|
ą×ą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (ą×ąĪąĀąÆ) FreeRTOS ą┐ąŠą╗čāčćąĖą╗ą░ ą┐ąŠčĆčé, ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐ąŠą┤ čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE. ąÆ čŹč鹊 čéčĆčāą┤ąĮąŠ ą┐ąŠą▓ąĄčĆąĖčéčī, ąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąŠą▒ąĄčēą░čÄčé ą┐ąŠą╗ąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ąŠ ą▓čüąĄą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ FreeRTOS ą▓ ą║ą╗ą░čüčüąĖč湥čüą║ąŠą╝ čĆą░ą▒ąŠč湥ą╝ ąŠą║čĆčāąČąĄąĮąĖąĖ Arduino.
ąŻąČąĄ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┤ą░ą▓ąĮąŠ Arduino IDE ą┐ąŠą╗čāčćąĖą╗ą░ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖąĄ ą┐ąĖčüą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ąŠčēąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ARM (ąĮąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ AVR). ą×ą┤ąĮą░ą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ Arduino ą▒čŗą╗ąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ ą┐čĆąŠčüčéčŗą╝ąĖ ą┐čĆąĖą╝ąĖčéąĖą▓ą░ą╝ąĖ čäčāąĮą║čåąĖą╣ setup (ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░) ąĖ loop (ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą│ąŠčüčÅ ą░ą╗ą│ąŠčĆąĖčéą╝ą░), čćč鹊 ąĮąĄ ą┤ą░ą▓ą░ą╗ąŠ čüą┐ąŠčüąŠą▒ą░ čŹčäč乥ą║čéąĖą▓ąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéčī.
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ (ą┐ąĄčĆąĄą▓ąŠą┤ [1]) ą┤ą░ąĮ ą║čĆą░čéą║ąĖą╣ ąŠą▒ąĘąŠčĆ ą┐čĆąŠčüč鹊ą╣ ąĖ čāą┤ąŠą▒ąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ FreeRTOS, ą║ąŠč鹊čĆą░čÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą║ąŠą╝ą┐ą░ą║čéąĮą░, čćč鹊ą▒čŗ čĆą░ą▒ąŠčéą░čéčī ą▓ čüčĆąĄą┤ąĄ Arduino IDE ą║ą░ą║ ąĄčæ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░, ąĖ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ą┐čĆąŠąĘčĆą░čćąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ čäčāąĮą║čåąĖąĖ Arduino, čéą░ą║ ąĖ FreeRTOS. ąÆčüąĄ ąĮąĄą┐ąŠąĮčÅčéąĮčŗąĄ č鹥čĆą╝ąĖąĮčŗ, ą║ą░čüą░čÄčēąĖąĄčüčÅ čüąĖčüč鹥ą╝ RTOS, čüą╝. ą▓ čüčéą░čéčīąĄ [10] (čĆą░ąĘą┤ąĄą╗ "ąĪą╗ąŠą▓ą░čĆąĖą║" ą▓ ą║ąŠąĮčåąĄ čŹč鹊ą╣ čüčéą░čéčīąĖ).
[ąØąĄą╝ąĮąŠą│ąŠ č鹥ąŠčĆąĖąĖ]
ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮčŗ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čüčĆą░ąĘčā ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ ąĖą╗ąĖ ą┐ąŠč鹊ą║ą░ą╝ čĆą░ą▒ąŠčéą░čéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ (ą┤ą░ąČąĄ ąĮą░ ąŠą┤ąĮąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ). ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéčīčÄ (multi-tasking). ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą║ą░ąČąĄčéčüčÅ, čćč鹊 ą▓čüąĄ ąĘą░ą┐čāčēąĄąĮąĮčŗąĄ ąĘą░ą┤ą░čćąĖ čĆą░ą▒ąŠčéą░čÄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, ąĮąŠ ąĄčüą╗ąĖ ąĘą░ą│ą╗čÅąĮčāčéčī ą│ą╗čāą▒ąČąĄ, č鹊 ą║ą░ąČą┤ąŠąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ čÅą┤čĆąŠ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą╗čīąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮčā ąĘą░ą┤ą░čćčā (ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĖą╗ąĖ ą┐ąŠč鹊ą║). ąĪą┐ąĄčåąĖą░ą╗čīąĮą░čÅ čćą░čüčéčī ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆą░čÅ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ąŠą╝ (scheduler), ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ. ąó. ąĄ. ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ čĆąĄčłą░ąĄčé, ą║ą░ą║ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖ ą▓ ą║ą░ą║ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą┤ąŠą╗ąČąĮą░ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čüą▓ąŠąĄą╣ ąĘą░ą┤ą░čćąĖ. ąóą░ą║ąŠąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ čÅą┤čĆą░ ą╝ąĄąČą┤čā ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ąĖ (ą┐ąŠč鹊ą║ą░ą╝ąĖ) ą╝ąŠąČąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒čŗčüčéčĆąŠ, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ąĖą╗ą╗čĹʹĖčÄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ čĆą░ą▒ąŠčéčŗ čüčĆą░ąĘčā ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝.
ą¤ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą▓ ą×ą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ ąĪąĖčüč鹥ą╝ąĄ ąĀąĄą░ą╗čīąĮąŠą│ąŠ ąÆčĆąĄą╝ąĄąĮąĖ (ą×ąĪąĀąÆ; čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą░ąĮą│ą╗ąĖą╣čüą║ąĖą╣ č鹥čĆą╝ąĖąĮ Real Time Operating System, RTOS) čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čéą░ą║, čćč鹊ą▒čŗ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ, čüąŠ čüčéčĆąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ čĆąĄą░ą║čåąĖąĖ ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ ąĮą░ ą▓ąĮąĄčłąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ [2]. ą×ą▒čŗčćąĮąŠ čéą░ą║ąŠąĄ čüą▓ąŠą╣čüčéą▓ąŠ ąŠą┐ąĖčüčŗą▓ą░čÄčé ą║ą░ą║ ą┤ąĄč鹥čĆą╝ąĖąĮąĖčüčéčüą║ąĖą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ (deterministic execution pattern). ąÆ čćą░čüčéąĮąŠčüčéąĖ čŹč鹊 čüą▓ąŠą╣čüčéą▓ąŠ ąĘą░čéčĆąĄą▒ąŠą▓ą░ąĮąŠ ąĖ ą▓ ą╝ą░ą╗čŗčģ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ą░čģ, čéą░ą║ąĖčģ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ Arduino, ą┐ąŠčüą║ąŠą╗čīą║čā ą║ čéą░ą║ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą┐čĆąĄą┤čŖčÅą▓ą╗čÅčÄčéčüčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ.
ąóčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗąĄ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ąĖ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real time scheduler), čéą░ą║ąĖąĄ ą║ą░ą║ čłąĄą┤čāą╗ąĄčĆ FreeRTOS, čĆąĄą░ą╗ąĖąĘčāčÄčé čüą▓ąŠą╣ ą┤ąĄč鹥čĆą╝ąĖąĮąĖąĘą╝, ąĮą░ąĘąĮą░čćą░čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą║ą░ąČą┤ąŠą╝čā ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╝čā ą┐ąŠč鹊ą║čā. ąóąŠą│ą┤ą░ čłąĄą┤čāą╗ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹč鹊čé ą┐čĆąĖąŠčĆąĖč鹥čé, čćč鹊ą▒čŗ čāąĘąĮą░čéčī, ą║ą░ą║ąŠą╝čā ą┐ąŠč鹊ą║čā ą▓ ą║ą░ą║ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ čüą╗ąĄą┤čāąĄčé ą┐ąĄčĆąĄą┤ą░čéčī ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ (čé. ąĄ. ą║ą░ą║ąŠą╣ ą┐ąŠč鹊ą║ ąĖ ą║ąŠą│ą┤ą░ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī ą▓čŗą┐ąŠą╗ąĮčÅčéčī čüą▓ąŠą╣ ą░ą╗ą│ąŠčĆąĖčéą╝). ąÆ čüąĖčüč鹥ą╝ąĄ FreeRTOS ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ ą┐ąŠč鹊ą║ ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ č鹥čĆą╝ąĖąĮąŠą╝ Task (ąĘą░ą┤ą░čćą░).
[ąæčŗčüčéčĆčŗą╣ čüčéą░čĆčé]
ą¤čĆąŠčēąĄ ą▓čüąĄą│ąŠ ąĮą░čćą░čéčī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ Codebender [3], ą│ą┤ąĄ Arduino FreeRTOS ą┤ąŠčüčéčāą┐ąĮą░ ą║ą░ą║ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ [4].
ąöčĆčāą│ąŠą╣ čüą┐ąŠčüąŠą▒, ą┐čĆąŠčåąĄčüčü ą┐ąŠ čłą░ą│ą░ą╝:
1. ą×čéą║čĆąŠą╣č鹥 ą╝ąĄąĮąĄą┤ąČąĄčĆ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ Arduino IDE (Arduino IDE Library, ą┤ąŠčüčéčāą┐ąĮčŗą╣ čü ą▓ąĄčĆčüąĖąĖ Arduino 1.6.8), ąĮą░ą╣ą┤ąĖč鹥 ą▓ čüą┐ąĖčüą║ąĄ FreeRTOS Library (čéąĖą┐ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ Type: "Contributed" ąĖ č鹥ą╝ą░ Topic: "Timing").
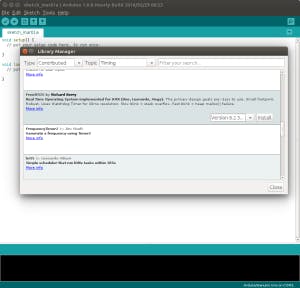
2. ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čüą░ą╝ą░čÅ čüą▓ąĄąČą░čÅ ą▓ąĄčĆčüąĖčÅ FreeRTOS Library Release. ąØą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čüčéą░čéčīąĖ [1] čŹč鹊 ą▒čŗą╗ą░ ą▓ąĄčĆčüąĖčÅ v9.0.0-1.

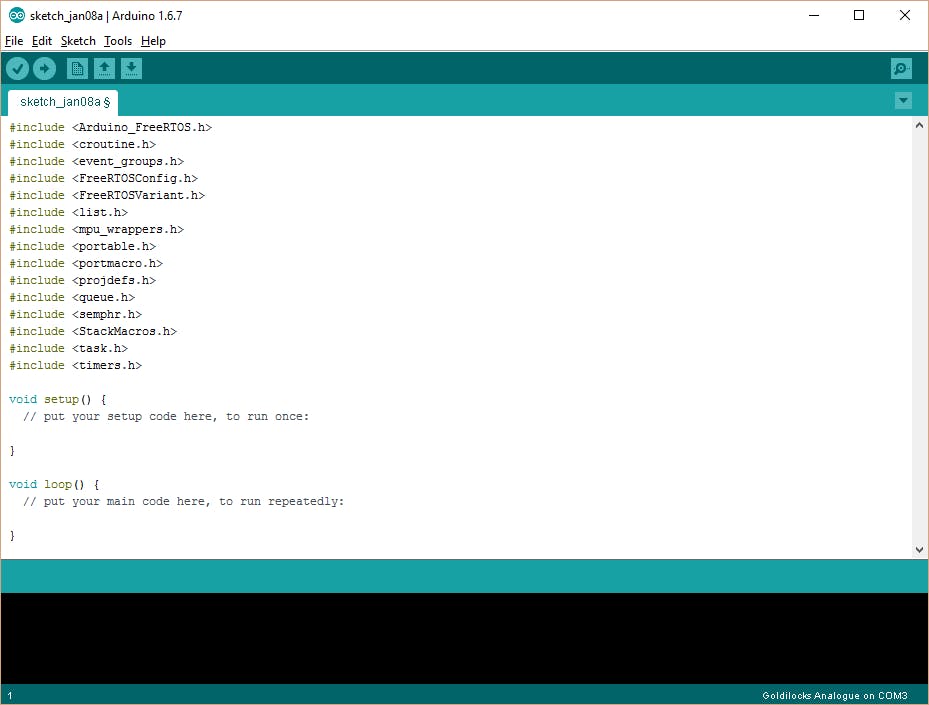
3. ąŻą▒ąĄą┤ąĖč鹥čüčī čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ąĄąĮčÄ Sketch -> Include Library, čćč鹊 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ FreeRTOS ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ąÆą░čłąĄą╝čā čüą║ąĄčéčćčā. ąØąŠą▓čŗą╣, ą┐čāčüč鹊ą╣ čüą║ąĄčéčć ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
4. ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 (Compile) ąĖ ą▓čŗą│čĆčāąĘąĖč鹥 (Upload) čŹč鹊čé ą┐čāčüč鹊ą╣ čüą║ąĄčéčć ą▓ čüą▓ąŠčÄ ą┐ą╗ą░čéčā Arduino (Arduino Uno, Arduino Yun, Arduino Leonardo, Arduino Mega 2560, Goldilocks 1284p ąĖ čé. ą┐.). ąŁč鹊 ą┐ąŠą║ą░ąČąĄčé ąÆą░ą╝, čüą║ąŠą╗čīą║ąŠ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Arduino čāą╣ą┤ąĄčé ąĮą░ čłąĄą┤čāą╗ąĄčĆ FreeRTOS. ąØąĖąČąĄ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ ą┐ą░ą╝čÅčéąĖ ąĮą░ čĆą░ąĘąĮčŗčģ ą┐ą╗ą░čéą░čģ (ą║ąŠą┤ ą▒čŗą╗ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ Arduino v1.6.9 ąĮą░ Windows 10).
ą¤ą╗ą░čéą░ ąÉčĆą┤čāąĖąĮąŠ: loop() -> FreeRTOS | ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝
Uno 444 -> 7340 | 21%
Goldilocks 502 -> 7408 | 6%
Leonardo 3624 -> 10508 | 24%
Yun 3618 -> 10502 | 24%
Mega 2560 656 -> 24108 | 9%
ąØą░ čŹč鹊ą╝ čłą░ą│ąĄ FreeRTOS čāąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ąÆą░čłąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ Arduino.
[ą¦č鹊 ą┤ą░ą╗čīčłąĄ?]
ąóąĄą┐ąĄčĆčī ą▓čŗą│čĆčāąĘąĖč鹥 ą▓ ą┐ą╗ą░čéčā ąĖ ą┐čĆąŠč鹥čüčéąĖčĆčāą╣č鹥 čüą║ąĄčéčć Blink čü ąĮąĖąČąĄą╗ąĄąČą░čēąĄą╣ RTOS ą┐čāč鹥ą╝ ą▓čüčéą░ą▓ą║ąĖ #include < Arduino_FreeRTOS.h > ą▓ ąĮą░čćą░ą╗ąŠ čüą║ąĄčéčćą░. ąŁč鹊 ą▓čüąĄ, čćč鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ FreeRTOS ą▓ ąÆą░čłąĖčģ čüą║ąĄčéčćą░čģ.
ąĪą╗ąĄą┤čāčÄčēąĖą╣ čłą░ą│ - čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐čĆąŠč乥čüčüąĖąŠąĮą░ą╗čīąĮąŠą╣ RTOS ą▓ čüčĆąĄą┤ąĄ Arduino IDE.
ąĪą║ąĄčéčć Blink_AnalogRead.ino (čüą╝. ą▓čĆąĄąĘą║čā ąĮąĖąČąĄ) čŹč鹊 čģąŠčĆąŠčłąĖą╣ čüą┐ąŠčüąŠą▒ ąĮą░čćą░čéčī ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░čéčī ą▓ ąŠą┤ąĮąŠą╝ čüą║ąĄčéč湥 ą▒ą░ąĘąŠą▓čŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ Arduino, čéą░ą║ąĖąĄ ą║ą░ą║ Blink ąĖ AnalogRead, čü čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ąĖčģ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ąĮą░ čĆą░ąĘąĮčŗąĄ ąĘą░ą┤ą░čćąĖ (Tasks). ą×ą▒ąĄ čŹčéąĖ ąĘą░ą┤ą░čćąĖ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī čüą▓ąŠąĖ čäčāąĮą║čåąĖąĖ, ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čłąĄą┤čāą╗ąĄčĆą░ FreeRTOS. ąŁč鹊čé čüą║ąĄčéčć ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┐ą░ą┐ą║ąĄ Examples ą║ą░čéą░ą╗ąŠą│ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ Arduino IDE.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┤ą▓ą░ ą▒ą░ąĘąŠą▓čŗčģ čüą║ąĄčéčćą░ ąĖąĘ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ Arduino IDE ą┐čĆąĖą╝ąĄčĆąŠą▓ (Examples) čüą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮčŗ ą▓ ąŠą┤ąĖąĮ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮčŗą╣ čüą║ąĄčéčć, ą▓ ą║ąŠč鹊čĆąŠą╝ čĆą░ą▒ąŠčéą░čÄčé 2 ąĘą░ą┤ą░čćąĖ FreeRTOS.
#include <Arduino_FreeRTOS.h>
// ą×ą┐čĆąĄą┤ąĄą╗ąĖą╝ ą┤ą▓ąĄ ąĘą░ą┤ą░čćąĖ ą┤ą╗čÅ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ Blink ąĖ AnalogRead:
void TaskBlink( void *pvParameters );
void TaskAnalogRead( void *pvParameters );
// ążčāąĮą║čåąĖčÅ setup ąĘą░ą┐čāčüčéąĖčéčüčÅ ąŠą┤ąĖąĮ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąÆčŗ ąĮą░ąČą╝ąĄč鹥 ą║ąĮąŠą┐ą║čā
// čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą┐ąŠą┤ą░ą┤ąĖč鹥 ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ą╗ą░čéčā.
void setup() {
// ąóąĄą┐ąĄčĆčī čüąŠąĘą┤ą░ą┤ąĖą╝ ą┤ą▓ąĄ ąĘą░ą┤ą░čćąĖ, čćč鹊ą▒čŗ ąŠąĮąĖ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ
// ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░:
xTaskCreate(
TaskBlink
, (const portCHAR *)"Blink" // ąŁč鹊 ą┐čĆąŠčüč鹊 ą╗čÄą▒ąŠąĄ ąĖą╝čÅ, čāą┤ąŠą▒ąĮąŠąĄ
// ą┤ą╗čÅ čćč鹥ąĮąĖčÅ č湥ą╗ąŠą▓ąĄą║ąŠą╝.
, 128 // ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ
, NULL
, 2 // ą¤čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ.
, NULL );
xTaskCreate(
TaskAnalogRead
, (const portCHAR *) "AnalogRead"
, 128 // ąŁč鹊čé čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą▓ąĄčĆąĄąĮ
// ąĖ ą┐ąŠą┤čüčéčĆąŠąĄąĮ ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ Highwater.
, NULL
, 1 // ą¤čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ.
, NULL );
// ąóąĄą┐ąĄčĆčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖ ąĮąĄčÅą▓ąĮąŠ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĘą░ą┐čāčüčéąĖčéčüčÅ scheduler,
// ą║ąŠč鹊čĆčŗą╣ ą▓ąŠąĘčīą╝ąĄčé ąĮą░ čüąĄą▒čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĘą░ą┐čāčüą║ą░ ąŠčéą┤ąĄą╗čīąĮčŗčģ ąĘą░ą┤ą░čć.
}
void loop()
{
// ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čāčüčéą░. ąÆčüčÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ čĆą░ą▒ąŠčéą░ č鹥ą┐ąĄčĆčī ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ
// ą▓ ąĘą░ą┐čāčēąĄąĮąĮčŗčģ ąĘą░ą┤ą░čćą░čģ (Tasks). ąŁčéąĖ ąĘą░ą┤ą░čćąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čäčāąĮą║čåąĖčÅą╝ąĖ
// TaskBlink ąĖ TaskAnalogRead.
}
/*--------------------------------------------------*/
/*---------------------- Tasks ---------------------*/
/*--------------------------------------------------*/
void TaskBlink(void *pvParameters)
{
(void) pvParameters;
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ 13 ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░.
pinMode(13, OUTPUT);
for (;;) // A Task shall never return or exit.
{
digitalWrite(13, HIGH); // ą▓ą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ LED
vTaskDelay( 1000 / portTICK_PERIOD_MS ); // ąŠąČąĖą┤ą░ąĮąĖąĄ ą▓ 1 čüąĄą║čāąĮą┤čā
digitalWrite(13, LOW); // ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ LED
vTaskDelay( 1000 / portTICK_PERIOD_MS ); // ąŠąČąĖą┤ą░ąĮąĖąĄ ą▓ 1 čüąĄą║čāąĮą┤čā
}
}
void TaskAnalogRead(void *pvParameters)
{
(void) pvParameters;
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ
// 9600 ą▒ąĖčé ą▓ čüąĄą║čāąĮą┤čā:
Serial.begin(9600);
for (;;)
{
// ą¦č鹥ąĮąĖąĄ ą▓čģąŠą┤ą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ 0:
int sensorValue = analogRead(A0);
// ąÆčŗą▓ąŠą┤ ąĮą░ ą┐ąĄčćą░čéčī ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ:
Serial.println(sensorValue);
// ąŚą░ą┤ąĄčƹȹ║ą░ ą▓ 1 čéąĖą║ (15 ą╝čü) ą╝ąĄąČą┤čā čćč鹥ąĮąĖčÅą╝ąĖ, ą┤ą╗čÅ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéąĖ:
vTaskDelay(1);
}
}
ąĢčüą╗ąĖ ąÆą░čü ąĖąĮč鹥čĆąĄčüčāčÄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ąĮąĖąĘą║ąĖą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ąĖą╗ąĖ čü ą┐ąĖčéą░ąĮąĖąĄą╝ ąŠčé ą▒ą░čéą░čĆąĄą╣, č鹊 ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī FreeRTOS ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čĆąĄąČąĖą╝ąŠą▓ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AVR ATmegaXXXX (AVR ATmega power reduction modes). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. [5].
ąöčĆčāą│ąĖąĄ čüčéą░čéčīąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąĄą╝ą░č乊čĆąŠą▓ (Semaphore) ą┤ą╗čÅ ąĘą░čēąĖčéčŗ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓ [6] (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ Serial), ąŠč湥čĆąĄą┤ąĄą╣ (Queue) ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ (Tasks), ąĖą╗ąĖ čéą░ą╣ą╝ąĄčĆąŠą▓ (Timer), čćč鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĘą░ą┤ąĄčƹȹ║ąĖ ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čéą░ą╣ą╝ą░čāčéčŗ. ąĪčéčĆą░ąĮąĖčćą║ą░ čü čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą╝ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ ąŠčüą▓ąŠąĄąĮąĖčÅ FreeRTOS [7] ą┤ą░čüčé ąÆą░ą╝ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗą╝ čäčāąĮą║čåąĖčÅą╝, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčé ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ [8]. ąóą░ą║ąČąĄ ąĄčüčéčī ą╝ąĮąŠą│ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą║ąŠą┤ą░ AVR FreeRTOS ąĮą░ čüą░ą╣č鹥 GitHub, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮčŗ ą▓ čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino.
[ąĪčüčŗą╗ą║ąĖ]
1. Using FreeRTOS multi-tasking in Arduino site:arduino.cc.
2. FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čćą░čüčéčī 1 (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ą░čćą░ą╝ąĖ).
3. We are codebender site:codebender.cc.
4. Arduino_FreeRTOS site:codebender.cc.
5. Arduino FreeRTOS ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü ą┐ąĖčéą░ąĮąĖąĄą╝ ąŠčé ą▒ą░čéą░čĆąĄą╣.
6. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąĄą╝ą░č乊čĆąŠą▓ FreeRTOS ą▓ Arduino IDE.
7. FreeRTOS Quick Start Guide site:freertos.org.
8. FreeRTOS Demo Applications site:freertos.org.
9. AVR ATmega port of freeRTOS site:github.com.
10. FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ, čüą╗ąŠą▓ą░čĆąĖą║. |



