|
ą×ą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ čü ąŠčéą║čĆčŗčéčŗą╝ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝ RT-Thread ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, čćč鹊 čāą┐čĆąŠčēą░ąĄčé čĆą░ąĘą▓ąĄčĆčéčŗą▓ą░ąĮąĖąĄ ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐ą╗ą░čéč乊čĆą╝ą░čģ ąĖ ą▒ąĖąĘąĮąĄčü-čüčåąĄąĮą░čĆąĖčÅčģ. ąĪąĖčüč鹥ą╝ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ flash ąĖ OTP. ąóą░ą║ąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ, ą║ą░ą║ ą║ąŠąĮčüąŠą╗čī FinSH, ą▓ąĖčĆčéčāą░ą╗čīąĮą░čÅ čäą░ą╣ą╗ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░ (virtual file system, VFS), čäčĆąĄą╣ą╝ą▓ąŠčĆą║ utest, dynamic module, socket abstraction layer, AT component, ąĖąĮč鹥čĆč乥ą╣čü POSIX, ą╗ąŠą│ Ulog, power management, čüąĄč鹥ą▓ą░čÅ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░, ąĖ čé. ą┐., ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┐čĆąŠčēą░čÄčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā čüąŠąĘą┤ą░ąĮąĖąĄ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą┐ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
[ąÜąŠąĮčüąŠą╗čī FinSH]
FinSH [2] čŹč鹊 ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ RT-Thread, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖąĮč鹥čĆč乥ą╣čü ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ č鹊ą│ąŠ, ą║ą░ą║ čŹč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą▓ Linux. ąÜąŠąĮąĄčćąĮąŠ, čäčāąĮą║čåąĖąŠąĮą░ą╗ ą║ąŠąĮčüąŠą╗ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮ, ąĮą░čüą║ąŠą╗čīą║ąŠ čŹč鹊 ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┤ąŠčüčéčāą┐ąĮčŗąĄ čĆąĄčüčāčĆčüčŗ MCU ąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░, ąŠą┤ąĮą░ą║ąŠ ą║ąŠąĮčüąŠą╗čī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ą┐ąŠ ą▓čŗą▓ąŠą┤čā ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĖčüč鹥ą╝čŗ ąĖ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖą╣. ą¤ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ ą║ąŠąĮčüąŠą╗ąĖ FinSH ą╝ąŠąČąĮąŠ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ PC, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé, Ethernet, USB, Wi-Fi.
ąØą░ čäą░ąĘąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╝ą░ąĮą┤ąĮą░čÅ čüčéčĆąŠą║ą░ FinSH ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā ą▒čŗčüčéčĆąĄąĄ ą┐čĆąŠą▓ąĄčĆąĖčéčī čĆą░ą▒ąŠčéčā ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ čćą░čüč鹥ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čāą┐čĆą░ą▓ą╗čÅčéčī ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ, ą▒čŗčüčéčĆąĄąĄ ąĮą░ą╣čéąĖ ąŠčłąĖą▒ą║ąĖ, ąĖ ą▓ ą║ąŠąĮąĄčćąĮąŠą╝ čüč湥č鹥 čāą╝ąĄąĮčīčłą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖč鹥čĆą░čåąĖą╣ ą┐ąŠ ą┐ąĄčĆąĄą┐čĆąŠčłąĖą▓ą║ąĄ, čüąŠą║čĆą░čēą░čÅ ąŠą▒čēąĄąĄ ą▓čĆąĄą╝čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ.
FinSH ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ ą▓ąĄčĆąĖčäąĖą║ą░čåąĖąĖ ą┐čĆą░ą▓ ą┤ąŠčüčéčāą┐ą░ ą║ čüčéčĆąŠą║ąĄ ą║ąŠą╝ą░ąĮą┤, ą░ą▓č鹊ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĖ ąĖčüč鹊čĆąĖčÄ ą║ąŠą╝ą░ąĮą┤.
[Virtual File System]
ąÆąĖčĆčéčāą░ą╗čīąĮą░čÅ čäą░ą╣ą╗ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░ (VFS) čŹč鹊 ąĮą░ą▒ąŠčĆ ą░ą▒čüčéčĆą░ą║čéąĮčŗčģ čéąĖą┐ąŠą▓ ą┤ą░ąĮąĮčŗčģ, čĆąĄą░ą╗ąĖąĘčāčÄčēąĖčģ čģčĆą░ąĮąĖą╗ąĖčēąĄ, ąĖąĄčĆą░čĆčģąĖč湥čüą║čāčÄ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÄ, ą┤ąŠčüčéčāą┐ ą║ čćč鹥ąĮąĖčÄ ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ [7]. ąæą░ąĘąŠą▓čāčÄ ąĄą┤ąĖąĮąĖčåčā čģčĆą░ąĮąĄąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čŗčćąĮąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čäą░ą╣ą╗čŗ, ąĖ ą┤ą╗čÅ ąĖčģ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čüčāčēąĄčüčéą▓čāčÄčé ą┐ą░ą┐ą║ąĖ.
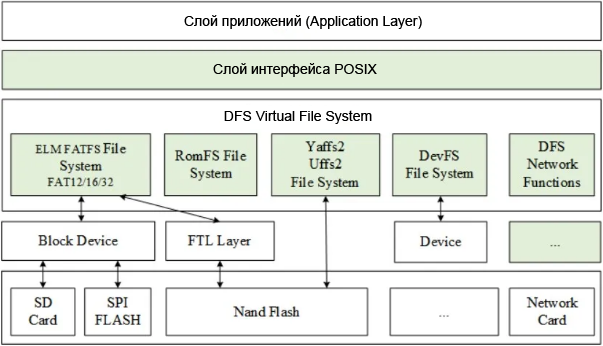
DFS (čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé Device File System) čŹč鹊 ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ RT-Thread. ą¤čĆąĖą╝ąĄąĮąĄąĮą░ čüąĖčüč鹥ą╝ą░ ąĖą╝ąĄąĮąŠą▓ą░ąĮąĖčÅ, ą░ąĮą░ą╗ąŠą│ąĖčćąĮą░čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čüąĖčüč鹥ą╝čŗ ąĖą╝ąĄąĮ čäą░ą╣ą╗ąŠą▓ ąĖ ą┐ą░ą┐ąŠą║ UNIX:

ą¤čāčéčī ą┤ąŠ ą▓čüąĄčģ ąŠą▒čŖąĄą║č鹊ą▓ ą▓ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąŠčé ą║ąŠčĆąĮčÅ (root), ąŠą▒ąŠąĘąĮą░č湥ąĮąĮąŠą│ąŠ ą║ą░ą║ /. ąØą░ą┐čĆąĖą╝ąĄčĆ, čäą░ą╣ą╗ f1.bin ą▓ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą┐čāč鹥ą╝ /f1.bin, ąĖ čäą░ą╣ą╗ f1.bin ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ data/2019 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą┐čāč鹥ą╝ /data/2019/f1.bin. ąŁčéą░ čüąĖčüč鹥ą╝ą░ ąĖą╝ąĄąĮ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé Windows, ą│ą┤ąĄ ą▓ ą║ą░č湥čüčéą▓ąĄ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ \, ąĖ ą▓čüąĄ ą┐čāčéąĖ ą║ čäą░ą╣ą╗ą░ą╝ ąĮą░čćąĖąĮą░čÄčéčüčÅ ąŠčé ą▒čāą║ą▓čŗ ą┤ąĖčüą║ą░ čü ą┤ą▓ąŠąĄč鹊čćąĖąĄą╝.
ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ RT-Thread DFS:
ŌĆó ąŻąĮąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗąĄ POSIX-ąŠą┐ąĄčĆą░čåąĖąĖ ąĮą░ą┤ čäą░ą╣ą╗ą░ą╝ąĖ ąĖ ą┐ą░ą┐ą║ą░ą╝ąĖ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣: read, write, poll/select, ąĖ čé. ą┐.
ŌĆó ąØąĄčüą║ąŠą╗čīą║ąŠ čéąĖą┐ąŠą▓ čäą░ą╣ą╗ąŠą▓čŗčģ čüąĖčüč鹥ą╝: FatFS, RomFS, DevFS, čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ąŠą▒čŗčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓, čäą░ą╣ą╗ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, čüąĄč鹥ą▓čŗčģ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ čäą░ą╣ą╗ąŠą▓.
ŌĆó ąØąĄčüą║ąŠą╗čīą║ąŠ čéąĖą┐ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ čģčĆą░ąĮąĄąĮąĖčÅ: SD Card, SPI Flash, Nand Flash, ąĖ čé. ą┤.
ąśąĄčĆą░čĆčģąĖč湥čüą║ą░čÅ čüčéčĆčāą║čéčāčĆą░ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ DFS ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ, ąĖ ąŠčüąĮąŠą▓ąĮčŗąĄ čćą░čüčéąĖ ąĘą┤ąĄčüčī čŹč鹊 čüą╗ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čüą░ POSIX, čüą╗ąŠą╣ VFS, čüą╗ąŠą╣ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ.
[ążčĆąĄą╣ą╝ą▓ąŠčĆą║ utest]
ą£ąŠą┤čāą╗čī utest (čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé unit test) čŹč鹊 čüąĖčüč鹥ą╝ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ čŹą╗ąĄą╝ąĄąĮč鹊ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ RT-Thread. ą×čüąĮąŠą▓ąĮąŠąĄ ąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ - čāą┐čĆąŠčüčéąĖčéčī čüąŠąĘą┤ą░ąĮąĖąĄ č鹥čüč鹊ą▓ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ RT-Thread (unit testing, coverage testing, integration testing).
[Dynamic Module: dlmodule]
Dynamic Module ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą╝ąĄčģą░ąĮąĖąĘą╝ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ ą╝ąŠą┤čāą╗ąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ RT-Thread. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą╝ąŠą┤čāą╗čī čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮ ąĖ čģčĆą░ąĮąĖčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ ąŠčé čÅą┤čĆą░ čüąĖčüč鹥ą╝čŗ (kernel), č鹊 ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ą│ąĖą▒ą║ąŠčüčéčī ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĖčÅ čäčāąĮą║čåąĖą╣. ąÆ ą║ąŠąĮč鹥ą║čüč鹥 čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čŹč鹊 ą╝ąĄčģą░ąĮąĖąĘą╝ čĆą░ąĘą┤ąĄą╗ąĄąĮąĖčÅ čÅą┤čĆą░ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ (ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖčģ) ą╝ąŠą┤čāą╗ąĄą╣. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čŹč鹊ą╝čā ą╝ąĄčģą░ąĮąĖąĘą╝čā kernel ąĖ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖąĄ ą╝ąŠą┤čāą╗ąĖ ą╝ąŠą│čāčé ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ, ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ čüąĖčüč鹥ą╝čŗ (runtime) čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖąĄ ą╝ąŠą┤čāą╗ąĖ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą▓ čÅą┤čĆąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą╝ąŠą┤čāą╗ąĄą╣ (module loader).
ąöą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ RT-Thread ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ 2 č乊čĆą╝ą░čéą░:
.mo ąŁč鹊 ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╣ ą╝ąŠą┤čāą╗čī, čā čäą░ą╣ą╗ą░ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čüčāčäčäąĖą║čü .mo; ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮ, ąĖ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠąĘą┤ą░ąĮ ą│ą╗ą░ą▓ąĮčŗą╣ ą┐ąŠč鹊ą║ čüąĖčüč鹥ą╝čŗ (main thread), čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čäčāąĮą║čåąĖčÄ main() ą╝ąŠą┤čāą╗čÅ. ą×ą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čäčāąĮą║čåąĖčÅ main(int argc, char**argv) ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ą┐čĆąĖąĮčÅčéčī ą░čĆą│čāą╝ąĄąĮčéčŗ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ.
.so ąŁč鹊 ą┤ąĖąĮą░ą╝ąĖč湥čüą║ą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░, čā čäą░ą╣ą╗ą░ ą║ąŠč鹊čĆąŠą╣ ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čüčāčäčäąĖą║čü .so; ąŠąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮą░ ą▓ ą┐ą░ą╝čÅčéčī, ąĖ ąĄčæ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖą╣ ą╝ąŠąČąĄčé ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ ą┤čĆčāą│ąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ (ąŠą▒čŗčćąĮčŗą╣ ą║ąŠą┤ ąĖą╗ąĖ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖąĄ ą╝ąŠą┤čāą╗ąĖ ą▓ čÅą┤čĆąĄ).
[Socket Abstraction Layer]
ą¦č鹊ą▒čŗ ą┤ąŠą▒ą░ą▓ąĖčéčī ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▒ąŠą╗čīčłąĄ čüąĄč鹥ą▓čŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ąĖ ąĖąĘą▒ąĄąČą░čéčī ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ čüąĖčüč鹥ą╝čŗ ąŠčé ąŠą┤ąĮąŠą│ąŠ čüč鹥ą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ą▓ RT-Thread ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ SAL (Socket Abstraction Layer), ą▓ ą║ąŠč鹊čĆčŗčģ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čüąĄč鹥ą▓čŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ąĖą╗ąĖ ą▓ą░čĆąĖą░ąĮčéčŗ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čüąĄč鹥ą▓čŗčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ąśąĮč鹥čĆč乥ą╣čü ą░ą▒čüčéčĆą░ą║čåąĖąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮą░ą▒ąŠčĆ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓ BSD Socket API ą┤ą╗čÅ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č湥ą╝čā čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā ąĮčāąČąĮąŠ ąĘą░ą▒ąŠčéąĖčéčīčüčÅ č鹊ą╗čīą║ąŠ ąŠą▒ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ API-ąĖąĮč鹥čĆč乥ą╣čüą░ ąĮą░ čüąĄč鹥ą▓ąŠą╝ čāčĆąŠą▓ąĮąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĮąĄ ą▓ą┤ą░ą▓ą░čÅčüčī ą▓ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čüą┐ąĄčåąĖčäąĖą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ąĮąĖąČąĄą╗ąĄąČą░čēąĖčģ čāčĆąŠą▓ąĮąĄą╣. ąŁč鹊 čāą┐čĆąŠčēą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čüąĄč鹥ą▓čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ. ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ SAL:
ŌĆó ąÉą▒čüčéčĆą░ą║čéąĮčŗą╣ ąĖ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąĄč鹥ą▓čŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓.
ŌĆó ą©ąĖčäčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░ą║ąĄč鹊ą▓ ąĮą░ čāčĆąŠą▓ąĮąĄ čüąŠą║ąĄčéą░ (Socket-level TLS encrypted transport).
ŌĆó ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ BSD Socket API.
ŌĆó ąŻąĮąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĄč鹥ą▓čŗą╝ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ą╝ąĖ čäą░ą╣ą╗ąŠą▓ (FD management) čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ read/write poll/select (SAL Network Framework).
ą×čüąĮąŠą▓ąĮą░čÅ čüčéčĆčāą║čéčāčĆą░ SAL network framework RT-Thread ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ:

[ąÜąŠą╝ą┐ąŠąĮąĄąĮčé AT]
ąśąĮč鹥čĆąĮąĄčé ąÆąĄčēąĄą╣ (Internet of Things, IoT) čĆąĄą░ą╗ąĖąĘčāąĄčé ą╝ąĮąŠąČąĄčüčéą▓ąŠ čüąĄč鹥ą▓čŗčģ ą╝ąŠą┤čāą╗ąĄą╣ AT, ąĖ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▓ RT-Thread čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ AT, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī č湥čĆąĄąĘ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü čüąŠą║ąĄč鹊ą▓ BSD.
ąÜąŠą╝ą┐ąŠąĮąĄąĮčé AT ą▓ čüąĖčüč鹥ą╝ąĄ RT-Thread ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ AT Server ąĖ AT Client. ąÜąŠą╝ą┐ąŠąĮąĄąĮčé ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ą║ąŠą╝ą░ąĮą┤čŗ AT, ąŠą▒čĆą░ą▒ąŠčéą║čā ąĄčæ č乊čĆą╝ą░čéą░ ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā, ą┐čĆąĖąĄą╝ ąĖ ą┐ą░čĆčüąĖąĮą│ ą┤ą░ąĮąĮčŗčģ, ąŠą▒čĆą░ą▒ąŠčéą║čā ą┤ą░ąĮąĮčŗčģ URC, ąĖ ą┤čĆčāą│čāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā ąĖąĮč鹥čĆą░ą║čéąĖą▓ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤čŗ.
ą¦ąĄčĆąĄąĘ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ą║ąŠą╝ą┐ąŠąĮąĄąĮčé AT čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝, čćč鹊ą▒čŗ ą┐ąŠčüčŗą╗ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ čüąĄčĆą▓ąĄčĆ (AT Server), ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ ąĮąĄą╝čā, ąĖą╗ąĖ ą┤ą░ąČąĄ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą╝ąŠąČąĄčé ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ąŠą╝ą┐čīčÄč鹥čĆ. ąóą░ą║ąČąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčüąŠą╗ąĖ (CLI mode), ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖ AT Server, ąĖ AT Client. ą×ą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ čüąĄčĆą▓ąĄčĆą░ ąĖ ą║ą╗ąĖąĄąĮčéą░ AT čćą░čēąĄ ą▓čüąĄą│ąŠ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ.
ąĀą░čüčģąŠą┤ čĆąĄčüčāčĆčüąŠą▓ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ AT:
AT Client: 4.6K ROM ąĖ 2.0K RAM.
AT Server: 4.0K ROM ąĖ 2.5K RAM;
AT CLI: 1.5K ROM ąĖ RAM ą┐ąŠčćčéąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
ąÆ čåąĄą╗ąŠą╝ čĆą░čüčģąŠą┤ čĆąĄčüčāčĆčüąŠą▓ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą╝ AT ąŠč湥ąĮčī ąĮąĄą▒ąŠą╗čīčłąŠą╣, ą┤ąĄą╗ą░čÅ ąĄą│ąŠ ąĖą┤ąĄą░ą╗čīąĮčŗą╝ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ąĖ čĆąĄčüčāčĆčüą░ą╝ąĖ. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ AT ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ rt-thread/components/net/at/.
ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ AT Server:
- ąæą░ąĘąŠą▓čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ. ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčüąĮąŠą▓ąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ (ATE, ATZ, ąĖ čé. ą┤.).
- ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī ą║ąŠą╝ą░ąĮą┤. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüąĖą╝ą▓ąŠą╗ąŠą▓.
- ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤. ąÜąŠą╝ą░ąĮą┤ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ą▓čŗčĆą░ąČąĄąĮąĖčÅ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąĮčÅčéčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠą╝ą░ąĮą┤čŗ.
- ąĀąĄą│ąĖčüčéčĆą░čåąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖčģ ą║ąŠą╝ą░ąĮą┤, ą┐ąŠą┤ąŠą▒ąĮąŠ č鹊ą╝čā ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░ąĮąŠ ą┤ą╗čÅ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ FinSH/MSH.
- Debug mode. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĖąĮč鹥čĆą░ą║čéąĖą▓ąĮčŗą╣ CLI-čĆąĄąČąĖą╝ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ firmware.
ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ AT Client:
- ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤ą░ąĮąĮčŗčģ URC. ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą╝ąĄč鹊ą┤ ą┐ąŠą╗ąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ URC data.
- ąÉąĮą░ą╗ąĖąĘ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą░ąĮą░ą╗ąĖąĘ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖčģ ą┤ą░ąĮąĮčŗčģ ąŠčéą▓ąĄčéą░ (custom response data), čāą┐čĆąŠčēąĄąĮąŠ ąĖąĘą▓ą╗ąĄč湥ąĮąĖąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖąĘ čŹčéąĖčģ ą┤ą░ąĮąĮčŗčģ.
- Debug mode. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĖąĮč鹥čĆą░ą║čéąĖą▓ąĮčŗą╣ CLI-čĆąĄąČąĖą╝ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ firmware.
- AT Socket. ąÆ ą║ą░č湥čüčéą▓ąĄ čĆą░čüčłąĖčĆąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ AT Client, ąĮą░ ą▒ą░ąĘąĄ AT-ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ BSD Socket API. ąŁč鹊 ą┤ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čĆą░ą▒ąŠčéčā čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠ čüąĄčéąĖ čü ą┐ąŠą╝ąŠčēčīčÄ AT-ą║ąŠą╝ą░ąĮą┤.
- Multi-client. ąÜąŠą╝ą┐ąŠąĮąĄąĮčé AT čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą║ą╗ąĖąĄąĮč鹊ą▓.
[ąśąĮč鹥čĆč乥ą╣čü POSIX]
API-ąĖąĮč鹥čĆč乥ą╣čü POSIX ą▓ RT-Thread ą▓ą║ą╗čÄčćą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čćą░čüčéąĖ: libc (ąĮą░ą┐čĆąĖą╝ąĄčĆ newlib), čäą░ą╣ą╗ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░, pthread, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ąŠčéą║čĆčŗčéčī ą▓ rtconfig.h čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąŠą┐čåąĖąĖ:
#define RT_USING_LIBC
#define RT_USING_DFS
#define RT_USING_DFS_DEVFS
#define RT_USING_PTHREADS
RT-Thread čĆąĄą░ą╗ąĖąĘčāąĄčé ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čäčāąĮą║čåąĖą╣ ąĖ ą║ąŠąĮčüčéą░ąĮčé Pthreads, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ą░čģ pthread.h, mqueue.h, semaphore.h ąĖ sched.h, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čüčéą░ąĮą┤ą░čĆčéčā POSIX. Pthreads čÅą▓ą╗čÅąĄčéčüčÅ ą┤ąŠč湥čĆąĮąĄą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ ą▓ libc, ąĖ Pthreads ą▓ RT-Thread ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ ąĖąĮą║ą░ą┐čüčāą╗čÅčåąĖąĖ kernel-čäčāąĮą║čåąĖą╣ RT-Thread, čćč鹊 ą┤ąĄą╗ą░ąĄčé čüąĖčüč鹥ą╝čā POSIX-čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠą╣.
[ąøąŠą│ Ulog]
Ulog čŹč鹊 ąŠč湥ąĮčī ą┐čĆąŠčüč鹊ą╣ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ą╗ąŠą│ą░ C/C++. ą¤ąĄčĆą▓ą░čÅ ą▒čāą║ą▓ą░ u ą▓ ąĖą╝ąĄąĮąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ąŠąĘąĮą░čćą░ąĄčé ╬╝, čé. ąĄ. micro, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąÜąŠą╝ą┐ąŠąĮąĄąĮčéčā ulog ąĮčāąČąĄąĮ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ čĆąĄčüčāčĆčüąŠą▓: ROM < 1K, RAM < 0.2K. ąźąŠčéčÅ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ulog ąŠč湥ąĮčī ąĮąĄą▒ąŠą╗čīčłąŠą╣ ą┐ąŠ ąŠą▒čŖąĄą╝čā, ą▓ ąĮąĄą╝ ąĄčüčéčī ąŠč湥ąĮčī ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ čäčāąĮą║čåąĖąĖ. ąÜąŠąĮčåąĄą┐čåąĖčÅ ąĄą│ąŠ ą┤ąĖąĘą░ą╣ąĮą░ ą┐ąĄčĆąĄą║ą╗ąĖą║ą░ąĄčéčüčÅ čü ą┤čĆčāą│ąŠą╣ C/C++ open source ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ ą╗ąŠą│ą░: EasyLogger (ą║ąŠč鹊čĆčāčÄ ąĮą░ąĘčŗą▓ą░čÄčé ąĄčēąĄ elog), ąĖ čüą┤ąĄą╗ą░ąĮąŠ ą╝ąĮąŠą│ąŠ čāą╗čāčćčłąĄąĮąĖą╣ ą▓ ą┐ą╗ą░ąĮąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ. ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ čüą╗ąĄą┤čāčÄčēąĖąĄ:
- ąØąĖąČąĮąĖą╣ čüą╗ąŠą╣ (backend) ą▓čŗą▓ąŠą┤ą░ ą╗ąŠą│ą░ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą┐ąŠą▓ąĄčĆčģ serial port, network, file, ą┐ą░ą╝čÅčéąĖ flash memory ąĖ ą┤čĆčāą│ąĖčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ čģčĆą░ąĮąĄąĮąĖčÅ ąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ.
- ąÆčŗą▓ąŠą┤ ą╗ąŠą│ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą┐ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮčŗą╝ (thread-safe), ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝ ą▓čŗą▓ąŠą┤ą░.
- ąĪąĖčüč鹥ą╝ą░ ą╗ąŠą│ą░ ąŠč湥ąĮčī ąĮą░ą┤ąĄąČąĮą░, ąĖ ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą░ąČąĄ ą▓ čéą░ą║ąĖčģ ąČąĄčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ, ą║ą░ą║ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ISR) ąĖ čüąŠą▒čŗčéąĖą╣ ąŠčéą║ą░ąĘą░ (Hardfault).
- ąŻčĆąŠą▓ąĄąĮčī ą▓čŗą▓ąŠą┤ą░ ą┤ąĖą░ą│ąĮąŠčüčéąĖč湥čüą║ąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, čéą░ą║ ąĖ runtime.
- ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ čäąĖą╗čīčéčĆą░čåąĖčÅ ą╗ąŠą│ą░ ą┐ąŠ ą║ą╗čÄč湥ą▓ąŠą╝čā čüą╗ąŠą▓čā ąĖą╗ąĖ ą╝ąĄčéą║ąĄ.
- API ąĖ č乊čĆą╝ą░čéčŗ ą╗ąŠą│ą░ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čü syslog Linux.
- ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ą╝ą┐ą░ ą┤ą░ąĮąĮčŗčģ ą▓ hex-č乊čĆą╝ą░č鹥.
- ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī API-čäčāąĮą║čåąĖą╣ ą▓čŗą▓ąŠą┤ą░ ą╗ąŠą│ą░ čü rtdbg (čĆą░ąĮąĮąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą╗ąŠą│ą░ RTT) ąĖ EasyLogger.
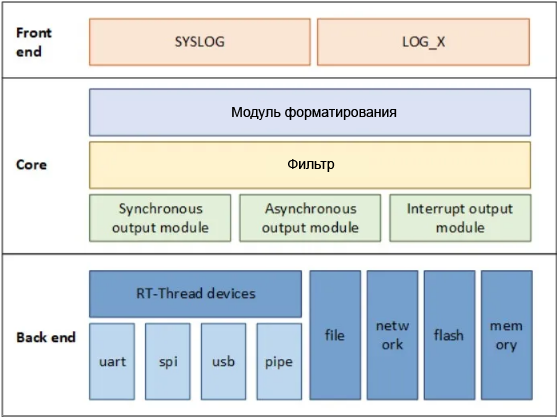
ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ulog:
[Power Management: PM]
ąØą░ ąĮą░čćą░ą╗čīąĮąŠą╣ čüčéą░ą┤ąĖąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąŠą▒čŗčćąĮąŠ ą▒ąŠą╗čīčłąĄ čāą┤ąĄą╗čÅąĄčéčüčÅ ą▓ąĮąĖą╝ą░ąĮąĖčÅ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ąŠą╗ąĄąĄ ą┐ąŠą╗ąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓čüąĄčģ čäčāąĮą║čåąĖą╣ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čäčāąĮą║čåąĖąĖ ą┐čĆąŠą┤čāą║čéą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ, ą▓čüčéą░ąĄčé ą▓ąŠą┐čĆąŠčü ąŠ ą▓ąĮąĄą┤čĆąĄąĮąĖąĖ čäčāąĮą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (power management, PM). ą¦č鹊ą▒čŗ čāčüčéčĆąŠą╣čüčéą▓ąŠ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅą╗ąŠ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ IoT-čāčüčéčĆąŠą╣čüčéą▓ą░, ą▓ RT-Thread ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝. ąśą┤ąĄčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ PM-ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ - čüą┤ąĄą╗ą░čéčī ąĖčģ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ąŠą╗ąĄąĄ ą┐čĆąŠąĘčĆą░čćąĮčŗą╝ąĖ ąĖ čāą┤ąŠą▒ąĮčŗą╝ąĖ ą┤ą╗čÅ ą┐čĆąŠčüč鹊ą│ąŠ ą▓ąĮąĄą┤čĆąĄąĮąĖčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ čäčāąĮą║čåąĖą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝.
PM-ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ RT-Thread ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ ąĖą┤ąĄąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüą╗ąŠąĄą▓, ąŠčéą┤ąĄą╗čÅčÅ čćą░čüčéąĖ ą║ąŠą┤ą░, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ, ąŠčé čćą░čüč鹥ą╣ ą║ąŠą┤ą░, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ąĮą░ čüą╗ąŠčÅ čÅą┤čĆą░. ąźąŠčéčÅ ąŠą▒čēąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą┤ą╗čÅ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čéą░ą║ąČąĄ čüčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą╗ąŠąČąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą░ą┤ą░ą┐čéą░čåąĖąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĮą░ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ PM-ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ RT-Thread:
- PM ąĮą░ ąŠčüąĮąŠą▓ąĄ č鹥ą║čāčēąĄą│ąŠ čĆąĄąČąĖą╝ą░ čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéčīčÄ, ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄčé čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle), ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčĆąŠą▓ąĮąĄą╣ čĆąĄąČąĖą╝ą░ čüąĮą░. ąŁč鹊 čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąŠąĘčĆą░čćąĮąŠ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčé ą┐ąĖčéą░ąĮąĖąĄą╝ ąĮą░ ąĮąĖąČąĮąĄą╝ čüą╗ąŠąĄ.
- ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ čćą░čüč鹊čéčŗ ą▓ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ (running), ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čćą░čüč鹊čéčŗ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čĆąĄąČąĖą╝ąŠą╝, ą│ą░čĆą░ąĮčéąĖčĆčāčÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ą░čģ.
- ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą┐čĆą░ą▓ą╗čÅčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąŠą╣ ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ čĆą░ą▒ąŠčéčŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čĆąĄąČąĖą╝ąŠą╝, ą│ą░čĆą░ąĮčéąĖčĆčāčÅ ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ą┐ąŠą│čĆčāąČąĄąĮąĖąĄ ą▓ čüąŠąĮ ąĖ ą▓ąŠąĘą▓čĆą░čé ąĖąĘ ąĮąĄą│ąŠ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆąĄąČąĖą╝ą░čģ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (sleep mode).
- ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ čüąĮą░, čćč鹊 ą┤ąĄą╗ą░ąĄčé čéąĖą║ čüąĖčüč鹥ą╝čŗ (OS Tick) ą┐čĆąŠąĘčĆą░čćąĮčŗą╝ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
- ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ. ąĢčüą╗ąĖ ąŠčéą║čĆčŗčé ą║ąŠą╝ą┐ąŠąĮąĄąĮčé devfs, č鹊 ą║ ąĮąĄą╝čā ą╝ąŠąČąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ.
[ążčĆąĄą╣ą╝ą▓ąŠčĆą║ čüąĄčéąĖ]
ą¦č鹊ą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čüč鹥ą║ąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ čüąĄč鹥ą▓čŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, ą▓ RT-Thread ą▒čŗą╗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé SAL (čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé Socket Abstraction Layer). RT-Thread ą╝ąŠąČąĄčé ą┐čĆąŠąĘčĆą░čćąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čüč鹥ą║ą░ą╝ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, ą▓ą║ą╗čÄčćą░čÅ ą┐čĆąŠč鹊ą║ąŠą╗ TCP/IP, čéą░ą║ąŠą╣ ą║ą░ą║ čłąĖčĆąŠą║ąŠ čĆą░čüą┐čĆąŠčüčéą░ąĮąĄąĮąĮčŗą╣ čüč鹥ą║ LwIP, čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ą░čģ, ą░ čéą░ą║ąČąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé čüč鹥ą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ AT Socket. ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐ąŠą╗ąĮą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā čüą╗ąŠąĄą╝ čüąĄčéąĖ ąĖ čüą╗ąŠąĄą╝ čéčĆą░ąĮčüą┐ąŠčĆčéą░.
ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ RT-Thread network framework:
- ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čüąĄč鹥ą▓ąŠą╣ BSD Socket API, čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ poll/select.
- ą£ąĮąŠąČąĄčüčéą▓ąŠ ą░ą▒čüčéčĆą░ą║čéąĮčŗčģ, čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą║ čüąĄč鹥ą▓čŗą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝.
- ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ čäąĖąĘąĖč湥čüą║ąĖčģ čüąĄč鹥ą▓čŗčģ ą║ą░čĆčé čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ąŠą┤čāą╗čÅ čüąĄč鹥ą▓ąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ.
- ąØąĄą▒ąŠą╗čīčłąŠą╣ čĆą░čüčģąŠą┤ čĆąĄčüčāčĆčüąŠą▓ ą┐ą░ą╝čÅčéąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ SAL: ROM 2.8K ąĖ RAM 0.6K.
ążčĆąĄą╣ą╝ąŠčĆą║ čüąĄčéąĖ RT-Thread čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┐ąŠ 4 čüą╗ąŠčÅą╝, ą║ą░ąČą┤čŗą╣ čüą╗ąŠą╣ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ čüą▓ąŠą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗. ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ čüčéčĆčāą║čéčāčĆą░ RT-Thread network framework:
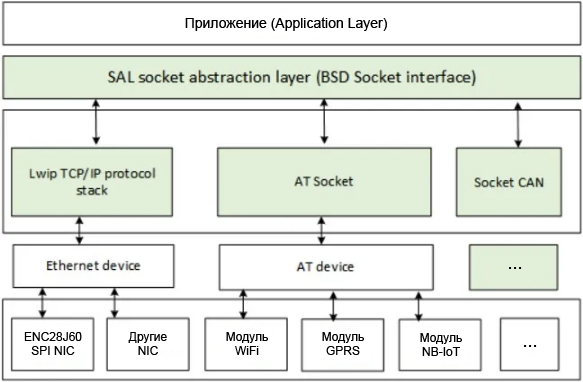
ąŁčéąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ ą▓ ą▓ąĖą┤ąĄ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╣, ąŠčéą┤ąĄą╗čīąĮąŠ ąŠčé čÅą┤čĆą░ OS, ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮčŗ ąĖ čĆą░čüčłąĖčĆąĄąĮčŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą│čĆą░čäąĖč湥čüą║ąŠą╣ čüčĆąĄą┤čŗ IDE. ą£ąŠą┤čāą╗čīąĮčŗą╣ ą┤ąĖąĘą░ą╣ąĮ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą│ąĖą▒ą║ąŠčüčéčī ą┐čĆąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ ąĖ ąĮąĄą▓čŗčüąŠą║čāčÄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą╝ąĄąČą┤čā ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ąĖ čüąĖčüč鹥ą╝čŗ.
[ąĪčüčŗą╗ą║ąĖ]
1. RT-Thread RTOS Overview and its Components site:iotbyhvm.ooo.
2. ąÜąŠąĮčüąŠą╗čī FinSH.
3. RT-Thread is an open source IoT operating system site:github.com.
3. IoT OS and RTOS for Internet of Things devices site:iotbyhvm.ooo.
4. What is RT-Thread RTOS site:iotbyhvm.ooo.
5. Internet of Things (IoT) Introduction | IoT Tutorial site:iotbyhvm.ooo.
6. QEMU: ą▒čŗčüčéčĆčŗą╣ čüčéą░čĆčé.
7. RT-Thread Virtual File System. |



