|
ą¤ąĄčĆąĄą▓ąŠą┤ ąŠą┐ąĖčüą░ąĮąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░ CAN (SAM-BAŌäó Boot4CAN), ą║ąŠč鹊čĆčŗą╣ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčé Atmel ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ firmware ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ čüąĄą╝ąĄą╣čüčéą▓ą░ AT91SAM. ą×čĆąĖą│ąĖąĮą░ą╗ ą┤ąŠą║čāą╝ąĄąĮčéą░ čüą╝. AT91SAM CAN Bootloader User Notes site:atmel.com.
[1. ą×ą┐ąĖčüą░ąĮąĖąĄ]
ąæčāčéą╗ąŠą░ą┤ąĄčĆ CAN čüąĖčüč鹥ą╝čŗ SAM-BAŌäó Boot4CAN ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ąĖ čĆąĄą│ąĖčüčéčĆčŗ ą╗čÄą▒ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą┐čĆąĖąĮą░ą┤ą╗ąĄąČą░čēąĄą│ąŠ čüąĄčĆąĖąĖ AT91SAM, ą║ąŠč鹊čĆčŗą╣ ąĖą╝ąĄąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā CAN ą▒ąĄąĘ čāą┤ą░ą╗ąĄąĮąĖčÅ ąĄą│ąŠ ąĖąĘ čüąĖčüč鹥ą╝čŗ, ąĖ ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĖą╝ąĄčéčī čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
ąæčāčéą╗ąŠą░ą┤ąĄčĆ CAN čāą┐čĆą░ą▓ą╗čÅąĄčé ąŠą▒ą╝ąĄąĮąŠą╝ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (čģąŠčüč鹊ą╝) č湥čĆąĄąĘ čüąĄčéčī CAN. ą×ąĮ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ CAN, ą║ąŠč鹊čĆčŗą╣ čéčĆą░ąĮčüą╗ąĖčĆčāąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗąĄ čäčĆąĄą╣ą╝čŗ CAN ą▓ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ ąĖ čĆąĄą│ąĖčüčéčĆą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
[2. ąÜą╗čÄč湥ą▓čŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ]
ąÜą╗čÄč湥ą▓čŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░ AT91SAM CAN Bootloader čüą╗ąĄą┤čāčÄčēąĖąĄ:
ŌĆó ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü čüąĄą╝ąĄą╣čüčéą▓ąŠą╝ ARM┬« Thumb┬«
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SAM-BAŌäó Boot4CAN
ŌĆō CAN ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ čüą▓čÅąĘąĖ
ŌĆō 7 ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ISP CAN
ŌĆō ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░ąĄą╝čŗąĄ/ą┐ąĄčĆąĄą╝ąĄčēą░ąĄą╝čŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ISP CAN (Relocatable ISP CAN Identifiers)
ŌĆō čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą▓čŗą▒ąŠčĆą░ čüą║ąŠčĆąŠčüčéąĖ (Software Autobaudrate Mode)
ŌĆó ąÜąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ čüąĖčüč鹥ą╝ąĄ (In-system Programming Commands)
ŌĆō čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī ą▒ą░ą╣čéą░/ą┐ąŠą╗čāčüą╗ąŠą▓ą░/čüą╗ąŠą▓ą░ (Read/Write Byte/Halfword/Word)
ŌĆō čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī ą▒čāč乥čĆąŠą▓
ŌĆō čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī ą▒ą░ą╣č鹊ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration Bytes):
ąĮąŠą╝ąĄčĆ čāąĘą╗ą░ čłąĖąĮčŗ CAN (CAN Node Number)
ą┐ąĄčĆąĄą╝ąĄčēą░ąĄą╝čŗą╣ čüąĄą│ą╝ąĄąĮčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ CAN (CAN Relocatable Identifier Segment)
ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą▓čŗą▒ąŠčĆą░ čüą║ąŠčĆąŠčüčéąĖ (Autobaudrate Parameters Configuration)
ŌĆō ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (Start Application Command)
ŌĆó ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü č湥čĆąĄąĘ DLL AT91Boot_DLL ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ISP čü ą┐ąŠą╝ąŠčēčīčÄ čüą░ą╝ąŠą┐ąĖčüąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ
[3. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░]
ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-1 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą▒ą░ą╣čéčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▒čāčéą╗ąŠą░ą┤ąĄčĆąŠą╝. ąśčģ ąĘąĮą░č湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮčŗ č湥čĆąĄąĘ ą║ąŠą╝ą░ąĮą┤čŗ čāčüčéą░ąĮąŠą▓ą║ąĖ. ąĪą╝. čĆą░ąĘą┤ąĄą╗ 6.2.8 ąĪą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
ąÉą┤čĆąĄčü FLASH |
| NNB |
Node NumBer (ąĮąŠą╝ąĄčĆ čāąĘą╗ą░) |
0xFF |
0x100F00 |
| CRIS |
CAN Re-locatable Identifier Segment (čüąĄą│ą╝ąĄąĮčé ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░ąĄą╝ąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░) |
0xFF |
0x100F04 |
| ABM |
AutoBaud Mode (čĆąĄąČąĖą╝ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ) |
0xFF |
0x100F08 |
| PROPAG |
Propagation Segment (čüąĄą│ą╝ąĄąĮčé čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ) |
0xFF |
0x100F0C |
| PHASE1 |
ąĪąĄą│ą╝ąĄąĮčé čäą░ąĘčŗ 1 |
0xFF |
0x100F10 |
| PHASE2 |
ąĪąĄą│ą╝ąĄąĮčé čäą░ąĘčŗ 2 |
0xFF |
0x100F14 |
| BRP |
Baudrate Prescaler (ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čüą║ąŠčĆąŠčüčéąĖ) |
0xFF |
0x100F18 |
ąóą░ą▒ą╗. 3-1. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ą░ą╣č鹊ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąÆčüąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą▒ą░ą╣čéčŗ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéąĖ FLASH ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░ 0x100F00. ą¤ąĄčĆąĄą┤ ą┐ąĄčĆą▓čŗą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝ čāąĘą╗ą░ CAN ą▓ čĆąĄąČąĖą╝ąĄ č鹊čćą║ą░-č鹊čćą║ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā, čćč鹊 ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čŹčéąĖčģ ą▒ą░ą╣čé čĆą░ą▓ąĮčŗ 0xFF (čüą╝. čĆą░ąĘą┤ąĄą╗ 7. ąÉą┐ą┐ą░čĆą░čéąĮčŗąĄ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ).
[4. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░]
ą¤čĆąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠąĖčüčģąŠą┤čÅčé čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1. ąØą░čüčéčĆąŠą╣ą║ą░ čüč鹥ą║ą░ ARM ą▓ čĆąĄąČąĖą╝ąĄ čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░ (supervisor mode)
2. ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ FLASH (Embedded Flash Controller)
3. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čćą░čüč鹊čéčŗ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░
4. ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (Master Clock) ąŠčé ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (Main Oscillator)
5. ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą┤ą░ ą▓ SRAM
6. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ C
7. ąØą░čüčéčĆąŠą╣ą║ą░ PLL (ążąÉą¤ą¦): PLL ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ čéą░ą║, čćč鹊ą▒čŗ čüąĖčüč鹥ą╝ąĮą░čÅ čćą░čüč鹊čéą░ ą┐ąŠą╗čāčćąĖą╗ą░čüčī 24 ą£ąōčå
8. ąŚą░ą┐čĆąĄčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (Watchdog) ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čģąŠą┤ą░ čüą▒čĆąŠčüą░
9. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ CAN PIO, čéą░ą║č鹊ą▓ ąĖ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ CAN
10. ą¤ąĄčĆąĄčģąŠą┤ ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ SAM-BA Boot4CAN (čüą╝. čĆą░ąĘą┤ąĄą╗ 6. SAM-BA Boot4CAN)
[5. ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ą▓čŗą▒ąŠčĆ čüą║ąŠčĆąŠčüčéąĖ CAN (CAN Autobaudrate)]
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čüą║ąŠčĆąŠčüčéąĖ - 100 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 125 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 250 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 500 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║ ąĖ 1 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║.
5.1 ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą░ą▓č鹊ą▓čŗą▒ąŠčĆą░ čüą║ąŠčĆąŠčüčéąĖ
ąÉą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠąĄ ą▓ SAM-BA Boot4CAN, čŹčäč乥ą║čéąĖą▓ąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą┐čĆąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ č鹊čćą║ą░-č鹊čćą║ą░. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN ą▒čāą┤ąĄčé ą┐ąŠą▓č鹊čĆčÅčéčīčüčÅ, ą┐ąŠą║ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčé ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŁčéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé č鹊ą╝čā, čćč鹊 čģąŠčüčé ą┐čŗčéą░ąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī čäčĆąĄą╣ą╝čŗ CAN, ą┐ąŠą║ą░ čāąĘąĄą╗ CAN čü ąĘą░ą┐čāčēąĄąĮąĮčŗą╝ SAM-BA Boot4CAN ąĮąĄ ą▓čŗą┤ą░čüčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (čĆąĖčü. 6-3).
ąæčāčéą╗ąŠą░ą┤ąĄčĆ ą╝ąŠąČąĄčé ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčéčī ą▓čģąŠą┤čÅčēąĖą╣ čäčĆąĄą╣ą╝ CAN č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ąĮą░ą╣ą┤ąĄąĮą░ ą┐ąŠą┤čģąŠą┤čÅčēą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ. ąóą░ą║ą░čÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ čüąĄčéąĖ, ą▓ ą║ąŠč鹊čĆąŠą╣ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čāąĘą╗ąŠą▓ CAN.
[6. ąæčāčéą╗ąŠą░ą┤ąĄčĆ SAM-BA Boot4CAN]
ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé, ą║ą░ą║ ąĘą░ą┐čāčüčéąĖčéčī ą▒čāčéą╗ąŠą░ą┤ąĄčĆ CAN ąĖ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ č湥čĆąĄąĘ CAN, ą║ąŠč鹊čĆčŗą╣ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ SAM-BA Boot4CAN.
CAN ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖ ąĖą╝ąĄąĄčé čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ:
ŌĆō ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäčĆąĄą╣ą╝ CAN, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ CAN Specification 2.0A (čĆą░ąĘą╝ąĄčĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ 11 ą▒ąĖčé)
ŌĆō ążčĆąĄą╣ą╝: čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ (Data Frame)
ŌĆō ąĪą║ąŠčĆąŠčüčéčī (Baudrate): ą▒čāčéą╗ąŠą░ą┤ąĄčĆąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ.
6.1 ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░ SAM-BA Boot4CAN
SAM-BA Boot4CAN initialization čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą┐čĆąĖąĮčåąĖą┐čā:
ŌĆō ą¤čĆąŠą▓ąĄčĆčÅąĄčé ą▒ą░ą╣čéčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĘą░ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ (User Configuration bytes).
ŌĆō ą×ąČąĖą┤ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖą╣ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ CAN (CAN Connecting) ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠąĄ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ CAN (Software AutoBaudrate, čüą╝. čĆąĖčü. 6-1).
ąśą╝ąĄąĄčéčüčÅ ą┤ą▓ą░ čüą┐ąŠčüąŠą▒ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN:
ŌĆō ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ (Software Autobaudrate).
ŌĆō ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖčģ ą▒ą░ą╣čé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (User Configuration Bytes), čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆ ą▓čŗą▒ąŠčĆą░ čüą║ąŠčĆąŠčüčéąĖ CAN (CAN Baudrate Register, CAN_BR) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą▒ą░ą╣čéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ čåąĄą╗ąĄą╣:
ŌĆō PROPAG: ąĮą░čüčéčĆąŠą╣ą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ ą▓ čüąĄą│ą╝ąĄąĮč鹥 (Propagation Time Segment): ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖč鹊ą▓ąŠąĄ ą▓čĆąĄą╝čÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ čüąĄčéąĖ.
ŌĆō PHASE1 ąĖ PHASE2: čüąĄą│ą╝ąĄąĮčé Phase 1 ąĖ Phase 2: ą┐ą░čĆą░ą╝ąĄčéčĆčŗ Phase-BufferSegments ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ąŠčłąĖą▒ąŠą║ ąĮą░ čüčĆąĄąĘą░ čäą░ąĘčŗ. ąŁčéąĖ čüąĄą│ą╝ąĄąĮčéčŗ ą╝ąŠąČąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčī (PHASE1) ąĖą╗ąĖ čüąŠą║čĆą░čéąĖčéčī (PHASE2) čü ą┐ąŠą╝ąŠčēčīčÄ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ŌĆō BRP: ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą▓čŗą▒ąŠčĆą░ čüą║ąŠčĆąŠčüčéąĖ (Baudrate Prescaler): čŹč鹊 ą┐ąŠą╗ąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ CAN, čćč鹊ą▒čŗ ąĘą░ą┤ą░čéčī ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčāčÄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčé.
ąÆąĮąĖą╝ą░ąĮąĖąĄ: ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┐ąŠą╗ąĮąŠą╝čā ą┤ą░čéą░čłąĖčéčā ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ąĮą░čüčéčĆąŠą╣ą║ąĄ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüč鹥ą╣ ą▒ąĖčé čłąĖąĮčŗ CAN (CAN Bit Timing Programmation). ąÆčŗą▒ąŠčĆ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ čĆąĄčłąĄąĮąĖčÅą╝ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮ č湥čĆąĄąĘ ą▒ą░ą╣čé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ABM:
ŌĆō ABM = 0xFF: ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ (Software Autobaudrate).
ŌĆō ABM != 0xFF: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ CAN_BR.
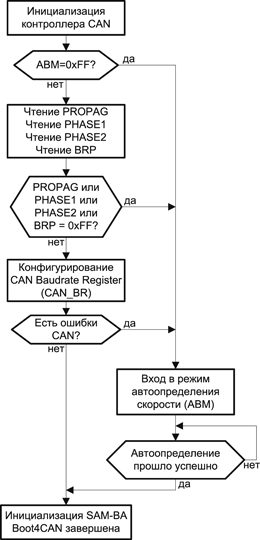
ąĀąĖčü. 6-1. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ SAM-BA Boot4CAN.
6.2 ą¤čĆąŠč鹊ą║ąŠą╗ SAM-BA Boot4CAN
ąŁč鹊čé ą┐čĆąŠč鹊ą║ąŠą╗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ:
ŌĆō ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░
ŌĆō čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī ą▒ą░ą╣čéą░/ą┐ąŠą╗čāčüą╗ąŠą▓ą░/čüą╗ąŠą▓ą░ (Read/Write Byte/Halfword/Word)
ŌĆō čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī ą▒čāč乥čĆąŠą▓
ŌĆō čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī ą▒ą░ą╣č鹊ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
ŌĆō ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā (ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ)
6.2.1 ą×ą┐ąĖčüą░ąĮąĖąĄ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ CAN (Generic CAN Data Frame)
| ą¤ąŠą╗ąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ Identifier |
ą¤ąŠą╗ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Control |
ą¤ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ Data |
| 11 ą▒ąĖčé |
1 ą▒ą░ą╣čé |
ą£ą░ą║čüąĖą╝čāą╝ 8 ą▒ą░ą╣čé |
ŌĆō Identifier: ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čäčĆąĄą╣ą╝. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆąĄąČąĖą╝ (11 ą▒ąĖčé).
ŌĆō Control: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ. ąĪąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ DLC ą▓ 4 ą▒ąĖčéą░čģ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ).
ŌĆō Data: ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆąŠąĄ čüąŠą┤ąĄčƹȹĖčé ąŠčé 0 ą┤ąŠ 8 ą▒ą░ą╣čé. ąśąĮč鹥čĆą┐čĆąĄčéą░čåąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ čäčĆąĄą╣ą╝ąĄ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą┐ąŠą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░.
6.2.2 ą×ą┐ąĖčüą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤
ąÜą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ SAM-BA Boot4CAN, č鹊 ąŠąĮ ąĘą░ą┐čāčüčéąĖčéčüčÅ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ą┐čĆąĖčģąŠą┤ą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ (čéą░ą▒ą╗ąĖčåą░ 6-1). ąÆ čéą░ą▒ą╗ąĖčåąĄ 6-1 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN, ąĘą░ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝.
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąÆčŗą┐ąŠą╗ąĮčÅąĄą╝ąŠąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ |
ąŚąĮą░č湥ąĮąĖąĄ |
ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| CAN_ID_SELECT_NODE |
ą×čéą║čĆčŗčéąĖąĄ/ąĘą░ą║čĆčŗčéąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü čāąĘą╗ąŠą╝ |
0x[CRIS]0 |
0x0 |
| CAN_ID_WR_CMD |
|
0x[CRIS]1 |
0x1 |
| CAN_ID_WR_DATA |
|
0x[CRIS]2 |
0x2 |
| CAN_ID_RD_DATA |
|
0x[CRIS]3 |
0x3 |
| CAN_ID_RD |
|
0x[CRIS]4 |
0x4 |
| CAN_ID_WR |
|
0x[CRIS]5 |
0x5 |
| CAN_ID_SPC_CMD |
|
0x[CRIS]6 |
0x6 |
ąóą░ą▒ą╗. 6-1. ąÜąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą▓ąŠčüą┐čĆąĖąĮąĖą╝ą░ąĄčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆ SAM-BA Boot4CAN
ą£ąŠąČąĮąŠ ą▓čŗą┤ąĄą╗ąĖčéčī ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ CAN ISP, ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▒ą░ą╣čéą░ CRIS ą▒ą░ąĘąŠą▓čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┤ą╗čÅ ą│čĆčāą┐ą┐čŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ (čüą╝. čĆąĖčü. 6-2). ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ CRIS čĆą░ą▓ąĮąŠ 0x7F. ąÆčüąĄ ąĘąĮą░č湥ąĮąĖčÅ čüą▓čŗčłąĄ 0x7F čüčćąĖčéą░čÄčéčüčÅ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖčÅ 0x00.
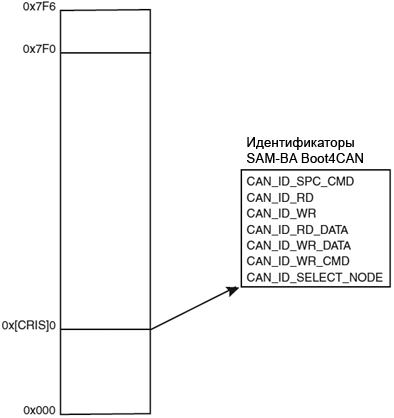
ąĀąĖčü. 6-2. ą¤ąĄčĆąĄąĮą░ąĘąĮą░č湥ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ CAN (CAN Identifier Remapping)
6.2.3 ą×čéą║čĆčŗčéąĖąĄ ąĖ ąĘą░ą║čĆčŗčéąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ
ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (čāąĘą╗ąŠą╝ CAN, ąĮą░ ą║ąŠč鹊čĆąŠą╝ čĆą░ą▒ąŠčéą░ąĄčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆ SAM-BA Boot4CAN) ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗč鹊 ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą╗čÄą▒ąŠą│ąŠ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ (ąŠą▒ą╝ąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ). ąöą╗čÅ ąŠčéą║čĆčŗčéąĖčÅ ąŠą▒ą╝ąĄąĮą░ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąŠčéą┐čĆą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ CAN "čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ" ("connecting", CAN_ID_SELECT_NODE), čü ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╝ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ąĮąŠą╝ąĄčĆąŠą╝ čāąĘą╗ą░ (node number, NNB). ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ąĮąŠą╝ąĄčĆ čĆą░ą▓ąĄąĮ 0xFF, č鹊 CAN bootloader ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ (čüą╝. čĆąĖčü 6-3).

ąĀąĖčü. 6-3. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ č鹊čćą║ą░-č鹊čćą║ą░.
ąÆ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāąĘą╗ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ą▓ąĄąĮ ą╗ąŠą║ą░ą╗čīąĮąŠą╝čā ąĮąŠą╝ąĄčĆčā čāąĘą╗ą░ (local Node Number, NNB), čüą╝. čĆąĖčü. 6-4.

ąĀąĖčü. 6-4. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓ čüąĄčéąĖ CAN.
ą¤ąĄčĆąĄą┤ ąŠčéą║čĆčŗčéąĖąĄą╝ ąĮąŠą▓ąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ č鹥ą║čāčēąĖą╣ ąŠą▒ą╝ąĄąĮ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą║čĆčŗčé čü ąĄą│ąŠ čüąŠąĄą┤ąĖąĮčÅčÄčēąĖą╝ CAN čüąŠąŠą▒čēąĄąĮąĖąĄą╝ (CAN_ID_SELECT_NODE).
6.2.3.1 ąŚą░ą┐čĆąŠčü ąŠčé čģąŠčüčéą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
| CAN_ID_SELECT_NODE |
1 |
ąØąŠą╝ąĄčĆ čāąĘą╗ą░ (Node Number, NNB) |
ąÆąĮąĖą╝ą░ąĮąĖąĄ: NNB čÅą▓ą╗čÅąĄčéčüčÅ ą▒ą░ą╣č鹊ą╝ ąĮąŠą╝ąĄčĆą░ čāąĘą╗ą░ (Node Number Byte) čü ą║ąŠč鹊čĆčŗą╝ čģąŠčüčé čģąŠč湥čé ąĮą░čćą░čéčī ąŠą▒ą╝ąĄąĮ.
6.2.3.2 ą×čéą▓ąĄčé ąŠčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
data[1] |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
| CAN_ID_SELECT_NODE |
2 |
Boot Version |
0x00 |
ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĘą░ą║čĆčŗč鹊 |
| 0x01 |
ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąŠčéą║čĆčŗč鹊 |
ąÆąĮąĖą╝ą░ąĮąĖąĄ: data[0] čüąŠą┤ąĄčƹȹĖčé ą▓ąĄčĆčüąĖčÄ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░. ąĢčüą╗ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĘą░ą║čĆčŗč鹊, č鹊 ą┤čĆčāą│ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆąŠą╝.
6.2.3.3 ą¤čĆąĖą╝ąĄčĆ
ą×čéą║čĆčŗčéąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ:
|
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
ąöą░ąĮąĮčŗąĄ |
| HOST |
CAN_ID_SELECT_NODE |
01 |
FF |
| BOOTLOADER |
CAN_ID_SELECT_NODE |
02 |
01 01 |
6.2.4 ąÜąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ ą▒ą░ą╣čéą░/ą┐ąŠą╗čāčüą╗ąŠą▓ą░/čüą╗ąŠą▓ą░ (Read Byte/Half-word/Word)
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čćąĖčéą░čéčī ą▒ą░ą╣čéčŗ (8 ą▒ąĖčé), ą┐ąŠą╗čāčüą╗ąŠą▓ą░ (16 ą▒ąĖčé, ą┤ą▓ą░ ą▒ą░ą╣čéą░) ąĖą╗ąĖ čüą╗ąŠą▓ą░ (32 ą▒ąĖčéą░, 4 ą▒ą░ą╣čéą░) ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ č鹊ą╗čīą║ąŠ čü č鹥ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čü ą║ąŠč鹊čĆčŗą╝ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
6.2.4.1 ąŚą░ą┐čĆąŠčü ąŠčé čģąŠčüčéą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
data[1] |
data[2] |
data[3] |
data[4] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_RD |
5 |
0x05 |
ąÉą┤čĆąĄčü |
ą¦č鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ |
| 0x06 |
ą¦č鹥ąĮąĖąĄ ą┐ąŠą╗čāčüą╗ąŠą▓ą░ |
| 0x08 |
ą¦č鹥ąĮąĖąĄ čüą╗ąŠą▓ą░ |
6.2.4.2 ą×čéą▓ąĄčé ąŠčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
| CAN_ID_RD |
1 |
ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░ |
| 2 |
ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą┐ąŠą╗čāčüą╗ąŠą▓ą░ |
| 4 |
ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ čüą╗ąŠą▓ą░ |
6.2.4.3 ą¤čĆąĖą╝ąĄčĆ
ą¦č鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x202000:
|
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
ąöą░ąĮąĮčŗąĄ |
| HOST |
CAN_ID_RD |
05 |
05 00 20 20 00 |
| BOOTLOADER |
CAN_ID_RD |
01 |
69 |
6.2.5 ąÜąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐ąĖčüąĖ ą▒ą░ą╣čéą░/ą┐ąŠą╗čāčüą╗ąŠą▓ą░/čüą╗ąŠą▓ą░ (Write Byte/Half-word/Word)
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĘą░ą┐ąĖčüą░čéčī ą▒ą░ą╣čéčŗ (8 ą▒ąĖčé), ą┐ąŠą╗čāčüą╗ąŠą▓ą░ (16 ą▒ąĖčé, ą┤ą▓ą░ ą▒ą░ą╣čéą░) ąĖą╗ąĖ čüą╗ąŠą▓ą░ (32 ą▒ąĖčéą░, 4 ą▒ą░ą╣čéą░) ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ č鹊ą╗čīą║ąŠ čü č鹥ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čü ą║ąŠč鹊čĆčŗą╝ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
6.2.5.1 ąŚą░ą┐čĆąŠčü ąŠčé čģąŠčüčéą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0:3] |
data[4] |
data[5] |
data[6] |
data[7] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_WR |
5 |
ąÉą┤čĆąĄčü |
ąŚąĮą░č湥ąĮąĖąĄ |
- |
ąŚą░ą┐ąĖčüčī ą▒ą░ą╣čéą░ |
| 6 |
ąŚąĮą░č湥ąĮąĖąĄ |
- |
ąŚą░ą┐ąĖčüčī ą┐ąŠą╗čāčüą╗ąŠą▓ą░ |
| 8 |
ąŚąĮą░č湥ąĮąĖąĄ |
ąŚą░ą┐ąĖčüčī čüą╗ąŠą▓ą░ |
6.2.5.2 ą×čéą▓ąĄčé ąŠčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_WR |
1 |
0x00 |
Command OK |
6.2.5.3 ą¤čĆąĖą╝ąĄčĆ
ąŚą░ą┐ąĖčüčī čüą╗ąŠą▓ą░ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x202030 (ąĘąĮą░č湥ąĮąĖąĄ čüą╗ąŠą▓ą░ = 0xCAFEDECA):
|
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
ąöą░ąĮąĮčŗąĄ |
| HOST |
CAN_ID_WR |
08 |
00 20 20 30 CA FE DE CA |
| BOOTLOADER |
CAN_ID_WR |
01 |
00 |
6.2.6 ąÜąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗčģ (Read Data Buffer)
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┐čĆąŠčćąĖčéą░čéčī ą▒čāč乥čĆ. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ č鹊ą╗čīą║ąŠ čü č鹥ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čü ą║ąŠč鹊čĆčŗą╝ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ. ąöą╗čÅ ąĮą░čćą░ą╗ą░ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ čģąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ CAN "Read Data Buffer" (CAN_ID_RD_DATA), ą▓ ą║ąŠč鹊čĆąŠą╝ čāą║ą░ąĘą░ąĮ ąĮą░čćą░ą╗čīąĮčŗą╣ ąĖ ą║ąŠąĮąĄčćąĮčŗą╣ ą░ą┤čĆąĄčü, čāą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ. ąĢčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą┐čĆąĄą▓čŗčłą░ąĄčé 8, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąĄą╗ąĖčé ąĖčģ ąĮą░ ą▒ą╗ąŠą║ąĖ ą┐ąŠ 8 ą▒ą░ą╣čé ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čģąŠčüčéčā.
6.2.6.1 ąŚą░ą┐čĆąŠčü ąŠčé čģąŠčüčéą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0:3] |
data[4:7] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_RD_DATA |
8 |
ąØą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü |
ąÜąŠąĮąĄčćąĮčŗą╣ ą░ą┤čĆąĄčü |
ą¦č鹥ąĮąĖąĄ ą▒ą░ą╣č鹊ą▓ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ąŠčé ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░ ą┤ąŠ ą║ąŠąĮąĄčćąĮąŠą│ąŠ ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ |
6.2.6.2 ą×čéą▓ąĄčé ąŠčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[n] |
| CAN_ID_RD_DATA |
n |
ą¤čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ |
6.2.6.3 ą¤čĆąĖą╝ąĄčĆ
ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čü ą░ą┤čĆąĄčüą░ 0x200000 ą┤ąŠ ą░ą┤čĆąĄčüą░ 0x200009:
|
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
ąöą░ąĮąĮčŗąĄ |
| HOST |
CAN_ID_RD_DATA |
08 |
00 20 00 00 00 20 00 09 |
| BOOTLOADER |
CAN_ID_RD_DATA |
08 |
08 01 23 45 67 89 AB CD EF |
| BOOTLOADER |
CAN_ID_RD_DATA |
02 |
EA FF |
6.2.7 ąÜąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐ąĖčüą░čéčī ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ (Write Data Buffer)
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĘą░ą┐ąĖčüą░čéčī ą▒čāč乥čĆ ą▓ ą┐ą░ą╝čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ č鹊ą╗čīą║ąŠ čü č鹥ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čü ą║ąŠč鹊čĆčŗą╝ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
1. ąĪąĮą░čćą░ą╗ą░ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ą┤čĆąĄčüąŠą▓, ą║čāą┤ą░ ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ąĘą░ą┐ąĖčüčī ą┤ą░ąĮąĮčŗčģ.
2. ąŚą░č鹥ą╝ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗąĄ.
ąźąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąĘą░ą▒ąŠčéąĖčéčīčüčÅ ąŠ č鹊ą╝, čćč鹊ą▒čŗ ą┐ąŠčüčŗą╗ą░čéčī 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą▓ ąŠą┤ąĮąŠą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ CAN, ąĄčüą╗ąĖ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ (ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ). ąöą╗čÅ čüčéą░čĆčéą░ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ čģąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ CAN čü ą║ąŠą╝ą░ąĮą┤ąŠą╣ ąĘą░ą┐ąĖčüąĖ "Write Command" (CAN_ID_WR_CMD), ą│ą┤ąĄ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĮą░čćą░ą╗čīąĮčŗą╣ ąĖ ą║ąŠąĮąĄčćąĮčŗą╣ ą░ą┤čĆąĄčüą░, ą║čāą┤ą░ ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ąĘą░ą┐ąĖčüčī.
6.2.7.1 ąŚą░ą┐čĆąŠčü ąŠčé čģąŠčüčéą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0:3] |
data[4:7] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_WR_CMD |
ą┤ąŠ 8 ą▒ą░ą╣čé |
ąØą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü |
ąÜąŠąĮąĄčćąĮčŗą╣ ą░ą┤čĆąĄčü |
ąŚą░ą┐čāčüą║ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ |
6.2.7.2 ą×čéą▓ąĄčé ąŠčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_WR_CMD |
1 |
0x00 |
Command OK |
ąØą░ ą▓č鹊čĆąŠą╝ čłą░ą│ąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ. ąźąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąŠčéą┐čĆą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ CAN "Write Data" (CAN_ID_WR_DATA), ą▓ ą║ąŠč鹊čĆąŠą╝ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┤ąŠ 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĘą░č鹥ą╝ ą┤ąŠą╗ąČąĄąĮ ąČą┤ą░čéčī ąŠčéą▓ąĄčéą░ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠčéą┐čĆą░ą▓ąĖčéčī čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ąŠčĆčåąĖčÄ ą┤ą░ąĮąĮčŗčģ.
6.2.7.3 ąŚą░ą┐čĆąŠčü ąŠčé čģąŠčüčéą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
... |
data[7] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_WR_DATA |
ą┤ąŠ 8 ą▒ą░ą╣čé |
x |
... |
x |
ąöą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ |
6.2.7.4 ą×čéą▓ąĄčé ąŠčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī čéčĆąĖ ą▓ą░čĆąĖą░ąĮčéą░ ąŠčéą▓ąĄčéą░:
ŌĆō ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą│ąŠč鹊ą▓ąŠ ą┐čĆąĖąĮčÅčéčī ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ, č鹊 ąŠąĮąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ CAN "Write Data" (CAN_ID_WR_DATA) čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ "ąČą┤čā ąĮąŠą▓čāčÄ ą║ąŠą╝ą░ąĮą┤čā" ("Wait for New Command"), ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╣ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ.
ŌĆō ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĘą░ą▓ąĄčĆčłąĖą╗ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ, č鹊 ąŠąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ CAN "Write Data" čü čĆąĄąĘčāą╗čīčéą░č鹊ą╝ "Command OK", ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╝ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ.
ŌĆō ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčé ąĘą░ą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ, č鹊 ąŠąĮąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ CAN "Write Data" čü čĆąĄąĘčāą╗čīčéą░č鹊ą╝ "Command Not OK", ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╝ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ.
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_WR_DATA |
1 |
0x00 |
Command OK |
| 0x01 |
Command Not OK |
| 0x02 |
ą×ąČąĖą┤ą░ąĮąĖąĄ ąĮąŠą▓ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ |
6.2.7.5 ą¤čĆąĖą╝ąĄčĆ
ąŚą░ą┐ąĖčüčī ą▒ą░ą╣čéą░ '0x55' ą┐ąŠ ą░ą┤čĆąĄčüą░ą╝ ąŠčé 0x200000 ą┤ąŠ 0x200008:
|
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
ąöą░ąĮąĮčŗąĄ |
| // ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą┐ąĖčüąĖ ą▓ ą▒čāč乥čĆ |
| HOST |
CAN_ID_WR_CMD |
08 |
00 20 00 00 00 20 00 08 |
| BOOTLOADER |
CAN_ID_WR_CMD |
01 |
00 |
| // ąŚą░ą┐ąĖčüčī ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆ |
| HOST |
CAN_ID_WR_DATA |
08 |
55 55 55 55 55 55 55 55 |
| BOOTLOADER |
CAN_ID_WR_DATA |
01 |
02 //ą×ąČąĖą┤ą░ąĮąĖąĄ ąĮąŠą▓ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ |
| HOST |
CAN_ID_WR_DATA |
01 |
55 |
| BOOTLOADER |
CAN_ID_WR_DATA |
01 |
00 //Command OK |
| // ą¤ąŠą┐čŗčéą║ą░ čģąŠčüčéą░ čüąŠą▓ąĄčĆčłąĖčéčī ąĮąĄąĮčāąČąĮčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā |
| HOST |
CAN_ID_WR_DATA |
01 |
55 |
| BOOTLOADER |
CAN_ID_WR_DATA |
01 |
01 //Command NOK |
6.2.8 ąĪą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ
ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čćąĖčéą░čéčī ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą▒ą░ą╣čéčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąóą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĄąĮ ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā (ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮąŠ ą▒čāčéą╗ąŠą░ą┤ąĄčĆąŠą╝ ąĖ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ). ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ č鹊ą╗čīą║ąŠ čü č鹥ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čü ą║ąŠč鹊čĆčŗą╝ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ.
6.2.8.1 ą¤čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖąĄ
ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┤ąĮąŠą╣ ąĖąĘ ąŠą┐ąĖčüą░ąĮąĮčŗčģ ąĘą┤ąĄčüčī ą║ąŠą╝ą░ąĮą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ čĆąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ FLASH (Embedded Flash Controller Flash Mode Register, EFC_FMR), ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąĄčĆąĄčģąŠą┤ą░ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā.
6.2.8.2 ąŚą░ą┐čĆąŠčü ąŠčé čģąŠčüčéą░
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
data[1] |
data[2] |
data[3] |
data[4] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_SPC_CMD |
2 |
0x00 |
0x00 |
- |
ą¦č鹥ąĮąĖąĄ NNB |
| 0x01 |
ą¦č鹥ąĮąĖąĄ CRIS |
| 0x02 |
ą¦č鹥ąĮąĖąĄ ABM |
| 0x03 |
ą¦č鹥ąĮąĖąĄ PROPAG |
| 0x04 |
ą¦č鹥ąĮąĖąĄ PHASE1 |
| 0x05 |
ą¦č鹥ąĮąĖąĄ PHASE2 |
| 0x06 |
ą¦č鹥ąĮąĖąĄ BRP |
| 3 |
0x01 |
0x00 |
ąŚąĮą░č湥ąĮąĖąĄ |
- |
ą¦č鹥ąĮąĖąĄ NNB |
| 0x01 |
ą¦č鹥ąĮąĖąĄ CRIS |
| 0x02 |
ą¦č鹥ąĮąĖąĄ ABM |
| 0x03 |
ą¦č鹥ąĮąĖąĄ PROPAG |
| 0x04 |
ą¦č鹥ąĮąĖąĄ PHASE1 |
| 0x05 |
ą¦č鹥ąĮąĖąĄ PHASE2 |
| 0x06 |
ą¦č鹥ąĮąĖąĄ BRP |
| 5 |
0x02 |
ąÉą┤čĆąĄčü |
ą¤ąĄčĆąĄčģąŠą┤ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā (ąĘą░ą┐čāčüą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ) |
6.2.8.3 ą×čéą▓ąĄčé ąŠčé ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░
ą×čéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ (Special Read Command):
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_SPC_CMD |
1 |
ąŚąĮą░č湥ąĮąĖąĄ |
ą¦č鹥ąĮąĖąĄ ą▒ą░ą╣čéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ |
ą×čéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ (Special Write Command):
| ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
data[0] |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CAN_ID_SPC_CMD |
1 |
0x00 |
Command OK |
ąÆąĮąĖą╝ą░ąĮąĖąĄ: ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ą┐ąĄčĆąĄčģąŠą┤ą░ (Jump Command) ą▒čāčéą╗ą┤ąŠą░ą┤ąĄčĆ ąĮąĄ ą▓čŗą┤ą░ąĄčé ąŠčéą▓ąĄčéą░.
6.2.8.4 ą¤čĆąĖą╝ąĄčĆ
ą¦č鹥ąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄą╝ąŠą│ąŠ čüąĄą│ą╝ąĄąĮčéą░ CAN (CAN Re-locatable Identifier Segment, CRIS = 0x7F):
|
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
ąöą░ąĮąĮčŗąĄ |
| HOST |
CAN_ID_SPC_CMD |
02 |
00 01 |
| BOOTLOADER |
CAN_ID_SPC_CMD |
01 |
7F |
ąŚą░ą┐ąĖčüčī ąĘąĮą░č湥ąĮąĖčÅ ą▒ą░ą╣čéą░ ąĮąŠą╝ąĄčĆą░ čāąĘą╗ą░ (NNB) ą▓ 0xCA:
|
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
ąöą░ąĮąĮčŗąĄ |
| HOST |
CAN_ID_SPC_CMD |
03 |
01 00 CA |
| BOOTLOADER |
CAN_ID_SPC_CMD |
01 |
00 |
ą¤ąĄčĆąĄčģąŠą┤ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x100000:
|
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ |
ąöą╗ąĖąĮą░ |
ąöą░ąĮąĮčŗąĄ |
| HOST |
CAN_ID_SPC_CMD |
05 |
02 00 10 00 00 |
[7. ąÉą┐ą┐ą░čĆą░čéąĮčŗąĄ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ]
ŌĆó ą¤ąĄčĆą▓čŗąĄ 4 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ą┐ą░ą╝čÅčéąĖ FLASH ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░ CAN (CAN Bootloader Application, ą░ą┤čĆąĄčüą░ 0x100000 .. 0x100FFF).
ŌĆó ąÆčüąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą▒ą░ą╣čéčŗ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéąĖ FLASH, ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░ 0x100F00. ą¤ąĄčĆąĄą┤ čüą░ą╝čŗą╝ ą┐ąĄčĆą▓čŗą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝ čü čāąĘą╗ąŠą╝ CAN ą▓ čĆąĄąČąĖą╝ąĄ č鹊čćą║ą░-č鹊čćą║ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā, čćč鹊 ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆą░ą▓ąĮčŗ 0xFF (čüą╝. čĆą░ąĘą┤ąĄą╗ 3. "ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░").
ŌĆó ąæčāčéą╗ąŠą░ą┤ąĄčĆ SAM-BA Boot4CAN ą║ąŠą┐ąĖčĆčāąĄčé čüą░ą╝ąŠą│ąŠ čüąĄą▒čÅ ą▓ SRAM ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ą╗ąŠą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ SRAM ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąĖ čüč鹥ą║ąŠą▓. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ ą┐ą░ą╝čÅčéčī ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĘą░ čŹčéąĖą╝ ą▒ą╗ąŠą║ąŠą╝, ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░ 0x202000.
ŌĆó ąĀąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ FLASH (Embedded Flash Controller Flash Mode Register, EFC_FMR) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čŗ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ (Special Read, Special Write Commands).
[ąĪčüčŗą╗ą║ąĖ]
1. ąæąĄąĘąŠą┐ą░čüąĮą░čÅ ąĖ ąĘą░čēąĖčēąĄąĮąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą▒čāčéą╗ąŠą░ą┤ąĄčĆą░.
2. ąæąĄąĘąŠą┐ą░čüąĮąŠąĄ ąĖ ąĘą░čēąĖčēąĄąĮąĮąŠąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ firmware ą┤ą╗čÅ AT91SAM.
3. AT91SAM7X: ą▒čāčéą╗ąŠą░ą┤ąĄčĆ SAM-BA ąŠčé ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel.
4. SAM-BA boot agent. |



