ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ADSP-BF538 :
ŌĆó ą»ą┤čĆąŠ Blackfin (čüąĄą╝ąĄą╣čüčéą▓ąŠ Stirling), čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąĮą░ čćą░čüč鹊čéą░čģ ą┤ąŠ 533 ą£ąōčå.
ą¤ą░ą╝čÅčéčī:
ŌĆó ąöąŠ 148 ą║ą▒ą░ą╣čé ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ (čüą╝. čéą░ą▒ą╗ąĖčåčā 1).
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░:
ŌĆó ą¤ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü PPI čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ č乊čĆą╝ą░č鹊ą▓ ą▓ąĖą┤ąĄąŠ ITU-R 656.2 S.
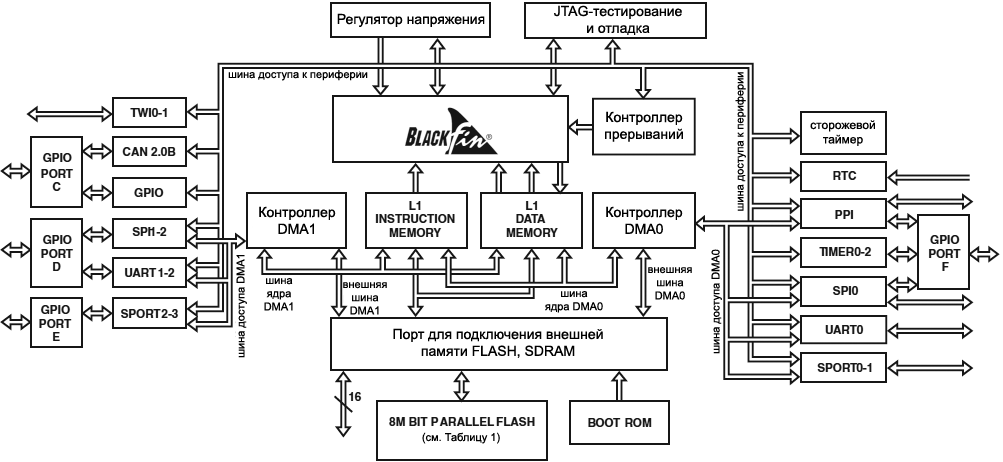
ąĀąĖčü. 1. ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą▒ą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ADSP-BF538.
ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ (ąĖą╗ąĖ ą║ čüčćą░čüčéčīčÄ?) čÅą┤čĆąŠ Blackfin ą┤ąŠą▓ąŠą╗čīąĮąŠ čüą╗ąŠąČąĮąŠąĄ, čéą░ą║ čćč鹊 ą▓ ąŠą┤ąĮąŠą╝ ą┤ą░čéą░čłąĖč鹥 ąÆčŗ ąĮąĄ ąĮą░ą╣ą┤ąĄč鹥 ą┐ąŠą╗ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ čćąĖą┐ą░, čāą║ą░ąĘą░ąĮąĖčÅ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ąĖ čé. ą┤. ąÆčüąĄ čŹč鹊 ą║ąŠą╝ą┐ą░ąĮąĖčÅ Analog Devices čĆą░ąĘą▒čĆąŠčüą░ą╗ą░ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą┤ą░čéą░čłąĖčéą░ą╝ (čüą╝. ą▓čĆąĄąĘą║čā). ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ č鹊ą╗čīą║ąŠ ą║čĆą░čéą║ąŠąĄ, ąŠą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄąĘąĮą░ą║ąŠą╝čŗąĄ č鹥čĆą╝ąĖąĮčŗ ąĖ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčŗ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ąĪą╗ąŠą▓ą░čĆąĖą║.
Blackfin Embedded Processor ADSP-BF538/ADSP-BF538F site:analog.com . ąŚą┤ąĄčüčī ą▓ čüčéą░čéčīąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čŹč鹊ą│ąŠ ą┤ą░čéą░čłąĖčéą░. ąØąĄą║ąŠč鹊čĆčŗąĄ čüą┐čĆą░ą▓ąŠčćąĮčŗąĄ čéą░ą▒ą╗ąĖčåčŗ ą▓ ą┐ąĄčĆąĄą▓ąŠą┤ ąĮąĄ ą▓ąŠčłą╗ąĖ (菹╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ, čåąŠą║ąŠą╗ąĄą▓ą║ą░ čćąĖą┐ą░ ąĖ čé. ą┐.) - ą▓čüąĄ čŹč鹊 čüą╝. ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╝ ą┤ą░čéą░čłąĖč鹥.
ADSP-BF538/ADSP-BF538F Blackfin┬« Processor Hardware Reference site:analog.com . ąöą░čéą░čłąĖčé čü ą┐ąŠą┤čĆąŠą▒ąĮčŗą╝ ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ BF538.
Blackfin┬« Processor Programming Reference site:analog.com . ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ.
Kernel (VDK) UserŌĆÖs Guide site:analog.com . ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ (RTOS).
ąóą░ą║ąČąĄ ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖčÅ ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠ ąĮą░ą╣ą┤ąĄąĮąĮčŗčģ ąŠčłąĖą▒ą║ą░čģ ąĖ čüą┐ąŠčüąŠą▒ą░čģ ąĖčģ ąŠą▒čģąŠą┤ą░ (anomalies, errata). ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čĆąĄą▓ąĖąĘąĖčÅčģ ą║čĆąĖčüčéą░ą╗ą╗ą░ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▒ą░ą│ąĖ.
ADSP-BF538 Blackfin Processor Anomaly List site: analog.com.
ADSP-BF538 čÅą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╝ čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ ą┐ąŠą┐čāą╗čÅčĆąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF533, ąĖ ąĖą┤ąĄą░ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ADSP-BF538 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, ąĖ čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čéą░ą║ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ą░ą║ ą▓ąĖą┤ąĄąŠčüąĖčüč鹥ą╝čŗ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ, ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗąĄ čüąĖčüč鹥ą╝čŗ ą░ą▓č鹊ą╝ą░čéąĖąĘą░čåąĖąĖ ąĖ ą║ąŠąĮčéčĆąŠą╗čÅ, ą╝ąĄą┤ąĖčåąĖąĮčüą║ą░čÅ č鹥čģąĮąĖą║ą░, ą│ą┤ąĄ čéčĆąĄą▒čāąĄčéčüčÅ čüą╝ąĄčüčī ąĘą░ą┤ą░čć čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓. ą¤čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538 čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą║ą░ą║ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░, ą│ą┤ąĄ ąĖą╝ąĄąĄčéčüčÅ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓: ąĖąĮč鹥čĆč乥ą╣čü CAN, čéčĆąĖ SPI-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆčéą░, čéčĆąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆčéą░ UART, č湥čéčŗčĆąĄ ą┐ąŠčĆčéą░ SPORT, čéčĆąĖ ą╝ąĮąŠą│ąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ čéą░ą╣ą╝ąĄčĆą░, 54 ą┐ąŠčĆčéą░ GPIO, ą┤ą▓ą░ ąĖąĮč鹥čĆč乥ą╣čüą░ TWI (I2C), čćą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčīčÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą║ą▓ą░čĆčåą░ ąĖ ą▒ą░čéą░čĆąĄąĖ, čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüąŠą▒čŗčéąĖą╣, ąĖąĮč鹥čĆč乥ą╣čü JTAG (ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ). ąōąĖą▒ą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü Parallel Peripheral Interface (PPI) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆčÅą╝ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ ą▓ąĖą┤ąĄąŠ ą║ąŠą┤ąĄčĆą░ą╝ąĖ ąĖ ą┤ąĄą║ąŠą┤ąĄčĆą░ą╝ąĖ, ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ ą┤ąĖčüą┐ą╗ąĄčÅ, čüąĄąĮčüąŠčĆą░ą╝ąĖ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ.
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ąĖą╝ąĄčÄčé čŹčäč乥ą║čéąĖą▓ąĮčŗą╣ ąĮą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą▓ čüčéąĖą╗ąĄ RISC, ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą▓ąĖą┤ąĄąŠ ąĖ ąĘą▓čāą║ąŠą╝. ADSP-BF538 ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čü ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ąĖ ą╝ąŠą┤ąĄą╗čÅą╝ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ čüąĄą╝ąĄą╣čüčéą▓ą░ Blackfin, ąĖ ąŠčéą╗ąĖčćą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÄ, ą║ąŠą╗ąĖč湥čüčéą▓čā ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, čéąĖą┐ąŠą╝ ą║ąŠčĆą┐čāčüą░ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ą┐ą░ą╝čÅčéąĖ.
ąóą░ą▒ą╗ąĖčåą░ 1. ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ADSP-BF538.
ążčāąĮą║čåąĖčÅ ADSP-BF538 ADSP-BF538F8
ą¤ąŠčĆčéčŗ SPORT
4
ą¤ąŠčĆčéčŗ UART
3
ą¤ąŠčĆčéčŗ SPI
3
ą¤ąŠčĆčéčŗ TWI
2
CAN
1
PPI
1
ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ą┐ą░ą╝čÅčéčī FLASH 1 ą╝ąĄą│ą░ą▒ą░ą╣čé
-
ąĄčüčéčī
SRAM ąĖąĮčüčéčĆčāą║čåąĖą╣ / ą║čŹčł
16 ą║ą▒ą░ą╣čé
SRAM ąĖąĮčüčéčĆčāą║čåąĖą╣
64 ą║ą▒ą░ą╣čé
SRAM ą┤ą░ąĮąĮčŗčģ / ą║čŹčł
32 ą║ą▒ą░ą╣čé
SRAM ą┤ą░ąĮąĮčŗčģ
32 ą║ą▒ą░ą╣čé
Scratchpad
4 ą║ą▒ą░ą╣čé
Max čćą░čüč鹊čéą░ čÅą┤čĆą░, ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ
533 ą£ąōčå, 1066 ą╝ąĖą╗ą╗ąĖąŠąĮąŠą▓ čåąĖą║ą╗ąŠą▓ MAC ą▓ čüąĄą║čāąĮą┤čā
ąÜąŠčĆą┐čāčü
BC-316
ąÉčĆčģąĖč鹥ą║čéčāčĆą░, čĆą░čüčüčćąĖčéą░ąĮąĮą░čÅ ąĮą░ 菹║ąŠąĮąŠą╝ąĖčÄ čŹąĮąĄčĆą│ąĖąĖ . ąÜąŠąĮąĄčćąĮąŠ, ą┤ąŠą▓ąŠą╗čīąĮąŠ čüą╝ąĄčłąĮąŠ ą│ąŠą▓ąŠčĆąĖčéčī ąŠą▒ 菹║ąŠąĮąŠą╝ąĖčćąĮąŠčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ DSP, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┤ą╗čÅ čéčÅąČąĄą╗čŗčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣. ą×ą┤ąĮą░ą║ąŠ ą║ąŠąĄ-čćč鹊 ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą▓ ADSP-BF538 ąĖą╝ąĄąĄčéčüčÅ. ą¤čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ čü čāč湥č鹊ą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ, čü č鹥čģąĮąŠą╗ąŠą│ąĖąĄą╣ ąĮąĖąĘą║ąŠą▓ąŠą╗čīčéąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ąśą╝ąĄąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (dynamic power management), ą║ąŠč鹊čĆą░čÅ ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čāą┐čĆą░ą▓ą╗čÅčéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ ąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ ą┐čĆąŠčåąĄčüčüąŠčĆą░, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąŠčüčéąĖčćčī ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠą│ąŠ čüąĮąĖąČąĄąĮąĖčÅ ąŠą▒čēąĄą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╝ąŠčēąĮąŠčüčéąĖ - ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą┐čĆąŠčüč鹊ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čāą▓ąĄą╗ąĖč湥ąĮąĮą░čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ ąŠčé ą▒ą░čéą░čĆąĄąĖ ąĖ čāą╝ąĄąĮčīčłąĄąĮąĖąĄ č鹥ą┐ą╗ąŠą▓čŗčģ ą┐ąŠč鹥čĆčī.
ąÆčüčéčĆąŠąĄąĮąĮčŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ . ąŚą┤ąĄčüčī ą┤ąŠą▓ąŠą╗čīąĮąŠ ą║čĆą░čéą║ąŠ čüą┤ąĄą╗ą░ąĮ ąŠą▒ąĘąŠčĆ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ADSP-BF538 (čüą╝. čĆąĖčü. 1). ą»ą┤čĆąŠ čüąŠą┤ąĄčƹȹĖčé ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒ąŠą│ą░čéčŗą╣ ąĮą░ą▒ąŠčĆ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą┐ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čłąĖąĮą░ą╝. ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮąŠ ą│ąĖą▒ą║ąŠąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĄąĄ ą▓čŗčüąŠą║čāčÄ ąŠą▒čēčāčÄ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ.
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ čü ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą░ąĮąĮčŗčģ ąĖą╝ąĄąĄčéčüčÅ čéą░ą║ąČąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓čāčÄčēąĖąĄ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čü čäčāąĮą║čåąĖčÅą╝ąĖ ą╝ąŠą┤ąĄą╝ą░, ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą▓čāą║ą░ ąĖ ą▓ąĖą┤ąĄąŠ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╝ąĖ ąĮą░ ą║ą░ąČą┤ąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ąÆčüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║čĆąŠą╝ąĄ ą┐ąŠčĆč鹊ą▓ GPIO, CAN, TWI, RTC, čéą░ą╣ą╝ąĄčĆąŠą▓, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĄčüčŗą╗ą║ą░ą╝ąĖ DMA. ąĢčüčéčī čéą░ą║ąČąĄ 4 ąŠčéą┤ąĄą╗čīąĮčŗčģ ą║ą░ąĮą░ą╗ą░ DMA ą┤ą╗čÅ ą┐ąĄčĆąĄčüčŗą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā čĆą░ąĘąĮčŗą╝ąĖ ąŠą▒ą╗ą░čüčéčÅą╝ąĖ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą▓ą║ą╗čÄčćą░čÅ ą▓ąĮąĄčłąĮčÄčÄ SDRAM ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮčāčÄ ą┐ą░ą╝čÅčéčī. ąØąĄčüą║ąŠą╗čīą║ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čłąĖąĮ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ čćą░čüč鹊čéą░čģ ą┤ąŠ 133 ą£ąōčå, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÅ ą┤ąŠčüčéą░č鹊čćąĮčāčÄ ą┐ąŠą╗ąŠčüčā ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ ąĖ ą▓ąĮąĄčłąĮąĖą╝ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ.
[ą»ą┤čĆąŠ Blackfin ]
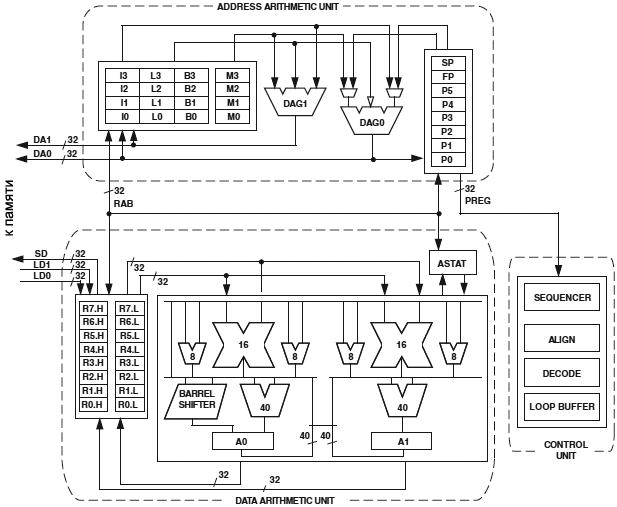
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ ąĮą░ čĆąĖčü. 2, čÅą┤čĆąŠ čüąŠą┤ąĄčƹȹĖčé 2 čłčé. 16-ą▒ąĖčéąĮčŗčģ čāą╝ąĮąŠąČąĖč鹥ą╗čÅ, 2 čłčé. 40-ą▒ąĖčéąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░, 2 čłčé. 40-ą▒ąĖčéąĮčŗčģ ALU, 4 čłčé. 8-ą▒ąĖčéąĮčŗčģ video-ALU, ąĖ 40-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░. ąæą╗ąŠą║ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī 8, 16 ąĖą╗ąĖ 32 čĆą░ąĘčĆčÅą┤ąĮčŗąĄ čćąĖčüą╗ą░, čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆąŠą▓ąŠą╝ čäą░ą╣ą╗ąĄ.
ąĀąĖčü. 2. ą¤čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ čÅą┤čĆąŠ Blackfin.
ąĀąĄą│ąĖčüčéčĆąŠą▓čŗą╣ čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé 8 čłčé. 32-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤čÅčé ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĮą░ą┤ 16-ą▒ąĖčéąĮčŗą╝ąĖ čćąĖčüą╗ą░ą╝ąĖ, čĆąĄą│ąĖčüčéčĆąŠą▓čŗą╣ čäą░ą╣ą╗ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ 16 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ 16-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░. ąÆčüąĄ ąĮčāąČąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┐ąŠčüčéčāą┐ą░čÄčé ąŠčé ą╝ąĮąŠą│ąŠą┐ąŠčĆč鹊ą▓ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ąŠą│ąŠ čäą░ą╣ą╗ą░ ąĖ ą┐ąŠą╗ąĄą╣ ą║ąŠąĮčüčéą░ąĮčé ąĖąĮčüčéčĆčāą║čåąĖąĖ.
ąÜą░ąČą┤ą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ MAC ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī čāą╝ąĮąŠąČąĄąĮąĖąĄ 16 ąĮą░ 16 ą▒ąĖčé ąĘą░ 1 čåąĖą║ą╗ čÅą┤čĆą░, čü ąĮą░ą║ąŠą┐ą╗ąĄąĮąĖąĄą╝ čĆąĄąĘčāą╗čīčéą░čéą░ ą▓ 40-čĆą░ąĘčĆčÅą┤ąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░čģ. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ č乊čĆą╝ą░čéčŗ čüąŠ ąĘąĮą░ą║ąŠą╝ ąĖ ą▒ąĄąĘ ąĘąĮą░ą║ą░, ąŠą║čĆčāą│ą╗ąĄąĮąĖąĄ, ąĮą░čüčŗčēąĄąĮąĖąĄ.
ąæą╗ąŠą║ ALU ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą░čĆąĖčäą╝ąĄčéąĖč湥čüą║ąĖčģ ąĖ ą╗ąŠą│ąĖč湥čüą║ąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ ąĮą░ą┤ 16 ąĖ 32 čĆą░ąĘčĆčÅą┤ąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĄčüčéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą┤ą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓. ąŁč鹊 ą▒ąĖč鹊ą▓čŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą┤ą╗čÅ čĆą░čüą┐ą░ą║ąŠą▓ą║ąĖ ą┐ąŠą╗ąĄą╣ ąĖąĘ ą┤ą░ąĮąĮčŗčģ, population count, čāą╝ąĮąŠąČąĄąĮąĖąĄ modulo 232 , ą┐čĆąĖą╝ąĖčéąĖą▓čŗ ą┤ąĄą╗ąĄąĮąĖčÅ, ąĮą░čüčŗčēąĄąĮąĖąĄ (saturation) ąĖ ąŠą║čĆčāą│ą╗ąĄąĮąĖąĄ, ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘąĮą░ą║ą░/菹║čüą┐ąŠąĮąĄąĮčéčŗ. ąØą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą║čåąĖą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓ąĖą┤ąĄąŠ ą▓ą║ą╗čÄčćą░ąĄčé ąŠą┐ąĄčĆą░čåąĖąĖ ą▒ą░ą╣č鹊ą▓ąŠą│ąŠ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ąĖ čāą┐ą░ą║ąŠą▓ą║ąĖ, 16- ąĖ 8-čĆą░ąĘčĆčÅą┤ąĮąŠąĄ čüą╗ąŠąČąĄąĮąĖąĄ čü ąŠą▒čĆąĄąĘą║ąŠą╣, ąŠą┐ąĄčĆą░čåąĖąĖ 8-ą▒ąĖčéąĮąŠą│ąŠ čāčüčĆąĄą┤ąĮąĄąĮąĖčÅ, 8-ą▒ąĖčéąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ SAA. ąóą░ą║ąČąĄ ąĄčüčéčī ąĖąĮčüčéčĆčāą║čåąĖąĖ čüčĆą░ą▓ąĮąĄąĮąĖčÅ/ą▓čŗą▒ąŠčĆą░ ąĖ ą┐ąŠąĖčüą║ą░ ą▓ąĄą║č鹊čĆą░.
ąöą╗čÅ ąŠčüąĮąŠą▓ąĮčŗčģ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ čüčĆą░ąĘčā ą┤ą▓ąĄ 16-ą▒ąĖčéąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ALU ąĮą░ ą┐ą░čĆąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ (ąĮą░ čüčéą░čĆčłąĄą╣ 16-čĆą░ąĘčĆčÅą┤ąĮąŠą╣ ą┐ąŠą╗ąŠą▓ąĖąĮąĄ ąĖ ą╝ą╗ą░ą┤čłąĄą╣ 16-čĆą░ąĘčĆčÅą┤ąĮąŠą╣ ą┐ąŠą╗ąŠą▓ąĖąĮąĄ čĆąĄą│ąĖčüčéčĆą░ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ). ą£ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī čüč湥čéą▓ąĄčĆąĄąĮąĮčŗąĄ 16-ą▒ąĖčéąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čü ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĄą╝ 2-ą│ąŠ ALU.
40-ą▒ąĖčéąĮčŗą╣ čłąĖčäč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī čüą┤ą▓ąĖą│ąĖ ąĖ čåąĖą║ą╗ąĖč湥čüą║ąĖąĄ čüą┤ą▓ąĖą│ąĖ, ąĖ čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĮąŠčĆą╝ą░ą╗ąĖąĘą░čåąĖąĖ, ąĖąĘą▓ą╗ąĄč湥ąĮąĖčÅ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ čéąĖą┐ą░ field deposit (ąĮą░ą║ąŠą┐ą╗ąĄąĮąĖąĄ ą┐ąŠą╗čÅ).
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüąĄą║ą▓ąĄąĮčüąŠčĆ (sequencer) čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠč鹊ą║ąŠą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖąĮčüčéčĆčāą║čåąĖą╣, ą▓ą║ą╗čÄčćą░čÅ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ąĖ ąĄčæ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ. ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čüąĄą║ą▓ąĄąĮčüąŠčĆ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čāčüą╗ąŠą▓ąĮčŗąĄ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮčŗąĄ ąĖ ą║ąŠčüą▓ąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄčģąŠą┤čŗ ąŠčé čüč湥čéčćąĖą║ą░ PC (relative and indirect conditional jumps), čüąŠ čüčéą░čéąĖč湥čüą║ąĖą╝ ą┐čĆąĄą┤čüą║ą░ąĘą░ąĮąĖąĄą╝ ą▓ąĄčéą▓ą╗ąĄąĮąĖčÅ (static branch prediction), ąĖ ą▓čŗąĘąŠą▓čŗ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čåąĖą║ą╗čŗ čü ąĮčāą╗ąĄą▓čŗą╝ąĖ ą┐ąŠč鹥čĆčÅą╝ąĖ (zero overhead looping). ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą▓ąĘą░ąĖą╝ąĮąŠ ą▒ą╗ąŠą║ąĖčĆčāąĄą╝ą░čÅ (interlocked), čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā ąĮąĄ ąĮčāąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą║ąŠąĮą▓ąĄą╣ąĄčĆąŠą╝, ą║ąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ąĖąĮčüčéčĆčāą║čåąĖąĖ čü ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčÅą╝ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝.
ąæą╗ąŠą║ ą░ą┤čĆąĄčüąĮąŠą╣ ą░čĆąĖčäą╝ąĄčéąĖą║ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 2 ą░ą┤čĆąĄčüą░ ą┤ą╗čÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą┤ą▓ąŠą╣ąĮąŠą│ąŠ ąĘą░čģą▓ą░čéą░ ąĖąĘ ą┐ą░ą╝čÅčéąĖ. ą×ąĮ čüąŠą┤ąĄčƹȹĖčé ą╝ąĮąŠą│ąŠą┐ąŠčĆč鹊ą▓čŗą╣ čĆąĄą│ąĖčüčéčĆąŠą▓čŗą╣ čäą░ą╣ą╗, čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ 4 ąĮą░ą▒ąŠčĆąŠą▓ 32-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖąĮą┤ąĄą║čü, ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ, ą┤ą╗ąĖąĮčŗ ąĖ ą▒ą░ąĘčŗ (ą┤ą╗čÅ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆąĖąĘą░čåąĖąĖ), ąĖ 8 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ 32-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čāą║ą░ąĘą░č鹥ą╗čÅ (ą┤ą╗čÅ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖą╣ ąĖąĮą┤ąĄą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╝ čüč鹥ą║ąŠą╝ ą▓ čüčéąĖą╗ąĄ čÅąĘčŗą║ą░ C).
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąōą░čĆą▓ą░čĆą┤čüą║čāčÄ ą░čĆčģąĖč鹥ą║čéčāčĆčā ą▓ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü ąĖąĄčĆą░čĆčģąĖč湥čüą║ąŠą╣ čüčéčĆčāą║čéčāčĆąŠą╣ ą┐ą░ą╝čÅčéąĖ. ą×ą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ Level 1 (L1) ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, ą║ąŠč鹊čĆčāčÄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆ, čé. ąĄ. ą▒ąĄąĘ ąĘą░ą┤ąĄčƹȹĄą║ (čéą░ą║č鹊ą▓ ąŠąČąĖą┤ą░ąĮąĖčÅ), ą╗ąĖą▒ąŠ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ąĖ ąĘą░ą┤ąĄčƹȹ║ą░ą╝ąĖ . ąØą░ čāčĆąŠą▓ąĮąĄ L1 ą┐ą░ą╝čÅčéčī ąĖąĮčüčéčĆčāą║čåąĖą╣ čģčĆą░ąĮąĖčé ą▓ čüąĄą▒ąĄ č鹊ą╗čīą║ąŠ ąĖąĮčüčéčĆčāą║čåąĖąĖ. ąöą▓ąĄ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ čģčĆą░ąĮčÅčé ą┤ą░ąĮąĮčŗąĄ ąĖ ąĄčüčéčī ą▓čŗą┤ąĄą╗ąĄąĮąĮą░čÅ ąŠą▒ą╗ą░čüčéčī ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüč鹥ą║ą░ ąĖ ą▓čĆąĄą╝ąĄąĮąĮčŗčģ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ (scratchpad data memory).
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą╗ąŠą║ąŠą▓ ą┐ą░ą╝čÅčéąĖ L1, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čāčÄ čüą╝ąĄčüčī SRAM ąĖ ą║čŹčłą░. ąæą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéčīčÄ (MMU) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĘą░čēąĖčéčā ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗčģ ąĘą░ą┤ą░čć, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ą▓ čÅą┤čĆąĄ, ąĖ ą╝ąŠąČąĄčé ąĘą░čēąĖčéąĖčéčī čüąĖčüč鹥ą╝ąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ąŠčé ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░.
ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 3 čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ: user mode (čĆąĄąČąĖą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ), supervisor mode (čĆąĄąČąĖą╝ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░) ąĖ emulation mode (čĆąĄąČąĖą╝ 菹╝čāą╗čÅčåąĖąĖ, ąŠčéą╗ą░ą┤ą║ąĖ). ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ čĆąĄąČąĖą╝ ąĖą╝ąĄąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ ąŠčüąĮąŠą▓ąĮčŗą╝ čüąĖčüč鹥ą╝ąĮčŗą╝ čĆąĄčüčāčĆčüą░ą╝, čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĘą░čēąĖčēąĄąĮąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čĆąĄąČąĖą╝ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░ ąĖą╝ąĄąĄčé ąĮąĄąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ čüąĖčüč鹥ą╝ąĄ ąĖ čĆąĄčüčāčĆčüą░ą╝ čÅą┤čĆą░.
ąØą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ą▒čŗą╗ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮ čéą░ą║, čćč鹊 16-čĆą░ąĘčĆčÅą┤ąĮčŗąĄ ą║ąŠą┤čŗ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅą╗ąĖ ąĮą░ąĖą▒ąŠą╗ąĄąĄ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ, čćč鹊 ą┤ą░ąĄčé ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąŠčéą╗ąĖčćąĮčāčÄ ą┐ą╗ąŠčéąĮąŠčüčéčī čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą║ąŠą┤ą░. ąĪą╗ąŠąČąĮčŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ DSP ą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą▓ 32-čĆą░ąĘčĆčÅą┤ąĮčŗąĄ ą║ąŠą┤čŗ ąŠą┐ąĄčĆą░čåąĖą╣, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ą┐ąŠą╗ąĮčŗąĄ, ą╝ąĮąŠą│ąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ. ą¤čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĮčāčÄ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą╝ąĮąŠąČąĄčüčéą▓ąĄąĮąĮąŠą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ, ą│ą┤ąĄ 32-čĆą░ąĘčĆčÅą┤ąĮą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┤ą░ąĮą░ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ čü ą┤ą▓čāą╝čÅ 16-čĆą░ąĘčĆčÅą┤ąĮčŗą╝ąĖ ąĖąĮčüčéčĆčāą║čåąĖčÅą╝ąĖ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąĮąŠą│ąĖąĄ čĆąĄčüčāčĆčüčŗ čÅą┤čĆą░ ą▓ ąŠą┤ąĮąŠą╝ čåąĖą║ą╗ąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ.
ą»ąĘčŗą║ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ Blackfin ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ą╗ą│ąĄą▒čĆą░ąĖč湥čüą║ąĖą╣ čüąĖąĮčéą░ą║čüąĖčü, čćč鹊 čāą┐čĆąŠčēą░ąĄčé ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ čćąĖčéą░ąĄą╝ąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą▒čŗą╗ą░ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆąŠą╝ C/C++, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▒čŗčüčéčĆąŠ ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠ ą┐ąĖčüą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
[ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┐ą░ą╝čÅčéąĖ ]
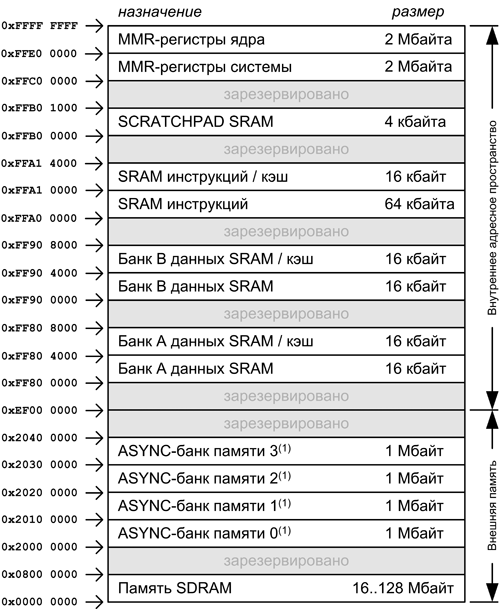
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ą▓ąĖą┤čÅčé ą┐ą░ą╝čÅčéčī ą║ą░ą║ ąŠą┤ąĮąŠ čāąĮąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą▓ 4 ą│ąĖą│ą░ą▒ą░ą╣čéą░, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ 32-čĆą░ąĘčĆčÅą┤ąĮąŠą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ (čüą╝. čĆąĖčü. 3). ąÆčüąĄ čĆąĄčüčāčĆčüčŗ, ą▓ą║ą╗čÄčćą░čÅ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ą┐ą░ą╝čÅčéčī, ą▓ąĮąĄčłąĮčÄčÄ ą┐ą░ą╝čÅčéčī, ąĖ ą┤ą░ąČąĄ čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, ąĘą░ąĮąĖą╝ą░čÄčé ąŠčéą┤ąĄą╗čīąĮčŗąĄ čüąĄą║čåąĖąĖ ąĖąĘ ąŠą▒čēąĄą│ąŠ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░. ąÜčāčüą║ąĖ ą┐ą░ą╝čÅčéąĖ čŹč鹊ą│ąŠ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą▓čŗčĆąŠą▓ąĮąĄąĮčŗ ą▓ ąĖąĄčĆą░čĆčģąĖč湥čüą║čāčÄ čüčéčĆčāą║čéčāčĆčā, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ čģąŠčĆąŠčłąĖą╣ ą▒ą░ą╗ą░ąĮčü ą▓ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ čåąĄąĮą░/čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī. ąÆ čüąĖčüč鹥ą╝ąĄ čāąČąĄ ąĄčüčéčī ąŠč湥ąĮčī ą▒čŗčüčéčĆą░čÅ, ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą▓ čćąĖą┐ ą┐ą░ą╝čÅčéčī (čĆą░ą▒ąŠčéą░čÄčēą░čÅ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ąĖ ąĘą░ą┤ąĄčƹȹ║ą░ą╝ąĖ) - ą┤ą╗čÅ ą║čŹčłą░ ąĖą╗ąĖ SRAM, ą░ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄą┤ąŠčĆąŠą│ą░čÅ ą▓ąĮąĄčłąĮčÅčÅ ą┐ą░ą╝čÅčéčī ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒ąŠą╗čīčłąŠą╣ ąĄą╝ą║ąŠčüčéąĖ čü ą╝ąĄąĮčīčłąĖą╝ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄą╝.
ąĪąĖčüč鹥ą╝ąĮą░čÅ ą┐ą░ą╝čÅčéčī čéąĖą┐ą░ L1 - čŹč鹊 čüą░ą╝ą░čÅ ą▒čŗčüčéčĆą░čÅ ą┐ą░ą╝čÅčéčī, ą║ąŠč鹊čĆą░čÅ ąĄčüčéčī čā ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin. ąĪąĖčüč鹥ą╝čŗ ą┐ą░ą╝čÅčéąĖ ą▓ąĮąĄ čćąĖą┐ą░ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ č湥čĆąĄąĘ ą▒ą╗ąŠą║ EBIU, čćč鹊 ą┤ą░ąĄčé čĆą░čüčłąĖčĆąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ą░ą╝čÅčéąĖ SRAM, SDRAM, FLASH - ą╝ąŠąČąĮąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ 132 ą╝ąĄą│ą░ą▒ą░ą╣čéą░ą╝ čäąĖąĘąĖč湥čüą║ąŠą╣ ą┐ą░ą╝čÅčéąĖ.
ąĀąĖčü. 3. ąÜą░čĆčéą░ ą┐ą░ą╝čÅčéąĖ BF538.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: ASYNC ąŠąĘąĮą░čćą░ąĄčé ą░čüąĖąĮčģčĆąŠąĮąĮą░čÅ ą┐ą░ą╝čÅčéčī, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ čćąĖą┐čā čüąĮą░čĆčāąČąĖ (ą┤ą╗čÅ BF538), ą╗ąĖą▒ąŠ (ą┤ą╗čÅ BF538F) ą║ą░ą║ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ čüąĮą░čĆčāąČąĖ, čéą░ą║ ąĖ ąĖąĘąĮčāčéčĆąĖ. ąĀą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ ą▓ ą░ą┤čĆąĄčüąĮąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé č鹊ą│ąŠ, ą║ ą║ą░ą║ąŠą╝čā ąĖąĘ ą▓čŗą▓ąŠą┤ąŠą▓ ~AMSx ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čüąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ą░ą╝čÅčéąĖ (ąĄčüą╗ąĖ BF538F ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčé ą▓čüčéčĆąŠąĄąĮąĮčāčÄ ą┐ą░ą╝čÅčéčī FLASH, č鹊 čŹč鹊 čüąĖą│ąĮą░ą╗ ~FCE).
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ DMA ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čłąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą▒ą╗ąŠą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ. ąŁčéąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą╝ąŠąČąĮąŠ ą▒čŗčüčéčĆąŠ, ąĮąĄ ąĮą░ą│čĆčāąČą░čÅ čÅą┤čĆąŠ, ą┐ąĄčĆąĄą╝ąĄčēą░čéčī ą┤ą░ąĮąĮčŗąĄ ą╝ąĄąČą┤čā ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéčīčÄ ąĖ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéčīčÄ.
ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ą┐ą░ą╝čÅčéčī (ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą▓ ą║čĆąĖčüčéą░ą╗ą╗). ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ąĖą╝ąĄčÄčé 3 ą▒ą╗ąŠą║ą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖąĄ čłąĖčĆąŠą║čāčÄ ą┐ąŠą╗ąŠčüčā ą┤ąŠčüčéčāą┐ą░ čüąŠ čüč鹊čĆąŠąĮčŗ čÅą┤čĆą░.
ą¤ąĄčĆą▓čŗą╣ ą▒ą╗ąŠą║ čŹč鹊 ą┐ą░ą╝čÅčéčī ąĖąĮčüčéčĆčāą║čåąĖą╣ L1 čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ 80 ą║ąĖą╗ąŠą▒ą░ą╣čé SRAM, ąĖąĘ ą║ąŠč鹊čĆčŗčģ 16 ą║ąĖą╗ąŠą▒ą░ą╣čé ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī č湥čéčŗčĆąĄčģčüč鹊čĆąŠąĮąĮąĖą╣ ą░čüčüąŠčåąĖą░čéąĖą▓ąĮčŗą╣ ą║čŹčł čü ą╝ąĮąŠąČąĄčüčéą▓ąĄąĮąĮčŗą╝ ą┤ąŠčüčéčāą┐ąŠą╝ (four way set-associative cache). ąÜ čŹč鹊ą╣ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ąĮą░ ą┐ąŠą╗ąĮąŠą╣, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ.
ąÆč鹊čĆąŠą╣ ą▒ą╗ąŠą║ čŹč鹊 ą┐ą░ą╝čÅčéčī ą┤ą░ąĮąĮčŗčģ L1, čüąŠčüč鹊čÅčēą░čÅ ąĖąĘ 2 ą▒ą░ąĮą║ąŠą▓ ą┐ąŠ 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ą║ą░ąČą┤čŗą╣. ąÜą░ąČą┤čŗą╣ ą▒ą░ąĮą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ą║ą░ą║ čäčāąĮą║čåąĖąŠąĮą░ą╗ two-way set-associative cache, čéą░ą║ ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗ SRAM. ąŁč鹊čé ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ ą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ąóčĆąĄčéąĖą╣ ą▒ą╗ąŠą║ čŹč鹊 ą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čĆą░ąĘą╝ąĄčĆąŠą╝ 4 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ (scratchpad SRAM), čĆą░ą▒ąŠčéą░čÄčēą░čÅ čéą░ą║ ąČąĄ ą▒čŗčüčéčĆąŠ, ą║ą░ą║ ąĖ ą┤čĆčāą│ąĖąĄ ą▒ą╗ąŠą║ąĖ L1. ą×ą┤ąĮą░ą║ąŠ čŹč鹊čé čéčĆąĄčéąĖą╣ ą▒ą╗ąŠą║ L1 ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą║čŹčł, ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą║ą░ą║ SRAM ą┤ą░ąĮąĮčŗčģ (ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ čüč鹥ą║ą░ ąĖ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ).
ąÆąĮąĄčłąĮčÅčÅ ą┐ą░ą╝čÅčéčī (čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĮą░čÅ ą▓ąĮąĄ ą║čĆąĖčüčéą░ą╗ą╗ą░). ąÜ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ čÅą┤čĆąŠ ą┐ąŠą╗čāčćą░ąĄčé ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ą▒ą╗ąŠą║ EBIU. ąŁč鹊 16-ą▒ąĖčéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣ ą┐čĆąŠąĘčĆą░čćąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą║ą░ą║ ą║ ą▒ą░ąĮą║čā čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ą┐ą░ą╝čÅčéąĖ (SDRAM), čéą░ą║ ąĖ ą║ 4 ą▒ą░ąĮą║ą░ą╝ čāčüčéčĆąŠą╣čüčéą▓ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ą▓ą║ą╗čÄčćą░čÅ flash, EPROM, ROM, SRAM, ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗąĄ ą▓ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ (memory mapped I/O devices).
PC133-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SDRAM ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ąŠ 128 ą╝ąĄą│ą░ą▒ą░ą╣čé SDRAM. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SDRAM ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ ą▒čŗčéčī ąŠčéą║čĆčŗč鹊ą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą▒ą░ąĮą║ą░ SDRAM, ą╝ą░ą║čüąĖą╝čāą╝ ą┤ą╗čÅ 4 ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▒ą░ąĮą║ąŠą▓ SDRAM, čāą╗čāčćčłą░čÅ ąŠą▒čēčāčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī čüąĖčüč鹥ą╝čŗ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠ 4 ą▒ą░ąĮą║ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ čü ąŠč湥ąĮčī ą│ąĖą▒ą║ąŠ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ą▒ąŠčéą░čéčī čü čłąĖčĆąŠą║ąŠą╝ čüą┐ąĄą║čéčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓. ąÜą░ąČą┤čŗą╣ ą▒ą░ąĮą║ ąĘą░ąĮąĖą╝ą░ąĄčé čüąĄą│ą╝ąĄąĮčé čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓ 1 ą╝ąĄą│ą░ą▒ą░ą╣čé, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čĆą░ąĘą╝ąĄčĆą░ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, čéą░ą║ čćč鹊 čŹčéą░ ą┐ą░ą╝čÅčéčī ą╝ąŠąČąĄčé ą┤ą░čéčī čüą┐ą╗ąŠčłąĮčāčÄ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą║ą░ąČą┤ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą╗ąĮąŠčĆą░ąĘą╝ąĄčĆąĮčŗą╣ ą▒ą░ąĮą║ ą┐ą░ą╝čÅčéąĖ ą▓ 1 ą╝ąĄą│ą░ą▒ą░ą╣čé.
ą¤ą░ą╝čÅčéčī FLASH (č鹊ą╗čīą║ąŠ ą▓ ADSP-BF538F8). ą¤čĆąŠčåąĄčüčüąŠčĆ ADSP-BF538F8 čüąŠą┤ąĄčƹȹĖčé ą▓ čüą▓ąŠąĄą╝ ą║ąŠčĆą┐čāčüąĄ ąŠčéą┤ąĄą╗čīąĮčāčÄ ą╝ą░čéčĆąĖčåčā flash, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčāčÄ č湥čĆąĄąĘ čłąĖąĮčā EBIU. ąØą░ čĆąĖčü. 4 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ čŹčéą░ ą┐ą░ą╝čÅčéčī čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ čü čÅą┤čĆąŠą╝ Blackfin.
ąĀąĖčü. 4. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą▓ ą║ąŠčĆą┐čāčü ą┐ą░ą╝čÅčéąĖ FLASH (ADSP-BF538F8).
ADSP-BF538F8 čüąŠą┤ąĄčƹȹĖčé 8-ą╝ąĄą│ą░ą▒ąĖčéąĮčŗą╣ (512K x 16-ą▒ąĖčé, ąĖą╗ąĖ 1 ą╝ąĄą│ą░ą▒ą░ą╣čé) ąĮąĖąČąĮąĖą╣ ąĘą░ą│čĆčāąĘąŠčćąĮčŗą╣ čüąĄą║č鹊čĆ ą┐ą░ą╝čÅčéąĖ S29AL008J ą║ąŠą╝ą┐ą░ąĮąĖąĖ Spansion, ąĖąĘą▓ąĄčüčéąĮąŠą╣ ą║ą░ą║ čģąŠčĆąŠčłą░čÅ ą┐ą░ą╝čÅčéčī flash. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠčüąĄčéąĖč鹥 čüą░ą╣čé www.spansion.com. ąśą╝ąĄčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ:
ŌĆó ąÆčĆąĄą╝čÅ ą┤ąŠčüčéčāą┐ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 70 ąĮčü (ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮą░čüčéčĆąŠąĄąĮčŗ čĆąĄą│ąĖčüčéčĆčŗ EBIU).
ą¤čĆąŠčåąĄčüčüąŠčĆ Blackfin čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ čü ą╝ą░čéčĆąĖčåąĄą╣ ą┐ą░ą╝čÅčéąĖ flash č湥čĆąĄąĘ čüąĖą│ąĮą░ą╗čŗ ą░ą┤čĆąĄčüą░, ą┤ą░ąĮąĮčŗčģ, ąĖ čüąĖą│ąĮą░ą╗čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ chip enable, write enable ąĖ output enable, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čŹč鹊 ą▒čŗą╗ąŠ ąŠą▒čŗčćąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓čŗą▓ąŠą┤ ą▓čģąŠą┤ą░ ąĘą░čēąĖčéčŗ ąŠčé ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ flash ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĖ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ, čćč鹊 ąŠčéą║ą╗čÄčćą░ąĄčé čäčāąĮą║čåąĖčÄ ąĘą░čēąĖčéčŗ ąŠčé ąĘą░ą┐ąĖčüąĖ.
ąÆčŗą▓ąŠą┤ flash chip enable (~FCE) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čüąĖą│ąĮą░ą╗čā AMS0 (ąŠą▒čŗčćąĮąŠ čéą░ą║ ąĖ ą┤ąĄą╗ą░čÄčé), ąĖą╗ąĖ ą║ AMS3..AMS1 č湥čĆąĄąĘ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ ąĮą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥. ąÜąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čüąĖą│ąĮą░ą╗ AMS0, ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin ą╝ąŠąČąĄčé ąĘą░ą│čĆčāąĘąĖčéčīčüčÅ ąĖąĘ čŹč鹊ą╣ ą┐ą░ą╝čÅčéąĖ flash. ąÜąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąŠą┤ąĖąĮ ąĖąĘ čüąĖą│ąĮą░ą╗ąŠą▓ AMS3..AMS1, č鹊 ą┐ą░ą╝čÅčéčī flash čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┐čĆąŠčüč鹊 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ą░čÅ ą┐ą░ą╝čÅčéčī, ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą▓ ą║ą░čĆčéčā ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 3.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ Flash . ą¤ą░ą╝čÅčéčī flash ą║čĆąĖčüčéą░ą╗ą╗ą░ ADSP-BF538F8 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ą╗ąĖą▒ąŠ ą┤ąŠ, ą╗ąĖą▒ąŠ ą┐ąŠčüą╗ąĄ ą╝ąŠąĮčéą░ąČą░ čćąĖą┐ą░ ąĮą░ ą┐ąĄčćą░čéąĮčāčÄ ą┐ą╗ą░čéčā.
ą¦č鹊ą▒čŗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī flash ą┤ąŠ ą╝ąŠąĮčéą░ąČą░, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ (ą░ą┤čĆąĄčü, ą┤ą░ąĮąĮčŗąĄ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ) ąĖ ą┐ąĖčéą░ąĮąĖąĄ č湥čĆąĄąĘ ą▓ąĮąĄčłąĮąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą║ąŠčĆą┐čāčüą░. ąÆąŠ ą▓čĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ čłąĖąĮą░čģ VDDEXT ąĖ GND, ąĖ Blackfin ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝ čüąĖą│ąĮą░ą╗ąĄ ąĘą░ą┐čĆąŠčüą░ čłąĖąĮčŗ (~BR), ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ čéą░ą║čéčŗ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CLKIN.
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ čćąĖą┐ą░ ąĮą░ ą┐ąĄčćą░čéąĮčāčÄ ą┐ą╗ą░čéčā ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ VisualDSP++ (č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü JTAG ąĖ ą░ą┤ą░ą┐č鹥čĆ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ICE-100B JTAG Emulator ąĖ čé. ą┐.).
ąŚą░čēąĖčéą░ čüąĄą║č鹊čĆą░ ą┐ą░ą╝čÅčéąĖ Flash. ą¦č鹊ą▒čŗ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī čéą░ą║čāčÄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī, čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą┤ą░čćą░ ą▓čŗčüąŠą║ąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (ąĮąŠą╝ąĖąĮą░ą╗ +12V) ąĮą░ ą▓čŗą▓ąŠą┤ FRESET. ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā (ą┤ą░čéą░čłąĖčéčā) ą┐ą░ą╝čÅčéąĖ FLASH.
ą¤čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ . ą¤čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čĆą░ąĘą┤ąĄą╗čīąĮčāčÄ ą░ą┤čĆąĄčüą░čåąĖčÄ ą┤ą╗čÅ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ I/O. ąÆčüąĄ čĆąĄčüčāčĆčüčŗ: ąĖ ą▒ą╗ąŠą║ąĖ ą┐ą░ą╝čÅčéąĖ, ąĖ čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠč鹊ą▒čĆą░ąČąĄąĮčŗ ąĮą░ ąŠą┤ąĮąŠ ąŠą▒čēąĄąĄ 32-ą▒ąĖčéąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą░ą┤čĆąĄčüąŠą▓ (4 ą│ąĖą│ą░ą▒ą░ą╣čéą░). ąÆčüčéčĆąŠąĄąĮąĮčŗąĄ ą▓ čćąĖą┐ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (ą┐ąĄčĆąĖč乥čĆąĖčÅ) ąĖą╝ąĄčÄčé čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ ą┐ą░ą╝čÅčéąĖ (mapped registers, MMR) ą┐ąŠ ą░ą┤čĆąĄčüą░ą╝, ąĮą░čģąŠą┤čÅčēąĖą╝čüčÅ ą▓ ą▓ąĄčĆčģąĮąĄą╣ ąŠą▒ą╗ą░čüčéąĖ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ 4 ą│ąĖą│ą░ą▒ą░ą╣čéą░. ąŁč鹊 ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ čĆą░ąĘą┤ąĄą╗ąĄąĮąŠ ąĮą░ ą┤ą▓ą░ ą▒ą╗ąŠą║ą░ ą╝ąĄąĮčīčłąĄą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ąŠą┤ąĖąĮ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüąŠą┤ąĄčƹȹĖčé MMR čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą▓čüąĄčģ čäčāąĮą║čåąĖą╣ čÅą┤čĆą░, ąĖ ą┤čĆčāą│ąŠą╣ čüąŠą┤ąĄčƹȹĖčé čĆąĄą│ąĖčüčéčĆčŗ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ąĖ ą║ ą║čĆąĖčüčéą░ą╗ą╗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ąĮąĄ ą▓čģąŠą┤čÅčēąĖą╝ąĖ ą▓ čÅą┤čĆąŠ. MMR ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░, ąĖ ą▓ąĖą┤ąĮčŗ ą║ą░ą║ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ čćąĖą┐.
ąŚą░ą│čĆčāąĘą║ą░ (booting). ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F čüąŠą┤ąĄčƹȹ░čé ą▓ čüąĄą▒ąĄ ą╝ą░ą╗ąĄąĮčīą║ąŠąĄ ąĘą░ą│čĆčāąĘąŠčćąĮąŠąĄ čÅą┤čĆąŠ (boot kernel), ą║ąŠč鹊čĆąŠąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ą┐ąĄčĆąĖč乥čĆąĖčÄ. ąĢčüą╗ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĖąĘ ąŠą▒ą╗ą░čüčéąĖ boot ROM, č鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ąĮą░čćąĮąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĖąĘ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą¤ąŚąŻ ąĘą░ą│čĆčāąĘą║ąĖ (on-chip boot ROM). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓čĆąĄąĘą║čā "ąĀąĄąČąĖą╝čŗ ąĘą░ą│čĆčāąĘą║ąĖ".
[ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖą╣ (Event Handling) ]
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüąŠą▒čŗčéąĖą╣ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSP-BF538/ADSP-BF538F ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüąĄ ą░čüąĖąĮčģčĆąŠąĮąĮčŗąĄ ąĖ čüąĖąĮčģčĆąŠąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ. ą¤čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā čüąŠą▒čŗčéąĖą╣ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ąĖ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ. ąÆą╗ąŠąČąĄąĮąĮąŠčüčéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▒čŗčéčī ą░ą║čéąĖą▓ąĮčŗą╝ąĖ čüčĆą░ąĘčā ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (event service routines). ą¤čĆąĖąŠčĆąĖč鹥ąĘą░čåąĖčÅ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖčÅ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą▒čāą┤ąĄčé ąĖą╝ąĄčéčī ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ą┐ąĄčĆąĄą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ čüąŠą▒čŗčéąĖčÅ čü ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā 5 čĆą░ąĘąĮčŗčģ čéąĖą┐ąŠą▓ čüąŠą▒čŗčéąĖą╣:
ŌĆó Emulation ŌĆō čüąŠą▒čŗčéąĖąĄ 菹╝čāą╗čÅčåąĖąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓ čĆąĄąČąĖą╝ 菹╝čāą╗čÅčåąĖąĖ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü JTAG.
ŌĆó Reset ŌĆō čŹč鹊 čüąŠą▒čŗčéąĖąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆ.
ŌĆó ąØąĄą╝ą░čüą║ąĖčĆčāąĄą╝ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (NMI) ŌĆō čüąŠą▒čŗčéąĖąĄ NMI ą╝ąŠąČąĄčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čüč鹊čĆąŠąČąĄą▓čŗą╝ čéą░ą╣ą╝ąĄčĆąŠą╝ (watchdog) ąĖą╗ąĖ ą▓čģąŠą┤ąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ NMI, ą┐ąŠą┤ą░ąĮąĮčŗą╝ ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ. ą¦ą░čüč鹊 čüąŠą▒čŗčéąĖąĄ NMI ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ čüąĖą│ąĮą░ą╗ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ, čćč鹊ą▒čŗ ąĮą░čćą░čéčī ą┐čĆąŠčåąĄą┤čāčĆčā ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čüąĖčüč鹥ą╝čŗ.
ŌĆó Exception ŌĆō ąĖčüą║ą╗čÄč湥ąĮąĖąĄ. ąŁčéąĖ čüąŠą▒čŗčéąĖčÅ ą▓ąŠąĘąĮąĖą║ą░čÄčé čüąĖąĮčģčĆąŠąĮąĮąŠ čü ą┐ąŠč鹊ą║ąŠą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┤ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖąĮčüčéčĆčāą║čåąĖąĖ čü ąŠčłąĖą▒ą║ąŠą╣). ąŻčüą╗ąŠą▓ąĖčÅą╝ąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠą▒čŗčéąĖčÅ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ąĮą░čĆčāčłąĄąĮąĖčÅ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą║ąŠą┤ ąĖąĮčüčéčĆčāą║čåąĖąĖ.
ŌĆó Interrupt ŌĆō ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąŁčéąĖ čüąŠą▒čŗčéąĖčÅ ą▓ąŠąĘąĮąĖą║ą░čÄčé ą░čüąĖąĮčģčĆąŠąĮąĮąŠ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą┐ąŠč鹊ą║čā ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą×ąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮčŗ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ ą┐ąŠčĆčéą░, čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ, ą▒ą╗ąŠą║ąŠą╝ DMA ąĖ ą┤čĆčāą│ąĖą╝ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą░ čéą░ą║ąČąĄ čÅą▓ąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąÜą░ąČą┤čŗą╣ čéąĖą┐ čüąŠą▒čŗčéąĖčÅ ąĖą╝ąĄąĄčé čüą▓čÅąĘą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ, ą▓ ą║ąŠč鹊čĆąŠą╝ čģčĆą░ąĮąĖčéčüčÅ ą░ą┤čĆąĄčü ą▓ąŠąĘą▓čĆą░čéą░ ąĖ čüą▓čÅąĘą░ąĮąĮčāčÄ ąĖąĮčüčéčĆčāą║čåąĖčÄ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ čüąŠą▒čŗčéąĖčÅ (return-from-event instruction). ąÜąŠą│ą┤ą░ čüčĆą░ą▒ąŠčéą░ą╗ąŠ čüąŠą▒čŗčéąĖąĄ, čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čüč鹥ą║ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ čüąŠą▒čŗčéąĖą╣ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSP-BF538/ADSP-BF538F čüąŠčüč鹊čÅčé ąĖąĘ ą┤ą▓čāčģ čüčéčāą┐ąĄąĮąĄą╣, core event controller (CEC) ąĖ system interrupt controller (SIC). CEC čĆą░ą▒ąŠčéą░ąĄčé ą▓ą╝ąĄčüč鹥 čü SIC ą┤ą╗čÅ ą┐čĆąĖąŠčĆąĖč鹥ąĘą░čåąĖąĖ ą▓čüąĄčģ čüąĖčüč鹥ą╝ąĮčŗčģ čüąŠą▒čŗčéąĖą╣ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą╝ąĖ. ąÜąŠąĮčåąĄą┐čéčāą░ą╗čīąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐ąŠčüčéčāą┐ą░čÄčé ą▓ SIC, ąĖ ąĘą░č鹥ą╝ ą╝ą░čĆčłčĆčāčéąĖąĘąĖčĆčāčÄčéčüčÅ ą┐čĆčÅą╝ąŠ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CEC.
Core Event Controller (CEC) . CEC ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 9 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (general-purpose interrupts IVG15ŌĆō7) ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ ąĖ čüąŠą▒čŗčéąĖčÅą╝ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ. ąśąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ 2 čü čüą░ą╝čŗą╝ ąĮąĖąĘą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ (IVG15, IVG14) čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ą×čüčéą░ą╗čīąĮčŗąĄ 7 ą▒ąŠą╗ąĄąĄ ą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čĆą░čüą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ ą╝ąĄąČą┤čā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░, čćč鹊ą▒čŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ąĖčģ čüąŠą▒čŗčéąĖčÅ. ąóą░ą▒ą╗ąĖčåą░ 2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čģąŠą┤čŗ CEC, ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ąĖčģ ąĖą╝ąĄąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓ąĄą║č鹊čĆąŠą▓ čüąŠą▒čŗčéąĖą╣ (event vector table, EVT), ąĖ ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ąĖčģ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ.
ąóą░ą▒ą╗ąĖčåą░ 2. ąōčĆčāą┐ą┐čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CEC ąĖ ąĖčģ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ (č湥ą╝ ą╝ąĄąĮčīčłąĄ čåąĖčäčĆą░ ą▓ čüč鹊ą╗ą▒čåąĄ ą¤čĆąĖąŠčĆąĖč鹥čé, č鹥ą╝ čŹčéą░ ą│čĆčāą┐ą┐ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čéąĮąĄąĄ).
ą¤čĆąĖąŠčĆąĖč鹥čé ąÜą╗ą░čüčü čüąŠą▒čŗčéąĖą╣ ąÆąĄą║č鹊čĆ EVT
0 (max ą┐čĆąĖąŠčĆąĖč鹥čé)
ąŁą╝čāą╗čÅčåąĖčÅ / čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĄą╝
EMU
1
ąĪą▒čĆąŠčü
RST
2
ąØąĄą╝ą░čüą║ąĖčĆčāąĄą╝ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ
NMI
3
Exception (ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠčłąĖą▒ą║ą░)
EVX
4 ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
5
Hardware Error (ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ ąŠčłąĖą▒ą║ą░)
IVHW
6
ąóą░ą╣ą╝ąĄčĆ čÅą┤čĆą░
IVTMR
7
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 7
IVG7
8
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 8
IVG8
9
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 9
IVG9
10
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 10
IVG10
11
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 11
IVG11
12
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 12
IVG12
13
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 13
IVG13
14
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 14
IVG14
15
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 15
IVG15
System Interrupt Controller (SIC) . ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SIC ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĖą▓čÅąĘą║čā ąĖ ą╝ą░čĆčłčĆčāčéąĖąĘą░čåąĖčÄ čüąŠą▒čŗčéąĖą╣ ąŠčé ą╝ąĮąŠąČąĄčüčéą▓ą░ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą║ ą│čĆčāą┐ą┐ą░ą╝ ą▓čģąŠą┤ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CEC, čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą│ąĖą▒ą║ąŠ ąĮą░čüčéčĆą░ąĖą▓ą░čéčī ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąźąŠčéčÅ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐čĆąĖą▓čÅąĘą║čā ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą║ąŠč鹊čĆą░čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░), ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą╝ąŠąČąĄčé ąĖąĘą╝ąĄąĮąĖčéčī ą┐čĆąĖą▓čÅąĘą║čā ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüąŠą▒čŗčéąĖą╣ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆčŗ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (interrupt assignment registers, SIC_IARx).
ąóą░ą▒ą╗ąĖčåą░ 3 ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą▓čģąŠą┤čŗ ą▓ SIC ąĖ ą┐čĆąĖą▓čÅąĘą║čā ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą║ ą│čĆčāą┐ą┐ą░ą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CEC.
ąóą░ą▒ą╗ąĖčåą░ 3. ą¤čĆąĖą▓čÅąĘą║ą░ čüąŠą▒čŗčéąĖą╣ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą║ ą│čĆčāą┐ą┐ą░ą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓.
ąśčüč鹊čćąĮąĖą║ čüąŠą▒čŗčéąĖčÅ ąÆąĄą║č鹊čĆ EVT
PLL Wake-Up Interrupt
IVG7
DMA Controller 0 Error
DMA Controller 1 Error
PPI Error Interrupt
SPORT0 Error Interrupt
SPORT1 Error Interrupt
SPORT2 Error Interrupt
SPORT3 Error Interrupt
SPI0 Error Interrupt
SPI1 Error Interrupt
SPI2 Error Interrupt
UART0 Error Interrupt
UART1 Error Interrupt
UART2 Error Interrupt
CAN Error Interrupt
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Real-Time Clock
IVG8
DMA0 Interrupt (PPI)
DMA1 Interrupt (SPORT0 Rx)
IVG9
DMA2 Interrupt (SPORT0 Tx)
DMA3 Interrupt (SPORT1 Rx)
DMA4 Interrupt (SPORT1 Tx)
DMA8 Interrupt (SPORT2 Rx)
DMA9 Interrupt (SPORT2 Tx)
DMA10 Interrupt (SPORT3 Rx)
DMA11 Interrupt (SPORT3 Tx)
DMA5 Interrupt (SPI0)
IVG10
DMA14 Interrupt (SPI1)
DMA15 Interrupt (SPI2)
DMA6 Interrupt (UART0 Rx)
DMA7 Interrupt (UART0 Tx)
DMA16 Interrupt (UART1 Rx)
DMA17 Interrupt (UART1 Tx)
DMA18 Interrupt (UART2 Rx)
DMA19 Interrupt (UART2 Tx)
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Timer0, Timer1, Timer2
IVG11
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ TWI0, TWI1
CAN Receive Interrupt
CAN Transmit Interrupt
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ A ąĖ B ą┐ąŠčĆčéą░ F GPIO
IVG12
MDMA0 Stream 0 Interrupt
IVG13
MDMA0 Stream 1 Interrupt
MDMA1 Stream 0 Interrupt
MDMA1 Stream 1 Interrupt
Software Watchdog Timer
Event Control (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąŠą▒čŗčéąĖčÅą╝ąĖ). ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā) ąŠč湥ąĮčī ą│ąĖą▒ą║ąĖą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ čüąŠą▒čŗčéąĖą╣. ąÆ CEC ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ 3 čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ ą║ąŠąŠčĆą┤ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖą╣. ąÜą░ąČą┤čŗą╣ čĆąĄą│ąĖčüčéčĆ čłąĖčĆąĖąĮąŠą╣ 32 ą▒ąĖčéą░:
ŌĆó CEC interrupt latch register (ILAT). ąĀąĄą│ąĖčüčéčĆ ILAT ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ čüąŠą▒čŗčéąĖąĄ ąĘą░čģą▓ą░č湥ąĮąŠ. ąæčāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĘą░čģą▓ą░čéąĖą╗ (ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ą╗) čüąŠą▒čŗčéąĖąĄ, ąĖ ąŠčćąĖčēąĄąĮ ą║ąŠą│ą┤ą░ čüąŠą▒čŗčéąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čüąĖčüč鹥ą╝ąŠą╣. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ CEC ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ąŠą┤ąĮą░ą║ąŠ ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąĘą░ą┐ąĖčüą░ąĮ ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ (ąŠčéą╝ąĄąĮčŗ) ąĘą░čģą▓ą░č湥ąĮąĮčŗčģ čüąŠą▒čŗčéąĖą╣. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░, ąĖ ą▓ č鹊ąČąĄ ą▓čĆąĄą╝čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ąŠčćąĖčēąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé IMASK.
ŌĆó CEC interrupt mask register (IMASK). ąĀąĄą│ąĖčüčéčĆ IMASK čāą┐čĆą░ą▓ą╗čÅąĄčé ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĖ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ (ąĘą░ą┐čĆąĄč鹊ą╝ ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝) ąŠčéą┤ąĄą╗čīąĮčŗčģ čüąŠą▒čŗčéąĖą╣. ąÜąŠą│ą┤ą░ ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ čĆąĄą│ąĖčüčéčĆąĄ IMASK, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ CEC, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé. ą×čćąĖčüčéą║ą░ ą▒ąĖčéą░ IMASK ą╝ą░čüą║ąĖčĆčāąĄčé čüąŠą▒čŗčéąĖąĄ, čćč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ čŹč鹊ą│ąŠ čüąŠą▒čŗčéąĖčÅ, ą┤ą░ąČąĄ ą┐čĆąĖ č鹊ą╝, čćč鹊 čüąŠą▒čŗčéąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░čģą▓ą░č湥ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ILAT. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ ąĖą╗ąĖ ąĘą░ą┐ąĖčüą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░. ąÜčĆąŠą╝ąĄ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠą│ąŠ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą│ą╗ąŠą▒ą░ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮčŗ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮčŗ ąĖąĮčüčéčĆčāą║čåąĖčÅą╝ąĖ STI ąĖ CLI čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ŌĆó CEC interrupt pending register (IPEND). ąĀąĄą│ąĖčüčéčĆ IPEND ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé ą▓čüąĄ ą▓ą╗ąŠąČąĄąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ IPEND ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čüąŠą▒čŗčéąĖąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą░ą║čéąĖą▓ąĮąŠ, ą╗ąĖ ą▓ą╗ąŠąČąĄąĮąŠ ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗą╣ čāčĆąŠą▓ąĄąĮčī. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ąŠą┤ąĮą░ą║ąŠ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąŠą╝ąĄčĆ ą▒ąĖčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ILAT, IMASK, IPEND čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮąŠą╝ąĄčĆą░ą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SIC čĆą░čüčłąĖčĆčÅčé ąŠą▒čĆą░ą▒ąŠčéą║čā čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ čéčĆąĄčģ 32-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüąŠčüč鹊čÅąĮąĖčÅ (interrupt control and status registers). ąÜą░ąČą┤čŗą╣ čĆąĄą│ąĖčüčéčĆ čüąŠą┤ąĄčƹȹĖčé ą▒ąĖčéčŗ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĄ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ čüąŠą▒čŗčéąĖą╣ ą┐ąĄčĆąĖč乥čĆąĖąĖ (ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3).
ŌĆó SIC interrupt mask registers (SIC_IMASKx). ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗čÅčÄčé ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĖ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą║ą░ąČą┤ąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. ąÜąŠą│ą┤ą░ ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé, čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤ąĄčé ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ ąĖ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ čüąĖčüč鹥ą╝ąŠą╣ ą┐čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ. ą×čćąĖčēąĄąĮąĮčŗą╣ ą▒ąĖčé ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ą╝ą░čüą║ąĖčĆčāąĄčé čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝.
ŌĆó SIC interrupt status registers (SIC_ISRx). ą¤ąŠčüą║ąŠą╗čīą║čā ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ąŠą┤ąĮąŠą╝čā čüąŠą▒čŗčéąĖčÄ, čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░čÄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝čā ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┐ąŠčüą╗čāąČąĖą╗ąŠ ąĖčüč鹊čćąĮąĖą║ąŠą╝ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą▓čŗąĘą▓ą░ą▓čłąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą░ ąŠčćąĖčēąĄąĮąĮčŗą╣ ą▒ąĖčé ą│ąŠą▓ąŠčĆąĖčé ąŠ č鹊ą╝, čćč鹊 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą▓čŗčüčéą░ą▓ą╗čÅą╗ąŠ čüąŠą▒čŗčéąĖąĄ.
ŌĆó SIC interrupt wake-up enable registers (SIC_IWRx). ą¤čāč鹥ą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĄčüą╗ąĖ čÅą┤čĆąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle) ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░ (sleep mode), ą║ąŠą│ą┤ą░ ą▒čŗą╗ąŠ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖąĄą╝.
ą¤ąŠčüą║ąŠą╗čīą║čā ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖą▓čÅąĘą░ąĮąŠ ą║ ąŠą┤ąĮąŠą╣ ą│čĆčāą┐ą┐ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (IVGx), č鹊 ą╝ąŠąČąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠą▒čŗčéąĖą╣ ą┤ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ - ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ čāąČąĄ ą▒čŗą╗ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ čŹč鹊ą╝ ą▓čģąŠą┤ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ IPEND ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčéčüčÅ SIC ą║ą░ą║ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ ILAT čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ ąĮą░čćą░ą╗ąŠ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čéčĆąĄą▒čāąĄčé ą┤ą▓čāčģ čéą░ą║č鹊ą▓ čÅą┤čĆą░). ąæąĖčé ąŠčćąĖčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ IPEND. ąæąĖčé IPEND ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čüąŠą▒čŗčéąĖąĄ ą▓ąŠčłą╗ąŠ ą▓ ą║ąŠąĮą▓ąĄą╣ąĄčĆ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé CEC čĆą░čüą┐ąŠąĘąĮą░ąĄčé čüąŠą▒čŗčéąĖąĄ ąĖ ą┐ąŠčüčéą░ą▓ąĖčé ą▓ ąŠč湥čĆąĄą┤čī čüą╗ąĄą┤čāčÄčēąĄąĄ ąĮą░čüčéčāą┐ą╗ąĄąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čģąŠą┤ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ą£ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ (latency) ąŠčé ąĮą░čćą░ą╗ą░ (čäčĆąŠąĮčéą░) čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠ ą▓čŗą▓ąŠą┤ą░ ą▓ IPEND čüąŠčüčéą░ą▓ą╗čÅąĄčé 3 čéą░ą║čéą░ čÅą┤čĆą░; ąŠą┤ąĮą░ą║ąŠ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą╝ąĮąŠą│ąŠ ą▒ąŠą╗čīčłąĄ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĖ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
Peripheral Interrupt ID . ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (Peripheral Interrupt ID) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ SIC_IARx. ąØąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ BF538 ą┐ąŠą║ą░ąĘą░ąĮčŗ čŹčéąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ (čüč鹊ą╗ą▒ąĄčå PID) ą▓ą╝ąĄčüč鹥 čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čÅą┤čĆą░ (Core Interrupt ID, čüč鹊ą╗ą▒ąĄčå CID). ąÆ čüč鹊ą╗ą▒čåąĄ IVG ą┐ąŠą║ą░ąĘą░ąĮąŠ ą┐čĆąĖą▓čÅąĘą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░) ą║ ą│čĆčāą┐ą┐ą░ą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąČąĄčüčéą║ąŠ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝.
ąóą░ą▒ą╗ąĖčåą░ 4-7. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čüąĖčüč鹥ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
ąśčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ PID IVG CID
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ PLL
0
IVG7
0
ą×čłąĖą▒ą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA 0 (ąŠą▒čŗčćąĮą░čÅ)
1
ą×čłąĖą▒ą║ą░ PPI
2
ą×čłąĖą▒ą║ą░ SPORT0
3
ą×čłąĖą▒ą║ą░ SPORT1
4
ą×čłąĖą▒ą║ą░ SPI0
5
ą×čłąĖą▒ą║ą░ UART0
6
RTC (ą▒čāą┤ąĖą╗čīąĮąĖą║, čüąĄą║čāąĮą┤ą░, ą╝ąĖąĮčāčéą░, čćą░čü, ąŠą▒čĆą░čéąĮčŗą╣ ąŠčéčüč湥čé čüąĄą║čāąĮą┤)
7
IVG8
1
DMA0 (PPI)
8
DMA1 (ą┐čĆąĖąĄą╝ SPORT0)
9
IVG9
2
DMA2 (ą┐ąĄčĆąĄą┤ą░čćą░ SPORT0)
10
DMA3 (ą┐čĆąĖąĄą╝ SPORT1)
11
DMA4 (ą┐ąĄčĆąĄą┤ą░čćą░ SPORT1)
12
DMA5 (SPI0)
13
IVG10
3
DMA6 (ą┐čĆąĖąĄą╝ UART0)
14
DMA7 (ą┐ąĄčĆąĄą┤ą░čćą░ UART0)
15
Timer0
16
IVG11
4
Timer1
17
Timer2
18
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé GPIO A
19
IVG12
5
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé GPIO B
20
DMA8/9 (ą┐ąŠč鹊ą║ 0 ą┐ąĄčĆąĄčüčŗą╗ąŠą║ DMA ą▓ ą┐ą░ą╝čÅčéąĖ)
21
IVG13
6
DMA10/11 (ą┐ąŠč鹊ą║ 1 ą┐ąĄčĆąĄčüčŗą╗ąŠą║ DMA ą▓ ą┐ą░ą╝čÅčéąĖ)
22
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ
23
ą×čłąĖą▒ą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA 1 (ąŠą▒čŗčćąĮą░čÅ)
24
IVG7
0
ą×čłąĖą▒ą║ą░ SPORT2
25
ą×čłąĖą▒ą║ą░ SPORT3
26
ą×čłąĖą▒ą║ą░ SPI1
28
ą×čłąĖą▒ą║ą░ SPI2
29
ą×čłąĖą▒ą║ą░ UART1
30
ą×čłąĖą▒ą║ą░ UART2
31
ą×čłąĖą▒ą║ą░ CAN
32
DMA8 (ą┐čĆąĖąĄą╝ SPORT2)
33
IVG9
2
DMA9 (ą┐ąĄčĆąĄą┤ą░čćą░ SPORT2)
34
DMA10 (ą┐čĆąĖąĄą╝ SPORT3)
35
DMA11 (ą┐ąĄčĆąĄą┤ą░čćą░ SPORT3)
36
DMA12
37
DMA13
38
DMA14 (SPI1)
39
IVG10
3
DMA15 (SPI2)
40
DMA16 (ą┐čĆąĖąĄą╝ UART1)
41
DMA17 (ą┐ąĄčĆąĄą┤ą░čćą░ UART1)
42
DMA18 (ą┐čĆąĖąĄą╝ UART2)
43
DMA19 (ą┐ąĄčĆąĄą┤ą░čćą░ UART2)
44
TWI0
45
IVG11
4
TWI1
46
ą¤čĆąĖąĄą╝ CAN
47
ą¤ąĄčĆąĄą┤ą░čćą░ CAN
48
MDMA1 ą┐ąŠč鹊ą║ 0 (DMA ą▓ ą┐ą░ą╝čÅčéąĖ)
49
IVG13
6
MDMA1 ą┐ąŠč鹊ą║ 0 (DMA ą▓ ą┐ą░ą╝čÅčéąĖ)
50
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ 51-63 - -
Core Interrupt ID . ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čÅą┤čĆą░ (Core Interrupt ID) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (SIC_IARx).
[ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ DMA ]
ąÆ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ ADSP-BF538/ADSP-BF538F ąĄčüčéčī ą┤ą▓ą░ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆčÅą╝ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ (DMA1 ąĖ DMA0), ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ąŠą╝ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą¤ąĄčĆąĄą┤ą░čćąĖ DMA ą╝ąŠą│čāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą╝ąĄąČą┤čā ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ ąŠą▒ą╗ą░čüčéčÅą╝ąĖ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ą╗čÄą▒čŗą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé DMA. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą┤ą░čćąĖ DMA ą╝ąŠą│čāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą╝ąĄąČą┤čā ą╗čÄą▒čŗą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ DMA ąĖ ą▓ąĮąĄčłąĮąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ ą║ ą▓ąĮąĄčłąĮąĖą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ ą┐ą░ą╝čÅčéąĖ, ą▓ą║ą╗čÄčćą░čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SDRAM ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ. DMA ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą┐ąŠčĆčéčŗ SPORT, SPI, UART ąĖ PPI. ąÜą░ąČą┤ąŠąĄ čéą░ą║ąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ DMA, ąĖą╝ąĄąĄčé ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą║ą░ąĮą░ą╗ DMA.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ DMA ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą║ą░ą║ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗąĄ (1-D), čéą░ą║ ąĖ ą┤ą▓čāčģą╝ąĄčĆąĮčŗąĄ (2-D) ą┐ąĄčĆąĄą┤ą░čćąĖ DMA. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ DMA ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖą╗ąĖ ąĖąĘ ąĮą░ą▒ąŠčĆą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĮą░ąĘčŗą▓ą░ąĄą╝čŗčģ ą▒ą╗ąŠą║ą░ą╝ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░.
2-D DMA ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗąĄ čĆą░ąĘą╝ąĄčĆčŗ čüčéčĆąŠą║ ąĖ čüč鹊ą╗ą▒čåąŠą▓ ą┤ąŠ 64K 菹╗ąĄą╝ąĄąĮč鹊ą▓ ąĮą░ 64K 菹╗ąĄą╝ąĄąĮč鹊ą▓, ąĖ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗąĄ čłą░ą│ąĖ čüčéčĆąŠą║ ąĖ ą║ąŠą╗ąŠąĮąŠą║ ą┤ąŠ ┬▒32K 菹╗ąĄą╝ąĄąĮč鹊ą▓. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čĆą░ąĘą╝ąĄčĆ čłą░ą│ą░ čüč鹊ą╗ą▒čåą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ, č湥ą╝ čĆą░ąĘą╝ąĄčĆ čłą░ą│ą░ čüčéčĆąŠą║ąĖ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐ąŠč鹊ą║ąĖ ą┤ą░ąĮąĮčŗčģ čü č湥čĆąĄą┤ąŠą▓ą░ąĮąĖąĄą╝ (interleaved data streams). ąŁčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠčüąŠą▒ąĄąĮąĮąŠ ą┐ąŠą╗ąĄąĘąĮą░ ą▓ ą▓ąĖą┤ąĄąŠą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą│ą┤ąĄ ąĮą░ ą╗ąĄčéčā ą╝ąŠąČąĄčé čāą┤ą░ą╗čÅčéčīčüčÅ č湥čĆąĄą┤ąŠą▓ą░ąĮąĖąĄ ą▓ąĖą┤ąĄąŠą┤ą░ąĮąĮčŗčģ (deinterleave).
ą¤čĆąĖą╝ąĄčĆčŗ čéąĖą┐ąŠą▓ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą┐ąĄčĆąĄą┤ą░čć ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ DMA ą▓ą║ą╗čÄčćą░čÄčé:
ŌĆó ą×ą┤ąĖąĮąŠčćąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą╗ąĖąĮąĄą╣ąĮąŠą│ąŠ ą▒čāč乥čĆą░ čü ąŠčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ.
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╝ ą║ą░ąĮą░ą╗ą░ą╝ DMA ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ ąĄčüčéčī čéą░ą║ąČąĄ 4 ą║ą░ąĮą░ą╗ą░ DMA, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čć ą╝ąĄąČą┤čā čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ ąŠą▒ą╗ą░čüčéčÅą╝ąĖ ą┐ą░ą╝čÅčéąĖ čüąĖčüč鹥ą╝ ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ ADSP-BF538/ADSP-BF538F. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą▒ą╗ąŠą║ąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą╗čÄą▒čŗą╝ąĖ ą▓ąĖą┤ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ, ą▓ą║ą╗čÄčćą░čÅ ą▓ąĮąĄčłąĮčÄčÄ SDRAM, ROM, SRAM ąĖ ą┐ą░ą╝čÅčéčī flash - čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ąŠą╝ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą¤ąĄčĆąĄą┤ą░čćąĖ DMA ą▓ ą┐ą░ą╝čÅčéąĖ ą╝ąŠą│čāčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ąŠč湥ąĮčī ą│ąĖą▒ą║ąŠą╣ ą╝ąĄč鹊ą┤ąŠą╗ąŠą│ąĖąĄą╣, ąŠčüąĮąŠą▓ą░ąĮąĮąŠą╣ ąĮą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░čģ, ąĖą╗ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ą╝ąĄčģą░ąĮąĖąĘą╝ąŠą╝ ą░ą▓č鹊ą▒čāč乥čĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ ą▒ą░ąĘąĄ čĆąĄą│ąĖčüčéčĆąŠą▓.
[ą¦ą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTC) ]
ą¦ą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ BF538 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čāą┤ąŠą▒ąĮčŗą╣ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖą╣ čåąĖčäčĆąŠą▓čŗčģ čćą░čüąŠą▓, ą▓ą║ą╗čÄčćą░čÅ ą┐ąŠą╗čāč湥ąĮąĖąĄ č鹥ą║čāčēąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čüąĄą║čāąĮą┤ąŠą╝ąĄčĆ ąĖ ą▒čāą┤ąĖą╗čīąĮąĖą║. RTC čéą░ą║čéąĖčĆčāčÄčéčüčÅ ąŠčé ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ ąĮą░ 32.768 ą║ąōčå ("čćą░čüąŠą▓ąŠą╣" ą║ą▓ą░čĆčå). ąÉą┐ą┐ą░čĆą░čéčāčĆą░ RTC ąĖą╝ąĄąĄčé ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ, čéą░ą║ čćč鹊 čćą░čüčŗ ą╝ąŠą│čāčé ą┐ąŠą╗čāčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ąĖ čĆą░ą▒ąŠčéą░čéčī ą┤ą░ąČąĄ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ąŠčüčéą░ą╗čīąĮą░čÅ čćą░čüčéčī ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ. RTC ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐čåąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą▓ą║ą╗čÄčćą░čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā, ą╝ąĖąĮčāčéčā, čćą░čü ąĖą╗ąĖ ą┤ąĄąĮčī, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé čüčćąĖčéą░čÄčēąĄą│ąŠ ą▓ąĮąĖąĘ čüąĄą║čāąĮą┤ąŠą╝ąĄčĆą░ (stopwatch) ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░.
ąÆčģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ 32768 ąōčå ą┤ąĄą╗ąĖčéčüčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ ą▓ąĮąĖąĘ ą┤ąŠ 1 ąōčå. ą¦ą░čüčŗ čüąŠčüč鹊čÅčé ąĖąĘ 4 čüč湥čéčćąĖą║ąŠą▓: 60-čüąĄą║čāąĮą┤ąĮčŗą╣ čüč湥čéčćąĖą║, 60-ą╝ąĖąĮčāčéąĮčŗą╣ čüč湥čéčćąĖą║, 24-čćą░čüąŠą▓ąŠą╣ čüč湥čéčćąĖą║ ąĖ čüč湥čéčćąĖą║ ą┤ąĮąĄą╣, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čüčćąĖčéą░čéčī ą┤ąŠ 32768.
ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░, č鹊 ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ čéą░ą╣ą╝ąĄčĆą░ čüąŠą▓ą┐ą░ą┤ąĄčé čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▒čāą┤ąĖą╗čīąĮąĖą║ąŠą╝. ą£ąŠąČąĄčé ą▒čŗčéčī ą┤ą▓ą░ ą▓ąĖą┤ą░ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░: ą┐ąĄčĆą▓čŗą╣ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüčāč鹊ą║, ą▓č鹊čĆąŠą╣ ą┐ąŠ ą┤ąĮčÄ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ čüčāč鹊ą║.
ążčāąĮą║čåąĖčÅ stopwatch-čüąĄą║čāąĮą┤ąŠą╝ąĄčĆą░ ąĘą░ą┐čāčüą║ą░ąĄčé čüčćąĖčéą░čÄčēąĖą╣ ą▓ąĮąĖąĘ čüč湥čéčćąĖą║ ąĮą░čćąĖąĮą░čÅ ąŠčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮčŗ, čü čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą▓ 1 čüąĄą║čāąĮą┤čā. ąÜąŠą│ą┤ą░ stopwatch čĆą░ąĘčĆąĄčłąĄąĮ ąĖ čüč湥čéčćąĖą║ ą┐ąĄčĆąĄą▓ą░ą╗ąĖčé č湥čĆąĄąĘ 0, ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
ąÜą░ą║ ąĖ ą┤čĆčāą│ąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, RTC ą╝ąŠąČąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ (sleep mode) ą┐čĆąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą╗čÄą▒ąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čćą░čüąŠą▓ (RTC wake-up event). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ RTC ą╝ąŠąČąĄčé ą▓čŗą▓ąĄčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖąĘ čĆąĄąČąĖą╝ą░ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░ (deep sleep mode), ąĖ čĆą░ąĘą▒čāą┤ąĖčéčī ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ čćąĖą┐ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąŠąĮ ą▓čŗą║ą╗čÄč湥ąĮ ąĖ ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą│ąĖą▒ąĄčĆąĮą░čåąĖąĖ (powered down hibernate state).
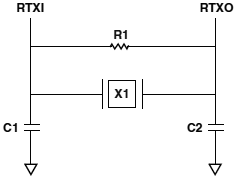
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ RTXI ąĖ RTXO ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ RTC ą║ ą▓ąĮąĄčłąĮąĖą╝ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 5.
ąĀąĖčü. 5. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ ą║ RTC.
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ: ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ ECLIPTEK EC38J (ą▓čŗą▓ąŠą┤čŗ ą┤ą╗čÅ ą┐ą░ą╣ą║ąĖ ą▓ ąŠčéą▓ąĄčĆčüčéąĖčÅ), ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ C1=C2=22 ą┐ąż, R1=10 ą£ą×ą╝.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąŠą╝ąĖąĮą░ą╗čŗ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ąĘą░ą▓ąĖčüčÅčé ąŠčé čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ X1 (čüą╝. ą┤ą░čéą░čłąĖčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ ą║ą▓ą░čĆčåą░). ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┤ą░ąĮčŗ čü čāč湥č鹊ą╝ ą┐ą░čĆą░ąĘąĖčéąĮčŗčģ ąĄą╝ą║ąŠčüč鹥ą╣ ą┐ą╗ą░čéčŗ 3 ą┐ąż.
[ąĪč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ (Wathdog) ]
ąÆ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ ADSP-BF538/ADSP-BF538F ąĄčüčéčī 32-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, čüą╗ąĄą┤čÅčēąĄą│ąŠ ąĘą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (software watchdog). ąŁčéą░ čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą┐ąŠą▓čŗčüąĖčéčī čĆą░ą▒ąŠčćčāčÄ ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī čüąĖčüč鹥ą╝čŗ ą┐čāč鹥ą╝ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐ąĄčĆąĄą▓ąŠą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ąĘą░čĆą░ąĮąĄąĄ ąĖąĘą▓ąĄčüčéąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüą▒čĆąŠčüą░, ąĮąĄą╝ą░čüą║ąĖčĆčāąĄą╝ąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (NMI), ąĖą╗ąĖ ąŠą▒čŗčćąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ čéą░ą╣ą╝ą░čāčé čéą░ą╣ą╝ąĄčĆą░ ąĖčüč鹥ą║ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čéą░ą╣ą╝ą░čāčé ą▒čŗą╗ čüą▒čĆąŠčłąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░, čĆą░ąĘčĆąĄčłą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĖ čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čéą░ą╣ą╝ąĄčĆ ąĮą░čćąĮąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüč湥čé ą▓ąĮąĖąĘ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░ąĮąŠą▓ąŠ ąĘą░ą│čĆčāąĘąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ ą▓ čüč湥čéčćąĖą║ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ąŠą▒ąĮčāą╗ąĖčéčüčÅ. ą×ą▒čŗčćąĮąŠ ą┐čĆąŠčåąĄą┤čāčĆą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ ą│ą╗ą░ą▓ąĮčŗą╣ čåąĖą║ą╗ čäčāąĮą║čåąĖąĖ main ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąŁč鹊 ąĘą░čēąĖčéąĖčé čüąĖčüč鹥ą╝čā ąŠčé ą┐ąŠą┐ą░ą┤ą░ąĮąĖąĄ ą▓ ąĮąĄąĖąĘą▓ąĄčüčéąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĖąĘ-ąĘą░ čüą▒ąŠčÅ ąĖą╗ąĖ ąĘą░ą▓ąĖčüą░ąĮąĖčÅ (ą┐ąŠ ą┐čĆąĖčćąĖąĮąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĖą╗ąĖ ąĖą╝ą┐čāą╗čīčüą░ ą┐ąŠą╝ąĄčģąĖ). ąĢčüą╗ąĖ čüč湥čéčćąĖą║ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄčāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, č鹊 ą┐čĆąĖ ąĖčüč鹥č湥ąĮąĖąĖ čéą░ą╣ą╝ą░čāčéą░ (ą║ąŠą│ą┤ą░ ąŠą▒ąĮčāą╗ąĖčéčüčÅ čüč湥čéčćąĖą║ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░) ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü čüąĖčüč鹥ą╝čŗ.
ąĪč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (SCLK) ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹥 fSCLK .
[ąóą░ą╣ą╝ąĄčĆčŗ ]
ąśą╝ąĄąĄčéčüčÅ 4 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ čéą░ą╣ą╝ąĄčĆą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ. ąóčĆąĖ ąĖąĘ čŹčéąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĖą╝ąĄčÄčé ą▓ąĮąĄčłąĮąĖą╣ ą▓čŗą▓ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą╗ąĖą▒ąŠ ą║ą░ą║ čłąĖčĆąŠčéąĮąŠ-ąĖą╝ą┐čāą╗čīčüąĮčŗą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆ (pulse-width modulator, PWM), ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čŗčģąŠą┤ čéą░ą╣ą╝ąĄčĆą░, ą║ą░ą║ čéą░ą║č鹊ą▓čŗą╣ ą▓čģąŠą┤ čéą░ą╣ą╝ąĄčĆą░, ąĖą╗ąĖ ą║ą░ą║ ą╝ąĄčģą░ąĮąĖąĘą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüą░ ąĖ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ą▓ąĮąĄčłąĮąĖčģ čüąŠą▒čŗčéąĖą╣. ąŁčéąĖ čéą░ą╣ą╝ąĄčĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ą▓ąĮąĄčłąĮąĄą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣, ą┐ąŠą┤ą░ąĮąĮąŠą╣ ąĮą░ ąĮąŠąČą║čā ą┐ąŠčĆčéą░ PF1 (TACLK), ą▓ąĮąĄčłąĮąĖą╝ čéą░ą║č鹊ą▓čŗą╝ ą▓čģąŠą┤ąŠą╝ PPI_CLK (TMRCLK), ąĖą╗ąĖ ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ SCLK.
ąŻąĘą╗čŗ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü UART0 ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓ ą┐ąŠč鹊ą║ąĄ ą┤ą░ąĮąĮčŗčģ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓ą▓ąĄčüčéąĖ čäčāąĮą║čåąĖčÄ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ čüą▓čÅąĘąĖ.
ąóą░ą╣ą╝ąĄčĆčŗ ą╝ąŠą│čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ čüąŠą▒čŗčéąĖčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą╗ąĖą▒ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ąĮčāčéčĆąĖ čüąĖčüč鹥ą╝čŗ, ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą┐ąŠą┤čüč湥čéą░ ą▓ąĮąĄčłąĮąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓.
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čŹčéąĖą╝ 3 čéą░ą╣ą╝ąĄčĆą░ą╝ č湥čéą▓ąĄčĆčéčŗą╣ čéą░ą╣ą╝ąĄčĆ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čćą░čüč鹊čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ čüąĖčüč鹥ą╝ąĮčŗąĄ čéąĖą║ąĖ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čü čåąĄą╗čīčÄ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĘą░ą┤ą░čć).
[SPORT ]
ąŁč鹊 čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ąĖąĮč鹥čĆč乥ą╣čü I2 S. ąśą╝ąĄąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ:
ŌĆó ąöą▓ą░ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ąĮą░ą▒ąŠčĆą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖčģ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī 16 ą║ą░ąĮą░ą╗ąŠą▓ čüč鹥čĆąĄąŠč乊ąĮąĖč湥čüą║ąŠą│ąŠ ą░čāą┤ąĖąŠ I2 S.
[SPI ]
ąÆ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ ADSP-BF538/ADSP-BF538F ąĖą╝ąĄąĄčéčüčÅ 3 SPI-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ ą┐ąŠčĆčéą░, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖčģ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąśąĮč鹥čĆč乥ą╣čü SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé 3 ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ: 2 ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ (master output-slave input, MOSIx, ąĖ master input-slave output, MISOx) ąĖ ą▓čŗą▓ąŠą┤ čéą░ą║č鹊ą▓ (serial clock, SCKx). ąÆčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ SPI chip select input (~SPIxSS) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ SPI ą▓čŗą▒čĆą░čéčī ą┐čĆąŠčåąĄčüčüąŠčĆ. ąöą╗čÅ SPI0 ąĄčüčéčī 7 ą▓čŗčģąŠą┤ąŠą▓ SPI chip select output (~SPI0SEL7..1), ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐čĆąŠčåąĄčüčüąŠčĆčā ą▓čŗą▒ąĖčĆą░čéčī ą┤čĆčāą│ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI. ąÜą░ąČą┤čŗą╣ ąĖąĘ ą┐ąŠčĆč鹊ą▓ SPI1 ąĖ SPI2 ąĖą╝ąĄčÄčé ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą▓čŗčģąŠą┤čā SPI chip select output (~SPI1SEL1 ąĖ ~SPI2SEL1) ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ č鹊čćą║ą░-č鹊čćą║ą░ č湥čĆąĄąĘ SPI. ąÜą░ąČą┤čŗą╣ ąĖąĘ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓čŗą▒ąŠčĆą║ąĖ SPI čĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ą║ą░ą║ ą┐ąŠčĆčéčŗ GPIO. ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čüąĄčģ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéčŗ SPI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗą╣ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ, čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ čĆąĄąČąĖą╝ąŠą▓ master/slave, ą░ čéą░ą║ąČąĄ čĆąĄąČąĖą╝ą░ multimaster.
ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠčĆč鹊ą▓ SPI ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī/čäą░ąĘą░ čéą░ą║č鹊ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ, ąĖ čā ą║ą░ąČą┤ąŠą│ąŠ SPI ąĄčüčéčī ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA, ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąŠč鹊ą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąĖą╗ąĖ ą┐čĆąĖąĄą╝. ąÜą░ąČą┤čŗą╣ ąĖąĘ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ DMA SPI ą╝ąŠąČąĄčé ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ą▓ ą║ą░ąČą┤čŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ (č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĄą╝).
ąĪą║ąŠčĆąŠčüčéčī ą▒ąĖčé SPI (čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SCKx) ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
fSCLK
SPI Clock Rate = ---------------
2 * SPIx_BAUD
ą│ą┤ąĄ 16-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ SPIx_BAUD čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ ąŠčé 2 ą┤ąŠ 65535.
[TWI ]
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ąĖą╝ąĄčÄčé 2 ąĖąĮč鹥čĆč乥ą╣čüą░ TWI (čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé Two-Wire Interface, čé. ąĄ. 2-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü), čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čłąĖąĮąŠą╣ I2C ą║ąŠą╝ą┐ą░ąĮąĖąĖ Philips. ą£ąŠą┤čāą╗ąĖ TWI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ą║ą░ą║ master ąĖ slave operation, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé 7-ą▒ąĖčéąĮčāčÄ ą░ą┤čĆąĄčüą░čåąĖčÄ ąĮą░ čłąĖąĮąĄ ąĖ ą░čĆą▒ąĖčéčĆą░ąČ ą┤ą░ąĮąĮčŗčģ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą░. ąśą╝ąĄąĄčéčüčÅ čéą░ą║ąČąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čéą░ą║č鹊ą▓ ą╝ą░čüč鹥čĆą░ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čĆą░čüčłąĖčĆąĄąĮąĖčÅ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
ąöą╗čÅ TWI ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ 2 ą▓čŗą▓ąŠą┤ą░: ąŠą┤ąĖąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čéą░ą║č鹊ą▓ (SCLx), ąĖ ą┤čĆčāą│ąŠą╣ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ (SDAx). ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ čłąĖąĮčŗ ąĮą░ čüą║ąŠčĆąŠčüčéčÅčģ ą┤ąŠ 400 kbps.
ąÆčŗą▓ąŠą┤čŗ TWI čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čü ą╗ąŠą│ąĖč湥čüą║ąĖą╝ąĖ čāčĆąŠą▓ąĮčÅą╝ąĖ 5V.
[UART ]
ąÆ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ą▓čüčéčĆąŠąĄąĮčŗ 3 ą┐ąŠčĆčéą░ ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗčģ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗčģ ą┐čĆąĖąĄą╝ąŠ-ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ (universal asynchronous receiver/transmitter, UART), ą║ąŠč鹊čĆčŗąĄ ą┐ąŠ č乊čĆą╝ą░čéčā čäčĆąĄą╣ą╝ą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ PC-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ UART (RS-232). ą¤ąŠčĆčéčŗ UART ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čāą┐čĆąŠčēąĄąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ ą┤čĆčāą│ąĖą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ąĖą╗ąĖ čģąŠčüčéą░ą╝, čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą┐ąŠą╗ąĮąŠą│ąŠ ą┤čāą┐ą╗ąĄą║čüą░, DMA, č湥čĆąĄąĘ ą░čüąĖąĮčģčĆąŠąĮąĮčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠčĆčéčŗ UART ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čäčĆąĄą╣ą╝čŗ čü č乊čĆą╝ą░č鹊ą╝ ąŠčé 5 ą┤ąŠ 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, 1 ąĖą╗ąĖ 2 čüč鹊ą┐-ą▒ąĖčéą░, ą▒ąĄąĘ ą▒ąĖčéą░ č湥čéąĮąŠčüčéąĖ ąĖą╗ąĖ ą▓čŗą▒ąŠčĆ č湥čéąĮąŠą│ąŠ ąĖą╗ąĖ ąĮąĄč湥čéąĮąŠą│ąŠ ą▒ąĖčéą░ ą║ąŠąĮčéčĆąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ (čéąĖą┐ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ none, even, ąĖą╗ąĖ odd). ą¤ąŠčĆčéčŗ UART ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé 2 čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ:
ŌĆó PIO (ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ I/O) ŌĆō ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąŠčüčŗą╗ą░ąĄčé ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ąĖą╗ąĖ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ UART, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗčģ ą║ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓čā ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O mapped UART registers). ąöą░ąĮąĮčŗąĄ ąĖą╝ąĄčÄčé ą┤ą▓ąŠą╣ąĮčāčÄ ą▒čāč乥čĆąĖąĘą░čåąĖčÄ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąĖ ą┐čĆąĖąĄą╝.
ŌĆó DMA ŌĆō ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąĄčĆąĄčüčŗą╗ą║ą░ą╝ąĖ ą║ą░ą║ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 čāą╝ąĄąĮčīčłą░ąĄčé čéčĆąĄą▒čāąĄą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą╗čÅ ą┐ąĄčĆąĄčüčŗą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą┐ąŠčĆč鹊ą╝ UART ąĖ ą┐ą░ą╝čÅčéčīčÄ. ąÜą░ąČą┤čŗą╣ UART ąĖą╝ąĄąĄčé 2 ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗčģ ą║ą░ąĮą░ą╗ą░ DMA, ąŠą┤ąĖąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┤čĆčāą│ąŠą╣ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░. ąŁčéąĖ ą║ą░ąĮą░ą╗čŗ DMA ąĖą╝ąĄčÄčé ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĖąŠčĆąĖč鹥čé ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ąŠčüčéą░ą╗čīąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ DMA, ą┐ąŠč鹊ą╝čā čćč鹊 ąĘą┤ąĄčüčī ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĄą▓čŗčüąŠą║ąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čüąĄčĆą▓ąĖčüą░.
ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčĆčéą░ UART ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ čüą║ąŠčĆąŠčüčéčī ą┤ą░ąĮąĮčŗčģ (baud rate), č乊čĆą╝ą░čé čäčĆąĄą╣ą╝ą░, ą│ąĄąĮąĄčĆą░čåąĖčÅ ą║ąŠą┤ą░ ąŠčłąĖą▒ą║ąĖ ąĖ čüčéą░čéčāčüą░, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüą║ąŠčĆąŠčüčéąĖ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé (fSCLK /1048576) ą┤ąŠ (fSCLK /16) ą▒ąĖčé ą▓ čüąĄą║čāąĮą┤čā.
ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčĆčéą░ UART (čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ) ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
fSCLK
UART Clock Rate = -------------------
16 * UART_Divisor
ą│ą┤ąĄ 16-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ UART_Divisor čüąŠčüč鹊ąĖčé ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ UARTx_DLH (čüčéą░čĆčłąĖąĄ 8 ą▒ąĖčé) ąĖ čĆąĄą│ąĖčüčéčĆą░ UARTx_DLL (ą╝ą╗ą░ą┤čłąĖąĄ 8 ą▒ąĖčé).
ąÆą╝ąĄčüč鹥 čü ąŠą▒čēąĖą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝ čéą░ą╣ą╝ąĄčĆąŠą▓ ą┤ą╗čÅ UART0 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą░ą▓č鹊ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠčĆč鹊ą▓ UART čĆą░čüčłąĖčĆčÅčÄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą┐čĆąŠč鹊ą║ąŠą╗ą░ Infrared Data Association (IrDA┬«) čüčéą░ąĮą┤ą░čĆčéą░ Serial Infrared Physical Layer Link Specification (SIR).
[GPIO ]
ą¤ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░ / ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ GPIO ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSP-BF538/ADSP-BF538F čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠ 54 ą▓čŗą▓ąŠą┤ą░ą╝ ą║ąŠčĆą┐čāčüą░. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāčÄčéčüčÅ čü ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (ą▓čŗą▓ąŠą┤čŗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖą╝ąĄčÄčé ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčāčÄ čäčāąĮą║čåąĖčÄ ą║ą░ą║ ą┐ąŠčĆčéčŗ GPIO). ą¤ąŠčĆčéčŗ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ ąĮą░ ą│čĆčāą┐ą┐čŗ ą┐ąŠčĆč鹊ą▓ C, D, E ąĖ F, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4.
ąóą░ą▒ą╗ąĖčåą░ 4. ą¤ąŠčĆčéčŗ GPIO.
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ GPIO
PPI
GPIO Port F15ŌĆō3
SPORT2
GPIO Port E7ŌĆō0
SPORT3
GPIO Port E15ŌĆō8
SPI0
GPIO Port F7ŌĆō0
SPI1
GPIO Port D4ŌĆō0
SPI2
GPIO Port D9ŌĆō5
UART1
GPIO Port D11ŌĆō10
UART2
GPIO Port D13ŌĆō12
CAN
GPIO Port C1ŌĆō0
GPIO
GPIO Port C9ŌĆō4(1)
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ ą║ą░ą║ GPIO, ąĖ ąĖčģ ąĮąĄą╗čīąĘčÅ ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. PC1 ąĖ PC4 ąĖą╝ąĄčÄčé ąŠčéą║čĆčŗčéčŗą╣ čüč鹊ą║, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą┐ąŠčĆčéčŗ-ą▓čŗčģąŠą┤čŗ GPIO.
[PPI ]
ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą│ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ PPI ą╝ąŠąČąĮąŠ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą║ ą┐čĆąŠčåąĄčüčüąŠčĆčā ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗąĄ ADC ąĖ DAC, ą▓ąĖą┤ąĄąŠ ą║ąŠą┤ąĄčĆčŗ ąĖ ą┤ąĄą║ąŠą┤ąĄčĆčŗ ąĖ ą┤čĆčāą│ąĖąĄ ą▓ąĮąĄčłąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. PPI čüąŠčüč鹊ąĖčé ąĖąĘ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓čģąŠą┤ą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ą┤ąŠ 3 ą▓čŗą▓ąŠą┤ąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ ąĖ ą┤ąŠ 16 ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ą░ąĮąĮčŗčģ. ąÆčģąŠą┤ čéą░ą║č鹊ą▓ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┤ąŠ fSCLK /2 ą£ąōčå, ąĖ čüąĖą│ąĮą░ą╗čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čģąŠą┤čŗ, ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ.
PPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆą░ąĘąĮčŗąĄ čĆąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ąĖ čĆąĄąČąĖą╝čŗ ITU-R 656. ąÆ čĆąĄąČąĖą╝ąĄ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ PPI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗąĄ, ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čłąĖčĆąĖąĮąŠą╣ ą┤ąŠ 16 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ąŠ 3 čüąĖą│ąĮą░ą╗ąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ Up. ąÆ čĆąĄąČąĖą╝ąĄ ITU-R 656 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗąĄ, ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čłąĖčĆąĖąĮąŠą╣ 8 ąĖą╗ąĖ 10 ą▒ąĖčé ą▓ąĖą┤ąĄąŠą┤ą░ąĮąĮčŗčģ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą▓ čćąĖą┐ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ ą┐ą░ą║ąĄčé ą┐čĆąĄą░ą╝ą▒čāą╗ ąĮą░čćą░ą╗ą░ čüčéčĆąŠą║ąĖ (start-of-line (SOL) ąĖ ąĮą░čćą░ą╗ą░ ą║ą░ą┤čĆą░ (start-of-field, SOF).
ąĀąĄąČąĖą╝čŗ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ PPI ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ čłąĖčĆąŠą║ąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą▓ ąŠą▒ą╗ą░čüčéąĖ ąĘą░čģą▓ą░čéą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąöąŠčüčéčāą┐ąĮąŠ 3 ą┐ąŠą┤čĆąĄąČąĖą╝ą░:
ŌĆó ąĀąĄąČąĖą╝ ą▓ą▓ąŠą┤ą░ ŌĆō čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ąĖ ą┤ą░ąĮąĮčŗąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą▓čģąŠą┤ą░ą╝ąĖ PPI.
ąĀąĄąČąĖą╝ ą▓ą▓ąŠą┤ą░ (Input Mode) . ąĀąĄąČąĖą╝ ą▓ą▓ąŠą┤ą░ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą║ą░ą║ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ADC, čéą░ą║ ąĖ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą▓ąĖą┤ąĄąŠ čü ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĄą╣. ąÆ čāą┐čĆąŠčēąĄąĮąĮąŠą╣ č乊čĆą╝ąĄ PPI_FS1 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé ą╝ąŠą╝ąĄąĮč鹊ą╝ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. PPI_DELAY MMR ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┤ą░čéčī ąĘą░ą┤ąĄčƹȹ║čā (ą▓ čåąĖą║ą╗ą░čģ PPI_CLK) ą╝ąĄąČą┤čā ą┐čĆąĖąĄą╝ąŠą╝ čŹč鹊ą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ ąĖ ąĮą░čćą░ą╗ąŠą╝ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čģąŠą┤ąĮčŗčģ ą▓čŗą▒ąŠčĆąŠą║ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝, ąĖ ąĘą░ą┤ą░ąĄčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ PPI_COUNT. PPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č乊čĆą╝ą░čéčŗ ą┤ą░ąĮąĮčŗčģ 8 ąĖ 10 ą▒ąĖčé č湥čĆąĄąĘ 16-ą▒ąĖčéąĮčāčÄ čłąĖąĮčā ą┤ą░ąĮąĮčŗčģ, čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ PPI_CONTROL.
ąĀąĄąČąĖą╝ ąĘą░čģą▓ą░čéą░ čäčĆąĄą╣ą╝ą░ (Frame Capture Mode) . Frame capture mode ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖčüč鹊čćąĮąĖą║čā (ąĖčüč鹊čćąĮąĖą║ą░ą╝) ą▓ąĖą┤ąĄąŠ čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ąĘą░čģą▓ą░čéą░ ą║ą░ą┤čĆą░). ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F čāą┐čĆą░ą▓ą╗čÅčÄčé ą╝ąŠą╝ąĄąĮč鹊ą╝, ą║ąŠą│ą┤ą░ čćąĖčéą░čéčī ąĖąĘ ą▓ąĖą┤ąĄąŠąĖčüč鹊čćąĮąĖą║ą░ (ąĖą╗ąĖ ąĖčüč鹊čćąĮąĖą║ąŠą▓). PPI_FS1 čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗčģąŠą┤ąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ HSYNC, ąĖ PPI_FS2 čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗčģąŠą┤ąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ VSYNC.
ąĀąĄąČąĖą╝ ą▓čŗą▓ąŠą┤ą░ (Output Mode) . ąĀąĄąČąĖą╝ ą▓čŗą▓ąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ąĖą┤ąĄąŠ ąĖą╗ąĖ ą┤čĆčāą│ąĖčģ ą┤ą░ąĮąĮčŗčģ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą┤ąŠ 3 ą▓čŗčģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░. ą×ą▒čŗčćąĮąŠ 1 čüąĖą│ąĮą░ą╗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ 2 ąĖą╗ąĖ 3 čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ąĖą┤ąĄąŠ čü ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĄą╣.
ąĀąĄąČąĖą╝čŗ ITU-R 656 ąĖąĮč鹥čĆč乥ą╣čüą░ PPI ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ čłąĖčĆąŠą║ąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĘą░čģą▓ą░čéą░ ą▓ąĖą┤ąĄąŠ, ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ 3 čĆą░ąĘąĮčŗčģ ą┐ąŠą┤čĆąĄąČąĖą╝ą░:
ŌĆó Active Video Only (č鹊ą╗čīą║ąŠ ą░ą║čéąĖą▓ąĮąŠąĄ ą▓ąĖą┤ąĄąŠ).
Active Video Only Mode . ąĀąĄąČąĖą╝ č鹊ą╗čīą║ąŠ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĖąĮč鹥čĆąĄčüčāąĄčé č鹊ą╗čīą║ąŠ ą┐ąŠą╗ąĄ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ, ąĮąŠ ąĮąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą│ą░čłąĄąĮąĖčÅ. PPI ąĮąĄ ą▒čāą┤ąĄčé čćąĖčéą░čéčī ą╗čÄą▒čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąĄąČą┤čā čüąĖą╝ą▓ąŠą╗ą░ą╝ąĖ ą┐čĆąĄą░ą╝ą▒čāą╗čŗ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ (EAV) ąĖ ąĮą░čćą░ą╗ą░ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ (SAV), ąĖą╗ąĖ ą╗čÄą▒čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ąĖą╝ąĄčÄčēąĖąĄčüčÅ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ ąĖą╝ą┐čāą╗čīčüą░ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ą░ą╣čé ąĮąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ, ąŠąĮą░ ąŠčéčäąĖą╗čīčéčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą╝ąŠą┤čāą╗ąĄą╝ PPI. ą¤ąŠčüą╗ąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤ą╗čÅ čüčéą░čĆčéą░ ąÜą░ą┤čĆą░ 1, ą╝ąŠą┤čāą╗čī PPI ąĖą│ąĮąŠčĆąĖčĆčāąĄčé ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ, ą┐ąŠą║ą░ ąĮąĄ čāą▓ąĖą┤ąĖčé ą║ąŠą┤ SAV. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ ąĮą░ ą║ą░ą┤čĆ (ą▓ čĆąĄą│ąĖčüčéčĆąĄ PPI_COUNT).
Vertical Blanking Interval Mode . ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ PPI ą┐ąĄčĆąĄą┤ą░ąĄčé č鹊ą╗čīą║ąŠ ą┤ą░ąĮąĮčŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ (VBI).
Entire Field Mode . ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ PPI čćąĖčéą░ąĄčé ą▓ąĄčüčī ą┐čĆąĖčģąŠą┤čÅčēąĖą╣ ą┐ąŠč鹊ą║ ą▒ąĖčé. ąŁč鹊 ą▓ą║ą╗čÄčćą░ąĄčé ą░ą║čéąĖą▓ąĮąŠąĄ ą▓ąĖą┤ąĄąŠ, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐čĆąĄą░ą╝ą▒čāą╗čŗ ąĖ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čüčéčĆąŠąĄąĮčŗ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą│ąŠ ąĖ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ (ą║ ą┐čĆąĖą╝ąĄčĆčā, čŹč鹊 ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ą░ąĮąĮčŗąĄ č鹥ą╗ąĄč鹥ą║čüčéą░). ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┐čāčüčéąĖčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠčüą╗ąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąÜą░ą┤čĆą░ 1.
[CAN ]
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ čłąĖąĮčŗ Controller Area Network (CAN) V2.0B. ąŁč鹊čé ą┐čĆąŠč鹊ą║ąŠą╗ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čÅčģ ąĖ čĆą░ąĘąĮčŗčģ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗčģ ąĖ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. CAN čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĮą░ą┤ąĄąČąĮąŠ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ čüąĄčéčī - ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ ą▓čüčéčĆąŠąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ CRC, ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąŠčłąĖą▒ąŠčćąĮąŠą│ąŠ čāąĘą╗ą░.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ RAM ą┤ą╗čÅ 32 ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ą░čģ (mailbox, čŹč鹊 č鹥čĆą╝ąĖąĮ čłąĖąĮčŗ CAN), ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č乊čĆą╝ą░čé čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ, čéą░ą║ ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ (standard, extended identifier) ID, ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮąĮčŗčģ čüčéą░ąĮą┤ą░čĆč鹊ą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN čĆąĄą▓ąĖąĘąĖąĖ 2.0 čćą░čüčéčī B.
ąÜą░ąČą┤čŗą╣ mailbox čüąŠčüč鹊ąĖčé ąĖąĘ ą▓ąŠčüčīą╝ąĖ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ. ąöą░ąĮąĮčŗąĄ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ ąĮą░ ą┐ąŠą╗čÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ą║ą╗čÄčćą░čÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą╝ąĄčéą║čā ą▓čĆąĄą╝ąĄąĮąĖ, čüč湥čéčćąĖą║ ą▒ą░ą╣čé, ą┤ąŠ 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖč鹊ą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąÜą░ąČą┤čŗą╣ čāąĘąĄą╗ čüąĄčéąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐čĆąŠčģąŠą┤čÅčēąĖąĄ ą┐ąŠ čüąĄčéąĖ. ąĢčüą╗ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą▓ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ mailbox, č鹊 ą╝ąŠą┤čāą╗čī ąĘąĮą░ąĄčé, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ąĮąĄą│ąŠ, ą┐ąŠą╝ąĄčēą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ mailbox ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆčā ąŠ ą┐čĆąĖčģąŠą┤ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ą▓čŗą▓ąĄčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up event), čéą░ą║ čćč鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąĮąĖąĘą║ąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ ą┐čĆąĖ ąŠąČąĖą┤ą░ąĮąĖąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čüąŠą▒čŗčéąĖąĄ CAN wake-up ą╝ąŠąČąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĖ čŹčéąĖą╝ ą▓čŗą▓ąĄčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖąĘ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (powered-down hibernate state).
ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čüąĄčéąĖ ąŠč湥ąĮčī čüčéčĆąŠą│ąĖąĄ, čéą░ą║ čćč鹊 čäąĖąĘąĖč湥čüą║ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN ąŠą▒čŗčćąĮąŠ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 2 čćą░čüčéąĖ: ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖ čéčĆą░ąĮčüąĖą▓ąĄčĆ. ąŁč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą┤ąĮąŠą╝čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čĆą░ąĘąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čüąĄč鹥ą╣ CAN. ą£ąŠą┤čāą╗čī CAN ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSP-BF538/ADSP-BF538F ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ą░ą║ čĆą░ąĘ čćą░čüčéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąØą░čĆčāąČčā ąĖąĘ ą╝ąŠą┤čāą╗čÅ ą┐ąŠčüčéčāą┐ą░čÄčé čüąĖą│ąĮą░ą╗čŗ I/O ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ąŠą┤ąĮąŠą│ąŠ ą▓čģąŠą┤ą░ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ čłąĖąĮčŗ CAN.
ąóą░ą║čéčŗ CAN ą┐ąŠą╗čāčćą░čÄčéčüčÅ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (SCLK) č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą┤ąĄą╗ąĖč鹥ą╗čī, čéą░ą║ čćč鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą║ą▓ą░čĆčå ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ.
[ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ ]
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé 4 čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ą░, ą║ą░ąČą┤čŗą╣ čüąŠ čüą▓ąŠąĖą╝ ą┐čĆąŠčäąĖą╗ąĄą╝, ąŠčéą╗ąĖčćą░čÄčēąĖą╝čüčÅ ą┐ąŠ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ/ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (dynamic power management), ą┤ą░čÄčēą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą╝ąĄąĮčÅčéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░, č湥ą╝ ą╝ąŠąČąĮąŠ ąĄčēąĄ ą▒ąŠą╗čīčłąĄ čüąĮąĖąĘąĖčéčī čĆą░čüčüąĄąĖą▓ą░ąĄą╝čāčÄ ą╝ąŠčēąĮąŠčüčéčī. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą┤ą░čéčī 菹║ąŠąĮąŠą╝ąĖčÄ čŹąĮąĄčĆą│ąĖąĖ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 5 čüą╝. ąŠą▒čēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 5. ąØą░čüčéčĆąŠą╣ą║ąĖ čĆąĄąČąĖą╝ą░ ą┐ąĖčéą░ąĮąĖčÅ.
ąĀąĄąČąĖą╝ PLL ą¤čĆąŠą┐čāčüą║ PLL CCLK SCLK VDDINT
ą¤ąŠą╗ąĮąŠąĄ ą▓ą║ą╗čÄč湥ąĮąĖąĄ
ąĀą░ąĘčĆąĄčłąĄąĮą░
ąØąĄčé
ąĀą░ąĘčĆąĄčłąĄąĮą░
ąĀą░ąĘčĆąĄčłąĄąĮą░
ąÆą║ą╗
ąÉą║čéąĖą▓ąĮčŗą╣
ąĀą░ąĘčĆąĄčłąĄąĮą░/ąĘą░ą┐čĆąĄčēąĄąĮą░
ąöą░
ąĀą░ąĘčĆąĄčłąĄąĮą░
ąĀą░ąĘčĆąĄčłąĄąĮą░
ąÆą║ą╗
ąĪąŠąĮ
ąĀą░ąĘčĆąĄčłąĄąĮą░
-
ąŚą░ą┐čĆąĄčēąĄąĮą░
ąĀą░ąĘčĆąĄčłąĄąĮą░
ąÆą║ą╗
ąōą╗čāą▒ąŠą║ąĖą╣ čüąŠąĮ
ąŚą░ą┐čĆąĄčēąĄąĮą░
-
ąŚą░ą┐čĆąĄčēąĄąĮą░
ąŚą░ą┐čĆąĄčēąĄąĮą░
ąÆą║ą╗
Hibernate
ąŚą░ą┐čĆąĄčēąĄąĮą░
-
ąŚą░ą┐čĆąĄčēąĄąĮą░
ąŚą░ą┐čĆąĄčēąĄąĮą░
ąÆčŗą║ą╗
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čéą░ą▒ą╗ąĖčåąĄ PLL ąŠąĘąĮą░čćą░ąĄčé ą▒ą╗ąŠą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čü ą┐ąŠą╝ąŠčēčīčÄ čāą╝ąĮąŠąČąĄąĮąĖčÅ ąĖ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ ą║ą▓ą░čĆčåą░, CCLK ąŠąĘąĮą░čćą░ąĄčé Core Clock (čćą░čüč鹊čéą░ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░), SCLK ąŠąĘąĮą░čćą░ąĄčé System Clock (čćą░čüč鹊čéą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ).
ąĀąĄąČąĖą╝ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ (Full-On) - ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ . ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ PLL čĆą░ąĘčĆąĄčłąĄąĮą░, ąĖ ąĮąĄ ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ ą▓ ąŠą▒čģąŠą┤, čćč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąĖą╝ąĄąĮąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čĆą░ą▒ąŠčćčāčÄ čćą░čüč鹊čéčā čéą░ą║č鹊ą▓. ąŁč鹊 čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ. ą»ą┤čĆąŠ ąĖ ą▓čüąĄ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ.
ąÉą║čéąĖą▓ąĮčŗą╣ čĆąĄąČąĖą╝ (Active Operating Mode) - čĆąĄąČąĖą╝ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠą╣ 菹║ąŠąĮąŠą╝ąĖąĖ . ąÆ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ PLL čĆą░ąĘčĆąĄčłąĄąĮą░, ąĮąŠ ąĮąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮą░ (ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ). ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ čćą░čüč鹊čéą░ CCLK ąĖ SCLK čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čćą░čüč鹊č鹥 ą▓čģąŠą┤ąĮčŗčģ čéą░ą║č鹊ą▓ (CLKIN). ąöąŠčüčéčāą┐ DMA čĆą░ą▒ąŠčéą░ąĄčé ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ L1.
ąÆ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī PLL č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL Control register, PLL_CTL). ąĢčüą╗ąĖ PLL ąĘą░ą┐čĆąĄčēąĄąĮą░, č鹊 ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ąĮąŠą▓ąŠ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ čüąĮą░.
ąĀąĄąČąĖą╝ čüąĮą░ (Sleep Operating Mode) - ą▒ąŠą╗čīčłąŠąĄ čüąĮąĖąČąĄąĮąĖąĄ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ . ąĀąĄąČąĖą╝ čüąĮą░ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ čüąĮąĖąČą░ąĄčé ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą┐čāč鹥ą╝ ąĘą░ą┐čĆąĄčéą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ (CCLK). ą×ą┤ąĮą░ą║ąŠ PLL ąĖ čüąĖčüč鹥ą╝ąĮą░čÅ čćą░čüč鹊čéą░ (SCLK) ąŠčüčéą░čÄčéčüčÅ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéą░čÄčēąĖą╝ąĖ. ąÆ čéą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ ąŠą▒čŗčćąĮąŠ ą┐ąŠ ą▓ąĮąĄčłąĮąĄą╝čā čüąŠą▒čŗčéąĖčÄ ąĖą╗ąĖ ąŠčé RTC. ąÆ čĆąĄąČąĖą╝ąĄ čüąĮą░ čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up event) čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SIC_IWRx, ą┐čĆąĖ čŹč鹊ą╝ ą┐čĆąŠčåąĄčüčüąŠčĆ čĆąĄą░ą│ąĖčĆčāąĄčé ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčéą░ BYPASS ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PLL (PLL_CTL). ąĢčüą╗ąĖ BYPASS ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ. ąĢčüą╗ąĖ BYPASS čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄąČąĖą╝. ąÆ čĆąĄąČąĖą╝ąĄ čüąĮą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čüąĖčüč鹥ą╝ąĮčŗą╣ ą┤ąŠčüčéčāą┐ DMA ą║ ą┐ą░ą╝čÅčéąĖ L1.
ąōą╗čāą▒ąŠą║ąĖą╣ čĆąĄąČąĖą╝ čüąĮą░ (Deep Sleep Operating Mode) - ą╝ą░ą║čüąĖą╝čāą╝ čüąĮąĖąČąĄąĮąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ . ąĀąĄąČąĖą╝ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čüąĮąĖąČą░ąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąŠą╣ čéą░ą║č鹊ą▓ čÅą┤čĆą░ (CCLK) ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čéą░ą║č鹊ą▓ ą▓čüąĄą╣ ą┐ąĄčĆąĖč乥čĆąĖąĖ (SCLK). ąÉčüąĖąĮčģčĆąŠąĮąĮčŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (čé. ąĄ. čéą░ą║čéąĖčĆčāąĄą╝čŗąĄ ąŠčé ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░), čéą░ą║ąĖąĄ ą║ą░ą║ RTC, ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī, ąĮąŠ ąĮąĄą╗čīąĘčÅ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čĆąĄčüčāčĆčüą░ą╝ ąĖą╗ąĖ ą║ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. ąśąĘ čĆąĄąČąĖą╝ą░ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą╝ąŠąČąĮąŠ ą▓čŗą╣čéąĖ č鹊ą╗čīą║ąŠ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ čüą▒čĆąŠčüą░ (reset interrupt, RESET), ąĖą╗ąĖ ąŠčé ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ RTC. ąÆ čĆąĄąČąĖą╝ąĄ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░ ą░čüąĖąĮčģčĆąŠąĮąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ RTC ą┐čĆąĖą▓ąĄą┤ąĄčé ą┐ąĄčĆąĄčģąŠą┤ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄąČąĖą╝. ąÆčŗčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ RESET ą▓ čĆąĄąČąĖą╝ąĄ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░ ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆ ą▓ čĆąĄąČąĖą╝ ą┐ąŠą╗ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ.
ąĪąŠčüč鹊čÅąĮąĖąĄ Hibernate - ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ čüčéą░čéąĖč湥čüą║ąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ . ąĪąŠčüč鹊čÅąĮąĖąĄ hibernate ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ąĘą░ą┐čĆąĄč鹊ą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░, čéą░ą║č鹊ą▓ čÅą┤čĆą░ (CCLK) ąĖ čéą░ą║č鹊ą▓ ą▓čüąĄčģ čüąĖąĮčģčĆąŠąĮąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ (SCLK). ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮ ąĘą░ą┐ąĖčüčīčÄ b#00 ą▓ ą▒ąĖčéčŗ FREQ čĆąĄą│ąĖčüčéčĆą░ VR_CTL. ąŁč鹊 čüčĆą░ąĘčā ąĘą░ą┐čĆąĄčéąĖčé ąĖ CCLK, ąĖ SCLK. ąóą░ą║ąČąĄ čü ąĘą░ą┐čĆąĄč鹊ą╝ čŹčéąĖčģ čéą░ą║č鹊ą▓ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ (VDDINT ) ą▓ 0V, čćč鹊 ą┤ą░ąĄčé čüą░ą╝čāčÄ čģąŠčĆąŠčłčāčÄ čŹą║ąŠąĮąŠą╝ąĖčÄ čŹąĮąĄčĆą│ąĖąĖ. ą¦č鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą╗čÄą▒ą░čÅ ą║čĆąĖčéąĖč湥čüą║ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, čģčĆą░ąĮčÅčēą░čÅčüčÅ ą▓ąĮčāčéčĆąĖ (čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ą░ą╝čÅčéąĖ, čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ ą┤čĆčāą│ąĖąĄ ą┤ą░ąĮąĮčŗąĄ), ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮą░ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą┤ąŠ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
ą¤ąŠčüą║ąŠą╗čīą║čā VDDEXT ą▓čüąĄ ąĄčēąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠčéą║ą╗čÄč湥ąĮąĮčŗčģ čéą░ą║č鹊ą▓, ą▓čüąĄ ą▓ąĮąĄčłąĮąĖąĄ ą▓čŗą▓ąŠą┤čŗ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ąĄčüą╗ąĖ ąĮąĄ ąĮą░čüčéčĆąŠąĄąĮčŗ ą║ą░ą║-č鹊 ąĖąĮą░č湥. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą║ ą┐čĆąŠčåąĄčüčüąŠčĆčā, ą▓čüąĄ ąĄčēąĄ ą┐ąŠą╗čāčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ą▒ąĄąĘ čāč鹥čćą║ąĖ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮąŠą│ąŠ č鹊ą║ą░.
ąĢčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĄč鹊ą┤ąŠą▓ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą£ąŠą┤čāą╗čī CAN ą╝ąŠąČąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▓čŗą▓ąŠą┤ ~GPW ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ ąĮąĖąĘą║ąĖą╣ ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī ą╗čÄą▒čŗą╝ ą▓ąĮąĄčłąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąś ąĮą░ą║ąŠąĮąĄčå, čĆąĄą│čāą╗čÅč鹊čĆ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ čĆą░ąĘą▒čāą┤ąĖčéčī čüąŠą▒čŗčéąĖąĄą╝ ąŠčé RTC, ąĖą╗ąĖ ąŠčé ą┐ąŠą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗą▓ąŠą┤ ~RESET. ąÆčüąĄ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate ąĖąĮąĖčåąĖąĖčĆčāčÄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą×čéą┤ąĄą╗čīąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ čĆą░ąĘčĆąĄčłą░čÄčéčüčÅ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ VR_CTL.
ąŚą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ VR_CTL ąĖ RTC, ą▓čüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ąĖ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ č鹥čĆčÅčÄčé čüą▓ąŠąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ hibernate. ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čüąŠčüč鹊čÅąĮąĖčÅ čüąĖčüč鹥ą╝čŗ ą╝ąŠą│čāčé čģčĆą░ąĮąĖčéčīčüčÅ ą▓ąŠ ą▓ąĮąĄčłąĮąĄą╝ SRAM ąĖą╗ąĖ SDRAM. ąæąĖčé SCKELOW ą▓ čĆąĄą│ąĖčüčéčĆąĄ VR_CTL ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▒čŗą╗ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate ą▒ąĄąĘ čĆą░ąĘčĆčāčłąĄąĮąĖčÅ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅčÄčēąĄą│ąŠčüčÅ SDRAM, ąĄčüą╗ąĖ ąĘą┤ąĄčüčī čéą░ą║ąČąĄ ąĄčüčéčī ą▓ąĮąĄčłąĮąĖą╣ čĆąĄąĘąĖčüč鹊čĆ pulldown ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SCKE.
ąŁą║ąŠąĮąŠą╝ąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ . ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 6, ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čéčĆąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┤ąŠą╝ąĄąĮą░ ą┐ąĖčéą░ąĮąĖčÅ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┤ąŠą╝ąĄąĮąŠą▓ ą┐ąĖčéą░ąĮąĖčÅ ą┐ąŠą▓čŗčłą░ąĄčé ą│ąĖą▒ą║ąŠčüčéčī, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗą╝ąĖ čüčéą░ąĮą┤ą░čĆčéą░ą╝ąĖ ąĖ čüąŠą│ą╗ą░čłąĄąĮąĖčÅą╝ąĖ. ąöąŠą╝ąĄąĮ ą┐ąĖčéą░ąĮąĖčÅ 3.3V VDDRTC ą┐ąĖčéą░ąĄčé RTC I/O ąĖ ą╗ąŠą│ąĖą║čā RTC, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé RTC ąŠčüčéą░čéčīčüčÅ ą▓ čĆą░ą▒ąŠč鹥, ą║ąŠą│ą┤ą░ ąŠčüčéą░ą╗čīąĮą░čÅ čćą░čüčéčī čćąĖą┐ą░ ą▓čŗą║ą╗čÄč湥ąĮą░ ąĖ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ. ąöąŠą╝ąĄąĮ ą┐ąĖčéą░ąĮąĖčÅ 1.25V VDDINT ą┐ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąŠčēąĮąŠčüčéčī ąĮą░ ą▓čüčÄ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ą╗ąŠą│ąĖą║čā, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą╗ąŠą│ąĖą║ąĖ RTC. ąöąŠą╝ąĄąĮ ą┐ąĖčéą░ąĮąĖčÅ 3.3V VDDEXT ą┤ą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą▓čüąĄ čāąĘą╗čŗ I/O, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą║ą▓ą░čĆčåą░ RTC. ąöą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┤ąŠą╝ąĄąĮąŠą▓ ą┐ąĖčéą░ąĮąĖčÅ ąĮąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 6. ąöąŠą╝ąĄąĮčŗ ą┐ąĖčéą░ąĮąĖčÅ.
ąöąŠą╝ąĄąĮ ą┐ąĖčéą░ąĮąĖčÅ ą”ąĄą┐čī
ąøąŠą│ąĖą║ą░ RTC, ą│ąĄąĮąĄčĆą░č鹊čĆ RTC
VDDRTC
ąÆčüčÅ ą▓ąĮąĄčłąĮčÅčÅ ą╗ąŠą│ąĖą║ą░, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ RTC
VDDINT
ąÆąĄčüčī I/O, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ RTC
VDDEXT
VDDRTC ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╗ąĖą▒ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ ą▓ąĮąĄčłąĮąĄą╣ ą▒ą░čéą░čĆąĄąĄ (ąĄčüą╗ąĖ RTC čĆą░ą▒ąŠčéą░ąĄčé, ą║ąŠą│ą┤ą░ ąŠčüčéą░ą╗čīąĮą░čÅ čćą░čüčéčī čćąĖą┐ą░ ą▓čŗą║ą╗čÄč湥ąĮą░) ąĖą╗ąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ čłąĖąĮąĄ ą┐ąĖčéą░ąĮąĖčÅ VDDEXT ą┐ą╗ą░čéčŗ čüąĖčüč鹥ą╝čŗ. VDDRTC ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą╗čāčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ hibernate ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĖ čéą░ą║ąČąĄ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą╗čāčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ RTC ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ąĀą░čüčüąĄąĖą▓ą░ąĄą╝ą░čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ą╝ąŠčēąĮąŠčüčéčī - ą▒ąŠą╗čīčłą░čÅ čäčāąĮą║čåąĖčÅ ąŠčé čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ą║ą▓ą░ą┤čĆą░čéą░ čĆą░ą▒ąŠč湥ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čāą╝ąĄąĮčīčłąĄąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĮą░ 25% čüąĮąĖąĘąĖčé ąĮą░ 25% ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čüąĮąĖąČąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ 25% čüąĮąĖąĘąĖčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą▒ąŠą╗čīčłąĄ č湥ą╝ ąĮą░ 40%. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čüąĮąĖąČąĄąĮąĖąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ čüą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ, čéą░ą║ čćč鹊 ąĄčüą╗ąĖ čüąĮąĖąĘąĖčéčī ą▓ą╝ąĄčüč鹥 čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ, č鹊 ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠąČąĄčé čāą┐ą░čüčéčī ą┤čĆą░ą╝ą░čéąĖč湥čüą║ąĖ.
ążčāąĮą║čåąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī ąĖ ą▓čģąŠą┤ąĮčŗą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ (VDDINT ), ąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ (fCCLK ).
ąŁą║ąŠąĮąŠą╝ąĖčÄ čĆą░čüčüąĄąĖą▓ą░ąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą╝ąŠąČąĮąŠ čüą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░čéčī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäą░ą║č鹊čĆą░ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ (power savings factor).
ążą░ą║č鹊čĆ čŹą║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
Power Savings Factor = (fCCLKRED /fCCLKNOM ) * (VDDINTRED /VDDINTNOM )2 * (tRED /tNOM )
ą│ą┤ąĄ:
fCCLKNOM fCCLKRED VDDINTNOM VDDINTRED tNOM tRED
ąŁą║ąŠąĮąŠą╝ąĖčÅ ą▓ ą┐čĆąŠčåąĄąĮčéą░čģ čüąŠčüčéą░ą▓ąĖčé:
% Power Savings = (1 ŌĆō Power Savings Factor) * 100%
[ąĀąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ]
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ BF538 ąĖą╝ąĄčÄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ) čāą┐čĆą░ą▓ą╗čÅčéčī 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝. ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░ ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ, ąĖ ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ čłąĖąĮ VDDEXT (čüą╝. čĆą░ąĘą┤ąĄą╗ ąŻčüą╗ąŠą▓ąĖčÅ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ą┤ą╗čÅ ą┤ąŠą┐čāčüą║ąŠą▓ čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ąĖ ąĖ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░čģ VDDEXT ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą╝ąŠą┤ąĄą╗ąĄą╣). ą¤čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ (č鹊ą│ą┤ą░ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ).
ąĀąĖčü. 6. ąĪčģąĄą╝ą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
ąĀąĄą│čāą╗čÅč鹊čĆ čāą┐čĆą░ą▓ą╗čÅąĄčé čāčĆąŠą▓ąĮčÅą╝ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąĖ, ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (voltage regulator control register, VR_CTL) čü ąĖąĮą║čĆąĄą╝ąĄąĮč鹊ą╝ ą▓ 50 mV. ąöą╗čÅ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (standby) ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čüąĮčÅčéąĖčÅ ą╝ąŠčēąĮąŠčüčéąĖ čü čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐čĆąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ čāąĘą╗ą░čģ I/O (VDDRTC , VDDEXT ). ąÆąŠ ą▓čĆąĄą╝čÅ čüąŠčüč鹊čÅąĮąĖčÅ hibernate ą┐ąĖčéą░ąĮąĖąĄ ą┤ą╗čÅ I/O ą▓čüąĄ ąĄčēąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ, čćč鹊 ąĖąĘą▒ą░ą▓ą╗čÅąĄčé ąŠčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ą▓ąĮąĄčłąĮąĄą╣ ą▒čāč乥čĆąĖąĘą░čåąĖąĖ. ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī (ą▓čŗą▓ąĄą┤čÅ ąĄą│ąŠ ąĖąĘ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ) ą╗ąĖą▒ąŠ č湥čĆąĄąĘ RTC wake-up, ą╗ąĖą▒ąŠ CAN wake-up, ą╗ąĖą▒ąŠ general-purpose wake-up, ą╗ąĖą▒ąŠ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ čüąĖą│ąĮą░ą╗ą░ ~RESET - ą▓čüąĄ čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĮą░čćą░ą╗čā ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĘą░ą│čĆčāąĘą║ąĖ (boot sequence). ąĀąĄą│čāą╗čÅč鹊čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ąĘą░ą┐čĆąĄčēąĄąĮ ąĖ ąŠčéą║ą╗čÄč湥ąĮ, ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮčāąČąĄąĮ ą║ą░ą║ąŠą╣-č鹊 ą▓ąĮąĄčłąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ.
ąĀą░ąĘą╝ąĄčēąĄąĮąĖąĄ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ čĆąĄą│čāą╗čÅč鹊čĆą░, čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖčģ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓, čĆą░ąĘą▓ąŠą┤ą║ą░ ą┐ą╗ą░čéčŗ - čŹč鹊 ą▓čüąĄ ąĖą│čĆą░ąĄčé čĆąĄčłą░čÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čłčāą╝ą░ ą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ čåąĄą┐ąĖ čćąĖą┐ą░. ą¤čĆąŠą▓ąŠą┤ąĮąĖą║ąĖ VROUT1ŌĆō0 ąĖ ą▓ąĮąĄčłąĮąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąĖ čĆą░ąĘą▓ąŠą┤ą║ąĄ ą┐ą╗ą░čéčŗ ą┤ąŠą╗ąČąĮčŗ čüčćąĖčéą░čéčīčüčÅ ąĖčüč鹊čćąĮąĖą║ą░ą╝ąĖ ą┐ąŠą╝ąĄčģ (ąĖą╝ą┐čāą╗čīčüąĮčŗčģ č鹊ą║ąŠą▓), čéą░ą║ čćč鹊 ąŠąĮąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ąĖą╗ąĖ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▒ą╗ąĖąĘą║ąŠ ą║ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗą╝ čüčģąĄą╝ą░ą╝ ąĖą╗ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ ąĮą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥. ąÆčüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ąĖ ąĖčüč鹊čćąĮąĖą║ąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ I/O ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ąĮą░ą┤ąĄąČąĮčāčÄ čäąĖą╗čīčéčĆą░čåąĖčÄ čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖą╝ąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ą╝ąĖ, čĆą░ąĘą╝ąĄčēąĄąĮąĮčŗą╝ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ ą║ ą║ąŠčĆą┐čāčüčā ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSPBF538/ADSP-BF538F.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą▓čüčéčĆąŠąĄąĮąĮąŠą╝čā čĆąĄą│čāą╗čÅč鹊čĆčā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖ čüą▓čÅąĘą░ąĮąĮčŗą╝ąĖ čü čŹčéąĖą╝ ąĘą░ą╝ąĄčćą░ąĮąĖčÅą╝ąĖ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ ą┐ą╗ą░čéčŗ čüą╝. ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ Switching Regulator Design Considerations for ADSP-BF533 Blackfin Processor (EE-228) site:analog.com (ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠąĖčüą║ čüčéčĆąŠą║ąĖ EE-228 ąĮą░ čüą░ą╣č鹥 analog.com).
[ąĪąĖą│ąĮą░ą╗čŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ]
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F ą╝ąŠą│čāčé ą┐ąŠą╗čāčćą░čéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░, ą▓čģąŠą┤ą░ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĖą╗ąĖ ąŠčé ą▒čāč乥čĆąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░.
ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ąĮąĄčłąĮąĖąĄ čéą░ą║čéčŗ, č鹊 čŹč鹊čé čüąĖą│ąĮą░ą╗ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī TTL-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗąĄ čāčĆąŠą▓ąĮąĖ, ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ, ą╝ąĄąĮčÅčéčī čüą▓ąŠčÄ čćą░čüč鹊čéčā ąĖ čäą░ąĘčā ą┐čĆąĖ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠč鹥. ąŁč鹊čé ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą▓čŗą▓ąŠą┤čā ą┐čĆąŠčåąĄčüčüąŠčĆą░ CLKIN. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗, ą▓čŗą▓ąŠą┤ XTAL ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ą▓ą░čéčīčüčÅ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝.
ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ADSP-BF538/ADSP-BF538F čüąŠą┤ąĄčƹȹ░čé ą▓čüčéčĆąŠąĄąĮąĮčāčÄ čüčģąĄą╝čā ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ąĮąĄčłąĮąĖą╣ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ (ą┐čĆąĖą╝ąĄčĆ ąŠčüąĮąŠą▓ąĮąŠą╣ čüčģąĄą╝čŗ ą▓ą║ą╗čÄč湥ąĮąĖčÅ čüą╝. ąĮą░ čĆąĖčü. 7). ąÜą▓ą░čĆčå čü ąĮčāąČąĮąŠą╣ ąŠčüąĮąŠą▓ąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą│ąŠ čĆąĄąĘąŠąĮą░ąĮčüą░ (ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ) ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ CLKIN ąĖ XTAL. ąÆąĮčāčéčĆąĄąĮąĮąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ CLKIN ąĖ XTAL ą┐čĆąĖą╝ąĄčĆąĮąŠ 500 ą║ą×ą╝. ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ąŠą▒čŗčćąĮąŠ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ. ąöą▓ą░ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ąĮą░ čĆąĖčü. 7, čģąŠčĆąŠčłąĖ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čäą░ąĘčŗ ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąØą░ čĆąĖčü. 7 ą┤ą░ąĮčŗ č鹊ą╗čīą║ąŠ čéąĖą┐ąĖčćąĮčŗąĄ ąĮąŠą╝ąĖąĮą░ą╗čŗ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ąĖ čĆąĄąĘąĖčüč鹊čĆąŠą▓. ąŚąĮą░č湥ąĮąĖąĄ ąĄą╝ą║ąŠčüčéąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ ąĖ čäąĖąĘąĖč湥čüą║ąŠą╣ čĆą░ąĘą▓ąŠą┤ą║ąĖ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ čüąĖčüč鹥ą╝čŗ. ąŚąĮą░č湥ąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé čāčĆąŠą▓ąĮčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╝ ą║ą▓ą░čĆčåą░. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čüąĖčüč鹥ą╝ ą┤ąŠą╗ąČąĮčŗ čéčēą░č鹥ą╗čīąĮąŠ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ, ą▒ą░ąĘąĖčĆčāčÅčüčī ąĮą░ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ ąĮčāąČąĮąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ.
ąÜčĆąĖčüčéą░ą╗ą╗čŗ čü čéčĆąĄčéčīąĄą╣ ą│ą░čĆą╝ąŠąĮąĖą║ąŠą╣ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĮą░ čćą░čüč鹊čéą░čģ ą▓čŗčłąĄ 25 ą£ąōčå. ąĪčģąĄą╝ą░, ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą┐ąŠą┤ čéčĆąĄčéčīčÄ ą│ą░čĆą╝ąŠąĮąĖą║čā ą║ą▓ą░čĆčåą░, ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą┐čĆą░ą▓ąŠą╣ čćą░čüčéąĖ čĆąĖčü. 7 (ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĖąĮą┤čāą║čéąĖą▓ąĮąŠčüčéčī ąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ).
ąĀąĖčü. 7. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąŠą╝ąĖąĮą░ą╗čŗ, ą┐ąŠą╝ąĄč湥ąĮąĮčŗąĄ *, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤čüčéčĆąŠąĄąĮčŗ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ ą║čĆąĖčüčéą░ą╗ą╗ą░ ąĖ čĆą░ąĘą▓ąŠą┤ą║ąĖ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ. ą×ą┤ąĮą░ą║ąŠ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ ą╝ąĮąŠą│ąĖąĄ ąĮą░ čŹč鹊 ąŠą▒čŗčćąĮąŠ ąĘą░ą▒ąĖą▓ą░čÄčé.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 8, čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ (CCLK) ąĖ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ (SCLK) ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĖąĘ ą▓čģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ (CLKIN). ąÆčüčéčĆąŠąĄąĮąĮą░čÅ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ čüąĖčüč鹥ą╝ą░ PLL ą╝ąŠąČąĄčé čāą╝ąĮąŠąČą░čéčī čüąĖą│ąĮą░ą╗ CLKIN ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ąŠčé 0.5 ą┤ąŠ 64 (ąŠą│čĆą░ąĮąĖč湥ąĮąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ VCO). ą£ąĮąŠąČąĖč鹥ą╗čī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 10, ąŠą┤ąĮą░ą║ąŠ čŹč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąØą░ ą╗ąĄčéčā čćą░čüč鹊čéą░ ą╝ąĄąĮčÅąĄčéčüčÅ ą┐čĆąŠčüč鹊ą╣ ąĘą░ą┐ąĖčüčīčÄ čĆąĄą│ąĖčüčéčĆą░ PLL_DIV.
ąĀąĖčü. 8. ą£ąĄč鹊ą┤čŗ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ čćą░čüč鹊čéčŗ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čāčüą╗ąŠą▓ąĖčÅ ą┤ą╗čÅ CCLK ąĖ SCLK: SCLK = CCLK ąĖ SCLK = 133 ą£ąōčå.
ąÆčüąĄ ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą▓ čćąĖą┐ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čéą░ą║čéąĖčĆčāčÄčéčüčÅ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ (SCLK). ąĪąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą▒ąĖč鹊ą▓ SSEL3ŌĆō0 čĆąĄą│ąĖčüčéčĆą░ PLL_DIV. ąŚąĮą░č湥ąĮąĖąĄ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠąĄ ą▓ ą┐ąŠą╗ąĄ SSEL, ąĘą░ą┤ą░ąĄčé čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą▓čŗčģąŠą┤ąŠą╝ PLL (VCO) ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣. ąŚąĮą░č湥ąĮąĖčÅ ą┤ąĄą╗ąĖč鹥ą╗čÅ SCLK ąŠčé 1 ą┤ąŠ 15. ąÆ čéą░ą▒ą╗ąĖčåąĄ 7 ą┐ąŠą║ą░ąĘą░ąĮčŗ čéąĖą┐ąĖčćąĮčŗąĄ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
ąóą░ą▒ą╗ąĖčåą░ 7. ą¤čĆąĖą╝ąĄčĆ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
SSEL3-0 VCO/SCLK ą¤čĆąĖą╝ąĄčĆ čüąŠąŠčéąĮąŠčłąĄąĮąĖą╣ čćą░čüč鹊čé (ą£ąōčå)
VCO SCLK
0001
1:1
100
100
0110
6:1
300
50
1010
10:1
500
50
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĖč鹥ą╗čÅ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮ čéą░ą║, čćč鹊ą▒čŗ ąŠą│čĆą░ąĮąĖčćąĖčéčī čüąĖčüč鹥ą╝ąĮčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝, ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ ą┤ą╗čÅ fSCLK . ąŚąĮą░č湥ąĮąĖąĄ SSEL ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą▒ąĄąĘ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĘą░čģą▓ą░čéą░ PLL ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆ ą┤ąĄą╗ąĖč鹥ą╗čÅ PLL (PLL_DIV).
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄąĮąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ SSEL, čŹč鹊 ą┐ąŠą▓ą╗ąĖčÅąĄčé ąĮą░ ą▓čüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗čāčćą░čÄčé čüą▓ąŠąĖ čéą░ą║č鹊ą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĖąĘ čüąĖą│ąĮą░ą╗ą░ SCLK.
ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ (CCLK) ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ąĖąĘą╝ąĄąĮąĄąĮą░ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą▒ąĖčé CSEL1ŌĆō0 čĆąĄą│ąĖčüčéčĆą░ PLL_DIV. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą┤ąĄą╗ąĄąĮąĖčÅ 1, 2, 4 ąĖ 8, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 8. ąŁčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą╗ąĄąĘąĮą░ ą┤ą╗čÅ ą▒čŗčüčéčĆčŗčģ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░.
ąóą░ą▒ą╗ąĖčåą░ 8. ąĪąŠąŠčéąĮąŠčłąĄąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓.
CSEL1-0 VCO/SCLK ą¤čĆąĖą╝ąĄčĆ čüąŠąŠčéąĮąŠčłąĄąĮąĖą╣ čćą░čüč鹊čé (ą£ąōčå)
VCO CCLK
00
1:1
300
300
01
2:1
300
150
10
4:1
500
125
11
8:1
200
25
ąŻ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSP-BF538/ADSP-BF538F ąĄčüčéčī 3 ą╝ąĄčģą░ąĮąĖąĘą╝ą░ (ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 9) ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ L1 ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░. ą¦ąĄčéą▓ąĄčĆčéčŗą╣ ą╝ąĄč鹊ą┤ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ, ą┐čĆąŠą┐čāčüą║ą░čÅ ą┐čĆąĖ čŹč鹊ą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĘą░ą│čĆčāąĘą║ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 9. ąĀąĄąČąĖą╝čŗ ąĘą░ą│čĆčāąĘą║ąĖ.
BMODE1-0 ą×ą┐ąĖčüą░ąĮąĖąĄ
00
ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ 16-ą▒ąĖčéąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ (ą┐čĆąŠą┐čāčüą║ Boot ROM).
01
ąŚą░ą│čĆčāąĘą║ą░ ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ 8-ą▒ąĖčéąĮąŠą╣ ąĖą╗ąĖ 16-ą▒ąĖčéąĮąŠą╣ FLASH (ADSP-BF538 ąĖą╗ąĖ ADSP-BF538F), ą╗ąĖą▒ąŠ ąĘą░ą│čĆčāąĘą║ą░ ąĖąĘ ą▓čüčéčĆąŠąĄąĮąĮčāčÄ ą▓ ą║ąŠčĆą┐čāčü FLASH (č鹊ą╗čīą║ąŠ čā ADSP-BF538F).
10
ąŚą░ą│čĆčāąĘą║ą░ ąŠčé ą╝ą░čüč鹥čĆą░ SPI (ą┤čĆčāą│ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░), ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ SPI0.
11
ąŚą░ą│čĆčāąĘą║ą░ ąĖąĘ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ SPI0. ąŁč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ EEPROM/FLASH čü 8-, 16- ąĖą╗ąĖ 24-ą▒ąĖčéąĮčŗą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą╝ ą░ą┤čĆąĄčüą░, ąĖą╗ąĖ Atmel Serial Flash AT45DB041, AT45DB081, ąĖą╗ąĖ AT45DB161.
ąÆčŗą▓ąŠą┤čŗ BMODE čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüą▒čĆąŠčüą░ čüčćąĖčéčŗą▓ą░čÄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ą┐čĆąĖ čüą▒čĆąŠčüąĄ, ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ą¤čĆąĖ čŹč鹊ą╝ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ čĆąĄąČąĖą╝čŗ ąĘą░ą│čĆčāąĘą║ąĖ:
ŌĆó ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ 16-čĆą░ąĘčĆčÅą┤ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ - ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą░ą┤čĆąĄčüą░ 0x2000 0000 čü 16-ą▒ąĖčéąĮąŠą╣ čāą┐ą░ą║ąŠą▓ą║ąŠą╣. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ boot ROM ąĮąĄ ą░ą║čéąĖą▓ąĮąŠ (ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ). ąÆčüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┤ą╗čÅ čüą░ą╝ąŠą│ąŠ ą╝ąĄą┤ą╗ąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆąŠąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ (3 čåąĖą║ą╗ą░ ą▓čĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ; 15 čåąĖą║ą╗ąŠą▓ ą▓čĆąĄą╝čÅ ą┤ąŠčüčéčāą┐ą░ ąĮą░ čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī; 4 čåąĖą║ą╗ą░ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą║ą░).
ŌĆó ąŚą░ą│čĆčāąĘą║ą░ ąĖąĘ 8- ąĖą╗ąĖ 16-čĆą░ąĘčĆčÅą┤ąĮąŠą╣ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ flash - 8-ą▒ąĖčéąĮą░čÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą│čĆčāąĘą║ąĖ flash, čĆą░ąĘą╝ąĄčēąĄąĮąĮą░čÅ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ boot ROM čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą▒ą░ąĮą║ą░ ą┐ą░ą╝čÅčéąĖ 0. ąöą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ADSP-BF538F ą┐čĆąĖ čŹč鹊ą╝ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą▓ ą║ąŠčĆą┐čāčü ą┐ą░ą╝čÅčéčī, ąĄčüą╗ąĖ ą▓čģąŠą┤ ~FCE ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓čŗčģąŠą┤čā ~AMS0. ąÆčüąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ čĆą░čüč湥č鹥 ąĮą░ čüą░ą╝ąŠąĄ ą╝ąĄą┤ą╗ąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ (3 čåąĖą║ą╗ą░ ą▓čĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ; 15 čåąĖą║ą╗ąŠą▓ ą▓čĆąĄą╝čÅ ą┤ąŠčüčéčāą┐ą░ ąĮą░ čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī; 4 čåąĖą║ą╗ą░ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą║ą░).
ŌĆó ąŚą░ą│čĆčāąĘą║ą░ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą▓ąĮąĄčłąĮąĄą│ąŠ čģąŠčüčéą░ SPI, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ SPI0 - ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ SPI, ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą▒ą░ą╣čé čäą░ą╣ą╗ą░ LDR ąŠčé čģąŠčüčéą░ SPI (ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ). ą¦č鹊ą▒čŗ čāą┤ąĄčƹȹ░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ čģąŠčüčéą░ ąŠčé ą┐ąĄčĆąĄą┤ą░čćąĖ, ą║ąŠą│ą┤ą░ boot ROM ąĘą░ąĮčÅč鹊, ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin ą▓čŗčüčéą░ą▓ą╗čÅąĄčé ą▓čŗą▓ąŠą┤ GPIO, ą║ąŠč鹊čĆčŗą╣ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ ąŠąČąĖą┤ą░ąĮąĖčÅ čģąŠčüčéą░ (host wait, HWAIT), čćč鹊ą▒čŗ ą┐ąŠą┤ą░čéčī čüąĖą│ąĮą░ą╗ čģąŠčüčéčā, čćč鹊 ą┐ąŠą║ą░ ąĮąĄ ąĮčāąČąĮąŠ ą▒ąŠą╗čīčłąĄ ą┐ąŠčüčŗą╗ą░čéčī ą▒ą░ą╣čéčŗ, ą┐ąŠą║ą░ čäą╗ą░ą│ ąĘą░ąĮčÅč鹊čüčéąĖ ąĮąĄ ą▒čāą┤ąĄčé čüąĮčÅčé. ążą╗ą░ą│ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝, ąĖ čŹčéą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĘą░ą┤ą░ąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin č湥čĆąĄąĘ ą▒ąĖčéčŗ 10:5 ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ FLAG ąŠą▒čĆą░ąĘą░ LDR.
ŌĆó ąŚą░ą│čĆčāąĘą║ą░ ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ SPI EEPROM/flash (čü 8-, 16- ąĖą╗ąĖ 24-ą▒ąĖč鹊ą▓čŗą╝ ą░ą┤čĆąĄčüąŠą╝, ąĖą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ Atmel AT45DB041, AT45DB081 ąĖą╗ąĖ AT45DB161), ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ SPI0. SPI0 ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čŗą▓ąŠą┤ PF2 ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąŠą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI EEPROM/flash, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ąŠą╝ą░ąĮą┤čā čćč鹥ąĮąĖčÅ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▒ą░ą╣čéčŗ ą░ą┤čĆąĄčüą░ (0x00), ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ 8-, 16- ąĖą╗ąĖ 24-ą▒ąĖčéąĮąŠąĄ ą░ą┤čĆąĄčüčāąĄą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ Atmel, ąĖ ąĮą░čćąĖąĮą░ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĖčģ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆ, ąĮą░čćąĖąĮą░čÅ čü ą┐ą░ą╝čÅčéąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ L1.
ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čĆąĄąČąĖą╝ą░ ąĘą░ą│čĆčāąĘą║ąĖ ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ čüąĮą░čćą░ą╗ą░ čćąĖčéą░ąĄčéčüčÅ 10-ą▒ą░ą╣čéąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║. ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆąŠąĄ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī, ąĖ ą░ą┤čĆąĄčü ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┐ą░ą╝čÅčéąĖ. ą¤čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ ą▓ ą╗čÄą▒ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą╗ąŠą║ąŠą▓ ą┐ą░ą╝čÅčéąĖ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čüąĄ ą▒ą╗ąŠą║ąĖ ąĘą░ą│čĆčāąČąĄąĮčŗ, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą┐ąĄčĆą▓ąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┐ą░ą╝čÅčéąĖ L1 SRAM.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▒ąĖčé 4 čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüą▒čĆąŠčüą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ąŠą┤ąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą┐čĆąŠą┐čāčüčéąĖčéčī ąŠą▒čŗčćąĮčāčÄ ą┐čĆąŠčåąĄą┤čāčĆčā ąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąĖ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄčüą║ąŠčćąĖčé ą┐čĆčÅą╝ąŠ ą▓ ąĮą░čćą░ą╗ąŠ ą┐ą░ą╝čÅčéąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ L1.
ą¦č鹊ą▒čŗ čāą▓ąĄą╗ąĖčćąĖčéčī ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ čĆąĄąČąĖą╝čŗ ąĘą░ą│čĆčāąĘą║ąĖ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ą╝ąĄčģą░ąĮąĖąĘą╝čŗ ąĘą░ą│čĆčāąĘą║ąĖ. ąŁč鹊čé ą▓č鹊čĆąĖčćąĮčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĘą░ą│čĆčāąĘąĖčéčīčüčÅ ąĖąĘ 16-ą▒ąĖčéąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ FLASH, ą▒čŗčüčéčĆąŠą╣ FLASH, čü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ąĖ ąĖąĘ ą┤čĆčāą│ąĖčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓. ąÆąŠ ą▓čüąĄčģ čĆąĄąČąĖą╝ą░čģ ąĘą░ą│čĆčāąĘą║ąĖ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐čĆąŠą┐čāčüą║ą░ (boot ROM), ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą┐ą░ą╝čÅčéąĖ L1 ą┐ąŠ ą░ą┤čĆąĄčüčā 0xFFA0 0000.
[ą×ą▒ąĘąŠčĆ ąĮą░ą▒ąŠčĆą░ ą║ąŠą╝ą░ąĮą┤ ]
ą»ąĘčŗą║ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ čüąĄą╝ąĄą╣čüčéą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin ąĖą╝ąĄąĄčé ąĮą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą║čåąĖą╣ čü ą░ą╗ą│ąĄą▒čĆą░ąĖč湥čüą║ąĖą╝ čüąĖąĮčéą░ą║čüąĖčüąŠą╝. ąŁč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čāą╗čāčćčłąĄąĮąĖčÅ čćąĖčéą░ąĄą╝ąŠčüčéąĖ. ąśąĮčüčéčĆčāą║čåąĖąĖ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┐ąŠą┤čüčéčĆąŠąĄąĮčŗ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą│ąĖą▒ą║ąŠą│ąŠ, ą┐ą╗ąŠčéąĮąŠą│ąŠ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą┤ą░ąĄčé ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąŠč湥ąĮčī ą╝ą░ą╗čŗą╣ čĆą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░. ąØą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą║čåąĖą╣ čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĮąŠą│ąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą║ąŠą╝ą░ąĮą┤, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ čĆąĄčüčāčĆčüąŠą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ąŠą┤ąĮąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ. ąÆ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ čü ą╝ąĮąŠą│ąĖą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ čćą░čüč鹊 ą▓čüčéčĆąĄčćą░čÄčéčüčÅ ą▓ čüąĖčüč鹥ą╝ąĄ ą║ąŠą╝ą░ąĮą┤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, čŹč鹊čé ąĮą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą║čåąĖą╣ ąŠč湥ąĮčī čŹčäč乥ą║čéąĖą▓ąĄąĮ ą┐čĆąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čü ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĮą░ čÅąĘčŗą║ąĄ C ąĖ C++. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą║ą░ą║ čĆąĄąČąĖą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖą╣ ąŠą▒čēąĖą╣ ą░ą╗ą│ąŠčĆąĖčéą╝), čéą░ą║ ąĖ čĆąĄąČąĖą╝ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░ (čÅą┤čĆąŠ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓, ąŠčéą╗ą░ą┤čćąĖą║ąĖ, ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣), čćč鹊 čĆą░čüą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ą║ čĆąĄčüčāčĆčüą░ą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čāčĆąŠą▓ąĮčÅą╝ ą║ąŠą┤ą░.
ą»ąĘčŗą║ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ ą┤ą░ąĄčé ą┤ąŠčüčéčāą┐ ą║ čāąĮąĖą║ą░ą╗čīąĮčŗą╝ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčÅą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ:
ŌĆó ąŁčäč乥ą║čéąĖą▓ąĮąŠ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ DSP/CPU, ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┤ą╗čÅ 8- ąĖ 16-čĆą░ąĘčĆčÅą┤ąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣.
[ąĪčĆąĄą┤čüčéą▓ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ]
ąÜąŠą╝ą┐ą░ąĮąĖčÅ Analog Devices ą┐ąŠčüčéą░ą▓ą╗čÅąĄčé čüą▓ąŠąĖ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ čü ą┐ąŠą╗ąĮąŠą╣ ą╗ąĖąĮąĄą╣ą║ąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (ą┤ąĖą║ąŠ ą┤ąŠčĆąŠą│ąŠą│ąŠ). ąĪčĆąĄą┤čüčéą▓ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▓ą║ą╗čÄčćą░čÄčé CrossCore┬« Embedded Studio ąĖ/ąĖą╗ąĖ VisualDSP++┬«, ąŠčåąĄąĮąŠčćąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ, 菹╝čāą╗čÅč鹊čĆčŗ ąĖ čłąĖčĆąŠą║ąĖą╣ čüą┐ąĄą║čéčĆ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ čāčéąĖą╗ąĖčé.
ąśąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čüčĆąĄą┤čŗ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ (IDE). ąöą╗čÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ čÅąĘčŗą║ąĄ C/C++, ą│ąĄąĮąĄčĆą░čåąĖąĖ ą║ąŠą┤ą░ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąŠčéą╗ą░ą┤ą║ąĖ ą║ąŠą╝ą┐ą░ąĮąĖčÅ Analog Devices ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 2 čüąĖčüč鹥ą╝čŗ IDE.
CrossCore Embedded Studio . ąŁč鹊 čüą░ą╝ą░čÅ ąĮąŠą▓ą░čÅ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ąŠčüąĮąŠą▓ą░ąĮąĮą░čÅ ąĮą░ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ąĄ EclipseTM . ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čüąĄą╝ąĄą╣čüčéą▓ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Analog Devices, ąĖ čŹč鹊 IDE ą▒čāą┤ąĄčé ą▓čŗą▒čĆą░ąĮą░ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčÅą▓čÅčéčüčÅ ą▓ ą▒čāą┤čāčēąĄą╝, ą▓ą║ą╗čÄčćą░čÅ ą╝ąĮąŠą│ąŠčÅą┤ąĄčĆąĮčŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ. ąÆ čüčĆąĄą┤ąĄ CrossCore Embedded Studio čŹčäč乥ą║čéąĖą▓ąĮąŠ ąĖąĮč鹥ą│čĆąĖčĆčāąĄčéčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą▓čüąĄ ą┤ąŠčüčéčāą┐ąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ą▓ą║ą╗čÄčćą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čäą░ą╣ą╗ąŠą▓čŗąĄ čüąĖčüč鹥ą╝čŗ, čüč鹥ą║ąĖ TCP/IP, čüč鹥ą║ąĖ USB, ą░ą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ, ą┐ą░ą║ąĄčéčŗ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąŠčåąĄąĮąŠčćąĮčŗčģ ą┐ą╗ą░čé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░. ą¤čĆąŠčåąĄčüčüąŠčĆčŗ čüąĄčĆąĖąĖ Blackfin ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĮą░ą▒ąŠčĆąŠą╝ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ Analog Devices CROSSCORE┬«, ą║ąŠč鹊čĆčŗą╣ čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖą┤ąĄčĆąŠą╝ čüčĆąĄą┤ąĖ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗčģ čüąĖčüč鹥ą╝ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ. ąÆ CROSSCORE ą▓čģąŠą┤ąĖčé IDE VisualDSP++┬«, ąŠčéą╗ą░ą┤ąŠčćąĮčŗąĄ ąĮą░ą▒ąŠčĆčŗ EZ-KIT Lite┬«, ą┤ąŠč湥čĆąĮąĖąĄ ą┐ą╗ą░čéčŗ EZ-ExtenderŌäó ąĖ 菹╝čāą╗čÅč鹊čĆčŗ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐ą╗ą░čé PCI ąĖą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ č湥čĆąĄąĘ USB.
ąÜąŠą╝ą┐ą░ąĮąĖčÅ Analog Devices ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čŹčäč乥ą║čéąĖą▓ąĮąŠ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ CrossCore Embedded Studio ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĖčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ čüčĆąĄą┤čŗ IDE ąĖ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ. ąöąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▓ą║ą╗čÄčćą░čÄčé ą┐ą░ą║ąĄčéčŗ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ą╗ą░čé (board support packages, BSP) ą┤ą╗čÅ ąŠčåąĄąĮąŠčćąĮčŗčģ ą┐ą╗ą░čé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░, čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ą░ą║ąĄčéčŗ ą║ąŠą┤ą░ ąŠčé čüč鹊čĆąŠąĮąĮąĖčģ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ąĖąĄ ą╝ąŠą┤čāą╗ąĖ. ąöąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, čüąĖčüč鹥ą╝ą░ ą┐ąŠą╝ąŠčēąĖ, ą┤ąĖą░ą╗ąŠą│ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ - ą▓čüąĄ čŹč鹊 ąĄčüčéčī ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅčģ, čćč鹊 ą╝ąŠąČąĮąŠ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī ą▓ čüčĆąĄą┤ąĄ CrossCore Embedded Studio IDE, ą║ą░ą║ č鹊ą╗čīą║ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ.
VisualDSP++ . ąŁčéčā čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╝ą┐ą░ąĮąĖčÅ Analog Devices ąĘą░ą▒čĆąŠčüąĖą╗ą░, ą┐ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ ąĮąŠą▓čŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ą▓ ąĮąĄą╣ ą▒ąŠą╗čīčłąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ąĮąĄ ą▒čāą┤čāčé. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüąĄą╝ąĄą╣čüčéą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą┤ąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ CrossCore Embedded Studio. ąÆ čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ VisualDSP++ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ VDK čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Analog Devices, ą│ą┤ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ čüč鹥ą║ TCP/IP čü ąŠčéą║čĆčŗčéčŗą╝ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝.
ąŚą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą┐ąŠ čüčĆąĄą┤ą░ą╝ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ CrossCore Embedded Studio ąĖ VisualDSP++ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ąĮą░ čüą░ą╣čé analog.com.
Green Hills® Software .
EZ-KIT Lite Evaluation Board . ąöą╗čÅ ąŠčåąĄąĮą║ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ Analog Devices ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┐ą╗ą░čé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ EZ-KIT Lite┬«. ąÆą║ą╗čÄčćą░čÅ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖ ą║ą╗čÄč湥ą▓čāčÄ ą┐ąĄčĆąĖč乥čĆąĖčÄ, ąŠčåąĄąĮąŠčćąĮą░čÅ ą┐ą╗ą░čéą░ čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą▓ čćąĖą┐ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ 菹╝čāą╗čÅčåąĖąĖ ąĖ ą┤čĆčāą│ąĖąĄ čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ. ąóą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĮčŗ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čĆą░čüčłąĖčĆąĖč鹥ą╗ąĖ (EZ-Extenders┬«), ą║ąŠč鹊čĆčŗąĄ ą┤ą░čÄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗, ą▓ą║ą╗čÄčćą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║čā ą░čāą┤ąĖąŠ ąĖ ą▓ąĖą┤ąĄąŠ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ąĮą░ čüą░ą╣čé www.analog.com ąĖ ąĖčēąĖč鹥 ą┐ąŠ ą║ą╗čÄč湥ą▓čŗą╝ čüą╗ąŠą▓ą░ą╝ "ezkit" ąĖą╗ąĖ "ezextender".
ąÜąĖčéčŗ EZ-KIT Lite Evaluation . ąŁčäč乥ą║čéąĖą▓ąĮčŗą╣ ą┐ąŠ čåąĄąĮąĄ čüą┐ąŠčüąŠą▒ ąĖąĘčāčćąĖčéčī čĆą░ąĘčĆą░ą▒ąŠčéą║čā ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ Analog Devices, ą║ąŠą╝ą┐ą░ąĮąĖčÅ Analog Devices ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąĖčéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ EZKIT Lite. ąÜą░ąČą┤čŗą╣ ą║ąĖčé ą▓ą║ą╗čÄčćą░ąĄčé ąŠčåąĄąĮąŠčćąĮčāčÄ ą┐ą╗ą░čéčā EZ-KIT Lite, ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąŠčåąĄąĮąŠčćąĮčŗą╣ ą▓ąĄčĆčüąĖąĖ ą┤ąŠčüčéčāą┐ąĮčŗčģ IDE, ą║ą░ą▒ąĄą╗čī USB ąĖ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ USB ąĮą░ ą┐ą╗ą░č鹥 EZ-KIT ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą┐ąŠčĆčéčā USB ą║ąŠą╝ą┐čīčÄč鹥čĆą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ čüčĆąĄą┤ąĄ IDE 菹╝čāą╗ąĖčĆąŠą▓ą░čéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ąĮą░ ą┐ą╗ą░č鹥 ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐čĆčÅą╝ąŠ ą▓ ą│ąŠč鹊ą▓ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ. ąŁč鹊 ą┤ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĘą░ą│čĆčāąĘąĖčéčī, ąĘą░ą┐čāčüčéąĖčéčī ąĖ ąŠčéą╗ą░ą┤ąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ čüąĖčüč鹥ą╝ ąĮą░ ą║ąĖč鹥 EZ-KIT Lite. ąŁč鹊 čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓ąĮčāčéčĆąĖčüčģąĄą╝ąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ąĮą░ ą┐ą╗ą░č鹥 ą┐ą░ą╝čÅčéąĖ FLASH, ą║čāą┤ą░ ą╝ąŠąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ąĘą░ą│čĆčāąĘąŠčćąĮčŗą╣ ą║ąŠą┤, ąĖ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī čüąŠąĘą┤ą░čéčī ą░ą▓č鹊ąĮąŠą╝ąĮąŠ čĆą░ą▒ąŠčéą░čÄčēčāčÄ čüąĖčüč鹥ą╝čā. ąÆą╝ąĄčüč鹥 čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ą┐ąŠą╗ąĮąŠą╣ ą▓ąĄčĆčüąĖąĄą╣ Cross-Core Embedded Studio ąĖą╗ąĖ VisualDSP++ (ą┐čĆąŠą┤ą░čÄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ) ąĖąĮąČąĄąĮąĄčĆčŗ ą╝ąŠą│čāčé čĆą░ąĘčĆą░ą▒ąŠčéą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ EZKIT-ąŠą▓ ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ čüąĖčüč鹥ą╝čŗ, ą│ą┤ąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices.
ą¤ą░ą║ąĄčéčŗ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąŠčåąĄąĮąŠčćąĮčŗčģ ą┐ą╗ą░čé . ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠčåąĄąĮąŠčćąĮčŗčģ ą┐ą╗ą░čé EZ-KIT Lite ąĖ ą┤ąŠč湥čĆąĮąĖčģ ą║ą░čĆčé EZExtender ą▓čüčéčĆąŠąĄąĮą░ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ ą┐ą░ą║ąĄčéčŗ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ą╗ą░čé (Board Support Packages, BSP). ą¤ą░ą║ąĄčéčŗ BSP čüąŠą┤ąĄčƹȹ░čé čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ, čāą║ą░ąĘą░ąĮąĖčÅ ą║ čĆąĄą╗ąĖąĘčā, ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. ąĪčüčŗą╗ą║ą░ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ą░ą║ąĄčéą░ BSP ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ web-čüčéčĆą░ąĮąĖčåąĄ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┤ą╗čÅ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ EZ-KIT ąĖą╗ąĖ EZExtender. ąĪčüčŗą╗ą║ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąŠą▒ą╗ą░čüčéąĖ Product Download ąĮą░ čüčéčĆą░ąĮąĖčåąĄ ą┐čĆąŠą┤čāą║č鹊ą▓ ą║ąŠą╝ą┐ą░ąĮąĖąĖ.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čüč鹊čĆąŠąĮąĮąĖčģ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ . Analog Devices ąŠčéą┤ąĄą╗čīąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖąĘ ą┤čĆčāą│ąĖčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓, čéą░ą║ąĖąĄ ą║ą░ą║ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čäą░ą╣ą╗ąŠą▓čŗąĄ čüąĖčüč鹥ą╝čŗ, čüč鹥ą║ąĖ USB ąĖ TCP/IP. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąĖčēąĖč鹥 ąĮą░ čüą╗ąĄą┤čāčÄčēąĖčģ web-čüčéčĆą░ąĮąĖčåą░čģ:
ŌĆó www.analog.com/ucos3
ąÉą╗ą│ąŠčĆąĖčéą╝ąĖč湥čüą║ąĖąĄ ą╝ąŠą┤čāą╗ąĖ . ąöą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Analog Devices ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ, ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĖąĄ ą┐ąŠą┐čāą╗čÅčĆąĮčŗąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą░čāą┤ąĖąŠ ąĖ ą▓ąĖą┤ąĄąŠ. ą×ąĮąĖ ą┤ąŠčüčéčāą┐ąĮčŗ ąĖ ą┤ą╗čÅ CrossCore Embedded Studio, ąĖ ą┤ą╗čÅ VisualDSP++. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąĖčēąĖč鹥 ąĮą░ čüą░ą╣č鹥 analog.com (čüčéčĆąŠą║ąĖ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ Blackfin software modules site:analog.com ąĖą╗ąĖ SHARC software modules site:analog.com ).
ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čü 菹╝čāą╗čÅč鹊čĆąŠą╝ ą┐ą╗ą░čé DSP Board (Target) . ąöą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ ą║ąŠą╝ą┐ą░ąĮąĖčÅ Analog Devices ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąĄą╝ąĄą╣čüčéą▓ąŠ 菹╝čāą╗čÅč鹊čĆąŠą▓. ąØą░ ą║ą░ąČą┤ąŠą╝ JTAG DSP ąĖą╝ąĄąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ IEEE 1149.1 ą┐ąŠčĆčé ąŠčéą╗ą░ą┤ą║ąĖ JTAG Test Access Port (TAP). ąŁą╝čāą╗čÅčåąĖčÅ ą▓ čüąĖčüč鹥ą╝ąĄ čāą┐čĆąŠčēą░ąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹč鹊ą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ JTAG. ąŁą╝čāą╗čÅč鹊čĆ ą┐ąŠą╗čāčćą░ąĄčé ą┤ąŠčüčéčāą┐ ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čäčāąĮą║čåąĖčÅą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ č湥čĆąĄąĘ TAP ą┐čĆąŠčåąĄčüčüąŠčĆą░, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā ąĘą░ą│čĆčāąĘąĖčéčī ą║ąŠą┤, čāčüčéą░ąĮąŠą▓ąĖčéčī č鹊čćą║ąĖ ąŠčüčéą░ąĮąŠą▓ą░ (breakpoint), ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ, ąŠą▒ą╗ą░čüč鹥ą╣ ą┐ą░ą╝čÅčéąĖ, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓. ą¤čĆąŠčåąĄčüčüąŠčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čćč鹊ą▒čŗ ą┐ąŠčüą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖ ą║ąŠą╝ą░ąĮą┤čŗ, ąŠą┤ąĮą░ą║ąŠ ą║ą░ą║ č鹊ą╗čīą║ąŠ 菹╝čāą╗čÅč鹊čĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čüą▓ąŠčÄ ąŠą┐ąĄčĆą░čåąĖčÄ, čüąĖčüč鹥ą╝ą░ DSP čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, ą▒ąĄąĘ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ą▓ čüąĖčüč鹥ą╝ąĄ (čé. ąĄ. 菹╝čāą╗čÅč鹊čĆ ąĮąĖą║ą░ą║ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ). ąŁą╝čāą╗čÅč鹊čĆčŗ čéčĆąĄą▒čāčÄčé ąĮą░ą╗ąĖčćąĖčÅ ąĮą░ čåąĄą╗ąĄą▓ąŠą╣ ą┐ą╗ą░č鹥 ą║ąŠąĮąĮąĄą║č鹊čĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ 菹╝čāą╗čÅč鹊čĆą░ čü ą┐ąŠčĆč鹊ą╝ JTAG ą┐čĆąŠčåąĄčüčüąŠčĆą░ DSP.
ą¤ąŠą┤čĆąŠą▒ąĮčŗąĄ čāą║ą░ąĘą░ąĮąĖčÅ ą┐ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą┐ą╗ą░čéčŗ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ (ą▓ą║ą╗čÄčćą░čÅ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝čā čĆą░ąĘą╝ąĄčēąĄąĮąĖčÄ ą║ąŠąĮąĮąĄą║č鹊čĆą░, čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ čü ąŠą┤ąĮąĖą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝, ą▒čāč乥čĆąĖąĘą░čåąĖčÄ ąĖ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓, ą╗ąŠą│ąĖą║čā čĆą░ą▒ąŠčéčŗ 菹╝čāą╗čÅč鹊čĆą░) ąĖ ąŠą▒čüčāąČą┤ąĄąĮąĖąĄ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čŹčéąĖą╝ ą┐čĆąŠą▒ą╗ąĄą╝ čüą╝. ą▓ ą┤ą░čéą░čłąĖč鹥 Engineer-to-Engineer Note "Analog Devices JTAG Emulation Technical Reference" (EE-68) ąĮą░ čüą░ą╣č鹥 Analog Devices (ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐ąŠąĖčüą║ ą┐ąŠ ą║ą╗čÄč湥ą▓ąŠą╝čā čüą╗ąŠą▓čā EE-68). ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé čĆąĄą│čāą╗čÅčĆąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čāą╗čāčćčłąĄąĮąĖą╣ čĆą░ą▒ąŠčéčŗ čü 菹╝čāą╗čÅč鹊čĆąŠą╝.
ąÆčüąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüčĆąĄą┤čüčéą▓ą░ ąŠčéą╗ą░ą┤ą║ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü JTAG, ąĖ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčī ą┐ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčāčÄ ąŠčéą╗ą░ą┤ą║čā.
ADZS-ICE-100B . ąŻą┤ąĄčłąĄą▓ą╗ąĄąĮąĮą░čÅ ą▓ąĄčĆčüąĖčÅ čŹą╝čāą╗čÅč鹊čĆą░, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēą░čÅ č鹊ą╗čīą║ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin. ą£ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī čüąŠą▓ą╝ąĄčüčéąĮąŠ čü IDE VisualDSP.
ADZS- ICE-1000 . ąÆčŗą│ą╗čÅą┤ąĖčé ą┐ąŠčćčéąĖ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ ICE-100. ąØąĄą┤ąŠčĆąŠą│ąŠą╣ (ą┐ąŠ ą╝ąĄčĆą║ą░ą╝ Analog Devices) ąŠčéą╗ą░ą┤čćąĖą║ JTAG, ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╣ č湥čĆąĄąĘ USB. ąØą░ čüą░ą╣č鹥 Analog Devices ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝ą░čÅ čåąĄąĮą░ čŹč鹊ą│ąŠ ąŠčéą╗ą░ą┤čćąĖą║ą░ $150 (čüčéčĆąŠą║ą░ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ADZS-ICE-1000 Low Cost USB-based JTAG Emulator site:analog.com ).
ADZS- ICE-2000 . ąöąŠčĆąŠą│ąŠą╣, ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ąŠčéą╗ą░ą┤čćąĖą║ čéą░ą║ąČąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╣ ą║ ąŠčéą╗ą░ąČąĖą▓ą░ąĄą╝ąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā č湥čĆąĄąĘ JTAG, ą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā č湥čĆąĄąĘ USB. ąĪč鹊ąĖčé ąĮą░ čüą░ą╣č鹥 Analog Devices $1495 (čüčéčĆąŠą║ą░ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ADZS-ICE-2000 High Performance USB-based JTAG Emulator site:analog.com ).
ADZS-HPUSB-ICE . ąØą░čüą║ąŠą╗čīą║ąŠ čÅ ą┐ąŠąĮčÅą╗, čŹč鹊 čāčüčéą░čĆąĄą▓čłą░čÅ ą▓ąĄčĆčüąĖčÅ ąŠčéą╗ą░ą┤čćąĖą║ą░, ą┐ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ čåąĄąĮčā ąĮą░ čüą░ą╣č鹥 Analog Devices ąĮąĄ ąĮą░čłąĄą╗ (čüčéčĆąŠą║ą░ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ HPUSB-ICE USB-Based Emulator site:analog.com ).
gnICE . ą¤ąŠčüčéčĆąŠąĄąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ čćąĖą┐ą░ FT2232D, ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé čü VisualDSP.
gnICE+ . ą¤ąŠčüčéčĆąŠąĄąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ čćąĖą┐ą░ FT2232H, ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ čĆą░ą▒ąŠčéčŗ. ąØąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝ čü VisualDSP.
gnICE site:blackfin.uclinux.org
[ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓ąĮąĄčłąĮąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ]
ąÆčüąĄ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ (ą▓čŗčüąŠą║ąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ, ąŠčéą║ą╗čÄč湥ąĮąŠ), ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓čŗą▓ąŠą┤ąŠą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ą░ą╝čÅčéčīčÄ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ą░ą╝čÅčéčīčÄ. ąÆčüąĄ čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ ą┐ąĄčĆąĄą▓ąŠą┤čÅčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ CLKOUT, ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗ ~BR ą░ą║čéąĖą▓ąĄąĮ (ą▓ąĮąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĖą╗ąĖ ąĮąĄčé čüąĖą│ąĮą░ą╗ ~RESET), č鹊 ą▓čŗą▓ąŠą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéčīčÄ čéą░ą║ąČąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ. ąŻ ą▓čüąĄčģ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ I/O ą▓čģąŠą┤ąĮčŗąĄ ą▒čāč乥čĆčŗ ąĘą░ą┐čĆąĄčēąĄąĮčŗ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé pull-up ąĖą╗ąĖ pull-down, ą║ą░ą║ čŹč鹊 ąŠčéčĆą░ąČąĄąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 10. ąÆ čüąŠčüč鹊čÅąĮąĖąĖ hibernate ą▓čüąĄ ą▓čŗą▓ąŠą┤čŗ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹥čģ, ąŠ ą║ąŠč鹊čĆčŗčģ ą│ąŠą▓ąŠčĆąĖčéčüčÅ ą▓ čéą░ą▒ą╗ąĖčåąĄ 10.
ą¦č鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ąĖ čāą╝ąĄąĮčīčłąĖčéčī čĆą░ąĘą╝ąĄčĆ ą║ąŠčĆą┐čāčüą░ ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąŠą▓, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą┤ą▓ąŠą╣ąĮąŠąĄ, ą╝čāą╗čīčéąĖą┐ą╗ąĖčåąĖčĆčāąĄą╝ąŠąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ. ąÆ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ, čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąŠą▒čŗčćąĮčŗą╝ č鹥ą║čüč鹊ą╝, ą░ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ą║ą╗ąŠąĮąĮčŗą╝ čłčĆąĖčäč鹊ą╝.
ąóą░ą▒ą╗ąĖčåą░ 10. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░ BF538.
ąśą╝čÅ ą▓čŗą▓ąŠą┤ą░ I/O ążčāąĮą║čåąĖčÅ DRV(1)
ąśąĮč鹥čĆč乥ą╣čü ą┐ą░ą╝čÅčéąĖ
DATA15-0
I/O
ą©ąĖąĮą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ/čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░.
A
~ABE1-0/SDQM1-0
O
ąĪąĖą│ąĮą░ą╗čŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▒ą░ą╣čéą░/ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ/čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░.
A
~BR
I
Bus Request (ąĘą░ą┐čĆąŠčü čłąĖąĮčŗ). ąŁč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĖčéčÅąĮčāčé ą║ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
~BG
O
Bus Grant (ą┤ąŠą┐čāčüą║ ą║ čłąĖąĮąĄ).
A
~BGH
O
Bus Grant Hang (ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠčüčéčāą┐ą░ ą║ čłąĖąĮąĄ ą┐ąŠą┤ą▓ąĄčłąĄąĮąŠ).
A
ąŻą┐čĆ. ą░čüąĖąĮčģčĆ. ą┐ą░ą╝čÅčéčīčÄ
ARDY
I
Hardware Ready Control (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą│ąŠč鹊ą▓ąĮąŠčüčéčīčÄ).
~AOE
O
Output Enable (čĆą░ąĘčĆąĄčłąĖčéčī ą▓čŗčģąŠą┤).
A
~ARE
O
Read Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čćč鹥ąĮąĖčÅ).
A
~AWE
O
Write Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĘą░ą┐ąĖčüąĖ).
A
ąŻą┐čĆ. ą┐ą░ą╝čÅčéčīčÄ FLASH
~FRESET
I
Flash Reset (ą▓ BF538 ą▓ąĮčāčéčĆąĖ ąĘą░ą╝ą║ąĮčāčé ąĮą░ GND).
ąŻą┐čĆ. čüąĖąĮčģčĆ. ą┐ą░ą╝čÅčéčīčÄ
~SCAS
O
ąĪčéčĆąŠą▒ ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░.
A
~SWE
O
Write Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĘą░ą┐ąĖčüąĖ).
A
SCKE
O
ąĀą░ąĘčĆąĄčłąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ. ąŁč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčé ą║ GND č湥čĆąĄąĘ pull-down čĆąĄąĘąĖčüč鹊čĆ 10 ą║ą×ą╝, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ hibernate, ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ SDRAM ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ hibernate.
A
CLKOUT
O
ąÆčŗą▓ąŠą┤ čéą░ą║č鹊ą▓.
B
SA10
O
ąĀą░ąĘčĆčÅą┤ ą░ą┤čĆąĄčüą░ A10.
A
~SMS
O
ąÆčŗą▒ąŠčĆ ą▒ą░ąĮą║ą░.
A
ąóą░ą╣ą╝ąĄčĆčŗ
TMR1/PPI_FS1
I/O
Timer 1/PPI Frame Sync1 .
C
TMR2/PPI_FS2
I/O
Timer 2/PPI Frame Sync2 .
C
TWI (I2C) ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ TWI0.
E
SCL0
I/O 5V
ąóą░ą║čéčŗ TWI0.
E
SDA1
I/O 5V
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ TWI1.
E
SCL1
I/O 5V
ąóą░ą║čéčŗ TWI1.
E
Serial Port0 (SPORT0)
RFS0
I/O
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐čĆąĖąĄą╝ą░.
C
DR0PRI
I
Primary-ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ.
DR0SEC
I
Secondary-ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ.
TSCLK0
I/O
ąóą░ą║čéčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ.
D
TFS0
I/O
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ.
C
DT0PRI
O
Primary-ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
C
DT0SEC
O
Secondary-ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
C
Serial Port1 (SPORT1)
RFS1
I/O
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐čĆąĖąĄą╝ą░.
C
DR1PRI
I
Primary-ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ.
DR1SEC
I
Secondary-ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ.
TSCLK1
I/O
ąóą░ą║čéčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ.
D
TFS1
I/O
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ.
C
DT1PRI
O
Primary-ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
C
DT1SEC
O
Secondary-ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
C
SPI0
MISO0
I/O
ąÆčģąŠą┤ ą╝ą░čüč鹥čĆą░, ą▓čŗčģąŠą┤ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
C
SCK0
I/O
ąóą░ą║čéčŗ.
D
UART0
TX0
O
ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ.
C
PPI
PPI_CLK/TMRCLK
I
ąóą░ą║čéčŗ PPI/ą▓ąĮąĄčłąĮčÅčÅ ąŠą┐ąŠčĆąĮą░čÅ čćą░čüč鹊čéą░ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ .
ą¤ąŠčĆčé C: CAN, GPIO PC0 ą¤ąĄčĆąĄą┤ą░čćą░ CAN/GPIO .
C
CANRX/PC1
I/O 5V
ą¤čĆąĖąĄą╝ CAN/GPIO .
C2
PC[9-5]
I/O
GPIO
C
PC4
I/O 5V
GPIO
C2
ą¤ąŠčĆčé D: SPI1-2, UART1-2, GPIO PD0 GPIO .
MISO1/PD1
I/O
ąÆčģąŠą┤ ą╝ą░čüč鹥čĆą░, ą▓čŗčģąŠą┤ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI1/GPIO .
C
SCK1/PD2
I/O
ąóą░ą║čéčŗ SPI1/GPIO .
D
~SPI1SS/PD3
I/O
ąÆčģąŠą┤ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI1/GPIO .
D
~SPI1SEL/PD4
I/O
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI1/GPIO .
D
MOSI2/PD5
I/O
ąÆčŗčģąŠą┤ ą╝ą░čüč鹥čĆą░, ą▓čģąŠą┤ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI2/GPIO .
C
MISO2/PD6
I/O
ąÆčģąŠą┤ ą╝ą░čüč鹥čĆą░, ą▓čŗčģąŠą┤ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI2/GPIO .
C
SCK2/PD7
I/O
ąóą░ą║čéčŗ SPI2/GPIO .
D
~SPI2SS/PD8
I/O
ąÆčģąŠą┤ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI2/GPIO .
D
~SPI2SEL1/PD9
I/O
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI2/GPIO .
D
RX1/PD10
I/O
ą¤čĆąĖąĄą╝ UART1/GPIO .
D
TX1/PD11
I/O
ą¤ąĄčĆąĄą┤ą░čćą░ UART1/GPIO .
D
RX2/PD12
I/O
ą¤čĆąĖąĄą╝ UART2/GPIO .
D
TX2/PD13
I/O
ą¤ąĄčĆąĄą┤ą░čćą░ UART2/GPIO .
D
ą¤ąŠčĆčé E: SPORT2-3, GPIO PE0 GPIO .
RFS2/PE1
I/O
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐čĆąĖąĄą╝ą░ SPORT2/GPIO .
C
DR2PRI/PE2
I/O
Primary-ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ SPORT2/GPIO .
C
DR2SEC/PE3
I/O
Secondary-ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ SPORT2/GPIO .
C
TSCLK2/PE4
I/O
ąóą░ą║čéčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ SPORT2/GPIO .
D
TFS2/PE5
I/O
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ SPORT2/GPIO .
C
DT2PRI/PE6
I/O
Primary-ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ SPORT2/GPIO .
C
DT2SEC/PE7
I/O
Secondary-ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ SPORT2/GPIO .
C
RSCLK3/PE8
I/O
ąóą░ą║čéčŗ ą┐čĆąĖąĄą╝ą░ SPORT3/GPIO .
D
RFS3/PE9
I/O
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐čĆąĖąĄą╝ą░ SPORT3/GPIO .
C
DR3PRI/PE10
I/O
Primary-ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ SPORT3/GPIO .
C
DR3SEC/PE11
I/O
Secondary-ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ SPORT3/GPIO .
C
TSCLK3/PE12
I/O
ąóą░ą║čéčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ SPORT3/GPIO .
D
TFS3/PE13
I/O
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ SPORT3/GPIO .
C
DT3PRI/PE14
I/O
Primary-ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ SPORT3/GPIO .
C
DT3SEC/PE15
I/O
Secondary-ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ SPORT3/GPIO .
C
ą¤ąŠčĆčé F: GPIO, PPI, SPI0, čéą░ą╣ą╝ąĄčĆčŗ
PF1/~SPI0SEL1/TACLK
I/O
GPIO/čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ 1 ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI0/ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ ą▓čģąŠą┤ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ .
C
PF2/~SPI0SEL2
I/O
GPIO/čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ 2 ą┐ąŠčćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
C
PF3/PPI_FS3/~SPI0SEL3
I/O
GPIO/PPI čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ 3/čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ 3 ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI0 .
C
PF4/PPI15/~SPI0SEL4
I/O
GPIO/PPI15/čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ 4 ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI0 .
C
PF5/PPI14/~SPI0SEL5
I/O
GPIO/PPI14/čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ 5 ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI0 .
C
PF6/PPI13/~SPI0SEL6
I/O
GPIO/PPI13/čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ 6 ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI0 .
C
PF7/PPI12/~SPI0SEL7
I/O
GPIO/PPI12/čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ 7 ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI0 .
C
PF8/PPI11
I/O
GPIO/PPI11
C
PF9/PPI10
I/O
GPIO/PPI10
C
PF10/PPI9
I/O
GPIO/PPI9
C
PF11/PPI8
I/O
GPIO/PPI8
C
PF12/PPI7
I/O
GPIO/PPI7
C
PF13/PPI6
I/O
GPIO/PPI6
C
PF14/PPI5
I/O
GPIO/PPI5
C
PF15/PPI4
I/O
GPIO/PPI4
C
RTC
RTXO
O
ąÜą▓ą░čĆčå, ą▓čŗčģąŠą┤ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (ą▓ čĆąĄąČąĖą╝ąĄ hibernate ąĮąĄ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ).
JTAG
TDO
O
ąÆčŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ.
ąĪ
TDI
I
ąÆčģąŠą┤ ą┤ą░ąĮąĮčŗčģ.
TMS
I
ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ JTAG.
~TRST
I
ąĪą▒čĆąŠčü JTAG (čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĖčéčÅąĮčāčé ą║ GND, ąĄčüą╗ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ).
~EMU
O
ąÆčŗčģąŠą┤ 菹╝čāą╗čÅčåąĖąĖ.
C
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ
XTAL
O
ąÜą▓ą░čĆčå, ą▓čŗčģąŠą┤ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ąŠą╝
~NMI
I
ąØąĄą╝ą░čüą║ąĖčĆčāąĄą╝ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĖčéčÅąĮčāčé ą║ +3.3V, ąĄčüą╗ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ).
BMODE1-0
I
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ąŠą╝ ąĘą░ą│čĆčāąĘą║ąĖ (čüą╝. čéą░ą▒ą╗ąĖčåčā 9).
ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ
~GPW
I 5V
General-Purpose Regulator Wake-Up (čüąĖą│ąĮą░ą╗ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąŁč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčé ą║ +3.3V, ą║ąŠą│ą┤ą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ).
ą¤ąĖčéą░ąĮąĖąĄ DDEXT
VDDINT
P
ąÆąĮčāčéčĆąĄąĮąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ (ąŠą▒čŗčćąĮąŠ +1.25V, čüčÄą┤ą░ ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čü ą▓čŗčģąŠą┤ą░ čĆąĄą│čāą╗čÅč鹊čĆą░).
VDDRTC
P
ą¤ąĖčéą░ąĮąĖąĄ RTC (ą║ąŠą│ą┤ą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ VDDEXT . ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, č鹊 ąĮą░ ąĮąĄą╝ ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĖčüčāčéčüčéą▓ąŠą▓ą░čéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ, ąŠą▒čŗčćąĮąŠ 3.0V).
GND
G
ąŚąĄą╝ą╗čÅ, ąŠą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤, ą╝ąĖąĮčāčü ą▓čüąĄčģ čåąĄą┐ąĄą╣ ą┐ąĖčéą░ąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) DRV ąŠąĘąĮą░čćą░ąĄčé čéąĖą┐ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąæčāą║ą▓ą░ (A, B, C, D, E) čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą│čĆą░čäąĖą║ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ą▓čŗčģąŠą┤ą░ čü čĆąĖčüčāąĮą║ąŠą▓ 33..42. (2) ąŁč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą┐čāčüą║ą░ąĄčé čĆą░ą▒ąŠčéčā čü ą╗ąŠą│. čāčĆąŠą▓ąĮčÅą╝ąĖ 5V (5V-tolerant), ą║ąŠą│ą┤ą░ ąŠąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤, ąĖą╗ąĖ ąĄčüą╗ąĖ čŹč鹊 ą▓čŗą▓ąŠą┤ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤, ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮčŗ č鹊ą╗čīą║ąŠ ą║čĆąĖą▓čŗąĄ VOL ąĮą░ čĆąĖčü. 37 ąĖ 38, ąĖ ą║čĆąĖą▓čŗąĄ ą▓čĆąĄą╝ąĄąĮąĖ čüą┐ą░ą┤ą░ ąĮą░ čĆąĖčü. 50 ąĖ 51.
ąĀąĖčü. 33. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ A (ąĮąĖąĘą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 34. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ A (ą▓čŗčüąŠą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 35. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ B (ąĮąĖąĘą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 36. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ B (ą▓čŗčüąŠą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 37. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ C (ąĮąĖąĘą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 38. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ C (ą▓čŗčüąŠą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 39. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ D (ąĮąĖąĘą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 40. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ D (ą▓čŗčüąŠą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 41. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ E (ąĮąĖąĘą║ąŠąĄ VDDEXT ).
ąĀąĖčü. 42. ąÆčŗčģąŠą┤ąĮąŠą╣ č鹊ą║ E (ą▓čŗčüąŠą║ąŠąĄ VDDEXT ).
[ąŻčüą╗ąŠą▓ąĖčÅ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ]
ąÆ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ą┐čĆąĄą┤ąĄą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĘą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ č鹊ą╗čīą║ąŠ ąŠčüąĮąŠą▓ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ. ą¤ąŠą╗ąĮčŗą╣ čüą┐ąĖčüąŠą║ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čüą╝. ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╝ ą┤ą░čéą░čłąĖč鹥.
ą¤ą░čĆą░ą╝ąĄčéčĆ ąŻčüą╗ąŠą▓ąĖčÅ min nom max ąĢą┤.
VDDINT , ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░.
ą£ąŠą┤ąĄą╗ąĖ, čĆą░čüčüčćąĖčéą░ąĮąĮčŗąĄ ąĮą░ 533 ą£ąōčå1, 2 .
0.8
1.25
1.375
V
ą£ąŠą┤ąĄą╗ąĖ, čĆą░čüčüčćąĖčéą░ąĮąĮčŗąĄ ąĮą░ 400 ą£ąōčå1, 2 .
0.8
1.2
1.32
V
VDDEXT , ą▓ąĮąĄčłąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ
ą£ąŠą┤ąĄą╗ąĖ, ą▓ ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą▓ ą║ąŠčĆą┐čāčü ą┐ą░ą╝čÅčéčī FLASH2 .
2.7
3.3
3.6
V
ą£ąŠą┤ąĄą╗ąĖ ą▒ąĄąĘ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ FLASH2, 3 .
2.25
3.0
3.6
V
VDDRTC , ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ RTC
2.25
3.6
V
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī VDDINT čü čāčĆąŠą▓ąĮčÅą╝ąĖ ąŠčé 0.85V ą┤ąŠ 1.2V čü ą┤ąŠą┐čāčüą║ąŠą╝ -5% +10%, ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 1.25V čü ą┤ąŠą┐čāčüą║ąŠą╝ -4% +10%. 2. ąĪą╝. čĆą░ąĘą┤ąĄą╗ ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą▓čŗą▒ąŠčĆčā ą╝ąŠą┤ąĄą╗ąĖ. 3. ąÜąŠą│ą┤ą░ VDDEXT < 2.7V, ą▓čüčéčĆąŠąĄąĮąĮąŠąĄ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čéą░ą▒ą╗ąĖčåčŗ ą┐čĆąĖą▓ąŠą┤čÅčé ą┤ą░ąĮąĮčŗąĄ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą┐ąĖčéą░ąĮąĖčÅ čÅą┤čĆą░ ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆą░ą▒ąŠčćąĖčģ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé. ąæčāą┤čīč鹥 ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮčŗ ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ čüą║ąŠčĆąŠčüč鹥ą╣ MSEL, SSEL ąĖ CSEL, čćč鹊ą▒čŗ ąĮąĄ ą┐čĆąĄą▓čŗčüąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čćą░čüč鹊čéčā čÅą┤čĆą░ (čéą░ą▒ą╗ąĖčåą░ 11 ąĖ 12) ąĖ čüąĖčüč鹥ą╝ąĮčāčÄ čćą░čüč鹊čéčā (čéą░ą▒ą╗ąĖčåą░ 14). ąÆ čéą░ą▒ą╗ąĖčåąĄ 13 ąŠą┐ąĖčüą░ąĮčŗ čĆą░ą▒ąŠčćąĖąĄ čāčüą╗ąŠą▓ąĖčÅ ą┤ą╗čÅ PLL.
ąóą░ą▒ą╗ąĖčåą░ 11. ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 čÅą┤čĆą░ (CCLK) ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĄą╣ 400 ą£ąōčå.
ą¤ą░čĆą░ą╝ąĄčéčĆ ąØą░čüčéčĆąŠą╣ą║ą░ ą▓ąĮčāčéčĆ. čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ Max čćą░čüč鹊čéą░
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =1.14V)
1.20V
400 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =1.045V)
1.10V
364 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =0.95V)
1.00V
333 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =0.85V)
0.90V
280 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =0.8V)
0.85V
250 ą£ąōčå
ąóą░ą▒ą╗ąĖčåą░ 12. ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 čÅą┤čĆą░ (CCLK) ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĄą╣ 533 ą£ąōčå.
ą¤ą░čĆą░ą╝ąĄčéčĆ ąØą░čüčéčĆąŠą╣ą║ą░ ą▓ąĮčāčéčĆ. čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ Max čćą░čüč鹊čéą░
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =1.2V)
1.25V
533 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =1.14V)
1.20V
500 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =1.045V)
1.10V
444 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =0.95V)
1.00V
400 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =0.85V)
0.95V
333 ą£ąōčå
fCCLK (ą╝ąĖąĮąĖą╝čāą╝ VDDINT =0.8V)
0.85V
250 ą£ąōčå
ąóą░ą▒ą╗ąĖčåą░ 13. ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 čÅą┤čĆą░ (CCLK) ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĄą╣ 533 ą£ąōčå.
ą¤ą░čĆą░ą╝ąĄčéčĆ Min Max
fVCO (čćą░čüč鹊čéą░ VCO)
50 ą£ąōčå
Max fCCLK
ąóą░ą▒ą╗ąĖčåą░ 14. ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 čÅą┤čĆą░ (CCLK) ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĄą╣ 533 ą£ąōčå.
ą¤ą░čĆą░ą╝ąĄčéčĆ(1) Max
fSCLK , čćą░čüč鹊čéą░ CLKOUT/SCLK (VDDINT Ōēź 1.14V)
133(2) ą£ąōčå
fSCLK , čćą░čüč鹊čéą░ CLKOUT/SCLK (VDDINT < 1.14V)
100 ą£ąōčå
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) tSCLK (= 1/fSCLK ) ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ tCCLK . (2) ąōą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ tSCLK = 7.5 ąĮčü. ąĪą╝. čéą░ą▒ą╗ąĖčåčā 27.
[ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą▓čŗą▒ąŠčĆčā ą╝ąŠą┤ąĄą╗ąĖ ]
ąóąĖą┐ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (ą╝ąŠą┤ąĄą╗čī) ąöąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ ą¦ą░čüč鹊čéą░ čÅą┤čĆą░ FLASH ą¤ąĖčéą░ąĮąĖąĄ (ąĮąŠą╝ąĖąĮą░ą╗) ąÜąŠčĆą┐čāčü / ąŠą┐čåąĖčÅ ą║ąŠčĆą┐čāčüą░
ADSP-BF538BBCZ-4A
ŌĆō40o C .. +85o C
400 ą£ąōčå
-
1.2V ą▓ąĮčāčéčĆ., 2.5V..3.3V I/O
316-čłą░čĆąĖą║ąŠą▓čŗą╣ CSP_BGA / BC-316-2
ADSP-BF538BBCZ-5A
533 ą£ąōčå
-
ADSP-BF538BBCZ-4F8
400 ą£ąōčå
8 ą╝ąĄą│ą░ą▒ąĖčé
ADSP-BF538BBCZ-5F8
533 ą£ąōčå
8 ą╝ąĄą│ą░ą▒ąĖčé
ą£ą░čĆą║ąĖčĆąŠą▓ą║čā ADSP-BF538tppZ-ccc vvvvvvv.x n.n ą╝ąŠąČąĮąŠ čĆą░čüčłąĖčäčĆąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
tpp ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čéąĖą┐ ą║ąŠčĆą┐čāčüą░ ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ.
Z ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čŹč鹊 ą║ąŠą╝ą┐ąŠąĮąĄąĮčé, ąŠčéą▓ąĄčćą░čÄčēąĖą╣ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ RoHS.
ccc ąŠąĘąĮą░čćą░ąĄčé čüą║ąŠčĆąŠčüčéčī ąĖ ąĮą░ą╗ąĖčćąĖąĄ ąĮą░ ą▒ąŠčĆčéčā ą┐ą░ą╝čÅčéąĖ FLASH, ą░ čéą░ą║ąČąĄ ąĄčæ ąŠą▒čŖąĄą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, 5F8 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čĆą░ą▒ąŠčćą░čÅ čćą░čüč鹊čéą░ 533 ą£ąōčå, ąĮą░ ą║čĆąĖčüčéą░ą╗ą╗ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ FLASH (ą┐ą░ą╝čÅčéčī ąĘą░ą│čĆčāąĘą║ąĖ) ąĮą░ 8 ą╝ąĄą│ą░ą▒ąĖčé (1 ą╝ąĄą│ą░ą▒ą░ą╣čé, ąĖą╗ąĖ 512K čÅč湥ąĄą║ ą┐ąŠ 16 ą▒ąĖčé).
vvvvvvv.x ą║ąŠą┤ ą╗ąŠčéą░ čüą▒ąŠčĆą║ąĖ.
n.n čĆąĄą▓ąĖąĘąĖčÅ ą║čĆąĖčüčéą░ą╗ą╗ą░ (Silicon Revision).
# RoHS Compliant Designation.
yyww ą║ąŠą┤ ą┤ą░čéčŗ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░.
country_of_origin čüčéčĆą░ąĮą░ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░.
[ąĪą╗ąŠą▓ą░čĆąĖą║ ]
1-D , 2-D ą▓ą░čĆąĖą░ąĮčéčŗ čĆą░ą▒ąŠčéčŗ DMA - ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ ą╝ąŠąČąĄčé ąŠą┐ąĄčĆąĖčĆąŠą▓ą░čéčī ą║ą░ą║ čü ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╝, čéą░ą║ ąĖ čü ą┤ą▓čāą╝ąĄčĆąĮčŗą╝ ą╝ą░čüčüąĖą▓ąŠą╝ ą┤ą░ąĮąĮčŗčģ.
ADC Analog-Digital Converter, ą░ąĮą░ą╗ąŠą│ąŠ-čåąĖčäčĆąŠą▓ąŠą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī (ąÉą”ą¤).
ALU Arithmetic Logic Unit
~AMSx Asynchronous memory selects, ą▓čŗčģąŠą┤čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ą░ą╝čÅčéąĖ (~AMS3, ~AMS2, ~AMS1 ąĖ ~AMS0).
~BR Bus Request, čüąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ čłąĖąĮčŗ.
CCLK čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░. ą×čüąĮąŠą▓ąĮąŠą╣ čäą░ą║č鹊čĆ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
CEC Core Event Controller, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖčÅą╝ąĖ čÅą┤čĆą░. ąĀą░ą▒ąŠčéą░ąĄčé čüąŠą▓ą╝ąĄčüčéąĮąŠ čü SIC, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐čĆąĖąŠčĆąĖč鹥čé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄčģ čüąĖčüč鹥ą╝ąĮčŗčģ čüąŠą▒čŗčéąĖą╣ (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣).
CLI ąĖąĮčüčéčĆčāą║čåąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
CLKIN ą▓čģąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓ čÅą┤čĆą░, ą╗ąĖą▒ąŠ ą▓čģąŠą┤ ą│ąĄąĮąĄčĆą░č鹊čĆą░, čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ čü ą║ą▓ą░čĆčåąĄą▓čŗą╝ čĆąĄąĘąŠąĮą░č鹊čĆąŠą╝.
CPLB Cacheability Protection Lookaside Buffer, čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą┐ą░čĆčŗ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą╗čÅ ą║čŹčłąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ (16 ą┐ą░čĆ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĖ 16 ą┐ą░čĆ ą┤ą╗čÅ ąĖąĮčüčéčĆčāą║čåąĖą╣). ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ąĘą░čēąĖčéčā ąŠą▒ą╗ą░čüč鹥ą╣ ą┐ą░ą╝čÅčéąĖ ąŠčé ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ (ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠą╣ čüčĆąĄą┤ąĄ). ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░) čŹčéą░ čäčāąĮą║čåąĖčÅ ąŠčéą║ą╗čÄč湥ąĮą░.
CRT C Runtime Library, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą║ąŠą┤ą░ čÅąĘčŗą║ą░ C, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
DAC Digital-Analog Converter, čåąĖčäčĆąŠ-ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī (ą”ąÉą¤).
DAG1 , DAG0 Data Address Generator.
DMA Direct Memory Access, ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ.
EBIU External Bus Interface Unit, ą▒ą╗ąŠą║ ąĖąĮč鹥čĆč乥ą╣čüą░ ą▓ąĮąĄčłąĮąĄą╣ čłąĖąĮčŗ.
EVT Event Vector Table, čéą░ą▒ą╗ąĖčåą░ ą▓ąĄą║č鹊čĆąŠą▓ čüąŠą▒čŗčéąĖą╣ (ą░ą┤čĆąĄčüą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣).
~FCE ą▓čģąŠą┤, čüąĖą│ąĮą░ą╗ Flash Enable (ą▓ čćąĖą┐ąĄ ADSP-BF538 čŹč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąĘąĄą╝ą╗ąĄ ą▓ąĮčāčéčĆąĖ čćąĖą┐ą░).
GPIO General Purpose Input/Output, ą┐ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ.
I2C ą┐ąŠą┐čāą╗čÅčĆąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┤ą▓čāčģą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą▓ č鹥ą╗ąĄą▓ąĖąĘąŠčĆą░čģ, ą▒čŗč鹊ą▓ąŠą╣ ąĖ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠą╣ č鹥čģąĮąĖą║ąĄ).
I2S ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čåąĖčäčĆąŠą▓ąŠą│ąŠ ąĘą▓čāą║ą░.
IAR Interrupt Assignment Register, čĆąĄą│ąĖčüčéčĆ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
IDE Integrated Development Environment, ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮą░čÅ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ.
IDDE Integrated Development and Debugging Environment, ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮą░čÅ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ.
ILAT Interrupt Latch Register, čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
IPEND Interrupts Pending, čĆąĄą│ąĖčüčéčĆ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ (ąŠąČąĖą┤ą░čÄčēąĖčģ) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
ISR Interrupt Service Routine, ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
IVG Interrupt Vector Group, ą│čĆčāą┐ą┐ą░ ą▓ąĄą║č鹊čĆąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąōčĆčāą┐ą┐ą░ ąĖą╝ąĄąĄčé ąĮąŠą╝ąĄčĆ (ąŠčé 0 ą┤ąŠ 15). ą¦ąĄą╝ ą╝ąĄąĮčīčłąĄ ąĮąŠą╝ąĄčĆ ą│čĆčāą┐ą┐čŗ, č鹥ą╝ ą▓čŗčłąĄ ą┐čĆąĖąŠčĆąĖč鹥čé. ąØąŠą╝ąĄčĆą░ ą│čĆčāą┐ą┐ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĖ enum čäą░ą╣ą╗ą░ adi_int.h, ą░ čéą░ą║ąČąĄ ą▓ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĖ typedef enum interrupt_kind čäą░ą╣ą╗ą░ exception.h.
LDR ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤čā ą▒ą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ č乊čĆą╝ą░čéą░ (čäą░ą╣ą╗, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ čüčĆąĄą┤ąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ VisualDSP++), ą▓ ą║ąŠč鹊čĆąŠą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ čĆą░ą▒ąŠčćąĖą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ Blackfin. ąŁč鹊čé čäą░ą╣ą╗ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ boot ROM.
MAC Multiply/Accumulate, čāą╝ąĮąŠąČąĄąĮąĖąĄ čü ąĮą░ą║ąŠą┐ą╗ąĄąĮąĖąĄą╝ - čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┤ą╗čÅ čåąĖčäčĆąŠą▓ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓.
MMU Memory Management Unit, ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéčīčÄ. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĘą░čēąĖčéčŗ ąŠą▒ą╗ą░čüč鹥ą╣ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ąŠčéą┤ąĄą╗čīąĮčŗčģ ąĘą░ą┤ą░čć čÅą┤čĆą░, ąĖ ą╝ąŠąČąĄčé ąĘą░čēąĖčéąĖčéčī čüąĖčüč鹥ą╝ąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ąŠčé ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░.
MMR Memory Mapped Register, ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ąŠą▒čēąĄąĄ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ čĆąĄą│ąĖčüčéčĆ.
NMI Non-Maskable Interrupt, ąĮąĄą╝ą░čüą║ąĖčĆčāąĄą╝ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĮąĄą╗čīąĘčÅ ąĘą░ą┐čĆąĄčéąĖčéčī).
PAB Peripheral Access Bus, čłąĖąĮą░ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝.
PC Program Counter, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüč湥čéčćąĖą║ - ą░ą┤čĆąĄčü ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
Peripheral Interrupt ID čćąĖčüą╗ąŠą▓ąŠą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▓ąĄąĮ ąĮąŠą╝ąĄčĆčā ą▒ąĖčéą░ IMASK/ISR/IWR. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ typedef enum ADI_INT_PERIPHERAL_ID čäą░ą╣ą╗ą░ adi_int.h.
PPI Parallel peripheral interface.
PREG Pointer Register, čŹč鹊 FP ąĖą╗ąĖ SP.
pulldown , pull-down ąĮąĖąČąĮąĖą╣ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ (ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĄčé ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī ą║ 0).
pullup , pull-up ą▓ąĄčĆčģąĮąĖą╣ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ (ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĄčé ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī ą║ 1).
RAB Register Access Bus.
RTC Real-Time Clock, čćą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
SAA subtract/absolute value/accumulate, ą▓čŗčćąĖčéą░ąĮąĖąĄ/ą▓ąĘčÅčéąĖąĄ ą░ą▒čüąŠą╗čÄčéąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ/ąĮą░ą║ąŠą┐ą╗ąĄąĮąĖąĄ - čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┤ą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ.
SCLK system clock, čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░.
SIC System Interrupt Controller, čüąĖčüč鹥ą╝ąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąĪą╗čāąČąĖčé ą┤ą╗čÅ ą┐čĆąĖą▓čÅąĘą║ąĖ ąĖ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčé ą╝ąĮąŠąČąĄčüčéą▓ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ ą▓čģąŠą┤čŗ ą│čĆčāą┐ą┐čŗ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CEC.
SPORT ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé, ą║ąŠč鹊čĆčŗčģ ą▓ ADSP-BF538 ą▓čüąĄą│ąŠ 4 čłčéčāą║ąĖ (SPORT0, SPORT1, SPORT2 ąĖ SPORT3).
STI ąĖąĮčüčéčĆčāą║čåąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
TWI Two Wire Interface, ą┤ą▓čāčģą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, č鹊 ąČąĄ čüą░ą╝ąŠąĄ čćč鹊 ąĖ I2C.
VCO voltage-controlled oscillator, ą│ąĄąĮąĄčĆą░č鹊čĆ, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ (ą▓čģąŠą┤ąĖčé ą▓ čüąĖčüč鹥ą╝čā PLL).
W1C Write-1-Clear, ą┐čĆąĖąĮčåąĖą┐ ąŠčćąĖčüčéą║ąĖ ą▒ąĖčéą░, ą║ąŠą│ą┤ą░ ą▒ąĖčé (ąĖą╗ąĖ ą▒ąĖčéčŗ) čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ ąĮąĄą│ąŠ ąĄą┤ąĖąĮąĖčåčŗ.
ąōą░čĆą▓ą░čĆą┤čüą║ą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąĖąĮčåąĖą┐ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗčģ ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ čĆą░ąĘąĮčŗąĄ čäąĖąĘąĖč湥čüą║ąĖąĄ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ąĖ ą║ąŠą│ą┤ą░ čłąĖąĮą░ ą┤ą░ąĮąĮčŗčģ ąĖ čłąĖąĮą░ ąĖąĮčüčéčĆčāą║čåąĖą╣ čéą░ą║ąČąĄ čäąĖąĘąĖč湥čüą║ąĖ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ Blackfin čüčćąĖčéą░ąĄčéčüčÅ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąōą░čĆą▓ą░čĆą┤čüą║ąŠą╣, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖ ą┤ą░ąĮąĮčŗąĄ, ąĖ ąĖąĮčüčéčĆčāą║čåąĖąĖ, ąĖ ą┐ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ąĄą┤ąĖąĮąŠą╝ ą░ą┤čĆąĄčüąĮąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ, ąĮąŠ ą▓ąĮčāčéčĆąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čłąĖąĮą░ ą┤ą░ąĮąĮčŗčģ ąĖ čłąĖąĮą░ ąĖąĮčüčéčĆčāą║čåąĖą╣ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ.
[ąĪčüčŗą╗ą║ąĖ ]
1 . ADSP-BF538 site:analog.com .2 . Blackfin site:wikipedia.org .3 . Blackfin: čüąĖčüč鹥ą╝ą░ ą║ąŠą╝ą░ąĮą┤ (ą░čüčüąĄą╝ą▒ą╗ąĄčĆ) - čćą░čüčéčī 1 .4 . ąÜą░ą║ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĘą░ą│čĆčāąĘą║ą░ ADSP-BF533 Blackfin .