ąĀą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ čĆą░ąĘąĮčŗąĄ ą▓ąŠą┐čĆąŠčüčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ Arduino.
ąØą░ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╝ čüą░ą╣č鹥 Arduino ąĄčüčéčī čģąŠčĆąŠčłąĖą╣ ąŠčéą▓ąĄčé ąĮą░ čŹč鹊čé ą▓ąŠą┐čĆąŠčü. ąŚą┤ąĄčüčī čÅ ą┐čĆąŠčüč鹊 ą▓čŗčüą║ą░ąČčā čüą▓ąŠąĄ ą╝ąĮąĄąĮąĖąĄ.
ArduinąŠ, ą║ą░ą║ ą┐ą╗ą░čéč乊čĆą╝ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, čüčéą░ą╗ą░ ą┐ąŠą┐čāą╗čÅčĆąĮąŠą╣ ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ čģąŠčĆąŠčłąŠ čüą▒ą░ą╗ą░ąĮčüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ (čäąĖąĘąĖą║ą░) ąĖ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąŠą┤ą▓ąĖąČąĄąĮąĖčÅ (ąĖą┤ąĄčÅ). ąØą░ čĆąĖčüčāąĮą║ąĄ čüčģąĄą╝ą░čéąĖčćąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮą░ čüčéčĆčāą║čéčāčĆą░ čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Arduino.
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ čĆąĖčüčāąĮą║čā: AVR GCC čŹč鹊 ą▒ąĄčüą┐ą╗ą░čéąĮčŗą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ čü čÅąĘčŗą║ą░ C/C++ (ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┤ą▓ąŠąĖčćąĮčŗą╣ čäą░ą╣ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ čü čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ HEX, ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. [10]). AVRDUDE čŹč鹊 ą▒ąĄčüą┐ą╗ą░čéąĮą░čÅ čāčéąĖą╗ąĖčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčĆąĄą┤ą░ąĄčé ąĘą░ą│čĆčāąĘčćąĖą║čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ąŠąĮ čüč鹊ąĖčé ąĮą░ ą┐ą╗ą░č鹥 Arduino, ąŠą▒čŗčćąĮąŠ čŹč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328P) ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ ą▓ąĖą┤ąĄ HEX-čäą░ą╣ą╗ą░.
[ążąĖąĘąĖč湥čüą║ą░čÅ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ-ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ) čüč鹊čĆąŠąĮą░ ą▓ąŠą┐čĆąŠčüą░ ]
Arduino = ąĘą░ą│čĆčāąĘčćąĖą║ + AVR + ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣
ąŚą░ą│čĆčāąĘčćąĖą║ . ąŁč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą╝ą░ą╗ąĄąĮčīą║ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ą║ąŠč鹊čĆą░čÅ ą▓čüąĄą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ ąĘą░ą│čĆčāąĘčćąĖą║čā ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čāą┐čĆąŠčēąĄąĮ ą┐čĆąŠčåąĄčüčü ąĘą░ą┐ąĖčüąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĖąĘą▒ą░ą▓ą╗ąĄąĮ ąŠčé ą┐čĆąŠą▒ą╗ąĄą╝ čü ą┐ąŠąĖčüą║ąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░, ąĄą╝čā ąĮąĄ ąĮčāąČąĮąŠ čĆą░ąĘą▒ąĖčĆą░čéčīčüčÅ ą▓ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ą┐ąĄčĆąĄą┐čĆąŠčłąĖą▓ą║ąĖ.
AVR . ąŁč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, čüąĄčĆą┤čåąĄ ą┐ą╗ą░čéčŗ Arduino. ą£ąŠčēąĮąŠąĄ, čģąŠčĆąŠčłąŠ čüą▒ą░ą╗ą░ąĮčüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┐ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖ ąŠą▒čŖąĄą╝čā ą┐ą░ą╝čÅčéąĖ, čüąĮą░ą▒ąČąĄąĮąĮąŠąĄ ą▒ąŠą│ą░č鹊ą╣ ą┐ąĄčĆąĖč乥čĆąĖąĄą╣ čÅą┤čĆąŠ AVR ąŠą▒čĆąĄą╗ąŠ ąĘą░čüą╗čāąČąĄąĮąĮčāčÄ ą┐ąŠą┐čāą╗čÅčĆąĮąŠčüčéčī ą▓ąŠ ą▓čüąĄą╝ ą╝ąĖčĆąĄ.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ . ąÜąŠą╝ą┐ą░ąĮąĖčÅ Atmel ą▓ą╝ąĄčüč鹥 čüąŠąŠą▒čēąĄčüčéą▓ąŠą╝ GNU GPL ą╝ąĮąŠą│ąŠ čüą┤ąĄą╗ą░ą╗ąĖ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ą╗ą░čéč乊čĆą╝čŗ AVR čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ. ą¤ąŠčÅą▓ąĖą╗čüčÅ ą▒ą░ąĘąŠą▓čŗą╣ ą▒ąĄčüą┐ą╗ą░čéąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ (AVR Studio, AVR GCC, avr libc, WinAVR). ąóą░ą║ąČąĄ ą┐ąŠčÅą▓ąĖą╗ąŠčüčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą▒ąĄčüą┐ą╗ą░čéąĮąŠą│ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ą┤ą╗čÅ ąĮąĄą│ąŠ ą┐ąŠą┤ čĆą░ąĘąĮčŗąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ - Windows, Linux, Mac. ąÆčüąĄ čŹč鹊 ą▒čŗą╗ąŠ ą▓ąĘčÅč鹊 ąĘą░ ąŠčüąĮąŠą▓čā, ąĖ ą┐ąŠčüą╗čāąČąĖą╗ąŠ ąĮą░ ą▒ą╗ą░ą│ąŠ ą┐ąŠą┐čāą╗čÅčĆąĮąŠčüčéąĖ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino.
[ąśą┤ąĄą╣ąĮą░čÅ čüč鹊čĆąŠąĮą░ ą▓ąŠą┐čĆąŠčüą░ ]
Arduino = ą┐čĆąŠčüč鹊čéą░ + ąŠčéą║čĆčŗč鹊čüčéčī + ą│ąĖą▒ą║ąŠčüčéčī
ą¤čĆąŠčüč鹊čéą░ . ąśąĘąĮą░čćą░ą╗čīąĮąŠ ą┐ą╗ą░čéč乊čĆą╝ą░ Arduino ą▒čŗą╗ą░ ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ąĮąŠą▓ąĖčćą║ąŠą▓, ąĮąĄ ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ čĆą░ąĘą▒ąĖčĆą░čÄčēąĖčģčüčÅ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ąĖ ą▓ 菹╗ąĄą║čéčĆąŠąĮąĖą║ąĄ. ąźąŠčĆąŠčłąŠ ąĮą░ą┐ąĖčüą░ąĮąĮą░čÅ ąĖ ąŠč乊čĆą╝ą╗ąĄąĮąĮą░čÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ąĖąĮč鹥čĆč乥ą╣čü čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ą┐čĆąĖą╝ąĄčĆčŗ ą│ąŠč鹊ą▓ąŠą│ąŠ ą║ąŠą┤ą░ ąĖ čāčüąĖą╗ąĖčÅ ą┐ąŠ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĄ čüąŠąŠą▒čēąĄčüčéą▓ą░ ą┐ąŠ ąĖąĮč鹥čĆąĄčüą░ą╝ - ą▓čüąĄ čŹč鹊 čüą╗čāąČąĖą╗ąŠ ąĖą┤ąĄąĄ ą┐ąŠą┐čāą╗čÅčĆąĖąĘą░čåąĖąĖ Arduino ą║ą░ą║ ąĮąĄ čéčĆąĄą▒čāčÄčēąĄą╣ ą▒ąŠą╗čīčłąĖčģ ąĘą░čéčĆą░čé ą┐ąŠ čĆąĄčüčāčĆčüą░ą╝ (ą┤ąĄąĮčīą│ą░ą╝, čĆą░ą▒ąŠč湥ą╝čā ą▓čĆąĄą╝ąĄąĮąĖ) čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ą×čéą║čĆčŗč鹊čüčéčī . ąÆčüąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ Arduino - ąŠčéą║čĆčŗč鹊ąĄ, ą┐čĆąĖč湥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąĮąĄ č鹊ą╗čīą║ąŠ ąŠčéą║čĆčŗč鹊ąĄ, ąĮąŠ ąĄčēąĄ ąĖ ą▒ąĄčüą┐ą╗ą░čéąĮąŠąĄ. ąæąĄčüą┐ą╗ą░čéąĮčŗ ąĖ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino, ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣, ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ. ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüąĄ čŹč鹊 ą┐ąŠ čüą▓ąŠąĄą╝čā čāčüą╝ąŠčéčĆąĄąĮąĖčÄ ą▒ąĄąĘ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣, ąĄčüą╗ąĖ ą║ąŠąĮąĄčćąĮąŠ čüąŠą▒ą╗čÄą┤ą░ąĄč鹥 čāčüą╗ąŠą▓ąĖčÅ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą╗ąĖčåąĄąĮąĘąĖąĖ GNU GPL.
ąōąĖą▒ą║ąŠčüčéčī . ąōąĖą▒ą║ąŠčüčéčī ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ č鹊ą╝, čćč鹊 čā čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ąĄčüčéčī čłąĖčĆąŠą║ąĖą╣ ą▓čŗą▒ąŠčĆ ą║ą░ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ, čéą░ą║ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣. ą×ąĮ ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī ą╗čÄą▒čāčÄ ąĖąĘ čłąĖčĆąŠą║ąŠą│ąŠ ą┐ąĄčĆąĄčćąĮčÅ ą│ąŠč鹊ą▓čŗčģ ą┐ą╗ą░čé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░, ąĖą╗ąĖ ą┤ą░ąČąĄ ą╝ąŠąČąĄčé ąĖąĘą│ąŠč鹊ą▓ąĖčéčī čüą▓ąŠčÄ ą┐ą╗ą░čéčā. ą×ąĮ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą│ąŠč鹊ą▓ąŠą│ąŠ ą║ąŠą┤ą░ ąĖąĘ ą┐čĆąĖą╝ąĄčĆąŠą▓ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ą╝ąŠąČąĄčé čüą░ą╝ ą┐ąĖčüą░čéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ - ą▓čüąĄ ąŠčéą║čĆčŗč鹊, ą▒ąĄčüą┐ą╗ą░čéąĮąŠ ąĖ ą┤ąŠčüčéčāą┐ąĮąŠ.
ą» ąĮąĄ ą▒čāą┤čā ąĘą┤ąĄčüčī ą┐ąĄčĆąĄčćąĖčüą╗čÅčéčī ąŠčäąĖčåąĖą░ą╗čīąĮčŗąĄ ą┐ą╗ą░čéčŗ Arduino - ąĖčģ čüą┐ąĖčüąŠą║ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą║ą░ą║ ą▓ čüą░ą╝ąŠą╣ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ (ąĪąĄčĆą▓ąĖčü -> ą¤ą╗ą░čéą░), čéą░ą║ ąĖ ąĮą░ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╝ čüą░ą╣č鹥 arduino.cc . ąĪąĮą░čćą░ą╗ą░ čÅ ąŠčüčéą░ąĮąŠą▓ą╗čÄčüčī ąĮą░ ą┐ą╗ą░čéą░čģ, ą║ąŠč鹊čĆčŗąĄ ąĄčüčéčī ąĮą░ ebay, ą░ ą┐ąŠč鹊ą╝ ąŠ ą┐ą╗ą░čéą░čģ - ą║ą░ąĮą┤ąĖą┤ą░čéą░čģ ąĮą░ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠąĄ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖąĄ.
[ą¤ąŠą╗ąĮčŗąĄ ą░ąĮą░ą╗ąŠą│ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą║čāą┐ąĖčéčī ąĮą░ ebay ]
ąŁčéąĖ ą┐ą╗ą░čéčŗ ą┐čĆąĖą╝ąĄčĆąĮąŠ ą▓ 3..10 čĆą░ąĘ ą┤ąĄčłąĄą▓ą╗ąĄ ąŠčäąĖčåąĖą░ą╗čīąĮčŗčģ. ąØąŠ čģąŠčćčā ą┐čĆąĄą┤čāą┐čĆąĄą┤ąĖčéčī - čćą░čüč鹥ąĮčīą║ąŠ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą┐ą╗ą░čéčŗ ą┐ąŠą┐ą░ą┤ą░čÄčéčüčÅ ą▒ąĄąĘ ą┐čĆąŠčłąĖč鹊ą│ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą┐ąŠčŹč鹊ą╝čā čā ąĮąŠą▓ąĖčćą║ąŠą▓ čü ąĮąĖą╝ąĖ ą▒čŗą▓ą░čÄčé ą┐čĆąŠą▒ą╗ąĄą╝čŗ. ą¤ą╗ą░čéą░ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ č湥čĆąĄąĘ USB, ąĮąŠ ąĖąĘ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ! ąĢčüą╗ąĖ čā ąÆą░čü ąĄčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ISP, č鹊 ąÆčŗ ą╗ąĄą│ą║ąŠ ą╝ąŠąČąĄč鹥 "ą┐ąŠčćąĖąĮąĖčéčī" čéą░ą║čāčÄ ą┐ą╗ą░čéčā.
ą¤ą╗ą░čéčŗ Arduino ą┐čĆąŠą┤ą░čÄčéčüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ ąĮą░ ebay.com. ąĢčüčéčī čüą╝čŗčüą╗ ą┐ąŠąĖčüą║ą░čéčī ąĖčģ čéą░ą║ąČąĄ ąĮą░ dealextreme (dx.com) ąĖ ąĮą░ aliexpress.com, ąŠą┤ąĮą░ą║ąŠ ą░čüčüąŠčĆčéąĖą╝ąĄąĮčé čéą░ą╝ ąŠą▒čŗčćąĮąŠ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąĮą░ ebay. ąÜą░ą║ ąĖčüą║ą░čéčī: ą▓ą▓ąĄą┤ąĖč鹥 ą▓ Google ą┐ąŠąĖčüą║ąŠą▓čŗą╣ ąĘą░ą┐čĆąŠčü ą▓ąĖą┤ą░ Arduino site:ą┤ąŠą╝ąĄąĮ_ąĖąĮč鹥čĆąĮąĄčé_ą╝ą░ą│ą░ąĘąĖąĮą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
ąöą╗čÅ ąĖąĮč鹥čĆąĮąĄčé-ą╝ą░ą│ą░ąĘąĖąĮąŠą▓ dealextreme ąĖ aliexpress ą┤ąŠą╝ąĄąĮčŗ ą▒čāą┤čāčé čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ dx.com ąĖ aliexpress.com. ąöą╗čÅ čāč鹊čćąĮąĄąĮąĖčÅ ą┐ąŠąĖčüą║ą░ ą▓ą▓ąŠą┤ąĖč鹥 ą▓ čüčéčĆąŠą║čā ąĘą░ą┐čĆąŠčüą░ ą┐ąŠą╗ąĮąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ ą┐ą╗ą░čéčŗ:
Arduino Mega 2560 site:ebay.com
ąÆ čéą░ą▒ą╗ąĖčåąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą┐ą╗ą░čéčŗ - ą░ąĮą░ą╗ąŠą│ąĖ ąŠčäąĖčåąĖą░ą╗čīąĮčŗčģ ą┐ą╗ą░čé Arduino čü ą║čĆą░čéą║ąĖą╝ ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ąĖčģ ąŠčéą╗ąĖčćąĖą╣.
ąóą░ą▒ą╗ąĖčåą░ 1. ąÉąĮą░ą╗ąŠą│ąĖ ąŠčäąĖčåąĖą░ą╗čīąĮčŗčģ ą┐ą╗ą░čé Arduino.
ąØą░ąĘą▓ą░ąĮąĖąĄ ą┐ą╗ą░čéčŗ ąÆąĮąĄčłąĮąĖą╣ ą▓ąĖą┤ ą£ąĖąĮ. čåąĄąĮą░, $ AVR ąŚą░ą│čĆčāąĘčćąĖą║ ą×ą┐ąĖčüą░ąĮąĖąĄ
Arduino Uno 4
ATmega168, ATmega328
Arduino UART
ąĪą░ą╝ą░čÅ ą┐ąŠą┐čāą╗čÅčĆąĮą░čÅ ą┐ą╗ą░čéą░, ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą╝ąĄčüčéąĖą╝ą░čÅ ąĖ ą┐ąŠ č乊čĆą╝-čäą░ą║č鹊čĆčā (ą┐ąŠą┤čģąŠą┤čÅčé ą▓čüąĄ čłąĖą╗ą┤čŗ), ąĖ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝čā ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÄ. ą£ąŠčüčé USB-UART ą▒čŗą▓ą░ąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą║ą░ą║ ąĮą░ čćąĖą┐ąĄ FTDI, čéą░ą║ ąĖ ąĮą░ ąŠčéą┤ąĄą╗čīąĮąŠą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ATmega16U2. ą×čüąĮąŠą▓ąĮąŠą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AVR ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ ą▓ ą║ąŠčĆą┐čāčüąĄ DIP28, čéą░ą║ ąĖ ą▓ ą║ąŠčĆą┐čāčüąĄ TQFP32.
Arduino Diecimila 15
ATmega168, ATmega328
Arduino UART
ąæą╗ąĖąĘąĮčÅčłą║ą░ ą┐ą╗ą░čéčŗ Arduino Uno - ąĮąĖč湥ą╝ ą┐čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮąŠ ąĮąĄ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ, ą║čĆąŠą╝ąĄ ąĘą░ą▓čŗčłąĄąĮąĮąŠą╣ čåąĄąĮčŗ.
Arduino Nano 2.7
ATmega328
Arduino UART
ą£ąĖąĮąĖą░čéčÄčĆąĮą░čÅ ą┐ą╗ą░čéą║ą░, ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čüąŠą▓ą╝ąĄčüčéąĖą╝ą░čÅ, ąŠą┤ąĮą░ą║ąŠ ąĖąĘ-ąĘą░ "ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ" č乊čĆą╝-čäą░ą║č鹊čĆą░ čłąĖą╗ą┤čŗ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ą┐čĆąŠą▓ąŠą┤ą░ą╝ąĖ.
Arduino Mega 2560 10.6
ATmega2560
Arduino UART
ą¤ąŠą╗ąĮąŠčĆą░ąĘą╝ąĄčĆąĮčŗą╣ č乊čĆą╝-čäą░ą║č鹊čĆ, ą┐ą╗ą░čéą░ čü čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ, čā ąĮąĄąĄ ą▒ąŠą╗čīčłąĄ ą┐ąŠčĆč鹊ą▓ ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░.
Arduino Leonardo 13.5
ATmega32U4
Atmel DFU
ą¤ąŠą╗ąĮąŠčĆą░ąĘą╝ąĄčĆąĮčŗą╣ č乊čĆą╝-čäą░ą║č鹊čĆ. ąśąĮč鹥čĆč乥ą╣čü USB ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā, ą▒ąĄąĘ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ą╝ąŠčüčéą░.
Arduino Leonardo Pro Micro 6.6
ATmega32U4
Atmel DFU
ą£ąĖąĮąĖą░čéčÄčĆąĮą░čÅ ą┐ą╗ą░čéą║ą░, čāčĆąĄąĘą░ąĮąĮčŗą╣ (ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā) ą░ąĮą░ą╗ąŠą│ Arduino Leonardo. ą©ąĖą╗ą┤čŗ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī č鹊ą╗čīą║ąŠ ą┐čĆąŠą▓ąŠą┤ą░ą╝ąĖ.
AVR-USB32U4 11
ATmega32U4
Atmel DFU
ąŁčéą░ ą┐ą╗ą░čéą║ą░ čÅą▓ą╗čÅąĄčéčüčÅ ą░ąĮą░ą╗ąŠą│ąŠą╝ Arduino Leonardo Pro Micro. ąŚą░ą║ą░ąĘą░čéčī ąĄčæ ą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ąĮą░ čüą░ą╣č鹥 microsin.net. ą×čéą╗ąĖčćąĖč鹥ą╗čīąĮą░čÅ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī ą┐ą╗ą░čéčŗ - ąĮą░ą╗ąĖčćąĖąĄ ą╝ą░ą║ąĄčéąĮčŗčģ ą┐ąŠą╗ąĄą╣, ąĮą░ ą║ąŠč鹊čĆčŗčģ ą╝ąŠąČąĮąŠ čüąŠą▒čĆą░čéčī čüą▓ąŠčÄ čĆą░ą┤ąĖąŠą╗čÄą▒ąĖč鹥ą╗čīčüą║čāčÄ ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ.
Adafruit Atmega32u4 Breakout Board 20
ATmega32U4
Atmel DFU
ą¤ąŠ čüčģąĄą╝ąĄ ą┐čĆąĖą╝ąĄčĆąĮąŠ č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ AVR-USB32U4.
Teensy 2.0 16
ATmega32U4
Atmel DFU
ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ AVR-USB32U4, ąĮąŠ ą╝ąĄąĮčīčłąĄ ą│ą░ą▒ą░čĆąĖčéčŗ, ąĖ ąŠčéčüčāčéčüčéą▓čāčÄčé ą┐ąŠą╗čÅ ą┤ą╗čÅ ą╝ą░ą║ąĄčéąĖčĆąŠą▓ą░ąĮąĖčÅ.
[ąØąĄą┐ąŠą╗ąĮčŗąĄ ą░ąĮą░ą╗ąŠą│ąĖ ]
ąØąĄą┐ąŠą╗ąĮčŗąĄ ą░ąĮą░ą╗ąŠą│ąĖ ąŠčéą╗ąĖčćą░čÄčéčüčÅ č鹥ą╝, čćč鹊 čā ąĮąĖčģ ąĮąĄčé ąĮą░ ą▒ąŠčĆčéčā ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą╝ąŠčüčéą░ USB-UART. ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ąĮąĖą╝ąĖ (ąĘą░ą│čĆčāąĘą║ąĖ ą║ąŠą┤ą░, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ Serial Monitor) ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ąĖ USB - TTL UART [2].
ą×čüąŠą▒ąŠą│ąŠ ą▓ąĮąĖą╝ą░ąĮąĖčÅ ąĘą░čüą╗čāąČąĖą▓ą░ąĄčé ą┐ą╗ą░čéą║ą░ metaboard. ą×ąĮą░ čéą░ą║ąČąĄ čüą┤ąĄą╗ą░ąĮą░ ą▒ąĄąĘ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą╝ąŠčüčéą░ USB-UART. ąØąŠ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ USB - TTL UART ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą║ąŠą┤ą░ ąĄą╣ ąĮąĄ ąĮčāąČąĄąĮ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮą░ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ č湥čĆąĄąĘ čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ USB, ąŠčüąĮąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ V-USB. ą¤ą╗ą░čéą║ą░ metaboard ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮą░ č鹥ą╝, čćč鹊 ąŠąĮą░ ąĮąĄą┤ąŠčĆąŠą│ą░čÅ, čüčģąĄą╝ą░ čā ąĮąĄčæ ą┐čĆąŠčüčéą░čÅ, ąĖ ąŠąĮą░ ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠą╣ čüą▒ąŠčĆą║ąĖ. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┐ą╗ą░čé Arduino, ąĖąĮč鹥čĆč乥ą╣čü USB čā ą┐ą╗ą░čéčŗ metaboard ą╝ąĮąŠą│ąŠčäčāąĮą║čåąĖąŠąĮą░ą╗ąĄąĮ - ąĄą│ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ, ą┐čĆąŠčłąĖč鹊ą│ąŠ ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąóą░ą▒ą╗ąĖčåą░ 2. ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą┐ą╗ą░čé Arduino ą▒ąĄąĘ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą╝ąŠčüčéą░ USB-UART.
ąØą░ąĘą▓ą░ąĮąĖąĄ ą┐ą╗ą░čéčŗ ąÆąĮąĄčłąĮąĖą╣ ą▓ąĖą┤ ą£ąĖąĮ. čåąĄąĮą░, $ AVR ąŚą░ą│čĆčāąĘčćąĖą║ ą×ą┐ąĖčüą░ąĮąĖąĄ
Arduino Pro Mini 4
ATmega328
Arduino UART
ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ Arduino Nano, ąĮąŠ ą▒ąĄąĘ ą╝ąŠčüčéą░ USB-UART.
Arduino Fio 25
ATmega168, ATmega328
Arduio UART
ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ Arduino Pro Mini, ąĮąŠ ą┤čĆčāą│ąŠą╣ č乊čĆą╝-čäą░ą║č鹊čĆ. ą£ąŠčüčéą░ USB-UART ąĮąĄčé, ąĖ ąĮą░ ą╝ąŠą╣ ą▓ąĘą│ą╗čÅą┤ čåąĄąĮą░ ą┐ą╗ą░čéčŗ ąĮąĄąŠą┐čĆą░ą▓ą┤ą░ąĮąĮąŠ ąĘą░ą▓čŗčłąĄąĮą░.
Metaboard 9
ATmega328
USBasp
ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ metaboard čüąŠ čüčĆąĄą┤ąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino ąĄčüčéčī ąŠčéą╗ąĖčćąĖčÅ, ą║ą░čüą░čÄčēąĖąĄčüčÅ ąĘą░ą│čĆčāąĘą║ąĖ ą║ąŠą┤ą░, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ąŠčĆč鹊ą▓ PD2 ąĖ PD4, ą░ čéą░ą║ąČąĄ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ USB ąĖ UART. ąØą░ ą┐ą╗ą░č鹥 metaboard ąĄčüčéčī ą╝ą░ą║ąĄčéąĮąŠąĄ ą┐ąŠą╗ąĄ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ čüčģąĄą╝čŗ. ąÆąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ čā ąĖąĮč鹥čĆč乥ą╣čüą░ USB ą▒ąŠą╗čīčłąĄ, č湥ą╝ čā čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┐ą╗ą░čé Arduino. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. [3] ąĖ FAQ [4] "ą¦ąĄą╝ metaboard ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ Arduino?".
[ąĪą░ą╝ąŠą┤ąĄą╗čīąĮčŗąĄ ą┐ą╗ą░čéčŗ ]
ąÜ čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╝ ą┐ą╗ą░čéą░ą╝, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé čüčéą░čéčī Arduino-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ąĖ, ą╝ąŠą│čāčé čüčéą░čéčī ą╗čÄą▒čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ AVR, ą▓ ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠčłąĖčé UART-ąĘą░ą│čĆčāąĘčćąĖą║. ąæąŠą╗čīčłąĄ ą▓čüąĄą│ąŠ ą┐ąŠą┤ąŠą╣ą┤čāčé ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ ATmega168 ąĖ ATmega328, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ą▓čŗą┐čāčüą║ą░čÄčéčüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ ą▓ ą║ąŠčĆą┐čāčüą░čģ TQFP, ąĮąŠ ąĖ ą▓ ą║ąŠčĆą┐čāčüą░čģ DIP - ąĮą░ąĖą▒ąŠą╗ąĄąĄ čāą┤ąŠą▒ąĮčŗčģ ą┤ą╗čÅ ą╗čÄą▒ąĖč鹥ą╗čīčüą║ąŠą╣ čüą▒ąŠčĆą║ąĖ.
ą» čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ metaboard ą║ą░ą║ ąŠčéą╗ąĖčćąĮąŠą│ąŠ ą║ą░ąĮą┤ąĖą┤ą░čéą░ ą┤ą╗čÅ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠą╣ čüą▒ąŠčĆą║ąĖ. ąóą░ą║ąČąĄ ąĄčüčéčī ąĖąĮč鹥čĆąĄčüąĮą░čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░, ąŠčüąĮąŠą▓ą░ąĮąĮą░čÅ ąĮą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 veroboard - veroduino [5].
ąóą░ą▒ą╗ąĖčåą░ 3. ąÜą░ąĮą┤ąĖą┤ą░čéčŗ ąĮą░ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠąĄ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖąĄ ą┐ą╗ą░čéčŗ Arduino.
ąØą░ąĘą▓ą░ąĮąĖąĄ ą┐ą╗ą░čéčŗ ąÆąĮąĄčłąĮąĖą╣ ą▓ąĖą┤ ą£ąĖąĮ. čåąĄąĮą░, $ AVR ąŚą░ą│čĆčāąĘčćąĖą║ ą×ą┐ąĖčüą░ąĮąĖąĄ
Veroduino 1
ATmega328
Arduino UART
ą¤ąŠ čüčģąĄą╝ąĄ ą▓čüąĄ č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ Arduino Pro Mini.
ąŚą░ą│čĆčāąĘčćąĖą║ (bootloader ) - ąŠą┤ąĮą░ ąĖąĘ ąŠčüąĮąŠą▓ąĮčŗčģ ą▓ąĄčēąĄą╣, čćč鹊 ąŠčéą╗ąĖčćą░ąĄčé Arduino ąŠčé ą┐čĆąŠčüč鹊ą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel. ąÜąŠą│ą┤ą░ ąÆčŗ čüąŠą▒ąĖčĆą░ąĄč鹥 čüą▓ąŠčÄ ą┐ą╗ą░čéčā, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ čüą╗čāčćą░ą╣ąĮąŠ ą║čāą┐ąĖą╗ąĖ ąĮą░ ebay ą┐ą╗ą░čéčā, ąĮąĄ ą┐čĆąŠčłąĖčéčāčÄ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝, č鹊 ąÆą░ą╝ ąĮčāąČąĄąĮ ą▓ąĮąĄčłąĮąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ISP , čćč鹊ą▒čŗ ą┐čĆąŠčłąĖčéčī ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĘą░ą│čĆčāąĘčćąĖą║. ąØąŠ ą║ąŠą│ą┤ą░ ąÆčŗ ą┐čĆąŠčłąĖą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║, č鹊 ą╝ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ISP ą┐ąŠą╗ąŠąČąĖčéčī ąĮą░ ą┐ąŠą╗ą║čā - ą▒ąŠą╗čīčłąĄ ąŠąĮ ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ (ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ą░ą║ąĖčģ-č鹊 čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čüą╗čāčćą░ąĄą▓), ą┐ąŠč鹊ą╝čā čćč鹊 ą┤ą░ą╗čīčłąĄ ą┐ąĄčĆąĄčłąĖą▓ą░čéčī ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą┤ąŠą▒ąĮąĄąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
ąŚą░ą│čĆčāąĘčćąĖą║ [6] čŹč鹊 ą┐ąŠ čüčāčéąĖ ą╝ą░ą╗ąĄąĮčīą║ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮą░čÅ ą┤ą╗čÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą╣ čåąĄą╗ąĖ - ą┐ąĄčĆąĄą┐čĆąŠčłąĖčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąŚą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘą╝ąĄčēąĄąĮ ą▓ čüčéą░čĆčłąĖčģ ą░ą┤čĆąĄčüą░čģ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH), ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ - ą▓ ą╝ą╗ą░ą┤čłąĖčģ ą░ą┤čĆąĄčüą░čģ (ąĮą░čćąĖąĮą░čÅ čü ąĮčāą╗ąĄą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░). ąØą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮ čéąĖą┐ąĖčćąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega328.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ čā ąÆą░čü ąĄčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ISP [9], č鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 ąĮą░čüčéčĆąŠąĖčéčī čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino čéą░ą║, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĖą╝ąĄąĮąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ, ą░ ąĮąĄ bootloader. ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ čéą░ą║ąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ ąĘą░ą│čĆčāąĘą║ąĖ ą▓ č鹊ą╝, čćč鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą▓čüčÄ ą┤ąŠčüčéčāą┐ąĮčāčÄ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ą┐ąŠč鹊ą╝čā čćč鹊 ąĘą░ą│čĆčāąĘčćąĖą║ čāąČąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĖ ąĄą│ąŠ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ čüą▓ąŠą▒ąŠą┤ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ).
ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ Arduino čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čäčīčĹʹ░ą╝ąĖ čéą░ą║, čćč鹊ą▒čŗ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ čüąĖčüč鹥ą╝čŗ (ą▓ą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ, čüą▒čĆąŠčü) čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čüąĄą│ą┤ą░ ą┐ąŠą╗čāčćą░ą╗ ąĘą░ą│čĆčāąĘčćąĖą║. ąŚą░č鹥ą╝ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ąČą┤ąĄčé (1..2 čüąĄą║čāąĮą┤čŗ) ąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĖ ąĄčüą╗ąĖ ąĘą░ą│čĆčāąĘą║ą░ ąĮąĄ ąĮą░čćą░ą╗ą░čüčī, č鹊 ąĘą░ą┐čāčüą║ą░ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ą┐ąĄčĆąĄą┤ą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ ą░ą┤čĆąĄčü 0). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čüąĄą│ą┤ą░ ą╝ąŠąČąĮąŠ ą┐čĆąĖ ąČąĄą╗ą░ąĮąĖąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĖ č鹥ą╝ čüą░ą╝čŗą╝ ąŠą▒ąĮąŠą▓ąĖčéčī ąĖą╗ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĖąĘą╝ąĄąĮąĖčéčī čäčāąĮą║čåąĖąŠąĮą░ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐čĆąĖ čŹč鹊ą╝ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄčéčĆąŠąĮčāčéčŗą╝.
ąŻčüą╗ąŠą▓ąĖąĄ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ . ąĢčüčéčī ąĘą░ą│čĆčāąĘčćąĖą║ąĖ, ą║ąŠč鹊čĆčŗąĄ čüčĆą░ąĘčā ą┐ąĄčĆąĄą┤ą░čÄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ą▒ąĄąĘ ąĘą░ą┤ąĄčƹȹ║ąĖ), ąĄčüą╗ąĖ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ čāčüą╗ąŠą▓ąĖąĄ ąĘą░ą│čĆčāąĘą║ąĖ. ąŁč鹊 ąĖąĮąŠą│ą┤ą░ ą┤ąĄą╗ą░ąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī ąĘą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąŻčüą╗ąŠą▓ąĖąĄ ąĘą░ą│čĆčāąĘą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘąĮčŗą╝, ąĮąŠ čćą░čēąĄ ą▓čüąĄą│ąŠ čŹč鹊 ą┐ąĄčĆąĄą╝čŗčćą║ą░, ąĘą░ą╝čŗą║ą░čÄčēą░čÅ ąĮą░ ąĘąĄą╝ą╗čÄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ (ąĖąĘą▓ąĄčüčéąĮčŗą╣ ąĘą░čĆą░ąĮąĄąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ) ą▓čŗą▓ąŠą┤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą╝čŗčćą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, č鹊 čāčüą╗ąŠą▓ąĖąĄ ąĘą░ą│čĆčāąĘą║ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ąČą┤ąĄčé ąĮą░čćą░ą╗ą░ ąĘą░ą│čĆčāąĘą║ąĖ, ąĮąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
[ąØą░ čćč鹊 ąĮčāąČąĮąŠ ąŠą▒čĆą░čéąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą┐čĆąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ]
ą¦č鹊ą▒čŗ ąĘą░ą┐ąĖčüą░čéčī ąĘą░ą│čĆčāąĘčćąĖą║, ąÆą░ą╝ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮčāąČąĄąĮ ą▓ąĮąĄčłąĮąĖą╣ ISP-ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ [9]. ą¤čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ąŠą▒čŗčćąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╣ ą┐ą╗ą░č鹊ą╣ Arduino č湥čĆąĄąĘ 6-ą▓čŗą▓ąŠą┤ąĮčŗą╣ ą║ąŠąĮąĮąĄą║č鹊čĆ ISP, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čŗčćąĮąŠ ą▓čüąĄą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ ą┐ą╗ą░č鹥 Arduino. ą¤čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą║ąŠąĮąĮąĄą║č鹊čĆą░ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąŠąĮ ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝. ąĢčüą╗ąĖ ąĄčüčéčī čüąŠą╝ąĮąĄąĮąĖčÅ ą┐čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ, č鹊 ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čüčģąĄą╝ąĄ ą┐ą╗ą░čéčŗ ąĖ ąĄčæ ąŠą┐ąĖčüą░ąĮąĖčÄ.
ąŚą░ą│čĆčāąĘčćąĖą║ ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą┐čĆčÅą╝ąŠ ąĖąĘ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino (Tools -> Burn Bootloader), ą┐ąĄčĆąĄą┤ čŹčéąĖą╝ ąĮčāąČąĮąŠ čüąĮą░čćą░ą╗ą░ ą▓čŗą▒čĆą░čéčī čéąĖą┐ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ ąĖ čéąĖą┐ ą┐ą╗ą░čéčŗ ą▓ ą╝ąĄąĮčÄ Tools.
ąÆčŗą▒ąŠčĆ ąĘą░ą│čĆčāąĘčćąĖą║ą░ . ą¤ąŠčüą║ąŠą╗čīą║čā ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čåąĄą╗ąĄą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ - ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮą░ čĆą░ąĘąĮą░čÅ ą╝ąŠą┤ąĄą╗čī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ATmega168, ATmega328, ATmega32U4 ąĖ čé. ą┐.). ąŚą░ą│čĆčāąĘčćąĖą║ąĖ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą╝ąŠą┤ąĄą╗ąĄą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ąĖ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝.
ą¦ą░čüč鹊čéą░ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ . ą×ą▒čÅąĘą░č鹥ą╗čīąĮąŠ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┐čĆąŠčłąĖą▓ą░ąĄą╝čŗą╣ ąÆą░ą╝ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ č鹊čćąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čĆą░ą▒ąŠč湥ą╣ čćą░čüč鹊č鹥 čüąĖčüč鹥ą╝čŗ. ąĀą░ą▒ąŠčćą░čÅ čćą░čüč鹊čéą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąŠą▒čŗčćąĮąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čäčīčĹʹŠą▓ ąĖ ąŠčé čćą░čüč鹊čéčŗ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ (čćą░čēąĄ ą▓čüąĄą│ąŠ ą┐čĆąĖą╝ąĄąĮčÅčÄčé ą║ą▓ą░čĆčåąĄą▓čŗąĄ čĆąĄąĘąŠąĮą░č鹊čĆčŗ ąĮą░ 8 ąĖą╗ąĖ 16 ą£ąōčå, ąĮąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖ ą┤čĆčāą│ąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ).
ążčīčÄąĘčŗ . ąöą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ą░ąČąĮčŗ 2 ą░čüą┐ąĄą║čéą░, ą║ąŠč鹊čĆčŗąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ čäčīčĹʹ░ą╝ąĖ - ą▓čŗą▒ąŠčĆ čĆą░ąĘą╝ąĄčĆą░ čüąĄą║čåąĖąĖ ąĘą░ą│čĆčāąĘą║ąĖ (čäčīčÄąĘčŗ BOOTSZ1, BOOTSZ0), čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (čäčīčÄąĘ BOOTRST), ą░ čéą░ą║ąČąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (čäčīčÄąĘčŗ, čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ - CKDIV8, SUT1, SUT0, CKSEL3..0).
ąĢčüą╗ąĖ ąÆčŗ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐čĆąŠčłčīąĄč鹥 čäčīčÄąĘčŗ BOOTSZ1, BOOTSZ0, BOOTRST, č鹊 ą║ąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą┐čāčüą║ą░čéčīčüčÅ, ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ čĆą░ą▒ąŠčéą░čéčī ąĮąĄ ą▒čāą┤ąĄčé. ąóąŠčćąĮąŠ čéą░ą║ąČąĄ ąĄčüą╗ąĖ ąÆčŗ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄč鹥 čäčīčĹʹ░ą╝ąĖ čéą░ą║č鹊ą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ, č鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ąĘą░čĆą░ą▒ąŠčéą░čéčī ąĮą░ č鹊ą╣ čćą░čüč鹊č鹥, ąĮą░ ą║ąŠč鹊čĆčāčÄ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ čĆą░čüčüčćąĖčéą░ąĮ, ąĖ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ąĘą░ą│čĆčāąĘčćąĖą║ą░ čéą░ą║ąČąĄ ą▒čāą┤ąĄčé ąĮą░čĆčāčłąĄąĮą░. ąöą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čäčīčĹʹŠą▓ ąÆą░ą╝ ą┐ąŠą╝ąŠąČąĄčé ą║ą░ą╗čīą║čāą╗čÅč鹊čĆ čäčīčĹʹŠą▓ [7].
ąÆ čéą░ą▒ą╗ąĖčåąĄ čÅ ą┐čĆąĖą▓ąĄą╗ čüą░ą╝čŗąĄ ą┐ąŠą┐čāą╗čÅčĆąĮčŗąĄ ąĘą░ą│čĆčāąĘčćąĖą║ąĖ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ ąĮąĖčģ. ążčīčÄąĘčŗ čāą║ą░ąĘą░ąĮčŗ ą▓ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą╝ ąĘąĮą░č湥ąĮąĖąĖ, ą│ą┤ąĄ HFUSE čŹč鹊 čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé čäčīčĹʹŠą▓, LFUSE ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé čäčīčĹʹŠą▓, EFUSE ą▒ą░ą╣čé čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ čäčīčĹʹŠą▓.
ąóą░ą▒ą╗ąĖčåą░ 4. ąŚą░ą│čĆčāąĘčćąĖą║ąĖ Arduino UART.
AVR ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą¤čĆąŠčłąĖą▓ą║ą░ ąĀą░ąĘą╝ąĄčĆ čüąĄą║čåąĖąĖ ąĘą░ą│čĆčāąĘą║ąĖ, ą▒ą░ą╣čé ążčīčÄąĘčŗ (HEX)
ATmega8
8
ArduinoBOOT-mega8-8MHz.hex
1024
HFUSE=CA LFUSE=DF
16
ArduinoBOOT-mega8-16MHz.hex
ATmega168
8
ArduinoBOOT-mega168-8MHz.hex
2048
HFUSE=DD
16
ArduinoBOOT-mega168-16MHz.hex
ATmega328
8
ArduinoBOOT-mega328-8MHz.hex
2048
HFUSE=DA
16
ArduinoBOOT-mega328-16MHz.hex
2048
ą¤čĆąŠčłąĖą▓ą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ Arduino ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┐ą░ą┐ą║ąĄ, ą│ą┤ąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čüąĖčüč鹥ą╝ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino, ąŠą▒čŗčćąĮąŠ čŹč鹊 ą┐ą░ą┐ą║ą░ čü ą┐ąŠą╗ąĮčŗą╝ ą┐čāč鹥ą╝ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ c:\Program Files\Arduino1.0.6\hardware\arduino\bootloaders. ąóą░ą╝ ąČąĄ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓. ąóą░ą║ąČąĄ ą│ąŠč鹊ą▓čŗąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĖ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓čüąĄčģ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ ą╝ąŠąČąĄč鹥 čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [8], čüą╝. ą┐ą░ą┐ą║čā arduino\bootloaders\HEX ą░čĆčģąĖą▓ą░, ąĖ ąĖčēąĖč鹥 čéą░ą╝ ąĖą╝ąĄąĮą░ čäą░ą╣ą╗ąŠą▓ ą┐čĆąŠčłąĖą▓ąŠą║, čāą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåą░čģ 4, 5, 6 (ąĖą╝čÅ čäą░ą╣ą╗ą░ ą┐čĆąŠčłąĖą▓ą║ąĖ čāą║ą░ąĘą░ąĮąŠ ą▓ čüč鹊ą╗ą▒čåąĄ ą¤čĆąŠčłąĖą▓ą║ą░).
ąóą░ą▒ą╗ąĖčåą░ 5. ąŚą░ą│čĆčāąĘčćąĖą║ąĖ Atmel DFU.
AVR ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą¤čĆąŠčłąĖą▓ą║ą░ ąĀą░ąĘą╝ąĄčĆ čüąĄą║čåąĖąĖ ąĘą░ą│čĆčāąĘą║ąĖ, ą▒ą░ą╣čé ążčīčÄąĘčŗ (HEX)
ATmega32U4
8
BootloaderDFU-mega32u4-8MHz.hex
4096
HFUSE=D8
16
BootloaderDFU-mega32u4-16MHz.hex
ąóą░ą▒ą╗ąĖčåą░ 6. ąŚą░ą│čĆčāąĘčćąĖą║ąĖ USBasp.
AVR ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą¤čĆąŠčłąĖą▓ą║ą░ ąĀą░ąĘą╝ąĄčĆ čüąĄą║čåąĖąĖ ąĘą░ą│čĆčāąĘą║ąĖ, ą▒ą░ą╣čé ążčīčÄąĘčŗ (HEX)
ATmega168
12
USBaspLoader-mega168-12MHz.hex
2048
HFUSE=D6
16
USBaspLoader-mega168-16MHz.hex
20
USBaspLoader-mega168-20MHz.hex
ATmega328
12
USBaspLoader-mega328-12MHz.hex
HFUSE=DA
16
USBaspLoader-mega328-16MHz.hex
20
USBaspLoader-mega328-20MHz.hex
[ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ ]
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ - ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ąŠčüąŠą▒čāčÄ čćą░čüč鹊čéčā ą║ą▓ą░čĆčåą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ąÆą░ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓ąĮąĄčüčéąĖ ą║ąŠčĆčĆąĄą║čéąĖą▓čŗ ą▓ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
ąÆ čéą░ą▒ą╗ąĖčåąĄ čÅ ą┐čĆąĖą▓ąĄą╗ ąŠą┐ąĖčüą░ąĮąĖąĄ čüą░ą╝čŗčģ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ Arduino-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ ą┐ą╗ą░čéą░čģ. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ ą▓ą╝ąĄčüč鹥 čü ą│ąŠč鹊ą▓čŗą╝ąĖ ą┐čĆąŠčłąĖą▓ą║ą░ą╝ąĖ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [8].
ąóą░ą▒ą╗ąĖčåą░ 7. ąĀą░ąĘąĮąŠą▓ąĖą┤ąĮąŠčüčéąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐ą╗ą░čéč乊čĆą╝čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino.
ąØą░ąĘą▓ą░ąĮąĖąĄ AVR ą×ą┐ąĖčüą░ąĮąĖąĄ
Arduino UART
ATmega8, ATmega168, ATmega328 ąĖ ą┤čĆčāą│ąĖąĄ
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┐ą╗ą░čé Arduino, ą║ąŠą│ą┤ą░ ą║ąŠą┤ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ č湥čĆąĄąĘ ą╝ąŠčüčé USB-UART.
Atmel DFU
ATmega32U4 ąĖ ą┤čĆčāą│ąĖąĄ
ą¤čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ čüą╗čāčćą░ąĄą▓, ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AVR ąĖą╝ąĄąĄčé ąĮą░ ą▒ąŠčĆčéčā ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü USB. ąŚą░ą│čĆčāąĘčćąĖą║ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ Atmel DFU Flip ąĖ ąŠčéą║čĆčŗč鹊ą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ LUFA.
USBasp
ATmega168, ATmega328
ą¤čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ ą┐ą╗ą░čé metaboard. ąŚą░ą│čĆčāąĘčćąĖą║ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ąŠčéą║čĆčŗč鹊ą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ V-USB, 菹╝čāą╗ąĖčĆčāąĄčé ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ąŠą┐čāą╗čÅčĆąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ USBasp.
ąÜą░ą║ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī . ąöą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąÆą░ą╝ ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ čéčāą╗č湥ą╣ąĮ AVR-GCC, ą┤ąŠčüčéčāą┐ąĮčŗą╣ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ - Linux, Mac OS, Windows. ąØą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows čéčāą╗č湥ą╣ąĮ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī, ąĄčüą╗ąĖ čüą║ą░čćą░čéčī ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ą░ą║ąĄčé WinAVR ąĖą╗ąĖ čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Atmel Studio.
ąÜąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ąĘą░ą│čĆčāąĘčćąĖą║ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ čāčéąĖą╗ąĖčéčŗ make. ą×ą▒čŗčćąĮąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ąĘą░ą╣čéąĖ ą▓ ą║ą░čéą░ą╗ąŠą│ čü ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī 2 ą║ąŠą╝ą░ąĮą┤čŗ:
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓ č鹥ą║čāčēąĄą╝ ą║ą░čéą░ą╗ąŠą│ąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ čäą░ą╣ą╗ čü čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ HEX - ą│ąŠč鹊ą▓ą░čÅ ą┐čĆąŠčłąĖą▓ą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą║ąŠč鹊čĆčāčÄ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą▒čŗčćąĮąŠą│ąŠ ISP-ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ [9] (ąĮąĄ ąĘą░ą▒čāą┤čīč鹥 čéą░ą║ąČąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čäčīčÄąĘčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░!).
ąśąĮčüčéčĆčāą║čåąĖąĖ ą┐ąŠ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╝ ąŠą┐čåąĖčÅą╝ ą╝ąŠąČąĮąŠ ąŠą▒čŗčćąĮąŠ ą┐ąŠą╗čāčćąĖčéčī, ąĖąĘčāčćą░čÅ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čäą░ą╣ą╗ą░ Makefile ą┐čĆąŠąĄą║čéą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ąĖ čüąŠą┐čāčéčüčéą▓čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ readme.txt.
[ąÆąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ Arduino UART ]
ąśą╝ąĄąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ąĄčĆčüąĖą╣ čŹč鹊ą│ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ą░. ąóą░ą║ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ą┐ąŠč鹊ą╝čā, čćč鹊 ą║ą░ąČą┤ą░čÅ ą▓ąĄčĆčüąĖčÅ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐ą╗ą░č鹥 (ąĖą╗ąĖ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐ą╗ą░čéą░čģ), ą░ čéą░ą║ąČąĄ ą┐ąŠč鹊ą╝čā, čćč鹊 ą║ąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą╝ąĄąĮčÅą╗čüčÅ čüąŠ ą▓čĆąĄą╝ąĄąĮąĄą╝.
ąóąĄą║čāčēąĖąĄ ąĘą░ą│čĆčāąĘčćąĖą║ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ č鹥, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ čü Arduino 0009) ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗ ą┤ą╗čÅ ą┐ą╗ą░čé Arduino Diecimila ąĖ Arduino NG (čü Atmega169). ą×ą▒ą░ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 19200 ąĖ ąĘą░ąĮąĖą╝ą░čÄčé 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ATmega168. ąĀą░ąĘą╗ąĖčćąĖąĄ čā ąĮąĖčģ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝, čüą║ąŠą╗čīą║ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ ąČą┤ąĄčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čüą┐čŗčłąĄą║ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ (pin 13 LED), ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ. ąŻ Arduino Diecimila ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ čüą▒čĆąŠčü, ą┐ąŠčŹč鹊ą╝čā ą┤ą╗čÅ čŹč鹊ą╣ ą┐ą╗ą░čéčŗ ąĘą░ą│čĆčāąĘčćąĖą║ ąČą┤ąĄčé ąŠč湥ąĮčī ą╝ą░ą╗čŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ (ą╝ąĄąĮčīčłąĄ čüąĄą║čāąĮą┤čŗ), ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ čā čŹč鹊ą│ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą╝ąĖą│ą░ąĄčé č鹊ą╗čīą║ąŠ 1 čĆą░ąĘ. ąŚą░ą│čĆčāąĘčćąĖą║ Arduino NG ąČą┤ąĄčé 6..8 čüąĄą║čāąĮą┤ (ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ą╗ą░čéą░ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓čĆčāčćąĮčāčÄ ą┐čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ), ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą╝ąĖą│ą░ąĄčé 3 čĆą░ąĘą░ ą┐čĆąĖ čüčéą░čĆč鹥 ąĘą░ą│čĆčāąĘčćąĖą║ą░.
ąÆ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčÅąĄą╝čŗčģ ą┐ą╗ą░čéą░čģ ąĘą░ą│čĆčāąĘčćąĖą║ Arduino NG ąĖą╝ąĄąĄčé ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ąŠčéą╗ąĖčćąĖčÅ. ąÆ ąĮąĄą╝ čĆą░ąĘčĆąĄčłąĄąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ pull-up čĆąĄąĘąĖčüč鹊čĆ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ 6, ąĖ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ pull-up čĆąĄąĘąĖčüč鹊čĆ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ RX. ąóą░ą║ąČąĄ ąĮąĄ ą┤ąĄą╗ą░ąĄčéčüčÅ čéą░ą╣ą╝ą░čāčé ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠčŹč鹊ą╝čā ąĄčüą╗ąĖ ąÆčŗ ąĮą░čćąĮąĄč鹥 ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ą╗ą░čéčā čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐ą╗ą░čéčŗ, č鹊 ąÆą░čł čüą║ąĄčéčć ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąĘą░ą┐čāčüčéąĖčéčüčÅ (čüą╝. ą▓ąŠą┐čĆąŠčüčŗ "ą¤ąŠč湥ą╝čā ą╝ąŠą╣ čüą║ąĄčéčć ąĮąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ...").
ąŚą░ą│čĆčāąĘčćąĖą║ ą┐ą╗ą░čéčŗ Arduino BT ą┤ąĄą╗ą░ąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ąŠą┤čāą╗čÅ Bluetooth.
ąŚą░ą│čĆčāąĘčćąĖą║ ą┤ą╗čÅ ATmega8 ąĘą░ąĮąĖą╝ą░ąĄčé ą▓čüąĄą│ąŠ ą╗ąĖčłčī 1 ą║ąĖą╗ąŠą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝. ą×ąĮ ąĮąĄ ąŠčéčüčćąĖčéčŗą▓ą░ąĄčé čéą░ą╣ą╝ą░čāčé ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ą╗ą░čéčā ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐ąŠą┤ąŠąČą┤ą░čéčī 6..8 čüąĄą║čāąĮą┤, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą┐čāčüčéąĖčéčüčÅ čüą║ąĄčéčć.
ąØąĄą║ąŠč鹊čĆčŗąĄ ą┤čĆąĄą▓ąĮąĖąĄ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 9600 ą▒ąŠą┤ ą▓ą╝ąĄčüč鹊 19200. ą¦č鹊ą▒čŗ ą║ąŠą┤ čüą║ąĄčéčćą░ ą╝ąŠą│ ąĘą░ą│čĆčāąČą░čéčīčüčÅ čü čéą░ą║ąĖą╝ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝, ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ąĮą░ 9600 ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ serial.download_rate ą▓ čäą░ą╣ą╗ąĄ ąĮą░čüčéčĆąŠąĄą║ preferences.txt.
ADABOOT . ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╣ čü Arduino-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ąĖ ą┐ą╗ą░čéą░ą╝ąĖ Wulfden Freeduino Kits. ąĢą│ąŠ ą║ąŠą┤ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą║ąŠą┤ąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ Arduino UART. "Lady Ada", Limor Fried ąĖąĘ Adafruit Industries, čüą┤ąĄą╗ą░ą╗ą░ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖą╣ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖą╣ ą▓ ą║ąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░ čü čåąĄą╗čīčÄ ą┐ąŠą╗čāč湥ąĮąĖčÅ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠčüčéąĖ (ą║ąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą╗čÄą▒ąŠą╣ ą▓ąĄčĆčüąĖąĖ Arduino IDE, čüą║ąĄčéčćąĖ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, čüą║ąĄčéčćąĖ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĘą░ą│čĆčāąĘą║ąĖ). ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ čĆąĄą▓ąĖąĘąĖąĖ Brian Riley čāąĮąĖčäąĖčåąĖčĆąŠą▓ą░ą╗ąĖ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ATmega168, ATmega328 ąĖ ATmega644, čéą░ą║ čćč鹊 ą┐ąŠą╗čāčćąĖą╗čüčÅ ąŠą┤ąĖąĮ čäą░ą╣ą╗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĖ ąŠą┤ąĖąĮ čäą░ą╣ą╗ makefile. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ ą╝ąĖą│ą░ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ pin 13 LED, ąĖąĮą┤ąĖčåąĖčĆčāčÄčēąĄąĄ ą┐čĆąŠčåąĄčüčü ąĘą░ą│čĆčāąĘą║ąĖ. ąŁč鹊čé ąĘą░ą│čĆčāąĘčćąĖą║ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░ čüčéą░čĆčŗčģ, ąĮąŠą▓čŗčģ (ąĖ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĮčŗčģ) ą┐ą╗ą░čéą░čģ, ą║ą░ą║ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĮčŗčģ, čéą░ą║ ąĖ ąĮąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĮčŗčģ čäčāąĮą║čåąĖąĄą╣ ą░ą▓č鹊čüą▒čĆąŠčüą░ (čüąŠ čüčĆąĄą┤ąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino-0009 ąĖ ą┐ą╗ą░čéą░ą╝ąĖ Arduino Diecimilia).
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅą╝ ą║ąŠą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ąĮą░ čüą░ą╣č鹥 Lady Ada (čüą╝. Bootloader for the Atmega328 site:learn.adafruit.com ). ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ADABOOT ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ąĮą░ čüą░ą╣č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ (čüą╝. ADABOOT - an ATmega Arduino(tm) compatible bootloader site:wulfden.org), ąĖą╗ąĖ ą▓ ąŠą┤ąĮąŠą╝ ą░čĆčģąĖą▓ąĄ [8].
[ą¤čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ Arduino UART ]
ą¤čĆąŠčåąĄčüčü ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ čüąŠčüč鹊ąĖčé ąĖąĘ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą│ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ Makefile , ą│ą┤ąĄ ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ąŠą┐čåąĖąĖ (ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ) ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ make clean ąĖ make . ąÜąŠąĮąĄčćąĮąŠ ąČąĄ, ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čā ąÆą░čü ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čéčāą╗č湥ą╣ąĮ (ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ AVR GCC ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ). ąØą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows čéčāą╗č湥ą╣ąĮ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ą░ą║ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ WinAVR ąĖą╗ąĖ Atmel Studio .
ąÜąŠą│ą┤ą░ ąĮčāąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĘą░ą│čĆčāąĘčćąĖą║ ą┤ą╗čÅ Arduino, č鹊 čćą░čēąĄ ą▓čüąĄą│ąŠ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéąĖą┐ą░ ą┐ą╗ą░čéčŗ ąĖą╗ąĖ ąÆą░čłąĄą╣ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ) čŹč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328, ąĖą╗ąĖ čĆąĄąČąĄ ATmega168, ATmega8, ATmega32U4. ą¤ąŠčŹč鹊ą╝čā čüąĮą░čćą░ą╗ą░ ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī, ą║ą░ą║ąŠą╣ ąĘą░ą│čĆčāąĘčćąĖą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. ą¤ąŠčćčéąĖ ą▓čüąĄ ąĘą░ą│čĆčāąĘčćąĖą║ąĖ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┐ą░ą┐ą║ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ Arduino c:\Program Files\Arduino1.0.6\hardware\arduino\bootloaders, čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┐ąŠ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ą░ą╝ atmega8, atmega ąĖ ą┤čĆčāą│ąĖą╝.
ąÆčŗą▒ąŠčĆ ąĘą░ą│čĆčāąĘčćąĖą║ą░ . ąĢčüą╗ąĖ ąÆą░ą╝ ąĮčāąČąĄąĮ ąĘą░ą│čĆčāąĘčćąĖą║ ą┤ą╗čÅ ATmega8, č鹊 ąĄą│ąŠ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖ Makefile ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ atmega8. ąĢčüą╗ąĖ ąĮčāąČąĄąĮ ąĘą░ą│čĆčāąĘčćąĖą║ ą┤ą╗čÅ ATmega168 ąĖą╗ąĖ ATmega328, č鹊 čüą╝. ą┐ą░ą┐ą║čā atmega. ąĢčüą╗ąĖ ąĮčāąČąĄąĮ ąĘą░ą│čĆčāąĘčćąĖą║ ą┤ą╗čÅ ATmega32U4, č鹊 ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ LUFA, čüą╝. ą┐ą░ą┐ą║čā Bootloaders\DFU.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [8].
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┤ą╗čÅ ATmega8 . ąŚą░ą╣ą┤ąĖč鹥 ą▓ ą┐ą░ą┐ą║čā atmega8, ąĖ ąŠčéą║čĆąŠą╣č鹥 č鹥ą║čüč鹊ą▓čŗą╝ čĆąĄą┤ą░ą║č鹊čĆąŠą╝ čäą░ą╣ą╗ Makefile. ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠą┐čåąĖąĖ:
ŌĆó DIRAVR. ąŁčéą░ ąŠą┐čåąĖčÅ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą║ą░čéą░ą╗ąŠą│ čāčüčéą░ąĮąŠą▓ą║ąĖ čéčāą╗č湥ą╣ąĮą░ (ą▓ čŹč鹊ą╝ ą║ą░čéą░ą╗ąŠą│ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ą░ą┐ą║ą░ bin čü ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╝ąĖ čäą░ą╣ą╗ą░ą╝ąĖ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ ąĖ ą┤čĆčāą│ąĖčģ čāčéąĖą╗ąĖčé, ąĖ ą┐ą░ą┐ą║ą░ include ą┤ą╗čÅ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║). ąĢčüą╗ąĖ čā ąÆą░čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čéčāą╗č湥ą╣ąĮ WinAVR, č鹊 ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą╣ ąŠą┐čåąĖąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ c:\WinAVR-20100110\avr. ąĢčüą╗ąĖ čā ąÆą░čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čéčāą╗č湥ą╣ąĮ ą▓ čüąŠčüčéą░ą▓ąĄ Atmel Studio, č鹊 ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą╣ ąŠą┐čåąĖąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ "c:\Program Files\Atmel\AVR Tools\AVR Toolchain" (ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą║ą░ą▓čŗčćą║ąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ čüąŠčüčéą░ą▓ąĄ ą┐čāčéąĖ ąĄčüčéčī ą┐čĆąŠą▒ąĄą╗čŗ).
ŌĆó DEFS. ąÆ čŹč鹊ą╣ ąŠą┐čåąĖąĖ čāą║ą░ąĘą░ąĮą░ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čüąĖčüč鹥ą╝čŗ č湥čĆąĄąĘ ąĘąĮą░č湥ąĮąĖąĄ ą╝ą░ą║čĆąŠą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ F_CPU. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čāą║ą░ąĘą░ąĮą░ ąŠą┐čåąĖčÅ:
DEFS = - DF_CPU=8000000 - DBAUD_RATE=19200
č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąŠčłąĖą▓ą║ą░ ą▒čāą┤ąĄčé čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮą░ ą▓ čĆą░čüč湥č鹥 ąĮą░ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā 8 ą£ąōčå. 8 ą£ąōčå ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĄčüą╗ąĖ čĆą░ą▒ąŠčéą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR. ąĢčüą╗ąĖ čā ąÆą░čü ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤čĆčāą│ą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░, ąĘą░ą┤ą░ą▓ą░ąĄą╝ą░čÅ ą▓ąĮąĄčłąĮąĖą╝ ą║ą▓ą░čĆčåąĄą▓čŗą╝ čĆąĄąĘąŠąĮą░č鹊čĆąŠą╝, č鹊 čāą║ą░ąČąĖč鹥 čĆčÅą┤ąŠą╝ čü -DF_CPU= čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą▓ ąōąĄčĆčåą░čģ. ą¦ą░čēąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ 16 ą£ąōčå, čé. ąĄ. ąĮčāąČąĮąŠ čāą║ą░ąĘą░čéčī -DF_CPU=16000000.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ą░ąČąĮąŠ čāą║ą░ąĘą░čéčī ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą┐ąŠč鹊ą╝čā, čćč鹊 ą║ čŹč鹊ą╝čā ąĘąĮą░č湥ąĮąĖčÄ ą┐čĆąĖą▓čÅąĘą░ąĮą░ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ UART, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠą╗čāčćą░ąĄčé ą║ąŠą┤ ąŠčé čģąŠčüčéą░ (ąĖąĘ čüąĖčüč鹥ą╝čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░ čāčéąĖą╗ąĖčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ AVRDUDE). ąØąĄą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ UART ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ čüą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┐čĆąŠčłąĖą▓ą░čéčīčüčÅ č湥čĆąĄąĘ ąĘą░ą│čĆčāąĘčćąĖą║.
ąØą░ čŹč鹊ą╝ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą╝ąŠąČąĮąŠ čüčćąĖčéą░čéčī ąĘą░ą║ąŠąĮč湥ąĮąĮčŗą╝. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąŠčüčéą░ą╗ąŠčüčī ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĖąĘ ą┤ą▓čāčģ ą║ąŠą╝ą░ąĮą┤:
ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐ąŠą╗čāčćąĖčéčüčÅ čäą░ą╣ą╗ ATmegaBOOT.hex, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ ISP ąĘą░ą┐ąĖčüą░čéčī ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega8. ąØąĄ ąĘą░ą▒čāą┤čīč鹥 ą┐ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čäčīčÄąĘčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čüą╝. čéą░ą▒ą╗ąĖčåčā 4).
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┤ą╗čÅ ATmega168 ąĖą╗ąĖ ATmega328 . ąŚą░ą╣ą┤ąĖč鹥 ą▓ ą┐ą░ą┐ą║čā atmega, ąĖ ąŠčéą║čĆąŠą╣č鹥 č鹥ą║čüč鹊ą▓čŗą╝ čĆąĄą┤ą░ą║č鹊čĆąŠą╝ čäą░ą╣ą╗ Makefile. ąŚą┤ąĄčüčī ą▓čüąĄ čāčüčéčĆąŠąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą╗ąŠąČąĮąĄąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊čé Makefile čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣, ąŠąĮ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐čĆąŠčłąĖą▓ąŠą║ ą┤ą╗čÅ ą╝ąĮąŠąČąĄčüčéą▓ą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ą╗ą░čé Arduino:
ąóą░ą▒ą╗ąĖčåą░ 8. ąÆčŗą▒ąŠčĆ čåąĄą╗ąĖ (target) ą▓ Makefile ą┤ą╗čÅ ATmegaXX8.
ą¤ą╗ą░čéą░ Arduino Target
Arduino LilyPad
lilypad
Arduino Pro ąĖą╗ąĖ Arduino Pro Mini
pro8, pro16 ąĖą╗ąĖ pro20 ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ
Arduino Diecimila
diecimila
Arduino NG
ng
ąĪą▓ąŠčÅ ą┐ą╗ą░čéą░ ąĮą░ ATmega328
atmega328
Arduino Pro ąĮą░ ATmega328P ą▒ąĄąĘ ą║ą▓ą░čĆčåą░
atmega328_pro8
Arduino Mega
mega
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čåąĄą╗čī Target, čāą║ą░ąĘą░ąĮąĮą░čÅ ą▓ čéą░ą▒ą╗ąĖčåąĄ, ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą║ą░ą║ ąŠą┐čåąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ make ą┐čĆąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ:
make clean make < čéčāčé ąĮą░ą┤ąŠ čāą║ą░ąĘą░čéčī Target >
ą¤ąĄčĆą▓ąŠąĄ, čćč鹊 ąÆą░ą╝ ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī, čŹč鹊 ą▓čŗą▒čĆą░čéčī čåąĄą╗čī ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ (ą▓ą░čĆąĖą░ąĮčé ąĖąĘ čüč鹊ą╗ą▒čåą░ Target čéą░ą▒ą╗ąĖčåčŗ 6) ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ą╗ą░čéčŗ, ą║ąŠč鹊čĆą░čÅ čā ąÆą░čü ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 čā ąÆą░čü čüą░ą╝ąŠą┤ąĄą╗čīąĮą░čÅ ą┐ą╗ą░čéą░ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ATmega328, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ąÆčŗ čüąŠą▒ąĖčĆą░ąĄč鹥čüčī čüą┤ąĄą╗ą░čéčī čüą▓ąŠą╣ ąĘą░ą│čĆčāąĘčćąĖą║. ąóąŠą│ą┤ą░ čåąĄą╗čī ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čā ąÆą░čü ą▒čāą┤ąĄčé atmega328, ą┐čĆąŠčłąĖą▓ą║ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ 2 ą║ąŠą╝ą░ąĮą┤:
make clean
make atmega328
ąĢčüą╗ąĖ čā ąÆą░čü ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤čĆčāą│ą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░, č鹊 ą┐čĆąŠą▓ąĄčĆčīč鹥 ąĘąĮą░č湥ąĮąĖąĄ ą╝ą░ą║čĆąŠą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ AVR_FREQ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ čåąĄą╗ąĖ atmega328 ąĘą░ą┤ą░ąĮą░ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ 16 ą£ąōčå: AVR_FREQ = 16000000L). ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐ąŠą╗čāčćąĖč鹥 ą┐čĆąŠčłąĖą▓ą║čā ATmegaBOOT_168_atmega328.hex, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ ą┐ą░ą╝čÅčéčī ąÆą░čłąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ ISP. ąÆąĮąĖą╝ą░ąĮąĖąĄ, ąĮąĄ ąĘą░ą▒čāą┤čīč鹥 čéą░ą║ąČąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čäčīčÄąĘčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čüą╝. čéą░ą▒ą╗ąĖčåčā 4).
ąÜąŠą╝ą░ąĮą┤ą░ Burn Bootloader ą▓ ą╝ąĄąĮčÄ Tools ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝ ISP čāčéąĖą╗ąĖčéčā avrdude . ą¤čĆąŠčåąĄą┤čāčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ą║ą╗čÄčćą░ąĄčé 4 čłą░ą│ą░: čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĄą║čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čāčüčéą░ąĮąŠą▓ą║ą░ čäčīčĹʹŠą▓, ąĘą░ą┐ąĖčüčī ą║ąŠą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ čüąĄą║čåąĖčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĖ ąĮą░ą║ąŠąĮąĄčå ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą┤ą░ čüąĄą║čåąĖąĖ ąĘą░ą│čĆčāąĘą║ąĖ. ą¤čĆąŠčåąĄčüčü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┤ą░ąĮčŗ ą▓ čäą░ą╣ą╗ąĄ preferences.txt čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüąĄą║čåąĖčÅ ąĘą░ą│čĆčāąĘą║ąĖ - čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ ą▓ čüčéą░čĆčłąĖčģ ą░ą┤čĆąĄčüą░čģ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ FLASH, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓ąŠą┐čĆąŠčü "ąŚą░ą│čĆčāąĘčćąĖą║ Arduino: čćč鹊 čŹč鹊 čéą░ą║ąŠąĄ, ą│ą┤ąĄ ąĄą│ąŠ ą▓ąĘčÅčéčī?".
ąØą░čüčéčĆąŠą╣ą║ąĖ preferences.txt ą┤ą╗čÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ATmega8:
bootloader.atmega8.programmer (ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ: stk500) ą┐čĆąŠč鹊ą║ąŠą╗, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĘą░ą│čĆčāąĘčćąĖą║.
ąØą░čüčéčĆąŠą╣ą║ąĖ preferences.txt ą┤ą╗čÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ATmega168 (ąĘą┤ąĄčüčī ą╗ąĖą▒ąŠ "diecimila", ą╗ąĖą▒ąŠ "ng"):
bootloader.atmega168-< BOARD >.programmer (ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ: avrispmkii) ą┐čĆąŠč鹊ą║ąŠą╗, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĘą░ą│čĆčāąĘčćąĖą║.
Windows XP ąĖąĮąŠą│ą┤ą░ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ąÆą░čł ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣ ą┐ąŠčĆčé, čćč鹊 čĆą░ąĘčĆčāčłą░ąĄčé ą┐čĆąŠčåąĄčüčü ąĘą░ą│čĆčāąĘą║ąĖ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░. ą£ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┤ąŠą▒ą░ą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ ą▓ čĆąĄąĄčüčéčĆąĄ:
[HKEY_LOCAL_MACHINE\SYSTEM\ControlSet001\Services\Parport\Parameters]
"DisableWarmPoll"=dword:00000001
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĖ čĆąĄčłąĄąĮąĖąĄ čüą╝. ą▓ąĄčéą║čā ąĮą░ č乊čĆčāą╝ąĄ: ParallelProgrammer Can't program firmware site:forum.arduino.cc
ą×ą┐ąĖčüą░ąĮąĖąĄ ParallelProgrammer: Parallel Port Programmer site:arduino.cc
ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĮą░ čÅąĘčŗą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ C, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĖčüč鹥ą╝ą░ Arduino (ą▓ąŠąŠą▒čēąĄ-č鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čÅąĘčŗą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ C++, ąĮąŠ ą▓ ą┤ą░ąĮąĮąŠą╝ ą║ąŠąĮč鹥ą║čüč鹥 čŹč鹊 ąĮąĄą▓ą░ąČąĮąŠ), ąĖą╝ąĄąĄčé ąŠčüąŠą▒ąŠąĄ čüą▓ąŠą╣čüčéą▓ąŠ, ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠąĄ ąŠą▒ą╗ą░čüčéčīčÄ ą▓ąĖą┤ąĖą╝ąŠčüčéąĖ. ąŁč鹊 ą▓ą░ąČąĮąŠąĄ ąŠčéą╗ąĖčćąĖąĄ ąŠčé čĆą░ąĮąĮąĖčģ čÅąĘčŗą║ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, čéą░ą║ąĖčģ ą║ą░ą║ BASIC, ą│ą┤ąĄ ą▓čüąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╝ąĖ.
ąōą╗ąŠą▒ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ . ąŁč鹊 čéą░ą║ą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ą░ąČą┤ąŠą╣ čäčāąĮą║čåąĖąĖ, ą▓ ą╗čÄą▒ąŠą╝ ą╝ąĄčüč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (čéą░ą║ąČąĄ ą│ąŠą▓ąŠčĆčÅčé, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▓ąĖą┤ąĖą╝ą░ ą▓ ą╗čÄą▒ąŠą╝ ą╝ąĄčüč鹥 ą║ąŠą┤ą░).
ąøąŠą║ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ . ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, ą╗ąŠą║ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▓ąĖą┤ąĮą░ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╣ čäčāąĮą║čåąĖąĖ, ą▓ ą║ąŠč鹊čĆąŠą╣ ąŠąĮą░ ą▒čŗą╗ą░ ąŠą▒čŖčÅą▓ą╗ąĄąĮą░. ąÆ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino ą╗čÄą▒ą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ, ą║ąŠč鹊čĆą░čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ąĮąĄ čäčāąĮą║čåąĖąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, setup(), loop() ąĖą╗ąĖ ą┤čĆčāą│ąĖčģ), čÅą▓ą╗čÅąĄčéčüčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣.
ąÜąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čĆą░ąĘčĆą░čüčéą░ąĄčéčüčÅ ąĖ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čüąĄ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮąŠą╣, ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čāą┐čĆąŠčēą░ąĄčé ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ. ąóą░ą║ąŠą╣ ą┐ąŠą┤čģąŠą┤ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ą░ą▓ą░čéčī ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ ą▒ąŠą╗ąĄąĄ ą┐čĆąŠčüčéčŗąĄ ąĖą╝ąĄąĮą░. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, č鹊ą╗čīą║ąŠ čäčāąĮą║čåąĖčÅ ą▒čāą┤ąĄčé ąĖą╝ąĄčéčī ą┤ąŠčüčéčāą┐ ą║ čüą▓ąŠąĖą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝, ąĮąĖ ą┤ą╗čÅ ą║ą░ą║ąŠą│ąŠ ą┤čĆčāą│ąŠą│ąŠ ą║ąŠą┤ą░ ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąĮąĄ ą▒čāą┤čāčé ą┤ąŠčüčéčāą┐ąĮčŗ. ąŁč鹊 čāą╝ąĄąĮčīčłą░ąĄčé ą▓ąĄčĆąŠčÅčéąĮąŠčüčéčī ąŠčłąĖą▒ąŠą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗčģ čüąŠ čüą╗čāčćą░ą╣ąĮąŠą╣ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĄą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą▓ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĖ.
ąśąĮąŠą│ą┤ą░ čéą░ą║ąČąĄ ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░čéčī ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą╗ąŠą║ą░ą╗čīąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ą┤ą╗čÅ čåąĖą║ą╗ą░ for. ąŁč鹊 čüąŠąĘą┤ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ą▓ąĖą┤ąĖą╝ą░ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĖ č鹥ą╗ą░ čåąĖą║ą╗ą░, ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠą│ąŠ čäąĖą│čāčĆąĮčŗą╝ąĖ čüą║ąŠą▒ą║ą░ą╝ąĖ.
ą¤čĆąĖą╝ąĄčĆ:
int myVal; // čŹč鹊 ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ. ąĢčæ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ą░čÅ čäčāąĮą║čåąĖčÅ.
void setup ()
{
// ...
}
void loop ()
{
int i; // ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ i ą▓ąĖą┤ąĖą╝ą░ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ loop.
float f; // ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ f ą▓ąĖą┤ąĖą╝ą░ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ loop. // ...
for (int j = 0 ; j < 100 ; j++ )
{
// ą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ j ą╝ąŠąČąĮąŠ ąŠą▒čĆą░čēą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čäąĖą│čāčĆąĮčŗčģ čüą║ąŠą▒ąŠą║ čåąĖą║ą╗ą░.
}
}
static . ąĢčüą╗ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąŠą▒čŖčÅą▓ą╗ąĄąĮą░ čü ą░čéčĆąĖą▒čāč鹊ą╝ static ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ, č鹊 ąŠąĮą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄąČą┤čā ą▓čŗąĘąŠą▓ą░ą╝ąĖ čäčāąĮą║čåąĖąĖ. ą¤čĆąĖ čŹč鹊ą╝ ą┐ąŠ ąŠą▒ą╗ą░čüčéąĖ ą▓ąĖą┤ąĖą╝ąŠčüčéąĖ ąŠąĮą░ ą▓ąĄą┤ąĄčé čüąĄą▒čÅ čéą░ą║ ąČąĄ ą║ą░ą║ ąĖ ą╗ąŠą║ą░ą╗čīąĮą░čÅ - ą▓ąĖą┤ąĖą╝ą░ č鹊ą╗čīą║ąŠ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čäčāąĮą║čåąĖąĖ, ą│ą┤ąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░.
ąĢčüą╗ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąŠą▒čŖčÅą▓ą╗ąĄąĮą░ ą║ą░ą║ static, ąĮąŠ ą▓ąĮąĄ čäčāąĮą║čåąĖą╣, čé. ąĄ. ąŠąĮą░ ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ ą║ąŠą┤ą░, č鹊 ąŠą▒ą╗ą░čüčéčī ąĄčæ ą▓ąĖą┤ąĖą╝ąŠčüčéąĖ ąŠą│čĆą░ąĮąĖč湥ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ čŹč鹊ą│ąŠ ą╝ąŠą┤čāą╗čÅ. ąó. ąĄ. ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▓ąĄą┤ąĄčé čüąĄą▒čÅ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ, ąĮąŠ ąŠąĮą░ ą▓ąĖą┤ąĖą╝ą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ ąŠą┤ąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ, ą│ą┤ąĄ čŹčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░.
volatile . ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ, ąŠą▒čŖčÅą▓ą╗ąĄąĮąĮą░čÅ čü čéą░ą║ąĖą╝ ą░čéčĆąĖą▒čāč鹊ą╝, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆąŠą╝ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝. ąŁč鹊čé ą░čéčĆąĖą▒čāčé ą│ąŠą▓ąŠčĆąĖčé ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆčā, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄąŠąČąĖą┤ą░ąĮąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮą░ ą╗ąĖą▒ąŠ ą║ąŠą┤ąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą╗ąĖą▒ąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠ ą┐ąŠ ą║ą░ą║ąŠą╝čā-č鹊 čüąŠą▒čŗčéąĖčÄ.
const . ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ čü čŹčéąĖą╝ ą░čéčĆąĖą▒čāč鹊ą╝ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, ąŠą┤ąĮą░ą║ąŠ ąŠąĮą░ ą▓čüąĄ čĆą░ą▓ąĮąŠ čĆą░ąĘą╝ąĄčēąĄąĮą░ ą▓ ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ (RAM). ąĢčüą╗ąĖ ąÆčŗ čüą╗čāčćą░ą╣ąĮąŠ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐ąŠą┐čĆąŠą▒čāąĄč鹥 ą┐čĆąĖčüą▓ąŠąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║ąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, č鹊 ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą▓čŗą┤ą░čüčé ąŠčłąĖą▒ą║čā. ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čü ą░čéčĆąĖą▒čāč鹊ą╝ const ąŠą▒čŖčÅą▓ą╗čÅčÄčéčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čü ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣:
const int Val = 123 ;char const String [] = "Hello, World!" ;
PROGRAM . ąØą░ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą░čéčĆąĖą▒čāčéą░ - čĆą░ąĘą╝ąĄčüčéąĖčéčī ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ą║ą░ą║ ą║ąŠąĮčüčéą░ąĮčéčā ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH). ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé 菹║ąŠąĮąŠą╝ąĖčéčī ąŠą┐ąĄčĆą░čéąĖą▓ąĮčāčÄ ą┐ą░ą╝čÅčéčī (RAM) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ążą░ą║čéąĖč湥čüą║ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▓čüąĄ čāąČąĄ ą│ąŠč鹊ą▓ąŠ; čÅąĘčŗą║ Arduino čŹč鹊 ą┐čĆąŠčüč鹊 ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖą╣ C/C++, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮčŗ ąĖąĘ ąÆą░čłąĄą│ąŠ ą║ąŠą┤ą░. ąÆą░čł čüą║ąĄčéčć ą┐čĆąĄč鹥čĆą┐ąĄą▓ą░ąĄčé ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖąĖ, ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. [10]) ąĖ ąĘą░č鹥ą╝ čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠą┤ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆčā C/C++ (avr-g++). ąÆčüąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ C ąĖ C++, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ avr-g++, ą┤ąŠą╗ąČąĮčŗ čĆą░ą▒ąŠčéą░čéčī ą▓ Arduino.
ą£ąŠąČąĮąŠ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ Arduino čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┤čĆčāą│ąĖčģ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓ čüą▒ąŠčĆą║ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čü ą┐čĆčÅą╝čŗą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäą░ą╗ąŠą▓ Makefile ąĖ/ąĖą╗ąĖ AVR Studio). ąÆą░ą╝ ą┐čĆąŠčüč鹊 ąĮčāąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąĖčģ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ ąŠčüąĮąŠą▓ąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ Arduino. ąĪą╝. čéą░ą║ąČąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░ čüą▒ąŠčĆą║ąĖ [10].
ąöą░, ą║ąŠąĮąĄčćąĮąŠ. ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ą╗ą░čéčā Arduino ą║ą░ą║ ąŠą▒čŗčćąĮčāčÄ ą┐ą╗ą░čéčā čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ AVR, ąĮą░ą┐čĆčÅą╝čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÅ ąĄčæ ąĮą░ čÅąĘčŗą║ąĄ C (ąĖą╗ąĖ C++) ą║ą░ą║ ąŠą▒čŗčćąĮčŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AVR (ąĖčüą┐ąŠą╗čīąĘčāčÅ avr-gcc ąĖ avrdude, ąĖą╗ąĖ AVR Studio, ąĖą╗ąĖ Atmel Studio).
ąöą░, čģąŠčéčÅ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ąŠčüąĮąŠą▓ąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ Arduino.
ą¤ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą║ [11].
ąÜąŠą│ą┤ą░ ąÆčŗ ą┐ąĖčłąĄč鹥 ąŠą▒čŗčćąĮčŗą╣ čüą║ąĄčéčć, č鹊 ąŠą▒čŗčćąĮąŠ ą┐ąŠą╗ą░ą│ą░ąĄč鹥čüčī ąĮą░ č鹊, čćč鹊 čäčāąĮą║čåąĖčÅ loop() ą▒čāą┤ąĄčé ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĖ ą▒ąĄąĘ ąĘą░ą┤ąĄčƹȹĄą║. ą×ą┤ąĮą░ą║ąŠ ą▓čģąŠą┤ ąĖ ą▓čŗčģąŠą┤ ąĖąĘ čäčāąĮą║čåąĖąĖ loop() ą▓ą▓ąŠą┤čÅčé ąĮąĄą║ąŠč鹊čĆčāčÄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā, ą┐čāčüčéčī ąĖ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčāčÄ.
ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čŹč鹊ą╣ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ąÆčŗ ą┐ąŠ-ą▓ąĖą┤ąĖą╝ąŠą╝čā ą╝ąŠąČąĄč鹥 čüąŠąĘą┤ą░čéčī čüą▓ąŠą╣ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
void loop ()
{
while (true )
{
// čéčāčé ą║ą░ą║ąĖąĄ-č鹊 ą┤ąĄą╣čüčéą▓ąĖčÅ...
}
}
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüą║ąĄčéčć ą┐čĆąŠą╣ą┤ąĄčé ą┐ąĄčĆą▓čāčÄ čüčéą░ą┤ąĖčÄ ą┐čĆąŠčåąĄčüčüą░ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ [], ą┐ąŠą╗čāčćąĖčéčüčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║ąŠą╣ ą║ąŠą┤:
#include < Arduino.h >
int main (void )
{
init();
#if defined(USBCON)
USBDevice.attach();#endif
setup();
for (;;) {
loop();
if (serialEventRun) serialEventRun();
}
return 0 ;
}
ąØąĄčüąŠą╝ąĮąĄąĮąĮąŠ, čćč鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čĆą░čüčģąŠą┤čŗ ąĮą░ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą▓ąŠąĘąĮąĖą║ą░čÄčé, ą║ąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓čŗąĘąŠą▓ serialEventRun(). ąĢčüą╗ąĖ čüčĆą░ą▓ąĮąĖčéčī 2 čüą║ąĄčéčćą░ (ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ x čüą┤ąĄą╗ą░ąĮą░ volatile ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖčÅ ąĮą░ ąĮąĄą╣ ą▒čŗą╗ą░ ąŠčéą║ą╗čÄč湥ąĮą░):
void setup ()
{
}
volatile uint8_t x;
void loop ()
{
x = 1 ;
}
ąĖ
void setup ()
{
}
volatile uint8_t x;
void loop ()
{
while (true )
{
x = 1 ;
}
}
ąóąŠ ą┐ąŠą╗čāčćąĖčéčüčÅ čüą╗ąĄą┤čāčÄčēą░čÅ čĆą░ąĘąĮąĖčåą░ ą▓ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą╝ ą║ąŠą┤ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░:
ąÜą░ą║ ąÆčŗ ą╝ąŠąČąĄč鹥 čāą▓ąĖą┤ąĄčéčī, čåąĖą║ą╗ while(true) ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ą┐čĆąŠčüč鹊ą╝ ą▒ąĄąĘčāčüą╗ąŠą▓ąĮąŠą╝ ą┐ąĄčĆąĄčģąŠą┤ąĄ rjmp (ą┐ąĄčĆąĄčģąŠą┤ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹥ą║čāčēąĄą│ąŠ ą░ą┤čĆąĄčüą░) ąĮą░ąĘą░ą┤ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖąĮčüčéčĆčāą║čåąĖą╣. ą¤čĆąĖ čŹč鹊ą╝ loop() ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą▓čŗčćąĖčéą░ąĮąĖąĄ, čüčĆą░ą▓ąĮąĄąĮąĖąĄ ąĖ ą▓čŗąĘąŠą▓. ąŁč鹊 ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 4 ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┐čĆąŠčéąĖą▓ ąŠą┤ąĮąŠą╣.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą╗ąĖčüčéąĖąĮą│, ą║ą░ą║ąŠą╣ ąÆčŗ ą▓ąĖą┤ąĖč鹥 ąĮą░ čüą║čĆąĖąĮčłąŠč鹥, ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ čāčéąĖą╗ąĖčéą░ avr-objdump. ą×ąĮą░ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü čéčāą╗č湥ą╣ąĮąŠą╝ avr-gcc (WinAVR ąĮą░ Windows). ąÜąŠąĮą║čĆąĄčéąĮąŠąĄ ą╝ąĄčüč鹊 čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĮą░ ą┤ąĖčüą║ąĄ ąĘą░ą▓ąĖčüąĖčé ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮą░ Windows čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░čéą░ą╗ąŠą│ C:\WinAVR-20100110\bin\. ąŻčéąĖą╗ąĖčéą░ avr-objdump ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī čäą░ą╣ą╗čŗ .hex, ąĮąŠ ą▓ čŹčéąĖčģ čäą░ą╣ą╗ą░čģ ąŠčéčüčāčéčüčéą▓čāąĄčé ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĖ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓. ąĢčüą╗ąĖ ąÆčŗ čģąŠčéąĖč鹥 ą┐čĆąŠčüč鹊 čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą║ąŠą┤, č鹊 čā ąÆą░čü ą╝ąŠąČąĄčé ą▒čŗčéčī čäą░ą╣ą╗ .elf, ą▓ ą║ąŠč鹊čĆąŠą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓čüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░čÅ ąŠčéą╗ą░ą┤ąŠčćąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ (ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓ą╝ąĄčüč鹥 čü ą┤ą▓ąŠąĖčćąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ). ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ elf-čäą░ą╣ą╗ą░ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą╣:
avr-objdump -S output.elf > asm.txt
ąŚą░č鹥ą╝ ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą▓čŗčģąŠą┤ąĮąŠą╣ čäą░ą╣ą╗ asm.txt ąŠą▒čŗčćąĮčŗą╝ č鹥ą║čüč鹊ą▓čŗą╝ čĆąĄą┤ą░ą║č鹊čĆąŠą╝.
ąæčŗą╗ąĖ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ [čüą╝. 11] čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ Arduino:
ŌĆó loop . ą×ą▒čŗčćąĮą░čÅ čäčāąĮą║čåąĖčÅ void loop() (ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣, inline).
ŌĆó loop_noinline . ąØąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ą░čÅ čäčāąĮą║čåąĖčÅ void loop(), ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ __attribute__ ((noinline)).
ŌĆó while . ą×ą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čåąĖą║ą╗ while(1).
ŌĆó while_noop . ąØąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čåąĖą║ą╗ while(1), ą┐čāč鹥ą╝ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ __asm__ __volatile__("");. ąŁč鹊 ąĖąĮčüčéčĆčāą║čåąĖčÅ nop, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ąŠą┐čéąĖą╝ąĖąĘą░čåąĖčÄ čåąĖą║ą╗ą░ ą▒ąĄąĘ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ąĘą░čéčĆą░čé ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ volatile.
ŌĆó while_noinline . ąØąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ą░čÅ čäčāąĮą║čåąĖčÅ void loop() čü ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ while(1).
ŌĆó while_noinline_noop . ąØąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ą░čÅ čäčāąĮą║čåąĖčÅ void loop() čü ąĮąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ while(1).
ąÜą░ąČą┤čŗą╣ ąĖąĘ čŹčéąĖčģ čüą║ąĄčéč湥ą╣ ą▒čŗą╗ ąĘą░ą┐čāčēąĄąĮ ąĮą░ 30 čüąĄą║čāąĮą┤, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ą┐ąŠ 300 ą▓čŗą▒ąŠčĆąŠą║ ą┤ą░ąĮąĮčŗčģ (ą┐ąŠą╗čāč湥ąĮąĮčŗčģ č湥čĆąĄąĘ ąĘą░ą┤ąĄčƹȹ║čā ą▓ 100 ą╝čü ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ delay(100)). ą¤ąŠą╗čāčćąĖą╗čüčÅ čüą╗ąĄą┤čāčÄčēąĖą╣ čĆąĄąĘčāą╗čīčéą░čé:
loop
92.4142394821974
loop_noinline
92.4142394821974
while
89.1132686084165
while_noinline
89.1132686084165
while_noinline_noop
89.1132686084165
while_noop
89.1132686084165
ąÆčŗą▓ąŠą┤čŗ:
ŌĆó ąØąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ while(1), ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ void loop, čĆą░ą▒ąŠčéą░ąĄčé ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆąŠą╝ void loop.
ŌĆó ąĀąĄą░ą╗čīąĮą░čÅ čĆą░ąĘąĮąĖčåą░ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą╝ąĄąČą┤čā ąĮąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą║ąŠą┤ąŠą╝ ąĖ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą║ąŠą┤ąŠą╝ Adrduino ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮąĄ ąĖą╝ąĄąĄčé ą┐čĆą░ą║čéąĖč湥čüą║ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ.
ąĢčüą╗ąĖ ąČąĄ ąÆčŗ ą╗ąŠą▓ąĖč鹥 ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤čŗ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, č鹊 ą╗čāčćčłąĄ ąĮą░ą┐čĆčÅą╝čāčÄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 avr-gcc ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ čÅąĘčŗą║ąĄ C, ąĖ ąĮąĄ čüčéą░ą▓čīč鹥 čüąĄą▒čÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE.
ąöą░ą╗ąĄąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čĆą░ąĘą┤ąĄą╗ą░ čéčĆą░ą▒ą╗čłčāčéąĖąĮą│ą░ (troubleshooting) - čĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą▓ čüąĖčüč鹥ą╝ąĄ Arduino čü čüą░ą╣čéą░ arduino.cc.
[ą×ą▒čēąĖąĄ ą▓ąŠą┐čĆąŠčüčŗ ]
ą£ąĮąŠąČąĄčüčéą▓ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ (ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ, ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ) ą▓ą╗ąĖčÅąĄčé ąĮą░ ą┐čĆąŠčåąĄčüčü ąĘą░ą┐ąĖčüąĖ čüą║ąĄčéčćą░ ą▓ ą┐ą░ą╝čÅčéčī ą┐ą╗ą░čéčŗ Arduino board, ąĖ ąĄčüą╗ąĖ ą▓ ą║ą░ą║ąŠą╝-č鹊 ąĖąĘ ąĮąĖčģ ąĄčüčéčī ą┐čĆąŠą▒ą╗ąĄą╝ą░ ąĖą╗ąĖ ąŠčłąĖą▒ą║ą░, č鹊 ą┐čĆąŠčåąĄčüčü ą▓čŗą│čĆčāąĘą║ąĖ (upload) čĆą░ą▒ąŠčéą░čéčī ąĮąĄ ą▒čāą┤ąĄčé. ąÆąŠčé čüą┐ąĖčüąŠą║ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, ąŠčé ą║ąŠč鹊čĆčŗčģ ąĘą░ą▓ąĖčüąĖčé ą▓čŗą│čĆčāąĘą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (čüą║ąĄčéčćą░) ą▓ ą┐ą╗ą░čéčā Arduino: ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ USB ą┐ą╗ą░čéčŗ, ą▓čŗą▒ąŠčĆ čéąĖą┐ą░ ą┐ą╗ą░čéčŗ ąĖ ą▓čŗą▒ąŠčĆ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ (čŹčéąĖ ąŠą┐čåąĖąĖ ą▓čŗą▒ąĖčĆą░čÄčéčüčÅ ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE), ą┤ąŠčüčéčāą┐ ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą┐ąŠčĆčéčā, čäąĖąĘąĖč湥čüą║ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą┐ą╗ą░č鹊ą╣, firmware (ą┐čĆąŠčłąĖą▓ą║ą░) ą╝ąŠčüčéą░ 8U2 (čŹč鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega8U2, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą║ą░ą║ ą╝ąŠčüčé USB-UART ąĮą░ ą┐ą╗ą░č鹥 Arduino Uno ąĖ Arduino Mega 2560), ąĮą░ą╗ąĖčćąĖąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ ą┐ą░ą╝čÅčéąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą╗ą░čéčŗ Arduino (ąŠą▒čŗčćąĮąŠ čŹč鹊 UART-ąĘą░ą│čĆčāąĘčćąĖą║), čüąŠčüč鹊čÅąĮąĖąĄ čäčīčĹʹŠą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĖ ą┤čĆčāą│ąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ąĘą░ą│čĆčāąĘą║ąĖ. ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ čüąŠą▓ąĄčéčŗ ą┤ą╗čÅ čāčüčéčĆą░ąĮąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā ąĖąĘ čŹčéąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, čāčćą░čüčéą▓čāčÄčēąĖčģ ą▓ ą┐čĆąŠčåąĄčüčüąĄ Upload.
[Arduino Software ]
ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą▒čĆą░ąĮ čéąĖą┐ ąÆą░čłąĄą╣ ą┐ą╗ą░čéčŗ č湥čĆąĄąĘ ą╝ąĄąĮčÄ Tools -> Board. ąĢčüą╗ąĖ čā ąÆą░čü ą┐ą╗ą░čéą║ą░ Arduino Uno, č鹊 ąÆą░ą╝ ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī ąĄčæ. ąóą░ą║ąČąĄ ąĮąŠą▓čŗąĄ ą┐ą╗ą░čéčŗ Arduino Duemilanove ą┐ąŠčüčéčāą┐ą░čÄčé ą▓ą╝ąĄčüč鹥 čü ATmega328, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čüčéą░čĆčŗąĄ ą▒čŗą╗ąĖ čü ATmega168. ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą║ą░ą║ąŠą╣ ąĖą╝ąĄąĮąĮąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐čĆąŠčćąĖčéą░ą╣č鹥 č鹥ą║čüčé ąĮą░ ą▓ąĄčĆčģąĮąĄą╣ ą┐ą╗ąŠčüą║ąŠčüčéąĖ ą║ąŠčĆą┐čāčüą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čŹč鹊 čüą░ą╝ą░čÅ ą▒ąŠą╗čīčłą░čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░), ą║ąŠč鹊čĆčŗą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ ąÆą░čłąĄą╣ ą┐ą╗ą░č鹥 Arduino.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ 菹╗ąĄą╝ąĄąĮčéą░ą╝ ą╝ąĄąĮčÄ Board ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐ąŠą╗čāčćąĖčéčī ąĖąĘ ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ą┐ąŠ čĆą░ą▒ąŠč湥ą╝čā ąŠą║čĆčāąČąĄąĮąĖčÄ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino (guide to the Arduino environment site:arduino.cc ).
ąŚą░č鹥ą╝ ą┐čĆąŠą▓ąĄčĆčīč鹥, čćč鹊 ą▓čŗą▒čĆą░ąĮ ąĮčāąČąĮčŗą╣ COM-ą┐ąŠčĆčé ą▓ ą╝ąĄąĮčÄ Tools -> Serial Port (ąĄčüą╗ąĖ ąĮčāąČąĮčŗą╣ ą┐ąŠčĆčé ąĮąĄ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ, č鹊 ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖč鹥 Arduino IDE, ą║ąŠą│ą┤ą░ ąÆą░čłą░ ą┐ą╗ą░čéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā č湥čĆąĄąĘ USB). ąØą░ Mac ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą┤ąŠą╗ąČąĄąĮ ąĮą░ąĘčŗą▓ą░čéčīčüčÅ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ /dev/tty.usbmodem621 (ą┤ą╗čÅ Arduino Uno ąĖą╗ąĖ Arduino Mega 2560) ąĖą╗ąĖ /dev/tty.usbserial-A02f8e (ą┤ą╗čÅ čüčéą░čĆčŗčģ ą┐ą╗ą░čé, ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ ą╝ąŠčüčéą░čģ FTDI). ąØą░ Linux, ąĖą╝čÅ ą┐ąŠčĆčéą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ /dev/ttyACM0 (ą┤ą╗čÅ Arduino Uno ąĖą╗ąĖ Arduino Mega 2560) ąĖą╗ąĖ /dev/ttyUSB0 (ą┤ą╗čÅ čüčéą░čĆčŗčģ ą┐ą╗ą░čé). ąØą░ Windows, ą┐ąŠčĆčé ą▒čāą┤ąĄčé ą║ą░ą║ COM-ą┐ąŠčĆčé, ąĮąŠ ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ ąĮčāąČąĮąŠ čāąĘąĮą░čéčī č湥čĆąĄąĘ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ą¤ąŠčĆčéčŗ (Device Manager, čĆą░ąĘą┤ąĄą╗ Ports). ąĢčüą╗ąĖ ąÆčŗ ąĮąĄ ą▓ąĖą┤ąĖč鹥 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé, ą║ąŠč鹊čĆčŗą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąÆą░čłąĄą╣ ą┐ą╗ą░č鹥 Arduino, č鹊 čüą╝. čüą╗ąĄą┤čāčÄčēąĖą╣ čĆą░ąĘą┤ąĄą╗, ą┐ąŠčüą▓čÅčēąĄąĮąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝.
[ąöčĆą░ą╣ą▓ąĄčĆčŗ ]
ąöčĆą░ą╣ą▓ąĄčĆčŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino) čüą┐ąŠčüąŠą▒ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝ (hardware), ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą║ ąÆą░čłąĄą╝čā ą║ąŠą╝ą┐čīčÄč鹥čĆčā (ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ čŹč鹊 ą┐ą╗ą░čéą░ Arduino). ąöą╗čÅ Arduino ą┤čĆą░ą╣ą▓ąĄčĆčŗ čĆą░ą▒ąŠčéą░čÄčé ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (virtual serial port, ąĖą╗ąĖ virtual COM-ą┐ąŠčĆčé). ą¤ą╗ą░čéčŗ Arduino Uno ąĖ Arduino Mega 2560 ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ (USB CDC), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąŠą╣, ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü ą╝ąŠčüč鹊ą╝ ATmega8U2, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ąĮą░ ą┐ą╗ą░č鹥. ąöčĆčāą│ąĖąĄ ą┐ą╗ą░čéčŗ Arduino ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┤čĆą░ą╣ą▓ąĄčĆčŗ FTDI ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü čćąĖą┐ąŠą╝ FTDI ąĮą░ ą┐ą╗ą░č鹥 (ąĖą╗ąĖ, ąĄčüą╗ąĖ čćąĖą┐ ąĮą░ ą┐ą╗ą░č鹥 ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č湥čĆąĄąĘ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī/ą╝ąŠčüčé USB-UART).
ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ čāąĘąĮą░čéčī, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ą╗čÅ ąÆą░čłąĄą╣ ą┐ą╗ą░čéčŗ - čŹč鹊 ąĘą░ą╣čéąĖ ą▓ ą╝ąĄąĮčÄ Tools -> Serial Port ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino, ą║ąŠą│ą┤ą░ ąÆą░čłą░ ą┐ą╗ą░čéą░ Arduino ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā č湥čĆąĄąĘ USB (čüąĮą░čćą░ą╗ą░ ąĮą░ą┤ąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┐ą╗ą░čéčā, ąĘą░č鹥ą╝ ąĘą░ą┐čāčüčéąĖčéčī čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE, ąĖ ąĘą░č鹥ą╝ ąĘą░ą╣čéąĖ ą▓ ą╝ąĄąĮčÄ Tools -> Serial Port). ąĪčĆą░ą▓ąĮąĖč鹥 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠčÅą▓ą╗čÅčÄčēąĖąĄčüčÅ ą┐čāąĮą║čéčŗ ą╝ąĄąĮčÄ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü čüąŠčüč鹊čÅąĮąĖąĄą╝, ą║ąŠą│ą┤ą░ ą┐ą╗ą░čéą░ Arduino ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ, ą║ą░ą║ąŠąĄ ąĖą╝čÅ ąĮą░ąĘąĮą░č湥ąĮąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą┐ąŠčĆčéčā ą┐ą╗ą░čéčŗ Arduino, ą┐ąŠą║ą░ ąŠąĮąŠ ąĮąĄ ą▒čŗą╗ąŠ ą▓čŗą▒čĆą░ąĮąŠ ą▓ ą╝ąĄąĮčÄ.
ąØą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows 7 (ą▓ čćą░čüčéąĮąŠčüčéąĖ ąĮą░ ą▓ąĄčĆčüąĖąĖ 64-bit) ąÆą░ą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąĘą░ą╣čéąĖ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ąŠą▒ąĮąŠą▓ąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ą╗čÅ ą┐ą╗ą░čé Arduino Uno ąĖą╗ąĖ Arduino Mega 2560. ą¤čĆąŠčüč鹊 čüą┤ąĄą╗ą░ą╣č鹥 ą┐čĆą░ą▓čŗą╣ ą║ą╗ąĖą║ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą╗ą░čéčŗ (ąŠąĮąŠ ą┐ąŠčÅą▓ąĖčéčüčÅ čü čĆą░ąĘą┤ąĄą╗ąĄ Ports, ą║ąŠą│ą┤ą░ ą┐ą╗ą░čéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā), ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 ą▓ ą║ąŠąĮč鹥ą║čüčéąĮąŠą╝ ą╝ąĄąĮčÄ ą×ą▒ąĮąŠą▓ąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆčŗ. ąŚą░č鹥ą╝ čāą║ą░ąČąĖč鹥 Windows ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą░ą╣ą╗ .inf. ążą░ą╣ą╗ .inf ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ drivers/, ąĮą░čģąŠą┤čÅčēąĄą╝čüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ Arduino (ąĮąĄ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ FTDI USB Drivers čŹč鹊ą│ąŠ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ą░).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐čāčéčī ą┤ąŠ ą║ą░čéą░ą╗ąŠą│ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ Arduino IDE ąĮą░ Windows 7 ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ c:\Program Files (x86)\Arduino, čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ .inf-čäą░ą╣ą╗ ą▒čāą┤ąĄčé ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ c:\Program Files (x86)\Arduino\drivers.
ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ąŠčłąĖą▒ą║čā ąĮą░ Windows XP, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄč鹥 ą┤čĆą░ą╣ą▓ąĄčĆą░ Arduino Uno ąĖą╗ąĖ Arduino Mega 2560: "The system cannot find the file specified" (čüąĖčüč鹥ą╝ą░ ąĮąĄ ą╝ąŠąČąĄčé ąĮą░ą╣čéąĖ čāą║ą░ąĘą░ąĮąĮčŗą╣ čäą░ą╣ą╗), č鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī čüą╗ąĄą┤ąŠą▓ą░čéčī čüąŠą▓ąĄčéčā ąĮą░ č乊čĆčāą╝ąĄ techguy.org (čüą╝. "cannot find the file specified" "during the installation of the device." site:forums.techguy.org ). ąĪąŠą▓ąĄčé ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĖ ą║ą╗čÄčćą░ "RunOnce" ą▓ čĆą░ąĘą┤ąĄą╗ "HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\Windows\CurrentVersion".
ąØą░ Linux ą┐ą╗ą░čéčŗ Arduino Uno ąĖ Arduino Mega 2560 ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą▓ąĖą┤ąĄ /dev/ttyACM0. ąŁčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą▓ąĄčĆčüąĖąĄą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ RXTX, ą║ąŠč鹊čĆčāčÄ čüąĖčüč鹥ą╝ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ. ąŚą░ą│čĆčāąČą░ąĄą╝čŗą╣ ą┐ą░ą║ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ Arduino ą┤ą╗čÅ Linux ą▓ą║ą╗čÄčćą░ąĄčé ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĮčāčÄ ą▓ąĄčĆčüąĖčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ RXTX, ą║ąŠč鹊čĆą░čÅ čéą░ą║ąČąĄ ąĖčēąĄčé čŹčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ /dev/ttyACM*. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ čŹčéąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ąĄčüčéčī čéą░ą║ąČąĄ ą▓ ą┐ą░ą║ąĄč鹥 Ubuntu (ą┤ą╗čÅ ą▓ąĄčĆčüąĖąĖ 11.04). ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┐ą░ą║ąĄčé RXTX ąĖąĘ ąÆą░čłąĄą│ąŠ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ą░, č鹊 ąÆą░ą╝ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ čüą┤ąĄą╗ą░čéčī čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║čāčÄ čüčüčŗą╗ą║čā (symlink) čü čäą░ą╣ą╗ą░ /dev/ttyACM0 ąĮą░ čäą░ą╣ą╗ /dev/ttyUSB0 (čŹčéąĖ ąĖą╝ąĄąĮą░ čāą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░), čćč鹊ą▒čŗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ąÆą░čłąĄą╣ ą┐ą╗ą░čéčŗ ą▒čŗą╗ ą▓ąĖą┤ąĄąĮ čüčĆąĄą┤ąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino.
[ąöąŠčüčéčāą┐ ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą┐ąŠčĆčéčā ]
ąØą░ Windows, ąĄčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ čüą╗ąĖčłą║ąŠą╝ ą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĖą╗ąĖ ąĮąĄ ą╝ąŠąČąĄčé ąĘą░ą┐čāčüčéąĖčéčīčüčÅ, ąĖą╗ąĖ ąĄčüą╗ąĖ ą╝ąĄąĮčÄ Tools ąŠčéą║čĆčŗą▓ą░ąĄčéčüčÅ čüą╗ąĖčłą║ąŠą╝ ą╝ąĄą┤ą╗ąĄąĮąĮąŠ, č鹊 ąÆą░ą╝ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ Bluetooth ąĖą╗ąĖ ą┤čĆčāą│ąĖąĄ čüąĄč鹥ą▓čŗąĄ COM-ą┐ąŠčĆčéčŗ (ąĘą░ą┐čĆąĄčéąĖčéčī ąĖčģ ą╝ąŠąČąĮąŠ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆąĄ ąŻčüčéčĆąŠą╣čüčéą▓). ą£ąĄą┤ą╗ąĄąĮąĮčŗą╣ ąĘą░ą┐čāčüą║ (ąĖą╗ąĖ ą┤ąŠčüčéčāą┐ ą▓ ą╝ąĄąĮčÄ) ą╝ąŠąČąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą┐ąŠč鹊ą╝čā, čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ Arduino ą┤ąĄą╗ą░ąĄčé čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čüąĄčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆč鹊ą▓ (COM-ą┐ąŠčĆčéčŗ) ąĮą░ ąÆą░čłąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ - ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ąĖ ą║ąŠą│ą┤ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĘą░čģąŠą┤ąĖčé ą▓ ą╝ąĄąĮčÄ Tools, ąĖ čŹčéąĖ čüąĄč鹥ą▓čŗąĄ ą┐ąŠčĆčéčŗ ą╝ąŠą│čāčé ą┐čĆąĖą▓ąŠą┤ąĖčéčī ą║ ą▒ąŠą╗čīčłąĖą╝ ąĘą░ą┤ąĄčƹȹ║ą░ą╝ ąĖą╗ąĖ čüą▒ąŠčÅą╝.
ąĢčüą╗ąĖ ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą┐ąŠčĆčéčā ą┐ą╗ą░čéčŗ Arduino, č鹊 ą┐čĆąŠą▓ąĄčĆčīč鹥, čćč鹊 čā ąÆą░čü ąĮąĄ ąĘą░ą┐čāčēąĄąĮčŗ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ čüą║ą░ąĮąĖčĆčāčÄčé ą▓čüąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ USB Cellular Wifi Dongle software (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠčé Sprint ąĖą╗ąĖ Verizon), ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ PDA, ą┤čĆą░ą╣ą▓ąĄčĆčŗ Bluetooth-USB (ąĮą░ą┐čĆąĖą╝ąĄčĆ BlueSoleil), virtual daemon tools, ąĖ čé. ą┤.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮą░ ą╝ąŠąĄą╝ ą┤ąŠą╝ą░čłąĮąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą║ą░ą║ čĆą░ąĘ ąĖ ą▒čŗą╗ą░ ą░ąĮą░ą╗ąŠą│ąĖčćąĮą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░ čü ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╝ ąĘą░ą┐čāčüą║ąŠą╝ ąĖ ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╝ ąĘą░čģąŠą┤ąŠą╝ ą▓ ą╝ąĄąĮčÄ Tools, čüą▓čÅąĘą░ąĮąĮą░čÅ čü Bluetooth-ą░ą┤ą░ą┐č鹥čĆąŠą╝.
ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čā ąÆą░čü ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čäą░ą╣ąĄčĆą▓ąŠą╗ą░ (firewall software), ą║ąŠč鹊čĆą░čÅ ą▒ą╗ąŠą║ąĖčĆčāąĄčé ą┤ąŠčüčéčāą┐ ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą┐ąŠčĆčéčā (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ZoneAlarm).
ąÆą░ą╝ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą▓čŗą╣čéąĖ ąĖąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ Processing, PD, vvvv, ąĖ čé. ą┤., ąĄčüą╗ąĖ ąÆčŗ ąĖčģ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ USB ąĖą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą┐ą╗ą░č鹊ą╣ Arduino.
ąØą░ Linux ą▓ čüą╗čāčćą░ąĄ ą┐čĆąŠą▒ą╗ąĄą╝ čü ą┤ąŠčüčéčāą┐ąŠą╝ ą║ ą┐ąŠčĆčéčā ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ąĘą░ą┐čāčüčéąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ Arduino ąŠčé ąĖą╝ąĄąĮąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ root, čćč鹊ą▒čŗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, čĆąĄčłąĖčé ą╗ąĖ čŹč鹊 ą┐čĆąŠą▒ą╗ąĄą╝čā ą▓čŗą│čĆčāąĘą║ąĖ (upload).
[ążąĖąĘąĖč湥čüą║ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ]
ą¤ąĄčĆą▓ąŠąĄ, ą▓ č湥ą╝ ąĮčāąČąĮąŠ čāą┤ąŠčüč鹊ą▓ąĄčĆąĖčéčīčüčÅ - čćč鹊 ąÆą░čłą░ ą┐ą╗ą░čéą░ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ (ą│ąŠčĆąĖčé ąĘąĄą╗ąĄąĮčŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ LED ąĮą░ ą┐ą╗ą░č鹥), ąĖ ą┐ą╗ą░čéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā č湥čĆąĄąĘ USB.
ąĪ ą┐ą╗ą░čéą░ą╝ąĖ Arduino Uno ąĖ Arduino Mega 2560 ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą┐čĆąĖ ąĖčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā Mac č湥čĆąĄąĘ čģą░ą▒ USB. ąĢčüą╗ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą▓ ą╝ąĄąĮčÄ Tools -> Serial Port, ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┐ą╗ą░čéčā ąĮą░ą┐čĆčÅą╝čāčÄ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā (ą▒ąĄąĘ čģą░ą▒ą░) ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖč鹥 čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE.
ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą┐ąŠčüč鹊čĆąŠąĮąĮąĄąĄ ą║ čåąĖčäčĆąŠą▓čŗą╝ ą▓čŗą▓ąŠą┤ą░ą╝ 0 ąĖ 1, ą║ąŠą│ą┤ą░ ąÆčŗ ą▓čŗą│čĆčāąČą░ąĄč鹥 čüą║ąĄčéčć ą▓ ą┐ą╗ą░čéčā, ą┐ąŠč鹊ą╝čā čćč鹊 čåąĖčäčĆąŠą▓čŗąĄ ą▓čŗą▓ąŠą┤čŗ 0 ąĖ 1 ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ ą┐ąŠą┤ UART (ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą║ą░ąĮą░ą╗ čüą▓čÅąĘąĖ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ ą┐čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ ą║ąŠą┤ą░ čüą║ąĄčéčćą░ č湥čĆąĄąĘ bootloader Arduino). ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 čüą┤ąĄą╗ą░čéčī upload, ą║ąŠą│ą┤ą░ ą▓ąŠąŠą▒čēąĄ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ ą┐ą╗ą░č鹥 (ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ą░ą▒ąĄą╗čÅ USB, ą║ąŠąĮąĄčćąĮąŠ).
ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┐ą╗ą░čéą░ ąĮąĄ ą║ąŠąĮčéą░čćąĖčé ąĮąĖ čü ą║ą░ą║ąĖą╝ąĖ ą╝ąĄčéą░ą╗ą╗ąĖč湥čüą║ąĖą╝ąĖ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéčÅą╝ąĖ, ąĖą╗ąĖ č湥ą╝-ąĮąĖą▒čāą┤čī č鹊ą║ąŠą┐čĆąŠą▓ąŠą┤čÅčēąĖą╝. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą┤čĆčāą│ąŠą╣ ą║ą░ą▒ąĄą╗čī USB; ąĖąĮąŠą│ą┤ą░ ą▒čŗą▓ą░ąĄčé čéą░ą║, čćč鹊 ą║ą░ą║ąŠą╣-č鹊 ą║ą░ą▒ąĄą╗čī ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé.
[Auto-Reset (čäčāąĮą║čåąĖčÅ ą░ą▓č鹊čüą▒čĆąŠčüą░ ą┐čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ čüą║ąĄčéčćą░) ]
ąĢčüą╗ąĖ čā ąÆą░čü ą┐ą╗ą░čéą░, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą░ą▓č鹊čüą▒čĆąŠčü, č鹊 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąÆčŗ ą┐ąĄčĆąĄą┤ ąĘą░ą│čĆčāąĘą║ąŠą╣ čüą▒čĆą░čüčŗą▓ą░ąĄč鹥 ą┐ą╗ą░čéčā. ą¤ą╗ą░čéčŗ Arduino Diecimila, Arduino Duemilanove ąĖ Arduino Nano ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé auto-reset, ąĖ ą┤ą░ąČąĄ čéą░ą║ąĖąĄ ą┐ą╗ą░čéčŗ ą▒ąĄąĘ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą╝ąŠčüčéą░ USB-UART, ą║ą░ą║ Arduino LilyPad, Arduino Pro ąĖ Arduino Pro Mini ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą░ą▓č鹊čüą▒čĆąŠčü, ąĄčüą╗ąĖ ąŠąĮąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ č湥čĆąĄąĘ 6-pin ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčēąĖą╣ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ (ą▓ąĮąĄčłąĮąĖą╣ ą╝ąŠčüčé USB-UART).
ą×ą┤ąĮą░ą║ąŠ ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ą╗ą░čéčŗ (Arduino Diecimila ąĖą╗ąĖ ą┤čĆčāą│ąĖąĄ), ą▓ ą║ąŠč鹊čĆčŗąĄ čüą╗čāčćą░ą╣ąĮąŠ ą┐čĆąŠčłąĖčéą░ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą╝ąŠą│čāčé čéčĆąĄą▒ąŠą▓ą░čéčī čĆčāčćąĮąŠą│ąŠ ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ąĮąŠą┐ą║čā čüą▒čĆąŠčüą░ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ upload (čüą╝. ą┤ą░ą╗ąĄąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓ąŠą┐čĆąŠčü).
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗčģ ą║ąŠą╝ą┐čīčÄč鹥čĆą░čģ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą▓čĆčāčćąĮčāčÄ ąĮą░ąČą░čéčī ą║ąĮąŠą┐ą║čā čüą▒čĆąŠčüą░ ąĮą░ ą┐ą╗ą░č鹥 ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąÆčŗ ąĮą░ąČą░ą╗ąĖ ą║ąĮąŠą┐ą║čā upload ą▓ čüąĖčüč鹥ą╝ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠ ą┐ąŠą┤ąŠą▒čĆą░čéčī ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ ą┤ąĄą╣čüčéą▓ąĖčÅą╝ąĖ, ą▓ą┐ą╗ąŠčéčī ą┤ąŠ 10 čüąĄą║čāąĮą┤ (ąĖą╗ąĖ ą┤ą░ąČąĄ ą▒ąŠą╗čīčłąĄ).
ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ąŠčłąĖą▒ą║čā: [VP 1] Device is not responding correctly, č鹊 ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ąĘą░ą┐čāčüčéąĖčéčī upload čüąĮąŠą▓ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ čüą▒čĆąŠčüčīč鹥 ą┐ą╗ą░čéčā ąĖ ąĮą░ąČą╝ąĖč鹥 ą║ąĮąŠą┐ą║čā upload ą▓č鹊čĆąŠą╣ čĆą░ąĘ).
[Bootloader (ąĘą░ą│čĆčāąĘčćąĖą║) ]
ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 bootloader ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠčłąĖčé ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą╗ą░čéčŗ Arduino. ą×ą▒čŗčćąĮąŠ čŹč鹊 ąĘą░ą│čĆčāąĘčćąĖą║ UART, ąĮąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖ ą┤čĆčāą│ąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ. ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī ąĮą░ą╗ąĖčćąĖąĄ UART-ąĘą░ą│čĆčāąĘčćąĖą║ą░, čüą▒čĆąŠčüčīč鹥 ą┐ą╗ą░čéčā. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ąĮą░ ą┐ą╗ą░čéčā ą║čĆą░čüąĮčŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ LED (ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čåąĖčäčĆąŠą▓ąŠą╝čā ą▓čŗą▓ąŠą┤čā 13) ą┤ąŠą╗ąČąĄąĮ ą╝ąĖą│ąĮčāčéčī. ąĢčüą╗ąĖ čŹč鹊 ąĮąĄ čéą░ą║, č鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą┐čĆąŠčłąĖčé ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąÆą░čłąĄą╣ ą┐ą╗ą░čéčŗ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▒ąŠą╗ąĄąĘąĮčīčÄ "ąĮąĄ ą┐čĆąŠčłąĖčé ąĘą░ą│čĆčāąĘčćąĖą║" čćą░čüč鹊 čüčéčĆą░ą┤ą░čÄčé ą┤ąĄčłąĄą▓čŗąĄ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą┐ą╗ą░čéčŗ Arduino, ą║ąŠč鹊čĆčŗąĄ ą▓ ąĖąĘąŠą▒ąĖą╗ąĖąĖ ąĄčüčéčī ą▓ ąśąĮč鹥čĆąĮąĄčé-ą╝ą░ą│ą░ąĘąĖąĮą░čģ ebay.com, dex.com ąĖ aliexpress.com.
ąŚą░ą│čĆčāąĘčćąĖą║ ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐čĆąŠčłąĖčéčī čü ą┐ąŠą╝ąŠčēčīčÄ ą▓ąĮąĄčłąĮąĄą│ąŠ ISP-ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ (čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓ąŠą┐čĆąŠčü "ą¦č鹊 čéą░ą║ąŠąĄ ąĘą░ą│čĆčāąĘčćąĖą║, ą│ą┤ąĄ ąĄą│ąŠ ą▓ąĘčÅčéčī"). ąĢčüą╗ąĖ ą▓čŗą│čĆčāąĘą║ą░ čüą║ąĄčéčćą░ ą▓ ą┐ą╗ą░čéčā ą▓čüąĄ ąĄčēąĄ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé, č鹊 ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ąĮą░ą╣čéąĖ ą┐ąŠą╝ąŠčēčī ąĮą░ č乊čĆčāą╝ąĄ Arduino (čüą╝. Help getting the Arduino board up and running site:forum.arduino.cc). ąÆąŠąĘą╝ąŠąČąĮąŠ, ąÆčŗ čüčĆą░ąĘčā čüą╝ąŠąČąĄč鹥 ąĮą░ą╣čéąĖ ąŠčéą▓ąĄčé, ąĄčüą╗ąĖ ą║č鹊-č鹊 čĆą░ąĮčīčłąĄ čüčéą░ą╗ą║ąĖą▓ą░ą╗čüčÅ čü ą┐ąŠčģąŠąČąĄą╣ ą┐čĆąŠą▒ą╗ąĄą╝ąŠą╣. ąĢčüą╗ąĖ ąÆčŗ čĆąĄčłąĖą╗ąĖ ąĘą░ą┤ą░čéčī ą▓ąŠą┐čĆąŠčü ąĮą░ č乊čĆčāą╝ąĄ, č鹊 ą┐ąŠąČą░ą╗čāą╣čüčéą░ čāą║ą░ąČąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ:
ŌĆó ąÜą░ą║ą░čÅ čā ąÆą░čü ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░.
ąĀą░ą▒ąŠč湥ąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ Arduino ą┤ąĄą╗ą░ąĄčé ąĮąĄą║ąŠč鹊čĆčāčÄ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā ąÆą░čłąĄą│ąŠ čüą║ąĄčéčćą░ ą┐čāč鹥ą╝ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ ą║ąŠą┤ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│čāą╗čÅčĆąĮčŗčģ ą▓čŗčĆą░ąČąĄąĮąĖą╣. ąśąĮąŠą│ą┤ą░ čŹčéą░ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüą▒ąĖą▓ą░ąĄčéčüčÅ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ čüčéčĆąŠą║ą░ą╝ č鹥ą║čüčéą░. ąĢčüą╗ąĖ ąÆčŗ ą▓ąĖą┤ąĖč鹥 ąŠčłąĖą▒ą║čā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą╣:
java.lang.StackOverflowError
at java.util.Vector.addElement(Unknown Source)
at java.util.Stack.push(Unknown Source)
at com.oroinc.text.regex.Perl5Matcher._pushState(Perl5Matcher.java)
ąĖą╗ąĖ:
at com.oroinc.text.regex.Perl5Matcher._match(Perl5Matcher.java)
at com.oroinc.text.regex.Perl5Matcher._match(Perl5Matcher.java)
at com.oroinc.text.regex.Perl5Matcher._match(Perl5Matcher.java)
at com.oroinc.text.regex.Perl5Matcher._match(Perl5Matcher.java)
at com.oroinc.text.regex.Perl5Matcher._match(Perl5Matcher.java)
at com.oroinc.text.regex.Perl5Matcher._match(Perl5Matcher.java)
at com.oroinc.text.regex.Perl5Matcher._match(Perl5Matcher.java)
č鹊 ą║ą░ą║ čĆą░ąĘ čŹč鹊 ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ. ąśčēąĖč鹥 ą▓ ą║ąŠą┤ąĄ ąĮąĄąŠą▒čŗčćąĮčŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čüąĖą╝ą▓ąŠą╗ąŠą▓, ą▓ą║ą╗čÄčćą░čÄčēąĖąĄ ą┤ą▓ąŠą╣ąĮčŗąĄ ą║ą░ą▓čŗčćą║ąĖ, ąŠą┤ąĖąĮąŠčćąĮčŗąĄ ą║ą░ą▓čŗčćą║ąĖ, ąŠą▒čĆą░čéąĮčŗąĄ čüą╗ąĄčłąĖ \, ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ąĖ čé. ą┤. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠą┐čāčēąĄąĮąĮčŗąĄ ą║ą░ą▓čŗčćą║ąĖ ą╝ąŠą│čāčé ą▓čŗąĘą▓ą░čéčī ą┐čĆąŠą▒ą╗ąĄą╝čŗ, ąĖ čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ čü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ '\"' (ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī '"').
ą¤ąŠč鹊ą╝čā čćč鹊 ą▓čŗą▓ąŠą┤ RX ąŠčüčéą░ą╗čüčÅ ąĮąĄą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝, ąĖ bootloader ą┐ą╗ą░čéčŗ ą╝ąŠą│ čāą▓ąĖą┤ąĄčéčī ą╝čāčüąŠčĆąĮčŗą╣ čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čģąŠą┤ąĄ, čćč鹊 ąĮąĄ ą┤ą░ąĄčé ąĖčüč鹥čćčī čéą░ą╣ą╝ą░čāčéčā ąĖ ąĘą░ą┐čāčüčéąĖčéčī ąÆą░čł čüą║ąĄčéčć. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐čĆąĖčéčÅąĮčāčéčī ą▓čŗą▓ąŠą┤ RX ą║ ąĘąĄą╝ą╗ąĄ č湥čĆąĄąĘ čĆąĄąĘąĖčüč鹊čĆ 10K (ąĖą╗ąĖ ąĘą░ą╝ą║ąĮčāčéčī ą┤čĆčāą│ ąĮą░ ą┤čĆčāą│ą░ ą▓čŗą▓ąŠą┤čŗ RX ąĖ TX).
ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 Arduino Diecimila ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čüčéą░čĆčāčÄ ą┐ą╗ą░čéčā USB (ąĮą░ą┐čĆąĖą╝ąĄčĆ Arduino NG), č鹊 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┐ąĄčĆąĄą╝čŗčćą║ą░ PWR-SEL (ą║čāčüąŠč湥ą║ ą┐ą╗ą░čüčéąĖą║ą░ ąĮą░ ą║ąŠąĮčéą░ą║čéą░čģ ą▓ąŠąĘą╗ąĄ ą║ąŠąĮąĮąĄą║č鹊čĆą░ USB) čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠą┤ą░ąĄč鹥 ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ą╗ą░čéčā ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą▒ą╗ąŠą║ą░ ą┐ąĖčéą░ąĮąĖčÅ (ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ č湥čĆąĄąĘ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą║ąŠąĮąĮąĄą║č鹊čĆ ą┐ąĖčéą░ąĮąĖčÅ), č鹊 ą┐ąĄčĆąĄą╝čŗčćą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąĮą░ 2 čłčéčŗčĆčīą║ą░, ą▒ą╗ąĖąČą░ą╣čłąĖąĄ ą║ ą║ąŠąĮąĮąĄą║č鹊čĆčā ą┐ąĖčéą░ąĮąĖčÅ. ąĢčüą╗ąĖ ąÆčŗ ą┐ąĖčéą░ąĄč鹥 ą┐ą╗ą░čéčā č湥čĆąĄąĘ USB, č鹊 ą┐ąĄčĆąĄą╝čŗčćą║ą░ ą┤ąŠą╗ąČąĮą░ čüč鹊čÅčéčī ąĮą░ 2 čłčéčŗčĆčīą║ą░čģ, ą║ąŠč鹊čĆčŗąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą▒ą╗ąĖąČąĄ ą║ ą║ąŠąĮąĮąĄą║č鹊čĆčā USB.
ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐ą╗ą░čéčŗ Arduino Diecimila čüą╗čāčćą░ą╣ąĮąŠ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ąĘą░ą┐ąĖčüą░ąĮčŗ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╝ ą┤ą╗čÅ Arduino NG. ą×ąĮ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĄąĮ čĆą░ą▒ąŠčéą░čéčī, ąĮąŠ ąĖą╝ąĄąĄčé ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ, ą║ąŠą│ą┤ą░ ą┐ą╗ą░čéą░ ą┐ąŠą╗čāčćą░ąĄčé čüą▒čĆąŠčü (ą┐ąŠč鹊ą╝čā čćč鹊 čā ą┐ą╗ą░čéčŗ Arduino NG ąĮąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ čüą▒čĆąŠčüą░, ąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ čüą║ąĄčéčćą░ čāčüą┐ąĄčéčī ąĮą░ąČą░čéčī ąĮą░ ą║ąĮąŠą┐ą║čā čüą▒čĆąŠčüą░). ąÆčŗ ą╝ąŠąČąĄč鹥 čĆą░čüą┐ąŠąĘąĮą░čéčī ąĘą░ą│čĆčāąĘčćąĖą║ NG, ą┐ąŠč鹊ą╝čā čćč鹊 čüą▓ąĄč鹊ą┤ąĖąŠą┤ LED ąĮą░ ą▓čŗą▓ąŠą┤ąĄ 13 čéčĆąĖ čĆą░ąĘą░ ą╝ąĖą│ąĮąĄčé ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐ą╗ą░čéčŗ (ąĄčüą╗ąĖ čüčĆą░ą▓ąĮąĖčéčī čü ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ Diecimila). ąĢčüą╗ąĖ ą▓ ąÆą░čłąĄą╣ ą┐ą╗ą░č鹥 Diecimila ąĘą░ą┐ąĖčüą░ąĮ ąĘą░ą│čĆčāąĘčćąĖą║ NG, č鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 čäąĖąĘąĖč湥čüą║ąĖ ąĮą░ąČą░čéčī ąĮą░ ą║ąĮąŠą┐ą║čā čüą▒čĆąŠčüą░ ą┐ą╗ą░čéčŗ ą┐ąĄčĆąĄą┤ ąĘą░ą│čĆčāąĘą║ąŠą╣ ąÆą░čłąĄą│ąŠ čüą║ąĄčéčćą░. ąÆčŗ čéą░ą║ąČąĄ ą╝ąŠąČąĄč鹥 ąĘą░ą│čĆčāąĘąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ąĘą░ą│čĆčāąĘčćąĖą║ ą┤ą╗čÅ ąÆą░čłąĄą╣ Diecimila (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓ąŠą┐čĆąŠčü "ą¦č鹊 čéą░ą║ąŠąĄ ąĘą░ą│čĆčāąĘčćąĖą║, ą│ą┤ąĄ ąĄą│ąŠ ą▓ąĘčÅčéčī").
ąĢčüą╗ąĖ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ Arduino ą▓čŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ąŠčłąĖą▒ą║čā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ:
Uncaught exception in main method: java.lang.UnsatisfiedLinkError: Native Library
/Users/anu/Desktop/arduino-0002/librxtxSerial.jnilib already loaded in another classloader
č鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ čā ąÆą░čü čüčéą░čĆą░čÅ ą▓ąĄčĆčüąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ (communications library), ąĮą░čģąŠą┤čÅčēąĄą╣čüčÅ ą┐ąŠą▒ą╗ąĖąĘąŠčüčéąĖ. ąśčēąĖč鹥 comm.jar ąĖą╗ąĖ jcl.jar ą▓ /System/Library/Frameworks/JavaVM.framework/ ąĖą╗ąĖ ą▓ ą║ą░čéą░ą╗ąŠą│ą░čģ čüąĖčüč鹥ą╝ąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąŠą║čĆčāąČąĄąĮąĖčÅ (environment variables) CLASSPATH ąĖą╗ąĖ PATH.
ąĢčüą╗ąĖ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ Arduino ą▓čŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ąŠčłąĖą▒ą║čā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ:
Java Virtual Machine Launcher: Could not find the main class. Program will exit.
č鹊 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąÆčŗ ą║ąŠčĆčĆąĄą║čéąĮąŠ čĆą░čüą┐ą░ą║ąŠą▓ą░ą╗ąĖ .zip-čäą░ą╣ą╗ Arduino - ą▓ čćą░čüčéąĮąŠčüčéąĖ, čćč鹊 ą║ą░čéą░ą╗ąŠą│ lib ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąĮčāčéčĆąĖ ą║ą░čéą░ą╗ąŠą│ą░ Arduino, ąĖ čéą░ą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ čäą░ą╣ą╗ pde.jar.
ąĢčüą╗ąĖ čüčĆąĄą┤ą░ Arduino ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čüą╗ąĖčłą║ąŠą╝ ą┤ąŠą╗ą│ąŠ, ąĖ ąĘą░ą▓ąĖčüą░ąĄčé ąĮą░ą┤ąŠą╗ą│ąŠ, ą║ąŠą│ą┤ą░ ąÆčŗ ą┐čŗčéą░ąĄč鹥čüčī ąĘą░ą╣čéąĖ ą▓ ą╝ąĄąĮčÄ Tools, č鹊 čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘ-ąĘą░ ą║ąŠąĮčäą╗ąĖą║čéą░ čü ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą▓ čüąĖčüč鹥ą╝ąĄ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ Arduino ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ąĖ ą▓čģąŠą┤ąĄ ą▓ ą╝ąĄąĮčÄ Tools ą┐čŗčéą░ąĄčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī čüą┐ąĖčüąŠą║ ą▓čüąĄčģ COM-ą┐ąŠčĆč鹊ą▓ ąĮą░ ąÆą░čłąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ. ą£ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčīčüčÅ čéą░ą║, čćč鹊 ąŠą┤ąĖąĮ ąĖąĘ COM-ą┐ąŠčĆč鹊ą▓, čüąŠąĘą┤ą░ąĮąĮčŗą╣ ą║ą░ą║ąĖą╝-č鹊 ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ ąÆą░čłąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ, čüą╗ąĖčłą║ąŠą╝ ąĘą░ą╝ąĄą┤ą╗čÅąĄčé ą┐čĆąŠčåąĄčüčü čüąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ čüą┐ąĖčüą║ą░. ą¤čĆąŠčüą╝ąŠčéčĆąĖč鹥 čüą┐ąĖčüąŠą║ COM-ą┐ąŠčĆč鹊ą▓ ą▓ Device Manager. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąĘą░ą┐čĆąĄčéąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖąĄ čĆą░ąĘąĮčŗąĄ COM-ą┐ąŠčĆčéčŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čāčüčéčĆąŠą╣čüčéą▓ą░ Bluetooth).
ą¤čĆąĖą╝. ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: čā ą╝ąĄąĮčÅ ą▒čŗą╗ą░ ąĖą╝ąĄąĮąĮąŠ čéą░ą║ą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░. ą¤ąŠą║ą░ čÅ ąĮąĄ ąĘą░ą┐čĆąĄčéąĖą╗ čāčüčéčĆąŠą╣čüčéą▓ąŠ "Bluetooth Serial Port", čüąĖčüč鹥ą╝ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino ąĘą░ą┐čāčüą║ą░ą╗ą░čüčī ąŠč湥ąĮčī ą┤ąŠą╗ą│ąŠ, ąĖ č鹊čĆą╝ąŠąĘąĖą╗ą░ ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ąĘą░ą╣čéąĖ ą▓ ą╝ąĄąĮčÄ ąĪąĄčĆą▓ąĖčü.
ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┐ą╗ą░čéčā Arduino, ą┐ąŠą┤ą║ą╗čÄčćąĖą▓ ąĄčæ č湥čĆąĄąĘ USB, č鹊 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čā ąÆą░čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┤čĆą░ą╣ą▓ąĄčĆčŗ FTDI (ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ, čüą╝. čāą║ą░ąĘą░ąĮąĖčÅ Howto site:arduino.cc). ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą░ą┤ą░ą┐č鹥čĆ USB-to-Serial (ą▓ąĮąĄčłąĮąĖą╣ ą╝ąŠčüčé USB-UART), č鹊 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čā ąÆą░čü ą┤ą╗čÅ ąĮąĄą│ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ąŻą┤ąŠčüč鹊ą▓ąĄčĆčīč鹥čüčī, čćč鹊 ą┐ą╗ą░čéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░: ą╝ąĄąĮčÄ ą┐ąŠčĆč鹊ą▓ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąÆčŗ ąŠčéą║čĆčŗą▓ą░ąĄč鹥 ą╝ąĄąĮčÄ Tools. ą¤ąŠčŹč鹊ą╝čā ąĄčüą╗ąĖ ąÆčŗ ą┐čĆąŠčüč鹊 ąŠčéą║ą╗čÄčćąĖą╗ąĖ ą┐ą╗ą░čéčā, č鹊 ąŠąĮą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓ čüą┐ąĖčüą║ąĄ ą╝ąĄąĮčÄ.
ą¤čĆąŠą▓ąĄčĆčīč鹥, čćč鹊 čā ąÆą░čü ąĮąĄ ąĘą░ą┐čāčēąĄąĮčŗ ą╗čÄą▒čŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ čüą║ą░ąĮąĖčĆčāčÄčé ą▓čüąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ PDA, ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ Bluetooth-USB (ąĮą░ą┐čĆąĖą╝ąĄčĆ BlueSoleil), virtual daemon tools, ąĖ čé. ą┤.
ąØą░ Windows ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ąĮąŠą╝ąĄčĆ COM-ą┐ąŠčĆčéą░ ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčīčüčÅ čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąĖą╝. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćąĖčéčī ąĮąŠą╝ąĄčĆ COM-ą┐ąŠčĆčéą░ čćąĖą┐ą░ FTDI ąĮą░ ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║ąĖą╣. ąÆąŠčé ąĘą░ą╝ąĄčćą░ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣:
"ąŻ ą╝ąĄąĮčÅ ą▒čŗą╗ ąĮą░ą▒ąŠčĆ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗčģ COM-ą┐ąŠčĆč鹊ą▓ ą┤ą╗čÅ Bluetooth, čéą░ą║ čćč鹊 ą┐ą╗ą░čéą░ Arduino ąŠą║ą░ąĘą░ą╗ą░čüčī čü ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╝ ą┐ąŠčĆč鹊ą╝ COM17. Arduino IDE ąĮąĄ ą╝ąŠą│ą╗ą░ ąĮą░ą╣čéąĖ ą┐ą╗ą░čéčā, ą┐ąŠą║ą░ čÅ ąĮąĄ čāą┤ą░ą╗ąĖą╗ ą┤čĆčāą│ąĖąĄ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ ą▓ ą¤ą░ąĮąĄą╗ąĖ ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąĮą░ Windows XP) ąĖ ą┐ąĄčĆąĄąĮąĄčü COM-ą┐ąŠčĆčé FTDI ą┐ą╗ą░čéčŗ ąĮą░ COM2. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čÅ čāą▒ąĄą┤ąĖą╗čüčÅ, čćč鹊 čüčĆąĄą┤ą░ Arduino ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮąŠą▓čŗą╣ ą┐ąŠčĆčé, ąĖ ą▓čüąĄ ąĘą░čĆą░ą▒ąŠčéą░ą╗ąŠ."
ąØą░ Mac ąĄčüą╗ąĖ čā ąÆą░čü čüčéą░čĆčŗąĄ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ FTDI, č鹊 ąÆą░ą╝ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ čāą┤ą░ą╗ąĖčéčī ąĖčģ ąĖ ą┐ąĄčĆąĄčāčüčéą░ąĮąŠą▓ąĖčéčī ąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ. ąĪą╝. č鹥ą╝čā ąĮą░ č乊čĆčāą╝ąĄ Can't install driver on Mac OS 10.4.5 site:forum.arduino.cc.
ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čü čüą░ą╣čéą░ FTDI, ąĖą╗ąĖ ąŠą▒čĆą░čéąĖčéčīčüčÅ ą▓ ąĖčģ čüą╗čāąČą▒čā č鹥čģą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ support1@ftdichip.com.
ą¤čĆąĖą╝. ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ąĖąĮąŠą│ą┤ą░ ą╗čāčćčłąĄ čŹč鹊ą│ąŠ ąĮąĄ ą┤ąĄą╗ą░čéčī, čüą╝. FTDI ąĮą░ąĮąŠčüąĖčé ąŠčéą▓ąĄčéąĮčŗą╣ čāą┤ą░čĆ site:habrahabr.ru .
ąĪą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ą┐čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ąÆčŗ ą┐ąŠčüčŗą╗ą░ąĄč鹥 ą║ą░ą║ąĖąĄ-č鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ą╗ą░čéčā, ą║ąŠą│ą┤ą░ ąŠąĮą░ č鹊ą╗čīą║ąŠ čćč鹊 ą▓ą║ą╗čÄč湥ąĮą░. ąÆąŠ ą▓čĆąĄą╝čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐ąĄčĆą▓čŗčģ čüąĄą║čāąĮą┤ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ Arduino (čćč鹊 čŹč鹊 čéą░ą║ąŠąĄ, čüą╝. ą▓ąŠą┐čĆąŠčü "ąŚą░ą│čĆčāąĘčćąĖą║ Arduino: čćč鹊 čŹč鹊 čéą░ą║ąŠąĄ") ąČą┤ąĄčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąŠčé ą║ąŠą╝ą┐čīčÄč鹥čĆą░ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čüą║ąĄčéčćą░. ą¤ąŠčüą╗ąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąĄą║čāąĮą┤, ąĄčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą┐ąŠčüčéčāą┐ąĖą╗ąĖ, ąĘą░ą│čĆčāąĘčćąĖą║ ąĘą░ą▓ąĄčĆčłąĖčé čéą░ą╣ą╝ą░čāčé ąĖ ąĘą░ą┐čāčüčéąĖčé čüą║ąĄčéčć, čāąČąĄ ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╣ čĆą░ąĮąĄąĄ ą▓ ą┐ą░ą╝čÅčéčī ą┐ą╗ą░čéčŗ. ąĢčüą╗ąĖ ąČąĄ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąÆčŗ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄč鹥 ą┐ąŠčüčŗą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĘą░ą│čĆčāąĘčćąĖą║čā, č鹊 čā ąĮąĄą│ąŠ ąĮąĄ ąĘą░ą║ąŠąĮčćąĖčéčüčÅ čéą░ą╣ą╝ą░čāčé, čéą░ą║ čćč鹊 ąÆą░čł čüą║ąĄčéčć ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąĘą░ą┐čāčüčéąĖčéčüčÅ. ąÆą░ą╝ ąĮčāąČąĮąŠ ą╗ąĖą▒ąŠ ąĮą░ą╣čéąĖ čüą┐ąŠčüąŠą▒ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą┐ąĄčĆą▓čŗąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĄą║čāąĮą┤ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą┐ą╗ą░čéčŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ čĆą░ąĘčĆąĄčłą░ąĄą╝ąŠą│ąŠ čćąĖą┐ą░, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠą┐čāčüą║ą░ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ čäčāąĮą║čåąĖąĖ setup() čüą║ąĄčéčćą░), ą╗ąĖą▒ąŠ ą┐čāč鹥ą╝ ą┐čĆąŠčłąĖą▓ą║ąĖ čüą║ąĄčéčćą░ ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą╗ą░čéčŗ ą▓ąĮąĄčłąĮąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĘą░ą┐čĆąĄčéąĖą▓ ą┐čĆąĖ čŹč鹊ą╝ čäčīčĹʹ░ą╝ąĖ ąĘą░ą┐čāčüą║ ąĘą░ą│čĆčāąĘčćąĖą║ą░. ąøąĖą▒ąŠ, ą║ą░ą║ ą▓ą░čĆąĖą░ąĮčé, ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą┐ąĖčüą░čéčī čüą▓ąŠčÄ ą▓ąĄčĆčüąĖčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░, čā ą║ąŠč鹊čĆąŠą│ąŠ ą▒čāą┤ąĄčé ą┐čĆąĖą╝ąĄąĮąĄąĮąŠ ąŠčüąŠą▒ąŠąĄ čāčüą╗ąŠą▓ąĖąĄ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘą║ąĖ.
ąÆčŗ čüą┤ąĄą╗ą░ą╗ąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą▓čŗą▒ąŠčĆ ą▓ ą╝ąĄąĮčÄ Tools -> Microcontroller. ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą▓čŗą▒ąŠčĆ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé č鹊ą╝čā, čćč鹊 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ ąÆą░čłąĄą╣ ą┐ą╗ą░č鹥 (ATmega8, ATmega168 ąĖą╗ąĖ ATmega328). ąØą░ąĘą▓ą░ąĮąĖąĄ čéąĖą┐ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮą░ą┐ąĖčüą░ąĮąŠ ąĮą░ čüą░ą╝ąŠą╣ ą▒ąŠą╗čīčłąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą┐ą╗ą░čéčŗ.
ą¤čĆąŠą▓ąĄčĆčīč鹥 ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┐ąŠą╝ąĄčģ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą▒ą╗ąŠą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ąØąĄą║ą░č湥čüčéą▓ąĄąĮąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 čüą║ąĄčéčć ą▒čāą┤ąĄčé ąĘą░ą┐ąŠčĆč湥ąĮ ąĖą╗ąĖ čüč鹥čĆčé ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąöčĆčāą│ą░čÅ ą┐čĆąĖčćąĖąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ č鹊ą╝, čćč鹊 čüą║ąĄčéčć čüą╗ąĖčłą║ąŠą╝ ą▓ąĄą╗ąĖą║ ą┤ą╗čÅ ą┐ą╗ą░čéčŗ. ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ čüą║ąĄčéčć, Arduino 0004 ą┐čĆąŠą▓ąĄčĆčÅąĄčé ą┐ąŠą╝ąĄčüčéąĖčéčüčÅ ą╗ąĖ ąŠąĮ ą▓ ą┐ą░ą╝čÅčéąĖ ATmega8, ą▒ą░ąĘąĖčĆčāčÅčüčī ą▓ čüą▓ąŠąĖčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅčģ ąĮą░ čĆą░ąĘą╝ąĄčĆąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ 1 ą║ąĖą╗ąŠą▒ą░ą╣čé. ąÆąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 čā ąÆą░čü čüčéą░čĆčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║, ą║ąŠč鹊čĆčŗą╣ ąĘą░ąĮąĖą╝ą░ąĄčé 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ąĖąĘ 8 ą║ąĖą╗ąŠą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH) ATmega8 ą▓ą╝ąĄčüč鹊 1 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ č鹥ą║čāčēąĄą╣ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░. ąĢčüą╗ąĖ čŹč鹊 čéą░ą║, ąĖ čā ąÆą░čü čüą║ąĄčéčć čüą╗ąĖčłą║ąŠą╝ ą▓ąĄą╗ąĖą║ (ą▒ąŠą╗čīčłąĄ 8 - 2 = 6 ą║ąĖą╗ąŠą▒ą░ą╣čé), č鹊 ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮą░ č鹊ą╗čīą║ąŠ čćą░čüčéčī čüą║ąĄčéčćą░, ąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą▒ čŹč鹊ą╝ ąĮąĖą║ą░ą║ ąĮąĄ čāąĘąĮą░ąĄčé, ąĖ ąÆą░čłą░ ą┐ą╗ą░čéą░ ą▒čāą┤ąĄčé ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░čéčīčüčÅ (reset, pause, reset...).
ąĢčüą╗ąĖ čā ąÆą░čü ąĄčüčéčī ą┤ąŠčüčéčāą┐ ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆčā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ AVR-ISP ąĖą╗ąĖ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (čüą╝. čéą░ą║ąČąĄ [9]), č鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą│čĆčāąĘąĖčéčī ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┤ą╗čÅ ąÆą░čłąĄą╣ ą┐ą╗ą░čéčŗ č湥čĆąĄąĘ ą┐čāąĮą║čé ą╝ąĄąĮčÄ Tools | Burn Bootloader. ąśąĮą░č湥 ąÆčŗ ą╝ąŠąČąĄč鹥 čüąŠąŠą▒čēąĖčéčī čüąĖčüč鹥ą╝ąĄ Arduino ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░, ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą┤ą╗čÅ čüą║ąĄčéč湥ą╣, ą┐čāč鹥ą╝ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ upload.maximum_size variable ą▓ čäą░ą╣ą╗ąĄ preferences.txt (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ, ą│ą┤ąĄ ąĮą░ą╣čéąĖ čŹč鹊čé čäą░ą╣ą╗, čüą╝. [10]). ą¤ąŠą╝ąĄąĮčÅą╣č鹥 7168 ąĮą░ 6144, ąĖ čĆą░ą▒ąŠč湥ąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ Arduino ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▒čāą┤ąĄčé ą║ąŠčĆčĆąĄą║čéąĮąŠ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ą░čéčī ąŠ čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ čüą║ąĄčéčć čüą╗ąĖčłą║ąŠą╝ ą▓ąĄą╗ąĖą║.
ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega168, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ąĮą░ ą┐ą╗ą░čéčā Arduino, ą┤ąĄčłąĄą▓ą╗ąĄ, ąĮąŠ čā ąĮąĄą│ąŠ ą▓čüąĄą│ąŠ č鹊ą╗čīą║ąŠ 16 ą║ąĖą╗ąŠą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (ąĖ 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ąĖąĘ ąĮąĖčģ čāčłą╗ąŠ ąĮą░ ąĘą░ą│čĆčāąĘčćąĖą║), čćč鹊 ą▓ąĄčüčīą╝ą░ ąĮąĄą╝ąĮąŠą│ąŠ.
ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čü ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ č鹊čćą║ąŠą╣ (float, double), č鹊 ą┐ąŠą┐čŗčéą░ą╣č鹥čüčī ą┐ąĄčĆąĄą┐ąĖčüą░čéčī čŹč鹊čé ą║ąŠą┤ ąĮą░ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčāčÄ ą░čĆąĖčäą╝ąĄčéąĖą║čā, čćč鹊 ą┤ą░čüčé 菹║ąŠąĮąŠą╝ąĖčÄ ą┐čĆąĖą╝ąĄčĆąĮąŠ 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░. ąŻą┤ą░ą╗ąĖč鹥 ą▓čüąĄ ąŠą┐ąĄčĆą░č鹊čĆčŗ #include ą▓ ąĮą░čćą░ą╗ąĄ čüą║ąĄčéčćą░ ą┤ą╗čÅ č鹥čģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥.
ąśąĮą░č湥 ąŠą┐čéąĖą╝ąĖąĘąĖčĆčāą╣č鹥 ą░ą╗ą│ąŠčĆąĖčéą╝ - čćą░čēąĄ ą▓čüąĄą│ąŠ ąĖą╝ąĄąĮąĮąŠ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖčÅ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüą┤ąĄą╗ą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ą║ąŠčĆąŠč湥.
ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čüąĖčüč鹥ą╝čŗ Arduino ą┐ąŠčüč鹊čÅąĮąĮąŠ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čāą╝ąĄąĮčīčłąĄąĮąĖąĄą╝ čÅą┤čĆą░ Arduino, čćč鹊ą▒čŗ ą┤ą╗čÅ ą║ąŠą┤ą░ čüą║ąĄčéč湥ą╣ ą▒čŗą╗ąŠ ą▒ąŠą╗čīčłąĄ ą╝ąĄčüčéą░ ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝.
ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░ ą┐ą╗ą░č鹥 Arduino (ATmega168 ąĖą╗ąĖ ATmega328) ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ PWM (ą©ąśą£) č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓čŗą▓ąŠą┤ą░čģ (č鹊ą╗čīą║ąŠ ąĮą░ 3, 5, 6, 9, 10 ąĖą╗ąĖ 11). ąÆčŗąĘąŠą▓ analogWrite() ąĮą░ ą╗čÄą▒čŗčģ ą┤čĆčāą│ąĖčģ ą▓čŗą▓ąŠą┤ą░čģ ą┐čĆąĖą▓ąĄą┤čāčé ą║ ą▓čŗą┤ą░č湥 ą╗ąŠą│. 1 (5V) ą┤ą╗čÅ ąĘąĮą░č湥ąĮąĖą╣, ą▒ąŠą╗čīčłąĖčģ 128, ąĖ ą╗ąŠą│. 0 (0V) ą┤ą╗čÅ ąĘąĮą░č湥ąĮąĖą╣, ą╝ąĄąĮčīčłąĖčģ 128. ąĪčéą░čĆčŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐ą╗ą░čé Arduino čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ ATmega8 ą╝ąŠą│čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓čŗą▓ąŠą┤ PWM č鹊ą╗čīą║ąŠ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ 9, 10 ąĖ 11.
ąĀą░ą▒ąŠč湥ąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ Arduino ą┐čŗčéą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąŠč鹊čéąĖą┐čŗ ą┤ą╗čÅ ąÆą░čłąĖčģ čäčāąĮą║čåąĖą╣, čéą░ą║ čćč鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 čĆą░čüą┐ąŠą╗ąŠąČąĖčéčī ąĖčģ ą▓ ąÆą░čłąĄą╝ čüą║ąĄčéč湥 ą▓ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąŠčåąĄčüčü ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ ąĮąĄ ąĖą┤ąĄą░ą╗ąĄąĮ, ąĖ ąĖąĮąŠą│ą┤ą░ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąĮąĄą┐ąŠąĮčÅčéąĮčŗą╝ ąŠčłąĖą▒ą║ą░ą╝.
ąĢčüą╗ąĖ ąÆčŗ ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄč鹥 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ čéąĖą┐ ą▓ čüą▓ąŠąĄą╝ ą║ąŠą┤ąĄ, ąĖ čüąŠąĘą┤ą░ąĄč鹥 čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĮą░ ą▓čģąŠą┤ąĄ čŹč鹊čé čéąĖą┐ ąĖą╗ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĄą│ąŠ, č鹊 ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćąĖč鹥 ąŠčłąĖą▒ą║čā ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čüą║ąĄčéčćą░. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┐čĆąŠč鹊čéąĖą┐čŗ ą┤ą╗čÅ čéą░ą║ąĖčģ čäčāąĮą║čåąĖą╣ ą┐ąŠčÅą▓čÅčéčüčÅ ą┤ąŠ ąÆą░čłąĄą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čéąĖą┐ą░ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. [10]).
ąĢčüą╗ąĖ ąÆčŗ ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄč鹥 čäčāąĮą║čåąĖčÄ, čā ą║ąŠč鹊čĆąŠą╣ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗą╣ čéąĖą┐ ąĖąĘ 2 čüą╗ąŠą▓ (ąĮą░ą┐čĆąĖą╝ąĄčĆ "unsigned int"), č鹊 čĆą░ą▒ąŠč湥ąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ ąĮąĄ čĆąĄą░ą╗ąĖąĘčāąĄčé čŹčéčā čäčāąĮą║čåąĖčÄ ąĖ ąĮąĄ čüąŠąĘą┤ą░čüčé ą┐čĆąŠč鹊čéąĖą┐ ą┤ą╗čÅ ąĮąĄčæ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čüą▓ąŠąĄ čüąŠą▒čüčéą▓ąĄąĮąĮąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ, ąĖą╗ąĖ ą┐ąŠą╝ąĄčüčéąĖčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮą░ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░.
ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ąŠčłąĖą▒ą║čā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ:
avrdude: Yikes! Invalid device signature.
Double check connections and try again, or use -F to override
this check.
č鹊 ą╝ąŠą│čāčé ą▒čŗčéčī 2 čĆą░ąĘąĮčŗčģ čüą╗čāčćą░čÅ. ąøąĖą▒ąŠ ąÆčŗ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą▒čĆą░ą╗ąĖ ą┐ą╗ą░čéčā ą▓ ą╝ąĄąĮčÄ Tools -> Board, ą╗ąĖą▒ąŠ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ą▓ąĄčĆčüąĖčÄ avrdude. Arduino ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą▓ąĄčĆčüąĖčÄ avrdude ą┤ą╗čÅ ą▓čŗą│čĆčāąĘą║ąĖ čüą║ąĄčéč湥ą╣ ą▓ ą┐ą╗ą░čéčā Arduino. ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą▓ąĄčĆčüąĖčÅ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé čüąĖą│ąĮą░čéčāčĆčā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą╗ą░čéčŗ (board device signature), ąĖ čŹč鹊 ą╝ąŠąČąĄčé ąĮąĄ ą┐ąŠąĮčÅčéčī ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ą╗ą░čéčŗ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░. ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ąĖą╝ąĄąĮąĮąŠ čéčā ą▓ąĄčĆčüąĖčÄ avrdude, ą║ąŠč鹊čĆą░čÅ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü čüąĖčüč鹥ą╝ąŠą╣ Arduino.
ą¦č鹊 ą┤ąĄą╗ą░čéčī, ąĄčüą╗ąĖ ąĮčāąČąĮąŠ ą▓čŗą▓ąŠą┤ąĖčéčī ą▓ ą┐ąŠčĆčé Serial čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮą░ čĆčāčüčüą║ąŠą╝ čÅąĘčŗą║ąĄ, ąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ Serial Monitor čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Arduino IDE ą▓čŗą┤ą░ąĄčé ą▓ą╝ąĄčüč鹊 čĆčāčüčüą║ąĖčģ ą▒čāą║ą▓ ąĮąĄčćąĖčéą░ąĄą╝čŗąĄ čüąĖą╝ą▓ąŠą╗čŗ?
ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ - ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ą╝ąĄčüč鹊 Serial Monitor č鹥čĆą╝ąĖąĮą░ą╗čīąĮčŗą╣ ą║ą╗ąĖąĄąĮčé putty . ąŻ ąĮąĄą│ąŠ ąĄčüčéčī ąŠč湥ąĮčī ą│ąĖą▒ą║ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ čüąĄčüčüąĖąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ, ąĖ ą╝ąŠąČąĮąŠ ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝ ąŠč鹊ą▒čĆą░ąČą░čéčī čĆčāčüčüą║ąĖąĄ ą▒čāą║ą▓čŗ ą▓ ąĮčāąČąĮąŠą╣ ą║ąŠą┤ąĖčĆąŠą▓ą║ąĄ.
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ ąĮąĄą┤ąŠčĆą░ą▒ąŠčéą║ąĄ čüčĆąĄą┤čŗ Arduino IDE - ą┐čĆąŠą│čĆą░ą╝ą╝ą░ Serial Monitor ąĮąĄ čāą╝ąĄąĄčé ąŠč鹊ą▒čĆą░ąČą░čéčī č鹥ą║čüčé ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą║ąĄ UTF-8 . ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą┐ąŠą║ą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čŹč鹊čé ą▒ą░ą│ ąĮąĄ ąĖčüą┐čĆą░ą▓čÅčé, ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ Serial Monitor ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ čĆčāčüčüą║ąŠčÅąĘčŗčćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĮąĄą╗čīąĘčÅ, ą┐čĆąĖą┤ąĄčéčüčÅ ą┤ąŠą▓ąŠą╗čīčüčéą▓ąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą░ąĮą│ą╗ąĖą╣čüą║ąĖą╝ čłčĆąĖčäč鹊ą╝. ąśą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 putty! ą¤čĆąĖ ąĮą░čüčéčĆąŠą╣ą║ąĄ čüąĄčüčüąĖąĖ putty ąĮąĄ ąĘą░ą▒čāą┤čīč鹥 ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗčüčéą░ą▓ąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (9600, 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, 1 čüč鹊ą┐-ą▒ąĖčé, ą▒ąĄąĘ ą▒ąĖčéą░ č湥čéąĮąŠčüčéąĖ, čé. ąĄ. č鹥 ąČąĄ ą┐ą░čĆą░č鹥čéčĆčŗ, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ čüą║ąĄčéč湥), ąĖ ąĮąĄ ąĘą░ą▒čāą┤čīč鹥 ą▓čŗčüčéą░ą▓ąĖčéčī ą║ąŠą┤ąĖčĆąŠą▓ą║čā ąŠą║ąĮą░ UTF-8.
ąĢčēąĄ ąŠą┤ąĖąĮ ąĮąĄą┤ąŠčüčéą░č鹊ą║ ą▓ č鹊ą╝, čćč鹊 čĆąĄą┤ą░ą║č鹊čĆ ą║ąŠą┤ą░ Arduino ąĖ Serial Monitor ą▓ą╗ąĖčÅčÄčé ąĮą░ čĆą░ą▒ąŠčéčā ą┤čĆčāą│ ą┤čĆčāą│ą░ ąĖ ąĮąĄ ą╗čāčćčłąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ - ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠąĄ ąŠą║ąĮąŠ Arduino ą┐ąŠą┤ą▓ąĖčüą░ąĄčé (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ąŠčéą║čĆčŗčéčī ą╝ąĄąĮčÄ ąĪąĄčĆą▓ąĖčü), č鹊 čĆą░ą▒ąŠčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ Serial Monitor ą┐ąŠą┤ą▓ąĖčüą░ąĄčé č鹊ąČąĄ.
ąöą╗čÅ čŹč鹊ą│ąŠ čüčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓:
1 . ą£ąŠąČąĮąŠ čüąŠąĘą┤ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčéą┤ąĄą╗čīąĮčŗčģ čäą░ą╣ą╗ąŠą▓, ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ąĖčģ ą▓ ą┐čĆąŠąĄą║č鹥 ą┤ąĖčĆąĄą║čéąĖą▓ąŠą╣ #include.
2 . ąĢčüą╗ąĖ čćą░čüčéčī ą║ąŠą┤ą░ čāąČąĄ čģąŠčĆąŠčłąŠ ąŠčéą╗ą░ąČąĄąĮą░, č鹊 ą╝ąŠąČąĮąŠ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ą┤ą╗čÅ čŹč鹊ą│ąŠ ąŠčéą┤ąĄą╗čīąĮčāčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā.
3 . ąĪąŠąĘą┤ą░čéčī ą▓ ą┐ą░ą┐ą║ąĄ ą┐čĆąŠąĄą║čéą░ ąŠčéą┤ąĄą╗čīąĮčŗąĄ čäą░ą╣ą╗čŗ čü čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ *.cpp ąĖ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ *.h. ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čŹč鹊ą│ąŠ čüą┐ąŠčüąŠą▒ą░ čüą╝. ą▓ čüčéą░čéčīąĄ [14].
ąóą░ą║ą░čÅ ąŠčłąĖą▒ą║ą░ ą╝ąŠąČąĄčé čüąŠą┐čĆąŠą▓ąŠąČą┤ą░čéčīčüčÅ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ, čüąŠą▓čüąĄą╝ ąĮąĄ čāą║ą░ąĘčŗą▓ą░čÄčēąĖą╝ąĖ ąĮą░ čĆąĄą░ą╗čīąĮčāčÄ ą┐čĆąŠą▒ą╗ąĄą╝čā, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
Multiple libraries were found for "Wire.h" Multiple libraries were found for "Adafruit_ILI9341.h"
ąØą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čŹčéąĖ ąŠčłąĖą▒ą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮčŗ čüąŠą▓čüąĄą╝ ą┤čĆčāą│ąĖą╝ąĖ ą┐čĆąĖčćąĖąĮą░ą╝ąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮąĄčģą▓ą░čéą║ąŠą╣ ą╝ąĄčüčéą░ ą┐ąŠą┤ ą║ąŠą┤ ąĖą╗ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ. ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▒ąŠą╗ąĄąĄ čéčēą░č鹥ą╗čīąĮąŠ ąĖąĘčāčćąĖčéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, ąĖ ąĖčüą┐čĆą░ą▓ąĖčéčī ą┤čĆčāą│ąĖąĄ ąŠčłąĖą▒ą║ąĖ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠą│čāčé čāą║ą░ąĘčŗą▓ą░čéčī.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ą╝ąŠąĄą╝ čüą╗čāčćą░ąĄ ąĮąĄ čģą▓ą░čéą░ą╗ąŠ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝:
C:\Users\mylogin\AppData\Local\Temp\arduino_build_415117/ controller.ino.elf section `.rodata' will not fit in region `rom'
c:/users/mylogin/appdata/local/arduino15/packages/arduino/tools/ arm-none-eabi-gcc/4.8.3-2014q1/bin/../lib/gcc/arm-none-eabi/4.8.3/ ../../../../arm-none-eabi/bin/ld.exe: region `rom' overflowed by 2160 bytes
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čÅ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ą╗ ą║ąŠą┤ ąĖ čāą╝ąĄąĮčīčłąĖą╗ ąĄą│ąŠ čĆą░ąĘą╝ąĄčĆ, ąŠčłąĖą▒ą║ąĖ "Multiple libraries were found" ąĖčüč湥ąĘą╗ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ.
ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąŠčłąĖą▒ą║ą░ą╝ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī ąŠą┐čåąĖčÄ "Show verbose output during compilation" (File -> Preferences).
[Mac OS ]
ąÆčŗ ą┐ąĄčĆąĄčéą░čēąĖą╗ąĖ Arduino.app ąĖąĘ ąŠą▒čĆą░ąĘą░ ą┤ąĖčüą║ą░ (čüą║ą░ąČąĄą╝, ą▓ ą┐ą░ą┐ą║čā ąÆą░čłąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ Applications)? ąĢčüą╗ąĖ ąĮąĄčé, č鹊 ąÆčŗ ąĮąĄ čüą╝ąŠąČąĄč鹥 čüą┤ąĄą╗ą░čéčī ą▓čŗą│čĆčāąĘą║čā ą┐čĆąĖą╝ąĄčĆąŠą▓.
ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ Java ąŠčé Apple ą┐čŗčéą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī 64-ą▒ąĖčéąĮčāčÄ ą▓ąĄčĆčüąĖčÄ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ (native librarčā), ąŠą┤ąĮą░ą║ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ Arduino ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü 32-ą▒ąĖčéąĮąŠą╣ ą▓ąĄčĆčüąĖąĄą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ RXTX. ąĢčüą╗ąĖ ąÆčŗ ąĘą░ą┐čāčüčéąĖč鹥 Arduino, č鹊 ą┐ąŠą╗čāčćąĖč鹥 ąŠčłąĖą▒ą║čā ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║ąŠą│ąŠ ą▓ąĖą┤ą░:
Uncaught exception in main method: java.lang.UnsatisfiedLinkError: /Applications/arduino-0016/Arduino
16.app/Contents/Resources/Java/librxtxSerial.jnilib: no suitable image found. Did find:
/Applications/arduino-0016/Arduino 16.app/Contents/Resources/Java/librxtxSerial.jnilib:
no matching architecture in universal wrapper
ą¦č鹊ą▒čŗ čŹč鹊 ąĖčüą┐čĆą░ą▓ąĖčéčī, ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ Arduino (ąĮą░ą┐čĆąĖą╝ąĄčĆ Arduino 16.app) ą▓ Finder, ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 Get Info ąĖąĘ ą╝ąĄąĮčÄ File. ąÆ ą┐ą░ąĮąĄą╗ąĖ info ą┐ąŠčüčéą░ą▓čīč鹥 ą│ą░ą╗ąŠčćą║čā Open in 32 Bit Mode. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüąĖčüč鹥ą╝ą░ Arduino ą┤ąŠą╗ąČąĮą░ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąĘą░ą┐čāčüčéąĖčéčīčüčÅ.
ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ąŠčłąĖą▒ą║čā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ:
Link (dyld) error:
č鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ ąÆą░ą╝ ąĮčāąČąĮąŠ ąŠą▒ąĮąŠą▓ąĖčéčī čüąĖčüč鹥ą╝čā ą┤ąŠ ą▓ąĄčĆčüąĖąĖ Max OS X 10.3.9 ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĄą╣. ąĪčéą░čĆčŗąĄ ą▓ąĄčĆčüąĖąĖ ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝čŗ ąĖą╝ąĄčÄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝čŗąĄ čüąĖčüč鹥ą╝ąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ.
Error inside Serial.< init >()
gnu.io.PortInUseException: Unknown Application
at gnu.io.CommPortIdentifier.open(CommPortIdentifier.java:354)
at processing.app.Serial.(Serial.java:127) at processing.app.Serial.(Serial.java:72)
ąóą░ą║ą░čÅ ąŠčłąĖą▒ą║ą░ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠčĆčé ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ąĖą╝-č鹊 ą┤čĆčāą│ąĖą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ . ą¤ąŠąČą░ą╗čāą╣čüčéą░, čāą┤ąŠčüč鹊ą▓ąĄčĆčīč鹥čüčī, čćč鹊 ąĮąĄ ąĘą░ą┐čāčüčéąĖą╗ąĖ ąĮąĖą║ą░ą║ąĖąĄ ą┤čĆčāą│ąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ąŠą▒čĆą░čēą░čÄčéčüčÅ ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ą┐ąŠčĆčéą░ą╝ ąĖą╗ąĖ ą┐ąŠčĆčéą░ą╝ USB, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ PDA, ą╝ąĄąĮąĄą┤ąČąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ bluetooth, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čäą░ą╣ąĄčĆą▓ąŠą╗čŗ ąĖ čé. ą┤. ąóą░ą║ąČąĄ ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ Max/MSP) čüąŠčģčĆą░ąĮčÅčÄčé ąŠčéą║čĆčŗčéčŗą╝ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ąŠąĮąĖ ąĄą│ąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé - ąÆą░ą╝ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ąĘą░ą║čĆčŗčéčī ą╗čÄą▒čŗąĄ ą┐čāčéąĖ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ, ą╗ąĖą▒ąŠ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą║čĆčŗčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąĮčāąČąĮčŗą╣ ąÆą░ą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą┐ą╗ą░čéčŗ Arduino.
ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čüčĆąĄą┤čā Arduino 0004 ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čĆą░ąĮąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ, ąĖą╗ąĖ ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ąĄčæ ą▓ą╝ąĄčüč鹥 čü Processing, č鹊 ąÆą░ą╝ ąĮčāąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī macosx_setup.command, ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčī ą║ąŠą╝ą┐čīčÄč鹥čĆ. Arduino 0004 ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą▓ąĄčĆčüąĖčÄ čŹč鹊ą│ąŠ čüą║čĆąĖą┐čéą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą┐čāčüą║ą░čéčī ą▓čüąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ (ą┤ą░ąČąĄ č鹥, ą║č鹊 ą▓čŗą┐ąŠą╗ąĮčÅą╗ čüą║čĆąĖą┐čé, ąĖą┤čāčēąĖą╣ ą▓ą╝ąĄčüč鹥 čü Arduino 0003). ąÆčŗ čéą░ą║ąČąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗ąĖčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą║ą░čéą░ą╗ąŠą│ą░ /var/spool/uucp.
[Windows ]
ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮąŠ ą║ąŠąĮčäą╗ąĖą║č鹊ą╝ čü ą┐čĆąŠčåąĄčüčüąŠą╝ Logitech 'LVPrcSrv.exe'. ą×čéą║čĆąŠą╣č鹥 Task Manager (ąöąĖčüą┐ąĄčéč湥čĆ ąĘą░ą┤ą░čć) ąĖ ą┐ąŠčüą╝ąŠčéčĆąĖč鹥, čĆą░ą▒ąŠčéą░ąĄčé ą╗ąĖ čŹčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ąĖ ąĄčüą╗ąĖ ą┤ą░, č鹊 ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐čĆąĖą▒ąĖčéčī ąĄčæ ą┐čĆąŠčåąĄčüčü, ąĖ ąĘą░č鹥ą╝ čüąĮąŠą▓ą░ čüą┤ąĄą╗ą░ą╣č鹥 upload (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. `as.exe' hanging intermittently site:mingw-users.narkive.com).
ąĢčüą╗ąĖ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows ąÆčŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ą┐čĆąĖ ą┤ą▓ąŠą╣ąĮąŠą╝ ą║ą╗ąĖą║ąĄ ąĮą░ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą╝ čäą░ą╣ą╗ąĄ arduino.exe ąŠčłąĖą▒ą║čā, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
Arduino has encountered a problem and needs to close.
č鹊 ąÆą░ą╝ ąĮčāąČąĮąŠ ąĘą░ą┐čāčüą║ą░čéčī Arduino čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤ąĮąŠą│ąŠ čäą░ą╣ą╗ą░ run.bat. ąæčāą┤čīč鹥 č鹥čĆą┐ąĄą╗ąĖą▓čŗ, čĆą░ą▒ąŠč湥ąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino čéčĆąĄą▒čāąĄčé ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░.
ąĢčüą╗ąĖ ąĮą░ ąÆą░čłąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ čāąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čüąĖčüč鹥ą╝ą░ cygwin, č鹊 ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čüą║ąĄčéčćą░ Arduino ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐ąŠą╗čāčćąĖčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║čāčÄ ąŠčłąĖą▒ą║čā:
6 [main] ? (3512) C:\Dev\arduino-0006\tools\avr\bin\avr-gcc.exe: *** fatal
error - C:\Dev\arduino-0006\tools\avr\bin\avr-gcc.exe: *** system shared memory
version mismatch detected - 0x75BE0084/0x75BE009C.
ąŁčéą░ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘ-ąĘą░ ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ ą▓ąĄčĆčüąĖą╣ cygwin DLL.
ąØą░ą╣ą┤ąĖč鹥 čäą░ą╣ą╗čŗ cygwin1.dll, ąĖčüą┐ąŠą╗čīąĘčāčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ą┐ąŠąĖčüą║ą░ Windows Start->Find/Search, ąĖ čāą┤ą░ą╗ąĖč鹥 ą▓čüąĄ čŹčéąĖ čäą░ą╣ą╗čŗ, ą║čĆąŠą╝ąĄ čüą░ą╝čŗčģ čüą▓ąĄąČąĖčģ ą┐ąŠ ą▓ąĄčĆčüąĖąĖ. ąĪą░ą╝ą░čÅ čüą▓ąĄąČą░čÅ ą▓ąĄčĆčüąĖčÅ ą┤ąŠą╗ąČąĮą░ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ x:\cygwin\bin, ą│ą┤ąĄ 'x' ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ą┤ąĖčüą║, ąĮą░ ą║ąŠč鹊čĆčŗą╣ čā ąÆą░čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ cygwin. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ą┐ąŠąĖčüą║ąŠą╝ čüą┤ąĄą╗ą░čéčī ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║čā, ąĄčüą╗ąĖ ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░ą╣čéąĖ ą┤čĆčāą│ąĖąĄ cygwin DLL.
ąĢčüą╗ąĖ ąÆčŗ ąĮąĄ ąĮą░čłą╗ąĖ čüčéą░čĆčŗčģ ą▓ąĄčĆčüąĖą╣ DLL, ąĮąŠ ąŠčłąĖą▒ą║ą░ ąĮąĄ ąĖčüč湥ąĘą░ąĄčé, č鹊 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čā ąÆą░čü ąĮąĄ ąĘą░ą┐čāčēąĄąĮ cygwin, ą║ąŠą│ą┤ą░ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 Arduino. ąĢčüą╗ąĖ ąĖ čŹč鹊 ąĮąĄ ą┐ąŠą╝ąŠą│ą░ąĄčé, č鹊 ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 čāą┤ą░ą╗ąĖčéčī cygwin1.dll ąĖąĘ ą║ą░čéą░ą╗ąŠą│ą░ Arduino, ąĖ ąĘą░ą╝ąĄąĮąĖčéčī ąĄą│ąŠ čäą░ą╣ą╗ąŠą╝ cygwin1.dll ąĖąĘ ąÆą░čłąĄą╣ čüčāčēąĄčüčéą▓čāčÄčēąĄą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ cygwin (čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ąŠąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ c:\cygwin\bin).
[ąĪčüčŗą╗ą║ąĖ ]
1 . ą£ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ AVR-USB32U4 .2 . AVR: ąŠčéą╗ą░ą┤ąŠčćąĮčŗą╣ ą▓čŗą▓ąŠą┤ č湥čĆąĄąĘ UART (RS232 debug) .3 . ą£ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ metaboard (AVR ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega168PA ąĖą╗ąĖ ATmega328P) .4 . AVR-USB-MEGA16, V-USB, FAQ: ą┐ąĄčĆąĄą┐ąĖčüą║ą░ ą┐ąŠ ą▓ąŠą┐čĆąŠčüą░ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ .5 . veroduino: čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╣ ą┤ąĄčłąĄą▓čŗą╣ Arduino .6 . ąŚą░ą│čĆčāąĘčćąĖą║ąĖ (bootloader) ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AVR .7 . Engbedded Atmel AVR┬« Fuse Calculator site:engbedded.com .8 . 150117arduino-bootloaders.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖ ą│ąŠč鹊ą▓čŗąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ Arduino.9 . ą¤čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆčŗ ą┤ą╗čÅ AVR .10 . Arduino: ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░ čüą▒ąŠčĆą║ąĖ čüą║ąĄčéčćą░ .11 . Arduino-Loop-Analysis site:github.com .12 . ArduinoDroid - Arduino IDE site:play.google.com - čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino, čĆą░ą▒ąŠčéą░čÄčēą░čÅ ąĮą░ Android.13 . Arduino Uno Port Control site:play.google.com - čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮąŠąČą║ą░ą╝ąĖ ą┐ą╗ą░čéčŗ Arduino ąĖąĘ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ Android.14 . Arduino: ą║ą░ą║ ą┐ąŠą┤ąĄą╗ąĖčéčī čüą║ąĄčéčć ąĮą░ ą╝ąŠą┤čāą╗ąĖ .




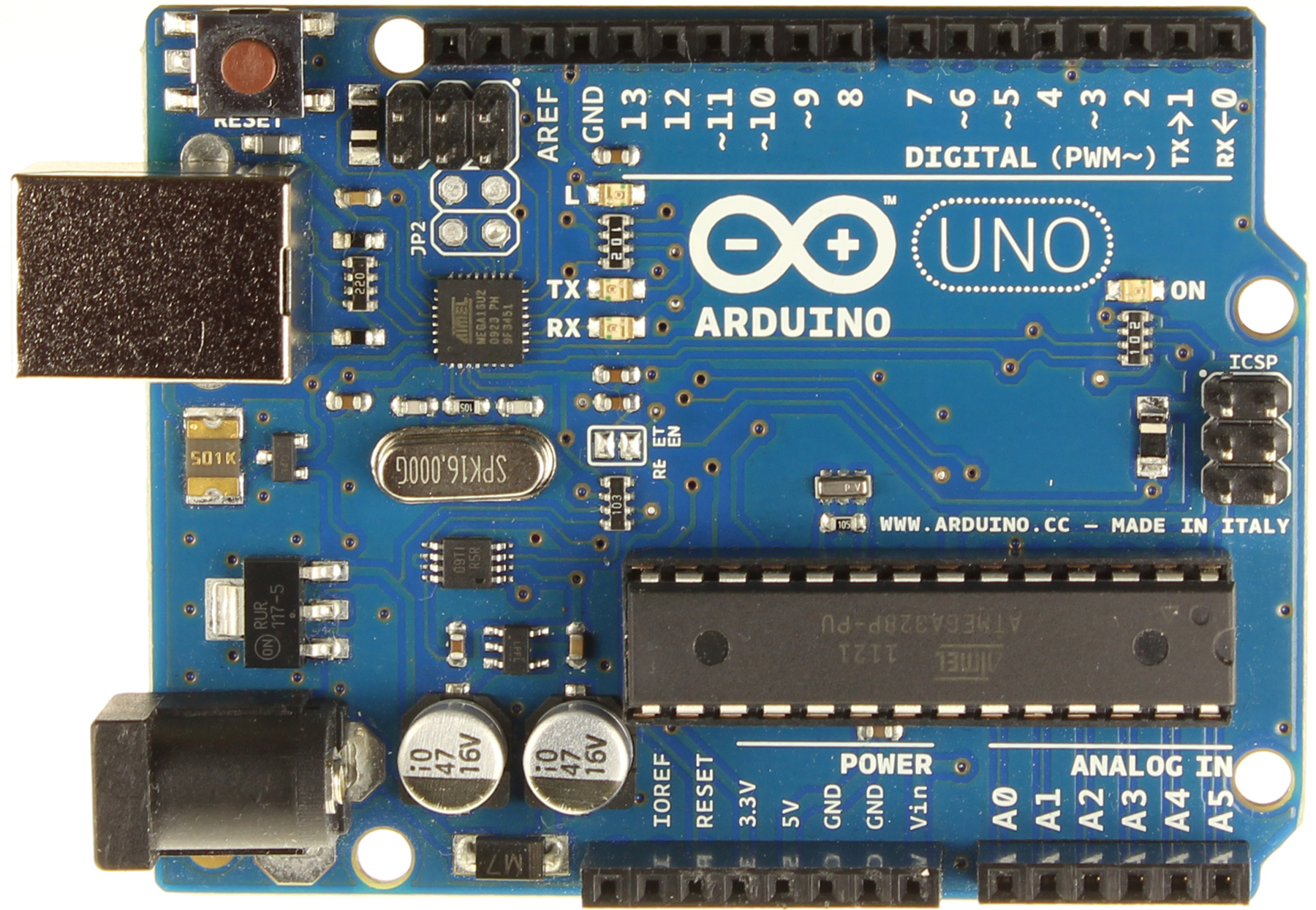
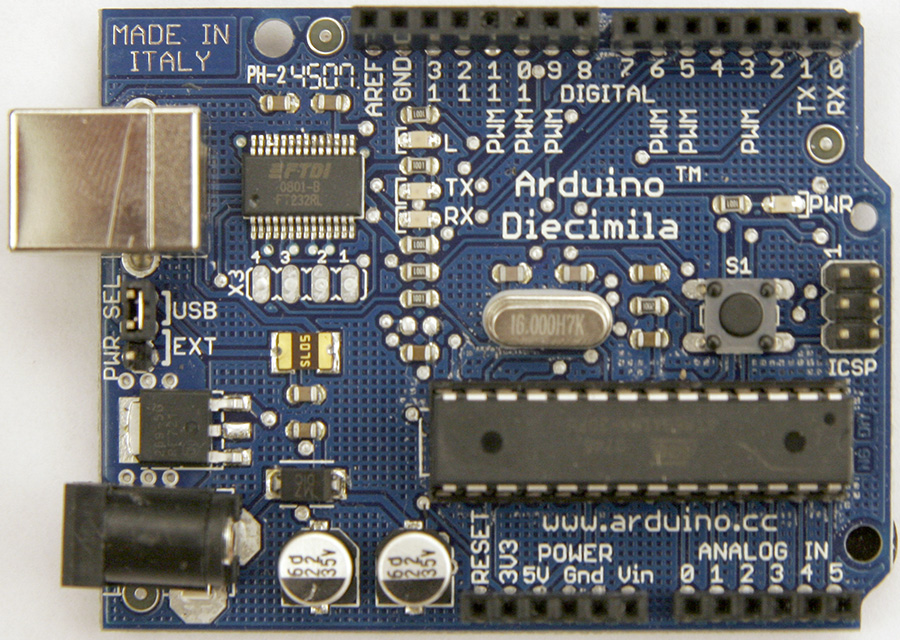
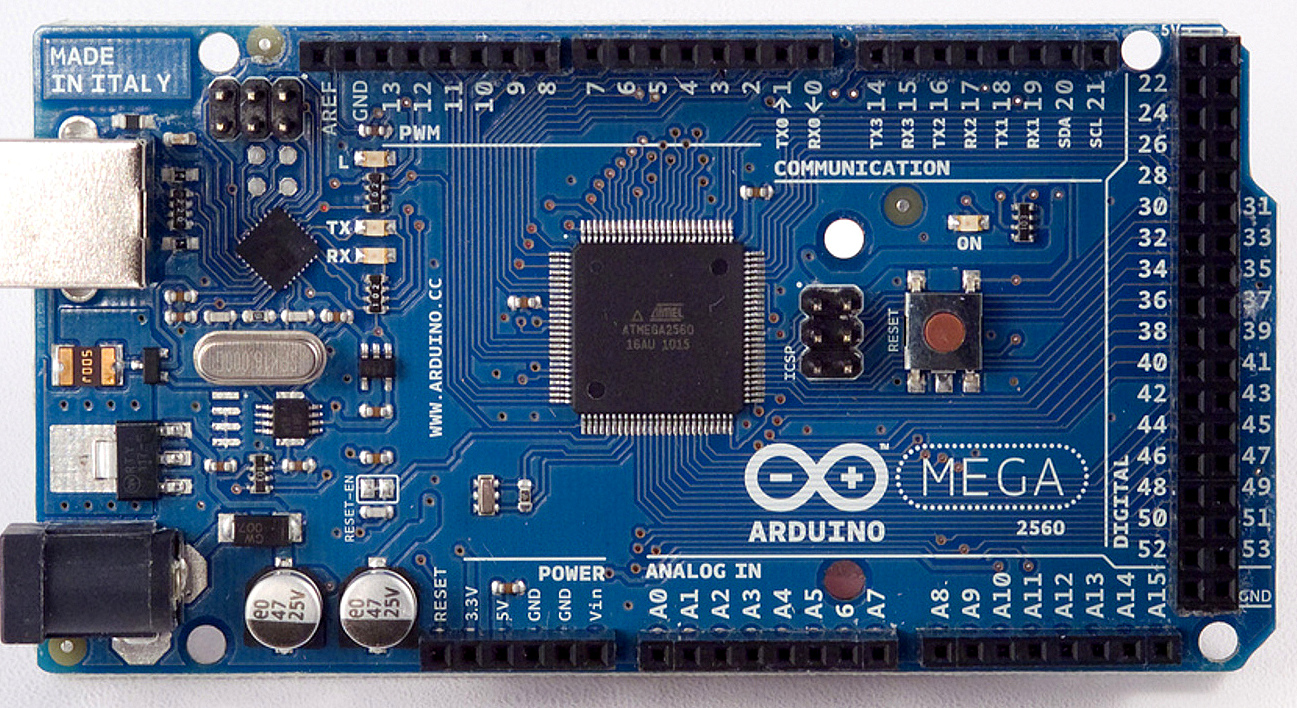
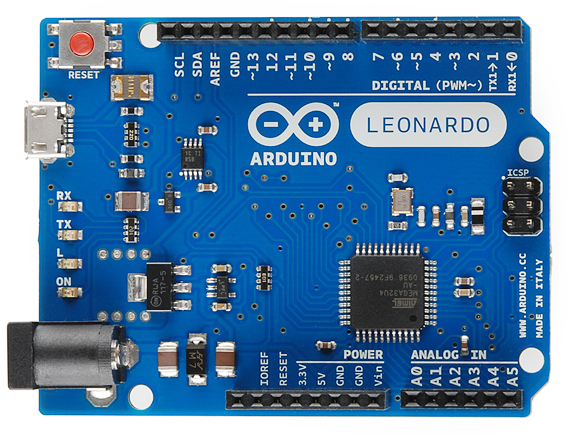



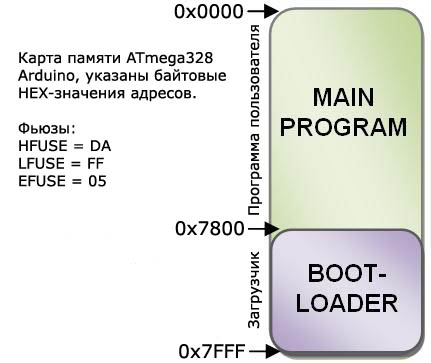


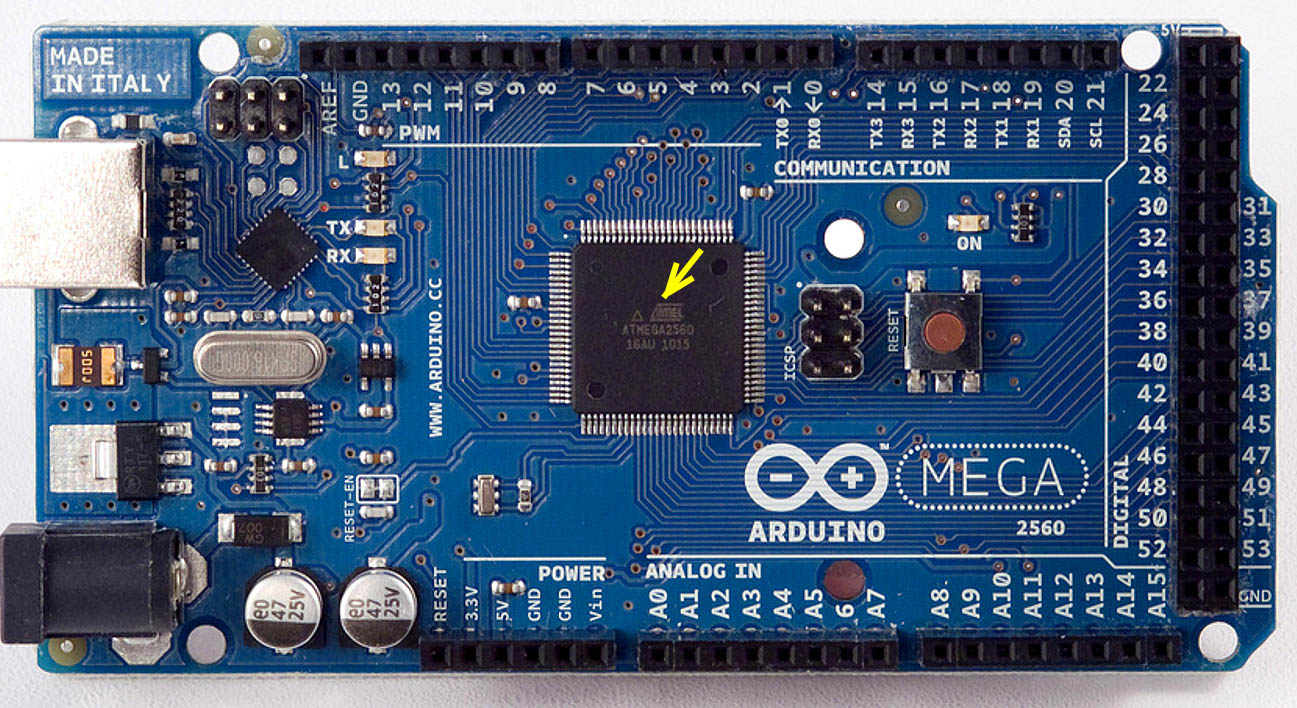
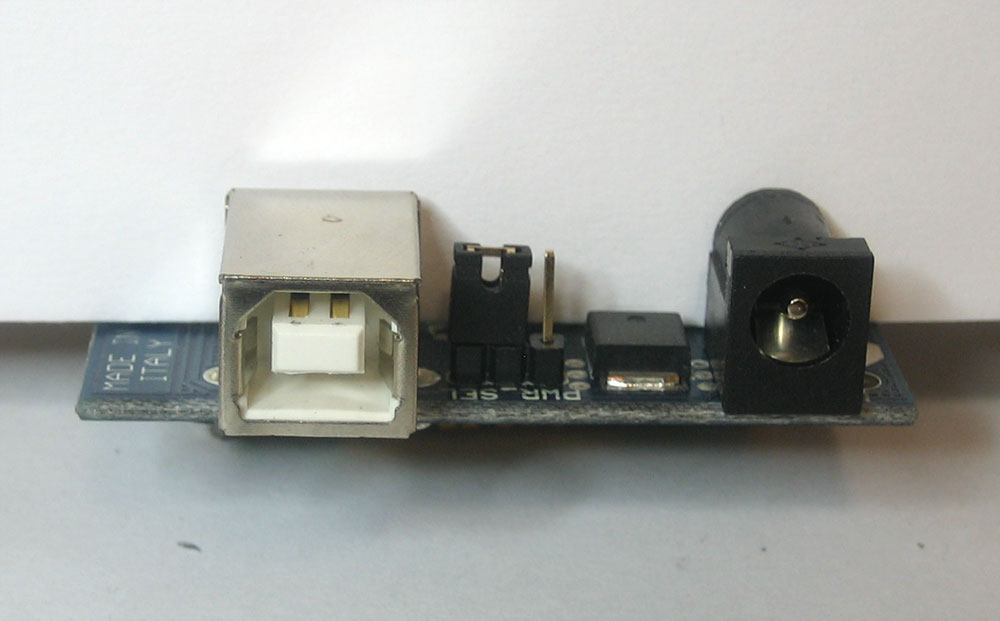



ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
ą¤ąŠč湥ą╝čā čā ą▓ą░čü ąĮąĄčé ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą║čĆą░ą║ąŠąĘčÅą▒čĆ ą┐čĆąĖ čüą╝ąĄąĮąĄ ą░ąĮą│ą╗ąĖą╣čüą║ąŠą│ąŠ ąĮą░ čĆčāčüčüą║ąĖą╣ čÅąĘčŗą║ ą▓ čłą░ą┐ą║ąĄ IDE??? ą» ąŻąĪąóąÉąø ąśąĪąÜąÉąóą¼ ąĀąĢą©ąĢąØąśąĢ. ąōą×ąöąÉ ąöąÆąÉ ąśą®ąŻ! ąÉ ą║ą░ą║-č鹊 ąŠą┤ąĖąĮ čĆą░ąĘ čĆąĄčłąĖą╗. ą¤čĆąŠčüč鹊 ąĮą░čłąĄą╗ ąĖ ą▓čüąĄ! ąÉ č鹥ą┐ąĄčĆčī ąŠą┤ąĖąĮ ą£ąŻąĪą×ąĀ ą▓ ąĖąĮč鹥čĆąĮąĄč鹥. ąś ąĮąĄ ąĮą░ą╣čéąĖ ąĮąĖč湥ą│ąŠ! ąÉ čĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠčüč鹊ąĄ, ąØą░čüčéčĆąŠą╣ą║ąĖ -> ą»ąĘčŗą║ čĆąĄą┤ą░ą║č鹊čĆą░ -> ąĀčāčüčüą║ąĖą╣.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ