| ESP32: API-функции ESP-IDF управления ШИМ-контроллером LEDC |
|
| Добавил(а) microsin | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
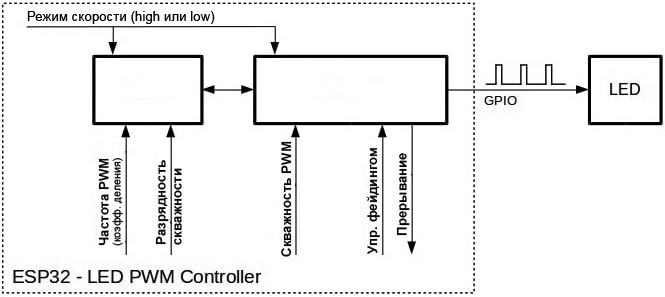
Периферийное устройство контроллера LED (LEDC) было разработано для основной цели управления яркостью светодиодов LED, хотя его можно также использовать для генерации ШИМ-сигналов (PWM), предназначенных для других целей. Имеется 16 каналов, которые могут генерировать независимые формы сигналов, что может использоваться, к примеру, для управления светодиодными лентами RGB или генерации звука. Каналы LEDC делятся на 2 группы по 8 каналов в каждой. Одна группа каналов LEDC работает в высокоскоростном режиме (high speed mode). Этот режим реализован аппаратно, и предоставляет автоматическое, без выбросов изменение скважности PWM. Другая группа каналов работает в низкоскоростном режиме (low speed mode), в этом режиме скважность PWM должна меняться программным драйвером. Каждая группа каналов также может также может использовать разные источники тактов. Контроллер PWM может автоматически и постепенно увеличивать или уменьшать скважность PWM, что позволяет управлять освещением без программного вмешательства процессора. Настройка канала LEDC в высокоскоростном или низкоскоростном режиме делается тремя шагами: 1. Конфигурируется таймер путем указания частоты сигнала PWM и разрешающей способности изменения его скважности. Как опциональный шаг также можно настроить прерывание по окончанию фейдинга.
Рис. 1. Ключевые настройки контроллера LED PWM с помощью API-функций. [Конфигурация таймера] Настройка таймера осуществляется вызовом функции ledc_timer_config(), с передачей ей структуры данных ledc_timer_config_t, которая содержит следующие настройки конфигурации: • ledc_mode_t: режим скорости. Частота и разрешающая способность взаимосвязаны. Чем выше частота PWM, тем меньшая разрешающая способность доступна, и наоборот. Эта взаимосвязь может быть важной, если Вы планируете использовать это API не для простого управления яркостью LED. Для дополнительной информации см. далее раздел "Поддерживаемые диапазоны частоты и разрешающей способности скважности". Частота тактирования также ограничивает частоту PWM. Чем выше частота тактов, тем более высокая частота PWM может быть сконфигурирована. Таблица 1. Характеристики источников тактирования ESP32 LEDC.
Примечание: на ESP32, если в качестве источника тактов LEDC выбран RTCxM_CLK, то для получения точной частоты тактов выполняется внутренняя калибровка. Это гарантирует точную частоту выходного сигнала PWM. Конфигурация канала. Когда настраивается таймер, конфигурируется желаемый канал (один из ledc_channel_t). Это делается функцией ledc_channel_config(). Подобно конфигурации таймера, функции настройки канала должна быть передана структура ledc_channel_config_t, которая содержит параметры конфигурации канала. В этом месте канал должен начать работать, генерируя сигнал PWM на выбранной ножке GPIO, как это было сконфигурировано в ledc_channel_config_t, на частоте, указанной в настройках таймера, и с заданной скважностью. Работа канала (генерация сигнала) может быть приостановлена в любой момент вызовом функции ledc_stop(). [Изменение сигнала PWM] Как только канал начнет работать и генерировать сигнал PWM с постоянной скважностью, есть несколько способов поменять этот сигнал. Когда осуществляется управление LED, меняется главным образом яркость свечения. В следующих двух секциях описывается, как менять скважность с помощью аппаратного и программного фейдинга. Если необходимо, также можно поменять частоту сигнала, это рассматривается в секции "Изменение частоты PWM". Изменение скважности программно. Для установки скважности периода PWM используйте специальную функцию ledc_set_duty(). После этого вызовите ledc_update_duty() для активации изменений. Для проверки текущего установленного значения скважности используйте соответствующую функцию ledc_get_duty(). Другой способ установки скважности, как и некоторых других параметров, это вызов ledc_channel_config(), см. выше секцию "Конфигурация канала". Диапазон передаваемых значений для изменения скважности зависит от выбранной разрешающей способности (duty_resolution), и значение должно быть от 0 до (2duty_resolution) - 1. Например, если выбранная разрешающая способность 10 (duty_resolution=10), то скважность может быть в диапазоне от 0 до 1023. Это дает точность установки уровня примерно 0.1%. Изменение скважности аппаратно. Аппаратура LEDC обеспечивает способ плавного изменения скважности от одного значения к другому. Для использования этой возможности разрешите фейдинг функцией ledc_fade_func_install(), и затем сконфигурируйте её вызовом одной из следующих доступных функций фейдинга: ledc_set_fade_with_time() Фейдинг начинается вызовом ledc_fade_start(). Фейдинг может работать в режиме блокирования или без блокирования, см. ledc_fade_mode_t для двух различных отличающихся режимов фейдинга. Обратите внимание, что в любом из этих двух режимов следующий фейдинг или обновление на фиксированную скважность не даст эффект, пока не завершится последний процесс фейдинга. Из-за аппаратных ограничений нет способа остановить фейдинг до момента достижения им целевой скважности. Для получения оповещения о завершении операции фейдинга может быть зарегистрирована соответствующая callback-функция путем вызова ledc_cb_register() после того, как была установлена служба фейдинга. Если больше не требуется фейдинг и связанное с ним прерывание, то фейдинг может быть запрещен вызовом ledc_fade_func_uninstall(). Изменение частоты PWM. LEDC API предоставляет несколько способов поменять частоту PWM "на лету": • Установка частоты вызовом ledc_set_freq(). Имеется комплементарная функция ledc_get_freq() для проверки текущей частоты. Дополнительное управление функцией PWM. Существует несколько функций таймера, реализующих управление на более низком уровне, которые можно использовать для изменения настроек PWM: ledc_timer_set() Две первые из них вызываются "закулисно" функцией ledc_channel_config(), чтобы обеспечить запуск таймера после того, как он сконфигурирован. Использование прерываний. Когда конфигурируется канал LEDC, одним из параметров ledc_channel_config_t является ledc_intr_type_t. Это обработчик прерывания, который запускается, когда завершается фейдинг PWM. Для регистрации обработчика этого прерывания вызовите ledc_isr_register(). Высокоскоростной и низкоскоростной режимы. Высокоскоростной режим LEDC позволяет реализовать переключение настроек таймера без выбросов и сбоев. Это означает, что если настройки таймера были изменены, то они вступят в действие автоматически на следующем прерывании переполнения таймера. Если сравнить с низкоскоростным режимом, когда применяется низкоскоростной таймер, изменение настроек должно быть явно инициировано программой. Драйвер LEDC осуществляет это в фоновом режиме, т. е. когда вызывается ledc_timer_config() или ledc_timer_set(). Дополнительную информацию по скоростным режимам см. документацию ESP32 Technical Reference Manual -> LED PWM Controller (LEDC) [PDF]. [Поддерживаемые диапазоны частоты и разрешающей способности скважности] Контроллер LED PWM (LEDC) изначально был разработан для управления светодиодами (LED). Он предоставляет для этого большую гибкость для настройки периода и скважности PWM. Например, при частоте PWM 5 кГц можно получить максимальную разрешающую способность скважности 13 бит. Это значит, что скважность можно менять в диапазоне от 0 до 100% шагами по ~0.012% (2 ^ 13 = 8192 дискретных уровней интенсивности свечения LED). Однако следует заметить, что эти параметры зависят от частоты тактов таймера, вырабатывающего такты для контроллера LED PWM, который в свою очередь тактирует канал (см. описание конфигурации таймера в документе ESP32 Technical Reference Manual -> LED PWM Controller (LEDC) [PDF]). LEDC может использоваться для генерации сигналов и с намного большей частотой, достаточной для тактирования других устройств, например модуля цифровой камеры. В этом случае максимально возможная частота составит 40 МГц при разрешающей способности 1 бит. это значит, что скважность может быть в этом случае только фиксированной на 50%, и не может быть изменена. Разработанное LEDC API сообщает об ошибке, когда делается попытка установить частоту и скважность, превышающие возможный диапазон аппаратуры LEDC. Например, попытка установить частоту 20 МГц и разрешающую способность 3 бита приведут к следующей ошибке, о которой сообщит serial monitor: E (196) ledc: requested frequency and duty resolution cannot be achieved, try reducing freq_hz or duty_resolution. div_param=128 В такой ситуации нужно уменьшить либо разрядность (т. е. разрешающую способность) скважности, либо уменьшить частоту PWM. Например, установка разрешающей способности изменения скважности 2 устранит эту проблему, и скважность периода ШИМ можно будет менять 4 градациями, с шагом 25%. Драйвер LEDC будет также перехватывать попытки конфигурирования комбинаций частота / разрядность, которые ниже поддерживаемого минимума, и сообщать о таких попытках, например: E (196) ledc: requested frequency and duty resolution cannot be achieved, try increasing freq_hz or duty_resolution. div_param=128000000 Разрешающая способность скважности обычно устанавливается с помощью ledc_timer_bit_t. Это перечисление, перекрывающее диапазон от 10 до 15 бит. Если нужна меньшая разрешающая способность (1 .. 10 бит), введите напрямую нужное числовое значение. Пример приложения, где осуществляется управление скважностью с функцией фейдинга, см. в каталоге peripherals/ledc/ledc_fade среди примеров среды разработки ESP-IDF [2]. Базовый пример LEDC см. в peripherals/ledc/ledc_basic. [Справочник по API LEDC] Заголовочный файл для API-функций драйвера LEDC: components/driver/include/driver/ledc.h. Используемые драйвером типы данных описаны в заголовке components/hal/include/hal/ledc_types.h.
Примечания: (1) Функции ledc_set_duty, ledc_set_duty_with_hpoint и ledc_update_duty не являются потокобезопасными (not thread-safe), поэтому не вызывайте эти функции для управления одним и тем же каналом LEDC одновременно из разных задач RTOS. Потокобезопасная версия это ledc_set_duty_and_update. Подробное описание функций, перечислений, типов данных, определений драйвера LEDC см. в документации [1]. [Ссылки] 1. ESP32 LED Control (LEDC) site:docs.espressif.com. |