|
 ąØą░ą╗ąĖčćąĖąĄ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time clock, čüąŠą║čĆą░čēąĄąĮąĮąŠ RTC) ą▓ čüąĖčüč鹥ą╝ąĄ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ąŠč湥ąĮčī čāą┤ąŠą▒ąĮą░čÅ ąŠą┐čåąĖčÅ. ą×čüąŠą▒ąĄąĮąĮąŠ ąŠąĮą░ ą┐ąŠą╗ąĄąĘąĮą░, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ ąĘą░ą┐ąŠą╝ąĖąĮą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ čü ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (ą▓ąĄą┤ąĄąĮąĖąĄ ą╗ąŠą│ą░ čüąĖčüč鹥ą╝čŗ). ą£ąĖą║čĆąŠčüčģąĄą╝ą░ čćą░čüąŠą▓ DS1307 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Maxim čłąĖčĆąŠą║ąŠ ąĖąĘą▓ąĄčüčéąĮą░ ąĖ ą┐ąŠą╗čāčćąĖą╗ą░ ą┐ąŠą┐čāą╗čÅčĆąĮąŠčüčéčī ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ą┐čĆąŠčüč鹊č鹥 ąĖ ą┤ąĄčłąĄą▓ąĖąĘąĮąĄ. ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čŹč鹊ą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čüąĄą│ąŠ ą╗ąĖčłčī 2 ą╗ąĖąĮąĖąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┐čĆąĖ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗą╝ąĖ. ąĢčüą╗ąĖ ąÆčŗ čģąŠčéąĖč鹥 ą┤ąŠą▒ą░ą▓ąĖčéčī RTC ą║ čüąĖčüč鹥ą╝ąĄ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR, ąĖą╗ąĖ ąĄčüą╗ąĖ čģąŠčéąĖč鹥 čāąĘąĮą░čéčī ąĮąĄą╝ąĮąŠą│ąŠ ą┐čĆąŠ ąĖąĮč鹥čĆč乥ą╣čü two-wire (čüąŠą║čĆą░čēąĄąĮąĮąŠ TWI, ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą║ą░ą║ "ą┤ą▓ą░-ą┐čĆąŠą▓ąŠą┤ą░"), ąĖą╗ąĖ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ I2C (čŹč鹊 ą┤ą▓ą░ čĆą░ąĘąĮčŗčģ ąĮą░ąĘą▓ą░ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ąĖąĮč鹥čĆč乥ą╣čüą░), č鹊 čŹčéą░ čüčéą░čéčīčÅ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ (ąĘą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čüčéą░čéčīąĖ [1]). ąØą░ą╗ąĖčćąĖąĄ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time clock, čüąŠą║čĆą░čēąĄąĮąĮąŠ RTC) ą▓ čüąĖčüč鹥ą╝ąĄ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ąŠč湥ąĮčī čāą┤ąŠą▒ąĮą░čÅ ąŠą┐čåąĖčÅ. ą×čüąŠą▒ąĄąĮąĮąŠ ąŠąĮą░ ą┐ąŠą╗ąĄąĘąĮą░, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ ąĘą░ą┐ąŠą╝ąĖąĮą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ čü ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (ą▓ąĄą┤ąĄąĮąĖąĄ ą╗ąŠą│ą░ čüąĖčüč鹥ą╝čŗ). ą£ąĖą║čĆąŠčüčģąĄą╝ą░ čćą░čüąŠą▓ DS1307 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Maxim čłąĖčĆąŠą║ąŠ ąĖąĘą▓ąĄčüčéąĮą░ ąĖ ą┐ąŠą╗čāčćąĖą╗ą░ ą┐ąŠą┐čāą╗čÅčĆąĮąŠčüčéčī ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ą┐čĆąŠčüč鹊č鹥 ąĖ ą┤ąĄčłąĄą▓ąĖąĘąĮąĄ. ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čŹč鹊ą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čüąĄą│ąŠ ą╗ąĖčłčī 2 ą╗ąĖąĮąĖąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┐čĆąĖ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗą╝ąĖ. ąĢčüą╗ąĖ ąÆčŗ čģąŠčéąĖč鹥 ą┤ąŠą▒ą░ą▓ąĖčéčī RTC ą║ čüąĖčüč鹥ą╝ąĄ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR, ąĖą╗ąĖ ąĄčüą╗ąĖ čģąŠčéąĖč鹥 čāąĘąĮą░čéčī ąĮąĄą╝ąĮąŠą│ąŠ ą┐čĆąŠ ąĖąĮč鹥čĆč乥ą╣čü two-wire (čüąŠą║čĆą░čēąĄąĮąĮąŠ TWI, ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą║ą░ą║ "ą┤ą▓ą░-ą┐čĆąŠą▓ąŠą┤ą░"), ąĖą╗ąĖ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ I2C (čŹč鹊 ą┤ą▓ą░ čĆą░ąĘąĮčŗčģ ąĮą░ąĘą▓ą░ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ąĖąĮč鹥čĆč乥ą╣čüą░), č鹊 čŹčéą░ čüčéą░čéčīčÅ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ (ąĘą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čüčéą░čéčīąĖ [1]).
[ą¦č鹊 čéą░ą║ąŠąĄ I2C ąĖą╗ąĖ TWI]
ąÜąŠą╝ą┐ą░ąĮąĖčÅ Atmel, ą▓čŗą┐čāčüą║ą░čÄčēą░čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ AVR, ąĮą░ąĘčŗą▓ą░ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ I2C ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ "two-wire", ąĖą╗ąĖ čüąŠą║čĆą░čēąĄąĮąĮąŠ TWI. ąŁč鹊čé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ 2 čüąĖą│ąĮą░ą╗čīąĮčŗąĄ ą╗ąĖąĮąĖąĖ: čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ (data line, SDA) ąĖ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ (clock line, SCL). ąŻčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ąŠą▒ą╝ąĄąĮąĖą▓ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ čłąĖąĮąĄ I2C (ąĖą╗ąĖ TWI) ą╝ąŠą│čāčé ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą▒čŗčéčī ą╗ąĖą▒ąŠ ą╝ą░čüč鹥čĆąŠą╝ čłąĖąĮčŗ (master), ą╗ąĖą▒ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĮą░ čłąĖąĮąĄ (slave). ąÆ ą║ą░č湥čüčéą▓ąĄ ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ ą┐ąŠčćčéąĖ ą▓čüąĄą│ą┤ą░ ą▓čŗčüčéčāą┐ą░ąĄčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ąĖ ąĖą╝ąĄąĮąĮąŠ čéą░ą║ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ DS1307 ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā AVR - ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master čłąĖąĮčŗ, ą░ DS1307 ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, slave. ą£ą░čüč鹥čĆ ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą▓čüąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ, ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ slave č鹊ą╗čīą║ąŠ ą╗ąĖčłčī ąŠčéą▓ąĄčćą░čÄčé ąĮą░ ąĘą░ą┐čĆąŠčüčŗ ą╝ą░čüč鹥čĆą░. ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ DS1307 (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ) ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā AVR ATmega328 (ą╝ą░čüč鹥čĆ).
ąÜ ą╝ą░čüč鹥čĆčā čłąĖąĮčŗ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄ ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave, ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ, ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ č湥čĆąĄąĘ č鹥 ąČąĄ čüą░ą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą░ąĮąĮčŗčģ SDA ąĖ SCL. ąæčāč乥čĆąĮčŗąĄ ą║ą░čüą║ą░ą┤čŗ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĖą╝ąĄčÄčé čüčģąĄą╝čā čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą╗ą╗ąĄą║č鹊čĆąŠą╝ (ąĖą╗ąĖ ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝), čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓ ą┐ą░čüčüąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąĖąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖčéčÅąĮčāčéčŗ ą║ čāčĆąŠą▓ąĮčÄ ą┐ąĖčéą░ąĮąĖčÅ VCC č湥čĆąĄąĘ ąĮą░ą│čĆčāąĘąŠčćąĮčŗąĄ čĆąĄąĘąĖčüč鹊čĆčŗ R1 ąĖ R2, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up (čüą╝. čüčģąĄą╝čā ąĮą░ čĆąĖčüčāąĮą║ąĄ). ąó. ąĄ. ą║ąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ ąĮąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ, ąŠą▒ą░ čüąĖą│ąĮą░ą╗ą░ SCL ąĖ SDA ąĖą╝ąĄčÄčé čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1. ąÜąŠą│ą┤ą░ ą║ą░ą║ąŠąĄ-č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ ą┐ąŠą╗čāčćą░ąĄčé ą║ ąĮąĄą╝čā ą┤ąŠčüčéčāą┐, č鹊 ąŠąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0 ą┐čāč鹥ą╝ ąĘą░ą╝čŗą║ą░ąĮąĖčÅ ą║ą╗čÄčćą░ ąĮą░ ąĘąĄą╝ą╗čÄ.

ąöą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ąĮą░ čłąĖąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ 7-ą▒ąĖčéąĮą░čÅ ą░ą┤čĆąĄčüą░čåąĖčÅ, ą┐ą╗čÄčü ąŠą┤ąĖąĮ ą▒ąĖčé čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ (read/write bit). ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą▓čüąĄą│ąŠ ą║ ąŠą┤ąĮąŠą╣ čłąĖąĮąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī 128 čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ RTC DS1307 ąĖą╝ąĄąĄčé čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą░ą┤čĆąĄčü 0xd0 (ą░ą┤čĆąĄčü čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ 7 čüčéą░čĆčłąĖčģ ą▒ąĖčéą░čģ, ą▓ čüą░ą╝ąŠą╝ ą╝ą╗ą░ą┤čłąĄą╝ čĆą░ąĘčĆčÅą┤ąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▒ąĖčé read/write).
ąĢčüčéčī ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ąĮąŠą│ąŠ čģąŠčĆąŠčłąĄą│ąŠ ą╝ą░č鹥čĆąĖą░ą╗ą░, ą┐ąŠčüą▓čÅčēąĄąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ TWI/I2C ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AVR. ąØąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ č鹥ą╝ą░čéąĖč湥čüą║ąĖąĄ čüčüčŗą╗ą║ąĖ. ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┐čĆąŠčüč鹊ą│ąŠ ą┐čĆąĖą║ą╗ą░ą┤ąĮąŠą│ąŠ ąĖąĘą╗ąŠąČąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ RTC DS1307.
ą¤čĆąĄąČą┤ąĄ č湥ą╝ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī ąĖąĘą╗ąŠąČąĄąĮąĖąĄ ą┤ą░ą╗čīčłąĄ, čüą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ąĄčüčéčī ąŠč湥ąĮčī ą┐čĆąŠčüčéčŗąĄ, ą│ąŠč鹊ą▓čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤ą╗čÅ I2C ą┤ą╗čÅ AVR, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĄčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čüąĖčüč鹥ą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Arduino. ą¤čĆą░ą║čéąĖč湥čüą║ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ąĮčāąČąĮąŠ ą┤ąĄą╗ą░čéčī čüą░ą╝ąŠą╝čā, ą┐čĆąŠčüč鹊 ą▓ą▒ąĄą╣č鹥 ą▓ čüčéčĆąŠą║čā ą┐ąŠąĖčüą║ą░ I2C master library, ąĖ čüčĆą░ąĘčā ąĮą░ą╣ą┤ąĄč鹥 ąĮąĄčüą║ąŠą╗čīą║ąŠ ą│ąŠč鹊ą▓čŗčģ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ čĆąĄčłąĄąĮąĖą╣. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ąÆčŗ ąĮąĄ čģąŠčéąĖč鹥 ąĖąĘčāčćąĖčéčī ąŠčüąĮąŠą▓čŗ I2C, č鹊 ą╝ąŠąČąĮąŠ ąĮąĄ čćąĖčéą░čéčī ą┤ą░ą╗čīčłąĄ čŹčéčā čüčéą░čéčīčÄ.
ą£ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐čĆąŠč鹊ą║ąŠą╗ I2C, ą┐čĆąŠčüč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čāą┐čĆą░ą▓ą╗čÅčÅ ą╗čÄą▒čŗą╝ąĖ ą┤ą▓čāą╝čÅ ąĮąŠąČą║ą░ą╝ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ą░ą║ ą┐ąŠčĆčéą░ą╝ąĖ ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░ GPIO (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą┐čĆąĖąĮčåąĖą┐ bit-bang). ąōąŠč鹊ą▓čŗčģ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ ą┐ąŠą┤ąŠą▒ąĮčŗčģ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ąĮąŠą│ąŠ ąĄčēąĄ čüąŠ ą▓čĆąĄą╝ąĄąĮ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ MCS51 (čüą╝. ąĮą░ą┐čĆąĖą╝ąĄčĆ [2, 3]). ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čéą░ą║ąĖą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ ą╝ąŠąČąĮąŠ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊 ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ąŠą▒ą╝ąĄąĮ ą┐ąŠ čłąĖąĮąĄ I2C.
ą×ą┤ąĮą░ą║ąŠ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ATmega328 (ąĖ čéą░ą║ąČąĄ ą┐ąŠčćčéąĖ ą▓ąŠ ą▓čüąĄčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ čüąĄčĆąĖąĖ ATmega, ąĮą░ą┐čĆąĖą╝ąĄčĆ ATmega16, ATmega32, ATmega256 ąĖ čé. ą┐.) ąĖą╝ąĄąĄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čāąĘąĄą╗ I2C, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆąŠčēą░ąĄčé čĆą░ą▒ąŠčéčā čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝. ąÜąŠą┤ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą║ąŠčĆąŠč湥, 菹║ąŠąĮąŠą╝čÅčéčüčÅ čĆą░ą▒ąŠčćąĖąĄ čéą░ą║čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąśą╝ąĄąĮąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü I2C/TWI ą▒čāą┤ąĄčé čĆą░čüčüą╝ąŠčéčĆąĄąĮ ą▓ čŹč鹊ą╣ čüčéą░čéčīąĄ.
[ąØą░čüčéčĆąŠą╣ą║ą░ I2C]
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ TWI. ą¤ąĄčĆą▓ąŠąĄ, čćč鹊 ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī, čŹč鹊 čāčüčéą░ąĮąŠą▓ąĖčéčī čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ čüąĖą│ąĮą░ą╗ą░ ą┤ą░ąĮąĮčŗčģ I2C. ą×ą▒čŗčćąĮąŠ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą╗ąĖą▒ąŠ 10 ą║ąōčå (slow mode, ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝), 100 ą║ąōčå (standard mode, čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆąĄąČąĖą╝) ąĖą╗ąĖ 400 ą║ąōčå (fast mode, ą▒čŗčüčéčĆčŗą╣ čĆąĄąČąĖą╝). ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ čłąĖąĮčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüą░ą╝čŗą╝ ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĮą░ čłąĖąĮąĄ, ą░ čéą░ą║ąČąĄ ąĄą╝ą║ąŠčüčéčīčÄ ąĖ ąĖąĮą┤čāą║čéąĖą▓ąĮąŠčüčéčīčÄ ą┐čĆąŠą▓ąŠą┤ąŠą▓ čłąĖąĮčŗ (čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüą▓čÅąĘą░ąĮčŗ čü ą┤ą╗ąĖąĮąŠą╣ čłąĖąĮčŗ ąĖ ąĄčæ čäąĖąĘąĖč湥čüą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ). ą×ą▒čŗčćąĮąŠ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čćą░čüč鹊č鹥 100 ą║ąōčå. ąØą░čłą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ DS1307 čéą░ą║ąČąĄ ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮą░ ąĮą░ čŹč鹊ą╣ ąČąĄ čćą░čüč鹊č鹥 100 ą║ąōčå.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ čŹč鹊čé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆčÅą┤ čćą░čüč鹊čé, čłąĖąĮą░ I2C čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ąĖ ąĮąĄ ą┐čĆąĖą▓čÅąĘą░ąĮąĮąŠą╣ ąČąĄčüčéą║ąŠ ą║ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ. ąó. ąĄ. čłąĖąĮą░ I2C ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą╗čÄą▒ąŠą╣, ą┤ą░ąČąĄ čüą░ą╝ąŠą╣ ąĮąĖąĘą║ąŠą╣ čćą░čüč鹊č鹥, čćč鹊 ą▓ąĄčüčīą╝ą░ čāą┐čĆąŠčēą░ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čłąĖąĮčŗ ą▓ čüąĖčüč鹥ą╝ą░čģ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ (bit-bang) čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ SDA ąĖ SCL č湥čĆąĄąĘ ą┐ąŠčĆčéčŗ GPIO.
ąśą╝ąĄąĄčéčüčÅ 2 čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░ ATmega, ą║ąŠč鹊čĆčŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčé čćą░čüč鹊č鹊ą╣ SCL: čĆąĄą│ąĖčüčéčĆčŗ TWSR ąĖ TWBR. ąĀąĄą│ąĖčüčéčĆ TWSR čŹč鹊 čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ TWI (TWI status register), ąĖ ąŠąĮ čüąŠą┤ąĄčƹȹĖčé ą▒ąĖčéčŗ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ (čé. ąĄ. ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ). ą¤čĆąĄčüą║ą░ą╗ąĄčĆ ą┤ąĄą╗ąĖčé čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā CPU, ąĖ čŹčéąĖą╝ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā SCL (ąŠčé ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąĘą░ą▓ąĖčüąĖčé čĆą░ą▒ąŠčćą░čÅ čćą░čüč鹊čéą░ TWI). ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328 čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čćą░čüč鹊č鹥 16 ą£ąōčå (ą▓ąŠąĘą╝ąŠąČąĮąŠ, čŹč鹊 čüą░ą╝ą░čÅ ą┐ąŠą┐čāą╗čÅčĆąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮą░ ą┐ą╗ą░čéą░čģ Arduino). ą×ą┤ąĮą░ą║ąŠ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ, ą┐čĆąŠ ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ ą╝ąŠąČąĮąŠ ąĘą░ą▒čŗčéčī, ą┐ąŠč鹊ą╝čā čćč鹊 ąĄčēąĄ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéčīčÄ TWBR (TWI bit-rate register). ą¦ą░čüč鹊čéą░ SCL čÅą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ ąŠčé čćą░čüč鹊čéčŗ frequency CPU ąĖ ąĘąĮą░č湥ąĮąĖčÅ ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ, ąĖ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąĄ:
F_SCL (ą▓ ą£ąōčå) = F_CPU/(16+2(TWBR))
ąÆ čŹč鹊ą╣ č乊čĆą╝čāą╗ąĄ, ą║ą░ą║ ąÆčŗ čāąČąĄ ą┤ąŠą│ą░ą┤ą░ą╗ąĖčüčī, F_CPU čŹč鹊 čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ CPU, ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ 16 ą£ąōčå. ąśąĘ č乊čĆą╝čāą╗čŗ ą╝ąŠąČąĮąŠ ą▓čŗą▓ąĄčüčéąĖ č乊čĆą╝čāą╗čā ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ TWBR ą┤ą╗čÅ ąĮčāąČąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ SCL:
TWBR = ((F_CPU/F_SCL)-16)/2
ą¤ąŠ čŹč鹊ą╣ č乊čĆą╝čāą╗ąĄ ą┤ą╗čÅ čćą░čüč鹊čéčŗ F_SCL= 100 ą║ąōčå (čé. ąĄ. 0.1 ą£ąōčå ) ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ TWBR ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī:
((16/0.1)-16)/2 = (160-16)/2 = 72
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąŠčüč鹊ą╣ ą║ąŠą┤ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ TWI.
#define F_CPU 16000000L // ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ CPU čĆą░ą▓ąĮą░ 16 ą£ąōčå
#define F_SCL 100000L // ą¦ą░čüč鹊čéą░ I2C 100 ą║ąōčå
void I2C_Init()
// ąØą░ čćą░čüč鹊č鹥 16 ą£ąōčå, čćą░čüč鹊čéą░ SCL ą▒čāą┤ąĄčé 16/(16+2(TWBR)), ąĄčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī
// ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ ą▓ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąĄ (ą┐čĆąĖ TWSR == 0).
// ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ą╗čÅ 100 ą║ąōčå SCL ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ TWBR čĆą░ą▓ąĮąŠ:
// ((F_CPU/F_SCL)-16)/2 = ((16/0.1)-16)/2 = 144/2 = 72.
{
// ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ 1 (ąĮąĄčé ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ F_CPU):
TWSR = 0;
// ąĮą░čüčéčĆąŠą╣ą║ą░ čćą░čüč鹊čéčŗ SCL:
TWBR = ((F_CPU/F_SCL)-16)/2; // == 72
}
[ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ I2C ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā]
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą║čĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ master -> slave.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĖąČąĄ ą▓čüčéčĆąĄčéčÅčéčüčÅ ąĮąĄą║ąŠč鹊čĆčŗąĄ č鹥čĆą╝ąĖąĮčŗ, ą║ąŠč鹊čĆčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą▒čāą┤čāčé ąĮąŠą▓čŗą╝ąĖ ą┤ą╗čÅ ąÆą░čü: Start Condition, Stop Condition, ACK ąĖ čé. ą┐. ąŁč鹊 ą┐čĆąŠčüč鹊 ąĮąĄą║ąĖąĄ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ čüąĖą│ąĮą░ą╗čŗ ąĮą░ čłąĖąĮąĄ, ąĘą░ą┤ą░ą▓ą░ąĄą╝čŗą╝ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅą╝ąĖ ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčÅą╝ąĖ čüą╝ąĄąĮčŗ čāčĆąŠą▓ąĮąĄą╣ čüąĖą│ąĮą░ą╗ąŠą▓ SDA ąĖ SCL. ąśą£ąźą× ąĮąĄčé čüą╝čŗčüą╗ą░ ą▓ą┤ą░ą▓ą░čéčīčüčÅ ą▓ čćčĆąĄąĘą╝ąĄčĆąĮčŗąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ, ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ąŠąĮąĖą╝ą░čéčī ąŠčüąĮąŠą▓ąĮąŠąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖčģ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ. ąÜąŠą╝čā ąĮčāąČąĮčŗ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ, čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ ąĮą░ ą░ąĮą│ą╗ąĖą╣čüą║ąŠą╝ [4] (ąĮą░ čĆčāčüčüą║ąŠą╝ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ čģčāąČąĄ).
Start Condition: čüąŠčüč鹊čÅąĮąĖąĄ ąĮą░čćą░ą╗ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐ąŠ čłąĖąĮąĄ. ą©ąĖąĮą░ ąĘą░ąĮąĖą╝ą░ąĄčéčüčÅ ą┐ą░čĆąŠą╣ master/slave ąĮą░ ą▓čĆąĄą╝čÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐ąŠ čłąĖąĮąĄ.
Stop Condition: čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐ąŠ čłąĖąĮąĄ, čłąĖąĮą░ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ.
ACK: ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ.
NACK: ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (čüąĖą│ąĮą░ą╗ ąŠ č鹊ą╝, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĄąĮą░).
data transfer: čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
1. ą£ą░čüč鹥čĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé Start Condition, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ čüčéą░čéčāčüą░ 0x08.
2. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą░ą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (slave address = 0xd0), DS1307 ąŠčéą▓ąĄčćą░ąĄčé ACK, ą║ąŠą┤ čüčéą░čéčāčüą░ 0x18.
3. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ, DS1307 ąŠčéą▓ąĄčćą░ąĄčé ACK, ą║ąŠą┤ čüčéą░čéčāčüą░ 0x28.
4. ą£ą░čüč鹥čĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé Stop Condition, ą║ąŠą┤ čüčéą░čéčāčüą░ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ.
ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ą▒ąĖčé ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ready bit) čĆąĄą│ąĖčüčéčĆąĄ TWCR ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0, ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. ąöą░ąĮąĮčŗąĄ čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓ ą▒ą░ą╣čé ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ/ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ č湥čĆąĄąĘ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ TWDR. ąŻčüą╗ąŠą▓ąĖčÅ start, stop ąĖ data transfer čāą║ą░ąĘčŗą▓ą░čÄčéčüčÅ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ TWCR. ąś ą║ąŠą┤čŗ čüčéą░čéčāčüą░ ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ TWSR. ąöą░ą▓ą░ą╣č鹥 ą┐ąŠčüą╝ąŠčéčĆąĖą╝ ąĮą░ ą║ąŠą┤, ąĖ čüčĆą░ą▓ąĮąĖą╝ ąĄą│ąŠ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝. ąÆąŠčé čéą░ą║ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ start condition:
#define TW_START 0xA4 // ąŠčéą┐čĆą░ą▓ą║ą░ start condition (TWINT,TWSTA,TWEN)
#define TW_READY (TWCR & 0x80) // TWI ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (TWINT ą▓ąĄčĆąĮčāą╗čüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1)
#define TW_STATUS (TWSR & 0xF8) // ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čüčéą░čéčāčüą░
byte I2C_Start()// ąōąĄąĮąĄčĆą░čåąĖčÅ start condition ą┐ąŠ čłąĖąĮąĄ I2C.
{
TWCR = TW_START; // ąŠčéą┐čĆą░ą▓ą║ą░ send
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ
return (TW_STATUS==0x08); // ą▓ąŠąĘą▓čĆą░čé 1, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ą╣ą┤ąĄąĮąŠ, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čé 0
}
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ start ąĘą░ą│čĆčāąĘąĖč鹥 ą▓ TWCR ąĘąĮą░č湥ąĮąĖąĄ 0xA4 ąĖ ąČą┤ąĖč鹥. ą¤ąŠč湥ą╝čā ąĖą╝ąĄąĮąĮąŠ 0xA4? ąÆ ą┤ą▓ąŠąĖčćąĮąŠą╝ ą║ąŠą┤ąĄ čŹč鹊 ą▒čāą┤ąĄčé 10100100. ąóčĆąĖ ąĄą┤ąĖąĮąĖčćą║ąĖ ą▓ čŹč鹊ą╝ ą║ąŠą┤ąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą▒ąĖčéą░ą╝ TWINT, TWSTA ąĖ TWEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąŁčéąĖ ą▒ąĖčéčŗ čĆą░ąĘčĆąĄčłą░čÄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ TWI, start condition, ąĖ ą▓ąĄčüčī ą╝ąŠą┤čāą╗čī TWI. ąÆčŗ ą▓ąŠąĘą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĖč鹥 ą│ą┤ąĄ-ąĮąĖą▒čāą┤čī ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░čģ ą║ąŠą┤ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čéą░ą║ąŠą│ąŠ: TWCR = (1 << TWINT) | (1 << TWSTA) | (1 << TWEN). ąÆąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 čŹč鹊 "čüą░ą╝ąŠą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗą╣" ą║ąŠą┤, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊čé ą┐čĆąĖąĄą╝, ąĄčüą╗ąĖ ąŠąĮ ąÆą░ą╝ ą┐ąŠą┤čģąŠą┤ąĖčé. ąöą╗čÅ ą┐čĆąŠčüč鹊čéčŗ ąĘą┤ąĄčüčī ą▒čāą┤ąĄčé ą┐čĆąŠčüč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ąŠą┤ 0xA4.
ąöą░ą╗ąĄąĄ ąĮčāąČąĮąŠ ą┐ąŠčüą╗ą░čéčī ą░ą┤čĆąĄčü ą┤ą╗čÅ č鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ slave, čü ą║ąŠč鹊čĆčŗą╝ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąŠą▒ą╝ąĄąĮ. ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ą┤ą╗čÅ DS1307 čŹč鹊čé ą░ą┤čĆąĄčü ą▓čüąĄą│ą┤ą░ 0xd0. ąÆąŠčé ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüčŗą╗ą░ąĄčé ą░ą┤čĆąĄčü, ąĘą┤ąĄčüčī ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą░ą┤čĆąĄčü DS1307 ą▓ čĆąĄą│ąĖčüčéčĆąĄ TWDR, ą┤ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠčüą╗ą░čéčī ą░ą┤čĆąĄčü č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ TWCR, ąĖ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čåąĖą║ą╗ ąŠąČąĖą┤ą░ąĮąĖčÅ:
#define DS1307 0xD0 // ą░ą┤čĆąĄčü ą┐ąŠ čłąĖąĮąĄ I2C ą┤ą╗čÅ DS1307 RTC
#define TW_SEND 0x84 // ą║ąŠą╝ą░ąĮą┤ą░ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ (TWINT,TWEN)
byte I2C_SendAddr(addr)// ą¤ąŠčüą╗ą░čéčī ą░ą┤čĆąĄčü čłąĖąĮčŗ ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
{
TWDR = addr; // ąĘą░ą│čĆčāąĘą║ą░ ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░
TWCR = TW_SEND; // ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ąĄą│ąŠ
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ
return (TW_STATUS==0x18); // ą▓ąŠąĘą▓čĆą░čé 1, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ą╣ą┤ąĄąĮąŠ, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čé 0
}
ąĪą╗ąĄą┤čāčÄčēąĄąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ čüąŠčüč鹊ąĖčé ą▓ ąŠčéą┐čĆą░ą▓ą║ąĄ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ, čćč鹊 ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆą░ą║čéąĖč湥čüą║ąĖ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ą░ą┤čĆąĄčüą░. ą×ą┤ąĮą░ą║ąŠ ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗą╣ ą║ąŠą┤ čüčéą░čéčāčüą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤čĆčāą│ąĖą╝:
byte I2C_Write (byte data)
// ą×čéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā.
{
TWDR = data; // ąĘą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ
TWCR = TW_SEND; // ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ąĖčģ
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ
return (TW_STATUS!=0x28); // ą▓ąŠąĘą▓čĆą░čé 1, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ą╣ą┤ąĄąĮąŠ, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čé 0
}
ąÜą░ą║ ą▓ąĖą┤ąĖč鹥, ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ DS1307 ą╝čŗ ą┤ą▓ą░ąČą┤čŗ ą▓čŗą┐ąŠą╗ąĮąĖą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÄ ąĘą░ą┐ąĖčüąĖ: ąŠą┤ąĖąĮ čĆą░ąĘ ą┤ą╗čÅ ą░ą┤čĆąĄčüą░ RTC, ąĖ ą▓č鹊čĆąŠą╣ čĆą░ąĘ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ.
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čłą░ą│ - ąŠčéą┐čĆą░ą▓ąĖčéčī Stop condition. ąŚą┤ąĄčüčī ąĮčāąČąĮąŠ ą┐čĆąŠčüč鹊 ąĘą░ą┐ąĖčüą░čéčī ą▓ čĆąĄą│ąĖčüčéčĆ ą║ąŠą╝ą░ąĮą┤ ąĘąĮą░č湥ąĮąĖąĄ 0x94. ąś čüąĮąŠą▓ą░ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčéčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ TWI, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖ ą▒ąĖčé stop. ąÆą╝ąĄčüč鹊 čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī (1 << TWINT) | (1 << TWEN) | (1 << TWSTO). ąöą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą║ąŠą╝ą░ąĮą┤čŗ ąŠčüčéą░ąĮąŠą▓ą░ ąĮąĄ ąĮą░ą┤ąŠ ąČą┤ą░čéčī ąĖ ą┐čĆąŠą▓ąĄčĆčÅčéčī ą║ąŠą┤ čüčéą░čéčāčüą░, ą┐ąŠčŹč鹊ą╝čā ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąŠčüč鹊ą╣ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╣ (inline) ą╝ą░ą║čĆąŠčü:
#define TW_STOP 0x94 // ą┐ąŠčüą╗ą░čéčī stop condition (TWINT,TWSTO,TWEN)
#define I2C_Stop() TWCR = TW_STOP // inline-ą╝ą░ą║čĆąŠčü ą┤ą╗čÅ stop condition
ąÜčĆą░čéą║ąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ ą┐ąŠ ą┐čĆąŠą▓ąĄčĆą║ąĄ ą║ąŠą┤ąŠą▓ čüčéą░čéčāčüą░: ą┤ą╗čÅ ą┐čĆąŠčüč鹥ą╣čłąĄą│ąŠ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ ą┐čĆąĖčüčāčéčüčéą▓ąĖąĄ ąŠąČąĖą┤ą░ąĄą╝ąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĮą░ čłąĖąĮąĄ, ą╝ąŠąČąĮąŠ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī čĆąĄąĘčāą╗čīčéą░čéčŗ ą▓ąŠąĘą▓čĆą░čéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝.
[ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ I2C ąĮą░ ą┐čĆąĖąĄą╝]
ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą╗ąŠąČąĮąĄąĄ: čüąĮą░čćą░ą╗ą░ čéčĆąĄą▒čāąĄčéčüčÅ čüą┤ąĄą╗ą░čéčī ąĘą░ą┐ąĖčüčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čāą║ą░ąĘą░č鹥ą╗čī ą░ą┤čĆąĄčüą░, ąĖ ąĘą░č鹥ą╝ ą┐čĆąŠčćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā (ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čŹč鹊 ąĮąĄ č鹊čé ąČąĄ ą░ą┤čĆąĄčü, čćč鹊 ąĖ ą░ą┤čĆąĄčü ą┐ąŠ čłąĖąĮąĄ I2C). ąÆąŠčé ą║čĆą░čéą║ąŠąĄ čüąŠą┤ąĄčƹȹ░ąĮąĖąĄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ ąŠčé slave-čāčüčéčĆąŠą╣čüčéą▓ą░ čłąĖąĮčŗ.
1. ą£ą░čüč鹥čĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé Start Condition, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ čüčéą░čéčāčüą░ 0x08.
2. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą░ą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (slave address = 0xd0), DS1307 ąŠčéą▓ąĄčćą░ąĄčé ACK, ą║ąŠą┤ čüčéą░čéčāčüą░ 0x18.
3. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą░ą┤čĆąĄčü ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ (čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ RTC), DS1307 ąŠčéą▓ąĄčéąĖčé ACK, ą║ąŠą┤ čüčéą░čéčāčüą░ 0x28.
4. ą£ą░čüč鹥čĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą▓č鹊čĆąŠą╣ Start Condition, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé čĆąĄčüčéą░čĆčé, ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ čüčéą░čéčāčüą░ 0x10.
5. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą░ą┤čĆąĄčü ą┐ąŠ čłąĖąĮąĄ ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą╗čÄčü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé čćč鹥ąĮąĖčÅ (0xd1), DS1307 ąŠčéą▓ąĄčéąĖčé ACK, ą║ąŠą┤ čüčéą░čéčāčüą░ 0x40.
6. ą£ą░čüč鹥čĆ ąĘą░ą┐čĆąŠčüąĖčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ čü NACK, DS1307 ą▓ąĄčĆąĮąĄčé ą▒ą░ą╣čé, ą║ąŠą┤ čüčéą░čéčāčüą░ 0x58.
7. ą£ą░čüč鹥čĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé Stop Condition, ą║ąŠą┤ čüčéą░čéčāčüą░ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ.
ąöą╗čÅ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖčÅ čćč鹥ąĮąĖčÅ ąĮčāąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī č鹊ą╗čīą║ąŠ ąĄčēąĄ ąŠą┤ąĮčā čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮą░ čłą░ą│ąĄ 6. ą×ąĮą░ ą▓čŗą│ą╗čÅą┤ąĖčé ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ. NACK ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ ąŠą┤ąĮąŠą│ąŠ (ąĖą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ) ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ.
#define TW_NACK 0x84 // čćč鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čü NACK (čćč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čŹč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé)
#define READ 1
byte I2C_ReadNACK () // čćč鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ ąŠčé ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░
{
TWCR = TW_NACK; // NACK ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé,
// ą▒ąŠą╗čīčłąĄ ą▒ą░ą╣čé ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĮąĄ ą▒čāą┤ąĄčé.
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ
return TWDR; // ą▓ąŠąĘą▓čĆą░čé ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░
}
ąĢčüą╗ąĖ čüąŠąĄą┤ąĖąĮąĖčéčī ą▓čüąĄ ą▓ą╝ąĄčüč鹥, ą┐ąŠą╗čāčćą░čéčüčÅ ą┤ą▓ąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ čćą░čüąŠą▓ DS1307:
void I2C_WriteRegister(byte deviceRegister, byte data)
{
I2C_Start();
I2C_SendAddr(DS1307); // ą┐ąŠčüą╗ą░čéčī ą░ą┤čĆąĄčü čłąĖąĮčŗ
I2C_Write(deviceRegister); // ą┐ąŠčüą╗ą░čéčī 1 ą▒ą░ą╣čé - ą░ą┤čĆąĄčü ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ
I2C_Write(data); // ą┐ąŠčüą╗ą░čéčī 2 ą▒ą░ą╣čé - ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĮą░ą┤ąŠ ąĘą░ą┐ąĖčüą░čéčī
I2C_Stop();
}
byte I2C_ReadRegister(byte busAddr, byte deviceRegister)
{
byte data = 0;
I2C_Start();
I2C_SendAddr(busAddr); // ą┐ąŠčüą╗ą░čéčī ą░ą┤čĆąĄčü čłąĖąĮčŗ
I2C_Write(deviceRegister); // čāčüčéą░ąĮąŠą▓ą║ą░ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čĆąĄą│ąĖčüčéčĆ
I2C_Start();
I2C_SendAddr(busAddr+READ); // ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ
data = I2C_ReadNACK(); // čćč鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░
I2C_Stop();
return data;
}
[ąĀą░ą▒ąŠčéą░ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ DS1307]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTC) ąĮą░ ąŠčüąĮąŠą▓ąĄ DS1307 ąŠč湥ąĮčī ą┐čĆčÅą╝ąŠą╗ąĖąĮąĄą╣ąĮąŠąĄ ąĖ ą┐čĆąŠčüč鹊ąĄ. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ čüąŠą┤ąĄčƹȹĖčé čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ, ąĖąĘ ą║ąŠč鹊čĆčŗčģ ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖčÅ čüąĄą║čāąĮą┤ (seconds), ą╝ąĖąĮčāčé (minutes), čćą░čüąŠą▓ (hours), ą┤ąĮąĄą╣ (days), ą╝ąĄčüčÅčåąĄą▓ (months) ąĖ ą╗ąĄčé (years). ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ąÆčŗ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄč鹥, ą║ąŠą│ą┤ą░ čģąŠčéąĖč鹥 čāčüčéą░ąĮąŠą▓ąĖčéčī č鹥ą║čāčēąĄąĄ ą▓čĆąĄą╝čÅ čćą░čüąŠą▓, ąĖ čćąĖčéą░ąĄč鹥, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī č鹥ą║čāčēąĄąĄ ą▓čĆąĄą╝čÅ. ąØąĖąČąĄ ą┤ą░ąĮ čüą┐ąĖčüąŠą║ ą░ą┤čĆąĄčüąŠą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓.
#define SECONDS_REGISTER 0x00
#define MINUTES_REGISTER 0x01
#define HOURS_REGISTER 0x02
#define DAYOFWK_REGISTER 0x03
#define DAYS_REGISTER 0x04
#define MONTHS_REGISTER 0x05
#define YEARS_REGISTER 0x06
ąĢčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čüą╗čāčćą░ąĄą▓. ąĀąĄą│ąĖčüčéčĆ čüąĄą║čāąĮą┤ čüąŠą┤ąĄčƹȹĖčé čäą╗ą░ą│ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░/ąŠčüčéą░ąĮąŠą▓ą║ąĖ čćą░čüąŠą▓. ąś čĆąĄą│ąĖčüčéčĆ čćą░čüąŠą▓ ąĖą╝ąĄąĄčé čäą╗ą░ą│ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ č乊čĆą╝ą░čéą░ ą▓čĆąĄą╝ąĄąĮąĖ čüčāč鹊ą║: 12/24 čćą░čüąŠą▓ąŠą╣ č乊čĆą╝ą░čé ąĖ AM/PM. ąÜąŠčĆąŠč湥 ą│ąŠą▓ąŠčĆčÅ, ą┐ąŠą╗čāč湥ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ą┐čĆąŠčüč鹊ą╝ čćč鹥ąĮąĖąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓.
void DS1307_GetTime(byte *hours, byte *minutes, byte *seconds)
// ą¤čĆąŠčåąĄą┤čāčĆą░ ą▓ąŠąĘą▓čĆą░čéąĖčé čćą░čüčŗ, ą╝ąĖąĮčāčéčŗ ąĖ čüąĄą║čāąĮą┤čŗ ą▓ č乊čĆą╝ą░č鹥 BCD.
{
*hours = I2C_ReadRegister(DS1307,HOURS_REGISTER);
*minutes = I2C_ReadRegister(DS1307,MINUTES_REGISTER);
*seconds = I2C_ReadRegister(DS1307,SECONDS_REGISTER);
if (*hours & 0x40) // čĆąĄąČąĖą╝ 12 čćą░čüąŠą▓:
*hours &= 0x1F; // ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą╝ą╗ą░ą┤čłąĖąĄ 5 ą▒ąĖčé (ą▒ąĖčé pm = temp & 0x20)
else
*hours &= 0x3F; // čĆąĄąČąĖą╝ 24 čćą░čüąŠą▓: ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą╝ą╗ą░ą┤čłąĖąĄ 6 ą▒ąĖčé
}
void DS1307_GetDate(byte *months, byte *days, byte *years)
// ą¤čĆąŠčåąĄą┤čāčĆą░ ą▓ąŠąĘą▓čĆą░čéąĖčé ą╝ąĄčüčÅčåčŗ, ą┤ąĮąĖ ąĖ ą│ąŠą┤ ą▓ č乊čĆą╝ą░č鹥 BCD.
{
*months = I2C_ReadRegister(DS1307,MONTHS_REGISTER);
*days = I2C_ReadRegister(DS1307,DAYS_REGISTER);
*years = I2C_ReadRegister(DS1307,YEARS_REGISTER);
}
void SetTimeDate()
// ą¤čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ąČąĄčüčéą║ąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ čćą░čüąŠą▓ ąĮą░ ą┤ą░čéčā 8/13/21013, ą▓čĆąĄą╝čÅ 8:51 PM
{
I2C_WriteRegister(DS1307,MONTHS_REGISTER, 0x08);
I2C_WriteRegister(DS1307,DAYS_REGISTER, 0x31);
I2C_WriteRegister(DS1307,YEARS_REGISTER, 0x13);
I2C_WriteRegister(DS1307,HOURS_REGISTER, 0x08+0x40); // ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ 0x40 ą┤ą╗čÅ PM
I2C_WriteRegister(DS1307,MINUTES_REGISTER, 0x51);
I2C_WriteRegister(DS1307,SECONDS_REGISTER, 0x00);
}
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čéą░ą║ąČąĄ ąĄčüčéčī ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗą╣ ą╝ąĄč鹊ą┤ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą▓čĆąĄą╝ąĄąĮąĖ - čü ą┐ąŠą╝ąŠčēčīčÄ čĆąĄąČąĖą╝ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą╝ą░čüčüąĖą▓čā čĆąĄą│ąĖčüčéčĆąŠą▓. ąöą╗čÅ čŹč鹊ą│ąŠ ą▓ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ čćč鹥ąĮąĖčÅ ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī čćč鹥ąĮąĖąĄ ąĮąĄ čü čüąĖą│ąĮą░ą╗ąŠą╝ NACK, ą░ čü čüąĖą│ąĮą░ą╗ąŠą╝ ACK, čćąĖčéą░čÅ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▓čüąĄ 7 čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ąĖ č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī čćč鹥ąĮąĖąĄ čü NACK ąĖ ą▓čŗą┤ą░čéčī stop.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ ąĮą░čćą░čéčī čćč鹥ąĮąĖąĄ I2C čü čĆąĄą│ąĖčüčéčĆą░ čüąĄą║čāąĮą┤ čü ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ą░ą┤čĆąĄčüąŠą╝ 0x00. ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čāą║ą░ąĘą░č鹥ą╗čī ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆą░ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ DS1307 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĖ čüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ą▒ąĄąĘ čāčüčéą░ąĮąŠą▓ą║ąĖ čāą║ą░ąĘą░č鹥ą╗čÅ ą┐ąŠąĘą▓ąŠą╗ąĖčé ą┐čĆąŠčćąĖčéą░čéčī čüą╗ąĄą┤čāčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ąŠąČąĮąŠ čüčĆą░ąĘčā ą┐čĆąŠčćąĖčéą░čéčī ą▓čüąĄ 7 čĆąĄą│ąĖčüčéčĆąŠą▓ ą▒ąĄąĘ ąŠčüčéą░ąĮąŠą▓ą║ąĖ, čćč鹊 čāčüą║ąŠčĆąĖčé ą┤ąŠčüčéčāą┐ ąĖ 菹║ąŠąĮąŠą╝ąĖčé ą╝ąĄčüč鹊 ą┐ąŠą┤ ą║ąŠą┤. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą▒ą╗ąŠčćąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ čćąĖčéą░ąĄčé čüčĆą░ąĘčā 8 čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐ąŠą┤čĆčÅą┤ - ąŠčé čĆąĄą│ąĖčüčéčĆą░ čü ąĮąŠą╝ąĄčĆąŠą╝ 0 (čĆąĄą│ąĖčüčéčĆ čüąĄą║čāąĮą┤) ą┤ąŠ čĆąĄą│ąĖčüčéčĆą░ čü ąĮąŠą╝ąĄčĆąŠą╝ 7 (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ) ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ.
I2C_Start(DS1307);
I2C_Write(SECONDS_REGISTER); // čāčüčéą░ąĮąŠą▓ą║ą░ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą┐ąĄčĆą▓čŗą╣ čĆąĄą│ąĖčüčéčĆ
I2C_Start(DS1307+READ); // ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ
u8 regcnt;
for (regcnt=SECONDS_REGISTER;regcnt<CONTROL_REGISTER;regcnt++)
rtc.data[regcnt] = I2C_ReadACK();
rtc.data[regcnt] = I2C_ReadNACK();
I2C_Stop();
ąöą╗čÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ: ą▓čüčÅ čŹčéą░ ą▒ą╗ąŠčćąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ąĮąĖą╝ą░ąĄčé 1 ą╝čü, č鹊ą│ą┤ą░ ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ ą╝čŗ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ąĖ ą┐čĆąŠčćąĖčéą░čéčī ą▓čüąĄ čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ (ą▓ąŠčüčīą╝ąĖą║čĆą░čéąĮčŗą╝ ą▓čŗąĘąŠą▓ąŠą╝ I2C_ReadRegister), č鹊 ąĮą░ą╝ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ąŠčüčī ą▒čŗ ąŠą║ąŠą╗ąŠ 13 ą╝čü.
[ą¦č鹊 čéą░ą║ąŠąĄ č乊čĆą╝ą░čé BCD]
ąÆ ą║ą░ąČą┤ąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗąĄ čģčĆą░ąĮčÅčéčüčÅ ą▓ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠą╝ ą┤ą▓ąŠąĖčćąĮąŠ-ą┤ąĄčüčÅčéąĖčćąĮąŠą╝ č乊čĆą╝ą░č鹥 (Binary Coded Decimal, BCD). ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓ ą║ą░ąČą┤ąŠą╝ ą▒ą░ą╣č鹥 čģčĆą░ąĮąĖčéčüčÅ čüčĆą░ąĘčā 2 ą│ąŠč鹊ą▓čŗąĄ ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ čåąĖčäčĆčŗ, ą┐ąŠ ąŠą┤ąĮąŠą╣ ą▓ ą║ą░ąČą┤ąŠą╣ č鹥čéčĆą░ą┤ąĄ. ąÆ čüčéą░čĆčłąĄą╣ č鹥čéčĆą░ą┤ąĄ čģčĆą░ąĮąĖčéčüčÅ čüčéą░čĆčłą░čÅ čåąĖčäčĆą░, ąĖ ą▓ ą╝ą╗ą░ą┤čłąĄą╣ ą╝ą╗ą░ą┤čłą░čÅ čåąĖčäčĆą░.
ąØą░ą┐čĆąĖą╝ąĄčĆ, čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ čćąĖčüą╗ąŠ 36. ąĢčüą╗ąĖ ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░čéčī čŹč鹊 čćąĖčüą╗ąŠ ą▓ ąŠą▒čŗčćąĮąŠą╝ ą┤ą▓ąŠąĖčćąĮąŠą╝ č乊čĆą╝ą░č鹥, č鹊 ą┐ąŠą╗čāčćąĖčéčüčÅ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ čćąĖčüą╗ąŠ 0x24, ąĖą╗ąĖ ą▓ ą┤ą▓ąŠąĖčćąĮąŠą╝ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ 0010.0100. ąØąŠ ą▓ č乊čĆą╝ą░č鹥 BCD čćąĖčüą╗ąŠ 36 ą▒čāą┤ąĄčé ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąŠ ą║ą░ą║ 0011.0110. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čüčéą░čĆčłąĖčģ 4 ą▒ąĖčéą░čģ (čüčéą░čĆčłą░čÅ č鹥čéčĆą░ą┤ą░) čģčĆą░ąĮąĖčéčüčÅ čćąĖčüą╗ąŠ 0011 (ą┤ąĄčüčÅčéąĖčćąĮą░čÅ čåąĖčäčĆą░ 3), ąĖ ą▓ ą╝ą╗ą░ą┤čłąĖčģ 4 ą▒ąĖčéą░čģ (ą╝ą╗ą░ą┤čłą░čÅ č鹥čéčĆą░ą┤ą░) ąĮą░čģąŠą┤ąĖčéčüčÅ čćąĖčüą╗ąŠ 0110 (ą┤ąĄčüčÅčéąĖčćąĮą░čÅ čåąĖčäčĆą░ 6).

ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖą╣ BCD ąĮąĄčüą╗ąŠąČąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ą║ą░ąČą┤ą░čÅ čåąĖčäčĆą░ čćąĖčüą╗ą░ ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮą░ ąŠčéą┤ąĄą╗čīąĮčŗą╝ąĖ ą▒ąĖčéą░ą╝ąĖ. ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ čåąĖčäčĆ ąĮą░ 菹║čĆą░ąĮ LCD čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ LCD_Char():
void TwoDigits(byte data)
// ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ WriteDate() ąĖ WriteTime().
// ąØą░ ą▓čģąŠą┤ąĄ ąŠąĮą░ ą┐ąŠą╗čāčćą░ąĄčé 2 čåąĖčäčĆčŗ ą▓ č乊čĆą╝ą░č鹥 BCD, ąĖ ą▓čŗą▓ąŠą┤ąĖčé
// ąĖčģ ąĮą░ ą┤ąĖčüą┐ą╗ąĄą╣ LCD ą▓ č鹥ą║čāčēčāčÄ ą┐ąŠąĘąĖčåąĖčÄ ą║čāčĆčüąŠčĆą░.
{
byte temp = data>>4; // ą┐ąŠą╗čāčćąĖčéčī čüčéą░čĆčłąĖąĄ 4 ą▒ąĖčéą░
LCD_Char(temp+'0'); // ąŠč鹊ą▒čĆą░ąĘąĖčéčī čüčéą░čĆčłčāčÄ čåąĖčäčĆčā
data &= 0x0F; // ą┐ąŠą╗čāčćąĖčéčī ą╝ą╗ą░ą┤čłąĖąĄ 4 ą▒ąĖčéą░
LCD_Char(data+'0'); // ąŠč鹊ą▒čĆą░ąĘąĖčéčī ą╝ą╗ą░ą┤čłčāčÄ čåąĖčäčĆčā
}
void WriteDate()
{
byte months, days, years;
DS1307_GetDate(&months,&days,&years);
TwoDigits(months);
LCD_Char('/');
TwoDigits(days);
LCD_Char('/');
TwoDigits(years);
}
void WriteTime()
{
byte hours, minutes, seconds;
DS1307_GetTime(&hours,&minutes,&seconds);
TwoDigits(hours);
LCD_Char(':');
TwoDigits(minutes);
LCD_Char(':');
TwoDigits(seconds);
}
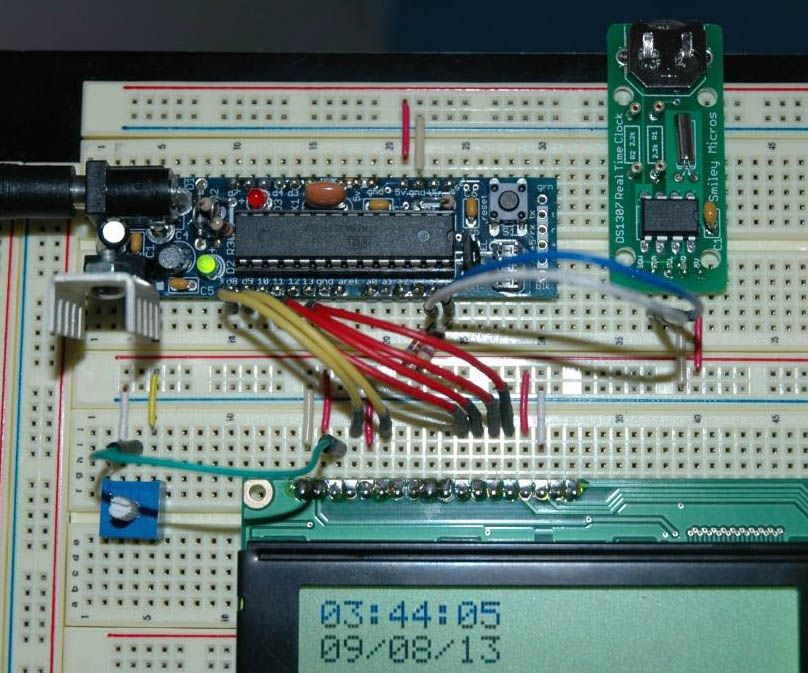
[ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠąĮčüčéčĆčāą║čåąĖą╣ čü čćą░čüą░ą╝ąĖ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ DS1307]
ą£ąŠąČąĮąŠ čüąŠą▒čĆą░čéčī ą╝ą░ą║ąĄčé ąĮą░ ą┐ą╗ą░č鹥 ą▒ąĄčüą┐ą░ąĄčćąĮąŠą│ąŠ ą╝ąŠąĮčéą░ąČą░ čéąĖą┐ą░ breadboard ąĖą╗ąĖ ąĮą░ ą┐čĆąŠčüč鹥ą╣čłąĄą╣ stripboard, ąĮąŠ ą╝ąŠąČąĮąŠ ą┐ąŠčüčéčāą┐ąĖčéčī ą┐čĆąŠčēąĄ, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ą░ą║ąĄčéąĮčŗąĄ ą┐ą╗ą░čéčŗ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Arduino, DC boardino, AVR-USB-MEGA16, metaboard ąĖ čé. ą┐. ąØą░ ą┐ą╗ą░čéą░čģ čéąĖą┐ą░ AVR-USB-MEGA16 ąĖ metaboard ąĄčüčéčī ą┤ą░ąČąĄ ą╝ą░ą║ąĄčéąĮąŠąĄ ą┐ąŠą╗ąĄ, ą│ą┤ąĄ ąÆčŗ ą╝ąŠąČąĄč鹥 čüą┐ą░čÅčéčī ąĮąĄčüą╗ąŠąČąĮčāčÄ čüčģąĄą╝čā ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čćąĖą┐ą░ DS1307 ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā.

ąØą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 AVR-USB-MEGA16 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega32A. ą¤ąŠčĆčé TWI čā ąĮąĄą│ąŠ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ ąĮąŠąČą║ą░ą╝ PC0 (SCL) ąĖ PC1 (SDA). ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą╝ą░ą║ąĄčéąĮčāčÄ ą┐ą╗ą░čéčā metaboard ąĖą╗ąĖ Arduino, č鹊 ąĮą░ ąĮąĖčģ ąŠą▒čŗčćąĮąŠ čüč鹊ąĖčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328. ą¤ąŠčĆčé TWI čā čŹč鹊ą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ ąĮąŠąČą║ą░ą╝ PC5 (SCL) ąĖ PC4 (SDA).
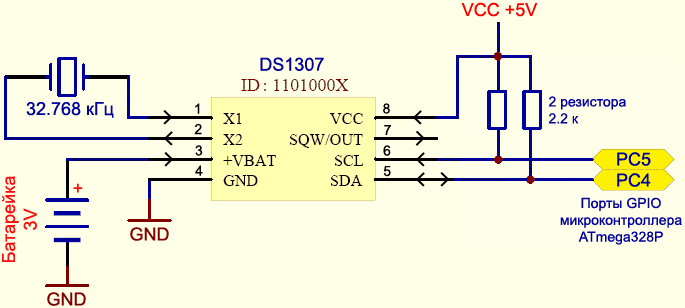
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄ ą┐čŗčéą░ą╣č鹥čüčī ąĘą░ą┐čāčüčéąĖčéčī DS1307 ą▒ąĄąĘ ą▒ą░čéą░čĆąĄą╣ą║ąĖ! ąØą░ ą▓čŗą▓ąŠą┤ąĄ +VBAT ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 2 ą┤ąŠ 3.5 ą▓ąŠą╗čīčé, ąĖąĮą░č湥 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą╗ąĖą▒ąŠ čüąŠą▓čüąĄą╝ čĆą░ą▒ąŠčéą░čéčī ąĮąĄ ą▒čāą┤ąĄčé, ą╗ąĖą▒ąŠ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮąĄąĮą░ą┤ąĄąČąĮąŠ (ą┐čĆąŠą▓ąĄčĆąĖą╗ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ).
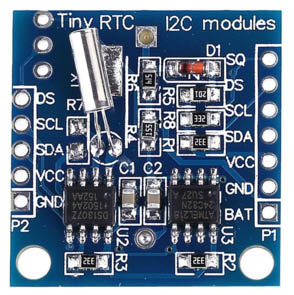
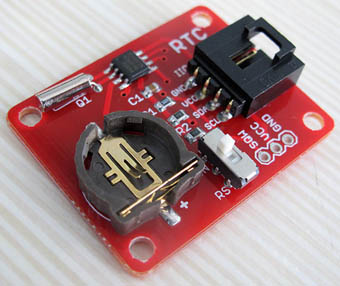
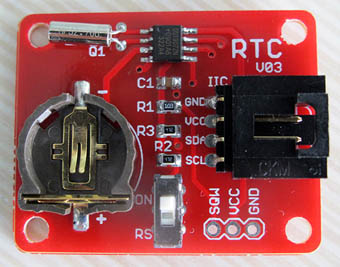
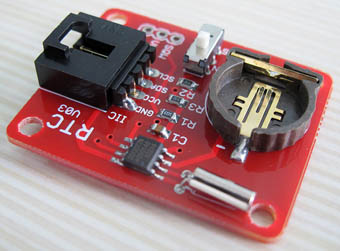
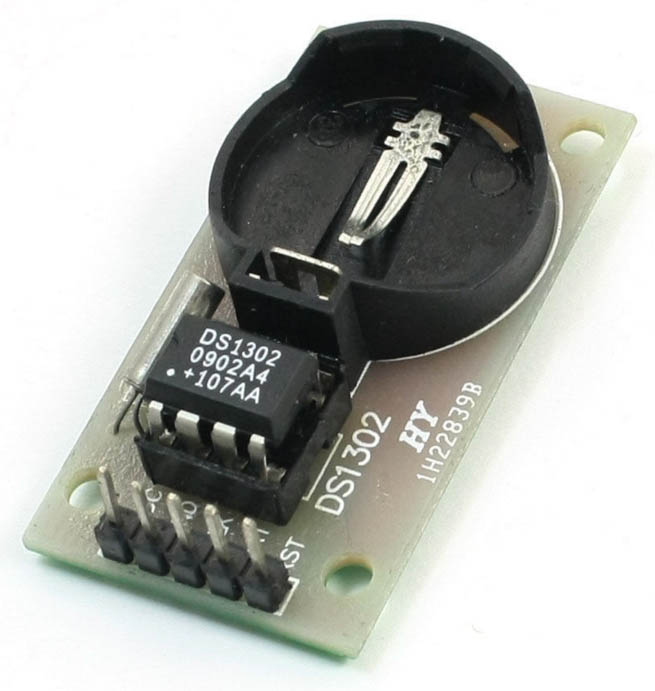
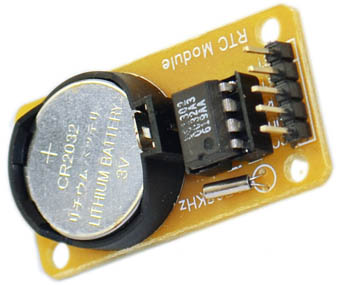
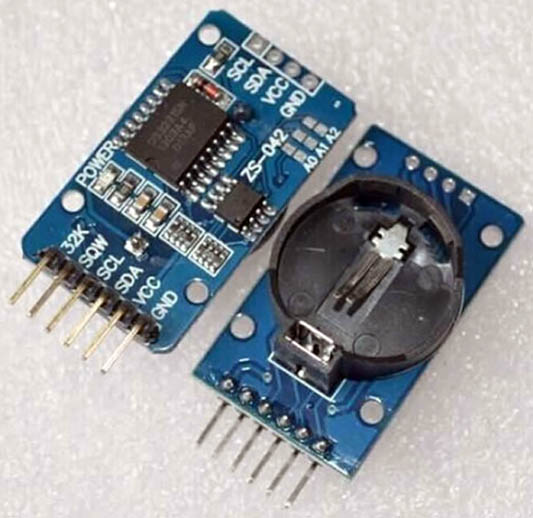
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čéą░ą║ąČąĄ ą┐ąŠą║čāą┐ą░čéčī čćąĖą┐ DS1307 ąĖ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┤ąĄčéą░ą╗ąĖ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ čüčģąĄą╝čŗ (ąĮą░ą│čĆčāąĘąŠčćąĮčŗąĄ čĆąĄąĘąĖčüč鹊čĆčŗ, ą║ą▓ą░čĆčå, čüąŠą║ąĄčé ą┤ą╗čÅ ą▒ą░čéą░čĆąĄą╣ą║ąĖ). ąÜą░ą║ ą▓ą░čĆąĖą░ąĮčé, ą╝ąŠąČąĮąŠ ą║čāą┐ąĖčéčī ą│ąŠč鹊ą▓čŗąĄ ą╝ąŠą┤čāą╗ąĖ RTC ąĮą░ čüą░ą╣čéą░čģ čéąĖą┐ą░ dx.com, aliexpress ąĖą╗ąĖ ebay. ąÆąŠčé ą┐čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ą╝ąŠą┤čāą╗ąĄą╣:
ąÜą░ą║ ą▓ą░čĆąĖą░ąĮčé, ą╝ąŠąČąĮąŠ ą║čāą┐ąĖčéčī ą│ąŠč鹊ą▓čŗąĄ ą╝ąŠą┤čāą╗ąĖ RTC ąĮą░ čüą░ą╣čéą░čģ čéąĖą┐ą░ dx.com, aliexpress ąĖą╗ąĖ ebay. ąÆąŠčé ą┐čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ą╝ąŠą┤čāą╗ąĄą╣ (ą▓ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░čģ čüą┐ąŠą╣ą╗ąĄčĆąŠą▓ ą║ą╗čÄč湥ą▓čŗąĄ čüą╗ąŠą▓ą░ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░):
ą¦č鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čéą░ą║ąŠą╣ ą╝ąŠą┤čāą╗čī ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā, ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čüąĄą│ąŠ ą╗ąĖčłčī 4 ą┐čĆąŠą▓ąŠą┤ą░ - GND, +5V, SCL ąĖ SDA. ąÆ čéą░ą▒ą╗ąĖčåąĄ ąĖ ąĮą░ č乊č鹊 ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ čéą░ą║ąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 AVR-USB162MU (AVR-ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čéąĖą┐ą░ AT90USB162).
ą¤čĆąĖ čéą░ą║ąŠą╝ ą┐čĆąŠčüč鹊ą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąŠą╝ąĮąĖč鹥, čćč鹊 ą║ą░ąČą┤čŗą╣ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ SDA ąĖ SCL čéčĆąĄą▒čāąĄčé ąĮą░ą╗ąĖčćąĖčÅ ą▓ąĄčĆčģąĮąĖčģ ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (pull-up), ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī ą║ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ ą┐ąĖčéą░ąĮąĖčÅ (ą╗ąŠą│. 1). ą¤čĆąŠą▓ąĄčĆčīč鹥 ąÆą░čł ą╝ąŠą┤čāą╗čī RTC ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ čéą░ą║ąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓. ąĢčüą╗ąĖ čéą░ą║ąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ąĮąĄčé, č鹊 ąĖčģ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī. ą¤ąŠą┤ąŠą╣ą┤čāčé čĆąĄąĘąĖčüč鹊čĆčŗ ąĮą░ 2.2 ą║ą×ą╝ (čü čéčĆąĄą╝čÅ ą║čĆą░čüąĮčŗą╝ąĖ ą┐ąŠą╗ąŠčüą║ą░ą╝ąĖ), ąĮąŠ ąĮąŠą╝ąĖąĮą░ą╗ ąĮąĄ ą║čĆąĖčéąĖč湥ąĮ, ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą╗čÄą▒čŗąĄ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1.5 ą║ą×ą╝ .. 6.2 ą║ą×ą╝. ąØą░ č乊č鹊 ą┐ąŠą║ą░ąĘą░ąĮą░ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅ ą░ą▓č鹊čĆą░ [1], čüąŠą▒čĆą░ąĮąĮą░čÅ ąĮą░ ą┐ą╗ą░č鹥 breadboard ąĮą░ ąŠčüąĮąŠą▓ąĄ DC boardino.
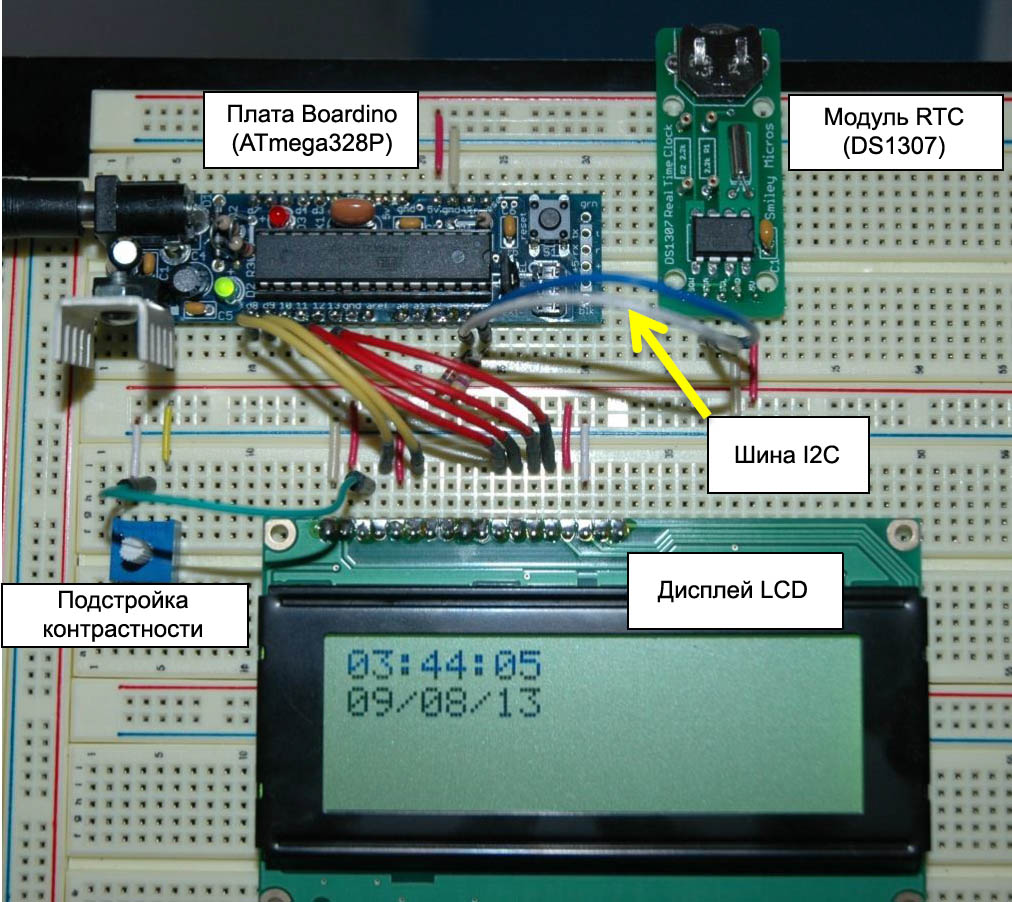
ą©ąĖąĮą░ I2C čĆą░ąĘą▓ąĄą┤ąĄąĮą░ ą▒ąĄą╗čŗą╝ (SDA) ąĖ ą│ąŠą╗čāą▒čŗą╝ (SCL) ą┐čĆąŠą▓ąŠą┤ą░ą╝ąĖ. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ pull-up čĆąĄąĘąĖčüč鹊čĆčŗ ąĮą░ 4.7 ą║ą×ą╝, ą║ąŠč鹊čĆčŗąĄ čćą░čüčéąĖčćąĮąŠ ąĘą░ą║čĆčŗčéčŗ ą║čĆą░čüąĮčŗą╝ąĖ ą┐čĆąŠą▓ąŠą┤ą░ą╝ąĖ. ąÆ ą║ą░č湥čüčéą▓ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ LCD ąĮą░ ąŠčüąĮąŠą▓ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ HD44780 (ą▓ čüčéą░čéčīąĄ [5] ą░ą▓č鹊čĆ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą┤ąĖčüą┐ą╗ąĄčÅ). ą¤ąŠą┤čüčéčĆąŠąĄčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ ąĮą░ 10 ą║ą×ą╝ čāą┐čĆą░ą▓ą╗čÅąĄčé čÅčĆą║ąŠčüčéčīčÄ ą┤ąĖčüą┐ą╗ąĄčÅ.
ąŁč鹊čé ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓ ą▓ąĖą┤ąĄ ą┐čĆąŠąĄą║čéą░ ą┤ą╗čÅ Atmel Studio 6 ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą▓ ą░čĆčģąĖą▓ąĄ ą┐ąŠ čüčüčŗą╗ą║ąĄ [6].
//-----------------------------------------------------------------------------
// i2c01: ąŁą║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ ATmega328 čćą░čüąŠą▓ DS1307 RTC
//
// ąÉą▓č鹊čĆ: Bruce E. Hall < bhall66@gmail.com >
// ąĪą░ą╣čé: w8bh.net
// ąÆąĄčĆčüąĖčÅ: 1.1
// ąöą░čéą░: 7 Sep 2013
// ą”ąĄą╗ąĄą▓ąŠą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ: ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328P
// ą»ąĘčŗą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ: C, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Atmel Studio 6
// ąĀą░ąĘą╝ąĄčĆ ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ ą┐čĆąŠčłąĖą▓ą║ąĖ: 1386 ą▒ą░ą╣čéą░ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ -O1
//
// ąØą░čüčéčĆąŠą╣ą║ąĖ čäčīčĹʹŠą▓: 8 ą£ąōčå čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čü 65 ą╝čü ąĘą░ą┤ąĄčƹȹ║ąŠą╣, čĆą░ąĘčĆąĄčłąĄąĮ SPI,
// ąŠčéą║ą╗čÄč湥ąĮąŠ ą┤ąĄą╗ąĄąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĮą░ 8.
// ---------------------------------------------------------------------------
// ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ:
#define F_CPU 16000000L // AVR CPU čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čćą░čüč鹊č鹥 16 ą£ąōčå
#define LED 5 // ąØą░ ą┐ą╗ą░č鹥 Boarduino čüą▓ąĄč鹊ą┤ąĖąŠą┤ LED ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ PB5
#define ClearBit(x,y) x &= ~_BV(y) // ą£ą░ą║čĆąŠčü, 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ cbi(x,y)
#define SetBit(x,y) x |= _BV(y) // ą£ą░ą║čĆąŠčü, 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ sbi(x,y)
// ---------------------------------------------------------------------------
// ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ čäą░ą╣ą╗čŗ
#include < avr/io.h > // ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ AVR
#include < util/delay.h > // ąöą╗čÅ čäčāąĮą║čåąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ _delay_ms
#include < string.h > // ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüčéčĆąŠą║
#include < stdlib.h >
// ---------------------------------------------------------------------------
// ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čéąĖą┐ąŠą▓
typedef uint8_t byte; // ą¤čĆąŠčüč鹊 ą▒ąŠą╗ąĄąĄ čāą┤ąŠą▒ąĮčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ
typedef int8_t sbyte; // ą▒ą░ą╣č鹊ą▓čŗčģ čćąĖčüąĄą╗ ą▒ąĄąĘ ąĘąĮą░ą║ą░ ąĖ čüąŠ ąĘąĮą░ą║ąŠą╝.
// ---------------------------------------------------------------------------
// ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ
void InitAVR()
{
DDRB = 0x3F; // 0011.1111; ąĮą░čüčéčĆąŠą╣ą║ą░ B0-B5 ą║ą░ą║ ą▓čŗčģąŠą┤ąŠą▓
DDRC = 0x00; // 0000.0000; ą┐ąŠčĆčé PORTC čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤čŗ
}
void msDelay(int delay)
// ąÆčŗąĘąŠą▓ ąĘą░ą┤ąĄčƹȹ║ąĖ ą┐ąŠą╝ąĄčēąĄąĮ ą▓ ąŠčéą┤ąĄą╗čīąĮčāčÄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čā,
// čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą▓čüčéčĆą░ąĖą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ (inlining);
// čŹč鹊 ąĖąĮąŠą│ą┤ą░ čāą┤ąŠą▒ąĮąŠ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ.
{
for (int i=0;i<delay;i++)
_delay_ms(1);
}
void FlashLED()
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ ą╝ąĄčĆčåą░ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░.
{
SetBit(PORTB,LED);
msDelay(250);
ClearBit(PORTB,LED);
msDelay(250);
}
// ---------------------------------------------------------------------------
// ążčāąĮą║čåąĖąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą╝ LCD HD44780
//
// LCD_Init ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ LCD
// LCD_Cmd ą┐ąŠčüčŗą╗ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā
// LCD_Char ą┐ąŠčüčŗą╗ą░ąĄčé ąŠą┤ąĖąĮ čüąĖą╝ą▓ąŠą╗ ASCII ąĮą░ 菹║čĆą░ąĮ LCD
// LCD_Clear ąŠčćąĖčēą░ąĄčé 菹║čĆą░ąĮ LCD ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą║čāčĆčüąŠčĆ ą▓ ąĖčüčģąŠą┤ąĮčāčÄ ą┐ąŠąĘąĖčåąĖčÄ
// LCD_Home ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą║čāčĆčüąŠčĆ ąĮą░ 菹║čĆą░ąĮąĄ LCD ą▓ ąĖčüčģąŠą┤ąĮčāčÄ ą┐ąŠąĘąĖčåąĖčÄ
// LCD_Goto ą┐ąŠą╝ąĄčēą░ąĄčé ą║čāčĆčüąŠčĆ ą▓ ą┐ąŠąĘąĖčåąĖčÄ (x,y)
// LCD_Line ą┐ąŠą╝ąĄčēą░ąĄčé ą║čāčĆčüąŠčĆ ą▓ ąĮą░čćą░ą╗ąŠ čüčéčĆąŠą║ąĖ (x)
// LCD_Hex ąŠč鹊ą▒čĆą░ąČą░ąĄčé čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
// LCD_Integer ąŠč鹊ą▒čĆą░ąČą░ąĄčé čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
// LCD_String ąŠč鹊ą▒čĆą░ąČą░ąĄčé čüčéčĆąŠą║čā
//
// ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ LCD čéčĆąĄą▒čāąĄčéčüčÅ 6 ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆč鹊ą▓ GPIO: 2 ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓
// čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ 4 ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
// ą¤ąŠčĆčé B ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ HD44780 LCD.
// ąĪą╗ąĄą┤čāčÄčēąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čāą║ą░ąĘčŗą▓ą░čÄčé, ą║ ą║ą░ą║ąĖą╝ ą▓čŗą▓ąŠą┤ą░ą╝ ą┐ąŠčĆč鹊ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR
// ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĖąĮą┤ąĖą║ą░č鹊čĆ LCD:
#define LCD_RS 0 // ąĮąŠąČą║ą░ ą┤ą╗čÅ LCD R/S (PB0)
#define LCD_E 1 // ąĮąŠąČą║ą░ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ LCD
#define DAT4 2 // ąĮąŠąČą║ą░ ą┤ą╗čÅ d4
#define DAT5 3 // ąĮąŠąČą║ą░ ą┤ą╗čÅ d5
#define DAT6 4 // ąĮąŠąČą║ą░ ą┤ą╗čÅ d6
#define DAT7 5 // ąĮąŠąČą║ą░ ą┤ą╗čÅ d7
// ąĪą╗ąĄą┤čāčÄčēąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĘą░ą┤ą░čÄčé ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ HD44780.
#define CLEARDISPLAY 0x01
#define SETCURSOR 0x80
void PulseEnableLine ()
// ąōąĄąĮąĄčĆąĖčĆčāąĄčé ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 1 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čłąĖąĮčŗ ąĖąĮą┤ąĖą║ą░č鹊čĆą░ LCD.
{
SetBit(PORTB,LCD_E); // LCD enable ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1
_delay_us(40); // ąŠąČąĖą┤ą░ąĮąĖąĄ 40 ą╝ą║čü
ClearBit(PORTB,LCD_E); // LCD enable ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0
}
void SendNibble(byte data)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠčüčŗą╗ą░ąĄčé ąĮąĖą▒ą▒ą╗ č湥čĆąĄąĘ čłąĖąĮčā ą┤ą░ąĮąĮčŗčģ.
{
PORTB &= 0xC3; // 1100.0011 = ąŠčćąĖčüčéą║ą░ 4 ą╗ąĖąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ
if (data & _BV(4)) SetBit(PORTB,DAT4);
if (data & _BV(5)) SetBit(PORTB,DAT5);
if (data & _BV(6)) SetBit(PORTB,DAT6);
if (data & _BV(7)) SetBit(PORTB,DAT7);
PulseEnableLine(); // čŹč鹊čé ąĖą╝ą┐čāą╗čīčü ą┐ąĄčĆąĄą┤ą░ąĄčé 4 ą▒ąĖčéą░ ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ
}
void SendByte (byte data)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čé č湥čĆąĄąĘ čłąĖąĮčā ą┤ą░ąĮąĮčŗčģ.
{
SendNibble(data); // ą┐ąŠčüą╗ą░čéčī čüčéą░čĆčłąĖąĄ 4 ą▒ąĖčéą░
SendNibble(data<<4); // ą┐ąŠčüą╗ą░čéčī ą╝ą╗ą░ą┤čłąĖąĄ 4 ą▒ąĖčéą░
ClearBit(PORTB,5); // ą▓ą║ą╗čÄčćąĖčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ LED
}
void LCD_Cmd (byte cmd)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠčüčŗą╗ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā LCD.
{
ClearBit(PORTB,LCD_RS); // čüąĖą│ąĮą░ą╗ R/S = 0, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ
SendByte(cmd); // ąŠčéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ
}
void LCD_Char (byte ch)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠčüčŗą╗ą░ąĄčé čüąĖą╝ą▓ąŠą╗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā LCD ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ.
{
SetBit(PORTB,LCD_RS); // čüąĖą│ąĮą░ą╗ R/S = 1, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ą┤ą░ąĮąĮčŗąĄ čüąĖą╝ą▓ąŠą╗ą░
SendByte(ch); // ąŠčéą┐čĆą░ą▓ą║ą░ čüąĖą╝ą▓ąŠą╗ą░
}
void LCD_Init()
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą║ąŠąĮčéčĆąŠą╗ąĄčĆ ą┤ąĖčüą┐ą╗ąĄčÅ.
{
LCD_Cmd(0x33); // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ LCD
LCD_Cmd(0x32); // ą┐ąĄčĆąĄą▓ąŠą┤ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▓ 4-ą▒ąĖčéąĮčŗą╣ čĆąĄąČąĖą╝ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ
LCD_Cmd(0x28); // 2 čüčéčĆąŠą║ąĖ, ą╝ą░čéčĆąĖčåą░ čüąĖą╝ą▓ąŠą╗ą░ 5x7
LCD_Cmd(0x0C); // ą▓čŗą║ą╗čÄčćąĖčéčī ą║čāčĆčüąŠčĆ (0x0E čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī)
LCD_Cmd(0x06); // ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║čāčĆčüąŠčĆą░: ą▓ą┐čĆą░ą▓ąŠ
LCD_Cmd(0x01); // ąŠčćąĖčüčéą║ą░ ą┤ąĖčüą┐ą╗ąĄčÅ
msDelay(3); // ąŠąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ LCD
}
void LCD_Clear()
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠčćąĖčēą░ąĄčé ą┤ąĖčüą┐ą╗ąĄą╣.
{
LCD_Cmd(CLEARDISPLAY);
msDelay(3); // ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╝ą░ąĮą┤čŗ LCD
}
void LCD_Home()
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčé ą║čāčĆčüąŠčĆ LCD ą▓ "ą┤ąŠą╝ą░čłąĮčÄčÄ" ą┐ąŠąĘąĖčåąĖčÄ
// (ą▒ąĄąĘ ąŠčćąĖčüčéą║ąĖ ą┤ąĖčüą┐ą╗ąĄčÅ).
{
LCD_Cmd(SETCURSOR);
}
void LCD_Goto(byte x, byte y)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčé ą║čāčĆčüąŠčĆ LCD ą▓ čāą║ą░ąĘą░ąĮąĮčāčÄ ą┐ąŠąĘąĖčåąĖčÄ čŹą║čĆą░ąĮą░.
{
byte addr = 0; // čüčéčĆąŠą║ą░ 0 ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą░ą┤čĆąĄčüą░ 0x00
switch (y)
{
case 1: addr = 0x40; break; // čüčéčĆąŠą║ą░ 1 ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą░ą┤čĆąĄčüą░ 0x40
case 2: addr = 0x14; break;
case 3: addr = 0x54; break;
}
LCD_Cmd(SETCURSOR+addr+x); // ąŠą▒ąĮąŠą▓ąĖčéčī ą┐ąŠąĘąĖčåąĖčÄ ą║čāčĆčüąŠčĆą░
}
void LCD_Line(byte row)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčé ą║čāčĆčüąŠčĆ LCD ą▓ ąĮą░čćą░ą╗ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╣ čüčéčĆąŠą║ąĖ 菹║čĆą░ąĮą░.
{
LCD_Goto(0,row);
}
void LCD_String(const char *text)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠč鹊ą▒čĆą░ąĘąĖčé čüčéčĆąŠą║čā ąĮą░ 菹║čĆą░ąĮąĄ LCD ą▓ č鹥ą║čāčēąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ.
{
while (*text) // čåąĖą║ą╗, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ čüąĖą╝ą▓ąŠą╗ /0
LCD_Char(*text++); // ą┐ąŠčüą╗ą░čéčī čüąĖą╝ą▓ąŠą╗ ąĖ ąŠą▒ąĮąŠą▓ąĖčéčī čāą║ą░ąĘą░č鹥ą╗čī
}
void LCD_Hex(int data)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠč鹊ą▒čĆą░ąĘąĖčé HEX-ąĘąĮą░č湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮą░ 菹║čĆą░ąĮąĄ LCD
// ą▓ č鹥ą║čāčēąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ ą║čāčĆčüąŠčĆą░.
{
char st[8] = ""; // ą╝ą░čüčüąĖą▓ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čĆąĄąĘčāą╗čīčéą░čéą░
itoa(data,st,16); // ą║ąŠąĮą▓ąĄčĆčéą░čåąĖčÅ čćąĖčüą╗ą░ ą▓ hex-čüčéčĆąŠą║čā ASCII
//LCD_Message("0x"); // ąĄčüą╗ąĖ ąĮčāąČąĮąŠ, ą╝ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐čĆąĄčäąĖą║čü "0x"
LCD_String(st); // ąŠč鹊ą▒čĆą░ąĘąĖčéčī čüčéčĆąŠą║čā ąĮą░ LCD
}
void LCD_Integer(int data)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠč鹊ą▒čĆą░ąĘąĖčé čåąĄą╗ąŠąĄ čćąĖčüą╗ąŠ ąĮą░ 菹║čĆą░ąĮąĄ LCD
// ą▓ č鹥ą║čāčēąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ ą║čāčĆčüąŠčĆą░.
{
char st[8] = ""; // ą╝ą░čüčüąĖą▓ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čĆąĄąĘčāą╗čīčéą░čéą░
itoa(data,st,10); // ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ čćąĖčüą╗ą░ ą▓ čüčéčĆąŠą║čā ASCII
LCD_String(st); // ąŠč鹊ą▒čĆą░ąĘąĖčéčī čüčéčĆąŠą║čā ąĮą░ LCD
}
// ---------------------------------------------------------------------------
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ I2C (TWI)
//
// ąØą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ čüąĄčĆąĖąĖ AVRmega čćą░čüč鹊 (ąĮąŠ ąĮąĄ ą▓čüąĄą│ą┤ą░) PA4 čÅą▓ą╗čÅąĄčéčüčÅ
// čüąĖą│ąĮą░ą╗ąŠą╝ ą┤ą░ąĮąĮčŗčģ (SDA) ąĖ PA5 čÅą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ čéą░ą║č鹊ą▓ (SCL).
// ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ 100 ą║ąōčå, čćč鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣
// I2C_Init. ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ I2C ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ą▒ąŠč湥ą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ AVR.
#define F_SCL 100000L // čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ I2C čĆą░ą▓ąĮą░ 100 ą║ąōčå
#define READ 1#define TW_START 0xA4 // ąŠčéą┐čĆą░ą▓ą║ą░ start condition (TWINT,TWSTA,TWEN)
#define TW_STOP 0x94 // ąŠčéą┐čĆą░ą▓ą║ą░ stop condition (TWINT,TWSTO,TWEN)
#define TW_ACK 0xC4 // ą▓ąŠąĘą▓čĆą░čé ACK ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (slave)
#define TW_NACK 0x84 // ąĮąĄčé ą▓ąŠąĘą▓čĆą░čéą░ ACK ą┤ą╗čÅ slave
#define TW_SEND 0x84 // ąŠčéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ (TWINT,TWEN)
#define TW_READY (TWCR & 0x80) // ą│ąŠč鹊ą▓ąĮąŠčüčéčī, ą║ąŠą│ą┤ą░ TWINT ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ ą╗ąŠą│. 1
#define TW_STATUS (TWSR & 0xF8) // ą▓ąĄčĆąĮąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
#define I2C_Stop() TWCR = TW_STOP // inline-ą╝ą░ą║čĆąŠčü ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ stop condition
void I2C_Init()
// ąØą░ čćą░čüč鹊č鹥 16 MHz čćą░čüč鹊čéą░ SCL ą▒čāą┤ąĄčé čĆą░ą▓ąĮą░ 16/(16+2(TWBR)), ąĄčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī,
// čćč鹊 ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąŠą▒ąĮčāą╗ąĄąĮ (ąĮąĄ ą┤ąĄą╗ąĖčé čćą░čüč鹊čéčā). ąóąŠą│ą┤ą░ ą┤ą╗čÅ 100 ą║ąōčå SCL:
// TWBR = ((F_CPU/F_SCL)-16)/2 = ((16/0.1)-16)/2 = 144/2 = 72
{
TWSR = 0; // ąŠčéą║ą╗čÄčćą░ąĄčé ą┐čĆąĄčüą║ą░ą╗ąĄčĆ
TWBR = ((F_CPU/F_SCL)-16)/2; // čāčüčéą░ąĮąŠą▓ą║ą░ čćą░čüč鹊čéčŗ SCL
}
byte I2C_Detect(byte addr)
// ążčāąĮą║čåąĖčÅ ąĖčēąĄčé slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā, ą▓ąĄčĆąĮąĄčé 1 ąĄčüą╗ąĖ
// čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ą╣ą┤ąĄąĮąŠ, ąĖąĮą░č湥 ą▓ąĄčĆąĮąĄčé 0.
{
TWCR = TW_START; // ąŠčéą┐čĆą░ą▓ą║ą░ start condition
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ
TWDR = addr; // ą┐ąĄčĆąĄą┤ą░čćą░ čāčüčéčĆąŠą╣čüčéą▓čā
TWCR = TW_SEND; // ą░ą┤čĆąĄčüą░ čłąĖąĮčŗ
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ
return (TW_STATUS==0x18); // ą▓ąĄčĆąĮąĄčé 1, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ą╣ą┤ąĄąĮąŠ
}
byte I2C_FindDevice(byte start)
// ążčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ą░ą┤čĆąĄčü ą┐ąĄčĆą▓ąŠą│ąŠ ąĮą░ą╣ą┤ąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čćąĖąĮą░čÅ
// čü ą░ą┤čĆąĄčüą░ start. ąĢčüą╗ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮąŠ ąĮą░ čłąĖąĮąĄ I2C, č鹊 ą▓ąĄčĆąĮąĄčé 0.
{
//ą¤ąŠąĖčüą║ ą┐ąŠ ą▓čüąĄą╝ 256 ą░ą┤čĆąĄčüą░ą╝:
for (byte addr=start;addr<0xFF;addr++)
{
if (I2C_Detect(addr))
return addr; // ą▓ąŠąĘą▓čĆą░čé, ą║ą░ą║ č鹊ą╗čīą║ąŠ čćč鹊-č鹊 ąĮą░ą╣ą┤ąĄąĮąŠ
}
return 0; // ąĮąĖč湥ą│ąŠ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮąŠ, ą▓ąŠąĘą▓čĆą░čé 0.
}
void I2C_Start (byte slaveAddr)
{
I2C_Detect(slaveAddr);
}
byte I2C_Write (byte data)
// ążčāąĮą║čåąĖčÅ ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ slave-čāčüčéčĆąŠą╣čüčéą▓čā.
{
TWDR = data; // ąĘą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ
TWCR = TW_SEND; // ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ąĖčģ
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ
return (TW_STATUS!=0x28);
}
byte I2C_ReadACK ()
// ążčāąĮą║čåąĖčÅ ą┐čĆąŠčćąĖčéą░ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖąĘ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą▒ą╗ąŠčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ.
{
TWCR = TW_ACK; // ack ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą░ą╗ąĄąĄ
// ą▒čāą┤čāčé ąĄčēąĄ čćąĖčéą░čéčīčüčÅ ą┤ą░ąĮąĮčŗąĄ
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ
return TWDR;
}
byte I2C_ReadNACK ()
// ążčāąĮą║čåąĖčÅ ą┐čĆąŠčćąĖčéą░ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖąĘ slave-čāčüčéčĆąŠą╣čüčéą▓ą░.
{
TWCR = TW_NACK; // nack ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮ č鹊ą╗čīą║ąŠ 1 ą▒ą░ą╣čé
while (!TW_READY); // ąŠąČąĖą┤ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ
return TWDR;
}
void I2C_WriteByte(byte busAddr, byte data)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą░ą╣čé ą▓ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ.
{
I2C_Start(busAddr); // ąŠčéą┐čĆą░ą▓ą║ą░ ą░ą┤čĆąĄčüą░ čłąĖąĮčŗ I2C
I2C_Write(data); // ąĘą░č鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ą░ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ
I2C_Stop();
}
void I2C_WriteRegister(byte busAddr, byte deviceRegister, byte data)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą░ą╣čé ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│ąĖčüčéčĆ slave-čāčüčéčĆąŠą╣čüčéą▓ą░.
{
I2C_Start(busAddr); // ąŠčéą┐čĆą░ą▓ą║ą░ ą░ą┤čĆąĄčüą░ čłąĖąĮčŗ I2C
I2C_Write(deviceRegister); // ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé = ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝čā ą░ą┤čĆąĄčüčā čĆąĄą│ąĖčüčéčĆą░
I2C_Write(data); // ą▓č鹊čĆąŠą╣ ą▒ą░ą╣čé = ą┤ą░ąĮąĮčŗą╝ ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░
I2C_Stop();
}
byte I2C_ReadRegister(byte busAddr, byte deviceRegister)
// ążčāąĮą║čåąĖčÅ čćąĖčéą░ąĄčé ą▒ą░ą╣čé ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ slave-čāčüčéčĆąŠą╣čüčéą▓ą░.
{
byte data = 0;
I2C_Start(busAddr); // ąŠčéą┐čĆą░ą▓ą║ą░ ą░ą┤čĆąĄčüą░ čłąĖąĮčŗ I2C
I2C_Write(deviceRegister); // čāčüčéą░ąĮąŠą▓ą║ą░ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čĆąĄą│ąĖčüčéčĆ
I2C_Start(busAddr+READ); // ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ
data = I2C_ReadNACK(); // čćč鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░
I2C_Stop();
return data;
}
// ---------------------------------------------------------------------------
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ DS1307 RTC
#define DS1307 0xD0 // ą░ą┤čĆąĄčü čłąĖąĮčŗ I2C ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS1307 RTC
#define SECONDS_REGISTER 0x00
#define MINUTES_REGISTER 0x01
#define HOURS_REGISTER 0x02
#define DAYOFWK_REGISTER 0x03
#define DAYS_REGISTER 0x04
#define MONTHS_REGISTER 0x05
#define YEARS_REGISTER 0x06
#define CONTROL_REGISTER 0x07
#define RAM_BEGIN 0x08
#define RAM_END 0x3F
void DS1307_GetTime(byte *hours, byte *minutes, byte *seconds)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓ąĄčĆąĮąĄčé čćą░čüčŗ, ą╝ąĖąĮčāčéčŗ, čüąĄą║čāąĮą┤čŗ ą▓ č乊čĆą╝ą░č鹥 BCD.
{
*hours = I2C_ReadRegister(DS1307,HOURS_REGISTER);
*minutes = I2C_ReadRegister(DS1307,MINUTES_REGISTER);
*seconds = I2C_ReadRegister(DS1307,SECONDS_REGISTER);
if (*hours & 0x40) // 12-čćą░čüąŠą▓ąŠą╣ čĆąĄąČąĖą╝:
*hours &= 0x1F; // ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą╝ą╗ą░ą┤čłąĖąĄ 5 ą▒ąĖčé (ą▒ąĖčé pm ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą╝ą░čüą║ąŠą╣ 0x20)
else
*hours &= 0x3F; // 24-čćą░čüąŠą▓ąŠą╣ čĆąĄąČąĖą╝: ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą╝ą╗ą░ą┤čłąĖąĄ 6 ą▒ąĖčé
}
void DS1307_GetDate(byte *months, byte *days, byte *years)
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓ąĄčĆąĮąĄčé ą╝ąĄčüčÅčå, ą┤ąĄąĮčī, ą│ąŠą┤ ą▓ č乊čĆą╝ą░č鹥 BCD.
{
*months = I2C_ReadRegister(DS1307,MONTHS_REGISTER);
*days = I2C_ReadRegister(DS1307,DAYS_REGISTER);
*years = I2C_ReadRegister(DS1307,YEARS_REGISTER);
}
void SetTimeDate()
// ą¤čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ą░čéčŗ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ.
{
I2C_WriteRegister(DS1307,MONTHS_REGISTER, 0x08);
I2C_WriteRegister(DS1307,DAYS_REGISTER, 0x31);
I2C_WriteRegister(DS1307,YEARS_REGISTER, 0x13);
I2C_WriteRegister(DS1307,HOURS_REGISTER, 0x08+0x40); // ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ 0x40 ą┤ą╗čÅ PM
I2C_WriteRegister(DS1307,MINUTES_REGISTER, 0x51);
I2C_WriteRegister(DS1307,SECONDS_REGISTER, 0x00);
}
// ---------------------------------------------------------------------------
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ
void ShowDevices()
// ąĪą║ą░ąĮąĖčĆčāąĄčé čłąĖąĮčā I2C ąĖ ąŠč鹊ą▒čĆą░ąČą░ąĄčé ą░ą┤čĆąĄčüą░ ą▓čüąĄčģ ąĮą░ą╣ą┤ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
{
LCD_Line(1); LCD_String("Found:");
byte addr = 1;
while (addr>0)
{
LCD_Char(' ');
addr = I2C_FindDevice(addr);
if (addr>0) LCD_Hex(addr++);
}
}
void LCD_TwoDigits(byte data)
// ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ WriteDate().
// ąØą░ ą▓čģąŠą┤ąĄ ą┐ąŠą╗čāčćą░ąĄčé 2 čåąĖčäčĆčŗ ą▓ č乊čĆą╝ą░č鹥 BCD.
// ąÆčŗą▓ąŠą┤ąĖčé čŹčéąĖ čåąĖčäčĆčŗ ąĮą░ ą┤ąĖčüą┐ą╗ąĄą╣ LCD ą▓ č鹥ą║čāčēčāčÄ ą┐ąŠąĘąĖčåąĖčÄ ą║čāčĆčüąŠčĆą░.
{
byte temp = data>>4;
LCD_Char(temp+'0');
data &= 0x0F;
LCD_Char(data+'0');
}
void WriteDate()
{
byte months, days, years;
DS1307_GetDate(&months,&days,&years);
LCD_TwoDigits(months);
LCD_Char('/');
LCD_TwoDigits(days);
LCD_Char('/');
LCD_TwoDigits(years);
}
void WriteTime()
{
byte hours, minutes, seconds;
DS1307_GetTime(&hours,&minutes,&seconds);
LCD_TwoDigits(hours);
LCD_Char(':');
LCD_TwoDigits(minutes);
LCD_Char(':');
LCD_TwoDigits(seconds);
}
void LCD_TimeDate()
{
LCD_Line(0); WriteTime();
LCD_Line(1); WriteDate();
}
// ---------------------------------------------------------------------------
// ąōą╗ą░ą▓ąĮčŗą╣ čåąĖą║ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
void MainLoop()
{
while(1)
{
LCD_TimeDate(); // ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ąĮą░ LCD ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┤ą░čéčŗ
msDelay(1000); // ą╝ąĄąČą┤čā ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅą╝ąĖ ąŠąČąĖą┤ą░ąĮąĖąĄ 1 čüąĄą║čāąĮą┤ą░
}
}
// ---------------------------------------------------------------------------
// ą×čüąĮąŠą▓ąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░: č鹥ą╗ąŠ čäčāąĮą║čåąĖąĖ main.
int main(void)
{
InitAVR(); // ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠčĆč鹊ą▓ GPIO ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░
LCD_Init(); // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ HD44780 ą┤ąĖčüą┐ą╗ąĄčÅ LCD
I2C_Init(); // ąĮą░čüčéčĆąŠą╣ą║ą░ čłąĖąĮčŗ I2C (čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ąĄčæ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ)
LCD_String("Ready.");
ShowDevices(); // ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 čłąĖąĮą░ I2C čĆą░ą▒ąŠčéą░ąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠ
msDelay(4000);
LCD_Clear();
MainLoop(); // ąŠč鹊ą▒čĆą░ąČą░ąĄčé ą▓čĆąĄą╝čÅ
}
[ąØą░ čćč鹊 ąĮčāąČąĮąŠ ąŠą▒čĆą░čéąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ]
1. 12-čćą░čüąŠą▓ąŠą╣ č乊čĆą╝ą░čé čćąĖčüą╗ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čćą░čüąŠą▓. ą¦č鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī čŹč鹊čé čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ, ą▓ čĆąĄą│ąĖčüčéčĆ čćą░čüąŠą▓ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ąĘąĮą░č湥ąĮąĖąĄ, ą▓ ą║ąŠč鹊čĆąŠą╝ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé D6 (01000000, čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 0x40):
I2C_WriteRegister(DS1307, HOURS_REGISTER, 0x09+0x40);
ąĢčüą╗ąĖ ą▓čŗą▒čĆą░ąĮ 12-čćą░čüąŠą▓ąŠą╣ č乊čĆą╝ą░čé čü ą▒ąĖč鹊ą╝ AM/PM ą▓ čĆąĄą│ąĖčüčéčĆąĄ čćą░čüąŠą▓, č鹊 ąĮčāąČąĮąŠ ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ čćą░čüąŠą▓ ą╝ąĄąĮčÅąĄčéčüčÅ ąŠčé 1 ą┤ąŠ 12 ą┐ąŠ ą║čĆčāą│čā. ą» ą┐ąŠč湥ą╝čā-č鹊 ąŠčłąĖą▒ąŠčćąĮąŠ ą┐ąŠą╗ą░ą│ą░ą╗, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ čćą░čüąŠą▓ ą╝ąĄąĮčÅąĄčéčüčÅ ąŠčé 0 ą┤ąŠ 11. ą¦č鹊ą▒čŗ ąĖąĘą▓ą╗ąĄčćčī ąĘąĮą░č湥ąĮąĖąĄ čćą░čüąŠą▓, ąĮčāąČąĮąŠ ąĮą░ą╗ąŠąČąĖčéčī ą╝ą░čüą║čā 00011111 (čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 0x1F):
u8 hoursBCD = I2C_ReadRegister(DS1307, HOURS_REGISTER) & 0x1F;
ąĪčéą░čĆčłčāčÄ ąĖ ą╝ą╗ą░ą┤čłčāčÄ č鹥čéčĆą░ą┤čŗ čćąĖčüą╗ą░ hoursBCD ą╝ąŠąČąĮąŠ čüčĆą░ąĘčā ą▓čŗą▓ąŠą┤ąĖčéčī ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆ. ąØąŠ ąĄčüą╗ąĖ ąĮą░ą┤ąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ą▓ąŠąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čćą░čüąŠą▓ ąŠčé 0 ą┤ąŠ 11, č鹊 ąĮčāąČąĮąŠ ąĖąĘ BCD ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░čéčī ą▓ ą┤ą▓ąŠąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖ ąĖąĘ čĆąĄąĘčāą╗čīčéą░čéą░ ą▓čŗč湥čüčéčī 1:
u8 hoursBIN = BCDtoBIN(hoursBCD) - 1;
ąæąĖčé AM/PM ąĖąĘą▓ą╗ąĄą║ą░ąĄčéčüčÅ ąĖąĘ čĆą░ąĘčĆčÅą┤ą░ D5 ąĮą░ą╗ąŠąČąĄąĮąĖąĄą╝ ą╝ą░čüą║ąĖ 00100000 (čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 0x20):
bool AMPM = (hoursBCD & 0x20)?true:false;
2. 24-čćą░čüąŠą▓ąŠą╣ č乊čĆą╝ą░čé čćąĖčüą╗ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čćą░čüąŠą▓. ą¦č鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī čŹč鹊čé čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ, ą▓ čĆąĄą│ąĖčüčéčĆ čćą░čüąŠą▓ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ąĘąĮą░č湥ąĮąĖąĄ, ą▓ ą║ąŠč鹊čĆąŠą╝ čüą▒čĆąŠčłąĄąĮ ą▒ąĖčé D6:
I2C_WriteRegister(DS1307, HOURS_REGISTER, 0x09);
ąĢčüą╗ąĖ ą▓čŗą▒čĆą░ąĮ 24-čćą░čüąŠą▓ąŠą╣ č乊čĆą╝ą░čé, č鹊 ąĮčāąČąĮąŠ ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ čćą░čüąŠą▓ ą╝ąĄąĮčÅąĄčéčüčÅ ąŠčé 0 ą┤ąŠ 23 ą┐ąŠ ą║čĆčāą│čā. ą¦č鹊ą▒čŗ ąĖąĘą▓ą╗ąĄčćčī ąĘąĮą░č湥ąĮąĖąĄ čćą░čüąŠą▓, ąĮčāąČąĮąŠ ąĮą░ą╗ąŠąČąĖčéčī ą╝ą░čüą║čā 00111111 (čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 0x3F):
u8 hoursBCD = I2C_ReadRegister(DS1307, HOURS_REGISTER) & 0x3F;
ąĪčéą░čĆčłčāčÄ ąĖ ą╝ą╗ą░ą┤čłčāčÄ č鹥čéčĆą░ą┤čŗ čćąĖčüą╗ą░ hoursBCD ą╝ąŠąČąĮąŠ čüčĆą░ąĘčā ą▓čŗą▓ąŠą┤ąĖčéčī ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆ. ąØąŠ ąĄčüą╗ąĖ ąĮą░ą┤ąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ą▓ąŠąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čćą░čüąŠą▓ ąŠčé 0 ą┤ąŠ 23, č鹊 ąĮčāąČąĮąŠ ąĖąĘ BCD ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░čéčī ą▓ ą┤ą▓ąŠąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
u8 hoursBIN = BCDtoBIN(hoursBCD);
3. ąŚą░ą┐čāčüą║ čćą░čüąŠą▓. ąĢčüą╗ąĖ ąÆčŗ č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ąĖ ą▒ą░čéą░čĆąĄą╣ą║čā ąĖ ą▓ą║ą╗čÄčćąĖą╗ąĖ ą┐ąĖčéą░ąĮąĖąĄ, č鹊 čćą░čüčŗ ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ čüąĄą║čāąĮą┤ ą╗čÄą▒ąŠą│ąŠ čćąĖčüą╗ą░, čā ą║ąŠč鹊čĆąŠą│ąŠ ą▒ąĖčé D7 čüą▒čĆąŠčłąĄąĮ ą▓ 0:
I2C_WriteRegister(DS1307,SECONDS_REGISTER, 0x00);
ą¦č鹊ą▒čŗ ąŠčüčéą░ąĮąŠą▓ąĖčéčī čģąŠą┤ čćą░čüąŠą▓, ą▓ ą▒ąĖč鹥 D7 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĄą┤ąĖąĮąĖčåą░ (ąĮąĄ ą┐ąŠąĮąĖą╝ą░čÄ, ąĘą░č湥ą╝ čŹč鹊 ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ, ąĮąŠ ą▓čüąĄ-čéą░ą║ąĖ):
I2C_WriteRegister(DS1307,SECONDS_REGISTER, 0x80);
4. ąæąĄąĘ ą▒ą░čéą░čĆąĄą╣ą║ąĖ čćą░čüčŗ ąĮąĄ čĆą░ą▒ąŠčéą░čÄčé! ąĢčüą╗ąĖ ą▒ą░čéą░čĆąĄą╣ą║ą░ čüąĄą╗ą░ (ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮąĖąČąĄ 2.5 ą▓ąŠą╗čīčé), č鹊 čćą░čüčŗ ą╝ąŠą│čāčé ąŠčüčéą░ąĮąŠą▓ąĖčéčīčüčÅ, ąĖ ąĘąĮą░č湥ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ čÅč湥ą╣ą║ą░čģ ą┐ą░ą╝čÅčéąĖ ą┐ąĄčĆąĄčüčéą░ąĮčāčé ą▒čŗčéčī ą░ą║čéčāą░ą╗čīąĮčŗą╝ąĖ. ąØčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą▒ą░čéą░čĆąĄą╣ą║čā, ąĖ čüąĮąŠą▓ą░ ąĘą░ą┐čāčüčéąĖčéčī čćą░čüčŗ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ čüąĄą║čāąĮą┤ ą╗čÄą▒ąŠą│ąŠ čćąĖčüą╗ą░, čā ą║ąŠč鹊čĆąŠą│ąŠ ą▒ąĖčé D7 čĆą░ą▓ąĄąĮ 0.
[ąĪčüčŗą╗ą║ąĖ]
1. Add a DS1307 RTC clock to your AVR microcontroller site:w8bh.net (ą░ą▓č鹊čĆ Bruce E. Hall, W8BH).
2. I2C Master library site:github.com.
3. I2c Master (Bit-Bang) site:procyonengineering.com - ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░. ąĢčüčéčī ą║ąŠą┤ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü I2C ą║ą░ą║ č湥čĆąĄąĘ ą░ą┐ą┐ą░čĆą░čéčāčĆčā TWI, čéą░ą║ ąĖ č湥čĆąĄąĘ ą┐ąŠčĆčéčŗ GPIO. ąóą░ą║ąČąĄ ąĄčüčéčī ą╝ąĮąŠą│ąŠ ą┤čĆčāą│ąĖčģ ą┐ąŠą╗ąĄąĘąĮčŗčģ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ.
4. I2C site:en.wikipedia.org.
5. Add an LCD to your AVR microcontroller site:w8bh.net (ą░ą▓č鹊čĆ Bruce E. Hall, W8BH).
6. 151223AVR-DS1307.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ (ą┐čĆąŠąĄą║čé ą┤ą╗čÅ Atmel Studio 6).
7. ąĪčĆą░ą▓ąĮąĄąĮąĖąĄ č鹊čćąĮąŠčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ RTC. |











ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ąĖąĘ-ąĘą░ ąĮą░ą╗ąĖčćąĖčÅ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ąĖčéą░ ą▓ ą░ą┤čĆąĄčüąĄ, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┐čĆąĖąĘąĮą░ą║ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ, ą▓ ą░ą┤čĆąĄčüą░čåąĖąĖ I2C ą▓čüąĄą│ą┤ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮąĄą║ą░čÅ ą┐čāčéą░ąĮąĖčåą░. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ąĘąĮą░č湥ąĮąĖčÅ 0xD0 ąĖ 0x68 ą▓ ą┤ą▓ąŠąĖčćąĮčŗą╣ ą▓ąĖą┤ ąĖ čāą▓ąĖą┤ąĖč鹥, čćč鹊 čŹč鹊 ąŠą┤ąĮą░ ąĖ čéą░ ąČąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ čüčéčī ą▒ąĖčé: 0xD0 = 11010000 ąĖ 0x68 = 01101000, ą┐čĆąŠčüč鹊 ą▓ čüą╗čāčćą░ąĄ 0x68 ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé "ą▓čŗą║ąĖąĮčāčé".
ąóąĄą┐ąĄčĆčī čćąĖčéą░ą╣č鹥 ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠ, ą▓ čüčéą░čéčīąĄ ąĮą░ą┐ąĖčüą░ąĮąŠ, čåąĖčéą░čéą░: "... čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą░ą┤čĆąĄčü 0xd0 (ą░ą┤čĆąĄčü čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ 7 čüčéą░čĆčłąĖčģ ą▒ąĖčéą░čģ, ą▓ čüą░ą╝ąŠą╝ ą╝ą╗ą░ą┤čłąĄą╝ čĆą░ąĘčĆčÅą┤ąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▒ąĖčé read/write)."
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ