|
ąÆ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ ARM7 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel (AT91SAM7128, AT91SAM7X256, AT91SAM7512 ąĖ ą┤čĆčāą│ąĖčģ) ąĖą╝ąĄąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü USB, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ą┤ąĄą╗ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čĆą░ąĘą┤ąĄą╗ą░ ą┤ą░čéą░čłąĖčéą░ Atmel, ą┤ą░čÄčēąĖą╣ ąŠą┐ąĖčüą░ąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ čŹč鹊ą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ USB (UDP, USB Device Port). ą¤ąŠčĆčé UDP čüą▓ąŠąĖą╝ ąĮą░ąĘą▓ą░ąĮąĖąĄą╝ (Device) ą┐ąŠą┤č湥čĆą║ąĖą▓ą░ąĄčé, čćč鹊 ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü USB ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ARM7 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ USB, ąĖ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆąĄąČąĖą╝ čģąŠčüčéą░ USB.
[34.1 ą×ą▒čēąĖą╣ ąŠą▒ąĘąŠčĆ ąĖąĮč鹥čĆč乥ą╣čüą░ USB]

USB Device Port (UDP) ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ ARM7 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel čüąŠą▓ą╝ąĄčüčéąĖą╝ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ čāčüčéčĆąŠą╣čüčéą▓ čłąĖąĮčŗ Universal Serial Bus (USB) V2.0 full-speed (high-speed ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ). ąĀąĄąČąĖą╝ DMA (ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ ą▒ąĄąĘ čāčćą░čüčéąĖčÅ čÅą┤čĆą░ ARM) ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ. ąÜą░ąČą┤ą░čÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ (endpoint) ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą▓ ąŠą┤ąĖąĮ ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čéąĖą┐ąŠą▓ ą┐ąĄčĆąĄą┤ą░čć USB. ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą▓čÅąĘą░ąĮą░ čü ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą┤ą▓čāą╝čÅ ą▒ą░ąĮą║ą░ą╝ąĖ ą┤ą▓čāčģą┐ąŠčĆč鹊ą▓ąŠą╣ RAM (DPR, Dual Port RAM), ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ č鹥ą║čāčēąĖčģ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ čéčāą┤ą░ ąĖ ąŠą▒čĆą░čéąĮąŠ ą┤ą░ąĮąĮčŗčģ (č鹥ą║čāčēą░čÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░, current data payload). ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą▓ą░ ą▒ą░ąĮą║ą░, č鹊 ąŠą┤ąĖąĮ ą▒ą░ąĮą║ DPR čćąĖčéą░ąĄčéčüčÅ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ čÅą┤čĆąŠą╝ ARM (ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ firmware), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ąŠą╣ ą▒ą░ąĮą║ čćąĖčéą░ąĄčéčüčÅ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąóą░ą║ą░čÅ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī ąŠą▒čÅąĘą░č鹥ą╗čīąĮą░ ą┤ą╗čÅ ąĖąĘąŠčģčĆąŠąĮąĮčŗčģ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ (isochronous endpoints). ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą┐ąŠą╗ąŠčüčā (1 ą╝ąĄą│ą░ą▒ą░ą╣čé/čüąĄą║), ą┐čāč鹥ą╝ čĆą░ą▒ąŠčéčŗ čü ą║ąŠąĮąĄčćąĮčŗą╝ąĖ č鹊čćą║ą░ą╝ąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╝ąĖ ą┤ą▓ą░ ą▒ą░ąĮą║ą░ DPR.
ąóą░ą▒ą╗ąĖčåą░ 34-1. ą×ą┐ąĖčüą░ąĮąĖąĄ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ USB
ąØąŠą╝ąĄčĆ
ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ |
ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ąöą▓ą░ ą▒ą░ąĮą║ą░ |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ
ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čéąĖą┐čŗ
ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ |
| 0 |
EP0 |
ąĮąĄčé |
8 |
Control/Bulk/Interrupt |
| 1 |
EP1 |
ąöąÉ |
64 |
Bulk/Iso/Interrupt |
| 2 |
EP2 |
ąöąÉ |
64 |
Bulk/Iso/Interrupt |
| 3 |
EP3 |
ąĮąĄčé |
64 |
Control/Bulk/Interrupt |
| 4 |
EP4 |
ąöąÉ |
256 |
Bulk/Iso/Interrupt |
| 5 |
EP5 |
ąöąÉ |
256 |
Bulk/Iso/Interrupt |
ąĪąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend) ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (resume) čĆą░ą▒ąŠčéčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┤ąĄč鹥ą║čéąĖčĆčāčÄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB, ąĖ ąŠ ąĮąĖčģ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ą┐čĆąŠčåąĄčüčüąŠčĆ (čÅą┤čĆąŠ ARM ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░) ą┐čāč鹥ą╝ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄą╝ąŠą│ąŠ ą┐čĆąŠąĄą║čéą░, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ąĮąĄčłąĮąĖą╣ čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čģąŠčüčéą░ USB (ą║ąŠą╝ą┐čīčÄč鹥čĆą░, ą║ ą║ąŠč鹊čĆąŠą╝čā ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ąĮą░ ARM7).
[34.2 ąæą╗ąŠą║ąŠą▓ą░čÅ ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ USB]
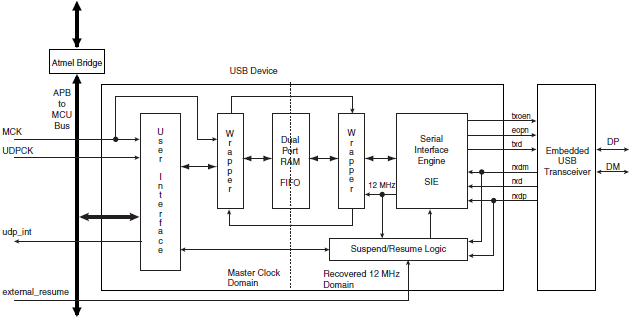
ąĀąĖčü. 34-1. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą┐ąŠčĆčéą░ UDP
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ ą▒ą╗ąŠą║ čüčģąĄą╝ąĄ:
Atmel Bridge - ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą╝ąŠčüčé, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ąĖą┤ąĄčé ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ Atmel. ą£ąŠčüčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čłąĖąĮąĄ APB ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąØą░ ąĮą░ą╗ąĖčćąĖąĄ ą╝ąŠčüčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░čēą░čéčī ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ąĮąĖą╝ą░ąĮąĖčÅ.
APB to MCU bus - čłąĖąĮą░ APB (Advanced Peripheral Bus), ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ ą║ čłąĖąĮąĄ MCU (ą╝ąĖąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░). ąÆąĮčāčéčĆąĄąĮąĮąĖąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ą║čĆąĖčüčéą░ą╗ą╗ą░, ąĮąĄ ąĮčāąČąĮąŠ ąŠą▒čĆą░čēą░čéčī ąĮą░ čŹč鹊 ą▓ąĮąĖą╝ą░ąĮąĖčÅ.
MCK, UDPCK - čéą░ą║č鹊ą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ UDP (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą┤ą░ą╗ąĄąĄ).
udp_int - čüąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé UDP.
external_resume - čüąĖą│ąĮą░ą╗ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ, ą▓čŗą▓ąŠą┤ ąĖąĘ čüą┐čÅčćą║ąĖ UDP.
USB Device - ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠč鹊čĆąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĄą│ąŠ čĆą░ą▒ąŠčéą░ ą▓ ą║ą░č湥čüčéą▓ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
User Interface - ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéą░) - ąĮą░ą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆąŠą▓, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 34-4 (čüą╝. ą┤ą░ą╗ąĄąĄ).
Wrapper - ąŠą║čĆčāąČąĄąĮąĖąĄ ą┤ą▓čāčģą┐ąŠčĆč鹊ą▓ąŠą╣ ą┐ą░ą╝čÅčéąĖ.
Dual Port RAM FIFO - ą┤ą▓čāčģą┐ąŠčĆč鹊ą▓ą░čÅ ą┐ą░ą╝čÅčéčī, ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą┤ą░ą╗ąĄąĄ.
Master Clock Domain - čćą░čüčéčī čüčģąĄą╝čŗ UDP, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ąŠčüąĮąŠą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 čÅą┤čĆą░.
Recovered 12 MHz Domain - čćą░čüčéčī čüčģąĄą╝čŗ UDP, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ąĮą░ "ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣" čćą░čüč鹊č鹥 12 ą£ąōčå.
Suspend/Resume Logic - ą╗ąŠą│ąĖą║ą░ UDP, ąŠčéą▓ąĄčćą░čÄčēą░čÅ ąĘą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║čā ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
Serial Interface Engine (SIE) - ąĮąĄą║ąĖą╣ ą▒ą╗ąŠą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą╗ąŠą│ąĖą║ąĖ. ąØą░ ąĄą│ąŠ ąĮą░ą╗ąĖčćąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā ąĮąĄ ąĮčāąČąĮąŠ ąŠą▒čĆą░čēą░čéčī ą▓ąĮąĖą╝ą░ąĮąĖčÅ.
txoen, eopn, txd, rxdm, rxd, rxdp - ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝ USB. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ąĮąĄ ąĖą╝ąĄąĄčé ą║ čŹčéąĖą╝ čüąĖą│ąĮą░ą╗ą░ą╝ ą┤ąŠčüčéčāą┐ą░, ąĖ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░čēą░čéčī ąĮą░ ąĮąĖčģ ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ąĮąĖą╝ą░ąĮąĖčÅ.
Embedded USB Transceiver - ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ čłąĖąĮčŗ USB.
DP, DM - ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ čłąĖąĮčŗ USB, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü čģąŠčüč鹊ą╝ USB. ą×ąĮąĖ ą▓čŗčģąŠą┤čÅčé ąĖąĘ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ č湥čĆąĄąĘ ąĮąŠąČą║ąĖ DDP ąĖ DDM čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ąöąŠčüčéčāą┐ ą║ UDP ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü čłąĖąĮčŗ APB. ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī FIFO ą┤ą░ąĮąĮčŗčģ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ 8-ą▒ąĖčéąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆčŗ APB.
ą¤ąĄčĆąĖč乥čĆąĖčÅ ą┐ąŠčĆčéą░ UDP čéčĆąĄą▒čāąĄčé ą┤ą▓ąĄ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ: ąŠą┤ąĮčā čćą░čüč鹊čéčā ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą┤ąŠą╝ąĄąĮąŠą╝ Master Clock (MCK) ąĖ ą┤čĆčāą│čāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā 48 ą£ąōčå (UDPCK), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą▓ ą┤ąŠą╝ąĄąĮąĄ 12 ą£ąōčå. ą¤ąŠą╗ąĮąŠčüą║ąŠčĆąŠčüčéąĮčŗąĄ USB 2.0 full-speed ą▓čŗą▓ąŠą┤čŗ ą▓čüčéčĆąŠąĄąĮčŗ ąĖ ą║ąŠąĮčéčĆąŠą╗ąĖčĆčāčÄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣ Serial Interface Engine (SIE).
ąĪąĖą│ąĮą░ą╗ external_resume (ą▓ąĮąĄčłąĮąĖąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ čĆą░ą▒ąŠčéčŗ, ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄą╝) čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝. ą×ąĮ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĖč乥čĆąĖąĖ UDP ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ čüąĖčüč鹥ą╝čŗ. ąźąŠčüčé USB ą┐čĆąĖ čŹč鹊ą╝ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ąŠ č鹊ą╝, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ (resume). ąŁčéą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čéą░ą║ąČąĄ čüąŠą│ą╗ą░čüąŠą▓ą░ąĮą░ čü čģąŠčüč鹊ą╝ ą▓ąŠ ą▓čĆąĄą╝čÅ čŹąĮčāą╝ąĄčĆą░čåąĖąĖ (enumeration).
[34.3 ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ čćąĖą┐ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (Product Dependencies)]
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čüą╝. ą▓ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 Product Properties (čüą▓ąŠą╣čüčéą▓ą░ ą┐čĆąŠą┤čāą║čéą░, ą┐ąŠą┤ ą┐čĆąŠą┤čāą║č鹊ą╝ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ARM ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel). ążąĖąĘąĖč湥čüą║ąĖą╣ ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ (transceiver) ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąöą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ DP ąĖ DM čéą░ą║ąČąĄ ą▓čŗą▓ąĄą┤ąĄąĮčŗ ąĮą░čĆčāąČčā č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DDP ąĖ DDM.
ąöą▓ąĄ ą╗ąĖąĮąĖąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O lines) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
- ąŠą┤ąĮą░ ąĮąŠąČą║ą░ (ą▓čģąŠą┤) ąĮčāąČąĮą░ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ą╗ąĖčćąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ą┐čĆąŠą▓ąŠą┤ąĄ VBUS čłąĖąĮčŗ USB (ą┐ąŠčĆčé, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ąĮą░ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ ą▓čģąŠą┤ ąÉą”ą¤). ąŻčüčéčĆąŠą╣čüčéą▓ą░ USB, ąĖą╝ąĄčÄčēąĖąĄ čüąŠą▒čüčéą▓ąĄąĮąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ, ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹč鹊čé čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, čćč鹊 čģąŠčüčé ą▓čŗą║ą╗čÄč湥ąĮ ąĖą╗ąĖ ąŠčéčüąŠąĄą┤ąĖąĮąĄąĮ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓ąĮąĄčłąĮąĖą╣ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ ąĮą░ čüąĖą│ąĮą░ą╗ąĄ DP ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčéą║ą╗čÄč湥ąĮ, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą▓čŗč鹥ą║ą░ąĮąĖąĄ č鹊ą║ą░ ą▓ čģąŠčüčé USB (ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ).
- ąŠą┤ąĮą░ ąĮąŠąČą║ą░ (ą▓čŗčģąŠą┤) ąĮčāąČąĮą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąĮąĄčłąĮąĖą╝ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╝ pull-up čĆąĄąĘąĖčüč鹊čĆąŠą╝ ąĮą░ čüąĖą│ąĮą░ą╗ąĄ DP. ą¦ąĄčĆąĄąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ąŠą┐ąŠą▓ąĄčēą░ąĄčé čģąŠčüčé, čćč鹊 ąŠąĮąŠ ą│ąŠč鹊ą▓ąŠ ą║ čĆą░ą▒ąŠč鹥.
ąöą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ K (ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čģąŠčüčéą░, čüą╝. ą┤ą░ą╗ąĄąĄ) ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ čéčĆąĄčéčīčÅ ąĮąŠąČą║ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
34.3.1 ąĪąĖą│ąĮą░ą╗čŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O Lines)
ąĪąĖą│ąĮą░ą╗čŗ DP ąĖ DM čłąĖąĮčŗ USB ąĮąĖą║ą░ą║ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ č湥čĆąĄąĘ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ PIO. ą×ąĮąĖ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ čäąĖąĘąĖč湥čüą║ąĖą╝ USB-čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╝ ąŠčé ą┐ąĄčĆąĖč乥čĆąĖąĖ USB čāčüčéčĆąŠą╣čüčéą▓ą░ (UDP). ą¦č鹊ą▒čŗ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░čéčī ą╗ąĖąĮąĖčÄ I/O ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ VBUS, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ą┤ąŠą╗ąČąĄąĮ čüąĮą░čćą░ą╗ą░ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO, čćč鹊ą▒čŗ ąĮą░ąĘąĮą░čćąĖčéčī čŹčéčā ą╗ąĖąĮąĖčÄ (ąĮąŠąČą║čā) I/O ą║ą░ą║ ą▓čģąŠą┤. ą¦č鹊ą▒čŗ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░čéčī ą╗ąĖąĮąĖčÄ I/O ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąĮąĄčłąĮąĖą╝ pull-up, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ą┤ąŠą╗ąČąĄąĮ čüąĮą░čćą░ą╗ą░ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO, čćč鹊ą▒čŗ ąĮą░ąĘąĮą░čćąĖčéčī čŹčéčā ą╗ąĖąĮąĖčÄ (ąĮąŠąČą║čā) I/O ą║ą░ą║ ą▓čŗčģąŠą┤.
34.3.2 ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management)
UDP čéčĆąĄą▒čāąĄčé čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ 48 ą£ąōčå. ąŁčéą░ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ PLL, čü č鹊čćąĮąŠčüčéčīčÄ +-0.25%. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą┐ąŠą╗čāčćą░ąĄčé ą┤ą▓ąĄ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ ąŠčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ Power Management Controller (PMC): ą│ą╗ą░ą▓ąĮą░čÅ čćą░čüč鹊čéą░ master clock, MCK, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ čćą░čüč鹊čéą░ UDPCK, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ čü čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čłąĖąĮčŗ USB (ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┤ąŠą╝ąĄąĮ 12 ą£ąōčå).
ąÆąØąśą£ąÉąØąśąĢ: čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ UDP ą▓ Power Management Controller (PMC) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐ąĄčĆąĄą┤ ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ čćč鹥ąĮąĖčÅ-ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ UDP, ą▓ą║ą╗čÄčćą░čÅ čĆąĄą│ąĖčüčéčĆ UDP_TXCV (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝).
34.3.3 ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (Interrupt)
ąśąĮč鹥čĆč乥ą╣čü čāčüčéčĆąŠą╣čüčéą▓ą░ USB ąĖą╝ąĄąĄčé ą╗ąĖąĮąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčāčÄ ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ Advanced Interrupt Controller (AIC). ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čéčĆąĄą▒čāąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ AIC ą┐ąĄčĆąĄą┤ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄą╝ UDP.
[34.4 ą¤čĆąĖą╝ąĄčĆ čéąĖą┐ąĖčćąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠą▓ąŠą┤ąŠą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ USB (Typical Connection)]
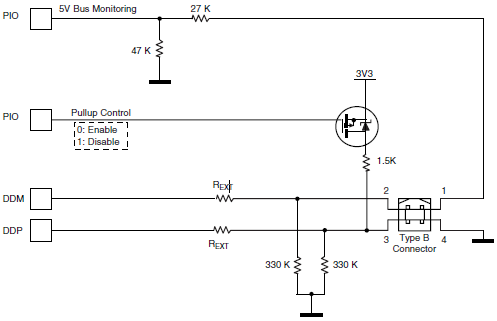
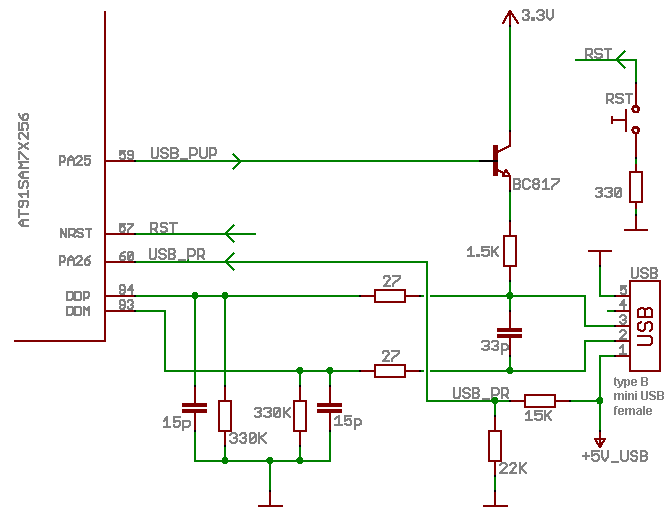
ąĀąĖčü. 34-2. ąĪčģąĄą╝ą░ ą┐ą╗ą░čéčŗ ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą╣ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ čü UDP
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ čüčģąĄą╝ąĄ:
PIO - ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą┐ąŠčĆčéą░ą╝ (ąĮąŠąČą║ą░ą╝) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
DDM, DDP - ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĖąĮč鹥čĆč乥ą╣čüą░ USB, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą▓ąĄą┤ąĄąĮčŗ ąĮą░ ąĮąŠąČą║ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
5V Bus Monitoring - ą║ąŠąĮčéčĆąŠą╗čī ąĮą░ą╗ąĖčćąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ +5V ąĮą░ ą┐čĆąŠą▓ąŠą┤ąĄ VBUS ąĖąĮč鹥čĆč乥ą╣čüą░ USB.
Pullup Control - čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ pull-up 1.5 ą║ą×ą╝. ąøąŠą│. 0 (0: Enable) ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčé čĆąĄąĘąĖčüč鹊čĆ, ą░ ą╗ąŠą│. 1 (1: Disable) ąŠčéą║ą╗čÄčćą░ąĄčé.
REXT - ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čĆąĄąĘąĖčüč鹊čĆčŗ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ čüąŠą│ą╗ą░čüąŠą▓ą░ąĮąĖčÅ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą╗ąĖąĮąĖąĖ USB (čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ąŠčéčĆą░ąČąĄąĮąĖą╣ čüąĖą│ąĮą░ą╗ą░).
Type B Connector - ą▓ąĮąĄčłąĮąĖą╣ ą║ąŠąĮąĮąĄą║č鹊čĆ USB-čāčüčéčĆąŠą╣čüčéą▓ą░ USB, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ąŠąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ čģąŠčüčéčā čüą╝. [2].
ąśąĮč鹥čĆąĄčüąĮąŠ čéą░ą║ąČąĄ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą┤čĆčāą│ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čüčģąĄą╝čŗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ USB ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AT91SAM7X. ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ čüčģąĄą╝ą░ ąĖąĮč鹥čĆč乥ą╣čüą░ USB ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ sam7-ex256 ą║ąŠą╝ą┐ą░ąĮąĖąĖ OLIMEX.
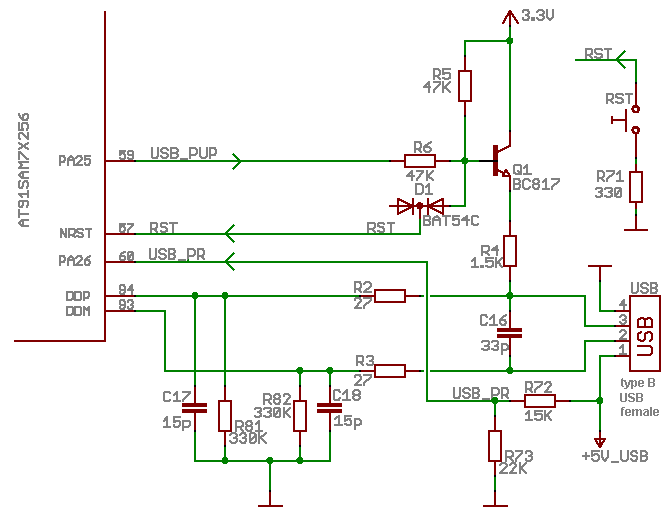
ąĪčģąĄą╝ą░ OLIMEX ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ą┤ą░čéą░čłąĖčéą░ Atmel. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąŠąĮą░ ą╗čāčćčłąĄ č鹥ą╝, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ą▒ąŠčéą░čéčī ą┐ąŠ USB ąĘą░ą│čĆčāąĘčćąĖą║čā SAM-BA. ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠč鹊ą╝čā, čćč鹊 čéčĆą░ąĮąĘąĖčüč鹊čĆ Q1 ą▒čāą┤ąĄčé ąŠčéą║čĆčŗčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ 3.3V, ą┐ąŠčüčéčāą┐ą░čÄčēąĖą╝ ąŠčé ąĮąŠąČą║ąĖ PIO PA25, čéą░ą║ čéą░ą║ ą║ą░ą║ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠą│ą┤ą░ flash-ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüč鹥čĆčéą░, ąĖ ą▓čüąĄ PIO ąĮą░čüčéčĆąŠąĄąĮčŗ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą║ą░ą║ ą▓čģąŠą┤čŗ čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ pull-up čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ. ą×čéą║čĆčŗčéčŗą╣ čéčĆą░ąĮąĘąĖčüč鹊čĆ ą┐ąŠą┤ą║ą╗čÄčćąĖčé pull-up čĆąĄąĘąĖčüč鹊čĆ 1.5 ą║ą×ą╝ ą║ ą╗ąĖąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ USB D+, č湥ą╝ ąŠą▒ąĄčüą┐ąĄčćąĖčé ą▓ąĖą┤ąĖą╝ąŠčüčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ ą┤ą╗čÅ čģąŠčüčéą░. ą¤čĆąĖ ąĮą░ąČą░čéąĖąĖ ąĮą░ ą║ąĮąŠą┐ą║čā čüą▒čĆąŠčüą░ pull-up čĆąĄąĘąĖčüč鹊čĆ ą▒čāą┤ąĄčé ąŠčéą║ą╗čÄčćą░čéčīčüčÅ, čćč鹊 ą▒čāą┤ąĄčé ą┤ą╗čÅ čģąŠčüčéą░ ąŠąĘąĮą░čćą░čéčī, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ąŠčéą║ą╗čÄč湥ąĮąŠ (ąĮąĖąĘą║ąĖą╣ ą┐ąŠč鹥ąĮčåąĖą░ą╗ č湥čĆąĄąĘ ą┤ąĖąŠą┤ D1 ą┐ąŠą┐ą░ą┤ąĄčé ąĮą░ ą▒ą░ąĘčā čéčĆą░ąĮąĘąĖčüč鹊čĆą░, ąĖ ąŠąĮ ąĘą░ą║čĆąŠąĄčéčüčÅ). ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ, čćč鹊 ąĮąĄ čāą╝ąĄąĄčé čŹčéą░ čüčģąĄą╝ą░ - č乊čĆą╝ąĖčĆąŠą▓ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ K (čüą╝. ą┤ą░ą╗ąĄąĄ).
ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╣ čüčģąĄą╝ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ USB ąĮą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 AT91SAM7X [3].
ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓ą░čĆąĖą░ąĮčé čüčģąĄą╝čŗ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ AT91SAM7X ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ Olimex ąŠčéčüčāčéčüčéą▓ąĖąĄą╝ čĆą░ąĘą▓ąŠą┤ą║ąĖ čüąĖą│ąĮą░ą╗ą░ čüą▒čĆąŠčüą░ RST ąĮą░ ąŠčéą║ą╗čÄč湥ąĮąĖąĄ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ 1.5 ą║ą×ą╝. ąÆ ąŠčüčéą░ą╗čīąĮąŠą╝ čüčģąĄą╝ą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą▒ą╗ą░ą┤ą░ąĄčé č鹥ą╝ ąČąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝, čćč鹊 ąĖ čā Olimex.
ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ čüčģąĄą╝ą░ USB ąĖąĮč鹥čĆč乥ą╣čüą░ čüą░ą╝ąŠą╣ ą┤ąŠčĆąŠą│ąŠą╣ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ ą┤ą╗čÅ čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ARM7, AT91SAM7X-EK ąŠčé ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel.

ąŁč鹊čé ą▓ą░čĆąĖą░ąĮčé čüčģąĄą╝čŗ čüąŠą▓čüąĄą╝ ą┐čĆąŠčüč鹊ą╣. ąØą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ 1.5 ą║ą×ą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą┐ąŠčüč鹊čÅąĮąĮąŠ, ąŠčéčüčāčéčüčéą▓čāąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĄą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (ąĮąĄčé čüąĖą│ąĮą░ą╗ą░ USB_PUP). ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 firmware ą┤ąŠą╗ąČąĮąŠ čüčĆą░ąĘčā ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčī ą┐ąŠą┤ą┤ąĄčƹȹ║čā ąĖąĮč鹥čĆč乥ą╣čüą░ USB. ą¤ąŠčŹč鹊ą╝čā čéą░ą║ąČąĄ ąŠčéčüčāčéčüčéą▓čāąĄčé čüąĖą│ąĮą░ą╗ ąŠ ąĮą░ą╗ąĖčćąĖąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ą┐čĆąŠą▓ąŠą┤ąĄ VBUS (ąĮąĄčé čüąĖą│ąĮą░ą╗ą░ USB_PR). ąĀą░ą▒ąŠčéą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ SAM-BA ą┐ąŠ USB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č鹊ą╝čā, čćč鹊 čĆąĄąĘąĖčüč鹊čĆ pull-up 1.5 ą║ą×ą╝ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čüąĖą│ąĮą░ą╗čā D+ (čĆąĄąĘąĖčüč鹊čĆ ą▓čüčéčĆąŠąĄąĮ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ąĘą░čēąĖčéčŗ MN1 USBUF02W6).
34.4.1 ą¤čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║, čéčĆą░ąĮčüąĖą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ USB (USB Device Transceiver)
ą¤čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą▓čüčéčĆąŠąĄąĮ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąóą░ą║ąČąĄ ąĮčāąČąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▓ąĮąĄčłąĮąĖčģ ą┤ąĄčéą░ą╗ąĄą╣ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ čåąĄą╗ąĄą╣:
- ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ (ą┐čĆąŠą│čĆą░ą╝ą╝ą░ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░) ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ą▓čüąĄ čüąŠčüč鹊čÅąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ą▓ ą¦ą░čüčéąĖ 9 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (Universal Serial Bus Specification, Rev. 2.0).
- čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ/ąĘą░ą┐čĆąĄčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą│ąŠ pull-up čĆąĄąĘąĖčüč鹊čĆą░.
- ąŠą┐čĆąŠčü ąĮą░ą╗ąĖčćąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ čłąĖąĮąĄ VBUS.
- čāą╝ąĄąĮčīčłąĄąĮąĖąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą┐čĆąĖ ąŠčéą║ą╗čÄč湥ąĮąĖąĖ čģąŠčüčéą░ USB.
- ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą╗ąĖąĮąĖą╣ čłąĖąĮčŗ USB (line termination).
ąØą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮąŠą╣ čüčģąĄą╝ąĄ ą┐čĆąĖą╝ąĄčĆą░ ąĀąĖčü. 34-2 čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆąŠą╝ pull-up 1.5 ą║ą×ą╝ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čéčĆą░ąĮąĘąĖčüč鹊čĆą░ MOSFET (p-ą║ą░ąĮą░ą╗), ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝ firmware č湥čĆąĄąĘ ą╗ąĖąĮąĖčÄ PIO Pullup Control. ąĀąĄąĘąĖčüč鹊čĆ pull-up ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮ (ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ čģąŠčüčéą░ USB), ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé ąĮąŠąČą║čā ą┐ąŠčĆčéą░ Pullup Control ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ PIO ą▒čāą┤ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī ą╗ąŠą│. 1 ą┤ą╗čÅ čéčĆą░ąĮąĘąĖčüč鹊čĆą░ MOSFET, čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĘą░ą┐čĆąĄčéčā pull-up čĆąĄąĘąĖčüč鹊čĆą░. (ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ą┐ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮą░čÅ čüčģąĄą╝ą░ ąĮąĄ ą┐ąŠąĘą▓ąŠą╗ąĖčé ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆąŠą╝ SAM-BA ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ č湥čĆąĄąĘ USB ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ firmware, čéą░ą║ ą║ą░ą║ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą▓čüąĄ ą┐ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░ ą▓čŗą▓ąŠą┤ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ARM7 ąĮą░čüčéčĆąŠąĄąĮčŗ ą║ą░ą║ ą▓čģąŠą┤čŗ čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ pull-up čĆąĄąĘąĖčüč鹊čĆąŠą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčĆčéą░ Pullup Control ą▒čāą┤ąĄčé ą╗ąŠą│. 1, MOSFET čéčĆą░ąĮąĘąĖčüč鹊čĆ ą▒čāą┤ąĄčé ąĘą░ą║čĆčŗčé, čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĖ USB-čāčüčéčĆąŠą╣čüčéą▓ą░ SAM-BA ą┤ą╗čÅ čģąŠčüčéą░ USB). ąÜą░ą║ č鹊ą╗čīą║ąŠ čĆąĄąĘąĖčüč鹊čĆ pull-up ą▒čāą┤ąĄčé čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 čģąŠčüčé č湥čĆąĄąĘ 100 ą╝čü ą▓čŗą┤ą░čüčé ąĮą░ čłąĖąĮčā USB čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (device reset). ąŻčüčéčĆąŠą╣čüčéą▓ą░, ąĘą░ą┐ąĖčéčŗą▓ą░ąĄą╝čŗąĄ ąŠčé čłąĖąĮčŗ USB, ą┤ąŠą╗ąČąĮčŗ ąĘą░ 100 ą╝čü čāčüą┐ąĄčéčī ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čĆąĄąĘąĖčüč鹊čĆ pull-up. (ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ čéą░ą║ąČąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ "čüąŠčüč鹊čÅąĮąĖčÅ K" ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čģąŠčüčéą░ USB, čüą╝. čĆą░ąĘą┤ąĄą╗ 34.5.3.8 Sending a Device Remote Wakeup.)
34.4.2 ą×ą┐čĆąŠčü čüąŠčüč鹊čÅąĮąĖčÅ VBUS (VBUS Monitoring)
ą£ąŠąĮąĖč鹊čĆąĖąĮą│ čüąĖą│ąĮą░ą╗ą░ VBUS ąĮčāąČąĄąĮ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čģąŠčüčéą░. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąŠ č湥čĆąĄąĘ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┐ąŠčĆčé PIO čü ą▓čŗą║ą╗čÄč湥ąĮąĮčŗą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ pull-up. ąÜąŠą│ą┤ą░ čģąŠčüčé ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ, č鹊 ąĮčāąČąĮąŠ ąŠčéčüą╗ąĄą┤ąĖčéčī čŹčéčā čüąĖčéčāą░čåąĖčÄ, ąĖ ą▓ąĮąĄčłąĮąĖą╣ pull-up čĆąĄąĘąĖčüč鹊čĆ ąĮą░ą┤ąŠ ąŠčéą║ą╗čÄčćąĖčéčī (čćč鹊ą▒čŗ ąĮąĄ ą┐ąŠą┤ą░ą▓ą░čéčī ą▓ čģąŠčüčé ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ č湥čĆąĄąĘ pull-up čĆąĄąĘąĖčüč鹊čĆ 1.5 ą║ą×ą╝).
ąÜąŠą│ą┤ą░ čģąŠčüčé USB ąŠčéą║ą╗čÄč湥ąĮ ąĖ čéčĆą░ąĮčüąĖą▓ąĄčĆ ąŠčüčéą░ą╗čüčÅ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝, č鹊 ą▓čŗą▓ąŠą┤čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DDP ąĖ DDM (ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ ą┐čĆąŠą▓ąŠą┤ą░ą╝ D+ ąĖ D- čłąĖąĮčŗ USB), ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ą▓ ą┐ąŠą┤ą▓ąĄčłąĄąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ. ąŁč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĄ čéčĆą░ąĮčüąĖą▓ąĄčĆą░. ą¦č鹊ą▒čŗ čāčüčéčĆą░ąĮąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą▓ą░ ąĮąĖąČąĮąĖčģ ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆą░ (pull-down) 330 ą║ą×ą╝, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ GND ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ DP ąĖ DM (čüą╝. ąĀąĖčü. 34-2). ąŁčéąĖ čĆąĄąĘąĖčüč鹊čĆčŗ ąĮąĄ ą┐ąŠą▓ą╗ąĖčÅčÄčé ąĮą░ čĆą░ą▒ąŠčéčā ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą▓čŗą▓ąŠą┤ąŠą▓ DDP ąĖ DDM.
ąóą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą┤ą▓ą░ č鹥čĆą╝ąĖąĮąĖčĆčāčÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆą░ REXT ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓ čåąĄą┐ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ DP ąĖ DM. ąŚąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĖąĮą░ą╗ą░ čĆąĄąĘąĖčüč鹊čĆą░ čāą║ą░ąĘą░ąĮąŠ ą▓ 菹╗ąĄą║čéčĆąĖč湥čüą║ąŠą╣ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ą┐ą░čĆą░ą╝ąĄčéčĆ REXT).
[34.5 ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ UDP]
34.5.1 ąÆą▓ąĄą┤ąĄąĮąĖąĄ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÄ USB V2.0 Full-speed
USB V2.0 Full-speed ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąĄčĆą▓ąĖčüčŗ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü čģąŠčüč鹊ą╝ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ USB. ąÜą░ąČą┤ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ąŠčüąĮą░čēąĄąĮąŠ ąĮą░ą▒ąŠčĆąŠą╝ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ą║ą░ąČą┤ąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣ (ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ). ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ čģąŠčüčéą░ (ą¤ą× čģąŠčüčéą░) ąŠą▒ą╝ąĄąĮąĖą▓ą░ąĄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB č湥čĆąĄąĘ čŹč鹊čé ąĮą░ą▒ąŠčĆ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ą┐ąŠč鹊ą║ąŠą▓.
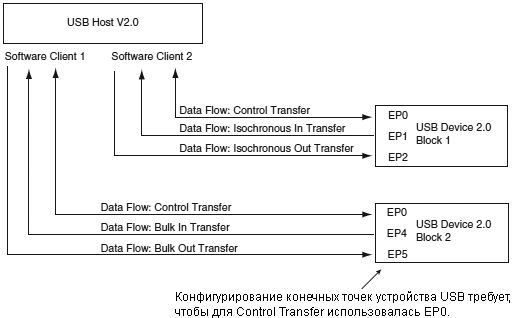
ąĀąĖčü. 34-3. ą¤čĆąĖą╝ąĄčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÅą╝ąĖ USB V2.0 Full-speed
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ ą║ ą┐čĆąĖą╝ąĄčĆčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒ą╝ąĄąĮąŠą╝:
USB Host V2.0 - čģąŠčüčé USB, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖą╣ čüčéą░ąĮą┤ą░čĆčé USB 2.0 (ąŠą▒čŗčćąĮąŠ čŹč鹊 ą║ąŠą╝ą┐čīčÄč鹥čĆ).
Software Client - ą¤ą× čģąŠčüčéą░, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB.
Data Flow - ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąŠčģąŠą┤čÅčēąĖą╣ č湥čĆąĄąĘ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā.
Control Transfer, Isochronous In Transfer, Isochronous Out Transfer, Bulk In Transfer, Bulk Out Transfer - čĆą░ąĘą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ ą┐ąĄčĆąĄą┤ą░čć.
EP0, EP1, .., EP5 - ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB (EP - ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ ąŠčé End Point).
ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░č湥ą╣ (Control Transfer endpoint) EP0 ą▓čüąĄą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ą┐ąĄčĆą▓čŗąĄ ą┐ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┐čĆąŠčģąŠą┤ąĖčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ (čüąŠą│ą╗ą░čüąĮąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB V2.0 Full-speed).
34.5.1.1 ąóąĖą┐čŗ ą┐ąĄčĆąĄą┤ą░čć (Transfer Types) USB V2.0 Full-speed
ą¤ąŠč鹊ą║ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąŠą┤ąĮąĖą╝ ąĖąĘ 4 čüą┐ąŠčüąŠą▒ąŠą▓ (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ąĖąĘąŠčģčĆąŠąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, bulk), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┤ą░ąĮčŗ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB (čüą╝. čéą░ą▒ą╗ąĖčåčā 34-2).
ąóą░ą▒ą╗ąĖčåą░ 34-2. USB Communication Flow
| ąóąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ |
ą¤ąŠą╗ąŠčüą░ |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čĆą░ąĘą╝ąĄčĆčŗ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ |
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ąŠą║ |
ą¤ąŠą▓č鹊čĆčŗ ą┐ąĄčĆąĄą┤ą░čć ą┐čĆąĖ ąŠčłąĖą▒ą║ąĄ |
| Control |
ą▓ ąŠą▒ąĄ čüč鹊čĆąŠąĮčŗ |
ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮą░čÅ |
8, 16, 32, 64 |
ąöąÉ |
ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖąĄ |
| Isochronous |
ąŠą┤ąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ |
ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮą░čÅ |
256 |
ąöąÉ |
ąĮąĄčé |
| Interrupt |
ąŠą┤ąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ |
ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮą░čÅ |
ąĮąĄ ą▒ąŠą╗ąĄąĄ 64 |
ąöąÉ |
ąöąÉ |
| Bulk |
ąŠą┤ąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ |
ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮą░čÅ |
8, 16, 32, 64 |
ąöąÉ |
ąöąÉ |
34.5.1.2 ąóčĆą░ąĮąĘą░ą║čåąĖąĖ čłąĖąĮčŗ USB
ąÜą░ąČą┤čŗą╣ čéčĆą░ąĮčüč乥čĆ (ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ą░ą║čāčÄ-ąĮąĖą▒čāą┤čī čüč鹊čĆąŠąĮčā) čÅą▓ą╗čÅąĄčéčüčÅ čĆąĄąĘčāą╗čīčéą░č鹊ą╝ ąŠą┤ąĮąŠą╣ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čéčĆą░ąĮąĘą░ą║čåąĖą╣ čłąĖąĮčŗ USB. ąĢčüčéčī čéčĆąĖ ą▓ąĖą┤ą░ čéčĆą░ąĮąĘą░ą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ ą▓ ą┐ą░ą║ąĄčéą░čģ (čüą╝. čéą░ą║ąČąĄ [1]):
1. Setup Transaction
2. Data IN Transaction
3. Data OUT Transaction
34.5.1.3 ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ čéčĆą░ąĮčüč乥čĆą░ USB (USB Transfer Event Definitions)
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ, čéčĆą░ąĮčüč乥čĆčŗ čÅą▓ą╗čÅčÄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ąĖ čüąŠą▒čŗčéąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ USB.
ąóą░ą▒ą╗ąĖčåą░ 34-3. USB Transfer Events
| ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ (Control Transfers (1) (3)) |
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Setup > čéčĆą░ąĮąĘą░ą║čåąĖąĖ Data IN > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Status OUT
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Setup > čéčĆą░ąĮąĘą░ą║čåąĖąĖ Data OUT > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Status IN
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Setup > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Status IN |
| ą¤ąĄčĆąĄą┤ą░čćą░ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ IN (Interrupt IN Transfer, ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą║ čģąŠčüčéčā USB) |
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN |
| ą¤ąĄčĆąĄą┤ą░čćą░ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ OUT (Interrupt OUT Transfer, ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčé čģąŠčüčéą░ USB ą║ čāčüčéčĆąŠą╣čüčéą▓čā USB) |
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data OUT > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data OUT |
| ąśąĘąŠčģčĆąŠąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ IN (Isochronous IN Transfer(2), ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą║ čģąŠčüčéčā USB) |
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN |
| ąśąĘąŠčģčĆąŠąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ OUT (Isochronous OUT Transfer(2), ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčé čģąŠčüčéą░ USB ą║ čāčüčéčĆąŠą╣čüčéą▓čā USB) |
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data OUT > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data OUT |
| ąæą╗ąŠčćąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ IN (Bulk IN Transfer, ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą║ čģąŠčüčéčā USB) |
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN |
| ąæą╗ąŠčćąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ OUT (Bulk OUT Transfer, ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčé čģąŠčüčéą░ USB ą║ čāčüčéčĆąŠą╣čüčéą▓čā USB) |
- čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data OUT > čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data OUT |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ ą║ čéą░ą▒ą╗ąĖčåąĄ 34-3:
1. ąŻą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą▒ąĄąĘ ą░čéčĆąĖą▒čāč鹊ą▓ ping-pong.
2. ąśąĘąŠčģčĆąŠąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ čü ą░čéčĆąĖą▒čāčéą░ą╝ąĖ ping-pong.
3. ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą▒ąŠčĆą▓ą░ąĮčŗ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠčüčéą░ąĮąŠą▓ą░ (stall handshake).
ąóčĆą░ąĮąĘą░ą║čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠčüč鹊čÅąĮąĖčÅ (status transaction) čÅą▓ą╗čÅąĄčéčüčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā (host-to-device) čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ čéąĖą┐ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ č鹊ą╗čīą║ąŠ ą▓ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐ąĄčĆąĄą┤ą░č湥. ąŻą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ą▒ąĄąĘ ą░čéčĆąĖą▒čāč鹊ą▓ ping-pong. ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ (čćč鹥ąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī) čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą┐ąĄčĆąĄą┤ą░ąĄčé ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čéčĆą░ąĮąĘą░ą║čåąĖčÄ čüąŠčüč鹊čÅąĮąĖčÅ.
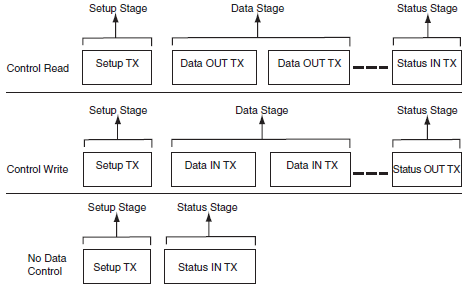
ąĀąĖčü. 34-4. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ Control Read ąĖ Control Write
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ ą║ čĆąĖčü. 34-4:
1. ąÆąŠ ą▓čĆąĄą╝čÅ čüčéą░ą┤ąĖąĖ Status IN čģąŠčüčé ąŠąČąĖą┤ą░ąĄčé ą┐ą░ą║ąĄčéą░ ąĮčāą╗ąĄą▓ąŠą╣ ą┤ą╗ąĖąĮčŗ (zero length packet, čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN ą▒ąĄąĘ ą┤ą░ąĮąĮčŗčģ) ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ DATA1 PID. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéąĖ 8 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (Universal Serial Bus Specification, Rev. 2.0) ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüą╗ąŠčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░.
2. ąÆąŠ ą▓čĆąĄą╝čÅ čüčéą░ą┤ąĖąĖ Status OUT čģąŠčüčé ą┐ąĄčĆąĄą┤ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓čā zero length packet (čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data OUT ą▒ąĄąĘ ą┤ą░ąĮąĮčŗčģ).
34.5.2 ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čéčĆą░ąĮąĘą░ą║čåąĖą╣ čü ą┐ąĄčĆąĖč乥čĆąĖąĄą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB V2.0
34.5.2.1 Setup Transaction
Setup čÅą▓ą╗čÅąĄčéčüčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ čéąĖą┐ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą┐ąĄčĆąĄą┤ą░čć. ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠąĮčéčĆąŠą╗čīąĮčŗčģ č鹊č湥ą║ ą▒ąĄąĘ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗčģ ą░čéčĆąĖą▒čāč鹊ą▓ ping-pong. ąóčĆą░ąĮąĘą░ą║čåąĖčÅ Setup ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮą░ ą▓ firmware čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒čŗčüčéčĆąŠ, ą║ą░ą║ čŹč鹊 č鹊ą╗čīą║ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠ. ąóčĆą░ąĮąĘą░ą║čåąĖčÅ Setup ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┐čĆąŠčüąŠą▓ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā. ąŁčéąĖ ąĘą░ą┐čĆąŠčüčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB, ąĖ ąĖą╝ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą░čĆą│čāą╝ąĄąĮč鹊ą▓. ąÉčĆą│čāą╝ąĄąĮčéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓čā čéčĆą░ąĮąĘą░ą║čåąĖčÅą╝ąĖ Data OUT, ą║ąŠč鹊čĆčŗąĄ ąĖą┤čāčé ąĘą░ čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣ Setup. ąŁčéąĖ ąĘą░ą┐čĆąŠčüčŗ ą╝ąŠą│čāčé čéą░ą║ąČąĄ ą▓ąŠąĘą▓čĆą░čēą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠą▒čĆą░čéąĮąŠ. ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄąĮąŠčüčÅčéčüčÅ ą║ čģąŠčüčéčā ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣ Data IN, ą║ąŠč鹊čĆą░čÅ čüą╗ąĄą┤čāąĄčé ąĘą░ čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣ Setup. ąŻą┐čĆą░ą▓ą╗čÅčÄčēčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā (control transfer) ąĘą░ą▓ąĄčĆčłą░ąĄčé čéčĆą░ąĮąĘą░ą║čåąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ (status transaction).
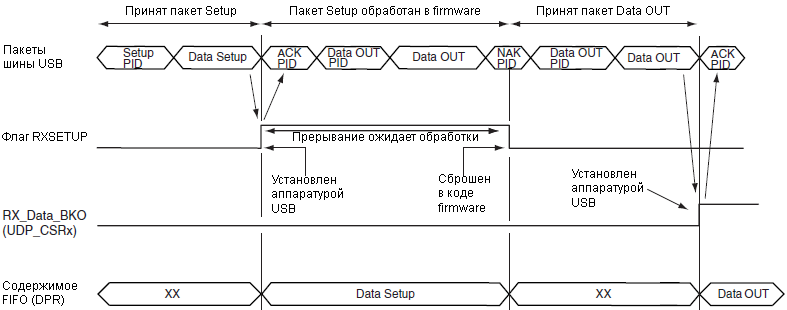
ąÜąŠą│ą┤ą░ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ USB ą┐ąŠą╗čāčćąĖą╗ą░ ą┐ąĄčĆąĄą┤ą░čćčā Setup:
- čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé ą┐ą░ą║ąĄčé Setup.
- ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_ CSRx čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čäą╗ą░ą│ RXSETUP.
- ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ RXSETUP ąĮąĄ ąŠčćąĖčēą░ąĄčéčüčÅ. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ), ąĄčüą╗ąĖ ą┤ą╗čÅ čŹč鹊ą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, firmware ą┤ąŠą╗ąČąĮąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī RXSETUP ą┐čāč鹥ą╝ ąŠą┐čĆąŠčüą░ UDP_ CSRx ąĖą╗ąĖ ą┐čāč鹥ą╝ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐čĆąŠčćąĖčéą░čéčī ą┐ą░ą║ąĄčé setup ąĖąĘ FIFO, ąĖ ąĘą░č鹥ą╝ ąŠčćąĖčüčéąĖčéčī čäą╗ą░ą│ RXSETUP. ążą╗ą░ą│ RXSETUP ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮ ą┤ąŠ čćč鹥ąĮąĖčÅ ą┐ą░ą║ąĄčéą░ setup ąĖąĘ FIFO. ąśąĮą░č湥 čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą┐čĆąĖą╝ąĄčé čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā Data OUT ąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčłąĄčé ą┐ą░ą║ąĄčé setup ą▓ FIFO.
ąĀąĖčü. 34-5. ąóčĆą░ąĮąĘą░ą║čåąĖčÅ Setup, ąĘą░ ą║ąŠč鹊čĆąŠą╣ čüą╗ąĄą┤čāąĄčé čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data OUT
34.5.2.2 Data IN Transaction
ąóčĆą░ąĮąĘą░ą║čåąĖąĖ Data IN ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą┐ąĄčĆąĄą┤ą░čćą░čģ čéąĖą┐ą░ control, isochronous, bulk ąĖ interrupt, ąĖ ą┐ąĄčĆąĄąĮąŠčüčÅčé ą┤ą░ąĮąĮčŗąĄ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ čģąŠčüčéčā. ąóčĆą░ąĮąĘą░ą║čåąĖąĖ Data IN ą▓ ąĖąĘąŠčģčĆąŠąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćą░čģ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī č湥čĆąĄąĘ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ čü ą░čéčĆąĖą▒čāčéą░ą╝ąĖ ping-pong.
34.5.2.3 ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ą▒ąĄąĘ ą░čéčĆąĖą▒čāč鹊ą▓ ping-pong
ąöą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ Data IN ąĮą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ ą▒ąĄąĘ ping-pong:
1. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ (firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░) ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ą╝ąŠąČąĮąŠ ą╗ąĖ ąĘą░ą┐ąĖčüą░čéčī ą▓ FIFO ą┐čāč鹥ą╝ ąŠą┐čĆąŠčüą░ čäą╗ą░ą│ą░ TXPKTRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ UDP_CSRx (čäą╗ą░ą│ TXPKTRDY ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ).
2. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┐ąĄčĆą▓čŗą╣ ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓ FIFO ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, ąĘą░ą┐ąĖčüčŗą▓ą░čÅ 0 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ čĆąĄą│ąĖčüčéčĆ UDP_FDRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
3. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB, čćč鹊 ą┐čĆąŠčåąĄčüčü ąĘą░ą▓ąĄčĆčłąĄąĮ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ TXPKTRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
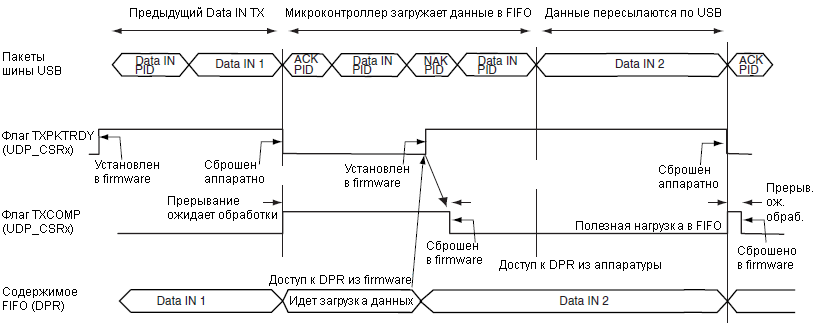
4. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ąŠ č鹊ą╝, čćč鹊 FIFO ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čäą╗ą░ą│ TXCOMP ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ą¤čĆąĖ čŹč鹊ą╝ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ č鹊čćą║ąĖ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ TXCOMP.
5. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓č鹊čĆąŠą╣ ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓ FIFO ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, ąĘą░ą┐ąĖčüčŗą▓ą░čÅ 0 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ čĆąĄą│ąĖčüčéčĆ UDP_FDRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
6. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB, čćč鹊 ą┐čĆąŠčåąĄčüčü ąĘą░ą▓ąĄčĆčłąĄąĮ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ TXPKTRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
7. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠčćąĖčēą░ąĄčé TXCOMP ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_ CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ą░ą║ąĄčéą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąŠčćąĖčüčéąĖčéčī TXCOMP čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ. TXCOMP čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB, ą║ąŠą│ą┤ą░ ąŠąĮąŠ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüąĖą│ąĮą░ą╗ ACK PID ą┤ą╗čÅ ą┐ą░ą║ąĄčéą░ Data IN. ąÜąŠą│ą┤ą░ TXCOMP čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
ąÆąØąśą£ąÉąØąśąĢ: TXCOMP ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ TXPKTRDY.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéąĖ 8 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (Universal Serial Bus Specification, Rev 2.0) ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüą╗ąŠčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ Data IN.
ąĀąĖčü. 34-6. Data IN Transfer ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ą▒ąĄąĘ ping-pong
34.5.2.4 ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ čü ą░čéčĆąĖą▒čāč鹊ą╝ ping-pong
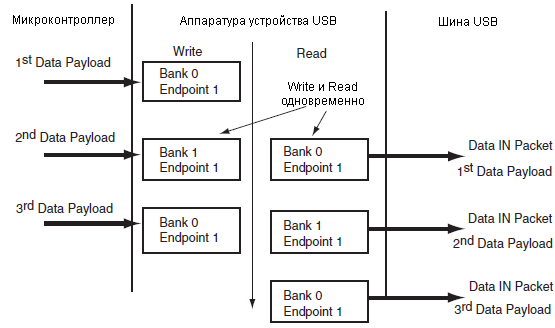
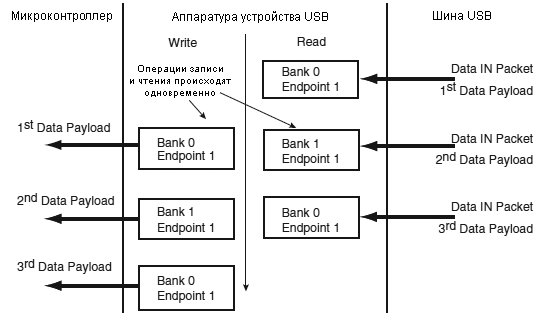
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā čü ą░čéčĆąĖą▒čāč鹊ą╝ ping-pong ąĮčāąČąĮąŠ ą┤ą╗čÅ ąĖąĘąŠčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁč鹊 čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąŠčüčéąĖčćčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ čłąĖąĮčŗ, ąĘą░ą┤ą░ąĮąĮąŠą╣ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB, ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ bulk. ą¦č鹊ą▒čŗ ąĖą╝ąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┐ąŠčüč鹊čÅąĮąĮčāčÄ ąĖą╗ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą┐ąŠą╗ąŠčüčā ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ (data payload) ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ, ą║ąŠą│ą┤ą░ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č鹥ą║čāčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą▓ą░ ą▒ą░ąĮą║ą░ ą┐ą░ą╝čÅčéąĖ. ąÜąŠą│ą┤ą░ ąŠą┤ąĖąĮ ą▒ą░ąĮą║ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, č鹊 ą▓č鹊čĆąŠą╣ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB.
ąĀąĖčü. 34-7. ą£ąĄčģą░ąĮąĖąĘą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▒ą░ąĮą║ąŠą▓ ą▓ ą┐ąĄčĆąĄą┤ą░čćą░čģ Data IN ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ čü ping-pong
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ping-pong, č鹊 ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ą╗čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Data IN:
1. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ FIFO, ą┐čāč鹥ą╝ ąŠą┐čĆąŠčüą░ TXPKTRDY (ąŠčćąĖčēąĄąĮ ą╗ąĖ ąŠąĮ) ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
2. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ FIFO (ą▒ą░ąĮą║ 0) ą┐ąĄčĆą▓čŗą╣ ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ, ąĘą░ą┐ąĖčüčŗą▓ą░čÅ 0 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ čĆąĄą│ąĖčüčéčĆ UDP_FDRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
3. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā USB, čćč鹊 ąŠąĮ ąĘą░ą▓ąĄčĆčłąĖą╗ ąĘą░ą┐ąĖčüčī ą▓ ą▒ą░ąĮą║ 0 FIFO, ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ TXPKTRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
4. ąæąĄąĘ ąŠąČąĖą┤ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąŠčćąĖčüčéąĖčéčüčÅ čäą╗ą░ą│ TXPKTRDY, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓č鹊čĆčāčÄ ą┐ąŠčĆčåąĖčÄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▓ FIFO (ą▒ą░ąĮą║ 1), ąĘą░ą┐ąĖčüčŗą▓ą░čÅ 0 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ čĆąĄą│ąĖčüčéčĆ UDP_FDRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
5. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ąŠ č鹊ą╝, čćč鹊 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ USB ąŠčüą▓ąŠą▒ąŠą┤ąĖą╗ą░ ą┐ąĄčĆą▓čŗą╣ ą▒ą░ąĮą║, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ TXCOMP ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ą¤čĆąĖ čŹč鹊ą╝ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
6. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą▒ąĮą░čĆčāąČąĖčé čāčüčéą░ąĮąŠą▓ą║čā TXCOMP ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ą░ąĮą║ą░, ąŠąĮ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB, čćč鹊 ąŠąĮą░ ą│ąŠč鹊ą▓ą░ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą▓č鹊čĆąŠą╣ ą▒ą░ąĮą║, ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ TXPKTRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
7. ąØą░ čŹč鹊ą╝ čłą░ą│ąĄ ą▒ą░ąĮą║ 0 ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī čéčĆąĄčéąĖą╣ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ą▒ą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ.
ąĀąĖčü. 34-8. Data IN Transfer ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ čü ping-pong
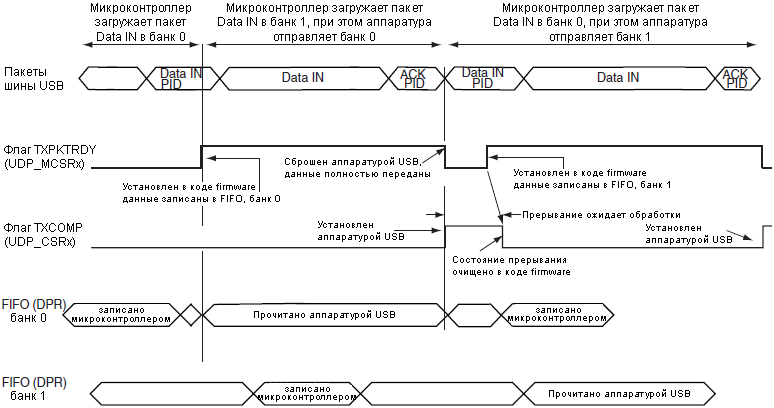
ąÆąØąśą£ąÉąØąśąĢ: ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čŹč鹊 ą║čĆąĖčéąĖč湥čüą║ąĖą╣ ą┐čāčéčī, ą┐ąŠčüą║ąŠą╗čīą║čā čäą░ą║čéąĖč湥čüą║ąĖ ą║ą░ č鹊ą╗čīą║ąŠ ą▓č鹊čĆąŠą╣ ą▒ą░ąĮą║ ąĘą░ą┐ąŠą╗ąĮąĄąĮ, ą┤čĆą░ą╣ą▓ąĄčĆ ąČą┤ąĄčé TXCOMP ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ TXPKTRDY. ąĢčüą╗ąĖ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ TXCOMP ąĖ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ TXPKTRDY čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłą░čÅ, č鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ą░ą║ąĄčéčŗ Data IN ą╝ąŠą│čāčé ą┐ąŠą╗čāčćąĖčéčī ą▓ ąŠčéą▓ąĄčé NACK, čćč鹊 čüąĮąĖąĘąĖčé ą┐ąŠą╗ąŠčüčā ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąÆąØąśą£ąÉąØąśąĢ: TXCOMP ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ TXPKTRDY.
34.5.2.5 Data OUT Transaction
ąóčĆą░ąĮąĘą░ą║čåąĖąĖ Data OUT ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čć control, isochronous, bulk ąĖ interrupt, ąĖ ą┐ąĄčĆąĄąĮąŠčüčÅčé ą┤ą░ąĮąĮčŗąĄ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā. ąóčĆą░ąĮąĘą░ą║čåąĖąĖ Data OUT ą▓ ąĖąĘąŠčģčĆąŠąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćą░čģ ą┤ąŠą╗ąČąĮčŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ąĮą░ ą║ąŠąĮąĄčćąĮčŗčģ č鹊čćą║ą░čģ čü ą░čéčĆąĖą▒čāčéą░ą╝ąĖ ping-pong.
34.5.2.6 ąóčĆą░ąĮąĘą░ą║čåąĖąĖ Data OUT ą▒ąĄąĘ ą░čéčĆąĖą▒čāč鹊ą▓ ping-pong
ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čéčĆą░ąĮąĘą░ą║čåąĖčÄ Data OUT ąĮą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ ą▒ąĄąĘ ping-pong:
1. ąźąŠčüčé ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐ą░ą║ąĄčé Data OUT.
2. ąŁč鹊čé ą┐ą░ą║ąĄčé ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąÜąŠą│ą┤ą░ FIFO, čüą▓čÅąĘą░ąĮąĮčŗą╣ čü čŹč鹊ą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝, č鹊 čģąŠčüčéčā ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ NACK PID. ąÜą░ą║ č鹊ą╗čīą║ąŠ FIFO ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčüčÅ, ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ FIFO ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB ąĖ čģąŠčüčéčā ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ACK.
3. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▒čāą┤ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮ, čćč鹊 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ USB ą┐ąŠą╗čāčćąĖą╗ą░ ą┤ą░ąĮąĮčŗąĄ (data payload), ąĄčüą╗ąĖ ąŠąĮ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ąĮą░ čāčüčéą░ąĮąŠą▓ą║čā RX_DATA_BK0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ą¤čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ RX_DATA_BK0 ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čŹč鹊ą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
4. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▒ą░ą╣čé ą▓ FIFO ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ RXBYTECNT ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
5. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗčćąĖčéčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ UDP_FDRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
6. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā USB, čćč鹊 ąŠąĮ ąĘą░ą║ąŠąĮčćąĖą╗ čćč鹥ąĮąĖąĄ FIFO ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ RX_DATA_BK0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
7. ąØąŠą▓čŗą╣ ą┐ą░ą║ąĄčé Data OUT ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčÅčé ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
ąĀąĖčü. 34-9. Data OUT Transfer ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ą▒ąĄąĘ ping-pong
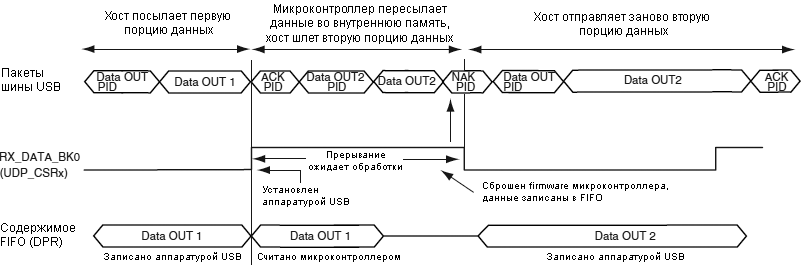
ąÜąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čäą╗ą░ą│ RX_DATA_BK0, č鹊 čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ą¤ąĄčĆąĄą┤ą░čćą░ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ ą╝ąĄąČą┤čā ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB, FIFO ąĖ ą┐ą░ą╝čÅčéčīčÄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮą░ ą┐ąŠčüą╗ąĄ ąŠčćąĖčüčéą║ąĖ RX_DATA_BK0. ąÆ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ USB ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī čüą╗ąĄą┤čāčÄčēąĖą╣ ą┐ą░ą║ąĄčé Data OUT ąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░čéčī ą▓ FIFO č鹥ą║čāčēąĖą╣ ą┐ą░ą║ąĄčé Data OUT.
34.5.2.7 ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ čü ą░čéčĆąĖą▒čāčéą░ą╝ąĖ ping-pong
ąöą╗čÅ ąĖąĘąŠčģčĆąŠąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć ąĮčāąČąĮąŠ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā čü ą░čéčĆąĖą▒čāčéą░ą╝ąĖ ping-pong. ą¦č鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┐ąŠčüč鹊čÅąĮąĮčāčÄ ą┐ąŠą╗ąŠčüčā ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ą┐čĆąĄą┤čŗą┤čāčēčāčÄ ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčāčÄ čģąŠčüč鹊ą╝, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ č鹥ą║čāčēą░čÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą┐ąŠčüčéčāą┐ą░ąĄčé ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą▓ą░ ą▒ą░ąĮą║ą░. ą¤ąŠą║ą░ ąŠą┤ąĖąĮ ąĖąĘ ąĮąĖčģ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą▓č鹊čĆąŠą╣ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB.
ąĀąĖčü. 34-10. ą£ąĄčģą░ąĮąĖąĘą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▒ą░ąĮą║ąŠą▓ ą▓ ą┐ąĄčĆąĄą┤ą░čćą░čģ Data OUT ąĮą░ ą║ąŠąĮąĄčćąĮčŗčģ č鹊čćą║ą░čģ čü ping-pong
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čü ping-pong, č鹊 ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐čĆąŠčåąĄą┤čāčĆčŗ ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Data OUT (ą┐ąĄčĆąĄą┤ą░čćą░ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā):
1. ąźąŠčüčé ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐ą░ą║ąĄčé Data OUT.
2. ąŁč鹊čé ą┐ą░ą║ąĄčé ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ą×ąĮ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą▒ą░ąĮą║ 0 FIFO ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
3. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čģąŠčüčéčā ą┐ą░ą║ąĄčé ACK PID. ąźąŠčüčé ą╝ąŠąČąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī ą▓č鹊čĆąŠą╣ ą┐ą░ą║ąĄčé Data OUT. ąŁč鹊čé ą▓č鹊čĆąŠą╣ ą┐ą░ą║ąĄčé ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčé ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ ąĖ ą┐ąŠą╝ąĄčēąĄąĮ ą▓ ą▒ą░ąĮą║ 1 FIFO.
4. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▒čāą┤ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮ ąŠ č鹊ą╝, čćč鹊 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ USB ą┐čĆąĖąĮčÅą╗ą░ ą┤ą░ąĮąĮčŗąĄ (data payload), ą┐čāč鹥ą╝ ąŠą┐čĆąŠčüą░ RX_DATA_BK0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ą¤čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ čŹč鹊ą│ąŠ ą▒ąĖčéą░ čéą░ą║ąČąĄ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
5. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▒ą░ą╣čé ą▓ FIFO ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čćč鹥ąĮąĖąĄą╝ ą┐ąŠą╗čÅ RXBYTECNT ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
6. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąĄčĆąĄąĮąŠčüąĖčé ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ą▓ čüą▓ąŠčÄ ą┐ą░ą╝čÅčéčī ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ UDP_FDRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
7. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā USB, čćč鹊 ąŠąĮ ąĘą░ą║ąŠąĮčćąĖą╗ čćč鹥ąĮąĖąĄ FIFO ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ RX_DATA_BK0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
8. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čéčĆąĄčéąĖą╣ ą┐ą░ą║ąĄčé Data OUT ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčÅčé ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB ąĖ čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮ ą▓ ą▒ą░ąĮą║ 0 FIFO.
9. ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅčé ą▓č鹊čĆąŠą╣ ą┐ą░ą║ąĄčé Data OUT, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ąŠą▒ čŹč鹊ą╝ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čäą╗ą░ą│ą░ RX_DATA_BK1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ą¤čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ čŹč鹊ą│ąŠ ą▒ąĖčéą░ čéą░ą║ąČąĄ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
10. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąĄčĆąĄąĮąŠčüąĖčé ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ą▓ čüą▓ąŠčÄ ą┐ą░ą╝čÅčéčī ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ UDP_FDRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
11. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā USB, čćč鹊 ąŠąĮ ąĘą░ą║ąŠąĮčćąĖą╗ čćč鹥ąĮąĖąĄ FIFO ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ RX_DATA_BK1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
12. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ č湥čéą▓ąĄčĆčéčŗą╣ ą┐ą░ą║ąĄčé Data OUT ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčÅčé ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB ąĖ čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮ ą▓ ą▒ą░ąĮą║ 0 FIFO.
ąĀąĖčü. 34-11. Data OUT Transfer ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ čü ping-pong
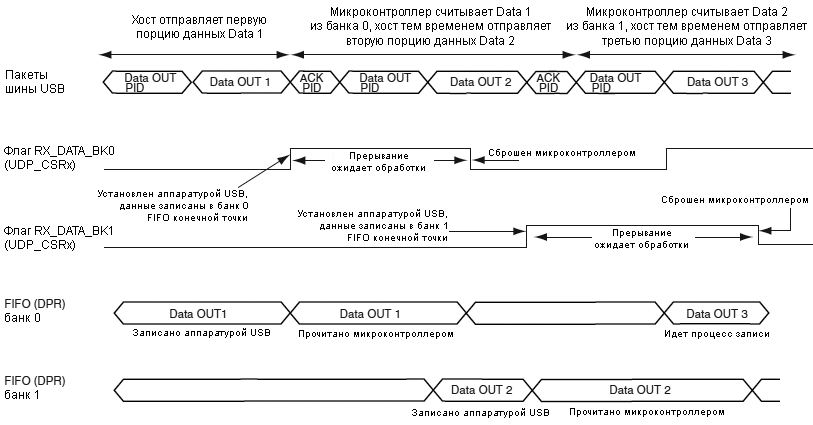
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ čäą╗ą░ą│ąĖ RX_DATA_BK0 ąĖą╗ąĖ RX_DATA_BK1 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠąČąĖą┤ą░ąĄčé čüą▓ąŠąĄą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ.
ąÆąØąśą£ąÉąØąśąĢ: ą║ąŠą│ą┤ą░ ąŠą▒ą░ ą▒ąĖčéą░ RX_DATA_BK0 ąĖ RX_DATA_BK1 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ, č鹊 ąĮąĄčé čüą┐ąŠčüąŠą▒ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąŠą╣ ąĖąĘ ąĮąĖčģ ąĮčāąČąĮąŠ ąŠčćąĖčüčéąĖčéčī čüąĮą░čćą░ą╗ą░, ą░ ą║ą░ą║ąŠą╣ ą┐ąŠč鹊ą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĮąŠ čģčĆą░ąĮąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüč湥čéčćąĖą║, čćč鹊ą▒čŗ ąĘąĮą░čéčī, ą║ą░ą║ąŠą╣ ąĖąĘ ą▒ąĖč鹊ą▓ ąĮčāąČąĮąŠ ąŠčćąĖčüčéąĖčéčī. ąŁčéą░ čüąĖčéčāą░čåąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ firmware ą┐čĆąŠą┐čāčüčéąĖą╗ąŠ ąĖąĘ-ąĘą░ čüą▓ąŠąĄą╣ ąĘą░ąĮčÅč鹊čüčéąĖ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆą▓ąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą▒ąĖč鹊ą▓, ąĖ čüčĆą░ąĘčā 2 ą▒ą░ąĮą║ą░, ąŠą┤ąĖąĮ ąĘą░ ą┤čĆčāą│ąĖą╝, ą▒čŗą╗ąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮčŗ čģąŠčüč鹊ą╝ USB. ąÜą░ą║ č鹊ą╗čīą║ąŠ firmware ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ USB, č鹊 ąŠąĮąŠ čāą▓ąĖą┤ąĖčé, čćč鹊 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čüčĆą░ąĘčā 2 čäą╗ą░ą│ą░, RX_DATA_BK0 ąĖ RX_DATA_BK1.
34.5.2.8 ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĄ (Stall Handshake)
ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ stall handshake ąŠą▒čĆą░čéąĖč鹥čüčī ą▓ čćą░čüčéčī 8 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (Universal Serial Bus Specification, Rev 2.0). Stall handshake ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ą▓ ą┤ą▓čāčģ čĆą░ąĘą╗ąĖčćąĮčŗčģ čüą╗čāčćą░čÅčģ:
- ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ (functional stall), čćč鹊ą▒čŗ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ čäčāąĮą║čåąĖąĖ, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ąŠ čäąĖč湥 halt čüą╝. ą¦ą░čüčéčī 9 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (Universal Serial Bus Specification, Rev 2.0).
- čćč鹊ą▒čŗ ąŠčéą╝ąĄąĮąĖčéčī, ą┐čĆąĄčĆą▓ą░čéčī č鹥ą║čāčēąĖą╣ ąĘą░ą┐čĆąŠčü, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ protocol stall, ąŠą┤ąĮą░ą║ąŠ čŹčéą░ čüąĖčéčāą░čåąĖčÅ čāąĮąĖą║ą░ą╗čīąĮą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ.
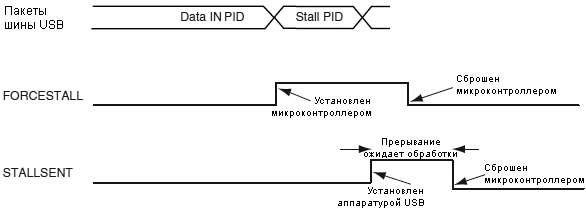
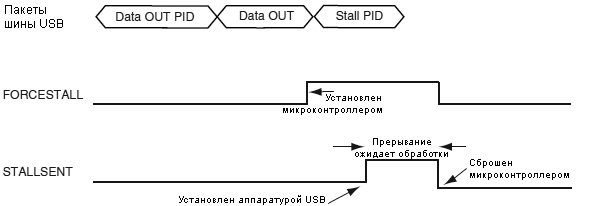
ąĪą╗ąĄą┤čāčÄčēą░čÅ ą┐čĆąŠčåąĄą┤čāčĆą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐ą░ą║ąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (stall packet):
1. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäą╗ą░ą│ FORCESTALL ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
2. ąźąŠčüčé USB ą┐čĆąĖąĮąĖą╝ą░ąĄčé stall packet.
3. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▒čāą┤ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮ ąŠ č鹊ą╝, čćč鹊 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ USB ąŠčéą┐čĆą░ą▓ąĖą╗ą░ stall ą┐čāč鹥ą╝ ąŠą┐čĆąŠčüą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĖą╗ąĖ ąĮąĄčé čäą╗ą░ą│ STALLSENT. ą¤čĆąĖ čŹč鹊ą╝, ąĄčüą╗ąĖ STALLSENT ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ą¦č鹊ą▒čŗ ąŠčćąĖčüčéąĖčéčī čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ čüą▒čĆąŠčüąĖčéčī STALLSENT.
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčéą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ setup ą┐ąŠčüą╗ąĄ stall handshake, č鹊 čäą╗ą░ą│ STALLSENT ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▓ąŠąĘąĮąĖą║ąĮčāčé ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 STALLSENT čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ąĀąĖčü. 34-12. Stall Handshake (Data IN Transfer)
ąĀąĖčü. 34-13. Stall Handshake (Data OUT Transfer)
34.5.3 ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ (Controlling Device States)
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ USB ą╝ąŠąČąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣. ąĪą╝. čéą░ą║ąČąĄ ą¦ą░čüčéčī 9 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (Universal Serial Bus Specification, Rev 2.0).
ąĀąĖčü. 34-14. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąŠčüč鹊čÅąĮąĖą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB
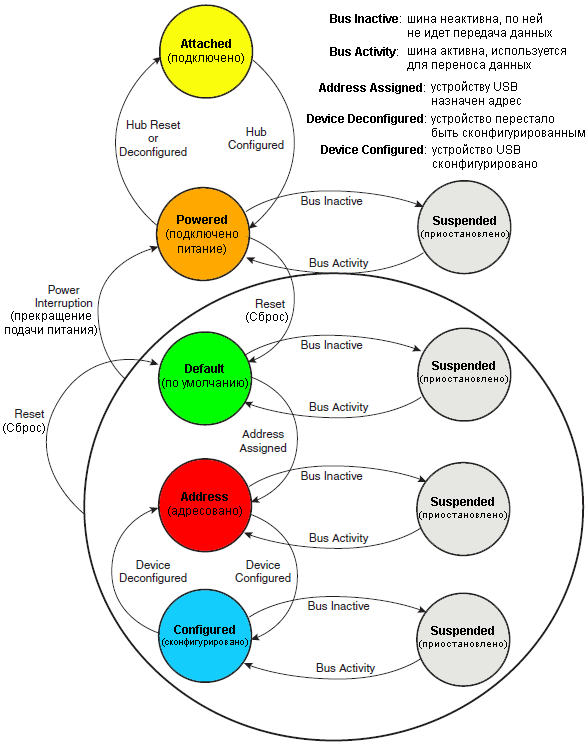
ą¤ąĄčĆąĄčģąŠą┤ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ ą┤čĆčāą│ąŠąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ čłąĖąĮčŗ USB ąĖą╗ąĖ ąŠčé čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░ąĮčŗ č湥čĆąĄąĘ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (default endpoint ąĖą╗ąĖ control endpoint, ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čü ąĮąŠą╝ąĄčĆąŠą╝ 0).
ą¤ąŠčüą╗ąĄ ą┐ąĄčĆąĖąŠą┤ą░ ąĮąĄą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ, čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą▓čģąŠą┤ąĖčé ą▓ ąĀąĄąČąĖą╝ ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend Mode). ą¤čĆąĖ čŹč鹊ą╝ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮčāąČąĮąŠ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą┐čĆąĖąĮąĖą╝ą░čéčī ąĘą░ą┐čĆąŠčüčŗ Suspend/Resume ąŠčé čģąŠčüčéą░ USB. ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą┐ąĖčéą░ąĄą╝čŗčģ ąŠčé čłąĖąĮčŗ USB, ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą▓ Suspend Mode ąŠč湥ąĮčī ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ, čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ą▒ąŠą╗čīčłąĄ 500 ą╝ą║ąÉ ąŠčé čłąĖąĮčŗ USB (ą┐čĆąŠą▓ąŠą┤ VBUS ąĖąĮč鹥čĆč乥ą╣čüą░ USB).
ąźąŠčüčé ą╝ąŠąČąĄčé ą▓čŗą▓ąĄčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Suspend Mode ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąĖą│ąĮą░ą╗ą░ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ resume (ą░ą║čéąĖą▓ąĮąŠčüčéčī čłąĖąĮčŗ), ąĖą╗ąĖ čéą░ą║ąČąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą╝ąŠąČąĄčé ąŠčéą┐čĆą░ą▓ąĖčéčī ąĘą░ą┐čĆąŠčü ąĮą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ čģąŠčüčéčā. ąØą░ą┐čĆąĖą╝ąĄčĆ, čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ Windows ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░, ąĄčüą╗ąĖ ą┐ąŠą┤ą▓ąĖą│ą░čéčī USB-ą╝čŗčłčī.
ąÆąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake up feature) ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠą╣ ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓, ąĖ čŹčéą░ čäąĖčćą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠą│ą╗ą░čüąŠą▓ą░ąĮą░ čü čģąŠčüč鹊ą╝ USB.
34.5.3.1 ąĪąŠčüč鹊čÅąĮąĖąĄ "ąĮąĄ ąĘą░ą┐ąĖčéą░ąĮąŠ" (Not Powered State)
ąŻčüčéčĆąŠą╣čüčéą▓ą░ USB, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé čüąŠą▒čüčéą▓ąĄąĮąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ (ąŠąĮąĖ ąĮąĄ ą┐ąĖčéą░čÄčéčüčÅ ąŠčé VBUS), ą╝ąŠą│čāčé ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī čāčĆąŠą▓ąĄąĮčī ąĮą░ ą┐čĆąŠą▓ąŠą┤ąĄ VBUS čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĮąŠąČą║ąĖ PIO, ą║ą░ą║ ą▒čŗą╗ąŠ ą┐ąŠą║ą░ąĘą░ąĮąŠ čĆą░ąĮąĄąĄ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ čéąĖą┐ąĖčćąĮąŠą╣ čäąĖąĘąĖč湥čüą║ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ USB (čüą╝. čĆą░ąĘą┤ąĄą╗ 34.4). ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ čģąŠčüčéčā, č鹊 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮąĖąČąĄąĮąŠ ą┐čāč鹥ą╝ ąĘą░ą┐čĆąĄčéą░ čéą░ą║č鹊ą▓ MCK ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ UDP, ąĘą░ą┐čĆąĄčéą░ čéą░ą║č鹊ą▓ UDPCK ąĖ ąĘą░ą┐čĆąĄčéą░ čéčĆą░ąĮčüąĖą▓ąĄčĆą░. ąØąŠąČą║ąĖ DDP ąĖ DDM ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĖčéčÅąĮčāčéčŗ ą║ GND čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ 330 ą║ą×ą╝.
34.5.3.2 ąÆčģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ" (Entering Attached State)
ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ, č鹊 DP ąĖ DM čüąĖą│ąĮą░ą╗čŗ USB ą┐čĆąĖčéčÅąĮčāčéčŗ ą║ GND čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ pull-down 15 ą║ą×ą╝, ą║ąŠč鹊čĆčŗąĄ ą▓čüčéčĆąŠąĄąĮčŗ ą▓ ąĮąĖčüčģąŠą┤čÅčēąĖąĄ (downstream) ą┐ąŠčĆčéčŗ čģą░ą▒ą░. ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ downstream ą┐ąŠčĆčéčā čģą░ą▒ą░, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčé ą║ DP čüą▓ąŠą╣ pull-up čĆąĄąĘąĖčüč鹊čĆ 1.5 ą║ą×ą╝. ą©ąĖąĮą░ USB ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ IDLE, DP ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĄčéčüčÅ ą▓ą▓ąĄčĆčģ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB č湥čĆąĄąĘ čŹč鹊čé čĆąĄąĘąĖčüč鹊čĆ ą║ 3.3V, ąĖ DM ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĄčéčüčÅ ą▓ąĮąĖąĘ čĆąĄąĘąĖčüč鹊čĆąŠą╝ 15 ą║ą×ą╝ čģąŠčüčéą░.
ąÆąØąśą£ąÉąØąśąĢ: ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆ UDP_TXVC ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ MCK ą┤ą╗čÅ UDP. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management Controller, PMC).
ą¤ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ pull-up čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "ąĘą░ą┐ąĖčéą░ąĮąŠ" (Powered State). ąÆ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ UDPCK ąĖ MCK ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ PMC. ąóčĆą░ąĮčüąĖą▓ąĄčĆ ą┐ąŠą║ą░ ą╝ąŠąČąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╝.
34.5.3.3 ą¤ąĄčĆąĄčģąŠą┤ ąŠčé Powered State ą▓ Default State (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ)
ą¤ąŠčüą╗ąĄ čüą▓ąŠąĄą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čģąŠčüčéčā, čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ąČą┤ąĄčé čüąĖą│ąĮą░ą╗ą░ čüą▒čĆąŠčüą░ ą┐ąŠ čłąĖąĮąĄ (end-of-bus reset). ą¤ąŠčüą╗ąĄ ą┐čĆąĖčģąŠą┤ą░ čéą░ą║ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮąĄą╝ą░čüą║ąĖčĆčāąĄą╝čŗą╣ čäą╗ą░ą│ ENDBUSRES ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_ISR, ąĖ čüčĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
ąÜą░ą║ č鹊ą╗čīą║ąŠ čüčĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ENDBUSRES, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ Default State. ąÆ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ firmware ą┤ą╗čÅ UDP ą┤ąŠą╗ąČąĮąŠ ą┤ąĄą╗ą░čéčī čüą╗ąĄą┤čāčÄčēąĄąĄ:
- čĆą░ąĘčĆąĄčłąĖčéčī default endpoint, čāčüčéą░ąĮąŠą▓ąĖą▓ čäą╗ą░ą│ EPEDS ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSR[0] ąĖ, čćč鹊 ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, čĆą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ 0 ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ 1 ą▓ čĆąĄą│ąĖčüčéčĆ UDP_IER. ą¤čĆąŠčåąĄčüčü 菹Įčāą╝ąĄčĆą░čåąĖąĖ ąĮą░čćąĮąĄčéčüčÅ č湥čĆąĄąĘ čāą┐čĆą░ą▓ą╗čÅčÄčēčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā (control transfer).
- čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ čüą▒čĆąŠčłąĄąĮ ą┐čĆąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĖ čüą▒čĆąŠčüą░ ą┐ąŠ čłąĖąĮąĄ USB (USB reset detection).
- čĆą░ąĘčĆąĄčłąĖčéčī čéčĆą░ąĮčüąĖą▓ąĄčĆ ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ čäą╗ą░ą│ą░ TXVDIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_TXVC.
ąÆ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ UDPCK ąĖ MCK ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ.
ąÆąØąśą£ąÉąØąśąĢ: ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐čĆąĖ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ENDBUSRES ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ (ą░ą┐ą┐ą░čĆą░čéąĮąŠ) čüą▒čĆąŠčłąĄąĮ čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (Interrupt Mask Register) ąĖ ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ UDP_CSR.
34.5.3.4 ą¤ąĄčĆąĄčģąŠą┤ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (Default State) ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą░ą┤čĆąĄčüą░čåąĖąĖ (Address State)
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (address standard device request), ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB čģąŠčüčéą░ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "ą░ą┤čĆąĄčüąŠą▓ą░ąĮąŠ" (address state).
ąÆąØąśą£ąÉąØąśąĢ: ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąŠą╣ą┤ąĄčé ą▓ address state, ąŠąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą┤ąŠčüčéąĖčćčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ Status IN ą▓ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐ąĄčĆąĄą┤ą░č湥, ąĮą░ą┐čĆąĖą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ąŠ UDP čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą▓ąŠą╣ ąĮąŠą▓čŗą╣ ą░ą┤čĆąĄčü ą▓ ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčé ąĖ ąŠčćąĖčēąĄąĮ čäą╗ą░ą│ TXCOMP ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSR[0].
ąöą╗čÅ ą┐ąĄčĆąĄčģąŠą┤ą░ ą▓ address state ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ firmware ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäą╗ą░ą│ FADDEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_GLB_STAT, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮąŠą▓čŗą╣ ą░ą┤čĆąĄčü, ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé FEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_FADDR.
34.5.3.5 ą¤ąĄčĆąĄčģąŠą┤ ąĖąĘ Address State ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ" (Configured State)
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ ą┐čĆąĖąĮčÅčé ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĘą░ą┐čĆąŠčü Set Configuration (čāčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ), čāčüčéčĆąŠą╣čüčéą▓ąŠ USB čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā čüą▓ąŠąĖčģ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║, ą║ąŠč鹊čĆčŗąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé č鹥ą║čāčēąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗ąĄą╣ EPEDS ąĖ EPTYPE ą▓ čĆąĄą│ąĖčüčéčĆą░čģ UDP_CSRx ąĖ, čćč鹊 ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_IER.
34.5.3.6 ąÆčģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ" (Suspend State)
ąÜąŠą│ą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (ąĮąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ USB), čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ RXSUSP ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_ISR. ąŁč鹊 ą▓čŗąĘąŠą▓ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_IMR (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ UDP). ążą╗ą░ą│ RXSUSP ąŠčćąĖčēą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆ UDP_ICR. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend Mode).
ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąĖčéą░čÄčēąĖąĄčüčÅ ąŠčé čłąĖąĮčŗ USB, ą┤ąŠą╗ąČąĮčŗ ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ąĮąĄ ą▒ąŠą╗ąĄąĄ 500 ą╝ą║ąÉ ąŠčé +5V VBUS. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ąĮą░ ąĮąĖąĘą║čāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā, ąĘą░ą┐čĆąĄčéąĖčéčī PLL ąĖ ą│ą╗ą░ą▓ąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, ąĖ ą┐ąĄčĆąĄą╣čéąĖ ą▓ čĆąĄąČąĖą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ (Idle Mode). ąóą░ą║ąČąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čŗą║ą╗čÄčćąĖčéčī ą▓čüąĄ ą┤čĆčāą│ąĖąĄ ą▓ąĮąĄčłąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ą╗ąĖčłąĮąĖą╣ č鹊ą║.
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ USB ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮąŠ. ąĪąŠą▒čŗčéąĖąĄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (Resume event) ą▒čāą┤ąĄčé ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠ. ąóą░ą║čéčŗ MCK ąĖ UDPCK ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮčŗ ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (PMC), ąĖ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮ čéčĆą░ąĮčüąĖą▓ąĄčĆ USB ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ TXVDIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_TXVC.
ąÆąØąśą£ąÉąØąśąĢ: ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ UDP ą▓ąŠąĘą╝ąŠąČąĮčŗ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ čéą░ą║čéčŗ MCK ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ UDP. ą×čéą║ą╗čÄč湥ąĮąĖąĄ MCK ą┤ą╗čÅ UDP ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣, ąĖ ąŠąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐ąŠčüą╗ąĄ ąĘą░ą┐ąĖčüąĖ UDP_TXVC ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ RXSUSP.
34.5.3.7 ą¤čĆąĖąĄą╝ čüąĖą│ąĮą░ą╗ą░ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąŠčé čģąŠčüčéą░ (Host Resume)
ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (resume event) ą┐ąŠ čłąĖąĮąĄ USB ą▒čāą┤ąĄčé ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠ, ą┐čĆąĖ čŹč鹊ą╝ čéčĆą░ąĮčüąĖą▓ąĄčĆ ąĖ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ ą┤ą╗čÅ UDP ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮčŗ (ąŠą┤ąĮą░ą║ąŠ čĆąĄąĘąĖčüč鹊čĆ pull-up ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčéą║ą╗čÄč湥ąĮ).
ąÜą░ą║ č鹊ą╗čīą║ąŠ ąĮą░ čłąĖąĮąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ resume, ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_ISR ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ WAKEUP. ąŁč鹊 ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī ą│ąĄąĮąĄčĆą░čåąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_IMR. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čĆą░ąĘą▒čāą┤ąĖčéčī čÅą┤čĆąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ PLL, ą│ą╗ą░ą▓ąĮčŗčģ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé.
ąÆąØąśą£ąÉąØąśąĢ: ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ, ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ UDP čĆą░ąĘčĆąĄčłąĄąĮčŗ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ MCK ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ UDP. ąóą░ą║čéčŗ MCK ą┤ą╗čÅ UDP ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┐ąĄčĆąĄą┤ ąŠčćąĖčüčéą║ąŠą╣ ą▒ąĖčéą░ WAKEUP ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_ICR ąĖ ą┐ąĄčĆąĄą┤ ąŠčćąĖčüčéą║ąŠą╣ TXVDIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_TXVC.
34.5.3.8 ą×čéą┐čĆą░ą▓ą║ą░ čģąŠčüčéčā čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (Device Remote Wakeup)
ąÆ čüąŠčüč鹊čÅąĮąĖąĖ Suspend čéą░ą║ąČąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ čĆą░ąĘą▒čāą┤ąĖčéčī čģąŠčüčé ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĄą╝čā ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ (external resume). ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
- čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą┤ąŠąČą┤ą░čéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 5 ą╝čü ą┐ąŠčüą╗ąĄ ą╝ąŠą╝ąĄąĮčéą░ ą▓čģąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ suspend, ą┐ąĄčĆąĄą┤ č鹥ą╝ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ąĖčéčī čüąĖą│ąĮą░ą╗ resume.
- ą┤ą░ą╗ąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ 10 ą╝čü ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čāč鹥čćą║čā č鹊ą║ą░ (drain current), č湥ą╝ ąŠąĮąŠ ą▓čŗąĘąŠą▓ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ K ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čģąŠčüčéą░.
- čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ čāą┤ąĄčƹȹĖą▓ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ K ąŠčé 1 ą┤ąŠ 15 ą╝čü ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čģąŠčüčéą░.
ą¦č鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī čüąŠčüč鹊čÅąĮąĖąĄ K ąĮą░ čłąĖąĮąĄ, ąĮčāąČąĮąŠ ą┐ąŠą┤čéčÅąĮčāčéčī čüąĖą│ąĮą░ą╗ DM ą║ 3.3V, ą░ DP ą┐ąŠą┤čéčÅąĮčāčéčī ą║ GND. ąöą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéčĆą░ąĮąĘąĖčüč鹊čĆ, čćč鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī pull-up ą║ DM. ąĪąŠčüč鹊čÅąĮąĖąĄ K ą▒čāą┤ąĄčé ą┐ąŠą╗čāč湥ąĮąŠ ą┐čāč鹥ą╝ ąĘą░ą┐čĆąĄčéą░ pull-up ąĮą░ DP ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ pull-up ąĮą░ DM. ąŁč鹊 ą▓čüąĄ ą┤ąŠą╗ąČąĮąŠ ą┤ąĄą╗ą░čéčīčüčÅ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąĀąĖčü. 34-15. ą¤čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąŠčüč鹊čÅąĮąĖčÅ K

ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ čüčģąĄą╝ąĄ:
PIO - ąĮąŠąČą║ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĮą░čüčéčĆąŠąĄąĮąĮą░čÅ ą║ą░ą║ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┐ąŠčĆčé ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą╝.
DM - ą┐čĆąŠą▓ąŠą┤ D-, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąĖąĮč鹥čĆč乥ą╣čüąĄ USB ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (ą▓ą╝ąĄčüč鹥 čü ą┐čĆąŠą▓ąŠą┤ąŠą╝ D+).
[34.6 ąśąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ USB Device Port (UDP)]
ąÆ čéą░ą▒ą╗ąĖčåąĄ 34-4 ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆąĄą│ąĖčüčéčĆčŗ UDP, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗąĄ ą║ ąĮąĄą╝čā ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą¦ąĄčĆąĄąĘ čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ UDP, ą┐ąŠą╗čāč湥ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ UDP, ąŠą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ čüčéą░čéčāčü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü FIFO.
ąÆąØąśą£ąÉąØąśąĢ: ą┐ąĄčĆąĄą┤ ą╗čÄą▒čŗą╝ąĖ ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ (ą▓ą║ą╗čÄčćą░čÅ čĆąĄą│ąĖčüčéčĆ UDP_TXCV) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ MCK ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ UDP. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PMC.
ąóą░ą▒ą╗ąĖčåą░ 34-4. ąÜą░čĆčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓ UDP
| ąĪą╝ąĄčēąĄąĮąĖąĄ(3) |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░)
|
ąóąĖą┐ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ |
| 0x000 |
Frame Number Register (čĆąĄą│ąĖčüčéčĆ ąĮąŠą╝ąĄčĆą░ čäčĆąĄą╣ą╝ą░) |
UDP_FRM_NUM |
ąóąŠą╗čīą║ąŠ čćč鹥ąĮąĖąĄ |
0x00000000 |
| 0x004 |
Global State Register (čĆąĄą│ąĖčüčéčĆ ąŠą▒čēąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ) |
UDP_GLB_STAT |
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī |
0x00000000 |
| 0x008 |
Function Address Register (čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░) |
UDP_FADDR |
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī |
0x00000100 |
| 0x00C |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
- |
- |
- |
| 0x010 |
Interrupt Enable Register (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
UDP_IER |
ąóąŠą╗čīą║ąŠ ąĘą░ą┐ąĖčüčī |
|
| 0x014 |
Interrupt Disable Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
UDP_IDR |
ąóąŠą╗čīą║ąŠ ąĘą░ą┐ąĖčüčī |
|
| 0x018 |
Interrupt Mask Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
UDP_IMR |
ąóąŠą╗čīą║ąŠ čćč鹥ąĮąĖąĄ |
0x00001200 |
| 0x01C |
Interrupt Status Register (čĆąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
UDP_ISR |
ąóąŠą╗čīą║ąŠ čćč鹥ąĮąĖąĄ |
-(1) |
| 0x020 |
Interrupt Clear Register (čĆąĄą│ąĖčüčéčĆ ąŠčćąĖčüčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
UDP_ICR |
ąóąŠą╗čīą║ąŠ ąĘą░ą┐ąĖčüčī |
|
| 0x024 |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
- |
- |
- |
| 0x028 |
Reset Endpoint Register (čĆąĄą│ąĖčüčéčĆ čüą▒čĆąŠčüą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ) |
UDP_RST_EP |
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī |
|
| 0x02C |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
- |
- |
- |
| 0x030 + 4*ept_num(4) |
Endpoint Control and Status Register (čĆąĄą│ąĖčüčéčĆ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĄčæ čüąŠčüč鹊čÅąĮąĖčÅ) |
UDP_CSR |
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī |
0x00000000 |
| 0x050 + 4*ept_num(4) |
Endpoint FIFO Data Register (čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ FIFO ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ) |
UDP_FDR |
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī |
0x00000000 |
| 0x070 |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
- |
- |
- |
| 0x074 |
Transceiver Control Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝) |
UDP_TXVC(2) |
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī |
0x00000000 |
| 0x078 .. 0x0FC |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
- |
- |
- |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąöą╗čÅ UDP_ISR ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░.
2. ąĪą╝. ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ MCK.
3. ąŻą║ą░ąĘą░ąĮąŠ ą▒ą░ą╣č鹊ą▓ąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░ UDP 0xFFFB0000. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ čāąĘąĮą░čéčī ą░ą▒čüąŠą╗čÄčéąĮčŗą╣ ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░, ąĮčāąČąĮąŠ ą║ ąĘąĮą░č湥ąĮąĖčÄ 0xFFFB0000 ą┐čĆąĖą▒ą░ą▓ąĖčéčī čüą╝ąĄčēąĄąĮąĖąĄ. ąÆčüąĄ ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▒ą░ą╣č鹊ą▓čŗąĄ, čĆąĄą│ąĖčüčéčĆčŗ ą░ą┤čĆąĄčüčāčÄčéčüčÅ ą┐ąŠ ą░ą┤čĆąĄčüčā čüą▓ąŠąĄą│ąŠ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░. ąĀąĄą│ąĖčüčéčĆčŗ 32-čĆą░ąĘčĆčÅą┤ąĮčŗąĄ, čé. ąĄ. ą┐ąŠą┤ ąŠą┤ąĖąĮ čĆąĄą│ąĖčüčéčĆ ąŠčéą▓ąŠą┤ąĖčéčüčÅ 4 ą▒ą░ą╣čéą░ ą▓ ą░ą┤čĆąĄčüąĮąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ.
4. ą¤ą░čĆą░ą╝ąĄčéčĆ ept_num ą▓ č乊čĆą╝čāą╗ąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čüą╝ąĄčēąĄąĮąĖčÅ ą░ą┤čĆąĄčüą░ - ąĮąŠą╝ąĄčĆ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü ąĮčāą╗čÅ. ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čü ąĮąŠą╝ąĄčĆąŠą╝ 0 - čŹč鹊 default endpoint, ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (čüą╝. ąĪą╗ąŠą▓ą░čĆąĖą║).
34.6.1 UDP Frame Number Register (čĆąĄą│ąĖčüčéčĆ ąĮąŠą╝ąĄčĆą░ čäčĆąĄą╣ą╝ą░)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_FRM_NUM
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-only (č鹊ą╗čīą║ąŠ čćč鹥ąĮąĖąĄ)

FRM_NUM[10:0] ąĮąŠą╝ąĄčĆ čäčĆąĄą╣ą╝ą░, ą║ą░ą║ ąĘą░ą┤ą░ąĮąŠ ą▓ č乊čĆą╝ą░č鹥 ą┐ąŠą╗čÅ ą┐ą░ą║ąĄčéą░. ąŁč鹊 11-ą▒ąĖčéąĮą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░, ą║ąŠč鹊čĆą░čÅ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ 1 čģąŠčüč鹊ą╝ ą┐čĆąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą║ą░ąČą┤ąŠą│ąŠ ąĮąŠą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░. ąŁčéą░ ą▓ąĄą╗ąĖčćąĖąĮą░ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ ą┐ąŠą╗čāč湥ąĮąĖąĖ ąĮąŠą▓ąŠą│ąŠ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ - čüąĖą│ąĮą░ą╗ Start of Frame, SOF (ąĖą╗ąĖ Start of Frame End of Packet, SOF_EOP). ą¤ąĄčĆąĖąŠą┤ ą┐ąŠą▓č鹊čĆąĄąĮąĖčÅ čäčĆąĄą╣ą╝ą░ ą▓čŗą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąŠč湥ąĮčī č鹊čćąĮąŠ, ąĖ ąŠąĮ čĆą░ą▓ąĄąĮ 1 ą╝čü.
FRM_ERR Frame Error, ąŠčłąĖą▒ą║ą░ čäčĆąĄą╣ą╝ą░. ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé SOF_EOP, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčéčŗą╣ ą┐ą░ą║ąĄčé SOF čüąŠą┤ąĄčƹȹĖčé ąŠčłąĖą▒ą║čā. ąŁč鹊čé ą▒ąĖčé čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ SOF_PID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ą░ą║ąĄčéą░).
FRM_OK čäčĆąĄą╣ą╝ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ. ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé SOF_EOP, ą║ąŠą│ą┤ą░ ą▒ąĄąĘąŠčłąĖą▒ąŠčćąĮąŠ ą┐čĆąĖąĮčÅčé ą┐ą░ą║ąĄčé SOF. ąŁč鹊čé ą▒ąĖčé čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ SOF_PID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ą░ą║ąĄčéą░). ąÆ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ UDP_ISR ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ SOF_PID ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ čüčéą░čéčāčü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SOF. ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĄąĘ ąŠąČąĖą┤ą░ąĮąĖčÅ EOP.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ 8-ą▒ąĖčéąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ąŠą╝ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą▒ąĖčé FRM_OK ąĖą╝ąĄąĄčé ąĮąŠą╝ąĄčĆ 4 ą▓ FRM_NUM_H, ąĖ ą▒ąĖčé FRM_ERR ąĖą╝ąĄąĄčé ąĮąŠą╝ąĄčĆ 3 ą▓ FRM_NUM_L.
34.6.2 UDP Global State Register (čĆąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ UDP)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_GLB_STAT
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-write (čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī)

ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠčüč鹊čÅąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ą▓ ą¦ą░čüčéąĖ 9 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
FADDEN čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ ą░ą┤čĆąĄčüą░čåąĖąĖ.
ą¦č鹥ąĮąĖąĄ:
0 = čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą░ą┤čĆąĄčüą░čåąĖąĖ (address state).
1 = čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą░ą┤čĆąĄčüą░čåąĖąĖ.
ąŚą░ą┐ąĖčüčī:
0 = ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, č鹊ą╗čīą║ąŠ čüą▒čĆąŠčü ą╝ąŠąČąĄčé ą▓ąĄčĆąĮčāčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą▒čĆą░čéąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (default state).
1 = ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą░ą┤čĆąĄčüą░čåąĖąĖ. ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ Set Address. ą¤čĆąĖ čŹč鹊ą╝ ąĘą░čĆą░ąĮąĄąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ čĆąĄą│ąĖčüčéčĆ UDP_FADDR ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ąĖąĘ Set Address. Set Address ą┤ąŠą╗ąČąĄąĮ ąĘą░ą▓ąĄčĆčłąĖčéčī čüčéą░ą┤ąĖčÄ čüčéą░čéčāčüą░ Status Stage ą┐ąĄčĆąĄą┤ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ FADDEN. ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéąĖ 9 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
CONFIG čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ.
ą¦č鹥ąĮąĖąĄ:
0 = čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ (ąĮąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ configured state).
1 = čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ.
ąŚą░ą┐ąĖčüčī:
0 = ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "ąĮąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ".
1 = ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ".
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąŠąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą░ą┤čĆąĄčüą░čåąĖąĖ ąĖ čāčüą┐ąĄčłąĮąŠ ą┐čĆąĖąĮčÅą╗ąŠ ąĘą░ą┐čĆąŠčü Set Configuration. ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéąĖ 9 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
34.6.3 UDP Function Address Register (čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_FADDR
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-write (čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī)

FADD[6:0] ąĘąĮą░č湥ąĮąĖąĄ ą░ą┤čĆąĄčüą░ čäčāąĮą║čåąĖąĖ. ąÆ čŹč鹊 ą┐ąŠą╗ąĄ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą░ą┤čĆąĄčü, ą║ą░ą║ č鹊ą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą╗čāčćąĖą╗ąŠ ąĄą│ąŠ ą▓ čāčüą┐ąĄčłąĮąŠ ą┐čĆąĖąĮčÅč鹊ą╝ ąŠčé čģąŠčüčéą░ ąĘą░ą┐čĆąŠčüąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą░ą┤čĆąĄčüą░, ąĖ ą▒čŗą╗ąŠ ą┤ąŠčüčéąĖą│ąĮčāč鹊 čüąŠčüč鹊čÅąĮąĖąĄ čüčéą░čéčāčüą░ ą▓ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ (čŹčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ąŠą▒ą╝ąĄąĮčā ą┤ą░ąĮąĮčŗą╝ąĖ). ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéąĖ 9 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0). ą¤ąŠčüą╗ąĄ ą┐ąŠą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüą░ ąĘąĮą░č湥ąĮąĖąĄ ą░ą┤čĆąĄčüą░ čäčāąĮą║čåąĖąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 0.
FEN čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ.
ą¦č鹥ąĮąĖąĄ:
0 = čäčāąĮą║čåąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ąĘą░ą┐čĆąĄčēąĄąĮą░.
1 = čäčāąĮą║čåąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░.
ąŚą░ą┐ąĖčüčī:
0 = ąĘą░ą┐čĆąĄčēą░ąĄčé čäčāąĮą║čåąĖčÄ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
1 = ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąæąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ (FEN) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā čĆą░ąĘčĆąĄčłąĖčéčī ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī čäčāąĮą║čåąĖčÄ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čŹč鹊čé ą▒ąĖčé ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ čüą▒čĆąŠčüą░ ąŠčé čģąŠčüčéą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ąĖ ą┐ąĄčĆąĄą┤ą░čéčī ą┐ą░ą║ąĄčéčŗ ą┤ą░ąĮąĮčŗčģ ąŠčé čģąŠčüčéą░ ąĖ ą║ čģąŠčüčéčā.
34.6.4 UDP Interrupt Enable Register (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_IER
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: write-only (č鹊ą╗čīą║ąŠ ąĘą░ą┐ąĖčüčī)
EPOINT, EP1INT, EP2INT, EP3INT, EP4INT, EP5INT čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ 0, 1, 2, 3, 4, 5 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹčéąĖ ą▒ąĖčéčŗ ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čĆą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
RXSUSP čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend). ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹč鹊čé ą▒ąĖčé ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čĆą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
RXRSM čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ (Resume). ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹč鹊čé ą▒ąĖčé ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čĆą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
SOFINT čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ SOF (ąĮą░čćą░ą╗ąŠ čäčĆąĄą╣ą╝ą░). ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹč鹊čé ą▒ąĖčé ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čĆą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
WAKEUP čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĮą░ čłąĖąĮąĄ. ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹč鹊čé ą▒ąĖčé ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čĆą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
34.6.5 UDP Interrupt Disable Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_IDR
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: write-only (č鹊ą╗čīą║ąŠ ąĘą░ą┐ąĖčüčī)
EPOINT, EP1INT, EP2INT, EP3INT, EP4INT, EP5INT ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ 0, 1, 2, 3, 4, 5 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹčéąĖ ą▒ąĖčéčŗ ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
RXSUSP ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend). ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹč鹊čé ą▒ąĖčé ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
RXRSM ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ (Resume). ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹč鹊čé ą▒ąĖčé ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
SOFINT ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ SOF (ąĮą░čćą░ą╗ąŠ čäčĆąĄą╣ą╝ą░). ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹč鹊čé ą▒ąĖčé ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
WAKEUP ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĮą░ čłąĖąĮąĄ. ąŚą░ą┐ąĖčüčī ąĮčāą╗čÅ ą▓ čŹč鹊čé ą▒ąĖčé ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
34.6.6 UDP Interrupt Mask Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_IMR
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-only (č鹊ą╗čīą║ąŠ čćč鹥ąĮąĖąĄ)
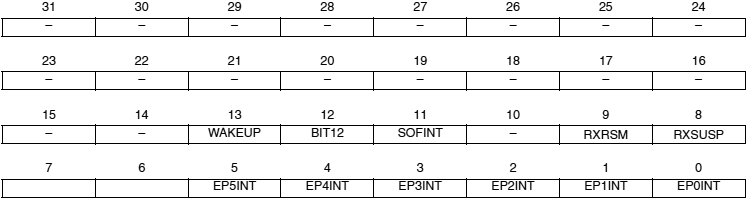
EPOINT, EP1INT, EP2INT, EP3INT, EP4INT, EP5INT ą┐ąŠ ąĘąĮą░č湥ąĮąĖčÄ čŹčéąĖčģ ą▒ąĖčé ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī, čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čüąŠą▒čŗčéąĖčÅą╝ ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ 0, 1, 2, 3, 4, 5 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮ 0, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ąĄčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ.
RXSUSP čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend). ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮ 0, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ąĄčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ.
RXRSM čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ (Resume). ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮ 0, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ąĄčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ.
SOFINT čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ SOF (ąĮą░čćą░ą╗ąŠ čäčĆąĄą╣ą╝ą░). ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮ 0, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ąĄčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ.
BIT12 ą┐čĆąŠčüč鹊 ą▒ąĖčé ąĮąŠą╝ąĄčĆ 12. ąöą╗čÅ č湥ą│ąŠ ąŠąĮ ąĮčāąČąĄąĮ, ąĮąĄą┐ąŠąĮčÅčéąĮąŠ. ąŁč鹊čé ą▒ąĖčé ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮ, ąĖ ąŠąĮ ą▓čüąĄą│ą┤ą░ čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 1.
WAKEUP čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĮą░ čłąĖąĮąĄ. ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮ 0, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ąĄčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ USB ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ą▓ suspend mode, firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą╝ąŠąČąĄčé ą▓čŗą║ą╗čÄčćąĖčéčī ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ ą╗ąŠą│ąĖą║čā USB. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╗čÄą▒čŗąĄ ąĘą░ą┐čĆąŠčüčŗ ąĮą░ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąŠčé čģąŠčüčéą░ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ ą▓ąŠ ą▓ąĮąĖą╝ą░ąĮąĖąĄ, ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĘąĮą░č湥ąĮąĖąĄ čüą▒čĆąŠčüą░ ą▒ąĖčéą░ RXRSM ą▒čāą┤ąĄčé čĆą░ąĘčĆąĄčłąĄąĮąŠ.
34.6.7 UDP Interrupt Status Register (čĆąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_ISR
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-only (č鹊ą╗čīą║ąŠ čćč鹥ąĮąĖąĄ)
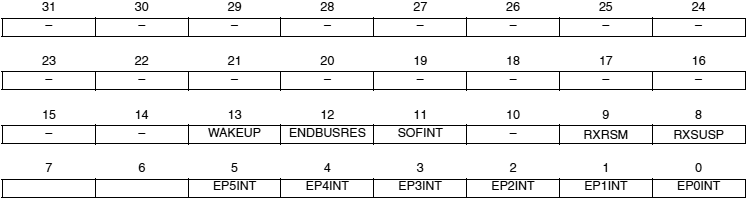
EPOINT, EP1INT, EP2INT, EP3INT, EP4INT, EP5INT ą┐ąŠ ąĘąĮą░č湥ąĮąĖčÄ čŹčéąĖčģ ą▒ąĖčé ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī, ąŠčé ą║ą░ą║ąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ - ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ 0, 1, 2, 3, 4, 5 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮ 1, č鹊 ą▒čŗą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ą¤čĆąĖčćąĖąĮ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ. ąŁčéčā ą┐čĆąĖčćąĖąĮčā ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠ ąĘąĮą░č湥ąĮąĖčÄ čĆąĄą│ąĖčüčéčĆą░ UDP_CSRx (x = 0..5), ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▒ąĖčéčŗ RXSETUP, RX_DATA_BK0, RX_DATA_BK1, TXCOMP, STALLSENT (čüą╝. ą┤ą░ą╗ąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ UDP_CSRx).
ąæąĖčé EP0INT čÅą▓ą╗čÅąĄčéčüčÅ "ą╗ąĖą┐ą║ąĖą╝ ą▒ąĖč鹊ą╝" (sticky bit). ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčüčéą░ąĮąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ EP0INT ąĘą░ą┐ąĖčüčīčÄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆ UDP_CSR0.
RXSUSP čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend). ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 ą▓ąŠąĘąĮąĖą║ą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čŹč鹊čé ą▒ąĖčé, ą║ąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ ąĮąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čāąČąĄ 3 ą╝čü. ą¤čĆąĖ čŹč鹊ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ.
RXRSM čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ (Resume). ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čŹč鹊čé ą▒ąĖčé, ą║ąŠą│ą┤ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čüąŠčüč鹊čÅąĮąĖąĄ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ, ąĖ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĮąŠ čüą▒čĆąŠčüąĖčéčī čŹč鹊čé čäą╗ą░ą│ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ čäą╗ą░ą│ą░ RXRSM ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_ICR.
SOFINT čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ SOF (ąĮą░čćą░ą╗ąŠ čäčĆąĄą╣ą╝ą░). ąĢčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ SOF. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ č鹊ą║ąĄąĮ SOF. ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ čüąĖą│ąĮą░ą╗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĮą░ ąĖąĘąŠčģčĆąŠąĮąĮčŗčģ ą║ąŠąĮąĄčćąĮčŗčģ č鹊čćą║ą░čģ.
ENDBUSRES čüąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüąŠą▒čŗčéąĖčÅ ą║ąŠąĮčåą░ čüą▒čĆąŠčüą░ ą┐ąŠ čłąĖąĮąĄ (End of BUS Reset). ąĢčüą╗ąĖ ą▓ ą▒ąĖč鹥 ą┐čĆąŠčćąĖčéą░ąĮą░ 1, č鹊 čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠąČąĖą┤ą░ąĄčé čüą▓ąŠąĄą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ą║ąŠąĮčåą░ čüą▒čĆąŠčüą░ ą┐ąŠ čłąĖąĮąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓čüčÅą║ąĖą╣ čĆą░ąĘ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ UDP reset. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮą░ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐čĆąŠčüąŠą▓ ąĮą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ 0. ąźąŠčüčé ąĮą░čćąĖąĮą░ąĄčé 菹Įčāą╝ąĄčĆą░čåąĖčÄ, ąĖ ąĘą░č鹥ą╝ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ.
WAKEUP čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĮą░ čłąĖąĮąĄ, ąĄčüą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮą░ 1. ąÆąŠąĘąĮąĖą║ą░ąĄčé ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čģąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ RESUME ąĖą╗ąĖ RESET.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüąŠčüč鹊čÅąĮąĖąĄ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ, firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĮąŠ ąŠčćąĖčüčéąĖčéčī čŹč鹊čé ą▒ąĖčé ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ čäą╗ą░ą│ą░ WAKEUP ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_ICR.
34.6.8 UDP Interrupt Clear Register (čĆąĄą│ąĖčüčéčĆ ąŠčćąĖčüčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_ICR
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: write-only (č鹊ą╗čīą║ąŠ ąĘą░ą┐ąĖčüčī)

RXSUSP ąŠčćąĖčüčéą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend). ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čüą▒čĆą░čüčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čŹč鹊ą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
RXRSM ąŠčćąĖčüčéą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ (Resume). ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čüą▒čĆą░čüčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čŹč鹊ą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
SOFINT ąŠčćąĖčüčéą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ SOF (ąĮą░čćą░ą╗ąŠ čäčĆąĄą╣ą╝ą░). ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čüą▒čĆą░čüčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čŹč鹊ą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ENDBUSRES ąŠčćąĖčüčéą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüąŠą▒čŗčéąĖčÅ ą║ąŠąĮčåą░ čüą▒čĆąŠčüą░ ą┐ąŠ čłąĖąĮąĄ (End of BUS Reset). ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čüą▒čĆą░čüčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čŹč鹊ą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
WAKEUP ąŠčćąĖčüčéą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĮą░ čłąĖąĮąĄ. ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą░ ąĘą░ą┐ąĖčüčī 1 čüą▒čĆą░čüčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čŹč鹊ą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
34.6.9 UDP Reset Endpoint Register (čĆąĄą│ąĖčüčéčĆ čüą▒čĆąŠčüą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_RST_EP
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-write (čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī)

EP0, EP1, EP2, EP3, EP4, EP5 ąĘą░ą┐ąĖčüčī ą▓ čŹčéąĖ ą▒ąĖčéčŗ ą▓čŗąĘčŗą▓ą░ąĄčé čüą▒čĆąŠčü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ 0, 1, 2, 3, 4, 5. ą¤čĆąĖ čŹč鹊ą╝ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ą▓ 0 čāą║ą░ąĘą░č鹥ą╗ąĖ FIFO, ą┐ąŠą╗ąĄ RXBYTECNT ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx ą▒čāą┤ąĄčé čćąĖčéą░čéčīčüčÅ ą║ą░ą║ 0.
ążą╗ą░ą│ EPx ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüą▒čĆąŠčüą░ FIFO, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣, ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ čüą▒čĆąŠčüą░ RXBYTECOUNT ą▓ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx. ąŁč鹊 čéą░ą║ąČąĄ čüą▒čĆąŠčüąĖčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ DATA0. ąĪą▒čĆąŠčü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ą┐ąŠą╗ąĄąĘąĄąĮ ą┐ąŠčüą╗ąĄ čāą┤ą░ą╗ąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ HALT ąĮą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ čéąĖą┐ą░ BULK. ą×ą▒čĆą░čéąĖč鹥čüčī ąĘą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą║ ą¦ą░čüčéąĖ 5.8.5 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
ąÆąØąśą£ąÉąØąśąĢ: čŹč鹊čé čäą╗ą░ą│ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čüą▒čĆąŠčüą░. ą×ąĮ ąĮąĄ ąŠčćąĖčēą░ąĄčé čäą╗ą░ą│ąĖ čĆąĄą│ąĖčüčéčĆą░ UDP_CSRx.
34.6.10 UDP Endpoint Control and Status Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĄčæ čüąŠčüč鹊čÅąĮąĖčÅ)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_CSRx (x = 0..5)
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-write (čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī)
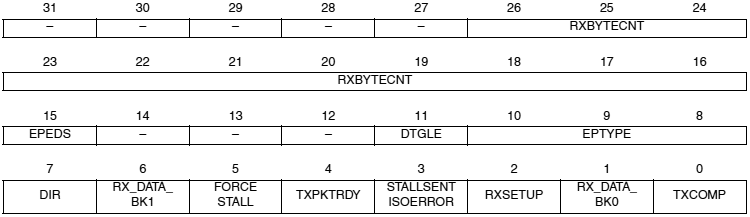
ąÆąØąśą£ąÉąØąśąĢ: ąĖąĘ-ąĘą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąĄąČą┤čā MCK ąĖ UDPCK ą║ąŠą┤ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĄąĮ ąŠąČąĖą┤ą░čéčī ąŠą║ąŠąĮčćą░ąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą┐ąĄčĆąĄą┤ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┤čĆčāą│ąŠą╣ ąĘą░ą┐ąĖčüąĖ ą┐čāč鹥ą╝ ąŠą┐čĆąŠčüą░ ą▒ąĖč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ/ąŠčćąĖčēąĄąĮčŗ. ą¤čĆąĖą╝ąĄčĆ:
//! ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ąŠą▓ čĆąĄą│ąĖčüčéčĆą░ UDP_CSR ąĖ ąŠąČąĖą┤ą░ąĮąĖąĄ ą╝ąŠą╝ąĄąĮčéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
#define Udp_ep_clr_flag(pInterface, endpoint, flags) {
pInterface->UDP_CSR[endpoint] &= ~(flags);
while ( (pInterface->UDP_CSR[endpoint] & (flags)) == (flags) );
}
//! ąŻčüčéą░ąĮąŠą▓ą║ą░ čäą╗ą░ą│ąŠą▓ čĆąĄą│ąĖčüčéčĆą░ UDP_CSR ąĖ ąŠąČąĖą┤ą░ąĮąĖąĄ ą╝ąŠą╝ąĄąĮčéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
#define Udp_ep_set_flag(pInterface, endpoint, flags) {
pInterface->UDP_CSR[endpoint] |= ~(flags);
while ( (pInterface->UDP_CSR[endpoint] & (flags)) != (flags) );
}
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ ąŠą║čĆčāąČąĄąĮąĖąĖ ą▓čŗč鹥čüąĮčÅčÄčēąĄą╣ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ (preemptive environment) ąŠčćąĖčüčéą║ą░ ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ čäą╗ą░ą│ą░, ąĖ ąŠąČąĖą┤ą░ąĮąĖąĄ čüąŠčüčéą░ą▓ąĖčé ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ 1 čéą░ą║čé UDPCK ąĖ 1 čéą░ą║čé ą┐ąĄčĆąĖč乥čĆąĖąĖ. ą×ą┤ąĮą░ą║ąŠ čäą╗ą░ą│ąĖ RX_DATA_BK0, TXPKTRDY, RX_DATA_BK1 čéčĆąĄą▒čāčÄčé ąŠąČąĖą┤ą░ąĮąĖčÅ 3 čéą░ą║čéą░ UDPCK ąĖ 3 čéą░ą║č鹊ą▓ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┐ąĄčĆąĄą┤ ą┐ąŠą╗čāč湥ąĮąĖąĄą╝ ą┤ąŠčüčéčāą┐ą░ ą║ DPR.
TXCOMP čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ą┐ą░ą║ąĄčé IN čü ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ąĖ ą▓ DPR ą┤ą░ąĮąĮčŗą╝ąĖ. ąŁč鹊čé čäą╗ą░ą│ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1.
ąŚą░ą┐ąĖčüčī (ąŠčćąĖčēą░ąĄčéčüčÅ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░):
0 = ąŠčćąĖčüčéą║ą░ čäą╗ą░ą│ą░, ąŠčćąĖčüčéą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
1 = ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.
ą¦č鹥ąĮąĖąĄ (čäą╗ą░ą│ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB):
0 = čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN ąĮąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮą░ čģąŠčüč鹊ą╝.
1 = čéčĆą░ąĮąĘą░ą║čåąĖčÅ Data IN ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮą░ čģąŠčüč鹊ą╝.
ą¤ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ Data IN ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ TXPKTRDY ą║ąŠą┤ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąČą┤ąĄčé čäą╗ą░ą│ą░ TXCOMP, čćč鹊ą▒čŗ čāą┤ąŠčüč鹊ą▓ąĄčĆąĖčéčīčüčÅ ą▓ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čģąŠčüč鹊ą╝.
RX_DATA_BK0 ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą▒ą░ąĮą║ą░ 0. ąŁč鹊čé čäą╗ą░ą│ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1.
ąŚą░ą┐ąĖčüčī (ąŠčćąĖčēą░ąĄčéčüčÅ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░):
0 = ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ USB, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ ą▒ą░ąĮą║ą░ 0 FIFO.
1 = čćč鹊ą▒čŗ ąŠčüčéą░ą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čćč鹥ąĮąĖčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝.
ą¦č鹥ąĮąĖąĄ (čäą╗ą░ą│ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB):
0 = ą▓ ą▒ą░ąĮą║ 0 FIFO ąĮąĄ ą┐čĆąĖąĮčÅčé ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ.
1 = ą┐ąŠą╗čāč湥ąĮ ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ ąĖ čüąŠčģčĆą░ąĮąĄąĮ ą▓ ą▒ą░ąĮą║ąĄ 0 FIFO.
ąÜąŠą│ą┤ą░ firmware ąŠą┐čĆą░čłąĖą▓ą░ąĄčé čŹč鹊čé ą▒ąĖčé, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čŹč鹊ą╝čā ą▒ąĖčéčā, č鹊 firmware ą┤ąŠą╗ąČąĮąŠ ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ FIFO ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąĮčÅčéčŗčģ ą▒ą░ą╣čé ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī ą▓ ą┐ąŠą╗ąĄ RXBYTECNT. ąöą░ąĮąĮčŗąĄ ą▒ą░ąĮą║ą░ 0 FIFO ą▓čŗčćąĖčéčŗą▓ą░čÄčéčüčÅ č湥čĆąĄąĘ čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ UDP_FDRx. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ, firmware ą┤ąŠą╗ąČąĮąŠ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī ą▒ą░ąĮą║ 0 ą┤ą╗čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ USB ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ ą▒ąĖčéą░ RX_DATA_BK0.
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖą╗ąĖ čüą▒čĆąŠčüą░ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąĮčāąČąĮąŠ ą┐ąŠą┤ąŠąČą┤ą░čéčī 3 čéą░ą║čéą░ UDPCK ąĖ 3 čéą░ą║čéą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┐ąĄčĆąĄą┤ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖąĄą╝ ą┤ąŠčüčéčāą┐ą░ ą║ DPR.
RXSETUP ą┐čĆąĖąĮčÅčé ą┐ą░ą║ąĄčé Setup. ąŁč鹊čé čäą╗ą░ą│ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1.
ą¦č鹥ąĮąĖąĄ:
0 = ąĮąĄ ą▒čŗą╗ąŠ ą┐ą░ą║ąĄčéą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ.
1 = čģąŠčüč鹊ą╝ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┐ą░ą║ąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ, čŹč鹊čé ą┐ą░ą║ąĄčé ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ FIFO ąĖ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
ąŚą░ą┐ąĖčüčī:
0 = firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā USB, čćč鹊 ąĮą░čüčéčĆąŠąĄčćąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ FIFO.
1 = ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.
ąŁč鹊čé čäą╗ą░ą│ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ firmware čāčüčéčĆąŠą╣čüčéą▓ą░ USB, čćč鹊 čģąŠčüč鹊ą╝ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┐ą░ą║ąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ, ąĖ čŹč鹊čé ą┐ą░ą║ąĄčé čāčüą┐ąĄčłąĮąŠ ą┐čĆąĖąĮčÅčé ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ USB. ąÜąŠą┤ firmware ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčī ą┤ą░ąĮąĮčŗąĄ Setup ąĖąĘ FIFO ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ UDP_FDRx. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ, ą║ąŠą┤ firmware ą┤ąŠą╗ąČąĄąĮ ąŠčćąĖčüčéąĖčéčī ą▒ąĖčé RXSETUP.
ąÆąŠ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ą▒ąĖčéą░ RXSETUP čéčĆą░ąĮąĘą░ą║čåąĖąĖ Data OUT ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ.
STALLSENT ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┐ą░ą║ąĄčé Stall (ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ Bulk Interrupt) / ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ ISOERROR (ąĖąĘąŠčģčĆąŠąĮąĮčŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ). ąŁč鹊čé čäą╗ą░ą│ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1.
ąæąĖčé STALLSENT ąĘą░ą▓ąĄčĆčłą░ąĄčé STALL handshake.
ą¦č鹥ąĮąĖąĄ:
0 = čģąŠčüčé ąĮąĄ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖą╗ STALL.
1 = čģąŠčüčé ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖą╗ ąŠčüčéą░ąĮąŠą▓ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ (stall).
ąŚą░ą┐ąĖčüčī:
0 = čüą▒čĆąŠčü čäą╗ą░ą│ą░ STALLSENT, ąŠčćąĖčüčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
1 = ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.
ąöą╗čÅ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮčāąČąĮąŠ ąŠčćąĖčüčéąĖčéčī čŹč鹊čé čäą╗ą░ą│. ąśąĮą░č湥 ąŠčüčéą░ąĮąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą┐ąŠ STALL handshake ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéčÅą╝ 8.4.5 ąĖ 9.4.5 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
ISOERROR ą▒čŗą╗ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ ąŠčłąĖą▒ą║ą░ CRC ą▓ ąĖąĘąŠčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥. ąŁč鹊čé čäą╗ą░ą│ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1.
ą¦č鹥ąĮąĖąĄ:
0 = ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ ąĖąĘąŠčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥 ąĮąĄ ą▒čŗą╗ąŠ ąŠčłąĖą▒ą║ąĖ.
1 = ą▒čŗą╗ą░ ąŠčłąĖą▒ą║ą░ CRC, čéą░ą║ čćč鹊 ą┤ą░ąĮąĮčŗąĄ ą▓ FIFO čüąŠą┤ąĄčƹȹ░čé ąŠčłąĖą▒ą║čā.
ąŚą░ą┐ąĖčüčī:
0 = čüą▒čĆąŠčü čäą╗ą░ą│ą░ ISOERROR, ąŠčćąĖčüčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
1 = ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.
TXPKTRDY ą▓čüąĄ ą│ąŠč鹊ą▓ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄčéą░. ąŁč鹊čé čäą╗ą░ą│ ąŠčćąĖčēą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ą¦č鹥ąĮąĖąĄ:
0 = ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ 1, čćč鹊ą▒čŗ ąŠčéą┐čĆą░ą▓ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ FIFO.
1 = ą┤ą░ąĮąĮčŗąĄ ąŠąČąĖą┤ą░čÄčé čüą▓ąŠąĄą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐ąŠ ą┐čĆąĖąĮčÅčéąĖčÄ č鹊ą║ąĄąĮą░ IN.
ąŚą░ą┐ąĖčüčī:
0 = ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ 0, ąĄčüą╗ąĖ čüčéą░čĆąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒čŗą╗ąŠ 0.
1 = firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĘą░ą┐ąĖčüą░ą╗ąŠ ą▓ ą▒čāč乥čĆ FIFO ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā, ąĖ ąŠąĮą░ ą│ąŠč鹊ą▓ą░ ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ.
ąŁč鹊čé čäą╗ą░ą│ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ Data IN (ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą║ čģąŠčüčéčā USB). ąÜąŠą┤ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čŹč鹊čé čäą╗ą░ą│ ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé ąŠčćąĖčüčéą║ąĖ, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī čģąŠčüčéčā ą┤ą░ąĮąĮčŗąĄ. ąĢčüą╗ąĖ čŹč鹊čé čäą╗ą░ą│ ą▓ ąĮčāą╗ąĄ, č鹊 ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ FIFO ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ UDP_FDRx. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ FIFO, ą║ąŠą┤ firmware ąŠą┐ąŠą▓ąĄčēą░ąĄčé ąŠą▒ čŹč鹊ą╝ ą░ą┐ą┐ą░čĆą░čéčāčĆčā USB ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ TXPKTRDY ą▓ 1. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąŠą│čāčé ąĮą░čćą░čéčīčüčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čłąĖąĮčŗ USB. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ą┐ąŠą╗čāč湥ąĮčŗ čģąŠčüč鹊ą╝, ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ TXCOMP.
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖą╗ąĖ čüą▒čĆąŠčüą░ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąĮčāąČąĮąŠ ą┐ąŠą┤ąŠąČą┤ą░čéčī 3 čéą░ą║čéą░ UDPCK ąĖ 3 čéą░ą║čéą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┐ąĄčĆąĄą┤ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖąĄą╝ ą┤ąŠčüčéčāą┐ą░ ą║ DPR.
FORCESTALL ąĘą░ą┐čāčüą║ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąŠčüčéą░ąĮąŠą▓ą░ (Force Stall). ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠąĮąĄčćąĮčŗą╝ąĖ č鹊čćą║ą░ą╝ąĖ Control, Bulk ąĖ Isochronous.
ą¦č鹥ąĮąĖąĄ:
0 = ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
1 = čüąŠčüč鹊čÅąĮąĖąĄ Stall.
ąŚą░ą┐ąĖčüčī:
0 = ą▓ąŠąĘą▓čĆą░čé ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
1 = ąŠčéą┐čĆą░ą▓ą║ą░ čģąŠčüčéčā STALL.
ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą┐ąŠ STALL handshake ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéčÅą╝ 8.4.5 ąĖ 9.4.5 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ Control: ą▓ąŠ ą▓čĆąĄą╝čÅ čüčéą░ą┤ąĖąĖ ą┤ą░ąĮąĮčŗčģ (data stage) ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čüčéą░ą┤ąĖąĖ čüčéą░čéčāčüą░ (status stage) čŹč鹊čé ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮąĄ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĘą░ą┐čĆąŠčü.
ąÜąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ Bulk ąĖ Interrupt: čŹč鹊čé ą▒ąĖčé ąŠą┐ąŠą▓ąĄčēą░ąĄčé čģąŠčüčé, čćč鹊 ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ (halted).
ąÜąŠą│ą┤ą░ čģąŠčüčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé STALL, č鹊 firmware ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ąŠą▒ čŹč鹊ą╝ čäą╗ą░ą│ąŠą╝ STALLSENT.
RX_DATA_BK1 ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą▒ą░ąĮą║ą░ 1. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠąĮąĄčćąĮčŗą╝ąĖ č鹊čćą║ą░ą╝ąĖ čü ą░čéčĆąĖą▒čāčéą░ą╝ąĖ ping-pong. ąŁč鹊čé čäą╗ą░ą│ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1.
ąŚą░ą┐ąĖčüčī (ąŠčćąĖčēą░ąĄčéčüčÅ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░):
0 = ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ USB, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ ą▒ą░ąĮą║ą░ 1 FIFO.
1 = čćč鹊ą▒čŗ ąŠčüčéą░ą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čćč鹥ąĮąĖčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝.
ą¦č鹥ąĮąĖąĄ (čäą╗ą░ą│ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ USB):
0 = ą▓ ą▒ą░ąĮą║ 1 FIFO ąĮąĄ ą┐čĆąĖąĮčÅčé ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ.
1 = ą┐ąŠą╗čāč湥ąĮ ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ ąĖ čüąŠčģčĆą░ąĮąĄąĮ ą▓ ą▒ą░ąĮą║ąĄ 1 FIFO.
ąÜąŠą│ą┤ą░ firmware ąŠą┐čĆą░čłąĖą▓ą░ąĄčé čŹč鹊čé ą▒ąĖčé, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čŹč鹊ą╝čā ą▒ąĖčéčā, č鹊 firmware ą┤ąŠą╗ąČąĮąŠ ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ FIFO ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąĮčÅčéčŗčģ ą▒ą░ą╣čé ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī ą▓ ą┐ąŠą╗ąĄ RXBYTECNT. ąöą░ąĮąĮčŗąĄ ą▒ą░ąĮą║ą░ 1 FIFO ą▓čŗčćąĖčéčŗą▓ą░čÄčéčüčÅ č湥čĆąĄąĘ čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ UDP_FDRx. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ, firmware ą┤ąŠą╗ąČąĮąŠ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī ą▒ą░ąĮą║ 1 ą┤ą╗čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ USB ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ ą▒ąĖčéą░ RX_DATA_BK1.
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖą╗ąĖ čüą▒čĆąŠčüą░ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąĮčāąČąĮąŠ ą┐ąŠą┤ąŠąČą┤ą░čéčī 3 čéą░ą║čéą░ UDPCK ąĖ 3 čéą░ą║čéą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┐ąĄčĆąĄą┤ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖąĄą╝ ą┤ąŠčüčéčāą┐ą░ ą║ DPR.
DIR ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ č鹊čćą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Control).
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī:
0 = čĆą░ąĘčĆąĄčłą░ąĄčé čéčĆą░ąĮąĘą░ą║čåąĖąĖ Data OUT ą▓ čüčéą░ą┤ąĖąĖ ą┤ą░ąĮąĮčŗčģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control data stage).
1 = čĆą░ąĘčĆąĄčłą░ąĄčé čéčĆą░ąĮąĘą░ą║čåąĖąĖ Data IN ą▓ čüčéą░ą┤ąĖąĖ ą┤ą░ąĮąĮčŗčģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control data stage).
ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą┐ąŠ control data stage ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéčÅą╝ 8.5.3 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ ąŠčćąĖčüčéą║ąŠą╣ RXSETUP (čĆąĄą│ąĖčüčéčĆ UDP_CSRx) ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čüčéą░ą┤ąĖąĖ setup. ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ ąĘą░ą┐čĆąŠčüąŠą╝ ą▓ ą┐ą░ą║ąĄč鹥 setup data, ąĮą░ čüčéą░ą┤ąĖąĖ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░čćą░ ą╗ąĖą▒ąŠ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ čģąŠčüčéčā (DIR = 1), ą╗ąĖą▒ąŠ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā (DIR = 0). ąØąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī čŹč鹊čé ą▒ąĖčé ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą│ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ čüčéą░ą┤ąĖąĖ čüčéą░čéčāčüą░.
EPTYPE[2:0] čéąĖą┐ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī:
| 000 |
Control (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ) |
| 001 |
Isochronous OUT |
| 101 |
Isochronous IN |
| 010 |
Bulk OUT |
| 110 |
Bulk IN |
| 011 |
Interrupt OUT |
| 111 |
Interrupt IN |
DTGLE ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (Data Toggle)
ąóąŠą╗čīą║ąŠ čćč鹥ąĮąĖąĄ:
0 = ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāčÄčé ą┐ą░ą║ąĄčé DATA0.
1 = ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāčÄčé ą┐ą░ą║ąĄčé DATA1.
ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅą╝ ą┐ą░ą║ąĄč鹊ą▓ DATA0, DATA1 ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą¦ą░čüčéąĖ 8 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
EPEDS ąĘą░ą┐čĆąĄčé ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
ą¦č鹥ąĮąĖąĄ:
0 = ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ąĘą░ą┐čĆąĄčēąĄąĮą░.
1 = ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čĆą░ąĘčĆąĄčłąĄąĮą░.
ąŚą░ą┐ąĖčüčī:
0 = ąĘą░ą┐čĆąĄčé ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
1 = čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čü ąĮąŠą╝ąĄčĆąŠą╝ 0) ą▓čüąĄą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░, čéą░ą║ čćč鹊 ąĘą░ą┐ąĖčüčī ą▓ čŹč鹊 ą┐ąŠą╗ąĄ ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą▓čüąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (0).
RXBYTECNT[10:0] ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▒ą░ą╣čé ą▓ FIFO. ąŁč鹊 ą┐ąŠą╗ąĄ ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
ąÜąŠą│ą┤ą░ čģąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ ą║ čāčüčéčĆąŠą╣čüčéą▓čā, ą░ą┐ą┐ą░čĆą░čéčāčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB čüąŠčģčĆą░ąĮčÅąĄčé ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ FIFO, ąĖ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ąŠą▒ čŹč鹊ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ąĘą░ą│čĆčāąĘąĖčéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ FIFO ą▓ čüą▓ąŠčÄ ą┐ą░ą╝čÅčéčī ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ RXBYTECNT ą▒ą░ą╣čé ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ UDP_FDRx.
34.6.11 UDP FIFO Data Register (čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ FIFO ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_FDRx (x = 0..5)
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-write (čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī)
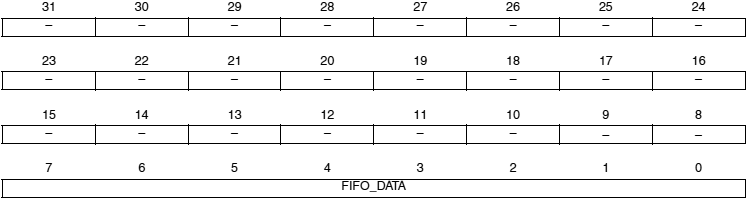
FIFO_DATA[7:0] ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ FIFO. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ą┐čĆąŠčéą░ą╗ą║ąĖą▓ą░čéčī ą▓ FIFO ąĖą╗ąĖ ą▓čŗąĮąĖą╝ą░čéčī ąŠčéčéčāą┤ą░ ą▒ą░ą╣čéčŗ č湥čĆąĄąĘ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ.
ąĪč湥čéčćąĖą║ RXBYTECNT ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ UDP_CSRx čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ąĖąĘ FIFO (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ čģąŠčüč鹊ą╝).
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ Max Packet Size (ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą║ąĄčéą░) ą▓ Standard Endpoint Descriptor (čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ). ąŁč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ čĆą░ąĘą╝ąĄčĆą░ čäąĖąĘąĖč湥čüą║ąŠą╣ ą┐ą░ą╝čÅčéąĖ, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąŠą╣. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB (USB Serial Bus Specification, Rev.2.0).
34.6.12 UDP Transceiver Control Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝)
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░): UDP_TXVC
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ čéąĖą┐čŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: read-write (čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī)

ąÆąØąśą£ąÉąØąśąĢ: ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮčŗ čéą░ą║čéčŗ ą┐ąĄčĆąĖč乥čĆąĖąĖ UDP č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ PMC ą┐ąĄčĆąĄą┤ ą╗čÄą▒čŗą╝ąĖ ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ čćč鹥ąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ UDP, ą▓ą║ą╗čÄčćą░čÅ čĆąĄą│ąĖčüčéčĆ UDP_TXCV.
TXVDIS ąĘą░ą┐čĆąĄčé ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ (Transceiver Disable)
ąÜąŠą│ą┤ą░ UDP ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮąĖąČąĄąĮąŠ ą┐čāč鹥ą╝ ąĘą░ą┐čĆąĄčéą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ ą╗ąĖąĮąĖąĖ USB. ąŁč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ TXVDIS. ą¦č鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā čéčĆą░ąĮčüąĖą▓ąĄčĆą░, č鹊 ąĮčāąČąĮąŠ ąŠčćąĖčüčéąĖčéčī ą▒ąĖčé TXVDIS.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ USB pull-up ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ DP, č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąĮąĖ ą▓ ą║ą░ą║ąŠą╣ ą┤čĆčāą│ąŠą╣ čĆąĄą│ąĖčüčéčĆ UDP, ą║čĆąŠą╝ąĄ čĆąĄą│ąĖčüčéčĆą░ UDP_TXVC. ą¤čĆąĖčćąĖąĮą░ - ąĄčüą╗ąĖ čüąĖą│ąĮą░ą╗čŗ DP ąĖ DM ą┐ą╗ą░ą▓ą░čÄčé ąŠą║ąŠą╗ąŠ 0, ąĖą╗ąĖ ą┐čĆąĖčéčÅąĮčāčéčŗ ą║ GND, čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčé SE0 ą▓čüą╗ąĄą┤čüčéą▓ąĖąĄ čüą▒čĆąŠčüą░ USB.
[ąĪą╗ąŠą▓ą░čĆąĖą║]
UDP USB Device Port, ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ARM7 ą┐ąĄčĆąĖč乥čĆąĖčÅ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┐ąŠčĆč鹊ą╝ USB.
DPR Dual Port RAM, ą┤ą▓čāčģą┐ąŠčĆč鹊ą▓ąŠąĄ ą×ąŚąŻ. ąŁč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ą×ąŚąŻ, ą▓ ą║ąŠč鹊čĆąŠą╣ ąĄčüčéčī ąŠčéą┤ąĄą╗čīąĮąŠ ą▓čģąŠą┤ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ, ąĖ ąŠčéą┤ąĄą╗čīąĮąŠ ą▓čģąŠą┤ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. ąöą▓čāčģą┐ąŠčĆč鹊ą▓ąŠąĄ ą×ąŚąŻ ąŠą▒čŗčćąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖ ąĘą░ą┐ąĖčüčī, ąĖ čćč鹥ąĮąĖąĄ čüą▓ąŠąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ.
APB Advanced Peripheral Bus, čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ čłąĖąĮą░ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ARM7 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel.
FIFO First Input First Output, čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą▒čāč乥čĆ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā "ą┐ąĄčĆą▓čŗą╝ ą┐čĆąĖčłąĄą╗, ą┐ąĄčĆą▓čŗą╝ ąĖ čāčłąĄą╗"
VBUS čłąĖąĮą░ ą┐ąĖčéą░ąĮąĖčÅ +5V, ą║ąŠč鹊čĆą░čÅ ąĖą╝ąĄąĄčéčüčÅ čüčĆąĄą┤ąĖ ą┐čĆąŠą▓ąŠą┤ąŠą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ USB (ąĮą░ą┐ąŠą╝ąĮčÄ, čćč鹊 čéą░ą╝ ą▓čüąĄą│ąŠ 4 ą┐čĆąŠą▓ąŠą┤ą░: VBUS, D+, D- ąĖ GND). ąĪ ąĮąĄčæ ą╝ąŠąČąĄčé ą┐ąŠą┤ą░ą▓ą░čéčīčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB (ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╗ąĖą▒ąŠ 100, ą╗ąĖą▒ąŠ 500 ą╝ąÉ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB).
DP D+, ąŠą┤ąĖąĮ ąĖąĘ ą┤ą▓čāčģ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ čłąĖąĮčŗ USB, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ pull-up čĆąĄąĘąĖčüč鹊čĆą░ ą║ čŹč鹊ą╝čā čüąĖą│ąĮą░ą╗čā ąŠą┐ąŠą▓ąĄčēą░ąĄčé čģąŠčüčé, čćč鹊 ąĮą░ čłąĖąĮąĄ USB ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ full-speed.
DM D-, ąŠą┤ąĖąĮ ąĖąĘ ą┤ą▓čāčģ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ čłąĖąĮčŗ USB, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ.
GND ground, ąŠą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤.
PLL Phase Locked Loop, ążąÉą¤ą¦, čäą░ąĘąŠą▓ą░čÅ ą░ą▓č鹊ą┐ąŠą┤čüčéčĆąŠą╣ą║ą░ čćą░čüč鹊čéčŗ.
PMC Power Management Controller, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝. ąĀą░ąĘčĆąĄčłą░ąĄčé/ąĘą░ą┐čĆąĄčēą░ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ USB, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ UDP.
Ping-pong ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤čā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą┐ąŠą╗ąŠą▓ąĖąĮąŠą║ ą┤ą▓ąŠą╣ąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąĖąĮą│ - ą▓ą║ą╗čÄč湥ąĮ ą┐ąĄčĆą▓čŗą╣ ą▒čāč乥čĆ, ą▓ ąĮąĄą│ąŠ ą╝ąŠą│čāčé ą░ą┐ą┐ą░čĆą░čéąĮąŠ ą┐ąŠčüčéčāą┐ąĖčéčī ąĖą╗ąĖ ą▒čŗčéčī ąŠč鹊čüą╗ą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ USB, ą░ ą▓č鹊čĆąŠą╣ ą▒čāč乥čĆ č鹥ą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝. ą¤ąŠąĮą│ - č鹥ą┐ąĄčĆčī ąĮą░ ą╝ąĄčüč鹥 ą┐ąĄčĆą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓č鹊čĆąŠą╣ ą▒čāč乥čĆ, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé, ąĮą░ ą╝ąĄčüč鹥 ą▓č鹊čĆąŠą│ąŠ ą▒čāč乥čĆą░ ą┐ąĄčĆą▓čŗą╣. ąæčāč乥čĆčŗ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ (ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéąĖą┐ą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ IN ąĖą╗ąĖ OUT) ą┐ąŠčüč鹊čÅąĮąĮąŠ ą╝ąĄąĮčÅčÄčéčüčÅ ą╝ąĄčüčéą░ą╝ąĖ.
default endpoint ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąŠąĮą░ ąČąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░, ąŠąĮą░ ąČąĄ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąŠąĮą░ ąČąĄ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čü ąĮąŠą╝ąĄčĆąŠą╝ 0. ąŁčéą░ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ ą╗čÄą▒ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ USB, č湥čĆąĄąĘ ąĮąĄčæ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ, č湥čĆąĄąĘ ąĮąĄčæ čģąŠčüčé ą┐ąŠą╗čāčćą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ USB ą▓ ą┐čĆąŠčåąĄčüčüąĄ 菹Įčāą╝ąĄčĆą░čåąĖąĖ.
[ąĪčüčŗą╗ą║ąĖ]
1. USB in the nutshell - ąĘą┤ąĄčüčī ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą┐ąŠąĮčÅčéąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą╝ąĮąŠą│ąĖčģ č鹥čĆą╝ąĖąĮąŠą▓, ą║ą░čüą░čÄčēąĖčģčüčÅ čüčéą░ąĮą┤ą░čĆčéą░ USB (ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░, 菹Įčāą╝ąĄčĆą░čåąĖčÅ, čģąŠčüčé USB, ACK, NACK, čüąŠčüč鹊čÅąĮąĖąĄ K, SOF, EOF, ąĖ čé. ą┐.).
2. ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ čĆą░ąĘčŖąĄą╝ąŠą▓ USB.
3. ą£ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ AT91SAM7X. |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ąĖą╝ąĄąĮąĮąŠ ą┐ąŠč鹊ą╝čā, čćč鹊 ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮąĄ ąŠą▒čŖčÅčüąĮčÅąĄčéčüčÅ č鹥čĆą╝ąĖąĮ ping-pong - ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĖ čéą░ą║ čüą░ą╝ ą▓čüąĄ ąĘąĮą░ąĄčé - čÅ ą┐čĆąĖą▓ąĄą╗ čĆą░čüčłąĖčäčĆąŠą▓ą║čā čŹč鹊ą│ąŠ č鹥čĆą╝ąĖąĮą░ ą▓ ąĪą╗ąŠą▓ą░čĆąĖą║ąĄ. ąÜ control endpoint čŹč鹊 ąĮąĄ ąĖą╝ąĄąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÅ, ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝čā ping-pong ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, ą║ ą║ąŠč鹊čĆčŗą╝ ą╝ąŠąČąĮąŠ ą┐čĆąĖą▓čÅąĘą░čéčī ą┤ą▓ąŠą╣ąĮąŠą╣ ą▒čāč乥čĆ. ąÜ ą┤ą▓čāčģčüč鹊čĆąŠąĮąĮąĄą╝čā ąŠą▒ą╝ąĄąĮčā ping-pong č鹊ąČąĄ ąĮąĄ ąĖą╝ąĄąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÅ, čŹč鹊čé ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą░ą╗ą│ąŠčĆąĖčéą╝čā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ