|
ąźąŠčĆąŠčłąŠ, ąĄčüą╗ąĖ ąŠčłąĖą▒ą║čā ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą╝ąŠąČąĮąŠ ą╗ąĄą│ą║ąŠ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ, č鹊ą│ą┤ą░ ąĄčæ ąĮą░ą╣čéąĖ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊, ąŠčüąŠą▒ąĄąĮąĮąŠ ą┐čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ JTAG-ąŠčéą╗ą░ą┤čćąĖą║ą░. ąØąŠ ą║ą░ą║ ą▒čŗčéčī, ą║ąŠą│ą┤ą░ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠčÅą▓ą╗čÅąĄčéčüčÅ čüą╗čāčćą░ą╣ąĮąŠ, ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ?
ąØąĄą┤ą░ą▓ąĮąŠ čüč鹊ą╗ą║ąĮčāą╗čüčÅ čü ąĮąĄčéčĆąĖą▓ąĖą░ą╗čīąĮąŠą╣ ąŠčłąĖą▒ą║ąŠą╣ - ą┐čĆąĖą▒ąŠčĆ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓ ąŠčéą╗ą░ą┤čćąĖą║ąĄ, ąĮąŠ ąĄčüą╗ąĖ ą▓čŗą║ą╗čÄčćąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ ąĖ ą┐ąŠą┤ąŠąČą┤ą░čéčī 2 ą╝ąĖąĮčāčéčŗ, č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓ąĄą┤ąĄčé čüąĄą▒čÅ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠ - ąĖąĮąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ą░ ąĖąĮąŠą│ą┤ą░ ąĘą░ą▓ąĖčüą░ąĄčé. ąĢčüą╗ąĖ čüčĆą░ąĘčā ą┐ąĄčĆąĄą┤ąĄčĆąĮčāčéčī ą┐ąĖčéą░ąĮąĖąĄ, ą▒ąĄąĘ ąĘą░ą┤ąĄčƹȹ║ąĖ, č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ.
ą×č湥ą▓ąĖą┤ąĮąŠ, čćč鹊 čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčéą╗ą░ą┤čćąĖą║ą░ ąŠčéą╗ąŠą▓ąĖčéčī čŹčéčā ąŠčłąĖą▒ą║čā ąĮąĄą╗čīąĘčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮą░ ąĮąĄ ą┐čĆąŠčÅą▓ą╗čÅąĄčéčüčÅ. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą┤ą╗čÅ ąĄčæ ą┐ąŠąĖčüą║ą░ ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą║ą░ą║ąŠą╣-č鹊 ą▓čŗą▓ąŠą┤ ą▓ ą╗ąŠą│, čćč鹊ą▒čŗ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░čéčī, ą║ą░ą║ąŠą╣ ą║ąŠą┤ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ, ąĖ ą│ą┤ąĄ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą▒ąŠą╣.
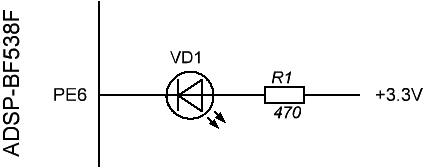
ąĪą▓ąĄč鹊ą┤ąĖąŠą┤, ą┐ąĖčēą░ą╗ą║ą░. ąÆ ą┐čĆąŠčüč鹥ą╣čłąĖčģ čüą╗čāčćą░čÅčģ ą╝ąŠąČąĄčé ą┐ąŠą╝ąŠčćčī čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮąŠąČą║ą░ą╝ąĖ ą┐ąŠčĆč鹊ą▓, ą║ ą║ąŠč鹊čĆčŗą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čüą▓ąĄč鹊ą┤ąĖąŠą┤ (ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓), ąĖą╗ąĖ ąĘą▓čāą║ąŠą▓ąŠą╣ ąĖąĘą╗čāčćą░č鹥ą╗čī. ąóąŠą│ą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ ą╝ąŠąČąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī ą▓ąĖąĘčāą░ą╗čīąĮąŠ ą┐ąŠ ą▓čüą┐čŗčłą║ą░ą╝, ą┐ąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÄ ąĘą▓čāą║ą░, ąĖą╗ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░.
#include < cdefBF538.h >
#include < services_types.h >
//ąóąĄčüč鹊ą▓čŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ą░č鹊ą┤ąŠą╝ ą║ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ PE6.
//ąÉąĮąŠą┤ č湥čĆąĄąĘ čĆąĄąĘąĖčüč鹊čĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ +3.3V.
#define portLED PE6
//ą£ą░ą║čĆąŠčüčŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝:
#define OFFLED() (*pPORTEIO_SET = portLED)
#define ONLED() (*pPORTEIO_CLEAR = portLED)
#define LEDCHANGE() (*pPORTEIO_TOGGLE = portLED)
#define LED(on) (on?ONLED():OFFLED())
void ConfigureOutputs (void)
{
//ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░
// ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝, ąĮąŠ ąŠą▒čŗčćąĮąŠ ąĘą┤ąĄčüčī ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ
// ąĖ ą┤čĆčāą│ąĖąĄ ą▓čŗčģąŠą┤čŗ.
*pPORTEIO_FER |= portLED; //ąĮą░čüčéčĆąŠąĖčéčī ą▓čŗą▓ąŠą┤ ą║ą░ą║ GPIO.
*pPORTEIO_DIR |= portLED; //ąĮą░čüčéčĆąŠąĖčéčī ą║ą░ą║ ą▓čŗčģąŠą┤.
*pPORTEIO_SET = portLED; //==1, ą┐ąŠą│ą░čüąĖčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤
}
#include "delay.h"
void main (void)
{
Initialize();
ConfigureOutputs();
...
while(1)
{
LED(1);
delay_ms(500);
LED(0);
delay_ms(500);
}
}
ąŁč鹊čé ą╝ąĄč鹊ą┤ ąĮą░ąĖą╝ąĄąĮąĄąĄ čéčĆąĄą▒ąŠą▓ą░č鹥ą╗ąĄąĮ ą║ čĆąĄčüčāčĆčüą░ą╝ ą┐ąŠ ą┐ą░ą╝čÅčéąĖ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░, ąĮąŠ ąĮąĄ ąŠč湥ąĮčī ąĖąĮč乊čĆą╝ą░čéąĖą▓ąĄąĮ. ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ čüą╗ąŠąČąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐čĆąĖą┤ąĄčéčüčÅ čüą┤ąĄą╗ą░čéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ ąĖč鹥čĆą░čåąĖą╣, ą┐ąŠą┤čüčéą░ą▓ą╗čÅčÅ ą╝ą░ą║čĆąŠčüčŗ ą▓ č鹥 ą╝ąĄčüčéą░ ą║ąŠą┤ą░, ą│ą┤ąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ.
ąÜąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ą╗ąŠą║ąŠą▓ ą║ąŠą┤ą░. ąĢčüą╗ąĖ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī, č鹊 ą▓ ą┐ąŠąĖčüą║ąĄ ąŠčłąĖą▒ą║ąĖ čüą╗ąĄą┤čāąĄčé ą┐ąŠčüč鹥ą┐ąĄąĮąĮąŠ čāą▒ąĖčĆą░čéčī ąĖąĘ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą║čāčüą║ąĖ čäčāąĮą║čåąĖą╣. ąśą┤ąĄą░ą╗čīąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé, ąĄčüą╗ąĖ ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą┐ąŠ čéą░ą║ąŠą╝čā čüčåąĄąĮą░čĆąĖčÄ:
1. ąŻą▒čĆą░čéčī ą┐ąŠą╗ąŠą▓ąĖąĮčā ą░ą╗ą│ąŠčĆąĖčéą╝ą░, ą│ą┤ąĄ ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą▓ąĄčĆąŠčÅčéąĮąŠ ąĮą░ą╗ąĖčćąĖąĄ ąŠčłąĖą▒ą║ąĖ.
2. ąĢčüą╗ąĖ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąŠčłąĖą▒ą║ą░ ąŠčüčéą░ą╗ą░čüčī, č鹊 čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąŠąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąŠčüčéą░ą▓čłąĄą╝čüčÅ ą║ąŠą┤ąĄ. ąĢčüą╗ąĖ ąĮąĄčé, č鹊 ąŠčłąĖą▒ą║ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĘą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą║ąŠą┤ąĄ. ąóąŠą│ą┤ą░ ąĮčāąČąĮąŠ ąŠčüčéą░ą▓ąĖčéčī ą║ąŠą┤, ą│ą┤ąĄ ą▓ąĄčĆąŠčÅčéąĮąŠ ąŠčłąĖą▒ą║ą░, ąĖ ą│ą┤ąĄ ąĮąĄčé ąŠčłąĖą▒ą║ąĖ, ą║ąŠą┤ ąĘą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī.
3. ą¤ąĄčĆąĄą╣čéąĖ ąĮą░ čłą░ą│ 1 čü ąŠčüčéą░ą▓čłąĖą╝čüčÅ ą▒ą╗ąŠą║ąŠą╝ ą║ąŠą┤ą░, ą│ą┤ąĄ ą▓ąĄčĆąŠčÅčéąĮąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ąŠčłąĖą▒ą║ą░.
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čŹčéąĖčģ ąĖč鹥čĆą░čåąĖą╣ ąŠčüčéą░ąĮąĄčéčüčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ą▒ą╗ąŠą║ ą║ąŠą┤ą░, ą│ą┤ąĄ ąŠčéą╗ąŠą▓ąĖčéčī ąŠčłąĖą▒ą║čā čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮą░ą╝ąĮąŠą│ąŠ ą┐čĆąŠčēąĄ.
ąÆčŗą▓ąŠą┤ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓ ą╗ąŠą│ UART. ąĢčüą╗ąĖ ąĄčüčéčī čéą░ą║ą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī, č鹊 čŹč鹊 čüą░ą╝čŗą╣ ąĖąĮč乊čĆą╝ą░čéąĖą▓ąĮčŗą╣ ąĖ čāą┤ąŠą▒ąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé. ąÆčüčéą░ą▓ą╗čÅą╣č鹥 ą▓ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓čŗą▓ąŠą┤ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣, ąĖ č鹊ą│ą┤ą░ ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą│ą┤ąĄ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą▒ąŠą╣. ąÆ ąŠą║ąĮąĄ č鹥čĆą╝ąĖąĮą░ą╗ą░ čŹčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ąŠčüčéą░ąĮčāčéčüčÅ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą▒čŗą╗ąŠ ąĘą░ą▓ąĖčüą░ąĮąĖąĄ, čüą▒ąŠą╣ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ, ąĄą│ąŠ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ ąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĄ, ąĖą╗ąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░. ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī UART ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ, čüą╝. ą▓ [1].
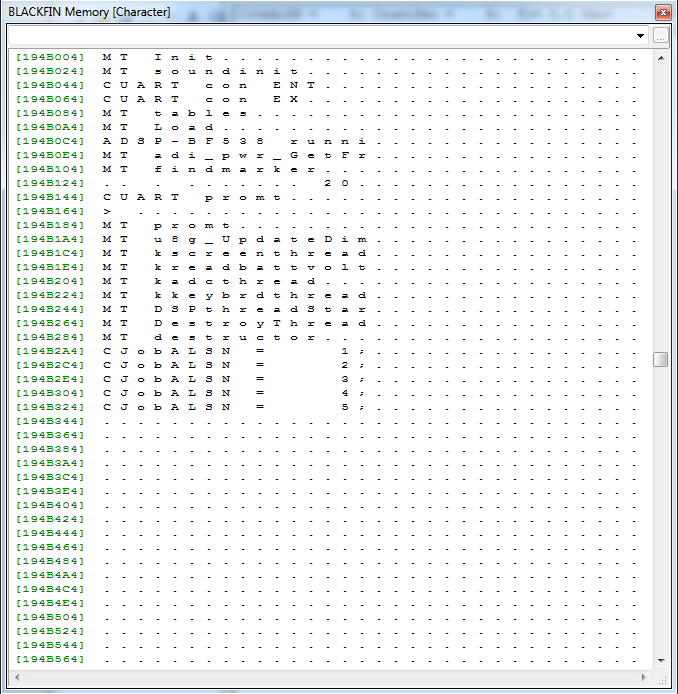
ąÆčŗą▓ąŠą┤ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓ ą╗ąŠą│ ą┐ą░ą╝čÅčéąĖ. ąĪą╝čŗčüą╗ ąĖą┤ąĄąĖ ą▓ č鹊ą╝, čćč鹊ą▒čŗ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ą▓ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆą░čÅ ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ąŠčéą╗ą░ą┤čćąĖą║ą░ ąĖ/ąĖą╗ąĖ ą┐čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą╗ąŠą│ čüąŠąŠą▒čēąĄąĮąĖą╣. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ą▓ąŠąĖčćąĮčŗą╣ ą╗ąŠą│ ąĖą╗ąĖ ą┤ą░ąČąĄ č鹥ą║čüč鹊ą▓čŗą╣ (ąĄčüą╗ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒čŖąĄą╝ ą┐ą░ą╝čÅčéąĖ). ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąĘą░ą▓ąĖčüą░ąĮąĖąĄ, č鹊 ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ čüąĖčüč鹥ą╝ąĄ ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝. ą¤čĆąŠčåąĄčüčüąŠčĆ ą┐čĆąĖ čŹč鹊ą╝ čüą▒čĆąŠčüąĖčéčüčÅ, ąĮąŠ ąĄčüą╗ąĖ ą┐ąĖčéą░ąĮąĖąĄ ąĮąĄ ą▓čŗą║ą╗čÄčćą░ą╗ąŠčüčī, č鹊 ąŠčéą╗ą░ą┤ąŠčćąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą┐ą░ą╝čÅčéąĖ ąŠčüčéą░ąĮčāčéčüčÅ, ąĖ ąĖčģ ą╝ąŠąČąĮąŠ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī ą▓ ąŠą║ąĮąĄ BLACKFIN Memory. ąØąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ čéą░ą║ąŠą╣ ąŠčéą╗ą░ą┤ą║ąĖ.
ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĖ čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą╗ąŠą│:
#define MEMLOGMSGLEN 16
#define MEMLOGSIZE 2048
#define MEMLOGMASK (MEMLOGSIZE-1)
// ąĪčéčĆčāą║čéčāčĆą░ ą┤ą╗čÅ ąŠą┤ąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ ą▓ ą╗ąŠą│:
typedef struct _TLog
{
char mess[MEMLOGMSGLEN]; //č鹥ą║čüč鹊ą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ
VDK::PanicCode pancode; //ą║ąŠą┤ KernelPanic
VDK::SystemError panerr; //ą║ąŠą┤ čüąĖčüč鹥ą╝ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ SEQSTAT)
int panval; //ą║ąŠą┤ čüąŠą▒čŗčéąĖčÅ ąŠčłąĖą▒ą║ąĖ
u32 panpc; //ą░ą┤čĆąĄčü, ą│ą┤ąĄ ą▓ąĄčĆąŠčÅčéąĮąŠ ą▓ąŠąĘąĮąĖą║ą╗ą░ ąŠčłąĖą▒ą║ą░
}TLog;
//ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ:
#pragma section ("no_init_sdram", NO_INIT)
u32 memlogidx;
#pragma section ("no_init_sdram", NO_INIT)
TLog memlogarr[MEMLOGSIZE];
//ążčāąĮą║čåąĖčÅ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą╗ąŠą│:
void memlog (char *memmsg)
{
u32 idx = memlogidx & MEMLOGMASK;
int len;
memset(memlogarr[idx].mess, 0, MEMLOGMSGLEN);
len = strlen(memmsg);
if (len>MEMLOGMSGLEN)
len = MEMLOGMSGLEN;
strncpy(memlogarr[idx].mess, memmsg, len);
memlogidx++;
}
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą╗ąŠą│ ą▓ č鹥ą╗ąĄ čäčāąĮą║čåąĖąĖ KernelPanic ą┐čĆąŠąĄą║čéą░ VDK:
extern "C" void KernelPanic(VDK::PanicCode, VDK::SystemError, const int );
void KernelPanic(VDK::PanicCode pc, VDK::SystemError se, const int val)
{
int *ppc; //ą░ą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ PanicPC
u32 idx = memlogidx & MEMLOGMASK;
memlogarr[idx].pancode = pc;
memlogarr[idx].panerr = se;
memlogarr[idx].panval = val;
ppc = (int*)0xff80145c;
memlogarr[idx].panpc = *ppc;
memlog("KernelPanic");
}
ąÉą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ 0xff80145c čü ą░ą┤čĆąĄčüąŠą╝ ą║ąŠą┤ą░, ą│ą┤ąĄ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą┐ą░ąĮąĖą║ą░ čÅą┤čĆą░ PanicPC, ą▒čŗą╗ ą▓čŗčćąĖčüą╗ąĄąĮ ą░ąĮą░ą╗ąĖąĘąŠą╝ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ MAP-čäą░ą╣ą╗ą░ ą╗ąĖąĮą║ąĄčĆą░ (čüą╝. ąĮąĖąČąĄ čüąĄą║čåąĖčÄ VDK: ąŠą▒čĆą░ą▒ąŠčéą║ą░ KernelPanic).
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ č鹥ą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ:
void main (void)
{
memlogidx = 0;
memset(memlogarr, 0, sizeof(TLog)*256);
ConfigureInputs();
ConfigureOutputs();
PowerON();
Init();
memlog("MT Init");
soundinit();
memlog("MT soundinit");
uartcns = new CUART(UART_CONSOLE);
memlog("MT CUART");
...
while(1)
{
...
}
}
ą¤čĆąŠčüą╝ąŠčéčĆ ą┐ąŠą╗čāč湥ąĮąĮąŠą│ąŠ ą╗ąŠą│ą░ ą▓ ą┤ą░ą╝ą┐ąĄ ą┐ą░ą╝čÅčéąĖ BLACKFIN Memory (ą┐čĆąŠčüą╝ąŠčéčĆ ą┐ą░ą╝čÅčéąĖ ą▓ čüąĖą╝ą▓ąŠą╗čīąĮąŠą╝ ą▓ąĖą┤ąĄ):
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąĖčüą║ą╗čÄč湥ąĮąĖą╣. ąÆ ą┐čĆąŠąĄą║č鹥 VisualDSP++ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖčüą║ą╗čÄč湥ąĮąĖą╣. ą¤čĆąĖą╝ąĄčĆ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĖčüą║ą╗čÄč湥ąĮąĖą╣ UserExceptionHandler ą┤ą╗čÅ ą┐čĆąŠąĄą║čéą░ VDK čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ (čéą░ą║ąČąĄ čüą╝. čüčéą░čéčīąĖ [2, 3]).
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą║ąŠą┤ čäą░ą╣ą╗ą░ ExceptionHandler-BF538.asm ąĖąĘ ą┐čĆąŠąĄą║čéą░ VDK. ąŚą┤ąĄčüčī ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ 2 ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ąŠčłąĖą▒ą║ąĖ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą║ąŠą┤ą░ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ (ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ mySEQSTAT) ąĖ ą░ą┤čĆąĄčüą░, ą│ą┤ąĄ ą▓ąĄčĆąŠčÅčéąĮąŠ ą▓ąŠąĘąĮąĖą║ą╗ą░ ąŠčłąĖą▒ą║ą░, ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ RETX (ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ myRETX). ąÆ č鹥ą║čüč鹥 čŹčéąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą▓čŗą┤ąĄą╗ąĄąĮčŗ ąČąĖčĆąĮčŗą╝ čłčĆąĖčäč鹊ą╝. ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ mySEGSTAT ąĖ myRETX ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą│ą╗ąŠą▒ą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą║ąŠą┤ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ čüąĄą│ą╝ąĄąĮč鹥 ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĘą░ą│čĆčāąĘčćąĖą║.
/* =============================================================================
* Description: ąĘą┤ąĄčüčī ąĮą░čģąŠą┤ąĖčéčüčÅ ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖčüą║ą╗čÄč湥ąĮąĖą╣ (exception handler).
* ===========================================================================*/
#include "VDK.h"
.file_attr prefersMemNum="30";
.file_attr prefersMem="internal";
.file_attr ISR;
.section/doubleany data1;
/* ąöąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąĮąĄčłąĮąĖčģ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ */
.extern _ExceptionPanic;
.section/doubleany L1_code;
/******************************************************************************
* UserExceptionHandler */
/* ąóąŠčćą║ą░ ą▓čģąŠą┤ą░ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ąĖčüą║ą╗čÄč湥ąĮąĖą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (User Exception Handler) */
.GLOBAL UserExceptionHandler;
UserExceptionHandler:
/**
* ąŚą┤ąĄčüčī ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ...
* * ąØąĄ ą▓čüąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ ą┤ąŠčüčéąĖą│ą░čÄčé UserExceptionHandler.
* VDK čĆąĄąĘąĄčĆą▓ąĖčĆčāąĄčé user exception 0, ą║ąŠč鹊čĆąŠąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą║ąŠą┤ąŠą╝
* VDK exception handler.
*
* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ runtime-ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ąĖ
* ą╝ąĄąĮąĄą┤ąČąĄčĆą░ cplb.
* ąśčüą║ą╗čÄč湥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą║ąŠą┤ąŠą╝ VDK ą▓ ą╝ąĄąĮąĄą┤ąČąĄčĆ cplb:
* 0x23 Data access CPLB protection violation
* 0x26 Data CPLB miss
* 0x2C Instruction CPLB miss
*
* ąÆ ąĘąŠąĮąĄ ąÆą░čłąĄą╣ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠčüčéąĖ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą╗čÄą▒čŗąĄ ą┤čĆčāą│ąĖąĄ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ
* (ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖąĄ ąĖą╗ąĖ čüąĖčüč鹥ą╝ąĮčŗąĄ), čćč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮąŠ ą▓ čŹč鹊ą╝ ą║ąŠą┤ąĄ.
*/
/**
* ąĢčüą╗ąĖ ą╗čÄą▒ąŠąĄ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ, č鹊 ą╗čÄą▒čŗąĄ ą┐čĆčÅą╝ąŠ ąĖą╗ąĖ ą║ąŠčüą▓ąĄąĮąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ
* čĆąĄą│ąĖčüčéčĆčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ.
* ą£čŗ ąĮąĄ čüąŠčģčĆą░ąĮčÅąĄą╝ ąĖ ąĮąĄ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ čĆąĄą│ąĖčüčéčĆčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ ą▓čŗąĘąŠą▓ąĄ
* ExceptionPanic, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▒ąĄąĘ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ
* ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖčÅ. */
/**
* ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ EXCAUSE ą▓ R2 ą║ą░ą║ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ panic
* ąöąĖčĆąĄą║čéąĖą▓ą░ .message čāą┤ą░ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, čüą▓čÅąĘą░ąĮąĮąŠąĄ čü
* one cycle stall
*/
.message/suppress 1056 for 2 lines;
R2 = SEQSTAT;
R2 < < = 26;
R2 > > = 26;
.EXTERN _mySEQSTAT;
P1.H = HI(_mySEQSTAT);
P1.L = LO(_mySEQSTAT);
[P1] = R2;
.EXTERN _myRETX;
P1.H = HI(_myRETX);
P1.L = LO(_myRETX);
[--SP] = RETX;
R2 = [SP++];
[P1] = R2;
R1.H = HI(_VDK_kUnhandledExceptionError_);
R1.L = LO(_VDK_kUnhandledExceptionError_);
R0 = _VDK_kUnhandledException_;
CALL.X _ExceptionPanic;
RTX;
.UserExceptionHandler.end:
ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ mySEQSTAT ąĖ myRETX ą▓ ą║ąŠą┤ąĄ C/C++ (ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄą║čåąĖčÅ ą┐ą░ą╝čÅčéąĖ no_init_sdram):
#pragma section ("no_init_sdram", NO_INIT)
u32 mySEQSTAT;
#pragma section ("no_init_sdram", NO_INIT)
u32 myRETX;
ą¤čĆąĖą╝ąĄčĆ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüąĄą║čåąĖąĖ no_init_sdram (ą║čāčüąŠą║ LDF-čäą░ą╣ą╗ą░ ą┐čĆąŠąĄą║čéą░):
PROCESSOR p0
{
...
SECTIONS
{
...
/*$VDSG< insert-new-sections-at-the-start > */
no_init_sdram NO_INIT
{
INPUT_SECTION_ALIGN(4)
INPUT_SECTIONS($OBJECTS(no_init_sdram))
} > MEM_SDRAM0_BANK3
/*$VDSG< insert-new-sections-at-the-start > */
...
} /* SECTIONS */
} /* p0 */
VDK: ąŠą▒čĆą░ą▒ąŠčéą║ą░ KernelPanic. ą£ąŠąČąĮąŠ ą┐ąĄčĆąĄąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ąŠą┤ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ KernelPanic, čćč鹊ą▒čŗ ąŠąĮą░ ą▓čŗą┐ąŠą╗ąĮčÅą╗ą░ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ čĆąĄą░ą╗čīąĮąŠ ą┐ąŠą╗ąĄąĘąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ (ą║ą░ą║ąĖą╝-ą╗ąĖą▒ąŠ ąŠą▒čĆą░ąĘąŠą╝ čüąŠąŠą▒čēą░ą╗ą░ ąŠą▒ ąŠčłąĖą▒ą║ąĄ ąĖ ą▓čŗą┤ą░ą▓ą░ą╗ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ). ą¤čĆąĖą╝ąĄčĆ:
extern "C" void KernelPanic(VDK::PanicCode, VDK::SystemError, const int );
void KernelPanic(VDK::PanicCode paniccode, VDK::SystemError se, const int val)
{
int *ppc; //ą░ą┤čĆąĄčü ą┤ą╗čÅ PanicPC
u32 idx = memlogidx & MEMLOGMASK;
memlogarr[idx].pancode = pc;
memlogarr[idx].panerr = se;
memlogarr[idx].panval = val;
ppc = (int*)0xff80145c;
memlogarr[idx].panpc = *ppc;
memlog("KernelPanic");
}
ąÆ čŹčéčā čäčāąĮą║čåąĖčÄ VDK ą┐ąĄčĆąĄą┤ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ:
paniccode ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ VDK [4]. ąĀą░čüčłąĖčäčĆąŠą▓ą║čā čŹčéąĖčģ ąŠčłąĖą▒ąŠą║ čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ VDK (Kernel) UserŌĆÖs Guide, ąĖą╗ąĖ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ą░čģ VisualDSP++.
se čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ SEQSTAT (ą║ąŠą┤ čüąĖčüč鹥ą╝ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ). ąĀą░čüčłąĖčäčĆąŠą▓ą║čā ą║ąŠą┤ąŠą▓ čĆąĄą│ąĖčüčéčĆą░ ąĖčüą║ą╗čÄč湥ąĮąĖą╣ čüą╝. ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ, čéą░ą║ąČąĄ čüą╝. ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin čéą░ą▒ą╗ąĖčåčā 1 ąĖąĘ ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ A čüčéą░čéčīąĖ [2].
val ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ ąŠčłąĖą▒ą║ąĖ. ąĢą│ąŠ čĆą░čüčłąĖčäčĆąŠą▓ą║ą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠą┤ą░ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ paniccode.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ ą╗ąŠą│ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄą╝ąŠą╝ čüąĄą│ą╝ąĄąĮč鹥 ą┐ą░ą╝čÅčéąĖ (NO_INIT), ą┐ąŠčŹč鹊ą╝čā ąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ąŠčéą╗ą░ą┤čćąĖą║ą░, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ą▒čāą┤ąĄčé čüą▒čĆąŠčłąĄąĮ, ąĖą╗ąĖ ą┤ą░ąČąĄ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮ ąĘą░ąĮąŠą▓ąŠ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ ąĖąĮč鹥čĆąĄčüąĮčāčÄ ą┤ąĄčéą░ą╗čī: č湥čĆąĄąĘ ą░ą▒čüąŠą╗čÄčéąĮčŗą╣ ą░ą┤čĆąĄčü 0xFF80145C ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čāčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ PanicPC ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ VDK, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāąĘąĮą░čéčī ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą▒ąŠą╣ ą║ąŠą┤ą░ VDK. ąŚąĮą░č湥ąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ PanicPC ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī ąĖąĘ ą║ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčāčÄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą╗ąĖąĮą║ąĄčĆ (XML-čäą░ą╣ą╗, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ čāą┤ąŠą▒ąĮąŠ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ XML Notepad). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ č鹊, ą║ą░ą║ ąĘą░ą┤ą░čéčī ą▓ čüą▓ąŠą╣čüčéą▓ą░čģ ą┐čĆąŠąĄą║čéą░ ą│ąĄąĮąĄčĆą░čåąĖčÄ ą║ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ą║ą░ą║ čüą╝ąŠčéčĆąĄčéčī ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ MAP-čäą░ą╣ą╗čŗ ą▓ č乊čĆą╝ą░č鹥 XML, čüą╝. ą▓ FAQ [5] ą▓ąŠą┐čĆąŠčü "Q070. VisualDSP: ą║ą░ą║ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī MAP-čäą░ą╣ą╗ ą╗ąĖąĮą║ąĄčĆą░?". ąÜčāčüąŠą║ ą║ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ, ą│ą┤ąĄ ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī ą░ą┤čĆąĄčü čŹč鹊ą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣:
Input section vdk-i-BF532.dlb[Initialize.doj](data1) :0x0
| Symbol | Demangled name | Address | Size | Binding |
|---|
| _vdkMainMarker |
vdkMainMarker |
0xff80144c |
0x1 |
GLOBAL |
| _g_KernelPanicCode__3VDK |
VDK::g_KernelPanicCode |
0xff801450 |
0x4 |
GLOBAL |
| _g_KernelPanicError__3VDK |
VDK::g_KernelPanicError |
0xff801454 |
0x4 |
GLOBAL |
| _g_KernelPanicValue__3VDK |
VDK::g_KernelPanicValue |
0xff801458 |
0x4 |
GLOBAL |
| _g_KernelPanicPC__3VDK |
VDK::g_KernelPanicPC |
0xff80145c |
0x4 |
GLOBAL |
| _g_remainingTicks__3VDK |
VDK::g_remainingTicks |
0xff801460 |
0x4 |
GLOBAL |
| _g_VdkIsInitialized__3VDK |
VDK::g_VdkIsInitialized |
0xff801464 |
0x1 |
GLOBAL |
VDK: ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ąŠą║ ą┐ąŠč鹊ą║ąŠą▓. ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠąĘą┤ą░ą▓ą░ąĄą╝čŗąĄ ą║ą╗ą░čüčüčŗ ą┐ąŠč鹊ą║ąŠą▓ VDK čüąŠą┤ąĄčƹȹ░čé čłą░ą▒ą╗ąŠąĮ čäčāąĮą║čåąĖąĖ ErrorHandler ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠčłąĖą▒ąŠą║ ą┐ąŠč鹊ą║ą░. ąöąŠčüčéą░č鹊čćąĮąŠ ą▓čüčéą░ą▓ąĖčéčī ą▓ ąĮąĄčæ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ čüąŠąŠą▒čēą░ąĄčé ąŠą▒ ąŠčłąĖą▒ą║ąĄ (ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ ąĖą╗ąĖ ą▓čŗą▓ąĄčüčéąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ą╗ąŠą│).
int mainthread::ErrorHandler()
{
memlog("ą×čłąĖą▒ą║ą░ ą┐ąŠč鹊ą║ą░ mainthread!");
return (VDK::Thread::ErrorHandler());
}
ąÆ Debug ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé, ą░ ą▓ Release ąĮąĄčé. ąŁč鹊 čćą░čüčéčŗą╣ čüą╗čāčćą░ą╣, ą║ąŠą│ą┤ą░ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĄčüčéčī ąŠčłąĖą▒ąŠčćąĮą░čÅ ą┐čĆąĖą▓čÅąĘą║ą░ ą║ čĆąĄčüčāčĆčüą░ą╝ ą┐ą░ą╝čÅčéąĖ ąĖą╗ąĖ čĆąĄčüčāčĆčüčā ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ą×ą┤ąĮą░ą║ąŠ ąŠą▒čŗčćąĮą░čÅ ą┐ąŠčłą░ą│ąŠą▓ą░čÅ ąŠčéą╗ą░ą┤ą║ą░ ą┐ąŠ ąĖčüčģąŠą┤ąĮąŠą╝čā ą║ąŠą┤čā ą▓ Release čéčāčé ąĮąĄ ą┐ąŠą╝ąŠąČąĄčé, ąĖ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą┐ąŠ ąĖčģ ąĖą╝ąĄąĮąĖ č鹊ąČąĄ ąĮąĄą╗čīąĘčÅ (ą┐ąŠ ą┐čĆąĖčćąĖąĮąĄ čĆą░ą▒ąŠčéčŗ ąŠą┐čéąĖą╝ąĖąĘą░č鹊čĆą░ ą║ąŠą┤ą░). ąÜą░ą║ ą▒čŗčéčī, ą║ą░ą║ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī ąĘąĮą░č湥ąĮąĖčÅ ąĮčāąČąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéąĖ?
ąØąĄ ą▓čüąĄ čéą░ą║ ą┐ą╗ąŠčģąŠ - ą╝ąŠąČąĮąŠ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░čĆč鹊ą╣ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčāčÄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą╗ąĖąĮą║ąĄčĆ, ąĖ ą┐ąŠ ąĮąĄą╣ ąĮą░ą╣čéąĖ ą░ą▒čüąŠą╗čÄčéąĮčŗąĄ ą░ą┤čĆąĄčüą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ. ąöą░ą╗čīčłąĄ ą▓čüąĄ ą┐čĆąŠčüč鹊 - ą┐čĆąĖ ąĘą░ą┐čāčēąĄąĮąĮąŠą╣ čüąĄčüčüąĖąĖ ąŠčéą╗ą░ą┤ą║ąĖ ąŠčüčéą░ąĮąŠą▓ąĖč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā ą▓ ą╗čÄą▒ąŠą╝ ą╝ąĄčüč鹥, ąĖ ą┐čĆąŠčüą╝ąŠčéčĆąĖč鹥 ąĘąĮą░č湥ąĮąĖąĄ ąĮčāąČąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą▓ ą┤ą░ą╝ą┐ąĄ ą┐ą░ą╝čÅčéąĖ BLACKFIN Memory.
ą¤čĆąŠčåąĄčüčü ą┐ąŠ čłą░ą│ą░ą╝:
1. ąØą░čüčéčĆąŠą╣č鹥 ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Release ą│ąĄąĮąĄčĆą░čåąĖčÄ MAP-čäą░ą╣ą╗ą░ ą╗ąĖąĮą║ąĄčĆą░. ąÜą░ą║ čŹč鹊 čüą┤ąĄą╗ą░čéčī, čüą╝. ą▓ FAQ [5] ą▓ąŠą┐čĆąŠčü "Q070. VisualDSP: ą║ą░ą║ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī MAP-čäą░ą╣ą╗ ą╗ąĖąĮą║ąĄčĆą░?"
2. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ą╗ąĖ ą┐čĆąŠąĄą║čé, ąŠčéą║čĆąŠą╣č鹥 ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ čäą░ą╣ą╗ ą║ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ čü ą┐ąŠą╝ąŠčēčīčÄ XML Notepad, ą┐ąĄčĆąĄą╣ą┤ąĖč鹥 ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║čā ą┐čĆąŠčüą╝ąŠčéčĆą░ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čäą░ą╣ą╗ą░ XSL Output.
3. ąØą░ąČą╝ąĖč鹥 ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ ą║ą╗ą░ą▓ąĖčł Ctrl+F (ąĘą░ą┐čāčüą║ ą┐ąŠąĖčüą║ą░ čüčéčĆąŠą║ąĖ) ąĖ ą▓ą▓ąĄą┤ąĖč鹥 ą▓ čüčéčĆąŠą║ąĄ ą┐ąŠąĖčüą║ą░ ą░ą┤čĆąĄčü ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, ą║ąŠč鹊čĆčāčÄ ąĮčāąČąĮąŠ ąĮą░ą╣čéąĖ.
ąØąĖąČąĄ ąĮą░ čüą║čĆąĖąĮčłąŠč鹥 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąŠčåąĄčüčü ą┐ąŠąĖčüą║ą░ ą░ą┤čĆąĄčüą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ KernelPanicPC, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčü, ą│ą┤ąĄ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą▒ąŠą╣ ą┐čĆąŠąĄą║čéą░ VDK.

[ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ]
ąØąĄ čüąĄą║čĆąĄčé, čćč鹊 čĆąĄąĘčāą╗čīčéą░čé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ą░ą║ąĖčģ-č鹊 ą┤ąĄą╣čüčéą▓ąĖą╣ ąĖ ąĖčģ ą║ą░č湥čüčéą▓ąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąŠą▒ą╗čÄą┤ąĄąĮąĖčÅ ą▒ą░ą╗ą░ąĮčüą░ ą╝ąĄąČą┤čā čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ čüąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╝ąĖ čüąĖčüč鹥ą╝čŗ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ č湥ą╗ąŠą▓ąĄą║ą░ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ ą▓ąĄčēąĄčüčéą▓ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ąŠą┤ąĮąŠą╝ čüą╗čāčćą░ąĄ ą┐ąŠą╗ąĄąĘąĮčŗą╝, ą░ ą▓ ą┤čĆčāą│ąŠą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖčćąĖąĮąĖčéčī ąĮąĄą┐ąŠą┐čĆą░ą▓ąĖą╝čŗą╣ ą▓čĆąĄą┤ (ąŠčéčĆą░ą▓ąĖčéčīčüčÅ ą╝ąŠąČąĮąŠ ąĮąĄ č鹊ą╗čīą║ąŠ ą▓ąŠą┤ą║ąŠą╣, ąĮąŠ ą┤ą░ąČąĄ ąŠą▒čŗčćąĮąŠą╣ ą▓ąŠą┤ąŠą╣ - ą▓čüąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąĖąĮčÅč鹊ą╣ ą┤ąŠąĘčŗ). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čåąĄąĮąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéą░ ą║ą░ą║ čüą┐ąĄčåąĖą░ą╗ąĖčüčéą░ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ č鹊ą╝, ąĮą░čüą║ąŠą╗čīą║ąŠ čģąŠčĆąŠčłąŠ ąŠąĮ ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī ąĘąŠą╗ąŠčéčāčÄ čüąĄčĆąĄą┤ąĖąĮčā ą┐čĆąĖ ą┐ąŠąĖčüą║ąĄ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčüąŠą▓ ą┐čĆąĖ ąĮą░ą┐ąĖčüą░ąĮąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ:
1. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą╝ąĄąČą┤čā čĆčāčéąĖąĮąĮąŠą╣ čĆą░ą▒ąŠč鹊ą╣, ą║ąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čĆąĄčłąĖčéčī ą║ąŠąĮą║čĆąĄčéąĮčŗąĄ č鹥ą║čāčēąĖąĄ ąĘą░ą┤ą░čćąĖ, ąĖ ą▓čŗą▒ąŠčĆąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ čüą░ą╝ąŠąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ.
2. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ čĆą░ą▒ąŠč湥ą╣ ą┐ą╗ą░čéč乊čĆą╝čŗ - ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čĆą░čüčüą╝ąŠčéčĆąĄčéčī čĆą░ąĘąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ą▓ ą┐ą╗ą░ąĮąĄ čåąĄąĮčŗ, ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čĆąĄčüčāčĆčüąŠą▓ (čü čāč湥č鹊ą╝ ąĘą░ą┐ą░čüą░ ąĮą░ čĆą░ąĘą▓ąĖčéąĖąĄ čüąĖčüč鹥ą╝čŗ ąĖ ąŠčéą╗ą░ą┤ą║čā) ąĖ čāą┤ąŠą▒čüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
3. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ čÅąĘčŗą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ - ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą▒ąŠą╗ąĄąĄ čāą┤ąŠą▒ąĮčŗą╣ ąĖ ąĘąĮą░ą║ąŠą╝čŗą╣ čÅąĘčŗą║, ąĖą╗ąĖ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą▒ąŠą╗ąĄąĄ ą┐ąĄčĆčüą┐ąĄą║čéąĖą▓ąĮčŗą╣, ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗą╣.
4. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą╝ąĄąČą┤čā čĆą░ąĘą╝ąĄčĆąŠą╝ ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (ąĖ/ąĖą╗ąĖ ą┤ą░ąĮąĮčŗčģ) ąĖ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄą╝.
5. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą╝ąĄąČą┤čā čüčéčĆąŠą│ąĖą╝ čüąŠą▒ą╗čÄą┤ąĄąĮąĖąĄą╝ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖą╣ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čü ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄą╝ ąĖ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝ ąĮčāąČąĮąŠą│ąŠ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ.
6. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą╝ąĄąČą┤čā čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčīčÄ ą║ąŠą┤ą░ ąĖ čāą┤ąŠą▒čüčéą▓ąŠą╝ ą▓ ąĄą│ąŠ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĄ.
7. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą╝ąĄąČą┤čā ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ ąŠč乊čĆą╝ą╗ąĄąĮąĖąĄą╝ ą║ąŠą┤ą░ ąĖ ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čüą▓ąŠąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣.
8. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą╝ąĄąČą┤čā ą▓čŗą▒ąŠčĆąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĄ čü ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ąŠčłąĖą▒ąŠą║.
9. ąÜąŠą╝ą┐čĆąŠą╝ąĖčüčü ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ą£ąŠąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī čü ąČąĄą╗ąĄąĘąŠą╝ ąĮą░ą┐čĆčÅą╝čāčÄ, ą░ ą╝ąŠąČąĮąŠ čāčüą║ąŠčĆąĖčéčī čĆą░ąĘčĆą░ą▒ąŠčéą║čā, ą┐čĆąĖą╝ąĄąĮčÅčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖ čüąĖčüč鹥ą╝čŗ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (RTOS).
ąÜąŠąĮąĄčćąĮąŠ, ą╝čŗ ą╗čÄą┤ąĖ-č湥ą╗ąŠą▓ąĄą║ąĖ, ą┐ąŠčŹč鹊ą╝čā čüąŠą▓ąĄčĆčłą░ąĄą╝ ąĖ ą▓čüąĄą│ą┤ą░, ąĖ ąĮąĄąĖąĘą▒ąĄąČąĮąŠ ą▒čāą┤ąĄą╝ čüąŠą▓ąĄčĆčłą░čéčī ąŠčłąĖą▒ą║ąĖ. ą×čüąŠą▒ąĄąĮąĮąŠ čŹč鹊 ą║ą░čüą░ąĄčéčüčÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéą░. ąÆ ąĮą░čłąĖčģ čüąĖą╗ą░čģ č鹊ą╗čīą║ąŠ čüčéą░čĆą░čéčīčüčÅ ąĖąĘą▒ąĄą│ą░čéčī ąŠčłąĖą▒ąŠą║, ąĖ čüčéą░čĆą░čéčīčüčÅ ąĖčģ ąĖčüą┐čĆą░ą▓ą╗čÅčéčī ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ, ą┤ą░ąČąĄ ą┐čĆąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╝ ą┐ąŠą┤ąŠąĘčĆąĄąĮąĖąĖ ąĮą░ ąŠčłąĖą▒ą║čā. ą¤čĆąĖą▓ąĄą┤čā ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą┐čĆąŠą▒ą╗ąĄą╝, ą▓čŗąĘą▓ą░ąĮąĮčŗčģ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮčŗą╝ ą▓ąĮąĖą╝ą░ąĮąĖąĄą╝ ą║ ą┤ąĄčéą░ą╗čÅą╝ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ.
ąĪą╗čāčćą░ą╣ 1. ą¤čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ąŠč湥ąĮčī čĆąĄą┤ą║ąŠ ą▓ąŠąĘąĮąĖą║ą░ą╗ąĖ čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄąŠąČąĖą┤ą░ąĮąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘą░ą▓ąĖčüą░ą╗ą░ ąĖ ąĮąĄ ąĘą░ą┐čāčüą║ą░ą╗ą░čüčī. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čŹčéąĖ čüą╗čāčćą░ąĖ ą▒čŗą╗ąĖ ąŠč湥ąĮčī čĆąĄą┤ą║ąĖ, čÅ ąĮąĄ ąŠą▒čĆą░čēą░ą╗ ąĮą░ ąĮąĖčģ ą▓ąĮąĖą╝ą░ąĮąĖąĄ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą▒čŗą╗ą░ čāąČąĄ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą│ąŠč鹊ą▓ą░, ą║ąŠą│ą┤ą░ ąĮą░ ąĮąŠą▓čŗčģ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░čģ ą┐čĆąĖą▒ąŠčĆąŠą▓ ąŠčłąĖą▒ą║ą░ čüčéą░ą╗ą░ ą┐čĆąŠčÅą▓ą╗čÅčéčīčüčÅ ąĮą░ą╝ąĮąŠą│ąŠ čćą░čēąĄ, ąĖ ą▓ ą┐ąŠą╗ąĮčŗą╣ čĆąŠčüčé ąĘą░čÅą▓ąĖą╗ą░ ąŠ čüąĄą▒ąĄ ą┐čĆąŠą▒ą╗ąĄą╝ą░ - ą┐čĆąĖą▒ąŠčĆ č鹊 čĆą░ą▒ąŠčéą░ąĄčé, č鹊 ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé. ą¤čĆąĖčćąĖąĮą░ ąŠą║ą░ąĘą░ą╗ą░čüčī ą▓ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ą▒čāč乥čĆą░ ąĖąĘ-ąĘą░ čłčāą╝ą░ ąĮą░ ą▓čģąŠą┤ąĄ UART, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤ąĮąŠą╣ ą▒čāč乥čĆ ą╝ąŠą│ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčīčüčÅ, čćč鹊 ą┐čĆąŠčÅą▓ą╗čÅą╗ąŠčüčī čüą╗čāčćą░ą╣ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčü 8. ąĢčüą╗ąĖ ą▒čŗ ąŠčłąĖą▒ą║ą░ ą▒čŗą╗ą░ čāčüčéčĆą░ąĮąĄąĮą░ ąĮą░ ąĮą░čćą░ą╗čīąĮąŠą╝ čŹčéą░ą┐ąĄ ą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, č鹊 ą╝ąĮąŠą│ąĖčģ ą┐čĆąŠą▒ą╗ąĄą╝ čāą┤ą░ą╗ąŠčüčī ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ čüą╗ąŠąČąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ, ą║ąŠą│ą┤ą░ ąŠąĮą░ čāąČąĄ ą┐ąŠčćčéąĖ ąĮą░ą┐ąĖčüą░ąĮą░, ąĖčüą║ą░čéčī ąŠčłąĖą▒ą║čā čéčĆčāą┤ąĮąĄąĄ.
ąĪą╗čāčćą░ą╣ 2. ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī čĆą░ą▒ąŠčéčā čü ą│čĆą░čäąĖč湥čüą║ąĖą╝ ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą╝, čÅ ą┐čĆąĄąĮąĄą▒čĆąĄą│ čüąŠą▒ą╗čÄą┤ąĄąĮąĖąĄą╝ ą┤ąĖą░ą│čĆą░ą╝ą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ą▓čŗą▒ąŠčĆą║ąŠą╣ ~CS ąĖąĮą┤ąĖą║ą░č鹊čĆą░. ąÆą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ čāą┐čĆą░ą▓ą╗čÅčéčī čŹčéąĖą╝ čüąĖą│ąĮą░ą╗ąŠą╝ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą┐ą░ą║ąĄč鹊ą▓ ą┤ą░ąĮąĮčŗčģ, čÅ ąĮą░ą▓čüąĄą│ą┤ą░ ą▓čŗą▒čĆą░ą╗ ąĖąĮą┤ąĖą║ą░č鹊čĆ, ąČąĄčüčéą║ąŠ ą┐ąŠą┤ą░ą▓ ą╗ąŠą│. 0 ąĮą░ čüąĖą│ąĮą░ą╗ ~CS. ąĀąĄąĘčāą╗čīčéą░čé ą┐ąŠą╗čāčćąĖą╗čüčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║ąŠą╣ ąČąĄ, ą║ą░ą║ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ čüą╗čāčćą░ąĄ - ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé, ą░ ąĖąĮąŠą│ą┤ą░ ą┐ąŠ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĮąĄą┐ąŠąĮčÅčéąĮčŗą╝ ą┐čĆąĖčćąĖąĮą░ą╝ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčü 5, ą┐ąŠąĖčüą║ ąĖ čāčüčéčĆą░ąĮąĄąĮąĖąĄ čŹč鹊ą╣ ąŠčłąĖą▒ą║ąĖ ąĘą░ąĮčÅą╗ ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ čüąĖą╗. ąØą░ą┤ąŠ ą▒čŗą╗ąŠ ą▓čŗą▒čĆą░čéčī ą┐čāčéčī č鹊čćąĮąŠą│ąŠ čüąŠą▒ą╗čÄą┤ąĄąĮąĖčÅ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ.
[ąĪčüčŗą╗ą║ąĖ]
1. Blackfin: č乊čĆą╝ą░čéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą▓ ąŠą║ąĮąŠ č鹥čĆą╝ąĖąĮą░ą╗ą░ č湥čĆąĄąĘ UART.
2. EE-307: čüąŠą▓ąĄčéčŗ ą┐ąŠ ąŠčéą╗ą░ą┤ą║ąĄ ą┤ą╗čÅ Blackfin.
3. EE-312: ą┐ąŠčüčéčĆąŠąĄąĮąĖąĄ čüą╗ąŠąČąĮčŗčģ LwIP-ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ VDK Blackfin.
4. VDK: ą║ąŠą┤čŗ ąĖ ąĘąĮą░č湥ąĮąĖčÅ ąŠčłąĖą▒ąŠą║.
5. Blackfin FAQ. |



