|
ąÆ ą┤ą░čéą░čłąĖč鹥 AVR134 [1] ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (Real Time Clock, RTC) čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ:
ŌĆó RTC čü ąŠč湥ąĮčī ą╝ą░ą╗čŗą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ (4 ą╝ą║ąÉ ą┐čĆąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ 3.3V)
ŌĆó ą×č湥ąĮčī ąĮąĄą┤ąŠčĆąŠą│ąŠąĄ čĆąĄčłąĄąĮąĖąĄ
ŌĆó ą¤ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čü ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą╣ č鹊čćąĮąŠčüčéčīčÄ
ŌĆó ą¤ąŠą┤čüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ, ą┤ą░čéčŗ, ą╝ąĄčüčÅčåąĄą▓, ą│ąŠą┤ą░ čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą▓ąĖčüąŠą║ąŠčüąĮąŠą│ąŠ ą│ąŠą┤ą░
ŌĆó ążąŠčĆą╝ą░čé ą┤ą░čéčŗ, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ čü 2000 ą│ąŠą┤ąŠą╝
ŌĆó ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░ ą▓čüąĄčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ AVR, ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╝ RTC
ŌĆó ąÆą╝ąĄčüč鹥 čü ą░ą┐ąĮąŠčāč鹊ą╝ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠą┤ ąĮą░ čÅąĘčŗą║ąĄ C ą┤ą╗čÅ ATMega128
ąÆ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ čüą┤ąĄą╗ą░čéčī RTC ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ AVR┬«, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ąĮą░ ą▒ąŠčĆčéčā ą╝ąŠą┤čāą╗čī RTC. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čéčĆąĄą▒čāąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą│ąŠ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ŌĆō čćą░čüąŠą▓ąŠą╣ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ ąĮą░ 32.768 ą║ąōčå. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ąŠč湥ąĮčī ą╝ą░ą╗ąŠ 菹ĮąĄčĆą│ąĖąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠčüąĮąŠą▓ąĮčāčÄ čćą░čüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą▓ąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠąĄ čÅą┤čĆąŠ AVR "čüą┐ąĖčé", čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ čéą░ą╣ą╝ąĄčĆ, čéą░ą║čéąĖčĆčāąĄą╝čŗą╣ ąŠčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ą▓ą░čĆčåą░. ą¤čĆąĖ ą║ą░ąČą┤ąŠą╝ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠą┤čüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ, ą┤ą░čéčŗ, ą╝ąĄčüčÅčåą░ ąĖ ą│ąŠą┤ą░. ąŁčéą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ RTC ąĮą░ą┐ąĖčüą░ąĮą░ ą┤ą╗čÅ ATmega128, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čü čāčüą┐ąĄčģąŠą╝ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą┤čĆčāą│ąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ AVR čü ą╝ąŠą┤čāą╗ąĄą╝ RTC. ąöąŠčüč鹊ąĖąĮčüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤ą╗ąŠąČąĄąĮąĮąŠą│ąŠ ą▓ą░čĆąĖą░ąĮčéą░ RTC ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ ą▓ąĮąĄčłąĮąĄą│ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ RTC-čćąĖą┐ą░ ąŠč湥ą▓ąĖą┤ąĮčŗ:
ŌĆó ąØąĖąĘą║ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī
ŌĆó ą£ą░ą╗ąŠ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, ą┐čĆąŠčüč鹊čéą░ čüčģąĄą╝čŗ (č鹊ą╗čīą║ąŠ 1 ą║ą▓ą░čĆčå)
ŌĆó ąØąĖąĘą║ąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ
ŌĆó ąæąŠą╗čīčłą░čÅ ą│ąĖą▒ą║ąŠčüčéčī
ą¤čĆąĖą╝. ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AVR, ą▓ ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą╝ąŠą┤čāą╗čī RTC, ąĮąĄ čéą░ą║ ą╝ąĮąŠą│ąŠ, ąĖ ą╝ąĮąŠą│ąĖąĄ ąĖąĘ ąĮąĖčģ ą┤ąĄčłąĄą▓čŗą╝ąĖ ąĮą░ąĘą▓ą░čéčī ąĮąĄą╗čīąĘčÅ. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ąĖčģ ą┐ąŠą╗ąĮčŗą╣ ą┐ąĄčĆąĄč湥ąĮčī ąĮą░ čüąĄą│ąŠą┤ąĮčÅčłąĮąĖą╣ ą┤ąĄąĮčī 150104.
8-ą▒ąĖčéąĮčŗąĄ AVR c ą╝ąŠą┤čāą╗ąĄą╝ RTC: AT90CAN32, AT90CAN64, AT90CAN128, AT90USB1286, AT90USB1287, AT90USB646, AT90USB647, ATmega128, ATmega128A, ATmega1280, ATmega1281, ATmega1284, ATmega16, ATmega16A, ATmega162, ATmega164, ATmega165, ATmega168, ATmega169, ATmega2560, ATmega2561, ATmega32, ATmega32A, ATmega324, ATmega324A, ATmega325, ATmega325A, ATmega3250, ATmega328, ATmega329, ATmega329A, ATmega3290, ATmega3290A, ATmega406, ATmega48, ATmega48A, ATmega64, ATmega64A, ATmega640, ATmega644, ATmega644A, ATmega645, ATmega645A, ATmega6450, ATmega6450A, ATmega649, ATmega649A, ATmega6490, ATmega6490A, ATmega8, ATmega8A, ATmega8535, ATmega88, ATmega88A, ATtiny1634, ATtiny167, ATtiny828, ATtiny87.
8-ą▒ąĖčéąĮčŗąĄ AVR XMEGA c ą╝ąŠą┤čāą╗ąĄą╝ RTC: ATxmega128A1, ATxmega128A1U, ATxmega128A3, ATxmega128A3U, ATxmega128A4U, ATxmega128B1, ATxmega128B3, ATxmega128C3, ATxmega128D3, ATxmega128D4, ATxmega16A4, ATxmega16A4U, ATxmega16C4, ATxmega16D4, ATxmega16E5, ATxmega192A3, ATxmega192A3U, ATxmega192C3, ATxmega192D3, ATxmega256A3, ATxmega256A3B, ATxmega256A3BU, ATxmega256A3U, ATxmega256C3, ATxmega256D3, ATxmega32A4, ATxmega32A4U, ATxmega32C3, ATxmega32C4, ATxmega32D3, ATxmega32D4, ATxmega32E5, ATxmega384C3, ATxmega64A1, ATxmega64A1U, ATxmega64A3, ATxmega64A3U, ATxmega64A4U, ATxmega64B1, ATxmega64B3, ATxmega64C3, ATxmega64D3, ATxmega64D4, ATxmega8E5.
32-ą▒ąĖčéąĮčŗąĄ AVR c ą╝ąŠą┤čāą╗ąĄą╝ RTC: AT32UC3A0128, AT32UC3A0256, AT32UC3A0512, AT32UC3A1128, AT32UC3A1256, AT32UC3A1512, AT32UC3A3128, AT32UC3A3256, AT32UC3A364, AT32UC3A4128, AT32UC3A4256, AT32UC3A464, AT32UC3B0128, AT32UC3B0256, AT32UC3B0512, AT32UC3B064, AT32UC3B1128, AT32UC3B1256, AT32UC3B1512, AT32UC3B164, AT32UC3C0128C, AT32UC3C0256C, AT32UC3C0512C, AT32UC3C064C, AT32UC3C1128C, AT32UC3C1256C, AT32UC3C1512C, AT32UC3C164C, AT32UC3C2128C, AT32UC3C2256C, AT32UC3C2512C, AT32UC3C264C, AT32UC3L0128, AT32UC3L016, AT32UC3L0256, AT32UC3L032, AT32UC3L064, ATUC128D3, ATUC128D4, ATUC128L3U, ATUC128L4U, ATUC256L3U, ATUC256L4U, ATUC64D3, ATUC64D4, ATUC64L3U, ATUC64L4U.
[ąØąĄą╝ąĮąŠą│ąŠ č鹥ąŠčĆąĖąĖ: ą║ą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé]
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ RTC ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčé ą░čüąĖąĮčģčĆąŠąĮąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ RTC. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ Timer/Counter0 čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ AVR.
ąØą░ čĆąĖčü. 2-1 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AVR čĆą░ą▒ąŠčéą░ąĄčé ą▓ ąŠą▒čŗčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ąŠčé ąŠčüąĮąŠą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ 4 ą£ąōčå. ąÜąŠą│ą┤ą░ ąĮčāąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī čü ą┐ąŠąĮąĖąČąĄąĮąĮčŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ, AVR ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ Power-down, ą▓ ą║ąŠč鹊čĆąŠą╝ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ąŠčé čćą░čüč鹊čéčŗ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║čĆąĖčüčéą░ą╗ą╗ą░ 32.768 ą║ąōčå.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠ Real Time Clock (RTC) čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ 8-čĆą░ąĘčĆčÅą┤ąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░, čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ (Timer/Counter Overflow Interrupt). ą¤čĆąŠą│čĆą░ą╝ą╝ą░ čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą║ą░ą╗ąĄąĮą┤ą░čĆčÅ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer Overflow ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĮąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ second (čüąĄą║čāąĮą┤čŗ), minute (ą╝ąĖąĮčāčéčŗ), hour (čćą░čüčŗ), date (ą┤ą░čéą░), month (ą╝ąĄčüčÅčå) ąĖ year (ą│ąŠą┤).
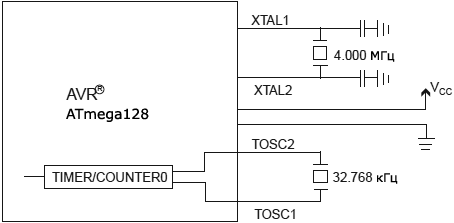
ąĀąĖčü. 2-1. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą║ RTC.
ą¤ąŠčüą║ąŠą╗čīą║čā ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐čĆąŠčģąŠą┤čÅčēąĄąĄ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅą╝ąĖ čéą░ą╣ą╝ąĄčĆą░ čüč湥čéčćąĖą║ą░ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ, ą║ą░ąČą┤ą░čÅ ąĖąĘ čŹčéąĖčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą▒čāą┤ąĄčé ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čćąĖčüą╗ąŠ čü ą║ą░ąČą┤čŗą╝ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ čéą░ą╣ą╝ąĄčĆą░. ąöą╗čÅ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (Interrupt Service Routine, ISR).
ąöą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AVR ą▓čģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ (Power-save mode), ą▓ ą║ąŠč鹊čĆąŠą╝ ą▓čüąĄ ą╝ąŠą┤čāą╗ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĘą░ą┐čĆąĄčēąĄąĮčŗ, ą║čĆąŠą╝ąĄ RTC. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2-1, čÅą┤čĆąŠ AVR ąŠą▒čŗčćąĮąŠ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą╝ąĄąĮčīčłąĄ 4 ą╝ą║ąÉ. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠčüąĮąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░ (Timer Overflow Interrupt). ąŚą░ą┐čāčüčéąĖčéčüčÅ ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čÅą┤čĆą░, ą║ąŠč鹊čĆčŗą╣ ąŠą▒ąĮąŠą▓ąĖčé ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆą░.
ąŚą░č鹥ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AVR čüąĮąŠą▓ą░ ąĘą░ą┐čāčüčéąĖčé čĆąĄąČąĖą╝ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ (Power-save mode), ąĖ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ ąĮąĄą╝, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer Overflow. ąØą░ čĆąĖčü. 2-2 ąĖ 2-3 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ AVR čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ (Power-save mode) ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą░ą║čéąĖą▓ąĮčŗą╝ čĆąĄąČąĖą╝ąŠą╝ (Active mode).
ą¦č鹊ą▒čŗ ą▓čŗčćąĖčüą╗ąĖčéčī ąŠą▒čēąĄąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ, ąĮčāąČąĮąŠ čüą╗ąŠąČąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ Power-save mode čü ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ ą▓ Active mode. ąÆčĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĮą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čéą░ą╣ą╝ąĄčĆą░ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čüąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĄąĮąĄąĄ 100 čåąĖą║ą╗ąŠą▓ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░, čćč鹊 ąĮą░ čćą░čüč鹊č鹥 4 ą£ąōčå čüąŠčüčéą░ą▓ąĖčé 25 ą╝ą║čü. ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ ąĘą░ čŹč鹊čé ą║ąŠčĆąŠčéą║ąĖą╣ ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮąĄčüčāčēąĄčüčéą▓ąĄąĮąĮčŗą╝. ąōąŠčĆą░ąĘą┤ąŠ ą▓ą░ąČąĮąĄąĄ ą▓čĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (wake-up time). ą×ąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ 35 ą╝čü ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░, ąĖą╗ąĖ 1 ą╝čü ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░. ą¤čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠą▒čāąČą┤ą░čÄčéčüčÅ ą║ą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ RTC, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą┤ą╗čÅ ą┤ą▓čāčģ čéąĖą┐ąŠą▓ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ:
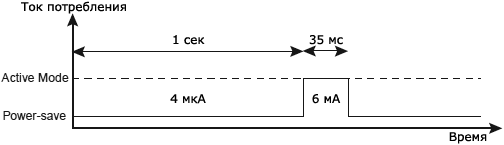
ąĀąĖčü. 2-2. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą│ąŠ č鹊ą║ą░ ą┤ą╗čÅ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░, ą▓čĆąĄą╝čÅ čüčéą░čĆčéą░ 35 ą╝čü (Startup Time).
ą×ą▒čēąĄąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ąĮą░ ąŠą┤ąĮčā čüąĄą║čāąĮą┤čā:
= (1 čü * 4 ą╝ą║A) + (35 ą╝čü * 6 ą╝ąÉ) = 4 ą╝ą║ąÉčü + 210 ą╝ą║ąÉčü = 214 ą╝ą║ąÉčü (ą╝ąĖą║čĆąŠą░ą╝ą┐ąĄčĆ ąĘą░ čüąĄą║čāąĮą┤čā)
ąŁč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąŠčüąĮąŠą▓ąĮą░čÅ čćą░čüčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ąĮą░ Active mode.
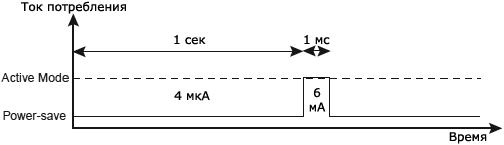
ąĀąĖčü. 2-3. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą│ąŠ č鹊ą║ą░ ą┤ą╗čÅ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░, ą▓čĆąĄą╝čÅ čüčéą░čĆčéą░ 1 ą╝čü (Startup Time).
ą×ą▒čēąĄąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ąĮą░ ąŠą┤ąĮčā čüąĄą║čāąĮą┤čā:
= (1 čü * 4 ą╝ą║ąÉ) + (1 ą╝čü * 6 mA) = 4 ą╝ą║ąÉčü + 6 ą╝ą║ąÉčü = 10 ą╝ą║ąÉčü
ą¤ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 čāą╝ąĄąĮčīčłąĄąĮąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čāą╝ąĄąĮčīčłąĄąĮąĖčÄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą│ąŠ č鹊ą║ą░ čü 214 ą╝ą║ąÉčü ą┤ąŠ 10 ą╝ą║ąÉčü.
ąóą░ą▒ą╗ąĖčåą░ 2-1. ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ AVR ą▓ ą║ą░ąČą┤ąŠą╝ čĆąĄąČąĖą╝ąĄ.
| ąĀąĄąČąĖą╝ |
ą×ą▒čŗčćąĮąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ |
Max |
| Active 4 ą£ąōčå, 3.3V ą┐ąĖčéą░ąĮąĖąĄ |
4 ą╝ąÉ |
6 ą╝ąÉ |
| Idle 4 ą£ąōčå, 3.3V ą┐ąĖčéą░ąĮąĖąĄ |
1.8 ą╝ąÉ |
2 ą╝ąÉ |
| Power-down 4 ą£ąōčå, 3.3V ą┐ąĖčéą░ąĮąĖąĄ |
< 1 ą╝ą║ąÉ |
2 ą╝ą║ąÉ |
| Power-save 4 ą£ąōčå, 3.3V ą┐ąĖčéą░ąĮąĖąĄ |
< 4 ą╝ą║ąÉ |
6 ą╝ą║ąÉ |
[ąÆčŗčćąĖčüą╗ąĄąĮąĖčÅ]
ąŚąĮą░čÅ čćą░čüč鹊čéčā čćą░čüąŠą▓ąŠą│ąŠ ą║ą▓ą░čĆčåą░, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéąĖą┐ą░ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ ą▓čŗą▒ąŠčĆąŠą╝ ąĮčāąČąĮąŠą│ąŠ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3-1, ą▒ąĖčéčŗ CS02, CS01 ąĖ CS00 ą▓ čĆąĄą│ąĖčüčéčĆąĄ TCCR0 (Timer/Counter0 Control Register) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą▓čŗą▒ąŠčĆ čćą░čüč鹊čéčŗ čü ą▓čŗčģąŠą┤ą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░, ą│ą┤ąĄ CK čĆą░ą▓ąĮąŠ čćą░čüč鹊č鹥 čćą░čüąŠą▓ąŠą│ąŠ ą║ą▓ą░čĆčåą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ CK čĆą░ą▓ąĮąŠ 32768 ąōčå, č鹊 čéą░ą╣ą╝ąĄčĆ/čüč湥čéčćąĖą║ ą┐ąŠą╗čāčćąĖčé čćą░čüč鹊čéčā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ 256 ąōčå, ąĄčüą╗ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą▒čāą┤ąĄčé CK/128.
ąóą░ą▒ą╗ąĖčåą░ 3-1. ąÆčŗą▒ąŠčĆ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ Timer/Counter0.
| CS02 |
CS01 |
CS00 |
ą×ą┐ąĖčüą░ąĮąĖąĄ(1) |
ą¤ąĄčĆąĖąŠą┤ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ |
| 0 |
0 |
0 |
Timer/Counter0 ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ |
- |
| 0 |
0 |
1 |
CK |
1/128 čüąĄą║ |
| 0 |
1 |
0 |
CK/8 |
1/16 čüąĄą║ |
| 0 |
1 |
1 |
CK/32 |
1/4 čüąĄą║ |
| 1 |
0 |
0 |
CK/64 |
1/2 čüąĄą║ |
| 1 |
0 |
1 |
CK/128 |
1 čüąĄą║ |
| 1 |
1 |
0 |
CK/256 |
2 čüąĄą║ |
| 1 |
1 |
1 |
CK/1024 |
8 čüąĄą║ |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): CK = 32.768 ą║ąōčå.
[ą¤čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ]
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 2-1, ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ TOSC1 ąĖ TOSC2. ąæąŠą╗ąĄąĄ ąĮąŠą▓čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čéčĆąĄą▒čāčÄčé ąĮą░ą╗ąĖčćąĖčÅ ąĮą░ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ą░čģ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ (ąĖąĘ-ąĘą░ čĆą░ąĘą╗ąĖčćąĖą╣ ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░), ą┐ąŠčŹč鹊ą╝čā ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┤ą░čéą░čłąĖčéčā ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, čćč鹊ą▒čŗ čāąĘąĮą░čéčī ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░. ąōąĄąĮąĄčĆą░č鹊čĆ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮ ąĮą░ čĆą░ą▒ąŠčéčā čü čćą░čüč鹊ą╣ 32.768 ą║ąōčå ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čćą░čüąŠą▓ąŠą│ąŠ ą║ą▓ą░čĆčåą░, ąĖą╗ąĖ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ ąŠčé 0 ąōčå ą┤ąŠ 256 ą║ąōčå. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ 8 čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ (LED) ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ą┐ąŠčĆčéčā B ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ RTC. LED ąĮą░ ąĮąŠąČą║ąĄ PB0 ą▒čāą┤ąĄčé ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą║ą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā. ąĢčēąĄ 6 LED (PB6..PB1) ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą╝ąĖąĮčāčéčŗ ą▓ ą┤ą▓ąŠąĖčćąĮąŠą╝ ą▓ąĖą┤ąĄ, ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ LED, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ PB7, ą│ąŠčĆąĖčé ą▓ č鹥č湥ąĮąĖąĄ čćą░čüą░, ąĖ ą┐ąŠą│ą░čłąĄąĮ ą▓ č鹥č湥ąĮąĖąĄ ą┤čĆčāą│ąŠą│ąŠ čćą░čüą░.
ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāčćąĖčéčŗą▓ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ čāčüą╗ąŠą▓ąĖčÅ, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ/čüč湥čéčćąĖą║ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé ąĖčüč鹊čćąĮąĖą║ą░, ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥. ąÜą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ ąĮą░ 32.768 ą║ąōčå ąĖą╝ąĄąĄčé ą▓čĆąĄą╝čÅ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ ą┤ąŠ ąŠą┤ąĮąŠą╣ čüąĄą║čāąĮą┤čŗ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą▓čģąŠą┤ąĖčéčī ą▓ čĆąĄąČąĖą╝ Power-save čĆą░ąĮčīčłąĄ, č湥ą╝ ą┐ąŠčüą╗ąĄ 1 čüąĄą║čāąĮą┤čŗ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ąØčāąČąĮąŠ čéą░ą║ąČąĄ ą┐ąŠąĘą░ą▒ąŠčéąĖčéčīčüčÅ ąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ čĆąĄąČąĖą╝ą░ čéą░ą╣ą╝ąĄčĆą░ ąĮą░ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐ąŠ čŹčéąĖą╝ ą▓ąŠą┐čĆąŠčüą░ą╝ čüą╝. ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąöą░ąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆą░ čéą░ą╣ą╝ąĄčĆą░ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ąĖ ąĘą░čēąĄą╗ą║ąĖą▓ą░čÄčéčüčÅ čéą░ą╝ ą┐ąŠčüą╗ąĄ 2 čåąĖą║ą╗ąŠą▓ ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓. ąĀąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ ą░čüąĖąĮčģčĆąŠąĮąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ (Asynchronous Status Register, ASSR) čüąŠą┤ąĄčƹȹĖčé čäą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊ą▒čŗ ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░čéčī, ą║ąŠą│ą┤ą░ ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ąŠą▒ąĮąŠą▓ąĖą╗čüčÅ.
[ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ čüąŠčüč鹊ąĖčé ąĖąĘ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┤ą▓čāčģ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝. ą¤čĆąŠčåąĄą┤čāčĆą░ counter čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (Timer/Counter Overflow ISR), ąŠąĮą░ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé ą▓čüąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ (čŹč鹊 čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā). ąÆč鹊čĆą░čÅ ą┐čĆąŠčåąĄą┤čāčĆą░ not_leap ą║ąŠčĆčĆąĄą║čéąĖčĆčāąĄčé ą┤ą░čéčā, čāčćąĖčéčŗą▓ą░čÅ ą▓ąĖčüąŠą║ąŠčüąĮčŗąĄ ą│ąŠą┤ą░. ą×čüąĮąŠą▓ąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ą▓čüąĄ ąĮčāąČąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā ą╝ąŠą┤čāą╗čÅ RTC, ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ (Power-down).
ąæąĖčé AS0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ ASSR (Asynchronous Status Register) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ Timer/Counter0 ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░. ąóąŠą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čéą░ą╣ą╝ąĄčĆ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą░čüąĖąĮčģčĆąŠąĮąĮąŠ. ąóą░ą╣ą╝ąĄčĆ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ ą┤ą╗čÅ ąĮąĄą│ąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮčāąČąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ (čćč鹊ą▒čŗ čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒čŗą╗ą░ 256 ąōčå, ąĖ čéą░ą╣ą╝ąĄčĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮčÅą╗čüčÅ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ 256-ą│ąŠ ąĖą╝ą┐čāą╗čīčüą░, čé. ąĄ. ą║ą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā). ąöą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čü ą▓ąĮąĄčłąĮąĖą╝ čéą░ą║č鹊ą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąČą┤ąĄčé, ą┐ąŠą║ą░ ąŠą▒ąĮąŠą▓ąĖčéčüčÅ čĆąĄą│ąĖčüčéčĆ ASSR. ąŚą░č鹥ą╝ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé TOIE0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMSK (Timer/Counter Interrupt Mask Register), čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer/Counter0 Overflow. ąóą░ą║ąČąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé ąŠą▒čēąĄą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (Global Interrupt Enable) ą▓ čĆąĄą│ąĖčüčéčĆąĄ SREG (Status Register) - čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā ą▓čüąĄčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąæąĖčéčŗ SM1 ąĖ SM0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ MCUCR (MCU Control Register) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čĆąĄąČąĖą╝ą░ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (Power-save mode). ąŚą░č鹥ą╝ ąĖąĮčüčéčĆčāą║čåąĖčÅ SLEEP ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ čĆąĄąČąĖą╝ čüąĮą░. ąōą╗ą░ą▓ąĮčŗą╣ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĖąĮčüčéčĆčāą║čåąĖčÄ SLEEP.
ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ counter. ąŁč鹊 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░, ąŠąĮ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ Timer Overflow. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ą░ąĄčé čÅą┤čĆąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čćč鹊ą▒čŗ ąŠą▒ąĮąŠą▓ąĖčéčī ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆą░. ą¤čĆąŠčåąĄą┤čāčĆą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą▓čģąŠą┤ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĖąĘ čüąĄą▒čÅ ą┤ą░ąĮąĮčŗąĄ, ą║ą░ą║ ą╝ąŠąČąĄčé ą┤ąĄą╗ą░čéčī ąŠą▒čŗčćąĮą░čÅ čäčāąĮą║čåąĖčÅ. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąŠąĮą░ čĆą░ą▒ąŠčéą░ąĄčé čü ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╝ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčéčüčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ čüčéčĆčāą║čéčāčĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ, čü ą┐ąŠą╗čÅą╝ąĖ second, minute, hour, date, month ąĖ year. ą¤ąŠčüą║ąŠą╗čīą║čā ąĖąĘą▓ąĄčüčéąĮąŠ ą▓čĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąŠčłą╗ąŠ ą╝ąĄąČą┤čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ čéą░ą╣ą╝ąĄčĆą░ (1 čüąĄą║čāąĮą┤ą░), č鹊 ą┐ąŠą╗ąĄ second ą▒čāą┤ąĄčé ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ 1. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠą╗ąĄ second ą┤ąŠčüčéąĖą│ąĮąĄčé 60, č鹊 ą┐ąŠą╗ąĄ minute ą▒čāą┤ąĄčé ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ 1, ąĖ ą┐ąŠą╗ąĄ second čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ 0.
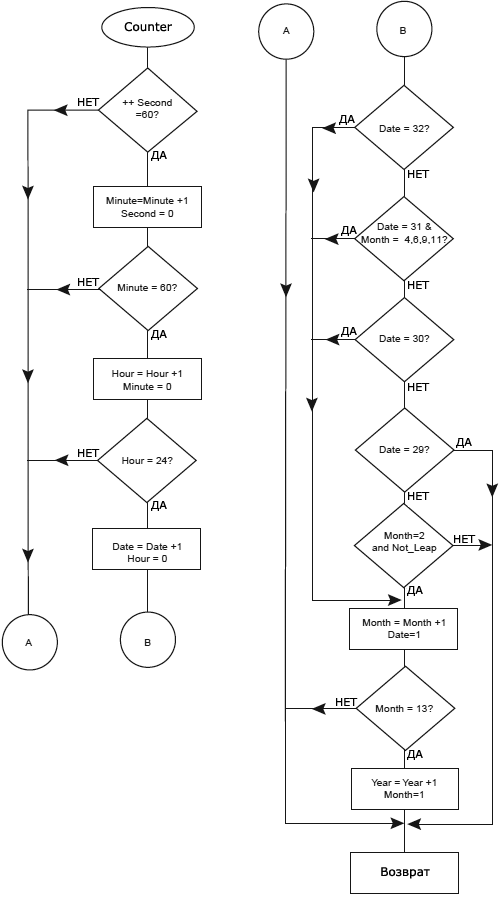
ąĀąĖčü. 5-1. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Counter.
//ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░ 0. ąŚą┤ąĄčüčī ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčéčüčÅ
// ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüč湥čéčćąĖą║ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ, ą┤ą░čéčŗ, ą╝ąĄčüčÅčåą░ ąĖ ą│ąŠą┤ą░.
ISR(TIMER0_OVF_vect)
{
if (++t.second==60)
{
t.second=0;
if (++t.minute==60)
{
t.minute=0;
if (++t.hour==24)
{
t.hour=0;
if (++t.date==32)
{
t.month++;
t.date=1;
}
else if (t.date==31)
{
if ((t.month==4) || (t.month==6) || (t.month==9) || (t.month==11))
{
t.month++;
t.date=1;
}
}
else if (t.date==30)
{
if(t.month==2)
{
t.month++;
t.date=1;
}
}
else if (t.date==29)
{
if((t.month==2) && (not_leap()))
{
t.month++;
t.date=1;
}
}
if (t.month==13)
{
t.month=1;
t.year++;
}
}
}
}
PORTB=~(((t.second & 0x01)|t.minute << 1)|t.hour << 7);
}
ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ not_leap. ąŁčéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ąĄčüčéčī ąĖą╗ąĖ ąĮąĄčé čüąĄą╣čćą░čü ą▓ąĖčüąŠą║ąŠčüąĮčŗą╣ ą│ąŠą┤. ą×ąĮą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé true, ąĄčüą╗ąĖ ą│ąŠą┤ ąĮąĄ ą▓ąĖčüąŠą║ąŠčüąĮčŗą╣, ąĖ false, ąĄčüą╗ąĖ ą▓ąĖčüąŠą║ąŠčüąĮčŗą╣. ąĪčćąĖčéą░ąĄčéčüčÅ, čćč鹊 ą│ąŠą┤ ą▓ąĖčüąŠą║ąŠčüąĮčŗą╣, ąĄčüą╗ąĖ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčéčüčÅ ąŠą▒ą░ čāčüą╗ąŠą▓ąĖčÅ:
1. ą¦ąĖčüą╗ąŠ ą│ąŠą┤ą░ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░čåąĄą╗ąŠ ąĮą░ 4, ąĖ
2. ąĢčüą╗ąĖ ą│ąŠą┤ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░čåąĄą╗ąŠ ąĮą░ 100, č鹊 ąŠąĮ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĄąĮ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ 400.

ąĀąĖčü. 5-2. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ čäčāąĮą║čåąĖąĖ not_leap.
//ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ą▓ąĖčüąŠą║ąŠčüąĮčŗą╣ ą│ąŠą┤ ąĖą╗ąĖ ąĮąĄčé.
static char not_leap(void)
{
if (!(t.year%100))
{
return (char)(t.year%400);
}
else
{
return (char)(t.year%4);
}
}
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ. ążčāąĮą║čåąĖčÅ init() ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠ ąĮą░čüčéčĆąŠą╣ą║ąĄ RTC, ą┐ąŠčĆč鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░.
static void init(void)
{
//ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ
// ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čćą░čüąŠą▓ RTC:
for (uint8_t i=0; i < 0x40; i++)
{
for (int j=0; j < 0xFFFF; j++);
}
//ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čüąĄčģ 8 ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ B ą║ą░ą║ ą▓čŗčģąŠą┤ąŠą▓:
DDRB = 0xFF;
//ąōą░čĆą░ąĮčéąĖčĆčāąĄą╝, čćč鹊 ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ TC0 ąĘą░ą┐čĆąĄčēąĄąĮčŗ:
TIMSK &= ~((1 << TOIE0)|(1 << OCIE0));
//ąØą░čüčéčĆąŠą╣ą║ą░ Timer/counter0 ąĮą░ čĆą░ą▒ąŠčéčā ą░čüąĖąĮčģčĆąŠąĮąĮąŠ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ
// ą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÄ čÅą┤čĆą░, ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░
// 32768 ąōčå:
ASSR |= (1 << AS0);
//ąĪą▒čĆąŠčü čéą░ą╣ą╝ąĄčĆą░:
TCNT0 =0;
//ąØą░čüčéčĆąŠą╣ą║ą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čćą░čüč鹊čéčā
// ą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ 128, ąĖ ą┐ąŠą╗čāčćąĖčéčī 1-čüąĄą║čāąĮą┤ąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗
// ą╝ąĄąČą┤čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░:
TCCR0 =(1 << CS00)|(1 << CS02);
//ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TC0:
while (ASSR & ((1 << TCN0UB)|(1 << OCR0UB)|(1 << TCR0UB)))
{}
//ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ 8-čĆą░ąĘčĆčÅą┤ąĮąŠą│ąŠ
// Timer/Counter0 (Overflow Interrupt Enable):
TIMSK |= (1 << TOIE0);
//ą×ą▒čēąĄąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
sei();
//ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (power save mode),
// ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ čüąĮą░ (sleep mode):
set_sleep_mode(SLEEP_MODE_PWR_SAVE);
//ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ čüąĮą░:
sleep_enable();
}
ą×čüąĮąŠą▓ąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ (čäčāąĮą║čåąĖčÅ main). ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ (čüą▒čĆąŠčüą░), ąĖ ą▓ ąĮąĄą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ čüąĖčüč鹥ą╝čŗ. ą¤ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▓čŗąĘąŠą▓ąŠą╝ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ init(), ą░ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ čüąĮą░, ąĖ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠąČąĖą┤ą░ąĮąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ Timer/Counter0.
int main(void)
{
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ RTC:
init();
while(1)
{
//ąÆčģąŠą┤ ą▓ čĆąĄąČąĖą╝ čüąĮą░ (ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĮą░čüčéčāą┐ąĖčé ą┐ąŠčüą╗ąĄ
// ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ timer overflow interrupt):
sleep_mode();
//ąŚą░ą┐ąĖčüčī ą┐čāčüč鹊ą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ:
TCCR0=(1 << CS00)|(1 << CS02);
//ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TC0:
while(ASSR & ((1 << TCN0UB)|(1 << OCR0UB)|(1 << TCR0UB)));
}
}
[ąóąŠčćąĮąŠčüčéčī]
RTC, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ AVR, čĆą░ą▒ąŠčéą░čÄčé ąĮą░čüč鹊ą╗čīą║ąŠ č鹊čćąĮąŠ, ąĮą░čüą║ąŠą╗čīą║ąŠ č鹊čćąĮą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ą░čÅ ą║ą▓ą░čĆčåąĄą▓čŗą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝ čćą░čüč鹊čéą░. ąÉčüąĖąĮčģčĆąŠąĮąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čéą░ą╣ą╝ąĄčĆčā čĆą░ą▒ąŠčéą░čéčī ą▒ąĄąĘ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ąĘą░ą┤ąĄčƹȹĄą║, čüą▓čÅąĘą░ąĮąĮčŗčģ čü čĆą░ą▒ąŠč鹊ą╣ čÅą┤čĆą░ - ąŠąĮąŠ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī (ąĖą╗ąĖ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅčéčī) ą╗čÄą▒čŗąĄ ą┤ą░ąČąĄ čüą░ą╝čŗąĄ čüą╗ąŠąČąĮčŗąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ, ąĮą░ čĆą░ą▒ąŠčéčā ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ čŹč鹊 ąĮąĖą║ą░ą║ ąĮąĄ ą┐ąŠą▓ą╗ąĖčÅąĄčé. ą×ą┤ąĮą░ą║ąŠ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĄčüčéčī ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠąĄ ąĮąĄčüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čüčćąĖčéčŗą▓ą░ąĄą╝ąŠą│ąŠ ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą▓čĆąĄą╝ąĄąĮąĖ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆą░ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮčŗ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ. ąÆčĆąĄą╝čÅ, ąĘą░ ą║ąŠč鹊čĆąŠąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ, ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ąŠč湥ąĮčī ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░. ąĪą░ą╝ąŠąĄ ą▒ąŠą╗čīčłąŠąĄ ąŠčéą╗ąĖčćąĖąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą▓čüąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆą░. ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą┐ąŠą╗ąĄ second = 59, minute = 59, hour = 23, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ. ąŁč鹊 ąĘą░ą╣ą╝ąĄčé 94 čåąĖą║ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ čÅą┤čĆą░ ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąØą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 čÅą┤čĆą░ 4 ą£ąōčå ąŠčłąĖą▒ąŠčćąĮąŠąĄ čĆą░čüčģąŠąČą┤ąĄąĮąĖąĄ ą╝ąĄąČą┤čā RTC ąĖ čćą░čüąŠą▓čŗą╝ ą║ą▓ą░čĆčåąĄą╝ ąĮąĄ ą┐čĆąĄą▓čŗčüąĖčé 23.5 ą╝ą║čü (ą▓čŗčćąĖčüą╗ąĄąĮąŠ ą║ą░ą║ 94/(4 * 10^6)). ą×ą▒čŗčćąĮąŠ ąŠčłąĖą▒ą║ą░ čüąŠčüčéą░ą▓ąĖčé 6 ą╝ą║čü, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą╗čÅ second čéčĆąĄą▒čāąĄčéčüčÅ 24 čåąĖą║ą╗ą░. ąŁčéą░ ąŠčłąĖą▒ą║ą░ ąĮąĄ ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ąĄčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čéą░ą╣ą╝ąĄčĆ ą▓čüąĄą│ą┤ą░ čüąĖąĮčģčĆąŠąĮąĄąĮ čü čćą░čüč鹊č鹊ą╣ čćą░čüąŠą▓ąŠą│ąŠ ą║ą▓ą░čĆčåą░, ąĖ ąĮąĄ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüč湥čé.
[ąŚą░čéčĆą░čéčŗ čĆąĄčüčāčĆčüąŠą▓]
ąóą░ą▒ą╗ąĖčåą░ 7-1. ąŚą░čéčĆą░čéčŗ čéą░ą║č鹊ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ąĘą░čéčĆą░čéčŗ ą┐ą░ą╝čÅčéąĖ AVR.
| ążčāąĮą║čåąĖčÅ |
ąĀą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░
(ą▓ ą▒ą░ą╣čéą░čģ) |
ą”ąĖą║ą╗čŗ |
ąĀąĄą│ąĖčüčéčĆčŗ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| main |
104 |
- |
R16 |
Timer0 Overflow |
ąÜąŠą┤ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čéčĆąĄą▒čāąĄą╝čāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ |
| counter |
356 |
- |
R16, R17, R30, R31 |
- |
ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čćą░čüąŠą▓ |
| not_leap |
48 |
10 (ąŠą▒čŗčćąĮąŠ) |
R16, R17, R30, R31 |
- |
ą¤čĆąŠą▓ąĄčĆą║ą░ ą│ąŠą┤ą░ - ą▓ąĖčüąŠą║ąŠčüąĮčŗą╣ ąĖą╗ąĖ ąĮąĄčé |
| ąÆčüąĄą│ąŠ |
508 |
- |
|
- |
|
ąóą░ą▒ą╗ąĖčåą░ 7-2. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ AVR.
| ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ |
| TOSC1, TOSC2 |
ąÆčģąŠą┤ ąĖ ą▓čŗčģąŠą┤ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ ą▓ąĮąĄčłąĮąĄą╝čā ą║ą▓ą░čĆčåąĄą▓ąŠą╝čā čĆąĄąĘąŠąĮą░č鹊čĆčā. |
- |
| Timer/Counter0 |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTC). |
Timer/Counter0 Overflow |
| 8 ą▓čŗą▓ąŠą┤ąŠą▓ GPIO ą┐ąŠčĆčéą░ B |
ąöą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ čĆą░ą▒ąŠčéčŗ čćą░čüąŠą▓ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗčģ čåąĄą╗ąĄą╣). |
- |
[ąĪčüčŗą╗ą║ąĖ]
1. AVR134: Real-Time Clock using the Asynchronous Timer on tinyAVR and megaAVR devices site:atmel.com. |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ