|
ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī čüą░ą╝ ą╝ąŠąČąĄčé ą┐ąĖčüą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ ą░ą┤ą░ą┐č鹥čĆą░ CANalyst-II [1] (ąĖ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ CAN-ą░ą┤ą░ą┐č鹥čĆąŠą▓ Zhuhai Chuangxin Technology Co., Ltd, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą║čāą┐ąĖčéčī ąĮą░ AliExpress). ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ąĖ ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗąĄ čü ąĮąĄą╣ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐ąĖčüą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ LabVIEW, Visual Studio ąĪ++, Visual Studio C#, Visual Basic, Delphi, C++Builder.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĖ čäą░ą╣ą╗ąŠą▓ ą┤ąĄą║ą╗ą░čĆą░čåąĖą╣ čäčāąĮą║čåąĖą╣:
ąóą░ą▒ą╗ąĖčåą░ 1. ążą░ą╣ą╗čŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ.
| ążą░ą╣ą╗ |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ |
| ControlCAN.lib |
ąöą▓ąŠąĖčćąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ą╗čÅ čüčéą░čéąĖč湥čüą║ąŠą╣ ą╗ąĖąĮą║ąŠą▓ą║ąĖ ą║ąŠą┤ą░ ą▓ Visual Studio C++, CBuilder. |
| ControlCAN.h |
ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ čü ą┤ąĄą║ą╗ą░čĆą░čåąĖąĄą╣ čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ ą║ąŠą┤ą░ ąĮą░ C/C++. |
| ControlCAN.pas |
ążą░ą╣ą╗ čü ą┤ąĄą║ą╗ą░čĆą░čåąĖąĄą╣ čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ Delphi. |
| ControlCAN.DLL |
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ąĘą░ą│čĆčāąČą░ąĄą╝čŗčģ čäčāąĮą║čåąĖą╣ (ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą║ąŠą┤ąĄ C++, C#, Object Pascal, Visual Basic). |
| ControlCAN.bas |
ążą░ą╣ą╗ ą┤ąĄą║ą╗ą░čĆą░čåąĖą╣ čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ Visual Basic. |
| ControlCAN.llb |
ą£ąŠą┤čāą╗čī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ LabVIEW. |
[ąóąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą║ąŠąĮčüčéą░ąĮčéčŗ]
ąóą░ą▒ą╗ąĖčåą░ 2. ąæą░ąĘąŠą▓čŗąĄ čéąĖą┐čŗ.
| ąóąĖą┐ |
ąÉąĮą░ą╗ąŠą│ ą▓ C++ |
ąÉąĮą░ą╗ąŠą│ ą▓ C# |
| BYTE |
unsigned char |
Byte |
| CHAR |
char |
char |
| USHORT |
unsigned short |
UInt16 |
| UINT |
unsigned int |
UInt32 |
| ULONG |
unsigned long |
UInt64 |
ąÜąŠąĮčüčéą░ąĮčéčŗ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ (ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆ DevType API-čäčāąĮą║čåąĖą╣) ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3.
ąóą░ą▒ą╗ąĖčåą░ 3. ąóąĖą┐čŗ ą░ą┤ą░ą┐č鹥čĆąŠą▓, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣.
| #define |
ąŚąĮą░č湥ąĮąĖąĄ |
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą░ą┤ą░ą┐č鹥čĆčā |
| VCI_USBCAN1 |
3 |
USBCAN-1 |
| VCI_USBCAN2 |
4 |
USBCAN-2A, USBCAN-2C, CANalyst-II |
[ąĪčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ]
ąĪčéčĆčāą║čéčāčĆą░ VCI_BOARD_INFO čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą░ą┤ą░ą┐č鹥čĆąŠą▓ čüąĄčĆąĖąĖ USB-CAN. ą×ąĮą░ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ VCI_ReadBoardInfo.
typedef struct _VCI_BOARD_INFO
{
USHORT hw_Version;
USHORT fw_Version;
USHORT dr_Version;
USHORT in_Version;
USHORT irq_Num;
BYTE can_Num;
CHAR str_Serial_Num[20];
CHAR str_hw_Type[40];
USHORT Reserved[4];
} VCI_BOARD_INFO, *PVCI_BOARD_INFO;
hw_Version ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą▓ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, 0x0100 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé V1.00.
fw_Version ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ firmware ą▓ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠą╝ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ.
dr_Version ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ USB ą▓ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠą╝ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ.
in_Version ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čäčāąĮą║čåąĖą╣ ą▓ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠą╝ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ.
irq_Num ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ čüąĖčüč鹥ą╝ąŠą╣.
can_Num ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ CAN, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠąĄ ą░ą┤ą░ą┐č鹥čĆąŠą╝.
str_Serial_Num ąĪąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ ą░ą┤ą░ą┐č鹥čĆą░.
str_hw_Type ą×ą┐ąĖčüą░ąĮąĖąĄ čéąĖą┐ą░ ą░ą┤ą░ą┐č鹥čĆą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ "USBCAN V1.00" (čŹč鹊 ASCIIZ-čüčéčĆąŠą║ą░, ąĘą░ą▓ąĄčĆčłą░čÄčēą░čÅčüčÅ '\0').
Reserved ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ čüąĖčüč鹥ą╝ąŠą╣.
ąÆ čäčāąĮą║čåąĖčÅčģ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ (VCI_Transmit ąĖ VCI_Receive) čüčéčĆčāą║čéčāčĆą░ VCI_CAN_OBJ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄčüčŗą╗ą║ąĖ čäčĆąĄą╣ą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN.
typedef struct _VCI_CAN_OBJ
{
UINT ID;
UINT TimeStamp;
BYTE TimeFlag;
BYTE SendType;
BYTE RemoteFlag;
BYTE ExternFlag;
BYTE DataLen;
BYTE Data[8];
BYTE Reserved[3];
}VCI_CAN_OBJ, *PVCI_CAN_OBJ;
ID ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ č乊čĆą╝ą░č鹥 čü ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄą╝ ą▓ą┐čĆą░ą▓ąŠ.
TimeStamp ą£ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čäčĆąĄą╣ą╝ą░, ąŠčéčüčćąĖčéčŗą▓ą░ąĄą╝ą░čÅ ąŠčé ą╝ąŠą╝ąĄąĮčéą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN, ą▓ ąĄą┤ąĖąĮąĖčåą░čģ 0.1 ą╝čü.
TimeFlag ąÆ ą║ąŠąĮč鹥ą║čüč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ 1 ą▓ čŹč鹊ą╝ ą┐ąŠą╗ąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéčī ą┐ąŠą╗čÅ TimeStamp. ą¤ąŠą╗čÅ TimeFlag ąĖ TimeStamp ąĖą╝ąĄčÄčé ąĘąĮą░č湥ąĮąĖąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ čäčĆąĄą╣ą╝ą░.
SendType ąóąĖą┐ ą┐ąŠčüčŗą╗ą║ąĖ. 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé Normal, 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé Single Send (ąŠą┤ąĖąĮąŠčćąĮą░čÅ ąŠčéą┐čĆą░ą▓ą║ą░).
RemoteFlag ążą╗ą░ą│ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čāą┤ą░ą╗ąĄąĮąĮąŠą│ąŠ čģąŠčüčéą░ (remote flag). 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čäčĆąĄą╣ą╝ remote, 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ.
ExternFlag ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéąĖą┐ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░: 1 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ (extern ID), 0 čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║č鹊čĆ (standard ID).
DataLen ąöą╗ąĖąĮą░ ą┤ą░ąĮąĮčŗčģ čäčĆąĄą╣ą╝ą░ (Data Length Code, DLC), ąĘąĮą░č湥ąĮąĖąĄ ą▓ čŹč鹊ą╝ ą┐ąŠą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 8.
Data ąöą░ąĮąĮčŗąĄ ą┐ą░ą║ąĄčéą░ (ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ čäčĆąĄą╣ą╝ą░).
Reserved ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ čüąĖčüč鹥ą╝ąŠą╣.
ąĪčéčĆčāą║čéčāčĆą░ VCI_INIT_CONFIG ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąŠąĮąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ CAN. ą×ąĮą░ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖąĖ VCI_InitCan.
typedef struct _INIT_CONFIG
{
DWORD AccCode;
DWORD AccMask;
DWORD Reserved;
UCHAR Filter; // 0, 1 ą┐čĆąĖąĄą╝ ą▓čüąĄčģ čäčĆąĄą╣ą╝ąŠą▓.
// 2 čäąĖą╗čīčéčĆą░čåąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ (11-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ID).
// 3 čäąĖą╗čīčéčĆą░čåąĖčÅ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ (29-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ID).
UCHAR Timing0;
UCHAR Timing1;
UCHAR Mode;
} VCI_INIT_CONFIG, *PVCI_INIT_CONFIG;
AccCode ążąĖą╗čīčéčĆčāąĄą╝čŗą╣ ą║ąŠą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░.
AccMask ą£ą░čüą║ą░ čäąĖą╗čīčéčĆą░ ą┐čĆąĖąĄą╝ą░.
Reserved ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
Filter ą£ąĄč鹊ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ, ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 0 .. 3, ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ VCI_InitCan ąĖ čéą░ą▒ą╗ąĖčåčā 5.
Timing0 ą¤ą░čĆą░ą╝ąĄčéčĆ ą┤ą╗čÅ SJA1000, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖą╣ čüą║ąŠčĆąŠčüčéčī (BTR0) [3, 4].
Timing1 ą¤ą░čĆą░ą╝ąĄčéčĆ ą┤ą╗čÅ SJA1000, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖą╣ čüą║ąŠčĆąŠčüčéčī (BTR1) [3, 4].
Mode ąĀą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝: 0 ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ (ąŠą▒čŗčćąĮčŗą╣ čāąĘąĄą╗ čüąĄčéąĖ CAN), 1 č鹊ą╗čīą║ąŠ ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĮąĖąĄ (ą▒ąĄąĘ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĮąĖą║ą░ą║ ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ čüąĄčéčī CAN), 2 čĆąĄąČąĖą╝ čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ (ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĘą░ą║ąŠą╗čīčåąŠą▓čŗą▓ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čü ą▓čŗčģąŠą┤ą░ ąĮą░ ą▓čģąŠą┤).
ą¤ąŠą╗čÅ Timing0 ąĖ Timing1 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ čłąĖąĮčŗ CAN ąĮą░ čüčéą░ą┤ąĖąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. čéą░ą▒ą╗ąĖčåčā 4).
ąóą░ą▒ą╗ąĖčåą░ 4. ąÜąŠąĮčüčéą░ąĮčéčŗ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čüą║ąŠčĆąŠčüčéąĖ CAN (baud rate).
| CAN Baud Rate |
Timing0 (BTR0) |
Timing1 (BTR1) |
| 10 kbps |
0xBF |
0xFF |
| 20 kbps |
0x18 |
0x1ąĪ |
| 40 kbps |
0x87 |
0xFF |
| 50 kbps |
0x09 |
0x1ąĪ |
| 80 kbps |
0x83 |
0xFF |
| 100 kbps |
0x04 |
0x1ąĪ |
| 125 kbps |
0x03 |
0x1ąĪ |
| 200 kbps |
0x81 |
0xFA |
| 250 kbps |
0x01 |
0x1C |
| 400 kbps |
0x80 |
0xFA |
| 500 kbps |
0x00 |
0x1C |
| 666 kbps |
0x80 |
0xB6 |
| 800 kbps |
0x00 |
0x16 |
| 1000 kbps |
0x00 |
0x14 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ąĮčāąČąĮąŠ čüą╗ąĄą┤ąŠą▓ą░čéčī čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅą╝ ą┤ą╗čÅ SJA1000 (16 ą£ąōčå, čüą╝. [3, 4]) ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čüą║ąŠčĆąŠčüčéąĖ.
2. ąĢą┤ąĖąĮąĖčåą░ kbps ąŠąĘąĮą░čćą░čé čäąĖąĘąĖč湥čüą║čāčÄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčé čłąĖąĮčŗ (ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║).
3. ąÉą┤ą░ą┐č鹥čĆ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéąĖ ąĮąĖąČąĄ 10 kbps.
4. ą×ą▒čŗčćąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą┐čĆčÅą╝čāčÄ ąĮą░čüčéčĆąŠąĄąĮą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4. ąöą╗čÅ ą┤čĆčāą│ąĖčģ ąĮąĄčéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, čćč鹊ą▒čŗ ąŠą▒ąĮą░čĆčāąČąĖčéčī ąĖ ą┐ąŠą╗čāčćąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąśą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĖąĮčüčéčĆčāą╝ąĄąĮčé ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ USB_CAN TOOL. (ąĪą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ┬½6. ą¤ą╗ą░ą│ąĖąĮ 2: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą▒ąŠą┤ą░čģ.pdf┬╗ [2]).
[API-čäčāąĮą║čåąĖąĖ]
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą░ą┤ą░ą┐č鹥čĆčā.
DWORD __stdcall VCI_OpenDevice(DWORD DevType, DWORD DevIndex, DWORD Reserved);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
Reserved ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ, ąĘą┤ąĄčüčī ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘąĮą░č湥ąĮąĖąĄ 0.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ; 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĮąĄčāą┤ą░č湥ą╣; -1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą┤ą░ą┐č鹥čĆą░ USB-CAN ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé ąĖą╗ąĖ USB ąŠčéą║ą╗čÄč湥ąĮ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
DWORD dwRel;
dwRel = VCI_OpenDevice(nDeviceType, nDeviceInd, 0);if(dwRel != 1)
{
MessageBox(_T("ąØąĄčāą┤ą░čćąĮąŠąĄ ąŠčéą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą║čĆčŗčéąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ.
DWORD __stdcall VCI_CloseDevice(DWORD DevType, DWORD DevIndex);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ; 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĮąĄčāą┤ą░č湥ą╣; -1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą┤ą░ą┐č鹥čĆą░ ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
DWORD dwRel;
dwRel = VCI_CloseDevice(nDeviceType, nDeviceInd);if(dwRel != 1)
{
MessageBox(_T("ąØąĄčāą┤ą░čćąĮąŠąĄ ąĘą░ą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą░ą┤ą░ą┐č鹥čĆą░ CAN.
DWORD __stdcall VCI_InitCAN(DWORD DevType,
DWORD DevIndex,
DWORD CANIndex,
PVCI_INIT_CONFIG pInitConfig);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
CANIndex ąśąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ) ą║ą░ąĮą░ą╗ą░ CAN, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0. ąĢčüą╗ąĖ ą░ą┤ą░ą┐č鹥čĆ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 2 ą║ą░ąĮą░ą╗ą░, č鹊 CANIndex ą╝ąŠąČąĄčé ą▒čŗčéčī 0 ąĖą╗ąĖ 1.
pInitConfig ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čéąĖą┐ą░ VCI_INIT_CONFIG.
ą¤ąŠą╗čÅ PVCI_INIT_CONFIG:
pInitConfig->AccCode, pInitConfig->AccMask ą¤ąŠą╗čÅ AccCode ąĖ AccMask čĆą░ą▒ąŠčéą░čÄčé ą▓ą╝ąĄčüč鹥, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ą░ą║ąĖąĄ ą┐ą░ą║ąĄčéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖąĮčÅčéčŗ, ą░ ą║ą░ą║ąĖąĄ ąŠčéą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ. ąŁčéąĖ ą┤ą▓ą░ čĆąĄą│ąĖčüčéčĆą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąĘąĮą░č湥ąĮąĖčÅ ID, ą▓čŗčĆą░ą▓ąĮąĄąĮąĮčŗąĄ ą▓ą╗ąĄą▓ąŠ, čé. ąĄ. čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ą▒ąĖčé (Bit31) ą┐ąŠą╗ąĄą╣ AccCode ąĖ AccMask ą▓čüąĄą│ą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüą░ą╝ąŠą╝čā čüčéą░čĆčłąĄą╝čā ą▒ąĖčéčā ąĘąĮą░č湥ąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ID.
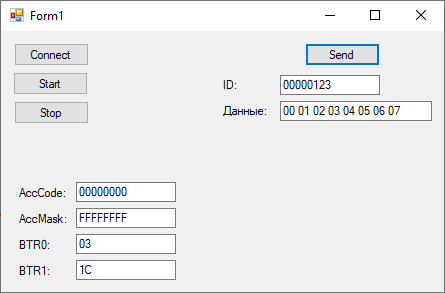
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ AccCode čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0x24600000 (čé. ąĄ. čŹč鹊 čćąĖčüą╗ąŠ 0x00000123, čüą┤ą▓ąĖąĮčāč鹊ąĄ ą▓ą╗ąĄą▓ąŠ ąĮą░ 21 ą▒ąĖčé), AccMask čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0x00000000, č鹊 č鹊ą│ą┤ą░ ą▒čāą┤čāčé ą┐čĆąĖąĮąĖą╝ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ č鹥 ą┐ą░ą║ąĄčéčŗ CAN, čā ą║ąŠč鹊čĆčŗčģ ID čäčĆąĄą╣ą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ čĆą░ą▓ąĄąĮ 0x123 (ąĘąĮą░č湥ąĮąĖąĄ AccMask 0x00000000 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓čüąĄ ą▒ąĖčéčŗ ą▓ ą┐čĆąĖąĮčÅč鹊ą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąĄ ą▓ą░ąČąĮčŗ ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ). ąĢčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ AccCode čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0x24600000, AccMask ą▓ 0x00600000 (0x00000003, čüą┤ą▓ąĖąĮčāč鹊ąĄ ą▓ą╗ąĄą▓ąŠ ąĮą░ 21 ą▒ąĖčé), č鹊ą│ą┤ą░ ą▒čāą┤čāčé ą┐čĆąĖąĮąĖą╝ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ č鹥 čüąŠąŠą▒čēąĄąĮąĖčÅ CAN, čā ą║ąŠč鹊čĆčŗčģ ID čäčĆąĄą╣ą╝ą░ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0x120 .. 0x123 (ąĘąĮą░č湥ąĮąĖąĄ AccMask 0x600000 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▒ąĖčéčŗ 0 ąĖ 1 ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ, čé. ąĄ. ą╝ąŠą│čāčé ą▒čŗčéčī ą╗čÄą▒čŗą╝ąĖ).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹčéąĖ ą┐čĆąĖą╝ąĄčĆčŗ ąĮą░čüčéčĆąŠą╣ą║ąĖ čäąĖą╗čīčéčĆą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ (11-ą▒ąĖčéąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░), čé. ąĄ. ąĘą┤ąĄčüčī čüą░ą╝čŗą╣ ąĘąĮą░čćąĖą╝čŗą╣ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╣ 11-ą╣ ą▒ąĖčé. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ čäčĆąĄą╣ą╝, č鹊 čā ąĮąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ID 29 ą▒ąĖčé, č鹊ą│ą┤ą░ AccCode ąĖ AccMask čüą░ą╝čŗą╝ ąĘąĮą░čćąĖą╝čŗą╝ ą▒čāą┤ąĄčé 29-ą╣ ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░.
pInitConfig->Filter ąŁč鹊 ą┐ąŠą╗ąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄąČąĖą╝ čäąĖą╗čīčéčĆą░čåąĖąĖ, čüą╝. čéą░ą▒ą╗ąĖčåčā 5.
ąóą░ą▒ą╗ąĖčåą░ 5. ąĀąĄąČąĖą╝čŗ čäąĖą╗čīčéčĆą░čåąĖąĖ.
| ąŚąĮą░č湥ąĮąĖąĄ |
ąĀą░ą▒ąŠčéą░ čäąĖą╗čīčéčĆą░ |
| 0, 1 |
ążąĖą╗čīčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ čéąĖą┐ąŠą▓ čäčĆąĄą╣ą╝ąŠą▓, ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ, čéą░ą║ ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ. |
| 2 |
ążąĖą╗čīčéčĆ čäąĖą╗čīčéčĆčāąĄčé č鹊ą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čäčĆąĄą╣ą╝čŗ, čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čüčĆą░ąĘčā ąŠčéą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ. |
| 3 |
ążąĖą╗čīčéčĆ čäąĖą╗čīčéčĆčāąĄčé č鹊ą╗čīą║ąŠ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čäčĆąĄą╣ą╝čŗ, čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čüčĆą░ąĘčā ąŠčéą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ. |
pInitConfig->Timing0, pInitConfig->Timing1 ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüą║ąŠčĆąŠčüčéąĖ BTR0 ąĖ BTR1 ą┤ą╗čÅ SJA1000 [3, 4].
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ; 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĮąĄčāą┤ą░č湥ą╣; -1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą┤ą░ą┐č鹥čĆą░ ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
DWORD dwRel;
VCI_INIT_CONFIG vic;
dwRel = VCI_OpenDevice(nDeviceType, nDeviceInd, 0);
if(dwRel != 1)
{
MessageBox(_T("ą×čłąĖą▒ą║ą░ ąŠčéą║čĆčŗčéąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
vic.AccCode=0x80000008;
vic.AccMask=0xFFFFFFFF;
vic.Filter=1;
vic.Timing0=0x00;
vic.Timing1=0x14;
vic.Mode=0;
dwRel = VCI_InitCAN(nDeviceType, nDeviceInd, nCANInd, &vic);
if(dwRel != 1)
{
VCI_CloseDevice(nDeviceType, nDeviceInd);
MessageBox(_T("ą×čłąĖą▒ą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ą░ą┤ą░ą┐č鹥čĆąĄ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ ą┐čĆąĖą║ą╗ą░ą┤ąĮčŗčģ ąĘą░ą┤ą░čć ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ.
DWORD __stdcall VCI_ReadBoardInfo(DWORD DevType,
DWORD DevIndex,
PVCI_BOARD_INFO pInfo);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
pInfo ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ VCI_BOARD_INFO, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ąĘą░ą┐ąŠą╗ąĮčÅčéčīčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠą▒ ą░ą┤ą░ą┐č鹥čĆąĄ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ; 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĮąĄčāą┤ą░č湥ą╣; -1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą┤ą░ą┐č鹥čĆą░ ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
int nCANInd = 0;
VCI_BOARD_INFO vbi;
DWORD dwRel;
bRel = VCI_ReadBoardInfo(nDeviceType, nDeviceInd, nCANInd, &vbi);
if(dwRel != 1)
{
MessageBox(_T("ą×čłąĖą▒ą║ą░ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, čüą║ąŠą╗čīą║ąŠ ąĄčēąĄ ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĮčÅčéčŗčģ, ąĮąŠ ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣.
DWORD __stdcall VCI_GetReceiveNum(DWORD DevType,
DWORD DevIndex,
DWORD CANIndex);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
CANIndex ąśąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░ CAN-ą░ą┤ą░ą┐č鹥čĆą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ą┤čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖąĮčÅčéčŗ, ąĮąŠ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ. -1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ USB-CAN ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé ąĖą╗ąĖ ąŠčéą║ą╗čÄč湥ąĮąŠ.
#include "ControlCan.h"
int ret = VCI_GetReceiveNum(2,0,0);
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą░ą┤ą░ą┐č鹥čĆą░ USB-CAN.
DWORD __stdcall VCI_ClearBuffer(DWORD DevType,
DWORD DevIndex,
DWORD CANIndex);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
CANIndex ąśąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░ CAN-ą░ą┤ą░ą┐č鹥čĆą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ; 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĮąĄčāą┤ą░č湥ą╣; -1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą┤ą░ą┐č鹥čĆą░ ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
bRel = VCI_ClearBuffer(nDeviceType, nDeviceInd, nCANInd);
ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ISR) CAN-ą░ą┤ą░ą┐č鹥čĆą░.
DWORD __stdcall VCI_StartCAN(DWORD DevType, DWORD DevIndex, DWORD CANIndex);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
CANIndex ąśąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░ CAN-ą░ą┤ą░ą┐č鹥čĆą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ; 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĮąĄčāą┤ą░č湥ą╣; -1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą┤ą░ą┐č鹥čĆą░ ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
VCI_INIT_CONFIG vic;
if(VCI_OpenDevice(nDeviceType, nDeviceInd, 0) != 1)
{
MessageBox(_T("ą×čłąĖą▒ą║ą░ ąŠčéą║čĆčŗčéąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
if(VCI_InitCAN(nDeviceType, nDeviceInd, nCANInd, &vic) != 1)
{
VCI_CloseDevice(nDeviceType, nDeviceInd);
MessageBox(_T("ą×čłąĖą▒ą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
if(VCI_StartCAN(nDeviceType, nDeviceInd, nCANInd) != 1)
{
VCI_CloseDevice(nDeviceType, nDeviceInd);
MessageBox(_T("ą×čłąĖą▒ą║ą░ čüčéą░čĆčéą░ čāčüčéčĆąŠą╣čüčéą▓ą░!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüą▒čĆąŠčüą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN.
DWORD __stdcall VCI_ResetCAN(DWORD DevType,
DWORD DevIndex,
DWORD CANIndex);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
CANIndex ąśąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░ CAN-ą░ą┤ą░ą┐č鹥čĆą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ; 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĮąĄčāą┤ą░č湥ą╣; -1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą┤ą░ą┐č鹥čĆą░ ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
bRel = VCI_ResetCAN(nDeviceType, nDeviceInd, nCANInd);
if(dwRel != 1)
{
MessageBox(_T("ąØąĄčāą┤ą░čćąĮčŗą╣ čüą▒čĆąŠčü!"),
_T("warning"),
MB_OK|MB_ICONQUESTION);
return FALSE;
}
ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN.
DWORD __stdcall VCI_Transmit(DWORD DeviceType,
DWORD DeviceInd,
DWORD CANInd,
PVCI_CAN_OBJ pSend,
DWORD Length);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
CANIndex ąśąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░ CAN-ą░ą┤ą░ą┐č鹥čĆą░.
pSend ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆą▓čāčÄ čüčéčĆčāą║čéčāčĆčā VCI_CAN_OBJ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ čäčĆąĄą╣ą╝ąŠą▓ ą┤ą░ąĮąĮčŗčģ.
Length ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ čäčĆąĄą╣ą╝ąŠą▓ ą┤ą░ąĮąĮčŗčģ, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 1000, ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖčģ čüą║ąŠčĆąŠčüč鹥ą╣ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 48.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ čäčĆąĄą╣ą╝ąŠą▓, -1 ąŠąĘąĮą░čćą░ąĄčé ąŠčłąĖą▒ą║čā čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
VCI_CAN_OBJ vco[48];
memset (&vco, 0, sizeof(VCI_CAN_OBJ)*48);
for(int i = 0; i < 48; i++)
{
vco[i].ID = i;
vco[i].RemoteFlag = 0;
vco[i].ExternFlag = 0;
vco[i].DataLen = 8;
for(int j = 0; j < 8; j++)
vco.Data[j] = j;
}
dwRel = VCI_Transmit(nDeviceType,
nDeviceInd,
nCANInd,
&vco,
48);
ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ CAN.
DWORD __stdcall VCI_Receive(DWORD DevType,
DWORD DevIndex,
DWORD CANIndex,
PVCI_CAN_OBJ pReceive,
ULONG Len,
INT WaitTime);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
CANIndex ąśąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░ CAN-ą░ą┤ą░ą┐č鹥čĆą░.
pReceive ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆą▓čāčÄ čüčéčĆčāą║čéčāčĆčā VCI_CAN_OBJ ą▓ ą╝ą░čüčüąĖą▓ąĄ ą┤ą╗čÅ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ čäčĆąĄą╣ą╝ąŠą▓ ą┤ą░ąĮąĮčŗčģ.
Len ąÜąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą▓ ą╝ą░čüčüąĖą▓ąĄ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą║ą░ą┤čĆąŠą▓ (ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ą┤čĆąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčÅč鹊, čĆąĄą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąĮčÅčéčŗčģ ą║ą░ą┤čĆąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ čŹč鹊ą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ). ąŚąĮą░č湥ąĮąĖąĄ Len ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆą░ąĘą╝ąĄčĆ ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ, ą▓ ąĄą┤ąĖąĮąĖčåą░čģ sizeof(VCI_CAN_OBJ). ąÉą┤ą░ą┐č鹥čĆ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆą░ąĘą╝ąĄčĆ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą▒čāč乥čĆą░ ąĮą░ 2000 čäčĆąĄą╣ą╝ąŠą▓ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą▓čŗą▒ąĖčĆą░ąĄčé ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ą┤ą╗ąĖąĮčā ą┐čĆąĖąĄą╝ąĮąŠą│ąŠ ą╝ą░čüčüąĖą▓ą░ ąŠčé 1 ą┤ąŠ 2000 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ąŠčéčĆąĄą▒ąĮąŠčüčéčÅą╝ąĖ čüą▓ąŠąĄą╣ čüąĖčüč鹥ą╝čŗ ąĖ čĆą░ą▒ąŠč湥ą╣ čüčĆąĄą┤čŗ. ąÜą░ą║ ą┐čĆą░ą▓ąĖą╗ąŠ, čĆą░ąĘą╝ąĄčĆ ą╝ą░čüčüąĖą▓ą░ pReceive ąĖ Len ąŠą▒ą░ ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▒ąŠą╗ąĄąĄ 2000, ąĮą░ą┐čĆąĖą╝ąĄčĆ: 2500. ąŁč鹊 ą╝ąŠąČąĄčé čŹčäč乥ą║čéąĖą▓ąĮąŠ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą║ąŠąĮčäą╗ąĖą║čéčŗ ą┤ą░ąĮąĮčŗčģ, ą▓čŗąĘą▓ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą░ą┤čĆąĄčüą░. ąÆ č鹊 ąČąĄ ą▓čĆąĄą╝čÅ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čŗąĘčŗą▓ą░čéčī VCI_Receive ą║ą░ąČą┤čŗąĄ 30 ą╝čü. ąöą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čüą▓ąŠąĄą▓čĆąĄą╝ąĄąĮąĮąŠčüčéąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ, ą┐ąŠčüčéą░čĆą░ą╣č鹥čüčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čāą╝ąĄąĮčīčłąĖčéčī (ą┐ąŠą┤ąŠą▒čĆą░čéčī) čćą░čüč鹊čéčā ą▓čŗąĘąŠą▓ąŠą▓ VCI_Receive. ą¤ąŠą║ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▒čāč乥čĆ ąĮąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ą║ą░ąČą┤čŗą╣ čĆą░ąĘ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ čäčĆąĄą╣ą╝ąŠą▓, čćč鹊 ą╝ąŠąČąĄčé ą┐ąŠą▓čŗčüąĖčéčī čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ.
WaitTime ąÆčĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (čéą░ą╣ą╝ą░čāčé) ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ. ą×ą▒čŗčćąĮąŠ čāą║ą░ąĘčŗą▓ą░čÄčé ąĘą┤ąĄčüčī ąĘąĮą░č湥ąĮąĖąĄ 10 .. 50, -1 ąŠąĘąĮą░čćą░ąĄčé ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠąĄ ą▓čĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čäčĆąĄą╣ą╝ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ čĆąĄą░ą╗čīąĮąŠ ą┐čĆąŠčćąĖčéą░ąĮčŗ, -1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║čā čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
int nCANInd = 0;
long lRel;
VCI_CAN_OBJ vco[100];
lRel = VCI_Receive(nDeviceType, nDeviceInd, nCANInd, &vco, 100, 1000);
if(lRel > 0)
{
... /* ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┤ą░ąĮąĮčŗčģ */
}
else if (lRel == -1)
{
/* ąŻčüčéčĆąŠą╣čüčéą▓ąŠ USB-CAN ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé ąĖą╗ąĖ ąŠčéą║ą╗čÄč湥ąĮąŠ ąŠčé USB.
ąÆčŗ ą╝ąŠąČąĄč鹥 ą▓čŗąĘą▓ą░čéčī VCI_CloseDevice ąĖ ąĘą░ąĮąŠą▓ąŠ ą▓čŗąĘą▓ą░čéčī
VCI_OpenDevice. ąŁč鹊 ą╝ąŠąČąĄčé ąŠą▒ąĄčüą┐ąĄčćąĖčéčī čŹčäč乥ą║čé
ą│ąŠčĆčÅč湥ą╣ ąĘą░ą╝ąĄąĮčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB-CAN. */
}
[ąöčĆčāą│ąĖąĄ čäčāąĮą║čåąĖąĖ ąĖ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ]
ąÆ čŹč鹊ą╣ ą│ą╗ą░ą▓ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ čäčāąĮą║čåąĖą╣, ąĮąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čü ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čüą░ Zhou Ligong (ZLG), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ ą▓ ControlCAN.dll ą░ą┤ą░ą┐č鹥čĆą░ USB-CAN. ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ZLG-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ čĆąĄąČąĖą╝ ą┤ą╗čÅ ą▓č鹊čĆąĖčćąĮąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ąĮąĄ ą▓čŗąĘčŗą▓ą░ą╣č鹥 čŹčéąĖ čäčāąĮą║čåąĖąĖ, čćč鹊ą▒čŗ ąĮąĄ ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī.
ąĪčéčĆčāą║čéčāčĆą░ VCI_BOARD_INFO1 čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ ąĖ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą░ą┤ą░ą┐č鹥čĆą░ čüąĄčĆąĖąĖ USB-CAN, ąĮą░čģąŠą┤čÅčēąĄą╝čüčÅ ą▓ ąÆą░čłąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ, ą║ąŠą│ą┤ą░ ą║ ąĮąĄą╝čā ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąŠą┤ąĮąŠ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čéą░ą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ (ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ąŠ 4 čāčüčéčĆąŠą╣čüčéą▓). ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąŠą╗ąĮąĄąĮą░ ą▓ čäčāąĮą║čåąĖąĖ VCI_FindUsbDevice.
typedef struct _VCI_BOARD_INFO1
{
USHORT hw_Version;
USHORT fw_Version;
USHORT dr_Version;
USHORT in_Version;
USHORT irq_Num;
BYTE can_Num;
BYTE Reserved;
CHAR str_Serial_Num[8];
CHAR str_hw_Type[16];
CHAR str_Usb_Serial [4][4];
}VCI_BOARD_INFO1, *PVCI_BOARD_INFO1;
ą¤ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ:
hw_Version ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ą▓ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, 0x0100 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé V1.00. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
fw_Version ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ firmware, ą▓ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠą╝ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
dr_Version ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ USB-ą┤čĆą░ą╣ą▓ąĄčĆą░, ą▓ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠą╝ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
in_Version ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░, ą▓ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠą╝ hex-ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
irq_Num ąØąŠą╝ąĄčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┐ą╗ą░č鹊ą╣, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
can_Num ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ CAN. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
Reserved ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ čüąĖčüč鹥ą╝ąŠą╣.
str_Serial_Num ąĪąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ ą┐ą╗ą░čéčŗ. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
str_hw_Type ąĪčéčĆąŠą║ą░ ąŠą┐ąĖčüą░ąĮąĖčÅ čéąĖą┐ą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ąĮą░ą┐čĆąĖą╝ąĄčĆ "USBCAN V1.00". ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
str_Usb_Serial ąĪąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ USB-CAN, ą▓ąŠąĘą▓čĆą░čéąĖčé 4 ąĮą░ą▒ąŠčĆą░ 4-čüąĖą╝ą▓ąŠą╗čīąĮčŗčģ čüčéčĆąŠą║ ASCII, ą║ą░ąČą┤ą░čÅ čüčéčĆąŠą║ą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ ąŠą┤ąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ 4 čāčüčéčĆąŠą╣čüčéą▓ą░ USB-CAN ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
ą×čüąĮąŠą▓ąĮąŠąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ:
1. ą¤čĆąĖą▓čÅąĘą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ: ą║ąŠą│ą┤ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą▓ąŠ ą▓č鹊čĆąŠą╣ čĆą░ąĘ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┤ąĮąŠąĘąĮą░čćąĮąŠ čüą▓čÅąĘą░ąĮąŠ. ąÆčŗąĘą▓ą░ą▓ čŹčéčā čäčāąĮą║čåąĖčÄ, ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī 4-ąĘąĮą░čćąĮčŗą╣ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü čüąĄčĆąĖą╣ąĮčŗą╝ ąĮąŠą╝ąĄčĆąŠą╝, ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čāąĮąĖą║ą░ą╗čīąĮąŠąĄ čüą▓čÅąĘčŗą▓ą░ąĮąĖąĄ ąĖ čłąĖčäčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (ą┐ą░čĆą░ą╝ąĄčéčĆ str_Serial_Num ą▓ čüčéčĆčāą║čéčāčĆąĄ VCI_BOARD_INFO, ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ čäčāąĮą║čåąĖąĄą╣ VCI_ReadBoardInfo, ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čłąĖčäčĆąŠą▓ą░ąĮąĖčÅ.
2. ąÜąŠą│ą┤ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓ ąĮą░čģąŠą┤čÅčéčüčÅ ąĮą░ ąŠą┤ąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ, ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü čüąĄčĆąĖą╣ąĮčŗą╝ ąĮąŠą╝ąĄčĆąŠą╝, ąŠą┤ąĮąŠ ąĘą░ ą┤čĆčāą│ąĖą╝. ąó. ąĄ. ąĄčüą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, č鹊 ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą▓ą░ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĘąĮą░čéčī ąĄą│ąŠ ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╣ ąĮąŠą╝ąĄčĆ. ą¤čĆąĖ ą▓čŗąĘąŠą▓ąĄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čüąĄčĆąĖą╣ąĮčŗąĄ ąĮąŠą╝ąĄčĆą░ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ str_Usb_Serial[4][4], ą│ą┤ąĄ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ ą┐ąŠ ą┐ąŠčĆčÅą┤ą║čā čĆą░ą▓ąĮčŗ 0, 1, 2 ąĖ 3.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓čüąĄ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ VCI_BOARD_INFO1, ą║čĆąŠą╝ąĄ 菹╗ąĄą╝ąĄąĮč鹊ą▓ str_Usb_Serial[4][4], ąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. ąŁčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī, ą▓čŗąĘą▓ą░ą▓ VCI_ReadBoardInfo.
ążčāąĮą║čåąĖčÅ VCI_ConnectDevice ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ą║ąŠčĆčĆąĄą║čéąĮąŠ ą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB-CAN ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā, čćč鹊ą▒čŗ čü ąĮąĖą╝ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ. ąÆąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB-CAN ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą║ą╗čÄč湥ąĮąŠ ąŠčé ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ąĖąĘ-ąĘą░ ą▓ąĮąĄčłąĮąĖčģ ą┐ąŠą╝ąĄčģ ąĖą╗ąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąĢčüą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ąŠčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ ą▒čŗčüčéčĆąŠąĄ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĖčéčāą░čåąĖąĖ.
DWORD __stdcall VCI_ConnectDevice(DWORD DevType, DWORD DevIndex);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
CANIndex ąśąĮą┤ąĄą║čü ą║ą░ąĮą░ą╗ą░ CAN-ą░ą┤ą░ą┐č鹥čĆą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠą▒ą╝ąĄąĮ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą▓ąŠąĘą╝ąŠąČąĄąĮ, 0 ąŠą▒ą╝ąĄąĮ ąĮąĄą▓ąŠąĘą╝ąŠąČąĄąĮ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int ret=VCI_ConnectDevice(2,0);
if(ret == 1)
SetWindowText("ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ");
else if (ret == 0)
{
SetWindowText("ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą▓ą░ą╗ąĖą╗ąŠčüčī...");
StopFlag=1;
for(int i=0; i < 10; i++)
{
Sleep(1000);
VCI_BOARD_INFO vbi;
// ą¤čĆąŠą▓ąĄčĆą║ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ ą┐ąŠčĆčéčā USB ą║ąŠą╝ą┐čīčÄč鹥čĆą░:
int temp = VCI_FindUsbDevice(&vbi);
if(temp == 1)
{
SetWindowText("ąŚą░ą┐čāčüčéąĖč鹥 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ.");
// ąÆčŗą┐ąŠą╗ąĮąĖč鹥 čäčāąĮą║čåąĖčÄ OpenDevice, čćč鹊ą▒čŗ čüąĮąŠą▓ą░ ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ.
}
else
SetWindowText("ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéčüčāčéčüčéą▓čāąĄčé ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ.");
}
}
ążčāąĮą║čåąĖčÅ čüą▒čĆą░čüčŗą▓ą░ąĄčé ą░ą┤ą░ą┐č鹥čĆ USB-CAN, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ąŠčéą║čĆčŗčéčī ąĄą│ąŠ ąĘą░ąĮąŠą▓ąŠ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ VCI_OpenDevice.
DWORD __stdcall VCI_UsbDeviceReset(DWORD DevType, DWORD DevIndex, DWORD Reserved);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
DevType ąóąĖą┐ ą░ą┤ą░ą┐č鹥čĆą░ (čüą╝. ą▓čŗčłąĄ čéą░ą▒ą╗ąĖčåčā 3).
DevIndex ąśąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┤ą░ą┐č鹥čĆ USB-CAN, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮą┤ąĄą║čüą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓, č鹊 ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ DevIndex čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü (ąĮąŠą╝ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÄčēąĖą╣čüčÅ čü 0.
Reserved ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 1 ąŠąĘąĮą░čćą░ąĄčé čāčüą┐ąĄčłąĮčŗą╣ čĆąĄąĘčāą╗čīčéą░čé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ, 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüą▒ąŠą╣ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ, -1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéčüčāčéčüčéą▓čāąĄčé.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
int nDeviceType = 4; /* USB-CAN2.0 */
int nDeviceInd = 0;
int nCANInd = 0;
DWORD dwRel;
bRel = VCI_UsbDeviceReset(nDeviceType, nDeviceInd, 0);
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĮą░ą╣čéąĖ č鹥ą║čāčēąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB-CAN, ą║ąŠą│ą┤ą░ ą║ ąŠą┤ąĮąŠą╝čā ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čéą░ą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓.
DWORD __stdcall VCI_FindUsbDevice(PVCI_BOARD_INFO1 pInfo);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
pInfo ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā, ą│ą┤ąĄ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĮą░ą╣ą┤ąĄąĮąĮčŗčģ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ čāčüčéčĆąŠą╣čüčéą▓.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą░ą┤ą░ą┐č鹥čĆąŠą▓ USB-CAN, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ C++:
#include "ControlCan.h"
CString ProductSn[5];
VCI_BOARD_INFO1 vbi;
CString strtemp,str;
int num = VCI_FindUsbDevice(&vbi);
for(int i=0; i < num; i++)
{
str="";
for(int j=0; j < 4; j++)
{
strtemp.Format("%c", pData->str_Usb_Serial[i][j]);
str+=strtemp;
}
ProductSn[i] = "USBCAN-" + str;
}
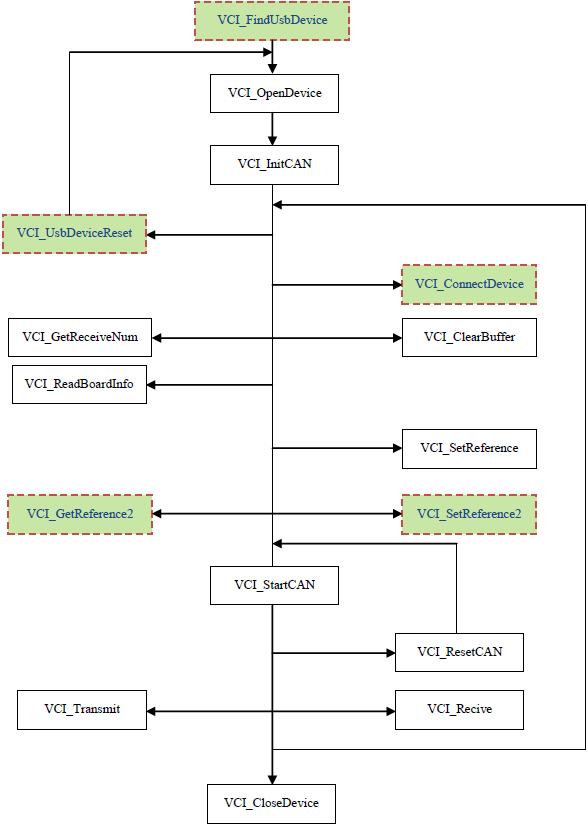
ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą▒ą╗ąĄą│čćąĖčéčī čĆą░ą▒ąŠčéčā čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ąĮą░ ąŠą┤ąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą╗ąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ (ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ąĮą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ąĮąĖąČąĄ ąĘąĄą╗ąĄąĮčŗą╝ąĖ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ą░ą╝ąĖ. ąŁč鹊 čäčāąĮą║čåąĖąĖ VCI_FindUsbDevice, VCI_UsbDeviceReset, VCI_ResumeConfig, VCI_ConnectDevice, VCI_GetReference2 ąĖ VCI_SetReference2. ąÆąŠ ą▓čĆąĄą╝čÅ ą▓č鹊čĆąĖčćąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čŹčéąĖ čäčāąĮą║čåąĖąĖ ą▓čŗąĘčŗą▓ą░čéčī ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ. ąöą░ąČąĄ ąĄčüą╗ąĖ čŹčéąĖ čäčāąĮą║čåąĖąĖ ąĮąĄ ą┐čĆąĖą╝ąĄąĮčÅčéčī čüąŠą▓čüąĄą╝, ą▓čüąĄ čĆą░ą▓ąĮąŠ ą╝ąŠąČąĮąŠ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓čüąĄą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ ą░ą┤ą░ą┐č鹥čĆą░ USB-CAN.
ąĀą░ą▒ąŠčéą░ čü CANalyst-II ąĮą░ čÅąĘčŗą║ąĄ C# ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ąĘą░ą│čĆčāąĘą║ąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ControlCAN.dll ąĖ ą▓čŗąĘąŠą▓ąĄ ąĄčæ čäčāąĮą║čåąĖą╣.
private const string DllFilePath = @"ControlCAN.dll";
[DllImport(DllFilePath, CallingConvention = CallingConvention.StdCall)]
extern static UInt32 VCI_CloseDevice(UInt32 DeviceType, UInt32 DeviceInd);
[DllImport(DllFilePath, CallingConvention = CallingConvention.StdCall)]
extern static UInt32 VCI_OpenDevice(UInt32 DeviceType, UInt32 DeviceInd, UInt32 Reserved);
...
ąÜąŠą┤ ą┐čĆąĖą╝ąĄčĆą░ čüąŠčģčĆą░ąĮąĄąĮ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┐čĆąŠčüčéčŗą╝, čćč鹊ą▒čŗ ą▒čŗą╗ ą┐ąŠąĮčÅčéąĮąĄąĄ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ čü ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣.
ą¤čĆąĖąĮąĖą╝ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ą┐ąĖčłčāčéčüčÅ ą▓ čäą░ą╣ą╗ ą╗ąŠą│ą░ logapp.txt.
200225 04:01:35 [CANalyst.Form1] [START]
200225 04:01:47 [CANalyst.Form1] RX: ID:0x321 ąóąĖą┐ čäčĆąĄą╣ą╝ą░:data čüčéą░ąĮą┤. ą┤ą░ąĮąĮčŗąĄ: 5C AD FF 3B FC D1 FF 2B
200225 04:01:50 [CANalyst.Form1] RX: ID:0x321 ąóąĖą┐ čäčĆąĄą╣ą╝ą░:data čüčéą░ąĮą┤. ą┤ą░ąĮąĮčŗąĄ: 5D AD FF A5 FE F6 EF C8
200225 04:01:59 [CANalyst.Form1] RX: ID:0x321 ąóąĖą┐ čäčĆąĄą╣ą╝ą░:data čüčéą░ąĮą┤. ą┤ą░ąĮąĮčŗąĄ: 5E AD FF AA B3 1B DF C8
200225 04:03:41 [CANalyst.Form1] [exit]
ąÆ ą░čĆčģąĖą▓ąĄ [5] ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī čŹč鹊čé ą┐čĆąŠąĄą║čé ą┐ąŠą╗ąĮąŠčüčéčīčÄ.
[ąĪčüčŗą╗ą║ąĖ]
1. CANalyst-II - čüčĆąĄą┤čüčéą▓ąŠ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĖ CAN ąĖ CANopen.
2. 170627CANalyst-II.7z - čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┤ąĖčüą║ą░ CANalyst-II (ą┤čĆą░ą╣ą▓ąĄčĆ, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ API, ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░).
3. CAN Bit Time Calculation site:bittiming.can-wiki.info.
4. SJA1000 Timing Calculator site:esacademy.com.
5. 200226CANalyst-II-minimal-example.zip - ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ API-čäčāąĮą║čåąĖą╣ ControlCAN.dll ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ CANalyst-II. |



