ąŚą┤ąĄčüčī ąŠą┐ąĖčüą░ąĮčŗ čĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝, ą║ąŠč鹊čĆčŗąĄ čüą▓čÅąĘą░ąĮčŗ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ESP32 ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ESP-IDF .
[ą×ą▒čēąĖąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ ]
ąźąŠčĆąŠčłą░čÅ ąĮąŠą▓ąŠčüčéčī - čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ESP-IDF [4] ą▒ąĄčüą┐ą╗ą░čéąĮą░čÅ, ąĖ ą║ č鹊ą╝čā ąČąĄ ą║čĆąŠčüčüą┐ą╗ą░čéč乊čĆą╝ąĄąĮąĮą░čÅ, čé. ąĄ. ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ (ą┐ąŠčćčéąĖ) ąĖ ąĮą░ Windows, ąĖ ąĮą░ Linux, ąĖ ąĮą░ MacOS. ą¤ą╗ąŠčģą░čÅ ąĮąŠą▓ąŠčüčéčī - ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ, čüčĆąĄą┤ą░ ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ Eclipse, ąĖ ą┐čĆąŠčåąĄčüčü ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐ą╗ąŠčéąĮąŠ ąĘą░ą▓čÅąĘą░ąĮ ąĮą░ čüą║čĆąĖą┐čéčŗ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ Python, ą┐ąŠčŹč鹊ą╝čā ą┐čĆąĖą│ąŠč鹊ą▓čīč鹥čüčī ą║ č鹊ą╝čā, čćč鹊 ą▒čāą┤ąĄč鹥 ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čéčĆą░čéąĖčéčī ąĮą░ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÄ ą┐čĆąŠąĄą║čéą░, ąŠčüąŠą▒ąĄąĮąĮąŠ ą┐ąŠčüą╗ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĄą│ąŠ ąŠą┐čåąĖą╣ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ. ąØą░ Linux ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ ąĮą░ Windows. ą¤ąŠčŹč鹊ą╝čā ą║ąŠą╝ą┐čīčÄč鹥čĆ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗą╣, ą┐ą░ą╝čÅčéąĖ ąĮąĄ ą╝ąĄąĮčīčłąĄ 16 ą│ąĖą│ą░ą▒ą░ą╣čé, ąĖ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čĆą░ą▒ąŠčćąĖą╣ ą┤ąĖčüą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī SSD.
ąśąĘą▓ąĄčüčéąĮą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░, čüą▓čÅąĘą░ąĮąĮą░čÅ čü čüąŠąĘą┤ą░ąĮąĖąĄą╝ Launch Target, ą║ąŠą│ą┤ą░ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ąĮąŠą▓ąŠą│ąŠ ą┐čĆąŠąĄą║čéą░ ąĖą╗ąĖ ąĄą│ąŠ ąĖą╝ą┐ąŠčĆč鹥 ąĮąĄ ą▒čŗą╗ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ COM-ą┐ąŠčĆčéčā ąŠčéą╗ą░ą┤ąŠčćąĮą░čÅ ą┐ą╗ą░čéą░. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąŠčüą╗ąĄ ą┐čĆąŠčåąĄčüčüą░ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąŠąĄą║čéą░ ą▓ ąŠą║ąĮąĄ čüąŠąŠą▒čēąĄąĮąĖą╣ čüą▒ąŠčĆą║ąĖ (CDT Build Console) ą╝ąŠąČąĄčé ą┐ąŠčÅą▓ąĖčéčīčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ:
No esp launch target found. Please create/select the correct 'Launch Target'
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▒čŗą╗ą░ ą▓ č鹊ą╝, ą┐čĆąŠčåąĄčüčü čüą▒ąŠčĆą║ąĖ čéčĆąĄą▒čāąĄčé čāą║ą░ąĘą░ąĮąĖčÅ ąĮą░ą╗ąĖčćąĖčÅ čåąĄą╗ąĖ ąĘą░ą┐čāčüą║ą░ (Launch Target). ą”ąĄą╗čī ąĘą░ą┐čāčüą║ą░ čŹč鹊 ąŠą▒čŗčćąĮąŠ ąŠčéą╗ą░ą┤ąŠčćąĮą░čÅ ą┐ą╗ą░čéą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ č湥čĆąĄąĘ USB, ąĖ ąŠąĮą░ ą▓ąĖą┤ąĮą░ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą║ą░ą║ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ COM-ą┐ąŠčĆčé.
ąĢčüą╗ąĖ Launch Target ą┤ą╗čÅ ą┐čĆąŠąĄą║čéą░ ąĮąĄ čüąŠąĘą┤ą░ąĮą░ ąĖą╗ąĖ ąĮąĄ ą▓čŗą▒čĆą░ąĮą░, č鹊 čüą▒ąŠčĆą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. Launch Target čüąŠąĘą┤ą░ąĄčéčüčÅ ą▓ čüčĆąĄą┤ąĄ ESP-IDF ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą┐čĆąŠčåąĄą┤čāčĆąĄ, ąŠą┐ąĖčüą░ąĮąĮąŠą╣ ą▓ [1]:
1 . ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 ą┐ą╗ą░čéčā ESP32 ą║ ą┐ąŠčĆčéčā USB. ąØą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠčÅą▓ąĖčéčīčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé (COM-ą┐ąŠčĆčé ąĮą░ Windows).2 . ąÆ čüčĆąĄą┤ąĄ ESP-IDF čĆą░ąĘą▓ąĄčĆąĮąĖč鹥 čéčĆąĄčéąĖą╣ ą▓čŗą┐ą░ą┤ą░čÄčēąĖą╣ čüą┐ąĖčüąŠą║, ą▓čŗą▒ąĄčĆąĖč鹥 New Launch Target.3 . ąÆ ą┐ąŠą╗ąĄ Name čāą║ą░ąČąĖč鹥 ą╗čÄą▒ąŠąĄ ąĖą╝čÅ. ąÆ ą┐ąŠą╗ąĄ IDF Target ą▓čŗą▒ąĄčĆąĖč鹥 esp32. ąÆ ą┐ąŠą╗ąĄ Serial Port ą▓čŗą▒ąĄčĆąĖč鹥 ą┐ąŠčĆčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┐ą╗ą░čéčŗ. ąÜą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā Finish ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ą¤ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ čüą▒ąŠčĆą║ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 čŹčéčā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ.
[ąōą╗čÄą║ ESP-IDF, čüą▓čÅąĘą░ąĮąĮčŗą╣ čü čüąŠąĘą┤ą░ąĮąĖąĄą╝ Launch Target ]
ąĢčüą╗ąĖ ą┐čĆąŠąĄą║čé ą▒čŗą╗ čüąŠąĘą┤ą░ąĮ ą▒ąĄąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą┐ą╗ą░čéčŗ, č鹊 ą▒čāą┤ąĄčé ąĮą░ą▒ą╗čÄą┤ą░čéčīčüčÅ ą│ą╗čÄą║, ą║ąŠą│ą┤ą░ ąĮąĄą╗čīąĘčÅ čüąŠąĘą┤ą░čéčī čåąĄą╗čī ąĘą░ą┐čāčüą║ą░. ąó. ąĄ. ąĄčüą╗ąĖ ą┐čĆąŠą╣čéąĖ ą▓čüąĄ ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą▓čŗčłąĄ čłą░ą│ąĖ New Launch Target, č鹊 čåąĄą╗čī ąĘą░ą┐čāčüą║ą░ ąĮąĄ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ąĮą░, ąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą▒čāą┤ąĄčé ąĮąĄąĖąĘą╝ąĄąĮąĮąŠ ąĘą░ą║ą░ąĮčćąĖą▓ą░čéčīčüčÅ ąŠčłąĖą▒ą║ąŠą╣ "No esp launch target found. Please create/select the correct 'Launch Target'".
ąĀąĄčłąĖčéčī čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā ą╝ąŠąČąĮąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝: čüąŠąĘą┤ą░ą╣č鹥/ąĖą╝ą┐ąŠčĆčéąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé ąĘą░ąĮąŠą▓ąŠ. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▒čāą┤ąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠ čĆą░ą▒ąŠčéą░čéčī New Launch Target. ą£ą░ą╗ąŠ č鹊ą│ąŠ, ą▓ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą╝ čüą┐ąĖčüą║ąĄ ą╝ą░ą│ąĖč湥čüą║ąĖ ą┐ąŠčÅą▓čÅčéčüčÅ ą▓čüąĄ čåąĄą╗ąĖ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┤ąŠ čŹč鹊ą│ąŠ čüąŠąĘą┤ą░ąĮčŗ ąĮąĄčāą┤ą░čćąĮčŗą╝ąĖ ą┐ąŠą┐čŗčéą║ą░ą╝ąĖ.
ąöą░ąČąĄ ąĮą░ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ (64-čĆą░ąĘčĆčÅą┤ąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ Windows 10, ą┐čĆąŠčåąĄčüčüąŠčĆ x64 11th Gen Intel(R) Core(TM) i7-1165G7 @ 2.80GHz, ą┤ąĖčüą║ SSD, ą┐ą░ą╝čÅčéčī 16 ą│ąĖą│ą░ą▒ą░ą╣čé) ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ čüą░ą╝ąŠą│ąŠ ą┐čĆąŠčüč鹊ą│ąŠ ą┐čĆąŠąĄą║čéą░ blink ą╝ąŠąČąĄčé ąĘą░ąĮąĖą╝ą░čéčī 5 ą╝ąĖąĮčāčé ąĖ ą▒ąŠą╗čīčłąĄ. ą¦č鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī čü čŹčéąĖą╝?
1 . ą×čéą║ą╗čÄčćąĖč鹥 ąĮą░ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą░ąĮčéąĖą▓ąĖčĆčāčü ąĖ Windows Defender.
2 . ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čüčĆąĄą┤ą░ ESP-IDF ąĖ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄą╝čŗą╣ ą┐čĆąŠąĄą║čé ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ ą┤ąĖčüą║ąĄ SSD.
3 . ą¤ąŠčüą╝ąŠčéčĆąĖč鹥, č湥ą╝ ąĘą░ą│čĆčāąČąĄąĮą░ čüąĖčüč鹥ą╝ą░ ą▓ ą╝ąŠą╝ąĄąĮčé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ (čü ą┐ąŠą╝ąŠčēčīčÄ ąöąĖčüą┐ąĄčéč湥čĆą░ ąĘą░ą┤ą░čć) ąĖ ąĘą░ą║čĆąŠą╣č鹥 ą▓čüąĄ ąĮąĄąĮčāąČąĮčŗąĄ čüąĄčĆą▓ąĖčüčŗ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą▒ąŠą╗čīčłąĄ ą▓čüąĄą│ąŠ ąŠčéąĮąĖą╝ą░čÄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ.
4 . ąØą░čüčéčĆąŠą╣č鹥 čāčéąĖą╗ąĖčéčā make ąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čÅą┤ąĄčĆ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (Make -jN [2]).
5 . ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐ąĄčĆąĄąĮąĄčüąĖč鹥 ą╝ą░ą╗ąŠ ąĖąĘą╝ąĄąĮčÅąĄą╝čŗą╣ ą║ąŠą┤ ą▓ ą┤ą▓ąŠąĖčćąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ.
6 . ąĢčüą╗ąĖ čüąŠą▓čüąĄą╝ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠą╝ąŠą│ą░ąĄčé, č鹊 ą┐ąĄčĆąĄą╣ą┤ąĖč鹥 čü Windows ąĮą░ Linux.
1 . ą×ą▒čÅąĘą░č鹥ą╗čīąĮąŠ (!) ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┐ą╗ą░čéčā ESP32-C3-DevKitC-02v1.1 č湥čĆąĄąĘ USB ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā. ąØą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠčÅą▓ąĖčéčīčüčÅ COM-ą┐ąŠčĆčé.
2 . ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī New Launch Target (čéčĆąĄčéąĖą╣ ą▓čŗą┐ą░ą┤ą░čÄčēąĖą╣ čüą┐ąĖčüąŠą║ ąĮą░ ą┐ą░ąĮąĄą╗ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓) ą┤ą╗čÅ ą┐ąŠčÅą▓ąĖą▓čłąĄą│ąŠčüčÅ COM-ą┐ąŠčĆčéą░ ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ESP32-C3.
3 . File -> New -> Espressif IDF Project -> blink.
4 . idf.py set-target ESP32-C3, ąĖą┤ąĄą╝ ą┐ąĖčéčī ą║ąŠč乥.
5 . F5, ąöą▓ąŠą╣ąĮąŠą╣ ą║ą╗ąĖą║ ąĮą░ sdkconfig, Example Configuration -> RMT - Addressable LED, RMT Channel 0, Blink GPIO number 8.
6 . Serial flasher config -> Flash size 4 MB.
7 . Component config -> FreeRTOS -> Run FreeRTOS only on first core.
8 . Ctrl+S, ą╝ąĄąĮčÄ Project -> Build Project, čüąĮąŠą▓ą░ ąĖą┤ąĄą╝ ą┐ąĖčéčī ą║ąŠč乥.
9 . idf.py flash
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĮą░ ą┐ą╗ą░čéą║ąĄ ą┤ąŠą╗ąČąĄąĮ ąĮą░čćą░čéčī ą╝ąĖą│ą░čéčī RGB-čüą▓ąĄč鹊ą┤ąĖąŠą┤ WS2812.
ą£ąŠą┤čāą╗ąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┤ąŠą▒ą░ą▓ą╗čÅčÄčéčüčÅ ą▓ ą┐čĆąŠąĄą║čé ą┐čāč鹥ą╝ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ą╣ą╗ąŠą▓ CMakeLists.txt .main ąĖ components ą┐čĆąŠąĄą║čéą░.
ąÜą░ą║ ą┤ąŠą▒ą░ą▓ąĖčéčī čäą░ą╣ą╗ čü ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝ ą▓ ą┐čĆąŠąĄą║čé, ą┐čĆąŠčåąĄčüčü ą┐ąŠ čłą░ą│ą░ą╝:
1 . ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 *.c ąĖ ąĄą│ąŠ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ *.h ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ main . ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čŹč鹊 ą▒čŗą╗ ą╝ąŠą┤čāą╗čī OneButton.c OneButton.h .
2 . ą×čéą║čĆąŠą╣č鹥 ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ main čäą░ą╣ą╗ CMakeLists.txt , ą┤ąŠą▒ą░ą▓čīč鹥 ą╝ąŠą┤čāą╗čī OneButton.c ą▓ ą┐čĆąŠąĄą║čé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
idf_component_register(SRCS "ledc_basic_example_main.c" "OneButton.c "
INCLUDE_DIRS ".")
ąĪą┐ąĖčüąŠą║ ą┤ąŠą▒ą░ą▓ą╗čÅąĄą╝čŗčģ ąĖčüčģąŠą┤ąĮčŗčģ čäą░ą╣ą╗ąŠą▓ ąĮčāąČąĮąŠ ą▓čüčéą░ą▓ą╗čÅčéčī č湥čĆąĄąĘ ą┐čĆąŠą▒ąĄą╗, ą║ą░ąČą┤ąŠąĄ ąĖą╝čÅ čäą░ą╣ą╗ą░ ąĮčāąČąĮąŠ ąĘą░ą║ą╗čÄčćą░čéčī ą▓ ą┤ą▓ąŠą╣ąĮčŗąĄ ą║ą░ą▓čŗčćą║ąĖ. ą£ąŠąČąĮąŠ čéą░ą║ąČąĄ ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą║ą░ąČą┤čŗą╣ čäą░ą╣ą╗ ąĮą░ ąŠčéą┤ąĄą╗čīąĮąŠą╣ čüčéčĆąŠą║ąĄ:
idf_component_register(SRCS "ledc_basic_example_main.c"
"OneButton.c "
INCLUDE_DIRS ".")
3 . ą¤ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé ą║ąŠą╝ą░ąĮą┤ąŠą╣ idf.py build . ąĪąĖčüč鹥ą╝ą░ čüą▒ąŠčĆą║ąĖ ąŠą▒ąĮą░čĆčāąČąĖčé ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ CMakeLists.txt , ąĖ ą▓ ą┐čĆąŠčåąĄčüčü ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą▒čāą┤ąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ ąĮąŠą▓čŗą╣ ą╝ąŠą┤čāą╗čī.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ čüąĖčüč鹥ą╝čā čüą▒ąŠčĆą║ąĖ ąĖ čäą░ą╣ą╗čŗ CMakeLists čüą╝. [6]. ą¤čĆąĖą╝ąĄčĆ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐čāčéąĖ ą┐ąŠąĖčüą║ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗčģ čäą░ą╣ą╗ąŠą▓ ą▓ čüąĄą║čåąĖčÄ INCLUDE_DIRS čüą╝. "Q035. ąÜą░ą║ ą▓ ą┐čĆąŠąĄą║č鹥 ESP-IDF ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐čāčéčī ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗčģ čäą░ą╣ą╗ąŠą▓? ".
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čā ąĮą░čü ąĄčüčéčī ą┐ą╗ą░čéą░ ESP32-ąĪ3-WROOM-02, čā ą║ąŠč鹊čĆąŠą╣ čéčĆąĄčģčåą▓ąĄčéąĮčŗą╣ RGB-čüą▓ąĄč鹊ą┤ąĖąŠą┤ WS2812 ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ GPIO18. ąÜą░ą║ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą┤čĆą░ą╣ą▓ąĄčĆą░ RGB ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī čŹčéąĖą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝, ą┐čĆąŠčåąĄčüčü ą┐ąŠ čłą░ą│ą░ą╝:
1 . ąĪąŠąĘą┤ą░ą╣č鹥 ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ main ą┐čĆąŠąĄą║čéą░ čäą░ą╣ą╗ Kconfig.projbuild čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ (ą▓ čŹč鹊ą╝ čäą░ą╣ą╗ąĄ č鹥ą║čüčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī č鹊ą╗čīą║ąŠ ą░ąĮą│ą╗ąĖą╣čüą║ąĖą╝):
menu "Example control RGB-LED WS2812"
choice BLINK_LED
prompt "Blink LED type"
default BLINK_LED_GPIO if IDF_TARGET_ESP32
default BLINK_LED_RMT
help
Defines the default peripheral for blink example
config BLINK_LED_GPIO
bool "GPIO"
config BLINK_LED_RMT
bool "RMT - Addressable LED"
endchoice
config BLINK_LED_RMT_CHANNEL
depends on BLINK_LED_RMT
int "RMT Channel"
range 0 7
default 0
help
Set the RMT peripheral channel.
ESP32 RMT channel from 0 to 7
ESP32-S2 RMT channel from 0 to 3
ESP32-S3 RMT channel from 0 to 3
ESP32-C3 RMT channel from 0 to 1
config BLINK_GPIO
int "Blink GPIO number"
range 0 48
default 8 if IDF_TARGET_ESP32C3 || IDF_TARGET_ESP32H2
default 18 if IDF_TARGET_ESP32S2
default 48 if IDF_TARGET_ESP32S3
default 5
help
GPIO number (IOxx) to blink on and off or the RMT signal for the addressable LED.
Some GPIOs are used for other purposes (flash connections, etc.) and cannot be used to blink.
config BLINK_PERIOD
int "Blink period in ms"
range 10 3600000
default 1000
help
Define the blinking period in milliseconds.
endmenu
2 . ąŚą░ą┐čāčüčéąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā idf.py menuconfig, ąĖ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ąĮą░čüčéčĆąŠąĄą║ "Example control RGB-LED WS2812" ą┐ąŠą╝ąĄąĮčÅą╣č鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠą┐čåąĖąĖ:
Blink LED type -> RMT - Addressable LED
ąĪąŠčģčĆą░ąĮąĖč鹥 ąĮą░čüčéčĆąŠą╣ą║ąĖ (S) ąĖ ą▓čŗą╣ą┤ąĖč鹥 ąĖąĘ menuconfig (Esc).
3 . ą×čéą║čĆąŠą╣č鹥 čäą░ą╣ą╗ CMakeLists.txt , ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ąŠčĆąĮąĄą▓ąŠą╝ ą║ą░čéą░ą╗ąŠą│ąĄ ą┐čĆąŠąĄą║čéą░. ą¤ąĄčĆąĄą┤ ą┤ąĖčĆąĄą║čéąĖą▓ąŠą╣ include ą┤ąŠą▒ą░ą▓čīč鹥 ą┤ąĖčĆąĄą║čéąĖą▓čā set, čāą║ą░ąĘčŗą▓ą░čÄčēčāčÄ ąĮą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé led_strip :
cmake_minimum_required(VERSION 3.5)
set(EXTRA_COMPONENT_DIRS $ENV{IDF_PATH}/examples/common_components/led_strip )
include($ENV{IDF_PATH}/tools/cmake/project.cmake)
get_filename_component(ProjectId ${CMAKE_CURRENT_LIST_DIR} NAME)
string(REPLACE " " "_" ProjectId ${ProjectId})
project(${ProjectId})
4 . ąöąŠą▒ą░ą▓čīč鹥 ą▓ ąŠčüąĮąŠą▓ąĮąŠą╣ ą╝ąŠą┤čāą╗čī ą┐čĆąŠąĄą║čéą░ (ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ čäčāąĮą║čåąĖčÅ app_main) čüą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤:
#include "led_strip.h"
static uint8_t s_led_state = 0 ;static led_strip_t * pStrip_a;
static void configure_led (void )
{
ESP_LOGI("configure_led" , "Example configured to blink addressable LED!" );
/* LED strip initialization with the GPIO and pixels number*/
pStrip_a = led_strip_init(CONFIG_BLINK_LED_RMT_CHANNEL, CONFIG_BLINK_GPIO, 1 );
/* Set all LED off to clear all pixels */
pStrip_a-> clear(pStrip_a, 50 );
}
static void blink_led (void )
{
/* If the addressable LED is enabled */
if (s_led_state) {
/* Set the LED pixel using RGB from 0 (0%) to 255 (100%) for each color */
pStrip_a-> set_pixel(pStrip_a, 0 , 16 , 16 , 16 );
/* Refresh the strip to send data */
pStrip_a-> refresh(pStrip_a, 100 );
} else {
/* Set all LED off to clear all pixels */
pStrip_a-> clear(pStrip_a, 50 );
}
}
void app_main (void )
{
configure_led();
while (1 )
{
/* Toggle the LED state */
blink_led();
s_led_state = ! s_led_state;
vTaskDelay(CONFIG_BLINK_PERIOD / portTICK_PERIOD_MS);
}
}
5 . ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé ą║ąŠą╝ą░ąĮą┤ąŠą╣ idf.py build.
Window -> Preferences -> C/C++ -> Build -> Environment
ąØą░ąĖą▒ąŠą╗ąĄąĄ čćą░čüč鹊 ą▓čüčéčĆąĄčćą░čÄčēąĖąĄčüčÅ ą┐čĆąĖčćąĖąĮčŗ:
ŌĆó ą¤čĆąŠą▒ą╗ąĄą╝čŗ čü ą┐ąĖčéą░ąĮąĖąĄą╝ - čāčĆąŠą▓ąĄąĮčī ą╝ąĄąĮčīčłąĄ 3.3V, ą┐čĆąŠčüą░ą┤ą║ąĖ.
ą¤ąŠą┤čĆąŠą▒ąĮąŠ čĆąĄčłąĄąĮąĖąĄ čéą░ą║ąĖčģ ą┐čĆąŠą▒ą╗ąĄą╝ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüčéą░čéčīąĄ [7].
ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąŠąĄą║č鹊ą▓ ą┐čĆąĖą╝ąĄčĆąŠą▓, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗčģ ą▓ą╝ąĄčüč鹥 čüąŠ čüčĆąĄą┤ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ESP-IDF, ą▓ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą┐ą░ą┐ą║ąĄ ą┐čĆąŠąĄą║čéą░ čüąŠąĘą┤ą░ąĄčéčüčÅ ą║ą░čéą░ą╗ąŠą│ esp_idf_components
ąĪčéčĆčāą║čéčāčĆą░ ą║ą░čéą░ą╗ąŠą│ąŠą▓ čŹč鹊ą╣ ą┐ą░ą┐ą║ąĖ esp_idf_components ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čüąŠ čüčéčĆčāą║čéčāčĆąŠą╣ ą║ą░čéą░ą╗ąŠą│ąŠą▓ ą┐ą░ą┐ą║ąĖ c:\Espressif\frameworks\esp-idf-v4.4\components\ , ąĮąŠ čŹčéąĖ ą║ą░čéą░ą╗ąŠą│ąĖ čāąČąĄ ąĮąĄ ą┐čāčüčéčŗąĄ, čéą░ą╝ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą┐čĆąŠąĄą║č鹥.
ąÆąŠąĘąĮąĖą║ą░ąĄčé ąĘą░ą║ąŠąĮąĮčŗą╣ ą▓ąŠą┐čĆąŠčü - ąĘą░č湥ą╝ ąĮčāąČąĄąĮ ą║ą░čéą░ą╗ąŠą│ esp_idf_components čü ą┐čāčüčéčŗą╝ąĖ ą┐ą░ą┐ą║ą░ą╝ąĖ?
ą×ą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ, čŹčéąĖ ą┐čāčüčéčŗąĄ ą┐ą░ą┐ą║ąĖ ą║ą░čéą░ą╗ąŠą│ąĖ ąĮčāąČąĮčŗ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐ąŠ ąČąĄą╗ą░ąĮąĖčÄ ą╝ąĄąĮčÅčéčī ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, ą┐čāč鹥ą╝ ą┐čĆą░ą▓ą║ąĖ ąĄą│ąŠ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░, ąĖ ąĮąĄ ąĘą░čéčĆą░ą│ąĖą▓ą░čÅ ą┐čĆąĖ čŹč鹊ą╝ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąŠčĆąĖą│ąĖąĮą░ą╗ą░. ąöą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠą┤čāą╗čī ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ąĮčāąČąĮąŠ ąĖčüą┐čĆą░ą▓ąĖčéčī, ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐čāčüč鹊ą╣ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ ą┐ą░ą┐ą║ąĖ esp_idf_components , ąĖ ą▓ čäą░ą╣ą╗ CMakeLists.txt ą┐čĆąŠąĄą║čéą░ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ čüčüčŗą╗ą║ą░ ąĮą░ ą║ąŠą┐ąĖčĆčāąĄą╝čŗą╣ čäą░ą╣ą╗. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüąĖčüč鹥ą╝ą░ čüą▒ąŠčĆą║ąĖ ą▒čāą┤ąĄčé ą▒čĆą░čéčī ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čŹč鹊čé ą╝ąŠą┤čāą╗čī ą▓ą╝ąĄčüč鹊 ąĖčüčģąŠą┤ąĮąŠą│ąŠ, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖą╗čüčÅ ą▓ ą┐ą░ą┐ą║ąĄ c:\Espressif\frameworks\esp-idf-v4.4\components\ .
ą¤ąŠą║ą░ąČčā ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą┐čĆąŠąĄą║čéą░ Console Example. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ąĖąĮč鹥čĆč乥ą╣čü ą║ąŠą╝ą░ąĮą┤ ą║ąŠąĮčüąŠą╗ąĖ. ą¤čĆąŠčåąĄčüčü ą┐ąŠ čłą░ą│ą░ą╝:
1 . ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 ą╝ąŠą┤čāą╗čī commands.c ąĖąĘ ą┐ą░ą┐ą║ąĖ c:\Espressif\frameworks\esp-idf-v4.4\components\console\ ą▓ ą┐ą░ą┐ą║čā c:\Espressif\frameworks\esp-idf-v4.4\workspace\console_basic\esp_idf_components\console\ .
2 . ą×čéą║čĆąŠą╣č鹥 ąĮą░ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čäą░ą╣ą╗ main\CMakeLists.txt ą┐čĆąŠąĄą║čéą░, ą┤ąŠą▒ą░ą▓čīč鹥 ą▓ ąĮąĄą│ąŠ čüčüčŗą╗ą║čā ąĮą░ čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą╝ąŠą┤čāą╗čī:
idf_component_register(SRCS "cmd_wifi.c"
"console_example_main.c"
"../esp_idf_components/console/commands.c
3 . ąÆąĮąĄčüąĖč鹥 ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą╝ąŠą┤čāą╗čī commands.c ąĖ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé.
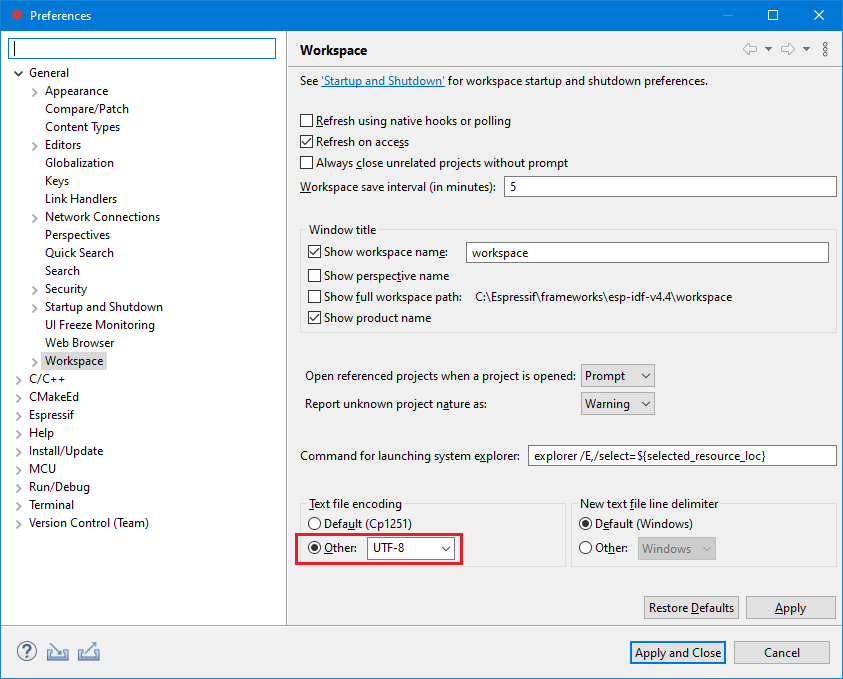
Windows -> Preferences -> General -> Workspace -> Text file encoding -> ą▓ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą╝ čüą┐ąĖčüą║ąĄ ą▓čŗą▒ąĄčĆąĖč鹥 ą║ąŠą┤ąĖčĆąŠą▓ą║čā.
ąöą╗čÅ ą▓čŗą▓ąŠą┤ą░ čĆčāčüčüą║ąŠą│ąŠ č鹥ą║čüčéą░ ą▓ ą║ąŠąĮčüąŠą╗ąĖ ą╝ąŠąĮąĖč鹊čĆą░ (idf.py monitor) ą▓čŗą▒ąĄčĆąĖč鹥 ą║ąŠą┤ąĖčĆąŠą▓ą║čā UTF-8 .
1 . ąŻčéąĖą╗ąĖčéą░ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ bin2c [8] (ą▓čģąŠą┤ąĖčé ą▓ ą┐ą░ą║ąĄčé hxtools).
2 . ążčāąĮą║čåąĖčÅ ą╗ąĖąĮą║ąŠą▓čēąĖą║ą░ ld, ą┐čĆąĄą▓čĆą░čēą░čÄčēą░čÅ ą╗čÄą▒ąŠą╣ čäą░ą╣ą╗ ą▓ ąŠą▒čŖąĄą║čé [9]:
ld -r -b binary -o binary.o foo.bar # ąĘą░č鹥ą╝ ą╗ąĖąĮą║ąŠą▓ą║ą░ binary.o
3 . ąØą░ ąĮąĄą║ąŠč鹊čĆčŗčģ SDK ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĄčüčéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą╝ą░ą║čĆąŠčü EMBED_FILES čüąĖčüč鹥ą╝čŗ čüą▒ąŠčĆą║ąĖ ESP-IDF (čüą╝. ą▓čĆąĄąĘą║čā "ą¤čĆąĖą╝ąĄčĆ CMakeLists ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░" [6]).
ąĪą┐ąŠčüąŠą▒ 1:
~/esp/esp-idf$ git status
ą×čéčüąŠąĄą┤ąĖąĮčæąĮąĮčŗą╣ čāą║ą░ąĘą░č鹥ą╗čī HEAD čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ v4.4.1
ąĪą┐ąŠčüąŠą▒ 2 (ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ąŠą║čĆčāąČąĄąĮąĖąĄ ESP-IDF, čüą╝. Q026):
$ idf.py --version
ESP-IDF v5.4.1-dirty
ą¤ąŠą╝ąĄąĮčÅčéčī ą│ą╗ąŠą▒ą░ą╗čīąĮąŠ ą┤ą╗čÅ ą▓čüąĄą│ąŠ ą┐čĆąŠąĄą║čéą░:
idf.py menuconfig ŌåÆ Component config ŌåÆ Log output ŌåÆ Default log verbosity
( ) No output ( ) Error ( ) Warning (X) Info ( ) Debug ( ) Verbose
ą¤ąŠą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ č鹥ą║čāčēąĄą│ąŠ ą╝ąŠą┤čāą╗čÅ:
static const char * TAG = "1-wire.device" ; ESP_LOG_DEBUG);
ąśą╗ąĖ čéą░ą║, ą┤ą░ąĄčé č鹊čé ąČąĄ čŹčäč乥ą║čé:
#undef LOG_LOCAL_LEVEL #define LOG_LOCAL_LEVEL ESP_LOG_DEBUG
ąĪą╝. čéą░ą║ąČąĄ:
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ESP-IDF ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą▓ ą╗ąŠą│ Q024 Q045
ąöą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā idf.py size , ąĮą░ą┐čĆąĖą╝ąĄčĆ:
ą║ą░čéą░ą╗ąŠą│ą┐čĆąŠąĄą║čéą░$ idf.py size
...
Total sizes:
Used stat D/IRAM: 155732 bytes ( 171948 remain, 47.5% used)
.data size: 23580 bytes
.bss size: 49864 bytes
.text size: 82288 bytes
Used Flash size : 1458700 bytes
.text : 1034218 bytes
.rodata : 424226 bytes
Total image size: 1564568 bytes (.bin may be padded larger)
ąÆ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖą╗ąŠčüčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čŗą▓ąŠą┤ GPIO2 ąĖ ą║ą░ą║ ą▓čģąŠą┤ ą┤ą╗čÅ ADC1 , ąĖ ą║ą░ą║ ą▓čģąŠą┤ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ ąĮąĖąĘą║ąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ deep sleep . ąÜąŠąĮąĄčćąĮąŠ, ąĮąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, ą░ ą▓ čĆą░ąĘąĮčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ ą▓čĆąĄą╝ąĄąĮąĖ ąČąĖąĘąĮąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą×ą┤ąĮą░ą║ąŠ ą┐čĆąĖ čŹč鹊ą╝ čüč鹊ą╗ą║ąĮčāą╗čüčÅ čü ą┐čĆąŠą▒ą╗ąĄą╝ąŠą╣: ąĄčüą╗ąĖ ą┐čĆąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĖ ąĮą░čüčéčĆąŠąĖčéčī GPIO2 ą║ą░ą║ ą▓čģąŠą┤ ąÉą”ą¤, ą░ ą┐ąŠč鹊ą╝ ą┐čĆąĖ čāčģąŠą┤ąĄ ą▓ čüąŠąĮ ą┐ąŠą┐čŗčéą░čéčīčüčÅ ą┐ąĄčĆąĄąĮą░čüčéčĆąŠąĖčéčī čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĮą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ deep sleep, č鹊 čäčāąĮą║čåąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄčüčéą░ąĄčé čĆą░ą▒ąŠčéą░čéčī. ąĢčüą╗ąĖ č鹊čćąĮąĄąĄ, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠą▒čāąČą┤ą░ąĄčéčüčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ čāčģąŠą┤ą░ ą▓ čüąŠąĮ, ą║ą░ą║ ą▒čāą┤č鹊 ąĮą░ ą▓čģąŠą┤ąĄ ą┐ąŠčÅą▓ąĖą╗čüčÅ ą┐čĆąŠą▒čāąČą┤ą░čÄčēąĖą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0, čģąŠčéčÅ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąĮąĖč湥ą│ąŠ čéą░ą║ąŠą│ąŠ ąĮąĄčé.
ąÜąŠą┤, ą║ąŠč鹊čĆčŗą╣ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ą▓čģąŠą┤ GPIO2 ą║ą░ą║ ą▓čģąŠą┤ ąÉą”ą¤:
ESP_ERROR_CHECK(adc1_config_width(ADC_WIDTH_BIT_12));
// ADC1_CHANNEL_2 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗą▓ąŠą┤čā GPIO_NUM_2, čé. ąĄ. GPIO2:
ESP_ERROR_CHECK(adc1_config_channel_atten(ADC1_CHANNEL_2, ADC_ATTEN_DB_11));
ąÜąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄą╗ą░ąĄčé ą┐ąŠą┐čŗčéą║čā ąĮą░čüčéčĆąŠąĖčéčī čŹč鹊čé ąČąĄ ą▓čŗą▓ąŠą┤ ąĮą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ:
uint64_t wakeup_mask = BIT(GPIO_NUM_2);
ESP_ERROR_CHECK(esp_deep_sleep_enable_gpio_wakeup(wakeup_mask, ESP_GPIO_WAKEUP_GPIO_LOW));
ESP_LOGI(__FUNCTION__, "Entering deep sleep..." );
esp_sleep_pd_config(ESP_PD_DOMAIN_VDDSDIO, ESP_PD_OPTION_OFF);
esp_deep_sleep_start();
ąĀąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ - ą┐ąĄčĆąĄą┤ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čüąĮąŠą▓ą░ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčī čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĮą░ čĆą░ą▒ąŠčéčā ą║ą░ą║ GPIO čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ gpio_config :
gpio_config_t pincfg =
{ .pin_bit_mask = BIT(GPIO_NUM_2),
.mode = GPIO_MODE_INPUT,
.pull_up_en = GPIO_PULLUP_ENABLE };
ESP_ERROR_CHECK(gpio_config(& pincfg));// ąöą░ą╗ąĄąĄ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą▓čŗąĘąŠą▓ą░ą╝ąĖ esp_deep_sleep_enable_gpio_wakeup // ąĖ esp_sleep_pd_config, ąĖ ąĘą░č鹥ą╝ čāčģąŠą┤ ą▓ čüąŠąĮ č湥čĆąĄąĘ esp_deep_sleep_start.
ąśąĮč鹥čĆąĄčüąĮąŠ, čćč鹊 ą▓čŗąĘąŠą▓ gpio_reset_pin ąĮąĄ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ ą▓čŗą▓ąŠą┤ą░ ąĖąĘ deep sleep, čģąŠčéčÅ ą┐ąŠ ąŠą┐ąĖčüą░ąĮąĖčÄ ą▓čŗąĘąŠą▓ gpio_reset_pin ą┤ąŠą╗ąČąĄąĮ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ą▓čŗą▓ąŠą┤ GPIO ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą▓čŗą▒ąŠčĆ čäčāąĮą║čåąĖąĖ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤/ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ pullup ąĖ ąĘą░ą┐čĆąĄčé čĆą░ą▒ąŠčéčŗ ąĮą░ ą▓čģąŠą┤ ąĖ ą▓čŗčģąŠą┤).
ąØąĄąŠąČąĖą┤ą░ąĮąĮąŠ čüč鹊ą╗ą║ąĮčāą╗čüčÅ ą▓ VS Code čü ąŠčłąĖą▒ą║ąŠą╣:
Squiggles are disabled for this translation unit (/home/username/myproject/src/main.c).
ąĀąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ:
1 . ąöąŠą▒ą░ą▓čīč鹥 čÅą▓ąĮąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ "compilerPath" ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ VS Code. ąöą╗čÅ čŹč鹊ą│ąŠ ą▓ čäą░ą╣ą╗ąĄ c_cpp_properties.json , ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ .vscode ą║ąŠčĆąĮąĄą▓ąŠą│ąŠ ą║ą░čéą░ą╗ąŠą│ą░ ą┐čĆąŠąĄą║čéą░, ą┐čāčéčī ą┤ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ ą▓ čüą▓ąŠą╣čüčéą▓ąĄ compilerPath, ąĮą░ą┐čĆąĖą╝ąĄčĆ "compilerPath": "/usr/bin/gcc":
{
"configurations" : [
{
"name" : "Linux" ,
"includePath" : [
"${default}" ,
"./include"
],
"defines" : [],
"compilerPath" : "/usr/bin/gcc" ,
"cStandard" : "c17" ,
"cppStandard" : "gnu++14" ,
"intelliSenseMode" : "linux-gcc-x64"
}
],
"version" : 4
}
2 . ąÆ čäą░ą╣ą╗ąĄ settings.json (ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ č鹊ą╣ ąČąĄ ą┐ą░ą┐ą║ąĄ .vscode ) ą┐ąŠą╝ąĄąĮčÅą╣č鹥 ąĮą░čüčéčĆąŠą╣ą║čā C_Cpp.errorSquiggles ąĮą░ "Enabled", ąĮą░ą┐čĆąĖą╝ąĄčĆ:
{
"idf.adapterTargetName" : "esp32c3" ,
"C_Cpp.errorSquiggles" : "enabled"
}
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ ą▒čŗą▓ą░ąĄčé ąĮčāąČąĮąŠ ą┐ąŠą┤ą░ą▓ąĖčéčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▒čŗą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąĖ ąĄą╣ ą┐čĆąĖčüą▓ąŠąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ, ąĮąŠ ąŠąĮą░ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čŹč鹊 ą╝ąŠąČąĄčé čüą╗čāčćąĖčéčīčüčÅ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą╝ą░ą║čĆąŠčüą░ ESP_GOTO_ON_ERROR , ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ret, ą║čāą┤ą░ ą╝ą░ą║čĆąŠčü ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ą¤čĆąĖą╝ąĄčĆ:
TEvent evt;
for (uint8_t i= 0 ; i < 3 ; i++ )
{
esp_err_t ret = ESP_OK; // ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą▓čŗą┤ą░čüčé ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ąĮą░
// ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ret...
ESP_GOTO_ON_ERROR(pdTRUE == xQueueReceive(queue, & evt, 100 ) ? ESP_OK : ESP_FAIL,
err_measure, __FUNCTION__, "Failed to read voltage" );
ESP_LOGI(__FUNCTION__, "%.3fV" , voltage);err_measure:
vTaskDelay(100 / portTICK_PERIOD_MS);
}
ąŻčüčéčĆą░ąĮąĖčéčī ą▓čŗą┤ą░čćčā ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą╝ąŠąČąĮąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝:
esp_err_t ret = ESP_OK;
(void )ret; // ą┐ąŠą┤ą░ą▓ą╗čÅąĄčé warning ąĮą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ret
#include "esp_idf_version.h"
#if (ESP_IDF_VERSION == ESP_IDF_VERSION_VAL(4, 4, 1)) # include "driver/gpio.h" # include "driver/uart.h" #elif (ESP_IDF_VERSION == ESP_IDF_VERSION_VAL(5, 0, 1)) # include "rom/gpio.h" # include "rom/uart.h" #endif
# register ESP IDF component if ("v4.4.1-dirty" STREQUAL ${ IDF_VER } )idf_component_register ( REQUIRES "driver"
"esp_adc_cal" )elseif ("v5.0.1" STREQUAL ${ IDF_VER } )idf_component_register ( REQUIRES "driver"
"esp_adc" )endif ()
error: format '%u' expects argument of type 'unsigned int', but argument 6
has type 'uint32_t' {aka 'long unsigned int'} [-Werror=format=]
ąŁčéčā ąŠčłąĖą▒ą║čā ą▓čŗą┤ą░ąĄčé ą║ąŠą┤:
uint32_t phaseincrement = (uint32_t )((uint64_t )4294967296* freq/ samplerate);
ESP_LOGI("" , "phaseincrement %u" , phaseincrement);
ąÜą░ą║ ąĖčüą┐čĆą░ą▓ąĖčéčī:
ESP_LOGI("" , "phaseincrement %" PRIu32, phaseincrement);
ą×čłąĖą▒ą║ą░:
error: expected ')' before 'PRIu32'
ESP_LOGI("", "phaseincrement %" PRIu32, phaseincrement);
^~~~~~
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ inttypes.h
error: missing binary operator before token "(" #if (ESP_IDF_VERSION == ESP_IDF_VERSION_VAL(4, 4, 1))
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ esp_idf_version.h .
ąÆąŠąĘą╝ąŠąČąĮąŠ ą┤ą▓ą░ąČą┤čŗ ą┐čĆąĖą╝ąĄąĮąĄąĮ ą░čéčĆąĖą▒čāčé IRAM_ATTR ą║ ąŠą┤ąĮąŠą╣ ąĖ č鹊ą╣ ąČąĄ čäčāąĮą║čåąĖąĖ - ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ ąŠą▒čŖčÅą▓ą╗ąĄąĮąĖąĖ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ (ąĖą╗ąĖ ą▓ static-ąŠą▒čŖčÅą▓ą╗ąĄąĮąĖąĖ čäčāąĮą║čåąĖąĖ), ąĖ ą▓č鹊čĆąŠą╣ čĆą░ąĘ ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ:
// ąŚą┤ąĄčüčī ąĮąĄ ąĮą░ą┤ąŠ čāą║ą░ąĘčŗą▓ą░čéčī ą░čéčĆąĖą▒čāčé IRAM_ATTR: void IRAM_ATTR ledc_timer_overflow_isr (void * arg);
// ąÉ ą▓ąŠčé ąĘą┤ąĄčüčī ą║ą░ą║ čĆą░ąĘ IRAM_ATTR ąĮčāąČąĄąĮ: void IRAM_ATTR ledc_timer_overflow_isr (void * arg)
{
// ą×čćąĖčüčéą║ą░ ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
uint32_t intstatus = READ_PERI_REG(LEDC_INT_ST_REG);
WRITE_PERI_REG(LEDC_INT_CLR_REG, intstatus);
// ąŚą┤ąĄčüčī ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
...
}
__FILE__ : ą╝ą░ą║čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ č鹥ą║čüč鹊ą▓ąŠąĄ ąĖą╝čÅ ą╝ąŠą┤čāą╗čÅ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░, ą│ą┤ąĄ ą▓čüčéčĆąĄčéąĖą╗čüčÅ čŹč鹊čé ą╝ą░ą║čĆąŠčü.
__FUNCTION__ : ą╝ą░ą║čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ č鹥ą║čüč鹊ą▓ąŠąĄ ąĖą╝čÅ čäčāąĮą║čåąĖąĖ, ą│ą┤ąĄ ą▓čüčéčĆąĄčéąĖą╗čüčÅ čŹč鹊čé ą╝ą░ą║čĆąŠčü.
__LINE__ : ą╝ą░ą║čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ č鹥ą║čüč鹊ą▓ąŠąĄ ąĖą╝čÅ čäčāąĮą║čåąĖąĖ, ą│ą┤ąĄ ą▓čüčéčĆąĄčéąĖą╗čüčÅ čŹč鹊čé ą╝ą░ą║čĆąŠčü.
ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čŹčéąĖą╝ ą╝ą░ą║čĆąŠčüą░ą╝ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čāą┤ąŠą▒ąĮą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓ ą╗ąŠą│ąĄ ąŠčéčüą╗ąĄą┤ąĖčéčī čģąŠą┤ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ:
ESP_LOGW(__FUNCTION__, "%d" , __LINE__);
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą▓ ą╗ąŠą│ąĄ ą▒čāą┤čāčé ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ą▓ąŠčé čéą░ą║ąĖąĄ čüčéčĆąŠą║ąĖ:
I (662) phy_init: phy_version 909,156dee4,Apr 7 2022,20:27:09
I (842) wifi:mode : sta (a0:76:4e:14:5a:3c)
I (842) wifi:enable tsfW (842) off_task: 475
W (842) off_task: 483
assert failed: 0x4038aaea
Core 0 register dump:
MEPC : 0x4038085e RA : 0x4038a710 SP : 0x3fcae140 GP : 0x3fc94a00
TP : 0x3fc4563c T0 : 0x37363534 T1 : 0x7271706f T2 : 0x33323130
S0/FP : 0x00000000 S1 : 0x00000000 A0 : 0x3fcae154 A1 : 0x00000061
A2 : 0x00000003 A3 : 0x3fcae168 A4 : 0x00000001 A5 : 0x3fca3000
A6 : 0x7a797877 A7 : 0x76757473 S2 : 0x00000000 S3 : 0x00000000
S4 : 0x00000000 S5 : 0x00000000 S6 : 0x00000000 S7 : 0x00000000
S8 : 0x00000000 S9 : 0x00000000 S10 : 0x00000000 S11 : 0x00000000
T3 : 0x6e6d6c6b T4 : 0x6a696867 T5 : 0x66656463 T6 : 0x62613938
MSTATUS : 0x00001801 MTVEC : 0x40380001 MCAUSE : 0x00000007 MTVAL : 0x00000000
MHARTID : 0x00000000
..
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮą░ą╝ąĮąŠą│ąŠ ą┐čĆąŠčēąĄ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ čĆąĄą░ą╗čīąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ąĖ ąĮą░ą╣čéąĖ ą╝ąĄčüč鹊 ąŠčłąĖą▒ą║ąĖ.
ą£ą░ą║čĆąŠčü __FILE__ ą╝ąŠąČąĄčé ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ ą▓ ą▒ąŠą╗čīčłąĖčģ ą┐čĆąŠąĄą║čéą░čģ, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ąŠčéą┤ąĄą╗čīąĮčŗčģ čäą░ą╣ą╗ąŠą▓ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░.
ąÆčŗąĘąŠą▓ vTaskDelete(NULL) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ąĘą░ą┤ą░čćą░ ą╝ąŠą│ą╗ą░ čāą┤ą░ą╗ąĖčéčī čüą░ą╝čā čüąĄą▒čÅ. ą×čüąŠą▒ąĄąĮąĮąŠčüčéčī čéą░ą║ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ ą▓ č鹊ą╝, čćč鹊 ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čĆą░ąĘą╝ąĄčēąĄąĮ ą▓ ą║ąŠąĮčåąĄ čäčāąĮą║čåąĖąĖ ąĘą░ą┤ą░čćąĖ. ąóąŠą╗čīą║ąŠ ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ čŹč鹊ą│ąŠ čāčüą╗ąŠą▓ąĖčÅ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ eDeleted .
ąĢčüą╗ąĖ ąČąĄ čĆą░ąĘą╝ąĄčüčéąĖčéčī vTaskDelete(NULL) ą▓ ą╗čÄą▒ąŠą╝ ą┤čĆčāą│ąŠą╝ ą╝ąĄčüč鹥 č鹥ą╗ą░ čäčāąĮą║čåąĖąĖ ąĘą░ą┤ą░čćąĖ, č鹊 ąĄčæ čüąŠčüč鹊čÅąĮąĖąĄ ąĮą░ą▓čüąĄą│ą┤ą░ ąŠčüčéą░ąĮąĄčéčüčÅ eRunning .
1 . Ctrl+Shift+t , cd ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ_ą┐čĆąŠąĄą║čéą░ .
2 . $ . ~/esp/v5.4.1/esp-idf/export.sh
3 . ąöą░ą╗ąĄąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 idf.py ą║ąŠą╝ą░ąĮą┤ą░ (clean, build, flash, monitor, ...).
ążčāąĮą║čåąĖčÅ xTaskGetTickCount ą▓ąŠąĘą▓čĆą░čéąĖčé ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓ čéąĖą║ą░čģ čüąĖčüč鹥ą╝čŗ ąĮą░čćąĖąĮą░čÅ ąŠčé ą╝ąŠą╝ąĄąĮčéą░ ąĄčæ ąĘą░ą┐čāčüą║ą░. ą¦ą░čüč鹊čéą░ čéąĖą║ąŠą▓ ą▓ ąōčå ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ menuconfig, čüą╝. Component config ŌåÆ FreeRTOS ŌåÆ Kernel ŌåÆ configTICK_RATE_HZ (čćą░čüč鹊čéą░ čéąĖą║ąŠą▓, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 100). ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąŠą┤ąĮąŠą│ąŠ čéąĖą║ą░ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ čĆą░ą▓ąĮą░ ą║ąŠąĮčüčéą░ąĮč鹥 portTICK_PERIOD_MS .
ąĢčüą╗ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąŠą╗čāčćąĖčéčī ą╝ąĄčéą║čā ą▓čĆąĄą╝ąĄąĮąĖ ą▓ č乊čĆą╝ą░č鹥 Unix, č鹊 ą╝ąŠąČąĮąŠ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║ąŠą╣ čäčāąĮą║čåąĖąĄą╣:
int64_t xx_time_get_time () {
struct timeval tv ;NULL );
return (tv.tv_sec * 1000LL + (tv.tv_usec / 1000LL ));
}
// ążčāąĮą║čåąĖčÅ, ąĘą░ą┐čāčüą║ą░čÄčēą░čÅ ą┐ąŠč鹊ą║ čü ąĘą░ą┤ą░ąĮąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ č鹥čüč鹊ą▓. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ č鹥čüč鹊ą▓ // ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą┐ąŠč鹊ą║ (čäčāąĮą║čåąĖčÄ ąĘą░ą┤ą░čćąĖ) č湥čĆąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆ num_tests: void run_test (int num_tests)
{
xTaskCreate(test_task, "test_task" , 3072 , &num_tests, PRIORITY_USER_CONSOLE, NULL );
}// ążčāąĮą║čåąĖčÅ ąĘą░ą┤ą░čćąĖ ą┐ąŠč鹊ą║ą░. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐čāčüą║ą░ąĄą╝čŗčģ č鹥čüč鹊ą▓ ąĖąĘą▓ą╗ąĄą║ą░ąĄčéčüčÅ // ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆą░ pvParameters: static void test_task (void *pvParameters)
{
vTaskSuspend(xConsoleTask);
int num_tests = *(int *)pvParameters;
printf ("Run %i tests\n" , num_tests);
memset (tstinfo, 0 , MAX_TESTS * sizeof (TTestInfo));
int curr_test = 0 ;
while (curr_test < num_tests)
{
printf ("\r%i" , curr_test+1 );
if (curr_test + 1 == num_tests)
printf ("\n" );
// .. ąĘą┤ąĄčüčī ąĮą░čģąŠą┤ąĖčéčüčÅ ą║ąŠą┤ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą│ąŠ č鹥čüčéą░ ..
curr_test++;
}
vTaskResume(xConsoleTask);
vTaskDelete(NULL );
}
ąÜą╗ąĖąĄąĮčé č鹥čĆą╝ąĖąĮą░ą╗ą░ Linux čāčüčéčĆąŠąĄąĮ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▓ ąŠą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ ąĖąĮą┤ąĖą║ą░č鹊čĆ ą┐čĆąŠą│čĆąĄčüčüą░ ąĮąĄ čéą░ą║ ą┐čĆąŠčüč鹊. ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ ą┐ąĄčćą░čéąĖ ą▓ ą┐ąŠą╝ąŠčēčīčÄ printf ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą▓ąŠą┤ąĖčéčī ą┐čĆąŠčåąĄąĮčéčŗ ą┐čĆąŠą│čĆąĄčüčüą░ ą▓ ą║ąŠąĮčüąŠą╗čī č鹥čĆą╝ąĖąĮą░ą╗ą░, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ ą▓čŗąĘąŠą▓čŗ flush :
int progress = (curr_test * 100 ) / (last_test + 1 );
printf ("%d%%\r" , progress);
fflush(stdout );
ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ą║ą╗ąĖąĄąĮčé č鹥čĆą╝ąĖąĮą░ą╗ą░ (ą▓ Ubuntu čŹč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ x-terminal-emulator) ą▒čāč乥čĆąĖąĘąĖčĆčāąĄčé ą▓čŗą▓ąŠą┤, ąĖ ąĮąĄ ą▒čāą┤ąĄčé ąŠč鹊ą▒čĆą░ąČą░čéčī č鹥ą║čüčé, ą┐ąŠą║ą░ ąĮąĄ ą▓čüčéčĆąĄčéąĖčé čüąĖą╝ą▓ąŠą╗ ą┐ąĄčĆąĄą▓ąŠą┤ą░ čüčéčĆąŠą║ąĖ CR ('\n'), ą╗ąĖą▒ąŠ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒čāč乥čĆą░ ą▓čŗą▓ąŠą┤ą░.
ąĀąĄčłąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ escape-ą║ąŠą┤ąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (čüą╝. ANSI escape code site:wikipedia.org
int progress = (curr_test * 100 ) / (last_test + 1 );
printf ("%d%%\n\x1b[A\r" , progress);
fflush(stdout );
ąĪą╝. čéą░ą║ąČąĄ printf ąĮąĄ ą▓čŗą▓ąŠą┤ąĖčé č鹥ą║čüčé ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ .
ąĪčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓ čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝ ąĘą░ą┤ą░čć FreeRTOS ąĖ ąĄčæ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░: vTaskSuspendAll() , xTaskResumeAll() , ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą┤ą╗čÅ ąĘą░ą┤ą░čć. ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ąĘą░ą┤ą░čć čŹč鹊ą│ąŠ ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčīčüčÅ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ. ą£ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ąĖ čĆąĄčüčāčĆčüą░ą╝ąĖ čü ąČąĄčüčéą║ąŠ ąĘą░ą┤ą░ąĮąĮčŗą╝ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą╝ąŠąČąĄčé ąŠą▒ąĄčüą┐ąĄčćąĖčéčī RTOS. ąźąŠčĆąŠčłąĖą╣ ą┐čĆąĖą╝ąĄčĆ - ąŠą┐čĆąŠčü ąÉą”ą¤ HX711 .
ąÆ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ rv_utils.h components/riscv/include/riscv ą║ą░čéą░ą╗ąŠą│ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ESP-IDF) ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą┤ą▓ąĄ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą│ą╗ąŠą▒ą░ą╗čīąĮąŠ ąĘą░ą┐čĆąĄčēą░čéčī ąĖ čĆą░ąĘčĆąĄčłą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ: rv_utils_intr_global_enable() ąĖ rv_utils_intr_global_disable() . ąŁčéąĖ čäčāąĮą║čåąĖąĖ čüą╗ąĄą┤čāąĄčé ą┐čĆąĖą╝ąĄąĮčÅčéčī čü ąŠčüč鹊čĆąŠąČąĮąŠčüčéčīčÄ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ąŠą║ą░ąĘčŗą▓ą░čÄčé ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ čåąĄą╗ąĖą║ąŠą╝.
ąöą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖ ąĘą░ą┐čĆąĄčéą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüą╝ąŠčéčĆąĖč鹥 ąŠą┐ąĖčüą░ąĮąĖąĄ API-čäčāąĮą║čåąĖą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ GPIO ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ gpio_set_intr_type() .
ąŁč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĖą╝ąĄąĮ čäčāąĮą║čåąĖą╣ ą▓ čāąĮąĖą║ą░ą╗čīąĮčŗąĄ ąĖą╝ąĄąĮą░, ą┐ąŠą┤čģąŠą┤čÅčēąĖąĄ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░. ąóą░ą║ąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąŠčüąŠą▒ąĄąĮąĮąŠ ą▓ą░ąČąĮąŠ ą┤ą╗čÅ čÅąĘčŗą║ą░ C++, ą▓ ą║ąŠč鹊čĆąŠą╝ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čäčāąĮą║čåąĖą╣ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ąĖ ąĖą╝ąĄąĮą░ą╝ąĖ, ąĮąŠ čü čĆą░ąĘąĮčŗą╝ąĖ čüąĖą│ąĮą░čéčāčĆą░ą╝ąĖ (čé. ąĄ. čü ąŠčéą╗ąĖčćą░čÄčēąĖą╝ąĖčüčÅ ąĮą░ą▒ąŠčĆą░ą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓).
ąöą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ GCC ą┐čĆąĖąĮčÅčéą░ čüą╗ąĄą┤čāčÄčēą░čÅ čüąĖčüč鹥ą╝ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖą╝ąĄąĮ. ąÜą░ąČą┤ąŠą╝čā ąĖą╝ąĄąĮąĖ čäčāąĮą║čåąĖąĖ ą┐čĆąĖčüą▓ą░ąĖą▓ą░ąĄčéčüčÅ ą┐čĆąĄčäąĖą║čü, čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ __Zn , ą│ą┤ąĄ n čŹč鹊 ą┤ą╗ąĖąĮą░ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ąĖą╝ąĄąĮąĖ čäčāąĮą║čåąĖąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ foo(void) ąŠą┐ąĄčĆą░čåąĖąĄą╣ mangling ą▒čāą┤ąĄčé ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ąĖą╝čÅ __Z3foo.
ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ąĖą╝ąĄąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą┐ąŠ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ čüčāčäčäąĖą║čü, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▒čāą║ą▓ą░ą╝ąĖ ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮčŗ čéąĖą┐čŗ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ foo (int param1, double pafam2) ą▒čāą┤ąĄčé ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ąĖą╝čÅ __Z3fooid.
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ c++filt ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ąŠą▒čĆą░čéąĮąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ mangling-ąĖą╝ąĄąĮąĖ ą▓ čüąĖą│ąĮą░čéčāčĆčā čäčāąĮą║čåąĖąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ:
$ c++filt -_ __Z3fooid
foo(int, double)
ążą░ą╣ą╗ dependencies.lock Version Solver site:docs.espressif.com ), ąĖ ą▓ ąĮąĄą╝ čüąŠą┤ąĄčƹȹ░čéčüčÅ č鹊čćąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, ą▓čŗą▒čĆą░ąĮąĮčŗčģ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣ (dependency resolution). ąŁč鹊čé čäą░ą╣ą╗ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝čŗąĄ čüą▒ąŠčĆą║ąĖ, ą▒ą╗ąŠą║ąĖčĆčāčÅ ą▓ąĄčĆčüąĖąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, čćč鹊ą▒čŗ ą▒čāą┤čāčēąĖąĄ čüą▒ąŠčĆą║ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ č鹥 ąČąĄ ą▓ąĄčĆčüąĖąĖ.
ąĢčüą╗ąĖ ą▓ą░čł ą┐čĆąŠąĄą║čé ą▓ą║ą╗čÄčćą░ąĄčé č鹊ą╗čīą║ąŠ ESP Component Registry Dependencies ąĖą╗ąĖ Git Dependencies, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ąŠą▒ą░ą▓ąĖčéčī čäą░ą╣ą╗ dependencies.lock ą┐ąŠą┤ ą║ąŠąĮčéčĆąŠą╗čī čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąĄčĆčüąĖčÅą╝ąĖ. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓čüąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąĮąĄą┐čĆąŠčéąĖą▓ąŠčĆąĄčćąĖą▓čŗąĄ ą▓ąĄčĆčüąĖąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą┐čĆąĖ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ čüą▒ąŠčĆą║ąĄ ą┐čĆąŠąĄą║čéą░.
ąĢčüą╗ąĖ ą▓ą░čł ą┐čĆąŠąĄą║čé ą▓ą║ą╗čÄčćą░ąĄčé Kconfig Options, č鹊 čäą░ą╣ą╗ dependencies.lock ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░čéčīčüčÅ čüąĖčüč鹥ą╝ąŠą╣ ą║ąŠąĮčéčĆąŠą╗čÅ ą▓ąĄčĆčüąĖą╣. ąŁč鹊 čüą▓čÅąĘą░ąĮąŠ čü č鹥ą╝, čćč鹊 ąŠąĮ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą┐čāčéąĖ, čģą░čĆą░ą║č鹥čĆąĮčŗąĄ ą┤ą╗čÅ ą▓ą░čłąĄą╣ čüčĆąĄą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą▒čāą┤čāčé ą┤ąŠčüčéčāą┐ąĮčŗ ą┤čĆčāą│ąĖą╝ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: čäą░ą╣ą╗ dependencies.lock ąĮąĄ čüą╗ąĄą┤čāąĄčé čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī ą▓čĆčāčćąĮčāčÄ. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ čüąĖčüč鹥ą╝ąŠą╣ Version Solver.
[Root Attributes (ą║ąŠčĆąĮąĄą▓čŗąĄ ą░čéčĆąĖą▒čāčéčŗ) čäą░ą╣ą╗ą░ dependencies.lock ]
dependencies
ąÉčéčĆąĖą▒čāčé dependencies čŹč鹊 čüą╗ąŠą▓ą░čĆčī, ą▓ą║ą╗čÄčćą░čÄčēąĖą╣ ą▓čüąĄ čĆą░ąĘą▓ąĄčĆąĮčāčéčŗąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą┐čĆąŠąĄą║čéą░. ąÜą░ąČą┤čŗą╣ ą║ą╗čÄčć ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĖą╝čÅ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ, ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé ą░čéčĆąĖą▒čāčéčŗ, ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą┤ą░ą╗ąĄąĄ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "Dependency Attributes".
direct_dependencies
ąÉčéčĆąĖą▒čāčé direct_dependencies čŹč鹊 čüą┐ąĖčüąŠą║ ą┐čĆčÅą╝čŗčģ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣ ą┐čĆąŠąĄą║čéą░, čāą║ą░ąĘą░ąĮąĮčŗčģ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ čäą░ą╣ą╗ą░čģ ą╝ą░ąĮąĖč乥čüčéą░ ą┐čĆąŠąĄą║čéą░. ąŁč鹊čé čüą┐ąĖčüąŠą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ čüąĖčüč鹥ą╝čŗ čüą▒ąŠčĆą║ąĖ ą┐čĆąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ ąĖąĘ ESP Component Registry Dependencies ą▓ Kconfig Options.
manifest_hash
ąÉčéčĆąĖą▒čāčé manifest_hash čŹč鹊 čģčŹčł ą▓čüąĄčģ čäą░ą╣ą╗ąŠą▓ ą╝ą░ąĮąĖč乥čüčéą░, ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝čŗčģ ą▓ ą┐čĆąŠąĄą║č鹥. ąŁč鹊čé čģčŹčł ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 čäą░ą╣ą╗ dependencies.lock ą▒čŗą╗ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĖčģ čäą░ą╣ą╗ąŠą▓ ą╝ą░ąĮąĖč乥čüčéą░.
target
ąÉčéčĆąĖą▒čāčé target čāą║ą░ąĘčŗą▓ą░ąĄčé, ą┤ą╗čÅ ą║ą░ą║ąŠą│ąŠ čåąĄą╗ąĄą▓ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (esp32, esp32c3, ąĖ čé. ą┐.) ą▒čŗą╗ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ čŹč鹊čé čäą░ą╣ą╗ dependencies.lock . ąŁč鹊 ą┐ąŠą╝ąŠą│ą░ąĄčé Conditional Dependencies ą║ąŠčĆčĆąĄą║čéąĮąŠ čĆą░ą▒ąŠčéą░čéčī ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ target.
version
ąÉčéčĆąĖą▒čāčé version ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąĄčĆčüąĖčÄ čäą░ą╣ą╗ą░ dependencies.lock . ąŁč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ąĄą│ąŠ ą▓ąĄčĆčüąĖąĖ čü ą▓ąĄčĆčüąĖąĄą╣ IDF Component Manager.
ąØą░ą┐čĆąĖą╝ąĄčĆ IDF Component Manager 1.x ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ąĄčĆčüąĖčÄ 1.0.0 ą┤ą╗čÅ čäą░ą╣ą╗ą░ dependencies.lock , ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ IDF Component Manager 2.x ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ąĄčĆčüąĖčÄ 2.0.0.
[Dependency Attributes ]
ąÜą░ąČą┤ą░čÅ ąĘą░ą┐ąĖčüčī čüą╗ąŠą▓ą░čĆčÅ dependencies ą▓ą║ą╗čÄčćą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čéčĆąĖą▒čāčéčŗ:
component_hash
ąÉčéčĆąĖą▒čāčé component_hash ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ čģčŹčł ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ąĮąĄ ą▒čŗą╗ ąĖąĘą╝ąĄąĮąĄąĮ čü ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ čäą░ą╣ą╗ą░ dependencies.lock .
dependencies
ąÉčéčĆąĖą▒čāčé dependencies čŹč鹊 čüą╗ąŠą▓ą░čĆčī, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ą┐čĆčÅą╝čŗąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░.
source
ąÉčéčĆąĖą▒čāčé source čāą║ą░ąĘčŗą▓ą░ąĄčé čéąĖą┐ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čüąĄą║čåąĖčÄ "Component Dependencies" ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čäą░ą╣ą╗čā ą╝ą░ąĮąĖč乥čüčéą░ (idf_component.yml Manifest File site:docs.espressif.com
version
ąÉčéčĆąĖą▒čāčé version ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąĄčĆčüąĖčÄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░, ą▓čŗą▒čĆą░ąĮąĮčāčÄ Version Solver.
targets
ąÉčéčĆąĖą▒čāčé targets ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ą▓čüąĄ ą▓ą░čĆąĖą░ąĮčéčŗ čåąĄą╗ąĄą▓čŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ (esp32, esp32c3, ąĖ čé. ą┐.), čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ čü čŹčéąĖą╝ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą╝. ąŁč鹊 ą┐ąŠą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čāčēąĄąĮąŠ, ąĄčüą╗ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé čüąŠą▓ą╝ąĄčüčéąĖą╝ čüąŠ ą▓čüąĄą╝ąĖ target.
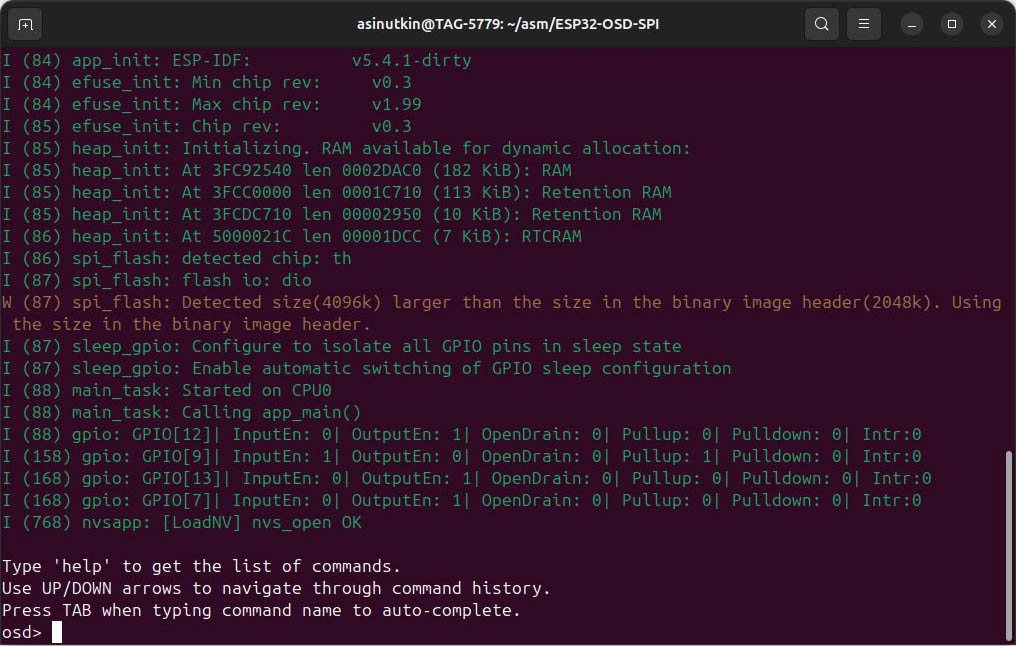
ą¤čĆąĖ ąĘą░ą┐čāčüą║ąĄ ą┐čĆąŠąĄą║čé ą▓čŗą┤ą░ąĄčé ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ą░čÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ:
W (87) spi_flash: Detected size(4096k) larger than the size in the binary image header(2048k). Using the size in the binary image header.
ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ firmware ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčé ąŠą▒čŖąĄą╝ FLASH-ą┐ą░ą╝čÅčéąĖ 2 ą╝ąĄą│ą░ą▒ą░ą╣čéą░ (ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ menuconfig-ąŠą┐čåąĖąĖ Serial Flasher), ąĮąŠ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čā ą▓ą░čłąĄą│ąŠ čćąĖą┐ą░ ą▓ ąĮą░ą╗ąĖčćąĖąĖ 4 ą╝ąĄą│ą░ą▒ą░ą╣čéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮąŠčĆą╝ą░ą╗čīąĮąŠ, ąĮąŠ ą▓ą░čł ą║ąŠą┤ ąĮąĄ čüą╝ąŠąČąĄčé ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ą░ą╝čÅčéčīčÄ čüą▓čŗčłąĄ 2 ą╝ąĄą│ą░ą▒ą░ą╣čé.
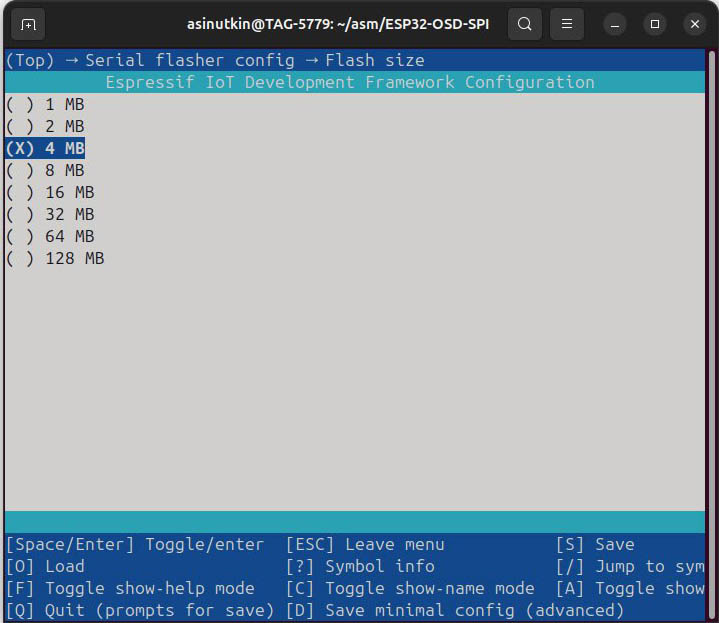
ąŻčüčéčĆą░ąĮąĖčéčī čŹč鹊 ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ą╝ąŠąČąĮąŠ, ąĄčüą╗ąĖ ąĖąĘą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ Serial flasher ąĖ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą┐čĆąŠąĄą║čé. ąŚą░ą┐čāčüčéąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā idf.py menuconfig, ą▓čŗą▒ąĄčĆąĖč鹥 ą┐čāąĮą║čé ąĮą░čüčéčĆąŠąĄą║ Serial flasher config ąĖ ą┐ąŠą╝ąĄąĮčÅą╣č鹥 ąŠą┐čåąĖčÄ Flash size , čćč鹊ą▒čŗ ąŠąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░ą╗ą░ čĆąĄą░ą╗čīąĮąŠą╝čā ąŠą▒čŖąĄą╝čā ą┐ą░ą╝čÅčéąĖ FLASH:
ążą░ą╣ą╗ idf_component.yml
1 . ą×čéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 ą▓ čäą░ą╣ą╗ąĄ idf_component.yml čüą┐ąĖčüąŠą║ ą┐ąŠčüą╗ąĄ ą╝ąĄčéą║ąĖ dependencies:, čāą┤ą░ą╗ąĖą▓ ąĖąĘ čŹč鹊ą│ąŠ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé.2 . ąśąĘ ą┐ą░ą┐ą║ąĖ managed_components 3 . ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ąŠčćąĖčüčéą║čā ąĖ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÄ ą┐čĆąŠąĄą║čéą░ (idf.py clean, idf.py build).
ąĢčüą╗ąĖ ą▓ą░čł ą┐čĆąŠąĄą║čé ąĘą░ą▓ąĖčüąĄą╗ č鹊ą╗čīą║ąŠ ąŠčé ąŠą┤ąĮąŠą│ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░, ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé ą║ąŠč鹊čĆąŠą│ąŠ ą▓čŗ čģąŠčéąĖč鹥 čāą┤ą░ą╗ąĖčéčī, č鹊 ą┐čĆąŠčüč鹊 čāą┤ą░ą╗ąĖč鹥 čäą░ą╣ą╗ idf_component.yml , ą┐ą░ą┐ą║čā managed_components ąĖ čäą░ą╣ą╗ dependencies.lock
[ąŻą┤ą░ą╗ąĄąĮąĖąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣ ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ espressif__ds18b20 ąĖ espressif__onewire_bus ]
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ą░ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĖąĘą╝ąĄąĮąĖčéčī ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čłąĖąĮčŗ OneWire - ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮčāąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ąĖąĮą▓ąĄčĆčüąĖčÄ ąĖ čĆą░ąĘą┤ąĄą╗ąĖčéčī ą║ą░ąĮą░ą╗čŗ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ RMT. ąóąŠą│ą┤ą░ ą▓ą░ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāą┤ą░ą╗ąĖčéčī ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ espressif__ds18b20 ąĖ espressif__onewire_bus, čćč鹊ą▒čŗ ą┐čĆąŠčüč鹊 ą▓čüčéčĆąŠąĖčéčī ąĖčģ ą▓ ą┐čĆąŠąĄą║čé ą║ą░ą║ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤.
ąÜą░ą║ čŹč鹊 čüą┤ąĄą╗ą░čéčī, ą┐ąŠ čłą░ą│ą░ą╝:
1 . ą×čéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 čäą░ą╣ą╗ main/idf_component.yml
espressif/ds18b20: '*' espressif/onewire_bus: '*'
2 . ą¤ąĄčĆąĄąĖą╝ąĄąĮčāą╣č鹥 ą┐ą░ą┐ą║čā managed_components components .
3 . ąŻą┤ą░ą╗ąĖč鹥 ą▓ ą┐ą░ą┐ą║ą░čģ espressif__ds18b20 ąĖ espressif__onewire_bus čäą░ą╣ą╗čŗ idf_component.yml
4 . ąöąŠą▒ą░ą▓čīč鹥 ą▓ idf_component_register čäą░ą╣ą╗ą░ main/CMakeLists.txt ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą╝ąŠą┤čāą╗ąĖ *.c , ąĖ ą▓ INCLUDE_DIRS ą┤ąŠą▒ą░ą▓čīč鹥 ą┐čāčéąĖ ą┐ąŠąĖčüą║ą░ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓.
5 . ąŻą┤ą░ą╗ąĖč鹥 čäą░ą╣ą╗ dependencies.lock
6 . ą¤ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé, ą║ą░ą║ ąŠą▒čŗčćąĮąŠ.
ąĪą╝. čéą░ą║ąČąĄ [11].
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüčéčī ą║ą░čéą░ą╗ąŠą│:
c:\Espressif\frameworks\esp-idf-lib\components\esp_idf_lib_helpers\
ąś ą▓ čŹč鹊ą╝ ą║ą░čéą░ą╗ąŠą│ąĄ ąĄčüčéčī čäą░ą╣ą╗ esp_idf_lib_helpers.h , ą║ąŠč鹊čĆčŗą╣ ą╝čŗ čģąŠčéąĖą╝ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą┤ąĖčĆąĄą║čéąĖą▓ąŠą╣ #include < esp_idf_lib_helpers.h> . ąÜą░ą║ ą┤ąŠą▒ą░ą▓ąĖčéčī ą▓ ą┐čĆąŠąĄą║čé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą┐čāčéčī ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗčģ čäą░ą╣ą╗ąŠą▓?
ąöą╗čÅ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ąŠčéčĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čäą░ą╣ą╗ą░ CMakeLists.txt main INCLUDE_DIRS ą┐ąŠčÅą▓ąĖą╗čüčÅ ąĮčāąČąĮčŗą╣ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą┐čāčéčī. ąöą╗čÅ ąĮą░čłąĄą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ (ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╣ ą┐čāčéčī ą┐ąŠą║ą░ąĘą░ąĮ ąČąĖčĆąĮčŗą╝ čłčĆąĖčäč鹊ą╝):
idf_component_register (SRCS "main.c" "cmd_console.c" "i2capp.c" "ds18b20app.c" "si5351a_synth.c" "nvsapp.c" "debug.c" "radiochannels.c" "ifsktx.c" "ifskcrc.c" "OneButton.c" "vars.c" "rs_code157.c" "sleep.c" "blinkapp.c" #"aht10.c" "aht.c" "i2cdev.c" PRIV_REQUIRES fatfs esp_driver_i2c INCLUDE_DIRS "." "${IDF_PATH}/../esp-idf-lib/components/esp_idf_lib_helpers " )
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čüčéčĆąŠą║ąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┐čāčéąĖ ą┐ąŠąĖčüą║ą░ ąĘą░ą│ąŠą╗ąŠą▓ą║ąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąŠą║čĆčāąČąĄąĮąĖčÅ IDF_PATH , ą║ąŠč鹊čĆą░čÅ ą┤ą╗čÅ Windows ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ C:\Espressif\frameworks\esp-idf-v5.4.1 :
> set
ALLUSERSPROFILE=C:\ProgramData
...IDF_PATH=C:\Espressif\frameworks\esp-idf-v5.4.1
IDF_PYTHON=C:/Espressif/python_env/idf5.4_py3.11_env/Scripts/python.exe
IDF_PYTHON_DIR=C:\Espressif\python_env\idf5.4_py3.11_env\Scripts\
IDF_PYTHON_ENV_PATH=C:\Espressif\python_env\idf5.4_py3.11_env
IDF_TOOLS_EXPORT_CMD=C:\Espressif\frameworks\esp-idf-v5.4.1\export.bat
IDF_TOOLS_INSTALL_CMD=C:\Espressif\frameworks\esp-idf-v5.4.1\install.bat
IDF_TOOLS_JSON_PATH=C:\Espressif\frameworks\esp-idf-v5.4.1\tools\tools.json
IDF_TOOLS_PATH=C:\Espressif
IDF_TOOLS_PY_PATH=C:\Espressif\frameworks\esp-idf-v5.4.1\tools\idf_tools.py
...
ProgramData=C:\ProgramData
ProgramFiles=C:\Program Files
ProgramFiles(x86)=C:\Program Files (x86)
ProgramW6432=C:\Program Files
windir=C:\Windows
ąĪą╝. čéą░ą║ąČąĄ "Q005. ąÜą░ą║ ą┤ąŠą▒ą░ą▓ąĖčéčī ą▓ ą┐čĆąŠąĄą║čé čäą░ą╣ą╗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ".
ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą║ąŠąĮčüąŠą╗ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüąŠąĘą┤ą░ąĄčéčüčÅ ą╝ą░ą║čĆąŠčüąŠą╝ ESP_CONSOLE_REPL_CONFIG_DEFAULT() (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 4096 ą▒ą░ą╣čé):
esp_console_repl_t * repl = NULL ; esp_console_repl_config_t repl_config = ESP_CONSOLE_REPL_CONFIG_DEFAULT();#if CONFIG_EXAMPLE_STORE_HISTORY initialize_filesystem(); repl_config.history_save_path = HISTORY_PATH;#endif repl_config.prompt = ">" ; // ą┐čĆąĖą│ą╗ą░čłąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ ą║ąŠąĮčüąŠą╗ąĖ // ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ ą║ąŠąĮčüąŠą╗ąĖ (console REPL environment), ąĘą░ą┐čāčüą║ ąĘą░ą┤ą░čćąĖ console_repl: #if CONFIG_ESP_CONSOLE_UART esp_console_dev_uart_config_t uart_config = ESP_CONSOLE_DEV_UART_CONFIG_DEFAULT(); ESP_ERROR_CHECK(esp_console_new_repl_uart(& uart_config, & repl_config, & repl));#elif CONFIG_ESP_CONSOLE_USB_CDC esp_console_dev_usb_cdc_config_t cdc_config = ESP_CONSOLE_DEV_CDC_CONFIG_DEFAULT(); ESP_ERROR_CHECK(esp_console_new_repl_usb_cdc(& cdc_config, & repl_config, & repl));#elif CONFIG_ESP_CONSOLE_USB_SERIAL_JTAG esp_console_dev_usb_serial_jtag_config_t usbjtag_config = ESP_CONSOLE_DEV_USB_SERIAL_JTAG_CONFIG_DEFAULT(); ESP_ERROR_CHECK(esp_console_new_repl_usb_serial_jtag(& usbjtag_config, & repl_config, & repl));#endif
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ ą║ąŠąĮčüąŠą╗ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ 4096 ą▒ą░ą╣čé. ą¦č鹊ą▒čŗ ą┐ąŠą╝ąĄąĮčÅčéčī čŹč鹊čé čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░, ą┐ąĄčĆąĄą┤ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĄą╣ ąĘą░ą┤ą░čćąĖ ą║ąŠąĮčüąŠą╗ąĖ ą┐ąŠą╝ąĄąĮčÅą╣č鹥 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗čÅ task_stack_size čüčéčĆčāą║čéčāčĆčŗ repl_config :
... repl_config.prompt = ">" ; // ą┐čĆąĖą│ą╗ą░čłąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ ą║ąŠąĮčüąŠą╗ąĖ repl_config.task_stack_size = 8196 ; // ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ ą║ąŠąĮčüąŠą╗ąĖ (console REPL environment), ąĘą░ą┐čāčüą║ ąĘą░ą┤ą░čćąĖ console_repl: ...
ąĪčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓ čāąĘąĮą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ FreeRTOS ESP-IDF.
[ąĪą┐ąŠčüąŠą▒ 1: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ API-čäčāąĮą║čåąĖą╣ FreeRTOS ]
ą¤ąŠą╗čāč湥ąĮąĖąĄ ą▒ą░ąĘąŠą▓ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčā č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ:
#include "freertos/FreeRTOS.h" #include "freertos/task.h" void print_current_task_info () { TaskHandle_t current_task = xTaskGetCurrentTaskHandle(); char * task_name = pcTaskGetName(current_task); UBaseType_t priority = uxTaskPriorityGet(current_task); printf("Current Task: %s \n " , task_name); printf("Priority: %d \n " , priority); printf("Stack High Water Mark: %d \n " , uxTaskGetStackHighWaterMark(current_task));
}
ą¤ąŠą╗čāč湥ąĮąĖąĄ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ąĘą░ą┤ą░čćąĖ:
void print_detailed_task_info () { TaskHandle_t current_task = xTaskGetCurrentTaskHandle(); TaskStatus_t task_status; vTaskGetInfo(current_task, & task_status, pdTRUE, eInvalid); printf("ąśą╝čÅ ąĘą░ą┤ą░čćąĖ: %s \n " , task_status.pcTaskName); printf("ąØąŠą╝ąĄčĆ ąĘą░ą┤ą░čćąĖ: %d \n " , (int )task_status.xTaskNumber); printf("ąóąĄą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ: %d \n " , (int )task_status.eCurrentState); printf("ąóąĄą║čāčēąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé: %d \n " , (int )task_status.uxCurrentPriority); printf("ąæą░ąĘąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé: %d \n " , (int )task_status.uxBasePriority); printf("ąĪč湥čéčćąĖą║ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ: %lu \n " , task_status.ulRunTimeCounter); printf("ąĪą║ąŠą╗čīą║ąŠ ąŠčüčéą░ą╗ąŠčüčī ąĮąĄąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą▓ čüč鹥ą║ąĄ: %d \n " , uxTaskGetStackHighWaterMark(current_task));
}
[ąĪą┐ąŠčüąŠą▒ 2: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ ]
1 . ąĀą░ąĘčĆąĄčłąĖč鹥 čü ą┐ąŠą╝ąŠčēčīčÄ menuconfig čäąĖčćąĖ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ ąĘą░ą┤ą░čćąĖ (task monitoring features):
ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ čĆą░ąĘą┤ąĄą╗ Component config ŌåÆ FreeRTOS ąĖ čĆą░ąĘčĆąĄčłąĖč鹥 ąŠą┐čåąĖąĖ:
Enable FreeRTOS trace utility
ą¤čĆąĖą╝ąĄčĆ čäčāąĮą║čåąĖąĖ, ą┐ąĄčćą░čéą░čÄčēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą▓čüąĄčģ ąĘą░ą┤ą░čćą░čģ:
void print_all_tasks () { // ąÆčŗą┤ąĄą╗ąĖč鹥 ą┤ąŠčüčéą░č鹊čćąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░, čćč鹊ą▒čŗ ą▓ ąĮąĄą╝ // ą┐ąŠą╝ąĄčüčéąĖą╗ą░čüčī ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ą║ąŠč鹊čĆčāčÄ ą▓čŗą┤ą░čüčé vTaskList: char * buffer = malloc(1024 ); if (buffer != NULL ) { vTaskList(buffer); printf("Task Name \t State \t Priority \t Stack \t Task# \n " ); printf("------------------------------------------------ \n " ); printf("%s \n " , buffer); free(buffer); }
}
ą¤čĆąĖą╝ąĄčĆ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ą▓čŗą▓ąŠą┤ąĖčé čüčéą░čéąĖčüčéąĖą║čā ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ FreeRTOS čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░ vTaskGetRunTimeStats():
void print_runtime_stats () { char * buffer = malloc(1024 ); if (buffer != NULL ) { vTaskGetRunTimeStats(buffer); printf("Runtime-čüčéą░čéąĖčüčéąĖą║ą░: \n " ); printf("%s \n " , buffer); free(buffer); }
}
[ąĪą┐ąŠčüąŠą▒ 3: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤ ą║ąŠąĮčüąŠą╗ąĖ ESP ]
ąöąŠą▒ą░ą▓čīč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą║ąŠąĮčüąŠą╗ąĖ ą▓ čüą▓ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ:
#include "esp_console.h" #include "freertos/FreeRTOS.h" #include "freertos/task.h" static int task_list_cmd (int argc, char ** argv) { char * buffer = malloc(1024 ); if (buffer) { vTaskList(buffer); printf("Task Name \t State \t Priority \t Stack \t Task# \n " ); printf("------------------------------------------------ \n " ); printf("%s \n " , buffer); free(buffer); } return 0 ;
}static int task_stats_cmd (int argc, char ** argv) { char * buffer = malloc(1024 ); if (buffer) { vTaskGetRunTimeStats(buffer); printf("Runtime Statistics: \n " ); printf("%s \n " , buffer); free(buffer); } return 0 ;
}void register_task_commands () { const esp_console_cmd_t cmd_list = { .command = "tasklist" , .help = "List all FreeRTOS tasks" , .hint = NULL , .func = & task_list_cmd, }; const esp_console_cmd_t cmd_stats = { .command = "taskstats" , .help = "Show task runtime statistics" , .hint = NULL , .func = & task_stats_cmd, }; esp_console_cmd_register(& cmd_list); esp_console_cmd_register(& cmd_stats);
}
[ą¤ąŠą╗ąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ]
#include < stdio.h> #include "freertos/FreeRTOS.h" #include "freertos/task.h" void task_monitor (void * pvParameters) { while (1 ) { printf(" \n === Current Task Info === \n " ); // ąśąĮč乊čĆą╝ą░čåąĖčÅ č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ: TaskHandle_t current = xTaskGetCurrentTaskHandle(); printf("Current: %s (Priority: %d) \n " , pcTaskGetName(current), uxTaskPriorityGet(current)); // ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ čüą┐ąĖčüąŠą║ ą▓čüąĄčģ ąĘą░ą┤ą░čć: char * buffer = malloc(1024 ); if (buffer) { vTaskList(buffer); printf(" \n All Tasks: \n " ); printf("Name \t State \t Pri \t Stack \t # \n " ); printf("------------------------ \n " ); printf("%s \n " , buffer); free(buffer); } vTaskDelay(pdMS_TO_TICKS(5000 )); // ąśąĮč乊čĆą╝ą░čåąĖčÅ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ą║ą░ąČą┤čŗąĄ 5 čüąĄą║čāąĮą┤ }
}void app_main () { // ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░: xTaskCreate(task_monitor, "task_monitor" , 4096 , NULL , 1 , NULL ); // ąöą░ą╗ąĄąĄ ą║ąŠą┤ ą▓ą░čłąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ: ...
}
ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ:
1 . ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ: ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖą╣ vTaskList() ąĖ vTaskGetRunTimeStats() ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą▓čŗą┤ąĄą╗ąĖčéčī ą┤ąŠčüčéą░č鹊čćąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░. ą¤ąŠą┤ą▒ąĄčĆąĖč鹥 čŹč鹊čé čĆą░ąĘą╝ąĄčĆ čŹą║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠ, ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ malloc ą▓čŗą▒ąĖčĆą░ą╣č鹥 čéą░ą║ąŠąĄ, čćč鹊ą▒čŗ ąŠąĮąŠ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖą╗ąŠčüčī ąĮą░ 8.
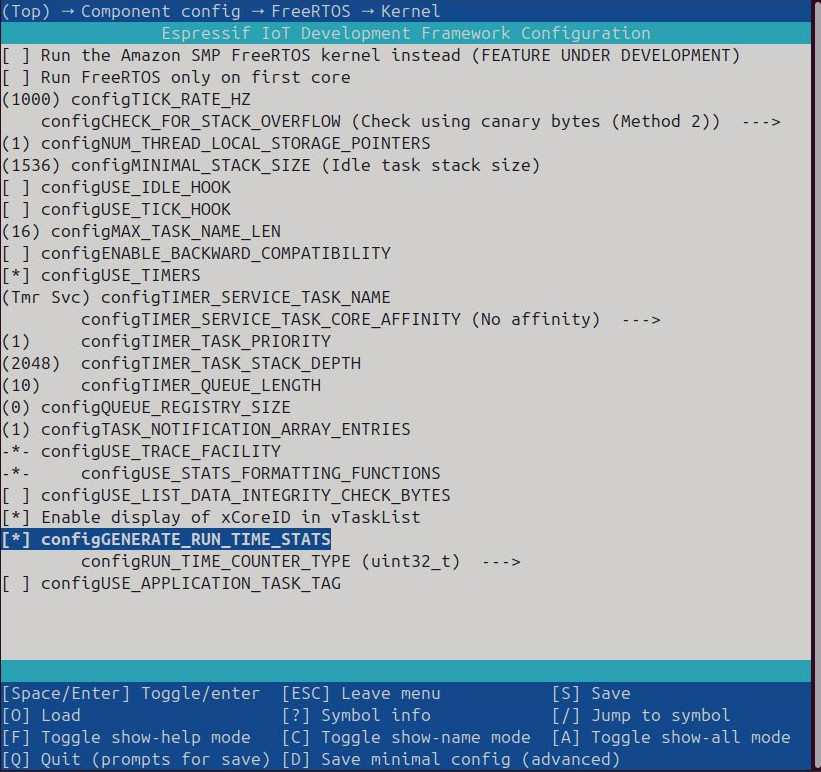
2 . ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ FreeRTOS: čćč鹊ą▒čŗ čĆą░ą▒ąŠčéą░ą╗ čüą▒ąŠčĆ runtime-čüčéą░čéąĖčüčéąĖą║ąĖ, ąĮčāąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī ąŠą┐čåąĖąĖ ą▓ čäą░ą╣ą╗ąĄ FreeRTOSConfig.h
#define configGENERATE_RUN_TIME_STATS 1 #define configUSE_STATS_FORMATTING_FUNCTIONS 1
3 . ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░: čü ą┐ąŠą╝ąŠčēčīčÄ uxTaskGetStackHighWaterMark() ą╝ąŠąČąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ čüč鹥ą║ą░ ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ąĮą░ą╗ąĖčćąĖąĄ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮčŗčģ ą┐čĆąŠą▒ą╗ąĄą╝. ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ uxTaskGetStackHighWaterMark() ą▓ąŠąĘą▓čĆą░čéąĖčé ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄąĮčīčłąĄ 100, č鹊 čŹč鹊 ą┐ąŠą▓ąŠą┤ ąĘą░ą┤čāą╝ą░čéčīčüčÅ ąŠą▒ čāą▓ąĄą╗ąĖč湥ąĮąĖąĖ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ.
4 . ąóąĄą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čć (Task States) ą▓ ą▓čŗą▓ąŠą┤ąĄ čäčāąĮą║čåąĖąĖ print_all_tasks ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ ą▒čāą║ą▓ą░ą╝ąĖ:
- `R`: Running
ESP-IDF FreeRTOS ą┐ą░čĆą░ą╝ąĄčéčĆ čĆą░ąĘą╝ąĄčĆą░ čüč鹥ą║ą░ usStackDepth čäčāąĮą║čåąĖąĖ xTaskCreate() čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą▒ą░ą╣čéą░čģ , ą░ ąĮąĄ ą▓ čüą╗ąŠą▓ą░čģ ąĖą╗ąĖ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą┤čĆčāą│ąĖčģ ąĄą┤ąĖąĮąĖčåą░čģ.
xTaskCreate ( TaskFunction_t pvTaskCode, const char * const pcName, const uint32_t usStackDepth, // ŌåÉ ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą┤ą░ąĄčéčüčÅ ą▓ ąæąÉąÖąóąÉąź void * pvParameters, UBaseType_t uxPriority, TaskHandle_t * pxCreatedTask
);
ąĪčĆą░ą▓ąĮąĖč鹥 čü ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĄą╣ FreeRTOS ą┐ąŠ čäčāąĮą║čåąĖąĖ xTaskCreate , ąŠąĮą░ čāą║ą░ąĘčŗą▓ą░ąĄčé čĆąŠą▓ąĮąŠ ąŠą▒čĆą░čéąĮąŠąĄ:
"ŌĆó uxStackDepth
The number of words (not bytes!) to allocate for use as the task's stack. For example, if the stack is 16-bits wide and uxStackDepth is 100, then 200 bytes will be allocated for use as the task's stack. As another example, if the stack is 32-bits wide and uxStackDepth is 400 then 1600 bytes will be allocated for use as the task's stack. The stack depth multiplied by the stack width must not exceed the maximum value that can be contained in a variable of type size_t. See the FAQ How big should the stack be?.
ą¤čĆą░ą║čéąĖč湥čüą║ąĖą╣ ą┐čĆąĖą╝ąĄčĆ:
// ąÆčüąĄ čŹčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą┤ą░čÄčéčüčÅ ą▓ ą▒ą░ą╣čéą░čģ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĮąŠ // ą┤ą╗čÅ čĆą░ąĘą╝ąĄčĆą░ čüč鹥ą║ą░ čāą║ą░ąĘčŗą▓ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ, ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗čÅčēąĖąĄčüčÅ ąĮą░ 4, ą┐ąŠčüą║ąŠą╗čīą║čā // 32-ą▒ąĖčéąĮą░čÅ ą┐ą╗ą░čéč乊čĆą╝ą░ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą▓ čüč鹥ą║ąĄ ą░ą┤čĆąĄčüąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čéąĖą┐ uint32_t. #define SMALL_TASK_STACK 2048 // 2KB #define MEDIUM_TASK_STACK 4096 // 4KB #define LARGE_TASK_STACK 8192 // 8KB #define VERY_LARGE_STACK 16384 // 16KB // ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čć, čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ čāą║ą░ąĘą░ąĮ ą▓ ą▒ą░ą╣čéą░čģ:
xTaskCreate(my_task, "task1" , SMALL_TASK_STACK, NULL , 1 , NULL );
xTaskCreate(another_task, "task2" , MEDIUM_TASK_STACK, NULL , 1 , NULL );
ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ:
1 . ąÉą▒čüąŠą╗čÄčéąĮčŗą╣ ą╝ąĖąĮąĖą╝čāą╝ ą┤ą╗čÅ ąŠč湥ąĮčī ą┐čĆąŠčüčéčŗčģ ąĘą░ą┤ą░čć:
#define MINIMUM_STACK 768 // 768 ą▒ą░ą╣čé
2 . ąĀąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ąĮąĮčŗą╣ ą╝ąĖąĮąĖą╝čāą╝ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ąĘą░ą┤ą░čć:
#define SAFE_MINIMUM 1024 // 1 ą║ąĖą╗ąŠą▒ą░ą╣čé
3 . ą¦ą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čĆą░ąĘą╝ąĄčĆ ą┤ą╗čÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ ą▓ ESP-IDF:
#define COMMON_STACK 4096 // 4 ą║ąĖą╗ąŠą▒ą░ą╣čéą░
4 . ąóąĖą┐ąŠą▓ąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čĆą░ąĘą╝ąĄčĆąŠą▓ čüč鹥ą║ą░ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ąĘą░ą┤ą░čć: 1 .. 16 ą║ąĖą╗ąŠą▒ą░ą╣čé.
5 . ąöą╗čÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ąŠčüčéą░ą▓ą╗čÅą╣č鹥 čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ ąĮąĄ ą╝ąĄąĮąĄąĄ 256 .. 512 ą▒ą░ą╣čé (ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī runtime ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ uxTaskGetStackHighWaterMark )
6 . ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ 32-ą▒ąĖčéąĮąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ESP čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą▒ą░ą╣čéą░čģ, ąĖ ąŠąĮąŠ ą┤ąŠą╗ąČąĮąŠ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ 4 (čĆą░ąĘą╝ąĄčĆ čéąĖą┐ą░ uint32_t).
ąóąĖą┐ąŠą▓čŗąĄ čĆą░ąĘą╝ąĄčĆčŗ čüč鹥ą║ą░ ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘą░ą┤ą░čć:
// ąŚą░ą┤ą░čćąĖ, čĆą░ą▒ąŠčéą░čÄčēąĖąĄ čü čüąĄčéčīčÄ, čéčĆąĄą▒čāčÄčé ą┐ąŠą▓čŗčłąĄąĮąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░ čüč鹥ą║ą░: #define WIFI_TASK_STACK 6144 // 6KB #define TCP_TASK_STACK 4096 // 4KB #define HTTP_SERVER_STACK 8192 // 8KB // ąŚą░ą┤ą░čćąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓: #define SPI_TASK_STACK 2048 // 2KB #define I2C_TASK_STACK 2048 // 2KB #define UART_TASK_STACK 2048 // 2KB // ąŚą░ą┤ą░čćąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ: #define UI_TASK_STACK 4096 // 4KB #define SENSOR_TASK_STACK 3072 // 3KB #define LOGGING_TASK_STACK 2048 // 2KB
ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ESP-IDF:
ŌĆó ąōą╗ą░ą▓ąĮą░čÅ ąĘą░ą┤ą░čćą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (app_main): ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 3584 ą▒ą░ą╣čé.
[ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ ]
ąÆ ESP-IDF ąĄčüčéčī ą▓čüčéčĆąŠąĄąĮąĮą░čÅ čäąĖčćą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč鹥ą║ą░ (Stack Overflow Detection). ąĀą░ąĘčĆąĄčłąĖč鹥 ąĄčæ ą▓ menuconfig:
Component config ŌåÆ FreeRTOS ŌåÆ Enable FreeRTOS stack overflow detection
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ąŠą┐čåąĖąĖ: None, Print warning, Trigger breakpoint.
[ą¤čĆąŠą▓ąĄčĆą║ą░ čĆąĄą░ą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüč鹥ą║ą░ ]
void my_task (void * pvParameters) { // ą¤čĆąŠą▓ąĄčĆą║ą░, čüą║ąŠą╗čīą║ąŠ čüč鹥ą║ą░ čüą▓ąŠą▒ąŠą┤ąĮąŠ (ą▓ ą▒ą░ą╣čéą░čģ) ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą┐čāčüą║ą░ ąĘą░ą┤ą░čćąĖ: UBaseType_t high_water_mark = uxTaskGetStackHighWaterMark(NULL ); printf("ąÆčŗą┤ąĄą╗ąĄąĮąŠ ą┤ą╗čÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ: %d ą▒ą░ą╣čé \n " , configSTACK_SIZE); // ąöą░ą╗ąĄąĄ ą▓ą░čł ą║ąŠą┤ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ, // ą┐čĆąĖą▓ąŠą┤čÅčēąĖąĄ ą║ čāčéąĖą╗ąĖąĘą░čåąĖąĖ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ: ... // ą¤čĆąŠą▓ąĄčĆą║ą░ č鹥ą║čāčēąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ: high_water_mark = uxTaskGetStackHighWaterMark(NULL ); printf("ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ čüč鹥ą║ą░ ąĘą░ ą▓čüąĄ ą▓čĆąĄą╝čÅ: %d bytes \n " , high_water_mark); printf("ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ čüč鹥ą║ą░: %d bytes \n " , configSTACK_SIZE - high_water_mark); if (high_water_mark < 256 ) { printf("WARNING: ą╝ą░ą╗ąŠ ą╝ąĄčüčéą░ ą▓ čüč鹥ą║ąĄ! ąĪą▓ąŠą▒ąŠą┤ąĮąŠ č鹊ą╗čīą║ąŠ %d ą▒ą░ą╣čé \n " , high_water_mark); }
}
ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ ą▓ ą▒ą░ą╣čéą░čģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐čĆąĖ ąĄčæ čüąŠąĘą┤ą░ąĮąĖąĖ č湥čĆąĄąĘ čéčĆąĄčéąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ uxStackDepth ą▓čŗąĘąŠą▓ą░ xTaskCreate . ąĢčüą╗ąĖ ą▓čŗ ąĮąĄ ąĘąĮą░ąĄč鹥, ą▓ ą║ą░ą║ąŠą╝ ą╝ąĄčüč鹥 ą║ąŠą┤ą░ čüąŠąĘą┤ą░ąĄčéčüčÅ ąĖąĮč鹥čĆąĄčüčāčÄčēą░čÅ ą▓ą░čü ąĘą░ą┤ą░čćą░, č鹊 čüąĮą░čćą░ą╗ą░ čāąĘąĮą░ą╣č鹥 ąĄčæ ąĖą╝čÅ čü ą┐ąŠą╝ąŠčēčīčÄ pcTaskGetName (čüą╝. ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ č鹥ą╗ąŠ čäčāąĮą║čåąĖąĖ print_current_task_info ą▓ Q038), ą░ ą┐ąŠč鹊ą╝ ąĖčēąĖč鹥 ą▓ ą║ąŠą┤ąĄ ą┐ąŠ čŹč鹊ą╝čā ąĖą╝ąĄąĮąĖ ą╝ąĄčüč鹊 čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░čćąĖ.
ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒, ąĮąŠ ąĮąĄ ąŠč湥ąĮčī č鹊čćąĮčŗą╣ (ą┐ąŠą║ą░ąČąĄčé čĆą░ąĘą╝ąĄčĆ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĄąĮčīčłąĖą╣, č湥ą╝ čĆąĄą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ): ą▓ č鹥ą╗ąĄ ąĘą░ą┤ą░čćąĖ čüčĆą░ąĘčā ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ uxTaskGetStackHighWaterMark , ąŠąĮą░ ą┐ąŠą║ą░ąČąĄčé čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą╝ąĄčüč鹊 ą▓ čüč鹥ą║ąĄ ąĘą░ą┤ą░čćąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┤ą░čćą░ ąĮą░čćąĮąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ.
ą¤čĆąĖ ą▓čŗą▓ąŠą┤ąĄ ąĮą░ ą┐ąĄčćą░čéčī č湥čĆąĄąĘ printf ą▓ ą┐čĆąŠąĄą║č鹥 ESP-IDF ąŠą┤ąĮąŠą▒ą░ą╣čéąĮčŗčģ čĆčāčüčüą║ąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą║ąĄ CP1251 (Windows-1251, ą║ąŠą┤čŗ čŹčéąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0x80 .. 0xFF) ą╝ąŠąĮąĖč鹊čĆ idf.py ą▓čŗą▓ąŠą┤ąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄ:
--- Warning: Failed to decode multiple lines in a row. Try
checking the baud rate and XTAL frequency setting in menuconfig
ą¤čĆąŠą▒ą╗ąĄą╝čā ą╝ąŠąČąĮąŠ čĆąĄčłąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ.
[ąĪą┐ąŠčüąŠą▒1: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā iconv (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ) ]
ąŁč鹊čé čüą┐ąŠčüąŠą▒ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣, ąĮąŠ ą┤ąŠą▓ąŠą╗čīąĮąŠ ąĘą░čéčĆą░čéąĮčŗą╣ ą┐ąŠ čĆąĄčüčāčĆčüą░ą╝ ąĖąĘ-ąĘą░ ą▒ąŠą│ą░č鹊ą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ iconv .
ąĀą░ąĘčĆąĄčłąĖč鹥 iconv ą▓ menuconfig:
ąÆ čĆą░ąĘą┤ąĄą╗ąĄ Component config ŌåÆ Newlib čĆą░ąĘčĆąĄčłąĖč鹥 ąŠą┐čåąĖčÄ "Enable ICONV library"
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░:
#include < stdio.h> #include < string.h> #include < iconv.h> #include < esp_log.h> static const char * TAG = "CP1251_TO_UTF8" ;void cp1251_to_utf8 (const char * cp1251_str, char * utf8_buffer, size_t buffer_size)
{ iconv_t cd = iconv_open("UTF-8" , "CP1251" ); if (cd == (iconv_t)-1 ) { ESP_LOGE(TAG, "ą×čłąĖą▒ą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ iconv" ); strncpy(utf8_buffer, cp1251_str, buffer_size); return ; } size_t in_bytes_left = strlen(cp1251_str); size_t out_bytes_left = buffer_size - 1 ; // čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐ąŠą┤ null-č鹥čĆą╝ąĖąĮą░č鹊čĆ char * in_ptr = (char * )cp1251_str; char * out_ptr = utf8_buffer; size_t result = iconv(cd, & in_ptr, & in_bytes_left, & out_ptr, & out_bytes_left); if (result == (size_t )-1 ) { ESP_LOGE(TAG, "ą×čłąĖą▒ą║ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ" ); } * out_ptr = '\0' ; // ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ Null-č鹥čĆą╝ąĖąĮą░č鹊čĆąŠą╝ ą▓čŗčģąŠą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ iconv_close(cd);
}void app_main ()
{ // ąĪčéčĆąŠą║ą░ č鹥ą║čüčéą░, ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą▓ CP1251 (čĆčāčüčüą║ąĖą╣ č鹥ą║čüčé "ą¤čĆąĖą▓ąĄčé, ą╝ąĖčĆ!") unsigned char cp1251_text[] = {0xCF , 0xF0 , 0xE8 , 0xE2 , 0xE5 , 0xF2 , 0x2C , 0x20 , 0xEC , 0xE8 , 0xF0 , 0x21 , 0x00 }; char utf8_buffer[256 ]; cp1251_to_utf8((char * )cp1251_text, utf8_buffer, sizeof (utf8_buffer)); printf("Original CP1251: %s \n " , cp1251_text); printf("Converted UTF-8: %s \n " , utf8_buffer); ESP_LOGI(TAG, "UTF-8: %s" , utf8_buffer);
}
[ąĪą┐ąŠčüąŠą▒2: čĆčāčćąĮą░čÅ ą┐ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ą░ ą┐ąŠ čéą░ą▒ą╗ąĖčåąĄ ]
ąĪą┐ąŠčüąŠą▒2 čéčĆąĄą▒čāąĄčé ą╝ąĄąĮčīčłąĄ čĆąĄčüčāčĆčüąŠą▓, č湥ą╝ ąĪą┐ąŠčüąŠą▒1.
#include < stdio.h> #include < string.h> #include < esp_log.h> static const char * TAG = "CP1251_TO_UTF8" ;// ąóą░ą▒ą╗ąĖčåą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ CP1251 ą▓ UTF-8 ą┤ą╗čÅ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą║ąĖčĆąĖą╗ą╗ąĖčåčŗ (ą║ąŠą┤čŗ 0x80-0xFF): static const char * cp1251_to_utf8_table[128 ] = { /* 0x80 */ " \u0402 " , /* 0x81 */ " \u0403 " , /* 0x82 */ " \u201A " , /* 0x83 */ " \u0453 " , /* 0x84 */ " \u201E " , /* 0x85 */ " \u2026 " , /* 0x86 */ " \u2020 " , /* 0x87 */ " \u2021 " , /* 0x88 */ " \u20AC " , /* 0x89 */ " \u2030 " , /* 0x8A */ " \u0409 " , /* 0x8B */ " \u2039 " , /* 0x8C */ " \u040A " , /* 0x8D */ " \u040C " , /* 0x8E */ " \u040B " , /* 0x8F */ " \u040F " , /* 0x90 */ " \u0452 " , /* 0x91 */ " \u2018 " , /* 0x92 */ " \u2019 " , /* 0x93 */ " \u201C " , /* 0x94 */ " \u201D " , /* 0x95 */ " \u2022 " , /* 0x96 */ " \u2013 " , /* 0x97 */ " \u2014 " , /* 0x98 */ " " , /* 0x99 */ " \u2122 " , /* 0x9A */ " \u0459 " , /* 0x9B */ " \u203A " , /* 0x9C */ " \u045A " , /* 0x9D */ " \u045C " , /* 0x9E */ " \u045B " , /* 0x9F */ " \u045F " , /* 0xA0 */ " \u00A0 " , /* 0xA1 */ " \u040E " , /* 0xA2 */ " \u045E " , /* 0xA3 */ " \u0408 " , /* 0xA4 */ " \u00A4 " , /* 0xA5 */ " \u0490 " , /* 0xA6 */ " \u00A6 " , /* 0xA7 */ " \u00A7 " , /* 0xA8 */ " \u0401 " , /* 0xA9 */ " \u00A9 " , /* 0xAA */ " \u0404 " , /* 0xAB */ " \u00AB " , /* 0xAC */ " \u00AC " , /* 0xAD */ " \u00AD " , /* 0xAE */ " \u00AE " , /* 0xAF */ " \u0407 " , /* 0xB0 */ " \u00B0 " , /* 0xB1 */ " \u00B1 " , /* 0xB2 */ " \u0406 " , /* 0xB3 */ " \u0456 " , /* 0xB4 */ " \u0491 " , /* 0xB5 */ " \u00B5 " , /* 0xB6 */ " \u00B6 " , /* 0xB7 */ " \u00B7 " , /* 0xB8 */ " \u0451 " , /* 0xB9 */ " \u2116 " , /* 0xBA */ " \u0454 " , /* 0xBB */ " \u00BB " , /* 0xBC */ " \u0458 " , /* 0xBD */ " \u0405 " , /* 0xBE */ " \u0455 " , /* 0xBF */ " \u0457 " , /* 0xC0 */ " \u0410 " , /* 0xC1 */ " \u0411 " , /* 0xC2 */ " \u0412 " , /* 0xC3 */ " \u0413 " , /* 0xC4 */ " \u0414 " , /* 0xC5 */ " \u0415 " , /* 0xC6 */ " \u0416 " , /* 0xC7 */ " \u0417 " , /* 0xC8 */ " \u0418 " , /* 0xC9 */ " \u0419 " , /* 0xCA */ " \u041A " , /* 0xCB */ " \u041B " , /* 0xCC */ " \u041C " , /* 0xCD */ " \u041D " , /* 0xCE */ " \u041E " , /* 0xCF */ " \u041F " , /* 0xD0 */ " \u0420 " , /* 0xD1 */ " \u0421 " , /* 0xD2 */ " \u0422 " , /* 0xD3 */ " \u0423 " , /* 0xD4 */ " \u0424 " , /* 0xD5 */ " \u0425 " , /* 0xD6 */ " \u0426 " , /* 0xD7 */ " \u0427 " , /* 0xD8 */ " \u0428 " , /* 0xD9 */ " \u0429 " , /* 0xDA */ " \u042A " , /* 0xDB */ " \u042B " , /* 0xDC */ " \u042C " , /* 0xDD */ " \u042D " , /* 0xDE */ " \u042E " , /* 0xDF */ " \u042F " , /* 0xE0 */ " \u0430 " , /* 0xE1 */ " \u0431 " , /* 0xE2 */ " \u0432 " , /* 0xE3 */ " \u0433 " , /* 0xE4 */ " \u0434 " , /* 0xE5 */ " \u0435 " , /* 0xE6 */ " \u0436 " , /* 0xE7 */ " \u0437 " , /* 0xE8 */ " \u0438 " , /* 0xE9 */ " \u0439 " , /* 0xEA */ " \u043A " , /* 0xEB */ " \u043B " , /* 0xEC */ " \u043C " , /* 0xED */ " \u043D " , /* 0xEE */ " \u043E " , /* 0xEF */ " \u043F " , /* 0xF0 */ " \u0440 " , /* 0xF1 */ " \u0441 " , /* 0xF2 */ " \u0442 " , /* 0xF3 */ " \u0443 " , /* 0xF4 */ " \u0444 " , /* 0xF5 */ " \u0445 " , /* 0xF6 */ " \u0446 " , /* 0xF7 */ " \u0447 " , /* 0xF8 */ " \u0448 " , /* 0xF9 */ " \u0449 " , /* 0xFA */ " \u044A " , /* 0xFB */ " \u044B " , /* 0xFC */ " \u044C " , /* 0xFD */ " \u044D " , /* 0xFE */ " \u044E " , /* 0xFF */ " \u044F "
};void cp1251_to_utf8_manual (const unsigned char * cp1251_str, char * utf8_buffer, size_t buffer_size)
{ size_t i = 0 , j = 0 ; while (cp1251_str[i] != '\0' && j < buffer_size - 1 ) { unsigned char c = cp1251_str[i++ ]; if (c < 0x80 ) { // ąĪąĖą╝ą▓ąŠą╗ ASCII - ą║ąŠą┐ąĖčĆčāąĄą╝ ą║ą░ą║ ąĄčüčéčī if (j < buffer_size - 1 ) { utf8_buffer[j++ ] = c; } } else { // ąĪąĖą╝ą▓ąŠą╗ CP1251 - ą┐ąĄčĆąĄą║ąŠą┤ąĖčĆčāąĄą╝ ą┐ąŠ čéą░ą▒ą╗ąĖčåąĄ const char * utf8_char = cp1251_to_utf8_table[c - 0x80 ]; size_t len = strlen(utf8_char); if (j + len < buffer_size - 1 ) { strcpy(& utf8_buffer[j], utf8_char); j += len; } } } utf8_buffer[j] = '\0' ;
}void app_main () { // ąĀčāčüčüą║ąĖą╣ č鹥ą║čüčé ą▓ ą║ąŠą┤ąĖčĆąŠą▓ą║ąĄ CP1251: unsigned char cp1251_text[] = {0xCF , 0xF0 , 0xE8 , 0xE2 , 0xE5 , 0xF2 , 0x2C , 0x20 , 0xEC , 0xE8 , 0xF0 , 0x21 , 0x00 }; char utf8_buffer[256 ]; cp1251_to_utf8_manual(cp1251_text, utf8_buffer, sizeof (utf8_buffer)); printf("CP1251: %s \n " , cp1251_text); printf("UTF-8: %s \n " , utf8_buffer); ESP_LOGI(TAG, "Converted: %s" , utf8_buffer);
}
[ąĪą┐ąŠčüąŠą▒3: čéą░ą▒ą╗ąĖčåą░ ą┐ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ąĖ čü HEX-ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ]
ąæąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮą░čÅ čĆčāčćąĮą░čÅ ą┐ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ą░:
#include < stdio.h> #include < string.h> typedef struct { unsigned char cp1251; const char * utf8;
} cp1251_utf8_map_t;// ąóą░ą▒ą╗ąĖčåą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ą║ąŠą┤ąŠą▓ čĆčāčüčüą║ąĖčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ cp1251 // čüąĖą╝ą▓ąŠą╗ą░ą╝ UTF8 (ą▓čŗ ą╝ąŠąČąĄč鹥 čĆą░čüčłąĖčĆąĖčéčī čŹčéčā čéą░ą▒ą╗ąĖčåčā): static const cp1251_utf8_map_t cp1251_utf8_map[] = { {0xC0 , "ąÉ" }, {0xC1 , "ąæ" }, {0xC2 , "ąÆ" }, {0xC3 , "ąō" }, {0xC4 , "ąö" }, {0xC5 , "ąĢ" }, {0xC6 , "ą¢" }, {0xC7 , "ąŚ" }, {0xC8 , "ąś" }, {0xC9 , "ąÖ" }, {0xCA , "ąÜ" }, {0xCB , "ąø" }, {0xCC , "ą£" }, {0xCD , "ąØ" }, {0xCE , "ą×" }, {0xCF , "ą¤" }, {0xD0 , "ąĀ" }, {0xD1 , "ąĪ" }, {0xD2 , "ąó" }, {0xD3 , "ąŻ" }, {0xD4 , "ąż" }, {0xD5 , "ąź" }, {0xD6 , "ą”" }, {0xD7 , "ą¦" }, {0xD8 , "ą©" }, {0xD9 , "ą®" }, {0xDA , "ą¬" }, {0xDB , "ą½" }, {0xDC , "ą¼" }, {0xDD , "ąŁ" }, {0xDE , "ą«" }, {0xDF , "ą»" }, {0xE0 , "ą░" }, {0xE1 , "ą▒" }, {0xE2 , "ą▓" }, {0xE3 , "ą│" }, {0xE4 , "ą┤" }, {0xE5 , "ąĄ" }, {0xE6 , "ąČ" }, {0xE7 , "ąĘ" }, {0xE8 , "ąĖ" }, {0xE9 , "ą╣" }, {0xEA , "ą║" }, {0xEB , "ą╗" }, {0xEC , "ą╝" }, {0xED , "ąĮ" }, {0xEE , "ąŠ" }, {0xEF , "ą┐" }, {0xF0 , "čĆ" }, {0xF1 , "čü" }, {0xF2 , "čé" }, {0xF3 , "čā" }, {0xF4 , "čä" }, {0xF5 , "čģ" }, {0xF6 , "čå" }, {0xF7 , "čć" }, {0xF8 , "čł" }, {0xF9 , "čē" }, {0xFA , "čŖ" }, {0xFB , "čŗ" }, {0xFC , "čī" }, {0xFD , "čŹ" }, {0xFE , "čÄ" }, {0xFF , "čÅ" }, {0x00 , NULL } // ą╝ą░čĆą║ąĄčĆ ą║ąŠąĮčåą░ čéą░ą▒ą╗ąĖčåčŗ
};const char * cp1251_char_to_utf8 (unsigned char c) { for (int i = 0 ; cp1251_utf8_map[i].utf8 != NULL ; i++ ) { if (cp1251_utf8_map[i].cp1251 == c) { return cp1251_utf8_map[i].utf8; } } return NULL ;
}void cp1251_to_utf8_simple (const unsigned char * cp1251_str, char * utf8_buffer, size_t buffer_size)
{ size_t i = 0 , j = 0 ; while (cp1251_str[i] != '\0' && j < buffer_size - 1 ) { unsigned char c = cp1251_str[i++ ]; if (c < 0x80 ) { // ASCII utf8_buffer[j++ ] = c; } else { // CP1251 const char * utf8_char = cp1251_char_to_utf8(c); if (utf8_char) { size_t len = strlen(utf8_char); if (j + len < buffer_size) { strcpy(& utf8_buffer[j], utf8_char); j += len; } } else { // ąØąĄąĖąĘą▓ąĄčüčéąĮčŗą╣ čüąĖą╝ą▓ąŠą╗ - čüą║ąŠą┐ąĖčĆčāą╣č鹥 ąĄą│ąŠ ą║ą░ą║ ąĄčüčéčī ąĖą╗ąĖ ąĘą░ą╝ąĄąĮąĖč鹥 utf8_buffer[j++ ] = '?' ; } } } utf8_buffer[j] = '\0' ;
}
ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ:
1 . ąöą╗čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ iconv čĆą░ąĘčĆąĄčłąĖč鹥 ICONV ą▓ menuconfig.2 . ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅą╣č鹥 ą▓čŗčģąŠą┤ąĮąŠą╣ ą▒čāč乥čĆ ą┤ą╗čÅ č鹥ą║čüčéą░ ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░ (čüąĖą╝ą▓ąŠą╗ UTF-8 ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī ą┤ą╗ąĖąĮčā ą┤ąŠ 4 ą▒ą░ą╣čé).3 . ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ąŠą║: ą┐čĆąŠą▓ąĄčĆčÅą╣č鹥 ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ čäčāąĮą║čåąĖą╣ iconv ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ ąŠčłąĖą▒ąŠą║ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ.4 . ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī: ą┤ą╗čÅ čćą░čüčéčŗčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ čüąŠčģčĆą░ąĮčÅą╣č鹥 ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠąĮč鹥ą║čüčé iconv ą▓ą╝ąĄčüč鹊 ą┐ąŠą▓č鹊čĆčÅčÄčēąĖčģčüčÅ ąŠčéą║čĆčŗčéąĖą╣/ąĘą░ą║čĆčŗčéąĖą╣.
ą£ąĄč鹊ą┤ ąĮą░ ąŠčüąĮąŠą▓ąĄ iconv čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖ ą┐čĆąŠą▓ąĄčĆąĄąĮąĮčŗą╣, ąŠąĮ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĄčé ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ čüą╗čāčćą░ąĖ. ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čĆčāčćąĮčŗčģ ą╝ąĄč鹊ą┤ąŠą▓ (ąĪą┐ąŠčüąŠą▒2 ąĖ ąĪą┐ąŠčüąŠą▒3) ą┐ąŠąĘą▓ąŠą╗čÅčé ą▓ą░ą╝ ąĖąĘą▒ąĄąČą░čéčī ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé iconv, ąĖą╗ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąŠą▒čĆą░ą▒ąŠčéą║čā čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čüą╗čāčćą░ąĄą▓.
ąĪą╝. čéą░ą║ąČąĄ "ą¤ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ą░ čĆčāčüčüą║ąŠą│ąŠ č鹥ą║čüčéą░ ąĖąĘ UTF-8 ą▓ CP1251".
ą×čłąĖą▒ą║ą░ ą┐ąŠčÅą▓ąĖą╗ą░čüčī ąĮą░ ą╝ą░čüčüąĖą▓ ą▓ąĖą┤ą░:
// ąóą░ą▒ą╗ąĖčåą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ CP1251 ą▓ UTF-8 ą┤ą╗čÅ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą║ąĖčĆąĖą╗ą╗ąĖčåčŗ (ą║ąŠą┤čŗ 0x80-0xFF): static const char * cp1251_to_utf8_table[128 ] = { /* 0x80 */ " \u0402 " , /* 0x81 */ " \u0403 " , /* 0x82 */ " \u201A " , /* 0x83 */ " \u0453 " , /* 0x84 */ " \u201E " , /* 0x85 */ " \u2026 " , /* 0x86 */ " \u2020 " , /* 0x87 */ " \u2021 " , /* 0x88 */ " \u20AC " , /* 0x89 */ " \u2030 " , /* 0x8A */ " \u0409 " , /* 0x8B */ " \u2039 " , /* 0x8C */ " \u040A " , /* 0x8D */ " \u040C " , /* 0x8E */ " \u040B " , /* 0x8F */ " \u040F " , /* 0x90 */ " \u0452 " , /* 0x91 */ " \u2018 " , /* 0x92 */ " \u2019 " , /* 0x93 */ " \u201C " , /* 0x94 */ " \u201D " , /* 0x95 */ " \u2022 " , /* 0x96 */ " \u2013 " , /* 0x97 */ " \u2014 " , /* 0x98 */ " \u0020 " , /* 0x99 */ " \u2122 " , /* 0x9A */ " \u0459 " , /* 0x9B */ " \u203A " , // ^ ąĘą┤ąĄčüčī ąŠčłąĖą▒ą║ą░ /* 0x9C */ " \u045A " , /* 0x9D */ " \u045C " , /* 0x9E */ " \u045B " , /* 0x9F */ " \u045F " , /* 0xA0 */ " \u00A0 " , /* 0xA1 */ " \u040E " , /* 0xA2 */ " \u045E " , /* 0xA3 */ " \u0408 " , ...
ąśčüą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠčüč鹊: ąĘą░ą╝ąĄąĮąĖč鹥 čüčéčĆąŠą║čā "\u0020" ąĮą░ čüčéčĆąŠą║čā " ".
ąØą░ ą┐čĆąĖą╝ąĄčĆąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ąĮąĄą▒ąĄąĘąŠą┐ą░čüąĮąŠą╝ ą┤ąŠčüčéčāą┐ąĄ ą║ ąĮąĄą▓čŗčĆąŠą▓ąĮąĄąĮąĮąŠą╝čā ą┐ąŠą╗čÄ čāą┐ą░ą║ąŠą▓ą░ąĮąĮąŠą╣ čüčéčĆčāą║čéčāčĆčŗ:
warning: taking address of packed member of 'struct < anonymous>' may result in an unaligned pointer value [-Waddress-of-packed-member]
ą¤ąŠą┤ą░ą▓ąĖčéčī čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╝ ąĮčāąČąĮąŠą╝ ą╝ąĄčüč鹥 ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ąĖčĆąĄą║čéąĖą▓čŗ #pragma GCC diagnostic . ą¤čĆąĖą╝ąĄčĆ:
// Packed čüčéčĆčāą║čéčāčĆą░ (ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ 1 ą▒ą░ą╣čé) struct __attribute__ ((packed)) network_packet { uint8_t header; uint32_t timestamp; uint16_t checksum;
};void process_packet_safe (void )
{ #pragma GCC diagnostic push #pragma GCC diagnostic ignored "-Waddress-of-packed-member" struct network_packet packet; // ąŚą┤ąĄčüčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąŠ uint32_t * ts_ptr = & packet.timestamp; * ts_ptr = 123456789 ; #pragma GCC diagnostic pop printf("Timestamp: %lu \n " , * ts_ptr);
}void process_packet_unsafe (void )
{ struct network_packet packet; // ąŚą┤ąĄčüčī ą▒čāą┤ąĄčé ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ uint32_t * ts_ptr = & packet.timestamp; * ts_ptr = 987654321 ; printf("Timestamp: %lu \n " , * ts_ptr);
}void app_main (void )
{ process_packet_safe(); // ą▒ąĄąĘ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ process_packet_unsafe(); // čü ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄą╝
}
ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ:
1 . ąæąĄąĘąŠą┐ą░čüąĮąŠčüčéčī: ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ čüčāčēąĄčüčéą▓čāąĄčé ąĮąĄ ą┐čĆąŠčüč鹊 čéą░ą║. ąöąŠčüčéčāą┐ ą║ ąĮąĄą▓čŗčĆąŠą▓ąĮąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ:
ŌĆó ą¤ą░ą┤ąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ (ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗčģ ą░čĆčģąĖč鹥ą║čéčāčĆą░čģ)
2 . ąÉčĆčģąĖč鹥ą║čéčāčĆą░: ąĮą░ ESP32-C3 (ą░čĆčģąĖč鹥ą║čéčāčĆą░ RISC-V) ąĮąĄą▓čŗčĆąŠą▓ąĮąĄąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī, ąĮąŠ čü ą┐ąŠąĮąĖąČąĄąĮąĖąĄą╝ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ.
3 . ąøčāčćčłą░čÅ ą┐čĆą░ą║čéąĖą║ą░: ąĄčüą╗ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 memcpy() ą┤ą╗čÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ąŠą╗čÅą╝ čāą┐ą░ą║ąŠą▓ą░ąĮąĮčŗčģ čüčéčĆčāą║čéčāčĆ:
void safe_access_example (void )
{ struct network_packet packet; // ąæąĄąĘąŠą┐ą░čüąĮąŠąĄ čćč鹥ąĮąĖąĄ uint32_t timestamp; memcpy(& timestamp, & packet.timestamp, sizeof (timestamp)); // ąæąĄąĘąŠą┐ą░čüąĮą░čÅ ąĘą░ą┐ąĖčüčī uint32_t new_ts = 123456 ; memcpy(& packet.timestamp, & new_ts, sizeof (new_ts));
}
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 #pragma GCC diagnostic ą┤ą╗čÅ č鹊č湥čćąĮąŠą│ąŠ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ č鹊ą╗čīą║ąŠ čéą░ą╝, ą│ą┤ąĄ ą▓čŗ čāą▓ąĄčĆąĄąĮčŗ ą▓ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ąŠą┐ąĄčĆą░čåąĖąĖ.
ąĪčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓.
1 . ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ čäčāąĮą║čåąĖčÅ esp_rom_delay_us (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ)
#include "esp_rom_sys.h" void delay_microseconds (uint32_t us) { esp_rom_delay_us(us);
}// ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ:
delay_microseconds(1000 ); // ąŚą░ą┤ąĄčƹȹ║ą░ 1000 ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ = 1 ą╝čü
2 . ążčāąĮą║čåąĖčÅ ets_delay_us
#include "esp32c3/rom/ets_sys.h" void delay_us (uint32_t microseconds) { ets_delay_us(microseconds);
}// ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ:
delay_us(500 ); // ąŚą░ą┤ąĄčƹȹ║ą░ 500 ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤
3 . ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ FreeRTOS vTaskDelay
ą¤ąŠčüą║ąŠą╗čīą║čā FreeRTOS ESP-IDF ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čéąĖą║ą░ ą╝ąĄąĮčīčłąĄ 1 ą╝čü, čŹč鹊čé ą╝ąĄč鹊ą┤ ą┐ąŠą┤ąŠą╣ą┤ąĄčé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┤ąĄčƹȹĄą║ čü ą║čĆą░čéąĮąŠčüčéčīčÄ ąĮąĄ ą╝ąĄąĮčīčłąĄ 1 ą╝čü, čé. ąĄ. ą┤ą╗čÅ ąĘą░ą┤ąĄčƹȹĄą║ čü ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ąĮąŠą╣ č鹊čćąĮąŠčüčéčīčÄ čŹč鹊čé ą▓ą░čĆąĖą░ąĮčé ąĮąĄ ą┐ąŠą┤ąŠą╣ą┤ąĄčé.
#include "freertos/FreeRTOS.h" #include "freertos/task.h" void delay_ms (uint32_t milliseconds) { vTaskDelay(milliseconds / portTICK_PERIOD_MS);
}
4 . ąóąŠčćąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čåąĖą║ą╗ąŠą▓
#include "esp_cpu.h" #include "soc/rtc.h" void precise_delay_us (uint32_t us)
{ // ąÆą╝ąĄčüč鹊 1000000 ą┐ąŠą┤ą▒ąĄčĆąĖč鹥 ą║ąŠąĮčüčéą░ąĮčéčā ą┐ąŠą┤ ąĖąĘą▓ąĄčüčéąĮčāčÄ čćą░čüč鹊čéčā CPU: uint32_t cycles_per_us = esp_cpu_get_cycle_count() / 1000000 ; uint32_t cycles = us * cycles_per_us; uint32_t start = esp_cpu_get_cycle_count(); while (esp_cpu_get_cycle_count() - start < cycles) { // busy wait }
}
5 . ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░
#include "esp_timer.h" void timer_delay_us (uint64_t us) { uint64_t start = esp_timer_get_time(); while (esp_timer_get_time() - start < us) { // busy wait }
}
6 . ą×ą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░
#include "esp_attr.h" void IRAM_ATTR busy_delay_us (uint32_t us) { uint32_t cycles = us * (CONFIG_ESP_DEFAULT_CPU_FREQ_MHZ); __asm__ __volatile__ ( "1: \n " " addi %0, %0, -1 \n " " bnez %0, 1b \n " : "+r" (cycles) );
}
[ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ]
#include < stdio.h> #include "esp_rom_sys.h" #include "freertos/FreeRTOS.h" #include "freertos/task.h" void app_main (void )
{ while (1 ) { printf("ąŚą░ą┤ąĄčƹȹ║ą░ 1 čüąĄą║čāąĮą┤ą░... \n " ); esp_rom_delay_us(1000000 ); // 1 čüąĄą║čāąĮą┤ą░ printf("ąŚą░ą┤ąĄčƹȹ║ą░ 500 ą╝ą║čü... \n " ); esp_rom_delay_us(500 ); // 500 ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ printf("ąŚą░ą┤ąĄčƹȹ║ą░ 100 ą╝čü č湥čĆąĄąĘ FreeRTOS... \n " ); vTaskDelay(100 / portTICK_PERIOD_MS); // 100 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ }
}
ąöą╗čÅ č鹊čćąĮčŗčģ ą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓:
#include "driver/gptimer.h" void precise_timer_delay_us (uint64_t us) { gptimer_handle_t gptimer = NULL ; gptimer_config_t timer_config = { .clk_src = GPTIMER_CLK_SRC_DEFAULT, .direction = GPTIMER_COUNT_UP, .resolution_hz = 1000000 , // 1 ą£ąōčå = 1 ą╝ą║čü čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ }; esp_err_t err = gptimer_new_timer(& timer_config, & gptimer); if (err == ESP_OK) { gptimer_start(gptimer); uint64_t count; gptimer_get_raw_count(gptimer, & count); while (gptimer_get_raw_count(gptimer, & count) == ESP_OK && count < us) {} gptimer_stop(gptimer); gptimer_del_timer(gptimer); }
}
[ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ]
ŌĆó ąöą╗čÅ ąŠą▒čŗčćąĮčŗčģ ąĘą░ą┤ąĄčƹȹĄą║ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 esp_rom_delay_us().
ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ets_delay_us() ą▓ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖčÅčģ ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ, čéą░ą║ ą║ą░ą║ ąŠąĮą░ ą╝ąŠąČąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░.
ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ąĮąĄ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ č鹊ą╝čā, čćč鹊 ąĮą░čćąĖąĮą░čÄčé ą▓čŗą▓ąŠą┤ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ą░ą║čĆąŠčüčŗ ESP_LOGD:
esp_log_level_set (TAG , ESP_LOG_DEBUG );
ąÆąĄčĆąŠčÅčéąĮą░čÅ ą┐čĆąĖčćąĖąĮą░ - ą▓ menuconfig čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī: Maximum log verbosity (Same as default) .
ą¦č鹊ą▒čŗ čĆąĄčłąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā, ąĘą░ą┐čāčüčéąĖč鹥 idf.py menuconfig , ąĘą░ą╣ą┤ąĖč鹥 ą▓ čĆą░ąĘą┤ąĄą╗ Component config ŌåÆ Log ŌåÆ Log Level, ąĖ ą┐ąŠą╝ąĄąĮčÅą╣č鹥 Maximum log verbosity ąĮą░ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮą░ Verbose .
ąĪą╝. čéą░ą║ąČąĄ:
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ESP-IDF ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą▓ ą╗ąŠą│ Q024 Q013
ąÆ ą╝ąŠąĮąĖč鹊čĆąĄ idf.py ąĮą░ Windows ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą▓čŗčüą║ą░ą║ąĖą▓ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ąĮąŠ ąĮą░ čĆą░ą▒ąŠčéčā ą╝ąŠąĮąĖč鹊čĆą░ čŹč鹊 ąĮąĄ ą▓ą╗ąĖčÅąĄčé:
--- Error: ClearCommError failed (PermissionError(13, 'The device does not recognize the command.', None, 22)) --- Waiting for the device to reconnect.
ą¤čĆąĖč湥ą╝ ąĮą░ Linux čéą░ą║ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĮąĄčé.
ąŁčéą░ ą┐čĆąŠą▒ą╗ąĄą╝ą░ čģą░čĆą░ą║č鹥čĆąĮą░ ą┤ą╗čÅ Windows ąĖ čüą▓čÅąĘą░ąĮą░ čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░. ąÆąŠčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆąĄčłąĄąĮąĖą╣:
1 . ą×ą▒ąĮąŠą▓ąĖč鹥 ą┤čĆą░ą╣ą▓ąĄčĆčŗ CP210x/CH340. ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čā ą▓ą░čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ:
CP210x: [ąöčĆą░ą╣ą▓ąĄčĆčŗ ąŠčé Silicon Labs](https://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers)
CH340: [ąöčĆą░ą╣ą▓ąĄčĆčŗ ąŠčé WCH](http://www.wch.cn/downloads/CH341SER_EXE.html)
2 . ąśąĘą╝ąĄąĮąĖč鹥 ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ą▓ Windows. ą¦ąĄčĆąĄąĘ ąöąĖčüą┐ąĄčéč湥čĆ čāčüčéčĆąŠą╣čüčéą▓:
1. ą×čéą║čĆąŠą╣č鹥 ąöąĖčüą┐ąĄčéč湥čĆ čāčüčéčĆąŠą╣čüčéą▓
2. ąØą░ą╣ą┤ąĖč鹥 čüą▓ąŠą╣ COM-ą┐ąŠčĆčé ą▓ "ą¤ąŠčĆčéčŗ (COM ąĖ LPT)"
3. ą¤čĆą░ą▓ąŠą╣ ą║ąĮąŠą┐ą║ąŠą╣ ŌåÆ ąĪą▓ąŠą╣čüčéą▓ą░ ŌåÆ ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠčĆčéą░
4. ąśąĘą╝ąĄąĮąĖč鹥 ąĮą░čüčéčĆąŠą╣ą║ąĖ:
- ąæąĖčé ą▓ čüąĄą║čāąĮą┤čā: 115200
ą¦ąĄčĆąĄąĘ čĆąĄąĄčüčéčĆ (ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒):
Windows Registry Editor Version 5.00
3 . ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░.
PuTTY:
putty.exe -serial COM1 -sercfg 115200,8,n,1,N
Tera Term: ąĮą░čüčéčĆąŠą╣č鹥 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą┐ąŠč鹊ą║ą░.
4 . ą¤čĆąŠą▓ąĄčĆčīč鹥 ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ ESP-IDF. ąÆ sdkconfig:
idf.py menuconfig
ąŻą▒ąĄą┤ąĖč鹥čüčī ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ:
- Component config ŌåÆ ESP System Settings ŌåÆ Channel for console output ŌåÆ USB Serial/JTAG Controller
ą¦ąĄčĆąĄąĘ idf.py ą┐čĆąĖą╝ąĄąĮąĖč鹥 čäą╗ą░ą│ąĖ:
idf.py -p COM1 monitor --force-color
5 . ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čĆąĄčłąĄąĮąĖčÅ
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 WSL:
# ąÆ WSL Linux idf.py -p /dev/ttyS3 monitor
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ąŠąĄ čĆąĄčłąĄąĮąĖąĄ:
1. ą×ą▒ąĮąŠą▓ąĖč鹥 ą┤čĆą░ą╣ą▓ąĄčĆčŗ (čüą░ą╝čŗą╣ ą▓ąĄčĆąŠčÅčéąĮčŗą╣ čäąĖą║čü).
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ąŠą▒čŗčćąĮąŠ čĆąĄčłą░ąĄčéčüčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ąĖ ąŠčéą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ąŠąĮčéčĆąŠą╗čÅ ą┐ąŠč鹊ą║ą░.
ą¤ąŠčüą╝ąŠčéčĆąĖč鹥 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ CONFIG_IDF_TARGET ą▓ čäą░ą╣ą╗ąĄ sdkconfig, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą┐ą░ą┐ą║ąĖ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░. ą×čéą║čĆąŠą╣č鹥 čäą░ą╣ą╗ `sdkconfig` ą▓ ą╗čÄą▒ąŠą╝ č鹥ą║čüč鹊ą▓ąŠą╝ čĆąĄą┤ą░ą║č鹊čĆąĄ ąĖ ąĮą░ą╣ą┤ąĖč鹥 čüčéčĆąŠą║čā:
CONFIG_IDF_TARGET="esp32"
ąŚąĮą░č湥ąĮąĖąĄ ą▓ ą║ą░ą▓čŗčćą║ą░čģ (ą▓ ą┤ą░ąĮąĮąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ `esp32`) ąĖ ąĄčüčéčī č鹥ą║čāčēąĖą╣ target.
ąĪą╝. čéą░ą║ąČąĄ Q065 .
restful_server/front/web-demo$ npm run build
ąÜą░ą║ ąĖčüą┐čĆą░ą▓ąĖčéčī:
restful_server/front/web-demo$ npm install --save-dev @vue/cli-service
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą║ąŠą╝ą░ąĮą┤ą░ npm run build ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ.
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čäą░ą╣ą╗ą░ sdkconfig build idf.py set-target :
$ rm -r build
$ idf.py set-target esp32s3
ą¤čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą║ąŠą╝ą░ąĮą┤čŗ `idf.py set-target` ESP-IDF č乊čĆą╝ąĖčĆčāąĄčé ąĮąŠą▓čŗą╣ čäą░ą╣ą╗ sdkconfig "čü ąĮčāą╗čÅ", ąĖčüą┐ąŠą╗čīąĘčāčÅ ą╝ąĮąŠą│ąŠčāčĆąŠą▓ąĮąĄą▓čāčÄ čüąĖčüč鹥ą╝čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąŁč鹊čé ą┐čĆąŠčåąĄčüčü ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓čüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąŠąĄą║čéą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą▓čŗą▒čĆą░ąĮąĮąŠą╝čā čćąĖą┐čā.
[ąśčüč鹊čćąĮąĖą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ]
ąĪąĖčüč鹥ą╝ą░ čüąŠą▒ąĖčĆą░ąĄčé ą║ąŠąĮąĄčćąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą┐čĆąĖą╝ąĄąĮčÅčÅ čäą░ą╣ą╗čŗ ą▓ ąŠą┐čĆąĄą┤ąĄą╗čæąĮąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ (ą║ą░ąČą┤čŗą╣ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╣ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ):
1. ąæą░ąĘąŠą▓čŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ESP-IDF: ąĖčüčģąŠą┤ąĮąŠą╣ č鹊čćą║ąŠą╣ čÅą▓ą╗čÅčÄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą▓ Kconfig ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ESP-IDF.
2. ążą░ą╣ą╗ sdkconfig.defaults : ą▓ą░čł ą┐čĆąŠąĄą║čéąĮčŗą╣ čäą░ą╣ą╗ čü ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ.
3. ą”ąĄą╗ąĄą▓ąŠą╣ čäą░ą╣ą╗ sdkconfig.defaults.< target> : čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ čåąĄą╗ąĄą▓ąŠą│ąŠ čćąĖą┐ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, sdkconfig.defaults.esp32s3 ). ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊čé čäą░ą╣ą╗ čāčćąĖčéčŗą▓ą░ąĄčéčüčÅ, č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą▓ ą┐čĆąŠąĄą║č鹥 čüčāčēąĄčüčéą▓čāąĄčé ąŠčüąĮąŠą▓ąĮąŠą╣ sdkconfig.defaults .
4. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäą░ą╣ą╗čŗ: ą╝ąŠąČąĮąŠ čÅą▓ąĮąŠ čāą║ą░ąĘą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čäą░ą╣ą╗ąŠą▓ č湥čĆąĄąĘ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ CMake `SDKCONFIG_DEFAULTS` (ąĮą░ą┐čĆąĖą╝ąĄčĆ, `idf.py -DSDKCONFIG_DEFAULTS="sdkconfig.defaults;sdkconfig.production" build`). ą×ąĮąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ čüą╗ąĄą▓ą░ ąĮą░ą┐čĆą░ą▓ąŠ.
ą¤ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čŹčéąĖčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čüąŠąĘą┤ą░čæčéčüčÅ ąĖč鹊ą│ąŠą▓čŗą╣ čäą░ą╣ą╗ sdkconfig .
[ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ]
ą¦č鹊ą▒čŗ čŹčäč乥ą║čéąĖą▓ąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą┐čĆąŠąĄą║čéą░, ąŠčüąŠą▒ąĄąĮąĮąŠ ą┐čĆąĖ čüą╝ąĄąĮąĄ čåąĄą╗ąĄą▓ąŠą│ąŠ čćąĖą┐ą░:
ŌŚÅ ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 sdkconfig.defaults : ą¤ąŠą╝ąĄčēą░ą╣č鹥 ą▓čüąĄ čüą▓ąŠąĖ ą┐ąŠčüč鹊čÅąĮąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, ąŠčéą╗ąĖčćą░čÄčēąĖąĄčüčÅ ąŠčé čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ, ą▓ čŹč鹊čé čäą░ą╣ą╗. ąŁč鹊 ą┤ąĄą╗ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐čĆąŠąĘčĆą░čćąĮąŠą╣ ąĖ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝ąŠą╣.
ŌŚÅ ąöą╗čÅ čĆą░ąĘąĮčŗčģ čćąĖą┐ąŠą▓ ŌĆö čåąĄą╗ąĄą▓čŗąĄ čäą░ą╣ą╗čŗ: ąĢčüą╗ąĖ ą┐čĆąŠąĄą║čé ą┤ąŠą╗ąČąĄąĮ čüąŠą▒ąĖčĆą░čéčīčüčÅ ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čćąĖą┐ąŠą▓, čüąŠąĘą┤ą░ą▓ą░ą╣č鹥 sdkconfig.defaults.< target> ą┤ą╗čÅ čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ąĮą░čüčéčĆąŠąĄą║ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ąĮąĖčģ.
ŌŚÅ ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╣č鹥 čåąĄą╗ąĄą▓ąŠą╣ čćąĖą┐ ą▓ sdkconfig.defaults : ą¦č鹊ą▒čŗ čćąĖą┐ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓čŗą▒ąĖčĆą░ą╗čüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą┤ąŠą▒ą░ą▓čīč鹥 ą▓ `sdkconfig.defaults` čüčéčĆąŠą║čā `CONFIG_IDF_TARGET="esp32s3"`. ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčé čüą▒čĆąŠčü čåąĄą╗ąĄą▓ąŠą│ąŠ čćąĖą┐ą░ ą┐čĆąĖ čĆąĄą│ąĄąĮąĄčĆą░čåąĖąĖ sdkconfig .
ŌŚÅ ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥, čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖą╗ąĖčüčī ąĮą░čüčéčĆąŠą╣ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą▓čŗ čüą┤ąĄą╗ą░ą╗ąĖ ą▓ menuconfig , ąĖ ąŠąĮąĖ ą▓čüąĄą│ą┤ą░ ą┐čĆąĖą╝ąĄąĮčÅą╗ąĖčüčī ą║ą░ą║ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, č鹊 čüą║ąŠą┐ąĖčĆčāą╣č鹥 čüą▓ąŠą╣ ąĮąŠą▓čŗą╣ čäą░ą╣ą╗ sdkconfig ą▓ čäą░ą╣ą╗ sdkconfig.defaults .
ąĪąŠą▒čŗčéąĖąĄ UART_FRAME_ERR ą▓ ESP-IDF ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą┐čĆąĖ ąŠčłąĖą▒ą║ąĄ ą║ą░ą┤čĆąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗą╣ ą┐ąŠ UART čüąĖą│ąĮą░ą╗ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠąČąĖą┤ą░ąĄą╝ąŠą╝čā č乊čĆą╝ą░čéčā ą┤ą░ąĮąĮčŗčģ. ą×čüąĮąŠą▓ąĮčŗąĄ ą┐čĆąĖčćąĖąĮčŗ ąĖ ą╝ąĄč鹊ą┤čŗ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĖ čŹč鹊ą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ:
ą¤čĆąĖčćąĖąĮą░ ą×ą┐ąĖčüą░ąĮąĖąĄ ą£ąĄč鹊ą┤ ą┐čĆąŠą▓ąĄčĆą║ąĖ/čĆąĄčłąĄąĮąĖčÅ
ąØąĄčüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ UART
ąØą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ (Baud Rate), ą▒ąĖč鹊ą▓ ą┤ą░ąĮąĮčŗčģ, čüč鹊ą┐-ą▒ąĖč鹊ą▓ ąĖą╗ąĖ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ ąĮą░ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąĄ ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé.
ą¤čĆąŠą▓ąĄčĆąĖčéčī ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī uart_config_t ąĮą░ ąŠą▒ąĄąĖčģ čüč鹊čĆąŠąĮą░čģ ą╗ąĖąĮąĖąĖ čüą▓čÅąĘąĖ.
ąØąĄčüčéą░ą▒ąĖą╗čīąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░
ąóą░ą║č鹊ą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ ąĖą╝ąĄąĄčé ąĮąĖąĘą║čāčÄ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī, čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ čĆą░čüčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ą¤čĆąŠą▓ąĄčĆąĖčéčī čåąĄą╗ąŠčüčéąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░ ąĖą╗ąĖ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ ą░ąĮą░ą╗ąĖąĘą░č鹊čĆą░.
ą¤ąŠą╝ąĄčģąĖ ą▓ ą╗ąĖąĮąĖąĖ čüą▓čÅąĘąĖ
ąŁą╗ąĄą║čéčĆąŠą╝ą░ą│ąĮąĖčéąĮčŗąĄ ą┐ąŠą╝ąĄčģąĖ ąĖčüą║ą░ąČą░čÄčé č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░, ąĖąĘ-ąĘą░ č湥ą│ąŠ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ą║ąŠčĆčĆąĄą║čéąĮąŠ čĆą░čüą┐ąŠąĘąĮą░čéčī ą▒ąĖčéčŗ.
ąŻą▒ąĄą┤ąĖčéčīčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄąĮąĮąŠą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĖčéčāčÄ ą┐ą░čĆčā, ą┐čĆąĖą╝ąĄąĮąĖčéčī 菹║čĆą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ.
ąØąĄą┤ąŠčüčéą░č鹊čćąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░
ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ čüąŠą▒čŗčéąĖąĄ ąŠčłąĖą▒ą║ąĖ UART_BUFFER_FULL .
ąŻą▓ąĄą╗ąĖčćčīč鹥 ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ rx_buffer_size ą▓ ą▓čŗąĘąŠą▓ąĄ uart_driver_install .
[ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĄ ]
- ą¤čĆąŠą▓ąĄčĆčīč鹥 čåąĄą╗ąŠčüčéąĮąŠčüčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ: ą┐ą╗ąŠčģąŠą╣ ą║ąŠąĮčéą░ą║čé, ąŠą▒čĆčŗą▓ ąĖą╗ąĖ ą║ąŠčĆąŠčéą║ąŠąĄ ąĘą░ą╝čŗą║ą░ąĮąĖąĄ ąĮą░ ą╗ąĖąĮąĖčÅčģ RX/TX čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖčćąĖąĮąŠą╣ ąĖčüą║ą░ąČąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ čŹč鹊ą╣ ąŠčłąĖą▒ą║ąĖ.
- ąŻą┐čĆąŠčüčéąĖč鹥 č鹥čüč鹊ą▓čŗąĄ čāčüą╗ąŠą▓ąĖčÅ: ą┤ą╗čÅ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ čüč鹊čĆąŠąĮąĮąĖčģ čäą░ą║č鹊čĆąŠą▓ ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 čüąĮąĖąĘąĖčéčī čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ (baud rate), ąŠčéą║ą╗čÄčćąĖčéčī ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control) ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čüąŠą║čĆą░čéąĖčéčī ą┤ą╗ąĖąĮčā čüąŠąĄą┤ąĖąĮąĖč鹥ą╗čīąĮčŗčģ ą┐čĆąŠą▓ąŠą┤ąŠą▓. ą¤čĆąŠą▓ąĄčĆčīč鹥 č乊čĆą╝čā čüąĖą│ąĮą░ą╗ąŠą▓ UART ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乊ą╝.
ąĪąŠą▒čŗčéąĖąĄ UART_BUFFER_FULL ą▓ ESP-IDF ą▓ąŠąĘąĮąĖą║ą░ąĄčé, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮčŗą╣ ą▒čāč乥čĆ UART ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ ąĖ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ. ąŁč鹊 čüą▓ąĖą┤ąĄč鹥ą╗čīčüčéą▓čāąĄčé ąŠ č鹊ą╝, čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄ čāčüą┐ąĄą▓ą░ąĄčé ą▓ąŠą▓čĆąĄą╝čÅ čćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą▒čāč乥čĆą░.
ą×čüąĮąŠą▓ąĮčŗąĄ ą┐čĆąĖčćąĖąĮčŗ čŹč鹊ą│ąŠ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ.
ą¤čĆąĖčćąĖąĮą░ ą×ą┐ąĖčüą░ąĮąĖąĄ ąĀąĄčłąĄąĮąĖčÅ
ąĪą╗ąĖčłą║ąŠą╝ ą▓čŗčüąŠą║ą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ
ąöą░ąĮąĮčŗąĄ ą┐ąŠčüčéčāą┐ą░čÄčé ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čāčüą┐ąĄą▓ą░ąĄčé ąĖčģ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī
ąŻą▓ąĄą╗ąĖčćąĖčéčī čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░, ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ą¦ą░čüč鹊 čĆąĄčłąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄąĮąŠčü ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ą╝ąĄąĮąĄąĄ ą┐čĆąĖąŠčĆąĖč鹥čéąĮčāčÄ ąĘą░ą┤ą░čćčā.
ąæą╗ąŠą║ąĖčĆčāčÄčēą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▓ callback
ąöąŠą╗ą│ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐čĆąŠą┐čāčüą║čā ą┤ą░ąĮąĮčŗčģ
ąÆčŗąĮąĄčüčéąĖ čéčÅąČąĄą╗čŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĖąĘ ISR ą▓ ąĘą░ą┤ą░čćąĖ
ą£ą░ą╗ąĄąĮčīą║ąĖą╣ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░
ąĪčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą▒čāč乥čĆą░ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ ą▓ą░čłąĄą│ąŠ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ
ąŻą▓ąĄą╗ąĖčćąĖčéčī rx_buffer_size ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
ą¤ąŠč鹥čĆčÅ ą┤ą░ąĮąĮčŗčģ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ
ą¤čĆąŠą▒ą╗ąĄą╝čŗ čü čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ UART ąĖą╗ąĖ DMA
ą¤čĆąŠą▓ąĄčĆąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ
ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ čĆąĄčłąĄąĮąĖčÅ:
1 . ąŻą▓ąĄą╗ąĖč湥ąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą▒čāč乥čĆą░.
uart_config = { .baud_rate = 115200 , .data_bits = UART_DATA_8_BITS, .parity = UART_PARITY_DISABLE, .stop_bits = UART_STOP_BITS_1, .flow_ctrl = UART_HW_FLOWCTRL_DISABLE
};const int uart_buffer_size = 2048 ; // ąŻą▓ąĄą╗ąĖčćąĖą▓ą░ąĄą╝ ą▒čāč乥čĆ
uart_driver_install(UART_NUM_1, uart_buffer_size, uart_buffer_size, 0 , NULL , 0 );
2 . ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ąĖ ąĘą░ą┤ą░čć.
// ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ void uart_event_task (void * pvParameters)
{ uart_event_t event; uint8_t data[128 ]; while (1 ) { if (xQueueReceive(uart_queue, & event, portMAX_DELAY)) { switch (event.type) { case UART_DATA : // ąæčŗčüčéčĆąŠąĄ čćč鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▒čāč乥čĆą░ int len = uart_read_bytes(UART_NUM_1, data, event.size, 0 ); // ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ, ą░ ąĮąĄ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ xQueueSend(processing_queue, data, portMAX_DELAY); break ; case UART_BUFFER_FULL : // ąÉą▓ą░čĆąĖą╣ąĮąŠąĄ čćč鹥ąĮąĖąĄ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ uart_flush_input(UART_NUM_1); xQueueReset(uart_queue); break ; } } }
}
3 . ąØą░čüčéčĆąŠą╣ą║ą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ ą┐ąŠč鹊ą║ą░.
uart_config = { .baud_rate = 115200 , .data_bits = UART_DATA_8_BITS, .parity = UART_PARITY_DISABLE, .stop_bits = UART_STOP_BITS_1, .flow_ctrl = UART_HW_FLOWCTRL_CTS_RTS // ąÆą║ą╗čÄčćą░ąĄą╝ ą║ąŠąĮčéčĆąŠą╗čī ą┐ąŠč鹊ą║ą░
};
4 . ą×ą┐čéąĖą╝ąĖąĘą░čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ DMA.
// ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ DMA ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖčģ ąŠą▒čŖąĄą╝ąŠą▓ ą┤ą░ąĮąĮčŗčģ
uart_driver_install(UART_NUM_1, 4096 , 0 , 0 , NULL , 0 );
uart_set_rx_full_threshold(UART_NUM_1, 1024 ); // ą¤ąŠčĆąŠą│ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ
ąöąĖą░ą│ąĮąŠčüčéąĖą║ą░:
1. ą¤čĆąŠą▓ąĄčĆčīč鹥 čüą║ąŠčĆąŠčüčéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ - ą┤ąŠą▒ą░ą▓čīč鹥 ąĘą░ą╝ąĄčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ.uart_get_buffered_data_len() .
ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅ: ą┤ą╗čÅ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (ą║ą░ą║ CRSF) ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┤ąŠčüčéą░č鹊čćąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ąĖ ą▒čŗčüčéčĆčāčÄ ą░čüąĖąĮčģčĆąŠąĮąĮčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┤ą░ąĮąĮčŗčģ.
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▓ ESP-IDF ąĮąĄčé ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╣ ąŠą▒ą╗ą░čüčéąĖ ą║čāčćąĖ ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ. ąÆčüąĄ ąĘą░ą┤ą░čćąĖ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą▒čēčāčÄ, ąĄą┤ąĖąĮčāčÄ ą║čāčćčā (heap) ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ.
ąĀą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ąĘą░ą┤ą░čć: čćč鹊 ą│ą┤ąĄ ą╗ąĄąČąĖčé . ą¦č鹊ą▒čŗ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ, ą║ą░ą║ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāčÄčé ąĘą░ą┤ą░čćąĖ ąĖ ą┐ą░ą╝čÅčéčī, ą┐ąŠčüą╝ąŠčéčĆąĖč鹥 ąĮą░ čŹčéčā čéą░ą▒ą╗ąĖčåčā:
ąÜąŠą╝ą┐ąŠąĮąĄąĮčé ą┐ą░ą╝čÅčéąĖ ąĘą░ą┤ą░čćąĖ ąĀą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą▓ ą┐ą░ą╝čÅčéąĖ ąÜč鹊 čāą┐čĆą░ą▓ą╗čÅąĄčé? ą£ąŠąČąĮąŠ ą╗ąĖ ą╝ąĄąĮčÅčéčī?
ąĪč鹥ą║ ąĘą░ą┤ą░čćąĖ (Task Stack)
ąÆčŗą┤ąĄą╗čÅąĄčéčüčÅ ąĖąĘ ąŠą▒čēąĄą╣ ą║čāčćąĖ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ąĘą░ą┤ą░čćąĖ.
FreeRTOS (ąĮą░ą┐čĆąĖą╝ąĄčĆ, xTaskCreate()).
ąöą░, č湥čĆąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆ ulStackDepth ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ.
TCB (Task Control Block)
ąĀą░ąĘą╝ąĄčĆ čäąĖą║čüąĖčĆąŠą▓ą░ąĮ.
ąöąĖąĮą░ą╝ąĖč湥čüą║ą░čÅ ą┐ą░ą╝čÅčéčī ąĖąĘ malloc()/new
ąÆčŗą┤ąĄą╗čÅąĄčéčüčÅ ąĖąĘ ąŠą▒čēąĄą╣ ą║čāčćąĖ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčüčé.
ąŚą░ą▓ąĖčüąĖčé ąŠčé ą╗ąŠą│ąĖą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ąÜąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ ą▓čŗąĘčŗą▓ą░ąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, malloc(), calloc(), new ą▓ C++), čŹčéąĖ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░čēą░čÄčéčüčÅ ą║ ąĄą┤ąĖąĮąŠą╝čā ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝čā ą░ą╗ą╗ąŠą║ą░č鹊čĆčā ESP-IDF. ąŁč鹊čé ą░ą╗ą╗ąŠą║ą░č鹊čĆ čāą┐čĆą░ą▓ą╗čÅąĄčé ąŠą▒čēąĄą╣ ą║čāč湥ą╣ ąĖ ą▓čŗą┤ąĄą╗čÅąĄčé ą┐ą░ą╝čÅčéčī ąŠčéčéčāą┤ą░, ąĮąĄ čĆą░ąĘą╗ąĖčćą░čÅ, ą║ą░ą║ą░čÅ ąĘą░ą┤ą░čćą░ ą┤ąĄą╗ą░ąĄčé ąĘą░ą┐čĆąŠčü. ąÆčüčÅ ą┐ą░ą╝čÅčéčī ą┐ąĄčĆąĄą╝ąĄčłą░ąĮą░.
ą¤ąŠč湥ą╝čā čŹč鹊 ą▓ą░ąČąĮąŠ: ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖčÅ ąŠą▒čēąĄą╣ ą║čāčćąĖ . ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą▒čēąĄą╣ ą║čāčćąĖ ąĖą╝ąĄąĄčé ą║ą╗čÄč湥ą▓čŗąĄ ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖčÅ, ąŠ ą║ąŠč鹊čĆčŗčģ ąĮčāąČąĮąŠ ą┐ąŠą╝ąĮąĖčéčī:
1 . ążčĆą░ą│ą╝ąĄąĮčéą░čåąĖčÅ ą┐ą░ą╝čÅčéąĖ: čćą░čüč鹊ąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ čĆą░ąĘąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░ ąĖąĘ ąŠą▒čēąĄą╣ ą║čāčćąĖ čĆą░ąĘąĮčŗą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĄąĄ čäčĆą░ą│ą╝ąĄąĮčéą░čåąĖąĖ. ąŁč鹊 ą║ąŠą│ą┤ą░ čüą▓ąŠą▒ąŠą┤ąĮą░čÅ ą┐ą░ą╝čÅčéčī čĆą░ąĘą▒ąĖčéą░ ąĮą░ ą╝ąĄą╗ą║ąĖąĄ ąĮąĄčüą╝ąĄąČąĮčŗąĄ ą▒ą╗ąŠą║ąĖ, ąĖ ąĘą░ą┐čĆąŠčü ąĮą░ ą▒ąŠą╗čīčłąŠą╣ ą▒ą╗ąŠą║ ą╝ąŠąČąĄčé ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčéčīčüčÅ, čģąŠčéčÅ ąŠą▒čēąĖą╣ ąŠą▒čŖąĄą╝ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ą┤ąŠčüčéą░č鹊č湥ąĮ.2 . ąÆąĘą░ąĖą╝ąĮąŠąĄ ą▓ą╗ąĖčÅąĮąĖąĄ: ąŠą┤ąĮą░ ąĘą░ą┤ą░čćą░, ą▓čŗąĘą▓ą░ą▓čłą░čÅ čāč鹥čćą║čā ą┐ą░ą╝čÅčéąĖ (ąĮąĄ ąŠčüą▓ąŠą▒ąŠą┤ąĖą▓čłą░čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠąĄ), ąĖą╗ąĖ ą┐čĆąĄą▓čŗčüąĖą▓čłą░čÅ ą╗ąĖą╝ąĖčé čüč鹥ą║ą░, ą╝ąŠąČąĄčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ čĆą░ą▒ąŠčéčā ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ, ąĖčüč湥čĆą┐ą░ą▓ ąŠą▒čēąĖą╣ čĆąĄčüčāčĆčü.3 . ą×čéą╗ą░ą┤ą║ą░: ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ą░čÅ ąĖą╝ąĄąĮąĮąŠ ąĘą░ą┤ą░čćą░ ą▓čŗąĘą▓ą░ą╗ą░ čāč鹥čćą║čā ąĖą╗ąĖ ą┐ąĄčĆąĄčĆą░čüčģąŠą┤ ą┐ą░ą╝čÅčéąĖ, čüą╗ąŠąČąĮąĄąĄ, čéą░ą║ ą║ą░ą║ ą▓čüąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┤ąĖąĮ ą┐čāą╗.
ąÜą░ą║ čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ą░ą╝čÅčéčīčÄ ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī ąĄąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ . ąÆąŠčé čćč鹊 ą╝ąŠąČąĮąŠ ą┤ąĄą╗ą░čéčī ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗čÅ ąĘą░ ą┐ą░ą╝čÅčéčīčÄ:
ŌŚÅ ą×čéčüą╗ąĄąČąĖą▓ą░ą╣č鹥 ąŠą▒čēčāčÄ ą║čāčćčā: ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čäčāąĮą║čåąĖąĖ ą▓čĆąŠą┤ąĄ heap_caps_get_free_size(MALLOC_CAP_8BIT) ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą▓ ą║čāč湥 DRAM.uxTaskGetStackHighWaterMark() ą┐ąŠą╝ąŠą│ą░ąĄčé ąĮą░ą╣čéąĖ ą┐ąĖą║ąŠą▓ąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ ąĘą░ą┤ą░č湥ą╣ ąĖ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ąĄą╣ čĆą░ąĘą╝ąĄčĆ.xTaskCreateStatic() . ąŁč鹊 ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą▓čŗą┤ąĄą╗čÅąĄčé ą┐ą░ą╝čÅčéčī (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą╝ą░čüčüąĖą▓čŗ), ąĖčüą║ą╗čÄčćą░čÅ ąĄąĄ ąĖąĘ ą║čāčćąĖ ąĖ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░čÅ čäčĆą░ą│ą╝ąĄąĮčéą░čåąĖčÄ.FreeRTOSConfig.h configCHECK_FOR_STACK_OVERFLOW ą┤ą╗čÅ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč鹥ą║ą░ ąĖ configUSE_TRACE_FACILITY ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąĄčéą░ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ąĘą░ą┤ą░čćą░čģ.
ą¤čĆąĖą╝ąĄčĆ, ą║ą░ą║ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čüč鹥ą║ ąĖ ą║čāčćą░:
void example_task (void * pvParameters)
{ // ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ 'local_var' čĆą░ąĘą╝ąĄčēą░ąĄčéčüčÅ ąĮą░ ąĪąóąĢąÜąĢ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ. int local_var = 0 ; // ą¤ą░ą╝čÅčéčī ą┤ą╗čÅ 'dynamic_buffer' ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ąĖąĘ ą×ąæą®ąĢąÖ ąÜąŻą¦ąś. char * dynamic_buffer = (char * ) malloc(1024 ); if (dynamic_buffer != NULL ) { // ąśčüą┐ąŠą╗čīąĘčāąĄą╝ ą┐ą░ą╝čÅčéčī... sprintf(dynamic_buffer, "Data from task" ); // ąÜąĀąśąóąśą¦ąĢąĪąÜąś ąÆąÉą¢ąØą×: ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄą╝ ą┐ą░ą╝čÅčéčī ąŠą▒čĆą░čéąĮąŠ ą▓ ąŠą▒čēčāčÄ ą║čāčćčā. free(dynamic_buffer); } vTaskDelete(NULL );
}
[ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą║čāč湥 ]
ąöą╗čÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čüąŠčüč鹊čÅąĮąĖčÅ ą║čāčćąĖ (čüą║ąŠą╗čīą║ąŠ ą▓čüąĄą│ąŠ ą┐ą░ą╝čÅčéąĖ ą▓ ą║čāč湥, čüą║ąŠą╗čīą║ąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠ, čüą║ąŠą╗čīą║ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąŠčüčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ) ą▓ ESP-IDF ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖą╣ ąĖąĘ API Heap Memory Debugging. ąÆąŠčé ąŠčüąĮąŠą▓ąĮčŗąĄ ąĖąĘ ąĮąĖčģ, čüą│čĆčāą┐ą┐ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┐ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÄ:
ążčāąĮą║čåąĖčÅ ąÜčĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąóąĖą┐ąĖčćąĮčŗą╣ čüčåąĄąĮą░čĆąĖą╣ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ
heap_caps_get_free_size()
ąóąĄą║čāčēąĖą╣ čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ ąŠą▒čŖąĄą╝ ą┐ą░ą╝čÅčéąĖ ą▓ ą▒ą░ą╣čéą░čģ.
size_t - ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą▓ąŠą▒ąŠą┤ąĮčŗčģ ą▒ą░ą╣čé.
ą¤čĆąŠą▓ąĄčĆą║ą░ ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ą┐ąĄčĆąĄą┤ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄą╝, ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ ąŠą▒čēąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ.
heap_caps_get_largest_free_block()
ąĀą░ąĘą╝ąĄčĆ čüą░ą╝ąŠą│ąŠ ą▒ąŠą╗čīčłąŠą│ąŠ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░.
size_t - čĆą░ąĘą╝ąĄčĆ ą▒ą╗ąŠą║ą░ ą▓ ą▒ą░ą╣čéą░čģ.
ą×čåąĄąĮą║ą░ čäčĆą░ą│ą╝ąĄąĮčéą░čåąĖąĖ ą║čāčćąĖ, ą┐čĆąŠą▓ąĄčĆą║ą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą▒ąŠą╗čīčłąŠą│ąŠ ą▒ą╗ąŠą║ą░.
heap_caps_get_minimum_free_size()
ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąŠą▒čŖąĄą╝ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąĘą░ ą▓čüąĄ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ.
size_t - ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą▒ą░ą╣čéą░čģ.
ą¤ąŠąĮąĖą╝ą░ąĮąĖąĄ ą┐ąĖą║ąŠą▓ąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ (ąĮą░čüą║ąŠą╗čīą║ąŠ ą▒ą╗ąĖąĘą║ąŠ ą┐ąŠą┤čģąŠą┤ąĖą╗ąĖ ą║ ąĖčüč湥čĆą┐ą░ąĮąĖčÄ).
heap_caps_get_total_size()
ą×ą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ čĆąĄą│ąĖąŠąĮą░(ąŠą▓) ą║čāčćąĖ čü ąĘą░ą┤ą░ąĮąĮčŗą╝ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ.
size_t - ąŠą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ ą▓ ą▒ą░ą╣čéą░čģ.
ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĖčüčģąŠą┤ąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░ ą┐čāą╗ą░ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čĆą░čüč湥č鹊ą▓.
heap_caps_print_heap_info()
ą¤ąĄčćą░čéą░ąĄčé ą┤ąĄčéą░ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║čāč湥 ą▓ stdout (ąŠą▒čŗčćąĮąŠ ą╝ąŠąĮąĖč鹊čĆ UART).
void (ą┐čĆąŠčüč鹊 ą▓čŗą▓ąŠą┤).
ą¤ąŠą┤čĆąŠą▒ąĮčŗą╣ ą░ąĮą░ą╗ąĖąĘ ą┐čĆąĖ ąŠčéą╗ą░ą┤ą║ąĄ: čüą▓ąŠą▒ąŠą┤ąĮąŠ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ, čäčĆą░ą│ą╝ąĄąĮčéą░čåąĖčÅ ą┐ąŠ čĆąĄą│ąĖąŠąĮą░ą╝.
ąÆą░ąČąĮčŗąĄ ą┐ąŠąĮčÅčéąĖčÅ: "Capabilities" (ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ) ą┐ą░ą╝čÅčéąĖ . ą¤ą░ą╝čÅčéčī ą▓ ESP32 čĆą░ąĘą┤ąĄą╗ąĄąĮą░ ąĮą░ čĆąĄą│ąĖąŠąĮčŗ čü čĆą░ąĘąĮčŗą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ. ąÜą╗čÄč湥ą▓ąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖą╣ ŌĆö caps (ą▒ąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░), ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé, ąĖąĘ ą║ą░ą║ąĖčģ čĆąĄą│ąĖąŠąĮąŠą▓ ąĘą░ą┐čĆą░čłąĖą▓ą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ.
MALLOC_CAP_8BIT : čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ RAM (DRAM) ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą▓čŗą┤ąĄą╗ąĄąĮąĖą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĖąĘ malloc()).MALLOC_CAP_32BIT : ą┐ą░ą╝čÅčéčī, ą▓čŗčĆąŠą▓ąĮąĄąĮąĮą░čÅ ą┤ą╗čÅ 32-ą▒ąĖčéąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░.MALLOC_CAP_SPIRAM : ą▓ąĮąĄčłąĮčÅčÅ PSRAM (ąĄčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ąĖ ą▓ą║ą╗čÄč湥ąĮą░).MALLOC_CAP_INTERNAL : ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą┐ą░ą╝čÅčéčī.MALLOC_CAP_DEFAULT : ą┐ą░ą╝čÅčéčī čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ MALLOC_CAP_8BIT).
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ]
1 . ąæą░ąĘąŠą▓čŗą╣ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą║čāčćąĖ (DRAM)
#include "esp_heap_caps.h" void print_heap_info () { // 1. ąóąĄą║čāčēą░čÅ čüą▓ąŠą▒ąŠą┤ąĮą░čÅ ą┐ą░ą╝čÅčéčī ą▓ DRAM size_t free_now = heap_caps_get_free_size(MALLOC_CAP_8BIT); printf("ąĪą▓ąŠą▒ąŠą┤ąĮąŠ čüąĄą╣čćą░čü: %u ą▒ą░ą╣čé (%.2f ąÜąæ) \n " , free_now, free_now / 1024.0 ); // 2. ą×ą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ ą║čāčćąĖ DRAM size_t total_size = heap_caps_get_total_size(MALLOC_CAP_8BIT); printf("ąÆčüąĄą│ąŠ ą▓ ą║čāč湥: %u ą▒ą░ą╣čé (%.2f ąÜąæ) \n " , total_size, total_size / 1024.0 ); // 3. ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĘą░ą┐ą░čü čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ąĘą░ ą▓čüčæ ą▓čĆąĄą╝čÅ (ą┐ąĖą║ąŠą▓ąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ) size_t min_free_ever = heap_caps_get_minimum_free_size(MALLOC_CAP_8BIT); printf("ą£ąĖąĮąĖą╝čāą╝ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ (ą┐ąĖą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ): %u ą▒ą░ą╣čé \n " , min_free_ever); // 4. ąĀą░ąĘą╝ąĄčĆ čüą░ą╝ąŠą│ąŠ ą▒ąŠą╗čīčłąŠą│ąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ (ąŠčåąĄąĮą║ą░ čäčĆą░ą│ą╝ąĄąĮčéą░čåąĖąĖ) size_t largest_block = heap_caps_get_largest_free_block(MALLOC_CAP_8BIT); printf("ąĪą░ą╝čŗą╣ ą▒ąŠą╗čīčłąŠą╣ čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ ą▒ą╗ąŠą║: %u ą▒ą░ą╣čé \n " , largest_block); // 5. ąĀą░čüč湥čé č鹥ą║čāčēąĄą╣ ąĘą░ąĮčÅč鹊ą╣ ą┐ą░ą╝čÅčéąĖ size_t used_now = total_size - free_now; printf("ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĄą╣čćą░čü: %u ą▒ą░ą╣čé \n " , used_now);
}
2 . ą£ąŠąĮąĖč鹊čĆąĖąĮą│ ą▓ąĮąĄčłąĮąĄą╣ PSRAM (ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ)
void check_spiram () { if (heap_caps_get_total_size(MALLOC_CAP_SPIRAM) > 0 ) { printf("PSRAM - ąĪą▓ąŠą▒ąŠą┤ąĮąŠ: %u ą▒ą░ą╣čé, ąĪą░ą╝čŗą╣ ą▒ąŠą╗čīčłąŠą╣ ą▒ą╗ąŠą║: %u ą▒ą░ą╣čé \n " , heap_caps_get_free_size(MALLOC_CAP_SPIRAM), heap_caps_get_largest_free_block(MALLOC_CAP_SPIRAM)); } else { printf("PSRAM ąĮąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮą░ ąĖą╗ąĖ ąĮąĄ ą▓ą║ą╗čÄč湥ąĮą░. \n " ); }
}
3 . ąöąĄčéą░ą╗čīąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą▓čüąĄčģ čĆąĄą│ąĖąŠąĮąŠą▓ ą║čāčćąĖ (ąŠčéą╗ą░ą┤ą║ą░)
// ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗą▓ąĄą┤ąĄčé čéą░ą▒ą╗ąĖčåčā čü čĆą░ąĘą▒ąĖą▓ą║ąŠą╣ ą┐ąŠ ą▓čüąĄą╝ čéąĖą┐ą░ą╝ ą┐ą░ą╝čÅčéąĖ:
heap_caps_print_heap_info(MALLOC_CAP_DEFAULT);// ąśą╗ąĖ ą┤ą╗čÅ ą▒ąŠą╗ąĄąĄ ą┤ąĄčéą░ą╗čīąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą▓čüąĄčģ čĆąĄą│ąĖąŠąĮąŠą▓:
heap_caps_print_heap_info(MALLOC_CAP_8BIT | MALLOC_CAP_32BIT | MALLOC_CAP_SPIRAM);
4 . ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖą╣ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ ą▓ ąĘą░ą┤ą░č湥
void monitoring_task (void * pvParameter) { while (1 ) { print_heap_info(); // ąÆčŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ąĖąĘ ą┐čĆąĖą╝ąĄčĆą░ 1 vTaskDelay(pdMS_TO_TICKS(10000 )); // ą¤čĆąŠą▓ąĄčĆą║ą░ ą║ą░ąČą┤čŗąĄ 10 čüąĄą║čāąĮą┤ }
}// ąØąĄ ąĘą░ą▒čāą┤čīč鹥 čüąŠąĘą┤ą░čéčī ąĘą░ą┤ą░čćčā:
xTaskCreate(monitoring_task, "heap_monitor" , 2048 , NULL , 1 , NULL );
[ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ ąĖ čüąŠą▓ąĄčéčŗ ]
1 . ążčĆą░ą│ą╝ąĄąĮčéą░čåąĖčÅ: ąĄčüą╗ąĖ largest_free_block ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą╝ąĄąĮčīčłąĄ free_size , č鹊 ą║čāčćą░ čüąĖą╗čīąĮąŠ čäčĆą░ą│ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮą░. ąŁč鹊 ą╝ąĄčłą░ąĄčé ą▓čŗą┤ąĄą╗ąĖčéčī ą▒ąŠą╗čīčłąŠą╣ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą▒ą╗ąŠą║, ą┤ą░ąČąĄ ąĄčüą╗ąĖ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ą╝ąĮąŠą│ąŠ.
2 . ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ: ąĘąĮą░č湥ąĮąĖąĄ heap_caps_get_minimum_free_size() čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. ąöą╗čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ ą░ą▒čüąŠą╗čÄčéąĮąŠą│ąŠ ąĖčüč鹊čĆąĖč湥čüą║ąŠą│ąŠ ą╝ąĖąĮąĖą╝čāą╝ą░ ąĮčāąČąĮąŠ čüąŠčģčĆą░ąĮčÅčéčī ąĘąĮą░č湥ąĮąĖąĄ ą▓čĆčāčćąĮčāčÄ.
3 . ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ čüč鹥ą║ą░: ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ ą║čāčćąĖ ąĮąĄ ą▓ą║ą╗čÄčćą░ąĄčé ą┐ą░ą╝čÅčéčī, ą▓čŗą┤ąĄą╗ąĄąĮąĮčāčÄ ą┐ąŠą┤ čüč鹥ą║ąĖ ąĘą░ą┤ą░čć. ąöą╗čÅ ą║ąŠąĮčéčĆąŠą╗čÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čć ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 uxTaskGetStackHighWaterMark() .
4 . ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī: čćą░čüčéčŗą╣ ą▓čŗąĘąŠą▓ čŹčéąĖčģ čäčāąĮą║čåąĖą╣ (ąŠčüąŠą▒ąĄąĮąĮąŠ print_heap_info) ą╝ąŠąČąĄčé ąĘą░ą╝ąĄą┤ą╗ąĖčéčī čĆą░ą▒ąŠčéčā. ąØąĄ čüč鹊ąĖčé ą▓čŗąĘčŗą▓ą░čéčī ąĖčģ ą▓ ą║čĆąĖčéąĖčćąĮčŗčģ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čāčćą░čüčéą║ą░čģ ą║ąŠą┤ą░.
ą¤čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ heap_caps_print_heap_info() :
ąśč鹊ą│:
1 . ąÆčüąĄ ąĘą░ą┤ą░čćąĖ ą▓ ESP-IDF čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąĄą┤ąĖąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ą┐ą░ą╝čÅčéąĖ (ą║čāčćčā). ąÜą╗čÄčć ą║ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠč鹥 ŌĆö ą░ą║ą║čāčĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čŹč鹊ą╣ ą┐ą░ą╝čÅčéčīčÄ ąĖ ą║ąŠąĮčéčĆąŠą╗čī ąĘą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüč鹥ą║ą░ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░č湥ą╣.
2 . ąöą╗čÅ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüą▓čÅąĘą║čā heap_caps_get_free_size() ąĖ heap_caps_get_minimum_free_size(). ąöą╗čÅ ą│ą╗čāą▒ąŠą║ąŠą╣ ąŠčéą╗ą░ą┤ą║ąĖ čäčĆą░ą│ą╝ąĄąĮčéą░čåąĖąĖ ŌĆö heap_caps_get_largest_free_block() ąĖ heap_caps_print_heap_info().
ąÆ ESP-IDF ąĘą░ą┤ą░čćą░ ą╝ąŠą┤čāą╗čÅ app_main ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ ąĘą░ą┤ą░čćąĖ main_task , ąĖ čĆą░ąĘą╝ąĄčĆ ąĄčæ čüč鹥ą║ą░ ąĘą░ą┤ą░čæčéčüčÅ č湥čĆąĄąĘ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐čĆąŠąĄą║čéą░.
ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą│ą╗ą░ą▓ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąŠą┐čåąĖąĖ CONFIG_ESP_MAIN_TASK_STACK_SIZE čäą░ą╣ą╗ą░ sdkconfig
$ grep -rnw CONFIG_ESP_MAIN_TASK_STACK_SIZE
sdkconfig:1250:CONFIG_ESP_MAIN_TASK_STACK_SIZE =3584
ąØą░čüčéčĆąŠą╣ą║ą░ čŹč鹊ą╣ ąŠą┐čåąĖąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ:
ąĪčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĪą┐ąŠčüąŠą▒ ąĮą░čüčéčĆąŠą╣ą║ąĖ
ą×čäąĖčåąĖą░ą╗čīąĮą░čÅ čüčĆąĄą┤ą░ ESP-IDF (SDK)
ąÜąŠąĮčäąĖą│čāčĆą░č鹊čĆ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ (idf.py menuconfig)
PlatformIO (čÅą┤čĆąŠ ESP-IDF)
ą¦ąĄčĆąĄąĘ ą│čĆą░čäąĖč湥čüą║ąĖą╣ ą║ąŠąĮčäąĖą│čāčĆą░č鹊čĆ, ąĖą╗ąĖ ą┐čĆčÅą╝čŗą╝ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čäą░ą╣ą╗ą░ sdkconfig
ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ąŠčäąĖčåąĖą░ą╗čīąĮčāčÄ ESP-IDF ąĖą╗ąĖ PlatformIO čü čäčĆąĄą╣ą╝ą▓ąŠčĆą║ąŠą╝ ESP-IDF, č鹊 ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1 . ą×čéą║čĆąŠą╣č鹥 ą║ąŠąĮčäąĖą│čāčĆą░č鹊čĆ ą╝ąĄąĮčÄ:
2 . ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ čĆą░ąĘą┤ąĄą╗ Component config ŌåÆ ESP System Settings.
3 . ąØą░ą╣ą┤ąĖč鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ Main task stack size (CONFIG_ESP_MAIN_TASK_STACK_SIZE) ąĖ ąĘą░ą┤ą░ą╣č鹥 ąĮčāąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą▒ą░ą╣čéą░čģ.
ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 PlatformIO čü čäčĆąĄą╣ą╝ą▓ąŠčĆą║ąŠą╝ Arduino, č鹊 ąĮą░čüčéčĆąŠą╣ą║ą░ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ, čéą░ą║ ą║ą░ą║ ąĘą░ą┤ą░čćą░ loop() čüąŠąĘą┤ą░čæčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąÆą░ą╝ ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ąĮą░ą╣čéąĖ ąĖ ąĖąĘą╝ąĄąĮąĖčéčī ą┐ą░čĆą░ą╝ąĄčéčĆ CONFIG_ARDUINO_LOOP_STACK_SIZE , čćč鹊 ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčī čĆčāčćąĮąŠą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ą╣ą╗ąŠą▓ SDK.
[ąÜą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąŠą┐čéąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ]
ą¤čĆąŠčüč鹊 čāą▓ąĄą╗ąĖčćąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ ŌĆö ąĮąĄ ą╗čāčćčłąĄąĄ čĆąĄčłąĄąĮąĖąĄ, čéą░ą║ ą║ą░ą║ čŹč鹊 čéčĆą░čéąĖčé čåąĄąĮąĮčāčÄ ąŠą┐ąĄčĆą░čéąĖą▓ąĮčāčÄ ą┐ą░ą╝čÅčéčī. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ čüč鹊ąĖčé ą┐čĆąŠą▓ąĄčüčéąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ.
ąÆčŗ ą╝ąŠąČąĄč鹥 ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čüą║ąŠą╗čīą║ąŠ čüč鹥ą║ą░ čäą░ą║čéąĖč湥čüą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĘą░ą┤ą░čćą░, ą▓čŗąĘą▓ą░ą▓ čäčāąĮą║čåąĖčÄ uxTaskGetStackHighWaterMark() . ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąŠą▒čŖąĄą╝ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ čüč鹥ą║ą░, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąĘą░ ą▓čüąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ą¦ąĄą╝ ą▒ąŠą╗čīčłąĄ čŹč鹊 čćąĖčüą╗ąŠ, č鹥ą╝ čüąĖą╗čīąĮąĄąĄ ą╝ąŠąČąĮąŠ čāą╝ąĄąĮčīčłąĖčéčī ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ čü ąĘą░ą┐ą░čüąŠą╝ ąĮą░ ąĮąĄą┐čĆąĄą┤ą▓ąĖą┤ąĄąĮąĮčŗąĄ čĆą░čüčģąŠą┤čŗ.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ (ą╝ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą▓ ą║ąŠąĮąĄčå app_main):
void app_main (void ) { // ... ą▓ą░čł ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ... // ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠčüąĮąŠą▓ąĮąŠą╣ ą╗ąŠą│ąĖą║ąĖ ą┐čĆąŠą▓ąĄčĆąĖą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░: UBaseType_t high_water_mark = uxTaskGetStackHighWaterMark(NULL ); printf("ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ čüč鹥ą║ main_task: %d ą▒ą░ą╣čé \n " , high_water_mark); printf("ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ čüč鹥ą║ąŠą╝: %d ą▒ą░ą╣čé \n " , CONFIG_ESP_MAIN_TASK_STACK_SIZE); printf("ążą░ą║čéąĖč湥čüą║ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ: %d ą▒ą░ą╣čé \n " , CONFIG_ESP_MAIN_TASK_STACK_SIZE - high_water_mark);
}
ąĢčüą╗ąĖ ą▓ ą▓ą░čłąĄą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą▓čüčæ ąĄčēčæ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ąŠčłąĖą▒ą║ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč鹥ą║ą░, ą┐ąŠą┤čāą╝ą░ą╣č鹥, ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╗ąĖ app_main čäčāąĮą║čåąĖąĖ, čéčĆąĄą▒čāčÄčēąĖąĄ ą╝ąĮąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, printf ą┤ą╗čÅ č乊čĆą╝ą░čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąŠą╗čīčłąĖčģ čüčéčĆąŠą║), ąĖą╗ąĖ ą▒ąŠą╗čīčłąĖąĄ ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą╝ą░čüčüąĖą▓čŗ.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ čäčāąĮą║čåąĖąĖ print_all_tasks_info , ą║ąŠč鹊čĆčŗą╣ ą▓čŗ ą╝ąŠąČąĄč鹥 ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░čéčī ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąĖ app_main() ąĖą╗ąĖ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ąĘą░ą┤ą░č湥 ą┤ą╗čÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░:
#include < stdio.h> #include "freertos/FreeRTOS.h" #include "freertos/task.h" // ążčāąĮą║čåąĖčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┤ąĄčéą░ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą▓čüąĄčģ ąĘą░ą┤ą░čćą░čģ void print_all_tasks_info (void ) { // 1. ą¤ąŠą╗čāčćąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┤ą░čć UBaseType_t task_count = uxTaskGetNumberOfTasks(); printf("=== ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ąĘą░ą┤ą░čćą░čģ FreeRTOS === \n " ); printf("ą×ą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┤ą░čć: %u \n " , task_count); if (task_count == 0 ) { return ; } // 2. ąÆčŗą┤ąĄą╗ąĖčéčī ą┐ą░ą╝čÅčéčī ą┐ąŠą┤ ą╝ą░čüčüąĖą▓ čüčéčĆčāą║čéčāčĆ TaskStatus_t TaskStatus_t * task_status_array = malloc(task_count * sizeof (TaskStatus_t)); if (task_status_array == NULL ) { printf("ą×čłąĖą▒ą║ą░ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ! \n " ); return ; } // 3. ąŚą░ą┐ąŠą╗ąĮąĖčéčī ą╝ą░čüčüąĖą▓ ą┤ą░ąĮąĮčŗą╝ąĖ ąĖ ą┐ąŠą╗čāčćąĖčéčī ąŠą▒čēąĄąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ uint32_t total_run_time; task_count = uxTaskGetSystemState( task_status_array, // ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ą░čüčüąĖą▓ task_count, // ąĀą░ąĘą╝ąĄčĆ ą╝ą░čüčüąĖą▓ą░ & total_run_time // ąĪčāą╝ą╝ą░čĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (ą▓ čéąĖą║ą░čģ) ); printf("ą×ą▒čēąĄąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (čéąĖą║ąŠą▓): %lu \n " , (unsigned long )total_run_time); printf("-------------------------------------------------- \n " ); printf("%-20s %-6s %-15s %-12s %-12s %s \n " , "ąśą╝čÅ" , "ą¤čĆąĖąŠčĆ." , " ąĪąŠčüč鹊čÅąĮąĖąĄ" , " ą»ą┤čĆąŠ" , " ąźą▓ąŠčüčé čüč鹥ą║ą░" , " ąÆčĆąĄą╝čÅ CPU (%)" ); // 4. ą¤čĆąŠą╣čéąĖ ą┐ąŠ ą▓čüąĄą╝ ąĘą░ą┤ą░čćą░ą╝ ąĖ ą▓čŗą▓ąĄčüčéąĖ ąĖąĮč乊čĆą╝ą░čåąĖčÄ for (UBaseType_t i = 0 ; i < task_count; i++ ) { TaskStatus_t * task = & task_status_array[i]; // ąĀą░čüčüčćąĖčéą░čéčī ą┐čĆąŠčåąĄąĮčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ CPU ą┤ą╗čÅ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ uint32_t cpu_percentage = 0 ; if (total_run_time > 0 ) { // ulRunTimeCounter ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ą▓ čéąĖą║ą░čģ čÅą┤čĆą░ FreeRTOS cpu_percentage = task-> ulRunTimeCounter * 100UL / total_run_time; } // ą¤ąŠą╗čāčćąĖčéčī čćąĖčéą░ąĄą╝ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ const char * state_str; switch (task-> eCurrentState) { case eRunning : state_str = "Running" ; break ; case eReady : state_str = "Ready" ; break ; case eBlocked : state_str = "Blocked" ; break ; case eSuspended : state_str = "Suspended" ; break ; case eDeleted : state_str = "Deleted" ; break ; default : state_str = "Unknown" ; break ; } // ą×ą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĮą░ ą║ą░ą║ąŠą╝ čÅą┤čĆąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĘą░ą┤ą░čćą░ (ą┤ą╗čÅ ESP32) const char * core_str = "N/A" ; #ifdef CONFIG_FREERTOS_SMP // ąöą╗čÅ SMP ą▓ąĄčĆčüąĖą╣ FreeRTOS core_str = (task-> xCoreID == tskNO_AFFINITY) ? "Any" : (task-> xCoreID == 0 ) ? "Core 0" : "Core 1" ; #elif defined(portNUM_PROCESSORS) && portNUM_PROCESSORS > 1 // ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▓ąĄčĆčüąĖą╣ core_str = (task-> xCoreID == 0 ) ? "Core 0" : (task-> xCoreID == 1 ) ? "Core 1" : "Any" ; #endif printf("%-20s %-6u %-15s %-12s %-12u %3u%% \n " , task-> pcTaskName, task-> uxCurrentPriority, state_str, core_str, task-> usStackHighWaterMark, // ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąŠčüčéą░č鹊ą║ čüč鹥ą║ą░ ą▓ čüą╗ąŠą▓ą░čģ cpu_percentage); } printf("================================================== \n\n " ); // 5. ą×čüą▓ąŠą▒ąŠą┤ąĖčéčī ą┐ą░ą╝čÅčéčī free(task_status_array);
}
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ čĆą░ą▒ąŠčéą░ą╗ą░ ą▓ ą┐ąŠą╗ąĮąŠą╝ ąŠą▒čŖąĄą╝ąĄ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓ idf.py menuconfig čĆą░ąĘčĆąĄčłąĖčéčī ąŠą┐čåąĖąĖ:
-*- configUSE_TRACE_FACILITY -*- configUSE_STATS_FORMATTING_FUNCTIONS [*] Enable display of xCoreID in vTaskList [*] configGENERATE_RUN_TIME_STATS configRUN_TIME_COUNTER_TYPE (uint32_t)
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ESP-IDF čüąŠąĘą┤ą░čæčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĖčüč鹥ą╝ąĮčŗčģ ąĘą░ą┤ą░čć (Idle, Timer, IPC, esp_timer ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┤čĆčāą│ąĖąĄ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ąĖą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ), ą║ąŠč鹊čĆčŗąĄ čéą░ą║ąČąĄ ą▒čāą┤čāčé ąŠč鹊ą▒čĆą░ąČą░čéčīčüčÅ ą▓ čüą┐ąĖčüą║ąĄ.
ą¤čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ čäčāąĮą║čåąĖąĖ print_all_tasks_info:
=== ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ąĘą░ą┤ą░čćą░čģ FreeRTOS === ą×ą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┤ą░čć: 16 ą×ą▒čēąĄąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (čéąĖą║ąŠą▓): 77949406 -------------------------------------------------- ąśą╝čÅ ą¤čĆąĖąŠčĆ. ąĪąŠčüč鹊čÅąĮąĖąĄ ą»ą┤čĆąŠ ąźą▓ąŠčüčé čüč鹥ą║ą░ ąÆčĆąĄą╝čÅ CPU (%) cli_task 1 Running Core 0 1788 0% IDLE1 0 Ready Core 1 696 44% IDLE0 0 Ready Core 0 688 34% uart_parser 4 Blocked Core 0 1304 2% main 1 Blocked Core 0 1272 0% tiT 18 Blocked Any 1276 0% w5500_tsk 15 Blocked Any 904 0% uart_tx 3 Blocked Core 0 172 7% ipc1 24 Suspended Core 1 536 0% httpd 2 Blocked Any 15252 0% sys_evt 20 Blocked Core 0 436 0% mdns 1 Blocked Core 0 2040 0% esp_timer 22 Suspended Core 0 2816 0% uart_rx 6 Blocked Core 1 2020 0% Tmr Svc 1 Blocked Any 1312 0% ipc0 1 Suspended Core 0 432 0% ==================================================
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ app_main:
void app_main (void ) { // ... čüąŠąĘą┤ą░ąĮąĖąĄ ą▓ą░čłąĖčģ ąĘą░ą┤ą░čć ... // ąŚą░ą┐čāčüą║ ąĘą░ą┤ą░čćąĖ ą┤ą╗čÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ xTaskCreate(monitor_task, "monitor" , 4096 , NULL , 1 , NULL );
}
ą¤čĆąĖą╝ąĄčĆ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą┤ą╗čÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░:
void monitor_task (void * pvParameter) { while (1 ) { print_all_tasks_info(); vTaskDelay(pdMS_TO_TICKS(5000 )); // ąÆčŗą▓ąŠą┤ąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą║ą░ąČą┤čŗąĄ 5 čüąĄą║čāąĮą┤ }
}
[ąÜčĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ API-čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ąĘą░ą┤ą░čćą░čģ ]
ąöą╗čÅ ą▒ąŠą╗ąĄąĄ ą│ąĖą▒ą║ąŠą╣ ąŠčåąĄąĮą║ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąŠč鹊ą║ąŠą▓ ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ API-čäčāąĮą║čåąĖąĖ:
ążčāąĮą║čåąĖčÅ ą×ą┐ąĖčüą░ąĮąĖąĄ ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ
uxTaskGetNumberOfTasks() ąÆąŠąĘą▓čĆą░čēą░ąĄčé ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą░ą║čéąĖą▓ąĮčŗčģ ąĘą░ą┤ą░čć.
UBaseType_t count = uxTaskGetNumberOfTasks();
uxTaskGetSystemState() ąŚą░ą┐ąŠą╗ąĮčÅąĄčé ą╝ą░čüčüąĖą▓ čüčéčĆčāą║čéčāčĆ TaskStatus_t čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠ ą▓čüąĄčģ ąĘą░ą┤ą░čćą░čģ.
uxTaskGetSystemState(taskArray, arraySize, &totalTime);
pcTaskGetName() ąÆąŠąĘą▓čĆą░čēą░ąĄčé ąĖą╝čÅ ąĘą░ą┤ą░čćąĖ ą┐ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčā (ąĖą╗ąĖ NULL ą┤ą╗čÅ č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ).
const char *name = pcTaskGetName(taskHandle);
uxTaskPriorityGet() ą¤ąŠą╗čāčćą░ąĄčé č鹥ą║čāčēąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ.
UBaseType_t priority = uxTaskPriorityGet(taskHandle);
eTaskGetState() ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ (Running, Ready, Blocked, etc.).
eTaskGetState(taskHandle);
xTaskGetCurrentTaskHandle() ą¤ąŠą╗čāčćą░ąĄčé ą┤ąĄčüą║ąĖą┐č鹊čĆ č鹥ą║čāčēąĄą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ.
TaskHandle_t myHandle = xTaskGetCurrentTaskHandle();
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ]
ŌŚÅ ąĪč鹥ą║: ą┐ąŠą╗ąĄ usStackHighWaterMark ą▓ TaskStatus_t ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąŠą▒čŖąĄą╝ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ čüč鹥ą║ą░, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ čā ąĘą░ą┤ą░čćąĖ čü ą╝ąŠą╝ąĄąĮčéą░ ąĄčæ čüąŠąĘą┤ą░ąĮąĖčÅ. ąŁč鹊 ąŠčéą╗ąĖčćąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčé ą┤ą╗čÅ č鹊čćąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆą░ąĘą╝ąĄčĆą░ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ (ą┐ą░čĆą░ą╝ąĄčéčĆ usStackDepth ą▓ xTaskCreate). ąĪčéčĆąĄą╝čÅčéčüčÅ ą║ ąĘąĮą░č湥ąĮąĖčÄ, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ ąŠčüčéą░čæčéčüčÅ čĆą░ąĘčāą╝ąĮčŗą╣ ąĘą░ą┐ą░čü, ąĮąŠ ąĮąĄ čéčĆą░čéąĖčéčüčÅ ą╗ąĖčłąĮčÅčÅ ą┐ą░ą╝čÅčéčī.
ŌŚÅ ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī: čäčāąĮą║čåąĖąĖ uxTaskGetSystemState() ąĖ vTaskList() (ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ) ą╝ąŠą│čāčé ąĮą░ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ąŠčéą║ą╗čÄčćą░čéčī ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║. ąØąĄ ą▓čŗąĘčŗą▓ą░ą╣č鹥 ąĖčģ čüą╗ąĖčłą║ąŠą╝ čćą░čüč鹊 ą▓ ą║čĆąĖčéąĖčćąĮčŗčģ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čāčćą░čüčéą║ą░čģ ą║ąŠą┤ą░.
ŌŚÅ ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ: ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ uxTaskGetSystemState() ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüčćčæčéčćąĖą║ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (ulRunTimeCounter) ą▓ FreeRTOSConfig.h
configUSE_TRACE_FACILITY ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ą▓ąĄąĮ 1.configGENERATE_RUN_TIME_STATS ąĖ configUSE_STATS_FORMATTING_FUNCTIONS čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ą▓ąĮčŗ 1 ą┤ą╗čÅ ą┐ąŠą┤čüčćčæčéą░ ą▓čĆąĄą╝ąĄąĮąĖ CPU.
ą¤čĆąĖąŠčĆąĖč鹥čé ą╗čÄą▒ąŠą╣ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ vTaskPrioritySet , ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ č鹊ą╗čīą║ąŠ ąĘąĮą░čéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ:
void vTaskPrioritySet (TaskHandle_t xTask, UBaseType_t uxNewPriority);
ąĢčüą╗ąĖ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ xTask ą┐ąĄčĆąĄą┤ą░čéčī NULL, č鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐čĆąĖąŠčĆąĖč鹥čé č鹥ą║čāčēąĄą╣ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą╣čüčÅ ąĘą░ą┤ą░čćąĖ (čé. ąĄ. ą┐ąŠą╝ąĄąĮčÅčéčī čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé).
[ąÜą░ą║ čāąĘąĮą░čéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ ]
ą¤ąŠą╗čāčćąĖčéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ.
1 . ą¤čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ąĘą░ą┤ą░čćąĖ:
xMyTaskHandle = NULL ;// xTaskCreate ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ
xTaskCreate(myTaskFunction, "MyTask" , configMINIMAL_STACK_SIZE, NULL , 2 , & xMyTaskHandle);if (xMyTaskHandle != NULL ) { // ąóąĄą┐ąĄčĆčī xMyTaskHandle čüąŠą┤ąĄčƹȹĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ
}
2 . ą¤ąŠą╗čāč湥ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąĘą░ą┤ą░čćąĖ ą┐ąŠ ąĄčæ č鹥ą║čüč鹊ą▓ąŠą╝čā ąĖą╝ąĄąĮąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ xTaskGetHandle :
xTaskHandle = xTaskGetHandle("TaskName" );if (xTaskHandle != NULL ) { // ąØą░čłą╗ąĖ ąĘą░ą┤ą░čćčā čü ąĖą╝ąĄąĮąĄą╝ "TaskName" vTaskPrioritySet(xTaskHandle, 3 );
}
3 . ą¤ąŠą╗čāčćąĖčéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ xTaskGetCurrentTaskHandle :
void myTaskFunction (void * pvParameters) { // ą¤ąŠą╗čāčćą░ąĄą╝ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ č鹥ą║čāčēąĄą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ TaskHandle_t xCurrentTaskHandle = xTaskGetCurrentTaskHandle(); // ąśą╗ąĖ ą┐čĆąŠčēąĄ (č鹊 ąČąĄ čüą░ą╝ąŠąĄ): TaskHandle_t xThisTask = xTaskGetCurrentTaskHandle(); // ą£ąŠąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čćą░čģ // (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĄą┤ą░čéčī č湥čĆąĄąĘ ąŠč湥čĆąĄą┤čī ąĖą╗ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ)
}
[ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ ]
1 . ąöąĖą░ą┐ą░ąĘąŠąĮ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▓ FreeRTOSConfig.h
#define configMAX_PRIORITIES (7) // ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓
2 . ąØčāą╝ąĄčĆą░čåąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓:
0 - čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé
3 . ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĘą░ą┤ą░čćąĖ ą┤ą░ąĄčé ą╝ą│ąĮąŠą▓ąĄąĮąĮčŗą╣ čŹčäč乥ą║čé, čé. ąĄ. ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĖ ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░.
4 . ąæąĄąĘąŠą┐ą░čüąĮąŠčüčéčī: ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ čāčćąĖčéčŗą▓ą░ą╣č鹥 ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖąĮą▓ąĄčĆčüąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ąĖ ą▓ąĘą░ąĖą╝ąĮčŗčģ ą▒ą╗ąŠą║ąĖčĆąŠą▓ąŠą║.
5 . ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖčÅčģ: ąĖąĘą▒ąĄą│ą░ą╣č鹥 ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą▓ąĮčāčéčĆąĖ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ.
6 . ąĀąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ:
ŌŚÅ ąśąĘą╝ąĄąĮčÅą╣č鹥 ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ąŠą▒ąŠčüąĮąŠą▓ą░ąĮąĮąŠ, ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ ą▓čĆąŠą┤ąĄ ąĮą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓.
ąØą░ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ą╗ą░čéčŗ WaveShare ESP32-S3-ETH (16 ą╝ąĄą│ą░ą▒ą░ą╣čé FLASH, ą▓čĆąĄą╝čÅ čćč鹥ąĮąĖčÅ ą╝ąŠąČąĄčé ąĘą░ąĮąĖą╝ą░čéčī ą┐ąŠčĆčÅą┤ą║ą░ 5 ą╝ąĖąĮčāčé):
ąŻčüčéą░ąĮąŠą▓ą║ą░ esptool :
ąØą░čüčéčĆąŠą╣ą║ą░ idf.py menuconfig :
ąöą╗čÅ č湥ą│ąŠ ąĮčāąČąĮčŗ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ "Default log verbosity " ąĖ "Maximum log verbosity "?
ą¤čĆąĄą┤čüčéą░ą▓čīč鹥 čüąĄą▒ąĄ čäąĖą╗čīčéčĆ ą┤ą╗čÅ ą▓ą░čłąĖčģ ą╗ąŠą│ąŠą▓. ą×ą┤ąĖąĮ ą┐ą░čĆą░ą╝ąĄčéčĆ čĆąĄčłą░ąĄčé, ą║ą░ą║ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé ą▓ąĖą┤ąĮčŗ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░, ą░ ą┤čĆčāą│ąŠą╣ ŌĆö ą║ą░ą║ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą║ą░ąĘą░ąĮčŗ, ąĄčüą╗ąĖ ą▓čŗ čĆąĄčłąĖč鹥 ąĖąĘą╝ąĄąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠąĘąČąĄ.
Default log verbosity (čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ)
ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāčĆąŠą▓ąĄąĮčī ą┤ąĄčéą░ą╗ąĖąĘą░čåąĖąĖ, čü ą║ąŠč鹊čĆčŗą╝ čüąĖčüč鹥ą╝ą░ ą▒čāą┤ąĄčé ą┐ąĖčüą░čéčī ą╗ąŠą│ąĖ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ (ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ). ąÆčüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čü čāčĆąŠą▓ąĮąĄą╝ ą▓čŗčłąĄ (čé.ąĄ. ą╝ąĄąĮąĄąĄ ą┤ąĄčéą░ą╗čīąĮčŗąĄ), č湥ą╝ ą▓čŗą▒čĆą░ąĮąĮčŗą╣, ą▒čāą┤čāčé ą▓čŗą▓ąŠą┤ąĖčéčīčüčÅ. ąĪąŠąŠą▒čēąĄąĮąĖčÅ čü čāčĆąŠą▓ąĮąĄą╝ ąĮąĖąČąĄ (ą▒ąŠą╗ąĄąĄ ą┤ąĄčéą░ą╗čīąĮčŗąĄ) ą▒čāą┤čāčé ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠčéą║ą╗čÄč湥ąĮčŗ.
ąŻčĆąŠą▓ąĮąĖ ą╗ąŠą│ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ą║ąĄ esp-idf/components/log/include/esp_log_level.h :
/** * @brief Log level */ typedef enum { ESP_LOG_NONE = 0 , /*!< ąøąŠą│ ąŠčéą║ą╗čÄč湥ąĮ */ ESP_LOG_ERROR = 1 , /*!< ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ ąŠčłąĖą▒ą║ąĖ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą╝ąŠą┤čāą╗čī ąĮąĄ ą╝ąŠąČąĄčé ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčéčīčüčÅ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ */ ESP_LOG_WARN = 2 , /*!< ąŻčüą╗ąŠą▓ąĖčÅ, ą┐čĆąĖ ą║ąŠč鹊čĆčŗčģ ąŠčłąĖą▒ą║ą░ ąĮąĄ ą║čĆąĖčéąĖčćąĮą░, ąĖą╗ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčŗ ą╝ąĄčĆčŗ ą┐ąŠ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÄ */ ESP_LOG_INFO = 3 , /*!< ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖąĄ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ č鹥č湥ąĮąĖąĄ čüąŠą▒čŗčéąĖą╣ */ ESP_LOG_DEBUG = 4 , /*!< ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ą▒čŗą▓ą░ąĄčé ąĮčāąČąĮą░ ą┤ą╗čÅ ąŠą▒čŗčćąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ (ąĘąĮą░č湥ąĮąĖčÅ, čāą║ą░ąĘą░č鹥ą╗ąĖ, čĆą░ąĘą╝ąĄčĆčŗ, ąĖ čé. ą┐.). */ ESP_LOG_VERBOSE = 5 , /*!< ąæąŠą╗čīčłąĖąĄ ą┐ąŠčĆčåąĖąĖ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖą╗ąĖ čćą░čüčéčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčī ą▓čŗą▓ąŠą┤. */ ESP_LOG_MAX = 6 , /*!< ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čāčĆąŠą▓ąĮąĄą╣ ą╗ąŠą│ą░ */
} esp_log_level_t;
ŌŚÅ ąōą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ: čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čŹčéą░ą┐ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖ ą║ą░ą║ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĖ čüčéą░čĆč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▓čŗ ą▓čŗčüčéą░ą▓ąĖč鹥 ąĘąĮą░č湥ąĮąĖąĄ `Info`, č鹊 ą▓ ą╗ąŠą│ą░čģ ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čüąŠąŠą▒čēąĄąĮąĖčÅ `Error`, `Warning` ąĖ `Info`. ąĪąŠąŠą▒čēąĄąĮąĖčÅ `Debug` ąĖ `Verbose` ą▒čāą┤čāčé čüą║čĆčŗčéčŗ, ąĮąŠ ąĖčģ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓ą║ą╗čÄčćąĖčéčī ą┐ąŠąĘąČąĄ (čüą╝. čüą╗ąĄą┤čāčÄčēąĖą╣ ą┐čāąĮą║čé).
Maximum log verbosity (ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│ąĖčĆąŠą▓ą░ąĮąĖčÅ)
ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé "ą┐ąŠč鹊ą╗ąŠą║" ą┤ąĄčéą░ą╗ąĖąĘą░čåąĖąĖ, ą║ąŠč鹊čĆčŗą╣ ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ ą┤ąŠčüčéčāą┐ąĄąĮ ą▓ ą┐čĆąŠčłąĖą▓ą║ąĄ. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ąŠąĮ ąĘą░ą┤ą░ąĄčé, ą║ą░ą║ąĖąĄ čāčĆąŠą▓ąĮąĖ ą╗ąŠą│ąŠą▓ ą▒čāą┤čāčé čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮčŗ ąĖ ą▓ą║ą╗čÄč湥ąĮčŗ ą▓ ą▒ąĖąĮą░čĆąĮčŗą╣ čäą░ą╣ą╗ ą┐čĆąŠčłąĖą▓ą║ąĖ.
ŌŚÅ ąōą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ: ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ ąĮą░ čŹčéą░ą┐ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĮąĄ ą▓ą║ą╗čÄčćą░čéčī ą▓ ą┐čĆąŠčłąĖą▓ą║čā ą║ąŠą┤ ą┤ą╗čÅ čüą░ą╝čŗčģ ą┤ąĄčéą░ą╗čīąĮčŗčģ ą╗ąŠą│ąŠą▓, ąĄčüą╗ąĖ ą▓čŗ čāą▓ąĄčĆąĄąĮčŗ, čćč鹊 ąŠąĮąĖ ą▓ą░ą╝ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ, 菹║ąŠąĮąŠą╝čÅ ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓čŗ čāčüčéą░ąĮąŠą▓ąĖą╗ąĖ `Maximum log verbosity` ą▓ ąĘąĮą░č湥ąĮąĖąĄ `Info`. ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖčÅ čāčĆąŠą▓ąĮąĄą╣ `Debug` ąĖ `Verbose` ąĮąĄ ą▒čāą┤čāčé čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą┐čĆąŠčłąĖą▓ą║čā. ąöą░ąČąĄ ąĄčüą╗ąĖ ą▓čŗ ąŠč湥ąĮčī ąĘą░čģąŠčéąĖč鹥 ąĖčģ čāą▓ąĖą┤ąĄčéčī ąĖ ą▓čŗąĘąŠą▓ąĄč鹥 čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ čäčāąĮą║čåąĖčÄ, ąŠąĮąĖ ąĮąĄ ą┐ąŠčÅą▓čÅčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖčģ čäąĖąĘąĖč湥čüą║ąĖ ąĮąĄčé ą▓ ą║ąŠą┤ąĄ.
ąÆąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĮą░ ą┐čĆąŠčüč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ
ą¦č鹊ą▒čŗ čüčéą░ą╗ąŠ čüąŠą▓čüąĄą╝ ą┐ąŠąĮčÅčéąĮąŠ, ą┐čĆąĄą┤čüčéą░ą▓čīč鹥 čüąĄą▒ąĄ "ą╗ąĄčüčéąĮąĖčåčā" čāčĆąŠą▓ąĮąĄą╣ ą╗ąŠą│ąĖčĆąŠą▓ą░ąĮąĖčÅ:
ąŻčĆąŠą▓ąĄąĮčī 5: `Verbose` (čüą░ą╝čŗą╣ ą┐ąŠą┤čĆąŠą▒ąĮčŗą╣)
1 . ąÆčŗ ą▓ą║ą╗čÄčćą░ąĄč鹥 ą▓ `menuconfig` `Default log verbosity = Warning`, `Maximum log verbosity = Verbose`.
ą¦č鹊 ąĮą░ ą▓čŗčģąŠą┤ąĄ: ą▓ ą┐čĆąŠčłąĖą▓ą║čā ą▒čāą┤čāčé čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓čüąĄčģ čāčĆąŠą▓ąĮąĄą╣ (ąŠčé Error ą┤ąŠ Verbose). ą×ą┤ąĮą░ą║ąŠ, čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą▓čŗ ą▒čāą┤ąĄč鹥 ą▓ąĖą┤ąĄčéčī č鹊ą╗čīą║ąŠ `Error` ąĖ `Warning`. ąĢčüą╗ąĖ ą▓ą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąŠčéą╗ą░ą┤ąĖčéčī ą║ą░ą║čāčÄ-č鹊 ą┐čĆąŠą▒ą╗ąĄą╝čā, ą▓čŗ ą╝ąŠąČąĄč鹥 ą▓ ą║ąŠą┤ąĄ čü ą┐ąŠą╝ąŠčēčīčÄ `esp_log_level_set()` ą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓ą║ą╗čÄčćąĖčéčī ą┤ą╗čÅ ąĮčāąČąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ čāčĆąŠą▓ąĄąĮčī `Debug` ąĖą╗ąĖ `Verbose`, ąĖ ąŠąĮąĖ ąĮą░čćąĮčāčé ą▓čŗą▓ąŠą┤ąĖčéčīčüčÅ.
2 . ąÆčŗ ą▓ą║ą╗čÄčćą░ąĄč鹥 ą▓ `menuconfig` `Default log verbosity = Warning`, `Maximum log verbosity = Info`.
ą¦č鹊 ąĮą░ ą▓čŗčģąŠą┤ąĄ: ą▓ ą┐čĆąŠčłąĖą▓ą║čā ą▒čāą┤čāčé čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮčŗ č鹊ą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ čāčĆąŠą▓ąĮąĄą╣ `Error`, `Warning` ąĖ `Info`. ąŻčĆąŠą▓ąĮąĖ `Debug` ąĖ `Verbose` ą▒čāą┤čāčé ą▓čŗčĆąĄąĘą░ąĮčŗ. ąĪčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą▓čŗ ą▒čāą┤ąĄč鹥 ą▓ąĖą┤ąĄčéčī `Error` ąĖ `Warning` (ą║ą░ą║ ąĖ ą▓ ą┐čĆąŠčłą╗ąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ). ąØąŠ č鹥ą┐ąĄčĆčī, ą║ą░ą║ ą▒čŗ ą▓čŗ ąĮąĖ čüčéą░čĆą░ą╗ąĖčüčī, ą▓čŗ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ čüą╝ąŠąČąĄč鹥 čāą▓ąĖą┤ąĄčéčī čüąŠąŠą▒čēąĄąĮąĖčÅ `Debug` ąĖ `Verbose`, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖčģ ą║ąŠą┤ ąĮąĄ ą▒čŗą╗ ą▓ą║ą╗čÄč湥ąĮ ą▓ ą┐čĆąŠčłąĖą▓ą║čā .
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, `Default log verbosity` čāą┐čĆą░ą▓ą╗čÅąĄčé č鹥ą╝, čćč鹊 ą▓čŗ ą▓ąĖą┤ąĖč鹥 "čüąĄą╣čćą░čü", ą░ `Maximum log verbosity` ŌĆö č鹥ą╝, čćč鹊 ą▓čŗ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ą╝ąŠąČąĄč鹥 čāą▓ąĖą┤ąĄčéčī "ą▓ąŠąŠą▒čēąĄ".
ąÆąŠąĘąĮąĖą║ą╗ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą▓ąĄčĆčüąĖą╣ ESP-IDF, čćč鹊ą▒čŗ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé cmd_system ą▒čĆą░ą╗čüčÅ ąŠčé č鹥ą║čāčēąĄą╣ ą▓ąĄčĆčüąĖąĖ ESP-IDF, v5.4.1 ąĖą╗ąĖ v5.5.3. ąŁč鹊 ą┐ąŠą╗čāčćąĖą╗ąŠčüčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĄą╣ ą║ąŠčĆąĮąĄą▓ąŠą│ąŠ CMakeLists.txt
cmake_minimum_required (VERSION 3.16 )# ą×ąóąÜąøą«ą¦ąÉąĢą£ cmd_system set (EXCLUDE_COMPONENTS cmd_system )# ą¤ąŠą╗čāčćą░ąĄą╝ IDF_PATH ąĖąĘ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠą║čĆčāąČąĄąĮąĖčÅ if (DEFINED ENV{IDF_PATH} ) message (STATUS "Building with ESP-IDF from: $ENV{IDF_PATH}" ) set (EXTRA_COMPONENT_DIRS $ENV{ IDF_PATH } /examples/system/console/advanced/components/cmd_system ) include ($ENV{ IDF_PATH } /tools/cmake/project.cmake )else () message (FATAL_ERROR "IDF_PATH environment variable is not set" )endif ()set (COMPONENTS main )project (myproject )
ąÜą░ą║ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī (ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą▓ąĄčĆčüąĖąĖ ESP-IDF ą▓ąĄčĆčüąĖąĖ v5.4.1):
cd ~/myproject . ~/esp/v5.4.1/esp-idf/export.sh rm -rf build idf.py set-target esp32c3 idf.py build
ąŻčüčéą░ąĮąŠą▓ą║ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ ESP-IDF [4], ąĮą░ą┐čĆąĖą╝ąĄčĆ v5.4.1, ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ č湥čĆąĄąĘ ą║ą╗ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą▓ąĄčéą║ąĖ ąĖąĘ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ GitHub.
[ąŻčüčéą░ąĮąŠą▓ą║ą░ č湥čĆąĄąĘ Git ]
ąŁč鹊čé čüą┐ąŠčüąŠą▒ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą×ąĪ. ą¤ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ Windows (č湥čĆąĄąĘ WSL2), Linux ąĖ macOS. ą×ąĮ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓čŗ ą┐ąŠą╗čāčćąĖč鹥 ą░ą║čéčāą░ą╗čīąĮčāčÄ ą▓ąĄčĆčüąĖčÄ čüąŠ ą▓čüąĄą╝ąĖ ą┐ąŠą┤ą╝ąŠą┤čāą╗čÅą╝ąĖ.
1 . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 čüąĖčüč鹥ą╝ąĮčŗąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ (ą┤ą╗čÅ Linux/macOS).
- Linux (Debian/Ubuntu):
sudo apt-get install git wget flex bison gperf python3 python3-pip python3-venv \ cmake ninja-build ccache libffi-dev libssl-dev dfu-util libusb-1.0-0
- macOS:
brew install cmake ninja dfu-util ccache python3
- Windows: čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī WSL2 (ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ Windows ą┤ą╗čÅ Linux [12]) ąĖ čüą╗ąĄą┤ąŠą▓ą░čéčī ąĖąĮčüčéčĆčāą║čåąĖčÅą╝ ą┤ą╗čÅ Linux. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖ ą┐čĆčÅą╝čāčÄ čāčüčéą░ąĮąŠą▓ą║čā č湥čĆąĄąĘ PowerShell, ąĮąŠ Git ąĖ Python ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ąĘą░čĆą░ąĮąĄąĄ.
2 . ąÜą╗ąŠąĮąĖčĆčāą╣č鹥 čĆąĄą┐ąŠąĘąĖč鹊čĆąĖą╣.
ą×čéą║čĆąŠą╣č鹥 č鹥čĆą╝ąĖąĮą░ą╗ ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ, čćč鹊ą▒čŗ čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓ąĄčĆčüąĖąĖ v5.4.1 ą▓ ą┐ą░ą┐ą║čā ~/esp:
mkdir -p ~/esp cd ~/esp git clone -b v5.4.1 --recursive https://github.com/espressif/esp-idf.git
ąĪąŠą▓ąĄčé: ąĄčüą╗ąĖ ą▓čŗ ąĮą░čģąŠą┤ąĖč鹥čüčī ą▓ ąÜąĖčéą░ąĄ ąĖą╗ąĖ čüą║ąŠčĆąŠčüčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ GitHub ąĮąĖąĘą║ą░čÅ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĘąĄčĆą║ą░ą╗ąŠ ąĮą░ Gitee:
git clone -b v5.4.1 --recursive https://gitee.com/EspressifSystems/esp-idf.git
3 . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ.
ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ ą┐ą░ą┐ą║čā čü IDF ąĖ ąĘą░ą┐čāčüčéąĖč鹥 čüą║čĆąĖą┐čé čāčüčéą░ąĮąŠą▓ą║ąĖ. ą×ąĮ ąĘą░ą│čĆčāąĘąĖčé ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆčŗ ąĖ ąŠčéą╗ą░ą┤ąŠčćąĮčŗąĄ čāčéąĖą╗ąĖčéčŗ ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮčŗčģ ą▓ą░ą╝ąĖ čćąĖą┐ąŠą▓.
cd ~/esp/esp-idf ./install.sh
ąÆčŗ ą╝ąŠąČąĄč鹥 čāčüčéą░ąĮąŠą▓ąĖčéčī ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ čćąĖą┐ą░, čćč鹊ą▒čŗ čü菹║ąŠąĮąŠą╝ąĖčéčī ą╝ąĄčüč鹊 (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ./install.sh esp32s3).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą╝ąŠąČąĮąŠ ą┤ąĄčƹȹ░čéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ąĄčĆčüąĖą╣ ESP-IDF, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ čüą║čĆąĖą┐čéą░ install.sh ą┐ąĄčĆąĄąĖą╝ąĄąĮąŠą▓ą░čéčī ą║ą░čéą░ą╗ąŠą│, ą▓ ą║ąŠč鹊čĆąŠą╝ ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ą▓ąĄčĆčüąĖąĖ v5.4.1 ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄąĖą╝ąĄąĮąŠą▓ą░čéčī ą║ą░čéą░ą╗ąŠą│ esp-idf ą▓ ąĖą╝čÅ esp-idf541.
4 . ąØą░čüčéčĆąŠą╣č鹥 ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąŠą║čĆčāąČąĄąĮąĖčÅ.
ą¦č鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī ąŠą║čĆčāąČąĄąĮąĖąĄ ą┐ąŠčüč鹊čÅąĮąĮčŗą╝, ą┤ąŠą▒ą░ą▓čīč鹥 ą░ą╗ąĖą░čü (ą▒čŗčüčéčĆčāčÄ ą║ąŠą╝ą░ąĮą┤čā) ą▓ ą▓ą░čł čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąŠą▒ąŠą╗ąŠčćą║ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ~/.bashrc ą┤ą╗čÅ Bash ąĖą╗ąĖ ~/.zshrc ą┤ą╗čÅ Zsh):
echo "alias get_idf='. $HOME/esp/esp-idf/export.sh'" >> ~/.bashrc source ~/.bashrc
ąóąĄą┐ąĄčĆčī ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐čĆąĖ ąŠčéą║čĆčŗčéąĖąĖ ąĮąŠą▓ąŠą│ąŠ č鹥čĆą╝ąĖąĮą░ą╗ą░ ą▓ą▓ąŠą┤ąĖč鹥 get_idf , čćč鹊ą▒čŗ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī čüčĆąĄą┤čā ESP-IDF.
[ąŻčüčéą░ąĮąŠą▓ą║ą░ č湥čĆąĄąĘ ą│čĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮčüčéą░ą╗ą╗čÅč鹊čĆ (Windows) ]
ąŁč鹊 čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ Windows, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čģąŠčéčÅčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤ąĮčāčÄ čüčéčĆąŠą║čā.
1 . ąĪą║ą░čćą░ą╣č鹥 ąŠčäą╗ą░ą╣ąĮ-čāčüčéą░ąĮąŠą▓čēąĖą║ čü ąŠčäąĖčåąĖą░ą╗čīąĮąŠą│ąŠ čüąĄčĆą▓ąĄčĆą░ Espressif: https://dl.espressif.com/dl/esp-idf/ .
2 . ąØą░ą╣ą┤ąĖč鹥 ą▓ čüą┐ąĖčüą║ąĄ čäą░ą╣ą╗, čüąŠą┤ąĄčƹȹ░čēąĖą╣ v5.4.1 (ąĮą░ą┐čĆąĖą╝ąĄčĆ esp-idf-tools-setup-offline-5.4.1.exe ).
3 . ąŚą░ą┐čāčüčéąĖč鹥 čüą║ą░čćą░ąĮąĮčŗą╣ čäą░ą╣ą╗ ąĖ čüą╗ąĄą┤čāą╣č鹥 ąĖąĮčüčéčĆčāą║čåąĖčÅą╝ ą╝ą░čüč鹥čĆą░ čāčüčéą░ąĮąŠą▓ą║ąĖ. ą£ą░čüč鹥čĆ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą│čĆčāąĘąĖčé ąĖ čāčüčéą░ąĮąŠą▓ąĖčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ (Python, Git, ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆčŗ). ąÆ ą║ąŠąĮčåąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮą░ čĆą░ą▒ąŠč湥ą╝ čüč鹊ą╗ąĄ ą┐ąŠčÅą▓čÅčéčüčÅ čÅčĆą╗čŗą║ąĖ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ ąŠą║čĆčāąČąĄąĮąĖčÅ ESP-IDF (ą║ąŠą╝ą░ąĮą┤ąĮą░čÅ čüčéčĆąŠą║ą░ ąĖą╗ąĖ PowerShell).
[ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ą░: ąĘą░ą│čĆčāąĘą║ą░ ą░čĆčģąĖą▓ą░ (ąĄčüą╗ąĖ ą▓ąŠąĘąĮąĖą║ą░čÄčé ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü Git) ]
ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐čŗčéčŗą▓ą░ąĄč鹥 čéčĆčāą┤ąĮąŠčüčéąĖ čü ą║ą╗ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĖąĘ-ąĘą░ ąĮąĄčüčéą░ą▒ąĖą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆąĮąĄčé-čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ą▓čŗ ą╝ąŠąČąĄč鹥 čüą║ą░čćą░čéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ZIP-ą░čĆčģąĖą▓, ą║ąŠč鹊čĆčŗą╣ čāąČąĄ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą▓ą╗ąŠąČąĄąĮąĮčŗąĄ ą┐ąŠą┤ą╝ąŠą┤čāą╗ąĖ Git. ąŁč鹊 čĆąĄčłą░ąĄčé ą┐čĆąŠą▒ą╗ąĄą╝čā, ą║ąŠą│ą┤ą░ ą┐ąŠčüą╗ąĄ čĆą░čüą┐ą░ą║ąŠą▓ą║ąĖ ąŠą▒čŗčćąĮąŠą│ąŠ ą░čĆčģąĖą▓ą░ čü GitHub ąĮąĄ čģą▓ą░čéą░ąĄčé čäą░ą╣ą╗ąŠą▓. ąĪą║ą░čćą░čéčī ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą┐ąŠ čüčüčŗą╗ą║ąĄ: esp-idf-v5.4.1.zip .
[ą¤čĆąŠą▓ąĄčĆą║ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ]
ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąŠą║čĆčāąČąĄąĮąĖčÅ (ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ąŠčéą║čĆčŗčéąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ čÅčĆą╗čŗą║ą░ ą▓ Windows) ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé:
1 . ąÉą║čéąĖą▓ąĖčĆčāą╣č鹥 ąŠą║čĆčāąČąĄąĮąĖąĄ:
- ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą░ą╗ąĖą░čü: ą┐čĆąŠčüč鹊 ą▓ą▓ąĄą┤ąĖč鹥 ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ get_idf.
2 . ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 č鹥čüč鹊ą▓čŗą╣ ą┐čĆąŠąĄą║čé:
cp -r $IDF_PATH/examples/get-started/hello_world ~/esp/
3 . ąĪąŠą▒ąĄčĆąĖč鹥 ąĄą│ąŠ:
cd ~/esp/hello_world idf.py build
ąĢčüą╗ąĖ čüą▒ąŠčĆą║ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą▒ąĄąĘ ąŠčłąĖą▒ąŠą║ čü čüąŠąŠą▒čēąĄąĮąĖąĄą╝ "Project build complete", ąĘąĮą░čćąĖčé, čāčüčéą░ąĮąŠą▓ą║ą░ ESP-IDF ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮąŠ.
ą¤čĆąĖą╝ąĄčĆ ą╗ąŠą│ą░ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ:
CMake Error at /home/ąĖą╝čÅ_ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ/esp/esp-idf541/tools/cmake/build.cmake:610 (message):
ąÜą░ą║ ąĖčüą┐čĆą░ą▓ąĖčéčī ąŠčłąĖą▒ą║čā:
cd ~/ą┐ą░ą┐ą║ą░_ą┐čĆąŠąĄą║čéą░ rm ./dependencies.lock idf.py fullclean idf.py build
ąÜąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ ą┐čĆąĖąĄą╝ą░ UART ą┐ąŠčüčéčāą┐ą░čÄčé ą┤ą░ąĮąĮčŗąĄ, čäčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ uart_param_config ąĖąĮąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ čü ąŠčłąĖą▒ą║ąŠą╣, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüą╗čāčćą░ą╣ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝. ą¤čĆąĖą╝ąĄčĆ ą╗ąŠą│ą░ ESP32-C3:
I (1133) uart: queue free spaces: 20
E (1133) uart: uart_param_config(1001): not able to power down in light sleep
E (1133) crsf: config uart parameter failed
ążčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ą▓čŗąĘčŗą▓ą░ą╗ą░ ąŠčłąĖą▒ą║čā:
uart_init (uint32_t baud)
{ esp_err_t result = ESP_FAIL; memset(& Header, 0 , sizeof (Header)); memset(& ErrorCount, 0 , sizeof (ErrorCount)); do { rdcq = xQueueCreate(CONFIG_EVENT_QUEUE_SIZE, sizeof (TRawDataChunk)); if (NULL == rdcq) { ESP_LOGE(TAG, "UART RX queue create failed" ); break ; } // ąØą░čüčéčĆąŠą╣ą║ą░ UART uart_config_t uart_config; uart_config.baud_rate = (int )baud; uart_config.data_bits = UART_DATA_8_BITS; uart_config.parity = UART_PARITY_DISABLE; uart_config.stop_bits = UART_STOP_BITS_1; uart_config.flow_ctrl = UART_HW_FLOWCTRL_DISABLE; uart_config.rx_flow_ctrl_thresh = 0 ; uart_config.source_clk = UART_SCLK_DEFAULT; result = uart_driver_install(UART_NUM, CONFIG_RX_BUF_SIZE, 0 , // TX ą▒čāč乥čĆ = 0 (ą┐ąĄčĆąĄą┤ą░čćą░ ąŠčéą║ą╗čÄč湥ąĮą░) CONFIG_EVENT_QUEUE_SIZE, & UartEventQueue, 0 ); // ążą╗ą░ą│ąĖ (0 = č鹊ą╗čīą║ąŠ ą┐čĆąĖčæą╝) if (ESP_OK != result) { ESP_LOGE(TAG, "install uart driver failed" ); break ; } result = uart_param_config(UART_NUM, & uart_config); if (ESP_OK != result) { ESP_LOGE(TAG, "config uart parameter failed" ); break ; } ESP_LOGI(TAG, "UART config uart gpio: tx %d, rx %d" , -1 , RX_PIN); result = uart_set_pin(UART_NUM, GPIO_NUM_NC, RX_PIN, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE); if (ESP_OK != result) { ESP_LOGE(TAG, "config uart gpio failed" ); break ; } uart_flush(UART_NUM); uart_set_rx_timeout(UART_NUM, 4 ); BaseType_t bt; bt = xTaskCreate(PARSER_task, "PARSER_task" , CONFIG_PARSER_TASK_STACK_SIZE, NULL , PRIORITY_PARSER, NULL ); if (pdPASS != bt) { ESP_LOGE(TAG, "PARSER_task create failed" ); result = ESP_FAIL; break ; } // ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣ ąŠčé UART ISR bt = xTaskCreate(uart_reader_task, "uart_reader" , CONFIG_PARSER_TASK_STACK_SIZE, NULL , PRIORITY_UART, NULL ); if (pdTRUE != bt) { ESP_LOGE(TAG, "uart reader task failed" ); result = ESP_FAIL; break ; } // ąæąĄąĘ čŹč鹊ą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ UART delay(100 ); ESP_LOGI(TAG, "UART init OK" ); } while (false ); return result;
}
ąśčüą┐čĆą░ą▓ą╗ąĄąĮą░čÅ čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čŹčéčā ąŠčłąĖą▒ą║čā čāčüčéčĆą░ąĮčÅąĄčé:
uart_init (uint32_t baud)
{ esp_err_t result = ESP_FAIL; memset(& Header, 0 , sizeof (Header)); memset(& ErrorCount, 0 , sizeof (ErrorCount)); do { rdcq = xQueueCreate(CONFIG_EVENT_QUEUE_SIZE, sizeof (TRawDataChunk)); if (NULL == rdcq) { ESP_LOGE(TAG, "UART RX queue create failed" ); break ; } // 1. ąĪąØąÉą¦ąÉąøąÉ ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ (UART ąĄčēčæ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ) result = uart_set_pin(UART_NUM, GPIO_NUM_NC, RX_PIN, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE); if (result != ESP_OK) { ESP_LOGE(TAG, "config uart gpio failed" ); break ; } // 2. ą¤ą×ąóą×ą£ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (ą┐ąŠą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▓ą║ą╗čÄč湥ąĮčŗ) uart_config_t uart_config = { .baud_rate = (int )baud, .data_bits = UART_DATA_8_BITS, .parity = UART_PARITY_DISABLE, .stop_bits = UART_STOP_BITS_1, .flow_ctrl = UART_HW_FLOWCTRL_DISABLE, .rx_flow_ctrl_thresh = 0 , .source_clk = UART_SCLK_XTAL, // ąśčüą┐ąŠą╗čīąĘčāąĄą╝ XTAL ą▓ą╝ąĄčüč鹊 APB }; result = uart_param_config(UART_NUM, & uart_config); if (result != ESP_OK) { ESP_LOGE(TAG, "config uart parameter failed" ); break ; } // 3. ąś ąóą×ąøą¼ąÜą× ą¤ą×ąóą×ą£ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ą┐čĆąĖčæą╝ąŠą╝ ą┤ą░ąĮąĮčŗčģ result = uart_driver_install(UART_NUM, CONFIG_RX_BUF_SIZE, 0 , // TX ą▒čāč乥čĆ = 0 CONFIG_EVENT_QUEUE_SIZE, & UartEventQueue, 0 ); if (result != ESP_OK) { ESP_LOGE(TAG, "install uart driver failed" ); break ; } uart_flush(UART_NUM); uart_set_rx_timeout(UART_NUM, 4 ); BaseType_t bt; bt = xTaskCreate(PARSER_task, "PARSER_task" , CONFIG_PARSER_TASK_STACK_SIZE, NULL , PRIORITY_PARSER, NULL ); if (pdPASS != bt) { ESP_LOGE(TAG, "PARSER_task create failed" ); result = ESP_FAIL; break ; } // ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣ ąŠčé UART ISR bt = xTaskCreate(uart_reader_task, "uart_reader" , CONFIG_PARSER_TASK_STACK_SIZE, NULL , PRIORITY_UART, NULL ); if (pdTRUE != bt) { ESP_LOGE(TAG, "uart reader task failed" ); result = ESP_FAIL; break ; } // ąæąĄąĘ čŹč鹊ą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ UART delay(100 ); ESP_LOGI(TAG, "UART init OK" ); } while (false ); return result;
}
[ąÉąĮą░ą╗ąĖąĘ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ]
ąÆąĮąĄčüąĄąĮąĮčŗąĄ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆą░ąĮčÅčÄčé čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠąĮą║ąĖ (race condition) ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ UART. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąŠą┤čĆąŠą▒ąĮčŗą╣ ą░ąĮą░ą╗ąĖąĘ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ.
1 . ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ąŠčĆčÅą┤ą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ (čüą░ą╝ąŠąĄ ą▓ą░ąČąĮąŠąĄ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ)
ąĪčéą░čĆčŗą╣ ą┐ąŠčĆčÅą┤ąŠą║:
ąØąŠą▓čŗą╣ ą┐ąŠčĆčÅą┤ąŠą║:
ąÆ čüčéą░čĆąŠą╝ ą║ąŠą┤ąĄ ą▓čŗąĘąŠą▓ uart_driver_install() ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ą╗ UART ąĖ ąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ąĖ ąĮą░čüčéčĆąŠąĄąĮčŗ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ (param_config) ąĖ ą▓čŗą▓ąŠą┤čŗ GPIO (set_pin). ąĢčüą╗ąĖ ąĮą░ ą╗ąĖąĮąĖąĖ RX čāąČąĄ ą▒čŗą╗ąĖ ą┤ą░ąĮąĮčŗąĄ, UART-ą┐ąĄčĆąĖč乥čĆąĖčÅ ąĮą░čćąĖąĮą░ą╗ą░ ąĖčģ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī čü ą┤ąĄč乊ą╗čéąĮčŗą╝ąĖ/ąĮąĄą║ąŠčĆčĆąĄą║čéąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ, čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖą╗ąŠ ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝čā ą║ąŠąĮčäą╗ąĖą║čéčā ą┐čĆąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╝ ą▓čŗąĘąŠą▓ąĄ uart_param_config().
ąÆ ąĮąŠą▓ąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ:
- set_pin ŌåÆ č鹊ą╗čīą║ąŠ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé IO MUX (UART ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ)
ąŁč鹊 ą║ą╗čÄč湥ą▓ąŠąĄ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ čāčüčéčĆą░ąĮčÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠąĮą║ąĖ.
2 . ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░
ąĪčéą░čĆąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ UART_SCLK_DEFAULT, ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ UART_SCLK_XTAL.
UART_SCLK_DEFAULT ą┤ą╗čÅ ESP32-C3 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé APB_CLK (80 ą£ąōčå), ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ čüąĖčüč鹥ą╝ąŠą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝.
UART_SCLK_XTAL ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ąĮąĄčłąĮąĖą╣ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ (40 ą£ąōčå), ą║ąŠč鹊čĆčŗą╣ ą▓čüąĄą│ą┤ą░ čüčéą░ą▒ąĖą╗ąĄąĮ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ CPU ąĖą╗ąĖ čüąĖčüč鹥ą╝čŗ ą┐ąĖčéą░ąĮąĖčÅ.
ąŁč鹊 ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą▓čŗčłą░ąĄčé ąĮą░ą┤čæąČąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ, čćč鹊 ąŠčüąŠą▒ąĄąĮąĮąŠ ą▓ą░ąČąĮąŠ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ čüą║ąŠčĆąŠčüčéčÅą╝ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ CrossFire 416000/420000 ą▒ąŠą┤).
3 . ą»ą▓ąĮą░čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüčéčĆčāą║čéčāčĆčŗ uart_config
ąĪčéą░čĆčŗą╣ ą▓ą░čĆąĖą░ąĮčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘčĆąŠą▓ą░ą╗ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ ą┐ąŠčüą╗ąĄ ąŠą▒čŖčÅą▓ą╗ąĄąĮąĖčÅ, ąĮąŠą▓čŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ č湥čĆąĄąĘ = { ... } ą┐čĆąĖ ąŠą▒čŖčÅą▓ą╗ąĄąĮąĖąĖ.
ąØąŠą▓čŗą╣ čüą┐ąŠčüąŠą▒ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓čüąĄ ąĮąĄąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ ą▒čāą┤čāčé ąŠą▒ąĮčāą╗ąĄąĮčŗ. ąÆ čüčéą░čĆąŠą╝ ą║ąŠą┤ąĄ ą┐ąŠą╗ąĄ source_clk ą▒čŗą╗ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ, ąĮąŠ č鹥ąŠčĆąĄčéąĖč湥čüą║ąĖ ą┤čĆčāą│ąĖąĄ ą┐ąŠą╗čÅ ą╝ąŠą│ą╗ąĖ čüąŠą┤ąĄčƹȹ░čéčī "ą╝čāčüąŠčĆ". ąØąŠą▓čŗą╣ ą▓ą░čĆąĖą░ąĮčé ą▒ąŠą╗ąĄąĄ ą▒ąĄąĘąŠą┐ą░čüąĄąĮ ąĖ ą┐ąŠąĮčÅč鹥ąĮ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
[ąĪą▓ąŠą┤ąĮą░čÅ čéą░ą▒ą╗ąĖčåą░ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ]
ąÉčüą┐ąĄą║čé ąĪčéą░čĆčŗą╣ ą║ąŠą┤ ąØąŠą▓čŗą╣ ą║ąŠą┤ ąÆą╗ąĖčÅąĮąĖąĄ ąĮą░ ąŠčłąĖą▒ą║čā
ą¤ąŠčĆčÅą┤ąŠą║ ą▓čŗąĘąŠą▓ąŠą▓
install ŌåÆ param ŌåÆ pin
pin ŌåÆ param ŌåÆ install
ąÜčĆąĖčéąĖč湥čüą║ąŠąĄ
ąśčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓
UART_SCLK_DEFAULT
UART_SCLK_XTAL
ąŚąĮą░čćąĖč鹥ą╗čīąĮąŠąĄ
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüčéčĆčāą║čéčāčĆčŗ
ą¤ąŠčŹą╗ąĄą╝ąĄąĮčéąĮą░čÅ
ąÉą│čĆąĄą│ą░čéąĮą░čÅ
ąÜąŠčüą╝ąĄčéąĖč湥čüą║ąŠąĄ
[ą¤ąŠč湥ą╝čā ąŠčłąĖą▒ą║ą░ ą▒ąŠą╗čīčłąĄ ąĮąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ]
ą×čłąĖą▒ą║ą░ `not able to power down in light sleep` ą▓ąŠąĘąĮąĖą║ą░ą╗ą░ ąĖąĘ-ąĘą░ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ:
1 . driver_install() ŌåÆ UART ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ čü ą┤ąĄč乊ą╗čéąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ.2 . ą¤ąŠčüčéčāą┐ą░čÄčé ą┤ą░ąĮąĮčŗąĄ ąĮą░ RX ŌåÆ UART ą┐čŗčéą░ąĄčéčüčÅ ąĖčģ ąŠą▒čĆą░ą▒ąŠčéą░čéčī.3 . uart_param_config() ŌåÆ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąĄčĆąĄąĮą░čüčéčĆąŠąĖčéčī UART.4 . ąöčĆą░ą╣ą▓ąĄčĆ UART ą▓ąĖą┤ąĖčé, čćč鹊 Light-sleep ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą║ą╗čÄčćčæąĮ, ąĖ ąĮąĄ ą╝ąŠąČąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ą┐čĆąĖ ą┐ąĄčĆąĄąĮą░čüčéčĆąŠą╣ą║ąĄ ą░ą║čéąĖą▓ąĮąŠą╣ ą┐ąĄčĆąĖč乥čĆąĖąĖ ŌåÆ ą▓čŗą▓ąŠą┤ąĖčé ąŠčłąĖą▒ą║čā.
ąØąŠą▓čŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čāčüčéčĆą░ąĮčÅąĄčé čŹč鹊čé čüčåąĄąĮą░čĆąĖą╣:
1 . set_pin() ŌåÆ č鹊ą╗čīą║ąŠ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠčĆč鹊ą▓ GPIO.2 . param_config() ŌåÆ ąĮą░čüčéčĆąŠą╣ą║ą░ UART ą▓ "ą▒ąĄąĘąŠą┐ą░čüąĮąŠą╝" čüąŠčüč鹊čÅąĮąĖąĖ.3 . driver_install() ŌåÆ ą░ą║čéąĖą▓ą░čåąĖčÅ UART čü ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ čü ą┐ąĄčĆą▓ąŠą│ąŠ ą╝ąŠą╝ąĄąĮčéą░ čĆą░ą▒ąŠčéčŗ.
[ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ]
ąĢčüą╗ąĖ čģąŠčéąĖč鹥 ąĄčēčæ ą▒ąŠą╗čīčłąĄ ą┐ąŠą▓čŗčüąĖčéčī ąĮą░ą┤čæąČąĮąŠčüčéčī, ą╝ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī:
// ą¤ąŠčüą╗ąĄ uart_driver_install, ąŠčćąĖčüčéą║ą░ ą▒čāč乥čĆą░ ąŠčé ą╗čÄą▒čŗčģ "ą╝čāčüąŠčĆąĮčŗčģ" ą┤ą░ąĮąĮčŗčģ, // ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ąĮą░ą║ąŠą┐ąĖčéčīčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ
uart_flush_input(UART_NUM); // ąĄčüą╗ąĖ čéą░ą║ą░čÅ čäčāąĮą║čåąĖčÅ ąĄčüčéčī, ąĖą╗ąĖ: uint8_t dummy[64 ]; // čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊č湥ąĮ
uart_read_bytes(UART_NUM, dummy, sizeof (dummy), pdMS_TO_TICKS(10 ));
ąŁč鹊 ą║ą╗ą░čüčüąĖč湥čüą║ą░čÅ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ESP-IDF. ąÜąŠą┤ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 0, ąĄčüą╗ąĖ ą▓čŗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ą╗ąĖ ąĄą│ąŠ ą▓ čĆąĄąČąĖą╝ GPIO_MODE_OUTPUT . ążčāąĮą║čåąĖčÅ gpio_get_level() ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ ą┐ąŠčĆčéą░. ąĢčüą╗ąĖ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ č鹊ą╗čīą║ąŠ ą║ą░ą║ ą▓čŗčģąŠą┤, č鹊 ąĄą│ąŠ ą▓čģąŠą┤ąĮąŠą╣ ą▒čāč乥čĆ ąŠčéą║ą╗čÄčćčæąĮ ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ, ąĖ čäčāąĮą║čåąĖčÅ ą┐čĆąŠčüč鹊 ąĮąĄ ą╝ąŠąČąĄčé ąĮąĖč湥ą│ąŠ ą┐čĆąŠčćąĖčéą░čéčī, ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą▓čĆą░čēą░čÅ 0.
ąÜą░ą║ čŹč鹊 ąĖčüą┐čĆą░ą▓ąĖčéčī: čüą░ą╝čŗą╣ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ čüą┐ąŠčüąŠą▒ ŌĆö čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┐ąŠčĆčé, ą║ąŠč鹊čĆčŗą╣ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┤ą╗čÅ čüą▒čĆąŠčüą░, ą▓ čĆąĄąČąĖą╝ GPIO_MODE_INPUT_OUTPUT . ąŁč鹊 ą▓ą║ą╗čÄčćąĖčé ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ (čćč鹊ą▒čŗ ą▓čŗ ą╝ąŠą│ą╗ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī čāčĆąŠą▓ąĮąĄą╝ ą▓čŗčģąŠą┤ą░) ąĖ ą▓čģąŠą┤ąĮąŠą╣ ą▒čāč乥čĆ (čćč鹊ą▒čŗ ą▓čŗ ą╝ąŠą│ą╗ąĖ čćąĖčéą░čéčī ąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖąĄ).
// ąÆą╝ąĄčüč鹊: // gpio_set_direction(ąØą×ą£ąĢąĀ_ąÆą½ąÆą×ąöąÉ_GPIO, GPIO_MODE_OUTPUT); // ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊:
gpio_set_direction(ąØą×ą£ąĢąĀ_ąÆą½ąÆą×ąöąÉ_GPIO, GPIO_MODE_INPUT_OUTPUT);
ą×čłąĖą▒ą║ą░ ą▓ ą╗ąŠą│ąĄ:
(13708) task_wdt: Task watchdog got triggered. The following tasks/users did not
reset the watchdog in time:
E (13708) task_wdt: - IDLE (CPU 0)
E (13708) task_wdt: Tasks currently running:
E (13708) task_wdt: CPU 0: FrameTask
E (13708) task_wdt: Print CPU 0 (current core) registers
Core 0 register dump:
MEPC : 0x40387566 RA : 0x403875f6 SP : 0x3fc9a030 GP : 0x3fc91600
--- Stack dump detected
--- 0x40387566: vPortClearInterruptMaskFromISR at ~/esp/v5.5.3/components/freertos/
FreeRTOS-Kernel/portable/riscv/port.c:515
--- 0x403875f6: vPortExitCritical at ~/esp/v5.5.3/components/freertos/
FreeRTOS-Kernel/portable/riscv/port.c:627
TP : 0x3fc9a220 T0 : 0x00000000 T1 : 0x80000000 T2 : 0x00000000
S0/FP : 0x00000000 S1 : 0x3fc98c88 A0 : 0x00000001 A1 : 0x00000000
A2 : 0x6003f000 A3 : 0x00200000 A4 : 0x00000000 A5 : 0x600c2000
A6 : 0xfff00000 A7 : 0x00000001 S2 : 0x3fc98bbc S3 : 0x3fc98c2c
S4 : 0x3fc98cec S5 : 0x3fc98e78 S6 : 0x3fc9a128 S7 : 0x00000000
S8 : 0x00000000 S9 : 0x00000000 S10 : 0x00000000 S11 : 0x00000000
T3 : 0xff000fff T4 : 0x00000008 T5 : 0x00000000 T6 : 0x00000000
MSTATUS : 0x00001889 MTVEC : 0x40380001 MCAUSE : 0xdeadc0de MTVAL : 0xdeadc0de
--- 0x40380001: _vector_table at ~/esp/v5.5.3/components/riscv/vectors_intc.S:54
MHARTID : 0x00000000
Please enable CONFIG_ESP_SYSTEM_USE_FRAME_POINTER option to have a full backtrace.
ąŁč鹊 čüčĆą░ą▒ąŠčéą░ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ (watchdog, WDT) ąĖąĘ-ąĘą░ ąĘą░ą┤ą░čćąĖ FrameTask, ą║ąŠč鹊čĆą░čÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čüą╗ąĖčłą║ąŠą╝ ą┤ąŠą╗ą│ąŠ ąĖ ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčé watchdog-čéą░ą╣ą╝ąĄčĆ. ąŚą░ą┤ą░čćą░ IDLE ąĮąĄ čüą▒čĆąŠčüąĖą╗ą░ watchdog, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ą▒čŗą╗ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ąĘą░ą┤ą░č湥ą╣ FrameTask. ąó. ąĄ. ąĘą░ą┤ą░čćą░ (ą▓ ą┤ą░ąĮąĮąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ čŹč鹊 ąĘą░ą┤ą░čćą░ čü ąĖą╝ąĄąĮąĄą╝ FrameTask ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čüą╗ąĖčłą║ąŠą╝ ą┤ąŠą╗ą│ąŠ ąĖ ąĮąĄ ą▓čŗąĘčŗą▓ą░ąĄčé esp_task_wdt_reset() ąĖą╗ąĖ vTaskDelay() , ąĖąĘ-ąĘą░ č湥ą│ąŠ ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčé watchdog. ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ watchdog ąŠąČąĖą┤ą░ąĄčé, čćč鹊 ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé "ą▓ąĄąČą╗ąĖą▓ąŠą╣" ąĖ ą▒čāą┤ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ąŠčéą┤ą░ą▓ą░čéčī ą┐čĆąŠčåąĄčüčüąŠčĆ.
[ąÆą░čĆąĖą░ąĮčéčŗ čĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ]
1 . ąöąŠą▒ą░ą▓čīč鹥 čüą▒čĆąŠčü watchdog ą▓ ąĘą░ą┤ą░čćčā FrameTask. ąöą╗čÅ čŹč鹊ą│ąŠ ą▓ ąĄčæ čåąĖą║ą╗ąĄ ą┤ąŠą▒ą░ą▓čīč鹥:
void FrameTask (void * pvParameters)
{ while (1 ) { // ąÆą░čł ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ą░ą┤čĆąŠą▓... ... // ąĪą▒čĆą░čüčŗą▓ą░ąĄą╝ watchdog esp_task_wdt_reset(); // ąśąøąś ą┤ąĄą╗ą░ąĄą╝ ąĮąĄą▒ąŠą╗čīčłčāčÄ ąĘą░ą┤ąĄčƹȹ║čā vTaskDelay(1 ); }
}
2 . ąŻą▓ąĄą╗ąĖčćčīč鹥 čéą░ą╣ą╝ą░čāčé watchdog (ąĄčüą╗ąĖ ąĘą░ą┤ą░čćą░ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ čéčĆąĄą▒čāąĄčé ą┤ąŠą╗ą│ąŠą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ). ąÆ app_main() ąĖą╗ąĖ ą▓ ąĮą░čćą░ą╗ąĄ FrameTask:
void app_main (void )
{ // ... čüčāčēąĄčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ... // ąŻą▓ąĄą╗ąĖčćąĖą▓ą░ąĄą╝ čéą░ą╣ą╝ą░čāčé ą┤ąŠ 10 čüąĄą║čāąĮą┤ esp_task_wdt_config_t wdt_config = { .timeout_ms = 10000 , .idle_core_mask = (1 << 0 ) | (1 << 1 ), // ąŠą▒ą░ čÅą┤čĆą░ .trigger_panic = true , }; esp_task_wdt_reconfigure(& wdt_config); // ... čüąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ FrameTask ... ...
}
3 . ą×čéą║ą╗čÄčćąĖčéčī watchdog (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ, čéą░ą║ ąĮąĄą╗čīąĘčÅ ą┤ąĄą╗ą░čéčī ą┤ą╗čÅ ą║ąŠą┤ą░ čĆąĄą╗ąĖąĘą░):
void app_main (void )
{ // ą×čéą║ą╗čÄčćą░ąĄą╝ watchdog esp_task_wdt_deinit(); // ... ąŠčüčéą░ą╗čīąĮąŠą╣ ą║ąŠą┤ ...
}
4 . ą¤čĆąŠą▓ąĄčĆčīč鹥, čćč鹊 ą┤ąĄą╗ą░ąĄčé FrameTask. ąØą░ąĖą▒ąŠą╗ąĄąĄ ą▓ąĄčĆąŠčÅčéąĮą░čÅ ą┐čĆąĖčćąĖąĮą░ - ąŠąĮą░ ą▓čŗąĘčŗą▓ą░ą╗ą░ čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čüą╗ąĖčłą║ąŠą╝ ą┤ąŠą╗ą│ąŠ. ąöąŠą▒ą░ą▓čīč鹥 ą▓ ą║ąŠą┤ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓čŗąĘąŠą▓čŗ vTaskDelay, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
void show_font (void )
{ Max7456clearScreen(); uint8_t x, y; x = y = 0 ; for (int i=0 ; i < 256 ; i++ ) { Max7456printMax7456Char((uint8_t )i, x, y, 0 , 0 ); x++ ; if (16 == x) { x = 0 ; y++ ; } // ąöą×ąæąÉąÆą¼ąóąĢ ąŁąóąŻ ąĪąóąĀą×ąÜąŻ. ąóąĄą╝ čüą░ą╝čŗą╝ ą╝čŗ ą┤ą░ąĄą╝ ą▓čĆąĄą╝čÅ ą┤čĆčāą│ąĖą╝ // ąĘą░ą┤ą░čćą░ą╝ ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄą╝ watchdog: vTaskDelay(1 ); }
}
ążą░ą╣ą╗ main/idf_component.yml
## IDF Component Manager Manifest File dependencies : ## Required IDF version idf : version : '>=5.4' espressif/json_generator : ^1.1.2 espressif/mdns : '*' protocol_examples_common : path : ${IDF_PATH}/examples/common_components/protocol_examples_common espressif/esp_websocket_client : ^1.0.0
ąÜą░ą║ čāą┤ą░ą╗ąĖčéčī ą▓ąĮąĄčłąĮčÄčÄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé protocol_examples_common
ą¦č鹊ą▒čŗ ą┐ąĄčĆąĄąĮąĄčüčéąĖ protocol_examples_common ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą▓ ą╗ąŠą║ą░ą╗čīąĮčāčÄ ą┐ą░ą┐ą║čā ą┐čĆąŠąĄą║čéą░, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1 . ąĪąŠąĘą┤ą░ą╣č鹥 ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé. ąĪąŠąĘą┤ą░ą╣č鹥 čüčéčĆčāą║čéčāčĆčā ą┐ą░ą┐ąŠą║ ą▓ ą▓ą░čłąĄą╝ ą┐čĆąŠąĄą║č鹥:
mkdir -p components/protocol_examples_common
2 . ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 čäą░ą╣ą╗čŗ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░. ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 ą▓čüąĄ čäą░ą╣ą╗čŗ ąĖąĘ ą┐čĆąĖą╝ąĄčĆą░ ą▓ ą▓ą░čł ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé:
cp -r ${IDF_PATH}/examples/common_components/protocol_examples_common/* \
3 . ą×ą▒ąĮąŠą▓ąĖč鹥 idf_component.yml . ąŻą┤ą░ą╗ąĖč鹥 čüčéčĆąŠą║čā čü protocol_examples_common ąĖąĘ ą▓ą░čłąĄą│ąŠ main/idf_component.yml . ążą░ą╣ą╗ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą│ą╗čÅą┤ąĄčéčī čéą░ą║:
## IDF Component Manager Manifest File dependencies : ## Required IDF version idf : version : '>=5.4' espressif/json_generator : ^1.1.2 espressif/mdns : '*' espressif/esp_websocket_client : ^1.0.0
4 . ą¤čĆąŠą▓ąĄčĆčīč鹥 ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░.
ąĢčüą╗ąĖ ą▓ components/protocol_examples_common/idf_component.yml ąĄčüčéčī ą▓ąĮąĄčłąĮąĖąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ, ąŠąĮąĖ ą▒čāą┤čāčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ č湥čĆąĄąĘ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéąĮčŗą╣ ą╝ąĄąĮąĄą┤ąČąĄčĆ.
5 . ą×čćąĖčüčéąĖč鹥 ąĖ ą┐ąĄčĆąĄčüąŠą▒ąĄčĆąĖč鹥 ą┐čĆąŠąĄą║čé:
idf.py clean idf.py build
[ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗą╣) ]
ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čŹč鹊čé ą║ąŠą╝ą┐ąŠąĮąĄąĮčé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░, ą╗čāčćčłąĄ čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čäą░ą╣ą╗čŗ:
# ąĪąŠąĘą┤ą░ą╣č鹥 ą╗ąŠą║ą░ą╗čīąĮčŗą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé mkdir -p components/protocol_examples_common
# ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 č鹊ą╗čīą║ąŠ ąĮčāąČąĮčŗąĄ čäą░ą╣ą╗čŗ cp ${IDF_PATH}/examples/common_components/protocol_examples_common/include/* \ components/protocol_examples_common/include/
cp ${IDF_PATH}/examples/common_components/protocol_examples_common/*.c \ components/protocol_examples_common/
cp ${IDF_PATH}/examples/common_components/protocol_examples_common/CMakeLists.txt \ components/protocol_examples_common/
cp ${IDF_PATH}/examples/common_components/protocol_examples_common/idf_component.yml \ components/protocol_examples_common/
ąÆą░ąČąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé: ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄąĮąŠčüą░ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ą▒čāą┤ąĄčé čćą░čüčéčīčÄ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░ ąĖ ąĮąĄ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒ąĮąŠą▓ą╗čÅčéčīčüčÅ čü ąĮąŠą▓čŗą╝ąĖ ą▓ąĄčĆčüąĖčÅą╝ąĖ ESP-IDF. ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 čüąŠčģčĆą░ąĮąĖčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą╗čāčćčłąĄ ąŠčüčéą░ą▓ąĖčéčī ąĄą│ąŠ ą║ą░ą║ ą▓ąĮąĄčłąĮčÄčÄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║čāčÄ čüčüčŗą╗ą║čā (symlink).
ąĪ ą┐ąŠą╝ąŠčēčīčÄ čāčéąĖą╗ąĖčéčŗ idf.py č鹊čćąĮąŠ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ, ąŠąĮą░ čĆą░ą▒ąŠčéą░ąĄčé čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ą┐čĆąŠąĄą║čéą░, ą░ ąĮąĄ čü ąČąĄą╗ąĄąĘąŠą╝. ąÉ ą▓ąŠčé čü ą┐ąŠą╝ąŠčēčīčÄ esptool čāąĘąĮą░čéčī čéąĖą┐ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą╝ąŠąČąĮąŠ.
esptool.py ŌĆö čŹč鹊 ąŠčäąĖčåąĖą░ą╗čīąĮą░čÅ čāčéąĖą╗ąĖčéą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čćąĖą┐ą░ą╝ąĖ Espressif. ą×ąĮą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéąĖą┐ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą║ąŠą╝ą░ąĮą┤, čéą░ą║ čćč鹊 ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ ą▓ą░ą╝ ąĮąĄ ąĮčāąČąĮąŠ čāą║ą░ąĘčŗą▓ą░čéčī ąĄą│ąŠ ą▓čĆčāčćąĮčāčÄ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┐čåąĖąĖ --chip . ąŻčéąĖą╗ąĖčéą░ čüą░ą╝ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéąĖą┐ ąĖ ą▓čŗą▒ąĖčĆą░ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ąŠą▒čēąĄąĮąĖčÅ.
ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ŌĆö ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā chip_id . ą×ąĮą░ ąĮąĄ č鹊ą╗čīą║ąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čćąĖą┐ą░, ąĮąŠ ąĖ ą▓čŗą▓ąŠą┤ąĖčé ą┐ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą╝ąŠą┤ąĄą╗ąĖ ąĖ ąĄčæ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅčģ.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ chip_id . ą×čéą║čĆąŠą╣č鹥 č鹥čĆą╝ąĖąĮą░ą╗ ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā, ąĘą░ą╝ąĄąĮąĖą▓ PORT ąĮą░ ąĖą╝čÅ ą▓ą░čłąĄą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, COM3 ą▓ Windows ąĖą╗ąĖ /dev/ttyUSB0 ą▓ Linux).
esptool.py --port PORT chip_id
ąÆ ąŠčéą▓ąĄčé ą▓čŗ ą┐ąŠą╗čāčćąĖč鹥 ą┐ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čćąĖą┐ąĄ, ą║ą░ą║ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ:
$ esptool.py -p /dev/ttyUSB2 chip_id
esptool.py v4.8.1
Serial port /dev/ttyUSB2
Connecting....
Detecting chip type... Unsupported detection protocol, switching and trying again...
Connecting....
Detecting chip type... ESP32
Chip is ESP32-D0WD-V3 (revision v3.1)
Features: WiFi, BT, Dual Core, 240MHz, VRef calibration in efuse, Coding Scheme None
Crystal is 40MHz
MAC: 8c:94:df:7c:91:88
Uploading stub...
Running stub...
Stub running...
Warning: ESP32 has no Chip ID. Reading MAC instead.
MAC: 8c:94:df:7c:91:88
Hard resetting via RTS pin...
ąÆ ą▓čŗą▓ąŠą┤ąĄ čüčéčĆąŠą║ą░ Chip is ... ą┐ąŠą║ą░ąČąĄčé č鹊čćąĮčāčÄ ą╝ąŠą┤ąĄą╗čī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąöčĆčāą│ąĖąĄ ą┐ąŠą╗ąĄąĘąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
flash_id : čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĖ ą▓čŗą▓ąŠą┤ąĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą▓ąĮąĄčłąĮąĄą╣ SPI Flash-ą┐ą░ą╝čÅčéąĖ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā, ą▓ą║ą╗čÄčćą░čÅ ąĄčæ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ ąĖ čĆą░ąĘą╝ąĄčĆ. ą×ąĮą░ čéą░ą║ąČąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéąĖą┐ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ čćąĖą┐ą░.
read_mac : ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé MAC-ą░ą┤čĆąĄčü, ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╣ ą▓ čćąĖą┐ąĄ. ąÜą░ą║ ąĖ ą┤čĆčāą│ąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ąŠąĮą░ čéą░ą║ąČąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéąĖą┐ čćąĖą┐ą░ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čüą▓ąŠąĄą╣ čĆą░ą▒ąŠčéčŗ.
ąĪą╝. čéą░ą║ąČąĄ Q047 .
ąÆ C-ą║ąŠą┤ąĄ ąŠčéą╗ąĖčćąĖčéčī čéąĖą┐ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą╝ąŠąČąĮąŠ ą┤ą▓čāą╝čÅ ąŠčüąĮąŠą▓ąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ: ąĮą░ čŹčéą░ą┐ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ (čüčéą░čéąĖč湥čüą║ąĖ) ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ). ąÆčŗą▒ąŠčĆ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▓ą░čłąĄą╣ ąĘą░ą┤ą░čćąĖ. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ čŹčéąĖ čĆąĄčłąĄąĮąĖčÅ ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ESP32-S3 ąĖ ESP32, ą┐čĆąŠąĄą║čé ą╝ąŠąČąĄčé ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĮąĖčģ.
ąĪą┐ąŠčüąŠą▒ 1 . ą¤čĆąŠą▓ąĄčĆą║ą░ ąĮą░ čŹčéą░ą┐ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ (ą╝ą░ą║čĆąŠčüčŗ ą┐čĆąĄą┐čĆąŠčåąĄčüčüąŠčĆą░)
ąŁč鹊čé ą╝ąĄč鹊ą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▓čŗ čģąŠčéąĖč鹥 čüąŠą▒čĆą░čéčī čĆą░ąĘąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čćąĖą┐ąŠą▓. ąĪą░ą╝čŗą╣ ąĮą░ą┤ąĄąČąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą▓ ESP-IDF ąĖ Arduino-ESP32 ŌĆö ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ą░ą║čĆąŠčüčŗ ąĖąĘ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą│ąŠ čäą░ą╣ą╗ą░ sdkconfig.h .
// ą×ą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 čŹč鹊čé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗: #include < sdkconfig.h> // ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 #if/#elif/#endif ą┤ą╗čÅ čāčüą╗ąŠą▓ąĮąŠą╣ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ #if defined(CONFIG_IDF_TARGET_ESP32) // ąŁč鹊čé ą║ąŠą┤ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ESP32 #define CHIP_NAME "ESP32" #elif defined(CONFIG_IDF_TARGET_ESP32S3) // ąŁč鹊čé ą║ąŠą┤ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ESP32-S3 #define CHIP_NAME "ESP32-S3" #else #error "Unsupported ESP32 chip target!" #endif
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ą▓ čĆą░ąĘąĮčŗčģ ą▓ąĄčĆčüąĖčÅčģ ESP-IDF ąĘąĮą░č湥ąĮąĖąĄ ą╝ą░ą║čĆąŠčüą░ CONFIG_IDF_TARGET_ESP32S3 ą╝ąŠąČąĄčé ąŠčéą╗ąĖčćą░čéčīčüčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▒čŗčéčī 4 ąĖą╗ąĖ 9). ą¤ąŠčŹč鹊ą╝čā ą▓ ą║ąŠą┤ąĄ ą┐čĆąŠą▓ąĄčĆčÅą╣č鹥 č鹊ą╗čīą║ąŠ čäą░ą║čé ąĄą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ (čü ą┐ąŠą╝ąŠčēčīčÄ #if defined ąĖą╗ąĖ #ifdef), ą░ ąĮąĄ ą║ąŠąĮą║čĆąĄčéąĮąŠąĄ čćąĖčüą╗ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąŁč鹊 čüą░ą╝čŗą╣ ąĮą░ą┤ąĄąČąĮčŗą╣ ą┐ąŠą┤čģąŠą┤.
ąĪą┐ąŠčüąŠą▒ 2 . ą¤čĆąŠą▓ąĄčĆą║ą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (čü ą┐ąŠą╝ąŠčēčīčÄ API)
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąŠą┤čģąŠą┤ąĖčé, ąĄčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 čüąŠą▒čĆą░čéčī ąŠą┤ąĮčā čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčāčÄ ą┐čĆąŠčłąĖą▓ą║čā, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ąŠą▒ąŠąĖčģ čćąĖą┐ą░čģ. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĖ čüčéą░čĆč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
1 . ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąŠą┤ąĮąŠą│ąŠ API ESP-IDF:
#include "esp_chip_info.h"
esp_chip_info_t chip_info;
esp_chip_info(& chip_info); // ą¤ąŠą╗čāčćą░ąĄą╝ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čćąĖą┐ąĄ switch (chip_info.model) {case CHIP_ESP32 : printf("ąŁč鹊 čćąĖą┐ ESP32. \n " ); break ;case CHIP_ESP32S3 : printf("ąŁč鹊 čćąĖą┐ ESP32-S3. \n " ); break ;default : printf("ąŁč鹊 ąĮąĄąĖąĘą▓ąĄčüčéąĮą░čÅ ą╝ąŠą┤ąĄą╗čī ESP32: %d \n " , chip_info.model); break ;
}
ąŚą┤ąĄčüčī CHIP_ESP32 ąĖ CHIP_ESP32S3 ŌĆö čŹč鹊 čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ. ąÜą░ą║ ąĖ ą▓ čüą╗čāčćą░ąĄ čü ą╝ą░ą║čĆąŠčüą░ą╝ąĖ, čćąĖčüą╗ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CHIP_ESP32S3 ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ąĄčĆčüąĖąĖ IDF, ąĮąŠ ą┤ą╗čÅ ą╗ąŠą│ąĖč湥čüą║ąĖčģ čüčĆą░ą▓ąĮąĄąĮąĖą╣ ą▓ switch čŹč鹊 ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ.
2 . ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ą░ Arduino:
void setup () { Serial.begin(115200 ); // ąśčüą┐ąŠą╗čīąĘčāąĄą╝ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą╝ąĄč鹊ą┤ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą╝ąŠą┤ąĄą╗ąĖ čćąĖą┐ą░ String chipModel = ESP.getChipModel(); Serial.print("ą£ąŠą┤ąĄą╗čī čćąĖą┐ą░: " ); Serial.println(chipModel); if (chipModel == "ESP32" ) { // ąÜąŠą┤ ą┤ą╗čÅ ESP32 } else if (chipModel == "ESP32-S3" ) { // ąÜąŠą┤ ą┤ą╗čÅ ESP32-S3 }
}
ąĪą╝. čéą░ą║ąČąĄ Q047 , Q065 .
ąØą░ ą┐čĆąĖą╝ąĄčĆąĄ ESP-IDF v5.4.1 ą┤ą╗čÅ ESP32-C3, čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ą░ ą╝ąŠčēąĮąŠčüčéąĖ Wi-Fi-ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ (Tx Power) ą▓ąŠąĘą╝ąŠąČąĮą░ čéčĆąĄą╝čÅ ąŠčüąĮąŠą▓ąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ.
ąĪą┐ąŠčüąŠą▒ 1 : ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ API esp_wifi_set_max_tx_power() (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗą╣)
ąŁč鹊 ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ API ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ (ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ) čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ŌŚÅ ą¤ą░čĆą░ą╝ąĄčéčĆ ąĖ ąĄą┤ąĖąĮąĖčåčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ. ą¤čĆąŠč鹊čéąĖą┐ čäčāąĮą║čåąĖąĖ: esp_wifi_set_max_tx_power(int8_t power).
ą¤ą░čĆą░ą╝ąĄčéčĆ power ąĘą░ą┤ą░čæčéčüčÅ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ 0,25 ą┤ąæą╝, č鹊 ąĄčüčéčī ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓ 4 čĆą░ąĘą░ ą▒ąŠą╗čīčłąĄ čäą░ą║čéąĖč湥čüą║ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą▓ ą┤ąæą╝.
ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī 20 ą┤ąæą╝, ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī 80.
ŌŚÅ ąöąĖą░ą┐ą░ąĘąŠąĮ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ąĘąĮą░č湥ąĮąĖą╣. ąöą╗čÅ ESP32-C3 power ą╝ąŠąČąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ąŠčé 8 ą┤ąŠ 84, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čäą░ą║čéąĖč湥čüą║ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąŠčé 2 ą┤ąæą╝ ą┤ąŠ 20 ą┤ąæą╝.
ŌŚÅ ąÆčĆąĄą╝čÅ ą▓čŗąĘąŠą▓ą░. ąŁč鹊čé API čüą╗ąĄą┤čāąĄčé ą▓čŗąĘčŗą▓ą░čéčī ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ Wi-Fi (esp_wifi_start()).
ŌŚÅ ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░:
#include "esp_wifi.h" void set_wifi_tx_power (void ) { // ąŻčüčéą░ąĮąŠą▓ąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą╝ąŠčēąĮąŠčüčéčī 10 ą┤ąæą╝ (40 * 0.25 = 10): int8_t max_tx_power = 40 ; esp_err_t ret = esp_wifi_set_max_tx_power(max_tx_power); if (ret == ESP_OK) { // ą£ąŠčēąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čāčüą┐ąĄčłąĮąŠ } else { // ą×čłąĖą▒ą║ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąŠčēąĮąŠčüčéąĖ }
}
ąĪą┐ąŠčüąŠą▒ 2 : ąĮą░čüčéčĆąŠą╣ą║ą░ č湥čĆąĄąĘ menuconfig (čüčéą░čéąĖč湥čüą║ą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░)
ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 ąĘą░ą┤ą░čéčī čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, čŹč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą▓ ą╝ąĄąĮčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąŠąĄą║čéą░.
ŌŚÅ ą¤čāčéčī ą▓ ą╝ąĄąĮčÄ:
`Component config` ŌåÆ `PHY` ŌåÆ `Max WiFi TX power (dBm)`.
ŌŚÅ ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ ą┤ą╗čÅ ESP32-C3:
ąÆ čŹč鹊ą╝ ą┐ąŠą╗ąĄ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čĆąĄą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą▓ ą┤ąæą╝ (ą▒ąĄąĘ čāą╝ąĮąŠąČąĄąĮąĖčÅ ąĮą░ 4).
ąĪą┐ąŠčüąŠą▒ 3 : AT-ą║ąŠą╝ą░ąĮą┤čŗ (ą┤ą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ESP-AT)
ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐čĆąŠčłąĖą▓ą║ąĖ ESP-AT, ą╝ąŠčēąĮąŠčüčéčī ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąŠčüąĖčéčī ąĖą╗ąĖ ąĖąĘą╝ąĄąĮąĖčéčī č湥čĆąĄąĘ AT-ą║ąŠą╝ą░ąĮą┤čŗ.
ŌŚÅ ąŚą░ą┐čĆąŠčü č鹥ą║čāčēąĄą╣ ą╝ąŠčēąĮąŠčüčéąĖ:
AT+RFPOWER?
ŌŚÅ ąŻčüčéą░ąĮąŠą▓ą║ą░ ą╝ąŠčēąĮąŠčüčéąĖ:
AT+RFPOWER=power, ą│ą┤ąĄ power ŌĆö čćąĖčüą╗ąŠ ąŠčé 8 ą┤ąŠ 84 (ą▓ ąĄą┤ąĖąĮąĖčåą░čģ 0,25 ą┤ąæą╝).
ąØą░ą┐čĆąĖą╝ąĄčĆ, AT+RFPOWER=40 čāčüčéą░ąĮąŠą▓ąĖčé ą╝ąŠčēąĮąŠčüčéčī 10 ą┤ąæą╝.
ąÆą░ąČąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ:
1 . ąóą░ą▒ą╗ąĖčåą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ ąĘąĮą░č湥ąĮąĖą╣. ąŚąĮą░č湥ąĮąĖąĄ, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ ą▓ esp_wifi_set_max_tx_power(), ąĮąĄ ą▓čüąĄą│ą┤ą░ ą╗ąĖąĮąĄą╣ąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čĆąĄą░ą╗čīąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ŌĆö ąŠąĮąŠ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčéčüčÅ ą┐ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čéą░ą▒ą╗ąĖčåąĄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĘąĮą░č湥ąĮąĖąĄ 40 ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠą┐ąŠčüčéą░ą▓ą╗ąĄąĮąŠ čü čäą░ą║čéąĖč湥čüą║ąĖą╝ ą║ąŠą┤ąŠą╝ 34. ą¤ąŠą┤čĆąŠą▒ąĮčāčÄ čéą░ą▒ą╗ąĖčåčā ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ.
2 . ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ čüąŠ čüč鹊čĆąŠąĮčŗ PHY-ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ą░čÅ č湥čĆąĄąĘ API ą╝ąŠčēąĮąŠčüčéčī ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąĄą▓čŗčüąĖčéčī ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ, ąĘą░ą┤ą░ąĮąĮąŠąĄ ą▓ ą┤ą░ąĮąĮčŗčģ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ PHY (phy_init_data.bin ). ąöą░ąČąĄ ąĄčüą╗ąĖ API ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗčüčéą░ą▓ąĖčéčī 20 ą┤ąæą╝, čĆąĄą░ą╗čīąĮčŗą╣ ą╝ą░ą║čüąĖą╝čāą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĖąČąĄ, ąĄčüą╗ąĖ čäą░ą╣ą╗ PHY ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé ąĄą│ąŠ.
3 . ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą┤ą╗čÅ čĆą░ąĮąĮąĖčģ čĆąĄą▓ąĖąĘąĖą╣ čćąĖą┐ą░. ąöą╗čÅ ESP32-C3 čĆąĄą▓ąĖąĘąĖą╣ v0.1 ŌĆō v1.0 ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▓ąĄčĆčüąĖčÅčģ ESP-IDF ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ PHY ą╝ąŠąČąĄčé ąĮą░ą▒ą╗čÄą┤ą░čéčīčüčÅ ą░ąĮąŠą╝ą░ą╗čīąĮąŠąĄ čüąĮąĖąČąĄąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮą░ 20 ą┤ąæ. ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čéą░ą║ąĖąĄ čĆą░ąĮąĮąĖąĄ čćąĖą┐čŗ, ąŠąĘąĮą░ą║ąŠą╝čīč鹥čüčī čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ čŹčĆčĆą░čéą░ą╝ąĖ (ąŠčäąĖčåąĖą░ą╗čīąĮčŗąĄ ą┐čĆąĖą╝ąĄčćą░ąĮąĖčÅ ą║ čćąĖą┐čā).
4 . ą¤čĆąŠą▓ąĄčĆą║ą░ čĆąĄą░ą╗čīąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ. ąöą╗čÅ ą║ąŠąĮčéčĆąŠą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄčĆčÅčéčī čāčĆąŠą▓ąĄąĮčī ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (RSSI) ąĮą░ ą┤čĆčāą│ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąŠč乥čüčüąĖąŠąĮą░ą╗čīąĮąŠąĄ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮąŠąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ.
ąöą╗čÅ ą┐čĆąŠčüą╝ąŠčéčĆą░ čéą░ą▒ą╗ąĖčåčŗ čĆą░ąĘą┤ąĄą╗ąŠą▓ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░ čü ą┐ąŠą╝ąŠčēčīčÄ idf.py ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ idf.py partition-table .
ąÆčŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ ąĖąĘ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ą▓ą░čłąĄą│ąŠ ESP-IDF ą┐čĆąŠąĄą║čéą░:
idf.py partition-table
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčé (ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ) ąĖ ą▓čŗą▓ąĄą┤ąĄčé ą▓ ą║ąŠąĮčüąŠą╗čī čāą┤ąŠą▒ąŠčćąĖčéą░ąĄą╝čāčÄ čüą▓ąŠą┤ą║čā ą▓ą░čłąĄą╣ č鹥ą║čāčēąĄą╣ čéą░ą▒ą╗ąĖčåčŗ čĆą░ąĘą┤ąĄą╗ąŠą▓. ąÆčŗą▓ąŠą┤ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
# ESP-IDF Partition Table # Name, Type, SubType, Offset, Size, Flags nvs, data, nvs, 0x9000, 0x6000, phy_init, data, phy, 0xf000, 0x1000, factory, app, factory, 0x10000, 1M,
ąśąĘ čŹč鹊ą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą▓čŗ čāą▓ąĖą┤ąĖč鹥 ąĖą╝čÅ (Name), čéąĖą┐ (Type), ą┐ąŠą┤čéąĖą┐ (SubType), čüą╝ąĄčēąĄąĮąĖąĄ ą▓ąŠ čäą╗ąĄčł-ą┐ą░ą╝čÅčéąĖ (Offset) ąĖ čĆą░ąĘą╝ąĄčĆ (Size) ą║ą░ąČą┤ąŠą│ąŠ čĆą░ąĘą┤ąĄą╗ą░.
[ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ]
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĮąĄ č鹊ą╗čīą║ąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ąĮąŠ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé čüąŠą▒čĆą░ąĮąĮčāčÄ čéą░ą▒ą╗ąĖčåčā čĆą░ąĘą┤ąĄą╗ąŠą▓ ą▓ąŠ čäą╗ąĄčł-ą┐ą░ą╝čÅčéčī (čü ą┐ąŠą╝ąŠčēčīčÄ esptool.py ą░ą┤čĆąĄčü ą┐čĆąŠčłąĖą▓ą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ):
idf.py partition-table-flash
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ čüąŠą▒ąĖčĆą░ąĄčé ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓čüčæ čüčĆą░ąĘčā: ąĘą░ą│čĆčāąĘčćąĖą║, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖ čéą░ą▒ą╗ąĖčåčā čĆą░ąĘą┤ąĄą╗ąŠą▓:
idf.py flash
ąóąŠčćą║ą░ ą┤ąŠčüčéčāą┐ą░ softAP (wifi_softAP.h
[ą¤čĆąĖčćąĖąĮą░1: WPA3 ]
ąÆąŠąĘą╝ąŠąČąĮą░čÅ ą┐čĆąĖčćąĖąĮą░ - ąĮą░ č鹊čćą║ąĄ ą┤ąŠčüčéčāą┐ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čĆą░ąĘčĆąĄčłąĄąĮą░ ąĖ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą░ą▓č鹊čĆąĖąĘą░čåąĖąĖ WPA3 . ąŁč鹊 ą║ą░ą║ čĆą░ąĘ ą▒čŗą╗ąŠ ą▓ ą╝ąŠąĄą╝ čüą╗čāčćą░ąĄ, ą┐ąŠą╝ąŠą│ ą┐ąĄčĆąĄčģąŠą┤ ąĮą░ ą░ą▓č鹊čĆąĖąĘą░čåąĖčÄ WPA2 . ąöą╗čÅ čŹč鹊ą│ąŠ ą▓ idf.py menuconfig ąĮčāąČąĮąŠ ąŠčéą║ą╗čÄčćąĖčéčī ąŠą┐čåąĖčÄ Enable WPA3-Personal, čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ąĮą░čüčéčĆąŠąĄą║ Component config ŌåÆ Wi-Fi, čüąĮąĖą╝ąĖč鹥 ąĘą▓ąĄąĘą┤ąŠčćą║čā čü ąŠą┐čåąĖąĖ Enable WPA3-Personal:
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüąŠčģčĆą░ąĮąĖč鹥 ąĮą░čüčéčĆąŠą╣ą║ąĖ.
ąÆ ą║ąŠą┤ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ č鹊čćą║ąĖ ą┤ąŠčüčéčāą┐ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║ąŠą╣ ą║ąŠą┤, čĆąĄąČąĖą╝ ą░ą▓č鹊čĆąĖąĘą░čåąĖąĖ .authmode = WIFI_AUTH_WPA2_PSK ą┐čĆąĖą╝ąĄąĮąĖčé ą░ą▓č鹊čĆąĖąĘą░čåąĖčÄ WPA2:
void wifi_init_softap (void )
{ ESP_ERROR_CHECK(esp_netif_init()); ESP_ERROR_CHECK(esp_event_loop_create_default()); esp_netif_create_default_wifi_ap(); wifi_init_config_t cfg = WIFI_INIT_CONFIG_DEFAULT(); ESP_ERROR_CHECK(esp_wifi_init(& cfg)); ESP_ERROR_CHECK(esp_event_handler_instance_register(WIFI_EVENT, ESP_EVENT_ANY_ID, & wifi_event_handler, NULL , NULL )); wifi_config_t wifi_config = { .ap = { .ssid = EXAMPLE_ESP_WIFI_SSID, .ssid_len = strlen(EXAMPLE_ESP_WIFI_SSID), .channel = EXAMPLE_ESP_WIFI_CHANNEL, .password = EXAMPLE_ESP_WIFI_PASS, .max_connection = EXAMPLE_MAX_STA_CONN,#ifdef CONFIG_ESP_WIFI_SOFTAP_SAE_SUPPORT .authmode = WIFI_AUTH_WPA3_PSK, .sae_pwe_h2e = WPA3_SAE_PWE_BOTH,#else /* CONFIG_ESP_WIFI_SOFTAP_SAE_SUPPORT */ .authmode = WIFI_AUTH_WPA2_PSK,#endif .pmf_cfg = { .required = true , }, }, }; if (strlen(EXAMPLE_ESP_WIFI_PASS) == 0 ) { wifi_config.ap.authmode = WIFI_AUTH_OPEN; } ESP_ERROR_CHECK(esp_wifi_set_mode(WIFI_MODE_AP)); ESP_ERROR_CHECK(esp_wifi_set_config(WIFI_IF_AP, & wifi_config)); ESP_ERROR_CHECK(esp_wifi_start()); ESP_LOGI(TAG, "wifi_init_softap finished. SSID:%s password:%s channel:%d" , EXAMPLE_ESP_WIFI_SSID, EXAMPLE_ESP_WIFI_PASS, EXAMPLE_ESP_WIFI_CHANNEL);
}
[ą¤čĆąĖčćąĖąĮą░2: pmf_cfg.required = true ]
ą×ą▒čÅąĘą░č鹥ą╗čīąĮąŠąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖąĄ Protected Management Frames (PMF) ąĘą░čüčéą░ą▓ą╗čÅąĄčé č鹊čćą║čā ą┤ąŠčüčéčāą┐ą░ ą┐čĆąĖąĮąĖą╝ą░čéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ č鹊ą╗čīą║ąŠ ąŠčé čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé PMF ąĖ čüąŠą│ą╗ą░čłą░čÄčéčüčÅ ąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. ą£ąĮąŠą│ąĖąĄ čüčéą░čĆčŗąĄ ąĖą╗ąĖ čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ Linux ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé čŹč鹊ą│ąŠ ąĮąĄ ą┤ąĄą╗ą░čéčī. ąÆ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ESP-IDF čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą║ą░ą║ "ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ PMF".
ąöą╗čÅ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ ąĘą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥 ąĖą╗ąĖ čāą┤ą░ą╗ąĖč鹥 č鹊 ą╝ąĄčüč鹊 ą▓ ą║ąŠą┤ąĄ, ą│ą┤ąĄ pmf_cfg.required čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ true:
wifi_config_t wifi_config = { .ap = { .ssid = EXAMPLE_ESP_WIFI_SSID, .ssid_len = strlen(EXAMPLE_ESP_WIFI_SSID), .channel = EXAMPLE_ESP_WIFI_CHANNEL, .password = EXAMPLE_ESP_WIFI_PASS, .max_connection = EXAMPLE_MAX_STA_CONN,#ifdef CONFIG_ESP_WIFI_SOFTAP_SAE_SUPPORT .authmode = WIFI_AUTH_WPA3_PSK, .sae_pwe_h2e = WPA3_SAE_PWE_BOTH,#else /* CONFIG_ESP_WIFI_SOFTAP_SAE_SUPPORT */ .authmode = WIFI_AUTH_WPA2_PSK,#endif // ąŚą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥 čŹč鹊 ą┐ąŠą╗ąĄ, čćč鹊ą▒čŗ ąŠčéą║ą╗čÄčćąĖčéčī PMF: //.pmf_cfg = { // .required = true, //},
[ąĪčüčŗą╗ą║ąĖ ]
1 . Configuring Launch target .2 . [Advice] Boost ESP-IDF Compile time on Windows 10 site:reddit.com.3 . ESP32 compiling time is way too long site:esp32.com.4 . ąŻčüčéą░ąĮąŠą▓ą║ą░ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ESP-IDF ą┤ą╗čÅ ESP32 .5 . ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠąĄą║čéą░ ESP-IDF .6 . ESP-IDF Build System .7 . ESP32: ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ą┐čĆąŠčłąĖą▓ą║ąŠą╣ SPI Flash ąĖ ąĘą░ą│čĆčāąĘą║ąŠą╣ .8 . hxtools bin2c site:manpages.debian.org.9 . Embedding binary blobs using gcc mingw site:stackoverflow.com.10 . inttypes.h I/O format of integer types site:ibm.com.11 . idf.py: ą║ą░ą║ ą┐čĆąŠą┐čāčüčéąĖčéčī ą┐čĆąŠą▓ąĄčĆą║čā ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣ ?12 . WSL: ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ AVR ą▓ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ ą╝ą░čłąĖąĮąĄ Linux .