|
ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé (ą┐ąĄčĆąĄą▓ąŠą┤ [1]) ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą╗ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ Spartan┬«-6 FPGA (memory controller block, MCB). ąöą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ čü ą┐ą░ą╝čÅčéčīčÄ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąŠą┤ąĖąĮ ąĖąĘ ą┤ą▓čāčģ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓:
1. Memory Interface Generator (MIG). ąöą╗čÅ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗčģ ą┤ąĖąĘą░ą╣ąĮąŠą▓ FPGA (ą▒ąĄąĘ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, non-embedded) čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ UG416 [2], ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ čü ą┐ą░ą╝čÅčéčīčÄ čü ą┐ąŠą╝ąŠčēčīčÄ čāčéąĖą╗ąĖčéčŗ MIG ą▓ čüąŠčüčéą░ą▓ąĄ ą¤ą× CORE GeneratorŌäó. ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé čéą░ą║ąČąĄ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąŠčéą╗ą░ą┤ą║ąĄ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ MCB.
2. Embedded Development Kit (EDK). ąöą╗čÅ embedded-ą┤ąĖąĘą░ą╣ąĮąŠą▓ čüą╝. DS643 [3], ą│ą┤ąĄ ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ MCB ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ MPMC ą▓ čüčĆąĄą┤ąĄ EDK.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čāčéąĖą╗ąĖčéą░ MIG ą┤ą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą┤ąŠčüčéčāą┐ą░ ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā SDRAM ą┤ąŠčüčéčāą┐ąĮą░ ą▓ čüčĆąĄą┤ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Xilinx ISE [10] č湥čĆąĄąĘ ą╝ąĄąĮčÄ Tools -> Core Generator... -> IP Catalog -> View by Function -> Memories & Storage Elements -> Memory Interface Generators -> MIG Virtex-6 and Spartan-6.
ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ čüąŠą┤ąĄčƹȹĖčé ą│ą╗ą░ą▓čŗ:
1. ą×ą▒ąĘąŠčĆ MCB, ą▓ą▓ąŠą┤ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ Spartan-6 FPGA MCB.
2. ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ MCB. ą×ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░, čüąĖą│ąĮą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ MCB.
3. ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ MCB, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ MCB ą▓ ą┤ąĖąĘą░ą╣ąĮąĄ ąĮą░ Spartan-6, čüąŠ čüą┐ąĄčåąĖčäąĖą║ąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▒ą╗ąŠą║ą░ ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
4. ąĀą░ą▒ąŠčéą░ MCB, ąŠą▒čŖčÅčüąĮąĄąĮąĖąĄ čäčāąĮą║čåąĖą╣ MCB ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ą░čģ: ąĘą░ą┐čāčüą║ (startup), ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ (calibration), ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čÅč湥ąĄą║ SDRAM (refresh), ą┐čĆąĄą┤ąĘą░čĆčÅą┤ (precharge), čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ąĖ čé. ą┤.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ A, čüčüčŗą╗ą║ąĖ ąĮą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ, ą║ą░čüą░čÄčēčāčÄčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąŠą║čāą╝ąĄąĮčéčŗ čéą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĮą░ čüą░ą╣č鹥 xilinx.com.
ŌĆó Spartan-6 Family Overview. ąŁč鹊čé ąŠą▒ąĘąŠčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖąĖ ąĖ ą▓ą░čĆąĖą░ąĮčéčŗ ą▓čŗą▒ąŠčĆą░ ą┐čĆąŠą┤čāą║čåąĖąĖ čüąĄą╝ąĄą╣čüčéą▓ą░ Spartan-6.
ŌĆó Spartan-6 FPGA Data Sheet: DC and Switching Characteristics. ąŁč鹊čé ą┤ą░čéą░čłąĖčé čüąŠą┤ąĄčƹȹĖčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░ (DC) ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┤ą╗čÅ čüąĄą╝ąĄą╣čüčéą▓ą░ Spartan-6.
ŌĆó Spartan-6 FPGA Packaging and Pinouts Product Specification. ąŁčéą░ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ą▓ą║ą╗čÄčćą░ąĄčé čéą░ą▒ą╗ąĖčåčŗ ą┤ą╗čÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░/ą║ąŠčĆą┐čāčü ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ I/O, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓, čéą░ą▒ą╗ąĖčå čĆą░ąĘą▓ąŠą┤ą║ąĖ ą▓čŗą▓ąŠą┤ąŠą▓, ą┤ąĖą░ą│čĆą░ą╝ą╝ ą▓čŗą▓ąŠą┤ąŠą▓, ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖąĄ č湥čĆč鹥ąČąĖ ą║ąŠčĆą┐čāčüąŠą▓, čüą┐ąĄčåąĖčäąĖą║ą░čåąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣.
ŌĆó Spartan-6 FPGA Configuration User Guide. ąŁč鹊 ą▓čüąĄąŠą▒čŖąĄą╝ą╗čÄčēąĄąĄ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÄ ą▓ą║ą╗čÄčćą░ąĄčé ą│ą╗ą░ą▓čŗ ą┐ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ (ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąĖ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗčģ), čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ ą▒ąĖčé, čłąĖčäčĆąŠą▓ą░ąĮąĖčÄ ą┐ąŠč鹊ą║ą░ ą▒ąĖčé, č鹥čģąĮąŠą╗ąŠą│ąĖąĖ boundary-scan ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ JTAG ąĖ č鹥čģąĮąĖą║ą░ą╝ ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ.
ŌĆó Spartan-6 FPGA SelectIO Resources User Guide. ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ąŠą┐ąĖčüčŗą▓ą░ąĄčé čĆąĄčüčāčĆčüčŗ SelectIOŌäó, ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą▓ąŠ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ Spartan-6.
ŌĆó Spartan-6 FPGA Clocking Resources User Guide. ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ąŠą┐ąĖčüčŗą▓ą░ąĄčé čĆąĄčüčāčĆčüčŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą▓ąŠ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ Spartan-6, ą▓ą║ą╗čÄčćą░čÅ ą▒ą╗ąŠą║ąĖ DCM ąĖ PLL.
ŌĆó Spartan-6 FPGA Block RAM Resources User Guide. ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą▒ą╗ąŠą║ą░ RAM čāčüčéčĆąŠą╣čüčéą▓ą░ Spartan-6.
ŌĆó Spartan-6 FPGA Configurable Logic Block User Guide. ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą▒ą╗ąŠą║ąŠą▓ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠą╣ ą╗ąŠą│ąĖą║ąĖ (configurable logic blocks, CLB), ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓ąŠ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ Spartan-6.
ŌĆó Spartan-6 FPGA GTP Transceivers User Guide. ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ąŠą┐ąĖčüčŗą▓ą░ąĄčé čéčĆą░ąĮčüąĖą▓ąĄčĆčŗ GTP, ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░čģ Spartan-6 LXT FPGA.
ŌĆó Spartan-6 FPGA DSP48A1 Slice User Guide. ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą░čĆčģąĖč鹥ą║čéčāčĆčā čüą╗ą░ą╣čüą░ DSP48A1 ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░čģ Spartan-6 FPGA, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ŌĆó Spartan-6 FPGA PCB and Pin Planning Design Guide. ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą┤ąĖąĘą░ą╣ąĮčā ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ Spartan-6, čü č乊ą║čāčüąŠą╝ ąĮą░ čüčéčĆą░č鹥ą│ąĖąĖ ą┤ą╗čÅ ą┐čĆąĖąĮčÅčéąĖčÅ čĆąĄčłąĄąĮąĖą╣ ą┐ąŠ ą┤ąĖąĘą░ą╣ąĮčā ąĮą░ čāčĆąŠą▓ąĮąĄ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░.
ŌĆó Spartan-6 FPGA Power Management User Guide. ąŁč鹊 čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ą╝ąĄč鹊ą┤ą░ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ Spartan-6 devices, č乊ą║čāčüąĖčĆčāčÅčüčī ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮą░ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode).
[1. ą×ą▒ąĘąŠčĆ MCB]
MCB čŹč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▒ą╗ąŠą║ ą╝ąĮąŠą│ąŠą┐ąŠčĆč鹊ą▓ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčé ąĘą░ą┤ą░čćčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ Spartan-6 ą║ ą▒ąŠą╗čīčłąĖąĮčüčéą▓čā čüčéą░ąĮą┤ą░čĆč鹊ą▓ ą┐ą░ą╝čÅčéąĖ. MCB ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čŗčüąŠą║ąŠąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ, ą┐ąŠąĮąĖąČąĄąĮąĮąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ąĖ ą▒čŗčüčéčĆčāčÄ čĆą░ąĘčĆą░ą▒ąŠčéą║čā - ą▓čüąĄ čŹč鹊 ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠą│ąŠ ą║ą░č湥čüčéą▓ą░, č湥ą╝ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗčģ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ IP. ąÆčüčéčĆąŠąĄąĮąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ MCB čüąŠčģčĆą░ąĮčÅąĄčé ąĘąĮą░čćąĖą╝čŗąĄ čĆąĄčüčāčĆčüčŗ FPGA, ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čüč乊ą║čāčüąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ą▒ąŠą╗ąĄąĄ čāąĮąĖą║ą░ą╗čīąĮčŗčģ čäčāąĮą║čåąĖčÅčģ ą┤ąĖąĘą░ą╣ąĮą░ FPGA.
MCB ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ ąĖ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ Spartan-6 FPGA:
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čüčéą░ąĮą┤ą░čĆč鹊ą▓ ą┐ą░ą╝čÅčéąĖ DDR, DDR2, DDR3 ąĖ LPDDR (Mobile DDR)
ŌĆó ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ą┤ąŠ 800 Mb/s (400 ą£ąōčå double data rate)
ŌĆó ąöąŠ 4 čÅą┤ąĄčĆ MCB ą▓ ąŠą┤ąĮąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ Spartan-6. ąÜą░ąČą┤ąŠąĄ čÅą┤čĆąŠ MCB čüąŠą┤ąĄčƹȹĖčé:
- 4-, 8- ąĖą╗ąĖ 16-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ąŠą┤ąĖąĮąŠčćąĮčŗą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ
- ą¤ą╗ąŠčéąĮąŠčüčéčī ą┐ą░ą╝čÅčéąĖ ą┤ąŠ 4 Gb
- ąÉą│čĆąĄą│ą░čéąĮčāčÄ ą┐ąŠą╗ąŠčüčā ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┤ąŠ 12.8 Gb/s
ŌĆó ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗą╣ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą╝ąĮąŠą│ąŠą┐ąŠčĆč鹊ą▓čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ ą╗ąŠą│ąĖą║ąĖ FPGA
- ą×čé 1 ą┤ąŠ 6 ą┐ąŠčĆč鹊ą▓ ąĮą░ MCB ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
- 32-, 64- ąĖą╗ąĖ 128-ą▒ąĖčéąĮą░čÅ čłąĖąĮą░ ą┤ą░ąĮąĮčŗčģ
- ąöą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ (R/W) ąĖą╗ąĖ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ (č鹊ą╗čīą║ąŠ W ąĖą╗ąĖ č鹊ą╗čīą║ąŠ R) ą┐ąŠčĆčé.
ŌĆó ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▒ą░ąĮą║ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ
- ąöąŠ 8 ą▒ą░ąĮą║ąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą║čĆčŗč鹊 ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░
ŌĆó ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü (PHY), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣:
- ą¤čĆąĄą┤čüą║ą░ąĘčāąĄą╝čŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ
- ąØąĖąĘą║ąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ
- ąōą░čĆą░ąĮčéąĖčĆčāąĄą╝ą░čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī
ŌĆó ąŚą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ čĆą░ąĘą▓ąŠą┤ą║ą░ ą▓ąĮąĄčłąĮąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ (ą╝ąĄčüčéą░ I/O ąĮą░ ą║ąŠčĆą┐čāčüąĄ) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ MCB
- ąŻą┐čĆąŠčēąĄąĮąĮčŗą╣ ą┤ąĖąĘą░ą╣ąĮ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ
- ąØąŠąČą║ąĖ I/O, ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāą╝čŗąĄ ą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ MCB, čüčéą░ąĮąŠą▓čÅčéčüčÅ ąŠą▒čŗčćąĮčŗą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ I/O ( ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ ąĖ čéą░ą▒ą╗ąĖčåčā 2-0).
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠą▒čēąĖčģ ąŠą┐čåąĖą╣ ąĖ ą░čéčĆąĖą▒čāč鹊ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┐ą░ą╝čÅčéąĖ
- ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ ąĮą░ą│čĆčāąĘąŠčćąĮą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī
- On-Die Termination (ODT)
- CAS latency (ąĘą░ą┤ąĄčƹȹ║ą░ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ čüč鹊ą╗ą▒čåą░)
- Self refresh (čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ą▓ą║ą╗čÄčćą░čÅ čćą░čüčéčī ą╝ą░čüčüąĖą▓ą░)
- ąśąĮč鹥čĆą▓ą░ą╗ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ
- Write recovery time (ą▓čĆąĄą╝čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ)
ŌĆó ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą┤ąĄčƹȹ║ąĖ čüčéčĆąŠą▒ą░ ą┐ą░ą╝čÅčéąĖ ąĖ čćč鹥ąĮąĖčÅ ą▓čģąŠą┤ąŠą▓ ą┤ą░ąĮąĮčŗčģ
- ą¤ąŠą┤čüčéčĆąŠą╣ą║ą░ ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘąĖ DQS (čüčéčĆąŠą▒) ąĖ DQ (ą┤ą░ąĮąĮčŗąĄ) ą┤ą╗čÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ čćč鹥ąĮąĖčÅ
ŌĆó ą×ą┐čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ FPGA č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ąŠą▓ ą┤ą╗čÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą║ą░č湥čüčéą▓ą░ čüąĖą│ąĮą░ą╗ąŠą▓
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗą╣ Xilinx┬« ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ CORE GeneratorŌäó ąĖ Embedded Development Kit (EDK):
- ąŻčéąĖą╗ąĖčéą░ Memory Interface Generator (MIG), ą▓čģąŠą┤čÅčēą░čÅ ą▓ čüąŠčüčéą░ą▓ ą¤ą× CORE Generator, čāą┐čĆąŠčēą░ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║čā čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ MCB
- ąöąĖąĘą░ą╣ąĮčŗ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ čéą░ą║ąČąĄ ą┐ąŠą╗čāčćą░čÄčé ą┤ąŠčüčéčāą┐ ą║ MCB č湥čĆąĄąĘ ą╝ąĮąŠą│ąŠą┐ąŠčĆč鹊ą▓čŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░ą╝čÅčéąĖ (multi-port memory controller, MPMC), ą║ąŠč鹊čĆčŗą╣ ą┤ąŠčüčéčāą┐ąĄąĮ ą▓ EDK ą║ą░ą║ IP.
ąæą╗ąŠą║-čüčģąĄą╝ą░ ąĮą░ čĆąĖčü. 1-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą│ą╗ą░ą▓ąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ čÅą┤čĆą░ MCB. ąÆčüčÄą┤čā ą▓ čŹč鹊ą╝ ąŠą┐ąĖčüą░ąĮąĖąĖ MCB ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ ą▓ memory IP tools ą¤ą× CORE Generator ąĖą╗ąĖ čĆą░ą▒ąŠč湥ą╣ čüčĆąĄą┤ąĄ EDK. ąŁčéąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ ąŠą▒čŗčćąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāčÄčé čäą░ą╣ą╗čŗ ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╣ ąŠą▒ąĄčĆčéą║ąĖ (IP Wrapper), ą║ąŠč鹊čĆčŗąĄ čĆąĄą░ą╗ąĖąĘčāčÄčé ą┐čĆąĖą╝ąĖčéąĖą▓ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčāčÄ ą╗ąŠą│ąĖą║čā ą▓ą╝ąĄčüč鹥 čü ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄą╝ ą┐ąŠčĆč鹊ą▓, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ čĆąĄčłąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĮą░ čĆąĖčü. 1-1 čäąĖąĘąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü MCB ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą▓ą▓ąŠą┤ą░ ą▓čŗą▓ąŠą┤ą░ (I/O block, IOB) ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ čü ą┐ą░ą╝čÅčéčīčÄ. ąóą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čĆąĄčüčāčĆčüčŗ čåąĄą┐ąĄą╣ ąŠą▒čēąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O clock network).
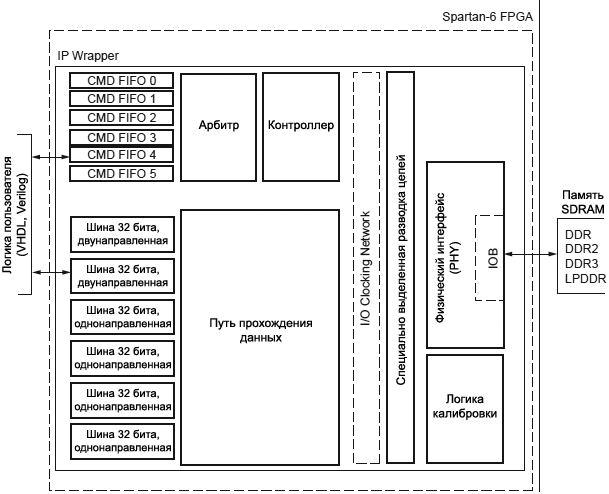
ąĀąĖčü. 1-1. ąæą╗ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ (MCB) Spartan-6 FPGA (ą▓ąĖą┤ ąĮą░ IP Wrapper).
ąśąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ MCB ąĮą░ ąŠą▒čŗčćąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (single data rate, SDR) ą▓ąĮčāčéčĆąĖ FPGA ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ č湥čĆąĄąĘ ą┐ąŠčĆčéčŗ, ąŠčé 1 ą┤ąŠ 6. ąŻ ą║ą░ąČą┤ąŠą│ąŠ čéą░ą║ąŠą│ąŠ ą┐ąŠčĆčéą░ ąĄčüčéčī ąĖąĮč鹥čĆč乥ą╣čü ą║ąŠą╝ą░ąĮą┤ ąĖ ąĖąĮč鹥čĆč乥ą╣čü čćč鹥ąĮąĖčÅ ąĖ/ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ. ąöą▓ą░ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗčģ ąĖ č湥čéčŗčĆąĄ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐ąŠčĆčéą░ ą▓ MCB ą╝ąŠą│čāčé ą▒čŗčéčī čüą│čĆčāą┐ą┐ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐čÅčéąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┐ąŠčĆč鹊ą▓.
ąöčĆčāą│ąĖąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ MCB:
ŌĆó ąÉčĆą▒ąĖčéčĆ: ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠą╣ ą┐ąŠčĆčé čüąĄą╣čćą░čü ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą┐ą░ą╝čÅčéąĖ.
ŌĆó ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ: ą│ą╗ą░ą▓ąĮčŗą╣ ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ą┐čĆąŠčüčéčŗąĄ ąĘą░ą┐čĆąŠčüčŗ, ą┐ąŠčüą╗ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą▓ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ.
ŌĆó ą¤čāčéčī ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (Datapath): ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąŠč鹊ą║ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ąĖ čćąĖčéą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ąĖ ą╗ąŠą│ąĖą║ąŠą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ŌĆó ążąĖąĘąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü (Physical Interface, PHY): ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ąĖąĮčüčéčĆčāą║čåąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▓ čĆąĄą░ą╗čīąĮčŗąĄ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ čüąĖą│ąĮą░ą╗čŗ DDR, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ.
ŌĆó ąøąŠą│ąĖą║ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ: ą║ą░ą╗ąĖą▒čĆčāąĄčé PHY ą┤ą╗čÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ.
ąÆčŗą┤ąĄą╗ąĄąĮąĮčŗąĄ čÅą┤čĆą░ MCB ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░čģ Spartan-6 ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čāčĆąŠą▓ąĮąĖ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ ą▓čŗčłąĄ, č湥ą╝ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗąĄ čĆąĄčłąĄąĮąĖčÅ IP, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ ą╗ąŠą│ąĖą║ąĄ FPGA. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čćą░čēąĄ ą▓čüąĄą│ąŠ ą┐ąŠą╗ąŠčüą░ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą║ą░ąĮą░ą╗ą░ ą┐ą░ą╝čÅčéąĖ čÅą▓ą╗čÅąĄčéčüčÅ čāąĘą║ąĖą╝ ą╝ąĄčüč鹊ą╝ ą┤ą╗čÅ ąŠą▒čēąĄą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ čüąĖčüč鹥ą╝čŗ, čÅą┤čĆą░ MCB čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣, ą║ąŠč鹊čĆčŗąĄ ąŠąČąĖą┤ą░čÄčé ą┐ąŠą╗čāčćąĖčéčī ą╝ą░ą║čüąĖą╝čāą╝ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┤ą╗čÅ ąĮąĄą┤ąŠčĆąŠą│ąŠą│ąŠ, ą╝ą░ą╗ąŠą┐ąŠčéčĆąĄą▒ą╗čÅčÄčēąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ FPGA.
ąÜą░ąČą┤ąŠąĄ čÅą┤čĆąŠ MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĖąĮč鹥čĆč乥ą╣čü ą┐ą░ą╝čÅčéąĖ čüąŠ čüą║ąŠčĆąŠčüčéčÅą╝ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╝ąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ 1-1. ą¤ąĖą║ąŠą▓ą░čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ąŠą┤ąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ MCB ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┤ą╗čÅ čéčĆąĄčģ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ (Standard) ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ (Extended) čĆąĄąČąĖą╝čŗ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓čŗą▒čĆą░ąĮąĮčŗčģ čĆą░ą▒ąŠčćąĖčģ čāčüą╗ąŠą▓ąĖą╣ VCCINT. ą¤ąĖą║ąŠą▓čŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 1-1, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮ VCCINT ą▓ čĆą░čüčłąĖčĆąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ čéą░ą▒ą╗ąĖčåąĄ 2 (Recommended Operating Conditions, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ čĆą░ą▒ąŠčćąĖąĄ čāčüą╗ąŠą▓ąĖčÅ) ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ (Performance Characteristics) ą▓ čüąĄą║čåąĖąĖ DS162, Spartan-6 FPGA Data Sheet: DC and Switching Characteristics ą┤ą╗čÅ čĆą░ą▒ąŠčćąĖčģ čāčüą╗ąŠą▓ąĖą╣ VCCINT ąĖ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┤ą╗čÅ čĆąĄąČąĖą╝ąŠą▓ Standard ąĖ Extended.
ąóą░ą▒ą╗ąĖčåą░ 1-1. ąĪą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĖą║ąŠą▓ą░čÅ ą┐ąŠą╗ąŠčüą░ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ MCB.
ąóąĖą┐ ą┐ą░ą╝čÅčéąĖ
|
ąĪą║ąŠčĆąŠčüčéčī (Data Rate) Mb/čüąĄą║ DDR (čéą░ą║čéčŗ ą▓ ą£ąōčå)
|
ą¤ąĖą║ąŠą▓ą░čÅ ą┐ąŠą╗ąŠčüą░ ąĮą░ ąĖąĮč鹥čĆč乥ą╣čü MCB (Gb/čüąĄą║)
|
| Min |
Max(1) |
4 ą▒ąĖčéą░ |
8 ą▒ąĖčé |
16 ą▒ąĖčé |
| DDR |
167 Mb/čüąĄą║(2)
(83.3 ą£ąōčå) |
400 Mb/čüąĄą║
(200 ą£ąōčå) |
1.6 Gb/čüąĄą║ |
3.2Gb/čüąĄą║ |
6.4 Gb/čüąĄą║ |
| DDR2 |
250 Mb/čüąĄą║(2)
(125 ą£ąōčå) |
800 Mb/čüąĄą║
(400 ą£ąōčå) |
3.2 Gb/čüąĄą║ |
6.4Gb/čüąĄą║ |
12.8 Gb/čüąĄą║ |
| DDR3 |
606 Mb/čüąĄą║(2)
(303 ą£ąōčå) |
800 Mb/čüąĄą║
(400 ą£ąōčå) |
3.2 Gb/čüąĄą║ |
6.4Gb/čüąĄą║ |
12.8 Gb/čüąĄą║ |
| LPDDR |
60 Mb/čüąĄą║(2)
(30 ą£ąōčå) |
400 Mb/čüąĄą║
(200 ą£ąōčå) |
1.6 Gb/čüąĄą║ |
3.2Gb/čüąĄą║ |
6.4 Gb/čüąĄą║ |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ą¤ąŠą║ą░ąĘą░ąĮ ą╝ą░ą║čüąĖą╝čāą╝ čüą║ąŠčĆąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ MCB, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ąŠ ą▓čüąĄą╝ ą║ą╗ą░čüčüą░ą╝ čüą║ąŠčĆąŠčüč鹥ą╣ (speed grade) FPGA. ąĪą╝. DS162, Spartan-6 FPGA Data Sheet: DC and Switching Characteristics, ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé speed grade. ąŻčüčéčĆąŠą╣čüčéą▓ą░ -3N speed-grade ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé MCB.
2. ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čćą░čüč鹊č鹥 MCB ą┤ąĖą║čéčāčÄčéčüčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ čćą░čüč鹊čéčŗ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéą░ ą┐ą░ą╝čÅčéąĖ. ąĪą╝. čüčéą░ąĮą┤ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ ą▓ ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĖ A, ą│ą┤ąĄ ą┤ą░ąĮčŗ čüčüčŗą╗ą║ąĖ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ JEDEC.
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ MCB ą▓ ąĖą╝ąĄčÄčēąĄą╝čüčÅ čāčüčéčĆąŠą╣čüčéą▓ąĄ Spartan-6 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮčā ą┐ą╗ąŠčéąĮąŠčüčéąĖ ą╗ąŠą│ąĖą║ąĖ, ą▓ ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┐ą░ą┤ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąĪą░ą╝ąŠąĄ ą╝ą░ą╗ąĄąĮčīą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (XC6SLX4) ąĮąĄ čüąŠą┤ąĄčƹȹĖčé MCB, čüčĆąĄą┤ąĮąĖąĄ ą┐ąŠ ą┐ą╗ąŠčéąĮąŠčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąŠą┤ąĄčƹȹ░čé ą┤ą▓ą░ MCB, ąĖ ą▒ąŠą╗ąĄąĄ ą║čĆčāą┐ąĮčŗąĄ ą┐ąŠ ą┐ą╗ąŠčéąĮąŠčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąŠą┤ąĄčƹȹ░čé č湥čéčŗčĆąĄ MCB. ąóą░ą▒ą╗ąĖčåą░ 1-2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ MCB ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ/ą║ąŠčĆą┐čāčü.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: MCB čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ą┐ą░ą╝čÅčéąĖ x4, x8 ąĖą╗ąĖ x16. ąśąĮč鹥čĆč乥ą╣čüčŗ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ąĖ ą▓ ąŠą┤ąĮąŠą╝ MCB (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą▓ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ x8, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ MCB ą▓ čĆąĄąČąĖą╝ąĄ x16) ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ.
ąóą░ą▒ą╗ąĖčåą░ 1-2. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ MCB ą▓ čĆą░ąĘąĮčŗčģ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅčģ čāčüčéčĆąŠą╣čüčéą▓ąŠ/ą║ąŠčĆą┐čāčü.
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ
|
ąÜąŠčĆą┐čāčü |
| TQG144 |
CPG196 |
CSG225 |
FT(G)256 |
CSG324 |
FG(G)484 |
CSG484 |
FG(G)676 |
FG(G)900 |
| XC6SLX4 |
0 |
0 |
0 |
|
|
|
|
|
|
| XC6SLX9 |
0 |
0 |
2(1) |
2 |
2 |
|
|
|
|
| XC6SLX16 |
|
0 |
2(1) |
2 |
2 |
|
|
|
|
| XC6SLX25 |
|
|
|
2 |
2 |
2 |
|
|
|
| XC6SLX45 |
|
|
|
|
2 |
2 |
2 |
2 |
|
| XC6SLX75 |
|
|
|
|
|
2(2) |
2(2) |
4 |
|
| XC6SLX100 |
|
|
|
|
|
2(2) |
2(2) |
4 |
|
| XC6SLX150 |
|
|
|
|
|
2(2) |
2(2) |
4 |
4 |
| XC6SLX25T |
|
|
|
|
2 |
2 |
|
|
|
| XC6SLX45T |
|
|
|
|
2 |
2 |
2 |
|
|
| XC6SLX75T |
|
|
|
|
|
2(2) |
2(2) |
4 |
|
| XC6SLX100T |
|
|
|
|
|
2(2) |
2(2) |
4 |
|
| XC6SLX150T |
|
|
|
|
|
2(2) |
2(2) |
4 |
4 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ą▓ ą║ąŠčĆą┐čāčüąĄ CSG225 ą▒ą╗ąŠą║ąĖ MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ąŠą┐čåąĖčÅčģ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ x4 ąĖ x8, čé. ąĄ. čāčüčéčĆąŠą╣čüčéą▓ą░ LPDDR ąĮąĄ ą╝ąŠą│čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą▓ čŹč鹊ą╝ ą║ąŠčĆą┐čāčüąĄ ą┤ąŠčüčéčāą┐ąĮąŠ č鹊ą╗čīą║ąŠ 13 ą▒ąĖčé ą░ą┤čĆąĄčüą░ MCB, čćč鹊 ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą┐ą╗ąŠčéąĮąŠčüčéąĖ ą┐ą░ą╝čÅčéąĖ ą┤ąŠ 256 Mb ą┤ą╗čÅ DDR2 ąĖ 512 Mb ą┤ą╗čÅ DDR ąĖ DDR3.
2. ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü č湥čéčŗčĆčīą╝čÅ MCB č鹊ą╗čīą║ąŠ ą┤ą▓ą░ MCB ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ąĮąŠąČą║ą░ą╝ ą║ąŠčĆą┐čāčüąŠą▓ FGG484 ąĖ CSG484.
Spartan-6 FPGA MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čéąĖą┐ąŠą▓ ą┐ą░ą╝čÅčéąĖ, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ąĖ ą┐ą╗ąŠčéąĮąŠčüč鹥ą╣, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 1-3.
ąóą░ą▒ą╗ąĖčåą░ 1-3. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ą░ą╝čÅčéąĖ.
ą¤ą╗ąŠčéąĮąŠčüčéčī ą┐ą░ą╝čÅčéąĖ
(ą▓ ą▒ąĖčéą░čģ) |
ąĀą░ąĘčĆčÅą┤ąĮąŠčüčéčī
(ą▒ąĖčé DQ)
|
ąóąĖą┐ ą┐ą░ą╝čÅčéąĖ
|
| LPDDR |
DDR |
DDR2 |
DDR3 |
| 128 Mb |
x16 |
X |
X |
|
|
| x8 |
|
X |
|
|
| x4 |
|
X |
|
|
| 256 Mb |
x16 |
X |
X |
X |
|
| x8 |
|
X |
X |
|
| x4 |
|
X |
X |
|
| 512 Mb |
x16 |
X |
X |
X |
X |
| x8 |
|
X |
X |
X |
| x4 |
|
X |
X |
X |
| 1 Gb |
x16 |
X |
X |
X |
X |
| x8 |
|
X |
X |
X |
| x4 |
|
X |
X |
X |
| 2 Gb |
x16 |
|
|
X |
X |
| x8 |
|
|
X |
X |
| x4 |
|
|
X |
X |
| 4 Gb(1) |
x16 |
|
|
|
X |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé single-die 4 Gb ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą┐ą░ą╝čÅčéąĖ (ą║ąŠą│ą┤ą░ ąŠąĮąĖ ą┤ąŠčüčéčāą┐ąĮčŗ ąŠčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣ ą┐ą░ą╝čÅčéąĖ) ąĮąŠ ąĮąĄ dual-die 4 Gb.
Spartan-6 FPGA MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ą¤ą× ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╝ąĖ, ą║ą░ą║ ąĖ ą┤čĆčāą│ąŠą╣ čüąŠčäčé ąĖ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗąĄ ą▒ą╗ąŠą║ąĖ IP, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗąĄ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ Xilinx. ąöą╗čÅ ąŠą▒čŗčćąĮčŗčģ (čé. ąĄ. ą▒ąĄąĘ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, non-embedded) ą┤ąĖąĘą░ą╣ąĮąŠą▓ FPGA ą▒ą╗ąŠą║ąĖ MCB ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą┤ąĖąĘą░ą╣ąĮ čü ą┐ąŠą╝ąŠčēčīčÄ čāčéąĖą╗ąĖčéčŗ Memory Interface Generator (MIG), ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą▓ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹥 CORE Generator.
ąŻčéąĖą╗ąĖčéą░ MIG ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą▓čüąĄčģ Xilinx FPGA. ą×ąĮą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čäą░ą╣ą╗čŗ RTL ą┤ąĖąĘą░ą╣ąĮą░, čäą░ą╣ą╗čŗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (user constraints files, UCF) ąĖ čäą░ą╣ą╗čŗ čüą║čĆąĖą┐č鹊ą▓ ą┤ą╗čÅ čüąĖą╝čāą╗čÅčåąĖąĖ ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čĆąĄčłąĄąĮąĖą╣ ą┐ą░ą╝čÅčéąĖ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ Xilinx. ąÆ ą│ą╗ą░ą▓ąĄ Getting Started čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ UG416 [2] čüąŠą┤ąĄčƹȹ░čéčüčÅ ą┐ąŠą┤čĆąŠą▒ąĮčŗąĄ ą┐ąŠčłą░ą│ąŠą▓čŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāčéąĖą╗ąĖčéčā MIG ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą┐ą░ą╝čÅčéąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB.
ąöą╗čÅ embedded-ą┤ąĖąĘą░ą╣ąĮąŠą▓ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čü čÅą┤čĆąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ MicroBlazeŌäó), GUI ą║ąŠąĮčäąĖą│čāčĆą░č鹊čĆ IP ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖąĖ Xilinx Platform Studio ąĖąĘ čüąŠčüčéą░ą▓ą░ čĆą░ą▒ąŠč湥ą╣ čüčĆąĄą┤čŗ EDK, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ. ąÆ čéą░ą║ąŠą╝ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ MCB čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ąĮąĖąČąĄą╗ąĄąČą░čēą░čÅ ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą▒ą╗ąŠą║ą░ MPMC IP, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠčüčéčāą┐ąĄąĮ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ EDK. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ąĮą░čüčéčĆąŠą╣ą║ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖ ą░čéčĆąĖą▒čāč鹊ą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą╝ąŠčüčéčŗ ą║ čłąĖąĮąĄ PLB, Xilinx Cache Link (XCL), LocalLink (LL) ąĖą╗ąĖ ą┤čĆčāą│ąĖą╝ čāą║ą░ąĘą░ąĮąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ EDK čü ą║ąŠąĮąĄčćąĮčŗą╝ąĖ ą┐ąŠčĆčéą░ą╝ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ.
[2. ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ MCB]
MCB ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠčüč鹊ą╣, ąĮą░ą┤ąĄąČąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą┐ą░ą╝čÅčéąĖ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ (ąŠą┤ąĮąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ SDRAM). ąśąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (MCB User Interface) čāčüčéčĆą░ąĮčÅąĄčé čüą╗ąŠąČąĮąŠčüčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ DDR, čéą░ą║ čćč鹊 ą▒ąŠą╗čīčłąĄ čĆąĄčüčāčĆčüąŠą▓ FPGA ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąŠ ąĮą░ čāąĮąĖą║ą░ą╗čīąĮčŗąĄ ą░čüą┐ąĄą║čéčŗ ą┤ąĖąĘą░ą╣ąĮą░.
MCB ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ čüą║ąŠčĆąŠčüčéčÅčģ, ą║ąŠč鹊čĆčŗąĄ ą▓čŗčłąĄ čüčĆą░ą▓ąĮąĖą╝čŗčģ ą┐ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čā "soft"-čĆąĄčłąĄąĮąĖą╣, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗčģ ąĮą░ ą╗ąŠą│ąĖą║ąĄ FPGA. ąĪąŠ čüą║ąŠčĆąŠčüčéčÅą╝ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┤ąŠ 800 Mb/s ą▒ą╗ąŠą║ MCB ą▒ąŠą╗ąĄąĄ č湥ą╝ ą▓ą┤ą▓ąŠąĄ ą┐ąŠą▓čŗčłą░ąĄčé ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ąĖ ąĮąĄą┤ąŠčĆąŠą│ąĖą╝ąĖ čĆąĄčłąĄąĮąĖčÅą╝ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ FPGA, ą┐ąŠą▓čŗčłą░čÅ čāčĆąŠą▓ąĄąĮčī ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ąĖ/ąĖą╗ąĖ čĆą░čüčłąĖčĆčÅčÅ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī čłąĖąĮ ą┐ą░ą╝čÅčéąĖ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 菹║ąŠąĮąŠą╝čÅčéčüčÅ čĆąĄčüčāčĆčüčŗ ą╗ąŠą│ąĖą║ąĖ FPGA ąĖ čĆąĄčüčāčĆčüčŗ I/O, ą║ąŠč鹊čĆčŗąĄ ąĖąĮą░č湥 ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ąĖčüčī ą▒čŗ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ.
ąĀąĖčü. 2-1 čĆą░čüčłąĖčĆčÅąĄčé ą▒ą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝čā MCB, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčāčÄ ą▓ ąōą╗ą░ą▓ąĄ 1, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ąŠčüąĮąŠą▓ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (User Interface) ą▓ FPGA, ą░ čéą░ą║ąČąĄ čüąĖą│ąĮą░ą╗čŗ I/O, ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ ą║ ą▓ąĮąĄčłąĮąĄą╝čā čāčüčéčĆąŠą╣čüčéą▓čā ą┐ą░ą╝čÅčéąĖ. ąźąŠčéčÅ User Interface ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┤ąŠ 6 ą┐ąŠčĆč鹊ą▓, ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ čĆąĖčü. 2-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąĖą│ąĮą░ą╗čŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆčéą░.

ąĀąĖčü. 2-1. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ MCB čü ąŠčüąĮąŠą▓ąĮčŗą╝ąĖ ą▓ąĮąĄčłąĮąĖą╝ąĖ (I/O) ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ.
ąśą╝ąĄąĄčéčüčÅ 3 ą▒ą░ąĘąŠą▓čŗčģ čéąĖą┐ą░ ą┐ąŠčĆč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ User Interface:
ŌĆó ą¤ąŠčĆčé čćč鹥ąĮąĖčÅ (Read port, ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣)
ŌĆó ą¤ąŠčĆčé ąĘą░ą┐ąĖčüąĖ (Write port ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣)
ŌĆó ą¤ąŠčĆčé čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ (Read and Write port, ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣)
ąÜą░ąČą┤čŗą╣ ą┐ąŠčĆčé čüąŠą┤ąĄčƹȹĖčé ą┐čāčéčī ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤čŗ (command path) ąĖ ą┐čāčéčī ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ (datapath). ąöą╗čÅ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆčéą░ command path čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ ą┐ą░čĆąĄ čü read-only ąĖą╗ąĖ ąŠą┤ąĖąĮąŠčćąĮčŗą╝ write-only datapath. ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠą┤ąĖąĮąŠčćąĮčŗą╣ command čüą┤ąĄą╗ą░ąĮ ąŠą▒čēąĖą╝ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ ą┐čāč鹥ą╣ datapath read ąĖ write ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░. ąØą░ User Interface ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüč鹥ą║ąĖ FIFO ą┤ą╗čÅ command path ąĖ datapath, čćč鹊ą▒čŗ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ąŠč湥čĆąĄą┤čī ąĘą░ą┐čĆąŠčüąŠą▓ ą║ ą┐ą░ą╝čÅčéąĖ ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅą╝ąĖ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą┤ąŠą╝ąĄąĮą░ čéą░ą║č鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ ą┤ąŠą╝ąĄąĮ čéą░ą║č鹊ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ.
ąĪąĖą│ąĮą░ą╗čŗ command path ą┤ą╗čÅ ą┐ąŠčĆčéą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĖ ą▓čŗą┤ą░č湥 ąĘą░ą┐čĆąŠčüąŠą▓ ą║ čüč鹥ą║ą░ą╝ FIFO ą║ąŠą╝ą░ąĮą┤. ąŻ čüč鹥ą║ą░ command FIFO ą│ą╗čāą▒ąĖąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┤ąŠ 4 čÅč湥ąĄą║. ąÆ ąĮąĄą╝ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ čéąĖą┐ ąĖąĮčüčéčĆčāą║čåąĖąĖ (read, write, refresh ąĖ čé. ą┤.), ą░ą┤čĆąĄčü ąĖ ą┤ą╗ąĖąĮą░ ą┐ą░ą║ąĄčéą░ (burst length) čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣ ą┐ą░ą╝čÅčéąĖ. ą¤čāčéčī ą║ąŠą╝ą░ąĮą┤čŗ (command path) čéą░ą║ąČąĄ ą▓ą║ą╗čÄčćą░ąĄčé čäą╗ą░ą│ąĖ čüčéą░čéčāčüą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ ąĖ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ (full ąĖ empty), ą▓čŗčģąŠą┤čÅčēąĖąĄ ąĖąĘ čüč鹥ą║ą░ command FIFO, ąŠąĮąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą╝ąŠą│čāčé ą╗ąĖ ą▒čŗčéčī ą┐čĆąĖąĮčÅčéčŗ ąĮąŠą▓čŗąĄ ąĘą░ą┐čĆąŠčüčŗ. ąśą╝ąĄąĄčéčüčÅ 6 command FIFO, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮąŠ; ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆč鹊ą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 ą┤ąŠčüčéčāą┐ąĮąŠ ą┤ą╗čÅ User Interface (čüą╝. "ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░"). ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüąĖą│ąĮą░ą╗ą░ą╝ command path čüą╝. "ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüą░".
ąØą░ datapath ąĮąĖąČąĄą╗ąĄąČą░čēą░čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ čüąŠą┤ąĄčƹȹĖčé 6 ą┐ąŠčĆč鹊ą▓ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčīčÄ 32-ą▒ąĖčéą░, ą┤ą▓ą░ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ. ąöčĆčāą│ąĖąĄ č湥čéčŗčĆąĄ ą┐ąŠčĆčéą░ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ, ąĮąŠ ąŠąĮąĖ ą╝ąŠą│čāčé čéą░ą║ąČąĄ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą┐ąŠčĆč鹊ą▓. ąÆčüąĄą│ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠ čüąŠąĘą┤ą░čéčī 5 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┐ąŠčĆč鹊ą▓ ą┐čāč鹥ą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąŠą╝ą▒ąĖąĮą░čåąĖą╣ čŹčéąĖčģ čłąĄčüčéąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąČąĄą╗ą░ąĄą╝ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (User Interface, čüą╝. "ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░"). ą©ąĖčĆąĖąĮą░ ą┐ąŠą╗ąĄą╣ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĄčüč鹥čüčéą▓ąĄąĮąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ ą┐čāč鹥ą╝ ą▓čŗą▒ąŠčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąĪč鹥ą║ąĖ FIFO datapath ąĖą╝ąĄčÄčé ą│ą╗čāą▒ąĖąĮčā 64 čÅč湥ą╣ą║ąĖ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą┐ą░ą║ąĄčéąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗ąĖąĮąŠą╣ ą┤ąŠ 64 čüą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ ąŠčé čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą┐ąŠą╗čÄ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ čüč鹥ą║ąĖ FIFO ą┐čāčéąĖ ąĘą░ą┐ąĖčüąĖ čüąŠą┤ąĄčƹȹ░čé ą┐ąŠą╗čÅ ą▒ąĖčé ą╝ą░čüą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą╝ą░čüą║ąĖčĆąŠą▓ą░čéčī ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą▒ą░ąĘąĄ ą▒ą░ą╣čéą░. ąÆčŗčģąŠą┤čŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ (full), ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ (empty), ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ (underrun), čüč湥čéčćąĖą║ą░ ą║ąŠą╗ąĖč湥čüčéą▓ą░ (count) ąĖ ąŠčłąĖą▒ą║ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüč鹥ą║ąŠą▓ FIFO ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. ąĪč鹥ą║ąĖ FIFO ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ ąĖą╝ąĄčÄčé ą┐ąŠą┤ąŠą▒ąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą▓čŗčģąŠą┤ąŠą▓ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ. ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ čüąĖą│ąĮą░ą╗čŗ read ąĖ write datapath čüą╝. "ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüą░".
ąÉčĆą▒ąĖčéčĆ ą▓ąĮčāčéčĆąĖ MCB ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ąĄčģą░ąĮąĖąĘą╝ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüą╗ąŠč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąŠčé ąŠą┤ąĮąŠą│ąŠ ą┤ąŠ čłąĄčüčéąĖ ą┐ąŠčĆč鹊ą▓ User Interface, ą║ąŠč鹊čĆčŗąĄ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąĖą╝ąĄčÄčé ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ. ąĢčüčéčī čéą░ą║ąČąĄ ą╝ąĄč鹊ą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąĮąĄą║ąŠč鹊čĆčŗą╝ ą┐ąŠčĆčéą░ą╝ ą┤ą░čéčī ą┐ąŠą▓čŗčłąĄąĮąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, čéą░ą║ čćč鹊 ąŠąĮąĖ ą╝ąŠą│čāčé čćą░čēąĄ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ. ąŁč鹊 ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąÉčĆą▒ąĖčéčĆą░ąČ".
ąøąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▒ą░ąĮą║ąŠą╝ ą▓ MCB ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéą║čĆčŗčéčī ą┤ąŠ 8 ą▒ą░ąĮą║ąŠą▓ ą┐ą░ą╝čÅčéąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ ą┤ąŠčüčéčāą┐ą░ ą║ ą┤ą░ąĮąĮčŗą╝ ą┐ąŠ ą▓čüąĄą╝ ą▒ą░ąĮą║ą░ą╝. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĘą░ą┐čĆąŠčüčŗ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┐ą░ą╝čÅčéąĖ ą╝ąŠą│čāčé ą▓ą║ą╗čÄčćą░čéčī ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą░ą▓č鹊-ą┐čĆąĄą┤ąĘą░čĆčÅą┤ (auto-precharge), čćč鹊ą▒čŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą║čĆčŗčéčī ą▒ą░ąĮą║ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąŁč鹊 ą┐ąŠą▓čŗčłą░ąĄčé čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┤ą░ąĮąĮčŗą╝ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą▒ą░ąĮą║ą░. MCB ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą╗čÄą▒ąŠąĄ ą┐ąĄčĆąĄčāą┐ąŠčĆčÅą┤ąŠčćąĖą▓ą░ąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖą╣.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░. 5 ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (User Interface) ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 2-2. ąÆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ 1, ą┐ąŠčĆčéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĮą░ą┐čĆčÅą╝čāčÄ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ąĮą░ 6 ąĮąĖąČąĄą╗ąĄąČą░čēąĖčģ čäąĖąĘąĖč湥čüą║ąĖčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐ąŠčĆč鹊ą▓. ąöą╗čÅ ą┤čĆčāą│ąĖčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┐ąŠčĆčéčŗ čüąŠąĄą┤ąĖąĮčÅčÄčéčüčÅ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąŠą╝ą▒ąĖąĮą░čåąĖą╣ ą┐ąŠčĆč鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 2-2, čāčéąĖą╗ąĖčéą░ MIG ą▓čüąĄą│ą┤ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąĮčāą╝ąĄčĆčāąĄčé ą┐ąŠčĆčéčŗ ą┤ą╗čÅ User Interface ąĮą░čćąĖąĮą░čÅ čü 0, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĮąĖąČąĄą╗ąĄąČą░čēąĖčģ ąĮąŠą╝ąĄčĆąŠą▓ čäąĖąĘąĖč湥čüą║ąĖčģ ą┐ąŠčĆč鹊ą▓.
ąÆąŠ ą▓čüąĄčģ ą┐čÅčéąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┐ąŠčĆč鹊ą▓ command path, write datapath ąĖ read datapath ą▓ ąĖą╝ąĄčÄčēąĄą╝čüčÅ ą┐ąŠčĆč鹥 ą▓čüąĄą│ą┤ą░ ąĖą╝ąĄčÄčé ąŠčéą┤ąĄą╗čīąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĖ ą┐ąŠčŹč鹊ą╝čā ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╝ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą┤ąŠą╝ąĄąĮą░ą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ ą▓čüąĄ ą┐čāčéąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĖą╝ąĄčÄčēąĖą╝čüčÅ ą┐ąŠčĆč鹊ą╝, čāą┤ąĄčƹȹĖą▓ą░ą╗ąĖčüčī ą▓ ąŠą┤ąĮąŠą╝ ą┤ąŠą╝ąĄąĮąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, čćč鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ąĖąĮč鹥čĆč乥ą╣čüčā.

ąĀąĖčü. 2-2. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ąŻčéąĖą╗ąĖčéą░ MIG ą▓ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖąĖ CORE GeneratorŌäó ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠčüč鹊ą╣ ą│čĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖ čéąĖą┐ą░ ą┐ąŠčĆč鹊ą▓, čéčĆąĄą▒čāąĄą╝čŗčģ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąöą╗čÅ ą┤ąĖąĘą░ą╣ąĮąŠą▓, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé ą╝ąĄąĮčīčłčāčÄ čłąĖčĆąĖąĮčā čłąĖąĮ, č湥ą╝ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ, ąĖą╗ąĖ ą╝ąĄąĮčīčłčāčÄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī User Interface, ąĮąĄąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┐ąŠčĆčéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčüč鹊 ąĘą░ą┐čĆąĄčēąĄąĮčŗ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü MIG. ąÆ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ čéčĆąĄą▒čāčÄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ ą▓ąĮąĄ čŹčéąĖčģ 6 ą┐ąŠčĆč鹊ą▓, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ MCB, ą▓ ą╗ąŠą│ąĖą║ąĄ FPGA ą╝ąŠą│čāčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą╝ąŠčüčéčŗ ą┐ąŠčĆč鹊ą▓ čü ą┤ąŠą▒ą░ą▓ąŠčćąĮčŗą╝ąĖ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ą╝ąĖ ą░čĆą▒ąĖčéčĆą░ąČą░, čćč鹊ą▒čŗ čĆą░čüčłąĖčĆąĖčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠčĆčéą░ MCB.
ąÉčĆą▒ąĖčéčĆą░ąČ. ąÉčĆą▒ąĖčéčĆ ą▓ąĮčāčéčĆąĖ MCB ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ąĄčģą░ąĮąĖąĘą╝ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüą╗ąŠč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąŠą╣ ą┐ąŠčĆčé User Interface ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ. ąśą╝ąĄąĄčéčüčÅ 12 čéą░ą╣ą╝-čüą╗ąŠč鹊ą▓ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą░čĆą▒ąĖčéčĆą░ąČą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2-1. ąÜą░ąČą┤čŗą╣ čéą░ą╣ą╝-čüą╗ąŠčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠą┤ąĮąŠą╝čā ą┐ąĄčĆąĖąŠą┤čā čéą░ą║čéą░ ą┐ą░ą╝čÅčéąĖ. ą¤ąŠčĆčÅą┤ąŠą║ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐ąŠčĆčéą░ ą▓ ąĖą╝ąĄčÄčēąĄą╝čüčÅ čéą░ą╣ą╝-čüą╗ąŠč鹥 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ąĮąŠą╝ąĄčĆą░ą╝ ą┐ąŠčĆč鹊ą▓, ą▓ą▓ąĄą┤ąĄąĮąĮčŗą╝ ą▓ čüč鹊ą╗ą▒čåčŗ ąŠčé Priority 1 ą┤ąŠ 6 čü ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄą╝ čüą╗ąĄą▓ą░ ąĮą░ą┐čĆą░ą▓ąŠ ą┐ąŠ čéą░ą▒ą╗ąĖčåąĄ.
ąóą░ą▒ą╗ąĖčåą░ 2-1. ąóą░ą▒ą╗ąĖčåą░ ą░čĆą▒ąĖčéčĆą░ąČą░ MCB čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ Round Robin.
| ąóą░ą╣ą╝-čüą╗ąŠčé |
ą¤čĆąĖąŠčĆąĖč鹥čé 1 |
ą¤čĆąĖąŠčĆąĖč鹥čé 2 |
ą¤čĆąĖąŠčĆąĖč鹥čé 3 |
ą¤čĆąĖąŠčĆąĖč鹥čé 4 |
ą¤čĆąĖąŠčĆąĖč鹥čé 5 |
ą¤čĆąĖąŠčĆąĖč鹥čé 6 |
| 0 |
0 |
1 |
2 |
3 |
4 |
5 |
| 1 |
1 |
2 |
3 |
4 |
5 |
0 |
| 2 |
2 |
3 |
4 |
5 |
0 |
1 |
| 3 |
3 |
4 |
5 |
0 |
1 |
2 |
| 4 |
4 |
5 |
0 |
1 |
2 |
3 |
| 5 |
5 |
0 |
1 |
2 |
3 |
4 |
| 6 |
0 |
1 |
2 |
3 |
4 |
5 |
| 7 |
1 |
2 |
3 |
4 |
5 |
0 |
| 8 |
2 |
3 |
4 |
5 |
0 |
1 |
| 9 |
3 |
4 |
5 |
0 |
1 |
2 |
| 10 |
4 |
5 |
0 |
1 |
2 |
3 |
| 11 |
5 |
0 |
1 |
2 |
3 |
4 |
ąóą░ą▒ą╗ąĖčåą░ 2-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüą╗čāčćą░ą╣, ą│ą┤ąĄ User Interface ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ąĮą░ ą╝ą░ą║čüąĖą╝čāą╝ 6 ą┐ąŠčĆč鹊ą▓. ąĢčüą╗ąĖ MCB čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą╝ąĄąĮčīčłąĄ, č湥ą╝ 6 ą┐ąŠčĆč鹊ą▓, čéą░ą▒ą╗ąĖčåą░ ą░čĆą▒ąĖčéčĆą░ąČą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ, čćč鹊ą▒čŗ ą▒čŗą╗ąĖ č鹊ą╗čīą║ąŠ čüč鹊ą╗ą▒čåčŗ ą┐čĆąĖąŠčĆąĖč鹥čéą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠčĆč鹊ą▓.
ąÆąŠ ą▓čĆąĄą╝čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓ ą░čĆą▒ąĖčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠą╣ ą┐ąŠčĆčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ ą║ą░ą║ąŠą╝ čéą░ą╣ą╝-čüą╗ąŠč鹥. ą¤ąŠąĘąĖčåąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ čüą╗ąĄą▓ą░ ąĮą░ą┐čĆą░ą▓ąŠ ą┐ąŠ čüč鹊ą╗ą▒čåą░ą╝ ą┐čĆąĖąŠčĆąĖč鹥čéą░, čćč鹊ą▒čŗ ąĮą░ą╣čéąĖ ą┐ąĄčĆą▓čŗą╣ ą┐ąŠčĆčé ą▓ č鹊ą╣ čüčéčĆąŠą║ąĄ, čā ą║ąŠč鹊čĆąŠą╣ ąĄčüčéčī ą║ąŠą╝ą░ąĮą┤ą░, ąŠąČąĖą┤ą░čÄčēą░čÅ ą▓ ąĄą│ąŠ command FIFO. ąŁč鹊čé ą┐ąŠčĆčé č鹊ą│ą┤ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čü ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ąŠąČąĖą┤ą░čÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ, ąĖ ą░čĆą▒ąĖčéčĆ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą║ čüą╗ąĄą┤čāčÄčēąĄą╝čā čéą░ą╣ą╝-čüą╗ąŠčéčā ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čéą░ą║č鹥. ąĢčüą╗ąĖ ąĮąĄčé ą┐ąŠčĆčéą░ čü ą║ąŠą╝ą░ąĮą┤ąŠą╣ ą▓ čéą░ą║ąŠą╝ čüč鹊ą╗ą▒čåąĄ, č鹊 ą▓ čŹč鹊ą╝ čéą░ą╣ą╝-čüą╗ąŠč鹥 ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ąĮąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ, ąĖ čéą░ą║čé č鹥čĆčÅąĄčéčüčÅ.
ą¤ąŠčĆčÅą┤ąŠą║ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą┐ąŠčĆčéą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą░čĆą▒ąĖčéčĆą░ąČą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ. ąŻčéąĖą╗ąĖčéą░ MIG ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüčģąĄą╝čā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ round-robin, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2-1, ą│ą┤ąĄ ą▓čüąĄą╝ ą┐ąŠčĆčéą░ą╝ ą┤ą░ąĄčéčüčÅ čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓ 2 ąĖąĘ 12 ą┤ąŠčüčéčāą┐ąĮčŗčģ čéą░ą╣ą╝-čüą╗ąŠč鹊ą▓. ą×ą┤ąĮą░ą║ąŠ čāčéąĖą╗ąĖčéą░ MIG čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝čāčÄ ąŠą┐čåąĖčÄ, ą│ą┤ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą╗čÄą▒čāčÄ čéą░ą▒ą╗ąĖčåčā ą░čĆą▒ąĖčéčĆą░ąČą░. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐ąŠčĆč鹊ą▓ ą┐ąŠą╗čāčćąĖčéčī čāą╗čāčćčłąĄąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą┐ą░ą╝čÅčéąĖ. ą×ą┤ąĮą░ą║ąŠ čŹčéčā ąŠą┐čåąĖčÄ čüą╗ąĄą┤čāąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čü ąŠčüč鹊čĆąŠąČąĮąŠčüčéčīčÄ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą▓čüąĄ ą┐čĆąĖčüą▓ąŠąĄąĮąĮčŗąĄ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ąĮąĄ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░čÄčé ą┤ąŠčüčéčāą┐ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą┐ą░ą╝čÅčéąĖ ą╗čÄą▒čŗčģ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąŠčĆč鹊ą▓.
ą£ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī User Interface ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ 5 ą┐ąŠčĆč鹊ą▓ (ą┤ą▓čāčģ 32-ą▒ąĖčéąĮčŗčģ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ąĖ čéčĆąĄčģ 32-ą▒ąĖčéąĮčŗčģ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ, čü ąŠą┤ąĮąĖą╝ ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╝ 32-ą▒ąĖčéąĮčŗą╝ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ ą┐ąŠčĆč鹊ą╝). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čéą░ą▒ą╗ąĖčåą░ ą░čĆą▒ąĖčéčĆą░ąČą░ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ą┤ąŠ 10 čéą░ą╣ą╝-čüą╗ąŠč鹊ą▓. ąÜąŠą│ą┤ą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą╣ą╝-čüą╗ąŠč鹊ą▓ čüą╗čāčćą░ą╣ąĮąŠ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠčĆč鹊ą▓, č鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ, čćč鹊 ą║ą░ąČą┤čŗą╣ ą┐ąŠčĆčé ą┐ąŠą╗čāčćąĖčé 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą┐ą░ą╝čÅčéąĖ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ. MCB ą│ą╗čāą▒ąŠą║ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčéčüčÅ č湥čĆąĄąĘ ąĮą░ą▒ąŠčĆ ą░čéčĆąĖą▒čāč鹊ą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆč鹊ą▓ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┐ą░ą╝čÅčéąĖ. ąŻčéąĖą╗ąĖčéą░ MIG ąĖąĘ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ CORE Generator ąĖ IP Configurator ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Xilinx Platform Studio čü ąĮą░ą╗ąĖčćąĖąĄą╝ EDK ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą░čéčĆąĖą▒čāč鹊ą▓ MCB ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąČąĄą╗ą░ąĄą╝ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čüą╝. ą│ą╗ą░ą▓čā "Getting Started" ąĖąĘ [2]).
ąóą░ą▒ą╗ąĖčåčŗ 2-2 ąĖ 2-3 ą┐ąĄčĆąĄčćąĖčüą╗čÅčÄčé čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą░čéčĆąĖą▒čāčéčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ MCB. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą┤ą╗čÅ HDL ąĖą╝ąĄąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą║ą░ąČą┤čŗą╝ ą░čéčĆąĖą▒čāč鹊ą╝. ąōą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čāčéąĖą╗ąĖčéą░ MIG ąĖą╗ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ IP Configurator ąŠčéą▓ąĄčćą░čÄčé ąĘą░ čāčüčéą░ąĮąŠą▓ą║čā ąĘąĮą░č湥ąĮąĖą╣ ą▓čüąĄčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, čéą░ą║ čćč鹊 ąĖčģ ąĘąĮą░č湥ąĮąĖčÅ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ.
| ąÉčéčĆąĖą▒čāčé |
ąśą╝čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ / ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ |
| ąóąĖą┐ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TYPE |
ąŁč鹊čé ą░čéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüčéą░ąĮą┤ą░čĆčé ą┐ą░ą╝čÅčéąĖ, čĆąĄą░ą╗ąĖąĘčāąĄą╝čŗą╣ MCB. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: DDR, DDR2, DDR3, LPDDR. |
| ą©ąĖčĆąĖąĮą░ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ą┐ą░ą╝čÅčéąĖ |
C_NUM_DQ_PINS |
ąÉčéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī čłąĖąĮčŗ DQ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ "4", "8", "16". |
| ą©ąĖčĆąĖąĮą░ čłąĖąĮčŗ ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ |
C_MEM_ADDR_WIDTH |
ąÉčéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī čłąĖąĮčŗ ą░ą┤čĆąĄčüą░ (ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą░ą┤čĆąĄčüą░). ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą▓čŗą▒ąŠčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čāčéąĖą╗ąĖč鹥 MIG. |
| ą©ąĖčĆąĖąĮą░ čłąĖąĮčŗ ą░ą┤čĆąĄčüą░ ą▒ą░ąĮą║ą░ |
C_MEM_BANKADDR_WIDTH |
ąÉčéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą░ą┤čĆąĄčüą░ ą▓čŗą▒ąŠčĆą░ ą▒ą░ąĮą║ą░. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą▓čŗą▒ąŠčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čāčéąĖą╗ąĖč鹥 MIG. |
| ą©ąĖčĆąĖąĮą░ čłąĖąĮčŗ ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░ |
C_MEM_NUM_COL_BITS |
ąÉčéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą▓čŗą▒ąŠčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čāčéąĖą╗ąĖč鹥 MIG. |
| ą©ąĖčĆąĖąĮą░ ą┐ą░ą║ąĄčéą░ (Memory Burst Length) |
C_MEM_BURST_LEN |
ąÉčéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤ą╗ąĖąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┐ą░ą║ąĄčéą░. ąŻčéąĖą╗ąĖčéą░ MIG ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ čüčéą░ąĮą┤ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░ ąĖ čłąĖčĆąĖąĮąĄ ąĖąĮč鹥čĆč乥ą╣čüą░. ąöą╗čÅ DDR3 ą▓čüąĄą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ 8. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: "4", "8". |
| ąŚą░ą┤ąĄčƹȹ║ą░ CAS (Memory CAS Latency) |
ąöą╗čÅ DDR, DDR2, LPDDR: C_MEM_CAS_LATENCY
ąöą╗čÅ DDR3: C_MEM_DDR3_CAS_LATENCY,
C_MEM_DDR3_CAS_WR_LATENCY |
ąÉčéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘą░ą┤ąĄčƹȹ║čā čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ čüč鹊ą╗ą▒čåą░ CAS (ąĘą░ą┤ąĄčƹȹ║ą░ ą▓ ą┐ąĄčĆąĖąŠą┤ąŠą▓ čéą░ą║č鹊ą▓ ą╝ąĄąČą┤čā ą║ąŠą╝ą░ąĮą┤ąŠą╣ READ ąĖ ą┐ąĄčĆą▓čŗą╝ąĖ ą▓čŗčģąŠą┤čÅčēąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ) ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ. ąŻ DDR3 ąŠčéą┤ąĄą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą┤čƹȹ║ąĖ CAS ą┤ą╗čÅ Read ąĖ Write. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéąĖą┐ą░ ą┐ą░ą╝čÅčéąĖ: 2, 3, 4, 5, 6, 7, 8, 9, 10. |
| Partial Array Self-Refresh Size |
C_MEM_MOBILE_PA_SR |
ąöą╗čÅ LPDDR: čŹč鹊čé ą░čéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆą░ąĘą╝ąĄčĆ ą╝ą░čüčüąĖą▓ą░ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: Full, Half. |
| Memory Drive Strength |
DDR, DDR2: C_MEM_DDR1_2_ODS
DDR3: C_MEM_DDR3_ODS
LPDDR: C_MEM_MDDR_ODS |
ąÉčéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮą░ą│čĆčāąĘąŠčćąĮčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą▓čŗčģąŠą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
DDR/DDR2: FULL, REDUCED
DDR3: DIV6 (RZQ/6), DIV7 (RZQ/7)
LPDDR: FULL, THREEQUARTERS, HALF, QUARTER |
| Memory Termination Value (ODT) |
DDR2: C_MEM_DDR2_RTT
DDR3: C_MEM_DDR3_RTT |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ on-die termination čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ. ąÆąŠąĘą╝ąŠąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
DDR2: OFF, 50OHMS, 75OHMS, 150OHMS
DDR3: OFF, DIV2 (RZQ/2), DIV4, (RZQ/4), DIV6 (RZQ/6), DIV8 (RZQ/8), DIV12 (RZQ/12)
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: RZQ=240╬® |
| Memory Differential DQS Enable |
C_MEM_DDR2_DIFF_DQS_EN |
ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą│ąŠ čüčéčĆąŠą▒ą░ DQS. ąŁč鹊čé ą░čéčĆąĖą▒čāčé ą▓čüąĄą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ ą┤ą╗čÅ DDR3; ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ YES ą┤ą╗čÅ DDR2 ąĮą░ čćą░čüč鹊č鹥 ą▓čŗčłąĄ 200 ą£ąōčå. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ DDR2: YES, NO |
| Memory Auto Self Refresh |
C_MEM_DDR3_AUTO_SR |
ąóąŠą╗čīą║ąŠ ą┤ą╗čÅ DDR3: auto self-refresh ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ą░ą╝čÅčéąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą╗čāčćčłąĖą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ą░ą▓č鹊ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čĆą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą║ą░ąĘą░ąĮ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą▓čŗčüąŠą║ąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: ENABLED, MANUAL. |
| Memory High Temperature Self Refresh |
C_MEM_DDR2_3_HIGH_TEMP_SR |
ąöą╗čÅ DDR2 ąĖ DDR3: ą┐ą░ą╝čÅčéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮą░ ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓čŗčüąŠą║ąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ DDR2/DDR3: NORMAL (0ŌĆō85┬░C), EXTENDED (> 85┬░C). |
| Memory Dynamic Output Driver Termination |
C_MEM_DDR3_DYN_WRT_ODT |
ąöą╗čÅ DDR3: ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: DDR3: OFF, DIV2 (RZQ/2), DIV4 (RZQ/4). |
| ąŚąĮą░č湥ąĮąĖąĄ tRAS ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TRAS |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ Active ą┤ąŠ čüąŠčüč鹊čÅąĮąĖčÅ Precharge. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąŚąĮą░č湥ąĮąĖąĄ tRCD ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TRCD |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ Active ą┤ąŠ ą║ąŠą╝ą░ąĮą┤čŗ Read ąĖą╗ąĖ Write. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąŚąĮą░č湥ąĮąĖąĄ tREFI ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TREFI |
ąĪčĆąĄą┤ąĮąĖą╣ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ. ąŁč鹊čé ą░čéčĆąĖą▒čāčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čćą░čüč鹊čéčā, čü ą║ąŠč鹊čĆąŠą╣ MCB ąŠą▒ąĮąŠą▓ą╗čÅąĄčé ą┐ą░ą╝čÅčéčī, ą░ ąĮąĄ ąĖąĮč鹥čĆą▓ą░ą╗ self-refresh. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąŚąĮą░č湥ąĮąĖąĄ tRFC ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TRFC |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ąŠčé Auto-Refresh ą┤ąŠ čüąŠčüč鹊čÅąĮąĖčÅ Active, ąĖą╗ąĖ ą┐ąĄčĆąĖąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ Auto-Refresh. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąŚąĮą░č湥ąĮąĖąĄ tRP ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TRP |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ą┐ąĄčĆąĖąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ Precharge. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąŚąĮą░č湥ąĮąĖąĄ tWR ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TWR |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ (Write Recovery) ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąŚąĮą░č湥ąĮąĖąĄ tRTP ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TRTP |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā ą║ąŠą╝ą░ąĮą┤ąŠą╣ Read ą┤ąŠ ą║ąŠą╝ą░ąĮą┤čŗ Precharge. ą×ą▒čŗčćąĮąŠ čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ č鹊ą╗čīą║ąŠ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ą░čģ DDR2 ąĖ DDR3. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąŚąĮą░č湥ąĮąĖąĄ tWTR ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ |
C_MEM_TWTR |
ą£ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ąŠčé ą║ąŠą╝ą░ąĮą┤čŗ Write ą┤ąŠ ą║ąŠą╝ą░ąĮą┤čŗ Read. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąÉčéčĆąĖą▒čāčé |
ąśą╝čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ / ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ |
| ą¤ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ |
C_MEMCLK_PERIOD |
ąŁč鹊čé ą░čéčĆąĖą▒čāčé ą║ąŠąĮą▓ąĄčĆčéąĖčĆčāąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ą░ą╝čÅčéąĖ ą╝ąĄąČą┤čā čåąĖą║ą╗ą░ą╝ąĖ čéą░ą║č鹊ą▓ ąĖ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░ą╝ąĖ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ą░čģ) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą▒ą░ąĘąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ. |
| ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčĆčéą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ |
C_PORT_CONFIG |
ąŁč鹊čé ą░čéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąŠčĆčéą░ User Interface. ą×ąĮ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠčĆčéą░ (B = Bidirectional, W = Unidirectional Write, R = Unidirectional Read) ąĖ čłąĖčĆąĖąĮčā čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ (32, 64 ąĖą╗ąĖ 128 ą▒ąĖčé). ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
B32_B32_W32_W32_W32_W32
B32_B32_W32_W32_W32_R32
B32_B32_W32_W32_R32_W32
B32_B32_W32_W32_R32_R32
B32_B32_W32_R32_W32_W32
B32_B32_W32_R32_W32_R32
B32_B32_W32_R32_R32_W32
B32_B32_W32_R32_R32_R32
B32_B32_R32_W32_W32_W32
B32_B32_R32_W32_W32_R32
B32_B32_R32_W32_R32_W32
B32_B32_R32_W32_R32_R32
B32_B32_R32_R32_W32_W32
B32_B32_R32_R32_W32_R32
B32_B32_R32_R32_R32_W32
B32_B32_R32_R32_R32_R32
B32_B32_B32_B32
B64_B32_B32
B64_B64
B128 |
| ą©ąĖčĆąĖąĮą░ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčĆčéą░ (ą┐ąŠčĆčéčŗ 0 ąĖ 1) |
C_P0_DATA_PORT_SIZE C_P1_DATA_PORT_SIZE |
ą¤ąŠčĆčéčŗ 0 ąĖ 1 User Interface ą╝ąŠą│čāčé ą╝ąĄąĮčÅčéčī čłąĖčĆąĖąĮčā čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░ (ą┐ąŠčĆčéčŗ ąŠčé 3 ą┤ąŠ 5, ąĄčüą╗ąĖ ą┤ąŠčüčéčāą┐ąĮčŗ, ąĖą╝ąĄčÄčé ą▓čüąĄą│ą┤ą░ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 32 ą▒ąĖčéą░). ąŁčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé čłąĖčĆąĖąĮčā ą┤ą░ąĮąĮčŗčģ ą┐ąŠčĆčéą░ 0 ąĖ 1. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: 32, 64, 128. |
| ą©ąĖčĆąĖąĮą░ ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ (ą┐ąŠčĆčéčŗ 0 ąĖ 1) |
C_P0_MASK_SIZE
C_P1_MASK_SIZE |
ąŁč鹊čé ą░čéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą╝ą░čüą║ąĖ ą┤ą╗čÅ ą┐ąŠčĆč鹊ą▓ 0 ąĖ 1, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čłąĖčĆąĖąĮčŗ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ą┐ąŠčĆčéą░. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: 4, 8, 16. |
| ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąŠčĆčéą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ |
C_PORT_ENABLE |
ąŁč鹊 6-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠą╣ ąĖąĘ ąĮąĖąČąĄą╗ąĄąČą░čēąĖčģ čłąĄčüčéąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ 32-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆčéą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ąĖą╝ąĄčÄčēąĄą╣čüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: ąĮą░ą┐čĆąĖą╝ąĄčĆ, b001111 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┐ąŠčĆčéčŗ ąŠčé 0 ą┤ąŠ 3. |
| ą¤ąŠčĆčÅą┤ąŠą║ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą░ą┤čĆąĄčüąŠą▓ |
C_MEM_ADDR_ORDER |
ąŁč鹊čé ą░čéčĆąĖą▒čāčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ User Interface, ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ą▒ąĖčéčŗ ą░ą┤čĆąĄčüą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą▒ą░ąĮą║ą░ ą┐ą░ą╝čÅčéąĖ, čüčéčĆąŠą║ąĖ, ąĖ čüč鹊ą╗ą▒čåą░. ąŁč鹊čé ą░čéčĆąĖą▒čāčé ąŠčüąĮąŠą▓čŗą▓ą░ąĄčéčüčÅ ąĮą░ čüčģąĄą╝ąĄ čüąĖčüč鹥ą╝ąĮąŠą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĮą░ąĖą▒ąŠą╗čīčłąĄą│ąŠ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ MCB ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠčéą║čĆčŗčéčŗą╝ ą▒ą░ąĮą║ąŠą╝. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: BANK_ROW_COLUMN, ROW_BANK_COLUMN. |
| Arbitration Time Slot Count |
C_ARB_NUM_TIME_SLOTS |
ąÉčéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą╣ą╝-čüą╗ąŠč鹊ą▓ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą░čĆą▒ąĖčéčĆą░ąČą░. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┐ąŠčĆčéą░ ąĖą╝ąĄčÄčé 12 čéą░ą╣ą╝-čüą╗ąŠč鹊ą▓, ąĮąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░ čü 5 ą░ą║čéąĖą▓ąĮčŗą╝ąĖ ą┐ąŠčĆčéą░ą╝ąĖ ąĖą╝ąĄčÄčé 10 čéą░ą╣ą╝-čüą╗ąŠč鹊ą▓ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą░čĆą▒ąĖčéčĆą░ąČą░, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą░čĆą▒ąĖčéčĆą░ąČ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: 12, 10. |
| Arbitration Time Slot Values |
C_ARB_TIME_SLOT[0:11] |
ąŁčéąĖ ą▓ąŠčüčīą╝ąĄčĆąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ 6 čåąĖčäčĆ (18 ą▒ąĖčé) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐ąŠčĆčéą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéą░ą╣ą╝-čüą╗ąŠčéą░. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: ąĮą░ą┐čĆąĖą╝ąĄčĆ, C_ARB_TIME_SLOT0 = 18'o012345 (čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐ąŠčĆčé 0 čü ąĮą░ąĖą▓čŗčüčłąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą┤ąŠ ą┐ąŠčĆčéą░ 5 čü čüą░ą╝čŗą╝ ąĮąĖąĘą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝). |
| ą¤čĆąŠą┐čāčüą║ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čüąĖą╝čāą╗čÅčåąĖčÅ) |
C_MC_CALIB_BYPASS |
ąŻą║ą░ąĘčŗą▓ą░ąĄčé čāčéąĖą╗ąĖč鹥 MIG čāčüčéą░ąĮąŠą▓ąĖčéčī čäą░ą╣ą╗čŗ čüąĖą╝čāą╗čÅčåąĖąĖ ą┤ą╗čÅ ą┐čĆąŠą┐čāčüą║ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čćč鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī čüąĖą╝čāą╗čÅčåąĖčÄ. ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüąĖą╝čāą╗čÅčåąĖąĖ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: YES, NO. |
| Reserved Calibration Address Space |
C_MC_CALIBRATION_RA C_MC_CALIBRATION_BA C_MC_CALIBRATION_CA |
ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮą░čćą░ą╗čīąĮčŗąĄ ą░ą┤čĆąĄčüą░ čüčéčĆąŠą║ąĖ, ą▒ą░ąĮą║ą░ ąĖ čüč鹊ą╗ą▒čåą░, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąŁč鹊čé ą░čéčĆąĖą▒čāčé ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čéčĆąĄąĮąĖčĆąŠą▓ą║ąĖ čłą░ą▒ą╗ąŠąĮą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (ą▓ąŠąĘą╝ąŠąČąĄąĮ ą╗čÄą▒ąŠą╣ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░ą┤čĆąĄčü), ą┐čĆąĖą╝ąĄčĆčŗ:
C_MC_CALIBRATION_RA = 15'h0000
C_MC_CALIBRATION_BA = 3'h0
C_MC_CALIBRATION_CA = 12'h000 |
| ąĀąĄąČąĖą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ |
C_MC_CALIBRATION_MODE |
ąŁč鹊čé ą░čéčĆąĖą▒čāčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą▓čŗą┐ąŠą╗ąĮąĖčé ą╗ąĖ MCB č鹊čćąĮąŠąĄ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ąĖ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖčÄ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ/č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą┤ą╗čÅ čüčéčĆąŠą▒ą░ DQS (čćč鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ) ąĖą╗ąĖ ą▒čāą┤ąĄčé ą┐čĆąŠčüč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ ą▒ąĖčéą░ ą║ čüą╝ąĄčēąĄąĮąĖčÄ DQS ą▓ ąŠą║ąĮąĄ ą┤ą░ąĮąĮčŗčģ. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: CALIBRATION (č鹊čćąĮąŠąĄ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ DQS čü ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĄą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ/č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ), NOCALIBRATION (čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ čüą╝ąĄčēąĄąĮąĖčÅ DQS). |
| ąŚąĮą░č湥ąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ DQS |
C_MC_CALIBRATION_DELAY |
ąŁč鹊čé ą░čéčĆąĖą▒čāčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā čüą╝ąĄčēąĄąĮąĖčÅ DQS ą║ą░ą║ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░ ą▒ąĖčéą░, ą║ąŠą│ą┤ą░ C_MC_CALIBRATION_MODE = NOCALIBRATION. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ: QUARTER, HALF, THREEQUARTER, FULL. |
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ą░ą╝čÅčéąĖ ą▒ąĄčĆčāčéčüčÅ ąĖąĘ ą┤ą░čéą░čłąĖč鹊ą▓ ą▓ąĄąĮą┤ąŠčĆąŠą▓, ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮą░ąĘąĮą░čćą░čÄčéčüčÅ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╝ąĖ, ą║ąŠą│ą┤ą░ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮčŗ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüą╝. "Setting Controller Options" ą▓ [2]).
ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüą░. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą▒ą╗ąŠą║-čüčģąĄą╝ąĄ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ąĮą░ čĆąĖčü. 2-1, čā MCB ąĄčüčéčī 2 ą▒ą░ąĘąŠą▓čŗčģ ąĖąĮč鹥čĆč乥ą╣čüą░: ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ User Interface ą┤ą╗čÅ ą╗ąŠą│ąĖą║ąĖ FPGA, ąĖ ą▓ąĮąĄčłąĮąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą┐ą░ą╝čÅčéąĖ čü ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ ąĮąŠąČą║ą░ą╝ąĖ ą▓čŗą▓ąŠą┤ąŠą▓ I/O. ąÆ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠą┤čüąĄą║čåąĖčÅ ąŠą▒čüčāąČą┤ą░čÄčéčüčÅ ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ. ąÆ ąŠčüčéą░ą╗čīąĮąŠą╣ čćą░čüčéąĖ čŹč鹊ą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░ ą▓čüąĄ ąŠą┐ąĖčüą░ąĮąĖčÅ čüčüčŗą╗ą░čÄčéčüčÅ ąĮą░ ąĖąĮč鹥čĆč乥ą╣čü IP wrapper, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ąŠčé CORE Generator ąĖą╗ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ EDK, ąĮąŠ ąĮąĄ ą║ ąĖąĮč鹥čĆč乥ą╣čüčā ą┐čĆąĖą╝ąĖčéąĖą▓ą░ ąĮąĖąČąĄą╗ąĄąČą░čēąĄą│ąŠ ą▒ą╗ąŠą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ.
ąśąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (čüč鹊čĆąŠąĮą░ čäą░ą▒čĆąĖą║ąĖ ą║čĆąĖčüčéą░ą╗ą╗ą░). User Interface čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą╗ąŠą│ąĖą║ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ FPGA, čćč鹊ą▒čŗ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī čü command path ąĖ datapath ą┐ąŠčĆč鹊ą▓ MCB. ą×ąĮ čéą░ą║ąČąĄ ą▓ą║ą╗čÄčćą░ąĄčé čüąĖą│ąĮą░ą╗čŗ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čüą▒čĆąŠčüą░ MCB, ą║ą░ą║ ąĖ čüąĖą│ąĮą░ą╗čŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ąŠą┐ąĄčĆą░čåąĖčÅą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ąŠčéą╗ą░ą┤ą║ąĖ ąĖ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. User Interface ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą╗čÄą▒ąŠą╣ ąŠą┤ąĖąĮ ąĖąĘ 6 ą┐ąŠčĆč鹊ą▓, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░".
ąĪąĖą│ąĮą░ą╗čŗ čéą░ą║č鹊ą▓, čüą▒čĆąŠčüą░, ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąóą░ą▒ą╗ąĖčåą░ 2-4 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝, čüą▒čĆąŠčüąŠą╝ ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąŠą╣ MCB User Interface.
ąóą░ą▒ą╗ąĖčåą░ 2-4. ąĪąĖą│ąĮą░ą╗čŗ Clock, Reset ąĖ Calbration.
| ąśą╝čÅ čüąĖą│ąĮą░ą╗ą░ |
ąØą░ą┐čĆ. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| async_rst |
ąÆčģąŠą┤ |
ąōą╗ą░ą▓ąĮčŗą╣ čüąĖčüč鹥ą╝ąĮčŗą╣ čüą▒čĆąŠčü ą┤ą╗čÅ MCB. |
| calib_done |
ąÆčŗčģąŠą┤ |
ąŁč鹊čé čüąĖą│ąĮą░ą╗ čü ą░ą║čéąĖą▓ąĮčŗą╝ čāčĆąŠą▓ąĮąĄą╝ ą╗ąŠą│. 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą▓čüąĄčģ čäą░ąĘ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĘą░ą┐čāčüą║ą░ (start-up) MCB. ąóčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░čéčīčüčÅ ą┤ą╗čÅ MCB, ą┐ąŠą║ą░ čŹč鹊čé čüąĖą│ąĮą░ą╗ ąĮąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąĪą╝. čĆą░ąĘą┤ąĄą╗ "ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░" ą▓ ąōą╗ą░ą▓ąĄ 4 ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. |
| mcb_drp_clk |
ąÆčģąŠą┤ |
ąŁč鹊čé čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčé ą╝ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (soft calibration module) čü ą┤ąŠą╝ąĄąĮąŠą╝ čéą░ą║č鹊ą▓ sysclk_2x. ąŁč鹊čé čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ č鹊ą╣ ąČąĄ PLL, čćč鹊 ąĖ sysclk_2x, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čüąĖąĮčģčĆąŠąĮąĮąŠčüčéčī čäą░ąĘčŗ čéą░ą║č鹊ą▓ čü čŹčéąĖą╝ ą┤ąŠą╝ąĄąĮąŠą╝. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. "ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ" ą▓ ąōą╗ą░ą▓ąĄ 3. |
| pll_ce_0 |
ąÆčģąŠą┤ |
ąĪčéčĆąŠą▒ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O clock enable) ąŠčé BUFPLL_MCB. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą▓čŗą┤ą░ąĄčé ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 1 ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┤čĆčāą│ąŠą╝ ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║č鹊ą▓ sysclk_2x. ą×ąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┤ą▓ąŠąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ą▒ą╗ąŠą║ą░čģ I/O. |
| pll_ce_90 |
ąÆčģąŠą┤ |
ąĪčéčĆąŠą▒ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O clock enable) ąŠčé BUFPLL_MCB. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą▓čŗą┤ą░ąĄčé ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 1 ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┤čĆčāą│ąŠą╝ ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║č鹊ą▓ sysclk_2x_180. ą×ąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┤ą▓ąŠąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ą▒ą╗ąŠą║ą░čģ I/O. |
| pll_lock |
ąÆčģąŠą┤ |
ąĪąĖą│ąĮą░ą╗ ąĘą░čģą▓ą░čéą░ PLL ąŠčé ą▒ą╗ąŠą║ą░ BUFPLL_MCB. |
| sysclk_2x |
ąÆčģąŠą┤ |
ąōą╗ą░ą▓ąĮą░čÅ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┤ą╗čÅ MCB. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą▒ą╗ąŠą║ąŠą╝ PLL Spartan-6 FPGA, ąĖ ą┐ąŠą▓č鹊čĆąĮąŠ ą▒čāč乥čĆąĖąĘąĖčĆčāąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ BUFPLL_MCB ą┤ą╗čÅ čåąĄą┐ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O clock network). ą×ąĮ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą┤ą▓ąŠą╣ąĮąŠą╣ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ ą┐ą░ą╝čÅčéąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ 667 ą£ąōčå ą┤ą╗čÅ 333 ą£ąōčå ąĮą░ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą┐ą░ą╝čÅčéąĖ). |
| sysclk_2x_180 |
ąÆčģąŠą┤ |
ąŁč鹊 ą▓čģąŠą┤ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ čüą┤ą▓ąĖąĮčāčéčŗčģ ą┐ąŠ čäą░ąĘąĄ čéą░ą║č鹊ą▓ čü č鹊ą╣ ąČąĄ čćą░čüč鹊č鹊ą╣, čćč鹊 ąĖ sysclk_2x. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ č鹥ą╝ąĖ ąČąĄ čĆąĄčüčāčĆčüą░ą╝ąĖ PLL/BUFPLL_MCB. |
Command Path. ąóą░ą▒ą╗ąĖčåą░ 2-5 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą┐čāč鹥ą╝ ą║ąŠą╝ą░ąĮą┤ MCB User Interface. ąÆčüąĄ ąĖą╝ąĄąĮą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠčĆčéą░ ąĖą╝ąĄčÄčé ą┐čĆąĄčäąĖą║čü pX, ą│ą┤ąĄ X ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠčĆčéą░ 0 ąĖą╝ąĄčÄčé ą┐čĆąĄčäąĖą║čü p0, ą┐ąŠčĆčé 1 ą┐čĆąĄčäąĖą║čü p1, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ).
ąóą░ą▒ą╗ąĖčåą░ 2-5. ąĪąĖą│ąĮą░ą╗čŗ Command Path.
| ąśą╝čÅ čüąĖą│ąĮą░ą╗ą░ |
ąØą░ą┐čĆ. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| pX_cmd_addr[29:0] |
ąÆčģąŠą┤ |
ąæą░ą╣č鹊ą▓čŗą╣ ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ą┤ą╗čÅ č鹥ą║čāčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąÉą┤čĆąĄčü ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗčĆąŠą▓ąĮąĄąĮ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā ą┐ąŠčĆčéą░: ą┤ą╗čÅ 32-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą╝ą╗ą░ą┤čłąĖąĄ 2 ą▒ąĖčéą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮčāą╗čÅą╝ąĖ, ą┤ą╗čÅ 64-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą╝ą╗ą░ą┤čłąĖąĄ 3 ą▒ąĖčéą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮčāą╗čÅą╝ąĖ, ąĖ ą┤ą╗čÅ 128-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą╝ą╗ą░ą┤čłą░čÅ č鹥čéčĆą░ą┤ą░ ą░ą┤čĆąĄčüą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą▒ąĮčāą╗ąĄąĮą░. |
| pX_cmd_bl[5:0] |
ąÆčģąŠą┤ |
ąöą╗ąĖąĮą░ ą┐ą░ą║ąĄčéą░ (Burst Length) ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čüą╗ąŠą▓ ą┤ą╗čÅ č鹥ą║čāčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. Burst Length ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ čćąĖčüą╗ą░ą╝ąĖ ąŠčé 0 ą┤ąŠ 63, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÅ čŹčéąĖą╝ ąŠčé 1 ą┤ąŠ 64 čüą╗ąŠą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, b00011 ąŠąĘąĮą░čćą░ąĄčé ą┤ą╗ąĖąĮčā ą┐ą░ą║ąĄčéą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ 4). ą©ąĖčĆąĖąĮą░ čüą╗ąŠą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ čĆą░ą▓ąĮą░ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ ą┐ąŠčĆčéą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, burst length 3 ąĮą░ 64-ą▒ąĖčéąĮąŠą╝ ą┐ąŠčĆčéčā ą┐ąĄčĆąĄą┤ą░ąĄčé 3 x 64-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čćč鹊 ą▓čüąĄą│ąŠ čĆą░ą▓ąĮąŠ 192 ą▒ąĖčéą░ą╝). |
| pX_cmd_clk |
ąÆčģąŠą┤ |
ąóą░ą║čéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ Command FIFO. ąĪąĖą│ąĮą░ą╗čŗ FIFO ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ąĮą░ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ čŹčéąĖčģ čéą░ą║č鹊ą▓. |
| pX_cmd_empty |
ąÆčŗčģąŠą┤ |
ąŁč鹊 čäą╗ą░ą│ čü ą░ą║čéąĖą▓ąĮčŗą╝ čāčĆąŠą▓ąĮąĄą╝ ą╗ąŠą│. 1 ą┤ą╗čÅ Command FIFO, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣, čćč鹊 ąĮąĄčé ą║ąŠą╝ą░ąĮą┤, ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤čī FIFO, čģąŠčéčÅ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą╝ąŠą│čāčé ą▒čŗčéčī ą║ąŠą╝ą░ąĮą┤čŗ ą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ. |
| pX_cmd_en |
ąÆčģąŠą┤ |
ąŁč鹊 čüąĖą│ąĮą░ą╗, ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąŠ ą╗ąŠą│. 1, ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ (write-enable) ą┤ą╗čÅ Command FIFO. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüą░ąĮ ą▓ ąōą╗ą░ą▓ąĄ 4. |
| pX_cmd_error |
ąÆčŗčģąŠą┤ |
ąŁč鹊čé ą▓čŗčģąŠą┤ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ ą┐ąŠčĆčéą░ ą║ąŠą╝ą░ąĮą┤čŗ (Command Port), ą┐ąŠč鹊ą╝čā čćč鹊 čāą║ą░ąĘą░č鹥ą╗ąĖ FIFO ąĮąĄ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ą╗ąĖčüčī. ąóčĆąĄą▒čāąĄčéčüčÅ čüą▒čĆąŠčü MCB ą┤ą╗čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ. |
| pX_cmd_full |
ąÆčŗčģąŠą┤ |
ąŁč鹊 ą▓čŗčģąŠą┤ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 1, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čäą╗ą░ą│ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ Command FIFO. ą×ąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 FIFO ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ą▒ąŠą╗čīčłąĄ ą║ąŠą╝ą░ąĮą┤ ąĖ ąĘą░ą┐ąĖčüąĄą╣ ą▒ą╗ąŠą║ąŠą▓ ą▓ Command FIFO. |
| pX_cmd_instr[2:0] |
ąÆčģąŠą┤ |
ąÜąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ č鹥ą║čāčēąĄą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ. ąæąĖčé 0 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą▓čŗą▒ąŠčĆ READ/WRITE, ą▒ąĖčé 1 čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ Auto Precharge, ąĖ ą▒ąĖčé 2 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé Refresh, ą║ąŠč鹊čĆčŗą╣ ą▓čüąĄą│ą┤ą░ ą┐ąŠą╗čāčćą░ąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé:
Write: 3'b000
Read: 3'b001
Write with Auto Precharge: 3'b010
Read with Auto Precharge: 3'b011
Refresh: 3'b1xx
ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ čŹč鹊čé čüąĖą│ąĮą░ą╗ ąŠą┐ąĖčüą░ąĮ ą▓ ąōą╗ą░ą▓ąĄ 4. |
Write Datapath. ąóą░ą▒ą╗ąĖčåą░ 2-6 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ MCB User Interface. ąÆčüąĄ ąĖą╝ąĄąĮą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠčĆčéą░ ąĖą╝ąĄčÄčé ą┐čĆąĄčäąĖą║čü pX, ą│ą┤ąĄ X ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠčĆčéą░ 0 ąĖą╝ąĄčÄčé ą┐čĆąĄčäąĖą║čü p0, ą┐ąŠčĆčé 1 ą┐čĆąĄčäąĖą║čü p1, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ).
ąóą░ą▒ą╗ąĖčåą░ 2-6. ąĪąĖą│ąĮą░ą╗čŗ Write Datapath.
| ąśą╝čÅ čüąĖą│ąĮą░ą╗ą░ |
ąØą░ą┐čĆ. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| pX_wr_clk |
ąÆčģąŠą┤ |
ąŁč鹊 čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ Write Data FIFO. |
| pX_wr_count[6:0] |
ąÆčŗčģąŠą┤ |
ąŚąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą┤ą╗čÅ Write Data FIFO. ąŁč鹊čé ą▓čŗčģąŠą┤ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čüą║ąŠą╗čīą║ąŠ čüą╗ąŠą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ FIFO (ąŠčé 1 ą┤ąŠ 64). ąŚąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 FIFO ą┐čāčüčé. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ąĖą╝ąĄąĄčé ą╗ą░č鹥ąĮčéąĮąŠčüčéčī ą▒ąŠą╗čīčłąĄ, č湥ą╝ čäą╗ą░ą│ pX_wr_empty. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, FIFO ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čāčüčéčŗą╝ ąĖą╗ąĖ ąĖčüą┐čŗčéčŗą▓ą░čéčī ąĮąĄą┤ąŠą│čĆčāąĘą║čā, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ ąĮąĄ čĆą░ą▓ąĄąĮ 0. |
| pX_wr_data[PX_SIZE-1:0] |
ąÆčģąŠą┤ |
ąŚąĮą░č湥ąĮąĖąĄ Write Data ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą▓ Write Data FIFO ąĖ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓ ą┐ą░ą╝čÅčéčī. PX_SIZE ą╝ąŠąČąĄčé ą▒čŗčéčī 32, 64 ąĖą╗ąĖ 128 ą▒ąĖčé, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. |
| pX_wr_empty |
ąÆčŗčģąŠą┤ |
ąŁč鹊 čüąĖą│ąĮą░ą╗, ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąŠ ą╗ąŠą│. 1, čÅą▓ą╗čÅąĄčéčüčÅ čäą╗ą░ą│ąŠą╝ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ Write Data FIFO. ą×ąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓ FIFO ąĮąĄčé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą┐ą░ą╝čÅčéčī. |
| pX_wr_en |
ąÆčģąŠą┤ |
ąŁč鹊 čüąĖą│ąĮą░ą╗, ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąŠ ą╗ąŠą│. 1, čÅą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ Write Data FIFO. ą×ąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ pX_wr_data ą┤ąŠą┐čāčüčéąĖą╝ąŠ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą▓ FIFO. ąöą░ąĮąĮčŗąĄ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ pX_wr_clk, ą║ąŠą│ą┤ą░ pX_wr_en = 1 ąĖ pX_wr_full = 0. |
| pX_wr_error |
ąÆčŗčģąŠą┤ |
ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ Write Data FIFO, ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čāą║ą░ąĘą░č鹥ą╗ąĖ FIFO čĆą░čüčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ą╗ąĖčüčī. ąöą╗čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čŹč鹊ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮ čüą▒čĆąŠčü MCB. |
| pX_wr_full |
ąÆčŗčģąŠą┤ |
ąŁč鹊čé čüąĖą│ąĮą░ą╗ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 1 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čäą╗ą░ą│ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ Write Data FIFO. ąÜąŠą│ą┤ą░ čŹč鹊čé čüąĖą│ąĮą░ą╗ ą▓ ą╗ąŠą│. 1, č鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčéčüčÅ ąĘą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ ą▓ FIFO. |
| pX_wr_mask[PX_MASKSIZE-1:0] |
ąÆčģąŠą┤ |
ąæąĖčéčŗ ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ Write Data. ąŁčéą░ ą╝ą░čüą║ą░ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą▓ FIFO čü čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄą╝ čüąŠ čüą▓čÅąĘą░ąĮąĮčŗą╝ąĖ Write Data (pX_wr_data). ą×ą┤ąĖąĮ ą▒ąĖčé ą╝ą░čüą║ąĖ čüą▓čÅąĘą░ąĮ čü ą║ą░ąČą┤čŗą╝ ą▒ą░ą╣č鹊ą╝ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą│ą┤ą░ ą▒ąĖčé pX_wr_mask bit ą▓ ą╗ąŠą│. 1, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą╝ą░čüą║ąĖčĆčāąĄčéčüčÅ (čé. ąĄ. ąĮąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą┐ą░ą╝čÅčéčī). |
| pX_wr_underrun |
ąÆčŗčģąŠą┤ |
ąŁč鹊čé čüąĖą│ąĮą░ą╗ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 1 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čäą╗ą░ą│ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ. ą×ąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą░ąĮąĮčŗčģ ą▓ Write Data FIFO ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą┤ą╗čÅ ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖčÅ ąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ą░ą║ąĄčéą░. ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ąĮąĄą┤ąŠą│čĆčāąĘą║čā, ą│ą░čĆą░ąĮčéąĖčĆčāą╣č鹥, čćč鹊 ą▓ FIFO ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ą▓čŗą┤ą░ąĄč鹥 ąĖąĮčüčéčĆčāą║čåąĖčÄ Write ą┤ą╗čÅ Command FIFO. ąöąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗčüčéą░ą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ sys_rst ą┤ą╗čÅ čüą▒čĆąŠčüą░ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ. |
Read Datapath. ąóą░ą▒ą╗ąĖčåą░ 2-7 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ MCB User Interface. ąÆčüąĄ ąĖą╝ąĄąĮą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠčĆčéą░ ąĖą╝ąĄčÄčé ą┐čĆąĄčäąĖą║čü pX, ą│ą┤ąĄ X ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠčĆčéą░ 0 ąĖą╝ąĄčÄčé ą┐čĆąĄčäąĖą║čü p0, ą┐ąŠčĆčé 1 ą┐čĆąĄčäąĖą║čü p1, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ).
ąóą░ą▒ą╗ąĖčåą░ 2-7. ąĪąĖą│ąĮą░ą╗čŗ Read Datapath.
| ąśą╝čÅ čüąĖą│ąĮą░ą╗ą░ |
ąØą░ą┐čĆ. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| pX_rr_clk |
ąÆčģąŠą┤ |
ąØą░ čŹč鹊čé ą▓čģąŠą┤ ą┐ąŠą┤ą░čÄčéčüčÅ čéą░ą║čéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ Read Data FIFO. |
| pX_rd_en |
ąÆčģąŠą┤ |
ąŁč鹊 čüąĖą│ąĮą░ą╗, ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąŠ ą╗ąŠą│. 1, čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čćč鹥ąĮąĖčÅ ą┤ą╗čÅ Read Data FIFO. ą¦ąĖčéą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ čéą░ą║čéąĖčĆčāčÄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ąĖąĘ FIFO ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ pX_rd_clk, ą║ąŠą│ą┤ą░ pX_rd_en = 1 ąĖ pX_rd_empty = 0. |
| pX_rd_data[PX_SIZE-1:0] |
ąÆčŗčģąŠą┤ |
ąŚąĮą░č湥ąĮąĖąĄ Read Data, ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓čŗčģąŠą┤ąŠą╝ Read Data FIFO ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą╗ąŠą│ąĖą║čā FPGA. PX_SIZE ą╝ąŠąČąĄčé ą▒čŗčéčī 32, 64 ąĖą╗ąĖ 128 ą▒ąĖčéą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░. |
| pX_rd_full |
ąÆčŗčģąŠą┤ |
ąŁč鹊 čüąĖą│ąĮą░ą╗ čü ą░ą║čéąĖą▓ąĮčŗą╝ čāčĆąŠą▓ąĮąĄą╝ ą╗ąŠą│. 1 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čäą╗ą░ą│ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ Read Data FIFO. ąÜąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ ą▓ ą╗ąŠą│. 1, ąŠąĮ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą▓ąŠąĘą▓čĆą░čé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą┐ą░ą╝čÅčéąĖ (ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čāą┤čāčé ą┐ąŠą┐ą░ą┤ą░čéčī ą▓ FIFO). |
| pX_rd_empty |
ąÆčŗčģąŠą┤ |
ąŁč鹊čé čüąĖą│ąĮą░ą╗, ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąŠ ą╗ąŠą│. 1, čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čäą╗ą░ą│ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ Read Data FIFO. ą×ąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĮąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą▓ FIFO. |
| pX_rd_count[6:0] |
ąÆčŗčģąŠą┤ |
ąŚąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą┤ą╗čÅ Read Data FIFO. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čüą║ąŠą╗čīą║ąŠ čüą╗ąŠą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ FIFO (ąŠčé 1 ą┤ąŠ 64). ąŚąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 FIFO ą┐čāčüčé. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ąĖą╝ąĄąĄčé ąĘą░ą┤ąĄčƹȹ║čā ą▒ąŠą╗čīčłąĄ, č湥ą╝ čäą╗ą░ą│ pX_rd_full. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, FIFO ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĮčŗą╝ ąĖą╗ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą╝ąĄąĮčīčłąĄ 64. |
| pX_rd_overflow |
ąÆčŗčģąŠą┤ |
ąĪąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 1. ą×ąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐ąŠč鹥čĆčÅąĮčŗ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 Read Data ą┐čĆąŠą┤ąŠą╗ąČą░ą╗ą░ ą▓ąŠąĘą▓čĆą░čēą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ Read Data FIFO ąĘą░ą┐ąŠą╗ąĮąĖą╗čüčÅ. ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ:
ŌĆó ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗčģ Read Data ą▓ FIFO ą┐ąĄčĆąĄą┤ ą▓čŗą┤ą░č湥ą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ Read ą▓ Command FIFO.
ŌĆó ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čāčćč鹥ąĮčŗ ą▓čüąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĖąĄčüčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąöąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗčüčéą░ą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ sys_rst ą┤ą╗čÅ čüą▒čĆąŠčüą░ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ. |
| pX_rd_error |
ąÆčŗčģąŠą┤ |
ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ Read Data FIFO, ą┐ąŠč鹊ą╝čā čćč鹊 čĆą░čüčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ą╗ąĖčüčī čāą║ą░ąĘą░č鹥ą╗ąĖ FIFO. ąöą╗čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗčüčéą░ą▓ą╗ąĄąĮ čüą▒čĆąŠčü MCB. |
ąĪąĖą│ąĮą░ą╗čŗ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąóą░ą▒ą╗ąĖčåą░ 2-8 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąĖą│ąĮą░ą╗čŗ self-refresh, ą┤ąŠčüčéčāą┐ąĮčŗąĄ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąĪą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą▓ ąōą╗ą░ą▓ąĄ 4.
ąóą░ą▒ą╗ąĖčåą░ 2-8. ąĪąĖą│ąĮą░ą╗čŗ Self-Refresh.
| ąśą╝čÅ čüąĖą│ąĮą░ą╗ą░ |
ąØą░ą┐čĆ. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| selfrefresh_enter |
ąÆčģąŠą┤ |
ąŁč鹊čé ą▓čģąŠą┤ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤čā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ. ąÜąŠą│ą┤ą░ ąŠąĮ ą▓čŗčüčéą░ą▓ą╗ąĄąĮ, MCB ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh mode). ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĮčŗą╝, ą┐ąŠą║ą░ ąĮąĄ čüčéą░ąĮąĄčé ą░ą║čéąĖą▓ąĮčŗą╝ čüąĖą│ąĮą░ą╗ selfrefresh_mode. |
| selfrefresh_mode |
ąÆčŗčģąŠą┤ |
ąÉą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 čŹč鹊ą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. |
ąśąĮč鹥čĆč乥ą╣čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. Memory Device Interface čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü ą▓ąĮąĄčłąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą┐ą░ą╝čÅčéąĖ. ąÆčüąĄ čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ (čéą░ą▒ą╗ąĖčåą░ 2-9) ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░čģ ą╗ąŠą│ąĖą║ąĖ Spartan-6 ą▓čŗą▓ąĄą┤ąĄąĮčŗ ąĮą░ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą║ąŠčĆą┐čāčüą░. ąĪą╝. See UG385 [4] ą┤ą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ ą▓čŗą▓ąŠą┤ąŠą▓ MCB ą║ą░ąČą┤ąŠą╣ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ/ą║ąŠčĆą┐čāčü. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą╝ąŠą┤čāą╗čī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (soft calibration module), čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ MIG, čéčĆąĄą▒čāąĄčé ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ (RZQ) ą┤ą╗čÅ ą▓čüąĄčģ ą┤ąĖąĘą░ą╣ąĮąŠą▓ MCB. RZQ čéčĆąĄą▒čāąĄą╝čŗą╣ ą▓čŗą▓ąŠą┤, ąŠą┤ąĮą░ą║ąŠ ąĄą│ąŠ ą╝ąĄčüč鹊ąĮą░čģąŠąČą┤ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąŠ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą▒ą░ąĮą║ą░ MCB. ąÜąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮčŗą╣ ą▓čģąŠą┤ ąŠčüčéą░ąĮąŠą▓ą║ąĖ (Calibrated Input Termination) ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ čāčéąĖą╗ąĖč鹊ą╣ MIG, ą▓čŗą▓ąŠą┤ ZIO čéą░ą║ąČąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą╝ąŠą┤čāą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą£ąĄčüč鹊 ą▓čŗą▓ąŠą┤ą░ ZIO ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąŠ, ąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮąŠ ąĮą░ čüą▓čÅąĘą░ąĮąĮąŠą╝ I/O (čé. ąĄ. ąĮą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╝ ą▓čŗą▓ąŠą┤ąĄ ą║ąŠčĆą┐čāčüą░) ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą▒ą░ąĮą║ą░ MCB. ąĪą╝. čüąĄą║čåąĖčÄ "Setting FPGA Options" ą▓ UG416 [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą▓čŗą▓ąŠą┤ą░ą╝ RZQ ąĖ ZIO.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓čüąĄ ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čēą░čÄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠą▒čŗčćąĮčŗčģ ąĮąŠąČąĄą║ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (general-purpose I/O), ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ MCB. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ ąĖąĘ ą░ą║čéąĖą▓ąĮąŠą│ąŠ MCB čéą░ą║ąČąĄ ą▓ąŠąĘą▓čĆą░čēą░čÄčéčüčÅ ą║ čüąŠčüč鹊čÅąĮąĖčÄ general-purpose I/O. ąŁč鹊 ą▓ą║ą╗čÄčćą░ąĄčé ąĮąŠąČą║ąĖ čüčéą░čĆčłąĄą╣ čćą░čüčéąĖ ą░ą┤čĆąĄčüą░ ąĖą╗ąĖ ąĮąŠąČą║ąĖ ą░ą┤čĆąĄčüą░ ą▒ą░ąĮą║ą░, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐ą╗ąŠčéąĮąŠčüčéąĖ, ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ DQ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ ąĖąĮč鹥čĆč乥ą╣čüą░, čüąĖą│ąĮą░ą╗čŗ čüą▒čĆąŠčüą░ ąĖ ODT, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéą░ ą┐ą░ą╝čÅčéąĖ, ąĖ čüčéčĆąŠą▒čŗ UDQS / UDQS_n ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ x4 ąĖą╗ąĖ x8. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ą▓čŗą▓ąŠą┤čŗ ąĖąĮč鹥čĆč乥ą╣čüą░ čéčĆąĄą▒čāčÄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┤ąĖąĘą░ą╣ąĮąŠą▓ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĄčüčéčī 2 ąĖčüą║ą╗čÄč湥ąĮąĖčÅ ąĖąĘ ą┐čĆą░ą▓ąĖą╗ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ąĮąŠąČąĄą║ general-purpose I/O:
a. ą¤ą░čĆąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ (Data Mask, DM), ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ LDM, č鹊 UDM ą▒čāą┤ąĄčé ą┐ąŠč鹥čĆčÅąĮ ą║ą░ą║ ą▓čŗą▓ąŠą┤ general I/O. ąÆčŗą▓ąŠą┤čŗ ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ čéčĆąĄą▒čāčÄčéčüčÅ ą▓ąŠ ą▓čüąĄčģ ą┤ąĖąĘą░ą╣ąĮą░čģ MCB ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĘą░ą┐čĆąŠčüąŠą▓ ą┐ą░ą║ąĄčéąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ (variable burst length requests) ą▓ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą▒ą░ ą▓čŗą▓ąŠą┤ą░ LDM ąĖ UDM ąĮąĄą┤ąŠčüčéčāą┐ąĮčŗ ą║ą░ą║ general I/O ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ MCB.
b. ą¤ą░čĆąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ čüčéčĆąŠą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ DQS (čüčéčĆąŠą▒ single-ended), DQS_n č鹥čĆčÅąĄčéčüčÅ ą║ą░ą║ I/O. ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ ą▓ąĄčĆąĮąŠ ą┤ą╗čÅ UDQS ąĖ UDQS_n.
ąóą░ą▒ą╗ąĖčåą░ 2-9. ąĪąĖą│ąĮą░ą╗čŗ Memory Device Interface.
| ąśą╝čÅ čüąĖą│ąĮą░ą╗ą░ |
ąØą░ą┐čĆ. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| mcbx_dram_addr [C_MEM_ADDR_WIDTHŌĆō1:0] |
ąÆčŗčģąŠą┤ |
ą©ąĖąĮą░ ą░ą┤čĆąĄčüą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. C_MEM_ADDR_WIDTH čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čāčéąĖą╗ąĖč鹊ą╣ MIG ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ (ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 15). |
| mcbx_dram_ba[2:0] |
ąÆčŗčģąŠą┤ |
ą©ąĖąĮą░ ą░ą┤čĆąĄčüą░ ą▒ą░ąĮą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ, čā ą║ąŠč鹊čĆčŗčģ ą┤ąŠ 8 ą▒ą░ąĮą║ąŠą▓. |
| mcbx_dram_cas_n |
ąÆčŗčģąŠą┤ |
ąŁč鹊čé čüąĖą│ąĮą░ą╗ čü ą░ą║čéąĖą▓ąĮąŠą╣ ą╗ąŠą│. 1 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čüčéčĆąŠą▒ ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. |
| mcbx_dram_cke |
ąÆčŗčģąŠą┤ |
ąĪąĖą│ąĮą░ą╗ čü ą░ą║čéąĖą▓ąĮąŠą╣ ą╗ąŠą│. 1 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║č鹊ą▓ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. |
| mcbx_dram_clk |
ąÆčŗčģąŠą┤ |
ąÆčŗą▓ąŠą┤ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ (p output) ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. |
| mcbx_dram_clk_n |
ąÆčŗčģąŠą┤ |
ąÆčŗą▓ąŠą┤ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ (n output) ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. |
| mcbx_dram_ddr3_rst |
ąÆčŗčģąŠą┤ |
ąŁč鹊 čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ DDR3. |
| mcbx_dram_dq [C_NUM_DQ_PINSŌĆō1:0] |
ąÆčģąŠą┤ ąĖ ą▓čŗčģąŠą┤ |
ąöą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮą░čÅ čłąĖąĮą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. C_NUM_DQ_PINS čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čāčéąĖą╗ąĖč鹊ą╣ MIG ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ (ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 4, 8 ąĖ 16). |
| mcbx_dram_dqs |
ąÆčģąŠą┤ ąĖ ą▓čŗčģąŠą┤ |
ąöą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ čüčéčĆąŠą▒ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ DQ[7:0]. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ ą▓ąŠ ą▓čĆąĄą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Read ąĖ ą║ą░ą║ ą▓čŗčģąŠą┤ ą┤ą╗čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Write. |
| mcbx_dram_dqs_n |
ąÆčģąŠą┤ ąĖ ą▓čŗčģąŠą┤ |
ąöą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╣ čüčéčĆąŠą▒ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ DQ[7:0]. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ ą▓ąŠ ą▓čĆąĄą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Read ąĖ ą║ą░ą║ ą▓čŗčģąŠą┤ ą┤ą╗čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Write. |
| mcbx_dram_ldm |
ąÆčŗčģąŠą┤ |
ąŁč鹊 ą▓čŗčģąŠą┤ ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ (DQ[7:0]) ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ x16, x8 ąĖą╗ąĖ x4. |
| mcbx_dram_odt |
ąÆčŗčģąŠą┤ |
ąŁč鹊 ą▓čŗčģąŠą┤ čüąĖą│ąĮą░ą╗ą░ on-die termination. ODT ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ DDR2 ąĖ DDR3. |
| mcbx_dram_ras_n |
ąÆčŗčģąŠą┤ |
ąĪąĖą│ąĮą░ą╗ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą║ą░ą║ čüčéčĆąŠą▒ ą░ą┤čĆąĄčüą░ čüčéčĆąŠą║ąĖ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. |
| mcbx_dram_udm |
ąÆčŗčģąŠą┤ |
ąŁč鹊 ą▓čŗčģąŠą┤ ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ (DQ[15:8]), ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ x16. |
| mcbx_dram_udqs |
ąÆčģąŠą┤ ąĖ ą▓čŗčģąŠą┤ |
ąöą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ čüčéčĆąŠą▒ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ DQ[15:8]. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ ą▓ąŠ ą▓čĆąĄą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Read ąĖ ą║ą░ą║ ą▓čŗčģąŠą┤ ą▓ąŠ ą▓čĆąĄą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Write. |
| mcbx_dram_udqs_n |
ąÆčģąŠą┤ ąĖ ą▓čŗčģąŠą┤ |
ąöą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╣ čüčéčĆąŠą▒ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ DQ[15:8]. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ ą▓ąŠ ą▓čĆąĄą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Read ąĖ ą║ą░ą║ ą▓čŗčģąŠą┤ ą▓ąŠ ą▓čĆąĄą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Write. |
| mcbx_dram_we_n |
ąÆčŗčģąŠą┤ |
ąŁč鹊 čüąĖą│ąĮą░ą╗ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą║ą░ą║ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĘą░ą┐ąĖčüąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ. |
| rzq |
ąÆčģąŠą┤ ąĖ ą▓čŗčģąŠą┤ |
ąóčĆąĄą▒čāąĄą╝čŗą╣ ą▓čŗą▓ąŠą┤ ą┤ą╗čÅ ą▓čüąĄčģ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ MCB. ąÜąŠą│ą┤ą░ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą▓čŗą▒čĆą░ąĮąŠ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮąŠąĄ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ą░ (Calibrated Input Termination), ą▓čŗą▓ąŠą┤ RZQ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī čĆąĄąĘąĖčüč鹊čĆ ąĘąĮą░č湥ąĮąĖčÅ 2R ą╝ąĄąČą┤čā čŹčéąĖą╝ ą▓čŗą▓ąŠą┤ąŠą╝ ąĖ ąĘąĄą╝ą╗ąĄą╣, ą│ą┤ąĄ R čĆą░ą▓ąĄąĮ ąČąĄą╗ą░ąĄą╝ąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ ą┤ą╗čÅ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ą░. ąÆąŠ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ čüą╗čāčćą░čÅčģ ą▓čŗą▓ąŠą┤ RZQ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčüčéą░ą▓ą╗ąĄąĮ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝. ąÆčŗą▓ąŠą┤ RZQ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮ ąĮą░ ą╗čÄą▒ąŠą╣ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą▓čŗą▓ąŠą┤ ą║ąŠčĆą┐čāčüą░ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą▒ą░ąĮą║ą░ MCB. |
| zio |
ąÆčģąŠą┤ ąĖ ą▓čŗčģąŠą┤ |
ąĪąĖą│ąĮą░ą╗ No Connect, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čü ą╝ąŠą┤čāą╗ąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (soft calibration module), ą║ąŠą│ą┤ą░ ą▓čŗą▒čĆą░ąĮąŠ Calibrated Input Termination. ZIO ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮ ąĮą░ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą▓čŗą▓ąŠą┤ ą║ąŠčĆą┐čāčüą░ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą▒ą░ąĮą║ą░ MCB, ąĖ ąĮą░ čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮąŠ ąĮąĖ ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ą░ (čé. ąĄ. ąŠąĮ ąĮąĖą║čāą┤ą░ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ, no connect). ZIO ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĖąĘą░ą╣ąĮąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé Calibrated Input Termination. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąŠą▒čĆą░čéąĖč鹥čüčī ą║ "PCB Layout Considerations" ą▓ ąōą╗ą░ą▓ąĄ 3 ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ą▓čŗą▓ąŠą┤ą░ą╝ąĖ CS#, ODT ąĖ CKE čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ.
[3. ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ MCB]
ąÆ čŹč鹊ą╣ ą│ą╗ą░ą▓ąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą┤čĆąŠą▒ąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ č鹊ą╝, ą║ą░ą║ čüą╗ąĄą┤čāąĄčé ą┐čĆąŠą▓ąŠą┤ąĖčéčī ą┤ąĖąĘą░ą╣ąĮ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ą╗ąŠą║ą░ MCB ą╝ąĖą║čĆąŠčüčģąĄą╝ Spartan-6 FPGA. ąŚą┤ąĄčüčī čüąŠą┤ąĄčƹȹ░čéčīčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čüąĄą║čåąĖąĖ:
ŌĆó ą¤čĆąŠčåąĄčüčü čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ
ŌĆó ąĪąĖą╝čāą╗čÅčåąĖčÅ
ŌĆó ąŻčéąĖą╗ąĖąĘą░čåąĖčÅ čĆąĄčüčāčĆčüąŠą▓ FPGA
ŌĆó ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ
ŌĆó ą£ąĖą│čĆą░čåąĖčÅ ąĖ ą▒ą░ąĮą║ąĖ ą┐ą░ą╝čÅčéąĖ
ŌĆó ąĀą░ąĘą▓ąŠą┤ą║ą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ
ą¤čĆąŠčåąĄčüčü čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ. ąśą╝ąĄąĄčéčüčÅ 2 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čüą┐ąŠčüąŠą▒ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┤ąĖąĘą░ą╣ąĮ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ MCB:
ŌĆó ąöą╗čÅ ąĮąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą┐čĆąŠąĄą║č鹊ą▓ (Non-embedded, ą│ą┤ąĄ ąĮąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ čÅą┤čĆą░):
- ą×ą▒čŗčćąĮčŗą╣ ą┤ąĖąĘą░ą╣ąĮ FPGA čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ Xilinx ISE [10].
- ąöą╗čÅ ą┤ąĖąĘą░ą╣ąĮą░ MCB ą▓ čüąŠčüčéą░ą▓ąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ CORE GeneratorŌäó ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čāčéąĖą╗ąĖčéą░ MIG.
ŌĆó ąöą╗čÅ ą┐čĆąŠąĄą║č鹊ą▓, ą│ą┤ąĄ ąĄčüčéčī ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ čÅą┤čĆąŠ (Embedded):
- ąĪąĖčüč鹥ą╝ą░ čü ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ąĮą░ ąŠčüąĮąŠą▓ąĄ FPGA, ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ EDK.
- ąÆ čĆą░ą▒ąŠč湥ą╝ ąŠą║čĆčāąČąĄąĮąĖąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ MCB ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ IP Configurator ą▓ Xilinx Platform Studio (XPS), ą▓čģąŠą┤čÅčēąĖą╣ ą▓ čüąŠčüčéą░ą▓ EDK.
ą×ą▒ą░ ą┐čĆąŠčåąĄčüčüą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐čĆąŠčüč鹊ą╣ ą╝ąĄč鹊ą┤ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮą░ą┤ąĄąČąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ. ą¤ąŠčłą░ą│ąŠą▓čŗą╣ ą╝ą░čüč鹥čĆ čü ą│čĆą░čäąĖč湥čüą║ąĖą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ čüąŠą┐čĆąŠą▓ąŠąČą┤ą░ąĄčé čüąŠąĘą┤ą░ąĮąĖąĄ ą┤ąĖąĘą░ą╣ąĮą░ MCB, čćč鹊ą▒čŗ ąŠąĮ ą▒čŗą╗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĖ čüąĮą░ą▒ąČąĄąĮ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčēąĖą╝ąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąŻčéąĖą╗ąĖčéą░ MIG ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ąĄąĄčé 2 čāčĆąŠą▓ąĮčÅ ąŠą▒ąĄčĆčéą║ąĖ ąĮą░ą┤ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣: lower-level wrapper (mcb_raw_wrapper.v) ąĖ top-level wrapper (ąĮą░ą┐čĆąĖą╝ąĄčĆ, memc3_wrapper.v).
Lower-level wrapper čĆąĄą░ą╗ąĖąĘčāąĄčé ą▓ čüąĄą▒ąĄ ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą▒ą╗ąŠą║ąĖ ą║čĆąĄą╝ąĮąĖčÅ (MCB, I/O ąĖ čé. ą┤.) ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčāčÄ ą╗ąŠą│ąĖą║čā (soft calibration module), čéčĆąĄą▒čāąĄą╝čāčÄ ą┤ą╗čÅ čĆąĄčłąĄąĮąĖčÅ. ą×ąĮ čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ą║ąŠ ą▓čüąĄą╝ čüąĖą│ąĮą░ą╗ą░ą╝, čüą▓čÅąĘą░ąĮąĮčŗą╝ čü ąĮąĖąČąĄą╗ąĄąČą░čēąĄą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą┐ąŠčĆč鹊ą▓ User Interface ąĖ ą╗ąŠą│ąĖą║ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. Top-level wrapper ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąĄčĆąĄąĮą░ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓, čüą▓čÅąĘčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čüąĖą│ąĮą░ą╗ąŠą▓ lower-level, ąĖ ą┐ąĄčĆąĄą┤ą░čćčā ą▓ąĮąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ lower wrapper, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ ą▓čŗą▒čĆą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ ą▓ čāčéąĖą╗ąĖč鹥 MIG.
Top-level wrapper ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠąĘčĆą░čćąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü č鹊ą╗čīą║ąŠ ą║ č鹥ą╝ čüąĖą│ąĮą░ą╗ą░ą╝, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤ąĖąĘą░ą╣ąĮą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB, ą║ą░ą║ čŹč鹊 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąŠčåąĄą┤čāčĆąŠą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ čāčéąĖą╗ąĖčéčŗ MIG. ąØą░ą┐čĆąĖą╝ąĄčĆ, čģąŠčéčÅ lower-level ą▓čüąĄą│ą┤ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ User Interface ą▓čüąĄ 6 ąŠą▒čŗčćąĮčŗčģ 32-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆčéą░, top-level wrapper ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░ąĄčé čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘčŗą▓ą░ąĄčé ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┐ąŠčĆčéčŗ, ąĖ čüą║ą╗ąĄąĖą▓ą░ąĄčé čłąĖąĮčŗ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠčĆčéą░ čéą░ą║ąĖą╝, ą║ą░ą║ ąĄą│ąŠ ąŠąČąĖą┤ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠą┤ąĖąĮ 64-ą▒ąĖčéąĮčŗą╣ ą┐ąŠčĆčé. Top-level wrapper čŹč鹊 ąŠą┤ąĮą░ ąĖąĘ ą▓ąĄčēąĄą╣, ą║ąŠč鹊čĆą░čÅ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąĖąĮč鹥ą│čĆąĖčĆčāąĄčéčüčÅ ą▓ ąŠą▒čēąĖą╣ ą▒ąŠą╗čīčłąŠą╣ ą┤ąĖąĘą░ą╣ąĮ FPGA.
ąÆ čŹč鹊ą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ lower-level wrapper (mcb_raw_wrapper.v). ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ ąōą╗ą░ą▓ąĄ 2, ą▓čüąĄ ąŠąĮąĖ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 čŹč鹊ą│ąŠ lower-level wrapper. ąŁčéą░ ąŠą▒ąĄčĆčéą║ą░ ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ ą┐čĆąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą▓čŗą▒ąŠčĆą░čģ ą▓ ą│čĆą░čäąĖč湥čüą║ąŠą╝ ą╝ą░čüč鹥čĆąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąŠąĄą║čéą░ čāčéąĖą╗ąĖčéčŗ MIG, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ top-level wrapper ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▓čŗą▒ąŠčĆą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠčåąĄčüčü čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ embedded-čüąĖčüč鹥ą╝ (ąĮą░ ąŠčüąĮąŠą▓ąĄ EDK) ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹊čé ąČąĄ lower-level wrapper ą║ą░ą║ čäčāąĮą┤ą░ą╝ąĄąĮčé ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ Multi-Port Memory Controller (MPMC). IP configurator ą▓ XPS ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┤ąŠą▒ą░ą▓ąĖčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą╝ąŠčüčéčŗ ą┐ąŠą▓ąĄčĆčģ lowerlevel wrapper, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ, čéą░ą║ąĖąĄ ą║ą░ą║:
ŌĆó ąśąĮč鹥čĆč乥ą╣čü PLB
ŌĆó ąśąĮč鹥čĆč乥ą╣čü Xilinx Cache Link (XCL)
ŌĆó ąśąĮč鹥čĆč乥ą╣čü Local Link (LL)
ŌĆó ąöčĆčāą│ąĖąĄ ą┐ąĄčĆčüąŠąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ (Personality Interface Module, PIM), ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ EDK
ąĀąĖčü. 3-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ lower-level wrapper ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüą░ ą┤ąĖąĘą░ą╣ąĮą░ non-embedded (čü ą┐ąŠą╝ąŠčēčīčÄ MIG), čéą░ą║ ąĖ ą┤ą╗čÅ embedded (ąĮą░ ąŠčüąĮąŠą▓ąĄ EDK).
 |
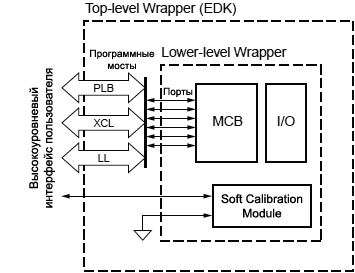 |
ąöąĖąĘą░ą╣ąĮ Non-embedded
(čāčéąĖą╗ąĖčéą░ MIG/CORE Generator) |
ąöąĖąĘą░ą╣ąĮ Embedded
(EDK / XPS) |
ąĀąĖčü. 3-1. ą×ą▒čēą░čÅ ąŠą▒ąĄčĆčéą║ą░ ąĮą░ą┤ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ (Lower-level Wrapper) ą┤ą╗čÅ Non-embedded ąĖ Embedded ą┤ąĖąĘą░ą╣ąĮą░.
CORE Generator Tool. ąĀąĖčü. 3-2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║čā non-embedded (ąŠą▒čŗčćąĮą░čÅ ą╗ąŠą│ąĖą║ą░, ą▒ąĄąĘ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ čÅą┤čĆą░) ą┤ąĖąĘą░ą╣ąĮą░ FPGA ąĮą░ ą▓ąĄčĆčģąĮąĄą╝ čāčĆąŠą▓ąĮąĄ ą┤ą╗čÅ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB. ąōą╗ą░ą▓ą░ "Getting Started" ą▓ UG416 [2] ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čäą░ąĘčŗ 1 čŹč鹊ą╣ ą┐čĆąŠčåąĄą┤čāčĆčŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ. ążą░ąĘčŗ 2 ąĖ 3 ą▓čŗčģąŠą┤čÅčé ąĘą░ čĆą░ą╝ą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ą▓ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥, ąŠą┤ąĮą░ą║ąŠ ą┐ąŠą┤čĆąŠą▒ąĮčŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┐ąŠ ą┐čĆąŠčåąĄčüčüčā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ ISE ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ Xilinx Documentation Library.
| ążą░ąĘą░ 1 |
ążą░ąĘą░ 2 |
ążą░ąĘą░ 3 |
 |
ąĀąĖčü. 3-2. ą¤čĆąŠčåąĄčüčü čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ MCB ą┤ą╗čÅ Non-embedded (ąŠą▒čŗčćąĮčŗčģ) ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ FPGA.
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-1 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čüą┐ąĖčüąŠą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┐ą░ą╝čÅčéąĖ, ą┐čĆąŠą▓ąĄčĆąĄąĮąĮčŗčģ ą▓ čĆą░ą▒ąŠč鹥 čü MCB ąĮą░ ą┐ą╗ą░čéč乊čĆą╝ąĄ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ (Xilinx hardware verification platform). ąŁčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą▓ GUI čāčéąĖą╗ąĖčéčŗ MIG (ąĖą╗ąĖ EDK) ąĖąĘ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą│ąŠ čüą┐ąĖčüą║ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓. Xilinx ą▒čāą┤ąĄčé ą┤ąŠą▒ą░ą▓ą╗čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą▓čŗą┐ą░ą┤ą░čÄčēąĖą╣ čüą┐ąĖčüąŠą║ čāčéąĖą╗ąĖčéčŗ MIG ą▓ ą▒čāą┤čāčēąĖčģ čĆąĄą╗ąĖąĘą░čģ, ąĮąŠ čŹčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠą╗čāčćą░čé ą▓ąĄčĆąĖčäąĖą║ą░čåąĖčÄ "simulation only" (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüąĖą╝čāą╗čÅčåąĖąĖ). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░; ąŠą┤ąĮą░ą║ąŠ ąŠąĮąĖ ąĮąĄ ą▒čāą┤čāčé ąĖą╝ąĄčéčī čüąĖą╝čāą╗čÅčåąĖąĖ ąĖą╗ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą▓ąĄčĆąĖčäąĖą║ą░čåąĖąĖ Xilinx. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čüąĄą║čåąĖčÄ "Setting Controller Options" ą▓ UG416 [2].
ąóą░ą▒ą╗ąĖčåą░ 3-1. ą£ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ MCB (ąĄą╝ą║ąŠčüčéčī ą┐ą░ą╝čÅčéąĖ čāą║ą░ąĘą░ąĮą░ ą▓ ą▒ąĖčéą░čģ).
| ąĪčéą░ąĮą┤ą░čĆčé |
ąÆąĄąĮą┤ąŠčĆ |
ąØą░ąĖą╝ąĄąĮąŠą▓ą░ąĮąĖąĄ |
ąĀą░ąĘčĆčÅą┤ąĮąŠčüčéčī |
ąĢą╝ą║ąŠčüčéčī |
| DDR3 |
Micron |
MT41J64M16xx-187E |
16 |
1 Gb |
| MT41J256M8xx-187E |
8 |
2 Gb |
| MT41J128M8xx-187E |
8 |
1 Gb |
| MT41J256M4xx-187E |
4 |
1 Gb |
| MT41J512M4xx-187E |
4 |
2 Gb |
| DDR2 |
MT47H256M4xx-25E |
4 |
1 Gb |
| MT47H64M8xx-25E-IT |
8 |
512 Mb |
| MT47H128M8xx-25 |
8 |
1 Gb |
| MT47H128M16xx-3 |
16 |
2 Gb |
| MT47H256M4xx-3 |
4 |
1 Gb |
| MT47H16M16xx-3 |
16 |
256 Mb |
| MT47H32M16xx-37E |
16 |
512 Mb |
| MT47H32M8xx-37E |
8 |
256 Mb |
| MT47J64M16xx-3 |
16 |
1 Gb |
| MT47J256M4xx-37E |
4 |
1 Gb |
| MT47J128M8xx-3 |
8 |
1 Gb |
| Elpida |
EDE1116ACBG-8E |
16 |
1 Gb |
| EDE5116AJBG-8E |
16 |
512 Mb |
| Hynix |
HYB18TC512160B2F-2.5 |
16 |
512 Mb |
| DDR |
Micron |
MT46V32M16xx-5B-IT |
16 |
512 Mb |
| MT46V32M8xx-5B |
8 |
256 Mb |
| MT46V64M4xx-5B |
4 |
256 Mb |
| LPDDR |
MT46H32M16xxxx-5 |
16 |
512 Mb |
| MT46H16M16xxxx-6-IT |
16 |
256 Mb |
| MT46H16M16xxxx-75-IT |
16 |
256 Mb |
| MT46H64M16xxxx-5L-IT |
16 |
1 Gb |
| MT46H64M16xxxx-6L-IT |
16 |
1 Gb |
ąĪąĖą╝čāą╗čÅčåąĖčÅ. ą£ąŠą┤ąĄą╗čī čüąĖą╝čāą╗čÅčåąĖąĖ ąĮąĖąČąĄą╗ąĄąČą░čēąĄą│ąŠ MCB ą▓ ąŠą▒ąĄčĆčéą║ąĄ MIG (ąĖą╗ąĖ EDK) čłąĖčäčĆčāąĄčéčüčÅ, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ Verilog LRM-IEEE Std 1364-2005. ąŁč鹊 čāčüčéčĆąŠąĄąĮąŠ ą┐ąŠą┤ąŠą▒ąĮąŠ ą┤čĆčāą│ąĖą╝ IP, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╝ Xilinx, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ čéčĆą░ąĮčüąĖą▓ąĄčĆ GTP ąĖ ą▒ą╗ąŠą║ąĖ Integrated Endpoint ą┤ą╗čÅ ą┤ąĖąĘą░ą╣ąĮą░ PCI Express┬«.
Xilinx ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čüąĖą╝čāą╗čÅč鹊čĆčŗ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą╝ąĄč鹊ą┤ą░ čłąĖčäčĆąŠą▓ą░ąĮąĖčÅ: ModelSim 6.4b ąĖ ą▓čŗčłąĄ.
ą©ąĖčäčĆąŠą▓ą░ąĮąĮą░čÅ ą╝ąŠą┤ąĄą╗čī MCB ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąŠą▒čŗčćąĮčŗą╣ čüą║čĆąĖą┐čé COMPXLIB, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠą┤čģąŠą┤čÅčēąĄą╣ ą▓ąĄčĆčüąĖąĄą╣ čüąĖą╝čāą╗čÅč鹊čĆą░, ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ. ąÜąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čüąĖą╝čāą╗čÅčåąĖčÅ ą┤ąĖąĘą░ą╣ąĮą░, ąŠčüąĮąŠą▓ą░ąĮąĮąŠą│ąŠ ąĮą░ Verilog, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüčüčŗą╗ą║ą░ ąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā secureip.
ąöą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ čüąĖą╝čāą╗čÅč鹊čĆąŠą▓ čŹč鹊 ą╝ąŠąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ą╗čÄčćą░ -L ą▓ ą░čĆą│čāą╝ąĄąĮč鹥 čüąĖą╝čāą╗čÅč鹊čĆą░, čéą░ą║ąŠą│ąŠ ą║ą░ą║ -L secureip.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ čÅąĘčŗą║ą░ ą┤ąĖąĘą░ą╣ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ VHDL, čéčĆąĄą▒čāąĄčéčüčÅ mixed-language license ą┤ą╗čÅ ModelSim, čćč鹊ą▒čŗ čüąĖą╝čāą╗ąĖčĆąŠą▓ą░čéčī ą┤ąĖąĘą░ą╣ąĮčŗ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ MCB.
ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüąĖą╝čāą╗čÅčåąĖąĖ ą▒ą╗ąŠą║ąŠą▓ IP čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╝ąĄč鹊ą┤ąŠą╗ąŠą│ąĖąĖ secureip, čüą╝. UG626 [5].
ąŻčéąĖą╗ąĖąĘą░čåąĖčÅ čĆąĄčüčāčĆčüąŠą▓ FPGA. ą×ą▒ąĄčĆčéą║ą░, čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą│čĆą░čäąĖč湥čüą║ąĖą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ čāčéąĖą╗ąĖčéčŗ MIG (ąĖą╗ąĖ EDK), ą▓čüčéčĆą░ąĖą▓ą░ąĄčé ą▓ čüąĄą▒čÅ ą▓čüąĄ čĆąĄčüčāčĆčüčŗ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ čü ą┐ą░ą╝čÅčéčīčÄ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB. ąöą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ čäą░ą╣ą╗čŗ ąŠą▒ąĄčĆčéą║ąĖ ą┐čĆąŠčüč鹊 čāą┐čĆą░ą▓ą╗čÅčÄčé ą┐ąĄčĆąĄąĮą░ąĘąĮą░č湥ąĮąĖąĄą╝ ąĖą╝ąĄąĮ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅą╝ąĖ ą╝ąĄąČą┤čā čĆąĄčüčāčĆčüą░ą╝ąĖ ą║čĆąĄą╝ąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅą╝ąĖ ą╝ąĄąČą┤čā ą▒ą╗ąŠą║ą░ą╝ąĖ MCB ąĖ I/O), ą┐ąŠčŹč鹊ą╝čā ąĘą┤ąĄčüčī ąĮąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčéčüčÅ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╗ąŠą│ąĖą║ąĖ FPGA. ą×ą┤ąĮą░ą║ąŠ ą╝ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (soft calibration module), čüąŠą┤ąĄčƹȹ░čēąĖą╣čüčÅ ą▓ ąŠą▒ąĄčĆčéą║ąĄ, ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ąĮąĄą▒ąŠą╗čīčłąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆąĄčüčāčĆčüąŠą▓ ą╗ąŠą│ąĖą║ąĖ FPGA. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┤ą╗čÅ MCB (čüą╝. ąĮąĖąČąĄ čĆą░ąĘą┤ąĄą╗ "ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ"), čćč鹊 ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ąŠą▒čēąĖąĄ čĆąĄčüčāčĆčüčŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 3-2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāčéąĖą╗ąĖąĘą░čåąĖčÄ čĆąĄčüčāčĆčüąŠą▓, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ą┤ąĖąĘą░ą╣ąĮąŠą╝ MCB, ąĖčüą║ą╗čÄčćą░čÅ ą╗ąŠą│ąĖą║čā, čéčĆąĄą▒čāąĄą╝čāčÄ ą┤ą╗čÅ ą┤ąĖąĘą░ą╣ąĮą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐čĆąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ą┐ąŠčĆčéą░ą╝ąĖ User Interface. ąŁčéą░ čéą░ą▒ą╗ąĖčåą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü DDR3 čü 8 ą▒ą░ąĮą║ą░ą╝ąĖ, ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ čüčéčĆąŠą▒čŗ ąĖ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ, čćč鹊ą▒čŗ ą▓čŗčćąĖčüą╗ąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓čŗą▓ąŠą┤ąŠą▓. ąöčĆčāą│ąĖąĄ čüčéą░ąĮą┤ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą╝ąĄąĮčīčłąĄ ą▓čŗą▓ąŠą┤ąŠą▓.
ąóą░ą▒ą╗ąĖčåą░ 3-2. ąŻčéąĖą╗ąĖąĘą░čåąĖčÅ čĆąĄčüčāčĆčüąŠą▓ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ čü ą┐ą░ą╝čÅčéčīčÄ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB.
ąĀąĄčüčāčĆčü
|
ą©ąĖčĆąĖąĮą░ čłąĖąĮčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ |
| x4 |
x8 |
x16 |
| Memory Controller Block (MCB) |
1 |
1 |
1 |
| ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ ą║ąŠčĆą┐čāčüąĄ ąĮąŠąČą║ąĖ I/O: Address, Data, Control, ąĖ čé. ą┤. |
35 |
39 |
50 |
| ą£ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą╗ąŠą│ąĖą║ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (Soft Calibration Module Logic) |
< 100 čüą╗ą░ą╣čüąŠą▓ |
| ąæą╗ąŠą║ PLL |
1 |
1 |
1 |
| ąæčāč乥čĆ BUFPLL_MCB |
1 |
1 |
1 |
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ. ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÄ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ čü ą┐ą░ą╝čÅčéčīčÄ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB. ąŻčéąĖą╗ąĖčéą░ MIG (ąĖą╗ąĖ EDK) ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆčā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čŹčéąĖą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝. MCB čéčĆąĄą▒čāąĄčé 3 ą▒ą░ąĘąŠą▓čŗčģ čéąĖą┐ą░ čéą░ą║č鹊ą▓:
ŌĆó ąĪąĖčüč鹥ą╝ąĮčŗąĄ čéą░ą║čéčŗ (MCB system clock), ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ čĆą░ą▒ąŠčćčāčÄ čćą░čüč鹊čéčā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą║ ą▓ąĮąĄčłąĮąĄą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą┐ą░ą╝čÅčéąĖ.
ŌĆó ąóą░ą║čéčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ čĆą░ą▒ąŠčćčāčÄ čćą░čüč鹊čéčā ą╗ąŠą│ąĖą║ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ŌĆó ąóą░ą║čéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ čĆą░ą▒ąŠčćčāčÄ čćą░čüč鹊čéčā ą┐ąŠčĆč鹊ą▓ User Interface. ąŁčéąĖ čéą░ą║čéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░čüąĖąĮčģčĆąŠąĮąĮčŗ čü čüąĖčüč鹥ą╝ąĮčŗą╝ąĖ čéą░ą║čéą░ą╝ąĖ ąĖ čéą░ą║čéą░ą╝ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąĪč鹥ą║ąĖ Command Path FIFO ąĖ Data Path FIFO ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąĄąČą┤čā ą┤ąŠą╝ąĄąĮą░ą╝ąĖ čéą░ą║č鹊ą▓ ąĖąĘ User Interface ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ą╗ąŠą│ąĖą║čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąĀąĖčü. 3-3 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čāčÄ čüčģąĄą╝čā čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ MCB ąĖ čéą░ą║č鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąæą╗ąŠą║ąĖ MCB, čĆą░ąĘą╝ąĄčēąĄąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖąŠąĮą░čģ I/O čüą╗ąĄą▓ą░ ąĖ čüą┐čĆą░ą▓ą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ, ąĖ ąŠąĮąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ąŠą╗ąČąĮčŗ čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ąŠčé čåąĄą┐ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ I/O. ą”ąĄą┐čī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ I/O čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą▒ąŠą╗čīčłąĖčģ čćą░čüč鹊čé, č湥ą╝ ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ čåąĄą┐čī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ ą┐ą░ą╝čÅčéąĖ čĆą░ą▒ąŠčéą░čéčī ąĮą░ čüą║ąŠčĆąŠčüčéčÅčģ ą┤ąŠ 800 Mb/čüąĄą║.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: CLKOUT0 ąĖ CLKOUT1 čŹč鹊 č鹊ą╗čīą║ąŠ ą▓čŗčģąŠą┤čŗ PLL, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ ą┤čĆą░ą╣ą▓ąĄčĆčā BUFPLL_MCB. ąŁčéąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ č鹊čćąĮąŠ čéą░ą║, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 3-3.
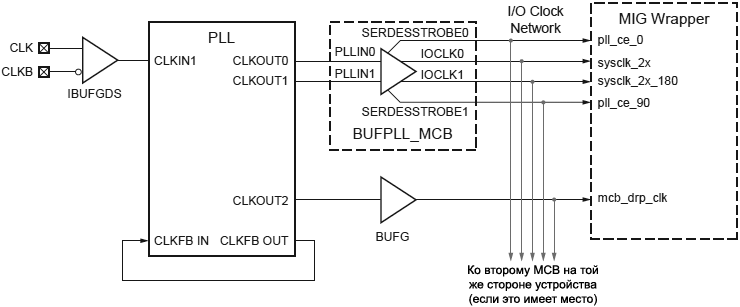
ąĀąĖčü. 3-3. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ąŠąĄ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖąĄ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ ąĖ čéą░ą║č鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ą¦č鹊ą▒čŗ čüąŠąĘą┤ą░čéčī čüąĖčüč鹥ą╝ąĮčŗąĄ čéą░ą║čéčŗ ąĮčāąČąĮąŠą╣ čćą░čüč鹊čéčŗ ąĮą░ čåąĄą┐ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ I/O, ą▓ąĮąĄčłąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ ą┐ąŠą┤ą░ąĄčé ąĖą╝ą┐čāą╗čīčüčŗ ąĮą░ ąŠą┤ąĖąĮ ąĖąĘ ą▒ą╗ąŠą║ąŠą▓ PLL ąĮą░ čåąĄąĮčéčĆą░ą╗čīąĮąŠą╝ čüč鹊ą╗ą▒čåąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¦ą░čüč鹊čéą░ ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓ ąĮąĄ ą║čĆąĖčéąĖčćąĮą░, ą┐ąŠą║ą░ ą▒ą╗ąŠą║ PLL ą╝ąŠąČąĄčé čüąĖąĮč鹥ąĘąĖčĆąŠą▓ą░čéčī ąĖąĘ ąĮąĄčæ ąĮčāąČąĮčŗąĄ čüąĖčüč鹥ą╝ąĮčŗąĄ čéą░ą║čéčŗ MCB. ą×ą▒čŗčćąĮąŠ ąČąĄą╗ą░č鹥ą╗čīąĮąŠ, čćč鹊ą▒čŗ PLL čĆą░ąĘą╝ąĄčēą░ą╗ą░čüčī ą▒ą╗ąĖąČąĄ ą║ čåąĄąĮčéčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊ą▒čŗ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī čäąĖąĘąĖč湥čüą║čāčÄ ą┤ąĖčüčéą░ąĮčåąĖčÄ ą╝ąĄąČą┤čā PLL ąĖ ą▒ą╗ąŠą║ąŠą╝ BUFPLL_MCB. ąŁč鹊 čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ PLL ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖčģ čāčüčéčĆąŠą╣čüčéą▓ čü čłąĄčüčéčīčÄ ą▒ą╗ąŠą║ą░ą╝ąĖ PLL.
PLL ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┤ą▓ą░ ą▓čŗčģąŠą┤ą░ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓: sysclk_2x ąĖ sysclk_2x_180, čĆą░ą▒ąŠčéą░čÄčēąĖąĄ ąĮą░ ą┤ą▓ąŠą╣ąĮąŠą╣ čćą░čüč鹊č鹥 ąŠčé ąČąĄą╗ą░ąĄą╝ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą┐ą░ą╝čÅčéąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ 667 Mb/čüąĄą║ DDR2 čü 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ą┐ą░ą╝čÅčéąĖ 333 ą£ąōčå, čüąĖčüč鹥ą╝ąĮčŗąĄ čéą░ą║čéčŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ 667 ą£ąōčå). ążą░ąĘą░ čŹčéąĖčģ ą┤ą▓čāčģ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ čüą┤ą▓ąĖąĮčāčéą░ ąĮą░ 180 ą│čĆą░ą┤čāčüąŠą▓ ą┤čĆčāą│ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┤čĆčāą│ą░. ąóąŠą╗čīą║ąŠ ą┤ą▓ąĄ ą╗ąĖąĮąĖąĖ čéą░ą║č鹊ą▓ ą┤ąŠčüčéčāą┐ąĮąŠ ąĮą░ ą║ą░ąČą┤ąŠą╣ čüč鹊čĆąŠąĮąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊ą▒čŗ čāą┐čĆą░ą▓ą╗čÅčéčī čåąĄą┐čÅą╝ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ I/O ąŠčé ą▒ą╗ąŠą║ąŠą▓ PLL. ąŁčéą░ ą┐ą░čĆą░ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéąĖ 2 ą╗ąĖąĮąĖąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, čćč鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĖčģ ą║ ą▒ą╗ąŠą║ą░ą╝ MCB čü ą╗ąĄą▓ąŠą╣ ąĖ ą┐čĆą░ą▓ąŠą╣ čüč鹊čĆąŠąĮčŗ čāčüčéčĆąŠą╣čüčéą▓ą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ ąĖą╝ąĄąĄčéčüčÅ 4 ą▒ą╗ąŠą║ą░ MCB, 2 ą▒ą╗ąŠą║ą░ MCB, ąĮą░čģąŠą┤čÅčēąĖąĄčüčÅ ąĮą░ ąŠą┤ąĮąŠą╣ čüč鹊čĆąŠąĮąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┤ąŠą╗ąČąĮčŗ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĮčā ąĖ čéčā ąČąĄ ą┐ą░čĆčā čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓, ą┐ąŠčŹč鹊ą╝čā ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ čĆą░ą▒ąŠčéą░čéčī ąĮą░ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (data rate), čģąŠčéčÅ čĆąĄą░ą╗ąĖąĘčāąĄą╝čŗąĄ čüčéą░ąĮą┤ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ ą╝ąŠą│čāčé ąŠčéą╗ąĖčćą░čéčīčüčÅ. ąæą╗ąŠą║ąĖ DCM ąĮąĄ ąĖą╝ąĄčÄčé ą┤ąŠčüčéčāą┐ą░ ą║ čåąĄą┐ąĖ čéą░ą║č鹊ą▓ I/O, ąĖ ą┐ąŠčŹč鹊ą╝čā DCM ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ą╗ąŠą║ąŠą▓ MCB. ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą▒ą╗ąŠą║ą░ą╝ąĖ MCB ąĮą░ ąŠą▒ąŠąĖčģ čüč鹊čĆąŠąĮą░čģ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠčé ąŠą┤ąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ PLL. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą▓ą░ ą▒ą╗ąŠą║ą░ BUFPLL_MCB (ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąĮą░ ą║ą░ąČą┤čāčÄ čüč鹊čĆąŠąĮčā čāčüčéčĆąŠą╣čüčéą▓ą░) ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą╗čāčćą░čéčī čüąĖą│ąĮą░ą╗ ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ąŠą▒čēąĄą│ąŠ ą▒ą╗ąŠą║ą░ PLL.
ąÜąŠą│ą┤ą░ ą┐ą░čĆą░ čüąĖą│ąĮą░ą╗ąŠą▓ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ ą┤ąŠčüčéąĖą│ą░ąĄčé čåąĄą┐ąĖ čéą░ą║č鹊ą▓ I/O, ąŠąĮąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąŠą╗čāčćą░čÄčé ą▒čāč乥čĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ BUFPLL_MCB. ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ čéą░ą║ąČąĄ čüąŠąĘą┤ą░ąĄčé čüčéčĆąŠą▒čŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčéčüčÅ ą┤ą╗čÅ MCB: pll_ce_0 ąĖ pll_ce_90. ąŁčéąĖ ą░čéčĆąĖą▒čāčéčŗ ą┐čĆąĖą╝ąĖčéąĖą▓ą░ BUFPLL_MCB ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čüčéčĆąŠą▒ą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą▒ą╗ąŠą║ąŠą▓ MCB:
ŌĆó LOCK_SRC = "LOCK_TO_0"
ŌĆó DIVIDE = 2
ą¤čĆąŠčłąĄą┤čłąĖąĄ č湥čĆąĄąĘ ą▒čāč乥čĆ čéą░ą║čéčŗ ą┐ąŠą╗ąĮąŠą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ (2X čéą░ą║čéčŗ) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĮą░ čüą╗ąŠąĄ PHY (čäąĖąĘąĖč湥čüą║ąĖąĄ čüąĖą│ąĮą░ą╗čŗ) ąĖąĮč鹥čĆč乥ą╣čüą░, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī čüąĖą│ąĮą░ą╗čŗ double data rate (DDR) ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ I/O (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čéą░ą║čéčŗ ąĮą░ čćą░čüč鹊č鹥 667 ą£ąōčå ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čŹčäč乥ą║čéąĖą▓ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ 667 Mb/čüąĄą║ DDR ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ I/O). ąĪčģąĄą╝ą░ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ 2 ą▓ MCB čüąŠąĘą┤ą░ąĄčé čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą┐ą░ą╝čÅčéąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, 333 ą£ąōčå ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ 667 Mb/s DDR). ąŁčéąĖ 1X čéą░ą║čéčŗ čāą┐čĆą░ą▓ą╗čÅčÄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝, ą░čĆą▒ąĖčéčĆąŠą╝ ąĖ ą┤čĆčāą│ąŠą╣ ą╗ąŠą│ąĖą║ąŠą╣, čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ąĮą░ 1X čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ (single data rate, SDR).
ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ mcb_drp_clk, ąŠčéąĮąŠčüčÅčēą░čÅčüčÅ ą║ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĄ, ą┤ąŠą╗ąČąĮą░ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą▒ą╗ąŠą║ąŠą╝ PLL, ąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮą░ ą┐ąŠ čäą░ąĘąĄ (čé. ąĄ. čüąŠą▓ą┐ą░ą┤ą░čéčī ą┐ąŠ čäą░ąĘąĄ) čü ą┤ąŠą╝ąĄąĮąŠą╝ čéą░ą║č鹊ą▓ sysclk_2x. ąĪą║ąŠčĆąŠčüčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (čćą░čüč鹊čéą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ) ąŠą│čĆą░ąĮąĖč湥ąĮą░ ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╝ čüčéą░čéąĖč湥čüą║ąĖą╝ ą░ąĮą░ą╗ąĖąĘąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, čü čéąĖą┐ąŠą▓ąŠą╣ ą┤ąŠčüčéąĖąČąĖą╝ąŠą╣ čćą░čüč鹊č鹊ą╣ 100 ą£ąōčå. ą×ą▒čŗčćąĮąŠ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 50 ą£ąōčå, čćč鹊ą▒čŗ MCB ąĘą░ą▓ąĄčĆčłąĖą╗ ąŠą┐ąĄčĆą░čåąĖąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĘą░ čĆą░ąĘčāą╝ąĮčŗą╣ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÆ ą┤ąĖąĘą░ą╣ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╣ ąĮą░ą▒ąŠčĆ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖčģ čéą░ą║č鹊ą▓ ąĮą░ ą┐ąŠčĆčéą░čģ User Interface (čü ąĮąŠą╝ąĄčĆą░ą╝ąĖ ą┐ąŠčĆč鹊ą▓ X = 0 .. 5):
pX_cmd_clk: čéą░ą║čéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ Command FIFO ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ Address, Instruction ąĖ Burst Length ąĖąĘ ą╗ąŠą│ąĖą║ąĖ FPGA ą▓ FIFO.
pX_wr_clk: čéą░ą║čéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ Write Data FIFO ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą╗ąŠą│ąĖą║ąĖ FPGA ą▓ FIFO ą┐čĆąĖ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĄ ą┐ą░ą║ąĄčéą░ ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄąĮąŠčüąĖą╝čŗčģ ą▓ ą┐ą░ą╝čÅčéčī.
pX_rd_clk: čéą░ą║čéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ Read Data FIFO ą┤ą╗čÅ, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą┤ą░čéčī ą▓ ą╗ąŠą│ąĖą║čā FPGA ą┤ą░ąĮąĮčŗąĄ, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮčŗąĄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ.
ąóą░ą║čéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░čüąĖąĮčģčĆąŠąĮąĮčŗ čü čüąĖčüč鹥ą╝ąĮčŗą╝ąĖ čéą░ą║čéą░ą╝ąĖ ąĖ čéą░ą║čéą░ą╝ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čéą░ą║ čćč鹊 ąŠąĮąĖ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą╗čÄą▒ąŠą╣ čćą░čüč鹊č鹥, ą║ą░ą║ č鹊ą│ąŠ ą┤ąĖą║čéčāąĄčé ą╗ąŠą│ąĖą║ą░ ą┤ąĖąĘą░ą╣ąĮą░ FPGA. ąĪč鹥ą║ąĖ FIFO ą▓ čüąŠčüčéą░ą▓ąĄ MCB ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐ąĄčĆąĄčģąŠą┤čŗ ą╝ąĄąČą┤čā ą┤ąŠą╝ąĄąĮą░ą╝ąĖ čéą░ą║č鹊ą▓. ąöą╗čÅ ąĮą░ąĖą╗čāčćčłąĄą╣ čāčéąĖą╗ąĖąĘą░čåąĖąĖ ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čĆą░ą▓ąĮąŠą╣ čćą░čüč鹊č鹥 (ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ), ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄą╝ User Interface ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ:
ŌĆó ąöą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ DDR3 800 Mb/s ąĮą░ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ ą┐ą░ą╝čÅčéąĖ 400 ą£ąōčå ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą┐ą░ą╝čÅčéąĖ x8 ą▒ąĖčé ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čĆąĄąĘčāą╗čīčéą░čé ą┐ąĄčĆąĄą┤ą░čćąĖ 16 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ 16 ąĘą░ ąŠą┤ąĖąĮ čéą░ą║čé (ą┐ąŠ 8 ą▒ąĖčé ąĮą░ ą║ą░ąČą┤čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą┐ą░ą╝čÅčéąĖ).
ŌĆó ąöą╗čÅ x64 ą▒ąĖčé User Interface čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čĆą░ą▓ąĮąŠą╣ ąĖą╗ąĖ ą▓čŗčłąĄ (16/64) * 400 ą£ąōčå = 100 ą£ąōčå.
ąźąŠčéčÅ čŹč鹊 č鹥čģąĮąĖč湥čüą║ąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, čéą░ą║ąČąĄ ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ ą▓čüąĄ čéčĆąĖ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ ą┐ąŠčĆčéą░ (pX_cmd_clk, pX_wr_clk ąĖ pX_rd_clk, ąĘą┤ąĄčüčī X ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆąŠą╝ ą┐ąŠčĆčéą░ ąŠčé 0 ą┤ąŠ 5) čāą┐čĆą░ą▓ą╗čÅą╗ąĖčüčī ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ąĖčüč鹊čćąĮąĖą║ą░ ąĖąĘ ą╗ąŠą│ąĖą║ąĖ FPGA, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čüą╗ąŠąČąĮąŠą│ąŠ čéą░ą╣ą╝ąĖąĮą│ą░ ąĖ ą┐čĆąŠą▒ą╗ąĄą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓ ą┤ąĖąĘą░ą╣ąĮąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ą£ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ Clock Setup. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čāčéąĖą╗ąĖčéą░ MIG ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆčā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÅ, čćč鹊 ą▓čģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (CLKIN1 ą┤ą╗čÅ PLL) čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ ą┐ą░ą╝čÅčéąĖ. ą¦č鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║čā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ čéą░ą║č鹊ą▓ MCB ąŠčé ą┤čĆčāą│ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĖą╗ąĖ ą┤ą╗čÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ čćą░čüč鹊čé čéą░ą║č鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĖą╗ąĖ čéą░ą║č鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤čüčéčĆąŠąĄąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ PLL ąĮą░ ą▓ąĄčĆčģąĮąĄą╝ čāčĆąŠą▓ąĮąĄ ą┐čĆąĖą╝ąĄčĆą░ MIG ąĖą╗ąĖ ą┤ąĖąĘą░ą╣ąĮą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ:
ŌĆó Cx_CLKFBOUT_MULT
ŌĆó Cx_DIVCLK_DIVIDE
ŌĆó Cx_CLKOUT0_DIVIDE (ą┤ą╗čÅ sysclk_2x)
ŌĆó Cx_CLKOUT1_DIVIDE (ą┤ą╗čÅ sysclk_2x_180)
ŌĆó Cx_CLKOUT2_DIVIDE (ą┤ą╗čÅ čéą░ą║č鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ)
ŌĆó Cx_CLKOUT3_DIVIDE (ą┤ą╗čÅ čéą░ą║č鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ)
ąŚą┤ąĄčüčī x ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĄčĆ ą▒ą╗ąŠą║ą░ MCB.
ąĢčüčéčī 2 ąŠą┐čåąĖąĖ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠčĆčĆąĄą║čéąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ čŹčéąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓:
1. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī Clocking Wizard, ąĮą░čģąŠą┤čÅčēąĖą╣čüčÅ ą▓ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹥 CORE Generator, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąČąĄą╗ą░ąĄą╝čŗčģ ą▓čģąŠą┤ąĮčŗčģ ąĖ ą▓čŗčģąŠą┤ąĮčŗčģ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé PLL. ąÆčŗą▒ąĄčĆąĖč鹥 čĆčāčćąĮąŠą╣ ą▓čŗą▒ąŠčĆ (Manual Selection) ąĖ ą┐čĆąĖą╝ąĖčéąĖą▓ PLL_BASE ą▓ ąŠčéą║čĆčŗą▓ą░čÄčēąĄą╣ čüčéčĆą░ąĮąĖčåąĄ ą┤ąĖą░ą╗ąŠą│ą░ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ PLL. ąóąŠą╗čīą║ąŠ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓čŗčłąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ PLL, čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ Clocking Wizard, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮčŗ ąŠą▒čĆą░čéąĮąŠ ą▓ ą┤ąĖąĘą░ą╣ąĮ MIG. ąØąĖą║ą░ą║ąŠą╣ ą┤čĆčāą│ąŠą╣ ą▓čŗą▓ąŠą┤ ąĖąĘ Clocking Wizard ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ. Clocking Wizard čéą░ą║ąČąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĄąĄ ą┤čĆąŠąČą░ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ (output jitter) ąĖąĘ čüą┐ąĄčåąĖčäąĖčćąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ PLL, čćč鹊ą▒čŗ ąĄčæ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ ąŠčüąĮąŠą▓ąĮčŗčģ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ MCB ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ ą┤ąČąĖčéč鹥čĆčā ą▓čģąŠą┤ąĮčŗčģ čéą░ą║č鹊ą▓.
2. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ ą│ą╗ą░ą▓ąĄ "PLL" čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ UG382 [6], čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ąŠą║ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓čŗčłąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ PLL ą┤ą╗čÅ ąČąĄą╗ą░ąĄą╝čŗčģ ą▓čģąŠą┤ąĮčŗčģ ąĖ ą▓čŗčģąŠą┤ąĮčŗčģ čćą░čüč鹊čé PLL. ąŁč鹊čé ą╝ąĄč鹊ą┤ čéčĆąĄą▒čāąĄčé ą╗čāčćčłąĄą│ąŠ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ čéą░ą║ąĖčģ ą░čüą┐ąĄą║č鹊ą▓, ą║ą░ą║ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ čĆą░ą▒ąŠč湥ą╣ čćą░čüč鹊čéčŗ PLL VCO ą▓ čāą║ą░ąĘą░ąĮąĮčŗčģ ą┐čĆąĄą┤ąĄą╗ą░čģ.
ą£ąĖą│čĆą░čåąĖčÅ ąĖ ą▒ą░ąĮą║ąĖ ą┐ą░ą╝čÅčéąĖ. MCB, ąĮą░čģąŠą┤čÅčēąĖą╣čüčÅ ąĮą░ ą╗ąĄą▓ąŠą╣ čüč鹊čĆąŠąĮąĄ (ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü ą┤ą▓čāą╝čÅ MCB) ąĖą╗ąĖ ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ čüą╗ąĄą▓ą░ ą▓ąĮąĖąĘčā (ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü č湥čéčŗčĆčīą╝čÅ MCB) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą│ąĖą▒ą║ąĖąĄ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüąĖčéčāą░čåąĖą╣ (čüą╝. čĆąĖčü. 3-4). ąŚą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ MCB ą▓ čŹč鹊ą╝ ą╝ąĄčüč鹥 ąĖą╝ąĄčÄčé ą╝ąĄąĮčīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ "ą╝ąĮąŠą│ąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ" čäčāąĮą║čåąĖą╣ ą▓čŗą▓ąŠą┤ą░, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ MCB ąĮą░ ą┐čĆą░ą▓ąŠą╣ čüč鹊čĆąŠąĮąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╝ąĄčÄčé č鹥ąĮą┤ąĄąĮčåąĖčÄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒ąŠą╗ąĄąĄ ą╝ąĮąŠą│ąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ.
 |
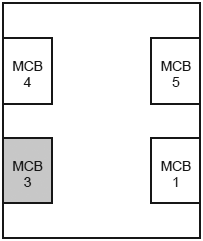 |
ąŻčüčéčĆąŠą╣čüčéą▓ą░ FPGA
čü ą┤ą▓čāą╝čÅ ą▒ą╗ąŠą║ą░ą╝ąĖ MCB |
ąŻčüčéčĆąŠą╣čüčéą▓ą░ FPGA
čü č湥čéčŗčĆčīą╝čÅ ą▒ą╗ąŠą║ą░ą╝ąĖ MCB |
ąĀąĖčü. 3-4: MCB3 ą▒ąŠą╗ąĄąĄ ą┐čĆąĄą┤ą┐ąŠčćčéąĖč鹥ą╗čīąĮąŠąĄ ą╝ąĄčüč鹊 ą┤ą╗čÅ ą╝ąĖą│čĆą░čåąĖąĖ ąĖ ą│ąĖą▒ą║ąŠčüčéąĖ ą┤ąĖąĘą░ą╣ąĮą░.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą▒ą░ąĮą║ą░ 1 MCB čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĮąŠąČą║ą░ą╝ąĖ Byte-wide Peripheral Interface (BPI), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ Spartan-6 ąŠčé ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ FLASH. ąŁčéąĖ ą▓čŗą▓ąŠą┤čŗ ą┤ą▓ąŠą╣ąĮąŠą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖą╗ąĖ ą┤ą╗čÅ BPI, ąĖą╗ąĖ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ MCB, ąĮąŠ ąĮąĖą║ą░ą║ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čäčāąĮą║čåąĖą╣ čüčĆą░ąĘčā. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüą╗ąĄą┤čāąĄčé čāč湥čüčéčī ą┤čĆčāą│ąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą▓ čüąĖčüč鹥ą╝ąĄ, ą║ą░ą║ ąŠąĮąĖ ą▒čāą┤čāčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓čā Spartan-6, ą║ąŠą│ą┤ą░ ąÆčŗ ą┐ą╗ą░ąĮąĖčĆčāąĄč鹥 čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ MCB. ąśąĮč鹥čĆč乥ą╣čüčŗ MCB ąĮą░ ąŠą▒ąŠąĖčģ čüč鹊čĆąŠąĮą░čģ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╝ąĄčÄčé ą▓čŗą▓ąŠą┤čŗ, ą║ąŠč鹊čĆčŗąĄ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ (global clock, GCLK) ąĖ ą▓čŗą▓ąŠą┤ąŠą▓ PCI, ąŠą┤ąĮą░ą║ąŠ MCB čüą╗ąĄą▓ą░ (ąĖą╗ąĖ čüą╗ąĄą▓ą░ ą▓ąĮąĖąĘčā) ąĖą╝ąĄčÄčé ą╝ąĄąĮčīčłąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┐ąŠ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠą╝čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ ą▓čŗą▓ąŠą┤ąŠą▓.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą╝ąĖą│čĆą░čåąĖąĖ ą╝ąĄąČą┤čā čćą╗ąĄąĮą░ą╝ąĖ čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ Spartan-6 ą▓ č鹊ą╝ ąČąĄ čéąĖą┐ąĄ ą║ąŠčĆą┐čāčüą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąĖą│čĆą░čåąĖčÅ čü čāčüčéčĆąŠą╣čüčéą▓ą░ LX16 ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ LX25 ą▓ č鹊ą╝ ąČąĄ čüą░ą╝ąŠą╝ ą║ąŠčĆą┐čāčüąĄ CSG324), čüąŠčģčĆą░ąĮčÅčÅ ą┐čĆąĖ čŹč鹊ą╝ č鹊čé ąČąĄ čüą░ą╝čŗą╣ ą▒ą╗ąŠą║ MCB čü ąĘą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ąĮą░ ą║ąŠčĆą┐čāčüąĄ. ąŁč鹊 čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ ą┤ą╗čÅ ą▓čüąĄčģ čĆą░ąĘą╝ąĄčēąĄąĮąĖą╣ MCB. ą×ą▒čŗčćąĮąŠ ą╝ąŠąČąĮąŠ ą╝ąĖą│čĆąĖčĆąŠą▓ą░čéčī "ą▓ą▓ąĄčĆčģ" ąĖą╗ąĖ "ą▓ąĮąĖąĘ" čü ą╗čÄą▒ąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą┐čĆąĖ ąŠą┤ąĮąŠą╣ ąĖ č鹊ą╣ ąČąĄ ą┐ą╗ąŠčéąĮąŠčüčéąĖ ą╗ąŠą│ąĖą║ąĖ ą▓ č鹊ą╝ ąČąĄ čüą░ą╝ąŠą╝ ą║ąŠčĆą┐čāčüąĄ. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā Spartan-6 Family Overview ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┤ąŠčüčéčāą┐ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ąĖ čéąĖą┐ą░ą╝ ąĖčģ ą║ąŠčĆą┐čāčüąŠą▓.
ąĀą░ąĘą▓ąŠą┤ą║ą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ. ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą╝ąŠą╝ąĄąĮčéčŗ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ą┐čĆąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĖ čĆą░ąĘą▓ąŠą┤ą║ąĖ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ (PCB), ą║ąŠą│ą┤ą░ ą▓ čüąĖčüč鹥ą╝ąĄ ąĮčāąČąĮąŠ ą┐čĆąĖą╝ąĄąĮąĖčéčī ąĖąĮč鹥čĆč乥ą╣čü ą║ ą┐ą░ą╝čÅčéąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB. ąóą░ą║ąČąĄ čüą╗ąĄą┤čāąĄčé ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā Spartan-6 FPGA PCB DesignerŌĆÖs Guide, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čĆą░ąĘą▓čÅąĘą║ąĄ ą┐ąĖčéą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąŠą▒čēąĄą╝čā čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą▓ čüąĖčüč鹥ą╝ąĄ, ąĖ ą┤čĆčāą│ąĖą╝ąĖ ąŠą▒čēąĖą╝ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅą╝ąĖ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ PCB. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čüčüčŗą╗ą║ąĖ ąĮą░ ą░ąĮą░ą╗ąĖąĘ ą┐ąĄčćą░čéąĮąŠą╣ čĆą░ąĘą▓ąŠą┤ą║ąĖ ą┐ą╗ą░čéčŗ ąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą┐ą░ą╝čÅčéąĖ DDR ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ čüčüčŗą╗ą║ą░čģ ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąÉ.
ąÆčüąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗ąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ ąĮą░ PCB ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčé čüčĆąĄą┤ąĮčÄčÄ ąĘą░ą┤ąĄčƹȹ║čā čüąĖą│ąĮą░ą╗ą░ 165 ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ ąĮą░ ą┤čÄą╣ą╝ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ą░.
ą×ą▒čēąĖąĄ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ:
ŌĆó ąöą╗čÅ čĆą░ąĘą▓ąŠą┤ą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ą╝ąĄąČą┤čā ą┐ą░ą╝čÅčéčīčÄ ąĖ FPGA ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüą╗ąŠąĖ PCB. ą¤ąĄčĆąĄčģąŠą┤ąĮčŗąĄ ąŠčéą▓ąĄčĆčüčéąĖčÅ ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąŠčé čłą░čĆąĖą║ąŠą▓čŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ą┤ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüą╗ąŠčÅ ąĖčüą║ą╗čÄčćą░čÄčéčüčÅ ąĖąĘ čŹč鹊ą│ąŠ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ.
ŌĆó ąĀą░ąĘą▓ąŠą┤ą║ą░ ąĮąĄ ą▓ąĄčĆčģąĮąĄą╝ ąĖą╗ąĖ ąĮąĖąČąĮąĄą╝ čüą╗ąŠąĄ ą╝ąŠąČąĄčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ (ąĄčüą╗ąĖ čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ) ą║ąŠą│ą┤ą░ ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ fly-by ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ą┐ą░ą╝čÅčéąĖ.
ŌĆó ąśąĮč鹥čĆč乥ą╣čüčŗ ą┐ą░ą╝čÅčéąĖ ą▒ąĄąĘ ą▓ąĮąĄčłąĮąĖčģ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖą╣ ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ą╝ą░ą║čüąĖą╝čāą╝ 2 ą┐ąĄčĆąĄčģąŠą┤ąĮčŗčģ ąŠčéą▓ąĄčĆčüčéąĖčÅ.
ŌĆó ąśąĮč鹥čĆč乥ą╣čüčŗ ą┐ą░ą╝čÅčéąĖ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅą╝ąĖ ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ą╝ą░ą║čüąĖą╝čāą╝ 3 ą┐ąĄčĆąĄčģąŠą┤ąĮčŗčģ ąŠčéą▓ąĄčĆčüčéąĖčÅ.
ŌĆó ąÜą░ą║ č鹊ą╗čīą║ąŠ čüąĖą│ąĮą░ą╗ ą┐čĆąŠą▒čĆąŠčłąĄąĮ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüąĖą│ąĮą░ą╗čīąĮčŗą╣ čüą╗ąŠą╣, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą▓ąĄčĆčłąĖčéčī čüą▓ąŠčÄ čĆą░ąĘą▓ąŠą┤ą║čā ą▓ čŹč鹊ą╝ čüą╗ąŠąĄ. ąŚą░ą▓ąĄčĆčłąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╝ ąŠčéą▓ąĄčĆčüčéąĖąĖ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą║ąŠąĮąĄčćąĮąŠą╣ čĆą░ąĘą▓ąŠą┤ą║ąŠą╣ ą┤ąŠ ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą│ąŠ ąŠčéą▓ąĄčĆčüčéąĖčÅ ą▓čŗą▓ąŠą┤ą░ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ąĮą░ ą▓ąĄčĆąĮąĄą╝ ąĖą╗ąĖ ąĮąĖąČąĮąĄą╝ čüą╗ąŠąĄ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ. ąØąĄ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą╝ąĄąĮčÅčéčī čüą╗ąŠąĖ PCB ą┐čĆąĖ čĆą░ąĘą▓ąŠą┤ą║ąĄ čüąĖą│ąĮą░ą╗ą░.
ŌĆó ą×ą▒čēą░čÅ ą┤ą╗ąĖąĮą░ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣. ą¤čĆąŠą▓ąŠą┤ąĮąĖą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ą╗ąĖąĮąŠą╣ 3 ą┤čÄą╣ą╝ą░ ąĖą╗ąĖ ą╝ąĄąĮčīčłąĄ.
ŌĆó ą©ąĖčĆąĖąĮą░ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčé 3 ą┤ąŠ 5 mil.
ŌĆó ąŚą░ąĘąŠčĆčŗ ą╝ąĄąČą┤čā ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ą░ą╝ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čéčĆąŠąĄ ą▒ąŠą╗čīčłąĄ čłąĖčĆąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ą░.
ŌĆó ąĪąĖą│ąĮą░ą╗čŗ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠą║ą╗ą░ą┤čŗą▓ą░čéčīčüčÅ ą┐ąŠ čĆą░ąĘą┤ąĄą╗čā ąĘą░ą╗ąĖą▓ąŠą║ ą╝ąĄą┤ąĖ (splits) ąĖą╗ąĖ ą┐ąŠ ą┐čāčüčéčŗą╝ ą╝ąĄčüčéą░ą╝, ą▒ąĄąĘ 菹║čĆą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą╗ąĖą▓ą║ą░ą╝ąĖ (voids).
ŌĆó ąĪą╗ąĄą┤čāąĄčé ąĖąĘą▒ąĄą│ą░čéčī čĆą░ąĘą▓ąŠą┤ą║čā ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą┐ą░čĆ čĆčÅą┤ąŠą╝ čü čłčāą╝čÅčēąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ąĖą╗ąĖ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ čćąĖą┐čŗ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ čéą░ą║č鹊ą▓.
ŌĆó ąŚą░ąĘąŠčĆ ą╝ąĄąČą┤čā ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╝ąĖ čéą░ą║čéą░ą╝ąĖ/čüčéčĆąŠą▒ą░ą╝ąĖ ąĖ ą┤čĆčāą│ąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ąĮą░ č鹊ą╝ ąČąĄ čüą╗ąŠąĄ PCB ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 20 mil. ą¤čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ 20 mil ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮąŠ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüąĄčĆą┐ą░ąĮčéąĖąĮąŠą▓ (ąĘą╝ąĄąĄą║) čü čåąĄą╗čīčÄ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ą┤ą╗ąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓.
ŌĆó ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ čéą░ą║čéčŗ/čüčéčĆąŠą▒čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ą║ą░ą║ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ čü ą▓ąŠą╗ąĮąŠą▓čŗą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ 100?. ą¤ą░čĆą░ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮą░ ąĮą░ č鹊ą╝ ąČąĄ čüą╗ąŠąĄ PCB, ą▒ąĄąĘ čüą╝ąĄąĮčŗ čüą╗ąŠčÅ ą┐ąŠčüą╗ąĄ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ąŠčé ąĮąŠąČą║ąĖ ą║ąŠčĆą┐čāčüą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
ŌĆó ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ (ąĄčüą╗ąĖ ąŠąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ) ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ ą║ąŠčĆą┐čāčüčā FPGA.
ŌĆó ą¤ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗąĄ č鹥čĆą╝ąĖąĮą░č鹊čĆčŗ (ąĄčüą╗ąĖ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ ą║ąŠčĆą┐čāčüčā DRAM.
ŌĆó ąĀąĄąĘąĖčüč鹊čĆčŗ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą│ąŠ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮčŗ ąĮą░ ą▓ąĄčĆčģąĮąĄą╝ ąĖą╗ąĖ ąĮąĖąČąĮąĄą╝ čüą╗ąŠąĄ ąŠčüčéčĆąŠą▓ą║ą░ VTT.
ŌĆó ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐ą╗ą░čéčŗ ą┤ąŠą╗ąČąĮčŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąĖ čéą░ą║č鹊ą▓ čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠ, ąĖ ą▓čŗą▒čĆą░ąĮčŗ ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ čłąĖčĆąĖąĮčŗ ąĖ ąĘą░ąĘąŠčĆčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čåąĄą╗ąĄą▓ąŠą╣ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ ąĖą╝ą┐ąĄą┤ą░ąĮčü. ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮą░čÅ čĆą░ąĘą▓ąŠą┤ą║ą░ čüąĖą│ąĮą░ą╗ą░ čāą╝ąĄąĮčīčłą░ąĄčé ą▓čĆąĄą╝čÅ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čéą░ą║č鹊ą▓ ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ ą┐ąŠ ą┤ąĖąĘą░ą╣ąĮčā DDR2 čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé, čćč鹊ą▒čŗ čüąĖą│ąĮą░ą╗čŗ čéą░ą║č鹊ą▓ ą▒čŗą╗ąĖ čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ą░ą╝ąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ ą┤ą╗ąĖąĮčŗ ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ ą┤ą╗ąĖąĮąĮčŗą╝ąĖ, č湥ą╝ čüąĖą│ąĮą░ą╗čŗ ą░ą┤čĆąĄčüą░, čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą╗ąĖ ą║ąŠą╝ą░ąĮą┤čŗ, čćč鹊ą▒čŗ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī čŹčéčā ą▓ą░čĆąĖą░čåąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░.
ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ Data, Data Mask ąĖ Data Strobe. ąĪąĖą│ąĮą░ą╗čŗ ą┤ą░ąĮąĮčŗčģ (Data, DQ), ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ (Data Mask, DM) ąĖ čüčéčĆąŠą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (Data Strobe, DQS) ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą╗čāčćą░čéčī čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé (čé. ąĄ. ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ą▓ ą┐ąĄčĆą▓čāčÄ ąŠč湥čĆąĄą┤čī ąĖ ą▒čŗčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą║ąŠčĆąŠčéą║ąĖą╝ąĖ), ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊 čüą░ą╝čŗąĄ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ DDR.
ŌĆó ąĪąĖą│ąĮą░ą╗čŗ DQ, DM ąĖ DQS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ą▓ ą│čĆčāą┐ą┐ąĄ (ąĮą░ ą▒ą░ą╣čé). ąÜą░ąČą┤ą░čÅ ą│čĆčāą┐ą┐ą░ ą┤ąŠą╗ąČąĮą░ ąĖą╝ąĄčéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čāčÄ ąĮą░ą│čĆčāąĘą║čā ąĖ čĆą░ąĘą▓ąŠą┤ą║čā, čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī čéą░ą╣ą╝ąĖąĮą│ ąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ąŠą▓.
ŌĆó ąŚą░ąĘąŠčĆ ą╝ąĄąČą┤čā ą│čĆčāą┐ą┐ąŠą╣ ą┤ą░ąĮąĮčŗčģ ąĖ ą╗čÄą▒čŗą╝ąĖ ą┤čĆčāą│ąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 20 mil.
ŌĆó ąĪąĖą│ąĮą░ą╗čŗ DQS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĖąĘąŠą╗ąĖčĆąŠą▓ą░ąĮčŗ ąŠčé ą┤čĆčāą│ąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĘą░ąĘąŠčĆąŠą╝ 20 mil, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąĄčĆąĄą║čĆąĄčüčéąĮčŗčģ ą┐ąŠą╝ąĄčģ (crosstalk).
ŌĆó ąöąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘąĮąĖčåą░ ą▓ ąĘą░ą┤ąĄčƹȹ║ąĄ ą╝ą░ą║čüąĖą╝čāą╝ ┬▒25 ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ (┬▒150 mil čĆą░ąĘąĮąĖčåą░ ą▓ ą┤ą╗ąĖąĮąĄ) ą╝ąĄąČą┤čā ą╗čÄą▒čŗą╝ DQ/DM ąĖ čüą▓čÅąĘą░ąĮąĮčŗą╝ čü ąĮąĖą╝ čüčéčĆąŠą▒ąŠą╝ DQS.
ŌĆó ąōčĆčāą┐ą┐ą░ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮą░ čĆčÅą┤ąŠą╝ čü ąĘą░ą╗ąĖą▓ą║ąŠą╣ GROUND.
ŌĆó ąöą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ čĆą░ąĘą▓ąŠą┤ą║ąĖ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┐ąĄčĆąĄčüčéą░ą▓ą╗čÅčéčī ą▒ąĖčéčŗ DQ ąĮą░ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą┐ą░ą╝čÅčéąĖ. ą¤ąĄčĆąĄčüčéą░ąĮąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮą░ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĖ ą│čĆčāą┐ą┐čŗ ą┤ą░ąĮąĮčŗčģ.
ŌĆó ąöą╗ąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ ąŠčé DQS ą┤ąŠ DQS_N ą┤ąŠą╗ąČąĮčŗ čüąŠą▓ą┐ą░ą┤ą░čéčī (┬▒10 mil).
ŌĆó ąóąĄčĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ (ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ąĮąĄčłąĮąĖąĄ č鹥čĆą╝ąĖąĮą░č鹊čĆčŗ) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą┐ąŠčüą╗ąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ą┐ą░ą╝čÅčéąĖ (ą▓ čüčéąĖą╗ąĄ fly-by).
ŌĆó ąöą╗čÅ 16-ą▒ąĖčéąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ DDR ą┤ą╗ąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ LDQS/LDQS_N ąĖ UDQS/UDQS_N ą┤ąŠą╗ąČąĮčŗ čüąŠą▓ą┐ą░ą┤ą░čéčī ą┐ąŠ ąĘą░ą┤ąĄčƹȹ║ąĄ ┬▒25 ą┐ąĖą║ąŠčüąĄą║čāąĮą┤ (┬▒150 mil).
ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ Address, Control ąĖ Clock. ąÜąŠą│ą┤ą░ ą│čĆčāą┐ą┐čŗ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ, čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠ čüą░ą╝ąŠą╝čā ą▓čŗčüąŠą║ąŠą╝čā ą┐čĆąĖąŠčĆąĖč鹥čéčā čŹč鹊 ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ čéą░ą║čéčŗ (CK / CK_N). ąŁčéąĖ čéą░ą║čéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ą┐ąĄčĆą▓čŗą╝ąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓čüąĄ ą┤ą╗ąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ čüąĖą│ąĮą░ą╗ąŠą▓ ą░ą┤čĆąĄčüą░ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ąŠą┐ąĖčĆą░čéčīčüčÅ ąĮą░ ą┤ą╗ąĖąĮčā čéčĆą░čüčü ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ ąĮą░ PCB, čćč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░čéčī ą┐ąŠ ą╝ąĄčĆąĄ ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ.
ŌĆó ąöą╗ąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ ąŠčé CK ą┤ąŠ CK_N ą┤ąŠą╗ąČąĮčŗ čüąŠą▓ą┐ą░ą┤ą░čéčī (┬▒10 mil).
ŌĆó ąöą╗ąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ CK ąĖ DQS ą┤ąŠą╗ąČąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī ą┤čĆčāą│ ą┤čĆčāą│čā (┬▒250 mil), čćč鹊ą▒čŗ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčī ą┐čĆąĄą┤ąĄą╗čŗ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ čāą┤ąĄčƹȹ░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓.
ŌĆó ąöąŠą╗ąČąĮą░ ą▒čŗčéčī ą╝ą░ą║čüąĖą╝čāą╝ ąĘą░ą┤ąĄčƹȹ║ą░ ┬▒50 ps (┬▒300 mil) ą╝ąĄąČą┤čā čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ą░ą┤čĆąĄčüą░/čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüą▓čÅąĘą░ąĮąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝ FPGA ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ CK ąĖ CK_N.
ŌĆó ąĪąĖą│ąĮą░ą╗čŗ ą░ą┤čĆąĄčüą░ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĘą░ą╗ąĖą▓ą║ąĖ POWER, ąĄčüą╗ąĖ ąĘą░ą╗ąĖą▓ą║ą░ GROUND ąĮąĄ čüą╗ąĄą┤čāčÄčēą░čÅ ą▓ čüč鹥ą║ąĄ čüą╗ąŠąĄą▓ PCB ą┤ą╗čÅ čŹč鹊ą╣ ą│čĆčāą┐ą┐čŗ čüąĖą│ąĮą░ą╗ąŠą▓.
ŌĆó ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąĄčĆąĄą║čĆąĄčüčéąĮčŗčģ ą┐ąŠą╝ąĄčģ, čüąĖą│ąĮą░ą╗čŗ ą░ą┤čĆąĄčüą░ ąĖ ą║ąŠą╝ą░ąĮą┤ čüą╗ąĄą┤čāąĄčé čĆą░ąĘą▓ąŠą┤ąĖčéčī ą▓ ą┤čĆčāą│ąŠą╝ čüą╗ąŠąĄ čĆą░ąĘą▓ąŠą┤ą║ąĖ, ąŠčéą╗ąĖčćą░čÄčēąĄą╝čüčÅ ąŠčé čüą╗ąŠčÅ čĆą░ąĘą▓ąŠą┤ą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ DQ, DQS ąĖ DM.
ŌĆó ąóąĄčĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ (ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ) ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ ą║ ąĮą░ą│čĆčāąĘą║ąĄ, ą┐ąŠčüą╗ąĄ čéą░ą║č鹊ą▓čŗčģ ą┐ą╗ąŠčēą░ą┤ąŠą║ PCB. ąöą╗ąĖąĮčŗ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ PCB, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ čāč湥č鹥 čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ą┤ą╗ąĖąĮčŗ, ą┤ąŠą╗ąČąĮčŗ ąĖčüą║ą╗čÄčćą░čéčī ą┤ą╗ąĖąĮčā CLINE ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ą░ PCB ąŠčé ą┐ą░ą╝čÅčéąĖ ą┤ąŠ č鹥čĆą╝ąĖąĮąĖčĆčāčÄčēąĄą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░.
ŌĆó ąóąĄčĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮąŠ (ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ) ą┐ąŠčüą╗ąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ą┐ą░ą╝čÅčéąĖ (ą▓ čüčéąĖą╗ąĄ fly-by).
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą┤ąĖąĘą░ą╣ąĮą░ PCB. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čāąČąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗą╝ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅą╝ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ PCB, ąŠą┐ąĖčüą░ąĮąĮčŗą╝ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ, ąĮčāąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą┤ąĖąĘą░ą╣ąĮčā ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ:
ŌĆó ąÆčŗą▓ąŠą┤ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0 (Chip Select, CS#) čåąĄą╗ąĄą▓ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąĘąĄą╝ą╗ąĄ ą┐ą╗ą░čéčŗ. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ č鹊ą╗čīą║ąŠ ą║ ąŠą┤ąĮąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą┐ą░ą╝čÅčéąĖ, ąŠąĮ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čģąŠą┤ąŠą╝ CS#. ąŚą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ą┐ąŠčüčéą░ą▓čēąĖą║čā ąÆą░čłąĄą╣ ą┐ą░ą╝čÅčéąĖ.
ŌĆó ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ą┐ą░ą╝čÅčéąĖ DDR3 čüąĖą│ąĮą░ą╗čŗ RESET ąĖ CKE ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ą║ą░ąČą┤čŗą╣ ą┐ąŠ čĆąĄąĘąĖčüč鹊čĆčā 4.7 k?, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝čā ą╝ąĄąČą┤čā čüąĖą│ąĮą░ą╗ąŠą╝ ąĖ ąĘąĄą╝ą╗ąĄą╣, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą╗ąŠą│. 0 ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ą░ą╝čÅčéąĖ.
ŌĆó ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ą┐ą░ą╝čÅčéąĖ DDR2 čüąĖą│ąĮą░ą╗čŗ ODT ąĖ CKE ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ą║ą░ąČą┤čŗą╣ ą┐ąŠ čĆąĄąĘąĖčüč鹊čĆčā 4.7 k?, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝čā ą╝ąĄąČą┤čā čüąĖą│ąĮą░ą╗ąŠą╝ ąĖ ąĘąĄą╝ą╗ąĄą╣, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą╗ąŠą│. 0 ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ą░ą╝čÅčéąĖ.
ŌĆó ąĢčüą╗ąĖ ą▓čŗą▓ąŠą┤ HSWAPEN čāčüčéčĆąŠą╣čüčéą▓ą░ Spartan-6 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0 ąĖą╗ąĖ ąĘą░ąĘąĄą╝ą╗ąĄąĮ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ąĮą░ čłąĖąĮčā ą┐ąĖčéą░ąĮąĖčÅ VCCO čĆą░ąĘčĆąĄčłąĄąĮčŗ ąĮą░ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ą░čģ I/O ą┤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą▓ą║ą╗čÄčćą░čÅ ą╗čÄą▒ąŠą╣ ąĖąĘ ą▓čŗą▓ąŠą┤ąŠą▓ VREF, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ MCB. ąĢčüą╗ąĖ čāčĆąŠą▓ąĄąĮčī VREF ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ čĆąĄąĘąĖčüč鹊čĆą░čģ, č鹊 ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ą╝ąŠą│čāčé ą┐ąŠą▓čŗčüąĖčéčī čāčĆąŠą▓ąĄąĮčī ą▓čŗą▓ąŠą┤ąŠą▓ VREF ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 MCB čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░, ą┐ąŠą║ą░ čāčĆąŠą▓ąĄąĮčī VREF ąĮąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüčéą░ą▒ąĖą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ MCB ąĖ čĆą░ą▒ąŠčéčŗ ąĮą░ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝ čāčĆąŠą▓ąĮąĄ VREF. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čüąĄą║čåąĖčÄ "Configuration" ą▓ ą│ą╗ą░ą▓ąĄ "I/O Pin and Clock Planning" chapter of UG393 [7].
ą×ą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą▓čŗčģąŠą┤ą░. ąÜą░ą║ ąŠčéą╝ąĄč湥ąĮąŠ ą▓ ą▒ą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ąōą╗ą░ą▓čŗ 1, MCB ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠčüąĮąŠą▓ąĮčŗąĄ ą▒ą╗ąŠą║ąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O blocks, IOB), čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĘą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ ą╝ąĄčüčéą░ą╝ąĖ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ ąĮą░ ą║ąŠčĆą┐čāčüąĄ, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ą▓ąĮąĄčłąĮąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą┐ą░ą╝čÅčéąĖ. ąŻčéąĖą╗ąĖčéą░ MIG ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čŹčéąĖ ą╝ąĄčüčéą░ IOB, čćč鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čéčĆąĄą▒čāąĄą╝čŗą╣ čüčéą░ąĮą┤ą░čĆčé I/O ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čéąĖą┐ą░ ą┐ą░ą╝čÅčéąĖ (čé. ąĄ. SSTL18 ą┤ą╗čÅ DDR2, SSTL15 ą┤ą╗čÅ DDR3).
ąÉą┐ą┐ą░čĆą░čéąĮčŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ąĮą░ ą▒ą░ąĘąĄ MCB ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, čćč鹊 ąĮąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓čŗčģąŠą┤ą░ (Simultaneous Switching Output, SSO) ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĘą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ IOB ą▓ą┐ą╗ąŠčéčī ą┤ąŠ ąĄą│ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ čĆą░čüčłąĖčĆąĄąĮąĖčÅ (čé. ąĄ. ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ą░ąĮąĮčŗčģ ąĖ ą░ą┤čĆąĄčüą░ ąĮą░ ąĖąĮč鹥čĆč乥ą╣čüąĄ). ą×ą▒čĆą░čéąĖč鹥čüčī ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ą╝ DS162 [8] ąĖ UG361 [9] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ SSO. ąÜąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗čŗ čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ ąĮą░ ą╗čÄą▒čŗčģ ąŠčüčéą░ą╗čīąĮčŗčģ ą▓čŗą▓ąŠą┤ą░čģ ą▓ ą▒ą░ąĮą║ąĄ, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝: ąŠą┤ąĖąĮąŠčćąĮčŗą╣ (single-ended, ąĮąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣) ą▓čŗčģąŠą┤ čü ą╝ą░ą╗ąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ (low drive strength), čüčéą░ąĮą┤ą░čĆčé ą▒ąĄąĘ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ LVCMOS 4 mA ąĖą╗ąĖ LVCMOS 2 mA.
[4. ążčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ MCB]
ąÆ čŹč鹊ą╣ ą│ą╗ą░ą▓ąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą┤čĆąŠą▒ąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ č鹊ą╝, ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé Spartan┬«-6 FPGA MCB. ąŚą┤ąĄčüčī čüąŠą┤ąĄčƹȹ░čéčīčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čüąĄą║čåąĖąĖ:
ŌĆó ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĘą░ą┐čāčüą║ą░ (Startup Sequence)
ŌĆó ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ (Calibration)
ŌĆó ąśąĮčüčéčĆčāą║čåąĖąĖ
ŌĆó ąÉą┤čĆąĄčüą░čåąĖčÅ
ŌĆó ąóą░ą╣ą╝ąĖąĮą│ ą┐čāčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ (Command Path Timing)
ŌĆó ąóą░ą╣ą╝ąĖąĮą│ ą┐čāčéąĖ ąĘą░ą┐ąĖčüąĖ (Write Path Timing)
ŌĆó ąóą░ą╣ą╝ąĖąĮą│ ą┐čāčéąĖ čćč鹥ąĮąĖčÅ (Read Path Timing)
ŌĆó ąóčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐ą░ą╝čÅčéąĖ
ŌĆó ąĪą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ (Self Refresh)
ŌĆó ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ čĆą░ą▒ąŠčéčŗ (Suspend)
ŌĆó ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą▒ą░ą╣čéą░ ą▓ ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ
ŌĆó ąŻą┐ąŠčĆčÅą┤ąŠčćąĖą▓ą░ąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĖ ą║ąŠą│ąĄčĆąĄąĮčéąĮąŠčüčéčī
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĘą░ą┐čāčüą║ą░. ąĀąĖčü. 4-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠčåąĄą┤čāčĆčā startup ą┤ą╗čÅ MCB. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ FPGA ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░, ą┐čĆąŠąĖąĘąŠčłąĄą╗ ąĘą░čģą▓ą░čé PLL ąĖ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ čüąĖčüč鹥ą╝ąĮčŗąĄ čéą░ą║čéčŗ, ą▒ą╗ąŠą║ąŠą╝ MCB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ ą┐ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĄ MCB, čćč鹊ą▒čŗ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī ąĄą│ąŠ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ.
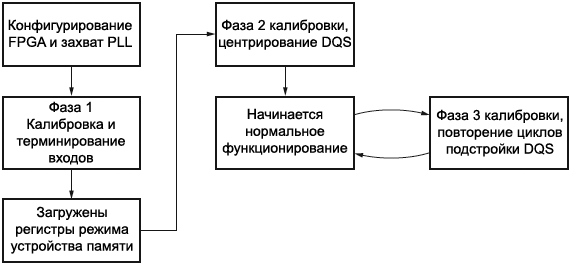
ąĀąĖčü. 4-1. MCB Startup Sequence.
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ ą┐ąŠ čĆąĖčü. 4-1:
1. ą£ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (soft calibration module) čĆąĄą░ą╗ąĖąĘčāąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ą░čüą┐ąĄą║čéčŗ čäą░ąĘ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ 1, 2 ąĖ 3.
2. ąÉą┐ą┐ą░čĆą░čéąĮą░čÅ ą╗ąŠą│ąĖą║ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ MCB ąØąĢ ąÆą½ą¤ą×ąøąØą»ąĢąó ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčāčÄ ą┐ąŠą┤čüčéčĆąŠą╣ą║čā ą┐ąŠ ą▒ąĖčéą░ą╝ ą╝ąŠą╝ąĄąĮčé ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ čłąĖąĮąĄ DQ. ąĪą╗ąĄą┤čāą╣č鹥 čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅą╝ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ (čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ąĀą░ąĘą▓ąŠą┤ą║ą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ"), čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ąĮą░ PCB ą┤ą╗ąĖąĮs ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ čüąĖą│ąĮą░ą╗ąŠą▓ DQ/DQS.
ą¤ąĄčĆą▓ą░čÅ ą▓ą░ąČąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐čāčüą║ą░ čŹč鹊 čäą░ąĘą░ 1 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąØą░ čŹč鹊ą╝ čłą░ą│ąĄ ą╝ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖąĘą╝ąĄčĆčÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ RZQ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąČąĄą╗ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐ąĄą┤ą░ąĮčüą░ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ (on-chip Input Termination) ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąČąĄčüčéą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ąĮą░ ą║ąŠčĆą┐čāčüąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓čŗą▓ąŠą┤ąŠą▓ MCB (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ DQ). ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą▓čŗą▒čĆą░ą╗ ąŠą┐čåąĖčÄ Calibrated Input Termination ą▓ ą│čĆą░čäąĖč湥čüą║ąŠą╝ ąĖąĮč鹥čĆč乥ą╣čüąĄ čāčéąĖą╗ąĖčéčŗ MIG (čüą╝. čüąĄą║čåąĖčÄ "Setting FPGA Options" čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ UG416 [2]). ąśąĮą░č湥 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠąĄ ąĮąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮąŠąĄ ą▓čüčéčĆąŠąĄąĮąĮąŠąĄ ą▓ čćąĖą┐ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĄąĄ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĖ čŹč鹊čé čłą░ą│ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ.
ąÆč鹊čĆąŠą╣ ą▓ą░ąČąĮčŗą╣ čłą░ą│ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĘą░ą┐čāčüą║ą░ čŹč鹊 ąĘą░ą│čĆčāąĘą║ą░ čĆąĄą│ąĖčüčéčĆąŠą▓ čĆąĄąČąĖą╝ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ (memory device mode registers) ąČąĄą╗ą░ąĄą╝čŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ, ąĮą░čćąĖąĮą░ąĄčéčüčÅ čäą░ąĘą░ 2 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąŁčéą░ čäą░ąĘą░ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ąĘą░ą┤ąĄčƹȹ║čā ą║ąŠ ą▓čģąŠą┤ąĮąŠą╝čā ą┐čāčéąĖ čüčéčĆąŠą▒ąŠą▓ DQS, ą▓čģąŠą┤čÅčēąĖčģ ą▓ FPGA. ą”ąĄą╗čī čŹč鹊ą│ąŠ - čüą┤ą▓ąĖąĮčāčéčī čüčéčĆąŠą▒čŗ DQS ą▓ čåąĄąĮčéčĆ ąŠą║ąĮą░ ąĘą░čģą▓ą░čéą░ čćąĖčéą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ (Read Data capture window).
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓čüąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐čāčüą║ą░ (startup sequence) ąĘą░ą▓ąĄčĆčłąĄąĮčŗ, MCB ą▓čģąŠą┤ąĖčé ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝. ąÜąŠą╝ą░ąĮą┤čŗ (Commands) ąĖ ą┤ą░ąĮąĮčŗąĄ (Data) ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓ čüč鹥ą║ąĖ FIFO ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (User Interface FIFO), ą┐ąŠą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čĆąŠčåąĄą┤čāčĆą░ ąĘą░ą┐čāčüą║ą░, ąĮąŠ ąĮąĖ ąŠą┤ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░, ą┐ąŠą║ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąĖ ą▒ą╗ąŠą║ ąĮąĄ ą▓ąŠą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąÆ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ soft calibration module ą┐ąŠčüč鹊čÅąĮąĮąŠ ą╝ąŠąĮąĖč鹊čĆąĖčé ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą┤ąĄčƹȹĄą║ (tap delay values) 菹╗ąĄą╝ąĄąĮčéą░ IDELAY, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┤ą╗čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┐čāčéąĖ DQS (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ IDELAY čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ "Spartan-6 FPGA SelectIOŌäó Resources"). ąŁč鹊 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą╗čÄą▒ąŠą│ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ tap delay ąĖąĘ-ąĘą░ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖą╗ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ąĢčüą╗ąĖ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüą╝ąĄčēąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ tap delay, č鹊 čüč湥čéčćąĖą║ tap delay ąĮą░ čüčéčĆąŠą▒ąĄ DQS ą▓čģąŠą┤ąĮąŠą│ąŠ ą┐čāčéąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤čüčéčĆąŠąĄąĮ čéą░ą║, čćč鹊ą▒čŗ čāą┤ąĄčƹȹ░čéčī ąĄą│ąŠ ą┐ąŠ čåąĄąĮčéčĆčā Read Data capture window. ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖą╣ IDELAY ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┐ąĄčĆą░čåąĖą╣ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ (REFRESH), čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą▓ą╗ąĖčÅąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ čäą░ą║č鹊čĆąŠą▓ ąĮą░ ąĮąŠčĆą╝ą░ą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā čü ą┤ą░ąĮąĮčŗą╝ąĖ ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ążą░ąĘą░ 3 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ "continuous DQS tuning", čé. ąĄ. ą┐ąŠą▓č鹊čĆčÅčÄčēąĖąĄčüčÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ DQS.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ ą▓čüąĄ čäą░ąĘčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čĆą░čüčüą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čüąĄą║čåąĖąĖ "ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░".
ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░. ą¦č鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ą┐čĆąĄą┤ąĄą╗ą░čģ čéą░ą╣ą╝ąĖąĮą│ą░ (ąĖ čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąĮą░ąĖą▓čŗčüčłąĄą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ) ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ, MCB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ č乊čĆą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ąŠą║, čćč鹊 ą║čĆą░čéą║ąŠ ąŠą┐ąĖčüą░ąĮąŠ ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĘą░ą┐čāčüą║ą░". ą¢ąĄčüčéą║ą░čÅ ą╗ąŠą│ąĖą║ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓ MCB ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą╝ąŠą┤čāą╗čī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ čāčéąĖą╗ąĖč鹊ą╣ MIG (ąĖą╗ąĖ EDK) čĆą░ą▒ąŠčéą░čÄčé čüąŠą▓ą╝ąĄčüčéąĮąŠ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĮą░ą┤ąĄąČąĮąŠą╣ ąĖ ą│ąĖą▒ą║ąŠą╣ čüčģąĄą╝čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąØąĖąČąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą║ą░ąČą┤ą░čÅ čäą░ąĘą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąŠą┐ąĖčüą░ąĮąĖčÅ čäą░ąĘ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ 2 ąĖ 3 ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčé, čćč鹊 ą░čéčĆąĖą▒čāčé C_MC_CALIBRATION_MODE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĘąĮą░č湥ąĮąĖąĄ "CALIBRATION", ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓čŗčłąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü čéą░ą▒ą╗ąĖčåąĄą╣ 2-2.
ążą░ąĘą░ 1: Input Termination. ąÆčüčéčĆąŠąĄąĮąĮąŠąĄ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĮąĖąČą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĮą░ ą┐ą╗ą░č鹥 ąĖ čāą╗čāčćčłą░ąĄčé čåąĄą╗ąŠčüčéąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ąŠą▓, ą┐ąŠč鹊ą╝čā čćč鹊 č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ, ąĮą░čüą║ąŠą╗čīą║ąŠ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą║ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░. ąōčĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü čāčéąĖą╗ąĖčé MIG ąĖ EDK ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą▒čĆą░čéčī ąŠą┐čåąĖčÄ "Calibrated Input Termination" ą┤ą╗čÅ ąČąĄčüčéą║ąŠ ąĘą░ą┤ą░ąĮąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą║ąŠčĆą┐čāčüą░ ą▒ą╗ąŠą║ą░ MCB. ąŁčéą░ čäčāąĮą║čåąĖčÅ čüąŠąĘą┤ą░ąĄčé ą▓čüčéčĆąŠąĄąĮąĮąŠąĄ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ąŠą▓ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ MCB, ą║ąŠč鹊čĆąŠąĄ ą║ą░ą╗ąĖą▒čĆčāąĄčéčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░, ą┤ąĄą╗ą░čÅ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąŠą╗ąĄąĄ č鹊čćąĮčŗą╝ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ąŠą┐čåąĖąĄą╣ "Uncalibrated Input Termination".
ą£ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (soft calibration module) ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą▓ą░ ą▓čŗą▓ąŠą┤ą░ I/O, RZQ ąĖ ZIO, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ čāčéąĖą╗ąĖč鹊ą╣ MIG (ąĖą╗ąĖ EDK), čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ą░. RZQ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╝ ą▓čŗą▓ąŠą┤ąŠą╝ ą┤ą╗čÅ ą▓čüąĄčģ ą┤ąĖąĘą░ą╣ąĮąŠą▓ MCB. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ Calibrated Input Termination, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čĆąĄąĘąĖčüč鹊čĆ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ąŠą╝ RZQ ąĖ ąĘąĄą╝ą╗ąĄą╣, ąĮąŠą╝ąĖąĮą░ą╗ ą║ąŠč鹊čĆąŠą│ąŠ ą▓ 2 čĆą░ąĘą░ (2R) ą▒ąŠą╗čīčłąĄ ąČąĄą╗ą░ąĄą╝ąŠą╝čā ą▓čģąŠą┤ąĮąŠą╝čā ąĖą╝ą┐ąĄą┤ą░ąĮčüčā (čé. ąĄ. čĆąĄąĘąĖčüč鹊čĆ 100? ą┤ą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ čŹčäč乥ą║čéąĖą▓ąĮąŠą│ąŠ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ 50?). RZQ ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ą▓ą░čéčīčüčÅ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą▓čŗą▓ąŠą┤ąŠą╝ (no-connect, NC) ą┤ą╗čÅ ą┤ąĖąĘą░ą╣ąĮąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé Calibrated Input Termination. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▓čŗą▓ąŠą┤ RZQ ą┤ąŠą╗ąČąĄąĮ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ č鹊ą╝ ąČąĄ ą▒ą░ąĮą║ąĄ I/O, čćč鹊 ąĖ ą▓čŗą▓ąŠą┤čŗ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ.
ąÆčŗą▓ąŠą┤ ZIO čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ąĖąĘą░ą╣ąĮąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ Calibrated Input Termination, ąĖ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ą▓ą░čéčīčüčÅ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ (čé. ąĄ. ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ ą╗čÄą▒ąŠą╝čā ą┐čĆąŠą▓ąŠą┤ąĮąĖą║čā ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ), ąĖ ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╝ ąĮą░ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą▓čŗą▓ąŠą┤ ą║ąŠčĆą┐čāčüą░ (čé. ąĄ. čüąŠąĄą┤ąĖąĮąĄąĮąĮčŗą╝ čü I/O) ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą▒ą░ąĮą║ą░ MCB. ąĀą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ RZQ ąĖ ZIO ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ čäą░ą╣ą╗ą░čģ UCF.
ą£ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (soft calibration module) ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ąĮą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ VREF, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆč鹊ą▓ SSTL I/O, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ą░. ą¤ą░ą╝čÅčéčī LPDDR ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮąŠąĄ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ąŠą▓ ąĖą╗ąĖ čüčéą░ąĮą┤ą░čĆčé I/O čéąĖą┐ą░ SSTL, ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄ čéčĆąĄą▒čāąĄčé VREF.
ążą░ąĘą░ 1 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠ ąĖąĘą╝ąĄčĆčÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ 2R, ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé ą▒ą╗ąŠą║ąĖ I/O ą▓čŗą▓ąŠą┤ąŠą▓ MCB ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąĄąČą┤čā VCCO ąĖ GND. ąŁčéą░ čüčģąĄą╝ą░ čüąŠąĘą┤ą░ąĄčé 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ (ą┐ąŠ č鹥ąŠčĆąĄą╝ąĄ Thevenin) ą┤ą╗čÅ VCCO / 2 čü čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ R, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 4-2. ąĀąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĄąĄ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ą░ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ MCB čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ ą┤ą░ąĮąĮčŗčģ DQ ą▓ąŠ ą▓čĆąĄą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ Write) ąĖ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą▓ąŠ ą▓čüąĄ ą┤čĆčāą│ąŠąĄ ą▓čĆąĄą╝čÅ, čćč鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░čéčī ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ.
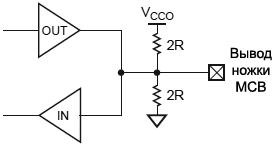 |
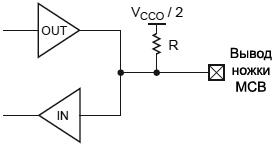 |
| ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čĆą░ąĘą┤ąĄą╗ąĄąĮąĮąŠąĄ č鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ (Split Termination) |
Thevenin-菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé |
ąĀąĖčü. 4-2. Calibrated Input Termination.
ążą░ąĘą░ 2: čåąĄąĮčéčĆąĖčĆąŠą▓ą░ąĮąĖąĄ DQS. ąöą╗čÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗčģ ą┤ąŠą┐čāčüą║ąŠą▓ ą┐ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┐ą░ą┤čŗ čüčéčĆąŠą▒ą░ DQS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čåąĄąĮčéčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ ąŠą║ąĮąĄ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (Read Data capture window) čćč鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüčĆą░ą▒ą░čéčŗą▓ą░ą╗ čéčĆąĖą│ą│ąĄčĆ ąĘą░čģą▓ą░čéą░ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ążą░ąĘą░ 2 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ čŹč鹊 čåąĄąĮčéčĆąĖčĆąŠą▓ą░ąĮąĖąĄ DQS.
ąÆčŗčģąŠą┤ąĮčŗąĄ ąĮąŠąČą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ DDR ą┐ąĄčĆąĄą┤ą░čÄčé ą┤ą░ąĮąĮčŗąĄ čćč鹥ąĮąĖčÅ Read Data (DQ) ąĖ čüčéčĆąŠą▒čŗ DQS, ą▓čŗčĆąŠą▓ąĮąĄąĮąĮčŗąĄ ą┐ąŠ čüčĆąĄąĘčā ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓čģąŠą┤ąŠą▓ FPGA, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 4-3. ąöą╗čÅ ąĮą░ą┤ąĄąČąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čüčéčĆąŠą▒ DQS ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┤ąĄčƹȹ░ąĮ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą▒ąĖčéą░ą╝ DQ, čćč鹊ą▒čŗ ąŠąĮąĖ ą▒čŗą╗ąĖ ąĘą░čģą▓ą░č湥ąĮčŗ ąĮą░ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ Read Data čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ąĖ ąĮąĄ ą┐ąŠą┐ą░ą┤ą░ą╗ąĖ ąĮą░ čĆąĄą│ąĖąŠąĮ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ.
ąÆąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą╣ čäą░ąĘčŗ čüč湥čéčćąĖą║ ąĘą░ą┤ąĄčƹȹ║ąĖ tap ą▒ą╗ąŠą║ą░ IDELAY ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╝ ą┐čāčéąĖ čüčéčĆąŠą▒ą░ DQS ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čüąŠ čüą┤ą▓ąĖą│ąŠą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ DQS ąĮą░ čéčĆąĖą│ą│ąĄčĆąĄ ąĘą░čģą▓ą░čéą░, čéą░ą║ čćč鹊ą▒čŗ ą┐ąĄčĆąĄą┐ą░ą┤ ą┐ąŠą┐ą░ą┤ą░ą╗ ąĮą░ čüąĄčĆąĄą┤ąĖąĮčā ąŠą║ąĮą░ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 4-3.
 |
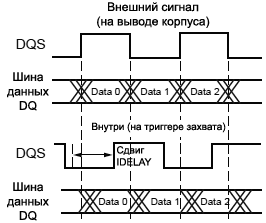 |
| ą¤ąĄčĆąĄą┤ čäą░ąĘąŠą╣ 2 |
ą¤ąŠčüą╗ąĄ čäą░ąĘčŗ 2 |
ąĀąĖčü. 4-3. ążą░ąĘą░ 2 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ - čåąĄąĮčéčĆąĖčĆąŠą▓ą░ąĮąĖąĄ DQS.
ążą░ąĘą░ 3: ą┐ąŠčüč鹊čÅąĮąĮą░čÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ą░ DQS. ąśąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ą▒ąŠčéčŗ ą╝ąŠą│čāčé ąĖąĘą╝ąĄąĮąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ IDELAY tap. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čüčéčĆąŠą▒ DQS ąĘą░ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĮą░ ą┐ąŠą╗ąŠą▓ąĖąĮčā ą┐ąĄčĆąĖąŠą┤ą░ ą▒ąĖčéą░ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą▒ąĖčéčŗ DQ, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ IDELAY. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ tap 菹╗ąĄą╝ąĄąĮč鹊ą▓ IDELAY ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą┤čĆąĄą╣čä ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖą╗ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┐čāčéąĖ čüčéčĆąŠą▒ą░ DQS ą▒čāą┤ąĄčé ąĖą╝ąĄčéčī ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čüą┤ą▓ąĖą│ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▒ąĖčé DQ.
ą¦č鹊ą▒čŗ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī čüą┤ą▓ąĖą│ čüčéčĆąŠą▒ąŠą▓ DQS ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĖąĘą╝ąĄąĮąĄąĮąĖčÅą╝ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, čäą░ąĘą░ 3 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčé soft calibration module ą┤ą╗čÅ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ ąĘąĮą░č湥ąĮąĖą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ tap 菹╗ąĄą╝ąĄąĮč鹊ą▓ IDELAY, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čģąŠą┤ąĮčŗčģ ą┐čāč鹥ą╣ čüąĖą│ąĮą░ą╗ą░ DQS. ąĢčüą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮ čüą┤ą▓ąĖą│ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą┤ąĄčƹȹ║ąĖ tap, č鹊 čüč湥čéčćąĖą║ ąĘą░ą┤ąĄčƹȹ║ąĖ tap ąĮą░ ą▓čģąŠą┤ąĮąŠą╝ ą┐čāčéąĖ čüčéčĆąŠą▒ą░ DQS ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤čüčéčĆąŠąĄąĮ, čćč鹊ą▒čŗ čāą┤ąĄčƹȹĖą▓ą░čéčī ąĄą│ąŠ čåąĄąĮčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą▓ ąŠą║ąĮąĄ ąĘą░čģą▓ą░čéą░ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (Read Data capture window). ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖą╣ IDELAY ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┐ąĄčĆą░čåąĖą╣ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ (REFRESH), čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą▓ą╗ąĖčÅąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ čäą░ą║č鹊čĆąŠą▓ ąĮą░ ąĮąŠčĆą╝ą░ą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąśąĮčüčéčĆčāą║čåąĖąĖ. ąóą░ą▒ą╗ąĖčåą░ 4-1 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓čüąĄčģ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą┐ą░ą╝čÅčéąĖ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗčģ MCB. ą¦č鹊ą▒čŗ ąĘą░ą│čĆčāąĘąĖčéčī ąĖąĮčüčéčĆčāą║čåąĖčÄ ą▓ Command FIFO ą┐ąŠčĆčéą░ User Interface, 3-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ą║ąŠą┤ ąĖąĮčüčéčĆčāą║čåąĖąĖ ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓čģąŠą┤ą░čģ pX_cmd_instr[2:0] ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ pX_cmd_clk.
ąóą░ą▒ą╗ąĖčåą░ 4-1. ąśąĮčüčéčĆčāą║čåąĖąĖ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ MCB.
| ąśąĮčüčéčĆčāą║čåąĖčÅ |
Code[2:0] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Write |
000 |
ąŚą░ą┐ąĖčüčī ą▓ ą┐ą░ą╝čÅčéčī. ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ, čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▒ąĖčéą░ą╝ąĖ pX_cmd_bl[5:0] ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ ąĮą░čćą░ą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā ą▒ą░ą╣čéą░, čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą▒ąĖčéą░ą╝ąĖ pX_cmd_addr[29:0]. ą¤ąĄčĆąĄą┤ ą▓čŗą┤ą░č湥ą╣ čŹč鹊ą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčī ąĘą░ą│čĆčāąČąĄąĮąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ ą▓ čüč鹥ą║ Write Data FIFO, čćč鹊ą▒čŗ čāčüą┐ąĄčłąĮąŠ ąĘą░ą▓ąĄčĆčłąĖčéčī čéčĆą░ąĮąĘą░ą║čåąĖčÄ ąĘą░ą┐ąĖčüąĖ. ą¤čĆąĖ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ čŹč鹊ą│ąŠ čāčüą╗ąŠą▓ąĖčÅ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ (underrun condition). ąŁčéą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┤ąŠą┐čāčüčéąĖą╝ą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą┐ąŠčĆč鹊ą▓. |
| Read |
001 |
ą¦č鹥ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ. ą¦ąĖčéą░ąĄčé ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąĘą░ą┤ą░ąĮąĮąŠąĄ ą▒ąĖčéą░ą╝ąĖ pX_cmd_bl[5:0] ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ ąĮą░čćą░ą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā ą▒ą░ą╣čéą░, čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą▒ąĖčéą░ą╝ąĖ pX_cmd_addr[29:0]. ą¤ąĄčĆąĄą┤ ą▓čŗą┤ą░č湥ą╣ čŹč鹊ą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą▓ čüč鹥ą║ąĄ Read Data FIFO ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąśąĮą░č湥 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ (overflow condition). ąŁčéą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┤ąŠą┐čāčüčéąĖą╝ą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą┐ąŠčĆč鹊ą▓. |
| Write with Auto Precharge |
010 |
ąŚą░ą┐ąĖčüčī ą▓ ą┐ą░ą╝čÅčéčī čü ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╝ ą┐čĆąĄą┤ąĘą░čĆčÅą┤ąŠą╝. ąŁčéą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ čéą░ą║ą░čÅ ąČąĄ, ą║ą░ą║ Write, čü ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄą╝ auto precharge ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ą░ą║ąĄčéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. Auto precharge ąĘą░ą║čĆčŗą▓ą░ąĄčé ą▒ą░ąĮą║ DRAM, ą│ą┤ąĄ ąĘą░ą║ąŠąĮčćąĖą╗ą░čüčī čéčĆą░ąĮąĘą░ą║čåąĖčÅ. ąŁč鹊 ą╝ąŠąČąĄčé čāą▓ąĄą╗ąĖčćąĖčéčī ą╗ą░č鹥ąĮčéąĮąŠčüčéčī ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčé ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗčģ ąĘą░ą┐ąĖčüąĄą╣ ą┐ąŠ ą┐ą░ą╝čÅčéąĖ čü č鹥ąĮą┤ąĄąĮčåąĖąĄą╣ ą┐ąĄčĆąĄčģąŠą┤ą░ ą╝ąĄąČą┤čā čüčéčĆąŠą║ą░ą╝ąĖ ą▓ č鹊ą╝ ąČąĄ čüą░ą╝ąŠą╝ ą▒ą░ąĮą║ąĄ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: MCB ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░ąĄčé ą▓ą┐ąĄčĆąĄą┤ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čŹč鹊ą╝čā auto precharge ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ čüą╗ąĄą┤čāčÄčēą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ čéčā ąČąĄ čüčéčĆąŠą║čā, čćč鹊 ąĖ č鹥ą║čāčēą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ. |
| Read with Auto Precharge |
011 |
ą¦č鹥ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ čü ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╝ ą┐čĆąĄą┤ąĘą░čĆčÅą┤ąŠą╝. ąŁčéą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┤ąĄą╗ą░ąĄčé č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ Read, ąĮąŠ ą▓ ą║ąŠąĮąĄčå ą┐ą░ą║ąĄčéą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ auto precharge. Auto precharge ąĘą░ą║čĆčŗą▓ą░ąĄčé ą▒ą░ąĮą║ DRAM, ą│ą┤ąĄ ąĘą░ą║ąŠąĮčćąĖą╗ą░čüčī čéčĆą░ąĮąĘą░ą║čåąĖčÅ. ąŁč鹊 ą╝ąŠąČąĄčé čāą▓ąĄą╗ąĖčćąĖčéčī ą╗ą░č鹥ąĮčéąĮąŠčüčéčī ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčé ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗčģ ąĘą░ą┐ąĖčüąĄą╣ ą┐ąŠ ą┐ą░ą╝čÅčéąĖ čü č鹥ąĮą┤ąĄąĮčåąĖąĄą╣ ą┐ąĄčĆąĄčģąŠą┤ą░ ą╝ąĄąČą┤čā čüčéčĆąŠą║ą░ą╝ąĖ ą▓ č鹊ą╝ ąČąĄ čüą░ą╝ąŠą╝ ą▒ą░ąĮą║ąĄ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: MCB ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░ąĄčé ą▓ą┐ąĄčĆąĄą┤ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čŹč鹊ą╝čā auto precharge ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ čüą╗ąĄą┤čāčÄčēą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ čéčā ąČąĄ čüčéčĆąŠą║čā, čćč鹊 ąĖ č鹥ą║čāčēą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ. |
| Refresh |
1xx |
ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ. ą¤čĆąĄą┤ą╗ą░ą│ą░ąĄčé MCB ą▓čŗą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. ąĪą▒čĆą░čüčŗą▓ą░ąĄčé čüč湥čéčćąĖą║ tREFI, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą┐ąŠč鹊ą║čā ą┤ą░ąĮąĮčŗčģ ą▒čŗčéčī ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╝ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąŁčéą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠč湥ąĮčī čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖčģ čüčéčĆčāą║čéčāčĆ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ą×ą▒čŗčćąĮąŠ MCB čüą░ą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čü ąĮčāąČąĮčŗą╝ ą┐ąĄčĆąĖąŠą┤ąŠą╝ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąÆčŗą┤ą░čćą░ ą║ąŠą╝ą░ąĮą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ čāą▓ąĄą╗ąĖč湥ąĮąĖčÄ ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ ą┤ą╗čÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣. |
ąÉą┤čĆąĄčüą░čåąĖčÅ. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ User Interface ą▒ą╗ąŠą║ MCB ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠčüčéčāčÄ ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčāčÄ čüčģąĄą╝čā ą░ą┤čĆąĄčüą░čåąĖąĖ ą┐ąŠ ą▒ą░ą╣čéą░ą╝ ą▓ čäąĖąĘąĖč湥čüą║čāčÄ ą┐ą░ą╝čÅčéčī DRAM. ąóąŠ, čćč鹊 čäą░ą║čéąĖč湥čüą║ąĖ DRAM čüąŠčģčĆą░ąĮčÅąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĄą│ą╝ąĄąĮčéą░čģ, ą░ą▒čüčéčĆą░ą│ąĖčĆąŠą▓ą░ąĮąŠ čŹč鹊ą╣ čüčģąĄą╝ąŠą╣, čćč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čü ą░ą┤čĆąĄčüą░čåąĖąĖ, ą┐ąŠą┤ąŠą▒ąĮčŗą╣ ą┐ą░ą╝čÅčéąĖ SRAM. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣, ą║ą░ą║ ą▒ąĖčéčŗ ą░ą┤čĆąĄčüą░ ą▒ą░ąĮą║ą░, čüčéčĆąŠą║ąĖ ąĖ čüč鹊ą╗ą▒čåą░ (bank, row ąĖ column) ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ą▓ ą▒ą░ą╣č鹊ą▓čŗą╣ ą░ą┤čĆąĄčü, čüą╝. čüąĄą║čåąĖčÄ "ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą▒ą░ą╣čéą░ ą▓ ą░ą┤čĆąĄčüą░čåąĖčÄ ą┐ą░ą╝čÅčéąĖ".
ąóą░ą▒ą╗ąĖčåą░ 4-2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ User Interface, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗčĆąŠą▓ąĮąĄąĮ ą┐ąŠ čłąĖčĆąĖąĮąĄ (čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ) ą┐ąŠčĆčéą░. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ čłąĖčĆąĖąĮąĄ ą┐ąŠčĆčéą░, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčé ą░ą┤čĆąĄčüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊ą▒čŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą░ą┤čĆąĄčüą░ ą┐ąŠą┐ą░ą╗ąĖ ą▓ ą│čĆą░ąĮąĖčåčŗ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ. ąÆčģąŠą┤čŗ ą╝ą░čüą║ąĖ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┐ąĖčüąĖ (write data mask, pX_wr_mask) ą┤ą╗čÅ User Interface ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüą╝ąĄčēąĄąĮąĖčÅ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░ ą▒ą░ą╣čéą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ ąĮą░čćą░čéčī ąĘą░ą┐ąĖčüčī ą┐ąŠ ą▒ą░ą╣č鹊ą▓ąŠą╝čā ą░ą┤čĆąĄčüčā 0x01, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ 32-ą▒ąĖčéąĮčŗą╣ (4-ą▒ą░ą╣čéąĮčŗą╣) User Interface, ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ ą┐ąŠčĆčé ą║ąŠą╝ą░ąĮą┤čŗ User Interface, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 0x00, čćč鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ čéą░ą▒ą╗ąĖčåčŗ 4-2, ąĮąŠ čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, čćč鹊ą▒čŗ ą▒čŗą╗ąĖ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĘą░ą┐ąĖčüą░ąĮčŗ č鹊ą╗čīą║ąŠ ą▒ą░ą╣čéčŗ ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░ 0x01 ąĖ ą▒ąŠą╗ąĄąĄ čüčéą░čĆčłąĖčģ ą░ą┤čĆąĄčüąŠą▓.
ąóą░ą▒ą╗ąĖčåą░ 4-2. ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą░ą┤čĆąĄčüčā ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ą▒ą░ą╣č鹊ą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░.
| ą©ąĖčĆąĖąĮą░ ą┐ąŠčĆčéą░ |
ąæą░ą╣čé ąĮą░ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ |
ąóčĆąĄą▒ąŠą▓ą░ąĮąĖąĄ ą║ ą░ą┤čĆąĄčüčā |
| 32 ą▒ąĖčéą░ |
4 |
pX_cmd_addr[1:0] = 2'b00 |
| 64 ą▒ąĖčéą░ |
8 |
pX_cmd_addr[2:0] = 3'b000 |
| 128 ą▒ąĖčé |
16 |
pX_cmd_addr[3:0] = 4'b0000 |
ąóą░ą║ąČąĄ ą▓ą░ąČąĮąŠ ą┐ąŠąĮąĖą╝ą░čéčī ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą░ą┤čĆąĄčüą░čåąĖąĖ, ą║ąŠą│ą┤ą░ 32-ą▒ąĖčéąĮčŗą╣ ąĖ 64-ą▒ąĖčéąĮčŗą╣ ą┐ąŠčĆčéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĮą░ User Interface (čüą╝. čüąĄą║čåąĖčÄ "ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░" ą▓čŗčłąĄ). ąöą╗čÅ 32-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą┐ą░ą╝čÅčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓čŗčĆąŠą▓ąĮąĄąĮąĮąŠą╣ ąĮą░ ą│čĆą░ąĮąĖčåčā 4 ą▒ą░ą╣čé, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤ą╗čÅ 64-ą▒ąĖčéąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą┐ą░ą╝čÅčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓čŗčĆąŠą▓ąĮąĄąĮąĮąŠą╣ ąĮą░ ą│čĆą░ąĮąĖčåčŗ 8 ą▒ą░ą╣čé. ąóą░ą▒ą╗ąĖčåą░ 4-3 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą┤ą▓ą░ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ 32-ą▒ąĖčéąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ąĮą░ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ąŠą┤ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ 64-ą▒ąĖčéąĮąŠą│ąŠ ą┐ąŠčĆčéą░.
ąóą░ą▒ą╗ąĖčåą░ 4-3. ąÆąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą░ą┤čĆąĄčüą░ 32-ą▒ąĖčéąĮąŠą│ąŠ ąĖ 64-ą▒ąĖčéąĮąŠą│ąŠ ą┐ąŠčĆčéą░.
| 32-ą▒ąĖčéąĮčŗą╣ ą┐ąŠčĆčé |
64-ą▒ąĖčéąĮčŗą╣ ą┐ąŠčĆčé
|
| ąÉą┤čĆąĄčü |
ąöą░ąĮąĮčŗąĄ |
ąÉą┤čĆąĄčü |
ąöą░ąĮąĮčŗąĄ |
| 0x00 |
[31:0] |
0x00 |
[31:0] |
| 0x04 |
[31:0] |
[63:32] |
| 0x08 |
[31:0] |
0x08 |
[31:0] |
| 0x0C |
[31:0] |
[63:32] |
ąóą░ą╣ą╝ąĖąĮą│ Command Path. ą¤čāčéčī ą║ąŠą╝ą░ąĮą┤čŗ User Interface ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠčüčéčāčÄ čüčéčĆčāą║čéčāčĆčā FIFO ą│ą╗čāą▒ąĖąĮąŠą╣ 4 čÅč湥ą╣ą║ąĖ, čćč鹊ą▒čŗ čģčĆą░ąĮąĖčéčī ą║ąŠą╝ą░ąĮą┤čŗ. ąóąĖą┐ ąĖąĮčüčéčĆčāą║čåąĖąĖ, ą░ą┤čĆąĄčü ąĖ ą┤ą╗ąĖąĮą░ ą┐ą░ą║ąĄčéą░ (burst length) ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ - ą▓čüąĄ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą▓ čŹč鹊čé Command FIFO. ążą╗ą░ą│ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ (pX_cmd_full) čŹč鹊 čüąĖą│ąĮą░ą╗ ąŠčé FIFO, čćč鹊 čŹč鹊čé čäą╗ą░ą│ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ą╗ąŠą│. 0, čćč鹊ą▒čŗ ąĮąŠą▓ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą╝ąŠą│ą╗ą░ ą▒čŗčéčī ą┐čĆąĖąĮčÅčéą░ ą▓ FIFO, ą║ąŠą│ą┤ą░ ą▓čŗčüčéą░ą▓ą╗ąĄąĮ pX_cmd_en ą▓ąŠ ą▓čĆąĄą╝čÅ čäčĆąŠąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ pX_cmd_clk. ąśąĮą░č湥 ą║ąŠą╝ą░ąĮą┤ą░ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. ąĀąĖčü. 4-4 ąĖ čĆąĖčü. 4-5 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčé ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ FIFO.
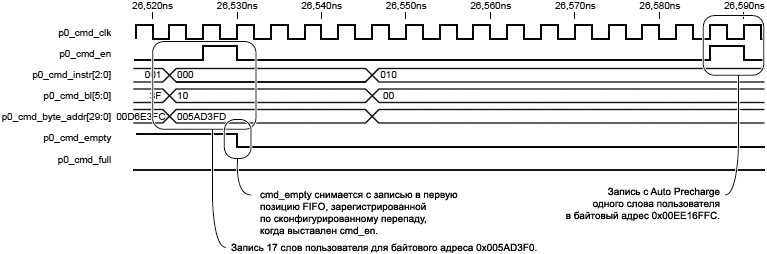
ąĀąĖčü. 4-4. Command Path Timing (Write, ąĘą░ą┐ąĖčüčī).

ąĀąĖčü. 4-5. Command Path Timing (Read, čćč鹥ąĮąĖąĄ).
ąóą░ą╣ą╝ąĖąĮą│ Write Path. ą¤čāčéčī ąĘą░ą┐ąĖčüąĖ User Interface ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüčéčĆčāą║čéčāčĆčā FIFO ą│ą╗čāą▒ąĖąĮąŠą╣ 64 čÅč湥ą╣ą║ąĖ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ ą┐ą░ą╝čÅčéčī. ą¤ąŠą┤ąŠą▒ąĮąŠ Command FIFO, čäą╗ą░ą│ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ (pX_wr_full) ąĖąĘ Write Data FIFO ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ą╗ąŠą│. 0, čćč鹊ą▒čŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ ą▓ čŹč鹊čé FIFO, ą║ąŠą│ą┤ą░ ą▓čŗčüčéą░ą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ pX_wr_en ą▓ąŠ ą▓čĆąĄą╝čÅ čäčĆąŠąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ pX_wr_clk. ąśąĮą░č湥 ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮčŗ (ąĮąĄ ąĘą░ą┐ąĖčłčāčéčüčÅ ą▓ FIFO). ąĢčüą╗ąĖ čäą╗ą░ą│ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ ą▓ ą╗ąŠą│. 0, č鹊 čłąĖąĮą░ ą┤ą░ąĮąĮčŗčģ pX_wr_data ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ FIFO ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ pX_wr_clk. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓, ą║ąŠą│ą┤ą░ ą▓čŗčüčéą░ą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ pX_wr_en, ąĮą░ čłąĖąĮąĄ pX_wr_data ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąĀąĖčü. 4-6 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ Write Data FIFO.
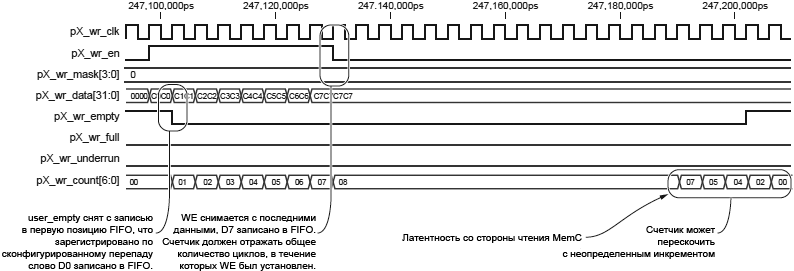
ąĀąĖčü. 4-6. Write Path Timing.
ąĪąĖą│ąĮą░ą╗ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ pX_wr_underrun ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ, čćč鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ąŠčéą┐čĆą░ą▓ąĖčéčī ą▒ąŠą╗čīčłąĄ ą┤ą░ąĮąĮčŗčģ, č湥ą╝ ą▒čŗą╗ąŠ ą▓ ąĮą░ą╗ąĖčćąĖąĖ ą▓ čÅč湥ą╣ą║ą░čģ write data FIFO, ąĖ čćč鹊 ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ, ąĮąĄ ą┤ąŠčüčéąĖą│ą╗ąĖ ąĄčæ. ąŁč鹊ą╣ čüąĖčéčāą░čåąĖąĖ ąĮčāąČąĮąŠ ąĖąĘą▒ąĄą│ą░čéčī ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠ ąĮą░ą┤ąĄąČąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čüąŠą▒čŗčéąĖčÅ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ (underrun condition), ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ write data FIFO, čćč鹊ą▒čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čŹčéą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮą░ č湥čĆąĄąĘ command FIFO.
ą©ąĖąĮą░ čüąĖą│ąĮą░ą╗ą░ čüč湥čéčćąĖą║ą░ (pX_wr_count) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüąĄą╣ ą▓ FIFO. ąśąĘ-ąĘą░ ą░čüąĖąĮčģčĆąŠąĮąĮąŠčüčéąĖ čüč鹥ą║ąŠą▓ FIFO ą▓ MCB, čłąĖąĮą░ čüąĖą│ąĮą░ą╗ą░ čüč湥čéčćąĖą║ą░ ąĖą╝ąĄąĄčé ą▒ąŠą╗čīčłąĄ ąĘą░ą┤ąĄčƹȹ║čā, č湥ą╝ čäą╗ą░ą│ąĖ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹčéą░ čłąĖąĮą░ čüč湥čéčćąĖą║ą░ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗčģ čüčüčŗą╗ąŠą║ ąĖ "ą▓ą░č鹥čĆą╗ąĖąĮąĖą╣". ąŚąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčüčÅ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ąŠą┐ąĄčĆą░čåąĖčÅą╝ FIFO, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝, ąŠą┤ąĮą░ą║ąŠ čŹč鹊 ą▓čĆąĄą╝čÅ ą▒ąŠą╗čīčłąĄ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ ąĖ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, Write Data FIFO ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ FIFO čüč湥čéčćąĖą║ ą┐ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ ą▓čüąĄą│ą┤ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čüą║ąŠą╗čīą║ąŠ ąĘą░ą┐ąĖčüąĄą╣ čĆąĄą░ą╗čīąĮąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ FIFO.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĘą░ą┐ąĖčüą░ą╗ 8 čüą╗ąŠą▓ ą▓ FIFO, čüč湥čéčćąĖą║ ą╝ąŠąČąĄčé čüąŠąŠą▒čēąĖčéčī 8 ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ąĘą░ą┐ąĖčüąĄą╣, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░čćą░ą╗ ą║ąŠąĄ-čćč鹊 ąĖąĘą▓ą╗ąĄą║ą░čéčī ąĖąĘ FIFO. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĄčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ą░ą╝čÅčéčī, čüč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ąĮą░ą╗ąĖčćąĖąĄ ąĘą░ą┐ąĖčüąĄą╣ ą▓ FIFO ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ FIFO čāąČąĄ ą┐čāčüčé. ąöą╗čÅ Write Data FIFO ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ čüč湥čéčćąĖą║ą░ ą║ą░ą║ čäą╗ą░ą│ "ą┐ąŠčćčéąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮąŠ", ą┐ąŠč鹊ą╝čā čćč鹊 FIFO ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąŠą╗ąĮąĄąĮ, ąĄčüą╗ąĖ čüč湥čéčćąĖą║ čüąŠąŠą▒čēą░ąĄčé ąŠ č鹊ą╝, čćč鹊 FIFO ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĘą░ą┐ąŠą╗ąĮąĄąĮ. ą×ą┤ąĮą░ą║ąŠ ąŠč湥ąĮčī ą▓ą░ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆčāą│ąĖąĄ ą╝ąĄč鹊ą┤čŗ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ ąŠčéčüčāčéčüčéą▓ąĖčÅ čüąĖčéčāą░čåąĖą╣ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ.
ąóą░ą╣ą╝ąĖąĮą│ Read Path. ą¤čāčéčī čćč鹥ąĮąĖčÅ User Interface ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠčüčéčāčÄ čüčéčĆčāą║čéčāčĆčā FIFO ą│ą╗čāą▒ąĖąĮąŠą╣ 64 čÅč湥ą╣ą║ąĖ, čćč鹊ą▒čŗ čģčĆą░ąĮąĖčéčī ą┤ą░ąĮąĮčŗąĄ, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮčŗąĄ ąĖąĘ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čćč鹥ąĮąĖčÅ. ążą╗ą░ą│ ąŠą┐čāčüč鹊賹ĄąĮąĮąŠčüčéąĖ (pX_rd_empty) ąĖąĘ Read Data FIFO ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ąĖąĮą┤ąĖą║ą░č鹊čĆ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąÆčüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ pX_rd_empty čüąĮčÅčé (ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0), č鹊 ąĮą░ čłąĖąĮąĄ pX_rd_data ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ą¦č鹊ą▒čŗ ą┐ąĄčĆąĄą┤ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ą╗ąŠą│ąĖą║čā FPGA ąĖąĘ Read Data FIFO, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗčüčéą░ą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ pX_rd_en ą▓ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ pX_rd_clk. ą¤ąĄčĆąĄčģąŠą┤čŗ čüąŠčüč鹊čÅąĮąĖą╣ ąĮą░ čłąĖąĮąĄ pX_rd_data ą┐čĆąŠąĖčüčģąŠą┤čÅčé ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ pX_rd_clk. ąĪąĖą│ąĮą░ą╗ pX_rd_en ą╝ąŠąČąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓čüąĄ ą▓čĆąĄą╝čÅ, ąĖ čüąĖą│ąĮą░ą╗ pX_rd_empty ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ąĖąĮą┤ąĖą║ą░č鹊čĆ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ąĀąĖčü. 4-7 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ ą▓čŗą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ ąĖąĘ Read Data FIFO.
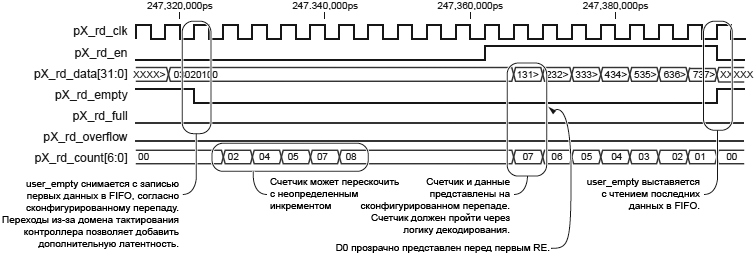
ąĀąĖčü. 4-7. Read Path Timing.
ąĪąĖą│ąĮą░ą╗ pX_rd_overflow ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ, čćč鹊 ą┐ą░ą╝čÅčéčī ą▓ąĄčĆąĮčāą╗ą░ ą▒ąŠą╗čīčłąĄ ą┤ą░ąĮąĮčŗčģ, č湥ą╝ ą╝ąŠąČąĄčé čāą╝ąĄčüčéąĖčéčī read data FIFO, čéą░ą║ čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐ąŠč鹥čĆčÅąĮčŗ. ąŁč鹊ą╣ čüąĖčéčāą░čåąĖąĖ čüą╗ąĄą┤čāąĄčé ąĖąĘą▒ąĄą│ą░čéčī, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ąĮą░ą┤ąĄąČąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čüąĖčéčāą░čåąĖąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ (overflow condition), ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąĄčüčéą░ ą▓ read data FIFO, čćč鹊ą▒čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čŹčéą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą┐ąŠčüčéčāą┐ąĖčé ą▓ command FIFO.
ą©ąĖąĮą░ čüąĖą│ąĮą░ą╗ą░ čüč湥čéčćąĖą║ą░ (pX_rd_count) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüąĄą╣ ą▓ čŹč鹊ą╝ FIFO. ąśąĘ-ąĘą░ ą░čüąĖąĮčģčĆąŠąĮąĮąŠčüč鹥ą╣ čüč鹥ą║ąŠą▓ FIFO ą▓ MCB čüąĖą│ąĮą░ą╗ čüč湥čéčćąĖą║ą░ ąĖą╝ąĄąĄčé ą▒ąŠą╗čīčłąĄąĄ ą▓čĆąĄą╝čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ, č湥ą╝ čäą╗ą░ą│ąĖ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹčéą░ čłąĖąĮą░ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗčģ čüčüčŗą╗ąŠą║ ąĖ "ą▓ą░č鹥čĆą╗ąĖąĮąĖą╣". ąŚąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąĖąĘą╝ąĄąĮąĖčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ąŠą┐ąĄčĆą░čåąĖčÅą╝ čü FIFO, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĮčŗą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝; ąŠą┤ąĮą░ą║ąŠ čŹč鹊 ą▒čāą┤ąĄčé ą┤ąŠą╗čīčłąĄ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝, ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čüąĖą│ąĮą░ą╗ą░ą╝ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ ąĖ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ąŠą│ą┤ą░ Read Data FIFO ąŠą┐čāčüč鹊賹░ąĄčéčüčÅ, čüč湥čéčćąĖą║ ą▓čüąĄą│ą┤ą░ čüąŠąŠą▒čēąĖčé ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠą╝ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čĆąĄą░ą╗čīąĮąŠą╝čā ą║ąŠą╗ąĖč湥čüčéą▓čā ąĘą░ą┐ąĖčüąĄą╣, ąĮą░čģąŠą┤čÅčēąĄą╝čāčüčÅ ą▓ FIFO.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▓ FIFO čüąŠą┤ąĄčƹȹĖčéčüčÅ 8, č鹊 čüč湥čéčćąĖą║ ą╝ąŠąČąĄčé čüąŠąŠą▒čēąĖčéčī ąŠ 8 ąĘą░ą┐ąĖčüčÅčģ ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮąĄą║ąŠąĄ čćč鹥ąĮąĖąĄ ąĖąĘ FIFO. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ, ąĄčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐čĆąŠčéą░ą╗ą║ąĖą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ FIFO, čüč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą┐ąŠą║ą░ąĘą░čéčī ą╝ąĄąĮčīčłąĄ ąĘą░ą┐ąĖčüąĄą╣ ą▓ FIFO, čģąŠčéčÅ FIFO čāąČąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ ąĖą╗ąĖ ą┤ą░ąČąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮ. ąöą╗čÅ Read Data FIFO čüč湥čéčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čü ąŠčüč鹊čĆąŠąČąĮąŠčüčéčīčÄ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ FIFO ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ą┤ą░ąĮąĮčŗčģ, č湥ą╝ čüąŠąŠą▒čēą░ąĄčé čüč湥čéčćąĖą║, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĄčüą╗ąĖ ą┐čĆąŠąĖčüčģąŠą┤čÅčé čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąĪč湥čéčćąĖą║ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ čäą╗ą░ą│ "ą┐ąŠčćčéąĖ ąŠą┐čāčüč鹊賹ĄąĮąŠ", ąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą░ąĮą░ą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ, ąĮąŠ ąĮąĄ ą┤ą╗čÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ ą▓ command FIFO.
ąóčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐ą░ą╝čÅčéąĖ. ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖą╣ Write ąĖą╗ąĖ Read čéčĆąĄą▒čāąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą╝ąĄąČą┤čā ą┐čāčéčÅą╝ąĖ ą║ąŠą╝ą░ąĮą┤ ąĖ ą┤ą░ąĮąĮčŗčģ. ąÆ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠą┤čüąĄą║čåąĖčÅ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą┤ą╗čÅ ą▓čŗą┤ą░čćąĖ ą┐čĆąŠčüčéčŗčģ čéčĆą░ąĮąĘą░ą║čåąĖą╣ ąĘą░ą┐ąĖčüąĖ (Simple Write) ąĖ ą┐čĆąŠčüčéčŗčģ čéčĆą░ąĮąĘą░ą║čåąĖą╣ čćč鹥ąĮąĖčÅ (Simple Read).
Simple Write. ąöą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĘą░ą┐ąĖčüąĖ Write Data FIFO čüąĮą░čćą░ą╗ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮ ąĘąĮą░čćą░čēąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĘą░ą┐čĆąŠčü, ą║ą░ą║ ą┤ąĖą║čéčāąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┤ą╗ąĖąĮčŗ ą┐ą░ą║ąĄčéą░ (burst length), ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą▓ą▓ąĄą┤ąĄąĮąŠ ą▓ Command FIFO. ąśąĮą░č湥 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ (underrun condition), ą║ąŠą│ą┤ą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą┐ąŠą┐čŗčéą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčīčüčÅ.
ąĀąĖčü. 4-8 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą▒ą░ąĘąŠą▓čŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ Write Data FIFO. ąöą░ąĮąĮčŗąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąĮą░ čłąĖąĮąĄ pX_wr_data, ąĖ pX_wr_en ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čéą░ą║, čćč鹊ą▒čŗ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ą╗ąĖčüčī ą▓ FIFO ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ pX_wr_clk. ąŚąĮą░č湥ąĮąĖčÅ pX_wr_empty ąĖ pX_wr_count ąŠčéčĆą░ąČą░ąĄčé čäą░ą║čé č鹊ą│ąŠ, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓ FIFO. ąÆ čŹč鹊ą╣ ą┐čĆąĖą╝ąĄčĆąĄ ą▓ FIFO ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą▓čüąĄą│ąŠ 3 čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ (ą║ą░ąČą┤ąŠąĄ ą┐ąŠ 32 ą▒ąĖčéą░).
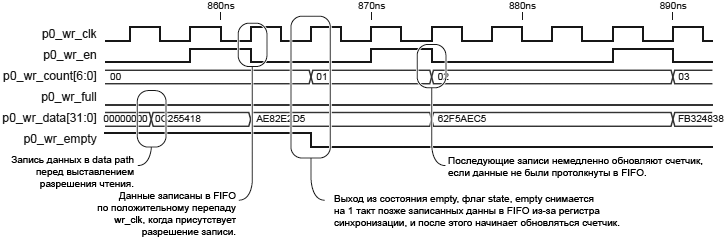
ąĀąĖčü. 4-8. ąŚą░ą│čĆčāąĘą║ą░ Write Data FIFO.
ąĀąĖčü. 4-9 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ąĘą░ą┐čĆąŠčüą░ ąĘą░ą┐ąĖčüąĖ ą▓ Command FIFO ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓ Write Data FIFO. ąŚąĮą░č湥ąĮąĖąĄ pX_cmd_bl (b'10 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ą╗ąĖąĮąĄ ą┐ą░ą║ąĄčéą░ burst length 3) čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą║ąŠą╗ąĖč湥čüčéą▓čā ąĘą░ą│čĆčāąČąĄąĮąĮčŗčģ čüą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą│ą┤ą░ ąĘą░ą┐čĆąŠčü ąĘą░ą┐ąĖčüąĖ ąĘą░ą│čĆčāąČąĄąĮ ą▓ Command FIFO, MCB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé čéčĆą░ąĮąĘą░ą║čåąĖčÄ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą┐ą░ą╝čÅčéąĖ, ą║ąŠą│ą┤ą░ ą░čĆą▒ąĖčéčĆ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé čŹč鹊čé ą┐ąŠčĆčé.

ąĀąĖčü. 4-9. ąÆą▓ąŠą┤ Write Request ą▓ Command FIFO.
Simple Read. ą¦č鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čéčĆą░ąĮąĘą░ą║čåąĖčÄ čćč鹥ąĮąĖčÅ, ą▓ čüč鹥ą║ąĄ Read Data FIFO ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąĄčüčéą░, čćč鹊ą▒čŗ ąĘą░ą▓ąĄčĆčłąĖčéčī čŹč鹊čé ąĘą░ą┐čĆąŠčü, ą║ą░ą║ ą┤ąĖą║čéčāąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┤ą╗ąĖąĮčŗ ą┐ą░ą║ąĄčéą░ (burst length), ą║ąŠč鹊čĆąŠąĄ ą▓ą▓ąĄą┤ąĄąĮąŠ ą▓ Command FIFO. ąśąĮą░č湥 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ (overflow condition), ą║ąŠą│ą┤ą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą┐ąŠą┐čŗčéą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčīčüčÅ.
ąĀąĖčü. 4-10 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ąĘą░ą┐čĆąŠčüą░ čćč鹥ąĮąĖčÅ ą▓ Command FIFO. ąŚąĮą░č湥ąĮąĖąĄ pX_cmd_bl čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ, ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗčģ ąĖąĘ ą┐ą░ą╝čÅčéąĖ. ąÜąŠą│ą┤ą░ ąĘą░ą┐čĆąŠčü čćč鹥ąĮąĖčÅ ąĘą░ą│čĆčāąČąĄąĮ ą▓ Command FIFO, MCB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čéčĆą░ąĮąĘą░ą║čåąĖčÄ, ą║ąŠą│ą┤ą░ ą░čĆą▒ąĖčéčĆ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé čŹč鹊čé ą┐ąŠčĆčé.

ąĀąĖčü. 4-10. ąÆą▓ąŠą┤ Read Request ą▓ Command FIFO.
ąĀąĖčü. 4-11 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ąĖ ąĘą░ą│čĆčāąČąĄąĮąĮčŗąĄ ą▓ Read Data FIFO. ąöą░ąĮąĮčŗąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąĮą░ čłąĖąĮąĄ pX_rd_data ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ čüąŠ čüč鹊čĆąŠąĮčŗ ą╗ąŠą│ąĖą║ąĖ FPGA. ąŚąĮą░č湥ąĮąĖčÅ pX_rd_empty ąĖ pX_rd_count ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓ FIFO.
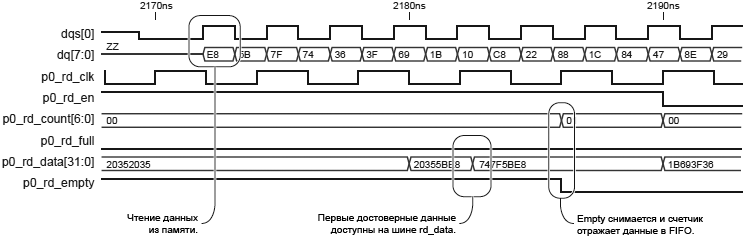
ąĀąĖčü. 4-11. Read Data, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą┐ą░ą╝čÅčéąĖ.
ąöą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ą╗ąŠą│ąĖą║čā FPGA ąĖąĘ Read Data FIFO čüąĖą│ąĮą░ą╗ pX_rd_en ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ ą┐ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ čäčĆąŠąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ pX_rd_clk, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 4-12. ąŚąĮą░č湥ąĮąĖąĄ pX_rd_count ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
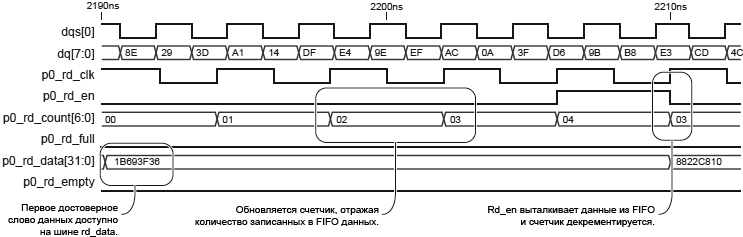
ąĀąĖčü. 4-12. ą¤ąĄčĆąĄą┤ą░čćą░ Read Data ą▓ ą╗ąŠą│ąĖą║čā FPGA.
Read Latency. ąŚą░ą┤ąĄčƹȹ║ą░ čćč鹥ąĮąĖčÅ (Read Latency) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓ ą┐ą░ą╝čÅčéąĖ ąŠčé ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą║ąŠą╝ą░ąĮą┤ą░ READ ąĘą░ą┐ąĖčüą░ąĮą░ ą▓ Command Path FIFO ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (User Interface) ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą┐ąĄčĆą▓ąŠąĄ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ ą┤ąŠčüčéčāą┐ąĮąŠ ą▓ čüč鹥ą║ąĄ FIFO Read Data Path.
ą¤čĆąĖ ąŠčåąĄąĮą║ąĄ ąĘą░ą┤ąĄčƹȹĄą║ čćč鹥ąĮąĖčÅ ą▓ą░ąČąĮąŠ ąĘą░ą┤ą░čéčī ą┐ąŠą╗ąĮčŗąĄ čāčüą╗ąŠą▓ąĖčÅ, ą┐čĆąĖ ą║ąŠč鹊čĆčŗčģ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ. ąŚą░ą┤ąĄčƹȹ║ą░ čćč鹥ąĮąĖčÅ ą╝ąĄąĮčÅąĄčéčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüą╗ąĄą┤čāčÄčēąĖčģ čāčüą╗ąŠą▓ąĖą╣:
ŌĆó ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠą╝ą░ąĮą┤, čāąČąĄ ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ ą║ąŠąĮą▓ąĄą╣ąĄčĆąĄ FIFO, ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▓čŗą┤ą░ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ READ
ŌĆó ąØčāąČąĮąŠ ąĖą╗ąĖ ąĮąĄčé ą▓čŗą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ACTIVATE, čćč鹊ą▒čŗ ąŠčéą║čĆčŗčéčī ąĮąŠą▓čŗą╣ ą▒ą░ąĮą║/čüčéčĆąŠą║čā
ŌĆó ąØčāąČąĮąŠ ąĖą╗ąĖ ąĮąĄčé ą▓čŗą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā PRECHARGE, čćč鹊ą▒čŗ ąĘą░ą║čĆčŗčéčī čĆą░ąĮąĄąĄ ąŠčéą║čĆčŗčéčŗą╣ ą▒ą░ąĮą║
ŌĆó ąĪą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ, čéą░ą║ąĖąĄ ą║ą░ą║ tRAS ąĖ tRCD čüąŠą▓ą╝ąĄčüčéąĮąŠ čü čćą░čüč鹊č鹊ą╣ čéą░ą║č鹊ą▓ čłąĖąĮčŗ
ŌĆó ąĪąŠčüč鹊čÅąĮąĖąĄ ą░čĆą▒ąĖčéčĆą░ ą▓ ą┤ąĖąĘą░ą╣ąĮą░čģ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┐ąŠčĆčéą░ą╝ąĖ
ŌĆó ąŚą░ą┤ąĄčƹȹ║ą░ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ čüč鹊ą╗ą▒čåą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ (CAS latency)
ŌĆó ąŚą░ą┤ąĄčƹȹ║ąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ čāčĆąŠą▓ąĮčÅ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ ąĖ čāčĆąŠą▓ąĮčÅ ą║čĆąĖčüčéą░ą╗ą╗ą░ (ą║ą░ą║ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ, čéą░ą║ ąĖ ą┤ą╗čÅ FPGA)
ąóą░ą▒ą╗ąĖčåą░ 4-4 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ MCB ąĘą░ą┤ąĄčƹȹ║ąĖ ą┤ą╗čÅ ą┤ą▓čāčģ čĆą░ąĘąĮčŗčģ čüąĖčéčāą░čåąĖą╣ ąĮą░ ą┤ą▓čāčģ čćą░čüč鹊čéą░čģ ą┐ą░ą╝čÅčéąĖ. ąÆ ą┐ąĄčĆą▓ąŠą╝ čüčåąĄąĮą░čĆąĖąĖ čćč鹥ąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮą░ čāąČąĄ ąŠčéą║čĆčŗč鹊ą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą┐ą░ą╝čÅčéąĖ, ą║ąŠą│ą┤ą░ ąĮąĄ čéčĆąĄą▒čāčÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ ą┐čĆąĄą┤ąĘą░čĆčÅą┤ą░ (precharge) ąĖą╗ąĖ ą░ą║čéąĖą▓ą░čåąĖąĖ čüčéčĆąŠą║ąĖ (row activate) ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╝ ą┤ą░ąĮąĮčŗą╝. ąÆąŠ ą▓č鹊čĆąŠą╝ čüčåąĄąĮą░čĆąĖąĖ čćč鹥ąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┤ą╗čÅ ąĮąŠą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░ čüčéčĆąŠą║ąĖ (ą║ąŠąĮčäą╗ąĖą║čé bank/row). ąŁč鹊 čéčĆąĄą▒čāąĄčé precharge, čćč鹊ą▒čŗ ąĘą░ą║čĆčŗčéčī čĆą░ąĮąĄąĄ ąŠčéą║čĆčŗčéčāčÄ čüčéčĆąŠą║čā, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ą░ą║čéąĖą▓ą░čåąĖčÅ ąĮąŠą▓ąŠą╣ čüčéčĆąŠą║ąĖ, čćč鹊 čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé ąĘą░ą┤ąĄčƹȹ║čā čćč鹥ąĮąĖčÅ (read latency). ą×ą▒ą░ čüčåąĄąĮą░čĆąĖčÅ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4-4 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčé ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ MCB (User Interface) čü ąŠą┤ąĮąĖą╝ ą┐ąŠčĆč鹊ą╝, ą║ąŠą│ą┤ą░ ąĮąĄčé ą┤čĆčāą│ąĖčģ ą║ąŠą╝ą░ąĮą┤, ąŠąČąĖą┤ą░čÄčēąĖčģ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (čé. ąĄ. MCB ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ ą┐ąŠą╗čāč湥ąĮąĖąĄą╝ ąĘą░ą┐čĆąŠčüą░ čćč鹥ąĮąĖčÅ) ąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ, čā ą║ąŠč鹊čĆąŠą│ąŠ CAS latency (ąĘą░ą┤ąĄčƹȹ║ą░ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ čüč鹊ą╗ą▒čåą░) čĆą░ą▓ąĮą░ 5.
ąóą░ą▒ą╗ąĖčåą░ 4-4. MCB Read Latency.
ąĪčåąĄąĮą░čĆąĖą╣ ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ čćč鹥ąĮąĖčÅ
|
ąøą░č鹥ąĮčéąĮąŠčüčéčī čćč鹥ąĮąĖčÅ (ą▓ čéą░ą║čéą░čģ ą┐ą░ą╝čÅčéąĖ) |
| MEMCLK = 333 ą£ąōčå (667 Mb/čüąĄą║) |
MEMCLK = 400 ą£ąōčå (800 Mb/čüąĄą║) |
| ą¦č鹥ąĮąĖąĄ ąĖąĘ ąŠčéą║čĆčŗč鹊ą╣ čüčéčĆąŠą║ąĖ (Open Row) |
| Outbound Command Path |
12.5 |
12.5 |
| Memory CAS Latency (CL) |
5 |
5 |
| Inbound Read Datapath |
4.5 |
4.5 |
| ą×ą▒čēą░čÅ ą╗ą░č鹥ąĮčéąĮąŠčüčéčī ą▓ čéą░ą║čéą░čģ (ą▓čĆąĄą╝čÅ ą▓ ąĮą░ąĮąŠčüąĄą║čāąĮą┤ą░čģ) |
22 (66 ąĮčü) |
22 (55 ąĮčü) |
| ą¦č鹥ąĮąĖąĄ ąĖąĘ ąĮąŠą▓ąŠą╣ čüčéčĆąŠą║ąĖ (New Row) |
| Outbound Command Path |
12.5 |
12.5 |
| Precharge/Activate |
10 |
12 |
| Memory CAS Latency (CL) |
5 |
5 |
| Inbound Read Datapath |
4.5 |
4.5 |
| ą×ą▒čēą░čÅ ą╗ą░č鹥ąĮčéąĮąŠčüčéčī ą▓ čéą░ą║čéą░čģ (ą▓čĆąĄą╝čÅ ą▓ ąĮą░ąĮąŠčüąĄą║čāąĮą┤ą░čģ) |
32 (96 ąĮčü) |
34 (85 ąĮčü) |
Self Refresh. ąśąĮč鹥čĆč乥ą╣čü čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh) čŹč鹊 ą╝ąĄčģą░ąĮąĖąĘą╝, ą║ąŠč鹊čĆčŗą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĘą░ą┐čĆąŠčüąĖčéčī ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ, ąĖą╗ąĖ ą▓čŗčģąŠą┤ ąĖąĘ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░. ąĪą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ LPDDR, DDR2 ąĖ DDR3. Self refresh ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ą░ą╝čÅčéąĖ 菹║ąŠąĮąŠą╝ąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čāčÄ ą╝ąŠčēąĮąŠčüčéčī, čüąŠčģčĆą░ąĮčÅčÅ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠą│ą┤ą░ ą┐ą░ą╝čÅčéąĖ ąĮąĄ ąĮčāąČąĮąŠ ą░ą║čéąĖą▓ąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ.
ąśąĮč鹥čĆč乥ą╣čü self-refresh ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠčüč鹊ą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ self-refresh ąĖ ą▓čŗčģąŠą┤ą░ ąĖąĘ ąĮąĄą│ąŠ. ą×ą┤ąĖąĮ ą▓čŗą▓ąŠą┤ čüąŠčüč鹊čÅąĮąĖčÅ čĆąĄąČąĖą╝ą░ (selfrefresh_mode) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ąĮą░čģąŠą┤ąĖčéčüčÅ ąĖą╗ąĖ ąĮąĄčé ą┐ą░ą╝čÅčéčī ą▓ čĆąĄąČąĖą╝ąĄ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąÉčüąĖąĮčģčĆąŠąĮąĮčŗą╣ čüąĖą│ąĮą░ą╗ selfresh_enter ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĮą░ čćą░čüč鹊č鹥 čÅą┤čĆą░ MCB, ą║ąŠč鹊čĆčŗą╣ čćą░čüč鹊 čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čćą░čüč鹊č鹥, ąĮą░ą╝ąĮąŠą│ąŠ ą▓čŗčłąĄ, č湥ą╝ čéą░ą║čéčŗ User Interface.
ąöą╗čÅ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ selfrefresh_enter čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą┐ąŠą║ą░ selfrefresh_mode ąĮąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1 (čüą╝. čĆąĖčü. 4-13). ąĪąĖą│ąĮą░ą╗ selfrefresh_enter ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│. 1, čćč鹊ą▒čŗ ąŠčüčéą░ą▓ą░ą╗čüčÅ čĆąĄąČąĖą╝ self-refresh. ąöą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ čüąĖą│ąĮą░ą╗ selfrefresh_enter ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ (čüą╝. čĆąĖčü. 4-14). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüąĖą│ąĮą░ą╗ selfrefresh_mode ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 0, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ ą▓čŗčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ.
ąĪąĖą│ąĮą░ą╗ selfresh_enter ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ čāčüč鹊ą╣čćąĖą▓ąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ą╗čÄą▒ąŠą╣ ąĖą╝ą┐čāą╗čīčü ą┐ąŠą╝ąĄčģąĖ ąĮą░ čŹč鹊ą╣ ą╗ąĖąĮąĖąĖ ą╝ąŠąČąĄčé ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ąĘą░ą┐čĆąŠčü. ą×ą▒čŗčćąĮąŠ čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┐ąĄčĆąĄą┤ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĄą╝ ą▓ MCB, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ.
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ Spartan-6 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode), ą║ąŠą│ą┤ą░ ą▓ąĮąĄčłąĮčÅčÅ ą┐ą░ą╝čÅčéčī ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh), čćč鹊ą▒čŗ ąĄčēąĄ ą▒ąŠą╗čīčłąĄ čüąĮąĖąĘąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ. ą×ą┤ąĮą░ą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ Spartan-6 ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ self-refresh. ą¤ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąŠč鹥čĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ MCB, ąĖąĘ-ąĘą░ č湥ą│ąŠ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą╣čéąĖ ąĖąĘ čĆąĄąČąĖą╝ą░ self-refresh.

ąĀąĖčü. 4-13. ąÆčģąŠą┤ ą▓ čĆąĄąČąĖą╝ Self-Refresh.

ąĀąĖčü. 4-14. ąÆčŗčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ Self-Refresh.
Suspend. ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą▓ą░ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ ą╝ąĄč鹊ą┤ą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend Mode) čāčüčéčĆąŠą╣čüčéą▓ Spartan-6 ą▓ ą┤ąĖąĘą░ą╣ąĮą░čģ, čüąŠą┤ąĄčƹȹ░čēąĖčģ ąĖąĮč鹥čĆč乥ą╣čü ą┐ą░ą╝čÅčéąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ MCB.
ąĀąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĄąĘ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ DRAM. ąÆ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ ąĮąĄ ąĮčāąČąĮąŠ čüąŠčģčĆą░ąĮčÅčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ čāąČąĄ ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ DRAM, ą▓čŗą▓ąŠą┤ Suspend ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠą╣ ą╗ąŠą│. 1, čćč鹊ą▒čŗ ą░ą║čéąĖą▓ąĖąĘąĖčĆąŠą▓ą░ą╗čüčÅ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode). ą¤ąĄčĆąĄą┤ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ ą▓čŗą▓ąŠą┤ą░ Suspend ą▓ ą╗ąŠą│. 1 MCB ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ čüą▒čĆąŠčüą░ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ async_rst ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1. ąÆąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ MCB čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░.
ąÜąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ Suspend ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0 ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, MCB čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čüą▒čĆąŠčüąĄ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ čüčéą░ąĮąĄčé ą░ą║čéąĖą▓ąĮčŗą╝ čüąĖą│ąĮą░ą╗ PLL_LOCK, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ ąĮą░ą╗ąĖčćąĖąĄ čüčéą░ą▒ąĖą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ ą┤ą╗čÅ MCB. ąŚą░č鹥ą╝ MCB ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čüą▒čĆąŠčüą░ ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé DRAM, ąĖčüą┐ąŠą╗čīąĘčāčÅ čéčā ąČąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĘą░ą┐čāčüą║ą░ (startup sequence), ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüąĖčüč鹥ą╝ąĮąŠą╝ čüą▒čĆąŠčüąĄ MCB. ąÆčüąĄ ą┤ą░ąĮąĮčŗąĄ DRAM ą┤ąŠą╗ąČąĮčŗ čüčćąĖčéą░čéčīčüčÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝ąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓čŗčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠ čŹč鹊ą╝čā čüčåąĄąĮą░čĆąĖčÄ.
ąĀąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čü čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ DRAM. ąÆ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą▓ DRAM ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ, ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąĖą╝ąĖčéąĖą▓ SUSPEND_SYNC čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ Self Refresh ą▒ą╗ąŠą║ą░ MCB, čćč鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode). ą¤čĆąĖą╝ąĖčéąĖą▓ SUSPEND_SYNC ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 MCB ą┐ąĄčĆąĄą▓ąĄą╗ čāčüčéčĆąŠą╣čüčéą▓ąŠ DRAM ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh mode, čüą╝. čüąĄą║čåąĖčÄ "Self Refresh"), čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ FPGA ą▓ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode).
ąĀąĖčü. 4-15 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą┐čĆąĖą╝ąĖčéąĖą▓ SUSPEND_SYNC ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą╗ąŠą│ąĖą║ąĄ ą▓čŗą▓ąŠą┤ą░ Suspend ąĖ ąĖąĮč鹥čĆč乥ą╣čüčā MCB ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ suspend mode čü čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą▓ DRAM. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ čĆąĖčü. 4-16 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī čüąĖą│ąĮą░ą╗ąŠą▓, čéčĆąĄą▒čāąĄą╝čāčÄ ą┤ą╗čÅ čāčüą┐ąĄčłąĮąŠą│ąŠ ą┐ąĄčĆąĄą▓ąŠą┤ą░ FPGA ą▓ suspend mode ąĖ ą▓čŗčģąŠą┤ą░ ąĖąĘ ąĮąĄą│ąŠ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čŹčéąĖą╝ čüčåąĄąĮą░čĆąĖąĄą╝.

ąĀąĖčü. 4-15. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖčÅ SUSPEND_SYNC.

ąĀąĖčü. 4-16. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ Suspend Mode.
ąÆ ąŠčéą▓ąĄčé ąĮą░ ą░ą║čéąĖą▓ąĮčāčÄ ą╗ąŠą│. 1 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ Suspend ą┐čĆąĖą╝ąĖčéąĖą▓ SUSPEND_SYNC ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą▓ MCB čüąĖą│ąĮą░ą╗ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend request, SREQ), čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓čģąŠą┤ą░ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode). ąĪąĖą│ąĮą░ą╗ SREQ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ąŠ ą▓čģąŠą┤čā selfrefresh_enter ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╣ ąŠą▒ąĄčĆčéą║ąĖ MIG (ąĖą╗ąĖ EDK), ąŠčéą║čāą┤ą░ ąŠąĮ ąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą╝ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (soft calibration module). ąŁč鹊čé ą╝ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĘą░ą▓ąĄčĆčłą░ąĄčé ą╗čÄą▒čŗąĄ č鹥ą║čāčēąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ąĘą░ą┐čĆąŠčüą░ self-refresh ą▓ MCB ąĖ ąŠčéčéčāą┤ą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ.
ąÜą░ą║ č鹊ą╗čīą║ąŠ MCB čāčüą┐ąĄčłąĮąŠ ą┐ąŠą╝ąĄčüčéąĖą╗ čāčüčéčĆąŠą╣čüčéą▓ąŠ DRAM ą▓ čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (self-refresh mode), ą▓čŗčģąŠą┤ selfrefresh_mode ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ąŠ ą▓čģąŠą┤čā ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend acknowledge, SACK) ą┐čĆąĖą╝ąĖčéąĖą▓ą░ SUSPEND_SYNC, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ, čćč鹊 FPGA ą╝ąŠąČąĄčé ą▒čŗčéčī č鹥ą┐ąĄčĆčī ą┐ąŠą╝ąĄčēąĄąĮą░ ą▓ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ. ąĪąĖą│ąĮą░ą╗ PLL_lock ą▒čāą┤ąĄčé čüąĮčÅčé, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ (Suspend = ą╗ąŠą│. 1).
ąÜąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ Suspend ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 0 ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, čüąĖą│ąĮą░ą╗ SREQ ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ selfrefresh_enter ą┐ąĄčĆąĄčģąŠą┤čÅčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ, ąĖ FPGA ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Suspend. ąĪąĖą│ąĮą░ą╗ PLL_lock čüąĮą░čćą░ą╗ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0, čéą░ą║ ą║ą░ą║ PLL ą┐čŗčéą░ąĄčéčüčÅ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ąĘą░čģą▓ą░čé ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čüąĮąŠą▓ą░ ąĮą░čćą░čéčī ą▓čŗą┤ą░ą▓ą░čéčī čüčéą░ą▒ąĖą╗čīąĮčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā. ą×ą┤ąĮą░ą║ąŠ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čüąĖą│ąĮą░ą╗ selfrefresh_mode ą░ą║čéąĖą▓ąĄąĮ, čŹč鹊 čāčüą╗ąŠą▓ąĖąĄ PLL_lock == ą╗ąŠą│. 0 ąĮąĄ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ čüą▒čĆąŠčüčā čüąĖčüč鹥ą╝čŗ MCB, ą║ą░ą║ čŹč鹊 ąŠą▒čŗčćąĮąŠ ą┐čĆąŠąĖčüčģąŠą┤ąĖą╗ąŠ ą▒čŗ. ąÜąŠą│ą┤ą░ PLL ą┤ąŠčüčéąĖą│ą░ąĄčé ąĘą░čģą▓ą░čéą░, ą╝ąŠą┤čāą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčé ąĘą░ą┐čĆąŠčü ą▓ MCB ąĮą░ ą▓čŗčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ąĖ ąŠčéčéčāą┤ą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ.
ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ DRAM čāčüą┐ąĄčłąĮąŠ ą▓čŗčłą╗ąŠ ąĖąĘ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, čüąĖą│ąĮą░ą╗ selfrefresh_mode ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0, ąĖ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ MCB ą╝ąŠąČąĄčé ą┐čĆąŠą┤ąŠą╗ąČąĖčéčīčüčÅ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą┤ą░ąĮąĮčŗčģ ą▓ DRAM.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ Suspend Mode. ąźąŠčéčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ Spartan-6 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą║čĆąĖčéąĖč湥čüą║ąĖąĄ čüąĖą│ąĮą░ą╗čŗ, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ DRAM, ą┤ąŠą╗ąČąĮčŗ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ąĖąĘą▓ąĄčüčéąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čĆąĄąČąĖą╝ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą▓čģąŠą┤ CKE čāčüčéčĆąŠą╣čüčéą▓ą░ Spartan-6 ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮąŠąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ (constraint), čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ą▓ąŠ ą▓čĆąĄą╝čÅ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Suspend). ąöąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ ą▓ čäą░ą╣ą╗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (user constraints file, UCF) ąŠą┐ąĄčĆą░č鹊čĆ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ:
NET "mcbx_dram_cke" SUSPEND="drive_last_value";
ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ DRAM ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą╣ą┤ąĄčé ąĖąĘ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┤ą╗čÅ DDR3 čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░ DRAM ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą┐ąŠą┤ąŠą▒ąĮąŠąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮąŠąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ą▓ čäą░ą╣ą╗ąĄ UCF, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ:
NET "mcbx_dram_reset_n" SUSPEND="drive_last_value";
ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčé ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗą╣ čüą▒čĆąŠčü čāčüčéčĆąŠą╣čüčéą▓ą░ DRAM ą▓ąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ.
ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą▒ą░ą╣čéą░ ą▓ ą░ą┤čĆąĄčüą░čåąĖčÄ ą┐ą░ą╝čÅčéąĖ. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ User Interface ą▒ą╗ąŠą║ MCB ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠčüčéčāčÄ ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčāčÄ čüčģąĄą╝čā ą░ą┤čĆąĄčüą░čåąĖąĖ ą▓ čäąĖąĘąĖč湥čüą║čāčÄ ą┐ą░ą╝čÅčéčī DRAM. ążą░ą║čé č鹊ą│ąŠ, čćč鹊 DRAM čüąŠčģčĆą░ąĮčÅąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĄą│ą╝ąĄąĮčéą░čģ čŹč鹊ą╣ čüčģąĄą╝ąŠą╣ ą░ą▒čüčéčĆą░ą│ąĖčĆčāąĄčéčüčÅ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ čĆą░ą▒ąŠčéą░čéčī čü ą┐ą░ą╝čÅčéčīčÄ č湥čĆąĄąĘ ą┐čĆąŠčüč鹊ą╣ ąĖąĮč鹥čĆč乥ą╣čü ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ SRAM. MCB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░ ąĮą░ User Interface ą▓ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą░ą┤čĆąĄčüą░ čüčéčĆąŠą║ąĖ, ą▒ą░ąĮą║ą░ ąĖ čüč鹊ą╗ą▒čåą░ (row, bank ąĖ column), čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą╗čÅ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. ąöą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ąŠčé ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą╣ ą┐ą░ą╝čÅčéąĖ DRAM, MCB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čüčéčĆąŠą║ąĖ ąĖ ą▒ą░ąĮą║ą░, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ą┐čĆąŠąĘčĆą░čćąĮąŠ ą┤ą╗čÅ User Interface.
ąĪčéą░ąĮą┤ą░čĆčé ą┐ą░ą╝čÅčéąĖ, čłąĖčĆąĖąĮą░ čłąĖąĮčŗ ąĖ ą┐ą╗ąŠčéąĮąŠčüčéčī ą▓ą╗ąĖčÅčÄčé ąĮą░ č鹊, ą║ą░ą║ ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░ ąĮą░ User Interface ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ ą░ą┤čĆąĄčüą░ čüčéčĆąŠą║ąĖ (row), ą▒ą░ąĮą║ą░ (bank) ąĖ čüč鹊ą╗ą▒čåą░ (column). ąÆčŗą▒ąŠčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ ą▓ čāčéąĖą╗ąĖč鹥 MIG ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓ MCB, čéą░ą║ čćč鹊ą▒čŗ ąŠąĮ čüąŠąĘą┤ą░ą╗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé ą░ą┤čĆąĄčüą░. ąóą░ą▒ą╗ąĖčåą░ 4-5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą┤ąĄą╗ą░ąĄčéčüčÅ čŹč鹊 ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ ąĖą╝ąĄčÄčēąĄą╣čüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ. ąŁčéąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąŠčüąĮąŠą▓čŗą▓ą░čÄčéčüčÅ ąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čüčģąĄą╝ą░čģ ą░ą┤čĆąĄčüą░čåąĖąĖ JEDEC.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4-5, čłąĖčĆąĖąĮą░ ą┐ą░ą╝čÅčéąĖ (x4, x8 ąĖą╗ąĖ x16) ą▓ą╗ąĖčÅąĄčé ąĮą░ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą▒ą░ą╣čéą░ ąĮą░ čäąĖąĘąĖč湥čüą║ąĖą╣ ą░ą┤čĆąĄčü DRAM. ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ x4 ą╝ą╗ą░ą┤čłąĖą╣ ąĘąĮą░čćą░čēąĖą╣ ą▒ąĖčé (LSB) ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 0 ąĮą░ ą▓ąĮąĄčłąĮąĄą╣ čłąĖąĮąĄ ą░ą┤čĆąĄčüą░, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ą▓čŗčĆąŠą▓ąĮąĄąĮąĮčāčÄ ąĮą░ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░čåąĖčÄ ą┐ą░ą╝čÅčéąĖ (ą▒ąĖčé 0 ąĮą░ User Interface ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ 1 ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░). ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ą░ x8 ąĖčüą┐ąŠą╗čīąĘčāčÄčé čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčāčÄ ą░ą┤čĆąĄčüą░čåąĖčÄ ą▒ą░ą╣čéą░, MCB ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆčÅą╝ąŠąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą▒ą░ą╣čéą░ ąĮą░ ą▒ąĖčéčŗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą░ą┤čĆąĄčüą░ (ą▒ąĖčé 0 User Interface ąĮą░ą┐čĆčÅą╝čāčÄ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ą▒ąĖčé 0 ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░). ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ x16 ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ čüą╝ąĄčēą░ąĄčéčüčÅ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ą░ą┤čĆąĄčüą░ ąĮą░ ą│čĆą░ąĮąĖčåčā 2 ą▒ą░ą╣čé (ą▒ąĖčé 1 User Interface ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ą▒ąĖčé 0 ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░).
MCB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┤ą▓ąĄ ąŠą▒čēąĖąĄ čüčģąĄą╝čŗ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą▒ą░ą╣č鹊ą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░ User Interface ąĮą░ čäąĖąĘąĖč湥čüą║ąĖą╣ ą░ą┤čĆąĄčü ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ą░ą╝čÅčéąĖ: ROW_BANK_COLUMN ąĖ BANK_ROW_COLUMN. ąĪčéčĆą░ąĮąĖčåą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░ (Port Configuration) čāčéąĖą╗ąĖčéčŗ MIG ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą▒ąĖčĆą░čéčī čüčģąĄą╝čā, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤čģąŠą┤ąĖčé ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ (čüą╝. čüąĄą║čåąĖčÄ "Creating an MCB Design" ą▓ UG416 [2]). ąóą░ą▒ą╗ąĖčåą░ 4-5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ ą░ą┤čĆąĄčüą░čåąĖąĖ ą┤ą╗čÅ ROW_BANK_COLUMN. ąöą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ BANK_ROW_COLUMN ą┐ąŠąĘąĖčåąĖčÅ ą│čĆčāą┐ą┐ ą░ą┤čĆąĄčüą░ Row ąĖ Bank ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ čéą░ą║, čćč鹊 ą▒ąĖčéčŗ ą░ą┤čĆąĄčüą░ Bank ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┐ąŠąĘąĖčåąĖąĖ MSB ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą▒ą░ą╣č鹊ą▓ąŠą╝čā ą░ą┤čĆąĄčüčā User Interface. ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą▒ąĖčé ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝.
ąĪčģąĄą╝ą░ ROW_BANK_COLUMN ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą╗čÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüąĮąŠą╝čā ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓čā, ąĮą░ą┐čĆąĖą╝ąĄčĆ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗ąĖąĮąĮčŗą╣ ą┐ą░ą║ąĄčé ą┤ą░ąĮąĮčŗčģ), MCB ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą║čĆąŠąĄčé čéčā ąČąĄ čüčéčĆąŠą║čā ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą▒ą░ąĮą║ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ DRAM, čćč鹊ą▒čŗ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī čéčĆą░ąĮąĘą░ą║čåąĖčÄ, ą║ąŠą│ą┤ą░ ą┤ąŠčüčéąĖą│ąĮčāčé ą║ąŠąĮąĄčå čüčāčēąĄčüčéą▓čāčÄčēąĄą╣ čüčéčĆąŠą║ąĖ. ąŁč鹊 čüąĮąĖąČą░ąĄčé ąĘą░čéčĆą░čéčŗ ą▓čĆąĄą╝ąĄąĮąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĘą░ą║čĆčŗčéąĖąĄą╝ č鹥ą║čāčēąĄą╣ čüčéčĆąŠą║ąĖ (ą║ąŠą╝ą░ąĮą┤ą░ Precharge) ąĖ ąŠčéą║čĆčŗčéąĖąĄą╝ ą┤čĆčāą│ąŠą╣ čüčéčĆąŠą║ąĖ ą▓ č鹊ą╝ ąČąĄ ą▒ą░ąĮą║ąĄ (ą║ąŠą╝ą░ąĮą┤ą░ Activate command) ą┤ą╗čÅ ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąĪčģąĄą╝ą░ ą░ą┤čĆąĄčüą░čåąĖąĖ ROW_BANK_COLUMN čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé ą┐čĆąŠčéą░ą╗ą║ąĖą▓ą░ąĮąĖčÅ ą▒ąŠą╗čīčłąĖčģ ą┐ą░ą║ąĄč鹊ą▓ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ čĆą░ąĘą╝ąĄčēąĄąĮąĮčŗąĄ ą┐ąŠ ą░ą┤čĆąĄčüą░ą╝ čÅč湥ą╣ą║ąĖ, ą│ą┤ąĄ ą╝ąŠąČąĄčé ą┤ąŠčüčéąĖą│ą░čéčīčüčÅ ą┐ąŠą▓čŗčłąĄąĮąĮą░čÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī ą┤ąŠčüčéčāą┐ą░ ą┐čāč鹥ą╝ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ąĮą║ą░čģ.
ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą░ą┤čĆąĄčüą░čåąĖąĖ ROW_BANK_COLUMN ą░ą┤čĆąĄčüą░čåąĖčÅ BANK_ROW_COLUMN ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąĄčĆąĄčüąĄč湥ąĮąĖąĄ ą│čĆą░ąĮąĖčåčŗ čüčéčĆąŠą║ąĖ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĘą░ą║čĆčŗčéąĖčÄ čŹč鹊ą╣ čüčéčĆąŠą║ąĖ ąĖ ąŠčéą║čĆčŗčéąĖąĄ ąĮąŠą▓ąŠą╣ čüčéčĆąŠą║ąĖ ą▓ č鹊ą╝ ąČąĄ ą▒ą░ąĮą║ąĄ. ąæąĖčéčŗ ą░ą┤čĆąĄčüą░ Bank ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ MSB ą┐ąŠąĘąĖčåąĖąĖ ą▒ą░ą╣č鹊ą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░, ąĖ ąŠąĮąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąŠčüąĮąŠą▓ąĮčŗčģ ą░ą┤čĆąĄčüąĮčŗčģ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ čĆą░ąĘąĮčŗčģ ą▒ą░ąĮą║ą░čģ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ąŠčüąĮąŠą▓ą░ąĮąĮąŠąĄ ąĮą░ ą╝ąĖą║čĆąŠą┐čĆąŠčåąĄčüčüąŠčĆąĄ ąĖą╗ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą║ąŠčĆąŠč湥, ą┤ąĄą╗ą░ąĄčé ą▒ąŠą╗čīčłąĄ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗčģ čéčĆą░ąĮąĘą░ą║čåąĖą╣ ą║ ąŠą┤ąĮąŠą╝čā ą▒ą╗ąŠą║čā ą┐ą░ą╝čÅčéąĖ ąĘą░ ąŠą┤ąĖąĮ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą║ ą┤čĆčāą│ąŠą╝čā ą▒ą╗ąŠą║čā (čé. ąĄ. ą▒ą░ąĮą║čā), č鹊ą│ą┤ą░ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą╗čāčćčłąĄ ą▓čŗą▒čĆą░čéčī čŹčéčā čüčģąĄą╝čā ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą░ą┤čĆąĄčüąŠą▓.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĘą░ą▓ąĖčüąĖčé ą▓čŗą▒ąŠčĆ čüčģąĄą╝čŗ ą░ą┤čĆąĄčüą░čåąĖąĖ ROW_BANK_COLUMN ąĖą╗ąĖ BANK_ROW_COLUMN.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐čĆąĖ ąŠą▒čĆą░čēąĄąĮąĖąĖ ą║ čéą░ą▒ą╗ąĖčåąĄ 4-5 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4-2, čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī ą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ą│čĆą░ąĮąĖčåčŗ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ.
ąóą░ą▒ą╗ąĖčåą░ 4-5. ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ (Memory Device Mapping).
| ąÉą┤čĆąĄčü ą▒ą░ą╣čéą░ |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
18 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
V |
| ąóąĖą┐ |
ąæąĖčé |
ąĢą╝ą║. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| DDR |
x16 |
128 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 256 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| x8 |
128 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 256 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| x4 |
128 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 256 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| DDR2 |
x16 |
256 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 4 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| x8 |
256 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| x4 |
256 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| DDR3 |
x16 |
512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 4 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| x8 |
512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| x4 |
512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| LPDDR |
x16 |
128 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 256 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 512 Mb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 Gb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ąøąĄą│ąĄąĮą┤ą░:
| |
ąæąĖčéčŗ ą░ą┤čĆąĄčüą░ čüč鹊ą╗ą▒čåą░ (Column) |
CA[0] ą┐čĆąĖčéčÅąĮčāčéčŗ ą║ ą╗ąŠą│. 0 ą┤ą╗čÅ 4-ą▒ąĖčéąĮčŗčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┐ą░ą╝čÅčéąĖ |
| |
ąæąĖčéčŗ ą░ą┤čĆąĄčüą░ ą▒ą░ąĮą║ą░ (Bank) |
| |
ąæąĖčéčŗ ą░ą┤čĆąĄčüą░ čüčéčĆąŠą║ąĖ (Row) |
ą¤ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ ąĖ ą║ąŠą│ąĄčĆąĄąĮčéąĮąŠčüčéčī. ąÆ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ MCB čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗąĄ čü ą┐ą░ą╝čÅčéčīčÄ, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░čÄčéčüčÅ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ąŠą┤ąĮąŠą╝čā ą┐ąŠčĆčéčā. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĘą░ą▓ąĄčĆčłą░čÄčéčüčÅ ą▓ č鹊ą╝ ąČąĄ ą┐ąŠčĆčÅą┤ą║ąĄ, ą▓ ą║ą░ą║ąŠą╝ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ.
ą¤ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ ą┐ąŠčĆčéą░ą╝ MCB ąĮąĄčé ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą▓čŗą┤ą░ąĮąĮčŗąĄ čĆą░ąĘąĮčŗą╝ąĖ ą┐ąŠčĆčéą░ą╝ąĖ, ą▒čāą┤čāčé ąĘą░ą▓ąĄčĆčłąĄąĮčŗ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüąŠą▓. ąÉą╗ą│ąŠčĆąĖčéą╝ ą░čĆą▒ąĖčéčĆą░ąČą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ čéą░ą║, čćč鹊ą▒čŗ čāą║ą░ąĘą░ąĮąĮčŗą╣ ą┐ąŠčĆčé ąĖą╝ąĄą╗ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ą┐ąĄčĆąĄą┤ ą┤čĆčāą│ąĖą╝ ą┐ąŠčĆč鹊ą╝. ąŁč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ą╝ąĄčģą░ąĮąĖąĘą╝ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ ą┐ąŠčĆčÅą┤ąŠą║ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣, ąĮąŠ čŹč鹊 ąĮąĄ ą╝ąŠąČąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ ąĖčģ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ.
MCB ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▒čāč乥čĆąĖąĘąĖčĆąŠą▓ą░čéčī ą▓ąĮčāčéčĆąĖ čüąĄą▒čÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĘą░ą┐ąĖčüąĖ. ąśąĘ-ąĘą░ ą▒čāč乥čĆąĖąĘą░čåąĖąĖ ą▒čāą┤ąĄčé ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčéą░ ą▓ Command FIFO, ąĖ ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąĘą░ą┐ąĖčüčī ą▓ ą┐ą░ą╝čÅčéčī. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ąŠčĆčÅą┤ąŠą║ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ ą╝ąĄąČą┤čā ą┐ąŠčĆčéą░ą╝ąĖ ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ, č鹊 ą┐ąŠčĆčé, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čćč鹥ąĮąĖčÅ ą┐ąŠ ą░ą┤čĆąĄčüčā, ą▓ ą║ąŠč鹊čĆčŗą╣ ą┐ąĖčłąĄčé ą┤čĆčāą│ąŠą╣ ą┐ąŠčĆčé, ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī ąĖąĘ ą┐ą░ą╝čÅčéąĖ ąĮąŠą▓ąŠąĄ ąĖą╗ąĖ čüčéą░čĆąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ (ąĮąŠ ą║ą░ą║ąŠąĄ ą║ąŠąĮą║čĆąĄčéąĮąŠ ąĘą░čĆą░ąĮąĄąĄ ąĮąĄ ąĖąĘą▓ąĄčüčéąĮąŠ).
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą▓ą░ąČąĮąŠ ąĘąĮą░čéčī, čćč鹊 ąĘą░ą┐ąĖčüčī ą▓ ą┐ą░ą╝čÅčéčī ą▒čŗą╗ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ą┐ąĄčĆąĄą┤ čćč鹥ąĮąĖąĄą╝ č鹊ą│ąŠ ąČąĄ ą╝ąĄčüčéą░ ą┐ą░ą╝čÅčéąĖ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ ą║ąŠą│ąĄčĆąĄąĮčéąĮąŠčüčéčī ą┤ąŠčüčéčāą┐ą░). ąĢčüčéčī 3 ą╝ąĄč鹊ą┤ą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą║ąŠą│ąĄčĆąĄąĮčéąĮąŠčüčéčī:
1. ą£ąŠąĮąĖč鹊čĆąĖąĮą│ čäą╗ą░ą│ą░ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ Command FIFO:
ŌĆó ąĢčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī, čćč鹊 č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąŠč湥čĆąĄą┤ąĖ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┐ąŠčĆčéčā, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą╝ąŠąĮąĖč鹊čĆąĖčéčī čäą╗ą░ą│ Command FIFO empty. ąŁč鹊čé čäą╗ą░ą│ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ MCB ąĮą░čćąĮąĄčé ą▓čŗą┤ą░ą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ąĘą░ą┐ąĖčüąĖ. ąÜąŠą│ą┤ą░ čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čāčüčéąĖčéčüčÅ, čŹč鹊 ą▒čāą┤ąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┤ą░ąĮąĮčŗčģ, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓ Write Data FIFO.
ŌĆó ąöąĖąĘą░ą╣ąĮ ą╝ąŠąČąĄčé ąČą┤ą░čéčī čäą╗ą░ą│ą░ Command FIFO empty, ą║ąŠą│ą┤ą░ ąŠąĮ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī čćč鹥ąĮąĖąĄ.
2. ąöąĖąĘą░ą╣ąĮ ą╝ąŠąČąĄčé ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠą╝ č鹊ą│ąŠ čäą░ą║čéą░, čćč鹊 čéčĆą░ąĮąĘą░ą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆčéą░:
ŌĆó ą¤ąŠčüą╗ąĄ ąĘą░ą┐ąĖčüąĖ ą▓ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčāčÄ čćą░čüčéčī ą┐ą░ą╝čÅčéąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī ą┐čāčüč鹊ąĄ čćč鹥ąĮąĖąĄ, ąĖ ąČą┤ą░čéčī ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čāčüč鹊ą│ąŠ čćč鹥ąĮąĖčÅ ąĖ ą▓ąŠąĘą▓čĆą░čéą░ ą┤ą░ąĮąĮčŗčģ.
ŌĆó ąŚą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐čāčüč鹊ą│ąŠ čćč鹥ąĮąĖčÅ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą┐čĆąĄą┤čŗą┤čāčēą░čÅ ąĘą░ą┐ąĖčüčī ą▓ ą┐ą░ą╝čÅčéčī ą▒čŗą╗ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░.
3. ą¤ąŠą┤čüčéčĆąŠą╣ą║ą░ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą░čĆą▒ąĖčéčĆą░ąČą░:
ŌĆó ąĢčüą╗ąĖ ą┐ąŠčĆčé, ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĖą╣ ąĘą░ą┐ąĖčüąĖ, ą╝ąŠąČąĄčé ą▓čüąĄą│ą┤ą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ąĮą░ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ ą┐ąŠčĆčéčŗ, ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĖąĄ čćč鹥ąĮąĖąĄ, č鹊 čŹč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ąĘą░ą┐ąĖčüčī ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┐ąĄčĆąĄą┤ čćč鹥ąĮąĖąĄą╝, ą║ąŠą│ą┤ą░ čŹčéąĖ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐čĆąŠąĖčüčģąŠą┤čÅčé ąĮą░ ą┤ą▓čāčģ ą┐ąŠčĆčéą░čģ. ąĪą╗ąĄą┤čāąĄčé ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠ ą┐čĆąĖą╝ąĄąĮčÅčéčī čŹč鹊čé ą╝ąĄč鹊ą┤, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ąŠčĆčéčŗ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī ą┐čāčüčéčŗąĄ čåąĖą║ą╗čŗ ą╝ąĄąČą┤čā ąĘą░ą┐čĆąŠčüą░ą╝ąĖ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą╗čÄą▒ąŠą│ąŠ ąĖąĘ čŹčéąĖčģ ą╝ąĄč鹊ą┤ąŠą▓ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠą│ąĄčĆąĄąĮčéąĮąŠčüčéąĖ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüąĮąĖąČąĄąĮąĖčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ čüąĖčüč鹥ą╝čŗ; ą┐ąŠčŹč鹊ą╝čā čéą░ą║ąĖąĄ ą╝ąĄč鹊ą┤čŗ čüą╗ąĄą┤čāąĄčé ą┐čĆąĖą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ ą▓ čüą╗čāčćą░ąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ.
[ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ A]
ą¤ąŠ čŹčéąĖą╝ čüčüčŗą╗ą║ą░ą╝ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą┐čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā ąĖąĘ čüčéą░ąĮą┤ą░čĆč鹊ą▓ ą┐ą░ą╝čÅčéąĖ, čĆąĄą░ą╗ąĖąĘčāąĄą╝ąŠą╝čā ą▓ MCB:
ŌĆó JEDEC DDR3 Specification
http://www.jedec.org/sites/default/files/docs/JESD79-3D.pdf
ŌĆó JEDEC DDR2 Specification
http://www.jedec.org/sites/default/files/docs/JESD79-2F.pdf
ŌĆó JEDEC DDR Specification
http://www.jedec.org/sites/default/files/docs/JESD79F.pdf
ŌĆó JEDEC LPDDR Specification
http://www.jedec.org/sites/default/files/docs/JESD209A.pdf
ąŁčéąĖ čüčüčŗą╗ą║ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐ąŠ čĆą░ąĘą▓ąŠą┤ą║ąĄ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ ąĖ ą░ąĮą░ą╗ąĖąĘčā čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┐ą░ą╝čÅčéąĖ DDR. Xilinx ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé č鹊čćąĮąŠčüčéčī ąĖ ą┐ąŠą╗ąĮąŠčéčā ą╗čÄą▒ąŠą│ąŠ ąĖąĘ čŹčéąĖčģ ą╝ą░č鹥čĆąĖą░ą╗ąŠą▓.
ŌĆó Hardware Tips for Point-to-Point System Design: Termination, Layout, and Routing
http://download.micron.com/pdf/technotes/DDR/tn4614.pdf
ŌĆó Interfacing the RC32434/5 with DDR SDRAM Memory
http://www.idt.com/products/getDoc.cfm?docID=571565
ŌĆó DDR-SDRAM Layout Considerations for MCF547x/8x Processors
http://www.freescale.com/files/32bit/doc/app_note/AN2826.pdf
ŌĆó Hardware and Layout Design Considerations for DDR2 SDRAM Memory Interfaces
http://www.freescale.com/files/32bit/doc/app_note/AN2910.pdf
ŌĆó DDR System Design Considerations
http://download.micron.com/pdf/presentations/dram/plat7justin.pdf
ŌĆó DDR2 Package Sizes and Layout Requirements
http://download.micron.com/pdf/technotes/ddr2/TN4708.pdf
ŌĆó DDR2 (Point-to-Point) Package Sizes and Layout Basics
http://download.micron.com/pdf/technotes/ddr2/TN4720.pdf
ŌĆó Understanding TIŌĆÖs PCB Routing Rule-Based DDR Timing Specification
http://focus.ti.com.cn/cn/lit/an/spraav0a/spraav0a.pdf
ŌĆó Implementing DDR2 PCB Layout on the TMS320C6454/5
http://focus.ti.com/lit/an/spraaa7e/spraaa7e.pdf
[ąĪčüčŗą╗ą║ąĖ]
1. UG388 Spartan-6 FPGA Memory Controller site:xilinx.com.
2. UG416 Spartan-6 FPGA Memory Interface Solutions site:xilinx.com.
3. DS643 LogiCORE IP Multi-Port Memory Controller (MPMC) site:xilinx.com.
4. UG385 Spartan-6 FPGA Packaging and Pinouts Product Specification site:xilinx.com.
5. UG626 Synthesis and Simulation Design Guide site:xilinx.com.
6. UG382 Spartan-6 FPGA Clocking Resources site:xilinx.com.
7. UG393 Spartan-6 FPGA PCB Design and Pin Planning site:xilinx.com.
8. DS162 Spartan-6 FPGA Data Sheet: DC and Switching Characteristics site:xilinx.com.
9. UG361 Spartan-6 FPGA SelectIO Resources site:xilinx.com.
10. ąÜą░ą║ čāčüčéą░ąĮąŠą▓ąĖčéčī Xilinx ISE Design Tools. |



