|
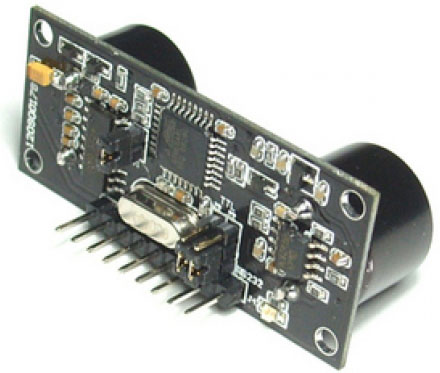
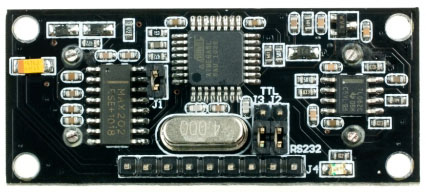
URM37 V3.2 Ultrasonic Sensor (SKU:SEN0001) čāą┤ąŠą▒ąĄąĮ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┤ą░čéčćąĖą║ą░ čĆą░čüčüč鹊čÅąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĄą┐čÅčéčüčéą▓ąĖą╣ ą▓ čĆą░ą┤ąĖąŠą╗čÄą▒ąĖč鹥ą╗čīčüą║ąĖčģ ąĖ čĆąŠą▒ąŠč鹊č鹥čģąĮąĖč湥čüą║ąĖčģ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅčģ.
ąöą░čéčćąĖą║ čüąŠą▒čĆą░ąĮ čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░čéčćąĖą║ąŠą╝ ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ ąŠčé ąĮąĄą│ąŠ, ą▓čŗčćąĖčüą╗čÅčÅ čĆą░čüčüč鹊čÅąĮąĖąĄ ą┤ąŠ ąŠą▒čŖąĄą║čéą░ (ą┐ąŠ ąĘą░ą┤ąĄčƹȹ║ąĄ ą╝ąĄąČą┤čā ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĖ ą┐čĆąĖąĄą╝ąŠą╝ čāą╗čīčéčĆą░ąĘą▓čāą║ąŠą▓ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░). ąÆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┤ą░čéčćąĖą║ą░ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮą░ ą▓čüčéčĆąŠąĄąĮąĮą░čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮą░čÅ ą║ąŠčĆčĆąĄą║čåąĖčÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ, čćč鹊 čÅą▓ą╗čÅąĄčéčüčÅ čāąĮąĖą║ą░ą╗čīąĮąŠą╣ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčīčÄ ą┤ą╗čÅ ą┤ą░čéčćąĖą║ąŠą▓ čĆą░čüčüč鹊čÅąĮąĖčÅ ąĮąĖąĘą║ąŠą│ąŠ čåąĄąĮąŠą▓ąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░.
[ą¤ą░čĆą░ą╝ąĄčéčĆčŗ URM37 V3.2 Ultrasonic Sensor]
- ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ +5V, ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗą╣ č鹊ą║ < 20 ą╝ąÉ.
- čĆą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ -10 .. +70 Co.
- ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ 4 .. 500 čüą╝, č鹊čćąĮąŠčüčéčī ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ 1 čüą╝.
- ąĖąĮč鹥čĆč乥ą╣čüčŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ RS232 (TTL ąĖ ąŠą▒čŗčćąĮčŗąĄ čāčĆąŠą▓ąĮąĖ +-12V), PWM (ą©ąśą£).
- čĆąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ: ą┐ą░čüčüąĖą▓ąĮčŗą╣ čĆąĄąČąĖą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ čü ą©ąśą£ (Serial PWM passive control mode), ą░ą▓č鹊ąĮąŠą╝ąĮčŗą╣ čĆąĄąČąĖą╝ (Autonomous Mode), čĆąĄą╗ąĄą╣ąĮčŗą╣ čĆąĄąČąĖą╝ (On/OFF Mode).
- čüąĄąĮčüąŠčĆ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖą╝ąĄąĄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 12 ą▒ąĖčé, ą┤ą░ąĮąĮčŗąĄ čü ąĮąĄą│ąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé RS232.
- čĆą░ąĘą╝ąĄčĆčŗ 22x51 ą╝ą╝, ą▓ąĄčü 30 ą│čĆą░ą╝ą╝.
- ą║ ą┤ą░čéčćąĖą║čā ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ čüąĄčĆą▓ąŠą╝ą░čłąĖąĮą║ą░, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą┐ąŠą▓ąŠčĆąŠčéą░ ą┤ą░čéčćąĖą║ą░ ąĮą░ ąĮčāąČąĮčŗą╣ čāą│ąŠą╗.
ąöąĖą░ą│čĆą░ą╝ą╝ą░ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠčüčéąĖ čüąĄąĮčüąŠčĆą░ URM37:

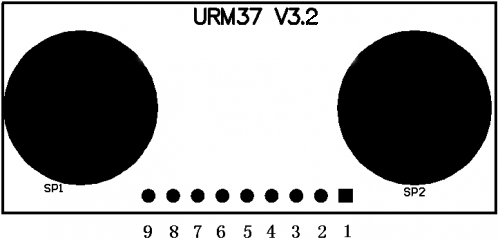
[ąØčāą╝ąĄčĆą░čåąĖčÅ ąĖ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ URM37]
1. VCC ą┐ąĖčéą░ąĮąĖąĄ +5V (Power).
2. GND ąĘąĄą╝ą╗čÅ (Ground).
3. RST čüą▒čĆąŠčü (Reset). ąØą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą▓ ąĮąŠąČą║ąĄ čüą▒čĆąŠčüą░ ATmega8L, ą┐ąŠčŹč鹊ą╝čā ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čüąĄąĮčüąŠčĆ čĆą░ą▒ąŠčéą░ą╗, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĮą░ RST ą┐ąŠą┤ą░čéčī ą╗ąŠą│. 1, ą┤ą╗čÅ čüą▒čĆąŠčüą░ čüąĄąĮčüąŠčĆą░ ąĮčāąČąĮąŠ ą┐ąŠą┤ą░čéčī ąĮą░ RST ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 0, ąĖ ą▓ąĄčĆąĮčāčéčī RST ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1.
4. PWM ą▓čŗčģąŠą┤ ą©ąśą£ (PWM Output) 0..25000 ą╝ą║čü, ą│ą┤ąĄ ą║ą░ąČą┤čŗąĄ 50 ą╝ą║čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé 1 čüą╝.
5. MOTO ą▓čŗčģąŠą┤ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĄčĆą▓ąŠą╝ą░čłąĖąĮą║ąŠą╣ (Servo control signal output).
6. COMP/TRIG ą▓čŗčģąŠą┤, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░. COMP On/OFF mode, ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĄčüą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ ą╝ąĄąĮčīčłąĄ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮčŗ, č鹊 ą▓čŗčģąŠą┤ COMP ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ąĮąĖąĘą║ąĖą╣ ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī. TRIG ąĮąŠąČą║ą░ PWM ąĖą╗ąĖ čéčĆąĖą│ą│ąĄčĆą░ RS232.
7. PWR_ON ą▓čģąŠą┤, ą║ąŠč鹊čĆčŗą╣ čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā ą┤ą░čéčćąĖą║ą░, ąĄčüą╗ąĖ ąĮą░ čŹč鹊ą╝ ą▓čģąŠą┤ąĄ ą▓čŗčüąŠą║ąĖą╣ ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī (ą╗ąĖą▒ąŠ ąĮąŠąČą║ą░ 7 ąĮąĖą║čāą┤ą░ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░, NC).
8. RXD ąĖąĮč鹥čĆč乥ą╣čüą░ RS232, ą▓čģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą╗ąĖą▒ąŠ ą║ ą▓čŗčģąŠą┤čā TXD ą▓ąĮąĄčłąĮąĄą│ąŠ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čāčĆąŠą▓ąĮąĖ TTL, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝čŗč湥ą║ J1, J2, J3, čüą╝. ą┤ą░ą╗ąĄąĄ), ą╗ąĖą▒ąŠ ą║ ą▓čŗčģąŠą┤čā TXD ą┐ąŠčĆčéą░ RS232 ą║ąŠą╝ą┐čīčÄč鹥čĆą░ (čāčĆąŠą▓ąĮąĖ +-12V, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝čŗč湥ą║ J1, J2, J3, čüą╝. ą┤ą░ą╗ąĄąĄ).
9. TXD ąĖąĮč鹥čĆč乥ą╣čüą░ RS232, ą▓čŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą╗ąĖą▒ąŠ ą║ ą▓čģąŠą┤čā RXD ą▓ąĮąĄčłąĮąĄą│ąŠ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čāčĆąŠą▓ąĮąĖ TTL, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝čŗč湥ą║ J1, J2, J3, čüą╝. ą┤ą░ą╗ąĄąĄ), ą╗ąĖą▒ąŠ ą║ ą▓čģąŠą┤čā RXD ą┐ąŠčĆčéą░ RS232 ą║ąŠą╝ą┐čīčÄč鹥čĆą░ (čāčĆąŠą▓ąĮąĖ +-12V, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝čŗč湥ą║ J1, J2, J3, čüą╝. ą┤ą░ą╗ąĄąĄ).
[ą¤ąŠą╗ąŠąČąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝čŗč湥ą║, ą║ąŠč鹊čĆčŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčé ą▓čŗčģąŠą┤ąŠą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (RS232, TTL)]
ąĪ ą┐ąŠą╝ąŠčēčīčÄ čéčĆąĄčģ ą┐ąĄčĆąĄą╝čŗč湥ą║ J1, J2, J3 ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓čŗčģąŠą┤ąĮąŠąĄ čĆą░ą▒ąŠč湥ąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ - čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ RS232 (+-12V) ąĖą╗ąĖ TTL čāčĆąŠą▓ąĮąĖ. ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ą▓ąŠąĘą╝ąŠąČąĄąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▓č鹊čĆąŠą╣ čĆąĄą▓ąĖąĘąĖąĖ ą┤ą░čéčćąĖą║ą░ (Rev2, v3.2) ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ ą┐ąŠąĘą┤ąĮąĄą╣. ąĀąĖčüčāąĮą║ąĖ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą▓ą░čĆąĖą░ąĮčéčŗ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąĄčĆąĄą╝čŗč湥ą║.
 |
 |
| ąĀąĄąČąĖą╝ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ RS232 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ COM-ą┐ąŠčĆčéčā ą║ąŠą╝ą┐čīčÄč鹥čĆą░ (čāčĆąŠą▓ąĮąĖ +-12V). ą¤ąĄčĆąĄą╝čŗčćą║ą░ J1 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, ą░ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ J2, J3 ą▓ ąĮąĖąČąĮąĄą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ. |
ąĀąĄąČąĖą╝ TTL RS232 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą▓ąĮąĄčłąĮąĄą╝čā čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╝čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā (čāčĆąŠą▓ąĮąĖ TTL 0..+5V). ą¤ąĄčĆąĄą╝čŗčćą║ą░ J1 čüąĮčÅčéą░, ą░ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ J2, J3 ą▓ ą▓ąĄčĆčģąĮąĄą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ. |
ąÆąĮąĖą╝ą░ąĮąĖąĄ: ąĮąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ą╣č鹥 ą▓čŗą▓ąŠą┤čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čü čāčĆąŠą▓ąĮčÅą╝ąĖ TTL ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą║ą░ąĮą░ą╗čā URM37, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ J1, J2, J3 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ RS232 Mode, ąĖąĮą░č湥 ąÆčŗ ą┐ąŠą▓čĆąĄą┤ąĖč鹥 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
[ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ URM37]
ąĀą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ ąĘą░ą┐ąĖčüčīčÄ 0x00, 0x01 ąĖą╗ąĖ 0x02 ą▓ ą┐ą░ą╝čÅčéčī EEPROM č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé (RS232 RXD, TXD).
ąĀąĄąČąĖą╝ 1: ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣, ą┐ą░čüčüąĖą▓ąĮčŗą╣ (Serial passive control mode)
ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüąĄąĮčüąŠčĆ ą▓čüąĄą│ą┤ą░ ąČą┤ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĖą╣čéąĖ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé. ąÜąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčéą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ ą║ąŠą╝ą░ąĮą┤ą░, č鹊 ą┤ą░čéčćąĖą║ ąĖąĘą╝ąĄčĆąĖčé čĆą░čüčüč鹊čÅąĮąĖąĄ ąĖ ą▓ąĄčĆąĮąĄčé ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé, ąĖ ąĘą░č鹥ą╝ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ąŠąČąĖą┤ą░ąĮąĖčÄ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ. ąŚąĮą░č湥ąĮąĖąĄ čāą│ą╗ą░ ą┐ąŠą▓ąŠčĆąŠčéą░ (degree) ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĄčĆą▓ąŠą╝ąŠč鹊čĆąŠą╝ čü čåąĄą╗čīčÄ ą┐ąŠą▓ąŠčĆąŠčéą░ ą┤ą░čéčćąĖą║ą░ ąĮą░ ąĮčāąČąĮčŗą╣ čāą│ąŠą╗. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čŹč鹊čé čĆąĄąČąĖą╝ ą▓čüąĄą│ą┤ą░ ą░ą║čéąĖą▓ąĄąĮ, ąĖ ąĄą│ąŠ ąĮąĄą╗čīąĘčÅ ą▓ą║ą╗čÄčćąĖčéčī ąĖą╗ąĖ ą▓čŗą║ą╗čÄčćąĖčéčī.
ąĀąĄąČąĖą╝ 2: ą░ą▓č鹊ąĮąŠą╝ąĮčŗą╣ čéčĆąĖą│ą│ąĄčĆąĮčŗą╣ čĆąĄąČąĖą╝ (Autonomous trigger mode)
ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüąĄąĮčüąŠčĆ ą▒čāą┤ąĄčé ąĖąĘą╝ąĄčĆčÅčéčī čĆą░čüčüč鹊čÅąĮąĖąĄ ą║ą░ąČą┤čŗąĄ 25 ą╝čü ąĖ čüčĆą░ą▓ąĮąĖą▓ą░čéčī ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ čü ą┐ąŠčĆąŠą│ąŠą▓čŗą╝ (čŹč鹊 ą┐ąŠčĆąŠą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĘą░čĆą░ąĮąĄąĄ ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ą▓ EEPROM). ąĢčüą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čĆą░ą▓ąĮąŠ ąĖą╗ąĖ ą╝ąĄąĮčīčłąĄ ą┐ąŠčĆąŠą│ąŠą▓ąŠą│ąŠ, č鹊 ą▓čŗčģąŠą┤ COMP/TRIG ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ąĮąĖąĘą║ąĖą╣ ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī. ąÆ č鹊 ąČąĄ čüą░ą╝ąŠąĄ ą▓čĆąĄą╝čÅ ąĮąŠąČą║ą░ PWM ą▓čŗą▓ąĄą┤ąĄčé ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ, ą│ą┤ąĄ ą║ą░ąČą┤čŗąĄ 50 ą╝ą║čü ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé čĆą░čüčüč鹊čÅąĮąĖčÄ 1 čüą╝, čéą░ą║ čćč鹊 ąĄčüą╗ąĖ ąĖąĘą╝ąĄčĆąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ ąĮčāą╗čÅ, č鹊 ą╝ąŠąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī čĆą░čüčüč鹊čÅąĮąĖąĄ ą┤ąŠ ąŠą▒čŖąĄą║čéą░. ąŁč鹊čé čĆąĄąČąĖą╝ ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ čĆąĄą╗ąĄą╣ąĮčŗą╣ ą▓čŗą║ą╗čÄčćą░č鹥ą╗čī (ON/OFF switch).
ąĀąĄąČąĖą╝ 3: ą┐ą░čüčüąĖą▓ąĮčŗą╣ ą©ąśą£ (PWM passive control mode)
ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄčģąŠą┤ ą▓ ą╗ąŠą│. 0 ą▓čŗą▓ąŠą┤ą░ COMP/TRIG čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮą░čćą░ą╗čā ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ čüąĄąĮčüąŠčĆą░. ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ ą╗ąŠą│. 0 ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮą░ čāą│ą╗čā ą┐ąŠą▓ąŠčĆąŠčéą░ čüąĄčĆą▓ąŠą╝ą░čłąĖąĮą║ąĖ. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ąĮąŠąČą║ą░ PWM ą▓čŗą▓ąĄą┤ąĄčé ąĖą╝ą┐čāą╗čīčü, ą│ą┤ąĄ ą║ą░ąČą┤čŗąĄ 50 ą╝ą║čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé 1 čüą╝. ąĢčüą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ čĆą░čüčüč鹊čÅąĮąĖčÅ ąĮąĄ čāą┤ą░ą╗ąŠčüčī, č鹊 ą▒čāą┤ąĄčé čüč乊čĆą╝ąĖčĆąŠą▓ą░ąĮ ąĖą╝ą┐čāą╗čīčü ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ 50000 ą╝ą║čü.
[ą¤čĆąŠč鹊ą║ąŠą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ URM37 (Serial control protocol)]
ąÆ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čäąĖąĘąĖč湥čüą║ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠčĆčéą░: 9600 ą▒ąŠą┤, ą▒ąĄąĘ č湥čéąĮąŠčüčéąĖ, 1 čüč鹊ą┐-ą▒ąĖčé (9600; Parity: none; Stop bit: 1). ą¤čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ąŠą▒ą╝ąĄąĮą░. ąÜą░ąČą┤ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ čüąŠčüč鹊ąĖčé ąĖąĘ 4 ą▒ą░ą╣čé: command+data0+data1+sum, ą│ą┤ąĄ:
command ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ
data0 ą▒ą░ą╣čé 0 ą┤ą░ąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤čŗ
data1 ą▒ą░ą╣čé 1 ą┤ą░ąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤čŗ
sum ą▒ą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ
ąÜąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ ą┐čĆąŠčüč鹊ą╝čā ą░ą╗ą│ąŠčĆąĖčéą╝čā. ą×ąĮą░ čĆą░ą▓ąĮą░ ą╝ą╗ą░ą┤čłąĖą╝ 8 ą▒ąĖčéą░ą╝ ąŠčé čüčāą╝ą╝čŗ command+data0+data1. ąÆ čéą░ą▒ą╗ąĖčåąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą║ąŠą╝ą░ąĮą┤čŗ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĖ ąĖčģ ąŠą┐ąĖčüą░ąĮąĖąĄ.
| ążąŠčĆą╝ą░čé ą║ąŠą╝ą░ąĮą┤čŗ |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
0x11+NC+NC+Sum
(ą┐čĆąĖą╝ąĄčĆ: 0x11 0x00 0x00 0x11) |
ą¦č鹥ąĮąĖąĄ 16 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. |
ą¦č鹥ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čüą╗ąĄą┤čāčÄčēąĖąĄ:
0x11+High(temperature)+Low(temperature)+SUM
ąĢčüą╗ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ą▓čŗčłąĄ 0, č鹊 ą▓čüąĄ ą┐ąĄčĆą▓čŗąĄ 4 ą▒ąĖčéą░ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ High ą▒čāą┤čāčé čĆą░ą▓ąĮčŗ 0. ąĢčüą╗ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĮąĖąČąĄ 0, č鹊 ą▓čüąĄ ą┐ąĄčĆą▓čŗąĄ 4 ą▒ąĖčéą░ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ High ą▒čāą┤čāčé čĆą░ą▓ąĮčŗ 1.
ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ 4 ą▒ąĖčéą░ ą▒ą░ą╣čéą░ High ą▓ą╝ąĄčüč鹥 čü ą▒ąĖčéą░ą╝ąĖ ą▒ą░ą╣čéą░ Low ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé 12-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ąóąŠčćąĮąŠčüčéčī ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čüąŠčüčéą░ą▓ą╗čÅąĄčé 0.1 ą│čĆą░ą┤čāčüą░. ąĢčüą╗ąĖ čćč鹥ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĘą░ą▓ąĄčĆčłąĖą╗ąŠčüčī čü ąŠčłąĖą▒ą║ąŠą╣, č鹊 čüąĄąĮčüąŠčĆ ą▓ąĄčĆąĮąĄčé 0x11+0xFF+0xFF+SUM |
| 0x22+Degree+NC+SUM (ą┐čĆąĖą╝ąĄčĆ: 0x22 0x00 0x00 0x22) |
ą¦č鹥ąĮąĖąĄ 16 ą▒ąĖčé ąĖąĘą╝ąĄčĆąĄąĮąĮąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ. |
ąÆ ą║ąŠą╝ą░ąĮą┤ąĄ ą▒ą░ą╣čé Degree (čāą│ąŠą╗ ą┐ąŠą▓ąŠčĆąŠčéą░) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą░ą▓ąĖą░ą╝ąŠą┤ąĄą╗čīąĮąŠą╣ čüąĄčĆą▓ąŠą╝ą░čłąĖąĮą║ąŠą╣, čćč鹊ą▒čŗ ąĖą╝ąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą▓ąĄčĆąĮčāčéčī ą┤ą░čéčćąĖą║ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čāą│ąŠą╗. ąŚąĮą░č湥ąĮąĖčÅ Degree 0..46 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé čāą│ą╗čā ą┐ąŠą▓č鹊čĆą░ 0..270 ą│čĆą░ą┤čāčüąŠą▓, čüą╝. čéą░ą▒ą╗ąĖčåčā ąĮąĖąČąĄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, Degree=3 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čāą│ą╗čā ą┐ąŠą▓ąŠčĆąŠčéą░ 18 ą│čĆą░ą┤čāčüąŠą▓. ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖą╝ąĄčÄčé č乊čĆą╝ą░čé 0x22’╝ŗHigh(čĆą░čüčüč鹊čÅąĮąĖąĄ)’╝ŗLow(čĆą░čüčüč鹊čÅąĮąĖąĄ)+SUM. ąĢčüą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ čĆą░čüčüč鹊čÅąĮąĖčÅ ą▒čŗą╗ąŠ ąĮąĄčāą┤ą░čćąĮčŗą╝, č鹊 čüąĄąĮčüąŠčĆ ą▓ąĄčĆąĮąĄčé 0x22+0xFF+0xFF+SUM. |
| 0x33+address+NC+SUM |
ą¦č鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ąĖąĘ EEPROM. |
ąÆąŠąĘą▓čĆą░čēąĄąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé:
0x33+address+Data+SUM |
| 0x44+address+Data+SUM (ą┐čĆąĖą╝ąĄčĆ ą▓ą║ą╗čÄč湥ąĮąĖčÅ čĆąĄąČąĖą╝ą░ 3, PWM mode: 0x44 0x02 0xbb 0x01) |
ąŚą░ą┐ąĖčüčī ą▒ą░ą╣čéą░ ą▓ EEPROM. |
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ (Data) ą╝ąŠąČąĄčé ą▒čŗčéčī č鹊ą╗čīą║ąŠ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0..255 (0x00..0xFF). ąÉą┤čĆąĄčüą░ (address) 0x00..0x02 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ą┤ą░čéčćąĖą║ą░ (čĆąĄąČąĖą╝ 0, čĆąĄąČąĖą╝ 1 ąĖą╗ąĖ čĆąĄąČąĖą╝ 2). ąæą░ą╣čé čü ą░ą┤čĆąĄčüąŠą╝ 0x00 - ą╝ą╗ą░ą┤čłąĖą╣ (Low) ą▒ą░ą╣čé ą┐ąŠčĆąŠą│ąŠą▓ąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ (threshold distance), ą▒ą░ą╣čé čü ą░ą┤čĆąĄčüąŠą╝ 0x01 - čüčéą░čĆčłąĖą╣ (High) ą▒ą░ą╣čé ą┐ąŠčĆąŠą│ąŠą▓ąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ (threshold distance), ą▒ą░ą╣čé čü ą░ą┤čĆąĄčüąŠą╝ 0x02 - čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą┤ą░čéčćąĖą║ą░ (0xAA ą┤ą╗čÅ ą░ą▓č鹊ąĮąŠą╝ąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ 2, 0xBB ą┤ą╗čÅ ą┐ą░čüčüąĖą▓ąĮąŠą│ąŠ PWM čĆąĄąČąĖą╝ą░ 3).
ąÆąŠąĘą▓čĆą░čēąĄąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čüą╗ąĄą┤čāčÄčēąĖąĄ:
0x44+address+Data+SUM
|
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą║ čéą░ą▒ą╗ąĖčåąĄ ą║ąŠą╝ą░ąĮą┤: NC ąŠąĘąĮą░čćą░ąĄčé ą╗čÄą▒čŗąĄ ą┤ą░ąĮąĮčŗąĄ (čŹč鹊čé ą▒ą░ą╣čé ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ), address ąŠąĘąĮą░čćą░ąĄčé ą░ą┤čĆąĄčü ą▒ą░ą╣čéą░ ą▓ EEPROM. ąĢčüą╗ąĖ ą┐ą╗ą░čéą░ čüąĄąĮčüąŠčĆą░ ąĖą╝ąĄąĄčé čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ PWR_ON (ąĮąŠąČą║ą░ 7, ąĖąĮąŠą│ą┤ą░ ąŠąĮą░ ąĮąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮą░), č鹊 ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą┤ą░čéčćąĖą║ą░ ąĮą░ ą▓čģąŠą┤ąĄ PWR_ON ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1.
ą¤čĆąĖą╝ąĄčĆ čäčāąĮą║čåąĖąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ:
if (HightByte>=0xF0)
{
Temperature= ((HightByte-0xF0)*256-LowByte)/10;
}
else
{
Temperature= ((HightByte)*256-LowByte)/10;
}
ąóą░ą▒ą╗ąĖčåą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĄčĆą▓ąŠą╝ą░čłąĖąĮą║ąŠą╣ (čāą│ąŠą╗ ą┐ąŠą▓ąŠčĆąŠčéą░ Degree):
| DEC |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
| HEX |
0 |
01 |
02 |
03 |
04 |
05 |
06 |
07 |
08 |
09 |
0A |
0B |
0C |
0D |
0E |
0F |
| Degree |
0 |
6 |
12 |
18 |
24 |
29 |
35 |
41 |
47 |
53 |
59 |
65 |
70 |
76 |
82 |
88 |
| DEC |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
| HEX |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
1A |
1B |
1C |
1D |
1E |
1F |
| Degree |
94 |
100 |
106 |
112 |
117 |
123 |
129 |
135 |
141 |
147 |
153 |
159 |
164 |
170 |
176 |
182 |
| DEC |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
40 |
41 |
42 |
43 |
44 |
45 |
46 |
|
| HEX |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
2A |
2B |
2C |
2D |
2E |
|
| Degree |
188 |
194 |
200 |
206 |
211 |
217 |
223 |
229 |
235 |
241 |
247 |
252 |
258 |
264 |
270 |
|
ą¤čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮą░čÅ čüčģąĄą╝ą░ čüąĄąĮčüąŠčĆą░ (ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čĆąĄą░ą╗čīąĮąŠą╣ - ą▓ čüčģąĄą╝ąĄ čüč鹊ąĖčé ATmega8 ą▓ ą║ąŠčĆą┐čāčüąĄ DIP28, ą░ ą▓ čüąĄąĮčüąŠčĆąĄ čüčéčĆąŠąĖčé ATmega8 ą▓ ą║ąŠčĆą┐čāčüąĄ TQFP32, ąĮąŠ ą┤čĆčāą│ąŠą╣ čüčģąĄą╝čŗ ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ ąĮąĄčé):

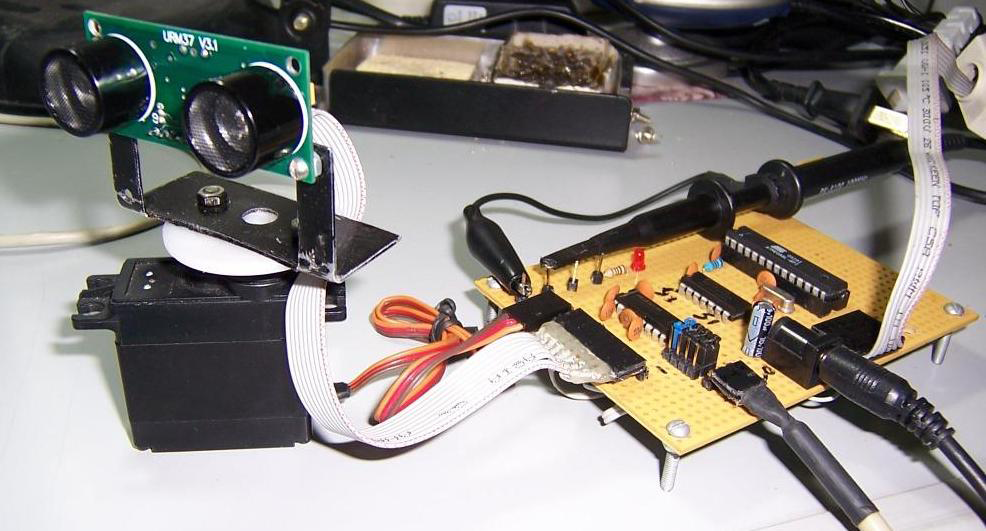
ą¤čĆąĖą╝ąĄčĆ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ą▓ čĆą░ą┤ąĖąŠą╗čÄą▒ąĖč鹥ą╗čīčüą║ąŠą╣ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ:
[ąĪčüčŗą╗ą║ąĖ]
1. 120122URM37-docs.zip - ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąĮą░ čüąĄąĮčüąŠčĆ, ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ CP210x, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą┤ą░čéčćąĖą║ą░ URM37V3.2helpmate. |