ąśąĮąĖčåąĖą░čéąĖą▓ą░ STMCube Ōäó ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ STMicroelectronics (ą┤ą░ą╗ąĄąĄ ą┐čĆąŠčüč鹊 ST) ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąČąĖąĘąĮąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, čüąĮąĖąČą░čÅ ąĖčģ čāčüąĖą╗ąĖčÅ, ą▓čĆąĄą╝čÅ ąĖ čåąĄąĮčā čĆą░ą▒ąŠčé. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ STM32Cube ą▓ąĄčĆčüąĖąĖ 1.x ą▓ą║ą╗čÄčćą░ąĄčé:
ŌĆó STM32CubeMX , ą│čĆą░čäąĖč湥čüą║ą░čÅ čāčéąĖą╗ąĖčéą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą║ąŠą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĮą░ čÅąĘčŗą║ąĄ C. čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą│čĆą░čäąĖč湥čüą║ąĖčģ ą▓ąĖąĘą░čĆą┤ąŠą▓.
ŌĆó ą¤čĆąŠą┤ą▓ąĖąĮčāčéą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ą┐ą╗ą░čéč乊čĆą╝ą░, ąĮą░čåąĄą╗ąĄąĮąĮą░čÅ ąĮą░ ą║ą░ąČą┤čāčÄ ąĖąĘ čüąĄčĆąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ (čéą░ą║čāčÄ ą║ą░ą║ STM32CubeF4 ą┤ą╗čÅ čüąĄčĆąĖąĖ STM32F4).
ŌĆō STM32Cube HAL , čüą╗ąŠą╣ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ, ą│ą░čĆą░ąĮčéąĖčĆčāčÄčēąĖą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ąĄąČą┤čā čüąĄą╝ąĄą╣čüčéą▓ą░ą╝ąĖ STM32.
ą©ąĖąĮą░ USB - čüą░ą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠąĄ ą▓ ąĖčüč鹊čĆąĖąĖ ą┐ąĄčĆčüąŠąĮą░ą╗čīąĮčŗčģ ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą▓ čüčĆąĄą┤čüčéą▓ąŠ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, čéą░ą║ąĖčģ ą║ą░ą║ ą╝čŗčłčī, ą│ąĄą╣ą╝ą┐ą░ą┤čŗ, ą┤ąČąŠą╣čüčéąĖą║ąĖ, čüą║ą░ąĮąĄčĆčŗ, ą┐čĆąĖąĮč鹥čĆčŗ, čåąĖčäčĆąŠą▓čŗąĄ ą║ą░ą╝ąĄčĆčŗ ąĖ čé. ą┤. USB čéą░ą║ąČąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čīčüą║ąŠą╣ ąĖ ą╝ąŠą▒ąĖą╗čīąĮąŠą╣ 菹╗ąĄą║čéčĆąŠąĮąĖą║ąĖ.
ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ (ą┐ąĄčĆąĄą▓ąŠą┤ UM1734 [1]) ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čāčüčéčĆąŠą╣čüčéą▓ USB STM32Cube, ą║ąŠč鹊čĆą░čÅ ą▓čģąŠą┤ąĖčé ą║ą░ą║ čćą░čüčéčī ą▓ ą┐ą░ą║ąĄčé STM32Cube. ąŁč鹊čé ą┐ą░ą║ąĄčé ą╝ąŠąČąĮąŠ ą▒ąĄčüą┐ą╗ą░čéąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī čü čüą░ą╣čéą░ ST (http://www.st.com/stm32cube). ąŚą┤ąĄčüčī ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ąĮą░čćą░čéčī čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čéčī ąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ąŠčüąĮąŠą▓ąĮčŗčģ ą║ą╗ą░čüčüąŠą▓ (HID, MSC, Audio, CDC...) ąĮą░ ą▒ą░ąĘąĄ čüč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą│ąŠ ą▓čüąĄą╝ąĖ čüąĄčĆąĖčÅą╝ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé ą┐čĆąĖą╝ąĄąĮąĖą╝ ą║ąŠ ą▓čüąĄą╝ čüąĄčĆąĖčÅą╝ STM32, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé ąĮą░ ą▒ąŠčĆčéčā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB. ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąĖąĘą╗ąŠąČąĄąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą▒čĆą░ąĘčåąŠą▓ąŠą╣ ą┐ą╗ą░čéč乊čĆą╝čŗ ą▓čŗą▒čĆą░ąĮą░ čĆą░ąĘąĮąŠą▓ąĖą┤ąĮąŠčüčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32F4xx ąĖ ą┐ą░ą║ąĄčé STM32CubeF4. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą┐čĆąĖą╝ąĄčĆą░ą╝ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĮą░ ąÆą░čłąĄą╝ STM32, ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čäą░ą╣ą╗čā readme, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝čā ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą┐ą░ą║ąĄč鹥 STM32Cube.
API Application Programming Interface (ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ąŠčüčéčāą┐ą░ ą║ čäčāąĮą║čåąĖčÅą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ).
BOT Bulk Only Transfer, ą┐ąĄčĆąĄą┤ą░čćą░ č鹊ą╗čīą║ąŠ ą▒ą╗ąŠą║ą░ą╝ąĖ.
CBW Command Block Wrapper, ą▒ą╗ąŠą║ ą║ąŠą╝ą░ąĮą┤čŗ SCSI, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┤ą╗ąĖąĮčŗ ą║ąŠą╝ą░ąĮą┤čŗ, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čÄąĮąĖčé (LUT), ą║čāą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░, ąĖ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą▓ ąŠčéą▓ąĄčé ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ąŠčéą▓ąĄčéą░ ąĘą░ą┐čĆąŠčüčā čģąŠčüčéą░. Command Block Wrapper ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓čā čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąĄčĆą▓ąŠą│ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Out ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ Block ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╗čÄą▒čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ čāčüčéčĆąŠą╣čüčéą▓čā ąĖą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ ąĖąĘ ąĮąĄą│ąŠ. ąŚą░č鹥ą╝ čģąŠčüčéčā čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čäąĖąĮą░ą╗čīąĮčŗą╣ CSW, čüąŠą┤ąĄčƹȹ░čēąĖą╣ čĆąĄąĘčāą╗čīčéą░čéčŗ ąŠą┐ąĄčĆą░čåąĖąĖ.
CDC Communication Device Class.
CSW Command Status Wrapper, ą▒ą╗ąŠą║ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SCSI.
DFU Device Firmware Upgrade, ą║ą╗ą░čüčü ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (firmware) ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
firmware ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ "ą┐čĆąŠčłąĖą▓ą║ą░".
FS Full Speed, ą┐ąŠą╗ąĮą░čÅ čüą║ąŠčĆąŠčüčéčī (12 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║).
HAL Hardware Abstraction Layer, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ (ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓) ą┤ą╗čÅ ą░ą▒čüčéčĆą░ą│ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčé ą▓ąĄčĆčüąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ.
HCD Host Controller Driver.
HID Human Interface Device.
HS High Speed, ą▓čŗčüąŠą║ą░čÅ čüą║ąŠčĆąŠčüčéčī (480 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║).
HSI high-speed internal oscillator, ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░ 8 ą£ąōčå.
I2C ą┐ąŠą┐čāą╗čÅčĆąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮą░čÅ čłąĖąĮą░ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą▓ 菹╗ąĄą║čéčĆąŠąĮąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ.
I2S Inter-IC Sound, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ąĘą▓čāą║ąŠą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą▓ą╝ąĄčüč鹊 I2S ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčā IIS.
LBA Logical Block Address.
LUN Logical Unit, č鹥čĆą╝ąĖąĮ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SCSI.
Mbps Megabit per second, ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║.
MCU MicroController Unit, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
MSC Mass Storage Class, ą║ą╗ą░čüčü čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąśąĮąŠą│ą┤ą░ čŹč鹊čé ą║ą╗ą░čüčü ąĮą░ąĘčŗą▓ą░čÄčé ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆąŠą╣ MSD (Mass Storage Device).
MSP MCU Support Package.
MUN Max Unit Number, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ąĮąŠą╝ąĄčĆ LUN.
OTG On-The-Go: ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄąĄ OTG, ą╝ąŠąČąĄčé ąĮą░ ą╗ąĄčéčā ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ą╝ąĄąČą┤čā čĆąŠą╗čÅą╝ąĖ HOST/DEVICE.
PCD Peripheral Controller Driver, ą┤čĆą░ą╣ą▓ąĄčĆ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
PID USB Product Identifier, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠą┤čāą║čéą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
PSTN Public Switched Telephone Network, č鹥ą╗ąĄč乊ąĮąĮą░čÅ ą║ąŠą╝ą╝čāčéą░čåąĖąŠąĮąĮą░čÅ čüąĄčéčī ąŠą▒čēąĄą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
RCC Reset and Clock Control, čüąĖčüč鹥ą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▒čĆąŠčüąŠą╝ ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝.
SCSI Small Computer System Interface, ą┐ąŠą┐čāą╗čÅčĆąĮčŗą╣ čüčéą░ąĮą┤ą░čĆčé čłąĖąĮčŗ ąĖ ąŠą┤ąĮąŠąĖą╝ąĄąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ąŠą▒ą╝ąĄąĮą░.
SOF Start Of Frame, čüąĖą│ąĮą░ą╗ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░.
VID USB Vendor Identifier, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USB Universal Serial Bus.
ZLP Zero Length Packet, ą┐ą░ą║ąĄčé ąĮčāą╗ąĄą▓ąŠą╣ ą┤ą╗ąĖąĮčŗ.
[ąöąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąŠčé ST ]
ŌĆó USB Host library user manual (UM1720), čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čģąŠčüčéą░ USB.
[ąÆąĮąĄčłąĮąĖąĄ čüčüčŗą╗ą║ąĖ ]
ŌĆó Universal Serial Bus Specification, Revision 2.0, http: //www.usb.org
[ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ]
ST ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą▓ąŠąĖą╝ ą║ą╗ąĖąĄąĮčéą░ą╝ ąĮąŠą▓čŗąĄ čüč鹥ą║ąĖ USB (čüč鹥ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ čüč鹥ą║ čģąŠčüčéą░) ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą▓čüąĄ STM32 MCU, ą▓ą╝ąĄčüč鹥 čü ą╝ąĮąŠą│ąĖą╝ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╝ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ Atollic┬« TrueSTUDIO, IAR Embedded Workbench for ARM┬« ąĖ Keil uVision┬«.
ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé č乊ą║čāčüąĖčĆčāąĄčéčüčÅ ąĮą░ čüč鹥ą║ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąöą╗čÅ čüč鹥ą║ą░ čģąŠčüčéą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝čā čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čÅą▓ą╗čÅąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą┤ą╗čÅ ą▓čüąĄčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32, ąĖ č鹊ą╗čīą║ąŠ čüą╗ąŠą╣ HAL ą░ą┤ą░ą┐čéąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ STM32.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą▓ąĄčĆčģ HAL-ą┤čĆą░ą╣ą▓ąĄčĆą░ STM32Cube ą┤ą╗čÅ USB čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ API ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤ąŠą║čāą╝ąĄąĮčé ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗą╣ ą╝ąŠą┤čāą╗čī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ STM32Cube čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ąĖ ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čü ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠą┤čāą╗čÅ ą┐čĆąŠčüč鹊 čĆą░ąĘčĆą░ą▒ąŠčéą░čéčī čüąŠą▒čüčéą▓ąĄąĮąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ ą┐ą░ą║ąĄčéą░ STM32Cube ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čüąĄčĆąĖąĖ STM32. ą×ąĮą░ čüąŠą┤ąĄčƹȹĖčé:
ŌĆó ąØąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ USB.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą╝čā ą┐čĆąĖą╝ąĄčĆčā firmware ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéąĖą┐ą░ ą┐ąĄčĆąĄą┤ą░čć USB:
ŌĆó Human Interface Device HID. ąöąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ HID-ą┤ąČąŠą╣čüčéąĖą║, ąŠčüąĮąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ ąŠčåąĄąĮąŠčćąĮčŗčģ ą┐ą╗ą░čéą░čģ (EVAL board), čéą░ą║ąČąĄ ąĄčüčéčī ą┐čĆąĖą╝ąĄčĆčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (Custom HID example).
ąĀą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ č鹥ą╝čŗ:
ŌĆó ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ążčāąĮą║čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ . ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB:
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čäčāąĮą║čåąĖąĖ ą╝ąĮąŠą│ąŠą┐ą░ą║ąĄčéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą▒ąŠą╗čīčłąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ ą▒ąĄąĘ čĆą░ąĘą┤ąĄą╗ąĄąĮąĖčÅ ąĖąĘ ąĮą░ ą┐ą░ą║ąĄčéčŗ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą▓ą╝ąĄčüč鹥 čü RTOS, čéą░ą║ ąĖ ąŠčéą┤ąĄą╗čīąĮąŠ; ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą▒ąĄčĆčéą║ą░ (CMSIS RTOS wrapper) ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą░ą▒čüčéčĆą░ą║čåąĖąĖ čü čÅą┤čĆąŠą╝ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ. ą¤čĆąĖą╝ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ąĮąĄ ąŠč鹊ą▒čĆą░ąČą░čÄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ą╗ąŠą│ą░.
ąĀąĖčü. 1. STM32Cube USB device library (ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB).
ąØą░ čĆąĖčüčāąĮą║ąĄ ą▓čŗčłąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĘąĄą╗ąĄąĮčŗą╝ čåą▓ąĄč鹊ą╝, čÅą┤čĆąŠ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ USB ąČąĄą╗čéčŗą╝ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ USB Device HAL čüąĖąĮąĖą╝.
[ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ]
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čĆą░ąĘą┤ąĄą╗ąĄąĮą░ ąĮą░ čéčĆąĖ ąŠčüąĮąŠą▓ąĮčŗčģ čüą╗ąŠčÅ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ąĮą░ą┤ čüą░ą╝čŗą╝ ą▓ąĄčĆčģąĮąĖą╝ čüą╗ąŠąĄą╝, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 2.
ąĀąĖčü. 2. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ USB device library.
ąØą░ čŹč鹊ą╝ čĆąĖčüčāąĮą║ąĄ ą▒ą╗ąŠą║ąĖ čÅą┤čĆą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ USB ą┐ąŠą║ą░ąĘą░ąĮčŗ ąČąĄą╗čéčŗą╝ čåą▓ąĄč鹊ą╝, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB (USB Device Configuration) čäąĖąŠą╗ąĄč鹊ą▓čŗą╝, ąĖ čüąĖąĮąĖą╝ ą┐ąŠą║ą░ąĘą░ąĮ ą┤čĆą░ą╣ą▓ąĄčĆ USB HAL.
ą¤ąĄčĆą▓čŗą╣ čüą╗ąŠą╣ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čÅą┤čĆą░ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą║ą╗ą░čüčüą░ USB.
ąöčĆą░ą╣ą▓ąĄčĆčŗ čÅą┤čĆą░ (Core drivers). ą»ą┤čĆąŠ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čüąŠčüčéą░ą▓ą╗ąĄąĮąŠ ąĖąĘ 4 ąŠčüąĮąŠą▓ąĮčŗčģ ą▒ą╗ąŠą║ąŠą▓:
ŌĆō ą£ąŠą┤čāą╗čī čÅą┤čĆą░ USB, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą╗ąĮčŗą╣ ąĮą░ą▒ąŠčĆ API ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą╝ą░čłąĖąĮčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ąĖ ą┐čĆąŠčåąĄčüčüą░ą╝ąĖ ąŠą▒čĆą░čéąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓ (callback) ąĖąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ USB.
ąöčĆą░ą╣ą▓ąĄčĆčŗ ą║ą╗ą░čüčüą░ . ąÜą╗ą░čüčüčŗ čāčüčéčĆąŠą╣čüčéą▓ USB ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąĮą░ą▒ąŠčĆąŠą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčüčéčŗą║ąŠą▓ą░ąĮčŗ čü čÅą┤čĆąŠą╝ USB č湥čĆąĄąĘ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čā USBD_RegisterClass().
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čŹč鹊 čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čüč鹥ą║, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ čü USB 2.0 ąĖ čüąŠ ą▓čüąĄą╝ąĖ čÅą┤čĆą░ą╝ąĖ STM32 USB. ą×ąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčüč鹊 čüąŠčüčéčŗą║ąŠą▓ą░ąĮ čü ą╗čÄą▒čŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ USB HAL ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą╝čā čäą░ą╣ą╗čā ąŠą▒ąĄčĆčéą║ąĖ, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čģąŠą┤ąĖčé ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą╝ąĄąČą┤čā ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ USB ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
[ąĪą╗ąŠą╣ USB OTG HAL ]
ąĀąĖčü. 3. ą×ą▒ąĘąŠčĆ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┤čĆą░ą╣ą▓ąĄčĆą░:
ŌĆó ąØąĖąČąĮąĖą╣ čüą╗ąŠą╣ (Low Layer USB driver) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą▒čēąĄąĄ API ą┤ą╗čÅ čĆąĄąČąĖą╝ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ OTG. ą×ąĮ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ čÅą┤čĆą░ ą▓ ą║ą░ąČą┤ąŠą╝ čĆąĄąČąĖą╝ąĄ ąĖ čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠč鹊ą║ąŠą╝ ą┐ąĄčĆąĄą┤ą░čć.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ ą┤čĆą░ą╣ą▓ąĄčĆą░ PCD ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┤ąŠą║čāą╝ąĄąĮčéčā UM1725, ą│ą┤ąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓čüąĄ ą▓čŗąĘąŠą▓čŗ API ą┤čĆą░ą╣ą▓ąĄčĆą░ PCD.
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ USB ]
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ą┤čĆą░ą╣ą▓ąĄčĆą░, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ.
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüą╗ąĄą┤čāčÄčēąĄą╣ čäčāąĮą║čåąĖąĖ, čüąŠą┤ąĄčƹȹ░čēąĄą╣čüčÅ ą▓ čäą░ą╣ą╗ąĄ stm32fxxx_hal_pcd.c:
HAL_StatusTypeDef HAL_PCD_Init (PCD_HandleTypeDef * hpcd);
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ . ąÜą░ą║ č鹊ą╗čīą║ąŠ čÅą┤čĆąŠ USB ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ, ą▓ąĄčĆčģąĮąĖą╣ čüą╗ąŠą╣ ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ, čćč鹊ą▒čŗ ąŠčéą║čĆčŗčéčī ąĖą╗ąĖ ąĘą░ą║čĆčŗčéčī ą░ą║čéąĖą▓ąĮčāčÄ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā čü čåąĄą╗čīčÄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ą£ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ 2 API-ą▓čŗąĘąŠą▓ą░:
HAL_StatusTypeDef HAL_PCD_EP_Open (PCD_HandleTypeDef * hpcd,
uint8_t ep_addr,
uint16_t ep_mps,
uint8_t ep_type);
HAL_StatusTypeDef HAL_PCD_EP_Close (PCD_HandleTypeDef * hpcd,
uint8_t ep_addr);
ąŚą┤ąĄčüčī ep_addr, ep_mps ąĖ ep_type čŹč鹊 ą░ą┤čĆąĄčü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, ą╝ą░ą║čüąĖą╝čāą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖ čéąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ąĪčéčĆčāą║čéčāčĆą░ čÅą┤čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ . ą×čüąĮąŠą▓ąĮą░čÅ čüčéčĆčāą║čéčāčĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, čŹč鹊 ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ (device handle) čéąĖą┐ą░ USBD_HandleTypedef:
typedef struct _USBD_HandleTypeDef
{
uint8_t id;
uint32_t dev_config;
uint32_t dev_default_config;
uint32_t dev_config_status;
USBD_SpeedTypeDef dev_speed;
USBD_EndpointTypeDef ep_in[15 ];
USBD_EndpointTypeDef ep_out[15 ];
uint32_t ep0_state;
uint32_t ep0_data_len;
uint8_t dev_state;
uint8_t dev_old_state;
uint8_t dev_address;
uint8_t dev_connection_status;
uint8_t dev_test_mode;
uint32_t dev_remote_wakeup;
USBD_SetupReqTypedef request;
USBD_DescriptorsTypeDef * pDesc;
USBD_ClassTypeDef * pClass;
void * pClassData;
void * pUserData;
void * pData;
} USBD_HandleTypeDef;
ąōą╗ąŠą▒ą░ą╗čīąĮą░čÅ čüčéčĆčāą║čéčāčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĖ čüčéčĆčāą║čéčāčĆčŗ, čćč鹊ą▒čŗ čģčĆą░ąĮąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ąŠčéąĮąŠčüčÅčēčāčÄčüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓čā, ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖą╣ ą╝ą░čłąĖąĮčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ(control transfer state machine), ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ/čüčéą░čéčāčüą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
ąÆ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆąĄ dev_config čģčĆą░ąĮąĖčé č鹥ą║čāčēčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ąĖ ep0_state čāą┐čĆą░ą▓ą╗čÅąĄčé ą╝ą░čłąĖąĮąŠą╣, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ:
/* ąĪąŠčüč鹊čÅąĮąĖąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ (EP0 State) */ #define USBD_EP0_IDLE 0 #define USBD_EP0_SETUP 1 #define USBD_EP0_DATA_IN 2 #define USBD_EP0_DATA_OUT 3 #define USBD_EP0_STATUS_IN 4 #define USBD_EP0_STATUS_OUT 5 #define USBD_EP0_STALL 6
ąÆ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆąĄ dev_state ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ:
/* ąĪąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ */ #define USBD_DEFAULT 1 #define USBD_ADDRESSED 2 #define USBD_CONFIGURED 3 #define USBD_SUSPENDED 4
ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ USB ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé 6 čüąŠčüč鹊čÅąĮąĖą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB:
Attached : čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ čłąĖąĮąĄ USB, ąŠą┤ąĮą░ą║ąŠ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ.Powered : čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ čłąĖąĮąĄ USB ąĖ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ, ąŠą┤ąĮą░ą║ąŠ ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠ ąĮąĖą║ą░ą║ąŠą╣ ąĘą░ą┐čĆąŠčü čüą▒čĆąŠčüą░ (reset request).Default : čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ USB. ą×ąĮąŠ ąĘą░ą┐ąĖčéą░ąĮąŠ ąĖ čüą▒čĆąŠčłąĄąĮąŠ, ąŠą┤ąĮą░ą║ąŠ ąĄą╝čā ąĮąĄ ą▒čŗą╗ ąĮą░ąĘąĮą░č湥ąĮ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü.Address : čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ USB, ąĘą░ą┐ąĖčéą░ąĮąŠ ąĖ čüą▒čĆąŠčłąĄąĮąŠ, ąĖ ą┐ąŠą╗čāčćąĖą╗ąŠ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü.Configured : čāčüčéčĆąŠą╣čüčéą▓ąŠ čāąČąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░ą┤čĆąĄčüąŠą▓ą░ąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ. ąŁč鹊 ąĮąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend).Suspended : čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ, ąĮąŠ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 3 ą╝čü ą┐ąŠ čłąĖąĮąĄ ąĮąĄ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ čüą▓čÅąĘą░ąĮąĮąŠą╣ čü ąĮąĖą╝ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ.
ą¤ąŠč鹊ą║ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ USB . ąĪą╗ąŠą╣ PCD ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüąĄ API-ą▓čŗąĘąŠą▓čŗ, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁč鹊 ą┤ąĄą╗ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╣ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖą╣:
HAL_StatusTypeDef HAL_PCD_EP_Transmit (PCD_HandleTypeDef * hpcd,
uint8_t ep_addr,
uint8_t * pBuf,
uint32_t len);
HAL_StatusTypeDef HAL_PCD_EP_Receive (PCD_HandleTypeDef * hpcd,
uint8_t ep_addr,
uint8_t * pBuf,
uint32_t len);
HAL_StatusTypeDef HAL_PCD_EP_SetStall (PCD_HandleTypeDef * hpcd,
uint8_t ep_addr);
HAL_StatusTypeDef HAL_PCD_EP_ClrStall (PCD_HandleTypeDef * hpcd,
uint8_t ep_addr);
HAL_StatusTypeDef HAL_PCD_EP_Flush (PCD_HandleTypeDef * hpcd,
uint8_t ep_addr);
ąĪą╗ąŠą╣ PCD čüąŠą┤ąĄčƹȹĖčé ąŠą┤ąĮčā čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ USB:
void HAL_PCD_IRQHandler (PCD_HandleTypeDef * hpcd);
ążą░ą╣ą╗ stm32fxxx_hal_pcd.h čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣, ą▓čŗąĘčŗą▓ą░ąĄą╝čŗčģ ąĖąĘ čüą╗ąŠčÅ čÅą┤čĆą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, čćč鹊ą▒čŗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čüąŠą▒čŗčéąĖčÅ USB.
ą¤ąŠčćčéąĖ ą▓čüąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą▓ąŠąĘą▓čĆą░čēą░čÄčé čüąŠčüč鹊čÅąĮąĖąĄ čéąĖą┐ą░ USBD_StatusTypeDef. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ąŠą╗ąČąĮąŠ ą▓čüąĄą│ą┤ą░ ą┐čĆąŠą▓ąĄčĆčÅčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čŹč鹊ą│ąŠ čéąĖą┐ą░ (ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖą╣), ąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3 ąŠą┐ąĖčüą░ąĮčŗ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ čüąŠčüč鹊čÅąĮąĖčÅ.
typedef enum
{
USBH_OK = 0 ,
USBH_BUSY,
USBH_FAIL,
}USBH_StatusTypeDef;
ąóą░ą▒ą╗ąĖčåą░ 3. ąĪąŠčüč鹊čÅąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
Status ą×ą┐ąĖčüą░ąĮąĖąĄ
USBH_OK ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ, ą║ąŠą│ą┤ą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ.
USBH_BUSY ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ, ą║ąŠą│ą┤ą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĄčēąĄ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī (čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĘą░ąĮčÅč鹊).
USBH_FAIL ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ, ą║ąŠą│ą┤ą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠč鹥čĆą┐ąĄą╗ą░ ąĮąĄčāą┤ą░čćčā ąĖąĘ-ąĘą░ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĖą╗ąĖ ąŠčłąĖą▒ą║ąĖ ą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą┐čĆąŠč鹊ą║ąŠą╗ą░.
[ą×ą▒ąĘąŠčĆ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ]
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝ ą┤čĆą░ą╣ą▓ąĄčĆąĄ USB ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ. ą¤ą× ą▒čŗą╗ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čĆąĄąČąĖą╝ąŠą▓ Full speed ąĖ High speed.
ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ USB 2.0. ąæąĖą▒ą╗ąĖąŠč鹥čćąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čäą░ą╣ą╗ą░čģ ą┐ą░ą┐ą║ąĖ Core ąĖąĘ ą┐ą░ą║ąĄčéą░ USB device library firmware package (čüą╝. čĆąĖčü. 5). ą£ąŠą┤čāą╗ąĖ ą║ą╗ą░čüčüą░ USB (ą┐ą░ą┐ą║ą░ Class) čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ ą┐čĆąŠč鹊ą║ąŠą╗ą░.
ąĀąĖčü. 5. ąĪčéčĆčāą║čéčāčĆą░ ą║ą░čéą░ą╗ąŠą│ąŠą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ą×ą▒čĆą░ą▒ąŠčéą║ą░ control endpoint . ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ USB ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé 4 čéąĖą┐ą░ ą┐ąĄčĆąĄą┤ą░čć: control, interrupt, bulk ąĖ isochronous. ąźąŠčüčé USB ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąĘą░ą┐čĆąŠčüčŗ ą║ čāčüčéčĆąŠą╣čüčéą▓čā č湥čĆąĄąĘ čāą┐čĆą░ą▓ą╗čÅčÄčēčāčÄ č鹊čćą║čā, control endpoint (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ control endpoint čÅą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣ čü ąĮąŠą╝ąĄčĆąŠą╝ 0). ąŚą░ą┐čĆąŠčüčŗ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ą░ą║ ą┐ą░ą║ąĄčéčŗ SETUP. ąŁčéąĖ ąĘą░ą┐čĆąŠčüčŗ ą╝ąŠąČąĮąŠ ą║ą╗ą░čüčüąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ąĮą░ 3 ą║ą░č鹥ą│ąŠčĆąĖąĖ: standard, class-specific ąĖ vendor-specific. ą¤ąŠčüą║ąŠą╗čīą║čā čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą▓čüąĄčģ ą▓ąĖą┤ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ USB, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ ąĮą░ control endpoint 0.
ążąŠčĆą╝ą░čé ąĖ čüą╝čŗčüą╗ čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ ąĘą░ą┐čĆąŠčüąŠą▓ ąĖ čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą▓ąĄąĮą┤ąŠčĆą░ ąĘą░ą┐čĆąŠčüąŠą▓ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ USB.
ąÆčüąĄ ąĘą░ą┐čĆąŠčüčŗ SETUP ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓ ą╝ą░čłąĖąĮąĄ čüąŠčüč鹊čÅąĮąĖą╣, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠą╣ ą▓ ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ USB. ąÜąŠą┤ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąÆ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR) ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčéčüčÅ čéčĆąĖą│ą│ąĄčĆ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ąĢčüą╗ąĖ čüąŠą▒čŗčéąĖąĄ čŹč鹊 ąĮą░čüčéčĆąŠą╣ą║ą░ (setup) ąĮą░ endpoint 0, č鹊 ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą┐čĆąĖąĮčÅč鹊ą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ, ąĖ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣.
ąóčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮą░ ą┤čĆčāą│ąĖčģ ą║ąŠąĮąĄčćąĮčŗčģ č鹊čćą║ą░čģ . ą»ą┤čĆąŠ, čüą┐ąĄčåąĖčäąĖč湥čüą║ąŠąĄ ą┤ą╗čÅ ą║ą╗ą░čüčüą░, ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, ąĮąĄ ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ ąĮą░ą▒ąŠčĆą░ čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ callback-čüčéą░ą┤ąĖąĖ data IN ąĖ data OUT.
ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ą░ą║ąĄčéą░ SETUP . ąÜąŠą│ą┤ą░ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮąŠą▓čŗą╣ ą┐ą░ą║ąĄčé SETUP, ą▓čüąĄ 8 ą▒ą░ą╣čé ą┐ą░ą║ąĄčéą░ SETUP ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ čüčéčĆčāą║čéčāčĆčā USB_SETUP_REQ req, čćč鹊ą▒čŗ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüą╗ąĄą┤čāčÄčēąĖą╣ ą┐ą░ą║ąĄčé SETUP ąĮąĄ ą╝ąŠą│ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░čéčī ą┐čĆąĄą┤čŗą┤čāčēąĖą╣. ąŁčéą░ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ čüčéčĆčāą║čéčāčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct usb_setup_req
{
uint8_t bmRequest;
uint8_t bRequest;
uint16_t wValue;
uint16_t wIndex;
uint16_t wLength;
}USBD_SetupReqTypedef;
ąĪčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ . ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ąĘą░ą┐čĆąŠčüąŠą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗčģ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ. ąóą░ą▒ą╗ąĖčåą░ 4 ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ą▓čüąĄ čŹčéąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ ąĖ ąĖčģ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ. ąŚą░ą┐čĆąŠčüčŗ, ą║ąŠč鹊čĆčŗčģ ąĮąĄčé ą▓ čéą░ą▒ą╗ąĖčåąĄ 4, čüčćąĖčéą░čÄčéčüčÅ ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 4. ąĪčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ USB.
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
CLEAR_FEATURE A, C
00
01
00
00
00
00
ą×čćąĖčēą░ąĄčé čäčāąĮą║čåąĖčÄ remote wakeup čāčüčéčĆąŠą╣čüčéą▓ą░.
C
02
00
00
EP
00
00
ą×čćąĖčēą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ STALL ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ EP. EP ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ EP0.
SET_FEATURE A, C
00
01
00
00
00
00
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ remote wakeup čāčüčéčĆąŠą╣čüčéą▓ą░.
C
02
00
00
EP
00
00
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ STALL ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ EP. EP ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ EP0.
SET_ADDRESS D, A
00
N
00
00
00
00
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░, N ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░.
GET_DESCRIPTOR ąÆčüąĄ čüąŠčüčé.
80
00
01
00
00
ąĮąĄ 0
ą¤ąŠą╗čāčćą░ąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░.
80
N
02
00
00
ąĮąĄ 0
ą¤ąŠą╗čāčćą░ąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą│ą┤ąĄ N ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ąĖąĮą┤ąĄą║čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
80
N
03
LangID
ąĮąĄ 0
ą¤ąŠą╗čāčćą░ąĄčé čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ, ą│ą┤ąĄ N ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ąĖąĮą┤ąĄą║čü čüčéčĆąŠą║ąĖ. ąŁč鹊čé ąĘą░ą┐čĆąŠčü ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ.
GET_CONFIGURATION A, C
80
00
00
00
00
1
ą¤ąŠą╗čāčćą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░.
SET_CONFIGURATION A, C
80
N
00
00
00
00
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą│ą┤ąĄ N ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ąĮąŠą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
GET_INTERFACE C
81
00
00
N
00
1
ą¤ąŠą╗čāčćą░ąĄčé ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčāčÄ ąĮą░čüčéčĆąŠą╣ą║čā ąĖąĮč鹥čĆč乥ą╣čüą░. ąŚą┤ąĄčüčī N ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ąĮąŠą╝ąĄčĆ ąĖąĮč鹥čĆč乥ą╣čüą░.
SET_INTERFACE C
01
M
00
N
00
00
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčāčÄ čāčüčéą░ąĮąŠą▓ą║čā N ąĖąĮč鹥čĆč乥ą╣čüą░ M. ąŚą┤ąĄčüčī N čŹč鹊 ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ąĮąŠą╝ąĄčĆ ąĖąĮč鹥čĆč乥ą╣čüą░, M čŹč鹊 ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ąĖąĮč鹥čĆč乥ą╣čüą░ N.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čüč鹊ą╗ą▒čåąĄ State ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠą▒ąŠąĘąĮą░č湥ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖą╣. D = Default state (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ), A = Address state (čüąŠčüč鹊čÅąĮąĖąĄ ą░ą┤čĆąĄčüą░čåąĖąĖ), C = Configured state (čüąŠčüč鹊čÅąĮąĖąĄ "čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ"). ąŚąĮą░č湥ąĮąĖąĄ EP: D0-D3 = ą░ą┤čĆąĄčü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, D4-D6 = čŹčéąĖ ą▒ąĖčéčŗ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ąĮčāą╗ąĖ, D7 = 0: OUT endpoint, 1: IN endpoint.
ąØąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ . ąÆčüąĄ ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ č湥čĆąĄąĘ callback-čäčāąĮą║čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ą║ąŠą┤, čüą┐ąĄčåąĖčäąĖčćąĮčŗą╣ ą┤ą╗čÅ ą║ą╗ą░čüčüą░.
ŌĆó SETUP stage
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┐ąĄčĆąĄą┤ą░ąĄčé ą▓čüąĄ ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ ą▓ čüą┐ąĄčåąĖčäąĖčćąĮčŗą╣ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ ą║ąŠą┤ č湥čĆąĄąĘ callback-čäčāąĮą║čåąĖčÄ pdev->pClass->Setup (pdev, req).
ąØąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ ą▓ą║ą╗čÄčćą░čÄčé ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄą╝čŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĘą░ą┐čĆąŠčüčŗ ąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ (invalid requests). ąśąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄą╝čŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĘą░ą┐čĆąŠčüčŗ čŹč鹊 ąĘą░ą┐čĆąŠčüčŗ, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą┤ą╗čÅ ą║ą╗ą░čüčüą░, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą┤ą╗čÅ ą▓ąĄąĮą┤ąŠčĆą░ ąĖą╗ąĖ ąĘą░ą┐čĆąŠčüčŗ, ą║ąŠč鹊čĆčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čüčćąĖčéą░ąĄčé ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╝ąĖ (invalid), čéą░ą║ čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĘą░čģąŠč鹥čéčī ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĖčģ ą┤ą╗čÅ čüąĄą▒čÅ ą║ą░ą║ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ.
Invalid-ąĘą░ą┐čĆąŠčüčŗ čŹč鹊 čéą░ą║ąĖąĄ ąĘą░ą┐čĆąŠčüčŗ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ, ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░ąĮčŗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣. ą¤ąŠčüą║ąŠą╗čīą║čā pdev->pClass->Setup (pdev, req) ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ SETUP stage ąĖ ą┐ąĄčĆąĄą┤ DATA stage, č鹊 ą║ąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ pdev->pClass->Setup (pdev, req) ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą┐ą░čĆčüąĖąĮą│ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐ą░ą║ąĄčéą░ SETUP (req). ąĢčüą╗ąĖ ąĘą░ą┐čĆąŠčü ąĮąĄą┤ąŠą┐čāčüčéąĖą╝, č鹊 ą║ąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ąŠą╗ąČąĄąĮ ą▓čŗąĘą▓ą░čéčī USBD_CtlError(pdev, req) ąĖ ą▓ąĄčĆąĮčāčéčī čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą▓čŗąĘą▓ą░ą╗ pdev->pClass->Setup (pdev, req).
ąöą╗čÅ ąĘą░ą┐čĆąŠčüą░, ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄą╝ąŠą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝, ą║ąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ DATA stage, ąĄčüą╗ąĖ ą▓ ąĘą░ą┐čĆąŠčüąĄ ąĄčüčéčī čüčéą░ą┤ąĖčÅ ą┤ą░ąĮąĮčŗčģ; ąĖąĮą░č湥 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą║ąŠą┤ ą▓čŗą┐ąŠą╗ąĮąĖčé ąĘą░ą┐čĆąŠčü ąĖ ą▓ąĄčĆąĮąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą▓čŗąĘčŗą▓ą░ą╗ pdev->pClass->Setup (pdev, req).
ŌĆó DATA stage
ąĪą╗ąŠą╣ ą║ą╗ą░čüčüą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ USBD_CtlSendData ąĖ USBD_CtlPrepareRx ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠč鹊ą║ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ą║ąŠą┤ąŠą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄ ąĮčāąČąĮąŠ ą┤ąĄą╗ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ą░ą║ąĄčéčŗ čĆą░ąĘą╝ąĄčĆą░ ep_size.
ŌĆó Status stage
ąĪčéą░ą┤ąĖčÅ čüčéą░čéčāčüą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ ą┐ąŠčüą╗ąĄ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ callback-čäčāąĮą║čåąĖąĖ pdev->pClass->Setup (pdev, req).
ąĀąĖčü. 7. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║čĆą░čüąĮčŗą╣ č鹥ą║čüčé ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 7, ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ USB ąĮčāąČąĮčŗ č鹊ą╗čīą║ąŠ čüą╗ąĄą┤čāčÄčēąĖąĄ ą╝ąŠą┤čāą╗ąĖ: ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ USB, ą║ą╗ą░čüčü čāčüčéčĆąŠą╣čüčéą▓ą░ USB ąĖ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
ąōą╗ą░ą▓ąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ą£ąŠą┤čāą╗ąĖ main.c, stm32fxx_it.c, usbd_conf.c ąĖ usbd_desc.c ą▓ą╝ąĄčüč鹥 čü ąĖčģ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╝ąĖ čäą░ą╣ą╗ą░ą╝ąĖ - ą▓čüąĄ, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čüą▓ąŠąĄą│ąŠ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĖąĘą╝ąĄąĮąĖčéčī ąĖąĘ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ čüą▓ąŠąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ą┤čĆą░ą╣ą▓ąĄčĆ ą║ą╗ą░čüčüą░).
ąöąĄą╗ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐čĆąŠčüčéčŗąĄ API-ą▓čŗąĘąŠą▓čŗ. ą×ąĮąĖ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā čüą╗ąŠąĄą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ą╝ąŠą┤čāą╗ąĄą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ USB, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ USB ąĖ ą┐ąŠą╗čāčćą░ąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ USB.
ą¦č鹊ą▒čŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ USB HAL, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čāčüčéčĆąŠą╣čüčéą▓ą░ USB ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčā ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┐ą╗ą░č鹥 (BSP), ąĖ ąĘą░ą┐čāčüčéąĖčéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ąŠą╗ąČąĮąŠ čüą┤ąĄą╗ą░čéčī 3 ą▓čŗąĘąŠą▓ą░ API:
ŌĆó USBD_Init(): čŹčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé čüč鹥ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĘą░ą│čĆčāąČą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ ą║ą╗ą░čüčüą░. ąöąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čäą░ą╣ą╗ą░čģ usbd_desc.c ąĖ usbd_desc.h (ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéąĖą┐ą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░).
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą┤ąŠą▒ą░ą▓ąĖčéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą▓ čäą░ą╣ą╗ąĄ usbd_conf, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą║ą╗ą░čüčüą░. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ USBD_LL_Init(). ąÆ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ dev_endpoints ą┤ąŠą╗ąČąĮąŠ čüąŠą┤ąĄčƹȹ░čéčīčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéčĆąĄą▒čāąĄą╝čŗčģ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ą┐ąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą║ą╗ą░čüčüą░ USB.
ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čäą░ą╣ą╗čā usbd_conf.h ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ (ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą┤ą░ą╗ąĄąĄ čüąĄą║čåąĖčÄ "ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ firmware ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB").
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ HAL ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ HAL_Init() API ą▓ ą╝ąŠą┤čāą╗ąĄ stm32fxxx_hal.c. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ:
- ąĪą▒čĆą░čüčŗą▓ą░ąĄčé ą▓čüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░ USB . ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ USB (USB core ąĖ čüą╗ąŠą╣ USB class) ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčé ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ 0 (EP0) č湥čĆąĄąĘ čüą╗ąŠą╣ ąĘą░ą┐čĆąŠčüą░ I/O, ą║ąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░ ąŠą▒ąĄčĆčéą║ą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäčāąĮą║čåąĖąĄą╣ multi-packet ąĮą░ control endpoint, ąĖą╗ąĖ ąĮą░ą┐čĆčÅą╝čāčÄ ąĖąĘ čüą╗ąŠčÅ stm32fxxx_hal_pcd, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤čĆčāą│ąĖąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā čÅą┤čĆąŠ USB OTG ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ multi-packet. ąĀąĖčü. 8 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčéčā čüčģąĄą╝čā ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 8. ąĪčģąĄą╝ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ (USB device data flow).
ąśąĮč鹥čĆč乥ą╣čü čÅą┤čĆą░ čü ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ . ąÜą░ą║ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī čĆą░ąĮąĄąĄ, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā STM32CubeŌäó HAL čü ą┐ąŠą╝ąŠčēčīčÄ čüą╗ąŠčÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄą╣čüčéą▓čāąĄčé ą║ą░ą║ čüą╗ąŠą╣ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ (link layer) čü STM32CubeŌäó HAL.
ąŁč鹊čé ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü čĆąĄą░ą╗ąĖąĘčāąĄčé API-čäčāąĮą║čåąĖąĖ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĖ ą▓čŗąĘčŗą▓ą░ąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ callback-čäčāąĮą║čåąĖąĖ čÅą┤čĆą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┐čĆąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ čüąŠą▒čŗčéąĖčÅčģ USB.
ąÆ ą┐ą░ą║ąĄč鹥 ą║ąŠą┤ą░ STM32CubeŌäó čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą║ą░ą║ čćą░čüčéčī ą┐čĆąĖą╝ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ą┐ąŠčüą║ąŠą╗čīą║čā ąĮąĄą║ąŠč鹊čĆčŗąĄ čćą░čüčéąĖ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą┐ą╗ą░čéčŗ ąĖ čüąĖčüč鹥ą╝čŗ.
ąóą░ą▒ą╗ąĖčåą░ 5 ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗąĄ čäčāąĮą║čåąĖąĖ API.
ąóą░ą▒ą╗ąĖčåą░ 5. ą×ą┐ąĖčüą░ąĮąĖąĄ API ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_LL_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
USBD_LL_DeInit ą×čéą╝ąĄąĮą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
USBD_LL_Start ąŚą░ą┐čāčüą║ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
USBH_LL_Stop ą×čüčéą░ąĮąŠą▓ą║ą░ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
USBD_LL_OpenEP ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
USBD_LL_CloseEP ąŚą░ą║čĆčŗčéąĖąĄ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ąĖ ąŠčéą╝ąĄąĮą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĄčæ čüąŠčüč鹊čÅąĮąĖčÅ.
USBD_LL_FlushEP ąĪą▒čĆą░čüčŗą▓ą░ąĄčé (flush) ą┤ą░ąĮąĮčŗąĄ ą▓ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ ą┤čĆą░ą╣ą▓ąĄčĆčā ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
USBD_LL_StallEP ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ STALL ąĮą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
USBD_LL_ClearStallEP ą×čćąĖčēą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ STALL ąĮą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
USBD_LL_IsStallEP ąÆąŠąĘą▓čĆą░čēą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ STALL.
USBD_LL_SetUSBAddress ąØą░ąĘąĮą░čćą░ąĄčé ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓čā USB.
USBD_LL_Transmit ą¤ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā.
USBD_LL_PrepareReceive ą¤ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā ą║ ą┐čĆąĖąĄą╝čā ą┤ą░ąĮąĮčŗčģ.
USBD_LL_GetRxDataSize ąÆąĄčĆąĮąĄčé čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą┐ą░ą║ąĄčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊 API ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ čäą░ą╣ą╗ąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB (usbd_conf.c). ą×ąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą▓ čäą░ą╣ą╗ą░čģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĖ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB (USB Device Controller Driver). ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĮą░čćą░čéčī čüąŠąĘą┤ą░ą▓ą░čéčī čüą▓ąŠą╣ čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą▒ąĄčĆčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ čäą░ą╣ą╗ usbd_conf.c ąĖąĘ ą┐ą░ą║ąĄčéą░ STM32CubeŌäó. ąŁč鹊čé čäą░ą╣ą╗ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą▓ ą┐ą░ą┐ą║čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ąĖąĘą╝ąĄąĮąĖčéčī ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą£ąŠą┤ąĄą╗čī ąĖąĮč鹥čĆč乥ą╣čüą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB . ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą┐ąŠčüčéčĆąŠąĄąĮą░ ą▓ąŠą║čĆčāą│ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čåąĄąĮčéčĆą░ą╗čīąĮčŗčģ ą┐ąŠčĆčéąĖčĆčāąĄą╝čŗčģ ą╝ąŠą┤čāą╗ąĄą╣ ą║ą╗ą░čüčüą░.
ąĀąĖčü. 9. ą£ąŠą┤ąĄą╗čī ąĖąĮč鹥čĆč乥ą╣čüą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ąóą░ą▒ą╗ąĖčåą░ 6 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čüąĄ callback-čäčāąĮą║čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ ąĖąĘ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗąĄ čüąŠą▒čŗčéąĖčÅ USB.
ąóą░ą▒ą╗ąĖčåą░ 6. Callback-čäčāąĮą║čåąĖąĖ čüąŠą▒čŗčéąĖą╣ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
HAL_PCD_ConnectCallback ąĪąŠą▒čŗčéąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą║ čłąĖąĮąĄ.
HAL_PCD_DataInStageCallback ąĪčéą░ą┤ąĖčÅ Data IN.
HAL_PCD_DataOutStageCallback ąĪčéą░ą┤ąĖčÅ Data OUT.
HAL_PCD_DisconnectCallback ąĪąŠą▒čŗčéąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
HAL_PCD_ISOINIncompleteCallback ąĪąŠą▒čŗčéąĖąĄ ąĮąĄąĘą░ą▓ąĄčĆčłąĄąĮąĮąŠą╣ ąĖąĘąŠčģčĆąŠąĮąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ IN (čüąŠą║čĆą░čēąĄąĮąĮąŠ ISO IN).
HAL_PCD_ISOOUTIncompleteCallback ąĪąŠą▒čŗčéąĖąĄ ąĮąĄąĘą░ą▓ąĄčĆčłąĄąĮąĮąŠą╣ ąĖąĘąŠčģčĆąŠąĮąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ OUT (čüąŠą║čĆą░čēąĄąĮąĮąŠ ISO OUT).
HAL_PCD_ResetCallback ąĪąŠą▒čŗčéąĖąĄ čüą▒čĆąŠčüą░ ą┐ąŠ čłąĖąĮąĄ USB.
HAL_PCD_ResumeCallback ąĪąŠą▒čŗčéąĖąĄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ.
HAL_PCD_SetupStageCallback ąĪąŠą▒čŗčéąĖąĄ čüčéą░ą┤ąĖąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ.
HAL_PCD_SOFCallback ąĪąŠą▒čŗčéąĖąĄ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (Start Of Frame, SOF).
HAL_PCD_SuspendCallback ąĪąŠą▒čŗčéąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čĆą░ą▒ąŠčéčŗ.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ firmware ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB . The USB device library can be configured using the usbd_conf.h file.
ążą░ą╣ą╗ usbd_conf.h - čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ čäą░ą╣ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣. ąŁč鹊čé čäą░ą╣ą╗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ ą▓ą╝ąĄčüč鹥 čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ HAL ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ BSP.
ąóą░ą▒ą╗ąĖčåą░ 7. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ USB.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą¤ą░čĆą░ą╝ąĄčéčĆ ą×ą┐ąĖčüą░ąĮąĖąĄ
ą×ą▒čēą░čÅ
USBD_MAX_NUM_CONFIGURATION ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ [1..255].
USBD_MAX_NUM_INTERFACES ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ [1..255].
USBD_MAX_STR_DESC_SIZ ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ čüčéčĆąŠą║ąŠą▓čŗčģ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ [uint16].
USBD_SELF_POWERED ąĀą░ąĘčĆąĄčłą░ąĄčé čäčāąĮą║čåąĖčÄ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ [0/1].
USBD_DEBUG_LEVEL ąŻčĆąŠą▓ąĄąĮčī ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠčéą╗ą░ą┤ą║ąĖ ąĖ ą╗ąŠą│ą░.
USBD_SUPPORT_USER_STRING ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā čüčéčĆąŠą║ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ [0/1].
MSC_MEDIA_PACKET ąĀą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąĮąŠčüąĖč鹥ą╗čÅ, ą┤ąĄą╗čÅčēąĖą╣čüčÅ ąĮą░čåąĄą╗ąŠ ąĮą░ 512 [ąŠčé 512 ą▒ą░ą╣čé ą┤ąŠ 32 ą║ąĖą╗ąŠą▒ą░ą╣čé].
HID
- ąØąĄą┤ąŠčüčéčāą┐ąĮąŠ.
DFU
USBD_DFU_MAX_ITF_NUM ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĮąŠčüąĖč鹥ą╗čÅ [1..255].
USBD_DFU_XFER_SIZE ąĀą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąĮąŠčüąĖč鹥ą╗čÅ, ą┤ąĄą╗čÅčēąĖą╣čüčÅ ąĮą░čåąĄą╗ąŠ ąĮą░ 512 [ąŠčé 512 ą▒ą░ą╣čé ą┤ąŠ 32 ą║ąĖą╗ąŠą▒ą░ą╣čé].
USBD_DFU_APP_DEFAULT_ADD ąÉą┤čĆąĄčü ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (0x0800C000).
CDC
- ąØąĄą┤ąŠčüčéčāą┐ąĮąŠ.
Audio
USBD_AUDIO_FREQ ą¦ą░čüč鹊čéą░ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ 8..48 ą║ąōčå.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĮą░čćą░čéčī čĆą░ą▒ąŠčéčā čü čäą░ą╣ą╗ą░ usbd_conf.c, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą▓ ą┐ą░ą║ąĄč鹥 STM32CubeŌäó. ąŁč鹊čé čäą░ą╣ą╗ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮ ą▓ ą┐ą░ą┐ą║čā čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄą╝ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ ąĖąĘą╝ąĄąĮąĄąĮ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮčāąČą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ USB ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗąĄ ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąĄ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ąĮą░ LCD. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąöą╗čÅ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĮą░ 菹║čĆą░ąĮ LCD ą║ čäą░ą╗ą░ą╝ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ ą┤čĆą░ą╣ą▓ąĄčĆ lcd_log.c. ą×ąĮ ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī, ą║ą░ą║ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠč鹊ą▒čĆą░ąČą░čéčī, ą┐čāč鹥ą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖą╣ #define ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą╝ čäą░ą╣ą╗ąĄ usbd_conf.h, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ąĮą░čģąŠą┤ąĖčéčīčüčÅ čüčĆąĄą┤ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗčģ čäą░ą╣ą╗ąŠą▓ ą┐čĆąŠąĄą║čéą░. ąØą░ą┐čĆąĖą╝ąĄčĆ:
0: ąĮąĄ ą▓čŗą▓ąŠą┤ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą╗ąŠą│ą░/ąŠčéą╗ą░ą┤ą║ąĖ.
ążčāąĮą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ USB
Device reset . ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą╗čāčćą░ąĄčé čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░ ąŠčé čłąĖąĮčŗ USB, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čüą▒čĆą░čüčŗą▓ą░ąĄčé ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąŁčéą░ čäčāąĮą║čåąĖčÅ - čćą░čüčéčī ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
Device suspend . ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ (suspend condition) ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ąĮą░ čłąĖąĮąĄ USB, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓čüąĄ ą┐čĆąŠąĖčüčģąŠą┤čÅčēąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čüąĖčüč鹥ą╝čā ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, suspend state (ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čäą░ą╣ą╗ąĄ usbd_conf.c).
Device resume . ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąĖą│ąĮą░ą╗ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ (resume) ąĮą░ čłąĖąĮąĄ USB, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čÅą┤čĆą░ USB ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čüąĖčüč鹥ą╝čā ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ, idle state (ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čäą░ą╣ą╗ąĄ usbd_conf.c).
[ążčāąĮą║čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ]
ąÆ ą┐ą░ą┐ą║ąĄ Core čüąŠą┤ąĄčƹȹ░čéčüčÅ ą╝ą░čłąĖąĮčŗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB čĆąĄą▓ąĖąĘąĖąĖ 2.0.
ąóą░ą▒ą╗ąĖčåą░ 8. ążą░ą╣ą╗čŗ čÅą┤čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ążą░ą╣ą╗čŗ ą×ą┐ąĖčüą░ąĮąĖąĄ
usbd_core.c, usbd_core.h ążčāąĮą║čåąĖąĖ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ąĖ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖčÅ.
usbd_req.c, usbd_req.h ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą┐čĆąŠčüąŠą▓, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓ ąōą╗ą░ą▓ąĄ 9 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ čüčéą░ąĮą┤ą░čĆčéą░ USB.
usbd_ctlreq.c, usbd_ctlreq.h ą×ą▒čĆą░ą▒ąŠčéą║ą░ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ čéčĆą░ąĮąĘą░ą║čåąĖą╣ USB.
usbd_conf_template.c, usbd_conf_template.h ą©ą░ą▒ą╗ąŠąĮ ą┤ą╗čÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ąĄą╗ą░ąĮ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą┐čĆąŠąĄą║čéčā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
usbd_def.c, usbd_def.h ą×ą▒čēąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ.
ą¤ą░ą┐ą║ą░ Class čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ čäą░ą╣ą╗čŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą║ą╗ą░čüčüą░, ąĖ ąŠąĮąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čŹčéąĖčģ ą║ą╗ą░čüčüąŠą▓.
ąóą░ą▒ą╗ąĖčåą░ 9. ążą░ą╣ą╗čŗ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą║ą╗ą░čüčüąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ USB.
ąÜą╗ą░čüčü USB ążą░ą╣ą╗čŗ ą×ą┐ąĖčüą░ąĮąĖąĄ
MSC (čāčüčéčĆąŠą╣čüčéą▓ąŠ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ)
usbh_msc.c, usbh_msc.h Handler ą║ą╗ą░čüčüą░ MSC.
usbh_msc_bot.c, usbh_msc_bot.h Handler ą┐čĆąŠč鹊ą║ąŠą╗ą░ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Bulk-only.
usbh_msc_scsi.c, usbh_msc_scsi.h ąÜąŠą╝ą░ąĮą┤čŗ SCSI.
usbd_msc_data.c, usbd_msc_data.h ąÆą░ąČąĮčŗąĄ čüčéčĆą░ąĮąĖčåčŗ ąĘą░ą┐čĆąŠčüą░ ąĖ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
HID (Joystick, mouse)
usbh_hid.c, usbh_hid.h Handler čüąŠčüč鹊čÅąĮąĖą╣ ą║ą╗ą░čüčüą░ HID.
Custom HID
usbd_customhid.c, usbd_customhid.h Handler ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ ą║ą╗ą░čüčüą░ HID.
Audio speaker
usbh_audio.c, usbh_audio.h Handler ą║ą╗ą░čüčüą░ Audio.
CDC (ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ)
usbh_cdc.c, usbh_cdc.h Handler ą║ą╗ą░čüčüą░ CDC (ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé).
DFU (čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ firmware)
usbd_dfu.c, usbd_dfu.h Handler ą║ą╗ą░čüčüą░ DFU.
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą║čĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ čäčāąĮą║čåąĖą╣ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą╝ąŠą┤čāą╗čÅčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 10. usbd_core.c, usbd_core.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čāčüčéčĆąŠą╣čüčéą▓ą░, ąĘą░ą│čĆčāąČą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ ą║ą╗ą░čüčüą░ ąĖ callback-čäčāąĮą║čåąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
USBD_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
USBD_RegisterClass ąŚą░ą│čĆčāąČą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_Start ąŚą░ą┐čāčüą║ą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
USBD_Stop ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
USBD_LL_SetupStage ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ ISR.
USBD_LL_DataOutStage ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ą▓ ISR.
USBD_LL_DataInStage ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ą▓ą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ.
USBD_LL_Reset ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüą▒čĆąŠčü USB ą▓ ISR.
USBD_LL_SetSpeed ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéčī čÅą┤čĆą░ USB.
USBD_LL_Suspend ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend Event).
USBD_LL_Resume ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ (Resume Event).
USBD_LL_SOF ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░, SOF (Start Of Frame Event).
USBD_LL_IsoINIncomplete ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ąĮąĄą┐ąŠą╗ąĮąŠą╣ ąĖąĘąŠčģčĆąŠąĮąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą▓ą▓ąŠą┤ą░ (ISO IN)
USBD_LL_IsoOUTIncomplete ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ąĮąĄą┐ąŠą╗ąĮąŠą╣ ąĖąĘąŠčģčĆąŠąĮąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą▓čŗą▓ąŠą┤ą░ (ISO OUT).
USBD_LL_DevConnected ą×ą┐ąŠą▓ąĄčēą░ąĄčé ąĖąĘ ISR ąŠ čüąŠą▒čŗčéąĖąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
USBD_LL_DevDisconnected ą×ą┐ąŠą▓ąĄčēą░ąĄčé ąĖąĘ ISR ąŠ čüąŠą▒čŗčéąĖąĖ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 10:
USBD_StatusTypeDef USBD_Init (USBD_HandleTypeDef * pdev,
USBD_DescriptorsTypeDef * pdesc,
uint8_t id);
USBD_StatusTypeDef USBD_DeInit (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_RegisterClass (USBD_HandleTypeDef * pdev,
USBD_ClassTypeDef * pclass);
USBD_StatusTypeDef USBD_Start (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_Stop (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_LL_SetupStage (USBD_HandleTypeDef * pdev,
uint8_t * psetup);
USBD_StatusTypeDef USBD_LL_DataOutStage (USBD_HandleTypeDef * pdev,
uint8_t epnum,
uint8_t * pdata);
USBD_StatusTypeDef USBD_LL_DataInStage (USBD_HandleTypeDef * pdev,
uint8_t epnum,
uint8_t * pdata);
USBD_StatusTypeDef USBD_LL_Reset (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_LL_SetSpeed (USBD_HandleTypeDef * pdev,
USBD_SpeedTypeDef speed);
USBD_StatusTypeDef USBD_LL_Suspend (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_LL_Resume (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_LL_SOF (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_LL_IsoINIncomplete (USBD_HandleTypeDef * pdev,
uint8_t epnum);
USBD_StatusTypeDef USBD_LL_IsoOUTIncomplete (USBD_HandleTypeDef * pdev,
uint8_t epnum);
USBD_StatusTypeDef USBD_LL_DevConnected (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_LL_DevDisconnected (USBD_HandleTypeDef * pdev);
ąóą░ą▒ą╗ąĖčåą░ 11. usbd_ioreq.c, usbd_ioreq.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_CtlSendData ą¤ąŠčüčŗą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control pipe).
USBD_CtlContinueSendData ą¤čĆąŠą┤ąŠą╗ąČą░ąĄčé ąŠčéą┐čĆą░ą▓ą║čā ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
USBD_CtlPrepareRx ą¤ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé čÅą┤čĆąŠ ą║ ą┐čĆąĖąĄą╝čā ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
USBD_CtlContinueRx ą¤čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
USBD_CtlSendStatus ą×čéą┐čĆą░ą▓ą╗čÅąĄčé č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą║ąĄčé ąĮčāą╗ąĄą▓ąŠą╣ ą┤ą╗ąĖąĮčŗ (ZLP).
USBD_CtlReceiveStatus ą¤čĆąĖąĮąĖą╝ą░ąĄčé č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą║ąĄčé ZLP.
USBD_GetRxCount ąÆąĄčĆąĮąĄčé ą┤ą╗ąĖąĮčā ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 11:
USBD_StatusTypeDef USBD_CtlSendData (USBD_HandleTypeDef * pdev,
uint8_t * pbuf,
uint16_t len);
USBD_StatusTypeDef USBD_CtlContinueSendData (USBD_HandleTypeDef * pdev,
uint8_t * pbuf,
uint16_t len);
USBD_StatusTypeDef USBD_CtlPrepareRx (USBD_HandleTypeDef * pdev,
uint8_t * pbuf,
uint16_t len);
USBD_StatusTypeDef USBD_CtlContinueRx (USBD_HandleTypeDef * pdev,
uint8_t * pbuf,
uint16_t len);
USBD_StatusTypeDef USBD_CtlSendStatus (USBD_HandleTypeDef * pdev);
USBD_StatusTypeDef USBD_CtlReceiveStatus (USBD_HandleTypeDef * pdev);
uint16_t USBD_GetRxCount (USBD_HandleTypeDef * pdev,
uint8_t ep_addr);
ąóą░ą▒ą╗ąĖčåą░ 12. usbd_ctrlq.c, usbd_ctrlq.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_StdDevReq ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_StdItfReq ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_StdEPReq ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_GetDescriptor ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░.
USBD_SetAddress ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮąŠą▓čŗą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_SetConfig ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü čāčüčéą░ąĮąŠą▓ą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_GetConfig ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_GetStatus ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü ą┐ąŠą╗čāč湥ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_SetFeature ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü čāčüčéą░ąĮąŠą▓ą║ąĖ čäčāąĮą║čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_ClrFeature ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü ąŠčćąĖčüčéą║ąĖ čäčāąĮą║čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
USBD_CtlError ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║ąĖ USB ąĮą░ ą║ą░ąĮą░ą╗ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control pipe).
USBD_GetString ą¤čĆąĄąŠą▒čĆą░ąĘčāąĄčé čüčéčĆąŠą║čā ASCII ą▓ čüčéčĆąŠą║čā Unicode.
USBD_GetLen ąÆąŠąĘą▓čĆą░čéąĖčé ą┤ą╗ąĖąĮčā čüčéčĆąŠą║ąĖ.
USBD_ParseSetupRequest ąÜąŠą┐ąĖčĆčāąĄčé ą▒čāč乥čĆ ąĘą░ą┐čĆąŠčüą░ ą▓ čüčéčĆčāą║čéčāčĆčā ąĮą░čüčéčĆąŠą╣ą║ąĖ.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 12:
USBD_StatusTypeDef USBD_StdDevReq (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);
USBD_StatusTypeDef USBD_StdItfReq (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);
USBD_StatusTypeDef USBD_StdEPReq (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);
static void USBD_GetDescriptor (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void USBD_SetAddress (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void USBD_SetConfig (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void USBD_GetConfig (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void USBD_GetStatus (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void USBD_SetFeature (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void USBD_ClrFeature (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);void USBD_CtlError (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);void USBD_GetString (uint8_t * desc, uint8_t * unicode, uint16_t * len);static uint8_t USBD_GetLen (uint8_t * buf);void USBD_ParseSetupRequest (USBD_SetupReqTypedef * req,
uint8_t * pdata);
[ąśąĮč鹥čĆč乥ą╣čü ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ]
ąĪčéčĆčāą║čéčāčĆą░ USB Class callback . ąÜą╗ą░čüčü USB ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐čĆąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą┐čāč鹥ą╝ ą▓čŗą▒ąŠčĆą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ callback-čüčéčĆčāą║čéčāčĆčŗ ą║ą╗ą░čüčüą░. ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ą║ą╗ą░čüčüą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct _Device_cb
{
uint8_t (* Init) (struct _USBD_HandleTypeDef * pdev,
uint8_t cfgidx);
uint8_t (* DeInit) (struct _USBD_HandleTypeDef * pdev,
uint8_t cfgidx);
/* ą×ą▒čĆą░ą▒ąŠčéą║ą░ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ (Control Endpoint, EP0) */
uint8_t (* Setup) (struct _USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);
uint8_t (* EP0_TxSent) (struct _USBD_HandleTypeDef * pdev);
uint8_t (* EP0_RxReady) (struct _USBD_HandleTypeDef * pdev);
/* ąÜąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB */
uint8_t (* DataIn) (struct _USBD_HandleTypeDef * pdev,
uint8_t epnum);
uint8_t (* DataOut) (struct _USBD_HandleTypeDef * pdev,
uint8_t epnum);
uint8_t (* SOF) (struct _USBD_HandleTypeDef * pdev);
uint8_t (* IsoINIncomplete) (struct _USBD_HandleTypeDef * pdev,
uint8_t epnum);
uint8_t (* IsoOUTIncomplete) (struct _USBD_HandleTypeDef * pdev,
uint8_t epnum);
uint8_t * (* GetHSConfigDescriptor)(uint16_t * length);
uint8_t * (* GetFSConfigDescriptor)(uint16_t * length);
uint8_t * (* GetOtherSpeedConfigDescriptor)(uint16_t * length);
uint8_t * (* GetDeviceQualifierDescriptor)(uint16_t * length);
} USBD_ClassTypeDef;
ąÆ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ čāą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖąĄ callback-čäčāąĮą║čåąĖąĖ:
Init : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąĖąĮąĖą╝ą░ąĄčé USB-ąĘą░ą┐čĆąŠčü čāčüčéą░ąĮąŠą▓ą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ; ą▓ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ąŠčéą║čĆčŗą▓ą░čÄčéčüčÅ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą║ą╗ą░čüčüą░.DeInit : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčé USB-ąĘą░ą┐čĆąŠčü ąŠčćąĖčüčéą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ; čŹčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą║čĆčŗą▓ą░ąĄčé ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą║ą╗ą░čüčüą░.Setup : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ ąĘą░ą┐čĆąŠčüąŠą▓ ąĮą░čüčéčĆąŠą╣ą║ąĖ (class setup request).EP0_TxSent : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐ą░ą║ąĄčéą░ ąĖąĘ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.EP0_RxSent : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ ą┐ą░ą║ąĄčéą░ ąĮą░ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ.DataIn : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą║ąŠąĮąĄčćąĮčŗą╝ č鹊čćą║ą░ą╝.DataOut : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą║ąŠąĮąĄčćąĮčŗą╝ č鹊čćą║ą░ą╝.SOF : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ SOF (čüąĖą│ąĮą░ą╗ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░); čŹč鹊čé callback ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąŠčåąĄčüčüąŠą▓ čü čüąĖą│ąĮą░ą╗ąŠą╝ SOF.IsoINIncomplete : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ čéąĖą┐ą░ IN (isochronous IN transfer).IsoOUTIncomplete : ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ čéąĖą┐ą░ OUT (isochronous OUT transfer).GetHSConfigDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ USB-ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ HS.GetFSConfigDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ USB-ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ FS.GetOtherSpeedConfigDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé ą┤čĆčāą│ąŠą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą║ą╗ą░čüčüą░ ą▓ čĆąĄąČąĖą╝ąĄ High Speed.GetDeviceQualifierDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ą▓ą░ą╗ąĖčäąĖą║ą░č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąĪčéčĆčāą║čéčāčĆą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ USB . ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé callback-čüčéčĆčāą║čéčāčĆčā ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖ čüčéčĆąŠą║ąŠą▓čŗą╝ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ą╝ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (run time). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
typedef struct
{
uint8_t * (* GetDeviceDescriptor)(USBD_SpeedTypeDef speed, uint16_t * length);
uint8_t * (* GetLangIDStrDescriptor)(USBD_SpeedTypeDef speed, uint16_t * length);
uint8_t * (* GetManufacturerStrDescriptor)(USBD_SpeedTypeDef speed, uint16_t * length);
uint8_t * (* GetProductStrDescriptor)(USBD_SpeedTypeDef speed, uint16_t * length);
uint8_t * (* GetSerialStrDescriptor)(USBD_SpeedTypeDef speed, uint16_t * length);
uint8_t * (* GetConfigurationStrDescriptor)( USBD_SpeedTypeDef speed, uint16_t * length);
uint8_t * (* GetInterfaceStrDescriptor)( USBD_SpeedTypeDef speed, uint16_t * length);
} USBD_DescriptorsTypeDef;
GetDeviceDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░.GetLangIDStrDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čÅąĘčŗą║ą░ (Language ID).GetManufacturerStrDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ.GetProductStrDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé the čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐čĆąŠą┤čāą║čéą░.GetSerialStrDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░.GetConfigurationStrDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.GetInterfaceStrDescriptor : čŹč鹊čé callback ą▓ąĄčĆąĮąĄčé čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖąĮč鹥čĆč乥ą╣čüą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čäą░ą╣ą╗ąĄ usbd_desc.c, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠą╝ čü ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ č鹥ą╗ą░ čŹčéąĖčģ callback-čäčāąĮą║čåąĖą╣.
[ą£ąŠą┤čāą╗čī ą║ą╗ą░čüčüą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ]
ą£ąŠą┤čāą╗čī ą║ą╗ą░čüčüą░ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ čäą░ą╣ą╗čŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ą×ąĮąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ čŹčéąĖ ą║ą╗ą░čüčüčŗ. ąóą░ą▒ą╗ąĖčåą░ 13 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čäą░ą╣ą╗čŗ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą┤ą╗čÅ ą║ą╗ą░čüčüąŠą▓ MSC, HID, DFU, Audio, CDC.
ąóą░ą▒ą╗ąĖčåą░ 13. ążą░ą╣ą╗čŗ ą║ą╗ą░čüčüąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ąÜą╗ą░čüčü USB ążą░ą╣ą╗čŗ ą×ą┐ąĖčüą░ąĮąĖąĄ
MSC (čāčüčéčĆąŠą╣čüčéą▓ąŠ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ)
usbd_msc.c, usbd_msc.h ąŚą┤ąĄčüčī čüąŠą┤ąĄčƹȹ░čéčüčÅ callback-čäčāąĮą║čåąĖąĖ ą║ą╗ą░čüčüą░ MSC (ą┤čĆą░ą╣ą▓ąĄčĆ) ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čŹč鹊ą╝čā ą║ą╗ą░čüčüčā.
usbd_bot.c, usbd_bot.h ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Bulk-only.
usbd_scsi.c, usbd_scsi.h ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą║ąŠą╝ą░ąĮą┤ SCSI.
usbd_msc_data.c, usbd_msc_data.h ąÆą░ąČąĮčŗąĄ čüčéčĆą░ąĮąĖčåčŗ ąĘą░ą┐čĆąŠčüą░ ąĖ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ.
usbd_msc_storage_template.c, usbd_msc_storage_template.h ą©ą░ą▒ą╗ąŠąĮ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗ąĖčé ąÆą░ą╝ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą║ą╗ą░čüčüą░ MSC.
HID (Joystick, mouse)
usbd_hid.c, usbd_hid.h ąŚą┤ąĄčüčī čüąŠą┤ąĄčƹȹ░čéčüčÅ callback-čäčāąĮą║čåąĖąĖ ą║ą╗ą░čüčüą░ HID (ą┤čĆą░ą╣ą▓ąĄčĆ) ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čŹč鹊ą╝čā ą║ą╗ą░čüčüčā.
Custom HID
usbd_customhid.c, usbd_customhid.h ąŚą┤ąĄčüčī čüąŠą┤ąĄčƹȹ░čéčüčÅ callback-čäčāąĮą║čåąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ ą║ą╗ą░čüčüą░ HID (ą┤čĆą░ą╣ą▓ąĄčĆ) ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čŹč鹊ą╝čā ą║ą╗ą░čüčüčā.
Audio speaker
usbd_audio.c, usbd_audio.h ąŚą┤ąĄčüčī čüąŠą┤ąĄčƹȹ░čéčüčÅ callback-čäčāąĮą║čåąĖąĖ ą║ą╗ą░čüčüą░ AUDIO (ą┤čĆą░ą╣ą▓ąĄčĆ) ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čŹč鹊ą╝čā ą║ą╗ą░čüčüčā.
usbd_audio_if_template.c, usbd_audio_if_template.h ą©ą░ą▒ą╗ąŠąĮ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗ąĖčé ąÆą░ą╝ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą║ą╗ą░čüčüą░ Audio.
CDC (ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ)
usbd_cdc.c, usbd_cdc.h ąŚą┤ąĄčüčī čüąŠą┤ąĄčƹȹ░čéčüčÅ callback-čäčāąĮą║čåąĖąĖ ą║ą╗ą░čüčüą░ CDC (ą┤čĆą░ą╣ą▓ąĄčĆ) ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čŹč鹊ą╝čā ą║ą╗ą░čüčüčā.
usbd_cdc_if_template.c, usbd_cdc_if_template.h ą©ą░ą▒ą╗ąŠąĮ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗ąĖčé ąÆą░ą╝ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖąĖ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą┤ą╗čÅ č鹥čĆą╝ąĖąĮą░ą╗ą░ CDC.
DFU (čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ firmware)
usbd_dfu.c, usbd_dfu.h ąŚą┤ąĄčüčī čüąŠą┤ąĄčƹȹ░čéčüčÅ callback-čäčāąĮą║čåąĖąĖ ą║ą╗ą░čüčüą░ DFU (ą┤čĆą░ą╣ą▓ąĄčĆ) ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čŹč鹊ą╝čā ą║ą╗ą░čüčüčā.
usbd_dfu_media_template_if.c, usbd_dfu_media_template_if.h ą©ą░ą▒ą╗ąŠąĮ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗ąĖčé ąÆą░ą╝ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ ą║ ą┐ą░ą╝čÅčéąĖ ą║ą╗ą░čüčüą░ DFU.
[ąÜą╗ą░čüčü USB HID ]
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą║ą╗ą░čüčüą░ HID . ąŁč鹊čé ą╝ąŠą┤čāą╗čī čüąŠą┤ąĄčƹȹĖčé HID class V1.11, ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ "Device Class Definition for Human Interface Devices (HID) Version 1.11 June 27, 2001".
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÄ HID ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą┐ąŠąĖčüą║ąŠą╝ ą┐ąŠ ą║ą╗čÄč湥ą▓ąŠą╝čā čüą╗ąŠą▓čā hidpage ąĮą░ čüą░ą╣č鹥 www.st.com.
ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ čĆąĄą░ą╗ąĖąĘčāąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čüą┐ąĄą║čéčŗ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ:
ŌĆó ą¤ąŠą┤ą║ą╗ą░čüčü ąĖąĮč鹥čĆč乥ą╣čüą░ ąĘą░ą│čĆčāąĘą║ąĖ (boot interface subclass).
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü HID . ąÆčģąŠą┤ąĮčŗąĄ čĆąĄą┐ąŠčĆčéčŗ (input reports) ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ IN (Interrupt In pipe, čüą╝. ą┐čĆąĖą╝ąĄčĆ HID mouse).
ąĀąĄą┐ąŠčĆčéčŗ Feature ąĖ Output ą┤ąŠą╗ąČąĮčŗ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčīčüčÅ čģąŠčüč鹊ą╝ č湥čĆąĄąĘ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą║ą░ąĮą░ą╗ (Control pipe) ąĖą╗ąĖ ą║ą░ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ OUT (Interrupt Out pipe, čüą╝. ą┐čĆąĖą╝ąĄčĆ Custom HID).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ IN ąĖ OUT ąŠą▒ąŠąĘąĮą░čćą░čÄčéčüčÅ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čģąŠčüčéčā USB (čģąŠčüčé čŹč鹊 ąŠą▒čŗčćąĮąŠ ą║ąŠą╝ą┐čīčÄč鹥čĆ ąĖą╗ąĖ čüą╝ą░čĆčéč乊ąĮ). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ą░ąĮą░ą╗ IN čŹč鹊 ą║ą░ąĮą░ą╗ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą║ čģąŠčüčéčā, ą░ ą║ą░ąĮą░ą╗ OUT čŹč鹊 ą║ą░ąĮą░ą╗ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā USB.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ HID mouse ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ HID-čĆąĄą┐ąŠčĆč鹊ą▓ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅ USBD_HID_SendReport. ąÆ čŹč鹊ą╝ čĆąĄą╗ąĖąĘąĄ ą┤čĆą░ą╣ą▓ąĄčĆ HID ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé č鹊ą╗čīą║ąŠ čéčĆą░čäąĖą║ IN. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ:
static __IO uint32_t counter= 0 ;
HAL_IncTick();/* ą¤čĆąŠą▓ąĄčĆą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┤ąČąŠą╣čüčéąĖą║ą░ ą║ą░ąČą┤čŗąĄ 10 ą╝čü */ if (counter++ == 10 )
{
GetPointerData(HID_Buffer);
/* ą×čéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā IN */
if ((HID_Buffer[1 ] != 0 ) || (HID_Buffer[2 ] != 0 ))
{
USBD_HID_SendReport(& USBD_Device, HID_Buffer, 4 );
}
counter = 0 ;
}
Toggle_Leds();
HID Class Driver API . ąØąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ API-čäčāąĮą║čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ HID-ą║ą╗ą░čüčüą░, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓ ą╝ąŠą┤čāą╗ąĄ usbd_hid.c.
ąóą░ą▒ą╗ąĖčåą░ 14. ążčāąĮą║čåąĖąĖ ą▓ čäą░ą╣ą╗ą░čģ usbd_hid.c, usbd_hid.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_HID_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü HID ąĖ ąŠčéą║čĆąŠąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ.
USBD_HID_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ čüą╗ąŠčÅ HID ąĖ ąĘą░ą║čĆčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ.
USBD_HID_Setup ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ąĘą░ą┐čĆąŠčüčŗ HID.
USBD_HID_SendReport ą×čéą┐čĆą░ą▓ą╗čÅąĄčé čĆąĄą┐ąŠčĆčéčŗ HID.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 14:
static uint8_t USBD_HID_Init (USBD_HandleTypeDef * pdev,
uint8_t cfgidx);static uint8_t USBD_HID_DeInit (USBD_HandleTypeDef * pdev,
uint8_t cfgidx);static uint8_t USBD_HID_Setup (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);uint8_t USBD_HID_SendReport (USBD_HandleTypeDef * pdev,
uint8_t * report,
uint16_t len);
ąĪč鹥ą║ HID ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ USBD_HID_Init(), ąĘą░č鹥ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī čäčāąĮą║čåąĖčÄ USBD_HID_SendReport() ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čĆąĄą┐ąŠčĆč鹊ą▓ HID.
ą¦ąĄčĆąĄąĘ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā 0 (EP0, Control, ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ) čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘą░ą┐čĆąŠčüčŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ HID:
#define HID_REQ_SET_PROTOCOL 0x0B #define HID_REQ_GET_PROTOCOL 0x03 #define HID_REQ_SET_IDLE 0x0A #define HID_REQ_GET_IDLE 0x02 #define HID_REQ_SET_REPORT 0x09 #define HID_REQ_GET_REPORT 0x01
ąÉą┤čĆąĄčü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ IN ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī, ąĘą░ą┤ą░čÄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅą╝ąĖ:
#define HID_EPIN_ADDR 0x81 #define HID_EPIN_SIZE 0x04
[ąÜą╗ą░čüčü Mass Storage (USB MSC) ]
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą║ą╗ą░čüčüą░ Mass Storage . ąŁč鹊čé ą╝ąŠą┤čāą╗čī ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé MSC class V1.0 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ "Universal Serial Bus Mass Storage Class (MSC) Bulk-Only Transport (BOT) Version 1.0 Sep. 31, 1999".
ąöčĆą░ą╣ą▓ąĄčĆ čĆąĄą░ą╗ąĖąĘčāąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čüą┐ąĄą║čéčŗ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ:
ŌĆó ą¤čĆąŠč鹊ą║ąŠą╗ čéčĆą░ąĮčüą┐ąŠčĆčéą░ Bulk-only (č鹊ą╗čīą║ąŠ ą┐ą░ą║ąĄčéąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ).
ąÜą╗ą░čüčü USB mass storage ą┐ąŠčüčéčĆąŠąĄąĮ ą▓ąŠą║čĆčāą│ Bulk Only Transfer (BOT). ą×ąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠąĘčĆą░čćąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą║ąŠą╝ą░ąĮą┤ SCSI.
ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ BOT-čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ą┐čĆąŠčüč鹊ą╣ ą╝ą░čłąĖąĮąĄ čüąŠčüč鹊čÅąĮąĖą╣. ą×ąĮą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ready state (idle state). ąĢčüą╗ąĖ ąŠčé čģąŠčüčéą░ ą┐čĆąĖąĮčÅčé CBW, ą╝ąŠą│čāčé ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčéčüčÅ 3 čüą╗čāčćą░čÅ:
ŌĆó DATA-OUT-STAGE: ą║ąŠą│ą┤ą░ čäą╗ą░ą│ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ "0", čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąŠ ą║ ą┐čĆąĖąĄą╝čā ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą┐ąŠą╗ąĄą╝ cbw.dDataLength ą▒ą╗ąŠą║ą░ CBW. ą¤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ CSW čü ąŠčüčéą░ą▓čłąĄą╣čüčÅ ą┤ą╗ąĖąĮąŠą╣ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąŠą╗ąĄ STATUS.
ąĀąĖčü. 13. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ BOT.
ąÆ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ SCSI.
ąóą░ą▒ą╗ąĖčåą░ 15. ąÜąŠą╝ą░ąĮą┤čŗ SCSI.
ąÜąŠą╝ą░ąĮą┤ą░ ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣
SCSI_PREVENT_REMOVAL
SCSI_START_STOP_UNIT
SCSI_TEST_UNIT_READY
SCSI_INQUIRY
SCSI_READ_CAPACITY10
SCSI_READ_FORMAT_CAPACITY READ_FORMAT_CAPACITY (0x23) čŹč鹊 ą║ąŠą╝ą░ąĮą┤ą░ UFI.
SCSI_MODE_SENSE6
SCSI_MODE_SENSE10
SCSI_READ10
SCSI_WRITE10
SCSI_VERIFY10
ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĘą░ą┐čĆąŠčü čüą▒čĆąŠčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ (Bulk-only mass storage reset request, čŹč鹊 ąĘą░ą┐čĆąŠčü, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą┤ą╗čÅ ą║ą╗ą░čüčüą░), ą║ą░ą║ č鹊ą│ąŠ čéčĆąĄą▒čāąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ BOT. ąŁč鹊 ąĘą░ą┐čĆąŠčü ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüą▒čĆąŠčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ (mass storage device) ąĖ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü ąĮąĖą╝ ąĖąĮč鹥čĆč乥ą╣čüą░. ąŁč鹊čé čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ ąĘą░ą┐čĆąŠčü ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąŠčé čģąŠčüčéą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ CBW.
ą¦č鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī BOT Mass Storage Reset, čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąŠčéą┐čĆą░ą▓ąĖčéčī ąĘą░ą┐čĆąŠčü čāčüčéčĆąŠą╣čüčéą▓čā ąĮą░ ą║ą░ąĮą░ą╗ąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (default pipe):
ŌĆó bmRequestType: čéąĖą┐ ąĘą░ą┐čĆąŠčüą░ Class, interface, ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā
Get Max MUN (čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ ąĘą░ą┐čĆąŠčü). ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╗ąŠą│ąĖč湥čüą║ąĖčģ čÄąĮąĖč鹊ą▓ (LUN), ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą▒čēąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ąźąŠčüčé ąĖčüą┐ąŠą╗čīąĘčāąĄčé bCBWLUN, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī, ą║ą░ą║ąŠą╣ LUN čāčüčéčĆąŠą╣čüčéą▓ą░ čÅą▓ą╗čÅąĄčéčüčÅ ą┐čāąĮą║č鹊ą╝ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ CBW. ąŚą░ą┐čĆąŠčü ą║ čāčüčéčĆąŠą╣čüčéą▓čā Get Max LUN ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ LUN, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĘą░ą┐čĆąŠčüą░ Get Max LUN ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, čģąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąĘą░ą┐čĆąŠčü ąĮą░ ą║ą░ąĮą░ą╗ąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (default pipe):
ŌĆó bmRequestType: čéąĖą┐ ąĘą░ą┐čĆąŠčüą░ Class, Interface, ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ čģąŠčüčéčā
ążą░ą╣ą╗čŗ čÅą┤čĆą░ MSC . ąØąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåą░čģ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą╝ąŠą┤čāą╗ąĖ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ ąĖ ąĖčģ čäčāąĮą║čåąĖąĖ čü ą║čĆą░čéą║ąĖą╝ ąŠą┐ąĖčüą░ąĮąĖąĄą╝.
ąóą░ą▒ą╗ąĖčåą░ 16. ążčāąĮą║čåąĖąĖ ą▓ čäą░ą╣ą╗ą░čģ usbd_msc.c, usbd_msc.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_MSC_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü MSC ąĖ ąŠčéą║čĆąŠąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ.
USBD_MSC_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ čüą╗ąŠčÅ MSC ąĖ ąĘą░ą║čĆčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ.
USBD_MSC_Setup ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ąĘą░ą┐čĆąŠčüčŗ MSC.
USBD_MSC_DataIn ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (MSC Data In).
USBD_MSC_DataOut ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ (MSC Data Out).
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 16:
uint8_t USBD_MSC_Init (USBD_HandleTypeDef * pdev, uint8_t cfgidx);uint8_t USBD_MSC_DeInit (USBD_HandleTypeDef * pdev, uint8_t cfgidx);uint8_t USBD_MSC_Setup (USBD_HandleTypeDef * pdev, USBD_SetupReqTypedef * req);uint8_t USBD_MSC_DataIn (USBD_HandleTypeDef * pdev, uint8_t epnum);uint8_t USBD_MSC_DataOut (USBD_HandleTypeDef * pdev, uint8_t epnum);
ąóą░ą▒ą╗ąĖčåą░ 17. ążčāąĮą║čåąĖąĖ ą▓ čäą░ą╣ą╗ą░čģ usbd_msc_bot.c, usbd_msc_bot.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
MSC_BOT_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā BOT ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ.
MSC_BOT_Reset ąĪą▒čĆą░čüčŗą▓ą░ąĄčé ą╝ą░čłąĖąĮčā čüąŠčüč鹊čÅąĮąĖą╣ BOT.
MSC_BOT_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ BOT.
MSC_BOT_DataIn ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (BOT Data In).
MSC_BOT_DataOut ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ (BOT Data Out).
MSC_BOT_CBW_Decode ąöąĄą║ąŠą┤ąĖčĆčāąĄčé ą║ąŠą╝ą░ąĮą┤čā CBW ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą╝ą░čłąĖąĮčā čüąŠčüč鹊čÅąĮąĖą╣ BOT.
MSC_BOT_SendData ą×čéą┐čĆą░ą▓ą╗čÅąĄčé ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
MSC_BOT_SendCSW ą×čéą┐čĆą░ą▓ą╗čÅąĄčé Command Status Wrapper (CSW).
MSC_BOT_Abort ą×ą▒čĆčŗą▓ą░ąĄčé č鹥ą║čāčēčāčÄ čéčĆą░ąĮąĘą░ą║čåąĖčÄ.
MSC_BOT_CplClrFeature ąŚą░ą▓ąĄčĆčłą░ąĄčé ąĘą░ą┐čĆąŠčü ąŠčćąĖčüčéą║ąĖ čäčāąĮą║čåąĖąĖ (Clear Feature).
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 17:
void MSC_BOT_Init (USBD_HandleTypeDef * pdev);void MSC_BOT_Reset (USBD_HandleTypeDef * pdev);void MSC_BOT_DeInit (USBD_HandleTypeDef * pdev);void MSC_BOT_DataIn (USBD_HandleTypeDef * pdev, uint8_t epnum);void MSC_BOT_DataOut (USBD_HandleTypeDef * pdev, uint8_t epnum);static void MSC_BOT_CBW_Decode (USBD_HandleTypeDef * pdev);static void MSC_BOT_SendData (USBD_HandleTypeDef * pdev, uint8_t * buf, uint16_t len);void MSC_BOT_SendCSW (USBD_HandleTypeDef * pdev, uint8_t CSW_Status);static void MSC_BOT_Abort (USBD_HandleTypeDef * pdev);void MSC_BOT_CplClrFeature (USBD_HandleTypeDef * pdev, uint8_t epnum);
ąóą░ą▒ą╗ąĖčåą░ 18. ążčāąĮą║čåąĖąĖ ą▓ čäą░ą╣ą╗ą░čģ usbd_msc_scsi.c, usbd_msc_scsi.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
SCSI_ProcessCmd ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā SCSI.
SCSI_TestUnitReady ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā ą┐čĆąŠą▓ąĄčĆą║ąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ SCSI.
SCSI_Inquiry ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Inquiry (ąĘą░ą┐čĆąŠčü).
SCSI_ReadCapacity10 ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Read Capacity 10.
SCSI_ReadFormatCapacity ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Read Format Capacity.
SCSI_ModeSense6 ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Mode Sense 6.
SCSI_ModeSense10 ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Mode Sense 10.
SCSI_RequestSense ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Request Sense.
SCSI_SenseCode ąŚą░ą│čĆčāąČą░ąĄčé ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ą▓ čüą┐ąĖčüąŠą║ ąŠčłąĖą▒ąŠą║.
SCSI_StartStopUnit ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Start Stop Unit.
SCSI_Read10 ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Read10.
SCSI_Write10 ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Write10.
SCSI_Verify10 ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Verify10.
SCSI_CheckAddressRange ą¤čĆąŠą▓ąĄčĆčÅąĄčé, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ LBA ą▓ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą░ą┤čĆąĄčüąŠą▓.
SCSI_ProcessRead ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąŠčåąĄčüčü Burst Read.
SCSI_ProcessWrite ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąŠčåąĄčüčü Burst Write.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 18:
int8_t SCSI_ProcessCmd (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_TestUnitReady (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_Inquiry (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_ReadCapacity10 (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_ReadFormatCapacity (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_ModeSense6 (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_ModeSense10 (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_RequestSense (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);void SCSI_SenseCode (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t sKey,
uint8_t ASC);static int8_t SCSI_StartStopUnit (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_Read10 (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_Write10 (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_Verify10 (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint8_t * params);static int8_t SCSI_CheckAddressRange (USBD_HandleTypeDef * pdev,
uint8_t lun,
uint32_t blk_offset,
uint16_t blk_nbr);static int8_t SCSI_ProcessRead (USBD_HandleTypeDef * pdev,
uint8_t lun);static int8_t SCSI_ProcessWrite (USBD_HandleTypeDef * pdev,
uint8_t lun);
ąĪčéčĆčāą║čéčāčĆą░ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣ ą┤ąĖčüą║ą░ .
USBD_StorageTypeDef USBD_DISK_fops = {
STORAGE_Init,
STORAGE_GetCapacity,
STORAGE_IsReady,
STORAGE_IsWriteProtected,
STORAGE_Read,
STORAGE_Write,
STORAGE_GetMaxLun,
STORAGE_Inquirydata,
};
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: MicroSD - ąĖąĮč鹥čĆč乥ą╣čü ąĮąŠčüąĖč鹥ą╗čÅ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (default media interface), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ. ą×ą┤ąĮą░ą║ąŠ ąÆčŗ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ąĖčéčī ą┤čĆčāą│ąĖąĄ ąĮąŠčüąĖč鹥ą╗ąĖ ą┤ą░ąĮąĮčŗčģ (ą┐ą░ą╝čÅčéčī Flash, SDRAM, ąĖ čé. ą┐.), ąĖčüą┐ąŠą╗čīąĘčāčÅ čäą░ą╣ą╗ čłą░ą▒ą╗ąŠąĮą░ usbd_msc_storage_template.c.
ążčāąĮą║čåąĖčÅ callback čģčĆą░ąĮąĖą╗ąĖčēą░ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ MSC ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ USBD_MSC_RegisterStorage(&USBD_Device, &USBD_DISK_fops).
ąöą░ąĮąĮčŗąĄ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą▓ ą╝ą░čüčüąĖą▓ąĄ STORAGE_Inquiry. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
int8_t STORAGE_Inquirydata[] = { /* 36 */
/* LUN 0 */
0x00 ,
0x80 ,
0x02 ,
0x02 ,
(STANDARD_INQUIRY_DATA_LEN - 5 ),
0x00 ,
0x00 ,
0x00 ,
'S' , 'T' , 'M' , ' ' , ' ' , ' ' , ' ' , ' ' , /* ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čī: 8 ą▒ą░ą╣čé */
'P' , 'r' , 'o' , 'd' , 'u' , 'c' , 't' , ' ' , /* ą¤čĆąŠą┤čāą║čé: 16 ą▒ą░ą╣čé */
' ' , ' ' , ' ' , ' ' , ' ' , ' ' , ' ' , ' ' ,
'0' , '.' , '0' ,'1' , /* ąÆąĄčĆčüąĖčÅ: 4 ą▒ą░ą╣čéą░ */
};
ąóą░ą▒ą╗ąĖčåą░ 19. ążčāąĮą║čåąĖąĖ ą┤ąĖčüą║ąŠą▓čŗčģ ąŠą┐ąĄčĆą░čåąĖą╣.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
STORAGE_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ (storage medium).
STORAGE_GetCapacity ąÆąĄčĆąĮąĄčé ąĄą╝ą║ąŠčüčéčī ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĖ čĆą░ąĘą╝ąĄčĆ ą▒ą╗ąŠą║ą░.
STORAGE_IsReady ą¤čĆąŠą▓ąĄčĆčÅąĄčé, ą│ąŠč鹊ą▓ ą╗ąĖ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ.
STORAGE_IsWriteProtected ą¤čĆąŠą▓ąĄčĆčÅąĄčé, ąĘą░čēąĖčēąĄąĮ ą╗ąĖ ąŠčé ąĘą░ą┐ąĖčüąĖ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ.
STORAGE_Read ą¦ąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ čü ąĮąŠčüąĖč鹥ą╗čÅ. ą¤ą░čĆą░ą╝ąĄčéčĆ blk_addr ą┤ą░ąĄčéčüčÅ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ čüąĄą║č鹊čĆą░, blk_len ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗčģ čüąĄą║č鹊čĆąŠą▓.
STORAGE_Write ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĮą░ ąĮąŠčüąĖč鹥ą╗čī. ą¤ą░čĆą░ą╝ąĄčéčĆ blk_addr ą┤ą░ąĄčéčüčÅ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ čüąĄą║č鹊čĆą░, blk_len ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗčģ čüąĄą║č鹊čĆąŠą▓.
STORAGE_GetMaxLun ąÆąŠąĘą▓čĆą░čēą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ LUN.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 19:
int8_t STORAGE_Init (uint8_t lun);int8_t STORAGE_GetCapacity (uint8_t lun,
uint32_t * block_num,
uint16_t * block_size);int8_t STORAGE_IsReady (uint8_t lun);int8_t STORAGE_IsWriteProtected (uint8_t lun);int8_t STORAGE_Read (uint8_t lun,
uint8_t * buf,
uint32_t blk_addr,
uint16_t blk_len);int8_t STORAGE_Write (uint8_t lun,
uint8_t * buf,
uint32_t blk_addr,
uint16_t blk_len);int8_t STORAGE_GetMaxLun (void );
[ąÜą╗ą░čüčü ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ (DFU) ]
ą»ą┤čĆąŠ ą║ą╗ą░čüčüą░ DFU ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ "Device Class Specification for Device Firmware Upgrade Version 1.1 Aug 5, 2004".
ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čüą┐ąĄą║čéčŗ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ:
ŌĆó ą×ą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čĆą░ąĘąĮąŠą▓ąĖą┤ąĮąŠčüčéčī ą┐čĆąŠč鹊ą║ąŠą╗ą░ DFU ąŠčé ą║ąŠą╝ą┐ą░ąĮąĖąĖ ST (ST DFU sub-protocol) čüąŠą▓ą╝ąĄčüčéąĖą╝ą░ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ DFU. ą×ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé sub-ąĘą░ą┐čĆąŠčüčŗ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ą░ą┤čĆąĄčüą░čåąĖąĖ ą┐ą░ą╝čÅčéąĖ, ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╝ą░ąĮą┤, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ čü ą┐ą░ą╝čÅčéčīčÄ (čüčéąĖčĆą░ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ, čćč鹥ąĮąĖąĄ, ąĘą░ą┐ąĖčüčī, ąĖ čé. ą┤.).
ąÜą░ą║ čéčĆąĄą▒čāąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ DFU, ą▓ čŹč鹊ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ 0 (EP0, endpoint 0, ąĖą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ).
ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą┤čĆčāą│ąĖąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ąĖ čäčāąĮą║čåąĖąĖ (HID, ąĖ čé. ą┐.).
ąŁčéąĖ ą░čüą┐ąĄą║čéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮčŗ ąĖą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮčŗ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąöčĆą░ą╣ą▓ąĄčĆ USB ąĮąĄ čĆąĄą░ą╗ąĖąĘčāąĄčé čĆąĄąČąĖą╝ Manifestation Tolerant, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ. ą×ą┤ąĮą░ą║ąŠ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą▒čüą╗čāąČąĖą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ ą┐čāč鹥ą╝ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą║ą╗ą░čüčüą░ DFU . ąóčĆą░ąĮąĘą░ą║čåąĖąĖ DFU ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ endpoint 0 (EP0, čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░). ąÆčüąĄ ąĘą░ą┐čĆąŠčüčŗ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖąĄą╝ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ/ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ č湥čĆąĄąĘ EP0.
ą£ą░čłąĖąĮą░ DFU ąŠčüąĮąŠą▓čŗą▓ą░ąĄčéčüčÅ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖčģ čüąŠčüč鹊čÅąĮąĖčÅčģ:
ąóą░ą▒ą╗ąĖčåą░ 20. ąĪąŠčüč鹊čÅąĮąĖčÅ DFU.
ąĪąŠčüč鹊čÅąĮąĖąĄ ąÜąŠą┤ čüąŠčüč鹊čÅąĮąĖčÅ
appIDLE 0x00
appDETACH 0x01
dfuIDLE 0x02
dfuDNLOAD-SYNC 0x03
dfuDNBUSY 0x04
dfuDNLOAD-IDLE 0x05
dfuMANIFEST-SYNC 0x06
dfuMANIFEST 0x07
dfuMANIFEST-WAIT-RESET 0x08
dfuUPLOAD-IDLE 0x09
dfuERROR 0x0A
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ą┤ąŠą║čāą╝ąĄąĮč鹥 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ DFU.
ąĀąĖčü. 16. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄčģąŠą┤ą░ čüąŠčüč鹊čÅąĮąĖą╣ ąĖąĮč鹥čĆč乥ą╣čüą░ DFU.
ą¦č鹊ą▒čŗ ąĘą░čēąĖčéąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠčé čüą╗čāčćą░ą╣ąĮčŗčģ ą┤ąŠčüčéčāą┐ąŠą▓ ą┐ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣, ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ čÅą┤čĆą░ DFU (ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░) ą▒čāą┤ąĄčé dfuERROR. ąóąŠą│ą┤ą░ čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąŠčćąĖčüčéąĖčéčī čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ DFU_CLRSTATE ą┐ąĄčĆąĄą┤ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą╗čÄą▒ąŠą│ąŠ ą┤čĆčāą│ąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░.
ą»ą┤čĆąŠ DFU ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ą▓čüąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ąĘą░ą┐čĆąŠčüčŗ (čüą╝. čéą░ą▒ą╗ąĖčåčā 21).
ąóą░ą▒ą╗ąĖčåą░ 21. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ąĘą░ą┐čĆąŠčüčŗ DFU.
ąŚą░ą┐čĆąŠčü ąÜąŠą┤ ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ
DFU_DETACH 0x00
ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé 3 ą▓ ą┐ąŠą╗ąĄ bmAttributes (ą▒ąĖčé WillDetach), čāčüčéčĆąŠą╣čüčéą▓ąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąŠčéčüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ-ą┐ąŠą┤čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ (detach-attach sequence) ąĮą░ čłąĖąĮąĄ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗čāčćąĖčé čŹč鹊čé ąĘą░ą┐čĆąŠčü.
DFU_DNLOAD 0x01
ą×ą▒čĆą░ąĘ firmware ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ č湥čĆąĄąĘ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ-ąĘą░ą┐ąĖčüąĖ (control-write transfer), ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĘą░ą┐čĆąŠčüąŠą╝ DFU_DNLOAD, čüą┐ąĄčåąĖčäąĖčćąĮčŗą╝ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ DFU.
DFU_UPLOAD 0x02
ąØą░ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ąĘą░ą┐čĆąŠčüą░ - ą┤ą░čéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čüčćąĖčéą░čéčī ą┐čĆąŠčłąĖą▓ą║čā firmware čü čåąĄą╗čīčÄ ąĄčæ ą░čĆčģąĖą▓ąĖčĆąŠą▓ą░ąĮąĖčÅ.
DFU_GETSTATUS 0x03
ąźąŠčüčé ą┐čĆąĖą╝ąĄąĮčÅąĄčé ąĘą░ą┐čĆąŠčü DFU_GETSTATUS, čćč鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (ąŠąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ąĮčÅč鹊 čüčéąĖčĆą░ąĮąĖąĄą╝ ą┐ą░ą╝čÅčéąĖ, ąĘą░ą┐ąĖčüčīčÄ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ą┤čĆčāą│ąĖą╝ąĖ ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ).
DFU_CLRSTATUS 0x04
ą¤čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ąĘą░ą┐čĆąŠčüą░ DFU_CLRSTATUS čāčüčéčĆąŠą╣čüčéą▓ąŠ čāčüčéą░ąĮąŠą▓ąĖčé čüčéą░čéčāčü OK ąĖ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ dfuIDLE.
DFU_GETSTATE 0x05
ąŁč鹊čé ąĘą░ą┐čĆąŠčü čéčĆąĄą▒čāąĄčé ąŠčéčüč湥čéą░ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
DFU_ABORT 0x06
ąŚą░ą┐čĆąŠčü DFU_ABORT ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čģąŠčüčéčā ą▓čŗą╣čéąĖ ąĖąĘ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣ ąĖ ą▓ąĄčĆąĮčāčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ DFU_IDLE.
ąÜą░ąČą┤ą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą║ EP0 ąŠą┤ąĮąŠą╣ ąĖąĘ ą┤ą▓čāčģ ą║ą░č鹥ą│ąŠčĆąĖą╣.
ŌĆó Data transfer: čŹčéąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ:
ŌĆō ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ (DFU_GETSTATUS, DFU_GETSTATE ąĖ DFU_UPLOAD).
ŌĆó No-Data transfer: čŹčéąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĘą░ą┐čĆąŠčüąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā (DFU_CLRSTATUS, DFU_ABORT ąĖ DFU_DETACH).
ążą░ą╣ą╗čŗ čÅą┤čĆą░ ą║ą╗ą░čüčüą░ DFU . ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čŹč鹊ą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╝ąŠą┤čāą╗ąĄ usbd_dfu.c ąĖ ąĄą│ąŠ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ usbd_dfu.h. ąŚą┤ąĄčüčī ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ ą▓čüąĄ ąĘą░ą┐čĆąŠčüčŗ DFU ąĖ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ DFU. ą£ąŠą┤čāą╗čī ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ čü ąĮąŠčüąĖč鹥ą╗ąĄą╝ ą┐ą░ą╝čÅčéąĖ (čŹč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ).
ąóą░ą▒ą╗ąĖčåą░ 22. ążčāąĮą║čåąĖąĖ ą▓ čäą░ą╣ą╗ą░čģ usbd_dfu.c, usbd_dfu.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_DFU_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü DFU.
USBD_DFU_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ čüą╗ąŠčÅ DFU.
USBD_DFU_Setup ą¤ą░čĆčüąĖąĮą│ ąĘą░ą┐čĆąŠčüą░ DFU.
USBD_DFU_EP0_TxReady ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ Rx Ready ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ EP0.
USBD_DFU_EP0_RxReady ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ Tx Ready ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ EP0.
USBD_DFU_GetUsrStringDesc ą×ą▒čüą╗čāąČąĖą▓ą░ąĄčé čüčéčĆąŠą║ąŠą▓čŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą┐ą░ą╝čÅčéąĖ.
DFU_Detach ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü DFU DETACH.
DFU_Download ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü DFU DNLOAD.
DFU_Upload ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü DFU UPLOAD.
DFU_GetStatus ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü DFU GETSTATUS.
DFU_ClearStatus ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü DFU CLRSTATUS.
DFU_GetState ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü DFU GETSTATE.
DFU_Abort ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü DFU ABORT.
DFU_Leave ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü sub-ą┐čĆąŠč鹊ą║ąŠą╗ą░ DFU ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ DFU (ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓čŗčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ DFU ąĖ čüą▒čĆąŠčü čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąČąĄąĮąĮąŠą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą║ąŠą┤ą░ firmware).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą┐ą░ą╝čÅčéčī Flash čŹč鹊 ą┐ą░ą╝čÅčéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣. ą×ą┤ąĮą░ą║ąŠ ąÆčŗ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ąĖčéčī ą┤čĆčāą│ąĖąĄ ąĮąŠčüąĖč鹥ą╗ąĖ ą┐ą░ą╝čÅčéąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÅ čäą░ą╣ą╗ čłą░ą▒ą╗ąŠąĮą░ usbd_dfu_media_template.c.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 22:
static uint8_t USBD_DFU_Init (USBD_HandleTypeDef * pdev,
uint8_t cfgidx);static uint8_t USBD_DFU_DeInit (USBD_HandleTypeDef * pdev,
uint8_t cfgidx);static uint8_t USBD_DFU_Setup (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static uint8_t USBD_DFU_EP0_TxReady (USBD_HandleTypeDef * pdev);static uint8_t USBD_DFU_EP0_RxReady (USBD_HandleTypeDef * pdev);static uint8_t * USBD_DFU_GetUsrStringDesc (USBD_HandleTypeDef * pdev,
uint8_t index,
uint16_t * length);static void DFU_Detach (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void DFU_Download (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void DFU_Upload (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void DFU_GetStatus (USBD_HandleTypeDef * pdev);static void DFU_ClearStatus (USBD_HandleTypeDef * pdev);static void DFU_GetState (USBD_HandleTypeDef * pdev);static void DFU_Abort (USBD_HandleTypeDef * pdev);static void DFU_Leave (USBD_HandleTypeDef * pdev);
ą¦č鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ DFU:
1 . ąŚą░ą┤ą░ą╣č鹥 ą▓ čäą░ą╣ą╗ąĄ usbd_conf.h čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ:
ŌĆō ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ąĮąŠčüąĖč鹥ą╗ąĄą╣ (ą▓ąĖą┤ąŠą▓ ą┐ą░ą╝čÅčéąĖ) ą▓ #define USBD_DFU_MAX_ITF_NUM.
2 . ąÆčŗąĘąŠą▓ąĖč鹥 čäčāąĮą║čåąĖčÄ USBD_DFU_Init() ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▓čüąĄčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą┐ą░ą╝čÅčéąĖ ąĖ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣ DFU.
3 . ąÆčüąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ/ąĘą░ą┐čĆąŠčüą░ (control/request) ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ č湥čĆąĄąĘ EP0 čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖą╣ USBD_DFU_Setup() ąĖ USBD_DFU_EP0_TxReady(). ąŁčéąĖ čäčāąĮą║čåąĖąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ callback ą║ą░ąČą┤ąŠą╣ ą┐ą░ą╝čÅčéąĖ (read / write /erase / get state, ...), ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓ DFU. ąöą╗čÅ čŹčéąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ ąŠčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣.
4 . ą¦č鹊ą▒čŗ ąĘą░ą║čĆčŗčéčī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÄ, ą▓čŗąĘąŠą▓ąĖč鹥 čäčāąĮą║čåąĖčÄ USBD_DFU_DeInit().
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ DFU, č鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüąŠčüč鹊čÅąĮąĖąĄ ąĄą│ąŠ ą╝ą░čłąĖąĮčŗ DFU_STATE_ERROR. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, čćč鹊ą▒čŗ ąĘą░čēąĖčéąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠčé čüą╗čāčćą░ą╣ąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą║ąŠčĆčĆąĄą║čéąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
[ąÜą╗ą░čüčü USB Audio ]
ąöčĆą░ą╣ą▓ąĄčĆ čĆąĄą░ą╗ąĖąĘčāąĄčé Audio Class 1.0 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ "USB Device Class Definition for Audio Devices V1.0 Mar 18, 98". ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čüą┐ąĄą║čéčŗ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ:
ŌĆó ą×ą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: Audio Class 1.0 ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ USB 1.0, ąĖ ą┐ąŠčŹč鹊ą╝čā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ čĆąĄąČąĖą╝čŗ čüą║ąŠčĆąŠčüč鹥ą╣ Low Speed ąĖ Full Speed (čéčĆą░ąĮąĘą░ą║čåąĖąĖ High Speed ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ). ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ čüčéą░ąĮą┤ą░čĆčéčā "USB Device Class Definition for Audio Devices V1.0 Mar 18, 98".
ą¤ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą░čüą┐ąĄą║čéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮčŗ ąĖą╗ąĖ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ čüą┐ąĄčåąĖčäąĖčćąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ąÆ čŹč鹊ą╝ ą┤čĆą░ą╣ą▓ąĄčĆąĄ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čüą┐ąĄą║čéčŗ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ (ąŠą┤ąĮą░ą║ąŠ ąĖčģ ą╝ąŠąČąĮąŠ ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ą┐čāč鹥ą╝ ąĮąĄą║ąŠč鹊čĆčŗčģ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░):
ŌĆó ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ Audio Control endpoint.
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą║ą╗ą░čüčüą░ Audio . ąóčĆą░ąĮąĘą░ą║čåąĖąĖ ąĘą▓čāą║ą░ ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ isochronous endpoint. ąŚą░ą┐čĆąŠčüčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (Audio control request) čéą░ą║ąČąĄ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ č湥čĆąĄąĘ control endpoint (endpoint 0).
ąÆ ą║ą░ąČą┤ąŠą╝ čäčĆąĄą╣ą╝ąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ ąĘą▓čāą║ą░, ąĖ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮ (ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮ ą▓ ąĘą▓čāą║) ą▓ č鹥č湥ąĮąĖąĄ čŹč鹊ą│ąŠ čäčĆąĄą╣ą╝ą░ (ą┐ąĄčĆąĄą┤ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░). ąÜą░č湥čüčéą▓ąŠ ąĘą▓čāą║ą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąĄąČą┤čā čéčĆą░ąĮąĘą░ą║čåąĖčÅą╝ąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ą░č湥čüčéą▓ąĄ ąĘą▓čāą║ą░. ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ čĆąĄą░ą╗ąĖąĘčāąĄčé ą┐čĆąŠčüč鹊ą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐čĆąŠčåąĄčüčüąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ, ą┐ąŠą╗ą░ą│ą░čÅčüčī ąĮą░ č鹊čćąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ I2S. ąÆ ą║ą░ąČą┤ąŠą╝ ąĮą░čćą░ą╗ąĄ čäčĆąĄą╣ą╝ą░ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ą▒čŗą╗ąĖ ą╗ąĖ ąĖąĘčĆą░čüčģąŠą┤ąŠą▓ą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ ą┐ą░ą║ąĄčéą░, ąŠą▒čĆčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčüą╗ąĖ ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą▓čüąĄ ąĄčēąĄ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąŠą┤čÅčéčüčÅ. ąöą╗čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēąĄąĮąĖčÅ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ 2 ąŠčüąĮąŠą▓ąĮčŗčģ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ ąĘą░čēąĖčéčŗ:
ŌĆó DMA ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą▒čāč乥čĆąŠą╝ USB ąĖ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗą▓ąŠą┤ą░ (I2S).
ąØą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą│ąŠ ą╝ąĄčģą░ąĮąĖąĘą╝ą░, ąĄčüą╗ąĖ č鹊čćąĮąŠčüčéčī čéą░ą║č鹊ą▓ ąĖą╗ąĖ čćą░čüč鹊čéą░ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čŗčüąŠą║ą░, č鹊 ą┐ąŠą╗čāčćąĖčéčüčÅ ą┐ą╗ąŠčģąŠąĄ ą║ą░č湥čüčéą▓ąŠ ąĘą▓čāą║ą░. ąŁč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą╗čāčćčłąĄąĮ ą┐čāč鹥ą╝ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▒ąŠą╗ąĄąĄ ą│ąĖą▒ą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ ąĘą▓čāą║ąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čĆąĄąČąĖą╝ą░ USB feedback, ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ą║ąŠčĆčĆąĄą║čåąĖąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą▓čāą║ą░ ąĖą╗ąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ/čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéą░ą║čéą░ą╝ąĖ ąĘą▓čāą║ą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüąŠą▒čŗčéąĖčÅ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (SOF event).
ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▒ą░ąĘąŠą▓čŗąĄ ąĘą░ą┐čĆąŠčüčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĘą▓čāą║ąŠą╝ (Audio Control). ą¦č鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║ą░ č鹊ą╗čīą║ąŠ ą┤ą▓čāčģ ąĘą░ą┐čĆąŠčüąŠą▓. ą×ą┤ąĮą░ą║ąŠ ą┤čĆčāą│ąĖąĄ ąĘą░ą┐čĆąŠčüčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą┤ąĄčƹȹ░ąĮčŗ ą┐čāč鹥ą╝ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠą╣ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ąóą░ą▒ą╗ąĖčåą░ 23. ąŚą░ą┐čĆąŠčüčŗ Audio control.
ąŚą░ą┐čĆąŠčü ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąØą░ąĘąĮą░č湥ąĮąĖąĄ
SET_CUR ąöąÉ
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄąČąĖą╝ Mute ą▓ čüąŠčüč鹊čÅąĮąĖąĄ On ąĖą╗ąĖ Off (ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąŠ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čāčĆąŠą▓ąĮčÅ ą│čĆąŠą╝ą║ąŠčüčéąĖ).
SET_MIN ąĮąĄčé
-
SET_MAX ąĮąĄčé
-
SET_RES ąĮąĄčé
-
SET_MEM ąĮąĄčé
-
GET_CUR ąöąÉ
ą¤ąŠą╗čāčćą░ąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čĆąĄąČąĖą╝ą░ Mute (ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąŠ ą┤ąŠ ą┐ąŠą╗čāč湥ąĮąĖčÅ č鹥ą║čāčēąĄą│ąŠ čāčĆąŠą▓ąĮčÅ ą│čĆąŠą╝ą║ąŠčüčéąĖ).
GET_MIN ąĮąĄčé
-
GET_MAX ąĮąĄčé
-
GET_RES ąĮąĄčé
-
GET_MEM ąĮąĄčé
-
ążą░ą╣ą╗čŗ ą║ą╗ą░čüčüą░ Audio . ą×čüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ ą┤čĆą░ą╣ą▓ąĄčĆą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ ą╝ąŠą┤čāą╗ąĄ usbd_audio_core.c ąĖ ąĄą│ąŠ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ usbd_audio_core.h. ą×ąĮ čāą┐čĆą░ą▓ą╗čÅąĄčé čéčĆą░ąĮąĘą░ą║čåąĖčÅą╝ąĖ audio-ą┤ą░ąĮąĮčŗčģ ąĖ ąĘą░ą┐čĆąŠčüą░ą╝ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control request). ąöčĆą░ą╣ą▓ąĄčĆ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ čü ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ ąĘą▓čāą║ą░ (čŹč鹊 ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčéčüčÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ).
ąóą░ą▒ą╗ąĖčåą░ 24. ążčāąĮą║čåąĖąĖ ą▓ čäą░ą╣ą╗ą░čģ usbd_audio_core.c, usbd_audio_core.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_AUDIO_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü ą║ą╗ą░čüčüą░ AUDIO.
USBD_AUDIO_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ąĖąĮč鹥čĆč乥ą╣čüą░ ą║ą╗ą░čüčüą░ AUDIO.
USBD_AUDIO_Setup ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ AUDIO.
USBD_AUDIO_EP0_RxReady ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ EP0 Rx (ąĄčüčéčī ąĘą▓čāą║ąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ).
USBD_AUDIO_DataIn ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ Data IN.
USBD_AUDIO_DataOut ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ Data OUT.
USBD_AUDIO_SOF ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (SOF). ą¤čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čü ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ ą▒čāč乥čĆą░.
AUDIO_REQ_GetCurrent ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ GET_CUR ą║ą╗ą░čüčüą░ AUDIO.
AUDIO_REQ_SetCurrent ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ SET_CUR ą║ą╗ą░čüčüą░ AUDIO.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 24:
static uint8_t USBD_AUDIO_EP0_RxReady (USBD_HandleTypeDef * pdev);static uint8_t USBD_AUDIO_DataIn (USBD_HandleTypeDef * pdev, uint8_t epnum);static uint8_t USBD_AUDIO_DataOut (USBD_HandleTypeDef * pdev, uint8_t epnum);static uint8_t USBD_AUDIO_SOF (USBD_HandleTypeDef * pdev);static void AUDIO_REQ_GetCurrent (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static void AUDIO_REQ_SetCurrent (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);
ąśąĮč鹥čĆč乥ą╣čü ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ čüą╗ąŠčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčéčüčÅ č湥čĆąĄąĘ ąĄą│ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čüčéčĆčāą║čéčāčĆčā ą┤čĆą░ą╣ą▓ąĄčĆą░:
typedef struct
{
int8_t (* Init) (uint32_t AudioFreq, uint32_t Volume, uint32_t options);
int8_t (* DeInit) (uint32_t options);
int8_t (* AudioCmd) (uint8_t * pbuf, uint32_t size, uint8_t cmd);
int8_t (* VolumeCtl) (uint8_t vol);
int8_t (* MuteCtl) (uint8_t cmd);
int8_t (* PeriodicTC) (uint8_t cmd);
int8_t (* GetState) (void );
}USBD_AUDIO_ItfTypeDef;
ąÜą░ąČą┤čŗą╣ ąĘą▓čāą║ąŠą▓ąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā čéąĖą┐ą░ USBD_AUDIO_ItfTypeDef. ążčāąĮą║čåąĖąĖ ąĖ ą║ąŠąĮčüčéą░ąĮčéčŗ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé čŹčéą░ čüčéčĆčāą║čéčāčĆą░, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ. ąĢčüą╗ąĖ ą║ą░ą║ą░čÅ-č鹊 čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ąĖą╝ąĄčÄčēąĄą╝čüčÅ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą┐ą░ą╝čÅčéąĖ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐ąŠą╗ąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ NULL.
usbd_audio_if.c, usbd_audio_if.h . ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ąĮą░ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ ąĘą▓čāą║ą░ - ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ Audio Out (ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ USB ą▓ ąĘą▓čāą║ ą┤ąĖąĮą░ą╝ąĖą║ą░ / ąĮą░čāčłąĮąĖą║ąŠą▓). ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą║ąŠą┤ąĄą║ą░ (Codec driver, ąĮą░ą┐čĆąĖą╝ąĄčĆ stm324xg_eval_audio.c, stm324xg_eval_audio.h) ą┤ą╗čÅ ą▒ą░ąĘąŠą▓čŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ čüąŠ ąĘą▓čāą║ąŠą╝ (play / pause / volume control, ...).
ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā:
extern USBD_AUDIO_ItfTypeDef USBD_AUDIO_fops;
ąóą░ą▒ą╗ąĖčåą░ 25. ążčāąĮą║čåąĖąĖ usbd_audio_if.c, usbd_audio_if.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
Audio_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü ąĘą▓čāą║ą░.
Audio_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĘą▓čāą║ą░ ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čĆąĄčüčāčĆčüąŠą▓.
Audio_PlaybackCmd ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ ą┐ą╗ąĄąĄčĆą░ (play, pause, ...).
Audio_VolumeCtl ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą│čĆąŠą╝ą║ąŠčüčéčīčÄ ą┐ą╗ąĄąĄčĆą░.
Audio_MuteCtl ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čĆąĄąČąĖą╝ą░ Mute ą┐ą╗ąĄąĄčĆą░.
Audio_PeriodicTC ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠą║ąŠąĮčćą░ąĮąĖąĄ č鹥ą║čāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄčéą░ (ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ č鹥ą║čāčēąĄą╣ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░).
Audio_GetState ąÆąŠąĘą▓čĆą░čēą░ąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą░čāą┤ąĖąŠą┐ą╗ąĄąĄčĆą░ (Playing / Paused / Error / ...).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čäą░ą╣ą╗čŗ čłą░ą▒ą╗ąŠąĮą░ (usbd_audio_if_template.c, usbd_audio_if_template.h) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▒ą░ąĘąŠą▓čŗą╣ ą┐čĆąĖą╝ąĄčĆ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗ąĖčé ąÆą░ą╝ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ Audio.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 25:
static int8_t Audio_Init (uint32_t AudioFreq, uint32_t Volume, uint32_t options);static int8_t Audio_DeInit (uint32_t options);static int8_t Audio_PlaybackCmd (uint8_t * pbuf, uint32_t size, uint8_t cmd);static int8_t Audio_VolumeCtl (uint8_t vol);static int8_t Audio_MuteCtl (uint8_t cmd);static int8_t Audio_PeriodicTC (uint8_t cmd);static int8_t Audio_GetState (void );
ą×ą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ Audio player, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ.
ąóą░ą▒ą╗ąĖčåą░ 26. ąĪąŠčüč鹊čÅąĮąĖčÅ Audio player.
ąĪąŠčüč鹊čÅąĮąĖąĄ ąÜąŠą┤ ą×ą┐ąĖčüą░ąĮąĖąĄ
AUDIO_CMD_START 0x00
ąÉčāą┤ąĖąŠą┐ą╗ąĄąĄčĆ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ąĖ ą│ąŠč鹊ą▓ ą║ čĆą░ą▒ąŠč鹥.
AUDIO_CMD_PLAY 0x01
ąÉčāą┤ąĖąŠą┐ą╗ąĄąĄčĆ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ąĘą▓čāą║.
AUDIO_CMD_STOP 0x02
ąÉčāą┤ąĖąŠą┐ą╗ąĄąĄčĆ ąŠčüčéą░ąĮąŠą▓ąĖą╗ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄ ąĘą▓čāą║ą░.
ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ USB Audio . ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüą╗ąŠą╣ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą║ąŠą┤ąĄą║, ąĖąĮč鹥čĆč乥ą╣čü I2S, ąĖąĮč鹥čĆč乥ą╣čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ č湥čĆąĄąĘ I2C, ąĖ čé. ą┐.). ąŁčéą░ ą░ą▒čüčéčĆą░ą║čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ č湥čĆąĄąĘ ą╝ąŠą┤čāą╗čī ąĮąĖąČąĮąĄą│ąŠ čüą╗ąŠčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ usbd_audio_if.c), ą║ąŠč鹊čĆčŗą╣ ąÆčŗ ą╝ąŠąČąĄč鹥 ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ:
1 . ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą▓ čäą░ą╣ą╗ąĄ usbd_conf.h ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ čćą░čüč鹊čéčā ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░, audio sampling rate (#define USBD_AUDIO_FREQ).
2 . ą¤čĆąĖ ąĘą░ą┐čāčüą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓čŗąĘąŠą▓ąĖč鹥 čäčāąĮą║čåąĖčÄ USBD_AUDIO_Init() ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čüąĄčģ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ (čäčāąĮą║čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čéą░ą║ąČąĄ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ ąĖąĘ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ). ąÉą┐ą┐ą░čĆą░čéąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü (ąĮą░ą┐čĆąĖą╝ąĄčĆ usbd_audio_if.c), ąĖ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
3 . ąóčĆą░ąĮąĘą░ą║čåąĖčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅą╝ąĖ (ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄ ąĮčāąČąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī ąĮąĖą║ą░ą║čāčÄ čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ out-čéčĆą░ąĮąĘą░ą║čåąĖą╣) usbd_audio_DataIn() ąĖ usbd_audio_DataOut(), ą║ąŠč鹊čĆčŗąĄ ąŠą▒ąĮąŠą▓ą╗čÅčÄčé ą▒čāč乥čĆčŗ ąĘą▓čāą║ą░ ą┐čĆąĖąĮčÅčéčŗą╝ąĖ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ. ąöą╗čÅ Out-čéčĆą░ąĮąĘą░ą║čåąĖą╣, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ, ąŠąĮąĖ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ ą▓ ąĘą▓čāą║ąŠą▓ąŠą╣ ą▒čāč乥čĆ, ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čāą║ą░ąĘą░č鹥ą╗čī ą▒čāč乥čĆą░ ąĘą░ą┐ąĖčüąĖ (wr_ptr).
4 . ąŚą░ą┐čĆąŠčüčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Audio Control ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ čäčāąĮą║čåąĖčÅą╝ąĖ USBD_AUDIO_Setup() ąĖ USBD_AUDIO_EP0_RxReady(). ąŁčéąĖ čäčāąĮą║čåąĖąĖ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅčÄčé ąĘą░ą┐čĆąŠčüčŗ Audio Control ąĮą░ ąĮąĖąČąĮąĖą╣ čāčĆąŠą▓ąĄąĮčī (ąĮą░ą┐čĆąĖą╝ąĄčĆ, usbd_audio_if.c). ąÆ č鹥ą║čāčēąĄą╣ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ąĘą░ą┐čĆąŠčüčŗ SET_CUR ąĖ GET_CUR ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäčāąĮą║čåąĖąĄą╣ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ąĘą▓čāą║ą░ (mute control).
ąśąĘą▓ąĄčüčéąĮčŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆó ąĢčüą╗ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ąĮąĖąĘą║ą░čÅ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ (#define USBD_AUDIO_FREQ ąĮąĖąČąĄ 24 ą║ąōčå), č鹊 ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╝ąĄčģąĖ ą▓ ąĘą▓čāą║ąĄ ą┐čĆąĖ ąŠą┐ąĄčĆą░čåąĖčÅčģ pause / resume / stop. ą¤čĆąĖčćąĖąĮą░ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ąŠčüčéą░ąĮąŠą▓ą║ąŠą╣ čéą░ą║č鹊ą▓ I2S ąĖ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ mute ą▓ąĮąĄčłąĮąĄą╝čā ą║ąŠą┤ąĄą║čā (external Codec).
[ąÜą╗ą░čüčü USB CDC ]
ąöčĆą░ą╣ą▓ąĄčĆ ą║ą╗ą░čüčüą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ USB (Communication device class, CDC) čĆą░ą▒ąŠčéą░ąĄčé ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ "Universal Serial Bus Class Definitions for Communications Devices Revision 1.2 November 16, 2007" ąĖ sub-ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ "Universal Serial Bus Communications Class Subclass Specification for PSTN Devices Revision 1.2 February 9, 2007".
ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ čĆąĄą░ą╗ąĖąĘčāąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čüą┐ąĄą║čéčŗ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ:
ŌĆó ą×ą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąŁčéąĖ ą░čüą┐ąĄą║čéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮčŗ ąĖ čāą╗čāčćčłąĄąĮčŗ ą┤ą╗čÅ čüą┐ąĄčåąĖčäąĖč湥čüą║ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ Abstract Control Model čŹčéą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ ąĮą░ ą┤ąĖčüą┐ąĄčéč湥čĆ ąĮąĖąČąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ usbd_cdc_vcp.c/usbd_cdc_vcp.h), ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ą║ą░ąČą┤čŗą╣ ąĘą░ą┐čĆąŠčü ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ.
ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ čĆąĄą░ą╗ąĖąĘčāąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čüą┐ąĄą║čéčŗ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ (ąŠą┤ąĮą░ą║ąŠ ą╝ąŠąČąĮąŠ ąŠą▒čüą╗čāąČąĖčéčī čŹčéąĖ čäčāąĮą║čåąĖąĖ ą┐čāč鹥ą╝ ąĮąĄą║ąŠč鹊čĆčŗčģ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░):
ŌĆó ąøčÄą▒ąŠą╣ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ ą░čüą┐ąĄą║čé, ąŠčéąĮąŠčüčÅčēąĖą╣čüčÅ ą║ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠą╝čā ą║ą╗ą░čüčüčā, ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ą»ą┤čĆąŠ CDC ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą▓ą░ čéąĖą┐ą░ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║/čéčĆą░ąĮąĘą░ą║čåąĖą╣:
ŌĆó ąÜąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ Bulk endpoint ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čć ą┤ą░ąĮąĮčŗčģ (1 OUT endpoint ąĖ 1 IN endpoint).
ą¤ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ IN ąĖ OUT ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā.
ą×ą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ Data IN transfer (ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ čģąŠčüčéčā). ąóčĆą░ąĮąĘą░ą║čåąĖčÅ ą┤ą░ąĮąĮčŗčģ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĘą░ą┐čĆąŠčüą░ čģąŠčüčéą░ (čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĘą░ą┤ą░ąĄčé ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą┐ą░ą║ąĄčéą░ą╝ąĖ ąĘą░ą┐čĆąŠčüą░). ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą▓ č鹥čĆą╝ąĖąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčéą░čéąĖč湥čüą║ąĖą╣ ą▒čāč乥čĆ (ąĮą░ą┐čĆąĖą╝ąĄčĆ USART ą▓ čüą╗čāčćą░ąĄ č鹥čĆą╝ąĖąĮą░ą╗ą░ Virtual COM Port).
ą×ą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ Data OUT transfer (ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā). ą×ą▒čŗčćąĮąŠ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ USB ąĮą░ą╝ąĮąŠą│ąŠ ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ ą▓čŗą▓ąŠą┤ č鹥čĆą╝ąĖąĮą░ą╗ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą▒ąĖčé ą┤ą╗čÅ USART čüąŠčüčéą░ą▓ą╗čÅąĄčé 115.2 Kbps, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čüą║ąŠčĆąŠčüčéčī USB čüąŠčüčéą░ą▓ą╗čÅąĄčé 12 Mbps ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ Full Speed ąĖ 480 Mbps ą▓ čĆąĄąČąĖą╝ąĄ High Speed). ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĮąŠą▓čŗčģ ą┐ą░ą║ąĄč鹊ą▓ čģąŠčüčé ąČą┤ąĄčé, ą┐ąŠą║ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ čĆą░ąĮąĄąĄ ą┐ąĄčĆąĄą┤ą░ą╗ čģąŠčüčé. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ ąŠčé čģąŠčüčéą░: ą┤čĆą░ą╣ą▓ąĄčĆ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą┤ą╗čÅ OUT čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĖ ąČą┤ąĄčé, ą┐ąŠą║ą░ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤čāčé čĆą░ąĘčĆąĄčłąĄąĮčŗ ąĮąŠą▓čŗąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮą░ OUT endpoint (ą┐čĆąĖ čŹč鹊ą╝ ą┐ą░ą║ąĄčéčŗ OUT ą▒čāą┤čāčé ąŠčéą║ą╗ąŠąĮčÅčéčīčüčÅ, NACK).
ą×ą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ Command request . ąÆ čŹč鹊ą╝ ą┤čĆą░ą╣ą▓ąĄčĆąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ (control endpoint, endpoint 0, EP0) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ąĘą░ą┐čĆąŠčüąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ data interrupt endpoint. ąĢčüą╗ąĖ čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┐čĆąŠčüą░ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ąĄčé 64 ą▒ą░ą╣čé, č鹊 čĆą░ąĘą╝ąĄčĆ endpoint 0 ą┤ąŠčüčéą░č鹊č湥ąĮ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čŹčéąĖčģ ąĘą░ą┐čĆąŠčüąŠą▓.
ąöčĆą░ą╣ą▓ąĄčĆ CDC ąĮąĄ ą┤ąĄą╗ą░ąĄčé ą┐ą░čĆčüąĖąĮą│ ą║ąŠą╝ą░ąĮą┤ąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąŠąĮ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čü ą║ąŠą┤ąŠą╝ ąĘą░ą┐čĆąŠčüą░, ą┤ą╗ąĖąĮąŠą╣ ąĖ ą▒čāč乥čĆąŠą╝ ą┤ą░ąĮąĮčŗčģ. ąóąŠą│ą┤ą░ čŹčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĘą░ą┐čĆąŠčü, ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ.
ążą░ą╣ą╗čŗ ą┤čĆą░ą╣ą▓ąĄčĆą░ USB CDC . ą»ą┤čĆąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čäą░ą╣ą╗ą░čģ usbd_cdc.c, usbd_cdc.h. ąŁč鹊čé ą║ąŠą┤ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ąĘą░ą┐čĆąŠčüčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ą×ąĮ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ čü ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ CDC (čŹč鹊 ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ).
ąóą░ą▒ą╗ąĖčåą░ 27. ążčāąĮą║čåąĖąĖ ą▓ čäą░ą╣ą╗ą░čģ usbd_cdc.c, usbd_cdc.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
USBD_CDC_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü CDC.
USBD_CDC_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ąĖąĮč鹥čĆč乥ą╣čüą░ CDC.
USBD_CDC_Setup ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ CDC.
USBD_CDC_EP0_RxReady ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐čĆąŠčüą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ CDC.
USBD_CDC_DataIn ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ą┤ą░ąĮąĮčŗčģ CDC IN.
USBD_CDC_DataOut ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüčéą░ą┤ąĖčÄ ą┤ą░ąĮąĮčŗčģ CDC OUT.
USBD_CDC_RegisterInterface ąöąŠą▒ą░ą▓ą╗čÅąĄčé ąĖąĮč鹥čĆč乥ą╣čü ą║ą╗ą░čüčüą░ CDC.
USBD_CDC_SetTxBuffer ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
USBD_CDC_SetRxBuffer ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
USBD_CDC_TransmitPacket Callback-čäčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ.
USBD_CDC_ReceivePacket Callback-čäčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐čĆąĖąĄą╝ą░.
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 27:
static uint8_t USBD_CDC_Init (USBD_HandleTypeDef * pdev, uint8_t cfgidx);static uint8_t USBD_CDC_DeInit (USBD_HandleTypeDef * pdev, uint8_t cfgidx);static uint8_t USBD_CDC_Setup (USBD_HandleTypeDef * pdev,
USBD_SetupReqTypedef * req);static uint8_t USBD_CDC_EP0_RxReady (USBD_HandleTypeDef * pdev);static uint8_t USBD_CDC_DataIn (USBD_HandleTypeDef * pdev, uint8_t epnum);static uint8_t USBD_CDC_DataOut (USBD_HandleTypeDef * pdev, uint8_t epnum);uint8_t USBD_CDC_RegisterInterface (USBD_HandleTypeDef * pdev,
USBD_CDC_ItfTypeDef * fops);uint8_t USBD_CDC_SetTxBuffer (USBD_HandleTypeDef * pdev,
uint8_t * pbuff,
uint16_t length);uint8_t USBD_CDC_SetRxBuffer (USBD_HandleTypeDef * pdev, uint8_t * pbuff);uint8_t USBD_CDC_TransmitPacket (USBD_HandleTypeDef * pdev);uint8_t USBD_CDC_ReceivePacket (USBD_HandleTypeDef * pdev);
ąØąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ č湥čĆąĄąĘ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čüčéčĆčāą║čéčāčĆčā ą┤čĆą░ą╣ą▓ąĄčĆą░, ą│ą┤ąĄ ą┐ąŠą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čāą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ callback-čäčāąĮą║čåąĖąĖ:
typedef struct _USBD_CDC_Itf
{
int8_t (* Init) (void );
int8_t (* DeInit) (void );
int8_t (* Control) (uint8_t , uint8_t * , uint16_t );
int8_t (* Receive) (uint8_t * , uint32_t * );
}USBD_CDC_ItfTypeDef;
ąÜą░ąČą┤čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā čéąĖą┐ą░ USBD_CDC_ItfTypeDef. ążčāąĮą║čåąĖąĖ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ čāą║ą░ąĘčŗą▓ą░čÄčé ą┐ąŠą╗čÅ ą▓ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ. ąĢčüą╗ąĖ ą║ą░ą║ą░čÅ-č鹊 čäčāąĮą║čåąĖčÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐ąŠą╗ąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ NULL.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī čüą░ą╝ąŠą╣ ą▓čŗčüąŠą║ąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čŗčćąĖčüą╗ąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (ą▓čüąĄ ąŠąĮąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ą▓ čäą░ą╣ą╗ą░čģ usbd_cdc.h ąĖ usbd_cdc_interface.h), čüą╝. čéą░ą▒ą╗ąĖčåčā 28.
ąóą░ą▒ą╗ąĖčåą░ 28. ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ CDC.
ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ #define ą¤ą░čĆą░ą╝ąĄčéčĆ ąóąĖą┐ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
Full Speed High Speed
CDC_DATA_HS_IN_PACKET_SIZE ąĀą░ąĘą╝ąĄčĆ ą║ą░ąČą┤ąŠą│ąŠ ą┐ą░ą║ąĄčéą░ ą┤ą░ąĮąĮčŗčģ IN.
64
512
CDC_DATA_FS_IN_PACKET_SIZE
CDC_DATA_HS_OUT_PACKET_SIZE ąĀą░ąĘą╝ąĄčĆ ą║ą░ąČą┤ąŠą│ąŠ ą┐ą░ą║ąĄčéą░ ą┤ą░ąĮąĮčŗčģ OUT.
64
512
CDC_DATA_FS_OUT_PACKET_SIZE
APP_TX_DATA_SIZE ą×ą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą┤ą╗čÅ OUT-čéčĆą░ąĮąĘą░ą║čåąĖą╣ ą┤ą░ąĮąĮčŗčģ.
2048
2048
APP_RX_DATA_SIZE ą×ą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą┤ą╗čÅ IN-čéčĆą░ąĮąĘą░ą║čåąĖą╣ ą┤ą░ąĮąĮčŗčģ.
2048
2048
usbd_cdc_interface.c, usbd_cdc_interface.h . ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī čćą░čüčéčīčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ą×ąĮ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ, ąŠą┤ąĮą░ą║ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čłą░ą▒ą╗ąŠąĮ (usbd_cdc_if_template.c, usbd_cdc_if_template.h), čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ USART. ą×ąĮ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ąĮąĖąČąĮąĖą╣ čüą╗ąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ CDC. ąöčĆą░ą╣ą▓ąĄčĆ usbd_cdc_interface.c / usbd_cdc_interface.c.h čāą┐čĆą░ą▓ą╗čÅąĄčé ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ č鹥čĆą╝ąĖąĮą░ą╗ą░ ąĖ ąŠą▒ą╝ąĄąĮąŠą╝ ą┤ą░ąĮąĮčŗą╝ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ąĖąĮč鹥čĆč乥ą╣čüą░ USART ąĖ ą┐ąĄčĆąĄą┤ą░č湥ą╣ / ą┐čĆąĖąĄą╝ąŠą╝ ą┤ą░ąĮąĮčŗčģ).
ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā:
USBD_CDC_ItfTypeDef USBD_CDC_fops =
{
CDC_Itf_Init,
CDC_Itf_DeInit,
CDC_Itf_Control,
CDC_Itf_Receive
};
ąóą░ą▒ą╗ąĖčåą░ 29. ążčāąĮą║čåąĖąĖ usbd_cdc_interface.c, usbd_cdc_interface.h.
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
CDC_Itf_Init ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü CDC ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
CDC_Itf_DeInit ą×čéą╝ąĄąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ąĖąĮč鹥čĆč乥ą╣čüą░ CDC ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
CDC_Itf_Control ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ą░čĆčüąĖąĮą│ ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĘą░ą┐čĆąŠčüąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ CDC.
CDC_Itf_Receive ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ąŠčé čģąŠčüčéą░ USB, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ čüą╗ąŠčÅ ąĮąĖąČąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ č鹥čĆą╝ąĖąĮą░ą╗ą░ CDC (OUT-čéčĆą░ąĮąĘą░ą║čåąĖąĖ).
ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣ čéą░ą▒ą╗ąĖčåčŗ 29:
static int8_t CDC_Itf_Init (void );static int8_t CDC_Itf_DeInit (void );static int8_t CDC_Itf_Control (uint8_t cmd, uint8_t * pbuf, uint16_t length);static int8_t CDC_Itf_Receive (uint8_t * pbuf, uint32_t * Len);
ą¦č鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ IN/OUT, ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ (ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ usbd_cdc_interface.c / usbd_cdc_interface.h):
ąóą░ą▒ą╗ąĖčåą░ 30. ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ usbd_cdc_xxx_if.c, / usbd_cdc_xxx_if.h.
ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ
uint8_t UserRxBuffer[APP_RX_DATA_SIZE]; ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┐čĆąĖąĮčÅčéčŗąĄ ąĖąĘ USART ą┤ą░ąĮąĮčŗąĄ ą▓ čŹč鹊čé ą▒čāč乥čĆ. ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā USB IN ą▓ čäčāąĮą║čåąĖčÅčģ čÅą┤čĆą░ CDC.
uint32_t UserTxBufPtrOut; ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ąĖą╗ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ąĮą░čćą░ą╗ąŠ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ ą▒čāč乥čĆ UserRxBuffer.
uint8_t UserTxBuffer[APP_TX_DATA_SIZE]; ąÆ čŹč鹊čé ą▒čāč乥čĆ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą┐čĆąĖąĮčÅčéčŗąĄ CDC ą┤ą░ąĮąĮčŗąĄ. ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ ąĖąĘ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ USB OUT ą▓ čäčāąĮą║čåąĖčÅčģ čÅą┤čĆą░ CDC.
uint32_t UserTxBufPtrIn; ąŁč鹊čé čāą║ą░ąĘą░č鹥ą╗čī ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ąĖą╗ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ąĮą░čćą░ą╗ąŠ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ č湥čĆąĄąĘ USART.
ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ USB CDC . ąÆ ą┤čĆą░ą╣ą▓ąĄčĆąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮ čāčĆąŠą▓ąĄąĮčī ą░ą▒čüčéčĆą░ą║čåąĖąĖ ą┤ą╗čÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ CDC (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĖąĮč鹥čĆč乥ą╣čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ USART). ąŁčéą░ ą░ą▒čüčéčĆą░ą║čåąĖčÅ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ stm32fxxx_hal_msp.c) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąÆą░ą╝ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą║ ąĖą╝ąĄčÄčēąĄą╣čüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ.
ą¦č鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĄąĄ.
1 . ąÆ čäą░ą╣ą╗ą░čģ usbd_cdc.h ąĖ usbd_cdc_interface.h čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ:
ŌĆō čĆą░ąĘą╝ąĄčĆčŗ ą┐ą░ą║ąĄč鹊ą▓ Data IN, OUT ąĖ ą║ąŠą╝ą░ąĮą┤ (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ #define CDC_DATA_XX_IN_PACKET_SIZE, CDC_DATA_XX_OUT_PACKET_SIZE). ąŚą┤ąĄčüčī ą▓ą╝ąĄčüč鹊 "XX" ąĮą░ą┤ąŠ ą┐ąŠą┤čüčéą░ą▓ąĖčéčī FS ąĖą╗ąĖ HS, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄąČąĖą╝ą░ čüą║ąŠčĆąŠčüčéąĖ Fast Speed ąĖą╗ąĖ High Speed.
2 . ąÆčŗąĘąŠą▓ąĖč鹥 čäčāąĮą║čåąĖčÄ USBD_CDC_Init() ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ (čŹčéą░ čäčāąĮą║čåąĖčÅ čéą░ą║ąČąĄ ą▓čŗąĘąŠą▓ąĄčé ąĘą░ą▓ąĖčüčÅčēąĖąĄ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ). ąÜąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ usbd_cdc_interface.c) ąĖ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
3 . CDC-čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ IN ąĖ OUT čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┤ą▓čāą╝čÅ čäčāąĮą║čåąĖčÅą╝ąĖ:
ŌĆō USBD_CDC_SetTxBuffer ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĖą╝ąĄčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čģąŠčüčéčā USB.
4 . ąŚą░ą┐čĆąŠčüčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (CDC control requests) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ čäčāąĮą║čåąĖąĄą╣ Controllability(). ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčé ąĘą░ą┐čĆąŠčü ąŠčé čģąŠčüčéą░, ąĖ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓čüąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ, ąĄčüą╗ąĖ čéą░ą║ąŠą▓čŗąĄ ąĖą╝ąĄčÄčéčüčÅ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą┐ą░čĆčüąĖčéčī ąĘą░ą┐čĆąŠčü, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅčéčī čéčĆąĄą▒čāąĄą╝čŗąĄ ąĘą░ą┐čĆąŠčüąŠą╝ ą┤ąĄą╣čüčéą▓ąĖčÅ.
5 . ą¦č鹊ą▒čŗ ąĘą░ą║čĆčŗčéčī ąŠą▒ą╝ąĄąĮ, ą▓čŗąĘąŠą▓ąĖč鹥 čäčāąĮą║čåąĖčÄ USBD_CDC_DeInit(). ą×ąĮą░ ąĘą░ą║čĆčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, ąĖ ą▓čŗąĘčŗą▓ą░ąĄčé ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗąĄ čäčāąĮą║čåąĖąĖ, ąŠčéą╝ąĄąĮčÅčÄčēąĖąĄ čüą┤ąĄą╗ą░ąĮąĮčŗąĄ čĆą░ąĮąĄąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ.
ąśąĘą▓ąĄčüčéąĮčŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ CDC . ąÜąŠą│ą┤ą░ čŹč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čü čÅą┤čĆąŠą╝ OTG HS, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ DMA (#define USB_OTG_HS_INTERNAL_DMA_ENABLED ą▓ čäą░ą╣ą╗ąĄ usb_conf.h) ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ ą▓čüąĄą│ą┤ą░ ą▒čāą┤ąĄčé ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ 4. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 čäą░ą║čéąĖč湥čüą║ąĖ USB DMA ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ, ąĮąĄ ą▓čŗčĆąŠą▓ąĮąĄąĮąĮčŗąĄ ą┐ąŠ ą░ą┤čĆąĄčüčā ąĮą░ ą│čĆą░ąĮąĖčåčā čüą╗ąŠą▓ą░. ąöą╗čÅ čŹč鹊ą│ąŠ čüą┐ąĄčåąĖčäąĖčćąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čĆą░ąĘčĆąĄčłą░čéčī čŹčéčā ąŠą┐čåąĖčÄ ą▒ąĄąĘ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ.
[ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ ą║ą╗ą░čüčüą░ USB ]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ čüąŠąĘą┤ą░čéčī ąĮąŠą▓čŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą║ą╗ą░čüčü USB (custom class), ąŠčüąĮąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ čüčāčēąĄčüčéą▓čāčÄčēąĄą╝ ą║ą╗ą░čüčüąĄ USB.
ą¦č鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ąĮąŠą▓čŗą╣ custom Class, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1 . ąöąŠą▒ą░ą▓čīč鹥 USBD_CustomClass_cb (čćč鹊ą▒čŗ ą┐čĆąĖąĮąĖą╝ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ čłąĖąĮčŗ USB) ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓čŗčłąĄ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąśąĮč鹥čĆč乥ą╣čü ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB", ą▓ usbd_template.c / usbd_template.h, ąĮą░čģąŠą┤čÅčēąĄą╝čüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ Class/Template. ąŁč鹊čé čłą░ą▒ą╗ąŠąĮ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮčŗ ą║ ą┐ąŠčéčĆąĄą▒ąĮąŠčüčéčÅą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ ąŠąĮ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╗čÄą▒ąŠą│ąŠ čéąĖą┐ą░ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
2 . ąØą░čüčéčĆąŠą╣č鹥 ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ. ąŁčéąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čģąŠčüčé, ąĖ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ, čćč鹊ą▒čŗ ąŠą┐ąĖčüą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čüą┐ąĖčüąŠą║ ąĮąĄ ą┐ąŠą╗ąĮčŗą╣, ąŠą┤ąĮą░ą║ąŠ ą┤ą░ąĄčé ąŠą▒ąĘąŠčĆ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ:
ŌĆō čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░
3 . ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī STM32, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ USB (isochronous, Bulk, Interrupt ąĖą╗ąĖ Control), ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ:
ŌĆō ąÆ čäčāąĮą║čåąĖčÅčģ DataIn ąĖ DataOut ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ąĖą╗ąĖ ą╝ą░čłąĖąĮčā čüąŠčüč鹊čÅąĮąĖą╣.
4 . ą¤čĆąŠčåąĄčüčü ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ: ą┐ą░ą╝čÅčéčī ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ malloc (USBD_malloc):
ŌĆō USBD_malloc(sizeof (USBD_CUSTOM_CLASS_HandleTypeDef)): čŹč鹊 ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗čÅąĄą╝ą░čÅ ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ čüčéčĆčāą║čéčāčĆčŗ ą║ą╗ą░čüčüą░.
[ą×ą┐čéąĖą╝ąĖąĘą░čåąĖčÅ ą║ąŠą┤ą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ USB ]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą╝čŗ čĆą░čüčüą╝ąŠčéčĆąĖą╝ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▒ą░ąĘąŠą▓čŗąĄ čüąŠą▓ąĄčéčŗ (ą▓ąŠąĘą╝ąŠąČąĮąŠ ą▒ą░ąĮą░ą╗čīąĮčŗąĄ) ą┤ą╗čÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ąŻą╝ąĄąĮčīčłąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą▓ ą┐čĆąĖą╝ąĄčĆą░čģ USB ą▓čüąĄą│ą┤ą░ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ą░ąČąĮčŗą╝ ą▓ąŠą┐čĆąŠčüąŠą╝ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32, ąŠčüąŠą▒ąĄąĮąĮąŠ ą┤ą╗čÅ č鹥čģ, čā ą║ąŠč鹊čĆčŗčģ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ąŠą▒čŖąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ Flash/RAM, čéą░ą║ąĖčģ ą║ą░ą║ čüąĄčĆąĖąĖ STM32L0 ąĖ F0.
ąŻą╝ąĄąĮčīčłąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą║čāčćąĖ ąĖ čüč鹥ą║ą░ (ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓ čäą░ą╣ą╗ąĄ ą╗ąĖąĮą║ąĄčĆą░). ąĪč鹥ą║ čŹč鹊 ąŠą▒ą╗ą░čüčéčī ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, ą│ą┤ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čüąŠčģčĆą░ąĮčÅąĄčé:
ŌĆó ąøąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą░čĆą│čāą╝ąĄąĮčéčŗ čäčāąĮą║čåąĖąĖ
ąÜčāčćą░ čŹč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ, ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą╝ąŠąČąĮąŠ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ (ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, run time) ą▓čŗą┤ąĄą╗čÅčéčī ą▒ą╗ąŠą║ąĖ ą┐ą░ą╝čÅčéąĖ ąĮčāąČąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░. ąÆąŠ ą╝ąĮąŠą│ąĖčģ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą║čāčćą░ ą▓ąŠąŠą▒čēąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
ąĢčüą╗ąĖ ąÆą░čłą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╗ąĖąĮą║ąĄčĆą░ čĆąĄąĘąĄčĆą▓ąĖčĆčāąĄčé čüą╗ąĖčłą║ąŠą╝ ą╝ąĮąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą║čāčćąĖ ąĖ čüč鹥ą║ą░, č鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 čāč鹊čćąĮąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆąŠąĄ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ.
ąĪčéą░čĆą░ą╣č鹥čüčī ą▓čüąĄą│ą┤ą░, ąĄčüą╗ąĖ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą▓ą╝ąĄčüč鹊 ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╣ čäčāąĮą║čåąĖąĖ, ąĖ ąĄčæ ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ąĮčāąČąĮąŠ čüąŠčģčĆą░ąĮčÅčéčī ą╝ąĄąČą┤čā ąŠčéą┤ąĄą╗čīąĮčŗą╝ąĖ ą▓čŗąĘąŠą▓ą░ą╝ąĖ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, č鹊 čéą░ą║ą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ ą╗ąŠą║ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ.
ąÜąŠąĮčüčéą░ąĮčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▓čŗą┤ąĄą╗čÅčéčīčüčÅ ąĖąĘ ą┐ą░ą╝čÅčéąĖ flash. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čüąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĖąĘą╝ąĄąĮčÅčÄčéčüčÅ, ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ą░ą║ ą║ąŠąĮčüčéą░ąĮčéčŗ ą▓ čüąĄą║čåąĖąĖ ą┐ą░ą╝čÅčéąĖ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮąŠą╣ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ USB čŹč鹊 čģąŠčĆąŠčłąĖąĄ ą║ą░ąĮą┤ąĖą┤ą░čéčŗ ą┤ą╗čÅ ą┤ąĄą║ą╗ą░čĆą░čåąĖąĖ ą▓ ą▓ąĖą┤ąĄ ą║ąŠąĮčüčéą░ąĮčé, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą║ą╗čÄč湥ą▓ąŠąĄ čüą╗ąŠą▓ąŠ const čÅąĘčŗą║ą░ C.
ą¤čĆąĖą╝ąĄčĆ ą┤ąĄą║ą╗ą░čĆą░čåąĖąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ USB ą║ą░ą║ const:
/* ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ USB */ const uint8_t USBD_DeviceDesc[USB_LEN_DEV_DESC]= {
0x12 , /* bLength */
USB_DESC_TYPE_DEVICE, /* bDescriptorType */
0x00 , /* bcdUSB */
0x02 ,
0x00 , /* bDeviceClass */
0x00 , /* bDeviceSubClass */
0x00 , /* bDeviceProtocol */
USB_MAX_EP0_SIZE, /* bMaxPacketSize */
LOBYTE(USBD_VID), /* idVendor */
HIBYTE(USBD_VID), /* idVendor */
LOBYTE(USBD_PID), /* idVendor */
HIBYTE(USBD_PID), /* idVendor */
0x00 , /* bcdDevice rel. 2.00 */
0x02 ,
USBD_IDX_MFC_STR, /* ąśąĮą┤ąĄą║čü čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ */
USBD_IDX_PRODUCT_STR, /* ąśąĮą┤ąĄą║čü čüčéčĆąŠą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠą┤čāą║čéą░ */
USBD_IDX_SERIAL_STR, /* ąśąĮą┤ąĄą║čü čüčéčĆąŠą║ąĖ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░ */
USBD_MAX_NUM_CONFIGURATION /* bNumConfigurations */
}; /* USB_DeviceDescriptor */
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čüčéą░čéąĖč湥čüą║čāčÄ ą┐ą░ą╝čÅčéčī ą▓ą╝ąĄčüč鹊 malloc. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║čāčÄ ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą┤ čüčéčĆčāą║čéčāčĆčā ą║ą╗ą░čüčüą░ (class handle structure), čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ ąŠą▒čŖąĄą║č鹊ą▓ (ą▓ čüą╗čāčćą░ąĄ čĆą░ą▒ąŠčéčŗ ą▓ ą┤ą▓čāčģčÅą┤ąĄčĆąĮąŠą╣ čüčĆąĄą┤ąĄ). ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, ą║ ą┐čĆąĖą╝ąĄčĆčā, čćč鹊 ą╝čŗ ą╝ąŠąČąĄą╝ ąĖą╝ąĄčéčī ąĖą╝ąĄčéčī ą┤ą▓ą░ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ą║ą╗ą░čüčüą░ USB (HS ąĖ FS).
ąÆč鹊čĆą░čÅ ą┐čĆąĖčćąĖąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ - ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĄčæ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ USB ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
ą×ą┤ąĮą░ą║ąŠ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą▓ąĮąŠčüąĖčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĘą░čéčĆą░čéčŗ ą║ą░ą║ ą┐ą░ą╝čÅčéąĖ ą║ąŠą┤ą░, čéą░ą║ ąĖ ą┐ą░ą╝čÅčéąĖ ą┤ą░ąĮąĮčŗčģ, ąŠčüąŠą▒ąĄąĮąĮąŠ ą▓ ą┐ą░ą╝čÅčéąĖ ą║ąŠą┤ą░. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░čéąĖč湥čüą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą▓ą╝ąĄčüč鹊 ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ STM32 čü ą╝ą░ą╗čŗą╝ ąŠą▒čŖąĄą╝ąŠą╝ ą┐ą░ą╝čÅčéąĖ, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ (ą▓ą░čĆąĖą░ąĮč鹊ą▓) čüč鹥ą║ą░ USB. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░čéčī čüčéą░čéąĖč湥čüą║ąĖą╣ ą▒čāč乥čĆ ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, čćč鹊ą▒čŗ ą▓ ąĮąĄą╝ čĆą░ąĘą╝ąĄčüčéąĖą╗ą░čüčī čüčéčĆčāą║čéčāčĆą░ ą║ą╗ą░čüčüą░ USB (class handle structure).
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ:
1 . ąÆ čäą░ą╣ą╗ąĄ usbd_conf.h ąŠą┐čĆąĄą┤ąĄą╗ąĖč鹥 čüčéą░čéąĖč湥čüą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ čŹč鹊ą│ąŠ:
USBD_static_malloc()and USBD_static_free()
#define MAX_STATIC_ALLOC_SIZE 4 /* HID Class structure size */ #define USBD_malloc (uint32_t *)USBD_static_malloc #define USBD_free USBD_static_free
2 . ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ą│ąŠč鹊ą▓ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą▓ čäą░ą╣ą╗ąĄ usbd_conf.c:
/** * @brief ą×ą┤ąĖąĮąŠčćąĮąŠąĄ čüčéą░čéąĖč湥čüą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ. * @param size: čĆą░ąĘą╝ąĄčĆ ą▓čŗą┤ąĄą╗čÅąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ * @retval ą▓ąĄčĆąĮąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▓čŗą┤ąĄą╗ąĄąĮąĮčāčÄ ą┐ą░ą╝čÅčéčī */ void * USBD_static_malloc (uint32_t size)
{
static uint32_t mem[MAX_STATIC_ALLOC_SIZE];
return mem;
}
/** * @brief ąŚą░ą│ą╗čāčłą║ą░ ą┤ą╗čÅ "ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ" ą┐ą░ą╝čÅčéąĖ * @param *p čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▓čŗą┤ąĄą╗ąĄąĮąĮčāčÄ ą┐ą░ą╝čÅčéčī * @retval ąĮąĄčé ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ */ void USBD_static_free (void * p)
{
}
[FAQ ]
1 . ąÜą░ą║ ą╝ąŠąČąĮąŠ ąĮą░ ą╗ąĄčéčā ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ čüčéčĆąŠą║ąŠą▓čŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ?
ąÆ čäą░ą╣ą╗ąĄ usbd_desc.c ą┤ąĄčüą║čĆąĖą┐č鹊čĆ, ąŠčéąĮąŠčüčÅčēąĖą╣čüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ąĖ čüčéčĆąŠą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ ą▓ ą┐ąŠą╝ąŠčēčīčÄ callback-ą▓čŗąĘąŠą▓ąŠą▓ Get Descriptor. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▓ąĄčĆąĮčāčéčī ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ ą▒čāč乥čĆ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĖąĮą┤ąĄą║čüą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāčÅ ąŠą┐ąĄčĆą░č鹊čĆ switch/case.
2 . ąÜą░ą║ ą┤čĆą░ą╣ą▓ąĄčĆčā ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čģčĆą░ąĮąĄąĮąĖčÅ (mass storage class, MSC) ą┐ąŠą┤ą┤ąĄčƹȹ░čéčī ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čÄąĮąĖčéą░ (LUN)?
ąÆ čäą░ą╣ą╗ąĄ usbd_msc_storage_template.c ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓čüąĄ API, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ąĮąŠčüąĖč鹥ą╗čÅ ą┤ą░ąĮąĮčŗčģ (physical media). ąÜą░ąČą┤ą░čÅ čäčāąĮą║čåąĖčÅ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ LUN ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ą░ą┤čĆąĄčüąŠą▓ą░ąĮąĮąŠą│ąŠ ąĮąŠčüąĖč鹥ą╗čÅ.
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ The LUN ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ #define STORAGE_LUN_NBR ą▓ čäą░ą╣ą╗ąĄ usbd_msc_storage_xxx.c (ąĘą┤ąĄčüčī xxx ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ąĮąŠčüąĖč鹥ą╗čī).
ąöą╗čÅ ąĘą░ą┐čĆąŠčüą░ ą┤ą░ąĮąĮčŗčģ ą▒čāč乥čĆ STORAGE_Inquirydata čüąŠą┤ąĄčƹȹĖčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐čĆąŠčüą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ LUN. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤ą▓čāčģ LUN.
const int8_t STORAGE_Inquirydata[] = {
/* LUN 0 */
0x00 ,
0x80 ,
0x02 ,
0x02 ,
(USBD_STD_INQUIRY_LENGTH - 5 ),
0x00 ,
0x00 ,
0x00 ,
'S' , 'T' , 'M' , ' ' , ' ' , ' ' , ' ' , ' ' , /* ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čī: 8 ą▒ą░ą╣čé */
'm' , 'i' , 'c' , 'r' , 'o' , 'S' , 'D' , ' ' , /* ą¤čĆąŠą┤čāą║čé: 16 ą▒ą░ą╣čé */
'F' , 'l' , 'a' , 's' , 'h' , ' ' , ' ' , ' ' ,
'1' , '.' , '0' ,'0' , /* ąÆąĄčĆčüąĖčÅ: 4 ą▒ą░ą╣čé */
/* LUN 0 */
0x00 ,
0x80 ,
0x02 ,
0x02 ,
(USBD_STD_INQUIRY_LENGTH - 5 ),
0x00 ,
0x00 ,
0x00 ,
'S' , 'T' , 'M' , ' ' , ' ' , ' ' , ' ' , ' ' , /* ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čī: 8 bytes */
'N' , 'a' , 'n' , 'd' , ' ' , ' ' , ' ' , ' ' , /* ą¤čĆąŠą┤čāą║čé: 16 Bytes */
'F' , 'l' , 'a' , 's' , 'h' , ' ' , ' ' , ' ' ,
'1' , '.' , '0' ,'0' , /* ąÆąĄčĆčüąĖčÅ: 4 Bytes */
};
3 . ąōą┤ąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą░ą┤čĆąĄčüą░ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║?
ąÉą┤čĆąĄčüą░ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čäą░ą╣ą╗ąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ą╗ą░čüčüą░. ąÆ čüą╗čāčćą░ąĄ MSC demo, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą░ą┤čĆąĄčüą░ ą║ąŠąĮąĄčćąĮčŗčģ č鹊čćą║ąĄ IN/OUT ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čäą░ą╣ą╗ąĄ usbd_msc.h čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
#define MSC_EPIN_ADDR 0x81 // ą┤ą╗čÅ Endpoint 1 IN #define MSC_EPOUT_ADDR 0x01 // ą┤ą╗čÅ Endpoint 1 OUT
4 . ą£ąŠąČąĄčé ą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą╗ąĖą▒ąŠ ą▓ čĆąĄąČąĖą╝ąĄ High Speed, ą╗ąĖą▒ąŠ ą▓ čĆąĄąČąĖą╝ąĄ Full Speed?
ąöą░, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī USB OTG HS ąĖ USB OTG FS, ąĖ ąĄčüą╗ąĖ čÅą┤čĆąŠ USB OTG FS ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ ą▓ Full Speed mode, č鹊 USB OTG HS ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĖ čĆąĄąČąĖą╝ą░čģ High Speed ąĖ Full Speed.
ąöą╗čÅ ą▓čŗą▒ąŠčĆą░ ą┐ąŠą┤čģąŠą┤čÅčēąĄą│ąŠ čÅą┤čĆą░ To USB, čü ą║ąŠč鹊čĆčŗą╝ ąĮčāąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┤ąŠą▒ą░ą▓ąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą╝ą░ą║čĆąŠąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĄą┐čĆąŠčåąĄčüčüąŠčĆą░ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ (čŹč鹊 čāąČąĄ čüą┤ąĄą╗ą░ąĮąŠ ą▓ ąĘą░čĆą░ąĮąĄąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐čĆąŠąĄą║čéą░čģ ą┐čĆąĖą╝ąĄčĆąŠą▓):
- "USE_USB_HS" ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čÅą┤čĆąŠ USB High Speed (HS)
5 . ąÜą░ą║ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĘą╝ąĄąĮąĄąĮąĮčŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB?
ąöą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą║ąŠąĮąĄčćąĮčŗčģ č鹊čćą║ąĄ ąĖą╗ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ąĮąŠą▓ąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ:
a) ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ USBD_LL_OpenEP().
ąöą╗čÅ čüąĄčĆąĖą╣ STM32F2 ąĖ STM32F4 (čÅą┤čĆą░ FS ąĖ HS):
HAL_PCD_SetRxFiFo()
HAL_PCD_SetTxFiFo()
ą×ą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ Rx FIFO ąĖ Tx FIFO ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąŠą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ FIFO, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čÅą┤čĆąŠą╝, 320 x 32 ą▒ąĖčé (1.25 ą║ąĖą╗ąŠą▒ą░ą╣čé) ą┤ą╗čÅ čÅą┤čĆą░ USB OTG FS ąĖ 1024 x 32 ą▒ąĖčé (4 ą║ąĖą╗ąŠą▒ą░ą╣čéą░) ą┤ą╗čÅ čÅą┤čĆą░ USB OTG HS.
ąöą╗čÅ čüąĄčĆąĖą╣ STM32F0, STM32L0, STM32F1 ąĖ STM32F3 (č鹊ą╗čīą║ąŠ čÅą┤čĆąŠ FS):
6 . ąĪąŠą▓ą╝ąĄčüčéąĖą╝ą░ ą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čü ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTOS)?
ąöą░, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ą╝ąĄčüč鹥 čü RTOS, ąŠą▒ąĄčĆčéą║ą░ CMSIS RTOS wrapper ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ą┤ą╗čÅ čÅą┤čĆą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ (OS kernel).
[ąĪčüčŗą╗ą║ąĖ ]
1 . UM1734 STM32Cube USB device library site:st.com.2 . USB Mass Storage Class Devices site:wiki.osdev.org.3 . ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ USB STM32 čüąĄčĆąĖą╣ STM32F103xx ąĖ STM32F102xx .



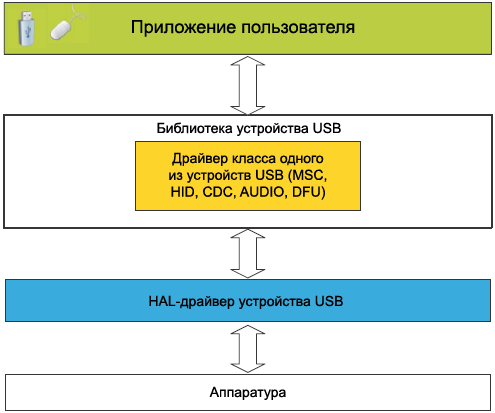


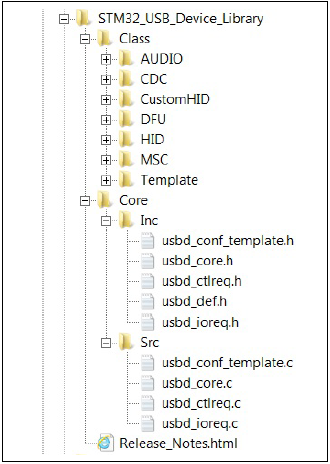







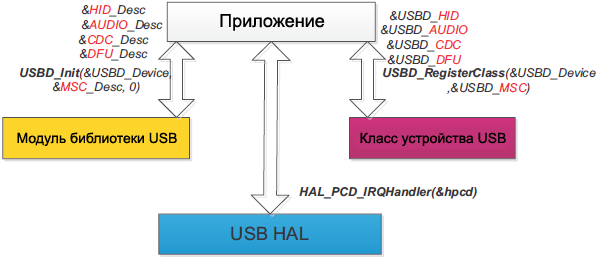
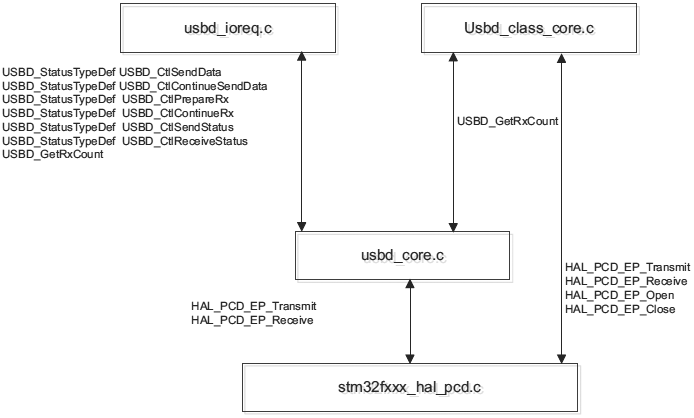


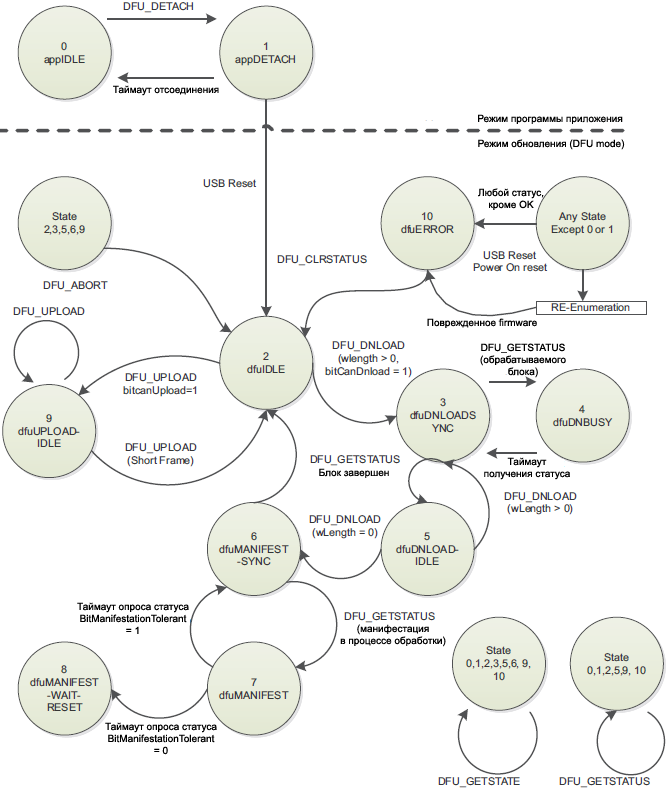

ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ą╗ąĖąĄąĮčéą░ ą║ čģąŠčüčéčā CDC, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ą╣č鹥 čüąŠą▒čŗčéąĖąĄ HOST_USER_CONNE CTION ą▓ čäčāąĮą║čåąĖąĖ USBH_UserProces s (čüą╝. ą╝ąŠą┤čāą╗čī usb_host.c).
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ