|
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą░ą┐ąĮąŠčāčéą░ [1], ąŠą┐ąĖčüčŗą▓ą░čÄčēąĄą│ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą║ąŠą╝ą┐ą░ą║čéąĮąŠą│ąŠ, ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą│ąŠ, čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čłą░ą│ąŠą▓ąŠą│ąŠ ą╝ąŠč鹊čĆą░. ą©ą░ą│ąŠą▓čŗąĄ ą┤ą▓ąĖą│ą░č鹥ą╗ąĖ (ą©ąö) ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ č乊ą║čāčüąŠą╝ ą║ą░ą╝ąĄčĆčŗ, ą┐čĆąĖą▓ąŠą┤ą░ ą╗ąĄąĮčéčŗ, ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┐ąĄčćą░čéą░čÄčēąĄą╣ ą│ąŠą╗ąŠą▓ą║ąĖ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖąČąĄąĮąĖąĄą╝ ą╝ąĄčģą░ąĮąĖą║ąĖ ą▓ čäą░ą║čüą░čģ, ą┐čĆąĖąĮč鹥čĆą░čģ, ą║ąŠą┐ąĖčĆąŠą▓ą░ą╗čīąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéą░čģ, 3D-ą┐čĆąĖąĮč鹥čĆą░čģ, čüčéą░ąĮą║ą░čģ čü ą¦ą¤ąŻ, ąČąĄčüčéą║ąĖčģ ą┤ąĖčüą║ą░čģ, ą┐čĆąĖą▓ąŠą┤ą░čģ DVD-ROM ąĖ čé. ą┐. ąÆčŗčüąŠą║ąŠąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AVR ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą©ąö, ą┐čĆąĖč湥ą╝ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠąĄ čÅą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąŠčüčéą░ąĄčéčüčÅ čüą╗ą░ą▒ąŠ ąĮą░ą│čĆčāąČąĄąĮąĮčŗą╝. ą×čüąŠą▒ąĄąĮąĮąŠčüčéąĖ ąŠą┐ąĖčüčŗą▓ą░ąĄą╝ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░:
ŌĆó ąÆčŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą©ąö
ŌĆó ą¤čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
ŌĆó ąÜąŠą╝ą┐ą░ą║čéąĮčŗą╣ ą║ąŠą┤ (ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą║ąŠą╗ąŠ 10 ą▒ą░ą╣čé)
ŌĆó ąØąĖąĘą║ąĖąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčŗą╝ čĆąĄčüčāčĆčüą░ą╝
ŌĆó ą£ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĮą░ ą▓čüąĄčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ čüąĄą╝ąĄą╣čüčéą▓ą░ AVR
[ąØąĄą╝ąĮąŠą│ąŠ č鹥ąŠčĆąĖąĖ: ą║ą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé]
ą©ą░ą│ąŠą▓čŗą╣ ą╝ąŠč鹊čĆ (čłą░ą│ąŠą▓čŗą╣ ą┤ą▓ąĖą│ą░č鹥ą╗čī, ą©ąö) ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ąĖą╝ą┐čāą╗čīčüčŗ č鹊ą║ą░ ą▓ąŠ ą▓čĆą░čēąĄąĮąĖąĄ čüą▓ąŠąĄą│ąŠ čĆąŠč鹊čĆą░. ąóąĖą┐ąĖčćąĮčŗą╣ ą©ąö čüąŠą┤ąĄčƹȹĖčé ą▓ čüą▓ąŠąĄą╝ čüąŠčüčéą░ą▓ąĄ 4 čüąĖą╗ąŠą▓čŗąĄ ąŠą▒ą╝ąŠčéą║ąĖ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą░čÄčéčüčÅ čŹčéąĖ ąĖą╝ą┐čāą╗čīčüčŗ č鹊ą║ą░. ą×ą▒ą╝ąŠčéą║ąĖ čćą░čüč鹊 ą┐ąŠą╝ąĄč湥ąĮčŗ čĆą░ąĘąĮčŗą╝ąĖ čåą▓ąĄčéą░ą╝ąĖ ą║ą░ą║ red (ą║čĆą░čüąĮčŗą╣), yellow/white (ąČąĄą╗čéčŗą╣/ą▒ąĄą╗čŗą╣), red/white (ą║čĆą░čüąĮčŗą╣/ą▒ąĄą╗čŗą╣) ąĖ yellow (ąČąĄą╗čéčŗą╣), ąĮąŠ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖ ą┤čĆčāą│ąĖąĄ čåą▓ąĄčéą░. ą¤čĆąĖą╗ąŠąČąĄąĮąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą║ čŹčéąĖą╝ ąŠą▒ą╝ąŠčéą║ą░ą╝ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÄ ą╝ąŠč鹊čĆąŠą╝ ąŠą┤ąĮąŠą│ąŠ čłą░ą│ą░.
ąÆąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ (ą║ąŠą│ą┤ą░ čĆąŠč鹊čĆ ą©ąö ą▓čĆą░čēą░ąĄčéčüčÅ) ą▓ ą║ą░ąČą┤čŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ 2 ąŠą▒ą╝ąŠčéą║ą░ą╝ ąĖąĘ č湥čéčŗčĆąĄčģ. ą©ąö ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčé čüą▓ąŠą╣ čĆąŠč鹊čĆ ąĮą░ ąŠą┤ąĖąĮ čłą░ą│ ą┐ąŠ čćą░čüąŠą▓ąŠą╣ čüčéčĆąĄą╗ą║ąĄ čü ą║ą░ąČą┤čŗą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐ą░čĆ ąŠą▒ą╝ąŠč鹊ą║ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ. ąĢčüą╗ąĖ ą┐ąŠčĆčÅą┤ąŠą║ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąŠą▒ą╝ąŠč鹊ą║ ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗą╣, č鹊 ą©ąö ą▒čāą┤ąĄčé ą▓čĆą░čēą░čéčī čĆąŠč鹊čĆ ą▓ ąŠą▒čĆą░čéąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ. ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ąŠą▒ą╝ąŠč鹊ą║ ąĖąĮąŠą│ą┤ą░ ąĮą░ąĘčŗą▓ą░čÄčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝ čäą░ąĘ ą©ąö.
ąĪą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čćą░čüč鹊č鹊ą╣ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čäą░ąĘ ą©ąö. ąĪ ą║ą░ąČą┤čŗą╝ ąĖą╝ą┐čāą╗čīčüąŠą╝ (čü ą║ą░ąČą┤čŗą╝ čłą░ą│ąŠą╝ ą©ąö) čĆąŠč鹊čĆ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĮą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čāą│ąŠą╗. ą×ą▒čŗčćąĮčŗą╣ čāą│ąŠą╗ ą┐ąŠą▓ąŠčĆąŠčéą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 1.8 ą│čĆą░ą┤čāčüą░. ąĪ čéą░ą║ąĖą╝ čāą│ą╗ąŠą╝ ą┐ąŠą▓ąŠčĆąŠčéą░ ąĮą░ čłą░ą│ ą┐ąŠą╗ąĮčŗą╣ ąŠą▒ąŠčĆąŠčé čĆąŠč鹊čĆą░ (360 ą│čĆą░ą┤čāčüąŠą▓) ą┐ąŠčéčĆąĄą▒čāąĄčé 200 čłą░ą│ąŠą▓ (čåąĖą║ą╗ąŠą▓ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čäą░ąĘ).
ą¤čāč鹥ą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą╝ąĄąČą┤čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĮąŠ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░čéčī čüą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ ą©ąö, ą░ ą┐čāč鹥ą╝ ą┐ąŠą┤čüč湥čéą░ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čłą░ą│ąŠą▓ ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čāą│ą╗ąŠą╝ ą┐ąŠą▓ąŠčĆąŠčéą░. ąØą░ čĆąĖčü. 1 ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čäą░ąĘ ą©ąö. ąÆ čéą░ą▒ą╗ąĖčåąĄ 1 ą┐ąŠą║ą░ąĘą░ąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čłą░ą│ąŠą▓ ą╝ąŠč鹊čĆą░ ąĘąĮą░č湥ąĮąĖčÅą╝, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗą╝ ą▓ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
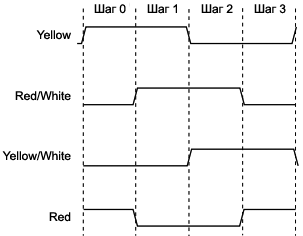
ąĀąĖčü. 1. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čäą░ąĘ.
ąóą░ą▒ą╗ąĖčåą░ 1. ąŚąĮą░č湥ąĮąĖčÅ čäą░ąĘ ą©ąö.
| ą©ą░ą│ |
Yellow |
Red/White |
Yellow/White |
Red |
ąŚąĮą░č湥ąĮąĖąĄ (HEX) |
| 0 |
1 |
0 |
0 |
1 |
9 |
| 1 |
1 |
1 |
1 |
0 |
C |
| 2 |
0 |
1 |
1 |
0 |
6 |
| 3 |
0 |
0 |
1 |
1 |
3 |
[ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ]
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé 16-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ čü čäčāąĮą║čåąĖąĄą╣ ąĘą░čģą▓ą░čéą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ą░ąČą┤čŗąĄ 100 ą╝ą║čü. ąÜąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ąĘ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ą▓ ą▓čŗčģąŠą┤ąĮčŗąĄ čĆą░ąĘčĆčÅą┤čŗ ą┐ąŠčĆčéą░ PORTB (ąŠąĮąĖ čāą┐čĆą░ą▓ą╗čÅčÄčé čüąĖą╗ąŠą▓čŗą╝ąĖ ą║ą╗čÄčćą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą░čÄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ąŠą▒ą╝ąŠčéą║ąĖ ą©ąö).
ąŚąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čäą░ąĘ čłą░ą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüąĄ čŹčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ ą▓ SRAM, čćč鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī ą║ ąĮąĖą╝ ą┤ąŠčüčéčāą┐ čüąŠ čüč鹊čĆąŠąĮčŗ ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ - čŹčéąĖą╝ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ. ąÆ čŹč鹊ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt service routine, ISR) ąĘą░ąĮąĖą╝ą░ąĄčé 7 čåąĖą║ą╗ąŠą▓ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ + 4 čåąĖą║ą╗ą░ ąĮą░ ą▓čģąŠą┤ ą▓ ISR ąĖ 4 čåąĖą║ą╗ą░ ąĮą░ ą▓čŗčģąŠą┤ ąĖąĘ ISR. ąÆčüąĄą│ąŠ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ 15 čéą░ą║č鹊ą▓čŗčģ čåąĖą║ą╗ąŠą▓. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮą░ čĆą░ą▒ąŠč湥ą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 8 ą£ąōčå ąŠą┤ąĖąĮ čłą░ą│ ą╝ąŠč鹊čĆą░ ąĘą░ą╣ą╝ąĄčé ą╝ąĄąĮčīčłąĄ 2 ą╝ą║čü. ąĢčüą╗ąĖ ąĘą░ą┐čāčüą║ ISR ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ą║ą░ąČą┤čŗąĄ 100 ą╝ą║čü, č鹊 ąŠą▒čĆą░ą▒ąŠčéą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäą░ąĘą░ą╝ąĖ ą©ąö ąĘą░ą╣ą╝ąĄčé ą┐čĆąĖą╝ąĄčĆąĮąŠ 2% ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓ čÅą┤čĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąÆ čŹč鹊ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ąĘ ą©ąö čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x0100 ą▓ ą┐ą░ą╝čÅčéąĖ RAM. ąĪčéą░čĆčłąĖą╣ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░ RAM ą▓čüąĄą│ą┤ą░ ą┐ąŠčüč鹊čÅąĮąĮčŗą╣, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą╝ą╗ą░ą┤čłąĖą╣ ąĮąĖą▒ą▒ą╗ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ ą░ą┤čĆąĄčüą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą┤ąŠčüčéčāą┐ą░ ą║ ąĘąĮą░č湥ąĮąĖčÅą╝ (čüą╝. čĆąĖčü. 2). ą£ą╗ą░ą┤čłąĖą╣ ąĮąĖą▒ą▒ą╗ ą▓ čÅč湥ą╣ą║ąĄ ą┐ą░ą╝čÅčéąĖ (4 ą▒ąĖčéą░) čüąŠą┤ąĄčƹȹ░čé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäą░ąĘą░ą╝ąĖ ą©ąö, čüčéą░čĆčłąĖą╣ ąĮąĖą▒ą▒ą╗ čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčü čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ.
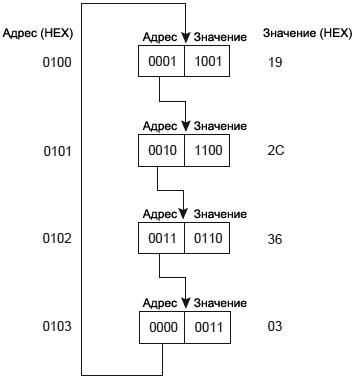
ąĀąĖčü. 2. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą░ą┤čĆąĄčüąŠą▓ ąĖ ąĘąĮą░č湥ąĮąĖą╣ ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čäą░ąĘ.
ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čéą░ą║ąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ ą╝ąŠąČąĮąŠ ą┤ąŠčüčéąĖčćčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čĆą░ą▒ąŠčéčŗ ą║ąŠą┤ą░ ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ čĆą░čüčģąŠą┤ą░ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÆ čéą░ą▒ą╗ąĖčåą░čģ 2 ąĖ 3 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čĆąĄčüčāčĆčüąŠą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąóą░ą▒ą╗ąĖčåą░ 2. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓ ąĖ ą┐ą░ą╝čÅčéąĖ.
| ążčāąĮą║čåąĖčÅ |
ąĀą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░ |
ą”ąĖą║ą╗ąŠą▓ |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Main |
38 čüą╗ąŠą▓ |
- |
R16, XL, XH, ZL, ZH |
- |
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ą┐čĆąĖą╝ąĄčĆ ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. |
| OC1A |
10 čüą╗ąŠą▓ |
13 + ą▓ąŠąĘą▓čĆą░čé |
R16, XL, XH |
Timer1 Output Compare A |
ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čłą░ą│ąŠą▓ ą╝ąŠč鹊čĆą░ ą┐čāč鹥ą╝ ą▓čŗą▓ąŠą┤ą░ ąŠč湥čĆąĄą┤ąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ ą┐ąŠčĆčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäą░ąĘą░ą╝ąĖ. ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čäą░ąĘ. |
| ąÆčüąĄą│ąŠ |
48 čüą╗ąŠą▓ |
- |
R16, XL, XH, ZL, ZH |
|
|
ąóą░ą▒ą╗ąĖčåą░ 3. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
| ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ |
| 4 ą▓čŗą▓ąŠą┤ą░ ą┐ąŠčĆč鹊ą▓ GPIO |
ąÆčŗčģąŠą┤čŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖą╗ąŠą▓čŗą╝ąĖ ą║ą╗čÄčćą░ą╝ąĖ čäą░ąĘ ą©ąö. |
|
| Timer1 |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čćą░čüč鹊čéčŗ čüą╝ąĄąĮčŗ čäą░ąĘ ą©ąö. |
Timer 1 Output Compare A |
;***************************************************************************
;* ąśą╝čÅ čäą░ą╣ą╗ą░: avr360.asm
;* ąóąĄą╝ą░: ą┐čĆąŠčüčéą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą©ąö
;* Date :98.07.02
;* Version :1.00
;* Support telephone :+47 72 88 43 88 (ATMEL Norway)
;* Support fax :+47 72 88 43 99 (ATMEL Norway)
;* Support E-mail :avr@atmel.com
;* Target MCU :ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą▓čüąĄčģ ą╝ąŠą┤ąĄą╗čÅčģ AVR
;* : (ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ATmega8515)
;***************************************************************************
.include "..\8515def.inc"
;*************** ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ **************************
.def temp = R16
;*************** ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą║ąŠąĮčüčéą░ąĮčé ********************************
.equ c_value = 500 ;ąĘąĮą░č湥ąĮąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ą┤ą╗čÅ output compare interrupt
; 500 čåąĖą║ą╗ąŠą▓ ąĮą░ 5 ą£ąōčå čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé 100 ą╝ą║čü
;************************************************************************=
;*
;* ąØą░čćą░ą╗ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ - čü čŹč鹊ą│ąŠ ą╝ąĄčüčéą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░
;*
;************************************************************************=
.cseg
;ąØą░čćą░ą╗ąŠ čéą░ą▒ą╗ąĖčåčŗ ą▓ąĄą║č鹊čĆąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣
.org 0x00
rjmp main
;ąÆąĄą║č鹊čĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Output compare A interrupt
.org OC1Aaddr
rjmp OC1A
;************************************************************************=
;* OC1A - ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR) Timer1 Output compare A
;*
;* ą×ą┐ąĖčüą░ąĮąĖąĄ:
;* ąŁč鹊čé ISR ąĘą░ą│čĆčāąČą░ąĄčé ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čäą░ąĘ ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ, čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĮąŠą╣
; ą▓ ą┐ą░ą╝čÅčéąĖ SRAM. ąŚąĮą░č湥ąĮąĖčÅ ą▓ čÅč湥ą╣ą║ą░čģ čéą░ą▒ą╗ąĖčåčŗ ąĖą╝ąĄčÄčé 2 čäčāąĮą║čåąĖąĖ: ą╝ą╗ą░ą┤čłąĖą╣
;* ąĮąĖą▒ą▒ą╗ čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą▓ ą┐ąŠčĆčé, ą░ čüčéą░čĆčłąĖą╣ čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčü ą┤ą╗čÅ
;* čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ. ą£ą╗ą░ą┤čłąĖą╣ ąĮąĖą▒ą▒ą╗ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠčĆčé, ą░ čüčéą░čĆčłąĖą╣ ąĮąĖą▒ą▒ą╗
;* ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ XL.
;*
;* ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠą▓ ą║ąŠą┤ą░ : 6 + ą▓ąŠąĘą▓čĆą░čé
;* ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓čŗčģ čåąĖą║ą╗ąŠą▓ : 7 + ą▓ąŠąĘą▓čĆą░čé
;* ą£ą╗ą░ą┤čłąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ : ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ
;* ąĪčéą░čĆčłąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ : 3 (temp, XL, XH)
;************************************************************************=
OC1A:
ld temp,X ;ąŚą░ą│čĆčāąĘąĖčéčī ą▓ temp ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą║ą░ąĘą░č鹥ą╗čÄ X
mov XL,temp ;ą¤ąŠą╝ąĄčüčéąĖčéčī čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé čāą║ą░ąĘą░č鹥ą╗čÅ X
andi temp,0x0F ;ąĪą▒čĆąŠčü čüčéą░čĆčłąĄą│ąŠ ąĮąĖą▒ą▒ą╗ą░ temp
out PORTB,temp ;ąÆčŗą▓ąŠą┤ ą╝ą╗ą░ą┤čłąĄą│ąŠ ąĮąĖą▒ą▒ą╗ą░ ą▓ čäą░ąĘčŗ ą©ąö
swap XL ;ą¤ąŠą╝ąĄąĮčÅčéčī ą╝ąĄčüčéą░ą╝ąĖ čüčéą░čĆčłąĖą╣ ąĖ ą╝ą╗ą░ą┤čłąĖą╣ ąĮąĖą▒ą▒ą╗čŗ XL
andi XL,0x0F ;ą¤ąŠą┤ą│ąŠč鹊ą▓ą║ą░ ą░ą┤čĆąĄčüą░ čüą╗ąĄą┤čāčÄčēąĄą╣ čÅč湥ą╣ą║ąĖ: čüą▒čĆąŠčüąĖčéčī čüčéą░čĆčłąĖą╣ ąĮąĖą▒ą▒ą╗
reti
;****************************************************************************
;* ą×čüąĮąŠą▓ąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░
;*
;* ąŁčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé Timer 1 output compare interrupt, čćč鹊ą▒čŗ ąŠąĮąŠ
;* čüčĆą░ą▒ą░čéčŗą▓ą░ą╗ąŠ čü ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą║ąŠąĮčüčéą░ąĮč鹊ą╣ c_value.
;* ąöą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čĆą░ą▒ąŠčéčŗ čéą░ą▒ą╗ąĖčåą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖą╣
;* ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH) ąĖ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ SRAM ą┐ąŠ ą░ą┤čĆąĄčüčā 0x0100.
;****************************************************************************
main:
ldi r16,high(RAMEND) ;ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ čüč鹥ą║ą░
out SPH,r16
ldi r16,low(RAMEND)
out SPL,r16
ldi temp,0x0F ;ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čŗčģąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ PORTB
out DDRB,temp
ldi temp,0x00
out PORTB,temp ;ąŚą░ą┐ąĖčüčī ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ PORTB
ldi temp,high(c_value);ąŚą░ą│čĆčāąĘą║ą░ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ ą▓ąĄą╗ąĖčćąĖąĮčŗ čüčĆą░ą▓ąĮąĄąĮąĖčÅ
out OCR1AH,temp
ldi temp,low(c_value) ;ąŚą░ą│čĆčāąĘą║ą░ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ ą▓ąĄą╗ąĖčćąĖąĮčŗ čüčĆą░ą▓ąĮąĄąĮąĖčÅ
out OCR1AL,temp
ldi temp,0x00
out TCNT1H,temp ;ą×čćąĖčüčéą║ą░ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ čéą░ą╣ą╝ąĄčĆą░
out TCNT1L,temp ;ą×čćąĖčüčéą║ą░ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ čéą░ą╣ą╝ąĄčĆą░
out TCCR1A,temp ;ą×čćąĖčüčéą║ą░ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ A (timer control reg A)
ldi temp,0x40
out TIFR,temp ;ą×čćąĖčüčéą║ą░ ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░
out TIMSK,temp ;ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (Timer compare interrupt)
ldi ZH,high(step*2) ;ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ Z ąĮą░ čéą░ą▒ą╗ąĖčåčā čäą░ąĘ ą╝ąŠč鹊čĆą░ ą▓ ą┐ą░ą╝čÅčéąĖ FLASH
ldi ZL,low(step*2)
ldi XH,high(0x0100) ;ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ X ąĮą░ ą╝ąĄčüč鹊 ą▓ ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ (RAM)
ldi XL,low(0x0100)
ldi temp,0x04 ;ąŚą░ą│čĆčāąĘą║ą░ ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░
load:
lpm ;ąŚą░ą│čĆčāąĘą║ą░ ąĘąĮą░č湥ąĮąĖčÅ čłą░ą│ą░ ąĖąĘ FLASH
st X+,R0 ;ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čłą░ą│ą░ ą▓ RAM
adiw ZL,0x01 ;ąśąĮą║čĆąĄą╝ąĄąĮčé čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ FLASH
dec temp ;ąöąĄą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ą░
brne load ;ą¤ąŠą▓č鹊čĆąĖčéčī, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮą░ ą▓čüčÅ čéą░ą▒ą╗ąĖčåą░
ldi XH,high(0x0100) ;ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ X ąĮą░ ą╝ąĄčüč鹊 čéą░ą▒ą╗ąĖčåčŗ ą▓ RAM
ldi XL,low(0x0100)
ldi temp,0x9
out TCCR1B,temp ;ą×čćąĖčüčéą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĖ ąĘąĮą░č湥ąĮąĖčÅ (compare match), CK/1
sei ;ą×ą▒čēąĄąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣
loop:
rjmp loop ;ąæąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ą┐ąŠ ą╝ąĄčéą║ąĄ loop
;ąóą░ą▒ą╗ąĖčåą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ąĘ ą©ąö (Step motor lookup table):
step:
.db 0x19,0x2C,0x36,0x03
[ąĪčüčŗą╗ą║ąĖ]
1. AVR360: Step Motor Controller site:atmel.com.
2. AVR-USB-MEGA16: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čłą░ą│ąŠą▓čŗą╝ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝ ą┐ąŠ USB. |



