ą¤ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü (PPI ) čŹč鹊 ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮčŗą╣, ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆčé, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ 16 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ. ąŻ ąĮąĄą│ąŠ ąĄčüčéčī ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓čŗą▓ąŠą┤ čéą░ą║č鹊ą▓, 3 ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą▓čŗą▓ąŠą┤ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ ąĖ 4 ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ. ą¤čāč鹥ą╝ ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąŠąČąĄą║ ą┐ąŠčĆčéą░ PF ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī 12 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ą░ąĮąĮčŗčģ. ąĪą░ą╝ą░čÅ ą▒ąŠą╗čīčłą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čü 8-ą▒ąĖčéąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┤ą▓ąĄ 8-ą▒ąĖčéąĮčŗąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĮąŠ čāą┐ą░ą║ąŠą▓ą░čéčī ą▓ ąŠą┤ąĮąŠ 16-ą▒ąĖčéąĮąŠąĄ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĄą┤čŗą┤čāčēą░čÅ ą▓čŗą▒ąŠčĆą║ą░ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ 8 ą╝ą╗ą░ą┤čłąĖčģ ąĘąĮą░čćą░čēąĖčģ ą▒ąĖčé (LSB).
ąÆčŗą▓ąŠą┤ PPI_CLK ą╝ąŠąČąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ąĮą░ čćą░čüč鹊č鹥 ą┤ąŠ SCLK/2. ą×ąĮ ąĮąĄ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćą░čéčī čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą▓ąĮčāčéčĆąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆ čéą░ą▒ą╗ąĖčåąĄ 11-1 ą┐ąŠą║ą░ąĘą░ąĮ ąĖąĮč鹥čĆč乥ą╣čü ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ą╗čÅ PPI.
ąóą░ą▒ą╗ąĖčåą░ 11-1. ąØąŠąČą║ąĖ PPI.
ąĪąĖą│ąĮą░ą╗ ążčāąĮą║čåąĖčÅ ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ
PPI15
ąöą░ąĮąĮčŗąĄ
ąöą▓ą░ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čŗčģąŠą┤)
PF4, SPI Enable Output
PPI14
PF5, SPI Enable Output
PPI13
PF6, SPI Enable Output
PPI12
PF7, SPI Enable Output
PPI11
PF8
PPI10
PF9
PPI9
PF10
PPI8
PF11
PPI7
PF12
PPI6
PF13
PPI5
PF14
PPI4
PF15
PPI3
ą×čéčüčāčéčüčéą▓čāąĄčé
PPI2
PPI1
PPI0
PPI_FS3
Frame Sync3/Field (čüąĖą│ąĮą░ą╗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąŠą╗čÅ)
PF3, SPI Enable Output
PPI_FS2
Frame Sync2/VSYNC (ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ)
Timer 2
PPI_FS1
Frame Sync1/HSYNC (ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ)
Timer 1
PPI_CLK
ąóą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ čü čćą░čüč鹊č鹊ą╣ ą┤ąŠ SCLK/2
ąÆčģąŠą┤ čéą░ą║č鹊ą▓
ą×čéčüčāčéčüčéą▓čāąĄčé
ąĢčüą╗ąĖ ąĮąŠąČą║ą░ GPIO ą┐ąŠčĆčéą░ F čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čü PPI, č鹊 ąĄčæ ą┐ąŠąĘąĖčåąĖčÅ čĆą░ąĘčĆčÅą┤ą░ ą▓ MMR-čĆąĄą│ąĖčüčéčĆąĄ GPIO ą┐ąŠčĆčéą░ F čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
[ąĀąĄą│ąĖčüčéčĆčŗ PPI ]
ąŻ PPI ąĄčüčéčī 5 čĆąĄą│ąĖčüčéčĆąŠą▓, ąŠč鹊ą▒čĆą░ąČąĄąĮąĮčŗčģ ąĮą░ ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ (memory-mapped register, MMR) ą║ąŠč鹊čĆčŗąĄ čĆąĄą│čāą╗ąĖčĆčāčÄčé ąĄą│ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ. ąŁč鹊 čüą╗ąĄą┤čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ: čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (PPI control register, PPI_CONTROL), čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ (PPI status register, PPI_STATUS), čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ąĘą░ą┤ąĄčƹȹ║ąĖ (delay count register, PPI_DELAY), čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖą╣ (transfer count register, PPI_COUNT) ąĖ čĆąĄą│ąĖčüčéčĆ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüčéčĆąŠą║ ąĮą░ čäčĆąĄą╣ą╝ (lines per frame register, PPI_FRAME).
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, PPI control register (PPI_CONTROL), ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ PPI, čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠą╗čÅčĆąĮąŠčüčéčīčÄ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖ čłąĖčĆąĖąĮąŠą╣ ą┤ą░ąĮąĮčŗčģ. ąĪą╝. čĆąĖčü. 11-1, ą│ą┤ąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▒ąĖč鹊ą▓ą░čÅ ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░.
ąĀąĖčü. 11-1. PPI Control Register (PPI_CONTROL).
POLC , POLS . ąæąĖčéčŗ POLC ąĖ POLS ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą▓čŗą▒ąŠčĆąŠčćąĮčāčÄ ąĖąĮą▓ąĄčĆčüąĖčÄ čüąĖą│ąĮą░ą╗ąŠą▓ PPI_CLK ąĖ PPI_FS1/PPI_FS2 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąŁč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ą│ąĖą▒ą║ąŠčüčéčī ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ PPI čłąĖčĆąŠą║ąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ čü čĆą░ąĘąĮąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéčīčÄ čüąĖą│ąĮą░ą╗ąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
DLEN[2:0] . ą¤ąŠą╗ąĄ ą▒ąĖčé DLEN[2:0] ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé čłąĖčĆąĖąĮčā ą┤ą░ąĮąĮčŗčģ ą┐ąŠčĆčéą░ PPI ą▓ ą╗čÄą▒ąŠą╝ čĆąĄąČąĖą╝ąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą▓ą░čĆąĖą░ąĮčéčŗ čłąĖčĆąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčĆčéą░ ąŠčé 8 ą┤ąŠ 16 ą▒ąĖčé, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čłąĖčĆąĖąĮčŗ 9 ą▒ąĖčé. ąøčÄą▒čŗąĄ ą▓čŗą▓ąŠą┤čŗ PF, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ PPI ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠą╗čÅ DLEN, čüą▓ąŠą▒ąŠą┤ąĮčŗ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ą░ą║ ąŠą▒čŗčćąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ PF GPIO.
ąÆ čĆąĄąČąĖą╝ą░čģ ITU-R 656 ą┐ąŠą╗ąĄ DLEN ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą▓ ą╗čÄą▒ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čłąĖčĆąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ą▒ąŠą╗čīčłąĄ č湥ą╝ 10 ą▒ąĖčé. ąĢčüą╗ąĖ čŹč鹊 čéą░ą║, č鹊 PPI ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆčāąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ, ą┤ąĄą╗ą░čÅ ąĖčģ ąĮąĄą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
SKIP_EN . ąæąĖčé SKIP_EN, ą▒čāą┤čāčćąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąĄą╗ąĄą║čéąĖą▓ąĮąŠ ą┐čĆąŠą┐čāčüą║ą░čéčī 菹╗ąĄą╝ąĄąĮčéčŗ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ čćąĖčéą░čÄčéčüčÅ č湥čĆąĄąĘ PPI. ą¤čāč鹥ą╝ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čŹą╗ąĄą╝ąĄąĮč鹊ą▓ ą┤ą░ąĮąĮčŗčģ PPI ą╝ąŠąČąĄčé čüąŠčģčĆą░ąĮąĖčéčī ą┐ąŠą╗ąŠčüčā ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ DMA.
SKIP_EO . ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé SKIP_EN, ą▒ąĖčé SKIP_EO ą┐ąŠąĘą▓ąŠą╗čÅąĄčé PPI ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ą╗ąĖą▒ąŠ ąĮąĄč湥čéąĮčŗąĄ, ą╗ąĖą▒ąŠ č湥čéąĮčŗąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ, ą║ ą┐čĆąĖą╝ąĄčĆčā, ą║ąŠą│ą┤ą░ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ čåą▓ąĄčéąĮąŠą╣ ą▓ąĖą┤ąĄąŠčüąĖą│ąĮą░ą╗ ą▓ č乊čĆą╝ą░č鹥 YCbCr (Cb, Y, Cr, Y, Cb, Y, Cr, Y...). ą¤čĆąŠą┐čāčüą║ ą║ą░ąČą┤ąŠą│ąŠ č湥čĆąĄą┤čāčÄčēąĄą│ąŠčüčÅ čŹą╗ąĄą╝ąĄąĮčéą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé PPI čćąĖčéą░čéčī č鹊ą╗čīą║ąŠ ąĘąĮą░č湥ąĮąĖčÅ čÅčĆą║ąŠčüčéąĖ (Y) ąĖą╗ąĖ č鹊ą╗čīą║ąŠ čåą▓ąĄčéą░ (Cr ąĖą╗ąĖ Cb). ąŁč鹊 čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĄąĘąĮąŠ, ą║ąŠą│ą┤ą░ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāčÄčéčüčÅ ą┤ą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĮą░ ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą▓čģąŠą┤čÅčēąĖą╣ ą┐ąŠč鹊ą║ ą▓ąĖą┤ąĄąŠčüąĖą│ąĮą░ą╗ą░. ą×ą┤ąĖąĮ ą┐čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī čüąĖą│ąĮą░ą╗ čÅčĆą║ąŠčüčéąĖ, ą░ ą┤čĆčāą│ąŠą╣ (čā ą║ąŠč鹊čĆąŠą│ąŠ ą▒ąĖčé SKIP_EO čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąŠ-ą┤čĆčāą│ąŠą╝čā) čüąĖą│ąĮą░ą╗ čåą▓ąĄčéą░. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąŠą┐čāčüą║ą░ ą┤ąŠą┐čāčüčéąĖą╝ą░ ą▓ čĆąĄąČąĖą╝ą░čģ ITU-R 656 ąĖ RX čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░.
PACK_EN . ąæąĖčé PACK_EN ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖąĄ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą┐ąŠčĆčé PPI ąĮą░čüčéčĆąŠąĄąĮ ą▒ąĖčéą░ą╝ąĖ DLEN[2:0] ąĮą░ čłąĖčĆąĖąĮčā 8 ą▒ąĖčé. ąÜą░ąČą┤ąŠąĄ čüąŠą▒čŗčéąĖąĄ ąĮą░ čłąĖąĮąĄ DMA, ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮąŠąĄ PPI_CLK (ąŠą┐ąĄčĆą░čåąĖčÅ ą▓ą▓ąŠą┤ą░ ąĖą╗ąĖ ą▓čŗą▓ąŠą┤ą░) ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé 16-ą▒ąĖčéąĮčŗąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą┤ą░ąĮąĮčŗčģ. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┐ąŠčĆčé ą▓ą▓ąŠą┤ą░ 10 ą▒ąĖčé ą▓čüąĄ ąĄčēčæ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ 16-ą▒ąĖčéąĮąŠą╝čā ą▓čģąŠą┤ąĮąŠą╝čā čüą╗ąŠą▓čā ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ PPI_CLK, čüčéą░čĆčłąĖąĄ 6 ą▒čāą┤čāčé ąĮčāą╗čÅą╝ąĖ. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čü čłąĖčĆąĖąĮąŠą╣ ą┤ą░ąĮąĮčŗčģ 8 ą▒ąĖčé čéą░ą║ąČąĄ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ 16-ą▒ąĖčéąĮąŠą╝čā ą▓ą▓ąŠą┤ąĖą╝ąŠą╝čā čüą╗ąŠą▓čā, ą│ą┤ąĄ ąŠą▒ąĮčāą╗ąĄąĮčŗ ą▓čüąĄ čüčéą░čĆčłąĖąĄ 8 ą▒ąĖčé. ąÆ čüą╗čāčćą░ąĄ 8-ą▒ąĖčéąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąŠą▒čŗčćąĮąŠ ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮąŠ ą┐ą░ą║ąŠą▓ą░čéčī čŹčéčā ąĖąĮč乊čĆą╝ą░čåąĖčÄ čéą░ą║, čćč鹊ą▒čŗ ą┤ą▓ą░ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░ą▓ą░ą╗ąĖčüčī ą▓ ą║ą░ąČą┤ąŠą╝ 16-ą▒ąĖčéąĮąŠą╝ čüą╗ąŠą▓ąĄ. ąŁč鹊 ąĖ ąĄčüčéčī čäčāąĮą║čåąĖčÅ ą▒ąĖčéą░ PACK_EN - ą║ąŠą│ą┤ą░ ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāą┐ą░ą║ąŠą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą▓čüąĄčģ čĆąĄąČąĖą╝ąŠą▓ RX.
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 č湥čĆąĄąĘ PPI čü ą┐ąŠą╝ąŠčēčīčÄ DMA ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ:
0xCE, 0xFA, 0xFE, 0xCA, ...
ąóąŠą│ą┤ą░ ąĄčüą╗ąĖ PACK_EN čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 č湥čĆąĄąĘ PPI, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą┤ą╗čÅ 8-ą▒ąĖčéąĮąŠą╣ čłąĖčĆąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ, ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ą░ą╣čé 0xCE, 0xFA, 0xFE, 0xCA, ..., ąĖ ą┐ąŠ čłąĖąĮąĄ DMA ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ 0xFACE, 0xCAFE, ...
ąĢčüą╗ąĖ ąČąĄ PACK_EN ąŠčćąĖčēąĄąĮ, č鹊 ą▓ PPI ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ 0xCE, 0xFA, 0xFE, 0xCA, ..., ąĖ ą┐ąŠ čłąĖąĮąĄ DMA ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ 0x00CE, 0x00FA, 0x00FE, 0x00CA, ...
ąöą╗čÅ čĆąĄąČąĖą╝ąŠą▓ TX čāčüčéą░ąĮąŠą▓ą║ą░ PACK_EN čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░čüą┐ą░ą║ąŠą▓ą║čā ą▒ą░ą╣čé. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ č湥čĆąĄąĘ PPI DMA (0xFA ąĖ 0xCA čŹč鹊 čüą░ą╝čŗąĄ ąĘąĮą░čćą░čēąĖąĄ ą▒ą░ą╣čéčŗ MSB ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓):
0xFACE, 0xCAFE, ...
ąóąŠą│ą┤ą░ ąĄčüą╗ąĖ PACK_EN čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 č湥čĆąĄąĘ PPI DMA ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ 0xFACE, 0xCAFE, ..., ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ 8-ą▒ąĖčéąĮčāčÄ čłąĖčĆąĖąĮčā čüą╗ąŠą▓ą░ PPI ą▓čŗą┤ą░čüčé ą▒ą░ą╣čéčŗ (ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╝ą╗ą░ą┤čłąĖąĄ ą▒ą░ą╣čéčŗ ąĖą┤čāčé ą┐ąĄčĆą▓čŗą╝ąĖ) 0xCE, 0xFA, 0xFE, 0xCA, ...
ąĢčüą╗ąĖ ąČąĄ PACK_EN ąŠčćąĖčēąĄąĮ, č鹊 č湥čĆąĄąĘ DMA ą┐čĆąŠą╣ą┤čāčé č鹥 ąČąĄ ą┤ą░ąĮąĮčŗąĄ 0xFACE, 0xCAFE, ..., ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ 8-ą▒ąĖčéąĮčāčÄ čłąĖčĆąĖąĮčā čüą╗ąŠą▓ą░ PPI ą▓čŗą▓ąĄą┤ąĄčé č鹊ą╗čīą║ąŠ ą╝ą╗ą░ą┤čłąĖąĄ ą▒ą░ą╣čéčŗ čüą╗ąŠą▓ 0xCE, 0xFE, ...
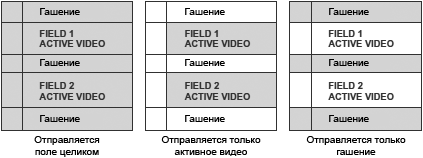
FLD_SEL . ąæąĖčé FLD_SEL ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ ą┐ąŠą╗ąĄ č鹊ą╗čīą║ąŠ čĆąĄąČąĖą╝ą░ ITU-R 656. ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą▒čāą┤ąĄčé ą╗ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠą╗ąĄ Field 1 ą▓ ą║ą░ąČą┤ąŠą╝ ą║ą░ą┤čĆąĄ ą▓ąĖą┤ąĄąŠ, ąĖą╗ąĖ ąČąĄ ąŠą▒ą░ ą┐ąŠą╗čÅ Field 1 ąĖ Field 2. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé 菹║ąŠąĮąŠą╝ąĖčéčī ą┐ąŠą╗ąŠčüčā DMA, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ č鹊ą╗čīą║ąŠ ą║ą░ąČą┤čŗą╣ č湥čĆąĄą┤čāčÄčēąĖą╣čüčÅ čäčĆąĄą╣ą╝ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ.
PORT_CFG[1:0] . ą¤ąŠą╗ąĄ PORT_CFG[1:0] ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░ PPI. ą×ąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą▒ąĖč鹊ą╝ PORT_DIR, ą║ąŠč鹊čĆčŗą╣ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčĆčéą░.
XFR_TYPE[1:0] . ąŁč鹊 ą┐ąŠą╗ąĄ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░, čćč鹊 ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą┤ą░ą╗ąĄąĄ. ą×ąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą┤čĆčāą│ąĖą╝ąĖ ą▒ąĖčéą░ą╝ąĖ PPI_CONTROL ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░. ąĪą╝. čéą░ą▒ą╗ąĖčåčā 11-2, ą│ą┤ąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ PPI.
ąóą░ą▒ą╗ąĖčåą░ 11-2. ąĀą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ PPI.
ąĀąĄąČąĖą╝ PPI # sync PORT_DIR PORT_CFG XFR_TYPE POLC POLS FLD_SEL
RX, 0 frame sync, external trigger
0
0
11
11
0 ąĖą╗ąĖ 1
0 ąĖą╗ąĖ 1
0
RX, 0 frame sync, internal trigger
1
RX, 1 external frame sync
1
00
X
RX, 2 ąĖą╗ąĖ 3 external frame sync
3
10
RX, 2 ąĖą╗ąĖ 3 internal frame sync
01
RX, ITU-R 656, Active Field Only
embedded
XX
00
0
0 ąĖą╗ąĖ 1
RX, ITU-R 656, Vertical Blanking Only
10
X
RX, ITU-R 656, Entire Field
01
TX, 0 frame sync
0
1
00, 01, 10
0 ąĖą╗ąĖ 1
TX, 1 internal ąĖą╗ąĖ external frame sync
1
00
11
TX, 2 external frame sync
2
01
TX, 2 ąĖą╗ąĖ 3 internal frame sync, FS3 čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ ą┐ąŠ čāčüčéą░ąĮąŠą▓ą║ąĄ FS1
3
01
TX, 2 ąĖą╗ąĖ 3 internal frame sync, FS3 čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ ą┐ąŠ čāčüčéą░ąĮąŠą▓ą║ąĄ FS2
11
PORT_EN . ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čĆą░ąĘčĆąĄčłąĄąĮą░ čĆą░ą▒ąŠčéą░ ą┐ąŠčĆčéą░ PPI.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąŠą│ą┤ą░ PPI čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą▓ą▓ąŠą┤, č鹊 PPI ąĮąĄ ąĘą░ą┐čāčüą║ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĄąĮ ą▒ąĖč鹊ą╝ PORT_EN, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą┐ąŠą╗čāč湥ąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąĢčüą╗ąĖ PPI čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą▓čŗą▓ąŠą┤, č鹊 ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (ą▓ą║ą╗čÄčćą░čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ) ąĮą░čćąĮąĄčéčüčÅ ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒čāą┤čāčé čĆą░ąĘčĆąĄčłąĄąĮčŗ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüčŗ ą║ą░ą┤čĆą░ (frame syncs, ą▓ ąĄą┤ąĖąĮąĖčåą░čģ čéą░ą╣ą╝ąĄčĆą░), čéą░ą║ čćč鹊 ą▓čüąĄ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüčŗ ą║ą░ą┤čĆą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ PPI ąĖ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüąŠą▓ ą║ą░ą┤čĆą░. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ąĮąĖąČąĄ ą▓čĆąĄąĘą║čā "ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą▓ GP-čĆąĄąČąĖą╝ą░čģ".
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ, PPI status register (PPI_STATUS) čüąŠą┤ąĄčƹȹĖčé ą▒ąĖčéčŗ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠčé č鹥ą║čāčēąĄą╝ čĆą░ą▒ąŠč湥ą╝ čüąŠčüč鹊čÅąĮąĖąĖ PPI.
ą¤čĆąĖ čćč鹥ąĮąĖąĖ ąŠčćąĖčēą░ąĄčéčüčÅ ą▓ąĄčüčī čĆąĄą│ąĖčüčéčĆ (čŹč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ "sticky" ą▒ąĖčéčŗ), čéą░ą║ čćč鹊 čüą╗ąŠą▓ąŠ čüčéą░čéčāčüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī, ą║ą░ą║ąĖąĄ ą▒ąĖčéčŗ ą▒čŗą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ.
ąĀąĖčü. 11-2. PPI Status Register (PPI_STATUS).
ERR_DET (sticky). ąŁč鹊čé ą▒ąĖčé ąŠą▒ąŠąĘąĮą░čćą░ąĄčé, ą▒čŗą╗ą░ ąĖą╗ąĖ ąĮąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąŠčłąĖą▒ą║ą░ ą▓ ą┐čĆąĄą░ą╝ą▒čāą╗ąĄ čüą╗ąŠą▓ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ITU-R 656. ą×ąĮ ą┤ąŠčüč鹊ą▓ąĄčĆąĄąĮ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ą░čģ ITU-R 656. ąĢčüą╗ąĖ ERR_DET = 1, č鹊 ą▓ ą┐čĆąĄą░ą╝ą▒čāą╗ąĄ ą▒čŗą╗ą░ ąŠą▒ąĮą░čĆčāąČąĄąĮą░ ąŠčłąĖą▒ą║ą░, ąĄčüą╗ąĖ ERR_DET = 0, č鹊 ą▓ ą┐čĆąĄą░ą╝ą▒čāą╗ąĄ ąŠčłąĖą▒ą║ąĖ ąĮąĄ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ.
ERR_NCOR (sticky). ąŁč鹊čé ą▒ąĖčé čéą░ą║ąČąĄ ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ čĆąĄąČąĖą╝ą░ą╝ ITU-R 656. ąĢčüą╗ąĖ ERR_NCOR = 0 ąĖ ERR_DET = 1, č鹊 ą▓čüąĄ ąŠčłąĖą▒ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮčŗ ą▓ ą┐čĆąĄą░ą╝ą▒čāą╗ąĄ, ą▒čŗą╗ąĖ čüą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░ąĮčŗ. ąĢčüą╗ąĖ ERR_NCOR = 1, č鹊 ą▒čŗą╗ą░ ąŠą▒ąĮą░čĆčāąČąĄąĮą░ ąŠčłąĖą▒ą║ą░ ą▓ ą┐čĆąĄą░ą╝ą▒čāą╗ąĄ, ąĮąŠ ąŠąĮą░ ąĮąĄ ą▒čŗą╗ą░ čüą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░ąĮą░. ąŁčéą░ čüąĖčéčāą░čåąĖčÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ PPI, ąĄčüą╗ąĖ čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▒ąĖčéą░ą╝ąĖ čĆąĄą│ąĖčüčéčĆą░ SIC_IMASKx.
FT_ERR (sticky). ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ čéčĆąĄą║ąĖąĮą│ą░ ą║ą░ą┤čĆą░ (frame track error). ąŁč鹊čé ą▒ąĖčé ą┤ąŠčüč鹊ą▓ąĄčĆąĄąĮ č鹊ą╗čīą║ąŠ ą▓ RX-čĆąĄąČąĖą╝ą░čģ. ąÆ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║ ą▓ ą║ą░ą┤čĆąĄ čĆąĄą│ąĖčüčéčĆą░ PPI_FRAME ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüąŠčüč鹊čÅąĮąĖčÄ ąĮą░čćą░ą╗ą░ ą║ą░ą┤čĆą░ (frame start detect, čüą╝. ąĮąĖąČąĄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą▓ ą┐čĆąĖą╝ąĄčćą░ąĮąĖčÅčģ ą▓čĆąĄąĘą║ąĖ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ PPI_FRAME). ą×čłąĖą▒ą║ą░ čéčĆąĄą║ąĖąĮą│ą░ čäčĆąĄą╣ą╝ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ PPI, ąĄčüą╗ąĖ čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▒ąĖčéą░ą╝ąĖ čĆąĄą│ąĖčüčéčĆą░ SIC_IMASKx.
FLD . ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĖą╗ąĖ ąŠčćąĖčēą░ąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ F (ą▓ čĆąĄąČąĖą╝ą░čģ ITU-R 656) ąĖą╗ąĖ PPI_FS3 (ą▓ ą┤čĆčāą│ąĖčģ RX-čĆąĄąČąĖą╝ą░čģ). ąæąĖčé ą┤ąŠčüč鹊ą▓ąĄčĆąĄąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čĆąĄąČąĖą╝ąŠą▓ ą▓ą▓ąŠą┤ą░ (RX). ąĪąŠčüč鹊čÅąĮąĖąĄ FLD ąŠčéčĆą░ąČą░ąĄčé č鹥ą║čāčēąĖą╣ ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ąŠą▓ F ąĖą╗ąĖ PPI_FS3. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą▒ąĖčé FLD ą▓čüąĄą│ą┤ą░ ąŠčéčĆą░ąČą░ąĄčé č鹥ą║čāčēąĄąĄ ą┐ąŠą╗ąĄ ą▓ąĖą┤ąĄąŠ, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝ąŠąĄ PPI.
OVR (sticky). ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 PPI FIFO ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮ ąĖ ąĮąĄ ą╝ąŠąČąĄčé ą▒ąŠą╗čīčłąĄ ą┐čĆąĖąĮčÅčéčī ą┤ą░ąĮąĮčŗąĄ. ą×čłąĖą▒ą║ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ FIFO ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ PPI, ąĄčüą╗ąĖ čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▒ąĖčéą░ą╝ąĖ čĆąĄą│ąĖčüčéčĆą░ SIC_IMASKx.
PPI FIFO ąĖą╝ąĄąĄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 16 ą▒ąĖčé ąĖ ą│ą╗čāą▒ąĖąĮčā 16 菹╗ąĄą╝ąĄąĮč鹊ą▓.
UNDR (sticky). ąÜąŠą│ą┤ą░ UNDR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą▓ PPI FIFO ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ (underrun, ąĮąĄčģą▓ą░čéą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░). ą×čłąĖą▒ą║ą░ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ FIFO ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ PPI, ąĄčüą╗ąĖ čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▒ąĖčéą░ą╝ąĖ čĆąĄą│ąĖčüčéčĆą░ SIC_IMASKx.
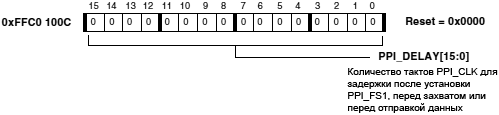
ąĀąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ąĘą░ą┤ąĄčƹȹ║ąĖ, PPI delay count register (PPI_DELAY) ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ąŠ ą▓čüąĄčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ, ą║čĆąŠą╝ąĄ čĆąĄąČąĖą╝ąŠą▓ ITU-R 656 ąĖ GP čü ąĮčāą╗ąĄą▓čŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüąŠą▓ ą║ą░ą┤čĆą░ (0 frame syncs). ąĀąĄą│ąĖčüčéčĆ čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓ PPI_CLK ą┤ą╗čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ PPI_FS1 ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąĮą░čćą░čéčī čćąĖčéą░čéčī ą▓ą▓ąŠą┤ąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą▓čŗą▓ąŠą┤ąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ąĀąĖčü. 11-3. Delay Count Register (PPI_DELAY).
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą▓ TX čĆąĄąČąĖą╝ą░čģ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčü ą║ą░ą┤čĆą░ (frame sync), ąĖą╝ąĄąĄčéčüčÅ ąŠą┤ąĖąĮ čåąĖą║ą╗ ąĘą░ą┤ąĄčƹȹ║ąĖ, čāą║ą░ąĘą░ąĮąĮčŗą╣ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ PPI_DELAY.
ąĪč湥čéčćąĖą║ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ, PPI transfer count register (PPI_COUNT), ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ č鹥čģ čüą╗čāčćą░čÅčģ, ą│ą┤ąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ ą┐ąŠą▓č鹊čĆčÅčÄčēąĖąĄčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüčŗ ą║ą░ą┤čĆą░ (frame syncs, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗąĄ ą▓ąĮčāčéčĆąĖ ąĖą╗ąĖ ą┐ąŠą┤ą░ą▓ą░ąĄą╝čŗąĄ čüąĮą░čĆčāąČąĖ). ąŁč鹊 ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ą░čģ ITU-R 656 ąĖą╗ąĖ čĆąĄąČąĖą╝ą░čģ čü ąĮčāą╗ąĄą▓čŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüąŠą▓ ą║ą░ą┤čĆą░ (0 frame syncs). ąöą╗čÅ čĆąĄąČąĖą╝ąŠą▓ RX čŹč鹊čé čĆąĄą│ąĖčüčéčĆ čģčĆą░ąĮąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ ą║ąŠč鹊čĆčŗąĄ čćąĖčéą░čÄčéčüčÅ ą▓ PPI ąĮą░ ąŠą┤ąĮčā čüčéčĆąŠą║čā ą╝ąĖąĮčāčü 1. ąöą╗čÅ čĆąĄąČąĖą╝ąŠą▓ TX čĆąĄą│ąĖčüčéčĆ čģčĆą░ąĮąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąĖą╝čŗčģ č湥čĆąĄąĘ PPI ą▓čŗą▒ąŠčĆąŠą║ ąĮą░ čüčéčĆąŠą║čā ą╝ąĖąĮčāčü 1. ąÆ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ čĆąĄą│ąĖčüčéčĆ ąĮąĄ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü ą║ą░ąČą┤ąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ ąĮą░čćą░ą╗ąĄ ąĮąŠą▓ąŠą╣ čüčéčĆąŠą║ąĖ ą┤ą░ąĮąĮčŗčģ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ 100 ą▓čŗą▒ąŠčĆąŠą║ č湥čĆąĄąĘ PPI čāčüčéą░ąĮąŠą▓ąĖč鹥 PPI_COUNT ą▓ ąĘąĮą░č湥ąĮąĖąĄ 99.
ą¤ąŠąĘą░ą▒ąŠčéčīč鹥čüčī ąŠ č鹊ą╝, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą▓ PPI_COUNT, ą▒čŗą╗ąŠ čüąŠą│ą╗ą░čüąŠą▓ą░ąĮąŠ čü ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą▓čŗą▒ąŠčĆąŠą║, ąŠąČąĖą┤ą░ąĄą╝ąŠą╝ ąĮą░ "ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╝" ąĖąĮč鹥čĆą▓ą░ą╗ąĄ, ąĘą░ą┤ą░ąĮąĮąŠą╝ PPI_FS1.
ąĀąĖčü. 11-4. Transfer Count Register (PPI_COUNT).
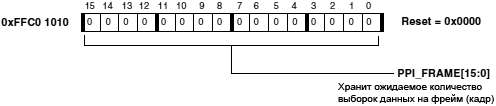
ąĀąĄą│ąĖčüčéčĆ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüčéčĆąŠą║ ą▓ ą║ą░ą┤čĆąĄ lines per frame (PPI_FRAME) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąŠ ą▓čüąĄčģ čĆąĄąČąĖą╝ą░čģ TX ąĖ RX čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą║ą░ą┤čĆą░ (frame syncs). ąöą╗čÅ čĆąĄąČąĖą╝ąŠą▓ ITU-R 656 čŹč鹊čé čĆąĄą│ąĖčüčéčĆ čģčĆą░ąĮąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║, ąŠąČąĖą┤ą░ąĄą╝čŗčģ ąĮą░ ą║ą░ąČą┤čŗą╣ ą║ą░ą┤čĆ (frame) ą┤ą░ąĮąĮčŗčģ, ą│ą┤ąĄ ą║ą░ą┤čĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą║ą░ą║ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ Field 1 ąĖ Field 2, ąŠą▒ąŠąĘąĮą░čćą░ąĄą╝čŗčģ ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą╝ F ą▓ ą┐ąŠč鹊ą║ąĄ ITU-R. ąŚą┤ąĄčüčī čüčéčĆąŠą║ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ ą┐ąŠą╗ąĮčŗą╣ čåąĖą║ą╗ ITU-R 656 SAV-EAV.
ąĀąĖčü. 11-5. Lines Per Frame Register (PPI_FRAME).
ąöą╗čÅ ąĮąĄ-ITU-R 656 čĆąĄąČąĖą╝ąŠą▓ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ frame sync, ą║ą░ą┤čĆ (frame) ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ, ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗąĄ ą╝ąĄąČą┤čā čāčüčéą░ąĮąŠą▓ą║ą░ą╝ąĖ PPI_FS2, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ PPI_FS3. ąĪčéčĆąŠą║ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ ą┐ąŠą╗ąĮčŗą╣ čåąĖą║ą╗ PPI_FS1. ąÆ čŹčéąĖčģ čĆąĄąČąĖą╝ą░čģ PPI_FS3 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą│ąŠ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (frame start) ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ PPI. ą×ąĮ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╝ ą┐ąŠą╗ąĄ ąĖ čäčĆąĄą╣ą╝ąĄ, ąĖ ąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖąĄ (ą╗ąŠą│. 1 ąĖą╗ąĖ ą╗ąŠą│. 0) ąĮąĄ ą▓ą░ąČąĮąŠ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ąĮą░čćą░ą╗ą░ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░.
ąĢčüą╗ąĖ ąĮą░čćą░ą╗ąŠ ąĮąŠą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ (ąĖą╗ąĖ ą┐ąŠą╗čÅ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ ITU-R 656) ą▒čŗą╗ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓ PPI_FRAME ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ čéčĆąĄą║ąĖąĮą│ą░ ą║ą░ą┤čĆą░ (frame track error), ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé FT_ERR ą▓ čĆąĄą│ąĖčüčéčĆąĄ PPI_STATUS. ą×ą┤ąĮą░ą║ąŠ PPI ą▓čüąĄ ąĄčēąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤čüč湥čéą░ ąĘąĮą░č湥ąĮąĖčÅ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ PPI_FRAME, ąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčüčÅ.
ąÆ čĆąĄąČąĖą╝ą░čģ ITU-R 656 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░čćą░ą╗ą░ ą║ą░ą┤čĆą░ (frame start) ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮą░ čüą┐ą░ą┤ąĄ F, ąĖąĮą┤ąĖą║ą░č鹊čĆą░ ą┐ąŠą╗čÅ. ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ąĮą░čćą░ą╗ąĄ ą┐ąŠą╗čÅ Field 1.
ąÆ čĆąĄąČąĖą╝ąĄ RX čü čéčĆąĄą╝čÅ ą▓ąĮąĄčłąĮąĖą╝ąĖ frame sync ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (frame start) čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüąŠčüč鹊čÅąĮąĖčÄ, ą│ą┤ąĄ ąĘą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ PPI_FS2 čüą╗ąĄą┤čāąĄčé čāčüčéą░ąĮąŠą▓ą║ą░ PPI_FS1, ą║ąŠą│ą┤ą░ PPI_FS3 ą▓ ą╗ąŠą│. 0. ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ąĮą░čćą░ą╗ąĄ ą┐ąŠą╗čÅ Field 1.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 PPI_FS3 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ą╗ąŠą│. 0 č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ PPI_FS1, ąĮąŠ ąĮąĄ ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ PPI_FS2. ąóą░ą║ąČąĄ PPI_FS3 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĮą░čćą░ą╗ą░ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĄąĮ PPI. ąÆą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čŹč鹊 ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ.
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ RX čü čéčĆąĄą╝čÅ ą▓ąĮąĄčłąĮąĖą╝ąĖ frame sync, ąĖ ąĮčāąČąĮąŠ č鹊ą╗čīą║ąŠ 2 čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 PPI ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čéčĆąĄą╝čÅ frame sync, ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą▓ąĮąĄčłąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ ą║ ą╗ąŠą│. 0 čĆąĄąĘąĖčüč鹊čĆ (pull-down GND) ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ PPI_FS3.
[ąĀąĄąČąĖą╝čŗ ITU-R 656 ]
PPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 3 čĆąĄąČąĖą╝ą░ ą▓ą▓ąŠą┤ą░ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ čäčĆąĄą╣ą╝ąŠą▓ (ą║ą░ą┤čĆąŠą▓) ITU-R 656, ą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ. ąźąŠčéčÅ PPI ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čÅą▓ąĮąŠ čĆąĄąČąĖą╝ ą▓čŗą▓ąŠą┤ą░ ITU-R 656, ąĘą┤ąĄčüčī čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ PPI ą┐čĆąĖ ą▓čŗą▓ąŠą┤ąĄ čäčĆąĄą╣ą╝ąŠą▓ ITU-R 656.
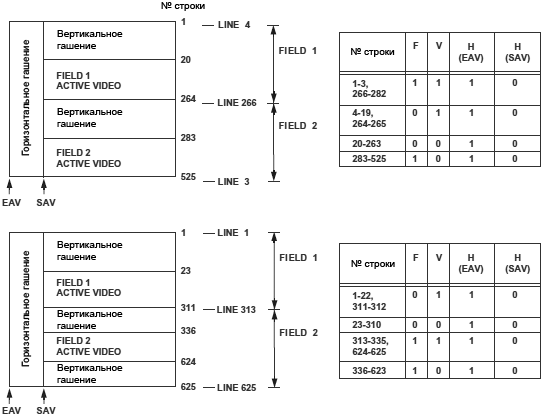
ą¦č鹊 čéą░ą║ąŠąĄ ITU-R 656. ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅą╝ąĖ ITU-R 656 (čĆą░ąĮąĄąĄ ąĖąĘą▓ąĄčüčéąĮčŗą╝ąĖ ą║ą░ą║ CCIR-656), ą┐ąŠč鹊ą║ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą▓ąĖą┤ąĄąŠ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ąĮą░ čĆąĖčü. 11-6 ąĖ čĆąĖčü. 11-7 ą┤ą╗čÅ čüąĖčüč鹥ą╝ 525/60 (NTSC) ąĖ 625/50 (PAL). ą¤čĆąŠčåąĄčüčüąŠčĆ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ ą▒ąĖčé ITU-R 656. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ 8-ą╝ąĖ ąĖ 10-čéąĖ ą▒ąĖčéąĮčŗąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą▓ąĖą┤ąĄąŠ.
ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüąĖą│ąĮą░ą╗čŗ čüčéčĆąŠą║ (horizontal, H), ą║ą░ą┤čĆąŠą▓ (vertical, V) ąĖ ą┐ąŠą╗ąĄą╣ (field, F) ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą║ą░ą║ ą▓čüčéčĆąŠąĄąĮąĮą░čÅ čćą░čüčéčī ą┐ąŠč鹊ą║ą░ ą▓ąĖą┤ąĄąŠą┤ą░ąĮąĮčŗčģ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▒ą░ą╣čé, č乊čĆą╝ąĖčĆčāčÄčēąĖčģ čüą╗ąŠą▓ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control word). ąĪąĖą│ąĮą░ą╗čŗ ąĮą░čćą░ą╗ą░ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ (start active video, SAV) ąĖ ąĄą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ (end active video, EAV) ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮą░čćą░ą╗ąŠ ąĖ ąŠą║ąŠąĮčćą░ąĮąĖąĄ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą▓ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąĄ. SAV ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ 1 -> 0 čüąĖą│ąĮą░ą╗ą░ H, ąĖ EAV ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐čĆąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ 0 -> 1 čüąĖą│ąĮą░ą╗ą░ H. ąÆčüąĄ ą┐ąŠą╗ąĄ ą▓ąĖą┤ąĄąŠ čüąŠčüč鹊ąĖčé ąĖąĘ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ + ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠąĄ ą│ą░čłąĄąĮąĖąĄ (ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą║ąŠą┤ąŠą╝ EAV ąĖ SAV) ąĖ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠąĄ ą│ą░čłąĄąĮąĖąĄ (ąĖąĮč鹥čĆą▓ą░ą╗, ą│ą┤ąĄ V = 1). ą¤ąŠą╗ąĄ ą▓ąĖą┤ąĄąŠ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĮą░ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ ą▒ąĖčéą░ F. ąØąĄč湥čéąĮąŠąĄ ą┐ąŠą╗ąĄ ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ F = 0, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ č湥čéąĮąŠąĄ ą┐ąŠą╗ąĄ ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ F = 1. ąÆąĖą┤ąĄąŠ čü ą┐čĆąŠą│čĆąĄčüčüąĖą▓ąĮąŠą╣ čĆą░ąĘą▓ąĄčĆčéą║ąŠą╣ (progressive video) ąĮąĄ čĆą░ąĘą┤ąĄą╗čÅąĄčé ą┐ąŠą╗čÅ Field 1 ąĖ Field 2, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą▓ąĖą┤ąĄąŠ čü č湥čĆąĄąĘ-čüčéčĆąŠčćąĮąŠą╣ čĆą░ąĘą▓ąĄčĆčéą║ąŠą╣ (interlaced video) čéčĆąĄą▒čāąĄčé čāąĮąĖą║ą░ą╗čīąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą╗čÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą┤ą▓čāčģ ą┐ąŠą╗ąĄą╣ čüąŠąĘą┤ą░ąĄčé čĆąĄą░ą╗čīąĮčŗą╣ ą║ą░ą┤čĆ ą▓ąĖą┤ąĄąŠ.
ąĀąĖčü. 11-6. ITU-R 656 8-Bit Parallel Data Stream ą┤ą╗čÅ čüąĖčüč鹥ą╝ NTSC/PAL.
ąĀąĖčü. 11-7. ąóąĖą┐ąŠą▓ąŠąĄ čĆą░ąĘą┤ąĄą╗ąĄąĮąĖąĄ ą║ą░ą┤čĆą░ ą▓ąĖą┤ąĄąŠ (Video Frame Partitioning) čüąĖčüč鹥ą╝ NTSC/PAL ą┤ą╗čÅ ITU-R BT.656-4.
ąÜąŠą┤čŗ SAV ąĖ EAV ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 11-3. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĘą┤ąĄčüčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą┐čĆąĄą░ą╝ą▒čāą╗ą░ ąĖąĘ čéčĆąĄčģ ą▒ą░ą╣čé (0xFF, 0x00, 0x00), ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé čüą╗ąŠą▓ąŠ čĆąĄą│ąĖčüčéčĆą░ XY, ą║ąŠč鹊čĆąŠąĄ ą║čĆąŠą╝ąĄ ą▒ąĖčé F (field), V (vertical blanking) ąĖ H (horizontal blanking) čüąŠą┤ąĄčƹȹĖčé čéą░ą║ąČąĄ 4 ą▒ąĖčéą░ ąĘą░čēąĖčéčŗ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąŠčłąĖą▒ąŠą║ ą▓ ąŠą┤ąĮąŠą╝ ą▒ąĖč鹥. ąóą░ą║ąČąĄ F ąĖ V ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ ą║ą░ą║ čćą░čüčéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüč鹥ą╣ EAV (čé. ąĄ. ą┐ąĄčĆąĄčģąŠą┤ ąŠčé H = 0 ą║ H = 1). ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▒ąĖčé čüą╗ąĄą┤čāčÄčēąĖąĄ:
ŌĆó F = 0 ą┤ą╗čÅ Field 1
ąóą░ą▒ą╗ąĖčåą░ 11-3. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░ ą┤ą╗čÅ 8-ą▒ąĖčéąĮąŠą│ąŠ ąĖ 10-ą▒ąĖčéąĮąŠą│ąŠ ITU-R 656 Video.
8-ą▒ąĖčéąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ
10-ą▒ąĖčéąĮčŗąĄ
D9
D8
D7
D6
D5
D4
D3
D2
D1
D0
ą¤čĆąĄą░ą╝ą▒čāą╗ą░
1
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
ąæą░ą╣čé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ
1
F
V
H
P3
P2
P1
P0
0
0
ąÆąŠ ą╝ąĮąŠą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ video-ą┐ąŠč鹊ą║ąĖ, ąŠčéą╗ąĖčćą░čÄčēąĖąĄčüčÅ ąŠčé č乊čĆą╝ą░č鹊ą▓ NTSC/PAL (ąĮą░ą┐čĆąĖą╝ąĄčĆ, CIF, QCIF). ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąŠčåąĄčüčüąŠčĆ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą│ąĖą▒ąŠą║, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčī čĆą░ąĘąĮčŗąĄ ą┤ą╗ąĖąĮčŗ čüčéčĆąŠą║ąĖ ąĖ ą┐ąŠą╗čÅ. ąÆ ąŠą▒čēąĄą╝ čüą╗čāčćą░ąĄ, ą┐ąŠą║ą░ ą▓čģąŠą┤čÅčēąĄąĄ ą▓ąĖą┤ąĄąŠ čüąĮą░ą▒ąČąĄąĮąŠ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ąĖ ą║ąŠą┤ą░ą╝ąĖ EAV/SAV, ąĖąĮč鹥čĆč乥ą╣čü PPI ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī ąĄą│ąŠ. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ąŠą▒čĆą░ąĘ CIF ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčéč乊čĆą╝ą░čéąĖčĆąŠą▓ą░ąĮ "656-compliant", ą│ą┤ąĄ ąĘąĮą░č湥ąĮąĖčÅ EAV ąĖ SAV ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą║ą░čĆčéąĖąĮą║ąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąĖ, ąĖ ą║ąŠą┤čŗ V ąĖ F ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čĆą░ąĘą┤ąĄą╗ąĄąĮąĖčÅ ą║ą░ą┤čĆąŠą▓ (frame) ąĖ ą┐ąŠą╗ąĄą╣ (field).
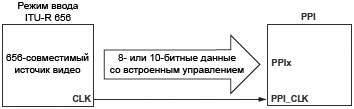
ąĀąĖčü. 11-8 ą▓ ąŠą▒čēąĄą╝ ą▓ąĖą┤ąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄąČąĖą╝ą░čģ ą▓ą▓ąŠą┤ą░ ITU-R 656. ąØą░ čŹč鹊ą╝ čĆąĖčüčāąĮą║ąĄ čéą░ą║čéčŗ CLK ą╗ąĖą▒ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą▓ąĖą┤ąĄąŠ, ą╗ąĖą▒ąŠ ą┐ąŠą┤ą░čÄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣ čüąĮą░čĆčāąČąĖ.
ąĀąĖčü. 11-8. ąĀąĄąČąĖą╝čŗ ą▓ą▓ąŠą┤ą░ ITU-R 656.
ąĢčüčéčī 3 ą┐ąŠą┤-čĆąĄąČąĖą╝ą░, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ITU-R 656: entire field, active video only ąĖ vertical blanking interval only. ąØą░ čĆąĖčü. 11-9 ą┐ąŠą║ą░ąĘą░ąĮčŗ čŹčéąĖ čéčĆąĖ ą┐ąŠą┤čĆąĄąČąĖą╝ą░.
ąĀąĖčü. 11-9. ITU-R 656 Input Sub-Modes.
Entire Field . ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓ąĄčüčī ą▓čģąŠą┤čÅčēąĖą╣ ą┐ąŠč鹊ą║ ą▒ąĖčé čćąĖčéą░ąĄčéčüčÅ č湥čĆąĄąĘ PPI. ąŁč鹊čé ą┐ąŠč鹊ą║ ą▓ą║ą╗čÄčćą░ąĄčé ą║ą░ą║ ą░ą║čéąĖą▓ąĮąŠąĄ ą▓ąĖą┤ąĄąŠ, čéą░ą║ ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░ ąĖ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čüčéčĆąŠąĄąĮčŗ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą│ąŠ ąĖą╗ąĖ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ. ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čüčéą░čĆčéčāąĄčé čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┤ą╗čÅ Field 1, ąĮąŠ ąĮąĄ ą▓ą║ą╗čÄčćą░ąĄčé ą┐ąĄčĆą▓čŗą╣ ą║ąŠą┤ EAV, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą┐čĆąĖčüą▓ąŠąĄąĮąĖąĄ F = 0.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąĄčĆą▓ą░čÅ čüčéčĆąŠą║ą░, ą┐ąĄčĆąĄą┤ą░ąĮąĮą░čÅ ą▓ ą┐ąŠčüą╗ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ PPI, ą┐čĆąŠą┐čāčüčéąĖčé čüą▓ąŠčÄ ą┐ąĄčĆą▓čāčÄ 4-ą▒ą░ą╣č鹊ą▓čāčÄ ą┐čĆąĄą░ą╝ą▒čāą╗čā. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čüčéčĆąŠą║ąĖ ąĖ ą║ą░ą┤čĆčŗ ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ą▓čüąĄ ąĮąĄą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĮčŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą║ąŠą┤čŗ.
ą×ą┤ąĮąŠ ąĖąĘ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ - ąŠąĮ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ "loopback", čü ą║ąŠč鹊čĆąŠą╣ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą┤ą▓ą░ ą║ą░ą┤čĆą░ ą┤ą░ąĮąĮčŗą╝ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ č湥čĆąĄąĘ PPI ąĖ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ą▓čŗą▓ąĄą┤ąĄąĮčŗ ąĮą░ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą▓ąĖą┤ąĄąŠ. ąÜąŠąĮąĄčćąĮąŠ, čŹč鹊 čéčĆąĄą▒čāąĄčé ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ PPI, ąŠą┤ąĮą░ą║ąŠ čŹč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāą┤ąŠą▒ąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ITU-R 656 ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ą▓ PPI ąĖą╗ąĖ ąĘą░ą┐ąĖčüą░ąĮčŗ ąĖąĘ PPI.
Active Video Only . ąŁč鹊čé čĆąĄąČąĖą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąĖąĮč鹥čĆąĄčüčāąĄčé č鹊ą╗čīą║ąŠ ą░ą║čéąĖą▓ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗čÅ ą▓ąĖą┤ąĄąŠ, ą░ ąĮąĄ ą╗čÄą▒čŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą│ą░čłąĄąĮąĖčÅ. PPI ąĖą│ąĮąŠčĆąĖčĆčāąĄčé (ąĮąĄ čćąĖčéą░ąĄčé ą▓ čüąĄą▒čÅ) ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąĄąČą┤čā EAV ąĖ SAV, ą║ą░ą║ ąĖ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą┐čĆąĖ V = 1. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓ ą┐ą░ą╝čÅčéčī ąĮąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░, ąŠąĮą░ ąŠčéčäąĖą╗čīčéčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ PPI. ą¤ąŠčüą╗ąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąŠ ąĮą░čćą░ą╗čā Field 1, ąĖąĮč鹥čĆč乥ą╣čü PPI ąĖą│ąĮąŠčĆąĖčĆčāąĄčé ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ, ą┐ąŠą║ą░ ąĮąĄ čāą▓ąĖą┤ąĖčé SAV.
ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĘą░ą┤ą░ąĄčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ PPI_FRAME ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║ ą▓ ą║ą░ą┤čĆąĄ (ą░ą║čéąĖą▓ąĮčŗčģ čüčéčĆąŠą║ ą┐ą╗čÄčü ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ).
Vertical Blanking Interval (VBI) Only . ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą░ą║čéąĖą▓ąĮąŠ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ V = 1 ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▒ą░ą╣čéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąŁč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĖčüč鹊čćąĮąĖą║ ą▓ąĖą┤ąĄąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ čüčĆąĄą┤ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ (vertical blanking interval, VBI), ą║ąŠč鹊čĆčŗą╣ ąĖąĮąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ (ąĮą░ą┐čĆąĖą╝ąĄčĆ č鹥ą╗ąĄč鹥ą║čüčéą░). ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅ ITU-R 656 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé č乊čĆą╝ą░čé čŹčéąĖčģ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ ą┐ą░ą║ąĄč鹊ą▓ ą┤ą░ąĮąĮčŗčģ, ąŠą┤ąĮą░ą║ąŠ PPI ąĮąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮ ą┤ąĄą║ąŠą┤ąĄčĆąŠą╝ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čŹčéąĖčģ ą┤ą░ąĮąĮčŗčģ, čŹčéą░ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąöą░ąĮąĮčŗąĄ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čüąŠą▓ą┐ą░ą┤ą░čÄčé čüąŠ čüčéčĆąŠą║ą░ą╝ąĖ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ VBI. ąóą░ą║ąČąĄ ą▓čüąĄą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░. ąÆ čĆąĄą│ąĖčüčéčĆąĄ PPI_FRAME ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĘą░ą┤ą░ąĄčé ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║ ąĮą░ ą║ą░ą┤čĆ (ą░ą║čéąĖą▓ąĮčŗčģ čüčéčĆąŠą║ ą┐ą╗čÄčü čüčéčĆąŠą║ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ).
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 VBI ą┐ąŠą┤ąĄą╗ąĄąĮ ąĮą░ ą┤ą▓ą░ čĆąĄą│ąĖąŠąĮą░ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐ąŠą╗ąĄ. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ PPI ąŠąĮ čüčćąĖčéą░ąĄčé čŹčéąĖ ą┤ą▓ą░ ąŠčéą┤ąĄą╗čīąĮčŗąĄ čĆąĄą│ąĖąŠąĮą░ ą║ą░ą║ ąŠą┤ąĮąŠ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ. ą×ą┤ąĮą░ą║ąŠ ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ąĮą░čćą░ą╗ąĄ Field 1, ą║ąŠč鹊čĆąŠąĄ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮą░čćą░ą╗čā ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ ą│ą░čłąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ čüąĖčüč鹥ą╝ą░čģ 525/60 ąĮą░čćą░ą╗ąŠ Field 1 (F = 0) čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüčéčĆąŠą║ąĄ 4 VBI.
PPI ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čÅą▓ąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą║ą░ą┤čĆąŠą▓ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠč鹊ą║ą░ ITU-R 656 čü ąĮą░ą┤ą╗ąĄąČą░čēąĖą╝ąĖ ą┐čĆąĄą░ą╝ą▒čāą╗ą░ą╝ąĖ ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ ą│ą░čłąĄąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ ą▓ TX-čĆąĄąČąĖą╝ąĄ čü ąĮčāą╗ąĄą▓čŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüąŠą▓ ą║ą░ą┤čĆą░ (0 frame syncs), čŹč鹊 ą╝ąŠąČąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą▓čĆčāčćąĮčāčÄ. ą¤ąŠ čüčāčēąĄčüčéą▓čā čŹč鹊čé čĆąĄąČąĖą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čŗą▓ąŠą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą┐ą░ą╝čÅčéąĖ č湥čĆąĄąĘ PPI. ąöą░ąĮąĮčŗąĄ ąĖ ą║ąŠą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéąĖ, čćč鹊ą▒čŗ ąŠąĮąĖ ą▒čŗą╗ąĖ ą▓čŗą▓ąĄą┤ąĄąĮčŗ ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą▓ąĖą┤ąĄąŠą┐ąŠč鹊ą║. ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüąĖčüč鹥ą╝čŗ 2D DMA čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąŠą┤ąĮą░ čüčéčĆąŠą║ą░ ą│ą░čłąĄąĮąĖčÅ (H + V) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮą░ ą▓ ą▒čāč乥čĆąĄ ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮą░ N čĆą░ąĘ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ DMA, ą║ąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, ą┐ąĄčĆąĄą┤ č鹥ą╝ ą║ą░ą║ ąŠčéą┐čĆą░ą▓ąĖčéčī č湥čĆąĄąĘ DMA ą░ą║čéąĖą▓ąĮąŠąĄ ą▓ąĖą┤ąĄąŠ. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą▓ čüčéą░čéąĖč湥čüą║ąŠą╝ ą▒čāč乥čĆąĄ ą┐ą░ą╝čÅčéąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą▓čüąĄą│ąŠ ą┐ąŠą╗čÅ čåąĄą╗ąĖą║ąŠą╝ (ą▓ą╝ąĄčüč鹥 čü ą║ąŠą┤ą░ą╝ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą│ą░čłąĄąĮąĖčÅ), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čüąĖčüč鹥ą╝ą░ DMA ą║ą░ą┤čĆ ąĘą░ ą║ą░ą┤čĆąŠą╝ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčé ą▓ ą▒čāč乥čĆ č鹊ą╗čīą║ąŠ ąŠą▒ą╗ą░čüčéčī ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ.
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą▓ čĆąĄąČąĖą╝ą░čģ ITU-R 656 ą▓čüąĄą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠ čüą┐ą░ą┤čā F, ąĖąĮą┤ąĖą║ą░č鹊čĆą░ ą┐ąŠą╗čÅ. ąŁč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╝ąŠą╝ąĄąĮčéčā ąĮą░čćą░ą╗ą░ Field 1. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ąŠ ą┤ą▓čāčģ ą┐ąŠą╗ąĄą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ Field 1 č鹊ą╗čīą║ąŠ čćč鹊 ąĮą░čćą░ą╗ąŠčüčī ą┐ąĄčĆąĄą┤ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą║ą░ąĮą░ą╗ą░ ą╝ąĄąČą┤čā PPI ąĖ ą║ą░ą╝ąĄčĆąŠą╣) ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ ą▓ PPI.
ą¤ąŠčüą║ąŠą╗čīą║čā ą▓ čĆąĄąČąĖą╝ą░čģ ITU-R 656 ą▓čüčÅ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ H ąĖ V ą▓čüčéčĆąŠąĄąĮą░ ą▓ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ, čĆąĄą│ąĖčüčéčĆ PPI_COUNT ąĮąĄ ąĮčāąČąĄąĮ. ą×ą┤ąĮą░ą║ąŠ čĆąĄą│ąĖčüčéčĆ PPI_FRAME ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ ąŠčłąĖą▒ą║ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čüčéčĆąŠą║, ąŠąČąĖą┤ą░ąĄą╝čŗčģ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą║ą░ą┤čĆąĄ ą▓ąĖą┤ąĄąŠ, ąĖ PPI ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄčģąŠą┤ąŠą▓ EAV -> SAV, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąĖ ąŠčé ąĮą░čćą░ą╗ą░ ą║ą░ą┤čĆą░ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ąŠąĮąĄčå ą║ą░ą┤čĆą░ (ą┐ąĄčĆąĄčģąŠą┤ ąŠčé F = 1 ą║ F = 0). ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé čĆąĄą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗčģ čüčéčĆąŠą║ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ąĘąĮą░č湥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ PPI_FRAME. ąĢčüą╗ąĖ ąŠąĮąĖ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé FT_ERR ą▓ čĆąĄą│ąĖčüčéčĆąĄ PPI_STATUS. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐čĆąŠą┐čāčēąĄąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ SAV, č鹊 č鹥ą║čāčēąĄąĄ ą┐ąŠą╗ąĄ ą▒čāą┤ąĄčé ąĖą╝ąĄčéčī NUM_ROWS ŌĆō 1 čüčéčĆąŠą║, ąŠą┤ąĮą░ą║ąŠ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĘą░ąĮąŠą▓ąŠ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓ ąĮą░čćą░ą╗ąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą║ą░ą┤čĆą░.
ą¤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐čĆąĖąĄą╝ą░ ą▓čüąĄą│ąŠ ą┐ąŠą╗čÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PPI_STATUS ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčüčÅ ą▒ąĖčé ą┐ąŠą╗čÅ F. ą¤ąŠ čŹč鹊ą╝čā ą▒ąĖčéčā ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt service routine, ISR) ą╝ąŠąČąĄčé ąŠčéą╗ąĖčćąĖčéčī, ą║ą░ą║ąŠąĄ ą┐ąŠą╗ąĄ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ čćč鹊 ą┐čĆąŠčćąĖčéą░ąĮąŠ.
[GP-čĆąĄąČąĖą╝čŗ PPI ]
ąĀąĄąČąĖą╝čŗ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (general-purpose, GP) PPI ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ čüą░ą╝ąŠą│ąŠ čłąĖčĆąŠą║ąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĘą░čģą▓ą░čéą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 11-4 čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ čŹčéąĖ čĆąĄąČąĖą╝čŗ. ąĢčüą╗ąĖ ą┤ą╗čÅ ą║ą░ą║ąŠą│ąŠ-č鹊 čĆąĄąČąĖą╝ą░ ą┐ąŠą║ą░ąĘą░ąĮąŠ, čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ PPI_FSx frame sync ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, č鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ čüą▓ąŠąĄą╣ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠą╣, ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ čäčāąĮą║čåąĖąĖ (čé. ąĄ. ą║ą░ą║ ą▓čŗą▓ąŠą┤ čéą░ą╣ą╝ąĄčĆą░ ąĖą╗ąĖ ą║ą░ą║ ą▓čŗą▓ąŠą┤ čäą╗ą░ą│ą░, čé. ąĄ. ą║ą░ą║ ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ GPIO). ąśčüą║ą╗čÄč湥ąĮąĖąĄ ąĖčģ čŹč鹊ą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░ - ą║ąŠą│ą┤ą░ PPI čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┤ą▓čāčģ čüąĖąĮčģčĆąŠčüąĖą│ąĮą░ą╗ąŠą▓ ą║ą░ą┤čĆą░ (2-frame-sync mode), PPI_FS3 ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ąĮąŠąČą║ą░ čäą╗ą░ą│ą░ GPIO, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ąŠąĮą░ čĆąĄą░ą╗čīąĮąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ PPI.
ąóą░ą▒ą╗ąĖčåą░ 11-4. ąĀąĄąČąĖą╝čŗ PPI ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ.
ąĀąĄąČąĖą╝ PPI ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ
RX, 0 frame sync, external trigger
ąÆčģąŠą┤
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
ąÆčģąŠą┤
RX, 0 frame sync, internal trigger
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
RX, 1 external frame sync
ąÆčģąŠą┤
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
RX, 2 ąĖą╗ąĖ 3 external frame sync
ąÆčģąŠą┤
RX, 2 ąĖą╗ąĖ 3 internal frame sync
ąÆčŗčģąŠą┤
TX, 0 frame sync
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
ąÆčŗčģąŠą┤
TX, 1 external frame sync
ąÆčģąŠą┤
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
TX, 2 external frame sync
ąÆčģąŠą┤
ąÆčŗčģąŠą┤
TX, 1 internal frame sync
ąÆčŗčģąŠą┤
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
TX, 2 ąĖą╗ąĖ 3 internal frame sync
ąÆčŗčģąŠą┤
ąĀąĖčü. 11-10 ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé ąŠą▒čēąĖą╣ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ GP-čĆąĄąČąĖą╝ąŠą▓. ąÆąĄčĆčģąĮčÅčÅ čćą░čüčéčī ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ RX-čĆąĄąČąĖą╝ą░ čü 1 ą▓ąĮąĄčłąĮąĖą╝ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüąŠą╝ ą║ą░ą┤čĆą░ (external frame sync). ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ PPI ą┐čĆąĖą╝ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü frame sync (PPI_FS1), ąŠąĮ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ąĘą░ą┤ąĄčƹȹ║čā PPI_CLK čéą░ą║č鹊ą▓, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą▓ čĆąĄą│ąĖčüčéčĆ PPI_DELAY. ąŚą░č鹥ą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA ą┐ąĄčĆąĄą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║, ąĘą░ą┤ą░ąĮąĮąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą╝ PPI_COUNT. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ ą║ą░ąČą┤ą░čÅ ą▓čŗą▒ąŠčĆą║ą░, ąĮąŠ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┐ąŠčüčéčāą┐ąĖčé čüą╗ąĄą┤čāčÄčēąĖą╣ PPI_FS1, ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ ąĖ ąĮąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ DMA.
ąĢčüą╗ąĖ čüą╗ąĄą┤čāčÄčēąĖą╣ PPI_FS1 frame sync ą┐ąŠčüčéčāą┐ąĖčé ą┐ąĄčĆąĄą┤ čāą║ą░ąĘą░ąĮąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą▓ą▓ąĄą┤ąĄąĮąĮčŗčģ ą▓čŗą▒ąŠčĆąŠą║ PPI_COUNT, čüč湥čéčćąĖą║ ą▓čŗą▒ąŠčĆąŠą║ ąĘą░ąĮąŠą▓ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ą▓ 0, ąĖ čüąĮąŠą▓ą░ ąĮą░čćąĖčéą░ąĄčé čüčćąĖčéą░čéčī ą▓ą▓ąĄčĆčģ ą┤ąŠ PPI_COUNT. ąŁčéą░ čüąĖčéčāą░čåąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠč鹥čĆąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ DMA ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ PPI.
ąĀąĖčü. 11-10. ą¤ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ GP-čĆąĄąČąĖą╝ąŠą▓ (ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮą░čÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī PPI_FS1).
ąØą░ ąĮąĖąČąĮąĄą╣ čćą░čüčéąĖ čĆąĖčüčāąĮą║ą░ 11-10 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ čĆąĄąČąĖą╝ą░ TX, ą│ą┤ąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąŠą┤ąĖąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ frame sync. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ PPI_FS1, ąĄčüčéčī ąĘą░ą┤ąĄčƹȹ║ą░ ą▓ 1 čéą░ą║čé PPI_CLK, ąĖ ąĘą░č鹥ą╝ ą▓čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┤ąĄčƹȹ║ą░ PPI_CLK čéą░ą║č鹊ą▓, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠč鹊čĆčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PPI_DELAY. ąöą░ą╗ąĄąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA ą▓čŗą▓ąŠą┤ąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║, ąĘą░ą┤ą░ąĮąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PPI_COUNT. ąöą░ą╗čīąĮąĄą╣čłąĖąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ DMA ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤čÅčé, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╣ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčü PPI_FS1 ąĖ ąĮąĄ ą┐čĆąŠą╣ą┤ąĄčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░.
ąĢčüą╗ąĖ čüą╗ąĄą┤čāčÄčēąĖą╣ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčü PPI_FS1 ą┐ąŠčüčéčāą┐ąĖčé ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮąŠ ąĘą░ą┤ą░ąĮąĮąŠąĄ PPI_COUNT ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║, č鹊 čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčü ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé, ąĖ ąĘą░ą┐čāčüčéąĖčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąŠą▓ąŠą╣ čüčéčĆąŠą║ąĖ. ąŁčéą░ čüąĖčéčāą░čåąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░ąĮą░ą╗ą░ DMA ą┐ąŠč鹥čĆčÅąĄčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čü ą┐čĆąŠčåąĄčüčüąŠą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ PPI.
PPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆąĄąČąĖą╝ąŠą▓ ą▓ą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ. ąŁčéąĖ čĆąĄąČąĖą╝čŗ ąŠčéą╗ąĖčćą░čÄčéčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ čäčĆąĄą╣ą╝čŗ. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ čéą░ą▒ą╗ąĖčåąĄ 11-2 ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī PPI ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čĆąĄąČąĖą╝ą░.
No Frame Syncs . ąŁčéąĖ čĆąĄąČąĖą╝čŗ ą┐ąŠą║čĆčŗą▓ą░čÄčé ąĮą░ą▒ąŠčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüčŗ čäčĆąĄą╣ą╝ą░ (frame sync) ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ą┤ą╗čÅ čäčĆąĄą╣ą╝ą░ ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ. ąĢčüčéčī ą┤ą▓ąĄ ąŠą┐čåąĖąĖ ąĮą░čćą░ą╗ą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąŠą▒ąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ čĆąĄą│ąĖčüčéčĆąŠą╝ PPI_CONTROL.
ŌĆó External trigger: ą▓ąĮąĄčłąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé ąŠą┤ąĖąĮ frame sync (ąĮą░ ą▓čŗą▓ąŠą┤ PPI_FS1) ą▓ ąĮą░čćą░ą╗ąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą║ąŠą│ą┤ą░ FLD_SEL=0 ąĖ PORT_CFG=b#11.
ąÆčüąĄ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ ąĮą░ą┤ ą┤ą░ąĮąĮčŗą╝ąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčéčüčÅ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ DMA. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮąŠ č湥čĆąĄą┤ąŠą▓ą░ąĮąĖąĄ ą╝ąĄąČą┤čā ą▒čāč乥čĆą░ą╝ąĖ ą▓ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ 1 ą║ąĖą╗ąŠą▒ą░ą╣čéčā. ąÜąŠą│ą┤ą░ ąŠą┤ąĖąĮ ą▒čāč乥čĆ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ, DMA ą┐čĆąŠą┤ąŠą╗ąČąĖčé ąĘą░ą┐ąŠą╗ąĮčÅčéčī ą▓č鹊čĆąŠą╣ ą▒čāč乥čĆ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ DMA ąŠčćąĖčēą░ąĄčé ą┐ąĄčĆą▓čŗą╣ ą▒čāč乥čĆ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
ąśąĘ-ąĘą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤ąŠą╝ąĄąĮą░ čéą░ą║č鹊ą▓ čĆąĄąČąĖą╝ąŠą▓ RX ą▒ąĄąĘ frame sync ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┤ąĄčƹȹ║ą░ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2 čéą░ą║čéą░ PPI_CLK, ą║ąŠą│ą┤ą░ čŹč鹊čé čĆąĄąČąĖą╝ čĆą░ąĘčĆąĄčłąĄąĮ, ąĖ ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčéčŗ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░čćą░ą╗ą░ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ.
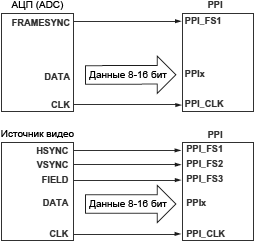
1, 2 ąĖą╗ąĖ 3 External Frame Sync . ąĀąĄąČąĖą╝ 1-sync ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą░ąĮą░ą╗ąŠą│ąŠ-čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ (analog-to-digital converter, ADC). ąÆąĄčĆčģąĮčÅčÅ čćą░čüčéčī čĆąĖčüčāąĮą║ą░ 11-11 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéąĖą┐ąĖčćąĮčāčÄ čüąĖčüč鹥ą╝čā ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░.
ąĀąĖčü. 11-11. RX-čĆąĄąČąĖą╝, ą▓ąĮąĄčłąĮąĖąĄ ąĖą╝ą┐čāą╗čīčüčŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ąĀąĄąČąĖą╝ 3-sync, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ ąĮąĖąČąĮąĄą╣ čćą░čüčéąĖ čĆąĖčü. 11-11, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ąĖą┤ąĄąŠ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÄ (HSYNC, VSYNC, FIELD) ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĄą╣ ITU-R 601. ąØą░ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (frame syncs) ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüą╗ąĄą┤čāčÄčēąĄąĄ: PPI_FS1 = HSYNC, PPI_FS2 = VSYNC, PPI_FS3 = FIELD. ą¤ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ "ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ą▓ GP-čĆąĄąČąĖą╝ą░čģ".
ąØąĄčÅą▓ąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čĆąĄąČąĖą╝ 2-sync, ą┐čāč鹥ą╝ ą┐ąŠą┤čéčÅąČą║ąĖ PPI_FS3 ą║ GND ą▓ąĮąĄčłąĮąĖą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝, ą║ąŠą│ą┤ą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čĆąĄąČąĖą╝ 3-sync.
2 ąĖą╗ąĖ 3 Internal Frame Sync . ąŁč鹊čé čĆąĄąČąĖą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĄąĘąĄąĮ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ąĖčüč鹊čćąĮąĖą║ą░ą╝ ą▓ąĖą┤ąĄąŠ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčé master-ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┐čĆąŠčåąĄčüčüąŠčĆ ą║ąŠąĮčéčĆąŠą╗ąĖčĆčāąĄčé, ą║ąŠą│ą┤ą░ čćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ąĖčüč鹊čćąĮąĖą║ą░ ą▓ąĖą┤ąĄąŠ, ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ PPI_FS1 ąĖ PPI_FS2, ąĖ ąĘą░č鹥ą╝ čćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ PPI. PPI_FS3 frame sync ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮą┤ąĖą║ą░čåąĖčÄ, ą║ą░ą║ąŠąĄ ą┐ąŠą╗ąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé, ąŠą┤ąĮą░ą║ąŠ ą┐ąŠčüą║ąŠą╗čīą║čā PPI_FS3 čŹč鹊 ą▓čŗčģąŠą┤, č鹊 ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ąŠčüčéą░ą▓ąĖčéčī ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝, ąĄčüą╗ąĖ ąŠąĮ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ąØą░ čĆąĖčü. 11-12 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ čéą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ.
ąĀąĖčü. 11-12. RX-čĆąĄąČąĖą╝, ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ąĖą╝ą┐čāą╗čīčüčŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
PPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆąĄąČąĖą╝ąŠą▓ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ. ąŁčéąĖ čĆąĄąČąĖą╝čŗ ąŠčéą╗ąĖčćą░čÄčéčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ čäčĆąĄą╣ą╝čŗ. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ čéą░ą▒ą╗ąĖčåąĄ 11-2 ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī PPI ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čĆąĄąČąĖą╝ą░.
No Frame Sync . ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▒ą╗ąŠą║ąĖ ą┤ą░ąĮąĮčŗčģ, čāą║ą░ąĘą░ąĮąĮčŗąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ DMA, ą▓čŗą▓ąŠą┤čÅčéčüčÅ č湥čĆąĄąĘ PPI ą▒ąĄąĘ ą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ ą║ą░ą┤čĆčŗ (no framing). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą║ą░ąĮą░ą╗ DMA čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĖ čĆą░ąĘčĆąĄčłąĄąĮ, ąĖ PPI čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĖ čĆą░ąĘčĆąĄčłąĄąĮ, ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĮą░čćąĖąĮą░čÄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čü PPI_CLK. ąĪą╝. čĆąĖčü. 11-13, ąĖą╗ą╗čÄčüčéčĆąĖčĆčāčÄčēąĖą╣ čŹč鹊čé čĆąĄąČąĖą╝.
ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĄčüčéčī ąĘą░ą┤ąĄčƹȹ║ą░ ą┤ąŠ 16 čéą░ą║č鹊ą▓ SCLK (ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ čłąĖčĆąĄ 8 ą▒ąĖčé) ąĖą╗ąĖ 32 čéą░ą║čéą░ SCLK (ą┤ą╗čÅ 8-ą▒ąĖčéąĮčŗčģ ą┤ą░ąĮąĮčŗčģ) ą╝ąĄąČą┤čā čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ PPI ąĖ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, DMA ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 16 ą▓čŗą▒ąŠčĆąŠą║ (ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ čłąĖčĆąĄ 8 ą▒ąĖčé) ąĖą╗ąĖ 32 ą▓čŗą▒ąŠčĆąŠą║ (ą┤ą╗čÅ 8-ą▒ąĖčéąĮčŗčģ ą┤ą░ąĮąĮčŗčģ).
ąĀąĖčü. 11-13. TX-čĆąĄąČąĖą╝, ą▒ąĄąĘ ąĖą╝ą┐čāą╗čīčüąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą║ą░ą┤čĆą░ (0 Frame Sync).
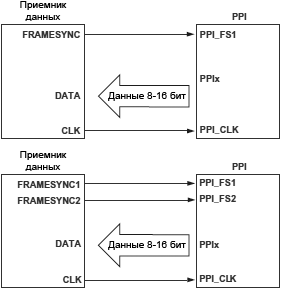
1 ąĖą╗ąĖ 2 External Frame Sync . ąÆ čŹčéąĖčģ čĆąĄąČąĖą╝ą░čģ ą▓ąĮąĄčłąĮąĖą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą║ą░ą┤čĆąĖčĆąŠą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ, ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ PPI. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąŠą▒ą░ čĆąĄąČąĖą╝ą░, 1-sync ąĖ 2-sync. ąÆąĄčĆčģąĮčÅčÅ čćą░čüčéčī čĆąĖčü. 11-14 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüą╗čāčćą░ą╣ čĆąĄąČąĖą╝ą░ 1-sync, ąĮąĖąČąĮčÅčÅ čĆąĄąČąĖą╝ą░ 2-sync.
ąĪčāčēąĄčüčéą▓čāąĄčé ąŠą▒čÅąĘą░č鹥ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ 1.5 čéą░ą║čéą░ PPI_CLK ą┐ą╗čÄčü ąĘąĮą░č湥ąĮąĖąĄ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą▓ PPI_DELAY, ą╝ąĄąČą┤čā čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ frame sync (ąĖą╗ąĖ ą┤ą▓čāčģ čüąĖą│ąĮą░ą╗ąŠą▓ frame sync) ąĖ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ PPI.
ąĀąĖčü. 11-14. TX-čĆąĄąČąĖą╝, 1 ąĖą╗ąĖ 2 ą▓ąĮąĄčłąĮąĖčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą║ą░ą┤čĆą░ (External Frame Sync).
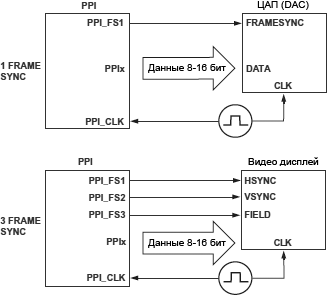
1, 2 ąĖą╗ąĖ 3 Internal Frame Syncs . ąĀąĄąČąĖą╝ 1-sync ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čåąĖčäčĆąŠ-ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗ąĄą╣ (digital-to-analog converter, DAC), ąĮą░ ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą░ąĄčéčüčÅ 1 čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčü. ąÆąĄčĆčģąĮčÅčÅ čćą░čüčéčī čĆąĖčü. 11-15 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ čéą░ą║ąŠą│ąŠ čéąĖą┐ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ.
ąĀąĖčü. 11-15. PPI GP Output.
ąĀąĄąČąĖą╝ 3-sync ą┐ąŠą╗ąĄąĘąĄąĮ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą░ ą┤ąĖčüą┐ą╗ąĄčÅą╝ ą▓ąĖą┤ąĄąŠ ąĖ ą│čĆą░čäąĖą║ąĖ, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ ąĮąĖąČąĮąĄą╣ čćą░čüčéąĖ čĆąĖčü. 11-15. ąØąĄčÅą▓ąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čĆąĄąČąĖą╝ 2-sync, ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ PPI_FS3 ąŠčüčéą░ąĄčéčüčÅ ąĮąĖą║čāą┤ą░ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝.
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ (ą║ą░ą┤čĆą░) ą▓ čĆąĄąČąĖą╝ą░čģ GP čĆą░ą▒ąŠčéą░ąĄčé čĆą░ąĘą╗ąĖčćą░ąĄčéčüčÅ ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ą░ą╝ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüąŠą▓ (internal frame syncs) ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ ą▓ąĮąĄčłąĮąĖčģ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüąŠą▓ (external frame syncs).
ąĀąĄąČąĖą╝čŗ čü ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ . ąÆ čĆąĄąČąĖą╝ą░čģ čü ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ PPI_FS1 ąĖ PPI_FS2 ąĮą░ą┐čĆčÅą╝čāčÄ čüąŠąĄą┤ąĖąĮčÅčÄčéčüčÅ čüąŠ čüčģąĄą╝ą░ą╝ąĖ ą©ąśą£ (pulse-width modulation, PWM) ąĮą░ čéą░ą╣ą╝ąĄčĆąĄ 1 (TIMER1) ąĖ čéą░ą╣ą╝ąĄčĆąĄ 2 (TIMER2) čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ą£ąŠąČąĮąŠ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĖ ą┐ąĄčĆąĖąŠą┤čŗ čŹčéąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ čü ą┐ąŠą╝ąŠčēčīčÄ čüčāčēąĄčüčéą▓čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ TIMERx, čćč鹊 čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčé čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą║ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹčéąĖ čüčģąĄą╝čŗ PWM čéą░ą║čéąĖčĆčāčÄčéčüčÅ ąŠčé PPI_CLK, ąĮąĄ ąŠčé SCLK ąĖą╗ąĖ PF1 (ą║ą░ą║ čŹč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čĆą░ą▒ąŠč鹥 PWM čéą░ą╣ą╝ąĄčĆą░). ąĢčüą╗ąĖ PPI_FS2 ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ PPI, č鹊 čéą░ą╣ą╝ąĄčĆ 2 čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ ąČąĄ, ą║ą░ą║ čŹč鹊 ąŠą▒čŗčćąĮąŠ ą▒čŗą╗ąŠ ą▒čŗ, ą▒ąĄąĘ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░. ąĪąŠčüč鹊čÅąĮąĖąĄ PPI_FS3 ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ PPI_FS1 ąĖ/ąĖą╗ąĖ PPI_FS2, čéą░ą║ čćč鹊 PPI_FS3 ąĮąĄ ąĖą╝ąĄąĄčé ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ą¦č鹊ą▒čŗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī PPI_FS1 ąĖ/ąĖą╗ąĖ PPI_FS2 ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ internal frame sync mode:
1 . ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĖ čĆą░ąĘčĆąĄčłąĖč鹥 DMA ą┤ą╗čÅ PPI. ąĪą╝. ą┤ą░ą╗ąĄąĄ čĆą░ąĘą┤ąĄą╗ "ąĀą░ą▒ąŠčéą░ DMA".2 . ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 čłąĖčĆąĖąĮčā ąĖ ą┐ąĄčĆąĖąŠą┤ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ frame sync ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ TIMER1_WIDTH ąĖ TIMER1_PERIOD (ą┤ą╗čÅ PPI_FS1) ąĖą╗ąĖ TIMER2_WIDTH ąĖ TIMER2_PERIOD (ą┤ą╗čÅ PPI_FS2).3 . ąØą░čüčéčĆąŠą╣č鹥 TIMER1_CONFIG ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ PWM_OUT (ą┤ą╗čÅ PPI_FS1). ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓č鹊čĆąŠą╣ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčü, č鹊 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 TIMER2_CONFIG ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ PWM_OUT (ą┤ą╗čÅ PPI_FS2). ąŁčéąĖ ąŠą┐ąĄčĆą░čåąĖąĖ ą▓ą║ą╗čÄčćą░čÄčé čāčüčéą░ąĮąŠą▓ą║čā CLK_SEL=1 ąĖ TIN_SEL=1 ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░.4 . ąŚą░ą┐ąĖčłąĖč鹥 PPI_CONTROL ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ PPI.5 . ąŚą░ą┐ąĖčłąĖč鹥 TIMER_ENABLE, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čéą░ą╣ą╝ąĄčĆ 1 ąĖ/ąĖą╗ąĖ čéą░ą╣ą╝ąĄčĆ 2.
ąÆą░ąČąĮąŠ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī frame sync ą╝ąĄąČą┤čā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ PPI ąĖ Timer. ąöą╗čÅ čŹč鹊ą│ąŠ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąĄčüą╗ąĖ PPI_CONTROL[15:14] = b#10 ąĖą╗ąĖ b#11, č鹊 PULSE_HI ąŠčćąĖčēą░ąĄčéčüčÅ ą▓ TIMER1_CONFIG ąĖ TIMER2_CONFIG. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ PPI_CONTROL[15:14] = b#00 ąĖą╗ąĖ b#01, č鹊 ą▒ąĖčé PULSE_HI ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ TIMER1_CONFIG ąĖ TIMER2_CONFIG.
ą¦č鹊ą▒čŗ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓ ą┤čĆčāą│ąŠą╣ čĆąĄąČąĖą╝ PPI, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé internal frame syncs:
1 . ąŚą░ą┐čĆąĄčéąĖč鹥 PPI (čü ą┐ąŠą╝ąŠčēčīčÄ PPI_CONTROL).2 . ąŚą░ą┐čĆąĄčéąĖč鹥 čéą░ą╣ą╝ąĄčĆčŗ (čü ą┐ąŠą╝ąŠčēčīčÄ TIMER_DISABLE).
ąĀąĄąČąĖą╝čŗ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ . ąÆ RX-čĆąĄąČąĖą╝ą░čģ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ frame sync ą▓čŗą▓ąŠą┤čŗ PPI_FS1 ąĖ PPI_FS2 čüčéą░ąĮąŠą▓čÅčéčüčÅ ą▓čģąŠą┤ą░ą╝ąĖ, čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗą╝ąĖ ą║ ą┐ąĄčĆąĄą┐ą░ą┤čā. ąÆ čéą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ čéą░ą╣ą╝ąĄčĆčŗ 1 ąĖ 2 ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÄ, ąĮąĄ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčēąĄą╝čā ą▓ąŠą▓ą╗ąĄč湥ąĮąĖąĄ ą▓ čĆą░ą▒ąŠčéčā ą▓čŗą▓ąŠą┤ąŠą▓ TMR1 ąĖ TMR2. ą×ą┤ąĮą░ą║ąŠ ą┤ąŠčüčéčāą┐ čéą░ą╣ą╝ąĄčĆą░ ą║ ą▓čŗą▓ąŠą┤čā TMRx ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ PPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ ą▓ą▓ąŠą┤ą░ PPI_FSx frame sync. ąöą╗čÅ čĆąĄąČąĖą╝ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čéčĆąĄą▒čāčÄčé PPI_FS2, čéą░ą╣ą╝ąĄčĆ 2 ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮ ą▓ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ, ąĖ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ PPI ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ (čé. ąĄ. ą▓čŗą▓ąŠą┤ TMR2 čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┤ąŠčüčéčāą┐ąĮčŗą╝ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čéą░ą╣ą╝ąĄčĆąŠą╝ 2). ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÄ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ čéą░ą╣ą╝ąĄčĆąŠą▓ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ąōą╗ą░ą▓ąĄ 16 "Timers" ą┤ą░čéą░čłąĖčéą░ [1], ąĖą╗ąĖ čüą╝. čüčéą░čéčīčÄ [2].
ąÆ RX-čĆąĄąČąĖą╝ąĄ čü čéčĆąĄą╝čÅ ą▓ąĮąĄčłąĮąĖą╝ąĖ frame sync ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, ą║ąŠą│ą┤ą░ ąĘą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ PPI_FS2 čüą╗ąĄą┤čāąĄčé čāčüčéą░ąĮąŠą▓ą║ą░ PPI_FS1, ąĖ ąĮą░ PPI_FS3 ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąŠą│. 0. ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ąĮą░čćą░ą╗ąĄ Field 1.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 PPI_FS3 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ą╗ąŠą│. 0 č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ PPI_FS1, ą░ ąĮąĄ ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ PPI_FS2. ąóą░ą║ąČąĄ PPI_FS3 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąŠ ąĮą░čćą░ą╗čā čüą░ą╝ąŠą│ąŠ ą┐ąĄčĆą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ PPI čĆą░ąĘčĆąĄčłąĄąĮ. ąÆą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąŠąĮ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ.
ąÆ TX-čĆąĄąČąĖą╝ą░čģ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ frame sync ą▓čŗą▓ąŠą┤čŗ PPI_FS1 ąĖ PPI_FS2 ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤čŗ, čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗąĄ ą║ ą┐ąĄčĆąĄą┐ą░ą┤čā. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čéą░ą╣ą╝ąĄčĆ (čéą░ą╣ą╝ąĄčĆčŗ), čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą┤ą▓čāą╝čÅ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ ą║ą░ą┤čĆą░ (frame sync) ą║ą░ą║ ą▓čģąŠą┤ (ąĖą╗ąĖ ą▓čģąŠą┤čŗ), ąĖą╗ąĖ čĆą░ąĘčĆąĄčłą░čéčī ąĖčģ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ TIMER_ENABLE. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čüą░ą╝ąĖ ą┐ąŠ čüąĄą▒ąĄ čéą░ą╣ą╝ąĄčĆčŗ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ (ą▓čŗą▓ąŠą┤čŗ) čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąĖąĮčÅčéčŗ PPI. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮąĄčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą║ ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą▒ą░ąĘąĄ (ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠą╣ TIN_SEL ą▓ TIMERx_CONFIG) PPI_CLK.
ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą╣ą╝ąĄčĆ, ą▓čŗą▓ąŠą┤ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓ąĮąĄčłąĮąĄą╝čā frame sync, č鹊 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĘą░ą┐čĆąĄčēąĄąĮ ą▒ąĖč鹊ą╝ OUT_DIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMERx_CONFIG. ąóąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ, ąĮąĄ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü PPI, ą▒ąĄąĘ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ čĆą░ą▒ąŠčéčā PPI ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ąōą╗ą░ą▓ąĄ 16 "Timers" ą┤ą░čéą░čłąĖčéą░ [1], ąĖą╗ąĖ čüą╝. čüčéą░čéčīčÄ [2].
[ąĀą░ą▒ąŠčéą░ DMA ]
PPI ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ą╝ąĄčüč鹥 čü čüąĖčüč鹥ą╝ąŠą╣ DMA ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāčÄčé PPI ąĖ DMA. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ DMA, ą▓ą║ą╗čÄčćą░čÅ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ DMA ąĖ ąŠą┐ąĄčĆą░čåąĖą╣ DMA, ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ąōą╗ą░ą▓ąĄ 9 "Direct Memory Access" ą┤ą░čéą░čłąĖčéą░ [1], ąĖą╗ąĖ čüą╝. čüčéą░čéčīčÄ [3].
ąÜą░ąĮą░ą╗ PPI DMA ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░, ąĖ čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą┐čĆąŠą┐čāčüą║ąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ (PPI_CLK) x (16 ą▒ąĖčé/čéčĆą░ąĮąĘą░ą║čåąĖčÅ). ąÆ čĆąĄąČąĖą╝ą░čģ, ą│ą┤ąĄ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ą▒ąŠą╗čīčłąĄ 8 ą▒ąĖčé, č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ čéą░ą║čé PPI_CLK, čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ čüąĮąĖąČąĄąĮąĖčÄ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ (ą┐ąŠčüą║ąŠą╗čīą║čā čāą┐ą░ą║ąŠą▓ą║ą░ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ). ąĪą░ą╝ą░čÅ ą▒ąŠą╗čīčłą░čÅ ą┐ąŠą╗ąŠčüą░ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čü 8-ą▒ąĖčéąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ąĖ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ PACK_EN=1 (čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ čāą┐ą░ą║ąŠą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 16-ą▒ąĖčéąĮčŗą╣ čĆąĄąČąĖą╝ čāą┐ą░ą║ąŠą▓ą║ąĖ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī č湥čéąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┤ą░ąĮąĮčŗčģ.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ PPI DMA - ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ čłą░ą│ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ PPI. ąĪąĖčüč鹥ą╝ą░ DMA ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ čüčéčĆąŠą║ąĖ, čäčĆąĄą╣ą╝ą░ ąĖą╗ąĖ čćą░čüčéąĖ čäčĆąĄą╣ą╝ą░. ąóą░ą║ąČąĄ čüąĖčüč鹥ą╝ą░ DMA ą║ąŠąŠčĆą┤ąĖąĮąĖčĆčāąĄčé ąĖčüč鹊čćąĮąĖą║ ąĖą╗ąĖ ą╝ąĄčüč鹊 ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą╝ąĄčēą░čÄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ PPI.
ążčāąĮą║čåąĖčÅ 2D DMA ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĄą╝čā ą┐ąŠą╗čāčćąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╣ čüčéčĆąŠą║ąĖ ąĖą╗ąĖ čäčĆąĄą╣ą╝ą░ ą▓ąĖą┤ąĄąŠ. ąóą░ą║ąČąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ, ąĄčüą╗ąĖ čüą╗čāčćąĖčéčüčÅ ąŠčłąĖą▒ą║ą░ DMA. ążą░ą║čéąĖč湥čüą║ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ čĆąĄą│ąĖčüčéčĆąŠą▓ MMR DMAx_XCOUNT ąĖ DMAx_YCOUNT ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą│ąĖą▒ą║ąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą╝ąŠą╝ąĄąĮčéą░ą╝ąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąöą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 čĆąĄą│ąĖčüčéčĆčŗ DMA XMODIFY = YMODIFY = 1. ąóąŠą│ą┤ą░ ąĄčüą╗ąĖ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ čüąŠčüč鹊ąĖčé ąĖąĘ 320 x 240 ą▒ą░ą╣čé (240 čüčéčĆąŠą║ ą┐ąŠ 320 ą▒ą░ą╣čé ą▓ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąĄ), č鹊 ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāčéčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ čāčüą╗ąŠą▓ąĖčÅ:
ŌĆó ąŻčüčéą░ąĮąŠą▓ą║ą░ XCOUNT = 320, YCOUNT = 240 ąĖ DI_SEL = 1 (ą▒ąĖčé DI_SEL ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ DMAx_CONFIG) ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąĖ ąĮą░ ą▓čüąĄą╝ čäčĆąĄą╣ą╝ąĄ.
ąÆčŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ąŠčüąĮąŠą▓ąĮčāčÄ ą┐čĆąŠčåąĄą┤čāčĆčā ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆą░ą▒ąŠčéčŗ DMA ą▓ą╝ąĄčüč鹥 čü PPI. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÄ DMA čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "DMA ąĖ čĆąĄą│ąĖčüčéčĆčŗ MMR DMA" čüčéą░čéčīąĖ [3].
1 . ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 čĆąĄą│ąĖčüčéčĆčŗ DMA, ą║ą░ą║ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ ąČąĄą╗ą░ąĄą╝ąŠą│ąŠ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ DMA.2 . ąĀą░ąĘčĆąĄčłąĖč鹥 čĆą░ą▒ąŠčéčā ą║ą░ąĮą░ą╗ą░ DMA.3 . ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ PPI.4 . ąĀą░ąĘčĆąĄčłąĖč鹥 PPI čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ PORT_EN ą▓ čĆąĄą│ąĖčüčéčĆąĄ PPI_CONTROL.
[ąĪčåąĄąĮą░čĆąĖąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ]
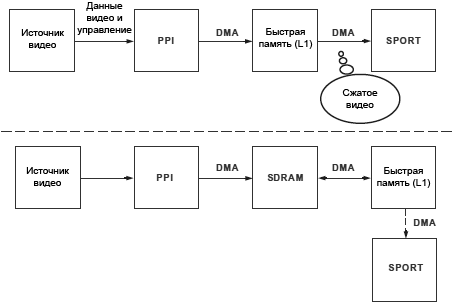
ąĀąĖčü. 11-16 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ą▓ą░ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čüą┐ąŠčüąŠą▒ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ PPI ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ąĖą┤ąĄąŠ. ąŁčéąĖ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą▓ąĄčüčīą╝ą░ ąŠą▒čēąĖąĄ, ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮčŗ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ PPI ąĖ ąĮą░čüčéčĆąŠąĄą║ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĄą┤ą░čćą░ č鹊ą╗čīą║ąŠ Field 1, ą┐ąĄčĆąĄą┤ą░č湥 ąĮąĄč湥čéąĮčŗčģ ąĖ č湥čéąĮčŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓).
ąĀąĖčü. 11-16. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čüčåąĄąĮą░čĆąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖą╣ ą┤ą░ąĮąĮčŗčģ PPI.
ąÆąĄčĆčģąĮčÅčÅ čćą░čüčéčī čĆąĖčü. 11-16 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąĖčéčāą░čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤čģąŠą┤ąĖčé, ą║ ą┐čĆąĖą╝ąĄčĆčā, ą┤ą╗čÅ ą║ąŠą╝ą┐čĆąĄčüčüąĖąĖ JPEG. ą¤ąĄčĆą▓čŗąĄ N čüčéčĆąŠą║ ą▓ąĖą┤ąĄąŠ čü ą┐ąŠą╝ąŠčēčīčÄ DMA ą┐ąŠčüčéčāą┐ą░čÄčé ą▓ ą┐ą░ą╝čÅčéčī L1 č湥čĆąĄąĘ PPI. ąØą░ą┤ ą┤ą░ąĮąĮčŗą╝ąĖ ą▓ ą┐ą░ą╝čÅčéąĖ L1 čĆą░ą▒ąŠčéą░ąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ čüąČą░čéąĖčÅ, ąĖ čĆąĄąĘčāą╗čīčéą░čéčŗ čüąČą░čéąĖčÅ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ąĖąĘ ą┐čĆąŠčåąĄčüčüąŠčĆą░ č湥čĆąĄąĘ SPORT. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐ąŠčüąŠą▒ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ąŠčüčéčāą┐ ą║ SDRAM.
ąØąĖąČąĮčÅčÅ čćą░čüčéčī ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ čāčćąĖčéčŗą▓ą░ąĄčé ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ą║ąŠą╝ą┐čĆąĄčüčüąĖąĖ, čéą░ą║ąŠą╣ ą║ą░ą║ MPEG-2 ąĖą╗ąĖ MPEG-4. ąŚą┤ąĄčüčī čüčŗčĆąŠąĄ ą▓ąĖą┤ąĄąŠ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čüčĆą░ąĘčā ą▓ SDRAM. ąØąĄąĘą░ą▓ąĖčüąĖą╝čŗą╣ ą║ą░ąĮą░ą╗ memory DMA ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčé ą▒ą╗ąŠą║ąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą┐ą░ą╝čÅčéčīčÄ SDRAM ąĖ L1 ą┤ą╗čÅ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗčģ čüčéą░ą┤ąĖą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ čüąČą░č鹊ąĄ ą▓ąĖą┤ąĄąŠ ą▓čŗčģąŠą┤ąĖčé ąĖąĘ ą┐čĆąŠčåąĄčüčüąŠčĆą░ č湥čĆąĄąĘ SPORT.
[ąĪčüčŗą╗ą║ąĖ ]
1 . ADSP-BF538/ADSP-BF538F Blackfin┬« Processor Hardware Reference site:analog.com.2 . ADSP-BF538: čéą░ą╣ą╝ąĄčĆčŗ .3 . ADSP-BF538: DMA .4 . ąöčĆą░ą╣ą▓ąĄčĆ PPI ą┤ą╗čÅ Blackfin .