| AVR360: контроллер для шагового двигателя |
|
| Добавил(а) microsin | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
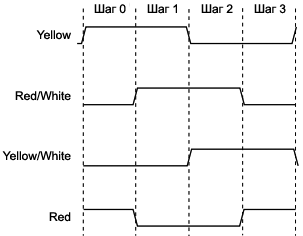
Здесь приведен перевод апноута [1], описывающего реализацию компактного, высокоскоростного, управляемого прерываниями контроллера шагового мотора. Шаговые двигатели (ШД) обычно используются для приложений наподобие управления фокусом камеры, привода ленты, перемещения печатающей головки, управления движением механики в факсах, принтерах, копировальных аппаратах, 3D-принтерах, станках с ЧПУ, жестких дисках, приводах DVD-ROM и т. п. Высокое быстродействие микроконтроллеров AVR позволяет разработчику реализовать высокоскоростные приложения для управления ШД, причем вычислительное ядро процессора остается слабо нагруженным. Особенности описываемого контроллера: • Высокоскоростной контроллер ШД [Немного теории: как это работает] Шаговый мотор (шаговый двигатель, ШД) постоянного тока преобразует импульсы тока во вращение своего ротора. Типичный ШД содержит в своем составе 4 силовые обмотки, на которые подаются эти импульсы тока. Обмотки часто помечены разными цветами как red (красный), yellow/white (желтый/белый), red/white (красный/белый) и yellow (желтый), но могут использоваться и другие цвета. Приложенное напряжение к этим обмоткам приводит к выполнению мотором одного шага. Во время нормального функционирования (когда ротор ШД вращается) в каждый момент времени напряжение подключено к 2 обмоткам из четырех. ШД поворачивает свой ротор на один шаг по часовой стрелке с каждым переключением пар обмоток в определенном порядке. Если порядок переключения обмоток меняется на противоположный, то ШД будет вращать ротор в обратном направлении. Переключение обмоток иногда называют переключением фаз ШД. Скорость вращения управляется частотой импульсов переключения фаз ШД. С каждым импульсом (с каждым шагом ШД) ротор поворачивается на фиксированный угол. Обычный угол поворота составляет 1.8 градуса. С таким углом поворота на шаг полный оборот ротора (360 градусов) потребует 200 шагов (циклов переключения фаз). Путем изменения интервала между прерываниями таймера можно регулировать скорость вращения ШД, а путем подсчета количества шагов можно управлять углом поворота. На рис. 1 показаны диаграммы переключения фаз ШД. В таблице 1 показано соответствие шагов мотора значениям, записываемым в выводы порта микроконтроллера.
Рис. 1. Последовательность переключения фаз. Таблица 1. Значения фаз ШД.
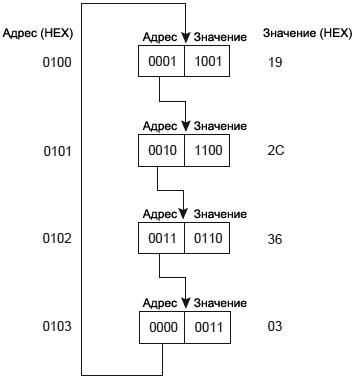
[Описание программного обеспечения] Программа микроконтроллера использует 16-разрядный таймер с функцией захвата для генерирования прерывания каждые 100 мкс. Когда выполняется обработчик прерывания, новое значение для формирования фаз выводится в выходные разряды порта PORTB (они управляют силовыми ключами, которые подают напряжения на обмотки ШД). Значения для фаз шагового двигателя записаны в память программ (FLASH) микроконтроллера. При включении питания или сбросе эти значения копируются в SRAM, чтобы ускорить к ним доступ со стороны кода программы - этим достигается максимальное быстродействие. В этой реализации подпрограмма обработчика прерывания (interrupt service routine, ISR) занимает 7 циклов процессорного времени + 4 цикла на вход в ISR и 4 цикла на выход из ISR. Всего получается 15 тактовых циклов. Таким образом, на рабочей тактовой частоте 8 МГц один шаг мотора займет меньше 2 мкс. Если запуск ISR потребуется каждые 100 мкс, то обработка управления фазами ШД займет примерно 2% вычислительных ресурсов ядра микроконтроллера. В этой программе значения для формирования фаз ШД сохраняются в по адресу 0x0100 в памяти RAM. Старший байт адреса RAM всегда постоянный, и используется только младший ниббл младшего байта адреса для получения доступа доступа к значениям (см. рис. 2). Младший ниббл в ячейке памяти (4 бита) содержат действительное значение для управления фазами ШД, старший ниббл содержит адрес следующего значения.
Рис. 2. Использование адресов и значений из таблицы переключения фаз. При использовании такого метода можно достичь максимальной скорости работы кода и минимального расхода процессорного времени микроконтроллера. В таблицах 2 и 3 показано использование ресурсов микроконтроллера. Таблица 2. Использование вычислительных ресурсов и памяти.
Таблица 3. Использование периферийных устройств.
;*************************************************************************** ;* Имя файла: avr360.asm ;* Тема: простая реализация высокоскоростного контроллера ШД ;* Date :98.07.02 ;* Version :1.00 ;* Support telephone :+47 72 88 43 88 (ATMEL Norway) ;* Support fax :+47 72 88 43 99 (ATMEL Norway) ;* Support E-mail :avr@atmel.com ;* Target MCU :может работать на всех моделях AVR ;* : (в этом примере используется ATmega8515) ;*************************************************************************** .include "..\8515def.inc" ;*************** Используемые глобальные регистры ************************** .def temp = R16 ;*************** Определение констант ******************************** .equ c_value = 500 ;значение сравнения для output compare interrupt ; 500 циклов на 5 МГц соответствует 100 мкс ;************************************************************************= ;* ;* Начало программы - с этого места начинается выполнение кода ;* ;************************************************************************= .cseg ;Начало таблицы векторов прерываний .org 0x00 rjmp main ;Вектор прерывания Output compare A interrupt .org OC1Aaddr rjmp OC1A ;************************************************************************= ;* OC1A - Обработчик прерывания (ISR) Timer1 Output compare A ;* ;* Описание: ;* Этот ISR загружает новое значение фаз из таблицы, расположенной ; в памяти SRAM. Значения в ячейках таблицы имеют 2 функции: младший ;* ниббл содержит значение для вывода в порт, а старший содержит адрес для ;* следующего значения. Младший ниббл выводится в порт, а старший ниббл ;* помещается в регистр XL. ;* ;* Количество слов кода : 6 + возврат ;* Количество тактовых циклов : 7 + возврат ;* Младшие регистры : не используются ;* Старшие регистры : 3 (temp, XL, XH) ;************************************************************************= OC1A: ld temp,X ;Загрузить в temp значение по указателю X mov XL,temp ;Поместить это значение в младший байт указателя X andi temp,0x0F ;Сброс старшего ниббла temp out PORTB,temp ;Вывод младшего ниббла в фазы ШД swap XL ;Поменять местами старший и младший нибблы XL andi XL,0x0F ;Подготовка адреса следующей ячейки: сбросить старший ниббл reti ;**************************************************************************** ;* Основная программа ;* ;* Эта программа инициализирует Timer 1 output compare interrupt, чтобы оно ;* срабатывало с интервалом, определенным константой c_value. ;* Для достижения максимальной скорости работы таблица преобразования значений ;* загружается из памяти программ (FLASH) и сохраняется в SRAM по адресу 0x0100. ;**************************************************************************** main: ldi r16,high(RAMEND) ;Инициализация указателя стека out SPH,r16 ldi r16,low(RAMEND) out SPL,r16 ldi temp,0x0F ;Настройка выходов порта PORTB out DDRB,temp ldi temp,0x00 out PORTB,temp ;Запись начального значения в PORTB ldi temp,high(c_value);Загрузка старшего байта величины сравнения out OCR1AH,temp ldi temp,low(c_value) ;Загрузка младшего байта величины сравнения out OCR1AL,temp ldi temp,0x00 out TCNT1H,temp ;Очистка старшего байта таймера out TCNT1L,temp ;Очистка младшего байта таймера out TCCR1A,temp ;Очистка регистра управления таймера A (timer control reg A) ldi temp,0x40 out TIFR,temp ;Очистка ожидающего прерывания таймера out TIMSK,temp ;Разрешение прерывания сравнения таймера (Timer compare interrupt) ldi ZH,high(step*2) ;Инициализация указателя Z на таблицу фаз мотора в памяти FLASH ldi ZL,low(step*2) ldi XH,high(0x0100) ;Инициализация указателя X на место в оперативной памяти (RAM) ldi XL,low(0x0100) ldi temp,0x04 ;Загрузка значения счетчика load: lpm ;Загрузка значения шага из FLASH st X+,R0 ;Сохранение значения шага в RAM adiw ZL,0x01 ;Инкремент указателя на FLASH dec temp ;Декремент счетчика brne load ;Повторить, пока не будет загружена вся таблица ldi XH,high(0x0100) ;Инициализация указателя X на место таблицы в RAM ldi XL,low(0x0100) ldi temp,0x9 out TCCR1B,temp ;Очистка таймера при совпадении значения (compare match), CK/1 sei ;Общее разрешение прерываний loop: rjmp loop ;Бесконечный цикл по метке loop ;Таблица преобразований для формирования фаз ШД (Step motor lookup table): step: .db 0x19,0x2C,0x36,0x03 [Ссылки] 1. AVR360: Step Motor Controller site:atmel.com. |