|
ą×čĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą▓ą║ą╗čÄčćą░ąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣ firmware ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗčüąŠą║ąŠč鹊čćąĮčŗčģ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĄčĆąĖąĖ u-blox 7. ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą▓ąĄčĆčüąĖčÄ 14 ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ NMEA ąĖ UBX (ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░ [1] GPS.G7-SW-12001-B1, 15 ąĖčÄąĮčÅ 2018 ą│. ąÆčüąĄ ąĮąĄą┐ąŠąĮčÅčéąĮčŗąĄ č鹥čĆą╝ąĖąĮčŗ ąĖ čüąŠą║čĆą░čēąĄąĮąĖčÅ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąĪą╗ąŠą▓ą░čĆąĖą║", ą▓ ą║ąŠąĮčåąĄ čüčéą░čéčīąĖ).
ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĖ ąĄą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ - ą▓ą░ąČąĮčŗą╣ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗą╣ čĆąĄčüčāčĆčü ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čćąĖą┐ąŠą▓ ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ u-blox. ą×ą┐ąĖčüą░ąĮąĖąĄ ą╝ąŠą┤čāą╗čīąĮąŠąĄ, ą┐ąŠčŹč鹊ą╝čā ąĄą│ąŠ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čćąĖčéą░čéčī ąŠčé ąĮą░čćą░ą╗ą░ ą┤ąŠ ą║ąŠąĮčåą░. ąÆ ąĮąĄą╝ 2 ąŠčüąĮąŠą▓ąĮčŗčģ čĆą░ąĘą┤ąĄą╗ą░: ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĖ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĄą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąÆ čŹč鹊ą╣ čćą░čüčéąĖ ą┐ąĄčĆąĄą▓ąŠą┤ą░ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1] ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąÆč鹊čĆą░čÅ ąĖ čéčĆąĄčéčīčÅ čćą░čüčéąĖ ą┐ąĄčĆąĄą▓ąŠą┤ą░ [6, 7] čüąŠą┤ąĄčƹȹ░čé ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ NMEA ąĖ UBX.
ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą░čüą┐ąĄą║čéčŗ čüąĖčüč鹥ą╝ąĮčŗčģ čäčāąĮą║čåąĖą╣ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ u-blox. ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čüčéčĆčāą║čéčāčĆąĖčĆąŠą▓ą░ąĮą░ ą┐ąŠ ąŠą▒ą╗ą░čüčéčÅą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ, čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╝ąĖ čüčüčŗą╗ą║ą░ą╝ąĖ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ NMEA ąĖ UBX, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ą║ąŠč鹊čĆčŗą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░.
ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čŹč鹊 čüą┐čĆą░ą▓ąŠčćąĮąĖą║, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ u-blox GNSS (Global Navigation Satellite System, ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ čüą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ, ą║ ą║ą░ą║ąĖą╝ ąŠčéąĮąŠčüčÅčéčüčÅ čüąĖčüč鹥ą╝čŗ GPS, GLONASS, QZSS). ąŁč鹊čé čüą┐čĆą░ą▓ąŠčćąĮąĖą║ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮ ą┐ąŠ čüą┐ąĄčåąĖčäąĖą║ąĄ čüąŠąŠą▒čēąĄąĮąĖą╣ NMEA ąĖ UBX.
 ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé ą┤ą░ąĄčé ąŠą▒čēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ą╝ u-blox GNSS. ąØąĄą║ąŠč鹊čĆą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ą░ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą╝ąŠą┤ąĄą╗čÅą╝ čćąĖą┐ąŠą▓ ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓. ą×ą▒čĆą░čēą░ą╣č鹥čüčī ą║ ą┤ąŠą║čāą╝ąĄąĮčéą░ą╝ product Data Sheet ąĖ Hardware Integration Manual ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝. ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé ą┤ą░ąĄčé ąŠą▒čēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ą╝ u-blox GNSS. ąØąĄą║ąŠč鹊čĆą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ą░ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą╝ąŠą┤ąĄą╗čÅą╝ čćąĖą┐ąŠą▓ ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓. ą×ą▒čĆą░čēą░ą╣č鹥čüčī ą║ ą┤ąŠą║čāą╝ąĄąĮčéą░ą╝ product Data Sheet ąĖ Hardware Integration Manual ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝.
[2. ą×ą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ]
ąŁčéą░ čüąĄą║čåąĖčÅ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą╝čā čüąŠąŠą▒čēąĄąĮąĖčÄ UBX-CFG-NAV5.
2.1. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą╗ą░čéč乊čĆą╝čŗ (Platform settings)
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ u-blox ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą╝ąŠą┤ąĄą╗ąĖ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖčģ ą┐ą╗ą░čéč乊čĆą╝ (čüą╝. čéą░ą▒ą╗ąĖčåčā ąĮąĖąČąĄ) ą┤ą╗čÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą║ ąŠąČąĖą┤ą░ąĄą╝ąŠą╝čā čĆą░ą▒ąŠč湥ą╝čā ąŠą║čĆčāąČąĄąĮąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąŁčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ą╗ą░čéč乊čĆą╝čŗ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą▒ąĄąĘ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüą░. ąŁčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ čāą╗čāčćčłą░čÄčé ąĖąĮč鹥čĆą┐čĆąĄčéą░čåąĖčÄ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▒ąŠą╗ąĄąĄ č鹊čćąĮąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮą░ ąĮąĄ ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ą╝ąŠą┤ąĄą╗čī ą┐ą╗ą░čéč乊čĆą╝čŗ ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ čĆą░ą▒ąŠč湥ą│ąŠ ąŠą║čĆčāąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą┐ąŠą▓ą╗ąĄčćčī ą┐ąŠč鹥čĆčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĖ čāčģčāą┤čłąĄąĮąĖąĄ č鹊čćąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąöąĖąĮą░ą╝ąĖč湥čüą║ąĖąĄ ą╝ąŠą┤ąĄą╗ąĖ ą┐ą╗ą░čéč乊čĆą╝:
| ą¤ą╗ą░čéč乊čĆą╝ą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Portable |
ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ą╝ą░ą╗čŗą╝ čāčüą║ąŠčĆąĄąĮąĖąĄą╝, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ąŠčĆčéą░čéąĖą▓ąĮčŗąĄ ą┐ąĄčĆąĄąĮąŠčüąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣. |
| Stationary |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ č鹊čćąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (ą░ąĮč鹥ąĮąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą║čĆąĄą┐ą╗ąĄąĮą░ ąĮąĄą┐ąŠą┤ą▓ąĖąČąĮąŠ) ąĖą╗ąĖ ą┤čĆčāą│ąĖčģ čüčéą░čåąĖąŠąĮą░čĆąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ąĪą║ąŠčĆąŠčüčéčī ąŠą│čĆą░ąĮąĖč湥ąĮą░ 0 ą╝/čüąĄą║, ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ąĮčāą╗ąĄą▓ą░čÅ ą┤ąĖąĮą░ą╝ąĖą║ą░. |
| Pedestrian |
ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ąĮąĖąĘą║ąĖą╝ čāčüą║ąŠčĆąĄąĮąĖąĄą╝ ąĖ čüą║ąŠčĆąŠčüčéčīčÄ, čĆą░čüčüčćąĖčéą░ąĮąĮčŗąĄ ąĮą░ ą┐ąĄčłąĄčģąŠą┤ą░. |
| Automotive |
ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠą╣ ą┤ąĖąĮą░ą╝ąĖą║ąŠą╣, ą║ąŠč鹊čĆčāčÄ ąĖčüą┐čŗčéčŗą▓ą░ąĄčé ą┐ą░čüčüą░ąČąĖčĆ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čÅ. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ąĮąĖąĘą║ąŠąĄ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠąĄ čāčüą║ąŠčĆąĄąĮąĖąĄ. |
| At sea |
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ ą╝ąŠčĆčüą║ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĮčāą╗ąĄą▓ąŠą╣ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ąĮčāą╗ąĄą▓ą░čÅ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ąĖ ąĮčāą╗ąĄą▓ą░čÅ ą▓čŗčüąŠčéą░ ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠčĆčÅ. |
| Airborne < 1g |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ą▓čŗčüąŠą║ąĖą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą╝ ą┤ąĖąĮą░ą╝ąĖą║ąĖ ąĖ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮčŗą╝ čāčüą║ąŠčĆąĄąĮąĖąĄą╝, ą░ąĮą░ą╗ąŠą│ąĖčćąĮčŗą╝ čāčüą║ąŠčĆąĄąĮąĖčÄ ą┐ą░čüčüą░ąČąĖčĆą░ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čÅ. ąØąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ 2D čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ. |
| Airborne < 2g |
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ čéąĖą┐ąŠą▓čŗčģ ą░ą▓ąĖą░čåąĖąŠąĮąĮčŗčģ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣. |
| Airborne < 4g |
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čŹą║čüčéčĆąĄą╝ą░ą╗čīąĮąŠ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖčģ čĆą░ą▒ąŠčćąĖčģ čāčüą╗ąŠą▓ąĖą╣. ąØąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ 2D čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ. |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖčģ ą╝ąŠą┤ąĄą╗ąĄą╣ ą┐ą╗ą░čéč乊čĆą╝:
| ą¤ą╗ą░čéč乊čĆą╝ą░ |
Max ą▓čŗčüąŠčéą░, ą╝ |
Max ą│ąŠčĆąĖąĘ. čüą║ąŠčĆąŠčüčéčī, ą╝/čü |
Max ą▓ąĄčĆčé. čüą║ąŠčĆąŠčüčéčī, ą╝/čü |
ąóąĖą┐ ą┐čĆąŠą▓ąĄčĆą║ąĖ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ |
Max ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ |
| Portable |
1200 |
310 |
50 |
ąÆčŗčüąŠčéą░ ąĖ čüą║ąŠčĆąŠčüčéčī |
ąĪčĆąĄą┤ąĮąĄąĄ |
| Stationary |
9000 |
10 |
6 |
ąÆčŗčüąŠčéą░ ąĖ čüą║ąŠčĆąŠčüčéčī |
ą£ą░ą╗ąŠąĄ |
| Pedestrian |
9000 |
30 |
20 |
ąÆčŗčüąŠčéą░ ąĖ čüą║ąŠčĆąŠčüčéčī |
ą£ą░ą╗ąŠąĄ |
| Automotive |
6000 |
84 |
15 |
ąÆčŗčüąŠčéą░ ąĖ čüą║ąŠčĆąŠčüčéčī |
ąĪčĆąĄą┤ąĮąĄąĄ |
| At sea |
500 |
25 |
5 |
ąÆčŗčüąŠčéą░ ąĖ čüą║ąŠčĆąŠčüčéčī |
ąĪčĆąĄą┤ąĮąĄąĄ |
| Airborne < 1g |
50000 |
100 |
100 |
ąÆčŗčüąŠčéą░ |
ąæąŠą╗čīčłąŠąĄ |
| Airborne < 2g |
50000 |
250 |
100 |
ąÆčŗčüąŠčéą░ |
ąæąŠą╗čīčłąŠąĄ |
| Airborne < 4g |
50000 |
500 |
100 |
ąÆčŗčüąŠčéą░ |
ąæąŠą╗čīčłąŠąĄ |
 ąöąĖąĮą░ą╝ąĖč湥čüą║ąĖąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗąĄ ą┤ą╗čÅ čüąĖčüč鹥ą╝ čü ą▓čŗčüąŠą║ąĖą╝ąĖ čāčüą║ąŠčĆąĄąĮąĖčÅą╝ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▒ąŠčĆč鹊ą▓ą░čÅ ą░ą▓ąĖąŠąĮąĖą║ą░ čü čāčüą║ąŠčĆąĄąĮąĖčÅą╝ąĖ ą▒ąŠą╗ąĄąĄ 2g) ą╝ąŠą│čāčé ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ą┐ąŠą▓čŗčłąĄąĮąĮčāčÄ čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ ą┤ąĄą▓ąĖą░čåąĖčÄ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ. ąöąĖąĮą░ą╝ąĖč湥čüą║ąĖąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗąĄ ą┤ą╗čÅ čüąĖčüč鹥ą╝ čü ą▓čŗčüąŠą║ąĖą╝ąĖ čāčüą║ąŠčĆąĄąĮąĖčÅą╝ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▒ąŠčĆč鹊ą▓ą░čÅ ą░ą▓ąĖąŠąĮąĖą║ą░ čü čāčüą║ąŠčĆąĄąĮąĖčÅą╝ąĖ ą▒ąŠą╗ąĄąĄ 2g) ą╝ąŠą│čāčé ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ą┐ąŠą▓čŗčłąĄąĮąĮčāčÄ čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ ą┤ąĄą▓ąĖą░čåąĖčÄ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ.
2.2. ąÆčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ
ąÆčģąŠą┤ąĮčŗąĄ čäąĖą╗čīčéčĆčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (Navigation Input Filter) ą▓ CFG-NAV5 ą╝ą░čüą║ąĖčĆčāčÄčé ą▓čģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ.
ąŁčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ čāąČąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ. ąØąĄ ą╝ąĄąĮčÅą╣č鹥 ąĮąĖą║ą░ą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ąĄčüą╗ąĖ č鹊ą╗čīą║ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮąĄ ą┐ąŠčüąŠą▓ąĄč鹊ą▓ą░ą╗ąĖ čüą┤ąĄą╗ą░čéčī ąĖąĮąČąĄąĮąĄčĆčŗ č鹥čģą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ u-blox.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čģąŠą┤ąĮčŗčģ čäąĖą╗čīčéčĆąŠą▓ ąĮą░ą▓ąĖą│ą░čåąĖąĖ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| fixMode |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗčćąĖčüą╗čÅąĄčé 3D-čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ, ąĄčüą╗ąĖ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, ąĮąŠ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą║ 2D-čäąĖą║čüą░čåąĖąĖ (Auto 2D/3D). ą¤čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą▓čŗčćąĖčüą╗čÅčéčī č鹊ą╗čīą║ąŠ ą┐ąŠąĘąĖčåąĖąĖ 2D (2D only) ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠąĘąĖčåąĖąĖ 3D (3D only). |
| fixedAlt ąĖ fixedAltVar |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą▓čŗčüąŠčéą░, ąĄčüą╗ąĖ fixMode čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ąĮą░ 2D only. ąöąŠą╗ąČąĮąŠ čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▒ąŠą╗čīčłąĄ ąĮčāą╗čÅ. |
| minElev |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓ąŠąĘą▓čŗčłąĄąĮąĖąĄ čüą┐čāčéąĮąĖą║ą░ ąĮą░ą┤ ą│ąŠčĆąĖąĘąŠąĮč鹊ą╝, čćč鹊ą▒čŗ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ąĮą░ą▓ąĖą│ą░čåąĖąĖ. ąĪą┐čāčéąĮąĖą║ąĖ čü ąĮąĖąĘą║ąĖą╝ ą▓ąŠąĘą▓čŗčłąĄąĮąĖąĄą╝ ą╝ąŠą│čāčé ą┤ą░ą▓ą░čéčī čāčģčāą┤čłąĄąĮąĮčāčÄ č鹊čćąĮąŠčüčéčī ąĖąĘ-ąĘą░ ą┤ąŠą╗ą│ąŠą│ąŠ ą┐čāčéąĖ čüąĖą│ąĮą░ą╗ą░ č湥čĆąĄąĘ ą░čéą╝ąŠčüč乥čĆčā. |
| cnoThreshNumSVs ąĖ cnoThresh |
ąæčāą┤ąĄčé ą┐čĆąĄą┤ą┐čĆąĖąĮčÅč鹊 ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ąĮą░ą▓ąĖą│ą░čåąĖąĖ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ čāą║ą░ąĘą░ąĮąĮąŠąĄ čćąĖčüą╗ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ čü čāčĆąŠą▓ąĮąĄą╝ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ ą╝ąĄąĮčīčłąĄ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░. |
ąĪą╝. čéą░ą║ąČąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ą▓ čüąĄą║čåąĖąĖ "Degraded Navigation".
2.3. ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ
ąĀąĄąĘčāą╗čīčéą░čé čĆąĄčłąĄąĮąĖčÅ ą┐ąŠ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą║ą╗ą░čüčüąĖčäąĖčåąĖčĆčāąĄčéčüčÅ ą┐ąŠ čéąĖą┐čā čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ (ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ą┐ąŠą╗ąĄą╝ fixType čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-NAV-PVT). ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéą╗ąĖčćą░čéčī ąŠčéą║ą░ąĘčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ("No Fix", ą┐ąŠąĘąĖčåąĖčÅ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░) ąĖ čüą╗čāčćą░ąĖ, ą║ąŠą│ą┤ą░ čäąĖą║čüą░čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéąĖą│ąĮčāčéą░, čćč鹊 ąĖą╝ąĄąĄčé ą┤ą░ą╗čīąĮąĄą╣čłąĄąĄ čāč鹊čćąĮąĄąĮąĖąĄ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čéąĖą┐čŗ čäąĖą║čüą░čåąĖąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ 2D, 3D, dead reckoning).
ąÜąŠą│ą┤ą░ čäąĖą║čüą░čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéąĖą│ąĮčāčéą░, ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐čĆąŠą▓ąĄčĆą║ą░ čü čåąĄą╗čīčÄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą┤ąŠą╗ąČąĮą░ ą╗ąĖ čŹčéą░ čäąĖą║čüą░čåąĖčÅ čüčćąĖčéą░čéčīčüčÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣, ąĖą╗ąĖ ąĮąĄčé. ążąĖą║čüą░čåąĖčÅ ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ąŠąĮą░ ą┐ąŠą┤čģąŠą┤ąĖčé ą┐ąŠą┤ ą▓čŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ (Navigation Output Filters), ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ UBX-CFG-NAV5. ąÆ čćą░čüčéąĮąŠčüčéąĖ, ąŠą▒ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ PDOP ąĖ č鹊čćąĮąŠčüčéčī ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą┐čĆąĄą┤ąĄą╗ąŠą▓.
ą¤čĆą░ą▓ąĖą╗čīąĮčŗąĄ čäąĖą║čüą░čåąĖąĖ ą┐ąŠą╝ąĄčćą░čÄčéčüčÅ čäą╗ą░ą│ąŠą╝ valid ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅčģ NMEA (čüą╝. "21. ążą╗ą░ą│ąĖ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ą▓ NMEA" [6]) ąĖ čäą╗ą░ą│ąŠą╝ gnssFixOK ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ UBX-NAV-PVT.
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐čĆąŠą▓ąĄčĆčÅčéčī čäą╗ą░ą│ gnssFixOK ą▓ UBX-NAV-PVT, ąĖą╗ąĖ čäą╗ą░ą│ valid NMEA. ążąĖą║čüą░čåąĖąĖ, ąĮąĄ ą┐ąŠą╝ąĄč湥ąĮąĮčŗąĄ ą║ą░ą║ valid, ąŠą▒čŗčćąĮąŠ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ.
ąĪąŠąŠą▒čēąĄąĮąĖčÅ UBX-NAV-SOL ąĖ UBX-NAV-STATUS ą┤ą░čÄčé čéą░ą║ąČąĄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠčüčéąĖ čäąĖą║čüą░čåąĖąĖ čüą▓ąŠąĖą╝ąĖ čäą╗ą░ą│ą░ą╝ąĖ gpsFixOK ąĖ GPSfixOk. ąŁčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčüčéą░ą▓ą╗ąĄąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐čĆąĄą┤ą┐ąŠčćčéąĖč鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-NAV-PVT.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-NAV5 čéą░ą║ąČąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ TDOP ąĖ č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąŠčéąĮąŠčüąĖčéčüčÅ ą╗ąĖ čäąĖą║čüą░čåąĖčÅ ą║ ąĘą░čģą▓ą░č湥ąĮąĮąŠą╣ GNSS ąĖą╗ąĖ ąĮąĄčé, ąĖ ą▓čüą╗ąĄą┤čüčéą▓ąĖąĄ čŹč鹊ą│ąŠ čāąĘąĮą░čéčī, ą╝ąŠąČąĄčé ą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ (time pulse). ążąĖą║čüą░čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčé ąŠą▒ąŠąĖą╝ ą║čĆąĖč鹥čĆąĖčÅą╝, čüčćąĖčéą░ąĄčéčüčÅ ąĮąĄ ąĘą░čģą▓ą░č湥ąĮąĮąŠą╣ GNSS, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ UBX-CFG-TP5 ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ.
2.4. Static Hold
ąĀąĄąČąĖą╝ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ čāą┤ąĄčƹȹ░ąĮąĖčÅ (Static Hold Mode) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ą░ą╝ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čāą╝ąĄąĮčīčłąĖčéčī čłčāą╝ ą▓ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠą│ą┤ą░ čüą║ąŠčĆąŠčüčéčī ąĮąĖąČąĄ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░ (Static Hold Threshold). ąŁč鹊 čāą╝ąĄąĮčīčłą░ąĄčé ą▒ą╗čāąČą┤ą░ąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ, ą▓čŗąĘą▓ą░ąĮąĮąŠąĄ čéą░ą║ąĖą╝ąĖ ą▓ąĮąĄčłąĮąĖą╝ąĖ čäą░ą║č鹊čĆą░ą╝ąĖ, ą║ą░ą║ ą╝ąĮąŠąČąĄčüčéą▓ąĄąĮąĮąŠąĄ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖąĄ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą▓čŗčłą░ąĄčéčüčÅ č鹊čćąĮąŠčüčéčī ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, čĆą░čüčüčćąĖčéą░ąĮąĮčŗčģ ąĮą░ čüčéą░čéąĖč湥čüą║ąŠąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ (ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ, ąĖą╗ąĖ ą╝ąĄąĮčÅąĄčéčüčÅ ą╝ąĄą┤ą╗ąĄąĮąĮąŠ). ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆąĄąČąĖą╝ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ čāą┤ąĄčƹȹ░ąĮąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮ.
ąĢčüą╗ąĖ čüą║ąŠčĆąŠčüčéčī ą┐ą░ą┤ą░ąĄčé ąĮąĖąČąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ Static Hold Threshold, č鹊 ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ Static Hold Mode. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮ ą▓čģąŠą┤ ą▓ Static Hold Mode, ą▓čŗą▓ąŠą┤ ą┐ąŠąĘąĖčåąĖąĖ čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čüčéą░čéąĖč湥čüą║ąĖą╝, ąĖ čüą║ąŠčĆąŠčüčéčī čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 0, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ ą┤ąŠą║ą░ąĘą░č鹥ą╗čīčüčéą▓ąŠ ąĮąŠą▓ąŠą│ąŠ ą┤ą▓ąĖąČąĄąĮąĖčÅ. ąóą░ą║ąĖą╝ ą┤ąŠą║ą░ąĘą░č鹥ą╗čīčüčéą▓ąŠą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠčĆąŠčüčéčī, čāčüą║ąŠčĆąĄąĮąĖąĄ, ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čäą╗ą░ą│ą░ valid (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮąĄč鹊čćąĮąŠčüčéčī ą┐ąŠąĘąĖčåąĖąĖ ą┐čĆąĄą▓čŗčüąĖą╗ą░ Position Accuracy Mask, čüą╝. čéą░ą║ąČąĄ čüąĄą║čåąĖčÄ "ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ"), čüą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ ąĖ čé. ą┐.
2.5. ążąĖą║čüą░čåąĖčÅ ą║čāčĆčüą░ ą┐ąŠ ąĘąĄą╝ą╗ąĄ
ą¤čĆąĖąĄą╝ąĮąĖą║ ą▓čŗčćąĖčüą╗čÅąĄčé ą║čāčĆčü ą┐ąŠ ąĘąĄą╝ą╗ąĄ ąĖąĘ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüą║ąŠčĆąŠčüčéąĖ (GNSS velocity). ąĢčüą╗ąĖ velocity ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗčćąĖčüą╗ąĄąĮą░ čü ą┤ąŠčüčéą░č鹊čćąĮąŠą╣ č鹊čćąĮąŠčüčéčīčÄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĖąĘ-ąĘą░ ą┐ą╗ąŠčģąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠčé čüą┐čāčéąĮąĖą║ąŠą▓) ąĖą╗ąĖ ąĄčüą╗ąĖ ą░ą▒čüąŠą╗čÄčéąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ąŠč湥ąĮčī ą╝ą░ą╗ą░ (ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 0.1 ą╝/čüąĄą║), č鹊 čéą░ą║ąČąĄ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮąĄč鹊čćąĮčŗą╝ ą║čāčĆčü ą┐ąŠ ąĘąĄą╝ą╗ąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą║čāčĆčü ą┐ąŠ ąĘąĄą╝ą╗ąĄ ąĘą░ą╝ąŠčĆą░ąČąĖą▓ą░ąĄčéčüčÅ, čé. ąĄ. čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖ ąĮą░ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ąĄą│ąŠ č鹊čćąĮąŠčüčéčī čüąĮąĖąČą░ąĄčéčüčÅ. ąŁčéąĖ ąĘą░ą╝ąŠčĆąŠąČąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĮąĄ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą▓ NMEA-čüąŠąŠą▒čēąĄąĮąĖčÅčģ NMEA-RMC ąĖ NMEA-VTG ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüą╗čāčćą░ąĄą▓, ą║ąŠą│ą┤ą░ ą┐čĆąŠč鹊ą║ąŠą╗ NMEA čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠą┤ąŠą▒ąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ (čüą╝. "NMEA Protocol Configuration").
2.6. Degraded Navigation
Degraded Navigation (čāčģčāą┤čłąĄąĮąĮą░čÅ ąĮą░ą▓ąĖą│ą░čåąĖčÅ) ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą▓čüąĄ čĆąĄąČąĖą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą╝ąĄąĮąĄąĄ 4 čüą┐čāčéąĮąĖą║ąŠą▓ (Satellite Vehicle, SV).
2.6.1. 2D-ąĮą░ą▓ąĖą│ą░čåąĖčÅ.
ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą▓ąŠąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ ąĖą╝ąĄąĄčé ą┤ą░ąĮąĮčŗąĄ č鹊ą╗čīą║ąŠ ąŠčé 3 čüą┐čāčéąĮąĖą║ąŠą▓, č鹊 ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐ąŠčüč鹊čÅąĮąĮčāčÄ ą▓čŗčüąŠčéčā ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ąŠčéčüčāčéčüčéą▓čāčÄčēąĄą│ąŠ č湥čéą▓ąĄčĆč鹊ą│ąŠ čüą┐čāčéąĮąĖą║ą░. ąÜąŠą│ą┤ą░ čüą┐čāčéąĮąĖą║ ą┐ąŠč鹥čĆčÅąĮ ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ 3D fix (ą║ąŠą│ą┤ą░ ą▒čŗą╗ąŠ ą┤ąŠčüčéčāą┐ąĮąŠ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 4 čüą┐čāčéąĮąĖą║ą░), ą▓čŗčćąĖčüą╗ąĄąĮąĮą░čÅ ą▓čŗčüąŠčéą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣, čĆą░ą▓ąĮąŠą╣ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ ą▓čŗčüąŠč鹥. ąŁč鹊čé čĆąĄąČąĖą╝ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ 2D fix.
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ u-blox ąĮąĄ ą┤ą░ąĄčé ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠą│ą┤ą░ ą┤ąŠčüčéčāą┐ąĮąŠ ą╝ąĄąĮčīčłąĄ 3 čüą┐čāčéąĮąĖą║ąŠą▓. ąóąŠą╗čīą║ąŠ timing-ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox, ą║ąŠą│ą┤ą░ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüčéą░čåąĖąŠąĮą░čĆąĄ, ą▓čŗčćąĖčüą╗čÅčÄčé ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą┤ąŠčüčéčāą┐ąĄąĮ č鹊ą╗čīą║ąŠ 1 čüą┐čāčéąĮąĖą║.
[3. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GNSS]
ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ ąĖąĘą┤ąĄą╗ąĖčÅ ą║ąŠą╝ą┐ą░ąĮąĖąĖ u-blox čŹč鹊 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖąĄ ą╝ąĮąŠąČąĄčüčéą▓ąŠ čüčéą░ąĮą┤ą░čĆč鹊ą▓ (multi-GNSS) ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖąĄ ą┐čĆąĖąĄą╝ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠčé čüą┐čāčéąĮąĖą║ąŠą▓čŗčģ čüąĖčüč鹥ą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ čüčéą░ąĮą┤ą░čĆč鹊ą▓.
ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox multi-GNSS ą╝ąŠą│čāčé ąĘą░čģą▓ą░čéčŗą▓ą░čéčī ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čüą┐čāčéąĮąĖą║ąĖ ąŠčé ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąĖčüč鹥ą╝ GNSS, ąĖ ą┐čĆąĖą╝ąĄąĮčÅčéčī ąĖčģ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ. ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox multi-GNSS čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ:
ŌĆó ąĪąĖą│ąĮą░ą╗ąŠą▓ GPS, SBAS (ąĮą░ą┐čĆąĖą╝ąĄčĆ WAAS, EGNOS, MSAS) ąĖ QZSS L1, čåąĄąĮčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĮą░ čćą░čüč鹊č鹥 1575.42 ą£ąōčå L1.
ŌĆó ąĪąĖą│ąĮą░ą╗ąŠą▓ GLONASS L1, čåąĄąĮčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĮą░ čćą░čüč鹊č鹥 1602.00 ą£ąōčå L1.
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-GNSS, čćč鹊ą▒čŗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĖąĄą╝ąĮąĖą║ u-blox ą▓ čéčĆąĄą▒čāąĄą╝čŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čāą║ą░ąĘą░čéčī, ą║ą░ą║ąĖąĄ čüąĖą│ąĮą░ą╗čŗ GNSS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą▓ą╝ąĄčüč鹥 čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝ąĖ, čüą║ąŠą╗čīą║ąŠ ą║ą░ąĮą░ą╗ąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą┤ąĄą╗ąĄąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ GNSS. ą¤čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé ąŠčéą▓ąĄčćą░čéčī ąĮą░ čéą░ą║ąĖąĄ ąĘą░ą┐čĆąŠčüčŗ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-ACK-ACK, ąĄčüą╗ąĖ ąŠąĮ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ░čéčī ąĘą░ą┐čĆąŠčłąĄąĮąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ, ąĖą╗ąĖ ą▒čāą┤ąĄčé ąŠčéą▓ąĄčćą░čéčī čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-ACK-NAK, ąĄčüą╗ąĖ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé.
ąöą╗čÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ GPS ą┐čĆąĖ čģąŠą╗ąŠą┤ąĮąŠą╝ čüčéą░čĆč鹥 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ SBAS.
3.1. GLONASS
GLONASS čŹč鹊 čüąĖčüč鹥ą╝ą░ GNSS, ą║ąŠč鹊čĆą░čÅ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ąĀąŠčüčüąĖąĖ. ąŻ ąĮąĄčæ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗčģ ąŠčéą╗ąĖčćąĖą╣ ąŠčé GPS. ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox čĆą░ą▒ąŠčéą░čÄčé ąŠč湥ąĮčī ą┐ąŠčģąŠąČąĄ, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ GLONASS ą▓ą╝ąĄčüč鹊 GPS. ą×ą┤ąĮą░ą║ąŠ ą▓ąĄčĆąŠčÅčéąĮąŠ ą▒čāą┤čāčé ąĘą░čéčĆąŠąĮčāčéčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą░čüą┐ąĄą║čéčŗ ą▓čŗą▓ąŠą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░:
ŌĆó ąĪąŠąŠą▒čēąĄąĮąĖčÅ NMEA ą┐ąŠą╝ąĄąĮčÅčÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąĮą░ GL (čüą╝. "NMEA Protocol Configuration").
ŌĆó ąĪąŠąŠą▒čēąĄąĮąĖčÅ UBX ą▒čāą┤čāčé ą┤ą░ą▓ą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ čü ą┤čĆčāą│ąĖą╝ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąŠąĮąĮčŗą╝ąĖ ąĮąŠą╝ąĄčĆą░ą╝ąĖ čüą┐čāčéąĮąĖą║ąŠą▓ (čüą╝. čüąĄą║čåąĖčÄ "ąØčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓").
ŌĆó ąóąŠčćąĮąŠčüčéčī ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ čüą┐čāčéąĮąĖą║ąĖ GLONASS, ą╝ąŠąČąĄčé ą▒čŗčéčī čģčāąČąĄ, č湥ą╝ ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ čüą┐čāčéąĮąĖą║ąĖ GPS. ą¤čĆąĖčćąĖąĮą░ ą▓ čüąĮąĖąČąĄąĮąĮąŠą╣ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ čüą┐čāčéąĮąĖą║ąŠą▓; čā čüąĖčüč鹥ą╝čŗ GLONASS ą╝ąĄąĮčīčłąĄ čüą┐čāčéąĮąĖą║ąŠą▓ (ąĮą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠ 24 čüą┐čāčéąĮąĖą║ą░ GLONASS ą▓ą╝ąĄčüč鹊 32 čüą┐čāčéąĮąĖą║ą░ GPS). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čüąĖą│ąĮą░ą╗čŗ GLONASS ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čĆąĄąČąĄ, čćč鹊 čüąĮąĖąČą░ąĄčé č鹊čćąĮąŠčüčéčī.
ŌĆó ąĪą┐čāčéąĮąĖą║ąĖ GLONASS ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāčÄčéčüčÅ ą┐ąŠ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čćą░čüčéąĖ ąĖčģ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠ č鹊ą╗čīą║ąŠ čćč鹊 ą┐ąŠą╗čāč湥ąĮąĮčŗčģ čüąĖą│ąĮą░ą╗ą░čģ GLONASS ą╝ąŠąČąĄčé čüąŠąŠą▒čēą░čéčīčüčÅ, čćč鹊 ąŠąĮąĖ ąŠčé ąĮąĄąĖąĘą▓ąĄčüčéąĮąŠą│ąŠ ("unknown") čüą┐čāčéąĮąĖą║ą░, ą┐ąŠą║ą░ čéąĖą┐ čüą┐čāčéąĮąĖą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ. ąĪ ą╝ąŠą╝ąĄąĮčéą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ ąŠ čüą┐čāčéąĮąĖą║ą░čģ GLONASS čüąŠąŠą▒čēą░čÄčé ąĖčģ ą║ąŠčĆčĆąĄą║čéąĮčŗą╝ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąŠąĮąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ.
ŌĆó ą¤ąŠčüą║ąŠą╗čīą║čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ GLONASS ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą▓čĆąĄą╝ąĄąĮąĮčāčÄ ą▒ą░ąĘčā, ą▓čŗčĆąŠą▓ąĮąĄąĮąĮčāčÄ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐ąŠ UTC, ąĮą░ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ GLONASS ą▓ą╗ąĖčÅčÄčé čüą║ą░čćą║ąĖ čüąĄą║čāąĮą┤, ą║ąŠą│ą┤ą░ ąĖąĮąŠą│ą┤ą░ ą▒ą░ąĘą░ ą▓čĆąĄą╝ąĄąĮąĖ UTC ą┐ąĄčĆąĄą║ą░ą╗ąĖą▒čĆąŠą▓čŗą▓ą░ąĄčéčüčÅ. ąÜą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą│ąŠč鹊ą▓čŗ ą║ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĄčüą╗ąĖ ą▓ ą╝ąŠą╝ąĄąĮčé ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ GLONASS ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą║ą░č湊ą║ čüąĄą║čāąĮą┤.
ąØą░ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ GPS ąĮąĄ ą▓ą╗ąĖčÅčÄčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ą░čćą║ąŠą▓ čüąĄą║čāąĮą┤, ą┐ąŠčüą║ąŠą╗čīą║čā ąĖčģ ą▓čĆąĄą╝ąĄąĮąĮą░čÅ ą▒ą░ąĘą░ (ą▓čĆąĄą╝čÅ GPS) ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą║ą░čćą║ąŠą▓ čüąĄą║čāąĮą┤. ąĪą┐čāčéąĮąĖą║ąĖ GPS ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą┐ąĄčĆąĄą┤ą░čÄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖąĄą╝ąĮąĖą║čā ą▓čŗčćąĖčüą╗ąĖčéčī UTC.
3.2. QZSS
QZSS čŹč鹊 čüąĖčüč鹥ą╝ą░ GNSS, čĆą░ą▒ąŠčéą░čÄčēą░čÅ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ Japan Aerospace Exploration Agency (JAXA). ą×ąĮą░ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą║ą░ą║ čāą╗čāčćčłąĄąĮąĖąĄ GPS, čü ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ ą┤ąŠčüčéčāą┐ąĮąŠčüčéčīčÄ čüą┐čāčéąĮąĖą║ąŠą▓ ąĖ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ č鹊čćąĮąŠčüčéčīčÄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāč鹊 ą┐čāč鹥ą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąĖčüč鹥ą╝ąŠą╣ QZSS čüąĖą│ąĮą░ą╗ąŠą▓, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čü GPS ąĖ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░čģ GPS.
ąĪąŠąŠą▒čēąĄąĮąĖčÅ NMEA ą┐ąŠą║ą░ąČčāčé čüą┐čāčéąĮąĖą║ąĖ QZSS č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąŠąĮąĖ čŹč鹊 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ (čüą╝. čüąĄą║čåąĖčÄ "ąØčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓").
[4. ąØčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓]
4.1. NMEA
ą¤čĆąŠč鹊ą║ąŠą╗ NMEA (V2.3) ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čüą┐čāčéąĮąĖą║ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čćąĖčüą╗ą░ ąĖąĘ 2 čåąĖčäčĆ, čĆąĄąĘąĄčĆą▓ąĖčĆčāčÅ čćąĖčüą╗ą░ 1 .. 32 ą┤ą╗čÅ GPS, 33 .. 64 ą┤ą╗čÅ SBAS ąĖ 65 .. 96 ą┤ą╗čÅ GLONASS. ąóą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ, GLONASS SV4 ą▒čāą┤ąĄčé čüąŠąŠą▒čēą░čéčīčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čćąĖčüą╗ą░ 68. ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čŹč鹊čé ą╝ąĄč鹊ą┤ ą▓ čüą▓ąŠąĄą╝ ą▓čŗą▓ąŠą┤ąĄ NMEA, ą║ąŠą│ą┤ą░ ą▓čŗą▒čĆą░ąĮą░ ąČąĄčüčéą║ą░čÅ ąĮčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓ ("strict" SV numbering). ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ čŹč鹊 čāčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąŠą┤ąĮą░ą║ąŠ čŹč鹊 ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĖą╗ąĖ ą┐čĆąŠą▓ąĄčĆąĖčéčī čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-NMEA.
ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮąĄčé čüą┐ąŠčüąŠą▒ą░ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░čéčī čüą┐čāčéąĮąĖą║ąĖ ą┤čĆčāą│ąĖčģ čüąĖčüč鹥ą╝ GNSS. ą¦č鹊ą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī QZSS č鹥ą║čāčēąĖą╝ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ą╝ąĖ ąĖ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčīčüčÅ ą║ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĄ ą┤čĆčāą│ąĖčģ čüąĖčüč鹥ą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ Galileo) ą▓ ą▒čāą┤čāčēąĖčģ ą┐čĆąĖąĄą╝ąĮąĖą║ą░čģ, čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-NMEA ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ čĆą░čüčłąĖčĆąĄąĮąĮą░čÅ čüčģąĄą╝ą░ ąĮčāą╝ąĄčĆą░čåąĖąĖ čüą┐čāčéąĮąĖą║ąŠą▓ ("extended" SV numbering). ą×ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮąŠą╝ąĄčĆą░ NMEA, ąĮąŠ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ą┤čĆčāą│ąĖąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ ąĮąŠą╝ąĄčĆąŠą▓, čćč鹊ą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą┤čĆčāą│ąĖąĄ čüąĖčüč鹥ą╝čŗ GNSS. ą×ą┤ąĮą░ą║ąŠ ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čŹč鹊 ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ čĆą░čüčłąĖčĆąĄąĮąĖąĄ čéčĆąĄą▒čāąĄčé čćąĖčüąĄą╗ ąĖąĘ 3 čåąĖčäčĆ, čćč鹊 ą╝ąŠąČąĄčé ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ąĮąĄą║ąŠč鹊čĆčŗą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╝ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ NMEA. ąØą░ą┐čĆąĖą╝ąĄčĆ, čĆą░čüčłąĖčĆąĄąĮąĮą░čÅ čüčģąĄą╝ą░ čüąŠąŠą▒čēą░ąĄčé ąŠ čüą┐čāčéąĮąĖą║ą░čģ QZSS čü ą┐ąŠą╝ąŠčēčīčÄ čćąĖčüąĄą╗ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 193 .. 197.
ąĪą┐čāčéąĮąĖą║ąĖ GLONASS ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮąĖ ą▒čŗą╗ąĖ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ. ąÆ ą▓čŗą▓ąŠą┤ąĄ NMEA ąŠ čéą░ą║ąĖčģ "unknown"-čüą┐čāčéąĮąĖą║ą░čģ čüąŠąŠą▒čēą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ null-ą┐ąŠą╗čÅ (čé. ąĄ. ą┐čāčüč鹊ą╣ čüčéčĆąŠą║ąĖ).
4.2. UBX
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ UBX ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┤ą▓ąĄ čĆą░ąĘąĮčŗąĄ čüčģąĄą╝čŗ ąĮčāą╝ąĄčĆą░čåąĖąĖ. ą£ąĮąŠą│ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX (ąĮą░ą┐čĆąĖą╝ąĄčĆ UBX-NAV-SVINFO) ąĖčüą┐ąŠą╗čīąĘčāčÄčé 1 ą▒ą░ą╣čé ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüą┐čāčéąĮąĖą║ą░ (ąŠą▒čŗčćąĮąŠ ąĖą╝ąĄąĮčāąĄą╝čŗą╣ "svId"). ąŁčéą░ čüąĖčüč鹥ą╝ą░ ąĮčāą╝ąĄčĆą░čåąĖąĖ ą┐ąŠą┤ąŠą▒ąĮą░ "extended"-čüčģąĄą╝ąĄ NMEA, ąĖ čŹč鹊 ą┐čĆąŠčüč鹊 čĆą░čüčłąĖčĆąĄąĮąĖąĄ čüčģąĄą╝čŗ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄą╣čüčÅ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ą┐ąŠą║ąŠą╗ąĄąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ u-blox.
ąĪ ą┐ąŠčüč鹥ą┐ąĄąĮąĮčŗą╝ čāą▓ąĄą╗ąĖč湥ąĮąĖąĄą╝ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüą┐čāčéąĮąĖą║ąŠą▓ GNSS čŹčéą░ čüčģąĄą╝ą░ ą▒čāą┤ąĄčé ą▓čŗčģąŠą┤ąĖčéčī ąĖąĘ čāą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ ą▒čāą┤čāčēąĖčģ ą┐čĆąĖąĄą╝ąĮąĖą║ą░čģ u-blox (čéą░ą║ ą║ą░ą║ ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ čćąĖčüą╗ą░ ą▒ąŠą╗čīčłąĄ 255). ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▒ąŠą╗ąĄąĄ ąĮąŠą▓čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čāą╗čāčćčłąĄąĮąĮčŗą╣ ąĖ ą│ąĖą▒ą║ąĖą╣ čüą┐ąŠčüąŠą▒ ąĮčāą╝ąĄčĆą░čåąĖąĖ, ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ čĆą░ąĘą▓ąĖčéąĖčÅ. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ gnssId ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ čéąĖą┐ą░ čüą┐čāčéąĮąĖą║ą░ GNSS ąĖ ą┐čĆąŠčüč鹊ą│ąŠ svId, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąŠą╝ąĄčĆ čüą┐čāčéąĮąĖą║ą░ ą▓ čŹč鹊ą╣ čüąĖčüč鹥ą╝ąĄ. ą¤ąŠčćčéąĖ ą▓ąŠ ą▓čüąĄčģ čüą╗čāčćą░čÅčģ čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 "svId" čŹč鹊 ąĮą░čéčāčĆą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ, čüą▓čÅąĘą░ąĮąĮąŠąĄ čüąŠ čüą┐čāčéąĮąĖą║ąŠą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą┐čāčéąĮąĖą║ GLONASS SV4 ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčéčüčÅ ą║ą░ą║ gnssId 6, svId 4, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ GPS SV4 ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčéčüčÅ gnssId 0, svId 4.
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ GNSS:
| gnssId |
ąóąĖą┐ GNSS |
| 0 |
GPS |
| 1 |
SBAS |
| 5 |
QZSS |
| 6 |
GLONASS |
ąÆ čŹčéčā čéą░ą▒ą╗ąĖčåčā ą▒čāą┤čāčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┤čĆčāą│ąĖčģ čéąĖą┐ąŠą▓ GNSS ą┐čĆąĖąĄą╝ąĮąĖą║ą░ą╝ąĖ u-blox.
ąĪą┐čāčéąĮąĖą║ąĖ GLONASS ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮąĖ ą▒čŗą╗ąĖ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ. ąÆ čüąŠąŠą▒čēąĄąĮąĖčÅčģ UBX čéą░ą║ąĖąĄ "unknown"-čüą┐čāčéąĮąĖą║ąĖ ą▓čüąĄą│ą┤ą░ čüąŠąŠą▒čēą░čÄčéčüčÅ ąĮąŠą╝ąĄčĆą░ą╝ąĖ svId 255.
ąĪą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄą╣ čüčāą╝ą╝ą░čĆąĮąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ąĮčāą╝ąĄčĆą░čåąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓.
| ąóąĖą┐ GNSS |
ąöąĖą░ą┐ą░ąĘąŠąĮ SV |
UBX gnssId:svId |
UBX svId |
NMEA (strict) |
NMEA (extended) |
| GPS |
G1-G32 |
0:1-32 |
1-32 |
1-32 |
1-32 |
| SBAS |
S120-S158 |
1:120-158 |
120-158 |
33-64 |
33-64,152-158 |
| QZSS |
Q1-Q5 |
5:1-5 |
193-197 |
- |
193-197 |
| GLONASS |
R1-R32, R? |
6:1-32, 6:255 |
65-96, 255 |
65-96, null |
65-96, null |
[5. ą×ą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SBAS]
5.1. SBAS
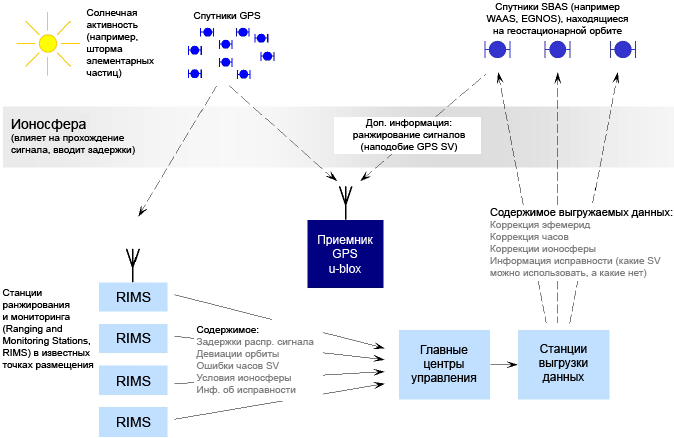
SBAS (Satellite Based Augmentation System) čŹč鹊 ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮą░čÅ (čāą╗čāčćčłą░čÄčēą░čÅ) č鹥čģąĮąŠą╗ąŠą│ąĖčÅ ą┤ą╗čÅ GPS, ą║ąŠč鹊čĆą░čÅ ą▓čŗčćąĖčüą╗čÅąĄčé čåąĄą╗ąŠčüčéąĮąŠčüčéčī ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ GPS čü ą┐ąŠą╝ąŠčēčīčÄ ąĮą░ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣ RIMS (Ranging and Integrity Monitoring Stations), ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą│ąĄąŠčüčéą░čåąĖąŠąĮą░čĆąĮčŗąĄ čüą┐čāčéąĮąĖą║ąĖ ą┤ą╗čÅ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖčÅ GPS ąĖ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ GPS. ąÜąŠčĆčĆąĄą║čéąĖčĆčāčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąĮą░ čćą░čüč鹊č鹥 GPS L1 (1575.42 ą£ąōčå), ą┐ąŠčŹč鹊ą╝čā čéčĆąĄą▒čāąĄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą┐čĆąĖąĄą╝ąĮąĖą║, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą║ąŠčĆčĆąĄą║čåąĖčÅ ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ.
ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ SBAS ą┤ąŠčüčéčāą┐ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ GPS, čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ GPS.
ąÆčüąĄą│ąŠ ą▓ ą╝ąĖčĆąĄ ąĖą╝ąĄąĄčéčüčÅ ąĖą╗ąĖ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ SBAS-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čüąĖčüč鹥ą╝:
ŌĆó WAAS (Wide Area Augmentation System) ą┤ą╗čÅ ąĪąĄą▓ąĄčĆąĮąŠą╣ ąÉą╝ąĄčĆąĖą║ąĖ, ą║ąŠč鹊čĆą░čÅ ą▓ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆą░ą▒ąŠč鹥 čü 2003 ą│ąŠą┤ą░.
ŌĆó MSAS (Multi-Functional Satellite Augmentation System) ą┤ą╗čÅ ąÉąĘąĖąĖ, ąĘą░ą┐čāčēąĄąĮąĮą░čÅ čü 2007 ą│ąŠą┤ą░.
ŌĆó EGNOS (European Geostationary Navigation Overlay Service), ąĄą▓čĆąŠą┐ąĄą╣čüą║ą░čÅ čüąĖčüč鹥ą╝ą░, čĆą░ą▒ąŠčéą░čÄčēą░čÅ čü 2009 ą│ąŠą┤ą░.
ŌĆó GAGAN (GPS Aided Geo Augmented Navigation), čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮą░čÅ ą┐čĆą░ą▓ąĖč鹥ą╗čīčüčéą▓ąŠą╝ ąśąĮą┤ąĖąĖ, ąĖ ąĮą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čŹč鹊ą│ąŠ č鹥ą║čüčéą░ čĆą░ą▒ąŠčéą░čÄčēą░čÅ ą▓ č鹥čüč鹊ą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ.
ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ SBAS ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░ą╝ u-blox ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ą░ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ čüąĖčüč鹥ą╝ (WAAS, EGNOS, MSAS), ą░ čéą░ą║ąČąĄ čüąĖčüč鹥ą╝, ą║ąŠč鹊čĆčŗąĄ č鹥čüčéąĖčĆčāčÄčéčüčÅ ąĖ ą┐ą╗ą░ąĮąĖčĆčāčÄčéčüčÅ ą║ ą▓ą▓ąŠą┤čā ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ (čéą░ą║ąĖąĄ ą║ą░ą║ GAGAN).
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ SBAS ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ (ąĮą░ą▓ąĖą│ą░čåąĖąĖ). ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ u-blox GPS ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čüąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ čüą┐čāčéąĮąĖą║ąĖ SBAS ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čéą░ą║ ąČąĄ, ą║ą░ą║ čüą┐čāčéąĮąĖą║ąĖ GPS, ąĄčüą╗ąĖ čüą┐čāčéąĮąĖą║ąĖ SBAS ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čüą╗čāąČą▒čā GPS.
ąöą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ SBAS ąĖčüą┐ąŠą╗čīąĘčāąĄčé čĆą░ąĘąĮčŗąĄ čéąĖą┐čŗ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ:
ŌĆó Fast Corrections (ą▒čŗčüčéčĆčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ) ą┤ą╗čÅ ą║ąŠčĆąŠčéą║ąĖčģ ąĮą░čĆčāčłąĄąĮąĖą╣ ą▓ čüąĖą│ąĮą░ą╗ą░čģ GPS (ąĖąĘ-ąĘą░ ą┐čĆąŠą▒ą╗ąĄą╝ čü čćą░čüą░ą╝ąĖ ąĖ čé. ą┐.).
ŌĆó Long-term corrections (ą┤ą╗ąĖąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ) ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čåąĖąĖ čćą░čüąŠą▓ GPS, ąŠčłąĖą▒ąŠą║ ąŠčĆą▒ąĖčéčŗ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖčÅ ąĖ čé. ą┐.
ŌĆó Ionosphere corrections ą┤ą╗čÅ čāč湥čéą░ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĖąŠąĮąŠčüč乥čĆčŗ.
ąöčĆčāą│ąŠąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ SBAS - ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ GPS. ąĪčéą░ąĮčåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ SBAS (SBAS Control stations) ą╝ąŠą│čāčé ąĘą░ą┐čĆąĄčéąĖčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüą┐čāčéąĮąĖą║ąŠą▓ GPS ąĮą░ 6 čüąĄą║čāąĮą┤ (alarm time) ą▓ čüą╗čāčćą░ąĄ čüąĄčĆčīąĄąĘąĮčŗčģ ą┐čĆąŠą▒ą╗ąĄą╝ čüąŠ čüą┐čāčéąĮąĖą║ą░ą╝ąĖ GPS. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ, č鹥čģąĮąŠą╗ąŠą│ąĖčÅ u-blox GPS ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹊ą╗čīą║ąŠ č鹥 čüą┐čāčéąĮąĖą║ąĖ, ą┤ą╗čÅ ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ.
ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ SBAS ąĖ čüą▓čÅąĘą░ąĮąĮčŗčģ čü čŹčéąĖą╝ čüą╗čāąČą▒ą░čģ čüą╝. čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖčüč鹊čćąĮąĖą║ąĖ:
ŌĆó RTCA/DO-229D (MOPS) ąĮą░ čüą░ą╣č鹥 www.rtca.org.
ŌĆó gps.faa.gov, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ WAAS.
ŌĆó www.esa.int, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ EGNOS.
ŌĆó www.essp-sas.eu, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ European Satellite Services Provider (ESSP), ą╝ąĄąĮąĄą┤ąČąĄčĆą░ EGNOS.
ŌĆó www.isro.org, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ GAGAN.
ąĪą┐čāčéąĮąĖą║ąĖ SBAS, ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝čŗąĄ ą▓ ą╝ą░čĆč鹥 2012 ą│ąŠą┤ą░:
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖčÅ |
ą¤ąŠą╗ąŠąČąĄąĮąĖąĄ |
GPS PRN |
ą¤čĆąŠą▓ą░ą╣ą┤ąĄčĆ SBAS |
| AMR |
98┬░ W |
133 |
WAAS |
| PanAmSat Galaxy XV |
133.1┬░ W |
135 |
WAAS |
| TeleSat Anik F1R |
107.3┬░ W |
138 |
WAAS |
| Inmarsat 3F2 AOR-E |
15.5┬░ W |
120 |
EGNOS |
| Artemis |
21.5┬░ W |
124 |
EGNOS |
| Inmarsat 3F5 IOR-W |
25┬░ E |
126 |
EGNOS |
| MTSAT-1R |
140┬░ E |
129 |
MSAS |
| MTSAT-2 |
145┬░ E |
137 |
MSAS |
| Inmarsat 4 F1 |
55.1┬░ E |
127 |
GAGAN |
5.2. ążčāąĮą║čåąĖąĖ SBAS
ąŁčéą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ u-blox SBAS čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ RTCA/DO-229D, ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ ą║ą╗ą░čüčüą░ Beta-1. ąÆčüąĄ čéą░ą╣ą╝ą░čāčéčŗ ąĖ čé. ą┐. ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čŗą▒čĆą░ąĮčŗ ą┤ą╗čÅ En Route Case. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊 ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ ąĮąĖ ą┐čĆąĖ ą║ą░ą║ąĖčģ ąŠą▒čüč鹊čÅč鹥ą╗čīčüčéą▓ą░čģ, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą║ą░čüą░čÄčéčüčÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ąČąĖąĘąĮąĖ!
ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox ą╝ąŠą│čāčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĖą│ąĮą░ą╗ąŠą▓ SBAS ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ, ą┤ą░ąČąĄ ąŠčé čĆą░ąĘąĮčŗčģ čüąĖčüč鹥ą╝ SBAS (WAAS, EGNOS, MSAS ąĖ čé. ą┐.). ą×ąĮąĖ ą╝ąŠą│čāčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčīčüčÅ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ. ąÜą░ąČą┤čŗą╣ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝čŗą╣ čüą┐čāčéąĮąĖą║ SBAS ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ ą║ą░ąĮą░ą╗ čéčĆąĄą║ąĖąĮą│ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ą×ą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą║ą░ąĮą░ą╗ąŠą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąÜą░ąČą┤čŗą╣ čüą┐čāčéąĮąĖą║ SBAS, čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čŹč乥ą╝ąĄčĆąĖą┤čŗ ąĖ ą░ą╗čīą╝ą░ąĮą░čģą░, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čéą░ą║ ąČąĄ, ą║ą░ą║ ąŠą▒čŗčćąĮčŗą╣ čüą┐čāčéąĮąĖą║ GPS.
ąöą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ u-blox GPS ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą▒ąĖčĆą░ąĄčé čüą░ą╝čŗą╣ ą╗čāčćčłąĖą╣ čüą┐čāčéąĮąĖą║ SBAS ą║ą░ą║ ąĖčüč鹊čćąĮąĖą║ ą┐ąĄčĆą▓ąĖčćąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. ąÆčŗą▒ąĖčĆą░ąĄčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ č鹊ą╗čīą║ąŠ ąŠčé ąŠą┤ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ SBAS, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠčé ą┤čĆčāą│ąĖčģ čüą┐čāčéąĮąĖą║ąŠą▓ SBAS ą▒čŗą╗ą░ ą▒čŗ ąĖąĘą▒čŗč鹊čćąĮąŠą╣ ąĖ/ąĖą╗ąĖ ą┐čĆąŠčéąĖą▓ąŠčĆąĄčćąĖą▓ąŠą╣. ąĪčéčĆą░č鹥ą│ąĖčÅ ą▓čŗą▒ąŠčĆą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▒ą╗ąĖąĘąŠčüčéčīčÄ čüą┐čāčéąĮąĖą║ąŠą▓, čüą╗čāąČą▒ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą┐čāčéąĮąĖą║, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (Testmode allowed/disallowed, Integrity enabled/disabled) ąĖ ą║ą░č湥čüčéą▓ąŠą╝ ą║ą░ąĮą░ą╗ą░ čüą▓čÅąĘąĖ čüąŠ čüą┐čāčéąĮąĖą║ąŠą╝.
ąÆ čüą╗čāčćą░ąĄ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą║ąŠčĆčĆąĄą║čåąĖą╣ ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░ SBAS ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąĖčģ ą┐čĆąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ DGPS ą▓ čüąŠąŠą▒čēąĄąĮąĖčÅčģ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ čäą╗ą░ą│ąŠą▓ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ NMEA: NAV-PVT, NAV-SOL, NAV-STATUS, NAV-SVINFO). ąĪąŠąŠą▒čēąĄąĮąĖąĄ NAV-SBAS ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ąĖąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą┤ąŠčüčéčāą┐ąĮčŗ ąĖ ą▒čŗą╗ąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ.
ąØą░ąĖą▒ąŠą╗ąĄąĄ ą▓ą░ąČąĮą░čÅ čäčāąĮą║čåąĖčÅ SBAS ą┤ą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ - Ionosphere correction. ąśąĘą╝ąĄčĆąĄąĮąĮčŗąĄ čüčéą░ąĮčåąĖčÅą╝ąĖ RIMS ą┤ą░ąĮąĮčŗąĄ čĆąĄą│ąĖąŠąĮą░ ą║ąŠą╝ą▒ąĖąĮąĖčĆčāčÄčéčüčÅ čü ą║ą░čĆč鹊ą╣ TEC (Total Electron Content). ąŁčéą░ ą║ą░čĆčéą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ č湥čĆąĄąĘ čüą┐čāčéąĮąĖą║ąĖ, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐čĆąĖą╝ąĄąĮąĖčéčī ą║ąŠčĆčĆąĄą║čåąĖčÄ ąĖąŠąĮąŠčüč乥čĆąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą╝ čüą┐čāčéąĮąĖą║ąĄ.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ SBAS
| ąóąĖą┐ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ |
ąśčüč鹊čćąĮąĖą║ |
| 0(0/2) |
Test Mode |
All |
| 1 |
PRN Mask Assignment |
Primary |
| 2, 3, 4, 5 |
Fast Corrections |
Primary |
| 6 |
Integrity |
Primary |
| 7 |
Fast Correction Degradation |
Primary |
| 9 |
Satellite Navigation (Ephemeris) |
All |
| 10 |
Degradation |
Primary |
| 12 |
Time Offset |
Primary |
| 17 |
Satellite Almanac |
All |
| 18 |
Ionosphere Grid Point Assignment |
Primary |
| 24 |
Mixed Fast / Long term Corrections |
Primary |
| 25 |
Long term Corrections |
Primary |
| 26 |
Ionosphere Delays |
Primary |
ąÜą░ąČą┤čŗą╣ čüą┐čāčéąĮąĖą║ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čĆąĄą│ąĖąŠąĮ ąĖ ąĄą│ąŠ ą║ąŠčĆčĆąĄą║čéąĖčĆčāčÄčēąĖą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠą╗ąĄąĘąĄąĮ č鹊ą╗čīą║ąŠ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čŹč鹊ą│ąŠ čĆąĄą│ąĖąŠąĮą░. ąÜčĆą░ą╣ąĮąĄ ą▓ą░ąČąĮąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗą▒ąŠčĆą░ ąĮą░ąĖą╗čāčćčłąĄą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčüąŠą▒ąĄąĮąĮąŠ ą▓ ą╝ąĄčüčéą░čģ, ą│ą┤ąĄ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąĖąĄą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠčé čĆą░ąĘąĮčŗčģ čüąĖčüč鹥ą╝ SBAS:
ą¤čĆąĖą╝ąĄčĆ 1, ą┐čĆąĖąĄą╝ąĮąĖą║ SBAS ą▓ ąĪąĄą▓ąĄčĆąĮąŠą╣ ąÉą╝ąĄčĆąĖą║ąĄ. ąÆ ą▓ąŠčüč鹊čćąĮčŗčģ čćą░čüčéčÅčģ ąĪąĄą▓ąĄčĆąĮąŠą╣ ąÉą╝ąĄčĆąĖą║ąĖ čüą╗ąĄą┤čāąĄčé ą▒čŗčéčī ąŠčüč鹊čĆąŠąČąĮčŗą╝, čćč鹊ą▒čŗ čüą┐čāčéąĮąĖą║ąĖ EGNOS ąĮąĄ ą┐ąŠą╗čāčćą░ą╗ąĖ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ą┐ąĄčĆąĄą┤ čüą┐čāčéąĮąĖą║ą░ą╝ąĖ WAAS. ąĪą┐čāčéąĮąĖą║ąĖ čüąĖčüč鹥ą╝čŗ EGNOS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮčŗ čü ą┐ąŠą╝ąŠčēčīčÄ PRN Mask.
ą¤čĆąĖą╝ąĄčĆ 2, ą┐čĆąĖąĄą╝ąĮąĖą║ SBAS ą▓ ąĢą▓čĆąŠą┐ąĄ. ąØąĄą║ąŠč鹊čĆčŗąĄ čüą┐čāčéąĮąĖą║ąĖ WAAS ą╝ąŠą│čāčé ą┐čĆąĖąĮąĖą╝ą░čéčīčüčÅ ą▓ ą▓ąŠčüč鹊čćąĮčŗčģ čćą░čüčéčÅčģ ąĢą▓čĆąŠą┐čŗ, ą┐ąŠčŹč鹊ą╝čā čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĘą░ą┐čĆąĄčéąĖčéčī ą▓čüąĄ čüą┐čāčéąĮąĖą║ąĖ, ą║čĆąŠą╝ąĄ EGNOS, čü ą┐ąŠą╝ąŠčēčīčÄ č鹊ą╣ ąČąĄ PRN Mask.
ąźąŠčéčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox ą┐čŗčéą░čÄčéčüčÅ ą▓čŗą▒čĆą░čéčī čüą░ą╝čŗąĄ ą╗čāčćčłąĖąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ SBAS, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ SBAS. SBAS-čüąĖčüč鹥ą╝ą░ EGNOS ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖčÄ čĆą░ąĮąČąĖčĆąŠą▓ą░ąĮąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓.
5.3. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SBAS
ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ SBAS ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮąŠąĄ UBX-čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-SBAS (SBAS Configuration).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SBAS
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Mode - SBAS Subsystem |
ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐ąŠą┤čüąĖčüč鹥ą╝čā SBAS |
| Mode - Allow test mode usage |
ąĀą░ąĘčĆąĄčłą░ąĄčé / ąĮąĄ čĆą░ąĘčĆąĄčłą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ SBAS čüąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ Test Mode (Message 0) |
| Services/Usage - Ranging |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüą┐čāčéąĮąĖą║ąŠą▓ SBAS ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ |
| Services/Usage - Apply SBAS correction data |
ąÜąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ą╗čÄčć čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ/ąĘą░ą┐čĆąĄčéą░ ą┤ą╗čÅ Fast ąĖ Long ąĖąŠąĮąŠčüč乥čĆąĮčŗčģ ą║ąŠčĆčĆąĄą║čåąĖą╣ |
| Services/Usage - Apply integrity information |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ (ąĖčüą┐čĆą░ą▓ąĮąŠčüčéąĖ) |
| Number of tracking channels |
ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CGF-GNSS. ą¤ąŠą╗ąĄ ą▓ UBX-CFG-SBAS ą▒ąŠą╗čīčłąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ. |
| PRN Mask |
ą¤ąŠąĘą▓ąŠą╗čÅąĄčé čüąĄą╗ąĄą║čéąĖą▓ąĮąŠ čĆą░ąĘčĆąĄčłą░čéčī/ąĘą░ą┐čĆąĄčēą░čéčī čüą┐čāčéąĮąĖą║ąĖ SBAS (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠą│čĆą░ąĮąĖčćąĖčéčī SBAS č鹊ą╗čīą║ąŠ čüąĖčüč鹥ą╝ąŠą╣ WAAS). |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ SBAS čĆą░ąĘčĆąĄčłąĄąĮą░ čü čéčĆąĄą╝čÅ ą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ SBAS, ąĖ ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗čÄą▒čŗąĄ ą┐čĆąĖąĮčÅčéčŗąĄ čüą┐čāčéąĮąĖą║ąĖ SBAS (ą║čĆąŠą╝ąĄ č鹥čģ, ą║ąŠč鹊čĆčŗąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ) ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ, ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖąŠąĮąŠčüč乥čĆčŗ.
[6. ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ą▓čĆąĄą╝čÅ]
6.1. ąøąŠą║ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░
ą¤čĆąĖąĄą╝ąĮąĖą║ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (ąŠą▒čŗčćąĮąŠ čŹč鹊 TCXO ąĖą╗ąĖ ą║ą▓ą░čĆčåąĄą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ), ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čĆą░ą┤ąĖąŠčéčĆą░ą║čéą░, čéą░ą║ ąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą┐čĆąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ čüąĖą│ąĮą░ą╗ą░. ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ čćą░čüč鹊čéčŗ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ 26 ą£ąōčå) ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox ą┤ąĄą╗čÅčé čŹčéčā čćą░čüč鹊čéčā ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ 1 ą║ąōčå, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąĮąŠą│ąĖą╝ąĖ ą┐čĆąŠčåąĄčüčüą░ą╝ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąÆ čćą░čüčéąĮąŠčüčéąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ čüą┐čāčéąĮąĖą║ąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ ą┐ąŠ "čéąĖą║ą░ą╝" čŹč鹊ą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ 1 ą║ąōčå.
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ, čā ąĮąĄą│ąŠ ą┐ąŠą║ą░ ąĮąĄčé ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ čŹčéąĖ čéą░ą║čéčŗ čéąĖą║ąŠą▓ čüąŠąŠčéąĮąŠčüčÅčéčüčÅ čü ą┤čĆčāą│ąĖą╝ąĖ čüąĖčüč鹥ą╝ą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ; ąŠąĮ ą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ ą╗ąĖčłčī ąŠčéčüčćąĖčéčŗą▓ą░čéčī ą▓čĆąĄą╝čÅ čłą░ą│ą░ą╝ąĖ ą▓ 1 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą╗čāčćą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠčé čüą┐čāčéąĮąĖą║ąŠą▓, ąŠąĮ ą║ąŠčĆčĆąĄą║čéąĖčĆčāąĄčé ą▓čĆąĄą╝čÅ ą┐ąŠ ąĖčģ čüąŠąŠą▒čēąĄąĮąĖčÅą╝, ąŠčĆąĖąĄąĮčéąĖčĆčāčÅ čüą▓ąŠąĖ čéąĖą║ąĖ 1 ą║ąōčå ą┐ąŠ ą▒ą░ąĘąĄ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čüąĖčüč鹥ą╝čŗ GNSS. ąÆ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ ą▓ąĄčĆčüąĖčÅčģ firmware ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ u-blox čŹč鹊 ą▓čüąĄą│ą┤ą░ ą▒čŗą╗ą░ ą▒ą░ąĘą░ ą▓čĆąĄą╝ąĄąĮąĖ GPS, ąĮąŠ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĖčģ ą▓ąĄčĆčüąĖčÅčģ firmware čŹč鹊 čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▒ą░ąĘčŗ GPS ąĖą╗ąĖ GLONASS, ąĖ ą▓ ą▒čāą┤čāčēąĄą╝ ą╝ąŠą│čāčé ą▒čŗčéčī čéą░ą║ąČąĄ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┤čĆčāą│ąĖčģ čüąĖčüč鹥ą╝ GNSS (čéą░ą║ąĖčģ ą║ą░ą║ Galileo, Compass, ąĖ čé. ą┤.). ąŁč鹊 ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ 1 ą║ąōčå ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą╗ąŠą║ą░ą╗čīąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ą¤ąŠčüą║ąŠą╗čīą║čā ą╗ąŠą║ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąŠč鹊ą▒čĆą░ąČą░ąĄčé ąŠą┐ąŠčĆąĮčāčÄ ą╗ąŠą║ą░ą╗čīąĮčāčÄ čćą░čüč鹊čéčā 1 ą║ąōčå ąĮą░ ą▒ą░ąĘčā ą▓čĆąĄą╝ąĄąĮąĖ GNSS, ą╝ąŠą│čāčé ą▒čŗčéčī čüą╗čāčćą░ą╣ąĮčŗąĄ ą┐ąĄčĆąĄčĆčŗą▓čŗ čŹč鹊ą│ąŠ ą┐čĆąŠčåąĄčüčüą░, ąŠčüąŠą▒ąĄąĮąĮąŠ ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ, ąĖ ą║ąŠą│ą┤ą░ ą╝ąĄąĮčÅąĄčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą▒ą░ąĘąĄ ą▓čĆąĄą╝ąĄąĮąĖ. ąÆ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąŠčüą╗ąĄ čģąŠą╗ąŠą┤ąĮąŠą│ąŠ čüčéą░čĆčéą░ ą╗ąŠą║ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ čĆą░ą▒ąŠčéą░ąĄčé. ą×ą┤ąĮą░ą║ąŠ ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą╗čāčćąĖčé ąĮąĄą║čāčÄ ą┤ąŠą▓ąĄčĆąĄąĮąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąŠčé čüą┐čāčéąĮąĖą║ą░ ąĖą╗ąĖ ąĖąĘ čāč鹊čćąĮčÅčÄčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąŠąĮ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą║ ąŠčåąĄąĮą║ąĄ ą▓čĆąĄą╝ąĄąĮąĖ GNSS.
6.2. Navigation Epoch
ąÜą░ąČą┤ąŠąĄ čĆąĄčłąĄąĮąĖąĄ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąŠ čéąĖą║ą░ą╝ 1 ą║ąōčå, čüą░ą╝čŗčģ ą▒ą╗ąĖąĘą║ąĖčģ ą║ ąČąĄą╗ą░ąĄą╝ąŠą╝čā ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ. ąŁč鹊čé čéąĖą║ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą╣ 菹┐ąŠčģąŠą╣ (navigation epoch). ąöą╗čÅ čāčüą┐ąĄčłąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ č鹊čćąĮąŠąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ GNSS, čćč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓čĆąĄą╝ąĄąĮąĄą╝ čüąĖčüč鹥ą╝čŗ GNSS. ąĀą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā ą▓čŗčćąĖčüą╗ąĄąĮąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ čüąĖčüč鹥ą╝čŗ GNSS ąĖ ą╗ąŠą║ą░ą╗čīąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüą╝ąĄčēąĄąĮąĖąĄą╝ čćą░čüąŠą▓ - clock bias (ąĖ clock drift, ąĄčüą╗ąĖ čüą║ąŠčĆąŠčüčéčī čŹč鹊ą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ ą╝ąĄąĮčÅąĄčéčüčÅ).
ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮąĄ ąĮą░čüč鹊ą╗čīą║ąŠ čüčéą░ą▒ąĖą╗ąĄąĮ, ą║ą░ą║ ą░č鹊ą╝ąĮčŗąĄ čćą░čüčŗ čüąĖčüč鹥ą╝ GNSS, ąĖ čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ clock bias ąĖą╝ąĄąĄčé č鹥ąĮą┤ąĄąĮčåąĖčÄ ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░čéčīčüčÅ čüąŠ ą▓čĆąĄą╝ąĄąĮąĄą╝. ą×ą┤ąĮą░ą║ąŠ ą║ąŠą│ą┤ą░ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēą░čÅ navigation epoch, ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé ą▓čüąĄą│ą┤ą░ ą┐čŗčéą░čéčīčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║ąŠą╣ čéąĖą║ 1 ą║ąōčå, ą║ąŠč鹊čĆčŗą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąČąĄą╗ą░ąĄą╝ąŠą╝čā čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ą┐ąĄčĆąĖąŠą┤čā, ąĖąĘą╝ąĄčĆąĄąĮąĮąŠą╝čā ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖčüč鹥ą╝čŗ GNSS. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ čćą░čüąŠą▓ 1 ą║ąōčå ą╝ąĄąČą┤čā čäąĖą║čüą░čåąĖčÅą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą▒čāą┤ąĄčé čüą╗čāčćą░ą╣ąĮąŠ ą╝ąĄąĮčÅčéčīčüčÅ ąóą░ą║, ąĄčüą╗ąĖ ą┤ąĄą╗ą░ąĄčéčüčÅ ąŠą┤ąĮą░ čäąĖą║čüą░čåąĖčÅ ą▓ čüąĄą║čāąĮą┤čā, č鹊 ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čüąĖčéčāą░čåąĖąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 1000 čéąĖą║ąŠą▓ ą╝ąĄąČą┤čā čäąĖą║čüą░čåąĖčÅą╝ąĖ, ąĮąŠ ąĖąĮąŠą│ą┤ą░ ąĖąĘ-ąĘą░ ą┤čĆąĄą╣čäą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖčüč鹥ą╝čŗ GNSS čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ ą▒čāą┤ąĄčé 999 ąĖą╗ąĖ 1001.
ąÆčĆąĄą╝čÅ čüąĖčüč鹥ą╝čŗ GNSS, ą▓čŗčćąĖčüą╗ąĄąĮąĮąŠąĄ ą▓ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą╝ čĆąĄčłąĄąĮąĖąĖ, ą▓čüąĄą│ą┤ą░ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ GPS ąĖ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą▓ąŠ ą▓čĆąĄą╝čÅ UTC.
ą×č湥ą▓ąĖą┤ąĮąŠ, čćč鹊 ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗą▒čĆą░ą╗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒ą░ąĘčā ą▓čĆąĄą╝ąĄąĮąĖ GPS ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖčüč鹥ą╝čŗ GNSS, ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝čÅ GPS ąĮąĄ čéčĆąĄą▒čāąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣, ąŠą┤ąĮą░ą║ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą▓ UTC čéčĆąĄą▒čāąĄčé ąĘąĮą░ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüąĄą║čāąĮą┤ čü ą╝ąŠą╝ąĄąĮčéą░ čüčéą░čĆčéą░ ą▓čĆąĄą╝ąĄąĮąĖ GPS (ąĖ ą┤čĆčāą│ąĖčģ ą╝ąĄąĮąĄąĄ ą▓ą░ąČąĮčŗčģ čäą░ą║č鹊čĆąŠą▓ ą║ąŠčĆčĆąĄą║čåąĖąĖ). ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠąĮą▓ąĄčĆčüąĖąĖ GPS ą▓ UTC ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ (ą║ą░ąČą┤čŗąĄ 12.5 ą╝ąĖąĮčāčéčŗ) čüą┐čāčéąĮąĖą║ą░ą╝ąĖ GPS, ąĮąŠ čéą░ą║ąČąĄ čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┐čĆąĖąĄą╝ąĮąĖą║čā č湥čĆąĄąĘ čāč鹊čćąĮčÅčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-AID-HUI. ąĢčüą╗ąĖ čüčĆą░ą▓ąĮąĖčéčī čü čüąĖčéčāą░čåąĖąĄą╣, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗą▒čĆą░ą╗ ą▒ą░ąĘčā ą▓čĆąĄą╝ąĄąĮąĖ GLONASS ą▓ ą║ą░č湥čüčéą▓ąĄ čüą▓ąŠąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖčüč鹥ą╝čŗ GNSS, č鹊 ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ GPS ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮąŠąĄ, čéą░ą║ ą║ą░ą║ čéčĆąĄą▒čāąĄčé ąĘąĮą░ąĮąĖą╣ ąŠ čĆą░ąĘąĮąĖčåąĄ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ ą▒ą░ąĘą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ, ąĮąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą║ UTC ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠčēąĄ (čéą░ą║ ą║ą░ą║ ą▓čĆąĄą╝čÅ GLONASS ąŠč湥ąĮčī ą▒ą╗ąĖąĘą║ąŠ čüą▓čÅąĘą░ąĮąŠ čü UTC).
ąÜąŠą│ą┤ą░ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, čćč鹊ą▒čŗ č鹊čćąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĘą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čüą╝ąĄčēąĄąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓ąĄčĆąŠčÅčéąĮčŗąĄ ą▒ą╗ąĖąĘą║ąĖąĄ ą▓čĆąĄą╝ąĄąĮą░ ą┐ąŠčćčéąĖ ą▓čüąĄą│ą┤ą░ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ, ąŠą┤ąĮą░ą║ąŠ ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčłąĖą▒ąŠčćąĮčŗą╝ąĖ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĄą║čāąĮą┤ (ąŠčüąŠą▒ąĄąĮąĮąŠ ą▒ą╗ąĖąĘą║ąŠ ą║ ą╝ąŠą╝ąĄąĮčéčā čüčéą░čĆčéą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░). ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čéą░ą║ąĖąĄ "ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ" ą▓čĆąĄą╝ąĄąĮą░ ą╝ąŠą│čāčé ą▓čŗą▓ąŠą┤ąĖčéčīčüčÅ, ąĮąŠ ą▓ą╝ąĄčüč鹥 čü čäą╗ą░ą│ąŠą╝, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╝ ąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ čäą╗ą░ą│ąĖ "valid" ą▓ UBX-NAV-PVT).
ąæčāą┤čāčēąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox ą▓ąĄčĆąŠčÅčéąĮąŠ ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓čĆąĄą╝ąĄąĮ čüąĖčüč鹥ą╝ GNSS ąĖ/ąĖą╗ąĖ ą╗ąŠą║ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (čćč鹊ą▒čŗ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĖčüč鹥ą╝ GNSS), čéą░ą║ čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą╗ą░ą│ą░čéčīčüčÅ ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX, ą║ąŠč鹊čĆčŗąĄ čüąŠąŠą▒čēą░čÄčé čüąĖčüč鹥ą╝ąĮąŠąĄ ą▓čĆąĄą╝čÅ GNSS ąĖą╗ąĖ ą╗ąŠą║ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ą║ą░ą║ čŹč鹊 ą▒čāą┤ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ą▒čāą┤čāčēąĄą╝. ą¤ąŠčŹč鹊ą╝čā čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐čĆąĄą┤ą┐ąŠčćčéąĖč鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé čüąŠąŠą▒čēą░čéčī ąŠ ą▓čĆąĄą╝ąĄąĮąĖ UTC.
6.3. ą£ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ iTOW
ąÆčüąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-NAV (ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤čĆčāą│ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ) čüąŠą┤ąĄčƹȹ░čé ą┐ąŠą╗ąĄ iTOW, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ ą▓čĆąĄą╝čÅ GPS, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąŠąĖąĘąŠčłą╗ą░ navigation epoch. ąĪąŠąŠą▒čēąĄąĮąĖčÅ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ iTOW ą╝ąŠą│čāčé čüčćąĖčéą░čéčīčüčÅ ą┐čĆąĖčłąĄą┤čłąĖą╝ąĖ ąŠčé č鹊ą│ąŠ ąČąĄ čüą░ą╝ąŠą│ąŠ čĆąĄčłąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĘąĮą░č湥ąĮąĖčÅ iTOW ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ąĖ (čé. ąĄ. ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ čü ąĮąĄą┤ąŠčüčéą░č鹊čćąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ), ą┐ąŠčŹč鹊ą╝čā ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠą╗ąĄ iTOW ą┤ą╗čÅ ą╗čÄą▒čŗčģ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣. ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ąĮą░ą┤ąĄąČąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą░ą▒čüąŠą╗čÄčéąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-NAV-TIMEUTC, UBX-NAV-TIMEGPS, UBX-NAV-PVT ąĖą╗ąĖ UBX-NAV-SOL, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠą╗čÅ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéčī ąĖ č鹊čćąĮąŠčüčéčī ą▓čŗčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓čĆąĄą╝ąĄąĮ.
ąśąĘąĮą░čćą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ GPS ą┐čĆąĖąĮčÅą╗ąĖ čĆąĄčłąĄąĮąĖąĄ ą▓čŗčĆą░ąĘąĖčéčī ą▓čĆąĄą╝čÅ/ą┤ą░čéčā ą║ą░ą║ čåąĄą╗ąŠąĄ čćąĖčüą╗ąŠ ąĮąĄą┤ąĄą╗čī (ąĮą░čćąĖąĮą░čÅ ąŠčé ą┐ąĄčĆą▓ąŠą╣ ą┐ąŠą╗ąĮąŠą╣ ąĮąĄą┤ąĄą╗ąĖ čÅąĮą▓ą░čĆčÅ 1980 ą│ąŠą┤ą░) ąĖ ą▓čĆąĄą╝čÅ ąĮąĄą┤ąĄą╗ąĖ (time of week, čüąŠą║čĆą░čēąĄąĮąĮąŠ TOW) ą▓ čüąĄą║čāąĮą┤ą░čģ. ą£ą░ąĮąĖą┐čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĄą╝/ą┤ą░č鹊ą╣ ą▓ čéą░ą║ąŠą╣ č乊čĆą╝ąĄ ąĮą░ą╝ąĮąŠą│ąŠ ą┐čĆąŠčēąĄ ą┤ą╗čÅ čåąĖčäčĆąŠą▓čŗčģ čüąĖčüč鹥ą╝, č湥ą╝ ą▒ąŠą╗ąĄąĄ "čāą┤ąŠą▒ąĮąŠąĄ" ą▓čŗčĆą░ąČąĄąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą│ąŠą┤/ą╝ąĄčüčÅčå/ą┤ąĄąĮčī, čćą░čü/ą╝ąĖąĮčāčéą░/čüąĄą║čāąĮą┤ą░. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ GPS/GNSS ąĖčüą┐ąŠą╗čīąĘčāčÄčé čéą░ą║ąŠąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄ, ą┐čĆąĄąŠą▒čĆą░ąĘčāčÅ ąĄą│ąŠ ą▓ ą▒ąŠą╗ąĄąĄ "čāą┤ąŠą▒ąĮčŗąĄ č乊čĆą╝čŗ" č鹊ą╗čīą║ąŠ ąĮą░ ą▓ąĮąĄčłąĮąĖčģ ąĖąĮč鹥čĆč乥ą╣čüą░čģ. ą¤ąŠą╗ąĄ iTOW čüą░ą╝ąŠąĄ ąŠč湥ą▓ąĖą┤ąĮąŠąĄ ą▓ąĖą┤ąĖą╝ąŠąĄ čüą╗ąĄą┤čüčéą▓ąĖąĄ čéą░ą║ąŠą│ąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ.
6.4. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ UTC
ąÆčĆąĄą╝čÅ UTC ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ čüąŠąŠą▒čēąĄąĮąĖčÅčģ NMEA ąĖ UBX. ąÆ čüąŠąŠą▒čēąĄąĮąĖčÅčģ NMEA ą▓čĆąĄą╝čÅ ą▓čüąĄą│ą┤ą░ ąŠą║čĆčāą│ą╗čÅąĄčéčüčÅ ą┤ąŠ ą▒ą╗ąĖąČą░ą╣čłąĖčģ čüąŠčéčŗčģ ą┤ąŠą╗ąĄą╣ čüąĄą║čāąĮą┤čŗ. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąŠąĮąŠ ąŠą▒čŗčćąĮąŠ čüąŠąŠą▒čēą░ąĄčéčüčÅ ą┤ą▓čāą╝čÅ ą┤ąĄčüčÅčéąĖčćąĮčŗą╝ąĖ ą┐ąŠąĘąĖčåąĖčÅą╝ąĖ ą┐ąŠčüą╗ąĄ ąĘą░ą┐čÅč鹊ą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ 124923.52). ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čģąŠčéčÅ čĆąĄąČąĖą╝ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ (ą▓čŗą▒čĆą░ąĮąĮčŗą╣ čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-NMEA) čéčĆąĄą▒čāąĄčé čéčĆąĖ ą┤ąĄčüčÅčéąĖčćąĮčŗąĄ ą┐ąŠąĘąĖčåąĖąĖ, ąŠą║čĆčāą│ą╗ąĄąĮąĖąĄ ą║ ą▒ą╗ąĖąČą░ą╣čłąĖą╝ čüąŠčéčŗą╝ čćą░čüčéčÅą╝ čüąĄą║čāąĮą┤čŗ ąŠčüčéą░ąĄčéčüčÅ, ą┐čĆąŠčüč鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ čåąĖčäčĆą░ ą▓čüąĄą│ą┤ą░ čĆą░ą▓ąĮą░ 0.
ąóą░ą║ąČąĄ ą▓čĆąĄą╝čÅ UTC čüąŠąŠą▒čēą░ąĄčéčüčÅ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅčģ UBX, čéą░ą║ąĖčģ ą║ą░ą║ UBX-NAV-TIMEUTC ąĖ UBX-NAV-PVT. ąÆ čŹčéąĖčģ čüąŠąŠą▒čēąĄąĮąĖčÅčģ ą┤ą░čéą░ ąĖ ą▓čĆąĄą╝čÅ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ ąĮą░ čüąĄą╝čī ąŠčéą┤ąĄą╗čīąĮčŗčģ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčŗčģ ą┐ąŠą╗ąĄą╣. ą©ąĄčüčéčī ąĖąĘ ąĮąĖčģ (ą│ąŠą┤, ą╝ąĄčüčÅčå, ą┤ąĄąĮčī, čćą░čü, ą╝ąĖąĮčāčéčŗ ąĖ čüąĄą║čāąĮą┤čŗ) ąĖą╝ąĄčÄčé ąŠč湥ą▓ąĖą┤ąĮčŗą╣ čüą╝čŗčüą╗. ąōą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ, čćč鹊 čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĘąĮą░č湥ąĮąĖčÅą╝ ą▓ čüąŠąŠą▒čēąĄąĮąĖčÅčģ NMEA ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╝ ą▓ č鹊ą╣ ąČąĄ navigation epoch. ąŁč鹊 čāą┐čĆąŠčēą░ąĄčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ ą╝ąĄąČą┤čā čüą▓čÅąĘą░ąĮąĮčŗą╝ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ UBX ąĖ NMEA.
ąĪąĄą┤čīą╝ąŠąĄ ą┐ąŠą╗ąĄ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ nano, ąĖ ąŠąĮąŠ čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĮą░ąĮąŠčüąĄą║čāąĮą┤, ąĮą░ ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖčüą┐čĆą░ą▓ą╗ąĄąĮą░ ąŠčüčéą░ą╗čīąĮą░čÅ čćą░čüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┤ą░čéčŗ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī č鹊čćąĮąŠąĄ ą▓čĆąĄą╝čÅ. ąóą░ą║, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓čĆąĄą╝čÅ UTC 12:49:23.521 ą▒čāą┤ąĄčé čüąŠąŠą▒čēąĄąĮąŠ čéą░ą║: hour: 12, min: 49, sec: 23, nano: 521000000.
ą×ą┤ąĮą░ą║ąŠ ą▓ą░ąČąĮąŠ ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 ą┐ąĄčĆą▓čŗąĄ čłąĄčüčéčī ą┐ąŠą╗ąĄą╣ čÅą▓ą╗čÅčÄčéčüčÅ čĆąĄąĘčāą╗čīčéą░č鹊ą╝ ąŠą║čĆčāą│ą╗ąĄąĮąĖčÅ ą┤ąŠ ą▒ą╗ąĖąČą░ą╣čłąĖčģ čüąŠčéčŗčģ čćą░čüč鹥ą╣ čüąĄą║čāąĮą┤čŗ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ nano ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé -5000000 (čé. ąĄ. -5 ą╝čü) ą┤ąŠ +994999999 (čé. ąĄ. ą┐čĆąĖą╝ąĄčĆąĮąŠ 995 ą╝čü).
ąÜąŠą│ą┤ą░ ą┐ąŠą╗ąĄ nano ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║čāąĮą┤ (ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĖąĮčāčé, čćą░čüąŠą▓, ą┤ąĮąĄą╣, ą╝ąĄčüčÅčåąĄą▓ ąĖ ą┤ą░ąČąĄ ą╗ąĄčé) ą▒čŗą╗ąŠ ąŠą║čĆčāą│ą╗ąĄąĮąŠ ą▓ą▓ąĄčĆčģ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ čŹčéąĖčģ ą┐ąŠą╗ąĄą╣ ąĖ ąĖąĮąŠą│ą┤ą░ ą▓čüąĄ ą▒čāą┤čāčé ąĮčāąČą┤ą░čéčīčüčÅ ą▓ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĄ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░čéčŗ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ. ąÜą░ą║ 菹║čüčéčĆąĄą╝ą░ą╗čīąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ, UTC-ą▓čĆąĄą╝čÅ 23:59:59.9993 ąĮą░ 31 ą┤ąĄą║ą░ą▒čĆčÅ 2011 ą╝ąŠą│ą╗ąŠ ą▒čŗčéčī čüąŠąŠą▒čēąĄąĮąŠ čéą░ą║: year: 2012, month: 1, day: 1, hour: 0, min: 0, sec: 0, nano: -700000.
ąÜąŠąĮąĄčćąĮąŠ, ąĄčüą╗ąĖ č鹊čćąĮąŠčüčéčī ąŠą┤ąĮą░ čüąŠčéą░čÅ čüąĄą║čāąĮą┤čŗ ą┤ąŠčüčéą░č鹊čćąĮąŠ, ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ąŠą║čĆčāą│ą╗ąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ nano ą┤ąŠ ąĮčāą╗čÅ (ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī).
6.5. ąĪą║ą░č湊ą║ čüąĄą║čāąĮą┤
ą¤čĆąĖąĮčÅč鹊 čĆąĄčłąĄąĮąĖąĄ (ąŠą┤ąĮąĖą╝ ąĖąĘ ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮčŗčģ ąŠčĆą│ą░ąĮąŠą▓ ą┐ąŠ čģčĆą░ąĮąĄąĮąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ), čćč鹊 ąĖąĘ-ąĘą░ ąĮąĄą╝ąĮąŠą│ąŠ ąĮąĄčĆą░ą▓ąĮąŠą╝ąĄčĆąĮąŠą╣ čćą░čüč鹊čéčŗ ą▓čĆą░čēąĄąĮąĖčÅ ąŚąĄą╝ą╗ąĖ, ą▓čĆąĄą╝čÅ UTC čüą╝ąĄčēą░ąĄčéčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü čüąŠą╗ąĮąĄčćąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ (čé. ąĄ. ąĪąŠą╗ąĮčåąĄ ąĮąĄ ą║ą░ąČąĄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĮą░ą▓ąĄčĆčģčā ąĮą░ 0 ą┤ąŠą╗ą│ąŠč鹥 ą▓ ą┐ąŠą╗ą┤ąĄąĮčī). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ą▓ąĄą┤ąĄąĮ "čüą║ą░č湊ą║ čüąĄą║čāąĮą┤" (leap second), čćč鹊ą▒čŗ ą┐čĆąĖą▓ąĄčüčéąĖ ą▓čĆąĄą╝čÅ UTC ąŠą▒čĆą░čéąĮąŠ, ą▒ą╗ąĖąĘą║ąŠ ą║ čéą░ą║ąŠą╝čā ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÄ. ąŁč鹊 ąŠą▒čŗčćąĮąŠ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ čüąĄą║čāąĮą┤ąĄ ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą╝ąĖąĮčāč鹥 ą│ąŠą┤ą░, ąĮąŠ čŹč鹊 ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ą┐čĆąŠąĖąĘąŠą╣čéąĖ 30 ąĖčÄąĮčÅ. ąÜąŠą│ą┤ą░ čŹč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, č鹊 ąŠąČąĖą┤ą░ąĄčéčüčÅ ą┐ąĄčĆąĄčģąŠą┤ čćą░čüąŠą▓ UTC ąŠčé 23:59:59 ą║ 23:59:60, ąĖ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░ ą║ 00:00:00.
ąóąĄąŠčĆąĄčéąĖč湥čüą║ąĖ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ čüą║ą░čćą║ą░ čüąĄą║čāąĮą┤čŗ, ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ ą▓ ą╝ąĖąĮčāč鹥 č鹊ą╗čīą║ąŠ 59 čüąĄą║čāąĮą┤, ąĖ ąĘą░ ą▓čĆąĄą╝ąĄąĮąĄą╝ 23:59:58 ą▒čāą┤ąĄčé ąĖą┤čéąĖ 00:00:00.
ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮčŗ čéą░ą║, čćč鹊 ąŠąĮąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčé čüą║ą░čćą║ąĖ čüąĄą║čāąĮą┤ ą▓ čüą▓ąŠąĄą╝ ą▓čŗą▓ąŠą┤ąĄ UTC, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĖąĄ ą▓čĆąĄą╝ąĄąĮą░ UTC, ą┐ąŠą╗čāčćą░ąĄą╝čŗąĄ ąĖąĘ čüąŠąŠą▒čēąĄąĮąĖą╣ NMEA ąĖ UBX, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą│ąŠč鹊ą▓čŗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą╝ąĖąĮčāčéčŗ čéą░ą║, čćč鹊 ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ą╗ąĖąĮąŠą╣ 59 ąĖą╗ąĖ 61 čüąĄą║čāąĮą┤.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ GLONASS ą▓ąŠ ą▓čĆąĄą╝čÅ čüą║ą░čćą║ą░ čüąĄą║čāąĮą┤ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠ čģąŠčĆąŠčłąŠ. ąÜą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą│ąŠč鹊ą▓čŗ ą║ č鹊ą╝čā, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčé čüą░ą╝ čüąĄą▒čÅ, ąĄčüą╗ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░čÄčéčüčÅ čüąĖą│ąĮą░ą╗čŗ GLONASS, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą║ą░č湥ą║ čüąĄą║čāąĮą┤čŗ.
6.6. Real Time Clock
ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox čüąŠą┤ąĄčƹȹ░čé čüčģąĄą╝čā ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real time clock, RTC, ąĄčüą╗ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮą░ ąĖ ąĘą░ą┐ąĖčéą░ąĮą░), čüąŠčģčĆą░ąĮčÅčÅ ąŠčéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗą║ą╗čÄč湥ąĮ. ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ, č鹊 ąŠąĮ ą┐čŗčéą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī RTC ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĖ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ čŹč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĘą░ą╝ąĄčéąĮąŠ ą▒čŗčüčéčĆąĄąĄ ą┐ąŠą╗čāčćąĖčéčī ą┐ąĄčĆą▓čŗąĄ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ.
[7. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗąĄ ą┐ąŠčĆčéčŗ]
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ u-blox ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü ąŠč湥ąĮčī ą│ąĖą▒ą║ąĖą╝ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ NMEA ąĖ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ UBX, ąĖ ąĄčüčéčī čĆąĄą░ą╗čīąĮą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ą▒ąŠčéą░čéčī č湥čĆąĄąĘ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠčĆč鹊ą▓ ąĖ ą┐ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝. ąÜą░ąČą┤čŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ (UBX, NMEA) ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ąĘąĮą░č湥ąĮ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠčĆč鹊ą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ (čäčāąĮą║čåąĖčÅ multi-port) čü ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ (čé. ąĄ. baud rate, čćą░čüč鹊čéą░ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖ čé. ą┤.) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčĆčéą░. ąĢčüčéčī ą┤ą░ąČąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĮą░ąĘąĮą░čćąĖčéčī ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ (čé. ąĄ. ą┐čĆąŠč鹊ą║ąŠą╗čŗ UBX ąĖ NMEA ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ) ąĮą░ ąŠą┤ąĖąĮ ą┐ąŠčĆčé (čäčāąĮą║čåąĖčÅ multi-protocol), čćč鹊 ą▓ čćą░čüčéąĮąŠčüčéąĖ ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ.
ą¦č鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮą░ ą┐ąŠčĆč鹥, ą┐čĆąŠč鹊ą║ąŠą╗ UBX ąĖ/ąĖą╗ąĖ NMEA ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ąĮą░ čŹč鹊ą╝ ą┐ąŠčĆč鹥, čćč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮąŠą│ąŠ UBX-čüąŠąŠą▒čēąĄąĮąĖčÅ CFG-PRT. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąĄąĮčÅčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą┤ą╗čÅ ą┐ąŠčĆčéą░ (baud rate, ą░ą┤čĆąĄčü ąĖ čé. ą┤.). ąĪą╝. CFG-MSG ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖ ąĘą░ą┐čĆąĄčéą░ čüąŠąŠą▒čēąĄąĮąĖą╣.
ąĪą╗ąĄą┤čāčÄčēą░čÅ čéą░ą▒ą╗ąĖčåą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĮąŠą╝ąĄčĆą░ ą┤ą╗čÅ ą┐ąŠčĆč鹊ą▓. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╗čÄą▒čŗąĄ ąĮąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ąĘą┤ąĄčüčī ąĮąŠą╝ąĄčĆą░ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą▒čāą┤čāčēąĄą╝.
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆąŠą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╝ ą┐ąŠčĆčéą░ą╝
| Ōä¢ ą┐ąŠčĆčéą░ |
ążąĖąĘąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü |
| 0 |
DDC (I2C-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣) |
| 1 |
UART 1 |
| 3 |
USB |
| 4 |
SPI |
7.1. ąśąĮą┤ąĖą║ą░čåąĖčÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 (TX-ready)
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ą░ąČą┤ąŠą╝čā ą┐ąŠčĆčéčā ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąĮąŠąČą║čā čćąĖą┐ą░, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ą│ąŠč鹊ą▓ąĮąŠčüčéčī ą▒ą░ą╣čé ą║ ą┐ąĄčĆąĄą┤ą░č湥. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮą░. ąöą╗čÅ USB čŹčéą░ čäčāąĮą║čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ, ąĮąŠ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮąĄ čéą░ą║, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ąĮąĖąČąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤čĆčāą│ąŠą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĢčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠąČąĖą┤ą░čÄčēąĖčģ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čé ą┤ąŠčüčéąĖą│ą╗ąŠ ą┐ąŠčĆąŠą│ą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ ąĮąŠąČą║ą░ čéąĖą┐ą░ čüčéą░ąĮąĄčé ą░ą║čéąĖą▓ąĮąŠą╣ (ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą╗ąŠą│. 0 ąĖą╗ąĖ ą╗ąŠą│. 1 ą┤ą╗čÅ čāčĆąŠą▓ąĮčÅ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ), ąĖ ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮąŠą╣, ą┐ąŠą║ą░ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ąĖąĘ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčā (ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąĮąĄ ą▓čüąĄą│ą┤ą░ čĆą░ą▓ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ą▒ą░ą╣čé, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ąĮąŠąČą║ą░ čüčéą░ą╗ą░ ąĮąĄ ą░ą║čéąĖą▓ąĮąŠą╣, ą┤ąŠ 16 ą▒ą░ą╣čé ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│čāčé ąĮčāąČą┤ą░čéčīčüčÅ ą▓ ą┐ąĄčĆąĄą┤ą░č湥 čģąŠčüčéčā).
ąØąŠąČą║ą░ TX-ready ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮą░ ąĖąĘ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ąŠą▓ PIO, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ (čüą╝. MON-HW ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüą┐ąĖčüą║ą░ PIO ąĖ ąĖčģ ą┐čĆąĖą▓čÅąĘą║ąĖ). ąÜą░ąČą┤ą░čÅ ąĮąŠąČą║ą░ TX-ready ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░, ąĖ ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą┤čĆčāą│ąĖą╝ąĖ ą┐ąŠčĆčéą░ą╝ąĖ. ąĢčüą╗ąĖ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą▓čŗą▓ąŠą┤ PIO ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ ąĖą╗ąĖ čāąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĮąŠąČą║ąĖ TX-ready, ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ąŠčüčéą░ą╗čīąĮą░čÅ ą┤ąĄą╣čüčéą▓čāčÄčēą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆč鹊ą▓, ąĄčüą╗ąĖ ąŠąĮą░ ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąĮąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ TX-ready čāčüą┐ąĄčłąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, ąŠąĮąŠ č鹊ą╗čīą║ąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāčüą┐ąĄčłąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąŠčĆčéą░. ą¦č鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čāčüą┐ąĄčłąĮąŠčüčéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮąŠąČą║ąĖ TX-ready, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąŠčłąĄąĮą░, ąĖ ą┐čĆąŠą▓ąĄčĆąĄąĮą░ čāčüčéą░ąĮąŠą▓ą║ą░ čäčāąĮą║čåąĖąĖ TX-ready (ąŠąĮą░ ą▒čāą┤ąĄčé ąĘą░ą┐čĆąĄčēąĄąĮą░/ąŠą▒ąĮčāą╗ąĄąĮą░, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ).
ą¤ąŠčĆąŠą│ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą▓čŗčłą░čéčī 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▒čāč乥čĆ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ąŠąČąĄčé ą▓ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčīčüčÅ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąĮąŠąČą║ą░ TX-ready ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮą░, čéą░ą║ ą║ą░ą║ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé ąŠčéą▒čĆą░čüčŗą▓ą░čéčīčüčÅ ą┤ąŠ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ą┐ąŠčĆąŠą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ.
7.2. ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čéą░ą╣ą╝ą░čāčé ą┐ąĄčĆąĄą┤ą░čćąĖ (Extended TX timeout)
ąĢčüą╗ąĖ čģąŠčüčé ąĮąĄ ąŠą▒ą╝ąĄąĮąĖą▓ą░ąĄčéčüčÅ čü ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ č湥čĆąĄąĘ SPI ąĖą╗ąĖ DDC ą┤ąŠą╗čīčłąĄ, č湥ą╝ ą┐čĆąĖą╝ąĄčĆąĮąŠ 2 čüąĄą║čāąĮą┤čŗ, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčé, čćč鹊 čģąŠčüčé ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹč鹊čé ąĖąĮč鹥čĆč乥ą╣čü, ąĖ ąĮą░ čŹč鹊čé ą┐ąŠčĆčé ą▒ąŠą╗čīčłąĄ ąĮąĄ ą┐ą╗ą░ąĮąĖčĆčāąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ą░ą║ąĄč鹊ą▓. ąŁč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī, čĆą░ąĘčĆąĄčłąĖą▓ "extended TX timeouts", ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĘą░ą┤ąĄčƹȹ║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĄąĘą┤ąĄą╣čüčéą▓čāčÄčēąĄą│ąŠ ą┐ąŠčĆčéą░, ą┐ąŠą║ą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĮąĄ ą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▒ą░ą╣čé ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░ ąĮąĄ ą┤ąŠčüčéąĖą│ąĮąĄčé 4 ą║ąĖą╗ąŠą▒ą░ą╣čé. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠčüąŠą▒ąĄąĮąĮąŠ ą┐ąŠą╗ąĄąĘąĮą░, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ TX-ready čüąŠ čüą║ąŠčĆąŠčüčéčīčÄ ą▓čŗą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ąĄąĮčīčłąĄ ąŠą┤ąĮąŠą│ąŠ čĆą░ąĘą░ ą▓ čüąĄą║čāąĮą┤čā, ąĖ ą┤ą░ąĮąĮčŗąĄ ąŠą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąŠąĮąĖ ą┤ąŠčüčéčāą┐ąĮčŗ, čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮąŠąČą║ąĖ TX-ready.
7.3. ą¤ąŠčĆčéčŗ UART
ąśą╝ąĄčÄčéčüčÅ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą┤ą▓ą░ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗčģ ą░čüąĖąĮčģčĆąŠąĮąĮčŗčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆčéą░ UART (Universal Asynchronous Receiver/Transmitter), čćč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ GNSS, ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüąĖą│ąĮą░ą╗čŗ RX ąĖ TX (čüąĖą│ąĮą░ą╗čŗ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ). ąØąĄčé ąĮąĖą║ą░ą║ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą║ą▓ąĖčéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĮąĖ č湥čĆąĄąĘ čüąĖą│ąĮą░ą╗čŗ ą┤ą░ąĮąĮčŗčģ (handshaking), ąĮąĖ č湥čĆąĄąĘ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ (hardware flow control). ąŁčéąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ čĆą░ą▒ąŠčéą░čÄčé ą▓ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ąĪą║ąŠčĆąŠčüčéčī (baud rate) ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░. ą×ą┤ąĮą░ą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ ą┐ąŠčĆč鹥 ąĮąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čĆą░ąĘąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖą╗ąĖ čĆą░ąĘąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓.
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ UART
| Baud Rate |
Data Bits |
Parity |
Stop Bits |
| 4800 |
8 |
none |
1 |
| 9600 |
8 |
none |
1 |
| 19200 |
8 |
none |
1 |
| 38400 |
8 |
none |
1 |
| 57600 |
8 |
none |
1 |
| 115200 |
8 |
none |
1 |
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ čéą░ą║ąĖčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, ą║ą░ą║ NMEA ąĖą╗ąĖ UBX, ąĮąĄ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ą░ ą╝ąĄąĮčÅčéčī ą┤ą╗ąĖąĮčā čüą╗ąŠą▓ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ), ą┐ąŠčüą║ąŠą╗čīą║čā ąĖčģ čüą▓ąŠą╣čüčéą▓ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ ąĖ ąĮąĄ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ 菹╗ąĄą║čéčĆąĖč湥čüą║ąŠą╝čā ąĖąĮč鹥čĆč乥ą╣čüčā.
ąĢčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąŠąĄ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┐ąŠčĆčéą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX ą▓čŗą▓ąŠą┤čÅčéčüčÅ č湥čĆąĄąĘ UART ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 9600), č鹊 ą▒čāč乥čĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą▒čāč乥čĆą░ ąĖčüč湥čĆą┐ą░ąĄčéčüčÅ, ąĮąŠą▓čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▒čāą┤čāčé ąŠčéą▒čĆą░čüčŗą▓ą░čéčīčüčÅ. ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą┐ąŠč鹥čĆčÄ čüąŠąŠą▒čēąĄąĮąĖą╣, čüą║ąŠčĆąŠčüčéčī ąĖ čćą░čüč鹊čéą░ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮąŠ čéą░ą║, čćč鹊ą▒čŗ ąŠąČąĖą┤ą░ąĄą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┐ąĄčĆąĄą┤ą░ą▓ą░ą╗ąŠčüčī ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĘą░ čüąĄą║čāąĮą┤čā.
ąĪą╝. CFG-PRT ą┤ą╗čÅ UART, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠčĆčéą░ UART.
7.4. ą¤ąŠčĆčé USB
ąśą╝ąĄąĄčéčüčÅ ą┐ąŠčĆčé Universal Serial Bus (USB). ąĢą│ąŠ ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī čüą╝. ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐čĆąŠą┤čāą║čé. ąŁč鹊čé ą┐ąŠčĆčé ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čåąĄą╗ąĄą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąĖ ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ čćąĖą┐ą░ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą╝ąŠą┤čāą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ąśąĮč鹥čĆč乥ą╣čü USB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 2 čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ą░ ą┐ąĖčéą░ąĮąĖčÅ (power modes):
ŌĆó Self Powered Mode, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąĖčéą░ąĄčéčüčÅ ąŠčé čüą▓ąŠąĄą│ąŠ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ąØąŠąČą║ą░ VDDUSB ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┐ąŠčĆčéą░ USB, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čģąŠčüčéčā USB.
ŌĆó Bus Powered Mode, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ ąŠčé čłąĖąĮčŗ USB, ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ ąĮąĄ ąĮčāąČąĄąĮ. ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠą║ąŠą╗ąĄąĮąĖčÅ u-blox 7 ą┐ąŠčéčĆąĄą▒ą╗čÅčÄčé č鹊ą║ ąĮąĄ ą▒ąŠą╗ąĄąĄ 50 ą╝ąÉ. ąĪą╝. CFG-USB ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠą┐ąĖčüą░ąĮąĖčÅ, ą║ą░ą║ ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ čŹč鹊čé ą╝ą░ą║čüąĖą╝čāą╝. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ Bus Powered Mode ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĖąĘą║ąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čü ąĘą░ą┐čĆąĄč鹊ą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ GNSS, ą║ąŠą│ą┤ą░ čģąŠčüčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčé (suspend) čāčüčéčĆąŠą╣čüčéą▓ąŠ USB, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą║ąŠą│ą┤ą░ čģąŠčüčé ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (stand-by mode).
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ č鹊ą║ ą▓ Bus Powered Mode
| ą¤ąŠą║ąŠą╗ąĄąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ |
Max č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ |
| u-blox 7 |
50 ą╝ąÉ |
ąöąĖą░ą┐ą░ąĘąŠąĮ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą┤ą╗čÅ VDDUSB čāą║ą░ąĘą░ąĮ ąŠčé 3.0V ą┤ąŠ 3.6V, čćč鹊 ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą┤ą╗čÅ VCC.
7.5. ą¤ąŠčĆčé DDC
ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ čłąĖąĮą░ Display Data Channel (DDC), čā ą║ąŠč鹊čĆąŠą╣ 2-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ I2C.
ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, DDC ąĮąĄ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ ą┤čāą┐ą╗ąĄą║čüą░ (full-duplex; ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ USB čäąĖąĘąĖč湥čüą║ąĖ č鹊ąČąĄ ąĮąĄ ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗą╣, ąŠą┤ąĮą░ą║ąŠ ąĮą░ ą▓čŗčüąŠą║ąŠą╝ čāčĆąŠą▓ąĮąĄ ąŠą▒ą╝ąĄąĮą░ ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ full-duplex), čé. ąĄ. ą┐ąĄčĆąĄą┤ą░čćą░ ąĖ ą┐čĆąĖąĄą╝ I2C ąĖčüą║ą╗čÄčćą░čÄčé ą┤čĆčāą│ ą┤čĆčāą│ą░ (ąĮąĄ ą╝ąŠą│čāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ). ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox ą▓ čĆąĄąČąĖą╝ąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░čÄčé ą┐ąŠ čłąĖąĮąĄ I2C ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (slave), ą┐ąŠčŹč鹊ą╝čā ąŠąĮąĖ ąĮąĄ ą╝ąŠą│čāčé čüą░ą╝ąĖ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąźąŠčüčé, ą║ąŠč鹊čĆčŗą╣ ą▓čüąĄą│ą┤ą░ čÅą▓ą╗čÅąĄčéčüčÅ ą╝ą░čüč鹥čĆąŠą╝, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ą┤ą░ąĮąĮčŗčģ (SCL), ąĖ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ąĮą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ.
ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SCL, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ą░čÅ ą╝ą░čüč鹥čĆąŠą╝, ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą▓čŗčłą░čéčī 400 ą║ąōčå (fast-mode I2C).
DDC-ą░ą┤čĆąĄčü ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ 0x42. ąŁč鹊čé ą░ą┤čĆąĄčü ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ąŠą╗čÅ mode ą▓ CFG-PRT.
ą¤ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ čüą╗ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĖčüą┐čŗčéčŗą▓ą░ąĄčé ąĮąĄą┤ąŠčüčéą░č鹊ą║ ą▓ handshake-ą╝ąĄčģą░ąĮąĖąĘą╝ąĄ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čģąŠčüčéą░ ąŠ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ, ą╝ąĄąČą┤čā čäąĖąĘąĖč湥čüą║ąĖą╝ čüą╗ąŠąĄą╝ ąĖ čüą╗ąŠąĄą╝ UBX ąĖ NMEA. DDC čĆąĄą░ą╗ąĖąĘčāąĄčé ą┐čĆąŠčüč鹊ą╣ ą┐ąŠč鹊ą║ąŠą▓čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ, ąŠčéą▒čĆą░čüčŗą▓ą░čÅ ą▓čüąĄ, čćč鹊 ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąĄčĆąĮąĄčé 0xFF, ąĄčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮąĄą┤ąŠčüčéčāą┐ąĮčŗ. ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅ TX-ready, čćč鹊ą▒čŗ ąŠą┐ąŠą▓ąĄčēą░čéčī ą╝ą░čüč鹥čĆ ąŠ ąĮą░ą╗ąĖčćąĖąĖ ą┤ą░ąĮąĮčŗčģ, ąĖ ą┐ąŠ čŹč鹊ą╝čā čüąĖą│ąĮą░ą╗čā ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüą║ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ.
7.5.1. ąöąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ
ą¦č鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą║ą░ą║ ą┤ąŠčüčéčāą┐ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░, čéą░ą║ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā ą┐ąŠą╗ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ ą▒čŗčüčéčĆčŗą╣ ą┤ąŠčüčéčāą┐ ą║ ą║ą╗čÄč湥ą▓čŗą╝ ą┤ą░ąĮąĮčŗą╝, ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ DDC.

ąĀąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ 0 .. 252 čü ą░ą┤čĆąĄčüą░ą╝ąĖ 0x00 .. 0xFC, ą║ą░ąČą┤čŗą╣ čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓ 1 ą▒ą░ą╣čé, čüąŠą┤ąĄčƹȹ░čé ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą┐ąŠąĘąČąĄ. ą¤ąŠ ą░ą┤čĆąĄčüą░ą╝ 0xFD ąĖ 0xFE ąĮą░čģąŠą┤ąĖčéčüčÅ č鹥ą║čāčēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ą▓ ą▓ąĖą┤ąĄ ą┐ąŠč鹊ą║ą░ čüąŠąŠą▒čēąĄąĮąĖą╣. ą¤ąŠ ą░ą┤čĆąĄčüčā 0xFF ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠč鹊ą║ čüąŠąŠą▒čēąĄąĮąĖą╣. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ 0xFF ą▓ąĄčĆąĮąĄčé ą▒ą░ą╣čé ąĘą░ ą▒ą░ą╣č鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą▒čāč乥čĆąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĢčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą┐čĆąĄą▓čŗčłą░ąĄčé ą┐ąŠą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ, č鹊 ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą▒čāą┤ąĄčé ą┤ąŠą┐ąŠą╗ąĮąĄąĮą░ ąĘąĮą░č湥ąĮąĖąĄą╝ 0xFF.
ąĀąĄą│ąĖčüčéčĆčŗ 0x00 .. 0xFC ą▒čāą┤čāčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą▒čāą┤čāčēąĖčģ čĆąĄą╗ąĖąĘą░čģ firmware. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĖčģ, čéą░ą║ ą║ą░ą║ ąŠąĮąĖ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą┐ąŠą╗ąĄąĘąĮčŗčģ ą┤ą░ąĮąĮčŗčģ!
7.5.1.1. ąöąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ ą┐ąŠ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā
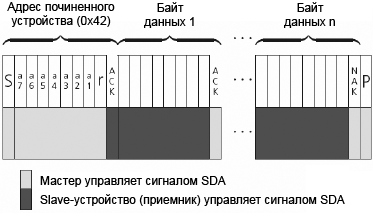
ą×ą┐ąĄčĆą░čåąĖąĖ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą╝ą░čüč鹥čĆčā ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą╗čÄą▒ąŠą╝čā čĆąĄą│ąĖčüčéčĆčā ą▓ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ. ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čŹč鹊čé čéąĖą┐ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ, ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ čüąĮą░čćą░ą╗ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ).
ąŚą░ čüąĖą│ąĮą░ą╗ąŠą╝ START (START condition, ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą▒čāą║ą▓ąŠą╣ S), ą▓čŗą┤ą░ąĮąĮčŗą╝ ą╝ą░čüč鹥čĆąŠą╝, ąĖą┤ąĄčé 7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (ą║ąŠč鹊čĆčŗą╣ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0x42) ąĖ ą▒ąĖčé RW (ą│ą┤ąĄ ą╗ąŠą│. 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī, čćč鹊 ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▒čāą║ą▓ąŠą╣ W), ą▓čüąĄ čŹčéąĖ ą▒ąĖčéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą╝ą░čüč鹥čĆąŠą╝ č湥čĆąĄąĘ čüąĖą│ąĮą░ą╗ SDA čü ą║ą░ąČą┤čŗą╝ čéą░ą║č鹊ą╝ SCL. ą¤čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé čŹč鹊 čüąĖą│ąĮą░ą╗ąŠą╝ ACK (ą╗ąŠą│. 0), čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ąŠąĮ ą╝ąŠąČąĄčé ąŠčéą▓ąĄčéąĖčéčī ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā (0x42). ąöą░ą╗ąĄąĄ ąĮą░ čłąĖąĮčā ą▓čŗą┤ą░ąĄčéčüčÅ 8-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ. ąŚą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄą╝ ACK ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ čŹč鹊ą│ąŠ ą░ą┤čĆąĄčüą░ ą╝ą░čüč鹥čĆ čüąĮąŠą▓ą░ ą▓čŗą┤ą░ąĄčé čüąĖą│ąĮą░ą╗ START, ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮąŠ ą▓ čŹč鹊čé čĆą░ąĘ ą▒ąĖčé RW ą▓ ą╗ąŠą│. 1 (ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▒čāą║ą▓ąŠą╣ r), čćč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ. ąóąĄą┐ąĄčĆčī ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī ąŠčé 1 ą┤ąŠ N ą▒ą░ą╣čé ąĖąĘ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ą│ąĄąĮąĄčĆąĖčĆčāčÅ not-acknowledge (ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, NAK) ąĖ čüąĖą│ąĮą░ą╗ STOP (STOP condition, ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▒čāą║ą▓ąŠą╣ P) ą┐ąŠčüą╗ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░. ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüč湥čéčćąĖą║ ą░ą┤čĆąĄčüą░ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ąĮą░ 1, čü ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ ą░ą┤čĆąĄčüą░ 0xFF. ąŁč鹊 ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠčüą╗ąĄ ą┐čĆąŠčćč鹥ąĮąĖčÅ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐ąŠčüą╗ąĄ ąĖąĘąĮą░čćą░ą╗čīąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆą░, ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ ą┐ąŠč鹊ą║ čüąŠąŠą▒čēąĄąĮąĖčÅ (ą║ąŠč鹊čĆčŗą╣, ą║ą░ą║ ąĖąĘą▓ąĄčüčéąĮąŠ, ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠ ą░ą┤čĆąĄčüčā 0xFF).
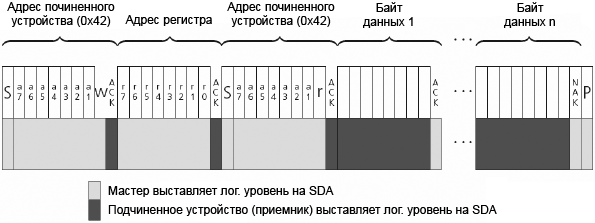
7.5.1.2. ą¦č鹥ąĮąĖąĄ ą┐ąŠ č鹥ą║čāčēąĄą╝čā ą░ą┤čĆąĄčüčā
ą¤čĆąĖąĄą╝ąĮąĖą║ čüąŠą┤ąĄčƹȹĖčé čüč湥čéčćąĖą║ ą░ą┤čĆąĄčüą░, ą║ąŠč鹊čĆčŗą╣ čģčĆą░ąĮąĖčé ą░ą┤čĆąĄčü ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠčüčāčēąĄčüčéą▓ą╗čÅą╗čüčÅ ą┤ąŠčüčéčāą┐, ą▓ąĮčāčéčĆąĄąĮąĮąĄ čāą▓ąĄą╗ąĖč湥ąĮąĮčŗą╣ ąĮą░ 1. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ą┐čĆąĄą┤čŗą┤čāčēąĖą╣ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▒čŗą╗ ą┐ąŠ ą░ą┤čĆąĄčüčā n (ą│ą┤ąĄ n ą╗čÄą▒ąŠą╣ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░ą┤čĆąĄčü), č鹊 čüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┤ąŠčüčéčāą┐ ą┐ąŠ ą░ą┤čĆąĄčüčā n+1 (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ).
ą¤čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ą│ą┤ąĄ ą▒ąĖčé RW čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1 (ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▒čāą║ą▓ąŠą╣ r), ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčéąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄą╝ (ACK) ąĖ ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī ąŠčé 1 ą┤ąŠ N ą▒ą░ą╣čé ąĖąĘ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ą│ąĄąĮąĄčĆąĖčĆčāčÅ not-acknowledge (ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, NAK) ąĖ čüąĖą│ąĮą░ą╗ STOP (P) ą┐ąŠčüą╗ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░.
ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ąŠč鹊ą║ąŠą▓čŗą╝ ą┤ą░ąĮąĮčŗą╝, ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüč湥čéčćąĖą║ ą░ą┤čĆąĄčüą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0xFF, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čćč鹥ąĮąĖčÅ č鹥ą║čāčēąĄą│ąŠ ą░ą┤čĆąĄčüą░ ą▒ąĄąĘ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ąĮą░ čćč鹥ąĮąĖąĄ ą┐ąŠ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēą░čéčī ą┐ąŠč鹊ą║ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĪč湥čéčćąĖą║ ą░ą┤čĆąĄčüą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ ą┤čĆčāą│ąŠą╣ ą░ą┤čĆąĄčü ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé, čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ąŠčüčéčāą┐ą░ ąĮą░ čćč鹥ąĮąĖąĄ ą┐ąŠ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā.
7.5.2. ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī
ą¤čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╗čÄą▒ąŠą╣ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī, ą║čĆąŠą╝ąĄ ąĘą░ą┐ąĖčüąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ UBX ąĖ NMEA, čéą░ą║ąĖčģ ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĖą╗ąĖ čāč鹊čćąĮčÅčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮą░ą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆąŠą▓, čāą┐ąŠą╝čÅąĮčāčéčŗą╣ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čüąĄą║čåąĖčÅčģ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ, ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░ ąĘą░ą┐ąĖčüčī. ąŚą░ čüąĖą│ąĮą░ą╗ąŠą╝ START ąŠčé ą╝ą░čüč鹥čĆ ąĖą┤ąĄčé 7-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą▒ąĖčé RW (čĆą░ą▓ąĮčŗą╣ ą╗ąŠą│. 0 ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ, ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▒čāą║ą▓ąŠą╣ W).
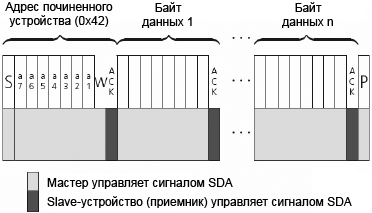
ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčéą▓ąĄčćą░ąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄą╝ (ACK, ą╗ąŠą│. 0), čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ąŠąĮ ąŠčéą▓ąĄčéąĖčé ąĮą░ čāą║ą░ąĘą░ąĮąĮčŗą╣ ą░ą┤čĆąĄčü. ąóąĄą┐ąĄčĆčī ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ąĘą░ą┐ąĖčüą░čéčī ąŠčé 2 ą┤ąŠ N ą▒ą░ą╣čé ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║, ą│ąĄąĮąĄčĆąĖčĆčāčÅ čüąĖą│ąĮą░ą╗ STOP ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłą░čÄčēąĄą│ąŠ ą▒ą░ą╣čéą░. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2, čćč鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą┤ąĄą╗ąĖčéčī ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čåąĄą╗čīčÄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą░ą┤čĆąĄčüą░, ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗą╣ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ąĮą░ čćč鹥ąĮąĖąĄ ą┐ąŠ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā.
7.6. ą¤ąŠčĆčé SPI
ąśą╝ąĄąĄčéčüčÅ čłąĖąĮą░ Serial Peripheral Interface (SPI) ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ (čüą╝. ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī ąĖąĮč鹥čĆč乥ą╣čüą░ ą▓ ą┤ą░čéą░čłąĖč鹥).
SPI čŹč鹊 4-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü [3]. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé UART, ąĘą┤ąĄčüčī ą╝ą░čüč鹥čĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓, ą┐ąŠčŹč鹊ą╝čā ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠčćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüą║ąŠčĆąŠčüčéčī) ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ąĘą░čĆą░ąĮąĄąĄ (čāčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ąĮąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮą░ ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ). ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čĆąĄąČąĖą╝čŗ 0-3 ąĖąĮč鹥čĆč乥ą╣čüą░ SPI, čćč鹊 ą╝ąŠąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┤ą╗čÅ SPI čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąŠą╗čÅ mode.spiMode ą▓ CFG-PRT (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ SPI čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čĆąĄąČąĖą╝ 0).
ąĪą║ąŠčĆąŠčüčéčī SPI ąŠą│čĆą░ąĮąĖč湥ąĮą░ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ąĄčĆčüąĖą╣ hardware ąĖ firmware!
7.6.1. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī čéą░ą║č鹊ą▓ SPI
u-blox 7
| ąÆąĄčĆčüąĖčÅ firmware |
Max čüą║ąŠčĆąŠčüčéčī SPI |
| 1.00 |
5.5 ą£ąōčå |
7.6.2. ąöąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ
ąóą░ą║ ą║ą░ą║ čĆąĄąČąĖą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠčĆčéą░ SPI, ąĖą╝ąĄąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠč鹊ą║ čüąŠąŠą▒čēąĄąĮąĖą╣ UBX/NMEA. ąÜ čŹč鹊ą╝čā ą┐ąŠč鹊ą║čā ą┤ąŠčüčéčāą┐ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ (Back-To-Back) ą┤ąŠčüčéčāą┐ą░ ąĮą░ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī (čüą╝. čüąĄą║čåąĖčÄ "ą¦č鹥ąĮąĖąĄ Back-To-Back ąĖ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī"). ąÜąŠą│ą┤ą░ ąĮąĄčé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║, čüąĖą│ąĮą░ą╗ MOSI ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│. 1, čé. ąĄ. ą▓čüąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ 0xFF.
ą¦č鹊ą▒čŗ ąĮąĄ ą┤ąŠą┐čāčüčéąĖčéčī, čćč鹊ą▒čŗ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čŗą╗ ąĘą░ąĮčÅčé ą┐ą░čĆčüąĖąĮą│ąŠą╝ ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąŠčåąĄčüčü ą┐ą░čĆčüąĖąĮą│ą░ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ 50 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▒ą░ą╣čé, čüąŠą┤ąĄčƹȹ░čēąĖčģ 0xFF. ą¤čĆąŠčåąĄčüčü ą┐ą░čĆčüąĖąĮą│ą░ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ čü ą┐ąĄčĆą▓čŗą╝ ą┐čĆąĖčłąĄą┤čłąĖą╝ ą▒ą░ą╣č鹊ą╝, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ čĆą░ą▓ąĄąĮ 0xFF. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĖ (50 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ) ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮąŠ ą┤ą╗čÅ SPI čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąŠą╗čÅ mode.ffCnt ą▓ CFG-PRT, čćč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ čü ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą▒ą░ą╣čé 0xFF.
ąĢčüą╗ąĖ čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▒ąŠą╗čīčłąĄ ąĮąĄčé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ, č鹊 ąŠąĮ čāą┤ąĄčƹȹĖą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ MISO ą▓ ą╗ąŠą│. 1, čé. ąĄ. ą▓čüąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ ą┤ąĄą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą║ą░ą║ 0xFF. ąŁčäč乥ą║čéąĖą▓ąĮčŗą╣ ą┐ą░čĆčüąĄčĆ čģąŠčüčéą░ ą▒čāą┤ąĄčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ą▓čüąĄ ą▒ą░ą╣čéčŗ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ čćą░čüčéčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą┤ą░ąĮąĮčŗčģ, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčé ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ čĆą░ą▓ąĄąĮ 0xFF.
7.6.3. ą¦č鹥ąĮąĖąĄ Back-To-Back ąĖ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī
ą¤čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĖą║ą░ą║ąŠą╣ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī, ą║čĆąŠą╝ąĄ ą║ą░ą║ ąĘą░ą┐ąĖčüčī ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ čüąŠąŠą▒čēąĄąĮąĖą╣ UBX ąĖ NMEA, čéą░ą║ąĖčģ ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖą╗ąĖ čāč鹊čćąĮčÅčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▒ą░ą╣čéą░, ąĘą░ą┐ąĖčüą░ąĮąĮąŠą│ąŠ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║, čŹč鹊čé ą▒ą░ą╣čé ą▒čāą┤ąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐čĆąŠčćąĖčéą░ąĮ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝. ąÆąŠ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ą╝ą░čüč鹥čĆ ą┐ąĖčłąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čüąĖą│ąĮą░ą╗ MOSI, ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ čćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ MISO, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓ąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą▒čāą┤čāčé ą▓čŗą▓ąĄą┤ąĄąĮčŗ ą╗čÄą▒čŗąĄ ąŠčüčéą░ą▓čłąĖąĄčüčÅ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ ą┤ą░ąĮąĮčŗąĄ. ąöą░ąĮąĮčŗąĄ ąĮą░ MISO ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čĆąĄąĘčāą╗čīčéą░čéčŗ čćč鹥ąĮąĖčÅ č鹥ą║čāčēąĄą│ąŠ ą░ą┤čĆąĄčüą░, ą▓ąŠąĘą▓čĆą░čēą░čÅ 0xFF, ą║ąŠą│ą┤ą░ ąĮąĄčé ą▒ąŠą╗čīčłąĄ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąØą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ čŹč鹊čé ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą┐ąŠ ąŠą▒ą╝ąĄąĮčā ą┤ą░ąĮąĮčŗą╝ąĖ (SPI Back-To-Back Read/Write Access).
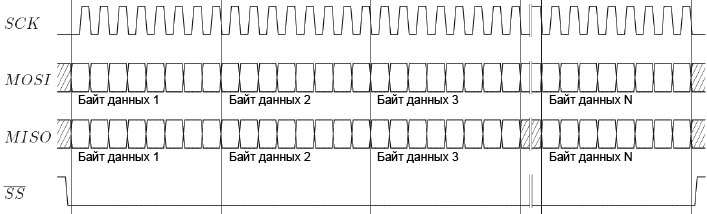
7.7. ąÜą░ą║ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ą╝ąĄąČą┤čā ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ąĖ
ą¤ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░ čü ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĮą░ ą┤čĆčāą│ąŠą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĘą░ 2 čłą░ą│ą░:
ŌĆó ą©ą░ą│ 1: ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ (ą┐čĆąŠč鹊ą║ąŠą╗čŗ) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┤ą╗čÅ ą┐ąŠčĆčéą░ čü ą┐ąŠą╝ąŠčēčīčÄ CFG-PRT. ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ąŠą┤ąĖąĮ ą┐ąŠčĆčé ą╝ąŠąČąĄčé ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ (čé. ąĄ. ą┐čĆąŠč鹊ą║ąŠą╗čŗ NMEA ąĖ UBX). ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓čüąĄ ą┐ąŠčĆčéčŗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ UBX ąĖ NMEA, čéą░ą║ čćč鹊 ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ čüą╗čāčćą░ąĄą▓ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą╝ąĄąĮčÅčéčī ąĮąĖą║ą░ą║ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠčĆčéą░. ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠčĆčéą░ ą╝ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖą╣ CFG-PRT.
ŌĆó ą©ą░ą│ 2: ą░ą║čéąĖą▓ą░čåąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐ąŠčĆčéčā čü ą┐ąŠą╝ąŠčēčīčÄ CFG-MSG.
[8. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░]
8.1. ąÜąŠąĮčåąĄą┐čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
ąÜąŠąĮčåąĄą┐čåąĖčÅ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ u-blox ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čĆąŠč鹊ą║ąŠą╗ą░ UBX (ą║ą╗ą░čüčü čüąŠąŠą▒čēąĄąĮąĖą╣ UBX-CFG). ąóą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ GNSS ą┐čĆąĖ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĖ, ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ č鹥ą║čāčēąĄą╣ (Current Configuration). ąóąĄą║čāčēą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ą╗čÄą▒ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-CFG-XXX č湥čĆąĄąĘ ą╗čÄą▒ąŠą╣ ą┐ąŠčĆčé ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░. ą¤čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą╝ąĄąĮčÅąĄčé čüą▓ąŠčÄ Current Configuration ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤čĆąĖąĄą╝ąĮąĖą║ GNSS ą▓čüąĄą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹊ą╗čīą║ąŠ č鹥ą║čāčēčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ.
ąÜčĆąŠą╝ąĄ čüą╗čāčćą░ąĄą▓, ą║ąŠą│ą┤ą░ Current Configuration čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ (čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-CFG-CFG, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ąĮąĖąČąĄ), Current Configuration ą▒čāą┤ąĄčé ą┐ąŠč鹥čĆčÅąĮą░:
ŌĆó ą¤čĆąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĖ ąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ (ą┐čĆąŠą┐ą░ą┤ą░ąĮąĖąĖ) ą┐ąĖčéą░ąĮąĖčÅ (power cycle).
ŌĆó ą¤čĆąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝ čüą▒čĆąŠčüąĄ (hardware reset).
ŌĆó ą¤čĆąĖ (ą┐ąŠą╗ąĮąŠą╝) čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝ čüą▒čĆąŠčüąĄ (software reset).
ąĪą╝. čüąĄą║čåąĖčÄ "9. ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮčŗą╣ čüą▒čĆąŠčü ą┐čĆąĖąĄą╝ąĮąĖą║ą░" ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣.
Current Configuration ą╝ąŠąČąĄčé ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ (čģčĆą░ąĮąĖą╝ąŠą╣ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ) ą┐čāč鹥ą╝ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĄčæ ą▓ ą┐ąŠčüč鹊čÅąĮąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ (Permanent Configuration). ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-CFG-CFG čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ saveMask (UBX-CFG-CFG/save).
Permanent Configuration ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ Current Configuration ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ (ą▓ą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ, čüą▒čĆąŠčü), ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-CFG čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ loadMask (UBX-CFG-CFG/load).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: u-blox ą║ąŠąĮčåąĄą┐čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ Permanent Configuration ąĖ Current Configuration ą┐ąŠą┤ąŠą▒ąĮą░ ą║ąŠąĮčåąĄą┐čåąĖąĖ startup-config ąĖ running-config ąĮą░ ą░ą║čéąĖą▓ąĮąŠą╝ čüąĄč鹥ą▓ąŠą╝ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĖ Cisco.
Permanent Configuration ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (Default Configuration) ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-CFG-CFG čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ clearMask (UBX-CFG-CFG/clear). ąŁč鹊 č鹊ą╗čīą║ąŠ ąĘą░ą╝ąĄąĮąĖčé Permanent Configuration, ąĮąŠ ąĮąĄ Current Configuration. ą¦č鹊ą▒čŗ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĘą░čĆą░ą▒ąŠčéą░ą╗ čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ Default Configuration, ą║ąŠą│ą┤ą░ ąŠąĮą░ ą▒čŗą╗ą░ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ (čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮą░) ą▓ Permanent Configuration, ą┐čĆąĖąĄą╝ąĮąĖą║čā ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ UBX-CFG-CFG/load, ąĖą╗ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮ čüą▒čĆąŠčü ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ąŁčéąĖ ą▓čŗčłąĄčāą┐ąŠą╝čÅąĮčāčéčŗąĄ ą╝ą░čüą║ąĖ (saveMask, loadMask, clearMask) ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čüąŠą▒ąŠą╣ 4-ą▒ą░ą╣čéąĮčŗąĄ ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ. ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ąĘą┤ąĄčüčī ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąŠą┤ąĮčā ąĖąĘ ą┐ąŠą┤čüąĄą║čåąĖą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŁčéąĖ ą┐ąŠą┤čüąĄą║čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "8.2. ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ čüąĄą║čåąĖą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ". ąÆčüąĄ čéčĆąĖ ą╝ą░čüą║ąĖ čÅą▓ą╗čÅčÄčéčüčÅ čćą░čüčéčīčÄ ą║ą░ąČą┤ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-CFG-CFG. ąÜąŠą╝ą░ąĮą┤čŗ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ (save), ąĘą░ą│čĆčāąĘą║ąĖ (load) ąĖ ąŠčćąĖčüčéą║ąĖ (clear) ą╝ąŠą│čāčé ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░čéčīčüčÅ ą▓ ąŠą┤ąĮąŠą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ. ą¤ąŠčĆčÅą┤ąŠą║ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖą╣: clear, save, load. ąŁč鹊čé ą┐čĆąŠčåąĄčüčü ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčéčüčÅ ą┤ąĖą░ą│čĆą░ą╝ą╝ąŠą╣:
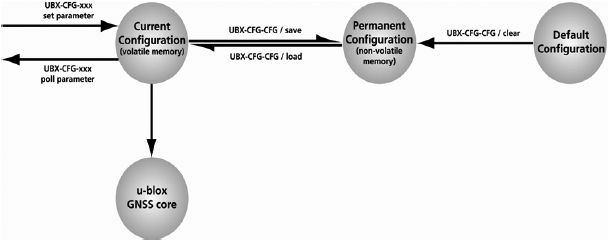
8.2. ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ čüąĄą║čåąĖą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠą┤čüąĄą║čåąĖą╣. ąÜą░ąČą┤ą░čÅ ą┐ąŠą┤čüąĄą║čåąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠą┤ąĮąŠą╝čā ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ UBX-CFG-XXX. ąØąŠą╝ąĄčĆą░ ą┐ąŠą┤čüąĄą║čåąĖą╣ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čéą░ą▒ą╗ąĖčåą░čģ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą┐ąŠąĘąĖčåąĖąĖ ą▒ąĖčéą░ ą▓ ą╝ą░čüą║ą░čģ, čāą┐ąŠą╝čÅąĮčāčéčŗčģ ą▓čŗčłąĄ. ąÆčüąĄ ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ čŹčéąĖčģ čéą░ą▒ą╗ąĖčåą░čģ, čÅą▓ą╗čÅčÄčéčüčÅ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ.
ą¤ąŠą┤čüąĄą║čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ:
| Ōä¢ |
ąśą╝čÅ |
GFG čüąŠąŠą▒čēąĄąĮąĖčÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
PRT |
UBX-CFG-PRT
UBX-CFG-USB |
ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠčĆčéą░ ąĖ USB |
| 1 |
MSG |
UBX-CFG-MSG |
ąØą░čüčéčĆąŠą╣ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī, čćą░čüč鹊čéą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ) |
| 2 |
INF |
UBX-CFG-INF |
ąØą░čüčéčĆąŠą╣ą║ąĖ ą▓čŗą▓ąŠą┤ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (Errors, Warnings, Notice, Test, ąĖ čé. ą┤.) |
| 3 |
NAV |
UBX-CFG-NAV5
UBX-CFG-NAVX5
UBX-CFG-DAT
UBX-CFG-RATE
UBX-CFG-SBAS
UBX-CFG-NMEA |
ą¤ą░čĆą░ą╝ąĄčéčĆ ąĮą░ą▓ąĖą│ą░čåąĖąĖ, Receiver Datum, ąĮą░čüčéčĆąŠą╣ą║ąĖ čćą░čüč鹊čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ, ąĮą░čüčéčĆąŠą╣ą║ąĖ SBAS, ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMEA. |
| 4 |
RXM |
UBX-CFG-GNSS
UBX-CFG-TP5
UBX-CFG-RXM
UBX-CFG-PM2
UBX-CFG-ITFM |
ąØą░čüčéčĆąŠą╣ą║ąĖ GNSS, Power Mode, Time Pulse, Jamming/Interference Monitor |
| 9 |
RINV |
UBX-CFG-RINV |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ Remote Inventory |
| 10 |
ANT |
UBX-CFG-ANT |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą░ąĮč鹥ąĮąĮčŗ |
| 11 |
LOG |
UBX-CFG-LOGFILTER |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╗ąŠą│ą░ |
8.3. ąØąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ Permanent Configuration
Current Configuration čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ąŠą▒čŗčćąĮąŠą╝ ą×ąŚąŻ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (volatile RAM), ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠč鹊čĆąŠą│ąŠ č鹥čĆčÅčÄčéčüčÅ ą┐čĆąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╗čÄą▒čŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ Current Configuration ą▒ąĄąĘ ąĖčģ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą▒čāą┤čāčé ą┐ąŠč鹥čĆčÅąĮčŗ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą╗čÄą▒ąŠąĄ ąĖąĘ čüąŠą▒čŗčéąĖą╣ čüą▒čĆąŠčüą░, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ čüąĄą║čåąĖąĖ "8.1. ąÜąŠąĮčåąĄą┐čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ". ąĪ ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-CFG/save, ą▓čŗą▒čĆą░ąĮąĮčŗąĄ ą┐ąŠą┤čüąĄą║čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ąŠ ą▓čüąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ (non-volatile) ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ:
ŌĆó On-chip BBR (battery backed RAM), ą▓čüčéčĆąŠąĄąĮąĮą░čÅ ą▓ čćąĖą┐ ą┐ą░ą╝čÅčéčī RAM, ą┤ą░ąĮąĮčŗąĄ ą║ąŠč鹊čĆąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ą▒ą░čéą░čĆąĄą╣ą║ąĖ. ą¦č鹊ą▒čŗ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ BBR čĆą░ą▒ąŠčéą░ą╗ą░, ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ ą▒ą░čéą░čĆąĄą╣ą║ą░ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ.
ŌĆó External flash memory (ą▓ąĮąĄčłąĮčÅčÅ ą┐ą░ą╝čÅčéčī FLASH), ą│ą┤ąĄ ąŠąĮą░ ąĖą╝ąĄąĄčéčüčÅ.
8.4. Default Configuration ą┐čĆąĖąĄą╝ąĮąĖą║ą░
Permanent Configuration ą╝ąŠąČąĄčé ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮą░ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ Default Configuration čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-CFG-CFG/clear. Default Configuration ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąŠą▒čŗčćąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąĮą░ ąĖąĘą┤ąĄą╗ąĖąĄ (product data sheet).
[9. ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮčŗą╣ čüą▒čĆąŠčü ą┐čĆąĖąĄą╝ąĮąĖą║ą░]
ą×ą▒čŗčćąĮąŠ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ą░čģ GNSS čĆą░ąĘą┤ąĄą╗čÅčÄčé čüąŠą▒čŗčéąĖčÅ čģąŠą╗ąŠą┤ąĮąŠą│ąŠ, č鹥ą┐ą╗ąŠą│ąŠ ąĖ ą│ąŠčĆčÅč湥ą│ąŠ čüčéą░čĆčéą░ (Cold, Warm ąĖ Hot start), ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą║ąŠč鹊čĆčāčÄ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĖą╝ąĄąĄčé ą▓ ą╝ąŠą╝ąĄąĮčé čüą▓ąŠąĄą│ąŠ čĆąĄčüčéą░čĆčéą░.
ŌĆó Cold start (čģąŠą╗ąŠą┤ąĮčŗą╣ čüčéą░čĆčé). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą┐čāčüą║ą░ čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮąĄčé ąĮąĖą║ą░ą║ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ (čé. ąĄ. ą▓čĆąĄą╝ąĄąĮąĖ, čüą║ąŠčĆąŠčüčéąĖ, čćą░čüč鹊č鹥). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ ąĮą░ą╣čéąĖ ą┐ąŠą╗ąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĖ ąŠą┐čĆąŠčüąĖčéčī ąŠą▒ą╗ą░čüčéčī čćą░čüč鹊čé ąĖ ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĮąŠą╝ąĄčĆą░ čüą┐čāčéąĮąĖą║ąŠą▓. ąĢčüą╗ąĖ ąĮą░ą╣ą┤ąĄąĮčŗ čüąĖą│ąĮą░ą╗čŗ čüą┐čāčéąĮąĖą║ąŠą▓, č鹊 ąŠąĮąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░čÄčéčüčÅ ąĖ ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ąĖčģ ąĖąĮč乊čĆą╝ą░čåąĖčÅ čŹč乥ą╝ąĄčĆąĖą┤ (ąĮą░ čćč鹊 čāčģąŠą┤ąĖčé 18..36 čüąĄą║čāąĮą┤ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ čģąŠčĆąŠčłąĄą│ąŠ ą┐čĆąĖąĄą╝ą░ čüąĖą│ąĮą░ą╗ą░), ą▓ č鹊 ąČąĄ čüą░ą╝ąŠąĄ ą▓čĆąĄą╝čÅ ą║ą░ąĮą░ą╗čŗ ą┐čĆąŠą┤ąŠą╗ąČą░čÄčé ąĖčüą║ą░čéčī čüą┐čāčéąĮąĖą║ąĖ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĮčÅč鹊 ą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ čü ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝ąĖ čŹč乥ą╝ąĄčĆąĖą┤ą░ą╝ąĖ, ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą▓čŗčćąĖčüą╗ąĖčéčī ą┤ą░ąĮąĮčŗąĄ čüą▓ąŠąĄą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĖ čüą║ąŠčĆąŠčüčéąĖ (position, velocity). ą¤ąŠąČą░ą╗čāą╣čüčéą░ ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą║ąŠąĮą║čāčĆąĄąĮčéčŗ ąĮą░ąĘčŗą▓ą░čÄčé čŹč鹊čé čĆąĄąČąĖą╝ ąĘą░ą┐čāčüą║ą░ Factory Startup.
ŌĆó Warm start (č鹥ą┐ą╗čŗą╣ čüčéą░čĆčé). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą░ą┐ą┐čĆąŠą║čüąĖą╝ąĖčĆąŠą▓ą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐ąŠąĘąĖčåąĖąĖ ąĖ ą║čāčĆčüąĄ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąŠąĘąĖčåąĖą╣ čüą┐čāčéąĮąĖą║ąŠą▓ (Almanac, ą░ą╗čīą╝ą░ąĮą░čģ). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠą▒čŗčćąĮąŠ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ąĘą░ą│čĆčāąĘą║ąĄ čŹč乥ą╝ąĄčĆąĖą┤ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüą╝ąŠąČąĄčé ą▓čŗčćąĖčüą╗ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠąĘąĖčåąĖąĖ ąĖ čüą║ąŠčĆąŠčüčéąĖ. ą¤ąŠčüą║ąŠą╗čīą║čā ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤ ąŠą▒čŗčćąĮąŠ čāčüčéą░čĆąĄą▓ą░čÄčé ą┐ąŠčüą╗ąĄ 4 čćą░čüąŠą▓, ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ č鹥ą┐ą╗ąŠą│ąŠ čüčéą░čĆčéą░, ąĄčüą╗ąĖ ąŠąĮ ą▒čŗą╗ ą▓čŗą║ą╗čÄč湥ąĮ ąĮą░ ą▓čĆąĄą╝čÅ ą▒ąŠą╗čīčłąĄ 4 čćą░čüąŠą▓. ąÆ čŹč鹊ą╝ čüčåąĄąĮą░čĆąĖąĖ čüčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čāč鹊čćąĮąĄąĮąĖą╣, čüą╝. čĆą░ąĘą┤ąĄą╗ "15. Aiding, Acquisition".
ŌĆó Hot start (ą│ąŠčĆčÅčćąĖą╣ čüčéą░čĆčé). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čŗą╗ ą▓čŗą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąĮą░ ą║ąŠčĆąŠčéą║ąŠąĄ ą▓čĆąĄą╝čÅ (ą╝ąĄąĮčīčłąĄ 4 čćą░čüąŠą▓), ą┐ąŠčŹč鹊ą╝čā čŹč乥ą╝ąĄčĆąĖą┤čŗ ą▓čüąĄ ąĄčēąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ. ą¤ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĖąĄą╝ąĮąĖą║čā ąĮąĄ ąĮčāąČąĮąŠ čüąĮąŠą▓ą░ ąĘą░ą│čĆčāąČą░čéčī čŹč乥ą╝ąĄčĆąĖą┤čŗ, č鹊 čŹč鹊 čüą░ą╝čŗą╣ ą▒čŗčüčéčĆčŗą╣ ą╝ąĄč鹊ą┤ ąĘą░ą┐čāčüą║ą░.
ąÆ čüąŠąŠą▒čēąĄąĮąĖąĖ UBX-CFG-RST ą╝ąŠąČąĮąŠ ą┐čĆąĖąĮčāą┤ąĖčéčī ą┐čĆąĖąĄą╝ąĮąĖą║ čüą▒čĆąŠčüąĖčéčī ąĖ ąŠčćąĖčüčéąĖčéčī ą┤ą░ąĮąĮčŗąĄ, čćč鹊ą▒čŗ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ čāą▓ąĖą┤ąĄčéčī čŹčäč乥ą║čéčŗ ąŠčé čüąŠčģčĆą░ąĮąĄąĮąĖčÅ / ą┐ąŠč鹥čĆąĖ čéą░ą║ąĖčģ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░ą╝ąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ CFG-RST ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą╗ąĄ navBbrMask, ą│ą┤ąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮčŗ ąĘą░ą┐čāčüą║ąĖ Hot, Warm ąĖ Cold, ąĖ čéą░ą║ąČąĄ ą┤čĆčāą│ąĖąĄ ąĖčģ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ.
ąöą░ąĮąĮčŗąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ ą┐ą░ą╝čÅčéąĖ flash, ąĮąĄ ąŠčćąĖčēą░čÄčéčüčÅ ąĮąĖ ąŠą┤ąĮąŠą╣ ąĖąĘ ąŠą┐čåąĖą╣, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ UBX-CFG-RST. ąóą░ą║, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ AlmanacPlus čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ flash, č鹊 čŹč鹊 ą▓ąĄčĆąŠčÅčéąĮąŠ ąŠą║ą░ąČąĄčé ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ Cold start.
ą£ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ąĘą░ą┤ą░ąĮ čéąĖą┐ čüą▒čĆąŠčüą░ (Reset Type). ąŁč鹊 ąĮąĄ čüą▓čÅąĘą░ąĮąŠ čü GNSS, ąĮąŠ ąĘą░ą┤ą░ąĄčé čüą┐ąŠčüąŠą▒, ą║ą░ą║ąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčé čüąĖčüč鹥ą╝čā.
ŌĆó Hardware Reset (ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü). ąŁč鹊čé čüą▒čĆąŠčü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ (on-chip Watchdog), čćč鹊ą▒čŗ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖ čüą▒čĆąŠčüąĖčéčī čćąĖą┐ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąŁč鹊 ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣, ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čüą▒čĆąŠčü. ąØąĄ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ čüąŠą▒čŗčéąĖčÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ (Stop events). ąŁč鹊 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé ą┐ąŠą┤ą░čćąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ Reset ą┐čĆąĖąĄą╝ąĮąĖą║čā.
ŌĆó Controlled Software Reset (čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü) ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮąĮčŗą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ąĘą░ą▓ąĄčĆčłą░ąĄčé ą▓čüąĄ čĆą░ą▒ąŠčéą░čÄčēąĖąĄ ą┐čĆąŠčåąĄčüčüčŗ ąĖ, ą║ą░ą║ č鹊ą╗čīą║ąŠ čüąĖčüč鹥ą╝ą░ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle), ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčé čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ, ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░ąĄčé čüą▓ąŠčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé ąĘą░čģą▓ą░čé ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüąŠ čüą┐čāčéąĮąĖą║ąŠą▓ GNSS.
ŌĆó Controlled Software Reset (GNSS only) ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░ąĄčé č鹊ą╗čīą║ąŠ ąĘą░ą┤ą░čćąĖ GNSS, ą▒ąĄąĘ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ ąĖą╗ąĖ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ ą╗čÄą▒ąŠą╣ čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ŌĆó Controlled GNSS Stop ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓čüąĄ ąĘą░ą┤ą░čćąĖ GNSS. ą¤čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ąĮąŠ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓čüąĄ ą┐čĆąŠčåąĄčüčüčŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą╗čÄą▒ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ GNSS.
ŌĆó Controlled GNSS Start ąĘą░ą┐čāčüą║ą░ąĄčé ą▓čüąĄ ąĘą░ą┤ą░čćąĖ GNSS.
[10. Remote Inventory]
10.1. ą×ą┐ąĖčüą░ąĮąĖąĄ č鹥čĆą╝ąĖąĮą░
Remote Inventory ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠčģčĆą░ąĮčÅčéčī ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┤ą░ąĮąĮčŗąĄ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (ą┤ąŠą▓ąŠą╗čīąĮąŠ čüčéčĆą░ąĮąĮąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ ą┤ą╗čÅ č鹥čĆą╝ąĖąĮą░). ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą╗ąĖą▒ąŠ ą┤ą▓ąŠąĖčćąĮčŗąĄ, ą╗ąĖą▒ąŠ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čüčéčĆąŠą║ą░ čüąĖą╝ą▓ąŠą╗ąŠą▓ ASCII. ąÆąŠ ą▓č鹊čĆąŠą╝ čüą╗čāčćą░ąĄ ą╝ąŠąČąĮąŠ ą┐čĆąĖ čüčéą░čĆč鹥 ą▓čŗą▓ąĄčüčéąĖ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ.
10.2. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ
ŌĆó ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ Remote Inventory ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ąĖ ąŠą┐čĆąŠčłąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-CFG-RINV (ą┐ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą╝. ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ).
ŌĆó ąĢčüą╗ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ Remote Inventory ą▒čŗą╗ąŠ ąŠą┐čĆąŠčłąĄąĮąŠ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čćč鹊-ą╗ąĖą▒ąŠ ą▒čŗą╗ąŠ čéą░ą╝ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, č鹊 ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (čüą╝. čéą░ą▒ą╗ąĖčåčā ąĮąĖąČąĄ).
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ Remote Inventory
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŚąĮą░č湥ąĮąĖąĄ |
| flags |
0x00 |
| data |
"Notice: no data saved!" |
ąÜąŠą│ą┤ą░ ą┐ąŠą╝ąĄąĮčÅą╗ą░čüčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ, ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮą░, čćč鹊ą▒čŗ čüčéą░čéčī ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ (permanent). ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čüąŠčģčĆą░ąĮčÅąĄč鹥 čüąĄą║čåąĖčÄ RINV ą┐ąĄčĆąĄą┤ čüą▒čĆąŠčüąŠą╝ ąĖą╗ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąæąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüąŠčģčĆą░ąĮąĄąĮąĖčÄ čüąĄą║čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą│ą╗ą░ą▓ąĄ "8.1. ąÜąŠąĮčåąĄą┐čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ".
[11. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management)]
ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čĆą░ąĘąĮčŗąĄ čĆąĄąČąĖą╝čŗ ą┐ąĖčéą░ąĮąĖčÅ. ąŁčéąĖ čĆąĄąČąĖą╝čŗ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čüčéčĆą░č鹥ą│ąĖąĖ, ą║ą░ą║ čāą┐čĆą░ą▓ą╗čÅčéčī čüąĖčüč鹥ą╝ą░ą╝ąĖ ąĘą░čģą▓ą░čéą░ ąĖ čéčĆąĄą║ąĖąĮą│ą░ (čüą┐čāčéąĮąĖą║ąŠą▓), čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ą╗ąĖą▒ąŠ čüą░ą╝ąŠą╣ ą╗čāčćčłąĄą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ, ą╗ąĖą▒ąŠ čģąŠčĆąŠčłąĄą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ čüąŠ čüąĮąĖąČąĄąĮąĮčŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ.
ąĀąĄąČąĖą╝čŗ ą┐ąĖčéą░ąĮąĖčÅ (power modes) ą▓čŗą▒ąĖčĆą░čÄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ CFG-RXM ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-CFG-PM2.
11.1. Continuous Mode
ąÆąŠ ą▓čĆąĄą╝čÅ čģąŠą╗ąŠą┤ąĮąŠą│ąŠ čüčéą░čĆčéą░ (Cold start), ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠčüč鹊čÅąĮąĮąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ Continuous Mode, ąĘą░ą┤ąĄą╣čüčéą▓čāčÅ čüąĖčüč鹥ą╝čā ąĘą░čģą▓ą░čéą░ (acquisition engine) ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ą▓čüąĄčģ ą┤ąŠčüčéčāą┐ąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗčćąĖčüą╗ąĄąĮą░ ą┐ąŠąĘąĖčåąĖčÅ, ąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčéčüčÅ, acquisition engine ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ, č湥ą╝ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠąĄ čüąĮąĖąČąĄąĮąĖąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ. ąĪąĖčüč鹥ą╝ą░ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ (tracking engine) ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé ąĘą░čģą▓ą░č湥ąĮąĮčŗąĄ čüą┐čāčéąĮąĖą║ąĖ ąĖ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčé ą┤čĆčāą│ąĖąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ąĖą╗ąĖ ą┐ąŠčÅą▓ą╗čÅčÄčēąĖąĄčüčÅ čüą┐čāčéąĮąĖą║ąĖ. ąÆčüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ą▒ąŠą╗čīčłąĄ ą▓čŗčćąĖčüą╗ąĖčéčī čüą▓ąŠčÄ ą┐ąŠąĘąĖčåąĖčÄ, ąĖą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮčŗą╝, acquisition engine čüąĮąŠą▓ą░ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą▒čŗčüčéčĆąŠąĄ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą░ąČąĄ ąĄčüą╗ąĖ acquisition engine ą▓čŗą║ą╗čÄč湥ąĮą░, čüą┐čāčéąĮąĖą║ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čÄčé ąŠą▒ąĮą░čĆčāąČąĖą▓ą░čéčīčüčÅ.
11.2. Power Save Mode
Power Save Mode (PSM, čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąĮąĖąĘąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ ąĘą░ čüč湥čé ą▓čŗą▒ąŠčĆąŠčćąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čćą░čüč鹥ą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: Power Save Mode ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮąŠ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ GLONASS.
11.2.1. ąĀą░ą▒ąŠčéą░ PSM
Power Save Mode ąĖą╝ąĄąĄčé 2 čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ: čåąĖą║ą╗ąĖč湥čüą║ąĖą╣ čéčĆąĄą║ąĖąĮą│ (cyclic tracking operation) ąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĄ/ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ (ON/OFF operation). ą”ąĖą║ą╗ąĖč湥čüą║ąĖą╣ čéčĆąĄą║ąĖąĮą│ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐ąŠąĘąĖčåąĖčÅ ąĘą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮą░, ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ ą║ąŠčĆąŠčéą║ąĖčģ ą┐ąĄčĆąĖąŠą┤ą░čģ 1 .. 10 čüąĄą║. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ON/OFF operation ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĖąŠą┤ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗čīčłąĄ 10 čüąĄą║. ą¤ąĄčĆąĖąŠą┤čŗ ą▓ ON/OFF operation ą╝ąŠą│čāčé ąĘą░ą┤ą░ą▓ą░čéčīčüčÅ ą▓ ą╝ąĖąĮčāčéą░čģ, čćą░čüą░čģ ąĖą╗ąĖ ą┤ąĮčÅčģ. ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą╝ąŠąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī, ąĖ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé čĆą░ąĘąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ: ą┐čĆąĖ ON/OFF operation ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą╝ąĄąČą┤čā čäą░ąĘą░ą╝ąĖ čüčéą░čĆčéą░/ąĮą░ą▓ąĖą│ą░čåąĖąĖ (startup/navigation) ąĖ čäą░ąĘą░ą╝ąĖ čü ąĮąĖąĘą║ąŠą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ ąĖą╗ąĖ ą┐ąŠčćčéąĖ ąĮąĖą║ą░ą║ąŠą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ. ą¤čĆąĖ čåąĖą║ą╗ąĖč湥čüą║ąŠą╝ čéčĆąĄą║ąĖąĮą│ąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą╝ąĄąČą┤čā čäąĖą║čüą░čåąĖčÅą╝ąĖ, ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ čéčĆąĄą║ąĖąĮą│ čü ąĮąĖąĘą║ąĖą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝.
PSM ąŠčüąĮąŠą▓čŗą▓ą░ąĄčéčüčÅ ąĮą░ ą╝ą░čłąĖąĮąĄ čüąŠčüč鹊čÅąĮąĖą╣ čü ą┐čÅčéčīčÄ čĆą░ąĘąĮčŗą╝ąĖ čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ: Inactive for update ąĖ Inactive for search, Acquisition, Tracking ąĖ Power Optimized Tracking (POT).
ŌĆó Inactive-čüąŠčüč鹊čÅąĮąĖčÅ: ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čāąĘą╗ąŠą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▓čŗą║ą╗čÄč湥ąĮąŠ.
ŌĆó Acquisition: ą┐čĆąĖąĄą╝ąĮąĖą║ ą░ą║čéąĖą▓ąĮąŠ ąĖčēąĄčé ąĖ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčé čüąĖą│ąĮą░ą╗čŗ čüą┐čāčéąĮąĖą║ąŠą▓. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ.
ŌĆó Tracking: ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé čüą┐čāčéąĮąĖą║ąĖ ąĖ ąĘą░ą│čĆčāąČą░ąĄčé ą┤ą░ąĮąĮčŗąĄ. ąÆ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Acquisition.
ŌĆó POT: ą┐čĆąĖąĄą╝ąĮąĖą║ čü ą┐ąŠą▓č鹊čĆą░ą╝ąĖ ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čüąŠčüč鹊čÅąĮąĖčÅ čéčĆąĄą║ąĖąĮą│ą░ (TRK), ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ čäąĖą║čüą░čåąĖąĖ (Calc) ąĖ ą▓čģąŠą┤ą░ ą▓ ą┐ąĄčĆąĖąŠą┤ ąŠąČąĖą┤ą░ąĮąĖčÅ (Idle). ąØąŠą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĮąĄ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ, ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ. ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ąĮą░ą╝ąĮąŠą│ąŠ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Tracking.
ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣:
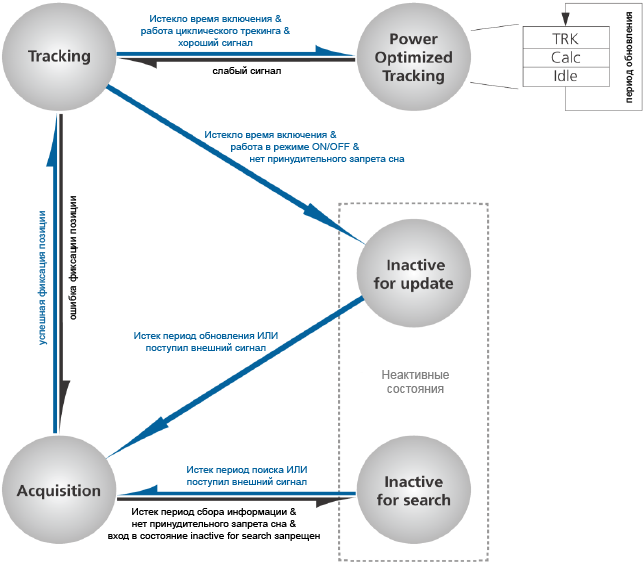
11.2.1.1. ON/OFF operation - ą┐ąĄčĆąĖąŠą┤ ą┤ąŠą╗ą│ąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ, ąŠąĮ čüąĮą░čćą░ą╗ą░ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Acquisition. ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮčāčÄ ą┐ąŠąĘąĖčåąĖčÄ čäąĖą║čüą░čåąĖąĖ ąĘą░ ą▓čĆąĄą╝čÅ, ąŠčéą▓ąĄą┤ąĄąĮąĮąŠąĄ čéą░ą╣ą╝ą░čāč鹊ą╝ acquisition, č鹊 ąŠąĮ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking. ąśąĮą░č湥 ąŠąĮ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for search ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčüčÅ ą┐ąŠčüą╗ąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą┐ąŠąĖčüą║ą░ (ą╝ąĖąĮčāčü ą┐ąŠą╗ąĄ ąĘą░ą┐čāčüą║ą░). ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą╗čāčćąĖčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčāčÄ ą┐ąŠąĘąĖčåąĖčÄ čäąĖą║čüą░čåąĖąĖ (čéą░ą║čāčÄ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠčłą╗ą░ č湥čĆąĄąĘ ą▓čŗčģąŠą┤ąĮčŗąĄ čäąĖą╗čīčéčĆčŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ), ąŠąĮ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking. ą¤ąŠčüą╗ąĄ ą▓čģąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓čĆąĄą╝čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ (on time). ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čĆąĄą╝čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĘą░ą║ąŠąĮčćąĖčéčüčÅ, ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for update, ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čüąĄčéą║ąŠą╣ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ update grid (čüą╝. "11.2.2.8. Grid offset"). ąĢčüą╗ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Tracking čüąĖą│ąĮą░ą╗ ą▒čŗą╗ ą┐ąŠč鹥čĆčÅąĮ, č鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄčģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Acquisition. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ ą▓ č鹥č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ acquisition, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for search. ąśąĮą░č湥 ą┐čĆąĖąĄą╝ąĮąĖą║ čüąĮąŠą▓ą░ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking ąĖ ąŠčüčéą░ąĄčéčüčÅ ą▓ ąĮąĄą╝, ą┐ąŠą║ą░ ąŠą┐čÅčéčī ąĮąĄ ąĖčüč鹥č湥čé ą▓čĆąĄą╝čÅ on time.
ąöąĖą░ą│čĆą░ą╝ą╝ą░ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čäčāąĮą║čåąĖąŠąĮąĖčĆčāąĄčé čĆąĄąČąĖą╝ ON/OFF:
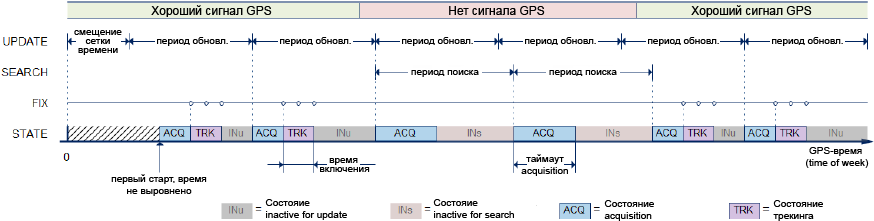
11.2.1.2. ą”ąĖą║ą╗ąĖč湥čüą║ąĖą╣ čéčĆąĄą║ąĖąĮą│ - ą║ąŠčĆąŠčéą║ąĖą╣ ą┐ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ, ąŠąĮ čüąĮą░čćą░ą╗ą░ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Acquisition. ąĢčüą╗ąĖ ąŠąĮ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ ą▓ č鹥č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ acquisition, č鹊 ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking. ąśąĮą░č湥 ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for search ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čüąĄčéą║ąŠą╣ ą┐ąŠąĖčüą║ą░ (search grid). ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ čäąĖą║čüą░čåąĖąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓čģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking, ąĖ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąŠčéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ on time. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ on time ąŠčéčüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ąŠčé ą┐ąĄčĆą▓ąŠą╣ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ. ąÜą░ą║ č鹊ą╗čīą║ąŠ on time ąĖčüč鹥ą║ą╗ąŠ, ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓čģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ POT. ąÆ čüąŠčüč鹊čÅąĮąĖąĖ POT ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą▓čŗą▓ąŠą┤ąĖčé čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čŹą║ąŠąĮąŠą╝ąĖčÄ čŹąĮąĄčĆą│ąĖąĖ, čāčüčéą░ąĮąŠą▓ąĖč鹥 on time ą▓ 0. ąŁč鹊 ąĘą░čüčéą░ą▓ąĖčé ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąŠą╣čéąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ POT ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ. ąĢčüą╗ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ POT čüąĖą│ąĮą░ą╗ čüčéą░ąĮąŠą▓ąĖčéčüčÅ čüą╗ą░ą▒čŗą╝ ąĖą╗ąĖ ą┐ąŠč鹥čĆčÅąĮ, ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓čģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking. ąÜą░ą║ č鹊ą╗čīą║ąŠ čüąĖą│ąĮą░ą╗ čüąĮąŠą▓ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĖą╗čīąĮčŗą╝, ąĖ ąĖčüč鹥č湥čé ąĘą░ąĮąŠą▓ąŠ ąĘą░ą┐čāčēąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ on time, ą┐čĆąĖąĄą╝ąĮąĖą║ čüąĮąŠą▓ą░ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ POT. ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Tracking, č鹊 ąŠąĮ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Acquisition. ąĢčüą╗ąĖ ąĘą░čģą▓ą░čé čéą░ą║ąČąĄ ą┐ąŠč鹥čĆą┐ąĖčé ąĮąĄčāą┤ą░čćčā, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄčģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for search.
ąØą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé čåąĖą║ą╗ąĖč湥čüą║ąĖą╣ čéčĆąĄą║ąĖąĮą│:
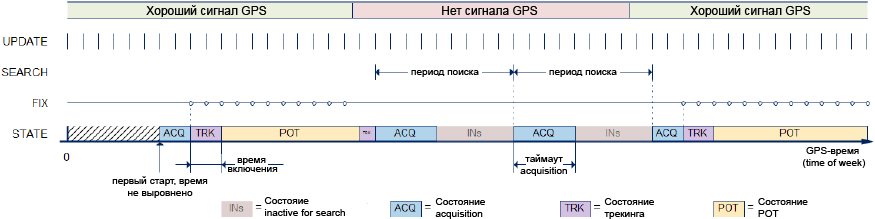
11.2.1.3. ążčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ - ąĮčāą╗ąĄą▓ąŠą╣ ą┐ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖ ą┐ąŠąĖčüą║ą░
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąĄčĆąĖąŠą┤ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓ 0 ąĘą░čüčéą░ą▓ąĖčé ą┐čĆąĖąĄą╝ąĮąĖą║ ąČą┤ą░čéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Inactive for update, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒čāąČąĄąĮ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąĄčĆąĖąŠą┤ą░ ą┐ąŠąĖčüą║ą░ ą▓ 0 ąĘą░čüčéą░ą▓ąĖčé ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ ąČą┤ą░čéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Inactive for search ą┐čĆąĖ ąĮąĄčāą┤ą░čćąĮąŠą╝ ąĘą░ą┐čāčüą║ąĄ. ąøčÄą▒ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up event) ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčé ą┐čĆąĖąĄą╝ąĮąĖą║. ąĪą╝. "11.2.3.2. Wake-up" ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüąŠą▒čŗčéąĖčÅą╝ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ.
ąóčĆąĄą▒čāčÄčéčüčÅ ą▓ąĮąĄčłąĮąĖąĄ wake-up čüąŠą▒čŗčéąĖčÅ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0 ą┐ąĄčĆąĖąŠą┤čŗ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖą╗ąĖ ą┐ąŠąĖčüą║ą░!
11.2.1.4. ąŚą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ą░
ą¤čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ąĘą░ą│čĆčāąĘąĖčéčī ą┤ą░ąĮąĮčŗąĄ čüą┐čāčéąĮąĖą║ą░ (čé. ąĄ. čŹč乥ą╝ąĄčĆąĖą┤čŗ) ą║ąŠą│ą┤ą░ ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ ON/OFF ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ čåąĖą║ą╗ąĖč湥čüą║ąŠą│ąŠ čéčĆąĄą║ąĖąĮą│ą░. ą¤ąŠčŹč鹊ą╝čā ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓ Continuous operation ąĮą░ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┤ą░ąĮąĮčŗčģ čüąŠ čüą┐čāčéąĮąĖą║ą░. ą¦č鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī 菹ĮąĄčĆą│ąĖčÄ, ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ą╗ą░ąĮąĖčĆčāąĄčé ąĘą░ą│čĆčāąĘą║ąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čéą░ą▒ą╗ąĖčåąĄą╣ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ Continuous operation č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąĖąĮč鹥čĆąĄčüčāčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čüą┐čāčéąĮąĖą║ą░ą╝ąĖ.
ąÜą░ąČą┤čŗą╣ čüą┐čāčéąĮąĖą║ (SV) ą┐ąĄčĆąĄą┤ą░ąĄčé čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤. ąŁč乥ą╝ąĄčĆąĖą┤ąĮą░čÅ ąĘą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ ą▓čŗą┐ąŠą╗ąĮąĖą╝ą░, ą║ąŠą│ą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ SV ą▒čŗą╗ ą┐čĆąŠčüą╗ąĄąČąĄąĮ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ C/No ąĘą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ. ąŚą░ą│čĆčāąĘą║ą░ ą┐ą╗ą░ąĮąĖčĆčāąĄčéčüčÅ ą▓ čüąĄčéą║ąĄ 30 ą╝ąĖąĮčāčé ąĖą╗ąĖ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ą║ąŠą│ą┤ą░ ą╝ąĄąĮčīčłąĄ č湥ą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ąĖą┤ąĖą╝čŗčģ ąĖą╝ąĄčÄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤. ąöą░ąĮąĮčŗąĄ ą░ą╗čīą╝ą░ąĮą░čģą░, ąĖąŠąĮąŠčüč乥čĆčŗ, ą║ąŠčĆčĆąĄą║čåąĖąĖ UTC ąĖ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ čüą┐čāčéąĮąĖą║ą░ (SV health) ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓čüąĄą╝ąĖ SV ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮčŗ, ą║ąŠą│ą┤ą░ ąŠą┤ąĖąĮ SV ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčéčüčÅ čü ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čŗčüąŠą║ąĖą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ C/No.
11.2.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ
Power Save Mode (PSM) čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-CFG-RXM, ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-CFG-PM2.
ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ Power Save Mode, ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ SBAS ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮą░ (UBX-CFG-SBAS) ą┐ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄ ą╝ąŠąČąĄčé ąĘą░ą│čĆčāąČą░čéčī ą╗čÄą▒čŗąĄ ą┤ą░ąĮąĮčŗąĄ SBAS.
ą¤čĆąĖ ąĮą░čüčéčĆąŠą╣ą║ąĄ PSM, čćč鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖčéčī ąÆą░čłąĖą╝ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąŁčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
ą×ą┐čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Power Save Mode
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Mode of operation |
ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| Update period |
ą¤ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ - ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ ą┐ąŠą┐čŗčéą║ą░ą╝ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ. |
| Search period |
ą¤ąĄčĆąĖąŠą┤ ą┐ąŠąĖčüą║ą░ - ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ ą┐ąŠą┐čŗčéą║ą░ą╝ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ, ąĄčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ čüą╝ąŠą│ ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ. |
| Acquisition timeout |
ąÆčĆąĄą╝čÅ, ą┐ąŠčüą╗ąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą▒ąŠčĆ ą┤ą░ąĮąĮčŗčģ (acquisition) ąĖ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for search (ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░). |
| On-time |
ąÆčĆąĄą╝čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ - ą▓čĆąĄą╝čÅ, ą▓ č鹥č湥ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čéčĆąĄą║ąĖąĮą│ą░, ą│ąĄąĮąĄčĆąĖčĆčāčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ. |
| Wait for timefix |
ą×ąČąĖą┤ą░ąĮąĖąĄ čäąĖą║čüą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ čéčĆąĄą║ąĖąĮą│ą░. |
| Do not enter Inactive for search state |
ąØąĄ ą▓čģąŠą┤ąĖčéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░" - ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "Inactive for search", ąĄčüą╗ąĖ ąŠąĮ ąĮąĄ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ, ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą┐čŗčéą░čÅčüčī ą┤ąĄą╗ą░čéčī ą┐ąŠą▓č鹊čĆąĮčŗąĄ ą┐ąŠą┐čŗčéą║ąĖ ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ. |
| Update RTC |
ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ ą┐ąŠą┐čŗčéą║ąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (Real Time Clock, RTC). |
| Update Ephemeris |
ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čŹč乥ą╝ąĄčĆąĖą┤. |
| EXTINT selection |
ąÆčŗą▒ąĖčĆą░ąĄčé ąĮąŠąČą║čā ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ EXTINT, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (čäčāąĮą║čåąĖčÅ pin control). |
| EXTINT 'high' keeps awake |
ąĀą░ąĘčĆąĄčłą░ąĄčé čäčāąĮą║čåąĖčÄ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čüąĖą│ąĮą░ą╗ąŠą╝ ąĮą░ ąĮąŠąČą║ąĄ EXTINT (force-ON pin control). |
| EXTINT 'low' forces sleep |
ąĀą░ąĘčĆąĄčłą░ąĄčé čäčāąĮą║čåąĖčÄ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čüąĖą│ąĮą░ą╗ąŠą╝ ąĮą░ ąĮąŠąČą║ąĄ EXTINT (force-OFF pin control). |
| Grid offset |
ąĪą╝ąĄčēąĄąĮąĖąĄ čüąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ąĮą░čćą░ą╗čā ąĮąĄą┤ąĄą╗ąĖ GPS-ą▓čĆąĄą╝ąĄąĮąĖ. |
11.2.2.1. ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ
ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĘą░ą▓ąĖčüąĖčé ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠčé ą┐ąĄčĆąĖąŠą┤ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ: ą┤ą╗čÅ ą║ąŠčĆąŠčéą║ąĖčģ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąĄą║čāąĮą┤) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čåąĖą║ą╗ąĖč湥čüą║ąĖą╣ čéčĆąĄą║ąĖąĮą│. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ą┤ą╗čÅ ą┤ą╗ąĖąĮąĮčŗčģ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé ą╝ąĖąĮčāčéčŗ ąĖą╗ąĖ ą┤ąŠą╗čīčłąĄ) čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ čĆąĄąČąĖą╝ ON/OFF.
ąĪą╝. "11.2.1.1. ON/OFF operation - ą┐ąĄčĆąĖąŠą┤ ą┤ąŠą╗ą│ąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ" ąĖ "11.2.1.2. ą”ąĖą║ą╗ąĖč湥čüą║ąĖą╣ čéčĆąĄą║ąĖąĮą│ - ą║ąŠčĆąŠčéą║ąĖą╣ ą┐ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ" ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ čĆą░ą▒ąŠčéą░čÄčé čŹčéąĖ ą┤ą▓ą░ čĆąĄąČąĖą╝ą░.
11.2.2.2. ą¤ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖ ą┐ąŠąĖčüą║ą░
ą¤ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (update period) ąĘą░ą┤ą░ąĄčé ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā čāčüą┐ąĄčłąĮčŗą╝ąĖ čäąĖą║čüą░čåąĖčÅą╝ąĖ ą┐ąŠąĘąĖčåąĖąĖ. ąĢčüą╗ąĖ ąĘą░ čéą░ą╣ą╝ą░čāčé acquisition ąĮąĄ ą▒čŗą╗ą░ ą┐ąŠą╗čāč湥ąĮą░ čäąĖą║čüą░čåąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ, ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą┐čĆąŠą▒čāąĄčé ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī ą┐ąŠą┐čŗčéą║čā ą┐ąŠčüą╗ąĄ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░ąĮąŠ ą┐ąĄčĆąĖąŠą┤ąŠą╝ ą┐ąŠąĖčüą║ą░ (search period). ą¤ąĄčĆąĖąŠą┤čŗ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖ ą┐ąŠąĖčüą║ą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮčŗ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą░ą▒čüąŠą╗čÄčéąĮąŠą╣ čüąĄčéą║ąĄ ą▓čĆąĄą╝ąĄąĮąĖ, ąŠčüąĮąŠą▓ą░ąĮąĮąŠą╣ ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ GPS. ą×ąĮąĖ ąĮąĄ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą┐ąŠą┐čŗčéą║ąĖ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ.
ąØąŠą▓čŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ, ąĄčüą╗ąĖ ą┐ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖą╗ąĖ ą┐ąĄčĆąĖąŠą┤ ą┐ąŠąĖčüą║ą░ ą┐čĆąĄą▓čŗčłą░čÄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ ą▓ ąĮąĄą┤ąĄą╗ąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąŠčüčéą░ąĮčāčéčüčÅ ą▓ ą┤ąĄą╣čüčéą▓ąĖąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ čĆą░ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖčÅ.
11.2.2.3. Acquisition timeout
ą¤čĆąĖąĄą╝ąĮąĖą║ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ ą▓ č鹥č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ acquisition. ąŁčéą░ ąĮą░čüčéčĆąŠą╣ą║ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 ąĮčāąČąĮąŠ ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ č鹥ą║čāčēąĖčģ ąĮą░čćą░ą╗čīąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ, č鹊 ąŠąĮ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąŠą┤ą╗ąĖčé čŹč鹊 ą▓čĆąĄą╝čÅ. ąĢčüą╗ąĖ čŹč鹊 ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0, č鹊 čéą░ą╣ą╝ą░čāčé acquisition ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ čüą░ą╝ąĖą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝. ąÆ čüą╗čāčćą░ąĄ ąŠč湥ąĮčī čüą╗ą░ą▒ąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ čüąĖą│ąĮą░ą╗ą░ GPS ąĖą╗ąĖ ą┐čĆąĖ ąĄą│ąŠ ąŠčéčüčāčéčüčéą▓ąĖąĖ čéą░ą╣ą╝ą░čāčé, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝, ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠą║čĆą░čēąĄąĮ, čćč鹊ą▒čŗ čüąĮąĖąĘąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ. ą×ą┤ąĮą░ą║ąŠ čéą░ą╣ą╝ą░čāčé acquisition ąĮąĄ ą▒čāą┤ąĄčé ą║ąŠčĆąŠč湥, č湥ą╝ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
11.2.2.4. On time ąĖ wait for timefix
ą¤ą░čĆą░ą╝ąĄčéčĆ on time ąĘą░ą┤ą░ąĄčé, ą║ą░ą║ ą┤ąŠą╗ą│ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčüčéą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Tracking ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ POT ąĖ Inactive for update čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąÜą░č湥čüčéą▓ąŠ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą╝ą░čüąŠą║ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ UBX-CFG-NAV5. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ wait for timefix, č鹊 ą┐ąĄčĆąĄčģąŠą┤ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ Acquisition ą║ čüąŠčüč鹊čÅąĮąĖčÄ Tracking ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąĖąĘą▓ąĄčüčéąĮąŠ ą▓čĆąĄą╝čÅ GPS ąĖ ą▓ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐čĆąĄą┤ąĄą╗ą░čģ, ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą▓čŗą┤ą░ąĄčé čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ą▓ č鹥č湥ąĮąĖąĄ ą▒ąŠą╗čīčłąĄ 2 čüąĄą║čāąĮą┤. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠą┐čåąĖąĖ timefix ąŠą▒čŗčćąĮąŠ ąĘą░ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąĄčĆąĄčģąŠą┤ ąĖąĘ Acquisition ą▓ Tracking ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĄą║čāąĮą┤. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čāčüčéą░ąĮąŠą▓ą║ą░ ą▒ąŠą╗ąĄąĄ ąČąĄčüčéą║ąĖčģ ą┐čĆąĄą┤ąĄą╗ąŠą▓ ą▓ UBX-CFG-NAVX5 čāą▓ąĄą╗ąĖčćąĖčé ą▓čĆąĄą╝čÅ ąĘą░ą┐čāčüą║ą░, čéą░ą║ čćč鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░čģąŠč鹥čéčī čāą▓ąĄą╗ąĖčćąĖčéčī čéą░ą╣ą╝ą░čāčé acquisition.
11.2.2.5. ąØąĄ ą▓čģąŠą┤ąĖčéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 'inactive for search' ą┐čĆąĖ ąŠčéčüčāčéčüčéą▓ąĖąĖ čäąĖą║čüą░čåąĖąĖ
ąĢčüą╗ąĖ čŹčéą░ ąŠą┐čåąĖčÅ čĆą░ąĘčĆąĄčłąĄąĮą░, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąĄą╣čüčéą▓čāąĄčé ą┐ąŠ-ą┤čĆčāą│ąŠą╝čā ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ąĮąĄ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ: ą▓ą╝ąĄčüč鹊 ą▓čģąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for search, čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą┐ąŠą┐čŗčéą║ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ (acquire fix). ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for search state, čéą░ą║ čćč鹊 ą┐ąĄčĆąĖąŠą┤ ą┐ąŠąĖčüą║ą░ (search period) ąĖ čéą░ą╣ą╝ą░čāčé acquisition čüčéą░ąĮąŠą▓čÅčéčüčÅ ąĮąĄ ą░ą║čéčāą░ą╗čīąĮčŗą╝ąĖ.
11.2.2.6. ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ RTC ąĖ čŹč乥ą╝ąĄčĆąĖą┤
ą¦č鹊ą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą│ąŠ ąĘą░ą┐čāčüą║ą░, ą┐čĆąĖąĄą╝ąĮąĖą║čā ąĮčāąČąĮąŠ čĆąĄą│čāą╗čÅčĆąĮąŠ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī čüą▓ąŠąĖ čćą░čüčŗ RTC ąĖ ąŠą▒ąĮąŠą▓ą╗čÅčéčī ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤. ąŁč鹊 ą╝ąŠąČąĮąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą░ą║čéąĖą▓ą░čåąĖąĄą╣ ąŠą┐čåąĖąĖ update RTC ąĖ update Ephemeris. RTC ą║ą░ą╗ąĖą▒čĆčāčÄčéčüčÅ ą║ą░ąČą┤čŗąĄ 5 ą╝ąĖąĮčāčé, ąĖ ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą║ą░ąČą┤čŗąĄ 30 ą╝ąĖąĮčāčé. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. "11.2.1.4. ąŚą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ą░".
11.2.2.7. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą╝ EXTINT
ążčāąĮą║čåąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮąŠąČą║ąŠą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéą╝ąĄąĮąĖčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ čåąĖą║ą╗ ą░ą║čéąĖą▓ąĮąŠ/ąĮąĄ ą░ą║čéąĖą▓ąĮąŠ Power Save Mode. ąĪąŠčüč鹊čÅąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī č湥čĆąĄąĘ ąĮąŠąČą║čā EXTINT0 ąĖą╗ąĖ EXTINT1.
ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ Force-ON (ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠąĄ ą▓ą║ą╗čÄč湥ąĮąĖąĄ), č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖčÅ Inactive, ą┐ąŠą║ą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąĮąŠąČą║ą░ EXTINT (ą╗ąĖą▒ąŠ EXTINT0, ą╗ąĖą▒ąŠ EXTINT1) ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1. ą¤čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé ą▓čüąĄą│ą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖčÅčģ Acquisition/Tracking (ON/OFF operation) ąĖ Acquisition/Tracking/POT (čåąĖą║ą╗ąĖč湥čüą║ąĖą╣ čéčĆąĄą║ąĖąĮą│) čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąÜąŠą│ą┤ą░ čŹčéą░ ąĮąŠąČą║ą░ ą┐ąŠą╝ąĄąĮčÅąĄčé čüą▓ąŠą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą╗ąŠą│. 0, ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐čĆąŠą┤ąŠą╗ąČąĖčé čüą▓ąŠąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ. UBX-CFG-PM2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąŠąČą║ąĖ, ą║ąŠč鹊čĆą░čÅ čāą┐čĆą░ą▓ą╗čÅąĄčé ąŠą┐ąĖčüą░ąĮąĮčŗą╝ ą▓čŗčłąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝.
ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ Force-OFF (ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠąĄ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ), č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive ąĖ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ ąĮąĄą╝ ą┤ąŠ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up event). ąøčÄą▒ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą╝ąŠąČąĄčé čĆą░ąĘą▒čāą┤ąĖčéčī ą┐čĆąĖąĄą╝ąĮąĖą║, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĮąŠąČą║ą░ EXTINT čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąĮą░ Force-OFF. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐čĆąŠčüąĮąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮąŠąČą║ąĖ, čé. ąĄ. Force-OFF, ąĖ ąĘą░č鹥ą╝ čüąĮąŠą▓ą░ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive.
11.2.2.8. ąĪą╝ąĄčēąĄąĮąĖąĄ (ą▓čĆąĄą╝ąĄąĮąĮąŠą╣) čüąĄčéą║ąĖ
ąÜą░ą║ č鹊ą╗čīą║ąŠ čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĄčüčéčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ąŠą▒ąĮąŠą▓ą╗čÅąĄą╝ą░čÅ čĆąĄčłąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ (update grid) ą▓čŗčĆąŠą▓ąĮąĄąĮą░ ąĮą░ ąĮą░čćą░ą╗ąŠ ąĮąĄą┤ąĄą╗ąĖ GPS (ą▓ąŠčüą║čĆąĄčüąĄąĮčīąĄ, 00:00). ąöąŠ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ update grid ąĮąĄ ą▓čŗčĆąŠą▓ąĮąĄąĮą░. ąóąŠą│ą┤ą░ čüą╝ąĄčēąĄąĮąĖąĄ čĆąĄčłąĄčéą║ąĖ čüą┤ą▓ąĖą│ą░ąĄčé update grid ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ąĮą░čćą░ą╗čā ąĮąĄą┤ąĄą╗ąĖ GPS. ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą│ą╗ą░ą▓ąĄ "11.2.4.1. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüą╝ąĄčēąĄąĮąĖčÅ čüąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ".
ąĪą╝ąĄčēąĄąĮąĖąĄ čüąĄčéą║ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĖ čåąĖą║ą╗ąĖč湥čüą║ąŠą│ąŠ čéčĆąĄą║ąĖąĮą│ą░.
11.2.3. ążčāąĮą║čåąĖąĖ PSM
11.2.3.1. ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÅ
ąÜąŠą│ą┤ą░ PSM čĆą░ąĘčĆąĄčłąĄąĮąŠ, ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠčéą┐čĆą░ą▓ą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ PSM) čéčĆąĄą▒čāąĄčé ąŠčüąŠą▒ąŠą│ąŠ ą▓ąĮąĖą╝ą░ąĮąĖčÅ. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄą░ą║čéąĖą▓ąĮąŠčüčéąĖ (Inactive state), ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄ čüą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ą║ą░ą║ąŠąĄ-ą╗ąĖą▒ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ č湥čĆąĄąĘ čüą▓ąŠąĖ ąĖąĮč鹥čĆč乥ą╣čüčŗ. ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ ą┤ą░ąČąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąĮąĄą░ą║čéąĖą▓ąĮąŠčüčéąĖ, čüą╗ąĄą┤čāąĄčé ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
ŌĆó ą×čéą┐čĆą░ą▓ąĖčéčī ą┐čāčüčéčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī 0xFF (ą┤ąŠčüčéą░č鹊čćąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī 1 ą▒ą░ą╣čé) č湥čĆąĄąĘ UART ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąŁč鹊 čĆą░ąĘą▒čāą┤ąĖčé ą┐čĆąĖąĄą╝ąĮąĖą║, ąĄčüą╗ąĖ ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Inactive. ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Inactive, č鹊 čŹčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒čāą┤ąĄčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčīčüčÅ.
ŌĆó ą×čéą┐čĆą░ą▓ąĖčéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ č湥čĆąĄąĘ ą┐čĆąĖą╝ąĄčĆąĮąŠ 0.5 čüąĄą║čāąĮą┤čŗ ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐čāčüč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ. ąĢčüą╗ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą┐čāčüč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ čüą╗ąĖčłą║ąŠą╝ ą║ąŠčĆąŠčéą║ąĖą╣, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄ ą│ąŠč鹊ą▓ ą║ ą┐čĆąĖąĄą╝čā čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ąĄčüą╗ąĖ čŹč鹊čé ąĖąĮč鹥čĆą▓ą░ą╗ ą▒čāą┤ąĄčé čüą╗ąĖčłą║ąŠą╝ ą┤ą╗ąĖąĮąĮčŗą╣, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą▓ąĄčĆąĮčāčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive ą┐ąĄčĆąĄą┤ č鹥ą╝ ą┐ąŠą╗čāč湥ąĮąĖąĄą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤ąŠčŹč鹊ą╝čā ą▓ą░ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī ąŠčéą▓ąĄčé UBX-ACK-ACK ąŠčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ ą▓ č鹊ą╝, čćč鹊 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊.
ŌĆó ąĪčĆą░ąĘčā ą┐ąŠčüą╗ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąŠčéą┐čĆą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠ čüąŠčģčĆą░ąĮąĄąĮąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
11.2.3.2. Wake-up (ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ, ą▓čŗą▓ąŠą┤ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Inactive)
ą¤čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī "čĆą░ąĘą▒čāąČąĄąĮ" ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖčģ ąĮąŠąČą║ą░čģ:
ŌĆó ąØą░čĆą░čüčéą░ąĮąĖąĄ ąĖą╗ąĖ čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ ąĮą░ ąŠą┤ąĮąŠą╣ ąĖąĘ ąĮąŠąČąĄą║ EXTINT.
ŌĆó ąØą░čĆą░čüčéą░ąĮąĖąĄ ąĖą╗ąĖ čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ RXD1 (ą┐čĆąĖąĄą╝ UART).
ŌĆó ąØą░čĆą░čüčéą░ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ NRESET.
ąÆčüąĄ čüąĖą│ąĮą░ą╗čŗ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāčÄčéčüčÅ ą║ą░ą║ ąĘą░ą┐čĆąŠčü ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐čĆąŠą▒čāąČą┤ą░ąĄčéčüčÅ ąĖ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ čüą▓ąŠąĄą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ. ąĪąĖą│ąĮą░ą╗čŗ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĮąĄ ą┤ą░čÄčé čŹčäč乥ą║čéą░, ąĄčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ čāąČąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Acquisition, Tracking ąĖą╗ąĖ POT.
11.2.3.3. ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą║ čģąŠčüčéčā USB
ą¤ąŠą║ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čģąŠčüčéčā USB, ąŠąĮ ąĮąĄ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ čü čüą░ą╝čŗą╝ ą╝ą░ą╗čŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ą▓ąĖčéčī ąĮąĄą║ąŠč鹊čĆčŗą╣ ąĮąĄą▒ąŠą╗čīčłąŠą╣ čāčĆąŠą▓ąĄąĮčī ą░ą║čéąĖą▓ąĮąŠčüčéąĖ CPU, čćč鹊ą▒čŗ ąĮąĄ ąĮą░čĆčāčłąĖčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ USB. ąØąĄą┤ąŠčüčéą░č鹊ą║, ąŠą┤ąĮą░ą║ąŠ, ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ č鹊ą╝, čćč鹊 ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓čŗčłąĄ.
ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąŠčé ąŠą┤ąĮąŠą╣ ąĖąĘ ąĮąŠąČąĄą║ EXTINT ąĖ ąŠčé UART čéą░ą║ąČąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čģąŠčüčéčā USB. ąĪąŠčüč鹊čÅąĮąĖąĄ čŹčéąĖčģ ąĮąŠąČąĄą║ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąĮą░ 1 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā.
11.2.3.4. ąÆąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ čü čäčāąĮą║čåąĖąĄą╣ AssistNow Autonomous
ąĢčüą╗ąĖ ąŠą▒ąĄ čäčāąĮą║čåąĖąĖ, PSM ąĖ AssistNow Autonomous, čĆą░ąĘčĆąĄčłąĄąĮčŗ, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for update, ą┐ąŠą║ą░ AssistNow Autonomous ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčé ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ. ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčé ą┐ąŠč鹥čĆčÄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ-ąĘą░ ąĮąĄ ąŠą║ąŠąĮč湥ąĮąĮčŗčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣, ąĖ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čüąĮąĖąĘąĖčé ąŠą▒čēąĖą╣ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ ąŠą▒čŖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ, ą║ąŠč鹊čĆčŗą╣ ąĮčāąČąĄąĮ ą┤ą╗čÅ AssistNow Autonomous. ąŚą░ą┤ąĄčƹȹ║ą░ ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for update, ąĄčüą╗ąĖ ąŠąĮą░ ąĄčüčéčī, ą▒čāą┤ąĄčé ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąĄą║čāąĮą┤, ąŠč湥ąĮčī čĆąĄą┤ą║ąŠ ą▒ąŠą╗čīčłąĄ 20 čüąĄą║čāąĮą┤.
AssistNow Autonomous ąĘą░čéčĆą░ą│ąĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ą▓čģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive for update. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čåąĖą║ą╗ąĖč湥čüą║ąŠą│ąŠ čéčĆąĄą║ąĖąĮą│ą░ AssistNow Autonomous ąĮąĄ ą┐ąĄčĆąĄčüąĄą║ą░ąĄčéčüčÅ čü PSM (ą║čĆąŠą╝ąĄ čāą▓ąĄą╗ąĖč湥ąĮąĮąŠą╣ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ).
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ AssistNow Autonomous ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąŠą▓čŗčłąĄąĮąĖčÄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą┐čĆąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĖ ą┐čĆąŠą│ąĮąŠąĘą░. ąōą╗ą░ą▓ąĮą░čÅ čåąĄą╗čī PSM čüąŠčüč鹊ąĖčé ą▓ čüąĮąĖąČąĄąĮąĖąĖ ąŠą▒čēąĄą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čüą╗ąĄą┤čāąĄčé čāą┤ąĄą╗čÅčéčī ąŠčüąŠą▒ąŠąĄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą┐čĆąĖąĮčÅčéąĖčÄ čĆąĄčłąĄąĮąĖčÅ, čćč鹊 čćč鹊 ą▓ą░ąČąĮąĄąĄ - ą▓čŗą│ąŠą┤čŗ AssistNow Autonomous ąĖą╗ąĖ ą┐ąŠą▓čŗčłąĄąĮąĮąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ, čüą▓čÅąĘą░ąĮąĮąŠąĄ čü ąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝.
11.2.4. ą¤čĆąĖą╝ąĄčĆčŗ
11.2.4.1. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüą╝ąĄčēąĄąĮąĖčÅ čüąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ
ąĪčåąĄąĮą░čĆąĖą╣: ą┐ąŠą╗čāč湥ąĮąĖąĄ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ ą┤ąĄąĮčī, ą▓ čāą║ą░ąĘą░ąĮąĮąŠąĄ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ. ąĢčüą╗ąĖ čäąĖą║čüą░čåąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ ąĮąĄ ą┐ąŠą╗čāč湥ąĮą░, č鹊 ą┐ąŠą┐čŗčéą░čéčīčüčÅ čŹč鹊 čüą┤ąĄą╗ą░čéčī čüąĮąŠą▓ą░ č湥čĆąĄąĘ ą║ą░ąČą┤čŗąĄ 2 čćą░čüą░.
ąĀąĄčłąĄąĮąĖąĄ: čüąĮą░čćą░ą╗ą░ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (update period) 24*3600 čüąĄą║čāąĮą┤, ąĖ ą┐ąĄčĆąĖąŠą┤ ą┐ąŠąĖčüą║ą░ (search period) 2*3600 čüąĄą║čāąĮą┤. ąóąĄą┐ąĄčĆčī čäąĖą║čüą░čåąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ ą▒čāą┤ąĄčé ą┐ąŠą╗čāč湥ąĮą░ ą║ą░ąČą┤čŗąĄ 24 čćą░čüą░, ąĖ ąĄčüą╗ąĖ ą┐čĆąĖ čŹč鹊ą╝ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░, č鹊 ą┐ąŠą▓č鹊čĆąĮčŗąĄ ą┐ąŠą┐čŗčéą║ąĖ ą▒čāą┤čāčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ ą▓ 2 čćą░čüą░. ą¤ąŠčüą║ąŠą╗čīą║čā update grid ą▓čŗčĆąŠą▓ąĮąĄąĮą░ ąĮą░ ą┐ąŠą╗ąĮąŠčćčī čüčāą▒ą▒ąŠčéą░/ą▓ąŠčüą║čĆąĄčüąĄąĮčīąĄ, č鹊 čäąĖą║čüą░čåąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą▓ ą┐ąŠą╗ąĮąŠčćčī. ą¤čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ grid offset ąĮą░ 12*3600 čüąĄą║čāąĮą┤, čäąĖą║čüą░čåąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ ą▒čāą┤ąĄčé čüą┤ą▓ąĖąĮčāčéą░ ąĮą░ ą▓čĆąĄą╝čÅ ą┐ąŠą╗ą┤ąĮčÅ. ąĢčüą╗ąĖ čäąĖą║čüą░čåąĖčÅ ą▓ ą┐ąŠą╗ą┤ąĄąĮčī ą┐ąŠč鹥čĆą┐ąĄą╗ą░ ąĮąĄčāą┤ą░čćčā, č鹊 ą┐ąŠą▓č鹊čĆąĮčŗąĄ ą┐ąŠą┐čŗčéą║ąĖ ą▒čāą┤čāčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą║ą░ąČą┤čŗąĄ 2 čćą░čüą░, ą┐ąĄčĆą▓ą░čÅ ą▓ 14:00. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ą┐ąŠą╗čāč湥ąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ čüą╗ąĄą┤čāčÄčēą░čÅ čäąĖą║čüą░čåąĖčÅ ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą▓ ą┐ąŠą╗ą┤ąĄąĮčī čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┤ąĮčÅ.
11.2.4.2. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĮčāą╗ąĄą▓ąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ
ąĪčåąĄąĮą░čĆąĖą╣: ą┐ąŠą╗čāčćą░čéčī čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ ą┐ąŠ ąĘą░ą┐čĆąŠčüčā.
ąĀąĄčłąĄąĮąĖąĄ: čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ 0 ą┐ąĄčĆąĖąŠą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (update period) ąĖ ą┐ąĄčĆąĖąŠą┤ ą┐ąŠąĖčüą║ą░ (search period). ąóąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ ąĮąĄą░ą║čéąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┤ąŠ čüą▓ąŠąĄą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ.
11.3. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ąĖą║ąŠą▓ąŠą│ąŠ č鹊ą║ą░
ą¤ąĖą║ąŠą▓čŗą╣ č鹊ą║ (peak current) ą▓ąŠ ą▓čĆąĄą╝čÅ ąĘą░čģą▓ą░čéą░ čüą┐čāčéąĮąĖą║ąŠą▓ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮąĖąČąĄąĮ ą┐čāč鹥ą╝ ą░ą║čéąĖą▓ą░čåąĖąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ąŠą┐čåąĖąĖ ą▓ CFG-PM2. ąĪąĮąĖąČąĄąĮąĖąĄ peak current ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čāą▓ąĄą╗ąĖč湥ąĮąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ąŁčéą░ ąĮą░čüčéčĆąŠą╣ą║ą░ ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ (Continuous ąĖą╗ąĖ Power Save Mode).
11.4. ąÜąŠą╝ą░ąĮą┤ą░ ą▓ą║ą╗čÄč湥ąĮąĖčÅ/ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (Power On/Off)
ąĪ ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ RXM-PMREQ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą▓ąĄą┤ąĄąĮ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive (ą▓ Continuous ąĖ Power Save Mode). ą×ąĮ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Inactive ąĮą░ ą▓čĆąĄą╝čÅ, čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ, ąĖą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒čāąČąĄąĮ ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ ąĮąŠąČąĄą║ EXTINT ąĖą╗ąĖ RXD1.
ą×čéą┐čĆą░ą▓ą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ RXM-PMREQ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ Power Save Mode ą┐ąĄčĆąĄąĘą░ą┤ą░čüčé PSM ąĖ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Inactive. ą×ąĮ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Inactive, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒čāąČąĄąĮ. ą¤ąŠčüą╗ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąŠąĮ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī čĆą░ą▒ąŠčéą░čéčī ą▓ Power Save Mode čéą░ą║, ą║ą░ą║ ą▒čŗą╗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ.
11.5. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ EXTINT, ą║ąŠą│ą┤ą░ Power Save Mode ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ
ą¤čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą▓čŗą║ą╗čÄč湥ąĮ (OFF) čéą░ą║ąČąĄ ą║ąŠą│ą┤ą░ ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ Power Save Mode. ąŁč鹊 čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ ąČąĄ, ą║ą░ą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ EXTINT ą▓ Power Save Mode. ąóąŠą╗čīą║ąŠ ą▓ Power Save Mode čŹčéą░ čäčāąĮą║čåąĖčÅ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ CFG-PM2.
11.6. ą¦ą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čü Power Save Mode
ąÆ Continuous Mode čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-RATE. ą×ą┤ąĮą░ą║ąŠ ą▓ Power Save Mode čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą╝ąŠąČąĄčé ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó Cyclic Operation: ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Power Optimized Tracking (čéčĆąĄą║ąĖąĮą│, ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ č鹊ą║ą░), čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąĄčĆąĖąŠą┤ąŠą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ updatePeriod, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą▓ CFG-PM2. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ). ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Tracking, čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ UBX-CFG-RATE. ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ą▒ąŠą╗čīčłąĄ ą▓čŗą┤ą░ą▓ą░čéčī čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ, ąŠąĮ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ąĖąĘ Cyclic Operation ą▓ ON/OFF Operation (ąĄčüą╗ąĖ čŹč鹊 ąĮąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ ą║ą╗čÄč湊ą╝ doNotEnterOff ą▓ CFG-PM2). ąÆ čŹč鹊ą╝ ą▓ą░ąČąĮčŗ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ ąĮąĖąČąĄ.
ŌĆó ON/OFF Operation: ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Acquisition, čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮą░ ąĮą░ 2 ąōčå. ąÆčüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ NMEA (ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠ UBX), ą║ąŠč鹊čĆčŗąĄ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą┐čĆąĖ čäąĖą║čüą░čåąĖčÅčģ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čéą░ą║ąČąĄ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ 2 ąōčå.
ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░čüčüą╝ąŠčéčĆąĄąĮąŠ ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ baud rate ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé Power Save Mode! ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Acquisition ą▓ č鹥č湥ąĮąĖąĄ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąĄčüčÅčéą║ąĖ čüąĄą║čāąĮą┤ ą┐čĆąĖ čāčüą╗ąŠą▓ąĖčÅčģ ą┐čĆąĖąĄą╝ą░ čüą╗ą░ą▒ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░). ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĖąĮąŠą│ą┤ą░ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Tracking, čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą▒čāą┤ąĄčé čéą░ą║ąŠą╣, ą║ą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ UBX-CFG-RATE.
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ Power Save Mode, čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ (baud rate) ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮą░ čéą░ą║ąŠą╣, čćč鹊ą▒čŗ ąŠąĮ ą╝ąŠą│ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą▓čŗą▓ąŠą┤ ąŠą▒čŖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ čćą░čüč鹊čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čĆą░ą▓ąĮą░ 2 ąōčå.
[12. Time pulse]
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖą╝ąĄąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĮčāčÄ ą┐ąŠą┤ą┤ąĄčƹȹ║čā, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ GLONASS mode. ąÆ čćą░čüčéąĮąŠčüčéąĖ, č鹊čćąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ (time pulse) ą▓ čĆąĄąČąĖą╝ąĄ GLONASS ąĮąĄ ą▒čŗą╗ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮą░.
ąŻ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ u-blox GNSS ąĄčüčéčī čäčāąĮą║čåąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░, čā ą║ąŠč鹊čĆčŗčģ ą╝ąŠąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖ čćą░čüč鹊čéčā. ążčāąĮą║čåąĖčÅ time pulse ą╝ąŠąČąĄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčīčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ CFG-TP5. ąĪąŠąŠą▒čēąĄąĮąĖąĄ TIM-TP ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĖą╝ą┐čāą╗čīčüą░, ąĖčüč鹊čćąĮąĖą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ąŠčłąĖą▒ą║ąĖ ą║ą▓ą░ąĮč鹊ą▓ą░ąĮąĖčÅ (quantization error) ą▓čŗčģąŠą┤ąĮąŠą╣ ąĮąŠąČą║ąĖ čüąĖą│ąĮą░ą╗ą░ ąĖą╝ą┐čāą╗čīčüą░.
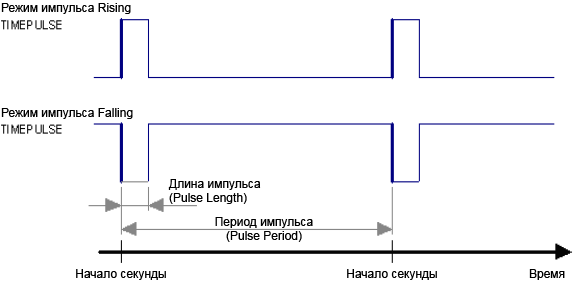
12.2. ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ
ŌĆó ąöą╗čÅ čüą░ą╝ąŠą│ąŠ ą╗čāčćčłąĄą│ąŠ ą║ą░č湥čüčéą▓ą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ (time pulse) čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąŠą┤čüąĖčüč鹥ą╝čā SBAS.
ŌĆó ąÜąŠą│ą┤ą░ time pulse ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹊čćąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąŠčéčüč湥čéą░ ą▓čĆąĄą╝ąĄąĮąĖ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī ąĘą░ą┤ąĄčƹȹ║čā čüąĖą│ąĮą░ą╗ą░ RF ą┐ąŠ ąŠą┐ąŠčĆąĮąŠą╝čā ąĖčüč鹊čćąĮąĖą║čā ą▓čĆąĄą╝ąĄąĮąĖ.
ŌĆó ąĪą╗ąĄą┤čāąĄčé ą┐ąŠąĘą░ą▒ąŠčéąĖčéčīčüčÅ ąŠ ąĮą░čüčéčĆąŠą╣ą║ą░čģ ąĘą░ą┤ąĄčƹȹ║ąĖ ą║ą░ą▒ąĄą╗čÅ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ŌĆó ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čüą░ą╝čāčÄ ą╗čāčćčłčāčÄ č鹊čćąĮąŠčüčéčī ą▓čĆąĄą╝ąĄąĮąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ąĮč鹥ąĮąĮčŗ, ą┤ą╗čÅ ąĮąĄčæ ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĖ č鹊čćąĮąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ.
ŌĆó ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮą░čÅ č鹊čćąĮąŠčüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ą╝ąĖ, ąĮąĄ čüą╝ąĄčłąĖą▓ą░ą╣č鹥 ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ čĆą░ąĘąĮčŗčģ čüąĄą╝ąĄą╣čüčéą▓. ąĢčüą╗ąĖ čŹč鹊 ą▓čüąĄ-čéą░ą║ąĖ čéčĆąĄą▒čāčÄčéčüčÅ, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąŠ ąĘą░ą┤ąĄčƹȹ║ąĄ ą║ą░ą▒ąĄą╗čÅ ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĄ.
ŌĆó ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ TIM-TP čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ąŠą▒ąŠąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, čüą║ąŠčĆąŠčüčéąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ (measurement rate, CFG-RATE) ąĖ čćą░čüč鹊čéčŗ ąĖą╝ą┐čāą╗čīčüą░ (time pulse frequency, CFG-TP5) ąĮą░ čćą░čüč鹊čéčā 1 ąōčå.
ą¤ąŠčüą║ąŠą╗čīą║čā ą▓čŗą┤ą░čćą░ TIM-TP čüą▓čÅąĘą░ąĮą░ čüąŠ čüą║ąŠčĆąŠčüčéčīčÄ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ (measurement rate), ą╝ąŠąČąĄčé ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ TIM-TP ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ, ąĄčüą╗ąĖ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▒ąŠą╗čīčłąĄ, č湥ą╝ čćą░čüč鹊čéą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ TIM-TP ą╝ąĄąČą┤čā ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ T1 ąĖ T2 ąŠčéąĮąŠčüčÅčéčüčÅ ą║ T2, ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ TIM-TP ą┐ąĄčĆąĄą┤ T2 čüąŠąŠą▒čēą░ąĄčé čüą░ą╝čŗąĄ č鹊čćąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, čü ą╝ąĄąĮčīčłąĄą╣ ąŠčłąĖą▒ą║ąŠą╣ ą║ą▓ą░ąĮč鹊ą▓ą░ąĮąĖčÅ (quantization error). ąÆ ąŠą▒čēąĄą╝, ąĄčüą╗ąĖ čćą░čüč鹊čéą░ čĆąĄčłąĄąĮąĖčÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĖ čćą░čüč鹊čéą░ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ čĆą░ąĘąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, č鹊 ąĮąĄ ą▒čāą┤ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ąŠą┤ąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ TIM-TP ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ąĮąŠąČą║ąĄ TIMEPULSE ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą▓čŗčģąŠą┤ąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąŠčüč鹊ą│ąŠ čüą╗čāčćą░čÅ 1 ąĖą╝ą┐čāą╗čīčüą░ ą▓ čüąĄą║čāąĮą┤čā (1PPS) ąĖ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ čĆą░ąĘ ą▓ čüąĄą║čāąĮą┤čā ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ.
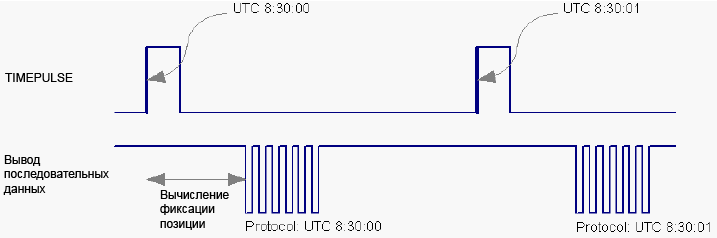
ą¤čĆąĖą╝ąĄčĆ ą┐čĆą░ą║čéąĖč湥čüą║ąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ TIMEPULSE ąĮą░ ą▓čŗą▓ąŠą┤ąĄ PPS ą╝ąŠą┤čāą╗ąĄą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą║čāą┐ąĖčéčī ąĮą░ AliExpress ąĖ Ebay, čüą╝. ą┐ąŠ čüčüčŗą╗ą║ąĄ [4].
12.3. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ time pulse
ą¤čĆąĖąĄą╝ąĮąĖą║ąĖ u-blox GNSS ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ąŠą┤ąĮčā ąĖą╗ąĖ ą┤ą▓ąĄ ąĮąŠąČą║ąĖ TIMEPULSE (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą╝ąŠą┤ąĄą╗ąĖ), ąĮą░ ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüčéčāą┐ą░ąĄčé čüąĖą│ąĮą░ą╗ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ (time pulse, TP) čü ą║ąŠąĮčäąĖą│čāčĆąĖčāąĄą╝čŗą╝ ą┐ąĄčĆąĖąŠą┤ąŠą╝ ąĖą╝ą┐čāą╗čīčüąŠą▓, ą┤ą╗ąĖąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüą░ ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčīčÄ (čü ąĮą░čĆą░čüčéą░ąĮąĖąĄą╝ ąĖą╗ąĖ čüą┐ą░ą┤ąŠą╝). ąĪą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ąĮą░ ąĖąĘą┤ąĄą╗ąĖąĄ (product data sheet) ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗčģ ą▓ąĄą╗ąĖčćąĖąĮ.
ąĢčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĖčé čĆą░ąĘąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓čŗčģąŠą┤ąĮčāčÄ čćą░čüč鹊čéčā ąĖą╗ąĖ ą┤ą╗ąĖąĮčā ąĖą╝ą┐čāą╗čīčüą░) ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ ą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ GPS. ąĪąĖą│ąĮą░ą╗čŗ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮąŠą│ąŠ UBX-čüąŠąŠą▒čēąĄąĮąĖčÅ CFG-TP5.
12.4. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ time pulse čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-TP5
UBX-čüąŠąŠą▒čēąĄąĮąĖąĄ CFG-TP5 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ. ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čŹč鹊čé ąĖą╝ą┐čāą╗čīčü:
ŌĆó time pulse index - ąĖąĮą┤ąĄą║čü ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ.
ŌĆó antenna cable delay - ąĘą░ą┤ąĄčƹȹ║ą░ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ-ąĘą░ ąĄą│ąŠ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ ą┐ąŠ ą║ą░ą▒ąĄą╗čÄ ą╝ąĄąČą┤čā ą░ąĮč鹥ąĮąĮąŠą╣ ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝.
ŌĆó RF group delay - ą│čĆčāą┐ą┐ąŠą▓ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ čĆą░ą┤ąĖąŠčéčĆą░ą║čéą░, ąĘą░ą┤ąĄčƹȹ║ą░ čüąĖą│ąĮą░ą╗ą░ ą▓ ą╝ąŠą┤čāą╗ąĄ RF ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (ą┐ą░čĆą░ą╝ąĄčéčĆ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ).
ŌĆó pulse frequency/period - čćą░čüč鹊čéą░ ąĖą╗ąĖ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░ ąĖą╝ą┐čāą╗čīčüą░.
ŌĆó pulse frequency/period lock - čćą░čüč鹊čéą░ ąĖą╗ąĖ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░ ąĖą╝ą┐čāą╗čīčüą░, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗčćąĖčüą╗ąĖą╗ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĖąĘ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤čĆčāą│ąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ąĘą░čģą▓ą░čéą░ (locked mode).
ŌĆó pulse length/ratio - ą┤ą╗ąĖąĮą░ ąĖą╗ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░, ą║ąŠą│ą┤ą░ ą╗ąĖą▒ąŠ ąĘą░ą┤ą░ąĄčéčüčÅ ą▓čĆąĄą╝čÅ ąĖą╝ą┐čāą╗čīčüą░, ą╗ąĖą▒ąŠ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčÅą╝ąĖ ąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖą╣ on/off.
ŌĆó pulse length/ratio lock - ą┤ą╗ąĖąĮą░ ąĖą╗ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗčćąĖčüą╗ąĖą╗ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĖąĘ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤čĆčāą│ąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ąĘą░čģą▓ą░čéą░ (locked mode).
ŌĆó user delay - ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░, ąĘą░ą┤ąĄčƹȹ║ą░ ą║ą░ą▒ąĄą╗čÅ ąŠčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┤ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐ą╗čÄčü ąĘą░ą┤ąĄčƹȹ║ą░ čüąĖą│ąĮą░ą╗ą░ ą▓ ą╗čÄą▒ąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ŌĆó active - ą▓čŗą┤ą░čćą░ time pulse, ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ŌĆó lock to gps freq - ąĄčüą╗ąĖ čŹč鹊čé čäą╗ą░ą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ GPS ą▓ą╝ąĄčüč鹊 čćą░čüč鹊čéčŗ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░.
ŌĆó locked other setting - ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓čŗčćąĖčüą╗ąĖą╗ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĖąĘ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąĖą│ąĮą░ą╗ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░. ąŁč鹊čé čĆąĄąČąĖą╝ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ą║ ą┐čĆąĖą╝ąĄčĆčā, ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ time pulse, ąĄčüą╗ąĖ ą▓čĆąĄą╝čÅ ąĮąĄ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąŠ, ąĖą╗ąĖ čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ąŠčéčüčāčéčüčéą▓ąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤čĆčāą│ąĖą╝ąĖ ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ.
ŌĆó is frequency - ąĄčüą╗ąĖ čŹč鹊čé čäą╗ą░ą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░čéčī ą┐ąŠą╗ąĄ 'Frequency/Period' ą║ą░ą║ čćą░čüč鹊čéą░, ą░ ąĮąĄ ą┐ąĄčĆąĖąŠą┤.
ŌĆó is length - ąĄčüą╗ąĖ čŹč鹊čé čäą╗ą░ą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░čéčī ą┐ąŠą╗ąĄ 'Length/Ratio' ą║ą░ą║ ą┤ą╗ąĖąĮą░, ą░ ąĮąĄ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓.
ŌĆó align to TOW - ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąĖą╝ą┐čāą╗čīčüčŗ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░čÄčéčüčÅ ą┐ąŠ ą│čĆą░ąĮąĖčåąĄ čüąĄą║čāąĮą┤čŗ.
ŌĆó polarity - ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, ą┐ąĄčĆą▓čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ąĖą╝ą┐čāą╗čīčüą░ ą▒čāą┤ąĄčé čäčĆąŠąĮč鹊ą╝ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ (Pulse Mode: Rising).
ŌĆó grid UTC/GPS - ą▓čŗą▒ąŠčĆ ą╝ąĄąČą┤čā čüąĄčéą║ąŠą╣ ą▓čĆąĄą╝ąĄąĮąĖ UTC (0) ąĖą╗ąĖ GPS (1). ąóą░ą║ąČąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą▓čŗą▓ąŠą┤ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ TIM-TP.
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąĄą▓čŗčüąĖčéčī ąĄą│ąŠ ą┐ąĄčĆąĖąŠą┤. ąØą░čüčéčĆąŠą╣ą║ąĖ time pulse ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮčŗ čéą░ą║, čćč鹊ą▒čŗ ąĮąĖ ą╗ąŠą│. 1, ąĮąĖ ą╗ąŠą│. 0 ąĖą╝ą┐čāą╗čīčüą░ ąĮąĄ ą▒čŗą╗ąĖ ą╝ąĄąĮčīčłąĄ 50 ąĮčü (ą║čĆąŠą╝ąĄ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ąĖą╝ą┐čāą╗čīčüčŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą┐čĆąĄčēąĄąĮčŗ), ąĖąĮą░č湥 ąĖą╝ą┐čāą╗čīčüčŗ ą╝ąŠą│čāčé č鹥čĆčÅčéčīčüčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ TIMEPULSE ą┐čĆąĖąĄą╝ąĮąĖą║ą░ u-blox 7 ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ 1000000000/(50+50) = 10000000 ąōčå, čé. ąĄ. ąĮąĄ ą▒ąŠą╗čīčłąĄ 10 ą£ąōčå.
12.4.1. ą¤čĆąĖą╝ąĄčĆ 1
ą¤čĆąĖą╝ąĄčĆ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą│ąĄąĮąĄčĆą░čåąĖčÄ čüąĖą│ąĮą░ą╗ą░ 1PPS TP ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╝ąĖ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ CFG-TP5. ąÆčŗą▓ąŠą┤ 1 ąōčå čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąĮąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ ąĖą╗ąĖ ąĮąĄčé ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ GPS. ąÆčŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ąĮą░ TOW ą▓ąŠąĘą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ GPS.
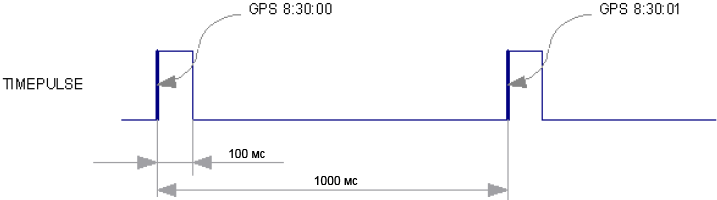

12.4.2. ą¤čĆąĖą╝ąĄčĆ 2
ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą│ąĄąĮąĄčĆą░čåąĖčÄ čüąĖą│ąĮą░ą╗ą░ 10 ą£ąōčå TP ąĮą░ ąĮąŠąČą║ąĄ ą▓čŗčģąŠą┤ą░ TIMEPULSE2, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ GPS. ąæąĄąĘ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ GPS čćą░čüč鹊čéą░ 10 ą£ąōčå ąĮąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ.


[13. Receiver Status Monitoring]
UBX-čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ą╗ą░čüčüą░ MON ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą▓čŗą┤ą░čćąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ čćą░čüč鹥ą╣ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ čüą┐ąĄčåąĖčäąĖą║ąĄ GNSS. ąŁčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ą╗čÅ:
ŌĆó ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▓ąĄčĆčüąĖą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąĖ ą¤ą× (Hardware and Software Versions) čü ą┐ąŠą╝ąŠčēčīčÄ MON-VER.
ŌĆó ą¤ąŠą╗čāč湥ąĮąĖčÅ čüčéą░čéčāčüą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░.
ŌĆó ą¤ąŠą╗čāč湥ąĮąĖčÅ čüčéą░čéčāčüą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čüąĄą║čåąĖą╣ čü ą┐ąŠą╝ąŠčēčīčÄ MON-HW.
13.1. ąĪąĖčüč鹥ą╝ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░
ąĪąĖčüč鹥ą╝ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (Input/Output, I/O) čŹč鹊 ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüą╗ąŠą╣ GNSS ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ, ą│ą┤ąĄ čüąŠčüčĆąĄą┤ąŠč鹊č湥ąĮčŗ ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠ ąŠą▒ą╝ąĄąĮčā ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ čü ą▓ąĮąĄčłąĮąĖą╝ čģąŠčüč鹊ą╝ (čéą░ą║ąĖąĄ ą║ą░ą║ ąŠą▒ą╝ąĄąĮ č湥čĆąĄąĘ UART, DDC, SPI, USB). ąÜą░ąČą┤ąŠą╣ ąĘą░ą┤ą░č湥 ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąĮą░ąĘąĮą░čćą░čÄčéčüčÅ ą▒čāč乥čĆčŗ, ą│ą┤ąĄ čüčéą░ą▓čÅčéčüčÅ ą▓ ąŠč湥čĆąĄą┤čī ą┤ą░ąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖą╣. ąöą╗čÅ ą┤ą░ąĮąĮčŗčģ, ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą║ąŠč鹊čĆčŗčģ čüą╗čāąČąĖčé ą┐čĆąĖąĄą╝ąĮąĖą║, ąĖ ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ č湥čĆąĄąĘ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ąŠč湥čĆąĄą┤ąĄą╣, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ MON-TXBUF. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹥ą║čāčēąĄąĄ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░, ą░ čéą░ą║ąČąĄ čüą╗čāčćą░ąĖ ąŠčłąĖą▒ą║ąĖ (error conditions).
ąĢčüą╗ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┤ą╗čÅ ą▓čŗą┤ą░čćąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ čüą╗ąĖčłą║ąŠą╝ ą▓ąĄą╗ąĖą║ąŠ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓čüąĄ UBX-čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠčĆčéą░ UART ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 9600), č鹊 ą▒čāč乥čĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ. ąÜąŠą│ą┤ą░ ą╝ąĄčüč鹊 ą▓ ą▒čāč乥čĆąĄ ąĖčüč鹊čēąĖčéčüčÅ, ąĮąŠą▓čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ, ąŠčéą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ čüąĄą║čåąĖąĖ "7. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗąĄ ą┐ąŠčĆčéčŗ".
ąÆčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ą▓ ą▒čāč乥čĆ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹčéąĖčģ ą▒čāč乥čĆąŠą▓ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ MON-RXBUF. ąöą░ą╗ąĄąĄ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┤ą░ąĮąĮčŗąĄ ąĘą░č鹥ą╝ ą┤ąĄą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ čĆą░ąĘą┤ąĄą╗ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ UBX ąĖ NMEA), ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ MON-MSGPP. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé (ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčĆčéą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░), čüą║ąŠą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ą┐čĆąĖąĮčÅč鹊. ą×ąĮąŠ čéą░ą║ąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé (ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčĆčéą░), čüą║ąŠą╗čīą║ąŠ ą▒ą░ą╣čé ą▒čŗą╗ąŠ ąŠčéą▒čĆąŠčłąĄąĮąŠ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ąŠąĮąĖ ąĮąĄ ą▒čŗą╗ąĖ ąĮąĖ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čüčéčĆčāą║čéčāčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░.
ąĪą╗ąĄą┤čāčÄčēą░čÅ čéą░ą▒ą╗ąĖčåą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĮąŠą╝ąĄčĆą░ ą┐ąŠčĆč鹊ą▓. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ąĘą┤ąĄčüčī ąĮąŠą╝ąĄčĆą░ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆąŠą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ą┐ąŠčĆč鹊ą▓
| Ōä¢ ą┐ąŠčĆčéą░ |
ążąĖąĘąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü |
| 0 |
DDC (I2C čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣) |
| 1 |
UART 1 |
| 3 |
USB |
| 4 |
SPI |
ą¤čĆąŠč鹊ą║ąŠą╗ą░ą╝ ąĮą░ąĘąĮą░č湥ąĮčŗ ąĮąŠą╝ąĄčĆą░ 0-7. ąÆčüąĄ ąĮąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ ąĮąŠą╝ąĄčĆą░ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ.
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆąŠą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓
| Ōä¢ ą┐čĆąŠč鹊ą║ąŠą╗ą░ |
ąśą╝čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ |
| 0 |
UBX |
| 1 |
NMEA |
13.2. ąśąĮą┤ąĖą║ą░č鹊čĆ Jamming/Interference
ą¤ąŠą╗ąĄ jamInd čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-MON-HW ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ąĖąĮą┤ąĖą║ą░č鹊čĆ ą║ą░č湥čüčéą▓ą░ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ (jammers/interference) ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą╣ ąĮąĄčüčāčēąĄą╣ (čāąĘą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗). ąśąĮč鹥čĆą┐čĆąĄčéą░čåąĖčÅ jamInd ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĘą░ą┐čāčüčéąĖčéčī ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī čüą╗čāčćą░ą╣ 'not jammed'. ąĢčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą▓čŗčĆą░čüč鹥čé čüą▓ąĄčĆčģ čŹč鹊ą│ąŠ ą┐ąŠčĆąŠą│ą░, č鹊 ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé continuous wave jammer. ąŁč鹊čé ąĖąĮą┤ąĖą║ą░č鹊čĆ ą▓čüąĄą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ.
13.3. Jamming/Interference Monitor (ITFM)
ą¤ąŠą╗ąĄ jammingState čüąŠąŠą▒čēąĄąĮąĖčÅ MON-HW ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ąĖąĮą┤ąĖą║ą░č鹊čĆ ą┐ąŠą╝ąĄčģ (jammers/interference) ą║ą░ą║ ą┤ą╗čÅ čłąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮąŠą│ąŠ, čéą░ą║ ąĖ čāąĘą║ąŠą┐ąŠą╗ąŠčüąĮąŠą│ąŠ (CW) čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░ (CW). ą×č鹊 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╣ ąŠčé CW-only ąĖąĮą┤ąĖą║ą░č鹊čĆą░ ą┐ąŠą╝ąĄčģ Jamming/Interference, ąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ ą▓čŗčłąĄ.
ąŁč鹊čé ą╝ąŠąĮąĖč鹊čĆ čüąŠąŠą▒čēą░ąĄčé, ą▒čŗą╗ ą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ jamming, ąĖą╗ąĖ ąĄčüčéčī ą╗ąĖ ą┐ąŠą┤ąŠąĘčĆąĄąĮąĖąĄ ąĮą░ ąĮąĄą│ąŠ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ą¤čĆąĖąĄą╝ąĮąĖą║ čüą╗ąĄą┤ąĖčé ąĘą░ č乊ąĮąŠą▓čŗą╝ čłčāą╝ąŠą╝, ąĖ čüą╝ąŠčéčĆąĖčé ąĮą░ ąĄą│ąŠ ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ. ą×ą▒čŗčćąĮąŠ, ąĄčüą╗ąĖ ą┐ąŠą╝ąĄčģąĖ ąĮąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮčŗ, č鹊 ąŠąĮ čüąŠąŠą▒čēą░ąĄčé 'OK'. ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 čłčāą╝ ą▓čŗčĆąŠčü ą▓čŗčłąĄ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░, č鹊 ąŠąĮ čüąŠąŠą▒čēąĖčé 'Warning'. ąĢčüą╗ąĖ čéą░ą║ąČąĄ čłčāą╝ ą▓čŗčĆąŠčü ąĮą░čüč鹊ą╗čīą║ąŠ, čćč鹊 ąĮąĄ ą┤ą░ąĄčé ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮčāčÄ čäąĖą║čüą░čåąĖčÄ, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ čüąŠąŠą▒čēąĖčé 'Critical'.
ąŻ ą╝ąŠąĮąĖč鹊čĆą░ ąĄčüčéčī 4 čüąŠčüč鹊čÅąĮąĖčÅ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ąŚąĮą░č湥ąĮąĖąĄ |
ąĪąŠąŠą▒čēąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
Unknown |
ą£ąŠąĮąĖč鹊čĆ jamming/interference ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮ, ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ąĖą╗ąĖ ą░ąĮč鹥ąĮąĮą░ ąŠčéą║ą╗čÄč湥ąĮą░. |
| 1 |
OK |
ą¤ąŠą╝ąĄčģąĖ ą┐čĆąĖąĄą╝čā ąĮąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮčŗ. |
| 2 |
Warning |
ą¤ąŠąĘąĖčåąĖčÅ ąĮąŠčĆą╝ą░ą╗čīąĮą░čÅ, ąĮąŠ ąĄčüčéčī ą▓ąĖą┤ąĖą╝čŗąĄ ą┐ąŠą╝ąĄčģąĖ (ą┐čĆąĄą▓čŗčłą░čÄčēąĖąĄ ąĘą░ą┤ą░ąĮąĮčŗąĄ ą┐ąŠčĆąŠą│ąĖ). |
| 3 |
Critical |
ąØąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ, ąĖ ąĄčüčéčī ą┐ąŠą╝ąĄčģąĖ, ą┐čĆąĄą▓čŗčłą░čÄčēąĖąĄ ąĘą░ą┤ą░ąĮąĮčŗąĄ ą┐ąŠčĆąŠą│ąĖ. ąØą░ą╗ąĖčćąĖąĄ ą┐ąŠą╝ąĄčģ ą▓ąŠąĘą╝ąŠąČąĮąŠ čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖčćąĖąĮąŠą╣ ąŠčéčüčāčéčüčéą▓ąĖčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ. |
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą╝ąŠąĮąĖč鹊čĆ ąĘą░ą┐čĆąĄčēąĄąĮ. ą£ąŠąĮąĖč鹊čĆ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-CFG-ITFM čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝ enable. ąÆ čŹč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čāą║ą░ąĘą░čéčī ą┐ąŠčĆąŠą│ąĖ, ąĮą░ ą║ąŠč鹊čĆčŗčģ ą▒čāą┤ąĄčé čüąŠąŠą▒čēą░čéčīčüčÅ čłąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ ąĖ CW jamming. ąŁčéąĖ ą┐ąŠčĆąŠą│ąĖ ą┤ąŠą╗ąČąĮčŗ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░čéčīčüčÅ ą║ą░ą║ čāčĆąŠą▓ąĄąĮčī ą▓ ą┤ąĄčåąĖą▒ąĄą╗ą░čģ (dB) ą▓čŗčłąĄ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ (normal). ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čāą║ą░ąĘą░čéčī, ą║ą░ą║čāčÄ ą░ąĮč鹥ąĮąĮčā ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, ą░ą║čéąĖą▓ąĮčāčÄ ąĖą╗ąĖ ą┐ą░čüčüąĖą▓ąĮčāčÄ (ąŠąĮąĖ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čāčüąĖą╗ąĄąĮąĖąĄą╝ ąĖ čāčĆąŠą▓ąĮąĄą╝ čłčāą╝ą░).
ąÉą╗ą│ąŠčĆąĖčéą╝ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čłčāą╝ą░/ą┐ąŠą╝ąĄčģ ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ąĮą░ čüčĆą░ą▓ąĮąĄąĮąĖąĄ č鹥ą║čāčēąĄą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠą│ąŠ čüą┐ąĄą║čéčĆą░ čü ąŠą┐ąŠčĆąĮčŗą╝, ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ą┐ąŠą╗čāč湥ąĮą░ čģąŠčĆąŠčłą░čÅ čäąĖą║čüą░čåąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹč鹊čé ą╝ąŠąĮąĖč鹊čĆ ą▒čāą┤ąĄčé čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĖą╝ąĄąĄčé čģąŠčéčÅ ą▒čŗ ąŠą┤ąĮčā (čģąŠčĆąŠčłčāčÄ) ą┐ąĄčĆą▓čāčÄ čäąĖą║čüą░čåąĖčÄ, ąĖ ą┤ąŠ čŹč鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▒čāą┤ąĄčé čüąŠąŠą▒čēą░čéčī 'Unknown'. Jamming/Interference ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ą░čģ Power Save Mode (PSM) ąĖ ON/OFF.
[14. Timemark]
ą¤čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ č鹊čćąĮąŠą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ąĖą╝ą┐čāą╗čīčü ąĮą░ ą▓ąĮąĄčłąĮąĄą╣ ąĮąŠąČą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (EXTINTx). ą×ą┐ąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮąŠ GPS, UTC ąĖą╗ąĖ ą╗ąŠą║ą░ą╗čīąĮąŠąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-CFG-TP5 (ąĖčüą┐ąŠą╗čīąĘčāčÅ čäą╗ą░ą│ąĖ LockGpsFreq ąĖ gridUtcGps). ą¦ąĖčüą╗ą░ ąĘą░ą┤ąĄčƹȹĄą║, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-TP5, čéą░ą║ąČąĄ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą┤ą╗čÅ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-TIM-TM2.
ąÆčŗą▓ąŠą┤ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-TIM-TM2 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╣ 菹┐ąŠčģąĄ, ąĄčüą╗ąĖ:
ŌĆó ąĀą░ąĘčĆąĄčłąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-TIM-TM2.
ŌĆó ąØą░ ąŠą┤ąĮąŠą╝ ąĖąĘ ą║ą░ąĮą░ą╗ąŠą▓ EXTINT ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąĮą░čĆą░čüčéą░ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĖą╗ąĖ ąĄą│ąŠ čüą┐ą░ą┤ čü ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ 菹┐ąŠčģąĖ.
ąĪąŠąŠą▒čēąĄąĮąĖčÅ UBX-TIM-TM2 ą▓ą║ą╗čÄčćą░čÄčé ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (timemark), ąĖąĮą┤ąĖą║ą░č鹊čĆ ąĮą░čĆą░čüčéą░ąĮąĖčÅ/čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ, ąĖčüč鹊čćąĮąĖą║ ą▓čĆąĄą╝ąĄąĮąĖ, ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéčī, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąĄč鹊ą║ ąĖ ąŠčłąĖą▒ą║ą░ ą║ą▓ą░ąĮč鹊ą▓ą░ąĮąĖčÅ (quantization error). ą£ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ.
ąĪąŠąŠą▒čēą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čŹą┐ąŠčģą░ą╝ąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā čćą░čüč鹊čéą░ ą▓čŗą▓ąŠą┤ą░ (output rate) čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-TIM-TM2 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čćą░čüč鹊č鹥 ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ (measurement rate), čüą║ąŠąĮčäąĖą│čāčĆąŠą▓ą░ąĮąĮąŠą╣ čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-RATE (čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ).
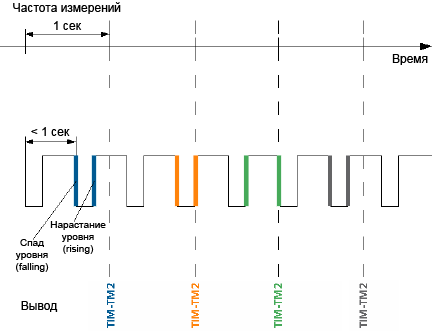
[15. Aiding, Acquisition]
ąÜą╗ą░čüčü čüąŠąŠą▒čēąĄąĮąĖą╣ UBX-AID ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ čāč鹊čćąĮčÅčÄčēąĖčģ/ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ (assistance data) ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ u-blox GNSS, ą▓ą║ą╗čÄčćą░čÅ AssistNow Online ąĖ AssistNow Offline.
ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čŹčéąĖ čäčāąĮą║čåąĖąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą▓ąŠ ą▓čüąĄčģ čüąĖčüč鹥ą╝ą░čģ, ą║čĆąŠą╝ąĄ GPS. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą▓čüąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠąĄ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÄ GPS.
15.2. ąĪčéčĆą░č鹥ą│ąĖąĖ ąĘą░ą┐čāčüą║ą░
ŌĆó Cold start (čģąŠą╗ąŠą┤ąĮčŗą╣ čüčéą░čĆčé): ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĘą░ą┐čāčüą║ą░ čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮąĄčé ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ, ą▓čĆąĄą╝ąĄąĮąĖ, čüą║ąŠčĆąŠčüčéąĖ, čćą░čüč鹊č鹥 ąĖ čé. ą┤. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą┐ąŠąĖčüą║ ą┐ąŠ ą▓čüąĄą╣ ąŠą▒ą╗ą░čüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ, čćą░čüč鹊čé ąĖ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ąĮąŠą╝ąĄčĆą░ą╝ čüą┐čāčéąĮąĖą║ąŠą▓. ąĢčüą╗ąĖ ąĮą░ą╣ą┤ąĄąĮ čüąĖą│ąĮą░ą╗ čüą┐čāčéąĮąĖą║ą░, č鹊 ąŠąĮ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ čŹč乥ą╝ąĄčĆąĖą┤ (18-36 čüąĄą║čāąĮą┤ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ čģąŠčĆąŠčłąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ąĖąĄ ą║ą░ąĮą░ą╗čŗ ą┐čĆąŠą┤ąŠą╗ąČą░čÄčé ąĖčüą║ą░čéčī čüą┐čāčéąĮąĖą║ąĖ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓ čü ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝ąĖ čŹč乥ą╝ąĄčĆąĖą┤ą░ą╝ąĖ, ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą▓čŗčćąĖčüą╗ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠąĘąĖčåąĖąĖ ąĖ čüą║ąŠčĆąŠčüčéąĖ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą║ąŠąĮą║čāčĆąĄąĮčéčŗ ąĮą░ąĘčŗą▓ą░čÄčé čŹč鹊čé čĆąĄąČąĖą╝ ąĘą░ą┐čāčüą║ą░ ą║ą░ą║ Factory Startup.
ŌĆó Warm start (č鹥ą┐ą╗čŗą╣ čüčéą░čĆčé): ą▓ čĆąĄąČąĖą╝ąĄ č鹥ą┐ą╗ąŠą│ąŠ čüčéą░čĆčéą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą░ą┐ą┐čĆąŠą║čüąĖą╝ąĖčĆčāąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐ąŠąĘąĖčåąĖąĖ, ą┤ą░ąĮąĮčŗčģ ą║čāčĆčüą░ ą┐ąŠ ą┐ąŠąĘąĖčåąĖčÅą╝ čüą┐čāčéąĮąĖą║ąŠą▓ (ą░ą╗čīą╝ą░ąĮą░čģčā). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą│čĆčāąĘąĖčéčī čŹč乥ą╝ąĄčĆąĖą┤čŗ, ą┐ąŠą║ą░ ąŠąĮ ąĮąĄ ą╝ąŠąČąĄčé ą▓čŗčćąĖčüą╗ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠąĘąĖčåąĖąĖ ąĖ čüą║ąŠčĆąŠčüčéąĖ. ą¤ąŠčüą║ąŠą╗čīą║čā ą┤ą░ąĮąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤ ąŠą▒čŗčćąĮąŠ čāčüčéą░čĆąĄą▓ą░čÄčé ą┐ąŠčüą╗ąĄ 4 čćą░čüąŠą▓, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠą▒čŗčćąĮąŠ ąĮą░čćąĖąĮą░ąĄčé čĆą░ą▒ąŠčéčā čü čĆąĄąČąĖą╝ąĄ č鹥ą┐ą╗ąŠą│ąŠ čüčéą░čĆčéą░, ąĄčüą╗ąĖ ą▓čĆąĄą╝čÅ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ, ąĮą░čćąĖąĮą░čÅ ąŠčé ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ąĘą░ą│čĆčāąĘą║ąĖ čŹč乥ą╝ąĄčĆąĖą┤, ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čŹč鹊ą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ. ąöą╗čÅ čéą░ą║ąŠą│ąŠ čüčåąĄąĮą░čĆąĖčÅ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čāč鹊čćąĮąĄąĮąĖą╣, čüą╝. ąĮąĖąČąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ AssistNOW online ąĖ AssistNOW offline.
ŌĆó Hot start (ą│ąŠčĆčÅčćąĖą╣ čüčéą░čĆčé): ą┐čĆąĖ ą│ąŠčĆčÅč湥ą╝ čüčéą░čĆč鹥 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čŗą╗ ą▓čŗą║ą╗čÄč湥ąĮ ąĮą░ ąĮąĄ ą┤ąŠą╗ą│ąĖą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ (ą╝ąĄąĮčīčłąĄ 4 čćą░čüąŠą▓), čéą░ą║ čćč鹊 čŹč乥ą╝ąĄčĆąĖą┤čŗ ą▓čüąĄ ąĄčēąĄ ą░ą║čéčāą░ą╗čīąĮčŗ. ą¤ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĖąĄą╝ąĮąĖą║čā ąĮąĄ ąĮčāąČąĮąŠ ąĘą░ąĮąŠą▓ąŠ ąĘą░ą│čĆčāąČą░čéčī čŹč乥ą╝ąĄčĆąĖą┤čŗ, čŹč鹊 čüą░ą╝čŗą╣ ą▒čŗčüčéčĆčŗą╣ ą╝ąĄč鹊ą┤ ąĘą░ą┐čāčüą║ą░. ąÆ čüąŠąŠą▒čēąĄąĮąĖąĖ UBX-CFG-RST ą╝ąŠąČąĮąŠ ą┐čĆąĖąĮčāą┤ąĖčéčī ą┐čĆąĖąĄą╝ąĮąĖą║ čüą▒čĆąŠčüąĖčéčī ąĖ ąŠčćąĖčüčéąĖčéčī ą┤ą░ąĮąĮčŗąĄ, čćč鹊ą▒čŗ čāą▓ąĖą┤ąĄčéčī čŹčäč乥ą║čé ąŠčé čģčĆą░ąĮąĄąĮąĖčÅ / ą┐ąŠč鹥čĆąĖ čéą░ą║ąĖčģ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ą╝ąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-RST ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą╗ąĄ navBbrMaskfield, ą│ą┤ąĄ ąĖąĮąĖčåąĖąĖčĆčāčÄčéčüčÅ ąĘą░ą┐čāčüą║ąĖ Hot, Warm ąĖ Cold, ą░ čéą░ą║ąČąĄ ąĖčģ ą┤čĆčāą│ąĖąĄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ.
15.3. Aiding / Assisted GPS (A-GPS)
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą░ą▓č鹊ąĮąŠą╝ąĮčŗčģ GPS. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ąŠąČąĖą┤ą░čÄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čüą▓ąŠąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ GPS čŹč鹊 ąĮąĄ ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║čā GPS ą┤ąŠą╗ąČąĮčŗ ą┐ąĄčĆąĄą┤ą░čéčī čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 4 čüą┐čāčéąĮąĖą║ą░, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ č鹊čćąĮčŗąĄ ąŠčĆą▒ąĖčéą░ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (čŹč乥ą╝ąĄčĆąĖą┤čŗ). ą¤čĆąĖ ąĮąĄą▒ą╗ą░ą│ąŠą┐čĆąĖčÅčéąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ ą╝ąŠą│čāčé ąĘą░ąĮčÅčéčī ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĖąĮčāčéčŗ, čćą░čüčŗ, ąĖą╗ąĖ ą┤ą░ąČąĄ ą▓ąŠą▓čüąĄ ąĘą░ą║ąŠąĮčćąĖčéčīčüčÅ ąĮąĄčāą┤ą░č湥ą╣.
ąĪąĖčüč鹥ą╝ą░ Assisted GPS (A-GPS) čāčüą║ąŠčĆčÅąĄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐čāč鹥ą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ č湥čĆąĄąĘ ą╝ąŠą▒ąĖą╗čīąĮčŗąĄ čüąĄčéąĖ ąĖą╗ąĖ ąśąĮč鹥čĆąĮąĄčé ą┐čĆąĖąĄą╝ąĮąĖą║čā GPS čéą░ą║ąĖčģ ą┤ą░ąĮąĮčŗčģ, ą║ą░ą║ čŹč乥ą╝ąĄčĆąĖą┤čŗ, ą░ą╗čīą╝ą░ąĮą░čģ, č鹊čćąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĖ čüčéą░čéčāčü čüą┐čāčéąĮąĖą║ą░. ąŁčéąĖ čāč鹊čćąĮčÅčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐čĆąĖąĄą╝ąĮąĖą║čā ą▓čŗčćąĖčüą╗ąĖčéčī ą┐ąŠąĘąĖčåąĖčÄ ą▓ ąĘą░ čüąĄą║čāąĮą┤čŗ, ą┤ą░ąČąĄ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą┐ą╗ąŠčģąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ čüąĖą│ąĮą░ą╗ą░.
15.4. Aiding Data
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čāč鹊čćąĮčÅčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ (aiding data) ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą┐čĆąĖąĄą╝ąĮąĖą║čā:
ŌĆó Position: ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą┐ąŠąĘąĖčåąĖąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-INI. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąŠą▒ą░ č乊čĆą╝ą░čéą░, ECEF X/Y/Z ąĖ latitude/longitude/height.
ŌĆó Time: ą▓čĆąĄą╝čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą╗ąĖą▒ąŠ ąĮąĄč鹊čćąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝, ą┐ąŠčüą║ąŠą╗čīą║čā ą▒čāą┤ąĄčé čüčéčĆą░ą┤ą░čéčī ąŠčé ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüą║ąŠčĆąŠčüčéąĖ ą▓ ą▒ąŠą┤ą░čģ ąĖąĮč鹥čĆč乥ą╣čüą░, ąĖą╗ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ č鹊čćąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖčģąŠą┤ąĖčé ąĮą░ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĪąŠąŠą▒čēąĄąĮąĖąĄ UBX-AID-INI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąŠą▒ą░ ą╝ąĄč鹊ą┤ą░.
ŌĆó Frequency: ą╝ąŠąČąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠ ą┐ąŠą┤ą░čéčī čćą░čüč鹊čéčā ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čü čćą░čüč鹊č鹊ą╣ 500 ą║ąōčå ąĖ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ čüą║ą▓ą░ąČąĮąŠčüčéčīčÄ (ąŠą┤ąĮą░ą║ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čäą░ąĘ ą╗ąŠą│. 0/ą╗ąŠą│. 1 ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ąŠčĆąŠč湥 50 ąĮčü) ąĮą░ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čćą░čüč鹊čéčŗ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-INI.
ŌĆó Orbit data: ą┤ą░ąĮąĮčŗąĄ ąŠčĆą▒ąĖčéčŗ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖą╣ UBX-AID-ALM ąĖ UBX-AID-EPH.
ŌĆó Additional information (ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ): UBX-AID-HUI ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║čā ą┤ą░ąĮąĮčŗčģ ąŠ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ (čüą┐čāčéąĮąĖą║ąŠą▓), ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ UTC ąĖ ąĖąŠąĮąŠčüč乥čĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ.
15.5. Aiding Sequence
ąóąĖą┐ąŠą▓ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ čāč鹊čćąĮčÅčÄčēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (aiding sequence) čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ čłą░ą│ąŠą▓:
ŌĆó ąÆą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ GNSS.
ŌĆó ą×čéą┐čĆą░ą▓ą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-INI (ą▓čĆąĄą╝čÅ, čéą░ą║čéčŗ ąĖ ą┐ąŠąĘąĖčåąĖčÅ).
ŌĆó ą×čéą┐čĆą░ą▓ą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-EPH (čŹč乥ą╝ąĄčĆąĖą┤čŗ).
ŌĆó ą¤ąŠą┤ą░čćą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 0.5 čü ą┐ąŠčüą╗ąĄ (ąĖą╗ąĖ ą┐ąĄčĆąĄą┤, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ UBX-AID-INI) ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-INI, ąĄčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ. ą║ąŠą│ą┤ą░ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ą┐ąŠą┤ą░č湥ą╣ ąĖą╝ą┐čāą╗čīčüą░, čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ GNSS čüą╝ąŠą│ ą┐čĆąŠč湥čüčéčī ąĖ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čāč鹊čćąĮčÅčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÆčĆąĄą╝čÅ čćč鹥ąĮąĖčÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé baud rate. ą£ą░ą║čüąĖą╝čāą╝ ą┤ą╗čÅ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ 100 ą╝čü.
ŌĆó ą×ą┐čåąĖąŠąĮą░ą╗čīąĮą░čÅ ąŠčéą┐čĆą░ą▓ą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-HUI (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ health, UTC ąĖ ionosphere).
ŌĆó ą×ą┐čåąĖąŠąĮą░ą╗čīąĮą░čÅ ąŠčéą┐čĆą░ą▓ą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-ALM (ą░ą╗čīą╝ą░ąĮą░čģ).
15.6. AssistNow Online
AssistNow Online čŹč鹊 čåąĄą╗ąŠčüčéąĮąŠąĄ Assisted GPS (A-GPS) čĆąĄčłąĄąĮąĖąĄ ą║ąŠą╝ą┐ą░ąĮąĖąĖ u-blox, čāčüą║ąŠčĆčÅčÄčēąĄąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ GPS, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą▓čĆąĄą╝čÅ ą┐ąĄčĆą▓ąŠą╣ čäąĖą║čüą░čåąĖąĖ (Time To First Fix, TTFF) čüąĮąĖąČą░ąĄčéčüčÅ ą┤ąŠ čüąĄą║čāąĮą┤. ąŁčéą░ čüąĖčüč鹥ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą┐čāč鹥ą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ čéą░ą║ąĖą╝ ą┤ą░ąĮąĮčŗą╝, ą║ą░ą║ čŹč乥ą╝ąĄčĆąĖą┤čŗ, ą░ą╗čīą╝ą░ąĮą░čģ ąĖ č鹊čćąĮąŠąĄ ą▓čĆąĄą╝čÅ ąŠčé čüąĄčéąĖ Global Reference Network ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ GNSS, čüąĄčĆą▓ąĄčĆą░ ą║ąŠč鹊čĆąŠą╣ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą┐ąŠ ą▓čüąĄą╝čā ąĘąĄą╝ąĮąŠą╝čā čłą░čĆčā. ąĪ ą┐ąŠą╝ąŠčēčīčÄ A-GPS ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ąĘą░čģą▓ą░čéčŗą▓ą░čéčī čüą┐čāčéąĮąĖą║ąĖ ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī č鹊čćąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠąĘąĖčåąĖąĖ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü, ą┤ą░ąČąĄ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą┐ą╗ąŠčģąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ čüąĖą│ąĮą░ą╗ą░.
AssistNow Online ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ (User Plane) ąĖ ąŠčéą║čĆčŗčéčŗąĄ čüčéą░ąĮą┤ą░čĆčéčŗ, čéą░ą║ąĖąĄ ą║ą░ą║ TCP/IP. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹčéą░ čüą╗čāąČą▒ą░ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą▓čüąĄčģ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ čüąĄčéčÅčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖčģ ą┤ąŠčüčéčāą┐ ą║ ąśąĮč鹥čĆąĮąĄčé, ą▓ą║ą╗čÄčćą░čÅ GPRS, UMTS ąĖ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮčŗąĄ čüąĄčéąĖ (Wireless LAN). ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čłą░ą│ąĖ, čćč鹊ą▒čŗ ą╝ąŠą▒ąĖą╗čīąĮčŗąĄ ąŠą┐ąĄčĆą░č鹊čĆčŗ čĆą░ąĘčĆąĄčłąĖą╗ąĖ čĆą░ą▒ąŠčéčā čüąĄčĆą▓ąĖčüą░ AssistNow Online.
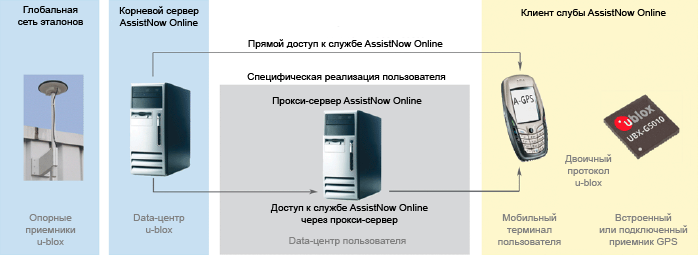
ąÆ ą║ąŠąĮč鹥ą║čüč鹥 čüąŠąŠą▒čēąĄąĮąĖą╣ AssistNow Online čüąŠčüč鹊ąĖčé ąĖąĘ čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ (Aiding data), ą║ąŠč鹊čĆčŗąĄ ą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐ąŠąĘąĖčåąĖčÄ ąĖ ą▓čĆąĄą╝čÅ (Position, Time) č湥čĆąĄąĘ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-AID-INI, čŹč乥ą╝ąĄčĆąĖą┤čŗ (Ephemerides) č湥čĆąĄąĘ UBX-AID-EPH, ą░ą╗čīą╝ą░ąĮą░čģ (Almanac) č湥čĆąĄąĘ UBX-AID-ALM ąĖ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī/UTC/ąĖąŠąĮąŠčüč乥čĆą░ (Health/UTC/Iono) č湥čĆąĄąĘ UBX-AID-HUI.
AssistNow Online ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮą░čÅ č乊čĆą╝ą░ čāč鹊čćąĮčÅčÄčēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą║ąŠč鹊čĆčāčÄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓ čĆą░ą▒ąŠč鹥 GLONASS. ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ čŹč鹊, ą┤ą░ąĮąĮčŗąĄ ąŠčĆą▒ąĖčéčŗ GLONASS (čŹč乥ą╝ąĄčĆąĖą┤čŗ ąĖą╗ąĖ ą░ą╗čīą╝ą░ąĮą░čģ) ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ.
15.7. AssistNow Offline
AssistNow Offline čŹč鹊 čüą╗čāąČą▒ą░ A-GPS, ą║ąŠč鹊čĆą░čÅ čéą░ą║ąČąĄ čāą╗čāčćčłą░ąĄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī GPS, čüąĮąĖąČą░čÅ TTFF ą┤ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąĄą║čāąĮą┤. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé AssistNow Online, čŹč鹊 čĆąĄčłąĄąĮąĖąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčüčāčēąĄčüčéą▓ąĖčéčī ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čüąĄčéąĖ ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą┐čāčüą║ą░. ąĪąĖčüč鹥ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé čü ą┐ąŠą╝ąŠčēčīčÄ AlmanacPlus (ALP), ą┤ą░ąĮąĮčŗčģ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą░ą╗čīą╝ą░ąĮą░čģą░ ą┤ą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čäąĖą║čüą░čåąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ ąĘą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĄą║čāąĮą┤. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ąŠą▒čĆą░čēą░čÄčéčüčÅ ą║ ą┤ą░ąĮąĮčŗą╝ ą┐čāč鹥ą╝ čüą╗čāčćą░ą╣ąĮčŗčģ ąĘą░ą│čĆčāąĘąŠą║ ąĖąĘ Internet, ą║ąŠą│ą┤ą░ čŹč鹊 čāą┤ąŠą▒ąĮąŠ.

ąÜąŠą╝ą┐ą░ąĮąĖčÅ u-blox ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäą░ą╣ą╗čŗ ą┤ą░ąĮąĮčŗčģ AlmanacPlus (ALP) čĆą░ąĘąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą░ą╗čīą╝ą░ąĮą░čģą░ ąĮą░ ą┐ąĄčĆąĖąŠą┤čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā 1 ąĖ 14 ą┤ąĮąĄą╣. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ąĘą░ą│čĆčāąĘąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ čā ąĮąĖčģ ąĄčüčéčī ą┤ąŠčüčéčāą┐ąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ąśąĮč鹥čĆąĮąĄčé. ą¤čĆąĖąĄą╝ąĮąĖą║ GNSS čüąŠčģčĆą░ąĮčÅąĄčé ąĘą░ą│čĆčāąČąĄąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ čüą▓ąŠąĄą╣ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ (non-volatile memory). ąÜą░ą║ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ą░ CPU čģąŠčüčéą░ ą╝ąŠąČąĄčé čģčĆą░ąĮąĖčéčī čäą░ą╣ą╗ čā čüąĄą▒čÅ, ąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ čćą░čüčéčÅą╝ąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąĖčģąŠą┤ąĖčé ąĘą░ą┐čĆąŠčü.
AssistNow Offline čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą╝ąĄčüčéą░čģ ą▒ąĄąĘ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ą┐ąŠą║ą░ čäą░ą╣ą╗čŗ čü ą┤ą░ąĮąĮčŗą╝ąĖ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ ąĖą╗ąĖ ąĮą░ čģąŠčüč鹥, čü ą║ąŠč鹊čĆčŗą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠą▒čēą░ąĄčéčüčÅ. ąŁč鹊 ą┤ąĄą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ, čāčüčéčĆą░ąĮčÅčÅ ąĘą░ą┤ąĄčƹȹ║ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ą▓čĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĖ ąĘą░čéčĆą░čéčŗ ąĮą░ ąĘą▓ąŠąĮą║ąĖ.
ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ GNSS čüąŠčüč鹊ąĖčé ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą╗ąĖ ą▓ąĮąĄčłąĮąĄą╣ flash-ą┐ą░ą╝čÅčéąĖ, ą│ą┤ąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą┤ą░ąĮąĮčŗąĄ ALP. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-AID-ALP.
ąÜąŠą│ą┤ą░ čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮąĄčé ąĮąĖ ąŠą┤ąĮąŠą╣ ą┐ąŠą┤čģąŠą┤čÅčēąĄą╣ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, čäą░ą╣ą╗ ALP ą┤ąŠą╗ąČąĄąĮ čģčĆą░ąĮąĖčéčīčüčÅ ąĮą░ čģąŠčüč鹥. ąóąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ąĘą░ą┐čĆąŠčüąĖčéčī ą┤ą░ąĮąĮčŗąĄ čā čģąŠčüčéą░ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ. ąŁč鹊 čĆąĄą░ą╗ąĖąĘčāąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-ALPSRV.
ąÆ ąŠą▒ąŠąĖčģ čüą╗čāčćą░čÅčģ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ALP ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-ALP (STAT).
ążą░ą╣ą╗čŗ ą┤ą░ąĮąĮčŗčģ AssistNow Offline ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮčŗ ą┐ąŠ ą░ą┤čĆąĄčüčā [2].
15.7.1. ą×ą▒ąĘąŠčĆ AlmanacPlus ąĮą░ ąŠčüąĮąŠą▓ąĄ flash
ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī Flash-based AlmanacPlus ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą░ąĮąĮčŗąĄ AlmanacPlus čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ flash, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ čćąĖą┐čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ąŚą░ą┤ą░čćą░ čüąĄčĆą▓ąĄčĆą░ - ą┐čĆąŠčüč鹊 ąĘą░ą│čĆčāąĘąĖčéčī ą┤ą░ąĮąĮčŗąĄ čü čüąĄčĆą▓ąĄčĆą░ ąśąĮč鹥čĆąĮąĄčé [2] ąĖą╗ąĖ ą┤čĆčāą│ąĖčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓, ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą┤ą░čéčī ąĖčģ ą┐ąŠ ą║čāčüąŠčćą║ą░ą╝ ą┐čĆąĖąĄą╝ąĮąĖą║čā GNSS. ąŁč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ą╝ąĄč鹊ą┤ą░, ąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ ą▓ UBX-AID-ALPSRV, ą│ą┤ąĄ čäą░ą╣ą╗ ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ą▓ą░čéčīčüčÅ ąĮą░ čģąŠčüč鹥, ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ GNSS ą┤ąŠą╗ąČąĄąĮ ą▒čŗą╗ ą▒čŗ ą▒čĆą░čéčī ąŠčéčéčāą┤ą░ ą┤ą░ąĮąĮčŗąĄ čćą░čüčéčÅą╝ąĖ ą┐ąŠ ą╝ąĄčĆąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ AID-ALP čüčāčēąĄčüčéą▓čāąĄčé ą▓ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▓ą░čĆąĖą░ąĮčéą░čģ, ą║ąŠą╝ą▒ąĖąĮąĖčĆčāčÅ ą▓ čüąĄą▒ąĄ ą▓ąĄčüčī čäčāąĮą║čåąĖąŠąĮą░ą╗, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ čü ąŠą┤ąĮąĖą╝ Class/Message ID.
ąøčÄą▒ąŠą╣ čéąĖą┐ čüą▒čĆąŠčüą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮąĄ ąĘą░čéčĆą░ą│ąĖą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ ą┐ą░ą╝čÅčéąĖ flash. ąĢčüčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ąŠčćąĖčüčéąĖčéčī ąĖčģ - čüč鹥čĆąĄčéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą▓čüčÄ ą┐ą░ą╝čÅčéčī flash, ąĖą╗ąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░čéčī ąĄčæ ąĮąŠą▓čŗą╝ ąĮą░ą▒ąŠčĆąŠą╝ ą┤ą░ąĮąĮčŗčģ AlmanacPlus.
15.7.1.1. ą¤čĆąŠčåąĄą┤čāčĆą░ ąĘą░ą│čĆčāąĘą║ąĖ
ąóąĖą┐ąŠą▓ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čłą░ą│ąŠą▓ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čäą░ą╣ą╗ą░ ALP ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║:
ŌĆó ąźąŠčüčé (ą║ąŠą╝ą┐čīčÄč鹥čĆ PC) ąĘą░ą│čĆčāąČą░ąĄčé ąĖąĘ ąśąĮč鹥čĆąĮąĄčé [2] ą║ąŠą┐ąĖčÄ č鹥ą║čāčēąĄą│ąŠ čäą░ą╣ą╗ą░ ALP, ąĖ čüąŠčģčĆą░ąĮčÅąĄčé ąĄčæ ąĮą░ čüą▓ąŠąĄą╝ ą╗ąŠą║ą░ą╗čīąĮąŠą╝ ą┤ąĖčüą║ąĄ.
ŌĆó ąźąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąĄčĆą▓čŗąĄ N ą▒ą░ą╣čé ąĖąĘ čŹč鹊ą│ąŠ čäą░ą╣ą╗ą░, ąĖčüą┐ąŠą╗čīąĘčāčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ AID-ALP (TX).
ŌĆó ąźąŠčüčé ąČą┤ąĄčé ąŠčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ AID-ALP (ACK) ąĖą╗ąĖ AID-ALP (NAK).
ŌĆó ąĢčüą╗ąĖ ą╝ąŠąČąĮąŠ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī, čģąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ N ą▒ą░ą╣čé, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąŠ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ (ACK).
ŌĆó ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (NAK), čģąŠčüčé ą┐ąĄčĆąĄą┤ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ AID-ALP (STOP).
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā:
ŌĆó N ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ~700 ą▒ą░ą╣čé (ąĖąĘ-ąĘą░ ą▓čģąŠą┤ąĮčŗčģ ą▒čāč乥čĆąŠą▓ RS232/USB). ą¦ąĄą╝ ą╝ąĄąĮčīčłąĄ N, č鹥ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čāčćčłąĄ ąĮą░ą┤ąĄąČąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄčéą░ ą┤ą░ąĮąĮčŗčģ.
ŌĆó N ą┤ąŠą╗ąČąĮąŠ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ 2.
ŌĆó ąŚą┤ąĄčüčī ąĮąĄčé ą╝ąĄčģą░ąĮąĖąĘą╝ą░ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ čüą╗čāčćą░ąĄ ąŠčłąĖą▒ą║ąĖ ąĖą╗ąĖ ą┤čĆčāą│ąĖčģ ą┐čĆąŠą▒ą╗ąĄą╝); ąĄčüą╗ąĖ ąŠčé ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą┐ąŠčüčéčāą┐ąĖą╗ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ NAK, č鹊 ą▓ąĄčüčī ą┐čĆąŠčåąĄčüčü ąĘą░ą│čĆčāąĘą║ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą┐čāčēąĄąĮ ąĘą░ąĮąŠą▓ąŠ.
ŌĆó ąØąĄčé ąĮąĖą║ą░ą║ąŠą╣ čÅą▓ąĮąŠą╣ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą┐ą░ą║ąĄč鹊ą▓, ąŠą┤ąĮą░ą║ąŠ ąĄčüčéčī ąĮąĄčÅą▓ąĮą░čÅ, ą┐ąŠčüą║ąŠą╗čīą║čā čüą░ą╝ čäą░ą╣ą╗ ALP čāąČąĄ čüąŠą┤ąĄčƹȹĖčé ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ čäą░ą╣ą╗ą░.
ą×ą▒ąĘąŠčĆ čĆą░ąĘąĮčŗčģ ą▓ąĄčĆčüąĖą╣ čüąŠąŠą▒čēąĄąĮąĖą╣ AID-ALP
| ąÜąŠčĆąŠčéą║ąŠąĄ ąĖą╝čÅ |
ąĪąŠą┤ąĄčƹȹ░ąĮąĖąĄ |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ |
| AID-ALP (TX) |
ALP-čüąĄčĆą▓ąĄčĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą║ą╗ąĖąĄąĮčéčā |
ąĪąĄčĆą▓ąĄčĆ ŌåÆ ąÜą╗ąĖąĄąĮčé |
| AID-ALP (STOP) |
ALP-čüąĄčĆą▓ąĄčĆ ąĘą░ą▓ąĄčĆčłą░ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ |
ąĪąĄčĆą▓ąĄčĆ ŌåÆ ąÜą╗ąĖąĄąĮčé |
| AID-ALP (ACK) |
ALP-ą║ą╗ąĖąĄąĮčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé čāčüą┐ąĄčłąĮčŗą╣ ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ |
ąÜą╗ąĖąĄąĮčé ŌåÆ ąĪąĄčĆą▓ąĄčĆ |
| AID-ALP (NAK) |
ALP-ą║ą╗ąĖąĄąĮčé čüąŠąŠą▒čēą░ąĄčé ąŠą▒ ąŠčłąĖą▒ą║ąĄ ą▓ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ |
ąÜą╗ąĖąĄąĮčé ŌåÆ ąĪąĄčĆą▓ąĄčĆ |
| AID-ALP (STAT) |
ALP-ą║ą╗ąĖąĄąĮčé čüąŠąŠą▒čēą░ąĄčé ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ ALP, čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéąĖ flash |
ąÜą╗ąĖąĄąĮčé ŌåÆ ąĪąĄčĆą▓ąĄčĆ |
15.7.2. ą×ą▒ąĘąŠčĆ AlmanacPlus ąĮą░ ąŠčüąĮąŠą▓ąĄ čģąŠčüčéą░
ąÆčüąĄ čéčĆąĖ ą▓ąĄčĆčüąĖąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ AID-ALPSRV ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ čäą░ą╣ą╗ ALP čģčĆą░ąĮąĖčéčüčÅ ąĮąĄ flash-ą┐ą░ą╝čÅčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĖ ą║ąŠą│ą┤ą░ čģąŠčüčéčā ąĮčāąČąĮąŠ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą┤ąŠčüčéą░ą▓ą╗čÅčéčī ą┤ą░ąĮąĮčŗąĄ čäą░ą╣ą╗ą░ GNSS-ą┐čĆąĖąĄą╝ąĮąĖą║čā. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī AlmanacPlus ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ GNSS, čā ą║ąŠč鹊čĆčŗčģ ąĮąĄčé ąĮą░ ą▒ąŠčĆčéčā ą┐ą░ą╝čÅčéąĖ flash. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą┐ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ, ą│ą┤ąĄ ą┤ą░ąĮąĮčŗąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ąŠ flash-ą┐ą░ą╝čÅčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, čüą╝. "15.7.1. ą×ą▒ąĘąŠčĆ AlmanacPlus ąĮą░ ąŠčüąĮąŠą▓ąĄ flash".
ąÆ čüčåąĄąĮą░čĆąĖąĖ, ą║ąŠą│ą┤ą░ čäą░ą╣ą╗ ALP ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ čģąŠčüč鹥, ą┐čĆąĖąĄą╝ąĮąĖą║ GNSS ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą║ą╗ąĖąĄąĮč鹊ą╝, čéą░ą║ ą║ą░ą║ ąŠąĮ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ čā čģąŠčüčéą░, ą░ čģąŠčüčé CPU, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ALP-čäą░ą╣ą╗, ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüąĄčĆą▓ąĄčĆąŠą╝.
ąóą░ą║ąŠą╣ čüą┐ąŠčüąŠą▒ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ą║ą╗ąĖąĄąĮčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą┐ąŠčüčŗą╗ą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ ą┤ą░ąĮąĮčŗčģ čģąŠčüčéčā (ą║ą╗ąĖąĄąĮčé ALP ą▓čŗą┤ą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ ALPSRV-REQ), ąĖ čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąŠčéą▓ąĄčéąĖčéčī ąĄą╝čā čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ ALPSRV-SRV.
ą¦č鹊ą▒čŗ čŹč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ čĆą░ą▒ąŠčéą░ą╗, čüąŠąŠą▒čēąĄąĮąĖąĄ AID-ALPSRV ąĮčāąČąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą▒čŗčćąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ CFG-MSG. ąĢčüą╗ąĖ čŹč鹊 ąĮąĄ ą▒čŗą╗ąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąŠ, č鹊 ąĘą░ą┐čĆąŠčüčŗ ąŠčéą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ąĮąĄ ą▒čāą┤čāčé.
ąÜą╗ąĖąĄąĮčé ą╝ąŠąČąĄčé ą┐ąŠą┐čŗčéą░čéčīčüčÅ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ąĮą░ čüąĄčĆą▓ąĄčĆąĄ, čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ ALPSRV-CLI. ąĪąĄčĆą▓ąĄčĆ ą╝ąŠąČąĄčé ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī čéą░ą║ąŠą╣ ąĘą░ą┐čĆąŠčü, ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ čäą░ą╣ą╗ ALP ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ. ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░čģ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ.
ą×ą▒ąĘąŠčĆ čéčĆąĄčģ ą▓ąĄčĆčüąĖą╣ čüąŠąŠą▒čēąĄąĮąĖą╣ AID-ALPSRV
| ąÜąŠčĆąŠčéą║ąŠąĄ ąĖą╝čÅ |
ąĪąŠą┤ąĄčƹȹ░ąĮąĖąĄ |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ |
| ALPSRV-REQ |
ALP-ą║ą╗ąĖąĄąĮčé ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus čü čüąĄčĆą▓ąĄčĆą░ |
ąÜą╗ąĖąĄąĮčé ŌåÆ ąĪąĄčĆą▓ąĄčĆ |
| ALPSRV-SRV |
ALP-čüąĄčĆą▓ąĄčĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus ą║ą╗ąĖąĄąĮčéčā |
ąĪąĄčĆą▓ąĄčĆ ŌåÆ ąÜą╗ąĖąĄąĮčé |
| ALPSRV-CLI |
ALP-ą║ą╗ąĖąĄąĮčé ą┐ąŠčüčŗą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ AlmanacPlus ąĮą░ čüąĄčĆą▓ąĄčĆ |
ąÜą╗ąĖąĄąĮčé ŌåÆ ąĪąĄčĆą▓ąĄčĆ |
15.7.3. ą×čüąŠą▒ąĄąĮąĮąŠčüčéąĖ čüąŠąŠą▒čēąĄąĮąĖą╣
ąóčĆąĖ ą▓ą░čĆąĖą░ąĮčéą░ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓čüąĄą│ą┤ą░ ąĮąĄčüčāčé ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ ąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ, ą┐čĆąĖčüąŠąĄą┤ąĖąĮąĄąĮąĮčŗąĄ ą║ č鹊ą╝čā ąČąĄ čüąŠąŠą▒čēąĄąĮąĖčÄ. ą¤ąĄčĆą▓ąŠąĄ ą┐ąŠą╗ąĄ idSize ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąĮą░ ą║ąŠč鹊čĆčŗčģ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ UBX, ąĖ ąĮą░čćąĖąĮą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ.
ąÆ čüą╗čāčćą░ąĄ ALP-ąĘą░ą┐čĆąŠčüą░ ą║ą╗ąĖąĄąĮčéą░ čüąĄčĆą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ čüąŠą▒čĆą░čéčī ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą▓ą░čĆąĖą░ąĮč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ AID-ALPSRV-SRV. ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┤čāą▒ą╗ąĖčĆąŠą▓ą░ąĮ ąĮą░ idSize ą▒ą░ą╣čé. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čüąĄčĆą▓ąĄčĆčā ąĮą░ą┤ąŠ ąĘą░ą┐ąŠą╗ąĮąĖčéčī ą┐ąŠą╗čÅ fileId ąĖ dataSize. ą¤čĆąĖčüąŠąĄą┤ąĖąĮąĄąĮąĮčŗąĄ ą║ ąĘą░ą│ąŠą╗ąŠą▓ą║čā čü čĆą░ąĘą╝ąĄčĆąŠą╝ idSize, ą┤ą░ąĮąĮčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĘą░ą┐čĆąŠčüąŠą╝ ą║ą╗ąĖąĄąĮčéą░ (ąĮą░čćąĖąĮą░čÅ ąŠčé čüą╝ąĄčēąĄąĮąĖčÅ ofs čü ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ size ąĘąĮą░č湥ąĮąĖą╣).
15.7.3.1. ą¤čĆąŠą▓ąĄčĆą║ąĖ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░
ąĪąĄčĆą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐čĆąŠą▓ąĄčĆą║čā ą┐ąŠą╗ąĄą╣ ofs (čüą╝ąĄčēąĄąĮąĖą╣) ąĖ size, čéą░ą║ ą║ą░ą║ ą║ą╗ąĖąĄąĮčé ą╝ąŠą│ ą▒čŗ ąĘą░ą┐čĆąŠčüąĖčéčī ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąĮąĄ čüčāčēąĄčüčéą▓čāčÄčé. ąĢčüą╗ąĖ ą║ą╗ąĖąĄąĮčé ąĘą░ą┐čĆąŠčüąĖą╗ ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ, ą│ą┤ąĄ ą┤ą░ąĮąĮčŗąĄ ąĄčēąĄ ąĄčüčéčī, č鹊 ą┐ąŠą╗ąĄ dataSize ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐ąŠą╗ąĮąĄąĮąŠ čāą┤ą▓ąŠąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┐ąŠą╗čÅ size (ą┐ąŠą╗ąĄ size ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 16-ą▒ąĖčéąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐ąŠą╗ąĄ dataSize ąŠąČąĖą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ ą▒ą░ą╣čéą░čģ). ąĢčüą╗ąĖ ą║ą╗ąĖąĄąĮčé ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ąĮąĄ ą┐čĆąĄą┤ąĄą╗ąŠą▓ ą▒čāč乥čĆą░, č鹊 ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą▒ą░ą╣čé ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čāą╝ąĄąĮčīčłąĄąĮąŠ, ąĖ čŹč鹊 čĆąĄą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░čéčīčüčÅ ą┐ąŠą╗ąĄą╝ dataSize.
15.7.3.2. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čäą░ą╣ą╗ąŠą▓ ALP
ążčāąĮą║čåąĖčÅ čüąĄčĆą▓ąĄčĆą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ALP ąĖąĘ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ (ą║ąŠąĮąĄčćąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠ čüčüčŗą╗ą║ąĄ [2]). ą¤ąĄčĆąĄą┤ą░čćą░ ąĮąŠą▓ąŠą│ąŠ čäą░ą╣ą╗ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ HTTP.
ąÜąŠą│ą┤ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┤ąŠčüčéčāą┐ąĮčŗą╝ ąĮąŠą▓čŗą╣ čäą░ą╣ą╗, čüąĄčĆą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ čŹč鹊 ą┐ąŠą║ą░ąĘą░čéčī ą║ą╗ąĖąĄąĮčéčā. ąŁčéčā čäčāąĮą║čåąĖčÄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐ąŠą╗ąĄ fileId.
ąĪąĄčĆą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮčāą╝ąĄčĆąŠą▓ą░čéčī čäą░ą╣ą╗čŗ ALP, ą║ąŠč鹊čĆčŗąĄ ąŠąĮ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé. ąöą╗čÅ čŹč鹊ą│ąŠ čüčāčēąĄčüčéą▓čāąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čéčĆąĄą▒ąŠą▓ą░ąĮąĖąĄ - čćč鹊ą▒čŗ ą┐ąŠą╗ąĄ fileId čĆąĄą░ą╗čīąĮąŠ ą╝ąĄąĮčÅą╗ąŠčüčī, ą║ąŠą│ą┤ą░ ąĖą╝ąĄąĄčéčüčÅ ąĮąŠą▓čŗą╣ čäą░ą╣ą╗, ąĖ fileId ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą╝ąĄąĮčÅčéčīčüčÅ, ą┐ąŠą║ą░ čŹč鹊čé čäą░ą╣ą╗ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ.
ąĢčüą╗ąĖ ą║ą╗ąĖąĄąĮčé ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čüą▓ąŠąĄą│ąŠ ąĘą░ą┐čĆąŠčüą░ ą┐ąŠą╗čāčćą░ąĄčé ą┤čĆčāą│ąŠą╣ fileId, ąŠčéą╗ąĖčćą░čÄčēąĖą╣čüčÅ ąŠčé ąŠčéą▓ąĄč鹊ą▓ ą┤čĆčāą│ąĖčģ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ ąĘą░ą┐čĆąŠčüąŠą▓, č鹊 ąŠąĮ ąĘą░ąĮąŠą▓ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé čüą▓ąŠčÄ ą┐ąŠą┤čüąĖčüč鹥ą╝čā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ALP, ąĖ ąĘą░ą┐čĆąŠčüąĖčé ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĄčüą╗ąĖ ą║ą╗ąĖąĄąĮčé ą┐čŗčéą░ąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ąĖčéčī ą┤ą░ąĮąĮčŗąĄ čüąĄčĆą▓ąĄčĆčā čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ąĄč鹊ą┤ą░ ALPSRV-CLI, ąŠąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄą╝ fileId, ą║ą░ą║ąŠą╣ čäą░ą╣ą╗ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ. ąĪąĄčĆą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ąĘą░ą┐čĆąŠčü, ąĄčüą╗ąĖ fileId ąĮąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą║ čäą░ą╣ą╗čā.
15.7.3.3. ąÜąŠą┤ ą┐čĆąĖą╝ąĄčĆą░
ąÜąŠą╝ą┐ą░ąĮąĖčÅ u-blox ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą╗ą░ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░ ąĮą░ čÅąĘčŗą║ąĄ C, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čüąĄčĆą▓ąĄčĆą░, ąŠą▒čüą╗čāąČąĖą▓ą░čÄčēąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ ALP ąĮą░ čüą▓ąŠąĄą╣ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝ąĄ čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ ąĖčģ ą║ą╗ąĖąĄąĮčéčā. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠą┐ąĖąĖ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą▒ą╗ąĖąČą░ą╣čłąĄą╝čā čüą┐ąĄčåąĖą░ą╗ąĖčüčéčā ą┐ąŠ ą▓ąĮąĄą┤čĆąĄąĮąĖčÄ čĆąĄčłąĄąĮąĖą╣ u-blox (u-blox Field Application Engineer).
15.8. AssistNow Autonomous
15.8.1. ąÆą▓ąĄą┤ąĄąĮąĖąĄ
ąĪčåąĄąĮą░čĆąĖąĖ ą┐ąŠą╝ąŠčēąĖ, ąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗąĄ AssistNow Online ąĖ AssistNow Offline, čéčĆąĄą▒čāčÄčé ąŠąĮą╗ą░ą╣ąĮ-čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ąĖ čģąŠčüčé ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čāč鹊čćąĮčÅčÄčēąĖčģ ą┤ą░ąĮąĮčŗčģ (aiding data) ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ąĖčģ ą┐čĆąĖąĄą╝ąĮąĖą║čā, ą║ąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. AssistNow Autonomous ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗, ą┐ąŠą┤ąŠą▒ąĮčŗą╣ AssistNow Offline, ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĮą░ą╗ąĖčćąĖčÅ čģąŠčüčéą░ ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąØą░ ąŠčüąĮąŠą▓ąĄ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤, ąĘą░ą│čĆčāąČąĄąĮąĮčŗčģ čüąŠ čüą┐čāčéąĮąĖą║ą░ (ąĖą╗ąĖ ą┐ąŠą╗čāč湥ąĮąĮčŗčģ čü ą┐ąŠą╝ąŠčēčīčÄ AssistNow Online) ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ą░ą▓č鹊ąĮąŠą╝ąĮąŠ (čé. ąĄ. ą▒ąĄąĘ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü čģąŠčüč鹊ą╝ ąĖą╗ąĖ ąŠąĮą╗ą░ą╣ąĮ-čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ) ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄ ąŠčĆą▒ąĖčéčŗ čüą┐čāčéąĮąĖą║ą░ ("AssistNow Autonomous data"), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĮą░ą╝ąĮąŠą│ąŠ ą┤ąŠą╗čīčłąĄ, č湥ą╝ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒čŗą╗ą░ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ąĘą░ą│čĆčāąČąĄąĮąĮą░čÅ č湥čĆąĄąĘ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖąĄ čŹč乥ą╝ąĄčĆąĖą┤ą░. ąŁč鹊 ą┤ąĄą╗ą░ąĄčé ąĮąĄąĮčāąČąĮčŗą╝ąĖ ąĘą░ą│čĆčāąĘą║ąĖ ąĮąŠą▓čŗčģ čŹč乥ą╝ąĄčĆąĖą┤ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąĄčĆą▓ąŠą╣ čäąĖą║čüą░čåąĖąĖ ą┐čĆąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░čģ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čäčāąĮą║čåąĖčÅ AssistNow Autonomous ąĘą░ą┐čĆąĄčēąĄąĮą░. ąĢčæ ą╝ąŠąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-CFG-NAVX5.
15.8.2. ąÜąŠąĮčåąĄą┐čåąĖčÅ
ąØąĖąČąĄ ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ AssistNow Autonomous.
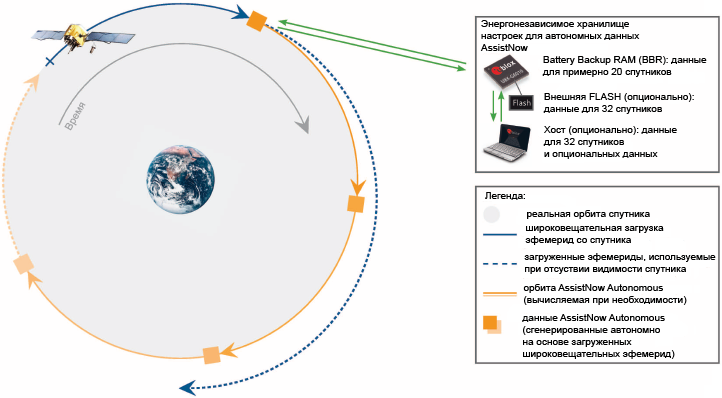
ŌĆó ą©ąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮą░čÅ čŹč乥ą╝ąĄčĆąĖą┤ą░, ąĘą░ą│čĆčāąČąĄąĮąĮą░čÅ čüąŠ čüą┐čāčéąĮąĖą║ą░, ą┤ą░ąĄčé č鹊čćąĮąŠąĄ, ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 4 čćą░čüąŠą▓, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄ čćą░čüčéąĖ ąŠčĆą▒ąĖčéčŗ čüą┐čāčéąĮąĖą║ą░ (čéčĆą░ąĄą║č鹊čĆąĖąĖ). ąØąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ąĮąĄ 4 čćą░čüąŠą▓, čéą░ą║ ą║ą░ą║ ąŠąĮąĖ ą▒čāą┤čāčé čüčāčēąĄčüčéą▓ąĄąĮąĮąŠ ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé čĆąĄą░ą╗čīąĮąŠą╣ ąŠčĆą▒ąĖčéčŗ.
ŌĆó ą×čĆą▒ąĖčéą░ AssistNow Autonomous čÅą▓ą╗čÅąĄčéčüčÅ čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮąŠą╣ čŹč乥ą╝ąĄčĆąĖą┤čŗ. ąŁč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠą╗ą│ąŠčüčĆąŠčćąĮčāčÄ ąŠčĆą▒ąĖčéčā čüą┐čāčéąĮąĖą║ą░ ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąŠą▒ąŠčĆąŠč鹊ą▓. ąźąŠčéčÅ čŹčéą░ ąŠčĆą▒ąĖčéą░ ąĮąĄ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ č鹊čćąĮą░, ąĄčæ č鹊čćąĮąŠčüčéčī ą┤ąŠčüčéą░č鹊čćąĮą░ ą┤ą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ąĖčüčéąĖąĮąĮąŠą╣ ąŠčĆą▒ąĖčéčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ.
ŌĆó ąöą░ąĮąĮčŗąĄ AssistNow Autonomous ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖ ą░ą▓č鹊ąĮąŠą╝ąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ąĖąĘ ąĘą░ą│čĆčāąČąĄąĮąĮčŗčģ (ąĖą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗą╝ąĖ čüą╗čāąČą▒ą░ą╝ąĖ) čŹč乥ą╝ąĄčĆąĖą┤. ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą┐ą░ą╝čÅčéčī, ąĘą░čēąĖčēąĄąĮąĮčŗąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ ąŠčé čĆąĄąĘąĄčĆą▓ąĮąŠą╣ ą▒ą░čéą░čĆąĄąĖ (on-chip battery-backed memory). ą×ą┐čåąĖąŠąĮą░ą╗čīąĮąŠ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ąŠ ą▓ąĮąĄčłąĮčÄčÄ flash-ą┐ą░ą╝čÅčéčī ąĖą╗ąĖ ąĮą░ čģąŠčüčé. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ą┤ą╗čÅ ą║ąŠč鹊čĆčŗčģ ą╝ąŠąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī ą┤ą░ąĮąĮčŗąĄ, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĖ čŹč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ.
ŌĆó ąĢčüą╗ąĖ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮąĄčé ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖčÅ čŹč乥ą╝ąĄčĆąĖą┤čŗ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ, č鹊 AssistNow Autonomous ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čéčĆąĄą▒čāąĄą╝čŗąĄ čćą░čüčéąĖ ąŠčĆą▒ąĖčéčŗ ąĖąĘ čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąöą░ąĮąĮčŗąĄ čéą░ą║ąČąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ č鹥ą║čāčēąĖą╝ąĖ, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī ą▓čĆąĄą╝čÅ čĆą░čüč湥čéą░, ą║ąŠą│ą┤ą░ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ą┤ą░ąĮąĮčŗčģ ąŠčĆą▒ąĖčéčŗ.
ŌĆó ąĀą░ą▒ąŠčéą░ čäčāąĮą║čåąĖąĖ AssistNow Autonomous ą┐čĆąŠąĘčĆą░čćąĮą░ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĖ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąÆčüąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčéčüčÅ ą▓ č乊ąĮąŠą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ, ąĖ ąĮąĄ ą▓ą╗ąĖčÅčÄčé ąĮą░ ąĮąŠčĆą╝ą░ą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
ŌĆó ą¤ąŠą┤čüąĖčüč鹥ą╝ą░ AssistNow Autonomous ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą▓ąŠą┤ąĖčé ąĖąĘ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ čüčéą░ą╗ąĖ čüą╗ąĖčłą║ąŠą╝ čüčéą░čĆčŗą╝ąĖ, ąĖ ą║ąŠč鹊čĆčŗąĄ ą▒ąŠą╗čīčłąĄ ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, čćč鹊ą▒čŗ ąĮąĄ ą▓ą▓ąŠą┤ąĖčéčī ąŠčłąĖą▒ą║ąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ą¤ąŠčĆąŠą│ čāčüčéą░čĆąĄą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ (čüą╝. ąĮąĖąČąĄ).
ŌĆó AssistNow Autonomous ą╝ąŠąČąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą╗čāčćčłąĖčéčī ą║ą░č湥čüčéą▓ąŠ ą┐čĆąĄą┤čüą║ą░ąĘą░ąĮąĖčÅ, ąĄčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé č湥čĆąĄąĘ 24 čćą░čüą░ ąĘą░ą│čĆčāąĘąĖčéčī čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤čŗ čĆą░ąĮąĮąĄąĄ ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░.
15.8.3. ąśąĮč鹥čĆč乥ą╣čü
ąöą╗čÅ čäčāąĮą║čåąĖąĖ AssistNow Autonomous ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ąĖąĮč鹥čĆč乥ą╣čü ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čĆąŠč鹊ą║ąŠą╗ą░ UBX:
ŌĆó ąĪąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-NAVX5 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéą░ čäčāąĮą║čåąĖąĖ AssistNow Autonomous. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮą░. ąÜąŠą│ą┤ą░ AssistNow Autonomous čĆą░ąĘčĆąĄčłąĄąĮą░, ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ AssistNow Autonomous ą┤ą╗čÅ ąĮąŠą▓čŗčģ ą┐čĆąĖčÅčéąĮčŗčģ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤ ąĖ, ąĄčüą╗ąĖ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ąŠčĆą▒ąĖčéčŗ ą┤ąŠčüčéčāą┐ąĮčŗ ąĖ ą░ą┤ąĄą║ą▓ą░čéąĮčŗ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī ąĖčģ ą┐ąŠą┤čüąĖčüč鹥ą╝ąĄ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝čāčÄ ąŠčłąĖą▒ą║čā ąŠčĆą▒ąĖčéčŗ. ąĪą╝. čüą╗ąĄą┤čāčÄčēčāčÄ čüąĄą║čåąĖčÄ ą┤ą╗čÅ ąŠą▒čŖčÅčüąĮąĄąĮąĖčÅ čŹč鹊ą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī firmware-ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆčŗąĄ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčé ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéčī ą┤ą░ąĮąĮčŗčģ ąŠčĆą▒ąĖčéčŗ ą┐čĆąĖą╝ąĄčĆąĮąŠ ą┤ąŠ 3 ą┤ąĮąĄą╣.
ŌĆó ąĪąŠąŠą▒čēąĄąĮąĖąĄ UBX-NAV-AOPSTATUS ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹥ą║čāčēąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ, ą░ čéą░ą║ąČąĄ ąŠ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ AssistNow Autonomous ą┤ą╗čÅ ąŠčéą┤ąĄą╗čīąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ GPS. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ AssistNow Autonomous ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ (idle, ąĖą╗ąĖ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮą░), ąĖą╗ąĖ ąŠąĮą░ ąĘą░ąĮčÅčéą░ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ąŠčĆą▒ąĖčé. ąźąŠčüčéčŗ ą┤ąŠą╗ąČąĮčŗ ą╝ąŠąĮąĖč鹊čĆąĖčéčī čŹčéčā ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąĖ ą▓čŗą║ą╗čÄčćą░čéčī ą┐čĆąĖąĄą╝ąĮąĖą║ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ AssistNow Autonomous ą▓ čüąŠčüč鹊čÅąĮąĖąĖ idle (čé. ąĄ. ą║ąŠą│ą┤ą░ ą┐ąŠą╗ąĄ status ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ ąĮčāą╗čī).
ŌĆó ąĪąŠąŠą▒čēąĄąĮąĖąĄ UBX-NAV-SVINFO ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠčĆą▒ąĖčé AssistNow Autonomous ą┤ą╗čÅ ąŠčéą┤ąĄą╗čīąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓.
ąĢčüčéčī 2 čüą┐ąŠčüąŠą▒ą░ čüąŠčģčĆą░ąĮąĖčéčī ą┤ą░ąĮąĮčŗąĄ AssistNow Autonomous ą┐čĆąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ą║ąŠą│ą┤ą░ ąĮąĄčé ąĮąĖą║ą░ą║ąŠą╣ ą▒ą░čéą░čĆąĄąĖ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ (ąĮąĄčé battery backup):
ŌĆó ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ą▓čüąĄčģ ą┤ą░ąĮąĮčŗčģ, ą▓ą║ą╗čÄčćą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ, ąŠčĆą▒ąĖčéčŗ, ąĖ čé. ą┤.) ą▓ąŠ flash, ą║ąŠą│ą┤ą░ čéą░ą║ą░čÅ ą┐ą░ą╝čÅčéčī ą┤ąŠčüčéčāą┐ąĮą░.
ŌĆó ą×ą┐čĆąŠčü ąĖąĘ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▓čüąĄčģ čéčĆąĄą▒čāąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čü čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ ąĖčģ ąĮą░ čüąĄčĆą▓ąĄčĆ ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĖąĄą╝ ąŠą▒čĆą░čéąĮąŠ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖą╣ UBX-AID-AOP (čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ AssistNow Autonomous), UBX-AID-ALM (ą░ą╗čīą╝ą░ąĮą░čģ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ) ąĖ UBX-AID-HUI (čéčĆąĄą▒čāąĄą╝ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ UTC). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-AID-AOP ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗąĄ) ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ battery backup RAM ąĖąĘ-ąĘą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą╝ąĄčüčéą░. ąŁčéąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╝ąŠą│ą░čÄčé ą┐čĆąĖąĄą╝ąĮąĖą║čā ą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ čĆą░čüč湥čéčŗ ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ ąĄčüą╗ąĖ ą▒čŗ ąĖčģ ąĮąĄ ą▒čŗą╗ąŠ. ą×ą┤ąĮą░ą║ąŠ čŹč鹊 ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą║ą░č湥čüčéą▓ąŠ ąŠčĆą▒ąĖčéčŗ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗčĆąĄąĘą░ąĮčŗ ąĖąĘ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ąĮą░gčĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ąŠą│čĆą░ąĮąĖč湥ąĮ čĆą░ąĘą╝ąĄčĆ čģčĆą░ąĮąĖą╗ąĖčēą░ čģąŠčüčéą░. ą×čéą┐čĆą░ą▓ą║ą░ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-AOP (ąĖą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣), ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čĆą░ąĘčĆąĄčłąĖčé čäčāąĮą║čåąĖčÄ AssistNow Autonomous. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čŗčüąŠą║ąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ąĮą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüą░čģ, ą║ąŠą│ą┤ą░ ąŠą┐čĆą░čłąĖą▓ą░ąĄčécčÅ ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ, ą┐ąŠčüą║ąŠą╗čīą║čā čā ąĮąĄą│ąŠ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒ąŠą╗čīčłąŠą╣ čĆą░ąĘą╝ąĄčĆ.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║čā čéčĆąĄą▒čāąĄčéčüčÅ ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ą▓čĆąĄą╝čÅ (čé. ąĄ. ą┐ąŠą╗ąĮčŗąĄ ą┤ą░čéą░ ąĖ ą▓čĆąĄą╝čÅ, Date ąĖ Time) ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąŠčĆą▒ąĖčé AssistNow Autonomous. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ą╗čÅ ą╗čāčćčłąĄą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī čŹčéčā ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐čĆąĖąĄą╝ąĮąĖą║čā čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-INI ą▓ čüčåąĄąĮą░čĆąĖąĖ, ą║ąŠą│ą┤ą░ čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮąĄčé čĆą░ą▒ąŠčéą░čÄčēąĖčģ čćą░čüąŠą▓ RTC (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ čā ąĮąĄą│ąŠ ąĮąĄčé backup battery).
15.8.4. ąöąŠčüč鹊ąĖąĮčüčéą▓ą░ ąĖ ąĮąĄą┤ąŠčüčéą░čéą║ąĖ
AssistNow Autonomous ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čāčüą║ąŠčĆąĄąĮąĮčŗą╣ ąĘą░ą┐čāčüą║ (čāą╝ąĄąĮčīčłąĄąĮąĖąĄ TTFF), ą║ąŠą│ą┤ą░ ą▓ ąĮą░ą╗ąĖčćąĖąĖ ąĖą╝ąĄąĄčéčüčÅ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ąĖą┤ąĖą╝čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓. ąŁč鹊 ą▓ čćą░čüčéąĮąŠčüčéąĖ ą▓ąĄčĆąĮąŠ ą┤ą╗čÅ čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ąĖąĘ-ąĘą░ čüą╗ą░ą▒ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĖąĄą╝ą░ ąĮąĄą╗čīąĘčÅ č湥čĆąĄąĘ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖąĄ ąĘą░ą│čĆčāąĘąĖčéčī čŹč乥ą╝ąĄčĆąĖą┤čŗ, ąĖ ą┐ąŠčŹč鹊ą╝čā ą▒ąĄąĘ AssistNow Autonomous (ąĖą╗ąĖ A-GPS) ąĮąĄą╗čīąĘčÅ ą┐ąŠą╗čāčćąĖčéčī čäąĖą║čüą░čåąĖčÄ ą┐ąŠąĘąĖčåąĖąĖ. ą×ą┤ąĮą░ą║ąŠ čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐čĆąĖąĄą╝ąĮąĖą║ ą│čĆčāą▒ąŠ ąĘąĮą░ą╗ ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą╗ąĖą▒ąŠ ąŠčé RTC, ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čāč鹊čćąĮčÅčÄčēąĄą│ąŠ ą▓čĆąĄą╝čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-AID-INI, ąĖ čćč鹊ą▒čŗ ąŠąĮ ąĘąĮą░ą╗, ą║ą░ą║ąĖąĄ čüą┐čāčéąĮąĖą║ąĖ čüąĄą╣čćą░čü ą▓ąĖą┤ąĖą╝čŗ, ą╗ąĖą▒ąŠ ąĖąĘ ą░ą╗čīą╝ą░ąĮą░čģą░, ąĖą╗ąĖ ą┐ąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝čŗą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ čüąĖą│ąĮą░ą╗ą░ą╝.
ąóąŠčćąĮąŠčüčéčī ąŠčĆą▒ąĖčéčŗ AssistNow Autonomous (ą┐ąŠąĘąĖčåąĖąĖ čüą┐čāčéąĮąĖą║ą░) ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ąĘąĮčŗčģ čäą░ą║č鹊čĆąŠą▓, čéą░ą║ąĖčģ ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čéąĖą┐ čüą┐čāčéąĮąĖą║ą░, č鹊čćąĮąŠčüčéąĖ ąĮąĖąČąĄą╗ąĄąČą░čēąĖčģ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤, ąĖą╗ąĖ ąŠčĆą▒ąĖčéą░ą╗čīąĮąŠą╣ čäą░ąĘčŗ čüą┐čāčéąĮąĖą║ą░ ąĖ ąŚąĄą╝ą╗ąĖ, ąĖ ąŠčé č鹊ą│ąŠ, ąĮą░čüą║ąŠą╗čīą║ąŠ čüčéą░čĆčŗ ą┤ą░ąĮąĮčŗąĄ (čüąŠ ą▓čĆąĄą╝ąĄąĮąĄą╝ ąŠčłąĖą▒ą║ą░ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ).
AssistNow Autonomous ąŠą▒čŗčćąĮąŠ čĆą░čüčłąĖčĆčÅąĄčé čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗąĄ čŹč乥ą╝ąĄčĆąĖą┤čŗ ąĮą░ čüčĆąŠą║ ą┤ąŠ 3 ą┤ąĮąĄą╣. ąĪąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-NAVX5 (čüą╝. ą▓čŗčłąĄ) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╝ąĄąĮčÅčéčī čŹč鹊čé ą┐ąŠčĆąŠą│ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ ąĮąĄč鹊čćąĮąŠčüčéąĖ ąŠčĆą▒ąĖčéčŗ "maximum acceptable modelled orbit error" (ą▓ ą╝ąĄčéčĆą░čģ). ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čŹč鹊 čćąĖčüą╗ąŠ ąĮąĄ ąŠčéčĆą░ąČą░ąĄčé čĆąĄą░ą╗čīąĮčāčÄ ąŠčłąĖą▒ą║čā ąŠčĆą▒ąĖčéčŗ, ą▓ą▓ąŠą┤ąĖą╝čāčÄ čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ čŹč乥ą╝ąĄčĆąĖą┤čŗ. ąŁč鹊 čüčéą░čéąĖčüčéąĖč湥čüą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠąČąĖą┤ą░ąĄą╝čŗą╣ ą▓ąĄčĆčģąĮąĖą╣ ą┐čĆąĄą┤ąĄą╗ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮąĄą║ąŠč鹊čĆąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąōčĆčāą▒ąŠąĄ ą┐čĆąĖą▒ą╗ąĖąČąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ čüą▓čÅąĘčŗą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ čĆą░čüčłąĖčĆąĄąĮąĖčÅ čü čŹč鹊ą╣ čāčüčéą░ąĮąŠą▓ą║ąŠą╣: maxError [m] = maxAge [d] * f, ą│ą┤ąĄ ą╝ąĮąŠąČąĖč鹥ą╗čī f čĆą░ą▓ąĄąĮ 30 ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ąĖąĘ čüą┐čāčéąĮąĖą║ąŠą▓, ąĘą░ą╝ąĄč湥ąĮąĮčŗčģ 1 čĆą░ąĘ, ąĖ 17 ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ąĖąĘ čüą┐čāčéąĮąĖą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą▓ąĖą┤ąĮčŗ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ čĆą░ąĘą░.
ąØąĄčé ą┐čĆčÅą╝ąŠą╣ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ (čĆąĄą░ą╗čīąĮąŠą╣ ąĖ čüčéą░čéąĖčüčéąĖč湥čüą║ąŠą╣) č鹊čćąĮąŠčüčéąĖ ąŠčĆą▒ąĖčéčŗ ąĖ č鹊čćąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąóąŠčćąĮąŠčüčéčī ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ąĘąĮčŗčģ čäą░ą║č鹊čĆąŠą▓, čéą░ą║ąĖčģ ą║ą░ą║ č鹊čćąĮąŠčüčéčī ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čüą┐čāčéąĮąĖą║ą░, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ąĖą┤ąĖą╝čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓ ąĖ ą│ąĄąŠą╝ąĄčéčĆąĖčÅ (DOP) ą▓ąĖą┤ąĖą╝čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓. ążąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą▓ą║ą╗čÄčćą░čÄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠčĆą▒ąĖčéčŗ AssistNow Autonomous, ą╝ąŠą│čāčé ą▒čŗčéčī čģčāąČąĄ, č湥ą╝ ą┐ąŠąĘąĖčåąĖąĖ, ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ č鹊ą╗čīą║ąŠ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗčģ čŹč乥ą╝ąĄčĆąĖą┤. ą£ąŠąČąĄčé ą▒čŗčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ą┐čĆąĄą┤ąĄą╗čŗ čäąĖą╗čīčéčĆąŠą▓ ą▓čŗą▓ąŠą┤ą░ ąĮą░ą▓ąĖą│ą░čåąĖąĖ (Navigation Output Filters).
ążčāąĮą┤ą░ą╝ąĄąĮčéą░ą╗čīąĮčŗą╣ ąĮąĄą┤ąŠčüčéą░č鹊ą║ ą╗čÄą▒ąŠą╣ čüąĖčüč鹥ą╝čŗ ą┤ą╗čÅ ą┐čĆąĄą┤čüą║ą░ąĘą░ąĮąĖčÅ ąŠčĆą▒ąĖčéčŗ čüą┐čāčéąĮąĖą║ą░, čüąŠčüč鹊ąĖčé ą▓ ąĮąĄąĖąĘą▓ąĄčüčéąĮčŗčģ ą▒čāą┤čāčēąĖčģ čüąŠą▒čŗčéąĖčÅčģ. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ąĘąĮą░čéčī ąŠ čüą┐čāčéąĮąĖą║ą░čģ, ą║ąŠč鹊čĆčŗąĄ čüčéą░ąĮčāčé ąĮąĄčĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮčŗą╝ąĖ, ą┐ąŠą┤ą▓ąĄčĆą│ą╗ąĖčüčī ą┐ąĄčĆąĄčāčüčéą░ąĮąŠą▓ą║ąĄ čćą░čüąŠą▓, ąĖą╗ąĖ ą┐ąŠą╗čāčćąĖą╗ąĖ ą╝ą░ąĮąĄą▓čĆ ąĮą░ ąŠčĆą▒ąĖč鹥. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüąĖčüč鹥ą╝ą░ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┐čāčéą░čéčī ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ą┐ąŠąĘąĖčåąĖčÄ čüą┐čāčéąĮąĖą║ą░ čü čĆąĄą░ą╗čīąĮąŠ čüčāčēąĄčüčéą▓čāčÄčēąĄą╣. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┤čĆčāą│ąĖčģ "čģąŠčĆąŠčłąĖčģ" čüą┐čāčéąĮąĖą║ąŠą▓ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮčŗąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ą▓ ą║ąŠąĮąĄčćąĮąŠą╝ čüč湥č鹥 čāčüčéčĆą░ąĮčÅčé ą┤ąĄč乥ą║čéąĮčāčÄ ąŠčĆą▒ąĖčéčā ąĖąĘ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą│ąŠ čĆąĄčłąĄąĮąĖčÅ.
ąÆąŠčüą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝ąŠčüčéčī čüąŠą▓ąŠą║čāą┐ąĮąŠčüčéąĖ čüą┐čāčéąĮąĖą║ąŠą▓ GPS - ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮą░čÅ ą╗ąŠą▓čāčłą║ą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ AssistNow Autonomous. ąöą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŚąĄą╝ą╗ąĖ čüąŠą▓ąŠą║čāą┐ąĮąŠčüčéčī čüą┐čāčéąĮąĖą║ąŠą▓ (ą│ąĄąŠą╝ąĄčéčĆąĖčÅ ą▓ąĖą┤ąĖą╝čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓) ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ ą║ą░ąČą┤čŗąĄ 24 čćą░čüą░. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ "ąŠą▒čāčćąĖą╗čüčÅ" ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čüą┐čāčéąĮąĖą║ąŠą▓ ą▓ ąĮąĄą║ąŠč鹊čĆčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, č鹥 ąČąĄ čüą┐čāčéąĮąĖą║ąĖ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ ą╝ąĄčüčé ąĮąĄ ą▒čāą┤čāčé ą▓ąĖą┤ąĖą╝čŗ č湥čĆąĄąĘ 12 čćą░čüąŠą▓, ąĖ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ AssistNow Autonomous ąĮąĖč湥ą╝ ąĮąĄ ą╝ąŠą│čāčé ą┐ąŠą╝ąŠčćčī. ąĢčēąĄ č湥čĆąĄąĘ 12 čćą░čüąŠą▓ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą▒čŗ ą┤ąŠčüčéčāą┐ąĮčŗ, ą┐ąŠč鹊ą╝čā čćč鹊 čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ 24 čćą░čüą░ ąĮą░ąĘą░ą┤.
ą¦ąĄą╝ ą┤ąŠą╗čīčłąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ čüą╝ąŠčéčĆąĖčé ą▓ ąĮąĄą▒ąŠ, č鹥ą╝ ą▒ąŠą╗čīčłąĄ čüą┐čāčéąĮąĖą║ąŠą▓ ąŠąĮ čāą▓ąĖą┤ąĖčé. ąØą░ 菹║ą▓ą░č鹊čĆąĄ ą┐čĆąĖ ą┐ąŠą╗ąĮąŠą╝ ą▓ąĖą┤ąĄ ąĮą░ ąĮąĄą▒ąŠ ą▓ č鹥č湥ąĮąĖąĄ čćą░čüą░ ąŠą▒ąĮą░čĆčāąČą░čéčüčÅ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 10 čüą┐čāčéąĮąĖą║ąŠą▓. ą¤ąŠčüą╗ąĄ 4 čćą░čüąŠą▓ čéčĆąĄą║ąĖąĮą│ą░ ąĮąĄą▒ą░ ąŠą▒ąĮą░čĆčāąČą░čéčüčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ 16 čüą┐čāčéąĮąĖą║ąŠą▓ (čé. ąĄ. ą┐ąŠą╗ąŠą▓ąĖąĮą░ ą▓čüąĄą╣ čüąŠą▓ąŠą║čāą┐ąĮąŠčüčéąĖ), ą┐ąŠčüą╗ąĄ 10 čćą░čüąŠą▓ ąŠą║ąŠą╗ąŠ 24 čüą┐čāčéąĮąĖą║ąŠą▓ (2/3 ąŠčé ąŠą▒čēąĄą╣ čüąŠą▓ąŠą║čāą┐ąĮąŠčüčéąĖ), ąĖ ą┐čĆąĖą╝ąĄčĆąĮąŠ č湥čĆąĄąĘ 16 čćą░čüąŠą▓ ą▒čāą┤ąĄčé ąŠčéčüą╗ąĄąČąĄąĮą░ ą▓čüčÅ čüąŠą▓ąŠą║čāą┐ąĮąŠčüčéčī čüą┐čāčéąĮąĖą║ąŠą▓ (ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ AssistNow Autonomous). ą£ąĄąĮčīčłą░čÅ ą▓ąĖą┤ąĖą╝ąŠčüčéčī ąĮąĄą▒ą░ čüąĮąĖąĘąĖčé čŹčéąĖ ąĘąĮą░č湥ąĮąĖčÅ. ąĪ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ čāą┤ą░ą╗ąĄąĮąĖąĄą╝ ąŠčé 菹║ą▓ą░č鹊čĆą░ čüąĖčéčāą░čåąĖčÅ ą╝ąŠąČąĄčé čāą╗čāčćčłąĖčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čüą┐čāčéąĮąĖą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ąĖą┤ąĖą╝čŗ ą┤ą▓ą░ąČą┤čŗ ą▓ ą┤ąĄąĮčī. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĮą░ 47 ą│čĆą░ą┤čāčüąŠą▓ ą║ čüąĄą▓ąĄčĆčā ą┐ąŠą╗ąĮą░čÅ čüąŠą▓ąŠą║čāą┐ąĮąŠčüčéčī čüą┐čāčéąĮąĖą║ąŠą▓ ą╝ąŠąČąĄčé ąĮą░ą▒ą╗čÄą┤ą░čéčīčüčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ č湥čĆąĄąĘ 12 čćą░čüąŠą▓ ą┐čĆąŠčüą╝ąŠčéčĆą░ ąĮąĄą▒ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝.
ąÆčŗčćąĖčüą╗ąĄąĮąĖčÅ, čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą╗čÅ AssistNow Autonomous, ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝. ąŁč鹊 čéčĆąĄą▒čāąĄčé 菹ĮąĄčĆą│ąĖąĖ, ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ąĘą░ą╝ąĄčéąĖčéčī čāą▓ąĄą╗ąĖč湥ąĮąĖąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ąĮą░ ą║ąŠčĆąŠčéą║ąĖąĄ ą┐ąĄčĆąĖąŠą┤čŗ ą▓čĆąĄą╝ąĄąĮąĖ (ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĄą║čāąĮą┤, čĆąĄą┤ą║ąŠ ą▒ąŠą╗čīčłąĄ 60 čüąĄą║čāąĮą┤), ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ čéą░ą║ąĖąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ. ą×čüčāčēąĄčüčéą▓ą╗čÅčÄčēąĖąĄčüčÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮąĄ ą┤ą░čÄčé ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčīčüčÅ čĆąĄąČąĖą╝čā čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ (power save mode), čé. ąĄ. ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (power-off). ą×čéą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▒čāą┤ąĄčé ąĘą░ą┤ąĄčƹȹ░ąĮąŠ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čüąĄčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣.
ążčāąĮą║čåąĖąĖ AssistNow Offline ąĖ AssistNow Autonomous čÅą▓ą╗čÅčÄčéčüčÅ ą▓ąĘą░ąĖą╝ąŠąĖčüą║ą╗čÄčćą░čÄčēąĖą╝ąĖ, ąĖ ąĮąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
[16. ąóąŠčćąĮąŠąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ (Precise Point Positioning, PPP)]
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠčüčéčāą┐ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ PPP-ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐čĆąŠą┤čāą║čåąĖąĖ.
Precise Point Positioning (PPP) čŹč鹊 čĆą░ąĘąĮąŠą▓ąĖą┤ąĮąŠčüčéčī ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖčģ čāą╗čāčćčłąĄąĮąĮčāčÄ č鹊čćąĮąŠčüčéčī ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čāč鹥ą╝ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čäą░ąĘčŗ ąĮąĄčüčāčēąĄą╣, čćč鹊ą▒čŗ čüą│ą╗ą░ąČąĖą▓ą░čéčī ąŠčłąĖą▒ą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ čüą┐čāčéąĮąĖą║ąŠą▓. ąŁč鹊ą╝čā ą░ą╗ą│ąŠčĆąĖčéą╝čā čéčĆąĄą▒čāčÄčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮčŗąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĮąĄčüčāčēąĄą╣, čćč鹊ą▒čŗ ą┐ąŠą▓čŗčüąĖčéčī čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī ą║ąŠčĆčĆąĄą║čåąĖąĖ. ąóčĆąĄą▒čāčÄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąĖąŠąĮąŠčüč乥čĆčŗ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐čĆąĖąĮčÅčéčŗčģ ąŠčé SBAS ąĖą╗ąĖ ąŠčé GPS. ąŻą╗čāčćčłąĄąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĮąŠ ąŠąČąĖą┤ą░čéčī č鹊ą╗čīą║ąŠ ą▓ čüą╗čāčćą░ąĄ ąĮąĄ ąĮą░čĆčāčłąĄąĮąĮąŠą│ąŠ ą▓ąĖą┤ą░ ąĮą░ ąĮąĄą▒ąŠ ą▓ ą┐ąĄčĆąĖąŠą┤ąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčĆčÅą┤ą║ą░ ą╝ąĖąĮčāčé.
PPP-ą░ą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüą┐čāčéąĮąĖą║ąŠą▓ GPS, ąĖ ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čéčĆąĄą▒čāčÄčéčüčÅ ą║ąŠčĆčĆąĄą║čåąĖąĖ SBAS.
16.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ
ą¦č鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą░ą╗ą│ąŠčĆąĖčéą╝ č鹊čćąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, čäčāąĮą║čåąĖčÅ PPP ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čäą╗ą░ą│ą░ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ UBX-CFG-NAVX5 (čŹčéąĖą╝ ąČąĄ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ PPP ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮąŠ).
PPP ą╝ąŠąČąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ą▓ ą▓ą░čĆąĖą░ąĮčéą░čģ ą┐čĆąŠą┤čāą║čåąĖąĖ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ Precise Point Positioning, ą│ą┤ąĄ čŹčéą░ čäčāąĮą║čåąĖčÅ čāąČąĄ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║čā ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą║ąŠčĆčĆąĄą║čåąĖąĖ RTCM, ą░ą╗ą│ąŠčĆąĖčéą╝ Precise Point Positioning ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī. ąÉą╗ą│ąŠčĆąĖčéą╝ Precise Point Positioning ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĖčüč鹥ą║ą╗ąŠ ą▓čĆąĄą╝čÅ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą║ąŠčĆčĆąĄą║čåąĖąĖ RTCM.
16.3. ą£ąŠąĮąĖč鹊čĆąĖąĮą│
ąĪąŠąŠą▒čēąĄąĮąĖąĄ UBX-NAV-SVINFO ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čüą┐čāčéąĮąĖą║ą░, čüą│ą╗ą░ąČąĖą▓ą░ą╗čüčÅ ą╗ąĖ ąĄą│ąŠ ą┐čüąĄą▓ą┤ąŠą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą╝ PPP.
[17. ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗą╣ ą╗ąŠą│]
17.1. ąÆą▓ąĄą┤ąĄąĮąĖąĄ
ążčāąĮą║čåąĖčÅ ą╗ąŠą│ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐ąĖčüą░čéčī č鹥ą║čāčēčāčÄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą▓ ą┐ą░ą╝čÅčéčī flash, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčāčÄ ą║ ąĮąĄą╝čā. ąøąŠą│ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗąĄ čüčéčĆąŠą║ąĖ ą▒ą░ą╣čé. ąŚą░ą┐ąĖčüčī ą┐ąŠąĘąĖčåąĖą╣ čäąĖą║čüą░čåąĖąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąĖčüč鹥ą╝čŗ čģąŠčüčéą░, ąĖ ą╝ąŠąČąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ čģąŠčüčé ą▓čŗą║ą╗čÄč湥ąĮ.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čéą░ą▒ą╗ąĖčåčŗ ą┐ąĄčĆąĄčćąĖčüą╗čÅčÄčé ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą╗ąŠą│ąŠą╝:
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╗ąŠą│ąŠą╝ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą╗ąŠą│ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| UBX-LOG-CREATE |
ąĪąŠąĘą┤ą░ąĄčé čäą░ą╣ą╗ ą╗ąŠą│ą░ ąĖ ą░ą║čéąĖą▓ąĖčĆčāąĄčé ą┐ąŠą┤čüąĖčüč鹥ą╝čā ą╗ąŠą│ą░ |
| UBX-LOG-ERASE |
ąĪčéąĖčĆą░ąĄčé ą╗ąŠą│ ąĖ ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčé ą┐ąŠą┤čüąĖčüč鹥ą╝čā ą╗ąŠą│ą░ |
| UBX-CFG-LOGFILTER |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░/ąŠčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐ąĖčüąĖ ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ/ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╗ąŠą│ą░ |
| UBX-LOG-INFO |
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čüąĖčüč鹥ą╝ąĄ ą╗ąŠą│ą░ |
| UBX-LOG-STRING |
ąĀą░ąĘčĆąĄčłą░ąĄčé čģąŠčüčéčā ąĘą░ą┐ąĖčüą░čéčī čüčéčĆąŠą║čā ą▒ą░ą╣čé ą▓ čäą░ą╣ą╗ ą╗ąŠą│ą░ |
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖąĘ ą╗ąŠą│ą░
| ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| UBX-LOG-RETRIEVE |
ąŚą░ą┐čāčüą║ą░ąĄčé ą┐čĆąŠčåąĄčüčü ą▓čŗą▒ąŠčĆą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖąĘ ą╗ąŠą│ą░ |
| UBX-LOG-RETRIEVEPOS |
ą¤ąŠąĘąĖčåąĖčÅ čŹą╗ąĄą╝ąĄąĮčéą░ ą╗ąŠą│ą░, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ |
| UBX-LOG-RETRIEVESTRING |
ąĪčéčĆąŠą║ą░ ą▒ą░ą╣čé ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│ą░, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮą░čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ |
| UBX-LOG-FINDTIME |
ąØą░čģąŠą┤ąĖčé ąĖąĮą┤ąĄą║čü ą┐ąĄčĆą▓ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą╗ąŠą│ą░, čā ą║ąŠč鹊čĆąŠą│ąŠ ą▓čĆąĄą╝čÅ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā. |
17.2. ąØą░čüčéčĆąŠą╣ą║ą░ čüąĖčüč鹥ą╝čŗ ą╗ąŠą│ą░
ą¤čāčüč鹊ą╣ ą╗ąŠą│ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-LOG-CREATE, ąĖ ą╗ąŠą│ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┤ą░ą╗ąĄąĮ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-LOG-ERASE. ąĪąĖčüč鹥ą╝ą░ ą╗ąŠą│ą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą╗ąŠą│ čüčāčēąĄčüčéą▓čāąĄčé, čéą░ą║ čćč鹊 ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╗ąŠą│ą░ ą▒čāą┤ąĄčé ąŠčéą▒čĆą░čüčŗą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ ą╗ąŠą│ ąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé. ąóąŠą╗čīą║ąŠ ąŠą┤ąĖąĮ ą╗ąŠą│ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, čéą░ą║ čćč鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-ACK-NAK ą▓ ąŠčéą▓ąĄčé ąĮą░ ą┐ąŠą┐čŗčéą║čā čüąŠąĘą┤ą░ąĮąĖčÅ ą╗ąŠą│ą░, ąĄčüą╗ąĖ ą╗ąŠą│ čāąČąĄ čüčāčēąĄčüčéą▓čāąĄčé. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ąĘą░ą┤ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą╗ąŠą│ą░ ą▓ ą▒ą░ą╣čéą░čģ (čü ąĮąĄą║ąŠč鹊čĆčŗą╝ąĖ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ). ąś ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ ą╗ąŠą│ą░, ąĖ čäą░ą╣ą╗ąŠą▓ąŠąĄ čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▓ąĮąŠčüčÅčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ, čéą░ą║ čćč鹊 ąŠą▒čēąĄąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ą┤ąŠčüčéčāą┐ąĮąŠąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĄą╣ ą╗ąŠą│ą░, ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĄąĮčīčłąĄ, č湥ą╝ čāą║ą░ąĘą░ąĮąŠ.
UBX-LOG-CREATE čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╗ąŠą│čā ą▒čŗčéčī čåąĖą║ą╗ąĖč湥čüą║ąĖą╝. ąĢčüą╗ąĖ ą╗ąŠą│ čüąŠąĘą┤ą░ąĮ ą║ą░ą║ čåąĖą║ą╗ąĖč湥čüą║ąĖą╣, č鹊 ą║ąŠą│ą┤ą░ ąŠąĮ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ, čüčéą░čĆčŗąĄ ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│ą░ ą▒čāą┤čāčé čāą┤ą░ą╗ąĄąĮčŗ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ ąĮąĄą│ąŠ ąĮąŠą▓čŗąĄ ąĘą░ą┐ąĖčüąĖ. ąØąĄ čåąĖą║ą╗ąĖč湥čüą║ąĖą╣ ą╗ąŠą│ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čåąĖą║ą╗ąĖč湥čüą║ąŠą│ąŠ č鹥ą╝, čćč鹊 ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ą╗ąŠą│ą░ ąĮąŠą▓čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ą▓ ą╗ąŠą│, ą▒čāą┤čāčé ąŠčéą▒čĆą░čüčŗą▓ą░čéčīčüčÅ. UBX-LOG-CREATE čéą░ą║ąČąĄ ąĘą░ą┐čāčüą║ą░ąĄčé čüąĖčüč鹥ą╝čā ą╗ąŠą│ą░, čćč鹊ą▒čŗ ą╝ąŠą│ą╗ąĖ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą▒čāą┤čāčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╗ąŠą│ą░. ąĪąĖčüč鹥ą╝ą░ ą╗ąŠą│ą░ ąĘą░ą┐čāčüčéąĖčéčīčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠčüą╗ąĄ čüčéą░čĆčéą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĄčüą╗ąĖ ąĖą╝ąĄąĄčéčüčÅ ą▓ ąĮą░ą╗ąĖčćąĖąĖ ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ą╗ąŠą│. ąøąŠą│ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čāąĮąĖčćč鹊ąČąĄąĮ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ UBX-LOG-ERASE.
UBX-CFG-LOGFILTER čāą┐čĆą░ą▓ą╗čÅąĄčé, čĆą░ąĘčĆąĄčłąĄąĮ ą╗ąĖ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą╗ąŠą│, ąĖ ą▓čŗą▒ąĖčĆą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą╗ąŠą│. ąŁčéąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▒čāą┤čāčé čüąŠčģčĆą░ąĮąĄąĮčŗ, ąĄčüą╗ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüą░ąĮą░ ą▓ąŠ flash. ąĢčüą╗ąĖ čŹč鹊 čéą░ą║, č鹊 ąĘą░ą┐ąĖčüčī ą▓ ą╗ąŠą│ ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČąĄąĮą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ą┤ąŠ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
ąØą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ąĄčĆąĄčģąŠą┤čŗ čüąŠčüč鹊čÅąĮąĖą╣ ąĮą░ ą▓čŗčüąŠą║ąŠą╝ čāčĆąŠą▓ąĮąĄ ą┤ą╗čÅ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą╗ąŠą│ą░:

17.3. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą╗ąŠą│ąĄ
ą¤čĆąĖąĄą╝ąĮąĖą║ ą╝ąŠąČąĄčé ąŠą┐čĆą░čłąĖą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-LOG-INFO, ą║ąŠč鹊čĆąŠąĄ ą┤ą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą╗ąŠą│ąĄ. ąÆ ąĮąĄą╣ ąĖą╝ąĄąĄčéčüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ, ą┤ąŠ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠąČąĄčé ą┤ąŠčĆą░čüčéąĖ ą╗ąŠą│ (ą║ąŠč鹊čĆčŗą╣, ąĖąĘ-ąĘą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čĆą░čüčģąŠą┤ąŠą▓, ą▒čāą┤ąĄčé ą╝ąĄąĮčīčłąĄ, č湥ą╝ čĆą░ąĘą╝ąĄčĆ, ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ ą▓ UBX-LOG-CREATE), ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāąČąĄ ąĘą░ąĮčÅč鹊ą│ąŠ ą╝ąĄčüčéą░ ą▓ ą╗ąŠą│ąĄ. ąóą░ą║ąČąĄ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ąĘą░ą┐ąĖčüąĄą╣, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ ą╗ąŠą│ąĄ, ą▓ą╝ąĄčüč鹥 čü ą▓čĆąĄą╝ąĄąĮąĄą╝ ąĖ ą┤ą░č鹊ą╣ čüą░ą╝ąŠą│ąŠ ąĮąŠą▓ąŠą│ąŠ ąĖ čüą░ą╝ąŠą│ąŠ čüčéą░čĆąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╗ąŠą│ą░, ąĖą╝ąĄčÄčēąĖčģ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčāčÄ ą╝ąĄčéą║čā ą▓čĆąĄą╝ąĄąĮąĖ.
ąŚą░ą┐ąĖčüąĖ ą╗ąŠą│ą░ čüąČą░čéčŗ, ąĖ ąĄčüčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÅ čģčĆą░ąĮąĄąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮą░čÅ čü ąĮąĖą╝ąĖ, čéą░ą║ čćč鹊 čĆąĄą░ą╗čīąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ąĘą░ąĮąĖą╝ą░ąĄą╝ąŠąĄ ą╗ąŠą│ąŠą╝, ą╝ąŠąČąĄčé ą▒čŗčéčī čéčĆčāą┤ąĮąŠ ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠ. ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ 9 ą▒ą░ą╣čé, ąĖ ą╝ą░ą║čüąĖą╝čāą╝ 24 ą▒ą░ą╣čéą░, čéąĖą┐ąŠą▓ąŠą╣ čĆą░ąĘą╝ąĄčĆ 10 ąĖą╗ąĖ 11 ą▒ą░ą╣čé.
ąÜą░ąČą┤čŗą╣ ą╗ąŠą│ ąĖą╝ąĄąĄčé čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā, ą║ąŠč鹊čĆą░čÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé čéąĖą┐ą░ ą╗ąŠą│ą░. ą¤čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ čŹč鹊ą╣ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐ąŠą║ą░ąĘą░ąĮ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĮą░ą║ą╗ą░ą┤ąĮčŗąĄ čĆą░čüčģąŠą┤čŗ ąĮą░ ą▓ąĄą┤ąĄąĮąĖąĄ ą╗ąŠą│ą░
| ąóąĖą┐ ą╗ąŠą│ą░ |
ąśą╝čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ |
| circular (ą║ąŠą╗čīčåąĄą▓ąŠą╣) |
ąöąŠ 40 ą║ąĖą╗ąŠą▒ą░ą╣čé |
| non-circular (ąŠą▒čŗčćąĮčŗą╣) |
ąöąŠ 8 ą║ąĖą╗ąŠą▒ą░ą╣čé |
ą×ą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüąĄą╣ N, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ ą▓ąĖą┤ąĄ ą╗ąŠą│ą░, ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ąĘą╝ąĄčĆą░ flash, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ ąŠčåąĄąĮąĄąĮąŠ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
N = (FSZ - LO)/TSZ
FSZ čĆą░ąĘą╝ąĄčĆ flash, ą┤ąŠčüčéčāą┐ąĮčŗą╣ ą┤ą╗čÅ ą╗ąŠą│ą░.
LO log overhead, čĆą░ąĘą╝ąĄčĆ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ.
TSZ čéąĖą┐ąĖčćąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ąŠą┤ąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čĆą░ąĘą╝ąĄčĆ flash ą┤ą╗čÅ ą╗ąŠą│ą░ 1500 kB (ą┤ąŠčüčéčāą┐ąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ąŠčüą╗ąĄ ą┤čĆčāą│ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖą╣ flash, čéą░ą║ąĖčģ ą║ą░ą║ ąŠą▒čĆą░ąĘ firmware), ąĮąĄ čåąĖą║ą╗ąĖč湥čüą║ąĖą╣ ą╗ąŠą│ ą╝ąŠą│ ą▒čŗ čüąŠą┤ąĄčƹȹ░čéčī ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 139000 ąĘą░ą┐ąĖčüąĄą╣:
((1500*1024)-(8*1024))/11 = 138891
17.4. ąŚą░ą┐ąĖčüčī ą▓ ą╗ąŠą│
ąĪąŠąŠą▒čēąĄąĮąĖąĄ UBX-CFG-LOGFILTER čāą║ą░ąĘčŗą▓ą░ąĄčé čāčüą╗ąŠą▓ąĖčÅ, ą┐čĆąĖ ą║ąŠč鹊čĆčŗčģ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĘą░ą┐ąĖčüčī ą▓ ą╗ąŠą│. ąØąĖč湥ą│ąŠ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ ąĘą░ą┐ąĖčüčī ąĘą░ą┐čĆąĄčēąĄąĮą░, ąĖąĮą░č湥 ą▒čāą┤čāčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ, ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐ąĖčüąĖ UBX-LOG-STRING. ąÜąŠą│ą┤ą░ ąĘą░ą┐ąĖčüčī čĆą░ąĘčĆąĄčłąĄąĮą░, č鹊 菹╗ąĄą╝ąĄąĮčé ą╗ąŠą│ą░ čéą░ą║ąČąĄ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ąĮ ąĖąĘ čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-LOG-STRING. ąÆ ąĮąĄą╝ ą▒čāą┤ąĄčé ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ, ąĄčüą╗ąĖ čā ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▒čāą┤ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ č鹥ą║čāčēąĄą╝ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÆ čüąŠąŠą▒čēąĄąĮąĖąĖ UBX-CFG-LOGFILTER ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĘąĮą░č湥ąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĘą░ą┐ąĖčüąĖ ą▓ ą╗ąŠą│ ą┐ąŠąĘąĖčåąĖą╣ čäąĖą║čüą░čåąĖąĖ. ąĢčüą╗ąĖ ą▓čüąĄ čŹčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ąĮčāą╗ąĄą▓čŗąĄ, č鹊 ą▒čāą┤čāčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│ ą▓čüąĄ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ (ąĖčģ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ 1 ąōčå). ą¤ąŠąĘąĖčåąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│, ąĄčüą╗ąĖ ą┐čĆąĄą▓čŗčłąĄąĮ ą╗čÄą▒ąŠą╣ ąĖąĘ ą┐ąŠčĆąŠą│ąŠą▓. ąĢčüą╗ąĖ ą┐ąŠčĆąŠą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 ąŠąĮ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čĆą░ąĘąĮąĖčåąĄ ą┐ąŠąĘąĖčåąĖąĖ ąĖ č鹥ą║čāčēąĄą╣ čüą║ąŠčĆąŠčüčéąĖ čéą░ą║ąČąĄ ąĄčüčéčī ą┐ąŠčĆąŠą│ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ.
ążąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą▒čŗą╗ą░ ą┤ąŠčüč鹊ą▓ąĄčĆąĮą░čÅ čäąĖą║čüą░čåąĖčÅ - ąŠčłąĖą▒ą║ąĖ čäąĖą║čüą░čåąĖąĖ ąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ čäąĖą║čüą░čåąĖąĖ ąĮąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ.
ążąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ čüąČąĖą╝ą░čÄčéčüčÅ, čćč鹊ą▒čŗ 菹║ąŠąĮąŠą╝ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ flash. ą¦č鹊ą▒čŗ čāą╗čāčćčłąĖčéčī čüąČą░čéąĖąĄ, ąĘąĮą░č湥ąĮąĖčÅ čäąĖą║čüą░čåąĖąĖ ąŠą║čĆčāą│ą╗čÅčÄčéčüčÅ, čćč鹊 čāą╗čāčćčłą░ąĄčé ąĖčģ čüąČą░čéąĖąĄ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠąĘąĖčåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▓ąĄčĆąĮčāą╗ą░ čüąĖčüč鹥ą╝ą░ ą╗ąŠą│ą░, ą╝ąŠą│čāčé ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé ąĘąĮą░č湥ąĮąĖą╣, ąĘą░čģą▓ą░č湥ąĮąĮčŗčģ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÆ čĆąĄąČąĖą╝ą░čģ On/Off ąĖ Power Save Mode ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čüąĖčüč鹥ą╝čā ą╗ąŠą│ą░ čéą░ą║, čćč鹊 č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ čäąĖą║čüą░čåąĖčÅ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░. ążąĖą║čüą░čåąĖčÅ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮą░ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĖ čŹč鹊 ą▒čāą┤ąĄčé čüą░ą╝ą░čÅ ą╗čāčćčłą░čÅ čäąĖą║čüą░čåąĖčÅ ąĘą░ ą┐ąĄčĆąĖąŠą┤ (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ "ą╗čāčćčłą░čÅ" ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ).
ąŚą░ą┐ąĖčüą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čäąĖą║čüą░čåąĖą╣ čüąŠčüč鹊čÅčé ąĖąĘ:
ŌĆó ąÆčĆąĄą╝ąĄąĮąĖ ąĖ ą┤ą░čéčŗ čäąĖą║čüą░čåąĖąĖ čü č鹊čćąĮąŠčüčéčīčÄ 1 čüąĄą║čāąĮą┤ą░.
ŌĆó ą©ąĖčĆąŠčéą░ ąĖ ą┤ąŠą╗ą│ąŠčéą░ čü č鹊čćąĮąŠčüčéčīčÄ ąŠą┤ąĮą░ ą╝ąĖą╗ą╗ąĖąŠąĮąĮą░čÅ ą│čĆą░ą┤čāčüą░. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąĘąĄą╝ą╗ąĖ čŹč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé č鹊čćąĮąŠčüčéčī ą┐ąŠčĆčÅą┤ą║ą░ 0.1 ą╝ąĄčéčĆą░.
ŌĆó ąÆčŗčüąŠčéą░ (ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąĖčĆąŠą▓ąŠą│ąŠ ąŠą║ąĄą░ąĮą░) čü č鹊čćąĮąŠčüčéčīčÄ 1 ą╝ąĄčéčĆ.
ŌĆó ąĪą║ąŠčĆąŠčüčéčī ą┐ąŠ ąĘąĄą╝ą╗ąĄ čü č鹊čćąĮąŠčüčéčīčÄ 1 čüą╝/čüąĄą║.
ŌĆó ąóąĖą┐ čäąĖą║čüą░čåąĖąĖ (ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ č鹊ą╗čīą║ąŠ čéąĖą┐čŗ čāčüą┐ąĄčłąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ).
ŌĆó ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ ąĘą░ą┐ąĖčüą░ąĮąĮąŠą╣ čäąĖą║čüą░čåąĖąĖ, ąĮąŠ ąĮąĄ ą▒ąŠą╗ąĄąĄ 19; ąĘąĮą░č湥ąĮąĖąĄ 19 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čäąĖą║čüą░čåąĖčÅ ą▒čŗą╗ą░ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ ąŠčé 19 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüą┐čāčéąĮąĖą║ąŠą▓.
ŌĆó ą×čåąĄąĮą║ą░ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ą║ą░č湥čüčéą▓ąŠ čäąĖą║čüą░čåąĖąĖ.
ŌĆó ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ ą║ č鹊čćąĮąŠčüčéąĖ ąŠą┤ąĮąŠą│ąŠ ą│čĆą░ą┤čāčüą░.
ąĪąŠčüč鹊čÅąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠą╣ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą╗ąŠą│ą░:
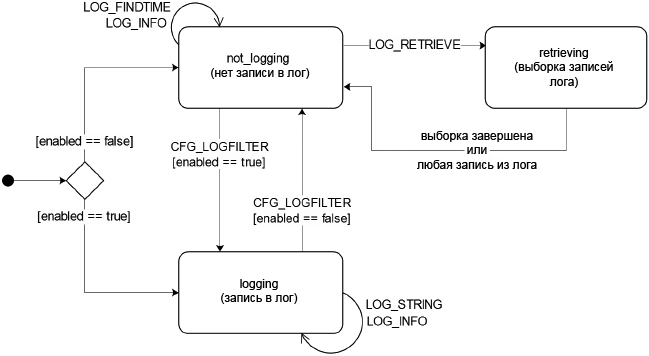
17.5. ą¤ąŠą╗čāč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą╗ąŠą│ą░
UBX-LOG-RETRIEVE ąĘą░ą┐čāčüą║ą░ąĄčé ą┐čĆąŠčåąĄčüčü, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖąĄą╝ąĮąĖą║čā ą▓čŗą▓ąĄčüčéąĖ ąĘą░ą┐ąĖčüąĖ ąĖąĘ ą╗ąŠą│ą░. ąöą╗čÅ čŹč鹊ą│ąŠ ąĘą░ą┐ąĖčüčī ą▓ ą╗ąŠą│ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ UBX-CFG-LOGFILTER. UBX-LOG-INFO ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ čüąĖčüč鹥ą╝čŗ čģąŠčüčéą░, čćč鹊ą▒čŗ ąŠčåąĄąĮąĖčéčī č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│ą░ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ ąĄą│ąŠ ą▓čŗą▓ąŠą┤ą░.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗą▓ąŠą┤ ą╗ąŠą│ą░ ąĘą░ą┐čāčēąĄąĮ, ąĖąĘ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąŠą┤ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ą░ąČą┤čŗą╣ ąĘą░ą┐čĆąŠčü ą║ ą╗ąŠą│čā. ą×čéą┐čĆą░ą▓ą║ą░ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ą╗čÄą▒ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą▒ąŠčĆą║ąĖ ą╗ąŠą│ą░ ą┐čĆąĖąĄą┤ąĄčé ą║ ąŠčüčéą░ąĮąŠą▓ą║ąĄ ą▓čŗą▓ąŠą┤ą░ ą╗ąŠą│ą░ ą┐ąĄčĆąĄą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą¦č鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā ą▓čŗą▓ąŠą┤ą░ ą╗ąŠą│ą░, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓čŗčüąŠą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ąŠą▒čĆą░ą▒ąŠčéą║čā GNSS ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╗ąŠą│ą░ (čüą╝. UBX-CFG-RST).
UBX-LOG-RETRIEVE ą╝ąŠąČąĄčé čāą║ą░ąĘą░čéčī ąĮą░čćą░ą╗čīąĮčŗą╣ ąĖąĮą┤ąĄą║čü ąĘą░ą┐ąĖčüąĄą╣ ą╗ąŠą│ą░ ąĖ ąĖčģ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüąĄą╣, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ ąŠčéą▓ąĄčé ąĮą░ UBX-LOG-RETRIEVE, čĆą░ą▓ąĮąŠ 256. ąĢčüą╗ąĖ ąŠčüčéą░ą╗ąŠčüčī ą▒ąŠą╗čīčłąĄ ąĘą░ą┐ąĖčüąĄą╣, č鹊 čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗą┤ą░čéčī UBX-LOG-RETRIEVE ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ čü ą┤čĆčāą│ąĖą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąĖąĮą┤ąĄą║čüą░ startEntry.
ą¤čĆąĖąĄą╝ąĮąĖą║ ąŠčéą┐čĆą░ą▓ąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-LOG-RETRIEVEPOS ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┐ąĖčüąĖ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ UBX-LOG-RETRIEVESTRING ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąŠą▓ąŠą╣ ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│ą░. ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą▓ č鹊ą╝ ąČąĄ ą┐ąŠčĆčÅą┤ą║ąĄ, ą║ą░ą║ ąŠąĮąĖ ą▒čŗą╗ąĖ ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ ą╗ąŠą│, čéą░ą║ čćč鹊 čüąŠąŠą▒čēąĄąĮąĖčÅ UBX-LOG-RETRIEVEPOS ąĖ UBX-LOG-RETRIEVESTRING ą╝ąŠą│čāčé č湥čĆąĄą┤ąŠą▓ą░čéčīčüčÅ ą▓ ą┐ąŠč鹊ą║ąĄ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓čŗą▓ąŠą┤ąĖą╝ąŠą│ąŠ ą╗ąŠą│ą░.
UBX-LOG-FINDTIME ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ą▓ ą╗ąŠą│ąĄ ąĖąĮą┤ąĄą║čüą░ ą┐ąĄčĆą▓ąŠą╣ ąĘą░ą┐ąĖčüąĖ čü ą╝ąĄąĮčīčłąĖą╝ ąĖą╗ąĖ čĆą░ą▓ąĮčŗą╝ čāą║ą░ąĘą░ąĮąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝. ąŚą░č鹥ą╝ čŹč鹊čé ąĖąĮą┤ąĄą║čü ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ UBX-LOG-RETRIEVE, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą▓čŗą▒ąŠčĆą║čā čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖąĘ ą╗ąŠą│ą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ.
17.6. ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąĮą░ ą║ąŠą╝ą░ąĮą┤čā čüąŠąŠą▒čēąĄąĮąĖčÅ
ąØąĄą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čü ą╗ąŠą│ąŠą╝ ą╝ąŠą│čāčé ąĘą░ąĮčÅčéčī ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĘą░ą┐ąĖčüčī ą▓ ą┐ą░ą╝čÅčéčī flash ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ąĄą┤ą╗ąĄąĮąĮą░čÅ. ąÆčĆąĄą╝čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠ, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓čĆąĄą╝čÅ ąŠą┐ąĄčĆą░čåąĖą╣ flash ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ. ą¦č鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą¤ą× čģąŠčüčéą░ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ čü čŹčéąĖą╝ąĖ ąĘą░ą┤ąĄčƹȹ║ą░ą╝ąĖ, čüąŠąŠą▒čēąĄąĮąĖčÅ ą╗ąŠą│ą░ ą│ąĄąĮąĄčĆąĖčĆčāčÄčé ąŠčéą▓ąĄčé. ąŁč鹊 ą▒čāą┤ąĄčé UBX-ACK-NAK ą▓ čüą╗čāčćą░ąĄ ąŠčłąĖą▒ą║ąĖ, ąĖąĮą░č湥 čŹč鹊 ą▒čāą┤ąĄčé UBX-ACK-ACK, ąĄčüą╗ąĖ ą┤ą╗čÅ ąŠčéą▓ąĄčéą░ ąĮąĄ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą┤čĆčāą│ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
ą£ąŠąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī ą╝ą░ą╗ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠą╝ą░ąĮą┤ ą╗ąŠą│ą░ ą▒ąĄąĘ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā čüčāčēąĄčüčéą▓čāąĄčé ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤, ąŠą┤ąĮą░ą║ąŠ č鹊ą│ą┤ą░ ąĄčüčéčī čĆąĖčüą║ ą║ąŠąĮčäą╗ąĖą║čéą░ ą╝ąĄąČą┤čā ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅą╝ąĖ ąŠčé ą║ąŠą╝ą░ąĮą┤. ąóą░ą║ąČąĄ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčīčüčÅ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠč鹥čĆčÅčÄčéčüčÅ.
[ąĪą╗ąŠą▓ą░čĆąĖą║]
AGC Automatic Gain Control, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ą░ čāčüąĖą╗ąĄąĮąĖčÅ, ąÉąĀąŻ.
A-GPS, aGPS Assisted GPS, čüąĖčüč鹥ą╝ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ čāč鹊čćąĮčÅčÄčēąĖčģ (ą▓čüą┐ąŠą╝ąŠą│ą░ą╗čīąĮčŗčģ) ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ GPS.
Acquisition čüą▒ąŠčĆ ą┤ą░ąĮąĮčŗčģ čüąŠ čüą┐čāčéąĮąĖą║ąŠą▓ čü čåąĄą╗čīčÄ čäąĖą║čüą░čåąĖąĖ ą┐ąŠąĘąĖčåąĖąĖ.
Aiding ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮą░čÅ, čāč鹊čćąĮčÅčÄčēą░čÅ čäčāąĮą║čåąĖčÅ.
Almanac ą░ą╗čīą╝ą░ąĮą░čģ. ąÉą╗čīą╝ą░ąĮą░čģ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 GPS čüąŠą┤ąĄčƹȹĖčé čłąĄčüčéčī ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠčĆą▒ąĖčéčŗ čüą┐čāčéąĮąĖą║ą░ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ. ą¤čĆąĖč湥ą╝ ą║ą░ąČą┤čŗą╣ čüą┐čāčéąĮąĖą║ čüąĖčüč鹥ą╝čŗ ąĖą╝ąĄąĄčé ą┤ą░ąĮąĮčŗąĄ ąŠ ą┤čĆčāą│ąĖčģ čüą┐čāčéąĮąĖą║ą░čģ. ąØą░ą▓ąĖą│ą░č鹊čĆ, čāčüčéą░ąĮąŠą▓ąĖą▓ čüą▓čÅąĘčī ą▓čüąĄą│ąŠ čü ąŠą┤ąĮąĖą╝ čüą┐čāčéąĮąĖą║ąŠą╝, ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą░ą╗čīą╝ą░ąĮą░čģą░ ąĖą╝ąĄąĄčé ą┤ą░ąĮąĮčŗąĄ ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ ąŠčĆą▒ąĖčé ąĖ ą┤čĆčāą│ąĖčģ. ąÉą╗čīą╝ą░ąĮą░čģ, ąĘą░ą│čĆčāąČąĄąĮąĮčŗą╣ ą▓ ą┐ą░ą╝čÅčéčī čüą┐čāčéąĮąĖą║ą░, ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗ąĄąĮ 30 ą┤ąĮąĄą╣. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ čāč鹊čćąĮčÅčÄčéčüčÅ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ čćą░čēąĄ ŌĆö čĆą░ąĘ ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüčāč鹊ą║, ą▓ąŠ ą▓čĆąĄą╝čÅ čüąĄą░ąĮčüą░ čüą▓čÅąĘąĖ čü ąŠą┤ąĮąŠą╣ ąĖąĘ ąĮą░ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣.
ALP čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé AlmanacPlus. ąĀą░čüčłąĖčĆąĄąĮąĖąĄ *.alp ąĖą╝ąĄčÄčé čäą░ą╣ą╗čŗ čü ą┤ą░ąĮąĮčŗą╝ąĖ AlmanacPlus.
AOP Autonomous Orbit Parameters, ą░ą▓č鹊ąĮąŠą╝ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąŠčĆą▒ąĖčéčŗ.
BBR Battery Backup RAM, ąŠą┐ąĄčĆą░čéąĖą▓ąĮą░čÅ ą┐ą░ą╝čÅčéčī, 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠąĄ čģčĆą░ąĮąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ąŠč鹊čĆąŠą╣ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ą▒ą░čéą░čĆąĄą╣ą║ąĖ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ.
C/No, CNO Carrier-to-noise-density ratio, čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĮąĄčüčāčēąĄą╣ ą║ ą┐ą╗ąŠčéąĮąŠčüčéąĖ čłčāą╝ą░, ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ.
COG course over ground, ą║čāčĆčü (ą╝ą░čĆčłčĆčāčé) ą┐ąŠ ąĘąĄą╝ą╗ąĄ.
CW continuous wave, ąĮąĄą┐čĆąĄčĆčŗą▓ąĮą░čÅ ąĮąĄčüčāčēą░čÅ, čāąĘą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ (čćąĖčüčéą░čÅ čüąĖąĮčāčüąŠąĖą┤ą░).
dBHz ą╗ąŠą│ą░čĆąĖčäą╝ąĖč湥čüą║ąŠąĄ ą▓čŗčĆą░ąČąĄąĮąĖąĄ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ (čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ).
dead reckoning, DR č鹊čćąĮčŗą╣ čĆą░čüč湥čé.
DGPS Differential Global Positioning Systems, ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮą░čÅ ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ čüąĖčüč鹥ą╝ą░ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŻą╗čāčćčłąĄąĮąĖąĄ čüąĖčüč鹥ą╝čŗ Global Positioning System (GPS) čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ čāą╗čāčćčłąĄąĮąĮąŠą╣ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ, ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ čĆą░ą▒ąŠčéčŗ ą║ą░ąČą┤ąŠą╣ čüąĖčüč鹥ą╝čŗ, ąŠčé ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ 15 ą╝ąĄčéčĆąŠą▓ ą┤ą╗čÅ GPS ą┤ąŠ č鹊čćąĮąŠčüčéąĖ ąŠą║ąŠą╗ąŠ 10 čüą╝ ą▓ čüą╗čāčćą░ąĄ ą╗čāčćčłąĖčģ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ (ąĖąĘ ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ).
DOP Dilution of precision, čüąĮąĖąČąĄąĮąĖąĄ č鹊čćąĮąŠčüčéąĖ - čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ č鹥čĆą╝ąĖąĮ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣čüčÅ ą▓ ąŠą▒ą╗ą░čüčéąĖ čüąĖčüč鹥ą╝ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą┐ą░čĆą░ą╝ąĄčéčĆąĖč湥čüą║ąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ ą│ąĄąŠą╝ąĄčéčĆąĖč湥čüą║ąŠą│ąŠ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čüą┐čāčéąĮąĖą║ąŠą▓ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą░ąĮč鹥ąĮąĮčŗ ą┐čĆąĖčæą╝ąĮąĖą║ą░. ąÜąŠą│ą┤ą░ čüą┐čāčéąĮąĖą║ąĖ ą▓ ąŠą▒ą╗ą░čüčéąĖ ą▓ąĖą┤ąĖą╝ąŠčüčéąĖ ąĮą░čģąŠą┤čÅčéčüčÅ čüą╗ąĖčłą║ąŠą╝ ą▒ą╗ąĖąĘą║ąŠ ą┤čĆčāą│ ą║ ą┤čĆčāą│čā, ą│ąŠą▓ąŠčĆčÅčé ąŠ ┬½čüą╗ą░ą▒ąŠą╣┬╗ ą│ąĄąŠą╝ąĄčéčĆąĖąĖ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ (ą▓čŗčüąŠą║ąŠą╝ ąĘąĮą░č湥ąĮąĖąĖ DOP), ąĖ, ąĮą░ąŠą▒ąŠčĆąŠčé, ą┐čĆąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠą╣ čāą┤ą░ą╗čæąĮąĮąŠčüčéąĖ ą│ąĄąŠą╝ąĄčéčĆąĖčÄ čüčćąĖčéą░čÄčé ┬½čüąĖą╗čīąĮąŠą╣┬╗ (ąĮąĖąĘą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ DOP) (ąĖąĘ ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ).
ECEF Earth Centered Earth Fixed, ą│ąĄąŠčåąĄąĮčéčĆąĖč湥čüą║ą░čÅ čüąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé čü ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ ąŚąĄą╝ą╗ąĄ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ).
GLONASS čüą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░ ąĮą░ą▓ąĖą│ą░čåąĖąĖ, ą┐čĆąĖąĮčÅčéą░čÅ ąĀąŠčüčüąĖąĄą╣.
GNSS global navigation satellite system, ąŠą▒čēąĖą╣ č鹥čĆą╝ąĖąĮ ąŠą▒ąŠąĘąĮą░č湥ąĮąĖčÅ čüąĖčüč鹥ą╝ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓čŗčģ čüąĖčüč鹥ą╝ ąĮą░ą▓ąĖą│ą░čåąĖąĖ.
GPS Global Positioning System, čüąĖčüč鹥ą╝ą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐čĆąĖąĮčÅčéą░čÅ ąĪą©ąÉ.
HDOP Horizontal DOP, ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠąĄ DOP (čüą╝. DOP).
IGS International GNSS Service, ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮą░čÅ čüą╗čāąČą▒ą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ąĮą░ą▓ąĖą│ą░čåąĖąĖ.
interference ą┐ąŠą╝ąĄčģą░, čłčāą╝.
jamming ą┐ąŠą╝ąĄčģą░, ąĮą░čĆčāčłąĄąĮąĖąĄ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░.
NED Nord East Down, čüąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé čüąĄą▓ąĄčĆ/ą▓ąŠčüč鹊ą║/ą▓ąĮąĖąĘ. ąĪąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé, čéą░ą║ąČąĄ ąĖąĘą▓ąĄčüčéąĮą░čÅ ą║ą░ą║ local tangent plane (LTP), čŹč鹊 ą│ąĄąŠą│čĆą░čäąĖč湥čüą║ą░čÅ čüąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēą░čÅ čüąŠčüč鹊čÅąĮąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖą╣ ąĖ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą▓ ą░ą▓ąĖą░čåąĖąĖ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ).
NMEA 0183 ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮą░čÅ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ čŹą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąĖ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā ą╝ąŠčĆčüą║ąŠą╣ 菹╗ąĄą║čéčĆąŠąĮąĖą║ąŠą╣, čéą░ą║ąŠą╣ ą║ą░ą║ čŹčģąŠ-ą╗ąŠą║ą░č鹊čĆčŗ, čüąŠąĮą░čĆčŗ, ą░ąĮąĄą╝ąŠą╝ąĄčéčĆčŗ, ą│ąĖčĆąŠą║ąŠą╝ą┐ą░čüčŗ, ą░ą▓č鹊ą┐ąĖą╗ąŠčé, ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ GPS ąĖ čé. ą┤.
PDOP Position DOP, čüą╝. DOP.
POST Power-On Self-Test, čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
POT Power Optimized Tracking, čĆą░ą▒ąŠčéą░ čéčĆąĄą║ąĖąĮą│ą░, ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą┐ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╝čā 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ.
PPS pulse per second, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓ čüąĄą║čāąĮą┤čā.
PR PseudoRange, čéąĖą┐ ą║ąŠčĆčĆąĄą║čåąĖąĖ DGPS.
PRN Psuedo Random Noise, ąĮą░čüą║ąŠą╗čīą║ąŠ čÅ ą┐ąŠąĮčÅą╗, čŹč鹊 čüąĖčüč鹥ą╝ą░ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ąĮąŠą╝ąĄčĆąŠą▓ čüą┐čāčéąĮąĖą║ą░ą╝ ą┐ąŠ ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮąŠą╝čā ąĘą░ą║ąŠąĮčā.
PRR PseudoRange Rate, čéąĖą┐ ą║ąŠčĆčĆąĄą║čåąĖąĖ DGPS.
PSM Power Save Mode, čĆąĄąČąĖą╝ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ.
RAIM Receiver Autonomous Integrity Monitoring, čüąĖčüč鹥ą╝ą░ ą░ą▓č鹊ąĮąŠą╝ąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
RF radio frequency, čĆą░ą┤ąĖąŠčćą░čüč鹊čéą░.
RTCM Radio Technical Commission for Maritime Services, čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ą╝ąŠčĆčüą║ąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ.
RXM RX Manager, čé. ąĄ. ą╝ąĄąĮąĄą┤ąČąĄčĆ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
SFDR spurious free dynamic range, ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüąĖą│ąĮą░ą╗ą░, čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ ąŠčé ą┐ąŠą╝ąĄčģ.
SV Satellite Vehicle, čüą┐čāčéąĮąĖą║.
TCT Temperature Compensation Table, č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮą░čÅ čéą░ą▒ą╗ąĖčåą░ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ.
TCXO č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠ-ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ą▓ą░čĆčåąĄą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ.
TDOP Time DOP, čüą╝. DOP.
TOW Time Of Week, č鹥čĆą╝ąĖąĮ č乊čĆą╝ą░čéą░ ą▓čĆąĄą╝ąĄąĮąĖ GPS.
TP TIMEPULSE, ąŠą▒ąŠąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĖą╝ą┐čāą╗čīčüą░ ą▓čĆąĄą╝ąĄąĮąĖ.
TTFF Time to First Fix, ą▓čĆąĄą╝čÅ ą┤ąŠ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ (čäąĖą║čüą░čåąĖąĖ).
UBX ą┐čĆąŠč鹊ą║ąŠą╗ ąŠą▒ą╝ąĄąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗą╣ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ u-blox.
URA User Range Accuracy, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą┐ąŠą║ą░ąĘą░č鹥ą╗čī č鹊čćąĮąŠčüčéąĖ.
UTC ąÆčüąĄą╝ąĖčĆąĮąŠąĄ ąÜąŠąŠčĆą┤ąĖąĮąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąÆčĆąĄą╝čÅ, čüąĖčüč鹥ą╝ą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ).
VDOP Vertical DOP, ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠąĄ DOP (čüą╝. DOP).
čŹč乥ą╝ąĄčĆąĖą┤čŗ ąŠčĆą▒ąĖčéą░ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čüą┐čāčéąĮąĖą║ą░.
[ąĪčüčŗą╗ą║ąĖ]
1. u-blox 7 Receiver Description Including Protocol Specification V14 site:u-blox.com.
2. ALP-čäą░ą╣ą╗čŗ u-blox.
3. ąśąĮč鹥čĆč乥ą╣čü SPI.
4. ą¤čĆąŠčüč鹊ą╣ GPS-čüčéą░ąĮą┤ą░čĆčé čćą░čüč鹊čéčŗ ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆ RF.
5. NEO-7: ą╝ąŠą┤čāą╗ąĖ GPS/GNSS.
6. ą¤čĆąŠč鹊ą║ąŠą╗ NMEA ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ą░čģ u-blox 7.
7. ą¤čĆąŠč鹊ą║ąŠą╗ UBX ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ą░čģ u-blox 7. |



