ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ:
ŌĆó ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ č湥čĆąĄąĘ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü čćą░čüč鹊čéą░ ąĖ čäą░ąĘą░.
ą×ą▒ą╗ą░čüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ:
ŌĆó ąōąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé, ą│ąĄąĮąĄčĆą░č鹊čĆčŗ ą║ą░čćą░čÄčēąĄą╣čüčÅ čćą░čüč鹊čéčŗ.
[ą×ą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ]
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ AD9833 čŹč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ čüąĖą│ąĮą░ą╗ąŠą▓ čü ąĮąĖąĘą║ąĖą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ č鹊ą║ą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą╣, čéčĆąĄčāą│ąŠą╗čīąĮąŠą╣ ąĖ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ. ąōąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ č乊čĆą╝čŗ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čéąĖą┐ąŠą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ ą┤ą░čéčćąĖą║ąŠą▓, ą░ą║čéčāą░č鹊čĆąŠą▓, ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ TDR. ąÆčŗčģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ąĖ čäą░ąĘą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą▓ąĮąĄčłąĮąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čćč鹊 čāą┐čĆąŠčēą░ąĄčé ąĮą░čüčéčĆąŠą╣ą║čā ą│ąĄąĮąĄčĆą░čåąĖąĖ. ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓ čĆą░ą▒ąŠčéčā ą┐ąŠčćčéąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ (ą║čĆąŠą╝ąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąŠą┐ąŠčĆąĮčŗčģ čéą░ą║č鹊ą▓ ąĖ ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĖčģ čäąĖą╗čīčéčĆčāčÄčēąĖčģ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓). ąĀąĄą│ąĖčüčéčĆčŗ čćą░čüč鹊čéčŗ ąĖą╝ąĄčÄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 28 ą▒ąĖčé: ą┐čĆąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 25 ą£ąōčå ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāčéą░ ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ą║ąĖ čćą░čüč鹊čéčŗ 0.1 ąōčå; čü čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ 1 ą£ąōčå ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāčéą░ ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéčī 0.004 ąōčå.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ AD9833 č湥čĆąĄąĘ 3-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü (SPI). ąŁč鹊čé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ čćą░čüč鹊čéą░čģ ą┤ąŠ 40 ą£ąōčå, ąĖ ąŠąĮ čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą╗čÄą▒ąŠą╝čā DSP ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ 2.3 .. 5.5V.
ąŻ AD9833 ąĄčüčéčī čäčāąĮą║čåąĖčÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (power-down), ąĖą╗ąĖ čĆąĄąČąĖą╝ čüąĮą░, čäčāąĮą║čåąĖčÅ SLEEP. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéą║ą╗čÄčćąĖčéčī ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čüąĄą║čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░, ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆčāčÅ č鹥ą╝ čüą░ą╝čŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, DAC (ą”ąÉą¤) ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮ, ą║ąŠą│ą┤ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čéą░ą║č鹊ą▓čŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ (ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮą░čÅ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ).
ąĀąĖčü. 1. ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą▒ą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ AD9833.
ą£ąĖą║čĆąŠčüčģąĄą╝čŗ DDS, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖąĮč鹥ąĘą░ čüąĖą│ąĮą░ą╗ąŠą▓ (ą┐ąŠą┤ąŠą▒ąĮčŗąĄ ą┐ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čā AD9833).
ą×čåąĄąĮąŠčćąĮčŗą╣ ą║ąĖčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ (ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: čā ą║ąĖčéą░ą╣čåąĄą▓ ąĮą░ Aliexpress ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą┐ą╗ą░čéčŗ ą┐ąŠą╗čāčćčłąĄ).
ąöąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ą░ą┐ąĮąŠčāčéčŗ, ą┤ą░čéą░čłąĖčéčŗ, ą║ąĮąĖą│ąĖ, čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ :
ŌĆó AN-1044: Programming the AD5932 for Frequency Sweep and Single Frequency Outputs
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąĖ čüąĖčüč鹥ą╝ąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ
ŌĆó AD9833 - Microcontroller No-OS Driver
ąśąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ąĖ čüąĖą╝čāą╗čÅčåąĖčÅ :
ŌĆó ADIsimDDS (Direct Digital Synthesis)
ą£ą░č鹥čĆąĖą░ą╗čŗ ą┐ąŠ č鹥ą╝ąĄ, č鹥čģąĮąĖč湥čüą║ąĖąĄ čüčéą░čéčīąĖ :
ŌĆó 400-MSample DDSs Run On Only +1.8 VDC
ą£ą░č鹥čĆąĖą░ą╗čŗ ą┐ąŠ ą┤ąĖąĘą░ą╣ąĮčā :
ŌĆó AD9833 Material Declaration
ą×ą▒čüčāąČą┤ąĄąĮąĖčÅ AD9833 ąĮą░ EngineerZone
ąóą░ą▒ą╗ąĖčåą░ 1. ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ ąĖ čüąĖą│ąĮą░ą╗čīąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ.
ąĢčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ąĮąĄčćč鹊 ąŠą▒čĆą░čéąĮąŠąĄ, č鹊 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┤ą░ąĮčŗ ą┤ą╗čÅ čāčüą╗ąŠą▓ąĖą╣ VDD =2.3 .. 5.5V, AGND = DGND = 0V, TA = TMIN .. TMAX , RSET = 6.8 ą║ą×ą╝ ą┤ą╗čÅ VOUT.
ą¤ą░čĆą░ą╝ąĄčéčĆ1 MIN ąóąĖą┐ąĖčćąĮąŠ MAX ąĢą┤. ąŻčüą╗ąŠą▓ąĖčÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ / ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ DAC
ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī
10
ą▒ąĖčé
ąĪą║ąŠčĆąŠčüčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ
25
MSPS2
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ VOUT
0.65
V
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ VOUT
38
mV
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé VOUT
200
ppm/┬░C3
ąóąŠčćąĮąŠčüčéčī ą┐ąŠ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ (DC), ąĖąĮč鹥ą│čĆą░ą╗čīąĮą░čÅ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī (INL)5
┬▒1.0
LSB4
ąóąŠčćąĮąŠčüčéčī ą┐ąŠ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ (DC), ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮą░čÅ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī (DNL)5
┬▒0.5
LSB4
ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ DDS
ąöąĖąĮą░ą╝ąĖą║ą░, SNR5
55
60
dB
fMCLK = 25 ą£ąōčå, fOUT = fMCLK /4096
ąöąĖąĮą░ą╝ąĖą║ą░, THD5
-66
-56
dBc6
fMCLK = 25 ą£ąōčå, fOUT = fMCLK /4096
SFDR5 ą▓ čłąĖčĆąŠą║ąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ (0 ą║ čćą░čüč鹊č鹥 ąØą░ą╣ą║ą▓ąĖčüčéą░)
-60
dBc
fMCLK = 25 ą£ąōčå, fOUT = fMCLK /50
SFDR ą▓ čāąĘą║ąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ (┬▒ 200 ą║ąōčå)
-78
dBc
fMCLK = 25 ą£ąōčå, fOUT = fMCLK /50
ąĪą║ą▓ąŠąĘąĮąŠąĄ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĄ čéą░ą║č鹊ą▓
-60
dBc
ąÆčĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (ą▓čŗčģąŠą┤ ąĖąĘ Power Down)
1
ą╝čü
ąøąŠą│ąĖč湥čüą║ąĖąĄ ą▓čģąŠą┤čŗ
ąÆčģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 1, VINH
1.7
V
ą¤ąĖčéą░ąĮąĖąĄ 2.3 .. 2.7V
2.0
V
ą¤ąĖčéą░ąĮąĖąĄ 2.7 .. 3.6V
2.8
V
ą¤ąĖčéą░ąĮąĖąĄ 4.5 .. 5.5V
ąÆčģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 0, VINL
0.5
V
ą¤ąĖčéą░ąĮąĖąĄ 2.3 .. 2.7V
0.7
V
ą¤ąĖčéą░ąĮąĖąĄ 2.7 .. 3.6V
0.8
V
ą¤ąĖčéą░ąĮąĖąĄ 4.5 .. 5.5V
ąÆčģąŠą┤ąĮąŠą╣ č鹊ą║, IINH /IINL
10
╬╝A
ąÆčģąŠą┤ąĮą░čÅ ąĄą╝ą║ąŠčüčéčī, CIN
3
ą┐ąż
ą¤ąĖčéą░ąĮąĖąĄ (fMCLK = 25 ą£ąōčå, fOUT = fMCLK /4096 )
VDD
2.3
5.5
V
IDD
4.5
mA
IDD ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠą┤ą░, čüą╝. čĆąĖčü. 7
ąĀąĄąČąĖą╝ čüąĮą░ čü ą┐ąŠąĮąĖąČąĄąĮąĮčŗą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ (Low Power Sleep Mode)
0.5
mA
DAC ą▓čŗą║ą╗čÄč湥ąĮ, čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ MCLK ą░ą║čéąĖą▓ąĮąŠ
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1 ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ -40┬░C .. +105┬░C; čéąĖą┐ąĖčćąĮčŗąĄ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčé +25┬░C. 2 MSPS ąŠąĘąĮą░čćą░ąĄčé Million Samples Per Second, čé. ąĄ. ą╝ąĖą╗ą╗ąĖąŠąĮ ą▓čŗą▒ąŠčĆąŠą║ ą▓ čüąĄą║čāąĮą┤čā. 3 ppm ąŠąĘąĮą░čćą░ąĄčé parts per million.
ąĀąĖčü. 2. ąĪčģąĄą╝ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐čĆąĖą╝ąĄąĮąĄąĮąĮą░čÅ ą┤ą╗čÅ č鹥čüč鹊ą▓čŗčģ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖą╣.
ąóą░ą▒ą╗ąĖčåą░ 2. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ.
ąĢčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ąĮąĄčćč鹊 ąŠą▒čĆą░čéąĮąŠąĄ1 , č鹊 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┤ą░ąĮčŗ ą┤ą╗čÅ čāčüą╗ąŠą▓ąĖą╣ VDD =2.3 .. 5.5V, AGND = DGND = 0V.
ą¤ą░čĆą░ą╝ąĄčéčĆ ą¤čĆąĄą┤ąĄą╗ ą╝ąĄąČą┤čā TMIN ąĖ TMAX ąĢą┤. ą×ą┐ąĖčüą░ąĮąĖąĄ
t1
40
ąĮčü min
ą¤ąĄčĆąĖąŠą┤ MCLK
t2
16
ąĮčü min
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąŠą│. 1 MCLK
t3
16
ąĮčü min
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąŠą│. 0 MCLK
t4
25
ąĮčü min
ą¤ąĄčĆąĖąŠą┤ SCLK
t5
10
ąĮčü min
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąŠą│. 1 SCLK
t6
10
ąĮčü min
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╗ąŠą│. 0 SCLK
t7
5
ąĮčü min
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ, ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā čüą┐ą░ą┤ąŠą╝ FSYNC ąĖ ą┐ąĄčĆą▓čŗą╝ čüą┐ą░ą┤ąŠą╝ SCLK
t8min
10
ąĮčü min
ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ FSYNK ą┤ą╗čÅ SCLK
t8max
t4 - 5
ąĮčü max
t9
5
ąĮčü min
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ
t10
3
ąĮčü min
ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ
t11
5
ąĮčü min
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ, ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā SCLK ą▓ ą╗ąŠą│. 1 ąĖ čüą┐ą░ą┤ąŠą╝ FSYNC
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąŠ ą┤ąĖąĘą░ą╣ąĮąŠą╝, ąĮąĄ č鹥čüčéąĖčĆčāąĄčéčüčÅ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄ.
ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ
ąĀąĖčü. 3. ąōą╗ą░ą▓ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ (Master Clock).
ąĀąĖčü. 4. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░.
ąóą░ą▒ą╗ąĖčåą░ 3. ą¤čĆąĄą┤ąĄą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ.
TA = 25┬░C, ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ąĮąĄčćč鹊 ąĖąĮąŠąĄ.
ą¤ą░čĆą░ą╝ąĄčéčĆ ąŚąĮą░č湥ąĮąĖąĄ
VDD ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ AGND
ŌłÆ0.3V .. +6 V
VDD ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ DGND
ŌłÆ0.3V .. +6 V
AGND ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ DGND
ŌłÆ0.3V .. +0.3 V
CAP/2.5V
2.75 V
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ DGND
ŌłÆ0.3 V .. (VDD + 0.3 V)
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ AGND
ŌłÆ0.3 V .. (VDD + 0.3 V)
ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ (ą▓ąĄčĆčüąĖčÅ B)
ŌłÆ40┬░C .. +105┬░C
ąöąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ čģčĆą░ąĮąĄąĮąĖčÅ
ŌłÆ65┬░C .. +150┬░C
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ą║čĆąĖčüčéą░ą╗ą╗ą░ (Maximum Junction Temperature)
150┬░C
ąÜąŠčĆą┐čāčü MSOP
ąóąĄčĆą╝ąŠčüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ╬ĖJA
206┬░C/W
ąóąĄčĆą╝ąŠčüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ╬ĖJC
44┬░C/W
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆą░ ą▓čŗą▓ąŠą┤ą░ ą┐čĆąĖ ą┐ą░ą╣ą║ąĄ (10 čüąĄą║čāąĮą┤)
300┬░C
ą¤ąĖą║ąŠą▓ą░čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ą▓ ąĖąĮčäčĆą░ą║čĆą░čüąĮąŠą╣ ą┐ąĄčćąĖ
220┬░C
[ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ąĖ čäčāąĮą║čåąĖąĖ ą▓čŗą▓ąŠą┤ąŠą▓ ]
ąĀąĖčü. 5. ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą║ąŠčĆą┐čāčüą░ MSOP10.
ąóą░ą▒ą╗ąĖčåą░ 4. ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓.
Ōä¢ ą£ąĮąĄą╝ąŠąĮąĖą║ą░ ą×ą┐ąĖčüą░ąĮąĖąĄ
1
COMP
ąÆčŗą▓ąŠą┤ čüą╝ąĄčēąĄąĮąĖčÅ ąÉą”ą¤ (DAC Bias). ąŁč鹊čé ą▓čŗą▓ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ąŠčćąĮąŠą│ąŠ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░, čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĄą│ąŠ ąŠčé ą┐ąŠą╝ąĄčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čüą╝ąĄčēąĄąĮąĖčÅ ąÉą”ą¤.
2
VDD
ą¤ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüąĄą║čåąĖą╣ čüčģąĄą╝čŗ ąĖ čåąĖčäčĆąŠą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░. ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄą│čāą╗čÅč鹊čĆ 2.5 V čéą░ą║ąČąĄ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ ąŠčé VDD. VDD ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī ąĘąĮą░č湥ąĮąĖąĄ ąŠčé 2.3 V ą┤ąŠ 5.5 V. ąĀą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ 0.1 ą╝ą║ąż ąĖ 10 ą╝ą║ąż ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą╝ąĄąČą┤čā VDD ąĖ AGND.
3
CAP/2.5V
ą”ąĖčäčĆąŠą▓ą░čÅ čüčģąĄą╝ąŠč鹥čģąĮąĖą║ą░ čĆą░ą▒ąŠčéą░ąĄčé ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ 2.5 V. ąŁč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĖąĘ VDD čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░, ą║ąŠą│ą┤ą░ VDD ą┐čĆąĄą▓čŗčłą░ąĄčé 2.7 V. ąĀąĄą│čāą╗čÅč鹊čĆ čéčĆąĄą▒čāąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čüą▓ąŠąĄą╝čā ą▓čŗčģąŠą┤čā čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĄą│ąŠ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ čéąĖą┐ąŠą▓ąŠą│ąŠ ąĮąŠą╝ąĖąĮą░ą╗ą░ 100 ąĮąż, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ąŠą╝ CAP/2.5V ąĖ DGND. ąĢčüą╗ąĖ VDD ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 2.7 V, ą▓čŗą▓ąŠą┤ CAP/2.5V ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ VDD.
4
DGND
ą”ąĖčäčĆąŠą▓ą░čÅ ąĘąĄą╝ą╗čÅ.
5
MCLK
ąÆčģąŠą┤ ąŠčüąĮąŠą▓ąĮąŠą╣ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ (Master Clock, MCLK). ąÆčŗčģąŠą┤ąĮčŗąĄ čćą░čüč鹊čéčŗ DDS ą▓čŗčĆą░ąČą░čÄčéčüčÅ ą║ą░ą║ ą┤ą▓ąŠąĖčćąĮąŠąĄ ą┤ąĄą╗ąĖą╝ąŠąĄ ąŠčé čćą░čüč鹊čéčŗ MCLK. ąŁč鹊ą╣ čćą░čüč鹊ą╣ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ č鹊čćąĮąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘąŠą▓čŗą╣ čłčāą╝ ąĮą░ ą▓čŗčģąŠą┤ąĄ.
6
SDATA
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą┤ą░ąĮąĮčŗčģ (SPI). ąØą░ čŹč鹊čé ą▓čģąŠą┤ ą┐čĆąĖčģąŠą┤ąĖčé 16-ą▒ąĖčéąĮąŠąĄ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ.
7
SCLK
ąÆčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓. ąöą░ąĮąĮčŗąĄ SDATA ą┤ą╗čÅ AD9833 ąĘą░čēąĄą╗ą║ąĖą▓ą░čÄčéčüčÅ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā čüą┐ą░ą┤čā čüąĖą│ąĮą░ą╗ą░ SCLK.
8
FSYNC
ąÆčģąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čåąĖčäčĆąŠą▓čŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ (ą▓čŗą▒ąŠčĆą║ą░ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0). FSYNC čÅą▓ą╗čÅąĄčéčüčÅ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāčÄčēąĖą╝ čüąĖą│ąĮą░ą╗ąŠą╝ čäčĆąĄą╣ą╝ą░ ą┤ą╗čÅ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą│ą┤ą░ FSYNC == 0, ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĖąĮč乊čĆą╝ąĖčĆčāąĄčéčüčÅ ąŠ č鹊ą╝, čćč鹊 ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĮąŠą▓ąŠąĄ čüą╗ąŠą▓ąŠ.
9
AGND
ąÉąĮą░ą╗ąŠą│ąŠą▓ą░čÅ ąĘąĄą╝ą╗čÅ.
10
VOUT
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąŚą┤ąĄčüčī č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ąĖ čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄąČąĖą╝ą░) čüąĖą│ąĮą░ą╗ą░. ąÆąĮąĄčłąĮčÅčÅ ąĮą░ą│čĆčāąĘą║ą░ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ąĖą╝ąĄąĄčéčüčÅ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ ąĮą░ą│čĆčāąĘą║ąĖ 200 ╬®.
ąĀąĖčü. 6. ąóąĖą┐ąĖčćąĮąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ (IDD ) ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ MCLK ą┤ą╗čÅ fOUT = MCLK/10
ąĀąĖčü. 9. ą©ąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ SFDR ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ MCLK
ąĀąĖčü. 7. ąóąĖą┐ąĖčćąĮčŗą╣ IDD ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé fOUT ą┤ą╗čÅ fMCLK = 25 ą£ąōčå
ąĀąĖčü. 10. ą©ąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ SFDR ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé fOUT /fMCLK ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čćą░čüč鹊čé MCLK
ąĀąĖčü. 8. ąŻąĘą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ SFDR ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ MCLK
ąĀąĖčü. 11. SNR ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ MCLK
ąĀąĖčü. 12. ąÆčĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (Wake-Up Time) ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ
ąĀąĖčü. 15. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 10 ą£ąōčå, fOUT = 1.43 ą£ąōčå = fMCLK /7, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x2492492
ąĀąĖčü. 13. VREF ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ
ąĀąĖčü. 16. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 10 ą£ąōčå, fOUT = 3.33 ą£ąōčå = fMCLK /3, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x5555555
ąĀąĖčü. 14. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 10 ą£ąōčå, fOUT = 2.4 ą║ąōčå = fMCLK /3, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x000FBA9
ąĀąĖčü. 17. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 25 ą£ąōčå, fOUT = 6 ą║ąōčå, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x000FBA9
ąĀąĖčü. 18. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 25 ą£ąōčå, fOUT = 60 ą║ąōčå, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x009D495
ąĀąĖčü. 21. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 25 ą£ąōčå, fOUT = 3.857 ą£ąōčå = fMCLK /7, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x2492492
ąĀąĖčü. 19. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 25 ą£ąōčå, fOUT = 600 ą║ąōčå, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x0624DD3
ąĀąĖčü. 22. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 25 ą£ąōčå, fOUT = 8.333 ą£ąōčå = fMCLK /3, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x5555555
ąĀąĖčü. 20. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé čćą░čüč鹊čéčŗ, fMCLK = 25 ą£ąōčå, fOUT = 2.4 ą£ąōčå, čüą╗ąŠą▓ąŠ čćą░čüč鹊čéčŗ = 0x189374D
ąśąĮč鹥ą│čĆą░ą╗čīąĮą░čÅ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī . Integral Nonlinearity (INL) čŹč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ąĄą▓ąĖą░čåąĖčÅ ą╗čÄą▒ąŠą│ąŠ ą║ąŠą┤ą░ ąŠčé ą┐čĆčÅą╝ąŠą╣ ą╗ąĖąĮąĖąĖ, ą┐čĆąŠčģąŠą┤čÅčēą░čÅ č湥čĆąĄąĘ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ. ąÜąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ - ąĮčāą╗ąĄą▓ąŠą╣ ą╝ą░čüčłčéą░ą▒, č鹊čćą║ą░ 0.5 LSB ąĮąĖąČąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ (ąŠčé 000 ... 00 ą║ 000 ... 01), ąĖ ą┐ąŠą╗ąĮčŗą╣ ą╝ą░čüčłčéą░ą▒, č鹊čćą║ą░ 0.5 LSB ą▓čŗčłąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą║ąŠą┤ą░ (ąŠčé 111 ... 10 ą║ 111 ... 11). ą×čłąĖą▒ą║ą░ ą▓čŗčĆą░ąČą░ąĄčéčüčÅ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čĆą░ąĘčĆčÅą┤ąŠą▓ LSB.
ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮą░čÅ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī . Differential Nonlinearity (DNL) čŹč鹊 čĆą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╝ ąĖ ąĖą┤ąĄą░ą╗čīąĮčŗą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ 1 LSB ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čüąŠčüąĄą┤ąĮąĖą╝ąĖ ą║ąŠą┤ą░ą╝ąĖ DAC. ąŻą║ą░ąĘą░ąĮąĮą░čÅ DNL ┬▒1 LSB ą╝ą░ą║čüąĖą╝čāą╝ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé ą╝ąŠąĮąŠč鹊ąĮąĮąŠčüčéčī čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ.
ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī ą┐ąŠ ą▓čŗčģąŠą┤čā (Output Compliance). ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą▓čŗčģąŠą┤ąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĮą░ ą▓čŗčģąŠą┤ąĄ, ą║ąŠą│ą┤ą░ DAC čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅą╝. ąÜąŠą│ą┤ą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▒ąŠą╗čīčłąĄ, č湥ą╝ čāą║ą░ąĘą░ąĮąŠ ą┤ą╗čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ ą┐ąŠ ą▓čŗčģąŠą┤čā, AD9833 ą╝ąŠąČąĄčé ąĮąĄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅą╝, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗą╝ ą▓ ą┤ą░čéą░čłąĖč鹥.
ąöąĖąĮą░ą╝ąĖč湥čüą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą▒ąĄąĘ ą┐ąŠą╝ąĄčģ . Spurious-Free Dynamic Range (SFDR) - ą▓ą╝ąĄčüč鹥 čü ąĖąĮč鹥čĆąĄčüčāčÄčēąĄą╣ čćą░čüč鹊č鹊ą╣ ą│ą░ ą▓čŗčģąŠą┤ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ DDS ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé čéą░ą║ąČąĄ ą│ą░čĆą╝ąŠąĮąĖą║ąĖ ąŠčüąĮąŠą▓ąĮąŠą╣ čćą░čüč鹊čéčŗ ąĖ ąŠą▒čĆą░ąĘčŗ čŹčéąĖčģ čćą░čüč鹊čé. SFDR ąŠčéąĮąŠčüąĖčéčüčÅ ą║ čüą░ą╝ąŠą╣ ą▒ąŠą╗čīčłąŠą╣ ą┐ąŠą▒ąŠčćąĮąŠą╣ čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣ čüąĖą│ąĮą░ą╗ą░ ąĖą╗ąĖ ą│ą░čĆą╝ąŠąĮąĖą║ąĄ, ąĮą░čģąŠą┤čÅčēąĄą╣čüčÅ ą▓ ąĖąĮč鹥čĆąĄčüčāčÄčēąĄą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ čüąĖą│ąĮą░ą╗ą░. ą©ąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ SFDR ą┤ą░ąĄčé ą░ą╝ą┐ą╗ąĖčéčāą┤čā čüą░ą╝ąŠą╣ ą▒ąŠą╗čīčłąŠą╣ ą┐ąŠą╝ąĄčģąĖ ąĖą╗ąĖ ą│ą░čĆą╝ąŠąĮąĖą║ąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ čäčāąĮą┤ą░ą╝ąĄąĮčéą░ą╗čīąĮąŠą╣ čćą░čüč鹊čéčŗ čā ąĮčāą╗ąĄ ą║ ą┐ąŠą╗ąŠčüąĄ ąØą░ą╣ą║ą▓ąĖčüčéą░. ąŻąĘą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ SFDR ą┤ą░ąĄčé ą┐ąŠą┤čüčéčĆąŠą╣ą║čā čüą░ą╝ąŠą╣ ą▒ąŠą╗čīčłąŠą╣ ą│ą░čĆą╝ąŠąĮąĖą║ąĖ ąĖą╗ąĖ ą┐ąŠą╝ąĄčģąĖ ą▓ ą┐ąŠą╗ąŠčüąĄ čćą░čüč鹊čé ┬▒200 ą║ąōčå ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąŠčüąĮąŠą▓ąĮąŠą╣ čćą░čüč鹊čéčŗ.
ąĪčĆąĄą┤ąĮąĄąĄ ą║ą▓ą░ą┤čĆą░čéąĖč湥čüą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ . Root Mean Square (RMS) - čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ čüąĖą│ąĮą░ą╗ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ č鹊ą║ą░, ą║ąŠč鹊čĆą░čÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĄą│ąŠ ą╝ąŠčēąĮąŠčüčéčī. ąĪčĆąĄą┤ąĮąĄą║ą▓ą░ą┤čĆą░čéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ č鹊ą║ą░ čĆą░ą▓ąĮąŠ ą▓ąĄą╗ąĖčćąĖąĮąĄ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░, ą┤ąĄą╣čüčéą▓ąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąĄą┤čæčé čéą░ą║čāčÄ ąČąĄ čĆą░ą▒ąŠčéčā ą▓ ą░ą║čéąĖą▓ąĮąŠą╣ (čĆąĄąĘąĖčüčéąĖą▓ąĮąŠą╣) ąĮą░ą│čĆčāąĘą║ąĄ ąĘą░ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░.
ąÜąŠčŹčäčäąĖčåąĖąĄąĮčé ąŠą▒čēąĖčģ ą│ą░čĆą╝ąŠąĮąĖč湥čüą║ąĖčģ ąĖčüą║ą░ąČąĄąĮąĖą╣ . Total Harmonic Distortion (THD) čŹč鹊 čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ rms čüčāą╝ą╝čŗ ą▓čüąĄčģ ą│ą░čĆą╝ąŠąĮąĖą║ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą║ rms ąŠčüąĮąŠą▓ąĮąŠą╣ čćą░čüč鹊čéčŗ. ąöą╗čÅ AD9833 THD ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
ąŚą┤ąĄčüčī:
V1 čŹč鹊 rms ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ ąŠčüąĮąŠą▓ąĮąŠą╣ čćą░čüč鹊čéčŗ.2 , V3 , V4 , V5 ąĖ V6 rms ą░ą╝ą┐ą╗ąĖčéčāą┤ ą│ą░čĆą╝ąŠąĮąĖą║ ąŠčé ą▓č鹊čĆąŠą╣ ą┤ąŠ čłąĄčüč鹊ą╣.
ąĪąŠąŠčéąĮąŠčłąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗/čłčāą╝ . Signal-to-Noise Ratio (SNR) čŹč鹊 ąŠčéąĮąŠčłąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ rms čüąĖą│ąĮą░ą╗ą░, ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ ąĮą░ ą▓čŗčģąŠą┤ąĄ, ą║ čüčāą╝ą╝ąĄ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ ą┐ąŠą▒ąŠčćąĮčŗčģ čüą┐ąĄą║čéčĆą░ą╗čīąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĮąĖąČąĄ čćą░čüč鹊čéčŗ ąØą░ą╣ą║ą▓ąĖčüčéą░. ąŚąĮą░č湥ąĮąĖąĄ SNR ą▓čŗčĆą░ąČą░ąĄčéčüčÅ ą▓ ą┤ąĄčåąĖą▒ąĄą╗ą░čģ.
ąĪą║ą▓ąŠąĘąĮąŠąĄ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĄ čćą░čüč鹊čéčŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ . Clock Feedthrough - čģą░čĆą░ą║č鹥čĆąĖąĘčāąĄčé ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĄ ą┐ąŠą╝ąĄčģąĖ čüąŠ ą▓čģąŠą┤ą░ MCLK ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čŗčģąŠą┤. Clock feedthrough ąŠčéąĮąŠčüąĖčéčüčÅ ą░ą╝ą┐ą╗ąĖčéčāą┤ąĄ čüąĖą│ąĮą░ą╗ą░ MCLK ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąŠčüąĮąŠą▓ąĮąŠą╣ čćą░čüč鹊čéčŗ ą▓ ą▓čŗčģąŠą┤ąĮąŠą╝ čüą┐ąĄą║čéčĆąĄ čüąĖą│ąĮą░ą╗ą░ AD9833.
[ąóąĄąŠčĆąĖčÅ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ]
ąĪąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ąŠą▒čŗčćąĮąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čü č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ ąĖčģ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ: a(t) = sin(Žēt). ą×ą┤ąĮą░ą║ąŠ čŹčéąĖ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĮąĄą╗ąĖąĮąĄą╣ąĮčŗ, ąĖ ąĖčģ ąĮąĄą┐čĆąŠčüč鹊 ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī, ą║čĆąŠą╝ąĄ ą║ą░ą║ čüčéčĆąŠąĖčéčī ą┐ąŠ ą║čāčüąŠčćą║ą░ą╝. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, čāą│ą╗ąŠą▓ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ čüą▓ąŠąĄą╣ ą┐čĆąĖčĆąŠą┤ąĄ ą╗ąĖąĮąĄą╣ąĮą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čćą░čüč鹊čéčŗ čāą│ąŠą╗ čäą░ąĘčŗ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĮą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čāą│ąŠą╗ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĄą┤ąĖąĮąĖčåčŗ ą▓čĆąĄą╝ąĄąĮąĖ. ąĪą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāą│ą╗ą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé čćą░čüč鹊čéčŗ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą╝čā čüąŠąŠčéąĮąŠčłąĄąĮąĖčÄ Žē = 2ŽĆ f.
ąĀąĖčü. 23. ąĪąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ ąĖ ąĘą░ą║ąŠąĮ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĄą│ąŠ čäą░ąĘčŗ.
ąŚąĮą░čÅ ąŠ č鹊ą╝, čćč鹊 čäą░ąĘą░ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą╗ąĖąĮąĄą╣ąĮą░ ąĮą░ čāą║ą░ąĘą░ąĮąĮąŠą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ ą▓čĆąĄą╝ąĄąĮąĖ (ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ), ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠą▓ąŠčĆąŠčé čäą░ąĘčŗ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░.
╬öPhase = Žē╬öt
ąŻą│ąŠą╗ Žē ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą║ą░ą║
Žē = ╬öPhase/╬öt = 2ŽĆ f
ąĢčüą╗ąĖ ą▓čŗčćąĖčüą╗ąĖčéčī f ąĖ ą┐ąŠą┤čüčéą░ą▓ąĖčéčī ąŠą┐ąŠčĆąĮčāčÄ čćą░čüč鹊čéčā ą┤ą╗čÅ ąŠą┐ąŠčĆąĮąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ (1/fMCLK = ╬öt), č鹊 ą┐ąŠą╗čāčćąĖčéčüčÅ č乊čĆą╝čāą╗ą░
f = ╬öPhase * fMCLK / 2ŽĆ
AD9833 čüčéčĆąŠąĖčé čüą▓ąŠą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą│ąŠ ą┐čĆąŠčüč鹊ą│ąŠ ą▓čŗčĆą░ąČąĄąĮąĖčÅ. ą¤čĆąŠčüč鹊ą╣ čćąĖą┐ DDS ą╝ąŠąČąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čŹč鹊 ą▓čŗčĆą░ąČąĄąĮąĖąĄ čéčĆąĄą╝čÅ ąŠčüąĮąŠą▓ąĮčŗą╝ąĖ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗą╝ąĖ čāąĘą╗ą░ą╝ąĖ: čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ č湥čĆąĄąĘ č湥čĆąĄąĘ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü ą│ąĄąĮąĄčĆą░č鹊čĆ (numerically controlled oscillator, NCO) ąĖ ą╝ąŠą┤čāą╗čÅč鹊čĆ čäą░ąĘčŗ, ą¤ąŚąŻ čüąĖąĮčāčüą░ (SIN ROM) ąĖ čåąĖčäčĆąŠ-ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī (digital-to-analog converter, DAC).
ąÜą░ąČą┤čŗą╣ ąĖąĘ čŹčéąĖčģ čāąĘą╗ąŠą▓ ąŠą┐ąĖčüą░ąĮ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čüčģąĄą╝čŗ AD9833".
[ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čüčģąĄą╝čŗ AD9833 ]
AD9833 čŹč鹊 ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čćąĖą┐ ą┐čĆčÅą╝ąŠą│ąŠ čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖąĮč鹥ąĘą░ (direct digital synthesis, DDS). ąöą╗čÅ ąĄą│ąŠ čĆą░ą▒ąŠčéčŗ čéčĆąĄą▒čāąĄčéčüčÅ ąŠą┤ąĮą░ ąŠą┐ąŠčĆąĮą░čÅ čćą░čüč鹊čéą░, ąŠą┤ąĖąĮ čĆąĄąĘąĖčüč鹊čĆ ąĮąĄ ą▓čŗčüąŠą│ąŠą╣ č鹊čćąĮąŠčüčéąĖ, ąĖ čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ, čćč鹊ą▒čŗ ąĄą│ąŠ čüčģąĄą╝ą░ čüąĖąĮč鹥ąĘąĖčĆąŠą▓ą░ą╗ą░ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ čü čćą░čüč鹊č鹊ą╣ ą┤ąŠ 12.5 ą£ąōčå. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čćąĖą┐ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┐čĆąŠčüčéčŗčģ ąĖ čüą╗ąŠąČąĮčŗčģ čüčģąĄą╝ ą╝ąŠą┤čāą╗čÅčåąĖąĖ. ąŁčéąĖ čüčģąĄą╝čŗ ą╝ąŠą┤čāą╗čÅčåąĖąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ čåąĖčäčĆąŠą▓ąŠą╝ ą┤ąŠą╝ąĄąĮąĄ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ č鹊čćąĮąŠ ąĖ ą┐čĆąŠčüč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čüą╗ąŠąČąĮčŗąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ą╝ąŠą┤čāą╗čÅčåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÅ č鹥čģąĮąĖą║ąĖ DSP.
ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ čüčģąĄą╝ą░ AD9833 čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ąŠčüąĮąŠą▓ąĮčŗčģ čćą░čüč鹥ą╣: čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ čćąĖčüą╗ą░ą╝ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆ (NCO), ą╝ąŠą┤čāą╗čÅč鹊čĆčŗ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ, SIN ROM, DAC ąĖ čĆąĄą│čāą╗čÅč鹊čĆ.
NCO ą┐ą╗čÄčü ą╝ąŠą┤čāą╗čÅč鹊čĆ čäą░ąĘčŗ . ąŁčéą░ čćą░čüčéčī čüčģąĄą╝čŗ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▓čŗą▒ąŠčĆą░ čćą░čüč鹊čéčŗ, ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ čäą░ąĘčŗ, ą┤ą▓čāčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝ąĄčēąĄąĮąĖčÅ čäą░ąĘčŗ ąĖ čüčāą╝ą╝ą░č鹊čĆą░ čüą╝ąĄčēąĄąĮąĖčÅ čäą░ąĘčŗ. ą×čüąĮąŠą▓ąĮąŠą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ NCO čŹč鹊 28-ą▒ąĖčéąĮčŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čäą░ąĘčŗ. ąØąĄą┐čĆąĄčĆčŗą▓ąĮčŗąĄ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖą│ąĮą░ą╗čŗ čĆą░ą▒ąŠčéą░čÄčé čü ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čäą░ąĘčŗ ąŠčé 0 ą┤ąŠ 2ŽĆ . ąÆąĮąĄ čŹč鹊ą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ čćąĖčüąĄą╗ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┐ąŠą▓č鹊čĆčÅčÄčé čüą░ą╝ąĖ čüąĄą▒čÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ. ą”ąĖčäčĆąŠą▓ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮąĖč湥ą╝ ąĮąĄ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ. ąÉą║ą║čāą╝čāą╗čÅč鹊čĆ ą┐čĆąŠčüč鹊 ą╝ą░čüčłčéą░ą▒ąĖčĆčāąĄčé ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĘąĮą░č湥ąĮąĖą╣ čäą░ąĘčŗ ą▓ ą╝ąĮąŠą│ąŠą▒ąĖčéąĮąŠąĄ čåąĖčäčĆąŠą▓ąŠąĄ čüą╗ąŠą▓ąŠ. ąÉą║ą║čāą╝čāą╗čÅč鹊čĆ čäą░ąĘčŗ ą▓ AD9833 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą║ą░ą║ 28-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ čüč湥čéčćąĖą║. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ AD9833 ą┐ąĄčĆąĖąŠą┤ 2ŽĆ = 228 . ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąŠąĮčÅčéąĖąĄ ╬öPhase ą╝ą░čüčłčéą░ą▒ąĖčĆčāąĄčéčüčÅ ą▓ čŹč鹊čé ą┤ąĖą░ą┐ą░ąĘąŠąĮ čćąĖčüąĄą╗:
0 < ΔPhase < 228 - 1
ąĪ čŹčéąĖą╝ąĖ ą┐ąŠą┤čüčéą░ąĮąŠą▓ą║ą░ą╝ąĖ ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ą▓čŗčĆą░ąČąĄąĮąĖąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▓ čéą░ą║ąŠą╝ ą▓ąĖą┤ąĄ:
f = ΔPhase * fMCLK / 228
ą│ą┤ąĄ 0 < ╬öPhase < 228 - 1.
ąÆčģąŠą┤ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ čäą░ąĘčŗ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮ ąĖą╗ąĖ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ FREQ0, ąĖą╗ąĖ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ FREQ1, čćč鹊 čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ FSELECT. ąōąĄąĮąĄčĆą░č鹊čĆčŗ NCO ą┐ąŠ čüčāčéąĖ č乊čĆą╝ąĖčĆčāčÄčé ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗąĄ ą┐ąŠ čäą░ąĘąĄ čüąĖą│ąĮą░ą╗čŗ, ą┐ąŠčŹč鹊ą╝čā ą░ą╝ą┐ą╗ąĖčéčāą┤ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄčĆą░ąĘčĆčŗą▓ąĮąŠą╣ ą┐čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅčģ ą╝ąĄąČą┤čā čćą░čüč鹊čéą░ą╝ąĖ.
ąĪą╗ąĄą┤čāčÅ ąĘą░ NCO, ą╝ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī čüą╝ąĄčēąĄąĮąĖąĄ čäą░ąĘčŗ, čćč鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą╝ąŠą┤čāą╗čÅčåąĖčÄ čäą░ąĘčŗ, ąĖčüą┐ąŠą╗čīąĘčāčÅ 12-ą▒ąĖčéąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ čäą░ąĘčŗ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą║ čüą░ą╝čŗą╝ čüčéą░čĆčłąĖą╝ ą▒ąĖčéą░ą╝ NCO. ąŻ AD9833 ąĄčüčéčī 2 čĆąĄą│ąĖčüčéčĆą░ čäą░ąĘčŗ; ąĖčģ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüąŠčüčéą░ą▓ą╗čÅąĄčé 2ŽĆ /4096.
SIN ROM . ą¦č鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī ą▓čŗčģąŠą┤ NCO ą┐ąŠą╗ąĄąĘąĮčŗą╝ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮ ą▓ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ą¤ąŠčüą║ąŠą╗čīą║čā ąĖąĮč乊čĆą╝ą░čåąĖčÅ čäą░ąĘčŗ ą┐čĆčÅą╝ąŠ ą┐čĆąĖą▓čÅąĘą░ąĮą░ ą║ ą░ą╝ą┐ą╗ąĖčéčāą┤ąĄ, SIN ROM ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéčā čåąĖčäčĆąŠą▓čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čäą░ąĘčŗ ą▓ ą║ą░č湥čüčéą▓ąĄ ą░ą┤čĆąĄčüą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ, ąĖ čéą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ čäą░ąĘčŗ ą▓ ą░ą╝ą┐ą╗ąĖčéčāą┤čā. ąźąŠčéčÅ NCO ąĖą╝ąĄąĄčé 28-ą▒ąĖčéąĮčŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čäą░ąĘčŗ, ą▓čŗčģąŠą┤ NCO ąŠą▒čĆąĄąĘą░ąĄčéčüčÅ ą┤ąŠ 12 ą▒ąĖčé. ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąŠą╗ąĮąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ čäą░ąĘčŗ ąĮąĄą┐čĆą░ą║čéąĖčćąĮąŠ, ąĖ čŹč鹊 ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā čŹč鹊 ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ąŠ ą▒čŗ čéą░ą▒ą╗ąĖčåčŗ ąĖąĘ 228 ąĘą░ą┐ąĖčüąĄą╣. ąóčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ čéą░ą║ą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┐ąŠ čäą░ąĘąĄ, čćč鹊ą▒čŗ ąĖčüą║ą╗čÄčćąĖčéčī ąŠčłąĖą▒ą║ąĖ čāčüąĄč湥ąĮąĖčÅ ąĖąĘ-ąĘą░ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ą╝ąĄąĮčīčłąĄ, č湥ą╝ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī 10-ą▒ąĖčéąĮąŠą│ąŠ DAC. ąŁč鹊 čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ SIN ROM ąĖą╝ąĄą╗ąŠ ąĮą░ 2 ą▒ąĖčéą░ ą▒ąŠą╗čīčłąĄ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ, č湥ą╝ 10-ą▒ąĖčéąĮčŗą╣ DAC (čé. ąĄ. 12 ą▒ąĖčé).
SIN ROM čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖčéą░ čĆąĄąČąĖą╝ą░ (D1) ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (čüą╝. čéą░ą▒ą╗ąĖčåčā 15).
DAC . ąÆąĮčāčéčĆąĖ AD9833 ąĖą╝ąĄąĄčéčüčÅ 10-ą▒ąĖčéąĮčŗą╣ DAC (čåąĖčäčĆąŠ-ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī, ą”ąÉą¤), čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ č鹊ą║ą░ čü ą▓čŗčüąŠą║ąĖą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝. DAC ą┐ąŠą╗čāčćą░ąĄčé čåąĖčäčĆąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ SIN ROM, ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ąĖčģ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
DAC čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ ą░čüąĖą╝ą╝ąĄčéčĆąĖčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ąÆąĮąĄčłąĮąĖą╣ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╝ąĄąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ 200 ╬®. DAC ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą▓čŗčģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čéąĖą┐ąĖčćąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ 0.6V ąŠčé ą┐ąĖą║ą░ ą┤ąŠ ą┐ąĖą║ą░.
ąĀąĄą│čāą╗čÅč鹊čĆ . VDD ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąĖčéą░ąĮąĖąĄ, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ čćą░čüčéąĖ ąĖ čåąĖčäčĆąŠą▓ąŠą╣ čćą░čüčéąĖ AD9833. ąŁč鹊 ą┐ąĖčéą░ąĮąĖąĄ ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠčé 2.3 V ą┤ąŠ 5.5 V.
ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ čåąĖčäčĆąŠą▓ą░čÅ čüąĄą║čåąĖčÅ AD9833 čĆą░ą▒ąŠčéą░ąĄčé ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 2.5V. ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄą│čāą╗čÅč鹊čĆ ą┐ąŠąĮąĖąČą░ąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ąŠąĄ ą║ VDD, ą┤ąŠ čāčĆąŠą▓ąĮčÅ 2.5V. ąÜąŠą│ą┤ą░ ą▓ąĮąĄčłąĮąĄąĄ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ąŠąĄ ą║ VDD ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 2.7V, ą▓čŗą▓ąŠą┤čŗ CAP/2.5V ąĖ VDD ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝, čŹč鹊 ą┐čĆąŠą┐čāčüą║ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░.
[ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ]
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü . AD9833 ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ č湥čĆąĄąĘ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ 3-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ čüąŠ čüčéą░ąĮą┤ą░čĆčéą░ą╝ąĖ SPI, QSPIŌäó, MICROWIRE┬« ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ čåąĖčäčĆąŠą▓čŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ DSP.
ąöą░ąĮąĮčŗąĄ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ą░ą║ 16-ą▒ąĖčéąĮąŠąĄ čüą╗ąŠą▓ąŠ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ ą▓čŗą▓ąŠą┤ą░ SCLK. ążąŠčĆą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĖ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 4.
ąÆčģąŠą┤ FSYNC čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ čāčĆąŠą▓ąĮčÄ ą║ą░ą║ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čäčĆąĄą╣ą╝ą░ ąĖ čĆą░ąĘčĆąĄčłą░čÄčēąĖą╣ čüąĖą│ąĮą░ą╗ ąĖąĮč鹥čĆč乥ą╣čüą░ (chip enable). ąöą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ FSYNC ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0. ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ FSYNC ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą▓ ą╗ąŠą│. 0, čüąŠą▒ą╗čÄą┤ą░čÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠčüą╗ąĄ čüą┐ą░ą┤ą░ FSYNC, ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā čüą┐ą░ą┤ąŠą╝ FSYNC ą┤ąŠ čüą┐ą░ą┤ą░ SCLK, ą▓čĆąĄą╝čÅ t7 . ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ FSYNC ą┐ąĄčĆąĄčłąĄą╗ ą▓ ą╗ąŠą│. 0, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠ čüą┐ą░ą┤ą░ą╝ čāčĆąŠą▓ąĮčÅ (ąŠčé ą╗ąŠą│. 1 ą║ ą╗ąŠą│. 0) čüąĖą│ąĮą░ą╗ą░ SCLK ą┤ą╗čÅ 16 čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓. FSYNC ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą╣čéąĖ ą▓ ą╗ąŠą│. 1 ą┐ąŠčüą╗ąĄ 16-ą│ąŠ čüą┐ą░ą┤ą░ SCLK, čü čüąŠą▒ą╗čÄą┤ąĄąĮąĖąĄą╝ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā čüą┐ą░ą┤ąŠą╝ SCLK ąĖ ąĮą░čĆą░čüčéą░ąĮąĖąĄą╝ FSYNC, ą▓čĆąĄą╝čÅ t8 . ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ FSYNC ą╝ąŠąČąĮąŠ čāą┤ąĄčƹȹĖą▓ą░čéčī ą▓ ą╗ąŠą│. 0 ąĮą░ ą║čĆą░čéąĮąŠąĄ 16 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓ SCLK, ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ FSYNC ą▓ ą╗ąŠą│. 1 ą┐ąŠčüą╗ąĄ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą┐ąŠč鹊ą║ 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ FSYNC čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0; FSYNC ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1 č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ 16-č鹊ą│ąŠ čüą┐ą░ą┤ą░ SCLK ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ąĘą░ą│čĆčāąČąĄąĮąĮąŠą│ąŠ čüą╗ąŠą▓ą░.
ą£ąĄąČą┤čā ąŠčéą┤ąĄą╗čīąĮčŗą╝ąĖ ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ ąĘą░ą┐ąĖčüąĖ ąĖą╝ą┐čāą╗čīčüčŗ SCLK ą╝ąŠą│čāčé ąĖą┤čéąĖ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ, ąĖą╗ąĖ ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ ą╗čÄą▒ąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ - ą╗ąŠą│. 1 ąĖą╗ąĖ ą╗ąŠą│. 0. ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ čāčĆąŠą▓ąĄąĮčī ąĮą░ SCLK ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ FSYNC ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0 (t11 ).
ą¤čĆąĖą╝ąĄčĆ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī AD9833, čüą╝. ą▓ ą░ą┐ąĮąŠčāč鹥 AN-1070 ąĮą░ čüą░ą╣č鹥 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices.
ą¤ąĖčéą░ąĮąĖąĄ AD9833 . ąÉą╗ą│ąŠčĆąĖčéą╝ ąĮą░ čĆąĖčü. 26 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ čü AD9833. ąÜąŠą│ą┤ą░ AD9833 ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐ąŠą┤ą░č湥ą╣ ą┐ąĖčéą░ąĮąĖčÅ, ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮą░. ąŁč鹊 čüą▒čĆą░čüčŗą▓ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ 0, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čŗčģąŠą┤ ą▓ čüčĆąĄą┤ąĮąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čüą╗čāčćą░ą╣ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čŗčģąŠą┤ąĄ DAC ą┐čĆąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ AD9833, ą▒ąĖčé čüą▒čĆąŠčüą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, ą┐ąŠą║ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ ą▒čāą┤ąĄčé ą│ąŠč鹊ą▓ą░ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗. ąĪą▒čĆąŠčü ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčé čĆąĄą│ąĖčüčéčĆčŗ čäą░ąĘčŗ, čćą░čüč鹊čéčŗ ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą▒čāą┤čāčé čüąŠą┤ąĄčƹȹ░čéčī ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ąĖ ą┐ąŠčŹč鹊ą╝čā ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąæąĖčé čüą▒čĆąŠčüą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī č鹊ą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, čćč鹊ą▒čŗ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčÅą▓ąĖą╗čüčÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗. ąöą░ąĮąĮčŗąĄ ą┐ąŠčÅą▓čÅčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ DAC č湥čĆąĄąĘ 7 ąĖą╗ąĖ 8 čéą░ą║č鹊ą▓ MCLK ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒ąĖčé čüą▒čĆąŠčüą░ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
ą¤ąĄčĆąĖąŠą┤ ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ (ąĘą░ą┤ąĄčƹȹ║ą░). ąŚą░ą┤ąĄčƹȹ║ą░ ąĘą┤ąĄčüčī čüą▓čÅąĘą░ąĮą░ čü ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣ ąĘą░ą┐ąĖčüąĖ ą▓ AD9833. ąĢčüą╗ąĖ ą▓ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ ąĖą╗ąĖ čäą░ąĘčŗ ąĘą░ą│čĆčāąČąĄąĮąŠ ąĮąŠą▓ąŠąĄ čüą╗ąŠą▓ąŠ, č鹊 ąĖą╝ąĄąĄčéčüčÅ ąĘą░ą┤ąĄčƹȹ║ą░ 7 ąĖą╗ąĖ 8 čéą░ą║č鹊ą▓ MCLK ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ą▓čŗčģąŠą┤ąĄ. ąÜą░ą║ą░čÅ ą▒čāą┤ąĄčé ąĘą░ą┤ąĄčƹȹ║ą░ - 7 ąĖą╗ąĖ 8 čåąĖą║ą╗ąŠą▓ - ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐ąŠąĘąĖčåąĖąĖ čäčĆąŠąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ MCLK, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ.
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ . AD9833 čüąŠą┤ąĄčƹȹĖčé 16-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čĆą░ą▒ąŠčéčā AD9833. ąÆčüąĄ ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║čĆąŠą╝ąĄ ą▒ąĖčéą░ čĆąĄąČąĖą╝ą░ (mode bit) ą░ąĮą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ą┐ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝čā čüą┐ą░ą┤čā čüąĖą│ąĮą░ą╗ą░ MCLK.
ąÆ čéą░ą▒ą╗ąĖčåąĄ 6 ąŠą┐ąĖčüą░ąĮčŗ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąĀą░ąĘą╗ąĖčćąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąĖ čĆą░ąĘąĮčŗąĄ ąŠą┐čåąĖąĖ ą▓čŗčģąŠą┤ą░ AD9833 ąŠą┐ąĖčüą░ąĮčŗ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą▓ čüąĄą║čåąĖąĖ "ąĀąĄą│ąĖčüčéčĆčŗ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ".
ą¦č鹊ą▒čŗ ąŠą┐ąŠą▓ąĄčüčéąĖčéčī AD9833, čćč鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī, ą▒ąĖčéčŗ D15 ąĖ D14 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 5.
ąóą░ą▒ą╗ąĖčåą░ 5. ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
D15 D14 D13 . . . D0
0
0
ąæąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
0 0 B28 HLB FSELECT PSELECT 0 RESET SLEEP1 SLEEP12 OPBITEN 0 DIV2 0 MODE 0
ąĀąĖčü. 24. ążčāąĮą║čåąĖąĖ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 6. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
ąæąĖčé ąśą╝čÅ ążčāąĮą║čåąĖčÅ
D13
B28
ąöą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┐ąŠą╗ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ą▓ ą╗čÄą▒ąŠą╣ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ čćą░čüč鹊čéčŗ čéčĆąĄą▒čāčÄčéčüčÅ 2 ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ. B28 = 1 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą│čĆčāąĘąĖčéčī ą┐ąŠą╗ąĮąŠąĄ čüą╗ąŠą▓ąŠ ą▓ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ ą┤ą▓čāą╝čÅ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąĘą░ą┐ąĖčüčÅą╝ąĖ. ą¤ąĄčĆą▓ą░čÅ ąĘą░ą┐ąĖčüčī čüąŠą┤ąĄčƹȹĖčé 14 LSB (14 ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčé) čüą╗ąŠą▓ą░ čćą░čüč鹊čéčŗ, ąĖ čüą╗ąĄą┤čāčÄčēą░čÅ ąĘą░ą┐ąĖčüčī čüąŠą┤ąĄčƹȹĖčé 14 MSB (14 čüčéą░čĆčłąĖčģ ą▒ąĖčé). ą¤ąĄčĆą▓čŗąĄ 2 ą▒ąĖčéą░ ą║ą░ąČą┤ąŠą│ąŠ 16-ą▒ąĖčéąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé č鹊čé čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ, ą▓ ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮąŠ čüą╗ąŠą▓ąŠ, ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹčéąĖ ą┐ąĄčĆą▓čŗąĄ 2 ą▒ąĖčéą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ąĖ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąĘą░ą┐ąĖčüąĄą╣. ąĪą╝. čéą░ą▒ą╗ąĖčåčā 8 ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą┤čģąŠą┤čÅčēąĄą│ąŠ ą░ą┤čĆąĄčüą░. ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤čāčé ąĘą░ą│čĆčāąČąĄąĮčŗ ąŠą▒ą░ čüą╗ąŠą▓ą░; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čĆąĄą│ąĖčüčéčĆ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐ąŠą╗čāčćąĖčé ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčāčÄ ą▓ąĄą╗ąĖčćąĖąĮčā. ą¤čĆąĖą╝ąĄčĆ ą┐ąŠą╗ąĮąŠą╣ 28-ą▒ąĖčéąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ ą┐ąŠą║ą░ąĘą░ąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 9. ąÜąŠą│ą┤ą░ B28 = 0, 28-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┤ą▓ą░ 14-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░, ąŠą┤ąĖąĮ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüąŠą┤ąĄčƹȹĖčé 14 MSB, ąĖ ą┤čĆčāą│ąŠą╣ 14 LSB. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 14 MSB čüą╗ąŠą▓ą░ čćą░čüč鹊čéčŗ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄąĮčÅąĮąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé 14 LSB, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé. ą¦č鹊ą▒čŗ ą┐ąŠą╝ąĄąĮčÅčéčī 14 MSB ąĖą╗ąĖ 14 LSB ą┤ąĄą╗ą░ąĄčéčüčÅ ąŠą┤ąĮą░ ąĘą░ą┐ąĖčüčī ą┐ąŠ ąĮčāąČąĮąŠą╝čā ą░ą┤čĆąĄčüčā čćą░čüč鹊čéčŗ. ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ąĖčé D12 (HLB) ąĖąĮč乊čĆą╝ąĖčĆčāąĄčé AD9833 ą║ą░ą║ąĖąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ ą▒ąĖčéčŗ: 14 MSB ąĖą╗ąĖ 14 LSB.
D12
HLB
ąŁč鹊čé ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą│čĆčāąĘąĖčéčī ą▒ąĖčéčŗ MSB ąĖą╗ąĖ ą▒ąĖčéčŗ LSB čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ, ąĖą│ąĮąŠčĆąĖčĆčāčÅ ą┐čĆąĖ čŹč鹊ą╝ ąŠčüčéą░ą╗čīąĮčŗąĄ 14 ą▒ąĖčé. ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ, ąĄčüą╗ąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą╗ąĮą░čÅ 28-ą▒ąĖčéąĮą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī. ąæąĖčé HLB ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü ą▒ąĖč鹊ą╝ D13 (B28). ąŁč鹊čé čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║čāą┤ą░ ą┐ąŠą┐ą░ą┤čāčé ąĘą░ą│čĆčāąČą░ąĄą╝čŗąĄ 14 ą▒ąĖčé - ą▓ 14 MSB ąĖą╗ąĖ 14 LSB ą░ą┤čĆąĄčüąŠą▓ą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ. D13 (B28) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čĆą░ąĘą┤ąĄą╗čīąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą▒ąĖčéčŗ MSB ąĖ LSB čüą╗ąŠą▓ą░ čćą░čüč鹊čéčŗ. ąÜąŠą│ą┤ą░ D13 (B28) = 1, čŹč鹊čé ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. HLB = 1 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐ąĖčüą░čéčī 14 MSB ą░ą┤čĆąĄčüąŠą▓ą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ HLB = 0 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐ąĖčüą░čéčī 14 LSB ą░ą┤čĆąĄčüąŠą▓ą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ.
D11
FSELECT
ąæąĖčé FSELECT ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠą╣ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąĄ čäą░ąĘčŗ - FREQ0 ąĖą╗ąĖ FREQ1.
D10
PSELECT
ąæąĖčé PSELECT ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą┤ą░ąĮąĮčŗąĄ ą║ą░ą║ąŠą│ąŠ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ PHASE0 ąĖą╗ąĖ PHASE1 ą┤ąŠą▒ą░ą▓ą╗čÅčÄčéčüčÅ ą║ ą▓čŗčģąŠą┤čā ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ čäą░ąĘčŗ.
D9 ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
D8
Reset
Reset = 1 čüą▒čĆą░čüčŗą▓ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ 0, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÄ ąĮą░ ą▓čŗčģąŠą┤ąĄ čüčĆąĄą┤ąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ. Reset = 0 ąĘą░ą┐čĆąĄčēą░ąĄčé čüą▒čĆąŠčü. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ąŠą▒čŖčÅčüąĮąĄąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ 13.
D7
SLEEP1
ąÜąŠą│ą┤ą░ SLEEP1 = 1, ą┤ąĄą╣čüčéą▓ąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čćą░čüč鹊čéčŗ MCLK ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ, ąĖ ą▓čŗčģąŠą┤ DAC ąŠčüčéą░ąĄčéčüčÅ ą▓ čüą▓ąŠąĄą╝ č鹥ą║čāčēąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 NCO ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ąĄčé čäą░ąĘčā. ąÜąŠą│ą┤ą░ SLEEP1 = 0, MCLK čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐ąĖčüą░ąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ 14.
D6
SLEEP12
SLEEP12 = 1 ą▓čŗą║ą╗čÄčćą░ąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ DAC (ą”ąÉą¤). ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ, ą║ąŠą│ą┤ą░ AD9833 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čŗą▓ąŠą┤ą░ čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ DAC (č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ). SLEEP12 = 0 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 DAC ą░ą║čéąĖą▓ąĄąĮ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐ąĖčüą░ąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ 14.
D5
OPBITEN
ążčāąĮą║čåąĖčÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ą▓ą╝ąĄčüč鹊 čü ą▒ąĖč鹊ą╝ D1 (mode, čĆąĄąČąĖą╝) čāą┐čĆą░ą▓ą╗čÅąĄčé, čćč鹊 ą▒čāą┤ąĄčé ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ VOUT. ąŁč鹊 ąŠą▒čŖčÅčüąĮąĄąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 15. ąÜąŠą│ą┤ą░ OPBITEN = 1, ą▓čŗčģąŠą┤ DAC ąĮąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ ąĮąŠąČą║čā VOUT, ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ čćą░čüč鹊čéą░ čüą╝ąĄąĮčŗ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖčéą░ MSB (čüčéą░čĆčłąĖą╣ ą▒ąĖčé) ą┤ą░ąĮąĮčŗčģ DAC (ąĖą╗ąĖ čćą░čüč鹊čéą░ MSB/2) ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ VOUT. ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (ą│čĆčāą▒ąŠą│ąŠ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░). ąæąĖčé DIV2 čāą┐čĆą░ą▓ą╗čÅąĄčé, ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą╗ąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą┤ąĄą╗ąĖč鹥ą╗čī čćą░čüč鹊čéčŗ MSB. ąÜąŠą│ą┤ą░ OPBITEN = 0, ą▓čŗčģąŠą┤ DAC ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ VOUT. ąæąĖčé mode (D1) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ą░čÅ ą▒čāą┤ąĄčé č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ - čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮą░čÅ ąĖą╗ąĖ čéčĆąĄčāą│ąŠą╗čīąĮą░čÅ.
D4 ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
D3
DIV2
DIV2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü ą▒ąĖč鹊ą╝ D5 (OPBITEN). ą×ąĮ ąŠą┐ąĖčüą░ąĮ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 15. ąÜąŠą│ą┤ą░ DIV2 = 1, čüčéą░čĆčłąĖą╣ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ DAC (MSB) ąĮą░ą┐čĆčÅą╝čāčÄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ VOUT. ąÜąŠą│ą┤ą░ DIV2 = 0, ąĮą░ ą▓čŗą▓ąŠą┤ąĄ VOUT ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮą░čÅ čćą░čüč鹊čéą░ MSB/2.
D2 ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
D1
Mode
ąŁč鹊čé ą▒ąĖčé ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü ą▒ąĖč鹊ą╝ OPBITEN (D5). ą×ąĮ čāą┐čĆą░ą▓ą╗čÅąĄčé, ą║ą░ą║ąŠą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ VOUT, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓čŗčģąŠą┤ DAC. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, ąĄčüą╗ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ąĖčé OPBITEN = 1. ąŁč鹊 ąŠą▒čŖčÅčüąĮąĄąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 15. ąÜąŠą│ą┤ą░ mode = 1, SIN ROM ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąĮą░ ą▓čŗčģąŠą┤ąĄ DAC ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čéčĆąĄčāą│ąŠą╗čīąĮą░čÅ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░. ąÜąŠą│ą┤ą░ mode = 0, SIN ROM ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čäą░ąĘčŗ ą▓ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗.
D0 ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
ąĀąĄą│ąĖčüčéčĆčŗ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ . AD9833 ą┤ą▓ą░ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ ąĖ 2 čĆąĄą│ąĖčüčéčĆą░ čäą░ąĘčŗ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 7.
ąóą░ą▒ą╗ąĖčåą░ 7. ąĀąĄą│ąĖčüčéčĆčŗ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ.
ąĀąĄą│ąĖčüčéčĆ ąĀą░ąĘą╝ąĄčĆ ą×ą┐ąĖčüą░ąĮąĖąĄ
FREQ0 28 ą▒ąĖčé
ąĀąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ 0. ąÜąŠą│ą┤ą░ ą▒ąĖčé FSELECT=0, čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓čŗčģąŠą┤ąĮčāčÄ čćą░čüč鹊čéčā ą║ą░ą║ čäčĆą░ą║čåąĖčÄ čćą░čüč鹊čéčŗ MCLK.
FREQ1 28 ą▒ąĖčé
ąĀąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ 1. ąÜąŠą│ą┤ą░ ą▒ąĖčé FSELECT=1, čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓čŗčģąŠą┤ąĮčāčÄ čćą░čüč鹊čéčā ą║ą░ą║ čäčĆą░ą║čåąĖčÄ čćą░čüč鹊čéčŗ MCLK.
PHASE0 12 ą▒ąĖčé
ąĀąĄą│ąĖčüčéčĆ čüą╝ąĄčēąĄąĮąĖčÅ čäą░ąĘčŗ 0. ąÜąŠą│ą┤ą░ ą▒ąĖčé PSELECT=0, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą║ ą▓čŗčģąŠą┤čā ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ čäą░ąĘčŗ.
PHASE1 12 ą▒ąĖčé
ąĀąĄą│ąĖčüčéčĆ čüą╝ąĄčēąĄąĮąĖčÅ čäą░ąĘčŗ 1. ąÜąŠą│ą┤ą░ ą▒ąĖčé PSELECT=1, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą║ ą▓čŗčģąŠą┤čā ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ čäą░ąĘčŗ.
ąØą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ą▓čŗčģąŠą┤ąĄ AD9833 ą▒čāą┤ąĄčé čćą░čüč鹊čéą░
fMCLK /228 * FREQREG
ą│ą┤ąĄ FREQREG čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ, ąĘą░ą│čĆčāąČąĄąĮąĮąŠąĄ ą▓ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠ čäą░ąĘąĄ čüą┤ą▓ąĖąĮčāčé ąĮą░
2ŽĆ /4096 * PHASEREG
ą│ą┤ąĄ PHASEREG čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ, čüąŠą┤ąĄčƹȹ░čēąĄąĄčüčÅ ą▓ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čäą░ąĘčŗ. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī čāą┤ąĄą╗ąĄąĮąŠ ą▓ąĮąĖą╝ą░ąĮąĖčÄ ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘąĖ ą╝ąĄąČą┤čā ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ąĖ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊č鹊ą╣, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ ą░ąĮąŠą╝ą░ą╗ąĖą╣ ąĮą░ ą▓čŗčģąŠą┤ąĄ.
ąØą░ čĆąĖčü. 28 ą┐ąŠą║ą░ąĘą░ąĮ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ AD9833.
ąÜąŠą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ, ą▒ąĖčéčŗ D15 ąĖ D14 ą┤ą░čÄčé ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ.
ąóą░ą▒ą╗ąĖčåą░ 8. ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ.
D15 D14 D13 D0
0
1
ąĪčéą░čĆčłąĖąĄ 14 ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ FREQ0
LSB
1
0
ąĪčéą░čĆčłąĖąĄ 14 ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ FREQ1
LSB
ąĢčüą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī čģąŠč湥čé ą┐ąŠą╝ąĄąĮčÅčéčī ą▓čüąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗ 2 čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąĖ č鹊ą╝čā ąČąĄ ą░ą┤čĆąĄčüčā, ą┐ąŠč鹊ą╝čā čćč鹊 čĆąĄą│ąĖčüčéčĆčŗ čćą░čüč鹊čéčŗ ąĖą╝ąĄčÄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 28 ą▒ąĖčé. ą¤ąĄčĆą▓ą░čÅ ąĘą░ą┐ąĖčüčī čüąŠą┤ąĄčƹȹĖčé 14 ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčé (LSB), ąĖ ą▓č鹊čĆą░čÅ ąĘą░ą┐ąĖčüčī čüąŠą┤ąĄčƹȹĖčé 14 čüčéą░čĆčłąĖčģ ą▒ąĖčé (MSB). ąöą╗čÅ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ B28 (D13) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1. ą¤čĆąĖą╝ąĄčĆ 28-ą▒ąĖčéąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ ą┐ąŠą║ą░ąĘą░ąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 9.
ąóą░ą▒ą╗ąĖčåą░ 9. ąŚą░ą┐ąĖčüčī 0xFFFC000 ą▓ čĆąĄą│ąĖčüčéčĆ FREQ0.
ąöą░ąĮąĮčŗąĄ SDATA ąĀąĄąĘčāą╗čīčéą░čé ą▓ą▓ąŠą┤ą░ čüą╗ąŠą▓ą░
0010 0000 0000 0000
ąŚą░ą┐ąĖčüčī čüą╗ąŠą▓ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ: (D15, D14) = 00, B28 (D13) = 1, HLB (D12) = X
0100 0000 0000 0000
ąŚą░ą┐ąĖčüčī čĆąĄą│ąĖčüčéčĆą░ FREQ0: (D15, D14) = 01, 14 ą▒ąĖčé LSB = 0x0000
0111 1111 1111 1111
ąŚą░ą┐ąĖčüčī čĆąĄą│ąĖčüčéčĆą░ FREQ0: (D15, D14) = 01, 14 ą▒ąĖčé MSB = 0x3FFF
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄ ąĮčāąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčī ą▓čüąĄ 28 ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ. ą¤čĆąĖ ą│čĆčāą▒ąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĄ ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ 14 MSB, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐čĆąĖ č鹊ąĮą║ąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ 14 LSB. ą¤čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ąĖčéą░ B28 (D13) ą▓ ą╗ąŠą│. 0, 28-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┤ą▓ą░ 14-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░, ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüąŠą┤ąĄčƹȹ░čéčüčÅ 14 MSB, ąĖ ą▓ ą┤čĆčāą│ąŠą╝ čüąŠą┤ąĄčƹȹ░čéčüčÅ 14 LSB. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 14 ą▒ąĖčé MSB čüą╗ąŠą▓ą░ čćą░čüč鹊čéčŗ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé 14 ą▒ąĖčé LSB, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé. ąæąĖčé HLB (D12) ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé, ą║ą░ą║ąĖąĄ ąĖąĘ čŹčéąĖčģ 14 ą▒ąĖčé ą▒čāą┤čāčé ąĖąĘą╝ąĄąĮąĄąĮčŗ. ą¤čĆąĖą╝ąĄčĆčŗ čŹč鹊ą│ąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåą░čģ 10 ąĖ 11.
ąóą░ą▒ą╗ąĖčåą░ 10. ąŚą░ą┐ąĖčüčī 0x3FFF ą▓ 14 ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčé (LSB) čĆąĄą│ąĖčüčéčĆą░ FREQ1.
ąöą░ąĮąĮčŗąĄ SDATA ąĀąĄąĘčāą╗čīčéą░čé ą▓ą▓ąŠą┤ą░ čüą╗ąŠą▓ą░
0000 0000 0000 0000
ąŚą░ą┐ąĖčüčī čüą╗ąŠą▓ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ: (D15, D14) = 00, B28 (D13) = 0, HLB (D12) = 0, ą┐ąŠčŹč鹊ą╝čā ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▒ąĖčéčŗ LSB
1011 1111 1111 1111
ąŚą░ą┐ąĖčüčī čĆąĄą│ąĖčüčéčĆą░ FREQ1: (D15, D14) = 10, 14 ą▒ąĖčé LSB = 0x3FFF
ąóą░ą▒ą╗ąĖčåą░ 11. ąŚą░ą┐ąĖčüčī 0x00FF ą▓ 14 čüčéą░čĆčłąĖčģ ą▒ąĖčé (MSB) čĆąĄą│ąĖčüčéčĆą░ FREQ0.
ąöą░ąĮąĮčŗąĄ SDATA ąĀąĄąĘčāą╗čīčéą░čé ą▓ą▓ąŠą┤ą░ čüą╗ąŠą▓ą░
0001 0000 0000 0000
ąŚą░ą┐ąĖčüčī čüą╗ąŠą▓ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ: (D15, D14) = 00, B28 (D13) = 0, HLB (D12) = 1, ą┐ąŠčŹč鹊ą╝čā ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▒ąĖčéčŗ MSB
0100 0000 1111 1111
ąŚą░ą┐ąĖčüčī čĆąĄą│ąĖčüčéčĆą░ FREQ0: (D15, D14) = 01, 14 ą▒ąĖčé MSB = 0x00FF
ąÜąŠą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ čäą░ąĘčŗ, ą▒ąĖčéčŗ D15 ąĖ D14 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ 11. ąæąĖčé D13 ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé, ą║ą░ą║ąŠą╣ čĆąĄą│ąĖčüčéčĆ čäą░ąĘčŗ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮ.
ąóą░ą▒ą╗ąĖčåą░ 12. ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čäą░ąĘčŗ.
D15 D14 D13 D12 D11 D0
1
1
0
X
12 čüčéą░čĆčłąĖčģ ą▒ąĖčé (MSB) čĆąĄą│ąĖčüčéčĆą░ PHASE0
LSB
1
1
1
X
12 čüčéą░čĆčłąĖčģ ą▒ąĖčé (MSB) čĆąĄą│ąĖčüčéčĆą░ PHASE1
LSB
ążčāąĮą║čåąĖčÅ čüą▒čĆąŠčüą░ . ąŁčéą░ čäčāąĮą║čåąĖčÅ čüą▒čĆąŠčüąĖčé ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ 0, ą┐čĆąĖ čŹč鹊ą╝ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čŗčģąŠą┤ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüčĆąĄą┤ąĮąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąĪą▒čĆąŠčü ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčé čĆąĄą│ąĖčüčéčĆčŗ čäą░ąĘčŗ, čćą░čüč鹊čéčŗ ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąÜąŠą│ą┤ą░ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čā AD9833 ą┐ąŠą┤ą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ, ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮą░. ą¦č鹊ą▒čŗ čüą▒čĆąŠčüąĖčéčī AD9833, čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé čüą▒čĆąŠčüą░ (reset bit) ą▓ ą╗ąŠą│. 1. ą¦č鹊ą▒čŗ ą▓čŗą▓ąĄčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ąĖąĘ čüą▒čĆąŠčüą░, čāčüčéą░ąĮąŠą▓ąĖč鹥 čŹč鹊čé ą▒ąĖčé ą▓ ą╗ąŠą│. 0. ąĪąĖą│ąĮą░ą╗ ą┐ąŠčÅą▓ąĖčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ DAC č湥čĆąĄąĘ 8 čéą░ą║č鹊ą▓ MCLK ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒ąĖčé čüą▒čĆąŠčüą░ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
ąóą░ą▒ą╗ąĖčåą░ 13. ą¤čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ čüą▒čĆąŠčüą░ (ą▓ą╗ąĖčÅąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ Reset).
Reset ąĀąĄąĘčāą╗čīčéą░čé
0
ąĪą▒čĆąŠčü ąĮąĄ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ
1
ąĪą▒čĆąŠčü ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓
ążčāąĮą║čåąĖčÅ čüąĮą░ . ąĪąĄą║čåąĖąĖ AD9833, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮčŗ ą┤ą╗čÅ ą╝ąĖąĮąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ čüąĮą░ (sleep). ąŻąĘą╗čŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą║ą╗čÄč湥ąĮčŗ, čŹč鹊 ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ DAC. ąæąĖčéčŗ, čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą╗čÅ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ čüąĮą░, ąŠą┐ąĖčüą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 14.
ąóą░ą▒ą╗ąĖčåą░ 14. ą¤čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ čüąĮą░ (ą▓ą╗ąĖčÅąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖč鹊ą▓ SLEEP1 ąĖ SLEEP12).
SLEEP1 SLEEP12 ąĀąĄąĘčāą╗čīčéą░čé
0
0
ąØąĄčé čüąŠčüč鹊čÅąĮąĖčÅ Power Down, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░ą║čéąĖą▓ąĮą░
0
1
ąÆčŗą║ą╗čÄč湥ąĮ DAC
1
0
ąŚą░ą┐čĆąĄčēąĄąĮąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ (MCLK ąĮąĄ ą┤ąĄą╣čüčéą▓čāąĄčé)
1
1
ąÆčŗą║ą╗čÄč湥ąĮ DAC ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ.
ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ, č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ AD9833 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüčéą░čĆčłąĄą│ąŠ čĆą░ąĘčĆčÅą┤ą░ ą┤ą░ąĮąĮčŗčģ DAC. ąÆ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ DAC ąĮąĄ ąĮčāąČąĄąĮ; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮ ą┤ą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ.
ąÜąŠą│ą┤ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ AD9833 ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ą▓čŗčģąŠą┤ DAC ąŠčüčéą░ąĄčéčüčÅ ą▓ čüą▓ąŠąĄą╝ č鹥ą║čāčēąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 NCO ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ąĄčé čäą░ąĘčā. ąØąŠą▓ą░čÅ čćą░čüč鹊čéą░, čäą░ąĘą░ ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ čüą╗ąŠą▓ąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā, ą║ąŠą│ą┤ą░ ą░ą║čéąĖą▓ąĄąĮ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ SLEEP1. ąóą░ą║čéčŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓čüąĄ ąĄčēąĄ ąŠčüčéą░čÄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ąĖ, čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓čŗą▒čĆą░ąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ SLEEP1 ą▓ ą╗ąŠą│. 0 čĆą░ąĘčĆąĄčłą░ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ MCLK. ąøčÄą▒čŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, čüą┤ąĄą╗ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ, ą║ąŠą│ą┤ą░ SLEEP1 ą▒čŗą╗ ą░ą║čéąĖą▓ąĄąĮ (ą▓ ą╗ąŠą│. 1), ą▒čāą┤čāčé ą▓ąĖą┤ąĮčŗ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĖąŠą┤ą░ ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ.
ąÆčŗčģąŠą┤ VOUT . AD9833 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čĆą░ąĘą╗ąĖčćąĮčŗą╣ ą▓čŗą▓ąŠą┤ čüąĖą│ąĮą░ą╗ą░, ą▓čüąĄ čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ VOUT. ąÆčŗą▒čĆą░ąĮąĮą░čÅ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüčéą░čĆčłąĖą╝ ą▒ąĖč鹊ą╝ (MSB) ą┤ą░ąĮąĮčŗčģ DAC: ą▓čŗą▓ąŠą┤ čüąĖąĮčāčüąŠąĖą┤čŗ ąĖą╗ąĖ ą▓čŗą▓ąŠą┤ čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ą░. ąæąĖčé OPBITEN (D5) ąĖ ą▒ąĖčé čĆąĄąČąĖą╝ą░ (D1) čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░, ą║ą░ą║ąŠą╣ ą▓čŗą▓ąŠą┤ ą┤ąŠčüčéčāą┐ąĄąĮ ąĖąĘ AD9833.
MSB ą┤ą░ąĮąĮčŗčģ DAC ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▓ąĄą┤ąĄąĮ ąĖąĘ AD9833. ą¤čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ OPBITEN (D5) ą▓ ą╗ąŠą│. 1, čüčéą░čĆčłąĖą╣ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ DAC ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ VOUT. ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│čĆčāą▒ąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ. ą¦ą░čüč鹊čéčā čŹč鹊ą│ąŠ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ąĄą╗ąĖčéčī ąĮą░ 2 ą┐ąĄčĆąĄą┤ ąĄą│ąŠ ą▓čŗą▓ąŠą┤ąŠą╝. ąæąĖčé DIV2 (D3) čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāą┐čĆą░ą▓ą╗čÅąĄčé čćą░čüč鹊č鹊ą╣ ąĮą░ ą▓čŗčģąŠą┤ąĄ VOUT, ą▒čāą┤ąĄčé ąŠąĮą░ ą┐ąŠą┤ąĄą╗ąĄąĮą░ ąĮą░ 2 ąĖą╗ąĖ ąĮąĄčé.
SIN ROM ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čäą░ąĘąĄ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ ą▓ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ, ą║ąŠč鹊čĆą░čÅ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┤ą░ąĄčé ąĮą░ ą▓čŗčģąŠą┤ąĄ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ VOUT, čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé čĆąĄąČąĖą╝ą░ (D1) ą▓ ą╗ąŠą│. 0, ąĖ ą▒ąĖčé OPBITEN (D5) ą▓ ą╗ąŠą│. 0.
SIN ROM ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą┐čāčēąĄąĮąŠ, ąĖ ą┐čĆąĖ čŹč鹊ą╝ ąŠą▒čĆąĄąĘą░ąĮąĮčŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤ ąĖąĘ NCO ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┐čĆą░ą▓ą╗ąĄąĮ ą▓ DAC. ąÆčŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą▒ąŠą╗čīčłąĄ ąĮąĄ ą▒čāą┤ąĄčé čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╝. DAC ą▒čāą┤ąĄčé č乊čĆą╝ąĖčĆąŠą▓ą░čéčī 10-ą▒ąĖčéąĮčāčÄ ą╗ąĖąĮąĄą╣ąĮčāčÄ čéčĆąĄčāą│ąŠą╗čīąĮčāčÄ čäčāąĮą║čåąĖčÄ. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čéčĆąĄčāą│ąŠą╗čīąĮčāčÄ č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ VOUT, čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé čĆąĄąČąĖą╝ą░ (D1) ą▓ ą╗ąŠą│. 1.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▒ąĖčé SLEEP12 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0 (čé. ąĄ. čĆą░ą▒ąŠčéą░ DAC čĆą░ąĘčĆąĄčłąĄąĮą░).
ąóą░ą▒ą╗ąĖčåą░ 15. ążąŠčĆą╝ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ VOUT (ą▓ą╗ąĖčÅąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖčé OPBITEN, Mode, DIV2).
OPBITEN Mode DIV2 ąĪąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ VOUT
0
0
X1
ąĪąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗
0
1
X1
ąóčĆąĄčāą│ąŠą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗
1
0
0
ąØą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čćą░čüč鹊čéą░ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ ąĮą░ ą▓čģąŠą┤ąĄ DAC (MSB).
1
0
1
ąØą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čćą░čüč鹊čéą░ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ ąĮą░ ą▓čģąŠą┤ąĄ DAC, ą┐ąŠą┤ąĄą╗ąĄąĮąĮą░čÅ ąĮą░ 2 (MSB/2).
1 1 X1 ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: X = ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ.
ąĀąĖčü. 25. ąóčĆąĄčāą│ąŠą╗čīąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗.
[ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÄ ]
ąśąĘ-ąĘą░ čĆą░ąĘąĮčŗčģ ąŠą┐čåąĖą╣ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ AD9833 ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ čłąĖčĆąŠą║ąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣.
ą×ą┤ąĮą░ ąĖąĘ ąŠą▒ą╗ą░čüč鹥ą╣ - ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠą┤čāą╗čÅčåąĖąĖ. ą£ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐čĆąŠčüčéą░čÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ, čéą░ą║ą░čÅ ą║ą░ą║ FSK (ą┐ąŠ čĆčāčüčüą║ąĖ čŹč鹊 čćą░čüč鹊čéąĮą░čÅ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖčÅ). ąæąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗąĄ čüčģąĄą╝čŗ ą╝ąŠą┤čāą╗čÅčåąĖą╣, čéą░ą║ąĖąĄ ą║ą░ą║ GMSK (ąōą░čāčüčüąŠą▓čüą║ą░čÅ čćą░čüč鹊čéąĮą░čÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ čüą┤ą▓ąĖą│ąŠą╝) and QPSK (ą║ą▓ą░ą┤čĆą░čéčāčĆąĮą░čÅ čäą░ąĘąŠą▓ą░čÅ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖčÅ), čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ąĮą░ AD9833.
ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ FSK ą┤ą▓ą░ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ čĆą░ąĘąĮčŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ. ą×ą┤ąĮą░ čćą░čüč鹊čéą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čćą░čüč鹊čéčā ą┐čĆąŠą▒ąĄą╗ą░ (space frequency), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ą░čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čćą░čüč鹊čéčā ą╝ą░čĆą║ąĄčĆą░ (mark frequency). ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčéą░ FSELECT ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī čćą░čüč鹊čéčā ąĮąĄčüčāčēąĄą╣ čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ.
ąŻ AD9833 ąĄčüčéčī 2 čĆąĄą│ąĖčüčéčĆą░ čäą░ąĘčŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą╝ąŠą┤čāą╗čÅčåąĖčÄ PSK. ą¤čĆąĖ ą╝ą░ąĮąĖą┐čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĖ čüą┤ą▓ąĖą│ąŠą╝ čäą░ąĘčŗ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ PSK, ą┐čĆąĖ čŹč鹊ą╝ čäą░ąĘą░ ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā, čüą▓čÅąĘą░ąĮąĮčāčÄ čü ą▒ąĖč鹊ą▓čŗą╝ ą┐ąŠč鹊ą║ąŠą╝, ą┐ąŠčüčéčāą┐ą░čÄčēąĖą╝ ąĮą░ ą▓čģąŠą┤ ą╝ąŠą┤čāą╗čÅč鹊čĆą░.
AD9833 čéą░ą║ąČąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čüąĖą│ąĮą░ą╗ąŠą▓. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 MSB ą┤ą░ąĮąĮčŗčģ DAC ą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ VOUT, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
ąĪ ą╝ą░ą╗čŗą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ ąŠąĮą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ą▓ ą┐ąĄčĆąĄąĮąŠčüąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ.
ąŚą░ąĘąĄą╝ą╗ąĄąĮąĖąĄ ąĖ čĆą░ąĘą▓ąŠą┤ą║ą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ . ą¤ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░ (printed circuit board, PCB), ąĮą░ ą║ąŠč鹊čĆąŠą╣ čĆą░ąĘą╝ąĄčēąĄąĮą░ AD9833, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ čéą░ą║, čćč鹊ą▒čŗ ą░ąĮą░ą╗ąŠą│ąŠą▓ą░čÅ ąĖ čåąĖčäčĆąŠą▓ą░čÅ čüąĄą║čåąĖąĖ čåąĄą┐ąĄą╣ ą▒čŗą╗ąĖ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮčŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ ąŠą▒ą╗ą░čüčéčÅą╝ąĖ ą┐ą╗ą░čéčŗ. ąŁč鹊 čāą┐čĆąŠčēą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čĆą░ąĘą┤ąĄą╗čīąĮčŗčģ ąĘą░ą╗ąĖą▓ąŠą║ čłąĖąĮąŠą╣ ąĘąĄą╝ą╗ąĖ (ground plane). ąóąĄčģąĮąĖą║ą░ čĆą░ąĘą▓ąŠą┤ą║ąĖ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ čéčĆą░ą╗ąĄąĮąĖąĄą╝ ą╝ąĄą┤ąĖ ąŠą▒čŗčćąĮąŠ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ąĘą░ą╗ąĖą▓ąŠą║, ą┐ąŠč鹊ą╝čā čćč鹊 ą┤ą░ąĄčé ą╗čāčćčłąĄąĄ 菹║čĆą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ. ą”ąĖčäčĆąŠą▓čŗąĄ ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ąĘą░ą╗ąĖą▓ą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╝ ą╝ąĄčüč鹥. ąĢčüą╗ąĖ AD9833 čÅą▓ą╗čÅąĄčéčüčÅ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čéčĆąĄą▒čāčÄčēąĖą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ AGND čü DGND, č鹊 ąĖčģ ąĘą░ą╗ąĖą▓ą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ čåąĄą┐čÅą╝ AGND ąĖ DGND ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ AD9833. ąĢčüą╗ąĖ AD9833 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąĖčüč鹥ą╝ąĄ, ą│ą┤ąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ čéčĆąĄą▒čāčÄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ AGND čü DGND, č鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮąŠ ą▓ ąŠą┤ąĮąŠą╣ č鹊čćą║ąĄ, čüč乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą▓ ą▓ąĖą┤ąĄ ąĘą▓ąĄąĘą┤čŗ, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ AD9833.
ąśąĘą▒ąĄą│ą░ą╣č鹥 ą┐čĆąŠą║ą╗ą░ą┤ą║ąĖ čåąĖčäčĆąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠą┤ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ AD9833, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮąĖ ą▓čŗąĘčŗą▓ą░čÄčé ąĮą░ą▓ąŠą┤ą║ąĖ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ. ąÉąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ąĘą░ą╗ąĖą▓ą║ąĄ čüą╗ąĄą┤čāąĄčé ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐čĆąŠčģąŠą┤ąĖčéčī ą┐ąŠą┤ AD9833, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąĮą░ą▓ąŠą┤ąŠą║ čłčāą╝ą░. ąøąĖąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ, ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą║ AD9833, ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čłąĖčĆąŠą║ąĖąĄ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąĖ, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ čåąĄą┐ąĄą╣ č鹊ą║ą░ ąĖ čüąĮąĖąĘąĖčéčī čŹčäč乥ą║čéčŗ ą┐čāą╗čīčüą░čåąĖą╣ ąĮą░ ą╗ąĖąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ. ąæčŗčüčéčĆąŠ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčēąĖąĄčüčÅ čüąĖą│ąĮą░ą╗čŗ, čéą░ą║ąĖąĄ ą║ą░ą║ čéą░ą║čéčŗ, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī 菹║čĆą░ąĮąĖčĆąŠą▓ą░ąĮčŗ čåąĖčäčĆąŠą▓ąŠą╣ ąĘąĄą╝ą╗ąĄą╣, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąĮą░ą▓ąŠą┤ąŠą║ čłčāą╝ą░ ąĮą░ ą┤čĆčāą│ąĖąĄ čüąĄą║čåąĖąĖ ą┐ą╗ą░čéčŗ.
ąśąĘą▒ąĄą│ą░ą╣č鹥 ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ąĖ čåąĖčäčĆąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. ą¤čĆąŠą▓ąŠą┤ąĮąĖą║ąĖ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗčģ čüč鹊čĆąŠąĮą░čģ ą┐ą╗ą░čéčŗ ą┤ąŠą╗ąČąĮčŗ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą┤čĆčāą│ ą║ ą┤čĆčāą│čā ą┐ąŠą┤ ą┐čĆčÅą╝čŗą╝ čāą│ą╗ąŠą╝. ąŁč鹊 čüąĮąĖąČą░ąĄčé čŹčäč乥ą║čéčŗ ą┐ąĄčĆąĄą║čĆąĄčüčéąĮčŗčģ ą┐ąŠą╝ąĄčģ ą╝ąĄąČą┤čā čüąĖą│ąĮą░ą╗ą░ą╝ąĖ č湥čĆąĄąĘ ą┐ą╗ą░čéčā. ą£ąĖą║čĆąŠą┐ąŠą╗ąŠčüą║ąŠą▓ą░čÅ č鹥čģąĮąĖą║ą░ čÅą▓ą╗čÅąĄčéčüčÅ ą▒ąĄąĘčāčüą╗ąŠą▓ąĮąŠ ą╗čāčćčłąĄą╣, ąĮąŠ ąŠąĮą░ ąĮąĄ ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą╝ąŠąČąĮą░ ąĮą░ ą┤ą▓čāčüč鹊čĆąŠąĮąĮąĄą╣ ą┐ą╗ą░č鹥. ąÆ čéą░ą║ąŠą╣ č鹥čģąĮąĖą║ąĄ čüč鹊čĆąŠąĮą░ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą▓čŗą┤ąĄą╗ąĄąĮą░ čåąĄą╗ąĖą║ąŠą╝ (ąĖą╗ąĖ ą┐ąŠčćčéąĖ čåąĄą╗ąĖą║ąŠą╝) ą┐ąŠą┤ ąĘą░ą╗ąĖą▓ą║ąĖ ą╝ąĄą┤čīčÄ, ąĖ ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ čüčéą░čĆą░čÄčéčüčÅ čĆą░ąĘą╝ąĄčüčéąĖčéčī ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╣ čüč鹊čĆąŠąĮąĄ.
ąÆą░ąČąĮą░ čģąŠčĆąŠčłą░čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ą╝ąĖ čåąĄą┐ąĄą╣ ą┐ąĖčéą░ąĮąĖčÅ. ąÜ AD9833 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą▒ą╗ąŠą║ąĖčĆąŠą▓ąŠčćąĮčŗąĄ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ 0.1 ą╝ą║čä ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ čéą░ąĮčéą░ą╗ąŠą▓čŗą╝ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ą╝ ąĮą░ 10 ą╝ą║čä. ą¦č鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ąĮą░ąĖą▒ąŠą╗čīčłąĄą╣ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖčģ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓, ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ ą║ ą║ąŠčĆą┐čāčüčā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
ąĀąĖčü. 26. ąÉą╗ą│ąŠčĆąĖčéą╝ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĖ čĆą░ą▒ąŠčéčŗ AD9833.
ąĀąĖčü. 27. ąÉą╗ą│ąŠčĆąĖčéą╝ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ.
ąĀąĖčü. 28. ąÉą╗ą│ąŠčĆąĖčéą╝ ąŠą┐ąĄčĆą░čåąĖą╣ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ.
[ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ]
AD9833 čüąĮą░ą▒ąČąĄąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĄčæ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ ą╗čÄą▒ąŠą╝čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ąĮąĄčłąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąóą░ą║čéčŗ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ą╝ąŠą│čāčé ą▒čŗčéčī čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ 40 ą£ąōčå. ąóą░ą║čéčŗ ą┤ą░ąĮąĮčŗčģ ą╝ąŠą│čāčé čüą╗ąĄą┤ąŠą▓ą░čéčī ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ, ąĖą╗ąĖ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī čüčéą░čéąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī (0 ąĖą╗ąĖ 1) ą▓ ąĮąĄą░ą║čéąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą╝ąĄąČą┤čā ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ ąĘą░ą┐ąĖčüąĖ. ąÜąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ AD9833, čüąĖą│ąĮą░ą╗ FSYNC ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0 ąĖ čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čéą░ą║ąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą┐ąŠą║ą░ ą▓ AD9833 ąĮąĄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ 16 ą┤ą░ąĮąĮčŗčģ. ąĪąĖą│ąĮą░ą╗ FSYNC ąĘą░ą┤ą░ąĄčé čäčĆąĄą╣ą╝čŗ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ 16 ą▒ąĖčé, ąĘą░ą│čĆčāąČą░ąĄą╝čŗąĄ ą▓ AD9833.
ąśąĮč鹥čĆč乥ą╣čü 68HC11/68L11 . ąØą░ čĆąĖčü. 29 ą┐ąŠą║ą░ąĘą░ąĮ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD9833 ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ 68HC11/68L11. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą╝ą░čüč鹥čĆ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▓ ą╗ąŠą│. 1 ą▒ąĖčéą░ MSTR čĆąĄą│ąĖčüčéčĆą░ SPCR. ąŁčéą░ čāčüčéą░ąĮąŠą▓ą║ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą▓čŗą▓ąŠą┤ SCK; ą▓čŗčģąŠą┤ MOSI ą┐ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čüąĖą│ąĮą░ą╗ą░ SDATA. ą¤ąŠčüą║ąŠą╗čīą║čā čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░, č鹊 čüąĖą│ąĮą░ą╗ FSYNC ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠčé ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ GPIO (PC7). ąŻčüą╗ąŠą▓ąĖčÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ čüą╗ąĄą┤čāčÄčēąĖąĄ:
ŌĆó SCK čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1 ą╝ąĄąČą┤čā ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ ąĘą░ą┐ąĖčüąĖ (CPOL = 0)
ąÜąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ AD9833, čüąĖą│ąĮą░ą╗ FSYNC ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0 (ąĮąŠąČą║ąŠą╣ ą┐ąŠčĆčéą░ PC7). ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ 68HC11/68L11 ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ ą▒ą░ą╣čéą░ą╝ (2 ą┐ąŠčüčŗą╗ą║ąĖ ą┐ąŠ 8 ą▒ąĖčé), 8 ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ čéą░ą║č鹊ą▓ ą┐čĆąŠąĖčüčģąŠą┤čÅčé ą▓ ąŠą┤ąĮąŠą╝ čåąĖą║ą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čüčéą░čĆčłąĖą╝ ą▒ąĖč鹊ą╝ (MSB) ą▓ą┐ąĄčĆąĄą┤. ąöą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ AD9833 ąĮąŠąČą║ą░ PC7 čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0 ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ 8 ą▒ąĖčé, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓č鹊čĆą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ AD9833. ąóąŠą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓č鹊čĆąŠą╣ ą┐ąŠčüčŗą╗ą║ąĖ ąĖąĘ 8 ą▒ąĖčé čüąĖą│ąĮą░ą╗ FSYNC ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ ą╗ąŠą│. 1. ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ č乊čĆą╝ąĖčĆčāąĄčéčüčÅ čäčĆąĄą╣ą╝ ąĖąĘ 16 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 29. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ 68HC11/68L11 ą║ ąĖąĮč鹥čĆč乥ą╣čüčā AD9833.
ąśąĮč鹥čĆč乥ą╣čü 80C51/80L51 . ąØą░ čĆąĖčü. 30 ą┐ąŠą║ą░ąĘą░ąĮ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD9833 ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ 80C51/80L51. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ą▓ Mode 0, čéą░ą║ čćč鹊 TxD čćąĖą┐ą░ 80C51/80L51 čāą┐čĆą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ąŠą╝ SCLK AD9833, ąĖ ąĮąŠąČą║ą░ RxD čāą┐čĆą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ąŠą╝ ą┤ą░ąĮąĮčŗčģ SDATA. ąĪąĖą│ąĮą░ą╗ FSYNC ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠčé ąĮąŠąČą║ąĖ GPIO P3.3.
ąĀąĖčü. 30. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ 80C51/80L51 ą║ ąĖąĮč鹥čĆč乥ą╣čüčā AD9833.
ąÜąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ AD9833, ą┐ąŠčĆčé P3.3 čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0. 80C51/80L51 ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ąŠ 8 ą▒ąĖčé, čéą░ą║ čćč鹊 č鹊ą╗čīą║ąŠ 8 ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ čéą░ą║č鹊ą▓ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ ą▓ ą║ą░ąČą┤ąŠą╝ čåąĖą║ą╗ąĄ. ą¦č鹊ą▒čŗ ąĘą░ą│čĆčāąĘąĖčéčī ąŠčüčéą░ą▓čłčāčÄčüčÅ ą┐ąŠčĆčåąĖčÄ ąĖąĘ 8 ą▒ąĖčé ą▓ AD9833, ą┐ąŠčĆčé P3.3 čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0 ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąĄčĆą▓ąŠą╣ ą┐ąŠčĆčåąĖąĖ ąĖąĘ 8 ą▒ąĖčé, ąĖ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą▓č鹊čĆą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓č鹊čĆąŠą│ąŠ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ. P3.3 ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1 ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓č鹊čĆąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ. ąĪąĖą│ąĮą░ą╗ SCLK ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│. 1 ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ ąĘą░ą┐ąĖčüąĖ.
80C51/80L51 ą▓čŗą▓ąŠą┤ąĖčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ č乊čĆą╝ą░č鹥, ą║ąŠą│ą┤ą░ LSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝. ąØąŠ AD9833 ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ąĄčĆą▓čŗą╝ ą▒ąĖčé MSB (ą┐ąĄčĆą▓čŗąĄ 4 MSB čüąŠą┤ąĄčƹȹ░čé ąĖąĮč乊čĆą╝ą░čåąĖčÄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, čüą╗ąĄą┤čāčÄčēąĖąĄ 4 ą▒ąĖčéą░ čüąŠą┤ąĄčƹȹ░čé ą░ą┤čĆąĄčü, ąĖ ąŠčüčéą░ą▓čłąĖąĄčüčÅ 8 ą▒ąĖčé LSB čüąŠą┤ąĄčƹȹ░čé ą┤ą░ąĮąĮčŗąĄ, ą║ąŠą│ą┤ą░ ąŠąĮąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠą╗ąČąĮą░ čāčćąĖčéčŗą▓ą░čéčī čŹč鹊 ąŠą▒čüč鹊čÅč鹥ą╗čīčüčéą▓ąŠ, čćč鹊ą▒čŗ ą┐ąĄčĆąĄčéą░čüąŠą▓ą░čéčī ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé čéą░ą║, čćč鹊ą▒čŗ MSB ą▓čŗą▓ąŠą┤ąĖą╗čüčÅ ą┐ąĄčĆą▓čŗą╝.
ąśąĮč鹥čĆč乥ą╣čü DSP56002 . ąĀąĖčü. 31 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD9833 ąĖ DSP56002. DSP56002 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ čü čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ (SYN = 0, GCK = 1, SCKD = 1). ąĪąĖą│ąĮą░ą╗ čäčĆąĄą╣ą╝ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (SC2 = 1), ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą┤ą╗ąĖąĮčā 16 ą▒ąĖčé (WL1 = 1, WL0 = 0), ąĖ čüąĖą│ąĮą░ą╗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé 16 ą▒ąĖčéą░ą╝ (FSL = 0). ąĪąĖą│ąĮą░ą╗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ ą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SC2, ąĮąŠ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┐ąŠą┤ą░čéčī ąĄą│ąŠ ąĮą░ AD9833. ąśąĮč鹥čĆč乥ą╣čü čü DSP56000/DSP56001 ą┐ąŠą┤ąŠą▒ąĄąĮ ąĖąĮč鹥čĆč乥ą╣čüčā čü DSP56002.
ąĀąĖčü. 31. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ DSP56002 ą║ ąĖąĮč鹥čĆč乥ą╣čüčā AD9833.
ąśąĮč鹥čĆč乥ą╣čü čü AVR . ąØą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ AD9833 ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ATmega32A. ąÆ ą║ą░č湥čüčéą▓ąĄ ą║ą░ąĮą░ą╗ą░ čüą▓čÅąĘąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü SPI, čüąĖą│ąĮą░ą╗ FSYNC čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąŠčĆčéą░ GPIO PB1.
ąÆąŠ ą▓čĆąĄąĘą║ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
[ad9833.h ]
/* * File: code for controlling the ad9833 DDS * Author: Tuomas Nylund (tuomas.nylund@gmail.com) * Website: http://tuomasnylund.fi * * This program is free software: you can redistribute it and/or modify * it under the terms of the GNU General Public License as published by * the Free Software Foundation, either version 3 of the License, or * (at your option) any later version. * * This program is distributed in the hope that it will be useful, * but WITHOUT ANY WARRANTY; without even the implied warranty of * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the * GNU General Public License for more details. * * You should have received a copy of the GNU General Public License * along with this program. If not, see http://www.gnu.org/licenses/ . */
/* * * \file ad9833.h * * ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ ad9833.c. */
/**\defgroup ad9833_h ad9833.h - ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ AVR ą┤ą╗čÅ AD9833 * ąŁčéą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čĆą░ą▒ąŠčéą░ąĄčé čü čćąĖą┐ąŠą╝ DDS AD9833. ąöą╗čÅ ąĮąĄčæ ąĮčāąČąĮą░ * ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ \ref spi_h * * \section ad9833_example Example * \code * // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ AD9833: * ad9833_init(); * * // ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ 0 ąĮą░ čćą░čüč鹊čéčā 10 ą║ąōčå: * ad9833_set_frequency(0,10000); * * // ąŚą░ą┐čāčüą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ 0: * ad9833_set_freq_out(0); * * // ąŻčüčéą░ąĮąŠą▓ą║ą░ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą╣ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░: * ad9833_set_mode(AD_SINE); * \endcode * * * \ingroup ad9833 * @{ */
#ifndef _AD9833_H_ #define _AD9833_H_
/** \name AD9833 ąØą░čüčéčĆąŠą╣ą║ąĖ ąĖ ą╝ą░ą║čĆąŠčüčŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą╝ FrameSync * @{ */ #define AD_FSYNC_PORT PORTB #define AD_FSYNC_DDR DDRB #define AD_FSYNC_BIT PB1
#define AD_FSYNC_HI() AD_FSYNC_PORT |= (1 << AD_FSYNC_BIT) #define AD_FSYNC_LO() AD_FSYNC_PORT &= ~(1 << AD_FSYNC_BIT) /** @} */
/** \name ąĀąĄąČąĖą╝čŗ ą▓čŗą▓ąŠą┤ą░ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░ AD9833 * ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ą╗čÅ \ref ad9833_set_mode() * @{ */ #define AD_OFF 0 #define AD_TRIANGLE 1 #define AD_SQUARE 2 #define AD_SINE 3 /**@}*/
/** \name ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ ą║ąŠą╝ą░ąĮą┤ AD9833 * @{ */ #define AD_B28 13 #define AD_HLB 12 #define AD_FSELECT 11 #define AD_PSELECT 10 #define AD_RESET 8 #define AD_SLEEP1 7 #define AD_SLEEP12 6 #define AD_OPBITEN 5 #define AD_DIV2 3 #define AD_MODE 1 /** @}*/
/** \name ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ AD9833 * @{ */ #define AD_FREQ0 (1 << 14) #define AD_FREQ1 (1 << 15) #define AD_PHASE0 (3 << 14) #define AD_PHASE1 ((3 << 14)|(1 << 13)) /** @}*/
/** \name ą£ą░ą║čĆąŠčüčŗ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ AD9833 * @{ */ #define AD_F_MCLK 25000000 // ą×ą┐ąŠčĆąĮą░čÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ad9833 #define AD_2POW28 268435456 // ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ
/** ą£ą░ą║čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ ą▓čŗčćąĖčüą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čćą░čüč鹊čéčŗ ą┐ąŠ ąĘą░ą┤ą░ąĮąĮąŠą╣ čćą░čüč鹊č鹥 */ #define AD_FREQ_CALC(freq) (uint32_t)(((double)AD_2POW28/(double)AD_F_MCLK*freq)*4)
/** ą£ą░ą║čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ ą▓čŗčćąĖčüą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ * Timer1 output compare ą┐ąŠ ąĘą░ą┤ą░ąĮąĮąŠą╣ čćą░čüč鹊č鹥 ą╝ąŠą┤čāą╗čÅčåąĖąĖ */ #define AD_MOD_FREQ_CALC(freq) (F_CPU/(64*(uint32_t)freq))
/** ą£ą░ą║čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ ą▓čŗčćąĖčüą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čäą░ąĘčŗ ad9833 * ą┐ąŠ ąĘąĮą░č湥ąĮąĖčÄ čäą░ąĘčŗ ą▓ ą│čĆą░ą┤čāčüą░čģ */ #define AD_PHASE_CALC(phase_deg) (uint16_t)((512*phase_deg)/45) /** @} */
/** \name ą£ą░ą║čĆąŠčüčŗ ą┤ą╗čÅ Timer1 * @{ */ #define TIMER_START() ICCR1B |= (1 << CS11)|(1 << CS10) #define TIMER_STOP() ICCR1B &= ~((1 << CS11)|(1 << CS10)) /** @} */
/** ąĪčéčĆčāą║čéčāčĆą░, ą│ą┤ąĄ čģčĆą░ąĮčÅčéčüčÅ ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ * ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čäą░ą╣ą╗ą░ ad9833.c */ typedef struct {
float freq[2 ]; // ąŚą┤ąĄčüčī čģčĆą░ąĮčÅčéčüčÅ čćą░čüč鹊čéčŗ
float phase[2 ];
float mod_freq;
uint8_t freq_out;
uint8_t phase_out;
uint8_t mode;
uint16_t command_reg;
} ad9833_settings_t ;
// ąØąĄą║ąŠč鹊čĆčŗąĄ čäčāąĮą║čåąĖąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠ čüą╗ąĄą┤čāąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╝ąĖ (inline) // ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▒ąŠą╗čīčłąĄą╣ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ...
void ad9833_init (void );
void ad9833_set_mode (uint8_t mode);
void ad9833_set_frequency (uint8_t reg, double freq);double ad9833_get_frequency (uint8_t reg);
void ad9833_set_phase (uint8_t reg, double phase);double ad9833_get_phase (uint8_t reg);
void ad9833_set_freq_out (uint8_t freq_out);uint8_t ad9833_get_freq_out (void );
void ad9833_set_phase_out (uint8_t phase_out);uint8_t ad9833_get_phase_out (void );
void ad9833_set_mod_freq (uint16_t freq);void ad9833_set_mod_bytes (uint8_t num, uint8_t * bytes, uint8_t repeat);
#endif /** @} */
[ad9833.c ]
/* * File: code for controlling the ad9833 DDS * Author: Tuomas Nylund (tuomas.nylund@gmail.com) * Website: http://tuomasnylund.fi */
/** * \file ad9833.c * * ążčāąĮą║čåąĖąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čćąĖą┐ąŠą╝ AD9833 DDS č湥čĆąĄąĘ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AVR. * ąŁč鹊čé čćąĖą┐ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą│ąĄąĮąĄčĆąĖčéčī čüąĖąĮčāčü, ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ ąĖ čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ ąĮą░ * čćą░čüč鹊čéą░čģ ąŠčé ą┐čĆąĖą╝ąĄčĆąĮąŠ 0.1 ąōčå ą┤ąŠ 3 ą£ąōčå. * * ą×ąĮ čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┐čĆąŠčüčéčāčÄ ą┤ą▓ąŠąĖčćąĮčāčÄ ą╝ąŠą┤čāą╗čÅčåąĖčÄ ą▓ č乊čĆą╝ąĄ * FSK ąĖ PSK. ąóą░ą║ąČąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ąŠąĘą╝ąŠąČąĮą░ ą░ą╝ą┐ą╗ąĖčéčāą┤ąĮą░čÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ, ąĮąŠ ąŠąĮą░ * ąĘą┤ąĄčüčī ą┐ąŠą║ą░ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░. */ #include < avr/io.h > #include < avr/interrupt.h > #include < util/delay.h > #include "ad9833.h" #include "spi.h"
ad9833_settings_t ad_settings; // ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║.
/** * ążčāąĮą║čåąĖčÅ ąŠą▒ąĄčĆčéą║ąĖ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ 16-ą▒ąĖčéąĮčŗčģ ą┐ą░ą║ąĄč鹊ą▓ SPI. * \param packet 16-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ č湥čĆąĄąĘ SPI. */ static inline void ad9833_send (uint16_t packet){
spi_send_byte((uint8_t )(packet >> 8 ));
spi_send_byte((uint8_t )packet);
}
/** * ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé AD9833 ąĖ ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ąĮąĄą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ. * ąóą░ą║ąČąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ Timer1, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┤ą╗čÅ * čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╝ąŠą┤čāą╗čÅčåąĖąĖ. */ void ad9833_init (void )
{
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▓čŗą▓ąŠą┤ą░ FSYNC (ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗą▒ąŠčĆą║ą░
// čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0):
ad_settings.command_reg |= (1 << AD_B28);
AD_FSYNC_DDR |= (1 << AD_FSYNC_BIT);
AD_FSYNC_HI();
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą╝ąŠą┤čāą╗ąĖčĆčāčÄčēąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░:
TCCR1B |= (1 << WGM12); // ąóą░ą╣ą╝ąĄčĆ ą▓ čĆąĄąČąĖą╝ąĄ CTC
TCCR1B |= (1 << CS11)| (1 << CS10);// ąöąĄą╗ąĖč鹥ą╗čī čéą░ą║č鹊ą▓ ąĮą░ 64
TIMSK |= (1 << OCIE1A);
OCR1A = 0xFFF0 ;
// ąŚą░ą┤ąĄčƹȹ║ą░, ą▓ąĘčÅčéą░čÅ ąĖąĘ ą┤ą░čéą░čłąĖčéą░:
_delay_us(10 );
// ąØą░čćą░ą╗ąŠ čü ą▓čŗą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ DAC ąĖ čüą▒čĆąŠčüąŠą╝
AD_FSYNC_LO();
_delay_us(5 );
ad9833_send((1 << AD_SLEEP12)| (1 << AD_RESET));
ad_settings.command_reg |= (1 << AD_SLEEP12);
_delay_us(5 );
AD_FSYNC_HI();
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮąĄą║ąŠč鹊čĆčŗčģ čģąŠčĆąŠčłąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ad9833_set_frequency(0 , 0 );
ad9833_set_frequency(1 , 0 );
ad9833_set_phase(0 , 0 );
ad9833_set_phase(1 , 0 );
ad9833_set_freq_out(0 );
ad9833_set_phase_out(0 );
}
/** * ąŻčüčéą░ąĮąŠą▓ą║ą░ č乊čĆą╝čŗ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ad9833 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ ą▓ ą▓čģąŠą┤ąĮčŗą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝. * \param mode ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: * - AD_OFF * - AD_TRIANGLE * - AD_SQUARE * - AD_SINE */ void ad9833_set_mode (uint8_t mode){
ad_settings.mode = mode;
switch (mode){
case AD_OFF:
ad_settings.command_reg |= (1 << AD_SLEEP12);
ad_settings.command_reg |= (1 << AD_SLEEP1);
break ;
case AD_TRIANGLE:
ad_settings.command_reg &= ~ (1 << AD_OPBITEN);
ad_settings.command_reg |= (1 << AD_MODE);
ad_settings.command_reg &= ~ (1 << AD_SLEEP12);
ad_settings.command_reg &= ~ (1 << AD_SLEEP1);
break ;
case AD_SQUARE:
ad_settings.command_reg |= (1 << AD_OPBITEN);
ad_settings.command_reg &= ~ (1 << AD_MODE);
ad_settings.command_reg |= (1 << AD_DIV2);
ad_settings.command_reg &= ~ (1 << AD_SLEEP12);
ad_settings.command_reg &= ~ (1 << AD_SLEEP1);
break ;
case AD_SINE:
ad_settings.command_reg &= ~ (1 << AD_OPBITEN);
ad_settings.command_reg &= ~ (1 << AD_MODE);
ad_settings.command_reg &= ~ (1 << AD_SLEEP12);
ad_settings.command_reg &= ~ (1 << AD_SLEEP1);
break ;
}
AD_FSYNC_LO();
//_delay_us(5);
ad9833_send(ad_settings.command_reg);
//_delay_us(5);
AD_FSYNC_HI();
}
/** * ąŻčüčéą░ąĮąŠą▓ą║ą░ čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čäą░ąĘčŗ ad9833. * * \param reg ąĮąŠą╝ąĄčĆ čĆąĄą│ąĖčüčéčĆą░ čäą░ąĘčŗ, 0 ąĖą╗ąĖ 1 * \param phase čéčĆąĄą▒čāąĄą╝ą░čÅ čäą░ąĘą░ */ void ad9833_set_phase (uint8_t reg, double phase){
uint16_t reg_reg;
if (reg==1 )
reg_reg = AD_PHASE1;
else
reg_reg = AD_PHASE0;
ad_settings.phase[reg] = phase;
AD_FSYNC_LO();
//_delay_us(5);
ad9833_send(reg_reg | AD_PHASE_CALC(ad_settings.phase[reg]));
//_delay_us(5);
AD_FSYNC_HI();
}
/** * ąÆąŠąĘą▓čĆą░čēą░ąĄčé čäą░ąĘčā ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ * \param reg čĆąĄą│ąĖčüčéčĆ, čäą░ąĘčā ą║ąŠč鹊čĆąŠą│ąŠ ąĮčāąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī * \return čäą░ąĘą░ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ */ double ad9833_get_phase (uint8_t reg){
return ad_settings.phase[reg];
}
/** * ąÆčŗą▒ąĖčĆą░ąĄčé čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ * ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąóą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅčåąĖąĖ * FSK (čćą░čüč鹊čéąĮą░čÅ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖčÅ). * \param freq_out ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: * - 0 = ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ 0 * - 1 = ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ 1 * - 2 = FSK */ void ad9833_set_freq_out (uint8_t freq_out){
ad_settings.freq_out = freq_out;
switch (freq_out){
case 0 :
ad_settings.command_reg &= ~ (1 << AD_FSELECT);
break ;
case 1 :
ad_settings.command_reg |= (1 << AD_FSELECT);
break ;
case 2 :
// ą¤ąŠą║ą░ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ...
break ;
}
AD_FSYNC_LO();
//_delay_us(5);
ad9833_send(ad_settings.command_reg);
//_delay_us(5);
AD_FSYNC_HI();
}
/** * ąÆąŠąĘą▓čĆą░čēą░ąĄčé čĆą░ąĮąĄąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ąĮąŠą╝ąĄčĆ čĆąĄą│ąĖčüčéčĆą░ * ą▓čŗą▓ąŠą┤ą░ čćą░čüč鹊čéčŗ. * \return čĆą░ąĮąĄąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ */ uint8_t ad9833_get_freq_out (void ){
return ad_settings.freq_out;
}
/** * ąÆčŗą▒ąĖčĆą░ąĄčé čĆąĄą│ąĖčüčéčĆ čäą░ąĘčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ * ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąóą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ * ą╝ąŠą┤čāą╗čÅčåąĖąĖ PSK (čäą░ąĘąŠą▓ą░čÅ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖčÅ). * \param phase_out ą▓ąŠąĘą╝ąĮąŠąĘąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: * - 0 = ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆ čäą░ąĘčŗ 0 * - 1 = ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆ čäą░ąĘčŗ 1 * - 2 = PSK */ void ad9833_set_phase_out (uint8_t phase_out){
ad_settings.phase_out = phase_out;
switch (phase_out){
case 0 :
ad_settings.command_reg &= ~ (1 << AD_PSELECT);
break ;
case 1 :
ad_settings.command_reg |= (1 << AD_PSELECT);
break ;
case 2 :
// ą¤ąŠą║ą░ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ...
break ;
}
AD_FSYNC_LO();
//_delay_us(5);
ad9833_send(ad_settings.command_reg);
//_delay_us(5);
AD_FSYNC_HI();
}
/** * ąÆąĄčĆąĮąĄčé čĆą░ąĮąĄąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ ą▓čŗčģąŠą┤ą░ čäą░ąĘčŗ. * \return the čĆą░ąĮąĄąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ čäą░ąĘčŗ */ uint8_t ad9833_get_phase_out (void ){
return ad_settings.phase_out;
}
/** * ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ ad9833 ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ, * čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčēąĄąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ čćą░čüč鹊č鹥. * * \param reg čĆąĄą│ąĖčüčéčĆ čćą░čüč鹊čéčŗ, 0 ąĖą╗ąĖ 1 * \param freq čéčĆąĄą▒čāąĄą╝ą░čÅ čćą░čüč鹊čéą░ */ void ad9833_set_frequency (uint8_t reg, double freq){
uint32_t freq_reg;
uint16_t reg_reg;
freq_reg = AD_FREQ_CALC(freq);
ad_settings.freq[reg] = freq;
if (reg==1 )
reg_reg = AD_FREQ1;
else
reg_reg = AD_FREQ0;
AD_FSYNC_LO();
//_delay_us(5);
ad9833_send((1 << AD_B28) | ad_settings.command_reg);
ad9833_send(reg_reg | (0x3FFF& (uint16_t )(freq_reg >> 2 )));
ad9833_send(reg_reg | (0x3FFF& (uint16_t )(freq_reg >> 16 )));
//_delay_us(5);
AD_FSYNC_HI();
}
/** * ąÆąŠąĘą▓čĆą░čéąĖčé ą▓čŗą▒čĆą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ. * \param reg čĆąĄą│ąĖčüčéčĆ, ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ čģąŠčéąĖą╝ ą┐ąŠą╗čāčćąĖčéčī * \return čćą░čüč鹊čéą░ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ */ double ad9833_get_frequency (uint8_t reg){
return ad_settings.freq[reg];
}
/** * ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čćą░čüč鹊čéčā ą╝ąŠą┤čāą╗čÅčåąĖąĖ. * * \param freq ą▓čŗą▒čĆą░ąĮąĮą░čÅ čćą░čüč鹊čéą░ ą╝ąŠą┤čāą╗čÅčåąĖąĖ */ void ad9833_set_mod_freq (uint16_t freq){
ad_settings.mod_freq = freq;
OCR1A = AD_MOD_FREQ_CALC(freq);
}
/** * ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ą░ą╣čéčŗ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅčåąĖąĖ * ą¤ą×ąÜąÉ ąØąĢ ąĀąĢąÉąøąśąŚą×ąÆąÉąØą× * * \param num ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą▒ą░ą╣čé * \param bytes čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ą░čüčüąĖą▓ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą▒ą░ą╣čé * \param repeat čüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą┐ąŠą▓č鹊čĆąĖčéčī ąŠčéą┐čĆą░ą▓ą║čā */ void ad9833_set_mod_bytes (uint8_t num, uint8_t * bytes, uint8_t repeat){
//TODO ...
}
/** * ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĄąĄ ą╝ąŠą┤čāą╗čÅčåąĖčÄ */
ISR(TIMER1_COMPA_vect){
uint16_t check = ad_settings.command_reg;
//TODO: čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą╝ąŠą┤čāą╗čÅčåąĖčÄ ą┤ą╗čÅ čĆąĄą░ą╗čīąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓
if (ad_settings.freq_out == 2 )
ad_settings.command_reg ^= ((uint16_t )1 << AD_FSELECT);
if (ad_settings.phase_out == 2 )
ad_settings.command_reg ^= ((uint16_t )1 << AD_PSELECT);
if (check != ad_settings.command_reg){
AD_FSYNC_LO();
//_delay_us(5);
ad9833_send(ad_settings.command_reg);
//_delay_us(5);
AD_FSYNC_HI();
}
}
[spi.h ]
/* * File: simple SPI routines for AVR * Author: Tuomas Nylund (tuomas.nylund@gmail.com) * Website: http://tuomasnylund.fi * * This program is free software: you can redistribute it and/or modify * it under the terms of the GNU General Public License as published by * the Free Software Foundation, either version 3 of the License, or * (at your option) any later version. * * This program is distributed in the hope that it will be useful, * but WITHOUT ANY WARRANTY; without even the implied warranty of * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the * GNU General Public License for more details. * * You should have received a copy of the GNU General Public License * along with this program. If not, see http://www.gnu.org/licenses/ . */
/** \file spi.h * ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ spi.c */ #ifndef SPI_H_ #define SPI_H_
/** \defgroup spi_h spi.h - ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ AVR SPI. * ąŁč鹊 ąŠč湥ąĮčī ą┐čĆąŠčüčéą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ SPI, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ * ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR. * * ą×ąĮą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮ ąŠą┐čĆąŠčü čäą╗ą░ą│ą░. * * ąøčÄą▒čŗąĄ čüąĖą│ąĮą░ą╗čŗ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ * ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ GPIO ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. * * * \section example Example * \code * // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ SPI: * spi_init(SPIMODE0|MSB_FIRST|CLOCKDIV4); * * // ą×čéą┐čĆą░ą▓ą║ą░ ą▒ą░ą╣čéą░: * spi_send_byte(0xAA); * * // ą¤čĆąĖąĄą╝ ą▒ą░ą╣čéą░: * uint8_t rcv; * rcv = spi_read_byte(); * \endcode * * @{ */
#include < avr/io.h >
/** \name ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĮąŠąČąĄą║ SPI * @{ */ #define SPI_DDR DDRB #define SPI_MOSI_BIT PB5 #define SPI_SCK_BIT PB7 #define SPI_CS_BIT PB4 /** @} */
/** \name ą£ą░čüą║ąĖ čĆąĄąČąĖą╝ą░ SPI * ąĖčüą┐ąŠą╗čīąĘčāčéčüčÅ ą▓ \ref spi_init() * @{ */ #define SPIMODE0 (0 << CPHA) #define SPIMODE1 (1 << CPHA) #define SPIMODE2 (2 << CPHA) #define SPIMODE3 (3 << CPHA) /** @} */
/** \name ą£ą░čüą║ąĖ, čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą┐ąŠčĆčÅą┤ą║ąŠą╝ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ SPI * ąĖčüą┐ąŠą╗čīąĘčāčéčüčÅ ą▓ \ref spi_init() * @{ */ #define LSB_FIRST (1 << DORD) #define MSB_FIRST (0 << DORD) /** @} */
/** \name ą£ą░čüą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéčīčÄ čéą░ą║č鹊ą▓ SPI * ąĖčüą┐ąŠą╗čīąĘčāčéčüčÅ ą▓ \ref spi_init() * @{ */ #define CLOCKDIV4 (0 << SPR0) #define CLOCKDIV16 (1 << SPR0) #define CLOCKDIV64 (2 << SPR0) /** @} */
void spi_init (uint8_t setup);
void spi_send_byte (uint8_t data);
uint8_t spi_read_byte (void );
#endif /** @} */
[spi.c ]
/* * File: simple SPI routines for AVR * Author: Tuomas Nylund (tuomas.nylund@gmail.com) * Website: http://tuomasnylund.fi */
/** \file spi.c * ą¤čĆąŠčüč鹊ą╣ ą║ąŠą┤ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ AVR SPI, * čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą┐ąŠ ąŠą┐čĆąŠčüčā (polling, čé. ąĄ. ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) */ #include "spi.h"
/** * ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé AVR SPI ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čāą║ą░ąĘą░ąĮąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. * \param setup čŹč鹊 ąŠą┐čåąĖąĖ SPI, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą╝ą░čüą║ąŠą╣, čüąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ * ąĖąĘ SPIMODE*, *_FIRST, CLOCKDIV*. */ void spi_init (uint8_t setup)
{
SPI_DDR |= (1 << SPI_MOSI_BIT)| (1 << SPI_SCK_BIT)| (1 << SPI_CS_BIT);
SPCR = (1 << SPE)| (1 << MSTR)| setup;
}
/** * ą¤ąŠčüčŗą╗ą░ąĄčé ąŠą┤ąĖąĮ ą▒ą░ą╣čé č湥čĆąĄąĘ SPI čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┐čĆąŠčüą░. * \param data ą▒ą░ą╣čé ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ */ void spi_send_byte (uint8_t data)
{
SPDR = data;
while (! (SPSR & (1 << SPIF)));
}
/** * ą¤čĆąĖąĄą╝ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ č湥čĆąĄąĘ SPI čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┐čĆąŠčüą░. * \return ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé */ uint8_t spi_read_byte (void )
{
SPDR = 0x00 ;
while (! (SPSR & (1 << SPIF)));
return SPDR;
}
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ SPI */
spi_init(SPIMODE2);
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ AD9833 */
ad9833_init();
/* ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░ wave ąĖ čćą░čüč鹊čéčŗ freq */
ad9833_set_frequency(0 , freq);
switch (wave)
{
case SYM_SINE:
ad9833_set_mode(AD_SINE);
mcp41010_write(levelSINE);
break ;
case SYM_TRIA:
ad9833_set_mode(AD_TRIANGLE);
mcp41010_write(levelTRIANGLE);
break ;
case SYM_SQUA:
ad9833_set_mode(AD_SQUARE);
mcp41010_write(levelSQUA);
break ;
ą¤čĆąŠąĄą║čé ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čŹč鹊čé ą║ąŠą┤, ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [5].
ą×čåąĄąĮąŠčćąĮą░čÅ ą┐ą╗ą░čéą░ (AD9833 evaluation board) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ą▓ čĆą░ą▒ąŠč鹥 ą▓čŗčüąŠą║ąŠą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮčŗą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆ AD9833 DDS čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ąĖ ąĘą░čéčĆą░čéą░ą╝ąĖ čāčüąĖą╗ąĖą╣.
[ą¤ą╗ą░čéč乊čĆą╝ą░ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ ]
ąĪąĖčüč鹥ą╝ąĮą░čÅ ą┐ą╗ą░čéč乊čĆą╝ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ (System demonstration platform, SDP) čŹč鹊 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ąĖ ąŠčåąĄąĮąŠčćąĮąŠąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╗čīąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü ąŠčåąĄąĮąŠčćąĮčŗą╝ąĖ ą┐ą╗ą░čéą░ą╝ąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░. ą¤ą╗ą░čéą░ SDP ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ Blackfin┬« ADSP-BF527 čü USB-ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ PC č湥čĆąĄąĘ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą┐ąŠčĆčé USB 2.0.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐ą╗ą░čéą░ SDP ą┐čĆąŠą┤ą░ąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ ąŠčé ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ AD9833.
[ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ AD9833 č湥čĆąĄąĘ SPORT ]
ą¤ą╗ą░čéą░ SDP ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices ąĖą╝ąĄąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé SPORT, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čģąŠą┤ą░ą╝ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ AD9833. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 32.
ąĀąĖčü. 32. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ SDP ą║ ąĖąĮč鹥čĆč乥ą╣čüčā AD9833.
[EVALUATION KIT ]
ą×čåąĄąĮąŠčćąĮčŗą╣ ą║ąĖčé (DDS evaluation kit) ą▓ą║ą╗čÄčćą░ąĄčé ą│ąŠč鹊ą▓čāčÄ, ą┐čĆąŠą▓ąĄčĆąĄąĮąĮčāčÄ ą┐ąĄčćą░čéąĮčāčÄ ą┐ą╗ą░čéčā čü AD9833. ąĪčģąĄą╝ą░ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 34 ąĖ 35.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠąĄ ą▓ą╝ąĄčüč鹥 čü ąŠčåąĄąĮąŠčćąĮčŗą╝ ą║ąĖč鹊ą╝, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┐čĆąŠčüč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī AD9833 (čüą╝. čĆąĖčü. 33). ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĮą░ ą╗čÄą▒ąŠą╝ IBM-čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠą╝ PC čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ Microsoft┬« Windows┬« (ą▓ą║ą╗čÄčćą░čÅ Windows 7). ą¤čĆąŠą│čĆą░ą╝ą╝ą░ čüąŠą▓ą╝ąĄčüčéąĖą╝ą░ ą║ą░ą║ čü 32-ą▒ąĖčéąĮąŠą╣, čéą░ą║ ąĖ čü 64-ą▒ąĖčéąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗą╝ąĖ čüąĖčüč鹥ą╝ą░ą╝ąĖ.
ąĀąĖčü. 33. ąōčĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü AD9833 Evaluation Software.
ąæąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ąŠčåąĄąĮąŠčćąĮąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĖ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĮą░ CD ąĖ ąĮą░ čüčéčĆą░ąĮąĖčćą║ąĄ ą┐čĆąŠą┤čāą║čéą░ AD9833 .
[ąÜą▓ą░čĆčåąĄą▓čŗąĄ ą│ąĄąĮąĄčĆą░č鹊čĆčŗ ą┐čĆąŠčéąĖą▓ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ]
AD9833 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī čü ąŠčüąĮąŠą▓ąĮąŠą╣ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ą┤ąŠ 25 ą£ąōčå. ąØą░ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░č鹥 ąĖą╝ąĄąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ 25 ą£ąōčå. ąŁč鹊čé ą│ąĄąĮąĄčĆą░č鹊čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┤ą░ą╗ąĄąĮ, ąĖ ąĄčüą╗ąĖ čŹč鹊 čéčĆąĄą▒čāąĄčéčüčÅ, č鹊 ą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ CMOS. ąÜą░ą║ ą▓ą░čĆąĖą░ąĮčé, ą╝ąŠą│čāčé ą▒čŗčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ąŠą▒čŗčćąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░:
ŌĆó ąōąĄąĮąĄčĆą░č鹊čĆčŗ AEL 301-Series, ą║ąŠą╝ą┐ą░ąĮąĖčÅ AEL Crystals
[ą¤ąĖčéą░ąĮąĖąĄ ]
ą¤ąĖčéą░ąĮąĖąĄ ą┤ą╗čÅ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ AD9833 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ č湥čĆąĄąĘ ą║ąŠąĮąĮąĄą║č鹊čĆ USB ąĖą╗ąĖ ą┐ąŠą┤ą░ąĮąŠ čüąĮą░čĆčāąČąĖ č湥čĆąĄąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą▓čŗą▓ąŠą┤ą░ą╝. ą¤čĆąŠą▓ąŠą┤ą░ ą┐ąĖčéą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą▓ąĖčéčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī ą┐ąŠą╝ąĄčģąĖ ąŠčé ąĮą░ą▓ąŠą┤ąŠą║.
[ą¤čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮčŗąĄ čüčģąĄą╝čŗ ]
ąĀąĖčü. 34. ąĪčģąĄą╝ą░ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ AD9833.
ąĀąĖčü. 35. ąĪčģąĄą╝ą░ ą║ąŠąĮąĮąĄą║č鹊čĆą░ SDP.
[ąĀą░ąĘą▓ąŠą┤ą║ą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ ]
ąĀąĖčü. 36. AD9833 Evaluation Board, čüč鹊čĆąŠąĮą░ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓.
ąĀąĖčü. 37. AD9833 Evaluation Board, čłąĄą╗ą║ąŠą│čĆą░čäąĖčÅ.
ąĀąĖčü. 38. AD9833 Evaluation Board, čüč鹊čĆąŠąĮą░ ą┐ą░ą╣ą║ąĖ.
ąĀąĖčü. 39. 10-ą▓čŗą▓ąŠą┤ąĮčŗą╣ ą║ąŠčĆą┐čāčü Mini Small Outline Package (MSOP, RM-10). ąĀą░ąĘą╝ąĄčĆčŗ čāą║ą░ąĘą░ąĮčŗ ą▓ ą╝ąĖą╗ą╗ąĖą╝ąĄčéčĆą░čģ (čüąŠą▓ą╝ąĄčüčéąĖą╝ čüąŠ čüčéą░ąĮą┤ą░čĆčéą░ą╝ąĖ JEDEC MO-187-BA).
[ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą▓čŗą▒ąŠčĆčā ą┐čĆąĖ ą┐ąŠą║čāą┐ą║ąĄ ]
ą£ąŠą┤ąĄą╗čī1,2,3 ąöąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ ąÜąŠčĆą┐čāčü ą×ą┐čåąĖčÅ ą║ąŠčĆą┐čāčüą░ ąæčĆąĄąĮą┤ąĖąĮą│
AD9833BRM
ŌłÆ40┬░C .. +105┬░C
10-ą▓čŗą▓ąŠą┤ąĮčŗą╣ MSOP
RM-10
DJB
AD9833BRM-REEL
ŌłÆ40┬░C .. +105┬░C
10-ą▓čŗą▓ąŠą┤ąĮčŗą╣ MSOP
RM-10
DJB
AD9833BRM-REEL7
ŌłÆ40┬░C .. +105┬░C
10-ą▓čŗą▓ąŠą┤ąĮčŗą╣ MSOP
RM-10
DJB
AD9833BRMZ
ŌłÆ40┬░C .. +105┬░C
10-ą▓čŗą▓ąŠą┤ąĮčŗą╣ MSOP
RM-10
D68
AD9833BRMZ-REEL
ŌłÆ40┬░C .. +105┬░C
10-ą▓čŗą▓ąŠą┤ąĮčŗą╣ MSOP
RM-10
D68
AD9833BRMZ-REEL7
ŌłÆ40┬░C .. +105┬░C
10-ą▓čŗą▓ąŠą┤ąĮčŗą╣ MSOP
RM-10
D68
AD9833WBRMZ-REEL
ŌłÆ40┬░C .. +105┬░C
10-ą▓čŗą▓ąŠą┤ąĮčŗą╣ MSOP
RM-10
D68
EVAL-AD9833SDZ
Evaluation Board
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1 Z = ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čüąŠą▓ą╝ąĄčüčéąĖą╝ą░ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ RoHS. 2 W = ą║ą▓ą░ą╗ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ (Automotive). 3 ą×čåąĄąĮąŠčćąĮą░čÅ ą┐ą╗ą░čéą░ ą┤ą╗čÅ AD9833 čéčĆąĄą▒čāąĄčé ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐ą╗ą░čéčā SDP, ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠą┤ą░ąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ.
ąÆą░čĆąĖą░ąĮčé ą┐ąŠčüčéą░ą▓ą║ąĖ AUTOMOTIVE . ą£ąŠą┤ąĄą╗čī AD9833WBRMZ-REEL ą┤ąŠčüčéčāą┐ąĮą░ čü ą║ąŠąĮčéčĆąŠą╗ąĄą╝ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą║ą░č湥čüčéą▓ą░ ąĖ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮčŗčģ (automotive) ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹčéą░ automotive ą╝ąŠą┤ąĄą╗čī ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ, ąŠčéą╗ąĖčćą░čÄčēąĖąĄčüčÅ ąŠčé ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąĖčģ ą╝ąŠą┤ąĄą╗ąĄą╣; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą┤ąŠą╗ąČąĮčŗ čéčēą░č鹥ą╗čīąĮąŠ ąĘą░ąĮąŠą▓ąŠ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī čüąĄą║čåąĖčÄ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖą╣ čŹč鹊ą│ąŠ ą┤ą░čéą░čłąĖčéą░. ąóąŠą╗čīą║ąŠ ą┐čĆąŠą┤čāą║čåąĖčÅ, čüąĄčĆčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą║ą░ą║ automotive, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ. ąĪą▓čÅąČąĖč鹥čüčī čü ą╗ąŠą║ą░ą╗čīąĮčŗą╝ ą┐čĆąĄą┤čüčéą░ą▓ąĖč鹥ą╗ąĄą╝ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ąĘą░ą║čāą┐ą║ąĄ, ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ąŠčéč湥č鹊ą▓ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┤ą╗čÅ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ (Automotive Reliability reports).
[ąĪą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ čüąĖą│ąĮą░ą╗ąŠą▓ ]
ąŚą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ąĮąĄą╣ čüąŠą▒čĆą░ą╗ ą│ąĄąĮąĄčĆą░č鹊čĆ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐ą╗ą░čéą║ąĖ, ą║čāą┐ą╗ąĄąĮąĮąŠą╣ ąĮą░ aliexpress, ąĖ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ AVR-USB-MEGA16. ąōąĄąĮąĄčĆą░č鹊čĆ ąĖą╝ąĄąĄčé LCD-ąĖąĮą┤ąĖą║ą░č鹊čĆ BC1601A1 (16x1) ąĖ ą┐čĆąŠčüč鹊ą╣ ąĖąĮč鹥čĆč乥ą╣čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ 菹Įą║ąŠą┤ąĄčĆą░ ąĖ ą║ąĮąŠą┐ą║ąĖ.
ą¦č鹊 čāą╝ąĄąĄčé ą│ąĄąĮąĄčĆą░č鹊čĆ:
ŌĆó ą£ąŠąČąĮąŠ ą╝ąĄąĮčÅčéčī čćą░čüč鹊čéčā ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0 ą┤ąŠ 12500000 ąōčå čü ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéčīčÄ 1 ąōčå.
ąæčŗą╗ ą▓ąĘčÅčé ą┐ąĄčĆą▓čŗą╣ ą┐ąŠą┐ą░ą▓čłąĖą╣čüčÅ ą╝ąĄčéą░ą╗ą╗ąĖč湥čüą║ąĖą╣ ą║ąŠčĆą┐čāčü. ą¤ąĄčĆąĄą┤ąĮčÄčÄ ą┐ą░ąĮąĄą╗čī čüą┤ąĄą╗ą░ą╗ ąĖąĘ č乊ą╗čīą│ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ č鹥ą║čüč鹊ą╗ąĖčéą░.
ą¤ą╗ą░čéčā AD9833, ą╝ą░ą║ąĄčéą║čā AVR-USB-MEGA16, čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ 7805 ąĘą░ą║čĆąĄą┐ąĖą╗ ąĮą░ ą╝ąĄčéą░ą╗ą╗ąĖč湥čüą║ąŠą╝ ą║ąŠčĆą┐čāčüąĄ. ąÜ ą┐ąĄčĆąĄą┤ąĮąĄą╣ ą┐ą░ąĮąĄą╗ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ č鹥čĆą╝ąŠą║ą╗ąĄčÅ ą┐čĆąĖą║ą╗ąĄąĖą╗ LCD-ąĖąĮą┤ąĖą║ą░č鹊čĆ, 菹Įą║ąŠą┤ąĄčĆ ąĖ ą║ąĮąŠą┐ą║čā.
ąÆ ąĘą░ą┤ąĮąĄą╣ ą║čĆčŗčłą║ąĄ ą▓čŗčĆąĄąĘą░ą╗ ąŠčéą▓ąĄčĆčüčéąĖčÅ ą┤ą╗čÅ ą┤ąČąĄą║ą░ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ą║ąŠąĮąĮąĄą║č鹊čĆą░ USB.
ąØąĖąČąĄ ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ąŠą▒čēą░čÅ čüčģąĄą╝ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ (ą▒ąĄąĘ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆą░ ą┐ąĖčéą░ąĮąĖčÅ +5V).
ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░:
ą×čüąĮąŠą▓ąĮąŠąĄ ą╝ąĄąĮčÄ
1 . ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüčćąĖčéčŗą▓ą░ąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖąĘ EEPROM, ąĖ ą▓čŗą▓ąŠą┤ąĖčé ąĮą░ 菹║čĆą░ąĮ čćą░čüč鹊čéčā č鹥ą║čāčēąĄą╣ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ (ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░čćąĖąĮą░ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ čćą░čüč鹊č鹥 ąŠą┤ąĮąŠą╣ ąĖąĘ 10 ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗčģ čÅč湥ąĄą║ ą┐ą░ą╝čÅčéąĖ). ąØą░ 菹║čĆą░ąĮ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░, ąĮąŠą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖ ą▓čŗčģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĘą░čēąĖčēąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéąĖ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝ąŠą╣ CRC16. ąĢčüą╗ąĖ ą┐ąŠ ą║ą░ą║ąŠą╣-č鹊 ą┐čĆąĖčćąĖąĮąĄ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ ąĮąĄ ą║ąŠčĆčĆąĄą║čéąĮą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī, ą║ąŠą│ą┤ą░ ą▓ čćąĖčüčéčŗą╣ čćąĖą┐ AVR č鹊ą╗čīą║ąŠ čćč鹊 ą▒čŗą╗ą░ ąĘą░ą┐ąĖčüą░ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░) č鹊 ąĮą░čüčéčĆąŠą╣ą║ąĖ EEPROM ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
2 . ą¤ąŠą▓ąŠčĆąŠčé 菹Įą║ąŠą┤ąĄčĆą░ ą╝ąĄąĮčÅąĄčé ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ ąĮą░ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé.
ąÆčŗą▒ąŠčĆ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ
3 . ąÜąŠčĆąŠčéą║ąŠąĄ ąĮą░ąČą░čéąĖąĄ ąĮą░ čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░ ą▓ą║ą╗čÄčćą░ąĄčé ą▓čŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ą¤ąŠą▓ąŠčĆąŠčé čĆčāčćą║ąĖ 菹Įą║ąŠą┤ąĄčĆą░ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčé ą║čāčĆčüąŠčĆ (ą╝ąĖą│ą░čÄčēąĖą╣ č湥čĆąĮčŗą╣ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║) ą┐ąŠ 菹║čĆą░ąĮčā, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą▓čŗą▒čĆą░čéčī 菹╗ąĄą╝ąĄąĮčé ą┤ą╗čÅ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ą£ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░ (čüąĖąĮčāčü, čéčĆąĄčāą│ąŠą╗čīąĮąĖą║, ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║), ąĮąŠą╝ąĄčĆą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ (ąŠčé 0 ą┤ąŠ 9) ąĖ čćą░čüč鹊čéčŗ ąĖą╗ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé č鹊ą│ąŠ, čćč鹊 ąŠč鹊ą▒čĆą░ąČą░ą╗ąŠčüčī ąĮą░ 菹║čĆą░ąĮąĄ).
ąöą▓ąŠą╣ąĮąŠąĄ ąĮą░ąČą░čéąĖąĄ ąĮą░ čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čĆąĄąČąĖą╝ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą╝ąĄąĮčÄ.
ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░
4 . ą¤ąŠą▓č鹊čĆąĮąŠąĄ ą║ąŠčĆąŠčéą║ąŠąĄ ąĮą░ąČą░čéąĖąĄ ąĮą░ čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░ ą▓ą║ą╗čÄčćą░ąĄčé čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░. ą¤čĆąĖ čŹč鹊ą╝ ą╝ąĖą│ą░čÄčēąĖą╣ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ ą║čāčĆčüąŠčĆą░ ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ ą┐ąŠą┤č湥čĆą║ąĖą▓ą░ąĮąĖąĄ čĆąĄą┤ą░ą║čéąĖčĆčāąĄą╝ąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ, ą░ ą┐ąŠą▓ąŠčĆąŠčé čĆčāčćą║ąĖ 菹Įą║ąŠą┤ąĄčĆą░ ą╝ąĄąĮčÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ (č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░, ąĮąŠą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ, čćą░čüč鹊čéą░ ąĖą╗ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ). ąśąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ąĮą░ 菹║čĆą░ąĮąĄ LCD ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░.
ąĢčüą╗ąĖ ąĄčēąĄ čĆą░ąĘ ą║ąŠčĆąŠčéą║ąŠ ąĮą░ąČą░čéčī ąĮą░ čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠą▒čĆą░čéąĮčŗą╣ ą┐ąĄčĆąĄčģąŠą┤ ą▓ čĆąĄąČąĖą╝ ą▓čŗą▒ąŠčĆą░ čĆąĄą┤ą░ą║čéąĖčĆčāąĄą╝ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░. ąöą▓ąŠą╣ąĮąŠąĄ ąĮą░ąČą░čéąĖąĄ ąĮą░ čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čĆąĄąČąĖą╝ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą╝ąĄąĮčÄ.
ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║
5 . ąĪą┤ąĄą╗ą░ąĮąĮčŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ ą╝ąŠąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī ą▓ EEPROM, čćč鹊ą▒čŗ ąŠąĮąĖ ą▓čüčéčāą┐ąĖą╗ąĖ ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ ą┐čĆąĖ čüą╗ąĄą┤čāčÄčēąĄą╝ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ą║ąŠčĆąŠčéą║ąŠ ąĮą░ąČą░čéčī ąĮą░ ą║čĆą░čüąĮčāčÄ ą║ąĮąŠą┐ą║čā. ą¤čĆąŠąĘą▓čāčćąĖčé ąĘą▓čāą║ąŠą▓ąŠą╣ čüąĖą│ąĮą░ą╗, ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąŠčģčĆą░ąĮčÅčéčüčÅ, ąĖ ąĮą░ 菹║čĆą░ąĮ ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
ąŚą░ą┐čāčüą║ USB-ąĘą░ą│čĆčāąĘčćąĖą║ą░
6 . ą¤čĆąĖą▒ąŠčĆ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čü ą┐ąŠą╝ąŠčēčīčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ USBasp, ą║ąŠč鹊čĆčŗą╣ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠ ąĘą░ą┐ąĖčüą░ąĮ ą▓ąŠ ą▓čüąĄ ą╝ą░ą║ąĄčéąĮčŗąĄ ą┐ą╗ą░čéčŗ AVR-USB-MEGA16. ąŚą░ą┐čāčüčéąĖčéčī ąĘą░ą│čĆčāąĘčćąĖą║ ą╝ąŠąČąĮąŠ ą┤ą▓čāą╝čÅ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ:
- ąÆčŗą║ą╗čÄčćąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ ą┐čĆąĖą▒ąŠčĆą░, ą▓čŗą┤ąĄčĆąĮčāčéčī čłąĮčāčĆ USB. ąØą░ąČą╝ąĖč鹥 ąĖ čāą┤ąĄčƹȹĖą▓ą░ą╣č鹥 ą▓ ąĮą░ąČą░č鹊ą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░, ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą┐čĆąĖą▒ąŠčĆ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā č湥čĆąĄąĘ USB. ą×čéą┐čāčüčéąĖč鹥 čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░. ąŚą░ą│čĆčāąĘčćąĖą║ USBasp ą▒čāą┤ąĄčé ąČą┤ą░čéčī ąĘą░ą┐ąĖčüąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ, ą┤ą░ą╗čīčłąĄ ąĮčāąČąĮąŠ ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą┐ąŠ ąĖąĮčüčéčĆčāą║čåąĖąĖ, ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąĮąŠą╣ ą▓ čüčéą░čéčīąĄ [3].
- ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 ą┐čĆąĖą▒ąŠčĆ č湥čĆąĄąĘ USB ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā. ąØą░ąČą╝ąĖč鹥 ąĖ čāą┤ąĄčƹȹĖą▓ą░ą╣č鹥 ą║čĆą░čüąĮčāčÄ ą║ąĮąŠą┐ą║čā. ąöąŠąČą┤ąĖč鹥čüčī ą┐ąŠą┤čüą║ą░ąĘą║ąĖ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ąĮą░ąČą╝ąĖč鹥 ąĖ čāą┤ąĄčƹȹĖą▓ą░ą╣č鹥 čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░, ąŠčéą┐čāčüčéąĖč鹥 ą║čĆą░čüąĮčāčÄ ą║ąĮąŠą┐ą║čā, ąĘą░č鹥ą╝ ąŠčéą┐čāčüčéąĖč鹥 ą║ąĮąŠą┐ą║čā 菹Įą║ąŠą┤ąĄčĆą░. ąŚą░ą│čĆčāąĘčćąĖą║ USBasp ą▒čāą┤ąĄčé ąČą┤ą░čéčī ąĘą░ą┐ąĖčüąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ, ą┤ą░ą╗čīčłąĄ ąĮčāąČąĮąŠ ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą┐ąŠ ąĖąĮčüčéčĆčāą║čåąĖąĖ, ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąĮąŠą╣ ą▓ čüčéą░čéčīąĄ [3].
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĘą░ą│čĆčāąĘčćąĖą║ ą▒čŗą╗ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ, čćč鹊ą▒čŗ ąŠąĮ ąĘą░ą┐čāčüą║ą░ą╗čüčÅ ąĮąĄ ąŠčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ, ą░ ąŠčé ąĮą░ąČą░č鹊ą╣ ą║ąĮąŠą┐ą║ąĖ 菹Įą║ąŠą┤ąĄčĆą░. ą¤čĆąŠčüč鹊 ąŠą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ą┤čĆčāą│ą░čÅ ąĮąŠąČą║ą░ GPIO ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ - PD5 ą▓ą╝ąĄčüč鹊 PB5.
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [5].
[ąĪčüčŗą╗ą║ąĖ ]
1 . AD9833: Low Power, 12.65 mW, 2.3 V to 5.5 V, Programmable Waveform Generator site:analog.com.2 . ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░ AD9833, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ č湥čĆąĄąĘ USB .3 . ą£ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ AVR-USB-MEGA16 .4 . ą”ąĖčäčĆąŠą▓ąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ MCP41XXX/42XXX čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ SPI .5 . 170709function-gen.zip .6 . How to Build Your Own Function Generator Using AD9833 site:allaboutcircuits.com.




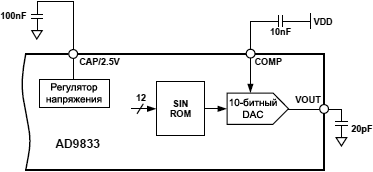
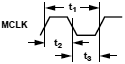
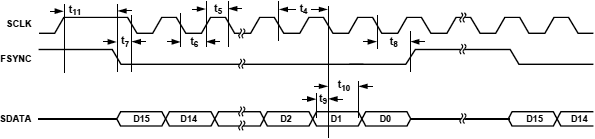

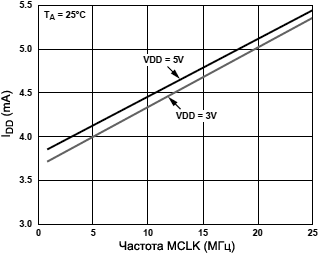

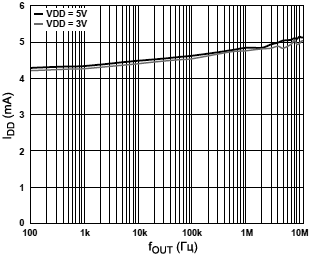
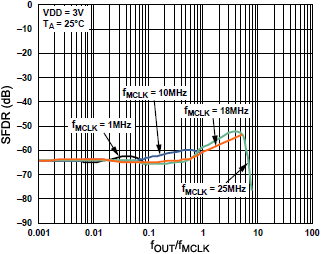
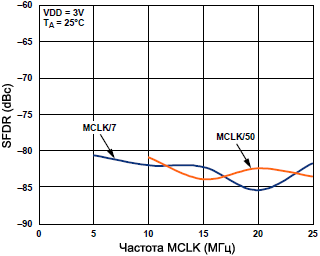
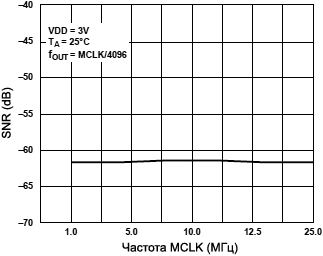
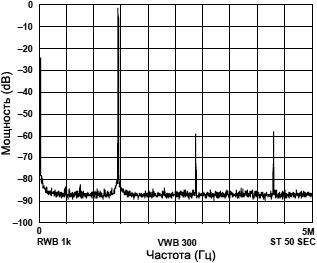
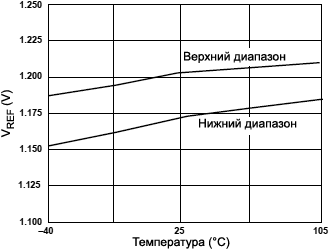

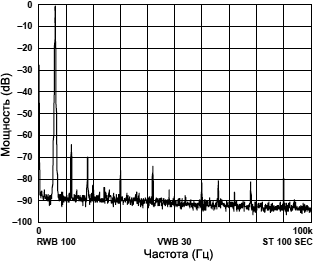
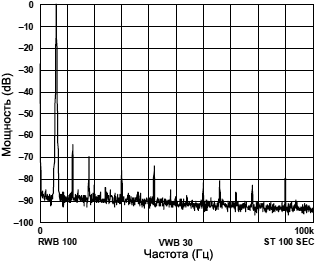


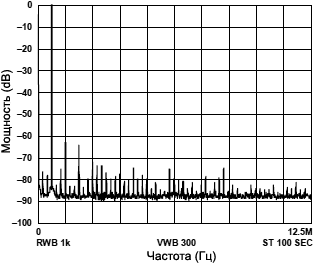



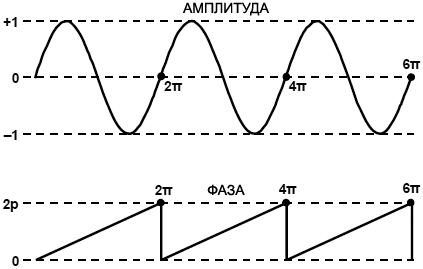
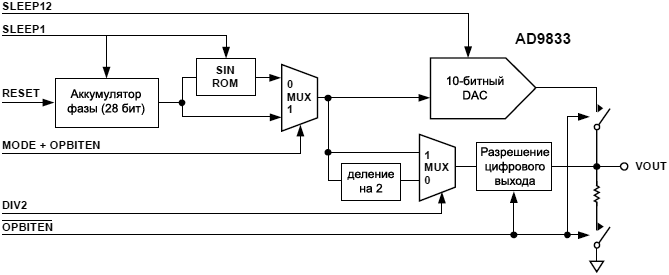

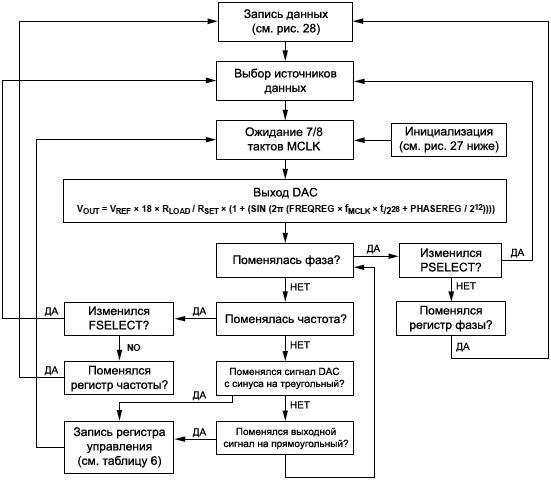
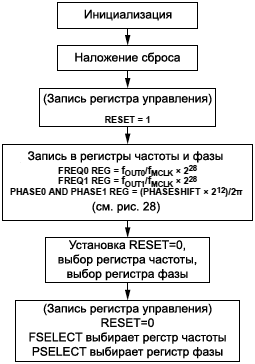

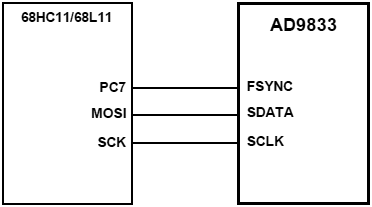
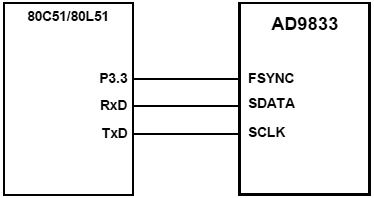
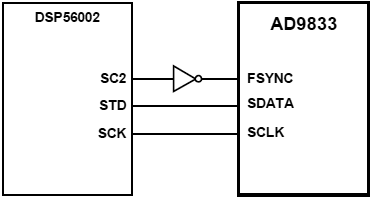


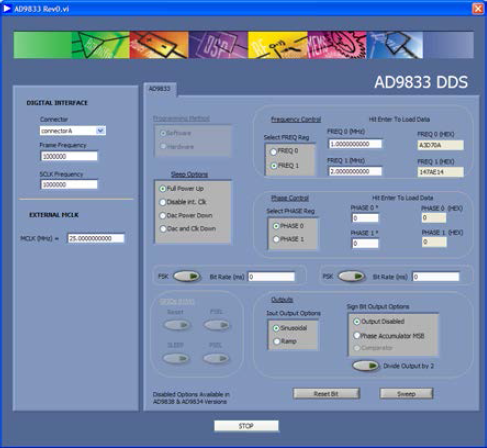
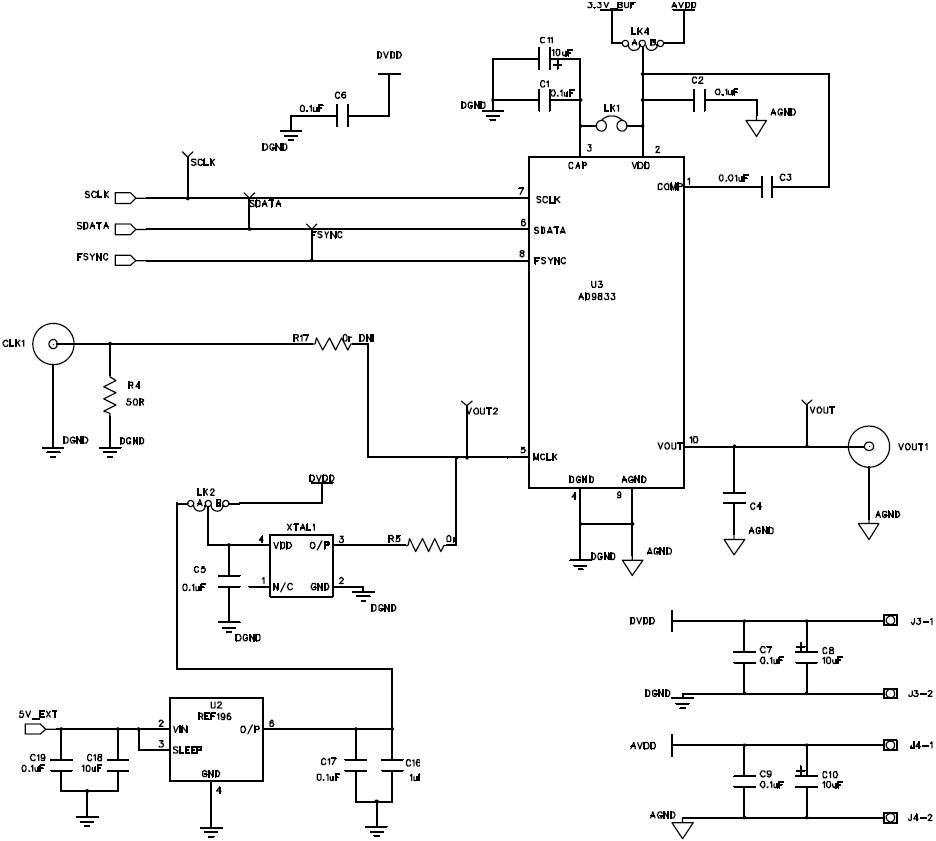
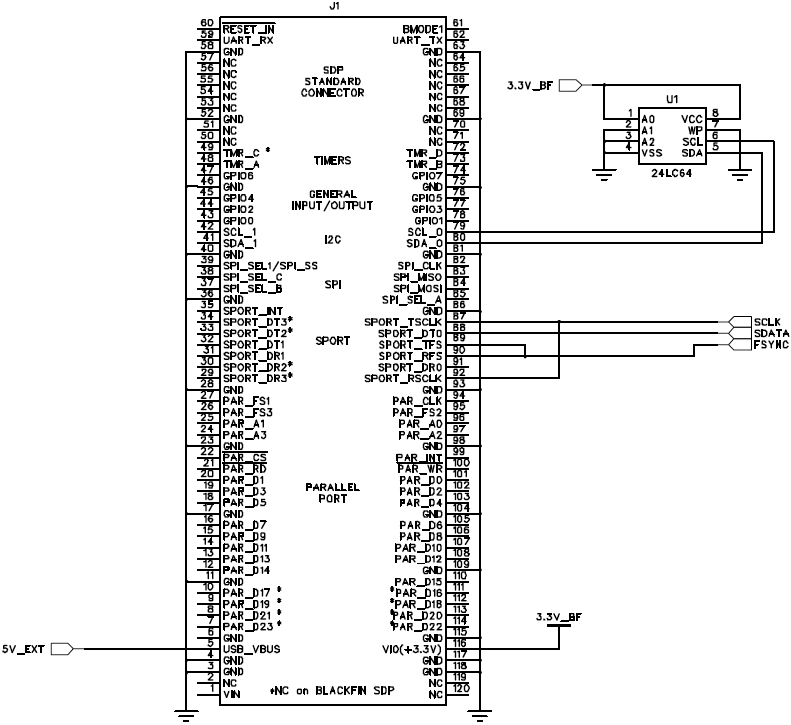
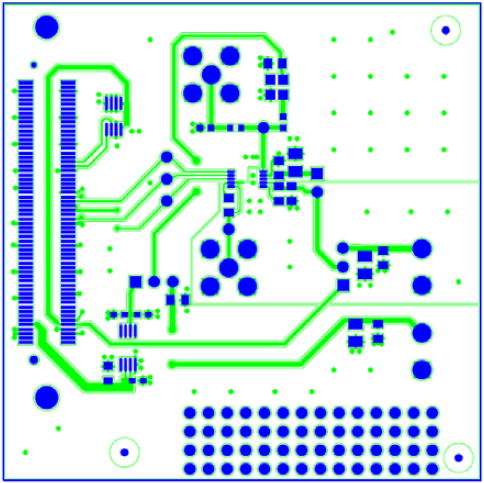
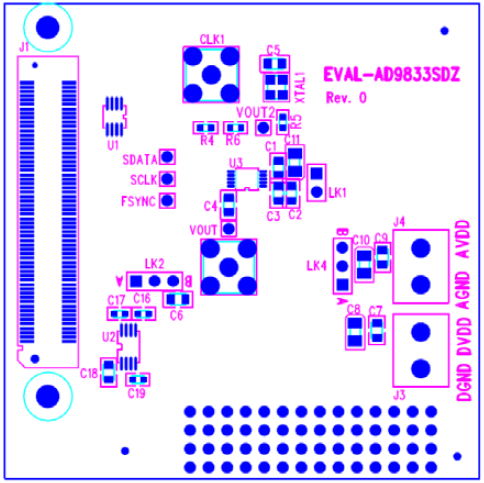
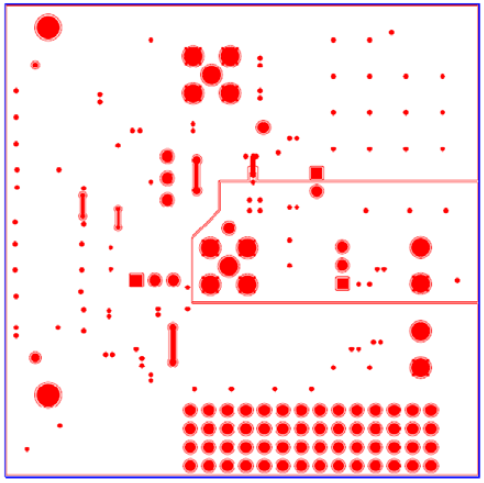

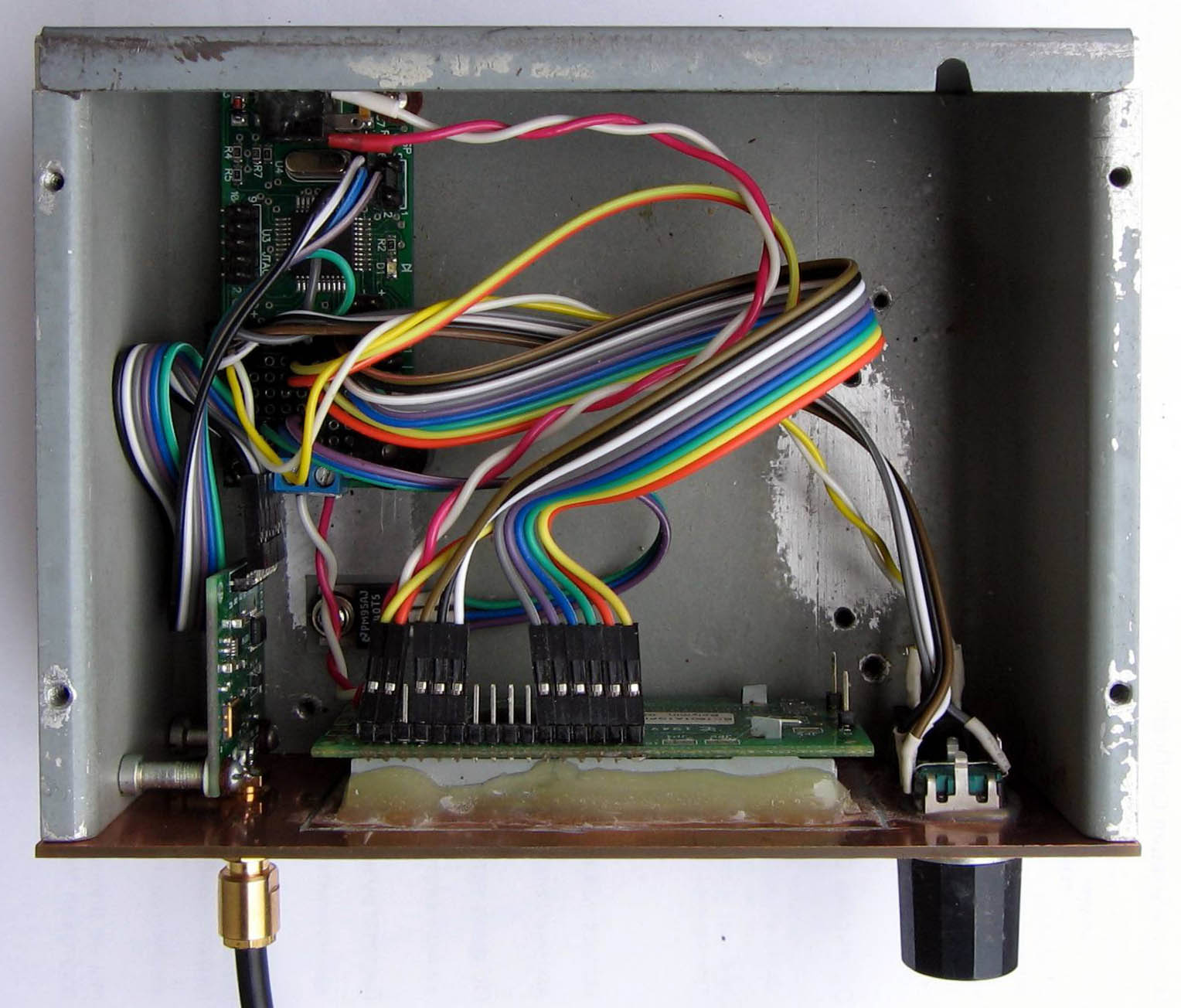

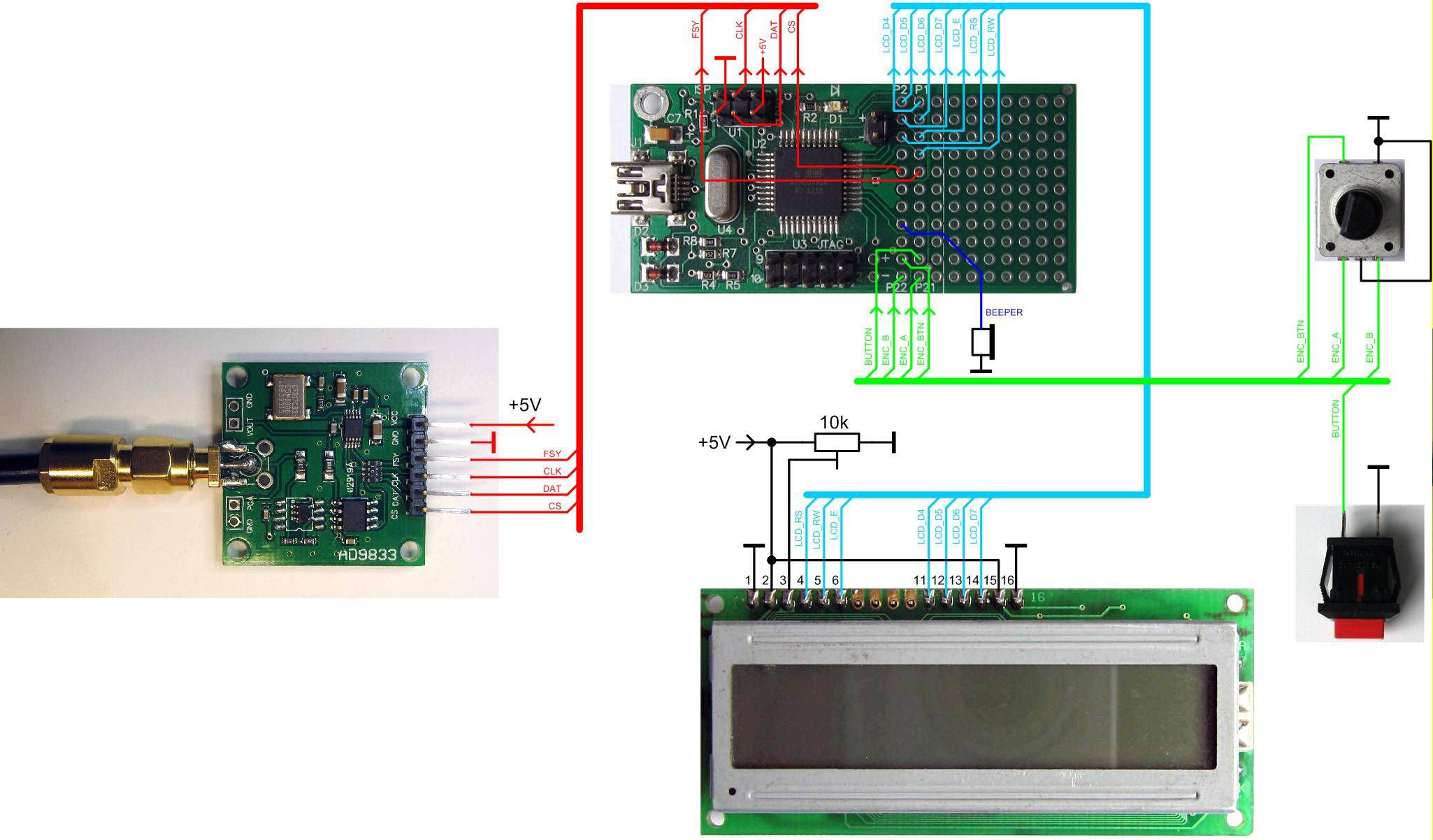

ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
ad9833_send(reg_reg | (0x3FFF&(uint16_t)(freq_reg >> 16)));
ą¤ąŠ-ą╝ąŠąĄą╝čā, ąĘą┤ąĄčüčī 2 ąĮčāąČąĮčŗčģ ą▒ąĖčéą░ ąĮąĄ čāčćąĖčéčŗą▓ą░čÄčéčüčÅ, ą║ą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ čćą░čüč鹊čéą░ ą▒čāą┤ąĄčé ąĮąĄ čéą░, čćč鹊 čģąŠčéąĖą╝.
ąÆčĆąŠą┤ąĄ čéą░ą║ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī:
ad9833_send(reg_reg | (0x3FFF&(uint16_t)(freq_reg)) );
ad9833_send(reg_reg | (0x3FFF&(uint16_t)(freq_reg >> 14)));
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ