|
UART čĆąĄą░ą╗ąĖąĘčāąĄčé ą▓ čüąĄą▒ąĄ ą┐ąŠą┤ą┤ąĄčƹȹ║čā čüą╗ąĄą┤čāčÄčēąĖčģ čäčāąĮą║čåąĖą╣:
ŌĆó ą¤ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ
ŌĆó ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control)
ŌĆó ą¤čĆąŠą▓ąĄčĆą║ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ą▒ąĖčéčā č湥čéąĮąŠčüčéąĖ (parity checking) ąĖ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą▒ąĖčéą░ č湥čéąĮąŠčüčéąĖ ą┤ą╗čÅ 9-ą│ąŠ ą▒ąĖčéą░.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 1, UART ąĮą░ą┐čĆčÅą╝čāčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čĆąĄą│ąĖčüčéčĆčŗ TXD ąĖ RXD ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. UART ąĖčüą┐ąŠą╗čīąĘčāąĄčé 1 stop-ą▒ąĖčé.
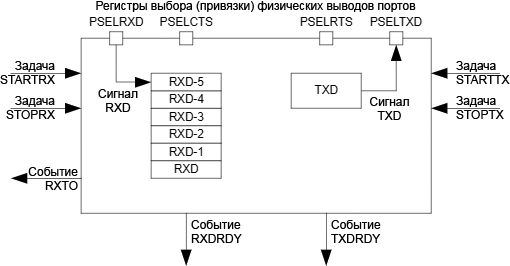
ąĀąĖčü. 1. ąæą╗ąŠą║-čüčģąĄą╝ą░ UART.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄą┐ąŠąĮčÅčéąĮčŗąĄ č鹥čĆą╝ąĖąĮčŗ ąĖ čüąŠą║čĆą░čēąĄąĮąĖčÅ čüą╝. ą▓ ąĪą╗ąŠą▓ą░čĆąĖą║ąĄ [2].
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓]
ąĀą░ąĘą╗ąĖčćąĮčŗąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ RXD (ą┐čĆąĖąĄą╝), CTS (Clear To Send, ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī 0), RTS (Request To Send, ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī 0) ąĖ TXD (ą┐ąĄčĆąĄą┤ą░čćą░), ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ UART, ą┐čĆąĖą▓čÅąĘčŗą▓ą░čÄčéčüčÅ ą║ čäąĖąĘąĖč湥čüą║ąĖą╝ ą▓čŗą▓ąŠą┤ą░ą╝ ąĮąŠąČąĄą║ ą┐ąŠčĆč鹊ą▓ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą╣ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ PSELRXD, PSELCTS, PSELRTS ąĖ PSELTXD čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ąĢčüą╗ąĖ ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čāą║ą░ąĘą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ 0xFFFFFFFF, č鹊 čüą▓čÅąĘą░ąĮąĮčŗą╣ čü čŹčéąĖą╝ čĆąĄą│ąĖčüčéčĆąŠą╝ čüąĖą│ąĮą░ą╗ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĮąĖ ą║ ąŠą┤ąĮąŠą╝čā čäąĖąĘąĖč湥čüą║ąŠą╝čā ą▓čŗą▓ąŠą┤čā MCU. ąĀąĄą│ąĖčüčéčĆčŗ PSELRXD, PSELCTS, PSELRTS, PSELTXD ąĖ ąĖčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠą║ą░ UART čĆą░ąĘčĆąĄčłąĄąĮ, ąĖ čŹčéąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ą┐čĆąŠčéčÅąČąĄąĮąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ MCU ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ System ON. PSELRXD, PSELCTS, PSELRTS ąĖ PSELTXD ą┤ąŠą╗ąČąĮčŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ UART ąĘą░ą┐čĆąĄčēąĄąĮ.
ąöą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą║ąŠčĆčĆąĄą║čéąĮčŗčģ čāčĆąŠą▓ąĮąĄą╣ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ UART, ą║ąŠą│ą┤ą░ MCU ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ System OFF, čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ GPIO [3], čüą╝. čéą░ą▒ą╗ąĖčåčā 1.
ąóą░ą▒ą╗ąĖčåą░ 1. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GPIO.
| ąĪąĖą│ąĮą░ą╗ UART |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ |
ąÆčŗčģąŠą┤ąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RXD |
ąÆčģąŠą┤ |
ąØąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ |
| CTS |
| TXD |
ąÆčŗčģąŠą┤ |
ąøąŠą│. 1 |
| RTS |
ąóąŠą╗čīą║ąŠ ąŠą┤ąĮąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą▓čŗą▓ąŠą┤ąŠą╝ GPIO. ąØąĄą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čŹč鹊ą│ąŠ čāčüą╗ąŠą▓ąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠą╝čā ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÄ.
[ą¤ąĄčĆąĄą┤ą░čćą░]
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ UART ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą░ą║čéąĖą▓ą░čåąĖąĄą╣ ąĘą░ą┤ą░čćąĖ STARTTX.
ąæą░ą╣čéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆ TXD. ąÜąŠą│ą┤ą░ ą▒ą░ą╣čé čāčüą┐ąĄčłąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĮ, UART čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąŠą▒čŗčéąĖąĄ TXDRDY, ą┐ąŠčüą╗ąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą▓ čĆąĄą│ąĖčüčéčĆ TXD ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ąĮąŠą▓čŗą╣ ą▒ą░ą╣čé. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ UART ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ STOPTX.
ąĢčüą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control) čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 ą┐ąĄčĆąĄą┤ą░čćą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ CTS ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ, ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāčĆąŠą▓ąĄąĮčī CTS čüąĮąŠą▓ą░ čüčéą░ąĮąĄčé ą░ą║čéąĖą▓ąĮčŗą╝, čüą╝. čĆąĖčü. 2. ąæą░ą╣čé, ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ CTS ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ą╗čüčÅ, ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐ąĄčĆąĄą┤ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą┤ą░ą╗ąĄąĄ "ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ UART".
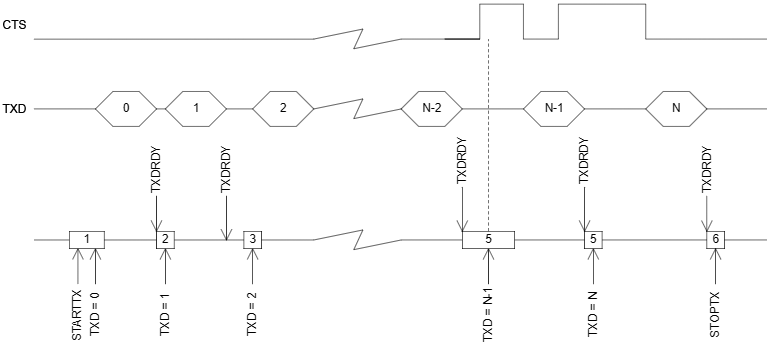
ąĀąĖčü. 2. ą¤ąĄčĆąĄą┤ą░čćą░ UART.
[ą¤čĆąĖąĄą╝]
ąĀą░ą▒ąŠčéą░ UART ąĮą░ ą┐čĆąĖąĄą╝ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą░ą║čéąĖą▓ą░čåąĖąĄą╣ ąĘą░ą┤ą░čćąĖ STARTRX.
ąÆ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ UART čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ FIFO, ą▓ ą║ąŠč鹊čĆąŠą╝ ą╝ąŠąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī 6 ą┐ąŠčüčéčāą┐ąĖą▓čłąĖčģ ą▓ čĆąĄą│ąĖčüčéčĆ RXD ą▒ą░ą╣čé ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ą┤ą░ąĮąĮčŗčģ. ąæą░ą╣čéčŗ ąĖąĘą▓ą╗ąĄą║ą░čÄčéčüčÅ ąĖąĘ FIFO čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ RXD. ąÜąŠą│ą┤ą░ ą▒ą░ą╣čé ąĖąĘą▓ą╗ąĄą║ą░ąĄčéčüčÅ ąĖąĘ FIFO, ąĮąŠą▓čŗą╣ ąŠąČąĖą┤ą░čÄčēąĖą╣ čćč鹥ąĮąĖčÅ ą▒ą░ą╣čé ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ RXD. UART ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąŠą▒čŗčéąĖąĄ RXDRDY ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĮąŠą▓čŗą╣ ą▒ą░ą╣čé ą▒čŗą╗ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮ ą▓ čĆąĄą│ąĖčüčéčĆ RXD.
ąÜąŠą│ą┤ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control) čĆą░ąĘčĆąĄčłąĄąĮąŠ, UART ą▒čāą┤ąĄčé ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ RTS, ą║ąŠą│ą┤ą░ ą▓ FIFO ą┐čĆąĖąĄą╝ą░ ąĄčüčéčī ą╝ąĄčüč鹊 č鹊ą╗čīą║ąŠ ą┤ą╗čÅ 4 ą▒ą░ą╣čé. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╣ čüč鹊čĆąŠąĮąĄ ą╝ąŠąČąĄčé ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą┐ąĄčĆąĄą┤ą░čéčī č鹊ą╗čīą║ąŠ 4 ą▒ą░ą╣čéą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąĖą│ąĮą░ą╗ RTS ą▒čŗą╗ ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą▒čāą┤ąĄčé ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā, č鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ čĆą░ąĮąĄąĄ ą┐čĆąĖąĮčÅčéčŗčģ ą▒ą░ą╣čé ą▓ FIFO (ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąĖąĄą╝ą░). ąöą╗čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēąĄąĮąĖčÅ čéą░ą║ąŠą╣ čüąĖčéčāą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ UART ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╣ čüč鹊čĆąŠąĮčŗ ą┤ąŠą╗ąČąĄąĮ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐čĆąĄą║čĆą░čēąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą║ąŠą│ą┤ą░ ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ RTS.
ąĪąĖą│ąĮą░ą╗ RTS ą▒čāą┤ąĄčé ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ čüąĮąŠą▓ą░, ą║ąŠą│ą┤ą░ ąŠą┐čāčüč鹊賹░ąĄčéčüčÅ FIFO, čé. ąĄ. ą║ąŠą│ą┤ą░ ą▓čüąĄ ą▒ą░ą╣čéčŗ FIFO ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ CPU, čüą╝. čĆąĖčü. 3.

ąĀąĖčü. 3. ą¤čĆąĖąĄą╝ UART.
ąĪąĖą│ąĮą░ą╗ RTS ą▒čāą┤ąĄčé čéą░ą║ąČąĄ ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐čāč鹥ą╝ ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ STOPRX, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 3. UART ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ą┤ąŠ 5 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▒ą░ą╣čé, ąĄčüą╗ąĖ ąŠąĮąĖ ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ RTS. ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č鹊ą╝čā, čćč鹊 UART, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ čüčĆą░ą▒ąŠčéą░ą╗ą░ ąĘą░ą┤ą░čćą░ STOPRX, ą╝ąŠąČąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ą▒ą░ą╣čéčŗ ą▓ č鹥č湥ąĮąĖąĄ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. UART čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąŠą▒čŗčéąĖąĄ čéą░ą╣ą╝ą░čāčéą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (RXTO), ą║ąŠą│ą┤ą░ čŹč鹊čé ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ ąĖčüč鹥ą║.
ąöą╗čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēąĄąĮąĖčÅ ą┐ąŠč鹥čĆąĖ ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆ RXD ą┤ąŠą╗ąČąĄąĮ čćąĖčéą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ ąĮą░ ą║ą░ąČą┤ąŠąĄ čüąŠą▒čŗčéąĖąĄ RXDRDY.
ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 CPU čüą╝ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓čüąĄ ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĖąĄą╝ą░ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ čüąŠą▒čŗčéąĖą╣ RXDRDY, čĆąĄą│ąĖčüčéčĆ RXDRDY ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ ą┐ąĄčĆąĄą┤ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ RXD. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 č鹥ą╝ čüą░ą╝čŗą╝ ąĖąĮč鹥čĆč乥ą╣čüčā UART čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ąĮąŠą▓čŗą╣ ą▒ą░ą╣čé ą▓ čĆąĄą│ąĖčüčéčĆ RXD, ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą│ąĄąĮąĄčĆą░čåąĖčÅ ąĮąŠą▓ąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ CPU ą▒čŗą╗ ą┐čĆąŠčćąĖčéą░ąĮ čĆąĄą│ąĖčüčéčĆ RXD (ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 1 ą▒ą░ą╣čé čüč鹥ą║ FIFO).
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ č鹊čćą║ąĄ 2 ąĮą░ čĆąĖčü. 3, čüąŠą▒čŗčéąĖąĄ RXDRDY ą┤ą╗čÅ ą▒ą░ą╣čéą░ B ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒ą░ą╣čé A ą▒čŗą╗ ą┐čĆąŠčćąĖčéą░ąĮ ąĖąĘ RXD.
ąĀą░ą▒ąŠčéą░ ą▒ąĄąĘ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝. ąĢčüą╗ąĖ flow control ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ąĖąĮč鹥čĆč乥ą╣čü UART ą▒čāą┤ąĄčé ą▓ąĄčüčéąĖ čüąĄą▒čÅ čéą░ą║, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čüąĖą│ąĮą░ą╗čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ CTS ąĖ RTS ą▒čŗą╗ąĖ ą▓čüąĄą│ą┤ą░ ą░ą║čéąĖą▓ąĮčŗ.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ č湥čéąĮąŠčüčéąĖ. ąÜąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗čī č湥čéąĮąŠčüčéąĖ (parity) čĆą░ąĘčĆąĄčłąĄąĮ, ą▒ąĖčé č湥čéąĮąŠčüčéąĖ ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ąĖ ą┐čĆąŠą▓ąĄčĆčÅčéčīčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮą░ ą║ą░ąĮą░ą╗ą░čģ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąÆąŠąĘą╝ąŠąČąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ č湥čéąĮąŠčüčéčī (even parity, ą┤ą╗ąĖąĮą░ ą║ą░ą┤čĆą░ 11 ą▒ąĖčé), ą╗ąĖą▒ąŠ ą▒ąĄąĘ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ (ą┤ą╗ąĖąĮą░ ą║ą░ą┤čĆą░ 10 ą▒ąĖčé).
[ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ UART]
ąĀą░ą▒ąŠčéą░ UART ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą┐čāč鹥ą╝ ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ SUSPEND.
SUSPEND ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąĄą╣čüčéą▓ąĖąĄ ą║ą░ą║ ąĮą░ ą┐čĆąĖąĄą╝ąĮąĖą║, čéą░ą║ ąĖ ąĮą░ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ UART, čé. ąĄ. ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┐ąĄčĆąĄčüčéą░ąĮąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī, ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąĄčĆąĄčüčéą░ąĮąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ. ą¤ąĄčĆąĄą┤ą░čćčā ąĖ ą┐čĆąĖąĄą╝ UART ą╝ąŠąČąĮąŠ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ UART ą▒čŗą╗ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐čāč鹥ą╝ ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą┤ą░čć STARTTX ąĖ STARTRX čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ąóąĄą║čāčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ą╝ąŠą╝ąĄąĮčé ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ SUSPEND, ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┤ąŠ ą║ąŠąĮčåą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ UART ą▒čāą┤ąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ąÜąŠą│ą┤ą░ čüčĆą░ą▒ąŠčéą░ą╗ą░ ąĘą░ą┤ą░čćą░ SUSPEND, ą┐čĆąĖąĄą╝ąĮąĖą║ UART ą▒čāą┤ąĄčé ą▓ąĄčüčéąĖ čüąĄą▒čÅ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ ą▒čŗą╗ą░ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮą░ ąĘą░ą┤ą░čćą░ STOPRX.
[ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ąŠą║]
ąæčāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ERROR, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ąŠčłąĖą▒ą║ąĄ ą║ą░ą┤čĆą░, ąĄčüą╗ąĖ ą▓ ą║ą░ą┤čĆąĄ ąĮąĄ ą▒čāą┤ąĄčé ąĮą░ą╣ą┤ąĄąĮ ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ stop-ą▒ąĖčé. ąöčĆčāą│ąŠąĄ čüąŠą▒čŗčéąĖąĄ ERROR, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čāčüą╗ąŠą▓ąĖčÄ čĆą░ąĘčĆčŗą▓ą░ čüą▓čÅąĘąĖ (break condition), ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ, ąĄčüą╗ąĖ čüąĖą│ąĮą░ą╗ RXD čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0 ą┤ąŠą╗čīčłąĄ, č湥ą╝ ą┤ą╗ąĖąĮą░ ą║ą░ą┤čĆą░ ą┤ą░ąĮąĮčŗčģ. ążą░ą║čéąĖč湥čüą║ąĖ ąŠčłąĖą▒ą║ą░ ą║ą░ą┤čĆą░ ą▓čüąĄą│ą┤ą░ ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąĄčĆąĄą┤ ą╝ąŠą╝ąĄąĮč鹊ą╝ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ break condition.
[ąĀąĄą│ąĖčüčéčĆčŗ UART]
ąóą░ą▒ą╗ąĖčåą░ 1. ąŁą║ąĘąĄą╝ą┐ą╗čÅčĆčŗ TIMER.
| ąæą░ąĘ. ą░ą┤čĆąĄčü |
ą¤ąĄčĆąĖčä. čāčüčéčĆąŠą╣čüčéą▓ąŠ |
ąŁą║ąĘ. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ |
| 0x40008000 |
UART |
UART0 |
ąŻąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐čĆąĖąĄą╝ąŠ-ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ |
|
ąóą░ą▒ą╗ąĖčåą░ 2. ą×ą▒ąĘąŠčĆ čĆąĄą│ąĖčüčéčĆąŠą▓ TIMER.
| ąĀąĄą│ąĖčüčéčĆ |
ąĪą╝ąĄčē. |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| TASKS_STARTRX |
0x000 |
ąŚą░ą┤ą░čćą░ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ą░. |
| TASKS_STOPRX |
0x004 |
ąŚą░ą┤ą░čćą░ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąĖąĄą╝ą░. |
| TASKS_STARTTX |
0x008 |
ąŚą░ą┤ą░čćą░ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| TASKS_STOPTX |
0x00C |
ąŚą░ą┤ą░čćą░ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| TASKS_SUSPEND |
0x01C |
ąŚą░ą┤ą░čćą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ UART. |
| EVENTS_CTS |
0x100 |
ąĪąŠą▒čŗčéąĖąĄ ą░ą║čéąĖą▓ą░čåąĖąĖ CTS (čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓ 0). |
| EVENTS_NCTS |
0x104 |
ąĪąŠą▒čŗčéąĖąĄ ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĖ CTS (čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓ 1). |
| EVENTS_RXDRDY |
0x108 |
ąĪąŠą▒čŗčéąĖąĄ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ, ą┤ą░ąĮąĮčŗąĄ ąŠąČąĖą┤ą░čÄčé čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ RXD. |
| EVENTS_TXDRDY |
0x11C |
ąĪąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ąĖąĘ TXD. |
| EVENTS_ERROR |
0x124 |
ąĪąŠą▒čŗčéąĖąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ. |
| EVENTS_RXTO |
0x144 |
ąĪąŠą▒čŗčéąĖąĄ čéą░ą╣ą╝ą░čāčéą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. |
| SHORTS |
0x200 |
ąĀąĄą│ąĖčüčéčĆ čłąŠčĆčéą║ą░čéą░. |
| INTENSET |
0x304 |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. |
| INTENCLR |
0x308 |
ąŚą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. |
| ERRORSRC |
0x480 |
ąśčüč鹊čćąĮąĖą║ ąŠčłąĖą▒ą║ąĖ. |
| ENABLE |
0x500 |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ UART. |
| PSELRTS |
0x508 |
ąÆčŗą▒ąŠčĆ ąĮąŠąČą║ąĖ ą┤ą╗čÅ RTS. |
| PSELTXD |
0x50C |
ąÆčŗą▒ąŠčĆ ąĮąŠąČą║ąĖ ą┤ą╗čÅ TXD. |
| PSELCTS |
0x510 |
ąÆčŗą▒ąŠčĆ ąĮąŠąČą║ąĖ ą┤ą╗čÅ CTS. |
| PSELRXD |
0x514 |
ąÆčŗą▒ąŠčĆ ąĮąŠąČą║ąĖ ą┤ą╗čÅ RXD. |
| RXD |
0x518 |
ąĀąĄą│ąĖčüčéčĆ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ. |
| TXD |
0x51C |
ąĀąĄą│ąĖčüčéčĆ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. |
| BAUDRATE |
0x524 |
ąĀąĄą│ąĖčüčéčĆ čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ. |
| CONFIG |
0x56C |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ č湥čéąĮąŠčüčéąĖ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x200. ąŚą░ą┐ąĖčüčī 1 čĆą░ąĘčĆąĄčłą░ąĄčé čłąŠčĆčéą║ą░čé, ąĘą░ą┐ąĖčüčī 0 ąĘą░ą┐čĆąĄčēą░ąĄčé. ą¦č鹥ąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ SHORTS:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
A |
|
|
|
| Reset 0x00000000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
CTS_STARTRX |
ą©ąŠčĆčéą║ą░čé ą╝ąĄąČą┤čā čüąŠą▒čŗčéąĖąĄą╝ CTS ąĖ ąĘą░ą┤ą░č湥ą╣ STARTRX. ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ EVENTS_CTS ąĖ TASKS_STARTRX. |
| B |
RW |
NCTS_STOPRX |
ą©ąŠčĆčéą║ą░čé ą╝ąĄąČą┤čā čüąŠą▒čŗčéąĖąĄą╝ NCTS ąĖ ąĘą░ą┤ą░č湥ą╣ TASKS_STOPRX. ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ EVENTS_NCTS ąĖ TASKS_STOPRX. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x304. ąŚą░ą┐ąĖčüčī 1 čĆą░ąĘčĆąĄčłą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ. ą¦č鹥ąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ: 0 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, 1 čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ INTENSET:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
E |
|
D |
|
|
|
|
C |
B |
A |
| Reset 0x00000000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
CTS |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ CTS. ąĪą╝. EVENTS_CTS. |
| B |
RW |
NCTS |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ NCTS. ąĪą╝. EVENTS_NCTS. |
| C |
RW |
RXDRDY |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ RXDRDY. ąĪą╝. EVENTS_RXDRDY. |
| D |
RW |
TXDRDY |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ TXDRDY. ąĪą╝. EVENTS_TXDRDY. |
| E |
RW |
ERROR |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ ERROR. ąĪą╝. EVENTS_ERROR. |
| F |
RW |
RXTO |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ RXTO. ąĪą╝. EVENTS_RXTO. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x308. ąŚą░ą┐ąĖčüčī 1 ąĘą░ą┐čĆąĄčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ. ą¦č鹥ąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ: 0 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, 1 čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ INTENCLR:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
E |
|
D |
|
|
|
|
C |
B |
A |
| Reset 0x00000000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
CTS |
ąŚą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ CTS. ąĪą╝. EVENTS_CTS. |
| B |
RW |
NCTS |
ąŚą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ NCTS. ąĪą╝. EVENTS_NCTS. |
| C |
RW |
RXDRDY |
ąŚą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ RXDRDY. ąĪą╝. EVENTS_RXDRDY. |
| D |
RW |
TXDRDY |
ąŚą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ TXDRDY. ąĪą╝. EVENTS_TXDRDY. |
| E |
RW |
ERROR |
ąŚą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ ERROR. ąĪą╝. EVENTS_ERROR. |
| F |
RW |
RXTO |
ąŚą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ RXTO. ąĪą╝. EVENTS_RXTO. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x308.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ ERRORSRC:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
C |
B |
A |
| Reset 0x00000000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
OVERRUN |
ą×čłąĖą▒ą║ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ. ąæčŗą╗ ą┐ąŠą╗čāč湥ąĮ start-ą▒ąĖčé, ą║ąŠą│ą┤ą░ ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ, ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓čüąĄ ąĄčēąĄ ąĮą░čģąŠą┤ąĖą╗ąĖčüčī ą▓ RXD. ą¤čĆąĄą┤čŗą┤čāčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą┐ąŠč鹥čĆčÅąĮčŗ.
0: ąĮąĄ ą▒čŗą╗ąŠ ąŠčłąĖą▒ą║ąĖ.
1: ą▒čŗą╗ą░ ąŠčłąĖą▒ą║ą░. |
| B |
RW |
PARITY |
ą×čłąĖą▒ą║ą░ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ. ąæčŗą╗ ą┐čĆąĖąĮčÅčé ą▒ą░ą╣čé, ą▓ ą║ąŠč鹊čĆąŠą╝ čüčāą╝ą╝ą░ ą▒ąĖčé ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐čĆąĖąĮčÅč鹊ą╝čā 9-ąŠą╝čā ą▒ąĖčéčā č湥čéąĮąŠčüčéąĖ (ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗čī č湥čéąĮąŠčüčéąĖ).
0: ąĮąĄ ą▒čŗą╗ąŠ ąŠčłąĖą▒ą║ąĖ.
1: ą▒čŗą╗ą░ ąŠčłąĖą▒ą║ą░. |
| C |
RW |
FRAMING |
ą×čłąĖą▒ą║ą░ ą║ą░ą┤čĆą░. ąØąĄ ą▒čŗą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ stop-ą▒ąĖčé ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ ą▓čüąĄ ą▒ąĖčéčŗ čüąĖą╝ą▓ąŠą╗ą░.
0: ąĮąĄ ą▒čŗą╗ąŠ ąŠčłąĖą▒ą║ąĖ.
1: ą▒čŗą╗ą░ ąŠčłąĖą▒ą║ą░. |
| D |
RW |
BREAK |
ą×čłąĖą▒ą║ą░ čĆą░ąĘčĆčŗą▓ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ (break condition). ąØą░ ą▓čģąŠą┤ąĄ ą▒čŗą╗ ąŠą▒ąĮą░čĆčāąČąĄąĮ čüąĖą│ąĮą░ą╗ ą╗ąŠą│. 0 ą┐ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą▓čĆąĄą╝čÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą║ą░ą┤čĆą░ (ą┤ą╗ąĖąĮą░ ą║ą░ą┤čĆą░ 10 ą▒ąĖčé ą▒ąĄąĘ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ ąĖ 11 ą▒ąĖčé čü ą║ąŠąĮčéčĆąŠą╗ąĄą╝ č湥čéąĮąŠčüčéąĖ).
0: ąĮąĄ ą▒čŗą╗ąŠ ąŠčłąĖą▒ą║ąĖ.
1: ą▒čŗą╗ą░ ąŠčłąĖą▒ą║ą░. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x500.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ ENABLE:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
A |
A |
A |
| Reset 0x00000000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
ENABLE |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčé UART.
0: UART ąĘą░ą┐čĆąĄčēąĄąĮ.
1: UART čĆą░ąĘčĆąĄčłąĄąĮ. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x508.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ PSELRTS:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
| Reset 0xFFFFFFFF |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
PSELRTS |
ąØąŠą╝ąĄčĆ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ P0, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĖą│ąĮą░ą╗ą░ RTS.
0 .. 31: ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą┐ąŠčĆčé P0.00 .. P0.31.
0xFFFFFFFF: ąĮąŠąČą║ą░ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ ą▓čŗą▒čĆą░ąĮą░. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x50C.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ PSELTXD:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
| Reset 0xFFFFFFFF |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
PSELTXD |
ąØąŠą╝ąĄčĆ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ P0, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĖą│ąĮą░ą╗ą░ TXD.
0 .. 31: ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą┐ąŠčĆčé P0.00 .. P0.31.
0xFFFFFFFF: ąĮąŠąČą║ą░ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ ą▓čŗą▒čĆą░ąĮą░. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x510.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ PSELCTS:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
| Reset 0xFFFFFFFF |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
PSELCTS |
ąØąŠą╝ąĄčĆ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ P0, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĖą│ąĮą░ą╗ą░ CTS.
0 .. 31: ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą┐ąŠčĆčé P0.00 .. P0.31.
0xFFFFFFFF: ąĮąŠąČą║ą░ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ ą▓čŗą▒čĆą░ąĮą░. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x514.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ PSELRXD:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
| Reset 0xFFFFFFFF |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
PSELRXD |
ąØąŠą╝ąĄčĆ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ P0, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĖą│ąĮą░ą╗ą░ RXD.
0 .. 31: ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą┐ąŠčĆčé P0.00 .. P0.31.
0xFFFFFFFF: ąĮąŠąČą║ą░ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ ą▓čŗą▒čĆą░ąĮą░. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x518.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ RXD:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
A |
A |
A |
A |
A |
A |
A |
| Reset 0x00000000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
R |
RXD |
ąöą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x51C.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ TXD:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
A |
A |
A |
A |
A |
A |
A |
| Reset 0x00000000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
W |
TXD |
ąöą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ. |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x524.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ BAUDRATE:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
A |
| Reset 0x04000000 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
BAUDRATE |
0x0004F000, Baud1200: 1200 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 1205 ą▒ąŠą┤) 0x0009D000, Baud2400: 2400 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 2396 ą▒ąŠą┤)
0x0013B000, Baud4800: 4800 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 4808 ą▒ąŠą┤)
0x00275000, Baud9600: 9600 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 9598 ą▒ąŠą┤)
0x003B0000, Baud14400: 14400 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 14414 ą▒ąŠą┤)
0x004EA000, Baud19200: 19200 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 19208 ą▒ąŠą┤)
0x0075F000, Baud28800: 28800 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 28829 ą▒ąŠą┤)
0x009D5000, Baud38400: 38400 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 38462 ą▒ąŠą┤)
0x00EBF000, Baud57600: 57600 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 57762 ą▒ąŠą┤)
0x013A9000, Baud76800: 76800 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 76923 ą▒ąŠą┤)
0x01D7E000, Baud115200: 115200 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 115942 ą▒ąŠą┤)
0x03AFB000, Baud230400: 230400 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 231884 ą▒ąŠą┤)
0x04000000, Baud250000: 250000 ą▒ąŠą┤
0x075F7000, Baud460800: 460800 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 470588 ą▒ąŠą┤)
0x0EBED000, Baud921600: 921600 ą▒ąŠą┤ (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī 941176 ą▒ąŠą┤)
0x10000000, Baud1M: 1 ą╝ąĄą│ą░ą▒ąŠą┤ |
ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░: 0x56C.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CONFIG:
| Ōä¢ ą▒ąĖčéą░ |
31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
B |
B |
A |
| Reset 0x00000000 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé:
| Id |
RW |
ą¤ąŠą╗ąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| A |
RW |
HWFC |
ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝.
0: ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
1: čĆą░ąĘčĆąĄčłąĄąĮąŠ. |
| B |
RW |
PARITY |
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ąĄą╝ č湥čéąĮąŠčüčéąĖ.
0, Excluded: ą│ąĄąĮąĄčĆą░čåąĖčÅ ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ ą▒ąĖčéą░ č湥čéąĮąŠčüčéąĖ ąĘą░ą┐čĆąĄčēąĄąĮčŗ (ą┤ą╗ąĖąĮą░ ą║ą░ą┤čĆą░ 10 ą▒ąĖčé).
7, Included: ą│ąĄąĮąĄčĆą░čåąĖčÅ ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ ą▒ąĖčéą░ č湥čéąĮąŠčüčéąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ (ą┤ą╗ąĖąĮą░ ą║ą░ą┤čĆą░ 11 ą▒ąĖčé). |
[ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ UART]
| ąĪąĖą╝ą▓ąŠą╗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
min |
Typ |
MAX |
ąĢą┤. |
| fUART |
ąĪą║ąŠčĆąŠčüčéčī čĆą░ą▒ąŠčéčŗ UART(1) |
|
|
1000 |
kbps |
| IUART1M |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ |
|
55 |
|
ą╝ą║ąÉ |
| IUART115k |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 115200 ą▒ąŠą┤ (bps) |
|
55 |
|
| IUART1k2 |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 1200 ą▒ąŠą┤ (bps) |
|
55 |
|
| IUART,IDLE |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ |
|
1 |
|
| tUART,CTSH |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 1 čüąĖą│ąĮą░ą╗ą░ CTS |
1 |
|
|
ą╝ą║čü |
| tUART,START,LP |
ąÆčĆąĄą╝čÅ ąŠčé ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ STARTRX/STARTTX ą┤ąŠ ąĮą░čćą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, low power mode |
|
tUART,START,CL
+
tSTART_HFINT |
|
| tUART,START,CL |
ąÆčĆąĄą╝čÅ ąŠčé ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ STARTRX/STARTTX ą┤ąŠ ąĮą░čćą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, constant latency mode |
|
1 |
|
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ąĮą░ ą┐ąŠą▓čŗčłąĄąĮąĮčŗčģ čüą║ąŠčĆąŠčüčéčÅčģ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ąĮą░čüčéčĆąŠąĖčéčī ą▓čŗčģąŠą┤čŗ GPIO ą▓ čĆąĄąČąĖą╝ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ (High Drive), ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ GPIO [3].
[ąĪčüčŗą╗ą║ąĖ]
1. UART Universal asynchronous receiver/transmitter nRF52832 site:nordicsemi.com.
2. Bluetooth: ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčŗ ąĖ č鹥čĆą╝ąĖąĮčŗ.
3. nRF5x: ą┐ąŠčĆčéčŗ GPIO. |



