ąÆ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ ADSP-BF538 ąĖą╝ąĄąĄčéčüčÅ ą┤ą▓ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ą▓čāčģą┐čĆąŠą▓ąŠą┤ąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (two-wire interface, TWI ), ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ąŠą▒ą╝ąĄąĮą░ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ čüčéą░ąĮą┤ą░čĆčéą░ Inter IC (I2C ), ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ Philips I2C Bus Specification ą▓ąĄčĆčüąĖąĖ 2.1, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮąŠą╝ ą▓ čÅąĮą▓ą░čĆąĄ 2000 ą│.
ąÜą░ąČą┤čŗą╣ ąĖąĘ čŹčéąĖčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ TWI ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą╝ąĄčüčéąĖą╝ čü čłąĖčĆąŠą║ąŠ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĮčŗą╝ čüčéą░ąĮą┤ą░čĆč鹊ą╝ čłąĖąĮčŗ I2C. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ TWI ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ, čćč鹊 ą┤ą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ multimaster (ąĮąĄčüą║ąŠą╗čīą║ąŠ ą│ą╗ą░ą▓ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ ąŠą┤ąĮąŠą╣ čłąĖąĮąĄ) ąĖ multislave (ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ, čüą░ą╝ą░čÅ čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ I2C). ą¦č鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ TWI ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ąĮą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čć čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖ čćč鹥ąĮąĖąĖ ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ. ą×ą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ I2C.
ąÜą░ąČą┤čŗą╣ ąĖąĘ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ TWI ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ąŠą▒ą╝ąĄąĮ 8-ą▒ąĖčéąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ čłąĖąĮčŗ I2C. ąĪčéą░ąĮą┤ą░čĆčé Philips I2C Bus Specification ą▓ąĄčĆčüąĖąĖ 2.1 ąŠčģą▓ą░čéčŗą▓ą░ąĄčé ą╝ąĮąŠą│ąŠ ą▓ą░čĆąĖą░ąĮč鹊ą▓ I2C. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ TWI ą▓ą║ą╗čÄčćą░čÄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖąĘ čŹčéąĖčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣:
ŌĆó ą×ą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ą░čģ master (ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ) ąĖ slave (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ) ą▓ čüąĖčüč鹥ą╝ą░čģ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 20-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čŗą▓ąŠą┤čŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ TWI. ąöą▓ą░ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓čŗą▓ąŠą┤ą░ čā ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čłąĖąĮąĄ I2C. ążąĖąĘąĖč湥čüą║ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąŠč湥ąĮčī ą┐čĆąŠčüčé, ąĖ ą║čĆąŠą╝ąĄ ą▓ąĄčĆčģąĮąĖčģ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓, ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ ąĮąĖą║ą░ą║ąĖčģ ą▓ąĮąĄčłąĮąĖčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ ąĖą╗ąĖ ą╗ąŠą│ąĖč湥čüą║ąĖčģ čüčģąĄą╝.
ąóą░ą▒ą╗ąĖčåą░ 20-1. ąØąŠąČą║ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ TWI ą║ąŠčĆą┐čāčüą░ BC-316 (CSP_BGA) ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF538.
ąÆčŗą▓ąŠą┤ ą©ą░čĆąĖą║ ążčāąĮą║čåąĖčÅ
SCL0
B9 ąĪąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓
SDA0
B10 ąĪąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ
SCL1
Y15 ąĪąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓
SDA1
Y16 ąĪąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ
[ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ]
ąĀąĖčü. 20-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠą▒čēčāčÄ ą░čĆčģąĖč鹥ą║čéčāčĆčā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ TWI. ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ 16-ą▒ąĖčéąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒čĆą░čēąĄąĮąĖčÅ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ TWI ąĖ ąĄą│ąŠ ą▒čāč乥čĆą░ą╝ FIFO ą┐čĆąĖ ąŠą┐ąĄčĆą░čåąĖčÅčģ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┐ąŠ čłąĖąĮąĄ I2C.
ąĀąĖčü. 20-1. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI.
ąæą╗ąŠą║ čĆąĄą│ąĖčüčéčĆąŠą▓ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüąŠčüč鹊čÅąĮąĖčÅ, ąĖ ąŠčéčĆą░ąČą░ąĄčé č鹊, čćč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ ąĖą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮąŠ, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą╝ąŠą┤ąĄą╗čīčÄ. ąæąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠą│čāčé ąŠą▒ąĮąŠą▓ą╗čÅčéčīčüčÅ čüą▓ąŠąĖą╝ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╝ąĖ ą▒ą╗ąŠą║ą░ą╝ąĖ.
ąæčāč乥čĆ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ąŠą┤ąĮąŠą▒ą░ą╣čéąĮčŗą╣ čü ą│ą╗čāą▒ąĖąĮąŠą╣ 2 čÅč湥ą╣ą║ąĖ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ FIFO ąĖ ąŠą┤ąĮąŠą▒ą░ą╣čéąĮčŗą╣ čü ą│ą╗čāą▒ąĖąĮąŠą╣ 2 čÅč湥ą╣ą║ąĖ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ FIFO.
ąĀąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓čŗą┤ą▓ąĖą│ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čćąĖą┐ą░. ąÆčŗą▓ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖą╣, ąĖą╗ąĖ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą╝ąĄąĮąĄąĮąŠ ą▓čĆčāčćąĮčāčÄ.
ąĀąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐čĆąĖąĄą╝ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ, ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ čüąĮą░čĆčāąČąĖ. ą©ąĖčĆąĖąĮą░ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ 1 ą▒ą░ą╣čé, ąĖ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą╗ąĖą▒ąŠ ą▓ ą▒čāč乥čĆ FIFO, ą╗ąĖą▒ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ ą░ą┤čĆąĄčüą░.
ąæą╗ąŠą║ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ą░ą┤čĆąĄčüą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüčĆą░ą▓ąĮąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą▓ čüąŠą▒čŗčéąĖąĖ ą╝ąŠą┤čāą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI, ą║ąŠą│ą┤ą░ ą║ ąĮąĄą╝čā ąŠą▒čĆą░čēą░čÄčéčüčÅ ą║ą░ą║ ą║ slave-čāčüčéčĆąŠą╣čüčéą▓čā (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ I2C).
ąæą╗ąŠą║ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ 10 ą£ąōčå ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥. ąŁčéą░ ąŠą┐ąŠčĆąĮą░čÅ čćą░čüč鹊čéą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┤ą░ąĮąĮčŗčģ ąĖ čüąŠą▒čŗčéąĖą╣ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą║ąŠč鹊čĆčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą┤ą░čéą░čłąĖčéą░ (čüą╝. čüčéą░ąĮą┤ą░čĆčé Philips), ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ SCL.
ą£ąŠą┤čāą╗čī ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ SCL, ą║ąŠą│ą┤ą░ TWI čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ master. ąÆ čŹč鹊ą╝ ą╝ąŠą┤čāą╗ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓čüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░čÅ ą╗ąŠą│ąĖą║ą░ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ čüąĖčüč鹥ą╝čŗ multimaster, ąĖ ą┤ą╗čÅ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖčÅ ą╗ąŠą│. 0 čéą░ą║č鹊ą▓, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ slave.
[ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ]
ąÆ ą║ą░ąČą┤ąŠą╝ ąĖąĘ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ TWI ąĖą╝ąĄąĄčéčüčÅ 16 čĆąĄą│ąĖčüčéčĆąŠą▓, ąŠą┐ąĖčüą░ąĮąĮčŗčģ ą▓ąŠ ą▓čĆąĄąĘą║ą░čģ ąĮąĖąČąĄ. ąæčāą║ą▓ą░ x ą▓ ąĖą╝ąĄąĮą░čģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ 0 ąĖą╗ąĖ 1 ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą║ ą║ą░ą║ąŠą╝čā ąĖąĘ ą┤ą▓čāčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ TWI čĆąĄą│ąĖčüčéčĆ ąŠčéąĮąŠčüąĖčéčüčÅ. ąÆ čüąĖčüč鹥ą╝ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ VisualDSP++ ąĖą╝ąĄąĮą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Blackfin ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ą░čģ, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ Blackfin\include. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą░ą┤čĆąĄčüąŠą▓ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ąĮą░ ąĮąĖčģ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF538 ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čäą░ą╣ą╗ą░čģ defBF538.h ąĖ cdefBF538.h.
[ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ defBF538.h ]
/* Two-Wire Interface 0 (0xFFC01400 - 0xFFC014FF) */ #define TWI0_CLKDIV 0xFFC01400 /* Serial Clock Divider Register */ #define TWI0_CONTROL 0xFFC01404 /* TWI0 Master Internal Time Reference Register */ #define TWI0_SLAVE_CTRL 0xFFC01408 /* Slave Mode Control Register */ #define TWI0_SLAVE_STAT 0xFFC0140C /* Slave Mode Status Register */ #define TWI0_SLAVE_ADDR 0xFFC01410 /* Slave Mode Address Register */ #define TWI0_MASTER_CTRL 0xFFC01414 /* Master Mode Control Register */ #define TWI0_MASTER_STAT 0xFFC01418 /* Master Mode Status Register */ #define TWI0_MASTER_ADDR 0xFFC0141C /* Master Mode Address Register */ #define TWI0_INT_STAT 0xFFC01420 /* TWI0 Master Interrupt Register */ #define TWI0_INT_MASK 0xFFC01424 /* TWI0 Master Interrupt Mask Register */ #define TWI0_FIFO_CTRL 0xFFC01428 /* FIFO Control Register */ #define TWI0_FIFO_STAT 0xFFC0142C /* FIFO Status Register */ #define TWI0_XMT_DATA8 0xFFC01480 /* FIFO Transmit Data Single Byte Register */ #define TWI0_XMT_DATA16 0xFFC01484 /* FIFO Transmit Data Double Byte Register */ #define TWI0_RCV_DATA8 0xFFC01488 /* FIFO Receive Data Single Byte Register */ #define TWI0_RCV_DATA16 0xFFC0148C /* FIFO Receive Data Double Byte Register */
/* Two-Wire Interface 1 (0xFFC02200 - 0xFFC022FF) */ #define TWI1_CLKDIV 0xFFC02200 /* Serial Clock Divider Register */ #define TWI1_CONTROL 0xFFC02204 /* TWI1 Master Internal Time Reference Register */ #define TWI1_SLAVE_CTRL 0xFFC02208 /* Slave Mode Control Register */ #define TWI1_SLAVE_STAT 0xFFC0220C /* Slave Mode Status Register */ #define TWI1_SLAVE_ADDR 0xFFC02210 /* Slave Mode Address Register */ #define TWI1_MASTER_CTRL 0xFFC02214 /* Master Mode Control Register */ #define TWI1_MASTER_STAT 0xFFC02218 /* Master Mode Status Register */ #define TWI1_MASTER_ADDR 0xFFC0221C /* Master Mode Address Register */ #define TWI1_INT_STAT 0xFFC02220 /* TWI1 Master Interrupt Register */ #define TWI1_INT_MASK 0xFFC02224 /* TWI1 Master Interrupt Mask Register */ #define TWI1_FIFO_CTRL 0xFFC02228 /* FIFO Control Register */ #define TWI1_FIFO_STAT 0xFFC0222C /* FIFO Status Register */ #define TWI1_XMT_DATA8 0xFFC02280 /* FIFO Transmit Data Single Byte Register */ #define TWI1_XMT_DATA16 0xFFC02284 /* FIFO Transmit Data Double Byte Register */ #define TWI1_RCV_DATA8 0xFFC02288 /* FIFO Receive Data Single Byte Register */ #define TWI1_RCV_DATA16 0xFFC0228C /* FIFO Receive Data Double Byte Register */
[ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ cdefBF538.h ]
/* Two-Wire Interface 0 */ #define pTWI0_CLKDIV ((volatile unsigned short *)TWI0_CLKDIV) #define pTWI0_CONTROL ((volatile unsigned short *)TWI0_CONTROL) #define pTWI0_SLAVE_CTRL ((volatile unsigned short *)TWI0_SLAVE_CTRL) #define pTWI0_SLAVE_STAT ((volatile unsigned short *)TWI0_SLAVE_STAT) #define pTWI0_SLAVE_ADDR ((volatile unsigned short *)TWI0_SLAVE_ADDR) #define pTWI0_MASTER_CTRL ((volatile unsigned short *)TWI0_MASTER_CTRL) #define pTWI0_MASTER_STAT ((volatile unsigned short *)TWI0_MASTER_STAT) #define pTWI0_MASTER_ADDR ((volatile unsigned short *)TWI0_MASTER_ADDR) #define pTWI0_INT_STAT ((volatile unsigned short *)TWI0_INT_STAT) #define pTWI0_INT_MASK ((volatile unsigned short *)TWI0_INT_MASK) #define pTWI0_FIFO_CTRL ((volatile unsigned short *)TWI0_FIFO_CTRL) #define pTWI0_FIFO_STAT ((volatile unsigned short *)TWI0_FIFO_STAT) #define pTWI0_XMT_DATA8 ((volatile unsigned short *)TWI0_XMT_DATA8) #define pTWI0_XMT_DATA16 ((volatile unsigned short *)TWI0_XMT_DATA16) #define pTWI0_RCV_DATA8 ((volatile unsigned short *)TWI0_RCV_DATA8) #define pTWI0_RCV_DATA16 ((volatile unsigned short *)TWI0_RCV_DATA16)
/* Two-Wire Interface 1 */ #define pTWI1_CLKDIV ((volatile unsigned short *)TWI1_CLKDIV) #define pTWI1_CONTROL ((volatile unsigned short *)TWI1_CONTROL) #define pTWI1_SLAVE_CTRL ((volatile unsigned short *)TWI1_SLAVE_CTRL) #define pTWI1_SLAVE_STAT ((volatile unsigned short *)TWI1_SLAVE_STAT) #define pTWI1_SLAVE_ADDR ((volatile unsigned short *)TWI1_SLAVE_ADDR) #define pTWI1_MASTER_CTRL ((volatile unsigned short *)TWI1_MASTER_CTRL) #define pTWI1_MASTER_STAT ((volatile unsigned short *)TWI1_MASTER_STAT) #define pTWI1_MASTER_ADDR ((volatile unsigned short *)TWI1_MASTER_ADDR) #define pTWI1_INT_STAT ((volatile unsigned short *)TWI1_INT_STAT) #define pTWI1_INT_MASK ((volatile unsigned short *)TWI1_INT_MASK) #define pTWI1_FIFO_CTRL ((volatile unsigned short *)TWI1_FIFO_CTRL) #define pTWI1_FIFO_STAT ((volatile unsigned short *)TWI1_FIFO_STAT) #define pTWI1_XMT_DATA8 ((volatile unsigned short *)TWI1_XMT_DATA8) #define pTWI1_XMT_DATA16 ((volatile unsigned short *)TWI1_XMT_DATA16) #define pTWI1_RCV_DATA8 ((volatile unsigned short *)TWI1_RCV_DATA8) #define pTWI1_RCV_DATA16 ((volatile unsigned short *)TWI1_RCV_DATA16)
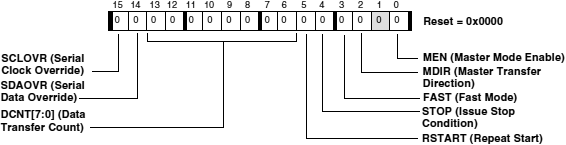
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ TWI (TWIx_CONTROL), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-2, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą╝ąŠą┤čāą╗čÅ TWI, ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘąĖ ą╝ąĄąČą┤čā čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ (SCLK) ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠą▒čŗčéąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI. ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ąŠą┐ąŠčĆąĮą░čÅ čćą░čüč鹊čéą░ TWI ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĖąĘ SCLK čü ą┐ąŠą╝ąŠčēčīčÄ ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░.
ąĀąĖčü. 20-2. TWI Control Register.
ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ TWIx_CONTROL:
ŌĆó SCCB Compatibility (SCCB).
ąĀąĄąČąĖą╝ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ SCCB čŹč鹊 ąŠą┐čåąĖčÅ, ąĖ ąŠą▒čŗčćąĮąŠ ąŠąĮą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĮą░ čłąĖąĮąĄ I2C. ążčāąĮą║čåąĖčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ SCCB ą┤ąŠą┐čāčüčéąĖą╝ą░ č鹊ą╗čīą║ąŠ ą▓ čüąĖčéčāą░čåąĖčÅčģ, ą║ąŠą│ą┤ą░ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čłąĖąĮą░ čüčéą░ąĮą┤ą░čĆčéą░ SCCB ą▓ čĆąĄąČąĖą╝ąĄ master. ą¤ąĄčĆąĄą┤ą░čć čĆąĄąČąĖą╝ą░ slave čüą╗ąĄą┤čāąĄčé ąĖąĘą▒ąĄą│ą░čéčī, ą║ąŠą│ą┤ą░ čŹčéą░ čäčāąĮą║čåąĖčÅ čĆą░ąĘčĆąĄčłąĄąĮą░, ą┐ąŠč鹊ą╝čā čćč鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą▓ čĆąĄąČąĖą╝ąĄ slave ą▓čüąĄą│ą┤ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (ACK).
1: ą┐ąĄčĆąĄą┤ą░čćąĖ Master čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čü SCCB. ąŁčéąĖą╝ ą╝ą░čüč鹥čĆąŠą╝ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ ą▓čüąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ą▓čŗčüčéą░ą▓ą╗čÅčÄčé ą▒ąĖčéčŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ.
ŌĆó TWI Enable (TWIx_ENA).
ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ slave ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ master. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī čŹč鹊čé ą▒ąĖčé ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ ąĖ čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ąŠčüčī ą▓čĆąĄą╝čÅ PRESCALE. ąŁč鹊 ą▒čāą┤ąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą╗ąŠą│ąĖą║ąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ąĮčÅč鹊čüčéąĖ čłąĖąĮčŗ (bus busy detection).
1: čĆą░ąĘčĆąĄčłąĄąĮą░ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ąŠą┐ąŠčĆąĮą░čÅ čćą░čüč鹊čéą░. ą×ą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ čĆąĄąČąĖą╝ąŠą▓ slave ąĖ master.
ŌĆó Prescale (PRESCALE).
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĖąŠą┤ąŠą▓ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ (SCLK), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ TWI. ąŚąĮą░č湥ąĮąĖąĄ PRESCALE ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ č乊čĆą╝ąĖčĆąŠą▓ą░ą╗ąĖčüčī ąŠą┐ąŠčĆąĮčŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ čü čćą░čüč鹊č鹊ą╣ 10 ą£ąōčå. ąŚąĮą░č湥ąĮąĖąĄ PRESCALE ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ą║ą░ą║ 7-čĆą░ąĘčĆčÅą┤ąĮąŠąĄ ą┤ą▓ąŠąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
ąØąĄ ą▓čüąĄą│ą┤ą░ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī č鹊čćąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čćą░čüč鹊čéčā TWI 10 ą£ąōčå. ąÆ čéą░ą║ąĖčģ čüą╗čāčćą░čÅčģ ą╝ąŠąČąĮąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ąŠą║čĆčāą│ą╗ąĖčéčī ą▓ą▓ąĄčĆčģ ą▓ąĄą╗ąĖčćąĖąĮčā PRESCALE, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĄą│ąŠ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄąĄ ą▒ąŠą╗čīčłąĄąĄ čåąĄą╗ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čćą░čüč鹊čéą░ SCLK čĆą░ą▓ąĮą░ 133 ą£ąōčå, ą▓ąĄą╗ąĖčćąĖąĮą░ PRESCALE ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą║ą░ą║ 133 ą£ąōčå / 10 ą£ąōčå = 13.3. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĘąĮą░č湥ąĮąĖąĄ PRESCALE = 14 ą▒čāą┤ąĄčé čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī ą▓čüąĄą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÆ čĆąĄąČąĖą╝ąĄ master ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ SCL (TWIx_CLKDIV) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüč鹥ą╣ ą╗ąŠą│. 1 ąĖ ą╗ąŠą│. 0 čéą░ą║č鹊ą▓ SCL (čüą╝. čĆąĖčü. 20-3). ą¦ą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ ą╝ąŠą│čāčé ą╝ąĄąĮčÅčéčīčüčÅ ąŠčé 400 ą║ąōčå ą┤ąŠ ą╝ąĄąĮąĄąĄ č湥ą╝ 20 ą║ąōčå. ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ čéą░ą║č鹊ą▓ čüąŠčüčéą░ą▓ą╗čÅąĄčé 100 ąĮčü (ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊ą╣ TWI 10 ą£ąōčå).
CLKDIV = ą┐ąĄčĆąĖąŠą┤ TWIx SCL / ą┐ąĄčĆąĖąŠą┤ 10 ą£ąōčå
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čćą░čüč鹊čéčŗ SCL 400 ą║ąōčå (ą┐ąĄčĆąĖąŠą┤ = 1/400 ą║ąōčå = 2500 ąĮčü) ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ 10 ą£ąōčå (ą┐ąĄčĆąĖąŠą┤ = 100 ąĮčü):
CLKDIV = 2500 ąĮčü / 100 ąĮčü = 25
ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čüą║ą▓ą░ąČąĮąŠčüčéčī čćą░čüč鹊čéčŗ SCL 30%, ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī CLKLOW = 17 ąĖ CLKHI = 8. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 CLKLOW ąĖ CLKHI ą▓ čüčāą╝ą╝ąĄ ą┤ą░čÄčé CLKDIV (CLKLOW + CLKHI = 17 + 8 = 25).
ąĀąĖčü. 20-3. TWI Clock Divider Register.
ŌĆó Clock High (CLKHI).
ąÆ čŹč鹊ą╝ ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ 10 ą£ąōčå, ą▓ č鹥č湥ąĮąĖąĄ ą║ąŠč鹊čĆčŗčģ SCL ąŠčüčéą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1 ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ ą╗ąŠą│. 0. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 TWI čĆą░ą▒ąŠčéą░ąĄčé ą▓ čüąĖčüč鹥ą╝ąĄ čü ąŠą┤ąĮąĖą╝ ą╝ą░čüč鹥čĆąŠą╝ čłąĖąĮčŗ. CLKHI ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ą║ą░ą║ 8-ą▒ąĖčéąĮą░čÅ ą┤ą▓ąŠąĖčćąĮą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░.
ŌĆó Clock Low (CLKLO).
ąÆ čŹč鹊ą╝ ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ 10 ą£ąōčå, ą▓ č鹥č湥ąĮąĖąĄ ą║ąŠč鹊čĆčŗčģ SCL čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0 (čāą┤ąĄčƹȹ░ąĮąĖąĄ ą▓ ą╗ąŠą│. 0 čŹč鹊 čüą┐ąŠčüąŠą▒ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ slave, ą║ąŠč鹊čĆčŗą╝ ąŠąĮ čüąŠąŠą▒čēą░ąĄčé ąŠ čüą▓ąŠąĄą╣ ąĮąĄą│ąŠč鹊ą▓ąĮąŠčüčéąĖ). CLKLO ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ą║ą░ą║ 8-ą▒ąĖčéąĮą░čÅ ą┤ą▓ąŠąĖčćąĮą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░.
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄąČąĖą╝ąŠą╝ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ TWI (TWIx_SLAVE_CTRL), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-4, čāą┐čĆą░ą▓ą╗čÅąĄčé ą╗ąŠą│ąĖą║ąŠą╣, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü čĆąĄąČąĖą╝ąŠą╝ čĆą░ą▒ąŠčéčŗ slave. ąØą░čüčéčĆąŠą╣ą║ąĖ ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ ąĮąĄ ą▓ą╗ąĖčÅčÄčé ąĮą░ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ master, ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝ čĆąĄąČąĖą╝ą░ master.
ąĀąĖčü. 20-4. TWI Slave Mode Control Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_SLAVE_CTRL:
ŌĆó General Call Enable (GEN).
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą░ą┤čĆąĄčüą░ ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░ ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ slave.
1: čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą░ą┤čĆąĄčüą░ ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░, ą┐čĆąĖ čŹč鹊ą╝ ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░ (general call). ą×ą▒ąĮąŠą▓čÅčéčüčÅ ą▓čüąĄ ą▒ąĖčéčŗ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ.
ŌĆó NAK (NAK).
1: ąĮą░ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ slave ą▒čāą┤čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī data NAK (ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, not acknowledge). Slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čüąĄ ąĄčēąĄ čüčćąĖčéą░ąĄčéčüčÅ ą░ą┤čĆąĄčüąŠą▓ą░ąĮąĮčŗą╝.
ŌĆó Slave Transmit Data Valid (STDVAL).
1: ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ slave-ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╝ FIFO.
ŌĆó Slave Enable (SEN).
1: ąĀą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ slave. ąĀą░ąĘčĆąĄčłąĄąĮąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖ ą║ąŠąĮą║čāčĆąĄąĮčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąČąĖą╝čŗ slave ąĖ master.
ąĀąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (TWIx_SLAVE_ADDR), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-5, čģčĆą░ąĮąĖčé ą░ą┤čĆąĄčü, ą║ąŠč鹊čĆčŗą╣ čĆą░čüą┐ąŠąĘąĮą░ąĄčéčüčÅ ąĮą░ čłąĖąĮąĄ ą▓ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ slave. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI čüčĆą░ą▓ąĮąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čü ą┐čĆąĖąĮčÅčéčŗą╝ ą░ą┤čĆąĄčüąŠą╝ ą▓ąŠ ą▓čĆąĄą╝čÅ čäą░ąĘčŗ ą░ą┤čĆąĄčüą░čåąĖąĖ I2C.
ąĀąĖčü. 20-5. TWI Slave Mode Address Register.
ąÆąŠ ą▓čĆąĄą╝čÅ ąĖ ą┐čĆąĖ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čć čĆąĄąČąĖą╝ą░ slave čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ (TWIx_SLAVE_STAT) čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ č鹥ą║čāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░č湥 (čüą╝. čĆąĖčü. 20-6). ąæąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ čĆąĄąČąĖą╝ą░ slave ąĮąĄ čüą▓čÅąĘą░ąĮčŗ čü ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąĀą░ą▒ąŠčéą░ ą▓ čĆąĄąČąĖą╝ąĄ master ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą▒ąĖčéčŗ TWIx_SLAVE_STAT.
ąĀąĖčü. 20-6. TWI Slave Mode Status Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_SLAVE_STAT:
ŌĆó General Call (GCALL).
ąŁč鹊čé ą▒ąĖčé ąŠčćąĖčüčéąĖčéčüčÅ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ, ąĄčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ čĆąĄąČąĖą╝ slave (SEN = 0).
1: ą▓ ą╝ąŠą╝ąĄąĮčé ą░ą┤čĆąĄčüą░čåąĖąĖ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą░ą┤čĆąĄčü ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░ (general call).
ŌĆó Slave Transfer Direction (SDIR).
ąŁč鹊čé ą▒ąĖčé ąŠčćąĖčüčéąĖčéčüčÅ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ, ąĄčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ čĆąĄąČąĖą╝ slave (SEN = 0).
1: ą▓ ą╝ąŠą╝ąĄąĮčé ą░ą┤čĆąĄčüą░čåąĖąĖ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ slave-ą┐ąĄčĆąĄą┤ą░čćąĖ (ą▒ąĖčé R/W ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą╗ąŠą│. 0).
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄąČąĖą╝ąŠą╝ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (TWIx_MASTER_CTRL) čāą┐čĆą░ą▓ą╗čÅąĄčé ą╗ąŠą│ąĖą║ąŠą╣, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü čĆąĄąČąĖą╝ąŠą╝ čĆą░ą▒ąŠčéčŗ master (čüą╝. čĆąĖčü. 20-7.) ąæąĖčéčŗ ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ąĮąĄ ą▓ą╗ąĖčÅčÄčé ąĮą░ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ slave, ąĖ ąŠąĮąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ čĆąĄąČąĖą╝ą░ slave.
ąĀąĖčü. 20-7. TWI Master Mode Control Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_MASTER_CTRL:
ŌĆó Serial Clock Override (SCLOVR).
ąŁč鹊čé ą▒ąĖčé ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ą║ąŠą│ą┤ą░ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆčÅą╝ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╗ąĖąĮąĖąĄą╣ čéą░ą║č鹊ą▓. ą×ą▒čŗčćąĮčŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ master ąĖ slave ąĮąĄ ą┤ąŠą╗ąČąĄąĮ čéčĆąĄą▒ąŠą▓ą░čéčī ąŠčéą╝ąĄąĮčŗ čĆą░ą▒ąŠčéčŗ čéą░ą║č鹊ą▓.
1: ą▓čŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ 0, ąŠčéą╝ąĄąĮčÅčÅ čĆą░ą▒ąŠčéčā ą▓čüąĄą╣ ą┤čĆčāą│ąŠą╣ ą╗ąŠą│ąĖą║ąĖ. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčīčüčÅ ą┤ąŠ ąŠčćąĖčüčéą║ąĖ ą▒ąĖčéą░ SCLOVR. ąĀą░čüčéčÅąČą║ą░ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 0 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ąŠ čüą▓ąŠąĄą╣ ąĘą░ąĮčÅč鹊čüčéąĖ.
ŌĆó Serial Data (SDA) Override (SDAOVR).
ąŁč鹊čé ą▒ąĖčé ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ą║ąŠą│ą┤ą░ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆčÅą╝ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╗ąĖąĮąĖąĄą╣ ą┤ą░ąĮąĮčŗčģ. ą×ą▒čŗčćąĮčŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ master ąĖ slave ąĮąĄ ą┤ąŠą╗ąČąĄąĮ čéčĆąĄą▒ąŠą▓ą░čéčī ąŠčéą╝ąĄąĮčŗ čĆą░ą▒ąŠčéčŗ ą┤ą░ąĮąĮčŗčģ.
1: ą▓čŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 0, ąŠčéą╝ąĄąĮčÅčÅ čĆą░ą▒ąŠčéčā ą▓čüąĄą╣ ą┤čĆčāą│ąŠą╣ ą╗ąŠą│ąĖą║ąĖ. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčīčüčÅ ą┤ąŠ ąŠčćąĖčüčéą║ąĖ ą▒ąĖčéą░ SDAOVR.
ŌĆó Data Transfer Count (DCNT).
ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. DCNT ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą╝ąĄčĆąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ą░ąČą┤ąŠą│ąŠ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ (ą▒ą░ą╣čéą░) DCNT. ąÜąŠą│ą┤ą░ DCNT ą┤ąŠčüčéąĖą│ą░ąĄčé 0, ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąĖą│ąĮą░ą╗ Stop. ąŻčüčéą░ąĮąŠą▓ą║ą░ DCNT ą▓ 0xFF ąĘą░ą┐čĆąĄčēą░ąĄčé čŹč鹊čé čüč湥čéčćąĖą║. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą┐čāčüčéąĖčéčüčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ STOP.
ŌĆó Repeat Start (RSTART).
1: ą▓čŗą┤ą░čéčī ą┐ąŠą▓č鹊čĆąĮčŗą╣ čüąĖą│ąĮą░ą╗ čüčéą░čĆčé (repeat start condition) ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ č鹥ą║čāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (DCNT = 0), ąĖ ąĮą░čćą░čéčī ąĮąŠą▓čāčÄ ą┐ąĄčĆąĄą┤ą░čćčā. ąóąĄą║čāčēą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ čü ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąĢčüą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ąŠąĘąĮąĖą║ą╗ą░ ąŠčłąĖą▒ą║ą░, repeat start ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé. ą¤čĆąĖ ąŠčéčüčāčéčüčéą▓ąĖąĖ ą╗čÄą▒čŗčģ ąŠčłąĖą▒ąŠą║ ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (master enable, MEN) ąĮąĄ ąŠčćąĖčüčéąĖčéčüčÅ čüą░ą╝ ą┐čĆąĖ repeat start.
ŌĆó Issue Stop Condition (STOP).
1: ą¤ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ, ąĖąĘą▒ąĄą│ą░čÅ ą╗čÄą▒čŗčģ čüąŠčüč鹊čÅąĮąĖą╣ ąŠčłąĖą▒ą║ąĖ (ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čüč湥čéčćąĖą║ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠčüčćąĖčéą░ą╗ ą┤ąŠ ą║ąŠąĮčåą░) ąĖ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ąŠą▒ąĮąŠą▓ąĖčéčüčÅ čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (TWIx_INT_STAT).
ŌĆó Fast Mode (FAST).
1: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒čŗčüčéčĆčŗą╣ čĆąĄąČąĖą╝ (čüą║ąŠčĆąŠčüčéčī ą┤ąŠ 400 ą║ą▒ąĖčé/čüąĄą║).
ŌĆó Master Transfer Direction (MDIR).
1: ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ - ą┐čĆąĖąĄą╝ master.
ŌĆó Master Mode Enable (MEN).
ąŁč鹊čé ą▒ąĖčé ąŠčćąĖčüčéąĖčéčüčÅ čüą░ą╝ ą┐čĆąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ą┤ąĄą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ą░ DCNT ą┤ąŠčüčéąĖą│ąĮąĄčé 0), ą▓ą║ą╗čÄčćą░čÅ čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĖąĘ-ąĘą░ ąŠčłąĖą▒ą║ąĖ.
1: čĆą░ąĘčĆąĄčłąĄąĮ čäčāąĮą║čåąĖąŠąĮą░ą╗ čĆąĄąČąĖą╝ą░ master. ąĢčüą╗ąĖ čłąĖąĮą░ I2C čüą▓ąŠą▒ąŠą┤ąĮą░ (ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąŠą▒ą░ čüąĖą│ąĮą░ą╗ą░ SCL ąĖ SDA ą▓ ą╗ąŠą│. 1), čüą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąĖą│ąĮą░ą╗ Start.
ąÆąŠ ą▓čĆąĄą╝čÅ čäą░ąĘčŗ ą░ą┤čĆąĄčüą░čåąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI, ą║ąŠą│ą┤ą░ ąŠąĮ čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ master, ą┐ąĄčĆąĄą┤ą░ąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ą░ą┤čĆąĄčüą░ (TWIx_MASTER_ADDR), ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą│ąŠ ąĮą░ čĆąĖčü. 20-8. ą¤čĆąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąŠą┐čāčüą║ą░čÄčé ą▒ąĖčé čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ (ą▒ąĖčé R/W, ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ą▓ čäą░ąĘąĄ ą░ą┤čĆąĄčüą░čåąĖąĖ I2C). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, č鹊ą╗čīą║ąŠ 7 ą▒ąĖčé, čüąŠčüčéą░ą▓ą╗čÅčÄčēąĖčģ čüčéą░čĆčłčāčÄ čćą░čüčéčī čäą░ąĘčŗ ą░ą┤čĆąĄčüą░, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ TWIx_MASTER_ADDR. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą░ą┤čĆąĄčü slave-čāčüčéčĆąŠą╣čüčéą▓ą░ b#1010000X, ą│ą┤ąĄ X čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▒ąĖčéčā R/W, čĆąĄą│ąĖčüčéčĆ TWIx_MASTER_ADDR ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ b#1010000, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé 0x50. ąÜąŠą│ą┤ą░ ąĮą░ čłąĖąĮčā ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI čüą░ą╝ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ą▒ąĖčé čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ čüąŠčüč鹊čÅąĮąĖąĖ ą▒ąĖčéą░ MDIR čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄąČąĖą╝ąŠą╝ master TWIx_MASTER_CTRL.
ąĀąĖčü. 20-8. TWI Master Mode Address Register.
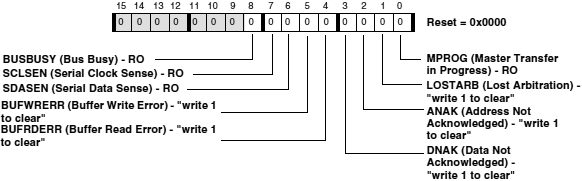
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ čĆąĄąČąĖą╝ą░ master TWIx_MASTER_STAT, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-9, čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┐ąĄčĆąĄą┤ą░čćą░čģ čĆąĄąČąĖą╝ą░ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąŠą▒ ąĖčģ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ. ąæąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ čĆąĄąČąĖą╝ą░ master ąĮąĄ čüą▓čÅąĘą░ąĮčŗ ąĮą░ą┐čĆčÅą╝čāčÄ čü ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąŠą┤ąĮą░ą║ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ č鹥ą║čāčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ążčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ slave ąĮąĖą║ą░ą║ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ čĆąĄąČąĖą╝ą░ master.
ąĀąĖčü. 20-9. TWI Master Mode Status Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_MASTER_STAT:
ŌĆó Bus Busy (BUSBUSY).
ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čłąĖąĮčŗ I2C - ąĘą░ąĮčÅčéą░ ąŠąĮą░ ąĖą╗ąĖ čüą▓ąŠą▒ąŠą┤ąĮą░. ąŁč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ, ąĮąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĖ čüąĖą│ąĮą░ą╗ąĄ Start čāčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąĘą░ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĖąĘ-ąĘą░ ąĮą░ą╗ąĖčćąĖčÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ą▓čģąŠą┤čā. ą¤čĆąĖ čüąĖą│ąĮą░ą╗ąĄ Stop ąŠčćąĖčüčéą║ą░ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠčüą╗ąĄ ąĖąĮč鹥čĆą▓ą░ą╗ą░ tBUF.
1: čłąĖąĮą░ ąĘą░ąĮčÅčéą░. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ čéą░ą║č鹊ą▓ ąĖą╗ąĖ ą┤ą░ąĮąĮčŗčģ.
ŌĆó Serial Clock Sense (SCLSEN).
ąŁč鹊čé ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠąĄ čćč鹥ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ą╗ąĖąĮąĖąĖ čéą░ą║č鹊ą▓ (SCL). ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ąĘą░ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĖąĘ-ąĘą░ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ (ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠ ąĮą░ 50 ąĮčü). ą×ą▒čŗčćąĮąŠ ą▓ čĆąĄąČąĖą╝ą░čģ master ąĖ slave ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ.
1: ąĮą░ ą╗ąĖąĮąĖąĖ čéą░ą║č鹊ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą░ą║čéąĖą▓ąĮčŗą╣ 0. ąśčüč鹊čćąĮąĖą║ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮčāą╗čÅ ąĮąĄ ąĖąĘą▓ąĄčüč鹥ąĮ, ąĖ ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝, čéą░ą║ ąĖ ą▓ąĮąĄčłąĮąĖą╝.
ŌĆó Serial Data Sense (SDASEN).
ąŁč鹊čé ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠąĄ čćč鹥ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ą╗ąĖąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ (SDA). ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ąĘą░ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĖąĘ-ąĘą░ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ (ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠ ąĮą░ 50 ąĮčü). ą×ą▒čŗčćąĮąŠ ą▓ čĆąĄąČąĖą╝ą░čģ master ąĖ slave ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ.
1: ąĮą░ ą╗ąĖąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą░ą║čéąĖą▓ąĮčŗą╣ 0. ąśčüč鹊čćąĮąĖą║ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮčāą╗čÅ ąĮąĄ ąĖąĘą▓ąĄčüč鹥ąĮ, ąĖ ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝, čéą░ą║ ąĖ ą▓ąĮąĄčłąĮąĖą╝.
ŌĆó Buffer Write Error (BUFWRERR).
1: č鹥ą║čāčēą░čÅ master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ ąĖąĘ-ąĘą░ ąŠčłąĖą▒ą║ąĖ ąĘą░ą┐ąĖčüąĖ ą▓ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╣ ą▒čāč乥čĆ. ą¤čĆąĖąĮąĖą╝ą░čÄčēąĖą╣ ą▒čāč乥čĆ ąĖ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ąŠą▒ą░ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮčŗ. ąŁč鹊čé ą▒ąĖčé ąĖą╝ąĄąĄčé čéąĖą┐ W1C ("ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī 1").
ŌĆó Buffer Read Error (BUFRDERR).
1: č鹥ą║čāčēą░čÅ master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ ąĖąĘ-ąĘą░ ąŠčłąĖą▒ą║ąĖ čćč鹥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ ą▒čāč乥čĆą░. ąÆ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ čéčĆąĄą▒ąŠą▓ą░ą╗ąĖčüčī ą┤ą░ąĮąĮčŗąĄ, ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą▒čŗą╗ ą┐čāčüčé. ąŁč鹊čé ą▒ąĖčé ąĖą╝ąĄąĄčé čéąĖą┐ W1C ("ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī 1").
ŌĆó Data Not Acknowledged (DNAK).
1: č鹥ą║čāčēą░čÅ master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ NAK ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ. ąŁč鹊čé ą▒ąĖčé ąĖą╝ąĄąĄčé čéąĖą┐ W1C ("ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī 1").
ŌĆó Address Not Acknowledged (ANAK).
1: č鹥ą║čāčēą░čÅ master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ NAK ą▓ąŠ ą▓čĆąĄą╝čÅ čäą░ąĘčŗ ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁč鹊čé ą▒ąĖčé ąĖą╝ąĄąĄčé čéąĖą┐ W1C ("ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī 1").
ŌĆó Lost Arbitration (LOSTARB).
1: č鹥ą║čāčēą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ ąĖąĘ-ąĘą░ ą┐ąŠč鹥čĆąĖ ą░čĆą▒ąĖčéčĆą░ąČą░ ą┐čĆąĖ ą║ąŠąĮą║čāčĆąĄąĮčåąĖąĖ čü ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ master ąĮą░ čłąĖąĮąĄ. ąŁč鹊čé ą▒ąĖčé ąĖą╝ąĄąĄčé čéąĖą┐ W1C ("ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī 1").
ŌĆó Master Transfer in Progress (MPROG).
1: ąĖą┤ąĄčé ą┐čĆąŠčåąĄčüčü master-čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ FIFO TWIx_FIFO_CTRL ą▓ą╗ąĖčÅčÄčé č鹊ą╗čīą║ąŠ ąĮą░ FIFO, ąĖ ąĮąĄ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ąĮąĖ ą║ ą║ą░ą║ąŠą╣ ą┤čĆčāą│ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ čĆąĄąČąĖą╝ą░ master ąĖą╗ąĖ slave (čüą╝. čĆąĖčü. 20-10).
ąĀąĖčü. 20-10. TWI FIFO Control Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_FIFO_CTRL:
ŌĆó Receive Buffer Interrupt Length (RCVINTLEN).
ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čćą░čüč鹊čéčā, čü ą║ąŠč鹊čĆąŠą╣ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąŠą│ąŠ ą▒čāč乥čĆą░. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐čĆąĖąĮčÅč鹊ą╝ ą▒ą░ą╣č鹥, ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ ą┤ą▓čāčģ ą▒ą░ą╣čé.
1: čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (RCVSERV) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ RCVSTAT ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT ą┐ąŠą║ą░ąČąĄčé ąĮą░ą╗ąĖčćąĖąĄ ą┤ą▓čāčģ ą▒ą░ą╣čé ą▓ FIFO (FIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ, 11).
ŌĆó Transmit Buffer Interrupt Length (XMTINTLEN).
ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čćą░čüč鹊čéčā, čü ą║ąŠč鹊čĆąŠą╣ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą╝ ą▒ą░ą╣č鹥, ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą┤ą▓čāčģ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ą▒ą░ą╣čé.
1: čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (XMTSERV) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ XMTSTAT ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT ą┐ąŠą║ą░ąČąĄčé, čćč鹊 FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čāčüčé (00).
ŌĆó Receive Buffer Flush (RCVFLUSH).
1: čüą▒čĆą░čüčŗą▓ą░ąĄčé (Flush) čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ ąĖ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ RCVSTAT, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ą┐čāčüč鹊čéčā čŹč鹊ą│ąŠ ą▒čāč乥čĆą░. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ą▒ąĖčé RCVFLUSH ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ. ąÆąŠ ą▓čĆąĄą╝čÅ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐čĆąĖą╝ą░ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ą▓ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąŠčéą▓ąĄčćą░ąĄčé ą╗ąŠą│ąĖą║ąĄ ą┐čĆąĖąĄą╝ą░ čéą░ą║, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ ąŠąĮ ą▒čŗą╗ ą┐ąŠą╗ąŠąĮ.
ŌĆó Transmit Buffer Flush (XMTFLUSH).
1: čüą▒čĆą░čüčŗą▓ą░ąĄčé (Flush) čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ XMTSTAT ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ, čćč鹊 ą▒čāč乥čĆ ą┐čāčüčé. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ, ą┐ąŠą║ą░ ą▒ąĖčé XMTFLUSH ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ. ąÆąŠ ą▓čĆąĄą╝čÅ ą░ą║čéąĖą▓ąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ čéą░ą║ąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčéą▓ąĄčćą░ąĄčé ą╗ąŠą│ąĖą║ąĄ čéą░ą║, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒čŗą╗ ą┐čāčüčé.
ą¤ąŠą╗čÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ FIFO (TWIx_FIFO_STAT), ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą│ąŠ ąĮą░ čĆąĖčü. 20-11, ąŠčéčĆą░ąČą░čÄčé čüąŠčüč鹊čÅąĮąĖąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒čāč乥čĆąŠą▓ FIFO. ąæčāč乥čĆčŗ FIFO ąĮąĄ čĆą░ąĘą┤ąĄą╗čÅčÄčé ą┤ą░ąĮąĮčŗąĄ master ąĖ ą┤ą░ąĮąĮčŗąĄ slave. ą¤čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ FIFO ą╝ąŠąČąĄčé ąŠą▒čüą╗čāąČąĖą▓ą░čéčīčüčÅ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ master ąĖ slave.
ąĀąĖčü. 20-11. TWI FIFO Status Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_FIFO_STAT (ą▓čüąĄ ą▒ąĖčéčŗ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ, RO):
ŌĆó Receive FIFO Status (RCVSTAT).
ą¤ąŠą╗ąĄ RCVSTAT ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. ą×ąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ FIFO. ąĪąŠčüč鹊čÅąĮąĖąĄ RCVSTAT ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ čü ą║ą░ąČą┤čŗą╝ čćč鹥ąĮąĖąĄą╝ ą▒čāč乥čĆą░ FIFO čü ą┐ąŠą╝ąŠčēčīčÄ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ąĖą╗ąĖ ą┐čĆąĖ ą┤ąŠčüčéčāą┐ąĄ ąĮą░ ąĘą░ą┐ąĖčüčī čüąŠ čüč鹊čĆąŠąĮčŗ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą┐čĆąĖąĄą╝ą░. ąöąŠą┐čāčüą║ą░ąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░.
11: FIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ąĖ čüąŠą┤ąĄčƹȹĖčé 2 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ. ąöąŠą┐čāčüą║ą░ąĄčéčüčÅ ąŠą┤ąĖąĮąŠčćąĮąŠąĄ ąĖą╗ąĖ ą┤ą▓ąŠą╣ąĮąŠąĄ čćč鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ą┐čĆąĖ ąŠą▒čĆą░čēąĄąĮąĖąĖ ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā FIFO.
ŌĆó Transmit FIFO Status (XMTSTAT).
ą¤ąŠą╗ąĄ XMTSTAT ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ. ą×ąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ FIFO. ąĪąŠčüč鹊čÅąĮąĖąĄ XMTSTAT čü ą║ą░ąČą┤ąŠą╣ ąĘą░ą┐ąĖčüčīčÄ FIFO č湥čĆąĄąĘ čłąĖąĮčā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ čü ą║ą░ąČą┤čŗą╝ čćč鹥ąĮąĖąĄą╝ čüąŠ čüč鹊čĆąŠąĮčŗ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąöąŠą┐čāčüą║ą░ąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░.
11: FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮ ąĖ čüąŠą┤ąĄčƹȹĖčé 2 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ.
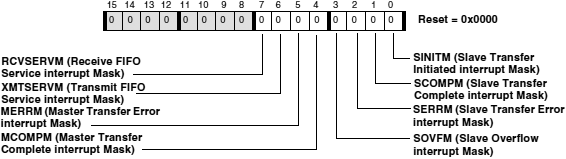
ąĀąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWIx_INT_ENABLE, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-12, čĆą░ąĘčĆąĄčłą░ąĄčé ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą╗čÅ ą░ą║čéąĖą▓ą░čåąĖąĖ ą▓čŗčģąŠą┤ą░ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ TWI. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠą┤ąĮąŠą╝čā ą▒ąĖčéčā ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI (TWIx_INT_STAT). ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
ąĀąĖčü. 20-12. TWI Interrupt Mask Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_INT_ENABLE ąŠą┐ąĖčüą░ąĮčŗ ąĮąĖąČąĄ. ąöą╗čÅ ą▓čüąĄčģ ą▒ąĖčé čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░: ąĄčüą╗ąĖ ą▒ąĖčé ą▓ ą╗ąŠą│. 0, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
ŌĆó Receive FIFO Service Mask (RCVSERVM).
ąĢčüą╗ąĖ ą▒ąĖčé RCVINTLEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_CTRL čüą▒čĆąŠčłąĄąĮ ą▓ 0, č鹊 ą┐ąŠą╗ąĄ čüąŠčüč鹊čÅąĮąĖčÅ RCVSTAT čĆąĄą│ąĖčüčéčĆą░ TWIx_FIFO_STAT ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ 01 ąĖą╗ąĖ 11. ąĢčüą╗ąĖ RCVINTLEN ą▓ 1, č鹊 RCVSTAT ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┐čĆąĖ RCVSTAT 10 ąĖą╗ąĖ 11. ąÆčüčÅą║ąĖą╣ čĆą░ąĘ ą┐čĆąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĖ RCVSTAT čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé RCVSERV ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąæąĖčé ą╝ą░čüą║ąĖ RCVSERVM ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą▒čāą┤ąĄčé ą╗ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ RCVSERV.
0: ąĘą░ą┐čĆąĄčēąĄąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ RCVSERV ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
ŌĆó Transmit FIFO Service Mask (XMTSERVM).
ąĢčüą╗ąĖ ą▒ąĖčé XMTINTLEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_CTRL čüą▒čĆąŠčłąĄąĮ ą▓ 0, č鹊 ą▒ąĖčé XMTSERV ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ XMTSTAT ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ 01 ąĖą╗ąĖ 00. ąĢčüą╗ąĖ XMTINTLEN čĆą░ą▓ąĄąĮ 1, č鹊 ą▒ąĖčé XMTSERV ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ XMTSTAT ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┤ąŠ čüąŠčüč鹊čÅąĮąĖčÅ 00. ąæąĖčé ą╝ą░čüą║ąĖ XMTSERVM ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą▒čāą┤ąĄčé ą╗ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ XMTSERV.
0: ąĘą░ą┐čĆąĄčēąĄąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ XMTSERV ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
ŌĆó Master Transfer Error Mask (MERRM).
0: ąĘą░ą┐čĆąĄčēąĄąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ MERR ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
ŌĆó Master Transfer Complete Mask (MCOMPM).
0: ąĘą░ą┐čĆąĄčēąĄąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ MCOMP čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
ŌĆó Slave Overflow Mask (SOVFM).
0: ąĘą░ą┐čĆąĄčēąĄąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ SOVF čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
ŌĆó Slave Transfer Error Mask (SERRM).
0: ąĘą░ą┐čĆąĄčēąĄąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ SERR čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
ŌĆó Slave Transfer Complete Mask (SCOMPM).
0: ąĘą░ą┐čĆąĄčēąĄąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ SCOMP čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
ŌĆó Slave Transfer Initiated Mask (SINITM).
0: ąĘą░ą┐čĆąĄčēąĄąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ SINIT čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI.
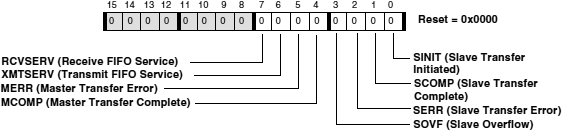
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI (TWIx_INT_STAT), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-13, čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą╣ ąŠą▒ą╗ą░čüčéąĖ TWI, ą║ąŠč鹊čĆą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠ čéčĆąĄą▒čāąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠą│ąŠ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ. ą£ąĮąŠą│ąĖąĄ ąĖąĘ čŹčéąĖčģ ą▒ąĖčé čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ąĖąĮą┤ąĖą║ą░č鹊čĆ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čüąŠčüč鹊čÅąĮąĖčÅ. ą¤ąŠčüą╗ąĄ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąŠčćąĖčüčéąĖčéčī čŹč鹊čé ą▒ąĖčé ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĀąĖčü. 20-13. TWI Interrupt Status Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_INT_STAT ąŠą┐ąĖčüą░ąĮčŗ ąĮąĖąČąĄ. ąÆčüąĄ ą▒ąĖčéčŗ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čŹč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ sticky-ą▒ąĖčéčŗ, čé. ąĄ. ąŠąĮąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą░ ąŠčćąĖčēą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┐ąĄčĆą░čåąĖąĄą╣ ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│. 1 (Write-1-clear, W1C):
ŌĆó Receive FIFO Service (RCVSERV).
ąĢčüą╗ąĖ ą▒ąĖčé RCVINTLEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_CTRL čüą▒čĆąŠčłąĄąĮ ą▓ 0, č鹊 ą▒ąĖčé RCVSERV čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ RCVSTAT ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ 01 ąĖą╗ąĖ 11. ąĢčüą╗ąĖ ą▒ąĖčé RCVINTLEN čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 ą▒ąĖčé RCVSERV čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ RCVSTAT ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ 10 ąĖą╗ąĖ 11.
1: ą▓ ą▒čāč乥čĆąĄ FIFO ą┐čĆąĖąĄą╝ą░ ąĄčüčéčī 1 ąĖą╗ąĖ 2 ą▒ą░ą╣čéą░, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ (ąŠčéčéčāą┤ą░ ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ).
ŌĆó Transmit FIFO Service (XMTSERV).
ąĢčüą╗ąĖ ą▒ąĖčé XMTINTLEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_CTRL čüą▒čĆąŠčłąĄąĮ ą▓ 0, č鹊 ą▒ąĖčé XMTSERV čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ XMTSTAT ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą╗ąĖą▒ąŠ ą▓ 01, ą╗ąĖą▒ąŠ ą▓ 00. ąĢčüą╗ąĖ ą▒ąĖčé XMTINTLEN čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 ą▒ąĖčé XMTSERV čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ XMTSTAT ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 00.
1: ą▓ ą▒čāč乥čĆąĄ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ąĄčüčéčī ąŠą┤ąĮą░ ąĖą╗ąĖ ą┤ą▓ąĄ čüą▓ąŠą▒ąŠą┤ąĮčŗąĄ 8-ą▒ąĖčéąĮčŗąĄ čÅč湥ą╣ą║ąĖ, ą▓ ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ŌĆó Master Transfer Error (MERR).
1: ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ master. ąŻčüą╗ąŠą▓ąĖčÅ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆąĄą│ąĖčüčéčĆąŠą╝ čüąŠčüč鹊čÅąĮąĖčÅ master (TWIx_MASTER_STAT).
ŌĆó Master Transfer Complete (MCOMP).
1: ą▒čŗą╗ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ master. ą¤čĆąĖ ąŠčéčüčāčéčüčéą▓ąĖąĖ repeat start čłąĖąĮą░ I2C ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ.
ŌĆó Slave Overflow (SOVF).
1: ą▒ąĖčé ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ slave-čéčĆą░ąĮąĘą░ą║čåąĖąĖ (SCOMP) ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮą░ čäą░ąĘąĄ ą░ą┤čĆąĄčüą░. ąóčĆą░ąĮąĘą░ą║čåąĖčÅ ą┐čĆąŠą┤ąŠą╗ąČąĖą╗ą░čüčī, ąŠą┤ąĮą░ą║ąŠ ą╝ąŠą│čāčé ą▒čŗčéčī čüą╗ąŠąČąĮąŠčüčéąĖ ą▓ ąŠčéą┤ąĄą╗ąĄąĮąĖąĖ ąŠą┤ąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąŠčé ą┤čĆčāą│ąŠą╣.
ŌĆó Slave Transfer Error (SERR).
1: ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ slave. ą¤čĆąŠąĖąĘąŠčłą╗ą░ ą▓čŗą┤ą░čćą░ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ Start ąĖą╗ąĖ ą▓čŗą┤ą░čćą░ čüąĖą│ąĮą░ą╗ą░ Stop ą▓ąŠ ą▓čĆąĄą╝čÅ čäą░ąĘčŗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ŌĆó Slave Transfer Complete (SCOMP).
1: čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░, ąĖ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą╗ąĖą▒ąŠ čüąĖą│ąĮą░ą╗ Stop, ą╗ąĖą▒ąŠ čüąĖą│ąĮą░ą╗ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ Start.
ŌĆó Slave Transfer Initiated (SINIT).
1: slave ąŠą▒ąĮą░čĆčāąČąĖą╗ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░, ąĖ ą▒čŗą╗ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ.
ąĀąĄą│ąĖčüčéčĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ TWIx_XMT_DATA8, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-14, čģčĆą░ąĮąĖčé 8-čĆą░ąĘčĆčÅą┤ąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ, ąĘą░ą┐ąĖčüą░ąĮąĮąŠąĄ ą▓ ą▒čāč乥čĆ FIFO.
ą¤ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ą▓ąŠą┤čÅčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ "ą┐ąĄčĆą▓čŗą╝ ą┐čĆąĖčłąĄą╗, ą┐ąĄčĆą▓čŗą╝ ą▓čŗčłąĄą╗" (first-in first-out, čüąŠą║čĆą░čēąĄąĮąĮąŠ FIFO). ąźąŠčéčÅ ąĘą░ą┐ąĖčüąĖ ą▓ čłąĖąĮčā ą┐ąĄčĆąĖč乥čĆąĖąĖ 16-ą▒ąĖčéąĮčŗąĄ, ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ TWIx_XMT_DATA8 ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆ FIFO. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéą░ą║ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠą╗ąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (XMTSTAT) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT. ąĢčüą╗ąĖ ą┤ąŠčüčéčāą┐ ą▒čŗą╗ ą▓čŗą┐ąŠą╗ąĮąĄąĮ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ, č鹊 ąĘą░ą┐ąĖčüčī ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ, ąĖ čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ ą▓ ą▒čāč乥čĆąĄ FIFO ą┤ą░ąĮąĮčŗąĄ ąŠčüčéą░čÄčéčüčÅ ąĮąĄ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝ąĖ.
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_XMT_DATA8 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ (WO), ą┐ąŠą┐čŗčéą║ą░ čćč鹥ąĮąĖčÅ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą▓ąĄčĆąĮąĄčé 0x0000.
ąĀąĖčü. 20-14. TWI FIFO Transmit Data Single Byte Register.
ąöą▓čāčģą▒ą░ą╣čéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ TWI FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ (TWIx_XMT_DATA16), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-15, čģčĆą░ąĮąĖčé 16-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ, ąĘą░ą┐ąĖčüą░ąĮąĮąŠąĄ ą▓ ą▒čāč乥čĆ FIFO.
ą¦č鹊ą▒čŗ čüąĮąĖąĘąĖčéčī čćą░čüč鹊čéčā ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ą▓čĆąĄą╝čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čłąĖąĮąĄ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┤ą▓čāčģą▒ą░ą╣čéąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╝ ą┤ą░ąĮąĮčŗą╝. ą£ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą┤ą▓ą░ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ, čćč鹊 čŹčäč乥ą║čéąĖą▓ąĮąŠ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé ą▓ąĄčüčī FIFO ąĘą░ ąŠą┤ąĖąĮ ą┤ąŠčüčéčāą┐ ą║ čłąĖąĮąĄ.
ąÆčüąĄ ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_XMT_DATA16 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (WO). ą¤ąŠą┐čŗčéą║ą░ čćč鹥ąĮąĖčÅ TWIx_XMT_DATA16 ą▓ąĄčĆąĮąĄčé 0x0000.
ąĀąĖčü. 20-15. TWI FIFO Transmit Data Double Byte Register.
ąöą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ą▒ą░ą╣čé little endian [2], ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╝ ąĮą░ čĆąĖčü. 20-16. ąŚą┤ąĄčüčī ą▒ą░ą╣čé 0 (B0) čŹč鹊 ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ, ąĖ ą▒ą░ą╣čé 1 (B1) čŹč鹊 ą▓č鹊čĆąŠą╣ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ą▒ą░ą╣čé. ąĪ ą║ą░ąČą┤čŗą╝ čéą░ą║ąĖą╝ ą┤ąŠčüčéčāą┐ąŠą╝ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (XMTSTAT) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT. ąĢčüą╗ąĖ ą┤ąŠčüčéčāą┐ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ąĮąĄ ąŠą┐čāčüč鹊賹Ėą╗čüčÅ, č鹊 ąĘą░ą┐ąĖčüčī ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ, ąĖ čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ ą▓ ą▒čāč乥čĆąĄ FIFO ą┤ą░ąĮąĮčŗąĄ ąĖ ąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ.
ąĀąĖčü. 20-16. Little Endian Byte Order.
ą×ą┤ąĮąŠą▒ą░ą╣čéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ TWI FIFO (TWIx_RCV_DATA8), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-17, čģčĆą░ąĮąĖčé 8-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖąĘ ą▒čāč乥čĆą░ FIFO. ą¤čĆąĖąĮąĖą╝ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ čćąĖčéą░čÄčéčüčÅ ąĖąĘ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ "ą┐ąĄčĆą▓čŗą╣ ą┐čĆąĖčłąĄą╗, ą┐ąĄčĆą▓čŗą╣ ą▓čŗčłąĄą╗" (first-in first-out, čüąŠą║čĆą░čēąĄąĮąĮąŠ FIFO). ąźąŠčéčÅ čłąĖąĮą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ąĖą╝ąĄąĄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 16 ą▒ąĖčé, ą┤ąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ ą║ TWIx_RCV_DATA8 ą┐ąĄčĆąĄą╝ąĄčüčéąĖčé č鹊ą╗čīą║ąŠ 1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▒čāč乥čĆą░ FIFO. ąĪ ą║ą░ąČą┤čŗą╝ čéą░ą║ąĖą╝ ą┤ąŠčüčéčāą┐ąŠą╝ ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠą╗ąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (RCVSTAT) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT. ąĢčüą╗ąĖ ą┤ąŠčüčéčāą┐ ą▓čŗą┐ąŠą╗ąĮčÅą╗čüčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░ ą┐čāčüčé, č鹊 ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ, ąĖ ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ FIFO ą▒čāą┤čāčé ą▓čüąĄ čéą░ą║ ąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ąĄą│ąŠ ą┐čāčüč鹊čéčā.
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_RCV_DATA8 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (RO).
ąĀąĖčü. 20-17. TWI FIFO Receive Data Single Byte Register.
ąöą▓čāčģą▒ą░ą╣čéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ TWI FIFO ą┐čĆąĖąĄą╝ą░ (TWIx_RCV_DATA16), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 20-18, čģčĆą░ąĮąĖčé 16-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖąĘ ą▒čāč乥čĆą░ FIFO. ą¦č鹊ą▒čŗ čüąĮąĖąĘąĖčéčī čćą░čüč鹊čéčā ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ą▓čĆąĄą╝čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą╣ čłąĖąĮąĄ, ą╝ąŠąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┤ą▓čāčģą▒ą░ą╣čéąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗą╝ ą┤ą░ąĮąĮčŗą╝. ą£ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī 2 ą▒ą░ą╣čéą░, čŹčäč乥ą║čéąĖą▓ąĮąŠ ąŠą┐čāčüč鹊賹░čÅ ą▒čāč乥čĆ FIFO ąĘą░ ąŠą┤ąĖąĮ ą┤ąŠčüčéčāą┐ ą║ čłąĖąĮąĄ. ąöą░ąĮąĮčŗąĄ čćąĖčéą░čÄčéčüčÅ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ą▒ą░ą╣čé little endian [2], ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 20-19. ąŚą┤ąĄčüčī ą▒ą░ą╣čé 0 (B0) čŹč鹊 ą┐ąĄčĆą▓čŗą╣ ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé, ąĖ ą▒ą░ą╣čé 1 (B1) čŹč鹊 ą▓č鹊čĆąŠą╣ ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé. ąĪ ą║ą░ąČą┤čŗą╝ čéą░ą║ąĖą╝ ą┤ąŠčüčéčāą┐ąŠą╝ ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠą╗ąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ (RCVSTAT) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWIx_FIFO_STAT, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ ą┐čāčüč鹊čéčā ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ FIFO. ąĢčüą╗ąĖ ą┤ąŠčüčéčāą┐ ąŠčüčāčēąĄčüčéą▓ą╗čÅą╗čüčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ąĮąĄ ą▒čŗą╗ ąĘą░ą┐ąŠą╗ąĮąĄąĮ, č鹊 ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ, ąĖ čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ ą▓ ą▒čāč乥čĆąĄ FIFO ą┤ą░ąĮąĮčŗąĄ ąĖ ąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčüčéą░čÄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ąĖ.
ąÆčüąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TWIx_RCV_DATA16 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (RO).
ąĀąĖčü. 20-18. TWI FIFO Receive Data Double Byte Register.
ąĀąĖčü. 20-19. Little Endian Byte Order.
[ą£ąĄčģą░ąĮąĖą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖą╣ ą┤ą░ąĮąĮčŗčģ ]
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ TWI čüą╗ąĄą┤čāčÄčé ą┐čĆąŠč鹊ą║ąŠą╗čā čéčĆą░ąĮąĘą░ą║čåąĖą╣ Philips I2C Bus Specification ą▓ąĄčĆčüąĖąĖ 2.1, ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąĮąŠą╝čā ą▓ čÅąĮą▓ą░čĆąĄ 2000 ą│ąŠą┤ą░. ą×ą┤ąĖąĮąŠčćąĮą░čÅ ą┐ąŠą╗ąĮą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 20-20.
S
7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü
R/W
ACK
8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ
ACK
P
ąĀąĖčü. 20-20. ąæą░ąĘąŠą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ.
S = čüąĖą│ąĮą░ą╗ START
ą¦č鹊ą▒čŗ ą╗čāčćčłąĄ ą┐ąŠąĮąĖą╝ą░čéčī ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI ąĮą░ ą▒ą░ąĘąŠą▓čāčÄ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ, čĆąĖčü. 20-21 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéčā ąČąĄ čüą░ą╝čāčÄ čéčĆą░ąĮąĘą░ą║čåąĖčÄ, ą║ą░ą║ ąĮą░ čĆąĖčüčāąĮą║ąĄ 20-20, čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ ąĖą╝ąĄąĮą░ą╝ąĖ ą▒ąĖčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI. ąØą░ čŹč鹊ą╣ ąĖą╗ą╗čÄčüčéčĆą░čåąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI čāčüą┐ąĄčłąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĄčé 1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ slave ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé (ACK) ąĖ ą░ą┤čĆąĄčü, ąĖ ą┤ą░ąĮąĮčŗąĄ.
S
MADDR[6:0]
MDIR
ACK
XMITDATA8[7:0]
ACK
P
ąĀąĖčü. 20-21. ąæą░ąĘąŠą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI.
[ąōąĄąĮąĄčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ]
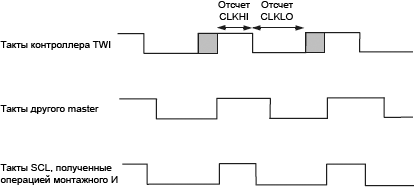
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI ą▓čŗą┤ą░ąĄčé čéą░ą║čéčŗ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéčŗ master, ąĖ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ. ąĢčüą╗ąĖ ą░čĆą▒ąĖčéčĆą░ąČ ąĮą░ čłąĖąĮąĄ ą┐ąŠč鹥čĆčÅąĮ, ą▓čŗčģąŠą┤ SCK ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąĢčüą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓čŗčģąŠą┤ąŠą▓ čéą░ą║č鹊ą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čāą┐čĆą░ą▓ą╗čÅčÄčé čüąĖą│ąĮą░ą╗ąŠą╝ SCK čłąĖąĮčŗ I2C, č鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčé čüą▓ąŠąĖ čéą░ą║čéčŗ čü ą┤čĆčāą│ąĖą╝ąĖ ąĖčüč鹊čćąĮąĖą║ą░ą╝ąĖ čéą░ą║č鹊ą▓. ąŁč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 20-22.
ąĀąĖčü. 20-22. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čéą░ą║č鹊ą▓ SCK ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI.
ąÆčŗčģąŠą┤ SCK ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI čüą╗ąĄą┤čāąĄčé čüą╗ąĄą┤čāčÄčēąĖą╝ ą┐čĆą░ą▓ąĖą╗ą░ą╝:
ŌĆó ąÜą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą▓ąĄčĆčłąĖą╗čüčÅ ąŠčéčüč湥čé ą┐ąĄčĆąĖąŠą┤ą░ ą╗ąŠą│. 1 čéą░ą║č鹊ą▓ (CLKHI), ą▓čŗčģąŠą┤ SCK ą┐ąŠą┤čéčÅą│ąĖą▓ą░ąĄčéčüčÅ ą║ ą╗ąŠą│. 0, ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąŠčéčüč湥čé ą┐ąĄčĆąĖąŠą┤ą░ ą╗ąŠą│. 0 ą▓čŗčģąŠą┤ą░ čéą░ą║č鹊ą▓ (CLKLOW).
[ąÉčĆą▒ąĖčéčĆą░ąČ ąĮą░ čłąĖąĮąĄ ]
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ TWI ąĖąĮąĖčåąĖąĖčĆčāčÄčé ą┐ąĄčĆąĄą┤ą░čćčā ą▓ čĆąĄąČąĖą╝ąĄ master (MEN) č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čłąĖąĮą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle), čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ąĮąĄ ąĘą░ąĮčÅč鹊čüčéčī čłąĖąĮčŗ ą┤čĆčāą│ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ master. ąĢčüą╗ąĖ čłąĖąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ, ąĖ ą┤ą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ masters ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćčā, ąĮą░čćąĮąĄčéčüčÅ ą░čĆą▒ąĖčéčĆą░ąČ ą┐ąŠ čłąĖąĮąĄ. ąŁč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 20-23.
ąĀąĖčü. 20-23. ąÉčĆą▒ąĖčéčĆą░ąČ čłąĖąĮčŗ I2C, ą║ą░ą║ ąĄą│ąŠ ąŠčéčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ TWI ąŠčéčüą╗ąĄąČąĖą▓ą░čÄčé čāčĆąŠą▓ąĄąĮčī ąĮą░ čüąĖą│ąĮą░ą╗ąĄ ą┤ą░ąĮąĮčŗčģ čłąĖąĮčŗ SDA, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ SCL ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1. ąĢčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ TWI ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ, čćč鹊 SDA ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĄą│ąŠ ą╗ąŠą│ąĖą║ą░ ą┤ą░ąĮąĮčŗčģ čéčĆąĄą▒čāąĄčé ą▓čŗą▓ąŠą┤ą░ ą╗ąŠą│. 1 ąĮą░ SDA, č鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI č鹥čĆčÅąĄčé ą░čĆą▒ąĖčéčĆą░ąČ ąĖ ą┐čĆąĄą║čĆą░čēą░ąĄčé ą│ąĄąĮąĄčĆą░čåąĖčÄ čüąĖą│ąĮą░ą╗ąŠą▓ čéą░ą║č鹊ą▓ ąĖ ą┤ą░ąĮąĮčŗčģ (ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čüą▓ąŠąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ SCL ąĖ SDA ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą░čĆą▒ąĖčéčĆą░ąČ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ SCK, ąĮąŠ ąĖ ą┐ąŠ ą▓čüąĄą╝čā ą┐čĆąŠčéčÅąČąĄąĮąĖčÄ ą╗ąŠą│. 1 ąĮą░ SCK.
[ąĪąĖą│ąĮą░ą╗čŗ Start ąĖ Stop ]
ąĪąĖą│ąĮą░ą╗čŗ Start ąĖ Stop čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ SDA, ą║ąŠą│ą┤ą░ SCK ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą│ąĄąĮąĄčĆąĖčĆčāąĄčé (ą▓ čĆąĄąČąĖą╝ąĄ master) ąĖ čĆą░čüą┐ąŠąĘąĮą░ąĄčé (ą▓ čĆąĄąČąĖą╝ąĄ slave) čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ. ą×ą▒čŗčćąĮąŠ čüąĖą│ąĮą░ą╗čŗ Start ąĖ Stop ą┐čĆąŠąĖčüčģąŠą┤čÅčé ą▓ ąĮą░čćą░ą╗ąĄ ąĖ ąĮą░ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüą╗čāčćą░ąĄą▓ "ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮčŗčģ" čéčĆą░ąĮąĘą░ą║čåąĖą╣, ą║ąŠą│ą┤ą░ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą▓č鹊čĆąĮčŗą╣ čüąĖą│ąĮą░ą╗ Start (repeated start), ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 20-24.
ąĀąĖčü. 20-24. ąĪąĖą│ąĮą░ą╗čŗ Start ąĖ Stop ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C.
ąĪą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čüą╗čāčćą░ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ Start ąĖ Stop ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI:
ŌĆó ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą░ą┤čĆąĄčüąŠą▓ą░ąĮ ą║ą░ą║ slave-ą┐čĆąĖąĄą╝ąĮąĖą║. ąĢčüą╗ąĖ master ą▓čŗą┤ą░ą╗ čüąĖą│ąĮą░ą╗ Stop ą▓ąŠ ą▓čĆąĄą╝čÅ čäą░ąĘčŗ ą┤ą░ąĮąĮčŗčģ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ąĘą░ą▓ąĄčĆčłą░ąĄčé čŹčéčā čéčĆą░ąĮąĘą░ą║čåąĖčÄ (SCOMP).
[ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą░ą┤čĆąĄčüą░ ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░ (General Call) ]
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ TWI ą▓čüąĄą│ą┤ą░ ą┤ąĄą║ąŠą┤ąĖčĆčāčÄčé ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░čÄčé ą░ą┤čĆąĄčü ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░, ąĄčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ slave (SEN) ąĖ ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ąŠą▒čēąĖą╣ ą▓čŗąĘąŠą▓ (GEN). ąÉą┤čĆąĄčüą░čåąĖčÅ ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░ (0x00) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▒ąĖč鹊ą╝ GCALL, ą║ąŠč鹊čĆčŗą╣ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĖ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI ą▓ čĆąĄąČąĖą╝ąĄ slave-ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąĢčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣, ą┐ąŠą╗čāčćąĖą╗ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé NAK.
ąĢčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą▓čŗą┤ą░ą╗ general call ą▓ čĆąĄąČąĖą╝ąĄ master-ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą░ą┤čĆąĄčü ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čü ąĘą░ą│čĆčāąĘą║ąŠą╣ ą┤ą░ąĮąĮčŗčģ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąæą░ą╣čé, čüą╗ąĄą┤čāčÄčēąĖą╣ ąĘą░ ą░ą┤čĆąĄčüąŠą╝ ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░, ąŠą▒čŗčćąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčŗ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą▓ ąŠčéą▓ąĄčé ąĮą░ čŹč鹊čé ą▓čŗąĘąŠą▓. ąÜąŠą╝ą░ąĮą┤ą░ ą▓ąŠ ą▓č鹊čĆąŠą╝ ą▒ą░ą╣č鹥 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ąĄčæ ą╝ą╗ą░ą┤čłąĄą╝ ą▒ąĖč鹥 (LSB). ąöą╗čÅ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ TWI čŹč鹊 ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ, ąĖ ą▒ą░ą╣čéčŗ, ą┐čĆąĖąĮčÅčéčŗąĄ ą┐ąŠčüą╗ąĄ ąŠą▒čēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░, čüčćąĖčéą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ.
[Fast Mode ]
ąæčŗčüčéčĆčŗą╣ čĆąĄąČąĖą╝ (Fast Mode) ą▓ čüčāčēąĮąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čéčā ąČąĄ ą╝ąĄčģą░ąĮąĖą║čā, ą║ą░ą║ ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆąĄąČąĖą╝ čüą║ąŠčĆąŠčüčéąĖ. ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čü 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖą╝ąĖ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅą╝ąĖ. ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ ą▒čŗčüčéčĆčŗą╣ čĆąĄąČąĖą╝ (FAST), ą▒čāą┤čāčé ąĖąĘą╝ąĄąĮąĄąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ ąŠąĮąĖ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅą╗ąĖ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝.
ŌĆó ąÆčĆąĄą╝čÅ ąĮą░čĆą░čüčéą░ąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄą╝ ą░čĆą▒ąĖčéčĆą░ąČą░ (tr).
[ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ]
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐čĆąĖą╝ąĄčĆčŗ, ą║ą░ą║ ą┤ąĄą╗ą░čéčī ąŠą▒čēčāčÄ ąĮą░čüčéčĆąŠą╣ą║čā, ą║ą░ą║ čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ slave ąĖ ą▓ čĆąĄąČąĖą╝ąĄ master, ą░ čéą░ą║ąČąĄ ą┤ą░ąĮčŗ ą┐ąŠčÅčüąĮąĄąĮąĖčÅ ą┐ąŠ ąĘą░ą┐čāčüą║čā ą┐ąŠą▓č鹊čĆąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ Start (repeated start).
ą×ą▒čēą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ . ą×ą▒čēą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ąĘą░ą┐ąĖčüąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆčŗ, čŹč鹊 ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą║ą░ą║ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ čĆąĄąČąĖą╝ąĄ master, čéą░ą║ ąĖ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ čĆąĄąČąĖą╝ąĄ slave. ą×ą▒čēą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤čāčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▒ąĖčéčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ master ąĖ/ąĖą╗ąĖ slave.
ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 čĆąĄą│ąĖčüčéčĆčŗ TWIx_CONTROL, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI, ąĖ čāčüčéą░ąĮąŠą▓ąĖč鹥 ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą║, čćč鹊ą▒čŗ ąĄą│ąŠ ą┤ą▓ąŠąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░ą╗ąŠ fSCLK / 10 ą£ąōčå.
ąÆčüąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą║čĆčāą│ą╗ąĄąĮčŗ ą▓ą▓ąĄčĆčģ ą┤ąŠ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čåąĄą╗ąŠą│ąŠ čćąĖčüą╗ą░. ąöąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TWIx_ENA. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI čĆą░ąĘčĆąĄčłąĄąĮ, ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąĘą░ąĮčÅč鹊čüčéčī čłąĖąĮčŗ. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčćąĖčēąĄąĮąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠą╣ą┤ąĄčé ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ tBUF - ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÅ, čćč鹊 ąĮąĄ ą▒čŗą╗ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ ą┤čĆčāą│ą░čÅ ą░ą║čéąĖą▓ąĮąŠčüčéčī čłąĖąĮčŗ.
ąĀąĄąČąĖą╝ slave . ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą║ą░ą║ ą┐čĆąĖąĄą╝ą░, čéą░ą║ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąØąĄą▓ąŠąĘą╝ąŠąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖ ąĮąĄ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčéčī ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ (NAK) ą┤čĆčāą│ąŠąĄ. ąŁč鹊 ąŠčéčĆą░ąČą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄą╣ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣.
1 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_SLAVE_ADDR. ąöą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ 7-čĆą░ąĘčĆčÅą┤ąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ čüąŠą▓ą┐ą░čüčéčī ą┐čĆąĖ ąŠą▒čĆą░čēąĄąĮąĖąĖ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą▓ąŠ ą▓čĆąĄą╝čÅ čäą░ąĘčŗ ą░ą┤čĆąĄčüą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
2 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_XMT_DATA8 ąĖą╗ąĖ TWIx_XMT_DATA16. ąŁč鹊 ąĮą░čćą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé slave-ą░ą┤čĆąĄčüą░čåąĖčÅ ąĖ ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╣ čłą░ą│. ąĢčüą╗ąĖ ąĮąĄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ, ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé slave-ą░ą┤čĆąĄčüą░čåąĖčÅ čü ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčīčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, čéą░ą║čéčŗ (SCL) ą▒čāą┤čāčé čĆą░čüčéčÅą│ąĖą▓ą░čéčīčüčÅ ąĖ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą┐ąŠą║ą░ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ.
3 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_INT_ENABLE. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮčāąČąĮčŗą╝ąĖ ąĖčüč鹊čćąĮąĖą║ą░ą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ 0x000F ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖčÅčģ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ą░ą┤čĆąĄčüą░, ą┐čĆąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠą╝ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ slave-čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą┐čĆąĖ ąŠčłąĖą▒ą║ąĄ slave-čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą┐čĆąĖ ąĮą░čćą░ą╗ąĄ čüą╗ąĄą┤čāčÄčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąĄą┤čŗą┤čāčēą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĮąĄ ą▒čŗą╗ą░ ąŠą▒čüą╗čāąČąĄąĮą░.
4 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_SLAVE_CTRL. ąŁč鹊 čÅą▓ąĮąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčé ąĖ čĆą░ąĘčĆąĄčłąĖčé čĆą░ą▒ąŠčéčā čĆąĄąČąĖą╝ą░ slave-čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜą░ą║ ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ 0x0005 čĆą░ąĘčĆąĄčłąĖčé čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ slave, ą┐ąŠčéčĆąĄą▒čāąĄčé 7-ą▒ąĖčéąĮąŠą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ ąĖ ą┐ąŠą║ą░ąČąĄčé, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ą▓ ą▒čāč乥čĆąĄ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ čĆąĄąČąĖą╝ąĄ slave.
ąóą░ą▒ą╗ąĖčåą░ 20-2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą╝ąŠąČąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ TWI ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 20-2. ąÆąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ Slave Mode.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą»ą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: SINIT - ą┐čĆąŠąĖčüčģąŠą┤ąĖčé slave-čéčĆą░ąĮąĘą░ą║čåąĖčÅ.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: RCVSERV - ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮ.
ą¦č鹥ąĮąĖąĄ ąĖąĘ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░.
...
...
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: SCOMP - slave-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░.
ą¦č鹥ąĮąĖąĄ ąĖąĘ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░.
ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą║č鹊ą▓ ą▓ čĆąĄąČąĖą╝ąĄ master . ąĀą░ą▒ąŠčéą░ čĆąĄąČąĖą╝ą░ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĖ čĆąĄą░ą╗ąĖąĘčāąĄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ čéčĆą░ąĮąĘą░ą║čåąĖą╣. ąÆ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ ą┤ą░ąĮčŗ ą┐čĆąĖą╝ąĄčĆčŗ ą┐ąŠčłą░ą│ąŠą▓ąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ master ąŠą┤ąĖąĮą░ą║ąŠą▓ą░čÅ ą║ą░ą║ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░, čéą░ą║ ąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_CLKDIV. ąŁč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĖčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą╗ąŠą│. 1 ąĖ ą╗ąŠą│. 0 čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ SCK.
ą¤ąĄčĆąĄą┤ą░čćą░ ą▓ čĆąĄąČąĖą╝ąĄ master . ąöą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ čĆąĄąČąĖą╝ąĄ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_MASTER_ADDR. ąŁč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĖčé ą░ą┤čĆąĄčü, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ąĮą░ čäą░ąĘąĄ ą░ą┤čĆąĄčüą░čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
2 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_XMT_DATA8 ąĖą╗ąĖ TWIx_XMT_DATA16. ąŁč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĖčé ąĮą░čćą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąĪčćąĖčéą░ąĄčéčüčÅ ąŠčłąĖą▒ą║ąŠą╣ ąĘą░ą▓ąĄčĆčłąĖčéčī čäą░ąĘčā ą░ą┤čĆąĄčüą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĖ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┤ą░ąĮąĮčŗąĄ čā ą▒čāč乥čĆąĄ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ.
3 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_FIFO_CTRL. ą¤ąŠą║ą░ąČąĖč鹥, ą║ąŠą│ą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ - ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ą░ąČą┤ąŠą│ąŠ ą▒ą░ą╣čéą░ (8 ą▒ąĖčé) ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą┤ą▓ą░ ą▒ą░ą╣čéą░ (16 ą▒ąĖčé).
4 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_INT_ENABLE. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčéčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓ ą╝ą░čüą║ąĄ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąČąĄą╗ą░ąĄą╝čŗą╝ ąĖčüč鹊čćąĮąĖą║ą░ą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ 0x0030 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ, ąĖ ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ master-čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
5 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_MASTER_CTRL. ąŁč鹊 ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčé ąĖ čĆą░ąĘčĆąĄčłąĖčé čĆą░ą▒ąŠčéčā ą▓ čĆąĄąČąĖą╝ąĄ master. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ 0x0201 čĆą░ąĘčĆąĄčłąĖčé čĆą░ą▒ąŠčéčā čĆąĄąČąĖą╝ą░ master, čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé 7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü, čāčüčéą░ąĮąŠą▓ąĖčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮą░ master-ą┐ąĄčĆąĄą┤ą░čćčā, ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą╣ą╝ąĖąĮą│ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čüčé 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ą░ Stop.
ąóą░ą▒ą╗ąĖčåą░ 20-3 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ TWI ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 20-3. ąÆąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ master-ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą»ą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: XMTEMPTY - ą▒čāč乥čĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čāčüčé.
ąŚą░ą┐ąĖčüčī ą▓ ą▒čāč乥čĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ.
...
...
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: MCOMP - master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ą¤čĆąĖąĄą╝ ą▓ čĆąĄąČąĖą╝ąĄ master . ąöą╗čÅ ą┐čĆąĖąĄą╝ą░ ą▓ čĆąĄąČąĖą╝ąĄ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_MASTER_ADDR. ąŁč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĖčé ą░ą┤čĆąĄčü, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ąĮą░ čäą░ąĘąĄ ą░ą┤čĆąĄčüą░čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
2 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_FIFO_CTRL. ą¤ąŠą║ą░ąČąĖč鹥, ą║ąŠą│ą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ - ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ ą║ą░ąČą┤ąŠą│ąŠ ą▒ą░ą╣čéą░ (8 ą▒ąĖčé) ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ ą┤ą▓ą░ ą▒ą░ą╣čéą░ (16 ą▒ąĖčé).
3 . ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_INT_ENABLE. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčéčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓ ą╝ą░čüą║ąĄ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąČąĄą╗ą░ąĄą╝čŗą╝ ąĖčüč鹊čćąĮąĖą║ą░ą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ 0x0030 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ, ąĖ ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ master-čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
4 . Program TWIx_MASTER_CTRL. ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 TWIx_MASTER_CTRL. ąŁč鹊 ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčé ąĖ čĆą░ąĘčĆąĄčłąĖčé čĆą░ą▒ąŠčéčā ą▓ čĆąĄąČąĖą╝ąĄ master. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ 0x0205 čĆą░ąĘčĆąĄčłąĖčé čĆą░ą▒ąŠčéčā čĆąĄąČąĖą╝ą░ master, čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé 7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü, čāčüčéą░ąĮąŠą▓ąĖčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮą░ master-ą┐čĆąĖąĄą╝, ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą╣ą╝ąĖąĮą│ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ąĖ ą┐čĆąĖą╝ąĄčé 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ą░ Stop.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒ąĖčéčŗ TWI_DCNT ą┐čĆąĖ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĖ ą┤ąŠą╣ą┤čāčé ą┤ąŠ ąĮčāą╗čÅ, master TWI ąŠčéą┐čĆą░ą▓ąĖčé NAK, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī slave-ą┐ąĄčĆąĄą┤ą░čéčćąĖą║čā, čćč鹊 čłąĖąĮą░ I2C ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮą░. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé master ą┐ąŠčüą╗ą░čéčī čüąĖą│ąĮą░ą╗ STOP ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ąóą░ą▒ą╗ąĖčåą░ 20-4 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ TWI ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 20-4. ąÆąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ master-ą┐čĆąĖąĄą╝ą░.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą»ą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: RCVSERV - ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮ.
ą¦č鹥ąĮąĖąĄ ąĖąĘ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░.
...
...
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: MCOMP - master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░.
ą¦č鹥ąĮąĖąĄ ąĖąĘ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░.
[ąĪąĖą│ąĮą░ą╗ Repeated Start ]
ąĪąĖą│ąĮą░ą╗ repeated start (ą┐ąŠą▓č鹊čĆąĮčŗą╣ čüčéą░čĆčé) čŹč鹊 ą┐čĆąŠčüč鹊 ąŠčéčüčāčéčüčéą▓ąĖąĄ čüąĖą│ąĮą░ą╗ą░ Stop ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅą╝ąĖ, ąĖ ą┐ąŠčüą║ąŠą╗čīą║čā ą║ą░ąČą┤ą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ Start, ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą┐ąŠą▓č鹊čĆąĮčŗą╣ čüčéą░čĆčé Repeated Start. ą¤čĆąĖ čŹč鹊ą╝ čŹčéąĖ ą┤ą▓ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą╗čÄą▒ąŠą│ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖąĄą╝ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░. ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ čüąŠą┤ąĄčƹȹĖčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą╝ąŠąČąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā ąĮą░ą┐ąĖčüą░čéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī Repeated Start ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥/ą┐čĆąĖąĄą╝ąĄ . ąØą░ čĆąĖčü. 20-25 ą┐ąŠą║ą░ąĘą░ąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ, ąĘą░ ą║ąŠč鹊čĆąŠą╣ čüčĆą░ąĘčā ąĖą┤ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 20-25. Transmit/Receive Data Repeated Start (ąĘą░č鹥ąĮąĄąĮąĮą░čÅ ąŠą▒ą╗ą░čüčéčī ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░).
ąŚą░ą┤ą░čćąĖ, ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗąĄ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ:
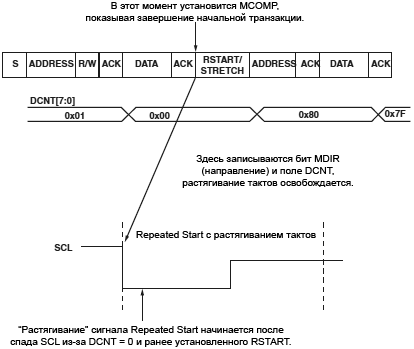
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ XMTSERV. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▒čŗą╗ąŠ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ąĖąĘ-ąĘą░ ą┤ąŠčüčéčāą┐ą░ ą║ FIFO. ą¤ąŠčüą║ąŠą╗čīą║čā čŹč鹊 ą▒čŗą╗ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé ą▓ čŹč鹊ą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, FIFO_STATUS čāą║ą░ąĘą░ą╗ ą▒čŗ ąĮą░ ąŠą┐čāčüč鹊賹ĄąĮąĖąĄ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤čĆąĖ čćč鹥ąĮąĖąĖ čüč湥čéčćąĖą║ DCNT ąŠą▒ąĮčāą╗ąĖą╗čüčÅ ą▒čŗ. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé RSTART, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī repeated start, ąĖ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé MDIR, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ MCOMP. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▒čŗą╗ąŠ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ (DCNT = 0). ąĢčüą╗ąĖ ąĮąĄ ą▒čŗą╗ąŠ ąŠčłąĖą▒ąŠą║, ą▒čāą┤ąĄčé ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ Start. ą×čćąĖčüčéąĖč鹥 ą▒ąĖčé RSTART ąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 DCNT ąČąĄą╗ą░ąĄą╝čŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ ą▒ą░ą╣čé.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ RCVSERV. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▒čŗą╗ąŠ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ąŠčüčéčāą┐ąĖą╗ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░. ąŚą┤ąĄčüčī čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐čĆąŠčüčéą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┤ą░ąĮąĮčŗčģ.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ MCOMP. ąŁč鹊 čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī Repeated Start ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ/ą┐ąĄčĆąĄą┤ą░č湥. ąØą░ čĆąĖčü. 20-26 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ, ąĘą░ ą║ąŠč鹊čĆąŠą╣ čüčĆą░ąĘčā ąĖą┤ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 20-26. Receive/Transmit Data Repeated Start (ąĘą░č鹥ąĮąĄąĮąĮą░čÅ ąŠą▒ą╗ą░čüčéčī ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░).
ąŚą░ą┤ą░čćąĖ, ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗąĄ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ:
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ RCVSERV. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ąĖąĘ-ąĘą░ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé RSTART, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī repeated start, ąĖ ąŠčćąĖčüčéąĖč鹥 ą▒ąĖčé MDIR, čćč鹊ą▒čŗ ą┐ąŠčüą╗ąĄą┤čāčÄčēą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą▒čŗą╗ą░ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą░ąĮąĮčŗčģ.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ MCOMP. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąĖąĘ-ąĘą░ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄ ą▒čŗą╗ąŠ ąŠčłąĖą▒ąŠą║, ą▒čāą┤ąĄčé ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ Start. ą×čćąĖčüčéąĖč鹥 ą▒ąĖčé RSTART, ąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 DCNT ąČąĄą╗ą░ąĄą╝čŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą▒ą░ą╣čé, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ XMTSERV. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą┐čĆąĖčćąĖąĮąĄ ą┤ąŠčüčéčāą┐ą░ ą║ FIFO. ąŚą┤ąĄčüčī ą▓čüąĄą│ąŠ ą╗ąĖčłčī ąĮčāąČąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ą░ą║ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ - ą▓ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┤ą╗čÅ FIFO ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ.
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ MCOMP. ąŁč鹊 čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ąØąĄčé ąĮąĖą║ą░ą║ąĖčģ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ ą┐čĆąŠąĖąĘąŠčłą╗ąĖ ą▓čŗčłąĄą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ; ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą▒ąĖčéčŗ čéą░ą║, ą║ą░ą║ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ąĪą╝. ą┤ą░ą╗ąĄąĄ "ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąĖ čüąĖą│ąĮą░ą╗ąĄ Repeated Start", ą│ą┤ąĄ ąŠą▒čŖčÅčüąĮčÅąĄčéčüčÅ, ą║ą░ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆą░čüčéčÅą│ąĖą▓ą░ąĄčé čéą░ą║čéčŗ ą┐čĆąĖ čéčĆą░ąĮąĘą░ą║čåąĖčÅčģ čü ą┐ąŠą▓č鹊čĆąĮčŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ Start.
[ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ]
ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ čŹč鹊 ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI, ą║ąŠą│ą┤ą░ ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ master. ąŁč鹊 ąĮąŠą▓ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčé čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠąĄ čāą┤ą╗ąĖąĮąĄąĮąĖąĄ čéą░ą║č鹊ą▓ I2C, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠąČąĖą┤ą░ąĮąĖąĄ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ (ą░ą┐ą┐ą░čĆą░čéąĮąŠ), ąĖ ąĮąĄ čéčĆąĄą▒čāąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ą┤ąĄą╣čüčéą▓ąĖą╣ čüąŠ čüč鹊čĆąŠąĮčŗ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą▓ ą║ą░č湥čüčéą▓ąĄ ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ I2C ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 3 čĆąĄąČąĖą╝ą░ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓:
ŌĆó ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąĖ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĄ FIFO.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą▓ ą┤ą░ąĮąĮąŠą╝ ą║ąŠąĮč鹥ą║čüč鹥 čŹč鹊 čāą▓ąĄą╗ąĖč湥ąĮąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą╗ąŠą│. 0 čüąĖą│ąĮą░ą╗ą░ SCK, ą║ąŠč鹊čĆąŠąĄ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠ ąĘą░ąĮčÅč鹊čüčéąĖ čłąĖąĮčŗ ąĖ ąŠ č鹊ą╝, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ master čéčĆąĄą▒čāąĄčé ąŠčé slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ/ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ą░ą║ąĖčģ-č鹊 čüą▓ąŠąĖčģ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣.
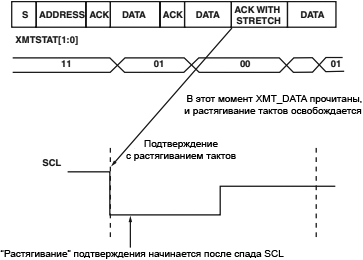
ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąĖ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĄ FIFO . ą¤čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą▓ čĆąĄąČąĖą╝ąĄ master ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ąŠą┐čāčüč鹊賹Ėą╗čüčÅ. ąÆ čŹč鹊 ą▓čĆąĄą╝čÅ ąĮą░čćąĖąĮą░ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ąĮąŠą▓čŗą╣ ą▒ą░ą╣čé. ąĢčüą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ XMTSERV ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ, č鹊 čĆą░čüčéčÅą│ąĖą▓ą░ąĄčéčüčÅ ąĘą░ą▓ąĄčĆčłą░čÄčēą░čÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ą▓ ą▒čāč乥čĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ (ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆ TWI_XMT_DATA8 ąĖą╗ąĖ TWI_XMT_DATA16). ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čéą░ą║čéčŗ ąĖ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą┐ąĄčĆąĄą┤ą░čćčā, ąĮąĖą║ą░ą║ąĖčģ ą┤čĆčāą│ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ. ąŁč鹊 ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą▓čüčÅ ą┐ąĄčĆąĄą┤ą░čćą░ (DCNT = 0). ąŚą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▒ąĖč鹊ą╝ MCOMP, ą║ą░ą║ ąĖą╗ą╗čÄčüčéčĆąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ čĆąĖčü. 20-27 ąĖ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 20-5.
ąĀąĖčü. 20-27. ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąĖ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĄ FIFO.
ąóą░ą▒ą╗ąĖčåą░ 20-5. ąĪą╗čāčćą░ą╣ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ FIFO.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą»ą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: XMTSERV - ą▒čāč乥čĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čāčüčé.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
...
...
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: MCOMP - master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ (DCNT = 0).
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
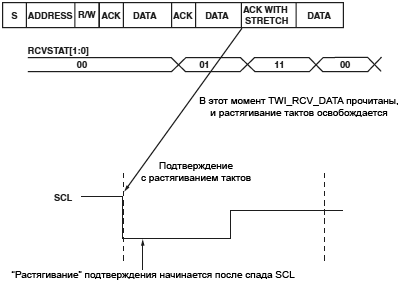
ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ FIFO . ąÆąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ą░ ą▓ čĆąĄąČąĖą╝ąĄ master ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╝. ą¤čĆąĖ čŹč鹊ą╝ ąĮą░ čäą░ąĘąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▒ą░ą╣čéą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓. ąØąĄ ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐ąŠą┐čŗč鹊ą║ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐čĆąĖąĄą╝ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą▒ą░ą╣čéą░. ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ, ą┐ąŠą║ą░ čĆą░ąĮąĄąĄ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ ą▒čāč乥čĆą░ FIFO (č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆčŗ TWI_RCV_DATA8, TWI_RCV_DATA16). ąöą╗čÅ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ čéą░ą║č鹊ą▓ ąĖ ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĖą║ą░ą║ąĖčģ ą┤čĆčāą│ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣. ąŁč鹊 ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąĖąĮčÅčéčŗ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ (DCNT = 0). ąóąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ (MCOMP), ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 20-28 ąĖ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 20-6.
ąĀąĖčü. 20-28. ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ FIFO.
ąóą░ą▒ą╗ąĖčåą░ 20-6. ąĪą╗čāčćą░ą╣ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ FIFO.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą»ą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: RCVSERV - ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮ.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
...
...
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: MCOMP - master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąĖ čüąĖą│ąĮą░ą╗ąĄ Repeated Start . ążčāąĮą║čåąĖčÅ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ čüčéą░čĆčéą░ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ I2C čéčĆąĄą▒čāąĄčé ą┐ąĄčĆąĄčģąŠą┤ą░ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čüąŠčüąĄą┤ąĮąĖą╝ąĖ čéčĆą░ąĮąĘą░ą║čåąĖčÅą╝ąĖ. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ ąĘą░ą┤ą░čćą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čŹčéąĖą╝ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ čāą┐čĆąŠčēą░ąĄčéčüčÅ, ąĖ ąŠąĮą░ ąŠą┤ąĖąĮą░ą║ąŠą▓ą░čÅ ą┤ą╗čÅ ą▓čüąĄčģ čéąĖą┐ąŠą▓ čéčĆą░ąĮąĘą░ą║čåąĖą╣.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ąĮą░čćą░ą╗čīąĮą░čÅ master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ TWI (ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ), ą▓ąŠ ą▓čĆąĄą╝čÅ čäą░ąĘčŗ repeated start (ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą╝ąĄąČą┤čā čéčĆą░ąĮąĘą░ą║čåąĖčÅą╝ąĖ) čéą░ą║čéčŗ ąĮą░čćąĖąĮą░čÄčé čĆą░čüčéčÅą│ąĖą▓ą░čéčīčüčÅ. ąÜąŠąĮą║čāčĆąĄąĮčéąĮąŠ čü čŹčéąĖą╝ čüąŠą▒čŗčéąĖąĄą╝ ąĮą░čćą░ą╗čīąĮą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ (MCOMP), ą║ąŠč鹊čĆąŠąĄ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ąĮą░čćą░ą╗čīąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ (DCNT = 0). ąŁčéą░ ąĮą░čćą░ą╗čīąĮą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą▒ąĄąĘ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čāčüčéą░ąĮąŠą▓ąŠą║ ą▒ąĖčé ąĖą╗ąĖ čéą░ą╣ą╝ąĖąĮą│ąŠą▓. ąŚą┤ąĄčüčī ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą▓čŗčłąĄąŠą┐ąĖčüą░ąĮąĮą░čÅ ą╗ąŠą│ąĖą║ą░ čĆą░čüčéčÅą│ąĖą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓. ąØąĄčé ąĮąĖą║ą░ą║ąĖčģ čüąĖčüč鹥ą╝ąĮčŗčģ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ ą┐ąŠčüą╗ąĄą┤čāčÄčēčāčÄ čéčĆą░ąĮąĘą░ą║čåąĖčÄ (ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čć), čćč鹊ą▒čŗ ąŠąĮą░ ą▒čŗą╗ą░ ąĮą░čüčéčĆąŠąĄąĮą░ ąĖ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮą░. ąŁčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą▓č鹊čĆąĄąĮą░ ą╗čÄą▒ąŠąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘ. ą¤čĆąŠčåąĄčüčü ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 20-29 ąĖ ąŠą┐ąĖčüą░ąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 20-7.
ąĀąĖčü. 20-29. ąĀą░čüčéčÅą│ąĖą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐čĆąĖ Repeated Start.
ąóą░ą▒ą╗ąĖčåą░ 20-7. ąĪą╗čāčćą░ą╣ Repeated Start.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ TWI ą»ą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: MCOMP - ąĮą░čćą░ą╗čīąĮą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ąĖ DCNT = 0.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: RCVSERV ŌĆō ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮ.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
...
...
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ: MCOMP - master-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąØąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ą░čģ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓ čĆą░ą▒ąŠčéčŗ čü TWI ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░, ąĮą░ą┐čĆčÅą╝čāčÄ.
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą║ąŠą┤ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ EEPROM AT24C64D [4]. ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčéčüčÅ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą┐čāč鹥ą╝ čåąĖą║ą╗ąĖč湥čüą║ąŠą│ąŠ ąŠą┐čĆąŠčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI0. ąŁč鹊čé ą║ąŠą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ Flash Programmer ą┤ą╗čÅ čāčéąĖą╗ąĖčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ VisualDSP++ [5].
static void twi_clear_all_stat (void )
{
/* ą×čćąĖčēą░ąĄčé ą▓čüąĄ ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ */
* pTWI0_MASTER_STAT = * pTWI0_MASTER_STAT;
ssync();
/* ą×čćąĖčēą░ąĄčé ą▓čüąĄ čäą╗ą░ą│ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ */
* pTWI0_INT_STAT = * pTWI0_INT_STAT;
ssync();
/* ąĪą▒čĆąŠčü ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ */
* pTWI0_FIFO_CTRL = ( XMTFLUSH | RCVFLUSH );
ssync();
}
/***************************************************************************** ąĪą▒čĆą░čüčŗą▓ą░ąĄčé ąĖąĮč鹥čĆč乥ą╣čü TWI. ******************************************************************************/ void twi_reset (void )
{
/* ąĪą▒čĆąŠčü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI */
* pTWI0_CONTROL = TWI_RESET_VAL;
ssync();
twi_clear_all_stat();
}
static void twiout (u8 byte, u16 ctrl)
{
* pTWI0_XMT_DATA8 = byte;
ssync();
if (ctrl)
{
* pTWI0_MASTER_CTRL = ctrl;
ssync();
}
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ:
while (* pTWI0_FIFO_STAT != XMT_EMPTY) { ssync(); }
}
/***************************************************************************** ąÆčŗą┐ąŠą╗ąĮčÅąĄčé ąĘą░ą┐ąĖčüčī ą▓ čĆąĄąČąĖą╝ąĄ master ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ******************************************************************************/ void twi_mastermode_write (u16 memaddr, u8 * pTwiDataPointer, u16 uwCount)
{
u8 i;
* pTWI0_FIFO_CTRL = 0 ;
* pTWI0_CONTROL = ( TWI_ENA | PRESCALE_VALUE );
* pTWI0_CLKDIV = ( ((CLKDIV_HI) << 8 ) | (CLKDIV_LO) );
// ą”ąĄą╗ąĄą▓ąŠą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü ą▒ąĄąĘ ą▒ąĖčéą░ R/~W):
* pTWI0_MASTER_ADDR = AT24_I2C_ADDR;
twiout(memaddr >> 8 , ((uwCount+ 2 ) << 6 ) | MEN);
twiout(memaddr & 0xFF , 0 );
for ( i= 0 ; i < uwCount; i++ )
{
twiout(* pTwiDataPointer, 0 );
pTwiDataPointer++ ; /* load the next sample into the TX FIFO */
}
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ MCOMP:
while ((* pTWI0_INT_STAT & MCOMP) == 0 ) { ssync(); }
// ąŻčüčéą░ąĮąŠą▓ą║ą░ TWI ąĮą░ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ:
* pTWI0_INT_STAT = ( XMTSERV | MCOMP );
delay_mks(PAGE_WRITE_MKS);
}
/***************************************************************************** ąÆčŗą┐ąŠą╗ąĮčÅąĄčé čćč鹥ąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ master ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ******************************************************************************/ void twi_mastermode_read (u16 memaddr, u8 * pTwiDataPointer, u16 uCount)
{
u8 i;
* pTWI0_FIFO_CTRL = 0 ;
* pTWI0_CONTROL = ( TWI_ENA | PRESCALE_VALUE );
* pTWI0_CLKDIV = ( ((CLKDIV_HI) << 8 ) | (CLKDIV_LO) );
* pTWI0_MASTER_ADDR = AT24_I2C_ADDR;
* pTWI0_XMT_DATA16 = (memaddr >> 8 ) | ((memaddr & 0x00FF ) << 8 );
// ąŚą░ą┐čāčüą║ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐ąŠčüą╗ąĄ ąĄčæ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▒čāą┤ąĄčé ą▓čŗą┤ą░ąĮ ą┐ąŠą▓č鹊čĆąĮčŗą╣ START:
* pTWI0_MASTER_CTRL = (2 << 6 ) | MEN | RSTART;
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ:
while (* pTWI0_FIFO_STAT == XMTSTAT) { ssync(); }
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ MCOMP:
while ((* pTWI0_INT_STAT & MCOMP) == 0 ) { ssync(); }
// ąĪą▒čĆąŠčü čäą╗ą░ą│ąŠą▓ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ:
* pTWI0_INT_STAT = XMTSERV | MCOMP;
asm("nop;" );
asm("nop;" );
asm("nop;" );
// ąŚą░ą┐čāčüą║ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ:
* pTWI0_MASTER_CTRL = (uCount << 6 ) | MEN | MDIR;
for (i = 0 ; i < uCount; i++ )
{
// ą×ąČąĖą┤ą░ąĮąĖąĄ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ FIFO ą┐čĆąĖąĄą╝ą░:
while (* pTWI0_FIFO_STAT == RCV_EMPTY) { ssync(); }
// ą¦č鹥ąĮąĖąĄ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ:
* pTwiDataPointer++ = * pTWI0_RCV_DATA8;
ssync();
}
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ą┐čĆąĖąĄą╝ą░ ą┐ąŠ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ MCOMP:
while ((* pTWI0_INT_STAT & MCOMP) == 0 ) { ssync(); }
// ąĪą▒čĆąŠčü čäą╗ą░ą│ąŠą▓ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ:
* pTWI0_INT_STAT = RCVSERV | MCOMP;
asm("nop;" );
asm("nop;" );
asm("nop;" );
}
ą¤čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ:
twi_reset();
twi_mastermode_read(addr, pVal, count);
ą¤čĆąĖą╝ąĄčĆ ąĘą░ą┐ąĖčüąĖ:
twi_reset();
twi_mastermode_write(addr, pVal, count);
ąŚą┤ąĄčüčī ą┐ą░čĆą░ą╝ąĄčéčĆ addr čŹč鹊 ą░ą▒čüąŠą╗čÄčéąĮčŗą╣ ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü, čāą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ EEPROM, ąŠčéą║čāą┤ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čćč鹥ąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī (ą┤ą╗čÅ AT24C64D ą░ą┤čĆąĄčü ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0 ą┤ąŠ 8191). ą¤ą░čĆą░ą╝ąĄčéčĆ pVal čŹč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ count ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ąĖą╗ąĖ čćąĖčéą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ (ąĮąĄ ą▒ąŠą╗čīčłąĄ čĆą░ąĘą╝ąĄčĆą░ čüčéčĆą░ąĮąĖčåčŗ, čé. ąĄ. ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1 .. 32).
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąŠą▒čĆą░čēąĄąĮąĖąĄ ą║ AT24C64D ą▓ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░čģ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé čĆą░ą▒ąŠčéčā ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą┤ąĮąŠą╣ čüčéčĆą░ąĮąĖčåčŗ. ąó. ąĄ. ąĄčüą╗ąĖ ąĮčāąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ąĖą╗ąĖ ąĘą░ą┐ąĖčüą░čéčī ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ, ą┤ą░ąĮąĮčŗąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąĄčĆąĄčüąĄą║ą░čÄčé ą│čĆą░ąĮąĖčåčŗ čüčéčĆą░ąĮąĖčå, č鹊 ąŠą▒čĆą░čēąĄąĮąĖčÅ ą║ EEPROM ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čĆą░ąĘą▒ąĖčéčī ąĮą░ čćą░čüčéąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ą║ą░ąČą┤ąŠąĄ ąŠą▒čĆą░čēąĄąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖą╗ąŠ ą║ ą┤ą░ąĮąĮčŗą╝ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╣ čüčéčĆą░ąĮąĖčåąĄ ą┐ą░ą╝čÅčéąĖ.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ čłąĖąĮčŗ I2C ą┐čĆąĖ čćč鹥ąĮąĖąĖ ąĖ ąĘą░ą┐ąĖčüąĖ (čüą║čĆąĖąĮčłąŠčéčŗ čāčéąĖą╗ąĖčéčŗ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ ą░ąĮą░ą╗ąĖąĘą░č鹊čĆą░ ąÉąÜąśą¤-9103). ą¤čĆąĖą╝ąĄčĆ ąĘą░ą┐ąĖčüąĖ ą┤ą▓čāčģ ą▒ą░ą╣čé 55h ąĖ AAh ą┐ąŠ ą░ą┤čĆąĄčüčā 0000h:
ąŚą░ą┐ąĖčüčī ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊: ą┐ąŠčüą╗ąĄ čüąĖą│ąĮą░ą╗ą░ START čüąĮą░čćą░ą╗ą░ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą▒ąĖč鹊ą╝ R/W=0, ą┐ąŠč鹊ą╝ ą┐ąĄčĆąĄą┤ą░čéčī čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░, ąĘą░č鹥ą╝ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░, ąĖ ą┤ą░ą╗ąĄąĄ ą┐ąĄčĆąĄą┤ą░čéčī ąĮčāąČąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé (1 .. 32). ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąŠą╗ąČąĮą░ ąĘą░ą▓ąĄčĆčłąĖčéčīčüčÅ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ą░ STOP.
ą¤čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ ą┤ą▓čāčģ ą▒ą░ą╣čé ą┐ąŠ ą░ą┤čĆąĄčüčā 0000h:
ą¦č鹥ąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮąĄą╝ąĮąŠą│ąŠ čüą╗ąŠąČąĮąĄąĄ. ąØą░čćąĖąĮą░ąĄčéčüčÅ ąŠąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĘą░ą┐ąĖčüčī, ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą▒ąĖč鹊ą╝ R/W=0 ąĖ ąĘą░č鹥ą╝ ą┤ą▓čāčģ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░ čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čāą║ą░ąĘą░č鹥ą╗čī ą░ą┤čĆąĄčüą░ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ EEPROM. ą¤ąŠč鹊ą╝ ąĮčāąČąĮąŠ ą▓čŗą┤ą░čéčī ą┐ąŠą▓č鹊čĆąĮčŗą╣ čüąĖą│ąĮą░ą╗ START, ą┐ąĄčĆąĄą┤ą░čéčī ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą▒ąĖč鹊ą╝ R/W=1 (čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠ č鹊ą╝, čćč鹊 ą┤ą░ą╗ąĄąĄ ą▒čāą┤ąĄčé ąĖą┤čéąĖ čćč鹥ąĮąĖąĄ), ąĖ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐čĆąŠčćąĖčéą░čéčī ąĮčāąČąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąŠą╗ąČąĮą░ ąĘą░ą▓ąĄčĆčłąĖčéčīčüčÅ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą╝ą░čüč鹥čĆąŠą╝ čłąĖąĮčŗ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ NACK ąĖ ąĘą░č鹥ą╝ čüąĖą│ąĮą░ą╗ą░ STOP.
FM24W256 čŹč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ą░ą╝čÅčéąĖ FRAM čĆą░ąĘą╝ąĄčĆąŠą╝ 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C, ą║ąŠč鹊čĆą░čÅ ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ EEPROM ąĖą╗ąĖ FLASH čĆą░ą▒ąŠčéą░ąĄčé ąŠč湥ąĮčī ą▒čŗčüčéčĆąŠ, ąĮąĄ čéčĆąĄą▒čāčÅ ąĘą░ą┤ąĄčƹȹĄą║ ąŠąČąĖą┤ą░ąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ čåąĖą║ą╗ąŠą▓ ąĘą░ą┐ąĖčüąĖ čüčéčĆą░ąĮąĖčå. ą£ą░ą╗ąŠ č鹊ą│ąŠ, ą┐ą░ą╝čÅčéčī FM24W256 ą▓ąŠąŠą▒čēąĄ čüą▓ąŠą▒ąŠą┤ąĮą░ ąŠčé čüčéčĆą░ąĮąĖčćąĮąŠą╣ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ, ąĖ ą║ąŠ ą▓čüąĄą╝ ąĄčæ čÅč湥ą╣ą║ą░ą╝ ą╝ąŠąČąĮąŠ ąŠą▒čĆą░čēą░čéčīčüčÅ ąĮą░ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī čü ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ ąĖ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ.
[TWI.h ]
#pragma once #include < services/services.h>
// ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗čÅ Prescale čĆąĄą│ąĖčüčéčĆą░ TWIx_CONTROL ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ // čłąĖąĮčŗ SCK (ą║ąōčå) ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ TWI=10 ą£ąōčå ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī // čĆą░ą▓ąĮąŠ SCK / 10000 = 50000 / 10000 = 5. ąŚą┤ąĄčüčī SCK čĆą░ą▓ąĮąŠ čéą░ą║č鹊ą▓ąŠą╣ // čćą░čüč鹊č鹥 čłąĖąĮčŗ ą▓ ą║ąĖą╗ąŠą│ąĄčĆčåą░čģ: #define PRESCALE_VALUE (SCK/10000) /* PRESCALE = 50/10 = 5 */ #define TWI_RESET_VAL 0 /* ąĘąĮą░č湥ąĮąĖąĄ RESET_TWI ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ */
// ąĢčüą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╝ą░ą║čĆąŠčü FAST_I2C, č鹊 čćą░čüč鹊čéą░ čłąĖąĮčŗ I2C ą▒čāą┤ąĄčé // 400 ą║ąōčå, ąĄčüą╗ąĖ ąČąĄ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ, č鹊 100 ą║ąōčå: #define FAST_I2C
#ifdef FAST_I2C // ą¤ąĄčĆąĖąŠą┤ SCL ą▓ čéą░ą║čéą░čģ 10 ą£ąōčå čĆą░ą▓ąĄąĮ 10000 ą║ąōčå / 400 ą║ąōčå: #define SCL_PERIOD (10000/400) #else // ą¤ąĄčĆąĖąŠą┤ SCL ą▓ čéą░ą║čéą░čģ 10 ą£ąōčå čĆą░ą▓ąĄąĮ 10000 ą║ąōčå / 100 ą║ąōčå: #define SCL_PERIOD (10000/100) #endif
// ąÜąŠąĮčüčéą░ąĮčéčŗ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ SCL ą▓ čĆąĄą│ąĖčüčéčĆąĄ pTWI_CLKDIV: #define CLKDIV_HI (SCL_PERIOD/2) // ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąŠą│. 1 SCL #define CLKDIV_LO (SCL_PERIOD/2) // ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąŠą│. 0 SCL
// ąŻ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF538 ą┤ą▓ą░ ą┐ąŠčĆčéą░ TWI: I2C0 ąĖ I2C1. // ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ I2C0, č鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ DevNumber ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī 0. // ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ I2C1, č鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ DevNumber ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī 1. #define DevNumber 1
#if (DevNumber == 0) #define pTWI_MASTER_STAT pTWI0_MASTER_STAT #define pTWI_INT_STAT pTWI0_INT_STAT #define pTWI_FIFO_CTRL pTWI0_FIFO_CTRL #define pTWI_CONTROL pTWI0_CONTROL #define pTWI_XMT_DATA8 pTWI0_XMT_DATA8 #define pTWI_MASTER_CTRL pTWI0_MASTER_CTRL #define pTWI_FIFO_STAT pTWI0_FIFO_STAT #define pTWI_CLKDIV pTWI0_CLKDIV #define pTWI_MASTER_ADDR pTWI0_MASTER_ADDR #define pTWI_XMT_DATA16 pTWI0_XMT_DATA16 #define pTWI_RCV_DATA8 pTWI0_RCV_DATA8 #elif (DevNumber == 1) #define pTWI_MASTER_STAT pTWI1_MASTER_STAT #define pTWI_INT_STAT pTWI1_INT_STAT #define pTWI_FIFO_CTRL pTWI1_FIFO_CTRL #define pTWI_CONTROL pTWI1_CONTROL #define pTWI_XMT_DATA8 pTWI1_XMT_DATA8 #define pTWI_MASTER_CTRL pTWI1_MASTER_CTRL #define pTWI_FIFO_STAT pTWI1_FIFO_STAT #define pTWI_CLKDIV pTWI1_CLKDIV #define pTWI_MASTER_ADDR pTWI1_MASTER_ADDR #define pTWI_XMT_DATA16 pTWI1_XMT_DATA16 #define pTWI_RCV_DATA8 pTWI1_RCV_DATA8 #endif
// ąÜąŠą┤čŗ ąŠčłąĖą▒ąŠą║: typedef enum
{
TWI_OK = 0 , // 0
TWI_TIMEOUT_TWIOUT, // 1
TWI_TIMEOUT2, // 2
TWI_TIMEOUT_NACK_I2C_ADRESS, // 3
TWI_TIMEOUT4, // 4
TWI_TIMEOUT5, // 5
TWI_TIMEOUT6, // 6
TWI_TIMEOUT_STOP // 7
}TWIstate;
extern u16 twi_master_stat;
const char * twierr_decode (TWIstate twistate);
TWIstate twiout (u8 byte);
TWIstate twi_STOP (void );
TWIstate twiin (u8 * byte);
TWIstate twi_START_write (u8 I2Caddr, u16 memaddr);
TWIstate twi_START_read (u8 I2Caddr, u16 memaddr);
[TWI.c ]
/***************************************************************************** ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ąĮą░ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ TWI (ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣). *****************************************************************************/ #include "init_platform.h" #include "TWI.h" #include "delay.h"
#define TWI_TIMEOUT_MS 100
u16 twi_master_stat;
const char * twierr_decode (TWIstate twistate)
{
const char * result = "twi unknown error" ;
switch (twistate)
{
case TWI_OK:
result = "OK" ;
break ;
case TWI_TIMEOUT_TWIOUT:
result = "TWI_TIMEOUT_TWIOUT" ;
break ;
case TWI_TIMEOUT2:
result = "TWI_TIMEOUT2" ;
break ;
case TWI_TIMEOUT_NACK_I2C_ADRESS:
// ą×čéčüčāčéčüčéą▓čāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ, ąĖą╗ąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü I2C:
result = "NACK to I2C address" ;
break ;
case TWI_TIMEOUT4:
result = "TWI_TIMEOUT4" ;
break ;
case TWI_TIMEOUT5:
result = "TWI_TIMEOUT5" ;
break ;
case TWI_TIMEOUT6:
result = "TWI_TIMEOUT6" ;
break ;
case TWI_TIMEOUT_STOP:
result = "TWI_TIMEOUT_STOP" ;
break ;
}
return result;
}
static void twi_clear_all_stat (void )
{
/* ą×čćąĖčēą░ąĄčé ą▓čüąĄ ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ */
//*pTWI_MASTER_STAT = ( BUFWRERR | BUFRDERR | DNAK | ANAK | LOSTARB);
* pTWI_MASTER_STAT = * pTWI_MASTER_STAT;
ssync();
/* ą×čćąĖčēą░ąĄčé ą▓čüąĄ čäą╗ą░ą│ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ */
* pTWI_INT_STAT = * pTWI_INT_STAT;
ssync();
/* ąĪą▒čĆąŠčü ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ */
* pTWI_FIFO_CTRL = ( XMTFLUSH | RCVFLUSH );
ssync();
}
/***************************************************************************** ąĪą▒čĆą░čüčŗą▓ą░ąĄčé ąĖąĮč鹥čĆč乥ą╣čü TWI. ******************************************************************************/ static void twi_reset (void )
{
/* ąĪą▒čĆąŠčü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI */
* pTWI_CONTROL = TWI_RESET_VAL;
ssync();
twi_clear_all_stat();
}
TWIstate twiout (u8 byte)
{
TWIstate twiresult = TWI_OK;
clock_t end_tick;
* pTWI_XMT_DATA8 = byte;
end_tick = clock() + TWI_TIMEOUT_MS * MS_TICKS;
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ:
while (* pTWI_FIFO_STAT != XMT_EMPTY)
{
ssync();
if (end_tick < clock())
{
twiresult = TWI_TIMEOUT_TWIOUT;
twi_master_stat = * pTWI_MASTER_STAT;
break ;
}
}
return twiresult;
}
TWIstate twi_STOP (void )
{
TWIstate twiresult = TWI_OK;
clock_t end_tick;
// ąÆčŗą┤ą░čćą░ čüąĖą│ąĮą░ą╗ą░ STOP:
* pTWI_MASTER_CTRL = MEN | MDIR | STOP;
end_tick = clock() + TWI_TIMEOUT_MS * MS_TICKS;
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ čłąĖąĮčŗ ą┐ąŠčüą╗ąĄ čüąĖą│ąĮą░ą╗ą░ STOP:
while (* pTWI_MASTER_STAT & BUSBUSY)
{
ssync();
if (end_tick < clock())
{
twiresult = TWI_TIMEOUT_STOP;
twi_master_stat = * pTWI_MASTER_STAT;
return twiresult;
}
}
return twiresult;
}
TWIstate twiin (u8 * byte)
{
TWIstate twiresult = TWI_OK;
clock_t end_tick;
end_tick = clock() + TWI_TIMEOUT_MS * MS_TICKS;
// ą×ąČąĖą┤ą░ąĮąĖąĄ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ FIFO ą┐čĆąĖąĄą╝ą░:
while (* pTWI_FIFO_STAT == RCV_EMPTY)
{
ssync();
if (end_tick < clock())
{
twiresult = TWI_TIMEOUT5;
twi_master_stat = * pTWI_MASTER_STAT;
twi_STOP();
return twiresult;
}
}
// ą¦č鹥ąĮąĖąĄ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ:
* byte = * pTWI_RCV_DATA8;
ssync();
return twiresult;
}
TWIstate twi_START_write (u8 I2Caddr, u16 memaddr)
{
TWIstate twiresult = TWI_OK;
clock_t end_tick;
twi_reset();
* pTWI_FIFO_CTRL = 0 ; // ąŠčćąĖčüčéą║ą░ ą▒ąĖčé ą▓čĆčāčćąĮčāčÄ
* pTWI_CONTROL = ( TWI_ENA | PRESCALE_VALUE );
* pTWI_CLKDIV = ( ((CLKDIV_HI) << 8 ) | (CLKDIV_LO) );
// ą”ąĄą╗ąĄą▓ąŠą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü ą▒ąĄąĘ ą▒ąĖčéą░ R/~W):
* pTWI_MASTER_ADDR = I2Caddr;
* pTWI_XMT_DATA16 = (memaddr << 8 ) | ((memaddr & 0xFF00 ) >> 8 );
// ąŚą░ą┐čāčüą║ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą░ą┤čĆąĄčüą░ I2C ąĖ 2 ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ FLASH,
// čüąĮą░čćą░ą╗ą░ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé, ą┐ąŠč鹊ą╝ ą╝ą╗ą░ą┤čłąĖą╣. ąÆ čüč湥čéčćąĖą║ ą▒ą░ą╣čé
// ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ 255, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ą▒ąĄčüą║ąŠąĮąĄčćąĮčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā,
// ą┐ąŠą║ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐ąĖčüčī ą▓ *pTWI_XMT_DATA8:
* pTWI_MASTER_CTRL = (255 << 6 ) | MEN | RSTART;
twiresult = TWI_OK;
end_tick = clock() + TWI_TIMEOUT_MS * MS_TICKS;
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ:
while (* pTWI_FIFO_STAT == XMTSTAT)
{
ssync();
if (end_tick < clock())
{
// ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ąŠčéą▓ąĄčéąĖą╗ąŠ ąĮą░ ą░ą┤čĆąĄčü I2C.
// ąøąĖą▒ąŠ ąĄą│ąŠ ąĮąĄčé, ą╗ąĖą▒ąŠ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü.
twiresult = TWI_TIMEOUT_NACK_I2C_ADRESS;
twi_master_stat = * pTWI_MASTER_STAT;
break ;
}
}
return twiresult;
}
TWIstate twi_START_read (u8 I2Caddr, u16 memaddr)
{
TWIstate twiresult = TWI_OK;
clock_t end_tick;
twi_reset();
* pTWI_FIFO_CTRL = 0 ; // ąŠčćąĖčüčéą║ą░ ą▒ąĖčé ą▓čĆčāčćąĮčāčÄ
* pTWI_CONTROL = ( TWI_ENA | PRESCALE_VALUE );
* pTWI_CLKDIV = ( ((CLKDIV_HI) << 8 ) | (CLKDIV_LO) );
// ą”ąĄą╗ąĄą▓ąŠą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü ą▒ąĄąĘ ą▒ąĖčéą░ R/~W):
* pTWI_MASTER_ADDR = I2Caddr;
* pTWI_XMT_DATA16 = (memaddr << 8 ) | ((memaddr & 0xFF00 ) >> 8 );
// ąŚą░ą┐čāčüą║ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą░ą┤čĆąĄčüą░ I2C ąĖ 2 ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ FLASH,
// čüąĮą░čćą░ą╗ą░ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé, ą┐ąŠč鹊ą╝ ą╝ą╗ą░ą┤čłąĖą╣. ąÆ čüč湥čéčćąĖą║ ą▒ą░ą╣čé
// ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ 255, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ą▒ąĄčüą║ąŠąĮąĄčćąĮčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā,
// ą┐ąŠą║ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐ąĖčüčī ą▓ *pTWI_XMT_DATA8:
* pTWI_MASTER_CTRL = (2 << 6 ) | MEN | RSTART;
twiresult = TWI_OK;
end_tick = clock() + TWI_TIMEOUT_MS * MS_TICKS;
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ:
//while (*pTWI_FIFO_STAT == XMTSTAT)
while ((* pTWI_INT_STAT & MCOMP) == 0 )
{
ssync();
if (end_tick < clock())
{
// ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ąŠčéą▓ąĄčéąĖą╗ąŠ ąĮą░ ą░ą┤čĆąĄčü I2C.
// ąøąĖą▒ąŠ ąĄą│ąŠ ąĮąĄčé, ą╗ąĖą▒ąŠ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü.
twiresult = TWI_TIMEOUT_NACK_I2C_ADRESS;
twi_master_stat = * pTWI_MASTER_STAT;
break ;
}
}
return twiresult;
}
[FM24W256.h ]
#pragma once #include "TWI.h"
// I2C-ą░ą┤čĆąĄčü ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ EEPROM FM24W256-GTR (A2A1A0 = 110): #define FM24W256_I2C_ADDR 0x56 // ąĀą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ EEPROM FM24W256-GTR, ą▒ą░ą╣čé: #define FM24W256_SIZE 0x8000
// I2Caddr: ą░ą┤čĆąĄčü I2C ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ // memaddr: ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ (0 .. 32767) // buffdata: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ąŠčéą║čāą┤ą░ ą▒ąĄčĆčāčéčüčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ // uCount: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ
TWIstate twi_mastermode_write (u8 I2Caddr, u16 memaddr, u8 * buffdata, u16 uCount);
// I2Caddr: ą░ą┤čĆąĄčü I2C ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ // memaddr: ą░ą┤čĆąĄčü ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ (0 .. 32767) // buffdata: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║čāą┤ą░ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ // uCount: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčćąĖčéčŗą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ
TWIstate twi_mastermode_read (u8 I2Caddr, u16 memaddr, u8 * buffdata, u16 uCount);
[FM24W256.c ]
/***************************************************************************** ąÆčŗą┐ąŠą╗ąĮčÅąĄčé ąĘą░ą┐ąĖčüčī ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā FM24W256 ą▓ čĆąĄąČąĖą╝ąĄ master ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ******************************************************************************/
TWIstate twi_mastermode_write (u8 I2Caddr, u16 memaddr, u8 * buffdata, u16 uCount)
{
u16 i;
TWIstate twiresult;
clock_t end_tick;
twiresult = twi_START_write (I2Caddr, memaddr);
if (TWI_OK == twiresult)
{
// ą”ąĖą║ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ:
for ( i= 0 ; i < uCount; i++ )
{
twiresult = twiout(* buffdata++ );
if (TWI_OK != twiresult)
{
twi_STOP();
return twiresult;
}
}
}
twiresult = twi_STOP();
return twiresult;
}
/***************************************************************************** ąÆčŗą┐ąŠą╗ąĮčÅąĄčé čćč鹥ąĮąĖąĄ ąĖąĘ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FM24W256 ą▓ čĆąĄąČąĖą╝ąĄ master ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ******************************************************************************/
TWIstate twi_mastermode_read (u8 I2Caddr, u16 memaddr, u8 * buffdata, u16 uCount)
{
u16 i;
TWIstate twiresult;
clock_t end_tick;
// ąŚą░ą┐čāčüą║ ą┐ąĄčĆąĄą┤ą░čćąĖ START, ą░ą┤čĆąĄčüą░ I2C, R/W=0, čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░
// FLASH, ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░ FLASH:
twiresult = twi_START_read (I2Caddr, memaddr);
if (TWI_OK == twiresult)
{
// ąĪą▒čĆąŠčü čäą╗ą░ą│ąŠą▓ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ:
* pTWI_INT_STAT = XMTSERV | MCOMP;
// ąÆčŗą┤ą░čćą░ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ START, ąĘą░ą┐čāčüą║ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ:
* pTWI_MASTER_CTRL = (255 << 6 ) | MEN | MDIR | RSTART;
for (i = 0 ; i < uCount; i++ )
{
// ą¤ąĄčĆąĄą┤ ą┐čĆąĖąĄą╝ąŠą╝ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą▒ą░ą╣čéą░ ąĘą░ą║ą░ąĘčŗą▓ą░ąĄą╝ ą▓čŗą┤ą░čćčā STOP:
if (i == (uCount- 1 ))
{
twiresult = twi_STOP();
if (twiresult != TWI_OK)
return twiresult;
}
twiresult = twiin(buffdata++ );
if (TWI_OK != twiresult)
{
twi_STOP();
break ;
}
}
}
return twiresult;
}
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
#include < stdio.h> #include "FM24W256.h"
u32 address;
TWIstate twistate;
// ą¤čĆąĖą╝ąĄčĆ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ:
twistate = twi_mastermode_write(FM24W256_I2C_ADDR,
0 ,
(u8* )0x20000000 ,
FM24W256_SIZE);if (TWI_OK != twistate)
{
print("error %s, TWI_MASTER_STAT: %04X \n " ,
twierr_decode(twistate), twi_master_stat);
}
// ą¤čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ:
twistate = twi_mastermode_read(FM24W256_I2C_ADDR,
0 ,
(u8* )SDRAM_BUF_BEGIN,
FM24W256_SIZE);if (TWI_OK != twistate)
{
print("error %s, TWI_MASTER_STAT: %04X \n " ,
twierr_decode(twistate), twi_master_stat);
}
[TWI.h ]
#pragma once #include < services/services.h>
// ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗čÅ Prescale čĆąĄą│ąĖčüčéčĆą░ TWIx_CONTROL ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ // čłąĖąĮčŗ SCK (ą║ąōčå) ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ TWI=10 ą£ąōčå ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī // čĆą░ą▓ąĮąŠ SCK / 10000 = 50000 / 10000 = 5. ąŚą┤ąĄčüčī SCK čĆą░ą▓ąĮąŠ čéą░ą║č鹊ą▓ąŠą╣ // čćą░čüč鹊č鹥 čłąĖąĮčŗ ą▓ ą║ąĖą╗ąŠą│ąĄčĆčåą░čģ: #define PRESCALE_VALUE (SCK/10000) /* PRESCALE = 50/10 = 5 */ #define TWI_RESET_VAL 0 /* ąĘąĮą░č湥ąĮąĖąĄ RESET_TWI ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ */
// ąĢčüą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╝ą░ą║čĆąŠčü FAST_I2C, č鹊 čćą░čüč鹊čéą░ čłąĖąĮčŗ I2C ą▒čāą┤ąĄčé // 400 ą║ąōčå, ąĄčüą╗ąĖ ąČąĄ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ, č鹊 100 ą║ąōčå: #define FAST_I2C
#ifdef FAST_I2C // ą¤ąĄčĆąĖąŠą┤ SCL ą▓ čéą░ą║čéą░čģ 10 ą£ąōčå čĆą░ą▓ąĄąĮ 10000 ą║ąōčå / 400 ą║ąōčå: #define SCL_PERIOD (10000/400) #else // ą¤ąĄčĆąĖąŠą┤ SCL ą▓ čéą░ą║čéą░čģ 10 ą£ąōčå čĆą░ą▓ąĄąĮ 10000 ą║ąōčå / 100 ą║ąōčå: #define SCL_PERIOD (10000/100) #endif
// ąÜąŠąĮčüčéą░ąĮčéčŗ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ SCL ą▓ čĆąĄą│ąĖčüčéčĆąĄ pTWI_CLKDIV: #define CLKDIV_HI (SCL_PERIOD/2) // ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąŠą│. 1 SCL #define CLKDIV_LO (SCL_PERIOD/2) // ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąŠą│. 0 SCL
// ąŻ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF538 ą┤ą▓ą░ ą┐ąŠčĆčéą░ TWI: I2C0 ąĖ I2C1. // ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ I2C0, č鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ DevNumber ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī 0. // ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ I2C1, č鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ DevNumber ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī 1. #define DevNumber 1
#if (DevNumber==0) #define pTWI_MASTER_STAT pTWI0_MASTER_STAT #define pTWI_INT_STAT pTWI0_INT_STAT #define pTWI_FIFO_CTRL pTWI0_FIFO_CTRL #define pTWI_CONTROL pTWI0_CONTROL #define pTWI_XMT_DATA8 pTWI0_XMT_DATA8 #define pTWI_XMT_DATA16 pTWI0_XMT_DATA16 #define pTWI_MASTER_CTRL pTWI0_MASTER_CTRL #define pTWI_FIFO_STAT pTWI0_FIFO_STAT #define pTWI_CLKDIV pTWI0_CLKDIV #define pTWI_MASTER_ADDR pTWI0_MASTER_ADDR #elif (DevNumber==1) #define pTWI_MASTER_STAT pTWI1_MASTER_STAT #define pTWI_INT_STAT pTWI1_INT_STAT #define pTWI_FIFO_CTRL pTWI1_FIFO_CTRL #define pTWI_CONTROL pTWI1_CONTROL #define pTWI_XMT_DATA8 pTWI1_XMT_DATA8 #define pTWI_XMT_DATA16 pTWI1_XMT_DATA16 #define pTWI_MASTER_CTRL pTWI1_MASTER_CTRL #define pTWI_FIFO_STAT pTWI1_FIFO_STAT #define pTWI_CLKDIV pTWI1_CLKDIV #define pTWI_MASTER_ADDR pTWI1_MASTER_ADDR #else #error "BAD TWI device (DevNumber)" #endif
void twi_reset (void );
[TWI.c ]
/**************************************************** ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü TWI ąĮą░ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ. *****************************************************/ #include "init_platform.h" #include "TWI.h"
static void twi_clear_all_stat (void )
{
/* ą×čćąĖčēą░ąĄčé ą▓čüąĄ ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ */
* pTWI_MASTER_STAT = * pTWI_MASTER_STAT;
ssync();
/* ą×čćąĖčēą░ąĄčé ą▓čüąĄ čäą╗ą░ą│ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ */
* pTWI_INT_STAT = * pTWI_INT_STAT;
ssync();
/* ąĪą▒čĆąŠčü ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ */
* pTWI_FIFO_CTRL = ( XMTFLUSH | RCVFLUSH );
ssync();
}
// ą¤čĆąŠčåąĄą┤čāčĆą░ čüą▒čĆą░čüčŗą▓ą░ąĄčé ąĖąĮč鹥čĆč乥ą╣čü TWI. void twi_reset (void )
{
/* ąĪą▒čĆąŠčü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TWI */
* pTWI_CONTROL = TWI_RESET_VAL;
ssync();
twi_clear_all_stat();
}
[timer.h ]
#pragma once #include "settings.h"
// ąÜąŠąĮčüčéą░ąĮčéčŗ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čćą░čüč鹊čéčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░: #define T0PERIOD (SCK/(SAMPLERATE/1000)) #define T0WIDTH (T0PERIOD >> 1)
// ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąĄčĆąĖč乥čĆąĖąĖ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ą┐čĆąĖą▓čÅąĘą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ: #define TIMER0_PERIPH_INT_ID 16
extern u8 ampl256;extern u16 voltage;
void Timer0init (void );
[timer.c ]
#include < sys/exception.h> #include "pins.h" #include "timer.h" #include "TWI.h" #include "AD5667.h"
u8 ampl256 = MAX;
u16 voltage = 600 ;
static void Timer0stop (void )
{
// ąŚą░ą┐čĆąĄčé čĆą░ą▒ąŠčéčŗ čéą░ą╣ą╝ąĄčĆą░:
* pTIMER_DISABLE = TIMEN0;
// ą¤ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłą░čÄčēąĄą╣ ą▓čŗą▒ąŠčĆą║ąĖ čü ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ STOP:
* pTWI_MASTER_CTRL = (2 << 6 ) | MEN;
u16 val16 = SHIFT;
* pTWI_XMT_DATA16 = (val16 >> 8 )| (val16 << 8 );
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ I2C:
* pTWI_INT_STAT = * pTWI_INT_STAT;
while (0 == (* pTWI_INT_STAT & MCOMP)) { ssync(); }
twistate = TWI_IDLE;
}
// ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ 0, ą║ąŠč鹊čĆčŗą╣ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé // čü čćą░čüč鹊č鹊ą╣ 20 ą║ąōčå (ąĘą░ą▓ąĖčüąĖčé ąŠčé SAMPLERATE). ą¤čĆąĖ ą║ą░ąČą┤ąŠą╝ // čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą”ąÉą¤ AD5667R ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ // ąŠą┤ąĮą░ 16-ą▒ąĖčéąĮą░čÅ ą▓čŗą▒ąŠčĆą║ą░ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĖ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ I2C // 400 ą║ąōčå ą╝ą░čüą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ // ąŠą│čĆą░ąĮąĖč湥ąĮą░ 20 ą║ąōčå.
EX_INTERRUPT_HANDLER(Timer0ISR)
{
* pTIMER_STATUS = TIMIL0;
// ąĪč湥čéčćąĖą║ čäą░ąĘčŗ:
static float phase = 0 ;
// ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čéą░ą▒ą╗ąĖčåčā čüąĖąĮčāčüą░ ą▓ SDRAM:
s16 * ptr = 0 ;
u16 val16phase;
u16 val16;
switch (twistate)
{
case TWI_IDLE:
break ;
case TWI_RUNNING:
LED(1 );
// ąŚą░ą┐ąĖčüčī ąŠą┤ąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ:
val16phase = (u16)phase;
val16 = SHIFT + (ptr[val16phase] * (float )ampl256/ 600 )* voltage;
* pTWI_XMT_DATA16 = (val16 >> 8 )| (val16 << 8 );
// ąśąĮą║čĆąĄą╝ąĄąĮčé čäą░ąĘčŗ ą┤ą╗čÅ 375 ąōčå:
phase += SINUS_TABLE_SIZE/ ((float )SAMPLERATE/ 375 );
if (phase > SINUS_TABLE_SIZE)
phase = phase - SINUS_TABLE_SIZE;
LED(0 );
break ;
case TWI_STOP:
Timer0stop();
break ;
}
}
void Timer0init (void )
{
// ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆą░ ąĮą░ čćą░čüč鹊čéčā 20 ą║ąōčå:
* pTIMER0_PERIOD = T0PERIOD;
* pTIMER0_WIDTH = T0WIDTH;
* pTIMER0_CONFIG = PWM_OUT | PULSE_HI | PERIOD_CNT | IRQ_ENA;
// ą¤čĆąĖą▓čÅąĘą║ą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą║ IVG:
* pSIC_IAR2 |= PX_IVG(TIMER0_PERIPH_INT_ID, ik_ivg7);
// ąĀąĄą│ąĖčüčéčĆą░čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
register_handler_ex(ik_ivg7, Timer0ISR, EX_INT_ENABLE);
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
* pSIC_IMASK0 |= TIMER0_IRQ;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čéą░ą╣ą╝ąĄčĆą░:
* pTIMER_ENABLE = TIMEN0;
}
[AD5667.h ]
#pragma once #include < services_types.h> #include "settings.h"
// I2C-ą░ą┤čĆąĄčü ą▒ąĄąĘ ą▒ąĖčéą░ R/W: #define AD5667_I2C_ADDR 0x0F
// ąŚą░ą┐ąĖčüčī č鹊ą╗čīą║ąŠ ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ: #define CMD_WRITE_NO_UPDATE (0 << 3) // ą×ą▒ąĮąŠą▓ąĖčéčī DAC ą┤ą░ąĮąĮčŗą╝ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░: #define CMD_UPDATE (1 << 3) // ąŚą░ą┐ąĖčüą░čéčī ą▓ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ, ąĖ čüčĆą░ąĘčā ąŠą▒ąĮąŠą▓ąĖčéčī ą▓ąĄčüčī DAC: #define CMD_WRITE_N_AND_UPDATE_ALL (2 << 3) // ąŚą░ą┐ąĖčüą░čéčī ąĖ ąŠą▒ąĮąŠą▓ąĖčéčī ą║ą░ąĮą░ą╗ n DAC: #define CMD_WRITE_AND_UPDATE_CHNL (3 << 3) // ąÜąŠą╝ą░ąĮą┤ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝: #define CMD_POWER (4 << 3) // ąÜąŠą╝ą░ąĮą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░: #define CMD_RESET (5 << 3) // ąÜąŠą╝ą░ąĮą┤ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆąĄą│ąĖčüčéčĆą░ LDAC: #define CMD_LDAC_SETUP (6 << 3) // ąÜąŠą╝ą░ąĮą┤ą░ ą▓ą║ą╗čÄč湥ąĮąĖčÅ/ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ: #define CMD_REFERENCE (7 << 3)
#define DAC_A 0 #define DAC_B 1 #define DAC_BOTH 7
#define S_MULTIBYTE (1 << 6)
// ąŚąĮą░č湥ąĮąĖčÅ, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą▓ čüč湥čéčćąĖą║ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą▒ą░ą╣čé, // čćč鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗čüčÅ ąĖą╗ąĖ ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗čüčÅ čüąĖą│ąĮą░ą╗ STOP: #define GENERATE_STOP 3 #define WITHOUT_STOP 0xFF
// ąŚąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ąŠą╝ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ: #define REF_EXTERNAL 0 #define REF_INTERNAL 1
// ąĪąŠčüč鹊čÅąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ // ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ twistate: #define TWI_IDLE 0 // ą▓čŗą▒ąŠčĆą║ąĖ ąĮąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ #define TWI_RUNNING 1 // ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ #define TWI_STOP 2 // ąĮčāąČąĮą░ ąŠčüčéą░ąĮąŠą▓ą║ą░ čü ą▓čŗą┤ą░č湥ą╣ STOP ą▓ I2C/TWI
extern volatile u8 twistate;extern u8 channelDAC;
void DAC_init (void );void DAC_write_value (u16 data);void DAC_set_reference (u8 ref);void DAC_softreset (void );void DAC_multiple_start (void );void DAC_multiple_stop (void );void DAC_set_channel (u8 channel);
[AD5667.c ]
#include "AD5667.h" #include "TWI.h" #include "timer.h"
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą”ąÉą¤ AD5667. ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ č鹊ą╗čīą║ąŠ // čäčāąĮą║čåąĖąĖ ąĘą░ą┐ąĖčüąĖ. ąÜą░ąČą┤ą░čÅ čäčāąĮą║čåąĖčÅ (ą║čĆąŠą╝ąĄ DAC_multiple_start // ąĖ DAC_multiple_stop) ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ąŠą┤ąĖąĮąŠčćąĮčāčÄ ąĘą░ą┐ąĖčüčī // ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą░ą╗ą│ąŠčĆąĖčéą╝čā: // ą×čéą┐čĆą░ą▓ą║ą░ čüąĖą│ąĮą░ą╗ą░ START // ą¤ąĄčĆąĄą┤ą░čćą░ 7-ą▒ąĖčéąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░ ąĖ ą▒ąĖčéą░ W // ą¤ąĄčĆąĄą┤ą░čćą░ ą▒ą░ą╣čéą░ ą║ąŠą╝ą░ąĮą┤čŗ // ą¤ąĄčĆąĄą┤ą░čćą░ 2 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ // ą×čéą┐čĆą░ą▓ą║ą░ čüąĖą│ąĮą░ą╗ą░ STOP.
volatile u8 twistate = TWI_IDLE;
u8 channelDAC = DAC_A;
static inline void START (u8 stop_or_not)
{
// ą×čćąĖčüčéą║ą░ ą▒ąĖčé ą▓čĆčāčćąĮčāčÄ:
* pTWI_FIFO_CTRL = 0 ;
// ąØą░čüčéčĆąŠą╣ą║ą░ čüą║ąŠčĆąŠčüčéąĖ:
* pTWI_CONTROL = ( TWI_ENA | PRESCALE_VALUE );
// CLKDIV = (1/SCL)/(1/10MHz):
* pTWI_CLKDIV = ( ((CLKDIV_HI) << 8 ) | (CLKDIV_LO) );
// ą”ąĄą╗ąĄą▓ąŠą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü ą▒ąĄąĘ ą▒ąĖčéą░ R/~W):
* pTWI_MASTER_ADDR = AD5667_I2C_ADDR;
// ąĢčüą╗ąĖ stop_or_not == 0xFF, č鹊 ą│ąĄąĮąĄčĆą░čåąĖąĖ STOP ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ
// ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄ ą▒čāą┤ąĄčé:
* pTWI_MASTER_CTRL = (stop_or_not << 6 ) | MEN;
ssync();
}
void DAC_init (void )
{
// ąĪą▒čĆąŠčü ąČąĄą╗ąĄąĘą░ I2C:
//twi_reset();
}
// ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé čüą╗ąŠą▓ąŠ ą▓ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ (0 .. 65535), čćč鹊ą▒čŗ // ąĮą░ ą▓čŗčģąŠą┤ąĄ ą”ąÉą¤ ą┐ąŠčÅą▓ąĖą╗ąŠčüčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ. void DAC_write_value (u16 data)
{
if (TWI_IDLE == twistate)
{
twi_reset();
// ą¤ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą░ą┤čĆąĄčüą░ ąĖ 3 ą▒ą░ą╣čé ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ STOP:
START(GENERATE_STOP);
// ą¤ąĄčĆąĄą┤ą░čćą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ąĮąŠą╝ąĄčĆą░ ą║ą░ąĮą░ą╗ą░:
* pTWI_XMT_DATA8 = CMD_WRITE_AND_UPDATE_CHNL | channelDAC;
ssync();
// ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą▓čŗą▒ąŠčĆą║ąĖ:
while (* pTWI_FIFO_STAT != XMT_EMPTY) { ssync(); }
* pTWI_XMT_DATA16 = (data << 8 ) | (data >> 8 );
ssync();
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ:
* pTWI_INT_STAT = * pTWI_INT_STAT;
while (0 == (* pTWI_INT_STAT & MCOMP)) { ssync(); }
}
}
// ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą╗ąĖą▒ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ, ą╗ąĖą▒ąŠ ą▓ąĮąĄčłąĮąĄąĄ // ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą”ąÉą¤. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą┐ąŠčüą╗ąĄ // ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ // ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. void DAC_set_reference (u8 ref)
{
if (TWI_IDLE == twistate)
{
twi_reset();
START(GENERATE_STOP);
// ą¤ąĄčĆąĄą┤ą░čćą░ ą║ąŠą╝ą░ąĮą┤čŗ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖčüč鹊čćąĮąĖą║ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ:
* pTWI_XMT_DATA8 = CMD_REFERENCE;
ssync();
while (* pTWI_FIFO_STAT != XMT_EMPTY) { ssync(); }
// ą¤ąĄčĆąĄą┤ą░čćą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣/ą▓ąĮąĄčłąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ ąŠą┐ąŠčĆčŗ:
* pTWI_XMT_DATA16 = ref << 8 ;
ssync();
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ:
* pTWI_INT_STAT = * pTWI_INT_STAT;
while (0 == (* pTWI_INT_STAT & MCOMP)) { ssync(); }
}
}
void DAC_softreset (void )
{
// ą×čüčéą░ąĮąŠą▓ą║ą░ ą╝ąĮąŠą│ąŠčüą╗ąŠą▓ąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčüą╗ąĖ ąŠąĮą░ ą░ą║čéąĖą▓ąĮą░:
DAC_multiple_stop();
twi_reset();
START(GENERATE_STOP);
// ą¤ąĄčĆąĄą┤ą░čćą░ ą║ąŠą╝ą░ąĮą┤čŗ čüą▒čĆąŠčüą░:
* pTWI_XMT_DATA8 = CMD_RESET;
ssync();
while (* pTWI_FIFO_STAT != XMT_EMPTY) { ssync(); }
// ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ąĮąĖč湥ą│ąŠ ąĮąĄ ąĘąĮą░čćą░čé:
* pTWI_XMT_DATA16 = 0 ;
ssync();
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ:
* pTWI_INT_STAT = * pTWI_INT_STAT;
while (0 == (* pTWI_INT_STAT & MCOMP)) { ssync(); }
}
void DAC_multiple_start (void )
{
if (TWI_IDLE == twistate)
{
// ąŚą░ą┐ąĖčüčī ąĮą░ ą▓čŗčģąŠą┤ ą”ąÉą¤ čüčĆąĄą┤ąĮąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ:
DAC_write_value(SHIFT);
// ą¤ąŠą┤ą░čćą░ ą║ąŠą╝ą░ąĮą┤čŗ Multiple Block Write, ą┐ąŠčüą╗ąĄ ą║ąŠč鹊čĆąŠą╣
// ą║ą░ąČą┤ą░čÅ 16-ą▒ąĖčéąĮą░čÅ ą▓čŗą▒ąŠčĆą║ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┤ą▓čāą╝čÅ ą▒ą░ą╣čéą░ą╝ąĖ
// ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ ą▓ čåąĖą║ą╗ąĄ, ą▒ąĄąĘ ą│ąĄąĮąĄčĆą░čåąĖąĖ STOP:
START(WITHOUT_STOP);
* pTWI_XMT_DATA8 = S_MULTIBYTE | CMD_WRITE_AND_UPDATE_CHNL | channelDAC;
ssync();
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ:
while (* pTWI_FIFO_STAT != XMT_EMPTY) { ssync(); }
twistate = TWI_RUNNING;
// ąŚą░ą┐čāčüą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░:
Timer0init();
}
}
void DAC_multiple_stop (void )
{
if (TWI_RUNNING == twistate)
{
// ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮąĄčćąĮąŠą│ąŠ ą░ą▓č鹊ą╝ą░čéą░ čéą░ą╣ą╝ąĄčĆą░
// ąĮą░ ąŠčüčéą░ąĮąŠą▓ą║čā:
twistate = TWI_STOP;
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠčüčéą░ąĮąŠą▓ą║ąĖ čéą░ą╣ą╝ąĄčĆą░:
while (twistate != TWI_IDLE){}
}
}
// ąŻčüčéą░ąĮąŠą▓ą║ą░ č鹥ą║čāčēąĄą│ąŠ ą║ą░ąĮą░ą╗ą░ ą”ąÉą¤, A ąĖą╗ąĖ B. void DAC_set_channel (u8 channel)
{
if (TWI_RUNNING == twistate)
{
// ąĢčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą╝ąĮąŠą│ąŠą▒ą░ą╣čéąĮąŠą╣
// ą┐ąĄčĆąĄą┤ą░čćąĖ, č鹊 čéčĆąĄą▒čāąĄčéčüčÅ ąĄą│ąŠ ąŠčüčéą░ąĮąŠą▓ą║ą░.
DAC_multiple_stop();
channelDAC = channel;
DAC_multiple_start();
}
else
channelDAC = channel;
}
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
/***************************************************************************** * TestAD5667, ą┐čĆąŠąĄą║čé ą┐čĆąŠą▓ąĄčĆčÅąĄčé 16-ą▒ąĖčéąĮčŗą╣ ą”ąÉą¤ AD5667R čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C. * ą¤čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538. ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ 32 ą╝ąĄą│ą░ą▒ą░ą╣čéą░ SDRAM ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ * ą┐ą░ą╝čÅčéąĖ MT48LC16M16A2. * * ąØą░ ą▓čŗčģąŠą┤ąĄ ą║ą░ąĮą░ą╗ą░ A (ąĮąŠąČą║ą░ 1) ą”ąÉą¤ AD5667R č乊čĆą╝ąĖčĆčāąĄčéčüčÅ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ * čü čćą░čüč鹊č鹊ą╣ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 375 ąōčå. *****************************************************************************/ #include < math.h> #include < math_const.h> #include "Initialize.h" #include "pins.h" #include "UARTconsole.h" #include "delay.h" #include "umsg.h" #include "initsdram.h" #include "TWI.h" #include "timer.h" #include "AD5667.h"
static void GenSinusTable (void )
{
s16* ptr = 0 ;
int i;
float phase = 0 ;
for (i= 0 ; i < SINUS_TABLE_SIZE; i++ )
{
ptr[i] = 255 * sinf(phase);
phase += (2 * PI)/ SINUS_TABLE_SIZE;
}
}
static void ChangeAmplitude (void )
{
static bool increment = true ;
if (increment)
{
if (MAX == ampl256)
increment = false ;
else
ampl256++ ;
}
else
{
if (0 == ampl256)
increment = true ;
else
ampl256-- ;
}
}
void main (void )
{
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čÅą┤čĆą░ ąĖ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé:
Initialize();
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ GPIO ą▓čģąŠą┤ąŠą▓ ąĖ ą▓čŗčģąŠą┤ąŠą▓:
ConfigureInputs();
ConfigureOutputs();
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ UART ąĮą░ 115200 ą▒ąŠą┤ (ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ):
InitUARTdebug();
umsg("ąóąĄčüčé AD5667 čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┐ąŠ I2C ą▓čŗą▒ąŠčĆąŠą║ 20 ą║ąōčå, \n " );
umsg("ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąĖąĮčāčüąŠą┤ąĖą┤ą░ 375 ąōčå čü ą┐ą╗ą░ą▓ąĮąŠ ą╝ąĄąĮčÅčÄčēąĄą╣čüčÅ \n " );
umsg("ą░ą╝ą┐ą╗ąĖčéčāą┤ąŠą╣. \n\n " );
umsg("ąöą╗čÅ ą┐ąŠą┤čüą║ą░ąĘą║ąĖ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ą░ą╝ ą▓ą▓ąĄą┤ąĖč鹥 ? ąĖą╗ąĖ help+Enter. \n\n " );
UARTconsolePoll();
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ 32 ą╝ąĄą│ą░ą▒ą░ą╣čé SDRAM:
InitSDRAM();
// ąĪąŠąĘą┤ą░ąĮąĖąĄ čéą░ą▒ą╗ąĖčåčŗ čüąĖąĮčāčüą░ ą▓ SDRAM:
GenSinusTable();
// ąŚą░ą┐čāčüą║ ą”ąÉą¤ AD5667R:
DAC_init();
DAC_set_reference(REF_EXTERNAL);
DAC_multiple_start();
// ąōą╗ą░ą▓ąĮčŗą╣ čåąĖą║ą╗ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┤ąĄą╗ą░ąĄčé, č鹊ą╗čīą║ąŠ ą╝ąĄąĮčÅąĄčé ą░ą╝ą┐ą╗ąĖčéčāą┤čā ampl256
// ąŠčé 0 ą┤ąŠ 255 ąĖ ąŠą▒čĆą░čéąĮąŠ. ąŁčéą░ ą░ą╝ą┐ą╗ąĖčéčāą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ
// čüąĖąĮčāčüą░, ą┤ą░ąĮąĮčŗąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ ą▓ ą”ąÉą¤ AD5667R ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ
// ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ EX_INTERRUPT_HANDLER(Timer0ISR).
while (true )
{
delay_ms(10 );
ChangeAmplitude();
UARTconsolePoll();
}
}
[ąĪčüčŗą╗ą║ąĖ ]
1 . Blackfin ADSP-BF538 .2 . ą¤ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ą░ą╣čé (endianness) .3 . ąÉą┐ą┐ą░čĆą░čéąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ I2C/TWI ą┤ą╗čÅ Blackfin .4 . AT24C64: Serial EEPROM čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C (TWI) .5 . Flash Programmer ą┤ą╗čÅ I2C EEPROM AT24C64D .