|
ąĀą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą┐čĆąĖą╝ąĄčĆ čĆą░ą▒ąŠčéčŗ ą║ąŠą┤ą░ Micrium RTOS ┬ĄC/OS-II ą┤ą╗čÅ ARM7, ąĘą░ą┐čāčēąĄąĮąĮčŗą╣ ąĮą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 AT91SAM7X [3] (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AT91SAM7X512). ąĢčüą╗ąĖ ą▓čüčéčĆąĄčéąĖč鹥 ąĮąĄą┐ąŠąĮčÅčéąĮčŗąĄ č鹥čĆą╝ąĖąĮčŗ, č鹊 ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą▓ čĆą░ąĘą┤ąĄą╗ [ąĪą╗ąŠą▓ą░čĆąĖą║] ąĖ ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą┐čĆą░ą║čéąĖč湥čüą║ąŠą╝čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ FreeRTOS [2].
ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠąĄą║čéą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ Micrium RTOS ┬ĄC/OS-II ą┤ą╗čÅ ARM7 ą╝ąŠąČąĮąŠ ą▒ąĄčüą┐ą╗ą░čéąĮąŠ čüą║ą░čćą░čéčī čü čüą░ą╣čéą░ Micrium (ąĮčāąČąĮą░ čĆąĄą│ąĖčüčéčĆą░čåąĖčÅ), ąĖą╗ąĖ čüą╝. čüčüčŗą╗ą║čā [1]. ą¤čĆąŠąĄą║čé IAR 5.4 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čäą░ą╣ą╗ąĄ Micrium \ Software \ EvalBoards \ Atmel \ AT91SAM7X256 \ IAR \ OS-Probe \ AT91SAM7X256-OS-Probe.eww. ą×čüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ (č鹥ą╗ąŠ main) ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ Micrium \ Software \ EvalBoards \ Atmel \ AT91SAM7X256 \IAR \ OS-Probe \ app.c. ą¤čĆąĖą╝ąĄčĆ čĆą░čüčüčćąĖčéą░ąĮ ąĮą░ čĆą░ą▒ąŠčéčā ą║ąŠą┤ą░ ą▓ąŠ FLASH ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7X256, ąĮąŠ ąĄą│ąŠ ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝ ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ AT91SAM7X512.
[ą×ą▒ąĘąŠčĆ ą┐čĆąŠąĄą║čéą░ Micrium RTOS ┬ĄC/OS-II ą┤ą╗čÅ ARM7]
ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘąĖč鹥 ą┐čĆąŠąĄą║čé [1] ą▓ IAR, č鹊 ą▓ ą▒čĆą░čāąĘąĄčĆąĄ Workspace čāą▓ąĖą┤ąĖč鹥 ą┤ąĄčĆąĄą▓ąŠ čüąŠčüčéą░ą▓ąĮčŗčģ čćą░čüč鹥ą╣ ą┐čĆąŠąĄą║čéą░.

APP. ąŁčéą░ ą▓ąĄčéą║ą░ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą╝ąŠą┤čāą╗ąĄą╣ ąĖ ąĘą░ą│ąŠą╗ąŠą▓ą║ąŠą▓, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą║ ą║ąŠą┤čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąÜąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ąŠčüąŠą▒čāčÄ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÄ, čćč鹊ą▒čŗ RTOS ┬ĄC/OS-II ą╝ąŠą│ą╗ą░ čĆą░ą▒ąŠčéą░čéčī, čćč鹊 ąĖ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ ą▓ app.c. ąÆ čćą░čüčéąĮąŠčüčéąĖ, ą▓ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖą╣, ąĖ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮčŗ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝.
app.c ą£ąŠą┤čāą╗čī, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ main, ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣ App_TaskStart, App_EventCreate, App_TaskCreate, ąĖ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčé ąĘą░ą┤ą░čćąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ - App_TaskUserIF, App_TaskJoy, App_DispScr_SignOn, App_DispScr_VerTickRate, App_DispScr_CPU, App_DispScr_CtxSw.
app_cfg.h ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║, ą▓ ą║ąŠč鹊čĆąŠą╝ ąĘą░ą┤ą░čÄčéčüčÅ ą▓čüąĄ ąŠą┐čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Micrium RTOS ┬ĄC/OS-II - ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╣ RTOS, ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ąĘą░ą┤ą░čć, čĆą░ąĘą╝ąĄčĆčŗ čüč鹥ą║ąŠą▓ ą┤ą╗čÅ ąĘą░ą┤ą░čć, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ą╗ą░ą│ąĖąĮąŠą▓, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ DCC, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ uC/LIB, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ BSP, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ (ą┤ą╗čÅ ARM7 ąŠą▒čŗčćąĮąŠ čŹč鹊 DBGU).
app_hooks.c ą£ąŠą┤čāą╗čī, ą│ą┤ąĄ ąĘą░ą┤ą░čÄčéčüčÅ čģčāą║ąĖ (ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ) ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čüąĖčüč鹥ą╝ąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ RTOS ┬ĄC/OS-II. ąØą░ą┐čĆąĖą╝ąĄčĆ, čŹč鹊 ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠą▒čŗčéąĖčÅ čüąŠąĘą┤ą░ąĮąĖčÅ, čāą┤ą░ą╗ąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░, čüąŠą▒čŗčéąĖčÅ čéąĖą║ą░ ąĖ ą┤čĆčāą│ąĖąĄ. ą£ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą║ąŠą┤ ą▓ čŹčéąĖ čģčāą║ąĖ, ąĖ ąĮčāąČąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą┐čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąĖčüč鹥ą╝ąĮčŗčģ čüąŠą▒čŗčéąĖą╣ RTOS.
app_probe.c ą£ąŠą┤čāą╗čī ą┤ą╗čÅ ą┐čĆąŠą▒, ą║ąŠč鹊čĆčŗą╣ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čüąĖčüč鹥ą╝čŗ ┬ĄC/Probe.
app_probe.h ąźąĄą┤ąĄčĆ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ app_probe.c. ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąŠąĮ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ąØčāąČąĄąĮ ą┤ą╗čÅ ąĘą░ą┤ą░ąĮąĖčÅ ąŠą▒čŖčÅą▓ą╗ąĄąĮąĖą╣ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ.
cpu_cfg.h ąźąĄą┤ąĄčĆ, ą│ą┤ąĄ ąĘą░ą┤ą░ąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ CPU. ąóčāčé ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ąĘą░ą│čĆčāąĘą║ąĖ CPU, ąĖą╝čÅ CPU ąĖ ą┤čĆčāą│ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ.
includes.h ąźąĄą┤ąĄčĆ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤čĆčāą│ąĖčģ ąĘą░ą│ąŠą╗ąŠą▓ą║ąŠą▓ (stdio.h, string.h, .., ioat91sam7x256.h ąĖ čé. ą┐.).
os_cfg.h ą×ą┐čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ uC/OS-II Real-Time Kernel. ąÆčüąĄ ąŠą┐čåąĖąĖ čģąŠčĆąŠčłąŠ ąĘą░ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮčŗ ą▓ čäą░ą╣ą╗ąĄ os_cfg.h.
probe_com_cfg.h ą×ą┐čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒ą╝ąĄąĮą░ č湥čĆąĄąĘ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ (RS-232, TCP/IP, USB).
BSP. ą£ąŠą┤čāą╗ąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĄ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą║ąŠą┤ (Board Support Package). ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čäąĖčĆą╝ąĄąĮąĮąŠą╣ ą┐ą╗ą░čéčŗ Atmel AT91SAM7X-EK Evaluation Board, ąĮąŠ ąŠąĮ ą▒čāą┤ąĄčé ąŠčéą╗ąĖčćąĮąŠ ą▒ąĄąĘ ą▓čüčÅą║ąĖčģ ą┐ąĄčĆąĄą┤ąĄą╗ąŠą║ čĆą░ą▒ąŠčéą░čéčī ąĖ ąĮą░ ą┐ą╗ą░č鹥 AT91SAM7X [3].
at91sam7x128-flash.board ążą░ą╣ą╗ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĘą░ą│čĆčāąĘą║ąĖ ą║ąŠą┤ą░ č湥čĆąĄąĘ ąŠčéą╗ą░ą┤čćąĖą║.
AT91SAM7X256_Flash.icf ążą░ą╣ą╗ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╗ąĖąĮą║ąĄčĆą░.
AT91SAM7X256_Flash.mac ą£ą░ą║čĆąŠčüčŗ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ.
bsp.c ąÜąŠą┤, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą┐ą╗ą░čéčŗ (čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ, ą┤ąČąŠą╣čüčéąĖą║, SD/MMC/DataFlash, CAN ąĖ čé. ą┐.).
bsp.h ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ bsp.c. ąŚą┤ąĄčüčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ąŠą▒čŖčÅą▓ą╗ąĄąĮąĖčÅ čäčāąĮą║čåąĖą╣ ąĖ ąŠčüąĮąŠą▓ąĮčŗąĄ ą║ąŠąĮčüčéą░ąĮčéčŗ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ąĄą╗ąĖč鹥ą╗čÅ, ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą┐ąĄčĆąĖč乥čĆąĖąĖ ąĖ čé. ą┐.
cstartup.s ąóčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╣ ą╝ąŠą┤čāą╗čī ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ, ą▓ ą║ąŠč鹊čĆąŠą╝ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą║ąŠą┤ ąĘą░ą┐čāčüą║ą░ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ čÅą┤čĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ - čéą░ą▒ą╗ąĖčåą░ ą▓ąĄą║č鹊čĆąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, č鹊čćą║ą░ ą▓čģąŠą┤ą░ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čā, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüč鹥ą║ą░.
ioat91sam7x256.h ąóąĖą┐čŗ, čüčéčĆčāą║čéčāčĆčŗ ąĖ ą║ąŠąĮčüčéą░ąĮčéčŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čÅą┤čĆčā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖ ąĄą│ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ.
uc/CPU. ą£ąŠą┤čāą╗ąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ CPU ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
cpu_core.c ążčāąĮą║čåąĖąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čÅą┤čĆą░, ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖą╝ąĄąĮąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ą▒ąŠčéčŗ CPU ąĖ čé. ą┐. ąöąŠčüčéčāą┐ąĮąŠčüčéčī ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ čäčāąĮą║čåąĖą╣ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąŠą┐čåąĖą╣ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĘą░ą┤ą░ąĮąĮčŗčģ ą▓ cpu_cfg.h.
cpu_core.h ą¤čĆąŠč鹊čéąĖą┐čŗ ąĖ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣ cpu_core.c.
cpu_def.h ąÜąŠąĮčüčéą░ąĮčéčŗ, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ - čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ CPU, ą┐ąŠčĆčÅą┤ąŠą║ ą▒ą░ą╣čé ą▓ čüą╗ąŠą▓ąĄ, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąŠčüčéą░ čüč鹥ą║ą░, ą╝ąĄč鹊ą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ ą║ąŠą┤ą░,
uc/CPU -> ARM. ą£ąŠą┤čāą╗čī ą┐ąŠčĆčéą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ - ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą║ąŠą┤ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ / ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣.
cpu.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣.
cpu_a.s ą£ąŠą┤čāą╗čī ąĮą░ čÅąĘčŗą║ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░, čüąŠą┤ąĄčƹȹ░čēąĖą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čäčāąĮą║čåąĖą╣ CPU.
uC/LIB. ą£ąŠą┤čāą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗčģ čäčāąĮą║čåąĖą╣.
lib_ascii.c ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčéą┤ąĄą╗čīąĮčŗčģ č鹥ą║čüč鹊ą▓čŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ - čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ čüąĖą╝ą▓ąŠą╗ ą▒čāą║ą▓ąŠą╣ ąĖ/ąĖą╗ąĖ čåąĖčäčĆąŠą╣, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüąĖą╝ą▓ąŠą╗ą░ (ą▓ąĄčĆčģąĮąĖą╣ ąĖą╗ąĖ ąĮąĖąČąĮąĖą╣), ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐čĆąĖąĮą░ą┤ą╗ąĄąČąĮąŠčüčéąĖ čüąĖą╝ą▓ąŠą╗ą░ ą║ čüąĖčüč鹥ą╝ąĄ čüčćąĖčüą╗ąĄąĮąĖčÅ (ą▓ąŠčüčīą╝ąĄčĆąĖčćąĮą░čÅ, čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮą░čÅ), čüčĆą░ą▓ąĮąĄąĮąĖąĄ čüąĖą╝ą▓ąŠą╗ąŠą▓ ąĖ čé. ą┐.
lib_ascii.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣ lib_ascii.c.
lib_def.h ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖčģ ą╝ą░ą║čĆąŠčüąŠą▓ - ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ BOOLEAN, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▒ąĖčé, ą▒ą░ąĘ čüąĖčüč鹥ą╝ čüčćąĖčüą╗ąĄąĮąĖą╣, ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗčģ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ čćąĖčüąĄą╗ ąĘą░ą┤ą░ąĮąĮąŠą╣ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ ąĖ čé. ą┐.
lib_math.c ą£ą░č鹥ą╝ą░čéąĖč湥čüą║ą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ - ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮčŗčģ čćąĖčüąĄą╗.
lib_math.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣ lib_math.c.
lib_mem.c ążčāąĮą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéčīčÄ - ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ą░ą╝čÅčéąĖ, ąŠčćąĖčüčéą║ą░, ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖąĄą╝, ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ, čüčĆą░ą▓ąĮąĄąĮąĖąĄ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▒ą╗ąŠą║ą░ą╝ąĖ ą║čāčćąĖ, ą┐čāą╗ą░.
lib_mem.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣ lib_mem.c.
lib_str.c ążčāąĮą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüčéčĆąŠą║ą░ą╝ąĖ - ą┐ąŠą┤čüč湥čé ą┤ą╗ąĖąĮčŗ, ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ, čüą╗ąĖčÅąĮąĖąĄ, čüčĆą░ą▓ąĮąĄąĮąĖąĄ, ą┐ąŠąĖčüą║, č乊čĆą╝ą░čéąĖčĆąŠą▓ą░ąĮąĖąĄ, ą┐ą░čĆčüąĖąĮą│.
lib_str.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣ lib_str.c.
uC/LIB -> Ports -> ARM -> IAR. ą£ąŠą┤čāą╗čī ą┐ąŠčĆčéą░ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗčģ čäčāąĮą║čåąĖą╣ ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆčā ARM/IAR, ąĮą░ą┐ąĖčüą░ąĮąĮčŗą╣ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ.
lib_mem_a.asm ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ą░čÅ čäčāąĮą║čåąĖčÅ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┐ą░ą╝čÅčéąĖ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ uC/LIB.
uC/OS-II -> Port. ą¤čĆąĖą▓čÅąĘą║ą░ RTOS ┬ĄC/OS-II ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ARM (ą┐ąŠčĆčé).
os_cpu.h ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ąĖ ą░ą┤čĆąĄčüąŠą▓ ą▓ąĄą║č鹊čĆąŠą▓ ąĖčüą║ą╗čÄč湥ąĮąĖą╣, ą▓čŗą▒ąŠčĆ ą╝ąĄč鹊ą┤ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣, ą╝ą░ą║čĆąŠčüčŗ (ą▓čģąŠą┤ ąĖ ą▓čŗčģąŠą┤) ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣, ąŠą▒čŖčÅą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣.
os_cpu_a.asm ążčāąĮą║čåąĖąĖ ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą╝ąĄč鹊ą┤ąŠą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣, ąĮą░ą┐ąĖčüą░ąĮąĮčŗčģ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ, ąĘą░ą┐čāčüą║ą░ čüčĆąĄą┤čŗ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ, ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░, ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąĖčüą║ą╗čÄč湥ąĮąĖą╣, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĖ ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
os_cpu_c.c ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ čü ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ ąĘą░ą┐čÅč鹊ą╣, čģčāą║ąĖ čüąŠą▒čŗčéąĖą╣ OS (ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ, čüąŠąĘą┤ą░ąĮąĖąĄ ąĖ čāą┤ą░ą╗ąĄąĮąĖąĄ ąĘą░ą┤ą░čćąĖ, ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ, čüčéą░čéąĖčüčéąĖą║ąĖ, ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ąĘą░ą┤ą░čć, čéąĖą║ ąĖ čé. ą┐), ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, ą▓ąĄą║č鹊čĆąŠą▓ ąĖčüą║ą╗čÄč湥ąĮąĖą╣ ąĖ ą┐čĆąŠčć.
os_dbg.c ą£ąŠą┤čāą╗ąĖ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ąŠčéą╗ą░ą┤ą║ąĖ.
os_dcc.c ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ DCC.
uC/OS-II -> Source. ą£ąŠą┤čāą╗ąĖ ą║ąŠą┤ą░ čÅą┤čĆą░ RTOS ┬ĄC/OS-II, ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čäą╗ą░ą│ąŠą▓, ą╝ą░ą╣ą╗ą▒ąŠą║čüąŠą▓, ą┐ą░ą╝čÅčéąĖ, ą╝čīčÄč鹥ą║čüąŠą▓, ąŠč湥čĆąĄą┤ąĄą╣, čüąĄą╝ą░č乊čĆąŠą▓, ąĘą░ą┤ą░čć, ąŠčéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ.
os_core.c ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ┬ĄC/OS-II, ą┐ąŠą╗čāč湥ąĮąĖąĄ ąĖ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ąĖą╝ąĄąĮ (čüąĄą╝ą░č乊čĆąŠą▓, ą╝čīčÄč鹥ą║čüąŠą▓, ą╝ą░ą╣ą╗ą▒ąŠą║čüąŠą▓, ąŠč湥čĆąĄą┤ąĄą╣), ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĮą░ čüąŠą▒čŗčéąĖčÅčģ, ą▓čģąŠą┤ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ą▓čŗčģąŠą┤ ąĖąĘ ąĮąĖčģ, ąĘą░ą┐čāčüą║ čłąĄą┤čāą╗ąĄčĆą░ ąĖ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ą░čćą░ą╝ąĖ), čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüčéą░čéąĖčüčéąĖą║ąŠą╣, ąŠą▒čĆą░ą▒ąŠčéą║ą░ čéąĖą║ą░ čüąĖčüč鹥ą╝čŗ, ąŠčćąĖčüčéą║ą░ ąĖ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĄą║čåąĖąĖ ą┐ą░ą╝čÅčéąĖ, ą║ąŠą┤ čłąĄą┤čāą╗ąĄčĆą░, ą║ąŠą┤ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (IDLE TASK), ą║ąŠą┤ ąĘą░ą┤ą░čćąĖ čüčéą░čéąĖčüčéąĖą║ąĖ, ą┐čĆąŠą▓ąĄčĆą║ą░ čüč鹥ą║ąŠą▓ ąĘą░ą┤ą░čć, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ TCB,
os_flag.c ą×ą▒čĆą░ą▒ąŠčéą║ą░ čäą╗ą░ą│ąŠą▓ ┬ĄC/OS-II, čüąŠą▒čŗčéąĖą╣ čäą╗ą░ą│ąŠą▓, ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĮą░ čäą╗ą░ą│ąĄ, ąŠą┐čĆąŠčü čäą╗ą░ą│ą░.
os_mbox.c ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ąŠą▓ (mailbox, MBOX).
os_mem.c ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠą▒ą╗ą░čüčéčÅą╝ąĖ ą┐ą░ą╝čÅčéąĖ (memory partition). ąŁč鹊 čüąĖčüč鹥ą╝ą░ čĆą░ą▒ąŠčéčŗ čü ą┐ą░ą╝čÅčéčīčÄ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą║čāčćąĖ, ąĮą░čģąŠą┤čÅčēą░čÅčüčÅ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą║ąŠą┤ą░ ┬ĄC/OS-II.
os_mutex.c ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą╝čīčÄč鹥ą║čüąŠą▓ (čüąŠąĘą┤ą░ąĮąĖąĄ, čāą┤ą░ą╗ąĄąĮąĖąĄ, ąŠąČąĖą┤ą░ąĮąĖąĄ ąĮą░ ą╝čīčÄč鹥ą║čüąĄ).
os_q.c ąĀą░ą▒ąŠčéą░ čü ąŠč湥čĆąĄą┤čÅą╝ąĖ. ą×č湥čĆąĄą┤ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ.
os_sem.c ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čüąĄą╝ą░č乊čĆąŠą▓ (čüąŠąĘą┤ą░ąĮąĖąĄ, čāą┤ą░ą╗ąĄąĮąĖąĄ, ąŠąČąĖą┤ą░ąĮąĖąĄ ąĮą░ čüąĄą╝ą░č乊čĆąĄ).
os_task.c ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ąĘą░ą┤ą░čć - ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĘą░ą┤ą░čćąĖ, čüąŠąĘą┤ą░ąĮąĖąĄ, čāą┤ą░ą╗ąĄąĮąĖąĄ, ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ ąĘą░ą┤ą░čćąĖ, ą┐čĆąŠą▓ąĄčĆą║ą░ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ ąĖ ą┤čĆčāą│ąĖąĄ čüąĄčĆą▓ąĖčüąĮčŗąĄ čäčāąĮą║čåąĖąĖ.
os_time.c ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĄą╝ - ąĘą░ą┤ąĄčƹȹ║ą░ ąĘą░ą┤ą░čćąĖ ąĮą░ ąĘą░ą┤ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓, ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ, ą┐ąŠą╗čāč湥ąĮąĖąĄ ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
os_tmr.c ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ - čüąŠąĘą┤ą░ąĮąĖąĄ, čāą┤ą░ą╗ąĄąĮąĖąĄ, ąĘą░ą┐čāčüą║, ąŠčüčéą░ąĮąŠą▓ą║ą░, ą┐čĆąŠą▓ąĄčĆą║ą░ čéą░ą╣ą╝ąĄčĆą░ ąĖ ą┤čĆčāą│ąĖąĄ čüąĄčĆą▓ąĖčüąĮčŗąĄ čäčāąĮą║čåąĖąĖ.
ucos_ii.h ąÜąŠąĮčüčéą░ąĮčéčŗ, čéąĖą┐čŗ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ąŠą┐čåąĖąĖ, ą║ąŠą┤čŗ ąŠčłąĖą▒ąŠą║, ą╝ą░ą║čĆąŠčüčŗ ┬ĄC/OS-II.
uC/Probe -> Target -> Communication. ą£ąŠą┤čāą╗ąĖ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąŠą▒ą╝ąĄąĮą░ ┬ĄC/Probe.
uC/Probe -> Target -> Communication -> OS -> uCOS-II -> probe_com_os.c ą£ąŠą┤čāą╗čī ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ č鹥čĆą╝ąĖąĮą░ą╗ą░ ┬ĄC/OS-II.
uC/Probe -> Target -> Communication -> RS-232 -> Port. ą¤ąŠčĆčé ąŠą▒ą╝ąĄąĮą░ ą┤ą╗čÅ ┬ĄC/OS-II.
probe_rs232c.c ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐ąŠčĆčéą░ č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ RS-232. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ UART, ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ UART, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ UART, ą┐ąĄčĆąĄą┤ą░čćą░ ą▒ą░ą╣čéą░.
probe_rs232c.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣ probe_rs232c.c.
uC/Probe -> Target -> Communication -> RS-232 -> Source. ąØą░ą┤čüčéčĆąŠą╣ą║ą░ ąĮą░ą┤ RS-232 ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąŠą▒ą╝ąĄąĮą░ čüąĮąĖąĘčā.
probe_rs232.c ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čüąŠčüč鹊čÅąĮąĖčÅ, ą▒čāč乥čĆčŗ, ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą▒ą╝ąĄąĮą░.
probe_rs232c.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣ probe_rs232c.c.
uC/Probe -> Target -> Communication -> Source. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąŠą▒ą╝ąĄąĮą░ uC/Probe.
probe_com.c ą║ąŠą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, čćč鹥ąĮąĖčÅ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ąĘą░ą┐ąĖčüčī ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ą▓čŗą▓ąŠą┤ č湥čĆąĄąĘ č鹥čĆą╝ąĖąĮą░ą╗, ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą║ąŠą╝ą░ąĮą┤ č鹥čĆą╝ąĖąĮą░ą╗ą░ ąĖ ą┤čĆčāą│ąĖąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
probe_com.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣ probe_com.c.
uC/Probe -> Target -> Demo. ąöąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗą╣ ą║ąŠą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ┬ĄC/Probe.
uC/Probe -> Target -> Plugin -> uCOS-II. ą¤ą╗ą░ą│ąĖąĮ ┬ĄC/Probe ą┤ą╗čÅ MICRIUM uC/OS-II.
os_probe.c ąÜąŠą┤ ą┐ą╗ą░ą│ąĖąĮą░ ┬ĄC/Probe - ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ, čāčüčéą░ąĮąŠą▓ą║ą░ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (callback function), ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čģčāą║ąŠą▓ ąĖ ą┤čĆčāą│ąĖąĄ čüąĄčĆą▓ąĖčüąĮčŗąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
os_probe.h ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊čéąĖą┐ąŠą▓ čäčāąĮą║čåąĖą╣ os_probe.c.
[ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ┬ĄC/OS-II]
INT8U OSTaskCreateExt (void (*task)(void *p_arg),
void *p_arg,
OS_STK *ptos,
INT8U prio,
INT16U id,
OS_STK *pbos,
INT32U stk_size,
void *pext,
INT16U opt)
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
task čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą║ąŠą┤ ąĘą░ą┤ą░čćąĖ.
p_arg čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčāčÄ ąŠą▒ą╗ą░čüčéčī ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĘą░ą┤ą░č湥, ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓ą┐ąĄčĆą▓čŗąĄ. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą░čĆą│čāą╝ąĄąĮčéčŗ ąĘą░ą┤ą░č湥 ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č湥čĆąĄąĘ čāą║ą░ąĘą░č鹥ą╗čī p_arg čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
void Task (void *p_arg)
{
for (;;)
{
//ąÜąŠą┤ ąĘą░ą┤ą░čćąĖ
...
}
}
ptos čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▓ąĄčĆčłąĖąĮčā čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ. ąĢčüą╗ąĖ ą║ąŠąĮčüčéą░ąĮčéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ OS_STK_GROWTH čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1, č鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čĆąŠčüčé čüč鹥ą║ą░ ą▓ąĮąĖąĘ (ąŠčé čüčéą░čĆčłąĖčģ ą░ą┤čĆąĄčüąŠą▓ ą┐ą░ą╝čÅčéąĖ ą║ ą╝ą╗ą░ą┤čłąĖą╝ - ąĖą╝ąĄąĮąĮąŠ čéą░ą║ ąĘą░ą┤ą░ąĮąŠ ą┤ą╗čÅ ARM7). ą¤čĆąĖ čŹč鹊ą╝ ptos ą▒čāą┤ąĄčé čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ą░ą┤čĆąĄčü ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ą╝ąĄčüč鹊čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüč鹥ą║ą░. ąĢčüą╗ąĖ OS_STK_GROWTH čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 ptos ą▒čāą┤ąĄčé čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ čüč鹥ą║ą░, ąĖ čüč鹥ą║ čĆą░čüč鹥čé ą▓ą▓ąĄčĆčģ, čé. ąĄ. ą▓ čüč鹊čĆąŠąĮčā čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ą░ą┤čĆąĄčüąŠą▓. ąŻą║ą░ąĘą░č鹥ą╗čī ptos ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čĆąĄą░ą╗čīąĮąŠąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ "čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ" ą╝ąĄčüč鹊 ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ.
prio ą┐čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ. ąÜą░ąČą┤ąŠą╣ ąĘą░ą┤ą░č湥 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ąĘąĮą░č湥ąĮ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé. ą¤čĆąĖ čŹč鹊ą╝ č湥ą╝ ą╝ąĄąĮčīčłąĄ čćąĖčüą╗ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░, č鹥ą╝ ą▓čŗčłąĄ ą┐čĆąĖąŠčĆąĖč鹥čé.
id ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąĘą░ą┤ą░čćąĖ, ID (0..65535)
pbos čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą║ąŠąĮąĄčå čüč鹥ą║ą░. ąĢčüą╗ąĖ ą║ąŠąĮčüčéą░ąĮčéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ OS_STK_GROWTH čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1, č鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čĆąŠčüčé čüč鹥ą║ą░ ą▓ąĮąĖąĘ (ąŠčé čüčéą░čĆčłąĖčģ ą░ą┤čĆąĄčüąŠą▓ ą┐ą░ą╝čÅčéąĖ ą║ ą╝ą╗ą░ą┤čłąĖą╝ - ąĖą╝ąĄąĮąĮąŠ čéą░ą║ ąĘą░ą┤ą░ąĮąŠ ą┤ą╗čÅ ARM7). ą¤čĆąĖ čŹč鹊ą╝ 'pbos' ą▒čāą┤ąĄčé čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ą░ą┤čĆąĄčü ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ą╝ąĄčüč鹊čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüč鹥ą║ą░. ąĢčüą╗ąĖ OS_STK_GROWTH čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 pbos ą▒čāą┤ąĄčé čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ čüč鹥ą║ą░, ąĖ čüč鹥ą║ čĆą░čüč鹥čé ą▓ą▓ąĄčĆčģ, čé. ąĄ. ą▓ čüč鹊čĆąŠąĮčā čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ą░ą┤čĆąĄčüąŠą▓. ąŻą║ą░ąĘą░č鹥ą╗čī pbos ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čĆąĄą░ą╗čīąĮąŠąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ "čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ" ą╝ąĄčüč鹊 ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ.
stk_size čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ą░čģ 菹╗ąĄą╝ąĄąĮč鹊ą▓. ąĢčüą╗ąĖ OS_STK čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ INT8U, č鹊 stk_size čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą║ąŠą╗ąĖč湥čüčéą▓čā ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▒ą░ą╣čé ą┤ą╗čÅ čüč鹥ą║ą░. ąĢčüą╗ąĖ OS_STK čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ INT16U č鹊 stk_size čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ 16-ą▒ąĖčéąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣. ąś ąĮą░ą║ąŠąĮąĄčå, ąĄčüą╗ąĖ OS_STK čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ INT32U (čéą░ą║ čüą┤ąĄą╗ą░ąĮąŠ ą┤ą╗čÅ ARM7), č鹊 stk_size čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 32-ą▒ąĖčéąĮčŗčģ ą▓ąĄą╗ąĖčćąĖąĮ, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą╗čÅ čüč鹥ą║ą░.
pext čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čāčÄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┐ą░ą╝čÅčéčī, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą║ą░ą║ čĆą░čüčłąĖčĆąĄąĮąĖąĄ TCB. ąØą░ą┐čĆąĖą╝ąĄčĆ, čŹčéą░ ą┐ą░ą╝čÅčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą╝ąŠąČąĄčé čģčĆą░ąĮąĖčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ č鹊čćą║ąĖ ą┐čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą║ąŠąĮč鹥ą║čüčéą░, ą▓čĆąĄą╝čÅ ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ ąĘą░ą┤ą░č湥ą╣ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą╗čāč湥ąĮąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĘą░ą┤ą░č湥ą╣ ąĖ čé. ą┤.
opt čüąŠą┤ąĄčƹȹĖčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ (ąĖą╗ąĖ ąŠą┐čåąĖąĖ), čüą▓čÅąĘą░ąĮąĮčāčÄ čü ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝ ąĘą░ą┤ą░čćąĖ. ą£ą╗ą░ą┤čłąĖąĄ 8 ą▒ąĖčé ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ uC/OS-II, ą░ čüčéą░čĆčłąĖąĄ 8 ą▒ąĖčé ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąĪą╝. OS_TASK_OPT_??? ą▓ čäą░ą╣ą╗ąĄ uCOS-II.H. ąóąĄą║čāčēąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ą▓čŗą▒ąŠčĆą░:
OS_TASK_OPT_STK_CHK ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ čüč鹥ą║ą░
OS_TASK_OPT_STK_CLR ąŠčćąĖčüčéą║ą░ čüč鹥ą║ą░ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ąĘą░ą┤ą░čćąĖ
OS_TASK_OPT_SAVE_FP ąĄčüą╗ąĖ CPU ąĖą╝ąĄąĄčé čĆąĄą│ąĖčüčéčĆčŗ čü ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ č鹊čćą║ąŠą╣, č鹊 ąŠąĮąĖ ą▒čāą┤čāčé čüąŠčģčĆą░ąĮąĄąĮčŗ ą┐čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą║ąŠąĮč鹥ą║čüčéą░.
ąÆąŠąĘą▓čĆą░čēą░ąĄčé:
OS_ERR_NONE čäčāąĮą║čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ.
OS_PRIO_EXIT ąĘą░ą┤ą░ąĮąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé čāąČąĄ ą│ą┤ąĄ-č鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ (ą║ą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĖą╝ąĄčéčī čāąĮąĖą║ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░).
OS_ERR_PRIO_INVALID ąĄčüą╗ąĖ čāą║ą░ąĘą░ąĮąĮąŠąĄ čćąĖčüą╗ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą▓čŗčłąĄ, č湥ą╝ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, > OS_LOWEST_PRIO).
OS_ERR_TASK_CREATE_ISR ąĄčüą╗ąĖ ąÆčŗ ą┐ąŠą┐čŗčéą░ą╗ąĖčüčī čüąŠąĘą┤ą░čéčī ąĘą░ą┤ą░čćčā ąĖąĘ ISR.
[ą¦č鹊 ą┤ąĄą╗ą░ąĄčé ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░ app.c]
ążčāąĮą║čåąĖčÅ main. ąÜąŠą┤ main čüąŠą▓čüąĄą╝ ą║ąŠčĆąŠčéą║ąĖą╣, ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ CPU (CPU_Init) ąĖ čÅą┤čĆą░ čüąĖčüč鹥ą╝čŗ (OSInit). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüąŠąĘą┤ą░ąĄčéčüčÅ ąĘą░ą┤ą░čćą░ App_TaskStart, ą║ąŠč鹊čĆą░čÅ ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī ąĘą░ą┐čāčüą║ą░ąĄčé ą║ąŠą┤ ąŠčüčéą░ą╗čīąĮčŗčģ ąĘą░ą┤ą░čć (App_TaskUserIF, App_TaskJoy). ąóą░ą║ą░čÅ ąĖąĄčĆą░čĆčģąĖčÅ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠč鹊ą╝čā, čćč鹊 ą┐ąĄčĆą▓ą░čÅ ąĘą░ą┤ą░čćą░ (App_TaskStart) ą┤ąŠą╗ąČąĮą░ čéą░ą║ąČąĄ ą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čłą░ą│ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ:
- ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ą╗ą░čéčŗ (BSP_Init).
- ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▓ąĄą║č鹊čĆąŠą▓ ąĖčüą║ą╗čÄč湥ąĮąĖą╣ (OS_CPU_InitExceptVect).
- ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą╝ąŠą┤čāą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ą░ą╝čÅčéąĖ (Mem_Init).
- ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą╝ąŠą┤čāą╗čÅ ą╝ą░č鹥ą╝ą░čéąĖą║ąĖ (Math_Init).
- ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ č湥čĆąĄąĘ DBGU, BSP_Ser_Init)
- ąĪąŠąĘą┤ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (App_EventCreate).
- ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čć ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (App_TaskCreate).
- ą▓čģąŠą┤ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ą╝ąĖą│ą░ąĮąĖčÅ ą▓čüąĄą╝ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ ąĮą░ ą┐ą╗ą░č鹥.
ąóąŠą╗čīą║ąŠ ąĮą░ ą┐čĆąĄą┤ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čłą░ą│ąĄ App_TaskCreate ąĘą░ą┐čāčüą║ą░ąĄčé ą┤ą▓ąĄ ąŠčüčéą░ą╗čīąĮčŗąĄ ąĘą░ą┤ą░čćąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
App_TaskUserIF ąÆčŗą▓ąŠą┤ čĆą░ąĘą╗ąĖčćąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗čāč湥ąĮąĮąŠą│ąŠ č湥čĆąĄąĘ mailbox čüąŠąŠą▒čēąĄąĮąĖčÅ (čćą░čüč鹊čéą░ čéąĖą║ąŠą▓, ąĘą░ą│čĆčāąĘą║ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░, č鹥ą║čāčēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖą╣ ą║ąŠąĮč鹥ą║čüčéą░, ą▓čŗą▓ąŠą┤ ąĮą░ąĘą▓ą░ąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ąĖ čéąĖą┐ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░).
App_TaskJoy ą×čéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┤ąČąŠą╣čüčéąĖą║ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖą╣ (č湥čĆąĄąĘ mailbox) ą▓ AppTaskUserIF.
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╝ąĄčĆą░ Micrium RTOS ┬ĄC/OS-II ą┤ą╗čÅ ARM7 ą▓čŗą▓ąŠą┤ąĖčé ą▓ ą║ąŠąĮčüąŠą╗čī čüą╗ąĄą┤čāčÄčēąĖą╣ 菹║čĆą░ąĮ:
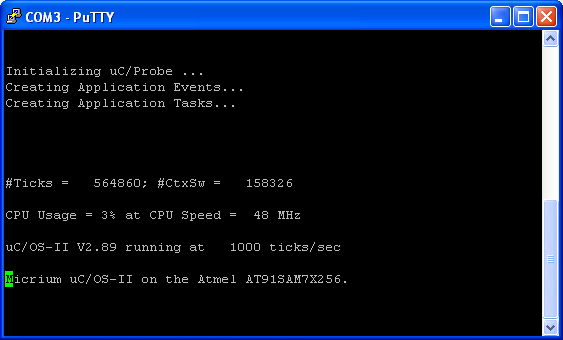
"Initializing uC/Probe ..." - čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčé App_ProbeInit.
"Creating Application Events..." ąĖ "Creating Application Tasks..." - ą▓čŗą▓ąŠą┤ąĖčé ąĘą░ą┤ą░čćą░ App_TaskStart.
"#Ticks = NNNNN; #CtxSw = MMMMM" - čŹč鹊 ą▓čŗą▓ąŠą┤ąĖčé čüč湥čéčćąĖą║ąĖ čéąĖą║ąŠą▓ ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖą╣ ą║ąŠąĮč鹥ą║čüčéą░ ąĘą░ą┤ą░čćą░ App_TaskUserIF. ą×ąĮą░ ą┐ąŠą╗čāčćą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ č湥čĆąĄąĘ mailbox ąŠčé ąĘą░ą┤ą░čćąĖ App_TaskJoy.
"CPU Usage = 3% at CPU Speed = 48 MHz" - čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čéą░ą║ąČąĄ ą▓čŗą▓ąŠą┤ąĖčé App_TaskUserIF ą┐ąŠ ą┐čĆąĖčłąĄą┤čłąĄą╣ ą║ąŠą╝ą░ąĮą┤ąĄ APP_SCR_CPU.
"uC/OS-II V2.89 running at 1000 ticks/sec" - čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čéą░ą║ąČąĄ ą▓čŗą▓ąŠą┤ąĖčé App_TaskUserIF ą┐ąŠ ą┐čĆąĖčłąĄą┤čłąĄą╣ ą║ąŠą╝ą░ąĮą┤ąĄ APP_SCR_VER_TICK_RATE.
"Micrium uC/OS-II on the Atmel AT91SAM7X256." - čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čéą░ą║ąČąĄ ą▓čŗą▓ąŠą┤ąĖčé App_TaskUserIF ą┐ąŠ ą┐čĆąĖčłąĄą┤čłąĄą╣ ą║ąŠą╝ą░ąĮą┤ąĄ APP_SCR_SIGN_ON ąĖ ąĮą░ ą▓čüąĄ ąĮąĄąŠą┐ąŠąĘąĮą░ąĮąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ.
[ąĪą╗ąŠą▓ą░čĆąĖą║]
BSP Board Support Package - ąĮą░ą▒ąŠčĆ ą╝ą░ą║čĆąŠčüąŠą▓ ąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ čü ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ.
DCC Debug Communications Channel.
MBOX, mailbox ąĪčĆąĄą┤čüčéą▓ąŠ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ.
ISR Interrupt Service Routine, ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
TCB Task Control Block, ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĘą░ą┤ą░č湥ą╣.
┬ĄC/Probe ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ Microsoft Windows, ą║ąŠč鹊čĆą░čÅ ąŠč鹊ą▒čĆą░ąČą░ąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüąĖčüč鹥ą╝ąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘą░ą┤ą░ą▓ą░ąĄą╝čŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą│čĆą░čäąĖč湥čüą║ąĖčģ 菹╗ąĄą╝ąĄąĮčéą░čģ, 菹╝čāą╗ąĖčĆčāčÄčēąĖčģ ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖąĄ čüč湥čéčćąĖą║ąĖ, ą│čĆą░čäčŗ, čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĮčŗąĄ ąĖąĮą┤ąĖą║ą░č鹊čĆčŗ ąĖ čé. ą┤. ą¦č鹊-č鹊 ą┐ąŠčģąŠąČąĄąĄ ąĄčüčéčī ą▓ LabView. ąöą╗čÅ ąŠą▒ą╝ąĄąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ čü ┬ĄC/Probe ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī JTAG, RS-232, UDP ąĖ USB. ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā [1] "┬ĄC/Probe User Manual" (Micrium \ Software \ uC-Probe \ Doc \ uC-Probe-User-Manual.pdf).
ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą┐ąĄčĆąĄčģąŠą┤ ąŠčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÄ ą┤čĆčāą│ąŠą╣.
[ąĪčüčŗą╗ą║ąĖ]
1. Micrium_AT91SAM7X-EK_uCOS-II.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ.
2. FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čćą░čüčéčī 1.
3. ą£ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ AT91SAM7X. |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ