEBUG. ąÜąŠą│ą┤ą░ ą▒ąĖčé CDE ąŠčćąĖčēąĄąĮ, ą▓čüąĄ čäčāąĮą║čåąĖąĖ ąŠčéą╗ą░ą┤ą║ąĖ ąĘą░ą┐čĆąĄčēąĄąĮčŗ.
//ąøąĖčüčéąĖąĮą│ 17-1. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čäčāąĮą║čåąĖą╣ CAN Debug ąĮą░ čÅąĘčŗą║ąĄ C.
#include < cdefBF537.h >
/* ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ debug mode, CDE ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ č鹥ą╝,
ą║ą░ą║ ą▒čāą┤čāčé ąĖąĘą╝ąĄąĮąĄąĮčŗ ą┤čĆčāą│ąĖąĄ čäą╗ą░ą│ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ */
*pCAN_DEBUG |= CDE;
/* ąŻčüčéą░ąĮąŠą▓ą║ą░ čäą╗ą░ą│ąŠą▓ ąŠčéą╗ą░ą┤ą║ąĖ (debug flags) */
*pCAN_DEBUG &= ~DTO;*pCAN_DEBUG |= MRB | MAA | DIL;
/* ąŚą░ą┐čāčüą║ ą║ąŠą┤ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ */
/* ąŚą░ą┐čĆąĄčé debug mode */
*pCAN_DEBUG &= ~CDE;
ąÜąŠą│ą┤ą░ ą▒ąĖčé CDE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čŹč鹊 čĆą░ąĘčĆąĄčłą░ąĄčé ąĘą░ą┐ąĖčüąĖ ą▓ ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_DEBUG. ąŁč鹊 čéą░ą║ąČąĄ čĆą░ąĘčĆąĄčłą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ, ąĮąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗąĄ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ CAN:
ŌĆó ąĀąĄą│ąĖčüčéčĆčŗ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▒ąĖčéą░ (Bit timing registers) ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ąĮąĄ č鹊ą╗čīą║ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŁč鹊 ą▓ą║ą╗čÄčćą░ąĄčé čĆąĄą│ąĖčüčéčĆčŗ CAN_CLOCK ąĖ CAN_TIMING.
ŌĆó ąĀą░ąĘčĆąĄčłąĄąĮ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ/ą┐čĆąĖąĄą╝ą░ CAN_CEC, ą║ąŠč鹊čĆčŗą╣ ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┤ąŠčüčéčāą┐ąĄąĮ č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
ąæąĖčé mode read back (MRB) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖčÅ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ ą┐ąŠ čłąĖąĮąĄ CAN (ąĖą╗ąĖ č湥čĆąĄąĘ internal loop back mode) ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ą¤ąŠčüą╗ąĄ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčé čŹč鹊 ą║ą░ą║ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ č鹥čüčéąĖčĆąŠą▓ą░čéčī č鹥čüčéąĖčĆąŠą▓ą░čéčī čäčāąĮą║čåąĖąĖ CAN ą▒ąĄąĘ ąĮą░ą╗ąĖčćąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąæąĖčé mode auto acknowledge (MAA) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąŠą┤čāą╗čÄ CAN ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĄ čüąŠą▒čüčéą▓ąĄąĮąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą▓ ą▓čĆąĄą╝čÅ čüą╗ąŠčéą░ ACK čäčĆąĄą╣ą╝ą░ CAN. ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠčģčĆą░ąĮąĖčéčüčÅ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ąÆ čĆąĄąČąĖą╝ąĄ auto acknowledge mode ą╝ąŠą┤čāą╗čī čüą░ą╝ čüąĄą▒ąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ. ąŁč鹊 ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CANTX, ąĄčüą╗ąĖ DIL=1 ąĖ DTO=0. ąĢčüą╗ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĖ, č鹊 čŹčéąĖ ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ąĘąĮą░č湥ąĮąĖčÅ DIL=0 ąĖ DTO=1.
ąæąĖčé disable internal loop (DIL) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĘą░ą╝ą║ąĮčāčéčī ą▓čŗčģąŠą┤ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮą░ ą▓čģąŠą┤ ą┐čĆąĖąĄą╝ą░.
ąæąĖčé disable transmit output (DTO) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ą▓čŗą▓ąŠą┤ą░ ą▓čŗčģąŠą┤ą░ CANTX. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą▓čŗą▓ąŠą┤ CANTX ą┐ąŠčüč鹊čÅąĮąĮąŠ ą▓čŗą┤ą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗąĄ ą▒ąĖčéčŗ.
ąæąĖčé disable receive input (DRI) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ą▓čŗą▓ąŠą┤ą░ ą▓čģąŠą┤ą░ CANRX. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗąĄ ą▒ąĖčéčŗ ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠąĄ ą▓ąĮčāčéčĆąĖ ą╝ąŠą┤čāą╗čÅ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ (internal loop enabled, DIL=0). ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ, ąĘąĮą░č湥ąĮąĖčÅ čāčĆąŠą▓ąĮąĄą╣, ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ čüąĮą░čĆčāąČąĖ ąĮą░ ą▓čŗą▓ąŠą┤ CANRX, ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ.
ąæąĖčé disable error counters (DEC) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CEC. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, CAN_CEC čüąŠą┤ąĄčƹȹĖčé č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ąŠą▓, ąĖ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮ ąĖąĮą║čĆąĄą╝ąĄąĮčé ąĖą╗ąĖ ą┤ąĄą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║. ąŁč鹊čé čĆąĄąČąĖą╝ąĄ ąĮąĄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ CAN.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüąĖ ą▓ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ ą┤ąŠą╗ąČąĮčŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ąŠčéą╗ą░ą┤ą║ąĖ. ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ą░ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║, čĆą░ą▓ąĮąŠ 255. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ 256, ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą╝ąŠą┤čāą╗čī ą▓ čüąŠčüč鹊čÅąĮąĖąĄ bus-off, ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║.
ąÆ čéą░ą▒ą╗ąĖčåąĄ 17-4 ą┐ąŠą║ą░ąĘą░ąĮčŗ ąŠą▒čēąĖąĄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ą▒ąĖčé čĆąĄąČąĖą╝ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 17-4. ąĀąĄąČąĖą╝čŗ CAN Test.
| MRB |
MAA |
DIL |
DTO |
DRI |
CDE |
ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ |
| X |
X |
X |
X |
X |
0 |
ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ (ąĮąĄ čĆąĄąČąĖą╝ ąŠčéą╗ą░ą┤ą║ąĖ). |
| 0 |
X |
X |
X |
X |
X |
ąØąĄčé ąŠą▒čĆą░čéąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. |
| 1 |
0 |
1 |
0 |
0 |
1 |
ą×ą▒čŗčćąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ (read back) čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ąóčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| 1 |
1 |
1 |
0 |
0 |
1 |
ą×ą▒čŗčćąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ (read back) čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ.
ą¤ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ąĀą░ąĘčĆąĄčłąĄąĮ ą▓čģąŠą┤ CANRX. |
| 1 |
1 |
0 |
0 |
0 |
1 |
ą×ą▒čŗčćąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ (read back) čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ.
ą¤ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ąĀą░ąĘčĆąĄčłąĄąĮ ą▓čģąŠą┤ CANRX ąĖ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ čü ą▓čŗčģąŠą┤ą░ ąĮą░ ą▓čģąŠą┤ (internal loop, ą╗ąŠą│ąĖč湥čüą║ąŠąĄ ąśąøąś čüąĖą│ąĮą░ą╗ąŠą▓ TX ąĖ RX). |
| 1 |
1 |
0 |
0 |
1 |
1 |
ą×ą▒čŗčćąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ (read back) čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ.
ą¤ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ąÆčģąŠą┤ CANRX ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ.
ąĀą░ąĘčĆąĄčłąĄąĮąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ (internal loop). |
| 1 |
1 |
0 |
1 |
1 |
1 |
ąØąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN.
ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ.
ąØąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĮąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ CANTX.
ąÆčģąŠą┤ CANRX ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ.
ąĀą░ąĘčĆąĄčłąĄąĮąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ (internal loop). |
ą¤čĆąŠčåąĄčüčüąŠčĆ Blackfin ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą│ąĖą▒ąĄčĆąĮą░čåąĖąĖ čü ąĮąĖąĘą║ąĖą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą╝ąŠčēąĮąŠčüčéąĖ (low power hibernate state), ąĖ ą╝ąŠą┤čāą╗čī CAN ą▓ą║ą╗čÄčćą░ąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ čĆąĄąČąĖą╝čŗ čüąĮą░ ąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (sleep, suspend modes) ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ. ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ CAN ą▓ čŹčéąĖčģ čéčĆąĄčģ čĆąĄąČąĖą╝ą░čģ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ.
CAN Built-In Suspend Mode (ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ). ąĪą░ą╝čŗą╝ čüą║čĆąŠą╝ąĮčŗą╝ ą┐ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ ąĖąĘ ą▓čüąĄčģ čĆąĄąČąĖą╝ąŠą▓ low power - suspend mode. ąÆ čŹč鹊čé čĆąĄąČąĖą╝ ą▓čģąŠą┤čÅčé čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode request, CSR) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL. ą£ąŠą┤čāą╗čī ą▓ąŠą╣ą┤ąĄčé ą▓ suspend mode ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ č鹥ą║čāčēąĄą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ąĮą░ čłąĖąĮąĄ CAN, ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą▓čģąŠą┤ą░ ą▓ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║čā (suspend mode acknowledge, CSA) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ čĆąĄąČąĖą╝ suspend ąĘą░ą┐čĆąŠčłąĄąĮ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ (bus-off recovery sequence), č鹊 ą╝ąŠą┤čāą╗čī ąŠčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ąĘą░ą▓ąĄčĆčłąĄąĮą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī bus-off recovery. ą£ąŠą┤čāą╗čī ąĮąĄ ą▓ąŠą╣ą┤ąĄčé ą▓ suspend mode, ąĖ ą▒ąĖčé CSA ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ ą▓čĆčāčćąĮčāčÄ ąŠčćąĖčüčéąĖčéčī ą▒ąĖčé CSR, čćč鹊ą▒čŗ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčī ą╝ąŠą┤čāą╗čī.
ą¤ąŠčüą╗ąĄ ą▓čģąŠą┤ą░ ą▓ čŹč鹊čé čĆąĄąČąĖą╝ ą╝ąŠą┤čāą╗čī ą▒ąŠą╗čīčłąĄ ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN, čćč鹊 ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮąĖąČą░ąĄčé ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čāčÄ ą╝ąŠčēąĮąŠčüčéčī. ąÜąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ suspend mode, ą▓čŗą▓ąŠą┤ ą▓čŗčģąŠą┤ą░ CANTX ąŠčüčéą░ąĄčéčüčÅ ąĮą░ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą╝ čāčĆąŠą▓ąĮąĄ, ąĖ ą╝ąŠą┤čāą╗čī ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖą╗ąĖ čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ CAN ąŠčüčéą░ąĄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝.
ąśąĘ suspend mode ą╝ąŠąČąĮąŠ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ą▓čŗą╣čéąĖ ąŠčćąĖčüčéą║ąŠą╣ ą▒ąĖčéą░ CSR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL. ą×čéą╗ąĖčćąĖąĄ ą╝ąĄąČą┤čā suspend mode ąĖ configuration mode č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝, čćč鹊 ąĘą░ą┐ąĖčüčī ą▓ CAN_CLOCK ąĖ CAN_TIMING ą▓ suspend mode ą▓čüąĄ ąĄčēąĄ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░, ąĖ čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüčéą░čéčāčüą░ CAN ąĮąĄ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ, ą║ąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗčģąŠą┤ ąĖąĘ suspend mode.
CAN Built-In Sleep Mode (ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ čüąĮą░). ąĪą╗ąĄą┤čāčÄčēąĖą╣ čāčĆąŠą▓ąĄąĮčī 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ ą╝ąŠą┤čāą╗čī CAN čĆąĄąČąĖą╝ą░ čüąĮą░ (sleep mode). ąÆ čŹč鹊čé čĆąĄąČąĖą╝ ą▓čģąŠą┤čÅčé čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ ąĘą░ą┐čĆąŠčüą░ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ čüąĮą░ (sleep mode request, SMR) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL. ą£ąŠą┤čāą╗čī ą▓ąŠą╣ą┤ąĄčé ą▓ sleep mode ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ č鹥ą║čāčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĮą░ čłąĖąĮąĄ CAN. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓čģąŠą┤ ą▓ čŹč鹊čé čĆąĄąČąĖą╝, ą╝ąĮąŠą│ąĖąĄ čüąĖą│ąĮą░ą╗čŗ čéą░ą║č鹊ą▓ ą╝ąŠą┤čāą╗čÅ CAN ą▓čŗą║ą╗čÄčćą░čÄčéčüčÅ, čüąĮąĖąČą░čÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ, ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ čüąĮą░ (sleep mode acknowledge, SMACK) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_INTR. ąÜąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░, čćč鹥ąĮąĖčÅ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▓ąĄčĆąĮčāčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ CAN_INTR ą▓ą╝ąĄčüč鹊 ąŠą▒čŗčćąĮąŠą│ąŠ čüą▓ąŠąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ. ąŚą░ą┐ąĖčüąĖ ą▓ąŠ ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ, ą║čĆąŠą╝ąĄ čĆąĄą│ąĖčüčéčĆą░ CAN_INTR.
ą£ą░ą╗ą░čÅ čćą░čüčéčī ą╝ąŠą┤čāą╗čÅ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ, čćč鹊ą▒čŗ ąŠčüčéą░ą▓ąĖčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓čŗą▓ąĄčüčéąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčā CAN ąĖąĘ čüąĮą░. ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ CAN_INTR ąĘą░ą▓ąĄčĆčłą░ąĄčé čĆąĄąČąĖą╝ čüąĮą░. ąĢčüą╗ąĖ ą▒ąĖčé WBA ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ čüąĮą░, ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CANRX čéą░ą║ąČąĄ ąĘą░ą▓ąĄčĆčłąĖčé čĆąĄąČąĖą╝ čüąĮą░.
CAN Wakeup From Hibernate State (ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą│ąĖą▒ąĄčĆą░ąĮčåąĖąĖ). ąĪą░ą╝ą░čÅ ą▒ąŠą╗čīčłą░čÅ čŹą║ąŠąĮąŠą╝ąĖčÅ čŹąĮąĄčĆą│ąĖąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą│ąĖą▒ąĄčĆąĮą░čåąĖąĖ (hibernate state), ą▓ ą║ąŠč鹊čĆąŠą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ, čüąĮąĖą╝ą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ čü čÅą┤čĆą░, ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüąĖčüč鹥ą╝ąĮčŗąĄ čéą░ą║čéčŗ ą▓čŗą║ą╗čÄčćą░čÄčéčüčÅ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ ą┤ą░čÄčé č鹊ą╗čīą║ąŠ č鹊ą║ ąŠąČąĖą┤ą░ąĮąĖčÅ (ą┐čĆąĖą╝ąĄčĆąĮąŠ 50 mkA), ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčģąĄą╝ąŠą╣ čĆąĄą│čāą╗čÅč鹊čĆą░ ą┤ą╗čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ ą│ąĖą▒ąĄčĆąĮą░čåąĖąĖ. ą×ą┤ąĮąĖą╝ ąĖąĘ čéą░ą║ąĖčģ čüąŠą▒čŗčéąĖą╣ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN. ą¤ąŠčüą╗ąĄ ą▓čŗčģąŠą┤ą░ ąĖąĘ ą│ąĖą▒ąĄčĆąĮą░čåąĖąĖ ą╝ąŠą┤čāą╗čī CAN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą▓č鹊čĆąĮąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ.
ąöą╗čÅ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ čü ą╝ą░ą╗čŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą╝ąŠčēąĮąŠčüčéąĖ ą▓ąĮąĄčłąĮąĖą╣ čéčĆą░ąĮčüąĖą▓ąĄčĆ čłąĖąĮčŗ CAN ąŠą▒čŗčćąĮąŠ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ standby čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin (general purpose I/O, GPIO). ąÆ čĆąĄąČąĖą╝ąĄ standby čéčĆą░ąĮčüąĖą▓ąĄčĆ CAN ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CANRX. ąĢčüą╗ąĖ ąĘą░č鹥ą╝ čéčĆą░ąĮčüąĖą▓ąĄčĆ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą░ą║čéąĖą▓ąĮąŠčüčéčī čłąĖąĮčŗ CAN, č鹊 ąŠąĮ ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé ą▓čŗą▓ąŠą┤ CANRX ą▓ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. ąŁč鹊 ą┤ą░ąĄčé čüąĖą│ąĮą░ą╗ ą┐čĆąŠčåąĄčüčüąŠčĆčā Blackfin, čćč鹊 ą▒čŗą╗ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ CAN. ąĢčüą╗ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░čüą┐ąŠąĘąĮą░ą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ CAN ą▓ ą║ą░č湥čüčéą▓ąĄ čüąŠą▒čŗčéąĖčÅ ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ hibernate state, č鹊 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ąŠčéą▓ąĄčéąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ąśąĮą░č湥 ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CANRX ąĮąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ą¦č鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čŹčéčā čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī, čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ (voltage control register, VR_CTL) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝ CAN wakeup enable. ąóąĖą┐ąŠą▓ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé CAN (CAN wakeup):
1. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ GPIO ą┤ą╗čÅ ą┐ąĄčĆąĄą▓ąŠą┤ą░ ą▓ąĮąĄčłąĮąĄą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ CAN ą▓ čĆąĄąČąĖą╝ standby.
2. ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 čĆąĄą│ąĖčüčéčĆ VR_CTL čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ CAN (CAN wakeup enable, CANWE), ąĖ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 0 ą▒ąĖčé HIBERNATEB.
[ąĀąĄą│ąĖčüčéčĆčŗ CAN]
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčé čĆąĄą│ąĖčüčéčĆčŗ CAN:
ŌĆó ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ CAN.
ŌĆó ąĀąĄą│ąĖčüčéčĆčŗ Mailbox/Mask.
ŌĆó ąĀąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Mailbox.
ŌĆó ąĀąĄą│ąĖčüčéčĆčŗ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░.
ŌĆó ąĀąĄą│ąĖčüčéčĆčŗ ąŠčłąĖą▒ą║ąĖ.
ąóą░ą▒ą╗ąĖčåčŗ ąŠčé 17-5 ą┤ąŠ 17-9 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé čäčāąĮą║čåąĖąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN.
ąóą░ą▒ą╗ąĖčåą░ 17-5. ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ CAN.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
ążčāąĮą║čåąĖčÅ |
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ |
| CAN_CONTROL |
Master control register (ą│ą╗ą░ą▓ąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ) |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ 15:8 ąĖ 3 ą┤ąŠą╗ąČąĮčŗ ą▓čüąĄą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ą║ą░ą║ ą╗ąŠą│. 0. |
| CAN_STATUS |
Global CAN status register (čĆąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ CAN) |
ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░. |
| CAN_DEBUG |
CAN debug register (čĆąĄą│ąĖčüčéčĆ ąŠčéą╗ą░ą┤ą║ąĖ CAN) |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ ąŠčéą╗ą░ą┤ą║ąĖ ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ CAN. |
| CAN_CLOCK |
CAN clock register (čĆąĄą│ąĖčüčéčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ CAN) |
ąöąŠčüčéčāą┐ ą▓ąŠąĘą╝ąŠąČąĄąĮ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. |
| CAN_TIMING |
CAN timing register (čĆąĄą│ąĖčüčéčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ CAN) |
ąöąŠčüčéčāą┐ ą▓ąŠąĘą╝ąŠąČąĄąĮ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. |
| CAN_INTR |
CAN interrupt register (čĆąĄą│ąĖčüčéčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN) |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ 15:8 ąĖ 5:4 ą┤ąŠą╗ąČąĮčŗ ą▓čüąĄą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ą║ą░ą║ ą╗ąŠą│. 0. |
| CAN_GIM |
Global CAN interrupt mask register (čĆąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
ąæąĖčéčŗ 15:11 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ. |
| CAN_GIS |
Global CAN interrupt status register (čĆąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
ąæąĖčéčŗ 15:11 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ. |
| CAN_GIF |
Global CAN interrupt flag register (čĆąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
ąæąĖčéčŗ 15:11 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ. |
ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ "ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╝ąĖ", ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ą▓ą╗ąĖčÅčÄčé ąĮą░ čĆą░ą▒ąŠčéčā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN čåąĄą╗ąĖą║ąŠą╝, ąĖ ąĮą░ ą▓čüąĄ ąĄą│ąŠ čÅčēąĖą║ąĖ.
[CAN_CONTROL]

ąĀąĖčü. 17-11. ąōą╗ą░ą▓ąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ CAN_CONTROL.
[CAN_STATUS]
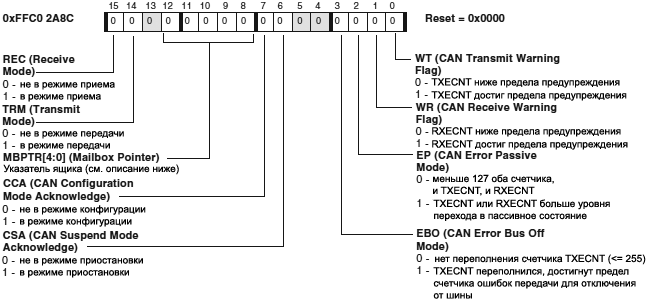
ąĀąĖčü. 17-12. ąōą╗ąŠą▒ą░ą╗čīąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ CAN_STATUS (ą┤ąŠčüčéčāą┐ č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ, RO).
ŌĆó Mail box pointer (MBPTR[4:0]), čāą║ą░ąĘą░č鹥ą╗čī čÅčēąĖą║ą░. ą¤čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ č鹥ą║čāčēąĄą│ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čŹčéąĖ ą▒ąĖčéčŗ ąŠčüčéą░čÄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ąĖ.
11111 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüąĄą╣čćą░čü ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ čÅčēąĖą║ą░ 31.
...
...
00000 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüąĄą╣čćą░čü ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ čÅčēąĖą║ą░ 0.
[CAN_DEBUG]
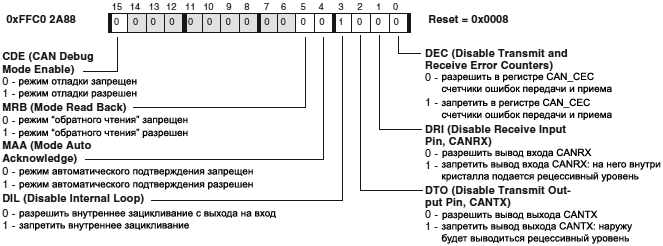
ąĀąĖčü. 17-13. ąĀąĄą│ąĖčüčéčĆ ąŠčéą╗ą░ą┤ą║ąĖ CAN_DEBUG.
[CAN_CLOCK]

ąĀąĖčü. 17-14. ąĀąĄą│ąĖčüčéčĆ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ CAN_CLOCK.
[CAN_TIMING]

ąĀąĖčü. 17-15. ąĀąĄą│ąĖčüčéčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▒ąĖčéą░ CAN_TIMING.
[CAN_INTR]

ąĀąĖčü. 17-16. ąĀąĄą│ąĖčüčéčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN_INTR (ą┤ąŠčüčéčāą┐ č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ, RO).
[CAN_GIM]
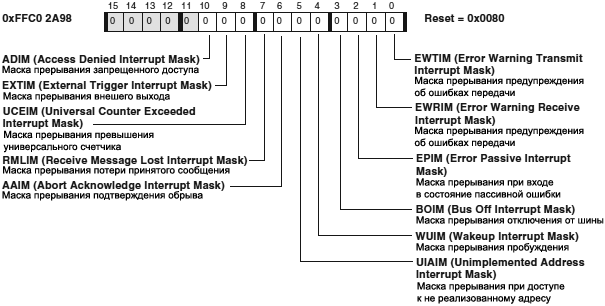
ąĀąĖčü. 17-17. ąĀąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN_GIM.
[CAN_GIS]
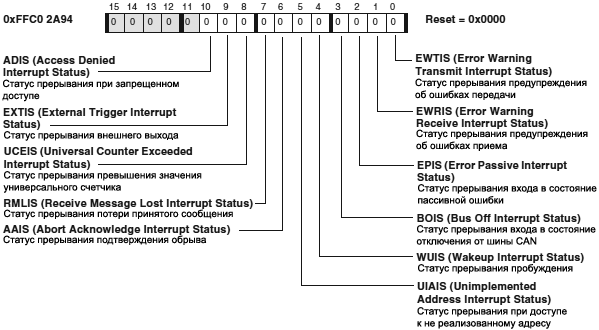
ąĀąĖčü. 17-18. ąĀąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN_GIS (ą▓čüąĄ ą▒ąĖčéčŗ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮčŗ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C).
[CAN_GIF]
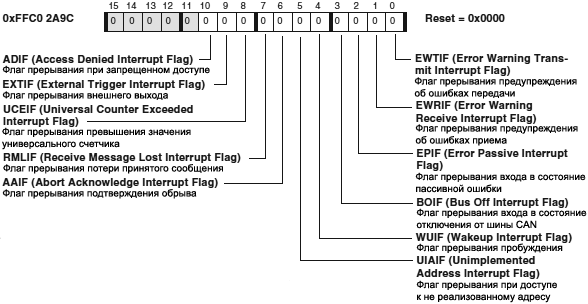
ąĀąĖčü. 17-19. ąĀąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN_GIF.
ąóą░ą▒ą╗ąĖčåą░ 17-6. ąĀąĄą│ąĖčüčéčĆčŗ Mailbox/Mask.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
ążčāąĮą║čåąĖčÅ |
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ |
CAN_AMxxH,
CAN_AMxxL |
Acceptance mask registers (čĆąĄą│ąĖčüčéčĆčŗ čäąĖą╗čīčéčĆą░ ą┐čĆąĖąĄą╝ą░) |
ąśąĘą╝ąĄąĮčÅčÄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čÅčēąĖą║ MBxx ąĘą░ą┐čĆąĄčēąĄąĮ. |
CAN_MBxx_ID1,
CAN_MBxx_ID0 |
Mailbox word 7/6 register (čĆąĄą│ąĖčüčéčĆ čüą╗ąŠą▓ 7, 6 ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ čÅčēąĖą║ą░) |
ąØąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ą╣č鹥, ą║ąŠą│ą┤ą░ čÅčēąĖą║ MBxx čĆą░ąĘčĆąĄčłąĄąĮ. |
| CAN_MBxx_TIMESTAMP |
Mailbox word 5 register (čĆąĄą│ąĖčüčéčĆ čüą╗ąŠą▓ą░ 5 ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ čÅčēąĖą║ą░) |
ąĪąŠą┤ąĄčƹȹĖčé ą╝ąĄčéą║čā ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ą░ą║čéąĖą▓ąĄąĮ čĆąĄąČąĖą╝ time stamp. |
| CAN_MBxx_LENGTH |
Mailbox word 4 register (čĆąĄą│ąĖčüčéčĆ čüą╗ąŠą▓ą░ 4 ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ čÅčēąĖą║ą░) |
ąŚąĮą░č湥ąĮąĖąĄ ą▒ąŠą╗čīčłąĄ 8 ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ 8. |
CAN_MBxx_DATA3,
CAN_MBxx_DATA2,
CAN_MBxx_DATA1,
CAN_MBxx_DATA0 |
Mailbox word 3/2/1/0 register (čĆąĄą│ąĖčüčéčĆ čüą╗ąŠą▓ 3, 2, 1, 0 ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ čÅčēąĖą║ą░) |
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ čāą┐čĆą░ą▓ą╗čÅąĄčé ą║ąŠčĆčĆąĄą║čéąĮčŗą╝ čćč鹥ąĮąĖąĄą╝ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĘąĮą░č湥ąĮąĖčÅ DLC. |
[CAN_AMxxH, CAN_AMxxL]
ąÆ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ čģčĆą░ąĮčÅčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čäąĖą╗čīčéčĆą░čåąĖąĖ čÅčēąĖą║ąŠą▓ ąĮą░ ą┐čĆąĖąĄą╝ąĄ. ąÆą╝ąĄčüč鹊 xx ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ ąŠčé 00 ą┤ąŠ 31 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆą░).

ąĀąĖčü. 17-20. ąĀąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ čäąĖą╗čīčéčĆą░ ą┐čĆąĖąĄą╝ą░ CAN_AMxxH, čüčéą░čĆčłą░čÅ čćą░čüčéčī (Acceptance Mask Register).
ąŚąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ acceptance mask ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą▒ąĖčé AME čüą▒čĆąŠčłąĄąĮ (ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBxx_ID1). ąĢčüą╗ąĖ ą▒ąĖčé AME čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čŹčéąĖ ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ čüčĆą░ą▓ąĮąĖą▓ą░čÄčéčüčÅ čü ą┐čĆąĖąĮčÅčéčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ ą▓ č鹥čģ ą┐ąŠąĘąĖčåąĖčÅčģ ą▒ąĖčé, ą│ą┤ąĄ ą▒ąĖčé ą╝ą░čüą║ąĖ ąŠčćąĖčēąĄąĮ. ąÆ ą┐ąŠąĘąĖčåąĖąĖ ą▒ąĖčéą░, ą│ą┤ąĄ ą▒ąĖčé ą╝ą░čüą║ąĖ ąĄą┤ąĖąĮąĖčåą░, čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ą▒ąĖčéą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī čÅčēąĖą║ ąĮą░ ą┐čĆąĖąĄą╝ ą│čĆčāą┐ą┐čŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ čüąŠąŠą▒čēąĄąĮąĖą╣.
ąóą░ą▒ą╗ąĖčåą░ 17-10. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Acceptance Mask (čüčéą░čĆčłą░čÅ čćą░čüčéčī ą╝ą░čüą║ąĖ).
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_AM00H |
0xFFC0 2B04 |
| CAN_AM01H |
0xFFC0 2B0C |
| CAN_AM02H |
0xFFC0 2B14 |
| CAN_AM03H |
0xFFC0 2B1C |
| CAN_AM04H |
0xFFC0 2B24 |
| CAN_AM05H |
0xFFC0 2B2C |
| CAN_AM06H |
0xFFC0 2B34 |
| CAN_AM07H |
0xFFC0 2B3C |
| CAN_AM08H |
0xFFC0 2B44 |
| CAN_AM09H |
0xFFC0 2B4C |
| CAN_AM10H |
0xFFC0 2B54 |
| CAN_AM11H |
0xFFC0 2B5C |
| CAN_AM12H |
0xFFC0 2B64 |
| CAN_AM13H |
0xFFC0 2B6C |
| CAN_AM14H |
0xFFC0 2B74 |
| CAN_AM15H |
0xFFC0 2B7C |
| CAN_AM16H |
0xFFC0 2B84 |
| CAN_AM17H |
0xFFC0 2B8C |
| CAN_AM18H |
0xFFC0 2B94 |
| CAN_AM19H |
0xFFC0 2B9C |
| CAN_AM20H |
0xFFC0 2BA4 |
| CAN_AM21H |
0xFFC0 2BAC |
| CAN_AM22H |
0xFFC0 2BB4 |
| CAN_AM23H |
0xFFC0 2BBC |
| CAN_AM24H |
0xFFC0 2BC4 |
| CAN_AM25H |
0xFFC0 2BCC |
| CAN_AM26H |
0xFFC0 2BD4 |
| CAN_AM27H |
0xFFC0 2BDC |
| CAN_AM28H |
0xFFC0 2BE4 |
| CAN_AM29H |
0xFFC0 2BEC |
| CAN_AM30H |
0xFFC0 2BF4 |
| CAN_AM31H |
0xFFC0 2BFC |

ąĀąĖčü. 17-21. ąĀąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ čäąĖą╗čīčéčĆą░ ą┐čĆąĖąĄą╝ą░ CAN_AMxxL, ą╝ą╗ą░ą┤čłą░čÅ čćą░čüčéčī (Acceptance Mask Register).
ąóą░ą▒ą╗ąĖčåą░ 17-11. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Acceptance Mask (ą╝ą╗ą░ą┤čłą░čÅ čćą░čüčéčī ą╝ą░čüą║ąĖ).
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_AM00L |
0xFFC0 2B00 |
| CAN_AM01L |
0xFFC0 2B08 |
| CAN_AM02L |
0xFFC0 2B10 |
| CAN_AM03L |
0xFFC0 2B18 |
| CAN_AM04L |
0xFFC0 2B20 |
| CAN_AM05L |
0xFFC0 2B28 |
| CAN_AM06L |
0xFFC0 2B30 |
| CAN_AM07L |
0xFFC0 2B38 |
| CAN_AM08L |
0xFFC0 2B40 |
| CAN_AM09L |
0xFFC0 2B48 |
| CAN_AM10L |
0xFFC0 2B50 |
| CAN_AM11L |
0xFFC0 2B58 |
| CAN_AM12L |
0xFFC0 2B60 |
| CAN_AM13L |
0xFFC0 2B68 |
| CAN_AM14L |
0xFFC0 2B70 |
| CAN_AM15L |
0xFFC0 2B78 |
| CAN_AM16L |
0xFFC0 2B80 |
| CAN_AM17L |
0xFFC0 2B88 |
| CAN_AM18L |
0xFFC0 2B90 |
| CAN_AM19L |
0xFFC0 2B98 |
| CAN_AM20L |
0xFFC0 2BA0 |
| CAN_AM21L |
0xFFC0 2BA8 |
| CAN_AM22L |
0xFFC0 2BB0 |
| CAN_AM23L |
0xFFC0 2BB8 |
| CAN_AM24L |
0xFFC0 2BC0 |
| CAN_AM25L |
0xFFC0 2BC8 |
| CAN_AM26L |
0xFFC0 2BD0 |
| CAN_AM27L |
0xFFC0 2BD8 |
| CAN_AM28L |
0xFFC0 2BE0 |
| CAN_AM29L |
0xFFC0 2BE8 |
| CAN_AM30L |
0xFFC0 2BF0 |
| CAN_AM31L |
0xFFC0 2BF8
|
[CAN_MBxx_ID1]
ąÆ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ čģčĆą░ąĮąĖčéčüčÅ ą▒ą░ąĘąŠą▓čŗą╣ (11-ą▒ąĖčéąĮčŗą╣) ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čÅčēąĖą║ą░, čćą░čüčéčī čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ (29-ą▒ąĖčéąĮąŠą│ąŠ) ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░, ą░ čéą░ą║ąČąĄ ą▒ąĖčéčŗ, čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ čéąĖą┐ąŠą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░, čéąĖą┐ąŠą╝ čÅčēąĖą║ą░ ąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĄą╝ čäąĖą╗čīčéčĆą░čåąĖąĖ. ąÆą╝ąĄčüč鹊 xx ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ ąŠčé 00 ą┤ąŠ 31 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆą░).

ąĀąĖčü. 17-22. ąĀąĄą│ąĖčüčéčĆ Mailbox Word 7, CAN_MBxx_ID1.
ąóą░ą▒ą╗ąĖčåą░ 17-12. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Word 7.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_MB00_ID1 |
0xFFC0 2C1C |
| CAN_MB01_ID1 |
0xFFC0 2C3C |
| CAN_MB02_ID1 |
0xFFC0 2C5C |
| CAN_MB03_ID1 |
0xFFC0 2C7C |
| CAN_MB04_ID1 |
0xFFC0 2C9C |
| CAN_MB05_ID1 |
0xFFC0 2CBC |
| CAN_MB06_ID1 |
0xFFC0 2CDC |
| CAN_MB07_ID1 |
0xFFC0 2CFC |
| CAN_MB08_ID1 |
0xFFC0 2D1C |
| CAN_MB09_ID1 |
0xFFC0 2D3C |
| CAN_MB10_ID1 |
0xFFC0 2D5C |
| CAN_MB11_ID1 |
0xFFC0 2D7C |
| CAN_MB12_ID1 |
0xFFC0 2D9C |
| CAN_MB13_ID1 |
0xFFC0 2DBC |
| CAN_MB14_ID1 |
0xFFC0 2DDC |
| CAN_MB15_ID1 |
0xFFC0 2DFC |
| CAN_MB16_ID1 |
0xFFC0 2E1C |
| CAN_MB17_ID1 |
0xFFC0 2E3C |
| CAN_MB18_ID1 |
0xFFC0 2E5C |
| CAN_MB19_ID1 |
0xFFC0 2E7C |
| CAN_MB20_ID1 |
0xFFC0 2E9C |
| CAN_MB21_ID1 |
0xFFC0 2EBC |
| CAN_MB22_ID1 |
0xFFC0 2EDC |
| CAN_MB23_ID1 |
0xFFC0 2EFC |
| CAN_MB24_ID1 |
0xFFC0 2F1C |
| CAN_MB25_ID1 |
0xFFC0 2F3C |
| CAN_MB26_ID1 |
0xFFC0 2F5C |
| CAN_MB27_ID1 |
0xFFC0 2F7C |
| CAN_MB28_ID1 |
0xFFC0 2F9C |
| CAN_MB29_ID1 |
0xFFC0 2FBC |
| CAN_MB30_ID1 |
0xFFC0 2FDC |
| CAN_MB31_ID1 |
0xFFC0 2FFC |
[CAN_MBxx_ID0]
ąÆ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ čćą░čüčéčī ą▒ąĖčé čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ (29-ą▒ąĖčéąĮąŠą│ąŠ) ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čÅčēąĖą║ą░. ąÆą╝ąĄčüč鹊 xx ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ ąŠčé 00 ą┤ąŠ 31 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆą░).

ąĀąĖčü. 17-23. ąĀąĄą│ąĖčüčéčĆ Mailbox Word 6, CAN_MBxx_ID0.
ąóą░ą▒ą╗ąĖčåą░ 17-13. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Word 6.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_MB00_ID0 |
0xFFC0 2C18 |
| CAN_MB01_ID0 |
0xFFC0 2C38 |
| CAN_MB02_ID0 |
0xFFC0 2C58 |
| CAN_MB03_ID0 |
0xFFC0 2C78 |
| CAN_MB04_ID0 |
0xFFC0 2C98 |
| CAN_MB05_ID0 |
0xFFC0 2CB8 |
| CAN_MB06_ID0 |
0xFFC0 2CD8 |
| CAN_MB07_ID0 |
0xFFC0 2CF8 |
| CAN_MB08_ID0 |
0xFFC0 2D18 |
| CAN_MB09_ID0 |
0xFFC0 2D38 |
| CAN_MB10_ID0 |
0xFFC0 2D58 |
| CAN_MB11_ID0 |
0xFFC0 2D78 |
| CAN_MB12_ID0 |
0xFFC0 2D98 |
| CAN_MB13_ID0 |
0xFFC0 2DB8 |
| CAN_MB14_ID0 |
0xFFC0 2DD8 |
| CAN_MB15_ID0 |
0xFFC0 2DF8 |
| CAN_MB16_ID0 |
0xFFC0 2E18 |
| CAN_MB17_ID0 |
0xFFC0 2E38 |
| CAN_MB18_ID0 |
0xFFC0 2E58 |
| CAN_MB19_ID0 |
0xFFC0 2E78 |
| CAN_MB20_ID0 |
0xFFC0 2E98 |
| CAN_MB21_ID0 |
0xFFC0 2EB8 |
| CAN_MB22_ID0 |
0xFFC0 2ED8 |
| CAN_MB23_ID0 |
0xFFC0 2EF8 |
| CAN_MB24_ID0 |
0xFFC0 2F18 |
| CAN_MB25_ID0 |
0xFFC0 2F38 |
| CAN_MB26_ID0 |
0xFFC0 2F58 |
| CAN_MB27_ID0 |
0xFFC0 2F78 |
| CAN_MB28_ID0 |
0xFFC0 2F98 |
| CAN_MB29_ID0 |
0xFFC0 2FB8 |
| CAN_MB30_ID0 |
0xFFC0 2FD8 |
| CAN_MB31_ID0 |
0xFFC0 2FF8
|
[CAN_MBxx_TIMESTAMP]
ąÆ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ čģčĆą░ąĮąĖčéčüčÅ ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ - ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░, ąĘą░čģą▓ą░č湥ąĮąĮąŠąĄ ą▓ ą╝ąŠą╝ąĄąĮčé ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÆą╝ąĄčüč鹊 xx ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ ąŠčé 00 ą┤ąŠ 31 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆą░).

ąĀąĖčü. 17-24. ąĀąĄą│ąĖčüčéčĆ Mailbox Word 5, CAN_MBxx_TIMESTAMP.
ąóą░ą▒ą╗ąĖčåą░ 17-14. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Word 5.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_MB00_TIMESTAMP |
0xFFC0 2C14 |
| CAN_MB01_TIMESTAMP |
0xFFC0 2C34 |
| CAN_MB02_TIMESTAMP |
0xFFC0 2C54 |
| CAN_MB03_TIMESTAMP |
0xFFC0 2C74 |
| CAN_MB04_TIMESTAMP |
0xFFC0 2C94 |
| CAN_MB05_TIMESTAMP |
0xFFC0 2CB4 |
| CAN_MB06_TIMESTAMP |
0xFFC0 2CD4 |
| CAN_MB07_TIMESTAMP |
0xFFC0 2CF4 |
| CAN_MB08_TIMESTAMP |
0xFFC0 2D14 |
| CAN_MB09_TIMESTAMP |
0xFFC0 2D34 |
| CAN_MB10_TIMESTAMP |
0xFFC0 2D54 |
| CAN_MB11_TIMESTAMP |
0xFFC0 2D74 |
| CAN_MB12_TIMESTAMP |
0xFFC0 2D94 |
| CAN_MB13_TIMESTAMP |
0xFFC0 2DB4 |
| CAN_MB14_TIMESTAMP |
0xFFC0 2DD4 |
| CAN_MB15_TIMESTAMP |
0xFFC0 2DF4 |
| CAN_MB16_TIMESTAMP |
0xFFC0 2E14 |
| CAN_MB17_TIMESTAMP |
0xFFC0 2E34 |
| CAN_MB18_TIMESTAMP |
0xFFC0 2E54 |
| CAN_MB19_TIMESTAMP |
0xFFC0 2E74 |
| CAN_MB20_TIMESTAMP |
0xFFC0 2E94 |
| CAN_MB21_TIMESTAMP |
0xFFC0 2EB4 |
| CAN_MB22_TIMESTAMP |
0xFFC0 2ED4 |
| CAN_MB23_TIMESTAMP |
0xFFC0 2EF4 |
| CAN_MB24_TIMESTAMP |
0xFFC0 2F14 |
| CAN_MB25_TIMESTAMP |
0xFFC0 2F34 |
| CAN_MB26_TIMESTAMP |
0xFFC0 2F54 |
| CAN_MB27_TIMESTAMP |
0xFFC0 2F74 |
| CAN_MB28_TIMESTAMP |
0xFFC0 2F94 |
| CAN_MB29_TIMESTAMP |
0xFFC0 2FB4 |
| CAN_MB30_TIMESTAMP |
0xFFC0 2FD4 |
| CAN_MB31_TIMESTAMP |
0xFFC0 2FF4
|
[CAN_MBxx_LENGTH]
ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé (ąĮą░ ą┐čĆąĖąĄą╝ąĄ) ąĖą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé (ąĮą░ ą┐ąĄčĆąĄą┤ą░č湥) ą┤ą╗ąĖąĮčā ą┤ą░ąĮąĮčŗčģ ą▓ ą▒ą░ą╣čéą░čģ ą┐ą░ą║ąĄčéą░ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN. ąÆą╝ąĄčüč鹊 xx ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ ąŠčé 00 ą┤ąŠ 31 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆą░).

ąĀąĖčü. 17-25. ąĀąĄą│ąĖčüčéčĆ Mailbox Word 4, CAN_MBxx_LENGTH.
ąóą░ą▒ą╗ąĖčåą░ 17-15. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Word 4.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_MB00_LENGTH |
0xFFC0 2C10 |
| CAN_MB01_LENGTH |
0xFFC0 2C30 |
| CAN_MB02_LENGTH |
0xFFC0 2C50 |
| CAN_MB03_LENGTH |
0xFFC0 2C70 |
| CAN_MB04_LENGTH |
0xFFC0 2C90 |
| CAN_MB05_LENGTH |
0xFFC0 2CB0 |
| CAN_MB06_LENGTH |
0xFFC0 2CD0 |
| CAN_MB07_LENGTH |
0xFFC0 2CF0 |
| CAN_MB08_LENGTH |
0xFFC0 2D10 |
| CAN_MB09_LENGTH |
0xFFC0 2D30 |
| CAN_MB10_LENGTH |
0xFFC0 2D50 |
| CAN_MB11_LENGTH |
0xFFC0 2D70 |
| CAN_MB12_LENGTH |
0xFFC0 2D90 |
| CAN_MB13_LENGTH |
0xFFC0 2DB0 |
| CAN_MB14_LENGTH |
0xFFC0 2DD0 |
| CAN_MB15_LENGTH |
0xFFC0 2DF0 |
| CAN_MB16_LENGTH |
0xFFC0 2E10 |
| CAN_MB17_LENGTH |
0xFFC0 2E30 |
| CAN_MB18_LENGTH |
0xFFC0 2E50 |
| CAN_MB19_LENGTH |
0xFFC0 2E70 |
| CAN_MB20_LENGTH |
0xFFC0 2E90 |
| CAN_MB21_LENGTH |
0xFFC0 2EB0 |
| CAN_MB22_LENGTH |
0xFFC0 2ED0 |
| CAN_MB23_LENGTH |
0xFFC0 2EF0 |
| CAN_MB24_LENGTH |
0xFFC0 2F10 |
| CAN_MB25_LENGTH |
0xFFC0 2F30 |
| CAN_MB26_LENGTH |
0xFFC0 2F50 |
| CAN_MB27_LENGTH |
0xFFC0 2F70 |
| CAN_MB28_LENGTH |
0xFFC0 2F90 |
| CAN_MB29_LENGTH |
0xFFC0 2FB0 |
| CAN_MB30_LENGTH |
0xFFC0 2FD0 |
| CAN_MB31_LENGTH |
0xFFC0 2FF0
|
[ąĀąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ CAN_MBxx_DATAx]
ąÆ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ čģčĆą░ąĮčÅčéčüčÅ ą┤ą░ąĮąĮčŗąĄ (ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░) ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą│ąŠ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čÅčēąĖą║ą░) ą┐ą░ą║ąĄčéą░ CAN. ąÆą╝ąĄčüč鹊 xx ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ ąŠčé 00 ą┤ąŠ 31 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆą░).

ąĀąĖčü. 17-26. ąĀąĄą│ąĖčüčéčĆ Mailbox Word 3, CAN_MBxx_DATA3.
ąóą░ą▒ą╗ąĖčåą░ 17-16. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Word 3.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_MB00_DATA3 |
0xFFC0 2C0C |
| CAN_MB01_DATA3 |
0xFFC0 2C2C |
| CAN_MB02_DATA3 |
0xFFC0 2C4C |
| CAN_MB03_DATA3 |
0xFFC0 2C6C |
| CAN_MB04_DATA3 |
0xFFC0 2C8C |
| CAN_MB05_DATA3 |
0xFFC0 2CAC |
| CAN_MB06_DATA3 |
0xFFC0 2CCC |
| CAN_MB07_DATA3 |
0xFFC0 2CEC |
| CAN_MB08_DATA3 |
0xFFC0 2D0C |
| CAN_MB09_DATA3 |
0xFFC0 2D2C |
| CAN_MB10_DATA3 |
0xFFC0 2D4C |
| CAN_MB11_DATA3 |
0xFFC0 2D6C |
| CAN_MB12_DATA3 |
0xFFC0 2D8C |
| CAN_MB13_DATA3 |
0xFFC0 2DAC |
| CAN_MB14_DATA3 |
0xFFC0 2DCC |
| CAN_MB15_DATA3 |
0xFFC0 2DEC |
| CAN_MB16_DATA3 |
0xFFC0 2E0C |
| CAN_MB17_DATA3 |
0xFFC0 2E2C |
| CAN_MB18_DATA3 |
0xFFC0 2E4C |
| CAN_MB19_DATA3 |
0xFFC0 2E6C |
| CAN_MB20_DATA3 |
0xFFC0 2E8C |
| CAN_MB21_DATA3 |
0xFFC0 2EAC |
| CAN_MB22_DATA3 |
0xFFC0 2ECC |
| CAN_MB23_DATA3 |
0xFFC0 2EEC |
| CAN_MB24_DATA3 |
0xFFC0 2F0C |
| CAN_MB25_DATA3 |
0xFFC0 2F2C |
| CAN_MB26_DATA3 |
0xFFC0 2F4C |
| CAN_MB27_DATA3 |
0xFFC0 2F6C |
| CAN_MB28_DATA3 |
0xFFC0 2F8C |
| CAN_MB29_DATA3 |
0xFFC0 2FAC |
| CAN_MB30_DATA3 |
0xFFC0 2FCC |
| CAN_MB31_DATA3 |
0xFFC0 2FEC
|

ąĀąĖčü. 17-27. ąĀąĄą│ąĖčüčéčĆ Mailbox Word 2, CAN_MBxx_DATA2.
ąóą░ą▒ą╗ąĖčåą░ 17-17. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Word 2.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_MB00_DATA2 |
0xFFC0 2C08 |
| CAN_MB01_DATA2 |
0xFFC0 2C28 |
| CAN_MB02_DATA2 |
0xFFC0 2C48 |
| CAN_MB03_DATA2 |
0xFFC0 2C68 |
| CAN_MB04_DATA2 |
0xFFC0 2C88 |
| CAN_MB05_DATA2 |
0xFFC0 2CA8 |
| CAN_MB06_DATA2 |
0xFFC0 2CC8 |
| CAN_MB07_DATA2 |
0xFFC0 2CE8 |
| CAN_MB08_DATA2 |
0xFFC0 2D08 |
| CAN_MB09_DATA2 |
0xFFC0 2D28 |
| CAN_MB10_DATA2 |
0xFFC0 2D48 |
| CAN_MB11_DATA2 |
0xFFC0 2D68 |
| CAN_MB12_DATA2 |
0xFFC0 2D88 |
| CAN_MB13_DATA2 |
0xFFC0 2DA8 |
| CAN_MB14_DATA2 |
0xFFC0 2DC8 |
| CAN_MB15_DATA2 |
0xFFC0 2DE8 |
| CAN_MB16_DATA2 |
0xFFC0 2E08 |
| CAN_MB17_DATA2 |
0xFFC0 2E28 |
| CAN_MB18_DATA2 |
0xFFC0 2E48 |
| CAN_MB19_DATA2 |
0xFFC0 2E68 |
| CAN_MB20_DATA2 |
0xFFC0 2E88 |
| CAN_MB21_DATA2 |
0xFFC0 2EA8 |
| CAN_MB22_DATA2 |
0xFFC0 2EC8 |
| CAN_MB23_DATA2 |
0xFFC0 2EE8 |
| CAN_MB24_DATA2 |
0xFFC0 2F08 |
| CAN_MB25_DATA2 |
0xFFC0 2F28 |
| CAN_MB26_DATA2 |
0xFFC0 2F48 |
| CAN_MB27_DATA2 |
0xFFC0 2F68 |
| CAN_MB28_DATA2 |
0xFFC0 2F88 |
| CAN_MB29_DATA2 |
0xFFC0 2FA8 |
| CAN_MB30_DATA2 |
0xFFC0 2FC8 |
| CAN_MB31_DATA2 |
0xFFC0 2FE8
|

ąĀąĖčü. 17-28. ąĀąĄą│ąĖčüčéčĆ Mailbox Word 1, CAN_MBxx_DATA1.
ąóą░ą▒ą╗ąĖčåą░ 17-18. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Word 1.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_MB00_DATA1 |
0xFFC0 2C04 |
| CAN_MB01_DATA1 |
0xFFC0 2C24 |
| CAN_MB02_DATA1 |
0xFFC0 2C44 |
| CAN_MB03_DATA1 |
0xFFC0 2C64 |
| CAN_MB04_DATA1 |
0xFFC0 2C84 |
| CAN_MB05_DATA1 |
0xFFC0 2CA4 |
| CAN_MB06_DATA1 |
0xFFC0 2CC4 |
| CAN_MB07_DATA1 |
0xFFC0 2CE4 |
| CAN_MB08_DATA1 |
0xFFC0 2D04 |
| CAN_MB09_DATA1 |
0xFFC0 2D24 |
| CAN_MB10_DATA1 |
0xFFC0 2D44 |
| CAN_MB11_DATA1 |
0xFFC0 2D64 |
| CAN_MB12_DATA1 |
0xFFC0 2D84 |
| CAN_MB13_DATA1 |
0xFFC0 2DA4 |
| CAN_MB14_DATA1 |
0xFFC0 2DC4 |
| CAN_MB15_DATA1 |
0xFFC0 2DE4 |
| CAN_MB16_DATA1 |
0xFFC0 2E04 |
| CAN_MB17_DATA1 |
0xFFC0 2E24 |
| CAN_MB18_DATA1 |
0xFFC0 2E44 |
| CAN_MB19_DATA1 |
0xFFC0 2E64 |
| CAN_MB20_DATA1 |
0xFFC0 2E84 |
| CAN_MB21_DATA1 |
0xFFC0 2EA4 |
| CAN_MB22_DATA1 |
0xFFC0 2EC4 |
| CAN_MB23_DATA1 |
0xFFC0 2EE4 |
| CAN_MB24_DATA1 |
0xFFC0 2F04 |
| CAN_MB25_DATA1 |
0xFFC0 2F24 |
| CAN_MB26_DATA1 |
0xFFC0 2F44 |
| CAN_MB27_DATA1 |
0xFFC0 2F64 |
| CAN_MB28_DATA1 |
0xFFC0 2F84 |
| CAN_MB29_DATA1 |
0xFFC0 2FA4 |
| CAN_MB30_DATA1 |
0xFFC0 2FC4 |
| CAN_MB31_DATA1 |
0xFFC0 2FE4
|

ąĀąĖčü. 17-29. ąĀąĄą│ąĖčüčéčĆ Mailbox Word 0, CAN_MBxx_DATA0.
ąóą░ą▒ą╗ąĖčåą░ 17-19. MMR-ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Word 0.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
Memory-Mapped ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
| CAN_MB00_DATA0 |
0xFFC0 2C00 |
| CAN_MB01_DATA0 |
0xFFC0 2C20 |
| CAN_MB02_DATA0 |
0xFFC0 2C40 |
| CAN_MB03_DATA0 |
0xFFC0 2C60 |
| CAN_MB04_DATA0 |
0xFFC0 2C80 |
| CAN_MB05_DATA0 |
0xFFC0 2CA0 |
| CAN_MB06_DATA0 |
0xFFC0 2CC0 |
| CAN_MB07_DATA0 |
0xFFC0 2CE0 |
| CAN_MB08_DATA0 |
0xFFC0 2D00 |
| CAN_MB09_DATA0 |
0xFFC0 2D20 |
| CAN_MB10_DATA0 |
0xFFC0 2D40 |
| CAN_MB11_DATA0 |
0xFFC0 2D60 |
| CAN_MB12_DATA0 |
0xFFC0 2D80 |
| CAN_MB13_DATA0 |
0xFFC0 2DA0 |
| CAN_MB14_DATA0 |
0xFFC0 2DC0 |
| CAN_MB15_DATA0 |
0xFFC0 2DE0 |
| CAN_MB16_DATA0 |
0xFFC0 2E00 |
| CAN_MB17_DATA0 |
0xFFC0 2E20 |
| CAN_MB18_DATA0 |
0xFFC0 2E40 |
| CAN_MB19_DATA0 |
0xFFC0 2E60 |
| CAN_MB20_DATA0 |
0xFFC0 2E80 |
| CAN_MB21_DATA0 |
0xFFC0 2EA0 |
| CAN_MB22_DATA0 |
0xFFC0 2EC0 |
| CAN_MB23_DATA0 |
0xFFC0 2EE0 |
| CAN_MB24_DATA0 |
0xFFC0 2F00 |
| CAN_MB25_DATA0 |
0xFFC0 2F20 |
| CAN_MB26_DATA0 |
0xFFC0 2F40 |
| CAN_MB27_DATA0 |
0xFFC0 2F60 |
| CAN_MB28_DATA0 |
0xFFC0 2F80 |
| CAN_MB29_DATA0 |
0xFFC0 2FA0 |
| CAN_MB30_DATA0 |
0xFFC0 2FC0 |
| CAN_MB31_DATA0 |
0xFFC0 2FE0 |
ąóą░ą▒ą╗ąĖčåą░ 17-7. ąĀąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Mailbox.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
ążčāąĮą║čåąĖčÅ |
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ |
| CAN_MCx |
Mailbox configuration registers (čĆąĄą│ąĖčüčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čÅčēąĖą║ą░) |
ąÆčüąĄą│ą┤ą░ ąĘą░ą┐čĆąĄčēą░ą╣č鹥 čÅčēąĖą║ ą┐ąĄčĆąĄą┤ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĄą╣ ąŠą▒ą╗ą░čüčéąĖ čÅčēąĖą║ą░ ąĖą╗ąĖ ąĄą│ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. |
| CAN_MDx |
Mailbox direction registers (čĆąĄą│ąĖčüčéčĆčŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čÅčēąĖą║ą░) |
ąØąĖą║ąŠą│ą┤ą░ ąĮąĄ ą╝ąĄąĮčÅą╣č鹥 ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ MDn, ą║ąŠą│ą┤ą░ čÅčēąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ. MD[31:24] ąĖ MD[7:0] ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. |
| CAN_RMPx |
Receive message pending registers (čĆąĄą│ąĖčüčéčĆčŗ ąŠąČąĖą┤ą░čÄčēąĖčģ ą┐čĆąĖąĮčÅčéčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣) |
ą×čćąĖčüčéą║ą░ ą▒ąĖč鹊ą▓ RMPn čéą░ą║ąČąĄ ąŠčćąĖčüčéąĖčé ą▒ąĖčéčŗ RMLn. |
| CAN_RMLx |
Receive message lost registers (čĆąĄą│ąĖčüčéčĆčŗ ą┐ąŠč鹥čĆčÅąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čĆąĖąĄą╝ą░) |
ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░. |
| CAN_OPSSx |
Overwrite protection or single-shot transmission register (čĆąĄą│ąĖčüčéčĆ ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ ąĮą░ ą┐čĆąĖąĄą╝ąĄ ąĖą╗ąĖ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
ążčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čÅčēąĖą║ą░ (mailbox direction). ąØąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠą│ą┤ą░ RFHn=1. ąØąĄ ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāą╣č鹥 ą▒ąĖčé OPSSn, ą║ąŠą│ą┤ą░ čÅčēąĖą║ n čĆą░ąĘčĆąĄčłąĄąĮ. |
| CAN_TRSx |
Transmission request set registers (čĆąĄą│ąĖčüčéčĆčŗ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
ą£ąŠą│čāčé ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. ąæąĖčéčŗ TRS[7:0] č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. |
| CAN_TRRx |
Transmission request reset registers (čĆąĄą│ąĖčüčéčĆčŗ čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
ąæąĖčéčŗ TRRn ąĮąĄ ą┤ąŠą╗ąČąĮčŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ čÅčēąĖą║ n ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖą╗ąĖ ąĄčüą╗ąĖ TRSn=0. |
| CAN_AAx |
Abort acknowledge registers (čĆąĄą│ąĖčüčéčĆčŗ ąŠą▒čĆčŗą▓ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ) |
ąæąĖčé AAn čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ą▒ąĖčé TRSn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓čĆčāčćąĮčāčÄ, ąĮąŠ ąĮąĄ ą║ąŠą│ą┤ą░ ą▒ąĖčé TRSn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. |
| CAN_TAx |
Transmission acknowledge registers (čĆąĄą│ąĖčüčéčĆčŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
ąæąĖčé TAn čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ą▒ąĖčé TRSn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓čĆčāčćąĮčāčÄ, ąĮąŠ ąĮąĄ ą║ąŠą│ą┤ą░ ą▒ąĖčé TRSn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. |
| CAN_MBTD |
Temporary mailbox disable feature register (čĆąĄą│ąĖčüčéčĆ čäčāąĮą║čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ čÅčēąĖą║ą░) |
ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą▒ąĄąĘąŠą┐ą░čüąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą│ąŠ čÅčēąĖą║ą░. |
| CAN_RFHx |
Remote frame handling registers (čĆąĄą│ąĖčüčéčĆčŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ą░ remote) |
ąöąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗčģ čÅčēąĖą║ąŠą▓ 23:8. ąæąĖčéčŗ RFH[31:24] ąĖ RFH[7:0] č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. |
| CAN_MBIMx |
Mailbox interrupt mask registers (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅčēąĖą║ą░) |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅčēąĖą║ąŠą▓ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čŹčéąĖ ą▒ąĖčéčŗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ. |
| CAN_MBTIFx |
Mailbox transmit interrupt flag registers (čĆąĄą│ąĖčüčéčĆčŗ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čÅčēąĖą║ą░) |
ą£ąŠą│čāčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮčŗ, ąĄčüą╗ąĖ čÅčēąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čÅčēąĖą║ą░ ąĘą░ą┐čĆąĄčēąĄąĮąŠ. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ MBTIFn=1, ą┤ą░ąĄčé čĆąĄąĘčāą╗čīčéą░čé MBRIFn=1 ąĖ MBTIFn=0. |
| CAN_MBRIFx |
Mailbox receive interrupt flag registers (čĆąĄą│ąĖčüčéčĆčŗ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čÅčēąĖą║ą░) |
ą£ąŠą│čāčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮčŗ, ąĄčüą╗ąĖ čÅčēąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čÅčēąĖą║ą░ ąĘą░ą┐čĆąĄčēąĄąĮąŠ. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ MBRIFn=1, ą┤ą░ąĄčé čĆąĄąĘčāą╗čīčéą░čé MBTIFn=1 ąĖ MBRIFn=0. |

ąĀąĖčü. 17-30. ąĀąĄą│ąĖčüčéčĆ 1 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Mailbox (CAN_MC1).
ąöą╗čÅ ą▓čüąĄčģ ą▒ąĖčé CAN_MC1: 0 čÅčēąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ, 1 čÅčēąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ.

ąĀąĖčü. 17-31. ąĀąĄą│ąĖčüčéčĆ 2 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Mailbox (CAN_MC2).
ąöą╗čÅ ą▓čüąĄčģ ą▒ąĖčé CAN_MC2: 0 čÅčēąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ, 1 čÅčēąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ.
[CAN_MD1, CAN_MD2]
ąĀąĄą│ąĖčüčéčĆčŗ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čÅčēąĖą║ąŠą▓. ąöą╗čÅ ą▓čüąĄčģ ą▒ąĖč鹊ą▓: 0 čÅčēąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, 1 čÅčēąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░. ąØąĄą║ąŠč鹊čĆčŗąĄ ą▒ąĖčéčŗ RO, čé. ąĄ. č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, čé. ąĄ. čā čŹčéąĖčģ čÅčēąĖą║ąŠą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ (čÅčēąĖą║ąĖ 7..0 čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ ąĮą░ ą┐čĆąĖąĄą╝, čÅčēąĖą║ąĖ 31..24 č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā).
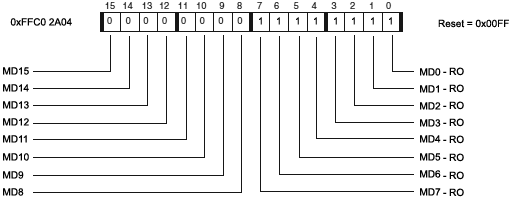
ąĀąĖčü. 17-32. ąĀąĄą│ąĖčüčéčĆ 1 ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ Mailbox (CAN_MD1).

ąĀąĖčü. 17-33. ąĀąĄą│ąĖčüčéčĆ 2 ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ Mailbox (CAN_MD2).

ąĀąĖčü. 17-34. ąĀąĄą│ąĖčüčéčĆ 1 ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (CAN_RMP1).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_RMP1 ąŠčćąĖčēą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.

ąĀąĖčü. 17-35. ąĀąĄą│ąĖčüčéčĆ 2 ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (CAN_RMP2).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_RMP2 ąŠčćąĖčēą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.

ąĀąĖčü. 17-36. ąĀąĄą│ąĖčüčéčĆ 1 ą┐ąŠč鹥čĆąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (CAN_RML1).
ąĀąĄą│ąĖčüčéčĆ CAN_RML1 č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (RO).
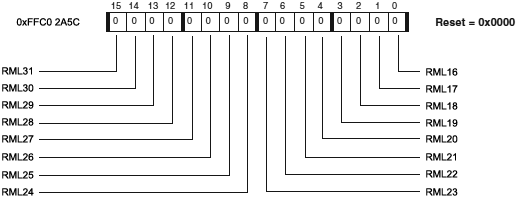
ąĀąĖčü. 17-37. ąĀąĄą│ąĖčüčéčĆ 2 ą┐ąŠč鹥čĆąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (CAN_RML2).
ąĀąĄą│ąĖčüčéčĆ CAN_RML2 č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (RO).
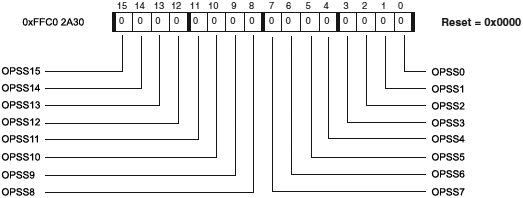
ąĀąĖčü. 17-38. ąĀąĄą│ąĖčüčéčĆ 1 ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ / ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (CAN_OPSS1).
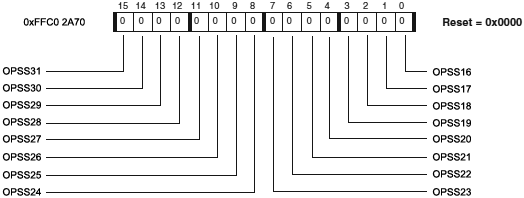
ąĀąĖčü. 17-39. ąĀąĄą│ąĖčüčéčĆ 2 ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ / ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (CAN_OPSS2).

ąĀąĖčü. 17-40. ąĀąĄą│ąĖčüčéčĆ 1 čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (CAN_TRS1).
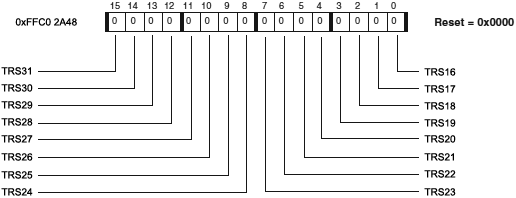
ąĀąĖčü. 17-41. ąĀąĄą│ąĖčüčéčĆ 2 čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (CAN_TRS2).

ąĀąĖčü. 17-42. ąĀąĄą│ąĖčüčéčĆ 1 čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (CAN_TRR1).
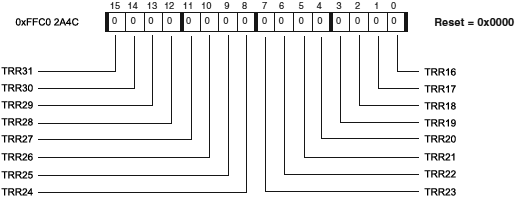
ąĀąĖčü. 17-43. ąĀąĄą│ąĖčüčéčĆ 2 čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (CAN_TRR2).
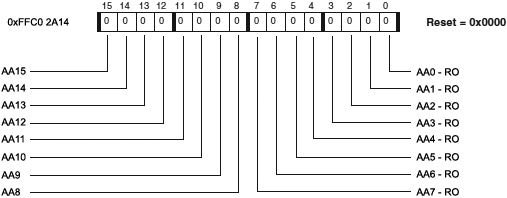
ąĀąĖčü. 17-44. ąĀąĄą│ąĖčüčéčĆ 1 ąŠą▒čĆčŗą▓ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (CAN_AA1).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_AA1 čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.

ąĀąĖčü. 17-45. ąĀąĄą│ąĖčüčéčĆ 2 ąŠą▒čĆčŗą▓ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (CAN_AA2).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_AA2 čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.
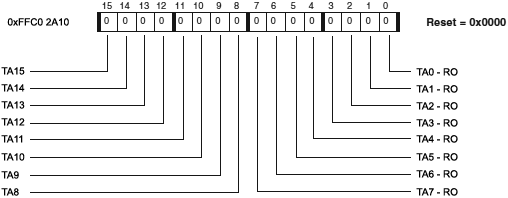
ąĀąĖčü. 17-46. ąĀąĄą│ąĖčüčéčĆ 1 ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_TA1).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_TA1 čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.
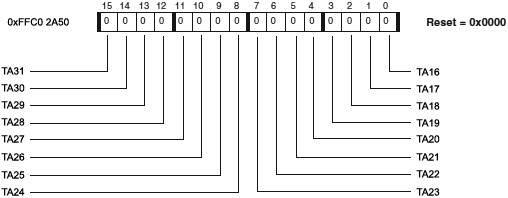
ąĀąĖčü. 17-47. ąĀąĄą│ąĖčüčéčĆ 2 ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_TA2).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_TA2 čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.
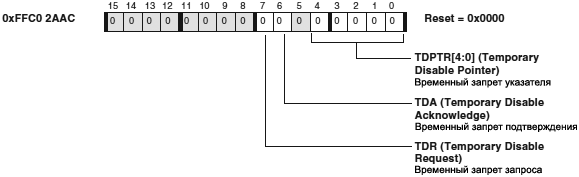
ąĀąĖčü. 17-48. ąĀąĄą│ąĖčüčéčĆ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ Mailbox (CAN_MBTD).
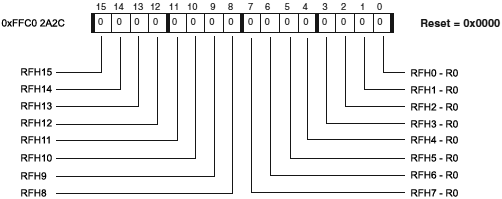
ąĀąĖčü. 17-49. ąĀąĄą│ąĖčüčéčĆ 1 ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ą░ remote (CAN_RFH1).
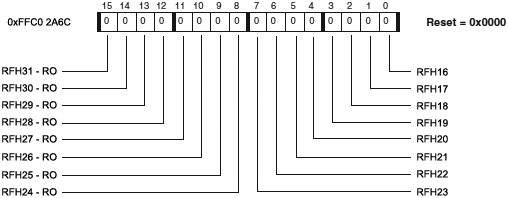
ąĀąĖčü. 17-50. ąĀąĄą│ąĖčüčéčĆ 2 ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ą░ remote (CAN_RFH2).
[CAN_MBIM1, CAN_MBIM2]
ąĀąĄą│ąĖčüčéčĆčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čÅčēąĖą║ąŠą▓. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé čÅčēąĖą║ą░ n čĆą░ąĘčĆąĄčłąĄąĮąŠ, ąĄčüą╗ąĖ ąĄą│ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBIMn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
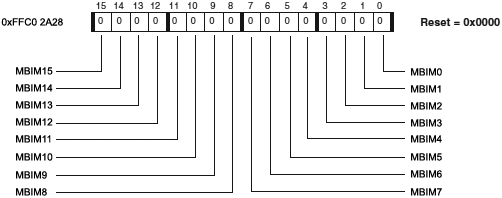
ąĀąĖčü. 17-51. ąĀąĄą│ąĖčüčéčĆ 1 ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ Mailbox (CAN_MBIM1).
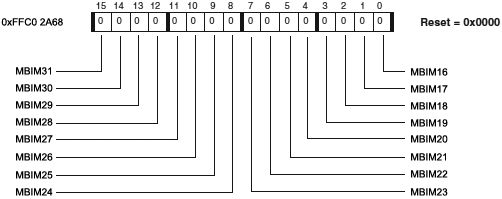
ąĀąĖčü. 17-52. ąĀąĄą│ąĖčüčéčĆ 2 ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ Mailbox (CAN_MBIM2).

ąĀąĖčü. 17-53. ąĀąĄą│ąĖčüčéčĆ 1 čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ Mailbox (CAN_MBTIF1).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_MBTIF1 čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.
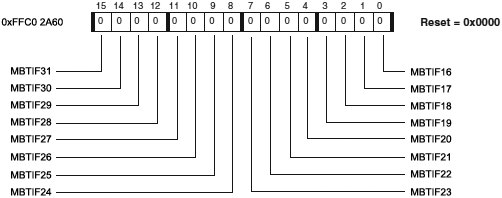
ąĀąĖčü. 17-54. ąĀąĄą│ąĖčüčéčĆ 2 čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ Mailbox (CAN_MBTIF2).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_MBTIF2 čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.

ąĀąĖčü. 17-55. ąĀąĄą│ąĖčüčéčĆ 1 čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐čĆąĖąĄą╝ą░ Mailbox (CAN_MBRIF1).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_MBRIF1 čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.

ąĀąĖčü. 17-56. ąĀąĄą│ąĖčüčéčĆ 2 čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐čĆąĖąĄą╝ą░ Mailbox (CAN_MBRIF2).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_MBRIF2 čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C.
ąóą░ą▒ą╗ąĖčåą░ 17-8. ąĀąĄą│ąĖčüčéčĆčŗ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
ążčāąĮą║čåąĖčÅ |
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ |
| CAN_UCCNF |
Universal counter mode register (čĆąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░) |
ąæąĖčéčŗ 15:8 ąĖ ą▒ąĖčé 4 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ. |
| CAN_UCCNT |
Universal counter register (čĆąĄą│ąĖčüčéčĆ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░) |
ąĪčćąĖčéą░ąĄčé ą▓ą▓ąĄčĆčģ ąĖą╗ąĖ ą▓ąĮąĖąĘ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄąČąĖą╝ą░. |
| CAN_UCRC |
Universal counter reload/capture register (čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░/ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░) |
ąÆ čĆąĄąČąĖą╝ąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (timestamp mode) čüąŠą┤ąĄčƹȹĖčé ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ čāčüą┐ąĄčłąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čāčüą┐ąĄčłąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░. |

ąĀąĖčü. 17-57. ąĀąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ (CAN_UCCNF).

ąĀąĖčü. 17-58. ąĀąĄą│ąĖčüčéčĆ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ (CAN_UCCNT).

ąĀąĖčü. 17-59. ąĀąĄą│ąĖčüčéčĆ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ/ąĘą░čģą▓ą░čéą░ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ (CAN_UCRC).
ąóą░ą▒ą╗ąĖčåą░ 17-9. ąĀąĄą│ąĖčüčéčĆčŗ ąŠčłąĖą▒ą║ąĖ.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
ążčāąĮą║čåąĖčÅ |
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ |
| CAN_CEC |
CAN error counter register (čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ CAN) |
ąØąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ (bus-off mode), ąĮą░ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü (software reset). |
| CAN_ESR |
Error status register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ) |
ąĪąŠčģčĆą░ąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓ą░čÅ ąŠčłąĖą▒ą║ą░. ążą╗ą░ą│ SA0 ąŠčćąĖčēą░ąĄčéčüčÅ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝ ą▒ąĖč鹊ą╝ ąĮą░ čłąĖąĮąĄ CAN. |
| CAN_EWR |
CAN error counter warning level register (čĆąĄą│ąĖčüčéčĆ ą┐ąŠčĆąŠą│ą░ čüč湥čéčćąĖą║ąŠą▓, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ) |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąŠčĆąŠą│ 96. |

ąĀąĖčü. 17-60. ąĀąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ (CAN_CEC).
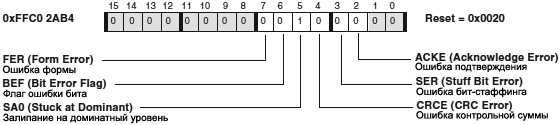
ąĀąĖčü. 17-61. ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčłąĖą▒ąŠą║ (CAN_ESR).
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_ESR čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā W1C.

ąĀąĖčü. 17-62. ąĀąĄą│ąĖčüčéčĆ čāčĆąŠą▓ąĮčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ (CAN_EWR).
[ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ]
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ CAN (ą╗ąĖčüčéąĖąĮą│ąĖ 17-2 .. 17-4) ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą░ą┐ą┐ą░čĆą░čéčāčĆčā CAN ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī čÅčēąĖą║ąĖ, ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÜą░ąČą┤čŗą╣ ąĖąĘ čŹčéąĖčģ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą║ąŠą┤ą░ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ą▓ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, #include < defBF537.h > ą┤ą╗čÅ ą┐čĆąŠąĄą║č鹊ą▓ čü ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ADSP-BF537).
ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā CAN, ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ CAN.
////////////////////////////////////////////////////////////////////////////
// ąøąĖčüčéąĖąĮą│ 17-2. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ CAN.
Initialize_CAN:
P0.H = HI(PORT_MUX); /* ąÆčŗą▓ąŠą┤čŗ CAN ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮčŗ čü ą┐ąŠčĆč鹊ą╝ J */
P0.L = LO(PORT_MUX);
R0 = PJCE_CAN(Z); /* ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤čŗ CAN TX/RX */
W[P0] = R0;
SSYNC;
/* ===================================================
** ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ CAN
**
** CAN_TIMING - SJW, TSEG2 ąĖ TSEG1 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ
** ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā:
** SJW Ōēż TSEG2 Ōēż TSEG1
**
** ===================================================
*/
P0.H = HI(CAN_TIMING);
P0.L = LO(CAN_TIMING);
R0 = 0x0334(Z); /* SJW = 3, TSEG2 = 3, TSEG1 = 4 */
W[P0] = R0;
SSYNC;
/* ===================================================
** CAN_CLOCK - ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ (BRP)
**
** ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ąĮčāąČąĮą░ čüą║ąŠčĆąŠčüčéčī CAN 500 kbps,
** čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčéą░ (tBIT) 2 ą╝ą║čü.
** ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ č乊čĆą╝čāą╗čŗ ąĖąĘ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ (čüą╝. čĆą░ąĘą┤ąĄą╗
** "ąĀą░ą▒ąŠčéą░ CAN -> ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčéą░") ą┤ą╗čÅ tBIT,
** ą▓čŗčćąĖčüą╗ąĖą╝ TQ:
**
** tBIT = TQ * (1 + (TSEG1 + 1) + (TSEG2 + 1))
** 2 ą╝ą║čü = TQ * (1 + (4 + 1) + (3 + 1))
** 2e-6 = TQ * (1 + 5 + 4)
** TQ = 2e-6 / 10
** TQ = 2e-7
**
** ąóąĄą┐ąĄčĆčī ą╝čŗ ąĘąĮą░ąĄą╝ ą║ą▓ą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ (TQ), ąŠčé ą║ąŠč鹊čĆąŠą│ąŠ
** ą╝ąŠąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ BRP ą┐ąŠ č乊čĆą╝čāą╗ąĄ ąĖąĘ
** čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ąĮą░čüčéčĆąŠą╣ą║ąĖ PLL
** ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą┤ą╗čÅ ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░
** ADSP-BF537 EZ-KIT, č鹊ą│ą┤ą░ čćą░čüč鹊čéą░ čüąĖčüč鹥ą╝ąĮąŠą╣
** čłąĖąĮčŗ (System Clock, SCLK) čĆą░ą▓ąĮą░ 50 ą£ąōčå:
**
** TQ = (BRP+1) / SCLK
** 2e-7 = (BRP+1) / 50e6
** (BRP+1) = 10
** BRP = 9
*/
P0.L = LO(CAN_CLOCK);
R0 = 9(Z);
W[P0] = R0;
SSYNC;
RTS;
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ CAN čüą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ, ąŠą▒ą╗ą░čüčéčī čĆąĄą│ąĖčüčéčĆąŠą▓ čÅčēąĖą║ąŠą▓ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░čüčéčĆąŠąĄąĮą░, ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮą░čüčéčĆąŠąĄąĮ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN.
////////////////////////////////////////////////////////////////////////
// ąøąĖčüčéąĖąĮą│ 17-3. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čÅčēąĖą║ąŠą▓.
CAN_Initialize_Mailboxes:
P0.H = HI(CAN_MD1); /* ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Mailbox */
P0.L = LO(CAN_MD1);
R0 = W[P0](Z);
BITCLR(R0, BITPOS(MD8)); /* ąŻčüčéą░ąĮąŠą▓ą║ą░ MB08 ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ */
BITSET(R0, BITPOS(MD9)); /* ąŻčüčéą░ąĮąŠą▓ą║ą░ MB09 ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ */
W[P0] = R0;
SSYNC;
/* ===================================================
** ąŚą░ą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠą▒ą╗ą░čüčéčī CAN Mailbox
**
** ą»čēąĖą║ 8 ą┐ąĄčĆąĄą┤ą░ąĄčé čü ID 0x411 ą┤ą░ąĮąĮčŗąĄ ąĖąĘ 4 ą▒ą░ą╣čé.
** ąæą░ą╣čéčŗ 0 ąĖ 1 čüąŠą┤ąĄčƹȹ░čé ąĘąĮą░č湥ąĮąĖąĄ 0xAABB. ąæą░ą╣čéčŗ 2
** ąĖ 3 ą▒čāą┤čāčé čüąŠą┤ąĄčƹȹ░čéčī ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą┤ą╗čÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░
** čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣.
**
** ą»čēąĖą║ 9 ą▒čāą┤ąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ čü ID 0x007.
** ===================================================
*/
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ Mailbox 8 ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ */
R0 = 0x411 << 2; /* ą¤ąŠą╝ąĄčüčéąĖčéčī ID čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ čüą╗ąŠčé */
P0.L = LO(CAN_MB_ID1(8)); /* ąöąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆčā ID1 čÅčēąĖą║ą░ 8 */
W[P0] = R0; /* ążčĆąĄą╣ą╝ remote ąĘą░ą┐čĆąĄčēąĄąĮ, ID ąĖąĘ 11 ą▒ąĖčé */
R0 = 0;
P0.L = LO(CAN_MB_ID0(8));
W[P0] = R0; /* ąÆ ą╝ą╗ą░ą┤čłąĖą╣ čĆąĄą│ąĖčüčéčĆ ID ą▓čŗą▓ąĄą┤ąĄą╝ 0 */
R0 = 4;
P0.L = LO(CAN_MB_LENGTH(8));
W[P0] = R0; /* DLC = 4 ą▒ą░ą╣čéą░ą╝ */
R0 = 0xAABB(Z);
P0.L = LO(CAN_MB_DATA3(8));
W[P0] = R0; /* Byte0 = 0xAA, Byte1 = 0xBB */
R0 = 1;
P0.L = LO(CAN_MB_DATA2(8));
W[P0] = R0; /* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüč湥čéčćąĖą║ą░ ą▓ 1 */
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ Mailbox 9 ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ */
R0 = 0x007 << 2; /* ą¤ąŠą╝ąĄčüčéąĖčéčī ID čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ čüą╗ąŠčé */
P0.L = LO(CAN_MB_ID1(9)); /* ąöąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆčā ID1 čÅčēąĖą║ą░ 9 */
W[P0] = R0; /* ążčĆąĄą╣ą╝ remote ąĘą░ą┐čĆąĄčēąĄąĮ, ID ąĖąĘ 11 ą▒ąĖčé */
R0 = 0;
P0.L = LO(CAN_MB_ID0(9));
W[P0] = R0; /* ąÆ ą╝ą╗ą░ą┤čłąĖą╣ čĆąĄą│ąĖčüčéčĆ ID ą▓čŗą▓ąĄą┤ąĄą╝ 0 */
SSYNC;
/* ąĀą░ąĘčĆąĄčłąĖčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čÅčēąĖą║ąĖ */
P0.L = LO(CAN_MC1);
R0 = W[P0](Z);
BITSET(R0, BITPOS(MC8)); /* ąĀą░ąĘčĆąĄčłąĖčéčī čÅčēąĖą║ 8 */
BITSET(R0, BITPOS(MC9)); /* ąĀą░ąĘčĆąĄčłąĖčéčī čÅčēąĖą║ 9 */
W[P0] = R0;
SSYNC;
RTS;
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čÅčēąĖą║ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░čüčéčĆąŠąĄąĮčŗ, ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠą│čāčé ąĘą░ą┐čĆą░čłąĖą▓ą░čéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN, ą▓čŗą▓ąŠą┤ąĖčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą┤ąĄą╗ą░ąĄčé ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ąĘą░č鹥ą╝ ąČą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN TX ąĖ CAN RX. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN_RX_HANDLER ąĖ CAN_TX_HANDLER ą▒čŗą╗ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ čüąĖčüč鹥ą╝ąĮąŠą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (system interrupt controller, SIC), ąĖ čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▒čŗą╗ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ SIC_IMASK.
////////////////////////////////////////////////////////////
// ąøąĖčüčéąĖąĮą│ 17-4. ą¤ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN
CAN_SetupIRQs_and_Transfer:
P0.H = HI(CAN_MBIM1);
P0.L = LO(CAN_MBIM1);
R0 = 0;
BITSET(R0, BITPOS(MBIM8)); /* ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ */
BITSET(R0, BITPOS(MBIM9)); /* ą┤ą╗čÅ čÅčēąĖą║ąŠą▓ 8 ąĖ 9 */
W[P0] = R0;
SSYNC;
/* ąÆčŗčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ CAN (ąŠčćąĖčüčéą║ąŠą╣ CCR) */
P0.L = LO(CAN_CONTROL);
R0 = W[P0](Z);
BITCLR(R0, BITPOS(CCR));
W[P0] = R0;
P0.L = LO(CAN_STATUS);
/* ą×ąČąĖą┤ą░ąĮąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ CAN (CCA) */
WAIT_FOR_CCA_TO_CLEAR:
R1 = W[P0](Z);
CC = BITTST (R1, BITPOS(CCA));
IF CC JUMP WAIT_FOR_CCA_TO_CLEAR;
P0.L = LO(CAN_TRS1);
R0 = TRS8; /* ąŚą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ čÅčēąĖą║ą░ 8 */
W[P0] = R0; /* ąÆčŗą┤ą░čéčī ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ */
SSYNC;Wait_Here_For_IRQs:
NOP;
NOP;
NOP;
JUMP Wait_Here_For_IRQs;
/* ===================================================
** CAN_TX_HANDLER (ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ)
**
** ISR ąŠčćąĖčēą░ąĄčé ąĘą░ą┐čĆąŠčü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅčēąĖą║ą░ 8, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé
** ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ, ąĖ ą┤ąĄą╗ą░ąĄčé ąĘą░ą┐čĆąŠčü
** ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ.
** ===================================================
*/
CAN_TX_HANDLER:
[--SP] = (R7:6, P5:5); /* ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ */
[--SP] = ASTAT;
P5.H = HI(CAN_MBTIF1);
P5.L = LO(CAN_MBTIF1);
R7 = MBTIF8;
W[P5] = R7; /* ą×čćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅčēąĖą║ą░ 8 */
P5.L = LO(CAN_MB_DATA2(8));
R7 = W[P5](Z); /* ą¤ąŠą╗čāč湥ąĮąĖąĄ čĆą░ąĮąĄąĄ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ */
R6 = 0xFF; /* ą£ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖąĄ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą╝ą╗ą░ą┤čłąĄą│ąŠ */
R6 = R6 & R7; /* ąæą░ą╣čé ą┤ą╗čÅ ą┐ąĄčĆąĄąĮąŠčüą░ */
R5 = 0xFF; /* ą¤čĆąŠą▓ąĄčĆą║ą░ ą┐ąĄčĆąĄąĮąŠčüą░ */
CC = R6 == R5; /* ą¤čĆąŠą▓ąĄčĆą║ą░: ą▒čŗą╗ ą╗ąĖ ą┐ąĄčĆąĄąĮąŠčü ąĖąĘ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░? */
IF CC JUMP HANDLE_COUNT_WRAP;
R7 += 1; /* ąØąĄčé ą┐ąĄčĆąĄąĮąŠčüą░, ąĖąĮą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ą░ */
JUMP PREPARE_TO_SEND;
HANDLE_COUNT_WRAP:
R6 = 0xFF00(Z); /* ą£ą░čüą║ąĖčĆąŠą▓ą░čéčī ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé */
R7 = R7 & R6; /* ąŻčüčéą░ąĮąŠą▓ąĖčéčī ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé ą▓ 0 */
R6 = 0x0100(Z); /* ąśąĮą║čĆąĄą╝ąĄąĮčé ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čüčéą░čĆčłąĄąĮąŠ ą▒ą░ą╣čéą░ */
R7 = R7 + R6; /* ąśąĮą║čĆąĄą╝ąĄąĮčé čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ */
PREPARE_TO_SEND:
W[P5] = R7; /* ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮąŠą▓čŗčģ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ */
P5.L = LO(CAN_TRS1);
R7 = TRS8;
W[P5] = R7; /* ąÆčŗą┤ą░čéčī ąĮąŠą▓čŗą╣ ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā */
ASTAT = [SP++]; /* ąÆąŠčüčüčéą░ąĮąŠą▓ąĖčéčī ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čĆąĄą│ąĖčüčéčĆčŗ */
(R7:6, P5:5) = [SP++];
SSYNC;
RTI;
/* ===================================================
** CAN_RX_HANDLER (ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░)
**
** ISR ąŠčćąĖčēą░ąĄčé ąĘą░ą┐čĆąŠčü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čÅčēąĖą║ą░ MB9,
** čüąŠčģčĆą░ąĮčÅąĄčé ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
** ===================================================
*/
CAN_RX_HANDLER:
[--SP] = (R7:7, P5:4); /* ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ */
[--SP] = ASTAT;
P4.H = HI(CAN_RX_WORD); /* ąŻčüčéą░ąĮąŠą▓ą║ą░ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čģčĆą░ąĮąĖą╗ąĖčēąĄ */
P4.L = LO(CAN_RX_WORD);
P5.H = HI(CAN_MBRIF1);
P5.L = LO(CAN_MBRIF1);
R7 = MBRIF9;
W[P5] = R7; /* ą×čćąĖčüčéą║ą░ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅčēąĖą║ą░ 9 */
P5.L = LO(CAN_MB_DATA3(9));
R7 = W[P5](Z); /* ą¦č鹥ąĮąĖąĄ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖąĘ čÅčēąĖą║ą░ */
W[P4] = R7; /* ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéčī */
ASTAT = [SP++]; /* ąÆąŠčüčüčéą░ąĮąŠą▓ąĖčéčī ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čĆąĄą│ąĖčüčéčĆčŗ */
(R7:7, P5:4) = [SP++];
SSYNC;
RTI;
[ąĪčüčŗą╗ą║ąĖ]
1. ADSP-BF50x Blackfin® Processor Hardware Reference site:analog.com.
2. CANopen ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ Blackfin ADSP-BF504F.
3. CAN Bit Time Calculation. |



