|
Multi Protocol Synchronous Serial Engine (MPSSE) čŹč鹊 ą░ą┐ą┐ą░čĆą░čéčāčĆą░, ą║ąŠč鹊čĆą░čÅ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĮą░ ą║čĆąĖčüčéą░ą╗ą╗ąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ čćąĖą┐ąŠą▓ FTDI. ą×ąĮą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖą╝ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čéą░ą║ąĖąĄ čüąĖąĮčģčĆąŠąĮąĮčŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ, ą║ą░ą║ I2C, SPI ąĖą╗ąĖ JTAG, čü ą║ąŠč鹊čĆčŗą╝ąĖ ą╝ąŠąČąĮąŠ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ USB. ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé MPSSE ą┤ąŠčüčéčāą┐ąĮą░ ąĮą░ ą║čĆąĖčüčéą░ą╗ą╗ą░čģ FT2232D, FT2232H, FT4232H ąĖ FT232H, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ čģąŠčüčéčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąŠą▒čŗčćąĮąŠ čŹč鹊 ą║ąŠą╝ą┐čīčÄč鹥čĆ PC, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ čćąĖą┐čā FTDI č湥čĆąĄąĘ USB. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ PC ąĖą╗ąĖ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą╣ čüąĖčüč鹥ą╝čŗ ąŠą▒ą╝ąĄąĮąĖą▓ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü MPSSE ą▓ čŹčéąĖčģ čćąĖą┐ą░čģ č湥čĆąĄąĘ ą┤čĆą░ą╣ą▓ąĄčĆčŗ D2XX USB [4].
MPSSE ą┐čĆąĖąĮąĖą╝ą░ąĄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ čćąĖą┐ąŠą▓ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ č乊čĆą╝ą░čéą░čģ, ą░ ąĖą╝ąĄąĮąĮąŠ I2C, SPI ąĖ JTAG. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ libMPSSE ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāą┤ąŠą▒ąĮčŗą╣ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéą░ API-ąĖąĮč鹥čĆč乥ą╣čü, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ąĮą░ą┐ąĖčüą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ I2C/SPI/JTAG ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąĖčüč鹥ą╝čŗ MPSSE ąĖ ąĖąĘčāč湥ąĮąĖčÅ ąĄčæ ą║ąŠą╝ą░ąĮą┤. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, č鹊 ąŠąĮ ą╝ąŠąČąĄčé ąĖąĘčāčćąĖčéčī čĆą░ą▒ąŠčéčā MPSSE ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĄčæ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮą░ą┐čĆčÅą╝čāčÄ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖą╣ D2XX.

ąĀąĖčü. 1. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüč鹥ą║, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠčģąŠą┤ąĖčé ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (I2C, SPI ąĖą╗ąĖ JTAG).
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 1, čā ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ libMPSSE ąĄčüčéčī 3 čĆą░ąĘąĮčŗčģ ą▓ąĖą┤ą░ API, ą║ą░ąČą┤čŗą╣ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ I2C, SPI ąĖ JTAG. ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé (ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ AN_178 [1]) čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ SPI. ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄą│ąŠ libMPSSE (ą▓ąĄčĆčüąĖąĖ ą┤ą╗čÅ Linux ąĖ Windows), ąĘą░ą╝ąĄčćą░ąĮąĖčÅ ą┐ąŠ čĆąĄą╗ąĖąĘčā ąĖ ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čäą░ą╣ą╗čŗ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī čü čüą░ą╣čéą░ FTDI ą┐ąŠ čüčüčŗą╗ą║ąĄ [3] (čéą░ą║ąČąĄ čüą╝. [2]).
[ą×ą▒ąĘąŠčĆ čüąĖčüč鹥ą╝čŗ]

ąĀąĖčü. 2. ą×ą▒čēą░čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ.
ąØą░ čĆąĖčü. 2 ą┐ąŠą║ą░ąĘą░ąĮ ą▒ą░ąĘąŠą▓ą░čÅ čüčéčĆčāą║čéčāčĆą░ čüąĖčüč鹥ą╝čŗ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI čü ą┐ąŠą╝ąŠčēčīčÄ čćąĖą┐ąŠą▓ FTDI ąĖ libMPSSE. ąŻčüčéčĆąŠą╣čüčéą▓ąŠą╝ PC/Host (čģąŠčüčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ) ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ąŠą╝ą┐čīčÄč鹥čĆ PC, čāčüčéčĆąŠą╣čüčéą▓ąŠ Android ąĖą╗ąĖ ą║ą░ą║ą░čÅ-ą╗ąĖą▒ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ą░čÅ čüąĖčüč鹥ą╝ą░. ą¦ąĖą┐ FTDI ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ąŠą▒čŗčćąĮąŠ čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ ąĮą░ ąŠą┤ąĮąŠą╣ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥, ąĖą╗ąĖ čüąŠąĄą┤ąĖąĮčÅčÄčéčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą║ąŠčĆąŠčéą║ąĖą╝ ą║ą░ą▒ąĄą╗ąĄą╝. ąØą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ą▓ąĮąĄčłąĮąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI, ąŠą┤ąĮą░ą║ąŠ ą║ ą║ą░ąČą┤ąŠą╝čā ą▒ą╗ąŠą║čā MPSSE ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą┤ąŠ 5 čāčüčéčĆąŠą╣čüčéą▓ SPI.
[ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (API)]
ążčāąĮą║čåąĖąĖ libMPSSE-SPI API ą╝ąŠąČąĮąŠ ą┐ąŠą┤ąĄą╗ąĖčéčī ąĮą░ 2 ą▒ąŠą╗čīčłąĖčģ ąĮą░ą▒ąŠčĆą░. ą¤ąĄčĆą▓čŗą╣ čüąŠčüč鹊ąĖčé ąĖąĘ 6 čäčāąĮą║čåąĖą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control API), ąĖ ą▓č鹊čĆąŠą╣ čüąŠą┤ąĄčƹȹĖčé 2 ąĮą░ą▒ąŠčĆą░ API-čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąÆčüąĄ API-čäčāąĮą║čåąĖąĖ ą▓ąŠąĘą▓čĆą░čēą░čÄčé ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠą┤ąŠą▓ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ FT_STATUS, ą║ą░ą║ ąŠąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ D2XX.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąŠą┐ąĖčüą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ API čüčéčĆčāą║čéčāčĆ ąĖ čéąĖą┐ą░čģ ą┤ą░ąĮąĮčŗčģ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąóąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ". ąØąĄą║ąŠč鹊čĆčŗąĄ čüčéčĆčāą║čéčāčĆčŗ čüą╝. ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ D2XX [4].
ążčāąĮą║čåąĖąĖ SPI. ąØąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ą░čģ ąŠą┐ąĖčüą░ąĮčŗ čäčāąĮą║čåąĖąĖ SPI, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą░ą┐ą┐ą░čĆą░čéąĮąŠ č乊čĆą╝ąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ SPI ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ ąŠą▒ą╝ąĄąĮąĄ čü ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ SPI (SPI slave).
FT_STATUS SPI_GetNumChannels (uint32 *numChannels);
ą¤ąŠą╗čāčćą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ SPI (ą┐ąŠčĆč鹊ą▓), ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čüąĖčüč鹥ą╝ąĄ čģąŠčüčéą░. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą╝ąŠąČąĄčé čĆą░ąĘą╗ąĖčćą░čéčīčüčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čćąĖą┐ą░.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
numChannels [out] ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą╗čÅ čģąŠčüčéą░ ą║ą░ąĮą░ą╗ąŠą▓.
ą¦ąĖą┐ FTDI ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą╝ąŠčüčé ą╝ąĄąČą┤čā ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ USB ąĖ ą▓ąĮąĄčłąĮąĖą╝ ą╝ąĖčĆąŠą╝, ąĖ čā ąĮąĄą│ąŠ ąĮą░ ą▒ąŠčĆčéčā ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ čĆąĄąČąĖą╝ąĄ SPI. ą×ą┤ąĮą░ą║ąŠ ąĮąĄ ą▓čüąĄ čŹčéąĖ ą║ą░ąĮą░ą╗čŗ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ SPI master. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą║ą░ą║ SPI. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ čüčĆą░ąĘčā čćąĖą┐čŗ FT2232D (1 ą┐ąŠčĆčé MPSSE), FT232H (1 ą┐ąŠčĆčé MPSSE), FT2232H (2 ą┐ąŠčĆčéą░ MPSSE) ąĖ FT4232H (2 ą┐ąŠčĆčéą░ MPSSE), č鹊 ą▓čŗąĘąŠą▓ SPI_GetNumChannels ą▓ąĄčĆąĮąĄčé 6 ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ *numChannels.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąĖąĘ ą┤ą▓čāčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĖą╗ąĖ ąĖąĘ ą┤ą▓čāčģ ą┐ąŠč鹊ą║ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
FT_STATUS SPI_GetChannelInfo (uint32 index, FT_DEVICE_LIST_INFO_NODE *chanInfo);
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░ (ą┤ąŠą┐čāčüčéąĖą╝čŗ ąĘąĮą░č湥ąĮąĖčÅ ąŠčé 0 ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą▓ąĄčĆąĮčāą╗ą░ SPI_GetNumChannels ą╝ąĖąĮčāčü 1) ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║ą░ąĮą░ą╗ąĄ ą▓ č乊čĆą╝ąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ čüčéčĆčāą║čéčāčĆčŗ FT_DEVICE_LIST_INFO_NODE.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
index [in] ąśąĮą┤ąĄą║čü ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░.
chanInfo [out] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā FT_DEVICE_LIST_INFO_NODE.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ SPI_GetNumChannels.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąĖąĘ ą┤ą▓čāčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĖą╗ąĖ ąĖąĘ ą┤ą▓čāčģ ą┐ąŠč鹊ą║ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
FT_STATUS SPI_OpenChannel (uint32 index, FT_HANDLE *handle);
ążčāąĮą║čåąĖčÅ ąŠčéą║čĆąŠąĄčé ą║ą░ąĮą░ą╗ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ąĖąĮą┤ąĄą║čüčā ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┤ą╗čÅ ąĮąĄą│ąŠ (handle). ąöą╗čÅ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą┐čāčüčéąĖą╝čŗ ąĘąĮą░č湥ąĮąĖčÅ ąŠčé 0 ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą▓ąĄčĆąĮčāą╗ą░ SPI_GetNumChannels ą╝ąĖąĮčāčü 1. ąöąĄčüą║čĆąĖą┐č鹊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąĄą╣čłąĄą╣ čĆą░ą▒ąŠčéčŗ čü čŹčéąĖą╝ ą║ą░ąĮą░ą╗ąŠą╝.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
index [in] ąśąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░.
handle [out] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ čéąĖą┐ą░ FT_HANDLE, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ.
ąĢčüą╗ąĖ ą▒čāą┤ąĄčé čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ąŠčéą║čĆčŗčéčī čāąČąĄ ąŠčéą║čĆčŗčéčŗą╣ ą║ą░ąĮą░ą╗, č鹊 čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ.
FT_STATUS SPI_InitChannel (FT_HANDLE handle, ChannelConfig *config);
ążčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą║ą░ąĮą░ą╗ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
config [in] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčāčÄ čüčéčĆčāą║čéčāčĆčā čü ąŠą▒ąĮąŠą▓ą╗čÅąĄą╝čŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĖ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą┤ąĄčƹȹ║ąĖ (latency timer).
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠ čāčüčéą░ąĮąŠą▓ą║ąĄ čĆą░ą▒ąŠč湥ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą║ą░ąĮą░ą╗ą░, čéą░ą║ąĖąĄ ą║ą░ą║ čüą▒čĆąŠčü ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ MPSSE.
FT_STATUS SPI_CloseChannel (FT_HANDLE handle);
ąŚą░ą║čĆąŠąĄčé ą║ą░ąĮą░ą╗ ąĖ ąŠčüą▓ąŠą▒ąŠą┤ąĖčé ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┐ąŠą┤ ąĮąĄą│ąŠ čĆąĄčüčāčĆčüčŗ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
FT_STATUS SPI_Read (FT_HANDLE handle,
uint8 *buffer,
uint32 sizeToTransfer,
uint32 *sizeTransferred,
uint32 transferOptions);
ążčāąĮą║čåąĖčÅ ą┐čĆąŠčćąĖčéą░ąĄčé čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ąĖą╗ąĖ ą▒ą░ą╣čé (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ą░čĆą░ą╝ąĄčéčĆą░ transferOptions) ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI slave (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čłąĖąĮčŗ SPI).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
buffer [out] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮčŗ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
sizeToTransfer [in] ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ąĖą╗ąĖ ą▒ąĖčé, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ.
sizeTransferred [out] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čÅč湥ą╣ą║čā, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé ąĖą╗ąĖ ą▒ąĖčé.
transferOptions [in] ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░ąĄčé ąŠą┐čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠąĘąĖčåąĖąĖ ą▒ąĖčé ą┤ą╗čÅ čŹčéąĖčģ ąŠą┐čåąĖą╣ čüą╗ąĄą┤čāčÄčēąĖąĄ:
BIT0: ąĄčüą╗ąĖ 1, č鹊 sizeToTransfer čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé, ąĖąĮą░č湥 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé. ą£ą░čüą║ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą║ąŠąĮčüčéą░ąĮčéą░ą╝ąĖ SPI_TRANSFER_OPTIONS_SIZE_IN_BYTES ąĖ SPI_TRANSFER_OPTIONS_SIZE_IN_BITS.
BIT1: ąĄčüą╗ąĖ 1, č鹊 ąĮąŠąČą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ (chip select) čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą£ą░čüą║ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ SPI_TRANSFER_OPTIONS_CHIPSELECT_ENABLE.
BIT2: ąĄčüą╗ąĖ 1, č鹊 ąĮąŠąČą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ čüąĮąĖą╝ąĄčé čüąĖą│ąĮą░ą╗ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą£ą░čüą║ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ SPI_TRANSFER_OPTIONS_CHIPSELECT_DISABLE.
BIT3 .. BIT31: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ.
ąŁč鹊 ą▒ą╗ąŠą║ąĖčĆčāčÄčēą░čÅ čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčé ą▓ąŠąĘą▓čĆą░čé ąĖąĘ ąĮąĄčæ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ, ąĖą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░.
FT_STATUS SPI_ Write (FT_HANDLE handle,
uint8 *buffer,
uint32 sizeToTransfer,
uint32 *sizeTransferred,
uint32 transferOptions);
ążčāąĮą║čåąĖčÅ ąĘą░ą┐ąĖčłąĄčé čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ąĖą╗ąĖ ą▒ą░ą╣čé (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ą░čĆą░ą╝ąĄčéčĆą░ transferOptions) ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI slave (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čłąĖąĮčŗ SPI).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
buffer [in] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ąŠčéą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ąĘčÅčéčŗ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
sizeToTransfer [in] ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ąĖą╗ąĖ ą▒ąĖčé, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ.
sizeTransferred [out] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čÅč湥ą╣ą║čā, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé ąĖą╗ąĖ ą▒ąĖčé.
transferOptions [in] ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░ąĄčé ąŠą┐čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠąĘąĖčåąĖąĖ ą▒ąĖčé ą┤ą╗čÅ čŹčéąĖčģ ąŠą┐čåąĖą╣ čüą╗ąĄą┤čāčÄčēąĖąĄ:
BIT0: ąĄčüą╗ąĖ 1, č鹊 sizeToTransfer čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé, ąĖąĮą░č湥 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé. ą£ą░čüą║ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą║ąŠąĮčüčéą░ąĮčéą░ą╝ąĖ SPI_TRANSFER_OPTIONS_SIZE_IN_BYTES ąĖ SPI_TRANSFER_OPTIONS_SIZE_IN_BITS.
BIT1: ąĄčüą╗ąĖ 1, č鹊 ąĮąŠąČą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ (chip select) čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą£ą░čüą║ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ SPI_TRANSFER_OPTIONS_CHIPSELECT_ENABLE.
BIT2: ąĄčüą╗ąĖ 1, č鹊 ąĮąŠąČą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ čüąĮąĖą╝ąĄčé čüąĖą│ąĮą░ą╗ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą£ą░čüą║ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ SPI_TRANSFER_OPTIONS_CHIPSELECT_DISABLE.
BIT3 .. BIT31: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ.
ąŁč鹊 ą▒ą╗ąŠą║ąĖčĆčāčÄčēą░čÅ čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčé ą▓ąŠąĘą▓čĆą░čé ąĖąĘ ąĮąĄčæ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ, ąĖą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░.
FT_STATUS SPI_ReadWrite (FT_HANDLE handle,
uint8 *inBuffer,
uint8 *outBuffer,
uint32 sizeToTransfer,
uint32 *sizeTransferred,
uint32 transferOptions);
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī ą┐čĆąĖ ąŠą▒ą╝ąĄąĮąĄ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ SPI slave. ąó. ąĄ. ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ čéą░ą║č鹥 ą▓ą▓ąŠą┤ąĖčéčüčÅ ąĖ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąŠą┤ąĖąĮ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
inBbuffer [in] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ čüčćąĖčéčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
outBbuffer [out] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ąŠčéą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ąĘčÅčéčŗ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
sizeToTransfer [in] ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ąĖą╗ąĖ ą▒ąĖčé, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ.
sizeTransferred [out] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čÅč湥ą╣ą║čā, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé ąĖą╗ąĖ ą▒ąĖčé.
transferOptions [in] ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░ąĄčé ąŠą┐čåąĖąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠąĘąĖčåąĖąĖ ą▒ąĖčé ą┤ą╗čÅ čŹčéąĖčģ ąŠą┐čåąĖą╣ čüą╗ąĄą┤čāčÄčēąĖąĄ:
BIT0: ąĄčüą╗ąĖ 1, č鹊 sizeToTransfer čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé, ąĖąĮą░č湥 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé. ą£ą░čüą║ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą║ąŠąĮčüčéą░ąĮčéą░ą╝ąĖ SPI_TRANSFER_OPTIONS_SIZE_IN_BYTES ąĖ SPI_TRANSFER_OPTIONS_SIZE_IN_BITS.
BIT1: ąĄčüą╗ąĖ 1, č鹊 ąĮąŠąČą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ (chip select) čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą£ą░čüą║ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ SPI_TRANSFER_OPTIONS_CHIPSELECT_ENABLE.
BIT2: ąĄčüą╗ąĖ 1, č鹊 ąĮąŠąČą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ čüąĮąĖą╝ąĄčé čüąĖą│ąĮą░ą╗ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą£ą░čüą║ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ SPI_TRANSFER_OPTIONS_CHIPSELECT_DISABLE.
BIT3 .. BIT31: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ.
ąŁč鹊 ą▒ą╗ąŠą║ąĖčĆčāčÄčēą░čÅ čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčé ą▓ąŠąĘą▓čĆą░čé ąĖąĘ ąĮąĄčæ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ, ąĖą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░.
FT_STATUS SPI_IsBusy (FT_HANDLE handle, bool *state);
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąĖąĮąĖąĖ MISO ą▒ąĄąĘ ą▓čŗą┤ą░čćąĖ čéą░ą║č鹊ą▓ ąĮą░ čłąĖąĮčā SPI.
ąöą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ SPI master ąŠą┐čĆą░čłąĖą▓ą░ą╗ čüąŠčüč鹊čÅąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ MISO (Master Input Slave Output) ą▒ąĄąĘ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĘą░ą▓ąĄčĆčłąĖą╗ąŠ ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI slave ą┐čĆąĄą┤čŗą┤čāčēčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ, čćč鹊ą▒čŗ ą▒čŗčéčī ą│ąŠč鹊ą▓čŗą╝ ą║ čüą╗ąĄą┤čāčÄčēąĄą╣ ąŠą┐ąĄčĆą░čåąĖąĖ. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą┐ąŠčģąŠą┤ąĖčé čäčāąĮą║čåąĖčÅ SPI_IsBusy.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
state [out] ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ čüąŠčüč鹊čÅąĮąĖąĄ MISO.
FT_STATUS SPI_ChangeCS (FT_HANDLE handle, uint32 configOptions);
ążčāąĮą║čåąĖčÅ ąĖąĘą╝ąĄąĮąĖčé čüąŠčüč鹊čÅąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ SPI slave.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
configOptions [in] ąÆ čŹč鹊ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čüą┐ąŠčüąŠą▒ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ (chip select) ąĖ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ąŠą┤ąĖąĮ ąĖąĘ č湥čéčŗčĆąĄčģ čĆąĄąČąĖą╝ąŠą▓ (SPI mode). ąóąŠčé ąČąĄ čüą░ą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ ą▓ ChannelConfig.configOptions ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ SPI_InitChannel. ą¤ąŠą┤čĆąŠą▒ąĮąŠ čŹčéąĖ ąŠą┐čåąĖąĖ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüąĄą║čåąĖąĖ "ąóąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ", čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ChannelConfig.
ążčāąĮą║čåąĖąĖ GPIO. ąÜą░ąČą┤čŗą╣ ą║ą░ąĮą░ą╗ MPSSE ą▓ čćąĖą┐ąĄ FTDI čüąĮą░ą▒ąČąĄąĮ ą┐ąŠčĆč鹊ą╝ ą▓ą▓ąŠą┤/ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (General Purpose Input/Output, GPIO), čā ą║ąŠč鹊čĆąŠą│ąŠ ąĄčüčéčī 8 ą╗ąĖąĮąĖą╣, ą┤ąŠą┐ąŠą╗ąĮčÅčÄčēąĖčģ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗčģą╝ąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čā čćąĖą┐ą░ FT232H ąĄčüčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗ MPSSE čü ą┤ą▓čāą╝čÅ 8-ą▒ąĖčéąĮčŗą╝ąĖ ą┐ąŠčĆčéą░ą╝ąĖ ADBUS ąĖ ACBUS. ąśąĘ ąĮąĖčģ ADBUS ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ (I2C/SPI/JTAG), ąĖ ACBUS čüą▓ąŠą▒ąŠą┤ąĄąĮ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ GPIO. ąöą▓ąĄ ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ąĮąĖąČąĄ čäčāąĮą║čåąĖąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čŹčéąĖą╝ ą╗ąĖąĮąĖčÅą╝ GPIO (čéą░ą║ąČąĄ ąŠąĮąĖ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ čüčéą░čĆčłąĖą╝ ą▒ą░ą╣č鹊ą╝ ą╗ąĖąĮąĖą╣ MPSSE), ą║ąŠč鹊čĆčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ čćąĖą┐ą░čģ FTDI čü ą▒ą╗ąŠą║ą░ą╝ąĖ MPSSE.
FT_STATUS FT_WriteGPIO (FT_HANDLE handle, uint8 dir, uint8 value);
ążčāąĮą║čåąĖčÅ ąĘą░ą┐ąĖčłąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ 8 ą╗ąĖąĮąĖą╣ GPIO, čüą▓čÅąĘą░ąĮąĮčŗčģ čüąŠ čüčéą░čĆčłąĖą╝ ą▒ą░ą╣č鹊ą╝ ą║ą░ąĮą░ą╗ą░ MPSSE.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
dir [in] ąÜą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ čŹč鹊ą╝ ą▒ą░ą╣č鹥 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą╗ąĖąĮąĖą╣ GPIO. 0 ąĘą░ą┤ą░ąĄčé ą▓čģąŠą┤, 1 ą▓čŗčģąŠą┤.
value [in] ąĢčüą╗ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ GPIO ąĮą░čüčéčĆąŠąĄąĮąŠ ąĮą░ ą▓čŗčģąŠą┤, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čŹč鹊ą│ąŠ ą▒ą░ą╣čéą░ čāčüčéą░ąĮąŠą▓ąĖčé čāčĆąŠą▓ąĄąĮčī čŹč鹊ą╣ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ ą▓ ąĘą░ą┤ą░ąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. 0 čāčüčéą░ąĮąŠą▓ąĖčé ą▓čŗčģąŠą┤ ą▓ ą╗ąŠą│. 0, ąĖ 1 ą▓ ą╗ąŠą│. 1.
FT_STATUS FT_ReadGPIO (FT_HANDLE handle, uint8 *value);
ążčāąĮą║čåąĖčÅ ą┐čĆąŠčćąĖčéą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ 8 ą╗ąĖąĮąĖą╣ GPIO, čüą▓čÅąĘą░ąĮąĮčŗčģ čüąŠ čüčéą░čĆčłąĖą╝ ą▒ą░ą╣č鹊ą╝ ą║ą░ąĮą░ą╗ą░ MPSSE.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
handle [in] ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ą░ąĮą░ą╗ą░.
value [out] ąĢčüą╗ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ GPIO ąĮą░čüčéčĆąŠąĄąĮąŠ ąĮą░ ą▓čģąŠą┤, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čŹč鹊ą│ąŠ ą▒ą░ą╣čéą░ ą┐ąŠą║ą░ąČąĄčé čāčĆąŠą▓ąĄąĮčī ąĮą░ čŹč鹊ą╣ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░. 0 ąŠąĘąĮą░čćą░ąĄčé čćč鹊 ąĮą░ ą▓čģąŠą┤ąĄ ą╗ąŠą│. 0, ąĖ 1 ąŠąĘąĮą░čćą░ąĄčé ąĮą░ ą▓čģąŠą┤ąĄ ą╗ąŠą│. 1.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ FT_ReadGPIO ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ FT_WriteGPIO, ą│ą┤ąĄ ą▒čāą┤ąĄčé ąĮą░čüčéčĆąŠąĄąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ 8 ąĮąŠąČąĄą║ ą┐ąŠčĆč鹊ą▓ GPIO.
ążčāąĮą║čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮąŠą╣ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆčŗ. ąĪą╗ąĄą┤čāčÄčēąĖąĄ 2 čäčāąĮą║čåąĖąĖ ąŠą▒čŗčćąĮąŠ ąĮąĄ ąĮčāąČąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čģąŠą┤ą░/ą▓čŗčģąŠą┤ą░. ą×ą┤ąĮą░ą║ąŠ čŹčéąĖ čäčāąĮą║čåąĖąĖ ąĮąĄ ą▒čāą┤čāčé ą▓čŗąĘą▓ą░ąĮčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą║ąŠą│ą┤ą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą╗ąĖąĮą║ąŠą▓ą░ąĮą░ čüčéą░čéąĖč湥čüą║ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ Microsoft Visual C++. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čÅą▓ąĮąŠ ą▓čŗąĘą▓ą░ąĮčŗ ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ą¤čĆąĖą╝ąĄčĆ čüčéą░čéąĖč湥čüą║ąŠą╣ ą╗ąĖąĮą║ąŠą▓ą║ąĖ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ čŹč鹊ą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ, ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ą░ą║čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠą▓ąĄčĆčÅčé, ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ą╗ąĖ ą║ąŠą┤ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čéčāą╗č湥ą╣ąĮą░ Microsoft, ąĖ ąĄčüą╗ąĖ čŹč鹊 čéą░ą║, č鹊 ąŠąĮ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗąĘąŠą▓ąĄčé čŹčéąĖ čäčāąĮą║čåąĖąĖ.
void Init_libMPSSE (void);
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā libMPSSE.
void Cleanup_libMPSSE (void);
ą×čüą▓ąŠą▒ąŠą┤ąĖčé čĆąĄčüčāčĆčüčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ libMPSSE.
[ąóąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ]
ChannelConfig čŹč鹊 čüčéčĆčāą║čéčāčĆą░, ą║ąŠč鹊čĆą░čÅ čģčĆą░ąĮąĖčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą║ą░ąĮą░ą╗ą░.
/* ąĪčéčĆčāą║čéčāčĆą░, čüąŠą┤ąĄčƹȹ░čēą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ą░ąĮą░ą╗ą░ SPI. ą×ąĮą░ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ
ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą║ą░ąĮą░ą╗ą░, ąĘą░č鹥ą╝ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ
ą▓ čüą▓čÅąĘą░ąĮąĮčŗą╣ čüą┐ąĖčüąŠą║ ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣ SPI ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ
ąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣. ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ čāą┤ą░ą╗čÅąĄčéčüčÅ ąĖąĘ čüą┐ąĖčüą║ą░, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ
ą▓čŗąĘąŠą▓ąĄčé SPI_CloseChannel. */
typedef struct ChannelConfig_t
{
DWORD ClockRate; /* čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SPI, ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ 30000000 */
UCHAR LatencyTimer; /* ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ, ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ
ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 255 */
DWORD configOptions;/* ąŁč鹊 ą┐ąŠą╗ąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą┐ąŠčüąŠą▒ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī
ąŠčéą┤ąĄą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝, ą║ą░ą║ ąŠąĮ
čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ.
BIT1-0=CPOL-CPHA: 00 - MODE0 - data captured on rising edge, propagated on falling
01 - MODE1 - data captured on falling edge, propagated on rising
10 - MODE2 - data captured on falling edge, propagated on rising
11 - MODE3 - data captured on rising edge, propagated on falling
BIT4-BIT2: 000 - A/B/C/D_DBUS3 = ChipSelect
: 001 - A/B/C/D_DBUS4 = ChipSelect
: 010 - A/B/C/D_DBUS5 = ChipSelect
: 011 - A/B/C/D_DBUS6 = ChipSelect
: 100 - A/B/C/D_DBUS7 = ChipSelect
BIT5: ą┤ą╗čÅ ChipSelect ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī 1, ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čĆą░ą▓ąĄąĮ 0
BIT6-BIT31: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
*/
DWORD Pin;/* BIT7 - BIT0: ąĮą░čćą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąĮąŠąČąĄą║ ą┐ąŠčĆčéą░ */
/* BIT15 - BIT8: ąĮą░čćą░ą╗čīąĮčŗąĄ čāčĆąŠą▓ąĮąĖ ąĮąŠąČąĄą║ ą┐ąŠčĆčéą░ */
/* BIT23 - BIT16: ą║ąŠąĮąĄčćąĮąŠąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąĮąŠąČąĄą║ ą┐ąŠčĆčéą░ */
/* BIT31 - BIT24: ą║ąŠąĮąĄčćąĮčŗąĄ čāčĆąŠą▓ąĮąĖ ąĮąŠąČąĄą║ ą┐ąŠčĆčéą░ */
USHORT currentPinState;/* BIT7 - BIT0: č鹥ą║čāčēąĄąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮąŠąČąĄą║ ą┐ąŠčĆčéą░ */
/* BIT15 - BIT8: č鹥ą║čāčēąĖąĄ čāčĆąŠą▓ąĮąĖ ąĮąŠąČąĄą║ ą┐ąŠčĆčéą░ */
}ChannelConfig;
ClockRate. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ SPI ą▓ ąōčå. ąöąŠą┐čāčüčéąĖą╝čŗ ąĘąĮą░č湥ąĮąĖčÅ ąŠčé 0 ą┤ąŠ 30 ą£ąōčå.
LatencyTimer. ąóčĆąĄą▒čāąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą┤ąĄčƹȹ║ąĖ (latency timer), ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 0 .. 255. ą×ą┤ąĮą░ą║ąŠ FTDI čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ latency timer:
2 .. 255 ąöą╗čÅ ą┐ąŠą╗ąĮąŠčüą║ąŠčĆąŠčüčéąĮčŗčģ (full speed) čāčüčéčĆąŠą╣čüčéą▓ (FT2232D).
1 .. 255 ąöą╗čÅ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗčģ (full speed) čāčüčéčĆąŠą╣čüčéą▓ (FT232H, FT2232H, FT4232H).
configOptions. ąÆ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ ąŠą┐ąĖčüą░ąĮąŠ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ.
| Ōä¢ ą▒ąĖčé |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąŚąĮą░čć. |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ |
ą£ą░ą║čĆąŠčü (ąĄčüą╗ąĖ ąŠąĮ ąĄčüčéčī) |
1
..
0 |
ąŁčéąĖ ą▒ąĖčéčŗ ąĘą░ą┤ą░čÄčé ąŠą┤ąĖąĮ ąĖąĘ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓ SPI (ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ čüą╝. ą▓ [5]), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą┤ą╗čÅ SPI master. |
00 |
SPI MODE0 |
SPI_CONFIG_OPTION_MODE0 |
| 01 |
SPI MODE1 |
SPI_CONFIG_OPTION_MODE1 |
| 10 |
SPI MODE2 |
SPI_CONFIG_OPTION_MODE2 |
| 11 |
SPI MODE3 |
SPI_CONFIG_OPTION_MODE3 |
4
..
2 |
ąŁčéąĖ ą▒ąĖčéčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ą║ą░ą║ąĖąĄ ą╗ąĖąĮąĖąĖ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ SPI (chip select, CS). |
000 |
xDBUS3 |
SPI_CONFIG_OPTION_CS_DBUS3 |
| 001 |
xDBUS4 |
SPI_CONFIG_OPTION_CS_DBUS4 |
| 010 |
xDBUS5 |
SPI_CONFIG_OPTION_CS_DBUS5 |
| 011 |
xDBUS6 |
SPI_CONFIG_OPTION_CS_DBUS6 |
| 100 |
xDBUS7 |
SPI_CONFIG_OPTION_CS_DBUS7 |
| 5 |
ąŁč鹊čé ą▒ąĖčé ąĘą░ą┤ą░ąĄčé, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ ą▒čŗčéčī ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0 ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ. |
0 |
ąÉą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 |
SPI_CONFIG_OPTION_CS_ACTIVEHIGH |
| 1 |
ąÉą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0 |
SPI_CONFIG_OPTION_CS_ACTIVELOW |
| 31..6 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
|
|
|
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: xDBUS0 .. xDBUS7 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą╗ąĖąĮąĖčÅą╝ ADBUS0 .. ADBUS7, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╣ ą║ą░ąĮą░ą╗ MPSSE, ąĖąĮą░č湥 ą╗ąĖąĮąĖčÅą╝ BDBUS0 .. BDBUS7, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓č鹊čĆąŠą╣ ą║ą░ąĮą░ą╗ (ą║ąŠąĮąĄčćąĮąŠ, ąĄčüą╗ąĖ ąŠąĮ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ čŹč鹊ą│ąŠ čćąĖą┐ą░).
ąĀąĄąČąĖą╝čŗ SPI:
SPI MODE0 - ą┤ą░ąĮąĮčŗąĄ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓, ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓.
SPI MODE1 - ą┤ą░ąĮąĮčŗąĄ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓, ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓.
SPI MODE2 - ą┤ą░ąĮąĮčŗąĄ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓, ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓.
SPI MODE3 - ą┤ą░ąĮąĮčŗąĄ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓, ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓.
ą¤ąŠčĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ čĆąĄąČąĖą╝čŗ SPI čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ ąĖą╗ąĖ [5].
Pins. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ąĘąĮą░č湥ąĮąĖčÅ ą╗ąĖąĮąĖą╣, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ą╝ą╗ą░ą┤čłąĖą╝ ą▒ą░ą╣č鹊ą╝ ą║ą░ąĮą░ą╗ą░ MPSSE ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓čŗąĘčŗą▓ą░ąĮčŗ SPI_InitChannel ąĖ SPI_CloseChannel.
| Ōä¢ ą▒ąĖčé |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
| 7 .. 0 |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╗ąĖąĮąĖą╣ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ SPI_InitChannel. |
ąøąŠą│. 1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗčģąŠą┤čā, ąĖ ą╗ąŠą│. 0 ą▓čģąŠą┤čā. |
| 15 .. 8 |
ąĪąŠčüč鹊čÅąĮąĖčÅ ą╗ąĖąĮąĖą╣ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ SPI_InitChannel. |
ąøąŠą│. 1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╗ąŠą│. 1 ąĮą░ ą▓čŗčģąŠą┤ąĄ, ą╗ąŠą│. 0 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╗ąŠą│. 0 ąĮą░ ą▓čŗčģąŠą┤ąĄ. |
| 23 .. 16 |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╗ąĖąĮąĖą╣ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ SPI_CloseChannel. |
ąøąŠą│. 1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗčģąŠą┤čā, ąĖ ą╗ąŠą│. 0 ą▓čģąŠą┤čā. |
| 31 .. 24 |
ąĪąŠčüč鹊čÅąĮąĖčÅ ą╗ąĖąĮąĖą╣ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ SPI_CloseChannel. |
ąøąŠą│. 1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╗ąŠą│. 1 ąĮą░ ą▓čŗčģąŠą┤ąĄ, ą╗ąŠą│. 0 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╗ąŠą│. 0 ąĮą░ ą▓čŗčģąŠą┤ąĄ. |
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ SCLK, MOSI ąĖ čāą║ą░ąĘąĮąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ ą▒čāą┤čāčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ 1, ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ MISO ą┐ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ 0, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĘąĮą░č湥ąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ą×čüčéą░ą╗čīąĮčŗąĄ 4 ą╗ąĖąĮąĖąĖ ą▒čāą┤čāčé ąĮą░čüčéčĆąŠąĄąĮčŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čŹčéąĖą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝.
reserved. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ.
[ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ]
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī FT2232H ą║ čāčüčéčĆąŠą╣čüčéą▓čā SPI (ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ EEPROM-ą┐ą░ą╝čÅčéąĖ 93LC56B), ąĖ ą║ą░ą║ ąĄčæ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ libMPSSE-SPI.
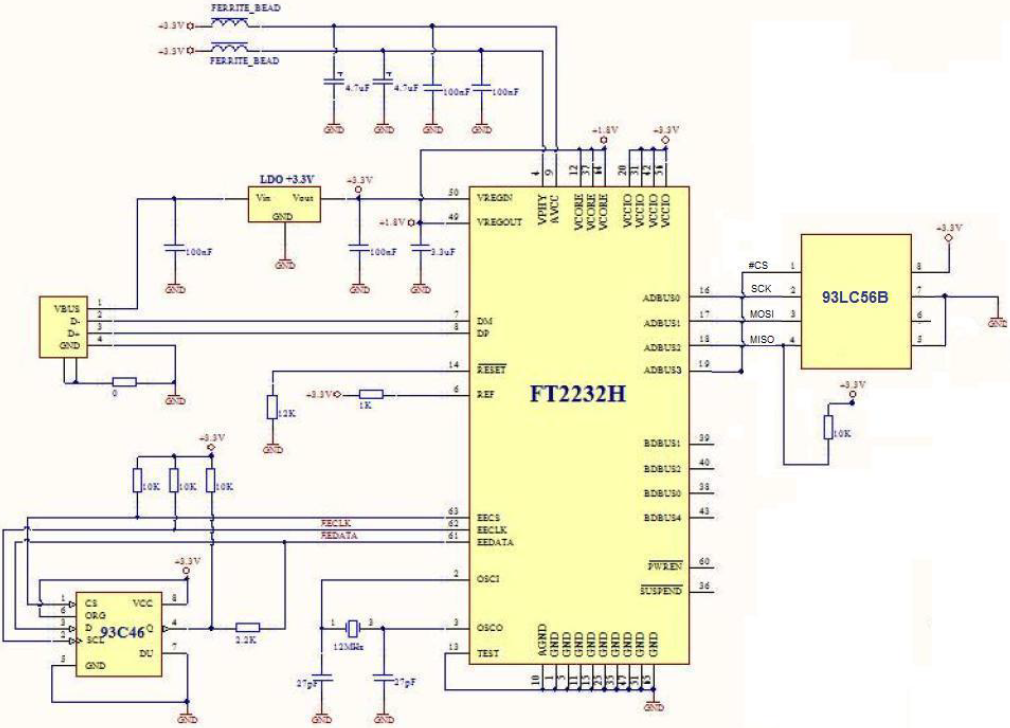
ąĀąĖčü. 3. ąĪčģąĄą╝ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ FT2232H ą║ SPI EEPROM 93LC56B.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čćąĖą┐ FT2232H ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░ ą│ąŠč鹊ą▓ąŠą╝ ą╝ąŠą┤čāą╗ąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ [6]), ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄąČąĖčé ą▓čüąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ čüčģąĄą╝čŗ ąĮą░ čĆąĖčü. 3, ą║čĆąŠą╝ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ 93LC56B ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ ąĮąĄą╣ ą▓ąĄčĆčģąĮąĖčģ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (pull-up). ą¦ąĖą┐ FT2232H čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ SPI master, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ PC č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü USB.
ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąÆ čüąĖčüč鹥ą╝ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čéčĆąĄą▒čāąĄą╝čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ D2XX (čŹč鹊 ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ [3]). ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ Linux PC, č鹊 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāą┤ą░ą╗ąĄąĮčŗ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ usbserial ąĖ ftdi_sio (čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ rmmod).
ąÜą░ą║ č鹊ą╗čīą║ąŠ čüčģąĄą╝ą░, ą┐ąŠą║ą░ąĘą░ąĮąĮą░čÅ ąĮą░ čĆąĖčü. 3, ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ PC, ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ, ą╝čŗ ą╝ąŠąČąĄą╝ ą┐ąŠą╝ąĄčüčéąĖčéčī ą║ąŠą┤ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ (sample-static.c), čäą░ą╣ą╗čŗ D2XX.h, libMPSSE_spi.h ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā libMPSSE.a ą▓ ąŠą┤ąĮčā ąĖąĘ ą┐ą░ą┐ąŠą║. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ąĖ ąĘą░ą┐čāčüčéąĖč鹥 ą┐čĆąĖą╝ąĄčĆ.
/*!
* \file sample-static.c
*
* \author FTDI
* \date 20110512
*
* Copyright ┬® 2011 Future Technology Devices International Limited
*
* ą¤čĆąŠąĄą║čé: libMPSSE
* ą£ąŠą┤čāą╗čī: SPI Sample Application - ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ 94LC56B SPI EEPROM
* \sa ąöą░čéą░čłąĖčé 93LC56B http://ww1.microchip.com/downloads/en/DeviceDoc/21794F.pdf
*
* ąśčüč鹊čĆąĖčÅ čĆąĄą▓ąĖąĘąĖą╣:
* 0.1 - 20110512 - ąĮą░čćą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ
* 0.2 - 20110801 - ąĖąĘą╝ąĄąĮąĄąĮąŠ LatencyTimer ąĮą░ 255
* ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐ąŠą┐čŗčéą║ą░ ąŠčéą║čĆčŗčéčī ą║ą░ąĮą░ą╗, č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąŠąĮ ą┤ąŠčüčéčāą┐ąĄąĮ
* ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ąĖ ąĖąĘą╝ąĄąĮąĄąĮčŗ ą╝ą░ą║čĆąŠčüčŗ
* ą┐ąŠą┤ą║ą╗čÄč湥ąĮ stdlib.h
* 0.3 - 20111212 - ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
*/
/******************************************************************************/
/* ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ąĖ */
/******************************************************************************/
/* ąĪčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ C */
#include < stdio.h>
#include < stdlib.h>
/* ąæąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ OS */
#ifdef _WIN32
#include < windows.h>
#endif
/* ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ D2XX */
#include "ftd2xx.h"
/* ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ libMPSSE */
#include "libMPSSE_spi.h"
/******************************************************************************/
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą╝ą░ą║čĆąŠčüąŠą▓ ąĖ čéąĖą┐ąŠą▓ */
/******************************************************************************/
/* ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ ą╝ą░ą║čĆąŠčüčŗ */
#define APP_CHECK_STATUS(exp) {if(exp!=FT_OK){printf("%s:%d:%s(): status(0x%x) \
!= FT_OK\n",__FILE__, __LINE__, __FUNCTION__,exp);exit(1);}else{;}};
#define CHECK_NULL(exp){if(exp==NULL){printf("%s:%d:%s(): NULL expression \
encountered \n",__FILE__, __LINE__, __FUNCTION__);exit(1);}else{;}};
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą╝ą░ą║čĆąŠčüąŠą▓, čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ */
#define SPI_DEVICE_BUFFER_SIZE 256
#define SPI_WRITE_COMPLETION_RETRY 10
#define START_ADDRESS_EEPROM 0x00 /* ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü read/write ą▓ąĮčāčéčĆąĖ EEPROM */
#define END_ADDRESS_EEPROM 0x10
#define RETRY_COUNT_EEPROM 10 /* ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą▓č鹊čĆąĮčŗ ą┐ąŠą┐čŗč鹊ą║, ąĄčüą╗ąĖ ą▒čŗą╗ą░ ąĮąĄčāą┤ą░čćą░ read/write */
#define CHANNEL_TO_OPEN 0 /* 0 ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░, 1 ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ, ąĖ čé. ą┤. */
#define SPI_SLAVE_0 0
#define SPI_SLAVE_1 1
#define SPI_SLAVE_2 2
#define DATA_OFFSET 3
/******************************************************************************/
/* ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ */
/******************************************************************************/
uint32 channels;
FT_HANDLE ftHandle;
ChannelConfig channelConf;
uint8 buffer[SPI_DEVICE_BUFFER_SIZE];
/******************************************************************************/
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐čāą▒ą╗ąĖčćąĮčŗčģ čäčāąĮą║čåąĖą╣ */
/******************************************************************************/
/*!
* \brief ą¦č鹥ąĮąĖąĄ EEPROM
*
* ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąŠčćąĖčéą░ąĄčé ą▒ą░ą╣čéčŗ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā ą▓ 93LC56B EEPROM
*
* \param[in] address ą░ą┤čĆąĄčü, ą║čāą┤ą░ ąĘą░ą┐ąĖčłąĄčéčüčÅ ą▒ą░ą╣čé
* \param[in] data čāą║ą░ąĘą░č鹥ą╗čī, ą║čāą┤ą░ ą┐ąĖčłčāčéčüčÅ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą▒ą░ą╣čéčŗ
* \return ąÆąŠąĘą▓čĆą░čéąĖčé ą║ąŠą┤ čüąŠčüč鹊čÅąĮąĖčÅ FT_STATUS (čüą╝. D2XX Programmer's Guide, ąĖą╗ąĖ [4])
*/
FT_STATUS read_byte (uint8 address, uint16 *data)
{
uint32 sizeToTransfer = 0;
uint32 sizeTransfered;
bool writeComplete = 0;
uint32 retry = 0;
bool state;
FT_STATUS status;
/* CS_High + Write command + Address */
sizeToTransfer = 1;
sizeTransfered = 0;
buffer[0] = 0xC0; /* ąÜąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ (3 ą▒ąĖčéą░) */
// ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ 5 čüčéą░čĆčłąĖčģ ą▒ąĖčé:
buffer[0] = buffer[0] | ( ( address >> 3) & 0x0F );
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BYTES|
SPI_TRANSFER_OPTIONS_CHIPSELECT_ENABLE);
APP_CHECK_STATUS(status);
/* ąŚą░ą┐ąĖčüčī čćą░čüčéąĖ ą▒ąĖčé ą░ą┤čĆąĄčüą░ */
sizeToTransfer = 4;
sizeTransfered = 0;
// ą×čüčéą░ą╗čīąĮčŗąĄ 3 ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčéą░ ą░ą┤čĆąĄčüą░:
buffer[0] = ( address & 0x07 ) << 5;
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BITS);
APP_CHECK_STATUS(status);
/* ą¦č鹥ąĮąĖąĄ 2 ą▒ą░ą╣čé */
sizeToTransfer = 2;
sizeTransfered = 0;
status = SPI_Read(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BYTES|
SPI_TRANSFER_OPTIONS_CHIPSELECT_DISABLE);
APP_CHECK_STATUS(status);
*data = (uint16)(buffer[1] << 8);
*data = (*data & 0xFF00) | (0x00FF & (uint16)buffer[0]);
return status;
}
/*!
* \brief ąŚą░ą┐ąĖčüčī EEPROM
*
* ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐ąĖčłąĄčé ą▒ą░ą╣čéčŗ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā ą▓ 93LC56B EEPROM
*
* \param[in] address ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ ą▓ EEPROM
* \param[in] data čāą║ą░ąĘą░č鹥ą╗čī, ąŠčéą║čāą┤ą░ ą▒ąĄčĆčāčéčüčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ
* \return Returns status code of type FT_STATUS(see D2XX Programmer's Guide)
* \return ąÆąŠąĘą▓čĆą░čéąĖčé ą║ąŠą┤ čüąŠčüč鹊čÅąĮąĖčÅ FT_STATUS (čüą╝. D2XX Programmer's Guide, ąĖą╗ąĖ [4])
*/
FT_STATUS write_byte (uint8 address, uint16 data)
{
uint32 sizeToTransfer = 0;
uint32 sizeTransfered = 0;
bool writeComplete = 0;
uint32 retry = 0;
bool state;
FT_STATUS status;
/* ąŚą░ą┐ąĖčüčī ą║ąŠą╝ą░ąĮą┤čŗ EWEN (čü čüąĖą│ąĮą░ą╗ąŠą╝ ą▓čŗą▒ąŠčĆą║ąĖ CS_High -> CS_Low) */
sizeToTransfer = 11;
sizeTransfered = 0;
buffer[0] = 0x9F;/* SPI_EWEN -> binary 10011xxxxxx (11 ą▒ąĖčé) */
buffer[1] = 0xFF;
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BITS|
SPI_TRANSFER_OPTIONS_CHIPSELECT_ENABLE|
SPI_TRANSFER_OPTIONS_CHIPSELECT_DISABLE);
APP_CHECK_STATUS(status);
/* CS_High + Write command + Address */
sizeToTransfer = 1;
sizeTransfered = 0;
buffer[0] = 0xA0; /* ąÜąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐ąĖčüąĖ (3 ą▒ąĖčéą░) */
// ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ 5 čüčéą░čĆčłąĖčģ ą▒ąĖčé:
buffer[0] = buffer[0] | ( ( address >> 3) & 0x0F );
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BYTES|
SPI_TRANSFER_OPTIONS_CHIPSELECT_ENABLE);
APP_CHECK_STATUS(status);
/* ąŚą░ą┐ąĖčüčī 3 ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčé ą░ą┤čĆąĄčüą░ */
sizeToTransfer = 3;
sizeTransfered = 0;
buffer[0] = ( address & 0x07 ) << 5; // ą╝ą╗ą░ą┤čłąĖąĄ 3 ą▒ąĖčéą░ ą░ą┤čĆąĄčüą░
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BITS);
APP_CHECK_STATUS(status);
/* ąŚą░ą┐ąĖčüčī 2 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ + CS_Low */
sizeToTransfer = 2;
sizeTransfered = 0;
buffer[0] = (uint8)(data & 0xFF);
buffer[1] = (uint8)((data & 0xFF00)>>8);
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BYTES|
SPI_TRANSFER_OPTIONS_CHIPSELECT_DISABLE);
APP_CHECK_STATUS(status);
/* ą×ąČąĖą┤ą░ąĮąĖąĄ ą┐ąĄčĆąĄčģąŠą┤ą░ D0 ą▓ ą╗ąŠą│. 1 */
#if 1
/* Strobe Chip Select */
sizeToTransfer = 0;
sizeTransfered = 0;
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BITS|
SPI_TRANSFER_OPTIONS_CHIPSELECT_ENABLE);
APP_CHECK_STATUS(status);
#ifndef __linux__
Sleep(10);
#endif
sizeToTransfer = 0;
sizeTransfered = 0;
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BITS|
SPI_TRANSFER_OPTIONS_CHIPSELECT_DISABLE);
APP_CHECK_STATUS(status);
#else
retry = 0;
state = FALSE;
SPI_IsBusy(ftHandle, &state);
while((FALSE==state) && (retry < SPI_WRITE_COMPLETION_RETRY))
{
printf("SPI device is busy(%u)\n", (unsigned)retry);
SPI_IsBusy(ftHandle, &state);
retry++;
}
#endif
/* ąŚą░ą┐ąĖčüčī ą║ąŠą╝ą░ąĮą┤čŗ EWEN(with CS_High -> CS_Low) */
sizeToTransfer = 11;
sizeTransfered = 0;
buffer[0] = 0x8F; /* SPI_EWEN -> binary 10011xxxxxx (11 ą▒ąĖčé) */
buffer[1] = 0xFF;
status = SPI_Write(ftHandle, buffer, sizeToTransfer, &sizeTransfered,
SPI_TRANSFER_OPTIONS_SIZE_IN_BITS|
SPI_TRANSFER_OPTIONS_CHIPSELECT_ENABLE|
SPI_TRANSFER_OPTIONS_CHIPSELECT_DISABLE);
APP_CHECK_STATUS(status);
return status;
}
/*!
* \brief ąóąŠčćą║ą░ ą▓čģąŠą┤ą░ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĖą╝ąĄčĆą░.
*
* ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠčéą║čĆąŠąĄčé ą║ą░ąĮą░ą╗, ąĘą░ą┐ąĖčłąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ EEPROM, ąĖ ą┐čĆąŠčćąĖčéą░ąĄčé
*
ą┤ą░ąĮąĮčŗąĄ ąŠą▒čĆą░čéąĮąŠ.
*
* \return ąÆąĄčĆąĮąĄčé 0 ą▓ čüą╗čāčćą░ąĄ čāčüą┐ąĄčģą░
*/
int main()
{
FT_STATUS status;
FT_DEVICE_LIST_INFO_NODE devList;
uint8 address = 0;
uint16 data;
int i, j;
#ifdef _MSC_VER
Init_libMPSSE();
#endif
channelConf.ClockRate = 5000;
channelConf.LatencyTimer = 255;
channelConf.configOptions = SPI_CONFIG_OPTION_MODE0 | SPI_CONFIG_OPTION_CS_DBUS3;
/* FinalVal-FinalDir-InitVal-InitDir (ą┤ą╗čÅ 0=in, 1=out) */
channelConf.Pin = 0x00000000;
status = SPI_GetNumChannels(&channels);
APP_CHECK_STATUS(status);
printf("Number of available SPI channels = %d\n", channels);
if(channels>0)
{
for(i=0; i < channels; i++)
{
status = SPI_GetChannelInfo(i, &devList);
APP_CHECK_STATUS(status);
printf("Information on channel number %d:\n", i);
/* ą¤ąĄčćą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ */
printf(" Flags=0x%x\n", devList.Flags);
printf(" Type=0x%x\n", devList.Type);
printf(" ID=0x%x\n", devList.ID);
printf(" LocId=0x%x\n", devList.LocId);
printf(" SerialNumber=%s\n", devList.SerialNumber);
printf(" Description=%s\n", devList.Description);
// ftHandle == 0, ąĄčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĮąĄ ąŠčéą║čĆčŗčé:
printf(" ftHandle=0x%x\n", devList.ftHandle);
}
/* ą×čéą║čĆčŗčéąĖąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ */
status = SPI_OpenChannel(CHANNEL_TO_OPEN, &ftHandle);
APP_CHECK_STATUS(status);
printf("\nhandle=0x%x status=0x%x\n", ftHandle, status);
status = SPI_InitChannel(ftHandle, &channelConf);
APP_CHECK_STATUS(status);
for(address=START_ADDRESS_EEPROM; address < END_ADDRESS_EEPROM; address++)
{
printf("writing address = %d data = %d\n", address,
address+DATA_OFFSET);
write_byte(address, (uint16)address+DATA_OFFSET);
}
for(address=START_ADDRESS_EEPROM; address < END_ADDRESS_EEPROM; address++)
{
read_byte(address, &data);
read_byte(address, &data);
printf("reading address=%d data=%d\n", address, data);
}
status = SPI_CloseChannel(ftHandle);
}
#ifdef _MSC_VER
Cleanup_libMPSSE();
#endif
return 0;
}
ą¤ąŠą║ą░ąĘą░ąĮąĮą░čÅ ą▓čŗčłąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĘą░ą┐ąĖčüčī ą┤ą░ąĮąĮčŗčģ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā EEPROM ą┐ąŠ ą░ą┤čĆąĄčüą░ą╝ 0 .. 15. ąŚą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĖąĘ ą░ą┤čĆąĄčüą░ +3, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĄčüą╗ąĖ ą░ą┤čĆąĄčü 5, č鹊 ą┐ąŠ čŹč鹊ą╝čā ą░ą┤čĆąĄčüčā ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ 8. ąÜąŠą│ą┤ą░ čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ąĖ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ą╝čŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī čüą╗ąĄą┤čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤:

ąĀąĖčü. 4. ąÆčŗą▓ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [3], čĆą░čüčüčćąĖčéą░ąĮ ąĮą░ čüąŠą▓čĆąĄą╝ąĄąĮąĮčāčÄ ą▓ąĄčĆčüąĖčÄ Visual Studio (ąĮąĄ ą╝ąĄąĮąĄąĄ 2019). ą¦č鹊ą▒čŗ ąĄą│ąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą▓ čüčĆąĄą┤ąĄ Visual Studio 2010 Ultimate, ą╝ąĮąĄ ą┐čĆąĖčłą╗ąŠčüčī ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠą▓ąŠąĘąĖčéčīčüčÅ. ąØąĖąČąĄ ąŠą┐ąĖčüą░ąĮ ą┐čĆąŠčåąĄčüčü ą┐ąŠ čłą░ą│ą░ą╝.
1. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 Visual Studio 2010 Ultimate.
2. ąĪąŠąĘą┤ą░ą╣č鹥 ą┐čĆąŠąĄą║čé Visual C++ -> ąÜąŠąĮčüąŠą╗čīąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ Win32.
3. ąĪą║ą░čćą░ą╣č鹥 ą░čĆčģąĖą▓ LibMPSSE_1.0.3.zip čü čüą░ą╣čéą░ FTDI (LibMPSSE-SPI Software Examples site:ftdichip.com).
4. ąĪąŠąĘą┤ą░ą╣č鹥 ą│ą╗ą░ą▓ąĮčŗą╣ ą╝ąŠą┤čāą╗čī ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐ąŠ ą░ąĮą░ą╗ąŠą│ąĖąĖ čü ą┐čĆąĖą╝ąĄčĆąŠą╝ ąĖąĘ AN_178 (*.cpp, čüą╝. ą▓čĆąĄąĘą║čā ą▓čŗčłąĄ).
5. ąöąŠą▒ą░ą▓čīč鹥 ą▓ ą┐čĆąŠąĄą║čé ą╝ąŠą┤čāą╗čī ftdi_infra.c ąĖąĘ ą░čĆčģąĖą▓ą░ LibMPSSE_1.0.3.zip, ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄąĖą╝ąĄąĮąŠą▓ą░ą▓ ąĄą│ąŠ ą▓ *.cpp.
6. ą×ą▒ąĄčĆąĮąĖč鹥 ą▓ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą┐čĆąĄčäąĖą║čü FTDIMPSSE_API čā čäčāąĮą║čåąĖą╣ ąĖąĘ ftdi_infra.cpp.
7. ąĀą░čüą┐ą░ą║čāą╣č鹥 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā libmpsse-windows-1.0.3.zip\release\build\Win32\libmpsse.lib ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ ą┐čĆąŠąĄą║čéą░. ąöąŠą▒ą░ą▓čīč鹥 ąĄčæ ą▓ ą┐čĆąŠąĄą║čé ą┐ąĄčĆąĄčéą░čüą║ąĖą▓ą░ąĮąĖąĄą╝ ą▓ ą║ąŠčĆąĄąĮčī ą┤ąĄčĆąĄą▓ą░ ą┐čĆąŠąĄą║čéą░.
8. ąØą░čüčéčĆąŠą╣č鹥 ą▓ ą┐čĆąŠąĄą║č鹥 ą┐čāčéąĖ ą┤ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĮčāąČąĮčŗčģ ąĘą░ą│ąŠą╗ąŠą▓ą║ąŠą▓.
9. ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé.
10. ąĀą░čüą┐ą░ą║čāą╣č鹥 libmpsse-windows-1.0.3.zip\release\build\Win32\libmpsse.dll ą▓ ą║ą░čéą░ą╗ąŠą│, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ *.exe čäą░ą╣ą╗ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄą╝ąŠą│ąŠ ą┐čĆąŠąĄą║čéą░ (ąŠą▒čŗčćąĮąŠ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čŹč鹊 ą┐ą░ą┐ą║ą░ Debug).
[ąĪčüčŗą╗ą║ąĖ]
1. AN_178 Programming Guide for libMPSSE SPI site:ftdichip.com.
2. AN_114: ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ FT2232H ą║ čłąĖąĮąĄ SPI.
3. LibMPSSE-SPI Software Examples site:ftdichip.com.
4. FTDI: čüą┐čĆą░ą▓ąŠčćąĮąĖą║ ą┐ąŠ čäčāąĮą║čåąĖčÅą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ D2XX.
5. ąśąĮč鹥čĆč乥ą╣čü SPI.
6. FT2232H Board - ą╝ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ ąĮą░ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╝ čćąĖą┐ąĄ ą╝ąŠčüčéą░ USB čäąĖčĆą╝čŗ FTDI.
7. 220728FT2232H-SPI-writer.zip - ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ą│ąŠč鹊ą▓čŗą╣ ą┐čĆąŠąĄą║čé ą┤ą╗čÅ Visual Studio 2010. |



