|
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą░ą┐ąĮąŠčāčéą░ Atmel "AVR911: AVR Open Source Programmer 8-bit Atmel Microcontrollers" [1], ąŠą┐ąĖčüčŗą▓ą░čÄčēąĄą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝čā ą┤ą╗čÅ ą║ąŠą╝ą┐čīčÄč鹥čĆą░ čü ąŠčéą║čĆčŗčéčŗą╝ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝. ąŻčéąĖą╗ąĖčéą░ ąĖąĘ ą║ąŠčĆąŠą▒ą║ąĖ ą╝ąŠąČąĄčé čüą╗čāąČąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ą╝ąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖą╝ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ STK200, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮą░ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┤čĆčāą│ąĖčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą▓. ąŻčéąĖą╗ąĖčéą░ Atmel AVR Open Source Programmer ąŠą▒ą╗ą░ą┤ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčÅą╝ąĖ:
ŌĆó ą×čéą║čĆčŗčéčŗą╣ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĮą░ C++ (Open source)
ŌĆó ą£ąŠą┤čāą╗čīąĮčŗą╣ ą┤ąĖąĘą░ą╣ąĮ
ŌĆó ą£ąŠąČąĄčé čćąĖčéą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ ąĖąĘ čäą░ą╣ą╗ąŠą▓ XML Atmel┬« AVR Studio┬«
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆ ą▓ Atmel AVR┬« 109
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ISP-ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ Atmel AVR910
ŌĆó ą»ą▓ą╗čÅąĄčéčüčÅ čŹą║ą▓ąĖą▓ą░ą╗ąĄąĮč鹊ą╝ čāčéąĖą╗ąĖčé ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ AVR Studio
ŌĆó ą£ąŠąČąĄčé čĆą░čüčłąĖčĆčÅčéčīčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┤čĆčāą│ąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą▓
ŌĆó ą£ąŠąČąĄčé čĆą░čüčłąĖčĆčÅčéčīčüčÅ ą┤ąŠ ą┤čĆčāą│ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓ ąŠą▒ą╝ąĄąĮą░ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ąŠ USB
[ąÆą▓ąĄą┤ąĄąĮąĖąĄ]
Atmel AVR Open Source Programmer (AVROSP) čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ - ąŠą▒ąŠą╗ąŠčćą║ąŠą╣ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ AVR (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel), ą║ąŠč鹊čĆą░čÅ čÅą▓ą╗čÅąĄčéčüčÅ čŹą║ą▓ąĖą▓ą░ą╗ąĄąĮč鹊ą╝ čāčéąĖą╗ąĖčéčŗ AVRProg, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠą╣ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü AVR Studio. ąŁč鹊 čāčéąĖą╗ąĖčéą░ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēą░čÅ č鹊čé ąČąĄ čüą░ą╝čŗą╣ čüąĖąĮčéą░ą║čüąĖčü, ą║ą░ą║ ąĖ ą┤čĆčāą│ąĖąĄ čāčéąĖą╗ąĖčéčŗ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ ą▓ AVR Studio.
ą×čéą║čĆčŗčéčŗą╣ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖ ą╝ąŠą┤čāą╗čīąĮčŗą╣ ą┤ąĖąĘą░ą╣ąĮ AVROSP ą┤ąĄą╗ą░čÄčé ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ą┐čĆąŠčüč鹊ąĄ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮą░ ą┤čĆčāą│ąĖąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ (ąĮąĄ Windows) ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą▓ ą┤čĆčāą│ąĖčģ čéąĖą┐ąŠą▓, ą░ čéą░ą║ąČąĄ ą┤čĆčāą│ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓ ąŠą▒ą╝ąĄąĮą░ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ (ąĮąĄ COM-ą┐ąŠčĆčé). ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ AVROSP ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆčŗ, ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ ą░ą┐ąĮąŠčāčéą░čģ Atmel AVR109 ąĖ AVR910 [3, 4], ą┐ąŠą┤ą║ą╗čÄčćą░čÄčēąĖąĄčüčÅ č湥čĆąĄąĘ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ PC serial port (RS-232, COM-ą┐ąŠčĆčé). ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą│ąŠą▓ąŠčĆąĖčéčüčÅ ąŠčé č鹊ą╝, ą║ą░ą║ čĆą░čüčłąĖčĆčÅčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čāčéąĖą╗ąĖčéčŗ AVROSP.
AVROSP ą╝ąŠąČąĄčé čćąĖčéą░čéčī ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī čäą░ą╣ą╗čŗ ą▓ č乊čĆą╝ą░č鹥 Intel┬« HEX [2], ąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčāčēąĄčüčéą▓čāčÄčēčāčÄ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖčÄ AVR Studio ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čéčĆąĄą▒čāąĄą╝čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 AVROSP ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ AVR Studio. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ AVROSP ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĮąŠą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąĄčüą╗ąĖ ą▒čāą┤ąĄčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮą░ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖčÅ AVR Studio.
[1. ą×ą▒čēąĄąĄ č鹥ąŠčĆąĄčéąĖč湥čüą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ]
ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ Atmel AVR ąŠą▒čŗčćąĮąŠ čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ čłą░ą│ąŠą▓: ąĮą░ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ą░ ą┤ą▓ąŠąĖčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ąĖ ąĮą░ą║ąŠąĮąĄčå ąĘą░ą┐čāčüą║ čāčéąĖą╗ąĖčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░, čćč鹊ą▒čŗ ąĘą░ą┐ąĖčüą░čéčī čŹčéąĖ čäą░ą╣ą╗čŗ ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÆčüąĄ čŹčéąĖ čłą░ą│ąĖ ą▓čüąĄą│ą┤ą░ č鹥 ąČąĄ čüą░ą╝čŗąĄ, ąŠąĮąĖ ąĮąĄ ąĘą░ą▓ąĖčüčÅčé ąŠčé čéąĖą┐ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ AVROSP ą┐čŗčéą░ąĄčéčüčÅ ąŠą▒ąŠą▒čēąĖčéčī čŹčéčā ą┐čĆąŠčåąĄą┤čāčĆčā ą▓ ąŠą┤ąĮąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĖąĘą▒ą░ą▓ą╗čÅčÅ ąŠčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü čĆą░ąĘąĮčŗą╝ čüąĖąĮčéą░ą║čüąĖčüąŠą╝ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéąĖą┐ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą╗ąĖ ąÆčŗ ą▒čāčéą╗ąŠą░ą┤ąĄčĆ, ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ISP, ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ą┤čĆčāą│ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ, ą┐čĆąŠčåąĄą┤čāčĆą░ ąŠą▒čŗčćąĮąŠ čéą░ ąČąĄ čüą░ą╝ą░čÅ. AVROSP ą┤ą░ąĄčé ąĮąĄą┐čĆąŠčéąĖą▓ąŠčĆąĄčćąĖą▓čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąÉą┐ąĮąŠčāčéčŗ Atmel AVR109 [3] ąĖ AVR910 [4] ąŠą┐ąĖčüčŗą▓ą░čÄčé Bootloader (ą▒čāčéą╗ąŠą░ą┤ąĄčĆ) ąĖ In-System Programmer (ISP, ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ čćąĖą┐ąŠą▓ ą┐čĆčÅą╝ąŠ ą▓ čüąĖčüč鹥ą╝ąĄ). ąś č鹊čé ąĖ ą┤čĆčāą│ąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąŠą┤ąĮčā ąĖ čéčā ąČąĄ ąŠą┐ąĄčĆą░čåąĖčÄ - Bootloader ą┐čĆąŠčłąĖą▓ą░ąĄčé ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝, ą┐ąŠą╗čāčćą░čÅ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ UART, ąĖ ISP č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ, ą┐ąŠčüčéčĆąŠąĄąĮąĮčŗą╣ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ AT90S1200. Bootloader ąŠčéą┤ąĄą╗čīąĮąŠ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ č鹊ą╗čīą║ąŠ ąĄą│ąŠ. ISP ąĮąĄ ąŠą▒ąĮąŠą▓ą╗čÅą╗čüčÅ ą┤ą╗čÅ ą┐čĆčÅą╝ąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čāčüčéčĆąŠą╣čüčéą▓, ą┐ąŠčÅą▓ąĖą▓čłąĖčģčüčÅ ą┐ąŠąĘąČąĄ Atmel ATmega163, ąĮąŠ ąĖą╝ąĄąĄčé "čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčāčÄ ą║ąŠą╝ą░ąĮą┤čā" (Universal Command), ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓), ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą▓ąĮčāčéčĆąĖčüčģąĄą╝ąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ (in-system programming, ISP). ąŻčéąĖą╗ąĖčéą░ AVROSP ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąŠą▒ą░ čéąĖą┐ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą▓. ą×ąĮą░ čćąĖčéą░ąĄčé čüąĖą│ąĮą░čéčāčĆčā ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čĆąĄčłąĄąĮąĖąĄ, ą║ą░ą║ąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄ ąĮčāąČąĮąŠ čāą║ą░ąĘčŗą▓ą░čéčī čéąĖą┐ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░, ąĄčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā čćč鹥ąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ (ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā "Read programmer ID"). ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā ąŠą▒čĆą░čéąĖč鹥čüčī ą║ [3, 4].
ąöą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čéčĆąĄą▒čāąĄčéčüčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ ąĖąĮč乊čĆą╝ą░čåąĖąĖ - ąŠą▒čŖąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ FLASH ąĖ EEPROM, ą▒ąĖčéčŗ ąĘą░čēąĖčéčŗ (lock bits) ąĖ čäčīčÄąĘčŗ (fuse bits) ąĖ čé. ą┐. ąŁčéą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ąŠčüčéčāą┐ąĮą░ ą▓ XML-čäą░ą╣ą╗ą░čģ ąŠą┐ąĖčüą░ąĮąĖčÅ (XML Part Description Files), ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ Atmel AVR Studio.
AVROSP čćąĖčéą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąĖąĘ čŹčéąĖčģ čäą░ą╣ą╗ąŠą▓ XML. ąĢčüą╗ąĖ AVR Studio ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĄčüą╗ąĖ AVROSP ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄ, ąĖą╗ąĖ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą┤čĆčāą│ąĖąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ (ą║ ą┐čĆąĖą╝ąĄčĆčā Linux┬«), č鹊 čŹčéąĖ XML Part Description Files ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ AVROSP čüąĮą░čćą░ą╗ą░ ą┐čŗčéą░ąĄčéčüčÅ ąĖčģ ąĮą░ą╣čéąĖ ą▓ č鹥ą║čāčēąĄą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ, ąĘą░č鹥ą╝ ą▓ ą┤ąŠą╝ą░čłąĮąĄą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ AVROSP, ą┤ąĖčĆąĄą║č鹊čĆąĖčÅčģ, čāą║ą░ąĘą░ąĮąĮčŗčģ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠą║čĆčāąČąĄąĮąĖčÅ PATH, ąĖ ąĘą░č鹥ą╝ ą▓ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ AVR Studio. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čäą░ą╣ą╗čŗ ąŠą┐ąĖčüą░ąĮąĖčÅ XML Part Description Files ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ, ąĮą░čģąŠą┤čÅčēčāčÄčüčÅ ą▓ ą┐čāčéčÅčģ PATH, ąĖ č鹊ą│ą┤ą░ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ AVR Studio.
ą¤čĆąĖą╝. ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ą┤ą╗čÅ AVR Studio 4.19 ąĖ Atmel Studio 6.0 čŹčéąĖ čäą░ą╣ą╗čŗ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ą░čģ c:\Program Files\Atmel\Atmel Studio 6.0\devices, c:\Program Files\Atmel\Atmel Studio 6.0\tools\AVRDragon\xml, c:\Program Files\Atmel\Atmel Studio 6.0\tools\AVRISPmkII\xml, c:\Program Files\Atmel\Atmel Studio 6.0\tools\AVRONE\xml, c:\Program Files\Atmel\Atmel Studio 6.0\tools\JTAGICE3\xml, c:\Program Files\Atmel\Atmel Studio 6.0\tools\JTAGICEmkII\xml, c:\Program Files\Atmel\Atmel Studio 6.0\tools\STK500\xml, c:\Program Files\Atmel\Atmel Studio 6.0\tools\STK600\xml, c:\Program Files\Atmel\AVR Tools\Partdescriptionfiles, c:\Program Files\Atmel\Flip 3.4.2\bin\PartDescriptionFiles, c:\Program Files\Atmel\Flip 3.4.7\bin\PartDescriptionFiles.
ą×čĆąĖą│ąĖąĮą░ą╗čīąĮčŗąĄ čäą░ą╣ą╗čŗ ąŠą┐ąĖčüą░ąĮąĖą╣ Part Description Files ąŠč湥ąĮčī ą▒ąŠą╗čīčłąĖąĄ, ąĖ ą┤ą╗čÅ ąĖčģ ą┐ą░čĆčüąĖąĮą│ą░ čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ. ą¤ąŠčŹč鹊ą╝čā AVROSP čüąŠąĘą┤ą░ąĄčé ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ čäą░ą╣ą╗ XML, čüąŠą┤ąĄčƹȹ░čēąĖą╣ č鹊ą╗čīą║ąŠ ąĖąĮč鹥čĆąĄčüčāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ąĖ čüąŠčģčĆą░ąĮčÅąĄčé ąĄą│ąŠ ą▓ ą┤ąŠą╝ą░čłąĮąĄą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ AVROSP. ąĢčüą╗ąĖ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗąĄ čäą░ą╣ą╗čŗ ą▒čŗą╗ąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮčŗ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĖ AVR Studio, č鹊 ą║čŹčłąĖčĆčāčÄčēąĖąĄ čäą░ą╣ą╗čŗ XML ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāą┤ą░ą╗ąĄąĮčŗ ąĖąĘ ą┤ąŠą╝ą░čłąĮąĄą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ, čćč鹊 čāą║ą░ąČąĄčé AVROSP ą┐ąĄčĆąĄčüąŠąĘą┤ą░čéčī ąĖčģ ąĘą░ąĮąŠą▓ąŠ.
ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čäą░ą╣ą╗čŗ Part Description Files ąĮąĄ čüąŠą┤ąĄčƹȹ░čé ą║ą░ą║čāčÄ-ą╗ąĖą▒ąŠ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą░ąČą┤ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąóą░ą║ čćč鹊 ą╝ąŠą┤čāą╗čī ISP čāčéąĖą╗ąĖčéčŗ AVROSP čĆąĄą░ą╗ąĖąĘčāąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣čüčÅ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čāčüčéčĆąŠą╣čüčéą▓ AVR. ąśąĘ-ąĘą░ čŹč鹊ą│ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ISP ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ čāčüčéčĆąŠą╣čüčéą▓, čā ą║ąŠč鹊čĆčŗčģ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ. ąŁč鹊 ąŠčéąĮąŠčüąĖčéčüčÅ ą║ čüą╗ąĄą┤čāčÄčēąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ Atmel: ATtiny26 ąĖ ATtiny2313. ą£ąŠą┤čāą╗čī ą▒čāčéą╗ąŠą░ą┤ąĄą┐ą░ AVROSP ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: Atmel ATtiny28L ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąĖ č湥čĆąĄąĘ ISP, ąĮąĖ č湥čĆąĄąĘ bootloader, ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čāčéąĖą╗ąĖč鹊ą╣ AVROSP. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ą┤ąŠčĆą░ą▒ąŠčéą░čéčī ą║ąŠą┤ AVROSP čćč鹊ą▒čŗ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą┤čĆčāą│ąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą▓, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą▓čŗčüąŠą║ąŠą▓ąŠą╗čīčéąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (serial high-voltage programmer, HVSP).
[2. ąæčŗčüčéčĆčŗą╣ čüčéą░čĆčé]
ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąĮčāąČąĮčŗ čłą░ą│ąĖ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ ąĘą░ą┐čāčüą║ą░, ąĄčüą╗ąĖ ąÆą░ą╝ ąĮąĄ ąĮčāąČąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ąĖą╗ąĖ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čāčéąĖą╗ąĖčéčŗ AVROSP čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ avrosp.exe. ą×ąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░čĆčģąĖą▓ąĄ avr911.zip [5], ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü čŹčéąĖą╝ ą░ą┐ąĮąŠčāč鹊ą╝. ZIP-čäą░ą╣ą╗ čéą░ą║ąČąĄ čüąŠą┤ąĄčƹȹĖčé ą▓ąĄčüčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖ ą║ąŠą┐ąĖčÄ čäą░ą╣ą╗ąŠą▓ ąŠą┐ąĖčüą░ąĮąĖčÅ Part Description Files ąĖąĘ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ AVR Studio.
ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ ą▓ ąĮąŠą▓čŗą╣ ą║ą░čéą░ą╗ąŠą│, ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĖą╝čÅ (ą┐ąŠą╗ąĮčŗą╣ ą┐čāčéčī) čŹč鹊ą│ąŠ ą║ą░čéą░ą╗ąŠą│ą░ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąŠą║čĆčāąČąĄąĮąĖčÅ PATH. ąĢčüą╗ąĖ ąÆčŗ ąĮąĄ čģąŠčéąĖč鹥 čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī Atmel AVR Studio, čüą║ąŠą┐ąĖčĆčāą╣č鹥 čäą░ą╣ą╗čŗ ąŠą┐ąĖčüą░ąĮąĖčÅ XML ą▓ ą┐ąŠą┤ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ (čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗčģ čäą░ą╣ą╗ąŠą▓ čäą░ą╣ą╗ą░ą╝ąĖ ą║čŹčłąĖčĆąŠą▓ą░ąĮąĖčÅ AVROSP), ąĖ čéą░ą║ąČąĄ ą┤ąŠą▒ą░ą▓čīč鹥 ą┐čāčéčī čŹč鹊ą│ąŠ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ą░ ą▓ PATH. ąóąĄą┐ąĄčĆčī ą▓čüąĄ ą│ąŠč鹊ą▓ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ AVROSP.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (čüą║ąŠčĆąŠčüčéčī baud rate, ą║ąŠąĮčéčĆąŠą╗čī č湥čéąĮąŠčüčéąĖ parity control ąĖ čé. ą┤.) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓čĆčāčćąĮčāčÄ ą┤ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ AVROSP. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ AVROSP čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą▒čāčéą╗ąŠą░ą┤ąĄčĆąŠą╝, ąŠą▒ą╝ąĄąĮąĖą▓ą░čÄčēąĖą╝čüčÅ č湥čĆąĄąĘ COM1 ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 115200 bps, no parity control, 8 data bits, ąĘą░ą┐čāčüčéąĖč鹥 ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ COM-ą┐ąŠčĆčéą░ čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā DOS:
mode com1 baud=115200 parity=n data=8
[3. ąĪąĖąĮčéą░ą║čüąĖčü ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ AVROSP]
ąÆčüąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ ą┤ąŠą╗ąČąĮčŗ ąĮą░čćąĖąĮą░čéčīčüčÅ čüąŠ ąĘąĮą░ą║ą░ ą╝ąĖąĮčāčü, ąŠą┤ąĮąŠą│ąŠ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ ąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣. ą£ąĄąČą┤čā ą╝ąĖąĮčāčüąŠą╝, čüąĖą╝ą▓ąŠą╗ą░ą╝ąĖ ąĖą╗ąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąŠą▒ąĄą╗ąŠą▓. ą¤ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ. ąÆ čüą╗čāčćą░ąĄ čāą║ą░ąĘą░ąĮąĖčÅ ą║ąŠąĮčäą╗ąĖą║čéčāčÄčēąĖčģ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ąĖ COM1, ąĖ COM2, ą▒čāą┤ąĄčé ą▓čüąĄą│ą┤ą░ ą┐čĆąĖą╝ąĄąĮąĄąĮ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čāą║ą░ąĘą░ąĮąĮčŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3-1.
ąóą░ą▒ą╗ąĖčåą░ 3-1. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ AVROSP.
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| -d< name > |
ąŚą░ą┤ą░ąĄčéčüčÅ ąĖą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░). ą×ą┐čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāą║ą░ąĘą░ąĮą░ ą┐čĆąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| -if< infile > |
ąÆčģąŠą┤ąĮąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH). ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą┐čĆąŠą▓ąĄčĆą║ąĖ FLASH. ążąŠčĆą╝ą░čé čäą░ą╣ą╗ą░ Intel Extended Hex. |
| -ie< infile > |
ąÆčģąŠą┤ąĮąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čŹąĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą┤ą░ąĮąĮčŗčģ (EEPROM). ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą┐čĆąŠą▓ąĄčĆą║ąĖ EEPROM. ążąŠčĆą╝ą░čé čäą░ą╣ą╗ą░ Intel Extended Hex. |
| -of< outfile > |
ąÆčŗčģąŠą┤ąĮąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ čäą░ą╣ą╗ą░ ą┐ą░ą╝čÅčéąĖ FLASH. ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą▓ čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ FLASH. ążąŠčĆą╝ą░čé čäą░ą╣ą╗ą░ Intel Extended Hex. |
| -oe< outfile > |
ąÆčŗčģąŠą┤ąĮąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ čäą░ą╣ą╗ą░ ą┐ą░ą╝čÅčéąĖ EEPROM. ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą▓ čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ EEPROM. ążąŠčĆą╝ą░čé čäą░ą╣ą╗ą░ Intel Extended Hex. |
| -s |
ą¤čĆąŠčćąĖčéą░čéčī ą▒ą░ą╣čéčŗ čüąĖą│ąĮą░čéčāčĆčŗ. |
| -O< addr > |
ą¤čĆąŠčćąĖčéą░čéčī ą▒ą░ą╣čé ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (oscillator calibration byte) čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ą░čĆą░ą╝ąĄčéčĆ addr ąĮąĄąŠą▒čÅąĘą░č鹥ą╗ąĄąĮ. |
| -O#< addr > |
ąŚą░ą┤ą░ąĮąĮąŠąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĘąĮą░č湥ąĮąĖąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĄą│ąŠ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ čüą▓ąŠąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓ą╝ąĄčüč鹊 čćč鹥ąĮąĖčÅ ąĄą│ąŠ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣ -O< addr >. |
| -Sf< addr > |
ąŚą░ą┐ąĖčüčī ą▒ą░ą╣čéą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▓ ą┐ą░ą╝čÅčéčī FLASH. ą¤ą░čĆą░ą╝ąĄčéčĆ addr ąĮąĄąŠą▒čÅąĘą░č鹥ą╗ąĄąĮ. |
| -Se< addr > |
ąŚą░ą┐ąĖčüčī ą▒ą░ą╣čéą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▓ ą┐ą░ą╝čÅčéčī EEPROM. ą¤ą░čĆą░ą╝ąĄčéčĆ addr ąĮąĄąŠą▒čÅąĘą░č鹥ą╗ąĄąĮ. |
| -e |
ą×čćąĖčüčéą║ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (erase). ą¤ą░ą╝čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮą░ ą┐ąĄčĆąĄą┤ č鹥ą╝ ą║ą░ą║ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą╗čÄą▒ąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ. |
| -p< t > |
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (program). ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ t ą▓ ąĘąĮą░č湥ąĮąĖąĄ f ą┤ą╗čÅ FLASH, ąĖ ą▓ ąĘąĮą░č湥ąĮąĖąĄ e ą┤ą╗čÅ EEPROM, ąĖą╗ąĖ čāą║ą░ąČąĖč鹥 b ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ FLASH, ąĖ EEPROM. ąöą╗čÅ čŹč鹊ą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒čāčÄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ čäą░ą╣ą╗čŗ. |
| -r< t > |
ą¤čĆąŠčćąĖčéą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ (read). ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ t ą▓ ąĘąĮą░č湥ąĮąĖąĄ f ą┤ą╗čÅ FLASH, ąĖ ą▓ ąĘąĮą░č湥ąĮąĖąĄ e ą┤ą╗čÅ EEPROM, ąĖą╗ąĖ čāą║ą░ąČąĖč鹥 b ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ FLASH, ąĖ EEPROM. ąöą╗čÅ čŹč鹊ą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒čāčÄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ čäą░ą╣ą╗čŗ. |
| -v< t > |
ą¤čĆąŠą▓ąĄčĆąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ (verify). ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ t ą▓ ąĘąĮą░č湥ąĮąĖąĄ f ą┤ą╗čÅ FLASH, ąĖ ą▓ ąĘąĮą░č湥ąĮąĖąĄ e ą┤ą╗čÅ EEPROM, ąĖą╗ąĖ čāą║ą░ąČąĖč鹥 b ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĖ FLASH, ąĖ EEPROM. ąöą╗čÅ čŹč鹊ą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒čāčÄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ čäą░ą╣ą╗čŗ. |
| -l< value > |
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ą░ą╣čéą░ ąĘą░čēąĖčéčŗ (lock byte). ąŚąĮą░č湥ąĮąĖąĄ value ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ ą║ą░ą║ 8-ą▒ąĖčéąĮąŠąĄ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ. |
| -L< value > |
ą¤čĆąŠą▓ąĄčĆą║ą░ ą▒ą░ą╣čéą░ ąĘą░čēąĖčéčŗ (lock byte). ąŚąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ value ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ ą║ą░ą║ 8-ą▒ąĖčéąĮąŠąĄ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ. |
| -y |
ą¤čĆąŠčćąĖčéą░čéčī ą▒ą░ą╣čé ąĘą░čēąĖčéčŗ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| -f< value > |
ąŻčüčéą░ąĮąŠą▓ąĖčéčī ą▒ą░ą╣čéčŗ čäčīčĹʹŠą▓ (fuse bytes). ąŚąĮą░č湥ąĮąĖąĄ value ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ ą║ą░ą║ 16-ą▒ąĖčéąĮąŠąĄ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ, čćč鹊ą▒čŗ ąĘą░ą┤ą░čéčī čŹčéąĖą╝ ąĘąĮą░č湥ąĮąĖąĄ čüčéą░čĆčłąĄą│ąŠ ąĖ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣č鹊ą▓ čäčīčĹʹŠą▓. |
| -E< value > |
ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░ čäčīčĹʹŠą▓ (extended fuse byte). ąŚąĮą░č湥ąĮąĖąĄ value ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 8-ą▒ąĖčéąĮčŗą╝ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮčŗą╝. |
| -F< value > |
ą¤čĆąŠą▓ąĄčĆąĖčéčī ą▒ą░ą╣čéčŗ čäčīčĹʹŠą▓ (fuse bytes). ąŚąĮą░č湥ąĮąĖąĄ value ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ ą║ą░ą║ 16-ą▒ąĖčéąĮąŠąĄ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠąĄ. |
| -G< value > |
ą¤čĆąŠą▓ąĄčĆą║ą░ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░ čäčīčĹʹŠą▓ (extended fuse byte). ąŚąĮą░č湥ąĮąĖąĄ value ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 8-ą▒ąĖčéąĮčŗą╝ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮčŗą╝. |
| -q |
ą¤čĆąŠčćąĖčéą░čéčī ą▒ą░ą╣čéčŗ čäčīčĹʹŠą▓ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| -x< value > |
ąŚą░ą┐ąŠą╗ąĮąĖčéčī ąĮąĄčāą║ą░ąĘą░ąĮąĮčŗąĄ ą╝ąĄčüčéą░ ąĘąĮą░č湥ąĮąĖąĄą╝ (00-FF). ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮąĄ čāą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ąŠ ą▓čģąŠą┤ąĮčŗčģ HEX-čäą░ą╣ą╗ą░čģ ą╝ąĄčüčéą░ ą┐ą░ą╝čÅčéąĖ ąĮąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ. |
| -af< start >,< stop > |
ąŻą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ą┤čĆąĄčüąŠą▓ FLASH ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĄčüčī ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ą┤čĆąĄčüąŠą▓ FLASH. ąÉą┤čĆąĄčüą░ ą▒ą░ą╣č鹊ą▓čŗąĄ, ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāą║ą░ąĘą░ąĮčŗ ą▓ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą╝ č乊čĆą╝ą░č鹥. |
| -ae< start >,< stop > |
ąŻą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ą┤čĆąĄčüąŠą▓ EEPROM ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĄčüčī ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ą┤čĆąĄčüąŠą▓ EEPROM. ąÉą┤čĆąĄčüą░ ą▒ą░ą╣č鹊ą▓čŗąĄ, ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāą║ą░ąĘą░ąĮčŗ ą▓ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą╝ č乊čĆą╝ą░č鹥. |
| -c< port > |
ąÆčŗą▒ąŠčĆ ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝, ąŠčé COM1 ą┤ąŠ COM8. ąĢčüą╗ąĖ čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠą┐čāčēąĄąĮ, č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▒čāą┤ąĄčé čüą║ą░ąĮąĖčĆąŠą▓ą░čéčī ą┐ąŠčĆčéčŗ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. |
| -b< t > |
ą¤ąŠą╗čāčćąĖčéčī čĆąĄą▓ąĖąĘąĖąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 t ą▓ ąĘąĮą░č湥ąĮąĖąĄ h ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓ąĄčĆčüąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąĖą╗ąĖ ą▓ ąĘąĮą░č湥ąĮąĖąĄ s ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓ąĄčĆčüąĖąĖ firmware. |
| -g |
"ąóąĖčģą░čÅ čĆą░ą▒ąŠčéą░". ąÆ ą║ąŠąĮčüąŠą╗čī ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąŠ ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░. |
| -z |
ą×čéą║ą╗čÄčćąĖčéčī ąĖąĮą┤ąĖą║ą░č鹊čĆ ą┐čĆąŠą│čĆąĄčüčüą░. ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ, ą║ ą┐čĆąĖą╝ąĄčĆčā, ąĄčüą╗ąĖ čüą┤ąĄą╗ą░ąĮąŠ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ą║ąŠąĮčüąŠą╗ąĖ ą▓ čäą░ą╣ą╗ čü čåąĄą╗čīčÄ ą╗ąŠą│ą░ - ą▓ čäą░ą╣ą╗ ąĮąĄ ą▒čāą┤čāčé ą▓čŗą▓ąĄą┤ąĄąĮčŗ čüąĖą╝ą▓ąŠą╗čŗ ą┐čĆąŠą│čĆąĄčüčü-ąĖąĮą┤ąĖą║ą░čåąĖąĖ. |
| -Y< addr > |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ RC ą│ąĄąĮąĄčĆą░č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ ATtiny4/5/9/10/20/40. ąĪą╝. ą░ą┐ąĮąŠčāčé AVR057. |
| -h |
ąÆčŗą▓ąĄčüčéąĖ ą┐ąŠą┤čüą║ą░ąĘą║čā (čüą┐čĆą░ą▓ą║čā) ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ. ą×čéą╝ąĄąĮčÅąĄčé ą▓čüąĄ ą┤čĆčāą│ąĖąĄ ąŠą┐čåąĖąĖ. |
| -? |
ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ -h. |
ąÆąŠčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čāčéąĖą╗ąĖčéčŗ AVROSP.
avrosp ŌĆōdATmega128 ŌĆōpf ŌĆōvf ŌĆōifprogram.hex ŌĆōe
ąÆčŗčłąĄčāą║ą░ąĘą░ąĮąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ čüąĮą░čćą░ą╗ą░ ąŠčćąĖčüčéąĖčé ą▓čüąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ą░ą╝čÅčéąĖ, ąĘą░č鹥ą╝ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé ąĖ ą┐čĆąŠą▓ąĄčĆąĖčé ą┤ą░ąĮąĮčŗąĄ, čüąŠą┤ąĄčƹȹ░čēąĖąĄčüčÅ ą▓ čäą░ą╣ą╗ąĄ program.hex, ą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ Atmel ATmega128.
avrosp ŌĆōdATmega32 ŌĆōre ŌĆōoedump.hex ŌĆōae0,ff ŌĆōcCOM2
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠčćąĖčéą░ąĄčé ą┐ąĄčĆą▓čŗąĄ 256 ą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ EEPROM čāčüčéčĆąŠą╣čüčéą▓ą░ ATmega32 ą▓ čäą░ą╣ą╗ dump.hex. ąæčāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ č鹊ą╗čīą║ąŠ COM2.
avrosp ŌĆōdATmega64 ŌĆōO#a0 ŌĆōSe0 ŌĆōlc0
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ąĘą░ą┐ąĖčłąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (oscillator calibration value) 0xA0 ą▓ EEPROM ą┐ąŠ ą░ą┤čĆąĄčüčā 0, ąĖ ąĘą░č鹥ą╝ ąĘą░čēąĖčéąĖčé ą┐ą░ą╝čÅčéčī ATmega64 ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▒ą░ą╣čéą░ ą▒ąĖčé ąĘą░čēąĖčéčŗ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0xC0.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ čäčīčÄąĘčŗ (fuse bits), ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ą░čÅ ą▒ąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé ą║ąŠčĆčĆąĄą║čéąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ čäčīčĹʹŠą▓ ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąæčāą┤čīč鹥 ąŠčüąŠą▒ąĄąĮąĮąŠ ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮčŗ, čćč鹊ą▒čŗ ąĮąĄ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĮąĄą▓ąĄčĆąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ čäčīčĹʹŠą▓, čéą░ą║ ą║ą░ą║ čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠą╗ąĮąŠą╣ ąĮąĄčĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗčüąŠą║ąĖą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ (High-voltage programming, HVSP) ą╝ąŠąČąĄčé ą┐ąŠą╝ąŠčćčī ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
[4. ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ AVROSP]
ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 čćąĖčéą░čÄčēąĖą╣ čŹčéčā čüąĄą║čåąĖčÄ ąĖą╝ąĄąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĘąĮą░ąĮąĖčÅ ą┐ąŠ ą║ąŠąĮčåąĄą┐čåąĖąĖ ąŠą▒čŖąĄą║čéąĮąŠ-ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą▓ čćą░čüčéąĮąŠčüčéąĖ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ąĮą░ čÅąĘčŗą║ąĄ C++.
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ AVROSP [5] čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüą▓ąŠą▒ąŠą┤ąĮčŗą╝. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī, čĆą░čüčłąĖčĆčÅčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčÅčéčī ąĄą│ąŠ ą║ą░ą║ ą┐ąŠąČąĄą╗ą░čÄčé. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą╗ąĖčåąĄąĮąĘąĖąĖ ą╝ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ čüą░ą╣č鹥 gnu.org.
ąĀąĖčü. 4-1. ąÜą╗ą░čüčüčŗ AVROSP.
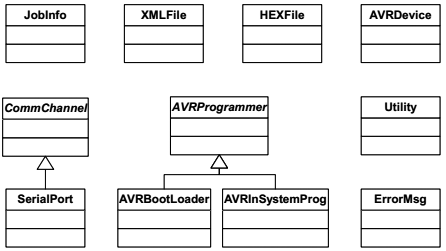
ą¤ąŠčćčéąĖ ą▓čüčÅ čĆą░ą▒ąŠčéą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ AVROSP ąĮą░ ą▓ąĄčĆčģąĮąĄą╝ čāčĆąŠą▓ąĮąĄ ąĖąĮą║ą░ą┐čüčāą╗ąĖčĆąŠą▓ą░ąĮą░ ą▓ ą║ą╗ą░čüčüąĄ JobInfo. ąŁč鹊čé ą║ą╗ą░čüčü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą▒čŖąĄą║čéčŗ ą║ą╗ą░čüčüąŠą▓ XMLFile, HEXFile ąĖ AVRDevice ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čäą░ą╣ą╗ąŠą▓ XML ąĖ HEX, ąĖ čĆą░čüą┐ą░ą║ąŠą▓ą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖąĘ čäą░ą╣ą╗ąŠą▓ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ XML Part Description Files. ąöą▓ą░ ą║ą╗ą░čüčüą░-ą┐ąŠą╝ąŠčēąĮąĖą║ą░ Utility ąĖ ErrorMsg ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¦ą░čüčéčī JobInfo, ą║ąŠč鹊čĆą░čÅ čĆąĄą░ą╗ąĖąĘčāąĄčé čĆą░ą▒ąŠčćąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü, ąĮąĄ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ąĘąĮą░ąĮąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąŠą▒ą╝ąĄąĮą░ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝. ą×ąĮą░ ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčé ą║ąŠą╝ą░ąĮą┤ąĮčāčÄ čüčéčĆąŠą║čā, ąĖ čüąŠąĘą┤ą░ąĄčé 菹║ąĘąĄą╝ą┐ą╗čÅčĆčŗ čéčĆąĄą▒čāąĄą╝čŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗčģ ą║ą╗ą░čüčüąŠą▓, ą║ ą┐čĆąĖą╝ąĄčĆčā ą║ą╗ą░čüčüą░ SerialPort. ą×čüčéą░ą╗čīąĮą░čÅ čćą░čüčéčī ą║ąŠą┤ą░ ą┐čĆąŠčüč鹊 čĆą░ą▒ąŠčéą░ąĄčé č湥čĆąĄąĘ ąŠą▒ąŠą▒čēąĄąĮąĮčŗą╣ ą║ą╗ą░čüčü čĆąŠą┤ąĖč鹥ą╗čÅ CommChannel. ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ č鹊ą╗čīą║ąŠ ą║ą╗ą░čüčü PC COM port, ąĮąŠ ą╝ąŠą│čāčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą║ą╗ą░čüčüčŗ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ č湥čĆąĄąĘ USB ąĖą╗ąĖ TCP/IP (ąĖą╗ąĖ č湥čĆąĄąĘ ą┤čĆčāą│ąĖąĄ ą║ą░ąĮą░ą╗čŗ ąŠą▒ą╝ąĄąĮą░), ą┤ą╗čÅ č湥ą│ąŠ ąÆčŗ ą╝ąŠąČąĄč鹥 čüą┤ąĄą╗ą░čéčī ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗą╣ ą║ą╗ą░čüčü ąĖąĘ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░ CommChannel, ąĖ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐čĆąŠą▓ąĄčĆą║čā čŹč鹊ą│ąŠ čéąĖą┐ą░ ą║ą░ąĮą░ą╗ą░ ą▓ ą┐ą░čĆčüąĄčĆ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ.
ąóą░ą║ąŠą╣ ąČąĄ ą╝ąĄč鹊ą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖ ą┤ą╗čÅ čéąĖą┐ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ąÜąŠą┤, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé čü ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąĘąĮą░čéčī ąŠ č鹊ą╝, ą║ą░ą║ąŠą╣ čéąĖą┐ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ. ą║ą╗ą░čüčü JobInfo ą┐ąŠą╗čāčćą░ąĄčé ąŠčé ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ čüčéčĆąŠą║čā ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (programmer ID), ąĖ čüąŠąĘą┤ą░ąĄčé ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ąŠą▒čŖąĄą║čé ą┤ą╗čÅ ąĮčāąČąĮąŠą│ąŠ čüą┐ąĄčåąĖčäąĖč湥čüą║ąŠą│ąŠ čéąĖą┐ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ą×čüčéą░ą╗čīąĮąŠą╣ ą║ąŠą┤ čĆą░ą▒ąŠčéą░ąĄčé č湥čĆąĄąĘ ąŠą▒ąŠą▒čēąĄąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü AVRProgrammer. ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ č鹊ą╗čīą║ąŠ ą║ą╗ą░čüčüčŗ ą┤ą╗čÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░ [3] ąĖ ą┤ą╗čÅ ISP-ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ [4]. ą×ą┤ąĮą░ą║ąŠ, ąÆčŗ ą╝ąŠąČąĄč鹥 čüąŠąĘą┤ą░čéčī čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗą╣ ą║ą╗ą░čüčü ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ąÆą░čłąĄą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ ąĮą░ ą▒ą░ąĘąĄ ą║ą╗ą░čüčüą░ AVRProgrammer, ąĖ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐čĆąŠą▓ąĄčĆą║čā ąĖ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĄą│ąŠ čüčéčĆąŠą║ąĖ ID ą▓ JobInfo.
ąóą░ą║ąŠą╣ ą┤ąĖąĘą░ą╣ąĮ AVROSP ą┤ąĄą╗ą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠč湥ąĮčī ą│ąĖą▒ą║ąĖą╝. ąæčāą┤čāčēąĖąĄ čĆą░čüčłąĖčĆąĄąĮąĖčÅ AVROSP ą▓ ą┐ą╗ą░ąĮąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą║ą░ąĮą░ą╗ąŠą╝ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąĖ čéąĖą┐ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą▓ čüčéą░ąĮąŠą▓čÅčéčüčÅ ą┐čĆąŠčüč鹊ą╣ ąĘą░ą┤ą░č湥ą╣.
4.2 ą×ą┐ąĖčüą░ąĮąĖčÅ ą║ą╗ą░čüčüąŠą▓
ąŚą┤ąĄčüčī ąŠą┐ąĖčüą░ąĮčŗ č鹊ą╗čīą║ąŠ ą┐čāą▒ą╗ąĖčćąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ąĖąĮč鹥čĆč乥ą╣čüą░ (public interface methods), ą║ąŠč鹊čĆčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą┤čĆčāą│ąĖčģ ą║ą╗ą░čüčüą░čģ ąĖ ą╝ąŠą┤čāą╗čÅčģ. ą¦ąĖčéą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖčÅą╝ ą▓ ą║ąŠą┤ąĄ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čĆą░ą▒ąŠč鹥 čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ą╗ą░čüčüąŠą▓. ąÜą░ąČą┤čŗą╣ ą║ą╗ą░čüčü ąŠą┐ąĖčüą░ąĮ čü ą║čĆą░čéą║ąĖą╝ ą▓ą▓ąĄą┤ąĄąĮąĖąĄą╝ ą▓ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą║ą╗ą░čüčüą░, ąĖ ą║ą░ąČą┤čŗą╣ ąĖąĘ ą┐čāą▒ą╗ąĖčćąĮčŗčģ ą╝ąĄč鹊ą┤ąŠą▓ ąŠą┐ąĖčüą░ąĮ čü čéąĖą┐ąŠą╝ ą▓ąŠąĘą▓čĆą░čéą░, ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ąĖ ąĮą░ąĘąĮą░č湥ąĮąĖąĄą╝.
AVRDevice
ąŁč鹊čé ą║ą╗ą░čüčü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ąŠąĮč鹥ą╣ąĮąĄčĆ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░), čéą░ą║ąĖčģ ą║ą░ą║ ąŠą▒čŖąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ (FLASH, EEPROM) ąĖ ą▒ą░ą╣čéčŗ čüąĖą│ąĮą░čéčāčĆ. ąÜą╗ą░čüčü čéą░ą║ąČąĄ čüąŠą┤ąĄčƹȹĖčé čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖąĘ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ Atmel AVR Studio.
AVRDevice
ąŁč鹊 ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą×ąĮ ą┐ąŠą╗čāčćą░ąĄčé čüčéčĆąŠą║ąŠą▓čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ - ąĖą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĮąĄ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąÜą╗ą░čüčü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĄč鹊ą┤ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┤ą╗čÅ AVR Studio, ąĮąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗąĄ ą║ą╗ą░čüčüčŗ ą╝ąŠą│čāčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┤čĆčāą│ąŠą╣ čüą┐ąŠčüąŠą▒ ą┐ąŠą╗čāč湥ąĮąĖčÅ čéą░ą║ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ.
~AVRDevice
ąŁč鹊 ą┤ąĄčüčéčĆčāą║č鹊čĆ ą║ą╗ą░čüčüą░. ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą▓ ąĮąĄą╝ ąĮąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░, čŹč鹊 ą┐čĆąŠčüč鹊 ą▓ą╝ąĄčüčéąĖą╗ąĖčēąĄ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ čĆą░čüčłąĖčĆąĄąĮąĖą╣.
readParametersFromAVRStudio
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąĄą╗ą░ąĄčé ą┐ąŠąĖčüą║ ą┐ąŠ č鹥ą║čāčēąĄą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ, ą┐ąŠ ą┤ąŠą╝ą░čłąĮąĄą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą┤ąĖčĆąĄą║č鹊čĆąĖčÅą╝ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠą║čĆčāąČąĄąĮąĖčÅ PATH ąĖ, ąĄčüą╗ąĖ čŹč鹊 ą┤ąŠčüčéčāą┐ąĮąŠ, ą▓ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ AVR Studio ą┤ą╗čÅ čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ čäą░ą╣ą╗ą░ XML. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┐čāčéčī ą┤ąŠ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ AVR Studio, ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ą▒ą░ąĘą░ ą┤ą░ąĮąĮčŗčģ čĆąĄąĄčüčéčĆą░ Windows┬« ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé ą║ą╗čÄčćą░ "HKEY_LOCAL_MACHINE\Software\Atmel\AVRTools\AVRToolsPath". ą£ąĄč鹊ą┤ ą┤ąĄą╗ą░ąĄčé ą┐ą░čĆčüąĖąĮą│ čäą░ą╣ą╗ą░ XML ąĖ ą┐ąŠą╗čāčćą░ąĄčé ąŠčéčéčāą┤ą░ ąĮčāąČąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ (exception thrown), ąĄčüą╗ąĖ čäą░ą╣ą╗ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ ąĖą╗ąĖ ą▓ čäą░ą╣ą╗ąĄ ąĄčüčéčī ąŠčłąĖą▒ą║ąĖ. ą£ąĄč鹊ą┤ ą▒ąĄčĆąĄčé čüą┐ąĖčüąŠą║ ą┐čāč鹥ą╣ ą┐ąŠąĖčüą║ą░, ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé.
getFlashSize
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░čĆą░ą╝ąĄčéčĆčā ąŠą▒čŖąĄą╝ą░ ą┐ą░ą╝čÅčéąĖ FLASH. ąŻ ą╝ąĄč鹊ą┤ą░ ąĮąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąŠąĮ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ long, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé (čĆą░ąĘą╝ąĄčĆ) FLASH.
getEEPROMSize
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░čĆą░ą╝ąĄčéčĆčā ąŠą▒čŖąĄą╝ą░ ą┐ą░ą╝čÅčéąĖ EEPROM. ąŻ ą╝ąĄč鹊ą┤ą░ ąĮąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąŠąĮ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ long, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé (čĆą░ąĘą╝ąĄčĆ) EEPROM.
getPageSize
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░čĆą░ą╝ąĄčéčĆčā čĆą░ąĘą╝ąĄčĆą░ čüčéčĆą░ąĮąĖčåčŗ FLASH. ą£ąĄč鹊ą┤ ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ č鹥čģ AVR, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé čüčéčĆą░ąĮąĖčåčŗ FLASH. ąöą╗čÅ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ AVR, čā ą║ąŠč鹊čĆčŗčģ ąĮąĄčé čüčéčĆą░ąĮąĖčå ą┐ą░ą╝čÅčéąĖ, ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé ŌĆō1. ąŻ ą╝ąĄč鹊ą┤ą░ ąĮąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąŠąĮ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ long, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ ą║ą░ąČą┤ąŠą╣ čüčéčĆą░ąĮąĖčåąĄ FLASH.
getFuseStatus
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čäčīčĹʹŠą▓ (fuse bits), ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖčģ ąĖą╝ąĄąĄčé. ąŻ ą╝ąĄč鹊ą┤ą░ ąĮąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąŠąĮ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true ąĄčüą╗ąĖ ą▓ XML-čäą░ą╣ą╗ąĄ ąĄčüčéčī čüąĄą║čåąĖčÅ "FUSE", ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false.
getXFuseStatus
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ - ąĄčüčéčī ąĖą╗ąĖ ąĮąĄčé ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ ą▒ąĖčéčŗ čäčīčĹʹŠą▓ (extended fuse bits). ąŻ ą╝ąĄč鹊ą┤ą░ ąĮąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąŠąĮ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╝ąĄąĄčé extended fuses, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false.
getSignature
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ ą▒ą░ą╣č鹊ą▓ čüąĖą│ąĮą░čéčāčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čŹč鹊 ąĮąĄ ą▒ą░ą╣čéčŗ čüąĖą│ąĮą░čéčāčĆčŗ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĖąĘ čĆąĄą░ą╗čīąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ą░ ą▒ą░ą╣čéčŗ čüąĖą│ąĮą░čéčāčĆčŗ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĖąĘ čäą░ą╣ą╗ąŠą▓ XML. ą£ąĄč鹊ą┤ ą▒ąĄčĆąĄčé ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čéčĆąĖ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ long, ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé. ąæą░ą╣čéčŗ čüąĖą│ąĮą░čéčāčĆčŗ ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ čāą║ą░ąĘčŗą▓ą░čÄčé čāą║ą░ąĘą░č鹥ą╗ąĖ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąĢčüą╗ąĖ ą╗čÄą▒ąŠą╣ ąĖąĘ čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ąŠą║ą░ąČąĄčéčüčÅ ąĮčāą╗ąĄą▓čŗą╝ (null pointer), č鹊 ą▒čāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ (exception thrown).
AVRProgrammer
ąŁč鹊 ą░ą▒čüčéčĆą░ą║čéąĮčŗą╣ ą║ą╗ą░čüčü, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┤ą╗čÅ čüą┐ąĄčåąĖčäąĖčćąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ AVR, ąĮą░ą┐čĆąĖą╝ąĄčĆ bootloader ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ ISP. ą¤ąŠčćčéąĖ ą▓čüąĄ ą╝ąĄč鹊ą┤čŗ čÅą▓ą╗čÅčÄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝ąĖ ąĖ ą┐čāčüčéčŗą╝ąĖ, ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą│čĆčāąČąĄąĮčŗ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗčģ ą║ą╗ą░čüčüą░čģ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ čĆą░ą▒ąŠčéą░ąĄčé č湥čĆąĄąĘ ąŠą▒ąŠą▒čēąĄąĮąĮčŗą╣ ą▒ą░ą╣čé-ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ą░ąĮą░ą╗ ąŠą▒ą╝ąĄąĮą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą▓ ą╝ąŠą╝ąĄąĮčé čüąŠąĘą┤ą░ąĮąĖčÅ čŹą║ąĘąĄą╝ą┐ą╗čÅčĆą░ čŹč鹊ą│ąŠ ą║ą╗ą░čüčüą░.
AVRProgrammer
ąŁč鹊 ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą×ąĮ ą┐ąŠą╗čāčćą░ąĄčé ąŠą┤ąĖąĮ ą┐ą░čĆą░ą╝ąĄčéčĆ, čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒čŖąĄą║čé CommChannel. ąŁč鹊 ą║ą░ąĮą░ą╗ ąŠą▒ą╝ąĄąĮą░, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ ąŠą▒ą╝ąĄąĮą░ čü čĆąĄą░ą╗čīąĮčŗą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ (exception thrown), ąĄčüą╗ąĖ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĮčāą╗ąĄą▓ąŠą╣ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒čŖąĄą║čé ą║ą░ąĮą░ą╗ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ.
~AVRProgrammer
ąŁč鹊 ą┤ąĄčüčéčĆčāą║č鹊čĆ ą║ą╗ą░čüčüą░. ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą▓ ąĮąĄą╝ ąĮąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░, čŹč鹊 ą┐čĆąŠčüč鹊 ą▓ą╝ąĄčüčéąĖą╗ąĖčēąĄ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ čĆą░čüčłąĖčĆąĄąĮąĖą╣.
readProgrammerID
ąŁč鹊 čüčéą░čéąĖč湥čüą║ąĖą╣ ą╝ąĄč鹊ą┤ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čüčéčĆąŠą║ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ (ID-string) ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ąŁč鹊čé ą╝ąĄč鹊ą┤ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé 'S' ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ ąŠą▒ą╝ąĄąĮą░, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ąŠą▒čŖąĄą║čé CommChannel. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊čé ą╝ąĄč鹊ą┤, čćč鹊ą▒čŗ čĆąĄčłąĖčéčī - ą║ą░ą║ąŠą╣ ąĮčāąČąĮąŠ čüąŠąĘą┤ą░čéčī ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗą╣ ąŠą▒čŖąĄą║čé ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ąŁč鹊čé ą╝ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ID-string ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ ąĖąĘ 7 čüąĖą╝ą▓ąŠą╗ąŠą▓. ąÆčŗą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą║ą░ąĮą░ą╗ą░ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮ čāą║ą░ąĘą░č鹥ą╗čī null, ąĖą╗ąĖ ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ ą┐čĆąĖ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝.
setPagesize
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą║ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüčéčĆą░ąĮąĖčåčŗ FLASH ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮ ą┐ąĄčĆąĄą┤ ą╗čÄą▒čŗą╝ąĖ ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ čü ą┐ą░ą╝čÅčéčīčÄ FLASH. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąŠą┤ąĖąĮ ą┐ą░čĆą░ą╝ąĄčéčĆ čéąĖą┐ą░ long, čĆą░ąĘą╝ąĄčĆ čüčéčĆą░ąĮąĖčåčŗ FLASH ą▓ ą▒ą░ą╣čéą░čģ, ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé.
enterProgrammingMode
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘą░čéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆčā ą▓ąŠą╣čéąĖ ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ą£ąĄč鹊ą┤ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ čŹčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ (exception thrown), ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ą▓ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗčģ.
leaveProgrammingMode
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘą░čéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆčā ą▓čŗą╣čéąĖ ąĖąĘ čĆąĄąČąĖą╝ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ą£ąĄč鹊ą┤ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ čŹčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ (exception thrown), ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ą▓ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗčģ.
chipErase
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘą░čéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆčā čüč鹥čĆąĄčéčī (erase) čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░). ą£ąĄč鹊ą┤ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ čŹčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ (exception thrown), ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ą▓ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗčģ.
RC_Calibrate
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘą░čéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆčā ą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ Atmel ATtiny4/5/9/10/20/40. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé 0. ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą░ą┐ąĮąŠčāčéčā Atmel AVR057.
readOSCCAL
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ąŠą┤ąĖąĮ ąĖąĘ ą▒ą░ą╣č鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąŠą╗čāčćą░ąĄčé ą┤ą▓ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ long ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄąĄ ą║ą░ą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ OSCCAL ąĮčāąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī, ąĖ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ long ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮą░ ą┐čĆąŠčćąĖčéą░ąĮąĮą░čÅ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąĄą╗ąĖčćąĖąĮą░. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░ ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĮčāą╗ąĄą▓ąŠą╣ čāą║ą░ąĘą░č鹥ą╗čī.
readSignature
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ą▒ą░ą╣čéčŗ čüąĖą│ąĮą░čéčāčĆčŗ ąĖąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą┐ąŠą╗čāčćą░ąĄčé 3 ą┐ą░čĆą░ą╝ąĄčéčĆą░, 3 long čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░ ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĮčāą╗ąĄą▓ąŠą╣ čāą║ą░ąĘą░č鹥ą╗čī.
checkSignature
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▒ą░ą╣čéčŗ čüąĖą│ąĮą░čéčāčĆčŗ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ą▒ą░ą╣čéą░ą╝ ąĖąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą┐ąŠą╗čāčćą░ąĄčé 3 ą┐ą░čĆą░ą╝ąĄčéčĆą░ čéąĖą┐ą░ long, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄą╝čāčÄ čüąĖą│ąĮą░čéčāčĆčā. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░ ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ ąĖą╝ąĄčÄčéčüčÅ ąĮąĄčüąŠą▓ą┐ą░ą┤ą░čÄčēąĖąĄ ą▒ą░ą╣čéčŗ čüąĖą│ąĮą░čéčāčĆčŗ.
writeFlashByte
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī ą▒ą░ą╣čé ą▓ ą┐ą░ą╝čÅčéčī FLASH ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą▓ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čéąĖą┐ą░ long - ąŠą┤ąĖąĮ čŹč鹊 ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░ ą▓ąŠ FLASH, ą░ ą┤čĆčāą│ąŠą╣ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠą│ąŠ ą▒ą░ą╣čéą░. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░.
writeEEPROMByte
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī ą▒ą░ą╣čé ą▓ ą┐ą░ą╝čÅčéčī EEPROM ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░.
writeFlash
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ HEX-čäą░ą╣ą╗ą░ ą▓ ą┐ą░ą╝čÅčéčī FLASH ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ, čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čéčĆąĄą▒čāąĄą╝čŗą╣ ąŠą▒čŖąĄą║čé HEXFile. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
readFlash
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ FLASH ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĘą░ą┐ąĖčüą░čéčī ąĖčģ ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ąŠą▒čŖąĄą║čé čäą░ą╣ą╗ą░ HEX. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ, čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čéčĆąĄą▒čāąĄą╝čŗą╣ ąŠą▒čŖąĄą║čé HEXFile. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
writeEEPROM
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ HEX-čäą░ą╣ą╗ą░ ą▓ ą┐ą░ą╝čÅčéčī EEPROM ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ, čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čéčĆąĄą▒čāąĄą╝čŗą╣ ąŠą▒čŖąĄą║čé HEXFile. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
readEEPROM
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ EEPROM ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĘą░ą┐ąĖčüą░čéčī ąĖčģ ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ąŠą▒čŖąĄą║čé čäą░ą╣ą╗ą░ HEX. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ, čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čéčĆąĄą▒čāąĄą╝čŗą╣ ąŠą▒čŖąĄą║čé HEXFile. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
writeLockBits
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčéčŗ ąĘą░čēąĖčéčŗ (lock bits) ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ čéąĖą┐ą░ long, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąĮčāąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ lock bits. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░.
readLockBits
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖč鹊ą▓ ąĘą░čēąĖčéčŗ (lock bits) ąĖąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ - čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ long, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ lock bits. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
writeFuseBits
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ čāčüčéą░ąĮąŠą▓ąĖčéčī čäčīčÄąĘčŗ (fuse bits, čüčĆą░ąĘčā ąĖ ą╝ą╗ą░ą┤čłąĖą╣, ąĖ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čéčŗ) ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ čéąĖą┐ą░ long, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąĮčāąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ fuse bits. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░.
readFuseBits
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖčÅ čäčīčĹʹŠą▓ (fuse bits, čüčĆą░ąĘčā ąĖ ą╝ą╗ą░ą┤čłąĖą╣ ąĖ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) ąĖąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ - čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ long, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ fuse bits. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
writeExtendedFuseBits
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ čāčüčéą░ąĮąŠą▓ąĖčéčī čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čäčīčÄąĘčŗ (extended fuse bits) ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ čéąĖą┐ą░ long, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąĮčāąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ extended fuse bits. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░.
readExtendedFuseBits
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖčÅ čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ čäčīčĹʹŠą▓ (extended fuse bits) ąĖąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ - čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ long, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ extended fuse bits. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
programmerSoftwareVersion
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ą▓ąĄčĆčüąĖčÄ firmware ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ - 2 long čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠą╝ąĄčĆą░ ą▓ąĄčĆčüąĖą╣ major ąĖ minor. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
programmerHardwareVersion
ąŁč鹊čé ą╝ąĄč鹊ą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ čŹč鹊ą╝ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ ą▒ą░ąĘąŠą▓ąŠą╝ ą║ą╗ą░čüčüąĄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ą▓ąĄčĆčüąĖčÄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ - 2 long čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą║čāą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠą╝ąĄčĆą░ ą▓ąĄčĆčüąĖą╣ major ąĖ minor. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čēą░ąĄčé false. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą▓ čüą╗čāčćą░ąĄ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī null.
AVRBootloader
ąŁč鹊 ą║ą╗ą░čüčü, ą║ąŠč鹊čĆčŗą╣ čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗą╝ ąŠčé ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░ AVRProgrammer. ą×ąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą▒čŗčćąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░ [3]. ąÜą╗ą░čüčü AVRBootloader ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░ąĄčé ą▓čüąĄ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ąŠąĮčüčéčĆčāą║č鹊čĆ čü 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ.
AVRInSystemProg
ąŁč鹊 ą║ą╗ą░čüčü, ą║ąŠč鹊čĆčŗą╣ čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗą╝ ąŠčé ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░ AVRProgrammer. ą×ąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą▒čŗčćąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ISP ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ [4].
ąÜą╗ą░čüčü AVRInSystemProg ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░ąĄčé ą▓čüąĄ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ąŠąĮčüčéčĆčāą║č鹊čĆ čü 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ.
CommChannel
ąŁč鹊čé ą║ą╗ą░čüčü čÅą▓ą╗čÅąĄčéčüčÅ ą░ą▒čüčéčĆą░ą║čéąĮčŗą╝, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╝ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▒ą░ą╣čé-ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąŠą▒ą╝ąĄąĮą░. ąÆčüąĄ ą╝ąĄč鹊ą┤čŗ ą║ą╗ą░čüčüą░ CommChannel čÅą▓ą╗čÅčÄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝ąĖ ąĖ ą┐čāčüčéčŗą╝ąĖ, ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą│čĆčāąČąĄąĮčŗ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗčģ ą║ą╗ą░čüčüą░čģ.
~CommChannel
ąŁč鹊 ą┤ąĄčüčéčĆčāą║č鹊čĆ ą║ą╗ą░čüčüą░. ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą▓ ąĮąĄą╝ ąĮąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░, čŹč鹊 ą┐čĆąŠčüč鹊 ą▓ą╝ąĄčüčéąĖą╗ąĖčēąĄ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ čĆą░čüčłąĖčĆąĄąĮąĖą╣.
openChannel
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą┤ą╗čÅ ąŠčéą║čĆčŗčéąĖčÅ ą║ą░ąĮą░ą╗ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ. ą×ąĮ ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮ ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ ą╗čÄą▒ąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖą╣. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░.
closeChannel
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą┤ą╗čÅ ąĘą░ą║čĆčŗčéąĖčÅ ą║ą░ąĮą░ą╗ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ. ą×ąĮ ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮ, ą║ąŠą│ą┤ą░ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą▓ąĄčĆčłąĄąĮ. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖą╣. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░.
sendByte
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠčüą╗ą░čéčī ą▒ą░ą╣čé č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ ąŠą▒ą╝ąĄąĮą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ - ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ long, čüąŠą┤ąĄčƹȹ░čēąĄąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą▒ą░ą╣čé. ą£ąĄč鹊ą┤ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖą╣. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĮąĄ ą▒čŗą╗ ąŠčéą║čĆčŗčé.
getByte
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąŠą╗ąČąĄąĮ ąŠąČąĖą┤ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą▒ą░ą╣čé ąĖąĘ ą║ą░ąĮą░ą╗ą░ ąŠą▒ą╝ąĄąĮą░. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé long, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĮąĄ ą▒čŗą╗ ąŠčéą║čĆčŗčé.
flushTX
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąŠą╗ąČąĄąĮ čüą▒čĆą░čüčŗą▓ą░čéčī (flush) ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖą╣. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĮąĄ ą▒čŗą╗ ąŠčéą║čĆčŗčé.
flushRX
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąŠą╗ąČąĄąĮ čüą▒čĆą░čüčŗą▓ą░čéčī (flush) ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖą╣. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĮąĄ ą▒čŗą╗ ąŠčéą║čĆčŗčé.
sendMultiple
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąŠą╗ąČąĄąĮ ąŠčéą┐čĆą░ą▓ąĖčéčī ą╝ą░čüčüąĖą▓ ą▒ą░ą╣čé č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ ąŠą▒ą╝ąĄąĮą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ - čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ą▓ ą╝ą░čüčüąĖą▓ąĄ unsigned char, ąĖ long čüąŠą┤ąĄčƹȹ░čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé. ą£ąĄč鹊ą┤ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ. ąöąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ąŠą▒ą╝ąĄąĮą░, ąĖą╗ąĖ ąĄčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĮąĄ ą▒čŗą╗ ąŠčéą║čĆčŗčé.
SerialPort
ąŁč鹊 ą║ą╗ą░čüčü, ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗą╣ ąĖąĘ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░ CommChannel. ą×ąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą▒čŗčćąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ ą║ą░ąĮą░ą╗čā ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ COM-ą┐ąŠčĆčéą░ PC (RS-232 ąĖą╗ąĖ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ USB COM-ą┐ąŠčĆčé). ąÜą╗ą░čüčü SerialPort ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░ąĄčé ą▓čüąĄ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░, ąĖ ąĖą╝ąĄąĄčé čüą▓ąŠą╣ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą║ąŠąĮčüčéčĆčāą║č鹊čĆ.
SerialPort
ąŁč鹊 ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą×ąĮ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą┐ąŠčĆčé, ąĮąŠ ąĮąĄ ąŠčéą║čĆčŗą▓ą░ąĄčé ą║ą░ąĮą░ą╗ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░. ąÜąŠąĮčüčéčĆčāą║č鹊čĆ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ - long čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąĮąŠą╝ąĄčĆ COM-ą┐ąŠčĆčéą░ (ąŠčé 1 ą┤ąŠ 8) ąĖ long čüąŠą┤ąĄčƹȹ░čēąĖą╣ ą╗ąĖą╝ąĖčé čéą░ą╣ą╝ą░čāčéą░ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą▓ čüąĄą║čāąĮą┤ą░čģ. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ čāą║ą░ąĘą░ąĮ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░, ąĖą╗ąĖ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░.
HEXFile
ąŁč鹊 ą║ą╗ą░čüčü, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ą░ąĘąŠą▓čŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čäą░ą╣ą╗ąŠą▓ ą▓ č乊čĆą╝ą░č鹥 Intel Extended HEX [2]. ąÆ ą║ą╗ą░čüčüąĄ ąĄčüčéčī čéą░ą║ąČąĄ ą╝ąĄč鹊ą┤čŗ ąČą┤čÅ ąĘą░ą┤ą░ąĮąĖąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ. ąŁč鹊 ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čćąĖčéą░čéčī ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī č鹊ą╗čīą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čćą░čüčéąĖ ąŠą▒ą╗ą░čüč鹥ą╣ ą┐ą░ą╝čÅčéąĖ AVR.
HEXFile
ąŁč鹊 ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą×ąĮ ą┐ąŠą╗čāčćą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ - long čāą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čéčĆąĄą▒čāąĄą╝čŗą╣ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ąĖ long čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąĘąĮą░č湥ąĮąĖąĄ ą▒ą░ą╣čéą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą▒čāč乥čĆą░. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ąĮąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą╝ą░ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą▒čāč乥čĆą░.
~HEXFile
ąŁč鹊 ą┤ąĄčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą×ąĮ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ą▓čüčÄ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĮčāčÄ ą┐ą░ą╝čÅčéčī.
readFile
ąŁč鹊čé ą╝ąĄč鹊ą┤ čćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ HEX-čäą░ą╣ą╗ą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąŠą┤ąĖąĮ ą┐ą░čĆą░ą╝ąĄčéčĆ, ąĖą╝čÅ HEX-čäą░ą╣ą╗ą░, ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĮąĖą║ą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ čü ą┤ąŠčüčéčāą┐ąŠą╝ ą║ čäą░ą╣ą╗čā, ąĖą╗ąĖ ąĄčüą╗ąĖ čäą░ą╣ą╗ ąĖą╝ąĄąĄčé ąŠčłąĖą▒ąŠčćąĮčŗą╣ č乊čĆą╝ą░čé.
writeFile
ąŁč鹊čé ą╝ąĄč鹊ą┤ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ HEX-čäą░ą╣ą╗. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąŠą┤ąĖąĮ ą┐ą░čĆą░ą╝ąĄčéčĆ, ąĖą╝čÅ HEX-čäą░ą╣ą╗ą░, ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĮąĖą║ą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ čü ą┤ąŠčüčéčāą┐ąŠą╝ ą║ čäą░ą╣ą╗čā.
setUsedRange
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░ąĄčé ąĖąĮą┤ąĖą║ą░č鹊čĆčŗ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą┐ą░ą╝čÅčéąĖ. ąŁč鹊 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąĄą╗ąŠą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ long, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ąĮąŠą▓čŗąĄ ą╗ąĖą╝ąĖčéčŗ start ąĖ end čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ą£ąĄč鹊ą┤ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╝.
clearAll
ąŁč鹊čé ą╝ąĄč鹊ą┤ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓ąĄčüčī ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ą▓ ąĮčāąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒ą░ą╣čéą░. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ long, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąĮčāąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒ą░ą╣čéą░, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ąŠ ą▓čüąĄ čÅč湥ą╣ą║ąĖ ą▒čāč乥čĆą░, ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ.
getRangeStart
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą║ ąĮą░čćą░ą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā č鹥ą║čāčēąĄą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü.
getRangeEnd
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą║ ą║ąŠąĮąĄčćąĮąŠą╝čā ą░ą┤čĆąĄčüčā č鹥ą║čāčēąĄą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü.
getData
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą║ ą┤ą░ąĮąĮčŗą╝ ą▒čāč乥čĆą░. ą¤čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ long, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé long, čüąŠą┤ąĄčƹȹ░čēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒ą░ą╣čéą░ ą▒čāč乥čĆą░. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą░ą┤čĆąĄčü ą▓čŗčłąĄą╗ ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░.
setData
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆąĄ. ą¤čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ - long čüąŠą┤ąĄčƹȹ░čēąĖą╣ ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░, ąĖ long čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąĘąĮą░č湥ąĮąĖąĄ ą▒ą░ą╣čéą░. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą░ą┤čĆąĄčü ą▓čŗčłąĄą╗ ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░.
getSize
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ čĆą░ąĘą╝ąĄčĆą░ ą▒čāč乥čĆą░. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé long, čüąŠą┤ąĄčƹȹ░čēąĄąĄ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą▓ ą▒ą░ą╣čéą░čģ.
XMLFile
ąŁč鹊 ą║ą╗ą░čüčü, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣ ą┐čĆąŠčüč鹊ą╣ ą┐ą░čĆčüąĄčĆ XML ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čäą░ą╣ą╗ąŠą▓ ąŠą┐ąĖčüą░ąĮąĖčÅ AVR (Part description files), ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü Atmel AVR Studio (ąĖčģ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ čüą║ą░čćą░čéčī ą▓ ą░čĆčģąĖą▓ąĄ [5]). ąÜą╗ą░čüčü ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą┤čĆčāą│ąĖčģ ą┐čĆąŠąĄą║čéą░čģ ą┤ą╗čÅ ąŠą▒čēąĄą│ąŠ ą┐ą░čĆčüąĖąĮą│ą░ XML. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą║ą╗ą░čüčü ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą░čéčĆąĖą▒čāčéčŗ ą▓ąĮčāčéčĆąĖ č鹥ą│ąŠą▓, čéą░ą║ čćč鹊 ąĮąĄ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ąŠčłąĖą▒ąŠą║ ąĄčüą╗ąĖ čéą░ą║ąĖąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤čāčé čü č鹥ą│ą░ą╝ąĖ. ąÉčéčĆąĖą▒čāčéčŗ ą┐čĆąŠčüč鹊 ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ. ąÜą╗ą░čüčü čćąĖčéą░ąĄčé ą▓ąĄčüčī čäą░ą╣ą╗ XML ąĖ čüčéčĆąŠąĖčé ą▓ ą┐ą░ą╝čÅčéąĖ čĆąĄąĘąĖą┤ąĄąĮčéąĮąŠąĄ ą┤ąĄčĆąĄą▓ąŠ ąĖąĘ ąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ.
XMLFile
ąŁč鹊 ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą¤čĆąĖąĮąĖą╝ą░ąĄčé 1 čüčéčĆąŠą║ąŠą▓čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ, ąĖą╝čÅ čäą░ą╣ą╗ą░ XML ą┤ą╗čÅ ą┐ą░čĆčüąĖąĮą│ą░. ąÜąŠąĮčüčéčĆčāą║č鹊čĆ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐čĆąŠčćąĖčéą░ąĄčé čäą░ą╣ą╗, čéą░ą║ čćč鹊 ąĄčüą╗ąĖ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖą╣, č鹊 ą▒čāą┤ąĄčé ą┐ąŠčüčéčĆąŠąĄąĮąŠ ą│ąŠč鹊ą▓ąŠąĄ ą┤ąĄčĆąĄą▓ąŠ XML, ą║ąŠą│ą┤ą░ ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ąĘą░ą▓ąĄčĆčłąĖčé čĆą░ą▒ąŠčéčā.
~XMLFile
ąŁč鹊 ą┤ąĄčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą×ąĮ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ą▓čüčÄ ą┐ą░ą╝čÅčéčī, ą▓čŗą┤ąĄą╗ąĄąĮąĮčāčÄ čĆą░ąĮąĄąĄ ą┤ą╗čÅ čĆąĄąĘąĖą┤ąĄąĮčéąĮąŠą│ąŠ ą┤ąĄčĆąĄą▓ą░ XML.
exists
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ąĄčüčéčī ą╗ąĖ čāą║ą░ąĘą░ąĮąĮčŗą╣ čāąĘąĄą╗ (node) ą┐ąŠ ą┤ą░ąĮąĮąŠą╝čā ą┐čāčéąĖ ą┤ąĄčĆąĄą▓ą░ XML. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 čüčéčĆąŠą║ąŠą▓čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ, ą┐ąŠą╗ąĮčŗą╣ ą┐čāčéčī ą▓ą║ą╗čÄčćą░čÄčēąĖą╣ ąĖą╝čÅ čāąĘą╗ą░, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true ąĄčüą╗ąĖ node čüčāčēąĄčüčéą▓čāąĄčé, ąĖąĮą░č湥 false.
getValue
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąŠą╗čāčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čāąĘą╗ą░ (node value) ą┤ąĄčĆąĄą▓ą░ XML. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 čüčéčĆąŠą║ąŠą▓čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ, ą┐ąŠą╗ąĮčŗą╣ ą┐čāčéčī ą▓ą║ą╗čÄčćą░čÄčēąĖą╣ ąĖą╝čÅ čāąĘą╗ą░ (node name), ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čüčéčĆąŠą║čā ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ čāąĘą╗ą░. ąÆčŗą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ čāąĘąĄą╗ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą╝ąĄč鹊ą┤ exists, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ąĮčāąČąĮčŗą╣ čāąĘąĄą╗ čüčāčēąĄčüčéą▓čāąĄčé.
print
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąĄčćą░čéą░ąĄčé ą▓čüąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┤ąĄčĆąĄą▓ą░ ą▓ ą║ąŠčĆąŠčéą║ąŠą╝ č乊čĆą╝ą░č鹥. ąŁč鹊čé ą╝ąĄč鹊ą┤ ą▒čŗą╗ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą┤ą╗čÅ čåąĄą╗ąĄą╣ ąŠčéą╗ą░ą┤ą║ąĖ. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé.
JobInfo
ąŁč鹊 ą║ą╗ą░čüčü, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ą▓čüąĄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ, čĆą░čüą┐ą░ą║ąŠą▓ą░ąĮąĮčāčÄ ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ. ąÜą╗ą░čüčü čéą░ą║ąČąĄ čüąŠą┤ąĄčƹȹĖčé čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▓čüąĄčģ ąĮčāąČąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣.
JobInfo
ąŁč鹊 ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą×ąĮ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą▓čüčÄ ąĄą│ąŠ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą▓ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
parseCommandline
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąĄą╗ą░ąĄčé ą┐ą░čĆčüąĖąĮą│ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ. ą¤čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░, čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ int argc ąĖ char *argv[] ąŠčé čäčāąĮą║čåąĖąĖ main(). ą£ąĄč鹊ą┤ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą▓čüčéčĆąĄčéąĖą╗čüčÅ ą╗čÄą▒ąŠą╣ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ.
doJob
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┤ąĄą╗ą░ąĄčé ą▓čüčÄ čĆą░ą▒ąŠčéčā, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▓čüąĄčģ ąĘą░ą┤ą░čć, ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ. ą×ąĮ čéą░ą║ąČąĄ ąĘą░ą▒ąŠčéąĖčéčüčÅ ąŠ čüąŠąĘą┤ą░ąĮąĖąĖ čéčĆąĄą▒čāąĄą╝čŗčģ ąŠą▒čŖąĄą║č鹊ą▓ ą║ą░ąĮą░ą╗ą░ ąŠą▒ą╝ąĄąĮą░ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░.
Utility
ąŁč鹊čé ą║ą╗ą░čüčü čÅą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮč鹥ą╣ąĮąĄčĆąŠą╝ ąĖ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠą╝ ąĖą╝ąĄąĮ ą┤ą╗čÅ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čäčāąĮą║čåąĖą╣. ą×ąĮ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ čäą░ą╣ą╗ąĄ, external čüčüčŗą╗ą║ą░ ąĮą░ ąŠą▒čŖąĄą║čé Util object ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą▓ čäą░ą╣ą╗ąĄ čģąĄą┤ąĄčĆą░. ąÜą╗ą░čüčü čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╗ąŠą│ą░ ąĖ ą┐čĆąŠą│čĆąĄčüčüą░, ąĖ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ č乊ąĮąŠą▓čŗčģ ąŠą┐ąĄčĆą░čåąĖą╣.
Utility
ąŁč鹊 ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą×ąĮ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąÜąŠąĮčüčéčĆčāą║č鹊čĆ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą╗ąŠą│ ąĖ čüčéą░čéčāčü ą┐čĆąŠą│čĆąĄčüčüą░ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā ą╗ąŠą│ą░ ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čĆąŠą│čĆąĄčüčüą░.
~Utility
ąŁč鹊 ą┤ąĄčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ąÆ ąĮąĄčüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą▓ ąĮąĄą╝ ąĮąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣, čŹč鹊 ą┐čĆąŠčüč鹊 ą╝ąĄčüč鹊 ą┤ą╗čÅ ą▒čāą┤čāčēąĖčģ čĆą░čüčłąĖčĆąĄąĮąĖą╣.
muteLog
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą▓čŗą▓ąŠą┤ ą▓čüąĄčģ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╗ąŠą│ą░ ąĮą░ 菹║čĆą░ąĮ. ą×ąĮ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé.
muteProgress
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą▓čŗą▓ąŠą┤ ą▓čüąĄčģ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╗ąŠą│ą░ ąĮą░ 菹║čĆą░ąĮ. ą×ąĮ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé.
log
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąĄčćą░čéą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ą╗ąŠą│ą░ ąĮą░ 菹║čĆą░ąĮ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄ ąĘą░ą│ą╗čāčłąĄąĮąŠ ą╝ąĄč鹊ą┤ąŠą╝ muteLog. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ - čüčéčĆąŠą║čā čüąŠąŠą▒čēąĄąĮąĖčÅ. ą£ąĄč鹊ą┤ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé.
Progress
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąĄčćą░čéą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąŠą│čĆąĄčüčüą░ ąĮą░ 菹║čĆą░ąĮ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄ ąĘą░ą│ą╗čāčłąĄąĮąŠ ą╝ąĄč鹊ą┤ąŠą╝ muteProgress. ą£ąĄč鹊ą┤ ą┐ąŠą╗čāčćą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ - čüčéčĆąŠą║čā čüąŠąŠą▒čēąĄąĮąĖčÅ. ą£ąĄč鹊ą┤ ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé.
convertHex
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą║ąŠąĮą▓ąĄčĆčéąĖčĆčāąĄčé čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮčāčÄ čüčéčĆąŠą║čā ą▓ čćąĖčüą╗ąŠ. ą£ąĄč鹊ą┤ ą┐ąŠą╗čāčćą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ - čüčéčĆąŠą║čā, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé long, čüąŠą┤ąĄčƹȹ░čēąĄąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĮčāčÄ ą▓ąĄą╗ąĖčćąĖąĮčā. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░.
convertLong
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé čćąĖčüą╗ąŠ ą▓ čüčéčĆąŠą║čā, ąĖčüą┐ąŠą╗čīąĘčāčÅ čāą║ą░ąĘą░ąĮąĮąŠąĄ ąŠčüąĮąŠą▓ą░ąĮąĖąĄ čüąĖčüč鹥ą╝čŗ čüčćąĖčüą╗ąĄąĮąĖčÅ. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ - long čüąŠą┤ąĄčƹȹ░čēąĖą╣ čćąĖčüą╗ąŠ ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, ąĖ long čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąĮčāąČąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ąŠčüąĮąŠą▓ą░ąĮąĖąĄ.
getRegistryValue
ąŁč鹊čé ą╝ąĄč鹊ą┤ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ ą▒ą░ąĘčŗ ą┤ą░ąĮąĮčŗčģ čĆąĄąĄčüčéčĆą░ Windows. ą£ąĄč鹊ą┤ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ - čüčéčĆąŠą║čā čüąŠą┤ąĄčƹȹ░čēčāčÄ ą┐čāčéčī ą┤ąŠ ą║ą╗čÄčćą░ čĆąĄąĄčüčéčĆą░, ąĖ čüčéčĆąŠą║čā čüąŠą┤ąĄčƹȹ░čēčāčÄ ąĖą╝čÅ ą║ą╗čÄčćą░. ą£ąĄč鹊ą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ąĘąĮą░č湥ąĮąĖąĄ ą║ą╗čÄčćą░ ąĖąĘ čĆąĄąĄčüčéčĆą░. ąæčāą┤ąĄčé ą▓čŗą▒čĆąŠčłąĄąĮąŠ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą╗čÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ą┐čĆąĖ ą┤ąŠčüčéčāą┐ąĄ ą║ ą▒ą░ąĘąĄ ą┤ą░ąĮąĮčŗčģ čĆąĄąĄčüčéčĆą░.
ErrorMsg
ąŁč鹊 ą║ą╗ą░čüčü, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ą║ąŠąĮč鹥ą╣ąĮąĄčĆ ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ąĖ ą┤ą╗čÅ ą▓čŗą▒čĆą░čüčŗą▓ą░ąĮąĖčÅ ąĖčģ ą║ą░ą║ ąĖčüą║ą╗čÄč湥ąĮąĖą╣.
ErrorMsg
ąŁč鹊 ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ą¤čĆąĖąĮąĖą╝ą░ąĄčé 1 ą┐ą░čĆą░ą╝ąĄčéčĆ, čüčéčĆąŠą║čā čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ.
~ErrorMsg
ąŁč鹊 ą┤ąĄčüčéčĆčāą║č鹊čĆ ą┤ą╗čÅ ą║ą╗ą░čüčüą░. ąĪąĄą╣čćą░čü čéčāčé ąĮąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░, čŹč鹊 ą┐čĆąŠčüč鹊 ą║ąŠąĮč鹥ą╣ąĮąĄčĆ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąĄą╣čłąĄą│ąŠ čĆą░čüčłąĖčĆąĄąĮąĖčÅ.
What
ąŁč鹊 ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ą░ ą║ čüčéčĆąŠą║ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ. ą£ąĄč鹊ą┤ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą║ąŠą┐ąĖčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ.
[5. ąśčüč鹊čĆąĖčÅ čĆąĄą▓ąĖąĘąĖą╣]
| ąĀąĄą▓ąĖąĘąĖčÅ |
ąöą░čéą░ |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
| 2568B |
10/2012 |
ąØąŠą▓čŗą╣ čłą░ą▒ą╗ąŠąĮ (template) ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąŻčüčéą░čĆąĄą▓čłąĄąĄ ą▓ čĆąĄą▓ąĖąĘąĖąĖ A čāą┤ą░ą╗ąĄąĮąŠ. |
| 2568A |
07/2004 |
ą¤ąĄčĆą▓čŗą╣ ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čĆąĄą╗ąĖąĘ. |
[ąĪčüčŗą╗ą║ąĖ]
1. AVR911: AVR Open Source Programmer 8-bit Atmel Microcontrollers site:atmel.com.
2. Intel HEX: ąŠą┐ąĖčüą░ąĮąĖąĄ č乊čĆą╝ą░čéą░ čäą░ą╣ą╗ą░.
3. AVR109 site:site:atmel.com.
4. AVR910 site:atmel.com.
5. avr911.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ (Windows) čāčéąĖą╗ąĖčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ AVROSP, XML-čäą░ą╣ą╗čŗ ąŠą┐ąĖčüą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ (XML part description files).
6. ą£ą░ą║ąĄčéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░ AVRISP-MKII ą▓ ą┤ąŠą╝ą░čłąĮąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ. |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ąŠą▒čŗčćąĮąŠ ą▓ ą┐ąŠčÅčüąĮąĖč鹥ą╗čīąĮąŠą╝ čäą░ą╣ą╗ąĄ ą║ ąĖčüčģąŠą┤ąĮąĖą║ą░ą╝ - čćą░čüč鹊 čŹč鹊 čäą░ą╣ą╗ README.txt, ąĖąĮąŠą│ą┤ą░ čāą║ą░ąĘą░ąĮąĖčÅ ąĄčüčéčī ą▓ makefile (čćč鹊 čÅą▓ąĮąŠ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą╗ąĖą▒ąŠ avr-gcc, ą╗ąĖą▒ąŠ Atmel Studio) ąĮą░ čćąĖčüč鹊ą╝ ąĖ ą┐ąŠąĮčÅčéąĮąŠą╝ ą▓čüčÅą║ąŠą╝čā čĆčāčüčüą║ąŠą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā ą░ąĮą│ą╗ąĖą╣čüą║ąŠą╝ čÅąĘčŗą║ąĄ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ąŠą╣ ą╗čāčćčłąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéčāą╗č湥ą╣ąĮ, ąĖ ą┤ą░ąČąĄ ą▒čŗą▓ą░ąĄčé ąŠą┐ąĖčüą░ąĮ ą┐ąŠ čłą░ą│ą░ą╝ čüą░ą╝ ą┐čĆąŠčåąĄčüčü čüą▒ąŠčĆą║ąĖ. ąÆą┐čĆąŠč湥ą╝, čüą▒ąŠčĆą║ą░ ąĖą╝ąĄąĮąĮąŠ čŹč鹊ą│ąŠ ą┐čĆąŠąĄą║čéą░ ąĮąĖč湥ą╝ ąĮąĄ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ ą┤čĆčāą│ąŠą│ąŠ, ąĖ ą┐čĆąĖ ąČąĄą╗ą░ąĮąĖąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠą╣ čéčāą╗č湥ą╣ąĮ, ą║ąŠč鹊čĆčŗą╣ ąÆą░ą╝ ą▒ąŠą╗čīčłąĄ ą┐ąŠ ą┤čāčłąĄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ąŠą┐čĆąŠčü čüą▓ąŠą┤ąĖčéčüčÅ čü čüąŠą▓čüąĄą╝ ą┤čĆčāą│ąŠą╝čā ą▓ąŠą┐čĆąŠčüčā: "ąØą░ č湥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ?" ąĖą╗ąĖ "ąÜą░ą║ ąĮą░čāčćąĖčéčīčüčÅ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą║ąŠą┤ C?", čćč鹊 ąĮąĄ ą▓čģąŠą┤ąĖčé ą▓ čĆą░ą╝ą║ąĖ čĆą░čüčüą╝ąŠčéčĆąĄąĮąĖčÅ čŹč鹊ą│ąŠ ą┤ą░čéą░čłąĖčéą░. ąóąĄą╝ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖ čÅ ą┐ąŠą┤ AVR ą┐ąŠčüą▓čÅčēąĄąĮąŠ ą╝ąĮąŠąČąĄčüčéą▓ąŠ čĆąĄčüčāčĆčüąŠą▓ ą▓ ąśąĮč鹥čĆąĮąĄč鹥, ąĖ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ , čćč鹊 čā čćąĖčéą░č鹥ą╗čÅ ą┤ą░čéą░čłąĖčéą░ AVR911 čāąČąĄ ąĄčüčéčī ą┤ąŠčüčéą░č鹊čćąĮčŗą╣ ąŠą┐čŗčé.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ