|
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ LED (LEDC) ą▒čŗą╗ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ą┤ą╗čÅ ąŠčüąĮąŠą▓ąĮąŠą╣ čåąĄą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čÅčĆą║ąŠčüčéčīčÄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ LED, čģąŠčéčÅ ąĄą│ąŠ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą©ąśą£-čüąĖą│ąĮą░ą╗ąŠą▓ (PWM), ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗčģ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣. ąśą╝ąĄąĄčéčüčÅ 16 ą║ą░ąĮą░ą╗ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓, čćč鹊 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ą║ ą┐čĆąĖą╝ąĄčĆčā, ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĮčŗą╝ąĖ ą╗ąĄąĮčéą░ą╝ąĖ RGB ąĖą╗ąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĘą▓čāą║ą░.
ąÜą░ąĮą░ą╗čŗ LEDC ą┤ąĄą╗čÅčéčüčÅ ąĮą░ 2 ą│čĆčāą┐ą┐čŗ ą┐ąŠ 8 ą║ą░ąĮą░ą╗ąŠą▓ ą▓ ą║ą░ąČą┤ąŠą╣. ą×ą┤ąĮą░ ą│čĆčāą┐ą┐ą░ ą║ą░ąĮą░ą╗ąŠą▓ LEDC čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (high speed mode). ąŁč鹊čé čĆąĄąČąĖą╝ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ, ą▒ąĄąĘ ą▓čŗą▒čĆąŠčüąŠą▓ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ PWM. ąöčĆčāą│ą░čÅ ą│čĆčāą┐ą┐ą░ ą║ą░ąĮą░ą╗ąŠą▓ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (low speed mode), ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüą║ą▓ą░ąČąĮąŠčüčéčī PWM ą┤ąŠą╗ąČąĮą░ ą╝ąĄąĮčÅčéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ąÜą░ąČą┤ą░čÅ ą│čĆčāą┐ą┐ą░ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ čéą░ą║č鹊ą▓.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PWM ą╝ąŠąČąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖ ą┐ąŠčüč鹥ą┐ąĄąĮąĮąŠ čāą▓ąĄą╗ąĖčćąĖą▓ą░čéčī ąĖą╗ąĖ čāą╝ąĄąĮčīčłą░čéčī čüą║ą▓ą░ąČąĮąŠčüčéčī PWM, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ąŠčüą▓ąĄčēąĄąĮąĖąĄą╝ ą▒ąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ąØą░čüčéčĆąŠą╣ą║ą░ ą║ą░ąĮą░ą╗ą░ LEDC ą▓ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╝ ąĖą╗ąĖ ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┤ąĄą╗ą░ąĄčéčüčÅ čéčĆąĄą╝čÅ čłą░ą│ą░ą╝ąĖ:
1. ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čéą░ą╣ą╝ąĄčĆ ą┐čāč鹥ą╝ čāą║ą░ąĘą░ąĮąĖčÅ čćą░čüč鹊čéčŗ čüąĖą│ąĮą░ą╗ą░ PWM ąĖ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĄą│ąŠ čüą║ą▓ą░ąČąĮąŠčüčéąĖ.
2. ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ąĮą░ą╗ ą┐čāč鹥ą╝ čüą▓čÅąĘčŗą▓ą░ąĮąĖčÅ ąĄą│ąŠ čü čéą░ą╣ą╝ąĄčĆąŠą╝ ąĖ ąĮąŠąČą║ąŠą╣ GPIO ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ PWM.
3. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ PWM, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé ą▓čŗčģąŠą┤ąŠą╝, čćč鹊ą▒čŗ ą╝ąĄąĮčÅčéčī ąĖąĮč鹥ąĮčüąĖą▓ąĮąŠčüčéčī čüą▓ąĄč湥ąĮąĖčÅ LED. ąŁč鹊 ą╝ąŠąČąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą╗ąĖą▒ąŠ ą┐ąŠ ą┐ąŠą╗ąĮčŗą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą╗ąĖą▒ąŠ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ č乥ą╣ą┤ąĖąĮą│ąŠą╝.
ąÜą░ą║ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗą╣ čłą░ą│ čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ č乥ą╣ą┤ąĖąĮą│ą░.
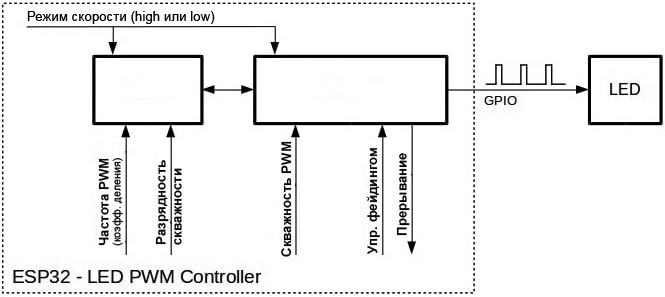
ąĀąĖčü. 1. ąÜą╗čÄč湥ą▓čŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ LED PWM čü ą┐ąŠą╝ąŠčēčīčÄ API-čäčāąĮą║čåąĖą╣.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░]
ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ ledc_timer_config(), čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ąĄą╣ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ ledc_timer_config_t, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé čüą╗ąĄą┤čāčÄčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ:
ŌĆó ledc_mode_t: čĆąĄąČąĖą╝ čüą║ąŠčĆąŠčüčéąĖ.
ŌĆó ledc_timer_t: ąĮąŠą╝ąĄčĆ čéą░ą╣ą╝ąĄčĆą░.
ŌĆó ą¦ą░čüč鹊čéą░ čüąĖą│ąĮą░ą╗ą░ PWM.
ŌĆó ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī (čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī) ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ PWM.
ŌĆó ledc_clk_cfg_t: čćą░čüč鹊čéą░ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓.
ą¦ą░čüč鹊čéą░ ąĖ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘą░ąĮčŗ. ą¦ąĄą╝ ą▓čŗčłąĄ čćą░čüč鹊čéą░ PWM, č鹥ą╝ ą╝ąĄąĮčīčłą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┤ąŠčüčéčāą┐ąĮą░, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé. ąŁčéą░ ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą░ąČąĮąŠą╣, ąĄčüą╗ąĖ ąÆčŗ ą┐ą╗ą░ąĮąĖčĆčāąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹč鹊 API ąĮąĄ ą┤ą╗čÅ ą┐čĆąŠčüč鹊ą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čÅčĆą║ąŠčüčéčīčÄ LED. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą┤ą░ą╗ąĄąĄ čĆą░ąĘą┤ąĄą╗ "ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ čćą░čüč鹊čéčŗ ąĖ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ".
ą¦ą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║ąČąĄ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé čćą░čüč鹊čéčā PWM. ą¦ąĄą╝ ą▓čŗčłąĄ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓, č鹥ą╝ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ą░čÅ čćą░čüč鹊čéą░ PWM ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░.
ąóą░ą▒ą╗ąĖčåą░ 1. ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ESP32 LEDC.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ |
ąĀąĄąČąĖą╝ čüą║ąŠčĆąŠčüčéąĖ |
ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ |
| APB_CLK |
80 ą£ąōčå |
High / Low |
|
| REF_TICK |
1 ą£ąōčå |
ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠ čü ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╝ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čćą░čüč鹊čéčŗ (Dynamic Frequency Scaling). |
| RTC8M_CLK |
~8 ą£ąōčå |
Low |
ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠ čü Dynamic Frequency Scaling ąĖ čĆąĄąČąĖą╝ąŠą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ Light Sleep. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮą░ ESP32, ąĄčüą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ LEDC ą▓čŗą▒čĆą░ąĮ RTCxM_CLK, č鹊 ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ č鹊čćąĮąŠą╣ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé č鹊čćąĮčāčÄ čćą░čüč鹊čéčā ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ PWM.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░ąĮą░ą╗ą░. ąÜąŠą│ą┤ą░ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ čéą░ą╣ą╝ąĄčĆ, ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ąČąĄą╗ą░ąĄą╝čŗą╣ ą║ą░ąĮą░ą╗ (ąŠą┤ąĖąĮ ąĖąĘ ledc_channel_t). ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ ledc_channel_config().
ą¤ąŠą┤ąŠą▒ąĮąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░, čäčāąĮą║čåąĖąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ą░ąĮą░ą╗ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮą░ čüčéčĆčāą║čéčāčĆą░ ledc_channel_config_t, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ą░ąĮą░ą╗ą░.
ąÆ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą║ą░ąĮą░ą╗ ą┤ąŠą╗ąČąĄąĮ ąĮą░čćą░čéčī čĆą░ą▒ąŠčéą░čéčī, ą│ąĄąĮąĄčĆąĖčĆčāčÅ čüąĖą│ąĮą░ą╗ PWM ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ąĮąŠąČą║ąĄ GPIO, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą▓ ledc_channel_config_t, ąĮą░ čćą░čüč鹊č鹥, čāą║ą░ąĘą░ąĮąĮąŠą╣ ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ čéą░ą╣ą╝ąĄčĆą░, ąĖ čü ąĘą░ą┤ą░ąĮąĮąŠą╣ čüą║ą▓ą░ąČąĮąŠčüčéčīčÄ. ąĀą░ą▒ąŠčéą░ ą║ą░ąĮą░ą╗ą░ (ą│ąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ą░) ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ ledc_stop().
[ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ PWM]
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą║ą░ąĮą░ą╗ ąĮą░čćąĮąĄčé čĆą░ą▒ąŠčéą░čéčī ąĖ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ PWM čü ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ čüą║ą▓ą░ąČąĮąŠčüčéčīčÄ, ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓ ą┐ąŠą╝ąĄąĮčÅčéčī čŹč鹊čé čüąĖą│ąĮą░ą╗. ąÜąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ LED, ą╝ąĄąĮčÅąĄčéčüčÅ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čÅčĆą║ąŠčüčéčī čüą▓ąĄč湥ąĮąĖčÅ.
ąÆ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤ą▓čāčģ čüąĄą║čåąĖčÅčģ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ą╝ąĄąĮčÅčéčī čüą║ą▓ą░ąČąĮąŠčüčéčī čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ č乥ą╣ą┤ąĖąĮą│ą░. ąĢčüą╗ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī čćą░čüč鹊čéčā čüąĖą│ąĮą░ą╗ą░, čŹč鹊 čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą▓ čüąĄą║čåąĖąĖ "ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čćą░čüč鹊čéčŗ PWM".
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąöą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą┐ąĄčĆąĖąŠą┤ą░ PWM ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ čäčāąĮą║čåąĖčÄ ledc_set_duty(). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓čŗąĘąŠą▓ąĖč鹥 ledc_update_duty() ą┤ą╗čÅ ą░ą║čéąĖą▓ą░čåąĖąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣. ąöą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ č鹥ą║čāčēąĄą│ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čäčāąĮą║čåąĖčÄ ledc_get_duty().
ąöčĆčāą│ąŠą╣ čüą┐ąŠčüąŠą▒ čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ, ą║ą░ą║ ąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┤čĆčāą│ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, čŹč鹊 ą▓čŗąĘąŠą▓ ledc_channel_config(), čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░ąĮą░ą╗ą░".
ąöąĖą░ą┐ą░ąĘąŠąĮ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą╣ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ (duty_resolution), ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčé 0 ą┤ąŠ (2duty_resolution) - 1. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▓čŗą▒čĆą░ąĮąĮą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī 10 (duty_resolution=10), č鹊 čüą║ą▓ą░ąČąĮąŠčüčéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0 ą┤ąŠ 1023. ąŁč鹊 ą┤ą░ąĄčé č鹊čćąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ą║ąĖ čāčĆąŠą▓ąĮčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ 0.1%.
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠ. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ LEDC ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čüą┐ąŠčüąŠą▒ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą║ ą┤čĆčāą│ąŠą╝čā. ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čŹč鹊ą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čĆą░ąĘčĆąĄčłąĖč鹥 č乥ą╣ą┤ąĖąĮą│ čäčāąĮą║čåąĖąĄą╣ ledc_fade_func_install(), ąĖ ąĘą░č鹥ą╝ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĄčæ ą▓čŗąĘąŠą▓ąŠą╝ ąŠą┤ąĮąŠą╣ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤ąŠčüčéčāą┐ąĮčŗčģ čäčāąĮą║čåąĖą╣ č乥ą╣ą┤ąĖąĮą│ą░:
ledc_set_fade_with_time()
ledc_set_fade_with_step()
ledc_set_fade()
ążąĄą╣ą┤ąĖąĮą│ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ ledc_fade_start(). ążąĄą╣ą┤ąĖąĮą│ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą▒ąĄąĘ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖčÅ, čüą╝. ledc_fade_mode_t ą┤ą╗čÅ ą┤ą▓čāčģ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąŠčéą╗ąĖčćą░čÄčēąĖčģčüčÅ čĆąĄąČąĖą╝ąŠą▓ č乥ą╣ą┤ąĖąĮą│ą░. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ čŹčéąĖčģ ą┤ą▓čāčģ čĆąĄąČąĖą╝ąŠą▓ čüą╗ąĄą┤čāčÄčēąĖą╣ č乥ą╣ą┤ąĖąĮą│ ąĖą╗ąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĮą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčāčÄ čüą║ą▓ą░ąČąĮąŠčüčéčī ąĮąĄ ą┤ą░čüčé čŹčäč乥ą║čé, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┐čĆąŠčåąĄčüčü č乥ą╣ą┤ąĖąĮą│ą░. ąśąĘ-ąĘą░ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ąĮąĄčé čüą┐ąŠčüąŠą▒ą░ ąŠčüčéą░ąĮąŠą▓ąĖčéčī č乥ą╣ą┤ąĖąĮą│ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ąĖą╝ čåąĄą╗ąĄą▓ąŠą╣ čüą║ą▓ą░ąČąĮąŠčüčéąĖ.
ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ąŠą┐ąĄčĆą░čåąĖąĖ č乥ą╣ą┤ąĖąĮą│ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ callback-čäčāąĮą║čåąĖčÅ ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ ledc_cb_register() ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čüą╗čāąČą▒ą░ č乥ą╣ą┤ąĖąĮą│ą░.
ąĢčüą╗ąĖ ą▒ąŠą╗čīčłąĄ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ č乥ą╣ą┤ąĖąĮą│ ąĖ čüą▓čÅąĘą░ąĮąĮąŠąĄ čü ąĮąĖą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, č鹊 č乥ą╣ą┤ąĖąĮą│ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮ ą▓čŗąĘąŠą▓ąŠą╝ ledc_fade_func_uninstall().
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čćą░čüč鹊čéčŗ PWM. LEDC API ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓ ą┐ąŠą╝ąĄąĮčÅčéčī čćą░čüč鹊čéčā PWM "ąĮą░ ą╗ąĄčéčā":
ŌĆó ąŻčüčéą░ąĮąŠą▓ą║ą░ čćą░čüč鹊čéčŗ ą▓čŗąĘąŠą▓ąŠą╝ ledc_set_freq(). ąśą╝ąĄąĄčéčüčÅ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮą░čÅ čäčāąĮą║čåąĖčÅ ledc_get_freq() ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ č鹥ą║čāčēąĄą╣ čćą░čüč鹊čéčŗ.
ŌĆó ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čćą░čüč鹊čéčŗ ąĖ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ą┤ą╗čÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą▓čŗąĘąŠą▓ąŠą╝ ledc_bind_channel_timer(), čćč鹊ą▒čŗ ą┐čĆąĖą▓čÅąĘą░čéčī ą║ ą║ą░ąĮą░ą╗čā ą║ą░ą║ąŠą╣-ąĮąĖą▒čāą┤čī ą┤čĆčāą│ąŠą╣ čéą░ą╣ą╝ąĄčĆ.
ŌĆó ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ ą║ą░ąĮą░ą╗ą░ ą▓čŗąĘąŠą▓ąŠą╝ ledc_channel_config().
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čäčāąĮą║čåąĖąĄą╣ PWM. ąĪčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čäčāąĮą║čåąĖą╣ čéą░ą╣ą╝ąĄčĆą░, čĆąĄą░ą╗ąĖąĘčāčÄčēąĖčģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ PWM:
ledc_timer_set()
ledc_timer_rst()
ledc_timer_pause()
ledc_timer_resume()
ąöą▓ąĄ ą┐ąĄčĆą▓čŗąĄ ąĖąĘ ąĮąĖčģ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ "ąĘą░ą║čāą╗ąĖčüąĮąŠ" čäčāąĮą║čåąĖąĄą╣ ledc_channel_config(), čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąĘą░ą┐čāčüą║ čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÜąŠą│ą┤ą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ąĮą░ą╗ LEDC, ąŠą┤ąĮąĖą╝ ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ledc_channel_config_t čÅą▓ą╗čÅąĄčéčüčÅ ledc_intr_type_t. ąŁč鹊 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ č乥ą╣ą┤ąĖąĮą│ PWM.
ąöą╗čÅ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čŹč鹊ą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓čŗąĘąŠą▓ąĖč鹥 ledc_isr_register().
ąÆčŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ąĖ ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ čĆąĄąČąĖą╝čŗ. ąÆčŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ čĆąĄąČąĖą╝ LEDC ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ čéą░ą╣ą╝ąĄčĆą░ ą▒ąĄąĘ ą▓čŗą▒čĆąŠčüąŠą▓ ąĖ čüą▒ąŠąĄą▓. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĄčüą╗ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ čéą░ą╣ą╝ąĄčĆą░ ą▒čŗą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮčŗ, č鹊 ąŠąĮąĖ ą▓čüčéčāą┐čÅčé ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░. ąĢčüą╗ąĖ čüčĆą░ą▓ąĮąĖčéčī čü ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗą╝ čĆąĄąČąĖą╝ąŠą╝, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ čéą░ą╣ą╝ąĄčĆ, ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čÅą▓ąĮąŠ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣. ąöčĆą░ą╣ą▓ąĄčĆ LEDC ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé čŹč鹊 ą▓ č乊ąĮąŠą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ, čé. ąĄ. ą║ąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ledc_timer_config() ąĖą╗ąĖ ledc_timer_set().
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĮčŗą╝ čĆąĄąČąĖą╝ą░ą╝ čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ESP32 Technical Reference Manual -> LED PWM Controller (LEDC) [PDF].
[ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ čćą░čüč鹊čéčŗ ąĖ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ]
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ LED PWM (LEDC) ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą▒čŗą╗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ (LED). ą×ąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ąŠą╗čīčłčāčÄ ą│ąĖą▒ą║ąŠčüčéčī ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąĄčĆąĖąŠą┤ą░ ąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ PWM. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖ čćą░čüč鹊č鹥 PWM 5 ą║ąōčå ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüą║ą▓ą░ąČąĮąŠčüčéąĖ 13 ą▒ąĖčé. ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 čüą║ą▓ą░ąČąĮąŠčüčéčī ą╝ąŠąČąĮąŠ ą╝ąĄąĮčÅčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0 ą┤ąŠ 100% čłą░ą│ą░ą╝ąĖ ą┐ąŠ ~0.012% (2 ^ 13 = 8192 ą┤ąĖčüą║čĆąĄčéąĮčŗčģ čāčĆąŠą▓ąĮąĄą╣ ąĖąĮč鹥ąĮčüąĖą▓ąĮąŠčüčéąĖ čüą▓ąĄč湥ąĮąĖčÅ LED). ą×ą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĘą░ą▓ąĖčüčÅčé ąŠčé čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░, ą▓čŗčĆą░ą▒ą░čéčŗą▓ą░čÄčēąĄą│ąŠ čéą░ą║čéčŗ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ LED PWM, ą║ąŠč鹊čĆčŗą╣ ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī čéą░ą║čéąĖčĆčāąĄčé ą║ą░ąĮą░ą╗ (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą┤ąŠą║čāą╝ąĄąĮč鹥 ESP32 Technical Reference Manual -> LED PWM Controller (LEDC) [PDF]).
LEDC ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖ čü ąĮą░ą╝ąĮąŠą│ąŠ ą▒ąŠą╗čīčłąĄą╣ čćą░čüč鹊č鹊ą╣, ą┤ąŠčüčéą░č鹊čćąĮąŠą╣ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤čĆčāą│ąĖčģ čāčüčéčĆąŠą╣čüčéą▓, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą╝ąŠą┤čāą╗čÅ čåąĖčäčĆąŠą▓ąŠą╣ ą║ą░ą╝ąĄčĆčŗ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮą░čÅ čćą░čüč鹊čéą░ čüąŠčüčéą░ą▓ąĖčé 40 ą£ąōčå ą┐čĆąĖ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ 1 ą▒ąĖčé. čŹč鹊 ąĘąĮą░čćąĖčé, čćč鹊 čüą║ą▓ą░ąČąĮąŠčüčéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ č鹊ą╗čīą║ąŠ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĮą░ 50%, ąĖ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮą░.
ąĀą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮąŠąĄ LEDC API čüąŠąŠą▒čēą░ąĄčé ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ą║ąŠą│ą┤ą░ ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐ąŠą┐čŗčéą║ą░ čāčüčéą░ąĮąŠą▓ąĖčéčī čćą░čüč鹊čéčā ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī, ą┐čĆąĄą▓čŗčłą░čÄčēąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ LEDC. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠą┐čŗčéą║ą░ čāčüčéą░ąĮąŠą▓ąĖčéčī čćą░čüč鹊čéčā 20 ą£ąōčå ąĖ čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī 3 ą▒ąĖčéą░ ą┐čĆąĖą▓ąĄą┤čāčé ą║ čüą╗ąĄą┤čāčÄčēąĄą╣ ąŠčłąĖą▒ą║ąĄ, ąŠ ą║ąŠč鹊čĆąŠą╣ čüąŠąŠą▒čēąĖčé serial monitor:
E (196) ledc: requested frequency and duty resolution cannot be achieved, try reducing freq_hz
or duty_resolution. div_param=128
ąÆ čéą░ą║ąŠą╣ čüąĖčéčāą░čåąĖąĖ ąĮčāąČąĮąŠ čāą╝ąĄąĮčīčłąĖčéčī ą╗ąĖą▒ąŠ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī (čé. ąĄ. čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī) čüą║ą▓ą░ąČąĮąŠčüčéąĖ, ą╗ąĖą▒ąŠ čāą╝ąĄąĮčīčłąĖčéčī čćą░čüč鹊čéčā PWM. ąØą░ą┐čĆąĖą╝ąĄčĆ, čāčüčéą░ąĮąŠą▓ą║ą░ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ 2 čāčüčéčĆą░ąĮąĖčé čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā, ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą╝ąĄąĮčÅčéčī 4 ą│čĆą░ą┤ą░čåąĖčÅą╝ąĖ, čü čłą░ą│ąŠą╝ 25%.
ąöčĆą░ą╣ą▓ąĄčĆ LEDC ą▒čāą┤ąĄčé čéą░ą║ąČąĄ ą┐ąĄčĆąĄčģą▓ą░čéčŗą▓ą░čéčī ą┐ąŠą┐čŗčéą║ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖą╣ čćą░čüč鹊čéą░ / čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī, ą║ąŠč鹊čĆčŗąĄ ąĮąĖąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą│ąŠ ą╝ąĖąĮąĖą╝čāą╝ą░, ąĖ čüąŠąŠą▒čēą░čéčī ąŠ čéą░ą║ąĖčģ ą┐ąŠą┐čŗčéą║ą░čģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
E (196) ledc: requested frequency and duty resolution cannot be achieved, try increasing freq_hz
or duty_resolution. div_param=128000000
ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüą║ą▓ą░ąČąĮąŠčüčéąĖ ąŠą▒čŗčćąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ledc_timer_bit_t. ąŁč鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ, ą┐ąĄčĆąĄą║čĆčŗą▓ą░čÄčēąĄąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 10 ą┤ąŠ 15 ą▒ąĖčé. ąĢčüą╗ąĖ ąĮčāąČąĮą░ ą╝ąĄąĮčīčłą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī (1 .. 10 ą▒ąĖčé), ą▓ą▓ąĄą┤ąĖč鹥 ąĮą░ą┐čĆčÅą╝čāčÄ ąĮčāąČąĮąŠąĄ čćąĖčüą╗ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
ą¤čĆąĖą╝ąĄčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą│ą┤ąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéčīčÄ čü čäčāąĮą║čåąĖąĄą╣ č乥ą╣ą┤ąĖąĮą│ą░, čüą╝. ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ peripherals/ledc/ledc_fade čüčĆąĄą┤ąĖ ą┐čĆąĖą╝ąĄčĆąŠą▓ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ESP-IDF [2]. ąæą░ąĘąŠą▓čŗą╣ ą┐čĆąĖą╝ąĄčĆ LEDC čüą╝. ą▓ peripherals/ledc/ledc_basic.
[ąĪą┐čĆą░ą▓ąŠčćąĮąĖą║ ą┐ąŠ API LEDC]
ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ API-čäčāąĮą║čåąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░ LEDC: components/driver/include/driver/ledc.h. ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ą║ąĄ components/hal/include/hal/ledc_types.h.
| ążčāąĮą║čåąĖčÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ledc_channel_config |
ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą║ą░ąĮą░ą╗ LEDC ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░, ąĮąŠąČą║ąĖ ą▓čŗčģąŠą┤ą░ GPIO, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čéą░ą╣ą╝ąĄčĆą░, čćą░čüč鹊čéčŗ PWM ą▓ ąōčå ąĖ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ. |
| ledc_timer_config |
ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čéą░ą╣ą╝ąĄčĆ LEDC čü čāą║ą░ąĘą░ąĮąĖąĄą╝ čćą░čüč鹊čéčŗ PWM ą▓ ąōčå ąĖ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ. |
| ledc_update_duty |
ą×ą▒ąĮąŠą▓ą╗čÅąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░, ą▓čŗąĘąŠą▓ąĖč鹥 čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ LEDC. ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ ledc_set_duty, ąĮą░ą╝ ąĮčāąČąĮąŠ ą▓čŗąĘą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ, čćč鹊ą▒čŗ ą▓čüčéčāą┐ąĖą╗ąĖ ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ. ąś ąĮąŠą▓čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ LEDC ąĮąĄ ą▓čüčéčāą┐čÅčé ą▓ čüąĖą╗čā ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čåąĖą║ą╗ą░ PWM(1). |
| ledc_set_pin |
ąŻčüčéą░ąĮąŠą▓ąĖčé ąĮąŠąČą║čā ą▓čŗčģąŠą┤ą░ GPIO. ąŁčéą░ čäčāąĮą║čåąĖčÅ č鹊ą╗čīą║ąŠ ąĮą░ą┐čĆą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ LEDC ąĮą░ ąĮąŠąČą║čā GPIO č湥čĆąĄąĘ ą╝ą░čéčĆąĖčåčā, ą┤čĆčāą│ąĖąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čĆąĄčüčāčĆčüąŠą▓ LEDC ąĮąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤čÅčéčüčÅ. ąÆą╝ąĄčüč鹊 čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ledc_channel_config() ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ą░ąĮą░ą╗ą░ LEDC. |
| ledc_stop |
ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé LEDC. ąÆčŗčģąŠą┤ LEDC ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ, ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čāčĆąŠą▓ąĄąĮčī ąŠąČąĖą┤ą░ąĮąĖčÅ (idle level). |
| ledc_set_freq |
ąŻčüčéą░ąĮąŠą▓ąĖčé čćą░čüč鹊čéčā PWM ą║ą░ąĮą░ą╗ą░ LEDC ą▓ ąōčå. |
| ledc_get_freq |
ąĪčćąĖčéčŗą▓ą░ąĄčé č鹥ą║čāčēčāčÄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčāčÄ čćą░čüč鹊čéčā PWM ą║ą░ąĮą░ą╗ą░ LEDC ą▓ ąōčå. |
| ledc_set_duty_with_hpoint |
ąŻčüčéą░ąĮąŠą▓ąĖčé čüą║ą▓ą░ąČąĮąŠčüčéčī ąĖ ą▓ąĄčĆčģąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ (hpoint) LEDC. ąĪą║ą▓ą░ąČąĮąŠčüčéčī ąŠą▒ąĮąŠą▓ąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ ledc_update_duty(1, 2). |
| ledc_get_hpoint |
ąĪčćąĖčéčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ hpoint, ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░, ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1. |
| ledc_set_duty |
ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą║ą░ąĮą░ą╗ą░ LEDC. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ą┐ąŠą╝ąĄąĮčÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ hpoint ą┤ą╗čÅ čŹč鹊ą│ąŠ ą║ą░ąĮą░ą╗ą░. ąĢčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, č鹊 ą▓čŗąĘąŠą▓ąĖč鹥 ledc_set_duty_with_hpoint. ąĪą║ą▓ą░ąČąĮąŠčüčéčī ąŠą▒ąĮąŠą▓ąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ ledc_update_duty(1, 2). |
| ledc_get_duty |
ąÆąĄčĆąĮąĄčé čüą║ą▓ą░ąČąĮąŠčüčéčī ą║ą░ąĮą░ą╗ą░ LED ąĮą░ č鹥ą║čāčēąĄą╝ ą┐ąĄčĆąĖąŠą┤ąĄ PWM. ąØąĄ čüą╗ąĄą┤čāąĄčé ąŠąČąĖą┤ą░čéčī, čćč鹊 čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ąĮąŠą▓čāčÄ čüą║ą▓ą░ąČąĮąŠčüčéčī ąĮą░ č鹊ą╝ ąČąĄ čåąĖą║ą╗ąĄ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓čŗąĘąŠą▓ ledc_update_duty, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐ąĄčĆąĖąŠą┤ąĄ PWM. |
| ledc_set_fade |
ąŻčüčéą░ąĮąŠą▓ąĖčé ą│čĆą░ą┤ąĖąĄąĮčé ą║ą░ąĮą░ą╗ą░ LEDC (čé. ąĄ. čüą║ąŠčĆąŠčüčéčī, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĖ ą┤čĆčāą│ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ č乥ą╣ą┤ąĖąĮą│ą░). ąØą░čüčéčĆąŠą╣ą║ąĖ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓čüčéčāą┐čÅčé ą▓ čüąĖą╗čā ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ ledc_update_duty(2). |
| ledc_isr_register |
ąĀąĄą│ąĖčüčéčĆąĖčĆčāąĄčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR) ą┤ą╗čÅ LEDC. ąŁč鹊čé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ č鹊ą╝čā ąČąĄ čÅą┤čĆčā CPU, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą▓čŗą┐ąŠą╗ąĮčÅą╗ą░čüčī čŹčéą░ čäčāąĮą║čåąĖčÅ. |
| ledc_timer_set |
ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ čéą░ą╣ą╝ąĄčĆą░ LEDC. |
| ledc_timer_rst |
ąĪą▒čĆąŠčüąĖčé čéą░ą╣ą╝ąĄčĆ LEDC. |
| ledc_timer_pause |
ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčé čéą░ą╣ą╝ąĄčĆ LEDC. |
| ledc_timer_resume |
ąÆąŠąĘąŠą▒ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā čéą░ą╣ą╝ąĄčĆą░ LEDC. |
| ledc_bind_channel_timer |
ą¤čĆąĖą▓čÅąĘčŗą▓ą░ąĄčé ą║ą░ąĮą░ą╗ LEDC ą║ ą▓čŗą▒čĆą░ąĮąĮąŠą╝čā čéą░ą╣ą╝ąĄčĆčā. |
| ledc_set_fade_with_step |
ąŻčüčéą░ąĮąŠą▓ąĖčé čäčāąĮą║čåąĖčÄ č乥ą╣ą┤ąĖąĮą│ą░ LEDC. ą¤ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓čŗąĘąŠą▓ąĖč鹥 ąŠą┤ąĖąĮ čĆą░ąĘ ledc_fade_func_install(). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ č乥ą╣ą┤ąĖąĮą│ą░ ą▓čŗąĘąŠą▓ąĖč鹥 ledc_fade_start()(1, 2). |
| ledc_set_fade_with_time |
ąŻčüčéą░ąĮąŠą▓ąĖčé ąĮą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ čäčāąĮą║čåąĖčÄ č乥ą╣ą┤ąĖąĮą│ą░ LEDC. ą¤ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓čŗąĘąŠą▓ąĖč鹥 ąŠą┤ąĖąĮ čĆą░ąĘ ledc_fade_func_install(). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ č乥ą╣ą┤ąĖąĮą│ą░ ą▓čŗąĘąŠą▓ąĖč鹥 ledc_fade_start()(1, 2). |
| ledc_fade_func_install |
ąśąĮčüčéą░ą╗ą╗ąĖčĆčāąĄčé čäčāąĮą║čåąĖčÄ č乥ą╣ą┤ąĖąĮą│ą░ LEDC. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą╣ą╝ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ LEDC. |
| ledc_fade_func_uninstall |
ąöąĄąĖąĮčüčéą░ą╗ą╗ąĖčĆčāąĄčé čäčāąĮą║čåąĖčÄ č乥ą╣ą┤ąĖąĮą│ą░ LEDC. |
| ledc_fade_start |
ąŚą░ą┐čāčüčéąĖčé č乥ą╣ą┤ąĖąĮą│ LEDC(2). ą¤ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓čŗąĘąŠą▓ąĖč鹥 ąŠą┤ąĖąĮ čĆą░ąĘ ledc_fade_func_install(). ą¤ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ č乥ą╣ą┤ąĖąĮą│ą░ ą▓čŗąĘąŠą▓ąĖč鹥 ledc_fade_start čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ ledc_set_fade_with_time ąĖą╗ąĖ ledc_set_fade_with_step. ąŚą░ą┐čāčüą║ ąŠą┐ąĄčĆą░čåąĖąĖ č乥ą╣ą┤ąĖąĮą│ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮčŗą╝, ą┐ąŠčŹč鹊ą╝čā ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ledc_fade_start čü ąŠčüč鹊čĆąŠąČąĮąŠčüčéčīčÄ. |
| ledc_set_duty_and_update |
ą¤ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮą░čÅ API-čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą║ą░ąĮą░ą╗ą░ LEDC ąĖ ą▓ąŠąĘą▓čĆą░čéą░, ą║ąŠą│ą┤ą░ čüą║ą▓ą░ąČąĮąŠčüčéčī ą▒čŗą╗ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮą░(2). |
| ledc_set_fade_time_and_start |
ą¤ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮą░čÅ API-čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ čüčéą░čĆčéą░ č乥ą╣ą┤ąĖąĮą│ą░, čü ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝(2). ą¤ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ ąŠą┤ąĮąŠą║čĆą░čéąĮčŗą╣ ą▓čŗąĘąŠą▓ ledc_fade_func_install(). |
| ledc_set_fade_step_and_start |
ą¤ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮą░čÅ API-čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ čüčéą░čĆčéą░ č乥ą╣ą┤ąĖąĮą│ą░ (2). ą¤ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ ąŠą┤ąĮąŠą║čĆą░čéąĮčŗą╣ ą▓čŗąĘąŠą▓ ledc_fade_func_install(). |
| ledc_cb_register |
ąĀąĄą│ąĖčüčéčĆąĖčĆčāąĄčé čäčāąĮą║čåąĖčÄ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (callback) LEDC. Callback-čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ ISR, ąŠąĮą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąĮąĖą║ąŠą│ą┤ą░ ą┐čŗčéą░čéčīčüčÅ ą┤ąĄą╗ą░čéčī ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║čā, ąĖ ą▓čüąĄ ą▓čŗąĘčŗą▓ą░ąĄą╝čŗąĄ ąĖąĘ ąĮąĄčæ API-čäčāąĮą║čåąĖąĖ FreeRTOS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ISR-ą▓ąĄčĆčüąĖčÅą╝ąĖ. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ążčāąĮą║čåąĖąĖ ledc_set_duty, ledc_set_duty_with_hpoint ąĖ ledc_update_duty ąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą┐ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮčŗą╝ąĖ (not thread-safe), ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ą▓čŗąĘčŗą▓ą░ą╣č鹥 čŹčéąĖ čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą┤ąĮąĖą╝ ąĖ č鹥ą╝ ąČąĄ ą║ą░ąĮą░ą╗ąŠą╝ LEDC ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖąĘ čĆą░ąĘąĮčŗčģ ąĘą░ą┤ą░čć RTOS. ą¤ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮą░čÅ ą▓ąĄčĆčüąĖčÅ čŹč鹊 ledc_set_duty_and_update.
(2) ąöą╗čÅ ESP32 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╗čÄą▒ąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ, ą┐ąŠą║ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą┐ąĄčĆą░čåąĖčÅ č乥ą╣ą┤ąĖąĮą│ą░ (ą┐čĆąŠčåąĄčüčü ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ) ąĮą░ čŹč鹊ą╝ ą║ą░ąĮą░ą╗ąĄ. ąöčĆčāą│ąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą┤ąŠąČą┤ą░čéčī ą╝ąŠą╝ąĄąĮčéą░ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ č乥ą╣ą┤ąĖąĮą│ą░.
ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣, čéąĖą┐ąŠą▓ ą┤ą░ąĮąĮčŗčģ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░ LEDC čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1].
[ąĪčüčŗą╗ą║ąĖ]
1. ESP32 LED Control (LEDC) site:docs.espressif.com.
2. ąŻčüčéą░ąĮąŠą▓ą║ą░ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ESP-IDF ą┤ą╗čÅ ESP32.
3. ESP32 High Resolution Timer. |



