ąØą░čłą╗ąĖ ąŠą┐ąĄčćą░čéą║čā?
ą¤ąŠąČą░ą╗čāą╣čüčéą░, čüąŠąŠą▒čēąĖč鹥 ąŠą▒ čŹč鹊ą╝ - ą┐čĆąŠčüč鹊 ą▓čŗą┤ąĄą╗ąĖč鹥 ąŠčłąĖą▒ąŠčćąĮąŠąĄ čüą╗ąŠą▓ąŠ ąĖą╗ąĖ čäčĆą░ąĘčā ąĖ ąĮą░ąČą╝ąĖč鹥 Shift Enter .
LuckFox FAQ
ąöąŠą▒ą░ą▓ąĖą╗(ą░) microsin
ąĀąĄčłąĄąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą▓ąŠą┐čĆąŠčüąŠą▓, ą▓ąŠąĘąĮąĖą║ą░čÄčēąĖčģ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čü ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą┐ą╗ą░čéč乊čĆą╝ąŠą╣ LuckFox (čüąĄčĆąĖčÅ ą┐ą╗ą░čé ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Rockchip RV1103 ąĖ RV1106 ).
ąśąĮčüčéčĆčāą║čåąĖčÅ [1], ą┐ąŠą┤ Ubuntu 24.04.3 LTS:
1 . ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣:
$ sudo apt update
$ sudo apt-get install -y git ssh make gcc gcc-multilib g++-multilib module-assistant expect g++ gawk \
texinfo libssl-v bison flex fakeroot cmake unzip gperf autoconf device-tree-compiler libncurses5-dev \
pkg-config bc python-is-python3 passwd openssl openssh-server openssh-client vim file cpio rsync
2 . ąÜą╗ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ SDK:
$ git clone https://gitee.com/LuckfoxTECH/luckfox-pico.git
[ąĪčéčĆčāą║čéčāčĆą░ ą║ą░čéą░ą╗ąŠą│ą░ SDK (luckfox-pico)]
Ōö£ŌöĆŌöĆ build.sh -> project/build.sh ---- čüą║čĆąĖą┐čé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ SDKŌö£ŌöĆŌöĆ media --------------------------- Multimedia encoding/decoding, ISP, etc.(1) Ōö£ŌöĆŌöĆ sysdrv -------------------------- U-Boot, kernel, rootfs(1) Ōö£ŌöĆŌöĆ project ------------------------- ą×ą▒čĆą░ąĘčåąŠą▓čŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ scriptsŌö£ŌöĆŌöĆ output -------------------------- ąöą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čäą░ą╣ą╗ąŠą▓ ąŠą▒čĆą░ąĘą░ ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ SDKŌööŌöĆŌöĆ tools --------------------------- ą┐čĆąŠčłąĖą▓ą║ą░ ąŠą▒čĆą░ąĘą░ ąĖ čāčéąĖą╗ąĖčéčŗ ą┐čĆąŠčłąĖą▓ą║ąĖ
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ą╝ąŠąČąĮąŠ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ.
ąöąĖčĆąĄą║č鹊čĆąĖčÅ čģčĆą░ąĮąĖą╗ąĖčēą░ ąŠą▒čĆą░ąĘą░:
output/ Ōö£ŌöĆŌöĆ image Ōöé Ōö£ŌöĆŌöĆ download.bin ---------------- ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░ čüč鹊čĆąŠąĮąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ| | čü čāčéąĖą╗ąĖčéą░ą╝ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ, ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą┐ą░ą╝čÅčéčī ą┐ą╗ą░čéčŗŌöé Ōö£ŌöĆŌöĆ env.img --------------------- ąóą░ą▒ą╗ąĖčåą░ čĆą░ąĘą┤ąĄą╗ąŠą▓ (partition table) ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĘą░ą│čĆčāąĘą║ąĖ| | (boot parameters)Ōöé Ōö£ŌöĆŌöĆ uboot.img ------------------- U-Boot imageŌöé Ōö£ŌöĆŌöĆ idblock.img ----------------- Loader imageŌöé Ōö£ŌöĆŌöĆ boot.img -------------------- Kernel imageŌöé Ōö£ŌöĆŌöĆ rootfs.img ------------------ Kernel imageŌöé ŌööŌöĆŌöĆ userdata.img ---------------- Userdata imageŌööŌöĆŌöĆ out Ōö£ŌöĆŌöĆ app_out --------------------- ążą░ą╣ą╗čŗ, ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄą╝čŗąĄ ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ reference application Ōö£ŌöĆŌöĆ media_out ------------------- ążą░ą╣ą╗čŗ, ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄą╝čŗąĄ ą┐ąŠčüą╗ąĄ media-related ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ Ōö£ŌöĆŌöĆ rootfs_xxx ------------------ File system packaging directory Ōö£ŌöĆŌöĆ S20linkmount ---------------- Partition mounting script Ōö£ŌöĆŌöĆ sysdrv_out ------------------ ążą░ą╣ą╗čŗ, ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄą╝čŗąĄ ą┐ąŠčüą╗ąĄ sysdrv ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ŌööŌöĆŌöĆ userdata -------------------- Userdata
[ążą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SDK ]
1 . ążą░ą╣ą╗čŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Luckfox-Pico series SDK ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ project/cfg/BoardConfig_IPC
luckfox-pico$ ls project/cfg/BoardConfig_IPC -1 BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_86Panel-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_86Panel_W-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Pi-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Pi_W-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Ultra-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Ultra_W-IPC.mk
BoardConfig-EMMC-Buildroot-RV1106_Luckfox_Pico_Zero-IPC.mk
BoardConfig-EMMC-Busybox-RV1106_Luckfox_Pico_Ultra-IPC_FASTBOOT.mk
BoardConfig-SD_CARD-Buildroot-RV1103_Luckfox_Pico-IPC.mk
BoardConfig-SD_CARD-Buildroot-RV1103_Luckfox_Pico_Mini-IPC.mk
BoardConfig-SD_CARD-Buildroot-RV1103_Luckfox_Pico_Plus-IPC.mk
BoardConfig-SD_CARD-Buildroot-RV1103_Luckfox_Pico_WebBee-IPC.mk
BoardConfig-SD_CARD-Buildroot-RV1106_Luckfox_Pico_Pro_Max-IPC.mk
BoardConfig-SPI_NAND-Buildroot-RV1103_Luckfox_Pico_Mini-IPC.mk
BoardConfig-SPI_NAND-Buildroot-RV1103_Luckfox_Pico_Plus-IPC.mk
BoardConfig-SPI_NAND-Buildroot-RV1103_Luckfox_Pico_WebBee-IPC.mk
BoardConfig-SPI_NAND-Buildroot-RV1106_Luckfox_Pico_Pro_Max-IPC.mk
BoardConfig-SPI_NAND-Busybox-RV1106_Luckfox_Pico_Pro_Max-IPC_FASTBOOT.mk
luckfox-buildroot-nocsi-oem-pre.sh
luckfox-buildroot-oem-pre.sh
luckfox-glibc-oem-pre.sh
luckfox-rv1106-tb-emmc-post.sh
luckfox-rv1106-tb-spi_nand-post.sh
luckfox-systemd-off-modem-post.sh
luckfox-userdata-pre.sh overlay
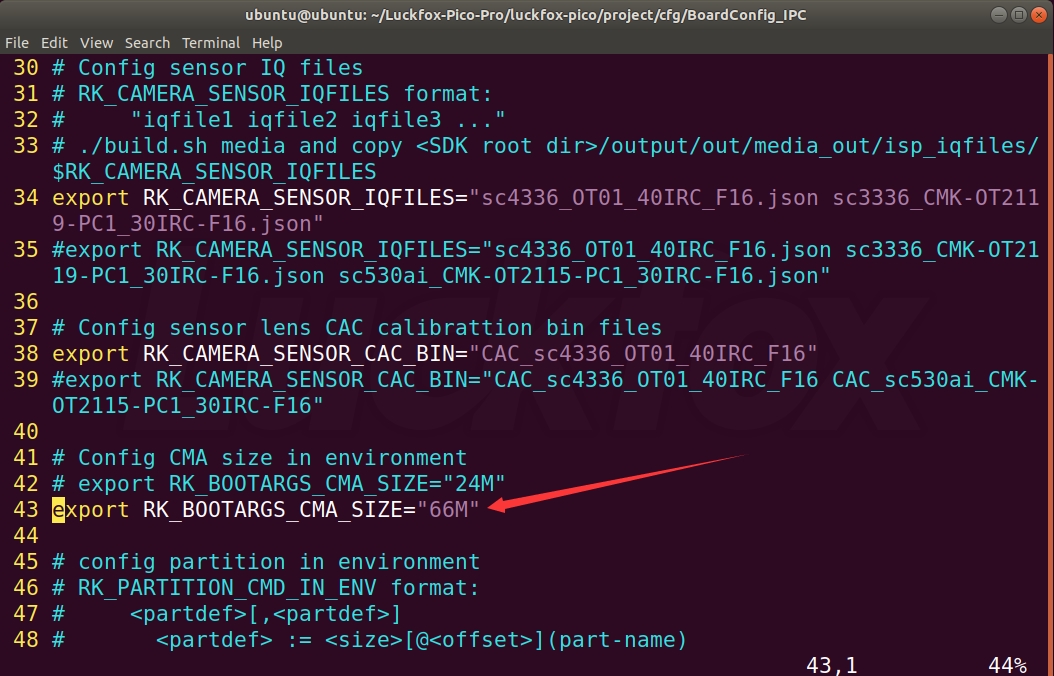
2 . ąĢčüą╗ąĖ ą▓ąĘčÅčéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ ą║ąŠąĮčäąĖą│ BoardConfig-SD_CARD-Buildroot-RV1106_Luckfox_Pico_Pro_Max-IPC.mk , č鹊 ą╝ąŠąČąĮąŠ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ąĄą│ąŠ ąŠčüąĮąŠą▓ąĮčŗąĄ ą║ą╗čÄčćąĖ.
# ąĀą░ąĘą╝ąĄčĆ CMA ą▓ ąŠą║čĆčāąČąĄąĮąĖąĖ export RK_BOOTARGS_CMA_SIZE = "66M" # Kernel dts export RK_KERNEL_DTS = rv1106g-luckfox-pico-pro-max.dts# ą×čéą║čāą┤ą░ ąĘą░ą│čĆčāąČą░čéčīčüčÅ (target boot medium) export RK_BOOT_MEDIUM = sd_card# ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆą░ąĘą┤ąĄą╗ą░ ą▓ ąŠą║čĆčāąČąĄąĮąĖąĖ # ążąŠčĆą╝ą░čé RK_PARTITION_CMD_IN_ENV: # < partdef>[,< partdef>] # < partdef> := < size>[@< offset>](part-name) # ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ čüą╝ąĄčēąĄąĮąĖąĄ ą┐ąĄčĆą▓ąŠą│ąŠ čĆą░ąĘą┤ąĄą╗ą░ ąĮąĄ 0x0, č鹊 čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąŠ. # ąśąĮą░č湥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ąĮąĄ ąĮčāąČąĮąŠ. export RK_PARTITION_CMD_IN_ENV = "32K(env),512K@32K(idblock),256K(uboot),32M(boot),512M(oem),256M(userdata),6G(rootfs)" # Target rootfs export LF_TARGET_ROOTFS = buildroot# SUBMODULES : gitee/gitee export LF_SUBMODULES_BY = gitee# Buildroot defconfig export RK_BUILDROOT_DEFCONFIG = luckfox_pico_defconfig
ąŚą┤ąĄčüčī:
RK_BOOTARGS_CMA_SIZE : ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą║ą░ą╝ąĄčĆčŗ; ąĄčüą╗ąĖ ą║ą░ą╝ąĄčĆą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĖąĘą╝ąĄąĮąĖč鹥 čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ 1M.
RK_KERNEL_DTS : čāą║ą░ąĘčŗą▓ą░ąĄčé čäą░ą╣ą╗ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ (device tree file, DTS).
RK_BOOT_MEDIUM : čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮąŠčüąĖč鹥ą╗čī ąĘą░ą│čĆčāąĘą║ąĖ (target boot medium), ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī emmc (ą║ą░čĆčéą░ SD), sd_card (ą║ą░čĆčéą░ SD), spi_nor (SPI NOR Flash) ąĖą╗ąĖ spi_nand (SPI NAND Flash).
RK_PARTITION_CMD_IN_ENV : čŹčéą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą▒ą╗ąĖčåčŗ čĆą░ąĘą┤ąĄą╗ąŠą▓. ąĢčüą╗ąĖ ą▓ą░ą╝ ąĮčāąČąĮąŠ čüąŠą┐ąŠčüčéą░ą▓ąĖčéčī ą┤ąĖčüą║ąŠą▓ąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ čü SD-ą║ą░čĆč鹊ą╣, č鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖąĘą╝ąĄąĮąĖčéčī čĆą░ąĘą┤ąĄą╗ rootfs.
LF_TARGET_ROOTFS : čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą║ąŠčĆąĮąĄą▓ą░čÅ čäą░ą╣ą╗ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░ target (Root File System).
LF_SUBMODULES_BY : čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖčüč鹊čćąĮąĖą║ čüčāą▒ą╝ąŠą┤čāą╗ąĄą╣.
RK_BUILDROOT_DEFCONFIG : čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ čäą░ą╣ą╗ Buildroot.
[ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ąŠą▒čĆą░ąĘąŠą▓ ]
ąśąĘ ąŠą┐ąĖčüą░ąĮąĖčÅ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī, čćč鹊 ąŠą▒čĆą░ąĘ Ubuntu ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĘą░ą│čĆčāąĘą║čā č鹊ą╗čīą║ąŠ čü SD-ą║ą░čĆč鹊čćą║ąĖ (SD card boot), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ąŠą▒čĆą░ąĘ Buildroot ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą║ą░ą║ ąĘą░ą│čĆčāąĘą║čā čü TF-ą║ą░čĆčéčŗ (TransFlash), čéą░ą║ ąĖ ąĘą░ą│čĆčāąĘą║čā ąĖąĘ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ (SPI NAND FLASH boot).
1 . ąĢčüą╗ąĖ ą▓ą░ą╝ ąĮčāąČąĮąŠ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąŠą▒čĆą░ąĘ ą┤ą╗čÅ čüąĖčüč鹥ą╝čŗ Ubuntu ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī gitee, č鹊 ąĖąĘą╝ąĄąĮąĖč鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mk-čäą░ą╣ą╗, ąĘą░ą┤ą░čÄčēąĖą╣ čéąĖą┐ ą┐ą╗ą░čéčŗ, čćč鹊ą▒čŗ ąŠčéčĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī LF_SUBMODULES_BY ą┤ą╗čÅ gitee, ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
2 . ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąŠą▒čĆą░ąĘ Buildroot ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ TF card boot, č鹊 ąĖąĘą╝ąĄąĮąĖč鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą░ą╣ą╗ BoardConfig-EMMC-Ubuntu-xxx.mk , čćč鹊ą▒čŗ ą┐ąŠą╝ąĄąĮčÅčéčī LF_TARGET_ROOTFS ąĮą░ buildroot, ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
export LF_TARGET_ROOTFS = buildroot
3 . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 cross-compilation toolchain:
$ cd {SDK_PATH}/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/
$ source env_install_toolchain.sh
4 . ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą▓čüąĄ ąŠą▒čĆą░ąĘčŗ:
$ cd luckfox-pico
# ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ busybox/buildroot
$ ./build.sh lunch
$ ./build.sh
# ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ubuntu
$ sudo ./build.sh lunch
$ sudo ./build.sh
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ Ubuntu, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 sudo, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čäą░ą╣ą╗ąŠą▓čŗčģ ąŠčłąĖą▒ąŠą║ čüąĖčüč鹥ą╝čŗ. ąĪą╗ąĄą┤čāčÄčēąĖąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ąĮąĄ ą┤ąĄą╗ą░čÄčé čĆą░ąĘą╗ąĖčćąĖą╣ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ ą▓ą░čĆąĖą░ąĮčéą░ą╝ąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, ąĮąŠ ą▓čŗ ą┤ąĄą╣čüčéą▓čāą╣č鹥 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą▓ą░čłąĄą╣ čüąĖčéčāą░čåąĖąĄą╣.
[ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą┐ąŠ čćą░čüčéčÅą╝ ]
ą×čéą┤ąĄą╗čīąĮą░čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ U-Boot:
$ ./build.sh clean uboot
$ ./build.sh uboot
ąĪą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čäą░ą╣ą╗čŗ ąŠą▒čĆą░ąĘą░: output/image/MiniLoaderAll.bin ąĖ output/image/uboot.img
ą×čéą┤ąĄą╗čīąĮą░čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ čÅą┤čĆą░:
$ ./build.sh clean kernel
$ ./build.sh kernel
ąĪą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čäą░ą╣ą╗ ąŠą▒čĆą░ąĘą░: output/image/boot.img
ą×čéą┤ąĄą╗čīąĮą░čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą║ąŠčĆąĮąĄą▓ąŠą╣ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ:
$ ./build.sh clean rootfs
$ ./build.sh rootfs
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā ./build.sh firmware ą┤ą╗čÅ ą┐ąĄčĆąĄčāą┐ą░ą║ąŠą▓ą║ąĖ.
ą×čéą┤ąĄą╗čīąĮą░čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ media:
$ ./build.sh clean media
$ ./build.sh media
ążą░ą╣ą╗čŗ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ: output/out/media_out . ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā ./build.sh firmware ą┤ą╗čÅ ą┐ąĄčĆąĄčāą┐ą░ą║ąŠą▓ą║ąĖ.
ą×čéą┤ąĄą╗čīąĮą░čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ąŠą▒čĆą░ąĘčåąŠą▓čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣:
$ ./build.sh clean app
$ ./build.sh app
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ: app ąĘą░ą▓ąĖčüąĖčé ąŠčé media. ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā ./build.sh firmware ą┤ą╗čÅ ą┐ąĄčĆąĄčāą┐ą░ą║ąŠą▓ą║ąĖ.
ąŻą┐ą░ą║ąŠą▓ą║ą░ ą┐čĆąŠčłąĖą▓ą║ąĖ (firmware packaging):
ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ busybox/buildroot :
$ ./build.sh lunch
$ ./build.sh
ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ Ubuntu:
$ sudo ./build.sh lunch
$ sudo ./build.sh
ąŁč鹊 ą┐čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮąŠ čĆą░ąĘąĮčŗąĄ ą┐ąŠą┤čģąŠą┤čŗ ą║ čüą▒ąŠčĆą║ąĄ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ą┤ą╗čÅ ą▓ą░čłąĄą│ąŠ Luckfox Pico. ąĪčĆą░ą▓ąĮąĖč鹥ą╗čīąĮą░čÅ čéą░ą▒ą╗ąĖčåą░:
ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ Busybox / Buildroot Ubuntu
ąĪčāčéčī ą£ąĖąĮąĖą╝ą░ą╗ąĖčüčéąĖčćąĮą░čÅ ą▓čüčéčĆąŠąĄąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ (Embedded)
ą¤ąŠą╗ąĮąŠčåąĄąĮąĮą░čÅ ąĮą░čüč鹊ą╗čīąĮą░čÅ ą×ąĪ (Desktop)
ą¤čĆąŠčåąĄčüčü čüą▒ąŠčĆą║ąĖ ./build.sh lunch -> ąÆčŗą▒čĆą░čéčī config -> ./build.shsudo ./build.sh lunch -> ąÆčŗą▒čĆą░čéčī config -> sudo ./build.sh
ąĀą░ąĘą╝ąĄčĆ čüąĖčüč鹥ą╝čŗ ą£ą░ą╗ąĄąĮčīą║ąĖą╣ (ą┤ąĄčüčÅčéą║ąĖ ą£ąæ)
ą×č湥ąĮčī ą▒ąŠą╗čīčłąŠą╣ (čüąŠčéąĮąĖ ą£ąæ - ąōąæ)
ąÆčĆąĄą╝čÅ čüą▒ąŠčĆą║ąĖ ą£ąĖąĮčāčéčŗ
ąöąĄčüčÅčéą║ąĖ ą╝ąĖąĮčāčé - čćą░čüčŗ
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą║ąĄč鹊ą▓ ą×ą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣, ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ąĮą░ą▒ąŠčĆ
ą×ą│čĆąŠą╝ąĮčŗą╣ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖą╣ (apt), čéčŗčüčÅčćąĖ ą┐ą░ą║ąĄč鹊ą▓
ąōąĖą▒ą║ąŠčüčéčī ąÆčŗ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄč鹥 č鹊ą╗čīą║ąŠ č鹊, čćč鹊 ąĮčāąČąĮąŠ
ąÆčŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ą│ąŠč鹊ą▓čāčÄ čüąĖčüč鹥ą╝čā čüąŠ ą▓čüąĄą╝ čüąŠčäč鹊ą╝
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą¤čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, IoT, ą┤čĆąŠąĮčŗ, ą│ą┤ąĄ ą▓ą░ąČąĮčŗ čĆą░ąĘą╝ąĄčĆ ąĖ čüą║ąŠčĆąŠčüčéčī
ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░, ą┐čĆąŠč鹊čéąĖą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąĮčāąČąĄąĮ ą┐čĆąĖą▓čŗčćąĮčŗą╣ Linux-ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą░ą║ąĄčéą░ą╝ąĖ ąØąĄčé ą╝ąĄąĮąĄą┤ąČąĄčĆą░ ą┐ą░ą║ąĄč鹊ą▓. ąĪąŠčäčé ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ąĮą░ čŹčéą░ą┐ąĄ čüą▒ąŠčĆą║ąĖ.
ąĢčüčéčī apt ŌĆö ą╝ąŠąČąĮąŠ čüčéą░ą▓ąĖčéčī/čāą┤ą░ą╗čÅčéčī čćč鹊 čāą│ąŠą┤ąĮąŠ.
Init čüąĖčüč鹥ą╝ą░ ą×ą▒čŗčćąĮąŠ ą┐čĆąŠčüč鹊ą╣ init ąĖą╗ąĖ busybox init
systemd
ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą┐čĆą░ą▓ą░ą╝ ą×ą▒čŗčćąĮčŗąĄ ą┐čĆą░ą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (./build.sh)
ąóčĆąĄą▒čāčÄčéčüčÅ ą┐čĆą░ą▓ą░ root (sudo ./build.sh)
[ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą▒čŖčÅčüąĮąĄąĮąĖąĄ ]
1. Compile busybox/buildroot
ąŁč鹊 čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą┤ą╗čÅ embedded-čāčüčéčĆąŠą╣čüčéą▓. Buildroot ŌĆö čŹč鹊 ąĖąĮčüčéčĆčāą╝ąĄąĮčé ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ, ą║ąŠč鹊čĆčŗą╣:
ąæąĄčĆąĄčé čÅą┤čĆąŠ Linux (kernel).
ąÜąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ čüąĖčüč鹥ą╝ąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, uClibc ąĖą╗ąĖ glibc).
ąśčüą┐ąŠą╗čīąĘčāąĄčé Busybox ŌĆö "čłą▓ąĄą╣čåą░čĆčüą║ąĖą╣ ąĮąŠąČ", ą║ąŠč鹊čĆčŗą╣ ąĘą░ą╝ąĄąĮčÅąĄčé čüąŠą▒ąŠą╣ čüąŠčéąĮąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ UNIX-čāčéąĖą╗ąĖčé (ls, cp, mv, vi, ifconfig ąĖ čé.ą┤.) ąŠą┤ąĮąĖą╝ ą▒ąĖąĮą░čĆąĮčŗą╝ čäą░ą╣ą╗ąŠą╝, 菹║ąŠąĮąŠą╝čÅ ąŠą│čĆąŠą╝ąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąĄčüčéą░.
ąĀąĄąĘčāą╗čīčéą░čé: ąÆčŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčāčÄ, ą▒čŗčüčéčĆčāčÄ ąĖ 菹║ąŠąĮąŠą╝ąĖčćąĮčāčÄ čüąĖčüč鹥ą╝čā, ąĖą┤ąĄą░ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ą┤ą╗čÅ čäąĖąĮą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠą┤čāą║čéą░. ąØąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮąŠą▓čŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ "ąĮą░ ą╗ąĄčéčā" ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ ŌĆö ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄčüąŠą▒ąĖčĆą░čéčī ą▓ąĄčüčī ąŠą▒čĆą░ąĘ.
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī: ą┤ą╗čÅ ą│ąŠč鹊ą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ ą▓ą░ąČąĮčŗ čĆą░ąĘą╝ąĄčĆ, čüą║ąŠčĆąŠčüčéčī ąĘą░ą│čĆčāąĘą║ąĖ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī.
2. Compile ubuntu
ąŁč鹊 čüą┐ąŠčüąŠą▒ ą┤ą╗čÅ č鹥čģ, ą║ąŠą╝čā ąĮčāąČąĮą░ ą┐ąŠą╗ąĮąŠčåąĄąĮąĮą░čÅ ąĖ ą┐čĆąĖą▓čŗčćąĮą░čÅ čüčĆąĄą┤ą░. ąŚą┤ąĄčüčī čüą║čĆąĖą┐čéčŗ ąĮąĄ čüąŠą▒ąĖčĆą░čÄčé čüąĖčüč鹥ą╝čā čü ąĮčāą╗čÅ, ą░ ą║ą░čüč鹊ą╝ąĖąĘąĖčĆčāčÄčé ąĖ ą░ą┤ą░ą┐čéąĖčĆčāčÄčé ą│ąŠč鹊ą▓čŗąĄ ąŠą▒čĆą░ąĘčŗ Ubuntu (čćą░čēąĄ ą▓čüąĄą│ąŠ Ubuntu Base ąĖą╗ąĖ Core) ą┐ąŠą┤ ą░čĆčģąĖč鹥ą║čéčāčĆčā Luckfox Pico. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą▓čŗ ą┐ąŠą╗čāčćą░ąĄč鹥 ą┐ąŠčćčéąĖ čéčā ąČąĄ Ubuntu, čćč鹊 ąĖ ąĮą░ ą¤ąÜ, ąĮąŠ čüąŠą▒čĆą░ąĮąĮčāčÄ ą┤ą╗čÅ ARM-ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆ ąĮąĄą╣ ąĄčüčéčī ą╝ąĄąĮąĄą┤ąČąĄčĆ ą┐ą░ą║ąĄč鹊ą▓ apt, ą▓čŗ ą╝ąŠąČąĄč鹥 ą╗ąĄą│ą║ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī python3, gcc, vim ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ ą┐ą░ą║ąĄčé ąĖąĘ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖąĄą▓ Ubuntu.
ą¤ąŠč湥ą╝čā ąĮčāąČąĄąĮ sudo? ą¤čĆąŠčåąĄčüčü ą░ą┤ą░ą┐čéą░čåąĖąĖ ąŠą▒čĆą░ąĘą░ čćą░čüč鹊 involves mounting ąŠą▒čĆą░ąĘčŗ čäą░ą╣ą╗ąŠą▓čŗčģ čüąĖčüč鹥ą╝ ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠą┐ąĄčĆą░čåąĖą╣, čéčĆąĄą▒čāčÄčēąĖčģ ą┐čĆą░ą▓ čüčāą┐ąĄčĆą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, chroot ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ą░ą║ąĄč鹊ą▓ ąĖą╗ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ).
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī: ąöą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ, ą║ąŠą│ą┤ą░ ą▓ą░ą╝ ąĮčāąČąĄąĮ ą┤ąŠčüčéčāą┐ ą║ ą▒ąŠą╗čīčłąŠą╝čā ą║ąŠą╗ąĖč湥čüčéą▓čā ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĖčģ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠą╣ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ.
[ąśč鹊ą│: ąÜą░ą║ąŠą╣ ą▓ą░čĆąĖą░ąĮčé ą▓čŗą▒čĆą░čéčī? ]
ąĢčüą╗ąĖ ą▓čŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ąĖ čģąŠčéąĖč鹥 ą▒čŗčüčéčĆąŠ ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░čéčī ą║ąŠą┤, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĖą▓čŗčćąĮčŗąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ (apt, systemd)? ąóąŠą│ą┤ą░ ą▓čŗą▒ąĖčĆą░ą╣č鹥 Ubuntu. ąĢčüą╗ąĖ ąČąĄ ą▓čŗ čüąŠąĘą┤ą░ąĄč鹥 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ą┐čĆąŠą┤ą░ąČąĖ ąĖą╗ąĖ čĆą░ąĘą▓ąĄčĆčéčŗą▓ą░ąĮąĖčÅ, ą│ą┤ąĄ ą║čĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĄąĮ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ąŠą▒čĆą░ąĘą░ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī? ąÆčŗą▒ąĖčĆą░ą╣č鹥 Buildroot/Busybox.
ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ čćą░čüč鹊 ąĮą░čćąĖąĮą░čÄčé čü Ubuntu ą┤ą╗čÅ čāą┤ąŠą▒čüčéą▓ą░ ą┐čĆąŠč鹊čéąĖą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą░ ą┤ą╗čÅ čäąĖąĮą░ą╗čīąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠą┤čāą║čéą░ ą┐ąĄčĆąĄčģąŠą┤čÅčé ąĮą░ Buildroot, čćč鹊ą▒čŗ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ąŠą▒čĆą░ąĘ.
Gitee Source (ąĖą╗ąĖ Gitee ąĖčüč鹊čćąĮąĖą║) ŌĆö čŹč鹊 čüąĄčĆą▓ąĄčĆčŗ-ąĘąĄčĆą║ą░ą╗ą░ (čĆąĄą┐ąŠąĘąĖč鹊čĆąĖąĖ) ąĮą░ ą┐ą╗ą░čéč乊čĆą╝ąĄ Gitee.com , ą║ąŠč鹊čĆčŗąĄ čģčĆą░ąĮčÅčé ą║ąŠą┐ąĖąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĖ ą┐ą░ą║ąĄč鹊ą▓ čü ą┤čĆčāą│ąĖčģ ąŠčéą║čĆčŗčéčŗčģ ą┐ą╗ą░čéč乊čĆą╝ (ą▓ ą┐ąĄčĆą▓čāčÄ ąŠč湥čĆąĄą┤čī ŌĆö GitHub). ąśčģ ąŠčüąĮąŠą▓ąĮą░čÅ čåąĄą╗čī ŌĆö čāčüą║ąŠčĆąĄąĮąĖąĄ ą┤ąŠčüčéčāą┐ą░ ą║ čŹčéąĖą╝ čĆąĄčüčāčĆčüą░ą╝ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą▓ąĮčāčéčĆąĖ ąÜąĖčéą░čÅ.
ąĢčüą╗ąĖ ą│ąŠą▓ąŠčĆąĖčéčī ą┐čĆąŠčēąĄ, Gitee Source ŌĆö čŹč鹊 "ąĘąĄčĆą║ą░ą╗ąŠ" ąĖą╗ąĖ "ą║čŹčł" ą┤ą╗čÅ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░.
ąöąĄčéą░ą╗čīąĮąŠąĄ ąŠą▒čŖčÅčüąĮąĄąĮąĖąĄ:
ąöą╗čÅ č湥ą│ąŠ čŹč鹊 ąĮčāąČąĮąŠ?
ą×ą▒čģąŠą┤ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣: ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮčŗą╝ ą┐ą╗ą░čéč乊čĆą╝ą░ą╝, like GitHub, ąĖąĘ ąÜąĖčéą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╝, ąĮąĄčüčéą░ą▒ąĖą╗čīąĮčŗą╝ ąĖą╗ąĖ ą▓ąŠą▓čüąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ (ąĖąĘ-ąĘą░ ąÆąĄą╗ąĖą║ąŠą│ąŠ čäą░ą╣ąĄčĆą▓ąŠą╗ą░).
ąÆčŗčüąŠą║ą░čÅ čüą║ąŠčĆąŠčüčéčī: Gitee-ąĘąĄčĆą║ą░ą╗ą░ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮčŗ ąĮą░ č鹥čĆčĆąĖč鹊čĆąĖąĖ ąÜąĖčéą░čÅ, ą┐ąŠčŹč鹊ą╝čā ą╝ąĄčüčéąĮčŗąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĖ čüąĖčüč鹥ą╝čŗ CI/CD (ą║ą░ą║ ą▓ ą▓ą░čłąĄą╝ čüą╗čāčćą░ąĄ čüąŠ čüą▒ąŠčĆą║ąŠą╣ Luckfox Pico) ą╝ąŠą│čāčé čüą║ą░čćąĖą▓ą░čéčī ą║ąŠą┤ ąĖ ą┐ą░ą║ąĄčéčŗ čü ąŠą│čĆąŠą╝ąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ.
ąØą░čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī: čüąŠąĘą┤ą░ąĮąĖąĄ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą║ąŠą┐ąĖą╣ ą║čĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĮąŠą│ąŠ opensource-ą║ąŠą┤ą░ čÅą▓ą╗čÅąĄčéčüčÅ čŹą╗ąĄą╝ąĄąĮč鹊ą╝ č鹥čģąĮąŠą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čüčāą▓ąĄčĆąĄąĮąĖč鹥čéą░.
ąÜą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé?
ą¤ą╗ą░čéč乊čĆą╝ą░ Gitee ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖą╗ąĖ ą▓čĆčāčćąĮčāčÄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ (ą║ąŠą┐ąĖčĆčāąĄčé) ą┐ąŠą┐čāą╗čÅčĆąĮčŗąĄ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖąĖ čü GitHub ąĖ ą┤čĆčāą│ąĖčģ ą┐ą╗ą░čéč乊čĆą╝.
ąÜąŠą│ą┤ą░ ą▓čŗ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čüą▒ąŠčĆą║ąĖ (ą║ą░ą║ ą┐čĆąĖą╝ąĄčĆąĄ čü ./build.sh) čāą║ą░ąĘčŗą▓ą░ąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī gitee source, čüąĖčüč鹥ą╝ą░ ąĮąĄ ąĖą┤ąĄčé ąĮą░ GitHub ąĘą░ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝ čÅą┤čĆą░ Linux, čéčāą╗č湥ą╣ąĮą░ (toolchain) ąĖą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ą░ čüą║ą░čćąĖą▓ą░ąĄčé ąĖčģ čü ą▒čŗčüčéčĆąŠą│ąŠ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ąĘąĄčĆą║ą░ą╗ą░ ąĮą░ Gitee.
ąōą┤ąĄ ą▓čŗ čü čŹčéąĖą╝ čüčéą░ą╗ą║ąĖą▓ą░ąĄč鹥čüčī?
ąśą╝ąĄąĮąĮąŠ ą▓ čüčåąĄąĮą░čĆąĖčÅčģ, ą┐ąŠą┤ąŠą▒ąĮčŗčģ ą▓ą░čłąĄą╝čā ŌĆö ą┐čĆąĖ čüą▒ąŠčĆą║ąĄ ą┐čĆąŠčłąĖą▓ąŠą║ ą┤ą╗čÅ embedded-čāčüčéčĆąŠą╣čüčéą▓ (Luckfox Pico, Raspberry Pi, Orange Pi ąĖ čé.ą┤.) čü ą┐ąŠą╝ąŠčēčīčÄ čüą║čĆąĖą┐č鹊ą▓ ą▓čĆąŠą┤ąĄ build.sh. ąÆąĮčāčéčĆąĖ čéą░ą║ąĖčģ čüą║čĆąĖą┐č鹊ą▓ čćą░čüč鹊 ąĄčüčéčī ą▓čŗą▒ąŠčĆ source (ąĖčüč鹊čćąĮąĖą║ą░ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ). ą×ą▒čŗčćąĮąŠ čŹč鹊 ą▓čŗą│ą╗čÅą┤ąĖčé čéą░ą║:
ŌĆó github (ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗą╣, ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ ąÜąĖčéą░čÅ)ŌĆó gitee (ąĘąĄčĆą║ą░ą╗ąŠ, ą▒čŗčüčéčĆąŠąĄ ą┤ą╗čÅ ąÜąĖčéą░čÅ)ŌĆó ąśąĮąŠą│ą┤ą░ gitlab ąĖą╗ąĖ ą┤čĆčāą│ąĖąĄ.
ą¤čĆąĖą╝ąĄčĆ ąĖąĘ ą┐čĆą░ą║čéąĖą║ąĖ: ą┤ąŠą┐čāčüčéąĖą╝, čüą║čĆąĖą┐čéčā čüą▒ąŠčĆą║ąĖ ąĮčāąČąĄąĮ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ čÅą┤čĆą░ Linux (linux.git). ąÆą╝ąĄčüč鹊 č鹊ą│ąŠ čćč鹊ą▒čŗ ą║ą╗ąŠąĮąĖčĆąŠą▓ą░čéčī ąĄą│ąŠ čü https://github.com/torvalds/linux, čćč鹊 ą▒čāą┤ąĄčé ą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ąŠąĮ ą║ą╗ąŠąĮąĖčĆčāąĄčé ąĄą│ąŠ čü https://gitee.com/mirrors/linux.git, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠčćčéąĖ ą╝ą│ąĮąŠą▓ąĄąĮąĮąŠ.
ąśč鹊ą│:
Gitee Source ŌĆö čŹč鹊 č鹥čģąĮąĖč湥čüą║ąŠąĄ čĆąĄčłąĄąĮąĖąĄ ą┤ą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ąĖ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▓ąĮčāčéčĆąĖ ąÜąĖčéą░čÅ ą┐čāč鹥ą╝ čüąŠąĘą┤ą░ąĮąĖčÅ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą║ąŠą┐ąĖą╣ ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮčŗčģ opensource-čĆąĄą┐ąŠąĘąĖč鹊čĆąĖąĄą▓. ąÜąŠą│ą┤ą░ ą▓čŗ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čüą▒ąŠčĆą║ąĖ ą▓ąĖą┤ąĖč鹥 čāą┐ąŠą╝ąĖąĮą░ąĮąĖąĄ gitee, čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ ą▒čāą┤čāčé ą║ą░čćą░čéčī ą║ąŠą┤ ąĮąĄ čü ą╝ąĄą┤ą╗ąĄąĮąĮąŠą│ąŠ GitHub, ą░ čü ąĄą│ąŠ ą▒čŗčüčéčĆąŠą│ąŠ ą║ąĖčéą░ą╣čüą║ąŠą│ąŠ ąĘąĄčĆą║ą░ą╗ą░.
ąÆ ą▓ą░čłąĄą╝ čüą╗čāčćą░ąĄ, ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ./build.sh lunch, ą▓ą░ą╝, čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ, ą┐čĆąĄą┤ą╗ąŠąČą░čé ą▓čŗą▒čĆą░čéčī ą┐ą╗ą░čéč乊čĆą╝čā (ąĮą░ą┐čĆąĖą╝ąĄčĆ, luckfox_pico) ąĖ, ą▓ąŠąĘą╝ąŠąČąĮąŠ, ąĖčüč鹊čćąĮąĖą║ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ (github ąĖą╗ąĖ gitee). ąÆčŗą▒ąŠčĆ gitee ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāčüą║ąŠčĆąĖčé ą┐čĆąŠčåąĄčüčü, ąĄčüą╗ąĖ ą▓čŗ ąĮą░čģąŠą┤ąĖč鹥čüčī ą▓ ąÜąĖčéą░ąĄ ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą║ąĖčéą░ą╣čüą║ąŠąĄ ąČąĄą╗ąĄąĘąŠ/ą┐čĆąŠą▓ą░ą╣ą┤ąĄčĆą░.
TF card ŌĆö čŹč鹊 čüčéą░čĆąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ ą║ą░čĆčé microSD. ą¤ąŠ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗą╝ čüčéą░ąĮą┤ą░čĆčéą░ą╝ čŹč鹊 ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ.
ąÆ ą║ąŠąĮč鹥ą║čüč鹥 ąŠą┤ąĮąŠą┐ą╗ą░čéąĮčŗčģ ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą▓ LuckFox (ąĖ ą┤čĆčāą│ąĖčģ ą┐ąŠą┤ąŠą▒ąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ Rockchip), č鹥čĆą╝ąĖąĮ `media` ąĖą╝ąĄąĄčé ąŠč湥ąĮčī ą║ąŠąĮą║čĆąĄčéąĮąŠąĄ ąĖ ą▓ą░ąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
`Media ` ąĘą┤ąĄčüčī ŌĆö čŹč鹊 čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé "Multimedia" ąĖ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┐ąŠą┤čüąĖčüč鹥ą╝ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą░ ą▓ąĮčāčéčĆąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (SoC). ąŁč鹊 čåąĄą╗čŗą╣ ąĮą░ą▒ąŠčĆ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▒ą╗ąŠą║ąŠą▓ (IP-čÅą┤ąĄčĆ) ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ, ąŠčéą▓ąĄčćą░čÄčēąĖčģ ąĘą░ čĆą░ą▒ąŠčéčā čü ą▓ąĖą┤ąĄąŠ ąĖ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅą╝ąĖ.
ąĢčüą╗ąĖ ą│ąŠą▓ąŠčĆąĖčéčī ą┐čĆąŠčüč鹊, `media` ą▓ LuckFox ŌĆö čŹč鹊 ą▓čüčæ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ą╗ą░č鹥 "ą▓ąĖą┤ąĄčéčī" ąĖ "ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī".
[ą¦č鹊 ą▓čģąŠą┤ąĖčé ą▓ ą┐ąŠą┤čüąĖčüč鹥ą╝čā Media? ]
ąŁčéą░ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ ą┤ą▓ą░ ąŠčüąĮąŠą▓ąĮčŗčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ:
1 . ąÆąĖą┤ąĄąŠąĘą░čģą▓ą░čé (Video Input - VI). ąŁč鹊 ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ą▒ą╗ąŠą║ąĖ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ, ąŠčéą▓ąĄčćą░čÄčēąĖąĄ ąĘą░ ą┐čĆąĖčæą╝ ą▓ąĖą┤ąĄąŠ ąŠčé ą║ą░ą╝ąĄčĆ.
ISP (Image Signal Processor): "ą£ąŠąĘą│ąĖ" ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ. ą×ąĮ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé čüčŗčĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ (raw data) čü ą╝ą░čéčĆąĖčåčŗ ą║ą░ą╝ąĄčĆčŗ ą▓ ą┐čĆąĖą▓čŗčćąĮąŠąĄ ąĮą░ą╝ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖąĄ, ą▓čŗą┐ąŠą╗ąĮčÅčÅ:
ŌĆó ąöąĄą▒ąĄą╣ąĄčĆąĖąĘą░čåąĖčÄ (Demosaic) ŌĆö ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ čüčŗčĆčŗčģ ą┤ą░ąĮąĮčŗčģ čü Bayer-čäąĖą╗čīčéčĆą░ ą▓ čåą▓ąĄčéąĮąŠąĄ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖąĄ.ŌĆó ąÜąŠčĆčĆąĄą║čåąĖčÄ ą▒ąĄą╗ąŠą│ąŠ (AWB)ŌĆó ąÉą▓č鹊菹║čüą┐ąŠąĘąĖčåąĖčÄ (AE)ŌĆó ą¤ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ čłčāą╝ąŠą▓ (3DNR)ŌĆó ąĀąĄąĘą║ąŠčüčéčī (Sharpness)ŌĆó ąÜąŠčĆčĆąĄą║čåąĖčÄ ą╗ąĖąĮąĘ (LSC)
MIPI CSI (Camera Serial Interface): hardware-ąĖąĮč鹥čĆč乥ą╣čü, ą║ ą║ąŠč鹊čĆąŠą╝čā čäąĖąĘąĖč湥čüą║ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą║ą░ą╝ąĄčĆąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ą░čłąĖ ą║ą░ą╝ąĄčĆčŗ LuckFox).
VIPP (Video Input Post Processor): ą▒ą╗ąŠą║ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąĄą╣čłąĄą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čāąČąĄ čüč乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ (ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖąĄ, ąŠą▒čĆąĄąĘą║ą░).
2 . ąÆąĖą┤ąĄąŠą▓čŗą▓ąŠą┤ ąĖ ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ/ąöąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ (Video Output & Codec). ąŁč鹊 ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ą▒ą╗ąŠą║ąĖ, ąŠčéą▓ąĄčćą░čÄčēąĖąĄ ąĘą░ čüąČą░čéąĖąĄ, čĆą░čüą┐ą░ą║ąŠą▓ą║čā ąĖ ą▓čŗą▓ąŠą┤ ą▓ąĖą┤ąĄąŠ.
VPU (Video Processing Unit): hardware-菹Įą║ąŠą┤ąĄčĆ ąĖ ą┤ąĄą║ąŠą┤ąĄčĆ. ąśą╝ąĄąĮąĮąŠ ąŠąĮ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ąŠą┤ąĖčĆąŠą▓ą░čéčī (čüąČąĖą╝ą░čéčī) ą▓ąĖą┤ąĄąŠ čü ą║ą░ą╝ąĄčĆčŗ ą▓ č乊čĆą╝ą░čéčŗ **H.264** ąĖą╗ąĖ **H.265 (HEVC)** čü ąŠč湥ąĮčī ą╝ą░ą╗čŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąŁč鹊 ą║čĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĮąŠ ą┤ą╗čÅ ą▓ąĖą┤ąĄąŠčĆąĄą│ąĖčüčéčĆą░č鹊čĆąŠą▓, ą║ą░ą╝ąĄčĆ ąĮą░ą▒ą╗čÄą┤ąĄąĮąĖčÅ.
VOP (Video Output Processor): ą▒ą╗ąŠą║, čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ąŠą╝ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ ąĮą░ ą┤ąĖčüą┐ą╗ąĄą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠ HDMI ąĖą╗ąĖ č湥čĆąĄąĘ LVDS-ąĖąĮč鹥čĆč乥ą╣čü).
[ąōą┤ąĄ ą▓čŗ ą▓čüčéčĆąĄčćą░ąĄč鹥čüčī čü č鹥čĆą╝ąĖąĮąŠą╝ "media" ą▓ LuckFox? ]
1 . ąÆ Device Tree (`*.dts`): ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čüąĄą╣ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ `media` (ą║ą░ą║ąĖąĄ ą║ą░ą╝ąĄčĆčŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ, ąĖčģ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ, čĆąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ ISP) ą┐čĆąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ čäą░ą╣ą╗ąĄ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓.
2 . ąÆ čÅą┤čĆąĄ Linux (`kernel/`): ą┤čĆą░ą╣ą▓ąĄčĆčŗ, ąĮą░čģąŠą┤čÅčēąĖąĄčüčÅ ą▓ čĆą░ąĘą┤ąĄą╗ą░čģ čéąĖą┐ą░ `drivers/media/platform/rockchip/isp/`, `.../mipi-csi/`, `.../rkcif/`.
3 . ąÆ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ:
ŌĆó ąŻčéąĖą╗ąĖčéą░ `rkisp_demo`: ą┐ąŠąĘą▓ąŠą╗čÅąĄčé č鹥čüčéąĖčĆąŠą▓ą░čéčī ąĖ ąĮą░čüčéčĆą░ąĖą▓ą░čéčī čĆą░ą▒ąŠčéčā ISP (ąĘą░ą┤ą░ą▓ą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čåą▓ąĄč鹊ą║ąŠčĆčĆąĄą║čåąĖąĖ, čĆąĄąĘą║ąŠčüčéąĖ ąĖ čé.ą┤.).ŌĆó ąŻčéąĖą╗ąĖčéą░ `v4l2-ctl`: čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ Linux-čāčéąĖą╗ąĖčéą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą▓ąĖą┤ąĄąŠčāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (Video4Linux2). ą¦ąĄčĆąĄąĘ ąĮąĄčæ ą╝ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī čüą┐ąĖčüąŠą║ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą║ą░ą╝ąĄčĆ (`v4l2-ctl --list-devices`), ą┐ąŠą╗čāčćąĖčéčī č乊čĆą╝ą░čé ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ čü ą║ą░ą╝ąĄčĆčŗ ąĖ čé.ą┤.ŌĆó ąŻčéąĖą╗ąĖčéą░ `rkmpp`: ąĮą░ą▒ąŠčĆ čāčéąĖą╗ąĖčé ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü hardware-ą║ąŠą┤ąĄą║ąŠą╝ (VPU) ŌĆö ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ, ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąĖą┤ąĄąŠ.
ą¤čĆąĖą╝ąĄčĆ čĆą░ą▒ąŠč湥ą│ąŠ ą┐ąŠč鹊ą║ą░ (pipeline) `media`:
ąÜą░ą╝ąĄčĆą░ (Sensor)
-> MIPI CSI-2 Interface
ąśč鹊ą│ :
ąÆ ą║ąŠąĮč鹥ą║čüč鹥 LuckFox č鹥čĆą╝ąĖąĮ `media` ŌĆö čŹč鹊 ąĮąĄ ą░ą▒čüčéčĆą░ą║čéąĮąŠąĄ "ą╝ąĄą┤ąĖą░", ą░ ą║ąŠąĮą║čĆąĄčéąĮąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ ą╝ąŠčēąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠ-ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆą░čÅ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░:
* ąŚą░čģą▓ą░čé ą▓ąĖą┤ąĄąŠ čü ą║ą░ą╝ąĄčĆčŗ
ąśą╝ąĄąĮąĮąŠ čŹčéą░ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ čÅą▓ą╗čÅąĄčéčüčÅ ą║ą╗čÄč湥ą▓čŗą╝ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Rockchip ąĖ ą┤ąĄą╗ą░ąĄčé ą┐ą╗ą░čéčŗ LuckFox čéą░ą║ąĖą╝ąĖ ą┐ąŠą┐čāą╗čÅčĆąĮčŗą╝ąĖ ą┤ą╗čÅ ą┐čĆąŠąĄą║č鹊ą▓ ą║ąŠą╝ą┐čīčÄč鹥čĆąĮąŠą│ąŠ ąĘčĆąĄąĮąĖčÅ, ą▓ąĖą┤ąĄąŠąĮą░ą▒ą╗čÄą┤ąĄąĮąĖčÅ ąĖ ą┐ąŠč鹊ą║ąŠą▓ąŠą│ąŠ ą▓ąĄčēą░ąĮąĖčÅ.
Buildroot ŌĆö čŹč鹊 ąĮąĄ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ Linux (ą║ą░ą║ Ubuntu ąĖą╗ąĖ Debian), ą░ čüąĖčüč鹥ą╝ą░ ą░ą▓č鹊ą╝ą░čéąĖąĘą░čåąĖąĖ čüą▒ąŠčĆą║ąĖ . ąĢčæ ą│ą╗ą░ą▓ąĮą░čÅ ąĘą░ą┤ą░čćą░ ŌĆö čüąŠą▒čĆą░čéčī ą▓čüčæ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ (embedded Linux ) ąĖąĘ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ make .
ą¤čĆąĄą┤čüčéą░ą▓čīč鹥 čüąĄą▒ąĄ ą║ąŠąĮčüčéčĆčāą║č鹊čĆ ąĖą╗ąĖ ą║ąŠąĮą▓ąĄą╣ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠ ą▓ą░čłąĄą╝čā ąĘą░ą║ą░ąĘčā:
ŌĆó ąĪą║ą░čćąĖą▓ą░ąĄčé ąĖčüčģąŠą┤ąĮčŗąĄ ą║ąŠą┤čŗ ąĮčāąČąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ čÅą┤čĆą░ Linux, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝.čÅą┤čĆąŠ (kernel.img ), Device Tree (dtb) ąĖ, čüą░ą╝ąŠąĄ ą│ą╗ą░ą▓ąĮąŠąĄ, ą║ąŠčĆąĮąĄą▓čāčÄ čäą░ą╣ą╗ąŠą▓čāčÄ čüąĖčüč鹥ą╝čā (rootfs ) ŌĆö č鹊 ąĄčüčéčī ąĮą░ą▒ąŠčĆ ą▓čüąĄčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, čüąĖčüč鹥ą╝ąĮčŗčģ čāčéąĖą╗ąĖčé ąĖ ą▓ą░čłąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝, čāą┐ą░ą║ąŠą▓ą░ąĮąĮčŗą╣ ą▓ ąŠą┤ąĖąĮ čäą░ą╣ą╗.
ąōą╗ą░ą▓ąĮą░čÅ čäąĖą╗ąŠčüąŠčäąĖčÅ Buildroot ŌĆö čüąŠąĘą┤ą░ą▓ą░čéčī ą╝ąĖąĮąĖą╝ą░ą╗ąĖčüčéąĖčćąĮčŗąĄ ąĖ čŹčäč乥ą║čéąĖą▓ąĮčŗąĄ čüąĖčüč鹥ą╝čŗ ą▒ąĄąĘ ą╗ąĖčłąĮąĄą│ąŠ čüąŠčäčéą░, čćč鹊 ąĖą┤ąĄą░ą╗čīąĮąŠ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ąĖ čĆąĄčüčāčĆčüą░ą╝ąĖ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐ą╗ą░čé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ Luckfox Pico Mini.
Buildroot ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╝ (Luckfox) ą▓ čüąŠčüčéą░ą▓ąĄ Software Development Kit (SDK ), ąĖ ą▓ąĮčāčéčĆąĖ čŹč鹊ą│ąŠ SDK Buildroot čÅą▓ą╗čÅąĄčéčüčÅ ąŠčüąĮąŠą▓ąĮčŗą╝ ą┤ą▓ąĖąČą║ąŠą╝ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ ą▓čüąĄą╣ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ.
ąÜąŠą│ą┤ą░ ą▓čŗ čüą║ą░čćąĖą▓ą░ąĄč鹥 ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ SDK ą┤ą╗čÅ Luckfox Pico, ąĄą│ąŠ čüčéčĆčāą║čéčāčĆą░ ąŠą▒čŗčćąĮąŠ ą▓ą║ą╗čÄčćą░ąĄčé:
buildroot/ linux/ uboot/ output/
ą¤čĆąŠčåąĄčüčü čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▓čŗą│ą╗čÅą┤ąĖčé čéą░ą║:
1 . ąÆčŗ ą▓čģąŠą┤ąĖč鹥 ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ SDK.
2 . ąŚą░ą┐čāčüą║ą░ąĄč鹥 ą║ąŠą╝ą░ąĮą┤čā ./build.sh
- ąÜąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčé ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ (gcc) ą┤ą╗čÅ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ARM.
3 . ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą▓ ą┐ą░ą┐ą║ąĄ output/ ą▓čŗ ą┐ąŠą╗čāčćą░ąĄč鹥 čäą░ą╣ą╗čŗ rootfs.img , kernel.img ąĖ ą┤čĆčāą│ąĖąĄ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐čĆąŠčłąĖčéčī ąĮą░ ą▓ą░čłčā ą┐ą╗ą░čéčā čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ RKDevTool .
Buildroot ą┤ą╗čÅ Luckfox Pico Mini ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ čüąŠąŠą▒čĆą░ąČąĄąĮąĖčÅą╝:
ŌĆó ąøąĄą│ą║ąŠą▓ąĄčüąĮąŠčüčéčī: ąĖč鹊ą│ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠč湥ąĮčī ą╝ą░ą╗ąĄąĮčīą║ąŠą╣. ą×ą▒čĆą░ąĘ rootfs.img ą╝ąŠąČąĄčé ą▓ąĄčüąĖčéčī ą▓čüąĄą│ąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ąĄčüčÅčéą║ąŠą▓ ą╝ąĄą│ą░ą▒ą░ą╣čé, čćč鹊 ąĖą┤ąĄą░ą╗čīąĮąŠ ą┤ą╗čÅ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
[ąÉą╗čīč鹥čĆąĮą░čéąĖą▓čŗ Buildroot ]
ą¦ą░čüč鹊 Buildroot čüčĆą░ą▓ąĮąĖą▓ą░čÄčé čü Yocto Project. ą×ą▒ą░ čĆąĄčłą░čÄčé ąŠą┤ąĮčā ąĘą░ą┤ą░čćčā, ąĮąŠ ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā:
Buildroot: ą¤čĆąŠčēąĄ ą▓ ąŠčüą▓ąŠąĄąĮąĖąĖ, ą▒čŗčüčéčĆąĄąĄ čüąŠą▒ąĖčĆą░ąĄčé čüąĖčüč鹥ą╝čā, ąĖą┤ąĄą░ą╗ąĄąĮ ą┤ą╗čÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠčüčéčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖ ą▒čŗčüčéčĆąŠą│ąŠ ą┐čĆąŠč鹊čéąĖą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ (ą║ą░ą║ ą▓ čüą╗čāčćą░ąĄ čü Luckfox Pico).
Yocto: ąæąŠą╗ąĄąĄ ą╝ąŠčēąĮčŗą╣, ą│ąĖą▒ą║ąĖą╣ ąĖ čüą╗ąŠąČąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčé, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ąŠą▓ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą╝ąĮąŠąČąĄčüčéą▓ą░ ą┐ą░ą║ąĄč鹊ą▓ ąĖ ą░čĆčģąĖč鹥ą║čéčāčĆ. ąĢą│ąŠ ą║čĆąĖą▓ą░čÅ ąŠą▒čāč湥ąĮąĖčÅ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą║čĆčāč湥.
ąśč鹊ą│:
Buildroot ą▓ ą║ąŠąĮč鹥ą║čüč鹥 Luckfox Pico Mini ŌĆö čŹč鹊 "čüąĄčĆą┤čåąĄ" ą┐čĆąŠčåąĄčüčüą░ čüą▒ąŠčĆą║ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ. ąŁč鹊 ąĖąĮčüčéčĆčāą╝ąĄąĮčé, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą▓čĆą░čēą░ąĄčé ąĖčüčģąŠą┤ąĮčŗąĄ ą║ąŠą┤čŗ čÅą┤čĆą░ Linux, ąĘą░ą│čĆčāąĘčćąĖą║ą░ U-Boot ąĖ čüąŠč鹥ąĮ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ ą▓ ąĄą┤ąĖąĮčŗą╣, ą│ąŠč鹊ą▓čŗą╣ ą║ ą┐čĆąŠčłąĖą▓ą║ąĄ, ą╝ąĖąĮąĖą╝ą░ą╗ąĖčüčéąĖčćąĮčŗą╣ ąĖ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąŠą▒čĆą░ąĘ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą▓čĆą░čēą░ąĄčé ą│ąŠą╗ąŠąĄ "ąČąĄą╗ąĄąĘąŠ" Luckfox Pico ą▓ čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą╝ąĖąĮąĖ-ą║ąŠą╝ą┐čīčÄč鹥čĆ čü Linux, čüą┐ąŠčüąŠą▒ąĮčŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą▓ą░čłąĖ ąĘą░ą┤ą░čćąĖ.
ąæąĄąĘ Buildroot ą▓ą░ą╝ ą┐čĆąĖčłą╗ąŠčüčī ą▒čŗ ą▓čĆčāčćąĮčāčÄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĖ ą║ąŠą╝ą┐ąŠąĮąŠą▓ą░čéčī ą▓čüąĄ čćą░čüčéąĖ ą×ąĪ, čćč鹊 čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄą▓ąĄčĆąŠčÅčéąĮąŠ čüą╗ąŠąČąĮąŠą╣ ąĖ čéčĆčāą┤ąŠąĄą╝ą║ąŠą╣ ąĘą░ą┤ą░č湥ą╣. Buildroot ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆčāąĄčé čŹč鹊čé ą┐čĆąŠčåąĄčüčü ą┤ąŠ ąŠą┤ąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ.
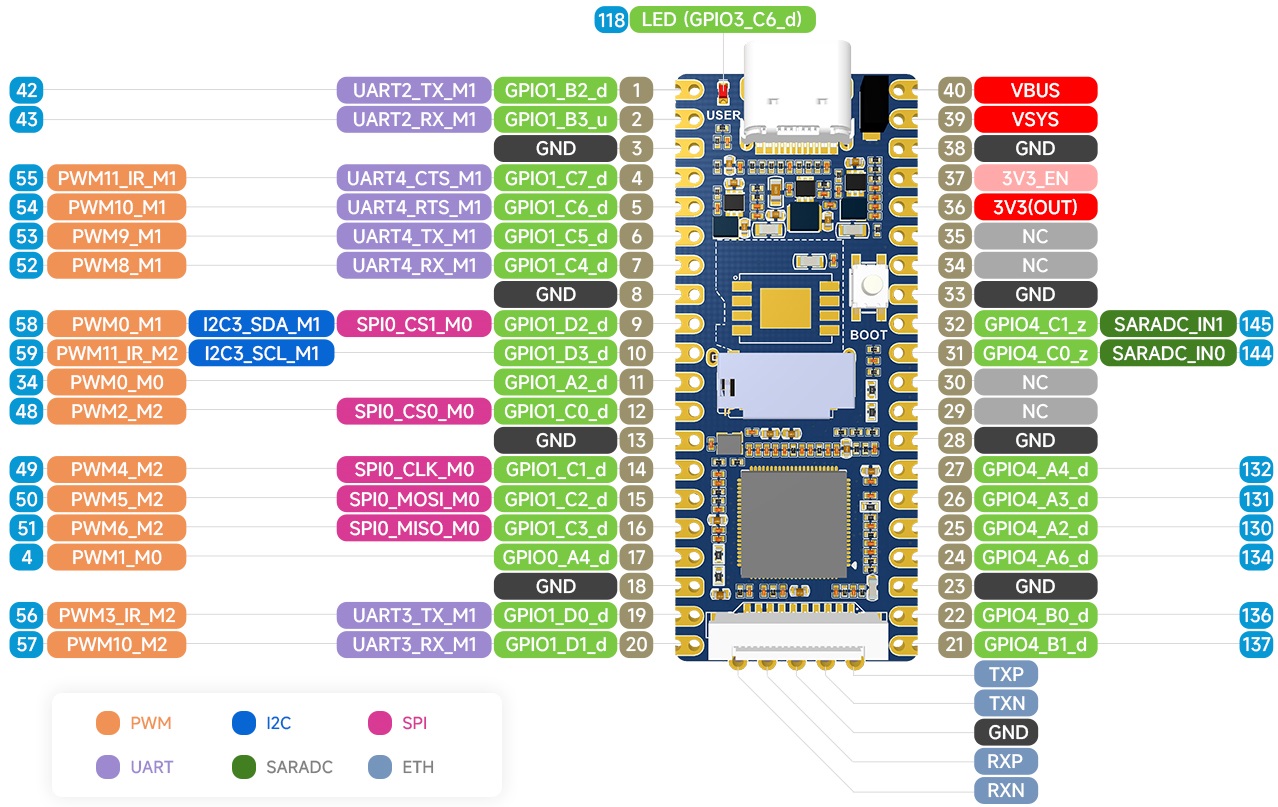
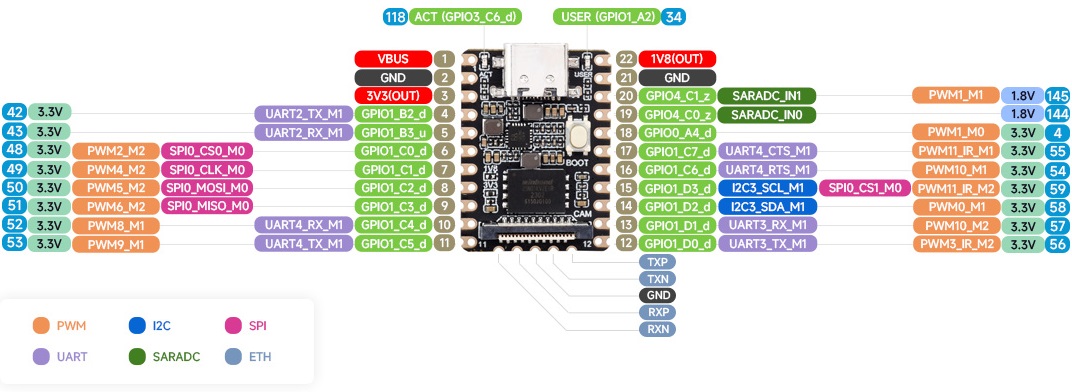
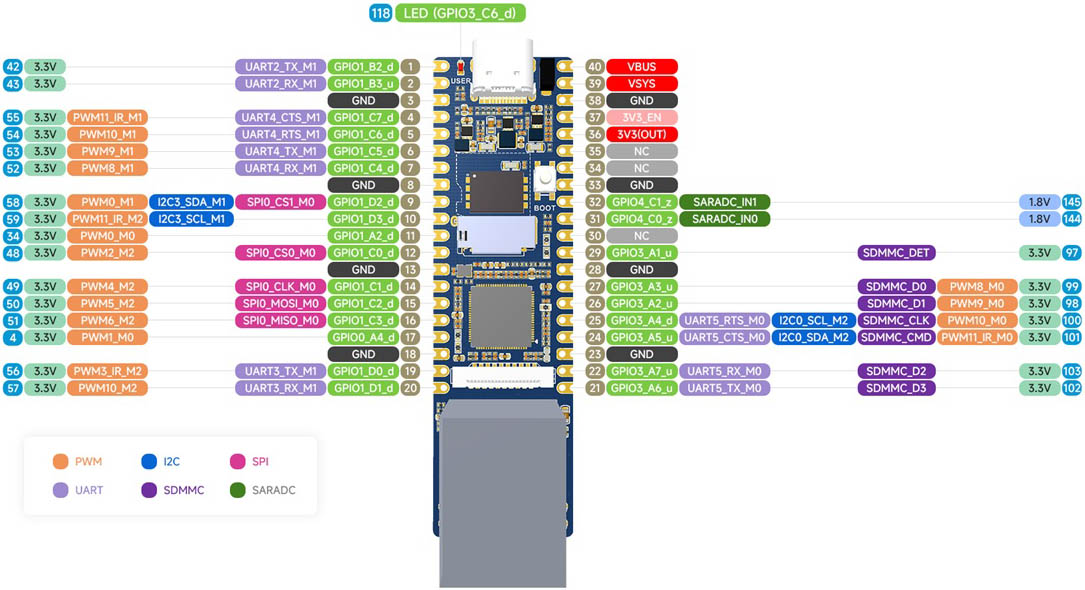
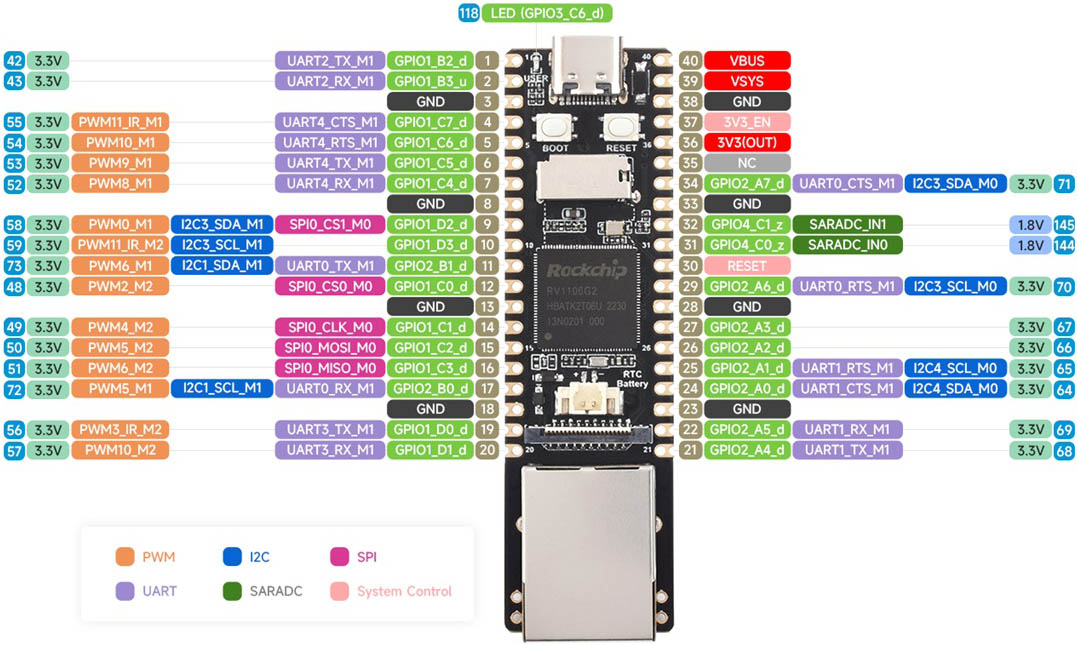
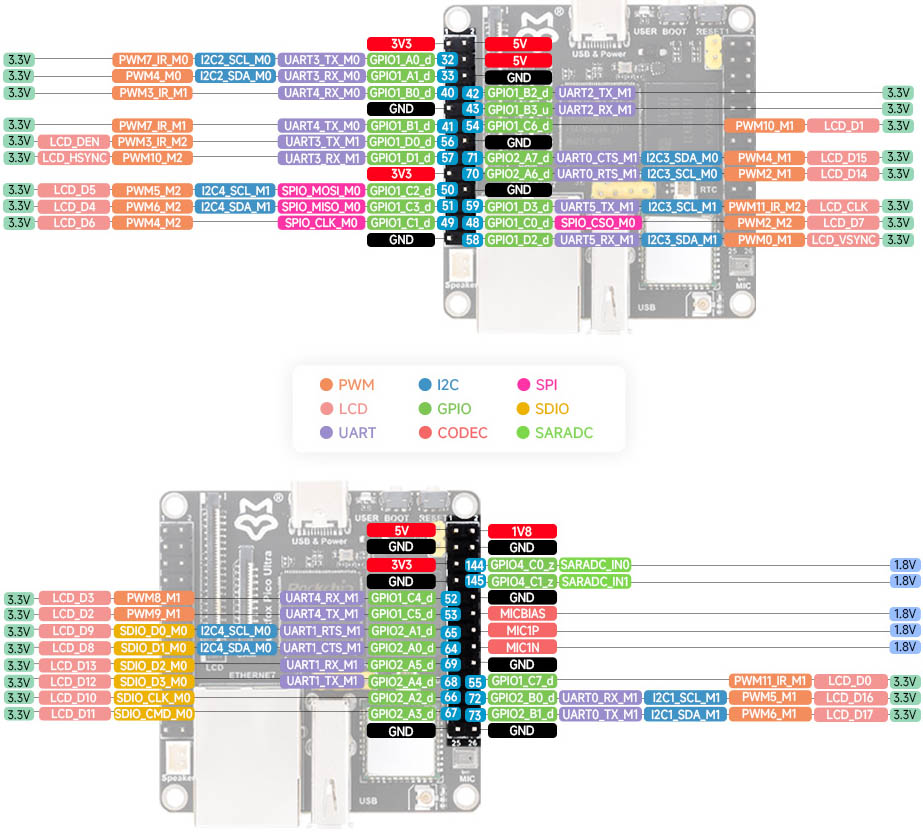
ą×ą┐čĆąĄą┤ąĄą╗ąĖčéčī ą╝ąŠą┤ąĄą╗čī ą┐ą╗ą░čéčŗ LuckFox Pico ą╝ąŠąČąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ, ąŠčé čüą░ą╝ąŠą│ąŠ ą┐čĆąŠčüč鹊ą│ąŠ (ą▓ąĖąĘčāą░ą╗čīąĮčŗą╣ ąŠčüą╝ąŠčéčĆ) ą┤ąŠ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗčģ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ).
[ąĪą┐ąŠčüąŠą▒ 1: ą▓ąĖąĘčāą░ą╗čīąĮčŗą╣ ąŠčüą╝ąŠčéčĆ (cą░ą╝čŗą╣ ą▒čŗčüčéčĆčŗą╣ ąĖ ą┐čĆąŠčüč鹊ą╣) ]
ąŁč鹊 ą┐ąĄčĆą▓čŗą╣ ąĖ čćą░čüč鹊 čüą░ą╝čŗą╣ čŹčäč乥ą║čéąĖą▓ąĮčŗą╣ čłą░ą│. ą¤ąŠčüą╝ąŠčéčĆąĖč鹥 ąĮą░ ą▓ą░čłčā ą┐ą╗ą░čéčā ąĖ ąĮą░ą╣ą┤ąĖč鹥 ą║ą╗čÄč湥ą▓čŗąĄ ąŠčéą╗ąĖčćąĖčÅ. ąØąĖąČąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą║ą╗čÄč湥ą▓čŗąĄ ą┐čĆąĖąĘąĮą░ą║ąĖ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ.
1 . ąĀą░ąĘą╝ąĄčĆ ąĖ č乊čĆą╝ą░ ą┐ą╗ą░čéčŗ:
LuckFox Pico : čüą░ą╝ą░čÅ ą╝ą░ą╗ąĄąĮčīą║ą░čÅ ą┐ą╗ą░čéą░ (ą┐čĆąĖą╝ąĄčĆąĮąŠ 20x20 ą╝ą╝), ą║ą▓ą░ą┤čĆą░čéąĮąŠą╣ č乊čĆą╝čŗ. ąÆčŗą│ą╗čÅą┤ąĖčé ą║ą░ą║ "ą│ąŠą╗čŗą╣" ą╝ąŠą┤čāą╗čī ą▒ąĄąĘ ą┐ąŠčĆč鹊ą▓.LuckFox Pico Plus : čćčāčéčī ą▒ąŠą╗čīčłąĄ (ą┐čĆąĖą╝ąĄčĆąĮąŠ 30x30 ą╝ą╝), č鹊ąČąĄ ą║ą▓ą░ą┤čĆą░čéąĮąŠą╣ č乊čĆą╝čŗ. ą¦ą░čüč鹊 ąĮą░ ą╝ąŠą┤čāą╗ąĄ ąĄčüčéčī ą╝ąĄčéą░ą╗ą╗ąĖč湥čüą║ą░čÅ ą║čĆčŗčłą║ą░-čĆą░ą┤ąĖą░č鹊čĆ.LuckFox Pico Mini : ąĖą╝ąĄąĄčé ą▓čŗčéčÅąĮčāčéčāčÄ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčāčÄ č乊čĆą╝čā (ą┐čĆąĖą╝ąĄčĆąĮąŠ 56x26 ą╝ą╝). ąÆčüąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ čĆą░čüą┐ą░čÅąĮčŗ ą┐čĆčÅą╝ąŠ ąĮą░ ą┐ą╗ą░č鹥, ą╝ąŠą┤čāą╗čīąĮąŠą╣ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ ąĮąĄčé. ąØą░ ąĮąĖąČąĮąĄą╣ čüč鹊čĆąŠąĮąĄ ą┐ą╗ą░čéčŗ (ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╣ ą║ąĮąŠą┐ą║ąĄ BOOT) čłąĄą╗ą║ąŠą│čĆą░čäąĖąĄą╣ ąĮą░ąĮąĄčüąĄąĮą░ ąĮą░ą┤ą┐ąĖčüčī "Luckfox Pico Mini".LuckFox Pico Pro : cą░ą╝ą░čÅ ą▒ąŠą╗čīčłą░čÅ ą┐ą╗ą░čéą░ (ą┐čĆąĖą╝ąĄčĆąĮąŠ 56x56 ą╝ą╝), ąĖą╝ąĄąĄčé ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčāčÄ č乊čĆą╝čā čü ą╝ąĮąŠąČąĄčüčéą▓ąŠą╝ čĆą░ąĘčŖąĄą╝ąŠą▓.
2 . ąØą░ą╗ąĖčćąĖąĄ ąĖ čéąĖą┐ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓:
Ethernet (ąĪąĄč鹥ą▓ąŠą╣ ą┐ąŠčĆčé RJ45): ąĄčüčéčī č鹊ą╗čīą║ąŠ čā LuckFox Pico Mini A ąĖ LuckFox Pico Mini B. ąŻ ą╝ąŠą┤ąĄą╗ąĖ "A" ąŠą┤ąĖąĮ ą┐ąŠčĆčé, čā ą╝ąŠą┤ąĄą╗ąĖ "B" ą┤ą▓ą░ ą┐ąŠčĆčéą░.USB Type-C (ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ą┤ą░ąĮąĮčŗčģ): ąĄčüčéčī čā ą▓čüąĄčģ ą╝ąŠą┤ąĄą╗ąĄą╣ Mini, Plus ąĖ Pro. ąŻ ą▒ą░ąĘąŠą▓ąŠą│ąŠ Pico ąĄą│ąŠ ąĮąĄčé (ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé č鹊ą╗čīą║ąŠ ą║ąŠąĮčéą░ą║čéčŗ ą┤ą╗čÅ ą┐ą░ą╣ą║ąĖ).ąĀą░ąĘčŖąĄą╝ ą┤ą╗čÅ ą║ą░ą╝ąĄčĆčŗ (MIPI CSI): ąĄčüčéčī čā Mini B, Plus ąĖ Pro. ąŻ Mini A ąĖ ą▒ą░ąĘąŠą▓ąŠą│ąŠ Pico ąĄą│ąŠ ąĮąĄčé.ąĀą░ąĘčŖąĄą╝ ą┤ą╗čÅ ą┤ąĖčüą┐ą╗ąĄčÅ (MIPI DSI): ąĄčüčéčī č鹊ą╗čīą║ąŠ čā LuckFox Pico Pro.
3 . ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĖ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą║ąŠąĮčéą░ą║č鹊ą▓ GPIO:
LuckFox Pico: 24 ą║ąŠąĮčéą░ą║čéą░ (2 čĆčÅą┤ą░ ą┐ąŠ 12 čü ą║ą░ąČą┤ąŠą╣ čüč鹊čĆąŠąĮčŗ).
LuckFox Pico:
LuckFox Pico Mini A/B:
B-ą▓ąĄčĆčüąĖčÅ LuckFox Pico Mini ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé A-ą▓ąĄčĆčüąĖąĖ č鹊ą╗čīą║ąŠ ąĮą░ą╗ąĖčćąĖąĄą╝ čĆą░čüą┐ą░čÅąĮąĮąŠą╣ ąĮą░ ą┐ą╗ą░č鹥 Flash ą┐ą░ą╝čÅčéąĖ ąĮą░ 128 ą£ą▒. ąØą░ Flash ą╝ąŠąČąĮąŠ ą┐ąŠčüčéą░ą▓ąĖčéčī ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčāčÄ čüąĖčüč鹥ą╝čā, ąĮąŠ ąŠą▒čŖąĄą╝ą░ 128 ą£ą▒ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ą░ą╗ąŠ (čģąŠčéčÅ ą▓ ą▓ą░čĆąĖą░ąĮč鹥 čüą▒ąŠčĆą║ąĖ Buildroot ą┤ą╗čÅ ą╝ąĮąŠą│ąĖčģ ąĘą░ą┤ą░čć ą╝ąŠąČąĄčé čģą▓ą░čéąĖčéčī). ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘą░ą│čĆčāąĘą║čā čü ą║ą░čĆčéčŗ SD, ą│ą┤ąĄ ą┐ą░ą╝čÅčéąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą╝ąĮąŠą│ąŠ ą▒ąŠą╗čīčłąĄ, č鹊 Flash ąĮą░ ą┐ą╗ą░č鹥 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░ ą▓ą░ąČąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╗ąŠą│ąŠą▓.
LuckFox Pico Plus:
LuckFox Pico Pro/Max:
LuckFox Pico Ultra/Ultra W:
[ąĪą┐ąŠčüąŠą▒ 2: ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ č湥čĆąĄąĘ Linux (ąĄčüą╗ąĖ ą┐ą╗ą░čéą░ čāąČąĄ ą┐čĆąŠčłąĖčéą░) ]
ąĢčüą╗ąĖ ą┐ą╗ą░čéą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ąĖ čā ą▓ą░čü ąĄčüčéčī ą┤ąŠčüčéčāą┐ ą║ ąĄčæ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ (č湥čĆąĄąĘ UART, SSH ąĖą╗ąĖ ADB [4]), č鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠą╝ą░ąĮą┤.
1 . ą¤ąŠčüą╝ąŠčéčĆąĄčéčī ą╝ąŠą┤ąĄą╗čī ą▓ `proc/device-tree/` (čüą░ą╝čŗą╣ č鹊čćąĮčŗą╣ čüą┐ąŠčüąŠą▒). ą¤čĆąŠą┐čĆąĖąĄčéą░čĆąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ą╗ą░čéčŗ čģčĆą░ąĮčÅčéčüčÅ ą▓ Device Tree. ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
# cat /proc/device-tree/model
ąĀąĄąĘčāą╗čīčéą░čé ą▒čāą┤ąĄčé ą┐čĆčÅą╝ąŠ čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ ą╝ąŠą┤ąĄą╗čī, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
`luckfox,pico` ŌåÆ LuckFox Pico
2 . ą¤ąŠčüą╝ąŠčéčĆąĄčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ. ąĪą╗ąĄą┤čāčÄčēą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą║ą░ąČąĄčé ąĮąĄ ą╝ąŠą┤ąĄą╗čī ą┐ą╗ą░čéčŗ, ą░ ą╝ąŠą┤ąĄą╗čī čćąĖą┐ą░, čŹč鹊 č鹊ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĄąĘąĮąŠ.
[root@luckfox ]# cat /proc/cpuinfo
processor : 0
model name : ARMv7 Processor rev 5 (v7l)
BogoMIPS : 26.08
Features : half thumb fastmult vfp edsp neon vfpv3 tls vfpv4 idiva idivt vfpd32 lpae
CPU implementer : 0x41
CPU architecture: 7
CPU variant : 0x0
CPU part : 0xc07
CPU revision : 5
3 . ą¤čĆąŠą▓ąĄčĆąĖčéčī ąĮą░ą╗ąĖčćąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ (ą║ąŠčüą▓ąĄąĮąĮčŗą╣ ą╝ąĄč鹊ą┤). ą¤čĆąŠą▓ąĄčĆąĖčéčī čüąĄč鹥ą▓čŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ąŠą╝ą░ąĮą┤ą░ `ifconfig -a` ąĖą╗ąĖ `ip addr`:
[root@luckfox ]# ifconfig -a
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:11948 errors:0 dropped:0 overruns:0 frame:0
TX packets:11948 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:884044 (863.3 KiB) TX bytes:884044 (863.3 KiB)
usb0 Link encap:Ethernet HWaddr 06:2C:70:05:43:2B
inet addr:172.32.0.93 Bcast:172.32.255.255 Mask:255.255.0.0
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:2043 errors:0 dropped:1563 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:334536 (326.6 KiB) TX bytes:0 (0.0 B)ip addr
1: lo: < LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: usb0: < BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast qlen 1000
link/ether 06:2c:70:05:43:2b brd ff:ff:ff:ff:ff:ff
inet 172.32.0.93/16 brd 172.32.255.255 scope global usb0
valid_lft forever preferred_lft forever
ąĢčüą╗ąĖ ą▓ąĖą┤ąĖč鹥 `eth0` ąĖ `eth1`, č鹊 čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ čŹč鹊 Pico Mini B. ąĢčüą╗ąĖ ą▓ąĖą┤ąĖč鹥 č鹊ą╗čīą║ąŠ `eth0`, č鹊 čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ čŹč鹊 Pico Mini A. ąĢčüą╗ąĖ Ethernet-ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ąĮąĄčé ą▓ąŠąŠą▒čēąĄ, č鹊 čŹč鹊 ą▒ą░ąĘąŠą▓ą░čÅ Pico (ą▒ąĄąĘ Ethernet).
ą¤čĆąŠą▓ąĄčĆąĖčéčī ąĮą░ą╗ąĖčćąĖąĄ ą░čāą┤ąĖąŠčāčüčéčĆąŠą╣čüčéą▓ą░: ą║ąŠą╝ą░ąĮą┤ą░ `ls /dev/snd/`.
[root@luckfox ]# ls /dev/snd/ by-path controlC0 pcmC0D0c pcmC0D0p
ąØą░ą╗ąĖčćąĖąĄ ąĘą▓čāą║ąŠą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ čģą░čĆą░ą║č鹥čĆąĮąŠ ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĄą╣ Plus ąĖ Pro.
[ąĪą┐ąŠčüąŠą▒ 3: ą┐ąŠ ąĮą░ą┤ą┐ąĖčüčÅą╝ ąĮą░ čāą┐ą░ą║ąŠą▓ą║ąĄ ąĖą╗ąĖ ą┐ą╗ą░č鹥 ]
ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čī čćą░čüč鹊 ąĮą░ąĮąŠčüąĖčé čłąĄą╗ą║ąŠą│čĆą░čäąĖčÄ čü ąĮą░ąĘą▓ą░ąĮąĖąĄą╝ ą╝ąŠą┤ąĄą╗ąĖ ąĮą░ čüą░ą╝čā ą┐ą╗ą░čéčā. ąśčēąĖč鹥 ąĮą░ą┤ą┐ąĖčüąĖ čéąĖą┐ą░ "Pico", "Pico Mini", "Pico Plus" ąĖą╗ąĖ "Pico Pro".
ąÜąŠčĆąŠą▒ą║ą░ ąĖą╗ąĖ ą░ąĮčéąĖčüčéą░čéąĖč湥čüą║ąĖą╣ ą┐ą░ą║ąĄčé, ą▓ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąĖčłą╗ą░ ą┐ą╗ą░čéą░, ą┐ąŠčćčéąĖ ą▓čüąĄą│ą┤ą░ ąĖą╝ąĄčÄčé ąĮą░ą║ą╗ąĄą╣ą║čā čü č鹊čćąĮčŗą╝ čāą║ą░ąĘą░ąĮąĖąĄą╝ ą╝ąŠą┤ąĄą╗ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, "LuckFox Pico Mini B").
BusyBox ŌĆö čŹč鹊 ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą╝ąĄąĮčÅąĄčé čüąŠą▒ąŠą╣ čüąŠčéąĮąĖ ą╝ą░ą╗ąĄąĮčīą║ąĖčģ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ UNIX-čāčéąĖą╗ąĖčé (ą║ąŠą╝ą░ąĮą┤), čéą░ą║ąĖčģ ą║ą░ą║:
`ls`, `cp`, `mv`, `mkdir`, `rm` (ą║ąŠą╝ą░ąĮą┤čŗ čĆą░ą▒ąŠčéčŗ čü čäą░ą╣ą╗ą░ą╝ąĖ)
ąś čéą░ą║ąČąĄ ą╝ąĮąŠą│ąĖąĄ ą┤čĆčāą│ąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ. ąŁč鹊 ą▓ąĖą┤ąĮąŠ ą┐ąŠ ą╝ąĮąŠąČąĄčüčéą▓čā čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║ąĖčģ čüčüčŗą╗ąŠą║ čü ą║ąŠą╝ą░ąĮą┤ ąĮą░ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ busybox:
[root@luckfox ]# ls -la /bin
total 5936
drwxrwxr-x 2 1000 1000 5768 Sep 16 2025 .
drwxr-xr-x 20 1000 1000 1584 Sep 16 2025 ..
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 arch -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 ash -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 base32 -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 base64 -> busybox
-rwxr-xr-x 1 1000 1000 990960 Sep 16 2025 bash
-rwxr-xr-x 1 1000 1000 857296 Sep 16 2025 busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 cat -> busybox
-rwxr-xr-x 1 1000 1000 9304 Sep 16 2025 chattr
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 chgrp -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 chmod -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 chown -> busybox
-rwxr-xr-x 1 1000 1000 1342 Sep 16 2025 compile_et
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 cp -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 cpio -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 date -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 dd -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 df -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 dmesg -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 dnsdomainname -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 dumpkmap -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 echo -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 egrep -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 false -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 fdflush -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 fgrep -> busybox
-rwxr-xr-x 1 1000 1000 3477 Sep 16 2025 gcore
-rwxr-xr-x 1 1000 1000 3486000 Sep 16 2025 gdb
-rwxr-xr-x 1 1000 1000 4045 Sep 16 2025 gdb-add-index
-rwxr-xr-x 1 1000 1000 253404 Sep 16 2025 gdbserver
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 getopt -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 grep -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 gunzip -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 gzip -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 hostname -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 kill -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 link -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 linux32 -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 linux64 -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 ln -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 login -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 ls -> busybox
-rwxr-xr-x 1 1000 1000 9304 Sep 16 2025 lsattr
-rwxrwxr-x 1 1000 1000 17900 Sep 16 2025 memtester
-rwxr-xr-x 1 1000 1000 1102 Sep 16 2025 mk_cmds
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 mkdir -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 mknod -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 mktemp -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 more -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 mount -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 mountpoint -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 mt -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 mv -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 netstat -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 nice -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 nuke -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 pidof -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 ping -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 pipe_progress -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 printenv -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 ps -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 pwd -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 resume -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 rm -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 rmdir -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 run-parts -> busybox
-rwxrwxr-x 1 1000 1000 88 Sep 16 2025 sdkinfo
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 sed -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 setarch -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 setpriv -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 setserial -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 sh -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 sleep -> busybox
-rwxr-xr-x 1 1000 1000 236644 Sep 16 2025 stressapptest
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 stty -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 su -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 sync -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 tar -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 touch -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 true -> busybox
-rwxr-xr-x 1 1000 1000 178592 Sep 16 2025 udevadm
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 umount -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 uname -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 usleep -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 vi -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 watch -> busybox
lrwxrwxrwx 1 1000 1000 7 Sep 16 2025 zcat -> busybox
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ą░ąČą┤ą░čÅ ąĖąĘ čŹčéąĖčģ ą║ąŠą╝ą░ąĮą┤ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ąĮąĄ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, ą░ ą▓čüąĄą│ąŠ ą╗ąĖčłčī "čüčüčŗą╗ą║ąŠą╣" ąĮą░ ą│ą╗ą░ą▓ąĮčŗą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ `busybox`. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ą▓čŗ ą▓čŗąĘčŗą▓ą░ąĄč鹥 ą║ąŠą╝ą░ąĮą┤čā `ls`, ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čüąĖčüč鹥ą╝ą░ ąĘą░ą┐čāčüą║ą░ąĄčé `busybox ls`, ąĖ BusyBox "ą┐ąŠąĮąĖą╝ą░ąĄčé", čćč鹊 ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čäčāąĮą║čåąĖčÄ `ls`.
ą¤ąŠč湥ą╝čā BusyBox ąÜąĀąśąóąśą¦ąĢąĪąÜąś ą▓ą░ąČąĄąĮ ą┤ą╗čÅ LuckFox Pico Mini? ąśą╝ąĄąĮąĮąŠ ąĘą┤ąĄčüčī ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ BusyBox čĆą░čüą║čĆčŗą▓ą░čÄčéčüčÅ ą▓ ą┐ąŠą╗ąĮąŠą╣ ą╝ąĄčĆąĄ:
1 . ąŁą║ąŠąĮąŠą╝ąĖčÅ ą╝ąĄčüčéą░ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ (čćč鹊 ą║čĆą░ą╣ąĮąĄ ą▓ą░ąČąĮąŠ!):
- LuckFox Pico Mini ąĖą╝ąĄąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ ąŠą▒čŖąĄą╝ čäą╗ąĄčł-ą┐ą░ą╝čÅčéąĖ (ąŠą▒čŗčćąĮąŠ 4GB ąĖą╗ąĖ 16GB eMMC), čćą░čüčéčī ą║ąŠč鹊čĆąŠą╣ ąĘą░ąĮčÅčéą░ čÅą┤čĆąŠą╝ Linux ąĖ ą▓ą░čłąĖą╝ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝ąĖ.
2 . ąŁą║ąŠąĮąŠą╝ąĖčÅ ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ: ąĘą░ą┐čāčēąĄąĮąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĘą░ąĮąĖą╝ą░čÄčé ąŠą┐ąĄčĆą░čéąĖą▓ąĮčāčÄ ą┐ą░ą╝čÅčéčī (RAM). ąóą░ą║ ą║ą░ą║ BusyBox ŌĆö čŹč鹊 ąŠą┤ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ą░ ąĮąĄ ą╝ąĮąŠąČąĄčüčéą▓ąŠ, ąŠąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ąĄąĮčīčłąĄ RAM ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘą░ą┤ą░čć.
3 . ąŻą┐čĆąŠčēąĄąĮąĖąĄ čüą▒ąŠčĆą║ąĖ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ: čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠčēąĄ čāą┐čĆą░ą▓ą╗čÅčéčī ąŠą┤ąĮąĖą╝ ą┐ą░ą║ąĄč鹊ą╝ (BusyBox), ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąĄčüčī ą▒ą░ąĘąŠą▓čŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗, ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ čćč鹊ą▒čŗ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čüąŠčéąĮąĖ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą╝ąĄą╗ą║ąĖčģ čāčéąĖą╗ąĖčé. ą¤čĆąĖ čüą▒ąŠčĆą║ąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ Buildroot (čüą╝. Q002) ą┐čĆąŠčüč鹊 ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ BusyBox čü ąĮčāąČąĮčŗą╝ ąĮą░ą▒ąŠčĆąŠą╝ čäčāąĮą║čåąĖą╣.
4 . ąĪą║ąŠčĆąŠčüčéčī ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī: BusyBox ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ąĮą░ čüąĖčüč鹥ą╝ą░čģ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ąĖ čĆąĄčüčāčĆčüą░ą╝ąĖ, čéą░ą║ąĖčģ ą║ą░ą║ LuckFox Pico Mini. ąĢą│ąŠ ą║ąŠą┤ ąĮą░ą┐ąĖčüą░ąĮ čü čāą┐ąŠčĆąŠą╝ ąĮą░ ą╝ąĖąĮąĖą╝ą░ą╗ąĖąĘą╝ ąĖ čüą║ąŠčĆąŠčüčéčī.
ąśčéą░ą║, ą║ąŠą│ą┤ą░ ą▓čŗ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄč鹥čüčī ą║ čüą▓ąŠąĄą╣ ą┐ą╗ą░č鹥 č湥čĆąĄąĘ UART, SSH ąĖą╗ąĖ ADB ąĖ ą┐ąŠą┐ą░ą┤ą░ąĄč鹥 ą▓ ą║ąŠą╝ą░ąĮą┤ąĮčāčÄ čüčéčĆąŠą║čā ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą╣ čüąĖčüč鹥ą╝čŗ, ą┐čĆą░ą║čéąĖč湥čüą║ąĖ čü ą║ą░ąČą┤čŗą╝ ą▓ą░čłąĖą╝ ą┤ąĄą╣čüčéą▓ąĖąĄą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ čü BusyBox.
ą¤čĆąŠą▓ąĄčĆą║ą░, čćč鹊 ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 BusyBox: ą▓ą▓ąĄą┤ąĖč鹥 ą╗čÄą▒čāčÄ ą║ąŠą╝ą░ąĮą┤čā čü ą║ą╗čÄč湊ą╝ --help, ąĖ ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čüąĖą│ąĮą░čéčāčĆčā BusyBox. ąØą░ą┐čĆąĖą╝ąĄčĆ:
[root@luckfox ]# ls --help
BusyBox v1.36.1 (2025-09-16 13:42:36 MSK) multi-call binary.
ą¤ąĄčĆą▓ą░čÅ čüčéčĆąŠą║ą░ č湥čéą║ąŠ čāą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čŹč鹊 BusyBox.
ą£ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, ą║ą░ą║ąĖąĄ čäčāąĮą║čåąĖąĖ ą▓čüčéčĆąŠąĄąĮčŗ ą▓ BusyBox. ąöą╗čÅ čŹč鹊ą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā `busybox` ą▒ąĄąĘ ą░čĆą│čāą╝ąĄąĮč鹊ą▓, ąĖ ąŠąĮą░ ą▓čŗą▓ąĄą┤ąĄčé ą▒ąŠą╗čīčłąŠą╣ čüą┐ąĖčüąŠą║ ą▓čüąĄčģ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ applets (ą╝ą░ą╗ąĄąĮčīą║ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣-čäčāąĮą║čåąĖą╣).
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, BusyBox ą▓ ą║ąŠąĮč鹥ą║čüč鹥 LuckFox ŌĆö čŹč鹊 čäčāąĮą┤ą░ą╝ąĄąĮčéą░ą╗čīąĮčŗą╣ čüčéčĆąŠąĖč鹥ą╗čīąĮčŗą╣ ą▒ą╗ąŠą║ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ. ąŁč鹊 ą╝ąĖąĮąĖą╝ą░ą╗ąĖčüčéąĖčćąĮą░čÅ, ąĮąĄą▓ąĄčĆąŠčÅčéąĮąŠ čŹčäč乥ą║čéąĖą▓ąĮą░čÅ ąĖ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮą░čÅ ąĘą░ą╝ąĄąĮą░ ą▓čüąĄą╝ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ UNIX-ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╝, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą╝ąĄčüčéąĖčéčī ą╝ąŠčēąĮčāčÄ ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčāčÄ ą║ąŠą╝ą░ąĮą┤ąĮčāčÄ čüčĆąĄą┤čā Linux ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĄą│ą░ą▒ą░ą╣čé, čćč鹊 ąĖą┤ąĄą░ą╗čīąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ čĆąĄčüčāčĆčüą░ą╝ ą┐ą╗ą░čéčŗ. ąæąĄąĘ BusyBox ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ Linux-čüąĖčüč鹥ą╝čŗ like LuckFox Pico Mini ą▒čŗą╗ąĖ ą▒čŗ ą│ąŠčĆą░ąĘą┤ąŠ ą▒ąŠą╗čīčłąĄ, ą┤ąŠčĆąŠąČąĄ ąĖ ą╝ąĄąĮąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗ.
ąØą░ čüą░ą╝ąŠą╣ ą┐ą╗ą░č鹥 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ busybox, buildroot ąĖ Ubuntu 22.04. ąØą░ ą╝ą░čłąĖąĮąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ą┤ą╗čÅ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ Ubuntu 24.04 ąĖą╗ąĖ Docker.
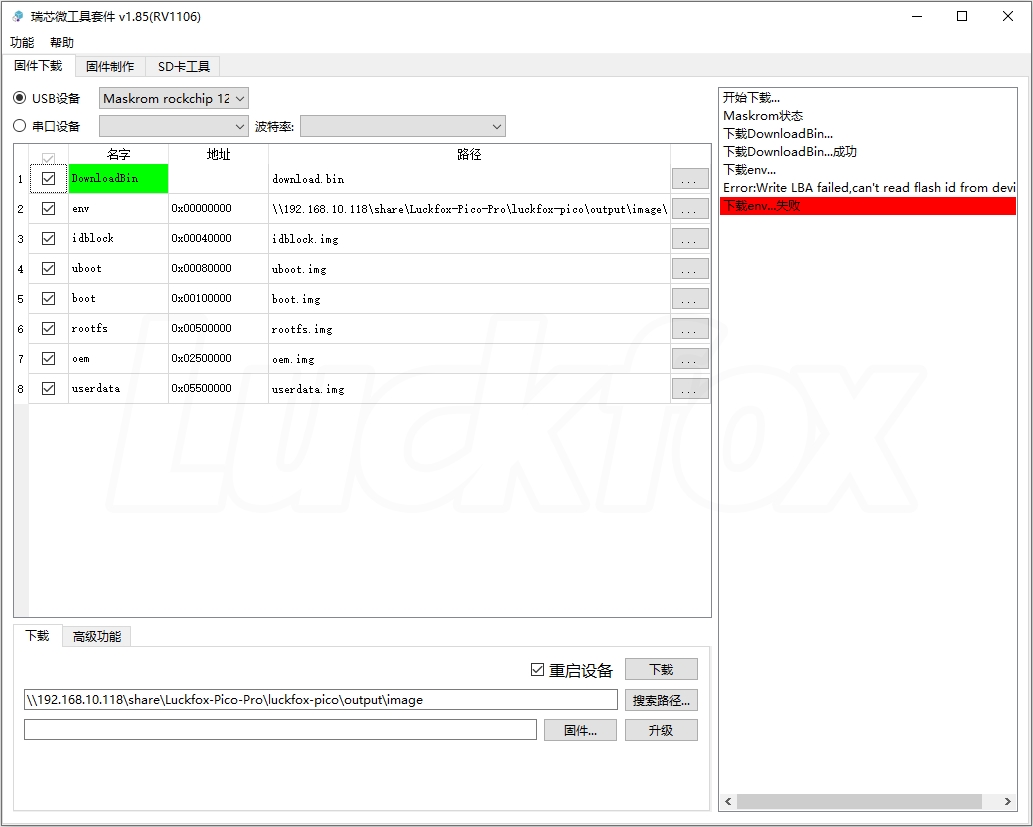
ąŚą░ą┐čāčüčéąĖč鹥 SocToolKit čü ą┐čĆą░ą▓ą░ą╝ąĖ ą░ą┤ą╝ąĖąĮąĖčüčéčĆą░č鹊čĆą░, ąĖ ąĘą░č鹥ą╝ čāčüčéą░ąĮąŠą▓ąĖč鹥 TF-ą║ą░čĆčéčā. ąĢčüą╗ąĖ ąŠąĮą░ ą▓čüąĄ ąĄčēąĄ ąĮąĄ čĆą░čüą┐ąŠąĘąĮą░ąĄčéčüčÅ, ąĘą░ą║čĆąŠą╣č鹥 ą¤ą× ą░ąĮčéąĖą▓ąĖčĆčāčüą░. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 čéą░ą║ąČąĄ ąĘą░ą│čĆčāąĘąĖčéčī ąĮąŠą▓čāčÄ ą▓ąĄčĆčüąĖčÄ SocToolKit.
ąĢą╝ą║ąŠčüčéčī TF-ą║ą░čĆčéčŗ čüą╗ąĖčłą║ąŠą╝ ą╝ą░ą╗ąĄąĮčīą║ą░čÅ; čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī 8GB ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ.
ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ SocToolKit ą┤ą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ firmware ą┐ą╗ą░čéčŗ Luckfox Pico, čāčéąĖą╗ąĖčéą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čäą░ą╣ą╗ luckfox pico\image\media.img ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé.
ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 Luckfox Pico ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ą╗ąĖčłčī ąĘą░ą│čĆčāąĘą║čā čü TF-ą║ą░čĆčéčŗ (TF card boot), ąĖ ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ą░čĆčéčĆąĖą┤ąĄčĆą░.
ą×ą▒ą╗ą░čćąĮčŗą╣ ą┤ąĖčüą║ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą▒čĆą░ąĘ čüąĖčüč鹥ą╝čŗ buildroot, ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čü ą║ą░čĆčéčŗ SD. ąÆą░ą╝ ąĮčāąČąĮąŠ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĄą│ąŠ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čüąĄą║čåąĖąĄą╣ SDK. ą¤ąŠčüą║ąŠą╗čīą║čā ąĄą╝ą║ąŠčüčéčī SD-ą║ą░čĆčé ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘąĮąŠą╣, ą▓ą░ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čĆčāčćąĮčāčÄ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ąĄą╝ą║ąŠčüčéčī čĆą░ąĘą┤ąĄą╗ą░.
ą¤čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ TF-ą║ą░čĆčéčŗ ą▓ ą┐ą╗ą░čéčā Luckfox Pico ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā SocToolKit ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄąČąĖą╝ Maskrom, ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčłąĖčéą░.
ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 Luckfox Pico ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ą╗ąĖčłčī ąĘą░ą│čĆčāąĘą║čā čü TF-ą║ą░čĆčéčŗ (TF card boot). ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ą░čĆčéčĆąĖą┤ąĄčĆ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą║ą░čĆčéčŗ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą║ą░čĆčéčā ą▓ čüą╗ąŠčé ą┐ą╗ą░čéčŗ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ čüąĖčüč鹥ą╝čŗ.
ą¤ąŠą┐čŗčéą║ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĮąĄ čāą┤ą░ąĄčéčüčÅ čü čüąŠąŠą▒čēąĄąĮąĖąĄą╝, čćč鹊 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ čüč鹊čĆąŠąĮą░ ąĮąĄ ąŠčéą▓ąĄčéąĖą╗ą░ ą┤ąŠą╗ąČąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ č湥čĆąĄąĘ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖą╗ąĖ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ čāąĘąĄą╗ ąĮąĄ ąŠčéą▓ąĄčéąĖą╗.
ąöą╗čÅ čĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝čŗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ čüąĄč鹥ą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü RNDIS.
ą¤čĆąŠą▓ąĄčĆčīč鹥 čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čāčĆąŠą▓ąĮąĄą╣ ą╗ąŠą│ąĖą║ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░, ąĖ ąĮąĄ ą┐ąĄčĆąĄą┐čāčéą░ąĮčŗ ą╗ąĖ ą┐čĆąĖąĄą╝ čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ (čüąĖą│ąĮą░ą╗čŗ RX ąĖ TX). Luckfox-Pico čĆą░ą▒ąŠčéą░ąĄčé čü čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│ąĖą║ąĖ 3.3V, ąĖ čéčĆąĄą▒čāąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ ą╝ąŠą┤čāą╗ąĄ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ą░ USB - TTL UART.
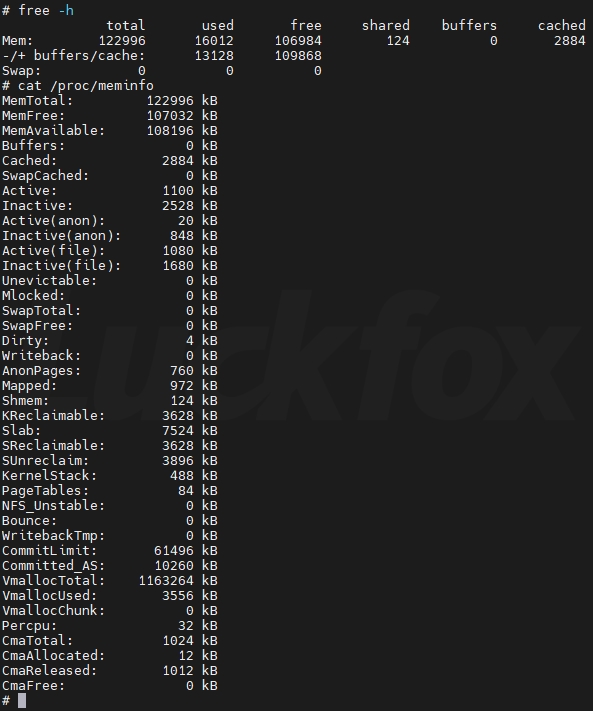
ąØą░ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╝ čüą░ą╣č鹥 ąĘą░čÅą▓ą╗ąĄąĮąŠ, čćč鹊 čā Luckfox-Pico ąĖ Luckfox-Pico-Mini/Plus čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ 64MB ą┐ą░ą╝čÅčéąĖ, ąĮąŠ čäą░ą║čéąĖč湥čüą║ąĖą╣ ąŠą▒čŖąĄą╝ ą┐ą░ą╝čÅčéąĖ ąŠą║ąŠą╗ąŠ 34 MB.
ąÆąĄčĆąŠčÅčéąĮąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ą┐ą░ą╝čÅčéčī ą▓čŗą┤ąĄą╗ąĄąĮą░ čüąĖčüč鹥ą╝ąŠą╣ ąĖ čĆą░ą▒ąŠčéą░čÄčēąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝. ą¤čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░:
[ 0.000000] Memory: 34328K/65536K available (3452K kernel code, 283K rwdata, 1644K rodata,
144K init, 127K bss, 6632K reserved, 24576K cma-reserved)
ąöą╗čÅ Luckfox-Pico-Pro/Max čäą░ą║čéąĖč湥čüą║ąĖą╣ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ ą╝ąĄąĮčīčłąĄ 128MB ąĖ 256MB. ąĢčüą╗ąĖ ą║ą░ą╝ąĄčĆą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, č鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī ą┐ą░ą╝čÅčéčī ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĄą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ RK_BOOTARGS_CMA_SIZE, ąĖąĘą╝ąĄąĮąĖą▓ ąĘąĮą░č湥ąĮąĖąĄ 66M ąĮą░ 1M.
ąĢčüą╗ąĖ ą▓ąĘčÅčéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ Luckfox-Pico-Pro, č鹊 ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ ą▓čŗą│ą╗čÅą┤ąĖčé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ą¤ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ Luckfox-Pico-Plus/Pro/Max č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čüąĄ ą▓čĆąĄą╝čÅ ą┐ąŠčüčŗą╗ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ "udhcpc: sending discover".
ąĢčüą╗ąĖ čüąĄč鹥ą▓ąŠą╣ ą║ą░ą▒ąĄą╗čī ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ, č鹊 ą▓ ą╗ąŠą│ ą▒čāą┤ąĄčé ą▓čŗą▓ąŠą┤ąĖčéčīčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ "udhcpc: sending discover". ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 čüąĄč鹥ą▓ąŠą╣ ą║ą░ą▒ąĄą╗čī, ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā kill ą┤ą╗čÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąŠčåąĄčüčüą░ udhcpc.
# ps | grep udhcpc
248 root 1196 S udhcpc -i eth0
311 root 1192 S grep udhcpc
# kill 248
udhcpc: received SIGTERM
ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 factory image ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ GPIO. ąÆą░ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ą┐čĆąŠčłąĖčéčī ąŠą▒čĆą░ąĘ ąĖąĘ ąŠąĮą╗ą░ą╣ąĮ-čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ.
ąÆčŗ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖąĘ SDK. ą¤ąŠčüą╗ąĄ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĮą░ čģąŠčüč鹥 Ubuntu ąĖą╗ąĖ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ ą╝ą░čłąĖąĮąĄ ą▓čŗą│čĆčāąĘąĖč鹥 čĆąĄąĘčāą╗čīčéą░čé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĮą░ ą┐ą╗ą░čéčā.
ą¤čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ ą╝ą░čłąĖąĮčŗ VirtualBox ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ "VT-x is disabled in the BIOS for both all CPU modes (VERR_VMX_MSR_ALL_VMX_DI)".
ą¤čĆąĖčćąĖąĮą░ ąŠčłąĖą▒ą║ąĖ ą▓ č鹊ą╝, čćč鹊 ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮą░ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ ą▓ąĖčĆčéčāą░ą╗ąĖąĘą░čåąĖąĖ CPU ąĮą░ ą╝ą░č鹥čĆąĖąĮčüą║ąŠą╣ ą┐ą╗ą░č鹥 čģąŠčüčéą░. ąÆčŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ ą╝ąŠą┤ąĄą╗ąĖ ą▓ą░čłąĄą╣ ą╝ą░č鹥čĆąĖąĮčüą║ąŠą╣ ą┐ą╗ą░čéčŗ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ BIOS ą║ąŠą╝ą┐čīčÄč鹥čĆą░:
1. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ą░č鹥čĆąĖąĮčüą║ąĖąĄ ą┐ą╗ą░čéčŗ ASUS ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ BIOS ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą║ą╗ą░ą▓ąĖčłčā F2 ą▓ąŠ ą▓čĆąĄą╝čÅ ąĘą░ą┐čāčüą║ą░.
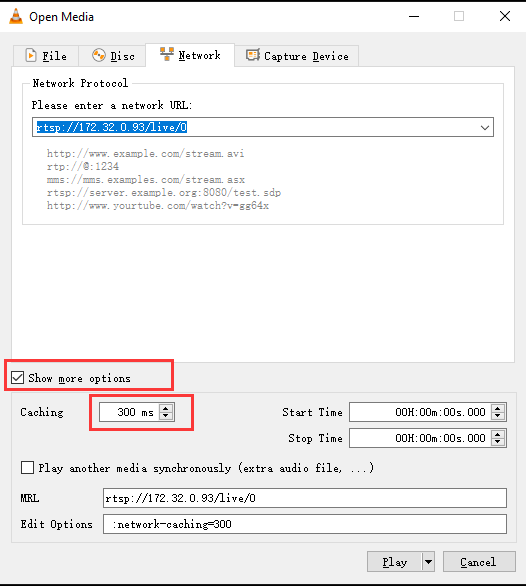
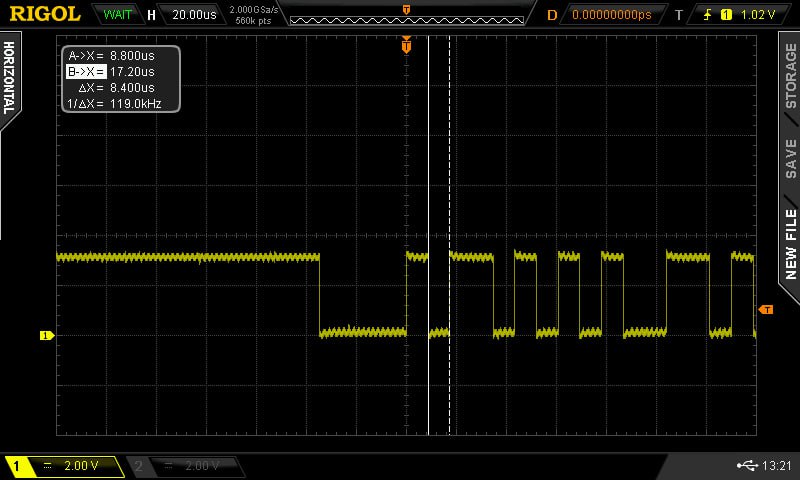
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ VLC ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ąĖą┤ąĄąŠą▒čāč乥čĆ čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓ 1 čüąĄą║čāąĮą┤čā (1000ms = 1s). ą£ąŠąČąĮąŠ čāą╝ąĄčĆąĄąĮąĮąŠ čüąŠą║čĆą░čéąĖčéčī ą▓čĆąĄą╝čÅ ą▒čāč乥čĆąĖąĘą░čåąĖąĖ ą┤ą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ real-time ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ, ąĮąŠ čüą╗ąĖčłą║ąŠą╝ ąĮąĖąĘą║ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠč鹥čĆąĄ ą┐ą░ą║ąĄč鹊ą▓ ąĖ ąĘą░ąĖą║ą░ąĮąĖčÄ. ąØąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą╝ąĄąĮčīčłąĄ 300ms.
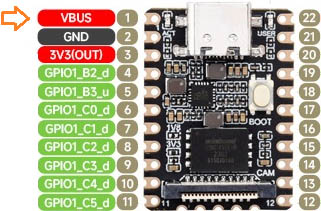
VBUS ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ąŠ ą▓čģąŠą┤ąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ ąĖąĮč鹥čĆč乥ą╣čüą░ Type-C; VSYS čŹč鹊 ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, čü ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 4.5V ą┤ąŠ 5.5V.
ą¤ą╗ą░čéą░ čĆą░čüą┐ąŠąĘąĮą░ąĄčéčüčÅ, ąĮąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠčłąĖą▒ą║ą░: "Error: Write LBA failed, can't read flash id from device".
ąĀąĄčłąĄąĮąĖąĄ: čāą┤ą░ą╗ąĖč鹥 USB HUB ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ą░ą▒ąĄą╗čī ą┐ą╗ą░čéčŗ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā.
$ sudo cp -r luckfox-pico/ ~/Luckfox-test/
$ cd ~/Luckfox-test/luckfox-pico/
$ ./build.sh lunch
ls: cannot access 'BoardConfig*.mk': No such file or directory[build.sh:error] Running build_select_board failed!
[build.sh:error] exit code 1 from line 191: [build.sh:info] ln -rfs $TARGET_PRODUCT_DIR/$RK_BUILD_TARGET_BOARD $BOARD_CONFIG
ąÆąŠąĘą╝ąŠąČąĮą░čÅ ą┐čĆąĖčćąĖąĮą░ ąŠčłąĖą▒ą║ąĖ ą▓ č鹊ą╝, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ sudo ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐ąŠčŹč鹊ą╝čā ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄčĆąĄąĮčŗ ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ ą║ čäą░ą╣ą╗ą░ą╝ ą▓ SDK. ąŻą┤ą░ą╗ąĖč鹥 ąĖ ąĘą░ąĮąŠą▓ąŠ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ čü ą┐čĆą░ą▓ą░ą╝ąĖ ąŠą▒čŗčćąĮąŠą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
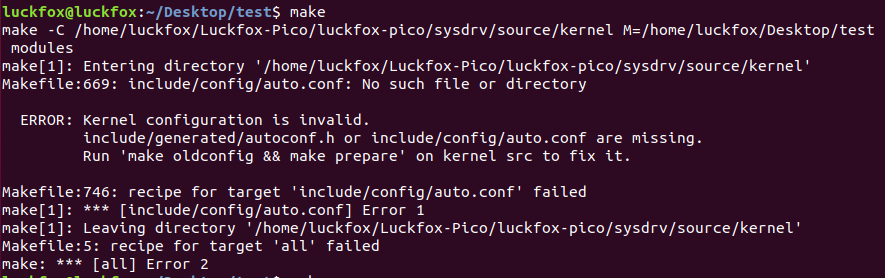
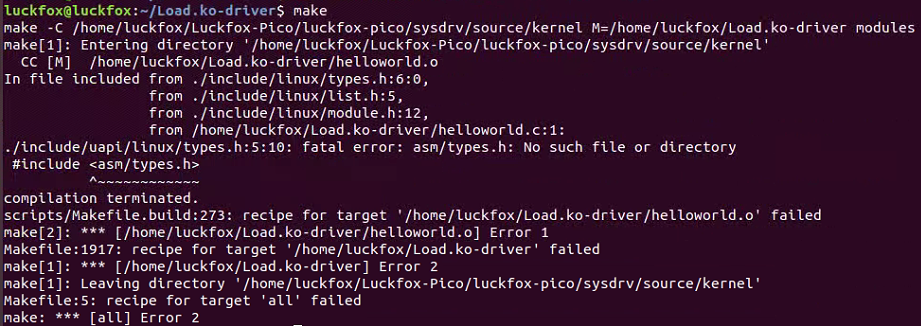
ą¤čĆąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠčłąĖą▒ą║ą░ ąĘą░ą│čĆčāąĘą║ąĖ ą╝ąŠą┤čāą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ Linux, SDK ąĮąĄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ą┐ąŠčüą╗ąĄ clean.
ąĪą╗čāčćą░ą╣ 1:
ąĀąĄčłąĄąĮąĖąĄ: ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ./build.sh ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą╣ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ.
ąĪą╗čāčćą░ą╣ 2:
ąĀąĄčłąĄąĮąĖąĄ: ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
$ make ARCH=arm CROSS_COMPILE=/home/luckfox/Luckfox-Pico/luckfox-pico/tools/linux/toolchain/\
arm-rockchip830-linux-uclibcgnueabihf/bin/arm-rockchip830-linux-uclibcgnueabihf-
ąØą░ ą┐ą╗ą░čéą░čģ LuckFox, ą▓ą║ą╗čÄčćą░čÅ Pico Mini, ąĮąĄčé ąĄą┤ąĖąĮąŠą╣ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆą░čÅ ą▒čŗ ą┐čĆąŠčüč鹊 ą▓čŗą▓ąĄą╗ą░ "čüą┐ąĖčüąŠą║ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓". ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą║ąŠą╝ą░ąĮą┤ ą┤ą╗čÅ ą░ąĮą░ą╗ąĖąĘą░ Device Tree (ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓) ąĖ čüąŠčüč鹊čÅąĮąĖčÅ čÅą┤čĆą░ Linux.
ąÆąŠčé ą║ą░ą║ čŹč鹊 ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą┤ąĄą╗ą░čéčī:
1 . ą×čüąĮąŠą▓ąĮąŠą╣ čüą┐ąŠčüąŠą▒: ą░ąĮą░ą╗ąĖąĘ Device Tree
Device Tree (DT) ŌĆö čŹč鹊 čüčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆą░čÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┐ą╗ą░čéčŗ čÅą┤čĆčā Linux. ąśą╝ąĄąĮąĮąŠ ą▓ ąĮąĄą╣ "čĆą░ąĘčĆąĄčłą░čÄčéčüčÅ" ąĖą╗ąĖ "ąĘą░ą┐čĆąĄčēą░čÄčéčüčÅ" ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąĪą░ą╝ą░čÅ ą▓ą░ąČąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░:
# cat /sys/firmware/devicetree/base/compatible
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą║ą░ąČąĄčé ą╝ąŠą┤ąĄą╗čī ą▓ą░čłąĄą╣ ą┐ą╗ą░čéčŗ, ą║ąŠč鹊čĆčāčÄ čÅą┤čĆąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąöą╗čÅ LuckFox Pico Mini ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čćč鹊-č鹊 ą▓čĆąŠą┤ąĄ:
$ adb shell
[root@luckfox ]# cat /sys/firmware/devicetree/base/compatible
rockchip,rv1103g-38x38-ipc-v10rockchip,rv1103
ą¦č鹊ą▒čŗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, ą║ą░ą║ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ "ą▓ą║ą╗čÄč湥ąĮčŗ" ą▓ č鹥ą║čāčēąĄą╣ Device Tree, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥:
a) ą¤čĆąŠčüą╝ąŠčéčĆ ą▓čüąĄčģ čāąĘą╗ąŠą▓ (devices) ą▓ ą┤ąĄčĆąĄą▓ąĄ:
[root@luckfox ]# ls /proc/device-tree/
#address-cells pwm@ff350010
#size-cells pwm@ff350020
acodec-sound pwm@ff350030
acodec@ff480000 pwm@ff360000
adc-keys pwm@ff360010
aliases pwm@ff360020
arm-debug@ff200000 pwm@ff360030
arm-pmu pwm@ff490000
chosen pwm@ff490010
clock-controller@ff3a0000 pwm@ff490020
clocks pwm@ff490030
compatible restart-poweroff
cpu0-opp-table rga@ff980000
cpuinfo rkcif-dvp
cpus rkcif-mipi-lvds
csi2-dphy-hw@ff3e8000 rkcif-mipi-lvds-sditf
csi2-dphy0 rkcif-mipi-lvds1
csi2-dphy1 rkcif@ffa10000
csi2-dphy2 rkdvbm@ffa70000
dht11_sensor rkisp-vir0
dma-controller@ff420000 rkisp@ffa00000
ethernet@ffa80000 rkvenc-pp@ffa60000
fiq-debugger rkvenc@ffa50000
i2c@ff310000 rng@ff448000
i2c@ff320000 rockchip-amp
i2c@ff450000 rockchip-suspend
i2c@ff460000 rockchip-system-monitor
i2c@ff470000 rve@ffad0000
i2s@ffae0000 saradc@ff3c0000
interrupt-controller@ff1f0000 serial-number
interrupt-parent serial@ff4a0000
leds serial@ff4b0000
memory serial@ff4c0000
mipi-csi2-hw@ffa20000 serial@ff4d0000
mipi-csi2-hw@ffa30000 serial@ff4e0000
mipi0-csi2 serial@ff4f0000
mmc@ff9a0000 spi@ff500000
mmc@ffa90000 spi@ff510000
mmc@ffaa0000 spi@ffac0000
model sram@ff6c0000
mpp-srv syscon@ff000000
mpp-vcodec syscon@ff388000
name syscon@ff538000
npu@ff660000 thermal-zones
otp@ff3d0000 timer
pinctrl tsadc@ff3c8000
power-management@ff300000 usb2-phy@ff3e0000
psci usbdrd
pvtm@ff240000 vcc-1v8
pvtm@ff390000 vcc-3v3
pwm@ff350000 vdd-arm
ąŁč鹊 ą┐ąŠą║ą░ąČąĄčé čüą┐ąĖčüąŠą║ ą▓čüąĄčģ čāąĘą╗ąŠą▓ ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, `gpio@fdd60000`, `serial@ff9c0000`). ąŁč鹊 ąĮąĄ ąĮą░ąĘą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą▓ ą┐čĆąĖą▓čŗčćąĮąŠą╝ ą▓ąĖą┤ąĄ, ą░ č鹥čģąĮąĖč湥čüą║ąĖąĄ ąĖą╝ąĄąĮą░.
b) ą¤ąŠąĖčüą║ ą┐ąŠ ą║ą╗čÄč湥ą▓čŗą╝ čüą╗ąŠą▓ą░ą╝ (čüą░ą╝čŗą╣ ą┐čĆą░ą║čéąĖčćąĮčŗą╣ ą╝ąĄč鹊ą┤). ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 `grep` ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ čāą┐ąŠą╝ąĖąĮą░ąĮąĖą╣ ą║ąŠąĮą║čĆąĄčéąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą▓ čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą┤ąĄčĆąĄą▓ąĄ čāčüčéčĆąŠą╣čüčéą▓.
ąöą╗čÅ UART (ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé):
# find /proc/device-tree/ -name "*uart*" | head -5
ąöą╗čÅ I2C:
# find /proc/device-tree/ -name "*i2c*" | head -5
ąöą╗čÅ SPI:
# find /proc/device-tree/ -name "*spi*" | head -5
ąöą╗čÅ PWM:
# find /proc/device-tree/ -name "*pwm*" | head -5
ąĢčüą╗ąĖ ą║ąŠą╝ą░ąĮą┤ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą┐čāčéąĖ ą║ čäą░ą╣ą╗ą░ą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, `/proc/device-tree/pwm@fdd70000 `), ąĘąĮą░čćąĖčé, čŹč鹊čé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ ą▓ Device Tree.
2 . ą¤čĆąŠą▓ąĄčĆą║ą░, ąĘą░ą│čĆčāąĘąĖą╗ąĖčüčī ą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓. ąöą░ąČąĄ ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ DT, čüč鹊ąĖčé ą┐čĆąŠą▓ąĄčĆąĖčéčī, čāą▓ąĖą┤ąĄą╗ąŠ ą╗ąĖ ąĄą│ąŠ čÅą┤čĆąŠ ąĖ ąĘą░ą│čĆčāąĘąĖą╗ąŠ ą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ.
a) ą¤čĆąŠčüą╝ąŠčéčĆ čüą┐ąĖčüą║ą░ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓:
# ls /sys/devices/platform/
ąŚą┤ąĄčüčī ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čüą┐ąĖčüąŠą║ ą┐ą╗ą░čéč乊čĆą╝ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮčŗ čÅą┤čĆąŠą╝.
b) ą¤čĆąŠą▓ąĄčĆą║ą░ ą║ąŠąĮą║čĆąĄčéąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓.
I2C: ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, ą║ą░ą║ąĖąĄ I2C ą░ą┤ą░ą┐č鹥čĆčŗ (čłąĖąĮčŗ) ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ čüąĖčüč鹥ą╝ąĄ.
SPI: ą┐čĆąŠą▓ąĄčĆąĖčéčī, ąĄčüčéčī ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI.
PWM: ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, 菹║čüą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮčŗ ą╗ąĖ ą║ą░ąĮą░ą╗čŗ PWM.
GPIO: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ GPIO ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č湥čĆąĄąĘ sysfs.
UART: ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ.
3 . ą¤čĆčÅą╝ąŠą╣ ą┐čĆąŠčüą╝ąŠčéčĆ ąĖčüčģąŠą┤ąĮąŠą│ąŠ čäą░ą╣ą╗ą░ Device Tree (ąĄčüą╗ąĖ ąĄčüčéčī ą┤ąŠčüčéčāą┐). ąĪą░ą╝čŗą╣ ą┐ąŠą╗ąĮčŗą╣, ąĮąŠ ąĖ čüą░ą╝čŗą╣ čüą╗ąŠąČąĮčŗą╣ čüą┐ąŠčüąŠą▒ ŌĆö ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĖčüčģąŠą┤ąĮčŗą╣ čäą░ą╣ą╗ *.dts . ąĢą│ąŠ ąŠą▒čŗčćąĮąŠ ąĮąĄčé ąĮą░ čüą░ą╝ąŠą╣ ą┐ą╗ą░č鹥, ąĮąŠ ąŠąĮ ąĄčüčéčī ą▓ SDK ąĮą░ ą▓ą░čłąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ.
ą¤čāčéčī ą▓ SDK, ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ą╗ą░čéčŗ LuckFox Pico Mini:
$ find . -name rv1103g-luckfox-pico-mini.dts
./sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico-mini.dts
ąÆ čŹč鹊ą╝ čäą░ą╣ą╗ąĄ ą▓čŗ ą╝ąŠąČąĄč鹥 ąĮą░ą╣čéąĖ ą▓čüąĄ ą▒ą╗ąŠą║ąĖ ą▓ąĖą┤ą░:
& pwm0 { status = "okay" ;
};
ąĪčéčĆąŠą║ą░ `status = "okay";` ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ. ąĢčüą╗ąĖ čüč鹊ąĖčé `status = "disabled";` ŌĆö čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║ą╗čÄč湥ąĮąŠ.
ąÜčĆą░čéą║ąĖą╣ ąĖč鹊ą│ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą╣ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ ą┐ą╗ą░č鹥 LuckFox Pico Mini:
1 . UART: `ls /dev/ttyS*` (ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī `ttyS0` ąĖ ą┤čĆčāą│ąĖąĄ).2 . I2C: `i2cdetect -l` (ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮą░ čłąĖąĮą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ `i2c0`).3 . SPI: `ls /dev/spidev*` (čćą░čüč鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠčéą║ą╗čÄč湥ąĮ ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ).4 . PWM: `ls /sys/class/pwm/` (ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ąĖą┤ąĮčŗ `pwmchip0`, `pwmchip4` ąĖ čé.ą┤.).
ąÆčŗą▓ąŠą┤: ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ `list-peripherals`. ą¦č鹊ą▒čŗ čāąĘąĮą░čéčī čüą┐ąĖčüąŠą║ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąĮčāąČąĮąŠ ą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą┤ąĄčĆąĄą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ č湥čĆąĄąĘ `/proc/device-tree/ ` ąĖ ą┐čĆąŠą▓ąĄčĆčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą▓ `/sys/ ` ąĖ `/dev/ `.
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ąĮą░ ą┐ą╗ą░č鹥 LuckFox Pico Mini ąĄčüčéčī ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ /oem/spitest , ąĖ ą▓ ąĮąĄą╣ ą▓čŗ č鹥čüčéąĖčĆčāąĄč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā ą▓ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą╝ čäą░ą╣ą╗ spi , ą║ąŠč鹊čĆčŗą╣ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĮčāąČąĮąŠ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čéčī. ąóąŠą│ą┤ą░ čüą║čĆąĖą┐čé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
#!/bin/bash # ąŻą┤ą░ą╗ąĖą╝ ą┐čĆąĄą┤čŗą┤čāčēąĖą╣ čĆąĄąĘčāą╗čīčéą░čé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ:
rm spi# ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ spi.c ą▓ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ spi:
arm-rockchip830-linux-uclibcgnueabihf-gcc spi.c -o spi# ąŻą┤ą░ą╗ąĖčéčī čäą░ą╣ą╗ spi ąĮą░ čåąĄą╗ąĄą▓ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ LuckFox Pico Mini:
adb shell "rm /oem/spitest/spi" # ąŚą░ą┐ąĖčüą░čéčī ą▓ č鹊 ąČąĄ ą╝ąĄčüč鹊 ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĮčāčÄ ą▓ąĄčĆčüąĖčÄ čäą░ą╣ą╗ą░:
adb push ./spi /oem/spitest
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą╝ą░ąĮą┤ą░ adb shell "rm /oem/spitest/spi" čāą┤ą░ą╗ąĖčé ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ ąĮą░ ą┐ą╗ą░č鹥 LuckFox Pico Mini, ą░ ą║ąŠą╝ą░ąĮą┤ą░ adb push ./spi /oem/spitest ąĘą░ą┐ąĖčłąĄčé ąĄą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĮčāčÄ ą▓ąĄčĆčüąĖčÄ.
ą£ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĖ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī ą╗ąŠą│ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, ąĮąŠ ąśą£ąźą× čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ ąĖ ąĮą░ą┤ąĄąČąĮčŗą╣ čüą┐ąŠčüąŠą▒ - ą▓ąĮąĄčüčéąĖ ą▓ čäą░ą╣ą╗ *.dts ąĮą░ą╝ąĄčĆąĄąĮąĮčāčÄ ąŠčłąĖą▒ą║čā. ą£ąŠąČąĮąŠ ą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąĄčĆąĄąĖą╝ąĄąĮąŠą▓ą░čéčī ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╣ ą▓ą░ą╝ąĖ čäą░ą╣ą╗, ą╗ąĖą▒ąŠ ą▓čüčéą░ą▓ąĖčéčī ą▓ ąĮąĄą│ąŠ čćč鹊-č鹊 ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
/**********USB**********/ & usbdrd_dwc3 { status = "okay" ; dr_mode = "peripheral" ;
};// ą£ąĮąĄ ąĮą░ą┤ąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ą╗ąĖ čŹč鹊 ą╝ąĄčüč鹊 ą▓ čäą░ą╣ą╗ąĄ DTS: aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa /**********SPI**********/ /* SPI0_M0 */ & spi0 { status = "okay" ; spidev @0 { spi-max-frequency = < 50000000> ; };
};
...
ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā ./build.sh , ąĖ ąĄčüą╗ąĖ čŹč鹊čé ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ čäą░ą╣ą╗ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ, č鹊 čüą║čĆąĖą┐čé ą▓čŗą┤ą░čüčé ąŠčłąĖą▒ą║čā:
...
Error: /home/user/luckfox-pico/sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico-mini.dts:
61.1-45 syntax error
FATAL ERROR: Unable to parse input tree
make[4]: *** [scripts/Makefile.lib:381: arch/arm/boot/dts/rv1103g-luckfox-pico-mini.dtb] Error 1
make[3]: *** [/home/user/luckfox-pico/sysdrv/source/kernel/Makefile:1464: rv1103g-luckfox-pico-mini.dtb]
Error 2
make[3]: *** Waiting for unfinished jobs....
CALL /home/user/luckfox-pico/sysdrv/source/kernel/scripts/atomic/check-atomics.sh
CALL /home/user/luckfox-pico/sysdrv/source/kernel/scripts/checksyscalls.sh
make[2]: *** [arch/arm/Makefile:375: rv1103g-luckfox-pico-mini.img] Error 2
make[2]: Leaving directory '/home/user/luckfox-pico/sysdrv/source/objs_kernel'
make[1]: *** [Makefile:185: __sub-make] Error 2
make[1]: Leaving directory '/home/user/luckfox-pico/sysdrv/source/kernel'
make: *** [Makefile:486: kernel] Error 1
make: Leaving directory '/home/user/luckfox-pico/sysdrv'[build.sh:error] Running build_kernel failed!
[build.sh:error] exit code 2 from line 847: [build.sh:info] make kernel -C ${SDK_SYSDRV_DIR} $kernel_build_options KERNEL_DTS=${RK_KERNEL_DTS}
KERNEL_CFG=${RK_KERNEL_DEFCONFIG} KERNEL_CFG_FRAGMENT=${RK_KERNEL_DEFCONFIG_FRAGMENT}
ą¤čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ą┐ąĄčĆąĄą┐čĆąŠčłąĖčéčī ąŠą▒čĆą░ąĘ čāčéąĖą╗ąĖčéą░ upgrade_tool ą▓čŗą┤ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ, čćč鹊 ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ rockusb:
$ upgrade_tool uf output/image/update.img No found any rockusb device,please plug device in!
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ą┐ą╗ą░čéą║ą░ LuckFox Pico ąĮąĄ ą▓ą▓ąĄą┤ąĄąĮą░ ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąöą╗čÅ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčéą║ą╗čÄčćąĖč鹥 ą║ą░ą▒ąĄą╗čī USB (č鹥ą╝ čüą░ą╝čŗą╝ ąŠą▒ąĄčüč鹊čćąĖč鹥 ą┐ą╗ą░čéčā), ąĮą░ąČą╝ąĖč鹥 ąĖ čāą┤ąĄčƹȹĖą▓ą░ą╣č鹥 ą║ąĮąŠą┐ą║čā BOOT , ąĖ čüąĮąŠą▓ą░ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ą░ą▒ąĄą╗čī USB. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąŠčéą┐čāčüčéąĖč鹥 ą║ąĮąŠą┐ą║čā BOOT. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą│ąŠč鹊ą▓ąŠ ą║ ą┐čĆąŠčłąĖą▓ą║ąĄ čāčéąĖą╗ąĖč鹊ą╣ upgrade_tool.
$ upgrade_tool uf output/image/update.img
Loading firmware...
Support Type:1106 FW Ver:0.0.00 FW Time:2025-09-23 15:00:24
Loader ver:1.01 Loader Time:2025-09-23 14:56:47
Start to upgrade firmware...
Download Boot Start
Download Boot Success
Wait For Maskrom Start
Wait For Maskrom Success
Test Device Start
Test Device Success
Check Chip Start
Check Chip Success
Get FlashInfo Start
Get FlashInfo Success
Prepare IDB Start
Prepare IDB Success
Download IDB Start
Download IDB Success
Download Firmware Start
Download Image... (100%)
Download Firmware Success
Upgrade firmware ok.
ą×čéą║čĆąŠą╣č鹥 čäą░ą╣ą╗ luckfox-pico/config/dts_config
/**********ETH**********/ & gmac { //status = "disabled"; status = "okay" ;
};
...
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąŠčüčéą░ą╗ąŠčüčī ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĖ ą┐ąĄčĆąĄą┐čĆąŠčłąĖčéčī:
$ ./build.sh
$ upgrade_tool uf output/image/update.img
[ąÆčĆąĄą╝ąĄąĮąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ą░ą┤čĆąĄčüą░ (ą┤ąŠ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ) ]
ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤ ifconfig ąĖ route :
# ifconfig eth0 192.168.1.100 netmask 255.255.255.0 up
# route add default gw 192.168.1.1
ąśą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÅ ą║ąŠą╝ą░ąĮą┤čā ip :
# ip addr add 192.168.1.100/24 dev eth0
# ip link set eth0 up
# ip route add default via 192.168.1.1
[ąØą░čüčéčĆąŠą╣ą║ą░ č湥čĆąĄąĘ DHCP ]
ąŚą░ą┐čāčüą║ DHCP ą║ą╗ąĖąĄąĮčéą░:
ąśą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÅ systemd (ąĄčüą╗ąĖ ą┤ąŠčüčéčāą┐ąĄąĮ):
# systemctl restart networking
[ą¤ąŠčüč鹊čÅąĮąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ]
1 . ąöąŠą▒ą░ą▓čīč鹥 ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ čäą░ą╣ą╗ čüąĄč鹥ą▓čŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ /etc/network/interfaces
# ąöą╗čÅ DHCP:
iface eth0 inet dhcp# ąśą╗ąĖ ą┤ą╗čÅ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ IP:
iface eth0 inet static address 192 .168.1.100 netmask 255 .255.255.0 gateway 192 .168.1.1 dns-nameservers 8 .8.8.8 8 .8.4.4
ąĢčüą╗ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā, č鹊 ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĖą╝ąĄąĮčÅčéčüčÅ:
# ifdown eth0 && ifup eth0
ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čŹčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĖą╝ąĄąĮčÅą╗ąĖčüčī ą┐čĆąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĄ, čüą┤ąĄą╗ą░ą╣č鹥 čüą╗ąĄą┤čāčÄčēąĄąĄ:
2 . ąĪąŠąĘą┤ą░ą╣č鹥 čäą░ą╣ą╗ S40eth0config /etc/init.d
# touch /etc/init.d/S40eth0config
3 . ąöąŠą▒ą░ą▓čīč鹥 ą▓ ąĮąĄą│ąŠ čüą╗ąĄą┤čāčÄčēąĖą╣ č鹥ą║čüčé:
#!/bin/sh ### BEGIN INIT INFO # Provides: eth0config # Required-Start: networking # Required-Stop: networking # Default-Start: 2 3 4 5 # Default-Stop: 0 1 6 # Description: Ethernet configuration for LuckFox Pico ### END INIT INFO case " $1 " in start) echo "Configuring eth0..." ifdown eth0 sleep 2 ifup eth0 ;; stop) echo "Stopping eth0..." ifdown eth0 ;; restart) $0 stop sleep 2 $0 start ;; *) echo "Usage: $0 {start|stop|restart}" exit 1 ;;esac exit 0
4 . ąĪą┤ąĄą╗ą░ą╣č鹥 čŹč鹊čé čäą░ą╣ą╗ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╝:
# chmod +x /etc/init.d/S40eth0config
ąóąĄą┐ąĄčĆčī ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą▒čāą┤ąĄčé ąĘą░ą┐čāčüą║ą░čéčīčüčÅ čüą║čĆąĖą┐čé S40eth0config , ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▒čāą┤čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ.
5 . ąØą░čüčéčĆąŠą╣č鹥 čüąĖčüč鹥ą╝čā čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖą╝ąĄąĮ DNS:
# echo "nameserver 8.8.8.8" > /etc/resolv.conf
# echo "nameserver 1.1.1.1" >> /etc/resolv.conf
# echo "nameserver 192.168.1.1" >> /etc/resolv.conf
[ą¤čĆąŠą▓ąĄčĆą║ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ]
ą¤čĆąŠą▓ąĄčĆą║ą░ IP ą░ą┤čĆąĄčüą░:
# ip addr show eth0
# ifconfig eth0
ą¤čĆąŠą▓ąĄčĆą║ą░ ą╝ą░čĆčłčĆčāčéąĖąĘą░čåąĖąĖ:
ą¤čĆąŠą▓ąĄčĆą║ą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖą╝ąĄąĮ DNS:
# ping 8.8.8.8
# ping google.com
ąĪą╝. čéą░ą║ąČąĄ čüąŠą▓ąĄčé Q082 [2].
ąĢčüą╗ąĖ ą▓ą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąŠčüč鹊 ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ąŠą╝ą░ąĮą┤čŗ ą┐čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 /etc/rc.local
1 . ąĪąŠąĘą┤ą░ą╣č鹥 ąĖą╗ąĖ ąŠčéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 čäą░ą╣ą╗:
2 . ąöąŠą▒ą░ą▓čīč鹥 ą▓ ąĮąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ:
#!/bin/sh
sleep 10 # ą¢ą┤ąĄą╝ ąĘą░ą│čĆčāąĘą║ąĖ čüąĖčüč鹥ą╝čŗ
ifdown eth0
ifup eth0exit 0
3 . ąĪą┤ąĄą╗ą░ą╣č鹥 /etc/rc.local ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╝:
ąÆ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą▓ąĄčĆčüąĖąĖ ą┐ą╗ą░čé Luckfox Pico čüąĄčĆą▓ąĖčü SSH ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆą░ąĘčĆąĄčłąĄąĮ.
[Buildroot ]
Login: root
[Ubuntu ]
Login: pico
ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā ssh root@IP_ą░ą┤čĆąĄčü , ąĮą░ą┐čĆąĖą╝ąĄčĆ:
ą¤ąŠčüą╗ąĄ č湥ą│ąŠ ą▓ą▓ąĄą┤ąĖč鹥 ą┐ą░čĆąŠą╗čī luckfox.
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┐ąŠ Ethernet ŌĆö čŹč鹊 ąŠč湥ąĮčī čāą┤ąŠą▒ąĮčŗą╣ čüą┐ąŠčüąŠą▒ čĆą░ą▒ąŠčéčŗ čü LuckFox Pico Mini, čéą░ą║ ą║ą░ą║ ąŠąĮ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čüčéą░ą▒ąĖą╗čīąĮąŠąĄ ąĖ ą▒čŗčüčéčĆąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
ąÆąŠčé ą┐ąŠčłą░ą│ąŠą▓ą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ, ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░čéčī.
[ą¤čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ]
ąĪąĄč鹥ą▓ą░čÅ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆą░: ąÆą░čł ą║ąŠą╝ą┐čīčÄč鹥čĆ ąĖ ą┐ą╗ą░čéą░ LuckFox Pico Mini ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąŠą┤ąĮąŠą╣ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ čüąĄčéąĖ (ą║ ąŠą┤ąĮąŠą╝čā ą╝ą░čĆčłčĆčāčéąĖąĘą░č鹊čĆčā/čüą▓ąĖčéčćčā).USB-C ą║ą░ą▒ąĄą╗čī (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĮą░čćą░ą╗čīąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ): ąÆą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąĄą│ąŠ ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĄčéąĖ ąĮą░ ą┐ą╗ą░č鹥.ADB ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░: ąØą░ ą▓ą░čłąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ Android Debug Bridge (ADB). ą×ą▒čŗčćąĮąŠ ąŠąĮ ąĖą┤ąĄčé ą▓ čüąŠčüčéą░ą▓ąĄ Android SDK Platform-Tools. ąĪą║ą░čćą░ą╣č鹥 čü ąŠčäąĖčåąĖą░ą╗čīąĮąŠą│ąŠ čüą░ą╣čéą░: https://developer.android.com/tools/releases/platform-tools PATH ą▓ą░čłąĄą╣ čüąĖčüč鹥ą╝čŗ.
[ą¤ąŠčłą░ą│ąŠą▓ą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ ]
ą©ą░ą│ 1: ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ą╗ą░čéčŗ č湥čĆąĄąĘ USB
ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 ą┐ą╗ą░čéčā LuckFox Pico Mini ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā čü ą┐ąŠą╝ąŠčēčīčÄ ą║ą░ą▒ąĄą╗čÅ USB-C (ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ąĄą│ąŠ ą║ ą┐ąŠčĆčéčā OTG ąĮą░ ą┐ą╗ą░č鹥).screen ąĖą╗ąĖ minicom ąĮą░ Linux/macOS) ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą┐ąŠčĆčéčā ą┐ą╗ą░čéčŗ. ąĪą║ąŠčĆąŠčüčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ (Baud Rate): 1500000root, ą┐ą░čĆąŠą╗čī ąŠą▒čŗčćąĮąŠ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ.
ą©ą░ą│ 2: ąØą░čüčéčĆąŠą╣ą║ą░ čüąĄčéąĖ ąĮą░ ą┐ą╗ą░č鹥 LuckFox Pico Mini
ąóąĄą┐ąĄčĆčī ąĮčāąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą┐ą╗ą░čéčā ąĮą░ ą┐ąŠą╗čāč湥ąĮąĖąĄ IP-ą░ą┤čĆąĄčüą░ ą┐ąŠ DHCP ąŠčé ą▓ą░čłąĄą│ąŠ čĆąŠčāč鹥čĆą░ ąĖą╗ąĖ ąĘą░ą┤ą░čéčī čüčéą░čéąĖč湥čüą║ąĖą╣ IP-ą░ą┤čĆąĄčü.
ąĪą┐ąŠčüąŠą▒ ąÉ: ąØą░čüčéčĆąŠą╣ą║ą░ DHCP (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ čüą╗čāčćą░ąĄą▓)
ą×čéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąĄčéąĖ. ą¦ą░čüč鹊 ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäą░ą╣ą╗ /etc/network/interfacesudhcpc
# ą¤čĆąŠą▓ąĄčĆčīč鹥 ąĖą╝čÅ čüąĄč鹥ą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░. ą×ą▒čŗčćąĮąŠ čŹč鹊 eth0 ąĖą╗ąĖ end0.
ifconfig -a# ąŚą░ą┐čāčüčéąĖč鹥 DHCP-ą║ą╗ąĖąĄąĮčé ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ IP-ą░ą┤čĆąĄčüą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. # ąĢčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü eth0:
udhcpc -i eth0# ąśą╗ąĖ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ąĘą░ą┐čāčüą║ ą┐čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ, ąŠčéčĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą▓ čäą░ą╣ą╗:
vi /etc/init.d/S99luckfox# ąöąŠą▒ą░ą▓čīč鹥 ą▓ ąĮąĄą│ąŠ čüčéčĆąŠą║čā (ą┐ąĄčĆąĄą┤ exit 0):
udhcpc -i eth0 &
ąĪą┐ąŠčüąŠą▒ ąæ: ąØą░čüčéčĆąŠą╣ą║ą░ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ IP-ą░ą┤čĆąĄčüą░
ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 ąĘą░ą┤ą░čéčī čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╣ IP-ą░ą┤čĆąĄčü, ąŠčéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
vi /etc/network/interfaces192.168.1.100
netmask 255.255.255.0
gateway 192.168.1.1
dns-nameservers 8.8.8.8
/etc/init.d/S40network restartą©ą░ą│ 3: ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ IP-ą░ą┤čĆąĄčüą░ ą┐ą╗ą░čéčŗ
ą¤ąŠčüą╗ąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĄčéąĖ ą▓ą░ą╝ ąĮčāąČąĮąŠ čāąĘąĮą░čéčī, ą║ą░ą║ąŠą╣ IP-ą░ą┤čĆąĄčü ą┐ąŠą╗čāčćąĖą╗ą░ ą┐ą╗ą░čéą░.
ąØą░ ą┐ą╗ą░č鹥 ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
ifconfig eth0ąØą░ą╣ą┤ąĖč鹥 čüčéčĆąŠą║čā inet addr:. ąØą░ą┐čĆąĖą╝ąĄčĆ, inet addr:192.168.1.50. ąŁč鹊 IP-ą░ą┤čĆąĄčü ą▓ą░čłąĄą╣ ą┐ą╗ą░čéčŗ. ąŚą░ą┐ąĖčłąĖč鹥 čŹč鹊čé ą░ą┤čĆąĄčü, ąŠąĮ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čłą░ą│ąĄ.
ą©ą░ą│ 4: ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ADB ą┐ąŠ TCP/IP
ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥čüčī ą║ ą┐ą╗ą░č鹥 ą┐ąŠ USB ąĖ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ADB ą▓ąĖą┤ąĖčé čāčüčéčĆąŠą╣čüčéą▓ąŠ č湥čĆąĄąĘ USB. ąØą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ (ąĖą╗ąĖ PowerShell/Terminal):
adb devices ąöąŠą╗ąČąĄąĮ ą┐ąŠčÅą▓ąĖčéčīčüčÅ čüą┐ąĖčüąŠą║ čāčüčéčĆąŠą╣čüčéą▓. ąĢčüą╗ąĖ ą▓ą░čłą░ ą┐ą╗ą░čéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą┐ąŠ USB, ąŠąĮą░ čéą░ą╝ ą▒čāą┤ąĄčé (ą▓ąŠąĘą╝ąŠąČąĮąŠ, čü čüčéą░čéčāčüąŠą╝ unauthorized ŌĆö ąĮčāąČąĮąŠ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčéčī čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĮą░ ąŠčéą╗ą░ą┤ą║čā ąĮą░ ą┐ą╗ą░č鹥, ąĄčüą╗ąĖ ąĄčüčéčī 菹║čĆą░ąĮ).
ą¤ąĄčĆąĄą▓ąĄą┤ąĖč鹥 ADB ą▓ čĆąĄąČąĖą╝ TCP/IP ąĮą░ čāą║ą░ąĘą░ąĮąĮčŗą╣ ą┐ąŠčĆčé (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 5555):
ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā, ą│ą┤ąĄ
adb tcpip 5555 ąÆ ąŠčéą▓ąĄčé ą▓čŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ: restarting in TCP mode port: 5555.
ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥čüčī ą║ ą┐ą╗ą░č鹥 ą┐ąŠ čüąĄčéąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ADB:
adb connect :5555
ąØą░ą┐čĆąĖą╝ąĄčĆ: adb connect 192.168.1.50:5555connected to 192.168.1.50:5555.
ą¤čĆąŠą▓ąĄčĆčīč鹥 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ:
adb devices
ąóąĄą┐ąĄčĆčī ą▓ čüą┐ąĖčüą║ąĄ ą┤ąŠą╗ąČąĮąŠ ąŠč鹊ą▒čĆą░ąČą░čéčīčüčÅ ą▓ą░čłąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠ čüąĄč鹥ą▓ąŠą╝čā ą░ą┤čĆąĄčüčā, ąĮą░ą┐čĆąĖą╝ąĄčĆ: 192.168.1.50:5555 device
ąōąŠč鹊ą▓ąŠ! ąóąĄą┐ąĄčĆčī ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ADB (adb shell, adb push, adb pull ąĖ čé.ą┤.), ąĖ ąŠąĮąĖ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą┐ąŠ Ethernet.
[ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ ąĖ čüąŠą▓ąĄčéčŗ ]
ąÉą▓č鹊ąĘą░ą┐čāčüą║ ADBD ą┐ąŠ čüąĄčéąĖ: ą¦č鹊ą▒čŗ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅčéčī adb tcpip 5555 ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą╣ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ, ą▓čŗ ą╝ąŠąČąĄč鹥 ąĮą░čüčéčĆąŠąĖčéčī ą┤ąĄą╝ąŠąĮ ADB (adbd) ąĮą░ ą┐ą╗ą░č鹥 ąĮą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ąĘą░ą┐čāčüą║ ą▓ TCP-čĆąĄąČąĖą╝ąĄ. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ąŠčé čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čäą░ą╣ą╗ /init.usb.rcadbd ąĮą░: start adbd --tcpip=5555 (ą▓ąĮąĄčüąĄąĮąĖąĄ čéą░ą║ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčī ą┐ąĄčĆąĄčüą▒ąŠčĆą║ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ).ąæąĄąĘąŠą┐ą░čüąĮąŠčüčéčī: ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 ąŠčéą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░ 5555 ą┤ą╗čÅ ADB ą┤ąĄą╗ą░ąĄčé ą▓ą░čłąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗą╝ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖąĘ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ čüąĄčéąĖ. ąØąĄ ą┤ąĄą╗ą░ą╣č鹥 čŹč鹊 ą▓ ą┐čāą▒ą╗ąĖčćąĮčŗčģ ąĖą╗ąĖ ąĮąĄą┤ąŠą▓ąĄčĆąĄąĮąĮčŗčģ čüąĄčéčÅčģ.ążą░ą╣ąĄčĆą▓ąŠą╗ą╗: ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąĮą░ ą▓ą░čłąĄą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą▒čĆą░ąĮą┤ą╝ą░čāčŹčĆ ąĮąĄ ą▒ą╗ąŠą║ąĖčĆčāąĄčé ąĖčüčģąŠą┤čÅčēąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąĮą░ ą┐ąŠčĆčé 5555.ąĢčüą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĮąĄ čāą┤ą░ąĄčéčüčÅ: ą¤čĆąŠą▓ąĄčĆčīč鹥, ą╝ąŠąČąĄč鹥 ą╗ąĖ ą▓čŗ "ą┐čĆąŠą┐ąĖąĮą│ąŠą▓ą░čéčī" ą┐ą╗ą░čéčā čü ą║ąŠą╝ą┐čīčÄč鹥čĆą░: ping . ąĢčüą╗ąĖ ą┐ąĖąĮą│ ąĮąĄ ą┐čĆąŠčģąŠą┤ąĖčé, ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą▓ čüąĄč鹥ą▓ąŠą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ, ą░ ąĮąĄ ą▓ ADB.
ąóąĄą┐ąĄčĆčī ą▓čŗ ą╝ąŠąČąĄč鹥 čāą┤ąŠą▒ąĮąŠ čĆą░ą▒ąŠčéą░čéčī čü ą▓ą░čłąĄą╣ LuckFox Pico Mini ą┐ąŠ ą▒čŗčüčéčĆąŠą╝čā ąĖ ąĮą░ą┤ąĄąČąĮąŠą╝čā Ethernet-čüąŠąĄą┤ąĖąĮąĄąĮąĖčÄ.
ąÜąŠą│ą┤ą░ čā ą▓ą░čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓, ąĮčāąČąĮąŠ čÅą▓ąĮąŠ čāą║ą░ąĘčŗą▓ą░čéčī, ą║ ą║ą░ą║ąŠą╝čā ąĖąĘ ąĮąĖčģ ąŠą▒čĆą░čēą░čéčīčüčÅ. ąÆąŠčé ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ.
[ą¤čĆąŠą▓ąĄčĆą║ą░ čüą┐ąĖčüą║ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ]
ąĪąĮą░čćą░ą╗ą░ ą▓čüąĄą│ą┤ą░ čüą╝ąŠčéčĆąĖč鹥, ą║ą░ą║ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąŠčüčéčāą┐ąĮčŗ:
adb devices
ą¤čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░:
List of devices attached
192.168 .1 .50 :5555 device emulator-5554 device ABCDEF012345 device
[ąĪą┐ąŠčüąŠą▒čŗ čāą║ą░ąĘą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ adb shell ]
ąĪą┐ąŠčüąŠą▒ ąÉ: ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ -s (serial)
ąŻą║ą░ąĘčŗą▓ą░ąĄč鹥 čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĖą╗ąĖ IP-ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░:
adb -s 192.168.1.50:5555 shell-s ABCDEF012345 shell-s emulator-5554 shell
ąĪą┐ąŠčüąŠą▒ ąæ: ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ -d (device) / -e (emulator)
ąĢčüą╗ąĖ čā ą▓ą░čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čäąĖąĘąĖč湥čüą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ ąŠą┤ąĖąĮ 菹╝čāą╗čÅč鹊čĆ:
adb -d shell-e shell
ąĪą┐ąŠčüąŠą▒ ąÆ: ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠą║čĆčāąČąĄąĮąĖčÅ ANDROID_SERIAL
ą£ąŠąČąĮąŠ ąĘą░ą┤ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮą░ ą▓čĆąĄą╝čÅ čüąĄčüčüąĖąĖ:
set ANDROID_SERIAL=192.168 .1 .50 :5555
adb shell
$env:ANDROID_SERIAL="192.168.1.50:5555"
adb shell
export ANDROID_SERIAL=192.168 .1 .50 :5555
adb shell
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą┤ą╗čÅ LuckFox Pico Mini ]
ąöąŠą┐čāčüčéąĖą╝, čā ą▓ą░čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓:
# ą¤čĆąŠą▓ąĄčĆčÅąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░
adb devices# List of devices attached # 192.168.1.50:5555 device # LuckFox Pico Mini # emulator-5554 device # Android Emulator # ABCDEF012345 device # ąóąĄą╗ąĄč乊ąĮ ą┐ąŠ USB 192.168 .1 .50 :5555 shell# ąśą╗ąĖ ąĄčüą╗ąĖ čŹč鹊 ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ čüąĄč鹥ą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ
adb -d shell# ąÆčŗą┐ąŠą╗ąĮčÅąĄą╝ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ ą║ąŠąĮą║čĆąĄčéąĮąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ
adb -s 192.168 .1 .50 :5555 shell ls -la
adb -s 192.168 .1 .50 :5555 shell cat /proc/version
[ą¤ąŠą╗ąĄąĘąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ čü čāą║ą░ąĘą░ąĮąĖąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ ]
# ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ čäą░ą╣ą╗ąŠą▓
adb -s 192.168 .1 .50 :5555 push local_file.txt /sdcard/
adb -s 192.168 .1 .50 :5555 pull /sdcard/file.txt ./
# ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ
adb -s 192.168 .1 .50 :5555 install app.apk
# ą¤čĆąŠčüą╝ąŠčéčĆ ą╗ąŠą│ąŠą▓
adb -s 192.168 .1 .50 :5555 logcat
# ą¤ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░
adb -s 192.168 .1 .50 :5555 reboot
[ąĪąŠąĘą┤ą░ąĮąĖąĄ ą░ą╗ąĖą░čüąŠą▓ ą┤ą╗čÅ čāą┤ąŠą▒čüčéą▓ą░ (Linux/macOS) ]
ąöąŠą▒ą░ą▓čīč鹥 ą▓ ~/.bashrc ąĖą╗ąĖ ~/.zshrc:
alias adb-luckfox='adb -s 192.168.1.50:5555' alias luckfox-shell ='adb -s 192.168.1.50:5555 shell'
adb-luckfox shell
luckfox-shell
[ąöą╗čÅ Windows - čüąŠąĘą┤ą░ąĮąĖąĄ ą┐ą░ą║ąĄčéąĮčŗčģ čäą░ą╣ą╗ąŠą▓ ]
ąĪąŠąĘą┤ą░ą╣č鹥 čäą░ą╣ą╗ luckfox-shell.bat
@echo off
adb -s 192.168.1.50:5555 shell
[ąÆą░ąČąĮčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ ]
ą¤ąŠčĆčé ąŠą▒čÅąĘą░č鹥ą╗ąĄąĮ: ą┤ą╗čÅ čüąĄč鹥ą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓čüąĄą│ą┤ą░ čāą║ą░ąĘčŗą▓ą░ą╣č鹥 ą┐ąŠčĆčé (:5555).ąĀąĄą│ąĖčüčéčĆ ą▓ą░ąČąĄąĮ: čüąĄčĆąĖą╣ąĮčŗąĄ ąĮąŠą╝ąĄčĆą░ ąŠą▒čŗčćąĮąŠ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗ ą║ čĆąĄą│ąĖčüčéčĆčā.ąÉą▓č鹊čĆąĖąĘą░čåąĖčÅ: čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą▓č鹊čĆąĖąĘąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ.ąĪčéą░ą▒ąĖą╗čīąĮąŠčüčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ: ą┤ą╗čÅ čüąĄč鹥ą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠą▓ąĄčĆčÅą╣č鹥, čćč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠ.
ąóąĄą┐ąĄčĆčī ą▓čŗ ą╝ąŠąČąĄč鹥 ą╗ąĄą│ą║ąŠ čĆą░ą▒ąŠčéą░čéčī čü ą║ąŠąĮą║čĆąĄčéąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ!
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▒čāą┤ąĄą╝ čāą┐čĆą░ą▓ą╗čÅčéčī ąĮąŠąČą║ąŠą╣ 34 ą┐ą╗ą░čéčŗ LuckFox Pico Mini, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ čüą▓ąĄč鹊ą┤ąĖąŠą┤čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ:
1 . ąŁą║čüą┐ąŠčĆčé ą▓čŗą▓ąŠą┤ą░ GPIO 34 ą▓ čäą░ą╣ą╗ąŠą▓čāčÄ čüąĖčüč鹥ą╝čā sysfs
# echo 34 > /sys/class/gpio/export
2 . ąØą░čüčéčĆąŠą╣ą║ą░ GPIO 34 ąĮą░ ą▓čŗčģąŠą┤:
# echo out > /sys/class/gpio/gpio34/direction
3 . ąŻčüčéą░ąĮąŠą▓ąĖą╝ ą╗ąŠą│. 1 ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčĆčéą░ GPIO 34:
# echo 1 > /sys/class/gpio/gpio34/value
ą¤ąŠčüą╗ąĄ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĘą░ą│ąŠčĆąĖčéčüčÅ.
4 . ąŻčüčéą░ąĮąŠą▓ąĖą╝ ą╗ąŠą│. 1 ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčĆčéą░ GPIO 34:
# echo 0 > /sys/class/gpio/gpio34/value
ą¤ąŠčüą╗ąĄ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐ąŠą│ą░čüąĮąĄčé.
5 . ąĢčüą╗ąĖ ą▓čŗą▓ąŠą┤ GPIO 34 ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĄąĮ, č鹊 ąŠčéą╝ąĄąĮąĖč鹥 ąĄą│ąŠ 菹║čüą┐ąŠčĆčé:
# echo 34 > /sys/class/gpio/unexport
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠčüą╗ąĄ ąŠčéą╝ąĄąĮčŗ 菹║čüą┐ąŠčĆčéą░ ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ą░ čüąŠčģčĆą░ąĮąĖčéčüčÅ, čé. ąĄ. ą▓čŗą▓ąŠą┤ 34 ąŠčüčéą░ąĮąĄčéčüčÅ ą▓čŗčģąŠą┤ąŠą╝, ą┐čĆąŠčüč鹊 ą▓čŗą▓ąŠą┤ 34 ą▒ąŠą╗čīčłąĄ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą▓ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝ąĄ sysfs .
ąÆ menuconfig (ą║ą░ą║ ą▓ Buildroot, čéą░ą║ ąĖ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čÅą┤čĆą░ Linux) čüąĖą╝ą▓ąŠą╗čŗ < > , < *> ąĖ < M> ąĖą╝ąĄčÄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
[1. ąŚąĮą░č湥ąĮąĖčÅ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ menuconfig ]
< > < *> < M>
[2. ąĀą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā < *> ąĖ < M> ]
< *> - ąĪčéą░čéąĖč湥čüą║ą░čÅ čüą▒ąŠčĆą║ą░:
ą¤ą░ą║ąĄčé/ą╝ąŠą┤čāą╗čī ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą▓:
- ą»ą┤čĆąŠ Linux (ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓)
< M> - ąĪą▒ąŠčĆą║ą░ ą║ą░ą║ ą╝ąŠą┤čāą╗čī:
ą¤ą░ą║ąĄčé/ą╝ąŠą┤čāą╗čī čüąŠą▒ąĖčĆą░ąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ:
- ąĪąŠąĘą┤ą░ąĄčéčüčÅ čäą░ą╣ą╗ .ko (ą┤ą╗čÅ čÅą┤čĆą░) ąĖą╗ąĖ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą▒ąĖąĮą░čĆąĮąĖą║
[3. ą¤čĆąĖą╝ąĄčĆčŗ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 LuckFox Pico ]
ąöą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čÅą┤čĆą░:
Device Drivers -->
ąöą╗čÅ ą┐ą░ą║ąĄč鹊ą▓ Buildroot:
Target packages -->
[4. ą¤čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą┤ą╗čÅ LuckFox Pico ]
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī < *>:
# ąÜčĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ
# ąæą░ąĘąŠą▓čŗąĄ čāčéąĖą╗ąĖčéčŗ
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī < M>:
# ąĪą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ąĖą╗ąĖ čĆąĄą┤ą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ
# ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čāčéąĖą╗ąĖčéčŗ
[5. ąĀą░ą▒ąŠčéą░ čü ą╝ąŠą┤čāą╗čÅą╝ąĖ ą┐ąŠčüą╗ąĄ čüą▒ąŠčĆą║ąĖ ]
ąĢčüą╗ąĖ ą▓čŗ čüąŠą▒čĆą░ą╗ąĖ čćč鹊-č鹊 ą║ą░ą║ < M>:
ąŚą░ą│čĆčāąĘą║ą░ ą╝ąŠą┤čāą╗čÅ:
# ąØą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ LuckFox Pico
ąöąŠą▒ą░ą▓čīč鹥 ą▓ /etc/modules :
usbserial
ą¤čĆąŠčüą╝ąŠčéčĆ ąĘą░ą│čĆčāąČąĄąĮąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╣:
[root@luckfox ]# lsmod
Module Size Used by Tainted: G
rve 23436 0
rockit 225880 0
rknpu 27019 0
mpp_vcodec 414257 1 rockit
rga3 90762 1 rockit
phy_rockchip_csi2_dphy 9338 0
phy_rockchip_csi2_dphy_hw 10066 0
video_rkisp 171902 1 rockit
video_rkcif 162117 1 rockit
rk_dvbm 5941 2 mpp_vcodec,video_rkisp
[6. ą×čüąŠą▒ąĄąĮąĮąŠčüčéąĖ ą┤ą╗čÅ Buildroot ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü čÅą┤čĆąŠą╝ Linux ]
ąÆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čÅą┤čĆą░ Linux:
ŌĆó < M> čüąŠąĘą┤ą░ąĄčé .ko čäą░ą╣ą╗čŗ ą▓ /lib/modules/
ąÆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Buildroot:
ŌĆó < M> ą╝ąŠąČąĄčé čüąŠąĘą┤ą░ą▓ą░čéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐ą░ą║ąĄčéčŗ .ipk
[7. ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┤ą╗čÅ LuckFox Pico Mini ]
ąöą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ ą┐ą░ą╝čÅčéąĖ (256MB):
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 < M> ą┤ą╗čÅ:
- ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čüąĄč鹥ą▓čŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 < *> ą┤ą╗čÅ:
- ąæą░ąĘąŠą▓čŗčģ čüąĖčüč鹥ą╝ąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓
[8. ąÜą░ą║ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ą░ą╝ąĖ ]
ąÆ menuconfig: ą┐čĆąŠą▒ąĄą╗ čåąĖą║ą╗ąĖč湥čüą║ąĖ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé ą╝ąĄąČą┤čā < >, < *> ąĖ < M>
Y - ą▓čŗą▒čĆą░čéčī ą║ą░ą║ < *>
[9. ą¤čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ LuckFox Pico ]
# ąÜčĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĮąŠąĄ - ą▓čüąĄą│ą┤ą░ < *>
# ą¤ąĄčĆąĖč乥čĆąĖčÅ - ą╝ąŠąČąĮąŠ ą║ą░ą║ < M>
# ążą░ą╣ą╗ąŠą▓čŗąĄ čüąĖčüč鹥ą╝čŗ
[10. ą¤čĆąŠą▓ąĄčĆą║ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ]
ą¤ąŠčüą╗ąĄ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ:
# ą¤čĆąŠčüą╝ąŠčéčĆ ą▓čŗą▒čĆą░ąĮąĮčŗčģ ąŠą┐čåąĖą╣
# ąÆ čÅą┤čĆąĄ Linux
ąÆčŗą▓ąŠą┤: < M> ą┐ąŠąĘą▓ąŠą╗čÅąĄčé 菹║ąŠąĮąŠą╝ąĖčéčī čĆąĄčüčāčĆčüčŗ ąĮą░ ą╝ąĖąĮąĖ-ą┐ą╗ą░čéą░čģ čéąĖą┐ą░ LuckFox Pico, ąĘą░ą│čĆčāąČą░čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąŠąĮąĖ ąĮčāąČąĮčŗ.
RKNN ą▓ ą║ąŠąĮč鹥ą║čüč鹥 LuckFox Pico Mini ŌĆö čŹč鹊 ą║ą╗čÄč湥ą▓ą░čÅ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ąĖčüą║čāčüčüčéą▓ąĄąĮąĮčŗą╝ ąĖąĮč鹥ą╗ą╗ąĄą║č鹊ą╝ ąĮą░ čŹč鹊ą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ.
[ą¦č鹊 čéą░ą║ąŠąĄ RKNN? ]
RKNN (Rockchip Neural Network) ŌĆö čŹč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüč鹥ą║ ąĖ č乊čĆą╝ą░čé ą╝ąŠą┤ąĄą╗ąĄą╣ ąśąś, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗą╣ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ Rockchip ą┤ą╗čÅ čüą▓ąŠąĖčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓. ąŁč鹊 ą░ąĮą░ą╗ąŠą│ Google Coral (.tflite) ąĖą╗ąĖ NVIDIA TensorRT, ąĮąŠ ą┤ą╗čÅ čćąĖą┐ąŠą▓ Rockchip.
ąÉčĆčģąĖč鹥ą║čéčāčĆą░ RKNN:
ŌöīŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöÉ Ōöé AI-ą╝ąŠą┤ąĄą╗čī Ōöé # TensorFlow, PyTorch, ONNX Ōöé (ąĖčüčģąŠą┤ąĮą░čÅ) Ōöé ŌööŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöś Ōåō ŌöīŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöÉ Ōöé RKNN Toolkit Ōöé # ąÜąŠąĮą▓ąĄčĆčéą░čåąĖčÅ ąĖ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖčÅ Ōöé (ąĮą░ ą¤ąÜ) Ōöé ŌööŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöś Ōåō ŌöīŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöÉ Ōöé RKNN-ą╝ąŠą┤ąĄą╗čī Ōöé # .rknn čäą░ą╣ą╗ Ōöé (.rknn) Ōöé ŌööŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöś Ōåō ŌöīŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöÉ Ōöé LuckFox Pico Ōöé # ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮą░ NPU Ōöé čü RKNN API Ōöé ŌööŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöś
ąÜąŠą╝ą┐ąŠąĮąĄąĮčéčŗ RKNN 菹║ąŠčüąĖčüč鹥ą╝čŗ:
1. RKNN Toolkit (ąĮą░ ą¤ąÜ)
- ąÜąŠąĮą▓ąĄčĆčéąĖčĆčāąĄčé ą╝ąŠą┤ąĄą╗ąĖ ą▓ č乊čĆą╝ą░čé .rknn
2. RKNN Runtime (ąĮą░ LuckFox Pico)
- ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą╝ąŠą┤ąĄą╗ąĄą╣
3. RKNN Model (.rknn čäą░ą╣ą╗)
- ą×ą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ č乊čĆą╝ą░čé ą╝ąŠą┤ąĄą╗ąĖ
[ą¤čĆą░ą║čéąĖč湥čüą║ąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĮą░ LuckFox Pico Mini ]
ąóąĖą┐ąĖčćąĮčŗą╣ workflow (ąĮą░ čÅąĘčŗą║ąĄ Python):
from rknnlite.api import RKNNLite# ąŚą░ą│čĆčāąĘą║ą░ ą╝ąŠą┤ąĄą╗ąĖ:
rknn = RKNNLite()
ret = rknn. load_rknn('model.rknn' )
ret = rknn. init_runtime()# ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ inference:
inputs = [... ] # ą▓čģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ
outputs = rknn. inference(inputs= [inputs])
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ:
- ąĪą▓čæčĆčéą║ąĖ (Convolutions)
ą¤čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ RKNN ąĮą░ LuckFox Pico:
1. ąÆčŗčüąŠą║ą░čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī
2. ąØąĖąĘą║ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░
- ą×ą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ embedded-čāčüčéčĆąŠą╣čüčéą▓
3. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ąŠą▓
- TensorFlow (.pb, .tflite)
ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣ ąĮą░ LuckFox Pico Mini:
# ąĀą░čüą┐ąŠąĘąĮą░ą▓ą░ąĮąĖąĄ ąŠą▒čŖąĄą║č鹊ą▓
# ąÜą╗ą░čüčüąĖčäąĖą║ą░čåąĖčÅ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣
# ąĪąĄą│ą╝ąĄąĮčéą░čåąĖčÅ
ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
- ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ąĮąĄ ą▓čüąĄčģ ąŠą┐ąĄčĆą░č鹊čĆąŠą▓ ąĮąĄą╣čĆąŠčüąĄč鹥ą╣
ąóąĖą┐ąĖčćąĮčŗą╣ ą┐čĆąŠčåąĄčüčü čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ:
1. ą×ą▒čāč湥ąĮąĖąĄ ą╝ąŠą┤ąĄą╗ąĖ ąĮą░ ą¤ąÜ (TensorFlow/PyTorch)
ą¤ąŠą╗ąĄąĘąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
# ą¤čĆąŠą▓ąĄčĆą║ą░ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ NPU
# ąŚą░ą│čĆčāąĘą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ RKNN
# ą¤čĆąĖą╝ąĄčĆčŗ ąĖąĘ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ LuckFox
ąÆ ąĖč鹊ą│ąĄ: RKNN ŌĆö čŹč鹊 ą╝ąŠčüčé ą╝ąĄąČą┤čā čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ą░ą╝ąĖ ą╝ą░čłąĖąĮąĮąŠą│ąŠ ąŠą▒čāč湥ąĮąĖčÅ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ čāčüą║ąŠčĆąĄąĮąĖąĄą╝ ąĮą░ čćąĖą┐ą░čģ Rockchip, čćč鹊 ą┤ąĄą╗ą░ąĄčé LuckFox Pico Mini ą╝ąŠčēąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą┤ą╗čÅ embedded AI ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣.
ąĪą╝. čéą░ą║ąČąĄ:
RKNN Model Inference Test site:wiki.luckfox.com.
RKMPI ą▓ ą║ąŠąĮč鹥ą║čüč鹥 LuckFox Pico Mini ŌĆö čŹč鹊 ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą╣ąĮčŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü (Media Process Interface) ąŠčé Rockchip ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ąĖ ą▒ą╗ąŠą║ą░ą╝ąĖ ą╝ąĄą┤ąĖą░čüąĖčüč鹥ą╝čŗ.
[ą¦č鹊 čéą░ą║ąŠąĄ RKMPI? ]
RKMPI (Rockchip Media Process Interface) ŌĆö čŹč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ SDK, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣ API ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą╣ąĮčŗą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Rockchip, ą▓ą║ą╗čÄčćą░čÅ:
- ąÆąĖą┤ąĄąŠ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ/ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ (VPU - Video Processing Unit)
ąÉčĆčģąĖč鹥ą║čéčāčĆą░ RKMPI:
ŌöīŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöÉ Ōöé ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ Ōöé Ōö£ŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöż Ōöé RKMPI API Ōöé Ōö£ŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöż Ōöé ąöčĆą░ą╣ą▓ąĄčĆčŗ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▒ą╗ąŠą║ąŠą▓: Ōöé Ōöé ŌĆó VPU (ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ/ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ) Ōöé Ōöé ŌĆó ISP (ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣) Ōöé Ōöé ŌĆó VOP (ą┤ąĖčüą┐ą╗ąĄą╣) Ōöé Ōöé ŌĆó RGA (ą│čĆą░čäąĖč湥čüą║ąĖą╣ čāčüą║ąŠčĆąĖč鹥ą╗čī) Ōöé Ōö£ŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöż Ōöé ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ Ōöé ŌööŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöś
[ą×čüąĮąŠą▓ąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ RKMPI ]
1. ąÆąĖą┤ąĄąŠ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ/ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ (VPU)
- H.264/H.265 ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ąŠ 1080p@30fps
2. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣ (ISP)
- ąöąĄą▒ąĄą╣ąĄčĆąĖąĘą░čåąĖčÅ RAW-ą┤ą░ąĮąĮčŗčģ čü ą║ą░ą╝ąĄčĆčŗ
3. ąōčĆą░čäąĖč湥čüą║ąĖą╣ čāčüą║ąŠčĆąĖč鹥ą╗čī (RGA)
- ą£ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣
4. ąöąĖčüą┐ą╗ąĄą╣ąĮčŗą╣ ą▓čŗą▓ąŠą┤ (VOP)
- ąÆčŗą▓ąŠą┤ ąĮą░ HDMI/LCD
[ą¤čĆą░ą║čéąĖč湥čüą║ąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĮą░ LuckFox Pico Mini ]
ą¤čĆąĖą╝ąĄčĆ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ VPU (čÅąĘčŗą║ C):
#include < rockchip/rk_mpi.h> // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ
RK_MPI_SYS_Init();// ąĪąŠąĘą┤ą░ąĮąĖąĄ VPU ą┤ą╗čÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ
VENC_CHN_ATTR_S venc_attr;
venc_attr.stVencAttr.enType = RK_VIDEO_ID_AVC; // H.264
RK_MPI_VENC_CreateChn(0 , & venc_attr);
ą¤čĆąĖą╝ąĄčĆ čĆą░ą▒ąŠčéčŗ čü ą║ą░ą╝ąĄčĆąŠą╣ č湥čĆąĄąĘ ISP:
// ąØą░čüčéčĆąŠą╣ą║ą░ ISP
ISP_DEV isp_dev = 0 ;
RK_MPI_ISP_SetContrast(isp_dev, 50 );
RK_MPI_ISP_SetSharpness(isp_dev, 60 );// ąŚą░čģą▓ą░čé ą║ą░ą┤čĆą░
VIDEO_FRAME_INFO_S stFrame;
RK_MPI_VI_GetChnFrame(0 , 0 , & stFrame, -1 );
ą¤čĆąĖą╝ąĄčĆ čĆą░ą▒ąŠčéčŗ čü RGA:
// ą£ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ
RGA_ATTR_S stRgaAttr;
stRgaAttr.bEnBufPool = RK_TRUE;
stRgaAttr.stImgIn.u32X = 1920 ;
stRgaAttr.stImgIn.u32Y = 1080 ;
stRgaAttr.stImgOut.u32X = 640 ;
stRgaAttr.stImgOut.u32Y = 360 ;
RK_MPI_RGA_CreateChn(0 , & stRgaAttr);
[ąóąĖą┐ąŠą▓čŗąĄ čüčåąĄąĮą░čĆąĖąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ]
1. ąÆąĖą┤ąĄąŠąĮą░ą▒ą╗čÄą┤ąĄąĮąĖąĄ
ąŚą░čģą▓ą░čé čü ą║ą░ą╝ąĄčĆčŗ ŌåÆ ISP ąŠą▒čĆą░ą▒ąŠčéą║ą░ ŌåÆ H.264 ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ŌåÆ ąĪąĄč鹥ą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░:
2. ąÆąĖą┤ąĄąŠą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čī
ąĪąĄč鹥ą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ŌåÆ H.264 ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ŌåÆ ąÆčŗą▓ąŠą┤ ąĮą░ ą┤ąĖčüą┐ą╗ąĄą╣:
3. ąÜąŠą╝ą┐čīčÄč鹥čĆąĮąŠąĄ ąĘčĆąĄąĮąĖąĄ
ąŚą░čģą▓ą░čé čü ą║ą░ą╝ąĄčĆčŗ ŌåÆ ISP ŌåÆ RGA (ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖąĄ) ŌåÆ AI ąŠą▒čĆą░ą▒ąŠčéą║ą░:
[ą¤čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ RKMPI ]
1. ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ čāčüą║ąŠčĆąĄąĮąĖąĄ:
- ąØąĖąĘą║ąŠąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ
2. ąØąĖąĘą║ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░
- ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ
3. ą¤ąŠą╗ąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗čī
- ąóąŠąĮą║ą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓
ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
- ąĪą╗ąŠąČąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ
[ą¤ąŠą╗ąĄąĘąĮčŗąĄ čāčéąĖą╗ąĖčéčŗ ]
ąóąĄčüčé ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ:
# rkmpp_venc_test
ąóąĄčüčé ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ:
# rkmpp_vdec_test
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüąĖčüč鹥ą╝ąĄ:
# cat /proc/rk_camship
ą¤čĆąŠą▓ąĄčĆą║ą░ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▒ą╗ąŠą║ąŠą▓:
# ls /dev/ | grep -E "vpu|rga|isp"
[ąĪčĆą░ą▓ąĮąĄąĮąĖąĄ čü ą┤čĆčāą│ąĖą╝ąĖ č鹥čģąĮąŠą╗ąŠą│ąĖčÅą╝ąĖ ]
ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ ąØą░ąĘąĮą░č湥ąĮąĖąĄ ąŻčĆąŠą▓ąĄąĮčī
RKMPI ą£čāą╗čīčéąĖą╝ąĄą┤ąĖą░ (ą▓ąĖą┤ąĄąŠ/ą░čāą┤ąĖąŠ)
ąØąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣
RKNN ąØąĄą╣čĆąŠąĮąĮčŗąĄ čüąĄčéąĖ (AI)
ąÆčŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣
GStreamer ą£čāą╗čīčéąĖą╝ąĄą┤ąĖą░ ą┐ą░ą╣ą┐ą╗ą░ą╣ąĮčŗ
ą¤čĆąĖą║ą╗ą░ą┤ąĮąŠą╣
OpenCV ąÜąŠą╝ą┐čīčÄč鹥čĆąĮąŠąĄ ąĘčĆąĄąĮąĖąĄ
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░
ąÆ ąĖč鹊ą│ąĄ: RKMPI ŌĆö čŹč鹊 čäčāąĮą┤ą░ą╝ąĄąĮčéą░ą╗čīąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčé ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą▓čŗčüąŠą║ąŠą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮčŗčģ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą╣ąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĮą░ LuckFox Pico Mini, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖą╣ ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ čćąĖą┐ą░ Rockchip.
ąĪą╝. čéą░ą║ąČąĄ:
Q040. ą¦č鹊 čéą░ą║ąŠąĄ RKNN?
OpenCV (Open Source Computer Vision Library) ŌĆö čŹč鹊 ąŠčéą║čĆčŗčéą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĮąŠą│ąŠ ąĘčĆąĄąĮąĖčÅ, ąŠą┤ąĮą░ ąĖąĘ čüą░ą╝čŗčģ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ ąĖ ą╝ąŠčēąĮčŗčģ ą▓ čüą▓ąŠąĄą╣ ąŠą▒ą╗ą░čüčéąĖ.
[ą¦č鹊 čéą░ą║ąŠąĄ OpenCV? ]
OpenCV ŌĆö čŹč鹊 ą║čĆąŠčüčüą┐ą╗ą░čéč乊čĆą╝ąĄąĮąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░, čüąŠą┤ąĄčƹȹ░čēą░čÅ ą▒ąŠą╗ąĄąĄ 2500 ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ ą┤ą╗čÅ:
- ąÜąŠą╝ą┐čīčÄč鹥čĆąĮąŠą│ąŠ ąĘčĆąĄąĮąĖčÅ
ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ OpenCV:
1. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣
# python import cv2 import numpy as np # ąŚą░ą│čĆčāąĘą║ą░ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ
img = cv2. imread('image.jpg' )# ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░
resized = cv2. resize(img, (640 , 480 ))# ąĀą░ąĘą╝čŗčéąĖąĄ
blurred = cv2. GaussianBlur(img, (5 , 5 ), 0 )# ą×ą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ą║čĆą░ąĄą▓
edges = cv2. Canny(img, 100 , 200 )# ą¤ąŠčĆąŠą│ąŠą▓ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░
gray = cv2. cvtColor(img, cv2. COLOR_BGR2GRAY)
_, threshold = cv2. threshold(gray, 127 , 255 , cv2. THRESH_BINARY)
2. ąĀą░ą▒ąŠčéą░ čü ą▓ąĖą┤ąĄąŠą┐ąŠč鹊ą║ąŠą╝ ąĖ ą║ą░ą╝ąĄčĆą░ą╝ąĖ
# python # ąŚą░čģą▓ą░čé ą▓ąĖą┤ąĄąŠ čü ą║ą░ą╝ąĄčĆčŗ
cap = cv2. VideoCapture(0 )while True :
ret, frame = cap. read()
if not ret:
break
# ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą║ą░ą┤čĆą░
gray_frame = cv2. cvtColor(frame, cv2. COLOR_BGR2GRAY)
cv2. imshow('Camera' , gray_frame)
if cv2. waitKey(1 ) & 0xFF == ord ('q' ):
break
cap. release()
cv2. destroyAllWindows()
3. ą×ą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ąŠą▒čŖąĄą║č鹊ą▓ ąĖ ą╗ąĖčå
# python # ąŚą░ą│čĆčāąĘą║ą░ ą║ą╗ą░čüčüąĖčäąĖą║ą░č鹊čĆą░ ą┤ą╗čÅ ą╗ąĖčå
face_cascade = cv2. CascadeClassifier('haarcascade_frontalface_default.xml' )# ą×ą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ą╗ąĖčå
faces = face_cascade. detectMultiScale(gray, 1.1 , 4 )# ąĀąĖčüąŠą▓ą░ąĮąĖąĄ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ąŠą▓ ą▓ąŠą║čĆčāą│ ą╗ąĖčå for (x, y, w, h) in faces:
cv2. rectangle(img, (x, y), (x+ w, y+ h), (255 , 0 , 0 ), 2 )
4. ą£ą░čłąĖąĮąĮąŠąĄ ąŠą▒čāč湥ąĮąĖąĄ
# python # K-mean ą║ą╗ą░čüč鹥čĆąĖąĘą░čåąĖčÅ
criteria = (cv2. TERM_CRITERIA_EPS + cv2. TERM_CRITERIA_MAX_ITER, 10 , 1.0 )
_, labels, centers = cv2. kmeans(data, 3 , None , criteria, 10 ,
cv2. KMEANS_RANDOM_CENTERS)# SVM ą║ą╗ą░čüčüąĖčäąĖą║ą░č鹊čĆ
svm = cv2. ml. SVM_create()
svm. setType(cv2. ml. SVM_C_SVC)
svm. setKernel(cv2. ml. SVM_LINEAR)
svm. train(training_data, cv2. ml. ROW_SAMPLE, labels)
ąÜą╗čÄč湥ą▓čŗąĄ ą╝ąŠą┤čāą╗ąĖ OpenCV:
ą£ąŠą┤čāą╗čī ąØą░ąĘąĮą░č湥ąĮąĖąĄ
core ą×čüąĮąŠą▓ąĮčŗąĄ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ ąĖ čäčāąĮą║čåąĖąĖ
imgproc ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣
video ąÉąĮą░ą╗ąĖąĘ ą▓ąĖą┤ąĄąŠ ąĖ čéčĆąĄą║ąĖąĮą│
calib3d ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą║ą░ą╝ąĄčĆ ąĖ 3D čĆąĄą║ąŠąĮčüčéčĆčāą║čåąĖčÅ
features2d ąöąĄč鹥ą║č鹊čĆčŗ ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą┐čĆąĖąĘąĮą░ą║ąŠą▓
objdetect ą×ą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ąŠą▒čŖąĄą║č鹊ą▓
ml ą£ą░čłąĖąĮąĮąŠąĄ ąŠą▒čāč湥ąĮąĖąĄ
dnn ąōą╗čāą▒ąŠą║ąĖąĄ ąĮąĄą╣čĆąŠąĮąĮčŗąĄ čüąĄčéąĖ
[ąŻčüčéą░ąĮąŠą▓ą║ą░ OpenCV ]
ąöą╗čÅ Python:
# ąæą░ąĘąŠą▓ą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░
$ pip install opencv-python pip install opencv-contrib-python
ąöą╗čÅ Ubuntu:
# ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĖąĘ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ
$ sudo apt update
$ sudo apt install python3-opencv
# ąśą╗ąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ąĖąĘ ąĖčüčģąŠą┤ąĮąĖą║ąŠą▓
$ sudo apt install build-essential cmake git libgtk2.0-dev pkg-config \
libavcodec-dev libavformat-dev libswscale-dev
$ git clone https://github.com/opencv/opencv.git
$ cd opencv && mkdir build && cd build
$ cmake .. && make -j4 && sudo make install
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ]
1. ąĀą░čüą┐ąŠąĘąĮą░ą▓ą░ąĮąĖąĄ QR-ą║ąŠą┤ąŠą▓:
# python
detector = cv2. QRCodeDetector()
data, bbox, _ = detector. detectAndDecode(img)if data:
print ("QR Code data:" , data)
2. ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ:
# python # ążąŠąĮąŠą▓ą░čÅ čüčāą▒čéčĆą░ą║čåąĖčÅ
fgbg = cv2. createBackgroundSubtractorMOG2()while True :
ret, frame = cap. read()
fgmask = fgbg. apply(frame)
# ąÉąĮą░ą╗ąĖąĘ ą╝ą░čüą║ąĖ ą┤ą▓ąĖąČąĄąĮąĖčÅ
3. ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą║ą░ą╝ąĄčĆčŗ:
# python # ą¤ąŠąĖčüą║ čłą░čģą╝ą░čéąĮąŠą╣ ą┤ąŠčüą║ąĖ
ret, corners = cv2. findChessboardCorners(gray, (9 , 6 ), None )if ret:
cv2. calibrateCamera(objpoints, imgpoints, gray. shape[::-1 ], None , None )
[ą¤čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ OpenCV ]
1. ąÜčĆąŠčüčüą┐ą╗ą░čéč乊čĆą╝ąĄąĮąĮąŠčüčéčī
- Windows, Linux, macOS, Android, iOS
2. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą╝ąĮąŠą│ąĖčģ čÅąĘčŗą║ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ
- C++, Python, Java, JavaScript
3. ąÆčŗčüąŠą║ą░čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī
- ą×ą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ
4. ąÉą║čéąĖą▓ąĮąŠąĄ čüąŠąŠą▒čēąĄčüčéą▓ąŠ
- ąĀąĄą│čāą╗čÅčĆąĮčŗąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ
[OpenCV ą▓ embedded-čüąĖčüč鹥ą╝ą░čģ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, LuckFox Pico) ]
# python # ą¤čĆąĖą╝ąĄčĆ ą┤ą╗čÅ embedded čāčüčéčĆąŠą╣čüčéą▓ą░ import cv2 # ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čāčüą║ąŠčĆąĄąĮąĖčÅ
cv2. setUseOptimized(True )# ąĀą░ą▒ąŠčéą░ čü ą║ą░ą╝ąĄčĆąŠą╣ MIPI
cap = cv2. VideoCapture(0 ) # CSI ą║ą░ą╝ąĄčĆą░ # ąŁą║ąŠąĮąŠą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┤ą╗čÅ ą╝ą░ą╗ąŠą╝ąŠčēąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓
small_frame = cv2. resize(frame, (320 , 240 ))
gray = cv2. cvtColor(small_frame, cv2. COLOR_BGR2GRAY)
ąóąĖą┐ąŠą▓čŗąĄ ąŠą▒ą╗ą░čüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ:
- ąĀąŠą▒ąŠč鹊č鹥čģąĮąĖą║ą░ (ąĮą░ą▓ąĖą│ą░čåąĖčÅ, SLAM)
ąÆ ąĖč鹊ą│ąĄ: OpenCV ŌĆö čŹč鹊 "čłą▓ąĄą╣čåą░čĆčüą║ąĖą╣ ąĮąŠąČ" ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą▓ ąŠą▒ą╗ą░čüčéąĖ ą║ąŠą╝ą┐čīčÄč鹥čĆąĮąŠą│ąŠ ąĘčĆąĄąĮąĖčÅ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╣ ą│ąŠč鹊ą▓čŗąĄ, ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ą┤ą╗čÅ čüą░ą╝čŗčģ čĆą░ąĘąĮąŠąŠą▒čĆą░ąĘąĮčŗčģ ąĘą░ą┤ą░čć ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣ ąĖ ą▓ąĖą┤ąĄąŠ.
ąØą░ą┐čĆąĖą╝ąĄčĆ:
$ adb devices
List of devices attached
359238bf91d2b5a8 device
192.168.1.100:5555 device
ą¦č鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ ąĮčāąČąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā ąĖąĘ čŹč鹊ą│ąŠ čüą┐ąĖčüą║ą░, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠą┐čåąĖčÄ -s
$ adb -s 192.168.1.100:5555 shell
[root@luckfox ]#
ą¦č鹊ą▒čŗ ąŠčéą║ą╗čÄčćąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 adb disconnect :
$ adb disconnect 192.168.1.100:5555
disconnected 192.168.1.100:5555
$ adb devices
List of devices attached
359238bf91d2b5a8 device
ą¦č鹊ą▒čŗ čüąĮąŠą▓ą░ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā adb connect :
$ adb connect 192.168.1.100:5555
connected to 192.168.1.100:5555
$ adb devices
List of devices attached
359238bf91d2b5a8 device
192.168.1.100:5555 device
ą×čéą║ą╗čÄč湥ąĮąĖąĄ ą▓čüąĄčģ čüąĄč鹥ą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ adb disconnect ą▒ąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (ąŠčéą║ą╗čÄčćą░čéčüčÅ č鹊ą╗čīą║ąŠ čüąĄč鹥ą▓čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, USB-čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčüčéą░ąĮąĄčéčüčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝):
$ adb disconnect
disconnected everything
$ adb devices
List of devices attached
359238bf91d2b5a8 device
ą¤ąŠą╗ąĮą░čÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░ ADB čüąĄčĆą▓ąĄčĆą░ (ąĄčüą╗ąĖ ąĮčāąČąĮąŠ):
$ adb kill-server
$ adb start-server
ąóą░ą║ą░čÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą╝ąŠąČąĄčé ą▓ąŠąĘąĮąĖą║ąĮčāčéčī, ąĄčüą╗ąĖ ą┐ąŠ ą║ą░ą║ąŠą╣-č鹊 ą┐čĆąĖčćąĖąĮąĄ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ č湥čĆąĄąĘ USB/ADB ąĖą╗ąĖ Ethernet/SSH ąĮąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓čŗ čüąŠą▒ąĖčĆą░ąĄč鹥čüčī ą┐ąĄčĆąĄčüąŠą▒čĆą░čéčī Buildroot ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ą┐ąŠčĆčé USB ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ čģąŠčüčé USB.
[ą¦č鹊 ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ]
1 . ą¤ąĄčĆąĄčģąŠą┤ąĮąĖč湊ą║ USB - TTL UART čü čāčĆąŠą▓ąĮčÅą╝ąĖ ą╗ąŠą│ąĖą║ąĖ 3.3V (ąĮą░ čćąĖą┐ąĄ CP2102, CH340, FT232 ąĖ čé. ą┐.).2 . ą¤čĆąŠą│čĆą░ą╝ą╝ą░ č鹥čĆą╝ąĖąĮą░ą╗ą░ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ čģąŠčüčéą░ - putty ąĖą╗ąĖ minicom, ąĖą╗ąĖ čćč鹊-č鹊 ą┐ąŠą┤ąŠą▒ąĮąŠąĄ.3 . ą¤ą╗ą░čéą░ LuckFox Pico.
[ąÜą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüąĖą│ąĮą░ą╗čŗ RX ąĖ TX ]
1 . ą¤čĆąŠčüą╝ąŠčéčĆąĖč鹥 čüą┐ąĖčüąŠą║ ą┐ąŠčĆč鹊ą▓ tty ą║ąŠą╝ą░ąĮą┤ąŠą╣:
[root@luckfox ]# ls -1 /dev | grep tty
ąÆčŗą▓ąĄą┤ąĄčéčüčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ ą▓ąŠčé čéą░ą║ąŠą╣ čüą┐ąĖčüąŠą║:
tty
tty0
tty1
tty10
tty11
..
tty8
tty9
ttyFIQ0
ąśčēąĖč鹥 ą▓ čŹč鹊ą╝ čüą┐ąĖčüą║ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ttyS* , ttyAMA* , ttyFIQ* . ą×ą▒čŗčćąĮąŠ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą║ąŠąĮčüąŠą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ttyS0 ąĖ ttyFIQ0.
ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī čüą┐ąĖčüąŠą║ ąĘą░ą│čĆčāąĘąŠčćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
[root@luckfox ]# cat /proc/cmdline
user_debug=31
storagemedia=mtd
androidboot.storagemedia=mtd
androidboot.mode=normal rootwait
earlycon=uart8250,mmio32,0xff4c0000
console=ttyFIQ0
root=ubi0:rootfs
snd_soc_core.prealloc_buffer_size_kbytes=16
coherent_pool=0
mtdparts=spi-nand0:256K(env),256K@256K(idblock),512K(uboot),4M(boot),
30M(oem),6M(userdata),85M(rootfs)
ubi.mtd=6 rootfstype=ubifs
rk_dma_heap_cma=24M
androidboot.fwver=uboot-09/23/2025
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▓ąĖą┤ąĮąŠ, čćč鹊 ą┤ą╗čÅ ą║ąŠąĮčüąŠą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ttyFIQ0.
2 . ąŚą░ą┐čāčüčéąĖč鹥 ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ ą║ąŠą╝ą░ąĮą┤čā:
[root@luckfox ]# echo "hello" > /dev/ttyFIQ0
ąś čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░ čüą╝ąŠčéčĆąĖč鹥, ąĮą░ ą║ą░ą║ąŠą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ UART. ąØą░ ą╝ąŠąĄą╣ ą┐ą╗ą░čéą║ąĄ LuckFox Pico Mini B čŹč鹊 ąŠą║ą░ąĘą░ą╗čüčÅ ą║ąŠąĮčéą░ą║čé 4 (ą┐ąŠčĆčé 42, GPIO1_B2_d, UART2_TX_M1 ).
ąŁč鹊 ąĖ ą▒čāą┤ąĄčé čüąĖą│ąĮą░ą╗ TX. ą¤ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą▒ąĖčéą░ ą▓ąĖą┤ąĮąŠ, čćč鹊 čŹč鹊 čüą║ąŠčĆąŠčüčéčī 115200 ą▒ąŠą┤. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čüąĖą│ąĮą░ą╗ RX ą▒čāą┤ąĄčé ąĮą░ ą║ąŠąĮčéą░ą║č鹥 5 (ą┐ąŠčĆčé 43, GPIO1_B3_u, UART2_RX_M1 ).
3 . ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ luckfox-config ą╝ąŠąČąĮąŠ ąŠąĘąĮą░ą║ąŠą╝ąĖčéčīčüčÅ čü č鹥ą║čāčēąĄą╣ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ą▓čŗą▓ąŠą┤ąŠą▓:
[root@luckfox root]# luckfox-config show
Luckfox_Pico_MiniA/B
+ -USB- +
- - VBUS | | 1V8 - -
- - GND | | GND - -
- - 3V3 | | GPIO4_C1 - SARADC_M1 -
- FIQtty_TX - GPIO1_B2 | | GPIO4_C0 - SARADC_M0 -
- FIQtty_RX - GPIO1_B3 | | GPIO0_A4 - - PWM1_M0
PWM2_M2 - SPI0_M0_CS0 - GPIO1_C0 | | GPIO1_C7 - - PWM11_M1
PWM4_M2 - SPI0_M0_CLK - GPIO1_C1 | | GPIO1_C6 - - PWM10_M1
PWM5_M2 - SPI0_M0_MOSI - GPIO1_C2 | | GPIO1_D3 - I2C3_M1_SCL - PWM11_M2
PWM6_M2 - SPI0_M0_MISO - GPIO1_C3 | | GPIO1_D2 - I2C3_M1_SDA - PWM0_M1
PWM8_M1 - UART4_M1_RX - GPIO1_C4 | | GPIO1_D1 - UART3_M1_RX - PWM10_M2
PWM9_M1 - UART4_M1_TX - GPIO1_C5 | | GPIO1_D0 - UART3_M1_TX - PWM3_M2
+ - + - +
[ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą║ąŠąĮčüąŠą╗ąĖ ]
ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 ą┐ąĄčĆąĄčģąŠą┤ąĮąĖč湊ą║ ą░ą┤ą░ą┐č鹥čĆą░ USB - TTL UART ą║ čüąĖą│ąĮą░ą╗ą░ą╝ TX ąĖ RX ą┐ą╗ą░čéčŗ:
LuckFox Pico Mini B USB-UART ą░ą┤ą░ą┐č鹥čĆ UART2_TX_M1 ŌåÆ RX UART2_RX_M1 ŌåÉ TX GND GND
ąØą░čüčéčĆąŠą╣č鹥 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą┐ąŠčĆčéčā ą░ą┤ą░ą┐č鹥čĆą░ USB - TTL UART čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ č鹥čĆą╝ąĖąĮą░ą╗ą░ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 115200, 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, 1 čüč鹊ą┐-ą▒ąĖčé, ą▒ąĄąĘ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ č鹥čĆą╝ąĖąĮą░ą╗ą░.
Windows:
Putty
Linux/macOS:
Minicom
ą¤čĆąĖą╝ąĄčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ minicom (ą╗ąŠą│ąĖąĮ root, ą┐ą░čĆąŠą╗čī luckfox):
$ minicom -D /dev/ttyUSB1
~/luckfox-pico$ upgrade_tool ul output/image/update.img
Loading loader...
Support Type:RK1106 Loader ver:1.01 Loader Time:2025-09-30 13:58:34
Start to upgrade loader...
Download Boot Start
Download Boot Success
Wait For Maskrom Start
Wait For Maskrom Success
Test Device Start
Test Device Success
Check Chip Start
Check Chip Success
Get FlashInfo Start
Get FlashInfo Success
Prepare IDB Start
Prepare IDB Success
Download IDB Start
Download IDB Success
Upgrade loader ok.
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 upgrade_tool ąĘą░ą│čĆčāąĘąĖą╗ č鹊ą╗čīą║ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ (loader), ąĮąŠ ąĮąĄ čüą░ą╝čā ą┐čĆąŠčłąĖą▓ą║čā.
ą¦č鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ:
ąŚą░ą│čĆčāąĘčćąĖą║ čāčüą┐ąĄčłąĮąŠ ąĘą░ą│čĆčāąČąĄąĮ ą▓ RAM.
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ą▒čŗą╗ą░ ąŠčłąĖą▒ąŠčćąĮąŠ čāą║ą░ąĘą░ąĮą░ ąŠą┐čåąĖčÅ ul uf
ąĀąĄčłąĄąĮąĖčÅ:
1. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ uf ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą╣ ą┐čĆąŠčłąĖą▓ą║ąĖ:
$ upgrade_tool uf output/image/update.img
2. ąśą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┤ą╗čÅ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ:
$ upgrade_tool uf output/image/update.img
3. ą¤čĆąŠą▓ąĄčĆčīč鹥 čĆąĄąČąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░:
ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čĆąĄąČąĖą╝ąĄ Loader ąĖą╗ąĖ Maskrom.
4. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ: ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 RKDevTool (ą│čĆą░čäąĖč湥čüą║ą░čÅ čāčéąĖą╗ąĖčéą░) ąĖą╗ąĖ rkdeveloptool .
$ rkdeveloptool db output/image/update.img
$ rkdeveloptool wl 0 output/image/update.img
$ rkdeveloptool rd
ą¤ąŠčĆčÅą┤ąŠą║ ą┤ąĄą╣čüčéą▓ąĖą╣:
- ą¤ąĄčĆąĄą▓ąĄą┤ąĖč鹥 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čĆąĄąČąĖą╝ Maskrom (ąĘą░ąČą░čéčī ą║ąĮąŠą┐ą║čā Boot ąĖ ąĮą░ąČą░čéčī Reset ąĖą╗ąĖ ą▓čŗą┤ąĄčĆąĮčāčéčī ąĖ čüąĮąŠą▓ą░ ą▓čüčéą░ą▓ąĖčéčī ą║ą░ą▒ąĄą╗čī).
ąÜą╗čÄč湥ą▓ąŠąĄ ąŠčéą╗ąĖčćąĖąĄ: ul ąĘą░ą│čĆčāąČą░ąĄčé č鹊ą╗čīą║ąŠ loader, uf ą┐čĆąŠčłąĖą▓ą░ąĄčé ą▓čüčÄ čüąĖčüč鹥ą╝čā.
[ąØą░čćą░ą╗čīąĮą░čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ]
ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ ą║ą░čéą░ą╗ąŠą│ SDK:
ąØą░čćąĖąĮą░čéčī ąĮą░ą┤ąŠ čü ą▓čŗą▒ąŠčĆą░ ą┐ą╗ą░čéčŗ:
ąóąĄą┐ąĄčĆčī ą╝ąŠąČąĮąŠ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī:
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┐čĆąŠčłąĖčéčī ą┐ą░ą╝čÅčéčī SPI FLASH ą║ąŠą╝ą░ąĮą┤ąŠą╣:
$ upgrade_tool uf output/image/update.img
[ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░ą║ąĄč鹊ą▓ ąĖ čÅą┤čĆą░ Buildroot ]
ąĪą▒ąŠčĆą║ą░ ą┐ą░ą║ąĄč鹊ą▓ ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
$ ./build.sh buildrootconfig
ąĪą▒ąŠčĆą║ą░ čÅą┤čĆą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
$ ./build.sh kernelconfig
ą¤ąŠą┤čüą║ą░ąĘą║ą░ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ą░ą╝:
$ ./build.sh --help
Usage: build.sh [OPTIONS]
Available options:
lunch -Select Board Configure
env -build env
meta -build meta (optional)
uboot -build uboot
kernel -build kernel
rootfs -build rootfs
driver -build kernel's drivers
sysdrv -build uboot, kernel, rootfs
media -build rockchip media libraries
app -build app
recovery -build recovery
tool -build tool
updateimg -build update image
unpackimg -unpack update image
factory -build factory image
all -build uboot, kernel, rootfs, recovery image
allsave -build all & firmware & save
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖąĮč鹥čĆč乥ą╣čü USB ą┐ą╗ą░čéą║ąĖ LuckFox Pico ą▓ čüą▒ąŠčĆą║ąĄ Buildroot čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąŁč鹊 čüą┤ąĄą╗ą░ąĮąŠ, ą▓ čćą░čüčéąĮąŠčüčéąĖ, čćč鹊ą▒čŗ ą┐čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ č湥čĆąĄąĘ USB ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ LuckFox Pico ą║ąŠą╝ą░ąĮą┤ąŠą╣ adb shell .
$ adb devices
* daemon not running; starting now at tcp:5037
* daemon started successfully
List of devices attached
359238bf91d2b5a8 device
ą¤ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī USB ąĮą░ čĆą░ą▒ąŠčéčā ą▓ čĆąĄąČąĖą╝ąĄ čģąŠčüčéą░ ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ luckfox-config ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ Buildroot ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąŠą╣.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ą▓čŗ ąĘą░ą┐čāčüčéąĖč鹥 Buildroot, ą║ąŠą│ą┤ą░ USB čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ čģąŠčüčéą░, ąĮąĄą╗čīąĘčÅ ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ č湥čĆąĄąĘ adb ą║ ą┐ą╗ą░č鹥. ąÆąŠčüčüčéą░ąĮąŠą▓ąĖčéčī čĆą░ą▒ąŠčéčā adb ą╝ąŠąČąĮąŠ č湥čĆąĄąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ Ethernet, ąĄčüą╗ąĖ ąŠąĮąŠ čā ą▓ą░čü ąĮą░čüčéčĆąŠąĄąĮąŠ, čüą╝. Q036. ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą║ąŠąĮčüąŠą╗ąĖ č鹥čĆą╝ąĖąĮą░ą╗ą░ č湥čĆąĄąĘ UART, čüą╝. Q044.
ąśčéą░ą║, ą║ą░ą║ ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čüą▒ąŠčĆą║čā Buildroot, čćč鹊ą▒čŗ ąĖąĮč鹥čĆč乥ą╣čü USB čĆą░ą▒ąŠčéą░ą╗ ą▓ čĆąĄąČąĖą╝ąĄ čģąŠčüčéą░. ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥čüčī ą║ č鹥čĆą╝ąĖąĮą░ą╗čā Buildroot, ąĖ ą▓ą▓ąĄą┤ąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
[root@luckfox root]# luckfox-config
ą×čéą║čĆąŠąĄčéčüčÅ ą╝ąĄąĮčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą▓ąŠą╣ą┤ąĖč鹥 ą▓ čĆą░ąĘą┤ąĄą╗ Advanced Options -> USB.
ąÆčŗą▒ąĄčĆąĖč鹥 ą▓ą░čĆąĖą░ąĮčé 2 host , ąĮą░ąČą╝ąĖč鹥 ą┐čĆąŠą▒ąĄą╗, čŹč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮą░ąČą░čéąĖčÄ ą║ąĮąŠą┐ą║ąĖ OK ą┤ą╗čÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą▓čŗą▒ąŠčĆą░. ą¤ąŠčÅą▓ąĖčéčüčÅ ąŠą║ąĮąŠ ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čüčéčāą┐ąĖą╗ąĖ ą▓ čüąĖą╗čā.
ąØą░ąČą╝ąĖč鹥 ąĄčēąĄ čĆą░ąĘ ą┐čĆąŠą▒ąĄą╗ (OK), ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ Esc ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ ą╝ąĄąĮčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ:
[root@luckfox root]# sync
[root@luckfox root]# reboot
ą¦č鹊ą▒ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąŠą┤ą░čéčī ą┐ąĖčéą░ąĮąĖąĄ +5V ąĮą░ ą║ąŠąĮčéą░ą║čé 1 (VBUS) ą┐ą╗ą░čéą║ąĖ LuckFox Pico:
ąóąĄą┐ąĄčĆčī ą┐ą╗ą░čéą║ą░ LuckFox Pico ą▒čāą┤ąĄčé ąŠą▒ąĮą░čĆčāąČąĖą▓ą░čéčī ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ ą║ ąĮąĄą╣ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ USB-čģą░ą▒ čü ą║ąŠąĮąĮąĄą║č鹊čĆąŠą╝ USB Type-C, ąĮą░ą┐čĆąĖą╝ąĄčĆ T-809A, T-809B, ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣:
ą¤čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ čģą░ą▒ą░ T-809A ą▓ ą║ąŠąĮčüąŠą╗ąĖ Buildroot ą┐ąŠčÅą▓ąĖčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ:
[root@luckfox root]# [ 187.785069] usb 1-1: new high-speed USB device
number 2 using xhci-hcd
[ 187.990667] hub 1-1:1.0: USB hub found
[ 187.991568] hub 1-1:1.0: 4 ports detected
v4l_id - čŹč鹊 ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮą░čÅ čāčéąĖą╗ąĖčéą░ ą▓ Linux-čüąĖčüč鹥ą╝ą░čģ, ą║ąŠč鹊čĆą░čÅ ąĖą│čĆą░ąĄčé ą▓ą░ąČąĮčāčÄ čĆąŠą╗čī ą▓ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĄ ą▓ąĖą┤ąĄąŠčāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆą░čÅ:
- ą¤čĆąĖąĮą░ą┤ą╗ąĄąČąĖčé ą┐ą░ą║ąĄčéčā udev (čüąĖčüč鹥ą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ).
[ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ v4l_id ]
1 . ąĪą▒ąŠčĆ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą▓ąĖą┤ąĄąŠčāčüčéčĆąŠą╣čüčéą▓ąĄ:
- ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ (č乊čĆą╝ą░čéčŗ, čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ)
2 . ąĪąŠąĘą┤ą░ąĮąĖąĄ čüąĖą╝ą╗ąĖąĮą║ąŠą▓ ą▓ /dev/v4l/
/dev/v4l/by-id/usb-VIDEO_DEVICE_NAME-video-index0 /dev/v4l/by-path/platform-xxxx.usb-usb-0:1.2:1.0-video-index0
ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą┐ąŠ ą┐ąŠčüč鹊čÅąĮąĮčŗą╝ ąĖą╝ąĄąĮą░ą╝, ą░ ąĮąĄ ą┐ąŠ ą╝ąĄąĮčÅčÄčēąĖą╝čüčÅ /dev/video0 , /dev/video1 ąĖ čé.ą┤.
ą¤ąŠč湥ą╝čā v4l_id ąŠčéčüčāčéčüčéą▓čāąĄčé ą▓ ą▓ą░čłąĄą╣ Buildroot?
ąÆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Buildroot ą┤ą╗čÅ LuckFox Pico Mini B čćą░čüč鹊 ą▓ą║ą╗čÄčćą░čÄčé č鹊ą╗čīą║ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ ą╝ąĄčüčéą░. ąŻčéąĖą╗ąĖčéą░ v4l_id ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą║ą╗čÄč湥ąĮą░ ą║ą░ą║ "ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮą░čÅ".
ąÜą░ą║ ą┤ąŠą▒ą░ą▓ąĖčéčī v4l_id ą▓ Buildroot?
ąĪą┐ąŠčüąŠą▒ 1 : ą¦ąĄčĆąĄąĘ menuconfig ąĖą╗ąĖ buildrootconfig.
$ cd ~/luckfox-pico/sysdrv/source/buildroot/buildroot-2023.02.6
$ make menuconfig
ąśą╗ąĖ:
$ cd ~/luckfox-pico
$ ./build.sh buildrootconfig
ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ čĆą░ąĘą┤ąĄą╗čŗ:
Target packages
ąĪą┐ąŠčüąŠą▒ 2 : ą¤čĆąŠą▓ąĄčĆą║ą░ čüčāčēąĄčüčéą▓čāčÄčēąĖčģ ą┐ą░ą║ąĄč鹊ą▓
ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐ą░ą║ąĄčéčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓ą║ą╗čÄčćą░čÄčé v4l_id:
ąś ą┐čĆąŠą▓ąĄčĆčīč鹥:
Target packages
ą¦č鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▒ąĄąĘ v4l_id?
- ąŻčüčéčĆąŠą╣čüčéą▓ą░ čüąŠąĘą┤ą░čÄčéčüčÅ: /dev/video0, /dev/video1 ąĖ čé. ą┤.
ą¤čĆąŠą▓ąĄčĆą║ą░ ąĮą░ą╗ąĖčćąĖčÅ v4l_id, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą╗ąĖ čāčéąĖą╗ąĖčéą░:
# which v4l_id
# ls -la /lib/udev/v4l_id
ą¤čĆąŠą▓ąĄčĆąĖčéčī ąĮą░ą╗ąĖčćąĖąĄ čüąĖą╝ą╗ąĖąĮą║ąŠą▓ (ą║ąŠč鹊čĆčŗąĄ čüąŠąĘą┤ą░ąĄčé v4l_id):
# ls -la /dev/v4l/by-id/
# ls -la /dev/v4l/by-path/
ą¤čĆą░ą║čéąĖč湥čüą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ LuckFox Pico . ąØą░ ą┐ą╗ą░čéą░čģ čéąĖą┐ą░ LuckFox Pico, ą│ą┤ąĄ čćą░čüč鹊 ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ USB-ą║ą░ą╝ąĄčĆčŗ ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąĖą┤ąĄąŠąĘą░čģą▓ą░čéą░, ąĮą░ą╗ąĖčćąĖąĄ v4l_id ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ:
1. ąĪčéą░ą▒ąĖą╗čīąĮąŠčüčéąĖ ąĖą╝ąĄąĮ - ąĄčüą╗ąĖ čā ą▓ą░čü ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ą╝ąĄčĆ, ąĖčģ ą┐ąŠčĆčÅą┤ąŠą║ ą▓ /dev/video* ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ą┐čĆąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĄ.
v4l_id - čŹč鹊 ąĮąĄ ą║čĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĮčŗą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé, ąĮąŠ ąŠč湥ąĮčī ą┐ąŠą╗ąĄąĘąĮą░čÅ čāčéąĖą╗ąĖčéą░ ą┤ą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą▓ąĖą┤ąĄąŠčāčüčéčĆąŠą╣čüčéą▓ ą▓ čüąĖčüč鹥ą╝ąĄ. ąĢąĄ ąŠčéčüčāčéčüčéą▓ąĖąĄ ąĮąĄ ą╝ąĄčłą░ąĄčé ą▒ą░ąĘąŠą▓ąŠą╣ čĆą░ą▒ąŠč鹥 čü ą║ą░ą╝ąĄčĆą░ą╝ąĖ, ąĮąŠ čüąŠąĘą┤ą░ąĄčé ąĮąĄčāą┤ąŠą▒čüčéą▓ą░ ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ą▓ ą╗ąŠą│ą░čģ.
eudev - čŹč鹊 čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ udev (userspace device manager), čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮą░čÅ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ ąĖ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ąŠą▓ ą▓čĆąŠą┤ąĄ Buildroot. ąŻčéąĖą╗ąĖčéą░ eudev (Embedded udev) ąĘą░ą╝ąĄąĮčÅąĄčé ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčāčÄ čāčéąĖą╗ąĖčéčā systemd-udev ąŠčé Red Hat, ą║ąŠč鹊čĆą░čÅ:
- ąĀą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé systemd
[ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ eudev ą▓ Buildroot ]
1. ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čüąŠąĘą┤ą░ąĮąĖąĄ čāąĘą╗ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ ą▓ /dev. ąæąĄąĘ eudev ą┐čĆąĖčłą╗ąŠčüčī ą▒čŗ čüąŠąĘą┤ą░ą▓ą░čéčī ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čüčéą░čéąĖč湥čüą║ąĖ (č湥čĆąĄąĘ `mknod`), čćč鹊 ąĮąĄčŹčäč乥ą║čéąĖą▓ąĮąŠ ą┤ą╗čÅ čüąĖčüč鹥ą╝ čü ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ.
2. ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ąĘą░ą│čĆčāąĘą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓. ą¤čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ eudev ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮčāąČąĄąĮ, ąĖ ąĘą░ą│čĆčāąČą░ąĄčé ąĄą│ąŠ.
3. ąĪąŠąĘą┤ą░ąĮąĖąĄ čüąĖą╝ą╗ąĖąĮą║ąŠą▓ ąĖ ą┐ąĄčĆčüąĖčüč鹥ąĮčéąĮčŗčģ ąĖą╝ąĄąĮ. ą¤čĆąĖą╝ąĄčĆ č鹊ą│ąŠ, čćč鹊 čüąŠąĘą┤ą░ąĄčé eudev:
/dev/disk/by-id/usb-SanDisk_Cruzer_Blade_000000000000-0:0 /dev/serial/by-id/usb-FTDI_FT232R_USB_UART_A900cePY-if00-port0 /dev/v4l/by-id/usb-VIDEO_DEVICE_NAME-video-index0
4. ąŚą░ą┐čāčüą║ čüą║čĆąĖą┐č鹊ą▓ ą┐čĆąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓. Eudev ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆą░ą▓ąĖą╗ą░ ąĖąĘ `/etc/udev/rules.d/` ą┐čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ/ąŠčéą║ą╗čÄč湥ąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ eudev ą▓ Buildroot ą┤ą╗čÅ LuckFox Pico ]
ąÆą║ą╗čÄč湥ąĮąĖąĄ eudev:
System configuration
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąŠą┐čåąĖąĖ:
Target packages
ą¤ąŠč湥ą╝čā eudev ą▓ą░ąČąĄąĮ ą┤ą╗čÅ LuckFox Pico?
ąöą╗čÅ USB-čāčüčéčĆąŠą╣čüčéą▓ (ą║ą░ą╝ąĄčĆčŗ, čäą╗ąĄčłą║ąĖ, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ):
- ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ čüąŠąĘą┤ą░ąĮąĖąĄ /dev/video0, /dev/sda1, /dev/ttyUSB0
ąöą╗čÅ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓:
- GPIO, I2C, SPI čāčüčéčĆąŠą╣čüčéą▓ą░
ą¦č鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▒ąĄąĘ eudev? ąæąĄąĘ eudev ą▓ Buildroot ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ:
1. ąĪčéą░čéąĖč湥čüą║ąĖą╣ /dev - ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąŠąĘą┤ą░čÄčéčüčÅ ą┐čĆąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖą╣ ą┐čĆąĖą╝ąĄčĆ čü USB-ą║ą░ą╝ąĄčĆąŠą╣ ]
ąĪ eudev ą┐čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą║ą░ą╝ąĄčĆčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ:
[ 561.687738] uvcvideo: Found UVC 1.00 device AV TO USB2.0
- ąĪąŠąĘą┤ą░ąĄčéčüčÅ /dev/video0
ąæąĄąĘ eudev:
- ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠčÅą▓ąĖčéčüčÅ ą▓ /dev/videoX (ąĄčüą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ąĘą░ą│čĆčāąČąĄąĮ)
ąĪčéčĆčāą║čéčāčĆą░ ą║ą░čéą░ą╗ąŠą│ąŠą▓ eudev
/etc/udev/rules.d/ # ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖąĄ ą┐čĆą░ą▓ąĖą╗ą░ /lib/udev/rules.d/ # ąĪąĖčüč鹥ą╝ąĮčŗąĄ ą┐čĆą░ą▓ąĖą╗ą░ /lib/udev/ # ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ čāčéąĖą╗ąĖčéčŗ Ōö£ŌöĆŌöĆ v4l_id # ąöą╗čÅ ą▓ąĖą┤ąĄąŠčāčüčéčĆąŠą╣čüčéą▓ Ōö£ŌöĆŌöĆ ata_id # ąöą╗čÅ ATA čāčüčéčĆąŠą╣čüčéą▓ ŌööŌöĆŌöĆ scsi_id # ąöą╗čÅ SCSI čāčüčéčĆąŠą╣čüčéą▓
[ą×čéą╗ą░ą┤ą║ą░ eudev ]
ą¤čĆąŠčüą╝ąŠčéčĆ čüąŠą▒čŗčéąĖą╣ eudev ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ:
[root@luckfox root]# udevadm monitor
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ:
[root@luckfox root]# udevadm info /dev/video0
P: /devices/platform/usbdrd/ffb00000.usb/xhci-hcd.0.auto/usb1/1-1/1-1.4/
1-1.4:1.0/video4linux/video21
N: video21
S: v4l/by-id/usb-MACROSILICON_AV_TO_USB2.0_20200909-video-index0
S: v4l/by-path/platform-xhci-hcd.0.auto-usb-0:1.4:1.0-video-index0
E: DEVLINKS=/dev/v4l/by-id/usb-MACROSILICON_AV_TO_USB2.0_20200909-video-index0
ąóąĄčüčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆą░ą▓ąĖą╗:
[root@luckfox root]# udevadm test /sys/class/video4linux/video0
ąÆčŗą▓ąŠą┤čŗ . eudev ą▓ ą║ąŠąĮč鹥ą║čüč鹥 LuckFox Pico čü Buildroot - čŹč鹊 čüąĖčüč鹥ą╝ą░, ą║ąŠč鹊čĆą░čÅ:
- Ō£ģ ą×ą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ
ąöą╗čÅ ą┐ą╗ą░čé čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čü čćą░čüčéčŗą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ USB-čāčüčéčĆąŠą╣čüčéą▓ (ą║ą░ą╝ąĄčĆ, čäą╗ąĄčłąĄą║, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą░ą┤ą░ą┐č鹥čĆąŠą▓) eudev ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ ą┤ą╗čÅ čāą┤ąŠą▒ąĮąŠą╣ čĆą░ą▒ąŠčéčŗ.
ą» ą┤ąŠą▒ą░ą▓ąĖą╗ ą▓ Lunux Buildroot ąĮą░čüčéčĆąŠą╣ą║čā čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ą░ą┤čĆąĄčüą░ ą┤ą╗čÅ eth0 ą▓ čäą░ą╣ą╗ /etc/network/interfaces
[root@luckfox root]# cat /etc/network/interfaces
auto lo
iface lo inet loopback
ą×ą┤ąĮą░ą║ąŠ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ čüąĖčüč鹥ą╝čŗ ąĖąĮč鹥čĆč乥ą╣čü eth0 ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé. ą¦č鹊ą▒čŗ ąŠąĮ ąĘą░čĆą░ą▒ąŠčéą░ą╗ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čĆčāčćąĮčāčÄ ąĘą░ą┐čāčüą║ą░čéčī ą║ąŠą╝ą░ąĮą┤čā:
[root@luckfox root]# /etc/init.d/S40network restart
ą¤ąŠč湥ą╝čā ąĮą░čüčéčĆąŠą╣ą║ą░ eth0 ąĮąĄ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ?
ą¤čĆąŠą▒ą╗ąĄą╝ą░ čüą▓čÅąĘą░ąĮą░ čü ą┐ąŠčĆčÅą┤ą║ąŠą╝ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüą╗čāąČą▒ ą▓ Buildroot. ąĪąĄčéčī ą┐ąŠą┤ąĮąĖą╝ą░ąĄčéčüčÅ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ čüąĖčüč鹥ą╝čŗ ą│ąŠč鹊ą▓čŗ.
[ą¤čĆąĖčćąĖąĮą░ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ]
ąÆ Buildroot čüčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĖčüč鹥ą╝ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, ąĖ ą┐ąŠčĆčÅą┤ąŠą║ ąĘą░ą┐čāčüą║ą░ čüą╗čāąČą▒ ą╝ąŠąČąĄčé ąŠčéą╗ąĖčćą░čéčīčüčÅ:
1. ąĪą║čĆąĖą┐čé S40network ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čüą╗ąĖčłą║ąŠą╝ čĆą░ąĮąŠ (ą┤ąŠ ą┐ąŠą╗ąĮąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓).
ą¤ąŠč湥ą╝čā čĆčāčćąĮąŠą╣ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ čĆą░ą▒ąŠčéą░ąĄčé?
ąÜąŠą╝ą░ąĮą┤ą░ `/etc/init.d/S40network restart` čĆą░ą▒ąŠčéą░ąĄčé, ą┐ąŠč鹊ą╝čā čćč鹊 ą║ ą╝ąŠą╝ąĄąĮčéčā ąĄąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ:
- ąöčĆą░ą╣ą▓ąĄčĆčŗ Ethernet čāąČąĄ ąĘą░ą│čĆčāąČąĄąĮčŗ
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ąĖą╝ąĄąĮąĮąŠ ą▓ ą▓čĆąĄą╝ąĄąĮąĮąŠą╝ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĖ ą╝ąĄąČą┤čā ąĘą░ą│čĆčāąĘą║ąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ąĖ ąĘą░ą┐čāčüą║ąŠą╝ čüąĄč鹥ą▓ąŠą│ąŠ čüąĄčĆą▓ąĖčüą░ ą┐čĆąĖ čüčéą░čĆč鹥 čüąĖčüč鹥ą╝čŗ.
[ąĀąĄčłąĄąĮąĖąĄ 1: ąĀčāčćąĮą░čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüą║čĆąĖą┐čéą░ą╝ąĖ ą░ą▓č鹊ąĘą░ą│čĆčāąĘą║ąĖ ]
ąĢčüą╗ąĖ ą▓čŗ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čüą║čĆąĖą┐čé rc.local , č鹊 ą┐čĆąŠčüč鹊 ą┤ąŠą▒ą░ą▓čīč鹥 čüčéčĆąŠčćą║čā /etc/init.d/S40network restart ą▓ ą║ąŠąĮąĄčå čäą░ą╣ą╗ą░ /etc/init.d/rcS
ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą║čĆąĖą┐čé /etc/rc.local , ąĖ ąĄą│ąŠ ąĘą░ą┐čāčüą║ ąĮą░čüčéčĆąŠąĄąĮ ą▓ /etc/init.d/rcS , č鹊 ą┤ąŠą▒ą░ą▓čīč鹥 ą▓ /etc/rc.local :
echo "Sleeping for network initialization..."
sleep 5
/etc/init.d/S40network restart
ąĪą┤ąĄą╗ą░ą╣č鹥 čäą░ą╣ą╗ /etc/rc.local ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╝:
ą¤ąĄčĆąĄąĘą░ą│čĆčāąĘąĖč鹥 čüąĖčüč鹥ą╝čā:
[ąĀąĄčłąĄąĮąĖąĄ 2: ą¤čĆąŠą▓ąĄčĆą║ą░ ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ąŠčĆčÅą┤ą║ą░ ąĘą░ą┐čāčüą║ą░ ]
ą¤ąŠčüą╝ąŠčéčĆąĖč鹥 ą┐ąŠčĆčÅą┤ąŠą║ čüą╗čāąČą▒ ą▓ /etc/init.d/
ąĪąĄč鹥ą▓ąŠą╣ čüąĄčĆą▓ąĖčü ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ą┐ąŠčüą╗ąĄ ąŠčüąĮąŠą▓ąĮčŗčģ čüąĖčüč鹥ą╝ąĮčŗčģ čüąĄčĆą▓ąĖčüąŠą▓. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐ąĄčĆąĄąĖą╝ąĄąĮąŠą▓ą░čéčī S40network ą▓ ą▒ąŠą╗ąĄąĄ ą┐ąŠąĘą┤ąĮąĖą╣ ąĮąŠą╝ąĄčĆ:
# mv /etc/init.d/S40network /etc/init.d/S45network
[ąĀąĄčłąĄąĮąĖąĄ 3: ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ čüąĄč鹥ą▓ąŠą╣ čüąĄčĆą▓ąĖčü ]
1. ą×čéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 /etc/init.d/S40network ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĘą░ą┤ąĄčƹȹ║čā ą┐ąĄčĆąĄą┤ ą┐ąŠą┤ąĮčÅčéąĖąĄą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓:
# vi /etc/init.d/S40network
ąöąŠą▒ą░ą▓čīč鹥 ą▓ ąĮą░čćą░ą╗ąŠ čäčāąĮą║čåąĖąĖ `start()`:
() { # ąöąŠą▒ą░ą▓ąĖčéčī ąĘą░ą┤ąĄčƹȹ║čā ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüąĖčüč鹥ą╝čŗ sleep 3 echo "Starting network..." # ąŠčüčéą░ą╗čīąĮąŠą╣ ą║ąŠą┤ }
[ąĀąĄčłąĄąĮąĖąĄ 4: ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąĖčüč鹥ą╝čŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ BusyBox ]
ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 BusyBox init, ą┐čĆąŠą▓ąĄčĆčīč鹥 /etc/inittab
ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąĄčüčéčī čüčéčĆąŠą║ą░ ą┤ą╗čÅ čüąĄč鹥ą▓ąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ:
[ąĀąĄčłąĄąĮąĖąĄ 5: ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ ą┐ąŠą┤čģąŠą┤ - ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ dhcpcd ]
ąĢčüą╗ąĖ čüčéą░čéąĖč湥čüą║ąĖą╣ IP ąĮąĄ ą║čĆąĖčéąĖč湥ąĮ, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī DHCP. ąśąĘą╝ąĄąĮąĖč鹥 ąĮą░čüčéčĆąŠą╣ą║čā eth0 ą▓ čäą░ą╣ą╗ąĄ /etc/network/interfaces :
eth0
iface eth0 inet dhcp
[ąĀąĄčłąĄąĮąĖąĄ 6: ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ systemd (ąĄčüą╗ąĖ ą┤ąŠčüčéčāą┐ąĮąŠ) ]
ąĢčüą╗ąĖ ą▓ ą▓ą░čłąĄą╣ čüą▒ąŠčĆą║ąĄ Buildroot ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ systemd :
# systemctl enable network
# systemctl start network
[ąöąĖą░ą│ąĮąŠčüčéąĖą║ą░ ]
ą¦č鹊ą▒čŗ ą┐ąŠąĮčÅčéčī, ą▓ č湥ą╝ ąĖą╝ąĄąĮąĮąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą┤ąĖą░ą│ąĮąŠčüčéąĖą║čā.
1. ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┤čĆą░ą╣ą▓ąĄčĆ Ethernet ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ. ą¤čĆąŠą▓ąĄčĆąĖčéčī ąĘą░ą│čĆčāąČąĄąĮąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ:
ąśą╗ąĖ:
2. ą¤čĆąŠą▓ąĄčĆąĖčéčī ą╗ąŠą│ąĖ ąĘą░ą│čĆčāąĘą║ąĖ:
# dmesg | grep -i eth
# dmesg | grep -i network
3. ą¤čĆąŠą▓ąĄčĆąĖčéčī čüčéą░čéčāčü ąĖąĮč鹥čĆč乥ą╣čüą░:
4. ą¤čĆąŠą▓ąĄčĆąĖčéčī, ą║ąŠą│ą┤ą░ ą┐ąŠą┤ąĮąĖą╝ą░ąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü:
5. ą¤čĆąŠą▓ąĄčĆąĖčéčī ąĮą░ą╗ąĖčćąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░:
# lsmod | grep gmac # ą┤ą╗čÅ LuckFox ąŠą▒čŗčćąĮąŠ gmac ąĖą╗ąĖ ą┐ąŠą┤ąŠą▒ąĮčŗą╣
[ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ąŠąĄ čĆąĄčłąĄąĮąĖąĄ ]
ą£ąĮąĄ ą┐ąŠą╝ąŠą│ ą▓ą░čĆąĖą░ąĮčé ąĖąĘ ąĀąĄčłąĄąĮąĖčÅ 1: ą┐čĆąŠčüč鹊 ą┤ąŠą▒ą░ą▓ąĖą╗ ą║ąŠą╝ą░ąĮą┤čā /etc/init.d/S40network restart ą▓ ą║ąŠąĮąĄčå čäą░ą╣ą╗ą░ /etc/init.d/rcS
ą» čüąŠąĘą┤ą░čÄ čŹč鹊čé čäą░ą╣ą╗ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
[root@luckfox root]# echo "nameserver 8.8.8.8" > /etc/resolv.conf
ąŁč鹊čé čäą░ą╣ą╗ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ čüąŠąĘą┤ą░ąĄčéčüčÅ ąĖ čāčćą░čüčéą▓čāąĄčé ą▓ čĆą░čüą┐ąŠąĘąĮą░ą▓ą░ąĮąĖąĖ DNS-ąĖą╝ąĄąĮ, ąĮąŠ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐čāčüčéčŗą╝. ą¤ąŠč湥ą╝čā?
ą¤čĆąŠą▒ą╗ąĄą╝ą░ čü čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ /etc/resolv.conf
ą¤čĆąĖčćąĖąĮą░ 1 . ążą░ą╣ą╗ /etc/resolv.conf ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čŹč鹊 čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║ą░čÅ čüčüčŗą╗ą║ą░ ąĮą░ ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ čäą░ą╣ą╗:
ą¤čĆąŠą▓ąĄčĆąĖčéčī, čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ resolv.conf čüąĖą╝ą╗ąĖąĮą║ąŠą╝:
[root@luckfox root]# ls -la /etc/resolv.conf
lrwxrwxrwx 1 1000 1000 18 Oct 16 2023 /etc/resolv.conf -> ../tmp/resolv.conf
[root@luckfox root]# ls -la /tmp/resolv.conf
-rw-r--r-- 1 root root 0 Jan 1 00:00 /tmp/resolv.conf
ą¤čĆąĖčćąĖąĮą░ 2 . tmpfs ąŠčćąĖčēą░ąĄčéčüčÅ ą┐čĆąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĄ. ążą░ą╣ą╗ ą▓ /tmp/ čüąŠąĘą┤ą░ąĄčéčüčÅ ąĘą░ąĮąŠą▓ąŠ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╣ ąĘą░ą│čĆčāąĘą║ąĄ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą¤čĆąĖčćąĖąĮą░ 1 ąĖ ą¤čĆąĖčćąĖąĮą░ 2 ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘą░ąĮčŗ, ąĖ ą┤ąŠą┐ąŠą╗ąĮąĖčéčī ą┤čĆčāą│ ą┤čĆčāą│ą░, čćč鹊 ą║ą░ą║ čĆą░ąĘ ą▒čŗą╗ ą╝ąŠą╣ čüą╗čāčćą░ą╣.
ą¤čĆąĖčćąĖąĮą░ 3 . ąĪąĄč鹥ą▓čŗąĄ čüą║čĆąĖą┐čéčŗ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čÄčé čäą░ą╣ą╗. ąĪąĄč鹥ą▓čŗąĄ ą┤ąĄą╝ąŠąĮčŗ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ connman, dhcpcd, network manager) ą╝ąŠą│čāčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čéčī resolv.conf .
ąĪą║ąŠčĆąĄąĄ ą┤ą╗čÅ Linux Buildroot ąĮą░ ą┐ą╗ą░č鹥 LuckFox Pico čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ą┐čĆąĖčćąĖąĮą░ ą┐čĆąŠą▒ą╗ąĄą╝čŗ čŹč鹊 ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą¤čĆąĖčćąĖąĮčŗ 1 ąĖ ą¤čĆąĖčćąĖąĮčŗ 2. ąĀąĄčłąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā ą╝ąŠąČąĮąŠ, ąĄčüą╗ąĖ ąĘą░ą╝ąĄąĮąĖčéčī čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║čāčÄ čüčüčŗą╗ą║čā čĆąĄą░ą╗čīąĮčŗą╝ čäą░ą╣ą╗ąŠą╝. ąÜą░ą║ čŹč鹊 čüą┤ąĄą╗ą░čéčī, ą┐ąŠ čłą░ą│ą░ą╝:
1. ąŻą┤ą░ą╗ąĖč鹥 čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║čāčÄ čüčüčŗą╗ą║čā:
[root@luckfox root]# rm -f /etc/resolv.conf
2. ąĪąŠąĘą┤ą░ą╣č鹥 čäą░ą╣ą╗ /etc/resolv.conf :
[root@luckfox root]# echo "nameserver 8.8.8.8" > /etc/resolv.conf
[root@luckfox root]# echo "nameserver 1.1.1.1" >> /etc/resolv.conf
3. ąŚą░ą▒ą╗ąŠą║ąĖčĆčāą╣č鹥 čŹč鹊čé čäą░ą╣ą╗ ąŠčé ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ (ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╣ čłą░ą│):
[root@luckfox root]# chattr +i /etc/resolv.conf 2>/dev/null || echo "chattr not available"
4. ą¤ąĄčĆąĄąĘą░ą│čĆčāąĘąĖč鹥 čüąĖčüč鹥ą╝čā:
[root@luckfox root]# sync
[root@luckfox root]# reboot
[ąöčĆčāą│ąĖąĄ čüą┐ąŠčüąŠą▒čŗ čĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ]
ąĀąĄčłąĄąĮąĖąĄ 2: ąśąĘą╝ąĄąĮąĖčéčī č鹊čćą║čā ąĮą░ąĘąĮą░č湥ąĮąĖčÅ čüąĖą╝ą╗ąĖąĮą║ą░.
ą£ąŠąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī čüąĖą╝ą╗ąĖąĮą║, ąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī ąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ. ąĪąŠąĘą┤ą░ą╣č鹥 ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ čäą░ą╣ą╗, ąĮą░ ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé čüčüčŗą╗ą░čéčīčüčÅ čüąĖą╝ą╗ąĖąĮą║:
[root@luckfox root]# mkdir -p /etc/resolv
[root@luckfox root]# echo "nameserver 8.8.8.8" > /etc/resolv/resolv.conf.perm
[root@luckfox root]# echo "nameserver 1.1.1.1" >> /etc/resolv/resolv.conf.perm
ąśąĘą╝ąĄąĮąĖč鹥 čüąĖą╝ą╗ąĖąĮą║:
[root@luckfox root]# rm -f /etc/resolv.conf
[root@luckfox root]# ln -s /etc/resolv/resolv.conf.perm /etc/resolv.conf
ąĀąĄčłąĄąĮąĖąĄ 3: ąöąŠą▒ą░ą▓ąĖčéčī ą▓ čüąŠąĘą┤ą░ąĮąĖąĄ /etc/resolv.conf ą░ą▓č鹊ąĘą░ą│čĆčāąĘą║čā.
ąöąŠą▒ą░ą▓čīč鹥 ą▓ ą║ąŠąĮąĄčå čäą░ą╣ą╗ą░ /etc/init.d/rcS čüčéčĆąŠčćą║ąĖ:
echo "nameserver 8.8.8.8" > /etc/resolv.confecho "nameserver 1.1.1.1" >> /etc/resolv.conf
ą¤ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ąĘą┤ąĄčüčī ą║ąŠą╝ą░ąĮą┤čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą┤ą╗čÅ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čģąŠčüčéą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ąĮą░ Ubuntu 24.04.3 LTS č湥čĆąĄąĘ čüąĄčéčī Ethernet čü Linux Buildroot ąĮą░ ą┐ą╗ą░čéą║ąĄ LuckFox Pico Mini B. ąØą░ Ubuntu IP-ą░ą┤čĆąĄčü 192.168.1.1, ąĮą░ Buildroot 192.168.1.100.
ąŚą░ą┐čāčüą║ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓čā LuckFox Pico Mini B:
$ adb connect 192.168.1.100:5555
connected to 192.168.1.100:5555
ą¤ąĄčĆąĄą┤ą░čćą░ čäą░ą╣ą╗ą░ čüą║čĆąĖą┐čéą░ videotest.sh ąĖąĘ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą║ą░čéą░ą╗ąŠą│ą░ čģąŠčüčéą░ ą▓ ą┤ąŠą╝ą░čłąĮąĖą╣ ą║ą░čéą░ą╗ąŠą│ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ root ąĮą░ ą┐ą╗ą░čéą║ąĄ LuckFox (ą┐ąŠč湥ą╝čā-č鹊 ą┤ąŠą╝ą░čłąĮąĄą╝čā ą║ą░čéą░ą╗ąŠą│čā root čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ą░ą┐ą║ą░ /oem ):
$ adb -s 192.168.1.100:5555 push ./videotest.sh /oem
ąŚą░ą┐čāčüą║ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ ą┐ą╗ą░čéą║ąĄ LuckFox:
$ adb -s 192.168.1.100:5555 shell "ls ~" usr videotest.sh
ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ . ąÆčŗą▓ąŠą┤ ą┐ąŠč鹊ą║ą░ ą▓ čäą░ą╣ą╗ čĆą░ą▒ąŠčéą░ąĄčé, č鹥čüč鹊ą▓čŗą╣ ą▓ąĖą┤ąĄąŠčäą░ą╣ą╗ /tmp/test.raw ąĮąŠčĆą╝ą░ą╗čīąĮąŠ čüąŠąĘą┤ą░ąĄčéčüčÅ:
[root@luckfox root]# v4l2-ctl -d /dev/video0 --stream-mmap --stream-count=10 \
--stream-to=/tmp/test.raw
ąØąŠ ąĘą░ą┐čāčüą║ ą┐ąŠč鹊ą║ą░ ąĮą░ 192.168.1.1:5000 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąŠčłąĖą▒ą║ąĄ, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 čüą▓čÅąĘčī čü čģąŠčüč鹊ą╝ 192.168.1.1 ąĄčüčéčī (ping ą┐čĆąŠčģąŠą┤ąĖčé), ąĮą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ ąĘą░ą┐čāčēąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ ffplay udp://192.168.1.100:5000.
[root@luckfox root]# v4l2-ctl -d /dev/video0 --stream-mmap --stream-count=10 \
--stream-to=192.168.1.1:5000
could not open 192.168.1.1:5000 for writing
ą¤ąŠč湥ą╝čā --stream-to=192.168.1.1:5000 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąŠčłąĖą▒ą║ąĄ?
ąöąĄą╗ąŠ ą▓ č鹊ą╝, čćč鹊 v4l2-ctl --stream-to ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüąĄč鹥ą▓čŗąĄ ą░ą┤čĆąĄčüą░ čü ą┐ąŠčĆčéą░ą╝ąĖ ąĮą░ą┐čĆčÅą╝čāčÄ. ąŁčéą░ ąŠą┐čåąĖčÅ ąŠąČąĖą┤ą░ąĄčé č鹊ą╗čīą║ąŠ ą┐čāčéčī ą║ čäą░ą╣ą╗čā ąĖą╗ąĖ čģąŠčüčé ą▒ąĄąĘ čāą║ą░ąĘą░ąĮąĖčÅ ą┐ąŠčĆčéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, v4l2-ctl --stream-to ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé 192.168.1.1:5000 ą║ą░ą║ ąĖą╝čÅ čäą░ą╣ą╗ą░, ą░ ąĮąĄ čüąĄč鹥ą▓ąŠą╣ ą░ą┤čĆąĄčü.
[ąĀąĄčłąĄąĮąĖąĄ 1: ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ netcat (nc) ]
ąØą░ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ (luckfox):
# v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=- | nc -u 192.168.1.1 5000
ąØą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ (192.168.1.1):
$ nc -ul -p 5000 | ffplay -f rawvideo -pixel_format yuyv422 -video_size 640x480 -i -
[ąĀąĄčłąĄąĮąĖąĄ 2: ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ socat ]
ąØą░ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ:
# v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=- | socat - udp-sendto:192.168.1.1:5000
ąØą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ:
$ ffplay -i udp://0.0.0.0:5000
[ąĀąĄčłąĄąĮąĖąĄ 3: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ffmpeg ą┤ą╗čÅ ą┐ąŠč鹊ą║ąŠą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ]
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊čé ą▓ą░čĆąĖą░ąĮčé čā ą╝ąĄąĮčÅ ąĮąĄ ąĘą░čĆą░ą▒ąŠčéą░ą╗ ąĮą░ Buildroot, čāčéąĖą╗ąĖčéą░ ffmpeg ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐čĆąĖą▓ąŠą┤ąĖą╗ą░ ą║ ą║čĆąĖčéąĖč湥čüą║ąŠą╝čā čüą▒ąŠčÄ.
ąØą░ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ:
# ffmpeg -f v4l2 -input_format yuyv422 -video_size 640x480 -i /dev/video0 \
-c copy -f mpegts udp://192.168.1.1:5000
ąØą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ:
$ ffplay udp://192.168.1.1:5000
[ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓ąĖą┤ąĄąŠ ]
ąöą╗čÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čāąĘąĮą░ą╣č鹥 č鹊čćąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓ą░čłąĄą│ąŠ ą▓ąĖą┤ąĄąŠ. ąØą░ čüč鹊čĆąŠąĮąĄ ą▓čŗą▓ąŠą┤ą░:
[root@luckfox root]# v4l2-ctl -d /dev/video0 --get-fmt-video
Format Video Capture:
Width/Height : 640/480
Pixel Format : 'MJPG' (Motion-JPEG)
Field : None
Bytes per Line : 0
Size Image : 614400
Colorspace : sRGB
Transfer Function : Rec. 709
YCbCr/HSV Encoding: ITU-R 601
Quantization : Default (maps to Full Range)
Flags :
ą¤čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░:
[root@luckfox root]# v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=- \
| socat - udp-sendto:192.168.1.1:5000
<<<<<<<<<<<<<<<<<<<<<<<<< 25.00 fps, dropped buffers: 1
<<<<<<<<<<<<<<<<<<<<<<<<< 25.00 fps
<<<<<<<<<<<<<<<<<<<<<<<<< 25.00 fps
<<<<<<<<<<<<<<<<<<<<<<<<< 25.00 fps
<<<<<<<<<<<<<<<<<<<<<<<<< 25.00 fps
<<<<<<<<<<<<<<<<<<<<<<<<< 25.00 fps
...
ąÜą░ą║ ą┐ąŠą┤ą░ą▓ąĖčéčī ą▓čŗą▓ąŠą┤, ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ąĮąĖąČąĄ.
[1. ą¤ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ stderr ą▓ /dev/null ]
ą¤ąŠą╗ąĮąŠčüčéčīčÄ ą┐ąŠą┤ą░ą▓ąĖčéčī ą▓čŗą▓ąŠą┤ čüąŠąŠą▒čēąĄąĮąĖą╣ čü fps ą╝ąŠąČąĮąŠ, ąĄčüą╗ąĖ ą┤ąŠą▒ą░ą▓ąĖčéčī 2>/dev/null ą║ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ v4l2-ctl:
[root@luckfox root]# v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=- \
2>/dev/null | socat - udp-sendto:192.168.1.1:5000
ą£ąĮąĄ ą┐ąŠą┤ąŠčłąĄą╗ čŹč鹊čé ą▓ą░čĆąĖą░ąĮčé. ąĢą│ąŠ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ: ąŠąĮ čüą║čĆčŗą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĮąŠ ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓ąĖą┤ąĄčéčī ą║čĆąĖčéąĖč湥čüą║ąĖąĄ ąŠčłąĖą▒ą║ąĖ ą▓ ą║ąŠąĮčüąŠą╗ąĖ.
[2. ąæąŠą╗ąĄąĄ č鹊čćąĮąŠąĄ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ FPS ą▓čŗą▓ąŠą┤ą░ ]
# v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=- 2>&1 | grep -v "fps" \
| socat - udp-sendto:192.168.1.1:5000
[3. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ --silent ąŠą┐čåąĖąĖ (ąĄčüą╗ąĖ ą┤ąŠčüčéčāą┐ąĮąŠ) ]
ąŁč鹊čé ą▓ą░čĆąĖą░ąĮčé čā ą╝ąĄąĮčÅ ąĮąĄ ąĘą░čĆą░ą▒ąŠčéą░ą╗.
# v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=- --silent 2>/dev/null \
| socat - udp-sendto:192.168.1.1:5000
[4. ążąĖą╗čīčéčĆą░čåąĖčÅ č鹊ą╗čīą║ąŠ ąŠčłąĖą▒ąŠą║ ]
# v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=- 2>&1 >/dev/null \
| socat - udp-sendto:192.168.1.1:5000
[5. ą¤ąŠą╗ąĮąŠčüčéčīčÄ čéąĖčģąĖą╣ čĆąĄąČąĖą╝ ]
# v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=- >/dev/null 2>&1 \
| socat - udp-sendto:192.168.1.1:5000
ąØąŠ ą▒čāą┤čīč鹥 ąŠčüč鹊čĆąŠąČąĮčŗ - čŹč鹊 čéą░ą║ąČąĄ čüą║čĆąŠąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ!
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ą▓ą░ą╝ ąĮčāąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ ą┐ą╗ą░čéą║ąĄ LuckFox Pico Mini č湥čĆąĄąĘ Ethernet, ą┐ą╗ą░čéą║ą░ ą▓ąĖą┤ąĮą░ ą┐ąŠ IP 192.168.1.100 (ąĮą░ ąĮąĄą╣ čĆą░ą▒ąŠčéą░ąĄčé čüąĄčĆą▓ąĄčĆ SSH).
1 . ąöąŠą▒ą░ą▓čīč鹥 čģąŠčüčé 192.168.1.100 čüą┐ąĖčüąŠą║ ą┤ąŠą▓ąĄčĆąĄąĮąĮčŗčģ čģąŠčüč鹊ą▓ SSH:
$ ssh-keygen -f '/home/ąĖą╝čÅ_ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ/.ssh/known_hosts' -R '192.168.1.100'
ąŚą┤ąĄčüčī ąĖą╝čÅ_ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ čŹč鹊 ą╗ąŠą│ąĖąĮ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĮą░ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ ą╝ą░čłąĖąĮąĄ, 192.168.1.100 čŹč鹊 IP čāą┤ą░ą╗ąĄąĮąĮąŠą│ąŠ čüąĄčĆą▓ąĄčĆą░ SSH (ąĮą░ ą┐ą╗ą░čéą║ąĄ LuckFox Pico Mini).
2 . ą¤čĆąĖą╝ąĄčĆ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ pwd ąĮą░ čāą┤ą░ą╗ąĄąĮąĮąŠą╝ čģąŠčüč鹥 192.168.1.100:
$ ssh root@192.168.1.100 "pwd"
root@192.168.1.100's password:
ąÆ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü ą┐ą░čĆąŠą╗čÅ ą▓ą▓ąĄą┤ąĖč鹥 luckfox, ąĖ ą║ąŠą╝ą░ąĮą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ:
[sshpass ]
ą¦č鹊ą▒čŗ ąĮąĄ ąĮą░ą┤ąŠ ą▒čŗą╗ąŠ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą▓ą▓ąŠą┤ąĖčéčī ą┐ą░čĆąŠą╗čī, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą╗ąĖą▒ąŠ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą║ą╗čÄčćąĖ SSH, ą╗ąĖą▒ąŠ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čāčéąĖą╗ąĖč鹊ą╣ sshpass .
ąĢčüą╗ąĖ čāčéąĖą╗ąĖčéą░ sshpass ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, čāčüčéą░ąĮąŠą▓ąĖč鹥 ąĄčæ:
$ sudo apt install sshpass
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čü ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╝ ą▓ą▓ąŠą┤ąŠą╝ ą┐ą░čĆąŠą╗čÅ:
$ sshpass -p 'luckfox' ssh user@192.168.1.1 "ą║ąŠą╝ą░ąĮą┤ą░"
ąØąĄą┤ąŠčüčéą░č鹊ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ sshpass ąŠč湥ą▓ąĖą┤ąĄąĮ, čćč鹊 ąĄčæ ąŠą▒ą╗ą░čüčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą┐ąŠąČą░ą╗čāą╣ č鹊ą╗čīą║ąŠ ą▓ čüą║čĆąĖą┐čéą░čģ, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ą░čĆąŠą╗čī ą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé, ą┤ą░ ąĄčēąĄ ąĖ ą▓ ąŠčéą║čĆčŗč鹊ą╝ ą▓ąĖą┤ąĄ. ą¤ąŠčŹč鹊ą╝čā ą╗čāčćčłąĄ ąĮą░čüčéčĆąŠąĖčéčī ą▒ąĄčüą┐ą░čĆąŠą╗čīąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą╗čāčćčłąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą▒ą╝ąĄąĮą░ ą║ą╗čÄčćą░ą╝ąĖ čłąĖčäčĆąŠą▓ą░ąĮąĖčÅ SSH.
[ąØą░čüčéčĆąŠą╣ą║ą░ ą┤ąŠčüčéčāą┐ą░ ą┐ąŠ ą║ą╗čÄčćčā SSH ]
1 . ąØą░ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ ą╝ą░čłąĖąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą│ąĄąĮąĄčĆą░čåąĖčÄ ą┐čāą▒ą╗ąĖčćąĮąŠą│ąŠ ąĖ ą┐čĆąĖą▓ą░čéąĮąŠą│ąŠ ą║ą╗čÄč湥ą╣:
$ ssh-keygen -t rsa -b 4096
Generating public/private rsa key pair.
Enter file in which to save the key (/home/ąĖą╝čÅ_ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ/.ssh/id_rsa): 251007luckfox
Enter passphrase (empty for no passphrase):
Enter same passphrase again:
Your identification has been saved in 251007luckfox
Your public key has been saved in 251007luckfox.pub
The key fingerprint is:
SHA256:eUJ6GQ+W2BComCfkuoF7aysNhFkYBf6SG8fJGtOeW0U ąĖą╝čÅ_ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ@TAG-5779
The key's randomart image is:
+---[RSA 4096]----+
|o=. .o. |
|o.. . + . |
|+* . .EB |
|*oO . .+ * |
|+O B ..S o |
|= X . .. o |
| O o . |
|+ + o |
| +o+ |
+----[SHA256]-----+
ąŚą┤ąĄčüčī ąĖą╝čÅ_ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ čŹč鹊 ą╗ąŠą│ąĖąĮ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, 251007luckfox ~
$ ls -1 ~ | grep luckfox 251007luckfox # ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą║ą╗čÄčć251007luckfox.pub # ą┐čāą▒ą╗ąĖčćąĮčŗą╣ ą║ą╗čÄčć
2 . ąöąŠą▒ą░ą▓čīč鹥 č鹥ą║čüčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐čāą▒ą╗ąĖčćąĮąŠą│ąŠ ą║ą╗čÄčćą░ ą▓ čäą░ą╣ą╗ /root/.ssh/authorized_keys root :
# mkdir -p /root/.ssh
# touch /root/.ssh/authorized_keys
# nano /root/.ssh/authorized_keys
ąÆčüčéą░ą▓čīč鹥 č鹥ą║čüčé ąĖąĘ čäą░ą╣ą╗ą░ 251007luckfox.pub /root/.ssh/authorized_keys . ąŁč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī čü ą┐ąŠą╝ąŠčēčīčÄ č鹥ą║čüč鹊ą▓ąŠą│ąŠ čĆąĄą┤ą░ą║č鹊čĆą░ nano ąĖą╗ąĖ vi . ą¤čĆąŠą▓ąĄčĆčīč鹥, čćč鹊 ą┐čāą▒ą╗ąĖčćąĮčŗą╣ ą║ą╗čÄčć čüąŠčģčĆą░ąĮąĖą╗čüčÅ:
# cat /root/.ssh/authorized_keys
ssh-rsa AAAAB3NzaC1yc2EAAAADAQABAAACAQDJdUdHXUwguO8FH0WkSPnts8fauiop
...
k6x+3hwVdJSKEmzIfGAnH6/7qsB1tPewQ8DQOFuk0NCCxUREQEfi3VXVizhvswpngrga
pa7xnuioQZsy88acuiWBfMqffZan6Vdsdq/Q== ąĖą╝čÅ_ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ@TAG-5779
3 . ąśčüą┐čĆą░ą▓čīč鹥 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čüąĄčĆą▓ąĄčĆą░ SSH, čćč鹊ą▒čŗ čéą░ą╝ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▒čŗą╗ čāą║ą░ąĘą░ąĮ ą┐čāčéčī ą┤ąŠ čäą░ą╣ą╗ą░ authorized_keys :
# nano /etc/ssh/sshd_config
ą¤čĆąŠą▓ąĄčĆčīč鹥 čüčéčĆąŠčćą║čā AuthorizedKeysFile , ąĖčüą┐čĆą░ą▓čīč鹥 ąĄčæ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ, ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čéą░ą║ą░čÅ:
/root/.ssh/authorized_keys
.. ąĖą╗ąĖ čéą░ą║ą░čÅ:
AuthorizedKeysFile .ssh/authorized_keys
4 . ą¤čĆąŠą▓ąĄčĆčīč鹥 ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ ąĖ ą▓ą╗ą░ą┤ąĄą╗čīčåą░ ąĮą░ ą║ą░čéą░ą╗ąŠą│ąĖ /root , /root/.ssh ąĖ čäą░ą╣ą╗ /root/.ssh/authorized_keys čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ ls -la :
# ls -la /root
# ls -la /root/.ssh
# ls -la /root/.ssh/authorized_keys
ąÆąĄąĘą┤ąĄ ą▓ą╗ą░ą┤ąĄą╗ąĄčå ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī root:root , ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ ąĮą░ ą║ą░čéą░ą╗ąŠą│ą░čģ /root ąĖ /root/.ssh ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī drwx------ , ą░ ąĮą░ čäą░ą╣ą╗ authorized_keys ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ -rw------- .
ąöąŠčüčéčāą┐ ąÆą╗ą░ą┤ąĄą╗ąĄčå ąōčĆčāą┐ą┐ą░ ążą░ą╣ą╗ ąĖą╗ąĖ ą┐ą░ą┐ą║ą░
drwx------ root root
/root
drwx------ root root
/root/.ssh
-rw------- root root
/root/.ssh/authorized_keys
ąĢčüą╗ąĖ čŹč鹊 ąĮąĄ čéą░ą║, č鹊 ąĖčüą┐čĆą░ą▓čīč鹥 ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ:
# chown -R root:root /root
# chown -R root:root /root/.ssh
# chown -R root:root /root/.ssh/authorized_keys
# chmod 700 /root
# chmod 700 /root/.ssh
# chmod 600 /root/.ssh/authorized_keys
5 . ą¤ąĄčĆąĄąĘą░ą┐čāčüčéąĖč鹥 čüąĄčĆą▓ąĄčĆ ssh:
# ps | grep ssh
1349 root sshd: /usr/sbin/sshd [listener] 0 of 10-100 startups
1380 root grep ssh
# kill 1349
# /usr/sbin/sshd
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓čŗ čüą╝ąŠąČąĄč鹥 ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ čüąĄčĆą▓ąĄčĆčā SSH ą┐ą╗ą░čéą║ąĖ LuckFox ą▒ąĄąĘ ą┐ą░čĆąŠą╗čÅ.
[ą¤ąŠą╗ąĄąĘąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĖ ]
ą¤ąŠą┤čüą║ą░ąĘą║ą░ ą┐ąŠ ąŠą┐čåąĖčÅą╝ (č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąŠą╗ąĮąŠčåąĄąĮąĮąŠą╝ čģąŠčüč鹥 ą┤ąŠčüčéčāą┐ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ man sshd):
$ ssh root@192.168.1.100 "sshd --help"
unknown option -- -
OpenSSH_9.3p2, OpenSSL 1.1.1v 1 Aug 2023
usage: sshd [-46DdeGiqTtV] [-C connection_spec] [-c host_cert_file]
[-E log_file] [-f config_file] [-g login_grace_time]
[-h host_key_file] [-o option] [-p port] [-u len]
ąĪą╗ąĄą┤čāčÄčēą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčé čüąĄčĆą▓ąĄčĆ SSH ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗą▓ąŠą┤ą░ ą╗ąŠą│ą░ ąŠčéą╗ą░ą┤ą║ąĖ ą▓ ą║ąŠąĮčüąŠą╗čī (ąŠą┐čåąĖčÅ -d ), čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čäą░ą╣ą╗ą░ /etc/ssh/sshd_config (ąŠą┐čåąĖčÅ -f ):
# /usr/sbin/sshd -d -f /etc/ssh/sshd_config
ąÆ čćą░čüčéąĮąŠčüčéąĖ, čŹč鹊 ą┐ąŠą╝ąŠą│ą╗ąŠ ą╝ąĮąĄ ąŠą▒ąĮą░čĆčāąČąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā ą┐čĆą░ą▓ ą┤ąŠčüčéčāą┐ą░ ą║ ą║ą░čéą░ą╗ąŠą│čā /root čüąŠ čüč鹊čĆąŠąĮčŗ čüąĄčĆą▓ąĄčĆą░ sshd. ą×ąĮ čāą┐ąŠčĆąĮąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ą╗ ą┐ą░čĆąŠą╗čī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą┐ąŠ ą║ą╗čÄčćčā (čüą╝. Q055 ).
ąĪą╝. čéą░ą║ąČąĄ:
Q032 . ąÜą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī Ethernet ąĮą░ ą┐ą╗ą░č鹥 LuckFox Pico MiniQ033 . ąØą░čüčéčĆąŠąĖčéčī IP ąĖąĮč鹥čĆč乥ą╣čüą░ Ethernet ąĮą░ ą┐ą╗ą░č鹥 LuckFox Pico MiniQ035 . ąÜą░ą║ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą┐ąŠ SSH?
ąØą░ą▒ą╗čÄą┤ą░ąĄčéčüčÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░: ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░čüčéčĆąŠąĄąĮ ą┤ąŠčüčéčāą┐ ą┐ąŠ ą┐ą░čĆąĄ ą║ą╗čÄč湥ą╣ SSH (čüą╝. Q054 ), čüąĄčĆą▓ąĄčĆ ą▓čüąĄ čĆą░ą▓ąĮąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą┐ą░čĆąŠą╗čī ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ.
ąŚą░ą┐čāčüą║ čüąĄčĆą▓ąĄčĆą░ SSH ą▓ čĆąĄąČąĖą╝ąĄ ąŠčéą╗ą░ą┤ą║ąĖ (ąŠą┐čåąĖčÅ -d ) ą┐ąŠąĘą▓ąŠą╗ąĖą╗ ą┐ąŠąĮčÅčéčī, ą▓ č湥ą╝ ą┐čĆąŠą▒ą╗ąĄą╝ą░:
# ps | grep ssh
1349 root sshd: /usr/sbin/sshd [listener] 0 of 10-100 startups
1380 root grep ssh
# kill 1349
# /usr/sbin/sshd -d -f /etc/ssh/sshd_config
debug1: sshd version OpenSSH_9.3, OpenSSL 1.1.1v 1 Aug 2023
debug1: private host key #0: ssh-rsa SHA256:TUf2NU/xAfSS8UXJjyrxTkdLbIlYxBe2ZnxgXe9
debug1: private host key #1: ecdsa-sha2-nistp256 SHA256:9wWC2XW74wk5uc4OrrFVyaZAX1+
debug1: private host key #2: ssh-ed25519 SHA256:5b8Z6u5uCWhu0AhfsQTkrRwiyTtBidfSUcm
debug1: rexec_argv[0]='/usr/sbin/sshd'
debug1: rexec_argv[1]='-d'
debug1: rexec_argv[2]='-f'
debug1: rexec_argv[3]='/etc/ssh/sshd_config'
debug1: Set /proc/self/oom_score_adj from 0 to -1000
socket: Address family not supported by protocol
debug1: Bind to port 22 on 0.0.0.0.
Server listening on 0.0.0.0 port 22.
...
ą¤ąŠą┐čŗčéą║ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ą╗ąĖąĄąĮčéą░ SSH:
...
debug1: rekey in after 134217728 blocks [preauth]
debug1: KEX done [preauth]
debug1: userauth-request for user root service ssh-connection method none [preauth]
debug1: attempt 0 failures 0 [preauth]
debug1: userauth-request for user root service ssh-connection method publickey [preauth]
debug1: attempt 1 failures 0 [preauth]
debug1: userauth_pubkey: publickey test pkalg ssh-ed25519 pkblob ED25519 SHA256:o2n
9di8eVNIKkVNRHUrWpD8yWsnnYhFietm7q2tgOxE [preauth]
debug1: temporarily_use_uid: 0/0 (e=0/0)
debug1: trying public key file /root/.ssh/authorized_keys
debug1: fd 4 clearing O_NONBLOCK
Authentication refused: bad ownership or modes for directory /root
debug1: restore_uid: 0/0
...
ąśąĘ ą╗ąŠą│ą░ ą▓ąĖą┤ąĮąŠ, čćč鹊 ąŠčéą║ą░ąĘą░ąĮąŠ ą▓ ą┐ąŠą┐čŗčéą║ąĄ ą┤ąŠčüčéčāą┐ą░ ą║ čäą░ą╣ą╗čā /root/.ssh/authorized_keys
ą¤čĆąŠą▒ą╗ąĄą╝čā čĆąĄčłąĖą╗ą░ ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓ą╗ą░ą┤ąĄą╗čīčåą░ ąĖ ą┐čĆą░ą▓ ą┤ąŠčüčéčāą┐ą░ ąĮą░ ą║ą░čéą░ą╗ąŠą│ /root:
# chown -R root:root /root
# chmod 700 /root
ą¤čĆąŠą▓ąĄčĆčīč鹥 čéą░ą║ąČąĄ ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ (ą║ąŠą╝ą░ąĮą┤ąŠą╣ ls -la ) ąĮą░ ą║ą░čéą░ą╗ąŠą│ /root/.ssh/ ąĖ čäą░ą╣ą╗ authorized_keys :
ąöąŠčüčéčāą┐ ąÆą╗ą░ą┤ąĄą╗ąĄčå ąōčĆčāą┐ą┐ą░ ążą░ą╣ą╗ ąĖą╗ąĖ ą┐ą░ą┐ą║ą░
drwx------ root root
/root
drwx------ root root
/root/.ssh
-rw------- root root
/root/.ssh/authorized_keys
ą¤ąĄčĆąĄąĘą░ą│čĆčāąĘąĖč鹥 čüąĄčĆą▓ąĄčĆ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ sync ąĖ reboot :
ąöą╗čÅ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ą╣ą╗ąŠą▓ ąĮą░ čüąĄčĆą▓ąĄčĆ ą┐ąŠ SSH čüčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčüąĮąŠą▓ąĮčŗčģ čüą┐ąŠčüąŠą▒ąŠą▓:
[1. SCP (Secure Copy) ]
ąŻčéąĖą╗ąĖčéą░ scp čŹč鹊 ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą┐čĆąŠčüč鹊ą╣ ąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĮčŗą╣ čüą┐ąŠčüąŠą▒. ą×ą▒čēąĖą╣ čüąĖąĮčéą░ą║čüąĖčü ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ čäą░ą╣ą╗ą░:
scp ąĖčüč鹊čćąĮąĖą║ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ
ą¤ąŠą┤ ąĖčüč鹊čćąĮąĖą║ąŠą╝ ąĖ ąĮą░ąĘąĮą░č湥ąĮąĖąĄą╝ ą╝ąŠą│čāčé ą▒čŗčéčī ą║ą░ą║ ą╗ąŠą║ą░ą╗čīąĮčŗą╣ čäą░ą╣ą╗, čéą░ą║ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čāą┤ą░ą╗ąĄąĮąĮąŠą╝čā čüąĄčĆą▓ąĄčĆčā SSH:
scp localfile remoteuser@IP:/ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ
ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ čĆąĄą║čāčĆčüąĖą▓ąĮąŠ:
scp -r localdir remoteuser@IP:/ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ
ąŚą┤ąĄčüčī localfile čŹč鹊 čäą░ą╣ą╗, localdir ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ ąĮą░ ą╝ą░čłąĖąĮąĄ, ąŠčéą║čāą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ, remoteuser čŹč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĮą░ čāą┤ą░ą╗ąĄąĮąĮąŠą╝ čüąĄčĆą▓ąĄčĆąĄ SSH, IP čŹč鹊 ą░ą┤čĆąĄčü čüąĄčĆą▓ąĄčĆą░ SSH (ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ DNS-ąĖą╝ąĄąĮąĄą╝), /ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ čŹč鹊 ą┐čāčéčī ą▓ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝ąĄ čüąĄčĆą▓ąĄčĆą░ SSH.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ą╣ą╗ą░ hello.txt ąĮą░ SSH-čüąĄčĆą▓ąĄčĆ ą┐ą╗ą░čéą║ąĖ LuckFox, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ č湥čĆąĄąĘ Ethernet. IP-ą░ą┤čĆąĄčü čüąĄčĆą▓ąĄčĆą░ SSH 192.168.1.100:
$ touch hello.txt
$ echo "hi!" > hello.txt
$ scp hello.txt root@192.168.1.100:/oem
hello.txt 100% 4 1.9KB/s 00:00
ąŚą┤ąĄčüčī ą║ą░čéą░ą╗ąŠą│ /oem
$ ssh root@192.168.1.100 "cat /oem/hello.txt"
hi!
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ : /ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą░ą▒čüąŠą╗čÄčéąĮčŗą╝, čé. ąĄ. ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮčŗąĄ ą┐čāčéąĖ ąĖ ą┐čāčéąĖ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ~. ąśąĮą░č湥 čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐čāčéą░ąĮąĖčåąĄ.
[2. SFTP (SSH File Transfer Protocol) ]
ąĪ ą┐ąŠą╝ąŠčēčīčÄ sftp ą╝ąŠąČąĮąŠ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ąĖąĮč鹥čĆą░ą║čéąĖą▓ąĮčāčÄ čĆą░ą▒ąŠčéčā čü čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ SSH-čüąĄčĆą▓ąĄčĆą░. ą×ą▒čēąĖą╣ čüąĖąĮčéą░ą║čüąĖčü ą┐ąŠą║ą░ąĘą░ąĮ ąĮąĖąČąĄ.
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čüąĄčĆą▓ąĄčĆčā:
sftp remoteuser@IP
ąÜąŠą╝ą░ąĮą┤čŗ ą▓ SFTP:
put ą╗ąŠą║ą░ą╗čīąĮčŗą╣_čäą░ą╣ą╗ # ąŚą░ą│čĆčāąĘąĖčéčī čäą░ą╣ą╗ get čāą┤ą░ą╗ąĄąĮąĮčŗą╣_čäą░ą╣ą╗ # ąĪą║ą░čćą░čéčī čäą░ą╣ą╗ ls # ą¤čĆąŠčüą╝ąŠčéčĆ čäą░ą╣ą╗ąŠą▓ cd ą┐ą░ą┐ą║ą░ # ąĪą╝ąĄąĮą░ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ
[3. Rsync č湥čĆąĄąĘ SSH ]
ąŻčéąĖą╗ąĖčéčā rsync čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäą░ą╣ą╗ąŠą▓ ąĖ ą┤ąĖčĆąĄą║č鹊čĆąĖą╣ ąĮą░ čüąĄč鹥ą▓čŗčģ čģąŠčüčéą░čģ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ąĘąĄčĆą║ą░ą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą░čéą░ą╗ąŠą│ąŠą▓ web-čüąĄčĆą▓ąĄčĆą░ ąĮą░ ą┤čĆčāą│ąŠą╣ web-čüąĄčĆą▓ąĄčĆ. ą¤čĆąĖ čŹč鹊ą╝ ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗąĄ ąĖą╗ąĖ ąĮąŠą▓čŗąĄ čäą░ą╣ą╗čŗ [5]. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ąŠą▒čēąĖą╣ čüąĖąĮčéą░ą║čüąĖčü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čāčéąĖą╗ąĖčéčŗ rsync.
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čü ą┐čĆąŠą│čĆąĄčüčüąŠą╝:
rsync -avz -e ssh localdir/ remoteuser@IP:/remotedir/
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čü čāą┤ą░ą╗ąĄąĮąĖąĄą╝ ą╗ąĖčłąĮąĖčģ čäą░ą╣ą╗ąŠą▓ ąĮą░ čüąĄčĆą▓ąĄčĆąĄ:
rsync -avz --delete -e ssh localdir/ remoteuser@IP:/remotedir/
[ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖąĖ scp ]
ąĪ ą┐ą░čĆąŠą╗ąĄą╝, ą▒čāą┤ąĄčé ąĘą░ą┐čĆąŠčłąĄąĮ ą┐ą░čĆąŠą╗čī, ąĄčüą╗ąĖ ąĮąĄ ąĮą░čüčéčĆąŠąĄąĮą░ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖčÅ ą┐ąŠ ą║ą╗čÄčćčā (čüą╝. Q054):
scp localfile remoteuser@IP:/ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ
ąĪ SSH-ą║ą╗čÄč湊ą╝, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą║ą╗čÄčćą░:
scp -i ~/.ssh/ą║ą╗čÄčć localfile remoteuser@IP:/ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ
[ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąŠą┐čåąĖąĖ scp ]
ąŻą║ą░ąĘą░ąĮąĖąĄ ą┐ąŠčĆčéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ(ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ):
scp -P 2222 localfile remoteuser@IP:/ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ
ąĪąČą░čéąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥:
scp -C localfile remoteuser@IP:/ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ
ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ą░čéčĆąĖą▒čāč鹊ą▓ čäą░ą╣ą╗ąŠą▓:
scp -p localfile remoteuser@IP:/ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ
ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ 1000 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║:
scp -l 1000 localfile remoteuser@IP:/ą┐čāčéčī/ąĮą░/čüąĄčĆą▓ąĄčĆąĄ
ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ . ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąĄą▒-čüą░ą╣čéą░:
$ scp -r /var/www/mysite/* user@webserver:/var/www/html/
ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ čü ą┐čĆąŠą│čĆąĄčüčüąŠą╝ (rsync):
$ rsync -avz --progress -e ssh backup.tar.gz user@server:/backups/
ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ č湥čĆąĄąĘ ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┐ąŠčĆčé SSH, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čäą░ą╣ą╗ą░ config.conf ą┤ą╗čÅ SSH (ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čāčéąĖą╗ąĖčéčā ssh):
$ scp -P 2022 -F config.conf admin@server:/etc/app/
ąĪąŠą▓ąĄčéčŗ:
- ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 SSH-ą║ą╗čÄčćąĖ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖąĘą░čåąĖąĖ.
ąöą╗čÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąŠčåąĄčüčüą░ ą┐ąŠ ąĖą╝ąĄąĮąĖ čü ą┐ąŠą╝ąŠčēčīčÄ kill ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓:
[ąĪ ą┐ąŠą╝ąŠčēčīčÄ čüą║čĆąĖą┐čéą░ ]
ąĪąŠąĘą┤ą░ą╣č鹥 ą▓ąŠčé čéą░ą║ąŠą╣ čüą║čĆąĖą┐čé (ąĮą░ą┐čĆąĖą╝ąĄčĆ, k.sh):
#!/bin/bash if [ $# -eq 0 ] ; then echo "ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ: $0 < ąĖą╝čÅ_ą┐čĆąŠčåąĄčüčüą░>" exit 1 fi PIDS = $( pgrep " $1 " ) if [ -z " $PIDS " ] ; then echo "ą¤čĆąŠčåąĄčüčü ' $1 ' ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ" exit 1 fi echo "ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą┐čĆąŠčåąĄčüčüčŗ: $PIDS " kill $PIDS 2 >/dev/null# ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąŠčåąĄčüčüčŗ ąĮąĄ ąŠčéą▓ąĄčćą░čÄčé
sleep 2 REMAINING = $( pgrep " $1 " ) if [ -n " $REMAINING " ] ; then echo "ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĘą░ą▓ąĄčĆčłą░ąĄą╝: $REMAINING " kill -9 $REMAINING 2 >/dev/nullfi echo "ąōąŠč鹊ą▓ąŠ"
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
$ gedit &
[1] 277402
$ ./k.sh gedit
ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą┐čĆąŠčåąĄčüčüčŗ: 277402
ąōąŠč鹊ą▓ąŠ
[1]+ Terminated gedit
[killall ]
ą×čüčéą░ąĮąŠą▓ąĖčéčī ą▓čüąĄ ą┐čĆąŠčåąĄčüčüčŗ čü čāą║ą░ąĘą░ąĮąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝:
killall process_name
ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮą░čÅ ąŠčüčéą░ąĮąŠą▓ą║ą░:
killall -9 process_name
ą¤čĆąĖą╝ąĄčĆčŗ:
$ killall nginx
$ killall -9 python
ą¤čĆąĖą╝ąĄčĆ ąĘą░ą┐čāčüą║ą░ ąĖ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą▓ąĖą┤ąĄąŠą┐ąŠč鹊ą║ą░ MPEG čü ą┐ąŠą╝ąŠčēčīčÄ čāčéąĖą╗ąĖčéčŗ v4l2-ctl:
$ v4l2-ctl -d0 --stream-mmap --stream-to=- | socat - udp-sendto:192.168.1.1:5000 &
[1] 277805
$ ps | grep v4l2-ctl
277804 pts/1 00:00:00 v4l2-ctl
$ killall v4l2-ctl
$ ps | grep v4l2-ctl
[1]+ Stopped v4l2-ctl -d0 --stream-mmap --stream-to=- | socat - udp-sendto:192.168.1.1:5000
[pkill (čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒) ]
ąŁč鹊čé čüą┐ąŠčüąŠą▒ ąĮąĄ ą┐ąŠą┤ąŠą╣ą┤ąĄčé ą┤ą╗čÅ Linux Buildroot, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ čüą▒ąŠčĆą║ąĄ Buildroot ąĮąĄčé čāčéąĖą╗ąĖčéčŗ pkill .
ą×čüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąŠčåąĄčüčü ą┐ąŠ ąĖą╝ąĄąĮąĖ (ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé SIGTERM):
pkill process_name
ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮą░čÅ ąŠčüčéą░ąĮąŠą▓ą║ą░ (SIGKILL):
pkill -9 process_name
ą¤čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
$ pkill firefox
$ pkill -9 chrome
[ąÜąŠą╝ą▒ąĖąĮą░čåąĖčÅ pgrep + kill ]
ąŁč鹊čé čüą┐ąŠčüąŠą▒ ąĮąĄ ą┐ąŠą┤ąŠą╣ą┤ąĄčé ą┤ą╗čÅ Linux Buildroot, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ čüą▒ąŠčĆą║ąĄ Buildroot ąĮąĄčé čāčéąĖą╗ąĖčéčŗ pgrep .
ąØą░ą╣čéąĖ PID ąĖ ąŠčüčéą░ąĮąŠą▓ąĖčéčī:
kill $(pgrep process_name)
ąśą╗ąĖ čü ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮčŗą╝ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝:
kill -9 $(pgrep process_name)
ą¤čĆąĖą╝ąĄčĆ:
ąæąĄąĘąŠą┐ą░čüąĮčŗą╣ čüą┐ąŠčüąŠą▒ čü ą┐čĆąŠą▓ąĄčĆą║ą░ą╝ąĖ (čüą║čĆąĖą┐čé):
# ą¤čĆąŠą▓ąĄčĆą║ą░ čüčāčēąĄčüčéą▓ąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠčåąĄčüčüą░ ą┐ąĄčĆąĄą┤ ąŠčüčéą░ąĮąŠą▓ą║ąŠą╣ PROCESS = "firefox" PID = $( pgrep " $PROCESS " ) if [ -n " $PID " ] ; then echo "ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą┐čĆąŠčåąĄčüčü $PROCESS (PID: $PID )" kill $PID else echo "ą¤čĆąŠčåąĄčüčü $PROCESS ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ" fi
ąöą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐čĆąŠčåąĄčüčüąŠą▓ čü ąŠą┤ąĮąĖą╝ ąĖą╝ąĄąĮąĄą╝ (čüą║čĆąĖą┐čé):
# ą×čüčéą░ąĮąŠą▓ąĖčéčī ą▓čüąĄ ą┐čĆąŠčåąĄčüčüčŗ čü čāą║ą░ąĘą░ąĮąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ PROCESS = "python" PIDS = $( pgrep " $PROCESS " ) if [ -n " $PIDS " ] ; then echo "ąØą░ą╣ą┤ąĄąĮčŗ ą┐čĆąŠčåąĄčüčüčŗ: $PIDS " kill $PIDS else echo "ą¤čĆąŠčåąĄčüčüčŗ $PROCESS ąĮąĄ ąĮą░ą╣ą┤ąĄąĮčŗ" fi
ą¤ąŠčüč鹥ą┐ąĄąĮąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ (čüą║čĆąĖą┐čé):
# ąĪąĮą░čćą░ą╗ą░ ą▓ąĄąČą╗ąĖą▓ą░čÅ ąŠčüčéą░ąĮąŠą▓ą║ą░, ąĘą░č鹥ą╝ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮą░čÅ PROCESS = "myapp" PID = $( pgrep " $PROCESS " ) if [ -n " $PID " ] ; then echo "ą×čéą┐čĆą░ą▓ą╗čÅąĄą╝ SIGTERM ą┐čĆąŠčåąĄčüčüčā $PID " kill $PID # ą¢ą┤ąĄą╝ 5 čüąĄą║čāąĮą┤ sleep 5 # ą¤čĆąŠą▓ąĄčĆčÅąĄą╝, ąČąĖą▓ ą╗ąĖ ąĄčēąĄ ą┐čĆąŠčåąĄčüčü if kill -0 $PID 2 >/dev/null; then echo "ą¤čĆąŠčåąĄčüčü ąĮąĄ ąŠčéą▓ąĄčéąĖą╗, ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ SIGKILL" kill -9 $PID fi fi
[ąŻąĮąĖą▓ąĄčĆčüą░ą╗čīąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ .bashrc ]
ąöąŠą▒ą░ą▓čīč鹥 ą▓ ~/.bashrc
() { if [ $# -eq 0 ] ; then echo "ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ: killp < ąĖą╝čÅ_ą┐čĆąŠčåąĄčüčüą░>" return 1 fi local PIDS = $( pgrep " $1 " ) if [ -z " $PIDS " ] ; then echo "ą¤čĆąŠčåąĄčüčü ' $1 ' ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ" return 1 fi echo "ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą┐čĆąŠčåąĄčüčüčŗ ' $1 ': $PIDS " kill $PIDS }
ą¤ąŠčüą╗ąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą▓ .bashrc :
$ source ~/.bashrc
$ killp firefox # ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ
[ąĪąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ kill ]
ąÆąĄąČą╗ąĖą▓ąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ):
kill -TERM $(pgrep process_name)
ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ:
kill -KILL $(pgrep process_name)
ą¤ąĄčĆąĄąĘą░ą┐čāčüą║ ą┐čĆąŠčåąĄčüčüą░:
kill -HUP $(pgrep process_name)
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ]
ą×čüčéą░ąĮąŠą▓ąĖčéčī ą▓ąĄą▒-čüąĄčĆą▓ąĄčĆ nginx:
ą×čüčéą░ąĮąŠą▓ąĖčéčī ą▓čüąĄ Python čüą║čĆąĖą┐čéčŗ:
ą×čüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąŠčåąĄčüčü čü ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄą╝:
$ read -p "ą×čüčéą░ąĮąŠą▓ąĖčéčī Firefox? (y/n): " ans
[[ $ans == "y" ]] && pkill firefox
ą×čüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąŠčåąĄčüčü, ąĄčüą╗ąĖ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ąĮąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ:
if ps aux | grep firefox | grep -v grep | awk '{if ($4 > 50) print $2}' | xargs kill; then echo "ą¤čĆąŠčåąĄčüčüčŗ Firefox čü >50% ą┐ą░ą╝čÅčéąĖ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ" fi
ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ:
- ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 pkill ą┤ą╗čÅ ą┐čĆąŠčüčéčŗčģ čüą╗čāčćą░ąĄą▓.
ąöą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ą░ą┤čĆą░ ą▓ č乊čĆą╝ą░č鹥 BMP čü ą┐ąŠą╝ąŠčēčīčÄ v4l2-ctl ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓:
[1. ą¤čĆčÅą╝ąŠąĄ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą▓ BMP č湥čĆąĄąĘ --stream-to ]
ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ą║ą░ą┤čĆą░:
v4l2-ctl -d0 --stream-mmap --stream-to=frame.bmp --stream-count=1
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą║ą░ą┤čĆ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą║ą░ą║ čĆą░čüčéčĆąŠą▓ą░čÅ ą║ą░čĆčéąĖąĮą║ą░ ą▓ č乊čĆą╝ą░č鹥 MJPEG.
[2. ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ RAW ą┤ą░ąĮąĮčŗčģ ąĖ ą║ąŠąĮą▓ąĄčĆčéą░čåąĖčÅ ]
ąĪąŠčģčĆą░ąĮčÅąĄą╝ RAW ą┤ą░ąĮąĮčŗąĄ (YUV ąĖą╗ąĖ MJPEG):
v4l2-ctl -d0 --set-fmt-video=width=1920,height=1080,pixelformat=YUYV v4l2-ctl -d0 --stream-mmap --stream-to=frame.raw --stream-count=1
ąŚą░č鹥ą╝ ą║ąŠąĮą▓ąĄčĆčéąĖčĆčāąĄą╝ ą▓ BMP (čéčĆąĄą▒čāčÄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čāčéąĖą╗ąĖčéčŗ). ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ffmpeg ą┤ą╗čÅ ą║ąŠąĮą▓ąĄčĆčéą░čåąĖąĖ:
ffmpeg -f rawvideo -pixel_format yuyv422 -video_size 640x480 -i frame.raw frame.bmp
[ą¤ąŠą╗ąĮčŗą╣ čüą║čĆąĖą┐čé ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ BMP ]
#!/bin/bash # ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ DEVICE = " ${ 1 :- 0 } " WIDTH = " ${ 2 :- 640 } " HEIGHT = " ${ 3 :- 480 } " PIXELFORMAT = " ${ 4 :- YUYV } " OUTPUT = " ${ 5 :- frame .bmp} " echo "ąŚą░čģą▓ą░čé ą║ą░ą┤čĆą░ čü /dev/video $DEVICE ..." echo "ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ: ${ WIDTH } x ${ HEIGHT } " echo "ążąŠčĆą╝ą░čé: $PIXELFORMAT " # ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ č乊čĆą╝ą░čé
v4l2-ctl -d$DEVICE --set-fmt-video= width = $WIDTH ,height= $HEIGHT ,pixelformat= $PIXELFORMAT # ąĪąŠčģčĆą░ąĮčÅąĄą╝ RAW ą┤ą░ąĮąĮčŗąĄ RAW_FILE = " ${ OUTPUT %.*} .raw"
v4l2-ctl -d$DEVICE --stream-mmap --stream-to= " $RAW_FILE " --stream-count=1 # ąÜąŠąĮą▓ąĄčĆčéąĖčĆčāąĄą╝ ą▓ BMP ąĖčüą┐ąŠą╗čīąĘčāčÅ ffmpeg if command -v ffmpeg &> /dev/null; then case $PIXELFORMAT in YUYV|YUYV422) ffmpeg -f rawvideo -pixel_format yuyv422 -video_size ${ WIDTH } x${ HEIGHT } \ -i " $RAW_FILE " " $OUTPUT " -y ;; MJPG) ffmpeg -f mjpeg -i " $RAW_FILE " " $OUTPUT " -y ;; RGB24) ffmpeg -f rawvideo -pixel_format rgb24 -video_size ${ WIDTH } x${ HEIGHT } \ -i " $RAW_FILE " " $OUTPUT " -y ;; *) echo "ążąŠčĆą╝ą░čé $PIXELFORMAT ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą║ąŠąĮą▓ąĄčĆčéą░čåąĖąĖ" echo "RAW ą┤ą░ąĮąĮčŗąĄ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓: $RAW_FILE " exit 1 ;; esac # ąŻą┤ą░ą╗čÅąĄą╝ ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ RAW čäą░ą╣ą╗ rm " $RAW_FILE " echo "ąÜą░ą┤čĆ čüąŠčģčĆą░ąĮąĄąĮ ą║ą░ą║: $OUTPUT " else echo "ffmpeg ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ. RAW ą┤ą░ąĮąĮčŗąĄ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓: $RAW_FILE " echo "ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ffmpeg ą┤ą╗čÅ ą║ąŠąĮą▓ąĄčĆčéą░čåąĖąĖ ą▓ BMP: sudo apt install ffmpeg" fi
[ąĪą║čĆąĖą┐čé čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą┤ąŠčüčéčāą┐ąĮčŗčģ č乊čĆą╝ą░č鹊ą▓ ]
#!/bin/bash
capture_bmp() { local device = " ${ 1 :- 0 } " local output = " ${ 2 :- frame_ $( date +%Y%m%d_%H%M%S) .bmp} " # ą¤ąŠą╗čāčćą░ąĄą╝ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ č乊čĆą╝ą░čéą░čģ echo "=== ą¤čĆąŠą▓ąĄčĆą║ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ č乊čĆą╝ą░č鹊ą▓ ===" v4l2-ctl -d$device --list-formats-ext # ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ read -p "ą©ąĖčĆąĖąĮą░ ą║ą░ą┤čĆą░ [640]: " width width = ${ width :- 640 } read -p "ąÆčŗčüąŠčéą░ ą║ą░ą┤čĆą░ [480]: " height height = ${ height :- 480 } read -p "ążąŠčĆą╝ą░čé ą┐ąĖą║čüąĄą╗ąĄą╣ [YUYV]: " pixelformat pixelformat = ${ pixelformat :- YUYV } # ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ č乊čĆą╝ą░čé echo "ąŻčüčéą░ąĮąŠą▓ą║ą░ č乊čĆą╝ą░čéą░: ${ width } x ${ height } $pixelformat " v4l2-ctl -d$device --set-fmt-video= width = $width ,height= $height ,pixelformat= $pixelformat # ąŚą░čģą▓ą░čéčŗą▓ą░ąĄą╝ ą║ą░ą┤čĆ echo "ąŚą░čģą▓ą░čé ą║ą░ą┤čĆą░..." temp_raw = $( mktemp) v4l2-ctl -d$device --stream-mmap --stream-to= " $temp_raw " --stream-count=1 # ąÜąŠąĮą▓ąĄčĆčéąĖčĆčāąĄą╝ ą▓ BMP if command -v ffmpeg &> /dev/null; then echo "ąÜąŠąĮą▓ąĄčĆčéą░čåąĖčÅ ą▓ BMP..." ffmpeg -f rawvideo -pixel_format yuyv422 -video_size ${ width } x${ height } \ -i " $temp_raw " " $output " -y -loglevel quiet rm " $temp_raw " echo "Ō£ģ ąÜą░ą┤čĆ čüąŠčģčĆą░ąĮąĄąĮ: $output " else mv " $temp_raw " " ${ output %.*} .raw" echo "ŌÜĀ’ĖÅ ffmpeg ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ. RAW ą┤ą░ąĮąĮčŗąĄ čüąŠčģčĆą░ąĮąĄąĮčŗ: ${ output %.*} .raw" fi }
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ:
capture_bmp "$@"
[ą¤čĆąŠčüčéą░čÅ ąŠą┤ąĮąŠčüčéčĆąŠčćąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ čü ą║ąŠąĮą▓ąĄčĆčéą░čåąĖąĄą╣ ]
ą×ą┤ąĮąŠčüčéčĆąŠčćąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ BMP:
v4l2-ctl -d0 --set-fmt-video=width=640,height=480,pixelformat=YUYV --stream-mmap \ --stream-to=/tmp/frame.raw --stream-count=1 && ffmpeg -f rawvideo -pixel_format \ yuyv422 -video_size 640x480 -i /tmp/frame.raw frame.bmp -y && rm /tmp/frame.raw
[ąĪą║čĆąĖą┐čé ą┤ą╗čÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ą░ą┤čĆąŠą▓ ]
#!/bin/bash # ą¤ą░čĆą░ą╝ąĄčéčĆčŗ DEVICE =0 INTERVAL =5 # čüąĄą║čāąĮą┤ ą╝ąĄąČą┤čā ą║ą░ą┤čĆą░ą╝ąĖ COUNT =10 # ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ą┤čĆąŠą▓ for i in $( seq 1 $COUNT ) ; do output = "frame_ $( printf "%03d" $i ) _ $( date +%H%M%S) .bmp" echo "ąŚą░čģą▓ą░čé ą║ą░ą┤čĆą░ $i / $COUNT : $output " v4l2-ctl -d$DEVICE --stream-mmap --stream-to= /tmp/temp.raw --stream-count=1 ffmpeg -f rawvideo -pixel_format yuyv422 -video_size 640x480 \ -i /tmp/temp.raw " $output " -y -loglevel quiet rm /tmp/temp.raw sleep $INTERVAL done
ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī:
1. ąĪąŠčģčĆą░ąĮąĖč鹥 čüą║čĆąĖą┐čé ą║ą░ą║ capture_bmp.sh.
$ ./capture_bmp.sh # ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ
$ ./capture_bmp.sh 0 frame1.bmp # ąŻą║ą░ąĘą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ ąĖą╝čÅ čäą░ą╣ą╗ą░
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
- v4l2-ctl čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ ąĮąĄ čāą╝ąĄąĄčé čüąŠčģčĆą░ąĮčÅčéčī ą┐čĆčÅą╝ąŠ ą▓ BMP, č鹊ą╗čīą║ąŠ RAW ą┤ą░ąĮąĮčŗąĄ
ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ - ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī "3. ą¤ąŠą╗ąĮčŗą╣ čüą║čĆąĖą┐čé ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ BMP", ą║ąŠč鹊čĆčŗą╣ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čłą░ą│ąĖ.
ąŻčéąĖą╗ąĖčéą░ v4l2-ctl čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čģąŠčüč鹥 čü IP-ą░ą┤čĆąĄčüąŠą╝ 192.168.1.100, ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčé ą▓ąĖą┤ąĄąŠą┐ąŠč鹊ą║ ąŠčé ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ą║ą░ą╝ąĄčĆčŗ ąĮą░ čģąŠčüčé čü IP-ą░ą┤čĆąĄčüąŠą╝ 192.168.1.1.
[ą¦ąĄčĆąĄąĘ UDP ]
ąØą░ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ:
v4l2-ctl -d0 --stream-mmap --stream-to=- | socat - udp-sendto:192.168.1.1:5000
ąØą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ ą▓ąĖą┤ąĄąŠą┐ąŠč鹊ą║ ą╝ąŠąČąĮąŠ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī ą║ąŠą╝ą░ąĮą┤ąŠą╣:
ffplay -f mjpeg udp://192.168.1.100:5000
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ąĮą░ą▒ą╗čÄą┤ą░ąĄčéčüčÅ ą▒ąŠą╗čīčłą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā čüąŠą▒čŗčéąĖčÅą╝ąĖ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┤ ą║ą░ą╝ąĄčĆąŠą╣ ąĖ ąĖčģ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄą╝ ąĮą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ. ąŚą░ą┤ąĄčƹȹ║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą╗čāčćą░ą╣ąĮą░čÅ, ą▓ąĖąĘčāą░ą╗čīąĮąŠ ąŠčé 0.2 ą┤ąŠ 3 čüąĄą║čāąĮą┤. ą¤čĆąĖ čŹč鹊ą╝ ą▓ąĖą┤ąĮąŠ, čćč鹊 ą┐čĆąŠąĖą│čĆčŗą▓ą░ąĮąĖąĄ ą║ą░čĆčéąĖąĮą║ąĖ ffplay ą║ą░ą║ čĆą░ąĘ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čü čŹč鹊ą╣ ąĘą░ą┤ąĄčƹȹ║ąŠą╣.
ą¤čĆąĖčćąĖąĮą░ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĘą░ą║ą╗čÄčćą░ą╗ą░čüčī ą▓ ą▒čāč乥čĆą░čģ UDP ąĮą░ čüč鹊čĆąŠąĮąĄ ą┐čĆąĖąĄą╝ą░. ą£ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī čŹčéčā ąĘą░ą┤ąĄčƹȹ║čā ąĖ čüą┤ąĄą╗ą░čéčī ąĄčæ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ čüč鹊čĆąŠąĮąĄ ą┐čĆąĖąĄą╝ą░:
ffplay -f mjpeg -fflags nobuffer -flags low_delay -framedrop -analyzeduration 1 \ -probesize 32 -buffer_size 16384 udp://192.168.1.100:5000
[ą¦ąĄčĆąĄąĘ TCP ]
ąØą░ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ:
v4l2-ctl -d0 --stream-mmap --stream-to-host 192.168.1.1:5000
ąØą░ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ:
ffplay -f mjpeg -fflags nobuffer -flags low_delay -framedrop -analyzeduration 1 \ -probesize 32 tcp://0.0.0.0:5000?listen
ąÆąŠčé ą┐ąŠą┤čĆąŠą▒ąĮą░čÅ čĆą░čüčłąĖčäčĆąŠą▓ą║ą░ čŹčéąĖčģ ą┐ąŠčģąŠąČąĖčģ, ąĮąŠ ą▓čüąĄ-čéą░ą║ąĖ čĆą░ąĘąĮčŗčģ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆ, ą║ąŠč鹊čĆčŗąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą║ą╗čÄč湥ą▓čŗą╝ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ąĖ ą▓ ą╝ąĖčĆąĄ ą┐ąŠč鹊ą║ąŠą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą░:
[RTP (Real-time Transport Protocol) ]
ąÜą░ą║ čüą╗ąĄą┤čāąĄčé ąĖąĘ čĆą░čüčłąĖčäčĆąŠą▓ą║ąĖ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčŗ RTP, čŹč鹊 ą┐čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ. ą×čüąĮąŠą▓ąĮą░čÅ ąĘą░ą┤ą░čćą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░: ą┤ąŠčüčéą░ą▓ą║ą░ ą░čāą┤ąĖąŠ ąĖ ą▓ąĖą┤ąĄąŠ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ čüąĄčéąĖ čü ą║ąŠą╝ą╝čāčéą░čåąĖąĄą╣ ą┐ą░ą║ąĄč鹊ą▓ (ą║ą░ą║ ąśąĮč鹥čĆąĮąĄčé).
RTP ąĮąĄ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą┤ąŠčüčéą░ą▓ą║čā (ą║ą░ą║ TCP), ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą▓ąĄčĆčģ UDP. ąŁč鹊 čüąŠąĘąĮą░č鹥ą╗čīąĮčŗą╣ ą▓čŗą▒ąŠčĆ, čéą░ą║ ą║ą░ą║ ą┤ą╗čÅ ąČąĖą▓ąŠą│ąŠ ą▓ąĖą┤ąĄąŠ ąĖ ąĘą▓čāą║ą░ ąĮąĖąĘą║ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓ą░ąČąĮąĄąĄ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ. ąøčāčćčłąĄ ą┐čĆąŠą┐čāčüčéąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ą┤čĆąŠą▓ ąĖą╗ąĖ čāčüą╗čŗčłą░čéčī ąĮąĄą▒ąŠą╗čīčłąŠą╣ čłčāą╝, č湥ą╝ ąČą┤ą░čéčī ą┐ąŠą▓č鹊čĆąĮąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐ąŠč鹥čĆčÅąĮąĮąŠą│ąŠ ą┐ą░ą║ąĄčéą░ ąĖ čüą╝ąŠčéčĆąĄčéčī "ąĘą░ą▓ąĖčüčłąĄąĄ" ą▓ąĖą┤ąĄąŠ.
ą¦č鹊 ą┤ąĄą╗ą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ RTP:
1. ąöąŠą▒ą░ą▓ą╗čÅąĄčé ą║ ą┤ą░ąĮąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą╝ąĄčéą║ąĖ (timestamps), čćč鹊ą▒čŗ ą┐ą╗ąĄąĄčĆ ą╝ąŠą│ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčī ą┐ą░ą║ąĄčéčŗ ą▓ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ąĖ čü ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ.
ąÉąĮą░ą╗ąŠą│ąĖčÅ: ą┐čĆąĄą┤čüčéą░ą▓čīč鹥, čćč鹊 RTP ŌĆö čŹč鹊 "ą┐ąŠčćč鹊ą▓čŗą╣ ą│čĆčāąĘąŠą▓ąĖą║", ą║ąŠč鹊čĆčŗą╣ ą▒čŗčüčéčĆąŠ čĆą░ąĘą▓ąŠąĘąĖčé ą┐ąŠčüčŗą╗ą║ąĖ (ą░čāą┤ąĖąŠ/ą▓ąĖą┤ąĄąŠ ą┐ą░ą║ąĄčéčŗ) ą┐ąŠ ą░ą┤čĆąĄčüą░ą╝. ą×ąĮ ąĮąĄ ąČą┤ąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ą░ąČą┤ąŠą╣ ą┐ąŠčüčŗą╗ą║ąĖ, ąŠąĮ ą┐čĆąŠčüč鹊 ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ąĄčģą░čéčī ąĖ čĆą░ąĘą▓ąŠąĘąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ.
[SRTP (Secure Real-time Transport Protocol) ]
ąŁč鹊 ą▒ąĄąĘąŠą┐ą░čüąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ. ąĢą│ąŠ ąĘą░ą┤ą░čćą░ čéą░ ąČąĄ čćč鹊 ąĖ čā RTP, ąĮąŠ čü ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄą╝ čäčāąĮą║čåąĖą╣ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, SRTP čŹč鹊 ą┐čĆąŠčüč鹊 čĆą░čüčłąĖčĆąĄąĮąĖąĄ RTP, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ą║ RTP čüą╗ąĄą┤čāčÄčēąĄąĄ:
1. ą©ąĖčäčĆąŠą▓ą░ąĮąĖąĄ: pą░čēąĖčēą░ąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą░čāą┤ąĖąŠ ąĖ ą▓ąĖą┤ąĄąŠ ąŠčé ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĮąĖčÅ.
ąÉąĮą░ą╗ąŠą│ąĖčÅ: čŹč鹊 č鹊čé ąČąĄ čüą░ą╝čŗą╣ ą┐ąŠčćč鹊ą▓čŗą╣ ą│čĆčāąĘąŠą▓ąĖą║ (RTP), ąĮąŠ č鹥ą┐ąĄčĆčī ą▓čüąĄ ą┐ąŠčüčŗą╗ą║ąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüąĄą╣čäą░čģ (čłąĖčäčĆąŠą▓ą░ąĮąĖąĄ), ąĖ ąŠčéą┐čĆą░ą▓ąĖč鹥ą╗čī čüčéą░ą▓ąĖčé ąĮą░ ąĮąĖčģ ą┐ąĄčćą░čéčī (ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖčÅ), ą║ąŠč鹊čĆčāčÄ ąĮąĄą╗čīąĘčÅ ą┐ąŠą┤ą┤ąĄą╗ą░čéčī.
[RTSP (Real Time Streaming Protocol) ]
ąŁč鹊 ą┐čĆąŠč鹊ą║ąŠą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ. ą×čüąĮąŠą▓ąĮą░čÅ ąĄą│ąŠ ąĘą░ą┤ą░čćą░: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄą╝ ą▓ąĖą┤ąĄąŠą┐ąŠč鹊ą║ą░. RTSP ąØąĢ ą┐ąĄčĆąĄą┤ą░ąĄčé čüą░ą╝ąĖ ą░čāą┤ąĖąŠ/ą▓ąĖą┤ąĄąŠ ą┤ą░ąĮąĮčŗąĄ, čŹčéąĖą╝ ąĘą░ąĮąĖą╝ą░ąĄčéčüčÅ RTP.
ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé? RTSP čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ "čüąĄč鹥ą▓ąŠą╣ ą┐čāą╗čīčé ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ" ą┤ą╗čÅ ą╝ąĄą┤ąĖą░čüąĄčĆą▓ąĄčĆą░. ąÜą╗ąĖąĄąĮčé (ą┐ą╗ąĄąĄčĆ) ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąĮą░ čüąĄčĆą▓ąĄčĆ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā RTSP (ąŠą▒čŗčćąĮąŠ ą┐ąŠ TCP):
ŌĆó `DESCRIBE` ŌĆö ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ (ą║ą░ą║ąĖąĄ ą║ąŠą┤ąĄą║ąĖ, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĖ čé.ą┤.).
ąÉąĮą░ą╗ąŠą│ąĖčÅ: RTSP ŌĆö čŹč鹊 ą┐ąĄčĆąĄą│ąŠą▓ąŠčĆčŗ ą╝ąĄąČą┤čā čĆąĄąČąĖčüčüąĄčĆąŠą╝ (ą║ą╗ąĖąĄąĮč鹊ą╝) ąĖ ą║ąĖąĮąŠąŠą┐ąĄčĆą░č鹊čĆąŠą╝ (čüąĄčĆą▓ąĄčĆąŠą╝). ąĀąĄąČąĖčüčüąĄčĆ ą║ąŠą╝ą░ąĮą┤čāąĄčé: "ąÜą░ą╝ąĄčĆą░, ą┐čĆąĖą│ąŠč鹊ą▓čīčüčÅ!" (`SETUP`), "ą£ąŠč鹊čĆ! ąØą░čćą░ą╗ąĖ!" (`PLAY`), "ąĪč鹊ą┐!" (`PAUSE`). ąØąŠ čüą░ą╝ ą▓ąĖą┤ąĄąŠčüąĖą│ąĮą░ą╗ ąŠčé ą║ą░ą╝ąĄčĆčŗ ą║ ą╝ąŠąĮąĖč鹊čĆčā ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠą╝čā ą║ą░ą▒ąĄą╗čÄ (RTP).
[RTSPS (Real Time Streaming Protocol over Secure Sockets) ]
ąŁč鹊 RTSP, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ č湥čĆąĄąĘ TLS/SSL čłąĖčäčĆąŠą▓ą░ąĮąĖąĄ. ą×čüąĮąŠą▓ąĮą░čÅ ąĘą░ą┤ą░čćą░ RTSPS: ąóąŠ ąČąĄ, čćč鹊 ąĖ čā RTSP, ąĮąŠ čü ąĘą░čēąĖčēąĄąĮąĮčŗą╝ ą║ą░ąĮą░ą╗ąŠą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹč鹊 č鹊čé ąČąĄ ą┐čĆąŠč鹊ą║ąŠą╗ RTSP, ąĮąŠ ą▓čüąĄ ą║ąŠą╝ą░ąĮą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (`DESCRIBE`, `SETUP`, `PLAY` ąĖ čé.ą┤.) ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č湥čĆąĄąĘ ąĘą░čłąĖčäčĆąŠą▓ą░ąĮąĮąŠąĄ TLS-čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ (ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠ HTTPS ą┤ą╗čÅ ą▓ąĄą▒ą░). ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą┐ąĄčĆąĄčģą▓ą░čé ąĖ ą┐ąŠą┤ą╝ąĄąĮčā ą║ąŠą╝ą░ąĮą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
ąÆą░ąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī: RTSPS čłąĖčäčĆčāąĄčé č鹊ą╗čīą║ąŠ ą║ą░ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ą║ąŠą╝ą░ąĮą┤čŗ), ąĮąŠ ąĮąĄ čüą░ą╝ąĖ ą╝ąĄą┤ąĖą░ą┤ą░ąĮąĮčŗąĄ! ąöą╗čÅ čłąĖčäčĆąŠą▓ą░ąĮąĖčÅ čüą░ą╝ąĖčģ ą░čāą┤ąĖąŠ ąĖ ą▓ąĖą┤ąĄąŠ ą┐ąŠč鹊ą║ąŠą▓ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī SRTP.
ąĪą▓ąŠą┤ąĮą░čÅ čéą░ą▒ą╗ąĖčåą░ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ RTP, SRTP, RTSP, RTSPS:
ąÉą▒ą▒čĆ. ą¤ąŠą╗ąĮąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ ą×čüąĮąŠą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ ą¦č鹊 ą┐ąĄčĆąĄą┤ą░ąĄčé? ą¤ąŠčĆčé ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ
RTP
Real-time Transport Protocol
ąöąŠčüčéą░ą▓ą║ą░ ą╝ąĄą┤ąĖą░ą┤ą░ąĮąĮčŗčģ (ą░čāą┤ąĖąŠ/ą▓ąĖą┤ąĄąŠ)
ąÉčāą┤ąĖąŠ ąĖ ą▓ąĖą┤ąĄąŠ ą┐ą░ą║ąĄčéčŗ
ąöąĖą░ą┐ą░ąĘąŠąĮ 16384-32768 (UDP)
SRTP
Secure RTP
ąæąĄąĘąŠą┐ą░čüąĮą░čÅ ą┤ąŠčüčéą░ą▓ą║ą░ ą╝ąĄą┤ąĖą░ą┤ą░ąĮąĮčŗčģ
ąŚą░čłąĖčäčĆąŠą▓ą░ąĮąĮčŗąĄ ą░čāą┤ąĖąŠ ąĖ ą▓ąĖą┤ąĄąŠ ą┐ą░ą║ąĄčéčŗ
ąóąŠ ąČąĄ, čćč鹊 ąĖ RTP
RTSP
Real Time Streaming Protocol
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄą╝ (ą┐čāą╗čīčé ąöąŻ)
ąÜąŠą╝ą░ąĮą┤čŗ (PLAY, PAUSE ąĖ čé.ą┤.)
554 (TCP)
RTSPS
RTSP over SSL/TLS
ąæąĄąĘąŠą┐ą░čüąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄą╝
ąŚą░čłąĖčäčĆąŠą▓ą░ąĮąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ
322 (TCP)
[ąÜą░ą║ ą┐čĆąŠč鹊ą║ąŠą╗čŗ čĆą░ą▒ąŠčéą░čÄčé ą▓ą╝ąĄčüč鹥 ]
ąóąĖą┐ąĖčćąĮčŗą╣ čüčåąĄąĮą░čĆąĖą╣ ą┐ąŠč鹊ą║ąŠą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čü ą║ą░ą╝ąĄčĆčŗ ą▓ąĖą┤ąĄąŠąĮą░ą▒ą╗čÄą┤ąĄąĮąĖčÅ:
1. ąÆą░čłąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ (ą║ą╗ąĖąĄąĮčé) ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą║ą░ą╝ąĄčĆąĄ (čüąĄčĆą▓ąĄčĆčā) ą┐ąŠ RTSPS (ą┐ąŠčĆčé 322) ą┤ą╗čÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ.
modprobe ŌĆö ąŠą┤ąĮą░ ąĖąĘ ą║ą╗čÄč湥ą▓čŗčģ ą║ąŠą╝ą░ąĮą┤ ą▓ Linux ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čÅą┤čĆąŠą╝ čüąĖčüč鹥ą╝čŗ. ąŁč鹊 ąĖąĮč鹥ą╗ą╗ąĄą║čéčāą░ą╗čīąĮą░čÅ čāčéąĖą╗ąĖčéą░ ą▓ Linux ą┤ą╗čÅ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ (ąĘą░ą│čĆčāąĘą║ąĖ) ąĖ čāą┤ą░ą╗ąĄąĮąĖčÅ (ą▓čŗą│čĆčāąĘą║ąĖ) ą╝ąŠą┤čāą╗ąĄą╣ čÅą┤čĆą░. ą×ąĮą░ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ ą┐ą░ą║ąĄčéą░ `kmod` (kernel modules).
ą£ąŠą┤čāą╗ąĖ čÅą┤čĆą░ ŌĆö čŹč鹊 čāą┐čĆąŠčēąĄąĮąĮąŠ ą║čāčüąŠčćą║ąĖ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓ čÅą┤čĆąŠ ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĖčÅ ąĄą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ, ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░čéčī ą▓čüčÄ čüąĖčüč鹥ą╝čā ąĖą╗ąĖ ą┐ąĄčĆąĄčüąŠą▒ąĖčĆą░čéčī čÅą┤čĆąŠ. ą¤čĆąĖą╝ąĄčĆčŗ ą╝ąŠą┤čāą╗ąĄą╣:
ŌĆó ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ (ą▓ąĖą┤ąĄąŠą║ą░čĆčéą░, čüąĄč鹥ą▓ą░čÅ ą║ą░čĆčéą░, USB-čāčüčéčĆąŠą╣čüčéą▓ąŠ).
ą¦ąĄą╝ modprobe ą╗čāčćčłąĄ ą┐čĆąŠčüč鹊ą│ąŠ insmod/rmmod?
ąÆ Linux ąĄčüčéčī ą▒ąŠą╗ąĄąĄ ą┐čĆąĖą╝ąĖčéąĖą▓ąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
insmod ŌĆö ą│čĆčāąĘąĖčé ą╝ąŠą┤čāą╗čī (ą┐čĆąŠčüč鹊 ąĘą░ą│čĆčāąČą░ąĄčé čāą║ą░ąĘą░ąĮąĮčŗą╣ čäą░ą╣ą╗ `.ko`).rmmod ŌĆö ą▓čŗą│čĆčāąČą░ąĄčé ą╝ąŠą┤čāą╗čī.
ąÜą╗čÄč湥ą▓ąŠąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ modprobe ą▓ č鹊ą╝, čćč鹊 ąŠąĮą░ ą┐ąŠąĮąĖą╝ą░ąĄčé ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą╝ąĄąČą┤čā ą╝ąŠą┤čāą╗čÅą╝ąĖ.
ą¤čĆąĄą┤čüčéą░ą▓čīč鹥, čćč鹊 ą╝ąŠą┤čāą╗čī `A` ą┤ą╗čÅ čüą▓ąŠąĄą╣ čĆą░ą▒ąŠčéčŗ čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ ą▒čŗą╗ ąĘą░ą│čĆčāąČąĄąĮ ą╝ąŠą┤čāą╗čī `B`. ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 `insmod A.ko`, ą▓čŗ ą┐ąŠą╗čāčćąĖč鹥 ąŠčłąĖą▒ą║čā, ąĄčüą╗ąĖ ą╝ąŠą┤čāą╗čī `B` ąĮąĄ ąĘą░ą│čĆčāąČąĄąĮ. ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 `modprobe A`, čāčéąĖą╗ąĖčéą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ:
1. ą¤čĆąŠą▓ąĄčĆąĖčé ą▒ą░ąĘčā ą┤ą░ąĮąĮčŗčģ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣ (ą║ąŠč鹊čĆą░čÅ čüąŠąĘą┤ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ `depmod`).
ąÉąĮą░ą╗ąŠą│ąĖčćąĮąŠ, ą┐čĆąĖ ą▓čŗą│čĆčāąĘą║ąĄ `modprobe -r A` čüąĮą░čćą░ą╗ą░ ą▓čŗą│čĆčāąĘąĖčé ą╝ąŠą┤čāą╗čī `A`, ą░ ąĘą░č鹥ą╝, ąĄčüą╗ąĖ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą╝ąŠą┤čāą╗čī `B`.
[ą×čüąĮąŠą▓ąĮąŠą╣ čüąĖąĮčéą░ą║čüąĖčü ąĖ ą║ą╗čÄč湥ą▓čŗąĄ ąŠą┐čåąĖąĖ modprobe ]
# ąŚąÉąōąĀąŻąŚąÜąÉ ą╝ąŠą┤čāą╗čÅ modprobe < ąĖą╝čÅ_ą╝ąŠą┤čāą╗čÅ>
# ąÆą½ąōąĀąŻąŚąÜąÉ ą╝ąŠą┤čāą╗čÅ modprobe -r < ąĖą╝čÅ_ą╝ąŠą┤čāą╗čÅ> # ąĖą╗ąĖ `modprobe --remove`
# ą¤ąĀą×ąĪą£ą×ąóąĀ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą╝ąŠą┤čāą╗ąĄ (ą║čāą┤ą░ ąŠąĮ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮ, ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ čé.ą┤.) modprobe --show-depends < ąĖą╝čÅ_ą╝ąŠą┤čāą╗čÅ>
# ąŚąÉąōąĀąŻąŚąÜąÉ čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ modprobe < ąĖą╝čÅ_ą╝ąŠą┤čāą╗čÅ> < ą┐ą░čĆą░ą╝ąĄčéčĆ1>=<ąĘąĮą░č湥ąĮąĖąĄ1> < ą┐ą░čĆą░ą╝ąĄčéčĆ2>=<ąĘąĮą░č湥ąĮąĖąĄ2>
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ]
1. ąŚą░ą│čĆčāąĘą║ą░ ą╝ąŠą┤čāą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąöąŠą┐čāčüčéąĖą╝, ą▓ą░ą╝ ąĮčāąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą╝ąŠą┤čāą╗čī ą┤ą╗čÅ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ FAT.
sudo modprobe fat
modprobe ąĮą░ą╣ą┤ąĄčé čäą░ą╣ą╗ `fat.ko` ą▓ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┐čāčéčÅčģ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, `/lib/modules/$(uname -r)/kernel/fs/fat/fat.ko`) ąĖ ąĘą░ą│čĆčāąĘąĖčé ąĄą│ąŠ.
2. ąŚą░ą│čĆčāąĘą║ą░ ą╝ąŠą┤čāą╗čÅ čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. ąØąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą┤čāą╗ąĖ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆą░ąĖą▓ą░čéčī. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠą┤čāą╗čī `usbcore` ąĖą╝ąĄąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ `autosuspend`.
sudo modprobe usbcore autosuspend=2
3. ąÆčŗą│čĆčāąĘą║ą░ ą╝ąŠą┤čāą╗čÅ. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĄąĮ ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣.
sudo modprobe -r fat
4. ą¤čĆąŠą▓ąĄčĆą║ą░ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣. ąźąŠčéąĖč鹥 ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, čćč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ, ąĮąŠ ąĮąĄ ąĘą░ą│čĆčāąČą░čéčī čüą░ą╝ ą╝ąŠą┤čāą╗čī?
modprobe --show-depends vboxguest
ąÆčŗą▓ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąĖą╝:
install /sbin/modprobe --ignore-install vboxguest
ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą╗čÅ čŹč鹊ą│ąŠ ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ ąĄčüčéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ čüą║čĆąĖą┐čé čāčüčéą░ąĮąŠą▓ą║ąĖ, ą░ ąĮąĄ ą┐čĆąŠčüč鹊 ąĘą░ą│čĆčāąĘą║ą░ `.ko` čäą░ą╣ą╗ą░.
ąōą┤ąĄ modprobe ąĖčēąĄčé ą╝ąŠą┤čāą╗ąĖ? ąŻčéąĖą╗ąĖčéą░ modprobe ąĖčēąĄčé ą╝ąŠą┤čāą╗ąĖ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ `/lib/modules/$(uname -r)/`, ą│ą┤ąĄ `$(uname -r)` ŌĆö čŹč鹊 ą▓ąĄčĆčüąĖčÅ ą▓ą░čłąĄą│ąŠ čÅą┤čĆą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, `6.2.0-39-generic`). ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▒čāą┤čāčé ąĘą░ą│čĆčāąČąĄąĮčŗ ą╝ąŠą┤čāą╗ąĖ, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗąĄ čü č鹥ą║čāčēąĖą╝ čÅą┤čĆąŠą╝.
[ą¦ąĄčĆąĮčŗąĄ čüą┐ąĖčüą║ąĖ ąĖ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮą░čÅ ą▓čŗą│čĆčāąĘą║ą░ ]
ą¦ąĄčĆąĮčŗą╣ čüą┐ąĖčüąŠą║ (`blacklist`): bąĮąŠą│ą┤ą░ ąĮčāąČąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║čāčÄ ąĘą░ą│čĆčāąĘą║čā ą╝ąŠą┤čāą╗čÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠąĮ ą║ąŠąĮčäą╗ąĖą║čéčāąĄčé čü ą┤čĆčāą│ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝). ąöą╗čÅ čŹč鹊ą│ąŠ ąĄą│ąŠ ąĖą╝čÅ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą▓ čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ąĮčāčéčĆąĖ `/etc/modprobe.d/` (ąĮą░ą┐čĆąĖą╝ąĄčĆ, `/etc/modprobe.d/blacklist.conf`).
# /etc/modprobe.d/blacklist-nouveau.conf blacklist nouveau options nouveau modeset=0
ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮą░čÅ ą▓čŗą│čĆčāąĘą║ą░ (`-f`): ąŠą┐čåąĖčÅ `-f` (ąĖą╗ąĖ `--force`) ą╝ąŠąČąĄčé ąĘą░čüčéą░ą▓ąĖčéčī modprobe ąĘą░ą│čĆčāąĘąĖčéčī ąĖą╗ąĖ ą▓čŗą│čĆčāąĘąĖčéčī ą╝ąŠą┤čāą╗čī, ą┤ą░ąČąĄ ąĄčüą╗ąĖ čŹč鹊 ą║ą░ąČąĄčéčüčÅ ąŠą┐ą░čüąĮčŗą╝. ąŁč鹊 ą┤ą╗čÅ čŹą║čüą┐ąĄčĆč鹊ą▓ ąĖ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ čüą▒ąŠčÄ čüąĖčüč鹥ą╝čŗ.
ąśč鹊ą│:
modprobe ŌĆö čŹč鹊 "čāą╝ąĮčŗą╣" ą╝ąĄąĮąĄą┤ąČąĄčĆ ą╝ąŠą┤čāą╗ąĄą╣ čÅą┤čĆą░, ą║ąŠč鹊čĆčŗą╣:
ŌĆó ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čĆą░ąĘčĆąĄčłą░ąĄčé ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ.
ąŁč鹊 ąŠčüąĮąŠą▓ąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░, ą║ąŠč鹊čĆčāčÄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüąĖčüč鹥ą╝ąĮčŗąĄ ą░ą┤ą╝ąĖąĮąĖčüčéčĆą░č鹊čĆčŗ ąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝ ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčīčÄ čÅą┤čĆą░ Linux.
MPEG-DASH ąĖ HLS čŹč鹊 ą┤ą▓ą░ čüą░ą╝čŗčģ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą░ą┤ą░ą┐čéąĖą▓ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ąŠą▓ąŠą│ąŠ ą▓ąĄčēą░ąĮąĖčÅ ą▓ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╝ ąĖąĮč鹥čĆąĮąĄč鹥. ą×ąĮąĖ čÅą▓ą╗čÅčÄčéčüčÅ č鹥čģąĮąŠą╗ąŠą│ąĖč湥čüą║ąŠą╣ ąŠčüąĮąŠą▓ąŠą╣ ą┤ą╗čÅ čéą░ą║ąĖčģ čüąĄčĆą▓ąĖčüąŠą▓, ą║ą░ą║ YouTube, Netflix, Twitch ąĖ ą╝ąĮąŠą│ąĖčģ ą┤čĆčāą│ąĖčģ.
[HLS (HTTP Live Streaming)? ]
ŌĆó ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║: Apple
ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé HLS:
1. ąśčüčģąŠą┤ąĮčŗą╣ ą┐ąŠč鹊ą║ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą║ą░č湥čüčéą▓ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, 360p, 720p, 1080p).
2. ąĪąĄą│ą╝ąĄąĮčéą░čåąĖčÅ: ą║ą░ąČą┤čŗą╣ ą▓ą░čĆąĖą░ąĮčé ą║ą░č湥čüčéą▓ą░ ąĮą░čĆąĄąĘą░ąĄčéčüčÅ ąĮą░ ą║ąŠčĆąŠčéą║ąĖąĄ čäą░ą╣ą╗čŗ (ąŠą▒čŗčćąĮąŠ ą┤ą╗ąĖąĮąŠą╣ 2-10 čüąĄą║čāąĮą┤) ą▓ č乊čĆą╝ą░č鹥 `.ts` (MPEG-TS) ąĖą╗ąĖ, ą▓ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ, ą▓ č乊čĆą╝ą░č鹥 `fMP4` (Fragmented MP4).
3. ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐ą╗ąĄą╣ą╗ąĖčüč鹊ą▓: ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą║ą░č湥čüčéą▓ą░ čüąŠąĘą┤ą░ąĄčéčüčÅ čüą▓ąŠą╣ čäą░ą╣ą╗ ą┐ą╗ąĄą╣ą╗ąĖčüčéą░ (ą▓ č乊čĆą╝ą░č鹥 `.m3u8`), ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé čüčüčŗą╗ą║ąĖ ąĮą░ ą▓čüąĄ čüąĄą│ą╝ąĄąĮčéčŗ čŹč鹊ą│ąŠ ą║ą░č湥čüčéą▓ą░.
4. ąōą╗ą░ą▓ąĮčŗą╣ ą┐ą╗ąĄą╣ą╗ąĖčüčé (Master Playlist): čüąŠąĘą┤ą░ąĄčéčüčÅ ąŠčüąĮąŠą▓ąĮąŠą╣ čäą░ą╣ą╗ `.m3u8`, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé čüčüčŗą╗ą║ąĖ ąĮą░ ą▓čüąĄ ą┐ą╗ąĄą╣ą╗ąĖčüčéčŗ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą║ą░č湥čüčéą▓, ą░ čéą░ą║ąČąĄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║ąŠą┤ąĄą║ą░čģ, ą┐čĆąŠą┐čāčüą║ąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ąĖ čé.ą┤.
5. ąÆąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄ, ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ą╗ąĄąĄčĆą░:
- ąŚą░ą│čĆčāąČą░ąĄčé ą│ą╗ą░ą▓ąĮčŗą╣ ą┐ą╗ąĄą╣ą╗ąĖčüčé.
ąÜą╗čÄč湥ą▓čŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ HLS:
ŌĆó ąĪčéą░ąĮą┤ą░čĆčé ą┤ąĄ-čäą░ą║č鹊 ą┤ą╗čÅ ą╝ąŠą▒ąĖą╗čīąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖ Apple ecosystem.
[MPEG-DASH (Dynamic Adaptive Streaming over HTTP) ]
ŌĆó ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║: ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮą░čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéąĖąĘą░čåąĖąĖ (MPEG)
ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé MPEG-DASH:
1. ąśčüčģąŠą┤ąĮčŗą╣ ą┐ąŠč鹊ą║ čéą░ą║ ąČąĄ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą║ą░č湥čüčéą▓ą░ ąĖ ą▒ąĖčéčĆąĄą╣č鹊ą▓.
2. ąĪąĄą│ą╝ąĄąĮčéą░čåąĖčÅ: ą┐ąŠč鹊ą║ ąĮą░čĆąĄąĘą░ąĄčéčüčÅ ąĮą░ čüąĄą│ą╝ąĄąĮčéčŗ. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé HLS, DASH ąĮąĄ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ ą║ąŠąĮą║čĆąĄčéąĮąŠą╝čā ą╝ąĄą┤ąĖą░č乊čĆą╝ą░čéčā. ą×ąĮ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąĄą│ą╝ąĄąĮčéčŗ ą▓ č乊čĆą╝ą░č鹥 `fMP4`, `WebM` ąĖ ą┤čĆčāą│ąĖčģ.
3. ąĪąŠąĘą┤ą░ąĮąĖąĄ ą╝ą░ąĮąĖč乥čüčéą░ (Manifest): ą▓ą╝ąĄčüč鹊 ą┐ą╗ąĄą╣ą╗ąĖčüčéą░ čüąŠąĘą┤ą░ąĄčéčüčÅ XML-čäą░ą╣ą╗ ą┐ąŠą┤ ąĮą░ąĘą▓ą░ąĮąĖąĄą╝ MPD (Media Presentation Description). ąŁč鹊čé čäą░ą╣ą╗ ąŠą┐ąĖčüčŗą▓ą░ąĄčé:
- ąöąŠčüčéčāą┐ąĮčŗąĄ ą║ą░č湥čüčéą▓ą░ ą▓ąĖą┤ąĄąŠ ąĖ ą░čāą┤ąĖąŠ.
4. ąÆąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄ, čćč鹊 ą┤ąĄą╗ą░ąĄčé ą┐ą╗ąĄąĄčĆ:
- ąŚą░ą│čĆčāąČą░ąĄčé čäą░ą╣ą╗ `MPD`.
ąÜą╗čÄč湥ą▓čŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ MPEG-DASH:
ŌĆó ą×čéą║čĆčŗčéčŗą╣ ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮčŗą╣ čüčéą░ąĮą┤ą░čĆčé (ISO/IEC 23009-1).
ąĪčĆą░ą▓ąĮąĖč鹥ą╗čīąĮą░čÅ čéą░ą▒ą╗ąĖčåą░, HLS ą┐čĆąŠčéąĖą▓ MPEG-DASH:
ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ HLS MPEG-DASH
ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║
Apple
MPEG (ąŠčéą║čĆčŗčéčŗą╣ čüčéą░ąĮą┤ą░čĆčé)
ążąŠčĆą╝ą░čé ą╝ą░ąĮąĖč乥čüčéą░
ąóąĄą║čüč鹊ą▓čŗą╣ M3U8
XML (MPD)
ą£ąĄą┤ąĖą░ą║ąŠąĮč鹥ą╣ąĮąĄčĆ
ąśąĘąĮą░čćą░ą╗čīąĮąŠ MPEG-TS, čüąĄą╣čćą░čü fMP4
fMP4, WebM, ą┤čĆčāą│ąĖąĄ (ą╝ąŠą│čāčé ą▒čŗčéčī ą╗čÄą▒čŗąĄ)
ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą▒čĆą░čāąĘąĄčĆą░ą╝ąĖ
ą×čéą╗ąĖčćąĮą░čÅ (ąŠčüąŠą▒ąĄąĮąĮąŠ ąĮą░ iOS/macOS)
ąźąŠčĆąŠčłą░čÅ, ąĮąŠ čćą░čüč鹊 čéčĆąĄą▒čāąĄčé MSE (Media Source Extensions)
ąĪą╗ąŠąČąĮąŠčüčéčī
ą¤čĆąŠčēąĄ
ąĪą╗ąŠąČąĮąĄąĄ ąĖ ą│ąĖą▒č湥
ąÜą╗čÄč湥ą▓ąŠąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ
ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ Apple, ą┐čĆąŠčüč鹊čéą░
ąōąĖą▒ą║ąŠčüčéčī, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé ą▓ąĄąĮą┤ąŠčĆą░, čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī
ą¦č鹊 ąČąĄ ą▓čŗą▒čĆą░čéčī, HLS ąĖą╗ąĖ DASH? ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ą▓ 2024 ą│ąŠą┤čā ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ąŠčéą▓ąĄčé ŌĆö ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą▒ą░.
1. HLS ą┤ą╗čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: čćč鹊ą▒čŗ ą▓ą░čłąĄ ą▓ąĖą┤ąĄąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠ čĆą░ą▒ąŠčéą░ą╗ąŠ ąĮą░ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ Apple (iPhone, iPad, Safari ąĮą░ Mac), ą▓ą░ą╝ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮčāąČąĄąĮ HLS. ąöą╗čÅ ą╝ąĮąŠą│ąĖčģ čŹč鹊 čāąČąĄ ą┤ąŠčüčéą░č鹊čćąĮą░čÅ ą┐čĆąĖčćąĖąĮą░.
2. DASH ą┤ą╗čÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ ąĖ ą│ąĖą▒ą║ąŠčüčéąĖ: ąĮą░ ą┤čĆčāą│ąĖčģ ą┐ą╗ą░čéč乊čĆą╝ą░čģ (Android, ą¤ąÜ) DASH ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄą╝ąĮąŠą│ąŠ čŹčäč乥ą║čéąĖą▓ąĮąĄąĄ ąĖąĘ-ąĘą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮč鹥ą╣ąĮąĄčĆą░ fMP4 ąĖąĘąĮą░čćą░ą╗čīąĮąŠ, čćč鹊 ą┤ą░ąĄčé ą╝ąĄąĮčīčłąĄ ąĮą░ą║ą╗ą░ą┤ąĮčŗčģ čĆą░čüčģąŠą┤ąŠą▓ ąĖ ą▒čŗčüčéčĆąĄąĄ ąĘą░ą┐čāčüą║ą░ąĄčé ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄ.
ąĪąŠą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ą┐ąŠą┤čģąŠą┤ (Unified Streaming): ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą║čĆčāą┐ąĮčŗčģ čüčéčĆąĖą╝ąĖąĮą│ąŠą▓čŗčģ ą┐ą╗ą░čéč乊čĆą╝ ą│ąŠč鹊ą▓čÅčé ąŠą┤ąĖąĮ ą╝ąĄą┤ąĖą░ą░ą║čéąĖą▓ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ č乊čĆą╝ą░č鹥 fMP4), ą░ ąĘą░č鹥ą╝ čü ą┐ąŠą╝ąŠčēčīčÄ čüąĄčĆą▓ąĄčĆąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, Wowza, Nimble Streamer, FFmpeg) ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāčÄčé ą║ą░ą║ HLS-ą┐ą╗ąĄą╣ą╗ąĖčüčéčŗ (.m3u8), čéą░ą║ ąĖ DASH-ą╝ą░ąĮąĖč乥čüčé (.mpd) ą┤ą╗čÅ ąŠą┤ąĮąĖčģ ąĖ č鹥čģ ąČąĄ čüąĄą│ą╝ąĄąĮč鹊ą▓. ą¤ą╗ąĄąĄčĆ ąĮą░ čüč鹊čĆąŠąĮąĄ ą║ą╗ąĖąĄąĮčéą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą▒ąĖčĆą░ąĄčé č鹊čé ą┐čĆąŠč鹊ą║ąŠą╗, ą║ąŠč鹊čĆčŗą╣ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ąĮąĄą│ąŠ.
ąśč鹊ą│: HLS ąĖ MPEG-DASH ŌĆö čŹč鹊 ąĮąĄ ą║ąŠąĮą║čāčĆąĄąĮčéčŗ "ą┐ąŠą▒ąĄą┤ąĖč鹥ą╗čī ą┐ąŠą╗čāčćą░ąĄčé ą▓čüąĄ", ą░ ą┤ą▓ą░ ąŠčüąĮąŠą▓ąĮčŗčģ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ ą▓ ą░čĆčüąĄąĮą░ą╗ąĄ ąĖąĮąČąĄąĮąĄčĆą░ ą┐ąŠ ą┐ąŠč鹊ą║ąŠą▓ąŠą╝čā ą▓ąĄčēą░ąĮąĖčÄ. ą¤ąŠąĮąĖą╝ą░ąĮąĖąĄ ąĖčģ čĆą░ą▒ąŠčéčŗ ą║čĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĮąŠ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą║ą░č湥čüčéą▓ąĄąĮąĮčŗčģ ą▓ąĖą┤ąĄąŠčüčéčĆąĖą╝ąĖąĮą│ąŠą▓čŗčģ čüąĄčĆą▓ąĖčüąŠą▓.
ąÜąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą║ąŠąĮą║čĆąĄčéąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮčāąČąĮąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣ make ąĖą╝čÅ_ą┐ą░ą║ąĄčéą░ .
ąÜąŠą╝ą░ąĮą┤ą░ make ąĖą╝čÅ_ą┐ą░ą║ąĄčéą░ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą┐ą░ą║ąĄčéą░ ą▓čüąĄą│ą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĖąĘ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ Buildroot (č鹊ą╣, ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą║ą░čéą░ą╗ąŠą│ąĖ package, configs, output ąĖ ą┤čĆčāą│ąĖąĄ). ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ SDK LuckFox ą║ąŠčĆąĮąĄą▓ą░čÅ ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ Buildroot ą▒čāą┤ąĄčé ~/luckfox-pico/sysdrv/source/buildroot/buildroot-2023.02.6 , ą│ą┤ąĄ ~/luckfox-pico čŹč鹊 ą║ą░čéą░ą╗ąŠą│, ą▓ ą║ąŠč鹊čĆąŠą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ SDK LuckFox.
ąÆ Buildroot ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖąĘ `.mk` čäą░ą╣ą╗ąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ Make. ąÆąŠčé ąŠčüąĮąŠą▓ąĮčŗąĄ čüą┐ąŠčüąŠą▒čŗ:
ą×čüąĮąŠą▓ąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖą╣:
ą£ąĄč鹊ą┤ ąĪąĖąĮčéą░ą║čüąĖčü ą¤čĆąĖą╝ąĄąĮąĄąĮąĖąĄ
info
$(info TEXT)
ąÆčŗą▓ąŠą┤ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣
warning
$(warning TEXT)
ąÆčŗą▓ąŠą┤ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖą╣
error
$(error TEXT)
ąÆčŗą▓ąŠą┤ ąŠčłąĖą▒ąŠą║ ąĖ ąŠčüčéą░ąĮąŠą▓ą║ą░ čüą▒ąŠčĆą║ąĖ
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ]
ąöąŠą┐čāčüčéąĖą╝, čā ą▓ą░čü ąĄčüčéčī ą┐ą░ą║ąĄčé `yourpackage.mk`. ąÆčŗ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ąĖčéčī ąŠčéą╗ą░ą┤ąŠčćąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
YOURPACKAGE_VERSION = 1 .0YOURPACKAGE_SITE = http://example.comYOURPACKAGE_SITE_METHOD = wget# ąÆčŗą▓ąŠą┤ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ $(info === ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░ą║ąĄčéą░ yourpackage ===) $(info ąÆąĄčĆčüąĖčÅ : $( YOURPACKAGE_VERSION ) )$(info URL : $( YOURPACKAGE_SITE ) )# ą¤čĆąŠą▓ąĄčĆą║ą░ čāčüą╗ąŠą▓ąĖą╣ ifneq ($(BR2_PACKAGE_YOURPACKAGE_OPTION),y) $( warning ą×ą┐čåąĖčÅ YOURPACKAGE_OPTION ąĮąĄ ą▓ą║ą╗čÄč湥ąĮą░ , ąĮąĄą║ąŠč鹊čĆčŗąĄ čäčāąĮą║čåąĖąĖ ą▒čāą┤čāčé ąĮąĄą┤ąŠčüčéčāą┐ąĮčŗ ) endif # ą¤čĆąŠą▓ąĄčĆą║ą░ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣ ifeq ($(BR2_PACKAGE_DEPENDENCY),y) $( info ąØąĄąŠą▒čģąŠą┤ąĖą╝ą░čÅ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąĮą░ą╣ą┤ąĄąĮą░ ) else $(error ą×čłąĖą▒ą║ą░ : ąóčĆąĄą▒čāąĄčéčüčÅ ą┐ą░ą║ąĄčé DEPENDENCY!)endif define YOURPACKAGE_BUILD_CMDS $( info === ąØą░čćą░ą╗ąŠ čüą▒ąŠčĆą║ąĖ yourpackage === ) $( TARGET_MAKE_ENV) $( MAKE) -C $( @D) endef define YOURPACKAGE_INSTALL_TARGET_CMDS $( info === ąŻčüčéą░ąĮąŠą▓ą║ą░ yourpackage ą▓ čåąĄą╗ąĄą▓ąŠą╣ ą║ą░čéą░ą╗ąŠą│ === ) $( INSTALL) -D -m 0755 $( @D) /yourbinary $( TARGET_DIR) /usr/bin/yourbinaryendef $( eval $( generic-package ))
ą©ą░ą▒ą╗ąŠąĮ `.mk`-čäą░ą╣ą╗ą░ ąĖąĘ čĆąĄą░ą╗čīąĮąŠą╣ ą┐čĆą░ą║čéąĖą║ąĖ:
YOURPACKAGE_VERSION = 1 .0YOURPACKAGE_SITE = $( BR2_EXTERNAL_YOUR_TREE_PATH) /package/yourpackageYOURPACKAGE_SITE_METHOD = local $( info [DEBUG ] ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ yourpackage ) $( info [DEBUG ] SITE =$( YOURPACKAGE_SITE )) $( info [DEBUG ] METHOD =$( YOURPACKAGE_SITE_METHOD )) YOURPACKAGE_DEPENDENCIES = some-dependencydefine YOURPACKAGE_BUILD_CMDS echo "=== ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čüą▒ąŠčĆą║ąĖ ===" $( TARGET_MAKE_ENV) $( MAKE) -C $( @D) endef $( eval $( generic-package ))
[ą¤ąŠą╗ąĄąĘąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ ]
$ (info === ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüą▒ąŠčĆą║ąĄ === )$(info ą”ąĄą╗ąĄą▓ą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░ : $( BR2_ARCH ) )$(info ą¤čāčéčī ą║ ą▓ąĮąĄčłąĮąĄą╝čā ą┤ąĄčĆąĄą▓čā : $( BR2_EXTERNAL_YOUR_TREE_PATH ) )$(info ą”ąĄą╗ąĄą▓ą░čÅ ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ : $( TARGET_DIR ) )$(info ąöąĖčĆąĄą║č鹊čĆąĖčÅ čüą▒ąŠčĆą║ąĖ : $( BUILD_DIR ) )$(info ąźąŠčüčé-ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ : $( HOST_DIR ) )
[ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ ]
- ąÆčĆąĄą╝čÅ ą▓čŗą▓ąŠą┤ą░: čüąŠąŠą▒čēąĄąĮąĖčÅ `$(info)`, `$(warning)` ąĖ `$(error)` ą▓čŗą▓ąŠą┤čÅčéčüčÅ ąĮą░ čŹčéą░ą┐ąĄ čćč鹥ąĮąĖčÅ Makefile, ą░ ąĮąĄ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ čüą▒ąŠčĆą║ąĖ.
ą¦č鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī ąĘą░ą┤ąĄčƹȹ║čā ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ RTSP -ą┐ąŠč鹊ą║ą░, ąĮčāąČąĮąŠ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą▓ą╗ąĖčÅčÄčēąĖąĄ ąĮą░ ą▒čāč乥čĆąĖąĘą░čåąĖčÄ, ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ. ąÆąŠčé čĆą░ą▒ąŠčćąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, čüąŠą▒čĆą░ąĮąĮčŗąĄ ąĖąĘ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓.
[ą¤ą╗ąĄą╣ąĄčĆ mpv ]
ą¤čĆąĖą╝ąĄčĆ ąĘą░ą┐čāčüą║ą░ (rtsp://192.168.1.100:8554/unicast čŹč鹊 čüčüčŗą╗ą║ą░ ąĮą░ ą▓ąĄčēą░ąĮąĖąĄ RTSP-čüąĄčĆą▓ąĄčĆą░):
$ mpv --no-cache --profile=low-latency --untimed --rtsp-transport=tcp \
--demuxer-lavf-o=rtsp_flags=prefer_tcp rtsp://192.168.1.100:8554/unicast
ąÜą╗čÄč湥ą▓čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ:
ŌĆó --profile=low-latency ąĖ --untimed ŌĆö ą│ąŠč鹊ą▓čŗą╣ ą┐čĆąŠčäąĖą╗čī mpv ą┤ą╗čÅ ą╝ąĖąĮąĖą╝ąĖąĘą░čåąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ, ąŠčéą║ą╗čÄčćą░ąĄčé ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐ąŠ čéą░ą╣ą╝ąĄčĆą░ą╝.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ ąĄčēąĄ ą▒ąŠą╗čīčłąĄą╣ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ:
$ mpv --no-cache --audio-buffer=0 --vd-lavc-threads=1 --cache-pause=no \
--no-audio --demuxer-lavf-probe-info=no --demuxer-lavf-analyzeduration=0.0 \
--video-sync=audio --interpolation=no --keep-open-pause=no --untimed \
--rtsp-transport=tcp rtsp://ą░ą┤čĆąĄčü_ą▓ą░čłąĄą│ąŠ_ą┐ąŠč鹊ą║ą░:site
ąŁčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ:
ŌĆó ąŻą╝ąĄąĮčīčłą░čÄčé ąĖą╗ąĖ ąŠčéą║ą╗čÄčćą░čÄčé ą▒čāč乥čĆąĖąĘą░čåąĖčÄ ą░čāą┤ąĖąŠ ąĖ ą░ąĮą░ą╗ąĖąĘą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąŠč鹊ą║ą░ (--audio-buffer=0, --demuxer-lavf-analyzeduration=0.0).
ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ:
ŌĆó ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ čāčüą║ąŠčĆąĄąĮąĖąĄ. ąöą╗čÅ čüąĄčĆčīąĄąĘąĮąŠą│ąŠ čüąĮąĖąČąĄąĮąĖčÅ ąĮą░ą│čĆčāąĘą║ąĖ ąĮą░ CPU ąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ ą┐čĆąĖ ą▓čŗčüąŠą║ąĖčģ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čäą╗ą░ą│ąĖ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ --hwdec=auto ą┤ą╗čÅ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖčÅ GPU.
ąØą░čćąĮąĖč鹥 čü ą▒ą░ąĘąŠą▓ąŠą│ąŠ ąĮą░ą▒ąŠčĆą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆčāą╣č鹥 čü ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą┐ąŠą┤ ą▓ą░čłąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ ąĖ čüąĄčéčī.
[ą¤ą╗ąĄą╣ąĄčĆ ffplay ]
ą¤čĆąĖą╝ąĄčĆ ąĘą░ą┐čāčüą║ą░:
$ ffplay -fflags nobuffer -flags low_delay -framedrop -analyzeduration 1 \
-probesize 32 -buffer_size 8192 rtsp://192.168.1.100:8554/unicast
ąöą╗čÅ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ RTSP-ą┐ąŠč鹊ą║ą░ ą▓ ffplay ą╝ąŠąČąĮąŠ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą╗čÄč湥ą▓čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ą▓ą╗ąĖčÅčÄčēąĖčģ ąĮą░ ą▒čāč乥čĆąĖąĘą░čåąĖčÄ, ą░ąĮą░ą╗ąĖąĘ ą┐ąŠč鹊ą║ą░ ąĖ čéčĆą░ąĮčüą┐ąŠčĆčéąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗.
ąÆąŠčé ąĮą░ąĖą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ čüč鹊ąĖčé ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī:
ąÜą░č鹥ą│ąŠčĆąĖčÅ ą¤ą░čĆą░ą╝ąĄčéčĆ ą×ą┐ąĖčüą░ąĮąĖąĄ ąĖ čŹčäč乥ą║čé
ąæčāč乥čĆąĖąĘą░čåąĖčÅ
-fflags nobuffer
Ō£ģ ąÆčŗčüąŠą║ą░čÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī: ąŠčéą║ą╗čÄčćą░ąĄčé ą▒čāč乥čĆąĖąĘą░čåąĖčÄ, ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆčāčÅ ąĘą░ą┤ąĄčƹȹ║čā ąĮą░ čŹčéą░ą┐ąĄ ą░ąĮą░ą╗ąĖąĘą░ ą┐ąŠč鹊ą║ą░.
ąÉąĮą░ą╗ąĖąĘ ą┐ąŠč鹊ą║ą░
-analyzeduration 1000000
Ō£ģ ąÆčŗčüąŠą║ą░čÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī: čüąŠą║čĆą░čēą░ąĄčé ą▓čĆąĄą╝čÅ ą░ąĮą░ą╗ąĖąĘą░ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą┐ąŠč鹊ą║ą░ (ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ą░čģ).
ąóčĆą░ąĮčüą┐ąŠčĆčé
-rtsp_transport tcp
Ō£ģ ąÆčŗčüąŠą║ą░čÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ TCP ą┤ąĄą╗ą░ąĄčé ą┐ąŠč鹊ą║ čüčéą░ą▒ąĖą╗čīąĮčŗą╝, čāą╝ąĄąĮčīčłą░čÅ ą┐ąŠč鹥čĆąĖ ąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ.
ąæčāč乥čĆąĖąĘą░čåąĖčÅ
-avioflags direct
ąĪąŠą║čĆą░čēą░ąĄčé ą▒čāč乥čĆąĖąĘą░čåąĖčÄ ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░.
ąöąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ
-flags low_delay
Ō£ģ ąÆčŗčüąŠą║ą░čÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī: čéčĆąĄą▒čāąĄčé ąŠčé ą║ąŠą┤ąĄą║ąŠą▓ čĆą░ą▒ąŠčéčŗ ą▓ čĆąĄąČąĖą╝ąĄ čü ą╝ą░ą╗ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąŠą╣.
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ
-framedrop
ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąŠą┐čāčüą║ą░čéčī ą║ą░ą┤čĆčŗ, ąĄčüą╗ąĖ ą▓ąĖą┤ąĄąŠ ąŠčéčüčéą░ąĄčé ąŠčé ą░čāą┤ąĖąŠ.
ąóąĄčüčéąĖčĆąŠą▓ą░ąĮąĖąĄ . ąÆčŗ ą╝ąŠąČąĄč鹥 ąĮą░čćą░čéčī čü ą▒ą░ąĘąŠą▓ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆą░čÅ ąŠą▒čŖąĄą┤ąĖąĮčÅąĄčé čüą░ą╝čŗąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ:
$ ffplay -fflags nobuffer -flags low_delay -framedrop -rtsp_transport tcp "your_rtsp_stream_url"
ąĢčüą╗ąĖ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čüąĄ ąĄčēąĄ ąĘą░ą╝ąĄčéąĮą░, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čĆą░čüčłąĖčĆąĄąĮąĮčāčÄ ą║ąŠą╝ą░ąĮą┤čā čü ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ:
$ ffplay -fflags nobuffer -analyzeduration 1000000 -rtsp_transport tcp \
-avioflags direct -flags low_delay -framedrop "your_rtsp_stream_url"
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ:
- ąŁą║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆčāą╣č鹥 čü čĆą░ąĘą╝ąĄčĆą░ą╝ąĖ ą▒čāč乥čĆą░: bąĮąŠą│ą┤ą░ ąĮąĄ č鹊ą╗čīą║ąŠ ąŠčéčüčāčéčüčéą▓ąĖąĄ ą▒čāč乥čĆą░, ąĮąŠ ąĖ ąĄą│ąŠ ąŠą┐čéąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą╝ąŠąČąĄčé ą┐ąŠą╝ąŠčćčī. ą£ąŠąČąĮąŠ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆ -buffer_size čü ąĮąĄą▒ąŠą╗čīčłąĖą╝ ąĘąĮą░č湥ąĮąĖąĄą╝.
ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą║ąŠą╝ą░ąĮą┤ą░ lspci lsusb -t
[root@luckfox root]# lsusb -t
Bus 001 Device 001: ID 1d6b:0002
Bus 001 Device 002: ID 534d:0021
Bus 002 Device 001: ID 1d6b:0003
ą×ą┤ąĮą░ą║ąŠ ą╝ąŠąČąĮąŠ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ą┤čĆčāą│ąĖąĄ čüą┐ąŠčüąŠą▒čŗ.
ążą░ą╣ą╗ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░ /sys . ąĪą░ą╝čŗą╣ ąĮą░ą┤ąĄąČąĮčŗą╣ čüą┐ąŠčüąŠą▒ ŌĆö ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ą┐čĆčÅą╝čāčÄ ą▓ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čÅą┤čĆą░ Linux. ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
cat /sys/bus/usb/devices/*/speed
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąŠč鹊ą▒čĆą░ąĘąĖčé čüą║ąŠčĆąŠčüčéčī ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ USB-čāčüčéčĆąŠą╣čüčéą▓ą░. ąŚąĮą░č湥ąĮąĖčÅ 12 ąŠąĘąĮą░čćą░čÄčé USB 2.0 (Full-Speed), 480 ąŠąĘąĮą░čćą░čÄčé USB 2.0 (High-Speed), ą░ 5000 ąŠąĘąĮą░čćą░čÄčé USB 3.0 / USB 3.1 Gen 1 / USB 3.2 Gen 1 (SuperSpeed).
[root@luckfox root]# cat /sys/bus/usb/devices/*/speed
480
480
5000
ą×čéą║ą╗čÄčćąĖč鹥 USB-čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčé ą┐ąŠčĆčéą░ ą┐ą╗ą░čéčŗ LuckFox, ą▓čŗą▓ąŠą┤ąĖą╝čŗą╣ čüą┐ąĖčüąŠą║ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĖąĘą╝ąĄąĮąĖčéčüčÅ. ąóą░ą║ ą▓čŗ ą╝ąŠąČąĄč鹥 čāąĘąĮą░čéčī čüą║ąŠčĆąŠčüčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čģąŠčüčéčā ą▓ą░čłąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
lsusb -v . ąĢčüą╗ąĖ čŹčéą░ ąŠą┐čåąĖčÅ ą┤ąŠčüčéčāą┐ąĮą░ ą▓ ą▓ą░čłąĄą╣ čüą▒ąŠčĆą║ąĄ, č鹊 ą║ąŠą╝ą░ąĮą┤ą░ lsusb -v ą╝ąŠąČąĄčé ą┐ąŠą║ą░ąĘą░čéčī čüą║ąŠčĆąŠčüčéčī čāčüčéčĆąŠą╣čüčéą▓ą░. ąśčēąĖč鹥 čüčéčĆąŠą║čā Device Status ą▓ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╝ ą▓čŗą▓ąŠą┤ąĄ.
ą¤čĆąŠą▓ąĄčĆčīč鹥 ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ . ą¤ąŠčüą║ąŠą╗čīą║čā LuckFox Pico ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ čćąĖą┐ąĄ Rockchip RV1106, ąĄą│ąŠ č鹥čģąĮąĖč湥čüą║ą░čÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░čéčī ą┐ąŠą┤ą┤ąĄčƹȹ║čā čüčéą░ąĮą┤ą░čĆčéą░ USB 2.0, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čģąŠčüčé-ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéąĖ High-Speed (480 ą£ą▒ąĖčé/čü).
[lsusb -t ]
ąĢčüą╗ąĖ čā ą▓ą░čü čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą┐ąŠą╗ąĮą░čÅ ą▓ąĄčĆčüąĖčÅ lsusb, č鹊 ąŠą┐čåąĖčÅ -t ą┐ąŠąĘą▓ąŠą╗ąĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüą║ąŠčĆąŠčüčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ USB, ąĮą░ ąŠčüąĮąŠą▓ąĄ č湥ą│ąŠ ą╝ąŠąČąĮąŠ čüčāą┤ąĖčéčī ąŠ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠčĆčéą░ čģąŠčüčéą░ USB.
ąØą░ ąŠą▒čŗčćąĮąŠą╝ čģąŠčüč鹥 Ubuntu ą║ąŠą╝ą░ąĮą┤ą░ lsusb -t ą┐ąŠą║ą░ąČąĄčé čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ USB ą▓ ą▓ąĖą┤ąĄ ą┤ąĄčĆąĄą▓ą░ čłąĖąĮ:
$ lsusb -t
/: Bus 001.Port 001: Dev 001, Class=root_hub, Driver=xhci_hcd/1p, 480M
/: Bus 002.Port 001: Dev 001, Class=root_hub, Driver=xhci_hcd/3p, 20000M/x2
/: Bus 003.Port 001: Dev 001, Class=root_hub, Driver=xhci_hcd/12p, 480M
|__ Port 001: Dev 002, If 0, Class=Hub, Driver=hub/7p, 480M
|__ Port 004: Dev 010, If 0, Class=Vendor Specific Class, Driver=ftdi_sio, 12M
|__ Port 005: Dev 009, If 0, Class=Communications, Driver=cdc_acm, 12M
|__ Port 005: Dev 009, If 1, Class=CDC Data, Driver=cdc_acm, 12M
|__ Port 005: Dev 009, If 2, Class=Vendor Specific Class, Driver=[none], 12M
|__ Port 002: Dev 003, If 0, Class=Vendor Specific Class, Driver=option, 480M
|__ Port 002: Dev 003, If 1, Class=Communications, Driver=cdc_mbim, 480M
|__ Port 002: Dev 003, If 2, Class=CDC Data, Driver=cdc_mbim, 480M
|__ Port 003: Dev 005, If 0, Class=Vendor Specific Class, Driver=[none], 12M
|__ Port 004: Dev 006, If 0, Class=Video, Driver=uvcvideo, 480M
|__ Port 004: Dev 006, If 1, Class=Video, Driver=uvcvideo, 480M
|__ Port 004: Dev 006, If 2, Class=Video, Driver=uvcvideo, 480M
|__ Port 004: Dev 006, If 3, Class=Video, Driver=uvcvideo, 480M
|__ Port 004: Dev 006, If 4, Class=Application Specific Interface, Driver=[none], 480M
|__ Port 007: Dev 007, If 0, Class=Human Interface Device, Driver=usbhid, 12M
|__ Port 007: Dev 007, If 1, Class=Human Interface Device, Driver=usbhid, 12M
|__ Port 010: Dev 008, If 0, Class=Wireless, Driver=btusb, 12M
|__ Port 010: Dev 008, If 1, Class=Wireless, Driver=btusb, 12M
/: Bus 004.Port 001: Dev 001, Class=root_hub, Driver=xhci_hcd/4p, 10000M
|__ Port 001: Dev 002, If 0, Class=Hub, Driver=hub/7p, 5000M
|__ Port 002: Dev 004, If 0, Class=Mass Storage, Driver=usb-storage, 5000M
ą”ąĖčäčĆą░ ą▓ ą║ąŠąĮčåąĄ čüčéčĆąŠą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, 5000M) čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéčī čĆą░ą▒ąŠčéčŗ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░. ąÜą╗čÄčć ą║ čĆą░čüčłąĖčäčĆąŠą▓ą║ąĄ:
12M ŌåÆ USB 2.0 (Full-Speed)
[ąĪčüčŗą╗ą║ąĖ ]
1 . SDK Environment Deployment(on the PC) site:wiki.luckfox.com.2 . Ubuntu FAQ .3 . ąŚą░ą┐čāčüą║ą░ąĄą╝ Yolo ąĮą░ ą┐čÅčéąĖčĆčāą▒ą╗čæą▓ąŠą╣ ą╝ąŠąĮąĄč鹥 ąĖą╗ąĖ Luckfox Pico Mini site:habr.com.4 . man adb .5 . rsync: čüąĖąĮčéą░ą║čüąĖčü, ą┐čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ .6 . The Buildroot user manual .
ąöąŠą▒ą░ą▓ąĖčéčī ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣