|
ąØąĄ čüąĄą║čĆąĄčé, čćč鹊 čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ čéąĖą┐ą░ "ąŻą╝ąĮčŗą╣ ą┤ąŠą╝" ąŠą▒čŗčćąĮąŠ ąŠč湥ąĮčī čüą╗ąŠąČąĮčŗąĄ, ą╗ąĖą▒ąŠ ąŠč湥ąĮčī ą┤ąŠčĆąŠą│ąĖąĄ, ą╗ąĖą▒ąŠ ąĖ č鹊 ąĖ ą┤čĆčāą│ąŠąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. ą¤čĆąĖčģąŠą┤ąĖčéčüčÅ čćąĖčéą░čéčī ą║čāčćčā čüą║čāčćąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ, čćč鹊-č鹊 čéą░ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī, ąĮą░čüčéčĆą░ąĖą▓ą░čéčī... ąØąŠ ą║ą░ą║ ą▒čŗčéčī, ąĄčüą╗ąĖ ą╗ąĖčłąĮąĖčģ ą┤ąĄąĮąĄą│ ąĮąĄčé, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī č鹊ąČąĄ ą║ą░ą║-č鹊 ąĮąĄ čüą╗ąŠąČąĖą╗ąŠčüčī (ąĮąŠ čĆčāą║ąĖ čĆą░čüčéčāčé ąĖąĘ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ą╝ąĄčüčéą░), ąĮąŠ čģąŠč湥čéčüčÅ ąĖą╝ąĄčéčī ą┤ąŠą╝ą░ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÄ + čćč鹊-č鹊 ąĄčēąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠč鹊ą┐ąĖč鹥ą╗čīąĮčŗą╝ ą║ąŠčéą╗ąŠą╝ ąĖ ą║ąŠąĮčéčĆąŠą╗čī ąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ, ą║ąŠąĮčéčĆąŠą╗čī č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▓ č鹥ą┐ą╗ąĖčåąĄ, ą┐ąŠą╗ąĖą▓ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ąĖ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ąĄ ąĖąĘą┤ą░ą╗ąĄą║ą░)? ąóčāčé ąÆą░ą╝ ąĮą░ ą┐ąŠą╝ąŠčēčī ą╝ąŠąČąĄčé ą┐čĆąĖą╣čéąĖ ą┤ąĄčłąĄą▓čŗą╣ ąĖ čüąĄčĆą┤ąĖčéčŗą╣ ąĮą░ą▒ąŠčĆčćąĖą║ SUNFOUNDER [1].
ąŻ SUNFOUNDER ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘąĮąŠą▓ąĖą┤ąĮąŠčüč鹥ą╣ ą║ąĖč鹊ą▓ ąĖ ąĮą░ą▒ąŠčĆąŠą▓ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čāą╝ąĮąŠą│ąŠ ą┤ąŠą╝ą░. ą£ąĮąĄ ą┐ąŠą┐ą░ą╗čüčÅ ąĮą░ą▒ąŠčĆ ąĮą░ ąŠčüąĮąŠą▓ąĄ Arduino Mega 2560 ąĘą░ $80, ą║čāą┐ą╗ąĄąĮąĮčŗą╣ ąĮą░ ebay.com [2]. ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ ą▓ ąĮą░ąĘą▓ą░ąĮąĖąĖ Raspberry Pi, ąĮąĖą║ą░ą║ąŠą│ąŠ Raspberry Pi ą▓ ą╝ąŠąĄą╝ ąĮą░ą▒ąŠčĆąĄ ąĮąĄ ą▒čŗą╗ąŠ, ą┐čĆąŠčüč鹊 čŹč鹊čé ąĮą░ą▒ąŠčĆ ą▒čŗą▓ą░ąĄčé ą▓ 2 ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÅčģ - ąŠą┤ąĖąĮ ą┐ąŠą┤ąĄčłąĄą▓ą╗ąĄ ąĮą░ ąŠčüąĮąŠą▓ąĄ Arduino Mega 2560 (ą║ą░ą║ čā ą╝ąĄąĮčÅ), ą┤čĆčāą│ąŠą╣ ą┐ąŠą┤ąŠčĆąŠąČąĄ ąĮą░ ąŠčüąĮąŠą▓ąĄ Raspberry Pi.
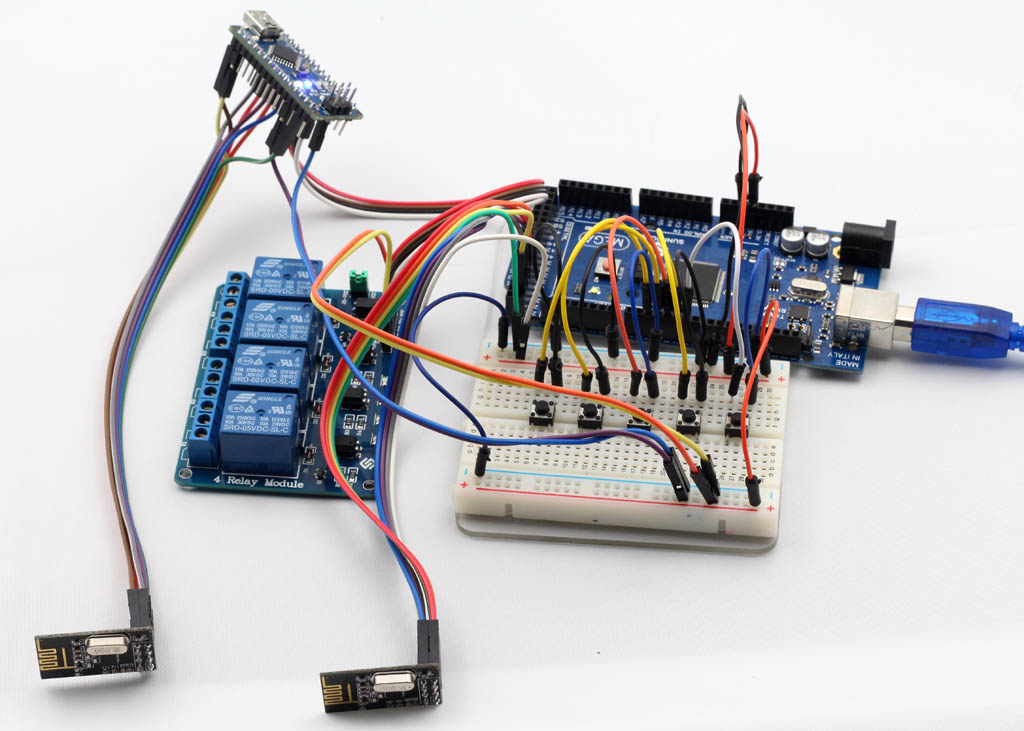
ąØą░ ą║ą░čĆčéąĖąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ, čćč鹊 ą▓čģąŠą┤ąĖčé ą▓ ąĮą░ą▒ąŠčĆ ąĮą░ ąŠčüąĮąŠą▓ąĄ Arduino Mega 2560.

1. ą¤ą╗ą░čéą░ čü 4 čĆąĄą╗ąĄ. ą£ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ąŠčüą▓ąĄčēąĄąĮąĖąĄą╝, ą▓ą║ą╗čÄčćą░čéčī ąĖ ą▓čŗą║ą╗čÄčćą░čéčī ą╗čÄą▒čŗąĄ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ ą┐čĆąĖą▒ąŠčĆčŗ.
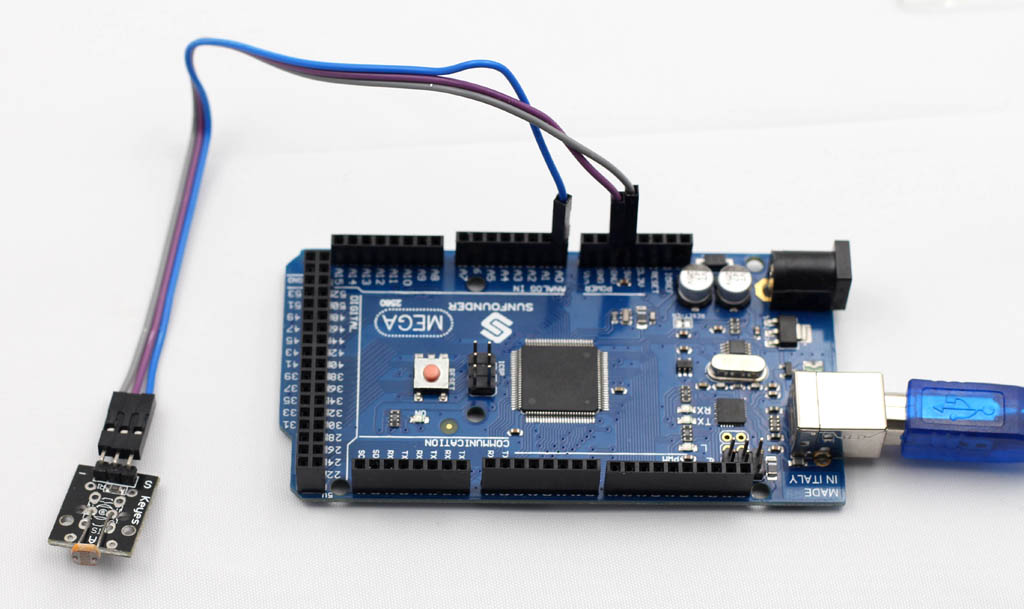
2. ążąŠč鹊-čĆąĄąĘąĖčüčéąĖą▓ąĮčŗą╣ čüąĄąĮčüąŠčĆ. ą£ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī čāčĆąŠą▓ąĄąĮčī ąŠčüą▓ąĄčēąĄąĮąĮąŠčüčéąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĮą░čüą║ąŠą╗čīą║ąŠ čģąŠčĆąŠčłąŠ ąŠčüą▓ąĄčēąĄąĮą░ č鹥ą┐ą╗ąĖčåą░).
3. ąöą░čéčćąĖą║ ą│ą░ąĘą░ ąĖ ąĘą░ą┤čŗą╝ą╗ąĄąĮąĖčÅ MQ-2. ą×ą▒ą╗ą░ą┤ą░ąĄčé ą▓čŗčüąŠą║ąŠą╣ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą║ ąĮą░ą╗ąĖčćąĖčÄ ą▓ ą▓ąŠąĘą┤čāčģąĄ ą┐čĆąĖčĆąŠą┤ąĮąŠą│ąŠ ą│ą░ąĘą░, čāą│ą╗ąĄą▓ąŠą┤ąŠčĆąŠą┤ąŠą▓ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐čĆąŠą┐ą░ąĮą░, ą▒čāčéą░ąĮą░, ąĖ ą║ čĆą░ąĘą╗ąĖčćąĮąŠą╝čā ąĘą░ą┤čŗą╝ą╗ąĄąĮąĖčÄ.
4. ąöą░čéčćąĖą║ ą░čéą╝ąŠčüč乥čĆąĮąŠą│ąŠ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ BMP180.
5a, 5b. 5 čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ ąĖ 5 č鹊ą║ąŠąŠą│čĆą░ąĮąĖčćąĖč鹥ą╗čīąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ą┤ą╗čÅ ąĖčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ.
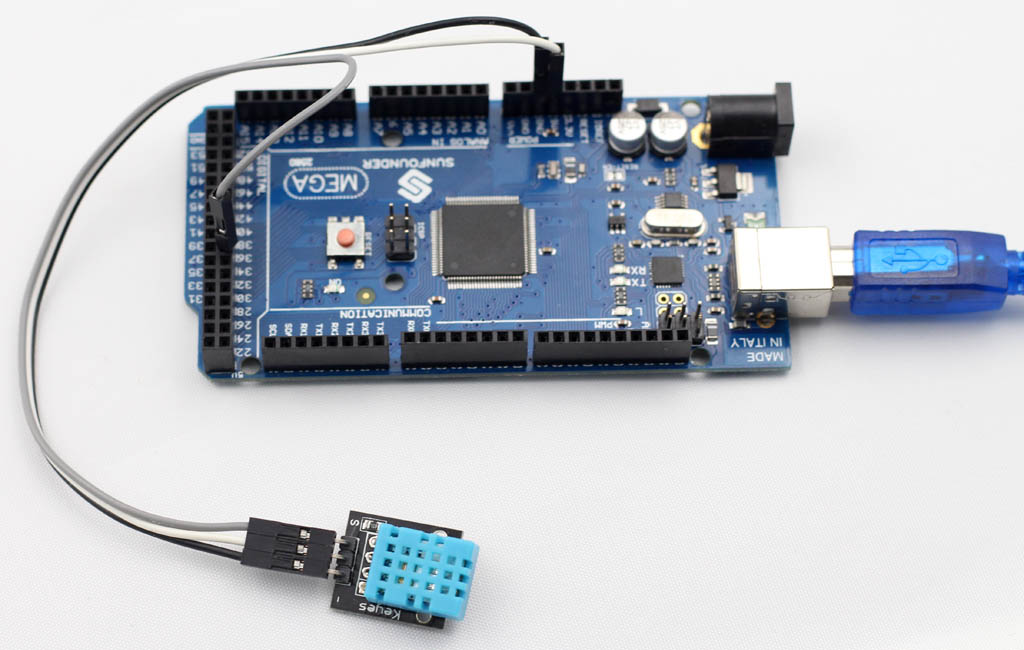
6. ąöą░čéčćąĖą║ ą▓ą╗ą░ąČąĮąŠčüčéąĖ ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ HDT11.
7. ą×čüąĮąŠą▓ąĮą░čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą┐ą╗ą░čéą░ Arduino Mega 2560 [7].
8. Ethernet-čłąĖą╗ą┤ ąĮą░ ąŠčüąĮąŠą▓ąĄ čćąĖą┐ą░ W5100, čüąŠą▓ą╝ąĄčēąĄąĮąĮčŗą╣ čüąŠ čüą╗ąŠč鹊ą╝ ą║ą░čĆčé microSD.
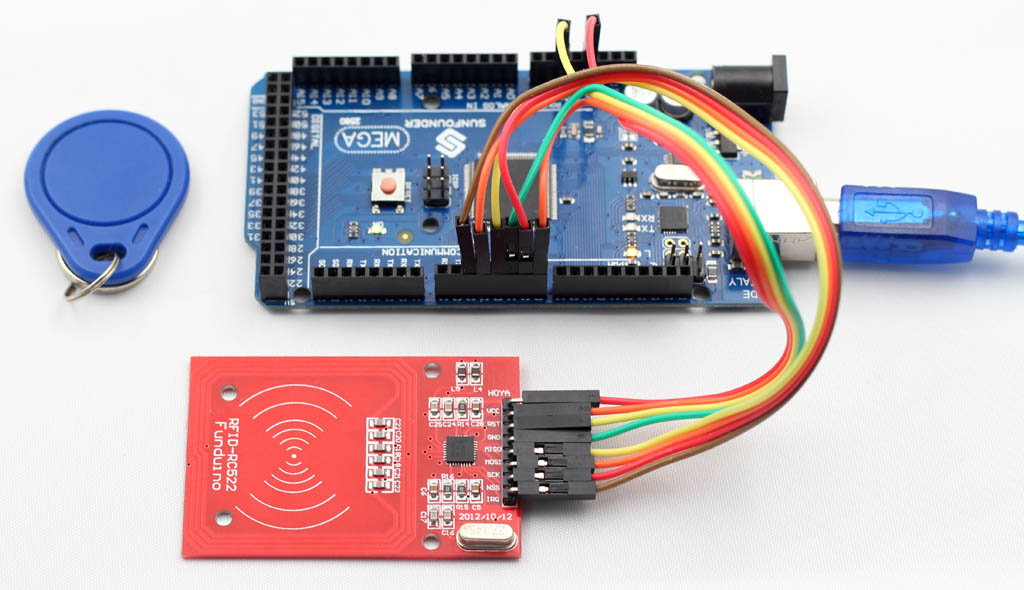
9. ąÜą╗čÄčć-ą▒čĆąĄą╗ąŠą║ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą╝ąĄčéą║ąĖ RFID.
10. ąĪčćąĖčéčŗą▓ą░č鹥ą╗čī ą╝ąĄč鹊ą║ RFID RC522.
11. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ą┐ą╗ą░čéą║ą░ Arduino Nano.
12. ą¤ąĖčĆąŠčŹą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą┤ą░čéčćąĖą║ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ (PIR).
13. 2 ą╝ąŠą┤čāą╗čÅ ą┤ą╗čÅ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ čüą▓čÅąĘąĖ NRF24L01. ąŁč鹊 ąĮąĖą║ą░ą║ąŠą╣ ąĮąĄ Wi-Fi, ą╝ąŠą┤čāą╗ąĖ čĆą░ą▒ąŠčéą░čÄčé ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéčā ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠą╣ čüą▓čÅąĘąĖ ISM 2.4..2.5 ąōąōčå.
14. ą¤ą╗ą░čéą░ ą┤ą╗čÅ ą╝ą░ą║ąĄčéąĖčĆąŠą▓ą░ąĮąĖčÅ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ Solderless BreadBoard).
15. ąØą░ą▒ąŠčĆ čüąŠąĄą┤ąĖąĮąĖč鹥ą╗čīąĮčŗčģ ą║ą░ą▒ąĄą╗ąĄą╣.
16. ąÜąŠą╝ą┐ą░ą║čé-ą┤ąĖčüą║ čü ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ ą║ąŠą┤ą░, ą▓ąĖą┤ąĄąŠčĆąŠą╗ąĖą║ą░ą╝ąĖ (čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī - ą┤ą░, čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé!) ąĖ čüčĆąĄą┤ąŠą╣ čĆą░ą┤ąĖąŠč鹥čģąĮąĖč湥čüą║ąŠą│ąŠ ą║ąŠąĮčüčéčĆčāąĖčĆąŠą▓ą░ąĮąĖčÅ Fritzing.
ąŻą┤ąĖą▓ąĖč鹥ą╗čīąĮąŠ, ą║ą░ą║ čéą░ą║ąŠąĄ ą▒ąŠą│ą░čéčüčéą▓ąŠ čāą╗ąŠąČąĖą╗ąŠčüčī ą▓ čåąĄąĮčā $79.99. ąÜąĖčéą░ą╣čåčŗ, čćč鹊 ąĖ ą│ąŠą▓ąŠčĆąĖčéčī, ą▓čüąĄ čā ąĮąĖčģ ąĮąĄ ą║ą░ą║ čā ą╗čÄą┤ąĄą╣. ąŻ ąĮą░čü ą▓ ąĀąŠčüčüąĖąĖ č鹊ą╗čīą║ąŠ ą┐ą╗ą░čéą║ą░ čü čĆąĄą╗ąĄ čüč鹊ąĖą╗ą░ ą▒čŗ čüč鹊ą╗čīą║ąŠ ąČąĄ, ąĄčüą╗ąĖ ąĮąĄ ą┤ąŠčĆąŠąČąĄ. ąÜąŠąĮąĄčćąĮąŠ, čćč鹊ą▒čŗ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī čüąŠą▒čĆą░čéčī čüąĖčüč鹥ą╝čā ą┤ą╗čÅ čāą╝ąĮąŠą│ąŠ ą┤ąŠą╝ą░ ąĖ ą┐ąŠčŹą║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī čü ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ ą║ąŠą┤ą░, čüąŠą▓čüąĄą╝ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┐ąŠą║čāą┐ą░čéčī ąĮą░ą▒ąŠčĆ ąĖą╝ąĄąĮąĮąŠ čā SUNFOUNDER, ą▓čüąĄ ąĮčāąČąĮčŗąĄ ą║ąŠą╝ą┐ą╗ąĄą║čéčāčÄčēąĖąĄ ą╝ąŠąČąĮąŠ ą║čāą┐ąĖčéčī ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ ąĮą░ ebay.com, aliexpress.com ąĖą╗ąĖ dex.com. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠ čüč鹊ąĖą╝ąŠčüčéąĖ ąÆčŗ ą╝ąĮąŠą│ąŠ ąĮąĄ ą▓čŗąĖą│čĆą░ąĄč鹥, čĆą░ąĘą▓ąĄ čćč鹊 ą╝ąŠąČąĄč鹥 ąĮąĄ ą┐ąŠą║čāą┐ą░čéčī č鹊, čćč鹊 ąÆą░ą╝ ąĮąĄ ąĮčāąČąĮąŠ. ąøąĖčćąĮąŠ ą╝ąĮąĄ ą▓ ąĮą░ą▒ąŠčĆąĄ ąĖąĮč鹥čĆąĄčüąĮąŠ ą▓čüąĄ, čĆą░ąĘą▓ąĄ čćč鹊 ąĮąĄ ąĮčāąČąĮą░ ą┐ą╗ą░čéą░ BreadBoard (ąŠąĮą░ čā ą╝ąĄąĮčÅ čāąČąĄ ąĄčüčéčī), ą▓čüąĄ ąŠčüčéą░ą╗čīąĮąŠąĄ ą┐čĆąĖą│ąŠą┤ąĖčéčüčÅ.
ąØą░ą▒ąŠčĆ ąŠčé SUNFOUNDER ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąÆčŗ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ąĖ ą┐čĆąŠčüč鹥ą╣čłąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ, ąŠą▒čĆą░ą┤ąŠą▓ą░ą╗ąĖčüčī č鹊ą╝čā, ą║ą░ą║ ą▓čüąĄ ą┐čĆąŠčüč鹊 ąĖ ą┐ąŠąĮčÅčéąĮąŠ, ąĖ čāąČąĄ ąĮą░ čŹč鹊ą╣ ąŠčüąĮąŠą▓ąĄ čüąŠąŠčĆčāą┤ąĖą╗ąĖ čćč鹊-č鹊 čüą▓ąŠčæ (čāą┤ą░ą╗ąĄąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą│ą░ąĘąŠą▓čŗą╝ ą║ąŠčéą╗ąŠą╝, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ č鹥ą┐ą╗ąĖčåčŗ, ą┤ąŠą╝ą░čłąĮčÄčÄ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÄ ąĖ čé. ą┤.).
ą×čüąĮąŠą▓ąĮą░čÅ ąĖą┤ąĄčÅ ąĮą░ą▒ąŠčĆą░: ą╝ąŠąČąĮąŠ čüąŠą▒čĆą░čéčī ąĮąĄą║čāčÄ ą░ą▓č鹊ąĮąŠą╝ąĮčāčÄ čüąĖčüč鹥ą╝čā, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą┤ąŠą╝ą░ (ąĮą░ ą┤ą░č湥 ąĖą╗ąĖ ąĄčēąĄ ą│ą┤ąĄ-č鹊). ą×ąĮą░ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą░ą▓č鹊ąĮąŠą╝ąĮąŠ, ą┐ąŠ ą║ą░ą║ąŠą╝čā-č鹊 čüą▓ąŠąĄą╝čā ą░ą╗ą│ąŠčĆąĖčéą╝čā, ąĮąŠ čéą░ą║ąČąĄ (čćč鹊 ą▒ąŠą╗ąĄąĄ ąĖąĮč鹥čĆąĄčüąĮąŠ) ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ąśąĮč鹥čĆąĮąĄčé. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąÆčŗ ą╝ąŠąČąĄč鹥 čü ą╗čÄą▒ąŠą│ąŠ ą╝ąĄčüčéą░, ą│ą┤ąĄ ąĄčüčéčī ą┤ąŠčüčéčāą┐ ą║ ąśąĮč鹥čĆąĮąĄčéčā (čü čĆą░ą▒ąŠč湥ą│ąŠ ą║ąŠą╝ą┐čīčÄč鹥čĆą░, čü ą╝ąŠą▒ąĖą╗čīąĮąŠą│ąŠ č鹥ą╗ąĄč乊ąĮą░, ąĖąĘ ą│ąŠčüčéąĖąĮąĖčåčŗ ąĮą░ ąŠčéą┤čŗčģąĄ ąĖ čé. ą┤.) ą┐ąŠą╗čāčćąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ čüąĖčüč鹥ą╝čŗ (č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░, ą▓ą╗ą░ąČąĮąŠčüčéčī, ąŠčüą▓ąĄčēąĄąĮąĖąĄ, čüąŠčüč鹊čÅąĮąĖąĄ ą║ą░ą║ąĖčģ-č鹊 ą┤ą░čéčćąĖą║ąŠą▓) ąĖ ą┤ą░ąČąĄ ą┐ąŠčāą┐čĆą░ą▓ą╗čÅčéčī ąĄą╣ (ą▓ą║ą╗čÄčćąĖčéčī/ą▓čŗą║ą╗čÄčćąĖčéčī ąŠčüą▓ąĄčēąĄąĮąĖąĄ, ąŠą▒ąŠą│čĆąĄą▓, ą┐ąŠą╗ąĖą▓ čĆą░čüč鹥ąĮąĖą╣ ąĖ čé. ą┐.). ą¤čĆąĖą╝ąĄčĆ čéą░ą║ąŠą╣ čüąĖčüč鹥ą╝čŗ ą▓ ąŠą▒čēąĄą╝ ą▓ąĖą┤ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ.

ą×čüąĮąŠą▓ąĮąŠąĄ čÅą┤čĆąŠ čŹč鹊ą╣ čüąĖčüč鹥ą╝čŗ - ą┐ą╗ą░čéą░ Arduino Mega 2560 čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ Ethernet-čłąĖą╗ą┤ąŠą╝ ąĮą░ čćąĖą┐ąĄ WS5100, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖą╝ čüą▓čÅąĘčī čü ąśąĮč鹥čĆąĮąĄčé. ąöą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ čüąŠąĘą┤ą░ąĮąĖčÅ čāą┤ą░ą╗ąĄąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ SUNFOUNDER ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄčé ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüąĄčĆą▓ąĖčüąŠą╝ devicebit.com. ąó. ąĄ. ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čā ąÆą░čü ą▒čŗą╗ą░ ą║ą░ą║ą░čÅ-č鹊 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ čüąĖčüč鹥ą╝ą░, ą┤ąŠčüčéčāą┐ąĮą░čÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ č湥čĆąĄąĘ ąśąĮč鹥čĆąĮąĄčé, ąÆą░ą╝ ąĮčāąČąĮą░ Arduino Mega 2560 čü ą▓ąŠčéą║ąĮčāčéčŗą╝ ą▓ ąĮąĄčæ Ethernet-čłąĖą╗ą┤ąŠą╝. ąÆ ą┐ą╗ą░čéčā Arduino Mega 2560 ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī čüą║ąĄčéčć Arduino, ą║ąŠč鹊čĆčŗą╣ čüą░ą╝ ą▒čāą┤ąĄčé čüą▓čÅąĘčŗą▓ą░čéčīčüčÅ čü čüąĄčĆą▓ąĄčĆąŠą╝ DeviceBit ą┐ąŠą┤ ąÆą░čłąĖą╝ ą░ą║ą║ą░čāąĮč鹊ą╝. ąØą░ ą┐ą╗ą░čéčā Arduino Mega 2560 ą╝ąŠąČąĮąŠ čāąČąĄ čüą▓ąĄčĆčģčā ąĮą░ą▓ąĄčüąĖčéčī ą▓čüčÅą║ąĖąĄ ą┤ą░čéčćąĖą║ąĖ, čĆąĄą╗čÄčłą║ąĖ, čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĖą║ąĖ, ąĖ ąĘą░ą╝čāčéąĖčéčī čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮąĄą╝ąĄčĆčÅąĮąŠ ą║čĆčāčéčāčÄ čüąĖčüč鹥ą╝čā. ąóą░ą║ąČąĄ, ąĄčüą╗ąĖ ąÆą░ą╝ čŹč鹊ą│ąŠ čģąŠč湥čéčüčÅ, ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ąŠą┤čāą╗ąĄą╣ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ čüą▓čÅąĘąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┐ą╗ą░čéą║čā Arduino Nano, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé čüą╗čāąČąĖčéčī ą▓čŗąĮąŠčüąĮčŗą╝ ą╝ąŠą┤čāą╗ąĄą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąŠąĮą░ č鹊ąČąĄ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī čĆąĄą╗ąĄ, čüąŠą▒ąĖčĆą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ čü ą┤ą░čéčćąĖą║ąŠą▓ ąĖ čé. ą┐.).
[ąōąŠč鹊ą▓čŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą┐čĆąŠąĄą║č鹊ą▓]
ą¦č鹊ą▒čŗ ą▒čŗčüčéčĆąŠ ą▓ąŠčéą║ąĮčāčéčīčüčÅ, ą║ą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé, ąĮčāąČąĮąŠ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī ą▓ąĖą┤ąĄąŠčĆąŠą╗ąĖą║ąĖ, ąĘą░ą┐ąĖčüą░ąĮąĮčŗąĄ ąĮą░ ą║ąŠą╝ą┐ą░ą║čé ą┤ąĖčüą║ąĄ, ąĖ ą┐ąŠč鹊ą╝ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ą┐ąŠąĖą│čĆą░čéčīčüčÅ čü ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ čüą║ąĄčéč湥ą╣ Arduino, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐ąĖčüą░ąĮčŗ ąĮą░ čŹč鹊ą╝ ąČąĄ ą║ąŠą╝ą┐ą░ą║čé ą┤ąĖčüą║ąĄ:
ąŁč鹊 čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą║ąĄčéčć. ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ čü ą▓čŗčģąŠą┤ą░ č乊č鹊菹╗ąĄą╝ąĄąĮčéą░ (čü ą┐ąŠą╝ąŠčēčīčÄ ąÉą”ą¤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░), ąĖ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ą▓ Serial-ą║ąŠąĮčüąŠą╗čī. ą¤ą╗ą░čéą░ č乊č鹊ą┤ą░čéčćąĖą║ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą┐ą╗ą░č鹥 Arduino Mega 2560 čü ą┐ąŠą╝ąŠčēčīčÄ 3 ą┐čĆąŠą▓ąŠą┤ą║ąŠą▓ (GND, čüąĖą│ąĮą░ą╗ ąĖ + ą┐ąĖčéą░ąĮąĖčÅ).
// ążąŠč鹊菹╗ąĄą╝ąĄąĮčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā ą┐ąŠčĆčéčā A0
// ą┐ą╗ą░čéčŗ Arduino MEGA 2560:
#define photocellPin 0
void setup()
{
Serial.begin(9600);
}
void loop()
{
Serial.print("Photocell Value: ");
Serial.println(analogRead(photocellPin));
delay(500);
}
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮąŠ čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ čü ą┐ą╗ą░č鹊ą╣ Arduino Mega 2560, čéą░ą║ ąĖ čü ą┐ą╗ą░č鹊ą╣ Arduino Nano (ąĮą░ą┤ąŠ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĄą╣ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗčüčéą░ą▓ąĖčéčī čéąĖą┐ ą┐ą╗ą░čéčŗ ą▓ čüąĖčüč鹥ą╝ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ).
ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ č乊č鹊ą┤ą░čéčćąĖą║ą░ ą┐čĆąŠčüč鹊ą╣. ą¤ąŠ čüčāčéąĖ čŹč鹊 čĆąĄąĘąĖčüč鹊čĆ, čā ą║ąŠč鹊čĆąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ąĮą░ ąĮąĄą│ąŠ ą┐ąŠč鹊ą║ą░ čüą▓ąĄčéą░. ąĢčüą╗ąĖ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéčī č乊č鹊čĆąĄąĘąĖčüč鹊čĆą░ ąĘą░č鹥ą╝ąĮąĄąĮą░, č鹊 ąĄą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą▒ąŠą╗čīčłąŠąĄ (čéčŗčüčÅčćąĖ ą║ąĖą╗ąŠąŠą╝), ąĮąŠ ąĄčüą╗ąĖ ąĮą░ č乊č鹊čĆąĄąĘąĖčüč鹊čĆ ą┐ąŠą┐ą░ą╗ čüą▓ąĄčé, č鹊 ąĄą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ. ą¦ąĄą╝ čÅčĆč湥 čüą▓ąĄčé, č鹥ą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą╝ąĄąĮčīčłąĄ. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčéčüčÅ ą▓ ą┐ą╗ą░č鹥 č乊č鹊ą┤ą░čéčćąĖą║ą░ ą▓ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ čŹč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ čāąĘą╗ąŠą╝ ąÉą”ą¤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
[dht11Test.ino]
#include < dht11.h >
DHT11 DHT11;
// DHT11 ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čåąĖčäčĆąŠą▓ąŠą╝čā ą┐ąŠčĆčéčā 34 ą┐ą╗ą░čéčŗ Arduino Mega 2560
// (ą┤ą╗čÅ Arduino Nano ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą┤čĆčāą│ąŠą╣ ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░).
#define DHT11PIN 34
void setup()
{
Serial.begin(9600);
}
void loop()
{
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą┤ą░čéčćąĖą║ą░ DHT11 ąĖ ą▓čŗą▓ąŠą┤ ąĖčģ ą▓ Serial-ą║ąŠąĮčüąŠą╗čī
Serial.print("DHT11, \t");
// ą¤čĆąŠčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┤ą░čéčćąĖą║ą░:
int chk = DHT11.read(DHT11PIN);
switch (chk)
{
case DHTLIB_OK:
Serial.print("OK,\t");
break;
case DHTLIB_ERROR_CHECKSUM:
Serial.print("Checksum error,\t");
break;
case DHTLIB_ERROR_TIMEOUT:
Serial.print("Time out error,\t");
break;
default:
Serial.print("Unknown error,\t");
break;
}
Serial.println();
// ąÆčŗą▓ąĄčüčéąĖ ą┤ą░ąĮąĮčŗąĄ:
Serial.print("Tem: ");
Serial.print(DHT11.temperature); //ą▓čŗą▓ąŠą┤ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ
Serial.println(" C");
Serial.print("Hum: ");
Serial.print(DHT11.humidity); //ą▓čŗą▓ąŠą┤ ą▓ą╗ą░ąČąĮąŠčüčéąĖ
Serial.println(" %");
Serial.println();
delay(500); //ąĘą░ą┤ąĄčƹȹ║ą░ ąĮą░ 0.5 čüąĄą║čāąĮą┤čŗ
}
ąöą░čéčćąĖą║ DHT11 čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ąŠą┤čāą╗ąĄą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ (ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ dht11.cpp, ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ dht11.h) - ą▓čüąĄ čŹč鹊 č鹊ąČąĄ ąĄčüčéčī ąĮą░ ą║ąŠą╝ą┐ą░ą║čé-ą┤ąĖčüą║ąĄ.
[dht11.cpp]
// FILE: dht11.cpp
// VERSION: 0.4.1
// ąØą░ąĘąĮą░č湥ąĮąĖąĄ: Arduino-ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ą╗čÅ DHT11 Temperature & Humidity Sensor
// LICENSE: GPL v3 (http://www.gnu.org/licenses/gpl.html)
//
// DATASHEET: http://www.micro4you.com/files/sensor/DHT11.pdf
//
// ąśčüč鹊čĆąĖčÅ čüąŠąĘą┤ą░ąĮąĖčÅ:
// George Hadjikyriacou - ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ (??)
// ą£ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąŠ SimKard - Version 0.2 (24/11/2010)
// ą£ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąŠ Rob Tillaart - Version 0.3 (28/03/2011)
// + ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
// + čāą┤ą░ą╗ąĄąĮ ą▓ąĄčüčī ą║ąŠą┤, ąĮąĄ ąŠčéąĮąŠčüčÅčēąĖą╣čüčÅ ą║ DHT11
// + ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ čüčüčŗą╗ą║ąĖ
// ą£ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąŠ Rob Tillaart - Version 0.4 (17/03/2012)
// + ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ 1.0
// ą£ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąŠ Rob Tillaart - Version 0.4.1 (19/05/2012)
// + ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą║ąŠą┤čŗ ąŠčłąĖą▒ąŠą║
#include "dht11.h"
// ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
// DHTLIB_OK
// DHTLIB_ERROR_CHECKSUM
// DHTLIB_ERROR_TIMEOUT
int DHT11::read(int pin)
{
// ąæčāč乥čĆ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░:
uint8_t bits[5];
uint8_t cnt = 7;
uint8_t idx = 0;
// ą×čćąĖčüčéą║ą░ ą▒čāč乥čĆą░:
for (int i=0; i< 5; i++) bits[i] = 0;
// ąŚą░ą┐čĆąŠčü ą▓čŗą▒ąŠčĆą║ąĖ:
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
delay(18);
digitalWrite(pin, HIGH);
delayMicroseconds(40);
pinMode(pin, INPUT);
// ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (ACKNOWLEDGE) ąĖą╗ąĖ čéą░ą╣ą╝ą░čāčé (TIMEOUT)
unsigned int loopCnt = 10000;
while(digitalRead(pin) == LOW)
if (loopCnt-- == 0) return DHTLIB_ERROR_TIMEOUT;
loopCnt = 10000;
while(digitalRead(pin) == HIGH)
if (loopCnt-- == 0) return DHTLIB_ERROR_TIMEOUT;
// ą¦č鹥ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ - 40 ą▒ąĖčé => 5 ą▒ą░ą╣čé, ąĖąĮą░č湥 čéą░ą╣ą╝ą░čāčé
for (int i=0; i<40; i++)
{
loopCnt = 10000;
while(digitalRead(pin) == LOW)
if (loopCnt-- == 0) return DHTLIB_ERROR_TIMEOUT;
unsigned long t = micros();
loopCnt = 10000;
while(digitalRead(pin) == HIGH)
if (loopCnt-- == 0) return DHTLIB_ERROR_TIMEOUT;
if ((micros() - t) > 40) bits[idx] |= (1 << cnt);
if (cnt == 0) // čüą╗ąĄą┤čāčÄčēąĖą╣ ą▒ą░ą╣čé?
{
cnt = 7; // ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ čüąŠ čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ (MSB)
idx++; // ą┐ąĄčĆąĄą╣čéąĖ ą║ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą▒ąĖčéčā
}
else cnt--;
}
// ąŚą░ą┐ąĖčüąĖ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ bits[1] ąĖ bits[3] ą▓čüąĄą│ą┤ą░ ą▒čāą┤čāčé
// ąĮčāą╗čÅą╝ąĖ - ąŠąĮąĖ ą┐čĆąŠą┐čāčēąĄąĮčŗ ą▓ č乊čĆą╝čāą╗ą░čģ.
humidity = bits[0];
temperature = bits[2];
uint8_t sum = bits[0] + bits[2];
if (bits[4] != sum) return DHTLIB_ERROR_CHECKSUM;
return DHTLIB_OK;
}
ąĪčģąĄą╝ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ą░čéčćąĖą║ą░ DHT11 čéą░ą║ąČąĄ ąŠč湥ąĮčī ą┐čĆąŠčüčéą░čÅ - GND, ą┐ąĖčéą░ąĮąĖąĄ, čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ čü ą┐ą╗ą░č鹊ą╣ Arduino Mega 2560, čéą░ą║ ąĖ čü ą┐ą╗ą░č鹊ą╣ Arduino Nano (ąĮą░ą┤ąŠ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĄą╣ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗčüčéą░ą▓ąĖčéčī čéąĖą┐ ą┐ą╗ą░čéčŗ ą▓ čüąĖčüč鹥ą╝ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ąĖ ą┐ąŠą╝ąĄąĮčÅčéčī ą▓ čüą║ąĄčéč湥 ąĮąŠą╝ąĄčĆ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠčĆčéą░).
ąÜąŠą┤ čüą║ąĄčéčćą░ ą┤ą╗čÅ ą┤ą░čéčćąĖą║ą░ ąĘą░ą┤čŗą╝ą╗ąĄąĮąĖčÅ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊ą╣, ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐ąŠą▓č鹊čĆčÅąĄčé ą║ąŠą┤ ą┐čĆąŠąĄą║čéą░ čü č乊č鹊ą┤ą░čéčćąĖą║ąŠą╝.
// ą£ąŠą┤čāą╗čī MQ-2 ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā ą▓čģąŠą┤čā (ąÉą”ą¤)
// ą┐ą╗ą░čéčŗ Arduino MEGA 2560:
#define mq2Pin 1
void setup()
{
Serial.begin(9600);
}
void loop()
{
Serial.print("MQ-2 Value: ");
Serial.println(analogRead(mq2Pin));
delay(500);
}

ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ čü ą┐ą╗ą░č鹊ą╣ Arduino Mega 2560, čéą░ą║ ąĖ čü ą┐ą╗ą░č鹊ą╣ Arduino Nano (ąĮą░ą┤ąŠ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĄą╣ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗčüčéą░ą▓ąĖčéčī čéąĖą┐ ą┐ą╗ą░čéčŗ ą▓ čüąĖčüč鹥ą╝ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ).
#define pirPin 36 //ą║ čŹč鹊ą╝čā čåąĖčäčĆąŠą▓ąŠą╝čā ą┐ąŠčĆčéčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ PIR
#define ledPin 38 //ą║ čŹč鹊ą╝čā čåąĖčäčĆąŠą▓ąŠą╝čā ą┐ąŠčĆčéčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čüą▓ąĄč鹊ą┤ąĖąŠą┤ LED
unsigned char pirValue = 0; //ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗čÅ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗčģąŠą┤ą░ PIR
void setup()
{
Serial.begin(9600);
pinMode(pirPin, INPUT);
pinMode(ledPin, OUTPUT);
}
void loop()
{
pirValue = digitalRead(pirPin);
Serial.println("Pir State: ");
Serial.println(pirValue);
digitalWrite(ledPin, pirValue);
delay(500);
}
ąŁč鹊 čéą░ą║ąČąĄ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ Arduino MEGA 2560, čéą░ą║ ąĖ čü Arduino Nano (ąĮąĄ ąĘą░ą▒čāą┤čīč鹥 č鹊ą╗čīą║ąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ąĮąŠą╝ąĄčĆą░ ą┐ąŠčĆč鹊ą▓ ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗčüčéą░ą▓ąĖčéčī čéąĖą┐ ą┐ą╗ą░čéčŗ ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ).
ąóą░ą║ąČąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ąĮą░ ą║ąŠą╝ą┐ą░ą║čé-ą┤ąĖčüą║ąĄ ąĄčüčéčī ą┐čĆąŠąĄą║čé Fritzing.
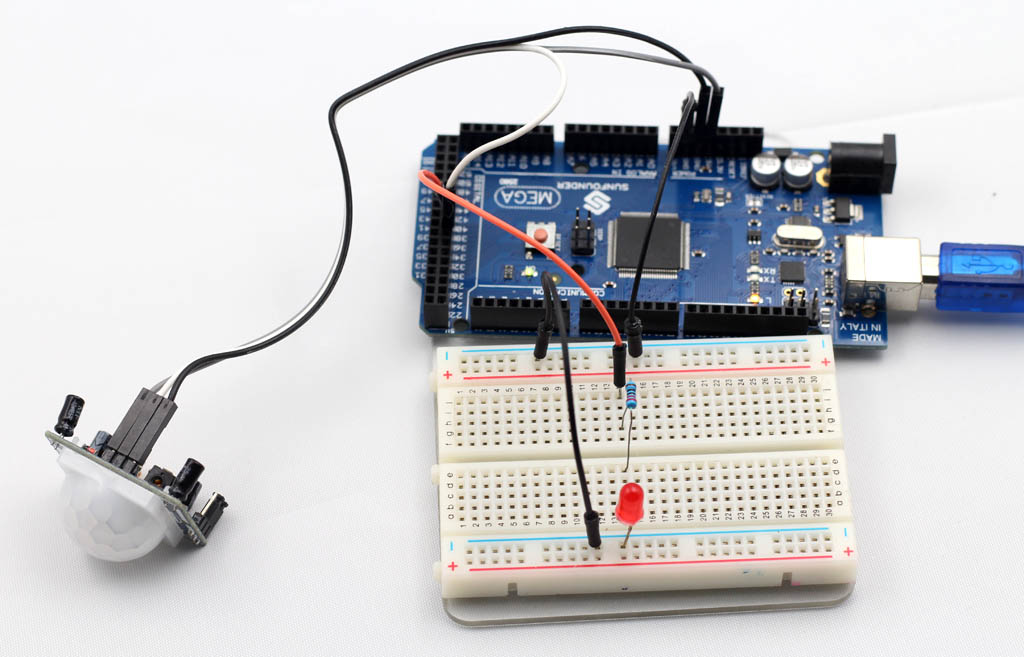
ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠčüč鹥ą╣čłąĖą╣: ą┤ą░čéčćąĖą║ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ PIR ąĖą╝ąĄąĄčé čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤, ą║ąŠč鹊čĆčŗą╣ ąĖąĘą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ ą▓ ą║ąŠą╝ąĮą░č鹥 ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ čāčĆąŠą▓ąĮčÅ ąĖąĮčäčĆą░ą║čĆą░čüąĮąŠą│ąŠ ąĖąĘą╗čāč湥ąĮąĖčÅ (ąŠčé č鹥ą╗ą░ č湥ą╗ąŠą▓ąĄą║ą░ ąĖą╗ąĖ ąČąĖą▓ąŠčéąĮąŠą│ąŠ). ą×ą▒ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┤ą░čéčćąĖą║ą░ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüčćąĖčéčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čü ą▓čŗčģąŠą┤ą░ ą┤ą░čéčćąĖą║ą░ č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ąŠąĮ ą╝ąŠą│ ą▒čŗ ąŠą┐čĆą░čłąĖą▓ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ ą║ąĮąŠą┐ą║ąĖ ąĖą╗ąĖ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ čéą░ą║ąŠą│ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ čĆą░ą▒ąŠčéčŗ ą┐ą╗ą░čéą░ Arduino čéčāčé ą┤ą░ąČąĄ ąĮąĄ ąĮčāąČąĮą░ - čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┐čĆčÅą╝ąŠ ą║ ą▓čŗčģąŠą┤čā ą┤ą░čéčćąĖą║ą░ PIR. ąØąŠ ąĘą░č鹊 ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą╝ąŠąČąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ čü ą┤ą░čéčćąĖą║ą░ PIR ą▓ą╝ąĄčüč鹥 čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠčé ą┤čĆčāą│ąĖčģ ą┤ą░čéčćąĖą║ąŠą▓, ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░čéčī ą║ą░ą║ąĖąĄ-č鹊 ą┤ąĄą╣čüčéą▓ąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮą░ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ čü ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝ ąŠ ąĮąĄąĘą░ą║ąŠąĮąĮąŠą╝ ą┐čĆąŠąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ ą▓ ą┐ąŠą╝ąĄčēąĄąĮąĖąĄ).
#include < Wire.h >
#include < Adafruit_Sensor.h >
#include < Adafruit_BMP085_U.h >
/* ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāąĮąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čüąĄąĮčüąŠčĆąŠą▓ ąŠčé
ą║ąŠą╝ą┐ą░ąĮąĖąĖ Adafruit (Adafruit_Sensor), ą║ąŠč鹊čĆą░čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą▒čēąĖą╣ čéąĖą┐
'type' ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ čüąĄąĮčüąŠčĆą░ ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ.
ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čŹč鹊ą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąÆą░ą╝ čéą░ą║ąČąĄ ąĮčāąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā
Adafruit_Sensor, ąĖ ą┤ąŠą▒ą░ą▓ąĖčéčī ąĄčæ ą▓ ą┐ą░ą┐ą║čā libraries čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ
(ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ čéą░ą║ąČąĄ ąĮą░ ą║ąŠą╝ą┐ą░ą║čé-ą┤ąĖčüą║ąĄ SUNFOUNDER).
ąÆčŗ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ąĮą░ąĘąĮą░čćąĖčéčī čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ (ID) ą┤ą╗čÅ čŹč鹊ą│ąŠ
čüąĄąĮčüąŠčĆą░ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü Adafruit Sensor API, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ
ą▒čŗą╗ąŠ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░čéčī čŹč鹊čé ąŠčéą┤ąĄą╗čīąĮčŗą╣ čüąĄąĮčüąŠčĆ ą▓ ą╗čÄą▒čŗčģ ą╗ąŠą│ą░čģ ą┤ą░ąĮąĮčŗčģ
ąĖ čé. ą┐. ą¦č鹊ą▒čŗ ąĮą░ąĘąĮą░čćąĖčéčī čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ID, ą┐čĆąŠčüč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓čīč鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ
ąĘąĮą░č湥ąĮąĖąĄ ąĮąĖąČąĄ ą▓ ą║ąŠąĮčüčéčĆčāą║č鹊čĆąĄ (ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ
12345).
ąĪąŠąĄą┤ąĖąĮąĄąĮąĖčÅ
==========
SCL ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā ą┐ąŠčĆčéčā 5
SDA ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā ą┐ąŠčĆčéčā 4
VDD ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ ą┐ąĖčéą░ąĮąĖčÅ 3.3V
GROUND ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ ąŠą▒čēąĄą╝čā ą┐čĆąŠą▓ąŠą┤čā (ąĘąĄą╝ą╗ąĄ) ą┐ą╗ą░čéčŗ (čüąĖą│ąĮą░ą╗ GND)
ąśčüč鹊čĆąĖčÅ
=======
2013/JUN/17 - ą×ą▒ąĮąŠą▓ą╗ąĄąĮąŠ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ą▓čŗčüąŠčéčŗ (KTOWN)
2013/FEB/13 - ą¤ąĄčĆą▓ą░čÅ ą▓ąĄčĆčüąĖčÅ ą┐čĆąŠąĄą║čéą░ (KTOWN)*/
Adafruit_BMP085_Unified bmp = Adafruit_BMP085_Unified(10085);
/**************************************************************************
ą¤čĆąŠčåąĄą┤čāčĆą░ ąŠč鹊ą▒čĆą░ąČą░ąĄčé ąĮąĄą║čāčÄ ą▒ą░ąĘąŠą▓čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ą┐ąŠą╗čāč湥ąĮąĮčāčÄ ąŠčé čüąĄąĮčüąŠčĆą░
čü ą┐ąŠą╝ąŠčēčīčÄ API-čéąĖą┐ą░ sensor_t (čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ąĖ ą║ąŠą┤ Adafruit_Sensor
ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ).
**************************************************************************/
void displaySensorDetails(void)
{
sensor_t sensor;
bmp.getSensor(&sensor);
Serial.println("------------------------------------");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" hPa");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" hPa");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" hPa");
Serial.println("------------------------------------");
Serial.println("");
delay(500);
}
/**************************************************************************
ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ čäčāąĮą║čåąĖčÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ Arduino (ąŠąĮą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ
ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüąĄ čüąĖčüč鹥ą╝čŗ).
**************************************************************************/
void setup(void)
{
Serial.begin(9600);
Serial.println("Pressure Sensor Test"); Serial.println("");
/* Initialise the sensor */
if(!bmp.begin())
{
/* ą×ą▒ąĮą░čĆčāąČąĄąĮą░ ą┐čĆąŠą▒ą╗ąĄą╝ą░ čü ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĮą░ą╗ąĖčćąĖčÅ BMP085. ąĢčüą╗ąĖ
čŹč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, ą┐čĆąŠą▓ąĄčĆčīč鹥 čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┤ą░čéčćąĖą║ąŠą╝. */
Serial.print("Ooops, no BMP085 detected ... Check your wiring or I2C ADDR!");
while(1);
}
/* ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ ąŠčé ą┤ą░čéčćąĖą║ą░. */
displaySensorDetails();
}
/**************************************************************************
ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ čäčāąĮą║čåąĖčÅ čåąĖą║ą╗ą░ Arduino, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮą░ ą┐ąŠčüą╗ąĄ
ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ setup (ąĘą┤ąĄčüčī čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠ ą┤ąŠą╗ąČąĄąĮ ąĮą░čģąŠą┤ąĖčéčīčüčÅ
ąÆą░čł ą║ąŠą┤ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ).
**************************************************************************/
void loop(void)
{
/* ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĮąŠą▓ąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ čüąĄąĮčüąŠčĆą░ */
sensors_event_t event;
bmp.getEvent(&event);
/* ą×č鹊ą▒čĆą░ąĘąĖčéčī čĆąĄąĘčāą╗čīčéą░čéčŗ (ą▒ą░čĆąŠą╝ąĄčéčĆąĖč湥čüą║ąŠąĄ ą┤ą░ą▓ą╗ąĄąĮąĖąĄ ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ą▓ hPa) */
if (event.pressure)
{
Serial.print("Pressure: ");
Serial.print(event.pressure);
Serial.println(" hPa");
/* ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą▓čŗčüąŠčéčŗ ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠčĆčÅ čü ą┐ąŠą┤čģąŠą┤čÅčēąĄą╣ č鹊čćąĮąŠčüčéčīčÄ čéčĆąĄą▒čāąĄčé *
* ąĮą░ą╗ąĖčćąĖčÅ ą▓ąĄą╗ąĖčćąĖąĮčŗ ą░čéą╝ąŠčüč乥čĆąĮąŠą│ąŠ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ ąÆą░čłąĄą│ąŠ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓ *
* ą╝ąŠą╝ąĄąĮčé ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┤ą░čéčćąĖą║ąŠą╝, ą░ čéą░ą║ąČąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąŠą║čĆčāąČą░čÄčēąĄą│ąŠ *
* ą▓ąŠąĘą┤čāčģą░ ą▓ ą│čĆą░ą┤čāčüą░čģ ą”ąĄą╗čīčüąĖčÅ. ąĢčüą╗ąĖ čā ąÆą░čü ąĮąĄčé čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, č鹊 *
* ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī 'čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ' ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ 1013.25 hPa *
* (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą╝ą░ą║čĆąŠčüąŠą╝ SENSORS_PRESSURE_SEALEVELHPA ą▓ čäą░ą╣ą╗ąĄ *
* sensors.h), ąŠą┤ąĮą░ą║ąŠ čŹč鹊 ąĮąĄ ąĖą┤ąĄą░ą╗čīąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé, čéą░ą║ čćč鹊 čĆąĄąĘčāą╗čīčéą░čéčŗ *
* ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą▒čāą┤čāčé ąĮąĄ č鹊čćąĮčŗą╝ąĖ. *
* *
* ąÆčŗ ą╝ąŠąČąĄč鹥 ąŠą▒čŗčćąĮąŠ čāąĘąĮą░čéčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ SLP (Sea Level Pressure) *
* ąĮą░ čüą░ą╣čéą░čģ ą┐ąŠą│ąŠą┤čŗ ąĖą╗ąĖ ąŠčé čåąĄąĮčéčĆąŠą▓ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗčģ ą┐čĆąŠą│ąĮąŠąĘąŠą▓ ąĮąĄą┤ą░ą╗ąĄą║ąŠ *
* ąŠčé ą░čŹčĆąŠą┐ąŠčĆčéą░. *
* *
* ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ą¤ą░čĆąĖąČą░ ą╝ąŠąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī č鹥ą║čāčēąĄąĄ ą┤ą░ą▓ą╗ąĄąĮąĖąĄ ąĖ čāčĆąŠą▓ąĄąĮčī *
* ąĮą░ą┤ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéčīčÄ ą╝ąĖčĆąŠą▓ąŠą│ąŠ ąŠą║ąĄą░ąĮą░ ą┐ąŠ čüčüčŗą╗ą║ąĄ http://bit.ly/16Au8ol */
/* ąĪąĮą░čćą░ą╗ą░ ą╝čŗ ą┐ąŠą╗čāčćąĖą╝ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčā ąŠčé ą┤ą░čéčćąĖą║ą░ BMP085 */
float temperature;
bmp.getTemperature(&temperature);
Serial.print("Temperature: ");
Serial.print(temperature);
Serial.println(" C");
/* ąŚą░č鹥ą╝ ą┐ąŠą╗čāčćąĖą╝ ą░čéą╝ąŠčüč乥čĆąĮąŠąĄ ą┤ą░ą▓ą╗ąĄąĮąĖąĄ, ąĖ ą┐ąŠ SLP ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ą┐ąŠą╗čāčćąĖą╝
ą▓čŗčüąŠčéčā ąĮą░ą┤ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠčĆčÅ. */
/* ąśčüą┐čĆą░ą▓čīč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ čüčéčĆąŠą║čā, čćč鹊ą▒čŗ čāą║ą░ąĘą░čéčī ą▓ ąĮąĄą╣ ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
SLP: č鹊ą│ą┤ą░ čĆąĄąĘčāą╗čīčéą░čéčŗ ą▒čāą┤čāčé č鹊čćąĮąĄąĄ. */
float seaLevelPressure = SENSORS_PRESSURE_SEALEVELHPA;
Serial.print("Altitude: ");
Serial.print(bmp.pressureToAltitude(seaLevelPressure,
event.pressure,
temperature));
Serial.println(" m");
Serial.println("");
}
else
{
Serial.println("Sensor error");
}
delay(1000);
}
ąÆ č鹥ą║čüč鹥 čüą║ąĄčéčćą░ ą┐ąŠčüč鹊čÅąĮąĮąŠ čāą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ ą┤ą░čéčćąĖą║ BMP085, ąĮąŠ ą║ąŠą┤ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĄąĮ ąĖ ą┤ą╗čÅ ą┤ą░čéčćąĖą║ą░ BMP180. ą¦č鹊ą▒čŗ ąĮąĄ ąĘą░ą│čĆąŠą╝ąŠąČą┤ą░čéčī čüčéą░čéčīčÄ, ą║ąŠą┤ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ Adafruit_BMP085_U ąĖ Adafruit_Sensor ąĘą┤ąĄčüčī ąĮąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ.

ąÜąŠą┤ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮąĄ č鹊ą╗čīą║ąŠ ąĮą░ Arduino MEGA 2560, ąĮąŠ ąĖ ąĮą░ Arduino Nano. ąöą╗čÅ čćč鹥ąĮąĖčÅ čåąĖčäčĆąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ čü ą┤ą░čéčćąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü I2C (TWI), ą┐čĆąĖ čŹč鹊ą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą╗ą░čüčü Wire ąŠčé Arduino.
ąÆ čŹč鹊ą╝ ą┐čĆąŠąĄą║č鹥 ąĖą╝ąĄąĄčéčüčÅ 2 ą┐čĆąĖą╝ąĄčĆą░ ą║ąŠą┤ą░. ą¤ąĄčĆą▓čŗą╣ getId.ino ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čćąĖčéą░čéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čü RFID-ą║ą╗čÄčćą░/ą╝ąĄčéą║ąĖ.
[getId.ino]
#include "rfid.h"
RFID rfid;
uchar serNum[5]; // ą╝ą░čüčüąĖą▓ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ąÆą░čłąĄą│ąŠ ID
void setup()
{
Serial.begin(9600);
rfid.begin(2, 3, 4, 5, 6, 7);
delay(100);
rfid.init();
}
void loop()
{
uchar status;
uchar str[MAX_LEN];
status = rfid.request(PICC_REQIDL, str);
if (status != MI_OK)
{
return;
}
rfid.showCardType(str);
status = rfid.anticoll(str);
if (status == MI_OK)
{
Serial.print("The card's number is: ");
memcpy(serNum, str, 5);
rfid.showCardID(serNum);
Serial.println();
Serial.println();
}
delay(500);
rfid.halt(); //ą║ąŠą╝ą░ąĮą┤ą░ ą║ą░čĆč鹥 ą┐ąĄčĆąĄą╣čéąĖ ą▓ čĆąĄąČąĖą╝ čüąĮą░ (sleep mode)
}
ąÆč鹊čĆąŠą╣ ą┐čĆąĖą╝ąĄčĆ rfidTest.ino ąĮąĄ ąĮą░ą╝ąĮąŠą│ąŠ čüą╗ąŠąČąĮąĄąĄ, ąŠąĮ ą┐čĆąŠčüč鹊 ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüčćąĖčéą░ąĮąĮčŗąĄ čü RFID-ą║ą╗čÄčćą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ, ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą║ą░ą║ąĖąĄ-č鹊 čĆą░ąĘąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ. ąÆčüąĄ čéčāą┐ąŠ ąĖ ą┐čĆąŠčüč鹊. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ rfid ąĖ softspi, ą║ąŠą┤ ą║ąŠč鹊čĆčŗčģ ąŠą┐čÅčéčī ąĮąĄ ą┐čĆąĖą▓ąŠąČčā ą┤ą╗čÅ ą║čĆą░čéą║ąŠčüčéąĖ (ą▓čüąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖ ą║ąŠą┤čŗ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé ąĮą░ ą║ąŠą╝ą┐ą░ą║čé-ą┤ąĖčüą║ąĄ SUNFOUNDER).
[rfidTest.ino]
#include "rfid.h"
RFID rfid;
uchar serNum[5];
void setup()
{
Serial.begin(9600);
rfid.begin(2, 3, 4, 5, 6, 7);
delay(100);
rfid.init();
}
void loop()
{
uchar status;
uchar str[MAX_LEN];
status = rfid.request(PICC_REQIDL, str);
if (status != MI_OK)
{
return;
}
rfid.showCardType(str);
status = rfid.anticoll(str);
if (status == MI_OK)
{
Serial.print("The card's number is: ");
memcpy(serNum, str, 5);
rfid.showCardID(serNum);
Serial.println();
// Check people associated with card ID
uchar* id = serNum;
if( id[0]==0x4B && id[1]==0xE6 && id[2]==0xD1 && id[3]==0x3B )
{
Serial.println("Hello Mary!");
}
else if(id[0]==0x3B && id[1]==0xE6 && id[2]==0xD1 && id[3]==0x3B)
{
Serial.println("Hello Greg!");
}
else if(id[0] == 0x15 && id[1] == 0x6F && id[2] == 0x9F && id[3] == 0xAF)
{
Serial.println("Collect!");
Serial.println();
}
else
{
Serial.println("Hello unkown guy!");
}
}
delay(500);
rfid.halt(); //ą║ąŠą╝ą░ąĮą┤ą░ ą║ą░čĆč鹥 ą┐ąĄčĆąĄą╣čéąĖ ą▓ čĆąĄąČąĖą╝ čüąĮą░ (sleep mode)
}
ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī čü ą╗čÄą▒ąŠą╣ ą┐ą╗ą░č鹊ą╣ Arduino, ąĮąĄ č鹊ą╗čīą║ąŠ čü Arduino MEGA 2560, ą║ąŠč鹊čĆčāčÄ ąÆčŗ ą▓ąĖą┤ąĖč鹥 ąĮą░ č乊č鹊.
ąŁč鹊čé ą┐čĆąŠąĄą║čé ą▓čŗą│ą╗čÅą┤ąĖčé ąĮą░ ą┐ąĄčĆą▓čŗą╣ ą▓ąĘą│ą╗čÅą┤ č乥ąĄčĆąĖč湥čüą║ąĖ čüą╗ąŠąČąĮčŗą╝. ąÜą░ą║ąĖąĄ-č鹊 ą┐ą╗ą░čéčŗ, ą║ąĮąŠą┐ąŠčćą║ąĖ, ą╝ąŠą┤čāą╗ąĖ, ą┐čĆąŠą▓ąŠą┤ą░... ą×ą┤ąĮą░ą║ąŠ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąĮąĖč湥ą│ąŠ čüą╗ąŠąČąĮąŠą│ąŠ čéčāčé ąĮąĄčé, ą┐čĆąŠčüč鹊 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ čĆą░ą┤ąĖąŠ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ ą┐ą╗ą░čéą░ą╝ąĖ Arduino čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ąŠą┤čāą╗ąĄą╣ NRF24L01 ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ISM 2.4 ą£ąōčå. ą×ą┤ąĮą░ ą┐ą╗ą░čéą░ čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ ą║ąŠą╝ą░ąĮą┤ ą┐ąŠ čĆą░ą┤ąĖąŠ (Arduino MEGA 2560, čüą║ąĄčéčć nrfTest_send.ino), ą┤čĆčāą│ą░čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ - ąŠąĮą░ ą║ąŠą╝ą░ąĮą┤čŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé (Arduino Nano, čüą║ąĄčéčć nrfTest_receive.ino). ąĪąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĮąĄ ą┐čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮąŠ, ą║ą░ą║čāčÄ ą┐ą╗ą░čéčā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ - ą║ąŠą┤ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ čģąŠčĆąŠčłąŠ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą╗čÄą▒ąŠą╣ ą┐ą╗ą░č鹥 Arduino.
[nrfTest_send.ino]
ąŁč鹊 ą║ąŠą┤ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮčŗ.
#include "NRF24L01.h"
// ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čéąĖą┐ąŠą▓ ą┤ą░ąĮąĮčŗčģ
#define uint8 unsigned char
#define uint16 unsigned int
#define uint32 unsigned long
//ąÆčŗą▒čĆą░ąĮąĮčŗąĄ ąĮąŠąČą║ąĖ ą┐ą╗ą░čéčŗ ą┤ą╗čÅ ą┐ąŠčĆč鹊ą▓ GPIO:
#define sw1Pin 2
#define sw2Pin 3
#define sw3Pin 4
#define sw4Pin 5
#define sw5Pin 6
#define TX_ADR_WIDTH 5 // 5 ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░ TX(RX)
#define TX_PLOAD_WIDTH 3 // 32 ą▒ą░ą╣čé ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ TX
unsigned char TX_ADDRESS[TX_ADR_WIDTH] =
{
0x34,0x43,0x10,0x10,0x01
}; // ąĘą┤ąĄčüčī ąĘą░ą┤ą░ąĄčéčüčÅ čüčéą░čéąĖč湥čüą║ąĖą╣ ą░ą┤čĆąĄčü TX
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĘąĮą░č湥ąĮąĖą╣:
unsigned char rx_buf[TX_PLOAD_WIDTH] = {0};
uint8 tx_buf[TX_PLOAD_WIDTH] = {0};
void setup()
{
Serial.begin(9600);
pinMode(sw1Pin, INPUT);
pinMode(sw2Pin, INPUT);
pinMode(sw3Pin, INPUT);
pinMode(sw4Pin, INPUT);
pinMode(sw5Pin, INPUT);
digitalWrite(sw1Pin, HIGH);
digitalWrite(sw2Pin, HIGH);
digitalWrite(sw3Pin, HIGH);
digitalWrite(sw4Pin, HIGH);
digitalWrite(sw5Pin, HIGH);
pinMode(CE, OUTPUT);
pinMode(SCK_PIN, OUTPUT);
pinMode(CSN, OUTPUT);
pinMode(MOSI_PIN, OUTPUT);
pinMode(MISO_PIN, INPUT);
pinMode(IRQ, INPUT);
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░
init_io();
unsigned char status=SPI_Read(STATUS);
Serial.print("status = ");
// ąŚą┤ąĄčüčī čćąĖčéą░ąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ čĆąĄąČąĖą╝ą░, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 'E'
Serial.println(status,HEX);
Serial.println("*******************TX_Mode Start****************************");
TX_Mode();
}
static void send (void)
{
// čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
unsigned char status = SPI_Read(STATUS);
// ąĄčüą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ transmit data send (TX_DS)
if(status&TX_DS)
{
SPI_RW_Reg(FLUSH_TX,0);
// ąĘą░ą┐ąĖčüą░čéčī ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā (ą┤ą░ąĮąĮčŗąĄ) ą▓ TX_FIFO
SPI_Write_Buf(WR_TX_PLOAD,tx_buf,TX_PLOAD_WIDTH);
}
// ąĄčüą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ receive data ready (MAX_RT),
// č鹊 ą┐ąŠą▓č鹊čĆąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ SETUP_RETR
if(status&MAX_RT)
{
SPI_RW_Reg(FLUSH_TX,0);
// ąĘą░ą┐čĆąĄčé čĆąĄąČąĖą╝ą░ standy
SPI_Write_Buf(WR_TX_PLOAD,tx_buf,TX_PLOAD_WIDTH);
}
// ąŠčćąĖčüčéą║ą░ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ RX_DR, TX_DS ąĖą╗ąĖ MAX_RT
SPI_RW_Reg(WRITE_REG+STATUS,status);
}
void loop()
{
if(digitalRead(sw1Pin) == 0)
{
Serial.println(1);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x11;
send();
}
if(digitalRead(sw2Pin) == 0)
{
Serial.println(2);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x21;
send();
}
if(digitalRead(sw3Pin) == 0)
{
Serial.println(3);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x31;
send();
}
if(digitalRead(sw4Pin) == 0)
{
Serial.println(4);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x41;
send();
}
if(digitalRead(sw5Pin) == 0)
{
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x50;
send();
}
}
//**************************************************
// ążčāąĮą║čåąĖčÅ: init_io();
// ą×ą┐ąĖčüą░ąĮąĖąĄ: ąŠą┤ąĮąŠą║čĆą░čéąĮąŠ ą╝ąĖą│ą░ąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝, čĆą░ąĘčĆąĄčłą░ąĄčé
// čćąĖą┐ (ą┤ą╗čÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ čĆąĄąČąĖą╝ą░ TX ąĖą╗ąĖ RX), ąĘą░ą┐čĆąĄčēą░ąĄčé
// SPI, ąĮą░ ą▓čŗčģąŠą┤ąĄ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ SPI ą▓ čāčĆąŠą▓ąĮąĄ ą╗ąŠą│. 1.
//**************************************************
void init_io(void)
{
digitalWrite(IRQ, 0);
digitalWrite(CE, 0); // čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čćąĖą┐ą░
digitalWrite(CSN, 1); // ąĘą░ą┐čĆąĄčé SPI
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_RW();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą░ą╣čé ą▓ nRF24L01 ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé
* ą▒ą░ą╣čé, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗą╣ ąĖąĘ nRF24L01 ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąĘą░ą┐ąĖčüąĖ,
* ą║ą░ą║ čŹč鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ SPI.
**************************************************/
unsigned char SPI_RW(unsigned char Byte)
{
unsigned char i;
//ą”ąĖą║ą╗ ą▓čŗą▓ąŠą┤ą░ 8 ą▒ąĖčé:
for(i=0; i < 8; i++)
{
if(Byte&0x80)
{
digitalWrite(MOSI_PIN, 1);
}
else
{
digitalWrite(MOSI_PIN, 0);
}
digitalWrite(SCK_PIN, 1);
// ą▓ą┤ą▓ąĖąĮčāčéčī čüą╗ąĄą┤čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čüčéą░čĆčłąĖą╣ ą▒ąĖčé (MSB)
Byte << = 1;
if(digitalRead(MISO_PIN) == 1)
{
Byte |= 1; // ąĘą░čģą▓ą░čé č鹥ą║čāčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ MISO
}
digitalWrite(SCK_PIN, 0);
}
return(Byte); // ą▓ąŠąĘą▓čĆą░čé ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_RW_Reg();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ value ą▓ čĆąĄą│ąĖčüčéčĆ reg.
**************************************************/
unsigned char SPI_RW_Reg(unsigned char reg, unsigned char value)
{
unsigned char status;
digitalWrite(CSN, 0); // CSN==0, ąĮą░čćą░ą╗ąŠ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░
SPI_RW(value); // .. ąĖ ąĘą░ą┐ąĖčüčī ą▓ ąĮąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ..
digitalWrite(CSN, 1); // ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą▓ąŠą┤ CSN ąŠą▒čĆą░čéąĮąŠ ą▓ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Read();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čćč鹥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ reg
* ą╝ąŠą┤čāą╗čÅ nRF24L01.
**************************************************/
unsigned char SPI_Read(unsigned char reg)
{
unsigned char reg_val;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ..
reg_val = SPI_RW(0); // .. ąĖ ąĘą░č鹥ą╝ čćč鹥ąĮąĖąĄ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ
digitalWrite(CSN, 1); // CSN==1, ą┐čĆąĄčĆą▓ą░čéčī ąŠą▒ą╝ąĄąĮ ą┐ąŠ SPI
return(reg_val); // ą▓ąŠąĘą▓čĆą░čé ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Read_Buf();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čćč鹥ąĮąĖąĄ ąĮčāąČąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ąĖąĘ čĆąĄą│ąĖčüčéčĆą░
* reg. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ
* ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐čĆąĖąĄą╝ą░, ą░ą┤čĆąĄčüąŠą▓ Rx/Tx.
**************************************************/
unsigned char SPI_Read_Buf(unsigned char reg, unsigned char *pBuf, unsigned char bytes)
{
unsigned char status,i;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
for(i=0; i < bytes; i++)
{
pBuf[i] = SPI_RW(0); // ą▓čŗą┐ąŠą╗ąĮąĖčéčī SPI_RW ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą▒ą░ą╣č鹊ą▓ ąĖąĘ nRF24L01
}
digitalWrite(CSN, 1); // ą▓ąĄčĆąĮčāčéčī CSN ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Write_Buf();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčī čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą▒čāč乥čĆą░ ą┐ąŠ čāą║ą░ąĘą░č鹥ą╗čÄ
* pBuf ą▓ nRF24L01. ą×ą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ
* ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą░ą┤čĆąĄčüąŠą▓ Rx/Tx.
**************************************************/
unsigned char SPI_Write_Buf(unsigned char reg, unsigned char *pBuf, unsigned char bytes)
{
unsigned char status,i;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
for(i=0; i < bytes; i++) // ą▓ čåąĖą║ą╗ąĄ ąĘą░ą┐ąĖčüą░čéčī ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▒ą░ą╣čé ąĖąĘ ą▒čāč乥čĆą░ (*pBuf)
{
SPI_RW(*pBuf++);
}
digitalWrite(CSN, 1); // ą▓ąĄčĆąĮčāčéčī CSN ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: TX_Mode();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čŹčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ
* nRF24L01 ą▓ čĆąĄąČąĖą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĄą│ąŠ ą░ą┤čĆąĄčü TX,
* čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą░ą┤čĆąĄčü RX ą┤ą╗čÅ auto.ack, ąĘą░ą┐ąŠą╗ąĮčÅąĄčé ą┐ąŠą╗ąĄąĘąĮčāčÄ
* ąĮą░ą│čĆčāąĘą║čā TX, ą▓čŗą▒ąĖčĆą░ąĄčé ą║ą░ąĮą░ą╗ RF, čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĖčé ąĖ
* ą╝ąŠčēąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ TX. PWR_UP čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, CRC
* (2 ą▒ą░ą╣čéą░) čĆą░ąĘčĆąĄčłąĄąĮąŠ, ąĖ PRIM:TX.
*
* ą¦č鹊 ą┤ąŠą┤ąĄą╗ą░čéčī: ąŠą┤ąĖąĮ ąĖą╝ą┐čāą╗čīčü (>10 ą╝ą║čü) ąĮą░ CE č鹥ą┐ąĄčĆčī ąŠčéą┐čĆą░ą▓ąĖčé
* čŹč鹊čé ą┐ą░ą║ąĄčé, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąŠąČąĖą┤ą░ąĄčéčüčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé
* ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╣ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮčŗ RX.
**************************************************/
void TX_Mode(void)
{
digitalWrite(CE, 0);
// ąĘą░ą┐ąĖčüčī TX_Address ą▓ nRF24L01:
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH);
// RX_Addr0 č鹊čé ąČąĄ, čćč鹊 ąĖ TX_Adr ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ Auto.Ack
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH);
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // čĆą░ąĘčĆąĄčłąĖčéčī Auto.Ack:Pipe0
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // čĆą░ąĘčĆąĄčłąĖčéčī Pipe0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x1a); // 500 ą╝ą║čü + 86 ą╝ą║čü, 10 ą┐ąŠą▓č鹊čĆąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć...
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // ą▓čŗą▒ąŠčĆ RF-ą║ą░ąĮą░ą╗ą░ 40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // TX_PWR:0dBm, Datarate:2Mbps, LNA:HCURR
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // čāčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ PWR_UP bit, čĆą░ąĘčĆąĄčłąĖčéčī CRC & Prim:TX,
// čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ MAX_RT & TX_DS.
SPI_Write_Buf(WR_TX_PLOAD,tx_buf,TX_PLOAD_WIDTH);
digitalWrite(CE, 1);
}
[nrfTest_receive.ino]
ąŁč鹊 ą║ąŠą┤ ąĮą░ čüč鹊čĆąŠąĮąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
/*********************************************************************
** SPI-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü **
** CS - ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ čåąĖčäčĆąŠą▓ąŠą╝čā ą┐ąŠčĆčéčā 8 **
** CSN - 9 (ąĮąŠąČą║ą░ SS) **
** SCK - 10 (ąĮąŠąČą║ą░ SCK) **
** MOSI - 11 (ąĮąŠąČą║ą░ MOSI) **
** MISO - 12 (ąĮąŠąČą║ą░ MISO) **
** IRQ - 13 **
*********************************************************************/#include "NRF24L01.h"
#define TX_ADR_WIDTH 5 // 5 ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░ TX(RX)
#define TX_PLOAD_WIDTH 3 // 32 ą▒ą░ą╣čé ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ TX
#define SW1_ON_Command 0x11
#define SW1_OFF_Command 0x10
#define SW2_ON_Command 0x21
#define SW2_OFF_Command 0x20
#define SW3_ON_Command 0x31
#define SW3_OFF_Command 0x30
#define SW4_ON_Command 0x41
#define SW4_OFF_Command 0x40
#define SWS_OFF_Command 0x50
//ą¤ąŠčĆčéčŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą╗ąĄ:
#define SW1 3
#define SW2 4
#define SW3 5
#define SW4 6
unsigned char TX_ADDRESS[TX_ADR_WIDTH] =
{
0x34,0x43,0x10,0x10,0x01
}; // ąĘą┤ąĄčüčī ąĘą░ą┤ą░ąĄčéčüčÅ čüčéą░čéąĖč湥čüą║ąĖą╣ ą░ą┤čĆąĄčü TX
unsigned char rx_buf[TX_PLOAD_WIDTH];
unsigned char tx_buf[TX_PLOAD_WIDTH];
void setup()
{
pinMode(CE, OUTPUT);
pinMode(SCK_PIN, OUTPUT);
pinMode(CSN, OUTPUT);
pinMode(MOSI_PIN, OUTPUT);
pinMode(MISO_PIN, INPUT);
pinMode(IRQ, INPUT);
Serial.begin(9600);
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░
init_io();
unsigned char status=SPI_Read(STATUS);
Serial.print("status = ");
// ąŚą┤ąĄčüčī čćąĖčéą░ąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ čĆąĄąČąĖą╝ą░, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 'E'
Serial.println(status,HEX);
Serial.println("*****************RX_Mode start******************************");
RX_Mode();
pinMode(SW1, OUTPUT);
pinMode(SW2, OUTPUT);
pinMode(SW3, OUTPUT);
pinMode(SW4, OUTPUT);
digitalWrite(SW1, HIGH);
digitalWrite(SW2, HIGH);
digitalWrite(SW3, HIGH);
digitalWrite(SW4, HIGH);
}
void loop()
{
// čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
unsigned char status = SPI_Read(STATUS);
if(status&RX_DR)
{
Serial.println(1);
// čćč鹥ąĮąĖąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▓ ą▒čāč乥čĆ rx_buf
SPI_Read_Buf(RD_RX_PLOAD, rx_buf, TX_PLOAD_WIDTH);
SPI_RW_Reg(FLUSH_RX,0); // ąŠčćąĖčüčéą║ą░ RX_FIFO
if(rx_buf[0] == 0x55)
{
if(rx_buf[1] == 0xAA)
{
switch(rx_buf[2])
{
case SW1_ON_Command:
digitalWrite(SW1, LOW);
break;
case SW1_OFF_Command:
digitalWrite(SW1, HIGH);
break;
case SW2_ON_Command:
digitalWrite(SW2, LOW);
break;
case SW2_OFF_Command:
digitalWrite(SW2, HIGH);
break;
case SW3_ON_Command:
digitalWrite(SW3, LOW);
break;
case SW3_OFF_Command:
digitalWrite(SW3, HIGH);
break;
case SW4_ON_Command:
digitalWrite(SW4, LOW);
break;
case SW4_OFF_Command:
digitalWrite(SW4, HIGH);
break;
case SWS_OFF_Command:
digitalWrite(SW1, HIGH);
digitalWrite(SW2, HIGH);
digitalWrite(SW3, HIGH);
digitalWrite(SW4, HIGH);
break;
}
}
}
}
// ąŠčćąĖčüčéą║ą░ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ RX_DR, TX_DS ąĖą╗ąĖ MAX_RT:
SPI_RW_Reg(WRITE_REG+STATUS,status);
for(int i = 0; i < 3; i++)
{
rx_buf[i] = 0;
}
delay(1000);
}
//**************************************************
// ążčāąĮą║čåąĖčÅ: init_io();
// ą×ą┐ąĖčüą░ąĮąĖąĄ: ąŠą┤ąĮąŠą║čĆą░čéąĮąŠ ą╝ąĖą│ą░ąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝, čĆą░ąĘčĆąĄčłą░ąĄčé
// čćąĖą┐ (ą┤ą╗čÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ čĆąĄąČąĖą╝ą░ TX ąĖą╗ąĖ RX), ąĘą░ą┐čĆąĄčēą░ąĄčé
// SPI, ąĮą░ ą▓čŗčģąŠą┤ąĄ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ SPI ą▓ čāčĆąŠą▓ąĮąĄ ą╗ąŠą│. 1.
//**************************************************
void init_io(void)
{
digitalWrite(IRQ, 0);
digitalWrite(CE, 0); // čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čćąĖą┐ą░
digitalWrite(CSN, 1); // ąĘą░ą┐čĆąĄčé SPI
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_RW();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą░ą╣čé ą▓ nRF24L01 ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé
* ą▒ą░ą╣čé, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗą╣ ąĖąĘ nRF24L01 ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąĘą░ą┐ąĖčüąĖ,
* ą║ą░ą║ čŹč鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ SPI.
**************************************************/
unsigned char SPI_RW(unsigned char Byte)
{
unsigned char i;
//ą”ąĖą║ą╗ ą▓čŗą▓ąŠą┤ą░ 8 ą▒ąĖčé:
for(i=0; i < 8; i++)
{
if(Byte&0x80)
{
// ą▓čŗą▓ąŠą┤ čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ ą▒ą░ą╣čéą░ (MSB) ą▓ MOSI
digitalWrite(MOSI_PIN, 1);
}
else
{
digitalWrite(MOSI_PIN, 0);
}
digitalWrite(SCK_PIN, 1); // SCK==1
Byte << = 1; // čüą┤ą▓ąĖą│ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ MSB
if(digitalRead(MISO_PIN) == 1)
{
Byte |= 1; // ąĘą░čģą▓ą░čé č鹥ą║čāčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ MISO
}
digitalWrite(SCK_PIN, 0); // SCK==0
}
return(Byte); // ą▓ąŠąĘą▓čĆą░čé ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_RW_Reg();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ value ą▓ čĆąĄą│ąĖčüčéčĆ reg.
**************************************************/
unsigned char SPI_RW_Reg(unsigned char reg, unsigned char value)
{
unsigned char status;
digitalWrite(CSN, 0); // CSN==0, ąĮą░čćą░ą╗ąŠ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░
SPI_RW(value); // .. ąĖ ąĘą░ą┐ąĖčüčī ą▓ ąĮąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ..
digitalWrite(CSN, 1); // ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą▓ąŠą┤ CSN ąŠą▒čĆą░čéąĮąŠ ą▓ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Read();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čćč鹥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ reg
* ą╝ąŠą┤čāą╗čÅ nRF24L01.
**************************************************/
unsigned char SPI_Read(unsigned char reg)
{
unsigned char reg_val;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ..
reg_val = SPI_RW(0); // .. ąĖ ąĘą░č鹥ą╝ čćč鹥ąĮąĖąĄ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ
digitalWrite(CSN, 1); // CSN==1, ą┐čĆąĄčĆą▓ą░čéčī ąŠą▒ą╝ąĄąĮ ą┐ąŠ SPI
return(reg_val); // ą▓ąŠąĘą▓čĆą░čé ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Read_Buf();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čćč鹥ąĮąĖąĄ ąĮčāąČąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ąĖąĘ čĆąĄą│ąĖčüčéčĆą░
* reg. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ
* ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐čĆąĖąĄą╝ą░, ą░ą┤čĆąĄčüąŠą▓ Rx/Tx.
**************************************************/
unsigned char SPI_Read_Buf(unsigned char reg, unsigned char *pBuf, unsigned char bytes)
{
unsigned char status,i;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
for(i=0; i < bytes; i++)
{
pBuf[i] = SPI_RW(0); // ą▓čŗą┐ąŠą╗ąĮąĖčéčī SPI_RW ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą▒ą░ą╣č鹊ą▓ ąĖąĘ nRF24L01
}
digitalWrite(CSN, 1); // ą▓ąĄčĆąĮčāčéčī CSN ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Write_Buf();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčī čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą▒čāč乥čĆą░ ą┐ąŠ čāą║ą░ąĘą░č鹥ą╗čÄ
* pBuf ą▓ nRF24L01. ą×ą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ
* ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą░ą┤čĆąĄčüąŠą▓ Rx/Tx.
**************************************************/
unsigned char SPI_Write_Buf(unsigned char reg, unsigned char *pBuf, unsigned char bytes)
{
unsigned char status,i;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
for(i=0; i < bytes; i++) // ą▓ čåąĖą║ą╗ąĄ ąĘą░ą┐ąĖčüą░čéčī ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▒ą░ą╣čé ąĖąĘ ą▒čāč乥čĆą░ (*pBuf)
{
SPI_RW(*pBuf++);
}
digitalWrite(CSN, 1); // ą▓ąĄčĆąĮčāčéčī CSN ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: RX_Mode();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čŹčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠą┤ąĖąĮ ą╝ąŠą┤čāą╗čī
* nRF24L01 ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ RX Mode, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé
* ą░ą┤čĆąĄčü RX, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą╗ąĖąĮčā ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ RX,
* ą▓čŗą▒ąĖčĆą░ąĄčé ą║ą░ąĮą░ą╗ RF, čüą║ąŠčĆąŠčüčéčī ąĖ LNA HCURR.
* ą¤ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ CE ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ
* ą╗ąŠą│. 1 - čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ č鹥ą┐ąĄčĆčī
* ą│ąŠč鹊ą▓ąŠ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┐ą░ą║ąĄčéą░ ą┤ą░ąĮąĮčŗčģ.
**************************************************/
void RX_Mode(void)
{
digitalWrite(CE, 0);
// ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ RX ąĖ TX ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą░ą┤čĆąĄčü
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH);
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // čĆą░ąĘčĆąĄčłąĖčéčī Auto.Ack:Pipe0
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // čĆą░ąĘčĆąĄčłąĖčéčī Pipe0
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // ą▓čŗą▒čĆą░čéčī RF-ą║ą░ąĮą░ą╗ 40
SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // ą▓čŗą▒čĆą░čéčī ą┤ą╗ąĖąĮčā ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ RX
// čéą░ą║čāčÄ ąČąĄ, ą║ą░ą║ ąĖ ą┤ą╗čÅ TX
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // TX_PWR:0dBm, Datarate:2Mbps, LNA:HCURR
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé PWR_UP, čĆą░ąĘčĆąĄčłąĖčéčī CRC & Prim:RX,
// čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĀRX_DR.
digitalWrite(CE, 1); // CE==1, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā čāčüčéčĆąŠą╣čüčéą▓ą░ RX
// ąóąĄą┐ąĄčĆčī čŹč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą│ąŠč鹊ą▓ąŠ ą║ ą┐čĆąĖąĄą╝čā ąŠą┤ąĮąŠą│ąŠ ą┐ą░ą║ąĄčéą░ ąĖąĘ 16 ą▒ą░ą╣čé ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ
// ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ TX, ą║ąŠč鹊čĆąŠąĄ ą┤ąĄą╗ą░ąĄčé ąŠčéą┐čĆą░ą▓ą║čā ąĮą░ ą░ą┤čĆąĄčü '3443101001' čü ą░ą▓č鹊ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄą╝,
// čüč湥čéčćąĖą║ąŠą╝ ą┐ąŠą▓č鹊čĆąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć 10, ąĮą░ RF-ą║ą░ąĮą░ą╗ąĄ 40 ąĖ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ = 2 Mbps.
}
ąÜą░ą║ ąÆčŗ ąĮą░ą▓ąĄčĆąĮąŠąĄ ąĘą░ą╝ąĄčéąĖą╗ąĖ, ą║ąŠą┤ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╣ ąĖ ą┐čĆąĖąĄą╝ąĮąŠą╣ čüč鹊čĆąŠąĮčŗ ą┐ąŠčģąŠąČ ą▓ č鹊ą╝ ą┐ą╗ą░ąĮąĄ, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ č鹥 ąČąĄ čüą░ą╝čŗąĄ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ ąĖ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄą╝ čĆą░ą┤ąĖąŠą╝ąŠą┤čāą╗ąĄą╣ NRF24L01.
ąĪčāčéčī čĆą░ą▒ąŠčéčŗ ą┐čĆąŠąĄą║čéą░ ą▓ č鹊ą╝, čćč鹊 ą║ąŠą│ą┤ą░ ąÆčŗ ąĮą░ąČąĖą╝ą░ąĄč鹥 ąĮą░ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╝ ą╝ąŠą┤čāą╗ąĄ ą║ąĮąŠą┐ą║ąĖ, č鹊 ąĮą░ ą┤ą░ą╗čīąĮąĖą╣ ą┐čĆąĖąĄą╝ąĮčŗą╣ ą╝ąŠą┤čāą╗čī ą┐ąŠ čĆą░ą┤ąĖąŠ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ąĘą░čüčéą░ą▓ą╗čÅčÄčé ą▓ą║ą╗čÄčćą░čéčīčüčÅ ąĖ ą▓čŗą║ą╗čÄčćą░čéčīčüčÅ čĆąĄą╗ąĄ.
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠąĄą║čéą░ čüą░ą╝čŗą╣ čüą╗ąŠąČąĮčŗą╣, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮą░ ąĮąĄą│ąŠ ą┐ąŠąĮą░ą▓ąĄčłą░ąĮąŠ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą┤ą░čéčćąĖą║ąŠą▓, ąĖ ą┐ą╗ą░čéą░ Arduino MEGA 2560 ąŠą▒čēą░ąĄčéčüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ čüąŠ ą▓čüąĄą╝ąĖ čŹčéąĖą╝ąĖ ą┤ą░čéčćąĖą║ą░ą╝ąĖ ąĖ čü ą┤ąŠč湥čĆąĮąĄą╣ ą┐ą╗ą░č鹊ą╣ ą┐ąŠ čĆą░ą┤ąĖąŠ, ąĮąŠ ąĄčēąĄ ąĖ č湥čĆąĄąĘ ąśąĮč鹥čĆąĮąĄčé ąŠą▒ą╝ąĄąĮąĖą▓ą░ąĄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü čüąĄčĆą▓ąĖčüąŠą╝ DeviceBit. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ąÆčŗ čāčüą┐ąĄčłąĮąŠ čüą┐čĆą░ą▓ąĖą╗ąĖčüčī čü ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ąĖ ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ, ąĖ ąŠąĘąĮą░ą║ąŠą╝ąĖą╗ąĖčüčī čü čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą╝, č鹊 ąĖ čü čŹčéąĖą╝ ą┐čĆąŠąĄą║č鹊ą╝ ąĮąĄ ą▒čāą┤ąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┐čĆąŠą▒ą╗ąĄą╝.
[W5100_DeviceBit.ino]
/*********************************************************************
** SPI-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü **
** CS - ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čåąĖčäčĆąŠą▓ąŠą╝čā ą┐ąŠčĆčéčā 22 **
** CSN - 24 (ąĮąŠąČą║ą░ SS) **
** SCK - 26 (ąĮąŠąČą║ą░ SCK) **
** MOSI - 28 (ąĮąŠąČą║ą░ MOSI) **
** MISO - 30 (ąĮąŠąČą║ą░ MISO) **
** IRQ - 32 **
*********************************************************************/
#include < SPI.h >
#include < Ethernet.h >
#include < DeviceBitTcpClient.h >
#include < EEPROM.h >
#include < dht11.h >
#include "NRF24L01.h"
#include "rfid.h"
#include < Wire.h >
#include < Adafruit_Sensor.h >
#include < Adafruit_BMP085_U.h >
#include < avr/interrupt.h >
//ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čéąĖą┐ąŠą▓ ą┤ą░ąĮąĮčŗčģ
#define uint8 unsigned char
#define uint16 unsigned int
#define uint32 unsigned long
//ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ
DHT11 DHT11;
RFID rfid;
uchar serNum[5];
Adafruit_BMP085_Unified bmp = Adafruit_BMP085_Unified(10085);
#define TX_ADR_WIDTH 5 // 5 ą▒ą░ą╣čé ą┤ą╗čÅ ą░ą┤čĆąĄčüą░ TX(RX)
#define TX_PLOAD_WIDTH 3 // 32 ą▒ą░ą╣čé ą┤ą╗čÅ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ TX
unsigned char TX_ADDRESS[TX_ADR_WIDTH] =
{
0x34,0x43,0x10,0x10,0x01
}; // ąĘą┤ąĄčüčī ąĘą░ą┤ą░ąĮ čüčéą░čéąĖč湥čüą║ąĖą╣ ą░ą┤čĆąĄčü TX
// ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ:unsigned char rx_buf[TX_PLOAD_WIDTH] = {0};
uint8 tx_buf[TX_PLOAD_WIDTH] = {0};
// USEEKEY (ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą║ą╗čÄčć, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┤ą░čÄčé ąĮą░ DeviceBit
// ą┐ąŠčüą╗ąĄ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ):
#define LW_USERKEY "611442bf3e1344ddac7302fe43187e91"
// ąØąŠą╝ąĄčĆą░ čłą╗čĹʹ░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ:
#define LW_GATEWAY "01"
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čüąĄč鹥ą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░, ą║ąŠč鹊čĆčŗąĄ čüą╗ąĄą┤čāąĄčé ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ
// čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī ąĖ ąĮą░čüčéčĆąŠąĖčéčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣
// ą╗ąŠą║ą░ą╗čīąĮąŠą╣ čüąĄčéąĖ, ą║ ą║ąŠč鹊čĆąŠą╣ č湥čĆąĄąĘ Ethernet-čłąĖą╗ą┤ WS5100 ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░
// ąÆą░čłą░ ą┐ą╗ą░čéą║ą░ Arduino MEGA2560.
//byte mac[] = {0xD0,0xC7,0xC0,0xAC,0xC5,0x81};
//IPAddress ip(192,168,0,135);
//IPAddress mydns(223,5,5,5);
//IPAddress gw(192,168,0,1);
//IPAddress subnet(255,255,255,0);
DeviceBitTcpClient *client;
int postInterval = 30000;
// ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ąÆčŗ ą▒čŗą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ čüąĄčĆą▓ąĄčĆčā, ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ:
unsigned long lastConnectionTime = 0;
// ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ:
boolean lastConnected = false;
// ąŚą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅą╝ąĖ ąĮą░ cosm.com.
const unsigned long postingInterval = 30*1000;
unsigned long duration;
unsigned long starttime;
unsigned long sampletime_ms = 10000;
unsigned long lowpulseoccupancy = 0;
float ratio = 0;
double concentration = 0;
#define p0 101325 // ąöą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ ą▓čŗčüąŠč鹥 čāčĆąŠą▓ąĮčÅ ą╝ąŠčĆčÅ (Pa) p0 = 101325;
#define currentAltitude 8 // ąóąĄą║čāčēą░čÅ ą▓čŗčüąŠčéą░ ą▓ ą╝ąĄčéčĆą░čģ
// ą×ąČąĖą┤ą░ąĄą╝ąŠąĄ ą┤ą░ą▓ą╗ąĄąĮąĖąĄ (ą▓ Pa) ąĮą░ čŹč鹊ą╣ ą▓čŗčüąŠč鹥:
const float epressure = p0 * pow((1-currentAltitude/44330), 5.255);
#define BMP085_ADDRESS 0x77 // ą░ą┤čĆąĄčü I2C ą┤ą╗čÅ BMP085
const unsigned char OSS = 0; // ąØą░čüčéčĆąŠą╣ą║ą░ ąŠą▓ąĄčĆčüą░ą╝ą┐ą╗ąĖąĮą│ą░
float pressure = 0;
float temperature = 0;
float altitude = 0;
char weather;
#define DELAYTIME 1000
#define F_CPU 16000000
#define F_DIV 1024
#define TIME 0.1
volatile uint8 count1,count2 = 0;
// ąŚąĮą░č湥ąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ:
int ac1; int ac2; int ac3;
uint16 ac4; uint16 ac5; uint16 ac6;
int b1; int b2;
int mb; int mc; int md;
// b5 ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą▓ bmp085GetTemperature(...), čŹčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
// ą▓ bmp085GetPressure(...), čéą░ą║ čćč鹊 ...Temperature(...) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░
// ą┐ąĄčĆąĄą┤ ...Pressure(...).
long b5;
uint8 pirValue = 0;
boolean pirState = false;
uint8 rfidValue = 0;
boolean rfidState = false;
#define photocellPin 0
#define mq2Pin 1
#define light1Pin 8 //ąŻčüčéą░ąĮąŠą▓ą║ą░ ąŠą┐ąĄčĆą░čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠčĆčéą░ I/O
#define light2Pin 9
#define pirPin 36
#define DHT11PIN 34
#define rfidLED 38
#define pirLED 40
void setup()
{
Serial.begin(9600);
if (!bmp.begin())
{
Serial.println("Could not find a valid BMP085 sensor, check wiring!");
while (1);
}
//Wire.begin();
//calibration();
rfid.begin(2, 3, 4, 5, 6, 7);
delay(100);
rfid.init();
pinMode(pirPin, INPUT);
pinMode(rfidLED, OUTPUT);
pinMode(pirLED, OUTPUT);
pinMode(CE, OUTPUT);
pinMode(SCK_PIN, OUTPUT);
pinMode(CSN, OUTPUT);
pinMode(MOSI_PIN, OUTPUT);
pinMode(MISO_PIN, INPUT);
pinMode(IRQ, INPUT);
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░
init_io();
unsigned char status=SPI_Read(STATUS);
Serial.print("status = ");
// ąŚą┤ąĄčüčī čćąĖčéą░ąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ čĆąĄąČąĖą╝ą░, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 'E'
Serial.println(status,HEX);
Serial.println("*******************TX_Mode Start****************************");
TX_Mode();
TIMER1_init();
client = new DeviceBitTcpClient(LW_USERKEY, LW_GATEWAY);
//client = new LeweiTcpClient(LW_USERKEY, LW_GATEWAY,mac,ip,mydns,gw,subnet);
UserSwitch us1(switchLight1,"light1",1);
client->addUserSwitch(us1);
UserSwitch us2(switchLight2,"light2",1);
client->addUserSwitch(us2);
UserSwitch us3(switchLight3,"light3",1);
client->addUserSwitch(us3);
UserSwitch us4(switchLight4,"light4",1);
client->addUserSwitch(us4);
starttime = millis();
pinMode(light1Pin,OUTPUT);
pinMode(light2Pin,OUTPUT);
}
void loop()
{
//long pressure = 0;
//float altitude = 0;
client->keepOnline();
if ((millis()-starttime) > postInterval)
{
//humiture
dhtPreprocess();
client -> appendSensorValue("Humidity", DHT11.humidity);
delay(DELAYTIME);
client -> appendSensorValue("Temperature", DHT11.temperature);
delay(DELAYTIME);
//illumination intensity
client -> appendSensorValue("Light",analogRead(photocellPin));
delay(DELAYTIME);
//gas sensor
client -> appendSensorValue("Gas",analogRead(mq2Pin));
delay(DELAYTIME);
//long pressure = 0;
//float altitude = 0;
//getBmpData(&pressure, &altitude);
//int pressureInt = (int)pressure;
readBmp();
client -> appendSensorValue("Pressure", pressure);
delay(DELAYTIME);
client -> appendSensorValue("Altitude",weather);
delay(DELAYTIME);
client->appendSensorValue("PIR",pirValue);
delay(DELAYTIME);
//RFID
client->sendSensorValue("RFID",rfidValue);
delay(DELAYTIME);
Serial.println("repeat lwc->send ...Completed.");
starttime = millis();
}
}
void stateChange1()
{
if(digitalRead(light1Pin)==HIGH)
{
switchLight1("0");
}
else
{
switchLight1("1");
}
}
void stateChange2()
{
if(digitalRead(light2Pin)==HIGH)
{
switchLight2("0");
}
else
{
switchLight2("1");
}
}
static void send (void)
{
// čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
unsigned char status = SPI_Read(STATUS);
// ąĄčüą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ tratsmit data send (TX_DS)
if(status&TX_DS)
{
SPI_RW_Reg(FLUSH_TX,0);
// ąĘą░ą┐ąĖčüą░čéčī ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā (ą┤ą░ąĮąĮčŗąĄ) ą▓ TX_FIFO
SPI_Write_Buf(WR_TX_PLOAD,tx_buf,TX_PLOAD_WIDTH);
}
// ąĄčüą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ receive data ready (MAX_RT),
// č鹊 ą┐ąŠą▓č鹊čĆąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ SETUP_RETR
if(status&MAX_RT)
{
// ąĘą░ą┐čĆąĄčé čĆąĄąČąĖą╝ą░ standy
SPI_RW_Reg(FLUSH_TX,0);
// ąĘą░ą┐ąĖčüčī ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▓ TX_FIFO
SPI_Write_Buf(WR_TX_PLOAD,tx_buf,TX_PLOAD_WIDTH);
}
// ąŠčćąĖčüčéą║ą░ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ RX_DR, TX_DS ąĖą╗ąĖ MAX_RT
SPI_RW_Reg(WRITE_REG+STATUS,status);
}
void switchLight1(char* p1)
{
Serial.println("switch1 test");
//stateChange1();
if(String(p1).equals("0"))
{
digitalWrite(light1Pin,HIGH);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x11;
send();
//delay(1000);
}
else
{
digitalWrite(light1Pin,LOW);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x10;
send();
//delay(1000);
}
client->checkFreeMem();
}
void switchLight2(char* p1)
{
Serial.println("switch2 test");
//stateChange2();
if(String(p1).equals("0"))
{
digitalWrite(light2Pin,HIGH);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x21;
send();
//delay(1000);
}
else
{
digitalWrite(light2Pin,LOW);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x20;
send();
//delay(1000);
}
client->checkFreeMem();
}
void switchLight3(char* p1)
{
Serial.println("switch1 test");
//stateChange1();
if(String(p1).equals("0"))
{
//digitalWrite(light3Pin,HIGH);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x31;
send();
}
else
{
//digitalWrite(light3Pin,LOW);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x30;
send();
}
client->checkFreeMem();
}
void switchLight4(char* p1)
{
Serial.println("switch2 test");
//stateChange2();
if(String(p1).equals("0"))
{
//digitalWrite(light4Pin,HIGH);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x41;
send();
}
else
{
//digitalWrite(light4Pin,LOW);
tx_buf[0] = 0x55;
tx_buf[1] = 0xAA;
tx_buf[2] = 0x40;
send();
}
client->checkFreeMem();
}
//**************************************************
// ążčāąĮą║čåąĖčÅ: init_io();
// ą×ą┐ąĖčüą░ąĮąĖąĄ: ąŠą┤ąĮąŠą║čĆą░čéąĮąŠ ą╝ąĖą│ą░ąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝, čĆą░ąĘčĆąĄčłą░ąĄčé
// čćąĖą┐ (ą┤ą╗čÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ čĆąĄąČąĖą╝ą░ TX ąĖą╗ąĖ RX), ąĘą░ą┐čĆąĄčēą░ąĄčé
// SPI, ąĮą░ ą▓čŗčģąŠą┤ąĄ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ SPI ą▓ čāčĆąŠą▓ąĮąĄ ą╗ąŠą│. 1.
//**************************************************
void init_io(void)
{
digitalWrite(IRQ, 0);
digitalWrite(CE, 0); // čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čćąĖą┐ą░
digitalWrite(CSN, 1); // ąĘą░ą┐čĆąĄčé SPI
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_RW();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą░ą╣čé ą▓ nRF24L01 ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé
* ą▒ą░ą╣čé, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗą╣ ąĖąĘ nRF24L01 ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąĘą░ą┐ąĖčüąĖ,
* ą║ą░ą║ čŹč鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ SPI.
**************************************************/
unsigned char SPI_RW(unsigned char Byte)
{
unsigned char i;
//ą”ąĖą║ą╗ ą▓čŗą▓ąŠą┤ą░ 8 ą▒ąĖčé:
for(i=0; i < 8; i++)
{
if(Byte&0x80)
{
digitalWrite(MOSI_PIN, 1);
}
else
{
digitalWrite(MOSI_PIN, 0);
}
digitalWrite(SCK_PIN, 1);
// ą▓ą┤ą▓ąĖąĮčāčéčī čüą╗ąĄą┤čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čüčéą░čĆčłąĖą╣ ą▒ąĖčé (MSB)
Byte << = 1;
if(digitalRead(MISO_PIN) == 1)
{
Byte |= 1; // ąĘą░čģą▓ą░čé č鹥ą║čāčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ MISO
}
digitalWrite(SCK_PIN, 0);
}
return(Byte); // ą▓ąŠąĘą▓čĆą░čé ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_RW_Reg();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ value ą▓ čĆąĄą│ąĖčüčéčĆ reg.
**************************************************/
unsigned char SPI_RW_Reg(unsigned char reg, unsigned char value)
{
unsigned char status;
digitalWrite(CSN, 0); // CSN==0, ąĮą░čćą░ą╗ąŠ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░
SPI_RW(value); // .. ąĖ ąĘą░ą┐ąĖčüčī ą▓ ąĮąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ..
digitalWrite(CSN, 1); // ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą▓ąŠą┤ CSN ąŠą▒čĆą░čéąĮąŠ ą▓ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Read();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čćč鹥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ reg
* ą╝ąŠą┤čāą╗čÅ nRF24L01.
**************************************************/
unsigned char SPI_Read(unsigned char reg)
{
unsigned char reg_val;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ..
reg_val = SPI_RW(0); // .. ąĖ ąĘą░č鹥ą╝ čćč鹥ąĮąĖąĄ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ
digitalWrite(CSN, 1); // CSN==1, ą┐čĆąĄčĆą▓ą░čéčī ąŠą▒ą╝ąĄąĮ ą┐ąŠ SPI
return(reg_val); // ą▓ąŠąĘą▓čĆą░čé ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Read_Buf();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čćč鹥ąĮąĖąĄ ąĮčāąČąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ąĖąĘ čĆąĄą│ąĖčüčéčĆą░
* reg. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ
* ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐čĆąĖąĄą╝ą░, ą░ą┤čĆąĄčüąŠą▓ Rx/Tx.
**************************************************/
unsigned char SPI_Read_Buf(unsigned char reg, unsigned char *pBuf, unsigned char bytes)
{
unsigned char status,i;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
for(i=0; i < bytes; i++)
{
pBuf[i] = SPI_RW(0); // ą▓čŗą┐ąŠą╗ąĮąĖčéčī SPI_RW ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą▒ą░ą╣č鹊ą▓ ąĖąĘ nRF24L01
}
digitalWrite(CSN, 1); // ą▓ąĄčĆąĮčāčéčī CSN ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: SPI_Write_Buf();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: ąĘą░ą┐ąĖčüčī čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą▒čāč乥čĆą░ ą┐ąŠ čāą║ą░ąĘą░č鹥ą╗čÄ
* pBuf ą▓ nRF24L01. ą×ą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ
* ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą░ą┤čĆąĄčüąŠą▓ Rx/Tx.
**************************************************/
unsigned char SPI_Write_Buf(unsigned char reg, unsigned char *pBuf, unsigned char bytes)
{
unsigned char status,i;
digitalWrite(CSN, 0); // CSN==0, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒ą╝ąĄąĮą░ SPI
status = SPI_RW(reg); // ą▓čŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
for(i=0; i < bytes; i++) // ą▓ čåąĖą║ą╗ąĄ ąĘą░ą┐ąĖčüą░čéčī ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▒ą░ą╣čé ąĖąĘ ą▒čāč乥čĆą░ (*pBuf)
{
SPI_RW(*pBuf++);
}
digitalWrite(CSN, 1); // ą▓ąĄčĆąĮčāčéčī CSN ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1
return(status); // ą▓ąŠąĘą▓čĆą░čé ą▒ą░ą╣čéą░ čüąŠčüč鹊čÅąĮąĖčÅ nRF24L01
}
/**************************************************
* ążčāąĮą║čåąĖčÅ: TX_Mode();
* ą×ą┐ąĖčüą░ąĮąĖąĄ: čŹčéą░ čäčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ
* nRF24L01 ą▓ čĆąĄąČąĖą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĄą│ąŠ ą░ą┤čĆąĄčü TX,
* čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą░ą┤čĆąĄčü RX ą┤ą╗čÅ auto.ack, ąĘą░ą┐ąŠą╗ąĮčÅąĄčé ą┐ąŠą╗ąĄąĘąĮčāčÄ
* ąĮą░ą│čĆčāąĘą║čā TX, ą▓čŗą▒ąĖčĆą░ąĄčé ą║ą░ąĮą░ą╗ RF, čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĖčé ąĖ
* ą╝ąŠčēąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ TX. PWR_UP čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, CRC
* (2 ą▒ą░ą╣čéą░) čĆą░ąĘčĆąĄčłąĄąĮąŠ, ąĖ PRIM:TX.
*
* ą¦č鹊 ą┤ąŠą┤ąĄą╗ą░čéčī: ąŠą┤ąĖąĮ ąĖą╝ą┐čāą╗čīčü (>10 ą╝ą║čü) ąĮą░ CE č鹥ą┐ąĄčĆčī ąŠčéą┐čĆą░ą▓ąĖčé
* čŹč鹊čé ą┐ą░ą║ąĄčé, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąŠąČąĖą┤ą░ąĄčéčüčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé
* ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╣ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮčŗ RX.
**************************************************/
void TX_Mode(void)
{
digitalWrite(CE, 0);
// ąĘą░ą┐ąĖčüčī TX_Address ą▓ nRF24L01:
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH);
// RX_Addr0 č鹊čé ąČąĄ, čćč鹊 ąĖ TX_Adr ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ Auto.Ack
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH);
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // čĆą░ąĘčĆąĄčłąĖčéčī Auto.Ack:Pipe0
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // čĆą░ąĘčĆąĄčłąĖčéčī Pipe0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x1a); // 500 ą╝ą║čü + 86 ą╝ą║čü, 10 ą┐ąŠą▓č鹊čĆąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć...
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // ą▓čŗą▒ąŠčĆ RF-ą║ą░ąĮą░ą╗ą░ 40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // TX_PWR:0dBm, Datarate:2Mbps, LNA:HCURR
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // čāčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ PWR_UP bit, čĆą░ąĘčĆąĄčłąĖčéčī CRC & Prim:TX,
// čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ MAX_RT & TX_DS.
SPI_Write_Buf(WR_TX_PLOAD,tx_buf,TX_PLOAD_WIDTH);
digitalWrite(CE, 1);
}
// ą¤čĆąĄą┐čĆąŠčåąĄčüčüąŠčĆ ą┤ą╗čÅ čüąĄąĮčüąŠčĆą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖ ą▓ą╗ą░ąČąĮąŠčüčéąĖ
void dhtPreprocess(void)
{
int chk = DHT11.read(DHT11PIN);
switch (chk)
{
case DHTLIB_OK:
break;
case DHTLIB_ERROR_CHECKSUM:
break;
case DHTLIB_ERROR_TIMEOUT:
break;
default:
break;
}
}
void getBmpData(long *pre, float *alt)
{
*pre = getPressure(readUP());
*alt = (float)44330 * (1 - pow(((float) (*pre)/p0), 0.190295));
}
long getPressure(uint32 up)
{
long x1, x2, x3, b3, b6, p;
uint32 b4, b7;
b6 = b5 - 4000;
// ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ B3
x1 = (b2 * (b6 * b6)>>12)>>11;
x2 = (ac2 * b6)>>11;
x3 = x1 + x2;
b3 = (((((long)ac1)*4 + x3) << OSS) + 2)>>2;
// ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ B4
x1 = (ac3 * b6)>>13;
x2 = (b1 * ((b6 * b6)>>12))>>16;
x3 = ((x1 + x2) + 2)>>2;
b4 = (ac4 * (unsigned long)(x3 + 32768))>>15;
b7 = ((unsigned long)(up - b3) * (50000>>OSS));
if (b7 < 0x80000000)
p = (b7<<1)/b4;
else
p = (b7/b4) << 1;
x1 = (p>>8) * (p>>8);
x1 = (x1 * 3038)>>16;
x2 = (-7357 * p)>>16;
p += (x1 + x2 + 3791)>>4;
return p;
}
// ą¦č鹥ąĮąĖąĄ ąĮąĄą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ
unsigned long readUP(void)
{
unsigned char msb, lsb, xlsb;
unsigned long up = 0;
// ąŚą░ą┐ąĖčüčī 0x34+(OSS << 6) ą▓ čĆąĄą│ąĖčüčéčĆ 0xF4 ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé
// čćč鹥ąĮąĖąĄ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ąŠą▓ąĄčĆčüą░ą╝ą┐ą╗ąĖąĮą│ą░
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF4);
Wire.write(0x34 + (OSS << 6));
Wire.endTransmission();
// ą×ąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, ą▓čĆąĄą╝čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé OSS
delay(2 + (3 << OSS));
// ą¦č鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ 0xF6 (MSB), 0xF7 (LSB) ąĖ 0xF8 (XLSB)
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF6);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 3);
// ą×ąČąĖą┤ą░ąĮąĖąĄ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ
while(Wire.available() < 3)
;
msb = Wire.read();
lsb = Wire.read();
xlsb = Wire.read();
up = (((unsigned long) msb << 16)
| ((unsigned long) lsb << 8)
| (unsigned long) xlsb) >> (8-OSS);
return up;
}
void calibration(void)
{
ac1 = readInt(0xAA);
ac2 = readInt(0xAC);
ac3 = readInt(0xAE);
ac4 = readInt(0xB0);
ac5 = readInt(0xB2);
ac6 = readInt(0xB4);
b1 = readInt(0xB6);
b2 = readInt(0xB8);
mb = readInt(0xBA);
mc = readInt(0xBC);
md = readInt(0xBE);
}
// ą¦č鹥ąĮąĖąĄ 2 ą▒ą░ą╣čé ąĖąĘ BMP085 (ąĖą╗ąĖ BMP180)
// ą¤ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ąĖąĘ 'ą░ą┤čĆąĄčüą░'
// ąÆč鹊čĆąŠą╣ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ąĖąĘ 'ą░ą┤čĆąĄčüą░'+1
int readInt(uint8 address)
{
uint8 msb, lsb;
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(address);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 2);
while(Wire.available() < 2)
;
msb = Wire.read();
lsb = Wire.read();
return (int) msb<<8 | lsb;
}
void TIMER1_init(void)
{
//cli();
TCCR1A=0; //ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą▓čŗą▓ąŠą┤ą░ PWM ąĮą░ čéą░ą╣ą╝ąĄčĆąĄ 1
TCCR1B = 0x05;
TCNT1 = 65536 - F_CPU / F_DIV * TIME;
TIMSK1 |= _BV(TOIE1); //ąŠčéą║čĆčŗčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ 1
SREG |= _BV(7);
}
ISR(TIMER1_OVF_vect)
{
TCNT1 = 65536 - F_CPU / F_DIV * TIME;
count1 ++;
if(count1 == 5)
{
count1 = 0;
if(readRfid())
{
rfidValue ++;
rfidState = ~rfidState;
digitalWrite(rfidLED, rfidState);
}
}
if(digitalRead(pirPin))
{
while(digitalRead(pirPin));
pirValue ++;
pirState = ~pirState;
digitalWrite(pirLED, pirState);
}
}
uint8 readRfid(void)
{
uint8 status;
uint8 str[MAX_LEN];
status = rfid.request(PICC_REQIDL, str);
if (status != MI_OK)
{
return 0;
}
status = rfid.anticoll(str);
if (status == MI_OK)
{
memcpy(serNum, str, 5);
// ą¤čĆąŠą▓ąĄčĆą║ą░ č湥ą╗ąŠą▓ąĄą║ą░, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü čŹčéąĖą╝ ID ą║ą░čĆčéčŗ
uchar* id = serNum;
if(id[0] == 0x15 && id[1] == 0x6F && id[2] == 0x9F && id[3] == 0xAF)
{
return 1;
}
}
return 0;
rfid.halt(); //ą║ąŠą╝ą░ąĮą┤ą░ ą║ą░čĆč鹥 ą┐ąĄčĆąĄą╣čéąĖ ą▓ čĆąĄąČąĖą╝ čüąĮą░ (sleep mode)
}
void readBmp(void)
{
/* ą¤ąŠą╗čāčćąĖčéčī ąĮąŠą▓ąŠąĄ čüąŠą▒čŗčéąĖąĄ ąŠčé čüąĄąĮčüąŠčĆą░ */
sensors_event_t event;
bmp.getEvent(&event);
/* ą×č鹊ą▒čĆą░ąĘąĖčéčī čĆąĄąĘčāą╗čīčéą░čéčŗ (ą▒ą░čĆąŠą╝ąĄčéčĆąĖč湥čüą║ąŠąĄ ą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą▓ hPa) */
if (event.pressure)
{
pressure = event.pressure;
bmp.getTemperature(&temperature);
if((pressure - epressure) > 250)
{
weather = 1;
}
else if(((pressure - epressure) < = 250) && ((pressure - epressure) >= -250))
{
weather = 0;
}
else if((pressure - epressure) < -250)
{
weather = -1;
}
float seaLevelPressure = SENSORS_PRESSURE_SEALEVELHPA;
altitude = bmp.pressureToAltitude(seaLevelPressure,event.pressure,temperature);
}
else
{
Serial.println("Sensor error");
}
}
[userSwitch_revertControl.ino]
ą¤čĆąĖą╝ąĄčĆ "ąŠą▒čĆą░čéąĮąŠą│ąŠ" čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ: čü čüąĄčĆą▓ąĄčĆą░ DeviceBit ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ ąÆą░čłčā ą┐ą╗ą░čéčā Arduino.
#include < SPI.h >
#include < Ethernet.h >
#include < DeviceBitTcpClient.h >
#include < EEPROM.h >
// ąÆą╝ąĄčüč鹊 your_api_key ą┐ąŠą┤čüčéą░ą▓čīč鹥 ą║ą╗čÄčć, ą║ąŠč鹊čĆčŗą╣ ąÆą░ą╝ ą▓čŗą┤ą░ą╗ąĖ ąĮą░ čüą░ą╣č鹥
// DeviceBit ą┐čĆąĖ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ:
#define DB_USERKEY "your_api_key"
#define DB_GATEWAY "01"
int relayPin = 6;
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čüąĄčéąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čüą╗ąĄą┤čāąĄčé čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī
// ąĖ ąĮą░čüčéčĆąŠąĖčéčī:
//byte mac[] = {0x74,0x69,0x69,0x2D,0x30,0x31};
//IPAddress ip(192,168,1, 15);
//IPAddress mydns(8,8,8,8);
//IPAddress gw(192,168,1,1);
//IPAddress subnet(255,255,255,0);
DeviceBitTcpClient *client;long starttime;int postInterval = 30000;
void setup()
{
Serial.begin(9600);
pinMode(relayPin, OUTPUT);
starttime = millis();
// ąÆą░ą╝ ą┤ąŠčüčéčāą┐ąĮąŠ 2 čüą┐ąŠčüąŠą▒ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüąĄč鹥ą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░
// 1. ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣:
client = new DeviceBitTcpClient(DB_USERKEY, DB_GATEWAY);
// 2. ą¤ąŠą╗ąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ čüąĄč鹥ą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░:
//client = new DeviceBitTcpClient(DB_USERKEY, DB_GATEWAY,mac,ip,mydns,gw,subnet);
// switchTest čÅą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣, ą║ąŠč鹊čĆčāčÄ ąÆčŗ ąĮą░ą┐ąĖčłąĄč鹥 ąĖ ą▓čüčéą░ą▓ąĖč鹥 ąĮąĖąČąĄ, čćč鹊ą▒čŗ
// čĆą░ą▒ąŠčéą░čéčī čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ "relay", ąĖą╝čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ąŠč鹊čĆąŠą│ąŠ ąÆčŗ čāčüčéą░ąĮąŠą▓ąĖą╗ąĖ
// ąĮą░ čüą░ą╣č鹥 http://www.devicebit.com/ ą▓ ą╝ąĄąĮčÄ "control command manager".
// ą£čŗ č鹥čüčéąĖčĆąŠą▓ą░ą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćčā čü čüą░ą╣čéą░ ą▓ ą┐ą╗ą░čéčā Arduino.
UserSwitch us1 (switchTest,"relay",0);
client->addUserSwitch(us1);
//client->easySetupMode(true);
}
void loop()
{
client->keepOnline();
}
void switchTest(char* p1)
{
if(String(p1).equals("0"))
{
digitalWrite(relayPin,LOW);
Serial.println("off");
}
else if(String(p1).equals("1"))
{
digitalWrite(relayPin,HIGH);
Serial.println("on");
}
//client->checkFreeMem();
}
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ ą║ ą┐čĆąĖą╝ąĄčĆą░ą╝ čüą╗čāąČąĖčé čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ SmartHome kit For Arduino.pdf, ą│ą┤ąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ, čü ą║ą░čĆčéąĖąĮą║ą░ą╝ąĖ ąĖ ą┐ąŠčÅčüąĮąĄąĮąĖčÅą╝ąĖ čĆą░ąĘąŠą▒čĆą░ąĮčŗ ą▓čüąĄ čŹčéąĖ ą┐čĆąĖą╝ąĄčĆčŗ, ą┤ą░ąĮčŗ čüčģąĄą╝čŗ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ - ą║ą░ą║ ąĖ čćč鹊 čü č湥ą╝ čüąŠąĄą┤ąĖąĮčÅčéčī. ąÆčüąĄ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊 ąĖ čÅčüąĮąŠ ąĮą░ą┐ąĖčüą░ąĮąŠ, ąĮą░ čģąŠčĆąŠčłąĄą╝ ą░ąĮą│ą╗ąĖą╣čüą║ąŠą╝ čÅąĘčŗą║ąĄ.
ą¦č鹊ą▒čŗ ą┐ąŠąĘą░ą┐čāčüą║ą░čéčī ą┐čĆąŠąĄą║čéčŗ, ąÆčŗ ą╝ąŠąČąĄč鹥 ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ čüąĖčüč鹥ą╝ąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Fritzing [3] (ąŠąĮą░ ąĄčüčéčī ąĮą░ ą║ąŠą╝ą┐ą░ą║čé-ą┤ąĖčüą║ąĄ čü ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ, ąĮąŠ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ čüą║ą░čćą░čéčī čüą▓ąĄąČčāčÄ ą▓ąĄčĆčüąĖčÄ čü čüą░ą╣čéą░ ą░ą▓č鹊čĆąŠą▓ Fritzing), ą╗ąĖą▒ąŠ čüąĖčüč鹥ą╝ąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE [4] (ąĄčæ ąĮą░ ą║ąŠą╝ą┐ą░ą║čé-ą┤ąĖčüą║ąĄ ąĮąĄčé, ąĮąŠ ą╝ąŠąČąĮąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠ čüą║ą░čćą░čéčī čü čüą░ą╣čéą░ arduino.cc). ąĢčüą╗ąĖ ąÆčŗ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąŠą┐čŗčéąĮčŗ, č鹊 ą▓ą╝ąĄčüč鹊 Arduino-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čüčĆąĄą┤ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī AVR Studio, IAR, Keil, CodeVision AVR ąĖą╗ąĖ čćč鹊-ąĮąĖą▒čāą┤čī ąĄčēąĄ - ą▓čŗą▒ąŠčĆ čüąĖčüč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ AVR ą▒ąŠą╗čīčłąŠą╣.
[devicebit.com]
ą¤ą╗ą░čéč乊čĆą╝ą░ DeviceBit [5] čÅą▓ą╗čÅąĄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆą░čÅ čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠčüčĆąĄą┤ąĮąĖą║ąŠą╝ ą╝ąĄąČą┤čā čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╝ ąĮąŠą▓ąŠą╝ąŠą┤ąĮčŗą╝ "ąśąĮč鹥čĆąĮąĄč鹊ą╝ ą▓ąĄčēąĄą╣" (Internet of Things, IOT) ąĖ ą╗čÄą┤čīą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ čģąŠčéčÅčé čüą▓ąŠąĖą╝ąĖ ą▓ąĄčēą░ą╝ąĖ čāą┤ą░ą╗ąĄąĮąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī (ą┐ąŠą┤ "ą▓ąĄčēą░ą╝ąĖ" ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ąĖąĮč鹥ą╗ą╗ąĄą║čéčāą░ą╗čīąĮčŗąĄ ą┤ąŠą╝ą░čłąĮąĖąĄ čüąĖčüč鹥ą╝čŗ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čģąŠą╗ąŠą┤ąĖą╗čīąĮąĖą║ąŠą▓, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖą╣, č鹥ą┐ą╗ąĖčå, ą│ą░ąĘąŠą▓čŗčģ ą║ąŠčéą╗ąŠą▓ ąĖ čé. ą┐.). ą¤ąŠčüčĆąĄą┤ąĮąĖč湥čüčéą▓ąŠ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ API. ąĪąĄčĆą▓ąĄčĆą░ DeviceBit ą┤ą░čÄčé ą▒čŗčüčéčĆčŗą╣ ąĖ ą┐čĆąŠčüč鹊ą╣ ą╝ąĄč鹊ą┤ ą┤ąŠą▒ą░ą▓ą╗čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ (Devices) ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (Applications), ą║ ą┐ą╗ą░čéč乊čĆą╝ąĄ DeviceBit. ą¤čĆąĖ čŹč鹊ą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čģčĆą░ąĮąĖą╗ąĖčēąĄ čüčéą░čéąĖčüčéąĖą║ąĖ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čāą┤ą░ą╗ąĄąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░ą╝ąĖ. ą¤ą╗ą░čéč乊čĆą╝ą░ DeviceBit čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄ ą┐čĆąŠčüč鹊 ą┐čĆąŠčüčéčŗą╝ ą╝ąĄč鹊ą┤ąŠą╝ ą┤ą╗čÅ čŹą║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖčÅ čü ąĮąŠą▓čŗą╝ąĖ ą┤ą░čéčćąĖą║ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ ąśąĮč鹥čĆąĮąĄčé; čŹč鹊 čéą░ą║ąČąĄ čüąĄčĆą▓ąĖčü, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą╝ąŠą│ą░ąĄčé ą║ąŠą╝ą┐ą░ąĮąĖčÅą╝ ą▓čŗą▓ąĄčüčéąĖ čüą▓ąŠąĖ ą┐čĆąŠą┤čāą║čéčŗ ąĮą░ čĆčŗąĮąŠą║.
ą¤ą╗ą░čéč乊čĆą╝ą░ DeviceBit ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ ą║ą░ą║ ą┤ą╗čÅ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą░ąĮą░ą╗ąĖąĘą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą╣ ąŠčåąĄąĮą║ąĖ ą┤ą░ąĮąĮčŗčģ, čéą░ą║ ąĖ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ą░ą▓ą░čĆąĖčÅčģ ąĖ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖčģąŠą┤čÅčé ąŠčé čüąĄąĮčüąŠčĆąŠą▓ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ čüąŠąŠą▒čēą░čÄčé ąŠą▒ čĆą░ąĘą╗ąĖčćąĮčŗčģ "ąĮąĄąĮąŠčĆą╝ą░ą╗čīąĮčŗčģ" čüąĖčéčāą░čåąĖčÅčģ.
ąÆčŗ ą╝ąŠąČąĄč鹥 čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ ąĖą┤ąĄąĖ ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą░čéčī čüą▓ąŠąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗ą░ą│ą░čÄčéčüčÅ ąĮą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ą╗ą░čéč乊čĆą╝čŗ DeviceBit. ąÆčŗ ą╝ąŠąČąĄč鹥 čüč乊ą║čāčüąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčāčÄ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆčā.
ąóą░ą║ąČąĄ ą┐ą╗ą░čéč乊čĆą╝ą░ DeviceBit ąŠą▒ą╝ąĄąĮąĖą▓ą░ąĄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü čüčāčēąĄčüčéą▓čāčÄčēąĖą╝ąĖ čüąŠčåąĖą░ą╗čīąĮčŗąĄ čüąĄčéčÅą╝ąĖ, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ Twitter ąĖ Facebook, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī ą▓ ąŠą▒čēąĖą╣ ą┤ąŠčüčéčāą┐ ąÆą░čłąĖą╝ ą┤čĆčāąĘčīčÅą╝ čüą▓ąŠąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ (ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą╗ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ), čćč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠč湥ąĮčī ą┐ąŠą╗ąĄąĘąĮčŗą╝ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ąŠčģąŠąČąĖčģ ąŠą▒ą╗ą░čüčéčÅčģ ą┤ąĄčÅč鹥ą╗čīąĮąŠčüčéąĖ.
ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ DeviceBit (čŹč鹊 ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ, čćč鹊ą▒čŗ ąĘą░ą┐čāčüčéąĖčéčī ą┐čĆąĖą╝ąĄčĆ Union čü ą║ąŠą╝ą┐ą░ą║čé-ą┤ąĖčüą║ą░ SUNFOUNDER), ąĮčāąČąĮąŠ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░čéčīčüčÅ čā ąĮąĖčģ ąĮą░ čüą░ą╣č鹥 [5]. ąŁč鹊 ąŠč湥ąĮčī ą┐čĆąŠčüč鹊: ą▓ą▓ąĄą┤ąĖč鹥 ą╗ąŠą│ąĖąĮ, ą┐čĆąĖą┤čāą╝ą░ą╣č鹥 ą┐ą░čĆąŠą╗čī, čāą║ą░ąČąĖč鹥 čüą▓ąŠą╣ čĆąĄą░ą╗čīąĮčŗą╣ email ąĖ ąĮą░ąČą╝ąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā Sign Up. ąØą░ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ.
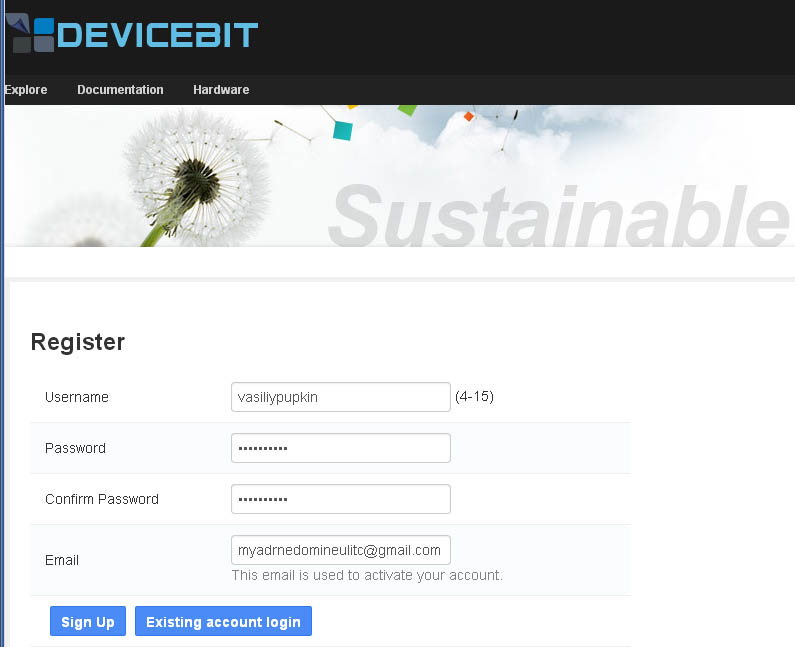
ą¤ąŠčüą╗ąĄ ą▓čģąŠą┤ą░ ąĮą░ čüą░ą╣čé ąÆčŗ čāą▓ąĖą┤ąĖč鹥 ą┐čĆąĖą│ą╗ą░čłąĄąĮąĖąĄ, ąĖ ą┐ąŠą╗čāčćąĖč鹥 ą┤ąŠčüčéčāą┐ ą║ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÄ DeviceBit. ą£ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ą╗čÅčéčī čüą▓ąŠąĖ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą║ ąĮąĖą╝ čüąĄąĮčüąŠčĆčŗ ąĖ čé. ą┐.

[ąĪčüčŗą╗ą║ąĖ]
1. SUNFOUNDER site:sunfounder.com.
2. SunFounder DIY Smart Home System Internet of things Kit for Arduino Raspberry Pi site:ebay.com.
3. Fritzing: ą║ą░ą║ ą┐ąĄčĆąĄčüčéą░čéčī ą▒ąŠčÅčéčīčüčÅ čŹą╗ąĄą║čéčĆąŠąĮąĖą║ąĖ.
4. Arduino: čćč鹊 čéą░ą╝ ą▓ąĮčāčéčĆąĖ? (FAQ).
5. DeviceBit site:devicebit.com.
6. 150418SUNFOUNDER-Arduino.zip - ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗąĄ ą▓ąĖą┤ąĄąŠčĆąŠą╗ąĖą║ąĖ.
7. Arduino MEGA 2560. |



