ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ Bluetooth ą╝ąŠą┤čāą╗ąĄą╣ HM-10 ąŠčé Martyn Currey [1]. ąÆ ąŠą┐ąĖčüą░ąĮąĖąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą╝ąŠą┤čāą╗ąĖ čü ą▓ąĄčĆčüąĖčÅą╝ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ 5.47 ąĖ 5.49.
ąöą╗čÅ firmware ą▓ąĄčĆčüąĖąĖ 5.49 ąĄčüčéčī 2 ą▓ą░čĆąĖą░ąĮčéą░, regular ąĖ long name. ąŻ ą▓ąĄčĆčüąĖąĖ regular ąĮąĄčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ readme, čéą░ą║ čćč鹊 ąĮąĄąĖąĘą▓ąĄčüčéąĮąŠ, čćč鹊 ą▓ ąĮąĄą╝ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī, ąĄčüą╗ąĖ čéą░ą║ąŠą▓ąŠąĄ ą▒čŗą╗ąŠ. ąÆąĄčĆčüąĖčÅ long name, ą║ą░ą║ čüą╗ąĄą┤čāąĄčé ąĖąĘ ąĮą░ąĘą▓ą░ąĮąĖčÅ, ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą╗ąĖąĮąĮąŠą│ąŠ ąĖą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī ą┤ą╗ąĖąĮčā ą┤ąŠ 29 čüąĖą╝ą▓ąŠą╗ąŠą▓. ąÆ č鹊 ąČąĄ čüą░ą╝ąŠąĄ ą▓čĆąĄą╝čÅ čāą┤ą░ą╗ąĄąĮčŗ čäčāąĮą║čåąĖąĖ iBeacon ąĖ ANCS. ąĢčüą╗ąĖ ąÆą░ą╝ ąĮąĄ ąĮčāąČąĮąŠ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĖą╝ąĄčéčī ą┤ą╗ąĖąĮąĮčŗąĄ ąĖą╝ąĄąĮą░, č鹊 ą╗čāčćčłąĄ ąŠčüčéą░ą▓ą░čéčīčüčÅ ąĮą░ ą▓ąĄčĆčüąĖąĖ regular firmware.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ąĮą░ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄą▓ąŠą┤ą░ 181214 ą▓čŗčłą╗ą░ ą▓ąĄčĆčüąĖčÅ 7.00 firmware HM-10.
2017-07-26 ą┤ąŠčüčéčāą┐ąĮąŠ Firmware 5.50.
2017-09.01 ą┤ąŠčüčéčāą┐ąĮąŠ Firmware 6.01 (ąĖčüą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠčłąĖą▒ą║ąĖ, ąĮąĄčé ąĮąŠą▓čŗčģ ą║ąŠą╝ą░ąĮą┤).
2017-10.xx ą┤ąŠčüčéčāą┐ąĮąŠ Firmware 6.03, čĆą░čüčłąĖčĆąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ CO. ąöąŠą▒ą░ą▓ą╗ąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ AT+MPIO (multi PIO control). ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ čäą░ą╣ą╗ąĄ readme. ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ (ąĮąŠčÅą▒čĆčī 2017) čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ąĮąĄ ą▒čŗą╗ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąŠ.
2018-03-24. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ Jinan Huamao čāą║ą░ąĘą░ą╗ą░, čćč鹊 HM-10 (ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗą╣, ąĮąĄ ą║ąŠą┐ąĖąĖ) čüąŠą▓ą╝ąĄčüčéąĖą╝ čü Android 8. ąØą░ čüą░ą╣č鹥 ąŠąĮąĖ čéą░ą║ąČąĄ ą┤ąŠą▒ą░ą▓ąĖą╗ąĖ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣, čćč鹊 HM-10 čĆą░ą▒ąŠčéą░ąĄčé čü Android 8.
2018-03. ąöąŠčüčéčāą┐ąĮčŗ ą╝ąŠą┤čāą╗ąĖ HM-10 čü ą▓ąĄčĆčüąĖąĄą╣ firmware 6.05, ąĮąŠ Jinan Huamao ąĮąĄ čüą┤ąĄą╗ą░ą╗ čĆąĄą╗ąĖąĘą░ čŹč鹊ą│ąŠ firmware, v6.03 ą▓čüąĄ ąĄčēąĄ ąŠčüčéą░ąĄčéčüčÅ čüą░ą╝čŗą╝ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ firmware, ą┤ąŠčüčéčāą┐ąĮčŗą╝ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ. ąÆčüąĄ ą▓čŗą│ą╗čÅą┤ąĖčé čéą░ą║, čćč鹊 Jinan Huamao ąĖąĘą▒ą░ą▓ą╗čÅąĄčéčüčÅ ąŠčé č乥ą╣ą║ąŠą▓čŗčģ ą║ąŠą┐ąĖą╣. ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĮąĄ ą▓čŗą┐čāčüą║ą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ firmware ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ HM-10 ąĖą╝ąĄčÄčé ąĮą░ą┤ą┐ąĖčüčī "HM-10", ąĮą░ą┐ąĄčćą░čéą░ąĮąĮčāčÄ čłąĄą╗ą║ąŠą│čĆą░čäąĖąĄą╣ ąĮą░ PCB.
HM-10 čŹč鹊 ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ ą╝ąŠą┤čāą╗čī 3.3v SMD Bluetooth 4.0 BLE, ąŠčüąĮąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ Bluetooth SOC-čćąĖą┐ąĄ CC2540 ąĖą╗ąĖ CC2541 ąŠčé TI (Texas Instruments). HM-10 čüą┤ąĄą╗ą░ąĮčŗ Jinan Huamao, ąĖ čŹč鹊 ąŠą┤ąĖąĮ ąĖąĘ ą╝ąĮąŠą│ąĖčģ Bluetooth-čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąŠąĮąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čÅčé, ą▓ą║ą╗čÄčćą░čÅ ą╝ąŠą┤čāą╗čī HM-11, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ ąČąĄ, ą║ą░ą║ HM-10, ąŠčéą╗ąĖčćą░čÅčüčī č鹥ą╝, čćč鹊 čā HM-11 ą┐ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░ ą╝ąĄąĮčīčłąĄ ąĖ ą╝ąĄąĮčīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠąĮčéą░ą║č鹊ą▓.
ąĢčüčéčī 2 ą▓ąĄčĆčüąĖąĖ HM-10: HM-10C ąĖ HM-10S.
HM-10C HM-10S
ąŻ HM-10C ąĮąĄčé ą║ąŠąĮčéą░ą║č鹊ą▓ ąĮą░ ąĮąĖąČąĮąĄą╝ č鹊čĆčåąĄ ą┐ą╗ą░čéčŗ (čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü USB), ąĖ čā ąĮąĄą│ąŠ 26 ą║ąŠąĮčéą░ą║č鹊ą▓ ą▓ą╝ąĄčüč鹊 34, čćč鹊 ą┤ąĄą╗ą░ąĄčé ąĄą│ąŠ ą┤ąĄčłąĄą▓ą╗ąĄ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄ. ą£ąŠą│čāčé ą▒čŗčéčī ąĖ ą┤čĆčāą│ąĖąĄ ąŠčéą╗ąĖčćąĖčÅ (čéą░ą║ąĖąĄ ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čéąĖą┐ ą║ą▓ą░čĆčåą░) ąĖąĘ-ąĘą░ ą┤ą░čéčŗ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖčÅ. ą¤ąŠ čüčāčéąĖ čŹč鹊 ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ ą╝ąŠą┤čāą╗ąĖ.
ą×čüąĮąŠą▓ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ HM-10:
ŌĆó ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ąŠčé +2.5v ą┤ąŠ +3.3v, čéčĆąĄą▒čāąĄą╝čŗą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ č鹊ą║ 50mA.
ąÆčüąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ HM-10 ą▓čŗą┐čāčüą║ą░čÄčéčüčÅ ąĮą░ čćąĖą┐ąĄ CC2541. ąŁč鹊 č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ CC2540 čü č鹥ą╝ ą╗ąĖčłčī ąŠčéą╗ąĖčćąĖąĄą╝, čćč鹊 ą╝ąĄąĮčīčłąĄ ą╝ąŠčēąĮąŠčüčéčī ąĖ ą╝ąĄąĮčīčłąĄ čĆą░ą┤ąĖčāčü ą┤ąĄą╣čüčéą▓ąĖčÅ. CC254x ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ čÅą┤čĆąĄ 8051 ąĖ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čćą░čüč鹊č鹥 32 ą£ąōčå.
HM-10 čüčéą░ą╗ ąŠč湥ąĮčī ą┐ąŠą┐čāą╗čÅčĆąĮčŗą╝ ą╝ąŠą┤čāą╗ąĄą╝ Bluetooth 4 BLE ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü Arduino. ąśąĘ-ąĘą░ ąĮą░ą╗ąĖčćąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ UART ąŠąĮ ą╗ąĄą│ą║ąŠ čüčéčŗą║čāąĄčéčüčÅ čü Arduino. ąŻčĆąŠą▓ąĄąĮčī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ UART čŹč鹊 čģąŠčĆąŠčłąŠ ąĖ ą┐ą╗ąŠčģąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 čāą┐čĆąŠčēą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ, ąĖ ą▓ č鹊 ąČąĄ ą▓čĆąĄą╝čÅ čüą║čĆčŗą▓ą░ąĄčé čāčĆąŠą▓ąĄąĮčī BLE, čéą░ą║ čćč鹊 ąÆčŗ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄč鹥 ąĮąĖą║ą░ą║ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ ąĮą░ą┤ čĆąĄą░ą╗čīąĮčŗą╝ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ BLE. HM-10 ąĖą╝ąĄąĄčé Bluetooth č鹊ą╗čīą║ąŠ ą▓ąĄčĆčüąĖąĖ 4.0. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮąĄą╗čīąĘčÅ ąŠčüčāčēąĄčüčéą▓ąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą╝ąŠą┤čāą╗čÅą╝ąĖ Bluetooth 2/2.1, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ HC-06 ąĖ HC-05.
HM-10 čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ AT-ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ UART. ąĪčāčēąĄčüčéą▓čāčÄčé ą║ąŠą╝ą░ąĮą┤čŗ čģąŠčüčéą░, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠčüčéčŗąĄ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗąĄ, čćč鹊 ą▒čāą┤ąĄčé čĆą░čüčüą╝ąŠčéčĆąĄąĮąŠ ą┐ąŠąĘąČąĄ.
[HM-10 ąĮą░ ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╣ ą┐ą╗ą░č鹥 ]
HM-10 čéą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĄąĮ čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ąĮą░ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą┐ą╗ą░č鹥 (breakout board), ą║ąŠč鹊čĆą░čÅ ą▓čŗą▓ąŠą┤ąĖčé čåąĄą┐ąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖ čüąĖą│ąĮą░ą╗čŗ UART ąĮą░ čłčéčŗčĆčīą║ąŠą▓čŗą╣ čĆą░ąĘčŖąĄą╝ (čü čłą░ą│ąŠą╝ 2.54 ą╝ą╝), čāą┤ąŠą▒ąĮčŗą╣ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓ ą┐ą╗ą░čéčā ą╝ą░ą║ąĄčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝.
ąØą░ breakout board čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ ą┐ąĖčéą░ąĮąĖčÅ 3.3v, čćč鹊 ą┤ąĄą╗ą░ąĄčé ą╝ąŠą┤čāą╗čī HM-10 čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ čü 5V, čćč鹊 ąĖą┤ąĄą░ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┤ąŠą╝ą░čłąĮąĄą│ąŠ čéą▓ąŠčĆč湥čüčéą▓ą░. ą×ą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé ą┐ąŠą╝ąĮąĖčéčī, čćč鹊 ą▓čŗą▓ąŠą┤ RX ą▓čüąĄ ąĄčēąĄ ąĖą╝ąĄąĄčé čĆą░ą▒ąŠčćąĖąĄ čāčĆąŠą▓ąĮąĖ 3.3v, ąĖ ą║ąŠą│ą┤ą░ HM-10 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ 5v Arduino, č鹊 čüą╗ąĄą┤čāąĄčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░čéčī 5v čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░ TX ą┐ą╗ą░čéčŗ Arduino ą▓ čāčĆąŠą▓ąĄąĮčī 3.3v ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ RX ą╝ąŠą┤čāą╗čÅ HM-10.
ąóą░ą▒ą╗ąĖčåą░ čü čåąŠą║ąŠą╗ąĄą▓ą║ąŠą╣ ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╣ ą┐ą╗ą░čéčŗ:
Ōä¢ ąĪąĖą│ąĮą░ą╗ I/O ą×ą┐ąĖčüą░ąĮąĖąĄ
1
BRK
ąÆčģąŠą┤
ąÆčŗą▓ąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ čĆą░ąĘčĆčŗą▓ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ (Break). ąĢčüą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠ, č鹊 ą┐ąĄčĆąĄą▓ąŠą┤ BRK ą▓ ą╗ąŠą│. 0 čĆą░ąĘąŠčĆą▓ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
2
VCC
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 3.6V ą┤ąŠ 6V.
3
GND
ąŚąĄą╝ą╗čÅ, ąŠą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤ ą┤ą╗čÅ čåąĄą┐ąĄą╣ ą┐ąĖčéą░ąĮąĖčÅ ąĖ čüąĖą│ąĮą░ą╗ąŠą▓.
4
TXD
ąÆčŗčģąŠą┤
ą¤ąĄčĆąĄą┤ą░čćą░ TTL UART.
5
RXD
ąÆčģąŠą┤
ą¤čĆąĖąĄą╝ TTL UART.
6
STATE
ąÆčŗčģąŠą┤
ąĪąŠčüč鹊čÅąĮąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąøąŠą│. 0, ąĄčüą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĮąĄ ą░ą║čéąĖą▓ąĮąŠ, ą╗ąŠą│. 1, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
LED . ąØą░ ą┐ą╗ą░č鹥 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüą▓ąĄč鹊ą┤ąĖąŠą┤ (LED), ą║ąŠč鹊čĆčŗą╣ ą╝ąĖą│ą░ąĄčé ą┐čĆąĖ ąŠąČąĖą┤ą░ąĮąĖąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü čćą░čüč鹊č鹊ą╣ 1 ąōčå (ą┐ąŠą╗čüąĄą║čāąĮą┤čŗ ą▓čŗą║ą╗čÄč湥ąĮ, ą┐ąŠą╗čüąĄą║čāąĮą┤čŗ ą▓ą║ą╗čÄč湥ąĮ). LED čüą▓ąĄčéąĖčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ, ą║ąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, ąĖ čüąĮąŠą▓ą░ ąĮą░čćąĖąĮą░ąĄčé ą╝ąĖą│ą░čéčī, ą║ąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čĆą░ąĘčĆčŗą▓ą░ąĄčéčüčÅ.
LED ąĮą░čćąĖąĮą░ąĄčé čüą▓ąĄčéąĖčéčīčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ, ą║ąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ (pairing). ą¤ąŠčüą╗ąĄ pairing ąŠąĮ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą║ ą╝ąĖą│ą░ąĮąĖčÄ. ąŁč鹊 ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą▓čÅąĘčī ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ąĖ LED ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖąĄ. ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ pairing čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĘą░ą║čĆčŗą▓ą░ąĄčéčüčÅ, ąĖ LED ą│ą░čüąĮąĄčé.
ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ LED ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą║ąŠą╝ą░ąĮą┤ąŠą╣ PIO1.
AT+PIO10 ŌĆō čāčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąÜąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī ąĮąĄ čüąŠąĄą┤ąĖąĮąĄąĮ, LED ą╝ąĄčĆčåą░ąĄčé 500 ą╝čü ą▓ą║ą╗čÄč湥ąĮ, 500 ą╝čü ą▓čŗą║ą╗čÄč湥ąĮ. ąÜąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĄčüčéčī, LED čüą▓ąĄčéąĖčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ.
STATE . ąÆčŗą▓ąŠą┤ STATE ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĮąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ.
BRK . ąÆčŗą▓ąŠą┤ BRK ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéą╝ąĄąĮąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ. ąÜąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠ, ą┐ąĄčĆąĄą▓ąŠą┤ BRK ą▓ ą╗ąŠą│. 0 ą╝ąŠą╝ąĄąĮčéą░ą╗čīąĮąŠ čĆą░ąĘčĆčŗą▓ą░ąĄčé ąĄą│ąŠ. ąÜąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąĮąĄčé, ą┐ąĄčĆąĄą▓ąŠą┤ BRK ą▓ ą╗ąŠą│. 1 ąĖą╗ąĖ ą▓ ą╗ąŠą│. 0 ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░. ąźąŠčéčÅ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĮąĄčé ąČąĄčüčéą║ąŠą│ąŠ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐ąŠą┤čéčÅąĮčāčéčī ą▓čŗą▓ąŠą┤ BRK ą║ čāčĆąŠą▓ąĮčÄ ą╗ąŠą│. 1 ą┤ą╗čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ, čćč鹊ą▒čŗ ą▓čģąŠą┤ BRK ąĮąĄ ą▓ąĖčüąĄą╗ ą▓ ą▓ąŠąĘą┤čāčģąĄ.
ą¤ąŠą┤ą┤ąĄą╗ą║ąĖ . ąÆ ąśąĮč鹥čĆąĮąĄč鹥 ąĄčüčéčī ą╝ąĮąŠą│ąŠ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ ą┐čĆąŠ ą┐ąŠą┤ą┤ąĄą╗čīąĮčŗąĄ HM-10, ąĖ ą┤ą░ąČąĄ Jinan Huamao ą┤ąŠą▒ą░ą▓ąĖą╗ąĖ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ čŹč鹊ą╝ čü ą┤ą░čéą░čłąĖčéčŗ. ąÉą▓č鹊čĆ [1] ąĮą░ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčé čŹčéąĖ ąĮąĄ-HM-10 čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ą░ą║ čäą░ą╗čīčłąĖą▓ą║ąĖ, ą░ ą┐čĆąŠčüč鹊 ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą┤čĆčāą│ąŠą╣ ą▓ąĄčĆčüąĖąĄą╣ ą¤ą× (firmware). ąĢčüą╗ąĖ ą▒čŗ ąŠąĮąĖ ą▒čŗą╗ąĖ čäą░ą╗čīčłąĖą▓ą║ą░ą╝ąĖ, č鹊 ą║ąŠą┐ąĖčĆąŠą▓ą░ą╗ąĖ ą▒čŗ firmware.
ąĪą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ąĮąĄ-HM-10 ą╝ąŠą┤čāą╗ąĖ čüą▓ąŠą▒ąŠą┤ąĮąŠ ą┐čĆąŠą┤ą░čÄčéčüčÅ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą╝ąĄčüčéą░čģ, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĮą░ eBay ąĖ AliExpress. ąÆčŗ ą▒čāą┤ąĄč鹥 čćą░čüč鹊 ą▓ąĖą┤ąĄčéčī ą╝ąŠą┤čāą╗ąĖ, ą┐čĆąŠą┤ą░ąĮąĮčŗąĄ ą▓ ą║ą░č湥čüčéą▓ąĄ HM-10, ąŠą┤ąĮą░ą║ąŠ ąŠąĮąĖ čéą░ą║ąĖą╝ąĖ ą╝ąŠą│čāčé ąĮąĄ ą▒čŗčéčī. ąĀą░ąĮčīčłąĄ ąŠą┤ąĮąĖą╝ ąĖąĘ čüą░ą╝čŗčģ ą╗ąĄą│ą║ąĖčģ čüą┐ąŠčüąŠą▒ąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄ-HM-10 ą▒čŗą╗ąŠ ąŠčéčüčāčéčüčéą▓ąĖąĄ ą║ą▓ą░čĆčåą░, ąĮąŠ ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ ą╝ąŠąČąĮąŠ č鹥ą┐ąĄčĆčī ą║čāą┐ąĖčéčī ąĮą░čüč鹊čÅčēąĖąĄ HM-10 ą▒ąĄąĘ ą║ą▓ą░čĆčåą░, čéą░ą║ čćč鹊 ą┐čāčéą░ąĮąĖčåą░ ą▓ąĄčĆąŠčÅčéąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčüčÅ.
[Bluetooth 4 BLE ]
BLE čŹč鹊 ąĮąĄ ą░ą┐ą│čĆąĄą╣ą┤ ą║ą╗ą░čüčüąĖč湥čüą║ąŠą│ąŠ Bluetooth, čŹč鹊 ą┤čĆčāą│ą░čÅ čüąĖčüč鹥ą╝ą░, ąŠąĮą░ čĆą░ą▒ąŠčéą░ąĄčé čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ą┐ąŠ-ą┤čĆčāą│ąŠą╝čā ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü čĆą░ąĮąĮąĖą╝ Bluetooth. BLE čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ą╝ą░ą╗čŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ, čćč鹊 ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠčĆąŠčéą║ąĖčģ, ąĮąĄčćą░čüč鹊 ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą┐ą░ą║ąĄč鹊ą▓ ą┤ą░ąĮąĮčŗčģ. BLE ąĮąĄ čĆą░čüčüčćąĖčéą░ąĮąŠ ą┤ą╗čÅ ą┤ą╗ąĖč鹥ą╗čīąĮčŗąĄ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą▒ąŠą╗čīčłąĖą╝ąĖ ąŠą▒čŖąĄą╝ą░ą╝ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. ąöą╗čÅ čéą░ą║ąĖčģ čåąĄą╗ąĄą╣ Bluetooth Classic ą▒čāą┤ąĄčé ą╗čāčćčłąĖą╝ ą▓čŗą▒ąŠčĆąŠą╝. ąÆ čüčāčēąĮąŠčüčéąĖ BLE ą┤ąŠčüčéąĖą│ą░ąĄčé ą╝ą░ą╗ąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ąĮąĄ čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ ą┐ąŠ čĆą░ą┤ąĖąŠ ąŠč湥ąĮčī čćą░čüč鹊, ą▓ ąŠčéą╗ąĖčćąĖąĄ Bluetooth Classic, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄčƹȹĖčé ą┐ąŠčüč鹊čÅąĮąĮčāčÄ čĆą░ą┤ąĖąŠčüą▓čÅąĘčī.
ąźąŠčéčÅ ąÆčŗ ą╝ąŠąČąĄč鹥 čüąŠąĘą┤ą░čéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓ ą║ą╗ą░čüčüąĖč湥čüą║ąŠą╝ čüčéąĖą╗ąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ HM-10 (čćč鹊 ą▒čāą┤ąĄčé ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĖą╝ąĄčĆą░čģ ąĮąĖąČąĄ), HM-10 ąĮąĄ ą▒čŗą╗ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ ą┤ą╗čÅ čŹč鹊ą│ąŠ, ąĖ ąĄčüą╗ąĖ čŹč鹊 ą▓čüąĄ, čćč鹊 ąÆą░ą╝ ąĮčāąČąĮąŠ, č鹊 ą╗čāčćčłąĄ ą┐ąŠą┤ąŠą╣ą┤čāčé ą╝ąŠą┤čāą╗ąĖ Bluetooth Classic ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┤ą▓čāčģ HC-05 ąĖą╗ąĖ HC-05 ąĖ HC-06.
ąĢčüčéčī ą┤ą▓ą░ čüą┐ąŠčüąŠą▒ą░, ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ BLE ą╝ąŠą│čāčé ąŠą▒čēą░čéčīčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝: Broadcaster + Observer ąĖ Central + Peripheral. HM-10 ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą▒ą░ čŹčéąĖčģ ą╝ąĄč鹊ą┤ą░.
ŌĆó Broadcaster + Observer čŹč鹊 ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ. Broadcaster, ąŠą▒čŗčćąĮąŠ čŹč鹊 ą║ą░ą║ąŠą╣-ąĮąĖą▒čāą┤čī ą┤ą░čéčćąĖą║, ą┐ąŠčüčŗą╗ą░ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ čüąĖą│ąĮą░ą╗čŗ (čĆąĄą║ą╗ą░ą╝ąĮčŗąĄ ą┐ą░ą║ąĄčéčŗ) ą║ąŠč鹊čĆčŗąĄ Observer ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĄčé. Broadcaster ąŠą▒čŗčćąĮąŠ ąĮąĖč湥ą│ąŠ ąĮąĄ ąĘąĮą░ąĄčé ąŠ č鹊ą╝, ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĄčé ą╗ąĖ ąĄą│ąŠ ą║č鹊-ąĮąĖą▒čāą┤čī, ąĖą╗ąĖ ąĮąĄčé.
ŌĆó ąĪčåąĄąĮą░čĆąĖą╣ Central + Peripheral ą▒ąŠą╗ąĄąĄ ą┐ąŠčģąŠąČ ąĮą░ ą║ą╗ą░čüčüąĖč湥čüą║ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ (ąŠą┤ąĮą░ą║ąŠ ąŠąĮąŠ ąĮąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čéą░ą║ąŠąĄ ąČąĄ, ą║ą░ą║ ą║ą╗ą░čüčüąĖč湥čüą║ąŠąĄ). ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ Central (ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, master) ąĮą░čģąŠą┤ąĖčé čāčüčéčĆąŠą╣čüčéą▓ąŠ Peripheral (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, slave), čāčüčéčĆąŠą╣čüčéą▓ąŠ Central čģąŠč湥čé čüąŠąĄą┤ąĖąĮąĖčéčīčüčÅ čü Peripheral ąĖ ąĖąĮąĖčåąĖąĖčĆčāąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 Central ą┐ąŠą╗čāčćą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĖ ą▒ąĄčĆąĄčé ąĮą░ čüąĄą▒čÅ čĆąŠą╗čī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝ ąĖ ąĄą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ.
[ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąĖ čüą╗čāąČą▒čŗ HM-10 ]
ąÜą░ą║ ąĖ ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ BLE, ą╝ąŠą┤čāą╗ąĖ HM-10 ąĖą╝ąĄąĄčé ąĮą░ą▒ąŠčĆ čüą╗čāąČą▒ (service), ąĖ ą║ą░ąČą┤ą░čÅ čüą╗čāąČą▒ą░ ąĖą╝ąĄąĄčé čĆčÅą┤ čüą▓čÅąĘą░ąĮąĮčŗčģ čü ąĮąĄą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║. ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čŹč鹊 ąĘąĮą░č湥ąĮąĖčÅ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čćąĖčéą░čÄčéčüčÅ (READ), ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ (WRITE), ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖ čćąĖčéą░čéčīčüčÅ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ.
ąÆčüąĄ čüą╗čāąČą▒čŗ HM-10 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ąĘą░čĆą░ąĮąĄąĄ, ą║čĆąŠą╝ąĄ ąŠą┤ąĮąŠą╣. ąŁč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ čüą╗čāąČą▒ą░ (custom service), čā ą║ąŠč鹊čĆąŠą╣ ąĄčüčéčī ąŠą┤ąĮą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ (custom) čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüą╗čāąČą▒ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ čéą░ą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą║ą░ą║ UUID ąĖ ąĖą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ Bluetooth. ąØą░ą┐čĆąĖą╝ąĄčĆ, čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ 0x2A00 čŹč鹊 ąĖą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ą║ąŠą│ą┤ą░ čā čāčüčéčĆąŠą╣čüčéą▓ą░ ąĄčüčéčī čŹčéą░ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░, č鹊 ąŠąĮą░ ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖą╝ąĄąĮąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤ąŠą╗ąĮčŗą╣ čüą┐ąĖčüąŠą║ ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüą╗čāąČą▒ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą┐ąŠ čüčüčŗą╗ą║ąĄ [2], ąĖ ą┐ąŠą╗ąĮčŗą╣ čüą┐ąĖčüąŠą║ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą┐ąŠ čüčüčŗą╗ą║ąĄ [3].
HM-10 ąĖčüą┐ąŠą╗čīąĘčāąĄčé custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü UART. ąŁč鹊 čĆą░ą▒ąŠčéą░ąĄčé ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘąĮą░č湥ąĮąĖčÅ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą▓ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŚą░č鹥ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┤čĆčāą│ąŠą╝čā ą┤ą░ą╗čīąĮąĄą╝čā čāčüčéčĆąŠą╣čüčéą▓čā, čćč鹊 ą┤ąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ąÜąŠą│ą┤ą░ ąÆčŗ ą│ąŠą▓ąŠčĆąĖč鹥 ą╝ąŠą┤čāą╗čÄ HM-10 ą┐ąĄčĆąĄą┤ą░čéčī "HELLO", ąŠąĮ čüąĮą░čćą░ą╗ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą▓ "HELLO", ąĖ ąĘą░č鹥ą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ, ą│ąŠą▓ąŠčĆčÅčēąĄąĄ ą┤ą░ą╗čīąĮąĄą╝čā čāčüčéčĆąŠą╣čüčéą▓čā: "ąŁą╣, čā ą╝ąĄąĮčÅ ąĄčüčéčī ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą┐ąŠą┤ą║ą╗čÄčćą░ą╣čüčÅ ąĖ ą┐ąŠą╗čāčćąĖ ąĖčģ". ąöą░ą╗čīąĮąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą║ą░ąĮąĖčĆčāąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĖ ą║ąŠą│ą┤ą░ ą┐ąŠą╗čāčćą░ąĄčé ąĄą│ąŠ, č鹊 ąĘąĮą░ąĄčé ąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĖ ąĮąŠą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, čćąĖčéą░ąĄčé ąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ ąĖ ąĘą░č鹥ą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąŠą▒čĆą░čéąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ "ąæą╗ą░ą│ąŠą┤ą░čĆčÄ, ą▓čüąĄ ą┐ąŠą╗čāčćąĖą╗".
Custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ą┤ąŠ 20 čüąĖą╝ą▓ąŠą╗ąŠą▓. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čüčéčĆąŠą║ąĖ ą┤ą╗ąĖąĮąĮąĄąĄ 20 čüąĖą╝ą▓ąŠą╗ąŠą▓ ą╝ąŠą┤čāą╗čī HM-10 ą┤ąĄą╗ąĖčé ą┤ą░ąĮąĮčŗąĄ ąĮą░ čüąĄą│ą╝ąĄąĮčéčŗ ą┐ąŠ 20 čüąĖą╝ą▓ąŠą╗ąŠą▓ ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą║ą░ąČą┤čŗą╣ ą┐ąŠ ąŠč湥čĆąĄą┤ąĖ, ą┐ąŠą║ą░ ą▓čüąĄ čüąĄą│ą╝ąĄąĮčéčŗ ąĮąĄ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ.
SERVICE 1
UUID: 00001800-0000-1000-8000-00805F9B34FB
GENERIC ACCESS
ŌĆó UUID: 00002A00-0000-1000-8000-00805F9B34FB
ŌĆó DEVICE NAME
ŌĆó READ
ŌĆó UUID: 00002A01-0000-1000-8000-00805F9B34FB
ŌĆó APPEARANCE
ŌĆó READ
ŌĆó UUID: 00002A02-0000-1000-8000-00805F9B34FB
ŌĆó PERIPHERAL PRIVACY FLAG
ŌĆó READ/WRITE
ŌĆó UUID: 00002A03-0000-1000-8000-00805F9B34FB
ŌĆó RECONNECTION ADDRESS
ŌĆó READ/WRITE
ŌĆó UUID: 00002A04-0000-1000-8000-00805F9B34FB
ŌĆó PERIPHERAL PREFERRED CONNECTION PARAMETERS
ŌĆó READ
SERVICE 2
UUID: 00001801-0000-1000-8000-00805F9B34FB
GENERIC ATTRIBUTE
ŌĆó UUID: 00002A05-0000-1000-8000-00805F9B34FB
ŌĆó SERVICE CHANGED
ŌĆó INDICATE
SERVICE 3
UUID: 0000FFE0-0000-1000-8000-00805F9B34FB
CUSTOM SERVICE
ŌĆó UUID: 0000FFE1-0000-1000-8000-00805F9B34FB
ŌĆó CUSTOM CHARACTERISTIC
ŌĆó READ/WRITE/NOTIFY
ą×čüąĮąŠą▓ąĮą░čÅ čćą░čüčéčī custom-čüą╗čāąČą▒čŗ UUID (FFE0) ąĖ ąŠčüąĮąŠą▓ąĮčāčÄ čćą░čüčéčī custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ UUID (FFE1) ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ AT. ą£ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓č鹊čĆą░čÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░.
ąĪąĮą░čćą░ą╗ą░ ą┐ąŠą┐čĆąŠą▒čāąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ Android, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī čüą╗čāąČą▒čŗ ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąĖąĘ ą╝ąŠą┤čāą╗čÅ HM-10. ą¤ąŠą┤ą░ą╣č鹥 ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ HM-10, ą┤ą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī Arduino, ąŠą┤ąĮą░ą║ąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐čĆąŠčüč鹊 ą┐ąŠą┤ą░čéčī +5V ąĮą░ ąĮąŠąČą║čā HM-10 VCC ąĖ ąŠą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤ (ą╝ąĖąĮčāčü) čüąŠąĄą┤ąĖąĮąĖčéčī čü ąĮąŠąČą║ąŠą╣ GND HM-10 GND.
ąĢčüą╗ąĖ ą▓čüąĄ čüą┤ąĄą╗ą░ąĮąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ, LED ąĮą░ HM-10 ą┤ąŠą╗ąČąĄąĮ ą╝ąĖą│ą░čéčī. ąÜąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, LED ą▒čāą┤ąĄčé čüą▓ąĄčéąĖčéčīčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ.
ą¤čĆąŠą▓ąĄčĆą║ą░ HM-10 ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ Android . ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé ąÆą░čłąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ Android ąĖ ą▓ąĄčĆčüąĖąĖ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ Android ąĮą░ ąĮąĄą╝ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ąĖą╗ąĖ ąĮąĄ čāą▓ąĖą┤ąĄčéčī HM-10 čüčĆąĄą┤ąĖ čāčüčéčĆąŠą╣čüčéą▓ Bluetooth (Bluetooth devices) ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ (Android Settings).
Samsung S7 ąĮą░ Android 6.0.1 ŌĆō ąĮą░čģąŠą┤ąĖčé HM-10 ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī pairing. Sony Z3 Compact ąĮą░ Android 4.4.4 ŌĆō ąĮą░čģąŠą┤ąĖčé HM-10 ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī pairing. Huawei honor pro 4 ąĮą░ Android 4.4.4 ŌĆō ąĮąĄ ąĮą░čģąŠą┤ąĖčé HM-10.
Samsung S7,
Sony Z3 Compact,
Huawei honor pro 4,
ąŻčüčéčĆąŠą╣čüčéą▓ą░ Samsung S7 ąĖ Sony Z3 Compact ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé HM-10 ą▓ čüą▓ąŠąĖčģ ąĮą░čüčéčĆąŠą╣ą║ą░čģ, ą░ honor Pro 4 ąĮąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé. ąØąŠ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ BLE ą▓čüąĄ čŹčéąĖ č鹥ą╗ąĄč乊ąĮčŗ ąĮą░čģąŠą┤čÅčé HM-10.
ąĪąŠą▓ąĄčé: ąĄčüą╗ąĖ ąÆą░čł Android ąĮąĄ ąĮą░čģąŠą┤ąĖčé HM-10 ą▓ čüą▓ąŠąĖčģ ąĮą░čüčéčĆąŠą╣ą║ą░čģ Bluetooth, ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī BLE Scanner app.
ą£ąŠą┤čāą╗ąĖ ą╝ąŠą│čāčé ą┐čĆąŠą╣čéąĖ pairing čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ pin ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 000000 (ą║ąŠąĮąĄčćąĮąŠ, ąĄčüą╗ąĖ ąÆčŗ ąĮąĄ ą┐ąŠą╝ąĄąĮčÅą╗ąĖ ąĄą│ąŠ).
ą¦č鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ HM-10 ąĖ ą┐čĆąŠčćąĖčéą░čéčī ąĄą│ąŠ čüą╗čāąČą▒čŗ ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ąĮą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ BLE. ąÉą▓č鹊čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą┤ą╗čÅ čŹč鹊ą│ąŠ BLE Scanner. ą£ąŠą│čāčé ą▒čŗčéčī ąĖ ą┤čĆčāą│ąĖąĄ ą┐ąŠą┤ąŠą▒ąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čéą░ą║ąĖąĄ ą║ą░ą║ B-BLE.
BLE Scanner, čćč鹥ąĮąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ HM-10 . ąŚą░ą┐čāčüčéąĖč鹥 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ BLE Scanner, ąĖ ąĮą░ą╣ą┤ąĖč鹥 HM-10. ąóą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā CONNECT, čćč鹊ą▒čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ąŠčüčī ą║ HM-10 ąĖ ąĮą░čćą░ą╗ąŠ čüčćąĖčéčŗą▓ą░čéčī ąĄą│ąŠ čüą▓ąŠą╣čüčéą▓ą░.
ąÜą╗ąĖą║ą░čÅ ąĮą░ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ čüčéčĆąĄą╗ą║ąĖ ą▓ąĮąĖąĘ, ą╝ąŠąČąĮąŠ čĆą░čüą║čĆčŗčéčī čüą╗čāąČą▒čŗ ąĖ ąŠč鹊ą▒čĆą░ąĘąĖčéčī ąĖčģ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ.
ąóčŗą║ą░čÅ ąĮą░ ą╝ąĄčéą║ąĖ
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄč鹊ą║:
R ą┐čĆąŠčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖąĄ. W ąĘą░ą┐ąĖčüą░čéčī ąĘąĮą░č湥ąĮąĖąĄ. I ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčī ąĖąĮą┤ąĖą║ą░čåąĖąĖ (on ąĖ off). N ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ (on ąĖ off).
ą¤ąŠą┤ Custom Service ąÆčŗ ą╝ąŠąČąĄč鹥 čāą▓ąĖą┤ąĄčéčī čüą╗čāąČą▒čā ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ HM-10 (default service) ąĖ ąĘąĮą░č湥ąĮąĖčÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║. ąÆčŗ ą╝ąŠąČąĄč鹥 čéą░ą║ąČąĄ čāą▓ąĖą┤ąĄčéčī, čćč鹊 custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ HM-10 ąĖą╝ąĄčÄčé ą░čéčĆąĖą▒čāčéčŗ Read, Write ąĖ Notify.
ąÜą░ą║ ąĖ ą╗čÄą▒ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ BLE, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ č湥čĆąĄąĘ ą▓čüąĄ čüą╗čāąČą▒čŗ ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, HM-10 čĆą░ą▒ąŠčéą░ąĄčé č湥čĆąĄąĘ čāčüčéą░ąĮąŠą▓ą║čā custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╝ ą┤ą░ąĮąĮčŗą╝ (ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĖąĮčÅčéčŗąĄ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ). ąŁč鹊 ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ BLE Scanner.
ąśčüą┐ąŠą╗čīąĘčāčÅ čüčģąĄą╝čā ąĖ čüą║ąĄčéčć ąĖąĘ čĆą░ąĘą┤ąĄą╗ą░ "ą×ą▒čēąĄąĮąĖąĄ ą╝ąĄąČą┤čā Arduino ąĖ HM-10" (čüą╝ ąĮąĖąČąĄ), ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ Arduino ą╝ąŠą┤čāą╗čī HM-10 ąĖ ąŠčéą║čĆąŠą╣č鹥 Serial Monitor. ąÆčŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī čćč鹊-č鹊 ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ č鹊ą│ąŠ, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čüą║čĆąĖąĮčłąŠč鹥 ąĮąĖąČąĄ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā AT, čćč鹊 ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčéčī čĆą░ą▒ąŠčéčā čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąĢčüą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĄčüčéčī, HM-10 ąŠčéą▓ąĄčéąĖčé OK.
ąóąĄą┐ąĄčĆčī ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ BLE Scanner ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥čüčī ą║ HM-10 čéčŗčćą║ąŠą╝ ą┐ąŠ ą║ąĮąŠą┐ą║ąĄ CONNECT.
ą×čéą║čĆąŠą╣č鹥 čüąĄą║čåąĖčÄ "CUSTOM SERVICE" ą▓ą║ą╗čÄčćąĖč鹥 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ (notifications on) čéčŗčćą║ąŠą╝ ąĮą░ ąĖą║ąŠąĮą║čā
ąóąĄą┐ąĄčĆčī ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąÆčŗ čćč鹊-č鹊 ąĮą░ą▒ąĖčĆą░ąĄč鹥 ąĮą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĄ ą▓ Serial Monitor Arduino, čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ BLE Scanner.
ą¦č鹊ą▒čŗ ąŠčéą┐čĆą░ą▓ąĖčéčī č鹥ą║čüčé ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ Serial Monitor, čéą║ąĮąĖč鹥 ąĮą░ ąĖą║ąŠąĮą║čā ąĘą░ą┐ąĖčüąĖ
[ą×ą▒čēąĄąĮąĖąĄ ą╝ąĄąČą┤čā Arduino ąĖ HM-10 ]
ąĪą╗ąĄą┤čāčÄčēąĄąĄ, čćč鹊 ą╝čŗ ą┐čĆąŠą┤ąĄą╗ą░ąĄą╝, čŹč鹊 ą┐ąŠą┤ą║ą╗čÄčćąĖą╝ HM-10 ą║ Arduino, ąĖ ą┐ąŠą┐čĆąŠą▒čāąĄą╝ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▒ą░ąĘąŠą▓čāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčāčÄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÄ ąĖ ą┐čĆąŠč鹥čüčéąĖčĆčāąĄą╝ AT-ą║ąŠą╝ą░ąĮą┤čŗ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: AT-ą║ąŠą╝ą░ąĮą┤čŗ čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ HM-10 ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą┐ąŠ Bluetooth. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ č湥čĆąĄąĘ UART ą║ąŠą╝ą░ąĮą┤čŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ. "AT" čÅą▓ą╗čÅąĄčéčüčÅ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝, ą║ąŠą╝ą░ąĮą┤ą░ "AT" čĆą░ąĘčĆčŗą▓ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
ąĪčģąĄą╝ą░ . ąÆčŗą┐ąŠą╗ąĮąĖč鹥 čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆō ąØąŠąČą║čā TX ą╝ąŠą┤čāą╗čÅ HM-10 ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ Arduino D8.(*) .
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (*): čüąĖą│ąĮą░ą╗čŗ HM-10 čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ čü čāčĆąŠą▓ąĮčÅą╝ąĖ ą╗ąŠą│ąĖą║ąĖ 3.3v. ą×čäąĖčåąĖą░ą╗čīąĮąŠ ąĮąĖą║ą░ą║ ąĮąĄ ąĘą░čÅą▓ą╗ąĄąĮąŠ, čćč鹊 ąŠąĮąĖ "5v tolerant" (čé. ąĄ. ąĮąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą░ą▓ą░čéčī ąĮą░ ąĮąĖčģ čāčĆąŠą▓ąĮąĖ ą╗ąŠą│ąĖą║ąĖ 5V), ą┐ąŠčŹč鹊ą╝čā ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą┐čĆąĖą▓ąĄčüčéąĖ čāčĆąŠą▓ąĮąĖ ą╗ąŠą│ąĖą║ąĖ 5V ą║ čāčĆąŠą▓ąĮčÅą╝ 3.3V.
ąÉą▓č鹊čĆ [1] ą┤ą╗čÅ ąŠą▒čēąĄąĮąĖčÅ čü ą╝ąŠą┤čāą╗čÅą╝ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā AltSoftSerial. AltSoftSerial ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮąŠąČą║čā D9 Arduino ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ąĮąŠąČą║čā D8 ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░. ąÆą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┤ąŠą▒ą░ą▓ąĖčéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā AltSoftSerial ą▓ Arduino IDE, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą┐čĆąĖą╝ąĄčĆčŗ čüą║ąĄčéč湥ą╣, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗčģ ą┤ą░ą╗ąĄąĄ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ čüą▓čÅąĘąĖ čü HM-10 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ UART ąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ AltSoftSerial ą▓ą╝ąĄčüč鹊 čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą┐ąŠčĆčéą░ Arduino. ąŁč鹊 ą▒čŗą╗ąŠ čüą┤ąĄą╗ą░ąĮąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┐ąŠčĆčé Arduino ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ąŠčéą╗ą░ą┤ąŠčćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣.
ą£ąŠą┤čāą╗čī HM-10 čÅą▓ą╗čÅąĄčéčüčÅ 3.3v čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. Breakout board ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ +5v VCC ą║ 3.3v ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ HM-10, ąĮąŠ čüąĖą│ąĮą░ą╗ RX ą▓čüąĄ ąĄčēąĄ ąŠčüčéą░ąĄčéčüčÅ čü čāčĆąŠą▓ąĮčÅą╝ąĖ 3.3v. ą¤ąŠčŹč鹊ą╝čā ąĮą░ą╝ ąĮčāąČąĮąŠ ą┐ąŠąĮąĖąĘąĖčéčī čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│ąĖą║ąĖ Arduino 5V TX ą┤ąŠ 3.3V. ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ - čüą┤ąĄą╗ą░čéčī ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖąĘ ą┤ą▓čāčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąĘąĖčüč鹊čĆčŗ 1 ą║ą×ą╝ ąĖ 2 ą║ą×ą╝. 1K+2K = 3K. 2K čüąŠčüčéą░ą▓ą╗čÅčÄčé ą┤ą▓ąĄ čéčĆąĄčéąĖ ąŠčé 3K, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé 3.3V, ą║ąŠč鹊čĆčŗąĄ čéą░ą║ąČąĄ čüąŠčüčéą░ą▓ą╗čÅčÄčé ą┤ą▓ąĄ čéčĆąĄčéąĖ ąŠčé 5V.
Arduino čāą▓ąĖą┤ąĖčé 3.3v čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ HM-10 TX ą║ą░ą║ ą╗ąŠą│. 1, ą┐ąŠčŹč鹊ą╝čā ą╝ąŠąČąĮąŠ ąĮą░ą┐čĆčÅą╝čāčÄ čüąŠąĄą┤ąĖąĮąĖčéčī HM-10 TX ąĖ Arduino RX (D8).
ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą║ ą▓čŗą▓ąŠą┤čā STATE, ą┤ą╗čÅ č湥ą│ąŠ ąĮčāąČąĄąĮ č鹊ą║ąŠąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ. ąØą░ ą▓čŗčģąŠą┤ąĄ STATE ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 1, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░ąČąĄčćčī čüą▓ąĄč鹊ą┤ąĖąŠą┤, čüąŠčüčéą░ą▓ą╗čÅąĄčé 3.3v, ą┐ąŠčŹč鹊ą╝čā ąĮčāąČąĄąĮ čĆąĄąĘąĖčüč鹊čĆ 100 ą×ą╝ ą┤ą╗čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ č鹊ą║ą░ ąĮą░ čāčĆąŠą▓ąĮąĄ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 10 ą╝ąÉ. ą¤ąŠą┤ąŠą╣ą┤ąĄčé ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ čĆąĄąĘąĖčüč鹊čĆ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ 150 .. 470 ą×ą╝. ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ ąĮą░ ą▓čŗčģąŠą┤ąĄ STATE ą▒čāą┤ąĄčé ąĘą░ą│ąŠčĆą░čéčīčüčÅ ą▓ą╝ąĄčüč鹥 čüąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ ąĮą░ ą╝ąŠą┤čāą╗ąĄ HM-10.
ąĪą║ąĄčéčć Serial . ą¤ąŠčüą╗ąĄ čüą▒ąŠčĆą║ąĖ čüčģąĄą╝čŗ ą▓čŗą│čĆčāąĘąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖą╣ čüą║ąĄčéčć. ąŁč鹊 ą┐čĆąŠčüčéą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░ ąĖ ą▓čŗą▓ąŠą┤ą░. ąÆčüąĄ, čćč鹊 Arduino ą┐čĆąĖą╝ąĄčé ąŠčé Serial Monitor, ą▒čāą┤ąĄčé ąĘąĄčĆą║ą░ą╗čīąĮąŠ ą┐ąŠčüą╗ą░ąĮąŠ ą▓ HM-10. ąÆčüąĄ, čćč鹊 ą┐ąĄčĆąĄą┤ą░čüčé HM-10, ąŠč鹊ą▒čĆą░ąĘąĖčéčüčÅ ą▓ ąŠą║ąĮąĄ Serial Monitor.
ą£ąŠą┤čāą╗čÄ HM-10 ąĮąĄ ąĮčĆą░ą▓čÅčéčüčÅ čüąĖą╝ą▓ąŠą╗čŗ ą║ąŠąĮčåą░ čüčéčĆąŠą║ąĖ(*) LF ąĖ CR (/n/r), ąĮąĄ ą┤ąŠą▒ą░ą▓ą╗čÅąĄč鹥 ąĖčģ ą║ ą║ąŠą╝ą░ąĮą┤ą░ą╝. ąÉą▓č鹊čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ čüąĖą╝ą▓ąŠą╗čŗ ą║ąŠąĮčåą░ čüčéčĆąŠą║ąĖ ą┐čĆąĖ ą▓čŗą▓ąŠą┤ąĄ ą▓ ąŠą║ąĮąŠ č鹥čĆą╝ąĖąĮą░ą╗ą░, čćč鹊ą▒čŗ ą┐čĆąĖą╝ąĄčĆčŗ ą▒čŗą╗ąŠ ą╗ąĄą│č湥 čćąĖčéą░čéčī, ąĖ čüą║ąĄčéčć ą▓čŗą▓ąŠą┤ąĖčé čŹčéąĖ čüąĖą╝ą▓ąŠą╗čŗ ą▓ Serial Monitor, ąĮąŠ ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąĖčģ ą▓ HM-10.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (*): čü ą▓ąĄčĆčüąĖąĄą╣ 6.05 firmware ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠąĄ ąŠą║ąŠąĮčćą░ąĮąĖąĄ čüčéčĆąŠą║ (čü ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄą╝ ąĖą╗ąĖ ą▒ąĄąĘ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ /n/r).
ąĪą║ąĄčéčć ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā AltSoftSerial [5], ą┐ąŠčŹč鹊ą╝čā ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ Arduino IDE, ąĖą╗ąĖ čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮą░ ą▓ ą┐ą░ą┐ą║čā library ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÄ.
// SerialIn_SerialOut_HM-10_01 // // ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü serial ą┤ą╗čÅ ąŠą▒čēąĄąĮąĖčÅ ą║ąŠą╝ą┐čīčÄč鹥čĆą░ čģąŠčüčéą░ // ąĖ AltSoftSerial, čćč鹊ą▒čŗ ąŠčüčāčēąĄčüčéą▓ąĖą╗ą░čüčī čüą▓čÅąĘčī čü ą╝ąŠą┤čāą╗ąĄą╝ Bluetooth. // // ąÆčüąĄ, čćč鹊 ą▒čŗą╗ąŠ ą▓ą▓ąĄą┤ąĄąĮąŠ ą▓ ąŠą║ąĮąĄ Serial Monitor, ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ // čāčüčéčĆąŠą╣čüčéą▓ąŠ HM-10. ąÆčüąĄ, čćč鹊 ą▒čŗą╗ąŠ ą┐ąŠą╗čāč湥ąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ HM-10, // ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą▓ ąŠą║ąĮąĄ Serial Monitor. ąÆ HM-10 ąĮąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ // čüąĖą╝ą▓ąŠą╗čŗ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čüčéčĆąŠą║ąĖ (/n/r). // // ąĪąŠąĄą┤ąĖąĮąĄąĮąĖčÅ: // // BT VCC - Arduino 5V // BT GND - Arduino GND // Arduino D8 (SS RX) - BT TX (ą▒ąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ) // Arduino D9 (SS TX) - BT RX (č湥čĆąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 5v -> 3.3v) // #include < AltSoftSerial.h>
AltSoftSerial BTserial;// https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
char c= ' ' ;
boolean NL = true ;
void setup ()
{
Serial.begin(9600 );
Serial.print("Sketch: " ); Serial.println(__FILE__);
Serial.print("Uploaded: " ); Serial.println(__DATE__);
Serial.println(" " );
BTserial.begin(9600 );
Serial.println("BTserial started at 9600" );
}
void loop ()
{
// ą¦č鹥ąĮąĖąĄ ąĖąĘ ą╝ąŠą┤čāą╗čÅ Bluetooth ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ą▓ Arduino Serial Monitor:
if (BTserial.available())
{
c = BTserial.read();
Serial.write(c);
}
// ą¦č鹥ąĮąĖąĄ ąĖąĘ Serial Monitor ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ą▓ ą╝ąŠą┤čāą╗čī Bluetooth:
if (Serial.available())
{
c = Serial.read();
// ąĪąĖą╝ą▓ąŠą╗čŗ CR ąĖ LF (/r ąĖ /n) ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą║ HM-10 ą▓ ą║ą░č湥čüčéą▓ąĄ
// ąŠą║ąŠąĮčćą░ąĮąĖčÅ čüčéčĆąŠą║ąĖ:
if (c!=10 & c!=13 )
{
BTserial.write(c);
}
// ąŁčģąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ ą▓ą▓ąŠą┤ą░ ą▓ ą│ą╗ą░ą▓ąĮąŠąĄ ąŠą║ąĮąŠ.
// ąĢčüą╗ąĖ ąĮąŠą▓ą░čÅ čüčéčĆąŠą║ą░, č鹊 ą┐ąĄčćą░čéą░ąĄčéčüčÅ čüąĖą╝ą▓ąŠą╗ ">".
if (NL) { Serial.print(" \r\n >" ); NL = false ; }
Serial.write(c);
if (c==10 ) { NL = true ; }
}
}
ą×čéą║čĆąŠą╣č鹥 Serial Monitor, ą▓ą║ą╗čÄčćąĖč鹥 ą┐ąĖčéą░ąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ, ąĖ ąÆčŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī čćč鹊-č鹊 ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ:
HM-10 čéčĆąĄą▒čāąĄčé ą▓ą▓ąŠą┤ą░ ą║ąŠą╝ą░ąĮą┤ ą▓ ą▓ąĄčĆčģąĮąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ, ąŠą▒čŗčćąĮąŠ ą▒ąĄąĘ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą║ąŠąĮčåą░ čüčéčĆąŠą║ąĖ. ą¤ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ą▓čŗčłąĄ čüą║ąĄčéčć ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĖą╝ą▓ąŠą╗čŗ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čüčéčĆąŠą║ąĖ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čćč鹊ą▒čŗ čüčéčĆąŠą║ąĖ čāą┤ąŠą▒ąĮąŠ ąŠč鹊ą▒čĆą░ąČą░ą╗ąĖčüčī ą▓ ąŠą║ąĮąĄ Serial Monitor, čé. ąĄ. čüąĖą╝ą▓ąŠą╗čŗ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čüčéčĆąŠą║ąĖ ąĮąĄ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ ą▓ ą╝ąŠą┤čāą╗čī Bluetooth, ąĖ ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą┐ąĄčćą░čéą░čÄčéčüčÅ, ą║ąŠą│ą┤ą░ čŹčģąŠ ą║ąŠą╝ą░ąĮą┤ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą▓ ąŠą║ąĮąĄ Serial Monitor. ąöą╗čÅ čĆą░ą▒ąŠčéčŗ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąŠą▒ą░ą▓ą╗čÅčéčī čüąĖą╝ą▓ąŠą╗čŗ ą║ąŠąĮčåą░ čüčéčĆąŠą║ ą▓ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ Serial Monitor, ąĮąŠ čŹč鹊 čāą┐čĆąŠčēą░ąĄčé čćč鹥ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐čĆąĖą╝ąĄčĆąŠą▓. ą×ą▒čŗčćąĮąŠ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ čü HM-10 ą▓čüąĄ ą▓ą▓ąŠą┤ąĖčéčüčÅ ą▓ ąŠą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ.
ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 ą║ąŠą│ą┤ą░ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┤čĆčāą│ąĖąĄ čüą║ąĄčéčćąĖ ąĖą╗ąĖ ą░ą┤ą░ą┐č鹥čĆ USB - serial UART, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĮą░čüčéčĆąŠąĖčéčī ąŠą║ąŠąĮčćą░ąĮąĖąĄ čüčéčĆąŠą║ ą▒ąĄąĘ čüąĖą╝ą▓ąŠą╗ąŠą▓ CR ąĖ LF (čāčüčéą░ąĮąŠą▓ą║ą░ line endings -> No line ending ą▓ ąĮąĖąČąĮąĄą╣ čćą░čüčéąĖ ąŠą║ąĮą░ Serial Monitor).
ąÆ ąĮąĖąČąĮąĄą╣ čćą░čüčéąĖ ąŠą║ąĮą░ Serial Monitor čāčüčéą░ąĮąŠą▓ąĖč鹥 čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ 9600 baud, ąĖ ą▓čüąĄ ąĮą░čłąĖ čüą║ąĄčéčćąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░čüčéčĆąŠą╣ą║čā čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüąĖą╝ą▓ąŠą╗ąŠą▓ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čüčéčĆąŠą║ąĖ:
ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ čāčüčéą░ąĮąŠą▓ą║ąĖ, ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą║ąŠą╝ą░ąĮą┤čā "AT". ą×ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą║ą░ąĮą░ą╗ą░ ą║ąŠą╝ą░ąĮą┤, ąĖ ą┤ąŠą╗ąČąĮą░ ą▓ąĄčĆąĮčāčéčī ąŠčéą▓ąĄčé ą╝ąŠą┤čāą╗čÅ "OK". ąóą░ą║ąČąĄ "AT" ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, čćč鹊ą▒čŗ čĆą░ąĘąŠčĆą▓ą░čéčī ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
ąÆą▓ąĄą┤ąĖč鹥 "AT" (ą▒ąĄąĘ ą║ą░ą▓čŗč湥ą║) ą▓ ą┐ąŠą╗ąĄ ą▓ą▓ąŠą┤ą░ č鹥ą║čüčéą░ ąĖ ą║ą╗ąĖą║ąĮąĖč鹥 Send. ąĢčüą╗ąĖ ą▓čüąĄ čĆą░ą▒ąŠčéą░ąĄčé, č鹊 ąÆčŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī "OK".
ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą║ą░ą║ą░čÅ ą▓ąĄčĆčüąĖčÅ firmware ą▓ HM-10, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 AT+VERR?
ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī ąĖą╝čÅ ą╝ąŠą┤čāą╗čÅ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥AT+NAME?, ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čāčüčéčĆąŠą╣čüčéą▓ąŠ Android ąĖ ą▓ ąĮąĄą╝ ą┐ąŠąĖčüą║ čāčüčéčĆąŠą╣čüčéą▓ Bluetooth. ąöą╗čÅ HM-10 ąĖą╝čÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ HMsoft.
ąŁč鹊 čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ HM-10 ą▓ čĆąĄąČąĖą╝ąĄ Salve/Peripheral. ąÜąŠą│ą┤ą░ ą░ą║čéąĖą▓ąĄąĮ čĆąĄąČąĖą╝ Master/Central, čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüą▓ąŠąĄ ąĖą╝čÅ.
ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą░ą┤čĆąĄčü ą╝ąŠą┤čāą╗čÅ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 AT+ADDR?
ąśą╝čÅ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī čü ą┐ąŠą╝ąŠčēčīčÄ AT+NAME. ą¤ąŠąĘąČąĄ čŹč鹊 ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┤ą▓čāčģ HM-10, čćč鹊ą▒čŗ ą┐ąŠą╝ąŠčćčī čü ąĖčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĄą╣ - ą│ą┤ąĄ ą║ą░ą║ąŠą╣. ąÜą░ą║ ąÆčŗ čāą▓ąĖą┤ąĖč鹥, ąĖą╝čÅ ą▒čŗą╗ąŠ ąĖąĘą╝ąĄąĮąĄąĮąŠ ąĮą░ HMsoft-38A3. "38A3" ąĘą┤ąĄčüčī ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ 4 čåąĖčäčĆčŗ MAC-ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą╝ąŠą┤čāą╗čÅ Bluetooth, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 AT+CHAR? ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čā BLE scanner.
ą¦č鹊ą▒čŗ ąĮą░ą╣čéąĖ UUID ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 AT+UUID? ąŁč鹊 ą▓ąŠąĘą▓čĆą░čéąĖčé "OK+Get:0xFFE0".
[ą×ą▒čēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ AT ]
ąÆ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ ą┤ą░ąĮ čüą┐ąĖčüąŠą║ ąŠčüąĮąŠą▓ąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ AT. ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 ą║ąŠą╝ą░ąĮą┤čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ ą▓ąĄčĆčģąĮąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ, ąĖ ąŠąĮąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▓ą║ą╗čÄčćą░čéčī čüąĖą╝ą▓ąŠą╗čŗ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čüčéčĆąŠą║ąĖ (\r\n), ąĄčüą╗ąĖ ąÆčŗ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ čüą║ąĄčéčć, ą║ąŠč鹊čĆčŗą╣ čāčćąĖčéčŗą▓ą░ąĄčé čŹčéčā ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī ą╝ąŠą┤čāą╗čÅ HM-10, čāą┤ą░ą╗čÅčÅ čŹčéąĖ čüąĖą╝ą▓ąŠą╗čŗ.
ąÜąŠą╝ą░ąĮą┤ą░ ą×ą┐ąĖčüą░ąĮąĖąĄ
AT
ąÜąŠą╝ą░ąĮą┤ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą║ąŠą╝ą░ąĮą┤ą░ čĆą░ąĘčĆčŗą▓ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą┐ąŠ čĆą░ą┤ąĖąŠ ą║ ą┤čĆčāą│ąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā, č鹊 ąŠąĮ ąŠčéą▓ąĄčéąĖčé "OK". ąĢčüą╗ąĖ čā ą╝ąŠą┤čāą╗čÅ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą░ą║čéąĖą▓ąĮąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐ąŠ čĆą░ą┤ąĖąŠ čü ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, č鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąĘą░ą║čĆčŗč鹊. ąĢčüą╗ąĖ ą░ą║čéąĖą▓ąĮą░ ąĮą░čüčéčĆąŠą╣ą║ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, č鹊 ą╝ąŠą┤čāą╗čī ąŠčéą▓ąĄčéąĖčé "OK+LOST".
AT+NAME?
ą×ą┐čĆąŠčü ąĖą╝ąĄąĮąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąŠą┤čāą╗čī ą▓ąĄčĆąĮąĄčé ąĖą╝čÅ ą╝ąŠą┤čāą╗čÅ, ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą▓ąĄčēą░ąĮąĖąĖ (čéą░ą║ąŠąĄ ą║ą░ą║ HMsoft).
AT+NAMEnewname
ą£ąĄąĮčÅąĄčé ąĖą╝čÅ ą╝ąŠą┤čāą╗čÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą╝ą░ąĮą┤ą░ AT+NAMEmyBTmodule ą┐ąŠą╝ąĄąĮčÅąĄčé ąĖą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ myBTmodule. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ ąĮąŠą▓ąŠą│ąŠ ąĖą╝ąĄąĮąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī 12 čüąĖą╝ą▓ąŠą╗ąŠą▓.
AT+ADDR?
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé MAC-ą░ą┤čĆąĄčü ą╝ąŠą┤čāą╗čÅ. ąÆąĄčĆąĮąĄčé ą░ą┤čĆąĄčü ą▓ ą▓ąĖą┤ąĄ 12 čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓, ąĮą░ą┐čĆąĖą╝ąĄčĆ "OK+ADDR:606405D138A3".
AT+VERS?
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé ąĮąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ firmware. ą¤čĆąĖą╝ąĄčĆ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░ ą▓ąĄčĆčüąĖąĖ: "HMSoft V540".
AT+RESET
ą¤ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčé ą╝ąŠą┤čāą╗čī. ą£ąŠą┤čāą╗čī ąŠčéą▓ąĄčéąĖčé "OK+RESET". ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąĘą░ą║čĆčŗč鹊.
AT+RENEW
ąÆąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘą░ą▓ąŠą┤čüą║ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą▒čŗčüčéčĆčŗą╣ ąĖ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ čüą▒čĆąŠčüąĖčéčī ą▓čüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ.
AT+BAUD?
ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ UART. ąŁčéą░ čüą║ąŠčĆąŠčüčéčī ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ ąŠą▒ą╝ąĄąĮčā ą┤ą░ąĮąĮčŗą╝ąĖ čü čģąŠčüč鹊ą╝, čéą░ą║ąĖą╝ ą║ą░ą║ Arduino, ąĖ ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čĆą░ą┤ąĖąŠ ą╝ąĄąČą┤čā ą╝ąŠą┤čāą╗čÅą╝ąĖ. ąÆ ąŠčéą▓ąĄčé ąĮą░ čŹčéčā ą║ąŠą╝ą░ąĮą┤čā ą▓ąĄčĆąĮąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąŠčé 0 ą┤ąŠ 8, ąĮą░ą┐čĆąĖą╝ąĄčĆ "OK+Get:0". ą¦ąĖčüą╗ą░ ąŠą▒ąŠąĘąĮą░čćą░čÄčé čĆčÅą┤ čüą║ąŠčĆąŠčüč鹥ą╣: 0 ŌĆō 9600, 1 ŌĆō 19200, 2 ŌĆō 38400, 3 ŌĆō 57600, 4 ŌĆō 115200, 5 ŌĆō 4800, 6 ŌĆō 2400, 7 ŌĆō 1200, 8 ŌĆō 230400. ąØą░čüčéčĆąŠą╣ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 ŌĆō 9600. ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čāčüčéčĆąŠą╣čüčéą▓, ąŠą▒čēą░čÄčēąĖčģčüčÅ č湥čĆąĄąĘ UART (Arduino ąĖ HM-10) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮą░ ąŠą┤ąĖąĮą░ą║ąŠą▓ą░čÅ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░. ą¤čĆąĖčćąĖąĮąŠą╣ ą╝čāčüąŠčĆąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ čćą░čüč鹊 ą▒čŗą▓ą░ąĄčé ąĮąĄčüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ąĮą░čüčéčĆąŠąĄą║ čüą║ąŠčĆąŠčüčéąĖ.
AT+BAUDx
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ UART. ąĪą║ąŠčĆąŠčüčéčī ąĘą░ą┤ą░ąĄčéčüčÅ čćąĖčüą╗ąŠą╝ x ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0 ą┤ąŠ 8 (čüą╝. ą║ąŠą╝ą░ąĮą┤čā AT+BAUD?). ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ą╗čÅ Arduino čüąŠčüčéą░ą▓ą╗čÅąĄčé 115200, čéą░ą║ čćč鹊 ąĄčüą╗ąĖ ąÆčŗ čāčüčéą░ąĮąŠą▓ąĖč鹥 230400, č鹊 ąĮąĄ čüą╝ąŠąČąĄč鹥 ąŠą▒čēą░čéčīčüčÅ čü ą╝ąŠą┤čāą╗ąĄą╝.
AT+NOTIx
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ. ąĢčüą╗ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ą║ą╗čÄč湥ąĮčŗ, č鹊 HM-10 ą▒čāą┤ąĄčé ąŠčéą▓ąĄčćą░čéčī ąĮą░ ą║ąŠą╝ą░ąĮą┤čŗ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, ąĖą╗ąĖ ą▒čāą┤ąĄčé ą┐ąŠčüčŗą╗ą░čéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąŠą▒čŗčéąĖčÅčģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ "OK" ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā AT ąĖ "OK+LOST" ą║ąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čĆą░ąĘąŠčĆą▓ą░ąĮąŠ. AT+NOTI0 ą▓čŗą║ą╗čÄčćą░ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, AT+NOTI1 ą▓ą║ą╗čÄčćą░ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ.
AT+NOTI?
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ. ąÆąŠąĘą▓čĆą░čéąĖčé 0 (ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓čŗą║ą╗čÄč湥ąĮčŗ) ąĖą╗ąĖ 1 (ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ą║ą╗čÄč湥ąĮčŗ).
AT+PIN?
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé ąĮąŠą╝ąĄčĆ PIN, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣čüčÅ ą┤ą╗čÅ pairing. ąÆąŠąĘą▓čĆą░čéąĖčé ąĮąŠą╝ąĄčĆ ąĖąĘ 6 čåąĖčäčĆ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ "OK+Get:123456". ąÆą╝ąĄčüč鹊 ąĮą░ą▒ąŠčĆą░ čüąĖą╝ą▓ąŠą╗ąŠą▓ 123456 ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī č鹥ą║čāčēąĖą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ PIN.
AT+PIN
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮąŠą▓čŗą╣ PIN/PASS. PIN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ą╗ąĖąĮąŠą╣ 6 čüąĖą╝ą▓ąŠą╗ąŠą▓. AT+PIN654321 ąĘą░ą┤ą░ąĄčé ąĮąŠą▓čŗą╣ PIN ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ 654321.
AT+ROLE?
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé č鹥ą║čāčēčāčÄ čĆąŠą╗čī čāčüčéčĆąŠą╣čüčéą▓ą░, Master (ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ) ąĖą╗ąĖ Slave (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ). ąÆąŠąĘą▓čĆą░čéąĖčé 0 (Slave ąĖą╗ąĖ Peripheral) ąĖą╗ąĖ 1 (Master ąĖą╗ąĖ Central). ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (Slave).
AT+ROLEx
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąŠą╗čī čāčüčéčĆąŠą╣čüčéą▓ą░, x = 0 ąĖą╗ąĖ 1. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā AT+ROLE0 ą┤ą╗čÅ čüą╝ąĄąĮčŗ čĆąĄąČąĖą╝ą░ ą╝ąŠą┤čāą╗čÅ ąĮą░ Slave/Peripheral, ą▓ ąŠčéą▓ąĄčé ąĮą░ čŹčéčā ą║ąŠą╝ą░ąĮą┤čā ą╝ąŠą┤čāą╗čī ą▓ąŠąĘą▓čĆą░čéąĖčé "OK+Set:0". ąöą╗čÅ čüą╝ąĄąĮčŗ čĆąĄąČąĖą╝ą░ ąĮą░ Master/Central ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā AT+ROLE1, ą╝ąŠą┤čāą╗čī ą▓ąŠąĘą▓čĆą░čéąĖčé "OK+Set:1". ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ąĄčĆčüąĖąĖ firmware ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ čüą▒čĆąŠčü, čćč鹊ą▒čŗ ąĮąŠą▓ą░čÅ čĆąŠą╗čī ą▓čüčéčāą┐ąĖą╗ą░ ą▓ čüąĖą╗čā.
AT+IMME?
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé čĆąĄąČąĖą╝ ąĘą░ą┐čāčüą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąÆąŠąĘą▓čĆą░čéąĖčé 0 ąĖą╗ąĖ 1. 0 ąŠąĘąĮą░čćą░ąĄčé čüąŠąĄą┤ąĖąĮčÅčéčīčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ (ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 čĆą░ąĮąĄąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ąŠčüčī čŹč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ), 1 ąŠąĘąĮą░čćą░ąĄčé ąČą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆą░čÅ ąĘą░ą┐čāčüą║ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ (AT+START, AT+CONN, AT+CONL). ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (čüąŠąĄą┤ąĖąĮčÅčéčīčüčÅ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ą╝ąŠą┤čāą╗čÅ, čé. ąĄ. ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ).
AT+IMMEx
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄąČąĖą╝ ąĘą░ą┐čāčüą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. AT+IMME0 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐čĆąĖ čüčéą░čĆč鹥(*) , AT+IMME1 čāčüčéą░ąĮąŠą▓ąĖčé čĆąĄąČąĖą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą▓čĆčāčćąĮčāčÄ. ąÜąŠą╝ą░ąĮą┤ą░ AT+IMMEx čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü AT+ROLEx. AT+IMMEx ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčī čüą▒čĆąŠčü, čćč鹊ą▒čŗ ąĄčæ čāčüčéą░ąĮąŠą▓ą║ą░ ą▓čüčéčāą┐ąĖą╗ą░ ą▓ čüąĖą╗čā.
AT+RESET
ą¤ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčé (čüą▒čĆą░čüčŗą▓ą░ąĄčé) ą╝ąŠą┤čāą╗čī.
AT+RENEW
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čā ą╝ąŠą┤čāą╗čÅ ąĘą░ą▓ąŠą┤čüą║ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (*): ąĄčüą╗ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣, HM-10 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčüčÅ ą║ ą╗čÄą▒ąŠą╝čā ą┤čĆčāą│ąŠą╝čā ą┤ąŠčüčéčāą┐ąĮąŠą╝čā HM-10 (ąŠą▒čŗčćąĮąŠ ą║ č鹊ą╝čā, čā ą║ąŠč鹊čĆąŠą│ąŠ čüąĖą│ąĮą░ą╗ čüąĖą╗čīąĮąĄąĄ). HM-10 (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ) ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄčé ą░ą┤čĆąĄčü ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą╝ąŠą┤čāą╗čÅ, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠąĮ ą▒čŗą╗ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ, ąĖ ąĄčüą╗ąĖ ąŠąĮ ą▓ čŹčäąĖčĆąĄ, č鹊 čĆą░ąĮąĄąĄ čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé, ą║ąŠą│ą┤ą░ HM-10 ą┐ąŠą▓č鹊čĆąĮąŠ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąŠą┤ąĮčÅčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
ą¤ąŠą╗ąĮčŗą╣ čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ čüą╝. ą▓ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ (ą▓ ą░čĆčģąĖą▓ąĄ [7] čüą╝. čäą░ą╣ą╗čŗ HM-DataSheet_V2017-07.pdf ą┤ą╗čÅ ą▓ąĄčĆčüąĖąĖ 5.50 ąĖ HM-DataSheet_V5.45-2017-01.pdf ą┤ą╗čÅ ą▓ąĄčĆčüąĖąĖ 5.45).
[ąĪą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ ą┐ąŠąĖčüą║ąĄ ą┤čĆčāą│ąĖčģ ą╝ąŠą┤čāą╗ąĄą╣ HM-10 ]
ąÉą▓č鹊čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą┤ą▓ą░ ą╝ąŠą┤čāą╗čÅ HM-10, ąŠą┤ąĖąĮ ą▒čŗą╗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ Arduino, ą║ą░ą║ ą▒čŗą╗ąŠ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓čŗčłąĄ, ąĮą░ ą┤čĆčāą│ąŠą╣ ą┐čĆąŠčüč鹊 ą▒čŗą╗ąŠ ą┐ąŠą┤ą░ąĮąŠ ą┐ąĖčéą░ąĮąĖąĄ.
ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĘą░ą▓ąŠą┤čüą║ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ AT+RENEW:
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ HM-10 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Slave ąĖą╗ąĖ Peripheral, ąĖ ą┤ą╗čÅ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤čĆčāą│ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ą╝ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą╝ąŠą┤čāą╗čī ą▓ čĆąĄąČąĖą╝ Central ąĖą╗ąĖ Master. ąöą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ AT+ROLE.
AT+ROLE? ąŠą┐čĆą░čłąĖą▓ą░ąĄčé, ą▓ ą║ą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ąÆ čüčéą░čĆčŗčģ ą▓ąĄčĆčüąĖčÅčģ firmware ą║ąŠą╝ą░ąĮą┤ą░ AT+ROLE čéčĆąĄą▒ąŠą▓ą░ą╗ą░ čüą▒čĆąŠčüąĖčéčī HM-10 ą╗ąĖą▒ąŠ ą┐ąĄčĆąĄą┤ąĄčĆą│ąĖą▓ą░ąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ, ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ AT+RESET. ąÆ ą▒ąŠą╗ąĄąĄ ąĮąŠą▓čŗčģ ą▓ąĄčĆčüąĖčÅčģ firmware ą╝ąŠą┤čāą╗čī čüą▒čĆą░čüčŗą▓ą░ąĄčé čüąĄą▒čÅ čüą░ą╝ (čŹč鹊 ą▓ąĖą┤ąĮąŠ ą┐ąŠ čüąŠąŠą▒čēąĄąĮąĖčÄ ą┐čĆąĖą▓ąĄčéčüčéą▓ąĖčÅ "www.jnhuamao.cn"). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝čŗ ą┐ąĄčĆąĄą║ą╗čÄčćąĖą╝čüčÅ ą▓ čĆąĄąČąĖą╝ Master/Central, ąĮčāąČąĮąŠ ą▓čŗą║ą╗čÄčćąĖčéčī auto connect ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+IMME. ąŻ ą║ąŠą╝ą░ąĮą┤čŗ AT+IMME ąĄčüčéčī ą┤ą▓ąĄ ąŠą┐čåąĖąĖ: AT+IMME0 ąĖ AT+IMME1.
AT+IMME0 ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ą╝ąŠą┤čāą╗čī ąĮą░ auto connect ą┐čĆąĖ čüčéą░čĆč鹥 (ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ). ąŁč鹊 čĆąĄąČąĖą╝ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
AT+IMME1 ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ą╝ąŠą┤čāą╗čī ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąŠą┤ąĮąŠą╣ ąĖąĘ AT-ą║ąŠą╝ą░ąĮą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝ (AT+START, AT+CON ąĖ AT+CONNL) ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝ąŠą┤čāą╗čī ą┐ąŠą┐čŗčéą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗ąĖ ąĮą░čüčéčĆąŠąĄąĮčŗ ąĮą░ auto-connect, č鹊 ą║ąŠą│ą┤ą░ ą╝čŗ ą▓ą▓ąŠą┤ąĖą╝ AT+ROLE1, ą╝ąŠą┤čāą╗ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠąĄą┤ąĖąĮčÅčéčüčÅ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čā ąĮą░čü ąĄčüčéčī čłą░ąĮčü ą▓ą▓ąĄčüčéąĖ ą║ąŠą╝ą░ąĮą┤čā AT+IMME1 (auto-connect ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒čŗčüčéčĆąŠ).
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 AT+IMME1 ą┤ą╗čÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ HM-10.
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 AT+ROLE1, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ HM-10 ą▓ čĆąĄąČąĖą╝ Central (ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ).
ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą▒ąŠą╗ąĄąĄ čüčéą░čĆąŠąĄ firmware, č鹊 ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ čüą▒čĆąŠčüąĖčéčī ą╝ąŠą┤čāą╗čī ą╗ąĖą▒ąŠ ą┐ąĄčĆąĄą┤ąĄčĆą│ąĖą▓ą░ąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ, ą╗ąĖą▒ąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+RESET. ąĢčüą╗ąĖ ąÆčŗ ąĘą░ą▒čŗą╗ąĖ čüą▒čĆąŠčüąĖčéčī ą╝ąŠą┤čāą╗čī, č鹊 ą║ąŠą╝ą░ąĮą┤ą░ AT+DISC ąĮąĄ čüčĆą░ą▒ąŠčéą░ąĄčé.
ą¦č鹊ą▒čŗ ą┐čĆąŠčüą║ą░ąĮąĖčĆąŠą▓ą░čéčī ą┤čĆčāą│ąĖąĄ ą╝ąŠą┤čāą╗ąĖ HM-10 ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā AT+DISC? (ąŠčé čüą╗ąŠą▓ą░ Discover, čé. ąĄ. "ąŠą▒ąĮą░čĆčāąČąĖčéčī").
ąÆ ąŠčéą▓ąĄčé ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮ ą░ą┤čĆąĄčü (ą░ą┤čĆąĄčüą░) ąĮą░ą╣ą┤ąĄąĮąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ (ą╝ąŠą┤čāą╗ąĄą╣).
OK+DISCSOK+DIS0:A81B6AAE55E4OK+DISCE
ąĪąŠąŠą▒čēąĄąĮąĖąĄ "OK+DISCE" ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ.
ąĀąĄąĘčāą╗čīčéą░čéčŗ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ čüą┐ąĖčüą║ąĄ, čŹč鹊čé čüą┐ąĖčüąŠą║ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą┐ąŠąĘąĖčåąĖąĖ 0, ąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+CONNx ą▓ą╝ąĄčüč鹊 ą▓ą▓ąŠą┤ą░ ą┐ąŠą╗ąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░. ąŚą┤ąĄčüčī x čŹč鹊 ąĮąŠą╝ąĄčĆ ąĖąĮą┤ąĄą║čüą░ ąĖą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ ą▓ čüą┐ąĖčüą║ąĄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ HM-10 ąĮą░ą╣ą┤ąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą╝ąŠą┤čāą╗čī, č鹊 čĆąĄąĘčāą╗čīčéą░čé ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0 ąĖ AT+CONN0? ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čŹč鹊ą╝čā ą╝ąŠą┤čāą╗čÄ. ąÜąŠą│ą┤ą░ ąĮą░ą╣ą┤ąĄąĮąŠ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ, ą░ą┤čĆąĄčüą░ ą▒čāą┤čāčé čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ čüą┐ąĖčüą║ąĄ ą▓ č鹊ą╝ ą┐ąŠčĆčÅą┤ą║ąĄ, ą║ą░ą║ ąŠąĮąĖ ą▒čŗą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮčŗ.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, čüą┐ąĖčüąŠą║ ąŠčćąĖčēą░ąĄčéčüčÅ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĄčüą╗ąĖ ąÆą░ą╝ ąĮčāąČąĮąŠ čĆą░ąĘąŠčĆą▓ą░čéčī ąĖ ą┐ąŠą▓č鹊čĆąĮąŠ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ, č鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüąĮąŠą▓ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā AT+DISC?. ąöą╗čÅ čŹą║čüą┐ąĄčĆąĖą╝ąĄąĮč鹊ą▓ čü AT ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ ą▓ą┐ąŠą╗ąĮąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī AT+CONNx, ąĮąŠ ą┤ą╗čÅ čĆąĄą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ą╗čāčćčłąĄ ąĘą░ą┐čāčüą║ą░čéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąŠą╗ąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░, čŹč鹊 čüą┤ąĄą╗ą░ąĄčé čüą║ąĄčéčć ą▒ąŠą╗ąĄąĄ ąĮą░ą┤ąĄąČąĮčŗą╝ ąĖ ą╗ąĄą│ą║ąĖą╝ ą┤ą╗čÅ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 AT+DISC? ąĮą░ą╣ą┤ąĄčé č鹊ą╗čīą║ąŠ č鹥 ą╝ąŠą┤čāą╗ąĖ HM-10, ą║ąŠč鹊čĆčŗąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ čĆąĄąČąĖą╝ Peripheral. ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┐čĆąŠčüą║ą░ąĮąĖčĆąŠą▓ą░čéčī ąĖ ąĮą░ą╣čéąĖ ą╝ąŠą┤čāą╗ąĖ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čĆąĄąČąĖą╝ Central.
[ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ Arduino-Arduino čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ HM-10 ]
ą£ąŠąČąĮąŠ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊 ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┤čĆčāą│ ą║ ą┤čĆčāą│čā ą┤ą▓ąĄ ą┐ą╗ą░čéčŗ Arduino čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ ą╝ąŠą┤čāą╗ąĄą╣ HM-10. ąŁč鹊 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą╝ąŠčüčé, ąĖ ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĄąĮčī UART HM-10 ą┤ąĄą╗ą░ąĄčé ą▓čüčÄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ čĆą░ą▒ąŠčéčā. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐čĆąĖ čŹč鹊ą╝ čāčĆąŠą▓ąĄąĮčī UART ąĮąĄ ą┤ą░ąĄčé ąÆą░ą╝ ąĮąĖą║ą░ą║ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ ąĮą░ą┤ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ BLE. ą¦č鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ, ąĮą░ą╝ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą│ą╗ą░ą▓ąĮčŗą╣ ą╝ąŠą┤čāą╗čī ą▓ čĆąĄąČąĖą╝ čĆčāčćąĮąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ąĖčéčī čĆąĄąČąĖą╝ Central, ąĖ ąĘą░č鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ AT+CON. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ HM-10 čüąŠąĄą┤ąĖąĮąĖą╗ąĖčüčī, ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘąĮą░č湥ąĮąĖčÅ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąĮą░ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąóąŠą│ą┤ą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠčćąĖčéą░ąĄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ.
ąØą░ ą║ą░čĆčéąĖąĮą║ąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┤ą▓čāčģ Arduino čüąŠ čüą▓ąŠąĖą╝ąĖ ą╝ąŠą┤čāą╗čÅą╝ąĖ. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ Arduino čŹčéąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ.
ąÆ č鹥čüč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą┤ą▓ąĄ čĆą░ąĘąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ Arduino IDE: ąŠą┤ąĮą░ 1.82, ą┤čĆčāą│ą░čÅ 1.63. ąŁč鹊 ą┤ą░ą╗ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĘą░ą┐čāčüčéąĖčéčī ą┤ą▓ą░ ąŠą║ąĮą░ Serial Monitor. ą×ą┤ąĮą░ ą┐ą╗ą░čéą░ Arduino ą▒čŗą╗ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ č湥čĆąĄąĘ COM6, ąĖ ą┤čĆčāą│ą░čÅ č湥čĆąĄąĘ COM9.
ąŚą░ą┐čāčüą║ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ HM-10 - HM-10 ą▓čĆčāčćąĮčāčÄ . ą¦č鹊ą▒čŗ ąŠčüčāčēąĄčüčéą▓ąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ, čüą┤ąĄą╗ą░ą╣č鹥 čüą╗ąĄą┤čāčÄčēąĄąĄ:
1. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓č鹊čĆąŠą╣ (ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣) ą╝ąŠą┤čāą╗čī ą▓ čĆąĄąČąĖą╝ Peripheral (čāčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ).
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čā ąĮą░čü ąĄčüčéčī ą┐ąŠą╗ąĮčŗą╣ ą░ą┤čĆąĄčü ą▓č鹊čĆąŠą│ąŠ HM-10, ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą░ą┤čĆąĄčüą░, ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĮą┤ąĄą║čüą░ ą▓ čüą┐ąĖčüą║ąĄ. ąŚą┤ąĄčüčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą░ą┤čĆąĄčü, ąĖ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą╗čāčćąĖą╗ą░čüčī ą▓ąĖą┤ą░ AT+CONA81B6AAE5221. ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą░ą┤čĆąĄčü ąĮą░ ą┤čĆčāą│ąŠą╣, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą░ą┤čĆąĄčüčā ą╝ąŠą┤čāą╗čÅ.
ąĢčüą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐čĆąŠčłą╗ąŠ čāčüą┐ąĄčłąĮąŠ, č鹊 ą╝čŗ ą┐ąŠą╗čāčćąĖą╝ čüąŠąŠą▒čēąĄąĮąĖąĄ OK+CONNA, čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ LED ąĮą░ ąŠą▒ąŠąĖčģ ą╝ąŠą┤čāą╗čÅčģ HM-10 ą┐ąĄčĆąĄčüčéą░ąĮčāčé ą╝ąĖą│ą░čéčī ąĖ ą▒čāą┤čāčé ą│ąŠčĆąĄčéčī ą┐ąŠčüč鹊čÅąĮąĮąŠ.
ąóąĄą┐ąĄčĆčī čü ą┐ąŠą╝ąŠčēčīčÄ Serial Monitor ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠčé ąŠą┤ąĮąŠą╣ ą┐ą╗ą░čéčŗ Arduino ą║ ą┤čĆčāą│ąŠą╣.
ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ HM-10 - HM-10 . HM-10 ą╝ąŠąČąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄ ą┐ąŠą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąÜąŠą│ą┤ą░ čĆčÅą┤ąŠą╝ ąĮą░čģąŠą┤čÅčéčüčÅ 2 ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąŠą┤čāą╗ąĄą╣, ąĖ ąŠą┤ąĖąĮ ąĖąĘ ąĮąĖčģ ą▓ čĆąĄąČąĖą╝ąĄ Central, č鹊 ąŠąĮ ą▒čāą┤ąĄčé ąĖčüą║ą░čéčī ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ ą┤čĆčāą│ąŠą╝čā ą╝ąŠą┤čāą╗čÄ HM-10. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ąĖ ąĮąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ ąĘą░ č鹥ą╝, ą║ ą║ą░ą║ąŠą╝čā ą╝ąŠą┤čāą╗čÄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ, čģąŠčéčÅ ąŠą▒čŗčćąĮąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čü č鹥ą╝ ą╝ąŠą┤čāą╗ąĄą╝, ąŠčé ą║ąŠč鹊čĆąŠą│ąŠ čüąĖą│ąĮą░ą╗ čüąĖą╗čīąĮąĄąĄ. ąÜąŠąĮąĄčćąĮąŠ, ąĄčüą╗ąĖ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé č鹊ą╗čīą║ąŠ 2 ą╝ąŠą┤čāą╗čÅ, č鹊 čŹč鹊 ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ. ąĢčüą╗ąĖ čā ąÆą░čü ąĄčüčéčī č鹊ą╗čīą║ąŠ 2 ą╝ąŠą┤čāą╗čÅ, čāčüčéą░ąĮąŠą▓ąĖč鹥 ąŠą┤ąĖąĮ ąĖąĘ ąĮąĖčģ ą▓ čĆąĄąČąĖą╝ Peripheral, ąĖ ą┤čĆčāą│ąŠą╣ ą▓ čĆąĄąČąĖą╝ Central. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąŠąĮąĖ čüąŠąĄą┤ąĖąĮčÅčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ąĮąĖč湥ą│ąŠ ą▒ąŠą╗čīčłąĄ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ.
ąĢčüą╗ąĖ čĆą░ąĮąĄąĄ čāąČąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅą╗ąŠčüčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ, č鹊 ąŠąĮąŠ ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ čā ąĮąĄą│ąŠ ą▒čāą┤ąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅą╝ąĖ čü ą┤čĆčāą│ąĖą╝ąĖ ą╝ąŠą┤čāą╗čÅą╝ąĖ. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąÆčŗ čüą┤ąĄą╗ą░ą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓čĆčāčćąĮčāčÄ, čĆą░ąĘąŠčĆą▓ąĖč鹥 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ (ą┐ąĄčĆąĄą┤ąĄčĆą│ąĖą▓ą░ąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ), ąĘą░č鹥ą╝ ą▓ą▓ąĄą┤ąĖč鹥 "AT+IMME0" (čŹč鹊 ą▓ą║ą╗čÄčćąĖčé auto connect). ąŚą░č鹥ą╝ čüą▒čĆąŠčüčīč鹥 ą╝ąŠą┤čāą╗čī ą╗ąĖą▒ąŠ ąĮąŠą▓čŗą╝ ą┐ąĄčĆąĄą┤ąĄčĆą│ąĖą▓ą░ąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ, ą╗ąĖą▒ąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+RESET. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čŹčéąĖ ą╝ąŠą┤čāą╗ąĖ ą┤ąŠą╗ąČąĮčŗ čüąŠąĄą┤ąĖąĮąĖčéčīčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą▓ ąŠą▒ą╗ą░čüčéąĖ ą┤ąĄą╣čüčéą▓ąĖčÅ ąĮą░čģąŠą┤čÅčéčüčÅ ą┤čĆčāą│ąĖąĄ ą╝ąŠą┤čāą╗ąĖ HM-10.
ąÜąŠą╝ą░ąĮą┤ą░ AT+IMME1 ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘą░ą┐čāčüą║ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī AT-ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ą▓ąŠą┤ąĖą╝čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ (ąĖčüą║ą╗čÄč湥ąĮąĖąĄ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą║ąŠą╝ą░ąĮą┤ą░ "AT", ą║ąŠč鹊čĆą░čÅ čĆą░ąĘčĆčŗą▓ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ). ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ AT-ą║ąŠą╝ą░ąĮą┤ ąĮčāąČąĮąŠ ą▓čŗą║ą╗čÄčćąĖčéčī Peripheral-ą╝ąŠą┤čāą╗čī ąĖ čüą▒čĆąŠčüąĖčéčī ą╝ąŠą┤čāą╗čī Central.
[ąöąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ čü ą┐ąŠą╝ąŠčēčīčÄ HM-10 ]
ąŁč鹊 ąŠč湥ąĮčī ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĮą░ąČą░čéąĖąĄ ą║ąĮąŠą┐ą║ąĖ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ ąŠą┤ąĮąŠą╣ ąĖąĘ ą┐ą╗ą░čé Arduino, ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąĘą░ąČąĖą│ą░ąĮąĖčÄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ą┤čĆčāą│ąŠą╣ ą┐ą╗ą░č鹥. ąĪąŠąĄą┤ąĖąĮąĄąĮčŗ čŹčéąĖ ą┐ą╗ą░čéčŗ č鹊ą╗čīą║ąŠ ą┐ąŠ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗čā, čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ ą╝ąŠą┤čāą╗ąĄą╣ HM-10.
ąÜ Arduino #1 ą╝čŗ ą┤ąŠą▒ą░ą▓ąĖą╝ ą║ąĮąŠą┐ą║čā ąĮą░ ą┐ąŠčĆčé D2 ąĖ ą║ Arduino #2 ą┤ąŠą▒ą░ą▓ąĖą╝ LED ąĮą░ ą┐ąŠčĆčé D4, čüą╝. čĆąĖčüčāąĮąŠą║ ąĮąĖąČąĄ.
ąĪąĖą│ąĮą░ą╗ ąŠčé ą║ąĮąŠą┐ą║ąĖ ąĮą░ Arduino #1 ą┐ąŠą┤čéčÅą│ąĖą▓ą░ąĄčéčüčÅ ą║ ąĘąĄą╝ą╗ąĄ č湥čĆąĄąĘ čĆąĄąĘąĖčüč鹊čĆ 10 ą║ą×ą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮą░ąČą░čéąĖąĄ ą║ąĮąŠą┐ą║ąĖ ą┐ąŠą┤ą░ąĄčé ąĮą░ D2 Arduino čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 (ą║ąŠą│ą┤ą░ ą║ąĮąŠą┐ą║ą░ ąĮąĄ ąĮą░ąČą░čéą░, ąĮą░ D2 čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0). LED ąĮą░ Arduino #2 ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č湥čĆąĄąĘ č鹊ą║ąŠąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ 220 ą×ą╝ (čéą░ą║ąČąĄ čģąŠčĆąŠčłąŠ ą┐ąŠą┤ąŠą╣ą┤ąĄčé ą╗čÄą▒ąŠą╣ čĆąĄąĘąĖčüč鹊čĆ 330 .. 680 ą×ą╝).
ąĪą║ąĄčéčć ą│ą╗ą░ą▓ąĮąŠą│ąŠ Arduino ąĖčüą┐ąŠą╗čīąĘčāąĄčé čéčĆąĖ AT-ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆąĄąČąĖą╝ą░ Central ą╝ąŠą┤čāą╗čÅ HM-10 ąĖ ąĘą░ą┐čāčüą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąŁč鹊 č鹥 ąČąĄ čüą░ą╝čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą▓čĆčāčćąĮčāčÄ.
BTserial.print("AT+IMME1 ");
delay(1000);
BTserial.print("AT+ROLE1 ");
delay(1000);
BTserial.print("AT+CONA81B6AAE5221 ");
delay(1000);
ąŁč鹊 ąĮąĄ ą╗čāčćčłąĄąĄ čĆąĄčłąĄąĮąĖąĄ, ąĮąŠ ąŠąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé, ąĖ ą┐ąŠą╝ąŠą│ą░ąĄčé čāą┐čĆąŠčüčéąĖčéčī ą┤ą╗čÅ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░. ąÜąŠąĮąĄčćąĮąŠ, ąĄčüą╗ąĖ HM-10 čāąČąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Central, č鹊 ą┤ą╗čÅ čĆčāčćąĮąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┐ąĄčĆą▓čŗąĄ ą┤ą▓ąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĮąĄ ąĮčāąČąĮčŗ. ąŚą░ą┤ąĄčƹȹ║ąĖ ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ąŠčéą▓ąĄčéą░ ą╝ąŠą┤čāą╗čÅ. ą¤čĆąĖ ąČąĄą╗ą░ąĮąĖąĖ ąÆčŗ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ ąŠčéą▓ąĄčé ąŠčé ą╝ąŠą┤čāą╗čÅ ąĮą░ ą║ą░ąČą┤čāčÄ ą║ąŠą╝ą░ąĮą┤čā ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ. ąś ą║ąŠąĮąĄčćąĮąŠ, ą┐ąŠą╝ąĄąĮčÅą╣č鹥 ą░ą┤čĆąĄčü, čćč鹊ą▒čŗ ąŠąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░ą╗ ąÆą░čłąĄą╝čā ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╝čā ą╝ąŠą┤čāą╗čÄ.
ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą▒ąŠą╗ąĄąĄ čüčéą░čĆąŠąĄ firmware, č鹊 ąĮčāąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą║ąŠą╝ą░ąĮą┤čā AT+RESET ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą░ąĮą┤čŗ AT+ROLE1.
ąĪ ą┐ąŠą╝ąŠčēčīčÄ čĆąĄąČąĖą╝ą░ ą░ą▓č鹊ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą╝ąŠąČąĮąŠ ąĖąĘą▒ąĄąČą░čéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čŹčéąĖčģ ą║ąŠą╝ą░ąĮą┤.
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüą║ąĄčéčć ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčĆčéą░ ą║ąĮąŠą┐ą║ąĖ, ąĖ ąĄčüą╗ąĖ ąŠąĮąŠ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī, č鹊 ą┐ąŠčüčŗą╗ą░ąĄčé ąŠą┤ąĮčā ąĖąĘ ą┤ą▓čāčģ ą┐čĆąŠčüčéčŗčģ ą║ąŠą╝ą░ąĮą┤.
ŌĆó ąŻčĆąŠą▓ąĄąĮčī ą┐ąŠą╝ąĄąĮčÅą╗čüčÅ ąŠčé ą╗ąŠą│. 0 ą║ ą╗ąŠą│. 1. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ąĮąŠą┐ą║ą░ ąĮą░ąČą░čéą░, ąĖ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ąĮą░ ą▓ą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüąĖą╝ą▓ąŠą╗ą░ "1" ą┤ą░ą╗čīąĮąĄą╝čā ą╝ąŠą┤čāą╗čÄ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąŠčéą┐čĆą░ą▓ą║ą░ čüąĖą╝ą▓ąŠą╗ą░ ASCII "1" ąĖ "0" ąĮąĄ č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąŠčéą┐čĆą░ą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ 1 ąĖ 0.
// ą×č湥ąĮčī ą┐čĆąŠčüč鹊ąĄ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░ ą║ąŠąĮčéą░ą║č鹊ą▓.
boolean state1 = digitalRead(switchPin); delay(1 );
boolean state2 = digitalRead(switchPin); delay(1 );
boolean state3 = digitalRead(switchPin); delay(1 );
if ((state1 == state2) && (state1== state3))
{
switch_State = state1;
if (switch_State != oldswitch_State)
{
if ( switch_State == HIGH) { BTserial.print("1" ); Serial.println("1" ); }
else { BTserial.print("0" ); Serial.println("0" ); }
oldswitch_State = switch_State;
}
}
ąÆč鹊čĆą░čÅ ą┐ą╗ą░čéą░ Arduino ą┐čĆąŠčüč鹊 ąČą┤ąĄčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüąĖą╝ą▓ąŠą╗ąŠą▓ "1" ąĖą╗ąĖ "0", ąĖ ąĄčüą╗ąĖ čŹč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą╗ąĖą▒ąŠ ą▓ą║ą╗čÄčćą░ąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤, ą╗ąĖą▒ąŠ ą▓čŗą║ą╗čÄčćą░ąĄčé.
void loop ()
{
// ą¦č鹥ąĮąĖąĄ ąĖąĘ ą╝ąŠą┤čāą╗čÅ Bluetooth ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
if (BTSerial.available())
{
c = BTSerial.read();
// 49 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ASCII-ą║ąŠą┤čā ą┤ą╗čÅ "1"
// 48 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ASCII-ą║ąŠą┤čā ą┤ą╗čÅ "0"
if (c==49 ) { digitalWrite(LEDpin,HIGH); }
if (c==48 ) { digitalWrite(LEDpin,LOW); }
Serial.println(c);
}
}
ąĪą║ąĄčéčć HM-10_Example_01_simpleLED_Central, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą╗ąĖčé ą▓ Adruino, čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą│ą╗ą░ą▓ąĮčŗą╝ ą╝ąŠą┤čāą╗ąĄą╝ Bluetooth (ąŠą┐čĆąŠčü ą║ąĮąŠą┐ą║ąĖ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą║ąŠą╝ą░ąĮą┤ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą╝čā ą╝ąŠą┤čāą╗čÄ Bluetooth):
// HM-10_Example_01_simpleLED_Central // // ą¤čĆąŠčüč鹊ąĄ ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ // ą╝ąŠą┤čāą╗ąĄą╣ HM-10: ą▓ą║ą╗čÄč湥ąĮąĖąĄ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ (LED). // // ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ: // BT VCC - Arduino 5V // BT GND - Arduino GND // Arduino D8 (RX) - BT TX ą▒ąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ // Arduino D9 (TX) - BT RX č湥čĆąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ
// https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html #include < AltSoftSerial.h>
AltSoftSerial BTserial;
byte switchPin = 2 ;
boolean switch_State = LOW;
boolean oldswitch_State = LOW;
void setup ()
{
Serial.begin(9600 );
Serial.print("Sketch: " ); Serial.println(__FILE__);
Serial.print("Uploaded: " ); Serial.println(__DATE__);
Serial.println(" " );
BTserial.begin(9600 );
Serial.println("BTserial started at 9600" );
Serial.println(" " );
pinMode(switchPin, INPUT);
// ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą┤ą░ą╗čīąĮąĄą╝čā ą╝ąŠą┤čāą╗čÄ Bluetooth:
BTserial.print("AT+IMME1" );
delay(1000 );
BTserial.print("AT+ROLE1" );
delay(1000 );
BTserial.print("AT+CONA81B6AAE5221" );
delay(1000 );
}
void loop ()
{
// ąŻą┐čĆąŠčēąĄąĮąĮąŠąĄ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░ ą║ąŠąĮčéą░ą║č鹊ą▓ ą║ąĮąŠą┐ą║ąĖ:
boolean state1 = digitalRead(switchPin); delay(1 );
boolean state2 = digitalRead(switchPin); delay(1 );
boolean state3 = digitalRead(switchPin); delay(1 );
if ((state1 == state2) && (state1== state3))
{
switch_State = state1;
if (switch_State != oldswitch_State)
{
if ( switch_State == HIGH) { BTserial.print("1" ); Serial.println("1" ); }
else { BTserial.print("0" ); Serial.println("0" ); }
oldswitch_State = switch_State;
}
}
}
ąĪą║ąĄčéčć HM-HM-10_Example_01_simpleLED_Peripheral, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą╗ąĖčé ą▓ Adruino, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą┐ąŠ čĆą░ą┤ąĖąŠ ąŠčé ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ Bluetooth (ą▓ą║ą╗čÄč湥ąĮąĖąĄ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░):
// HM-10_Example_01_simpleLED_Peripheral // // ą¤čĆąŠčüč鹊ąĄ ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ // ą╝ąŠą┤čāą╗ąĄą╣ HM-10: ą▓ą║ą╗čÄč湥ąĮąĖąĄ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ (LED). // // ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ: // BT VCC - Arduino 5V. // BT GND - GND. // Arduino D8 (RX) - BT TX ą▒ąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ // Arduino D9 (TX) - BT RX č湥čĆąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ
// https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html #include < AltSoftSerial.h>
AltSoftSerial BTSerial;
char c= ' ' ;
byte LEDpin = 4 ;
void setup ()
{
Serial.begin(9600 );
Serial.print("Sketch: " ); Serial.println(__FILE__);
Serial.print("Uploaded: " ); Serial.println(__DATE__);
Serial.println(" " );
BTSerial.begin(9600 );
Serial.println("BTserial started at 9600" );
Serial.println(" " );
pinMode(LEDpin, OUTPUT);
digitalWrite(LEDpin,LOW);
}
void loop ()
{
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą╝ąŠą┤čāą╗čÅ Bluetooth ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ čŹčéąĖčģ
// ą┤ą░ąĮąĮčŗčģ ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
if (BTSerial.available())
{
c = BTSerial.read();
// 49 čŹč鹊 ą║ąŠą┤ ASCII čüąĖą╝ą▓ąŠą╗ą░ "1"
// 48 čŹč鹊 ą║ąŠą┤ ASCII čüąĖą╝ą▓ąŠą╗ą░ "0"
if (c==49 ) { digitalWrite(LEDpin,HIGH); }
if (c==48 ) { digitalWrite(LEDpin,LOW); }
Serial.println(c);
}
}
ąŁč鹊čé ą║ąŠą┤ čģąŠčĆąŠčłąŠ čĆą░ą▒ąŠčéą░ąĄčé, ąĮąŠ čćč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą║ąŠą│ą┤ą░ ąÆčŗ čüą▒čĆąŠčüąĖč鹥 Arduino #1 ą┐čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ? ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ ą▓ą║ą╗čÄčćąĖčéčüčÅ.
ąÜąŠą│ą┤ą░ ąÆčŗ čüą▒čĆąŠčüąĖč鹥 ą┐ą╗ą░čéčŗ Arduino, ąĮąŠ ąĮąĄ ą╝ąŠą┤čāą╗ąĖ HM-10, čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąŠčüčéą░ąĮąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝, ąĖ AT-ą║ąŠą╝ą░ąĮą┤čŗ ą▓ čäčāąĮą║čåąĖąĖ setup() ą▒čāą┤čāčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ą╗čÄą▒čŗąĄ čüąĖą╝ą▓ąŠą╗čŗ "1" ąĖ "0" ą▓ čŹčéąĖčģ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤čāčé ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĮą░ ą┤ą░ą╗čīąĮąĖą╣ ą║ąŠąĮąĄčå ą┐ą╗ą░č鹥 Arduino #2, ąĖ ą▒čāą┤čāčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ąĄą╣ ą║ą░ą║ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝. ąĢčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓, ą║ą░ą║ čŹč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī.
1 . ą¤ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĮą░čüčéčĆąŠąĄčćąĮčŗčģ AT-ą║ąŠą╝ą░ąĮą┤ ą┐ąĄčĆąĄą┤ą░ą╣č鹥 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖą▓ąĄčéčüčéą▓ąĖčÅ ąĮą░ ą┤ą░ą╗čīąĮąĖą╣ ą║ąŠąĮąĄčå, čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą░ą║čéąĖą▓ąĮąŠčüčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąöą░ą╗čīąĮąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą▓ąĄčéąĖą╗ąŠ ą▒čŗ ąĮą░ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ.
2 . ą¤čĆąŠą▓ąĄčĆą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ STATE ą╝ąŠą┤čāą╗čÅ HM-10 ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ AT-ą║ąŠą╝ą░ąĮą┤. ąÆčŗą▓ąŠą┤ STATE ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠ.
3 . ą¤čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ą╝ąŠą┤čāą╗ąĄą╣ ąĮą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ, čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓ čüą║ąĄčéčćą░čģ AT-ą║ąŠą╝ą░ąĮą┤ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖ ąĘą░ą┐čāčüą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąÆąŠąĘą╝ąŠąČąĮąŠ čŹč鹊 čüą░ą╝ąŠąĄ ą╗čāčćčłąĄąĄ čĆąĄčłąĄąĮąĖąĄ, ą▓čŗą▒ąŠčĆ ą▓ą░čĆąĖą░ąĮčéą░ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ ąÆą░ą╝ąĖ.
ą¤ąŠąĘąČąĄ ą╝čŗ čĆą░čüčüą╝ąŠčéčĆąĖą╝, ą║ą░ą║ čāą┐čĆą░ą▓ą╗čÅčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ ą┐čĆąŠčüč鹊 čü ą┐ąŠą╝ąŠčēčīčÄ HM-10, ą▒ąĄąĘ ą▓č鹊čĆąŠą╣ ą┐ą╗ą░čéčŗ Arduino.
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ ą┐ąŠčĆčéčŗ HM-10 ]
ąŻ HM-10 ąĄčüčéčī 10 ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆčŗą╝ąĖ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī (GPIO). ąØąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ ąĮąĖčģ čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ ą║ą░ą║ ą▓čģąŠą┤čŗ, ą┤čĆčāą│ąĖąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖą╗ąĖ ą▓čģąŠą┤ą░ą╝ąĖ, ąĖą╗ąĖ ą▓čŗčģąŠą┤ą░ą╝ąĖ. ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╣ ą┐ą╗ą░č鹥 (breakout board), čéą░ą║ čćč鹊 ą║ ąĮąĖą╝ ąĮčāąČąĮąŠ ą┐ąŠą┤ą┐ą░ąĖą▓ą░čéčīčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ (ą╗ąĖą▒ąŠ ą┤ąĄą╗ą░čéčī ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╣ čĆą░ąĘčŖąĄą╝ ąĖą╗ąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ą┐ą╗ą░čéčā).
ążčāąĮą║čåąĖąĖ ą▓čŗą▓ąŠą┤ąŠą▓ . ąÆčŗą▓ąŠą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝čŗ ą╝ąŠąČąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ąĮąŠčüčÅčé ąĖą╝ąĄąĮą░ PIO-02 .. PIO-11 (ąĖą╗ąĖ PIO2..PIOB ą▓ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą╣ ąĮčāą╝ąĄčĆą░čåąĖąĖ).
ą¤ąŠčĆčé ążčāąĮą║čåąĖčÅ
PIO2
OUTPUT / PWM OUTPUT
PIO3
OUTPUT
PIO4
INPUT / ADC / OUTPUT
PIO5
INPUT / ADC / OUTPUT
PIO6
INPUT / ADC / OUTPUT
PIO7
INPUT / ADC / OUTPUT
PIO8
INPUT / ADC / OUTPUT
PIO9
INPUT / ADC / OUTPUT
PIOA (PIO10)
INPUT / ADC / OUTPUT
PIOB (PIO11)
INPUT / ADC / DS18B20/ DHT11 / OUTPUT
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: PIO-02 ąĖ PIO-03 ą╝ąŠą│čāčé ą▓čŗą┤ą░ą▓ą░čéčī ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ ą┤ąŠ 20 mA. PIO-04 .. PIO-11 čĆą░čüčüčćąĖčéą░ąĮčŗ ąĮą░ ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ č鹊ą╗čīą║ąŠ 4 mA.
ąØąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ą░čģ ą┤ą░ąĮčŗ ą║ąŠą╝ą░ąĮą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ HM-10.
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓čŗčģąŠą┤ąĮąŠą╣ čāčĆąŠą▓ąĄąĮčī ą▓čŗą▓ąŠą┤ą░ ą▓ HIGH ąĖą╗ąĖ LOW. pin = ąĮąŠą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ ąŠčé 2 ą┤ąŠ B. 0/1 = 0 ą┤ą╗čÅ LOW, 1 ą┤ą╗čÅ HIGH. ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓čŗą▓ąŠą┤ PIO-02 ą▓ HIGH ąĮą░ą╝ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā AT+PIO21, ąĖ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓ LOW ą║ąŠą╝ą░ąĮą┤čā AT+PIO20.
ąÆčŗą▓ąŠą┤ PIO2 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ą▓čŗčģąŠą┤ ą©ąśą£ (PWM). x = ąĘąĮą░č湥ąĮąĖąĄ ąŠčé 0 ą┤ąŠ 9.
AT+PIO20 = LOW
ąÜąŠą╝ą░ąĮą┤ą░ AT+PIO21 čāčüčéą░ąĮąŠą▓ąĖčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ HIGH 100 ą╝čü ąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ LOW 100 ą╝čü.
ąĪčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓ ą┐čĆąŠčćąĖčéą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓, ą╗ąĖą▒ąŠ čćč鹥ąĮąĖąĄą╝ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ, ą╗ąĖą▒ąŠ čćč鹥ąĮąĖąĄą╝ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ąŠą▓ čüčĆą░ąĘčā.
ą¦ąĖčéą░ąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░. pin = ąĮąŠą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 2 ą┤ąŠ B. ą¦č鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ PIO2, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 AT+PIO2?. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▓ąŠąĘą▓čĆą░čéąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓ ą▓ąĖą┤ąĄ "OK+PIO2:0" ąĖą╗ąĖ "OK+PIO2:1". 0 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé LOW, ąĖ 1 HIGH.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą▓ą░ ąĘąĮą░ą║ą░ ą▓ąŠą┐čĆąŠčüą░. ąÜąŠą╝ą░ąĮą┤ą░ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ PIO4 .. PIOB. ąÆąĄčĆąĮąĄčé ąŠą┤ąĖąĮ ą▒ą░ą╣čé ą▓ č乊čĆą╝ąĄ ąŠčé "OK+Col:00" ą┤ąŠ "OK+Col:FF", ą│ą┤ąĄ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮčŗąĄ čåąĖčäčĆčŗ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ PIO4 .. PIOB. ąæąĖčéčŗ 7 .. 0 ąŠč鹊ą▒čĆą░ąČąĄąĮčŗ ąĮą░ ą▓čŗą▓ąŠą┤čŗ POI4 .. PIOB.
PIN 4
5
6
7
8
9
A
B
BIT 7
6
5
4
3
2
1
0
ą¦č鹥ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ąŠą▓ PIO čüčĆą░ąĘčā. ąÆąĄčĆąĮąĄčé 2 ą▒ą░ą╣čéą░ ą▓ HEX-ą▓ąĖą┤ąĄ, ąŠčé "OK+PIO?:0000" ą┤ąŠ "OK+PIO?:03FF". ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ 3 ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ąĮą░ ąĮąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ PIO0 .. PIOB; čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 3FF == 001111111111, ąĖą╗ąĖ ą▓čüąĄ ą┐ąŠčĆčéčŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ HIGH. ąÆčŗą▓ąŠą┤čŗ PIO0 ąĖ PIO1 (ą┐ąĄčĆą▓čŗąĄ 2 ą▒ąĖčéą░) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣, ąĖ ąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą║ą░ą║ 0.
ąÆčŗą▓ąŠą┤čŗ PIO4 .. PIOB ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ.
ą¦ąĖčéą░ąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ čāą║ą░ąĘą░ąĮąĮąŠą╝ ą▓čŗą▓ąŠą┤ąĄ. pin ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ą▓čŗą▓ąŠą┤ PIO ąŠčé 4 ą┤ąŠ B. ąÆąĄčĆąĮąĄčé čĆąĄą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą▓ ą▓ąĖą┤ąĄ čćąĖčüą╗ą░ float ąĖąĘ 3 čåąĖčäčĆ.
ąöą╗čÅ čćč鹥ąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ PIOA (10) ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 AT+ADCA?, čŹč鹊 ą▓ąĄčĆąĮąĄčé "OK+ADCA:2.80", ą║ąŠą│ą┤ą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 2.8v, ąĖ "OK+ADCA:0.00" ą║ąŠą│ą┤ą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ čāčĆąŠą▓ąĄąĮčī LOW, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĮąĄ ą┐ąŠą┤ą░ąĮąŠ.
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čćą░čüč鹊čéčā, čü ą║ąŠč鹊čĆąŠą╣ ąŠą▒ąĮąŠą▓ą╗čÅčÄčéčüčÅ čĆąĄą│ąĖčüčéčĆčŗ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ (ą▓ąĮčāčéčĆąĖ CC2541, ąŠą┐čĆąŠčü ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓, ą░ ąĮąĄ ą▓čŗą▓ąŠą┤ąŠą▓). freq = čćą░čüč鹊č鹥 ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓ čüąĄą║čāąĮą┤ą░čģ, ąĖ čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┤ą░ą▓ą░čéčīčüčÅ ą┤ą▓čāą╝čÅ čåąĖčäčĆą░ą╝ąĖ ąŠčé 00 ą┤ąŠ 99. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄčé č鹊ą╗čīą║ąŠ čćąĖčüą╗ąŠ ąĖąĘ 2 čåąĖčäčĆ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮą░ą┤ąŠ ą┤ą░ą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā AT+CYC01 ą▓ą╝ąĄčüč鹊 AT+CYC1.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą▓ą░ ą▓ąŠą┐čĆąŠčüąĖč鹥ą╗čīąĮčŗčģ ąĘąĮą░ą║ą░. ą×ą┐čĆą░čłąĖą▓ą░ąĄčé č鹥ą║čāčēčāčÄ čćą░čüč鹊čéčā. ąÆąĄčĆąĮąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ 2 čåąĖčäčĆ ą▓ č乊čĆą╝ąĄ ąŠčé "OK+Get:00" ą┤ąŠ "OK+Get:99". ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 10 čüąĄą║čāąĮą┤.
ąĪąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ HM-10 ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┤ą╗čÅ ą╝ąŠą╝ąĄąĮčéą░ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+BEFC, ąĖ čéą░ą║ąČąĄ ą┤ą╗čÅ ą╝ąŠą╝ąĄąĮčéą░ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+AFTC.
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ PIO ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ / ą┐ąĄčĆąĄą┤ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝. pinValues čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ čćąĖčüą╗ą░ ąĖąĘ 3 čåąĖčäčĆ, ąŠčé 000 ą┤ąŠ 3FF, ą│ą┤ąĄ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ PIO0 .. PIOB. ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 PIO0 ąĖ PIO1 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣, ąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ą▓čŗą▓ąŠą┤čŗ PIO2 .. PIOB.
ąöą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ąŠą▓ (PIO2 .. PIOB) ą▓ HIGH ą┐ąĄčĆąĄą┤ą░ą╣č鹥 ą▓ ą║ąŠą╝ą░ąĮą┤čā BEFC ąĘąĮą░č湥ąĮąĖąĄ 001111111111 ą▓ ą▓ąĖą┤ąĄ "3FF" (AT+BEFC3FF). ąĪąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ąĘą░ą┤ą░ąĮąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣ BEFC, ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąĖąĘą╝ąĄąĮąĄąĮąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+PIOxv (x ąĮąŠą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░, v čāčĆąŠą▓ąĄąĮčī).
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ. pinValues ąĘą░ą┤ą░ąĄčéčüčÅ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮčŗą╝ čćąĖčüą╗ąŠą╝ ąĖąĘ 3 čåąĖčäčĆ ąŠčé 000 ą┤ąŠ 3FF, ą│ą┤ąĄ ą▒ąĖčéčŗ čŹč鹊ą│ąŠ čćąĖčüą╗ą░ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤čŗ PIO0 .. PIOB (č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ ą▓ ą║ąŠą╝ą░ąĮą┤ąĄ AT+BECF). ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 PIO0 ąĖ PIO1 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣, ąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ą▓čŗą▓ąŠą┤čŗ PIO2 .. PIOB.
ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī PIO2 ą▓ HIGH, ą║ąŠą│ą┤ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą┐ąĄčĆąĄą┤ą░ą╣č鹥 ą▓ ą║ąŠą╝ą░ąĮą┤čā ą▒ąĖčéčŗ 001000000000 ąĖą╗ąĖ "200" (AT+AFTC200).
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą╝ąŠą┤čāą╗čÅ HM-10, ą║ąŠą│ą┤ą░ ąŠąĮ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Arduino, ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ ąĮąĄ ąĖą╝ąĄąĄčé ąŠčüąŠą▒ąŠą│ąŠ čüą╝čŗčüą╗ą░, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮą░ą╝ąĮąŠą│ąŠ ą╗čāčćčłąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čŗą▓ąŠą┤čŗ čüą░ą╝ąŠą│ąŠ Arduino. ą¤ąŠą╗ąĄąĘąĮąĄąĄ čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗą▓ąŠą┤ą░ą╝ąĖ HM-10, ą║ąŠą│ą┤ą░ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ HM-10 ą┐ąŠ čĆą░ą┤ąĖąŠ ą▓ čĆąĄąČąĖą╝ąĄ Peripheral . ąÆčŗą▓ąŠą┤ą░ą╝ąĖ PIO ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą▓ čĆąĄąČąĖą╝ąĄ Peripheral č湥čĆąĄąĘ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗. ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 HM-10 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓čā Peripheral ą┐čĆąĖąĮąĖą╝ą░čéčī AT-ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠ čĆą░ą┤ąĖąŠ, ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī AT-ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ. ąÜąŠą│ą┤ą░ HM-10 čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čāą┤ą░ą╗ąĄąĮąĮąŠ ą┐ąŠ čĆą░ą┤ąĖąŠ, ąĖ ą║ąŠą╝ą░ąĮą┤čŗ AT ą┐čĆąĖąĮčÅčéčŗ ą┐ąŠ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗čā, ą║ąŠą╝ą░ąĮą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ čĆą░ą▒ąŠčéą░čÄčé ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠ-ą┤čĆčāą│ąŠą╝čā. ąŚą┤ąĄčüčī ąĮą░ą╝ ąĮą░ą┤ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čĆąĄąČąĖą╝, MODE1 ąĖą╗ąĖ MODE2.
PIO ą╝ąŠą│čāčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ ą║ą░ą║ ą▓čģąŠą┤čŗ ąĖą╗ąĖ ą▓čŗčģąŠą┤čŗ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄąČąĖą╝ą░ ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā:
ą¤ąŠčĆčé MODE1 MODE2
PIO2
OUTPUT / PWM OUTPUT
OUTPUT / PWM OUTPUT
PIO3
OUTPUT
OUTPUT
PIO4
INPUT / ADC / OUTPUT
OUTPUT
PIO5
INPUT / ADC / OUTPUT
OUTPUT
PIO6
INPUT / ADC / OUTPUT
OUTPUT
PIO7
INPUT / ADC / OUTPUT
OUTPUT
PIO8
INPUT / ADC / OUTPUT
OUTPUT
PIO9
INPUT / ADC / OUTPUT
OUTPUT
PIOA (PIO10)
INPUT / ADC / OUTPUT
OUTPUT
PIOB (PIO11)
INPUT / ADC / DS18B20/ DHT11 / OUTPUT
OUTPUT
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: PIO-02 ąĖ PIO-03 ą╝ąŠą│čāčé ą▓čŗą┤ą░ą▓ą░čéčī ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ ą┤ąŠ 20 mA. PIO-04 .. PIO-11 čĆą░čüčüčćąĖčéą░ąĮčŗ ąĮą░ ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ č鹊ą╗čīą║ąŠ 4 mA.
ą¦č鹊ą▒čŗ čāą║ą░ąĘą░čéčī HM-10, čćč鹊 ą╝čŗ čģąŠčéąĖą╝ čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗą▓ąŠą┤ą░ą╝ąĖ PIO ą┐ąŠ čĆą░ą┤ąĖąŠ, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ AT+MODE1 ąĖ AT+MODE2.
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄąČąĖą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ PIO, ą▓ ą║ąŠč鹊čĆąŠą╝ PIO2 ąĖ PIO3 čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čŗčģąŠą┤čŗ, ąĖ PIO4 .. PIOB ą║ą░ą║ ą▓čģąŠą┤čŗ.
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄąČąĖą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ PIO, ą▓ ą║ąŠč鹊čĆąŠą╝ PIO2 .. PIOB čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ.
ąóąŠą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ MODE1 ą▓čŗą▓ąŠą┤čŗ PIO2 ąĖ PIO3 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ąŠą╝ą░ąĮą┤ą░ AT+PIOxv čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čŹčéąĖčģ ą┤ą▓čāčģ ą▓čŗą▓ąŠą┤ąŠą▓. ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠą┐čŗčéą░ąĄč鹥čüčī čāčüčéą░ąĮąŠą▓ąĖčéčī ą║ą░ą║ąŠą╣-ąĮąĖą▒čāą┤čī ą┤čĆčāą│ąŠą╣ ą▓čŗą▓ąŠą┤ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣, č鹊 HM-10 ąĮąĄ ąŠčéą▓ąĄčéąĖčé, ąĖą╗ąĖ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ąĄčĆčüąĖąĖ firmware ą╝ąŠąČąĄčé čĆą░ąĘąŠčĆą▓ą░čéčī ąĖ ąĘą░ąĮąŠą▓ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
[ą¤čĆąĖą╝ąĄčĆ ą░ą▓č鹊ąĮąŠą╝ąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ HM-10: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ ą▓ MODE2 ]
ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąŠčüč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ą▒čāą┤ąĄą╝ ą▓ą║ą╗čÄčćą░čéčī ąĖ ą▓čŗą║ą╗čÄčćą░čéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐ąŠ čĆą░ą┤ąĖąŠ. ąĪąĮą░čćą░ą╗ą░ ą┐ąŠą┐čĆąŠą▒čāąĄą╝ čüą┤ąĄą╗ą░čéčī čŹč鹊 ą▓čĆčāčćąĮčāčÄ AT-ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ č湥čĆąĄąĘ Serial Monitor. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāą▒ąĄą┤ąĖą╝čüčÅ, čćč鹊 čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé, ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ Arduino ą║ąĮąŠą┐ą║čā ąĖ ąĮą░ą┐ąĖčüą░čéčī čüą║ąĄčéčć, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐ąŠčüčŗą╗ą░čéčī čéą░ą║ąĖąĄ ąČąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┐čĆąĖ ąĮą░ąČą░čéąĖąĖ ąĖ ąŠčéą┐čāčüą║ą░ąĮąĖąĖ ą║ąĮąŠą┐ą║ąĖ.
ąōą╗ą░ą▓ąĮą░čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ čüąĖčüč鹥ą╝ą░, Central HM-10:
ąŻą┐čĆą░ą▓ą╗čÅąĄą╝ą░čÅ čüąĖčüč鹥ą╝ą░, Peripheral HM-10:
ą¤ąŠčüą╗ąĄ čüą▒ąŠčĆą║ąĖ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ąĖ ąĘą░ą│čĆčāąĘąĖč鹥 ą▓ ą┐ą░ą╝čÅčéčī ą┐ą╗ą░čéčŗ Arduino čüą╗ąĄą┤čāčÄčēąĖą╣ čüą║ąĄčéčć. ąŁč鹊čé čüą║ąĄčéčć ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā AltSoftSerial [5], ą┐ąŠčŹč鹊ą╝čā ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ čüčĆąĄą┤ąĄ Arduino IDE, ąĖąĮą░č湥 čüą║ąĄčéčć ąĮąĄ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ.
// SerialIn_SerialOut_HM-10_01 // // ąśčüą┐ąŠą╗čīąĘčāąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ UART ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ čģąŠčüčéą░ // ąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą╝ąŠą┤čāą╗ąĄą╝ Bluetooth HM-10. ąöą╗čÅ čĆą░ą▒ąŠčéčŗ čü UART // ą┐čĆąĖą╝ąĄąĮąĄąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ AltSoftSerial. // // ąÆčüąĄ, čćč鹊 ą▒čŗą╗ąŠ ą▓ą▓ąĄą┤ąĄąĮąŠ ą▓ ąŠą║ąĮąĄ č鹥čĆą╝ąĖąĮą░ą╗ą░ Serial Monitor, ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ // ąĮą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ HM-10, ąĖ ą▓čüąĄ, čćč鹊 ą┐ąŠčüčéčāą┐ąĖą╗ąŠ ąŠčé HM-10, // ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ ąŠą║ąĮąŠ Serial Monitor. // ąÆ ą╝ąŠą┤čāą╗čī HM-10 ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čüąĖą╝ą▓ąŠą╗čŗ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čüčéčĆąŠą║ąĖ. // // ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ: // BT VCC - Arduino 5V // BT GND - Arduino GND // Arduino D8 (RX) - BT TX ą▒ąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ // Arduino D9 (TX) - BT RX č湥čĆąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (5v -> 3.3v) // #include < AltSoftSerial.h>
AltSoftSerial BTserial;// https://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
char c= ' ' ;
boolean NL = true ;
void setup ()
{
Serial.begin(9600 );
Serial.print("Sketch: " ); Serial.println(__FILE__);
Serial.print("Uploaded: " ); Serial.println(__DATE__);
Serial.println(" " );
BTserial.begin(9600 );
Serial.println("BTserial started at 9600" );
}
void loop ()
{
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą╝ąŠą┤čāą╗čÅ Bluetooth ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ą▓ Arduino Serial Monitor:
if (BTserial.available())
{
c = BTserial.read();
Serial.write(c);
}
// ą¦č鹥ąĮąĖąĄ ąĖąĘ Serial Monitor, ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ą▓ ą╝ąŠą┤čāą╗čī Bluetooth:
if (Serial.available())
{
c = Serial.read();
// ąØąĄ ąĮčāąČąĮąŠ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī čüąĖą╝ą▓ąŠą╗čŗ ą║ąŠąĮčåą░ čüčéčĆąŠą║ąĖ ą▓ HM-10:
if (c!=10 & c!=13 )
{
BTserial.write(c);
}
// ąŁčģąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ ą▓ą▓ąŠą┤ą░ ą▓ ąŠą║ąĮąŠ č鹥čĆą╝ąĖąĮą░ą╗ą░.
// ąĢčüą╗ąĖ ąĘą┤ąĄčüčī ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮąŠą▓ą░čÅ čüčéčĆąŠą║ą░, č鹊 ą┐ąĄčćą░čéą░ąĄčéčüčÅ čüąĖą╝ą▓ąŠą╗ ">":
if (NL) { Serial.print(" \r\n >" ); NL = false ; }
Serial.write(c);
if (c==10 ) { NL = true ; }
}
}
ąŚą░č鹥ą╝ ąĮą░ą╝ ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ąĄą╣čüčéą▓ąĖą╣ ą▓ ąŠą║ąĮąĄ Serial Monitor.
1. ąŻčüčéą░ąĮąŠą▓ąĖčéčī čĆąĄąČąĖą╝ Peripheral ą╝ąŠą┤čāą╗čÅ HM-10, ą║ ą║ąŠč鹊čĆąŠą╝čā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤, čćč鹊ą▒čŗ ąŠąĮ ą┐čĆąĖąĮąĖą╝ą░ą╗ AT-ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠ čĆą░ą┤ąĖąŠ.
ąØą░čüč鹊ą╣ą║ą░ čĆąĄąČąĖą╝ą░ Peripheral . ą¦č鹊ą▒čŗ ąĮą░čüčéčĆąŠąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ HM-10 ą▓ čĆąĄąČąĖą╝ Peripheral, ąĮą░ą╝ čüąĮą░čćą░ą╗ą░ ąĮą░ą┤ąŠ ąĮą░čüčéčĆąŠąĖčéčī ąĄą│ąŠ ą┤ą╗čÅ ą┐čĆąĖąĮčÅčéąĖčÅ AT-ą║ąŠą╝ą░ąĮą┤ ą┐ąŠ čĆą░ą┤ąĖąŠ. ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, čŹč鹊 ąĮąĄą╗čīąĘčÅ čüą┤ąĄą╗ą░čéčī ą┐ąŠ čĆą░ą┤ąĖąŠ, čéą░ą║ čćč鹊 ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ č湥čĆąĄąĘ UART. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖą╗ąĖ ą░ą┤ą░ą┐č鹥čĆ usb-to-serial, ąĖą╗ąĖ Arduino, ą▓ ą┐ą░ą╝čÅčéčī ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą│čĆčāąČąĄąĮ čüą║ąĄčéčć serial.
ąöą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ąŠą┤čāą╗čÅ č湥čĆąĄąĘ UART ąĮą░ą┤ąŠ ą┐ąĄčĆąĄą┤ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
AT
ą¤ąĄčĆą▓ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ąĮčāąČąĮą░, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ ą▓ ą┐čĆą░ą▓ąĖą╗čīąĮąŠčüčéąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ č湥čĆąĄąĘ UART, ąĖ čćč鹊 ą╝ąŠą┤čāą╗čī ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čŗ. ąÜąŠą╝ą░ąĮą┤ą░ AT+RENEW ą▓ąĄčĆąĮąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ HM-10 ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą▓ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ HM-10 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Peripheral.
ąØčāąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą░ą┤čĆąĄčü ą╝ąŠą┤čāą╗čÅ, ąŠąĮ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ąŠąĘąČąĄ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą╝ąŠą┤čāą╗čÄ ą┐ąŠ čĆą░ą┤ąĖąŠ:
ąś ą▓ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čĆąĄąČąĖą╝ MODE2 ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ HM-10. ąŁč鹊 čāą║ą░ąČąĄčé HM-10 ą┐čĆąĖąĮąĖą╝ą░čéčī ąĖ ąŠą▒čĆą░čéčŗą▓ą░čéčī AT-ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗čā:
ą£ąŠą┤čāą╗čī čü ą░ą┤čĆąĄčüąŠą╝ A81B6AAE5221 č鹥ą┐ąĄčĆčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ čĆąĄąČąĖą╝ Peripheral, ąĖ ąĮą░čüčéčĆąŠąĄąĮ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ AT-ą║ąŠą╝ą░ąĮą┤, ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ ą║ ąĮąĄą╝čā ą┐ąŠ čĆą░ą┤ąĖąŠ. ąóąĄą┐ąĄčĆčī ą╝čŗ ą╝ąŠąČąĄą╝ ą┐ąŠ čĆą░ą┤ąĖąŠ ą┐ąŠčüčŗą╗ą░čéčī ą║ąŠą╝ą░ąĮą┤čŗ, čćč鹊ą▒čŗ čāą┐čĆą░ą▓ą╗čÅčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą║ PIO2.
ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄąČąĖą╝ą░ Central . ąöčĆčāą│ąŠą╣ ą╝ąŠą┤čāą╗čī HM-10 ą▒čāą┤ąĄčé "ą│ą╗ą░ą▓ąĮčŗą╝", ąĖ ąĄą│ąŠ ąĮą░ą┤ąŠ ąĮą░čüčéčĆąŠąĖčéčī ą▓ čĆąĄąČąĖą╝ Central. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ:
AT
ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ ą┐ąŠ čĆą░ą┤ąĖąŠ ą▒čāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čŗ AT+PIO21 ąĖ AT+PIO20.
ąÜąŠą╝ą░ąĮą┤ą░ AT ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüą┤ąĄą╗ą░čéčī ą┐čĆąŠą▓ąĄčĆą║čā čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą╝ąŠą┤čāą╗ąĄą╝ (čćč鹊 ąŠąĮ ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čŗ), ąĖ ą║ąŠą╝ą░ąĮą┤ą░ AT+RENEW čüą▒čĆą░čüčŗą▓ą░ąĄčé ą╝ąŠą┤čāą╗čī ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ:
ąÜąŠą╝ą░ąĮą┤ą░ AT+IMME1 ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ "ą▓čĆčāčćąĮčāčÄ":
ąÜąŠą╝ą░ąĮą┤ą░ AT+ROLE1 ą░ą║čéąĖą▓ąĖąĘąĖčĆčāąĄčé čā ą╝ąŠą┤čāą╗čÅ čĆąĄąČąĖą╝ Central:
ąĢčüą╗ąĖ čā ąÆą░čü čüčéą░čĆąŠąĄ firmware HM-10, č鹊 čüą╗ąĄą┤čāąĄčé ąŠą▒ąĮąŠą▓ąĖčéčī ąĄą│ąŠ. ąÆ čüą╗čāčćą░ąĄ čüčéą░čĆąŠą│ąŠ firmware ą▓ čŹč鹊ą╝ ą╝ąĄčüč鹥 ąĮčāąČąĮąŠ čüą▒čĆąŠčüąĖčéčī ą╝ąŠą┤čāą╗čī, čćč鹊ą▒čŗ čĆąĄąČąĖą╝ Central ą░ą║čéąĖą▓ąĖąĘąĖčĆąŠą▓ą░ą╗čüčÅ, ąĖ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī.
ąöą░ą╗ąĄąĄ ąĮą░ą╝ ąĮčāąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą╝ąŠą┤čāą╗ąĄą╝ Central ąĖ Peripheral, ą┤ą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠą┤čāą╗čÄ Central ąĮą░ą┤ąŠ ą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā AT+CON88C255122F9E. ąĢčüą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čāčüą┐ąĄčłąĮąŠ, č鹊 HM-10 Central ąŠčéą▓ąĄčéąĖčé "OK+CONNA", ąĖ ąĮą░ ąŠą▒ąŠąĖčģ ą╝ąŠą┤čāą╗čÅčģ HM-10 ą┐ąĄčĆąĄčüčéą░ąĮčāčé ą╝ąĖą│ą░čéčī ąĖ ąĮą░čćąĮčāčé ą┐ąŠčüč鹊čÅąĮąĮąŠ čüą▓ąĄčéąĖčéčīčüčÅ LED, čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāčÅ ąŠą▒ ą░ą║čéąĖą▓ąĮąŠą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ.
ąóąĄą┐ąĄčĆčī ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ ą╝ąŠą┤čāą╗čÅ Peripheral ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠ, ą┐ąŠ čĆą░ą┤ąĖąŠ, ą┐ąŠčüčŗą╗ą░čÅ AT-ą║ąŠą╝ą░ąĮą┤čŗ ą╝ąŠą┤čāą╗čÄ Central. ą¦č鹊ą▒čŗ ąĘą░ąČąĄčćčī čüą▓ąĄč鹊ą┤ąĖąŠą┤, ąŠčéą┐čĆą░ą▓čīč鹥 ą║ąŠą╝ą░ąĮą┤čā AT+PIO21:
ąÜąŠą╝ą░ąĮą┤ą░ AT+PIO20 ą┤ąŠą╗ąČąĮą░ ą▓čŗą║ą╗čÄčćąĖčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤:
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ ą╝ąŠą┤čāą╗čÅ Peripheral ą╝ąŠąČąĄčé ąĘą░ą▓ąĖčüąĄčéčī ąŠčé ąĮą░čüčéčĆąŠąĄą║ ą┐ąŠčĆč鹊ą▓ ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ąĮą░čćą░ą╗ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ąĖąĘ-ąĘą░ č湥ą│ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą╝ąŠąČąĄčé ąĘą░ąČąĄčćčīčüčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąØą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ PIO ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+BEFC (ą┐ąĄčĆąĄą┤ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝) ąĖ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+AFTC (ą┐ąŠčüą╗ąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ).
ąÉą▓č鹊ą╝ą░čéąĖąĘą░čåąĖčÅ ą┐čĆąŠčåąĄčüčüą░ . ą¤ąŠčüą║ąŠą╗čīą║čā ą┤ą░ą╗čīąĮąĄąĄ ą░ą▓č鹊ąĮąŠą╝ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ Peripheral čāąČąĄ ąĮą░čüčéčĆąŠąĄąĮąŠ ą┤ąŠą╗ąČąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮą░ ąĮąĄą╝ ąĮąĖč湥ą│ąŠ ą╝ąĄąĮčÅčéčī ąĮąĄ ąĮčāąČąĮąŠ. ąØą░ Central ą╝ąŠą┤čāą╗ąĄ HM-10 ą╝čŗ čāčüčéą░ąĮąŠą▓ąĖą╝ ą┤ą╗čÅ ąĮąĄą│ąŠ auto connect ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+IMM0.
ą¦č鹊ą▒čŗ ąŠą▒ąŠčĆą▓ą░čéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ Central (čŹč鹊 ąĮčāąČąĮąŠ, čćč鹊ą▒čŗ ąŠąĮ ąĮą░čćą░ą╗ ąŠčéą▓ąĄčćą░čéčī ąĮą░ AT-ą║ąŠą╝ą░ąĮą┤čŗ), ą▓čŗą║ą╗čÄčćąĖč鹥 ą┐ąĖčéą░ąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ Peripheral. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĮą░ ą╝ąŠą┤čāą╗ąĄ Central ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ąŠą╝ą░ąĮą┤čŗ:
AT
ąÜąŠą╝ą░ąĮą┤ą░ AT+RENEW čüą▒čĆą░čüčŗą▓ą░ąĄčé HM-10 ą▓ ąĘą░ą▓ąŠą┤čüą║ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĖ ą┐ąŠčüą║ąŠą╗čīą║čā IMME0 čŹč鹊 čĆąĄąČąĖą╝ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, č鹊 čŹč鹊 ąĮą░čüčéčĆą░ąĖą▓ą░čéčī ąĮąĄ ąĮčāąČąĮąŠ.
ąóąĄą┐ąĄčĆčī ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čā ąŠą▒ąŠąĖčģ ą╝ąŠą┤čāą╗ąĄą╣ ąŠą┤ąĮąĖ ą┤ąŠą╗ąČąĮčŗ čüąŠąĄą┤ąĖąĮčÅčéčīčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ.
ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ąĮąŠą┐ą║čā ąĮą░ ą▓čŗą▓ąŠą┤ D2 ą┐ą╗ą░čéčŗ Arduino, ą║ ą║ąŠč鹊čĆąŠą╣ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ HM-10 Central.
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ąĖ ą▓čŗą│čĆčāąĘąĖč鹥 ą▓ ą┐ą░ą╝čÅčéčī Arduino čüą╗ąĄą┤čāčÄčēąĖą╣ čüą║ąĄčéčć:
// HM-10_Example_03_MODE2_LED // // ą¤čĆąŠčüč鹊ąĄ ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ Bluetooth HM-10: // ą▓ą║ą╗čÄč湥ąĮąĖąĄ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ (LED). // ą¤ąĄčĆą▓čŗą╣ ą╝ąŠą┤čāą╗čī HM-10 ą▓ čĆąĄąČąĖą╝ąĄ Central ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ Arduino. // ąÆč鹊čĆąŠą╣ ą╝ąŠą┤čāą╗čī HM-10, ą▒ąĄąĘ Arduino, čāą┐čĆą░ą▓ą╗čÅąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝, // ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą║ PIO2. // // ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ: // BT VCC - Arduino 5V. // BT GND - Arduino GND. // Arduino D8 (RX) - BT TX ą▒ąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. // Arduino D9 (TX) - BT RX č湥čĆąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
#include < AltSoftSerial.h>
AltSoftSerial BTserial;
byte switchPin = 2 ;
boolean switch_State = LOW;
boolean oldswitch_State = LOW;
void setup ()
{
Serial.begin(9600 );
Serial.print("Sketch: " ); Serial.println(__FILE__);
Serial.print("Uploaded: " ); Serial.println(__DATE__);
Serial.println(" " );
BTserial.begin(9600 );
Serial.println("BTserial started at 9600" );
Serial.println("" );
pinMode(switchPin, INPUT);
}
void loop ()
{
// ą×č湥ąĮčī ą┐čĆąŠčüč鹊ąĄ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆąĄą▒ąĄąĘą│ą░ ą║ąŠąĮčéą░ą║č鹊ą▓.
boolean state1 = digitalRead(switchPin); delay(1 );
boolean state2 = digitalRead(switchPin); delay(1 );
boolean state3 = digitalRead(switchPin); delay(1 );
if ((state1 == state2) && (state1== state3))
{
switch_State = state1;
if (switch_State != oldswitch_State)
{
if ( switch_State == HIGH) { BTserial.print("AT+PIO21" ); Serial.println("The LED is ON" ); }
else { BTserial.print("AT+PIO20" ); Serial.println("The LED is OFF" ); }
oldswitch_State = switch_State;
}
}
}
ąŁč鹊čé čüą║ąĄčéčć ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊ą╣. ąÜąŠą│ą┤ą░ ą║ąĮąŠą┐ą║ą░ ąĮą░ąČą░čéą░, ą┤ą░ą╗čīąĮąĄą╝čā ą╝ąŠą┤čāą╗čÄ Peripheral ą┐ąŠ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗čā ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ AT+PIO21. ąÜąŠą│ą┤ą░ ą║ąĮąŠą┐ą║ą░ ąŠčéą┐čāčüą║ą░ąĄčéčüčÅ, ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ AT+PIO20. AT+PIO21 ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé PIO2 ą▓ HIGH, č鹊ą│ą┤ą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĮą░čćąĮąĄčé čüą▓ąĄčéąĖčéčīčüčÅ, ąĖ ą║ąŠą╝ą░ąĮą┤ą░ AT+PIO20 čāčüčéą░ąĮąŠą▓ąĖčé PIO-2 ą▓ LOW, č鹊ą│ą┤ą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐ąŠą│ą░čüąĮąĄčé.
[ą¤čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ ą┐ąŠ čĆą░ą┤ąĖąŠ ą┤ą░čéčćąĖą║ą░ ąŠčüą▓ąĄčēąĄąĮąĮąŠčüčéąĖ ]
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą╝čŗ čüą┤ąĄą╗ą░ąĄą╝ ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╣ ą┐ąŠ čĆą░ą┤ąĖąŠ ą┤ą░čéčćąĖą║ ąŠčüą▓ąĄčēąĄąĮąĮąŠčüčéąĖ, ą┤ą╗čÅ č湥ą│ąŠ ą▒čāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą░ą▓č鹊ąĮąŠą╝ąĮčŗą╣ ą╝ąŠą┤čāą╗čī HM-10 ą▓ čĆąĄąČąĖą╝ąĄ Peripheral ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ ąĮąĄą╝čā č乊č鹊čĆąĄąĘąĖčüč鹊čĆ (Light Dependent Resistor, LDR). LDR ą┐ąŠą┤ą║ą╗čÄčćąĖą╝ ą║ ą▓čŗą▓ąŠą┤čā PIOB ą╝ąŠą┤čāą╗čÅ Peripheral HM-10. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ MODE1 ą┐ąŠąĘą▓ąŠą╗ąĖčé ąĮą░ą╝ čćąĖčéą░čéčī čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ PIOB Peripheral HM-10 č湥čĆąĄąĘ ą╝ąŠą┤čāą╗čī Central HM-10 ąĖ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
ąØą░čüčéčĆąŠą╣ą║ąĖ . ą×ą▒ą░ ą╝ąŠą┤čāą╗čÅ HM-10 ąĮą░čüčéčĆąŠąĄąĮčŗ ąĮą░ auto connect čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ AT+IMME1, ąĖ ą╝ąŠą┤čāą╗čī Peripheral HM-10 ąĮą░čüčéčĆąŠąĄąĮ ą▓ čĆąĄąČąĖą╝ MODE1.
ąĪčģąĄą╝ą░ . Central HM-10 ("ą│ą╗ą░ą▓ąĮčŗą╣" ą╝ąŠą┤čāą╗čī) ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ Arduino. ąÜ Peripheral HM-10 ("ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣" ą╝ąŠą┤čāą╗čī) ą┐ąŠą┤ą║ą╗čÄč湥ąĮ LDR č湥čĆąĄąĘ ą┐ąŠčĆčé PIOB. Peripheral HM-10 ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčéą░čéčī ąŠčé ą▒ą░čéą░čĆąĄą╣ą║ąĖ, ąŠą┤ąĮą░ą║ąŠ ąĮčāąČąĮąŠ čāč湥čüčéčī, čćč鹊 ąĮą░ VCC ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╣ ą┐ą╗ą░čéčŗ HM-10 ąĮą░ą┤ąŠ ą┐ąŠą┤ą░čéčī +5v, ąĖ ąĮą░ LDR ąĮą░ą┤ąŠ ą┐ąŠą┤ą░čéčī +3.3v.
ąĪą║ąĄčéčć . ą¤čĆąŠą│čĆą░ą╝ą╝ą░ Arduino ąŠč湥ąĮčī ą┐čĆąŠčüčéą░čÅ, ąŠąĮą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé AT+ADCB? ąĖ ą▓čŗą▓ąŠą┤ąĖčé ąŠčéą▓ąĄčé ąĮą░ ąĮąĄčæ. AT+ADCB? ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čćč鹥ąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ PIOB ą┤ą░ą╗čīąĮąĄą│ąŠ Peripheral HM-10.
// Sketch: HM-10_Example_04A_RemoteLightSensor // // ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ Master HM-10: // BT VCC - Arduino 5V. // BT GND - Arduino GND. // Arduino D8 (RX) - BT TX ą▒ąĄąĘ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. // Arduino D9 (TX) - BT RX čü ą┤ąĄą╗ąĖč鹥ą╗ąĄą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. // // ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ Remote HM-10: // HM-10 vcc - +5V. // HM-10 GND - GND. // HM-10 PIOB - LDR/CDS.
#include < AltSoftSerial.h>
AltSoftSerial BTSerial;
char c= ' ' ;char reply[30 ];int pos = 0 ;
void setup ()
{
Serial.begin(9600 );
Serial.print("Sketch: " ); Serial.println(__FILE__);
Serial.print("Uploaded: " ); Serial.println(__DATE__);
Serial.println(" " );
Serial.println("The HM-10s should be set for auto connect" );
Serial.println("The remote HM-10 should be set for MODE1" );
BTSerial.begin(9600 );
Serial.println("BTserial started at 9600" );
Serial.println(" " );
}
void loop ()
{
BTSerial.print("AT+ADCB?" );
delay(500 );
pos = 0 ;
while ( BTSerial.available() )
{
c = BTSerial.read();
reply[pos] = c;
pos++ ;
}
reply[pos] = '\0' ;
Serial.print("Reply = " ); Serial.println(reply);
delay (3000 );
}
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ čćč鹥ąĮąĖčÅ č乊č鹊ą┤ą░čéčćąĖą║ą░ ą┐čĆąŠčüč鹊 ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ą▓ ąŠą║ąĮąĄ Serial Monitor, ąĮąŠ ąÆčŗ ą╝ąŠąČąĄč鹥 čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą║ą░ą║ąĖąĄ-č鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮą░čćą░čéčī ą╝ąĖą│ą░čéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ ąĮą░ ą┐ą╗ą░č鹥 Arduino, ą║ąŠą│ą┤ą░ čüą▓ąĄčé ą▓ą║ą╗čÄč湥ąĮ (ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▓čŗą║ą╗čÄč湥ąĮ).
[HM-10: ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą▓č鹊čĆąŠą╣ Custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ]
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ HM-10 ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü ąŠą┤ąĮąŠą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╣ (custom) čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąŠą╣ custom-čüą╗čāąČą▒čŗ, ą░ ą▓č鹊čĆą░čÅ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮą░čÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+FFE2. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▒čŗą╗ą░ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ firmware ą▓ąĄčĆčüąĖąĖ 5.45, ąĖ čĆą░čüčłąĖčĆąĄąĮą░ ą▓ ą▓ąĄčĆčüąĖąĖ 5.50.
ąŻ ą▓č鹊čĆąŠą╣ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ FFE2 ąĄčüčéčī č鹊ą╗čīą║ąŠ čüą▓ąŠą╣čüčéą▓ąŠ WRITE, ąĖ ąĮąĄčé čüą▓ąŠą╣čüčéą▓ą░ READ, ąĖ ąĘąĮą░č湥ąĮąĖąĄ čā čŹč鹊ą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ąŠąĄ ą▓ UART, ą▒čāą┤ąĄčé čéą░ą║ąŠąĄ ąČąĄ, ą║ą░ą║ ąĖ čā čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ FFE1.
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓č鹊čĆąŠą╣ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ. ąÆąĄčĆąĮąĄčé 0 ąĖą╗ąĖ 1.
0 čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ ąĮąĄ ą░ą║čéąĖą▓ąĮą░.
AT+FFE21 ąĘą░ą┐čāčüą║ą░ąĄčé ą▓č鹊čĆčāčÄ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā.
AT+FFE20 ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓č鹊čĆčāčÄ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā.
ąźąŠčéčÅ ą▓č鹊čĆą░čÅ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ (WRITE only), ąÆčŗ ą╝ąŠąČąĄč鹥 ąĮą░čüčéčĆąŠąĖčéčī, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖą╗ąĖ ąĮąĄčé ąŠčéą▓ąĄčé ą┤ą╗čÅ ąĮąĄčæ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ AT+RESP.
AT+RESP?
ą×ą┐čĆą░čłąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéą▓ąĄčéą░, ą▓ąĄčĆąĮąĄčé 0 ąĖą╗ąĖ 1.
0 ąĘą░ą┐ąĖčüčī ą▒ąĄąĘ ąŠčéą▓ąĄčéą░.
AT+RESP0 čāčüčéą░ąĮąŠą▓ąĖčé ą▓č鹊čĆčāčÄ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā ąĮą░ čĆą░ą▒ąŠčéčā ą▒ąĄąĘ ąŠčéą▓ąĄčéą░.
AT+RESP1 čāčüčéą░ąĮąŠą▓ąĖčé ą▓č鹊čĆčāčÄ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā ąĮą░ čĆą░ą▒ąŠčéčā čü ąŠčéą▓ąĄč鹊ą╝.
ąĪą║ąĄčéčć . ąŁč鹊čé čüą║ąĄčéčć ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé čüąĖą╝ą▓ąŠą╗čŗ ą║ąŠąĮčåą░ čüčéčĆąŠą║ąĖ ą▓ ą┤ą░ąĮąĮčŗąĄ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą▓ Serial Monitor, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą┐čĆąŠčēąĄ čćąĖčéą░čéčī ą║ąŠą╝ą░ąĮą┤čŗ. ąŁč鹊čé čüą║ąĄčéčć čéą░ą║ąČąĄ čāą┤ą░ą╗čÅąĄčé ą╗čÄą▒čŗąĄ čüąĖą╝ą▓ąŠą╗čŗ ą║ąŠąĮčåą░ čüčéčĆąŠą║ąĖ ąĖąĘ ą┤ą░ąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĖčģ ą▓ HM-10. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 Serial Monitor ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą▓ čĆąĄąČąĖą╝ ą▓čŗą▓ąŠą┤ą░ čŹčéąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ "Both NL & CR".
ą¤ąŠčüą╗ąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąĖ ą▓čŗą│čĆčāąĘą║ąĖ čüą║ąĄčéčćą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ AT ą┐čĆąŠą▓ąĄčĆčīč鹥, čćč鹊 HM-10 ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čŗ. ąŚą░č鹥ą╝ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā AT+RENEW ą┤ą╗čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĘą░ą▓ąŠą┤čüą║ąĖčģ ąĮą░čüčéčĆąŠąĄą║.
AT+FFE21 ąĘą░ą┐čāčüčéąĖčé ą▓ čĆą░ą▒ąŠčéčā ą▓č鹊čĆčāčÄ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā. ąÉą▓č鹊čĆ čéą░ą║ąČąĄ ąĮą░čüčéčĆąŠąĖą╗ čĆą░ą▒ąŠčéčā ą▓č鹊čĆąŠą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čü ąŠčéą▓ąĄč鹊ą╝ ą║ąŠą╝ą░ąĮą┤ąŠą╣ AT+RESP1.
ą¤ąĄčĆąĄą┤ąĄčĆąĮąĖč鹥 ą┐ąĖčéą░ąĮąĖąĄ ąĖą╗ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā čüą▒čĆąŠčüą░, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ HM-10 ą▓čüčéčāą┐ąĖą╗ąĖ ą▓ čüąĖą╗čā.
ąÆč鹊čĆą░čÅ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī (WRITE only). ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą╝čŗ ą╝ąŠąČąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĄčæ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ HM-10, ąĮąŠ ąĮąĄ ą╝ąŠąČąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąÆčüąĄ, čćč鹊 ą╝čŗ ąŠčéą┐čĆą░ą▓ąĖą╝ ą▓ HM-10, ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮąŠ čéą░ą║ąĖą╝ ąČąĄ, čćč鹊 ą▓ ą┐ąĄčĆą▓ąŠą╣ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĄ.
ą¦č鹊ą▒čŗ čāą▓ąĖą┤ąĄčéčī čŹč鹊 ą▓ ą┤ąĄą╣čüčéą▓ąĖąĖ, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ BLE Scanner. ąŚą░ą┐čāčüčéąĖč鹥 ąĄą│ąŠ, ąĮą░ą╣ą┤ąĖč鹥 HM-10 ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥čüčī ą║ ąĮąĄą╝čā, čĆą░čüą║čĆąŠą╣č鹥 custom service, ąĖ ąÆčŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī ą┤ą▓ąĄ custom-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ:
ąØą░ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĄ FFE2 ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā
[ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ HM-10 čü ą┤čĆčāą│ąĖą╝ąĖ ą╝ąŠą┤čāą╗čÅą╝ąĖ (ąĮąĄ HM-10) ]
ąØą░čćąĖąĮą░čÅ čü firmware 5.42, Jinan Huamao ąĖąĘą╝ąĄąĮąĖą╗ąĖ, ą║ą░ą║ HM-10 ąŠą▒čēą░čÄčéčüčÅ čü ą╝ąŠą┤čāą╗čÅą╝ąĖ ąĮąĄ ąŠčé Jinan Huamao. ąÆąĄčĆčüąĖąĖ ą┤ąŠ 5.42 HM-10 čüąŠąĄą┤ąĖąĮčÅą╗ąĖčüčī ąĖ ąŠą▒ą╝ąĄąĮąĖą▓ą░ą╗ąĖčüčī ą┤ą░ąĮąĮčŗą╝ąĖ ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ.
ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüą▓ąĄąČąĖčģ ą▓ąĄčĆčüąĖą╣ firmware, ą░ą▓č鹊čĆ ąŠą▒ąĮą░čĆčāąČąĖą╗, čćč鹊 čüčéą░ą╗ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮčŗ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÄ HM-10 čü ą┤čĆčāą│ąĖą╝ąĖ ą╝ąŠą┤čāą╗čÅą╝ąĖ UART BLE ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ AT09 ąĖ BT05. HM-10 ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ ą┤čĆčāą│ąŠą╝čā ą╝ąŠą┤čāą╗čÄ ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą▓ ąĮąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ, ąĮąŠ ąŠą▒čĆą░čéąĮąŠ ą┤ą░ąĮąĮčŗąĄ HM-10 ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé. ą¤čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ą╗ąŠčüčī, čćč鹊 čäčāąĮą║čåąĖčÅ čüą░ą╝ąŠąŠą▒čāč湥ąĮąĖčÅ AT+COMP1 ą┤ąŠą╗ąČąĮą░ čüčĆą░ą▒ąŠčéą░čéčī, ąĮąŠ čŹč鹊ą│ąŠ ąĮąĄ čüą╗čāčćąĖą╗ąŠčüčī.
ążčāąĮą║čåąĖčÅ iBeacon ą┐ąŠą║ą░ ąĮąĄ ą┤ąŠčüčéčāą┐ąĮą░, ąŠąĮą░ ą┐ąĄčĆąĄą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ.
[ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ firmware HM-10 ]
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ firmware ąĮąĄą╗čīąĘčÅ ąŠčéą║ą░čéąĖčéčī ąĖą╗ąĖ ąŠčéą╝ąĄąĮąĖčéčī. ąÜą░ą║ č鹊ą╗čīą║ąŠ ąÆčŗ ą▓čŗą┤ą░ą╗ąĖ ą║ąŠą╝ą░ąĮą┤čā OK+SBLUP, ą▒ąŠą╗čīčłąĄ ąĮąĄą╗čīąĘčÅ ą▓ąĄčĆąĮčāčéčīčüčÅ ą║ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ ą▓ąĄčĆčüąĖąĖ firmware.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ HM-10 ą┤ąŠą▓ąŠą╗čīąĮąŠ čĆąĄą│čāą╗čÅčĆąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ, ąĖ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĮą░ čüą░ą╣č鹥 Jinan Huamao [6]. ąóą░ą╝ ąČąĄ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÄ ąĮąŠą▓čŗą╝ firmware.
ąÜą░ą║ ąĖ ą┐ą╗ą░čéčŗ Arduino, ą╝ąŠą┤čāą╗čī HM-10 ąĖą╝ąĄąĄčé ąĮą░ ą▒ąŠčĆčéčā ąĘą░ą│čĆčāąĘčćąĖą║ (bootloader), ą║ąŠč鹊čĆčŗą╣ čāą┐čĆąŠčēą░ąĄčé ą┐čĆąŠčåąĄą┤čāčĆčā ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ firmware. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ Windows PC ąĖ ą░ą┤ą░ą┐č鹥čĆ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ USB to serial UART (čü čāčĆąŠą▓ąĮčÅą╝ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ 3.3V).
ą¤ąŠą╗čāč湥ąĮąĖąĄ čäą░ą╣ą╗ąŠą▓ firmware . ąĪąŠ čüčéčĆą░ąĮąĖčćą║ąĖ ąĘą░ą│čĆčāąĘą║ąĖ [6] ąĘą░ą│čĆčāąĘąĖč鹥 zip-ą░čĆčģąĖą▓ čü ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ HM-10 firmware, ąĘą░ą┐ąĖčłąĖč鹥 ąĄą│ąŠ ąĮą░ ą┤ąĖčüą║ąĄ ą▓ ą╗čÄą▒čāčÄ čāą┤ąŠą▒ąĮčāčÄ ą┐ą░ą┐ą║čā, ąĖ čĆą░čüą┐ą░ą║čāą╣č鹥.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: firmware ą┤ą╗čÅ čćąĖą┐ąŠą▓ CC2540 ąĖ CC2541 čĆą░ąĘąĮąŠąĄ, čé. ąĄ. ąĮąĄą╗čīąĘčÅ ąĘą░ą│čĆčāąĘąĖčéčī CC2540 firmware ą▓ čćąĖą┐ CC251. ąÆčüąĄ ą╝ąŠą┤čāą╗ąĖ, čü ą║ąŠč鹊čĆčŗą╝ čĆą░ą▒ąŠčéą░ą╗ ą░ą▓č鹊čĆ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ čćąĖą┐ CC2541, ąĖ ąĮą░ čüą░ą╣č鹥 Jinan Haumao ą▓čŗą╗ąŠąČąĄąĮčŗ firmware ą┤ą╗čÅ čćąĖą┐ą░ CC2541, čģąŠčéčÅ čŹč鹊 čüč鹊ąĖčé ąĄčēąĄ čĆą░ąĘ ą┐čĆąŠą▓ąĄčĆąĖčéčī.
ąÆ zip-ą░čĆčģąĖą▓ąĄ firmware 5.47 čüąŠą┤ąĄčƹȹ░ą╗ąŠčüčī 4, čģąŠčéčÅ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ą▓ąĄčĆčüąĖą╣ čŹč鹊 ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ. ąÆ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą▓ąĄčĆčüąĖąĖ ą▓ąĄčĆčüąĖąĖ 7.00 (ąĮą░ ą╝ąŠą╝ąĄąĮčé 181214) čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹ░ą╗ 3 čäą░ą╣ą╗ą░:
HMSoft.bin
ąöą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ firmware ąĮčāąČąĮčŗ ą┤ą▓ą░ čäą░ą╣ą╗ą░ HMSoft.exe ąĖ HMSoft.bin. HMSoft.exe čŹč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ Windows, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčĆąĄą┤ą░ąĄčé firmware ą▓ ą╝ąŠą┤čāą╗čī, HMSoft.bin čŹč鹊 čüą░ą╝ąŠ firmware. HMSoft.exe ąĮąĄ čéčĆąĄą▒čāąĄčé ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ, ąĖ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąŠčüčéčŗą╝ ą┤ą▓ąŠą╣ąĮčŗą╝ ą║ą╗ąĖą║ąŠą╝.
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ HM-10 ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā . ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą░ą┤ą░ą┐č鹥čĆ USB - TTL UART čü čāčĆąŠą▓ąĮčÅą╝ąĖ čüąĖą│ąĮą░ą╗ą░ 5V, č鹊 ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ąĄą│ąŠ čüąĖą│ąĮą░ą╗ TX. ą£ąĮąŠą│ąĖąĄ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ąĖąĘ ąśąĮč鹥čĆąĮąĄčé ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ 5V ą░ą┤ą░ą┐č鹥čĆą░ UART (ąĖ ą▓čŗą▓ąŠą┤ąŠą▓ Arduino čü čāčĆąŠą▓ąĮčÅą╝ąĖ 5V) ąĮą░ą┐čĆčÅą╝čāčÄ, ąĮąŠ ą╗čāčćčłąĄ čéą░ą║ ąĮąĄ ą┤ąĄą╗ą░čéčī. ą£ąŠą┤čāą╗ąĖ HM-10 ą┐ąĖčéą░čÄčéčüčÅ ąŠčé 3.3v, ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą╗ąŠą│ąĖč湥čüą║ąĖąĄ čāčĆąŠą▓ąĮąĖ 3.3V, ąĖ čüąĖą│ąĮą░ą╗ RX ą╝ąŠą┤čāą╗čÅ HM-10 ąĮąĄ čĆą░čüčüčćąĖčéą░ąĮ ąĮą░ čāčĆąŠą▓ąĄąĮčī 5V.
ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą╝ąĄąČą┤čā TX ą░ą┤ą░ą┐č鹥čĆą░ UART 5V ą┤ąŠ ą▓čŗą▓ąŠą┤ą░ RX HM-10 ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ąĄą╗ąĖč鹥ą╗čī, ąĮąŠ ą┤čĆčāą│ąŠą╣ čüąĖą│ąĮą░ą╗ ą╝ąĄąČą┤čā RX ą░ą┤ą░ą┐č鹥čĆą░ UART 5V ą┤ąŠ ą▓čŗą▓ąŠą┤ą░ TX HM-10 ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĮą░ą┐čĆčÅą╝čāčÄ. ąóą░ą║ čüą┤ąĄą╗ą░ąĮąŠ ą┐ąŠč鹊ą╝čā, čćč鹊 čāčĆąŠą▓ąĮąĖ 3.3V čāčüčéčĆąŠą╣čüčéą▓ą░ čü čāčĆąŠą▓ąĮčÅą╝ąĖ 5V ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāčÄčéčüčÅ ą║ą░ą║ ą╗ąŠą│. 1.
ąØą░ ą┐ąĄčĆąĄčģąŠą┤ąĮčāčÄ ą┐ą╗ą░čéčā HM-10 ą┐ąŠą┤ą░ąĮąŠ ą┐ąĖčéą░ąĮąĖąĄ 5V ąŠčé ą░ą┤ą░ą┐č鹥čĆą░ UART. ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą░ą┤ą░ą┐č鹥čĆ 3.3V UART, ąĮą░ ą▓čŗčģąŠą┤ąĄ ą║ąŠč鹊čĆąŠą│ąŠ ąĄčüčéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ 3.3V, č鹊 ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╣ ą┐ą╗ą░čéčŗ HM-10, ą┐ąŠč鹊ą╝čā čćč鹊 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ąŠčé ą║ąŠč鹊čĆąŠą│ąŠ čĆą░ą▒ąŠčéą░ąĄčé čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╣ ą┐ą╗ą░čéčŗ, čüąŠčüčéą░ą▓ą╗čÅąĄčé 3.6V.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓čüąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čüą┤ąĄą╗ą░ąĮčŗ, ąĮčāąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čĆą░ą▒ąŠčéą░ąĄčé ą╗ąĖ čüą▓čÅąĘčī HM-10 čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā č鹥čĆą╝ąĖąĮą░ą╗ą░ (pytty, TerraTerm, SecureCRT), ąĮąŠ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī Serial Monitor ąĖąĘ Arduino IDE.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: čüą╗ąĄą┤čāąĄčé ą┐ąŠą╝ąĮąĖčéčī ąŠ č鹊ą╝, čćč鹊 ą┤ą╗čÅ HM-10 ąĮčāąČąĮąŠ ą▓ą▓ąŠą┤ąĖčéčī ą║ąŠą╝ą░ąĮą┤čŗ ą▓ ą▓ąĄčĆčģąĮąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ, ąĖ ąĮąĄ ąĮčāąČąĮąŠ ą▓ ąĮąĖčģ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čüąĖą╝ą▓ąŠą╗čŗ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čüčéčĆąŠą║ąĖ.
ą¦č鹊ą▒čŗ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ Serial Monitor Arduino IDE, čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą▒čĆą░ąĮ ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ. ąØąŠą╝ąĄčĆ ą┐ąŠčĆčéą░, ą║ąŠč鹊čĆąŠą╝čā čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą░ą┤ą░ą┐č鹥čĆ USB - UART, ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī ą▓ ąöąĖčüą┐ąĄčéč湥čĆąĄ ąŻčüčéčĆąŠą╣čüčéą▓ Windows. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 čŹč鹊 ą┐ąŠčĆčé COM6.
ą×čéą║čĆąŠą╣č鹥 Serial Monitor, ą▓čŗą▒ąĄčĆąĖč鹥 čüą║ąŠčĆąŠčüčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ "9600 baud" ąĖ ąĮą░čüčéčĆąŠą╣ą║čā "No line ending". ąÆą▓ąĄą┤ąĖč鹥 ąĖ ąŠčéą┐čĆą░ą▓čīč鹥 ą║ąŠą╝ą░ąĮą┤čā AT, ąĖ ąĄčüą╗ąĖ ą▓čüąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ, č鹊 ą┐ąŠą╗čāčćąĖč鹥 ąŠčéą▓ąĄčé "OK".
ąĢčüą╗ąĖ ąĮąĄčé ąŠčéą▓ąĄčéą░ "OK":
ŌĆō ą¤čĆąŠą▓ąĄčĆčīč鹥, ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čüą║ąŠčĆąŠčüčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüą║ąŠčĆąŠčüčéčī 9600.
ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ "OK" ą╝čŗ ą╝ąŠąČąĄą╝ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą▓ąĄčĆčüąĖčÄ č鹥ą║čāčēąĄą│ąŠ firmware ą▓ ą╝ąŠą┤čāą╗ąĄ HM-10 čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ AT+VERR?.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▓ąĖą┤ąĮąŠ, čćč鹊 č鹥ą║čāčēą░čÅ ą▓ąĄčĆčüąĖčÅ 5.40.
ą¦č鹊ą▒čŗ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą▓ čĆąĄąČąĖą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā AT+SBLUP. ąÆčŗ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą╗čāčćąĖčéčī ąŠčéą▓ąĄčé "OK+SBLUP", ąĖ LED ąĮą░ ą╝ąŠą┤čāą╗ąĄ HM-10 ą┐ąĄčĆąĄčüčéą░ąĮąĄčé ą╝ąĖą│ą░čéčī.
ąŚą░ą║čĆąŠą╣č鹥 Serial Monitor.
ą¤čĆąŠčåąĄčüčü ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ . ą×čéą║čĆąŠą╣č鹥 ą┐ą░ą┐ą║čā, ą║čāą┤ą░ ąÆčŗ čĆą░čüą┐ą░ą║ąŠą▓ą░ą╗ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą░čĆčģąĖą▓ą░ firmware, ąĖ ąĘą░ą┐čāčüčéąĖč鹥 HMSoft.exe. ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 Windows 7 ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČčāčÄ ą▓ąĄčĆčüąĖčÄ Windows, č鹊 ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ąĘą░ą┐čāčüčéąĖčéčī čŹčéčā ą┐čĆąŠą│čĆą░ą╝ą╝čā čü ą┐čĆą░ą▓ą░ą╝ąĖ ą░ą┤ą╝ąĖąĮąĖčüčéčĆą░č鹊čĆą░.
ąÆčŗą▒ąĄčĆąĖč鹥 čäą░ą╣ą╗ firmware HMSoft.bin, ą▓ą▓ąĄą┤ąĖč鹥 ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ąĮąŠą╝ąĄčĆ COM-ą┐ąŠčĆčéą░, ąĖ ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā Load Image.
ążą░ą╣ą╗ firmware ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ąĖ ą┐čĆąŠą▓ąĄčĆąĄąĮ. ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠč鹊ą▒čĆą░ąĘąĖčéčüčÅ ąŠą║ąĮąŠ "Download completed successfully", ąĖ LED ąĮą░ HM-10 čüąĮąŠą▓ą░ ąĮą░čćąĮąĄčé ą╝ąĖą│ą░čéčī. ąóąĄą┐ąĄčĆčī ą╝ąŠąČąĮąŠ ąĘą░ą║čĆčŗčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖ čüąĮąŠą▓ą░ ąĘą░ą┐čāčüčéąĖčéčī Serial Monitor, čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą▓ąĄčĆčüąĖčÄ ąĮąŠą▓ąŠą│ąŠ firmware.
ą¤čĆąŠą▒ą╗ąĄą╝čŗ ą┐čĆąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĖ firmware . ąĢčüą╗ąĖ ąÆčŗ ąĘą░ą┐čāčüčéąĖą╗ąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, č鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ čćč鹊 ąÆčŗ ąŠčüčéą░ą▓ąĖą╗ąĖ ąŠčéą║čĆčŗčéčŗą╝ Arduino IDE. ąØčāąČąĮąŠ ąĖąĘ Arduino IDE, čćč鹊ą▒čŗ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī COM-ą┐ąŠčĆčé. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ HMSoft.exe ąĮąĄ ą▓čŗą┤ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ąĄčüą╗ąĖ COM-ą┐ąŠčĆčé ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ.
ąĢčüą╗ąĖ ą▓čŗčüą║ąŠčćąĖą╗ą░ ąŠčłąĖą▒ą║ą░ čéą░ą╣ą╝ą░čāčéą░ (timeout error), č鹊 ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 čüąĮąŠą▓ą░ ąĘą░ą┐čāčüčéąĖčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ. ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐ąŠą╗čāčćą░ąĄč鹥 ąŠčłąĖą▒ą║čā, č鹊 čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ą▓ąĖąĮąŠą▓ą░čé ą░ą┤ą░ą┐č鹥čĆ USB - UART. ąØąĄą║ąŠč鹊čĆčŗąĄ ą░ą┤ą░ą┐č鹥čĆčŗ ą╝ąŠą│čāčé ą┐ą╗ąŠčģąŠ čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą▒ąŠą╗čīčłąĖčģ čüą║ąŠčĆąŠčüčéčÅčģ (ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĮą░ ą║ąŠč鹊čĆčŗčģ čüč鹊čÅčé ą┐ąŠą┤ą┤ąĄą╗čīąĮčŗąĄ čćąĖą┐čŗ FDTI), ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖčćąĖąĮąŠą╣ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 firmware ąĖ/ąĖą╗ąĖ ąĄą│ąŠ ą┐čĆąŠą▓ąĄčĆą║ąĄ.
ąĢčüą╗ąĖ ą▓ąŠąĘąĮąĖą║ą╗ą░ ą┐čĆąŠą▒ą╗ąĄą╝ą░ čü ąĘą░ą│čĆčāąĘą║ąŠą╣, č鹊 LED ąĮą░ ą╝ąŠą┤čāą╗ąĄ HM-10 ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčī čüą▓ąĄčéąĖčéčīčüčÅ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠąĮ ą▓čüąĄ ąĄčēąĄ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ firmware (upload mode). ą×ąĮ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┤ą░ąČąĄ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ąĄčĆą│ąĖą▓ą░ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ą¤čĆąŠčüč鹊 ąĘą░ą┐čāčüčéąĖč鹥 ąĘą░ąĮąŠą▓ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ HMSoft.exe.
[ąĪą╗ąŠą▓ą░čĆąĖą║ ]
BLE Bluetooth Low Energy, ąĖą╗ąĖ Bluetooth LE, čŹč鹊 ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮą░čÅ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ (ąĖąĮąŠą│ą┤ą░ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ Bluetooth Smart), čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮą░čÅ ąĖ ą┐čĆąŠą┤ą▓ąĖą│ą░ąĄą╝ą░čÅ Bluetooth Special Interest Group (Bluetooth SIG), ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮą░čÅ ą┤ą╗čÅ ą▒čŗč鹊ą▓ąŠą╣ 菹╗ąĄą║čéčĆąŠąĮąĖą║ąĖ, ą╝ąĄą┤ąĖčåąĖąĮąĄ, čüąĖčüč鹥ą╝ą░čģ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ąĖ ąĖąĮą┤čāčüčéčĆąĖąĖ ą┤ąŠą╝ą░čłąĮąĖčģ čĆą░ąĘą▓ą╗ąĄč湥ąĮąĖą╣. BLE ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą║ą╗ą░čüčüąĖč湥čüą║ąĖą╝ Bluetooth ą▒čŗą╗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ąĖ čüč鹊ąĖą╝ąŠčüčéąĖ ą┐čĆąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĖ ą┐ąŠčćčéąĖ čéą░ą║ąŠą│ąŠ ąČąĄ čĆą░ą┤ąĖčāčüą░ ą┤ąĄą╣čüčéą▓ąĖčÅ. ą×ą┐ąĄčĆą░čåąĖąŠąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄąĮąŠčüąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą▓ą║ą╗čÄčćą░čÅ iOS, Android, Windows Phone ąĖ BlackBerry, ą░ čéą░ą║ąČąĄ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ macOS, Linux, Windows 8 ąĖ Windows 10 ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąĖą╝ąĄčÄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā Bluetooth Low Energy (ąĖąĘ ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ).
[ąĪčüčŗą╗ą║ąĖ ]
1 . HM-10 Bluetooth 4 BLE Modules site:martyncurrey.com.2 . GATT Services site:bluetooth.com.3 . GATT Characteristics site:bluetooth.com.4 . BLE Scanner site:play.google.com.5 . AltSoftSerial Library site:pjrc.com.6 . jnhuamao.cn Common Downloads .7 . 181213BLE-Bluetooth-HM-10.zip - čüą║ąĄčéčćąĖ, čāčéąĖą╗ąĖčéą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ.8 . ąØą░čüčéčĆąŠą╣ą║ą░ App Inventor .



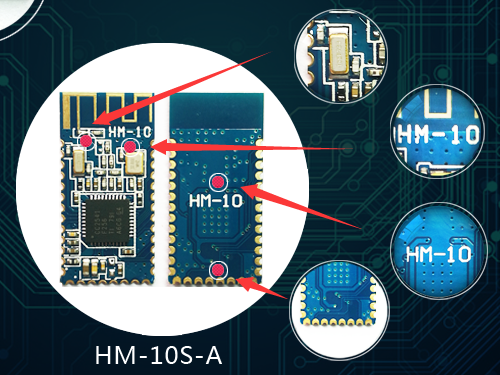
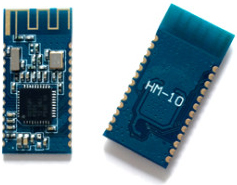



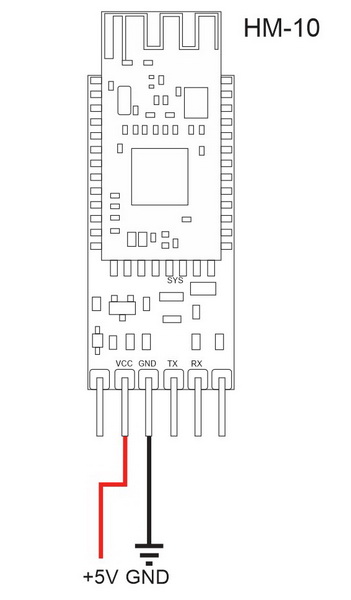



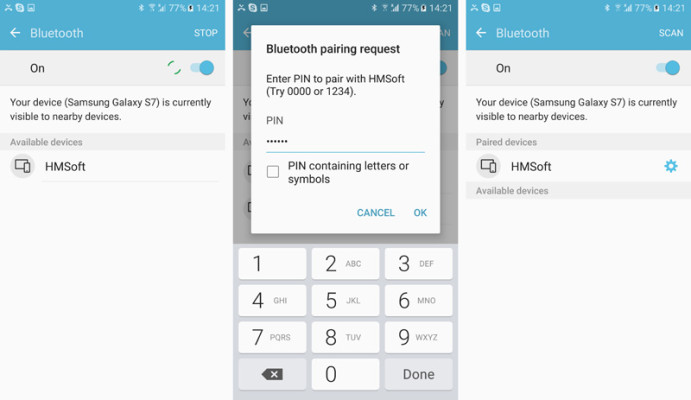
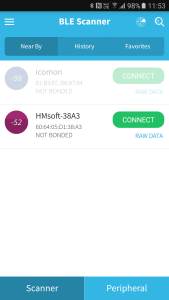
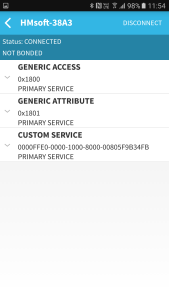

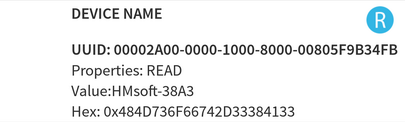



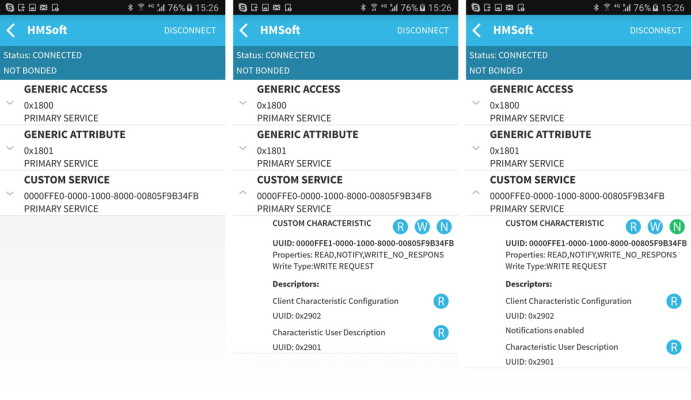
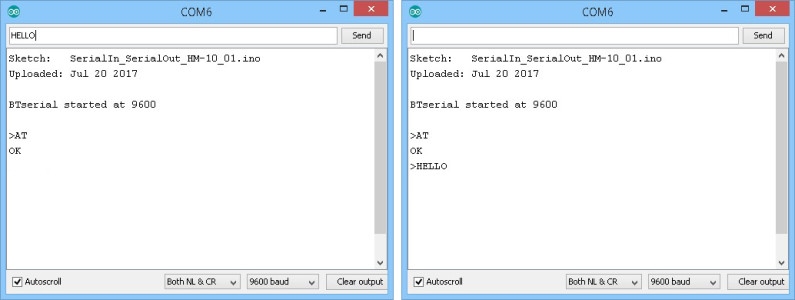
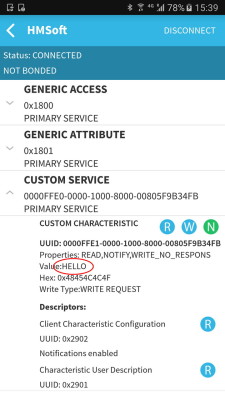
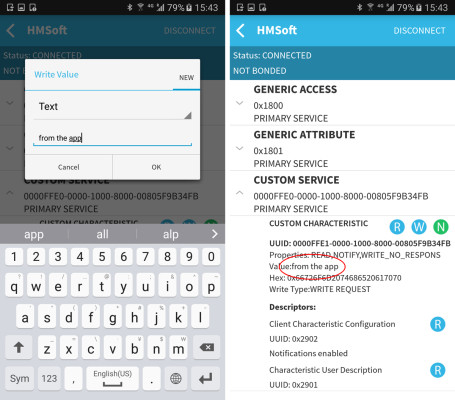
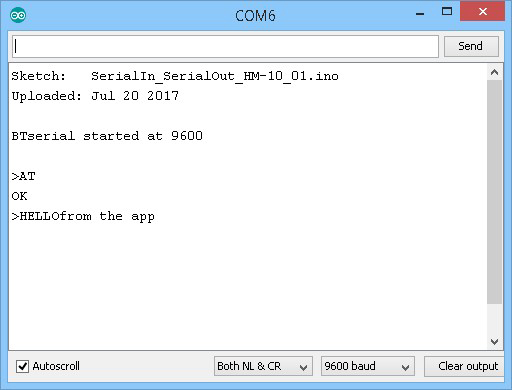
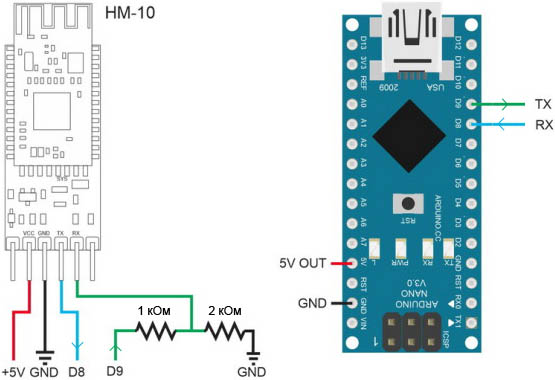
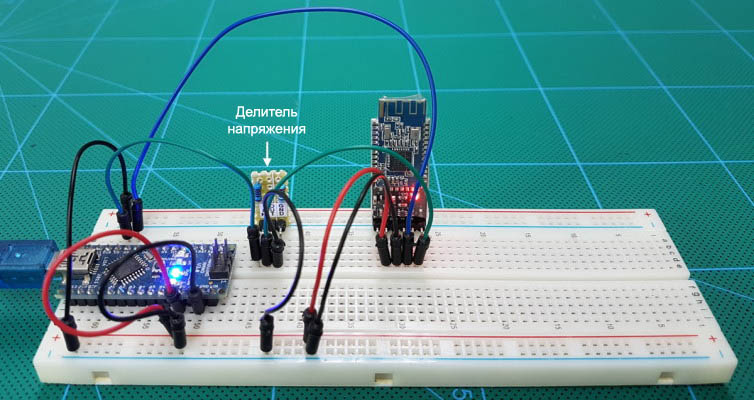

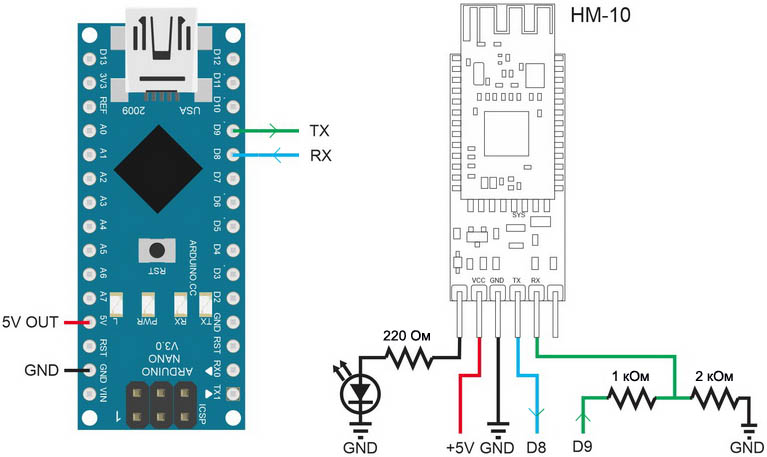
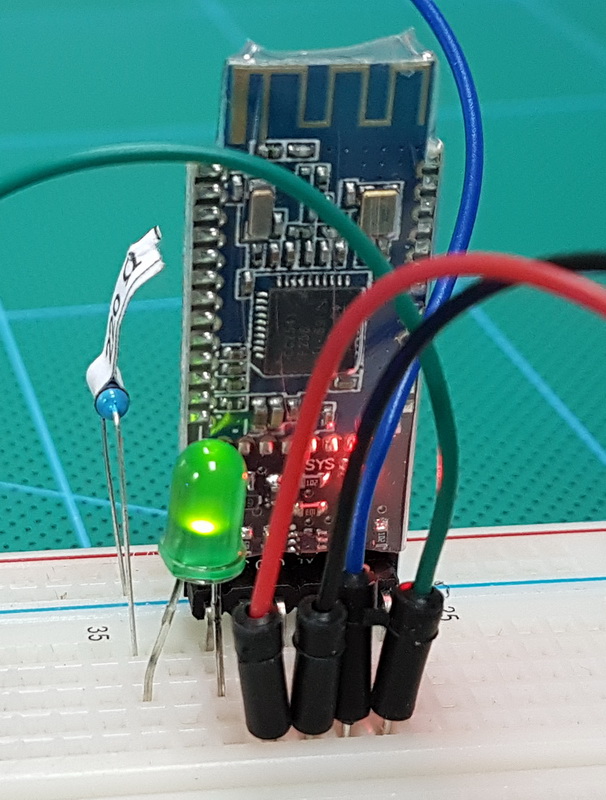

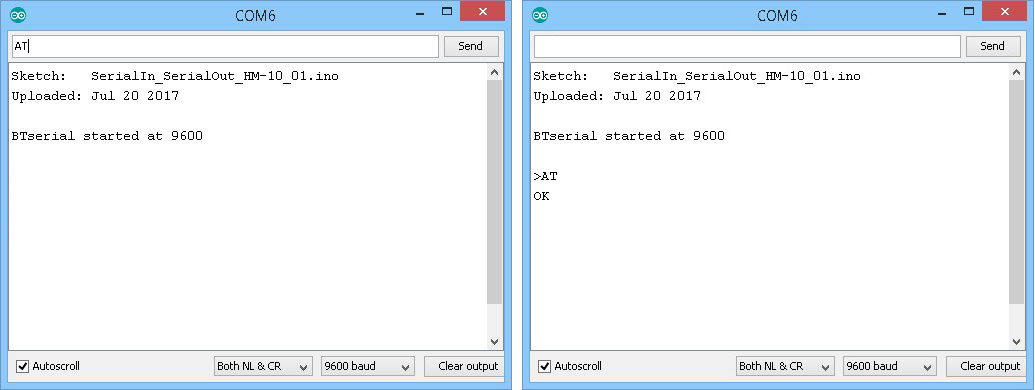
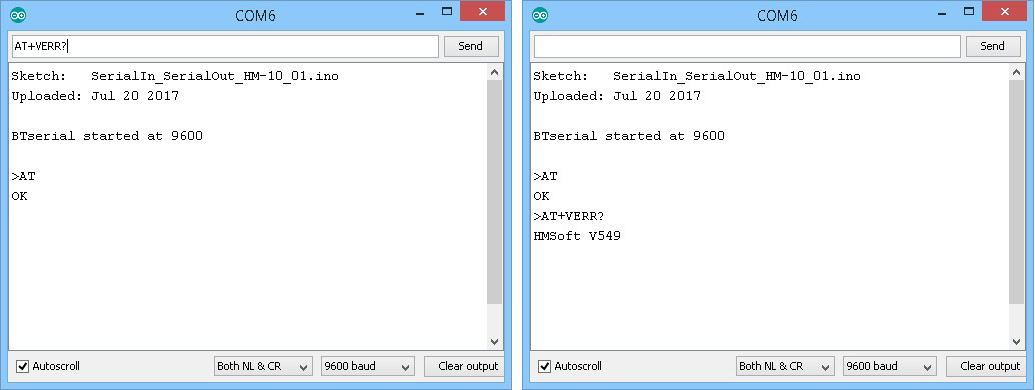
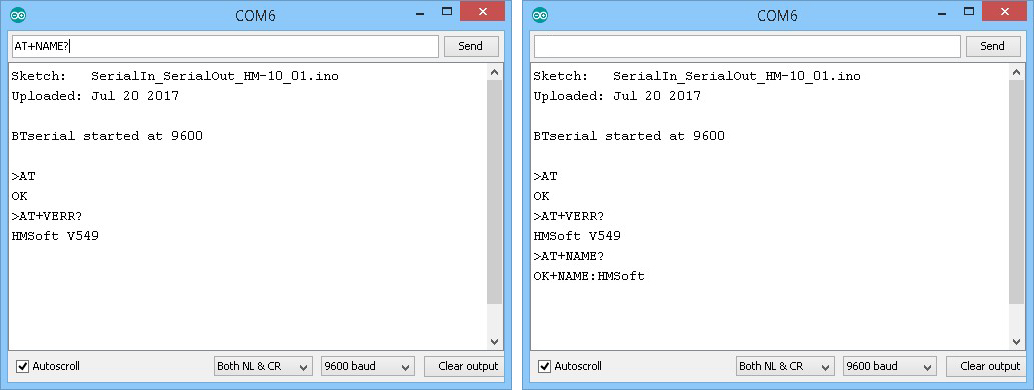
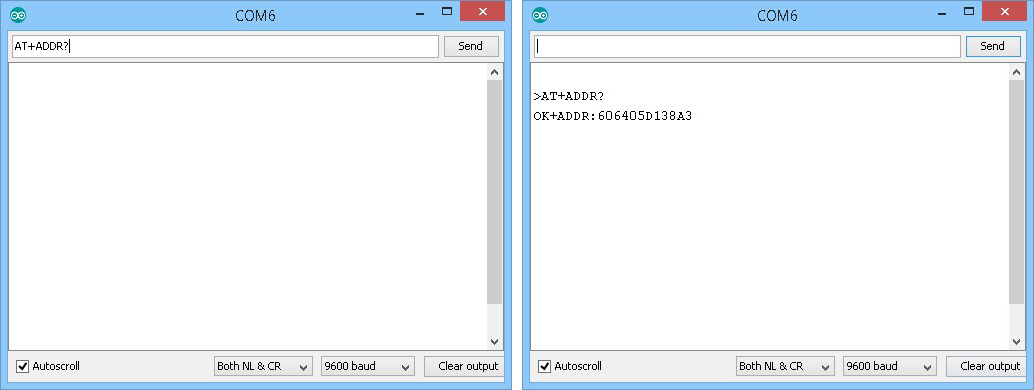
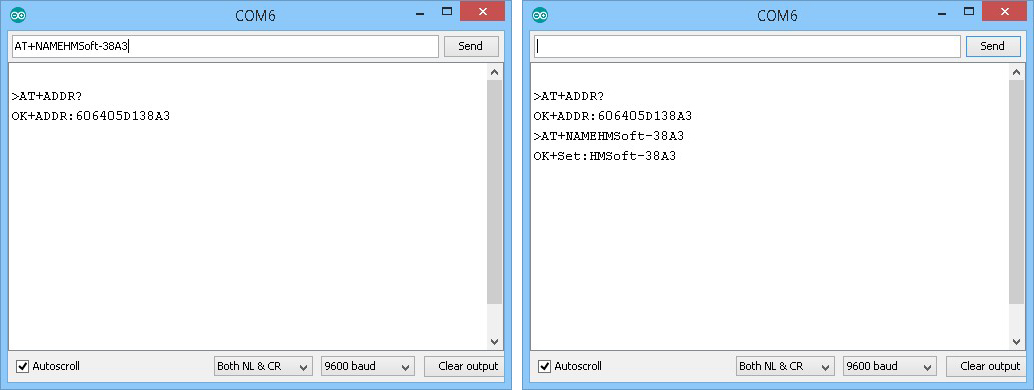
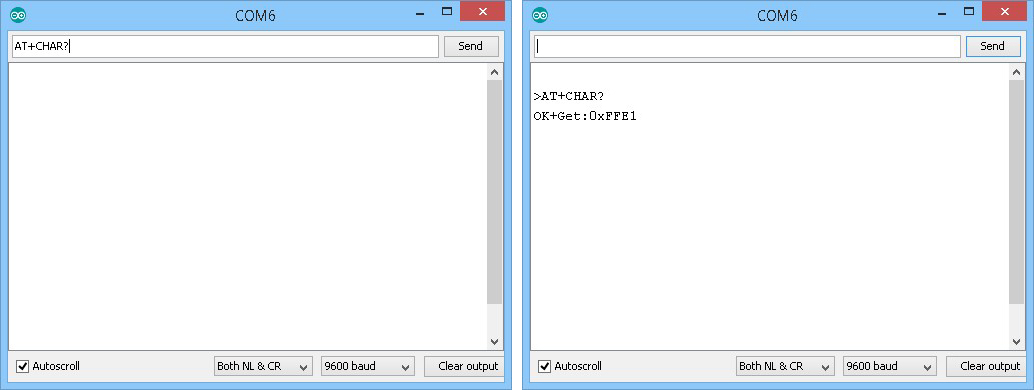
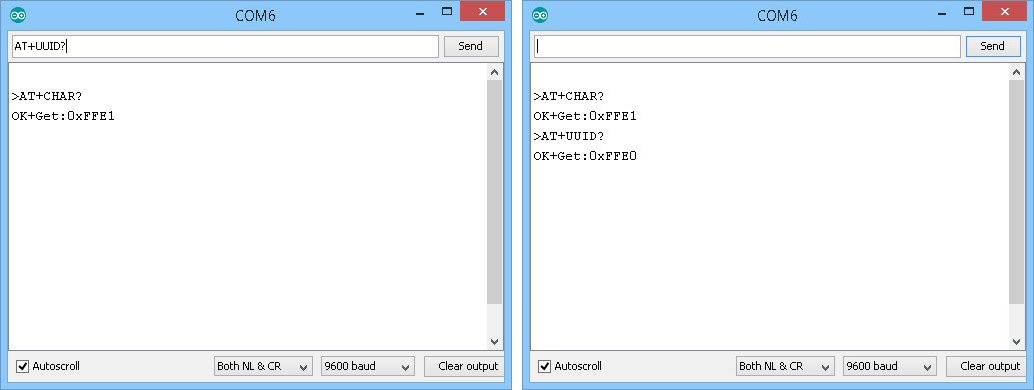
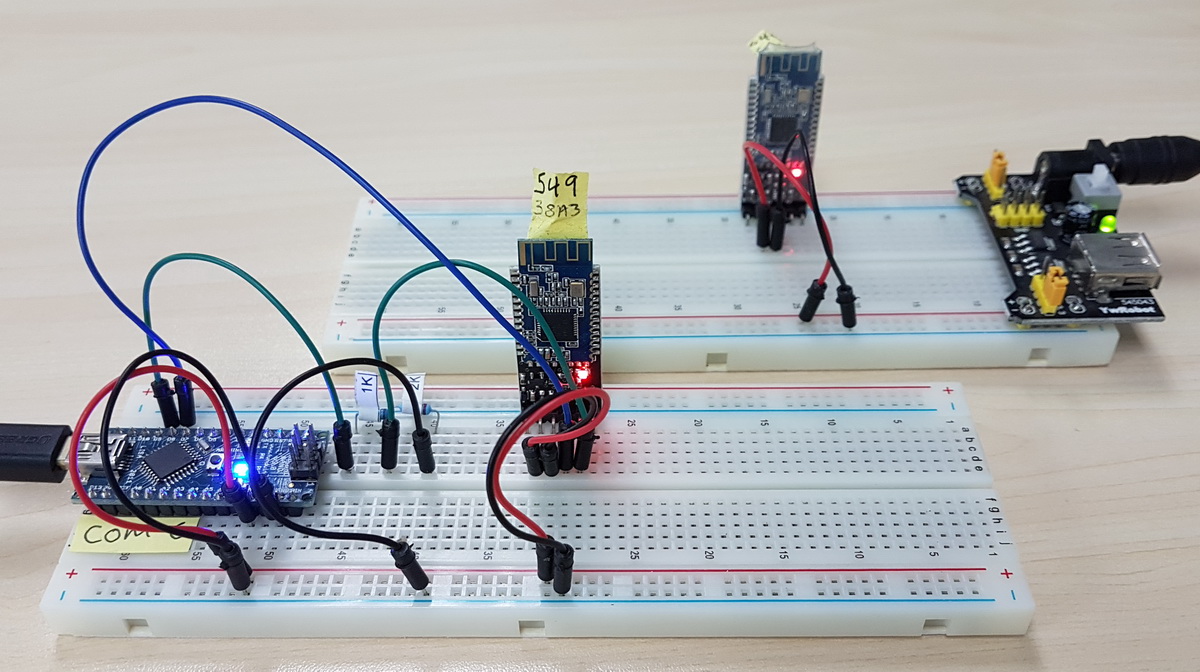

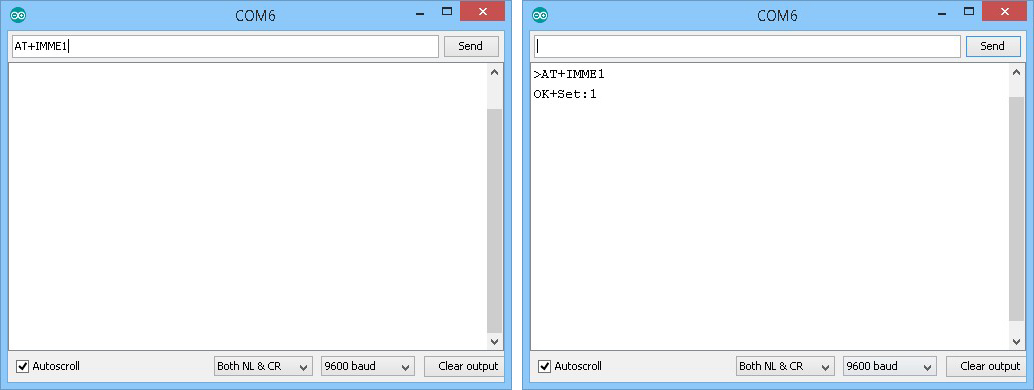
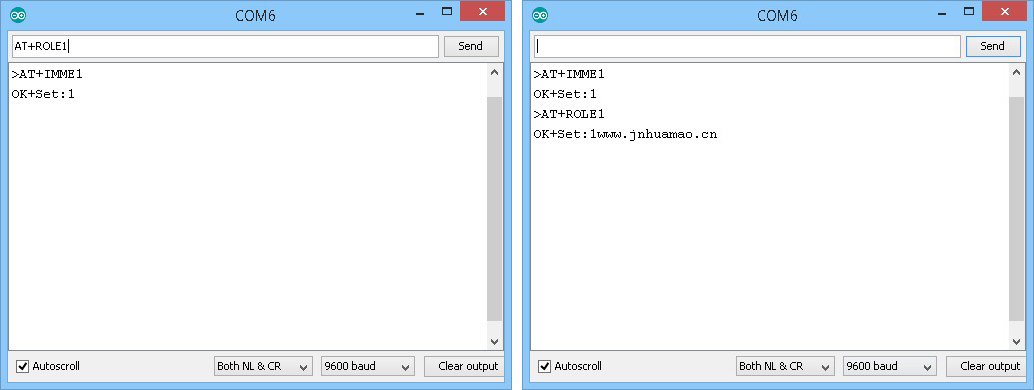
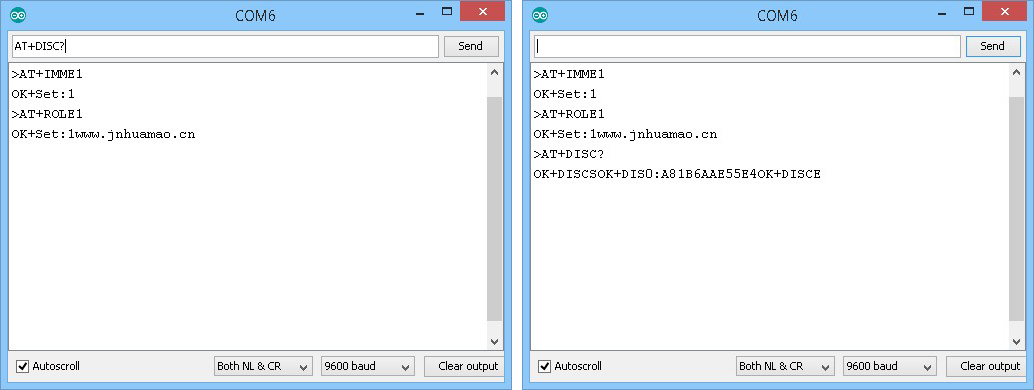
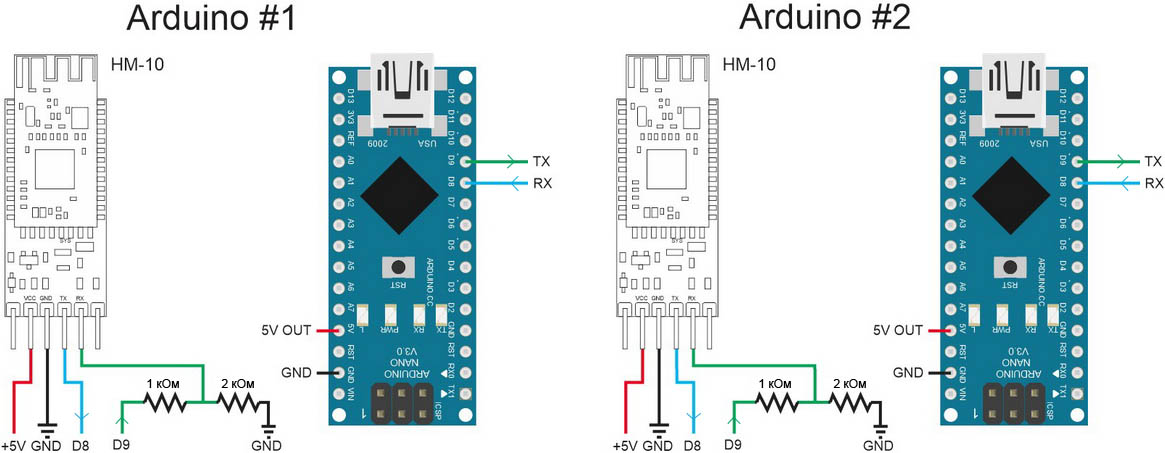
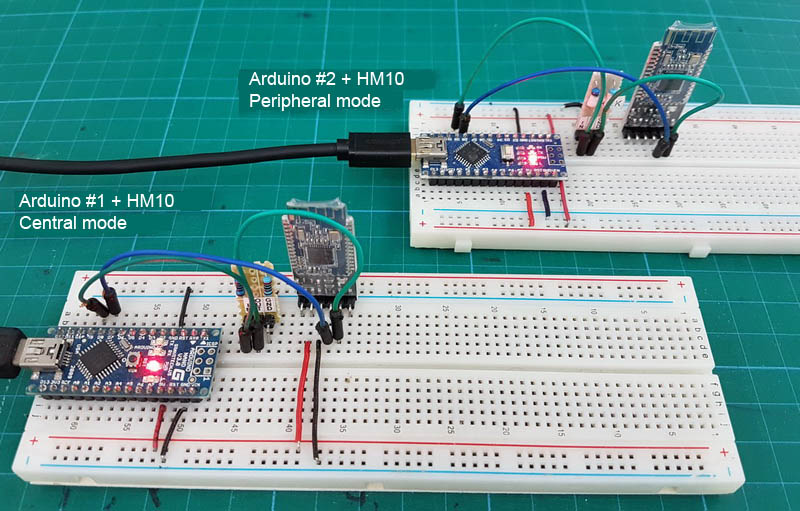
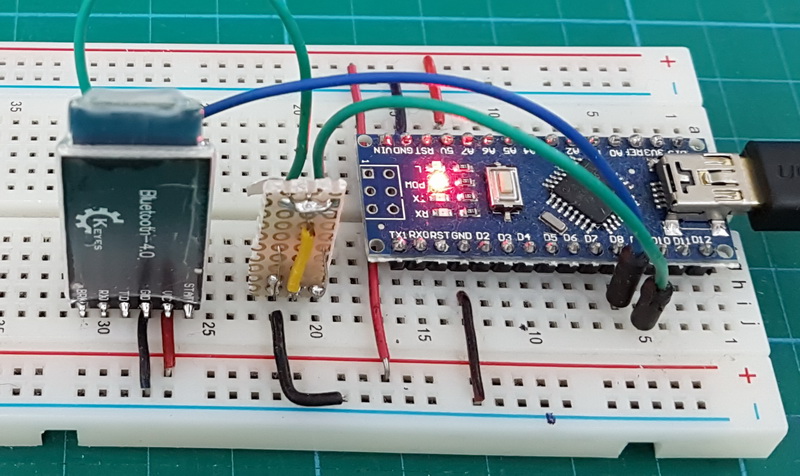

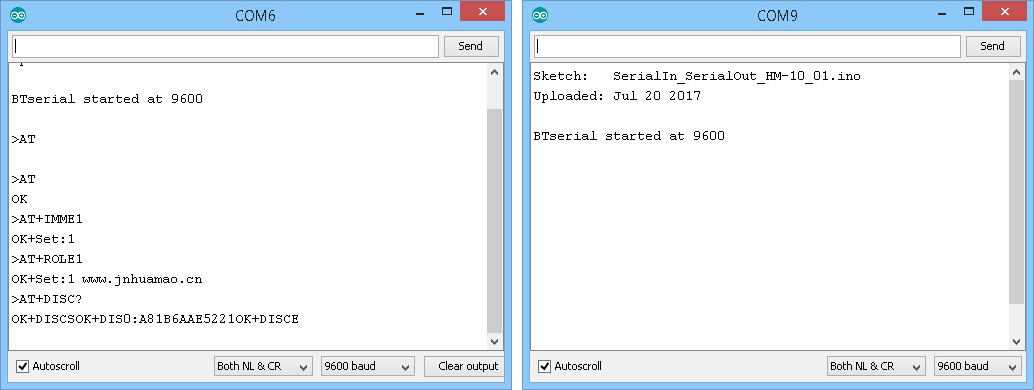
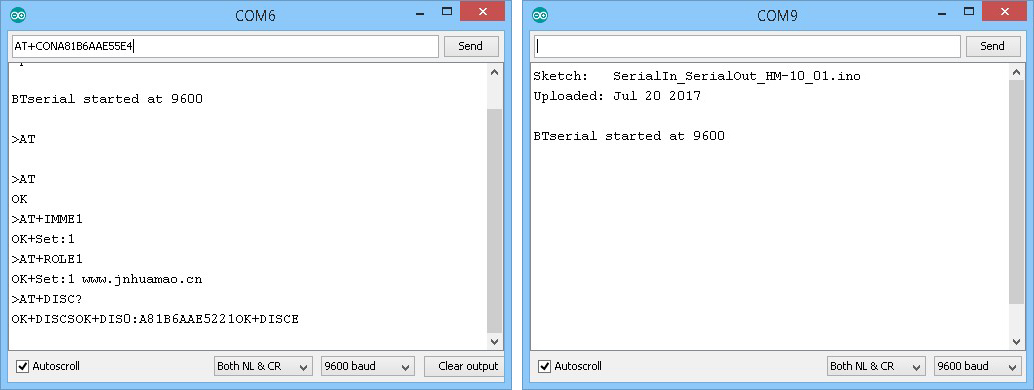
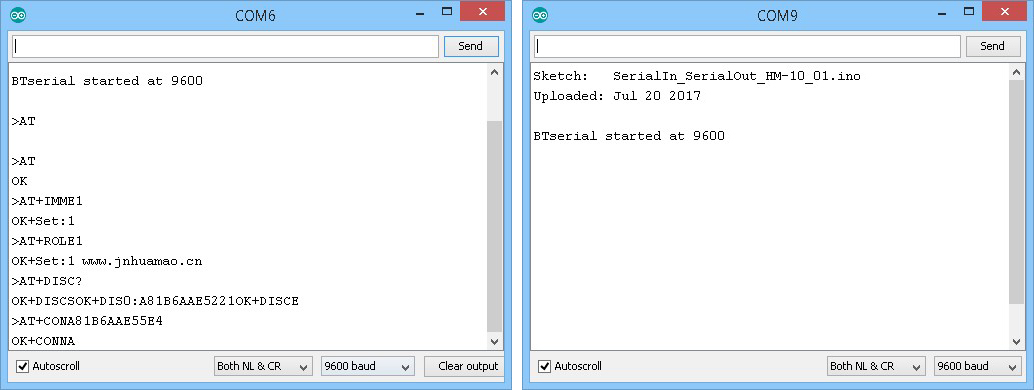
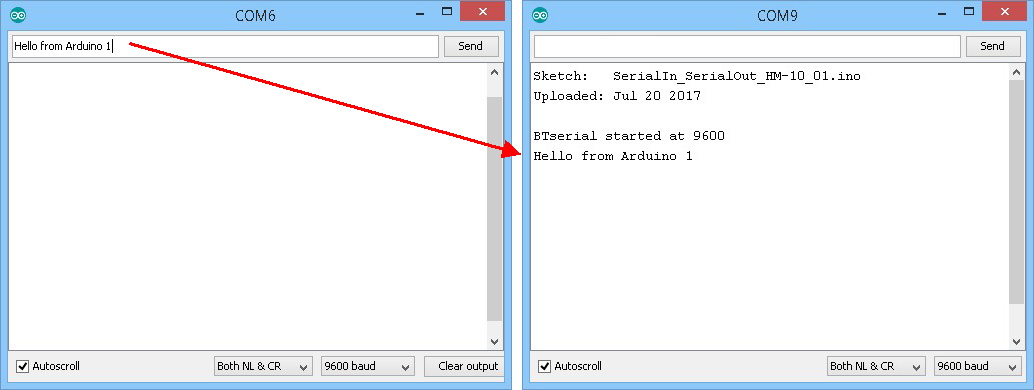
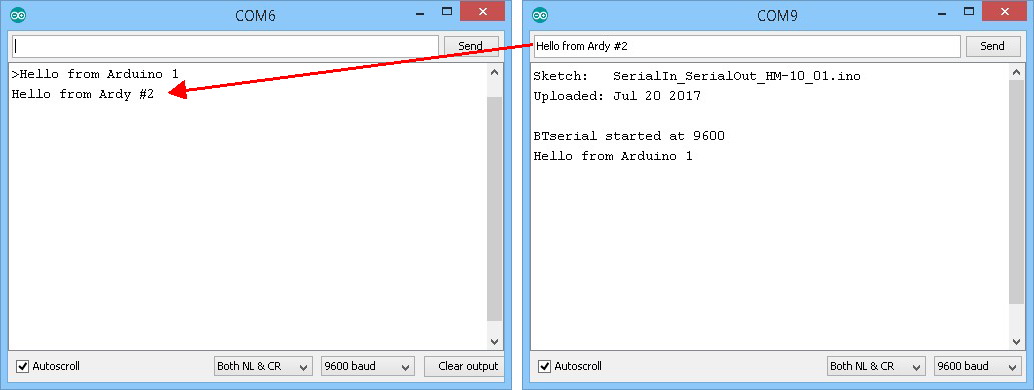
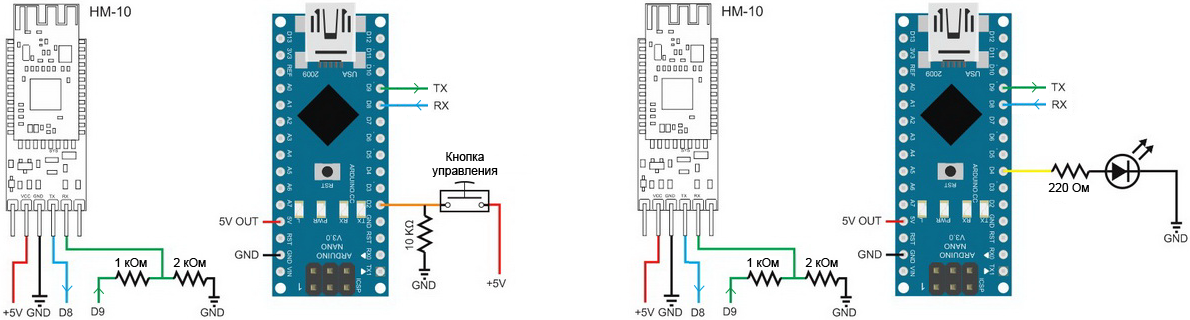
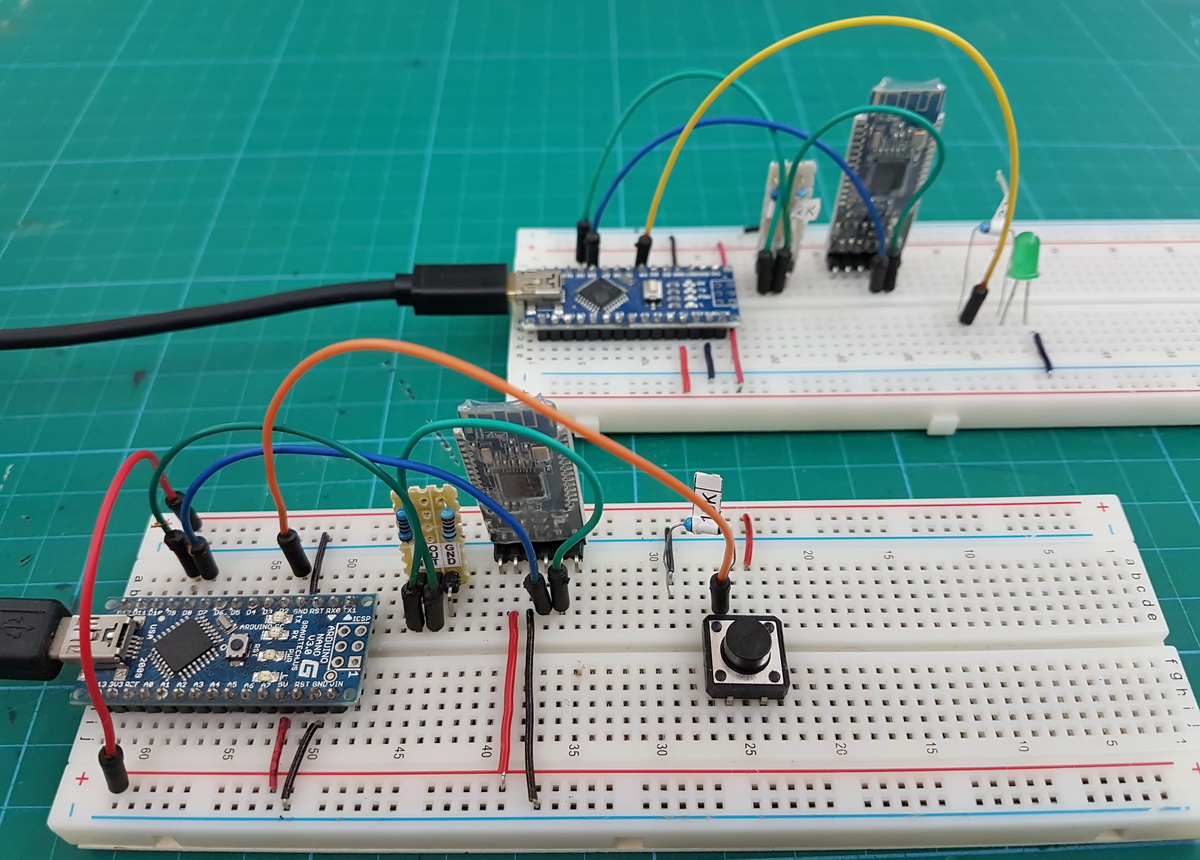

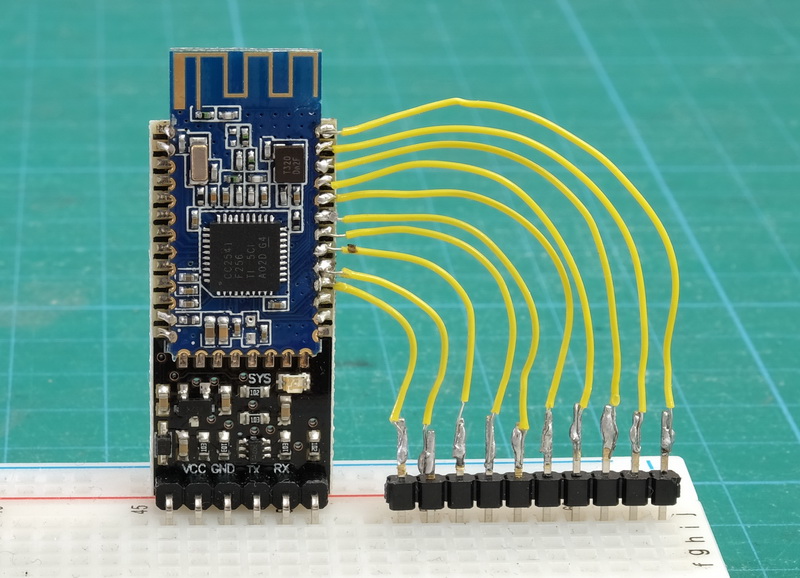

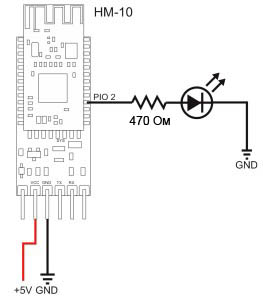
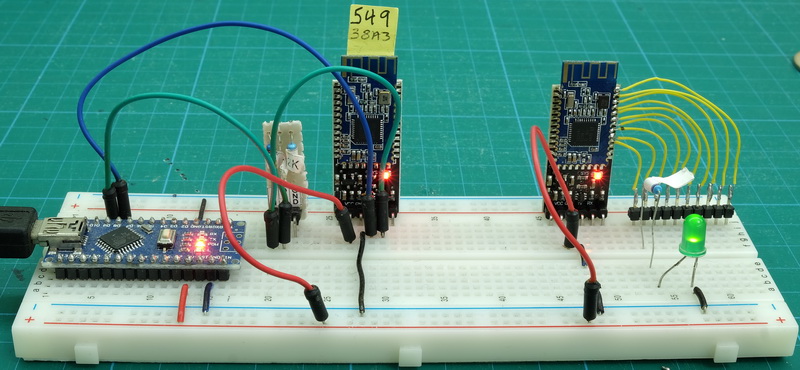
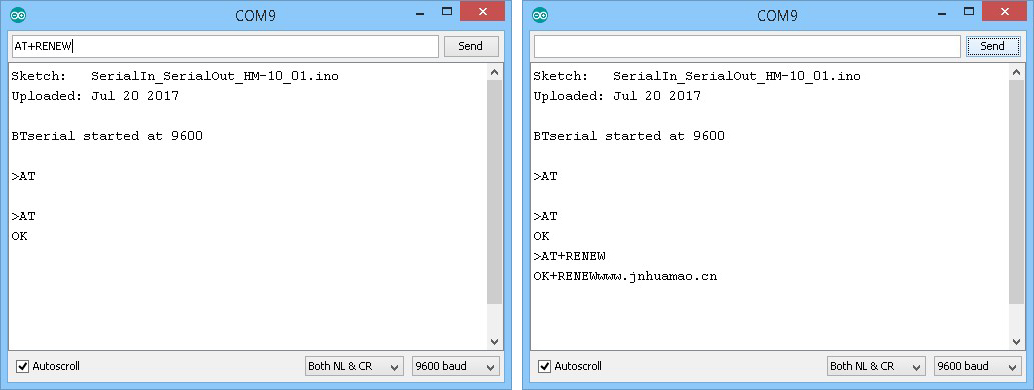
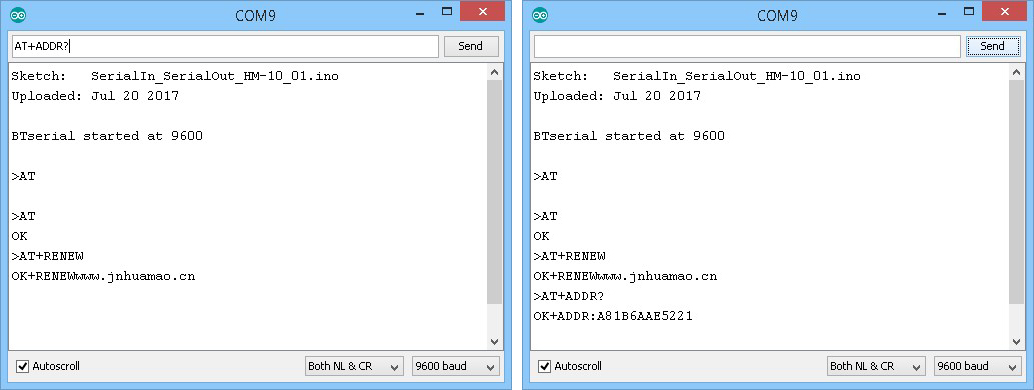
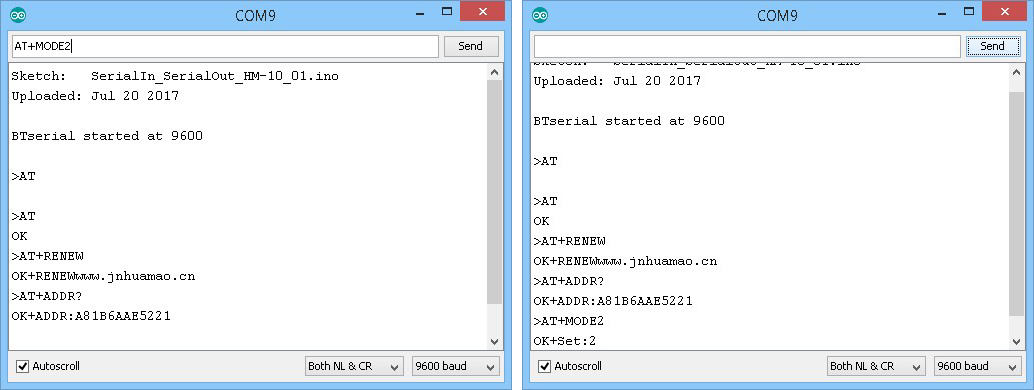

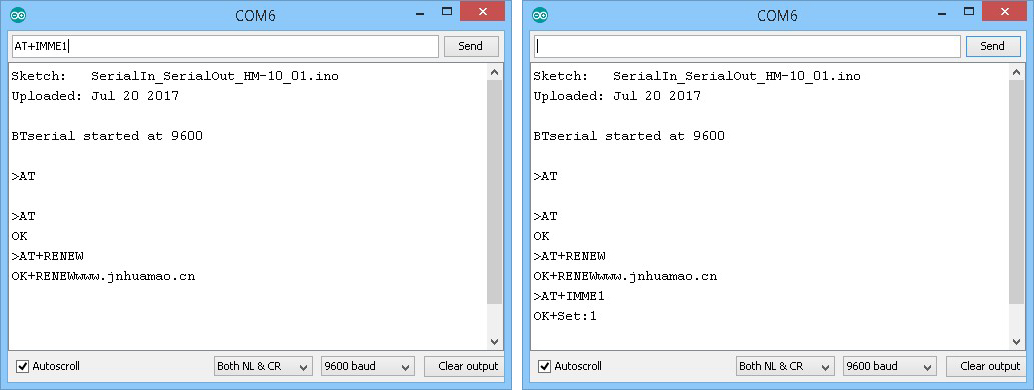
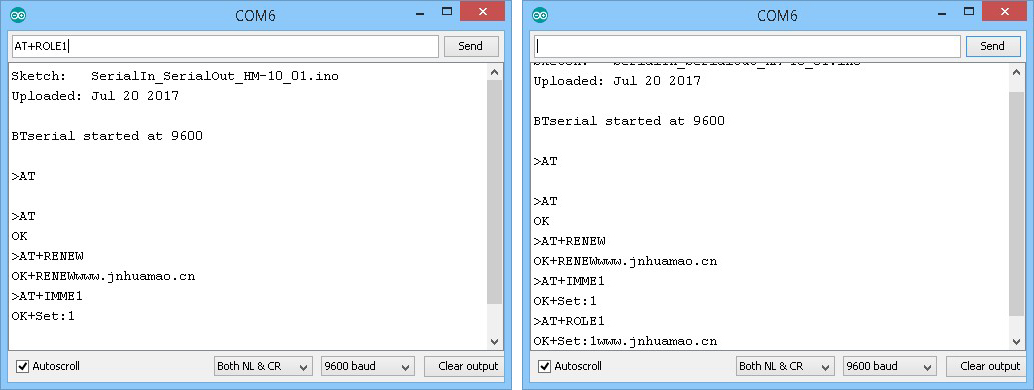
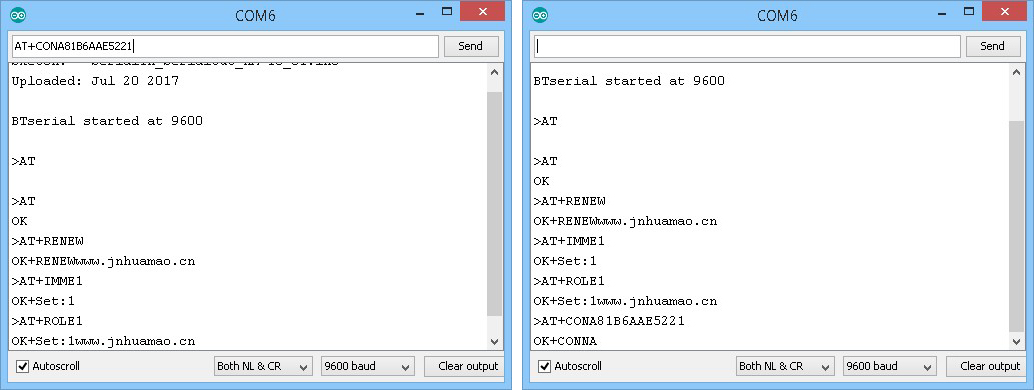
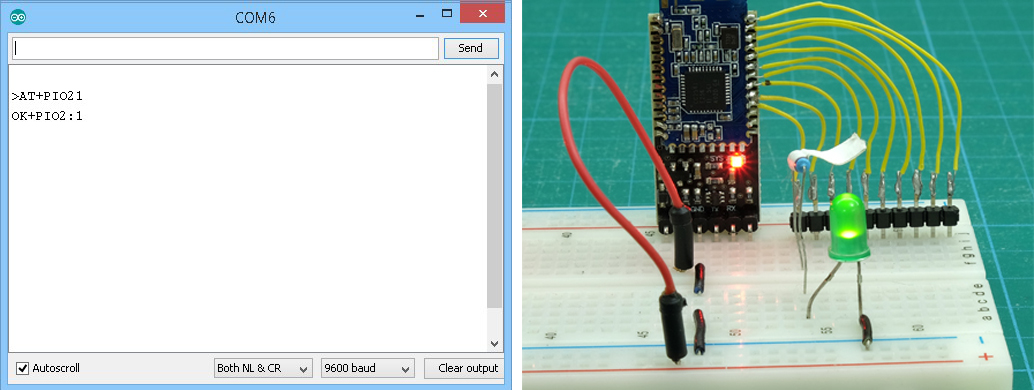
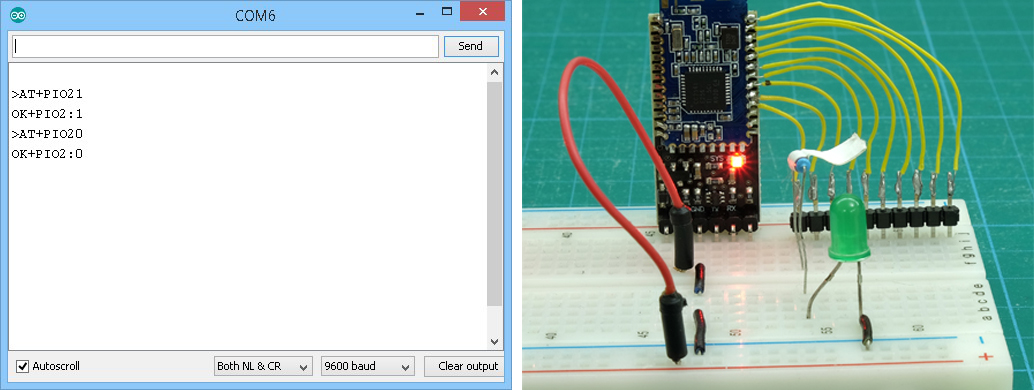
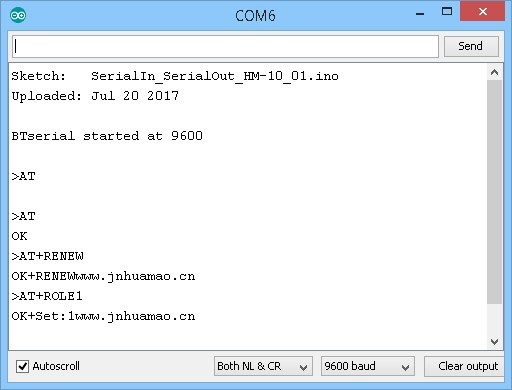

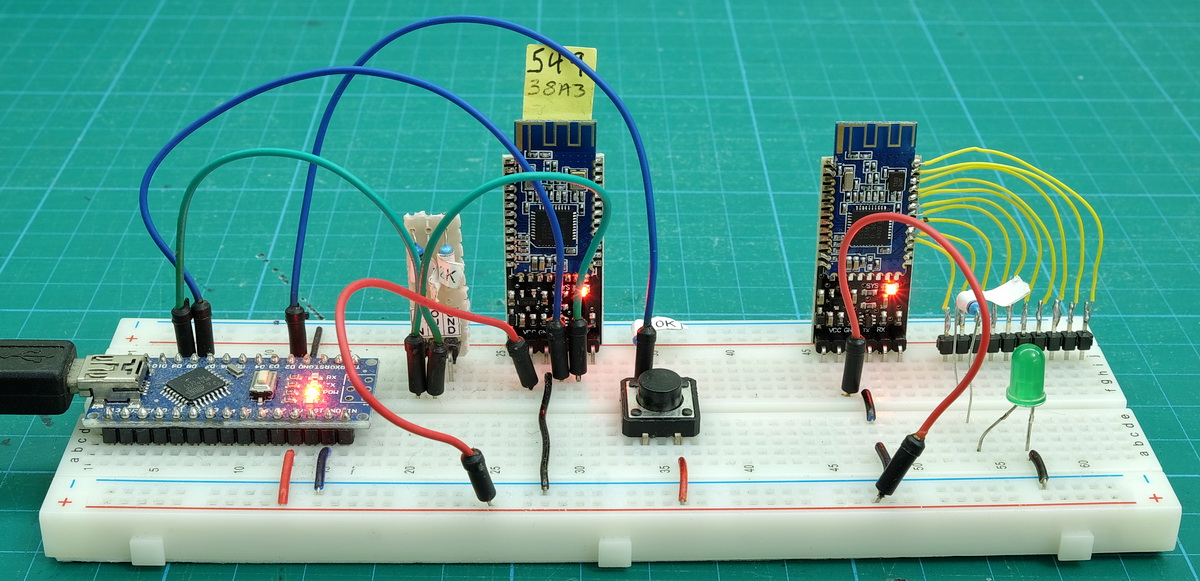
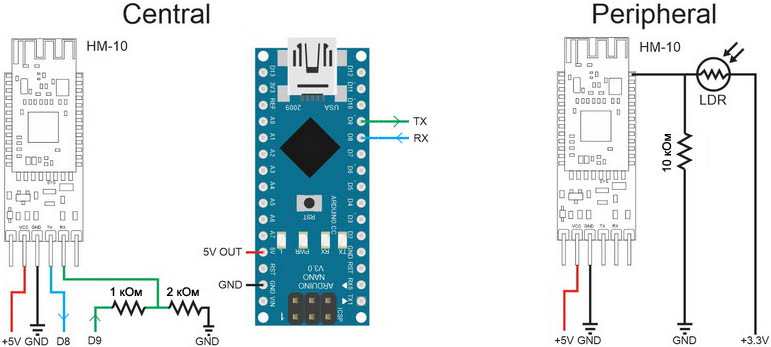


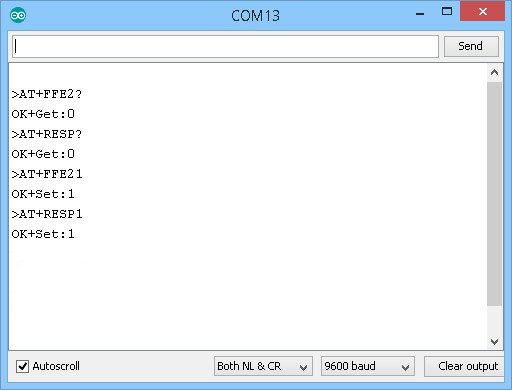

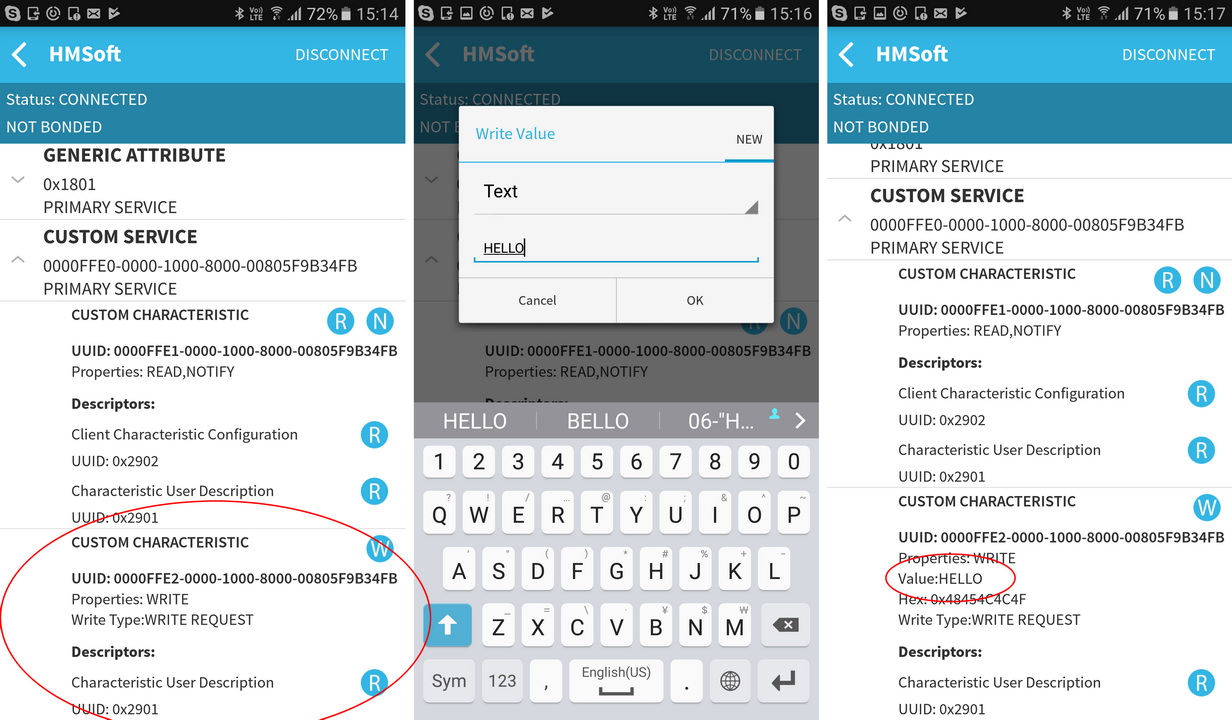
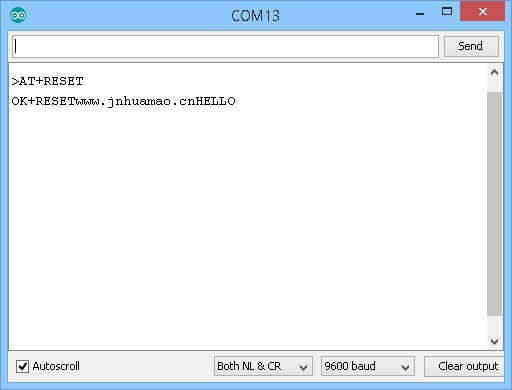


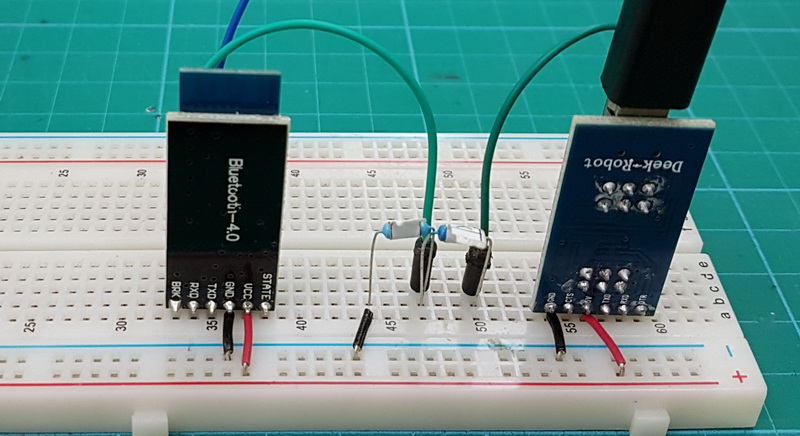
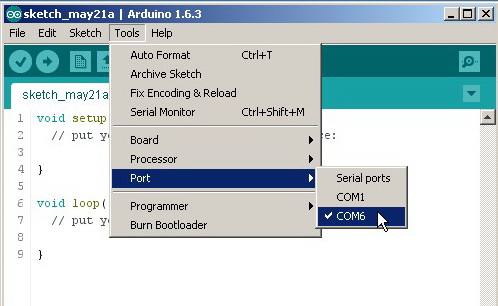
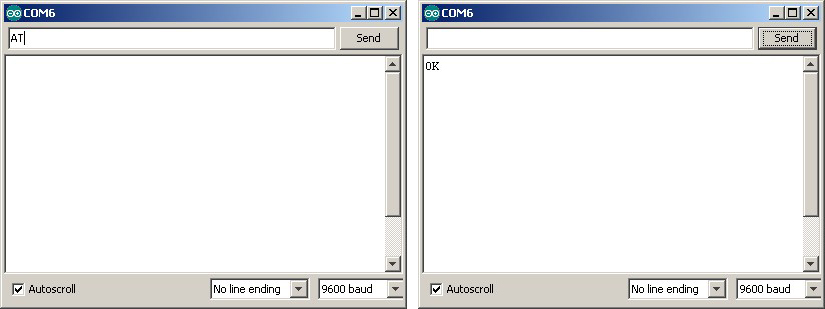
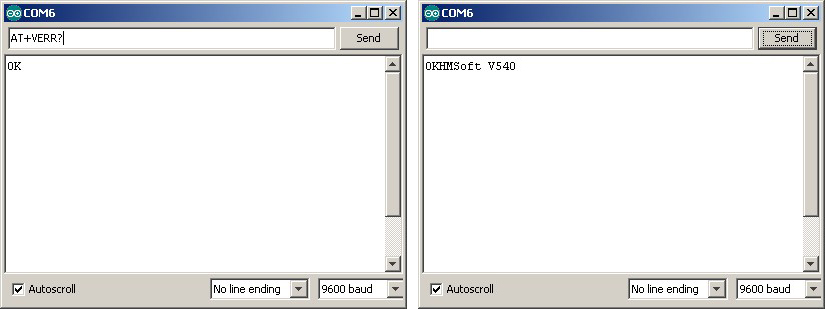
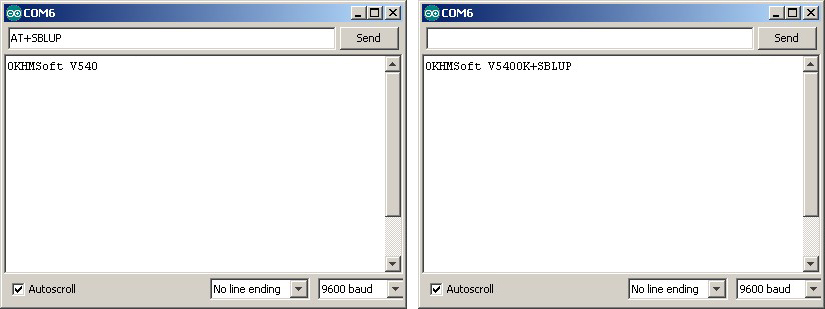

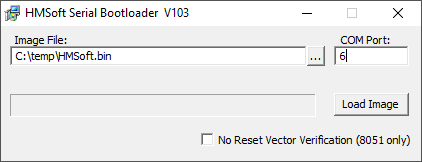
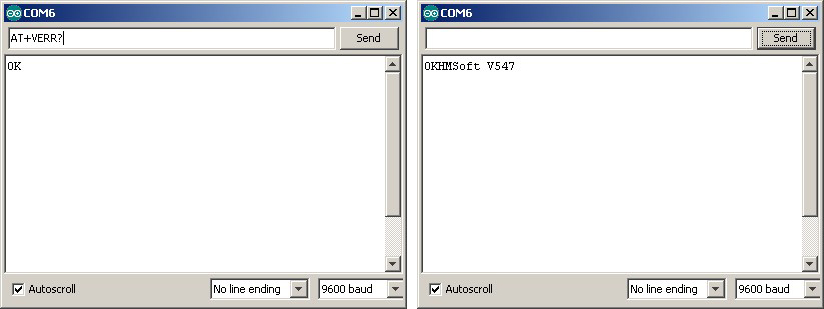

ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ą▓ąŠą┐čĆąŠčü ą┐ąŠ-ąĮą░čüč鹊čÅčēąĄą╝čā čüą╗ąŠąČąĮčŗą╣, ąĮąĄ čüą╝ąŠą│čā ąĮą░ ąĮąĄą│ąŠ ąŠčéą▓ąĄčéąĖčéčī. ąÆčüąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮą║čĆąĄčéąĮčŗčģ čĆą░ą▒ąŠčćąĖčģ čāčüą╗ąŠą▓ąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąŠčé ą▓ą░čü ą┤ą░ąČąĄ ąĮąĄ ąĘą░ą▓ąĖčüąĄčéčī (čé. ąĄ. ąŠčé čĆą░ą┤ąĖąŠą┐ąŠą╝ąĄčģ, čĆą░čüčüč鹊čÅąĮąĖčÅ ą╝ąĄąČą┤čā ą╝ąŠą┤čāą╗čÅą╝ąĖ, ąĮą░ą╗ąĖčćąĖčÅ čĆčÅą┤ąŠą╝ ą┤čĆčāą│ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ Bluetooth). ąÆ ąĖą┤ąĄą░ą╗čīąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ č鹊ąČąĄ ąĮąĄ ą▓čüąĄ ąŠą┤ąĮąŠąĘąĮą░čćąĮąŠ - čüą║ąŠčĆąŠčüčéčī ą╝ąŠąČąĄčé ąĘą░ą▓ąĖčüąĄčéčī ąŠčé čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ, čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą║ąĄč鹊ą▓, ą┤čāą┐ą╗ąĄą║čü/čüąĖą╝ą┐ą╗ąĄą║čü, ąŠčé čüą║ąŠčĆąŠčüčéąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĄ čģąŠčüčéą░.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ