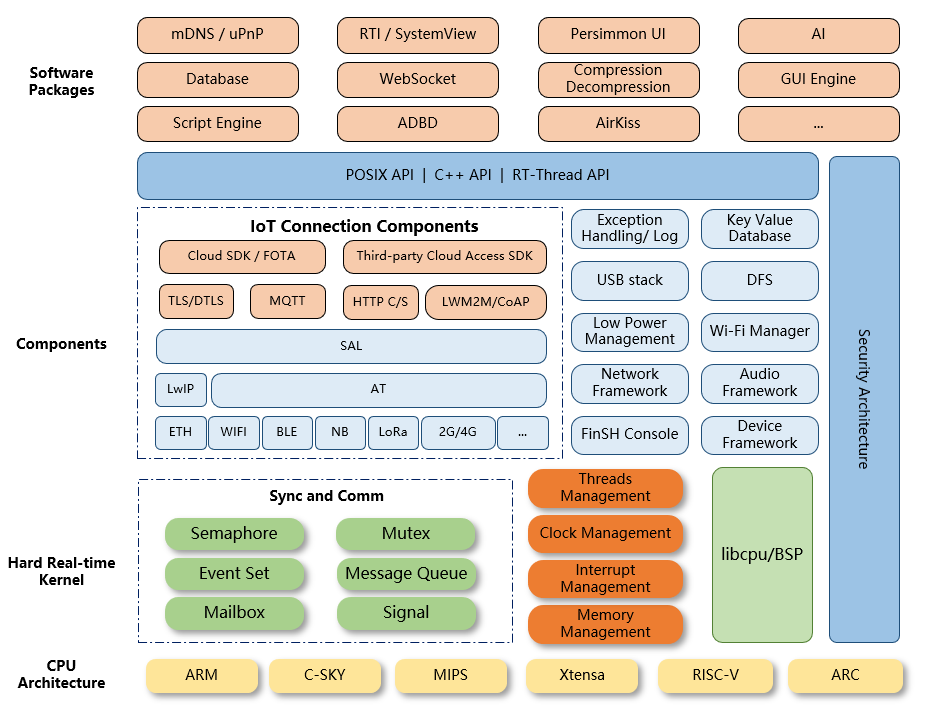
ąæą░ąĘąŠą▓čŗąĄ ą▓ąŠą┐čĆąŠčüčŗ
Q1. ąŚą░ą│čĆčāąĘąĖą╗ SDK, ą▓čüąĄ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ, ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą┐čĆąŠčģąŠą┤ąĖčé čāčüą┐ąĄčłąĮąŠ. ą×ą┤ąĮą░ą║ąŠ ąĮąĄ ą╝ąŠą│čā ąĘą░ą┐čāčüčéąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā, ą▓ č湥ą╝ ą┐čĆąŠą▒ą╗ąĄą╝ą░?
ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 Keil + RT-Thread Env, č鹊 ą┐ąĄčĆą▓ąŠąĄ, čćč鹊 ą▓ą░ą╝ čüą╗ąĄą┤čāąĄčé čüą┤ąĄą╗ą░čéčī ą┐ąŠčüą╗ąĄ ąĘą░ą│čĆčāąĘą║ąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░, čŹč鹊 ą┐čĆąŠą╣čéąĖ ą┐čĆąŠčåąĄčüčü ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ č湥čĆąĄąĘ menuconfig.
ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 RT-Studio IDE, č鹊 ąĮčāąČąĮąŠ ąŠčéą║čĆčŗčéčī Settings ą┐ąĄčĆąĄą┤ čüąŠąĘą┤ą░ąĮąĖąĄą╝ ą┐čĆąŠąĄą║čéą░; ą┐čĆąŠą╣ą┤ąĖč鹥 č湥čĆąĄąĘ ą▓čüąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčéą╝ąĄąĮąĖč鹥 ąĮąĄąĮčāąČąĮąŠąĄ, ąŠčüčéą░ą▓ąĖą▓ č鹊ą╗čīą║ąŠ čÅą┤čĆąŠ (kernel).
ąĪąĮą░čćą░ą╗ą░ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čüąĖčüč鹥ą╝ą░ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąŠčüč鹥ą╣čłčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą╝ąĖą│ą░ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐ąŠčłą░ą│ąŠą▓ąŠ ą┤ąŠą▒ą░ą▓ą╗čÅą╣č鹥 ąĮąĖąČąĄą╗ąĄąČą░čēąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ ą┤čĆčāą│ąĖąĄ ą┐ą░ą║ąĄčéčŗ, ą┐čĆąŠą▓ąĄčĆčÅčÅ čĆą░ą▒ąŠčéčā ąĮą░ ą║ą░ąČą┤ąŠą╝ čłą░ą│ąĄ (menuconfig -> ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ -> ą┐čĆąŠą▓ąĄčĆą║ą░).
Q2. ąŚą░ą│čĆčāąĘąĖą╗ SDK, ą▓čüąĄ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ, ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą┐čĆąŠčģąŠą┤ąĖčé čāčüą┐ąĄčłąĮąŠ. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé Hard Fault on Thread, ą▓ č湥ą╝ ą┐čĆąŠą▒ą╗ąĄą╝ą░?
ąĪą┤ąĄą╗ą░ą╣č鹥 ą▓čüąĄ č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąŠ ą▓ ąŠčéą▓ąĄč鹥 ąĮą░ Q1.
Q3. ąŚą░ą│čĆčāąĘąĖą╗ SDK, ąĮąŠ ąĄčüčéčī ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĄą╣.
ąĪą┤ąĄą╗ą░ą╣č鹥 ą▓čüąĄ č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąŠ ą▓ ąŠčéą▓ąĄč鹥 ąĮą░ Q1.
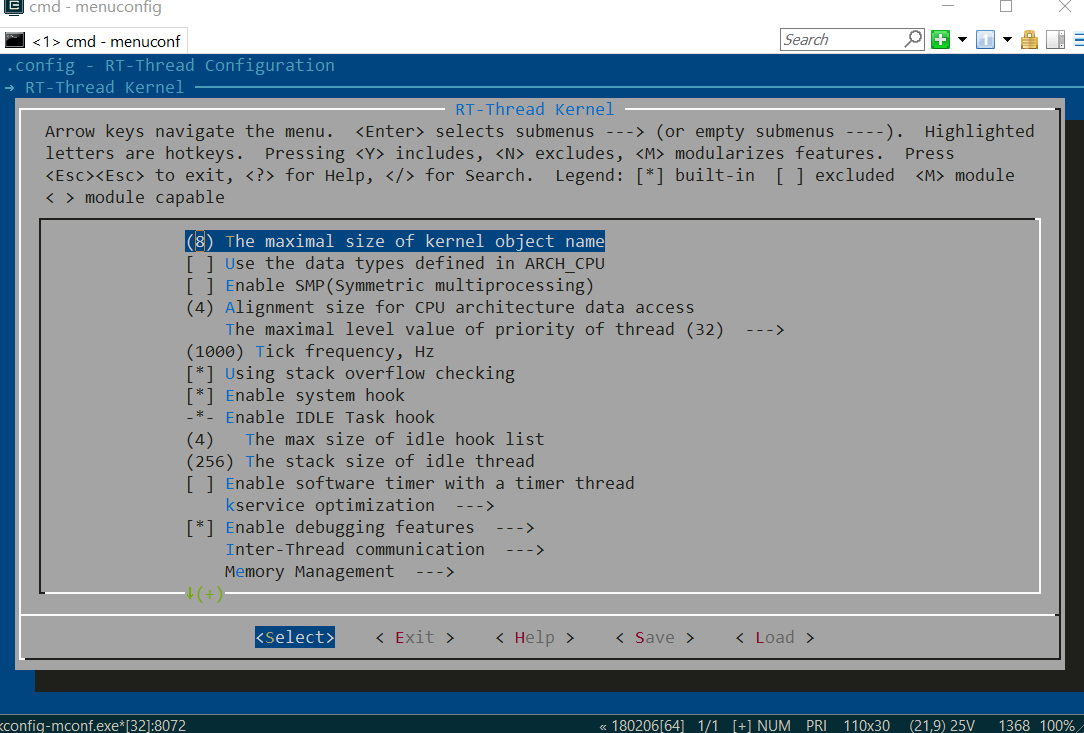
Kernel
Q1. ąÜą░ą║ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī RT_NAME_MAX?
ą¦ąĄą╝ ą╝ąĄąĮčīčłąĄ RT_NAME_MAX, č鹥ą╝ ą╝ąĄąĮčīčłąĄ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ą░ą╝čÅčéąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čüčāčēąĄčüčéą▓čāąĄčé 100 ąŠą▒čŖąĄą║č鹊ą▓ kernel, ąĖ ąĖą╝čÅ ąŠą▒čŖąĄą║čéą░ ąĘą░ąĮąĖą╝ą░ąĄčé 8, č鹊 ą▓čüąĄą│ąŠ ąĮą░ čŹč鹊 ą▒čāą┤ąĄčé ą┐ąŠčéčĆą░č湥ąĮąŠ 800 ą▒ą░ą╣čé. ąÆ čüčéčĆčāą║čéčāčĆąĄ rt_object ąĮą░čģąŠą┤ąĖčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąŠą▒čŖąĄą║čéą░, ą│ą┤ąĄ ąĄčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĖą╝ąĄąĮąĖ ą┤ą╗ąĖąĮąŠą╣ RT_NAME_MAX ą▒ą░ą╣čé ąĖ ą┤ą▓ąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéąĖą┐ą░ rt_uint8_t. RT_NAME_MAX ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą║ą░ą║ 2n + 2.
Q2. RT_DEBUG
ąØąĄ ą▓ą║ą╗čÄčćą░ą╣č鹥 ąŠčéą╗ą░ą┤ą║čā čÅą┤čĆą░ (kernel debugging), ąĄčüą╗ąĖ ąĮąĄ ą┐ąŠąĮąĖą╝ą░ąĄč鹥, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą╗ąĖ čŹč鹊 ą▓ ą▓ą░čłąĄą╣ čüąĖčéčāą░čåąĖąĖ.
Q3. ąÜą░ą║ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą┐ąŠč鹊ą║ą░?
ąŁč鹊čé ą▓ąŠą┐čĆąŠčü ąĖą╝ąĄąĄčé ą▒ąŠą╗čīčłąŠąĄ ąŠčéąĮąŠčłąĄąĮąĖąĄ ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝. ąĖ ąĄčüą╗ąĖ čŹč鹊 č鹊ą╗čīą║ąŠ čüąĖčüč鹥ą╝ą░ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ čÅą┤čĆąŠą╝ (minimal kernel system), ą┐ąŠč鹊ą║ąŠą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread), ą▒ąĄąĘ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝, č鹊 256 ą┤ą╗čÅ čüč鹥ą║ą░ ą┤ąŠčüčéą░č鹊čćąĮąŠ. ąĢčüą╗ąĖ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą▓ą╝ąĄčüč鹥 čü ą╝ąĄčģą░ąĮąĖąĘą╝ą░ą╝ąĖ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, ąŠč湥čĆąĄą┤ąĄą╣, ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖą╣, č鹊 ą╗čāčćčłąĄ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą┐ąŠč鹊ą║ą░ čāą▓ąĄą╗ąĖčćąĖčéčī ą┤ąŠ 1024 ąĖą╗ąĖ ą┤ą░ąČąĄ ą▒ąŠą╗čīčłąĄ (ą┐ąŠą┤ą▒ąĖčĆą░ąĄčéčüčÅ ąŠą┐čŗčéąĮčŗą╝ ą┐čāč鹥ą╝).
Q4. ąÜą░ą║ ą▒čŗčüčéčĆąŠ ą▓čŗčćąĖčüą╗ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ, ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ GET_PIN?
ą£čŗ ąĘąĮą░ąĄą╝, čćč鹊 ą│čĆčāą┐ą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ GPIO čćąĖą┐ąŠą▓ ąŠą▒čŗčćąĮąŠ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü PA, ą┐ąŠč鹊ą╝ ąĖą┤čāčé PB, PC, PD, PE, ... PZ. ąóą░ą║ąČąĄ ą║ą░ąČą┤ą░čÅ čéą░ą║ą░čÅ ą│čĆčāą┐ą┐ą░ ą┐ąŠčĆč鹊ą▓ čüąŠą┤ąĄčƹȹĖčé ą╗ąĖą▒ąŠ 16 ą▒ąĖčé, ą╗ąĖą▒ąŠ 8 ą▒ąĖčé (čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé 16 IO ąĖ 8 IO). ąŻą┐čĆąŠčēąĄąĮąĮą░čÅ č乊čĆą╝čāą╗ą░ ą┤ą╗čÅ GET_PIN ą┤ą╗čÅ 16-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆč鹊ą▓:
(X - A) * 16 + n
ąó. ąĄ. ą┤ą╗čÅ A10 ą┐ąŠą╗čāčćąĖčéčüčÅ 10. ąöą╗čÅ C9 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ 2*16+9=41. H1 ą▒čāą┤ąĄčé 7*16+1=113.
ąöą╗čÅ 8-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆč鹊ą▓ č乊čĆą╝čāą╗ą░ ą▒čāą┤ąĄčé:
(X - A) * 8 + n.
Q5. ąØąĄ ą┐ąŠąĮąĖą╝ą░čÄ, č湥ą╝ ąŠčéą╗ąĖčćą░čÄčéčüčÅ hard timers, soft timers ąĖ hardware timers.
RT-Thread kernel ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ (software timer). ą×ąĮąĖ, ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ (hardware timer), ąĮąĄ čéčĆąĄą▒čāčÄčé ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖčÅ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ timer, ą║ą░ą║ ąĖ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čĆą░ąĘąĮčŗčģ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣ čéąĖą┐ą░ čüčĆą░ą▓ąĮąĄąĮąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ (comparison) ąĖ ąĘą░čģą▓ą░čé čüąĖą│ąĮą░ą╗ą░ (capture). ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą┐čĆąŠčüč鹊 ąĘą░ą┤ą░ąĄčé ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ čéą░ą╣ą╝ą░čāčéą░, ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖ ąĖčüč鹥č湥ąĮąĖąĖ čŹč鹊ą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗą╣ RT-Thread, čéą░ą║ąČąĄ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ ą┤ą▓ą░ čéąĖą┐ą░ "hard timer" ąĖ "soft timer". ą¤ąĄčĆą▓čŗą╣ čéąĖą┐ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čüą▓ąŠčÄ callback-čäčāąĮą║čåąĖčÄ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ SysTick. ąŁč鹊čé čéąĖą┐ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ ą┐ąŠč鹊ą║ą░, ąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čéą░ą║ąČąĄ ąĮą░ čāčĆąŠą▓ąĮąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąŠą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā, čćč鹊 callback-čäčāąĮą║čåąĖąĖ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ ąĖąĘ ą║ąŠąĮč鹥ą║čüčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
ąÆč鹊čĆąŠą╣ čéąĖą┐, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą┐ąŠč鹊ą║ąĄ, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ čüą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮąĄ čéčĆąĄą▒čāąĄčé ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ. ą×ą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą┐ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéą░ą╣ą╝ąĄčĆ, ąĖ ą┐ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé callback-čäčāąĮą║čåąĖčÄ čéą░ą╣ą╝ąĄčĆą░, čÅą▓ą╗čÅčÄčéčüčÅ ą┤ą▓čāą╝čÅ čĆą░ąĘąĮčŗą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ.
Q6. ąĪą║ąŠą╗čīą║ąŠ ą┐ą░ą╝čÅčéąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĘą░ą┐čĆąŠčüąĖčéčī ą┤ą╗čÅ ą┐čāą╗ą░ ąŠč湥čĆąĄą┤ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ (Message Queue)?
ą×č湥čĆąĄą┤čī čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ąŠąČąĄčé čüąŠąĘą┤ą░ą▓ą░čéčīčüčÅ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ.
rt_err_t rt_mq_init (rt_mq_t mq,
const char *name,
void *msgpool,
rt_size_t msg_size,
rt_size_t pool_size,
rt_uint8_t flag);
rt_mq_t rt_mq_create (const char *name,
rt_size_t msg_size,
rt_size_t max_msgs,
rt_uint8_t flag);
ąĢčüą╗ąĖ ą▓čŗ čüąŠąĘą┤ą░ąĄč鹥 ąŠč湥čĆąĄą┤čī čüąŠąŠą▒čēąĄąĮąĖą╣ čü ą┐ąŠą╝ąŠčēčīčÄ rt_mq_create, č鹊 ą┐čāą╗ ąŠč湥čĆąĄą┤ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▒čāą┤ąĄčé ą▓čŗčćąĖčüą╗ąĄąĮ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā č鹥ą╗ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ msg_size ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą┤ą╗ąĖąĮąĄ ąŠč湥čĆąĄą┤ąĖ max_msgs.
ąĢčüą╗ąĖ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąŠč湥čĆąĄą┤ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ rt_mq_init, č鹊 ą┐ą░ą╝čÅčéčī ą┐čāą╗ą░ msgpool ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüą╗ąĄą┤čāąĄčé ąŠą▒čĆą░čéąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čĆą░ąĘą╝ąĄčĆ čüčéčĆčāą║čéčāčĆčŗ pool_size. ąØąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ ąŠą▒čŖąĄą╝ ą┐čāą╗ą░ ą┐ą░ą╝čÅčéąĖ ą╝ąŠąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
(RT_ALIGN(msg_size, RT_ALIGN_SIZE) + sizeof(struct rt_mq_message*)) * max_msgs
ąŚą┤ąĄčüčī msg_size čŹč鹊 čĆą░ąĘą╝ąĄčĆ č鹥ą╗ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĖ max_msgs čŹč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ąĄą╝ą║ąŠčüčéčī ąŠč湥čĆąĄą┤ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣.
Q7. ąŚą░ą╝ąĄčćą░ąĮąĖčÅ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ ąŠč湥čĆąĄą┤ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ (message queue).
ąźąŠčéčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ API-čäčāąĮą║čåąĖą╣ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ rt_mq_send, rt_mq_urgent ąĖ rt_mq_recv ąĖą╝ąĄčÄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čĆą░ąĘą╝ąĄčĆą░ size, ąŠą▒čĆą░čéąĖč鹥 ąŠčüąŠą▒ąŠąĄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąĄčĆąĄą┤ą░ąĄč鹥 čüčéčĆąŠą│ąŠ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą░čĆą│čāą╝ąĄąĮčéą░, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ msg_size, ą▓ rt_mq_init ąĖ rt_mq_create. ąØąĄ čüą╗ąĄą┤čāąĄčé ą╝ąĄąĮčÅčéčī čĆą░ąĘą╝ąĄčĆ ą┐ą░čĆą░ą╝ąĄčéčĆą░ size.
ąó. ąĄ. ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠč湥čĆąĄą┤čī čüąŠąŠą▒čēąĄąĮąĖą╣, čćč鹊ą▒čŗ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠčüčŗą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░.
Q8. ą×ą▒čŖčÅčüąĮąĄąĮąĖąĄ čüą╝čŗčüą╗ą░ ą╝ą░ą║čĆąŠčüą░ INIT_xxx_EXPORT.
ą×čéą╗ąĖčćąĖč鹥ą╗čīąĮą░čÅ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī RT-Thread ą▓ č鹊ą╝, čćč鹊 ą▓ čäčāąĮą║čåąĖąĖ main ąĮąĄ ą┤ąĄą╗ą░ąĄčéčüčÅ ąĮąĖą║ą░ą║ą░čÅ ąĮą░čćą░ą╗čīąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ, ą┤ą╗čÅ čŹč鹊ą│ąŠ čüčāčēąĄčüčéą▓čāąĄčé ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą┐ąŠč鹊ą║. ąöčĆčāą│ąĖąĄ ą┐ąŠč鹊ą║ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ č湥čĆąĄąĘ INIT_APP_EXPORT. ą¤ąŠąĮą░čćą░ą╗čā čŹč鹊 čüą╗ąĄą│ą║ą░ ąĘą░ą┐čāčéčŗą▓ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ąÆčüąĄą│ąŠ RT-Thread ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé 6 ą┐čĆąŠčåąĄčüčüąŠą▓ ąĘą░ą┐čāčüą║ą░ (startup processes).
1. ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ą╗ą░čéčŗ, ą▓čŗąĘčŗą▓ą░ąĄą╝čŗąĄ ą▓ čäčāąĮą║čåąĖąĖ board_init(). ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ:
#define INIT_BOARD_EXPORT(fn) INIT_EXPORT(fn, "1")
2. ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ pre/device/component/env/app, ą▓čŗąĘčŗą▓ą░ąĄą╝čŗąĄ ą▓ init_thread (čćąĖčüč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ). ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ:
#define INIT_PREV_EXPORT(fn) INIT_EXPORT(fn, "2")
3. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ:
#define INIT_DEVICE_EXPORT(fn) INIT_EXPORT(fn, "3")
4. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ (dfs, lwip, ...). ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ:
#define INIT_COMPONENT_EXPORT(fn) INIT_EXPORT(fn, "4")
5. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą║čĆčāąČąĄąĮąĖčÅ (ą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ąĖčüą║ą░, ...). ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ:
#define INIT_ENV_EXPORT(fn) INIT_EXPORT(fn, "5")
6. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ rtgui, ąĖ čé. ą┐. ...). ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ:
#define INIT_APP_EXPORT(fn) INIT_EXPORT(fn, "6")
INIT_BOARD_EXPORT ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ (scheduler). ąŚą┤ąĄčüčī ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠčåąĄčüčü ąĮą░čćą░ą╗čīąĮąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąĄčĆąĖč乥čĆąĖąĖ.
ą×čüčéą░ą╗čīąĮčŗąĄ ą┐čĆąŠčåąĄčüčüčŗ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ ąŠčüąĮąŠą▓ąĮčŗą╝ ą┐ąŠč鹊ą║ąŠą╝ (ą▓ standard-ą▓ąĄčĆčüąĖąĖ RT-Thread, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąŠč鹊ą║ main) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┐čāčēąĄąĮ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║.
ąŁčéąĖ ą┐čĆąŠčåąĄčüčüčŗ ąĮąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čäąĖą║čüąĖčĆąŠą▓ą░ąĮčŗ, ąĖ ą║ąŠąĄ-čćč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą┤čüčéčĆąŠąĖčéčī. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄąĮąĄčüčéąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ LCD ąĖąĘ DEVICE ą▓ BOARD, ąĖ čüą┤ąĄą╗ą░čéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ emwin ą▓ PREV. ąØąĄą║ąŠč鹊čĆčŗąĄ ąŠč湥čĆąĄą┤ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ čéą░ą║ąČąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ENV.
ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ ą▓čüąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą╝ąŠąČąĮąŠ ą┐čĆąŠą▓ąĄčüčéąĖ ą▓ ąŠą┐ąĖčüą░ąĮąĮčŗčģ ą▓čŗčłąĄ ą┐čĆąŠčåąĄčüčüą░čģ 1 .. 6. ą×ą┤ąĮą░ą║ąŠ čüčāčēąĄčüčéą▓čāąĄčé ą▓ąĄčĆąŠčÅčéąĮąŠčüčéčī ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą║ąŠąĮčäą╗ąĖą║čéą░.
ąŁč鹊ą╣ č鹥ą╝ąĄ ą┐ąŠčüą▓čÅčēąĄąĮ č鹊ą┐ąĖą║ PR #5194 ą▓ RT-Thread Github Repository, ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗ąĄąĘąĮčŗąĄ čüčüčŗą╗ą║ąĖ, ąĖ ą╝ąĮąŠą│ąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĮą░čģąŠą┤čÅčé ąĘą┤ąĄčüčī čüąŠą▓ąĄčéčŗ ą┐ąŠ čĆąĄčłąĄąĮąĖčÄ čüą▓ąŠąĖčģ ą┐čĆąŠą▒ą╗ąĄą╝.
ąĀą░čåąĖąŠąĮą░ą╗čīąĮąŠ čüą┤ąĄą╗ą░čéčī ąĘą░ą┐čāčüą║ čāčüčéčĆąŠą╣čüčéą▓ ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĮą░ ąŠą┤ąĮąŠą╝ čāčĆąŠą▓ąĮąĄ, čĆą░ąĘčĆąĄčłą░čÅ ąĖčģ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą╝čīčÄč鹥ą║čüąŠą▓. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮčāąČąĮąŠ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ą┐ąŠčĆčÅą┤ąŠą║ ą║ąŠą┤ą░.
Q9. ąÜą░ą║ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ rt_thread_suspend ąĖ rt_thread_resume?
ąøčāčćčłąĄ ą▓čüąĄą│ąŠ ąĖąĘą▒ąĄą│ą░čéčī čéą░ą║ąĖčģ čüčåąĄąĮą░čĆąĖąĄą▓. ąÆ RT-Thread ą╝ąŠąČąĄčé ą▒čŗčéčī 2 ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ, ą▓ąŠąĘąĮąĖą║ą░čÄčēąĖąĄ ą┐čĆąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ ą┐ąŠč鹊ą║ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend): ą▓ ąŠą┤ąĮąŠą╝ čüą╗čāčćą░ąĄ ąŠąĮ čüčĆą░ąĘčā ą┐ąŠą╗čāčćąĖčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą▓ ą┤čĆčāą│ąŠą╝ čüą╗čāčćą░ąĄ ąŠąĮ ą▒čāą┤ąĄčé ąČą┤ą░čéčī ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ čĆąĄčüčāčĆčüą░, ą┐ąŠą║ą░ čĆąĄčüčāčĆčü ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ. ąØąĄ čüčāčēąĄčüčéą▓čāąĄčé ą┐ąŠą╗ąĮąŠą│ąŠ ąĖ ą┐čĆąŠąĘčĆą░čćąĮąŠą│ąŠ čüą┐ąŠčüąŠą▒ą░, čćč鹊ą▒čŗ ą┐ąŠč鹊ą║ąĖ ąĘąĮą░ą╗ąĖ č鹥ą║čāčēąĄąĄ ą▓ąĘą░ąĖą╝ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ą┐ąŠč鹊ą║ A čģąŠč湥čé čÅą▓ąĮąŠ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠč鹊ą║ B, ąĮąŠ A ąĮąĄ ąĘąĮą░ąĄčé, ąŠčéą║ą░ąĘą░ą╗čüčÅ ą╗ąĖ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé B ąŠčé CPU, ąĖą╗ąĖ ąŠąĮ ą┐ąŠą║ąĖą┤ą░ąĄčé čĆąĄčüčāčĆčü ą┤ą╗čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, ąĖą╗ąĖ čĆąĄčüčāčĆc ą┤ąŠčüčéčāą┐ąĄąĮ ąĖ B ą┐čĆąŠą▒čāąČą┤ą░ąĄčéčüčÅ, ą▓čŗčģąŠą┤čÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ. ąóą░ą║ ąĖą╗ąĖ ąĖąĮą░č湥, ąŠą┐ą░čüąĮąŠ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčī ą▓ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║čā ą┤čĆčāą│ąŠą╣ ą┐ąŠč鹊ą║, ąĮąĄ ąĘąĮą░čÅ ąĄą│ąŠ č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╣ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą▓ą░čĆąĖą░ąĮčé ą╝ąŠąČąĄčé ą▒čŗčéčī, ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ B ąĘą░ą│čĆčāąČąĄąĮ ą▒ąŠą╗čīčłąĄ ą▓čüąĄą│ąŠ, ąĖ čüą░ą╝ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąŠčÅą▓ą╗čÅčéčī ąĖąĮąĖčåąĖą░čéąĖą▓čā ą┤ą╗čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, čćč鹊ą▒čŗ ąŠą║ą░ąĘą░čéčīčüčÅ ąŠčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą┐čĆąĖąŠčĆąĖč鹥čé B ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĖąĘą║ąĖą╣, ąĖ č鹊ą│ą┤ą░ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗą╣ ą┐ąŠč鹊ą║ A ą╝ąŠąČąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī B ą┐čĆąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ. ąØąŠ č鹊ą│ą┤ą░ ą┐ąŠč鹊ą║ B ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ ą┐ąŠč鹊ą║ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread).
ążą░ą║čéąĖč湥čüą║ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ą╝ąŠąČąĮąŠ ą┤ąŠčüčéąĖčćčī ą▒ąŠą╗ąĄąĄ ą▒ąĄąĘąŠą┐ą░čüąĮčŗą╝ąĖ ą╝ąĄč鹊ą┤ą░ą╝ąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÅ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗąĄ ą╝ąĄčģą░ąĮąĖąĘą╝čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąŠč鹊ą║ąŠą▓ - ąŠąČąĖą┤ą░ąĮąĖąĄ ąĮą░ čüąĄą╝ą░č乊čĆąĄ ąĖą╗ąĖ ąŠč湥čĆąĄą┤ąĖ. ą¤ąŠč鹊ą║ B ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą░ą╝ čüąĄą▒čÅ, ąŠąČąĖą┤ą░čÅ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąŠčé A; ą┐ąŠč鹊ą║ A č鹊ą│ą┤ą░ čĆą░ąĘą▒čāą┤ąĖčé ą┐ąŠč鹊ą║ B čü ą┐ąŠą╝ąŠčēčīčÄ čüąĖą│ąĮą░ą╗ą░ (ą┐čāą▒ą╗ąĖą║čāčÅ čüąĄą╝ą░č乊čĆ ąĖą╗ąĖ čüčéą░ą▓čÅ ąŠą▒čŖąĄą║čé ą▓ ąŠč湥čĆąĄą┤čī).
Q10. ąÜąŠą╝ą░ąĮą┤čŗ list_thread (ąĖą╗ąĖ ps) ąĮąĄ ą╝ąŠą│čāčé ą┐čĆąŠą▓ąĄčĆąĖčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹊ą║ą░?
ą×čłąĖą▒ą║ąĖ ą┐ąŠč鹊ą║ą░ ą▓ čüč鹊ą╗ą▒čåąĄ Error ąĮąĄ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ čüčüčŗą╗ą║ąĖ. ąŚą┤ąĄčüčī 0 čŹč鹊 ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, -2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéą░ą╣ą╝ą░čāčé, ąĖ ą║ąŠą│ą┤ą░ ą▓čŗ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 rt_thread_mdelay, ąŠąĮ ą┐čĆąĄą▓čĆą░čéąĖčéčüčÅ ą▓ -2. ą×ą┤ąĮą░ą║ąŠ čŹč鹊 ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé ąŠčłąĖą▒ą║čā.
ąĪč鹊ą╗ą▒ąĄčå status ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹊ą║ą░. ą×ą┤ąĮą░ą║ąŠ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą║ąŠą╝ą░ąĮą┤ą░ list_thread (ąĖą╗ąĖ ps) ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą┐ąŠč鹊ą║ą░ tshell, ą┐ąŠč鹊ą║ tshell ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÄ čĆą░ą▒ąŠčéą░ąĄčé (čüąŠčüč鹊čÅąĮąĖąĄ running). ą¤ąŠč鹊ą║ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread) ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąŠąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ready). ąöčĆčāą│ąĖąĄ ą┐ąŠč鹊ą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ready, ąĮąŠ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ ą┐čĆąĖ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čüčåąĄąĮą░čĆąĖąĖ ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend), ąŠąČąĖą┤ą░čÅ ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ čüąĄą╝ą░č乊čĆą░ ąĖą╗ąĖ ąŠč湥čĆąĄą┤ąĖ. ą×ą┤ąĮą░ą║ąŠ čŹč鹊 ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤čĆčāą│ąĖąĄ ą┐ąŠč鹊ą║ąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ, ąĖ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ąŠą╝.
Q11. ą£ąŠąČąĄčé ą╗ąĖ čéą░ą╣ą╝ąĄčĆ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┤ąŠą╗ą│ąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ?
ąÜą░ą║ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī ą▓čŗčłąĄ, čüčāčēąĄčüčéą▓čāąĄčé 3 čĆą░ąĘąĮąŠą▓ąĖą┤ąĮąŠčüčéąĖ čéą░ą╣ą╝ąĄčĆąŠą▓ ą▓ RT-Thread, ąĖ čā ą║ą░ąČą┤ąŠą│ąŠ čüą▓ąŠąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ.
Hardware timer: ąĄą│ąŠ callback-čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ, čéą░ą║ čćč鹊 ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ ąŠąĮą░ ą▓čŗą┐ąŠą╗ąĮčÅą╗ą░ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ.
Hard timer: čéą░ą║ąČąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čüą▓ąŠąĖ callback-čäčāąĮą║čåąĖąĖ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ, ąĖ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓ ąĮąĖčģ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┤ą╗ąĖč鹥ą╗čīąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ.
Soft Timer: ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠč鹊ą║ąŠą╝ čéą░ą╣ą╝ąĄčĆą░ (timer thread), ą║ąŠč鹊čĆčŗą╣ ą▓čŗąĘąŠą▓ąĄčé callback-čäčāąĮą║čåąĖąĖ, ąĖ č鹥ąŠčĆąĄčéąĖč湥čüą║ąĖ ąĘą┤ąĄčüčī ą╝ąŠą│čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą┤ąŠą╗ą│ąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ. Timer thread čéą░ą║ąČąĄ čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒čŗčćąĮčŗą╝ ą┐ąŠč鹊ą║ąŠą╝, čā ąĮąĄą│ąŠ ąĄčüčéčī čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čüč鹥ą║ ą┐ąŠč鹊ą║ą░, čüą▓ąŠą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, ąĖ čé. ą┐. ąĢčüą╗ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗ, č鹊 čĆą░ąĘą╝ąĄčēąĄąĮąĖąĄ ąĖčģ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┐ąŠč鹊ą║ąĄ čüąŠą▓ą┐ą░ą┤ąĄčé čü ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą▓ ą┐ąŠč鹊ą║ąĄ čéą░ą╣ą╝ąĄčĆą░.
ą×ą┤ąĮą░ą║ąŠ čüą┐ąŠčüąŠą▒, ą║ąŠč鹊čĆčŗą╝ č鹥ą║čāčēąĖą╣ timer thread ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé soft-čéą░ą╣ą╝ąĄčĆčŗ, ąĮąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣. ąöą╗čÅ čŹč鹊ą│ąŠ čéčĆąĄą▒čāčÄčéčüčÅ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ.
ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ą┐čĆąĖąŠčĆąĖč鹥čé timer thread ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┤čĆčāą│ąĖčģ ą┐ąŠč鹊ą║ąŠą▓. ąĪą╗ąĄą┤čāąĄčé ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüą╗ąĖ čüąŠąĘą┤ą░ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ soft-čéą░ą╣ą╝ąĄčĆąŠą▓, č鹊 ą┤ą╗ąĖč鹥ą╗čīąĮąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ callback-čäčāąĮą║čåąĖąĖ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čŹčéąĖčģ soft-čéą░ą╣ą╝ąĄčĆąŠą▓ ą╝ąŠąČąĄčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ čĆą░ą▒ąŠčéčā ą┤čĆčāą│ąĖčģ soft-čéą░ą╣ą╝ąĄčĆąŠą▓, č湥ą│ąŠ ąĖąĘą▒ąĄąČą░čéčī ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ.