|
ąŁč鹊 čéčĆąĄčéčīčÅ čćą░čüčéčī ą┐ąĄčĆąĄą▓ąŠą┤ą░ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1], ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ ą┐čĆąŠč鹊ą║ąŠą╗ UBX (ą┐ąĄčĆą▓čāčÄ ąĖ ą▓č鹊čĆčāčÄ čćą░čüčéąĖ čüą╝. ą┐ąŠ čüčüčŗą╗ą║ą░ą╝ [2, 3]). ąÆčüąĄ ąĮąĄą┐ąŠąĮčÅčéąĮčŗąĄ č鹥čĆą╝ąĖąĮčŗ ąĖ čüąŠą║čĆą░čēąĄąĮąĖčÅ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąĪą╗ąŠą▓ą░čĆąĖą║" čüčéą░čéčīąĖ [2].
ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ GPS/GNSS ą║ąŠą╝ą┐ą░ąĮąĖąĖ u-blox ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüą▓ąŠą╣ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ UBX ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ GNSS čģąŠčüčéčā (ą║ąŠą╝ą┐čīčÄč鹥čĆ ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ). ąŻ čŹč鹊ą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ą╗čÄč湥ą▓čŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ:
ŌĆó ąÜąŠą╝ą┐ą░ą║čéąĮąŠčüčéčī, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą▓ąŠąĖčćąĮčŗąĄ 8-ą▒ąĖčéąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ŌĆó ąŚą░čēąĖčéą░ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝ąŠą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĮąĄ čĆąĄčüčāčĆčüąŠąĄą╝ą║ąŠą│ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝ą░.
ŌĆó ą£ąŠą┤čāą╗čīąĮąŠčüčéčī - ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ 2 čüčéą░ą┤ąĖą╣ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ (Class ąĖ Message ID).
[27. ąĪčéčĆčāą║čéčāčĆą░ ą┐ą░ą║ąĄčéą░ UBX]
ąæą░ąĘąŠą▓čŗą╣ ą┐ą░ą║ąĄčé UBX ą▓čŗą│ą╗čÅą┤ąĖčé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:

ŌĆó ąÜą░ąČą┤ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü 2 ą▒ą░ą╣čé: 0xB5 0x62 (čüąĖą╝ą▓ąŠą╗čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ SYNCCHAR1 ąĖ SYNCCHAR2).
ŌĆó ąŚą░č鹥ą╝ ąĖą┤ąĄčé 1 ą▒ą░ą╣čé ą┐ąŠą╗čÅ ą║ą╗ą░čüčüą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (Class). Class ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▒ą░ąĘąŠą▓ąŠąĄ ą┐ąŠą┤ą╝ąĮąŠąČąĄčüčéą▓ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣.
ŌĆó ąöą░ą╗ąĄąĄ ąĖą┤ąĄčé 1 ą▒ą░ą╣čé ą┐ąŠą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (ID). ID ąŠą┤ąĮąŠąĘąĮą░čćąĮąŠ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ čüą╗ąĄą┤čāąĄčé ą┤ą░ą╗ąĄąĄ.
ŌĆó ąöą░ą╗ąĄąĄ ąĖą┤ąĄčé 2 ą▒ą░ą╣čéą░ ą┐ąŠą╗čÅ ą┤ą╗ąĖąĮčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ (Length). Length ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čāč湥čéą░ ą┤ą╗ąĖąĮčŗ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ. ą×ąĮąŠ ąĮąĄ čāčćąĖčéčŗą▓ą░ąĄčé ą┐ąŠą╗čÅ SYNCCHAR1, SYNCCHAR2, Length, Class, ID ąĖą╗ąĖ CRC. ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ ą┤ą╗čÅ ą┤ą╗ąĖąĮčŗ čŹč鹊 16-ą▒ąĖčéąĮąŠąĄ čåąĄą╗ąŠąĄ čćąĖčüą╗ąŠ čü ą┐ąŠčĆčÅą┤ą║ąŠą╝ ą▒ą░ą╣čé Little Endian [4], čé. ąĄ. ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝.
ŌĆó ą¤ąŠą╗ąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ Payload ąĖą╝ąĄąĄčé ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ą┤ą╗ąĖąĮčā (ą┤ą╗ąĖąĮą░ ą▓ ą▒ą░ą╣čéą░čģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┐ąŠą╗čÅ Length).
ŌĆó ąæą░ą╣čé CK_A ąĖ ą▒ą░ą╣čé CK_B čŹč鹊 16-ą▒ąĖčéąĮą░čÅ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ (ą░ą╗ą│ąŠčĆąĖčéą╝ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą▒čāą┤ąĄčé ą┐ąŠą║ą░ąĘą░ąĮ ąĮąĖąČąĄ).
[28. ą¤čĆą░ą▓ąĖą╗ą░, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā UBX]
28.1. ąŻą┐ą░ą║ąŠą▓ą║ą░ čüčéčĆčāą║čéčāčĆčŗ ą┐ą░ą║ąĄčéą░
ąŚąĮą░č湥ąĮąĖčÅ čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ, čéą░ą║ čćč鹊 čāą┐ą░ą║ąŠą▓ą║ą░ čüčéčĆčāą║čéčāčĆčŗ ąĮąĄ čüąŠąĘą┤ą░ąĄčé ą┐čĆąŠą▒ą╗ąĄą╝. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 2-ą▒ą░ą╣čéąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ąĮą░čćąĖąĮą░čéčīčüčÅ čüąŠ čüą╝ąĄčēąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 2, 4-ą▒ą░ą╣čéąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ąĮą░čćąĖąĮą░čéčīčüčÅ čüąŠ čüą╝ąĄčēąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 4, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠą╗ąĄ Payload ąĮą░čćąĖąĮą░ąĄčéčüčÅ čüąŠ čüą╝ąĄčēąĄąĮąĖčÅ 6 ąŠčé ąĮą░čćą░ą╗ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX.
28.2. ąśą╝ąĄąĮąŠą▓ą░ąĮąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ
ą¤ąŠą╗ąĮąŠąĄ ąĖą╝čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą┐čāč鹥ą╝ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ąĖą╝ąĄąĮąĖ ą║ą╗ą░čüčüą░ ąĖ ą┤ąĄčäąĖčüą░ ą┐ąĄčĆąĄą┤ ąĖą╝ąĄąĮąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čüąŠąŠą▒čēąĄąĮąĖąĄ POSECEF ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ ą║ą░ą║ NAV-POSECEF. ąĪčüčŗą╗ą║ą░ ąĮą░ ąĘąĮą░č湥ąĮąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąĄčäąĖčüą░ ąĖ ąĖą╝ąĄąĮąĖ ąĘąĮą░č湥ąĮąĖčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ NAV-POSECEF-X.
28.3. ążąŠčĆą╝ą░čéčŗ čćąĖčüą╗ą░
ąÆčüąĄ ą╝ąĮąŠą│ąŠą▒ą░ą╣čéąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ ą▓ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĄ ą▓ č乊čĆą╝ą░č鹥 Little Endian [4], ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ąĮąĄčćč鹊 ąĖąĮąŠąĄ. ąÆčüąĄ ąĘąĮą░č湥ąĮąĖčÅ čü ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ č鹊čćą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ č乊čĆą╝ą░č鹥 IEEE754 ąŠą┤ąĖąĮą░čĆąĮąŠą╣ ąĖą╗ąĖ ą┤ą▓ąŠą╣ąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ. ąóąĄčģąĮąĖč湥čüą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ č乊čĆą╝ą░čéą░ IEEE754 ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ AnswerBook ąĖąĘ čéčāą╗ą║ąĖčéą░ ADS1.x (čüą╝. čéą░ą║ąČąĄ [5]).
ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čéąĖą┐ąŠą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ
| ąĪąŠą║čĆ. |
ąóąĖą┐ |
ąæą░ą╣čé |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
Min..Max |
ąóąŠčćąĮąŠčüčéčī |
| U1 |
Unsigned Char |
1 |
|
0..255 |
1 |
| I1 |
Signed Char |
1 |
ążąŠčĆą╝ą░čé čü ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┤ąŠ 2 |
-128..127 |
1 |
| X1 |
Bitfield |
1 |
|
ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ |
ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ |
| U2 |
Unsigned Short |
2 |
|
0..65535 |
1 |
| I2 |
Signed Short |
2 |
ążąŠčĆą╝ą░čé čü ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┤ąŠ 2 |
-32768..32767 |
1 |
| X2 |
Bitfield |
2 |
|
ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ |
ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ |
| U4 |
Unsigned Long |
4 |
|
0..4'294'967'295 |
1 |
| I4 |
Signed Long |
4 |
ążąŠčĆą╝ą░čé čü ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┤ąŠ 2 |
-2'147'483'648 .. 2'147'483'647 |
1 |
| X4 |
Bitfield |
4 |
|
ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ |
|
| R4 |
IEEE 754 Single Precision |
4 |
|
-2+127 ..2+127 |
ąĘąĮą░č湥ąĮąĖąĄ ┬Ę 2-24 |
| R8 |
IEEE 754 Double Precision |
8 |
|
-2+1023 .. 2+1023 |
ąĘąĮą░č湥ąĮąĖąĄ ┬Ę 2-53 |
| CH |
ASCII / ISO 8859.1 Encoding |
1 |
|
|
|
[29. ąÜąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ UBX]
ąÜąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ąŠčé ą┤ą░ąĮąĮčŗčģ ą┐ą░ą║ąĄčéą░, ąĮą░čćąĖąĮą░čÅčüčī čü ą┐ąŠą╗čÅ ą║ą╗ą░čüčüą░, ąĖ ą┤ą░ą╗ąĄąĄ ą┤ąŠ ą║ąŠąĮčåą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ:

ąÜąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé 8-ą▒ąĖčéąĮčŗą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ążą╗ąĄčéč湥čĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ čüčéą░ąĮą┤ą░čĆč鹥 TCP (RFC 1145). ą×ąĮ čĆą░ą▒ąŠčéą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
Buffer[N] čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ, ą┐ąŠ ą║ąŠč鹊čĆčŗą╝ ąĮčāąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā. ąöą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą▓ą░ ąĘąĮą░č湥ąĮąĖčÅ CK_A ąĖ CK_B, ą║ąŠč鹊čĆčŗąĄ čÅą▓ą╗čÅčÄčéčüčÅ ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ 8-ą▒ąĖčéąĮčŗą╝ąĖ čćąĖčüą╗ą░ą╝ąĖ ą▒ąĄąĘ ąĘąĮą░ą║ą░. ąŁč鹊 ą▓ą░ąČąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé, ą┐ąŠčŹč鹊ą╝čā ąĄčüą╗ąĖ ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čćąĖčüą╗ą░ ą▒ąŠą╗čīčłąĄą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ą┐ąŠčŹč鹊ą╝čā ą│ą░čĆą░ąĮčéąĖčĆčāą╣č鹥, čćč鹊 ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ą▓ čåąĖą║ą╗ąĄ ąĮą░ą┤ ąŠą▒ąŠąĖą╝ąĖ čćąĖčüą╗ą░ą╝ąĖ CK_A ąĖ CK_B ąĮą░ ąĮąĖčģ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ą╝ą░čüą║ą░ 0xFF.
u8 CK_A = 0;
u8 CK_B = 0;
for (u16 i=0; i < N; i++)
{
CK_A = CK_A + Buffer[i];
CK_B = CK_B + CK_A;
}
ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čŹč鹊ą│ąŠ čåąĖą║ą╗ą░ ą┤ą▓ą░ ąĘąĮą░č湥ąĮąĖčÅ CK_A ąĖ CK_B čüąŠą┤ąĄčƹȹ░čé ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā, ą║ąŠč鹊čĆą░čÅ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą▓ ą║ąŠąĮčåąĄ ą┐ą░ą║ąĄčéą░.
[30. ą¤ąŠč鹊ą║ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX]
ąĢčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ čüą▓čÅąĘą░ąĮčŗ čü ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ąŠą▒ąŠąĖčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ:
30.1. ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ (Acknowledgement)
ąÜąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ą╗ą░čüčüą░ CFG ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčéą┐čĆą░ą▓ąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄ "ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ" (acknowledge, ACK-ACK) ąĖą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą║ą░ąĘą░ (not acknowledge, ACK-NAK), ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą▒čŗą╗ąŠ ą╗ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ.
ąØąĄą║ąŠč鹊čĆčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤čĆčāą│ąĖčģ ą║ą╗ą░čüčüąŠą▓ (ąĮą░ą┐čĆąĖą╝ąĄčĆ LOG) čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čéą░ą║ąŠą╣ ąČąĄ ą╝ąĄčģą░ąĮąĖąĘą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ.
30.2. ą£ąĄčģą░ąĮąĖąĘą╝ ąŠą┐čĆąŠčüą░ (Polling)
ąÆčüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą▓čŗą▓ąŠą┤ąĖčé ą┐čĆąĖąĄą╝ąĮąĖą║ (ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ą╗ą░čüčüąŠą▓ MON, NAV ąĖ RXM) ą╝ąŠą│čāčé čéą░ą║ąČąĄ ąŠą┐čĆą░čłąĖą▓ą░čéčīčüčÅ.
ąŚą┤ąĄčüčī ąĮąĄčé ąŠą┤ąĮąŠą│ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ą╗čÄą▒ąŠąĄ ą┤čĆčāą│ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ą¤čĆąŠč鹊ą║ąŠą╗ UBX ą▒čŗą╗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 ą║ąŠą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒ąĄąĘ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ (ą┐ąŠą╗ąĄ Payload ą┐čāčüč鹊ąĄ, ąĖą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą┐ą░čĆą░ą╝ąĄčéčĆ, ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāčÄčēąĖą╣ ąĘą░ą┐čĆąŠčü, poll request), č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé ąŠą┐čĆąŠčü čüąŠąŠą▒čēąĄąĮąĖčÅ.
31. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ą╗ą░čüčüąŠą▓ čüąŠąŠą▒čēąĄąĮąĖą╣ (UBX Class ID)
ąÜą╗ą░čüčü ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ą│čĆčāą┐ą┐čā čüąŠąŠą▒čēąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąĮąĄą║ąŠč鹊čĆčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čüą▓čÅąĘą░ąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝. ąĪą╗ąĄą┤čāčÄčēą░čÅ čéą░ą▒ą╗ąĖčåą░ ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ą▓čüąĄ č鹥ą║čāčēąĖąĄ ą║ą╗ą░čüčüčŗ čüąŠąŠą▒čēąĄąĮąĖą╣. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ą║ą╗ą░čüčüčŗ, ąĮąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ.
| ąśą╝čÅ |
ąÜą╗ą░čüčü |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| NAV |
0x01 |
ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ: Position (ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ), Speed (čüą║ąŠčĆąŠčüčéčī), Time (ą▓čĆąĄą╝čÅ), Acc (č鹊čćąĮąŠčüčéčī), Heading (ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║čāčĆčüą░), DOP (ą┐ą░čĆą░ą╝ąĄčéčĆ čāčģčāą┤čłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ), SVs used (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓) |
| RXM |
0x02 |
Receiver Manager Messages (čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░): Satellite Status (čüąŠčüč鹊čÅąĮąĖąĄ čüą┐čāčéąĮąĖą║ą░), RTC Status (čüąŠčüč鹊čÅąĮąĖąĄ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ) |
| INF |
0x04 |
ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čüčéąĖą╗čÅ printf c ID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ), čéą░ą║ąĖąĄ ą║ą░ą║ Error (ąŠčłąĖą▒ą║ą░), Warning (ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ), Notice (ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ) |
| ACK |
0x05 |
ąĪąŠąŠą▒čēąĄąĮąĖčÅ Ack/Nack (ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ/ąŠčéą║ą░ąĘ), ą║ąŠč鹊čĆčŗą╝ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ ą▓čģąŠą┤ąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ (CFG Input Messages) |
| CFG |
0x06 |
Configuration Input Messages (čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░): Set Dynamic Model (čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ), Set DOP Mask (čāčüčéą░ąĮąŠą▓ą║ą░ DOP-ą╝ą░čüą║ąĖ), Set Baud Rate (čāčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ą╝ąĄąĮą░) ąĖ čé. ą┤. |
| MON |
0x0A |
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░: Comunication Status (čüąŠčüč鹊čÅąĮąĖąĄ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ), CPU Load (ąĘą░ą│čĆčāąĘą║ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░), Stack Usage (ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░), Task Status (čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ) |
| AID |
0x0B |
AssistNow Aiding Messages (čāč鹊čćąĮčÅčÄčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ): Ephemeris (čŹč乥ą╝ąĄčĆąĖą┤čŗ), Almanac (ą░ą╗čīą╝ą░ąĮą░čģ), ą┤čĆčāą│ąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ A-GPS |
| TIM |
0x0D |
Timing Messages (čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ): Time Pulse Output (ą│ąĄąĮąĄčĆą░čåąĖčÅ ą▓čŗčģąŠą┤ąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ), Timemark Results (čĆąĄąĘčāą╗čīčéą░čéčŗ ą╝ąĄč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ) |
| LOG |
0x21 |
Logging Messages (čüąŠąŠą▒čēąĄąĮąĖčÅ ą╗ąŠą│ą░): čüąŠąĘą┤ą░ąĮąĖąĄ, čāą┤ą░ą╗ąĄąĮąĖąĄ ą╗ąŠą│ą░, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą╗ąŠą│ąĄ ąĖ ą▓čŗą▒ąŠčĆą║ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖąĘ ą╗ąŠą│ą░ |
[32. ą×ą▒ąĘąŠčĆ čüąŠąŠą▒čēąĄąĮąĖą╣ UBX]
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
Cls/ID |
ąöą╗ąĖąĮą░ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| UBX Class ACK |
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ/ąŠčéą║ą░ąĘą░ (Ack/Nack) |
| ACK-ACK |
0x05 0x01 |
2 |
ąÆčŗą▓ąŠą┤ |
ą¤ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ |
| ACK-NAK |
0x05 0x00 |
2 |
ąÆčŗą▓ąŠą┤ |
ą×čéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (ąŠčéą║ą░ąĘ) |
| UBX Class AID |
AssistNow Aiding (čāč鹊čćąĮčÅčÄčēąĖąĄ, ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ) |
| AID-ALM |
0x0B 0x30 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ GPS Aiding Almanac |
| AID-ALM |
0x0B 0x30 |
1 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ GPS Aiding Almanac Data ą┤ą╗čÅ čüą┐čāčéąĮąĖą║ą░ |
| AID-ALM |
0x0B 0x30 |
(8) ąĖą╗ąĖ (40) |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ čüąŠąŠą▒čēąĄąĮąĖčÅ GPS Aiding Almanac |
| AID-ALPSRV |
0x0B 0x32 |
16 |
ąÆčŗą▓ąŠą┤ |
ALP-ą║ą╗ąĖąĄąĮčé ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus čü čüąĄčĆą▓ąĄčĆą░ |
| AID-ALPSRV |
0x0B 0x32 |
16 + 1┬ĘdataSize |
ąÆą▓ąŠą┤ |
ALP-čüąĄčĆą▓ąĄčĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus ą║ą╗ąĖąĄąĮčéčā |
| AID-ALPSRV |
0x0B 0x32 |
8 + 2┬Ęsize |
ąÆčŗą▓ąŠą┤ |
ALP-ą║ą╗ąĖąĄąĮčé ą┐ąŠčüčŗą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus ąĮą░ čüąĄčĆą▓ąĄčĆ |
| AID-ALP |
0x0B 0x50 |
0 + 2┬ĘN |
ąÆą▓ąŠą┤ |
ą¤ąĄčĆąĄą┤ą░čćą░ ą┐čĆąĖąĄą╝ąĮąĖą║čā ą┤ą░ąĮąĮčŗčģ čäą░ą╣ą╗ą░ ALP |
| AID-ALP |
0x0B 0x50 |
1 |
ąÆą▓ąŠą┤ |
ą¤ąŠą╝ąĄčéą║ą░ ą║ąŠąĮčåą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ |
| AID-ALP |
0x0B 0x50 |
1 |
ąÆčŗą▓ąŠą┤ |
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ |
| AID-ALP |
0x0B 0x50 |
1 |
ąÆčŗą▓ąŠą┤ |
ąŻą║ą░ąĘą░ąĮąĖąĄ ąĮą░ ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą░ąĮąĮčŗčģ |
| AID-ALP |
0x0B 0x50 |
24 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ą×ą┐čĆąŠčü čüąŠčüč鹊čÅąĮąĖčÅ AlmanacPlus |
| AID-AOP |
0x0B 0x33 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ AssistNow Autonomous |
| AID-AOP |
0x0B 0x33 |
1 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ AssistNow Autonomous ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ |
| AID-AOP |
0x0B 0x33 |
(60) ąĖą╗ąĖ (204) |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąöą░ąĮąĮčŗąĄ AssistNow Autonomous |
| AID-DATA |
0x0B 0x10 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą▓čüąĄčģ ąĮą░čćą░ą╗čīąĮčŗčģ čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ (GPS Initial Aiding Data) |
| AID-EPH |
0x0B 0x31 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ (GPS Aiding Ephemeris Data) |
| AID-EPH |
0x0B 0x31 |
1 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ ąŠą┤ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ |
| AID-EPH |
0x0B 0x31 |
(8) ąĖą╗ąĖ (104) |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ GPS |
| AID-HUI |
0x0B 0x02 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ (GPS Health), UTC ąĖ ąĖąŠąĮąŠčüč乥čĆčŗ |
| AID-HUI |
0x0B 0x02 |
72 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ GPS Health, UTC ąĖ ąĖąŠąĮąŠčüč乥čĆčŗ |
| AID-INI |
0x0B 0x01 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ąĮą░čćą░ą╗čīąĮčŗčģ čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ (GPS Initial Aiding Data) |
| AID-INI |
0x0B 0x01 |
48 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąŻč鹊čćąĮąĄąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ, ą▓čĆąĄą╝ąĄąĮąĖ, čćą░čüč鹊čéčŗ, ą┤čĆąĄą╣čäą░ čéą░ą║č鹊ą▓ |
| AID-REQ |
0x0B 0x00 |
0 |
Virtual |
ą¤ąŠčüčŗą╗ą░ąĄčé ąĘą░ą┐čĆąŠčü (AID-DATA) ą┤ą╗čÅ ą▓čüąĄčģ GPS Aiding Data |
| UBX Class CFG |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| CFG-ANT |
0x06 0x13 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ąĮą░čüčéčĆąŠąĄą║ ą░ąĮč鹥ąĮąĮčŗ |
| CFG-ANT |
0x06 0x13 |
4 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąØą░čüčéčĆąŠą╣ą║ąĖ ą░ąĮč鹥ąĮąĮčŗ |
| CFG-CFG |
0x06 0x09 |
(12) ąĖą╗ąĖ (13) |
ąÜąŠą╝ą░ąĮą┤ą░ |
Clear (ąŠčćąĖčüčéą║ą░), Save (čüąŠčģčĆą░ąĮąĄąĮąĖąĄ) ąĖ Load (ąĘą░ą│čĆčāąĘą║ą░) ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ |
| CFG-DAT |
0x06 0x06 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü čāčüčéą░ąĮąŠą▓ąŠą║ čüąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé (Datum) |
| CFG-DAT |
0x06 0x06 |
44 |
ąÆą▓ąŠą┤ |
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╣ čüąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé (User-defined Datum) |
| CFG-DAT |
0x06 0x06 |
52 |
ąÆčŗą▓ąŠą┤ |
ąóąĄą║čāčēą░čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé |
| CFG-GNSS |
0x06 0x3E |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąĖčüč鹥ą╝čŗ GNSS |
| CFG-GNSS |
0x06 0x3E |
4 + 8┬ĘnumConfigBlocks |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ GNSS |
| CFG-INF |
0x06 0x02 |
1 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ INF ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ |
| CFG-INF |
0x06 0x02 |
0 + 10┬ĘN |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| CFG-ITFM |
0x06 0x39 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąĮąĖč鹊čĆą░ ąĮą░čĆčāčłąĄąĮąĖą╣ čüąĖą│ąĮą░ą╗ą░/ą┐ąŠą╝ąĄčģ (Jamming/Interference Monitor) |
| CFG-ITFM |
0x06 0x39 |
8 |
ąÜąŠą╝ą░ąĮą┤ą░ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ Jamming/Interference |
| CFG-LOGFILTER |
0x06 0x47 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čäąĖą╗čīčéčĆą░ ą╗ąŠą│ą░ ą┤ą░ąĮąĮčŗčģ (Data Logger filter) |
| CFG-LOGFILTER |
0x06 0x47 |
12 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ Data Logger |
| CFG-MSG |
0x06 0x01 |
2 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| CFG-MSG |
0x06 0x01 |
8 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ (čüą║ąŠčĆąŠčüč鹥ą╣) ą▓čŗą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| CFG-MSG |
0x06 0x01 |
3 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| CFG-NAV5 |
0x06 0x24 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ąĮą░čüčéčĆąŠąĄą║ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (Navigation Engine) |
| CFG-NAV5 |
0x06 0x24 |
36 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąØą░čüčéčĆąŠą╣ą║ąĖ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| CFG-NAVX5 |
0x06 0x23 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü 菹║čüą┐ąĄčĆčéąĮčŗčģ ąĮą░čüčéčĆąŠąĄą║ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (Navigation Engine Expert Settings) |
| CFG-NAVX5 |
0x06 0x23 |
40 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąŁą║čüą┐ąĄčĆčéąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| CFG-NMEA |
0x06 0x17 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA |
| CFG-NMEA |
0x06 0x17 |
4 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA (čāčüčéą░čĆąĄą▓čłąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ) |
| CFG-NMEA |
0x06 0x17 |
12 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA |
| CFG-PM2 |
0x06 0x3B |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü čĆą░čüčłąĖčĆąĄąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management) |
| CFG-PM2 |
0x06 0x3B |
44 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąĀą░čüčłąĖčĆąĄąĮąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ |
| CFG-PRT |
0x06 0x00 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┐ąŠčĆč鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O Port) |
| CFG-PRT |
0x06 0x00 |
1 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ |
| CFG-PRT |
0x06 0x00 |
20 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ UART |
| CFG-PRT |
0x06 0x00 |
20 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ USB |
| CFG-PRT |
0x06 0x00 |
20 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ SPI |
| CFG-PRT |
0x06 0x00 |
20 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ DDC (I2C) |
| CFG-RATE |
0x06 0x08 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ąĮą░čüčéčĆąŠąĄą║ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ/ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ |
| CFG-RATE |
0x06 0x08 |
6 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąØą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĮą░ą▓ąĖą│ą░čåąĖąĖ/ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ |
| CFG-RINV |
0x06 0x34 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ Remote Inventory |
| CFG-RINV |
0x06 0x34 |
1 + 1┬ĘN |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ Remote Inventory |
| CFG-RST |
0x06 0x04 |
4 |
ąÜąŠą╝ą░ąĮą┤ą░ |
ąĪą▒čĆąŠčü ą┐čĆąĖąĄą╝ąĮąĖą║ą░ / ą×čćąĖčüčéą║ą░ čüčéčĆčāą║čéčāčĆ Backup Data |
| CFG-RXM |
0x06 0x11 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ RXM |
| CFG-RXM |
0x06 0x11 |
2 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ RXM |
| CFG-SBAS |
0x06 0x16 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SBAS |
| CFG-SBAS |
0x06 0x16 |
8 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SBAS |
| CFG-TP5 |
0x06 0x31 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ (Time Pulse) |
| CFG-TP5 |
0x06 0x31 |
1 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| CFG-TP5 |
0x06 0x31 |
32 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ |
| CFG-USB |
0x06 0x1B |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ USB |
| CFG-USB |
0x06 0x1B |
108 |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ USB |
| UBX Class INF |
ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| INF-DEBUG |
0x04 0x04 |
0 + 1┬ĘN |
ąÆčŗą▓ąŠą┤ |
ASCII-čüčéčĆąŠą║ą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēą░čÅ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą╗ą░ą┤ą║ąĖ |
| INF-ERROR |
0x04 0x00 |
0 + 1┬ĘN |
ąÆčŗą▓ąŠą┤ |
ASCII-čüčéčĆąŠą║ą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēą░čÅ ąŠčłąĖą▒ą║čā |
| INF-NOTICE |
0x04 0x02 |
0 + 1┬ĘN |
ąÆčŗą▓ąŠą┤ |
ASCII-čüčéčĆąŠą║ą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ |
| INF-TEST |
0x04 0x03 |
0 + 1┬ĘN |
ąÆčŗą▓ąŠą┤ |
ASCII-čüčéčĆąŠą║ą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēą░čÅ č鹥čüč鹊ą▓čŗą╣ ą▓čŗą▓ąŠą┤ |
| INF-WARNING |
0x04 0x01 |
0 + 1┬ĘN |
ąÆčŗą▓ąŠą┤ |
ASCII-čüčéčĆąŠą║ą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēą░čÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ |
| UBX Class LOG |
ą¤ąŠą┤čüąĖčüč鹥ą╝ą░ ą╗ąŠą│ą░ |
| LOG-CREATE |
0x21 0x07 |
8 |
ąÜąŠą╝ą░ąĮą┤ą░ |
ąĪąŠąĘą┤ą░ąĮąĖąĄ čäą░ą╣ą╗ą░ ą╗ąŠą│ą░ |
| LOG-ERASE |
0x21 0x03 |
0 |
ąÜąŠą╝ą░ąĮą┤ą░ |
ąĪčéąĖčĆą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą╗ąŠą│ą░ |
| LOG-FINDTIME |
0x21 0x0E |
12 |
ąÆą▓ąŠą┤ |
ąØą░ą╣čéąĖ ąĖąĮą┤ąĄą║čü ą┐ąĄčĆą▓ąŠą╣ ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│ą░, čā ą║ąŠč鹊čĆąŠą╣ ą▓čĆąĄą╝čÅ Ōēż čāą║ą░ąĘą░ąĮąĮąŠą╝čā |
| LOG-FINDTIME |
0x21 0x0E |
8 |
ąÆčŗą▓ąŠą┤ |
ą×čéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü FINDTIME |
| LOG-INFO |
0x21 0x08 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą╗ąŠą│ą░ |
| LOG-INFO |
0x21 0x08 |
48 |
ąÆčŗą▓ąŠą┤ |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą╗ąŠą│ą░ |
| LOG-RETRIEVEPOS |
0x21 0x0b |
40 |
ąÆčŗą▓ąŠą┤ |
ąÆčŗą┤ą░čćą░ 菹╗ąĄą╝ąĄąĮčéą░ ą╗ąŠą│ą░ ąŠ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ |
| LOG-RETRIEVESTRING |
0x21 0x0d |
16 + 1┬ĘbyteCount |
ąÆčŗą▓ąŠą┤ |
ąÆčŗą┤ą░čćą░ 菹╗ąĄą╝ąĄąĮčéą░-čüčéčĆąŠą║ąĖ ą╗ąŠą│ą░ |
| LOG-RETRIEVE |
0x21 0x09 |
12 |
ąÜąŠą╝ą░ąĮą┤ą░ |
ąŚą░ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą╗ąŠą│ą░ |
| LOG-STRING |
0x21 0x04 |
0 + 1┬ĘN |
ąÜąŠą╝ą░ąĮą┤ą░ |
ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ čüčéčĆąŠą║ąĖ ą▓ ą┐ą░ą╝čÅčéčī Flash ą┐čĆąĖąĄą╝ąĮąĖą║ą░ |
| UBX Class MON |
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ |
| MON-HW2 |
0x0A 0x0B |
28 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĀą░čüčłąĖčĆąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ (Extended Hardware Status) |
| MON-HW |
0x0A 0x09 |
60 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ |
| MON-IO |
0x0A 0x02 |
0 + 20┬ĘN |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O Subsystem Status) |
| MON-MSGPP |
0x0A 0x06 |
120 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ą░čĆčüąĖąĮą│ą░ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| MON-RXBUF |
0x0A 0x07 |
24 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ (Receiver Buffer Status) |
| MON-RXR |
0x0A 0x21 |
1 |
ąÆčŗą▓ąŠą┤ |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (Receiver Status Information) |
| MON-TXBUF |
0x0A 0x08 |
28 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmitter Buffer Status) |
| MON-VER |
0x0A 0x04 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü ą▓ąĄčĆčüąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ / ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (Receiver/Software Version) |
| MON-VER |
0x0A 0x04 |
40 + 30┬ĘN |
ą×čéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü |
ąÆąĄčĆčüąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ / ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ |
| UBX Class NAV |
ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| NAV-AOPSTATUS |
0x01 0x60 |
20 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĪąŠčüč鹊čÅąĮąĖąĄ AssistNow Autonomous |
| NAV-CLOCK |
0x01 0x22 |
20 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
Clock Solution (ą┤ą░ąĮąĮčŗąĄ ą▓čĆąĄą╝ąĄąĮąĖ) |
| NAV-DGPS |
0x01 0x31 |
16 + 12┬ĘnumCh |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąöą░ąĮąĮčŗąĄ DCPS, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| NAV-DOP |
0x01 0x04 |
18 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą┤ąĄą│čĆą░ą┤ą░čåąĖąĖ č鹊čćąĮąŠčüčéąĖ (Dilution of precision, DOP) |
| NAV-POSECEF |
0x01 0x01 |
20 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąöą░ąĮąĮčŗąĄ ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ąŠą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ (Position Solution) ą▓ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░čģ ECEF |
| NAV-POSLLH |
0x01 0x02 |
28 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąöą░ąĮąĮčŗąĄ ą│ąĄąŠą┤ąĄąĘąĖąĖ (Geodetic Position Solution) |
| NAV-PVT |
0x01 0x07 |
84 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąöą░ąĮąĮčŗąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ, čüą║ąŠčĆąŠčüčéąĖ, ą▓čĆąĄą╝ąĄąĮąĖ (Navigation Position Velocity Time Solution) |
| NAV-SBAS |
0x01 0x32 |
12 + 12┬Ęcnt |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąöą░ąĮąĮčŗąĄ čüąŠčüč鹊čÅąĮąĖčÅ SBAS (SBAS Status Data) |
| NAV-SOL |
0x01 0x06 |
52 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąöą░ąĮąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (Navigation Solution Information) |
| NAV-STATUS |
0x01 0x03 |
16 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĪąŠčüč鹊čÅąĮąĖąĄ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (Receiver Navigation Status) |
| NAV-SVINFO |
0x01 0x30 |
8 + 12┬ĘnumCh |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüą┐čāčéąĮąĖą║ą░čģ (Space Vehicle Information) |
| NAV-TIMEGPS |
0x01 0x20 |
16 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąÆčĆąĄą╝čÅ GPS (GPS Time Solution) |
| NAV-TIMEUTC |
0x01 0x21 |
20 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąÆčĆąĄą╝čÅ UTC (UTC Time Solution) |
| NAV-VELECEF |
0x01 0x11 |
20 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüą║ąŠčĆąŠčüčéąĖ (Velocity Solution) ą▓ ECEF |
| NAV-VELNED |
0x01 0x12 |
36 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüą║ąŠčĆąŠčüčéąĖ (Velocity Solution) ą▓ NED |
| UBX Class RXM |
ąĪąŠąŠą▒čēąĄąĮąĖčÅ Receiver Manager |
| RXM-ALM |
0x02 0x30 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü čüąŠą▓ąŠą║čāą┐ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą░ą╗čīą╝ą░ąĮą░čģą░ čüą┐čāčéąĮąĖą║ąŠą▓ GPS (GPS Constellation Almanac Data) |
| RXM-ALM |
0x02 0x30 |
1 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ |
| RXM-ALM |
0x02 0x30 |
(8) ąĖą╗ąĖ (40) |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü |
ąŻč鹊čćąĮčÅčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą░ą╗čīą╝ą░ąĮą░čģą░ (GPS Aiding Almanac Input/Output) |
| RXM-EPH |
0x02 0x31 |
0 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ą×ą┐čĆąŠčü čüąŠą▓ąŠą║čāą┐ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ čüą┐čāčéąĮąĖą║ąŠą▓ GPS (GPS Constellation Ephemeris) |
| RXM-EPH |
0x02 0x31 |
1 |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ |
| RXM-EPH |
0x02 0x31 |
(8) ąĖą╗ąĖ (104) |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü |
ąŻč鹊čćąĮčÅčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čŹč乥ą╝ąĄčĆąĖą┤ (GPS Aiding Ephemeris Input/Output) |
| RXM-PMREQ |
0x02 0x41 |
8 |
ąÜąŠą╝ą░ąĮą┤ą░ |
ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé ąĘą░ą┤ą░čćčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management task) |
| RXM-RAW |
0x02 0x10 |
8 + 24┬ĘnumSV |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąĪčŗčĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ (Raw Measurement Data) |
| RXM-SFRB |
0x02 0x11 |
42 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ |
Subframe Buffer |
| RXM-SVSI |
0x02 0x20 |
8 + 6┬ĘnumSV |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ čüą┐čāčéąĮąĖą║ą░ (SV Status Info) |
| UBX Class TIM |
ąĪąŠąŠą▒čēąĄąĮąĖčÅ čéą░ą╣ą╝ąĖąĮą│ą░ (Timing Messages) |
| TIM-TM2 |
0x0D 0x03 |
28 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąöą░ąĮąĮčŗąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (Time mark data) |
| TIM-TP |
0x0D 0x01 |
16 |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
ąöą░ąĮąĮčŗąĄ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ (Time Pulse Timedata) |
| TIM-VRFY |
0x0D 0x06 |
20 |
ą¤ąŠ ąĘą░ą┐čĆąŠčüčā/ąŠą┤ąĮąŠą║čĆą░čéąĮąŠ |
ą¤ąŠą╗čāč湥ąĮąĮą░čÅ ą┐čĆąŠą▓ąĄčĆą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ (Sourced Time Verification) |
[33. ACK (0x05)]
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ/ąŠčéą║ą░ąĘą░ (Ack/Nack). ąØą░ą┐čĆąĖą╝ąĄčĆ, ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠčéą▓ąĄčéą░ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ ąĮą░ ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą╗ą░čüčüą░ CFG. ąĪąŠąŠą▒čēąĄąĮąĖčÅ čŹč鹊ą│ąŠ ą║ą╗ą░čüčüą░ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąŠą▒čēąĄąĮąĖąĄ CFG ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊, ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąŠ ąĖ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝.
33.1. ACK-ACK (0x05 0x01)
33.1.1. Message Acknowledged (čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąŠ)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
ACK-ACK
|
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Message Acknowledged
|
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆčŗą▓ąŠą┤ ą┐čĆąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x05 0x01 |
2 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
clsID |
- |
Class ID ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| 1 |
U1 |
- |
msgID |
- |
Message ID ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ |
33.2. ACK-NAK (0x05 0x00)
33.2.1. Message Not-Acknowledged (čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą▒čĆąŠčłąĄąĮąŠ)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
ACK-NAK |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Message Not-Acknowledged |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆčŗą▓ąŠą┤ ą┐čĆąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x05 0x00 |
2 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
clsID |
- |
Class ID ąĮąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| 1 |
U1 |
- |
msgID |
- |
Message ID ąĮąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ |
[34. AID (0x0B)]
ąĪąŠąŠą▒čēąĄąĮąĖčÅ čüąĖčüč鹥ą╝čŗ čāč鹊čćąĮąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (AssistNow Aiding): ąĮą░ą┐čĆąĖą╝ąĄčĆ čŹč乥ą╝ąĄčĆąĖą┤čŗ (Ephemeris), ą░ą╗čīą╝ą░ąĮą░čģ (Almanac), ą┤čĆčāą│ąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ A-GPS. ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą║ą╗ą░čüčüąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ čāč鹊čćąĮčÅčÄčēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ.
34.1. AID-ALM (0x0B 0x30)
34.1.1. Poll GPS Aiding Almanac Data (ąŠą┐čĆąŠčü čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ ą░ą╗čīą╝ą░ąĮą░čģą░ GPS)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Aiding Almanac Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą┐čāčüčéą░čÅ! ąźąŠčüčé ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ/čāč鹊čćąĮčÅčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą░ą╗čīą╝ą░ąĮą░čģą░, GPS Aiding Data (Almanac) ą┤ą╗čÅ ą▓čüąĄčģ 32 čüą┐čāčéąĮąĖą║ąŠą▓ ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā. ą¤čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé 32 čüąŠąŠą▒čēąĄąĮąĖčÅ čéąĖą┐ą░ AID-ALM, ą║ą░ą║ čŹč鹊 ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x30 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
34.1.2. Poll GPS Aiding Almanac Data for a SV (ąŠą┐čĆąŠčü čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ ą░ą╗čīą╝ą░ąĮą░čģą░ ą┤ą╗čÅ SV)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Aiding Almanac Data for a SV |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąźąŠčüčé ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čāč鹊čćąĮčÅčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą░ą╗čīą╝ą░ąĮą░čģą░ čüą┐čāčéąĮąĖą║ą░ (GPS Aiding Data, Almanac) ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā. ąÆ ąŠčéą▓ąĄčé ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąĄčĆąĄą┤ą░čüčé ąŠą┤ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ čéąĖą┐ą░ AID-ALM, ą║ą░ą║ čŹč鹊 ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x30 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░ (SV ID), ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▓ąĄčĆąĮčāčéčī ą┤ą░ąĮąĮčŗąĄ ą░ą╗čīą╝ą░ąĮą░čģą░. ąöąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ: 1..32 ąĖą╗ąĖ 51, 56, 63. |
34.1.3. GPS Aiding Almanac Input/Output Message (čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ čāč鹊čćąĮąĄąĮąĖčÅ ą░ą╗čīą╝ą░ąĮą░čģą░ GPS)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
GPS Aiding Almanac Input/Output Message |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ŌĆó ąĢčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ WEEK čĆą░ą▓ąĮąŠ 0, č鹊 čüą╗ąŠą▓ą░ DWRD0 .. DWRD7 ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ, čéą░ą║ ą║ą░ą║ ą░ą╗čīą╝ą░ąĮą░čģ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ. ąŁč鹊 ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ NAV-SVINFO ąĖ RXM-SVSI ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī ą░ą╗čīą╝ą░ąĮą░čģą░, čéą░ą║ ą║ą░ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ąĮąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą│ąŠ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮąŠą│ąŠ ą░ą╗čīą╝ą░ąĮą░čģą░ (ąĖą╗ąĖ čéą░ą╝ č鹊ą╗čīą║ąŠ ąĄą│ąŠ čćą░čüčéąĖ).
ŌĆó DWORD0 .. DWORD7 čüąŠą┤ąĄčƹȹ░čé 8 čüą╗ąŠą▓ ą┐ąŠčüą╗ąĄ Hand-Over Word (HOW) čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ GPS, ą╗ąĖą▒ąŠ ąĮą░ čüčéčĆą░ąĮąĖčåą░čģ 1 .. 24 čüčāą▒čäčĆąĄą╣ą╝ą░ 5, ą╗ąĖą▒ąŠ ąĮą░ čüčéčĆą░ąĮąĖčåą░čģ 2 .. 10 čüčāą▒čäčĆąĄą╣ą╝ą░ 4. ąĪą╝. IS-GPS-200 ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čüčéčĆą░ąĮąĖčå ą░ą╗čīą╝ą░ąĮą░čģą░.
ŌĆó ąÆ DWORD0 .. DWORD7 ą▒ąĖčéčŗ č湥čéąĮąŠčüčéąĖ čāą┤ą░ą╗ąĄąĮčŗ, ąĖ 24 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą▒ąĖčéą░čģ 0 .. 23. ąæąĖčéčŗ 24 .. 31 ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ.
ŌĆó ą¤čĆąĖą╝ąĄčĆ: ą┐ą░čĆą░ą╝ąĄčéčĆ e (Eccentricity) ąĖąĘ Almanac Subframe 4/5, Word 3, ą▒ąĖčéčŗ 69-84 čüčāą▒čäčĆąĄą╣ą╝ą░ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ DWRD0, ą▒ąĖčéčŗ 15..0, ą│ą┤ąĄ ą▒ąĖčé 0 ą╝ą╗ą░ą┤čłąĖą╣ (LSB). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x30 |
(8) ąĖą╗ąĖ (40) |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░ (SV ID), ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▓ąĄčĆąĮčāčéčī ą┤ą░ąĮąĮčŗąĄ ą░ą╗čīą╝ą░ąĮą░čģą░. ąöąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ: 1..32 ąĖą╗ąĖ 51, 56, 63. |
| 4 |
U4 |
- |
week |
- |
ąöą░čéą░ ą▓čŗą┐čāčüą║ą░ ą░ą╗čīą╝ą░ąĮą░čģą░ (ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ GPS) |
| ąØą░čćą░ą╗ąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
| 8 |
U4[8] |
- |
dwrd |
- |
ąĪą╗ąŠą▓ą░ ą░ą╗čīą╝ą░ąĮą░čģą░ |
| ąÜąŠąĮąĄčå ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
34.2. AID-ALPSRV (0x0B 0x32)
34.2.1. ąÜą╗ąĖąĄąĮčéčüą║ąĖą╣ ąĘą░ą┐čĆąŠčü ALP ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ AlmanacPlus čü čüąĄčĆą▓ąĄčĆą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALPSRV |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ALP client requests AlmanacPlus data from server |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠčüčŗą╗ą░ąĄčé ALP-ą║ą╗ąĖąĄąĮčé čüąĄčĆą▓ąĄčĆčā ALP, čćč鹊ą▒čŗ ąĘą░ą┐čĆąŠčüąĖčéčī ąŠčé ąĮąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ. ąÆčŗą┤ą░ąĮąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠąČąĖą┤ą░ąĄą╝čŗą╝ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░čÄčéčüčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x32 |
16 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
idSize |
ą▒ą░ą╣čé |
ąĀą░ąĘą╝ąĄčĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ, ąĮą░čćąĖąĮą░čÄčēąĖąĄčüčÅ ąŠčé ąĮą░čćą░ą╗ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┤ąŠą╗ąČąĮčŗ ąŠąČąĖą┤ą░čéčīčüčÅ ą▓ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. |
| 1 |
U1 |
- |
type |
- |
ąóąĖą┐ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. ąŚąĮą░č湥ąĮąĖąĄ ąĘą┤ąĄčüčī ą┤ąŠą╗ąČąĮąŠ ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé 0xFF, ąĖąĮą░č湥 čŹč鹊 ąĮąĄ ąĘą░ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ. |
| 2 |
U2 |
- |
ofs |
- |
ąŚą░ą┐čĆąŠčłąĄąĮąĮąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (ą▓ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ą░čģ) |
| 4 |
U2 |
- |
size |
- |
ąŚą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ (ą▓ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ą░čģ) |
| 6 |
U2 |
- |
fileId |
- |
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąĖ ąĘą░ą┐čĆąŠčüąĄ ą┤ą░ąĮąĮčŗčģ, ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ. |
| 8 |
U2 |
- |
dataSize |
ą▒ą░ą╣čé |
ąĀąĄą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ, ąĖ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ. |
| 10 |
U1 |
- |
id1 |
- |
ąöą░ąĮąĮčŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ |
| 11 |
U1 |
- |
id2 |
- |
| 12 |
U4 |
- |
id3 |
- |
34.2.2. ąĪąĄčĆą▓ąĄčĆ ALP ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus ą║ą╗ąĖąĄąĮčéčā
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALPSRV |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ALP server sends AlmanacPlus data to client |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠčüčŗą╗ą░ąĄčé ALP-čüąĄčĆą▓ąĄčĆ ą║ą╗ąĖąĄąĮčéčā ALP, ąŠą▒čŗčćąĮąŠ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĄą│ąŠ ąĘą░ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ. ąĪąĄčĆą▓ąĄčĆ ą║ąŠą┐ąĖčĆčāąĄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąĖąĘ ąĘą░ą┐čĆąŠčüą░ ąĖ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé ą┐ąŠą╗čÅ dataSize ąĖ fileId. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x32 |
16+1┬ĘdataSize |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
idSize |
ą▒ą░ą╣čé |
ąĀą░ąĘą╝ąĄčĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ |
| 1 |
U1 |
- |
type |
- |
ąóąĖą┐ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ |
| 2 |
U2 |
- |
ofs |
- |
ąŚą░ą┐čĆąŠčłąĄąĮąĮąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (ą▓ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ą░čģ) |
| 4 |
U2 |
- |
size |
- |
ąŚą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ (ą▓ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ą░čģ) |
| 6 |
U2 |
- |
fileId |
- |
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäą░ą╣ą╗ą░ ALP, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąŠą╗ąĮąĄąĮ čüąĄčĆą▓ąĄčĆąŠą╝. |
| 8 |
U2 |
- |
dataSize |
ą▒ą░ą╣čé |
ąĀąĄą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ, čüąŠą┤ąĄčƹȹ░čēąĖčģčüčÅ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ, čŹč鹊 ą┐ąŠą╗ąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐ąŠą╗ąĮąĄąĮąŠ čüąĄčĆą▓ąĄčĆąŠą╝. |
| 10 |
U1 |
- |
id1 |
- |
ąöą░ąĮąĮčŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ |
| 11 |
U1 |
- |
id2 |
- |
| 12 |
U4 |
- |
id3 |
- |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ąŠąĮ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ dataSize čĆą░ąĘ) |
| 16 + 1┬ĘN |
U1 |
- |
data |
- |
ąöą░ąĮąĮčŗąĄ ą┤ą╗čÅ ALP-ą║ą╗ąĖąĄąĮčéą░ |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
34.2.3. ąÜą╗ąĖąĄąĮčé ALP ą┐ąŠčüčŗą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus čüąĄčĆą▓ąĄčĆčā
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALPSRV |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ALP client sends AlmanacPlus data to server |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠčüčŗą╗ą░ąĄčé ALP-ą║ą╗ąĖąĄąĮčé čüąĄčĆą▓ąĄčĆčā ALP, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąĪąĄčĆą▓ąĄčĆ ą╝ąŠąČąĄčé ą╗ąĖą▒ąŠ ąĘą░ą╝ąĄąĮąĖčéčī č鹥ą║čāčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ čŹč鹊ą╣ ą┐ąŠąĘąĖčåąĖąĖ, ąĖą╗ąĖ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī čŹčéąĖ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ (čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąĖąĘ-ąĘą░ ąĖčģ čģčāą┤čłąĄą│ąŠ ą║ą░č湥čüčéą▓ą░). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x32 |
8 + 2┬Ęsize |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
idSize |
ą▒ą░ą╣čé |
ąĀą░ąĘą╝ąĄčĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ |
| 1 |
U1 |
- |
type |
- |
ąŚą┤ąĄčüčī čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ 0xFF ą┤ą╗čÅ ą┐ąŠą╝ąĄčéą║ąĖ, čćč鹊 čŹč鹊 ąĮąĄ ąĘą░ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ. |
| 2 |
U2 |
- |
ofs |
- |
ąŚą░ą┐čĆąŠčłąĄąĮąĮąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (ą▓ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ą░čģ) |
| 4 |
U2 |
- |
size |
- |
ąŚą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ (ą▓ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ą░čģ) |
| 6 |
U2 |
- |
fileId |
- |
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäą░ą╣ą╗ą░ ALP. |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ąŠąĮ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ dataSize čĆą░ąĘ) |
| 8 + 2┬ĘN |
U2 |
- |
data |
- |
ąöą░ąĮąĮčŗąĄ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗąĄ ą┤ą╗čÅ ALP-čüąĄčĆą▓ąĄčĆą░ |
ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░
|
34.3. AID-ALP (0x0B 0x50)
34.3.1. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ čäą░ą╣ą╗ą░ ALP ą┐čĆąĖąĄą╝ąĮąĖą║čā
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ALP file data transfer to the receiver |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║čā ą║čāčüą║ą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ čäą░ą╣ą╗ą░ AlmanacPlus (*.ALP). ą¤čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĘą░ą┐ąĖčłąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▓ čüą▓ąŠčÄ čŹąĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī, ą▓čĆąĄą╝čÅ ąŠčé ą▓čĆąĄą╝ąĄąĮąĖ ąŠčćąĖčēą░čÅ ąĄčæ čćą░čüčéąĖ (菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ą░čÅ ą┐ą░ą╝čÅčéčī flash čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ ą┤ą░ąĮąĮčŗąĄ čüčéąĖčĆą░ą╗ąĖčüčī ą▒ą╗ąŠą║ą░ą╝ąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ čüąĄą║č鹊čĆčā). ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čĆą░ąĘą╝ąĄčĆ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ (ą▓ ą▒ą░ą╣čéą░čģ) ą▓čüąĄą│ą┤ą░ č湥č鹥ąĮ, čé. ąĄ. ą┤ąĄą╗ąĖčéčüčÅ ąĮą░čåąĄą╗ąŠ ąĮą░ 2. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čĆą░ąĘą╝ąĄčĆ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▒ąŠą╗čīčłąĄ ą┐čĆąĖą╝ąĄčĆąĮąŠ 700 ą▒ą░ą╣čé, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąĄą▓čŗčüąĖčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą▒čāč乥čĆąĖąĘą░čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ą¤čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčé (ąĖą╗ąĖ ąĮąĄ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčé) čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ąĮąĖąČąĄ. ąźąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąČą┤ą░čéčī ąŠčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, ą┐čĆąĄąČą┤ąĄ č湥ą╝ ąĮą░čćą░čéčī ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĮąŠą▓čŗą╣ ą║čāčüąŠą║ ą┤ą░ąĮąĮčŗčģ AlmanacPlus. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x50 |
0 + 2┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ąŠąĮ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ dataSize čĆą░ąĘ) |
| 2┬ĘN |
U2 |
- |
alpData |
- |
ąöą░ąĮąĮčŗąĄ ALP-čäą░ą╣ą╗ą░ |
ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░
|
34.3.2. ą¤ąŠą╝ąĄčéą║ą░ ą║ąŠąĮčåą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Mark end of data transfer |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ą▓čüąĄ ą║čāčüą║ąĖ ąĖąĘ čäą░ą╣ą╗ą░ AlmanacPlus (*.ALP) ą┐ąĄčĆąĄą┤ą░ąĮčŗ, ąĖ ą╝ąŠąČąĮąŠ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī ąĮąŠčĆą╝ą░ą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ą¤čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐čĆąŠą▓ąĄčĆąĖčé ą▓čüąĄ č鹊ą╗čīą║ąŠ čćč鹊 ą┐čĆąĖąĮčÅčéčŗąĄ čćą░čüčéąĖ, ąĖ čĆą░ąĘčĆąĄčłąĖčé čäčāąĮą║čåąĖčÄ AssistNow Offline, ą░ čéą░ą║ąČąĄ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĄčüą╗ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ. ąóą░ą║ąČąĄ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, čćč鹊ą▒čŗ ąŠčéą╝ąĄąĮąĖčéčī ąĮąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĮčāčÄ ąĘą░ą│čĆčāąĘą║čā. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x50 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
dummy |
- |
ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ |
34.3.3. ą¤ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Acknowledges a data transfer |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé čāčüą┐ąĄčłąĮčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā č鹊ą╗čīą║ąŠ čćč鹊 ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▒ą╗ąŠą║ą░ ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ 34.3.1. AID-ALP. ąóą░ą║ąČąĄ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ 34.3.2, ąĄčüą╗ąĖ ą▒čŗą╗ą░ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ čāčüą┐ąĄčłąĮą░čÅ ą┐čĆąŠą▓ąĄčĆą║ą░ ąĮą░ čåąĄą╗ąŠčüčéąĮąŠčüčéčī ą▓čüąĄčģ ą┐čĆąĖąĮčÅčéčŗčģ čćą░čüč鹥ą╣ ALP-čäą░ą╣ą╗ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x50 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
ack |
- |
ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0x01 |
34.3.4. ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą░ąĮąĮčŗčģ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Indicate problems with a data transfer |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║čā, ą┐čĆąŠąĖąĘąŠčłąĄą┤čłčāčÄ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ č鹊ą╗čīą║ąŠ čćč鹊 ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▒ą╗ąŠą║ą░ ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ 34.3.1 AID-ALP. ąóą░ą║ąČąĄ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ 34.3.2, ąĄčüą╗ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ ąĮą░ čåąĄą╗ąŠčüčéąĮąŠčüčéčī ą▓čüąĄčģ ą┐čĆąĖąĮčÅčéčŗčģ čćą░čüč鹥ą╣ ALP-čäą░ą╣ą╗ą░ ą┐ąŠą║ą░ąĘą░ą╗ą░ ąĮą░ą╗ąĖčćąĖąĄ ąŠčłąĖą▒ą║ąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x50 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
nak |
- |
ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0x00 |
34.3.5. ą×ą┐čĆą░čłąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ AlmanacPlus
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll the AlmanacPlus status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ/ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║čā, ą┐čĆąŠąĖąĘąŠčłąĄą┤čłčāčÄ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ č鹊ą╗čīą║ąŠ čćč鹊 ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▒ą╗ąŠą║ą░ ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ 34.3.1 AID-ALP. ąóą░ą║ąČąĄ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ 34.3.2, ąĄčüą╗ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ ąĮą░ čåąĄą╗ąŠčüčéąĮąŠčüčéčī ą▓čüąĄčģ ą┐čĆąĖąĮčÅčéčŗčģ čćą░čüč鹥ą╣ ALP-čäą░ą╣ą╗ą░ ą┐ąŠą║ą░ąĘą░ą╗ą░ ąĮą░ą╗ąĖčćąĖąĄ ąŠčłąĖą▒ą║ąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x50 |
24 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
predTow |
čüąĄą║ |
ą¤čĆąŠą│ąĮąŠąĘąĖčĆčāąĄą╝ąŠąĄ ą▓čĆąĄą╝čÅ ąĮą░čćą░ą╗ą░ ąĮąĄą┤ąĄą╗ąĖ. |
| 4 |
U4 |
- |
predDur |
čüąĄą║ |
ą¤čĆąĄą┤čüą║ą░ąĘą░ąĮąĮą░čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąŠčé ąĮą░čćą░ą╗ą░ ą┐ąĄčĆą▓ąŠą│ąŠ ąĮą░ą▒ąŠčĆą░ ą┤ą░ąĮąĮčŗčģ ą┤ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ąĮą░ą▒ąŠčĆą░ ą┤ą░ąĮąĮčŗčģ. |
| 8 |
I4 |
- |
age |
čüąĄą║ |
ąóąĄą║čāčēąĖą╣ ą▓ąŠąĘčĆą░čüčé ą┤ą░ąĮąĮčŗčģ ALP. |
| 12 |
U2 |
- |
predWno |
- |
ą¤čĆąŠą│ąĮąŠąĘąĖčĆčāąĄą╝ąŠąĄ čćąĖčüą╗ąŠ ąĮą░čćą░ą╗ą░ ąĮąĄą┤ąĄą╗ąĖ. |
| 14 |
U2 |
- |
almWno |
- |
ą×ą▒čĆąĄąĘą░ąĮąĮąŠąĄ čćąĖčüą╗ąŠ ąĮąĄą┤ąĄą╗ąĖ ąŠą┐ąŠčĆąĮąŠą│ąŠ ą░ą╗čīą╝ą░ąĮą░čģą░. |
| 16 |
U4 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 20 |
U1 |
- |
svs |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĮą░ą▒ąŠčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓, čüąŠą┤ąĄčƹȹ░čēąĖčģčüčÅ ą▓ ą┤ą░ąĮąĮčŗčģ ALP. |
| 21 |
U1 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 22 |
U2 |
- |
reserved3 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
34.4. AID-AOP (0x0B 0x33)
34.4.1. ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ AssistNow Autonomous
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-ALP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll AssistNow Autonomous data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŻ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čāčüčéą░čÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░.
ą×ą┐čĆąŠčü čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ AssistNow Autonomous ą┤ą╗čÅ ą▓čüąĄčģ čüą┐čāčéąĮąĖą║ąŠą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ ą┐čāčüč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčéąĖčé ąĮą░ ąĮąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ AID-AOP (čüą╝. ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĮąĖąČąĄ) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ąĄčüčéčī ą┤ą░ąĮąĮčŗąĄ. ąöą╗čÅ čüą┐čāčéąĮąĖą║ąŠą▓, ą┐ąŠ ą║ąŠč鹊čĆčŗą╝ ą┤ą░ąĮąĮčŗčģ ąĮąĄčé, ąŠąĮ ą▓ąŠąĘą▓čĆą░čéąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĘą░ą┐čĆąŠčüą░ AID-AOP (čüą╝. ąĮąĖąČąĄ). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x33 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
34.4.2. ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ AssistNow Autonomous ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-AOP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll AssistNow Autonomous data for one satellite |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ AssistNow Autonomous ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░. ą¤čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ AID-AOP (čüą╝. ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĮąĖąČąĄ), ąĄčüą╗ąĖ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░. ąĢčüą╗ąĖ ąĮąĄčé ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĘą░ą┐čĆąŠčüą░ AID-AOP (čé. ąĄ. čŹč鹊 ąČąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x33 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░ GPS (GPS SV id), ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ 1..32). |
34.4.3. ąöą░ąĮąĮčŗąĄ AssistNow Autonomous
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-AOP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
AssistNow Autonomous data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ čü ąĮąĄ čĆąĄą│čāą╗čÅčĆąĮčŗą╝ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ. ą×ąĮąŠ ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮąŠ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ čüą┐čāčéąĮąĖą║ą░ ą▒čŗą╗ąĖ ą▓čŗą┐čāčēąĄąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ AssistNow Autonomous. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗą▓ąĄą┤ąĄčé ąŠą┤ąĮčā ąĖąĘ ą▓ąĄčĆčüąĖą╣ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą┐čĆą░čłąĖą▓ą░ą╗ąŠčüčī ąŠą┤ąĮąĖą╝ ąĖąĘ ą┤ą▓čāčģ ąĘą░ą┐čĆąŠčüąŠą▓, ąŠą┐ąĖčüą░ąĮąĮčŗčģ čĆą░ąĮąĄąĄ, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčéą┐čĆą░ą▓ąĖčé čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĄčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ AOP ą┤ąŠčüčéčāą┐ąĮčŗ, ąĖą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĘą░ą┐čĆąŠčüą░, ąĄčüą╗ąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ (čé. ąĄ. čü svid 1..32) ąĮąĄčé ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ AOP. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī, ąĄčüą╗ąĖ ąĄą╝čā čŹč鹊 ąĮčāąČąĮąŠ, ą╝ąŠąČąĄčé ą▓ąĘčÅčéčī ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ čĆą░ąĮąĄąĄ ąŠą┐čĆąŠčłąĄąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą║ ą┐čĆąĖąĄą╝ąĮąĖą║čā. ą×čéą┐čĆą░ą▓ą║ą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ AID-AOP ą┐čĆąĖąĄą╝ąĮąĖą║čā ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čĆą░ąĘčĆąĄčłąĖčé ąĮą░ ąĮąĄą╝ čäčāąĮą║čåąĖčÄ AssistNow Autonomous. ąĪą╝. čüąĄą║čåąĖčÄ "15.8. AssistNow Autonomous" [2], ą│ą┤ąĄ ąŠą┐ąĖčüą░ąĮą░ čŹčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x33 |
(60) ąĖą╗ąĖ (204) |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
svid |
- |
GPS SV id |
| 1 |
U1[59] |
- |
data |
- |
ąöą░ąĮąĮčŗąĄ AssistNow Autonomous |
| ąØą░čćą░ą╗ąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
| 60 |
U1[48] |
- |
optional0 |
- |
1 čćą░čüčéčī ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
| 108 |
U1[48] |
- |
optional1 |
- |
2 čćą░čüčéčī ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
| 156 |
U1[48] |
- |
optional2 |
- |
3 čćą░čüčéčī ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
| ąÜąŠąĮąĄčå ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
34.5. AID-DATA (0x0B 0x10)
34.5.1. ą×ą┐čĆą░čłąĖą▓ą░ąĄčé ą▓čüąĄ ąĮą░čćą░ą╗čīąĮčŗąĄ čāč鹊čćąĮčÅčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ GPS (Initial Aiding Data)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-DATA |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Polls all GPS Initial Aiding Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĢčüą╗ąĖ čŹč鹊čé ąĘą░ą┐čĆąŠčü ą┐čĆąĖąĮčÅčé, č鹊 ąŠą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ AID-INI, AID-HUI, AID-EPH ąĖ AID-ALM. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x10 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
34.6. AID-EPH (0x0B 0x31)
34.6.1. ą×ą┐čĆąŠčü čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ GPS (Aiding Ephemeris Data)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-EPH |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Aiding Ephemeris Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐čāčüčéą░čÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ čāč鹊čćąĮčÅčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ (GPS Aiding Data, čŹč乥ą╝ąĄčĆąĖą┤čŗ) ą▓čüąĄčģ 32 čüą┐čāčéąĮąĖą║ąŠą▓. ą¤čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé 32 čüąŠąŠą▒čēąĄąĮąĖčÅ čéąĖą┐ą░ AID-EPH, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x31 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
34.6.2. ą×ą┐čĆąŠčü čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ GPS ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-EPH |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Aiding Ephemeris Data for a SV |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ GPS Constellation Data (čŹč乥ą╝ąĄčĆąĖą┤čŗ) ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░. ą¤čĆąĖąĄą╝ąĮąĖą║ ą▓ ąŠčéą▓ąĄčé ąĮą░ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ąĄčĆąĮąĄčé ąŠą┤ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ AID-EPH (čüą╝. ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĮąĖąČąĄ). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x31 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░ GPS (GPS SV id), ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ 1..32). |
34.6.3. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ čāč鹊čćąĮąĄąĮąĖčÅ čŹč乥ą╝ąĄčĆąĖą┤ GPS (Aiding Ephemeris Input/Output)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-EPH |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
GPS Aiding Ephemeris Input/Output Message |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ŌĆó SF1D0 .. SF3D7 ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░ ą┤ąŠčüčéčāą┐ąĮčŗ čŹč乥ą╝ąĄčĆąĖą┤čŗ. ąĢčüą╗ąĖ ąĮąĄčé, č鹊 ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą╝ąŠąČąĄčé čāą╝ąĄąĮčīčłąĖčéčīčüčÅ ą▓ čĆą░ąĘą╝ąĄčĆąĄ ą┤ąŠ 8 ą▒ą░ą╣čé, ąĖą╗ąĖ ą▓čüąĄ ą▒ą░ą╣čéčŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ 0, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ č鹥ą╝ čüą░ą╝čŗą╝, čćč鹊 čŹč鹊čé čüą┐čāčéąĮąĖą║ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮąĄ ąĖą╝ąĄąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤. ąŁč鹊 ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┤ą░ąČąĄ ąĄčüčéčī NAV-SVINFO ąĖ RXM-SVSI ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī čŹč乥ą╝ąĄčĆąĖą┤, čéą░ą║ ą║ą░ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ąĮąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčéčī ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗąĄ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤čŗ (ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ąĖčģ čćą░čüčéčī).
ŌĆó SF1D0 .. SF3D7 čüąŠą┤ąĄčƹȹ░čé 24 čüą╗ąŠą▓ą░, ą║ąŠč鹊čĆčŗąĄ ąĖą┤čāčé ąĘą░ ą┐ąŠą╗ąĄą╝ Hand-Over Word (HOW) ąĖąĘ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ GPS, čüčāą▒čäčĆąĄą╣ą╝čŗ 1..3. ą×ą▒čĆąĄąĘą░ąĮąĮčŗą╣ čüč湥čéčćąĖą║ TOW ąĮąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĄąĮ, ąĖ ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ. ąĪą╝. IS-GPS-200 ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čŹčéąĖčģ čüčāą▒čäčĆąĄą╣ą╝ąŠą▓.
ŌĆó ąÆ SF1D0 .. SF3D7 ą▒ąĖčéčŗ č湥čéąĮąŠčüčéąĖ čāą┤ą░ą╗ąĄąĮčŗ, ąĖ 24 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ ą▒ąĖčéą░čģ 0 .. 23. ąæąĖčéčŗ 24 .. 31 ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ.
ŌĆó ą¤čĆąĖ ąŠą┐čĆąŠčüąĄ ą┤ą░ąĮąĮčŗąĄ, čüąŠą┤ąĄčƹȹ░čēąĖąĄčüčÅ ą▓ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ, ąĮąĄ čüąŠą┤ąĄčƹȹ░čé ą┐ąŠą╗ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ą░ą║ąĄčéą░ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗčģ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤. ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗čÅ, ąĮąĄ ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ u-blox, ą╝ąŠą│čāčé ąŠčéčüčāčéčüčéą▓ąŠą▓ą░čéčī. ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ ą▓ čüčāą▒čäčĆąĄą╣ą╝ąĄ 1 čāąČąĄ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ čŹč乥ą╝ąĄčĆąĖą┤ (Time Of Ephemeris, TOE). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x31 |
(8) ąĖą╗ąĖ (104) |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░ (SV id), ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..32). |
| 4 |
U4 |
- |
how |
- |
Hand-Over Word ą┐ąĄčĆą▓ąŠą│ąŠ čüčāą▒čäčĆąĄą╣ą╝ą░. ąŁč鹊 čéčĆąĄą▒čāąĄčéčüčÅ, ąĄčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║. 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┤ą░ą╗čīčłąĄ ąĮąĄ ąĖą┤čāčé ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤. |
| ąØą░čćą░ą╗ąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
| 8 |
U4[8] |
- |
sf1d |
- |
ąĪą╗ąŠą▓ą░ 3..10 (SF1D0..SF1D7) čüčāą▒čäčĆąĄą╣ą╝ą░ 1 |
| 40 |
U4[8] |
- |
sf2d |
- |
ąĪą╗ąŠą▓ą░ 3..10 (SF2D0..SF2D7) čüčāą▒čäčĆąĄą╣ą╝ą░ 2 |
| 72 |
U4[8] |
- |
sf3d |
- |
ąĪą╗ąŠą▓ą░ 3..10 (SF3D0..SF3D7) čüčāą▒čäčĆąĄą╣ą╝ą░ 3 |
| ąÜąŠąĮąĄčå ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
34.7. AID-HUI (0x0B 0x02)
34.7.1. ą×ą┐čĆąŠčü čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ (GPS Health), ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ UTC ąĖ ąĖąŠąĮąŠčüč乥čĆčŗ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-HUI |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Health, UTC and ionosphere parameters |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐čāčüčéą░čÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x02 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
34.7.2. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ GPS Health, UTC ąĖ ąĖąŠąĮąŠčüč乥čĆčŗ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-HUI |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
GPS Health, UTC and ionosphere parameters |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé ą▒ąĖč鹊ą▓čāčÄ ą╝ą░čüą║čā čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ (health bit mask), ą▓čĆąĄą╝čÅ UTC ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ Klobuchar. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čŹčéąĖą╝ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ICD-GPS-200. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x02 |
72 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X4 |
- |
health |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░, ą│ą┤ąĄ ą║ą░ąČą┤čŗą╣ ą▒ąĖčé ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüą┐čāčéąĮąĖą║ GPS (GPS SV id ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1..32). ąĢčüą╗ąĖ ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čüą┐čāčéąĮąĖą║ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĄąĮ. |
| 4 |
R8 |
- |
utcA0 |
- |
UTC - ą┐ą░čĆą░ą╝ąĄčéčĆ A0 |
| 12 |
R8 |
- |
utcA1 |
- |
UTC - ą┐ą░čĆą░ą╝ąĄčéčĆ A1 |
| 20 |
I4 |
- |
utcTOW |
- |
UTC - reference time of week (ąŠą┐ąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ) |
| 24 |
I2 |
- |
utcWNT |
- |
UTC - reference week number (ąŠą┐ąŠčĆąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ) |
| 26 |
I2 |
- |
utcLS |
- |
UTC - čĆą░ąĘąĮąŠčüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ąĖąĘ-ąĘą░ čüą║ą░čćą║ą░ čüąĄą║čāąĮą┤ ą┐ąĄčĆąĄą┤ čüąŠą▒čŗčéąĖąĄą╝ |
| 28 |
I2 |
- |
utcWNF |
- |
UTC - ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ čüą║ą░čćą║ą░ čüąĄą║čāąĮą┤ |
| 30 |
I2 |
- |
utcDN |
- |
UTC - ą┤ąĄąĮčī ąĮąĄą┤ąĄą╗ąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ čüą║ą░čćą║ą░ čüąĄą║čāąĮą┤ |
| 32 |
I2 |
- |
utcLSF |
- |
UTC - čĆą░ąĘąĮąŠčüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ąĖąĘ-ąĘą░ čüą║ą░čćą║ą░ čüąĄą║čāąĮą┤ ą┐ąŠčüą╗ąĄ čüąŠą▒čŗčéąĖčÅ |
| 34 |
I2 |
- |
utcSpare |
- |
UTC - ą┐čāčüč鹊ąĄ ą╝ąĄčüč鹊, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ąĮą░ 4 ą▒ą░ą╣čéą░ (čćč鹊ą▒čŗ ąĄčæ čĆą░ąĘą╝ąĄčĆ ą┤ąĄą╗ąĖą╗čüčÅ ąĮą░ 4). |
| 36 |
R4 |
- |
klobA0 |
čüąĄą║ |
Klobuchar - alpha 0 |
| 40 |
R4 |
- |
klobA1 |
čüąĄą║/
semicircle |
Klobuchar - alpha 1 |
| 44 |
R4 |
- |
klobA2 |
čüąĄą║/
semicircle2 |
Klobuchar - alpha 2 |
| 48 |
R4 |
- |
klobA3 |
čüąĄą║/
semicircle3 |
Klobuchar - alpha 3 |
| 52 |
R4 |
- |
klobB0 |
čüąĄą║ |
Klobuchar - beta 0 |
| 56 |
R4 |
- |
klobB1 |
čüąĄą║/
semicircle |
Klobuchar - beta 1 |
| 60 |
R4 |
- |
klobB2 |
čüąĄą║/
semicircle2 |
Klobuchar - beta 2 |
| 64 |
R4 |
- |
klobB3 |
čüąĄą║/
semicircle3 |
Klobuchar - beta 3 |
| 68 |
X4 |
- |
flags |
- |
ążą╗ą░ą│ąĖ, čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ. |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| healthValid |
ą¤ąŠą╗ąĄ health ą▓ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ |
| utcValid |
ą¤ąŠą╗čÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ UTC ą▓ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ |
| klobValid |
ą¤ąŠą╗čÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ Klobuchar ą▓ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ |
34.8. AID-INI (0x0B 0x01)
34.8.1. ą×ą┐čĆąŠčü ąĮą░čćą░ą╗čīąĮčŗčģ čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ GPS (Initial Aiding Data)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-INI |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Initial Aiding Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐čāčüčéą░čÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x01 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
34.8.2. Aiding position, time, frequency, clock drift (čāč鹊čćąĮąĄąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ, ą▓čĆąĄą╝ąĄąĮąĖ, čćą░čüč鹊čéčŗ, ą┤čĆąĄą╣čäą░ čéą░ą║č鹊ą▓)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-INI |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Aiding position, time, frequency, clock drift |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ, ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┤čĆąĄą╣čäą░ čéą░ą║č鹊ą▓. ą¤ąŠąĘąĖčåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą▓ąĄą┤ąĄąĮą░ ą╗ąĖą▒ąŠ ą▓ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé ECEF X/Y/Z, ąĖą╗ąĖ ą▓ č乊čĆą╝ą░č鹥 čłąĖčĆąŠčéą░/ą┤ąŠą╗ą│ąŠčéą░/ą▓čŗčüąŠčéą░ (lat/lon/height). ąÆčĆąĄą╝čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą▓ąĄą┤ąĄąĮąŠ ą╗ąĖą▒ąŠ ą║ą░ą║ ąĮąĄč鹊čćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ č湥čĆąĄąĘ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ą▓ą▓ąŠą┤čÅ ą┐čĆąĖ čŹč鹊ą╝ ąŠčłąĖą▒ą║čā ąĘą░ą┤ąĄčƹȹ║ąĖ, ąĘą░ą▓ąĖčüčÅčēčāčÄ ąŠčé baudrate, ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą║ąŠą│ą┤ą░ č鹊čćąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠ ą┐ąŠą┤ą░čéčī ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčāčÄ čāč鹊čćąĮčÅčÄčēčāčÄ čćą░čüč鹊čéčā ąĮą░ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x01 |
48 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
I4 |
- |
ecefXOrLat |
čüą╝ ąĖą╗ąĖ deg┬Ę1e-7 |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ WGS84 ECEF X ąĖą╗ąĖ čłąĖčĆąŠčéą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ąŠą▓ ąĮąĖąČąĄ |
| 4 |
I4 |
- |
ecefYOrLon |
čüą╝ ąĖą╗ąĖ deg┬Ę1e-7 |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ WGS84 ECEF Y ąĖą╗ąĖ ą┤ąŠą╗ą│ąŠčéą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ąŠą▓ ąĮąĖąČąĄ |
| 8 |
I4 |
- |
ecefZOrAlt |
čüą╝ |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ WGS84 ECEF Z ąĖą╗ąĖ ą▓čŗčüąŠčéą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ąŠą▓ ąĮąĖąČąĄ |
| 12 |
U4 |
- |
posAcc |
čüą╝ |
ąóąŠčćąĮąŠčüčéčī ą┐ąŠąĘąĖčåąĖąĖ (stddev) |
| 16 |
X2 |
- |
tmCfg |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (time mark), čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ čü čĆą░čüčłąĖčäčĆąŠą▓ą║ąŠą╣ čŹč鹊ą│ąŠ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ |
| 18 |
U2 |
- |
wnoOrDate |
ąĮąĄą┤ąĄą╗čÅ ąĖą╗ąĖ ą│ąŠą┤/ą╝ąĄčü |
ąĀąĄą░ą╗čīąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ ąĖą╗ąĖ yearSince2000/Month (YYMM, ą│ąŠą┤ ąĮą░čćąĖąĮą░čÅ čü 2000 ą│ąŠą┤ą░), ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ąŠą▓ ąĮąĖąČąĄ. |
| 20 |
U4 |
- |
towOrTime |
ą╝čü ąĖą╗ąĖ ą┤ąĄąĮčī/čćą░čü/ą╝ąĖąĮ/čüąĄą║ |
ąĀąĄą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ ąĖą╗ąĖ ą▓čĆąĄą╝čÅ ą▓ č乊čĆą╝ą░č鹥 ą┤ąĄąĮčī ą╝ąĄčüčÅčåą░/čćą░čü/ą╝ąĖąĮčāčéą░/čüąĄą║čāąĮą┤ą░ (DayOfMonth/Hour/Minute/Second), ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ąŠą▓ ąĮąĖąČąĄ |
| 24 |
I4 |
- |
towNs |
ąĮčü |
ąöčĆąŠą▒ąĮą░čÅ čćą░čüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ąĮąĄą┤ąĄą╗ąĖ |
| 28 |
U4 |
- |
tAccMs |
ą╝čü |
ą£ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ąĮą░čÅ čćą░čüčéčī č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ |
| 32 |
U4 |
- |
tAccNs |
ąĮčü |
ąØą░ąĮąŠčüąĄą║čāąĮą┤ąĮą░čÅ čćą░čüčéčī č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ |
| 36 |
I4 |
- |
clkDOrFreq |
ąĮčü/čüąĄą║ ąĖą╗ąĖ
ąōčå┬Ę1e-2 |
ąöčĆąĄą╣čä čéą░ą║č鹊ą▓ ąĖą╗ąĖ čćą░čüč鹊čéą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ąŠą▓ ąĮąĖąČąĄ |
| 40 |
U4 |
- |
clkDAccOrFreqAcc |
ąĮčü/čüąĄą║ ąĖą╗ąĖ ppb |
ąóąŠčćąĮąŠčüčéčī ą┤čĆąĄą╣čäą░ čéą░ą║č鹊ą▓ ąĖą╗ąĖ čćą░čüč鹊čéą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ąŠą▓ ąĮąĖąČąĄ |
| 44 |
X4 |
- |
flags |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ čäą╗ą░ą│ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
ąæąĖčéčŗ ą┐ąŠą╗čÅ tmCfg:
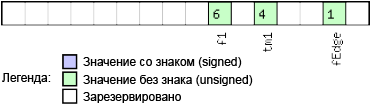
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| fEdge |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ) |
| tm1 |
ą£ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ (time mark) ąĮą░ EXTINT1 (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ EXTINT0) |
| f1 |
ą¦ą░čüč鹊čéą░ ąĮą░ EXTINT1 (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ EXTINT0) |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| pos |
ą¤ąŠąĘąĖčåąĖčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮą░ |
| time |
ąÆčĆąĄą╝čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ |
| clockD |
ąöą░ąĮąĮčŗąĄ ą┤čĆąĄą╣čäą░ čéą░ą║č鹊ą▓ čüąŠą┤ąĄčƹȹ░čé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╣ ą┤čĆąĄą╣čä čéą░ą║č鹊ą▓, čŹč鹊 ąĮąĄ ą┤ąŠą╗ąČąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ ą▓ą╝ąĄčüč鹥 čü clockF |
| tp |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖą╝ą┐čāą╗čīčü ą▓čĆąĄą╝ąĄąĮąĖ (time pulse) |
| clockF |
ąöą░ąĮąĮčŗąĄ ą┤čĆąĄą╣čäą░ čéą░ą║č鹊ą▓ čüąŠą┤ąĄčƹȹ░čé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčāčÄ čćą░čüč鹊čéčā, čŹč鹊 ąĮąĄ ą┤ąŠą╗ąČąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ ą▓ą╝ąĄčüč鹥 čü clockD |
| lla |
ą¤ąŠąĘąĖčåąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą▓ č乊čĆą╝ą░č鹥 lat/long/alt (čłąĖčĆąŠčéą░/ą┤ąŠą╗ą│ąŠčéą░/ą▓čŗčüąŠčéą░ ą▓ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé ECEF) |
| altInv |
ąÆčŗčüąŠčéą░ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮą░, ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ lla |
| prevTm |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐čĆąĖąĮčÅčéą░čÅ ą┐ąĄčĆąĄą┤ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ AID-INI (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą╝ąĄčéą║ą░, ą┐čĆąĖąĮčÅčéą░čÅ ą┐ąŠčüą╗ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ) |
| utc |
ąÆčĆąĄą╝čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▓ č乊čĆą╝ą░č鹥 UTC date/time (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ č乊čĆą╝ą░čé GPS wno/tow) |
34.9. AID-REQ (0x0B 0x00)
34.9.1. ą×čéą┐čĆą░ą▓ą║ą░ ąĘą░ą┐čĆąŠčüą░ (AID-DATA) ą┤ą╗čÅ ą▓čüąĄčģ čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ (GPS Aiding Data)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
AID-REQ |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Sends a poll (AID-DATA) for all GPS Aiding Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
Virtual |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
AID-REQ čŹč鹊 ąĮąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą░ ą╝ąĄčüč鹊 čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą┤ą╗čÅ čåąĄą╗ąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąĢčüą╗ąĖ virtual AID-REQ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ (čüą╝. CFG-MSG), č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé ą▓čŗą▓ąŠą┤ąĖčéčī ąĘą░ą┐čĆąŠčü ą┤ą╗čÅ čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ (AID-DATA) ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░, ąĄčüą╗ąĖ čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ąĮčāčéčĆąĖ ąĮąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ (ą┐ąŠąĘąĖčåąĖčÅ, ą▓čĆąĄą╝čÅ) ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą│ąŠčĆčÅčćąĖą╣ čüčéą░čĆčé. ąĢčüą╗ąĖ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░, č鹊 AID-REQ ąĮąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ąĖą╝ąĄąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤. ąöą╗čÅ GNSS ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠčĆą▒ąĖčéčŗ GPS. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0B 0x00 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
[35. CFG (0x06)]
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ: ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąŠą┤ąĄą╗ąĖ ą┤ąĖąĮą░ą╝ąĖą║ąĖ (Set Dynamic Model), ą╝ą░čüą║ąĖ čāčģčāą┤čłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ (Set DOP Mask), čāčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ą╝ąĄąĮą░ (Set Baud Rate), ąĖ čé. ą┤. ąÜą╗ą░čüčü CFG ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĖ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖąĘ ąĮąĄą│ąŠ ąĘąĮą░č湥ąĮąĖą╣ č鹥ą║čāčēąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąøčÄą▒ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ą╗ą░čüčüą░ CFG, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║, ą▒čāą┤ąĄčé ąĖą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąŠ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ (čüąŠąŠą▒čēąĄąĮąĖąĄą╝ ACK-ACK), ąĄčüą╗ąĖ ąŠąĮąŠ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ, ąĖ ąŠčéą▒čĆąŠčłąĄąĮąŠ (čüąŠąŠą▒čēąĄąĮąĖąĄą╝ ACK-NAK), ąĄčüą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čŗą╗ą░ ąĮąĄčāą┤ą░čćąĮąŠą╣.
35.1. CFG-ANT (0x06 0x13)
35.1.1. ą×ą┐čĆąŠčü čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ąĮą░čüčéčĆąŠąĄą║ ą░ąĮč鹥ąĮąĮčŗ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-ANT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Antenna Control Settings |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×čéą┐čĆą░ą▓ą║ą░ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓ąŠąĘą▓čĆą░čéčā ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ čéąĖą┐ą░ CFG-ANT čü ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x13 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.1.2. ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą░ąĮč鹥ąĮąĮčŗ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-ANT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Antenna Control Settings |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x13 |
4 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X2 |
- |
flags |
- |
ą£ą░čüą║ą░ čäą╗ą░ą│ąŠą▓ ą░ąĮč鹥ąĮąĮčŗ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 2 |
X2 |
- |
pins |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą░ąĮč鹥ąĮąĮčŗ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
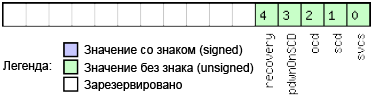
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| svcs |
ąĀą░ąĘčĆąĄčłąĖčéčī čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ ą░ąĮč鹥ąĮąĮčŗ (Antenna Supply Voltage Control Signal) |
| scd |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠčĆąŠčéą║ąŠą│ąŠ ąĘą░ą╝čŗą║ą░ąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗ (Short Circuit Detection) |
| ocd |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗ (Open Circuit Detection) |
| pdwnOnSCD |
ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ą║ąŠčĆąŠčéą║ąŠąĄ ąĘą░ą╝čŗą║ą░ąĮąĖąĄ (č鹊ą╗čīą║ąŠ ą▓ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü ą▒ąĖč鹊ą╝ 1). |
| recovery |
ąĀą░ąĘčĆąĄčłąĖčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą║ąŠčĆąŠčéą║ąŠą│ąŠ ąĘą░ą╝čŗą║ą░ąĮąĖčÅ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ pins:
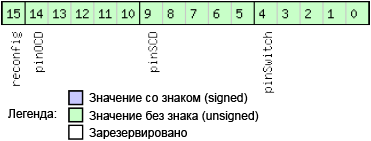
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| pinSwitch |
ąØąŠąČą║ą░ ą┐ąŠčĆčéą░ (PIO-Pin), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗ (ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą┤ą╗čÅ TIM-LP/TIM-LF) |
| pinSCD |
PIO-Pin, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠčĆąŠčéą║ąŠą│ąŠ ąĘą░ą╝čŗą║ą░ąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą▓ ą░ąĮč鹥ąĮąĮąĄ |
| pinOCD |
PIO-Pin, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčéčüčāčéčüčéą▓ąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗ |
| reconfig |
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 1, ąĖ čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮą░ ą┐čĆąĖąĄą╝ąĮąĖą║čā, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ąĖąĘą╝ąĄąĮąĖčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ą░ą║ čāą║ą░ąĘą░ąĮąŠ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ. |
35.2. CFG-CFG (0x06 0x09)
35.2.1. ą×čćąĖčüčéą║ą░, čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĖ ąĘą░ą│čĆčāąĘą║ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-CFG |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Clear, Save and Load configurations |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÜąŠą╝ą░ąĮą┤ą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪą╝. ą│ą╗ą░ą▓čā čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąóčĆąĖ ą╝ą░čüą║ąĖ čüąŠčüčéą░ą▓ą╗ąĄąĮčŗ ąĖąĘ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé, ą║ą░ąČą┤čŗą╣ ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą┤čüąĄą║čåąĖčÄ ą▓čüąĄčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣, ąĮą░ ą║ąŠč鹊čĆčŗčģ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ. ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ ą▓ ą╝ą░čüą║ą░čģ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮčŗ ą▓ 0. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čüąĄą║čåąĖąĖ "8.2. ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ čüąĄą║čåąĖą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ" [2]. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąŠą╝ą░ąĮą┤čŗ ą╝ąŠą│čāčé ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░čéčīčüčÅ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ - Clear, Save, Load. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x09 |
(12) ąĖą╗ąĖ (13) |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X4 |
- |
clearMask |
- |
ą£ą░čüą║ą░ čü ą┐ąŠą┤čüąĄą║čåąĖčÅą╝ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ (Clear), čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĘą░ą│čĆčāąĘą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ ą┐ąŠčüč鹊čÅąĮąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Permanent Configurations) ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 4 |
X4 |
- |
saveMask |
- |
ą£ą░čüą║ą░ čü ą┐ąŠą┤čüąĄą║čåąĖčÅą╝ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ (Save), čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüąŠčģčĆą░ąĮąĄąĮąĖčÄ č鹥ą║čāčēąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ clearMask. |
| 8 |
X4 |
- |
loadMask |
- |
ą£ą░čüą║ą░ čü ą┐ąŠą┤čüąĄą║čåąĖčÅą╝ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ (Load), čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĘą░ą│čĆčāąĘą║ąĄ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖąĘ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą▓ č鹥ą║čāčēčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ clearMask. |
| ąØą░čćą░ą╗ąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
| 12 |
X1 |
- |
deviceMask |
- |
ą£ą░čüą║ą░, ą║ąŠč鹊čĆą░čÅ ą▓čŗą▒ąĖčĆą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| ąÜąŠąĮąĄčå ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ clearMask:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ioPort |
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠčĆčéą░ |
| msgConf |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣ |
| infMsg |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ INF |
| navConf |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| rxmConf |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ Receiver Manager |
| rinvConf |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ Remote Inventory |
| antConf |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą░ąĮč鹥ąĮąĮčŗ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ deviceMask:
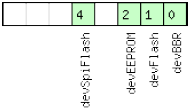
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| devBBR |
ą×ąŚąŻ čāčüčéčĆąŠą╣čüčéą▓ą░, 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą║ąŠč鹊čĆąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ ą▒ą░čéą░čĆąĄą╣ą║ąŠą╣ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ (battery backed RAM) |
| devFlash |
ą¤ą░ą╝čÅčéčī Flash čāčüčéčĆąŠą╣čüčéą▓ą░ |
| devEEPROM |
ą¤ą░ą╝čÅčéčī EEPROM čāčüčéčĆąŠą╣čüčéą▓ą░ |
| devSpiFlash |
ą¤ą░ą╝čÅčéčī SPI Flash čāčüčéčĆąŠą╣čüčéą▓ą░ |
35.3. CFG-DAT (0x06 0x06)
35.3.1. ą×ą┐čĆąŠčü ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé (Datum)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-DAT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Datum Setting |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé CFG-DAT, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x06 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.3.2. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╣ čüąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-DAT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Set User-defined Datum |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x06 |
44 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
R8 |
- |
majA |
ą╝ |
Semi-major Axis (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 6,300,000.0 .. 6,500,000.0 ą╝ąĄčéčĆąŠą▓). |
| 8 |
R8 |
- |
flat |
- |
1.0 / ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0.0 .. 500.0) |
| 16 |
R4 |
- |
dX |
ą╝ |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ X ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒5000.0 ą╝ąĄčéčĆąŠą▓). |
| 20 |
R4 |
- |
dY |
ą╝ |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ Y ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒5000.0 ą╝ąĄčéčĆąŠą▓). |
| 24 |
R4 |
- |
dZ |
ą╝ |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ Z ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒5000.0 ą╝ąĄčéčĆąŠą▓). |
| 28 |
R4 |
- |
rotX |
čüąĄą║ |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ X (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒20.0 milli-arc second). |
| 32 |
R4 |
- |
rotY |
čüąĄą║ |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ Y (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒20.0 milli-arc second). |
| 36 |
R4 |
- |
rotZ |
čüąĄą║ |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ Z (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒20.0 milli-arc second). |
| 40 |
R4 |
- |
scale |
ppm |
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą╝ą░čüčłčéą░ą▒ą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0.0 .. 50.0 čćą░čüč鹥ą╣ ąĮą░ ą╝ąĖą╗ą╗ąĖąŠąĮ). |
35.3.3. ąóąĄą║čāčēą░čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-DAT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
The currently defined Datum |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆąĄčĆąĮąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ č鹥ą║čāčēąĄą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé (datum). ąĢčüą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ čüąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, č鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĖčüč鹥ą╝ą░ WGS84. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x06 |
52 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U2 |
- |
datumNum |
- |
ąØąŠą╝ąĄčĆ čüąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé: 0 WGS84, -1 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ čüąĖčüč鹥ą╝ą░. |
| 2 |
CH[6] |
- |
datumName |
- |
ASCII čüčéčĆąŠą║ą░: WGS84 ąĖą╗ąĖ USER. |
| 8 |
R8 |
- |
majA |
ą╝ |
Semi-major Axis (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 6,300,000.0 .. 6,500,000.0 ą╝ąĄčéčĆąŠą▓). |
| 16 |
R8 |
- |
flat |
- |
1.0 / ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0.0 .. 500.0) |
| 24 |
R4 |
- |
dX |
ą╝ |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ X ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒5000.0 ą╝ąĄčéčĆąŠą▓). |
| 28 |
R4 |
- |
dY |
ą╝ |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ Y ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒5000.0 ą╝ąĄčéčĆąŠą▓). |
| 32 |
R4 |
- |
dZ |
ą╝ |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ Z ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒5000.0 ą╝ąĄčéčĆąŠą▓). |
| 36 |
R4 |
- |
rotX |
čüąĄą║ |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ X (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒20.0 milli-arc second). |
| 40 |
R4 |
- |
rotY |
čüąĄą║ |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ Y (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒20.0 milli-arc second). |
| 44 |
R4 |
- |
rotZ |
čüąĄą║ |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ Z (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒20.0 milli-arc second). |
| 48 |
R4 |
- |
scale |
ppm |
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą╝ą░čüčłčéą░ą▒ą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0.0 .. 50.0 čćą░čüč鹥ą╣ ąĮą░ ą╝ąĖą╗ą╗ąĖąŠąĮ). |
35.4. CFG-GNSS (0x06 0x3E)
35.4.1. ą×ą┐čĆą░čłąĖą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čüąĖčüč鹥ą╝čŗ GNSS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-GNSS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Polls the configuration of the GNSS system configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x3E |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.4.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ GNSS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-GNSS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
GNSS system configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą¤ąŠą╗čāčćą░ąĄčé ąĖą╗ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čüąĖčüč鹥ą╝čŗ GNSS. ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčéąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-ACK-ACK, ąĄčüą╗ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┤ąŠą┐čāčüčéąĖą╝ą░, ąĖ UBX-ACK-NAK, ąĄčüą╗ąĖ ą║ą░ą║ąŠą╣-č鹊 ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą▓čŗčłą░čéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓, ąĖ čüčāą╝ą╝ą░ ą▓čüąĄčģ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ ą║ąŠą╗ąĖč湥čüčéą▓čā ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čüą┐ąĄčåąĖčäąĖčćąĮąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ GNSS, ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓čā ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░. ąĪą╝. čĆą░ąĘą┤ąĄą╗ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ "3. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GNSS" [2] ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ čüąĄą║čåąĖčÄ "4. ąØčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓" [2] ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮčŗčģ GNSS ID. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ, čüą┐ąĄčåąĖčäąĖčćąĮą░čÅ ą┤ą╗čÅ čüąĖčüč鹥ą╝čŗ GNSS, ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ č湥čĆąĄąĘ ą┤čĆčāą│ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ, čüą┐ąĄčåąĖčäąĖčćąĮą░čÅ ą┤ą╗čÅ SBAS, ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ CFG-SBAS. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čĆą░ą▒ąŠčéą░ GLONASS ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮą░, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ čĆąĄąČąĖą╝ąĄ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ Power Save Mode (čü ą┐ąŠą╝ąŠčēčīčÄ CFG-RXM). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x3E |
4 + 8┬ĘnumConfigBlocks |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
msgVer |
- |
ąÆąĄčĆčüąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ (=0 ą┤ą╗čÅ čŹč鹊ą╣ ą▓ąĄčĆčüąĖąĖ). |
| 1 |
U1 |
- |
numTrkChHw |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ (ą┐ą░čĆą░ą╝ąĄčéčĆ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ). |
| 2 |
U1 |
- |
numTrkChUse |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ (Ōēż numTrkChHw). |
| 3 |
U1 |
- |
numConfigBlocks |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą╗ąŠą║ąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ čüą╗ąĄą┤čāčÄčé ą┤ą░ą╗ąĄąĄ. |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ąŠąĮ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ numConfigBlocks čĆą░ąĘ) |
| 4 + 8┬ĘN |
U1 |
- |
gnssId |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ GNSS (čüą╝. "4. ąØčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓" [2]) |
| 5 + 8┬ĘN |
U1 |
- |
resTrkCh |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗčģ (ą╝ąĖąĮąĖą╝čāą╝) ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ą┤ą╗čÅ čŹč鹊ą╣ čüąĖčüč鹥ą╝čŗ GNSS. |
| 6 + 8┬ĘN |
U1 |
- |
maxTrkCh |
- |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ čŹč鹊ą╣ čüąĖčüč鹥ą╝čŗ GNSS (ŌēźresTrkChn) |
| 7 + 8┬ĘN |
U1 |
- |
reserved1 |
- |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 8 + 8┬ĘN |
X4 |
- |
flags |
- |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ čäą╗ą░ą│ąŠą▓ flags (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| enable |
ąĀą░ąĘčĆąĄčłąĖčéčī čŹčéčā čüąĖčüč鹥ą╝čā GNSS |
35.5. CFG-INF (0x06 0x02)
35.5.1. ą×ą┐čĆąŠčü čüąŠąŠą▒čēąĄąĮąĖčÅ INF ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-INF |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll INF message configuration for one protocol |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x02 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
protocolID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĘą░ą┐čĆąŠčüą░. ąöąŠą┐čāčüčéąĖą╝čŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą┐čĆąŠč鹊ą║ąŠą╗ą░:
0 UBX
1 NMEA
2..255 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
35.5.2. ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-INF |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Information message configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŚąĮą░č湥ąĮąĖąĄ infMsgMask[x] ąĮąĖąČąĄ ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ: ą║ą░ąČą┤čŗą╣ ą▒ąĖčé ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąŠą┤ąĮąŠ ąĖąĘ čüąŠąŠą▒čēąĄąĮąĖą╣ ą║ą╗ą░čüčüą░ INF (ą▒ąĖčé 0 ą┤ą╗čÅ ERROR, ą▒ąĖčé 1 ą┤ą╗čÅ WARNING, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ). ąöą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ čüą┐ąĖčüą║ą░ čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ą╗ą░čüčüą░ čüąŠąŠą▒čēąĄąĮąĖą╣ INF. ąØąĄą║ąŠč鹊čĆčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą▓ ąŠą┤ąĮąŠą╝ ą▓čģąŠą┤ąĮąŠą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą▒ąŠą╗čīčłąĄ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ ą┤ą╗ąĖąĮčŗ. ąÆčŗčģąŠą┤ąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĘ ą╝ąŠą┤čāą╗čÅ čüąŠą┤ąĄčƹȹ░čé ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 I/O Ports 1 ąĖ 2 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ą┐ąŠčĆčéą░ą╝ 1 ąĖ 2. I/O Port 0 čŹč鹊 DDC. I/O Port 3 čŹč鹊 USB. I/O Port 4 čŹč鹊 SPI. I/O Port 5 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x02 |
0 + 10┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ąŠąĮ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| N┬Ę10 |
U1 |
- |
protocolID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĘą░ą┐čĆąŠčüą░. ąöąŠą┐čāčüčéąĖą╝čŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą┐čĆąŠč鹊ą║ąŠą╗ą░:
0 UBX
1 NMEA
2..255 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 1 + 10┬ĘN |
U1 |
- |
reserved0 |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗčģ (ą╝ąĖąĮąĖą╝čāą╝) ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ą┤ą╗čÅ čŹč鹊ą╣ čüąĖčüč鹥ą╝čŗ GNSS. |
| 2 + 10┬ĘN |
U2 |
- |
reserved1 |
- |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ čŹč鹊ą╣ čüąĖčüč鹥ą╝čŗ GNSS (ŌēźresTrkChn) |
| 4 + 10┬ĘN |
X1[6] |
- |
infMsgMask |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░, ą║ąŠč鹊čĆą░čÅ ą│ąŠą▓ąŠčĆąĖčé ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅčģ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐ąŠčĆčéčā I/O (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ infMsgMask:
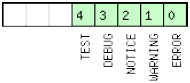
35.6. CFG-ITFM (0x06 0x39)
35.6.1. ą×ą┐čĆą░čłąĖą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą╝ąŠąĮąĖč鹊čĆą░ ąĮą░čĆčāčłąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĖ ą┐ąŠą╝ąĄčģ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-ITFM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Polls the Jamming/Interference Monitor configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x39 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.6.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╝ąŠąĮąĖč鹊čĆą░ ą┐ąŠą╝ąĄčģ ąĖ ąĮą░čĆčāčłąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-ITFM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Jamming/Interference Monitor configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÜąŠą╝ą░ąĮą┤ą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╝ąŠąĮąĖč鹊čĆą░ ąĮą░čĆčāčłąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĖ ą┐ąŠą╝ąĄčģ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x39 |
8 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X4 |
- |
config |
- |
ąĪą╗ąŠą▓ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąĮąĖč鹊čĆą░ ą┐ąŠą╝ąĄčģ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 4 |
X4 |
- |
config2 |
- |
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ąŠąĮąĖč鹊čĆą░ ąĮą░čĆčāčłąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĖ ą┐ąŠą╝ąĄčģ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
ąæąĖčéčŗ ą┐ąŠą╗čÅ config:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| bbThreshold |
ą¤ąŠčĆąŠą│ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠą┐ą░ą┤ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖčÅ (ąĄą┤ąĖąĮąĖčåčŗ ą┤ąĄčåąĖą▒ąĄą╗čŗ, dB) |
| cwThreshold |
ą¤ąŠčĆąŠą│ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠą┐ą░ą┤ą░ąĮąĖčÅ ąĮąĄčüčāčēąĄą╣, CW (ąĄą┤ąĖąĮąĖčåčŗ ą┤ąĄčåąĖą▒ąĄą╗čŗ, dB) |
| reserved1 |
ąØą░čüčéčĆąŠą╣ą║ąĖ, čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą░ą╗ą│ąŠčĆąĖčéą╝ą░, ąĘą┤ąĄčüčī ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ 0x16B156 ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ. |
| enable |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą╝ąĄčģ. |
ąæąĖčéčŗ ą┐ąŠą╗čÅ config2:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| reserved2 |
ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ 0x31E ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ. |
| antSetting |
ąØą░čüčéčĆąŠą╣ą║ą░ ą░ąĮč鹥ąĮąĮčŗ: 0 čéąĖą┐ ą░ąĮč鹥ąĮąĮčŗ ąĮąĄ ąĖąĘą▓ąĄčüč鹥ąĮ, 1 ą┐ą░čüčüąĖą▓ąĮą░čÅ ą░ąĮč鹥ąĮąĮą░, 2 ą░ą║čéąĖą▓ąĮą░čÅ ą░ąĮč鹥ąĮąĮą░ |
| reserved3 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0 |
35.7. CFG-LOGFILTER (0x06 0x47)
35.7.1. ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čäąĖą╗čīčéčĆą░ ą╗ąŠą│ą░ ą┤ą░ąĮąĮčŗčģ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-LOGFILTER |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Data Logger filter Configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā ąŠąĮ ąŠčéą▓ąĄčéąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄą╝ CFG-LOGFILTER, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x47 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.7.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╗ąŠą│ą░ ą┤ą░ąĮąĮčŗčģ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-LOGFILTER |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Data Logger Configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ/ąĘą░ą┐čĆąĄčéą░ ą╗ąŠą│ą░ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖą╗ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮą░čüčéčĆąŠąĄą║ ąĘą░ą┐ąĖčüąĖ 菹╗ąĄą╝ąĄąĮčéą░ čäąĖą╗čīčéčĆą░. ąŁą╗ąĄą╝ąĄąĮčéčŗ ą┐ąŠąĘąĖčåąĖąĖ ą╝ąŠą│čāčé čäąĖą╗čīčéčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čĆą░ąĘąĮąĖčåčŗ ą▓čĆąĄą╝ąĄąĮąĖ, čĆą░ąĘąĮąĖčåčŗ ą┐ąŠąĘąĖčåąĖąĖ ąĖą╗ąĖ č鹥ą║čāčēąĖčģ ą┐ąŠčĆąŠą│ąŠą▓ čüą║ąŠčĆąŠčüčéąĖ. ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą┐ąŠąĘąĖčåąĖąĖ ąĖ čüą║ąŠčĆąŠčüčéąĖ čéą░ą║ąČąĄ ąĖą╝ąĄąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ. ą¤ąŠąĘąĖčåąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│, ąĄčüą╗ąĖ ą┐čĆąĄą▓čŗčłąĄąĮ ą╗čÄą▒ąŠą╣ ąĖąĘ ą┐ąŠčĆąŠą│ąŠą▓. ąĢčüą╗ąĖ ą┐ąŠčĆąŠą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 ąŠąĮ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ ąĘą░ą┐ąĖčüąĖ ą▓ ą╗ąŠą│ ą┐ąŠąĘąĖčåąĖąĖ 1 ąōčå. ąØą░čüčéčĆąŠą╣ą║ąĖ čäąĖą╗čīčéčĆą░ ą▒čāą┤čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ, č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ applyAllFilterSettings. ąŁč鹊 čĆą░ąĘčĆąĄčłą░ąĄčé/ąĘą░ą┐čĆąĄčēą░ąĄčé ąĘą░ą┐ąĖčüčī ą▒ąĄąĘ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ ą┤čĆčāą│ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x47 |
12 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 1. |
| 1 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ, čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ. |
| 2 |
U2 |
- |
minInterval |
čüąĄą║ |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ąĘą░ą┐ąĖčüčÅą╝ąĖ ą┐ąŠąĘąĖčåąĖą╣ ą▓ ą╗ąŠą│ (0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĖąĮč鹥čĆą▓ą░ą╗ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ). ąŁč鹊 ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü ą┐ąŠčĆąŠą│ą░ą╝ąĖ čüą║ąŠčĆąŠčüčéąĖ ąĖ/ąĖą╗ąĖ ą┐ąŠąĘąĖčåąĖąĖ. |
| 4 |
U2 |
- |
timeThreshold |
čüąĄą║ |
ąĢčüą╗ąĖ čĆą░ąĘąĮąĖčåą░ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą┐ąŠčĆąŠą│, č鹊 ą┐ąŠąĘąĖčåąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│ (0 ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ). |
| 6 |
U2 |
- |
speedThreshold |
ą╝/čüąĄą║ |
ąĢčüą╗ąĖ č鹥ą║čāčēą░čÅ čüą║ąŠčĆąŠčüčéčī ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą┐ąŠčĆąŠą│, č鹊 ą┐ąŠąĘąĖčåąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│ (0 ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ). ąóą░ą║ąČąĄ ą┤ąĄą╣čüčéą▓čāąĄčé minInterval. |
| 8 |
U4 |
- |
positionThreshold |
ą╝ |
ąĢčüą╗ąĖ čĆą░ąĘąĮąĖčåą░ 3D-ą┐ąŠąĘąĖčåąĖąĖ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą┐ąŠčĆąŠą│, č鹊 ą┐ąŠąĘąĖčåąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│ (0 ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ). ąóą░ą║ąČąĄ ą┤ąĄą╣čüčéą▓čāąĄčé minInterval. |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| recordEnabled |
1 čĆą░ąĘčĆąĄčłą░ąĄčé ąĘą░ą┐ąĖčüčī ą▓ ą╗ąŠą│, 0 ąĘą░ą┐čĆąĄčēą░ąĄčé ą╗ąŠą│. |
| psmOncePerWakupEnabled |
1 čĆą░ąĘčĆąĄčłą░ąĄčé ąĘą░ą┐ąĖčüčī č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ ą▓ čĆąĄąČąĖą╝ąĄ PSM on/off ą┐ąĄčĆąĖąŠą┤ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ, 0 ąĘą░ą┐čĆąĄčé ąĮą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĖ. |
| applyAllFilterSettings |
1 ą┐čĆąĖą╝ąĄąĮąĖčéčī ą▓čüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čäąĖą╗čīčéčĆą░, 0 ą┐čĆąĖą╝ąĄąĮąĖčéčī č鹊ą╗čīą║ąŠ recordEnabled. |
35.8. CFG-MSG (0x06 0x01)
35.8.1. ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-MSG |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll a message configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x01 |
2 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
msgClass |
- |
ąÜą╗ą░čüčü čüąŠąŠą▒čēąĄąĮąĖčÅ |
| 1 |
U1 |
- |
msgID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ |
35.8.2. ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ (čüą║ąŠčĆąŠčüč鹥ą╣) ą▓čŗą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-MSG |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Set Message Rate(s) |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŻčüčéą░ąĮąŠą▓ą║ą░/ą┐ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąóą░ą║ąČąĄ čüą╝. čüąĄą║čåąĖčÄ "7.7. ąÜą░ą║ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ą╝ąĄąČą┤čā ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ąĖ" [2].
ŌĆó ąĪą║ąŠčĆąŠčüčéčī ąŠčéą┐čĆą░ą▓ą║ąĖ (rate) ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą╝ąŠą╝ąĄąĮčéą░ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ čüąŠą▒čŗčéąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ rate čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 2, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéčüčŗą╗ą░ąĄčéčüčÅ ąĮą░ ą║ą░ąČą┤ąŠąĄ ą▓č鹊čĆąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ. ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣ NMEA čüąĄą║čåąĖčÅ "23. ą×ą▒ąĘąŠčĆ čüąŠąŠą▒čēąĄąĮąĖą╣ NMEA" [3] ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ą╗ą░čüčüą░ ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ NMEA. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x01 |
8 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
msgClass |
- |
ąÜą╗ą░čüčü čüąŠąŠą▒čēąĄąĮąĖčÅ |
| 1 |
U1 |
- |
msgID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| 2 |
U1[6] |
- |
rate |
- |
ą¦ą░čüč鹊čéą░ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĮą░ I/O Port (ą┤ą╗čÅ 6 ą┐ąŠčĆč鹊ą▓). |
35.8.3. ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-MSG |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Set Message Rate |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŻčüčéą░ąĮąŠą▓ą║ą░/ą┐ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮą░ č鹥ą║čāčēąĄą╝ ą┐ąŠčĆčéčā. ąóą░ą║ąČąĄ čüą╝. čüąĄą║čåąĖčÄ "7.7. ąÜą░ą║ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ą╝ąĄąČą┤čā ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ąĖ" [2]. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x01 |
3 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
msgClass |
- |
ąÜą╗ą░čüčü čüąŠąŠą▒čēąĄąĮąĖčÅ |
| 1 |
U1 |
- |
msgID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ |
| 2 |
U1 |
- |
rate |
- |
ą¦ą░čüč鹊čéą░ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĮą░ č鹥ą║čāčēąĄą╝ ą┐ąŠčĆčéčā I/O. |
35.9. CFG-NAV5 (0x06 0x24)
35.9.1. ą×ą┐čĆąŠčü ąĮą░čüčéčĆąŠąĄą║ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-NAV5 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Navigation Engine Settings |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (čü ą┐čāčüč鹊ą╣ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣) ą┐čĆąĖąĄą╝ąĮąĖą║čā ąŠąĮ ąŠčéą▓ąĄčéąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄą╝ CFG-NAV5 čü ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x24 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.9.2. ąØą░čüčéčĆąŠą╣ą║ąĖ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-NAV5 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Navigation Engine Settings |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪą╝. "2. ą×ą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ" [2] ą┤ą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ, ą║ą░ą║ čŹčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ą╗ąĖčÅčÄčé ąĮą░ čĆą░ą▒ąŠčéčā ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x24 |
36 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X2 |
- |
mask |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąæčāą┤čāčé ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ č鹊ą╗čīą║ąŠ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą╝ą░čüą║ąĖ ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ). |
| 2 |
U1 |
- |
dynModel |
- |
ą£ąŠą┤ąĄą╗čī ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ą┐ą╗ą░čéč乊čĆą╝čŗ:
0 Portable (ą┐ąĄčĆąĄąĮąŠčüąĮą░čÅ)
2 Stationary (čüčéą░čåąĖąŠąĮą░čĆąĮą░čÅ)
3 Pedestrian (ą┐ąĄčłąĄčģąŠą┤)
4 Automotive (ą░ą▓č鹊)
5 Sea (ą╝ąŠčĆčüą║ą░čÅ)
6 ąÉą▓ąĖą░čåąĖčÅ čü čāčüą║ąŠčĆąĄąĮąĖčÅą╝ąĖ < 1g
7 ąÉą▓ąĖą░čåąĖčÅ čü čāčüą║ąŠčĆąĄąĮąĖčÅą╝ąĖ < 2g
8 ąÉą▓ąĖą░čåąĖčÅ čü čāčüą║ąŠčĆąĄąĮąĖčÅą╝ąĖ < 4g |
| 3 |
U1 |
- |
fixMode |
- |
ąĀąĄąČąĖą╝ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ:
1 č鹊ą╗čīą║ąŠ 2D
2 č鹊ą╗čīą║ąŠ 3D
3 Auto 2D/3D |
| 4 |
I4 |
0.01 |
fixedAlt |
ą╝ |
ążąĖą║čüąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą▓čŗčüąŠčéą░ (ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠčĆčÅ) ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čäąĖą║čüą░čåąĖąĖ 2D. |
| 8 |
U4 |
0.0001 |
fixedAltVar |
ą╝2 |
ążąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓čŗčüąŠčéčŗ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ 2D. |
| 12 |
I1 |
- |
minElev |
deg |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓ąŠąĘą▓čŗčłąĄąĮąĖčÅ čüą┐čāčéąĮąĖą║ą░ GNSS, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ. |
| 13 |
U1 |
- |
drLimit |
čüąĄą║ |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 14 |
U2 |
0.1 |
pDop |
- |
ą£ą░čüą║ą░ DOP ą┐ąŠąĘąĖčåąĖąĖ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ |
| 16 |
U2 |
0.1 |
tDop |
- |
ą£ą░čüą║ą░ DOP ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ |
| 18 |
U2 |
- |
pAcc |
ą╝ |
ą£ą░čüą║ą░ č鹊čćąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąĖ |
| 20 |
U2 |
- |
tAcc |
ą╝ |
ą£ą░čüą║ą░ č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ |
| 22 |
U1 |
- |
staticHoldThresh |
čüą╝/čüąĄą║ |
ą¤ąŠčĆąŠą│ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ čāą┤ąĄčƹȹ░ąĮąĖčÅ |
| 23 |
U1 |
- |
dgpsTimeOut |
čüąĄą║ |
ąóą░ą╣ą╝ą░čāčé DGPS |
| 24 |
U1 |
- |
cnoThreshNumSVs |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ C/N0 ą▓čŗčłąĄ cnoThresh, čćč鹊ą▒čŗ ą┐ąŠą┐čŗčéą░čéčīčüčÅ čäąĖą║čüąĖčĆąŠą▓ą░čéčī ą┐ąŠąĘąĖčåąĖčÄ. |
| 25 |
U1 |
- |
cnoThresh |
dBHz |
ą¤ąŠčĆąŠą│ C/N0 ą┤ą╗čÅ ą┐čĆąĖąĮčÅčéąĖčÅ čĆąĄčłąĄąĮąĖčÅ ąŠ ą┐ąŠą┐čŗčéą║ąĄ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ |
| 26 |
U2 |
- |
reserved2 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 28 |
U4 |
- |
reserved3 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 32 |
U4 |
- |
reserved4 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ mask:
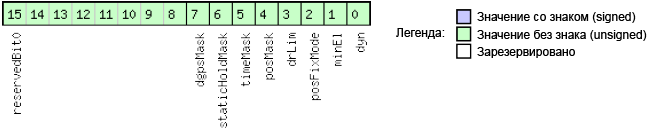
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| dyn |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ |
| minEl |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą▓ąŠąĘą▓čŗčłąĄąĮąĖčÅ čüą┐čāčéąĮąĖą║ą░ |
| posFixMode |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ |
| drLim |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| posMask |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ą░čüą║ąĖ ą┐ąŠąĘąĖčåąĖąĖ |
| timeMask |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ą░čüą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ |
| staticHoldMask |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ čāą┤ąĄčƹȹ░ąĮąĖčÅ |
| dgpsMask |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ DGPS |
| reservedBit0 |
ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
35.10. CFG-NAVX5 (0x06 0x23)
35.10.1. Poll Navigation Engine Expert Settings
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-NAVX5 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Navigation Engine Expert Settings |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (čü ą┐čāčüč鹊ą╣ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣) ą┐čĆąĖąĄą╝ąĮąĖą║čā ąŠąĮ ąŠčéą▓ąĄčéąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄą╝ CFG-NAVX5 čü ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x23 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.10.2. Navigation Engine Expert Settings
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-NAV5 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Navigation Engine Settings |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪą╝. "2. ą×ą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ" [2] ą┤ą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ, ą║ą░ą║ čŹčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ą╗ąĖčÅčÄčé ąĮą░ čĆą░ą▒ąŠčéčā ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x23 |
40 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U2 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ (ą┤ą╗čÅ čŹč鹊ą╣ ą▓ąĄčĆčüąĖąĖ čéčāčé 0) |
| 2 |
X2 |
- |
mask1 |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąæčāą┤čāčé ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ č鹊ą╗čīą║ąŠ ą┐ąŠą╝ąĄč湥ąĮąĮčŗąĄ čäą╗ą░ą│ą░ą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▒ąĖčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ 0 (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ mask1 ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ). |
| 4 |
U4 |
- |
reserved0 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 8 |
U1 |
- |
reserved1 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 9 |
U1 |
- |
reserved2 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 10 |
U1 |
- |
minSVs |
- |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| 11 |
U1 |
- |
maxSVs |
- |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| 12 |
U1 |
- |
minCNO |
dBHz |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░ ąŠčé čüą┐čāčéąĮąĖą║ą░ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| 13 |
U1 |
- |
reserved5 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 14 |
U1 |
- |
iniFix3D |
- |
ąØą░čćą░ą╗čīąĮą░čÅ čäąĖą║čüą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī 3D (0 false / 1 true) |
| 15 |
U1 |
- |
reserved6 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 16 |
U1 |
- |
reserved7 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 17 |
U1 |
- |
reserved8 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 18 |
U2 |
- |
wknRollover |
- |
ą¦ąĖčüą╗ąŠ ąĮąĄą┤ąĄą╗čī GPS, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄčģąŠą┤ (rollover number). ąØąŠą╝ąĄčĆą░ ąĮąĄą┤ąĄą╗čī GPS ą▒čāą┤čāčé ą║ąŠčĆčĆąĄą║čéąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┐ąŠčüą╗ąĄ čŹč鹊ą╣ ąĮąĄą┤ąĄą╗ąĖ ą┤ąŠ 1024 ąĮąĄą┤ąĄą╗čī ą┐ąŠčüą╗ąĄ čŹč鹊ą╣ ąĮąĄą┤ąĄą╗ąĖ. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▓ 0 ą▓ąĄčĆąĮąĄčé čāčüčéą░ąĮąŠą▓ą║čā ą║ čüąŠčüč鹊čÅąĮąĖčÄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ firmware. |
| 20 |
U4 |
- |
reserved9 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 24 |
U1 |
- |
reserved10 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 25 |
U1 |
- |
reserved9 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 26 |
U1 |
- |
usePPP |
- |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▓ą░čĆąĖą░ąĮčéą░čģ ą┐čĆąŠą┤čāą║čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ Precise Point Positioning (0 false / 1 true). |
| 27 |
U1 |
- |
aopCfg |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ AssistNow Autonomous (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 28 |
U1 |
- |
reserved12 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 29 |
U1 |
- |
reserved13 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 30 |
U2 |
- |
aopOrbMaxErr |
ą╝ |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ (čüą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĮą░čÅ) ąŠčłąĖą▒ą║ą░ ąŠčĆą▒ąĖčéčŗ AssistNow Autonomous (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 5..1000, ąĖą╗ąĖ 0 ą┤ą╗čÅ čüą▒čĆąŠčüą░ ą║ ąĘąĮą░č湥ąĮąĖčÄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ firmware). |
| 32 |
U1 |
- |
reserved14 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 33 |
U1 |
- |
reserved15 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 34 |
U2 |
- |
reserved16 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 36 |
U4 |
- |
reserved4 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ mask1:
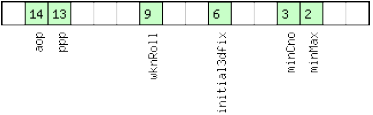
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| minMax |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║čā ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüą┐čāčéąĮąĖą║ąŠą▓ |
| minCno |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║čā ą┤ą╗čÅ ą╝ąĖąĮąĖą╝čāą╝ą░ C/N0 |
| initial3dfix |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║čā ą┤ą╗čÅ ąĮą░čćą░ą╗čīąĮąŠą╣ 3D čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ |
| wknRoll |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║čā GPS weeknumber rollover |
| ppp |
ą¤čĆąĖą╝ąĄąĮąĖčéčī čäą╗ą░ą│ PPP (ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓ą░čĆąĖą░ąĮčéą░čģ ą┐čĆąŠą┤čāą║čåąĖąĖ) |
| aop |
ą¤čĆąĖą╝ąĄąĮąĖčéčī čäą╗ą░ą│ useAOP ąĖ ąĮą░čüčéčĆąŠą╣ą║čā aopOrbMaxErr (AssistNow Autonomous) |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ aopCfg:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| useAOP |
ążą╗ą░ą│ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ AOP |
35.11. CFG-NMEA (0x06 0x17)
35.11.1. ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-NMEA |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll the NMEA protocol configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x17 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.11.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA (čāčüčéą░čĆąĄą▓čłąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-NMEA |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
NMEA protocol configuration (deprecated) |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁčéą░ ą▓ąĄčĆčüąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčüčéą░ą▓ą╗ąĄąĮą░ č鹊ą╗čīą║ąŠ čü čåąĄą╗čīčÄ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ čüčéą░čĆčŗą╝ ą¤ą×. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą▓ą╝ąĄčüč鹊 ąĮąĄą│ąŠ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčāčÄ ą▓ąĄčĆčüąĖčÄ UBX-CFG-NMEA ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ/ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA. ąĪą╝. čüąĄą║čåąĖčÄ "18. ą×ą▒ąĘąŠčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA" ąĖ "19. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA" [3] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą▓ą╗ąĖčÅąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ NMEA ąĮą░ ą▓čŗą▓ąŠą┤. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x17 |
4 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X1 |
- |
filter |
- |
ążą╗ą░ą│ąĖ čäąĖą╗čīčéčĆą░ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 1 |
U1 |
- |
nmeaVersion |
- |
ąÆąĄčĆčüąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA:
0x23 NMEA version 2.3
0x21 NMEA version 2.1 |
| 2 |
U1 |
- |
numSV |
- |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA (0 = ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ). ąŁč鹊 ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čĆą░ą▒ąŠčéčā ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÅ č鹊ą╗čīą║ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąŠ ą║ąŠč鹊čĆčŗčģ čüąŠąŠą▒čēą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ NMEA (čŹč鹊 ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ čüąŠ čüčéą░čĆčŗą╝ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé č鹊ą╗čīą║ąŠ 8- ąĖą╗ąĖ 12-ą║ą░ąĮą░ą╗čīąĮčŗąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ). |
| 3 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ filter:
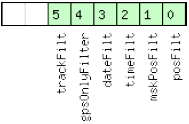
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| posFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą┐ąŠąĘąĖčåąĖąĖ ą┤ą╗čÅ ąŠčłąĖą▒ąŠčćąĮčŗčģ ąĖą╗ąĖ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ čäąĖą║čüą░čåąĖą╣ |
| mskPosFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą┐ąŠąĘąĖčåąĖąĖ ą┤ą╗čÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ čäąĖą║čüą░čåąĖą╣ |
| timeFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąĄą│ąŠ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ |
| dateFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą┤ą░čéčŗ ą┤ą╗čÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░čé |
| gpsOnlyFilter |
ą×ą│čĆą░ąĮąĖčćąĖčéčī ą▓čŗą▓ąŠą┤ č鹊ą╗čīą║ąŠ čüą┐čāčéąĮąĖą║ą░ą╝ąĖ GPS |
| trackFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ COG, ąĄčüą╗ąĖ COG ąĘą░ą╝ąŠčĆąŠąČąĄąĮ |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ flags:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| compat |
ąĀą░ąĘčĆąĄčłąĖčéčī čĆąĄąČąĖą╝ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ. ąŁč鹊 ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠą│ą┤ą░ ą┐ą░čĆčüąĄčĆ NMEA ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąŠąČąĖą┤ą░ąĄčé čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖčäčĆ ą▓ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░čģ ą┐ąŠąĘąĖčåąĖąĖ. |
| consider |
ąĀą░ąĘčĆąĄčłąĖčéčī considering mode |
35.11.3. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-NMEA |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
NMEA protocol configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą¤ąŠą╗čāčćą░ąĄčé/čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA. ąĪą╝. čüąĄą║čåąĖčÄ "18. ą×ą▒ąĘąŠčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA" ąĖ "19. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA" [3] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą▓ą╗ąĖčÅąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ NMEA ąĮą░ ą▓čŗą▓ąŠą┤. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x17 |
12 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X1 |
- |
filter |
- |
ążą╗ą░ą│ąĖ čäąĖą╗čīčéčĆą░ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 1 |
U1 |
- |
nmeaVersion |
- |
ąÆąĄčĆčüąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA:
0x23 NMEA version 2.3
0x21 NMEA version 2.1 |
| 2 |
U1 |
- |
numSV |
- |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA (0 = ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ). ąŁč鹊 ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čĆą░ą▒ąŠčéčā ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÅ č鹊ą╗čīą║ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąŠ ą║ąŠč鹊čĆčŗčģ čüąŠąŠą▒čēą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ NMEA (čŹč鹊 ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ čüąŠ čüčéą░čĆčŗą╝ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé č鹊ą╗čīą║ąŠ 8- ąĖą╗ąĖ 12-ą║ą░ąĮą░ą╗čīąĮčŗąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ). |
| 3 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 4 |
X4 |
- |
gnssToFilter |
- |
ążąĖą╗čīčéčĆčāąĄčé čüą┐čāčéąĮąĖą║ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĖčģ čüąĖčüč鹥ą╝čŗ GNSS. ąĢčüą╗ąĖ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüą┐čāčéąĮąĖą║ąĖ ąĮąĄ ą▒čāą┤čāčé ą▓čŗą▓ąŠą┤ąĖčéčīčüčÅ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 8 |
U1 |
- |
svNumbering |
- |
ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ čüą┐čāčéąĮąĖą║ąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĮąĄčé ąĘąĮą░č湥ąĮąĖčÅ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ NMEA. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąĮąĄ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ čüą┐čāčéąĮąĖą║ąŠą▓ čü ąĮąĄąĖąĘą▓ąĄčüčéąĮčŗą╝ ID.
0: Strict (ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ - čüą┐čāčéąĮąĖą║ąĖ ąĮąĄ ą▓čŗą▓ąŠą┤čÅčéčüčÅ)
1: Extended (ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮą░čÅ ąĮčāą╝ąĄčĆą░čåąĖčÅ UBX, čüą╝. "4. ąØčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓" [2]). |
| 9 |
U1 |
- |
mainTalkerId |
- |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠčüąĮąŠą▓ąĮąŠą╣ Talker ID (čé. ąĄ. Talker ID, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą▓čüąĄčģ čüąŠąŠą▒čēąĄąĮąĖą╣, ąŠčéą╗ąĖčćą░čÄčēąĖčģčüčÅ ąŠčé GSV) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÄ GNSS ą║ą░ąĮą░ą╗ąŠą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (čüą╝. čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-GNSS). ąŁč鹊 ą┐ąŠą╗ąĄ čĆą░ąĘčĆąĄčłą░ąĄčé ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćąĖčéčī ąŠčüąĮąŠą▓ąĮąŠą╣ Talker ID.
0: ąŠčüąĮąŠą▓ąĮąŠą╣ Talker ID ąĮąĄ ą┐ąĄčĆąĄąĮą░ąĘąĮą░č湥ąĮ
1: čāčüčéą░ąĮąŠą▓ąĖčéčī ąŠčüąĮąŠą▓ąĮąŠą╣ Talker ID ą▓ 'GP'
2: čāčüčéą░ąĮąŠą▓ąĖčéčī ąŠčüąĮąŠą▓ąĮąŠą╣ Talker ID ą▓ 'GL'
3: čāčüčéą░ąĮąŠą▓ąĖčéčī ąŠčüąĮąŠą▓ąĮąŠą╣ Talker ID ą▓ 'GN' |
| 10 |
U1 |
- |
gsvTalkerId |
- |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ Talker ID ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣ GSV čüą┐ąĄčåąĖčäąĖč湥ąĮ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ GNSS (ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ NMEA). ąŁč鹊 ą┐ąŠą╗ąĄ čĆą░ąĘčĆąĄčłą░ąĄčé ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćąĖčéčī GSV Talker ID.
0: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ GNSS Talker ID (ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ NMEA)
1: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠčüąĮąŠą▓ąĮąŠą╣ Talker ID |
| 11 |
U1 |
- |
reserved |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, ąĘą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ filter (čéą░ą║ąŠąĄ ąČąĄ, ą║ą░ą║ ąĖ ą▓ čāčüčéą░čĆąĄą▓čłąĄą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ CFG-NMEA):
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| posFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą┐ąŠąĘąĖčåąĖąĖ ą┤ą╗čÅ ąŠčłąĖą▒ąŠčćąĮčŗčģ ąĖą╗ąĖ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ čäąĖą║čüą░čåąĖą╣ |
| mskPosFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą┐ąŠąĘąĖčåąĖąĖ ą┤ą╗čÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ čäąĖą║čüą░čåąĖą╣ |
| timeFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąĄą│ąŠ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ |
| dateFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą┤ą░čéčŗ ą┤ą╗čÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░čé |
| gpsOnlyFilter |
ą×ą│čĆą░ąĮąĖčćąĖčéčī ą▓čŗą▓ąŠą┤ č鹊ą╗čīą║ąŠ čüą┐čāčéąĮąĖą║ą░ą╝ąĖ GPS |
| trackFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ COG, ąĄčüą╗ąĖ COG ąĘą░ą╝ąŠčĆąŠąČąĄąĮ |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ flags (čéą░ą║ąŠąĄ ąČąĄ, ą║ą░ą║ ąĖ ą▓ čāčüčéą░čĆąĄą▓čłąĄą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ CFG-NMEA):
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| compat |
ąĀą░ąĘčĆąĄčłąĖčéčī čĆąĄąČąĖą╝ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ. ąŁč鹊 ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠą│ą┤ą░ ą┐ą░čĆčüąĄčĆ NMEA ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąŠąČąĖą┤ą░ąĄčé čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖčäčĆ ą▓ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░čģ ą┐ąŠąĘąĖčåąĖąĖ. |
| consider |
ąĀą░ąĘčĆąĄčłąĖčéčī considering mode |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ gnssToFilter:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| gps |
ąŚą░ą┐čĆąĄčé čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠ čüą┐čāčéąĮąĖą║ą░čģ GPS |
| sbas |
ąŚą░ą┐čĆąĄčé čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠ čüą┐čāčéąĮąĖą║ą░čģ SBAS |
| qzss |
ąŚą░ą┐čĆąĄčé čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠ čüą┐čāčéąĮąĖą║ą░čģ QZSS |
| glonass |
ąŚą░ą┐čĆąĄčé čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠ čüą┐čāčéąĮąĖą║ą░čģ GLONASS |
35.12. CFG-PM2 (0x06 0x3B)
35.12.1. ą×ą┐čĆąŠčü čĆą░čüčłąĖčĆąĄąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management)
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-PM2 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll extended Power Management configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x3B |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.12.2. ąĀą░čüčłąĖčĆąĄąĮąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-PM2 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Extended Power Management configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x3B |
44 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ (1 ą┤ą╗čÅ čŹč鹊ą╣ ą▓ąĄčĆčüąĖąĖ) |
| 1 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 2 |
U1 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 3 |
U1 |
- |
reserved3 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 4 |
X4 |
- |
flags |
- |
ążą╗ą░ą│ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ PSM (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 8 |
U4 |
- |
updatePeriod |
ą╝čü |
ą¤ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▒čāą┤ąĄčé ą┐čŗčéą░čéčīčüčÅ ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ. |
| 12 |
U4 |
- |
searchPeriod |
ą╝čü |
ą¤ąĄčĆąĖąŠą┤ ą┐ąŠą▓č鹊čĆą░ ą┐ąŠą┐čŗč鹊ą║ ąĘą░čģą▓ą░čéą░. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▒čāą┤ąĄčé ą┐čŗčéą░čéčīčüčÅ ąĘą░ą┐čāčüčéąĖčéčīčüčÅ. |
| 16 |
U4 |
- |
gridOffset |
ą╝čü |
ąĪą╝ąĄčēąĄąĮąĖąĄ čüąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮą░čćą░ą╗ą░ ąĮąĄą┤ąĄą╗ąĖ GPS. |
| 20 |
U2 |
- |
onTime |
čüąĄą║ |
ąÆčĆąĄą╝čÅ ą▓ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą╣ čāčüą┐ąĄčłąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ |
| 22 |
U2 |
- |
minAcqTime |
čüąĄą║ |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐ąŠąĖčüą║ą░ |
| 24 |
U2 |
- |
reserved4 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 26 |
U2 |
- |
reserved5 |
- |
| 28 |
U4 |
- |
reserved6 |
- |
| 32 |
U4 |
- |
reserved7 |
- |
| 36 |
U1 |
- |
reserved8 |
- |
| 37 |
U1 |
- |
reserved9 |
- |
| 38 |
U2 |
- |
reserved10 |
- |
| 40 |
U4 |
- |
reserved11 |
- |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ flags:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| extintSelect |
ąÆčŗą▒ąŠčĆ ą▓čŗą▓ąŠą┤ą░ ą▓čģąŠą┤ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ EXTINT:
0 EXTINT0
1 EXTINT1 |
| extintWake |
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčé ą▓čŗą▓ąŠą┤ą░ EXTINT:
0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ
1 čĆą░ąĘčĆąĄčłąĄąĮąŠ, čāą┤ąĄčƹȹĖą▓ą░čéčī ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčé ą▓čģąŠą┤ą░ ą▓ čüąŠąĮ, ą┐ąŠą║ą░ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ ą▓čŗą▓ąŠą┤ąĄ EXTINT ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1. |
| extintBackup |
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčé ą▓čŗą▓ąŠą┤ą░ EXTINT:
0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ
1 čĆą░ąĘčĆąĄčłąĄąĮąŠ, ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ čĆąĄąČąĖą╝ BACKUP, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ ą▓čŗą▓ąŠą┤ąĄ EXTINT ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. |
| limitPeakCurr |
ą×ą│čĆą░ąĮąĖčćąĖčéčī ą┐ąĖą║ąŠą▓ąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░:
00 ąĘą░ą┐čĆąĄčēąĄąĮąŠ
01 čĆą░ąĘčĆąĄčłąĄąĮąŠ, ą┐ąĖą║ąŠą▓čŗą╣ č鹊ą║ ąŠą│čĆą░ąĮąĖč湥ąĮ
10 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
11 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| WaitTimeFix |
ą×ąČąĖą┤ą░ąĮąĖąĄ čäąĖą║čüą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ:
0 ąČą┤ą░čéčī čāčüą┐ąĄčłąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ ą▓ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ
1 ąČą┤ą░čéčī čāčüą┐ąĄčłąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ ą▓ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ |
| updateRTC |
ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ:
0 ąĮąĄ ą┐čĆąŠčüčŗą┐ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ RTC. RTC ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ.
1 ąŠą▒ąĮąŠą▓ą╗čÅčéčī RTC. ą¤čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čåąĖą║ą╗čŗ ą▓čŗčģąŠą┤ą░ ąĖąĘ čüąĮą░ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ RTC. |
| updateEPH |
ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čŹč乥ą╝ąĄčĆąĖą┤:
0 ąĮąĄ ą┐čĆąŠčüčŗą┐ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤
1 ąŠą▒ąĮąŠą▓ą╗čÅčéčī čŹč乥ą╝ąĄčĆąĖą┤čŗ. ą¤čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čåąĖą║ą╗čŗ ą▓čŗčģąŠą┤ą░ ąĖąĘ čüąĮą░ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤. |
| doNotEnterOff |
ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▓ čüą╗čāčćą░ąĄ ąŠčéčüčāčéčüčéą▓ąĖčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ:
0 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéčüčāčéčüčéą▓ąĖčÅ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ čüą┐čāčéąĮąĖą║ąŠą▓ (inactive for search)
1 ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ inactive for search, ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą┐čĆąŠą┤ąŠą╗ąČą░čÅ ą┐ąŠą┐čŗčéą║ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ. |
| mode |
ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ:
00 čĆą░ą▒ąŠčéą░ ą▓ čĆąĄąČąĖą╝ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (ON/OFF operation)
01 čĆą░ą▒ąŠčéą░ čåąĖą║ą╗ąĖč湥čüą║ąŠą│ąŠ čéčĆąĄą║ąĖąĮą│ą░
10 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
11 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
35.13. CFG-PRT (0x06 0x00)
35.13.1. ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┐ąŠčĆč鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-PRT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Polls the configuration of the used I/O Port |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąŠčĆčéą░ I/O, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x00 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.13.2. ą×ą┐čĆą░čłąĖą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąŠčĆčéą░ I/O
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-PRT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Polls the configuration for one I/O Port |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×čéą┐čĆą░ą▓ą║ą░ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą┐ąŠčĆčéą░ ą▓ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓ąŠąĘą▓čĆą░čéčā ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą┐ąŠčĆčéą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x00 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
PortID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ (čüą╝. ą┤čĆčāą│ąĖąĄ ą▓ąĄčĆčüąĖąĖ CFG-PRT ą┤ą╗čÅ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ąĘąĮą░č湥ąĮąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓) |
35.13.3. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ ą┤ą╗čÅ UART
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-PRT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Port Configuration for UART |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąØąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ą╗ąĄąĄąĮčŗ ą▓ ąŠą┤ąĮąŠ ą▓čģąŠą┤ąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ą╗ąĖąĮ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ (čüą╝. ą┤čĆčāą│ąĖąĄ ą▓ąĄčĆčüąĖąĖ CFG-PRT). ąÆčŗą▓ąŠą┤ąĖą╝čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĘ ą╝ąŠą┤čāą╗čÅ čüąŠą┤ąĄčƹȹ░čéčī ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x00 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
portID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ (čüą╝. "7. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗąĄ ą┐ąŠčĆčéčŗ" [2] ą┤ą╗čÅ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ą┐ąŠčĆč鹊ą▓ UART). |
| 1 |
U1 |
- |
reserved0 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 2 |
X2 |
- |
txReady |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗą▓ąŠą┤ą░ TX (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 4 |
X4 |
- |
mode |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ čĆąĄąČąĖą╝ UART (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 8 |
U4 |
- |
baudRate |
ą▒ąĖčé/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠčĆčéą░ |
| 12 |
X2 |
- |
inProtoMask |
- |
ą£ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ, ą║ą░ą║ąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą░ą║čéąĖą▓ąĮčŗ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╣ ą╝ą░čüą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 14 |
X2 |
- |
outProtoMask |
- |
ą£ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ, ą║ą░ą║ąĖąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą░ą║čéąĖą▓ąĮčŗ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╣ ą╝ą░čüą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 16 |
X2 |
- |
flags |
- |
ąæąĖčéčŗ ą╝ą░čüą║ąĖ čäą╗ą░ą│ąŠą▓ |
| 18 |
U2 |
- |
reserved5 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ txReady:
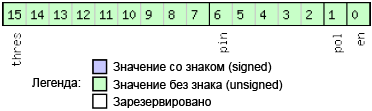
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| en |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░ čäčāąĮą║čåąĖčÄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX ready). |
| pol |
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī: 0 ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 1, 1 ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 0. |
| pin |
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ąĮąŠąČą║ą░ PIO (ąŠąĮą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĄą╣) |
| thres |
ą¤ąŠčĆąŠą│, čāą║ą░ąĘą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāą╝ąĮąŠąČą░ąĄčéčüčÅ ąĮą░ 8 ą▒ą░ą╣čé. ąØąŠąČą║ą░ TX ready ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĮą░ ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī, ą║ąŠą│ą┤ą░ ąĮą░ ą┐ąŠčĆčéčā ąŠąČąĖą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ Ōēź thres┬Ę8 ą▒ą░ą╣čé, ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ąĮąĄą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ąŠąČąĖą┤ą░čÄčēąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčā ą┐ąŠčĆčéą░ (0..4 ą▒ą░ą╣čéą░ ą┐ąĄčĆąĄą┤ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ą░).
0x000 ąĮąĄčé ą┐ąŠčĆąŠą│ą░
0x001 8 ą▒ą░ą╣čé
0x002 16 ą▒ą░ą╣čé
...
0x1FE 4080 ą▒ą░ą╣čé
0x1FF 4088 ą▒ą░ą╣čé |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ mode:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| reserved1 |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĘą┤ąĄčüčī 1 ą┤ą╗čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čü A4 |
| charLen |
ąöą╗ąĖąĮą░ čüąĖą╝ą▓ąŠą╗ą░ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ą▓ ą║ą░ą┤čĆąĄ UART):
00 5 ą▒ąĖčé (ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ)
01 6 ą▒ąĖčé (ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ)
10 7 ą▒ąĖčé (ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ čü ą▒ąĖč鹊ą╝ č湥čéąĮąŠčüčéąĖ)
11 8 ą▒ąĖčé |
| parity |
ąæąĖčé č湥čéąĮąŠčüčéąĖ:
000 ą▒ąĖčé ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ č湥čéąĮąŠčüčéąĖ (Even Parity)
001 ą▒ąĖčé ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄč湥čéąĮąŠčüčéąĖ (Odd Parity)
10X ą║ąŠąĮčéčĆąŠą╗čī č湥čéąĮąŠčüčéąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
X1X ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| nStopBits |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüč鹊ą┐-ą▒ąĖč鹊ą▓:
00 1 čüč鹊ą┐-ą▒ąĖčé
01 1.5 čüč鹊ą┐-ą▒ąĖčéą░
10 2 čüč鹊ą┐-ą▒ąĖčéą░
11 0.5 čüč鹊ą┐-ą▒ąĖčéą░ |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ inProtoMask:

ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ outProtoMask:

ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ flags:
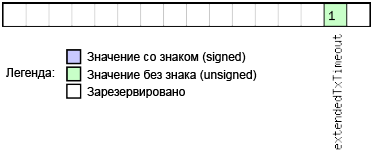
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| extendedTxTimeout |
ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čéą░ą╣ą╝ą░čāčé ą┐ąĄčĆąĄą┤ą░čćąĖ: ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┐ąŠčĆčé ą▒čāą┤ąĄčé ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čéą░ą╣ą╝ą░čāčé ąĄčüą╗ąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĮą░čÅ ą┐ą░ą╝čÅčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ Ōēź4 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ 1.5 čüąĄą║čāąĮą┤čŗ. |
35.13.4. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ USB
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-PRT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Port Configuration for USB Port |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąØąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ą╗ąĄąĄąĮčŗ ą▓ ąŠą┤ąĮąŠ ą▓čģąŠą┤ąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ą╗ąĖąĮ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ (čüą╝. ą┤čĆčāą│ąĖąĄ ą▓ąĄčĆčüąĖąĖ CFG-PRT). ąÆčŗą▓ąŠą┤ąĖą╝čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĘ ą╝ąŠą┤čāą╗čÅ čüąŠą┤ąĄčƹȹ░čéčī ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x00 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
portID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ (=3 ą┤ą╗čÅ ą┐ąŠčĆčéą░ USB). |
| 1 |
U1 |
- |
reserved0 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 2 |
X2 |
- |
txReady |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗą▓ąŠą┤ą░ TX (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 4 |
U4 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 8 |
U4 |
- |
reserved3 |
|
| 12 |
X2 |
- |
inProtoMask |
- |
ą£ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ, ą║ą░ą║ąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą░ą║čéąĖą▓ąĮčŗ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╣ ą╝ą░čüą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 14 |
X2 |
- |
outProtoMask |
- |
ą£ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ, ą║ą░ą║ąĖąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą░ą║čéąĖą▓ąĮčŗ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╣ ą╝ą░čüą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 16 |
U2 |
- |
reserved4 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 18 |
U2 |
- |
reserved5 |
- |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ txReady:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| en |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░ čäčāąĮą║čåąĖčÄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX ready). |
| pol |
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī: 0 ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 1, 1 ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 0. |
| pin |
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ąĮąŠąČą║ą░ PIO (ąŠąĮą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĄą╣) |
| thres |
ą¤ąŠčĆąŠą│, čāą║ą░ąĘą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāą╝ąĮąŠąČą░ąĄčéčüčÅ ąĮą░ 8 ą▒ą░ą╣čé. ąØąŠąČą║ą░ TX ready ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĮą░ ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī, ą║ąŠą│ą┤ą░ ąĮą░ ą┐ąŠčĆčéčā ąŠąČąĖą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ Ōēź thres┬Ę8 ą▒ą░ą╣čé, ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ąĮąĄą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ąŠąČąĖą┤ą░čÄčēąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčā ą┐ąŠčĆčéą░ (0..4 ą▒ą░ą╣čéą░ ą┐ąĄčĆąĄą┤ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ą░).
0x000 ąĮąĄčé ą┐ąŠčĆąŠą│ą░
0x001 8 ą▒ą░ą╣čé
0x002 16 ą▒ą░ą╣čé
...
0x1FE 4080 ą▒ą░ą╣čé
0x1FF 4088 ą▒ą░ą╣čé |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ inProtoMask:
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ outProtoMask:
35.13.5. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ SPI
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-PRT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Port Configuration for SPI Port |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąØąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ą╗ąĄąĄąĮčŗ ą▓ ąŠą┤ąĮąŠ ą▓čģąŠą┤ąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ą╗ąĖąĮ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ (čüą╝. ą┤čĆčāą│ąĖąĄ ą▓ąĄčĆčüąĖąĖ CFG-PRT). ąÆčŗą▓ąŠą┤ąĖą╝čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĘ ą╝ąŠą┤čāą╗čÅ čüąŠą┤ąĄčƹȹ░čéčī ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x00 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
portID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ (=4 ą┤ą╗čÅ ą┐ąŠčĆčéą░ SPI). |
| 1 |
U1 |
- |
reserved0 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 2 |
X2 |
- |
txReady |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗą▓ąŠą┤ą░ TX (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 4 |
U4 |
- |
mode |
- |
ążą╗ą░ą│ąĖ čĆąĄąČąĖą╝ą░ SPI (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 8 |
U4 |
- |
reserved3 |
|
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 12 |
X2 |
- |
inProtoMask |
- |
ą£ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ, ą║ą░ą║ąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą░ą║čéąĖą▓ąĮčŗ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╣ ą╝ą░čüą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 14 |
X2 |
- |
outProtoMask |
- |
ą£ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ, ą║ą░ą║ąĖąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą░ą║čéąĖą▓ąĮčŗ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╣ ą╝ą░čüą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 16 |
X2 |
- |
flags |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ čäą╗ą░ą│ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 18 |
U2 |
- |
reserved5 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ txReady:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| en |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░ čäčāąĮą║čåąĖčÄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX ready). |
| pol |
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī: 0 ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 1, 1 ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 0. |
| pin |
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ąĮąŠąČą║ą░ PIO (ąŠąĮą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĄą╣) |
| thres |
ą¤ąŠčĆąŠą│, čāą║ą░ąĘą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāą╝ąĮąŠąČą░ąĄčéčüčÅ ąĮą░ 8 ą▒ą░ą╣čé. ąØąŠąČą║ą░ TX ready ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĮą░ ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī, ą║ąŠą│ą┤ą░ ąĮą░ ą┐ąŠčĆčéčā ąŠąČąĖą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ Ōēź thres┬Ę8 ą▒ą░ą╣čé, ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ąĮąĄą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ąŠąČąĖą┤ą░čÄčēąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčā ą┐ąŠčĆčéą░ (0..4 ą▒ą░ą╣čéą░ ą┐ąĄčĆąĄą┤ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ą░).
0x000 ąĮąĄčé ą┐ąŠčĆąŠą│ą░
0x001 8 ą▒ą░ą╣čé
0x002 16 ą▒ą░ą╣čé
...
0x1FE 4080 ą▒ą░ą╣čé
0x1FF 4088 ą▒ą░ą╣čé |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ mode:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| spiMode |
00 SPI Mode 0: CPOL = 0, CPHA = 0
01 SPI Mode 1: CPOL = 0, CPHA = 1
10 SPI Mode 2: CPOL = 1, CPHA = 0
11 SPI Mode 3: CPOL = 1, CPHA = 1 |
| flowControl |
(ąóąŠą╗čīą║ąŠ ą┤ą╗čÅ ą▒ą╗ąŠą║ąŠą▓ u-blox 6)
0 čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ąĘą░ą┐čĆąĄčēąĄąĮąŠ
1 čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ čĆą░ąĘčĆąĄčłąĄąĮąŠ (9-ą▒ąĖčéąĮčŗą╣ čĆąĄąČąĖą╝) |
| ffCnt |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé 0xFF ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┐ąĄčĆąĄą┤ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ą░. ąöąĖą░ą┐ą░ąĘąŠąĮ: 0 (ą╝ąĄčģą░ąĮąĖąĘą╝ ą▓čŗą║ą╗čÄč湥ąĮ) .. 255. |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ inProtoMask:
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ outProtoMask:
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ flags:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| extendedTxTimeout |
ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čéą░ą╣ą╝ą░čāčé ą┐ąĄčĆąĄą┤ą░čćąĖ: ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┐ąŠčĆčé ą▒čāą┤ąĄčé ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čéą░ą╣ą╝ą░čāčé ąĄčüą╗ąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĮą░čÅ ą┐ą░ą╝čÅčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ Ōēź4 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ 1.5 čüąĄą║čāąĮą┤čŗ. |
35.13.6. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ DDC
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-PRT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Port Configuration for DDC Port |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąØąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ą╗ąĄąĄąĮčŗ ą▓ ąŠą┤ąĮąŠ ą▓čģąŠą┤ąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ą╗ąĖąĮ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ (čüą╝. ą┤čĆčāą│ąĖąĄ ą▓ąĄčĆčüąĖąĖ CFG-PRT). ąÆčŗą▓ąŠą┤ąĖą╝čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĘ ą╝ąŠą┤čāą╗čÅ čüąŠą┤ąĄčƹȹ░čéčī ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x00 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
portID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ (=0 ą┤ą╗čÅ ą┐ąŠčĆčéą░ DDC). |
| 1 |
U1 |
- |
reserved0 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 2 |
X2 |
- |
txReady |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗą▓ąŠą┤ą░ TX (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 4 |
X4 |
- |
mode |
- |
ążą╗ą░ą│ąĖ čĆąĄąČąĖą╝ą░ DDC (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 8 |
U4 |
- |
reserved3 |
|
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 12 |
X2 |
- |
inProtoMask |
- |
ą£ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ, ą║ą░ą║ąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą░ą║čéąĖą▓ąĮčŗ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╣ ą╝ą░čüą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 14 |
X2 |
- |
outProtoMask |
- |
ą£ą░čüą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ, ą║ą░ą║ąĖąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą░ą║čéąĖą▓ąĮčŗ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╣ ą╝ą░čüą║ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 16 |
X2 |
- |
flags |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ čäą╗ą░ą│ąŠą▓ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 18 |
U2 |
- |
reserved5 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ txReady:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| en |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░ čäčāąĮą║čåąĖčÄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX ready). |
| pol |
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī: 0 ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 1, 1 ą░ą║čéąĖą▓ąĮčŗą╣ ą╗ąŠą│. 0. |
| pin |
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ąĮąŠąČą║ą░ PIO (ąŠąĮą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĄą╣) |
| thres |
ą¤ąŠčĆąŠą│, čāą║ą░ąĘą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāą╝ąĮąŠąČą░ąĄčéčüčÅ ąĮą░ 8 ą▒ą░ą╣čé. ąØąŠąČą║ą░ TX ready ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĮą░ ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī, ą║ąŠą│ą┤ą░ ąĮą░ ą┐ąŠčĆčéčā ąŠąČąĖą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ Ōēź thres┬Ę8 ą▒ą░ą╣čé, ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ąĮąĄą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ąŠąČąĖą┤ą░čÄčēąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčā ą┐ąŠčĆčéą░ (0..4 ą▒ą░ą╣čéą░ ą┐ąĄčĆąĄą┤ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ą░).
0x000 ąĮąĄčé ą┐ąŠčĆąŠą│ą░
0x001 8 ą▒ą░ą╣čé
0x002 16 ą▒ą░ą╣čé
...
0x1FE 4080 ą▒ą░ą╣čé
0x1FF 4088 ą▒ą░ą╣čé |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ mode:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| slaveAddr |
ąÉą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C. ąöąĖą░ą┐ą░ąĘąŠąĮ 0x07 .. 0x78. ąæąĖčé 0 ą░ą┤čĆąĄčüą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ą▓ąĄąĮ 0. |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ inProtoMask:
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ outProtoMask:
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ flags:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| extendedTxTimeout |
ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čéą░ą╣ą╝ą░čāčé ą┐ąĄčĆąĄą┤ą░čćąĖ: ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┐ąŠčĆčé ą▒čāą┤ąĄčé ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čéą░ą╣ą╝ą░čāčé ąĄčüą╗ąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĮą░čÅ ą┐ą░ą╝čÅčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ Ōēź4 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ 1.5 čüąĄą║čāąĮą┤čŗ. |
35.14. CFG-RATE (0x06 0x08)
35.14.1. ą×ą┐čĆąŠčü ąĮą░čüčéčĆąŠąĄą║ čüą║ąŠčĆąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ / ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-RATE |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Navigation/Measurement Rate Settings |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×čéą┐čĆą░ą▓ą║ą░ čŹč鹊ą│ąŠ ąĘą░ą┐čĆąŠčüą░ (ą┐čāčüč鹊ą│ąŠ) ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ čéąĖą┐ą░ CFG-RATE čü ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x00 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.14.2. ąØą░čüčéčĆąŠą╣ą║ąĖ čćą░čüč鹊čéčŗ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-RATE |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Navigation/Measurement Rate Settings |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ u-blox ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą▓čŗčłąĄ ąĖą╗ąĖ ąĮąĖąČąĄ ąŠą┤ąĮąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓ čüąĄą║čāąĮą┤čā. ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą▓čüąĄą│ą┤ą░ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ ą┐ąŠ čüčĆąĄąĘčā čüąĄą║čāąĮą┤čŗ.
ŌĆó ą¦ą░čüč鹊čéą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ ą┐ąĖčéą░ąĮąĖčÅ. ą¦ąĄą╝ ą▒ąŠą╗čīčłąĄ čéčĆąĄą▒čāąĄčéčüčÅ čäąĖą║čüą░čåąĖą╣, č鹥ą╝ ą▒ąŠą╗čīčłąĄ ąĮą░ą│čĆčāąČąĄąĮ CPU ąĖ ą▒ąŠą╗čīčłąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓.
ŌĆó ąöą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čćą░čüč鹊čéą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ 1 ąōčå čÅą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠą╣.
ŌĆó ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ (Power Save Mode, PSM), čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą╝ąŠąČąĄčé ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĘą┤ąĄčüčī ąĘąĮą░č湥ąĮąĖą╣. ąĪą╝. čüąĄą║čåąĖčÄ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ "11.6. ą¦ą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čü Power Save Mode" [2] ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x08 |
6 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U2 |
- |
measRate |
ą╝čü |
Measurement Rate, čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ GPS ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą║ą░ąČą┤čŗąĄ measRate ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤. |
| 2 |
U2 |
- |
navRate |
cycles |
Navigation Rate, ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ą░čģ čåąĖą║ą╗ąŠą▓ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĮąĄą╗čīąĘčÅ ąĖąĘą╝ąĄąĮąĖčéčī, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1. |
| 4 |
U2 |
- |
timeRef |
- |
ąÆčŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ą┐ąŠ ąŠą┐ąŠčĆąĮąŠą╝čā ą▓čĆąĄą╝ąĄąĮąĖ: 0 ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ UTC, 1 ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ GPS. |
35.15. CFG-RINV (0x06 0x34)
35.15.1. ą×ą┐čĆąŠčü čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ Remote Inventory
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-RINV |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll contents of Remote Inventory |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x34 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.15.2. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ Remote Inventory
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-RINV |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Contents of Remote Inventory |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĢčüą╗ąĖ N ą▒ąŠą╗čīčłąĄ 30, č鹊 ąĖąĘą╗ąĖčłąĮąĖąĄ ą▒ą░ą╣čéčŗ ąŠčéą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ. ąÆ ą▒čāą┤čāčēąĖčģ čĆąĄą╗ąĖąĘą░čģ firmware čŹč鹊čé ą┐čĆąĄą┤ąĄą╗ ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x34 |
1 + 1┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 1+1┬ĘN |
U1 |
- |
data |
- |
ąöą░ąĮąĮčŗąĄ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĖą╗ąĖ čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ Remote Inventory |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
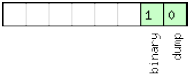
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| dump |
ąÆčŗą┤ą░čéčī ą┤ą░ą╝ą┐ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ. ąØąĄ čĆą░ą▒ąŠčéą░ąĄčé, ąĄčüą╗ąĖ čäą╗ą░ą│ binary čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ. |
| binary |
ąöą░ąĮąĮčŗąĄ ą┤ą▓ąŠąĖčćąĮčŗąĄ |
35.16. CFG-RST (0x06 0x04)
35.16.1. ąĪą▒čĆąŠčü ą┐čĆąĖąĄą╝ąĮąĖą║ą░ / ąŠčćąĖčüčéą║ą░ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-RST |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Reset Receiver / Clear Backup Data Structures |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÜąŠą╝ą░ąĮą┤ą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x04 |
4 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X2 |
- |
navBbrMask |
- |
ąĪąĄą║čåąĖąĖ BBR ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ. ą¤čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ąĮą░ą▒ąŠčĆčŗ:
0x0000 Hotstart (ą│ąŠčĆčÅčćąĖą╣ ąĘą░ą┐čāčüą║)
0x0001 Warmstart (č鹥ą┐ą╗čŗą╣ ąĘą░ą┐čāčüą║)
0xFFFF Coldstart (čģąŠą╗ąŠą┤ąĮčŗą╣ ąĘą░ą┐čāčüą║)
ąĪą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ. |
| 2 |
U1 |
- |
resetMode |
- |
ąóąĖą┐ čüą▒čĆąŠčüą░:
0x00 ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü (Watchdog, čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ)
0x01 čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü
0x02 čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü (č鹊ą╗čīą║ąŠ GNSS)
0x04 ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü (Watchdog) ą┐ąŠčüą╗ąĄ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ
0x08 čāą┐čĆą░ą▓ą╗čÅąĄą╝ą░čÅ ąŠčüčéą░ąĮąŠą▓ą║ą░ GNSS
0x09 čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ąĘą░ą┐čāčüą║ GNSS |
| 3 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ navBbrMask:
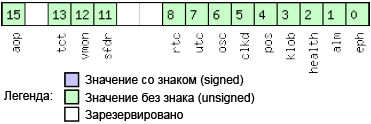
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| eph |
ąŁč乥ą╝ąĄčĆąĖą┤čŗ |
| alm |
ąÉą╗čīą╝ą░ąĮą░čģ |
| health |
ąĀą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī |
| klob |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ Klobuchar |
| pos |
ą¤ąŠąĘąĖčåąĖčÅ |
| clkd |
ąöčĆąĄą╣čä čéą░ą║č鹊ą▓ |
| osc |
ą¤ą░čĆą░ą╝ąĄčéčĆ ą│ąĄąĮąĄčĆą░č鹊čĆą░ |
| utc |
ąÜąŠčĆčĆąĄą║čåąĖčÅ UTC + ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüą║ą░čćą║ą░ čüąĄą║čāąĮą┤ GPS |
| rtc |
RTC |
| sfdr |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ SFDR |
| vmon |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ SFDR |
| tct |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ TCT |
| aop |
ąÉą▓č鹊ąĮąŠą╝ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąŠčĆą▒ąĖčéčŗ |
35.17. CFG-RXM (0x06 0x11)
35.17.1. ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ RXM
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-RXM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll RXM configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĖąĄą╝ąĮąĖą║čā ąŠąĮ ąŠčéą▓ąĄčéąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄą╝ CFG-RXM, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x11 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.17.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ RXM
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-RXM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
RXM configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. "11. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management)" [2]. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čĆąĄąČąĖą╝ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ (Power Save Mode, PSM) ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ (čü ą┐ąŠą╝ąŠčēčīčÄ CFG-GNSS) ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ GLONASS. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x11 |
2 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
reserved1 |
- |
ąÆčüąĄą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 8 |
| 1 |
U1 |
- |
lpMode |
- |
ąĀąĄąČąĖą╝ ą╝ą░ą╗ąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╝ąŠčēąĮąŠčüčéąĖ ą┐ąĖčéą░ąĮąĖčÅ (Low Power Mode):
0 Continuous Mode (ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝)
1 Power Save Mode (čĆąĄąČąĖą╝ 菹║ąŠąĮąŠą╝ąĖąĖ ą╝ąŠčēąĮąŠčüčéąĖ)
2-3 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
4 Continuous Mode (ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝)
5..255 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ čü ą▓ąĄčĆčüąĖčÅą╝ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮčŗą╝ąĖ 14 ąŠą▒ąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ 0 ąĖ 4 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčé ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ Continuous Mode (ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ą▒ąĄąĘ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ). |
35.18. CFG-SBAS (0x06 0x16)
35.18.1. ą×ą┐čĆąŠčü čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SBAS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-SBAS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll contents of SBAS Configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x16 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.18.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SBAS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-SBAS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
SBAS Configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą┐ąŠą┤čüąĖčüč鹥ą╝čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░ SBAS (ąĮą░ą┐čĆąĖą╝ąĄčĆ WAAS, EGNOS, MSAS). ąĪą╝. "5. ą×ą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SBAS" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ, ą║ą░ą║ čŹčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ą╗ąĖčÅčÄčé ąĮą░ čĆą░ą▒ąŠčéčā ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x16 |
8 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X1 |
- |
mode |
- |
ąĀąĄąČąĖą╝ SBAS (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 1 |
X1 |
- |
usage |
- |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ SBAS (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 2 |
U1 |
- |
maxSBAS |
- |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ, ą┐čĆąĖąŠčĆąĖč鹥ąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĮą░ SBAS (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0 .. 3). ąŻčüčéą░čĆąĄą╗ąŠ ąĖ ąĖąĘą▒čŗč鹊čćąĮąŠ ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ UBX-CFG-GNSS ą▓ ą▓ąĄčĆčüąĖčÅčģ ą┐čĆąŠč鹊ą║ąŠą╗ą░ 14.00+. |
| 3 |
X1 |
- |
scanmode2 |
- |
ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ ą▒ąĖč鹊ą▓ąŠą╣ ą╝ą░čüą║ąĖ scanmode (ąĮą░čćą░ą╗ąŠ ą▓ scanmode1, čüą╝. čéą░ą║ąČąĄ čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 4 |
X4 |
- |
scanmode1 |
- |
ąÜą░ą║ąĖąĄ ąĮąŠą╝ąĄčĆą░ SBAS PRN ąĖčüą║ą░čéčī (ą▒ąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░). ąĢčüą╗ąĖ ą▓čüąĄ ą▒ąĖčéčŗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0, č鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ (čé. ąĄ. ąĖčēčāčéčüčÅ ą▓čüąĄ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ PRN). ąÜą░ąČą┤čŗą╣ ą▒ąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮąŠą╝ąĄčĆčā PRN (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ mode:
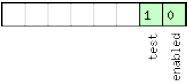
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| enabled |
SBAS čĆą░ąĘčĆąĄčłąĄąĮą░ (1) / ąĘą░ą┐čĆąĄčēąĄąĮą░ (0) |
| test |
ąśčüą┐čŗčéą░č鹥ą╗čīąĮčŗą╣ čüč鹥ąĮą┤ SBAS: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ (1) / ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ, ą║ąŠą│ą┤ą░ čĆąĄąČąĖą╝ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ (Test Mode, SBAS Msg 0). |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ usage:
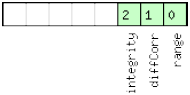
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| range |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī SBAS GEO ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čĆą░ąĮąČąĖčĆąŠą▓ą░ąĮąĖčÅ (ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ) |
| diffCorr |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ SBAS |
| integrity |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ SBAS |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ scanmode2:
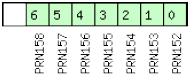
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ scanmode1:

35.19. CFG-TP5 (0x06 0x31)
35.19.1. ą×ą┐čĆąŠčü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-TP5 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Time Pulse Parameters |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×čéą┐čĆą░ą▓ą║ą░ čŹč鹊ą│ąŠ ąĘą░ą┐čĆąŠčüą░ (ą┐čāčüč鹊ą│ąŠ) ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ čéąĖą┐ą░ CFG-TP5 čü ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ ą┤ą╗čÅ timepulse 0. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x31 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.19.2. ą×ą┐čĆąŠčü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-TP5 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Time Pulse Parameters |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×čéą┐čĆą░ą▓ą║ą░ čŹč鹊ą│ąŠ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ čéąĖą┐ą░ CFG-TP5 čü ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x31 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
tpIdx |
- |
ąÆčŗą▒ąŠčĆ ą▓čŗčģąŠą┤ą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ. 0 ą┤ą╗čÅ TIMEPULSE, 1 ą┤ą╗čÅ TIMEPULSE2. |
35.19.3. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-TP5 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Time Pulse Parameters |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ/ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ ąĖą╝ą┐čāą╗čīčü ą▓čĆąĄą╝ąĄąĮąĖ čüą╝. "12. Time pulse" [2]. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x31 |
32 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
tpIdx |
- |
ąÆčŗą▒ąŠčĆ ą▓čŗčģąŠą┤ą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ. 0 ą┤ą╗čÅ TIMEPULSE, 1 ą┤ą╗čÅ TIMEPULSE2. |
| 1 |
U1 |
- |
reserved0 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 2 |
U2 |
- |
reserved1 |
- |
| 4 |
I2 |
- |
antCableDelay |
ąĮčü |
ąŚą░ą┤ąĄčƹȹ║ą░ ą║ą░ą▒ąĄą╗čÅ ą░ąĮč鹥ąĮąĮčŗ. |
| 6 |
I2 |
- |
rfGroupDelay |
ąĮčü |
ąōčĆčāą┐ą┐ąŠą▓ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ RF. |
| 8 |
U4 |
- |
freqPeriod |
ąōčå ąĖą╗ąĖ ą╝ą║čü |
ą¦ą░čüč鹊čéą░ ąĖą╗ąĖ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ isFreq ą▓ ą▒ąĖč鹊ą▓ąŠą╝ ą┐ąŠą╗ąĄ flags. |
| 12 |
U4 |
- |
freqPeriodLock |
ąōčå ąĖą╗ąĖ ą╝ą║čü
|
ą¦ą░čüč鹊čéą░ ąĖą╗ąĖ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ lockedOtherSet ą▓ ą▒ąĖč鹊ą▓ąŠą╝ ą┐ąŠą╗ąĄ flags. |
| 16 |
U4 |
- |
pulseLenRatio |
ąōčå ąĖą╗ąĖ 2-32 |
ąöą╗ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ ąĖą╗ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ isLength ą▓ ą▒ąĖč鹊ą▓ąŠą╝ ą┐ąŠą╗ąĄ flags. |
| 20 |
U4 |
- |
pulseLenRatioLock |
ą╝ą║čü ąĖą╗ąĖ 2-32 |
ąöą╗ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ ąĖą╗ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ąĘą░čģą▓ą░čé ąĮą░ ą▓čĆąĄą╝čÅ GPS. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé lockedOtherSet. |
| 24 |
I4 |
- |
userConfigDelay |
ąĮčü |
ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĘą░ą┤ąĄčƹȹ║ą░ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ. |
| 28 |
X4 |
- |
flags |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ čäą╗ą░ą│ąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ flags:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Active |
ąĢčüą╗ąĖ čŹč鹊čé čäą╗ą░ą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąĖą╝ą┐čāą╗čīčü ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ąĘčĆąĄčłąĄąĮ. ąĢčüą╗ąĖ čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĖ, č鹊 ąŠąĮą░ ą┐ąŠą╗čāčćą░ąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé. |
| LockGpsFreq |
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čŹč鹊čé čäą╗ą░ą│, č鹊 čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī ąĖą╝ą┐čāą╗čīčü ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ GPS, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▓čĆąĄą╝čÅ GPS čüčéą░ąĮąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝, ąĖąĮą░č湥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗ąŠą║ą░ą╗čīąĮčŗą╣ čéą░ą║č鹊ą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ. |
| lockedOtherSet |
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čŹč鹊čé čäą╗ą░ą│, č鹊 ą┤ąĄą╣čüčéą▓čāčÄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ freqPeriodLock ąĖ pulseLenRatioLock, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▓čĆąĄą╝čÅ GPS čüčéą░ąĮąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝, ąĖ freqPeriod ąĖ pulseLenRatio, ąĄčüą╗ąĖ ą▓čĆąĄą╝čÅ GPS ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ. ąĢčüą╗ąĖ ąŠčćąĖčēąĄąĮ čŹč鹊čé čäą╗ą░ą│, č鹊 freqPeriod ąĖ pulseLenRatio ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą▓čĆąĄą╝ąĄąĮąĖ GPS. |
| isFreq |
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čŹč鹊čé čäą╗ą░ą│, č鹊 freqPeriodLock ąĖ freqPeriod ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāčÄčéčüčÅ ą║ą░ą║ čćą░čüč鹊čéą░, ąĖąĮą░č湥 ą║ą░ą║ ą┐ąĄčĆąĖąŠą┤. |
| isLength |
ąĢčüą╗ąĖ čŹč鹊čé čäą╗ą░ą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 pulseLenRatioLock ąĖ pulseLenRatio ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāčÄčéčüčÅ ą║ą░ą║ ą┤ą╗ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░, ąĖąĮą░č湥 ą║ą░ą║ čüą║ą▓ą░ąČąĮąŠčüčéčī. |
| alignToTow |
ąÆčŗčĆą░ą▓ąĮąĖą▓ą░čéčī ąĖą╝ą┐čāą╗čīčü ą┐ąŠ čüčĆąĄąĘčā čüąĄą║čāąĮą┤čŗ (ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ąŠą╗ąČąĄąĮ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 1 čüąĄą║čāąĮą┤čŗ). |
| polarity |
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░: 0 čüą┐ą░ą┤ ąĮą░ čüčĆąĄąĘąĄ čüąĄą║čāąĮą┤čŗ, 1 čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ ąĮą░ čüčĆąĄąĘąĄ čüąĄą║čāąĮą┤čŗ. |
| gridUtcGps |
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ čüąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ: 0 UTC, 1 GPS. |
35.20. CFG-USB (0x06 0x1B)
35.20.1. ą×ą┐čĆąŠčü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ USB
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-USB |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll a USB configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x1B |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
35.20.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ USB
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
CFG-USB |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
USB Configuration |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x06 0x1B |
108 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U2 |
- |
vendorID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. ąŁč鹊 ą┐ąŠą╗ąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ č鹊ą╗čīą║ąŠ ą▓ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ Vendor ID. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ ą┐ąŠčéčĆąĄą▒čāąĄčé ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ čģąŠčüčéą░ USB (ą║ąŠą╝ą┐čīčÄč鹥čĆą░). |
| 2 |
U2 |
- |
productID |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠą┤čāą║čéą░. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ ą┐ąŠčéčĆąĄą▒čāąĄčé ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ čģąŠčüčéą░ USB (ą║ąŠą╝ą┐čīčÄč鹥čĆą░). |
| 4 |
U2 |
- |
reserved1 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 6 |
U2 |
- |
reserved2 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 1 |
| 8 |
U2 |
- |
powerConsumption |
ą╝ąÉ |
ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. |
| 10 |
X2 |
- |
flags |
- |
ąĀą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ čäą╗ą░ą│ąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 12 |
CH[32] |
- |
vendorString |
-
|
ąĪčéčĆąŠą║ą░ čüąĖą╝ą▓ąŠą╗ąŠą▓, čüąŠą┤ąĄčƹȹ░čēą░čÅ ąĖą╝čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. ąŁč鹊 čüčéčĆąŠą║ą░ ą▓ č乊čĆą╝ą░č鹥 čüąĖą╝ą▓ąŠą╗ąŠą▓ ASCII, ąĘą░ą▓ąĄčĆčłąĄąĮąĮą░čÅ ąĮčāą╗ąĄą╝ (čé. ąĄ. ASCIIZ-čüčéčĆąŠą║ą░). |
| 44 |
CH[32] |
- |
productString |
- |
ąĪčéčĆąŠą║ą░ čüąĖą╝ą▓ąŠą╗ąŠą▓, čüąŠą┤ąĄčƹȹ░čēą░čÅ ąĖą╝čÅ ą┐čĆąŠą┤čāą║čéą░. ąŁč鹊 čüčéčĆąŠą║ą░ ą▓ č乊čĆą╝ą░č鹥 čüąĖą╝ą▓ąŠą╗ąŠą▓ ASCII, ąĘą░ą▓ąĄčĆčłąĄąĮąĮą░čÅ ąĮčāą╗ąĄą╝ (čé. ąĄ. ASCIIZ-čüčéčĆąŠą║ą░). |
| 76 |
CH[32] |
- |
serialNumber |
- |
ąĪčéčĆąŠą║ą░ čüąĖą╝ą▓ąŠą╗ąŠą▓, čüąŠą┤ąĄčƹȹ░čēą░čÅ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ. ąŁč鹊 čüčéčĆąŠą║ą░ ą▓ č乊čĆą╝ą░č鹥 čüąĖą╝ą▓ąŠą╗ąŠą▓ ASCII, ąĘą░ą▓ąĄčĆčłąĄąĮąĮą░čÅ ąĮčāą╗ąĄą╝ (čé. ąĄ. ASCIIZ-čüčéčĆąŠą║ą░). |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ flags:
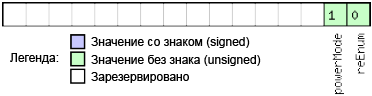
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| reEnum |
ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī 菹Įčāą╝ąĄčĆą░čåąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. |
| powerMode |
ąÜą░ą║ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ: 1 ąĖą╝ąĄąĄčé čüą▓ąŠą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ (self-powered), 0 ą┐ąĖčéą░ąĄčéčüčÅ ąŠčé čłąĖąĮčŗ USB (bus-powered). |
[36. INF (0x04)]
ąÜą╗ą░čüčü INF ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ: ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąŠąŠą▒čēąĄąĮąĖčÅ čüčéąĖą╗čÅ printf, čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ ID, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ Error (ąŠčłąĖą▒ą║ą░), Warning (ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ), Notice (ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ). ąÜą╗ą░čüčü INF čŹč鹊 ą▒ą░ąĘąŠą▓čŗą╣ ą║ą╗ą░čüčü ą▓čŗą▓ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé firmware ąĖ ą║ąŠą┤čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąĖčéčī čüčéčĆąŠą║ąĖ ą▓ čüčéąĖą╗ąĄ ą▓čŗąĘąŠą▓ą░ printf. ąÆčüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ INF ąĖą╝ąĄčÄčé čüą▓čÅąĘą░ąĮąĮčŗą╣ čéąĖą┐, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ.
36.1. INF-DEBUG (0x04 0x04)
36.1.1. ąÆčŗą▓ąŠą┤ ASCII-čüčéčĆąŠą║ąĖ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄą╣ ąŠčéą╗ą░ą┤ąŠčćąĮčŗą╣ ą▓čŗą▓ąŠą┤
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
INF-DEBUG |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ASCII String output, indicating debug output |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŻ čŹč鹊ą╣ čüčéčĆąŠą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ą╗ąĖąĮčŗ ASCII-čüčéčĆąŠą║ąĖ |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x04 0x04 |
0 + 1┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 1┬ĘN |
CH |
- |
str |
- |
ąĪąĖą╝ą▓ąŠą╗ ASCII |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
36.2. INF-ERROR (0x04 0x00)
36.2.1. ąÆčŗą▓ąŠą┤ ASCII-čüčéčĆąŠą║ąĖ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄą╣ ąŠčłąĖą▒ą║čā
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
INF-ERROR |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ASCII String output, indicating an error |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŻ čŹč鹊ą╣ čüčéčĆąŠą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ą╗ąĖąĮčŗ ASCII-čüčéčĆąŠą║ąĖ |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x04 0x00 |
0 + 1┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 1┬ĘN |
CH |
- |
str |
- |
ąĪąĖą╝ą▓ąŠą╗ ASCII |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
36.3. INF-NOTICE (0x04 0x02)
36.3.1. ąÆčŗą▓ąŠą┤ ASCII-čüčéčĆąŠą║ąĖ čü ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗą╝ čüąŠą┤ąĄčƹȹĖą╝čŗą╝
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
INF-NOTICE |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ASCII String output, with informational contents |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŻ čŹč鹊ą╣ čüčéčĆąŠą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ą╗ąĖąĮčŗ ASCII-čüčéčĆąŠą║ąĖ |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x04 0x02 |
0 + 1┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 1┬ĘN |
CH |
- |
str |
- |
ąĪąĖą╝ą▓ąŠą╗ ASCII |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
36.4. INF-TEST (0x04 0x03)
36.4.1. ąÆčŗą▓ąŠą┤ ASCII-čüčéčĆąŠą║ąĖ čü č鹥čüč鹊ą▓ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
INF-TEST |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ASCII String output, indicating test output |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŻ čŹč鹊ą╣ čüčéčĆąŠą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ą╗ąĖąĮčŗ ASCII-čüčéčĆąŠą║ąĖ |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x04 0x03 |
0 + 1┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 1┬ĘN |
CH |
- |
str |
- |
ąĪąĖą╝ą▓ąŠą╗ ASCII |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
36.5. INF-WARNING (0x04 0x01)
36.5.1. ąÆčŗą▓ąŠą┤ ASCII-čüčéčĆąŠą║ąĖ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄą╣ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
INF-WARNING |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
ASCII String output, indicating a warning |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŻ čŹč鹊ą╣ čüčéčĆąŠą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗ąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ą╗ąĖąĮčŗ ASCII-čüčéčĆąŠą║ąĖ |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x04 0x01 |
0 + 1┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 1┬ĘN |
CH |
- |
str |
- |
ąĪąĖą╝ą▓ąŠą╗ ASCII |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
[37. LOG (0x21)]
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą╗ąŠą│: čüąŠąĘą┤ą░ąĮąĖąĄ, čāą┤ą░ą╗ąĄąĮąĖąĄ ą╗ąŠą│ą░, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą╗ąŠą│ąĄ ąĖ ąĘą░ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą╗ąŠą│ą░. ążčāąĮą║čåąĖčÅ ą╗ąŠą│ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą▓ ąĮąĄą│ąŠ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗąĄ čüčéčĆąŠą║ąĖ ą▒ą░ą╣čé. ąøąŠą│ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ FLASH, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ ą┐čĆąĖąĄą╝ąĮąĖą║čā. ą¤ąŠą╗ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą╗ąŠą│ą░ čüą╝. "17. ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗą╣ ą╗ąŠą│" [2].
37.1. LOG-CREATE (0x21 0x07)
37.1.1. ąĪąŠąĘą┤ą░ąĮąĖąĄ čäą░ą╣ą╗ą░ ą╗ąŠą│ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-CREATE |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Create Log File |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÜąŠą╝ą░ąĮą┤ą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ čäą░ą╣ą╗ą░ ą┤ą╗čÅ ą╗ąŠą│ą░ ąĖ ą░ą║čéąĖą▓ąĖčĆčāąĄčé ą┐ąŠą┤čüąĖčüč鹥ą╝čā ą╗ąŠą│ą░. ą¤čĆąĖąĄą╝ąĮąĖą║ ą▓ąŠąĘą▓čĆą░čéąĖčé UBX-ACK-ACK ąĖą╗ąĖ UBX-ACK-NAK, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī čāčüą┐ąĄčģ ąĖą╗ąĖ ąŠčéą║ą░ąĘ ą▓ čüąŠąĘą┤ą░ąĮąĖąĖ ą╗ąŠą│ą░. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą░ą║čéąĖą▓ą░čåąĖčÄ ąĘą░ą┐ąĖčüąĖ ąĖą╗ąĖ čäąĖą╗čīčéčĆą░čåąĖąĖ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą╗ąŠą│ą░ (čüą╝. UBX-CFG-LOGFILTER). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x07 |
8 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 0. |
| 1 |
X1 |
- |
logCfg |
- |
ążą╗ą░ą│ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 2 |
U1 |
- |
reserved |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0. |
| 3 |
U1 |
- |
logSize |
- |
ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆą░ąĘą╝ąĄčĆ ą╗ąŠą│ą░:
0 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą╗ąŠą│ą░. ąōą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą╗ąŠą│ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĄčĆą▓ą░ąĮ, ąĖ ąŠčüčéą░ąĮąĄčéčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäą░ą╣ą╗ąŠą▓ąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░.
1 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ.
2 čĆą░ąĘą╝ąĄčĆ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ (čüą╝. ąĮąĖąČąĄ ą┐ąŠą╗ąĄ userDefinedSize). |
| 4 |
U4 |
- |
userDefinedSize |
ą▒ą░ą╣čé |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ąŠą▒čŖąĄą╝ ą▓ čäą░ą╣ą╗ąŠą▓ąŠą╝ čģčĆą░ąĮąĖą╗ąĖčēąĄ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ ą╗ąŠą│ą░. ąŁč鹊 ą┐ąŠą╗ąĄ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą┐ąŠą╗ąĄ logSize čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ą▓ą░čĆąĖą░ąĮčé 2 (čĆą░ąĘą╝ąĄčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝). |
ąæąĖčéčŗ ą┐ąŠą╗čÅ logCfg:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| circular |
ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą╗ąŠą│ čåąĖą║ą╗ąĖč湥čüą║ąĖą╣ (ąĮąŠą▓čŗąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą╗ąŠą│ą░ ą┐ąĄčĆąĄąĘą░ą┐ąĖčłčāčé čüą░ą╝čŗąĄ čüčéą░čĆčŗąĄ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą╗ąŠą│ą░). |
37.2. LOG-ERASE (0x21 0x03)
37.2.1. ąĪčéąĖčĆą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą╗ąŠą│ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-ERASE |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Erase Logged Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÜąŠą╝ą░ąĮą┤ą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčé ą┐ąŠą┤čüąĖčüč鹥ą╝čā ą╗ąŠą│ą░ ąĖ čüčéąĖčĆą░ąĄčé ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ, ąĘą░ą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ ą╗ąŠą│. ąÆ ąŠčéą▓ąĄčé ąĮą░ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-ACK-ACK ąĖą╗ąĖ UBX-ACK-NAK ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāčüą┐ąĄčģą░ ąĖą╗ąĖ ąŠčéą║ą░ąĘą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x03 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
37.3. LOG-FINDTIME (0x21 0x0E)
37.3.1. ąśčēąĄčé ąĖąĮą┤ąĄą║čü ą┐ąĄčĆą▓ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą╗ąŠą│ą░, čā ą║ąŠč鹊čĆąŠą│ąŠ ą▓čĆąĄą╝čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-FINDTIME |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Finds the index of the first log entry Ōēż given time |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ą┐ąŠ ą╗ąŠą│čā ąĖąĮą┤ąĄą║čüą░ ą┐ąĄčĆą▓ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą╗ąŠą│ą░, čā ą║ąŠč鹊čĆąŠą│ąŠ ą▓čĆąĄą╝čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą▓ LOG-FINDTIME. ąŁč鹊čé ąĖąĮą┤ąĄą║čü ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░č鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čü čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-LOG-RETRIEVE, čćč鹊ą▒čŗ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą┐čĆąĖą▓čÅąĘą░ąĮąĮąŠąĄ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠą╗čāč湥ąĮąĖąĄ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą╗ąŠą│ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x0E |
12 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 0. |
| 1 |
U1 |
- |
type |
- |
ąóąĖą┐ čüąŠąŠą▒čēąĄąĮąĖčÅ, 0 ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░. |
| 2 |
U2 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 4 |
U2 |
- |
year |
- |
ąōąŠą┤ (1..65635) ą▓čĆąĄą╝ąĄąĮąĖ UTC. |
| 6 |
U1 |
- |
month |
- |
ą£ąĄčüčÅčå (1..12) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 7 |
U1 |
- |
day |
- |
ąöąĄąĮčī (1..31) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 8 |
U1 |
- |
hour |
- |
ą¦ą░čü (0..23) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 9 |
U1 |
- |
minute |
- |
ą£ąĖąĮčāčéą░ (0..59) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 10 |
U1 |
- |
second |
- |
ąĪąĄą║čāąĮą┤ą░ (0..60) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 11 |
U1 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
37.3.2. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čÅą▓ą╗čÅąĄčéčüčÅ ąŠčéą▓ąĄč鹊ą╝ ąĮą░ ąĘą░ą┐čĆąŠčü FINDTIME
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-FINDTIME |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
This message is the response to FINDTIME request |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x0E |
8 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1 ą┤ą╗čÅ čŹč鹊ą╣ ą▓ąĄčĆčüąĖąĖ. |
| 1 |
U1 |
- |
type |
- |
ąóąĖą┐ čüąŠąŠą▒čēąĄąĮąĖčÅ, 1 ą┤ą╗čÅ ąŠčéą▓ąĄčéą░ ąĮą░ ąĘą░ą┐čĆąŠčü. |
| 2 |
U2 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 4 |
U4 |
- |
entryNumber |
- |
ąśąĮą┤ąĄą║čü čüą░ą╝ąŠą│ąŠ čüą▓ąĄąČąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąŠčéą▓ąĄčćą░čÄčēąĄą│ąŠ ąĘą░ą┐čĆąŠčüčā FINDTIME. |
37.4. LOG-INFO (0x21 0x08)
37.4.1. ą×ą┐čĆąŠčü ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą╗ąŠą│ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-INFO |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll for log information |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā ąŠąĮ ą▓ąĄčĆąĮąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-LOG-INFO, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x08 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
37.4.2. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą╗ąŠą│ąĄ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-INFO |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Log information |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ąŠą┤čüąĖčüč鹥ą╝ąĄ ą╗ąŠą│ą░. ąŚą░ą╝ąĄčćą░ąĮąĖąĄ:
ŌĆó ąĪąŠąŠą▒čēąĄąĮąĮčŗą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą╗ąŠą│ą░ ą▒čāą┤ąĄčé ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą▒čŗą╗ąŠ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ čāą║ą░ąĘą░ąĮąŠ ą▓ LOG-CREATE ąĖąĘ-ąĘą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ąĮą░ą║ą╗ą░ą┤ąĮčŗčģ čĆą░čüčģąŠą┤ąŠą▓ ąĮą░ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą╗ąŠą│ą░.
ŌĆó ąŁą╗ąĄą╝ąĄąĮčéčŗ ą╗ąŠą│ą░ čüąČą░čéčŗ čéą░ą║, čćč鹊 čā ąĮąĖčģ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗ąĖąĮą░, ą┐ąŠčŹč鹊ą╝čā čéčĆčāą┤ąĮąŠ ą┐čĆąĄą┤čüą║ą░ąĘą░čéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą╗ąŠą│ą░ čü ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ č鹊čćąĮąŠčüčéčīčÄ.
ŌĆó ą£ąŠą│čāčé ą▒čŗčéčī čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ąĖą╝ąĄąĄčé č鹊čćąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĄčüą╗ąĖ ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ ąĖąĘą▓ąĄčüč鹥ąĮ), č鹊ą│ą┤ą░ čā ąĮąĄą║ąŠč鹊čĆčŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą╗ąŠą│ą░ ąĮąĄ ą▒čāą┤ąĄčé ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ. ąŁč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 ąĘąĮą░č湥ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ čüą░ą╝čŗčģ čüčéą░čĆčŗčģ/čüą░ą╝čŗčģ ąĮąŠą▓čŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą╗ąŠą│ą░ ąĮąĄ ą▒čāą┤čāčé čāčćąĖčéčŗą▓ą░čéčīčüčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x08 |
48 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1. |
| 1 |
U1[3] |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 4 |
U4 |
- |
filestoreCapacity |
ą▒ą░ą╣čé |
ąĢą╝ą║ąŠčüčéčī čŹč鹊ą│ąŠ čäą░ą╣ą╗ąŠą▓ąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░. |
| 8 |
U4 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 12 |
U4 |
- |
reserved3 |
- |
| 16 |
U4 |
- |
currentMaxLogSize |
- |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ č鹥ą║čāčēąĄą│ąŠ ą╗ąŠą│ą░, ą┤ąŠ ą║ąŠč鹊čĆąŠą│ąŠ ąĄą╝čā čĆą░ąĘčĆąĄčłąĄąĮąŠ čĆą░čüčéąĖ. |
| 20 |
U4 |
- |
currentLogSize |
- |
ą¤čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ąĮąĖą╝ą░ąĄčé č鹥ą║čāčēąĖą╣ ą╗ąŠą│. |
| 24 |
U4 |
- |
entryCount |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüąĄą╣ ą▓ ą╗ąŠą│ąĄ. ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ čåąĖą║ą╗ąĖč湥čüą║ąĖčģ ą╗ąŠą│ąŠą▓ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé čāą╝ąĄąĮčīčłąĄąĮąŠ, ą║ąŠą│ą┤ą░ ą│čĆčāą┐ą┐ą░ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą╗ąŠą│ą░ ą▒čāą┤ąĄčé čāą┤ą░ą╗ąĄąĮą░ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą╝ąĄčüč鹊 ą┤ą╗čÅ ąĮąŠą▓čŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą╗ąŠą│ą░. |
| 28 |
U2 |
- |
oldestYear |
- |
ąōąŠą┤ čüą░ą╝ąŠą╣ čüčéą░čĆąŠą╣ ąĘą░ą┐ąĖčüąĖ (ą│ąŠą┤ UTC ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1..65535) ąĖą╗ąĖ 0, ąĄčüą╗ąĖ ąĮąĄčé ąĘą░ą┐ąĖčüąĖ čü ąĖąĘą▓ąĄčüčéąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝. |
| 30 |
U1 |
- |
oldestMonth |
- |
ąĪą░ą╝čŗą╣ čüčéą░čĆčŗą╣ ą╝ąĄčüčÅčå (1..12) |
| 31 |
U1 |
- |
oldestDay |
- |
ąĪą░ą╝čŗą╣ čüčéą░čĆčŗą╣ ą┤ąĄąĮčī (1..31) |
| 32 |
U1 |
- |
oldestHour |
- |
ąĪą░ą╝čŗą╣ čüčéą░čĆčŗą╣ čćą░čü (0..23) |
| 33 |
U1 |
- |
oldestMinute |
- |
ąĪą░ą╝ą░čÅ čüčéą░čĆą░čÅ ą╝ąĖąĮčāčéą░ (0..59) |
| 34 |
U1 |
- |
oldestSecond |
- |
ąĪą░ą╝ą░čÅ čüčéą░čĆą░čÅ čüąĄą║čāąĮą┤ą░ (0..60) |
| 35 |
U1 |
- |
reserved4 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 36 |
U2 |
- |
newestYear |
- |
ąōąŠą┤ čüą░ą╝ąŠą╣ ąĮąŠą▓ąŠą╣ ąĘą░ą┐ąĖčüąĖ (ą│ąŠą┤ UTC ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1..65535) ąĖą╗ąĖ 0, ąĄčüą╗ąĖ ąĮąĄčé ąĘą░ą┐ąĖčüąĖ čü ąĖąĘą▓ąĄčüčéąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝. |
| 38 |
U1 |
- |
newestMonth |
- |
ąĪą░ą╝čŗą╣ ąĮąŠą▓čŗą╣ ą╝ąĄčüčÅčå (1..12) |
| 39 |
U1 |
- |
newestDay |
- |
ąĪą░ą╝čŗą╣ ąĮąŠą▓čŗą╣ ą┤ąĄąĮčī (1..31) |
| 40 |
U1 |
- |
newestHour |
- |
ąĪą░ą╝čŗą╣ ąĮąŠą▓čŗą╣ čćą░čü (0..23) |
| 41 |
U1 |
- |
newestMinute |
- |
ąĪą░ą╝ą░čÅ ąĮąŠą▓ą░čÅ ą╝ąĖąĮčāčéą░ (0..59) |
| 42 |
U1 |
- |
newestSecond |
- |
ąĪą░ą╝ą░čÅ ąĮąŠą▓ą░čÅ čüąĄą║čāąĮą┤ą░ (0..60) |
| 43 |
U1 |
- |
reserved5 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 44 |
X1 |
- |
status |
- |
ążą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ ą╗ąŠą│ą░ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 45 |
U1[3] |
- |
reserved6 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ status:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| recording |
ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą▓ą║ą╗čÄč湥ąĮą░ ąĘą░ą┐ąĖčüčī 菹╗ąĄą╝ąĄąĮčéą░ ą▓ ą╗ąŠą│. |
| inactive |
ąĪąĖčüč鹥ą╝ą░ ą╗ąŠą│ą░ ąĮąĄ ą░ą║čéąĖą▓ąĮą░ - ą╗ąŠą│ ąŠčéčüčāčéčüčéą▓čāąĄčé. |
| circular |
ąóąĄą║čāčēąĖą╣ ą╗ąŠą│ čÅą▓ą╗čÅąĄčéčüčÅ čåąĖą║ą╗ąĖč湥čüą║ąĖą╝. |
37.5. LOG-RETRIEVEPOS (0x21 0x0b)
37.5.1. ąŁą╗ąĄą╝ąĄąĮčé ą╗ąŠą│ą░ čü čäąĖą║čüą░čåąĖąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-RETRIEVEPOS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Position fix log entry |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ 菹╗ąĄą╝ąĄąĮčéą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖąĘ ą╗ąŠą│ą░ čü ą┐ąŠąĘąĖčåąĖąĄą╣ čäąĖą║čüą░čåąĖąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x0b |
40 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
entryIndex |
- |
ąśąĮą┤ąĄą║čü čŹč鹊ą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą╗ąŠą│ą░. |
| 4 |
I4 |
1e-7 |
lon |
deg |
ąöąŠą╗ą│ąŠčéą░ |
| 8 |
I4 |
1e-7 |
lat |
deg |
ą©ąĖčĆąŠčéą░ |
| 12 |
I4 |
- |
hMSL |
ą╝ą╝ |
ąÆčŗčüąŠčéą░ ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠčĆčÅ |
| 16 |
U4 |
- |
hAcc |
ą╝ą╝ |
ą×čåąĄąĮąŠčćąĮą░čÅ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮą░čÅ č鹊čćąĮąŠčüčéčī |
| 20 |
U4 |
- |
gSpeed |
ą╝ą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠ ąĘąĄą╝ą╗ąĄ (2-D) |
| 24 |
U4 |
- |
heading |
deg |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║čāčĆčüą░ |
| 28 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0 |
| 29 |
U1 |
- |
fixType |
- |
ąóąĖą┐ čäąĖą║čüą░čåąĖąĖ:
2 ąŠąĘąĮą░čćą░ąĄčé 2D
3 ąŠąĘąĮą░čćą░ąĄčé 3D |
| 30 |
U2 |
- |
year |
- |
ąōąŠą┤ (ą│ąŠą┤ UTC ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1..65535) |
| 32 |
U1 |
- |
month |
- |
ą£ąĄčüčÅčå UTC (1..12) |
| 33 |
U1 |
- |
day |
- |
ąöąĄąĮčī UTC (1..31) |
| 34 |
U1 |
- |
hour |
- |
ą¦ą░čü UTC (0..23) |
| 35 |
U1 |
- |
minute |
- |
ą£ąĖąĮčāčéą░ UTC (0..59) |
| 36 |
U1 |
- |
second |
- |
ąĪąĄą║čāąĮą┤ą░ UTC (0..60) |
| 37 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 38 |
U1 |
- |
numSV |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą▓čłąĖčģčüčÅ ą┤ą╗čÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ. |
| 39 |
U1 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
37.6. LOG-RETRIEVESTRING (0x21 0x0d)
37.6.1. ąŁą╗ąĄą╝ąĄąĮčé ą╗ąŠą│ą░ čüąŠ čüčéčĆąŠą║ąŠą╣ ą▒ą░ą╣čé
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-RETRIEVESTRING |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Byte string log entry |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ 菹╗ąĄą╝ąĄąĮčéą░ ą╗ąŠą│ą░ - ą▒ą░ą╣č鹊ą▓ąŠą╣ čüčéčĆąŠą║ąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x0D |
16 + 1┬ĘbyteCount |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
entryIndex |
- |
ąśąĮą┤ąĄą║čü čŹč鹊ą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą╗ąŠą│ą░. |
| 4 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0. |
| 5 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 6 |
U2 |
- |
year |
- |
ąōąŠą┤ (1..65635) ą▓čĆąĄą╝ąĄąĮąĖ UTC. ąŚą┤ąĄčüčī ą▒čāą┤ąĄčé 0, ąĄčüą╗ąĖ ą▓čĆąĄą╝čÅ ąĮąĄ ąĖąĘą▓ąĄčüčéąĮąŠ. |
| 8 |
U1 |
- |
month |
- |
ą£ąĄčüčÅčå (1..12) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 9 |
U1 |
- |
day |
- |
ąöąĄąĮčī (1..31) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 10 |
U1 |
- |
hour |
- |
ą¦ą░čü (0..23) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 11 |
U1 |
- |
minute |
- |
ą£ąĖąĮčāčéą░ (0..59) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 12 |
U1 |
- |
second |
- |
ąĪąĄą║čāąĮą┤ą░ (0..60) ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| 13 |
U1 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ byteCount čĆą░ąĘ) |
| 16 + 1┬ĘN |
U1 |
- |
bytes |
- |
ąæą░ą╣čéčŗ čüčéčĆąŠą║ąĖ |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
37.7. LOG-RETRIEVE (0x21 0x09)
37.7.1. ąŚą░ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ ą╗ąŠą│ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-RETRIEVE |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Request log data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÜąŠą╝ą░ąĮą┤ą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▓ ą╗ąŠą│ ą┤ą░ąĮąĮčŗčģ (ą┐čĆąĖ čŹč鹊ą╝ čüąĮą░čćą░ą╗ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮą░ ąĘą░ą┐ąĖčüčī ą▓ ą╗ąŠą│, čüą╝. UBX-CFG-LOGFILTER). ąŁą╗ąĄą╝ąĄąĮčéčŗ ą╗ąŠą│ą░ ą▓ąŠąĘą▓čĆą░čēą░čÄčéčüčÅ ą▓ čģčĆąŠąĮąŠą╗ąŠą│ąĖč湥čüą║ąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ, ąĖčüą┐ąŠą╗čīąĘčāčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-LOG-RETRIEVEPOS ąĖ UBX-LOG-RETRIEVESTRING. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą▓ ąŠčéą▓ąĄčé ąĮą░ ąŠą┤ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-LOG-RETRIEVE, čĆą░ą▓ąĮąŠ 256. ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī ą▒ąŠą╗čīčłąĄ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą╗ąŠą│ą░, č鹊 čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ čü čĆą░ąĘąĮčŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ startNumbers. ą¤ąŠą╗čāč湥ąĮąĖąĄ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅč鹊 ą╗čÄą▒ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-LOG. ąĪą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ą░ą║čüąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮą░ ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ GPS (čüą╝. UBX-CFG-RST). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x09 |
12 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
startNumber |
- |
ąśąĮą┤ąĄą║čü ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░. |
| 4 |
U4 |
- |
entryCount |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą╗ąŠą│ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ą░ą║čüąĖą╝čāą╝ 256. |
| 8 |
U1 |
- |
version |
- |
ąÆąĄčĆčüąĖčÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0. |
| 9 |
U1[3] |
- |
reserved |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
37.8. LOG-STRING (0x21 0x04)
37.8.1. ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ čüčéčĆąŠą║ąĖ ą▓ąŠ ą▓čüčéčĆąŠąĄąĮąĮčāčÄ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ą░ą╝čÅčéčī Flash
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
LOG-STRING |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Store arbitrary string in on-board Flash memory |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÜąŠą╝ą░ąĮą┤ą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ ą▒ą░ą╣č鹊ą▓ąŠą╣ čüčéčĆąŠą║ąĖ ą▓ąŠ ą▓čüčéčĆąŠąĄąĮąĮčāčÄ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ą░ą╝čÅčéčī flash. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ čüąŠčģčĆą░ąĮčÅąĄą╝ąŠą╣ čüčéčĆąŠą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī 256 ą▒ą░ą╣čé. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x21 0x04 |
0 + 1┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 1┬ĘN |
U1 |
- |
bytes |
- |
ąĪčéčĆąŠą║ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą▓ ą╗ąŠą│ ą▒ą░ą╣čé (ą╝ą░ą║čüąĖą╝čāą╝ 256). |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
[38. MON (0x0A)]
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą║ą╗ą░čüčüąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ GPS: ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąŠčüč鹊čÅąĮąĖąĄ ąŠą▒ą╝ąĄąĮą░ (Comunication Status), ąĘą░ą│čĆčāąĘą║ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (CPU Load), ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░ (Stack Usage), čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ (Task Status), čüčéą░čéąĖčüčéąĖą║ą░ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O subsystem) ąĖ čé. ą┐.
38.1. MON-HW2 (0x0A 0x0B)
38.1.1. ąĀą░čüčłąĖčĆąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-HW2 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Extended Hardware Status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪąŠčüč鹊čÅąĮąĖąĄ čĆą░ąĘąĮčŗčģ ą░čüą┐ąĄą║č鹊ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, čéą░ą║ąĖčģ ą║ą░ą║ ą┤ąĖčüą▒ą░ą╗ą░ąĮčü, ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĖ čĆąĄąĘčāą╗čīčéą░čéčŗ POST. ą¤ąĄčĆą▓čŗąĄ 4 ą┐ą░čĆą░ą╝ąĄčéčĆą░ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą║ąŠą╝ą┐ą╗ąĄą║čüąĮčŗą╣ čüąĖą│ąĮą░ą╗ ąŠčé ą▒ą╗ąŠą║ą░ čĆą░ą┤ąĖąŠčćą░čüč鹊čéčŗ (RF front end). ą¤čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ 菹╝ą┐ąĖčĆąĖč湥čüą║ąĖąĄ ą┐čĆą░ą▓ąĖą╗ą░:
ŌĆó ą¦ąĄą╝ ą╝ąĄąĮčīčłąĄ ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ofsI ąĖ ofsQ, č鹥ą╝ ą╗čāčćčłąĄ.
ŌĆó ąÆ ąĖą┤ąĄą░ą╗ąĄ ą╝ą░ą│ąĮąĖčéčāą┤ą░ I-čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣ (magI) ąĖ Q-čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣ (magQ) ą║ąŠą╝ą┐ą╗ąĄą║čüąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x0B |
28 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
I1 |
- |
ofsI |
- |
ąöąĖčüą▒ą░ą╗ą░ąĮčü I-čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠą╝ą┐ą╗ąĄą║čüąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ (-128 = max. ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ą┤ąĖčüą▒ą░ą╗ą░ąĮčü, 127 = max. ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą┤ąĖčüą▒ą░ą╗ą░ąĮčü). |
| 1 |
U1 |
- |
magI |
- |
ą£ą░ą│ąĮąĖčéčāą┤ą░ I-čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠą╝ą┐ą╗ąĄą║čüąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĮą░čÅ (0 = ąĮąĄčé čüąĖą│ąĮą░ą╗ą░, 255 = max. ą╝ą░ą│ąĮąĖčéčāą┤ą░). |
| 2 |
I1 |
- |
ofsQ |
- |
ąöąĖčüą▒ą░ą╗ą░ąĮčü Q-čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠą╝ą┐ą╗ąĄą║čüąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ (-128 = max. ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ą┤ąĖčüą▒ą░ą╗ą░ąĮčü, 127 = max. ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą┤ąĖčüą▒ą░ą╗ą░ąĮčü). |
| 3 |
U1 |
- |
magQ |
- |
ą£ą░ą│ąĮąĖčéčāą┤ą░ Q-čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠą╝ą┐ą╗ąĄą║čüąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĮą░čÅ (0 = ąĮąĄčé čüąĖą│ąĮą░ą╗ą░, 255 = max. ą╝ą░ą│ąĮąĖčéčāą┤ą░). |
| 4 |
U1 |
- |
cfgSource |
- |
ąśčüč鹊čćąĮąĖą║ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ:
114 ROM
111 OTP
112 ąĮąŠąČą║ąĖ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ
102 ąŠą▒čĆą░ąĘ flash |
| 5 |
U1[3] |
- |
reserved0 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 8 |
U4 |
- |
lowLevCfg |
- |
ąØąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ |
| 12 |
U4[2] |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 20 |
U4 |
- |
postStatus |
- |
ąĪą╗ąŠą▓ąŠ čüąŠčüč鹊čÅąĮąĖčÅ č鹥čüčéą░ POST |
| 24 |
U4 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
38.2. MON-HW (0x0A 0x09)
38.2.1. ąĪąŠčüč鹊čÅąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-HW |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Hardware Status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪąŠčüč鹊čÅąĮąĖąĄ čĆą░ąĘąĮčŗčģ ą░čüą┐ąĄą║č鹊ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, čéą░ą║ąĖčģ ą║ą░ą║ ą░ąĮč鹥ąĮąĮą░, PIO/ą▓čŗą▓ąŠą┤čŗ ą┐ąĄčĆąĖč乥čĆąĖąĖ, čāčĆąŠą▓ąĄąĮčī čłčāą╝ą░, ąÉąĀąŻ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x09 |
60 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X4 |
- |
pinSel |
- |
ą£ą░čüą║ą░ ąĮą░ą▒ąŠčĆą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ąĄčĆąĖč乥čĆąĖąĖ/PIO. |
| 4 |
X4 |
- |
pinBank |
- |
ą£ą░čüą║ą░ ąĮą░ą▒ąŠčĆą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▒ą░ąĮą║ąŠą▓ A/B |
| 8 |
X4 |
- |
pinDir |
- |
ą£ą░čüą║ą░ ąĮą░ą▒ąŠčĆą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (Input/Output, I/O) |
| 12 |
X4 |
- |
pinVal |
- |
ą£ą░čüą║ą░ čāčĆąŠą▓ąĮčÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą╗ąŠą│. 0 / ą╗ąŠą│. 1. |
| 16 |
U2 |
- |
noisePerMS |
- |
ąŻčĆąŠą▓ąĄąĮčī čłčāą╝ą░, ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ čÅą┤čĆąŠą╝ GPS |
| 18 |
U2 |
- |
agcCnt |
- |
ą£ąŠąĮąĖč鹊čĆ ąÉąĀąŻ (AGC Monitor, čüčćąĖčéą░ąĄčé SIGHI xor SIGLO, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..8191). |
| 20 |
U1 |
- |
aStatus |
- |
ąĪčéą░čéčāčü ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░ ą░ąĮč鹥ąĮąĮčŗ (0=INIT, 1=DONTKNOW, 2=OK, 3=SHORT, 4=OPEN). |
| 21 |
U1 |
- |
aPower |
- |
ąóąĄą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗ |
| 22 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 23 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 24 |
X4 |
- |
usedMask |
- |
ą£ą░čüą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé Virtual Pin Manager |
| 28 |
U1[17] |
- |
VP |
- |
ą£ą░čüčüąĖą▓ ą┐čĆąĖą▓čÅąĘąŠą║ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ 17 čäąĖąĘąĖč湥čüą║ąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓. |
| 45 |
U1 |
- |
jamInd |
- |
ąśąĮą┤ąĖą║ą░č鹊čĆ ą┐čĆąŠą┐ą░ą┤ą░ąĮąĖčÅ ąĮąĄčüčāčēąĄą╣ (CW Jamming indicator), ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ (0 = ąĮąĄčé ąĮą░čĆčāčłąĄąĮąĖčÅ CW, 255 ąŠč湥ąĮčī čüąĖą╗čīąĮčŗąĄ ąĮą░čĆčāčłąĄąĮąĖčÅ CW). |
| 46 |
U2 |
- |
reserved3 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 48 |
X4 |
- |
pinIrq |
- |
ą£ą░čüą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ PIO Irq |
| 52 |
X4 |
- |
pullH |
- |
ą£ą░čüą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ ą▓ąĄčĆčģąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ PIO (PullUp High). |
| 56 |
X4 |
- |
pullL |
- |
ą£ą░čüą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ ąĮąĖąČąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ PIO (PullUp Low). |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| rtcCalib |
ą¦ą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTC) ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮčŗ |
| safeBoot |
ąĀąĄąČąĖą╝ ą▒ąĄąĘąŠą┐ą░čüąĮąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ (0 ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ, 1 ą░ą║čéąĖą▓ąĄąĮ) |
| jammingState |
ąÆčŗą▓ąŠą┤ ąĖąĘ ą╝ąŠąĮąĖč鹊čĆą░ ąĮą░čĆčāčłąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ / ą┐ąŠą╝ąĄčģ, Jamming/Interference Monitor. 0 ąĮąĄ ąĖąĘą▓ąĄčüčéąĮąŠ ąĖą╗ąĖ čäčāąĮą║čåąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮą░, 1 ok - ąĮąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠą│ąŠ ąĮą░čĆčāčłąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░, 2 ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ (warning) - ąĮą░ą▒ą╗čÄą┤ą░čÄčéčüčÅ ą┐ąŠą╝ąĄčģąĖ, ąĮąŠ čäąĖą║čüą░čåąĖčÅ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ, 3 ą║čĆąĖčéąĖč湥čüą║ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ (critical) - ąĮą░ą▒ą╗čÄą┤ą░čÄčéčüčÅ ą┐ąŠą╝ąĄčģąĖ ąĖ ąĮąĄčé čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ. |
38.3. MON-IO (0x0A 0x02)
38.3.1. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-IO |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
I/O Subsystem Status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĀą░ąĘą╝ąĄčĆ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą┐ąŠčĆč鹊ą▓ N, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝. ąóą░ą║, ąĮą░ą┐čĆąĖą╝ąĄčĆ, u-blox 5 ąĖą╝ąĄąĄčé 6 ą┐ąŠčĆč鹊ą▓. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x02 |
0 + 20┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 20┬ĘN |
U4 |
- |
rxBytes |
ą▒ą░ą╣čé |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠą│ą┤ą░-ą╗ąĖą▒ąŠ ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ą▒ą░ą╣čé |
| 4 + 20┬ĘN |
U4 |
- |
txBytes |
ą▒ą░ą╣čé |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠą│ą┤ą░-ą╗ąĖą▒ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą▒ą░ą╣čé |
| 8 + 20┬ĘN |
U2 |
- |
parityErrs |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ 100 ą╝čü čü ąŠčłąĖą▒ą║ąŠą╣ č湥čéąĮąŠčüčéąĖ |
| 10 + 20┬ĘN |
U2 |
- |
framingErrs |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ 100 ą╝čü čü ąŠčłąĖą▒ą║ąŠą╣ čäčĆąĄą╣ą╝ą░ |
| 12 + 20┬ĘN |
U2 |
- |
overrunErrs |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ 100 ą╝čü čü ąŠčłąĖą▒ą║ąŠą╣ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (overrun errors) |
| 14 + 20┬ĘN |
U2 |
- |
breakCond |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ 100 ą╝čü čü čüąŠą▒čŗčéąĖąĄą╝ ąŠčüčéą░ąĮąŠą▓ą░ (break conditions) |
| 16 + 20┬ĘN |
U1 |
- |
rxBusy |
- |
ążą╗ą░ą│ ąĘą░ąĮčÅč鹊čüčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ |
| 17 + 20┬ĘN |
U1 |
- |
txBusy |
- |
ążą╗ą░ą│ ąĘą░ąĮčÅč鹊čüčéąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ |
| 18 + 20┬ĘN |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
38.4. MON-MSGPP (0x0A 0x06)
38.4.1. ąĪčéą░čéčāčü ą┐ą░čĆčüąĖąĮą│ą░ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-MSGPP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Message Parse and Process Status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x06 |
120 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U2[8] |
- |
msg1 |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüą┐ąĄčłąĮąŠ ą┐čĆąŠčłąĄą┤čłąĖčģ ą┐ą░čĆčüąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĮą░ ą┐ąŠčĆč鹥 0. |
| 16 |
U2[8] |
- |
msg2 |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüą┐ąĄčłąĮąŠ ą┐čĆąŠčłąĄą┤čłąĖčģ ą┐ą░čĆčüąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĮą░ ą┐ąŠčĆč鹥 1. |
| 32 |
U2[8] |
- |
msg3 |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüą┐ąĄčłąĮąŠ ą┐čĆąŠčłąĄą┤čłąĖčģ ą┐ą░čĆčüąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĮą░ ą┐ąŠčĆč鹥 2. |
| 48 |
U2[8] |
- |
msg4 |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüą┐ąĄčłąĮąŠ ą┐čĆąŠčłąĄą┤čłąĖčģ ą┐ą░čĆčüąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĮą░ ą┐ąŠčĆč鹥 3. |
| 64 |
U2[8] |
- |
msg5 |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüą┐ąĄčłąĮąŠ ą┐čĆąŠčłąĄą┤čłąĖčģ ą┐ą░čĆčüąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĮą░ ą┐ąŠčĆč鹥 4. |
| 80 |
U2[8] |
- |
msg6 |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüą┐ąĄčłąĮąŠ ą┐čĆąŠčłąĄą┤čłąĖčģ ą┐ą░čĆčüąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĮą░ ą┐ąŠčĆč鹥 5. |
| 96 |
U4[6] |
- |
skipped |
ą▒ą░ą╣čé |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠą┐čāčēąĄąĮąĮčŗčģ ą▒ą░ą╣čé ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčĆčéą░. |
38.5. MON-RXBUF (0x0A 0x07)
38.5.1. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-RXBUF |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Receiver Buffer Status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x07 |
24 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U2[6] |
- |
pending |
ą▒ą░ą╣čé |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąŠąČąĖą┤ą░čÄčēąĖčģ ąĮą░ ą┐čĆąĖąĄą╝ąĄ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čåąĄą╗ąĖ (ą┐ąŠčĆčéą░?). |
| 12 |
U1[6] |
- |
usage |
% |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čüąĖčüč鹥ą╝čŗ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čåąĄą╗ąĖ. |
| 18 |
U1[6] |
- |
peakUsage |
% |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čåąĄą╗ąĖ. |
38.6. MON-RXR (0x0A 0x21)
38.6.1. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-RXR |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Receiver Status Information |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą▓ąŠą┤ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą┐ąĄčĆąĄčģąŠą┤čÅ ą▓ čĆąĄąČąĖą╝ backup ąĖą╗ąĖ ą▓čŗčģąŠą┤čÅ ąĖąĘ ąĮąĄą│ąŠ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x21 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| awake |
ą¤čĆąĖąĄą╝ąĮąĖą║ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąĄ ą▓ čĆąĄąČąĖą╝ąĄ Backup |
38.7. MON-TXBUF (0x0A 0x08)
38.7.1. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-TXBUF |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Transmitter Buffer Status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x08 |
28 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U2[6] |
- |
pending |
ą▒ą░ą╣čé |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąŠąČąĖą┤ą░čÄčēąĖčģ ąĮą░ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čåąĄą╗ąĖ (ą┐ąŠčĆčéą░?). |
| 12 |
U1[6] |
- |
usage |
% |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čüąĖčüč鹥ą╝čŗ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čåąĄą╗ąĖ. |
| 18 |
U1[6] |
- |
peakUsage |
% |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čåąĄą╗ąĖ. |
| 24 |
U1 |
- |
tUsage |
% |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čüąĖčüč鹥ą╝čŗ ą┤ą╗čÅ ą▓čüąĄčģ čåąĄą╗ąĄą╣. |
| 25 |
U1 |
- |
tPeakusage |
% |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ą▓čüąĄčģ čåąĄą╗ąĄą╣. |
| 26 |
X1 |
- |
errors |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ ąŠčłąĖą▒ąŠą║ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 27 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ errors:
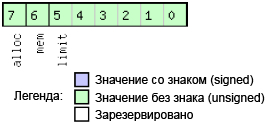
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| limit |
ąöąŠčüčéąĖą│ąĮčāčé ą┐čĆąĄą┤ąĄą╗ ą▒čāč乥čĆą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čåąĄą╗ąĖ (ą┐ąŠčĆčéą░) |
| mem |
ą×čłąĖą▒ą║ą░ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ (Memory Allocation error) |
| alloc |
ą×čłąĖą▒ą║ą░ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ (ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠą╗ąŠąĮ) |
38.8. MON-VER (0x0A 0x04)
38.8.1. ą×ą┐čĆąŠčü ą▓ąĄčĆčüąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ / ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-VER |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll Receiver/Software Version |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x04 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
38.8.2. Receiver/Software Version
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
MON-VER |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Receiver/Software Version |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą×čéą▓ąĄčé ąĮą░ ąŠą┐čĆąŠčü |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0A 0x04 |
40 + 30┬ĘN |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
CH[30] |
- |
swVersion |
- |
ąĪčéčĆąŠą║ą░, ąĘą░ą▓ąĄčĆčłą░čÄčēą░čÅčüčÅ ąĮčāą╗ąĄą╝, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ ą▓ąĄčĆčüąĖčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ. |
| 30 |
CH[10] |
- |
hwVersion |
- |
ąĪčéčĆąŠą║ą░, ąĘą░ą▓ąĄčĆčłą░čÄčēą░čÅčüčÅ ąĮčāą╗ąĄą╝, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ ą▓ąĄčĆčüąĖčÄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą▒ą╗ąŠą║ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ N čĆą░ąĘ) |
| 40 + 30┬ĘN |
CH[30] |
- |
extension |
- |
ąĀą░čüčłąĖčĆąĄąĮąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ / ąĄą│ąŠ ą¤ą× (firmware). ąĢčüą╗ąĖ firmware ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čĆą░ą▒ąŠčéą░ąĄčé ąĖąĘ flash, ą┐ąĄčĆą▓ąŠąĄ ą┐ąŠą╗ąĄ čĆą░čüčłąĖčĆąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī čüčéčĆąŠą║čā ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (Software Version String) ąĮąĖąČąĄą╗ąĄąČą░čēąĄą│ąŠ ROM. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠą╗čÅ ą╝ąŠą│čāčé čéą░ą║ąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čāčÄ ą▓ąĄčĆčüąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĖ ą╗čÄą▒čŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ą┐čĆąŠą┤čāą║čéą░, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖą╗ąĖ čĆą░čüčłąĖčĆąĄąĮąĖčÅ. |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
[39. NAV (0x01)]
ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ: Position (ą┐ąŠąĘąĖčåąĖčÅ), Speed (čüą║ąŠčĆąŠčüčéčī), Time (ą▓čĆąĄą╝čÅ), Acc (č鹊čćąĮąŠčüčéčī), Heading (ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║čāčĆčüą░), DOP, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ SV. ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą║ą╗ą░čüčüąĄ NAV ą▓čŗą▓ąŠą┤čÅčé ą▓ čĆą░ąĘąĮčŗčģ č乊čĆą╝ą░čéą░čģ čéą░ą║ąĖąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ą░ą║ ą┐ąŠąĘąĖčåąĖčÅ, ą▓čŗčüąŠčéą░, čüą║ąŠčĆąŠčüčéčī. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čäą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ (status) ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé č鹊čćąĮąŠčüčéčī ą▓čŗą▓ąŠą┤ą░.
39.1. NAV-AOPSTATUS (0x01 0x60)
39.1.1. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ AssistNow Autonomous
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-AOPSTATUS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
AssistNow Autonomous Status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹥ą║čāčēąĄą╣ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ AssistNow Autonomous ąĖ ąŠ č鹥ą║čāčēąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ čŹč鹊ą╣ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čģąŠčüčéą░ ą╝ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┐čāč鹥ą╝ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ ą┐ąŠą╗čÅ status, čćč鹊 ąŠąĮąŠ čāčüč鹊ą╣čćąĖą▓ąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ 0. ąĪą╝. ą│ą╗ą░ą▓čā "15.8. AssistNow Autonomous" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x60 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
U1 |
- |
aopCfg |
- |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ AssistNow Autonomous (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 5 |
U1 |
- |
status |
- |
ą¤ąŠą┤čüąĖčüč鹥ą╝ą░ AssistNow Autonomous ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle, 0) ąĖą╗ąĖ ą▓ čĆą░ą▒ąŠč鹥 (running, ąĮąĄ 0). |
| 6 |
U1 |
- |
reserved0 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 7 |
U1 |
- |
reserved1 |
- |
| 8 |
U4 |
- |
availGPS |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ ąŠčłąĖą▒ąŠą║ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 12 |
U4 |
- |
reserved2 |
- |
ąŚą┤ąĄčüčī ą▓čüąĄą│ą┤ą░ 0 |
| 16 |
U4 |
- |
reserved3 |
- |
ąæąĖčéčŗ ą┐ąŠą╗čÅ aopCfg:
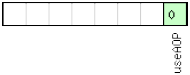
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| useAOP |
ążą╗ą░ą│ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ AOP |
39.2. NAV-CLOCK (0x01 0x22)
39.2.1. ąĀąĄčłąĄąĮąĖąĄ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-CLOCK |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Clock Solution |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
- |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x22 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I4 |
- |
clkB |
ąĮčü |
ąŻčģąŠą┤ čéą░ą║č鹊ą▓ (Clock bias, čüą╝. "6.2. Navigation Epoch" [2]). |
| 8 |
U1 |
- |
clkD |
ąĮčü/čüąĄą║ |
ąöčĆąŠąČą░ąĮąĖąĄ čéą░ą║č鹊ą▓ (Clock drift, čüą╝. "6.2. Navigation Epoch" [2]). |
| 12 |
U4 |
- |
tAcc |
ąĮčü |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ. |
| 16 |
U4 |
- |
fAcc |
ą┐čü/čüąĄą║ |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ čćą░čüč鹊čéčŗ. |
39.3. NAV-DGPS (0x01 0x31)
39.3.1. ąöą░ąĮąĮčŗąĄ DGPS, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ NAV
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-DGPS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
DGPS Data Used for NAV |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčé ą║ąŠčĆčĆąĄą║čéąĖčĆčāčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ DGPS, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą║ č鹥ą║čāčēąĄą╝čā čĆąĄčłąĄąĮąĖčÄ ąĮą░ą▓ąĖą│ą░čåąĖąĖ. ąóą░ą║ąČąĄ čüą╝. ąĘą░ą╝ąĄčćą░ąĮąĖčÅ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā RTCM (čüą╝. ą┤ą░ą╗ąĄąĄ ą▓čĆąĄąĘą║čā "ą¤čĆąŠč鹊ą║ąŠą╗ RTCM"). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x31 |
16 + 12┬ĘnumCh |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I4 |
- |
age |
ą╝čü |
ąÆąŠąĘčĆą░čüčé čüą░ą╝čŗčģ čüą▓ąĄąČąĖčģ ą┤ą░ąĮąĮčŗčģ ą║ąŠčĆčĆąĄą║čåąĖąĖ. |
| 8 |
I2 |
- |
baseId |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą▒ą░ąĘąŠą▓ąŠą╣ čüčéą░ąĮčåąĖąĖ DGPS. |
| 10 |
I2 |
- |
baseHealth |
- |
ąĪąŠčüč鹊čÅąĮąĖąĄ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ (health status) ą▒ą░ąĘąŠą▓ąŠą╣ čüčéą░ąĮčåąĖąĖ DGPS. |
| 12 |
U1 |
- |
numCh |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓, ą┤ą╗čÅ ą║ąŠč鹊čĆčŗčģ ą┐ąŠčüčéčāą┐ą░čÄčé ą┤ą░ąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ. |
| 13 |
U1 |
- |
status |
- |
ąĪąŠčüč鹊čÅąĮąĖąĄ čéąĖą┐ą░ ą║ąŠčĆčĆąĄą║čåąĖąĖ DGPS:
0x00 ąŠčéčüčāčéčüčéą▓ąĖąĄ
0x01 ą║ąŠčĆčĆąĄą║čåąĖčÅ PR+PRR |
| 14 |
U2 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ numCh čĆą░ąĘ) |
| 16 + 12┬ĘN |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░ |
| 17 + 12┬ĘN |
X1 |
- |
flags |
- |
ąØąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░ ąĖ ąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ). |
| 18 + 12┬ĘN |
U2 |
- |
ageC |
ą╝čü |
ąÆąŠąĘčĆą░čüčé ą┐ąŠčüą╗ąĄą┤ąĮąĖčģ ą┤ą░ąĮąĮčŗčģ ą║ąŠčĆčĆąĄą║čåąĖąĖ. |
| 20 + 12┬ĘN |
R4 |
- |
prc |
ą╝ |
ąÜąŠčĆčĆąĄą║čåąĖčÅ pseudorange |
| 24 + 12┬ĘN |
R4 |
- |
prrc |
ą╝/čüąĄą║ |
ąÜąŠčĆčĆąĄą║čåąĖčÅ čćą░čüč鹊čéčŗ pseudorange rate |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
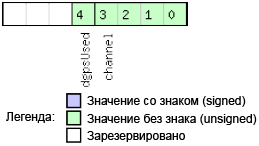
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| channel |
ąØąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░ GPS, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą▓ą║ą╗čÄč湥ąĮ čŹč鹊čé čüą┐čāčéąĮąĖą║ |
| dgpsUsed |
1 = ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ DGPS |
39.4. NAV-DOP (0x01 0x04)
39.4.1. ąĪąĮąĖąČąĄąĮąĖąĄ č鹊čćąĮąŠčüčéąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-DOP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Dilution of precision |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ŌĆó ąŻ ąĘąĮą░č湥ąĮąĖą╣ DOP ąĮąĄčé čĆą░ąĘą╝ąĄčĆąĮąŠčüčéąĖ.
ŌĆó ąÆčüąĄ ąĘąĮą░č湥ąĮąĖčÅ DOP ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮčŗ ą╝ąĮąŠąČąĖč鹥ą╗ąĄą╝ 100. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▒ą╗ąŠą║ ą┐ąĄčĆąĄą┤ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ 156, č鹊 ąĘąĮą░č湥ąĮąĖąĄ DOP čĆą░ą▓ąĮąŠ 1.56. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x04 |
18 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
U2 |
- |
gDOP |
- |
ąōąĄąŠą╝ąĄčéčĆąĖč湥čüą║ąŠąĄ DOP |
| 6 |
U2 |
- |
pDOP |
- |
DOP ą┐ąŠąĘąĖčåąĖąĖ |
| 8 |
U2 |
- |
tDOP |
- |
DOP ą▓čĆąĄą╝ąĄąĮąĖ |
| 10 |
U2 |
- |
vDOP |
- |
ąÆąĄčĆčéąĖą║ą░ą╗čīąĮąŠąĄ DOP |
| 12 |
U2 |
- |
hDOP |
- |
ąōąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠąĄ DOP |
| 14 |
U2 |
- |
nDOP |
- |
ąĪąĄą▓ąĄčĆąĮąŠąĄ DOP |
| 16 |
U2 |
- |
eDOP |
- |
ąÆąŠčüč鹊čćąĮąŠąĄ DOP |
39.5. NAV-POSECEF (0x01 0x01)
39.5.1. ąĀąĄčłąĄąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ ą▓ ECEF
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-POSECEF |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Position Solution in ECEF |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪą╝. ą▓ą░ąČąĮčŗąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ, ą║ą░čüą░čÄčēąĖąĄčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮčŗ ą▓ čüąĄą║čåąĖąĖ "2.3. ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ" [2]. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x01 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I4 |
- |
ecefX |
čüą╝ |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ X ECEF |
| 8 |
I4 |
- |
ecefY |
čüą╝ |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ Y ECEF |
| 12 |
I4 |
- |
ecefZ |
čüą╝ |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ Z ECEF |
| 16 |
U4 |
- |
pAcc |
čüą╝ |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąĖ |
39.6. NAV-POSLLH (0x01 0x02)
39.6.1. ąĀąĄčłąĄąĮąĖąĄ ą┤ą╗čÅ ą│ąĄąŠą┤ąĄąĘąĖč湥čüą║ąŠą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-POSLLH |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Geodetic Position Solution |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪą╝. ą▓ą░ąČąĮčŗąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ, ą║ą░čüą░čÄčēąĖąĄčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮčŗ ą▓ čüąĄą║čåąĖąĖ "2.3. ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ" [2].
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčé ą│ąĄąŠą┤ąĄąĘąĖč湥čüą║ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą▓ č鹥ą║čāčēąĄą╝ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ 菹╗ą╗ąĖą┐čüąŠąĖą┤ąĄ. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓čŗą▒čĆą░ąĮ 菹╗ą╗ąĖą┐čüąŠąĖą┤ WGS84, ąĮąŠ čŹč鹊 ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄą╝ CFG-DAT. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x02 |
28 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I4 |
1e-7 |
lon |
deg |
ąöąŠą╗ą│ąŠčéą░ |
| 8 |
I4 |
1e-7 |
lat |
deg |
ą©ąĖčĆąŠčéą░ |
| 12 |
I4 |
- |
height |
ą╝ą╝ |
ąÆčŗčüąŠčéą░ ąĮą░ą┤ 菹╗ą╗ąĖą┐čüąŠąĖą┤ąŠą╝ |
| 16 |
I4 |
- |
hMSL |
ą╝ą╝ |
ąÆčŗčüąŠčéą░ ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠčĆčÅ |
| 20 |
U4 |
- |
hAcc |
ą╝ą╝ |
ą×čåąĄąĮą║ą░ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ |
| 24 |
U4 |
- |
vAcc |
ą╝ą╝ |
ą×čåąĄąĮą║ą░ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ |
39.7. NAV-PVT (0x01 0x07)
39.7.1. ąĀąĄčłąĄąĮąĖąĄ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ, čüą║ąŠčĆąŠčüčéąĖ, ą▓čĆąĄą╝ąĄąĮąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-PVT |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Navigation Position Velocity Time Solution |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čüą║ą░č湊ą║ čüąĄą║čāąĮą┤ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 ą▓ ą╝ąĖąĮčāč鹥 ąŠą║ą░ąČąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ ą╝ąĄąĮčīčłąĄ 60 čüąĄą║čāąĮą┤. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ "6.5. ąĪą║ą░č湊ą║ čüąĄą║čāąĮą┤" [2]. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠą╝ą▒ąĖąĮąĖčĆčāąĄčé ą▓ čüąĄą▒ąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠąĘąĖčåąĖąĖ, čüą║ąŠčĆąŠčüčéąĖ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓ą║ą╗čÄčćą░čÅ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ č鹊čćąĮąŠčüčéąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x07 |
84 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
U2 |
- |
year |
- |
ąōąŠą┤ (UTC) |
| 6 |
U1 |
- |
month |
- |
ą£ąĄčüčÅčå, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..12 (UTC) |
| 7 |
U1 |
- |
day |
- |
ąöąĄąĮčī ą╝ąĄčüčÅčåą░, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..31 (UTC) |
| 8 |
U1 |
- |
hour |
- |
ą¦ą░čü ą┤ąĮčÅ, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..23 (UTC) |
| 9 |
U1 |
- |
min |
- |
ą£ąĖąĮčāčéą░ čćą░čüą░, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..59 (UTC) |
| 10 |
U1 |
- |
sec |
- |
ąĪąĄą║čāąĮą┤ą░ ą▓ ą╝ąĖąĮčāč鹥, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..60 (UTC) |
| 11 |
X1 |
- |
valid |
- |
ążą╗ą░ą│ąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 12 |
U4 |
- |
tAcc |
ąĮčü |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ (UTC) |
| 16 |
I4 |
- |
nano |
ąĮčü |
ąöčĆąŠą▒ąĮą░čÅ čćą░čüčéčī čüąĄą║čāąĮą┤čŗ, ą┤ąĖą░ą┐ą░ąĘąŠąĮ -1e9 .. 1e9 (UTC) |
| 20 |
U1 |
- |
fixType |
- |
ąóąĖą┐ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ GNSS, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..5:
0x00 No Fix (ąĮąĄčé čäąĖą║čüą░čåąĖąĖ)
0x01 č鹊ą╗čīą║ąŠ Dead Reckoning (č鹊čćąĮčŗą╣ čĆą░čüč湥čé)
0x02 2D-Fix
0x03 3D-Fix
0x04 ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ GNSS + dead reckoning
0x05 č鹊ą╗čīą║ąŠ čäąĖą║čüą░čåąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ
0x06..0xff: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 21 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 22 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 23 |
U1 |
- |
numSV |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą▓čłąĖčģčüčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ. |
| 24 |
I4 |
1e-7 |
lon |
deg |
ąöąŠą╗ą│ąŠčéą░ |
| 28 |
I4 |
1e-7 |
lat |
deg |
ą©ąĖčĆąŠčéą░ |
| 32 |
I4 |
- |
height |
ą╝ą╝ |
ąÆčŗčüąŠčéą░ ąĮą░ą┤ 菹╗ą╗ąĖą┐čüąŠąĖą┤ąŠą╝ |
| 36 |
I4 |
- |
hMSL |
ą╝ą╝ |
ąÆčŗčüąŠčéą░ ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠčĆčÅ |
| 40 |
U4 |
- |
hAcc |
ą╝ą╝ |
ą×čåąĄąĮą║ą░ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ |
| 44 |
U4 |
- |
vAcc |
ą╝ą╝ |
ą×čåąĄąĮą║ą░ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ |
| 48 |
I4 |
- |
velN |
ą╝ą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą▓ čüąĄą▓ąĄčĆąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ (NED) |
| 52 |
I4 |
- |
velE |
ą╝ą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą▓ ą▓ąŠčüč鹊čćąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ (NED) |
| 56 |
I4 |
- |
velD |
ą╝ą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą▓ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ (NED) |
| 60 |
I4 |
- |
gSpeed |
ą╝ą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠ ąĘąĄą╝ą╗ąĄ (2-D) |
| 64 |
I4 |
1e-5 |
heading |
deg |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ (2-D) |
| 68 |
U4 |
- |
sAcc |
ą╝ą╝/čüąĄą║ |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ čüą║ąŠčĆąŠčüčéąĖ |
| 72 |
U4 |
1e-5 |
headingAcc |
deg |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ |
| 76 |
U2 |
0.01 |
pDOP |
- |
DOP ą┐ąŠąĘąĖčåąĖąĖ |
| 78 |
X2 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 80 |
U4 |
- |
reserved3 |
- |
ąæąĖčéčŗ ą┐ąŠą╗čÅ valid:
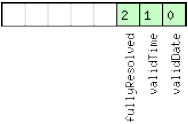
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| validDate |
1 = ą┤ą░čéą░ UTC ą┤ąŠčüč鹊ą▓ąĄčĆąĮą░ |
| validTime |
1 = ą▓čĆąĄą╝čÅ ą┤ąĮčÅ UTC ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ |
| fullyResolved |
1 = ą▓čĆąĄą╝čÅ ą┤ąĮčÅ UTC ą┐ąŠą╗ąĮąŠčüčéčīčÄ čĆą░čüą┐ąŠąĘąĮą░ąĮąŠ (ąĮąĄčé ąĮąĖą║ą░ą║ąŠą╣ ąĮąĄčāą▓ąĄčĆąĄąĮąĮąŠčüčéąĖ ą▓ čüąĄą║čāąĮą┤ą░čģ) |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
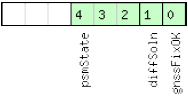
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| gnssFixOK |
ążąĖą║čüą░čåąĖčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮą░ (čé. ąĄ. ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą╝ą░čüąŠą║ DOP ąĖ č鹊čćąĮąŠčüčéąĖ) |
| diffSoln |
1, ąĄčüą╗ąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ |
| psmState |
ąĪąŠčüč鹊čÅąĮąĖąĄ čĆąĄąČąĖą╝ą░ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ (Power Save Mode, PSM, čüą╝. "11. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management)" [2]):
0 ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ (čé. ąĄ. čüąŠčüč鹊čÅąĮąĖąĄ PSM ąĮąĄą░ą║čéąĖą▓ąĮąŠ)
1 ENABLED (čĆą░ąĘčĆąĄčłąĄąĮąŠ, ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĄčĆąĄą┤ čüąŠčüč鹊čÅąĮąĖąĄą╝ ACQUISITION)
2 ACQUISITION (ąĘą░čģą▓ą░čé ą┤ą░ąĮąĮčŗčģ čüąŠ čüą┐čāčéąĮąĖą║ą░)
3 TRACKING (čéčĆąĄą║ąĖąĮą│ čüą┐čāčéąĮąĖą║ąŠą▓)
4 POWER OPTIMIZED TRACKING (ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┐ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ čüą┐čāčéąĮąĖą║ąŠą▓)
5 INACTIVE (ąĮąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░) |
39.8. NAV-SBAS (0x01 0x32)
39.8.1. ąöą░ąĮąĮčŗąĄ čüąŠčüč鹊čÅąĮąĖčÅ SBAS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-SBAS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
SBAS Status Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ SBAS. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x32 |
12 + 12┬Ęcnt |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
U1 |
- |
geo |
ą╝čü |
ąØąŠą╝ąĄčĆ PRN GEO, ąŠčéą║čāą┤ą░ ą┤ą░ąĮąĮčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ąŠą▒ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ |
| 5 |
U1 |
- |
mode |
- |
ąĀąĄąČąĖą╝ SBAS:
0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ
1 čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ
3 čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ |
| 6 |
I1 |
- |
sys |
- |
ąóąĖą┐ čüąĖčüč鹥ą╝čŗ SBAS:
-1 ąĮąĄąĖąĘą▓ąĄčüčéąĮąŠ
0 WAAS
1 EGNOS
2 MSAS |
| 7 |
X1 |
- |
service |
- |
ąöąŠčüčéčāą┐ąĮąŠčüčéčī čüą╗čāąČą▒ SBAS (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 8 |
U1 |
- |
cnt |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ |
| 9 |
U1[3] |
- |
reserved0 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ cnt čĆą░ąĘ) |
| 12 + 12┬ĘN |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░ |
| 13 + 12┬ĘN |
U1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░ |
| 14 + 12┬ĘN |
U1 |
- |
udre |
- |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ |
| 15 + 12┬ĘN |
U1 |
- |
svSys |
- |
ąĪąĖčüč鹥ą╝ą░ SBAS (WAAS/EGNOS/...) čéą░ą║ą░čÅ ąČąĄ, ą║ą░ą║ ą▓ ą┐ąŠą╗ąĄ sys. |
| 16 + 12┬ĘN |
U1 |
- |
svService |
- |
ąöąŠčüčéčāą┐ąĮčŗąĄ čüą╗čāąČą▒čŗ SBAS, ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║ąŠąĄ ąČąĄ, ą║ą░ą║ ą▓ ą┐ąŠą╗ąĄ service. |
| 17 + 12┬ĘN |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 18 + 12┬ĘN |
I2 |
- |
prc |
čüą╝ |
ąÜąŠčĆčĆąĄą║čåąĖčÅ Pseudo Range ą▓ čüą░ąĮčéąĖą╝ąĄčéčĆą░čģ |
| 20 + 12┬ĘN |
U2 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 22 + 12┬ĘN |
I2 |
- |
ic |
čüą╝ |
ąśąŠąĮąŠčüč乥čĆąĮą░čÅ ą║ąŠčĆčĆąĄą║čåąĖčÅ ą▓ čüą░ąĮčéąĖą╝ąĄčéčĆą░čģ |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ service:
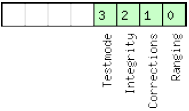
39.9. NAV-SOL (0x01 0x06)
39.9.1. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ąĮą░ą▓ąĖą│ą░čåąĖąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-SOL |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Navigation Solution Information |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠą╝ą▒ąĖąĮąĖčĆčāąĄčé ą▓ čüąĄą▒ąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠąĘąĖčåąĖąĖ, čüą║ąŠčĆąŠčüčéąĖ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ECEF, ą▓ą║ą╗čÄčćą░čÅ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ č鹊čćąĮąŠčüčéąĖ.
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▓ čåąĄą╗čÅčģ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ; ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ą╝ąĄčüč鹊 ąĮąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-NAV-PVT. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x06 |
52 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I4 |
- |
fTOW |
ąĮčü |
ąöčĆąŠą▒ąĮą░čÅ čćą░čüčéčī iTOW (ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒500000). ąóąŠčćąĮąŠčüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ąĮąĄą┤ąĄą╗ąĖ GPS: (iTOW ┬Ę 1e-3) + (fTOW ┬Ę 1e-9) |
| 8 |
I2 |
- |
week |
- |
ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ 菹┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" [2]). |
| 10 |
U1 |
- |
gpsFix |
- |
ąóąĖą┐ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ GPS, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..5:
0x00 No Fix (ąĮąĄčé čäąĖą║čüą░čåąĖąĖ)
0x01 č鹊ą╗čīą║ąŠ Dead Reckoning (č鹊čćąĮčŗą╣ čĆą░čüč湥čé)
0x02 2D-Fix
0x03 3D-Fix
0x04 ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ GNSS + dead reckoning
0x05 č鹊ą╗čīą║ąŠ čäąĖą║čüą░čåąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ
0x06..0xff: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 11 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 12 |
I4 |
- |
ecefX |
čüą╝ |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ X ECEF |
| 16 |
I4 |
- |
ecefY |
čüą╝ |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ Y ECEF |
| 20 |
I4 |
- |
ecefZ |
čüą╝ |
ąÜąŠąŠčĆą┤ąĖąĮą░čéą░ Z ECEF |
| 24 |
U4 |
- |
pAcc |
čüą╝ |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ 3D ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ |
| 28 |
I4 |
- |
ecefVX |
čüą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī X ECEF |
| 32 |
I4 |
- |
ecefVY |
čüą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī Y ECEF |
| 36 |
I4 |
- |
ecefVZ |
čüą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī Z ECEF |
| 40 |
U4 |
- |
sAcc |
- |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ čüą║ąŠčĆąŠčüčéąĖ |
| 44 |
U2 |
0.01 |
pDOP |
- |
DOP ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ |
| 46 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 47 |
U1 |
- |
numSV |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą▓čłąĖčģčüčÅ ą▓ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| 48 |
U4 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
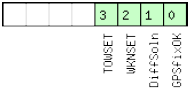
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| GPSfixOK |
1 = čäąĖą║čüą░čåąĖčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐čĆąĄą┤ąĄą╗ą░čģ (čé. ąĄ. čü čāč湥č鹊ą╝ DOP ąĖ č鹊čćąĮąŠčüčéąĖ) |
| DiffSoln |
1 = ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąŠčüčī DGPS |
| WKNSET |
1 = ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ GPS |
| TOWSET |
1 = ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ ą▓čĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS (iTOW ąĖ fTOW) |
39.10. NAV-STATUS (0x01 0x03)
39.10.1. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-STATUS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Receiver Navigation Status |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪą╝. ą▓ą░ąČąĮčŗąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ, ą║ą░čüą░čÄčēąĖąĄčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮčŗ ą▓ čüąĄą║čåąĖąĖ "2.3. ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ" [2]. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x03 |
16 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
U1 |
- |
gpsFix |
- |
ąóąĖą┐ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ GNSS, čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą║ą▓ą░ą╗ąĖčäąĖčåąĖčĆčāąĄčé čäąĖą║čüą░čåąĖčÄ ą║ą░ą║ ą┤ąŠą┐čāčüčéąĖą╝čāčÄ čü čāč湥č鹊ą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą┐čĆąĄą┤ąĄą╗ąŠą▓. ąĪą╝. ąĮąĖąČąĄ ą┐čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą║ čäą╗ą░ą│čā gpsFixOk.
0x00 No Fix (ąĮąĄčé čäąĖą║čüą░čåąĖąĖ)
0x01 č鹊ą╗čīą║ąŠ Dead Reckoning (č鹊čćąĮčŗą╣ čĆą░čüč湥čé)
0x02 2D-Fix
0x03 3D-Fix
0x04 ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ GNSS + dead reckoning
0x05 č鹊ą╗čīą║ąŠ čäąĖą║čüą░čåąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ
0x06..0xff: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| 5 |
X1 |
- |
flags |
- |
ążą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 6 |
X1 |
- |
fixStat |
- |
ąśąĮč乊čĆą╝ą░čåąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 7 |
X1 |
- |
flags2 |
- |
ąĢčēąĄ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ą▓čŗą▓ąŠą┤čā ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 8 |
U4 |
- |
ttff |
- |
ąÆčĆąĄą╝čÅ ą┐ąĄčĆą▓ąŠą╣ čäąĖą║čüą░čåąĖąĖ (ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ąĮą░čÅ ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ) |
| 12 |
U4 |
- |
msss |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ čü ą╝ąŠą╝ąĄąĮčéą░ čüčéą░čĆčéą░ / čüą▒čĆąŠčüą░ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
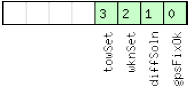
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| gpsFixOk |
1 = ą┐ąŠąĘąĖčåąĖčÅ ąĖ čüą║ąŠčĆąŠčüčéčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐čĆąĄą┤ąĄą╗ą░čģ (čé. ąĄ. čü čāč湥č鹊ą╝ DOP ąĖ ą╝ą░čüąŠą║ č鹊čćąĮąŠčüčéąĖ ACC, čéą░ą║ąČąĄ čüą╝. ą▓ą░ąČąĮčŗąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ą▓ čüąĄą║čåąĖąĖ "2.3. ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ" [2]) |
| diffSoln |
1 = ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąŠčüčī DGPS |
| wknSet |
1 = ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ GPS |
| towSet |
1 = ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ ą▓čĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS |
ąæąĖčéčŗ ą┐ąŠą╗čÅ fixStat:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| dgpsIStat |
ąÆčģąŠą┤ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ DGPS:
0 ąĮąĄčé ą║ąŠčĆčĆąĄą║čåąĖąĖ
1 ą║ąŠčĆčĆąĄą║čåąĖčÅ PR+PRR |
| mapMatching |
ąĪąŠčüč鹊čÅąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ą║ą░čĆčéčŗ (čüą╝. [7])
00 ąĮąĄčé
01 ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖąĮčÅčéčŗ ą┤ą░ąĮąĮčŗąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ą║ą░čĆčéčŗ, ąĮąŠ ąŠąĮąĖ čüą╗ąĖčłą║ąŠą╝ čüčéą░čĆčŗ
10 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ ą┤ą░ąĮąĮčŗąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ą║ą░čĆčéčŗ
11 DR (č鹊čćąĮčŗą╣ čĆą░čüč湥čé), čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ą║ą░čĆčéčŗ ą┐ąŠ ą┐čĆąĖčćąĖąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą│ąŠ čéąĖą┐ą░ čäąĖą║čüą░čåąĖąĖ dead reckoning ą▓ gpsFix ą▓ą╝ąĄčüč鹊 ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ ąŠčéčüčāčéčüčéą▓ąĖčÅ čäąĖą║čüą░čåąĖąĖ. |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags2:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| psmState |
ąĪąŠčüč鹊čÅąĮąĖąĄ čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čŹą║ąŠąĮąŠą╝ąĖąĄą╣ 菹ĮąĄčĆą│ąĖąĖ (PSM):
0 ACQUISITION (čüąŠčüč鹊čÅąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ąĘą░čģą▓ą░čéą░ ą┤ą░ąĮąĮčŗčģ čüąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ PSM ąĘą░ą┐čĆąĄčēąĄąĮą░)
1 TRACKING (ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ čüą┐čāčéąĮąĖą║ąŠą▓)
2 POWER OPTIMIZED TRACKING (čéčĆąĄą║ąĖąĮą│ čüą┐čāčéąĮąĖą║ąŠą▓ čü ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ)
3 INACTIVE (ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄą░ą║čéąĖą▓ąĄąĮ, ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüąĮą░) |
39.11. NAV-SVINFO (0x01 0x30)
39.11.1. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüą┐čāčéąĮąĖą║ą░čģ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-SVINFO |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Space Vehicle Information |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ SBAS. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x30 |
8 + 12┬ĘnumCh |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
U1 |
- |
numCh |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ |
| 5 |
X1 |
- |
globalFlags |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 6 |
U2 |
- |
reserved2 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ (ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ numCh čĆą░ąĘ) |
| 8 + 12┬ĘN |
U1 |
- |
chn |
- |
ąØąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░, 255 ą┤ą╗čÅ čüą┐čāčéąĮąĖą║ąŠą▓, ąĮąĄ ą┐čĆąĖčüą▓ąŠąĄąĮąĮčŗčģ ą║ą░ąĮą░ą╗čā |
| 9 + 12┬ĘN |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░, čüą╝. "4. ąØčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓" [2]. |
| 10 + 12┬ĘN |
X1 |
- |
flags |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░, čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ. |
| 11 + 12┬ĘN |
X1 |
- |
quality |
- |
ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ, čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ. |
| 12 + 12┬ĘN |
U1 |
- |
cno |
dBHz |
ąĪąŠąŠčéąĮąŠčłąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ ąĮąĄčüčāčēąĄą╣/čłčāą╝ (Carrier to Noise Ratio, CNR, čé. ąĄ. čüąĖą╗ą░ čüąĖą│ąĮą░ą╗ą░). |
| 13 + 12┬ĘN |
I1 |
- |
elev |
deg |
ąÆąŠąĘą▓čŗčłąĄąĮąĖąĄ čüą┐čāčéąĮąĖą║ą░, čåąĄą╗ąŠąĄ čćąĖčüą╗ąŠ ą│čĆą░ą┤čāčüąŠą▓ |
| 14 + 12┬ĘN |
I2 |
- |
azim |
deg |
ąÉąĘąĖą╝čāčé ąĮą░ čüą┐čāčéąĮąĖą║, čåąĄą╗ąŠąĄ čćąĖčüą╗ąŠ ą│čĆą░ą┤čāčüąŠą▓ |
| 16 + 12┬ĘN |
I4 |
- |
prRes |
čüą╝ |
Pseudo range residual ą▓ čüą░ąĮčéąĖą╝ąĄčéčĆą░čģ (ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ) |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ globalFlags:
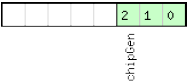
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| chipGen |
ą¤ąŠą║ąŠą╗ąĄąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą║čĆąĖčüčéą░ą╗ą╗ą░:
0 Antaris, Antaris 4
1 u-blox 5
2 u-blox 6 |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
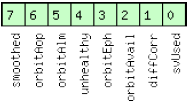
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| svUsed |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| diffCorr |
ąöą╗čÅ čŹč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ |
| orbitAvail |
ąöą╗čÅ čŹč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░ ą┤ąŠčüčéčāą┐ąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠčĆą▒ąĖčéčŗ (čŹč乥ą╝ąĄčĆąĖą┤čŗ ąĖ ą░ą╗čīą╝ą░ąĮą░čģ) |
| orbitEph |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠčĆą▒ąĖčéčŗ čŹč鹊 čŹč乥ą╝ąĄčĆąĖą┤ą░ |
| unhealthy |
ąĪą┐čāčéąĮąĖą║ ą▓ ąĮąĄčĆą░ą▒ąŠč湥ą╝ čüąŠčüč鹊čÅąĮąĖąĖ (unhealthy) / ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ |
| orbitAlm |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠčĆą▒ąĖčéčŗ čŹč鹊 Almanac Plus |
| orbitAop |
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠčĆą▒ąĖčéčŗ ą┐ąŠą╗čāč湥ąĮą░ ąĖąĘ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ AssistNow Autonomous |
| smoothed |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą│ą╗ą░ąČąĖą▓ą░ąĮąĖąĄ ąĮąĄčüčāčēąĄą╣ (carrier smoothed pseudorange), ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ "16. ąóąŠčćąĮąŠąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ (Precise Point Positioning, PPP)" [2]. |
ąæąĖčéčŗ ą┐ąŠą╗čÅ quality:
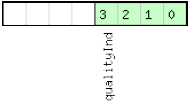
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| qualityInd |
ąśąĮą┤ąĖą║ą░č鹊čĆ ą║ą░č湥čüčéą▓ą░ čüąĖą│ąĮą░ą╗ą░ (ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..7). ąĪą╗ąĄą┤čāčÄčēąĖą╣ čüą┐ąĖčüąŠą║ čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčé čüą╝čŗčüą╗ ąĘąĮą░č湥ąĮąĖą╣ čŹč鹊ą│ąŠ ąĖąĮą┤ąĖą║ą░č鹊čĆą░:
0 čŹč鹊čé ą║ą░ąĮą░ą╗ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle)
1 ą║ą░ąĮą░ą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠąĖčüą║ą░
2 ą┐ąŠą╗čāč湥ąĮ čüąĖą│ąĮą░ą╗
3 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čüąĖą│ąĮą░ą╗, ąĮąŠ ąĄą│ąŠ ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī
4 ąĮą░ čüąĖą│ąĮą░ą╗ąĄ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ąĘą░čģą▓ą░čé ą║ąŠą┤ą░ (Code Lock)
5, 6, 7 ą║ąŠą┤ ąĖ ąĮąĄčüčāčēą░čÅ ąĘą░čģą▓ą░č湥ąĮčŗ |
39.12. NAV-TIMEGPS (0x01 0x20)
39.12.1. ą¤ąŠą╗čāč湥ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ GPS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-TIMEGPS |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
GPS Time Solution |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčé č鹊čćąĮąŠąĄ ą▓čĆąĄą╝čÅ GPS, ą┐ąŠą╗čāč湥ąĮąĮąŠąĄ ąĖąĘ čüą░ą╝ąŠą│ąŠ čüą▓ąĄąČąĄą│ąŠ čĆąĄąĘčāą╗čīčéą░čéą░ ąĮą░ą▓ąĖą│ą░čåąĖąĖ, ą▓ą║ą╗čÄčćą░čÅ čäą╗ą░ą│ąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ąĖ ąŠčåąĄąĮą║čā č鹊čćąĮąŠčüčéąĖ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x20 |
16 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I4 |
- |
fTOW |
ąĮčü |
ąöčĆąŠą▒ąĮą░čÅ čćą░čüčéčī iTOW (ą┤ąĖą░ą┐ą░ąĘąŠąĮ ┬▒500000). ąóąŠčćąĮąŠčüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ąĮąĄą┤ąĄą╗ąĖ GPS: (iTOW ┬Ę 1e-3) + (fTOW ┬Ę 1e-9) |
| 8 |
I2 |
- |
week |
- |
ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ 菹┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" [2]). |
| 10 |
I1 |
- |
leapS |
čüąĄą║ |
ąĪą║ą░č湊ą║ čüąĄą║čāąĮą┤ GPS (GPS-UTC) |
| 11 |
X1 |
- |
valid |
- |
ążą╗ą░ą│ąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 12 |
U4 |
- |
tAcc |
ąĮčü |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ valid:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| towValid |
1 = ą▓čĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ (iTOW ąĖ fTOW) |
| weekValid |
1 = ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ąŠčüč鹊ą▓ąĄčĆąĄąĮ |
| leapSValid |
1 = čüą║ą░č湊ą║ čüąĄą║čāąĮą┤ GPS ą┤ąŠčüč鹊ą▓ąĄčĆąĄąĮ |
39.13. NAV-TIMEUTC (0x01 0x21)
39.13.1. ą¤ąŠą╗čāč湥ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ UTC
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-TIMEUTC |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
UTC Time Solution |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čüą║ą░č湊ą║ čüąĄą║čāąĮą┤ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 ą▓ ą╝ąĖąĮčāč鹥 ąŠą║ą░ąČąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ ą╝ąĄąĮčīčłąĄ 60 čüąĄą║čāąĮą┤. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ "6.5. ąĪą║ą░č湊ą║ čüąĄą║čāąĮą┤" [2]. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x21 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
U4 |
- |
tAcc |
ąĮčü |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ (UTC) |
| 8 |
I4 |
- |
nano |
ąĮčü |
ąöčĆąŠą▒ąĮą░čÅ čćą░čüčéčī čüąĄą║čāąĮą┤čŗ, ą┤ąĖą░ą┐ą░ąĘąŠąĮ -1e9 .. 1e9 (UTC) |
| 12 |
U2 |
- |
year |
- |
ąōąŠą┤ (UTC) |
| 14 |
U1 |
- |
month |
- |
ą£ąĄčüčÅčå, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..12 (UTC) |
| 15 |
U1 |
- |
day |
- |
ąöąĄąĮčī ą╝ąĄčüčÅčåą░, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..31 (UTC) |
| 16 |
U1 |
- |
hour |
- |
ą¦ą░čü ą┤ąĮčÅ, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..23 (UTC) |
| 17 |
U1 |
- |
min |
- |
ą£ąĖąĮčāčéą░ čćą░čüą░, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..59 (UTC) |
| 18 |
U1 |
- |
sec |
- |
ąĪąĄą║čāąĮą┤ą░ ą▓ ą╝ąĖąĮčāč鹥, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..60 (UTC) |
| 19 |
X1 |
- |
valid |
- |
ążą╗ą░ą│ąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
ąæąĖčéčŗ ą┐ąŠą╗čÅ valid:
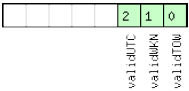
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| validTOW |
1 = ą▓čĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ |
| validWKN |
1 = ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĄąĮ |
| validUTC |
1 = ą▓čĆąĄą╝čÅ UTC ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ |
39.14. NAV-VELECEF (0x01 0x11)
39.14.1. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą▓ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé ECEF
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-VELECEF |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Velocity Solution in ECEF |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪą╝. ą▓ą░ąČąĮčŗąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ, ą║ą░čüą░čÄčēąĖąĄčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮčŗ ą▓ čüąĄą║čåąĖąĖ "2.3. ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ" [2]. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x11 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I4 |
- |
ecefVX |
čüą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░č鹥 X ECEF |
| 8 |
I4 |
- |
ecefVY |
čüą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░č鹥 Y ECEF |
| 12 |
I4 |
- |
ecefVZ |
čüą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░č鹥 Z ECEF |
| 16 |
U4 |
- |
sAcc |
čüą╝/čüąĄą║ |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ čüą║ąŠčĆąŠčüčéąĖ |
39.15. NAV-VELNED (0x01 0x12)
39.15.1. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą▓ čüąĖčüč鹥ą╝ąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé NED
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
NAV-VELNED |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Velocity Solution in NED |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪą╝. ą▓ą░ąČąĮčŗąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ, ą║ą░čüą░čÄčēąĖąĄčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮčŗ ą▓ čüąĄą║čåąĖąĖ "2.3. ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ" [2]. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x01 0x12 |
36 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I4 |
- |
velN |
čüą╝/čüąĄą║ |
ąÜąŠą╝ą┐ąŠąĮąĄąĮčé čüą║ąŠčĆąŠčüčéąĖ ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ čüąĄą▓ąĄčĆą░ |
| 8 |
I4 |
- |
velE |
čüą╝/čüąĄą║ |
ąÜąŠą╝ą┐ąŠąĮąĄąĮčé čüą║ąŠčĆąŠčüčéąĖ ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ą▓ąŠčüč鹊ą║ą░ |
| 12 |
I4 |
- |
velD |
čüą╝/čüąĄą║ |
ąÜąŠą╝ą┐ąŠąĮąĄąĮčé čüą║ąŠčĆąŠčüčéąĖ ą▓ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ |
| 16 |
U4 |
- |
speed |
čüą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī (3-D) |
| 20 |
U4 |
- |
gSpeed |
čüą╝/čüąĄą║ |
ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠ ąĘąĄą╝ą╗ąĄ (2-D) |
| 24 |
I4 |
1e-5 |
heading |
deg |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ (2-D) |
| 28 |
U4 |
- |
sAcc |
čüą╝/čüąĄą║ |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ čüą║ąŠčĆąŠčüčéąĖ |
| 32 |
U4 |
1e-5 |
cAcc |
deg |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║čāčĆčüą░ |
[40. RXM (0x02)]
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (Receiver Manager): ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąŠčüč鹊čÅąĮąĖąĄ čüą┐čāčéąĮąĖą║ą░, (Satellite Status), čüąŠčüč鹊čÅąĮąĖąĄ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTC Status). ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą║ą╗ą░čüčüąĄ RXM ą▓čŗą▓ąŠą┤čÅčé čüčéą░čéčāčü ąĖ čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
40.1. RXM-ALM (0x02 0x30)
40.1.1. ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ ą░ą╗čīą╝ą░ąĮą░čģą░ čüąŠą▓ąŠą║čāą┐ąĮąŠčüčéąĖ čüą┐čāčéąĮąĖą║ąŠą▓ GPS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-ALM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Constellation Almanac Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ ą┐čĆąŠą┤čāą║čéą░ čü čüčŗčĆčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą┐čāčüčéą░čÅ. ą×ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┐ą╗ąĄčÅą┤čŗ GPS (ą░ą╗čīą╝ą░ąĮą░čģ) ą┤ą╗čÅ ą▓čüąĄčģ 32 čüą┐čāčéąĮąĖą║ąŠą▓, ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā. ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčéąĖčé 32 čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ čéąĖą┐ą░ RXM-ALM, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x30 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
40.1.2. ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ ą░ą╗čīą╝ą░ąĮą░čģą░ GPS ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-ALM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Constellation Almanac Data for a SV |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ ą┐čĆąŠą┤čāą║čéą░ čü čüčŗčĆčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┐ą╗ąĄčÅą┤čŗ GPS (ą░ą╗čīą╝ą░ąĮą░čģ) ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░. ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčéąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄą╝ čéąĖą┐ą░ RXM-ALM, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x30 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą░ą╗čīą╝ą░ąĮą░čģą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..32). |
40.1.3. ąÆą▓ąŠą┤/ą▓čŗą▓ąŠą┤ čāč鹊čćąĮčÅčÄčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą░ą╗čīą╝ą░ąĮą░čģą░ GPS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-ALM |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
GPS Aiding Almanac Input/Output Message |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ ą┐čĆąŠą┤čāą║čéą░ čü čüčŗčĆčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) |
| ąóąĖą┐ |
ą×čéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü / ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüčćąĖčéą░ąĄčéčüčÅ čāčüčéą░čĆąĄą▓čłąĖą╝, ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą▓ą╝ąĄčüč鹊 ąĮąĄą│ąŠ AID-ALM.
ŌĆó ąĢčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ WEEK čĆą░ą▓ąĮąŠ 0, č鹊 DWRD0 .. DWRD7 ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ, čéą░ą║ ą║ą░ą║ ą░ą╗čīą╝ą░ąĮą░čģ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ.
ŌĆó DWORD0 .. DWORD7 čüąŠą┤ąĄčƹȹ░čé 8 čüą╗ąŠą▓ ą┐ąŠčüą╗ąĄ Hand-Over Word (HOW) čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ GPS, ą╗ąĖą▒ąŠ ąĮą░ čüčéčĆą░ąĮąĖčåą░čģ 1 .. 24 čüčāą▒čäčĆąĄą╣ą╝ą░ 5, ą╗ąĖą▒ąŠ ąĮą░ čüčéčĆą░ąĮąĖčåą░čģ 2 .. 10 čüčāą▒čäčĆąĄą╣ą╝ą░ 4. ąĪą╝. IS-GPS-200 ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čüčéčĆą░ąĮąĖčå ą░ą╗čīą╝ą░ąĮą░čģą░.
ŌĆó ąÆ DWORD0 .. DWORD7 ą▒ąĖčéčŗ č湥čéąĮąŠčüčéąĖ čāą┤ą░ą╗ąĄąĮčŗ, ąĖ 24 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą▒ąĖčéą░čģ 0 .. 23. ąæąĖčéčŗ 24 .. 31 ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ.
ŌĆó ą¤čĆąĖą╝ąĄčĆ: ą┐ą░čĆą░ą╝ąĄčéčĆ e (Eccentricity) ąĖąĘ Almanac Subframe 4/5, Word 3, ą▒ąĖčéčŗ 69-84 čüčāą▒čäčĆąĄą╣ą╝ą░ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ DWRD0, ą▒ąĖčéčŗ 15..0, ą│ą┤ąĄ ą▒ąĖčé 0 ą╝ą╗ą░ą┤čłąĖą╣ (LSB). |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x30 |
(8) ąĖą╗ąĖ (40) |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą░ą╗čīą╝ą░ąĮą░čģą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..32 ąĖą╗ąĖ 51, 56, 63). |
| 4 |
U4 |
- |
week |
- |
ąöą░čéą░ ą▓čŗą┐čāčüą║ą░ ą░ą╗čīą╝ą░ąĮą░čģą░ (ąĮąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ GPS) |
| ąØą░čćą░ą╗ąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
| 8 |
U4[8] |
- |
dwrd |
- |
ąĪą╗ąŠą▓ą░ ą░ą╗čīą╝ą░ąĮą░čģą░ |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĄą│ąŠčüčÅ ą▒ą╗ąŠą║ą░ |
40.2. RXM-EPH (0x02 0x31)
40.2.1. ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ ą┐ą╗ąĄčÅą┤čŗ čüą┐čāčéąĮąĖą║ąŠą▓ GPS
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-EPH |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Constellation Ephemeris Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ ą┐čĆąŠą┤čāą║čéą░ čü čüčŗčĆčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąÆ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą┐čāčüčéą░čÅ. ą×ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┐ą╗ąĄčÅą┤čŗ GPS (čŹč乥ą╝ąĄčĆąĖą┤čŗ) ą┤ą╗čÅ ą▓čüąĄčģ 32 čüą┐čāčéąĮąĖą║ąŠą▓, ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā. ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčéąĖčé 32 čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ čéąĖą┐ą░ RXM-EPH, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x31 |
0 |
ąŠčéčüčāčéčüčéą▓čāąĄčé |
CK_A CK_B |
40.2.2. ą×ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ GPS ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-EPH |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Poll GPS Constellation Ephemeris Data for a SV |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ ą┐čĆąŠą┤čāą║čéą░ čü čüčŗčĆčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) |
| ąóąĖą┐ |
ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ą×ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┐ą╗ąĄčÅą┤čŗ GPS (čŹč乥ą╝ąĄčĆąĖą┤čŗ) ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░. ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčéąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄą╝ čéąĖą┐ą░ RXM-EPH, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĖąČąĄ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x31 |
1 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..32). |
40.2.3. GPS Aiding Ephemeris Input/Output Message
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-EPH |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
GPS Aiding Ephemeris Input/Output Message |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ ą┐čĆąŠą┤čāą║čéą░ čü čüčŗčĆčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) |
| ąóąĖą┐ |
ą×čéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü / ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüčćąĖčéą░ąĄčéčüčÅ čāčüčéą░čĆąĄą▓čłąĖą╝, ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą▓ą╝ąĄčüč鹊 ąĮąĄą│ąŠ AID-EPH.
ŌĆó SF1D0 .. SF3D7 ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░ ą┤ąŠčüčéčāą┐ąĮčŗ čŹč乥ą╝ąĄčĆąĖą┤čŗ. ąĢčüą╗ąĖ ąĮąĄčé, č鹊 ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą╝ąŠąČąĄčé čāą╝ąĄąĮčīčłąĖčéčīčüčÅ ą▓ čĆą░ąĘą╝ąĄčĆąĄ ą┤ąŠ 8 ą▒ą░ą╣čé, ąĖą╗ąĖ ą▓čüąĄ ą▒ą░ą╣čéčŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ 0, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ č鹥ą╝ čüą░ą╝čŗą╝, čćč鹊 čŹč鹊čé čüą┐čāčéąĮąĖą║ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮąĄ ąĖą╝ąĄąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤.
ŌĆó SF1D0 .. SF3D7 čüąŠą┤ąĄčƹȹ░čé 24 čüą╗ąŠą▓ą░, ą║ąŠč鹊čĆčŗąĄ ąĖą┤čāčé ąĘą░ ą┐ąŠą╗ąĄą╝ Hand-Over Word (HOW) ąĖąĘ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ GPS, čüčāą▒čäčĆąĄą╣ą╝čŗ 1..3. ąĪą╝. IS-GPS-200 ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čŹčéąĖčģ čüčāą▒čäčĆąĄą╣ą╝ąŠą▓.
ŌĆó ąÆ SF1D0 .. SF3D7 ą▒ąĖčéčŗ č湥čéąĮąŠčüčéąĖ čāą┤ą░ą╗ąĄąĮčŗ, ąĖ 24 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ ą▒ąĖčéą░čģ 0 .. 23. ąæąĖčéčŗ 24 .. 31 ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x31 |
(8) ąĖą╗ąĖ (104) |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą░ą╗čīą╝ą░ąĮą░čģą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..32 ąĖą╗ąĖ 51, 56, 63). |
| 4 |
U4 |
- |
how |
- |
Hand-Over Word ą┐ąĄčĆą▓ąŠą│ąŠ čüčāą▒čäčĆąĄą╣ą╝ą░. ąŁč鹊 čéčĆąĄą▒čāąĄčéčüčÅ, ąĄčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║. 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą░ą╗ąĄąĄ ąĮąĄ ąĖą┤čāčé ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤. |
| ąØą░čćą░ą╗ąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
| 8 |
U4[8] |
- |
sf1d |
- |
ąĪą╗ąŠą▓ą░ 3..10 (SF1D0..SF1D7) čüčāą▒čäčĆąĄą╣ą╝ą░ 1 |
| 40 |
U4[8] |
- |
sf2d |
- |
ąĪą╗ąŠą▓ą░ 3..10 (SF2D0..SF2D7) čüčāą▒čäčĆąĄą╣ą╝ą░ 2 |
| 72 |
U4[8] |
- |
sf3d |
- |
ąĪą╗ąŠą▓ą░ 3..10 (SF3D0..SF3D7) čüčāą▒čäčĆąĄą╣ą╝ą░ 3 |
| ąÜąŠąĮąĄčå ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ |
40.3. RXM-PMREQ (0x02 0x41)
40.3.1. ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé ąĘą░ą┤ą░čćčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-PMREQ |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Requests a Power Management task |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ąÜąŠą╝ą░ąĮą┤ą░ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŚą░ą┐čĆąŠčü ąĘą░ą┤ą░čćąĖ, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ čŹč鹊ą│ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x41 |
8 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
duration |
ą╝čü |
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ, čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ 0 ą┤ą╗čÅ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╣ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ. |
| 4 |
X4 |
- |
flags |
- |
ążą╗ą░ą│ąĖ ąĘą░ą┤ą░čćąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:

| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| backup |
ą¤čĆąĖąĄą╝ąĮąĖą║ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ backup ąĮą░ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐ąŠą╗ąĄą╝ duration. |
40.4. RXM-RAW (0x02 0x10)
40.4.1. ąĪčŗčĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-RAW |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Raw Measurement Data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ ą┐čĆąŠą┤čāą║čéą░ čü čüčŗčĆčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé ą▓čüčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ą┤ą╗čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ čäą░ą╣ą╗ą░ RINEX observation [8]. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčé ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ pseudorange, ą┤ąŠą┐ą╗ąĄčĆ-čŹčäč乥ą║čéą░ ąĖ čäą░ąĘčŗ ąĮąĄčüčāčēąĄą╣ ą┤ą╗čÅ čüą┐čāčéąĮąĖą║ąŠą▓ GPS, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗čŗ ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāčÄčéčüčÅ. ąöčĆčāą│ąĖąĄ čéąĖą┐čŗ GNSS ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x10 |
8 + 24┬ĘnumSV |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
I4 |
- |
rcvTow |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąŠ ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| 4 |
I2 |
- |
week |
- |
ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąŠ ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| 6 |
U1 |
- |
numSV |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ą┤ą╗čÅ ą║ąŠč鹊čĆčŗčģ ą┤ą░ą╗čīčłąĄ ąĖą┤ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÅ |
| 7 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĖčģčüčÅ ą▒ą╗ąŠą║ąŠą▓ (ą┐ąŠą▓č鹊čĆčÅčÄčéčüčÅ numSV čĆą░ąĘ) |
| 8 + 24┬ĘN |
R8 |
- |
cpMes |
čåąĖą║ą╗ |
ąśąĘą╝ąĄčĆąĄąĮąĖąĄ čäą░ąĘčŗ ąĮąĄčüčāčēąĄą╣ (L1 čåąĖą║ą╗ąŠą▓) |
| 16 + 24┬ĘN |
R8 |
- |
prMes |
ą╝ |
ąśąĘą╝ąĄčĆąĄąĮąĖąĄ pseudorange (ą╝) |
| 24 + 24┬ĘN |
R4 |
- |
doMes |
ąōčå |
ąśąĘą╝ąĄčĆąĄąĮąĖąĄ ą┤ąŠą┐ą╗ąĄčĆ-čŹčäč乥ą║čéą░ (ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ąĘąĮą░ą║ ą┤ą╗čÅ ą┐čĆąĖą▒ą╗ąĖąČą░čÄčēąĖčģčüčÅ čüą┐čāčéąĮąĖą║ąŠą▓), ąōčå |
| 28 + 24┬ĘN |
U1 |
- |
sv |
- |
ąØąŠą╝ąĄčĆ čüą┐čāčéąĮąĖą║ą░ |
| 29 + 24┬ĘN |
I1 |
- |
mesQI |
- |
ąśąĮą┤ąĖą║ą░č鹊čĆ ą║ą░č湥čüčéą▓ą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ:
Ōēź 4 PR+DO OK
Ōēź 5 PR+DO+CP OK
< 6 ą▓ąĄčĆąŠčÅčéąĮą░ ą┐ąŠč鹥čĆčÅ ąĘą░čģą▓ą░čéą░ ąĮąĄčüčāčēąĄą╣ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ. |
| 30 + 24┬ĘN |
I1 |
- |
cno |
dBHz |
ąĪąĖą╗ą░ čüąĖą│ąĮą░ą╗ą░ (C/No) |
| 31 + 24┬ĘN |
U1 |
- |
lli |
- |
ąśąĮą┤ąĖą║ą░č鹊čĆ ą┐ąŠč鹥čĆąĖ ąĘą░čģą▓ą░čéą░ (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ RINEX) |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĖčģčüčÅ ą▒ą╗ąŠą║ąŠą▓ |
40.5. RXM-SFRB (0x02 0x11)
40.5.1. ąæčāč乥čĆ čüčāą▒čäčĆąĄą╣ą╝ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-SFRB |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Subframe Buffer |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 (ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ ą┐čĆąŠą┤čāą║čéą░ čü čüčŗčĆčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░ čüčāą▒čäčĆąĄą╣ą╝ą░.
ąöą╗čÅ čüą┐čāčéąĮąĖą║ąŠą▓ GPS ą┤ąĄčüčÅčéčī ąĘąĮą░č湥ąĮąĖą╣ dwrd čüąŠą┤ąĄčƹȹ░čéčī ą┐čĆąŠą▓ąĄčĆčÅąĄą╝čŗąĄ č湥čéąĮąŠčüčéčīčÄ ą┤ą░ąĮąĮčŗąĄ čüčāą▒čäčĆąĄą╣ą╝ą░ ą┤ą╗čÅ 10 čüą╗ąŠą▓. ąÜą░ąČą┤ąŠąĄ čüą╗ąŠą▓ąŠ dwrd ąĖą╝ąĄąĄčé 24 ą▒ąĖčéą░ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ (ą▒ąĖčéčŗ ąŠčé 23 ą┤ąŠ 0). ą×čüčéą░ą▓čłąĖąĄčüčÅ 8 ą▒ąĖčé (ąŠčé 31 ą┤ąŠ 24) ąĖą╝ąĄčÄčé ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą┤ą░ąĮąĮčŗčģ ą▓ čüą╗ąŠą▓ąĄ čéą░ą║ąŠąĄ, čćč鹊 ąŠčé čüą┐čāčéąĮąĖą║ą░ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ čüčéą░čĆčłąĖąĄ ą▒ąĖčéčŗ. ą¤čĆąĖą╝ąĄčĆ: ą┐čĆąĄą░ą╝ą▒čāą╗ą░ ą╝ąŠąČąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ dwrd[0], ą▓ ą▒ąĖčéą░čģ čü ą┐ąŠąĘąĖčåąĖčÅčģ 23 .. 16. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ č乊čĆą╝ą░čéčā ą┤ą░ąĮąĮčŗčģ čüą╝. ą┤ąŠą║čāą╝ąĄąĮčé ICD-GPS-200C Interface.
ąöą╗čÅ čüą┐čāčéąĮąĖą║ąŠą▓ SBAS čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖąĘ 250 ą▒ąĖčé ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ čüą╗ąŠą▓ą░čģ dwrd[0] .. dwrd[6] ą┤ą╗čÅ ą┐ąĄčĆą▓čŗčģ 224 ą▒ąĖčé. ą×čüčéą░ą╗čīąĮčŗąĄ 26 ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ dwrd[7], č鹊ą│ą┤ą░ ą║ą░ą║ ą▒ąĖčéčŗ 25 ąĖ 24 ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ 2 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ, ąĖ ą▒ąĖčéčŗ ąŠčé 23 ą┤ąŠ 0 čŹč鹊 ą▒ąĖčéčŗ č湥čéąĮąŠčüčéąĖ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ č乊čĆą╝ą░čéčā ą┤ą░ąĮąĮčŗčģ SBAS ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ą┤ąŠą║čāą╝ąĄąĮčéčā RTCA/DO-229C (MOPS), Appendix A.
ąØąĖą║ą░ą║ąĖąĄ ą┤čĆčāą│ąĖąĄ čéąĖą┐čŗ GNSS ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x11 |
42 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
chn |
- |
ąØąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░ |
| 1 |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░, ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ čüčāą▒čäčĆąĄą╣ą╝. |
| 2 |
X4[10] |
- |
dwrd |
- |
ąĪą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ |
40.6. RXM-SVSI (0x02 0x20)
40.6.1. ąśąĮč乊čĆą╝ą░čåąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čüą┐čāčéąĮąĖą║ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
RXM-SVSI |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
SV Status Info |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąĪąŠčüč鹊čÅąĮąĖąĄ ąĘąĮą░ąĮąĖčÅ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ąŠčĆą▒ąĖčéčŗ GPS |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x02 0x20 |
8 + 6┬ĘnumSV |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
iTOW |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS ą┤ą╗čÅ čŹą┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" ąĖ "6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ). |
| 4 |
I2 |
- |
week |
- |
ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ 菹┐ąŠčģąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (čüą╝. "6.2. Navigation Epoch" [2]). |
| 6 |
U1 |
- |
numVis |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ąĖą┤ąĖą╝čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ |
| 7 |
U1 |
- |
numSV |
- |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą╗ąŠą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ, čüą╗ąĄą┤čāčÄčēąĖčģ ą┤ą░ą╗ąĄąĄ, ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą▒ą╗ąŠą║čā ąĮą░ čüą┐čāčéąĮąĖą║. |
| ąØą░čćą░ą╗ąŠ ą┐ąŠą▓č鹊čĆčÅčÄčēąĖčģčüčÅ ą▒ą╗ąŠą║ąŠą▓ (ą┐ąŠą▓č鹊čĆčÅčÄčéčüčÅ numSV čĆą░ąĘ) |
| 8 + 6┬ĘN |
U1 |
- |
svid |
- |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüą┐čāčéąĮąĖą║ą░ |
| 9 + 24┬ĘN |
X1 |
- |
svFlag |
- |
ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čäą╗ą░ą│ąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 10 + 24┬ĘN |
I2 |
- |
azim |
- |
ąÉąĘąĖą╝čāčé |
| 12 + 24┬ĘN |
I1 |
- |
elev |
- |
ąÆąŠąĘą▓čŗčłąĄąĮąĖąĄ |
| 13 + 24┬ĘN |
X1 |
- |
age |
- |
ąÆąŠąĘą▓čĆą░čé ą░ą╗čīą╝ą░ąĮą░čģą░ ąĖ čŹč乥ą╝ąĄčĆąĖą┤ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| ąÜąŠąĮąĄčå ą┐ąŠą▓č鹊čĆčÅčÄčēąĖčģčüčÅ ą▒ą╗ąŠą║ąŠą▓ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ svFlag:
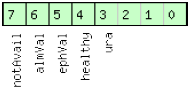
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ura |
ą¤ąŠą║ą░ąĘą░č鹥ą╗čī ą║ą░č湥čüčéą▓ą░ (URA) ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0..15 |
| healthy |
ążą╗ą░ą│ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ čüą┐čāčéąĮąĖą║ą░ |
| ephVal |
ąŁč乥ą╝ąĄčĆąĖą┤čŗ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ |
| almVal |
ąÉą╗čīą╝ą░ąĮą░čģ ą┤ąŠčüč鹊ą▓ąĄčĆąĄąĮ |
| notAvail |
ąĪą┐čāčéąĮąĖą║ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ age:
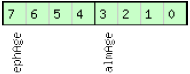
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| almAge |
ąÆąŠąĘčĆą░čüčé ALM (ą░ą╗čīą╝ą░ąĮą░čģ) ą▓ ą┤ąĮčÅčģ čüąŠ čüą╝ąĄčēąĄąĮąĖąĄą╝ 4, čé. ąĄ. ąŠą┐ąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą▒čāą┤čāčēąĄą╝: ageOfAlm = (age & 0x0f) - 4 |
| ephAge |
ąÆąŠąĘčĆą░čüčé EPH (čŹč乥ą╝ąĄčĆąĖą┤čŗ) ą▓ čćą░čüą░čģ čüąŠ čüą╝ąĄčēąĄąĮąĖąĄą╝ 4, čé. ąĄ. ąŠą┐ąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą▒čāą┤čāčēąĄą╝: ageOfEph = ((age & 0xf0) >> 4) - 4 |
[41. TIM (0x0D)]
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ (Timing Messages): ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓čŗčģąŠą┤ą░ ą▓čŗą┤ą░čćąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ (Time Pulse Output), čĆąĄąĘčāą╗čīčéą░čéčŗ ą╝ąĄč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ (Timemark Results). ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą║ą╗ą░čüčüąĄ, ą▓čŗą▓ąŠą┤ąĖą╝čŗąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝, ą┤ą░čÄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ ąĖą╝ą┐čāą╗čīčüąĄ Timepulse ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅčģ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (Timemark).
41.1. TIM-TM2 (0x0D 0x03)
41.1.1. ąöą░ąĮąĮčŗąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
TIM-TM2 |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Time mark data |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┤ą╗čÅ ą▓čŗčüąŠą║ąŠč鹊čćąĮčŗčģ ą╝ąĄč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ / čüč湥čéą░ ąĖą╝ą┐čāą╗čīčüąŠą▓. ąŚąĮą░č湥ąĮąĖčÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĖ ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą▒ą░ąĘčŗ, ąĘą░ą┤ą░ąĮąĮčŗąĄ ą▓ CFG-TP5, čéą░ą║ąČąĄ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą▓ ą▓čŗą▓ąŠą┤ąĄ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0D 0x03 |
28 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U1 |
- |
ch |
- |
ą£ą░čĆą║ąĄčĆ ą║ą░ąĮą░ą╗ą░ (0 ąĖą╗ąĖ 1). |
| 1 |
X1 |
- |
flags |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 2 |
U2 |
- |
count |
- |
ąĪč湥čéčćąĖą║ ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ |
| 4 |
U2 |
- |
wnR |
- |
ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ |
| 6 |
U2 |
- |
wnF |
- |
ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ |
| 8 |
U4 |
- |
towMsR |
ą╝čü |
TOW ą╝ąŠą╝ąĄąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ |
| 12 |
U4 |
- |
towSubMsR |
ąĮčü |
ąöčĆąŠą▒ąĮą░čÅ čćą░čüčéčī ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čŗ TOW ą╝ąŠą╝ąĄąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ, ą▓čŗčĆą░ąČąĄąĮąĮą░čÅ ą▓ ąĮą░ąĮąŠčüąĄą║čāąĮą┤ą░čģ |
| 16 |
U4 |
- |
towMsF |
ą╝čü |
TOW ą╝ąŠą╝ąĄąĮčéą░ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ |
| 20 |
U4 |
- |
towSubMsF |
ąĮčü |
ąöčĆąŠą▒ąĮą░čÅ čćą░čüčéčī ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čŗ TOW ą╝ąŠą╝ąĄąĮčéą░ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ, ą▓čŗčĆą░ąČąĄąĮąĮą░čÅ ą▓ ąĮą░ąĮąŠčüąĄą║čāąĮą┤ą░čģ |
| 24 |
U4 |
|
accEst |
ąĮčü |
ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
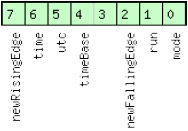
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| mode |
0 ąŠą┤ąĖąĮąŠčćąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü, 1 ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ |
| run |
0 ą▓ąĘą▓ąĄą┤ąĄąĮąŠ, 1 ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ |
| newFallingEdge |
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ąĮąŠą▓čŗą╣ čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ |
| timeBase |
0 ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░
1 ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ GPS
2 ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| utc |
0 ą▓čĆąĄą╝čÅ UTC ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ
1 ą▓čĆąĄą╝čÅ UTC ą┤ąŠčüčéčāą┐ąĮąŠ |
| time |
0 ą▓čĆąĄą╝čÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ
1 ą▓čĆąĄą╝čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┐ąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ GPS) |
| newRisingEdge |
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ąĮąŠą▓ąŠąĄ ąĮą░čĆą░čüčéą░ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ |
41.2. TIM-TP (0x0D 0x01)
41.2.1. ąöą░ąĮąĮčŗąĄ ą▓čĆąĄą╝ąĄąĮąĖ ąĖą╝ą┐čāą╗čīčüą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
TIM-TP |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Time Pulse Timedata |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ / ą┐ąŠ ąĘą░ą┐čĆąŠčüčā |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┤ą╗čÅ ą▓čŗčüąŠą║ąŠč鹊čćąĮąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ - čāčüčéą░ąĮąŠą▓ą║ą░ ąŠą▒ąŠąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čćą░čüč鹊čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ (CFG-RATE) ąĖ čćą░čüč鹊čéčŗ ąĖą╝ą┐čāą╗čīčüą░ (CFG-TP5) ąĮą░ 1 ąōčå. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. "12. Time pulse" [2]. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0D 0x01 |
16 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
U4 |
- |
towMS |
ą╝čü |
ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ ąĖą╝ą┐čāą╗čīčüą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą▒ą░ąĘąŠą╣ ą▓čĆąĄą╝ąĄąĮąĖ. |
| 4 |
U4 |
2-32 |
towSubMS |
ą╝čü |
ąĪčāą▒ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ąĮą░čÅ čćą░čüčéčī TOWMS |
| 8 |
I4 |
- |
qErr |
ą┐čü |
ą×čłąĖą▒ą║ą░ ą║ą▓ą░ąĮč鹊ą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ |
| 12 |
U2 |
- |
week |
- |
ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ ąĖą╝ą┐čāą╗čīčüą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą▒ą░ąĘąŠą╣ ą▓čĆąĄą╝ąĄąĮąĖ. |
| 14 |
X1 |
- |
flags |
- |
ąæąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 15 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
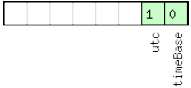
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| timeBase |
0 ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ GPS
1 ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ UTC |
| utc |
0 ą▓čĆąĄą╝čÅ UTC ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ 1 ą▓čĆąĄą╝čÅ UTC ą┤ąŠčüčéčāą┐ąĮąŠ |
41.3. TIM-VRFY (0x0D 0x06)
41.3.1. ąÆąĄčĆąĖčäąĖą║ą░čåąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠ ąĖčüč鹊čćąĮąĖą║čā
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
TIM-VRFY |
| ą×ą┐ąĖčüą░ąĮąĖąĄ |
Sourced Time Verification |
| Firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ u-blox 7 firmware ą▓ąĄčĆčüąĖąĖ 1.00 |
| ąóąĖą┐ |
ą¤ąŠ ąĘą░ą┐čĆąŠčüčā / ąŠą┤ąĮąŠą║čĆą░čéąĮąŠ |
| ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝čā ą┐čĆąĖąĮčÅč鹊ą╝čā č湥čĆąĄąĘ AID-INI ąĖą╗ąĖ ąŠčé RTC. |
| ąĪčéčĆčāą║čéčāčĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ |
ID |
ąæą░ą╣čé |
ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąÜąŠąĮčéčĆ. čüčāą╝ą╝ą░ |
| 0xB5 0x62 |
0x0D 0x06 |
20 |
ąĪą╝. ąĮąĖąČąĄ |
CK_A CK_B |
| ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ |
| ąĪą╝ąĄčē. ą▒ą░ą╣čé |
ążąŠčĆą╝ą░čé čćąĖčüą╗ą░ |
ą£ą░čüčłčéą░ą▒ |
ąśą╝čÅ |
ąĢą┤. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
I4 |
- |
itow |
ą╝čü |
ą”ąĄą╗ą░čÅ čćą░čüčéčī ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ TOW, ą┐čĆąĖąĮčÅč鹊ą│ąŠ ąŠčé ąĖčüč鹊čćąĮąĖą║ą░. |
| 4 |
I4 |
- |
frac |
ąĮčü |
ąĪčāą▒ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ąĮą░čÅ čćą░čüčéčī TOW |
| 8 |
I4 |
- |
deltaMs |
ą╝čü |
ą”ąĄą╗ą░čÅ čćą░čüčéčī ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ ą┤ąĄą╗čīčéčŗ ą▓čĆąĄą╝ąĄąĮąĖ (č鹥ą║čāčēąĄąĄ ą▓čĆąĄą╝čÅ ą╝ąĖąĮčāčü ą▓čĆąĄą╝čÅ ąĖčüč鹊čćąĮąĖą║ą░) |
| 12 |
I4 |
- |
deltaNs |
ąĮčü |
ąĪčāą▒ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ąĮą░čÅ čćą░čüčéčī ą┤ąĄą╗čīčéčŗ ą▓čĆąĄą╝ąĄąĮąĖ |
| 16 |
U2 |
- |
wno |
- |
ąØąŠą╝ąĄčĆ ąĮąĄą┤ąĄą╗ąĖ |
| 18 |
X1 |
- |
flags |
- |
ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čäą╗ą░ą│ąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ) |
| 19 |
U1 |
- |
reserved1 |
- |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
ąæąĖčéčŗ ą┐ąŠą╗čÅ flags:
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| src |
ąśčüč鹊čćąĮąĖą║ čāč鹊čćąĮąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ:
0 ąĮąĄ ą▒čŗą╗ąŠ čāč鹊čćąĮąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ
2 ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą▒čŗą╗ąĖ RTC
3 ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą▒čŗą╗ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ AID-INI |
ą¤čĆąŠč鹊ą║ąŠą╗ RTCM (Radio Technical Commission for Maritime Services) čŹč鹊 ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ (ą▓ą▓ąŠą┤ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║), ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā GPS ą┤ą░ąĮąĮčŗčģ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą║ąŠčĆčĆąĄą║čåąĖąĖ (DGPS). ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ RTCM ą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░ čüą░ą╣č鹥 http://www.rtcm.org.
 ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ čĆą░ą▒ąŠč鹥 čüąĖčüč鹥ą╝čŗ GPS. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ čĆą░ą▒ąŠč鹥 čüąĖčüč鹥ą╝čŗ GPS.
[43. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ]
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ RTCM 2.3 (čéąĖą┐čŗ čüąŠąŠą▒čēąĄąĮąĖą╣, čüč鹊ą╗ą▒ąĄčå Message Types):
| ąóąĖą┐ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 1 |
ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ GPS |
| 2 |
ąöąĄą╗čīčéą░ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą║ąŠčĆčĆąĄą║čåąĖą╣ GPS |
| 3 |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąŠą┐ąŠčĆąĮąŠą╣ čüčéą░ąĮčåąĖąĖ GPS |
| 9 |
ąØą░ą▒ąŠčĆ čćą░čüčéąĖčćąĮąŠą╣ ą║ąŠčĆčĆąĄą║čåąĖąĖ GPS |
[44. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ]
ążčāąĮą║čåąĖčÅ DGPS ą┤ą╗čÅ čüą▓ąŠąĄą╣ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ąĮąĄ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ RTCM ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą╗čÄą▒ąŠą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, č鹊 čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ą░čĆčüčÅčéčüčÅ ąĖ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ, ąĄčüą╗ąĖ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą┐čĆąĖąĄą╝ąĮąĖą║čā ą▓ čĆąĄąČąĖą╝ DGPS. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ RTCM ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ąĮą░ čŹč鹊ą╝ ąĖąĮč鹥čĆč乥ą╣čüąĄ, čćč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-CFG-PRT.
ąĢčüčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ čĆąĄąČąĖą╝ą░ DGPS, čŹč鹊 čéą░ą╣ą╝ą░čāčé, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĘą░ą┤ą░čéčī čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-NAV5. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓čĆąĄą╝čÅ, ą┐ąŠčüą╗ąĄ ą║ąŠč鹊čĆąŠą│ąŠ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ RTCM ąŠčéą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ.
[45. ąÆčŗą▓ąŠą┤]
ąĀąĄąČąĖą╝ DGPS ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ą▓čŗą▓ąŠą┤čā:
ŌĆó NMEA-GGA: ą┐ąŠą╗ąĄ ą║ą░č湥čüčéą▓ą░ quality ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 2 (čüą╝. "21. ążą╗ą░ą│ąĖ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ą▓ NMEA" [3]). ąæčāą┤čāčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ąŠąĘčĆą░čüčé ą║ąŠčĆčĆąĄą║čåąĖą╣ DGPS (age) ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąŠą┐ąŠčĆąĮąŠą╣ čüčéą░ąĮčåąĖąĖ (Reference station id).
ŌĆó NMEA-GLL, NMEA-RMC, NMEA-VTG, NMEA-GNS: ąĖąĮą┤ąĖą║ą░č鹊čĆ posMode ą▒čāą┤ąĄčé D (čüą╝. "21. ążą╗ą░ą│ąĖ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ą▓ NMEA" [3]).
ŌĆó NMEA-PUBX-POSITION: status ą▒čāą┤ąĄčé D2/D3; ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ąŠąĘčĆą░čüčé (age) ą║ąŠčĆčĆąĄą║čåąĖą╣ DGPS.
ŌĆó UBX-NAV-SOL: ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ DGPS.
ŌĆó UBX-NAV-PVT: ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ DGPS.
ŌĆó UBX-NAV-STATUS: ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ DGPS. ąÆą▓ąŠą┤ DGPS ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ "PR+PRR".
ŌĆó UBX-NAV-SVINFO: ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ DGPS ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ąŠą▓ čü ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ą║ąŠčĆčĆąĄą║čåąĖąĖ DGPS.
ŌĆó UBX-NAV-DGPS: čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī ą▓čüąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ DGPS.
ŌĆó ąĢčüą╗ąĖ ą▒ą░ąĘąŠą▓ą░čÅ ą╗ąĖąĮąĖčÅ ą┐čĆąĄą▓čŗčłą░ąĄčé 100 ą║ą╝, ąĖ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čéąĖą┐ą░ 3, č鹊 ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮąŠ UBX-INF-WARNING, ąĮą░ą┐čĆąĖą╝ąĄčĆ "WARNING: DGPS baseline big: 330.3km".
[46. ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ]
ąöą╗čÅ čĆąĄąČąĖą╝ą░ DGPS ąĮą░ą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆó ąĀąĄčłąĄąĮąĖąĄ DGPS ą▒čāą┤ąĄčé ą▓ą║ą╗čÄčćą░čéčī č鹊ą╗čīą║ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąŠčé čüą┐čāčéąĮąĖą║ąŠą▓, ą┤ą╗čÅ ą║ąŠč鹊čĆčŗčģ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą║ąŠčĆčĆąĄą║čåąĖąĖ DGPS. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĮąĄ ą╝ąŠą│čāčé čüą╝ąĄčłąĖą▓ą░čéčī ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ čüą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĖ ąĮąĄ čüą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ.
ŌĆó ąÜąŠčĆčĆąĄą║čåąĖąĖ SBAS ąĮąĄ ą▒čāą┤čāčé ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ąŠčĆčĆąĄą║čéąĖčĆčāčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ RTCM.
ŌĆó ąĀąĄąČąĖą╝ č鹊čćąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ (Precise Point Positioning, PPP) ą▒čāą┤ąĄčé ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ RTCM.
ŌĆó ąöą░ąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ RTCM ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ AssistNow Offline ąĖą╗ąĖ AssistNow Autonomous.
[47. ąöąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ]
ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ RTCM čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┤ąŠą║čāą╝ąĄąĮč鹊ą╝ RTCM 10402.3 ("RECOMMENDED STANDARDS FOR DIFFERENTIAL GNSS", čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ čüčéą░ąĮą┤ą░čĆčéčŗ ą┤ą╗čÅ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝).
[A. ąÆąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░]
ąÆąĄčĆčüąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ (Protocol Version) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮą░ą▒ąŠčĆ čüąŠąŠą▒čēąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ ą┐ąŠ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ą▓ąĄčĆčüąĖčÅą╝ ą┐čĆąŠą┤čāą║čåąĖąĖ u-blox. ąÜą░ąČą┤ąŠąĄ firmware, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ u-blox, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą┐ąĄčåąĖčäąĖč湥čüą║čāčÄ ą▓ąĄčĆčüąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░, čćč鹊 ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ. ąÜą░ąČą┤čŗą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ čüąŠąŠą▒čēą░ąĄčé ąŠ čüą▓ąŠąĄą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą╣ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ:
ŌĆó ą¤čĆąĖ čüčéą░čĆč鹥, ą║ąŠą│ą┤ą░ ąŠąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 菹║čĆą░ąĮ ąĘą░ą│čĆčāąĘą║ąĖ ('boot screen').
ŌĆó ąÆ čüąŠąŠą▒čēąĄąĮąĖąĖ UBX-MON-VER.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čéą░ą▒ą╗ąĖčåčŗ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ąŠą▒čēąĄčĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĮčŗčģ ą▓ąĄčĆčüąĖą╣ firmware ąĖ ą┐ą╗ą░čéč乊čĆą╝.
A.1. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░
u-blox 5
| ąÆąĄčĆčüąĖčÅ firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ |
| 4.00 |
10.00 |
| 4.01 |
10.01 |
| 5.00 |
11.00 |
| 6.00 |
12.00 |
| 6.02 |
12.02 |
u-blox 6
| ąÆąĄčĆčüąĖčÅ firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ |
| 6.00 |
12.00 |
| 6.02 |
12.02 |
| 7.01 |
13.01 |
| 7.03 |
13.03 |
u-blox 6 GPS/GLONASS/QZSS
| ąÆąĄčĆčüąĖčÅ firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ |
| 1.00 |
14.00 |
u-blox 7
| ąÆąĄčĆčüąĖčÅ firmware |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ |
| 1.00 |
14.00 |
[B. ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ u-blox 7]
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ, ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ ą║ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ą╝ u-blox 7, ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ ą¤ąŚąŻ ą┐čĆąŠą│čĆą░ą╝ą╝ (u-blox 7 ROM-based) ą▓ąĄčĆčüąĖąĖ 1.00 ąĖ ą▓čŗčłąĄ. ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčé, čćč鹊 čāčĆąŠą▓ąĮąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓čŗą▓ąŠą┤ąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, ąĖ ą▓ eFuse ąĮąĄ ą▒čŗą╗ą░ ąĘą░ą┐ąĖčüą░ąĮą░ ąĮąĖą║ą░ą║ą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░, ą║ąŠč鹊čĆą░čÅ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĘą░ą▓ąĖčüčÅčēąĖąĄ ąŠčé ą▓čŗą▓ąŠą┤ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖ ąĮą░čüčéčĆąŠąĄą║ eFuse, ą┤ą╗čÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 čŹčéąĖčģ ąĮą░čüčéčĆąŠąĄą║, čüą╝. ą┐čĆąĖą╝ąĄąĮąĖą╝čŗą╣ ą┤ą░čéą░čłąĖčé ąĮą░ ąÆą░čłąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ.
B.1. Antenna Supervisor Settings (UBX-CFG-ANT), ąĮą░čüčéčĆąŠą╣ą║ąĖ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░ ą░ąĮč鹥ąĮąĮčŗ
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-ANT.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą░ąĮč鹥ąĮąĮčŗ
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| flags-svcs |
ąĀą░ąĘčĆąĄčłąĖčéčī čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
| flags-scd |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠčĆąŠčéą║ąŠą│ąŠ ąĘą░ą╝čŗą║ą░ąĮąĖčÅ |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
| flags-pdwnOnSCD |
ąĀą░ąĘčĆąĄčłąĖčéčī ą╗ąŠą│ąĖą║čā ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą┐čĆąĖ ą║ąŠčĆąŠčéą║ąŠą╝ ąĘą░ą╝čŗą║ą░ąĮąĖąĖ |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
| flags-recovery |
ąĀą░ąĘčĆąĄčłąĖčéčī ą╗ąŠą│ąĖą║čā ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą║ąŠčĆąŠčéą║ąŠą│ąŠ ąĘą░ą╝čŗą║ą░ąĮąĖčÅ |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
| flags-ocd |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠą▒čĆčŗą▓ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą░ąĮč鹥ąĮąĮąŠą╣ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| pins-pinSwitch |
ąØąŠąČą║ą░ PIO, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗ |
16 |
| pins-pinSCD |
ąØąŠąČą║ą░ PIO, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠčĆąŠčéą║ąŠą│ąŠ ąĘą░ą╝čŗą║ą░ąĮąĖčÅ ą▓ ąĖčüč鹊čćąĮąĖą║ąĄ ą┐ąĖčéą░ąĮąĖčÅ ą░ąĮč鹥ąĮąĮčŗ |
15 |
| pins-pinOCD |
ąØąŠąČą║ą░ PIO, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą░ąĮč鹥ąĮąĮčŗ |
14 |
B.2. Datum Settings (UBX-CFG-DAT), ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĖčüč鹥ą╝čŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé.
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-DAT.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ Datum
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| datumNum |
ąØąŠą╝ąĄčĆ Datum |
0 |
|
| datumName |
ąśą╝čÅ Datum |
WGS84 |
|
| majA |
Semi-major Axis |
6378137 |
ą╝ |
| flat |
1.0 / Flattening |
298.257223563 |
|
| dX |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ X ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ |
0 |
ą╝ |
| dY |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ Y ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ |
0 |
ą╝ |
| dZ |
ąĪą╝ąĄčēąĄąĮąĖąĄ ąŠčüąĖ Z ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ č鹊čćą║ąĖ ąŠčéčüč湥čéą░ |
0 |
ą╝ |
| rotX |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ X |
0 |
čüąĄą║ |
| rotY |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ Y |
0 |
čüąĄą║ |
| rotZ |
ą¤ąŠą▓ąŠčĆąŠčé ą▓ąŠą║čĆčāą│ ąŠčüąĖ Z |
0 |
čüąĄą║ |
| scale |
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą╝ą░čüčłčéą░ą▒ą░ |
0 |
ppm |
B.3. Navigation Settings (UBX-CFG-NAV5), ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ.
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-NAV5.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| dynModel |
ąöąĖąĮą░ą╝ąĖč湥čüą║ą░čÅ ą╝ąŠą┤ąĄą╗čī ą┐ą╗ą░čéč乊čĆą╝čŗ |
0 - Portable |
|
| fixMode |
ąĀąĄąČąĖą╝ čäąĖą║čüą░čåąĖąĖ |
3 - Auto 2D/3D |
|
| fixedAlt |
ążąĖą║čüą░čåąĖčÅ ą▓čŗčüąŠčéčŗ |
ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ (fixMode=3) |
ą╝ |
| fixedAltVar |
ążąĖą║čüą░čåąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čŗčüąŠčéčŗ |
ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ (fixMode=3) |
|
| minElev |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓ąŠąĘą▓čŗčłąĄąĮąĖąĄ ąĮą░ čüą┐čāčéąĮąĖą║ |
5 |
deg |
| pDop |
ą£ą░čüą║ą░ PDOP (ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ) |
25 |
- |
| tDop |
ą£ą░čüą║ą░ TDOP (ą▓čĆąĄą╝čÅ) |
25 |
- |
| pAcc |
ąóąŠčćąĮąŠčüčéčī P (ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ) |
100 |
ą╝ |
| tAcc |
ąóąŠčćąĮąŠčüčéčī T (ą▓čĆąĄą╝čÅ) |
300 |
ą╝ |
| staticHoldThresh |
ą¤ąŠčĆąŠą│ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ čāą┤ąĄčƹȹ░ąĮąĖčÅ |
0.00 |
čüą╝/čüąĄą║ |
| dgpsTimeOut |
ąóą░ą╣ą╝ą░čāčé DGPS |
60 |
čüąĄą║ |
| cnoThreshNumSVs |
ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, čā ą║ąŠč鹊čĆčŗčģ čéčĆąĄą▒čāąĄčéčüčÅ C/N0 ą▓čŗčłąĄ ą┐ąŠčĆąŠą│ą░ cnoThresh, čćč鹊ą▒čŗ čäąĖą║čüą░čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą╣. |
0 |
|
| cnoThresh |
ą¤ąŠčĆąŠą│ C/N0 ą┤ą╗čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ |
0 |
dBHz |
ąØą░čüčéčĆąŠą╣ą║ąĖ Dynamic Platform Model ąŠčéą╗ąĖčćą░čÄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐čĆąŠą┤čāą║čåąĖąĖ.
B.4. Navigation Settings (UBX-CFG-NAVX5), ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ.
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-NAVX5.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| minSVs |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ |
3 |
čüąĄą║ |
| maxSVs |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ |
22 |
|
| minCNO |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ C/N0 ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
7 |
dBHz |
| iniFix3D |
ąØą░čćą░ą╗čīąĮą░čÅ čäąĖą║čüą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī 3D |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| opCfg-useAOP |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī AssistNow Autonomous |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| aopOrbMaxErr |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ąŠčłąĖą▒ą║ą░ ąŠčĆą▒ąĖčéčŗ AssistNow Autonomous |
100 |
ą╝ |
| wknRollover |
ą¤ąĄčĆąĄčģąŠą┤ ąĮąŠą╝ąĄčĆą░ ąĮąĄą┤ąĄą╗ąĖ ą▓ ąĮą░čćą░ą╗ąŠ (Weeknumber rollover) |
1691 |
|
ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ SV ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐čĆąŠą┤čāą║čåąĖąĖ.
B.5. Output Rates (UBX-CFG-RATE), čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą▓ąŠą┤ą░
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-RATE.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ Output Rate
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| timeRef |
ąśčüč鹊čćąĮąĖą║ ą▓čĆąĄą╝ąĄąĮąĖ |
1 ŌĆō ą▓čĆąĄą╝čÅ GPS |
|
| measRate |
ą¤ąĄčĆąĖąŠą┤ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ |
1000 |
ą╝čü |
| navRate |
ą¦ą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ |
1 |
čåąĖą║ą╗ąŠą▓ |
B.6. Power Management 2 Configuration (UBX-CFG-PM2), ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-PM2.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Power Management 2
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| version |
ąÆąĄčĆčüąĖčÅ |
1 |
|
| flags-extintSelect |
ąÆčŗą▒ąŠčĆ ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ EXTINT |
EXTINT0 |
|
| flags-extintWake |
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčé ą▓čŗą▓ąŠą┤ą░ EXTINT - čāą┤ąĄčƹȹĖą▓ą░čéčī ąŠčé ą▓čģąŠą┤ą░ ą▓ čüąŠąĮ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| flags-extintBackup |
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčé ą▓čŗą▓ąŠą┤ą░ EXTINT - ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą▓ą▓ąĄčüčéąĖ ą▓ čüąŠąĮ (backup) |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| flags-limitPeakCurr |
ą¤čĆąĄą┤ąĄą╗ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| flags-WaitTimeFix |
ą×ąČąĖą┤ą░čéčī čäąĖą║čüą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| flags-updateRTC |
ą×ą▒ąĮąŠą▓ąĖčéčī RTC |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| flags-updateEPH |
ą×ą▒ąĮąŠą▓ąĖčéčī čŹč乥ą╝ąĄčĆąĖą┤čŗ |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
|
| flags-doNotEnterOff |
ąØąĄ ą▓čģąŠą┤ąĖčéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "ąĮąĄ ą░ą║čéąĖą▓ąĮąŠ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░" (inactive for search), ą║ąŠą│ą┤ą░ ąĮąĄčé čäąĖą║čüą░čåąĖąĖ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| flags-mode |
ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ |
ą”ąĖą║ą╗ąĖč湥čüą║ąĖą╣ čéčĆąĄą║ąĖąĮą│ |
|
| updatePeriod |
ą¤ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ |
1000 |
ą╝čü |
| searchPeriod |
ą¤ąĄčĆąĖąŠą┤ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ąŠąĖčüą║ą░ |
10000 |
ą╝čü |
| gridOffset |
ąĪą╝ąĄčēąĄąĮąĖąĄ čüąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ |
0 |
ą╝čü |
| onTime |
ąÆčĆąĄą╝čÅ ą▓ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ |
0 |
čüąĄą║ |
| minAcqTime |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĘą░čģą▓ą░čéą░ |
0 |
čüąĄą║ |
B.7. Receiver Manager Configuration (UBX-CFG-RXM), ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-RXM.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ Power Management
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| lpMode |
ąĀąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ |
0 - Continuous Mode
(ą▒ąĄąĘ ą▓čģąŠą┤ą░ ą▓ čüąŠąĮ) |
B.8. GNSS system configuration (UBX-CFG-GNSS), ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ GNSS
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-GNSS.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ UBX-CFG-GNSS
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| numTrkChHw |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą╗čÅ čéčĆąĄą║ąĖąĮą│ą░ |
22 |
| numTrkChUse |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ |
22 |
| numConfigBlocks |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąĄą┤čāčÄčēąĖčģ ą▒ą╗ąŠą║ąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ |
4 |
| gnssId |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ GNSS (čüą╝. "4. ąØčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓" [2]) |
0, 1, 5, 6 |
| flags-enable |
ąĀą░ąĘčĆąĄčłąĖčéčī čŹčéčā čüąĖčüč鹥ą╝čā GNSS |
1, 1, 1, 0 |
| resTrkCh |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ąĮą░ ąŠą┤ąĮčā čüąĖčüč鹥ą╝čā GNSS |
4, 1, 0, 8 |
| maxTrkCh |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ąĮą░ ąŠą┤ąĮčā čüąĖčüč鹥ą╝čā GNSS |
255, 3, 3, 255 |
B.9. SBAS Configuration (UBX-CFG-SBAS), ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SBAS
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-SBAS.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ SBAS Configuration
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| mode-enabled |
ą¤ąŠą┤čüąĖčüč鹥ą╝ą░ SBAS |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
| mode-test |
ąĀą░ąĘčĆąĄčłąĖčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąČąĖą╝ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| usage-range |
ąĀą░ąĮąČąĖčĆąŠą▓ą░ąĮąĖąĄ (ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī SBAS ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ) |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
| usage-diffCorr |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ SBAS |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
| usage-integrity |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| scanmode1 |
PRN-ą║ąŠą┤čŗ 120-151 |
120, 124, 126,
127, 129, 133,
135, 137, 138 |
| scanmode2 |
PRN-ą║ąŠą┤čŗ 152-158 |
ąØąĄčé |
B.10. Port Configuration (UBX-CFG-PRT), ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆč鹊ą▓
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-PRT.
B.10.1. UART Port Configuration, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ UART
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-PRT-UART.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ UART 1
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| portID |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ |
1 (UART 1) |
|
| txReady-en |
ążčāąĮą║čåąĖčÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX-ready) |
0 (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) |
|
| mode-charLen |
ąöą╗ąĖąĮą░ čüąĖą╝ą▓ąŠą╗ą░ |
3 (8 ą▒ąĖčé) |
|
| mode-parity |
ąóąĖą┐ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ |
4 (ąĮąĄčé ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ) |
|
| mode-nStopBits |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüč鹊ą┐-ą▒ąĖčé |
0 (1 čüč鹊ą┐-ą▒ąĖčé) |
|
| baudRate |
Baud rate (čüą║ąŠčĆąŠčüčéčī) |
9600 |
ą▒ąŠą┤ |
| inProtoMask |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ |
UBX, NMEA, RTCM |
|
| outProtoMask |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ |
UBX, NMEA |
|
| flags-extendedTxTimeout |
ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čéą░ą╣ą╝ą░čāčé TX |
0 (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) |
|
B.10.2. USB Port Configuration, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ USB
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-PRT-USB.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ USB
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| portID |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ |
3 (USB) |
| txReady-en |
ążčāąĮą║čåąĖčÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX-ready) |
0 (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) |
| inProtoMask |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ |
UBX, NMEA, RTCM |
| outProtoMask |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ |
UBX, NMEA |
B.10.3. SPI Port Configuration, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ SPI
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-PRT-SPI.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ SPI
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| portID |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ |
4 (SPI) |
| txReady-en |
ążčāąĮą║čåąĖčÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX-ready) |
0 (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) |
| mode-spiMode |
ąĀąĄąČąĖą╝ SPI |
0 (CPOL=0, CPHA=0) |
| mode-ffCnt |
ą¤ąŠą┤čüč湥čé ą▒ą░ą╣čé 0xFF ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čĆąĄąČąĖą╝ą░ |
50 |
| inProtoMask |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ |
UBX, NMEA, RTCM |
| outProtoMask |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ |
UBX, NMEA |
| flags-extendedTxTimeout |
ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čéą░ą╣ą╝ą░čāčé TX |
0 (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) |
B.10.4. DDC Port Configuration, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ DDC (I2C)
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-PRT-DDC.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ DDC
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| portID |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčĆčéą░ |
4 (SPI) |
| txReady-en |
ążčāąĮą║čåąĖčÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX-ready) |
0 (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) |
| mode-slaveAddr |
ąÉą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C |
0x42 |
| inProtoMask |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ |
UBX, NMEA, RTCM |
| outProtoMask |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ |
UBX, NMEA |
| flags-extendedTxTimeout |
ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čéą░ą╣ą╝ą░čāčé TX |
0 (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) |
B.11. USB Settings (UBX-CFG-USB), ąĮą░čüčéčĆąŠą╣ą║ąĖ USB
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-USB.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ USB
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| vendorID |
Vendor ID, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ |
0x1546 |
|
| productID |
Product ID, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąĖąĘą┤ąĄą╗ąĖčÅ |
0x01A7 |
|
| powerConsumption |
ąóčĆąĄą▒čāąĄą╝čŗą╣ č鹊ą║ ąŠčé čłąĖąĮčŗ USB |
100 |
ą╝ąÉ |
| flags-powerMode |
ąĀąĄąČąĖą╝ ą┐ąĖčéą░ąĮąĖčÅ |
1 (self-powered,
čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║
ą┐ąĖčéą░ąĮąĖčÅ) |
|
| vendorString |
ąĪčéčĆąŠą║ą░, čüąŠą┤ąĄčƹȹ░čēą░čÅ ąĖą╝čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ |
u-blox AG - www.u-blox.com |
|
| productString |
ąĪčéčĆąŠą║ą░, čüąŠą┤ąĄčƹȹ░čēą░čÅ ąĖą╝čÅ ąĖąĘą┤ąĄą╗ąĖčÅ |
u-blox 7 - GPS/GNSS Receiver |
ą▒ąŠą┤ |
B.12. Message Settings (UBX-CFG-MSG), ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-MSG.
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
ąóąĖą┐ |
ąÆčüąĄ ą┐ąŠčĆčéčŗ |
| NMEA-Standard-GGA |
Out |
1 |
| NMEA-Standard-GLL |
Out |
1 |
| NMEA-Standard-GSA |
Out |
1 |
| NMEA-Standard-GSV |
Out |
1 |
| NMEA-Standard-RMC |
Out |
1 |
| NMEA-Standard-VTG |
Out |
1 |
B.13. NMEA Protocol Settings (UBX-CFG-NMEA), ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-NMEA.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| filter-posFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą┐ąŠąĘąĖčåąĖąĖ ą┤ą░ąČąĄ ą┤ą╗čÅ ąĮąĄčāą┤ą░čćąĮčŗčģ ąĖą╗ąĖ ąŠčłąĖą▒ąŠčćąĮčŗčģ čäąĖą║čüą░čåąĖą╣ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| filter-mskPosFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą░ąČąĄ ą┤ą╗čÅ ąŠčłąĖą▒ąŠčćąĮčŗčģ čäąĖą║čüą░čåąĖą╣ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| filter-timeFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą░ąČąĄ ą┤ą╗čÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▓čĆąĄą╝ąĄąĮ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| filter-dateFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą░ąČąĄ ą┤ą╗čÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄąĮčŗčģ ą┤ą░čé |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| filter-gpsOnlyFilter |
ą×ą│čĆą░ąĮąĖčćąĖčéčī ą▓čŗą▓ąŠą┤ č鹊ą╗čīą║ąŠ čüą┐čāčéąĮąĖą║ą░ą╝ąĖ GPS |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| filter-trackFilt |
ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ COG, ą┤ą░ąČąĄ ąĄčüą╗ąĖ COG ąĘą░ą╝ąŠčĆąŠąČąĄąĮ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| nmeaVersion |
ąÆąĄčĆčüąĖčÅ NMEA |
2.3 |
| numSV |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąØąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ |
| flags-compat |
ąĀąĄąČąĖą╝ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ (Compatibility Mode) |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
| flags-consider |
ąĀąĄąČąĖą╝ ą┐čĆąĖąĮčÅčéąĖčÅ čĆąĄčłąĄąĮąĖčÅ (Consideration Mode) |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ |
| gnssToFilter-gps |
ąŚą░ą┐čĆąĄčéąĖčéčī čüą┐čāčéąĮąĖą║ąĖ GPS |
False |
| gnssToFilter-sbas |
ąŚą░ą┐čĆąĄčéąĖčéčī čüą┐čāčéąĮąĖą║ąĖ SBAS |
False |
| gnssToFilter-qzss |
ąŚą░ą┐čĆąĄčéąĖčéčī čüą┐čāčéąĮąĖą║ąĖ QZSS |
False |
| gnssToFilter-glonass |
ąŚą░ą┐čĆąĄčéąĖčéčī čüą┐čāčéąĮąĖą║ąĖ GLONASS |
False |
| svNumbering |
ąÆčŗą▓ąŠą┤ čüą┐čāčéąĮąĖą║ąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ NMEA |
0 (ąĮąĄ ą▓čŗą▓ąŠą┤ąĖčéčī) |
| mainTalkerId |
ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćąĖčéčī main Talker ID |
0 (ąĮąĄ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░čéčī) |
| gsvTalkerId |
ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćąĖčéčī GSV Talker ID |
0 (ąĮąĄ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░čéčī) |
B.14. Logging Configuration (UBX-CFG-LOGFILTER), ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╗ąŠą│ą░
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-LOGFILTER.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ UBX-CFG-LOGFILTER
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| flags-recordEnabled |
ąĀą░ąĘčĆąĄčłąĖčéčī ąĘą░ą┐ąĖčüčī ą▓ ą╗ąŠą│ |
0 |
|
| flags-applyAllFilterSettings |
ą¤čĆąĖą╝ąĄąĮąĖčéčī ą▓čüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čäąĖą╗čīčéčĆą░ |
0 |
|
| flags-psmOncePerWakupEnabled |
ąŚą░ą┐ąĖčüą░čéčī ąŠą┤ąĮčā ą┐ąŠąĘąĖčåąĖčÄ ąĮą░ PSM čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ |
0 |
|
| minInterval |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ |
0 |
čüąĄą║ |
| timeThreshold |
ą¤ąŠčĆąŠą│ ą▓čĆąĄą╝ąĄąĮąĖ |
0 |
čüąĄą║ |
| speedThreshold |
ą¤ąŠčĆąŠą│ čüą║ąŠčĆąŠčüčéąĖ |
0 |
ą╝/čüąĄą║ |
| positionThreshold |
ą¤ąŠčĆąŠą│ ą┐ąŠąĘąĖčåąĖąĖ |
0 |
ą╝ |
B.15. Remote Inventory (UBX-CFG-RINV), čāą┤ą░ą╗ąĄąĮąĮąŠąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-RINV.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ UBX-CFG-RINV
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| flags-dump |
ąöą░ą╝ą┐ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ |
0 |
| flags-binary |
ąöą░ąĮąĮčŗąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą┤ą▓ąŠąĖčćąĮčŗą╝ąĖ |
0 |
| data |
ąöą░ąĮąĮčŗąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ Remote Inventory |
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄčé čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
B.16. INF Messages Settings (UBX-CFG-INF), ąĮą░čüčéčĆąŠą╣ą║ą░ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-INF.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣ INF
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąóąĖą┐ |
ąÆčüąĄ ą┐ąŠčĆčéčŗ |
ąöąĖą░ą┐ą░ąĘąŠąĮ/ąĘą░ą╝ąĄčćą░ąĮąĖąĄ |
| infMsgMask-ERROR |
Out |
1 |
ąóąŠą╗čīą║ąŠ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ NMEA (GPTXT) |
| infMsgMask-WARNING |
Out |
1 |
ąóąŠą╗čīą║ąŠ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ NMEA (GPTXT) |
| infMsgMask-NOTICE |
Out |
1 |
ąóąŠą╗čīą║ąŠ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ NMEA (GPTXT) |
| infMsgMask-TEST |
Out |
|
|
| infMsgMask-DEBUG |
Out |
|
|
B.17. Timepulse Settings (UBX-CFG-TP5), ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-TP5.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ TIMEPULSE
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| tpIdx |
ąÆčŗą▒ąŠčĆ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ |
0 |
ąĮčü |
| antCableDelay |
ąŚą░ą┤ąĄčƹȹ║ą░ ą░ąĮč鹥ąĮąĮąŠą│ąŠ ą║ą░ą▒ąĄą╗čÅ |
50 |
ąĮčü |
| rfGroupDelay |
ąōčĆčāą┐ą┐ąŠą▓ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ čéčĆą░ą║čéą░ RF |
0 |
ąĮčü |
| freqPeriod |
ą¤ąĄčĆąĖąŠą┤ |
1000000 |
ą╝ą║čü |
| freqPeriodLock |
ą¤ąĄčĆąĖąŠą┤ ą┐čĆąĖ ąĘą░čģą▓ą░č鹥 |
1000000 |
ą╝ą║čü |
| pulseLenRatio |
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ |
0 |
ą╝ą║čü |
| pulseLenRatioLock |
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ ą┐čĆąĖ ąĘą░čģą▓ą░č鹥 |
100000 |
ą╝ą║čü |
| userConfigDelay |
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ |
0 |
ąĮčü |
| flags-gridUtcGps |
ąĪąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ |
1 (ą▓čĆąĄą╝čÅ GPS) |
|
| flags-polarity |
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī |
1 (čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ
ąĮą░ ą│čĆą░ąĮąĖčåąĄ čüąĄą║čāąĮą┤čŗ) |
|
| flags-alignToTow |
ąÆčŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ąĮą░ TOW |
1 |
|
| flags-isLength |
ąŁč鹊 ą┤ą╗ąĖąĮą░ |
1 |
|
| flags-isFreq |
ąŁč鹊 čćą░čüč鹊čéą░ |
0 |
|
| flags-lockedOtherSet |
ąŚą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮčŗ ą┤čĆčāą│ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ |
1 |
|
| flags-LockGpsFreq |
ąŚą░čģą▓ą░čé ąĮą░ čćą░čüč鹊čéčā GPS |
1 |
|
| flags-Active |
ąÉą║čéąĖą▓ąĮąŠ |
1 |
|
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ TIMEPULSE2
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| tpIdx |
ąÆčŗą▒ąŠčĆ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ |
0 |
ąĮčü |
| antCableDelay |
ąŚą░ą┤ąĄčƹȹ║ą░ ą░ąĮč鹥ąĮąĮąŠą│ąŠ ą║ą░ą▒ąĄą╗čÅ |
50 |
ąĮčü |
| rfGroupDelay |
ąōčĆčāą┐ą┐ąŠą▓ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ čéčĆą░ą║čéą░ RF |
0 |
ąĮčü |
| freqPeriod |
ą¦ą░čüč鹊čéą░ |
4 |
ąōčå |
| freqPeriodLock |
ą¦ą░čüč鹊čéą░ ą┐čĆąĖ ąĘą░čģą▓ą░č鹥 |
1 |
ąōčå |
| pulseLenRatio |
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ |
125000 |
ą╝ą║čü |
| pulseLenRatioLock |
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ ą┐čĆąĖ ąĘą░čģą▓ą░č鹥 |
100000 |
ą╝ą║čü |
| userConfigDelay |
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ |
0 |
ąĮčü |
| flags-gridUtcGps |
ąĪąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ |
1 (ą▓čĆąĄą╝čÅ GPS) |
|
| flags-polarity |
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī |
1 (čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ
ąĮą░ ą│čĆą░ąĮąĖčåąĄ čüąĄą║čāąĮą┤čŗ) |
|
| flags-alignToTow |
ąÆčŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ąĮą░ TOW |
1 |
|
| flags-isLength |
ąŁč鹊 ą┤ą╗ąĖąĮą░ |
1 |
|
| flags-isFreq |
ąŁč鹊 čćą░čüč鹊čéą░ |
1 |
|
| flags-lockedOtherSet |
ąŚą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮčŗ ą┤čĆčāą│ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ |
1 |
|
| flags-LockGpsFreq |
ąŚą░čģą▓ą░čé ąĮą░ čćą░čüč鹊čéčā GPS |
1 |
|
| flags-Active |
ąÉą║čéąĖą▓ąĮąŠ |
0 |
|
B.18. Jammer/Interference Monitor (UBX-CFG-ITFM), ą╝ąŠąĮąĖč鹊čĆ ąĮą░čĆčāčłąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░/ą┐ąŠą╝ąĄčģ
ąöą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. UBX-CFG-ITFM.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ Jamming/Interference monitor
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąĢą┤. |
| config-enable |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ |
|
| config-bbThreshold |
ą¤ąŠčĆąŠą│ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╝ąĄčģąĖ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖčÅ |
3 |
dB |
| config-cwThreshold |
ą¤ąŠčĆąŠą│ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╝ąĄčģąĖ ąĮąĄčüčāčēąĄą╣ (CW) |
15 |
dB |
| config-antSetting |
ąØą░čüčéčĆąŠą╣ą║ą░ ą░ąĮč鹥ąĮąĮčŗ |
0 |
|
[C. ąĪčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ u-blox 7 firmware]
ąĪčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čüčéčĆąŠą║ąĖ ą▓ąĄčĆčüąĖąĖ firmware
| ą¤ąŠą║ąŠą╗ąĄąĮąĖąĄ |
ąÆąĄčĆčüąĖčÅ |
ąĪčéčĆąŠą║ą░ |
ROM BASE |
| u-blox 7 |
|
ROM CORE 1.00 (59842) Jun 27 2012 17:43:52 |
- |
| u-blox 7 |
FW 1.00 |
EXT CORE 1.00 (59843) Jun 27 2012 18:25:33 |
u-blox 7 ROM 1.00 |
[ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ]
ąÜąŠą╝ą┐ą░ąĮąĖčÅ u-blox ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▒ąŠą╗čīčłąŠą╣ ąŠą▒čŖąĄą╝ č鹥čģąĮąĖč湥čüą║ąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┤ą╗čÅ čüą▓ąŠąĄą╣ ą┐čĆąŠą┤čāą║čåąĖąĖ. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╝ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐čĆąŠą┤čāą║čéą░ ą┤ą░čéą░čłąĖčéą░ą╝ ąĖ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ą╝ ą┐ąŠ ąĖąĮč鹥ą│čĆą░čåąĖąĖ, čéą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ąĖ ąŠą▒čēąĖąĄ ą┤ąŠą║čāą╝ąĄąĮčéčŗ:
ŌĆó GPS Compendium, Docu. No GPS-X-02007
ŌĆó GPS Antennas - RF Design Considerations for u-blox GPS Receivers, Docu. No GPS-X-08014
ąĪą░ą╣čé www.u-blox.com čüąŠą┤ąĄčƹȹĖčé ą▓ą░ąČąĮčŗąĄ čĆąĄčüčāčĆčüčŗ ą┤ą╗čÅ ąŠą▒čēąĄą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąĖ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ą┐čĆąŠą┤čāą║čéčā. ąöą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ ąĖąĮč鹥ą│čĆą░čåąĖąĖ ą┐čĆąŠąĄą║č鹊ą▓ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ [1], čüąŠą┤ąĄčƹȹ░čēą░čÅ ą┐čĆąŠč鹊ą║ąŠą╗ (ą┐ąĄčĆąĄą▓ąŠą┤ čŹč鹊ą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ čüą╝. ą┐ąŠ čüčüčŗą╗ą║ą░ą╝ [1, 2]) ą▓ą╝ąĄčüč鹥 čü ą┤ą░čéą░čłąĖč鹊ą╝ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą╝ ą┐ąŠ ąĖąĮč鹥ą│čĆą░čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ GPS (čüą╝. čéą░ą║ąČąĄ [6]).
ąöą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ č鹊čćąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāą╝ąŠą│ąŠ ą┐ąŠ čüąĖą│ąĮą░ą╗ą░ą╝ čüą┐čāčéąĮąĖą║ą░, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega32U4 ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ NEO-6N, ą║čāą┐ą╗ąĄąĮąĮčŗą╣ ąĮą░ AliExpress.

ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ č鹊ą╗čīą║ąŠ ąŠčéčĆčŗą▓ą║ąĖ ą║ąŠą┤ą░ ąĮą░ čÅąĘčŗą║ąĄ C, ą┐ąŠčÅčüąĮčÅčÄčēąĖąĄ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā UBX. ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠąĄą║čéą░ čüą╝. ą┐ąŠ čüčüą╗čŗą║ąĄ [9], čéą░ą╝ ąČąĄ ąĄčüčéčī čüčüčŗą╗ą║ą░ ąĮą░ ą░čĆčģąĖą▓ čü ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝ ą┐čĆąŠąĄą║čéą░.
[UBLOX.h]
/* UBLOX.h
Brian R Taylor
brian.taylor@bolderflight.com
Copyright (c) 2016 Bolder Flight Systems
Permission is hereby granted, free of charge, to any person obtaining a copy of this software
and associated documentation files (the "Software"), to deal in the Software without restriction,
including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense,
and/or sell copies of the Software, and to permit persons to whom the Software is furnished
to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial
portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED,
INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR
A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION
WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.*/
#ifndef UBLOX_h
#define UBLOX_h
#include "types.h"
#define _PI 3.14159265358979323846
#define _m2ft 3.28084
#define _deg2rad (_PI/180.0)
#define UBLOXclassidNAV 0x01
#define UBLOXmsgidPVT 0x07
typedef enum _FixType
{
NO_FIX = 0,
DEAD_RECKONING,
FIX_2D,
FIX_3D,
GNSS_AND_DEAD_RECKONING,
TIME_ONLY
}FixType;
typedef enum _PowerSaveMode
{
NOT_ACTIVE = 0,
ENABLED,
ACQUISITION,
TRACKING,
OPTIMIZED_TRACKING,
INACTIVE
}PowerSaveMode;
typedef enum _CarrierPhaseStatus
{
NO_SOL = 0,
FLOAT_SOL,
FIXED_SOL
}CarrierPhaseStatus;
typedef struct _UBX_NAV_PVT
{
u8 msg_class; //NAV 0x01
u8 msg_id; //PVT 0x07
u16 msg_length; //0x0054
u32 iTOW; //ąÆčĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ GPS
u16 year; //ąōąŠą┤ (UTC)
u8 month; //ą£ąĄčüčÅčå, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..12 (UTC)
u8 day; //ąöąĄąĮčī ą╝ąĄčüčÅčåą░, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 1..31 (UTC)
u8 hour; //ą¦ą░čü ą┤ąĮčÅ, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..23 (UTC)
u8 min; //ą£ąĖąĮčāčéą░ čćą░čüą░, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..59 (UTC)
u8 sec; //ąĪąĄą║čāąĮą┤ą░ ą▓ ą╝ąĖąĮčāč鹥, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..60 (UTC)
u8 valid; //ążą╗ą░ą│ąĖ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ)
u32 tAcc; //ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ (UTC)
s32 nano; //ąöčĆąŠą▒ąĮą░čÅ čćą░čüčéčī čüąĄą║čāąĮą┤čŗ, ą┤ąĖą░ą┐ą░ąĘąŠąĮ -1e9 .. 1e9 (UTC)
u8 fixType; //ąóąĖą┐ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ GNSS, ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0..5
u8 flags; //ążą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ
u8 flags2; //ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
u8 numSV; //ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓
s32 lon; //ąöąŠą╗ą│ąŠčéą░
s32 lat; //ą©ąĖčĆąŠčéą░
s32 height; //ąÆčŗčüąŠčéą░ ąĮą░ą┤ 菹╗ą╗ąĖą┐čüąŠąĖą┤ąŠą╝
s32 hMSL; //ąÆčŗčüąŠčéą░ ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠčĆčÅ
u32 hAcc; //ą×čåąĄąĮą║ą░ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ
u32 vAcc; //ą×čåąĄąĮą║ą░ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ
s32 velN; //ąĪą║ąŠčĆąŠčüčéčī ą▓ čüąĄą▓ąĄčĆąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ (NED)
s32 velE; //ąĪą║ąŠčĆąŠčüčéčī ą▓ ą▓ąŠčüč鹊čćąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ (NED)
s32 velD; //ąĪą║ąŠčĆąŠčüčéčī ą▓ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ (NED)
s32 gSpeed; //ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠ ąĘąĄą╝ą╗ąĄ (2-D)
s32 headMot; //ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ (2-D)
u32 sAcc; //ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ čüą║ąŠčĆąŠčüčéąĖ
u32 headAcc; //ą×čåąĄąĮą║ą░ č鹊čćąĮąŠčüčéąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ
u16 pDOP; //DOP ą┐ąŠąĘąĖčåąĖąĖ
u8 reserved[6]; //ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
//s32 headVeh;
//s16 magDec;
//u16 magAcc;
}UBX_NAV_PVT;
typedef union _TUBLOXsize
{
u8 val8[2];
u16 val16;
}TUBLOXsize;
typedef struct _TParseSet
{
// ąśčüčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą┐ąŠ ą║ąŠč鹊čĆčŗą╝ čäąĖą╗čīčéčĆčāąĄčéčüčÅ ą┐ą░ą║ąĄčé UBX:
u8 msgclass; //ą║ą╗ą░čüčü čüąŠąŠą▒čēąĄąĮąĖčÅ
u8 msgid; //ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ
u8 state; //čüąŠčüč鹊čÅąĮąĖąĄ ą┐ą░čĆčüąĄčĆą░, ąŠąĮ ąČąĄ ąĖąĮą┤ąĄą║čü č鹥ą║čāčēąĄą│ąŠ ą▒ą░ą╣čéą░ ą▓ ą┐ą░ą║ąĄč鹥
u16 size; //ąĘą░ą┤ą░ąĮąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ
//ąöą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐čĆąĖąĄą╝ą░/ą┐ą░čĆčüąĖąĮą│ą░ ą┐ą░ą║ąĄčéą░ UBX:
TUBLOXsize usize; //ą▒ą░ą╣čéčŗ čĆą░ąĘą╝ąĄčĆą░, ą┐čĆąĖčłąĄą┤čłąĖąĄ ą▓ ą┐ą░ą║ąĄč鹥
u8 param8a; //ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ąĄą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ 1
u8 param8b; //ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ąĄą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ 2
u8 param8c; //ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ąĄą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ 3
u8 CK_A; //ą▒ą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ
u8 CK_B; //ą▒ą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ
}TParseSet;
typedef union _TYear
{
u16 val16;
u8 val8[2];
}TYear;
extern TParseSet psPVT;
extern FixType fixtype;
extern bool fixOK;
extern u8 numSV;
extern TYear year;
extern u8 month, day, hour, min, sec, valid;
bool UBLOXparse(u8 databyte, TParseSet *ps);
void disableNmea (void);
void disableUnnecessaryChannels(void);
void enableNavPvt (void);
void sendCFG_TP5(u32 freq);
#endif
[UBLOX.c]
/* UBLOX.cpp
Brian R Taylor
brian.taylor@bolderflight.com
Copyright (c) 2016 Bolder Flight Systems
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and
associated documentation files (the "Software"), to deal in the Software without restriction, including
without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is furnished to do so, subject
to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial
portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED,
INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR
A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION
WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.*/
#include "UBLOX.h"
#include < string.h>
#include < util\delay.h>
#include "pins.h"
#include "vars.h"
#include "Adafruit_GFX.h"
#include "screenapp.h"
static const u8 _ubxHeader[2] = {0xB5, 0x62};
FixType fixtype = NO_FIX;
bool fixOK = false;
u8 numSV;
TYear year;
u8 month, day, hour, min, sec, valid;
// ą¤čĆąŠą▓ąĄčĆąŠčćąĮčŗą╣ ą┐ą░ą║ąĄčé ąĮą░ ąŠčüąĮąŠą▓ąĄ UBX-TIM-TM2.
static const u8 PROGMEM checkpacket[] =
{
0xB5, // sync char 1
0x62, // sync char 2
0x06, // class
0x01, // id
0x03, // length
0x00, // length
0x0D, // payload (ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ąĖąĘ 菹╗ąĄą╝ąĄąĮčéą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ą░čüčüąĖą▓ą░ messages)
0x03, // payload (ą▓č鹊čĆąŠą╣ ą▒ą░ą╣čé ąĖąĘ 菹╗ąĄą╝ąĄąĮčéą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ą░čüčüąĖą▓ą░ messages)
0x01, // payload (not changed in the case)
0x1B, // CK_A
0x6D, // CK_B
};
// ą¤ą░ą║ąĄčé ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓.
static const u8 PROGMEM DUCpacket[] =
{
0xB5, // sync char 1
0x62, // sync char 2
0x06, 0x3E, // class/id CFG-GNSS
0x24, // length
0x00, // length
//ą¤ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░:
0x00, 0x00, 0x16, 0x04,
0x00, 0x04, 0xFF, 0x00, 0x01, 0x00, 0x00, 0x01, //GPS
0x01, 0x01, 0x03, 0x00, 0x00, 0x00, 0x00, 0x01, //SBAS
0x05, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x01, //QZSS
0x06, 0x08, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x01, //GLONASS
0xA4, // CK_A
0x25, // CK_B
};
TParseSet psPVT =
{
UBLOXclassidNAV,
UBLOXmsgidPVT,
0,
84,
{0},
0,
0,
0,
0
};
//ą¤ąĄčĆąĄą┤ą░čćą░ ą┐ą░ą║ąĄčéą░ čü ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąŠą╣:
static void sendPacket (void *senddata, u8 length)
{
u8 idx = 0;
while (length)
{
if(UCSR1A & (1 < < UDRE1))
{
UDR1 = ((u8*)senddata)[idx++];
length--;
}
}
}
//ą¤ąĄčĆąĄą┤ą░čćą░ ą┐ą░ą║ąĄčéą░ čü ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąŠą╣ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝:
static void sendPacketPM (PGM_VOID_P senddata, u8 length)
{
u8 idx = 0;
u8 val;
while (length)
{
if(UCSR1A & (1 < < UDRE1))
{
val = pgm_read_byte(&senddata[idx++]);
UDR1 = val;
length--;
}
}
}
/* uBlox checksum */
void UBLOXcrc (u8 databyte, TParseSet *ps)
{
ps->CK_A += databyte;
ps->CK_B += ps->CK_A;
}
static void PSreset (TParseSet *ps)
{
ps->state = 0;
}
/* parse the uBlox data */
bool UBLOXparse(u8 databyte, TParseSet *ps)
{
bool result = false;
// ąśą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖčÅ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ą┐ą░ą║ąĄčéą░:
if (ps->state < 2)
{
if (databyte == _ubxHeader[ps->state])
ps->state++;
else
PSreset(ps);//ps->state = 0;
if (2 == ps->state)
{
ps->CK_A = 0;
ps->CK_B = 0;
}
}
else if (2==ps->state)
{
// ą¤čĆąŠą▓ąĄčĆą║ą░ ą║ą╗ą░čüčüą░ čüąŠąŠą▒čēąĄąĮąĖčÅ:
if (databyte == ps->msgclass)
ps->state++;
else
PSreset(ps);//ps->state = 0;
UBLOXcrc(databyte, ps);
}
else if (3==ps->state)
{
// ą¤čĆąŠą▓ąĄčĆą║ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ:
if (databyte == ps->msgid)
ps->state++;
else
PSreset(ps);//ps->state = 0;
UBLOXcrc(databyte, ps);
}
else if (4==ps->state)
{
//ą¤ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé čĆą░ąĘą╝ąĄčĆą░:
ps->usize.val8[0] = databyte;
ps->state++;
UBLOXcrc(databyte, ps);
}
else if (5==ps->state)
{
//ąÆč鹊čĆąŠą╣ ą▒ą░ą╣čé čĆą░ąĘą╝ąĄčĆą░:
ps->usize.val8[1] = databyte;
if (ps->size == ps->usize.val16)
{
ps->state++;
}
else
PSreset(ps);//ps->state = 0;
UBLOXcrc(databyte, ps);
}
else if (ps->state == (6+ps->size))
{
//ą¤ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ:
if (databyte != ps->CK_A)
PSreset(ps);//ps->state = 0;
else
{
ps->state++;
}
}
else if (ps->state == (ps->size+7))
{
//ąÆč鹊čĆąŠą╣ ą▒ą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ:
if (databyte == ps->CK_B)
{
if (UBLOXclassidNAV == ps->msgclass && UBLOXmsgidPVT == ps->msgid)
{
fixtype = ps->param8a;
fixOK = (ps->param8b & 0x01);
numSV = ps->param8c;
}
result = true;
}
PSreset(ps);
}
else if (ps->state > (ps->size+7))
{
PSreset(ps);//ps->state = 0;
}
else if (ps->state < (6+ps->size))
{
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐ą░ą║ąĄč鹊ą▓
if (UBLOXclassidNAV == ps->msgclass && UBLOXmsgidPVT == ps->msgid)
{
if (ps->state == (6+4))
{
//ą£ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé ą│ąŠą┤ą░:
year.val8[0] = databyte;
}
else if (ps->state == (6+5))
{
//ąĪčéą░čĆčłąĖą╣ ą▒ą░ą╣čé ą│ąŠą┤ą░:
year.val8[1] = databyte;
}
else if (ps->state == (6+6))
{
//ą£ąĄčüčÅčå:
month = databyte;
}
else if (ps->state == (6+7))
{
//ąöąĄąĮčī:
day = databyte;
}
else if (ps->state == (6+8))
{
//ą¦ą░čü:
hour = databyte;
}
else if (ps->state == (6+9))
{
//ą£ąĖąĮčāčéą░:
min = databyte;
}
else if (ps->state == (6+10))
{
//ąĪąĄą║čāąĮą┤ą░:
sec = databyte;
}
else if (ps->state == (6+11))
{
valid = databyte;
}
else if (ps->state == (6+20))
{
//ąóąĖą┐ čäąĖą║čüą░čåąĖąĖ:
ps->param8a = databyte;
}
else if (ps->state == (6+21))
{
//ąöąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéčī čäąĖą║čüą░čåąĖąĖ:
ps->param8b = databyte;
}
else if (ps->state == (6+23))
{
//ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓:
ps->param8c = databyte;
}
}
UBLOXcrc(databyte, ps);
ps->state++;
}
return result;
}
// ą×čéą┐čĆą░ą▓ą╗čÅąĄčé ąĮą░ą▒ąŠčĆ ą┐ą░ą║ąĄč鹊ą▓ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ čüąŠąŠą▒čēąĄąĮąĖą╣ NMEA.
void disableNmea (void)
{
// ą£ą░čüčüąĖą▓ ąĖąĘ ą┤ą▓čāčģ ą▒ą░ą╣čé ą┤ą╗čÅ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ CFG-MSG.
u8 messages[][2] = {
{0xF0, 0x0A},
{0xF0, 0x09},
{0xF0, 0x00},
{0xF0, 0x01},
{0xF0, 0x0D},
{0xF0, 0x06},
{0xF0, 0x02},
{0xF0, 0x07},
{0xF0, 0x03},
{0xF0, 0x04},
{0xF0, 0x0E},
{0xF0, 0x0F},
{0xF0, 0x05},
{0xF0, 0x08},
{0xF1, 0x00},
{0xF1, 0x01},
{0xF1, 0x03},
{0xF1, 0x04},
{0xF1, 0x05},
{0xF1, 0x06},
};
// ąæčāč乥čĆ ą┤ą╗čÅ ą┐ą░ą║ąĄčéą░ CFG-MSG.
u8 packet[] = {
0xB5, // sync char 1
0x62, // sync char 2
0x06, // class
0x01, // id
0x03, // length
0x00, // length
0x00, // payload (ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ąĖąĘ 菹╗ąĄą╝ąĄąĮčéą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ą░čüčüąĖą▓ą░ messages)
0x00, // payload (ą▓č鹊čĆąŠą╣ ą▒ą░ą╣čé ąĖąĘ 菹╗ąĄą╝ąĄąĮčéą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ą░čüčüąĖą▓ą░ messages)
0x00, // payload (not changed in the case)
0x00, // CK_A
0x00, // CK_B
};
u8 packetSize = sizeof(packet);
// ąĪą╝ąĄčēąĄąĮąĖąĄ, ąŠčéą║čāą┤ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░:
u8 payloadOffset = 6;
// ą¤čĆąŠčģąŠą┤ ą┐ąŠ ą╝ą░čüčüąĖą▓čā čüąŠąŠą▒čēąĄąĮąĖą╣ (ą┐ąĄčĆąĄą┤ą░čćą░ ąĖčģ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║).
for (u8 i = 0; i < sizeof(messages) / sizeof(*messages); i++)
{
// ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą▓čāčģ ą▒ą░ą╣čé ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▓ ą▒čāč乥čĆ ą┐ą░ą║ąĄčéą░.
for (u8 j = 0; j < sizeof(*messages); j++)
{
packet[payloadOffset + j] = messages[i][j];
}
// ąĪą▒čĆąŠčü ą▒ą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ.
packet[packetSize - 2] = 0x00;
packet[packetSize - 1] = 0x00;
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ ąŠčé ą▒čāč乥čĆą░ ą┐ą░ą║ąĄčéą░, ąĮąĄ ą▓ą║ą╗čÄčćą░čÅ sync
// (ą┐ąĄčĆą▓čŗąĄ ą┤ą▓ą░ ą▒ą░ą╣čéą░) ąĖ čüąĖą╝ą▓ąŠą╗čŗ ą║ąŠąĮčéčĆąŠą╗čīąĘąĮąŠą╣ čüčāą╝ą╝čŗ (ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ ą┤ą▓ą░).
for (u8 j = 0; j < packetSize - 4; j++)
{
packet[packetSize - 2] += packet[2 + j];
packet[packetSize - 1] += packet[packetSize - 2];
}
sendPacket(packet, packetSize);
}
}
// ą×čéą┐čĆą░ą▓ą╗čÅąĄčé ą┐ą░ą║ąĄčé ą┐čĆąĖąĄą╝ąĮąĖą║čā ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ SBAS ąĖą╗ąĖ QZSS.
void disableUnnecessaryChannels(void)
{
sendPacketPM(DUCpacket, sizeof(DUCpacket));
}
static const u8 PROGMEM PVTpacket[] =
{
0xB5, // sync char 1
0x62, // sync char 2
0x06, // class
0x01, // id
0x03, // length
0x00, // length
0x01, // payload
0x07, // payload
0x01, // payload
0x13, // CK_A
0x51, // CK_B
};
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ąŠčéą┐čĆą░ą▓ą║čā ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā UBX.
void enableNavPvt (void)
{
sendPacketPM(PVTpacket, sizeof(PVTpacket));
}
static const u8 PROGMEM TP5packetBegin[] =
{
0xB5, 0x62, // sync chars
0x06, 0x31, // class, id
0x20, 0x00, // length
0x00, // TIMEPULSE 0
0x01, 0x00, 0x00, // reserved
0x00, 0x00, // ąĘą░ą┤ąĄčƹȹ║ą░ ą║ą░ą▒ąĄą╗čÅ ą░ąĮč鹥ąĮąĮčŗ
0x00, 0x00, // ą│čĆčāą┐ą┐ąŠą▓ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ RF
0x01, 0x00, 0x00, 0x00 // čćą░čüč鹊čéą░ 1 ąōčå
};
static const u8 PROGMEM TP5packetMid[] =
{
0x00, 0x00, 0x00, 0x80, // čüą║ą▓ą░ąČąĮąŠčüčéčī 50%
0x00, 0x00, 0x00, 0x80, // čüą║ą▓ą░ąČąĮąŠčüčéčī 50% ą┐čĆąĖ ąĘą░čģą▓ą░č鹥
0x00, 0x00, 0x00, 0x00, // ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ą░čÅ ą┐ąŠą╗čīąĘą▓ą░č鹥ą╗ąĄą╝ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čĆąĄą╝ąĄąĮąĖ, 0 ąĮčü
0xEF, 0x00, 0x00, 0x00 // čäą╗ą░ą│ąĖ
};
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą▓čŗčģąŠą┤ TIMEPULSE 0 ąĮą░ ąĮčāąČąĮčāčÄ ą▓čŗčģąŠą┤ąĮčāčÄ čćą░čüč鹊čéčā.
void sendCFG_TP5(u32 freq)
{
//ą¤ąĄčĆąĄą┤ą░čćą░ ąĮą░čćą░ą╗ą░ ą┐ą░ą║ąĄčéą░:
sendPacketPM(TP5packetBegin, sizeof(TP5packetBegin));
//ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ CRC ąŠčé ąĮą░čćą░ą╗ą░ ą┐ą░ą║ąĄčéą░, ą║čĆąŠą╝ąĄ čüąĖąĮčģčĆąŠą▒ą░ą╣čé:
u8 CK_A = 0;
u8 CK_B = 0;
u8 length = sizeof(TP5packetBegin)-2;
u8 idx = 2;
while(length)
{
CK_A += pgm_read_byte(&TP5packetBegin[idx++]);
CK_B += CK_A;
length--;
}
//ą¤ąĄčĆąĄą┤ą░čćą░ čćą░čüč鹊čéčŗ:
length = 4;
u8 *pnt = (u8*)&freq;
u8 val;
while(length)
{
if(UCSR1A & (1 < < UDRE1))
{
val = *pnt;
UDR1 = val;
CK_A += val;
CK_B += CK_A;
pnt++;
length--;
}
}
//ą×čéą┐čĆą░ą▓ą║ą░ ąŠčüčéą░ą╗čīąĮąŠą╣ čćą░čüčéąĖ ą┐ą░ą║ąĄčéą░:
sendPacketPM(TP5packetMid, sizeof(TP5packetMid));
//ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ CRC ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ:
length = sizeof(TP5packetMid);
idx = 0;
while(length)
{
CK_A += pgm_read_byte(&TP5packetMid[idx++]);
CK_B += CK_A;
length--;
}
//ą¤ąĄčĆąĄą┤ą░čćą░ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ:
while(0==(UCSR1A & (1 < < UDRE1)));
UDR1 = CK_A;
while(0==(UCSR1A & (1 < < UDRE1)));
UDR1 = CK_B;
}
[ą£ąŠą┤čāą╗čī ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ]
#include < util\delay.h>
#include < stdlib.h>
#include < alloca.h>
#include "beep.h"
#include "vars.h"
#include "timer.h"
#include "pins.h"
#include "encoder.h"
#include "modeapp.h"
#include "eepromutil.h"
#include "Adafruit_GFX.h"
#include "OneButton.h"
#include "screenapp.h"
#include "UBLOX.h"
#include "i2c.h"
static void SetupHardware(void)
{
MCUSR &= ~(1 < < WDRF);
wdt_disable();
clock_prescale_set(clock_div_1);
}
static void RedBtnLongPress (void)
{
Save();
Beep(1000,100);
}
ISR(USART1_RX_vect, ISR_BLOCK)
{
tx_usb[inUsbTX++] = UDR1;
inUsbTX &= TX_BUF_MASK_USB;
}
int main(void)
{
bool fixed = false;
SetupHardware();
portsInit();
FixType oldfixtype = NO_FIX;
bool oldfixOK = false;
u8 oldnumSV;
u16 olddatatime, currdatatime;
//ąŚą░ą│čĆčāąĘą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖąĘ EEPROM:
if (!Load())
{
RestoreEEPROM();
}
// ąóą░ą╣ą╝ąĄčĆ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą░ą┤ąĄčƹȹĄą║ ąĖ 菹Įą║ąŠą┤ąĄčĆą░:
SetupTIMER0();
// UART ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĖąĘ čüąŠą▒čŗčéąĖčÅ USB ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ LUFA. ą×ą┤ąĮą░ą║ąŠ
// ą┤ą╗čÅ čüą▓čÅąĘąĖ čü ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ ąĘą┤ąĄčüčī ąĮčāąČąĮą░ ąĄą│ąŠ ąĮą░čüčéčĆąŠą╣ą║ą░,
// ąĄčüą╗ąĖ USB ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ:
Serial_Init(9600, false);
UCSR1B = ((1 < < RXCIE1)|(1 < < TXEN1)|(1 < < RXEN1));
ENC_InitEncoder();
OBInit();
OBAttachLongPressStart(REDBUTTON, RedBtnLongPress);
OBAttachClick(ENCBUTTON, ChangeCursor);
GlobalInterruptEnable();
SSD1306begin(SSD1306_SWITCHCAPVCC);
GFXinit(SSD1306_LCDWIDTH, SSD1306_LCDHEIGHT);
setTextSize(1);
setTextColor(WHITE);
//ąöą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ...
FreqFormat(&eeprm.freq, &freqformat, freqtxt);
InitCursorPos();
updateflags |= SCRUPD_FREQ;
// ... ąĖ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ:
updateflags |= SCRUPD_FIXTYPE;
for (;;)
{
//ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĖąĄą╝ą░ USB CDC:
//ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ USB CDC ąĖ ą▓čŗąĘąŠą▓ ą┐ą░čĆčüąĄčĆą░ UBLOX:
if (inUsbTX != outUsbTX)
{
if (UBLOXparse(tx_usb[outUsbTX], &psPVT))
{
if(oldfixOK != fixOK)
{
oldfixOK = fixOK;
updateflags |= SCRUPD_FIXTYPE;
}
if (oldfixtype != fixtype)
{
oldfixtype = fixtype;
updateflags |= SCRUPD_FIXTYPE;
}
bool fixedcurrent = ((FIX_3D == fixtype) && fixOK)?true:false;
if (fixed != fixedcurrent)
{
if (fixedcurrent)
Beep(3000, 50);
else
Beep(200, 50);
fixed = fixedcurrent;
updateflags |= SCRUPD_FIXTYPE;
}
if (oldnumSV != numSV)
{
oldnumSV = numSV;
updateflags |= SCRUPD_FIXTYPE;
}
currdatatime = (year.val16 + month + day + hour + min + sec + valid);
if (olddatatime != currdatatime)
{
olddatatime = currdatatime;
updateflags |= SCRUPD_DATATIME;
}
}
outUsbTX++;
outUsbTX &= TX_BUF_MASK_USB;
}
//ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ č湥čĆąĄąĘ UART:
if (inUsbRX != outUsbRX)
{
if(UCSR1A & (1 < < UDRE1))
{
UDR1 = rx_usb[outUsbRX++];
outUsbRX &= RX_BUF_MASK_USB;
}
}
receiverStateHandler();
modehandler();
cursorHandler();
ScreenHandler();
display();
}
}
[ąĪčüčŗą╗ą║ąĖ]
1. u-blox 7 Receiver Description Including Protocol Specification V14 site:u-blox.com.
2. ą×ą┐ąĖčüą░ąĮąĖąĄ GPS ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čüąĄčĆąĖąĖ u-blox 7, čćą░čüčéčī 1.
3. ą¤čĆąŠč鹊ą║ąŠą╗ NMEA ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ą░čģ u-blox 7.
4. ą¤ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ą░ą╣čé (endianness).
5. IEEE Standard for Floating-Point Arithmetic (IEEE 754) site:wikipedia.org.
6. NEO-7: ą╝ąŠą┤čāą╗ąĖ GPS/GNSS.
7. Map Matching Input site:u-blox.com.
8. RINEX The Receiver Independent Exchange Format site:igs.org.
9. ą¤čĆąŠčüč鹊ą╣ GPS-čüčéą░ąĮą┤ą░čĆčé čćą░čüč鹊čéčŗ ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆ RF. |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ą┤ą╗čÅ čŹčéąĖčģ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ ąĄčüčéčī čāčéąĖą╗ąĖčéą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ č湥čĆąĄąĘ UART. ą¤čĆąŠą│čāą│ą╗ąĖč鹥 u-center GNSS evaluation software for Windows. ąóą░ą║ąČąĄ čāą┐čĆąŠčēą░čÄčé ąČąĖąĘąĮčī ąĄčüčéčī ą│ąŠč鹊ą▓čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝, ąŠą┐čÅčéčī ąČąĄ ąŠąĮąĖ čĆą░ą▒ąŠčéą░čÄčé č湥čĆąĄąĘ UART. ąśą╝ąĄąĮąĮąŠ ąĮą░ čéą░ą║ąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ ą▒čŗą╗ čüą┤ąĄą╗ą░ąĮ ą┐čĆąŠąĄą║čé "ą¤čĆąŠčüč鹊ą╣ GPS-čüčéą░ąĮą┤ą░čĆčé čćą░čüč鹊čéčŗ ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆ RF", čüą╝. čüčüčŗą╗ą║čā [8].
microsin: ą▓ čüčéą░čéčīąĄ [9] ąĄčüčéčī ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠąĄą║čéą░ ąĮą░ AVR, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą▒ą╝ąĄąĮ čü ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ u-blox ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā UBX. ąóą░ą╝ ąČąĄ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮ.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ