ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ąŠą┐ąĖčüą░ąĮ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ą┐ąŠčĆčéą░ ą║ą░ą║ GPIO ąĖ čüąŠą▓ą╝ąĄčēąĄąĮąĖčÅ ąĮą░ ąĮąĄą╝ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ (ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ) čäčāąĮą║čåąĖą╣, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗčģ ą║ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ (UART, TWI, SPI ąĖ čé. ą┤.) ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ąŠą┐čāą╗čÅčĆąĮąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega328P (ą┐ąĄčĆąĄą▓ąŠą┤ ąĖąĘ ą┤ą░čéą░čłąĖčéą░). ą£ąĮąŠą│ąŠąĄ, ąŠ č湥ą╝ ą│ąŠą▓ąŠčĆąĖčéčüčÅ ą▓ čŹč鹊ą╣ čüčéą░čéčīąĄ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ą┐ąĄčĆąĄąĮąĄčüąĄąĮąŠ ąĮą░ ą┤čĆčāą│ąĖąĄ ą╝ąŠą┤ąĄą╗ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čüąĄą╝ąĄą╣čüčéą▓ą░ Atmel AVR .
ąÆčüąĄ ą▓ąĮąĄčłąĮąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆč鹊ą▓ AVR ąĖą╝ąĄčÄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ Read-Modify-Write (čé. ąĄ. čüąŠą▓ą╝ąĄčēąĄąĮąĮą░čÅ ą▓ ąŠą┤ąĮąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖąĄ-ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ-ąĘą░ą┐ąĖčüčī), ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ąŠą▒čŗčćąĮčŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠčĆčé ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O, ąĖą╗ąĖ GPIO). ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąŠą┤ąĮąŠą╣ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ (ą▓čģąŠą┤ čŹč鹊 ąĖą╗ąĖ ą▓čŗčģąŠą┤) ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī (čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĮčüčéčĆčāą║čåąĖą╣ SBI ąĖ CBI) ą▒ąĄąĘ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą┤čĆčāą│ąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓. ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ, ą║ąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą╝ąĄąĮčÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ ą╗ąŠą│. čāčĆąŠą▓ąĮčÅ ąĮąŠąČą║ąĖ ą▓čŗčģąŠą┤ą░ ą┐ąŠčĆčéą░ (ąĄčüą╗ąĖ ąŠąĮą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą║ą░ą║ ą▓čŗčģąŠą┤), ąĖą╗ąĖ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ ąĮą░ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ pull-up čĆąĄąĘąĖčüč鹊čĆą░ (ąĄčüą╗ąĖ ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą║ą░ą║ ą▓čģąŠą┤). ąÜą░ąČą┤čŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą╗ąŠą▓ąŠą╣ ą▒čāč乥čĆ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ ąŠą▒ą╗ą░ą┤ą░ąĄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ąĖ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ ą┐ąŠ ą▓čģąŠą┤ąĮąŠą╝čā č鹊ą║čā (č鹊ą║ ą╗ąŠą│. 0) ąĖ ą┐ąŠ ą▓čŗčģąŠą┤ąĮąŠą╝čā č鹊ą║čā (č鹊ą║ ą╗ąŠą│. 1). ąöčĆą░ą╣ą▓ąĄčĆ ą▓čŗčģąŠą┤ą░ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąŠčēąĮčŗą╣, čćč鹊ą▒čŗ ąĮą░ą┐čĆčÅą╝čāčÄ čāą┐čĆą░ą▓ą╗čÅčéčī č鹊ą║ąŠą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ (LED). ąØą░ ą▓čüąĄčģ ąĮąŠąČą║ą░čģ ą┐ąŠčĆč鹊ą▓ ą╝ąŠąČąĮąŠ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ąĮą░ą╗ąĖčćąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą▓ąĄčĆčģąĮąĄą│ąŠ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą│ąŠ (pull-up) čĆąĄąĘąĖčüč鹊čĆą░; ą▒čāą┤čāčćąĖ ą▓ą║ą╗čÄč湥ąĮąĮčŗą╝, čŹč鹊čé čĆąĄąĘąĖčüč鹊čĆ ą┐ąŠą┤čéčÅą│ąĖą▓ą░ąĄčé ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī ą▓čģąŠą┤ą░ ą║ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ ą┐ąĖčéą░ąĮąĖčÅ (ą╗ąŠą│. 1). ąóą░ą║ąČąĄ ąĮą░ ą▓čüąĄčģ ąĮąŠąČą║ą░čģ ą┐ąŠčĆč鹊ą▓ I/O ąĖą╝ąĄčÄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ąĘą░čēąĖčéąĮčŗąĄ ą┤ąĖąŠą┤čŗ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ąĮą░ čłąĖąĮčŗ ą┐ąĖčéą░ąĮąĖčÅ VCC ąĖ GND, čüą╝. čĆąĖčü. 14-1.
ąĀąĖčü. 14-1. ąŁą║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮą░čÅ čüčģąĄą╝ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čüčģąĄą╝ąŠč鹥čģąĮąĖą║ąĖ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ AVR.
ąÆąŠčé ą║čĆą░čéą║ą░čÅ čüą▓ąŠą┤ą║ą░ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ AVR (ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ TA = -40┬░C .. 85┬░C):
ą¤ą░čĆą░ą╝ąĄčéčĆ ąŚąĮą░č湥ąĮąĖąĄ ąĢą┤.
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░
40
ą╝ąÉ
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░
-0.5..VCC+0.5
V
ąĪąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ pull-up čĆąĄąĘąĖčüč鹊čĆą░
20..50
k╬®
ąóąŠą║ čāč鹥čćą║ąĖ ą┐ąŠ ą▓čģąŠą┤čā
Ōēż1
╬╝A
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐ąŠčĆčéą░ čüą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
[ąĀą░ą▒ąŠčéą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ GPIO ]
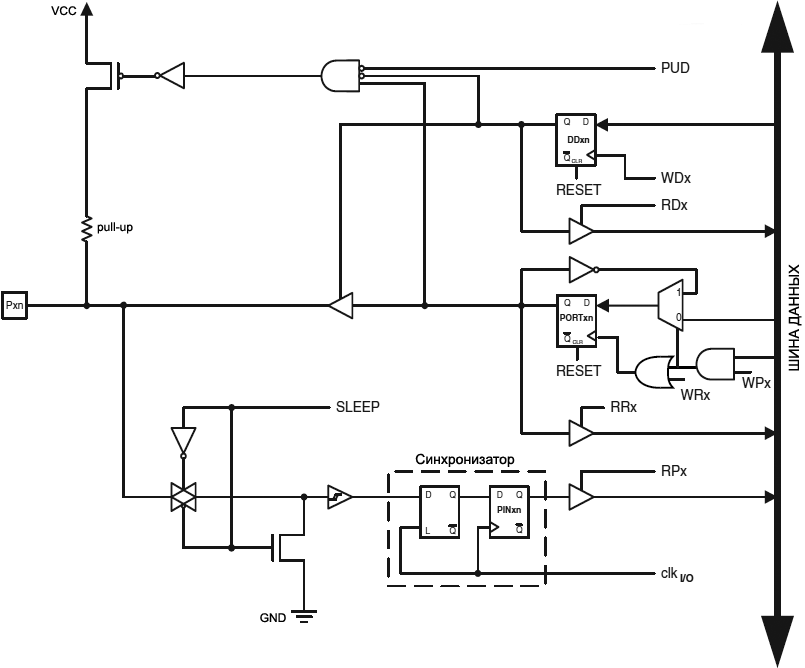
ąÆčŗą▓ąŠą┤čŗ ą┐ąŠčĆč鹊ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ čåąĖčäčĆąŠą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (GPIO). ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą╗ąŠą│ąĖč湥čüą║ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ ą║ą░ą║ ą▓čŗčģąŠą┤ą░ ą╝ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą╗ąĖą▒ąŠ ą▓ ą╗ąŠą│. 0, ą╗ąĖą▒ąŠ ą▓ ą╗ąŠą│. 1, ąĖ čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čćąĖčéą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░, ąĮą░čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą╗ąĖą▒ąŠ ąĮą░ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ ąĮą░ ą▓čŗčģąŠą┤. ąÆ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéčŗ ą║ą░ą║ ą▓čģąŠą┤ ąĮą░ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ ą╝ąŠąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą▓ąĄčĆčģąĮąĄą│ąŠ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ (pull-up). ąØą░ čĆąĖčü. 14-2 ą┐ąŠą║ą░ąĘą░ąĮąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠčĆčéą░ I/O, ą│ą┤ąĄ ą▓čŗą▓ąŠą┤ ąŠą▒ąŠąĘąĮą░č湥ąĮ ą┤ą╗čÅ ąŠą▒čēąĄą│ąŠ čüą╗čāčćą░čÅ ą║ą░ą║ Pxn (ą▓ą╝ąĄčüč鹊 x ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▒čāą║ą▓ą░ ą┐ąŠčĆčéą░ A, B, C, D ąĖ čé. ą┤., ą░ ą▓ą╝ąĄčüč鹊 n ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čĆą░ąĘčĆčÅą┤ą░ ą┐ąŠčĆčéą░ 7..0).
ąĀąĖčü. 14-2. ąÆąĮčāčéčĆąĄąĮąĮąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: WRx, WPx, WDx, RRx, RPx ąĖ RDx čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ą┐ąŠčĆčéą░ (A, B, C, D ąĖ čé. ą┤.). ąĪąĖą│ąĮą░ą╗čŗ clkI/O , SLEEP ąĖ PUD čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą▓čüąĄčģ ą┐ąŠčĆč鹊ą▓.
PUD: PULLUP DISABLEI/O : I/O CLOCK
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ . ąÜ ą║ą░ąČą┤ąŠą╝čā ą▓čŗą▓ąŠą┤čā ą┐ąŠčĆčéą░ ą┐čĆąĖą▓čÅąĘą░ąĮą░ čéčĆąĖ ą▒ąĖčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓: DDxn , PORTxn ąĖ PINxn (ąĘą┤ąĄčüčī čāą║ą░ąĘą░ąĮčŗ ąŠą▒ąŠą▒čēąĄąĮąĮčŗąĄ ąĖą╝ąĄąĮą░, ą│ą┤ąĄ x čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĖą╝ąĄąĮąĖ ą┐ąŠčĆčéą░ A, B, C ąĖ čé. ą┤., ą░ n čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮąŠą╝ąĄčĆčā čĆą░ąĘčĆčÅą┤ą░ ą┐ąŠčĆčéą░ ąŠčé 7 ą┤ąŠ 0). ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ (DDRx, PORTx, PINx) ąĮąĖąČąĄ, ą║ ą▒ąĖčéą░ą╝ DDxn ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ą░ą┤čĆąĄčü ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ DDRx, ą║ ą▒ąĖčéą░ą╝ PORTxn ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ą░ą┤čĆąĄčü ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ PORTx, ąĖ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ PINxn ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ą░ą┤čĆąĄčü ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ PINx.
ąæąĖčé DDxn ą▓ čĆąĄą│ąĖčüčéčĆąĄ DDRx ą▓čŗą▒ąĖčĆą░ąĄčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čŹč鹊ą│ąŠ ą▓čŗą▓ąŠą┤ą░. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ) ą▓ ą▒ąĖčé DDRx ąĘą░ą┐ąĖčüą░ąĮ 0, ąĖ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ čü ąŠčéą║ą╗čÄč湥ąĮąĮčŗą╝ pull-up čĆąĄąĘąĖčüč鹊čĆąŠą╝ (ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ). ąĢčüą╗ąĖ ą▓ DDxn ąĘą░ą┐ąĖčüą░čéčī ą╗ąŠą│. 1, č鹊 ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ Pxn ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤. ąĢčüą╗ąĖ ą▓ DDxn ąĘą░ą┐ąĖčüą░čéčī ą╗ąŠą│. 0, č鹊 ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ Pxn ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤.
ąĢčüą╗ąĖ ą▓ PORTxn ąĘą░ą┐ąĖčüą░čéčī ą╗ąŠą│. 1 ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤ (DDxn=0), č鹊 ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą▓ąĄčĆčģąĮąĖą╣ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ, ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (pull-up). ą¦č鹊ą▒čŗ ąŠčéą║ą╗čÄčćąĖčéčī čĆąĄąĘąĖčüč鹊čĆ pull-up, ą▓ ą▒ąĖčé PORTxn ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą╗ąŠą│. 0. ąøąĖą▒ąŠ ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą▓čŗą▓ąŠą┤ ą║ą░ą║ ą▓čŗčģąŠą┤. ąÆčüąĄ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆč鹊ą▓ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ (ąŠčéą║ą╗čÄč湥ąĮąĮąŠą╝) čüąŠčüč鹊čÅąĮąĖąĖ čü ą▓čŗčüąŠą║ąĖą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą▒čĆąŠčüą░, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĮąĄčé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čÅą┤čĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąĢčüą╗ąĖ ą▓ PORTxn ąĘą░ą┐ąĖčüą░čéčī ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ (DDxn=0), č鹊 ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┐ąŠčĆčéą░ ą┐ąĄčĆąĄą▓ąĄą┤čāčé ąĄą│ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1 (ą┐čĆąĖ čŹč鹊ą╝ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ąŠčÅą▓ąĖčéčüčÅ čāčĆąŠą▓ąĄąĮčī, ą▒ą╗ąĖąĘą║ąĖą╣ ą║ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ ą┐ąĖčéą░ąĮąĖčÅ). ąĢčüą╗ąĖ ą▓ PORTxn ąĘą░ą┐ąĖčüą░čéčī ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ (DDxn=0), č鹊 ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┐ąŠčĆčéą░ ą┐ąĄčĆąĄą▓ąĄą┤čāčé ąĄą│ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0 (ą┐čĆąĖ čŹč鹊ą╝ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▒čāą┤ąĄčé ąŠč湥ąĮčī ą╝ą░ą╗ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą▒ą╗ąĖąĘą║ąŠąĄ ą║ čāčĆąŠą▓ąĮčÄ GND).
ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ (toggling) . ąŚą░ą┐ąĖčüčī ą╗ąŠą│. 1 PINxn ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ PORTxn, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ DDRxn. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĮčüčéčĆčāą║čåąĖčÄ SBI ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ą░ą║ąŠą│ąŠ-č鹊 ąŠą┤ąĮąŠą│ąŠ ą▒ąĖčéą░ ą▓ 8-čĆą░ąĘčĆčÅą┤ąĮąŠą╝ ą┐ąŠčĆč鹥.
ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĄąČą┤čā ą▓čģąŠą┤ąŠą╝ ąĖ ą▓čŗčģąŠą┤ąŠą╝. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĄąČą┤čā čéčĆąĄčéčīąĖą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝ ({DDxn, PORTxn} = 0b00) ąĖ ą▓čŗčģąŠą┤ąŠą╝ ą▓ ą╗ąŠą│. 1 ({DDxn, PORTxn} = 0b11), ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąĖą▒ąŠ čü čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ pull-up ({DDxn, PORTxn} = 0b01), ą╗ąĖą▒ąŠ čü ą▓čŗčģąŠą┤ąĮčŗą╝ čāčĆąŠą▓ąĮąĄą╝ ą▓ ą╗ąŠą│. 0 ({DDxn, PORTxn} = 0b10). ą×ą▒čŗčćąĮąŠ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąĖąĄą╝ą╗ąĄą╝čŗą╝ ą▒čāą┤ąĄčé čĆą░ąĘčĆąĄčłąĖčéčī čüąŠčüč鹊čÅąĮąĖąĄ čü čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ pull-up, ą┐ąŠčüą║ąŠą╗čīą║čā ąĮą░ą│čĆčāąĘą║ą░ čü ą▓čŗčüąŠą║ąĖą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ ąĮąĄ čāą▓ąĖą┤ąĖčé čĆą░ąĘąĮąĖčåčŗ ą╝ąĄąČą┤čā ą╝ąŠčēąĮčŗą╝ ą╗ąŠą│. 1 ąŠčé ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖ čāčĆąŠą▓ąĮąĄą╝ ąŠčé pull-up. ąĢčüą╗ąĖ ąĘą┤ąĄčüčī ą┤čĆčāą│ąŠą╣ čüą╗čāčćą░ą╣, č鹊 ą▒ąĖčé PUD ą▓ čĆąĄą│ąĖčüčéčĆąĄ MCUCR ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čü čåąĄą╗čīčÄ ąĘą░ą┐čĆąĄčéąĖčéčī ą▓čüąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-ups ąĮą░ ą▓čüąĄčģ ą┐ąŠčĆčéą░čģ.
ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĄąČą┤čā ą▓čģąŠą┤ąŠą╝ čü čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ pull-up ąĖ ą▓čŗčģąŠą┤ąŠą╝ čü ą╗ąŠą│. 0 ą┤ą░ąĄčé čéčā ąČąĄ čüą░ą╝čāčÄ ą┐čĆąŠą▒ą╗ąĄą╝čā. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą╗ąĖą▒ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ čü ą▓čŗčüąŠą║ąĖą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ ą▓čŗą▓ąŠą┤ą░ ({DDxn, PORTxn} = 0b00), ą╗ąĖą▒ąŠ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ čü ą▓čŗčüąŠą║ąĖą╝ ą▓čŗčģąŠą┤ąĮčŗą╝ čāčĆąŠą▓ąĮąĄą╝ ({DDxn, PORTxn} = 0b11).
ąÆ čéą░ą▒ą╗ąĖčåąĄ 14-1 čüą┤ąĄą╗ą░ąĮ ąŠą▒čēąĖą╣ ąŠą▒ąĘąŠčĆ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▓ą╗ąĖčÅčÄčé ąĮą░ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░.
ąóą░ą▒ą╗ąĖčåą░ 14-1. ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓čŗą▓ąŠą┤ą░.
DDxn PORTxn PUD I/O pull-up ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ
0
0
X
ą▓čģąŠą┤
ąĮąĄčé
ąóčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ąŠčéą║ą╗čÄč湥ąĮąŠ (Hi-Z).
0
1
0
ą▓čģąŠą┤
ą┤ą░
ą¦ąĄčĆąĄąĘ ą▓čŗą▓ąŠą┤ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ Pxn ą▒čāą┤ąĄčé č鹥čćčī ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║, ą║ąŠą│ą┤ą░ ąĮąŠąČą║ą░ ą┐čĆąĖčéčÅąĮčāčéą░ čüąĮą░čĆčāąČąĖ ą║ ąĘąĄą╝ą╗ąĄ.
0
1
1
ą▓čģąŠą┤
ąĮąĄčé
ąóčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ąŠčéą║ą╗čÄč湥ąĮąŠ (Hi-Z).
1
0
X
ą▓čŗčģąŠą┤
ąĮąĄčé
ą¤ąŠčĆčé ąĮą░čüčéčĆąŠąĄąĮ ą║ą░ą║ ą▓čŗčģąŠą┤, ąĖ ąĮą░ ąĮąĄą╝ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0 (ą▓č鹥ą║ą░čÄčēąĖą╣ čüąĮą░čĆčāąČąĖ č鹊ą║).
1
1
X
ą▓čŗčģąŠą┤
ąĮąĄčé
ą¤ąŠčĆčé ąĮą░čüčéčĆąŠąĄąĮ ą║ą░ą║ ą▓čŗčģąŠą┤, ąĖ ąĮą░ ąĮąĄą╝ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 (ą▓čŗč鹥ą║ą░čÄčēąĖą╣ ąĮą░čĆčāąČčā č鹊ą║).
ą¦č鹥ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ . ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖčéą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą┐ąŠčĆčéą░ DDxn, čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠčĆčéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ č湥čĆąĄąĘ čćč鹥ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ PINxn. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 14-2, ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ PINxn ąĖ ą┐čĆąĄą┤čłąĄčüčéą▓čāčÄčēą░čÅ ąĘą░čēąĄą╗ą║ą░ čüąŠčüčéą░ą▓ą╗čÅčÄčé čüąĖąĮčģčĆąŠąĮąĖąĘą░č鹊čĆ. ąóą░ą║ą░čÅ čüčģąĄą╝ą░ ąĮčāąČąĮą░ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ čüąŠčüč鹊čÅąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠą▒ą╗ąĖąĘąŠčüčéąĖ ąŠčé ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ąŠą┤ąĮą░ą║ąŠ čŹč鹊 čéą░ą║ąČąĄ ą▓ą▓ąŠą┤ąĖčé ąĘą░ą┤ąĄčƹȹ║čā. ąØą░ čĆąĖčü. 14-3 ą┐ąŠą║ą░ąĘą░ąĮą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐čĆąĖ čćč鹥ąĮąĖąĖ ą▓ąĮąĄčłąĮąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ ąŠą▒ąŠąĘąĮą░č湥ąĮčŗ ą║ą░ą║ tpd,max ąĖ tpd,min čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ąĀąĖčü. 14-3. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐čĆąĖ čćč鹥ąĮąĖąĖ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐čĆąĖą╗ąŠąČąĄąĮąĮąŠą│ąŠ ą║ ą▓čŗą▓ąŠą┤čā čüąĮą░čĆčāąČąĖ.
ąĀą░čüčüą╝ąŠčéčĆąĖą╝ čüą╗čāčćą░ą╣, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐ąŠčćčéąĖ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ čüą┐ą░ą┤ą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ. ąŚą░čēąĄą╗ą║ą░ ąĘą░ą║čĆčŗčéą░, ą║ąŠą│ą┤ą░ čéą░ą║čé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0, ąĖ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐čĆąŠąĘčĆą░čćąĮąŠą╣, ą║ąŠą│ą┤ą░ čéą░ą║čé ą▓ ą╗ąŠą│. 1, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ ąĘą░č鹥ąĮąĄąĮąĮąŠą╣ ąŠą▒ą╗ą░čüčéąĖ čüąĖą│ąĮą░ą╗ą░ "SYNC LATCH". ąŚąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 0. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ čĆąĄą│ąĖčüčéčĆ PINxn ąĮą░ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╝ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ čéą░ą║č鹊ą▓. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą┤ą▓čāą╝čÅ čüčéčĆąĄą╗ą║ą░ą╝ąĖ tpd,max ąĖ tpd,min, ąŠą┤ąĖąĮąŠčćąĮąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą▒čāą┤ąĄčé ąĘą░ą┤ąĄčƹȹ░ąĮąŠ ąĮą░ ą▓čĆąĄą╝čÅ ąŠčé 0.5 ą┤ąŠ 1.5 ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ.
ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮčŗ čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čüčéą░ą▓ą╗ąĄąĮą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ nop, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 14-4. ąśąĮčüčéčĆčāą║čåąĖčÅ out čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ "SYNC LATCH" ąĮą░ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ čéą░ą║č鹊ą▓. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĘą░ą┤ąĄčƹȹ║ą░ tpd č湥čĆąĄąĘ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░č鹊čĆą░ čüąŠčüčéą░ą▓ąĖčé 1 ą┐ąĄčĆąĖąŠą┤ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
ąĀąĖčü. 14-4. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐čĆąĖ čćč鹥ąĮąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ.
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░, ą│ą┤ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą║ą░ą║ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓čŗą▓ąŠą┤čŗ čĆą░ąĘčĆčÅą┤ąŠą▓ 0 ąĖ 1 ą┐ąŠčĆčéą░ B ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1, ąĖ ą▓čŗą▓ąŠą┤čŗ čĆą░ąĘčĆčÅą┤ąŠą▓ 2 ąĖ 3 ą▓ ą╗ąŠą│. 0, ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░ čü čĆą░ąĘčĆčÅą┤ą░ą╝ąĖ 7..4 ą║ą░ą║ ą▓čģąŠą┤čŗ, ą│ą┤ąĄ čĆą░ąĘčĆąĄčłąĄąĮčŗ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ čĆą░ąĘčĆčÅą┤ąŠą▓ ą┐ąŠčĆčéą░ 6 ąĖ 7. ą¤ąŠą╗čāč湥ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ ą┐ąŠčĆčéą░ ą▓čŗčćąĖčéčŗą▓ą░čÄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ, ąŠą┤ąĮą░ą║ąŠ ą║ą░ą║ ąŠą▒čüčāąČą┤ą░ą╗ąŠčüčī čĆą░ąĮąĄąĄ, ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ nop, čćč鹊ą▒čŗ ą▒čŗą╗ą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī č鹊ą╗čīą║ąŠ čćč鹊 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ ą┐ąŠčĆčéą░.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ:
...
; ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄąĘąĖčüč鹊čĆąŠą▓ pull-up ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ ą▓čŗčģąŠą┤ąŠą▓ ą▓ ą╗ąŠą│. 1. ; ąŚą░ą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░.
ldi r16 ,(1 << PB7 )| (1 << PB6 )| (1 << PB1 )| (1 << PB0 )
ldi r17 ,(1 << DDB3 )| (1 << DDB2 )| (1 << DDB1 )| (1 << DDB0 )
out PORTB ,r16
out DDRB ,r17 ; ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ nop ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
nop ; ą¦č鹥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░.
in r16 ,PINB
...
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąöą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą▓ą░ ą▓čĆąĄą╝ąĄąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░, čćč鹊ą▒čŗ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā čāčüčéą░ąĮąŠą▓ą║ąŠą╣ pull-up ą▓čŗą▓ąŠą┤ąŠą▓ 0, 1, 6 ąĖ 7 ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖč鹊ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÅ ą▒ąĖčéčŗ 2 ąĖ 3 ą║ą░ą║ ąĮą░čģąŠą┤čÅčēąĖąĄčüčÅ ą▓ ą╗ąŠą│. 0 ąĖ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÅ ą▒ąĖčéčŗ 0 ąĖ 1 ąĖ ą║ą░ą║ ą╝ąŠčēąĮčŗą╣ ą▓čŗčģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąĮą░ čÅąĘčŗą║ąĄ C:
...
/* ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄąĘąĖčüč鹊čĆąŠą▓ pull-up ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ ą▓čŗčģąŠą┤ąŠą▓ ą▓ ą╗ąŠą│. 1. ąŚą░ą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░. */
PORTB = (1 << PB7)| (1 << PB6)| (1 << PB1)| (1 << PB0);
DDRB = (1 << DDB3)| (1 << DDB2)| (1 << DDB1)| (1 << DDB0);/* ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ nop ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. */
__no_operation();/* ą¦č鹥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░. */
i = PINB;
...
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čåąĖčäčĆąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓ ąĖ čĆąĄąČąĖą╝čŗ čüąĮą░ (Sleep Modes). ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 14-2, čåąĖčäčĆąŠą▓ąŠą╣ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮ ąĮą░ čāčĆąŠą▓ąĮąĄ ąĘąĄą╝ą╗ąĖ ą┐ąŠ ą▓čģąŠą┤čā čéčĆąĖą│ą│ąĄčĆą░ ą©ą╝ąĖčéčéą░. ąĪąĖą│ąĮą░ą╗, ąŠą▒ąŠąĘąĮą░č湥ąĮąĮčŗą╣ ąĮą░ čĆąĖčüčāąĮą║ąĄ ą║ą░ą║ SLEEP, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ čüąĮą░ (MCU Sleep Controller) ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (čĆąĄąČąĖą╝čŗ čüąĮą░ Power-down mode, Power-save mode ąĖ Standby mode), čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąŠč鹥čĆčī 菹ĮąĄčĆą│ąĖąĖ, ąĄčüą╗ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ąŠčüčéą░ą╗ąĖčüčī ąĮąĄą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ, ąĖą╗ąĖ čā ąĮąĖčģ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░ ą▒ą╗ąĖąĘąŠą║ ą║ VCC/2.
ąĪąĖą│ąĮą░ą╗ SLEEP ąŠčéą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░, ą║ąŠč鹊čĆčŗąĄ čĆą░ąĘčĆąĄčłąĄąĮčŗ ą║ą░ą║ ą▓čŗą▓ąŠą┤čŗ ą▓ąĮąĄčłąĮąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (external interrupt pins). ąĢčüą╗ąĖ ąĘą░ą┐čĆąŠčü ąĮą░ ą▓ąĮąĄčłąĮąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 SLEEP ą┤ą╗čÅ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĄąĮ. SLEEP čéą░ą║ąČąĄ ąŠčéą╝ąĄąĮčÅąĄčéčüčÅ čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ ą┐ąŠčĆč鹊ą▓, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗčģ ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝.
ąĢčüą╗ąĖ ąĮą░ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╝ ą▓ąĮąĄčłąĮąĄą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ąĮą░čüčéčĆąŠąĄąĮ ą║ą░ą║ "ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čüą┐ą░ą┤čā" ąĖą╗ąĖ ą║ą░ą║ "ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čäčĆąŠąĮčéčā" ąĖą╗ąĖ ą║ą░ą║ "ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąŠą▒ąŠąĖą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅą╝ čüąĖą│ąĮą░ą╗ą░", ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąŠą│. 1, ąĖ ą▓ąĮąĄčłąĮąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (External Interrupt Flag), ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓čŗčģąŠą┤ ąĖąĘ ą▓čŗčłąĄčāą┐ąŠą╝čÅąĮčāčéčŗčģ čĆąĄąČąĖą╝ąŠą▓ čüąĮą░, čéą░ą║ ą║ą░ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ą▓čŗą▓ąŠą┤ąĖčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░.
ąØąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ. ąĢčüą╗ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓čŗą▓ąŠą┤čŗ ąŠčüčéą░ą╗ąĖčüčī ąĮąĄą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ąĮą░ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ą░čģ ąĘą░ą┤ą░ąĮ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī (ą╗ąĖą▒ąŠ ą╗ąŠą│. 0, ą╗ąĖą▒ąŠ ą╗ąŠą│. 1). ąöą░ąČąĄ ą┐čĆąĖ č鹊ą╝, čćč鹊 ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čåąĖčäčĆąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓ ąĘą░ą┐čĆąĄčēąĄąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓čŗčłąĄ, ąĮčāąČąĮąŠ ąĖąĘą▒ąĄą│ą░čéčī ąĮą░ą╗ąĖčćąĖčÅ ą┐ą╗ą░ą▓ą░čÄčēąĖčģ ą▓čģąŠą┤ąŠą▓, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą▓ąŠ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ čĆąĄąČąĖą╝ą░čģ, ą│ą┤ąĄ čåąĖčäčĆąŠą▓čŗąĄ ą▓čģąŠą┤čŗ čĆą░ąĘčĆąĄčłąĄąĮčŗ (Reset, Active mode ąĖ Idle mode).
ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ ą╝ąĄč鹊ą┤ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ąĮą░ą╗ąĖčćąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąĄąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓čŗą▓ąŠą┤ą░čģ ą┐ąŠčĆč鹊ą▓ - čĆą░ąĘčĆąĄčłąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄąĘąĖčüč鹊čĆ pull-up. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ pull-up ą▒čāą┤ąĄčé ąĘą░ą┐čĆąĄčēąĄąĮ ą▓ąŠ ą▓čĆąĄą╝čÅ čüą▒čĆąŠčüą░. ąĢčüą╗ąĖ ą▓ą░ąČąĮąŠ ą╝ą░ą╗ąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čüą▒čĆąŠčüą░, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĮąĄčłąĮąĖąĄ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ąĖą╗ąĖ pull-down. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ąĮąĄąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ VCC ąĖą╗ąĖ GND ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ čćčĆąĄąĘą╝ąĄčĆąĮąŠą╝čā č鹊ą║čā ą║ąŠčĆąŠčéą║ąŠą│ąŠ ąĘą░ą╝čŗą║ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░, ąĄčüą╗ąĖ čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ čüą╗čāčćą░ą╣ąĮąŠ ą▒čŗą╗ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ.
[ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ ]
ąŻ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆč鹊ą▓ ąĄčüčéčī ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ (ą┐ąŠą┤ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠčüčéčīčÄ ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤čā ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ąŠčéą╗ąĖčćą░čÄčēąĖąĄčüčÅ ąŠčé čĆą░ą▒ąŠčéčŗ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ ą▓ čĆąĄąČąĖą╝ąĄ GPIO). ąØą░ čĆąĖčü. 14-5 ą┐ąŠą║ą░ąĘą░ąĮčŗ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ąĖąĘ čĆąĖčü. 14-2 (čüą╝. ą▓čĆąĄąĘą║čā "ąĀą░ą▒ąŠčéą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ GPIO"), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćąĖčéčī ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ. ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą╝ąŠą│čāčé ąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓ąŠą▓ą░čéčī ąĮą░ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ą░čģ ą┐ąŠčĆčéą░, ąĮąŠ čĆąĖčüčāąĮąŠą║ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ąŠčéąĮąŠčüąĖčéčīčüčÅ ą║ąŠ ą▓čüąĄą╝ ą▓čŗą▓ąŠą┤ą░ą╝ ą┐ąŠčĆč鹊ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüąĄą╝ąĄą╣čüčéą▓ą░ AVR.
ąĀąĖčü. 14-5. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠčĆčéą░(1) .
PUOExn: Pxn PULL-UP OVERRIDE ENABLEI/O : I/O CLOCK
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): WRx, WPx, WDx, RRx, RPx ąĖ RDx čÅą▓ą╗čÅčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (A, B, C, D ąĖ čé. ą┤.). ąĪąĖą│ąĮą░ą╗čŗ clkI/O, SLEEP ąĖ PUD ąŠą▒čēąĖąĄ ą┤ą╗čÅ ą▓čüąĄčģ ą┐ąŠčĆč鹊ą▓. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ čüąĖą│ąĮą░ą╗čŗ čāąĮąĖą║ą░ą╗čīąĮčŗ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠčĆčéą░.
ąÆ čéą░ą▒ą╗ąĖčåąĄ 14-2 ą┤ą░ąĮ ąŠą▒čēąĖą╣ ąŠą▒ąĘąŠčĆ čäčāąĮą║čåąĖą╣ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓. ąśąĮą┤ąĄą║čüčŗ ą▓čŗą▓ąŠą┤ą░ ąĖ ą┐ąŠčĆčéą░ ąĖąĘ čĆąĖčüčāąĮą║ą░ 14-5 ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čéą░ą▒ą╗ąĖčåą░čģ ąĮąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ. ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ą▓ąĮčāčéčĆąĖ ą╝ąŠą┤čāą╗ąĄą╣, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 14-2. ą×ą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąĄčĆąĄąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣.
ąśą╝čÅ ą¤ąŠą╗ąĮąŠąĄ ąĖą╝čÅ ą×ą┐ąĖčüą░ąĮąĖąĄ
PUOE
Pull-up Override Enable
ąĢčüą╗ąĖ čŹč鹊čé čüąĖą│ąĮą░ą╗ ą▓ ą╗ąŠą│. 1, č鹊 čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆąŠą▓ pull-up čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ PUOV. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗ PUOE ą▓ ą╗ąŠą│. 0, č鹊 čĆąĄąĘąĖčüč鹊čĆ pull-up čĆą░ąĘčĆąĄčłąĄąĮ, ą║ąŠą│ą┤ą░ {DDxn, PORTxn, PUD} = 0b010.
PUOV
Pull-up Override Value
ąĢčüą╗ąĖ PUOE ą▓ ą╗ąŠą│. 1, č鹊 pull-up čĆą░ąĘčĆąĄčłąĄąĮ/ąĘą░ą┐čĆąĄčēąĄąĮ, ą║ąŠą│ą┤ą░ PUOV ą▓ ą╗ąŠą│. 1/ą╗ąŠą│. 0, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆąŠą▓ DDxn, PORTxn ąĖ PUD.
DDOE
Data Direction Override Enable
ąĢčüą╗ąĖ čŹč鹊čé čüąĖą│ąĮą░ą╗ ą▓ ą╗ąŠą│. 1, č鹊 čüąĖą│ąĮą░ą╗ Output Driver Enable čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ DDOV. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗ DDOE ąŠčćąĖčēąĄąĮ, č鹊 ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą▒ąĖč鹊ą╝ DDxn čĆąĄą│ąĖčüčéčĆą░ DDRx.
DDOV
Data Direction Override Value
ąĢčüą╗ąĖ DDOE ą▓ ą╗ąŠą│. 1, č鹊 ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čĆą░ąĘčĆąĄčłąĄąĮ/ąĘą░ą┐čĆąĄčēąĄąĮ, ą║ąŠą│ą┤ą░ DDOV ą▓ ą╗ąŠą│. 1/ą╗ąŠą│. 0, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ DDxn ą▓ čĆąĄą│ąĖčüčéčĆąĄ DDRx.
PVOE
Port Value Override Enable
ąĢčüą╗ąĖ čŹč鹊čé čüąĖą│ąĮą░ą╗ ą▓ ą╗ąŠą│. 1, ąĖ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčĆčéą░ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ PVOV. ąĢčüą╗ąĖ PVOE ą▓ ą╗ąŠą│. 0, ąĖ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ PORTxn čĆąĄą│ąĖčüčéčĆą░ PORTx.
PVOV
Port Value Override Value
ąĢčüą╗ąĖ PVOE ą▓ ą╗ąŠą│. 1, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčĆčéą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ PVOV, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ PORTxn čĆąĄą│ąĖčüčéčĆą░ PORTx.
PTOE
Port Toggle Override Enable
ąĢčüą╗ąĖ ą▒ąĖčé PTOE ą▓ ą╗ąŠą│. 1, č鹊 ą▒ąĖčé PORTxn čĆąĄą│ąĖčüčéčĆą░ PORTx ąĖąĮą▓ąĄčĆčéąĖčĆčāąĄčéčüčÅ.
DIEOE
Digital Input Enable Override Enable
ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé ą▓ ą╗ąŠą│. 1, č鹊 Digital Input Enable čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ DIEOV. ąĢčüą╗ąĖ DIEOE ą▓ ą╗ąŠą│. 0, č鹊 Digital Input Enable ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (Normal mode, sleep mode).
DIEOV
Digital Input Enable Override Value
ąĢčüą╗ąĖ DIEOE ą▓ ą╗ąŠą│. 1, č鹊 Digital Input čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ/ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ DIEOV ą▓ ą╗ąŠą│. 1/ą╗ąŠą│. 0, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (Normal mode, sleep mode).
DI
Digital Input
ąŁč鹊 čåąĖčäčĆąŠą▓ąŠą╣ ą▓čģąŠą┤ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣. ąØą░ čĆąĖčüčāąĮą║ąĄ čŹč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓čŗčģąŠą┤čā čéčĆąĖą│ą│ąĄčĆą░ ą©ą╝ąĖčéčéą░, ąĮąŠ ą┐ąĄčĆąĄą┤ čüąĖąĮčģčĆąŠąĮąĖąĘą░č鹊čĆąŠą╝. ąŚą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüąĖčéčāą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░ ą║ą░ą║ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓, ą╝ąŠą┤čāą╗čī čü ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠą╣ čäčāąĮą║čåąĖąĄą╣ ąĖą╝ąĄąĄčé čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░č鹊čĆ.
AIO
Analog Input/Output
ąŁč鹊 ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤/ą▓čŗčģąŠą┤ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ ą▓čŗą▓ąŠą┤čā ą║čĆąĖčüčéą░ą╗ą╗ą░, ąĖ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą┤ą▓čāčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ.
ąÆ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠą┤čüąĄą║čåąĖčÅčģ ąŠą┐ąĖčüą░ąĮčŗ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčĆčéą░, ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĖą╝ąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąĄčĆąĄąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠą╣ čäčāąĮą║čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega328P. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ąŠą┐ąĖčüą░ąĮąĖčÄ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠą╣ čäčāąĮą║čåąĖąĖ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
ąóą░ą▒ą╗ąĖčåą░ 14-3. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┐ąŠčĆčéą░ B.
ą¤ąŠčĆčé ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ
PB7
XTAL2 (Chip Clock Oscillator pin 2)
PB6
XTAL1 (Chip Clock Oscillator pin 1 or External clock input)
PB5
SCK (SPI Bus Master clock Input)
PB4
MISO (SPI Bus Master Input/Slave Output)
PB3
MOSI (SPI Bus Master Output/Slave Input)
PB2
~SS (SPI Bus Master Slave select)
PB1
OC1A (Timer/Counter1 Output Compare Match A Output)
PB0
ICP1 (Timer/Counter1 Input Capture Input)
XTAL2/TOSC2/PCINT7 ŌĆō Port B, Bit 7
XTAL2 : ą▓čŗą▓ąŠą┤ 2 ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą║č鹊ą▓ (Oscillator), ą▓čŗčģąŠą┤. ą×ą▒čŗčćąĮąŠ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗą▓ąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ ąĖą╗ąĖ ąĮąĖąĘą║ąŠčćą░čüč鹊čéąĮąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░, ą║ą░ą║ ą▓ą░čĆąĖą░ąĮčé ą┐čīąĄąĘąŠą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗą▓ąŠą┤ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ąĄą│ąŠ ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ą┐ąŠčĆčé ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (GPIO).
TOSC2 : ą▓čŗą▓ąŠą┤ 2 ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą╣ą╝ąĄčĆą░ (Timer Oscillator). ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮčŗą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ, ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ASSR. ąÜąŠą│ą┤ą░ ą▒ąĖčé AS2 ą▓ čĆąĄą│ąĖčüčéčĆąĄ ASSR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1, ąĖ ą▒ąĖčé EXCLK čüą▒čĆąŠčłąĄąĮ ą▓ ą╗ąŠą│. 0 ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ Timer/Counter2 čü ą┐ąŠą╝ąŠčēčīčÄ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░, ą▓čŗą▓ąŠą┤ PB7 ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ ąŠčé ą┐ąŠčĆčéą░, ąĖ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĖą╝ ą▓čŗčģąŠą┤ąŠą╝ čāčüąĖą╗ąĖč鹥ą╗čÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąÆ čéą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ ą║ čŹč鹊ą╝čā ą▓čŗą▓ąŠą┤čā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ (ąŠą▒čŗčćąĮąŠ ąĮą░ čćą░čüč鹊čéčā 32768 ąōčå), ąĖ ą▓čŗą▓ąŠą┤ ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ąŠčĆčé ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (GPIO).
PCINT7 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 7 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 7). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB7 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĢčüą╗ąĖ PB7 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗą▓ąŠą┤ čéą░ą║č鹊ą▓, č鹊 čĆą░ąĘčĆčÅą┤čŗ DDB7, PORTB7 ąĖ PINB7 ą▓čüąĄ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0.
XTAL1/TOSC1/PCINT6 ŌĆō Port B, Bit 6
XTAL1 : ą▓čŗą▓ąŠą┤ 1 ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą║č鹊ą▓ (Oscillator), ą▓čģąŠą┤. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮąŠą│ąŠ RC-ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗą▓ąŠą┤ čéą░ą║č鹊ą▓, čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąŠčĆčé ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (GPIO).
TOSC1 : ą▓čŗą▓ąŠą┤ 1 ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą╣ą╝ąĄčĆą░ (Timer Oscillator). ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮčŗą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ, ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ASSR. ąÜąŠą│ą┤ą░ ą▒ąĖčé AS2 ą▓ čĆąĄą│ąĖčüčéčĆąĄ ASSR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1, ąĖ ą▒ąĖčé EXCLK čüą▒čĆąŠčłąĄąĮ ą▓ ą╗ąŠą│. 0 ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ Timer/Counter2 čü ą┐ąŠą╝ąŠčēčīčÄ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░, ą▓čŗą▓ąŠą┤ PB6 ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ ąŠčé ą┐ąŠčĆčéą░, ąĖ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓čģąŠą┤ąŠą╝ ąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĄą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąÆ čéą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ ą║ čŹč鹊ą╝čā ą▓čŗą▓ąŠą┤čā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ (ąŠą▒čŗčćąĮąŠ ąĮą░ čćą░čüč鹊čéčā 32768 ąōčå), ąĖ ą▓čŗą▓ąŠą┤ ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ąŠčĆčé ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (GPIO).
PCINT6 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 6 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 6). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB6 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĢčüą╗ąĖ PB6 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗą▓ąŠą┤ čéą░ą║č鹊ą▓, č鹊 čĆą░ąĘčĆčÅą┤čŗ DDB6, PORTB6 ąĖ PINB6 ą▓čüąĄ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0.
SCK/PCINT5 ŌĆō Port B, Bit 5
SCK : Master Clock output, Slave Clock input ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ SPI. ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ Slave, čŹč鹊čé ą▓čŗą▓ąŠą┤ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ DDB5. ąÜąŠą│ą┤ą░ SPI čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ Master, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ DDB5. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĮą░ąĘąĮą░č湥ąĮ ą▒ą╗ąŠą║ąŠą╝ SPI ą║ą░ą║ ą▓čģąŠą┤, č鹊 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ pull-up čĆąĄąĘąĖčüč鹊čĆą░ ą▓čüąĄ ąĄčēąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┤ą░ą▓ą░čéčī ą▒ąĖč鹊ą╝ PORTB5.
PCINT5 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 5 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 5). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB5 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
MISO/PCINT4 ŌĆō Port B, Bit 4
MISO : Master Data input, Slave Data output ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ SPI. ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ Master, čŹč鹊čé ą▓čŗą▓ąŠą┤ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ DDB4. ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ Slave, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ DDB4. ąÜąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▒ą╗ąŠą║ąŠą╝ SPI ą║ą░ą║ ą▓čģąŠą┤, č鹊 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ pull-up čĆąĄąĘąĖčüč鹊čĆą░ ą▓čüąĄ ąĄčēąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┤ą░ą▓ą░čéčī ą▒ąĖč鹊ą╝ PORTB4.
PCINT4 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 4 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 4). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB4 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
MOSI/OC2/PCINT3 ŌĆō Port B, Bit 3
MOSI : SPI Master Data output, Slave Data input ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ SPI. ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ Slave, čŹč鹊čé ą▓čŗą▓ąŠą┤ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ DDB3. ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ Master, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčéą░ DDB3. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▒ą╗ąŠą║ąŠą╝ SPI ą║ą░ą║ ą▓čģąŠą┤, č鹊 pull-up ą▓čüąĄ ąĄčēąĄ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčéą░ PORTB3.
OC2 , Output Compare Match Output: ą▓čŗą▓ąŠą┤ PB3 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗, čüąŠąŠą▒čēą░čÄčēąĖą╣ ąŠ čüąŠą▒čŗčéąĖąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 2 (Timer/Counter2 Compare Match). ąöą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ PB3 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ (DDB3=1). ąÆčŗą▓ąŠą┤ OC2 čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ čĆą░ą▒ąŠčéčŗ čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą©ąśą£ (PWM mode).
PCINT3 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 3 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 3). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB3 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
~SS/OC1B/PCINT2 ŌĆō Port B, Bit 2
~SS : Slave Select input. ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ Slave, čŹč鹊čé ą▓čŗą▓ąŠą┤ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ DDB2. ąÜą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ Slave, ą▒ą╗ąŠą║ SPI ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┐ąŠą┤čéčÅą│ąĖą▓ą░ąĄčéčüčÅ ą║ ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ Master, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčéą░ DDB2. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĮą░čüčéčĆąŠąĄąĮ ą▒ą╗ąŠą║ąŠą╝ SPI ą║ą░ą║ ą▓čģąŠą┤, č鹊 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ pull-up ą▓čüąĄ ąĄčēąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčéą░ PORTB2.
OC1B , Output Compare Match output: ą▓čŗą▓ąŠą┤ PB2 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗, čüąŠąŠą▒čēą░čÄčēąĖą╣ ąŠ čüąŠą▒čŗčéąĖąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ B čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 1 (Timer/Counter1 Compare Match B). ąöą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ PB2 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ (DDB2=1). ąÆčŗą▓ąŠą┤ OC1B čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ čĆą░ą▒ąŠčéčŗ čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą©ąśą£ (PWM mode).
PCINT2 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 2 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 2). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB2 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
OC1A/PCINT1 ŌĆō Port B, Bit 1
OC1A , Output Compare Match output: ą▓čŗą▓ąŠą┤ PB1 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗, čüąŠąŠą▒čēą░čÄčēąĖą╣ ąŠ čüąŠą▒čŗčéąĖąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ A čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 1 (Timer/Counter1 Compare Match A). ąöą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ PB1 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ (DDB1=1). ąÆčŗą▓ąŠą┤ OC1A čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ čĆą░ą▒ąŠčéčŗ čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą©ąśą£ (PWM mode).
PCINT1 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 1 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 1). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB1 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ICP1/CLKO/PCINT0 ŌĆō Port B, Bit 0
ICP1 , Input Capture Pin: ą▓čŗą▓ąŠą┤ PB0 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ąĘą░čģą▓ą░čéą░ čüąŠą▒čŗčéąĖą╣ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 1 (Input Capture Pin for Timer/Counter1).
CLKO , Divided System Clock: ąĮą░ ą▓čŗą▓ąŠą┤ PB0 ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▓ąĄą┤ąĄąĮą░ ą┐ąŠą┤ąĄą╗ąĄąĮąĮą░čÅ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░. ąŁč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ čäčīčÄąĘ CKOUT, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ąŠą║ ą▒ąĖčé PORTB0 ąĖ DDB0. ąóą░ą║ąČąĄ ą▓čŗą▓ąŠą┤ ą▒čāą┤ąĄčé ą▓čŗčģąŠą┤ąŠą╝ ą▓ąŠ ą▓čĆąĄą╝čÅ čüą▒čĆąŠčüą░.
PCINT0 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 0 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 0). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PB0 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąÆ čéą░ą▒ą╗ąĖčåą░čģ 14-4 ąĖ 14-5 ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ ą┐ąŠčĆčéą░ B (čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčüčāąĮą║ąĄ 14-5). SPI MSTR INPUT ąĖ SPI SLAVE OUTPUT čüąŠčüčéą░ą▓ą╗čÅčÄčé čüąĖą│ąĮą░ą╗ MISO, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ MOSI ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ SPI MSTR OUTPUT ąĖ SPI SLAVE INPUT.
ąóą░ą▒ą╗ąĖčåą░ 14-4. ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣ PB7...PB4.
ąśą╝čÅ PB7/XTAL2/(2) PB6/XTAL1/(2) PB5/SCK/ PB4/MISO/
PUOE
~INTRC ŌĆó ~EXTCK + AS2
~INTRC + AS2
SPE ŌĆó ~MSTR
SPE ŌĆó MSTR
PUOV
0
0
PORTB5 ŌĆó ~PUD
PORTB4 ŌĆó ~PUD
DDOE
~INTRC ŌĆó ~EXTCK + AS2
~INTRC + AS2
SPE ŌĆó ~MSTR
SPE ŌĆó MSTR
DDOV
0
0
0
0
PVOE
0
0
SPE ŌĆó MSTR
SPE ŌĆó ~MSTR
PVOV
0
0
SCK OUTPUT
SPI SLAVE OUTPUT
DIEOE
~INTRC ŌĆó ~EXTCK + AS2 +
~INTRC + AS2 +
PCINT5 ŌĆó PCIE0
PCINT4 ŌĆó PCIE0
DIEOV
(INTRC + EXTCK) ŌĆó ~AS2
~INTRC ŌĆó AS2
1
1
DI
PCINT7 INPUT
PCINT6 INPUT
PCINT5 INPUT
PCINT4 INPUT
AIO
Oscillator Output
Oscillator/Clock Input
-
-
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (2): INTRC ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓čŗą▒čĆą░ąĮ ąŠą┤ąĖąĮ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ RC-ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ (ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ čäčīčĹʹ░ą╝ąĖ CKSEL), EXTCK ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓čŗą▒čĆą░ąĮąŠ ą▓ąĮąĄčłąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ (čéą░ą║ąČąĄ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ čäčīčĹʹ░ą╝ąĖ CKSEL).
ąóą░ą▒ą╗ąĖčåą░ 14-5. ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣ PB3...PB0.
ąśą╝čÅ PB3/MOSI/ PB2/~SS/ PB1/OC1A/ PB0/ICP1/
PUOE
SPE ŌĆó ~MSTR
SPE ŌĆó ~MSTR
0
0
PUOV
PORTB3 ŌĆó ~PUD
PORTB2 ŌĆó ~PUD
0
0
DDOE
SPE ŌĆó ~MSTR
SPE ŌĆó ~MSTR
0
0
DDOV
0
0
0
0
PVOE
SPE ŌĆó MSTR + OC2A ENABLE
OC1B ENABLE
OC1A ENABLE
0
PVOV
SPI MSTR OUTPUT + OC2A
OC1B
OC1A
0
DIEOE
PCINT3 ŌĆó PCIE0
PCINT2 ŌĆó PCIE0
PCINT1 ŌĆó PCIE0
PCINT0 ŌĆó PCIE0
DIEOV
1
1
1
1
DI
PCINT3 INPUT
PCINT2 INPUT
PCINT1 INPUT
PCINT0 INPUT
AIO
-
-
-
-
ąóą░ą▒ą╗ąĖčåą░ 14-6. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┐ąŠčĆčéą░ C.
ą¤ąŠčĆčé ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ
PC6
~RESET (Reset pin)
PC5
ADC5 (ADC Input Channel 5)
PC4
ADC4 (ADC Input Channel 4)
PC3
ADC3 (ADC Input Channel 3)
PC2
ADC2 (ADC Input Channel 2)
PC1
ADC1 (ADC Input Channel 1)
PC0
ADC0 (ADC Input Channel 0)
~RESET/PCINT14 ŌĆō Port C, Bit 6
~RESET , ą▓čģąŠą┤ čüą▒čĆąŠčüą░: ą║ąŠą│ą┤ą░ ą▒ąĖčé čäčīčĹʹŠą▓ RSTDISBL ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ, čŹč鹊čé ą▓čŗą▓ąŠą┤ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ąŠą▒čŗčćąĮą░čÅ ąĮąŠąČą║ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (GPIO), ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ąĮą░ čüą▒čĆąŠčü ąŠčé Power-on Reset ąĖ Brown-out Reset (ą╗ąĖą▒ąŠ ąĮą░ čüą▒čĆąŠčü ąŠčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░). ąÜąŠą│ą┤ą░ čäčīčÄąĘ RSTDISBL ąĮąĄ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ (čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ), čüčģąĄą╝ą░ čüą▒čĆąŠčüą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ čŹč鹊ą╝čā ą▓čŗą▓ąŠą┤čā, ąĖ ąŠąĮ ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ GPIO.
ąĢčüą╗ąĖ PC6 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤ čüą▒čĆąŠčüą░, č鹊 ą▓čüąĄ ą▒ąĖčéčŗ DDC6, PORTC6 ąĖ PINC6 ą▒čāą┤čāčé čćąĖčéą░čéčīčüčÅ ą║ą░ą║ 0.
PCINT14 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 14 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 14). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PC6 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ą║ąŠą│ą┤ą░ ąŠąĮ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ čüą▒čĆąŠčüą░).
SCL/ADC5/PCINT13 ŌĆō Port C, Bit 5
SCL , 2-wire Serial Interface Clock: ą║ąŠą│ą┤ą░ ą▒ąĖčé TWEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWCR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1 ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ 2-ą┐čĆąŠą▓ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (TWI, ąĖą╗ąĖ I2C), č鹊 ą▓čŗą▓ąŠą┤ PC5 ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ ąŠčé ą┐ąŠčĆčéą░ ąĖ čüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ čéą░ą║č鹊ą▓ ą┤ą╗čÅ TWI. ąÆ čéą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ čĆą░ą▒ąŠčéą░ąĄčé čäąĖą╗čīčéčĆ ą║ąŠčĆąŠčéą║ąĖčģ ąĖą╝ą┐čāą╗čīčüąŠą▓, čćč鹊ą▒čŗ ą┐ąŠą┤ą░ą▓ąĖčéčī ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╝ čüąĖą│ąĮą░ą╗ąĄ ąĖą│ąŠą╗ą║ąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą║ąŠčĆąŠč湥 50 ąĮčü, ąĖ ą▓čŗą▓ąŠą┤ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄą╝ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ.
ADC5 : PC5 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 5 ąÉą”ą¤ (ADC input Channel 5). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą║ą░ąĮą░ą╗ 5 ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čåąĖčäčĆąŠą▓ąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ.
PCINT13 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 13 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 13). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PC5 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
SDA/ADC4/PCINT12 ŌĆō Port C, Bit 4
SDA , 2-wire Serial Interface Data: ą║ąŠą│ą┤ą░ ą▒ąĖčé TWEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWCR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1 ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ 2-ą┐čĆąŠą▓ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (TWI, ąĖą╗ąĖ I2C), č鹊 ą▓čŗą▓ąŠą┤ PC4 ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ ąŠčé ą┐ąŠčĆčéą░ ąĖ čüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ TWI. ąÆ čéą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ čĆą░ą▒ąŠčéą░ąĄčé čäąĖą╗čīčéčĆ ą║ąŠčĆąŠčéą║ąĖčģ ąĖą╝ą┐čāą╗čīčüąŠą▓, čćč鹊ą▒čŗ ą┐ąŠą┤ą░ą▓ąĖčéčī ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╝ čüąĖą│ąĮą░ą╗ąĄ ąĖą│ąŠą╗ą║ąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą║ąŠčĆąŠč湥 50 ąĮčü, ąĖ ą▓čŗą▓ąŠą┤ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄą╝ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ.
ADC4 : PC4 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 4 ąÉą”ą¤ (ADC input Channel 4). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą║ą░ąĮą░ą╗ 4 ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čåąĖčäčĆąŠą▓ąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ.
PCINT12 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 12 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 12). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PC4 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ADC3/PCINT11 ŌĆō Port C, Bit 3
ADC3 : PC3 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 3 ąÉą”ą¤ (ADC input Channel 3). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą║ą░ąĮą░ą╗ 3 ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ.
PCINT11 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 11 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 11). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PC3 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ADC2/PCINT10 ŌĆō Port C, Bit 2
ADC2 : PC2 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 2 ąÉą”ą¤ (ADC input Channel 2). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą║ą░ąĮą░ą╗ 2 ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ.
PCINT10 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 10 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 10). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PC2 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ADC1/PCINT9 ŌĆō Port C, Bit 1
ADC1 : PC1 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 1 ąÉą”ą¤ (ADC input Channel 1). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą║ą░ąĮą░ą╗ 1 ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ.
PCINT9 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 9 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 9). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PC1 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ADC0/PCINT8 ŌĆō Port C, Bit 0
ADC0 : PC0 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 0 ąÉą”ą¤ (ADC input Channel 0). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą║ą░ąĮą░ą╗ 0 ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ.
PCINT8 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 8 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 8). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PC0 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąÆ čéą░ą▒ą╗ąĖčåą░čģ 14-7 ąĖ 14-8 ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ ą┐ąŠčĆčéą░ C (čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčüčāąĮą║ąĄ 14-5).
ąóą░ą▒ą╗ąĖčåą░ 14-7. ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣ PC6...PC4(3) .
ąśą╝čÅ PC6/~RESET/PCINT14 PC5/SCL/ADC5/PCINT13 PC4/SDA/ADC4/PCINT12
PUOE
RSTDISBL
TWEN
TWEN
PUOV
1
PORTC5 ŌĆó ~PUD
PORTC4 ŌĆó ~PUD
DDOE
RSTDISBL
TWEN
TWEN
DDOV
0
SCL_OUT
SDA_OUT
PVOE
0
TWEN
TWEN
PVOV
0
0
0
DIEOE
RSTDISBL + PCINT14 ŌĆó PCIE1
PCINT13 ŌĆó PCIE1 + ADC5D
PCINT12 ŌĆó PCIE1 + ADC4D
DIEOV
RSTDISBL
PCINT13 ŌĆó PCIE1
PCINT12 ŌĆó PCIE1
DI
PCINT14 INPUT
PCINT13 INPUT
PCINT12 INPUT
AIO
RESET INPUT
ADC5 INPUT / SCL INPUT
ADC4 INPUT / SDA INPUT
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (3): ą║ąŠą│ą┤ą░ TWI čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ PC4 ąĖ PC5 ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄą╝ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ. ąŁč鹊 ąĮąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ąĄąČą┤čā ą▓čŗčģąŠą┤ą░ą╝ąĖ AIO ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ čäąĖą╗čīčéčĆčŗ ąĖą│ąŠą╗ąŠą║, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ čĆąĖčüčāąĮą║ąĄ ą┐ąŠčĆč鹥 ąĖ čåąĖčäčĆąŠą▓ąŠą╣ ą╗ąŠą│ąĖą║ąĄ ą╝ąŠą┤čāą╗čÅ TWI.
ąóą░ą▒ą╗ąĖčåą░ 14-8. ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣ PC3...PC0.
ąśą╝čÅ PC3/ADC3/ PC2/ADC2/ PC1/ADC1/ PC0/ADC0/
PUOE
0
0
0
0
PUOV
0
0
0
0
DDOE
0
0
0
0
DDOV
0
0
0
0
PVOE
0
0
0
0
PVOV
0
0
0
0
DIEOE
PCINT11 ŌĆó PCIE1 + ADC3D
PCINT10 ŌĆó PCIE1 + ADC2D
PCINT9 ŌĆó PCIE1 + ADC1D
PCINT8 ŌĆó PCIE1 + ADC0D
DIEOV
PCINT11 ŌĆó PCIE1
PCINT10 ŌĆó PCIE1
PCINT9 ŌĆó PCIE1
PCINT8 ŌĆó PCIE1
DI
PCINT11 INPUT
PCINT10 INPUT
PCINT9 INPUT
PCINT8 INPUT
AIO
ADC3 INPUT
ADC2 INPUT
ADC1 INPUT
ADC0 INPUT
ąóą░ą▒ą╗ąĖčåą░ 14-9. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┐ąŠčĆčéą░ D.
ą¤ąŠčĆčé ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ
PD7
AIN1 (Analog Comparator Negative Input)
PD6
AIN0 (Analog Comparator Positive Input)
PD5
T1 (Timer/Counter 1 External Counter Input)
PD4
XCK (USART External Clock Input/Output)
PD3
INT1 (External Interrupt 1 Input)
PD2
INT0 (External Interrupt 0 Input)
PD1
TXD (USART Output Pin)
PD0
RXD (USART Input Pin)
AIN1/OC2B/PCINT23 ŌĆō Port D, Bit 7
AIN1 , Analog Comparator Negative Input (ąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĖą╣ ą▓čģąŠą┤ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░). ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ ą║ą░ą║ ą▓čģąŠą┤ čü ąŠčéą║ą╗čÄč湥ąĮąĮčŗą╝ pull-up čĆąĄąĘąĖčüč鹊čĆąŠą╝, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą▓ą╗ąĖčÅąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠčĆčéą░ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆ.
PCINT23 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 23 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 23). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD7 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
AIN0/OC0A/PCINT22 ŌĆō Port D, Bit 6
AIN0 , Analog Comparator Positive Input (ąĮąĄąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĖą╣ ą▓čģąŠą┤ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░). ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ ą║ą░ą║ ą▓čģąŠą┤ čü ąŠčéą║ą╗čÄč湥ąĮąĮčŗą╝ pull-up čĆąĄąĘąĖčüč鹊čĆąŠą╝, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą▓ą╗ąĖčÅąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠčĆčéą░ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆ.
OC0A , Output Compare Match output: ą▓čŗą▓ąŠą┤ PD6 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓ąĮąĄčłąĮąĖą╣ ą▓čŗčģąŠą┤, čüąŠąŠą▒čēą░čÄčēąĖą╣ ąŠ čüąŠą▒čŗčéąĖąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ A čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 0 (Timer/Counter0 Compare Match A). ąÆčŗą▓ąŠą┤ PD6 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ (DDD6=1) ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. ąÆčŗą▓ąŠą┤ OC0A čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ ą©ąśą£ (PWM).
PCINT22 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 22 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 22). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD6 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
T1/OC0B/PCINT21 ŌĆō Port D, Bit 5
T1 , Timer/Counter1 counter source (ąĖčüč鹊čćąĮąĖą║ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 1).
OC0B , Output Compare Match output: ą▓čŗą▓ąŠą┤ PD5 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓ąĮąĄčłąĮąĖą╣ ą▓čŗčģąŠą┤, čüąŠąŠą▒čēą░čÄčēąĖą╣ ąŠ čüąŠą▒čŗčéąĖąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ B čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 0 (Timer/Counter0 Compare Match B). ąÆčŗą▓ąŠą┤ PD5 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ (DDD5=1) ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. ąÆčŗą▓ąŠą┤ OC0B čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ ą©ąśą£ (PWM).
PCINT21 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 21 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 21). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD5 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
XCK/T0/PCINT20 ŌĆō Port D, Bit 4
XCK , USART external clock (ąĖčüč鹊čćąĮąĖą║ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ USART).
T0 , Timer/Counter0 counter source (ąĖčüč鹊čćąĮąĖą║ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 0).
PCINT20 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 20 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 20). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD4 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
INT1/OC2B/PCINT19 ŌĆō Port D, Bit 3
INT1 , External Interrupt source 1: ą▓čŗą▓ąŠą┤ PD3 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
OC2B , Output Compare Match output: ą▓čŗą▓ąŠą┤ PD3 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓ąĮąĄčłąĮąĖą╣ ą▓čŗčģąŠą┤, čüąŠąŠą▒čēą░čÄčēąĖą╣ ąŠ čüąŠą▒čŗčéąĖąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ B čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ 0 (Timer/Counter0 Compare Match B). ąÆčŗą▓ąŠą┤ PD3 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ (DDD3=1) ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. ąÆčŗą▓ąŠą┤ OC2B čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ ą©ąśą£ (PWM).
PCINT19 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 19 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 19). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD3 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
INT0/PCINT18 ŌĆō Port D, Bit 2
INT0 , External Interrupt source 0: ą▓čŗą▓ąŠą┤ PD2 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
PCINT18 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 18 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 18). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD2 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
TXD/PCINT17 ŌĆō Port D, Bit 1
TXD , Transmit Data (ą▓čŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ USART). ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ čĆą░ą▒ąŠčéą░ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ USART, čŹč鹊čé ą▓čŗčģąŠą┤ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ DDD1.
PCINT17 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 17 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 17). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD1 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
RXD/PCINT16 ŌĆō Port D, Bit 0
RXD , Receive Data (ą▓čģąŠą┤ ą┤ą░ąĮąĮčŗčģ USART). ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ ą┐čĆąĖąĄą╝ąĮąĖą║ USART, čŹč鹊čé ą▓čŗą▓ąŠą┤ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ DDD0. ąÜąŠą│ą┤ą░ ą▒ą╗ąŠą║ USART ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ą╗ čŹč鹊čé ą▓čŗą▓ąŠą┤ ą║ą░ą║ ą▓čģąŠą┤, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ pull-up ą▓čüąĄ ąĄčēąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ PORTD0.
PCINT16 : ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 16 ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ (Pin Change Interrupt source 16). ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD0 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąÆ čéą░ą▒ą╗ąĖčåą░čģ 14-10 ąĖ 14-11 ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ ą┐ąŠčĆčéą░ C (čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčüčāąĮą║ąĄ 14-5).
ąóą░ą▒ą╗ąĖčåą░ 14-10. ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣ PD7...PD4.
ąśą╝čÅ PD7/AIN1/ PD6/AIN0/ PD5/T1/OC0B/ PD4/XCK/T0/
PUOE
0
0
0
0
PUOV
0
0
0
0
DDOE
0
0
0
0
DDOV
0
0
0
0
PVOE
0
OC0A ENABLE
OC0B ENABLE
UMSEL
PVOV
0
OC0A
OC0B
XCK OUTPUT
DIEOE
PCINT23 ŌĆó PCIE2
PCINT22 ŌĆó PCIE2
PCINT21 ŌĆó PCIE2
PCINT20 ŌĆó PCIE2
DIEOV
1
1
1
1
DI
PCINT23 INPUT
PCINT22 INPUT
PCINT21 INPUT
PCINT20 INPUT
AIO
AIN1 INPUT
AIN0 INPUT
-
-
ąóą░ą▒ą╗ąĖčåą░ 14-11. ą¤ąĄčĆąĄąĮą░ąĘąĮą░čćą░čÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣ PD3...PD0.
ąśą╝čÅ PD3/OC2B/ PD2/INT0/ PD1/TXD/ PD0/RXD/
PUOE
0
0
TXEN
RXEN
PUOV
0
0
0
PORTD0 ŌĆó ~PUD
DDOE
0
0
TXEN
RXEN
DDOV
0
0
1
0
PVOE
OC2B ENABLE
0
TXEN
0
PVOV
OC2B
0
TXD
0
DIEOE
INT1 ENABLE +
INT0 ENABLE +
PCINT17 ŌĆó PCIE2
PCINT16 ŌĆó PCIE2
DIEOV
1
1
1
1
DI
PCINT19 INPUT
PCINT18 INPUT
PCINT17 INPUT
PCINT16 INPUT
AIO
-
-
-
-
[ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ]
MCUCR ŌĆō MCU Control Register
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▒ąĖčéčŗ BODS ąĖ BODSE ąĄčüčéčī č鹊ą╗čīą║ąŠ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ ą┐ąŠą┤čüąĄą╝ąĄą╣čüčéą▓ą░ picoPower ATmega48PA/88PA/168PA/328P.
BODS : BOD Sleep (ąĘą░ą┐čĆąĄčé ą┤ąĄč鹥ą║č鹊čĆą░ ąĮąĄą║ą░č湥čüčéą▓ąĄąĮąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ąŠą▓ čüąĮą░, sleep mode). ąÜąŠą│ą┤ą░ Brown-out Detector (BOD) čĆą░ąĘčĆąĄčłąĄąĮ ą▒ąĖčéą░ą╝ąĖ čäčīčĹʹŠą▓ BODLEVEL (čüą╝. čéą░ą▒ą╗ąĖčåčā 28-7 ą┤ą░čéą░čłąĖčéą░ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328), BOD ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ čüąĮą░. ą¦č鹊ą▒čŗ 菹║ąŠąĮąŠą╝ąĖčéčī 菹ĮąĄčĆą│ąĖčÄ, BOD ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ čĆąĄąČąĖą╝ąŠą▓ čüąĮą░ (čüą╝. čéą░ą▒ą╗ąĖčåčā 10-1 ą┤ą░čéą░čłąĖčéą░ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328). ąŁąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░ ą▒čāą┤ąĄčé č鹊ą│ą┤ą░ čéą░ą║ąŠąĄ ąČąĄ, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ BOD ą▒čŗą╗ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮ čäčīčĹʹ░ą╝ąĖ. ąĢčüą╗ąĖ BOD ąĘą░ą┐čĆąĄčēąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, č鹊 čäčāąĮą║čåąĖčÅ BOD ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ čüąĮą░. ą¤ąŠčüą╗ąĄ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ čĆą░ą▒ąŠčéą░ BOD ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąŠą┐čÅčéčī. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī VCC ą┐ą░ą┤ą░ąĄčé ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░ čüąĮą░.
ąÜąŠą│ą┤ą░ BOD ąĘą░ą┐čĆąĄčēąĄąĮ, ą▓čĆąĄą╝čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ ą▒čāą┤ąĄčé ą┐čĆąĖą╝ąĄčĆąĮąŠ 60 ╬╝s, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą║ąŠčĆčĆąĄą║čéąĮčāčÄ čĆą░ą▒ąŠčéčā BOD ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ MCU ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░.
ąŚą░ą┐ąĖčüčī ą▒ąĖčéą░ BODS ą▓ ą╗ąŠą│. 1 ą▓čŗą║ą╗čÄčćą░ąĄčé BOD ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄąČąĖą╝ą░čģ čüąĮą░, ą░ ąĘą░ą┐ąĖčüčī ą╗ąŠą│. 0 čüąŠčģčĆą░ąĮčÅąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéčī čüąĖčüč鹥ą╝čŗ BOD ą▓ąŠ ą▓čĆąĄą╝čÅ čüąĮą░. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ BOD ą░ą║čéąĖą▓ąĄąĮ ą▓čüąĄą│ą┤ą░, čé. ąĄ. BODS čüą▒čĆąŠčłąĄąĮ ą▓ ą╗ąŠą│. 0.
BODSE . BODSE čĆą░ąĘčĆąĄčłą░ąĄčé čāčüčéą░ąĮąŠą▓ą║čā čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ąĖčéą░ BODS. ąŚą░ą┐čĆąĄčé BOD čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ ą┤ąĄą╣čüčéą▓ąĖą╣ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
PUD : Pull-up Disable (ąĘą░ą┐čĆąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓ąĄčĆčģąĮąĖčģ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓). ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ ą╗ąŠą│. 1, čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ąĮą░ ą▓čüąĄčģ ą┐ąŠčĆčéą░čģ I/O ąĘą░ą┐čĆąĄčēą░čÄčéčüčÅ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą▒ąĖčéčŗ DDxn ąĖ PORTxn čĆąĄą│ąĖčüčéčĆąŠą▓ DDRx ąĖ PORTx čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ pull-up ({DDxn, PORTxn} = 0b01). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░".
PORTB ŌĆō The Port B Data Register
DDRB ŌĆō The Port B Data Direction Register
PINB ŌĆō The Port B Input Pins Address(5)
PORTC ŌĆō The Port C Data Register
DDRC ŌĆō The Port C Data Direction Register
PINC ŌĆō The Port C Input Pins Address(5)
PORTD ŌĆō The Port D Data Register
DDRD ŌĆō The Port D Data Direction Register
PIND ŌĆō The Port D Input Pins Address(5)
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (5): ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ PINx ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖčÄ čéčĆąĖą│ą│ąĄčĆąĮąŠą│ąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ GPIO ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ (toggle). ąŚą░ą┐ąĖčüčī ą╗ąŠą│. 1 ą▓ ą▒ąĖčé PINxn ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PORTxn, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ DDRxn. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĖąĮčüčéčĆčāą║čåąĖčÅ SBI ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ą▒ąĖčéą░ ą▓ ą┐ąŠčĆčéčā.
[ąĪčüčŗą╗ą║ąĖ ]
1 . ąöąŠčüčéčāą┐ ą║ ą┐ąŠčĆčéą░ą╝ I/O AVR ąĮą░ čÅąĘčŗą║ąĄ C (GCC, WinAVR) .



.")
.")














ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ