|
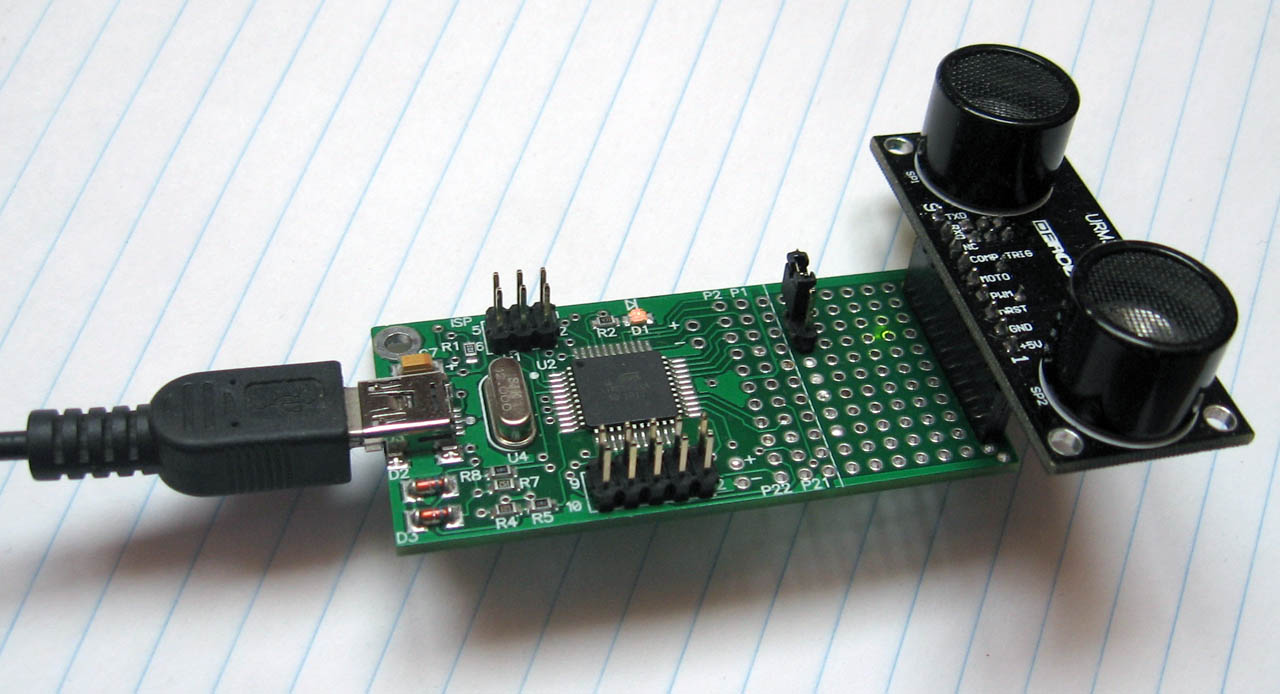
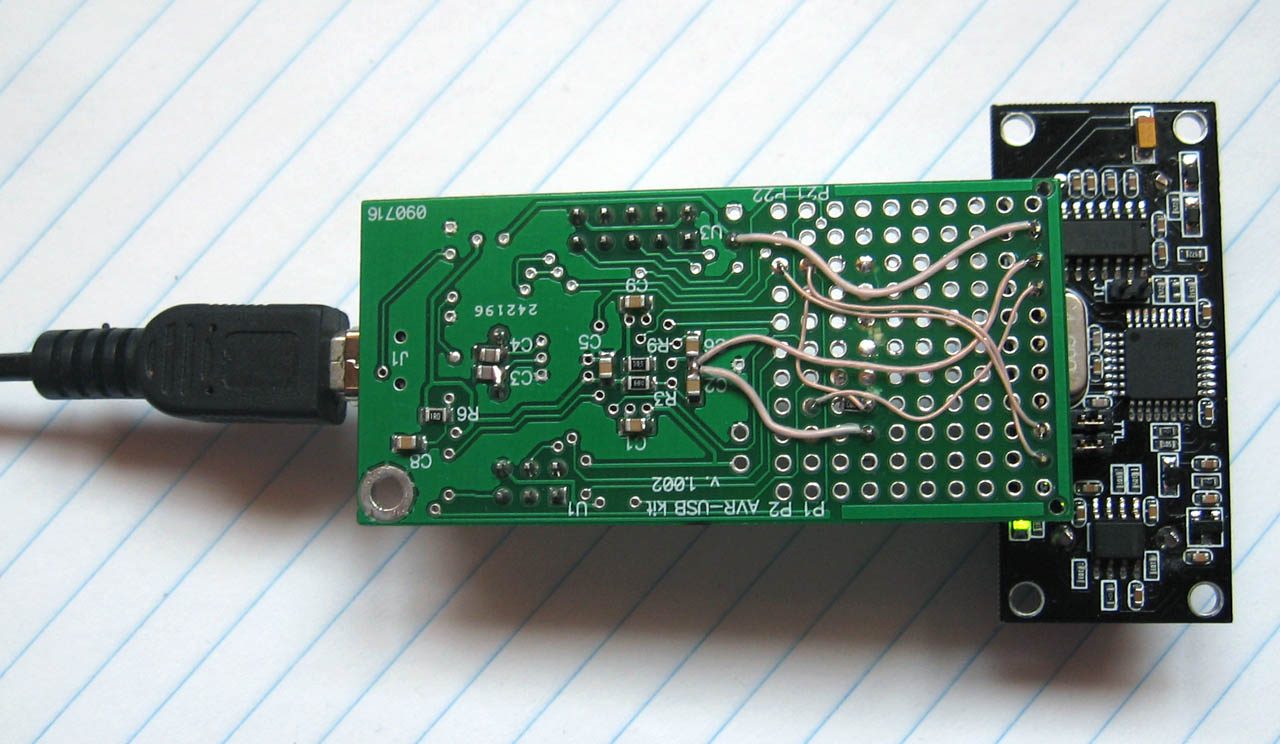
ąöą╗čÅ ą╝ąŠčüčéą░ USB ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega32A, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ąĮą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 AVR-USB-MEGA16. ąŻą╗čīčéčĆą░ąĘą▓čāą║ąŠą▓ąŠą╣ ą┤ą░čéčćąĖą║ čĆą░čüčüč鹊čÅąĮąĖčÅ URM37 ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ ą┐ąŠčĆčéą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÆąĮąĖą╝ą░ąĮąĖąĄ! ąØąĄ ąĘą░ą▒čāą┤čīč鹥 ą┐čĆąŠ ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ čāčüčéą░ąĮąŠą▓ą║čā ą┐ąĄčĆąĄą╝čŗč湥ą║ J1, J2, J3 URM37, čüą╝. [1].
ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▒čŗą╗ąŠ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąŠ 5 ą┐čĆąŠą▓ąŠą┤ąŠą▓ (ą║ąŠąĮčéą░ą║čéčŗ 1, 2, 3, 8, 9 URM37), ąŠą┤ąĖąĮ ąĖąĘ ą║ąŠč鹊čĆčŗčģ (RST) ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╣. ąØčāą╝ąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ (ą║ąŠąĮčéą░ą║č鹊ą▓) čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čåąŠą║ąŠą╗ąĄą▓ą║ąĄ ą┤ą░čéčćąĖą║ą░ URM37, čüą╝. [1]. ąØąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ RST ą▓čŗą┤ąĄą╗ąĄąĮ čüąĄčĆčŗą╝ čåą▓ąĄč鹊ą╝.

1. VCC ą┐ąĖčéą░ąĮąĖąĄ +5V (Power).
2. GND ąĘąĄą╝ą╗čÅ (Ground).
3. RST čüą▒čĆąŠčü (Reset). ąØą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą▓ ąĮąŠąČą║ąĄ čüą▒čĆąŠčüą░ ATmega8L, ą┐ąŠčŹč鹊ą╝čā ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čüąĄąĮčüąŠčĆ čĆą░ą▒ąŠčéą░ą╗, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĮą░ RST ą┐ąŠą┤ą░čéčī ą╗ąŠą│. 1, ą┤ą╗čÅ čüą▒čĆąŠčüą░ čüąĄąĮčüąŠčĆą░ ąĮčāąČąĮąŠ ą┐ąŠą┤ą░čéčī ąĮą░ RST ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 0, ąĖ ą▓ąĄčĆąĮčāčéčī RST ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1.
8. RXD ąĖąĮč鹥čĆč乥ą╣čüą░ RS232, ą▓čģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą▓čŗčģąŠą┤čā TXD ą▓ąĮąĄčłąĮąĄą│ąŠ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čāčĆąŠą▓ąĮąĖ TTL, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝čŗč湥ą║ J1, J2, J3).
9. TXD ąĖąĮč鹥čĆč乥ą╣čüą░ RS232, ą▓čŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą▓čģąŠą┤čā RXD ą▓ąĮąĄčłąĮąĄą│ąŠ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čāčĆąŠą▓ąĮąĖ TTL, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝čŗč湥ą║ J1, J2, J3).
[Firmware]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (firmware) ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ AVR-USB-MEGA16 ąĮą░ą┐ąĖčüą░ąĮąŠ ąĮą░ ą▒ąĄąĘąŠčéą║ą░ąĘąĮąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ V-USB. ąŚą░ ąŠčüąĮąŠą▓čā ą▓ąĘčÅčé ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ą║ą╗ą░čüčüą░ USB CDC (ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ COM-ą┐ąŠčĆčé), ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąĮčŗą╣ ą▓ [2].
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖ ą│ąŠč鹊ą▓čŗąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ, ą░ čéą░ą║ąČąĄ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą│ąŠ COM-ą┐ąŠčĆčéą░ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [3].
Firmware čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą┤ą▓čāčģ čĆąĄąČąĖą╝ą░čģ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąĄčĆąĄą╝čŗčćą║ąĖ BRIDGE. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą╝čŗčćą║ą░ BRIDGE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, č鹊 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čćąĖčüčéčŗą╣ ą┤ą▓ąŠąĖčćąĮčŗą╣ ą╝ąŠčüčé, čé. ąĄ. ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčé ą┤ą░čéčćąĖą║ą░ URM37 ąĖ ą▓ ąĮąĄą│ąŠ ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą╝čŗčćą║čā BRIDGE čüąĮčÅčéčī, č鹊 ą╝ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ AVR-USB-MEGA16 čüą░ą╝ą░ ą┐ąŠčüčŗą╗ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ ą┤ą░čéčćąĖą║čā URM37 (č乊čĆą╝ą░čé ą║ąŠą╝ą░ąĮą┤ čüą╝. ą▓ [1]), ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąŠčé ą┤ą░čéčćąĖą║ą░ ąŠčéą▓ąĄčé, ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčé ąĄą│ąŠ ąĖ ą▓ č鹥ą║čüč鹊ą▓ąŠą╝ ą▓ąĖą┤ąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ąŠą▒čĆą░čéąĮąŠ. ą×ą┐čĆąŠčü ą┤ą░čéčćąĖą║ą░ URM37 ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ 10 ąōčå - ąŠą┤ąĖąĮ ąŠą┐čĆąŠčü ą║ą░ąČą┤čŗąĄ 100 ą╝čü.
ą¤čĆąĖ ą┐ąĄčĆą▓ąŠą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą╝ąŠčüčéą░ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ Windows ąĘą░ą┐čĆąŠčüąĖčé ą┤čĆą░ą╣ą▓ąĄčĆ. ą¤ąŠą┤čüčāąĮčīč鹥 ą╝ą░čüč鹥čĆčā čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ąĖąĘ ą░čĆčģąĖą▓ą░ [3].
[ą¤ą× čģąŠčüčéą░]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ čģąŠčüčéą░ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą╝čŗčćą║ą░ BRIDGE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, č鹊 ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą║ąŠą╝ą░ąĮą┤ ą┤ą░čéčćąĖą║čā URM37 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą│ąŠč鹊ą▓čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā URM37V3.2helpmate.exe, čüą╝. [4].
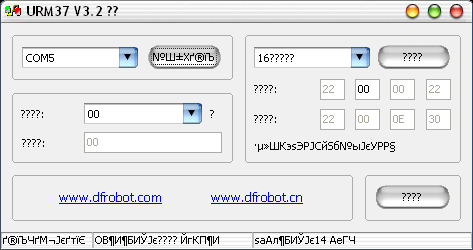
ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ ą║čĆą░ą║ąŠąĘčÅą▒čĆčŗ (ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą║ąĖčéą░ą╣čüą║ą░čÅ), čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ URM37V3.2helpmate.exe ą╝ąŠąČąĮąŠ, ąĄčüą╗ąĖ ąŠąĘąĮą░ą║ąŠą╝ąĖčéčīčüčÅ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ ą┤ą░čéčćąĖą║ą░ URM37 (čüą╝. [1]). ąÆčŗą┐ą░ą┤ą░čÄčēąĖą╣ čüą┐ąĖčüąŠą║ čüą┐čĆą░ą▓ą░ ą▓ą▓ąĄčĆčģčā čüą╗čāąČąĖčé ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čéąĖą┐ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ. ąĪčĆą░ąĘčā ą┐ąŠą┤ ą▓čŗą┐ą░ą┤ą░čÄčēąĖą╝ čüą┐ąĖčüą║ąŠą╝ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▒ą░ą╣čéčŗ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą╝ ą▓ąĖą┤ąĄ, ąĖ ą▒ą░ą╣čéčŗ ąŠčéą▓ąĄčéą░, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖčģąŠą┤čÅčé ąŠčé ą┤ą░čéčćąĖą║ą░. ą£ąŠąČąĮąŠ čéą░ą║ąČąĄ ąĮą░ą┐ąĖčüą░čéčī čüą▓ąŠčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā, ą║ąŠč鹊čĆą░čÅ ą┐ąŠčüčŗą╗ą░ąĄčé ą▓ ą┤ą░čéčćąĖą║ 4 ą▒ą░ą╣čéą░ 0x22 0x00 0x00 0x22, ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąŠčé ą┤ą░čéčćąĖą║ą░ ąŠčéą▓ąĄčé (čéą░ą║ąČąĄ 4 ą▒ą░ą╣čéą░) ąĖ ąĖąĘą▓ą╗ąĄą║ą░ąĄčé ąĖąĘ ąŠčéą▓ąĄčéą░ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ.
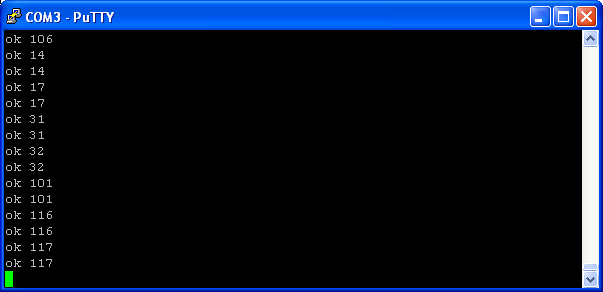
ąĀą░ą▒ąŠčéą░ ą▓ čĆąĄąČąĖą╝ąĄ č鹥ą║čüč鹊ą▓ąŠą╣ ą║ąŠąĮčüąŠą╗ąĖ ąĮą░ą╝ąĮąŠą│ąŠ ą┐čĆąŠčēąĄ. ą¤čĆąŠčüč鹊 čüąĮąĖą╝ąĖč鹥 ą┐ąĄčĆąĄą╝čŗčćą║čā BRIDGE, ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥čüčī ą║ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╝čā COM-ą┐ąŠčĆčéčā ą╗čÄą▒čŗą╝ č鹥čĆą╝ąĖąĮą░ą╗čīąĮčŗą╝ ą║ą╗ąĖąĄąĮč鹊ą╝ (putty, SecureCRT, TerraTerm, HyperTerminal ąĖ čé. ą┐.). ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĮąĖą║ą░ą║ąŠą╣ čĆąŠą╗ąĖ ąĮąĄ ąĖą│čĆą░čÄčé, ąĮčāąČąĮąŠ č鹊ą╗čīą║ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┤ą░čéčī ąĮąŠą╝ąĄčĆ COM-ą┐ąŠčĆčéą░. ą¤ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ ąŠą║ąĮąĄ č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąÆčŗ čāą▓ąĖą┤ąĖč鹥 čĆą░čüčüč鹊čÅąĮąĖąĄ ą┤ąŠ ąŠą▒čŖąĄą║čéą░, ą║ąŠč鹊čĆąŠąĄ ąĖąĘą╝ąĄčĆčÅąĄčé ą┤ą░čéčćąĖą║. ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ ąĮą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 AVR-USB-MEGA16 ą▒čāą┤ąĄčé čćą░čüč鹊 ą╝ąĖą│ą░čéčī ą▓ čéą░ą║čé čü ąĖąĘą╝ąĄčĆąĄąĮąĖčÅą╝ąĖ.
ąÆąĮąĄčłąĮąĖą╣ ą▓ąĖą┤ čüąŠą▒čĆą░ąĮąĮąŠą│ąŠ USB ą╝ąŠčüčéą░ ą┤ą╗čÅ ą┤ą░čéčćąĖą║ą░ URM37:
[ąĪčüčŗą╗ą║ąĖ]
1. ąŻą╗čīčéčĆą░ąĘą▓čāą║ąŠą▓ąŠą╣ ą┤ą░čéčćąĖą║ čĆą░čüčüč鹊čÅąĮąĖčÅ URM37.
2. USB ą║ąŠąĮčüąŠą╗čī ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą┤ąĖąŠą╗čÄą▒ąĖč鹥ą╗čīčüą║ąĖą╝ąĖ ą┐čĆąĖą▒ąŠčĆą░ą╝ąĖ.
3. 120204URM37-v-usb-public.zip - firmware AVR-USB-MEGA16 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ URM37 - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤, čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ.
4. 120122URM37-docs.zip - ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┤ą░čéčćąĖą║ąŠą╝ URM37V3.2helpmate.exe, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┐ąŠ ą┤ą░čéčćąĖą║čā URM37. |