|
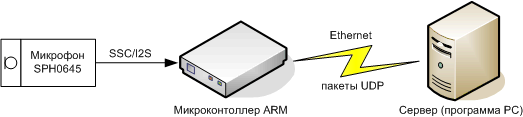
ą¤ąŠčüčéą░ą▓ąĖą╗ ą┐ąĄčĆąĄą┤ čüąŠą▒ąŠą╣ ąĘą░ą┤ą░čćčā - ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┐ąŠ čüąĄčéąĖ Ethernet ąĘą▓čāą║ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąŠčüčéčŗą╝ (ąĮąĄ ą║ąŠą╝ą┐čīčÄč鹥čĆ), ąĖ ą▓ąŠą┐čĆąŠčü čģąŠč鹥ą╗ąŠčüčī čĆąĄčłąĖčéčī čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ąĖ čāčüąĖą╗ąĖčÅą╝ąĖ, ąŠą┐ąĖčĆą░čÅčüčī ąĮą░ ą│ąŠč鹊ą▓čŗąĄ ą┐ąŠą┐čāą╗čÅčĆąĮčŗąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ.
[ąÆčŗą▒ąŠčĆ ą┐ą╗ą░čéčŗ ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░]
ąÆčŗą▒ąŠčĆ ą┐ą░ą╗ ąĮą░ ą┐ą╗ą░čéč乊čĆą╝čā Arduino ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ ą┐čĆąĖčćąĖąĮą░ą╝: ą╝ą░ą║ąĄčéąĮčŗąĄ ą┐ą╗ą░čéčŗ ą▓ąĄčüčīą╝ą░ ą┤ąŠčüčéčāą┐ąĮčŗ ą┐ąŠ čåąĄąĮąĄ, čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▒ąĄčüą┐ą╗ą░čéąĮą░, čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüčĆąĄą┤čüčéą▓ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮąĄ čéčĆąĄą▒čāčÄčéčüčÅ. ą¤ąŠąĮą░čćą░ą╗čā ąĘą░ą┤ą░čćą░ ą║ą░ąĘą░ą╗ą░čüčī ąĮąĄčüą╗ąŠąČąĮąŠą╣, ą┐ąŠčüą║ąŠą╗čīą║čā čĆą░ąĮčīčłąĄ čĆą░ą▒ąŠčéą░ą╗ čü 8-ą▒ąĖčéąĮčŗą╝ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ PIC, ąĖ Arduino ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī, ą║ą░ą║ ąŠą▒ąĄčēą░ą╗ąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤čĆčāąČąĄčüčéą▓ąĄąĮąĮą░ ą┤ą╗čÅ ąĮąŠą▓ąĖčćą║ąŠą▓.
ą¤čĆąŠčüą╝ąŠčéčĆąĄą▓ ą┤ąŠčüčéčāą┐ąĮčŗąĄ čā ą║ąĖčéą░ą╣čåąĄą▓ Arduino-ą┐ąŠą┤ąŠą▒ąĮčŗąĄ ą┐ą╗ą░čéčŗ, ąĘą░ą║ą░ąĘą░ą╗ Arduino Due R3 ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ SAM3X8E ARM Cortex-M3 [1].
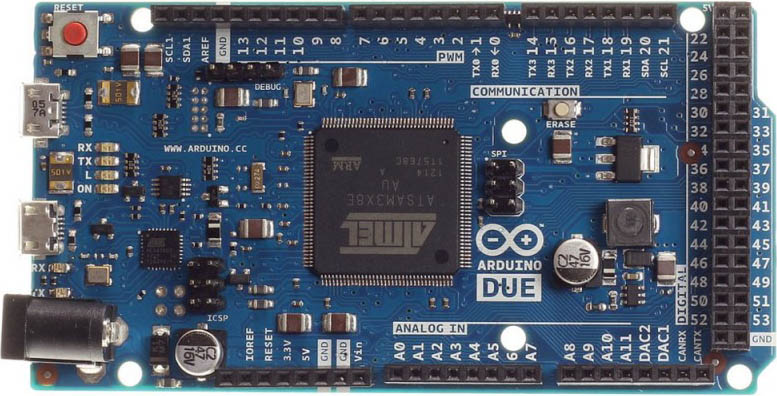
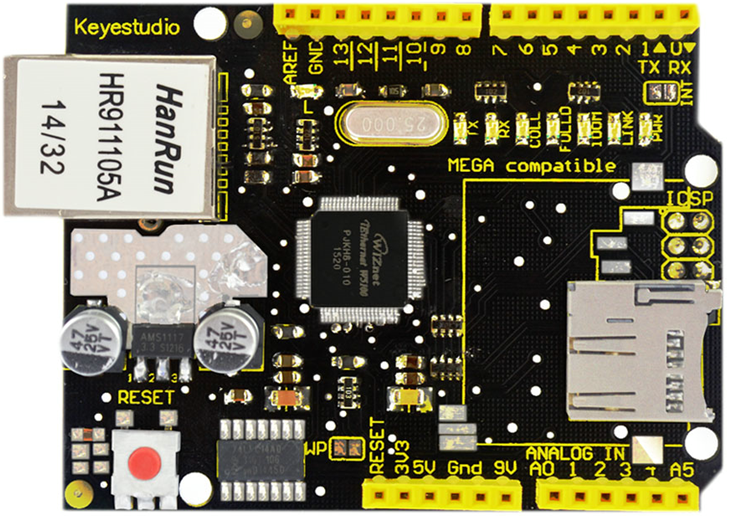
ąŻ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮą░čÅ ą┤ą╗čÅ čĆąĄčłąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī, ąĄčüčéčī ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▒čŗčüčéčĆčŗą╣ ąÉą”ą¤, ąĖąĮč鹥čĆč乥ą╣čü SSC čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ I2S, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA. ąÜ čŹč鹊ą╣ ą┐ą╗ą░č鹥 ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čłąĖą╗ą┤čŗ Arduino. ąöą╗čÅ Ethernet ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĘą░ą║ą░ąĘą░ą╗ Keyestudio W5100 Ethernet Shield [2].
ą×ą┐čŗčéą░ čĆą░ą▒ąŠčéčŗ ą▓ Arduino IDE ą▒čŗą╗ąŠ ąŠč湥ąĮčī ą╝ą░ą╗ąŠ, ą┐ąŠčŹč鹊ą╝čā čĆąĄčłąĖą╗ ąĮą░čćą░čéčī čü ą┐čĆąŠčüč鹊ą│ąŠ - ą┐ąŠą┤ąĄčĆą│ą░čéčī ąĮąŠąČą║ą░ą╝ąĖ GPIO, ąĮą░čāčćąĖčéčīčüčÅ ąŠą┐čĆą░čłąĖą▓ą░čéčī ąÉą”ą¤.
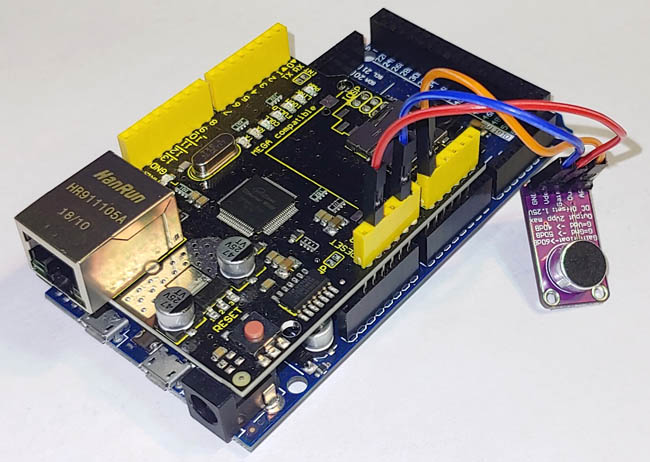
[ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░]
ą¤ąĄčĆą▓čŗąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ čü Arduino IDE ą┐čĆąŠčłą╗ąĖ ąĮą░ čāą┤ąĖą▓ą╗ąĄąĮąĖąĄ čāą┤ą░čćąĮąŠ. ąŻą┤ą░ą╗ąŠčüčī ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠčĆč鹊ą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ čåąĖčäčĆąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓-ą▓čŗčģąŠą┤ąŠą▓ ąĖ ąŠą┤ąĖąĮ ą┐ąŠčĆčé ą▓ ą║ą░č湥čüčéą▓ąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░. Ethernet-čłąĖą╗ą┤ ąĘą░čĆą░ą▒ąŠčéą░ą╗ čüčĆą░ąĘčā, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ąŠčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čłčéą░čéąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čüąĄ čäčāąĮą║čåąĖąĖ čĆą░ą▒ąŠčéą░čÄčé ŌĆō ą┐ąŠą╗čāč湥ąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą┐ąŠ DHCP, ąĮą░čüčéčĆąŠą╣ą║ą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ IP ą░ą┤čĆąĄčüą░, ąŠčéą┐čĆą░ą▓ą║ą░ ąĖ ą┐ąŠą╗čāč湥ąĮąĖąĄ UDP ą┐ą░ą║ąĄč鹊ą▓, TCP čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąÆčŗąĘąŠą▓čŗ čüąĄč鹥ą▓čŗčģ čäčāąĮą║čåąĖą╣ ąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĮąĄ ą╝ąĄčłą░čÄčé ą┤čĆčāą│-ą┤čĆčāą│čā.
ąöąĄą╗ąŠ ą┤ąŠčłą╗ąŠ ą┤ąŠ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąĘą▓čāą║ą░ čü ą╝ąĖą║čĆąŠč乊ąĮą░. ąĀąĄčłąĖą╗ ąĮą░čćą░čéčī čü ą┐čĆąŠčüč鹊ą│ąŠ ŌĆō ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ąĘą▓čāą║ą░ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ąÉą”ą¤, ąĖ ą┐ąŠčéčĆąĄąĮąĖčĆąŠą▓ą░čéčīčüčÅ čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ Ethernet. ąöą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗą▒ąŠčĆąŠą║ ą┐ąŠąĮą░ą┤ąŠą▒ąĖą╗čüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ąÉą”ą¤ čü ąĘą░ą┤ą░ąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣. ą×ą┤ąĮą░ą║ąŠ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ Arduino IDE čéą░ą╣ą╝ąĄčĆąŠą╝ ąĘą░ą┤ą░čćą░ ąĮąĄ ąĖąĘ čéčĆąĖą▓ąĖą░ą╗čīąĮčŗčģ. ąÆąĮčÅčéąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čäčāąĮą║čåąĖčÅą╝ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĮąĄčé. ą¤čĆąĖčłą╗ąŠčüčī ąĖąĘčāčćą░čéčī ąĖčüčģąŠą┤ąĮąĖą║ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ąĖčüą║ą░čéčī ą┐čĆąĖą╝ąĄčĆčŗ ą▓ ąśąĮč鹥čĆąĮąĄč鹥. ąĪ čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ ą┐ąŠą╝ąŠą│ čĆąĄčüčāčĆčü [4]. ąĪąŠ čüč鹊čĆąŠąČąĄą▓čŗą╝ čéą░ą╣ą╝ąĄčĆąŠą╝ ą▓ąŠąĘąĮąĖą║ą╗ąĖ ą┐čĆąŠą▒ą╗ąĄą╝čŗ. ąÆčŗčÅčüąĮąĖą╗ąŠčüčī, čćč鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ Arduino IDE čāą▒čĆą░ą╗ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║čā WatchDog. ąÜ čüčćą░čüčéčīčÄ, čĆąĄčłąĄąĮąĖąĄ ąĮą░čłą╗ąŠčüčī ąĮą░ č乊čĆčāą╝ąĄ Arduino [5].
ąĪčéą░ą╗ąŠ ą┐ąŠąĮčÅčéąĮąŠ, ą┐ąŠč湥ą╝čā ą╝ąĮąŠą│ąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čĆčāą│ą░čÄčé ą┐ą╗ą░čéč乊čĆą╝čā Arduino - čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┤ą░čćąĖ čĆąĄčłą░čÄčéčüčÅ ą┐čĆąŠčüč鹊, ąŠą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ąĮčāąČąĮąŠ čćč鹊-č鹊 ą▒ąŠą╗čīčłąĄąĄ, č鹊 čüčĆą░ąĘčā ąĮą░ą▓ą░ą╗ąĖą▓ą░ąĄčéčüčÅ ą║čāčćą░ ą┐čĆąŠą▒ą╗ąĄą╝ - č鹊 ąĮąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, č鹊 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĮą░čćąĖąĮą░čÄčé ą║ąŠąĮčäą╗ąĖą║č鹊ą▓ą░čéčī ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝. ąóąĄą╝, ą║č鹊 ąĮąĄ ą▒ąŠąĖčéčüčÅ čćąĖčéą░čéčī ą┤ą░čéą░čłąĖčéčŗ, ą▓ Atmel Studio ą▒čŗą╗ąŠ ą▒čŗ ąĮą░ą╝ąĮąŠą│ąŠ čāą┤ąŠą▒ąĮąĄąĄ - ą╗ąĄą│č湥 ą┤ąŠčüčéčāą┐ ą║ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ ąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄčüčāčĆčüąŠą▓, čüą░ą╝ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčłčī, ą║ą░ą║ čćč鹊 ą┤ąŠą╗ąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī. ąØąĖą║č鹊 ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┐ąĖą╗ąĖą▓ą░čéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą▓ąĄčēąĖ, ąĮąĄ ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé ą▓čĆčāčćąĮčāčÄ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī čüąĖčüč鹥ą╝ąĮčŗąĄ ą║ąŠąĮčüčéą░ąĮčéčŗ ą┐ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą▒čāą┤ąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣, ą▒čāą┤čāčé ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą┐čĆąŠąĄą║č鹊ą▓.
ąŻą┤ą░ą╗ąŠčüčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąŠą┐čĆąŠčü ąÉą”ą¤ čü ą┤ą▓ąŠą╣ąĮąŠą╣ ą▒čāč乥čĆąĖąĘą░čåąĖąĄą╣ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā UDP-ą┐ą░ą║ąĄč鹊ą▓ č鹥čüč鹊ą▓ąŠą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąĮą░ PC.

[ąĪąĄčĆą▓ąĄčĆ, ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╣ ą┐ą░ą║ąĄčéčŗ UDP]
ąóąĄčüčé-ą┐čĆąŠą│čĆą░ą╝ą╝ą░ PC ąĮą░ą┐ąĖčüą░ąĮą░ ą▓ čüčĆąĄą┤ąĄ Visual Studio 2010 ąĮą░ čÅąĘčŗą║ąĄ C#. ąŁč鹊 čüąĄč鹥ą▓ąŠą╣ čüąĄčĆą▓ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĄčé UDP ą┐ąŠčĆčé 8266. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ARM ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ čüąĄčĆą▓ąĄčĆčā ą┐ąŠ ąĄą│ąŠ IP ąĖ čŹč鹊ą╝čā ąĮąŠą╝ąĄčĆčā ą┐ąŠčĆčéą░. ąöą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ąĖą┤ąĄčé č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ - ąĘą▓čāą║ąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ARM čüąĄčĆą▓ąĄčĆčā PC. ąĪą║čĆąĖąĮčłąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖ ąŠąĘą▓čāčćąĖą▓ą░ąĄčé ą┐ą░ą║ąĄčéčŗ UDP:

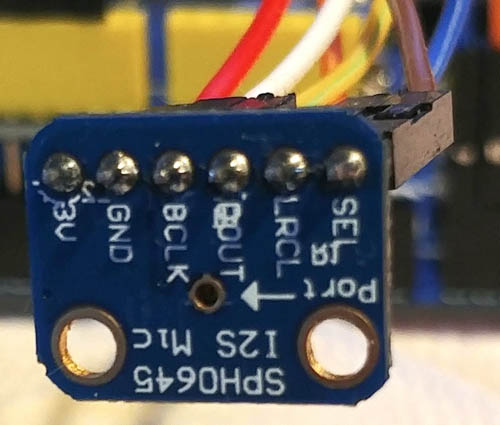
ąĪąŠąŠčéąĮąŠčłąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗/čłčāą╝ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ ąĮąĄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖą╗ąŠ ą╝ąŠąĖą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą╗ąŠą│ąĖčćąĮčŗą╣ čłą░ą│ - ąŠčüą▓ąŠąĖčéčī SSC (Synchronous Serial Controller) ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą╝ąĖą║čĆąŠč乊ąĮą░ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2S (SPH0645).
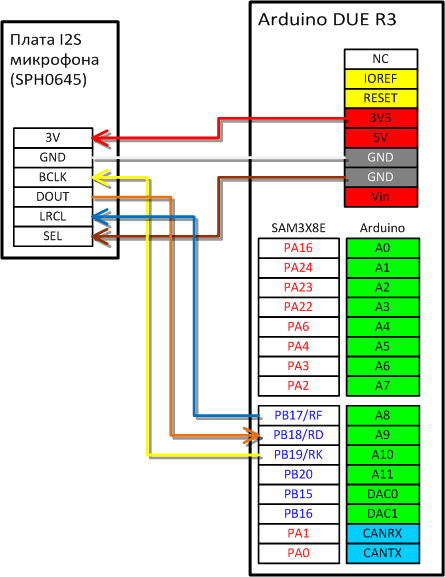
[ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2S]
ą¤ą╗ą░čéą║ą░ ą╝ąĖą║čĆąŠč乊ąĮą░ SPH0645:
ąśąĮč鹥čĆč乥ą╣čü SSC ąĖ Arduino Due R3:
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ |
ą£ąĖą║čĆąŠč乊ąĮ SPH0645LM4H |
ą¤ąŠčĆčé SAM3X8E |
ą¤ąĄčĆąĖčä.
SAM3X8E |
ą¤ąŠčĆčé Arduino |
| RF |
ąĪąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčü ą║ą░ą┤čĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (ą▓čģąŠą┤ ą╝ąĖą║čĆąŠč乊ąĮą░) |
LRCL (WS) |
PB17 |
A |
A8 |
| RD |
ąöą░ąĮąĮčŗąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (ą▓čŗčģąŠą┤ ą╝ąĖą║čĆąŠč乊ąĮą░) |
DOUT (DATA) |
PB18 |
A9 |
| RK |
ąóą░ą║čéčŗ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (ą▓čģąŠą┤ ą╝ąĖą║čĆąŠč乊ąĮą░) |
BCLK (CLK) |
PB19 |
A10 |
| TK |
ąóą░ą║čéčŗ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ |
|
PA14 |
B |
23 |
| TF |
ąĪąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčü ą║ą░ą┤čĆą░ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ |
|
PA15 |
24 |
| TD |
ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ |
|
PA16 |
A0 |
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĖą║čĆąŠč乊ąĮą░ SPH0645 ą║ SSC:
ą¤čĆąĖ ąĮą░ą┐ąĖčüą░ąĮąĖąĖ ą║ąŠą┤ą░ SSC/I2S čüąĮąŠą▓ą░ ą▓ąŠąĘąĮąĖą║ą╗ąĖ ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ąĖ Arduino IDE. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ I2S ąĄčüčéčī č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüąĄčĆąĖąĖ MKR čü ą┐čĆąŠčåąĄčüčüąŠčĆą░ą╝ąĖ čüąĄą╝ąĄą╣čüčéą▓ą░ SAM D21 Cortex-M0. ą¤čĆąŠ SSC ą▓ąŠąŠą▒čēąĄ ąĮąĖ čüą╗ąŠą▓ą░. ąÆ ąśąĮč鹥čĆąĮąĄč鹥 ą║ą░ą║ąĖčģ-č鹊 ą┐čĆąĖą╝ąĄčĆąŠą▓ čĆąĄą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ čü SSC ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ąĮąĄčé.
ą¤ąŠ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ SSC ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüą╗ąĄą┤čāčÄčēąĄąĄ:
1. ąØą░čüčéčĆąŠąĖčéčī ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠąĮąĖ ąĮą░čüčéčĆąŠąĄąĮčŗ ąĮą░ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗.
2. ąÆą║ą╗čÄčćąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ SSC ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PMC.
3. ąØą░ą┐ąĖčüą░čéčī ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SSC.
4. ąØą░čüčéčĆąŠąĖčéčī ąĖ čĆą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé SSC.
ąØą░ą▒ąŠčĆ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čā SSC ą▓ąĄčüčīą╝ą░ ą┐čĆąĖą╗ąĖčćąĮčŗą╣, čćč鹊 čüąĖą╗čīąĮąŠ čāčüą╗ąŠąČąĮčÅąĄčé ąĄą│ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ąĮą░čüčéčĆąŠą╣ą║čā. ą¤čĆąĖ ą▓čŗą▒ąŠčĆąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SSC čÅ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą▓ą░ą╗čüčÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĄą╣ ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆ [1], ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĄą╣ ąĮą░ ą╝ąĖą║čĆąŠč乊ąĮ SPH0645 [3], ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čłąĖąĮčŗ I2S [6], ą┐čĆąŠąĄą║č鹊ą╝-ą┐čĆąĖą╝ąĄčĆąŠą╝ ąĖąĘ Atmel Studio SSC_UNIT_TEST ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ SAM3X. ąśąĘ ą┐čĆąĖą▒ąŠčĆąŠą▓ ą▒čŗą╗ č鹊ą╗čīą║ąŠ ą╝čāą╗čīčéąĖą╝ąĄčéčĆ čü čäčāąĮą║čåąĖąĄą╣ čćą░čüč鹊č鹊ą╝ąĄčĆą░ (ą┤ąŠ 30 ą║ąōčå).
ąĀą░ąĘąŠą▒čĆą░čéčīčüčÅ čü ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ą┐ąĄčĆąĖč乥čĆąĖąĖ PIO ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąĮąĄ čüčĆą░ąĘčā. ąÆ čĆąĄąČąĖą╝ąĄ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖčÅ ąĮą░ čüąĄą▒čÅ SSC ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé, ąĮąŠ ą┐čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ą╝čāą╗čīčéąĖą╝ąĄčéčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čćą░čüčéčī ą▓čŗčģąŠą┤ąŠą▓ ą┐čĆąŠčüč鹊 ą▓ąĖčüčÅčé ą▓ ą▓ąŠąĘą┤čāčģąĄ ą▒ąĄąĘ ą┐ąŠą┤čéčÅąČą║ąĖ ą║ ąĮčāą╗čÄ ąĖą╗ąĖ ą┐ąĖčéą░ąĮąĖčÄ. ą×ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 čŹč鹊 č鹊ąČąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ Arduino IDE. ąæąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖ ą║ąŠąĮčüčéą░ąĮčéčŗ ąĄčüčéčī, ąĮąŠ ąĮąĄ čéą░ą║ ą┐čĆąŠčüč鹊 ąĮą░ą╣čéąĖ, ą│ą┤ąĄ ąŠąĮąĖ ąŠą┐ąĖčüą░ąĮčŗ. ą¤ąŠą║ąŠą┐ą░ą▓čłąĖčüčī ą▓ ąĖčüčģąŠą┤ąĮąĖą║ą░čģ ą┐ą╗ą░čéč乊čĆą╝čŗ, ąĮą░čłąĄą╗ ą║ą░ą║ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖąĄą╣.
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┤ąŠą╗ą│ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą┐ąŠą┤ą▒ąŠčĆą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SSC čāą┤ą░ą╗ąŠčüčī ą┐ąŠą╗čāčćąĖčéčī ąĮčāąČąĮčŗąĄ čćą░čüč鹊čéčŗ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ RK ąĖ RF, ąĮąŠ ą┤ą░ąĮąĮčŗčģ čü ą╝ąĖą║čĆąŠč乊ąĮą░ ąĮąĄ ąĮą░ą▒ą╗čÄą┤ą░ą╗ąŠčüčī. ą¤ąŠ ą▓čüąĄą╣ ą▓ąĖą┤ąĖą╝ąŠčüčéąĖ, ą║ą░ą║ąĖąĄ-č鹊 ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮąĄ ąĮčĆą░ą▓ąĖą╗ąĖčüčī ą╝ąĖą║čĆąŠč乊ąĮčā ąĖ ą┤ą░ąĮąĮčŗąĄ ąŠąĮ ąŠčéą┤ą░ą▓ą░čéčī ąĮąĄ čģąŠč鹥ą╗. ą¤ąŠ ą┐ąŠą║ą░ąĘą░ąĮąĖčÅą╝ ą╝čāą╗čīčéąĖą╝ąĄčéčĆą░ ąĮą░ čłąĖąĮąĄ DOUT ą╝ąĖą║čĆąŠč乊ąĮą░ ąĮą░ą▒ą╗čÄą┤ą░ą╗ąĖčüčī čüčéą░ą▒ąĖą╗čīąĮčŗąĄ ąĮąŠą╗čī ą▓ąŠą╗čīčé.
ą¤ąŠčüą╗ąĄ ą▒ąŠą╗ąĄąĄ ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠąĖčüą║ą░ ą▓ ąśąĮč鹥čĆąĮąĄč鹥 ąĮą░čéą║ąĮčāą╗čüčÅ ąĮą░ čüčéą░čéčīčÄ [7], ą│ą┤ąĄ ą▒čŗą╗ąĖ čĆą░čüą║čĆčŗčéčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╗čÄą▒ąŠą┐čŗčéąĮčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ, ą║ąŠč鹊čĆčŗąĄ čÅą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ Atmel ąĮąĄ ąŠą┐ąĖčüą░ąĮčŗ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čāą┤ą░ą╗ąŠčüčī ą▒ąŠą╗ąĄąĄ ąŠčüą╝čŗčüą╗ąĄąĮąĮąŠ čāč鹊čćąĮąĖčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ąĖ ą▓čüčæ ąĘą░čĆą░ą▒ąŠčéą░ą╗ąŠ. ąÆčŗčĆą░ąČą░čÄ ą▒ą╗ą░ą│ąŠą┤ą░čĆąĮąŠčüčéčī ą░ą▓č鹊čĆčā ąĘą░ čüč鹊ą╗čī ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüč鹥ą╣ čĆą░ą▒ąŠčéčŗ SSC.
#define PIN_RD PIO_PB18
#define PIN_RF PIO_PB17
#define PIN_RK PIO_PB19
#define PIN_TD PIO_PA16
#define PIN_TF PIO_PA15
#define PIN_TK PIO_PA14
#define DATA_BIT_LEN 32
#define FRAME_BIT_LEN 64
#define SAMPLE_RATE 44000 //ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ ą▓ čüąĄą║čāąĮą┤čā
#define SSC_BIT_RATE (FRAME_BIT_LEN * SAMPLE_RATE)
// ą¤čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SSC:
#define SSC_IRQ_PRIO 4
uint32_t SSC_RX_PIN_MASK = (PIN_RD | PIN_RF | PIN_RK);
uint32_t SSC_TX_PIN_MASK = (PIN_TD | PIN_TF | PIN_TK);
////////////////////////////////////////////////////////////////////////////////
// ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ SSC ą┐čĆąŠčåąĄčüčüąŠčĆą░
void ssc_configure_pio()
{
uint32_t absr;
// ą×čéą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ SSC:
PIOB->PIO_IDR = SSC_RX_PIN_MASK;
PIOA->PIO_IDR = SSC_TX_PIN_MASK;
// ąØą░cčéčĆąŠą╣ą║ą░ ą▓čģąŠą┤ąŠą▓ ąĖ ą▓čŗčģąŠą┤ąŠą▓. ąØą░ ą▓čŗą▓ąŠą┤ą░čģ PIN_RD, PIN_TF, PIN_TK
// čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓ąĄčĆčģąĮąĖčģ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓.
PIOB->PIO_ODR = PIN_RD;
PIOB->PIO_PUER = PIN_RD;
PIOA->PIO_ODR = (PIN_TF | PIN_TK);
PIOA->PIO_PUER = (PIN_TF | PIN_TK);
PIOB->PIO_OER = (PIN_RF | PIN_RK);
PIOA->PIO_OER = PIN_TD;
// ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ąĮą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SSC:
PIOB->PIO_PDR = SSC_RX_PIN_MASK;
PIOA->PIO_PDR = SSC_TX_PIN_MASK;
// ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą┐ąĄčĆąĖč乥čĆąĖąĖ B:
absr = PIOB->PIO_ABSR;
PIOB->PIO_ABSR = (absr & ~SSC_RX_PIN_MASK);
// ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą┐ąĄčĆąĖč乥čĆąĖąĖ A:
absr = PIOA->PIO_ABSR;
PIOA->PIO_ABSR = (absr | SSC_TX_PIN_MASK);
}
////////////////////////////////////////////////////////////////////////////////
// ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ SSC
static void ssc_setup()
{
uint32_t ul_mck;
clock_opt_t rx_clk_option;
data_frame_opt_t rx_data_frame_option;
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ:
ul_mck = 0;
memset((uint8_t *)&rx_clk_option, 0, sizeof(clock_opt_t));
memset((uint8_t *)&rx_data_frame_option, 0, sizeof(data_frame_opt_t));
// ąÆą║ą╗čÄč湥ąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ SSC:
pmc_set_writeprotect(false);
pmc_enable_periph_clk(ID_SSC);
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ SSC ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ NVIC:
NVIC_DisableIRQ(SSC_IRQn);
NVIC_ClearPendingIRQ(SSC_IRQn);
NVIC_SetPriority(SSC_IRQn, SSC_IRQ_PRIO);
NVIC_EnableIRQ(SSC_IRQn);
// ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ SSC:
ssc_configure_pio();
// ąĪą▒čĆąŠčü SSC:
ssc_reset(SSC);
// ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ:
ul_mck = SystemCoreClock;
ssc_set_clock_divider(SSC, SSC_BIT_RATE, ul_mck);
Serial.print("RK Clock = ");
Serial.println(ul_mck / 2 / SSC->SSC_CMR, DEC);
Serial.print("Sample rate = ");
Serial.println(ul_mck / 2 / SSC->SSC_CMR / 64, DEC);
// ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣,
// ąŠčé ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą┤ąĄą╗ąĖč鹥ą╗čÅ, ą▓čŗą▓ąŠą┤ RK čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤:
rx_clk_option.ul_cks = SSC_RCMR_CKS_MCK;
rx_clk_option.ul_cko = SSC_RCMR_CKO_CONTINUOUS;
rx_clk_option.ul_cki = 0; // Falling edge
rx_clk_option.ul_ckg = SSC_RCMR_CKG_CONTINUOUS;
// ąÆčŗą▒ąŠčĆ čüą┐ąŠčüąŠą▒ą░ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ą░ ą┐ąŠ ąĘą░ą┤ąĮąĄą╝čā čäčĆąŠąĮčéčā čüąĖą│ąĮą░ą╗ą░ RF:
rx_clk_option.ul_start_sel = SSC_RCMR_START_RF_FALLING;
// ąĪčéą░čĆčé ą▒ąĄąĘ ąĘą░ą┤ąĄčƹȹ║ąĖ:
rx_clk_option.ul_sttdly = 0;
// ąÆčŗą▒ąŠčĆ ą┤ąĄą╗ąĖč鹥ą╗čÅ ą┤ą╗čÅ ą┐ąĄčĆąĖąŠą┤ą░ ąŠą┐čĆąŠčüą░ ąĖ ą▓čŗą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ "ąØąŠą▓čŗą╣ ą║ą░ą┤čĆ":
rx_clk_option.ul_period = (FRAME_BIT_LEN / 2) - 1;
// ąØą░čüčéčĆąŠą╣ą║ą░ ą║ą░ą┤čĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąæčāą┤ąĄą╝ ą┐čĆąĖąĮąĖą╝ą░čéčī ąŠą┤ąĮąŠ čüą╗ąŠą▓ąŠ ą┤ą╗ąĖąĮąŠą╣ 32 ą▒ąĖčéą░.
// ążą░ą║čéąĖč湥čüą║ąĖ ą▓ ąĮąĄą╝ č鹊ą╗čīą║ąŠ 24 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░, ąĖąĘ ą║ąŠč鹊čĆčŗčģ
// č鹊ą╗čīą║ąŠ 18 čüčéą░čĆčłąĖčģ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
rx_data_frame_option.ul_datlen = DATA_BIT_LEN - 1;
rx_data_frame_option.ul_datnb = 0;
rx_data_frame_option.ul_msbf = SSC_RFMR_MSBF; // čüčéą░čĆčłąĖą╣ ą▒ąĖčé ą┐ąĄčĆą▓čŗą╣
// ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé, čüąŠčģčĆą░ąĮčÅąĄą╝čŗčģ ą▓ ą┐čĆąĖąĄą╝ąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ:
rx_data_frame_option.ul_fslen = (FRAME_BIT_LEN / 2) - 1 - 16;
// ąöą╗ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ čĆą░ą▓ąĮą░ FSLEN + (FSLEN_EXT * 16) + 1 ą┐ąĄčĆąĖąŠą┤ąŠą▓ čéą░ą║č鹊ą▓ ą┐čĆąĖąĄą╝ą░:
rx_data_frame_option.ul_fslen_ext = 1;
// ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ą░ RF. 1: SSC_RFMR_FSOS_NEGATIVE, ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü,
// RF ą▓čŗą▓ąŠą┤ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤:
rx_data_frame_option.ul_fsos = SSC_RFMR_FSOS_NEGATIVE;
// ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╝čā čäčĆąŠąĮčéčā RF:
rx_data_frame_option.ul_fsedge = SSC_RFMR_FSEDGE_POSITIVE;
// ąŚą░ą┐ąĖčüčī ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąĮąŠą╣ čüčéčĆčāą║čéčāčĆčŗ ą▓ ąĮą░čüčéčĆąŠą╣ą║ąĖ SSC:
ssc_set_receiver(SSC, &rx_clk_option, &rx_data_frame_option);
// ąĢčüą╗ąĖ čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī, č鹊 čŹčéą░ čüčéčĆąŠčćą║ą░ ą▓ą║ą╗čÄčćąĖčé č鹥čüč鹊ą▓čŗą╣
// čĆąĄąČąĖą╝ (ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ "ąĮą░ čüąĄą▒čÅ"):
//ssc_set_loop_mode(SSC);
// ąÆą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░:
ssc_enable_rx(SSC);
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐čĆąĖąĄą╝ą░:
ssc_enable_interrupt(SSC, SSC_IER_RXRDY);
}
////////////////////////////////////////////////////////////////////////////////
// ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SSC
void SSC_Handler(void)
{
uint32_t ul_ssc_sr;
uint32_t ul_data;
// ą¤čĆąŠą▓ąĄčĆą║ą░ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ:
ul_ssc_sr = ssc_get_status(SSC);
if(ul_ssc_sr & SSC_SR_RXRDY)
{
// ąĢčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ą│ąŠč鹊ą▓čŗ, č鹊 ąŠąĮąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą▓ą╗ąŠąČąĄąĮąĮčŗčģ
// ą▓čŗąĘąŠą▓ąŠą▓, ą┤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠčéą║ą╗čÄčćą░čÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
// ąóąĄąŠčĆąĄčéąĖč湥čüą║ąĖ čŹč鹊 ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī ą┐ąŠč鹥čĆąĖ ąŠčéą┤ąĄą╗čīąĮčŗčģ čäčĆąĄą╣ą╝ąŠą▓,
// ą┤ą╗čÅ ąĘą▓čāą║ą░ ąĮąĄ čüčéčĆą░čłąĮąŠ.
ssc_disable_interrupt(SSC, SSC_IDR_RXRDY);
// ąÆčŗą▒ąŠčĆą║ą░ ą┤ą░ąĮąĮčŗčģ:
ssc_read(SSC, &ul_data);
// ą×ą▒ąĮčāą╗ąĄąĮąĖąĄ ą╝ą╗ą░ą┤čłąĖčģ 14 ą▒ąĖčé:
analogValue = ul_data & 0xFFFFC000;
// ąĪą┤ą▓ąĖą│ ą┤ąĄą╗ąĄąĮąĖąĄą╝ ąĮą░ 14 ą▒ąĖčé, čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī ąĘąĮą░ą║:
analogValue = analogValue / 0x4000;
// ąÜąŠą╝ą┐ąĄąĮčüą░čåąĖčÅ čüą╝ąĄčēąĄąĮąĖąĄą╝ (ą┐ąŠą┤ąŠą▒čĆą░ąĮąŠ ąŠą┐čŗčéąĮčŗą╝ ą┐čāč鹥ą╝):
analogValue += 7295; // correct DC offset
// ąöą░ą╗ąĄąĄ ą┤ą░ąĮąĮčŗąĄ čüą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ ą▒čāč乥čĆ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣
// ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐ąŠ čüąĄčéąĖ:
// ...
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
ssc_enable_interrupt(SSC, SSC_IER_RXRDY);
}
}
ąÜą░ą║ ą▓čŗą│ą╗čÅą┤ąĖčé ą┐ąŠą╗čāčćąĖą▓čłąĖą╣čüčÅ ą╝ą░ą║ąĄčé:
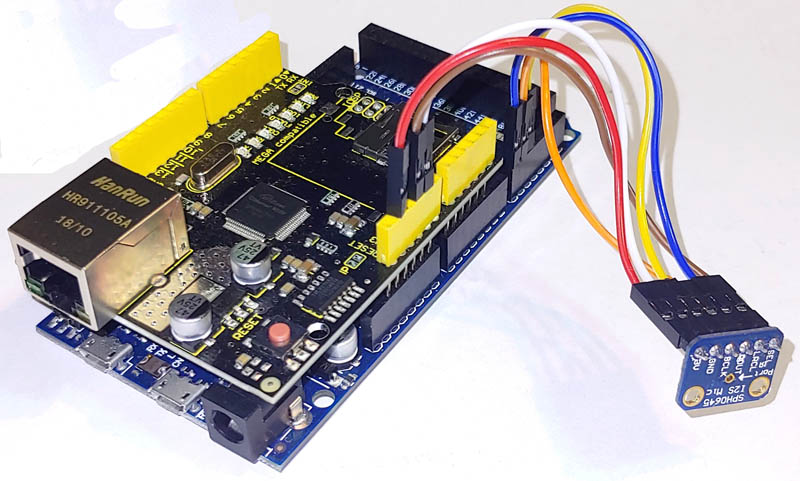
ąÜą░č湥čüčéą▓ąŠ ąĘą▓čāą║ą░ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ ąŠą║ą░ąĘą░ą╗ąŠčüčī ąĮą░ą╝ąĮąŠą│ąŠ ą╗čāčćčłąĄ. ą×čüąŠą▒ąĄąĮąĮąŠ ą┐ąŠčĆą░ą┤ąŠą▓ą░ą╗ąŠ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗/čłčāą╝ ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╝ąĖ ą╝ąĖą║čĆąŠč乊ąĮą░ą╝ąĖ, čü ą║ąŠč鹊čĆčŗą╝ąĖ čāą┤ą░ą╗ąŠčüčī ą┐ąŠčŹą║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī ŌĆō 菹╗ąĄą║čéčĆąĄčéąĮčŗąĄ, MEMS, čü ąŠą▒čŗčćąĮčŗą╝ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗą╝ čāčüąĖą╗ąĖč鹥ą╗ąĄą╝ ąĖ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ.
ąÆ ą┐ą╗ą░ąĮą░čģ ąŠčüą▓ąŠąĖčéčī ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ (DMA) ą┤ą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ąóąĄą║čāčēą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮąĄ čéčÅąĮąĄčé čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ą▓čŗčłąĄ 44000 ąōčå.
[ą×ą▒čēąĖąĄ ą▓čŗą▓ąŠą┤čŗ]
ąĢčüą╗ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī Arduino č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą╝ą░ą║ąĄčéąĖčĆąŠą▓ą░ąĮąĖčÅ, č鹊 čŹč鹊 ą┐čĆąŠčüč鹊 ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮą░čÅ ą▓ąĄčēčī, ą┐čĆąĖč湥ą╝ ą┐čĆąĖčÅčéąĮąŠ ą┤ąŠčüčéčāą┐ąĮą░čÅ ą┐ąŠ čåąĄąĮąĄ. ąÆčŗą▒ąŠčĆ čĆą░ąĘąĮąŠąŠą▒čĆą░ąĘąĮčŗčģ čłąĖą╗ą┤ąŠą▓ čéą░ą║ąČąĄ ąĮąĄ ą╝ąŠąČąĄčé ąĮąĄ čĆą░ą┤ąŠą▓ą░čéčī. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠčüą╗ąĄ ąŠąĘąĮą░ą║ąŠą╝ą╗ąĄąĮąĖčÅ čü Arduino IDE ąĖ ą┐ą╗ą░čéčŗ Due R3 ą▓čŗčÅčüąĮąĖą╗ąŠčüčī, čćč鹊 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤ą╗čÅ SAM3X čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ąĖ Arduino IDE ą┐ąŠą┐čĆąŠčüčéčā ąŠčéčüčāčéčüčéą▓čāčÄčé ŌĆō ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĮą░ čāčĆąŠą▓ąĮąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čü ą┐ą╗ą░č鹊ą╣ Due ąĮą░ ą▒ą░ąĘąĄ Mega328P, ąĮąĖą║ą░ą║ąĖčģ SSC, I2S, DMAC. ąæą░ąĮą░ą╗čīąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ, WatchDog ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ (ąĖą╗ąĖ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ąĮąĄą┐čĆąŠčüč鹊). ąĀą░ą▒ąŠčéą░čéčī čü ą┐ąŠčĆčéą░ą╝ąĖ GPIO ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┤ą░ąČąĄ ą║ą░ą║ čåąĖčäčĆąŠą▓čŗą╝ąĖ ą▓čģąŠą┤ą░ą╝ąĖ-ą▓čŗčģąŠą┤ą░ą╝ąĖ ą┐čĆąŠčüč鹊 čéą░ą║ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ ŌĆō ąĮčāąČąĮąŠ čüąĮą░čćą░ą╗ą░ ąĮą░čüčéčĆąŠąĖčéčī ą┐ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░ čü ą┐ąŠą╝ąŠčēčīčÄ PIO ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąØąĄ ąĘąĮą░čÄ, ą▓ č湥ą╝ ąĖą╝ąĄąĮąĮąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ŌĆō ąĖą╗ąĖ Arduino ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą▒čāč湥ąĮąĖčÅ ąĖ ą╝ąĖą│ą░ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ, ąĖą╗ąĖ čŹč鹊 ą▒čŗą╗ą░ ąĮąĄčāą┤ą░čćąĮą░čÅ ą┐ą╗ą░čéą░, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ą▒čŗą╗ą░ čāą┤ąŠčüč鹊ąĄąĮą░ ą┤ąŠą╗ąČąĮčŗą╝ ą▓ąĮąĖą╝ą░ąĮąĖąĄą╝ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║. ąØą░ ą▓č鹊čĆąŠą╣ ą▓ą░čĆąĖą░ąĮčé ąĮą░ą╝ąĄą║ą░ąĄčé č鹊čé čäą░ą║čé, čćč鹊 ąĮąŠą▓čŗąĄ ą░ą║čéčāą░ą╗čīąĮčŗąĄ ą┐ą╗ą░čéčŗ ą▓čŗą┐čāčüą║ą░čÄčéčüčÅ čü ą┐čĆąŠčåąĄčüčüąŠčĆą░ą╝ąĖ SAM D21. ąĀą░čüčüčéčĆą░ąĖą▓ą░ąĄčé ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąĮą░ ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ąĮąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮčŗčģ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą┐čĆąŠąĄą║č鹊ą▓ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čéą░ą╣ą╝ąĄčĆąŠą▓, čüč湥čéčćąĖą║ąŠą▓, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, DMA.
ąĪąĄą╝ąĄą╣čüčéą▓ąŠ SAM3X ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ąĘą░ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗ąŠ. ą¤ą╗ą░ąĮąĖčĆčāčÄ ą┐čĆąĖąŠą▒čĆąĄčüčéąĖ ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čĆą░ą▒ąŠčéą░čéčī čü Atmel Studio. Atmel Studio čŹč鹊 ąĖ ą┐čĆąĖą▓čŗčćąĮčŗą╣ ą┤ą╗čÅ ą╝ąĄąĮčÅ ąĖąĮč鹥čĆč乥ą╣čü Visual Studio, ąĖ ą┤ąŠčüčéčāą┐ ą║ ąŠą│čĆąŠą╝ąĮąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ ą┐čĆąĖą╝ąĄčĆąŠą▓, ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠčéą╗ą░ą┤čćąĖą║ąŠą▓. ą¤ąŠčüą╗ąĄ 8-ą▒ąĖčéąĮčŗčģ PIC ąĖ uC čŹčéą░ čüčĆąĄą┤ą░ ą▓čŗą│ą╗čÅą┤ąĖčé ą┐čĆąŠčüč鹊 ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮąŠ. ą×čéą╗ą░ą┤čćąĖą║ č鹊ąČąĄ čģąŠč湥čéčüčÅ - ą▒čāą┤čā ąĖčüą║ą░čéčī, ą▓čŗą▒ąĖčĆą░čéčī. ąöą╗čÅ čéą░ą║ąĖčģ ąĘą░ą┤ą░čć ą┐čĆąŠčåąĄčüčüąŠčĆ SAM3X, ą║ąŠąĮąĄčćąĮąŠ, ąĖąĘą▒čŗč鹊č湥ąĮ. ąØąŠ ą┤ą╗čÅ ą╝ą░ą║ąĄčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ čüč鹊ą╗ąĄ čŹč鹊 ąŠč湥ąĮčī čāą┤ąŠą▒ąĮą░čÅ čüąĖčüč鹥ą╝ą░ čü ą▒ąŠą│ą░čéčŗą╝ ąĮą░ą▒ąŠčĆąŠą╝ ą┐ąĄčĆąĖč乥čĆąĖąĖ. ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ąĮąĄ ąĮą░čłąĄą╗ ą│ąŠč鹊ą▓čŗčģ ą┐ą╗ą░čé Ethernet, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ čŹč鹊čé ą┐čĆąŠčåąĄčüčüąŠčĆ MAC-ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąśąĘ ąĮąĄą┐čĆąĖčÅčéąĮąŠčüč鹥ą╣ ŌĆō ąĘą░ą║ą░ąĘą░čéčī čā ąĖčéą░ą╗čīčÅąĮčåąĄą▓ ąĮąĄą╗čīąĘčÅ (ą▓ ąĀąŠčüčüąĖčÄ ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčé), ą┐čĆąĖ čŹč鹊ą╝ ą▓ ą╝ąĄčüčéąĮčŗčģ ą╝ą░ą│ą░ąĘąĖąĮą░čģ ąĮąŠą▓čŗčģ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ą┐ą╗ą░čé ąĮąĄčé ąĮąĖ ą▓ ąĮą░ą╗ąĖčćąĖąĖ, ąĮąĖ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ. ą¤ą╗ą░ąĮąĖčĆčāčÄ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą┐ąŠą▒ą╗ąĖąČąĄ ąĮą░ MKR WiFi 1010 v2 [8].
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓čüąĄčģ ą┐čĆąŠąĄą║č鹊ą▓ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [9].
[ąĪčüčŗą╗ą║ąĖ]
1. SAM3X8E ARM Cortex-M3 site:microchip.com.
2. Keyestudio W5100 Ethernet Shield site:keyestudio.com.
3. Adafruit I2S MEMS Microphone Breakout SPH0645LM4H site:adafruit.com.
4. Arduino Due Timers site:ko7m.blogspot.com
5. Arduino Forum > Products > Arduino Due > Watchdog timer site:forum.arduino.cc.
6. I2S Wikipedia site:wikipedia.org.
7. AT91SAM7X256: čĆą░ą▒ąŠčéą░ čü ą┐ąŠčĆč鹊ą╝ SSC.
8. Arduino MKR WiFi 1010 site:arduino.cc.
9. 190331SSC-I2C-AT91SAM3X.zip - ą░čĆčģąĖą▓ čü ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝ ą┐čĆąŠąĄą║č鹊ą▓, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ. |



