|
ąóą░ą╣ą╝ąĄčĆ - ąŠč湥ąĮčī ą▓ą░ąČąĮąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ ąĮą░ą▒ąŠčĆąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĖ ąĖčģ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ąŠą┤ąĮąŠą│ąŠ čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32 ą║ ą┤čĆčāą│ąŠą╝čā, ąŠą┤ąĮą░ą║ąŠ ą▓čüąĄ ąČąĄ čā ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĄčüčéčī ąŠą▒čēąĖąĄ čäčāąĮą║čåąĖąĖ ąĖ čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ.
ąóą░ą╣ą╝ąĄčĆ STM32 čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ą╗čüčÅ ą║ą░ą║ ą║čĆą░ąĄčāą│ąŠą╗čīąĮčŗą╣ ą║ą░ą╝ąĄąĮčī ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣: ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüą░ą╝čŗčģ čĆą░ąĘąĮčŗčģ ąĘą░ą┤ą░čć ąŠčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅą╝ąĖ ą┤ąŠ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ čüąŠą▒čŗčéąĖą╣ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ. ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ąŠ ą▓čüąĄčģ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░čģ STM32, ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čéą░ą╣ą╝ąĄčĆą░ą╝ ąŠč湥ąĮčī ą╝ąĮąŠą│ąŠ ąĖąĘ-ąĘą░ ąĖčģ čłąĖčĆąŠą║ąĖčģ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣.
ąØą░ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ (ą┐ąĄčĆąĄą▓ąŠą┤ [1]) - ą┤ą░čéčī ą┐čĆąŠčüč鹊ąĄ ąĖ čÅčüąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▒ą░ąĘąŠą▓čŗčģ čäčāąĮą║čåąĖą╣ ąĖ čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ąŠą▓ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32 ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ. ąŁč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ general-purpose čéą░ą╣ą╝ąĄčĆčŗ (čüąŠą║čĆą░čēąĄąĮąĮąŠ GP). ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé čüąŠą┐čĆąŠą▓ąŠąČą┤ą░ąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą┐ąŠ ą║ą░ąČą┤ąŠą╣ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ čüąĄčĆąĖąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čĆą░čüčłąĖčäčĆąŠą▓ą║čā ąĮąĄą║ąŠč鹊čĆčŗčģ ąĮąĄą┐ąŠąĮčÅčéąĮčŗčģ č鹥čĆą╝ąĖąĮąŠą▓ ąĖ čüąŠą║čĆą░čēąĄąĮąĖą╣ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ čüčéą░čéčīąĄ [5].
ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé ą┐ąŠą┤ąĄą╗ąĄąĮ ąĮą░ 2 ąŠčüąĮąŠą▓ąĮčŗąĄ čćą░čüčéąĖ:
ŌĆó ą¤ąĄčĆą▓ą░čÅ čćą░čüčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą▒ą░ąĘąŠą▓čŗąĄ čäčāąĮą║čåąĖąĖ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32 ąĖ ą┐čĆąŠčüčéčŗą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ ąŠą▒čŖčÅčüąĮčÅąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čéą░ą╣ą╝ąĄčĆąŠą▓.
ŌĆó ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ čāą┤ąĄą╗ąĄąĮąŠ ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮąĖčÄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüčåąĄąĮą░čĆąĖąĄą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ STM32. ąŚą┤ąĄčüčī ą▒čāą┤ąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▒ąŠą╗ąĄąĄ ą│ą╗čāą▒ąŠą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąŠčüąĮąŠą▓ąĮčŗčģ čäčāąĮą║čåąĖą╣ čéą░ą╣ą╝ąĄčĆą░ STM32, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąŚą┤ąĄčüčī čéą░ą║ąČąĄ ą▒čāą┤ąĄčé ąŠą┐ąĖčüą░ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░.
ąÆ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 ąŠą▒čüčāąČą┤ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐čĆąŠčüčéčŗąĄ ą▓ąŠą┐čĆąŠčüčŗ, ąĖ ąĮąĄ ą▒čāą┤čāčé ąĘą░čéčĆąŠąĮčāčéčŗ čéą░ą║ąĖąĄ čüą╗ąŠąČąĮčŗąĄ č鹥ą╝čŗ, ą║ą░ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅą╝ąĖ. ąśąĮč乊čĆą╝ą░čåąĖčÅ, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮą░čÅ ąĘą┤ąĄčüčī, ą┐čĆąĖą╝ąĄąĮąĖą╝ą░ ą║ čüą╗ąĄą┤čāčÄčēąĖą╝ čüąĄčĆąĖčÅą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32:
STM32F0, STM32F1, STM32F2, STM32F3, STM32F4, STM32F7, STM32L0, STM32L1, STM32L1W, STM32L4.
ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM32 ąĖą╝ąĄčÄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąŠčéčüč湥čéą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐ąŠą┤čüč湥čéą░ ąĖą╝ą┐čāą╗čīčüąŠą▓, ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĖ ą┐ąĄčĆąĖąŠą┤ąŠą▓ čüąĖą│ąĮą░ą╗ąŠą▓, ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ą©ąśą£, ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓. ą×ą┤ąĮą░ą║ąŠ ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ 8-ą▒ąĖčéąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, ą▓ ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī 2/3 čéą░ą╣ą╝ąĄčĆą░ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝, čéą░ą╣ą╝ąĄčĆčŗ STM32 ą▓ąĄčüčīą╝ą░ ąĖąĘąŠčēčĆąĄąĮąĮčŗąĄ ąĖ čüą╗ąŠąČąĮčŗąĄ. ąŁč鹊 ąŠą▒čŖčÅčüąĮčÅąĄčé č鹊čé čäą░ą║čé, čćč鹊 ąŠą┐ąĖčüą░ąĮąĖąĄ ą╝ąŠą┤čāą╗ąĄą╣ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĘą░ąĮąĖą╝ą░ąĄčé ą┐čĆąĖą╝ąĄčĆąĮąŠ 25% ą┤ą░čéą░čłąĖčéą░ ą╗čÄą▒ąŠą│ąŠ STM32.
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąĮą░čćą░čéčī čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī čéą░ą╣ą╝ąĄčĆčŗ STM32, čüą╗ąĄą┤čāąĄčé ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 ąŠąĮąĖ čüą╗ąĖčłą║ąŠą╝ čüą╗ąŠąČąĮčŗ, čćč鹊ą▒čŗ ą▓ ąŠą┤ąĮąŠą╣ čüčéą░čéčīąĄ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą▓čüąĄ ąĖčģ čäčāąĮą║čåąĖąĖ. ą¤ąŠčŹč鹊ą╝čā ąĘą┤ąĄčüčī ą╝čŗ čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą▒ą░ąĘąŠą▓čŗąĄ ą▓ąŠą┐čĆąŠčüčŗ čĆą░ą▒ąŠčéčŗ čü čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé ąĮą░čćą░čéčī ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. ą¤ąŠą╗ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąĖčēąĖč鹥 ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą║ąŠąĮą║čĆąĄčéąĮčāčÄ ą╝ąŠą┤ąĄą╗čī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
[ąÜą╗ą░čüčüąĖčäąĖą║ą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32]
ąóą░ą╣ą╝ąĄčĆčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32 ą╝ąŠąČąĮąŠ ą┐ąŠą┤ąĄą╗ąĖčéčī ąĮą░ čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ą░č鹥ą│ąŠčĆąĖąĖ:
ŌĆó ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ (Advanced Timers)
ŌĆó ą×ą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (General Purpose Timers, čüąŠą║čĆą░čēąĄąĮąĮąŠ GP)
ŌĆó ąæą░ąĘąŠą▓čŗąĄ (Basic Timers)
ąśąĘ čŹčéąĖčģ čéčĆąĄčģ čéąĖą┐ąŠą▓ čéą░ą╣ą╝ąĄčĆąŠą▓ ą┐ąĄčĆą▓čŗąĄ ą┤ą▓ą░ ą▒čāą┤čāčé ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą▓čüąĄčģ ą╝ąŠą┤ąĄą╗ąĄą╣ STM32. ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čéčĆąĄčéąĖą╣ čéąĖą┐ ą┤ąŠčüčéčāą┐ąĄąĮ č鹊ą╗čīą║ąŠ ą▓ čüčéą░čĆčłąĖčģ ą╝ąŠą┤ąĄą╗čÅčģ. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą║ą╗ą░čüčüą░ čéą░ą║ąČąĄ ą╝ąĄąĮčÅąĄčéčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĄą╝ą║ąŠčüčéąĖ ąĖą╗ąĖ čĆą░ąĘą╝ąĄčĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32. ąØą░ą┐čĆąĖą╝ąĄčĆ, čā STM32F103C8T6 ąĄčüčéčī ąŠą┤ąĖąĮ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗą╣ čéą░ą╣ą╝ąĄčĆ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čā STM32F103VET6 ą┤ą▓ą░ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗčģ čéą░ą╣ą╝ąĄčĆą░. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ STM32CubeMX ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ č鹊ą│ąŠ, ą║ą░ą║ąĖąĄ čéą░ą╣ą╝ąĄčĆčŗ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ ąĖą╝ąĄčÄčēąĄą╣čüčÅ ą╝ąŠą┤ąĄą╗ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĄčüą╗ąĖ ąÆčŗ ąĮąĄ čģąŠčéąĖč鹥 ąĘą░ą▒ą╗čāą┤ąĖčéčīčüčÅ ą▓ ą▒ąŠą╗čīčłąŠą╝ ą╝ą░čüčüąĖą▓ąĄ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ.
ąÆ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠčüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čéą░ą╣ą╝ąĄčĆąŠą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ čéąĖą┐ąŠą▓.
| ąóąĖą┐ čéą░ą╣ą╝ąĄčĆą░ |
ąóą░ą╣ą╝ąĄčĆ |
ąĀą░ąĘčĆ. čüč湥čéčćąĖą║ą░ |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüč湥čéą░ |
ąÜąŠčŹčä. ą┐čĆąĄčüą║ą░ą╗. |
DMA |
ąÜą░ąĮą░ą╗čŗ Capt./Comp. |
ąÜąŠą╝ą┐ą╗. ą▓čŗčģąŠą┤čŗ |
| ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗą╣ |
TIM1, TIM8 |
16 ą▒ąĖčé |
ąÆą▓ąĄčĆčģ, ą▓ąĮąĖąĘ, ą▓ ą┤ą▓čāčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ |
1..65535 |
ąĢčüčéčī |
4 |
ąĢčüčéčī |
| GP |
TIM2, TIM5 |
32 ą▒ąĖčéą░ |
ąØąĄčé |
| TIM3, TIM4 |
16 ą▒ąĖčé |
| TIM9 |
16 ą▒ąĖčé |
ąóąŠą╗čīą║ąŠ ą▓ą▓ąĄčĆčģ |
ąØąĄčé |
2 |
| TIM10, TIM11 |
16 ą▒ąĖčé |
1 |
| TIM12 |
16 ą▒ąĖčé |
2 |
| TIM13, TIM14 |
16 ą▒ąĖčé |
1 |
| ąæą░ąĘąŠą▓čŗą╣ |
TIM6, TIM7 |
16 ą▒ąĖčé |
ąĢčüčéčī |
0 |
General purpose (GP) čéą░ą╣ą╝ąĄčĆčŗ ąĖą╝ąĄčÄčé ą▓čüąĄ čäčāąĮą║čåąĖąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ čéą░ą╣ą╝ąĄčĆą░-čüč湥čéčćąĖą║ą░, ąŠąĮąĖ ą┐ąŠčćčéąĖ čéą░ą║ąĖąĄ ąČąĄ, ą║ą░ą║ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ 8-ą▒ąĖčéąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓. GP-čéą░ą╣ą╝ąĄčĆčŗ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą╗čÄą▒čŗčģ čüą▓čÅąĘą░ąĮąĮčŗčģ čü ąŠčéčüč湥č鹊ą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤čüč湥č鹊ą╝ čüąŠą▒čŗčéąĖą╣ čåąĄą╗ąĄą╣, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą©ąśą£ ąĖ ąĘą░čģą▓ą░čé ąĖą╝ą┐čāą╗čīčüąŠą▓. ą×ą▒čŗčćąĮąŠ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ STM32 ą▒ąŠą╗čīčłąĄ ą▓čüąĄą│ąŠ ąĖą╝ąĄąĮąĮąŠ čéą░ą╣ą╝ąĄčĆąŠą▓ GP, č湥ą╝ čéą░ą╣ą╝ąĄčĆąŠą▓ ą┤čĆčāą│ąĖčģ ą║ą╗ą░čüčüąŠą▓. ąśąĘčāč湥ąĮąĖąĄ GP-čéą░ą╣ą╝ąĄčĆąŠą▓ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╗čāčćčłąĄ ą┐ąŠąĮčÅčéčī ą▒ą░ąĘąŠą▓čŗąĄ ą║ąŠąĮčåąĄą┐čåąĖąĖ.
ąŻ ą▒ą░ąĘąŠą▓čŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĮąĄčé ą║ą░ąĮą░ą╗ąŠą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ ąĘą░čģą▓ą░čéą░ ą▓čģąŠą┤ąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ (čüąŠą▒čŗčéąĖą╣) ąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą©ąśą£, ą┐ąŠčŹč鹊ą╝čā čéą░ą║ąĖąĄ čéą░ą╣ą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čåąĄą╗ąĄą╣ ąŠčéčüč湥čéą░ ą▓čĆąĄą╝ąĄąĮąĖ. ąæą░ąĘąŠą▓čŗąĄ čéą░ą╣ą╝ąĄčĆčŗ ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ ą▓ čüčéą░čĆčłąĖčģ ą╝ąŠą┤ąĄą╗čÅčģ STM32, ąĖ čŹč鹊 čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ ą║ą╗ą░čüčü čéą░ą╣ą╝ąĄčĆąŠą▓.
ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┐ąŠčģąŠąČąĖ ąĮą░ GP-čéą░ą╣ą╝ąĄčĆčŗ, ąĮąŠ ąĖą╝ąĄčÄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą©ąśą£, ą░ čéą░ą║ąČąĄ č乊čĆą╝ąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ ąĖ čäą░ąĘčŗ ą©ąśą£ čü "ą╝ąĄčĆčéą▓čŗą╝" ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝, ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░čÄčēąĖą╝ čüą║ą▓ąŠąĘąĮčŗąĄ č鹊ą║ąĖ čüąĖą╗ąŠą▓ąŠą│ąŠ ą╝ąŠčüčéą░ (dead-time). ąŁčéąĖ čäčāąĮą║čåąĖąĖ ą┐ąŠą╗ąĄąĘąĮčŗ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, čüą▓čÅąĘą░ąĮąĮčŗčģ čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┤ą▓ąĖą│ą░č鹥ą╗čÅą╝ąĖ, čü čüąĖą╗ąŠą▓čŗą╝ąĖ ąĖąĮą▓ąĄčĆč鹊čĆą░ą╝ąĖ, čüąĖčüč鹥ą╝ą░ą╝ąĖ SMPS ąĖ ą┤čĆčāą│ąĖą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ, čüą▓čÅąĘą░ąĮąĮčŗą╝ąĖ čü ąĖčüč鹊čćąĮąĖą║ą░ą╝ąĖ ą┐ąĖčéą░ąĮąĖčÅ čŹą╗ąĄą║čéčĆąŠąĮąĖą║ąĖ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą╝ąŠčēąĮąŠčüčéčīčÄ. ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32 ąĄčüčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ čéą░ą║ąŠą╣ čéą░ą╣ą╝ąĄčĆ. ąÆ čüčéą░čĆčłąĖčģ ą╝ąŠą┤ąĄą╗čÅčģ STM32, ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ą▓ą░.
ąÜą░ąČą┤čŗą╣ čéą░ą╣ą╝ąĄčĆ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ STM32 ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┤čĆčāą│ąĖčģ, ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮąĖą║ą░ą║ąĖąĄ ąŠą▒čēąĖąĄ čĆąĄčüčāčĆčüčŗ. ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ, čćč鹊 ąŠą▒čēąĄąĄ ą╝ąĄąČą┤čā čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ, čŹč鹊 čéąĖą┐čŗ čĆąĄą│ąĖčüčéčĆąŠą▓, ą┐čĆąĖąĮčåąĖą┐čŗ ąĖą╝ąĄąĮąŠą▓ą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ ąŠą▒čēąĖą╣ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ. ąĪ ąŠč湥ąĮčī ą╝ą░ą╗čŗą╝ąĖ ąĖčüą║ą╗čÄč湥ąĮąĖčÅą╝ąĖ ą╝ąŠą┤čāą╗ąĖ čéą░ą╣ą╝ąĄčĆąŠą▓ ą▒ąŠą╗ąĄąĄ ąĖą╗ąĖ ą╝ąĄąĮąĄąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ ą┐ąŠ ą▓čüąĄą╝ čüąĄą╝ąĄą╣čüčéą▓ą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąÆčŗ ąĮąĄ ąĮą░ą╣ą┤ąĄč鹥 ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗčģ čĆą░ąĘą╗ąĖčćąĖą╣ ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ čéą░ą╣ą╝ąĄčĆąŠą▓ ą┐čĆąĖ ą╝ąĖą│čĆą░čåąĖąĖ ą┐čĆąŠąĄą║čéą░ čü čüąĄčĆąĖąĖ STM32F1xx ąĮą░ čüąĄčĆąĖčÄ STM32F4xx. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠą▓čüąĄą╝ ąĮąĄ čéą░ą║ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ - ą┐ąŠčĆč鹊ą▓ GPIO, ADC, ąĖ čé. ą┐.
ąÆ čéą░ą▒ą╗ąĖčåąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ą╗ąĖčćąĖąĄ čéą░ą╣ą╝ąĄčĆąŠą▓ čĆą░ąĘąĮčŗčģ ą║ą╗ą░čüčüąŠą▓ ą▓ čüąĄą╝ąĄą╣čüčéą▓ą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32.
ąóąĖą┐ čéą░ą╣ą╝ąĄčĆą░
|
STM32F0 |
STM32F101, 102, 103, 105, 107 |
STM32F100 |
STM32L1 |
STM32F2, STM32F4 |
STM32F30x, STM32F3x8 |
STM32F37x |
| ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗą╣ |
TIM1 |
TIM1 |
TIM1 |
- |
TIM1 |
TIM1 |
- |
| - |
TIM8 |
- |
- |
TIM8 |
TIM8 |
- |
| - |
- |
- |
- |
- |
TIM20 |
- |
| GP |
16 ą▒ąĖčé |
- |
TIM2 |
TIM2 |
TIM2 |
- |
TIM2 |
TIM2 |
| TIM3 |
TIM3 |
TIM3 |
TIM3 |
TIM3 |
TIM3 |
TIM |
| - |
TIM4 |
TIM4 |
TIM4 |
TIM4 |
TIM4 |
TIM4 |
| - |
TIM5 |
TIM5 |
- |
- |
- |
TIM5 |
| - |
- |
- |
- |
- |
- |
TIM19 |
| 32 ą▒ąĖčéą░ |
TIM2 |
- |
- |
- |
TIM2 |
TIM2 |
TIM2 |
| - |
- |
- |
- |
TIM5 |
- |
TIM5 |
| ąæą░ąĘąŠą▓čŗą╣ |
TIM6 |
TIM6 |
TIM6 |
TIM6 |
TIM6 |
TIM6 |
TIM6 |
| - |
TIM7 |
TIM7 |
TIM7 |
TIM7 |
TIM7 |
TIM7 |
| - |
- |
- |
- |
- |
- |
TIM18 |
| 1 ą║ą░ąĮą░ą╗ |
- |
TIM10 |
- |
TIM10 |
TIM10 |
- |
- |
| - |
TIM11 |
- |
TIM11 |
TIM11 |
- |
- |
| - |
TIM13 |
TIM13 |
- |
TIM13 |
- |
TIM13 |
| TIM14 |
TIM14 |
TIM14 |
- |
TIM14 |
- |
TIM14 |
| 2 ą║ą░ąĮą░ą╗ą░ |
- |
TIM9 |
- |
TIM9 |
TIM9 |
- |
- |
| - |
TIM12 |
TIM12 |
- |
TIM12 |
- |
TIM12 |
| 1 ą║ą░ąĮą░ą╗ čü ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝ |
TIM15 |
- |
TIM15 |
- |
- |
TIM15 |
TIM15 |
| 2 ą║ą░ąĮą░ą╗ą░ čü ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝ |
TIM16 |
- |
TIM16 |
- |
- |
TIM16 |
TIM16 |
| TIM17 |
- |
TIM17 |
- |
- |
TIM17 |
TIM17 |
[ą×ą▒ąĘąŠčĆ čéą░ą╣ą╝ąĄčĆąŠą▓]
ą×ą▒čŗčćąĮąŠ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32 čüąŠčüč鹊ąĖčé ąĖąĘ 16-ą▒ąĖčéąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ čü ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąĘą░ą│čĆčāąĘą║ąŠą╣ ąĖ 16-ą▒ąĖčéąĮąŠą│ąŠ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. ą¤čĆąĄčüą║ą░ą╗ąĄčĆ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą┤ąĄą╗ąĄąĮąĖąĄ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čüąŠą│ą╗ą░čüąĮąŠ ą┐ąŠčéčĆąĄą▒ąĮąŠčüčéčÅą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ążčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ čüč湥čéčćąĖą║ą░ čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠčćčéąĖ čéą░ą║ ąČąĄ, ą║ą░ą║ ą╝čŗ ą┐čĆąĖą▓čŗą║ą╗ąĖ ą▓ąĖą┤ąĄčéčī ą▓ 8-ą▒ąĖčéąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ, čü ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╝ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝. ąÆ 8-ą▒ąĖčéąĮčŗčģ MCU čüčéą░čĆąŠą╣ čłą║ąŠą╗čŗ ąĮą░ą╝ ąĮčāąČąĮąŠ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčī čéą░ą╣ą╝ąĄčĆ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░. ąŁč鹊 ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ čéą░ą╣ą╝ąĄčĆą░čģ STM32, čéą░ą║ ą║ą░ą║ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ.
ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą╝ąĮąŠą│ąĖčģ ą┤čĆčāą│ąĖčģ MCU, ą▓ ą║ąŠč鹊čĆčŗčģ čéą░ą╣ą╝ąĄčĆčŗ ąŠą▒čŗčćąĮąŠ čüčćąĖčéą░čÄčé ąĮą░ čāą▓ąĄą╗ąĖč湥ąĮąĖąĄ (ąĮą░ ąĖąĮą║čĆąĄą╝ąĄąĮčé), čéą░ą╣ą╝ąĄčĆčŗ STM32 ą╝ąŠą│čāčé čüčćąĖčéą░čéčī ą▓ą▓ąĄčĆčģ, ą▓ąĮąĖąĘ ąĖą╗ąĖ ą▓ą▓ąĄčĆčģ/ą▓ąĮąĖąĘ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čüčĆąĄą┤ąĮąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠ ąĖ ą┐čĆąĄą┤ą┐ąŠčćčéąĖč鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüč湥čé ą▓ą▓ąĄčĆčģ.
ąŚą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą▒ą░ąĘąŠą▓čŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓, ą▓čüąĄ čéą░ą╣ą╝ąĄčĆčŗ STM32 ąĖą╝ąĄčÄčé 4 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą║ą░ąĮą░ą╗ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O channels TIMx_CH1 .. TIMx_CH4). ą×ąĮąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó Input Capture (ąĘą░čģą▓ą░čé ą▓ąĮąĄčłąĮąĖčģ čüąŠą▒čŗčéąĖą╣)
ŌĆó Output Compare, ąĖą╗ąĖ PWM (ą©ąśą£)
ŌĆó One Pulse Mode (čĆąĄąČąĖą╝ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░)
ąóą░ą╣ą╝ąĄčĆčŗ ą╝ąŠą│čāčé čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ (čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ RC ąĖą╗ąĖ ąŠčé ą│ąĄąĮąĄčĆą░č鹊čĆą░, čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ąĮąĄčłąĮąĖą╝ ą║ą▓ą░čĆčåąĄą╝), ąĖą╗ąĖ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓. ąÆąĮąĄčłąĮąĖąĄ ąĖčüč鹊čćąĮąĖą║ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ:
ŌĆó External Mode 1 (čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ TI1 ąĖ TI2)
ŌĆó External Mode 2 (čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ETR)
ŌĆó Internal Trigger (ITRx)
ąĪąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ DMA ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĖčéčāą░čåąĖčÅčģ:
ŌĆó ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ: ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąĖ čüč湥č鹥 ą▓ą▓ąĄčĆčģ (overflow) ąĖą╗ąĖ ąŠą▒ąĮčāą╗ąĄąĮąĖąĄ ą┐čĆąĖ čüč湥č鹥 ą▓ąĮąĖąĘ (underflow), ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüč湥čéčćąĖą║ą░, ą┤čĆčāą│ąĖąĄ čüąŠą▒čŗčéąĖčÅ.
ŌĆó ąóčĆąĖą│ą│ąĄčĆ: čüčéą░čĆčé čüč湥čéą░, ąŠčüčéą░ąĮąŠą▓ą║ą░ čüč湥čéą░, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüč湥čéčćąĖą║ą░, ą┤čĆčāą│ąĖąĄ čüąŠą▒čŗčéąĖčÅ.
ŌĆó Input Capture / Output Compare.
ŌĆó ąöčĆčāą│ąĖąĄ čüąŠą▒čŗčéąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ ąĮąĖąČąĄ ą┤ą░ąĄčé ąŠą▒ąĘąŠčĆ ąĮą░ ąŠą▒čēąĖąĄ čäčāąĮą║čåąĖąĖ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32.
ąóąĖą┐ čéą░ą╣ą╝ąĄčĆą░
|
ąĀą░ąĘčĆ. čüč湥čéčćąĖą║ą░
|
ąĪč湥čé
|
DMA
|
ąÜą░ąĮą░ą╗ąŠą▓
|
ążčāąĮą║čå. čüčĆą░ą▓ąĮ.
|
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ |
| Master |
Slave |
| ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗą╣ |
16 ą▒ąĖčé |
ąÆą▓ąĄčĆčģ, ą▓ąĮąĖąĘ ąĖ čü
ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄą╝
ą┐ąŠ čåąĄąĮčéčĆčā |
ąĢčüčéčī |
5 |
3 |
ąĢčüčéčī |
ąĢčüčéčī |
| GP |
16 ą▒ąĖčé, 32 ą▒ąĖčéą░(1) |
ąĢčüčéčī |
4 |
0 |
ąĢčüčéčī |
ąĢčüčéčī |
| ąæą░ąĘąŠą▓čŗą╣ |
16 ą▒ąĖčé |
ąóąŠą╗čīą║ąŠ ą▓ą▓ąĄčĆčģ |
ąĢčüčéčī |
0 |
0 |
ąĢčüčéčī |
- |
| 1 ą║ą░ąĮą░ą╗ |
16 ą▒ąĖčé |
- |
1 |
0 |
ąĢčüčéčī (čüąĖą│ąĮą░ą╗ OC) |
- |
| 2 ą║ą░ąĮą░ą╗ą░ |
16 ą▒ąĖčé |
- |
2 |
0 |
ąĢčüčéčī |
ąĢčüčéčī |
| 1 ą║ą░ąĮą░ą╗ čü ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝ |
16 ą▒ąĖčé |
ąĢčüčéčī |
1 |
1 |
ąĢčüčéčī (čüąĖą│ąĮą░ą╗ OC) |
- |
| 2 ą║ą░ąĮą░ą╗ą░ čü ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝ |
16 ą▒ąĖčé |
ąĢčüčéčī |
2 |
1 |
ąØąĄčé |
ąØąĄčé |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): TIM2 ąĖ TIM5 čŹč鹊 32-ą▒ąĖčéąĮčŗąĄ čüč湥čéčćąĖą║ąĖ ą▓ čüąĄčĆąĖčÅčģ STM32F2 ąĖ STM32F4, čāčüčéčĆąŠą╣čüčéą▓ą░čģ STM32F303xB, STM32F303xC, STM32F303xD, STM32F303xE ąĖ STM32F3x8.
ąśąĘ ą▓čüąĄą╣ čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą▓ąĖą┤ąĮą░ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠčüčéčī čéą░ą╣ą╝ąĄčĆąŠą▓ STM32, ąĖ ą┐ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąŠąĮąĖ ąĮąĄ ąŠč湥ąĮčī ą┐čĆąŠčüčéčŗ ą┤ą╗čÅ ąŠčüą▓ąŠąĄąĮąĖčÅ ąĮą░čćąĖąĮą░čÄčēąĖą╝ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéą░ą╝ąĖ.
[ąĀąĄą│ąĖčüčéčĆčŗ čéą░ą╣ą╝ąĄčĆą░]
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝čŗ ąĮą░čćąĮąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī, čüą╗ąĄą┤čāąĄčé ąŠą▒čĆą░čéąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĮą░ąĖą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗą╣ ąĮą░ą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32, ąŠčéąĮąŠčüčÅčēąĖą╣čüčÅ ą║ ą╝ąŠą┤čāą╗čÅą╝ čéą░ą╣ą╝ąĄčĆą░-čüč湥čéčćąĖą║ą░. ąÆ ą║ąŠąĮą║čĆąĄčéąĮąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą▓čüąĄ čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą╝ąŠą│čāčé ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ, ąĖ čćč鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ, ą╝čŗ ą┐čĆąŠčüč鹊 ąŠą▒čüčāą┤ąĖą╝ ąĖčģ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ. ąØąĄą║ąŠč鹊čĆčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ąĮčāąČąĮčŗ ą▒čāą┤čāčé ą▓čüąĄą│ą┤ą░, ąŠą┤ąĮą░ą║ąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čéą░ą║ąĖčģ ąĘą░ą┤ą░čć, ą║ą░ą║ input capture / output compare. ąĢčēąĄ ąŠą┤ąĮą░ ą▓ą░ąČąĮą░čÅ ą▓ąĄčēčī, ą║ąŠč鹊čĆčāčÄ čüč鹊ąĖčéčī ąŠčéą╝ąĄčéąĖčéčī - ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ čÅą┤čĆąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ARM ąĖą╝ąĄčÄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 32 ą▒ąĖčéą░, ąĖ ą┤ą╗čÅ ą╝ąŠą┤čāą╗ąĄą╣ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĖ ą╝ąĮąŠą│ąĖčģ ą┤čĆčāą│ąĖčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąĮąŠą│ąĖąĄ ą▒ąĖčéčŗ ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ (čé. ąĄ. ąŠąĮąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, ąĮąŠ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą▒čāą┤čāčēąĖčģ ą╝ąŠą┤ąĄą╗čÅčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓). ąŁč鹊 čāą┐čĆąŠčēą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą▒ąĖčé. ą¦č鹊ą▒čŗ ąĄčēąĄ ą▒ąŠą╗čīčłąĄ čāą┐čĆąŠčüčéąĖčéčī ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ, ą▓ čŹč鹊ą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖ čäčāąĮą║čåąĖąĖ, ą┐ąŠą┤ąŠą▒ąĮčŗąĄ č鹥ą╝, čćč鹊 ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ SPL ąŠčé ST. ąæąĖą▒ą╗ąĖąŠč鹥ą║ąĖ MikroC čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐ąŠčģąŠąČąĖą╣ ą┐ąŠą┤čģąŠą┤ ą║ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÄ.
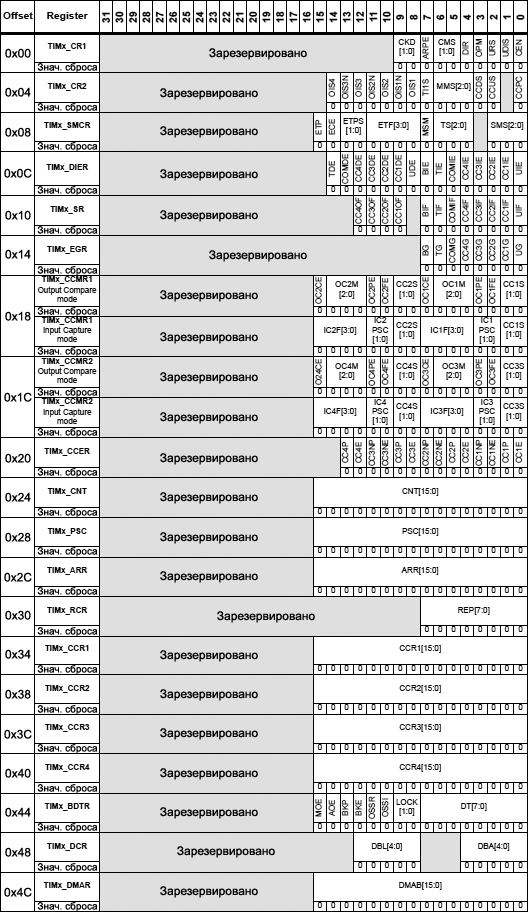
ąØąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą║ą░č湥čüčéą▓ąĄ čüą┐čĆą░ą▓ąŠčćąĮąĖą║ą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ą║ą░čĆčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąŠą┤čāą╗čÅ čéą░ą╣ą╝ąĄčĆą░.
ą¤čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą║ąŠą┤ą░ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆąŠą▓ čüą╗ąĄą┤čāąĄčé čāčćąĖčéčŗą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą╝ąŠą╝ąĄąĮčéčŗ:
ŌĆó ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╝ąŠą┤čāą╗ąĖ čéą░ą╣ą╝ąĄčĆąŠą▓ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąĮą░čćą░ą╗ą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ RCC_APBx_ENR. ąĀą░ą▒ąŠčéą░ ąŠčéą┤ąĄą╗čīąĮčŗčģ čüč湥čéčćąĖą║ąŠą▓, čäčāąĮą║čåąĖą╣ DMA ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓čüąĄą│ąŠ ąŠčüčéą░ą╗čīąĮąŠą│ąŠ.
ŌĆó ąĪčĆą░ąĘčā ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą║ą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąöą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čŹč鹊 ą▓čüąĄ ąĮčāą╗ąĖ, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ąĘą░ą┐čĆąĄčé ą▓čüąĄčģ čäčāąĮą║čåąĖą╣. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąĄ ąĮčāąČąĮąŠ čŹčéąĖ ą▒ąĖčéčŗ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąŠčćąĖčēą░čéčī ą┐čĆąĖ čüčéą░čĆč鹥 (č鹊čćąĮąŠ čéą░ą║ ąČąĄ ąŠą▒čüč鹊čÅčé ą┤ąĄą╗ą░ ąĖ čü ą╗čÄą▒čŗą╝ ą┤čĆčāą│ąĖą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ STM32). ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą║ąŠąĄ-čćč鹊 ąĮą░ ą╗ąĄčéčā, č鹊 ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ čüąĮą░čćą░ą╗ą░ čüą▒čĆąŠčüąĖčéčī ą▓čüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, čćč鹊ą▒čŗ ąĮąĄ ą┐ąŠą┐ą░čüčéčī ą▓ čüąĖčéčāą░čåąĖčÄ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠą│ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčēąĄą│ąŠ ąĖčģ ą║ąŠą┤ą░.
ŌĆó ąóą░ą╣ą╝ąĄčĆčŗ ąĮąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTC) ąĖąĘ-ąĘą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čäą░ą║č鹊čĆąŠą▓, ąĖ ąŠąĮąĖ ąĮąĄ ą▓čüąĄą│ą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čģčĆą░ąĮąĖčéčī ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī č鹊čćąĮąŠąĄ ą▓čĆąĄą╝čÅ. ąĢčüą╗ąĖ č鹊čćąĮąŠčüčéčī ąĮąĄ ąŠč湥ąĮčī ą▓ą░ąČąĮą░, č鹊 čéą░ą╣ą╝ąĄčĆčŗ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą▒čŗčćąĮąŠą│ąŠ čüčĆąĄą┤čüčéą▓ą░ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ. ąæąĄąĘ čüąŠą╝ąĮąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆčŗ ą▒ąŠą╗ąĄąĄ č鹊čćąĮčŗ ąĖ čŹčäč乥ą║čéąĖą▓ąĮčŗ, č湥ą╝ čéčāą┐čŗąĄ ą┐čāčüčéčŗąĄ čåąĖą║ą╗čŗ ąĘą░ą┤ąĄčƹȹ║ąĖ, ąĮąŠ ąŠąĮąĖ ąĮąĄ ąŠč湥ąĮčī čģąŠčĆąŠčłąĖ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹊 ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ RTC.
ŌĆó ąÜąŠą│ą┤ą░ ąĮąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ GPIO ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ čĆąĄąČąĖą╝ą░ capture/compare, čéčēą░č鹥ą╗čīąĮąŠ ąĖąĘčāčćąĖč鹥, ą║ą░ą║ąĖąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą▓čŗą▓ąŠą┤čŗ I/O, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖąĮąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤čŗ I/O, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čŹčéąĖą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ, ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ą║ą░ą║ąŠą╣-č鹊 ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĖ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 STM32CubeMX, čćč鹊ą▒čŗ ąĮą░ą╣čéąĖ, ą║ą░ą║ąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čü ą║ą░ąČą┤čŗą╝ ą║ąŠąĮą║čĆąĄčéąĮčŗą╝ čéą░ą╣ą╝ąĄčĆąŠą╝.
ŌĆó ą£ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▒ą╗ąŠą║ AFIO ą┤ą╗čÅ ą┐ąĄčĆąĄąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ I/O, ą┐ąŠčüą║ąŠą╗čīą║čā capture/compare čŹč鹊 ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąŠą▒čŗčćąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ GPIO. ąæą╗ąŠą║ AFIO ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą┐ąĄčĆąĄąĮą░ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ąÆčŗą▓ąŠą┤čŗ GPIO ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ AFIO ą┤ą╗čÅ čĆąĄąČąĖą╝ąŠą▓ compare/output.
ŌĆó ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ ąĘą░čģą▓ą░čéą░ ą┐ąŠ ą▓čģąŠą┤čā (input capture), ąŠą▒ąĄčüą┐ąĄčćčīč鹥 čāčüą╗ąŠą▓ąĖčÅ, čćč鹊ą▒čŗ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠčüčéčāą┐ą░čÄčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ ą┐čĆąĄą▓čŗčüąĖą╗ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ. ąØąĄ ą▓čüąĄ, ąĮąŠ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ąĮąŠąČąĄą║ ą▓čŗą▓ąŠą┤ąŠą▓ I/O ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐ąŠą┤ą░ą▓ą░čéčī ą▓čģąŠą┤ąĮąŠą╣ čāčĆąŠą▓ąĄąĮčī 5 ą▓ąŠą╗čīčé ą┐čĆąĖ ą┐ąĖčéą░ąĮąĖąĖ ą┐ąŠą┤čüąĖčüč鹥ą╝ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąŠčé čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ 3.3 ą▓ąŠą╗čīčéą░ (ą┐čĆąŠ čéą░ą║ąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆč鹊ą▓ ą│ąŠą▓ąŠčĆčÅčé, čćč鹊 ąŠąĮąĖ ąŠą▒ą╗ą░ą┤ą░čÄčé čäčāąĮą║čåąĖąĄą╣ "5V tolerant"). ą×ą┤ąĮą░ą║ąŠ ą▓čüąĄ čĆą░ą▓ąĮąŠ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĮąĄ ą┐čĆąĄą▓čŗčłą░čéčī čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ VDD, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čŗčćąĮąŠ čüąŠčüčéą░ą▓ą╗čÅąĄčé 3.3V.
ŌĆó ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čĆąĄąČąĖą╝ą░ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (output compare mode) čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąĮą░ą│čĆčāąĘą║ą░ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ ąĖą╗ąĖ ąŠą┐čéčĆąŠąĮąĮąŠą│ąŠ ąĖąĘąŠą╗čÅč鹊čĆą░ ąĮąĄ ą┐čĆąĖą▓ąŠą┤ąĖą╗ą░ ą║ čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąŠą╝čā č鹊ą║čā č湥čĆąĄąĘ ą┤čĆą░ą╣ą▓ąĄčĆ ą▓čŗčģąŠą┤ą░. ą×č湥ąĮčī ą▓ą░ąČąĮąŠ, čćč鹊ą▒čŗ č鹊ą║ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ą╗ ą┐čĆąĄą┤ąĄą╗, čāą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąĢčüą╗ąĖ ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ ąĮąĄą┤ąŠčüčéą░č鹊č湥ąĮ, č鹊 ą┐čĆąĖą╝ąĄąĮčÅą╣č鹥 čāčüąĖą╗ąĖą▓ą░čÄčēąĖąĄ čéčĆą░ąĮąĘąĖčüč鹊čĆąĮčŗąĄ ą║ą╗čÄčćąĖ ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▒čāč乥čĆą░.
ŌĆó ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32 ą┤ąŠą▓ąŠą╗čīąĮąŠ č鹊čćąĮčŗą╣ (čü ą┤ąŠą┐čāčüą║ąŠą╝ 1%), ąŠą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ąĮčāąČąĮą░ ąĮą░ą╝ąĮąŠą│ąŠ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ą░čÅ č鹊čćąĮąŠčüčéčī, č鹊 ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮčŗąĄ ą▓ąĮąĄčłąĮąĖąĄ ą│ąĄąĮąĄčĆą░č鹊čĆčŗ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĖąĄ č鹊čćąĮčŗąĄ ą║ą▓ą░čĆčåąĄą▓čŗąĄ čĆąĄąĘąŠąĮą░č鹊čĆčŗ.
ŌĆó ąŻčćąĖčéčŗą▓ą░ą╣č鹥 ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą▓ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓, čāą╝ąĮąŠąČąĖč鹥ą╗ąĄą╣ ąĖ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
ŌĆó ą¤ąŠą╝ąĮąĖč鹥, čćč鹊 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ čłąĖąĮąĄ APB2, ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čłąĖąĮčŗ APB1 ąŠą│čĆą░ąĮąĖč湥ąĮčŗ ą┐ąŠą╗ąŠą▓ąĖąĮąŠą╣ čŹč鹊ą╣ čüą║ąŠčĆąŠčüčéąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čéą░ą╣ą╝ąĄčĆčŗ APB1 ąĮąĄ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ č鹊ą╣ ąČąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥, ą║ą░ą║ čéą░ą╣ą╝ąĄčĆčŗ APB2.
ŌĆó ą¤ąŠčüą║ąŠą╗čīą║čā ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą║ą░ąČą┤ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĄą│ąŠ čłąĖąĮčŗ APB, č鹊 ąÆčŗ ą┤ąŠą╗ąČąĮčŗ ąĘąĮą░čéčī, ą║ ą║ą░ą║ąŠą╣ čłąĖąĮąĄ APB ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čéą░ą╣ą╝ąĄčĆ. ąŻčéąĖą╗ąĖčéą░ Timer Calculator ąŠčé MikroElektronika (MikroE) ą┐ąŠąĘą▓ąŠą╗ąĖčé čāčćąĖčéčŗą▓ą░čéčī čŹčéąĖ čäą░ą║č鹊čĆčŗ ą┤ą╗čÅ čĆąĄą░ą╗čīąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čĆąĄą┤ą░ą║č鹊čĆ ą┐čĆąŠąĄą║čéą░ STM32CubeMX, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüą║ąŠčĆąŠčüčéąĖ čłąĖąĮčŗ APB. ąØąĖąČąĄ ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ, ąĘą┤ąĄčüčī čéą░ą╣ą╝ąĄčĆčŗ APB1 ą┐ąŠą╗čāčćą░čÄčé čéą░ą║čéčŗ 36 ą£ąōčå, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čéą░ą╣ą╝ąĄčĆčŗ APB2 čéą░ą║čéąĖčĆčāčÄčéčüčÅ ąŠčé 72 ą£ąōčå.
[ą×čéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ]
ą×čéčüč湥čé č鹥ą║čāčēąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ - ąŠčüąĮąŠą▓ąĮąŠą╣ čĆąĄąČąĖą╝ čéą░ą╣ą╝ąĄčĆą░. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéčŗ čéą░ą╣ą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ čéą░ą║, čćč鹊ą▒čŗ ąŠąĮ ą▓čŗąĘčŗą▓ą░ą╗ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗąĄ čüąŠą▒čŗčéąĖčÅ čü čĆą░ą▓ąĮčŗą╝ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą▒ą░ąĘčŗ). ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą╝čŗ ą╝ąŠąČąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠą╣ čéą░ą╣ą╝ąĄčĆ, ąŠą┤ąĮą░ą║ąŠ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖą╗ąĖ ą▒ą░ąĘąŠą▓čŗą╣ čéą░ą╣ą╝ąĄčĆ (ąĄčüą╗ąĖ ąŠąĮ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé), ąĖą╗ąĖ GP-čéą░ą╣ą╝ąĄčĆ.
ąöą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą▒ą░ąĘčŗ čĆą░čåąĖąŠąĮą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąĄč鹊ą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąĪąĮą░čćą░ą╗ą░ ąĮą░ą┤ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčīčüčÅ, ą║ą░ą║ąŠą╣ čéą░ą╣ą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ąĖ ą║ą░ą║ą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čćą░čüč鹊čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░. ąŚą░č鹥ą╝ ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé čĆą░čüčüčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ (PSC), čĆąĄą│ąĖčüčéčĆą░ ą░ą▓č鹊ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ (auto-reload register, ARR) ąĖ čĆąĄą│ąĖčüčéčĆą░ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ (repetition counter register, RCR), ąĄčüą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé. ąĪč湥čéčćąĖą║ąĖ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ ą▓ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗčģ čéą░ą╣ą╝ąĄčĆą░čģ. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēčāčÄ č乊čĆą╝čāą╗čā ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
TIMxCLK
ąĪąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ = ----------------
((PSC+1)(ARR+1))
RCR ą▒čāą┤ąĄčé ąĮčāą╗ąĄą▓čŗą╝ ą║čĆąŠą╝ąĄ čüą╗čāčćą░ąĄą▓, ą║ąŠą│ą┤ą░ ąŠąĮ ą┤ąŠčüčéčāą┐ąĄąĮ ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, č鹊ą│ą┤ą░ č乊čĆą╝čāą╗ą░ ą▒čāą┤ąĄčé čüą╗ąĄą┤čāčÄčēąĄą╣:
TIMxCLK
ąĪąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ = -----------------------
((PSC+1)(ARR+1)(RCR+1))
ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ TIMx ąĘą░ą▓ąĖčüąĖčé ąŠčé čćą░čüč鹊čéčŗ čłąĖąĮčŗ APB.
ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆą░ąĘčĆąĄčłą░čÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąĖ čĆą░ą▒ąŠčéą░ čüą░ą╝ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ čéą░ą╣ą╝ąĄčĆą░.
ąöą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ (ą▓ą╝ąĄčüč鹊 x ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čéą░ą╣ą╝ąĄčĆą░):
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ 1 (TIMx_CR1), čüą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ 0x00, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ 0x0000.
| ąĀą░ąĘčĆčÅą┤ |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąæąĖčé |
ąĀąĄąĘąĄčĆą▓ |
CKD[1:0] |
ARPE |
CMS
|
DIR |
OPM |
URS |
UDIS |
CEN |
| ą¦č鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ DMA/ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (TIMx_DIER), čüą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ 0x0C, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ 0x0000.
| ąĀą░ąĘčĆčÅą┤ |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąæąĖčé |
ąĀąĄąĘ. |
TDE |
ąĀąĄąĘ. |
CC4DE |
CC3DE |
CC2DE |
CC1DE |
UDE |
ąĀąĄąĘ. |
TIE
|
ąĀąĄąĘ. |
CC4IE |
CC3IE |
CC2IE |
CC1IE |
UIE |
| ą¦č鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
ą¤čĆąĄčüą║ą░ą╗ąĄčĆ (TIMx_PSC), čüą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ 0x28, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ 0x0000.
| ąĀą░ąĘčĆčÅą┤ |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąĀąĄą│ąĖčüčéčĆ |
PSC[15:0] |
| ą¦č鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
ąĀąĄą│ąĖčüčéčĆ ą░ą▓č鹊ąĘą░ą│čĆčāąĘą║ąĖ (TIMx_ARR), čüą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ 0x2C, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ 0x0000.
| ąĀą░ąĘčĆčÅą┤ |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| ąĀąĄą│ąĖčüčéčĆ |
ARR[15:0] |
| ą¦č鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
[ąæą░ąĘąŠą▓čŗąĄ čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ GP-čéą░ą╣ą╝ąĄčĆąŠą▓]
ąÆčüąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM32 ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮčŗ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮąĖą╝ čéą░ą╣ą╝ąĄčĆąŠą╝, ąĖ ą╝ąĮąŠą│ąĖąĄ ąĖąĘ ąĮąĖčģ ąĖą╝ąĄčÄčé ą▓ čüą▓ąŠąĄą╝ čüąŠčüčéą░ą▓ąĄ ą┐ąĄčĆąĖč乥čĆąĖąĖ čéą░ą╣ą╝ąĄčĆčŗ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čéąĖą┐ąŠą▓. ąÆ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ ąŠą▒čŗčćąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ (general purpose, GP-čéą░ą╣ą╝ąĄčĆčŗ). GP-čéą░ą╣ą╝ąĄčĆčŗ ą╝ąŠąČąĮąŠ ąŠčéą╗ąĖčćąĖčéčī ąŠčé čéą░ą╣ą╝ąĄčĆąŠą▓ ą┤čĆčāą│ąĖčģ čéąĖą┐ąŠą▓ ą┐ąŠ ąĖą╝ąĄąĮąĖ ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32.
ąÆ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32 GP-čéą░ą╣ą╝ąĄčĆ ąĖą╝ąĄąĮčāąĄčéčüčÅ ą║ą░ą║ "TIMx timer", ą│ą┤ąĄ "x" ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒čŗą╝ čćąĖčüą╗ąŠą╝, ąĖ čŹč鹊 ąĮąĄ ąŠčéčĆą░ąČą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓, ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ čŹč鹊čé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ čüąĄčĆąĖąĖ STM32F100 ąĖą╝ąĄčÄčé ąĮą░ ą▒ąŠčĆčéčā čéą░ą╣ą╝ąĄčĆ TIM17, ąŠą┤ąĮą░ą║ąŠ ąŠą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓ ą▓ čŹč鹊ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą╝ąĄąĮčīčłąĄ 17.
ąÆ ąŠčüąĮąŠą▓ąĮąŠą╝ č湥čĆąĄąĘ ą▓čüąĄ čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32 čüąŠą▒ą╗čÄą┤ą░ąĄčéčüčÅ ą┐čĆąĖąĮčåąĖą┐, čćč鹊 čéą░ą╣ą╝ąĄčĆčŗ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ąĖą╝ąĄąĮąĄą╝ ąĖą╝ąĄčÄčé ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣, ąĮąŠ ąĖąĘ čŹč鹊ą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ čéą░ą╣ą╝ąĄčĆ TIM1 ąŠą▒čēąĖą╣ ą▓ąŠ ą▓čüąĄčģ čüąĄčĆąĖčÅčģ STM32F1, STM32F2 ąĖ STM32F4, ąĮąŠ ą┤ą╗čÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ čüą╗čāčćą░čÅ čüąĄą╝ąĄą╣čüčéą▓ą░ STM32F30x čéą░ą╣ą╝ąĄčĆ TIM1 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąŠą╗čīčłąĖą╣ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖą╣, č湥ą╝ čéą░ą╣ą╝ąĄčĆ TIM1 ą▓ ą┤čĆčāą│ąĖčģ čüąĄą╝ąĄą╣čüčéą▓ą░čģ.
GP-čéą░ą╣ą╝ąĄčĆčŗ, ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM32, ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čāčÄ ąŠčüąĮąŠą▓ąĮčāčÄ čüčéčĆčāą║čéčāčĆčā; ąŠąĮąĖ ąŠčéą╗ąĖčćą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ čāčĆąŠą▓ąĮąĄą╝ čäčāąĮą║čåąĖą╣, ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ.
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čéą░ą╣ą╝ąĄčĆąŠą▓ ą╝ąŠąČąĮąŠ ą║ą╗ą░čüčüąĖčäąĖčåąĖčĆąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ, čéą░ą║ąĖąĄ ą║ą░ą║ TIM1 ąĖ TIM8.
ŌĆó GP-čéą░ą╣ą╝ąĄčĆčŗ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ TIM2 ąĖ TIM3.
ŌĆó ąóą░ą╣ą╝ąĄčĆčŗ čü ąŠą▒ą╗ąĄą│č湥ąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣, čéą░ą║ąĖąĄ ą║ą░ą║ TIM9, TIM10, TIM12 ąĖ TIM16.
ŌĆó ąæą░ąĘąŠą▓čŗąĄ čéą░ą╣ą╝ąĄčĆčŗ, čéą░ą║ąĖąĄ ą║ą░ą║ TIM6 ąĖ TIM7.
ąÉą┐ąĮąŠčāčé AN4013 [2] ą┤ą░ąĄčé ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32 ą┐ąŠ ą▓čüąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čüąĄą╝ąĄą╣čüčéą▓ą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32.
TIM1. ąØą░ čĆąĖčü. 1 ą▒ą╗ąŠą║-čüčģąĄą╝čŗ čéą░ą╣ą╝ąĄčĆą░ TIM1 ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĄą│ąŠ č湥čéčŗčĆąĄ ąŠčüąĮąŠą▓ąĮčŗčģ ą▒ą╗ąŠą║ą░:
1. ąæą╗ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave.
2. ąæą╗ąŠą║ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ.
3. ąæą╗ąŠą║ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą╣ą╝ąĄčĆą░.
4. ąæą╗ąŠą║ čäčāąĮą║čåąĖąĖ Break.
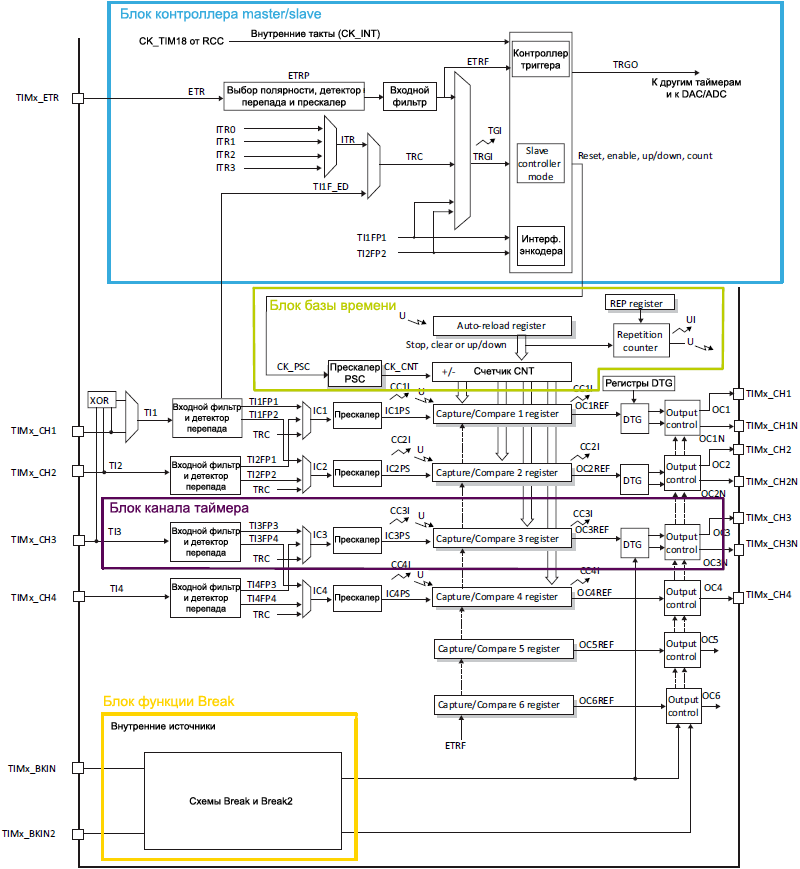
ąĀąĖčü. 1. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čéą░ą╣ą╝ąĄčĆą░ TIM1.
ąæą╗ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave. ąæą╗ąŠą║ master/slave ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ą╗ąŠą║ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ąŠčéčüčćąĖčéčŗą▓ą░čÄčēąĖą╣ ąĖą╝ą┐čāą╗čīčüčŗ čéą░ą║č鹊ą▓ (ąĮą░ą┐čĆąĖą╝ąĄčĆ CK_PSC), ą░ čéą░ą║ąČąĄ čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čüč湥čéą░. ąŁč鹊čé ą▒ą╗ąŠą║ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ ą▒ą╗ąŠą║ą░ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ master/slave ą┐čĆąĖą╝ąĄąĮčÅąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čüč湥čéą░ ą┤ą╗čÅ ą▒ą╗ąŠą║ą░ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ master/slave; ąŠąĮ čéą░ą║ąČąĄ ąŠčåąĄąĮąĖą▓ą░ąĄčé čĆąĄą░ą╗čīąĮčŗą╣ čüčéą░čéčāčü čüč湥čéą░.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ 菹Įą║ąŠą┤ąĄčĆą░ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ SMS čĆąĄą│ąĖčüčéčĆą░ TIMx_SMCR, č鹊 čüąĖą│ąĮą░ą╗ ą┐ąŠą┤čüčćąĖčéčŗą▓ą░ąĄą╝čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĖ čüąĖą│ąĮą░ą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čüč湥čéą░ ą▒čāą┤ąĄčé ą▓čŗčćąĖčüą╗čÅčéčīčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ čäą░ąĘ 菹Įą║ąŠą┤ąĄčĆą░ TI1FP1 ąĖ TI2FP2.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ master/slave ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ ą╝ąĄąČą┤čā čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ. ąŁč鹊čé ą▒ą╗ąŠą║ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (čüąĖą│ąĮą░ą╗ TRGO) čĆčÅą┤ąŠą╝ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čüąŠą▒čŗčéąĖąĄą╝ čéą░ą╣ą╝ąĄčĆą░. ą×ąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čéą░ą║ąČąĄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüč湥čéčćąĖą║ąŠą╝ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ čäčāąĮą║čåąĖąĖ ą▓ąĮąĄčłąĮąĖčģ čüąŠą▒čŗčéąĖą╣ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čüąŠą▒čŗčéąĖą╣ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓).
ą£ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąŠą┤ąĖąĮ slave-čéą░ą╣ą╝ąĄčĆ ą┤ą╗čÅ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ čüą▓ąŠąĄą│ąŠ čüč湥čéčćąĖą║ą░, ą▒ą░ąĘąĖčĆčāčÅčüčī ąĮą░ čüąŠą▒čŗčéąĖčÅčģ master-čéą░ą╣ą╝ąĄčĆą░, čéą░ą║ąĖčģ ą║ą░ą║ ąĄą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čüąŠą▒čŗčéąĖąĄ master-čéą░ą╣ą╝ąĄčĆą░ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą▒ą╗ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave. ąŁč鹊čé čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ą╗ąŠą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĖą│ąĮą░ą╗ ą▓čŗčģąŠą┤ą░ master-čéą░ą╣ą╝ąĄčĆą░ TRGO. ąĪąĖą│ąĮą░ą╗ ą▓čŗčģąŠą┤ą░ master-čéą░ą╣ą╝ąĄčĆą░ TRGO ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ slave-čéą░ą╣ą╝ąĄčĆą░ TRGI. ąæą╗ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave slave-čéą░ą╣ą╝ąĄčĆą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ TRGI ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ slave-čéą░ą╣ą╝ąĄčĆą░.
ąØąĄ čā ą▓čüąĄčģ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32 ąĄčüčéčī čäčāąĮą║čåąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave. ąÆ čéą░ą╣ą╝ąĄčĆąĄ TIM1, ą║ąŠč鹊čĆčŗą╣ ą┤ą░ąĮ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░, ą▓čüčéčĆąŠąĄąĮ ą┐ąŠą╗ąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ master/slave; ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ąĮąĖą╝ ą▒ą░ąĘąŠą▓čŗąĄ čéą░ą╣ą╝ąĄčĆčŗ TIM6 ąĖ TIM7 ąĖą╝ąĄčÄčé čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ master/slave. ąŻ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave čéą░ą╣ą╝ąĄčĆąŠą▓ TIM6 ąĖ TIM7 ąĮąĄčé čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą┐ąŠą╗čÅ ą▒ąĖčé.
ąöą╗čÅ čéą░ą╣ą╝ąĄčĆąŠą▓ TIM6 ąĖ TIM7 čüč湥čéčćąĖą║ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čüąĄą│ą┤ą░ čüčćąĖčéą░ąĄčé ą▓ą▓ąĄčĆčģ, ą▒ąĄąĘ čüą▒čĆąŠčüą░ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐ąŠ ą▓ąĮąĄčłąĮąĖą╝ čüąŠą▒čŗčéąĖčÅą╝. ąØąĄą╗čīąĘčÅ ąĖčģ čéą░ą║čéąĖčĆąŠą▓ą░čéčī ąĮąĖ ąŠčé ą┤čĆčāą│ąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓, ąĮąĖ ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čéą░ą║č鹊ą▓.
ąæą╗ąŠą║ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ. ąæą╗ąŠą║ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ čüą┤ąĄą╗ą░ąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüč湥čéčćąĖą║ą░ ą▓ą╝ąĄčüč鹥 čü ą║ą░čüą║ą░ą┤ąŠą╝ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąĖ čüč湥čéčćąĖą║ąŠą╝ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣. ąóą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠčüčéčāą┐ą░ąĄčé ą▓ ą▒ą╗ąŠą║ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐čĆąŠčģąŠą┤čÅ č湥čĆąĄąĘ ą║ą░čüą║ą░ą┤ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┤ąŠčüčéąĖčćčī čüč湥čéčćąĖą║ą░ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░ TIMx_PSC, čćą░čüč鹊čéą░ čüčćąĖčéą░ąĄą╝čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮąĖąČąĄąĮą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┤ąŠčüčéąĖčćčī čüčéą░ą┤ąĖąĖ čüč湥čéčćąĖą║ą░. ąĪąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čÅą▓ą╗čÅąĄčéčüčÅ čéą░ą║č鹊ą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ čüč湥čéą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą║ą░čüą║ą░ą┤ čüč湥čéčćąĖą║ą░.
ąĪč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┤ą▓čāą╝čÅ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ:
ŌĆó TIMx_CNT, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░.
ŌĆó TIMx_ARR, čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░.
ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░ čüč湥čéčćąĖą║ą░ čĆą░ą▒ąŠčéą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ąĢčüą╗ąĖ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ čüčćąĖčéą░ąĄčé ą▓ą▓ąĄčĆčģ, ąĖ ą┤ąŠčüčéąĖą│ ąĘąĮą░č湥ąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ TIMx_ARR, č鹊 čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąĖ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĮąŠą▓čŗą╣ čåąĖą║ą╗ čüč湥čéą░. ąĢčüą╗ąĖ čüč湥čéčćąĖą║ čüčćąĖčéą░ąĄčé ą▓ąĮąĖąĘ, ąĖ ą┤ąŠčüčéąĖą│ ąĮčāą╗čÅ, č鹊 ą▓ čüč湥čéčćąĖą║ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ TIMx_ARR, ąĖ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĮąŠą▓čŗą╣ čåąĖą║ą╗ čüč湥čéą░.
ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĮąŠą▓čŗą╣ čåąĖą║ą╗ čüč湥čéą░, čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé "čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ" čéą░ą╣ą╝ąĄčĆą░, ą┐ąŠą║ą░ čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ (repetition counter) čĆą░ą▓ąĄąĮ 0. ąĢčüą╗ąĖ čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ ąĮąĄ čĆą░ą▓ąĄąĮ 0, č鹊 čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĮąĄ čüčĆą░ą▒ąŠčéą░ąĄčé, ąĮąŠ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčüčÅ ąĮąŠą▓čŗą╣ čåąĖą║ą╗ čüč湥čéą░, ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ čāą╝ąĄąĮčīčłąĖčéčüčÅ ąĮą░ 1. ąÜąŠą│ą┤ą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ ą┤ąŠčüčéąĖą│ąĮąĄčé ąĮčāą╗čÅ, ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ąĖ ą▓ čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ ąĘą░ą│čĆčāąĘąĖčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_RCR.
ąØąĄ čā ą▓čüąĄčģ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32 ąĄčüčéčī čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣. ąĢčüą╗ąĖ ąĄą│ąŠ ąĮąĄčé, č鹊 čéą░ą╣ą╝ąĄčĆ ą▓ąĄą┤ąĄčé čüąĄą▒čÅ čéą░ą║, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ ą▒čŗą╗ ą▓čüąĄą│ą┤ą░ čĆą░ą▓ąĄąĮ 0.
ąæą╗ąŠą║ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░. ąÜą░ąĮą░ą╗čŗ čéą░ą╣ą╝ąĄčĆą░ čŹč鹊 čĆą░ą▒ąŠčćąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ čéą░ą╣ą╝ąĄčĆą░, čü ą┐ąŠą╝ąŠčēčīčÄ ąĮąĖčģ čéą░ą╣ą╝ąĄčĆ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāąĄčé čü ą▓ąĮąĄčłąĮąĖą╝ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ąŠą║čĆčāąČąĄąĮąĖąĄą╝. ąÆ čåąĄą╗ąŠą╝ ą║ą░ąĮą░ą╗čŗ čéą░ą╣ą╝ąĄčĆą░ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ąĮą░ ą▓ąĮąĄčłąĮąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32, čü ąĮąĄą║ąŠč鹊čĆčŗą╝ąĖ ąĖčüą║ą╗čÄč湥ąĮąĖčÅą╝ąĖ, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ ą║ą░ąĮą░ą╗čŗ 5 ąĖ 6 čéą░ą╣ą╝ąĄčĆą░ TIM1 čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32F30x. ąÜą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░, ąŠč鹊ą▒čĆą░ąČąĄąĮąĮčŗą╣ ąĮą░ ą▓čŗą▓ąŠą┤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ ą║ą░ą║ ą▓čŗčģąŠą┤.
ąÜąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤, ą║ą░ąĮą░ą╗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓. ą¤ąŠą║ą░ ą║ą░ąĮą░ą╗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ąĮą░ą╗ą░ TIMx_CCRy čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░. ąØą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą│ąŠ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐ąŠą┤čĆąĄąČąĖą╝ą░ ą▓čŗčģąŠą┤ą░ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ PWM1 mode ąĖą╗ąĖ Inactive mode), ą║ą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ ą╗ąĖą▒ąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé, ą╗ąĖą▒ąŠ čüą▒čĆą░čüčŗą▓ą░ąĄčé čäą╗ą░ą│ OCyREF, ąĖ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą║ą░čüą║ą░ą┤ ą▓čŗčģąŠą┤ą░ ą║ą░ąĮą░ą╗ą░. ąÜą░čüą║ą░ą┤ ą▓čŗčģąŠą┤ą░ ą┐čĆąĖą╝ąĄąĮčÅąĄčé ąĮą░ą▒ąŠčĆ čāč鹊čćąĮčÅčÄčēąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą║ čüąĖą│ąĮą░ą╗čā OCyREF, ą▒ą░ąĘąĖčĆčāčÅčüčī ąĮą░ ąĮą░ą▒ąŠčĆąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą║ą░ąĮą░ą╗ą░ ąĖą╗ąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ dead-time, ąĖ ą┤čĆčāą│ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓).
ąÆčŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą║ą░čüą║ą░ą┤ą░ ą▓čŗčģąŠą┤ą░ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ą░ą║ ąĖčģ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┐ąŠčĆčéą░. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą║ą░čüą║ą░ą┤čŗ ą▓čŗčģąŠą┤ą░ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą╣ą╝ąĄčĆą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 2, ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮčŗ ą║ą░ą║ ą┤ą▓ą░ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗčģ čüąĖą│ąĮą░ą╗ą░ (čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą╗ąĄčćą░ą╝ąĖ čüąĖą╗ąŠą▓ąŠą│ąŠ ą╝ąŠčüčéą░).
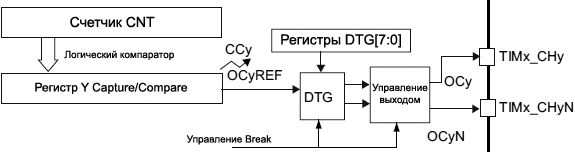
ąĀąĖčü. 2. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ ąŠąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą▓čŗą▓ąŠą┤.
ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ ą┤ą╗čÅ čéą░ą║ąŠą│ąŠ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčé čüčĆąĄą┤čüčéą▓ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ/ąĘą░ą┐čĆąĄčéą░ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąĖą╗ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ).
ąÜąŠą│ą┤ą░ ą║ą░ąĮą░ą╗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą▓čģąŠą┤, ąŠąĮ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĘą░ą┐ąŠą╝ąĖąĮą░ąĮąĖčÅ ą╝ąĄč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą╝ąŠą╝ąĄąĮčéčŗ ą┐ąĄčĆąĄčģąŠą┤ąŠą▓ čāčĆąŠą▓ąĮčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ - ą╗ąĖą▒ąŠ ą┐ąŠ ąĄą│ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ, ą╗ąĖą▒ąŠ ą┐ąŠ čüą┐ą░ą┤čā, ą╗ąĖą▒ąŠ ą┐ąŠ ąŠą▒ąŠąĖą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝. ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ąŠą┤ąĖąĮ ąĖąĘ ą▓čŗą▓ąŠą┤ąŠą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąØąĄą║ąŠč鹊čĆčŗąĄ ą▓čģąŠą┤čŗ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ąŠč鹊ą▒čĆą░ąČą░čéčīčüčÅ ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüąĖą│ąĮą░ą╗čŗ čćąĖą┐ą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮą░ ą▓čŗčģąŠą┤ ą│ąĄąĮąĄčĆą░č鹊čĆą░ - čü čåąĄą╗čīčÄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čćą░čüč鹊čéčŗ. ąØą░ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ TIy ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüčģąĄą╝ąŠą╣ ą║ąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 3. ąĪčģąĄą╝ą░ ą║ąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą║ą╗čÄčćą░ąĄčé ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ ąĖ ą┤ąĄč鹥ą║č鹊čĆ ą┐ąĄčĆąĄą┐ą░ą┤ą░. ąÜą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░ ą▓čŗčĆąĄąĘą░ąĄčé ąĖą╝ą┐čāą╗čīčüčŗ, ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ąŠč鹊čĆčŗčģ ą╝ąĄąĮčīčłąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣. ąöąĄč鹥ą║č鹊čĆ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąĖ ąĮą░ ąĮčāąČąĮąŠą╝ ą▓čģąŠą┤ąĄ ą┐ąŠčüą╗ąĄ čäąĖą╗čīčéčĆą░čåąĖąĖ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ.
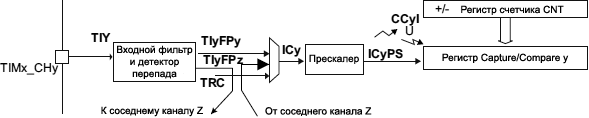
ąĀąĖčü. 3. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ ąŠąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą▓ą▓ąŠą┤.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_CCER. ąĪčģąĄą╝ą░ ą║ąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąĖčé ą┤ą▓ą░ čüąĖą│ąĮą░ą╗ą░:
ŌĆó TIyFPy: ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ TIy, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░ąĮ, ąĖ čā ą║ąŠč鹊čĆąŠą│ąŠ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ ŌĆ£yŌĆØ.
ŌĆó TIyFPz: ą▓čüąĄą│ą┤ą░ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ TIy, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░ąĮ, ąĮąŠ ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą▒čŗą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ ŌĆ£zŌĆØ.
ąĪąĖą│ąĮą░ą╗ TIyFPz ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čģąŠą┤ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą║ą░ąĮą░ą╗ą░ ŌĆ£zŌĆØ, ą│ą┤ąĄ čüąĖą│ąĮą░ą╗ TIzFPy ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čģąŠą┤ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą║ą░ąĮą░ą╗ą░ ŌĆ£yŌĆØ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 3 ą▓čŗčłąĄ. ą¤ąĄčĆąĄą║čĆąĄčüčéąĮąŠąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ čäąĖą╗čīčéčĆąŠą▓ą░ąĮąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠč湥ąĮčī ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ čäąĖą║čüą░čåąĖąĖ ą╝ąŠą╝ąĄąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą║ą░ą║ ą┤ą╗čÅ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ, čéą░ą║ ąĖ ą┤ą╗čÅ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąŠčåąĄąĮą║ąĖ ą©ąśą£).
ąÜą░ąČą┤čŗą╣ ą║ą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ ąŠą┤ąĖąĮ ąĖąĘ čéčĆąĄčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓. ąÜą░ąČą┤čŗą╣ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄąČąĖą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠą┤ąĮąŠą╝čā ąĖąĘ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čéčĆąĄčģ ą▓čģąŠą┤ąŠą▓ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ą┐čĆąĄčüą║ą░ą╗ąĄčĆčā ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░. ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ CCyS ą▓ą╗ąĖčÅąĄčé ąĮą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░, ąĄčüą╗ąĖ ąŠąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗą▓ąŠą┤ą░ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ CCyS[1:0] = 00), ąĖą╗ąĖ ąĄčüą╗ąĖ ąŠąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ ą▓ą▓ąŠą┤ą░ (ą║ąŠą│ą┤ą░ ą▒ąĖčéčŗ CCyS[1:0] ąŠčéą╗ąĖčćą░čÄčéčüčÅ ąŠčé 00).
ąóąĄ ąČąĄ čüą░ą╝čŗąĄ čĆąĄą│ąĖčüčéčĆčŗ čéą░ą╣ą╝ąĄčĆą░ TIMx_CCMRn (n ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒čŗą╝ čćąĖčüą╗ąŠą╝, ąĮąŠ ąŠą▒čŗčćąĮąŠ čŹč鹊 1 ąĖą╗ąĖ 2) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ąĮą░ ą▓ą▓ąŠą┤ ąĖą╗ąĖ ą▓čŗą▓ąŠą┤. ąØąĄą║ąŠč鹊čĆčŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ TIMx_CCMRn ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāčÄčéčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ą░ąĮą░ą╗ą░, čĆąĄąČąĖą╝ąŠą▓ ą▓ą▓ąŠą┤ą░ ąĖą╗ąĖ ą▓čŗą▓ąŠą┤ą░.
ą¤čĆąĄčüą║ą░ą╗ąĄčĆ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ čćą░čüč鹊čéčŗ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓, ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĮą░ ą▓čģąŠą┤ąĄ čéą░ą╣ą╝ąĄčĆą░ TIy. ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąĄčĆąĄąĮąŠčüčā čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄą│ąĖčüčéčĆ ŌĆ£yŌĆØ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ TIMx_CCRy.
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ŌĆ£yŌĆØ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ TIMx_CCRy čŹč鹊 ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą║ą░ąĮą░ą╗ą░ ŌĆ£yŌĆØ. ąŁč鹊 ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ čéą░ą╣ą╝ąĄčĆą░ TIy, ąĄčüą╗ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą║ą░ąĮą░ą╗ą░ ŌĆ£yŌĆØ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮąĄ čüąĮąĖąČą░čéčī čćą░čüč鹊čéčā ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ = 1 ąĖ čüąĖą│ąĮą░ą╗ ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣, čé. ąĄ. ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąŠčéą║ą╗čÄč湥ąĮ).
ąæą╗ąŠą║ čäčāąĮą║čåąĖąĖ Break. ążčāąĮą║čåąĖčÅ Break ą▓čüčéčĆąŠąĄąĮą░ č鹊ą╗čīą║ąŠ ą▓ č鹥 čéą░ą╣ą╝ąĄčĆčŗ, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗąĄ ą▓čŗčģąŠą┤čŗ. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, č鹊ą╗čīą║ąŠ č鹥 čéą░ą╣ą╝ąĄčĆčŗ, čā ą║ąŠč鹊čĆčŗčģ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗ čüąĮą░ą▒ąČąĄąĮ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╝ąĖ ą▓čŗčģąŠą┤ą░ą╝ąĖ, ąĖą╝ąĄąĄčé čäčāąĮą║čåąĖčÄ Break.
ążčāąĮą║čåąĖčÅ Break ą┤ąĄą╣čüčéą▓čāąĄčé ąĮą░ ą▓čŗčģąŠą┤ąĮąŠą╝ ą║ą░čüą║ą░ą┤ąĄ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗą▓ąŠą┤ą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ ąĮą░ ą▓čģąŠą┤ąĄ break ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤, ą▓čŗčģąŠą┤čŗ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą╣ą╝ąĄčĆą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗą▓ąŠą┤ą░, ą╗ąĖą▒ąŠ ą▓čŗą║ą╗čÄčćą░čÄčéčüčÅ, ą╗ąĖą▒ąŠ ą┐ąĄčĆąĄą▓ąŠą┤čÅčéčüčÅ ą▓ ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ążčāąĮą║čåąĖčÅ Break ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠą│ąŠ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čüąĖą╗ąŠą▓ąŠą│ąŠ ą╝ąŠčüčéą░ ą▓ ąĖąĮą▓ąĄčĆč鹊čĆą░čģ ą▒ą╗ąŠą║ąŠą▓ ą┐ąĖčéą░ąĮąĖčÅ ą▓ čüą╗čāčćą░ąĄ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą║ą░ą║ąĖčģ-č鹊 č鹥čģąĮąĖč湥čüą║ąĖčģ ą░ąĮąŠą╝ą░ą╗ąĖą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą┐ąŠ č鹊ą║čā).
ąÆ ą░ą┐ąĮąŠčāč鹥 AN4277 [3] ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čäčāąĮą║čåąĖąĖ Break ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ čüąĄą╝ąĄą╣čüčéą▓ą░čģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32.
[ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ]
ąØąĖąČąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą║čāčüą║ąĖ ą║ąŠą┤ą░ ąĮą░ čÅąĘčŗą║ąĄ C, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖąĄ ą▒ą░ąĘąŠą▓čŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ STM32.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ č鹊čćąĮąŠą│ąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čåąĖą║ą╗ą░ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĮą░ čéą░ą╣ą╝ąĄčĆąĄ TIM6. ą£ąŠąČąĮąŠ ą┤ą╗čÅ č鹊ą╣ ąČąĄ čåąĄą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ čéą░ą╣ą╝ąĄčĆ STM32, ąĮąŠ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ TIM6, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮ ąĮąĄ čüą░ą╝čŗą╣ čüą╗ąŠąČąĮčŗą╣. ąöčĆčāą│ąĖąĄ čéą░ą╣ą╝ąĄčĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗčģ ąĘą░ą┤ą░čć.
#define ANY_DELAY_RQUIRED 0x0FFF
/* ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ą░ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ: */
TIM6->SR = 0
/* ąŻčüčéą░ąĮąŠą▓ą║ą░ čéčĆąĄą▒čāąĄą╝ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ: */
// ą¤čĆąĄčüą║ą░ą╗ąĄčĆ čéą░ą╣ą╝ąĄčĆą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0:
// TIM6->PSC = 0;
// ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą▒ąŠą╗ąĄąĄ ą┤ą╗ąĖąĮąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░, č鹊 čĆąĄą│ąĖčüčéčĆ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░
// ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą┤čĆčāą│ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
TIM6->ARR = ANY_DELAY_RQUIRED;
/* ąŚą░ą┐čāčüą║ čüč湥čéą░ čéą░ą╣ą╝ąĄčĆą░ */
TIM6->CR1 |= TIM_CR1_CEN;
/* ą”ąĖą║ą╗ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ: */
while (!(TIM6->SR & TIM_SR_UIF));
/* ąóčĆąĄą▒čāąĄą╝ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĖčüč鹥ą║ą╗ą░, ą┤ą░ą╗čīčłąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī
ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ ą║ąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. */
...
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░ąĮą░ą╗ą░ ąĮą░ ą▓ą▓ąŠą┤.
// ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ
// ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ:
uint32_t TimeStamp;
// ąĪąŠčüč鹊čÅąĮąĖąĄ čüą▒čĆąŠčüą░ čĆąĄą│ąĖčüčéčĆą░ ARR ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ TIM3 čĆą░ą▓ąĮąŠ
// 0x0000FFFF. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą┤ąŠą╣čéąĖ ą┤ą╗čÅ ąĮą░čłąĄą│ąŠ ą┐čĆąĖą╝ąĄčĆą░.
// ąĢčüą╗ąĖ ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ąĘąĮą░č湥ąĮąĖąĄ ARR, č鹊 čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥
// čüą╗ąĄą┤čāčÄčēčāčÄ čüčéčĆąŠą║čā ą║ąŠą┤ą░:
// TIM3->ARR = ANY_VALUE_YOU_WANT;
// ąØą░čüčéčĆąŠą╣ą║ą░ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ TIM3 ąĮą░ ą▓ą▓ąŠą┤.
// ąæąĖčéčŗ CC1S ą┤ąŠčüčéčāą┐ąĮčŗ ąĮą░ ąĘą░ą┐ąĖčüčī č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą║ą░ąĮą░ą╗ 1 ą▓čŗą║ą╗čÄč湥ąĮ.
// ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą▓čüąĄ ą║ą░ąĮą░ą╗čŗ ą▓čŗą║ą╗čÄč湥ąĮčŗ.
TIM3->CCMR1 |= TIM_CCMR1_CC1S_0;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ TIM3 ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
// ą║ą░ąĮą░ą╗ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░) ą┤ą╗čÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ
// ą║ą░ąĮą░ą╗ą░.
TIM3->CCER |= TIM_CCER_CC1E;
// ąĪčéą░čĆčé čüč湥čéą░ čéą░ą╣ą╝ąĄčĆą░:
TIM3->CR1 |= TIM_CR1_CEN;
// ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ą░ čüąŠą▒čŗčéąĖčÅ ąĘą░čģą▓ą░čéą░ (Capture event flag)
// ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ 1:
TIM3->SR = ~TIM_SR_CC1IF;
// ą”ąĖą║ą╗, ą┐ąŠą║ą░ ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ capture event flag:
while (!(TIM3->SR & TIM_SR_CC1IF));
// ąæčŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤, čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ:
TimeStamp = TIM3->CCR1;
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░ąĮą░ą╗ą░ ąĮą░ ą▓čŗą▓ąŠą┤.
// ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čĆąĄą│ąĖčüčéčĆą░ ARR ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ TIM3 čĆą░ą▓ąĮąŠ
// 0x0000FFFF. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą┤ąŠą╣čéąĖ ą┤ą╗čÅ ąĮą░čłąĄą│ąŠ ą┐čĆąĖą╝ąĄčĆą░. ąĢčüą╗ąĖ
// ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┤čĆčāą│ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, č鹊 čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥
// čüą╗ąĄą┤čāčÄčēčāčÄ čüčéčĆąŠą║čā:
// TIM3->ARR = ANY_VALUE_YOU_WANT;
// ąÜą░ąĮą░ą╗ 1 čéą░ą╣ą╝ąĄčĆą░ TIM3 ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą▓čŗą▓ąŠą┤,
// TIM3->CC1S čĆą░ą▓ąĄąĮ 0.
// ąöą╗čÅ ą▓čŗą▒ąŠčĆą░ čĆąĄąČąĖą╝ą░ ą▓čŗą▓ąŠą┤ą░ ą©ąśą£ PWM2 ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ OC1M
// čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 111:
TIM3->CCMR1 |= TIM_CCMR1_OC1M_0 | TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ą▓ą░ąČąĮąŠčüčéąĖ 50%:
TIM3->CCR1 = TIM3->ARR / 2;
// ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ą░ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ 1 ą▓čŗą║ą╗čÄč湥ąĮą░.
// ą¦č鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĖčéčī čŹč鹊, čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥 čüą╗ąĄą┤čāčÄčēčāčÄ čüčéčĆąŠą║čā:
// TIM3->CCMR1 |= TIM_CCMR1_OC1PE;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ TIM3 ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
// ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░) ą┤ą╗čÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą║ą░ąĮą░ą╗ą░:
TIM3->CCER |= TIM_CCER_CC1E;
// ąĪčéą░čĆčé čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░:
TIM3->CR1 |= TIM_CR1_CEN;
[ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ čäčāąĮą║čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ STM32]
ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą┤ąĄčéą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ ąŠą▒čēąĖčģ čäčāąĮą║čåąĖą╣ čéą░ą╣ą╝ąĄčĆą░, ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▒čāą┤čāčé ą┤ą░ąĮčŗ ą┐čĆąĖą╝ąĄčĆčŗ.
ąÜą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ. ąÆčģąŠą┤čŗ čéą░ą╣ą╝ąĄčĆą░ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą▓čģąŠą┤ą░ ETR ąĖą╗ąĖ ą▓čģąŠą┤ąŠą▓ ą║ą░ąĮą░ą╗ąŠą▓) čüąĮą░ą▒ąČąĄąĮčŗ ą║ą░čüą║ą░ą┤ąŠą╝ čäąĖą╗čīčéčĆą░čåąĖąĖ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ąŠčéą▒čĆą░čüčŗą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ čüąĖą│ąĮą░ą╗ą░, ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ąŠč鹊čĆčŗčģ ą╝ąĄąĮčīčłąĄ ąČąĄą╗ą░ąĄą╝ąŠą│ąŠ ą┐ąŠčĆąŠą│ą░.
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čäąĖą╗čīčéčĆčāąĄą╝čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┤ą▓čāčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓:
ŌĆó ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░čåąĖąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓čģąŠą┤ą░ čéą░ą╣ą╝ąĄčĆą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ ą▓čģąŠą┤ą░ ETR ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ ETF[3:0] čĆąĄą│ąĖčüčéčĆą░ TIMx_SMCR. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░čüą║ą░ą┤ą░ ą▓čģąŠą┤ąĮąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ą▓čŗą▒ąŠčĆ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą▓čģąŠą┤ąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓, čāčüčéą░ąĮąŠą▓ą║ąĖ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆą║ąĖ čéą░ą║č鹊ą▓ ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ čéą░ą║č鹊ą▓ čāąČąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čćą░čüč鹊čéčŗ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
ŌĆó ąÆ čüą╗čāčćą░ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ FDTS ą▓ ą║ą░č湥čüčéą▓ąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąŠčåąĖčäčĆąŠą▓ą║ąĖ, ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝čāčÄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠčģąŠą┤čÅčēąĄą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ ąĘą░ą┐ąĖčüčīčÄ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┐ąŠą╗ąĄ ą▒ąĖčé CKD[1:0] čĆąĄą│ąĖčüčéčĆą░ TIMx_CR1. ąóą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ FDTS ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĖąĘ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░, ąĖ ą┐ąŠą╗ąĄ ą▒ąĖčé CKD[1:0] čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ čéą░ą║č鹊ą▓čŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ.
ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąŠą┤ąĖąĮ ąĖąĘ ą┤ą▓čāčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║č鹊ą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ čćą░čüč鹊čéčŗ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ, ą╗ąĖą▒ąŠ čüąĖą│ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ FCK_INT, ą╗ąĖą▒ąŠ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ FDTS.
ąĀąĖčü. 4 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆą░ą║čéąĖč湥čüą║ąĖą╣ ą┐čĆąĖą╝ąĄčĆ, ą│ą┤ąĄ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čģąŠą┤ą░ čéą░ą╣ą╝ąĄčĆą░ ETR. ąöą╗čÅ čŹč鹊ą│ąŠ ą┤ąĄą╝ąŠąĮčüčéčĆą░čéąĖą▓ąĮąŠą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ąĮą░čüčéčĆąŠąĄąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ:
ŌĆó ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ FCK_INT = 1 ą£ąōčå.
ŌĆó CKD [1:0] = 01. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ FDTS ą▓ 2 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čüąĖą│ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░: Fdts = Fck_int/2 = 500 ą║ąōčå.
ŌĆó ETF [3:0] = 0100. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓čŗą▒čĆą░ąĮ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ FDTS ą▓ ą║ą░č湥čüčéą▓ąĄ čćą░čüč鹊čéčŗ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░, ą┐ąŠąĮąĖąČąĄąĮąĮąŠą╣ ą▓ 2 čĆą░ąĘą░. ąóą░ą║ąČąĄ čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ąĖą╝ą┐čāą╗čīčü, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠą╣ą┤ąĄčé č湥čĆąĄąĘ čäąĖą╗čīčéčĆ, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▒čŗčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 6 čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąŠčåąĖčäčĆąŠą▓ą║ąĖ.
ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ą╗čÄą▒ąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮčŗą╣ čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čģąŠą┤ąĄ čéą░ą╣ą╝ąĄčĆą░ ETR, ą║ąŠč鹊čĆčŗą╣ ą║ąŠčĆąŠč湥 6 x Tsampling = 6 x 1 / 250 ą║ąōčå = 24 ą╝ą║čü, ą▒čāą┤ąĄčé ąŠčéą▒čĆąŠčłąĄąĮ.

ąĀąĖčü. 4. ążąĖą╗čīčéčĆą░čåąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (ETF [3:0]= 0100): FSAMPLING = FDTS/2, N=6.
ążčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░. ą¤čĆąĄą┤ąĘą░ą│čĆčāąĘą║ą░ (preload) ą▓ ą║ąŠąĮč鹥ą║čüč鹥 čéą░ą╣ą╝ąĄčĆą░ STM32 ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┤čāą▒ą╗ąĖčĆąŠą▓ą░ąĮąĖčÄ ąĮąĄą║ąŠč鹊čĆčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ąĖą╗ąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąóą░ą║ ą║ą░ą║ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą▓čŗą▓ąŠą┤ąĖą╝čŗąĄ ąĖąĘ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą╣ą╝ąĄčĆą░ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░, ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī č湥čéą║ąŠ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąŠ čü čüąŠą▒čŗčéąĖąĄą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (update event), ą║ąŠč鹊čĆąŠąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮą░ ąĮą░čćą░ą╗ąĄ ąĮąŠą▓ąŠą│ąŠ čåąĖą║ą╗ą░ čüč湥čéą░. ąŁčéą░ ąČąĄčüčéą║ą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ ąĮąĄ ą▒čŗą╗ą░ ą▒čŗ ą▓ąŠąĘą╝ąŠąČąĮą░, ąĄčüą╗ąĖ ą▒čŗ ąĮąĄ ą▒čŗą╗ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ čäčāąĮą║čåąĖąĖ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣.
ąÜąŠą│ą┤ą░ čā čĆąĄą│ąĖčüčéčĆą░ čéą░ą╣ą╝ąĄčĆą░ ąĄčüčéčī čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ, č鹊 čüčāčēąĄčüčéą▓čāąĄčé ą┤ą▓ą░ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░:
ŌĆó ąÉą║čéąĖą▓ąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ (čéą░ą║ąČąĄ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ č鹥ąĮąĄą▓čŗą╝ čĆąĄą│ąĖčüčéčĆąŠą╝): ąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą╗ąŠą│ąĖą║ąŠą╣ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ ą║ą░ąĮą░ą╗ąĄ čéą░ą╣ą╝ąĄčĆą░.
ŌĆó ąĀąĄą│ąĖčüčéčĆ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ: čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ą┤ąŠčüčéčāą┐ąĄąĮ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░.
ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą▓čŗą║ą╗čÄč湥ąĮą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 5, č鹊 ą▓čüčéčāą┐ą░čÄčé ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ ą┤ą▓ąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ:
ŌĆó ąĀąĄą│ąĖčüčéčĆ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą║ą░ą║ ąĮąĄ čüčāčēąĄčüčéą▓čāčÄčēąĖą╣.
ŌĆó ąøčÄą▒ą░čÅ ą┐ąŠą┐čŗčéą║ą░ ą┤ąŠčüčéčāą┐ą░ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąĮą░ą┤ ą░ą║čéąĖą▓ąĮčŗą╝ čĆąĄą│ąĖčüčéčĆąŠą╝.

ąĀąĖčü. 5. ą£ąĄčģą░ąĮąĖąĘą╝ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą┐čĆąĄčēąĄąĮ.
ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą▓ą║ą╗čÄč湥ąĮą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 6, č鹊 ą▓čüčéčāą┐ą░čÄčé ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ ą┤ą▓ąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ:
ŌĆó ąøčÄą▒ąŠą╣ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮą░ą┤ čĆąĄą│ąĖčüčéčĆąŠą╝ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ąĮąĄ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ.
ŌĆó ąÜą░ą║ č鹊ą╗čīą║ąŠ čéą░ą╣ą╝ąĄčĆąŠą╝ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ "update event", čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąĄčĆąĄąĮąŠčüąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąČąĄčüčéą║ąŠ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ čü čüąŠą▒čŗčéąĖąĄą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, čŹč鹊čé ą┐čĆąŠčåąĄčüčü čüčéčĆąŠą│ąŠ čüąĖąĮčģčĆąŠąĮąĄąĮ čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ąĮąŠą▓ąŠą╝ čåąĖą║ą╗ąĄ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£.
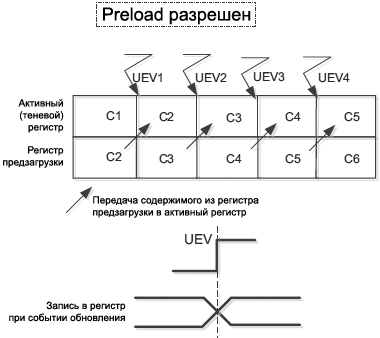
ąĀąĖčü. 6. ą£ąĄčģą░ąĮąĖąĘą╝ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ čĆą░ąĘčĆąĄčłąĄąĮ.
ążčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣:
ŌĆó Auto-reload timer register (TIMx_ARR).
ŌĆó Timer prescaler register (TIMx_PSC) (ąĄą│ąŠ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ą░ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮą░).
ŌĆó Timer channel registers (TIMx_CCRy).
ŌĆó ąæąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ CCxE ąĖ CCxNE ą▓ čĆąĄą│ąĖčüčéčĆąĄ čéą░ą╣ą╝ąĄčĆą░ TIMx_CCER.
ŌĆó ąæąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ OCxM ą▓ čĆąĄą│ąĖčüčéčĆą░čģ čéą░ą╣ą╝ąĄčĆą░ TIMx_CCMRn.
ążčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąŠą╣ ąĖąĮč鹥čĆąĄčü ą┐čĆąĖ ą▓čŗą▓ąŠą┤ąĄ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ (PWM) ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą║ą░ąĮą░ą╗ąĄ čéą░ą╣ą╝ąĄčĆą░. ąŻčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗčģąŠą┤ąĄ ą║ą░ąĮą░ą╗ą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ą╝ąĄąČą┤čā ąĘąĮą░č湥ąĮąĖąĄą╝ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ ąĖ čĆąĄą│ąĖčüčéčĆąŠą╝ TIMx_CCRy, ą┐ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ą╗čÄą▒ąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠą╝čā ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ čéą░ą╣ą╝ąĄčĆą░. ąÆ čüą╗ąĄą┤čüčéą▓ąĖąĄ čŹč鹊ą│ąŠ ą┐čĆčÅą╝ą░čÅ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ ą║ą░ąĮą░ą╗ą░ ą┐ąŠčüąĄčĆąĄą┤ąĖąĮąĄ ą┐ąĄčĆąĖąŠą┤ą░ PWM ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüą╗čāčćą░ą╣ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓.
ą¦č鹊ą▒čŗ čĆąĄčłąĖčéčī čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░. ąÜąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░, ą╗čÄą▒ąŠą╣ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ ą║ą░ąĮą░ą╗ą░ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą║ą░ąĮą░ą╗ą░ ąŠčüčéą░ąĮąĄčéčüčÅ ąĮąĄčéčĆąŠąĮčāčéčŗą╝. ąŁč鹊 čāčüčéčĆą░ąĮąĖčé ą┐ąĄčĆčéčāčĆą▒ą░čåąĖąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▓ ą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£ ą┤ą╗čÅ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮąŠą▓ąŠą╣ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé ąŠčéčüčāčéčüčéą▓ąĖąĄ ąŠčłąĖą▒ąŠčćąĮčŗčģ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ą©ąśą£ ąĮą░ ą▓čŗčģąŠą┤ąĄ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ čéą░ą╣ą╝ąĄčĆą░ ąĖ ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ, ą║ąŠč鹊čĆčŗąĄ ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠąĄ ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą©ąśą£, ąŠčüąŠą▒ąĄąĮąĮąŠ čŹč鹊 ą▓ą░ąČąĮąŠ ą┐ąŠčüąĄčĆąĄą┤ąĖąĮąĄ ą┐ąĄčĆąĖąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£.
[ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ STM32 ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░]
ąóą░ą╣ą╝ąĄčĆ STM32 ą╝ąŠąČąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĮąŠ čŹč鹊 ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮąĄ ąĮčāąČąĮąŠ čéą░ą║čéąĖčĆąŠą▓ą░čéčī čłąĖąĮčā APB (advanced peripheral bus). ąóą░ą╣ą╝ąĄčĆ STM32, čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ ą▓ąĮąĄčłąĮąĖą╝ čéą░ą║č鹊ą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ čüąŠ čüą▓ąŠąĄą╣ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣ čÅą┤čĆą░ (ą║ąŠč鹊čĆą░čÅ čÅą▓ą╗čÅąĄčéčüčÅ čéą░ą║čéą░ą╝ąĖ APB). ąĀąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖą╣ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüą╗ąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąĖą┤ąĄčé ąĮą░ čüč湥čéčćąĖą║.
ąóą░ą╣ą╝ąĄčĆ STM32 čéčĆąĄą▒čāąĄčé 2 ąĖčüč鹊čćąĮąĖą║ą░ čüąĖą│ąĮą░ą╗ą░, čćč鹊ą▒čŗ ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅą╗ą░čüčī ą▓čĆąĄą╝ąĄąĮąĮą░čÅ ą▒ą░ąĘą░ (čüą╝. čĆąĖčü. 7). ą¤ąĄčĆąĖąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ čŹč鹊 ąĄą┤ąĖąĮąĖčåą░ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▒ą░ąĘčŗ ą▓čĆąĄą╝ąĄąĮąĖ čéą░ą╣ą╝ąĄčĆą░.
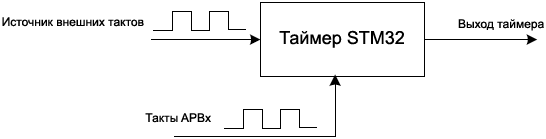
ąĀąĖčü. 7. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą▓ąĮąĄčłąĮąĖą╝ čéą░ą║č鹊ą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝.
ąĢčüčéčī ą┤ą▓ą░ čüą┐ąŠčüąŠą▒ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ) čéą░ą╣ą╝ąĄčĆą░ STM32:
ŌĆó ąĀąĄąČąĖą╝ 1 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ: ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ąŠą┤ąĖąĮ ąĖąĘ ą▓čģąŠą┤ąŠą▓ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ TIx.
ŌĆó ąĀąĄąČąĖą╝ 2 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ: ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą▓čģąŠą┤ ETR (ąĄčüą╗ąĖ čŹč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą▓ čéą░ą╣ą╝ąĄčĆąĄ ąĖ ą┤ąŠčüčéčāą┐ąĮąŠ).
ąĀąĖčü. 8 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čŹčéąĖčģ čĆąĄąČąĖą╝ąŠą▓.

ąĀąĖčü. 8. ąĀą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖąĄ čéą░ą║č鹊ą▓ ą┤ą╗čÅ čĆąĄąČąĖą╝ąŠą▓ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąæą╗ąŠą║ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ą¤ąĄčĆąĄą┤ ą▓ą▓ąĄą┤ąĄąĮąĖąĄą╝ ą▓ čĆąĄąČąĖą╝čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ ą▓ąĮąĄčłąĮąĖą╝ čüąĖą│ąĮą░ą╗ąŠą╝ ą▓ą░ąČąĮąŠ čüąĮą░čćą░ą╗ą░ ą┐ąŠą║ą░ąĘą░čéčī ą╝ąĄčģą░ąĮąĖąĘą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗą╣ ą▓ čéą░ą╣ą╝ąĄčĆąĄ STM32, ą║ąŠą│ą┤ą░ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ STM32 čĆą░ą▒ąŠčéą░ąĄčé čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ. ąÆąĮąĄčłąĮąĖąĄ čüąĖą│ąĮą░ą╗čŗ čŹč鹊 čéą░ą║ąĖąĄ čüąĖą│ąĮą░ą╗čŗ, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĖąĘą▓ąĮąĄ čéą░ą╣ą╝ąĄčĆą░. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ čü čéą░ą║č鹊ą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝, čéą░ą║ ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╝.
ąóą░ą╣ą╝ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą▓ąĮąĄčłąĮąĖąĄ čüąĖą│ąĮą░ą╗čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╝ąĖ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī ą▓čŗčģąŠą┤ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ č乊čĆą╝ąĖčĆčāąĄą╝čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. ąóą░ą╣ą╝ąĄčĆ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą┐ąŠčüąŠą▒ąĄąĮ ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąŠ ą╝ąĄčéą║ą░čģ ą▓čĆąĄą╝ąĄąĮąĖ, ąĮą░ ą║ąŠč鹊čĆčŗčģ čüąĖą│ąĮą░ą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░).
ą¦č鹊ą▒čŗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čüąĖą│ąĮą░ą╗, ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆą░ čüąĮą░čćą░ą╗ą░ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ č鹊ą╝, čćč鹊ą▒čŗ ą┐ąĄčĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓. ąĢą│ąŠ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┐ąĄčĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī ąĮą░ą┐čĆąĖą╝ąĄčĆ čü čéą░ą║č鹊ą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ ą╗ąŠą│ąĖą║ąĖ čÅą┤čĆą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čéčī čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖą╣ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą▓ čĆą░ąĘąĮčŗąĄ čüčāą▒ą▒ą╗ąŠą║ąĖ čéą░ą╣ą╝ąĄčĆą░. ąŁč鹊 ą┤ąĄą╣čüčéą▓ąĖąĄ ąĘą░čēąĖčéąĖčé ą╗ąŠą│ąĖą║čā čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░ ąŠčé ą┐čĆąŠą▒ą╗ąĄą╝ ą╝ąĄčéą░čüčéą░ą▒ąĖą╗čīąĮąŠčüčéąĖ.
ąĀąĖčü. 9 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąĖąĮąŠą┐čéąĖč湥čüą║čāčÄ ą┤ąĖą░ą│čĆą░ą╝ą╝čā ą┤ą╗čÅ čüčģąĄą╝čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓ąĮąĄčłąĮąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓, ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ ąĮą░ ą▓čģąŠą┤čŗ čéą░ą╣ą╝ąĄčĆą░. ąĪčģąĄą╝ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čüąŠčüčéą░ą▓ą╗ąĄąĮą░ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĖąĘ ą┤ą▓čāčģ čüąŠąĄą┤ąĖąĮąĄąĮąĮčŗčģ ą║ą░čüą║ą░ą┤ąŠą╝ D-čéčĆąĖą│ą│ąĄčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ čéą░ą║čéąĖčĆčāčÄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░. ąÆąĮąĄčłąĮąĖą╣ čüąĖą│ąĮą░ą╗ ą┐čĆąĖčģąŠą┤ąĖčé ąĮą░ ą▓čģąŠą┤ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ D-čéčĆąĖą│ą│ąĄčĆą░, ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ D-čéčĆąĖą│ą│ąĄčĆą░. ąŁč鹊čé ą▒ą╗ąŠą║ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓ą▓ąŠą┤ąĖčé ąĘą░ą┤ąĄčƹȹ║čā ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2 čéą░ą║čéą░ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░ ąĖ ą╝ą░ą║čüąĖą╝čāą╝ 3 čéą░ą║čéą░.

ąĀąĖčü. 9. ąæą╗ąŠą║ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ąÆ čéą░ą╣ą╝ąĄčĆąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ŌĆ£ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅŌĆØ ąĮą░ ą▓čüąĄčģ ą▓čģąŠą┤ą░čģ, ą║čĆąŠą╝ąĄ ETR, ą│ą┤ąĄ ą┐ąĄčĆą▓čŗą╝ ąĖą┤ąĄčé ą┐čĆąĄčüą║ą░ą╗ąĄčĆ, ą┐ąŠčüą╗ąĄ ąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ č乊čĆą╝čāą╗ąŠą╣ ąĮąĖąČąĄ, čćą░čüč鹊čéą░ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ 3 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ, č湥ą╝ čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čÅą┤čĆą░.
FreqTIMCLK Ōēź 3 x Freqinputsignal
ąĀąĄąČąĖą╝ 1 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÜąŠą│ą┤ą░ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ external clock-source mode 1, ą╗čÄą▒ąŠą╣ čüąĖą│ąĮą░ą╗, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮ ąĮą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüąĖą│ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ TRGI, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čéą░ą║ąČąĄ ą║ą░ą║ čéą░ą║čéčŗ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░. ąĀąĖčü. 8 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ čéą░ą║č鹊ą▓ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░:
ŌĆó ąÆčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ETRF: čüąĖą│ąĮą░ą╗ ETR ą┐ąŠčüą╗ąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ ąĖ ąĘą░č鹥ą╝ čäąĖą╗čīčéčĆčāąĄčéčüčÅ.
ŌĆó ąÆąĮčāčéčĆąĄąĮąĮąĖąĄ čüąĖą│ąĮą░ą╗čŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ (ą▓čģąŠą┤čŗ ITR).
ŌĆó ąĪąĖą│ąĮą░ą╗ TI1FD, ą║ąŠč鹊čĆčŗą╣ čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗčģąŠą┤ąŠą╝ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░, ąĮąŠ ą║ąŠč鹊čĆčŗąĄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗ ą║ ąŠą▒ąŠąĖą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ čüąĖą│ąĮą░ą╗ą░ (ą║ą░ąČą┤čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ąĮą░ ą▓čģąŠą┤ąĄ čéą░ą╣ą╝ąĄčĆą░ 1 ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĖą╝ą┐čāą╗čīčü).
ŌĆó ąÆčģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ TI1FP1 ąĖ TI2FP2 čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāčÄčéčüčÅ, čäąĖą╗čīčéčĆčāčÄčéčüčÅ, ąĘą░č鹥ą╝ ą┐ąŠą┤ą░čÄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ąĮą░ ą┐čĆąĄčüą║ą░ą╗ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▓čģąŠą┤čŗ čéą░ą╣ą╝ąĄčĆą░ TI1 ąĖ TI2.
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ external clock mode 1, ą║ąŠą│ą┤ą░ ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ čéą░ą╣ą╝ąĄčĆ č湥čĆąĄąĘ ąŠą┤ąĖąĮ ąĖąĘ ąĄą│ąŠ ą▓čģąŠą┤ąŠą▓, ą┤čĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą║ąŠą│ą┤ą░ čéą░ą║čéčŗ ą┐ąŠą┤ą░čÄčéčüčÅ ąĮą░ čéą░ą╣ą╝ąĄčĆ č湥čĆąĄąĘ ą▓čģąŠą┤čŗ ETR, TI1 ąĖą╗ąĖ TI2.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ą░ ETR ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ čŹč鹊 ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┤ą╗čÅ external clock-source mode 2, čéą░ą║ čćč鹊 ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠąĮą░ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąĮąĄ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ čüąŠą┤ąĄčƹȹĖčé ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┤ą╗čÅ ą░ą║čéąĖą▓ą░čåąĖąĖ čŹč鹊ą╣ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓čŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąÆčģąŠą┤čŗ čéą░ą╣ą╝ąĄčĆą░, TI1 ąĖ TI2 ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║č鹊ą▓. ąÜąŠą│ą┤ą░ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ external clock mode 1, č鹊ą╗čīą║ąŠ ą▓čģąŠą┤čŗ TI1 ąĖ TI2 ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░. ąĢčüą╗ąĖ ą▓ čéą░ą╣ą╝ąĄčĆąĄ ąĮąĄ ą▓čüčéčĆąŠąĄąĮąŠ 4 ą║ą░ąĮą░ą╗ą░, ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓čģąŠą┤čŗ TI3 ąĖ TI4 ąĮąĄ ą╝ąŠą│čāčé čéą░ą║čéąĖčĆąŠą▓ą░čéčī čéą░ą╣ą╝ąĄčĆ.
ąóą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗, ą┐ąŠčüčéčāą┐ą░čÄčēąĖą╣ ąĮą░ ą▓čģąŠą┤čŗ čéą░ą╣ą╝ąĄčĆą░ TI1 ąĖą╗ąĖ TI2, čüąĮą░čćą░ą╗ą░ ą║ąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆčāąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĄą╝ ąĮą░ čüč湥čéčćąĖą║. ąÜąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą║ą░čüą║ą░ą┤ąŠą╝ ą▓ąĮąĄčłąĮąĄą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĘą░č鹥ą╝ čüąĖą│ąĮą░ą╗ ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąĖ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ.
ąÆčģąŠą┤ąĮąŠą╣ čäąĖą╗čīčéčĆ ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ. ąÜą░ąĮą░ą╗, čüą▓čÅąĘą░ąĮąĮčŗą╣ čü čåąĄą╗ąĄą▓čŗą╝ ą▓čģąŠą┤ąŠą╝ čéą░ą╣ą╝ąĄčĆą░, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤ąĮąŠą╣; ąĘą░č鹥ą╝ č鹥 ąČąĄ čüą░ą╝čŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ą░ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ čéąĖą┐ąŠą▓ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ąŠą▓ TI1 ąĖą╗ąĖ TI2 ą║ą░ą║ ą▓čģąŠą┤ą░ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓:
1. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ą░ąĮą░ą╗ą░, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čüąŠ ą▓čģąŠą┤ąŠą╝ čéą░ą╣ą╝ąĄčĆą░, ąĮą░ ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą░ąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗. ąöą░ąČąĄ ą┐čĆąĖ č鹊ą╝, čćč鹊 ą╗čÄą▒ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé, ą║čĆąŠą╝ąĄ 00, ąĘą░ą┐ąĖčüą░ąĮąĮąŠąĄ ą▓ ą┐ąŠą╗ąĄ capture/compare selection (CCxS), čāčüčéą░ąĮąŠą▓ąĖčé ą║ą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ ą▓čģąŠą┤ą░, ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ CCxS = 01.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čüą▓čÅąĘą░ąĮąĮčŗą╣ čü ąĮąĖą╝ ą║ą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą┐čĆąĄčēąĄąĮ (ą║ąŠą│ą┤ą░ čüą▒čĆąŠčłąĄąĮąŠ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ/ąĘą░ą┐čĆąĄčéą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą║ą░ąĮą░ą╗ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_CCER, CCxE = 0.
2. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░. ąÆčüčéčĆąŠąĄąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ STM32 ąĖą╝ąĄčÄčé ą▓čģąŠą┤čŗ ą▓čģąŠą┤čŗ, čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗąĄ ą║ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ, ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĖą╗ąĖ ą║ ąŠą▒ąŠąĖą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüąĄčĆąĖąĖ STM32F2); ą▓ ą┤čĆčāą│ąĖčģ čüąĄą╝ąĄą╣čüčéą▓ą░čģ STM32 ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ ąĖą╝ąĄčÄčé ą▓čģąŠą┤čŗ, čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüą┐ą░ą┤ą░ ąĖą╗ąĖ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüąĄčĆąĖąĖ STM32F1). ąĪą┐čĆą░ą▓ąŠčćąĮčŗą╣ ą┤ąŠą║čāą╝ąĄąĮčé čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32 čāą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéčīčÄ. ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░, čćč鹊ą▒čŗ ąĮą░čüčéčĆąŠąĖčéčī ą▓čģąŠą┤ čéą░ą╣ą╝ąĄčĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32F30x ąĮą░ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ ąŠą▒ąŠąĖą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝, ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą┤ą╗čÅ ąĖąĮč鹥čĆąĄčüčāčÄčēąĄą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ CCxP = 1 ąĖ CCxNP = 1.
3. ąĢčüą╗ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü ąĖąĮč鹥čĆąĄčüčāčÄčēąĖą╝ ą║ą░ąĮą░ą╗ąŠą╝ čéą░ą╣ą╝ąĄčĆą░, čćč鹊ą▒čŗ ą▓čŗčĆąĄąĘą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ čü ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ, ą╝ąĄąĮčīčłąĄ č湥ą╝ čāą║ą░ąĘą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ą¤ąŠčĆąŠą│ ą┤ą╗čÅ ąŠčéą▒čĆą░čüčŗą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą┐čāčüą║ą░ čüčģąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ ICxF[3:0] ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_CCMRx, čüą▓čÅąĘą░ąĮąĮčŗą╝ čü ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ ą║ą░ąĮą░ą╗ąŠą╝ čéą░ą╣ą╝ąĄčĆą░.
4. ą¤ąŠčüą╗ąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓čģąŠą┤ą░ čéą░ą╣ą╝ąĄčĆą░ čü čéčĆąĄą▒čāąĄą╝čŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ą║ąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░. ąŁč鹊čé čłą░ą│ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ ą▓čŗą▒ąŠčĆą░ čéčĆąĖą│ą│ąĄčĆą░ TS[2:0], ąĮą░čģąŠą┤čÅčēąĄąĄčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_SMCR. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓čģąŠą┤ TI1 ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ ą▓čģąŠą┤ą░, č鹊 ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī TS[2:0]=101.
5. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čĆąĄąČąĖą╝ 1 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ (external clock-source mode 1). ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ ą▓čŗą▒ąŠčĆą░ slave/master (SMS) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_SMCR. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ ąĖą╝ąĄąĄčé čĆą░ąĘąĮčāčÄ čłąĖčĆąĖąĮčā ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čüąĄą╝ąĄą╣čüčéą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32. ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĘą░ą┤ą░ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ SMS, čćč鹊ą▒čŗ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī čĆą░ąĘąĮčŗąĄ čĆąĄąČąĖą╝čŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čüąĄčĆąĖąĖ STM32F1 ą┐ąŠą╗ąĄ SMS ąĖą╝ąĄąĄčé ą┤ą╗ąĖąĮčā 3-ą▒ąĖčéą░ ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ SMS[2:0] = 111, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32F30x ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ SMS ą┤ą╗ąĖąĮąŠą╣ 4 ą▒ąĖčéą░, ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ SMS[3:0] = 0111.
6. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ CEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_CR1, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░.
ąĀąĖčü. 10 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéąĖą┐ąŠą▓čāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čüč湥čéą░ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čüč湥čéą░ ą▓ą▓ąĄčĆčģ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüč湥čéčćąĖą║ą░ čĆą░ą▓ąĮąŠ null ą▓ ą╝ąŠą╝ąĄąĮčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ CEN, ąĖ čéą░ą╣ą╝ąĄčĆ ą┐ąŠą╗čāčćą░ąĄčé ą▓ąĮąĄčłąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ 1 č湥čĆąĄąĘ ą▓čģąŠą┤ TI1.
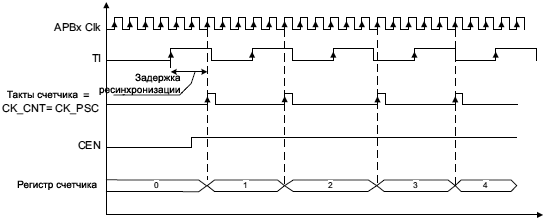
ąĀąĖčü. 10. ąśąĮą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ (external clock mode 1).
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ, ą│ą┤ąĄ ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäąĖą╗čīčéčĆąŠą╝ ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ čüą▓ąŠąĄą╝ ąĘąĮą░č湥ąĮąĖąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą▓ č鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą▓ ą║ą░ą║ąŠą╝ ąŠąĮąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░). ąĀąĖčü. 10 čéą░ą║ąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čé ą║ą░čüą║ą░ą┤ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĮą░ ą▓čģąŠą┤ąĄ TI1 čéą░ą╣ą╝ąĄčĆą░.
ąĢčüčéčī ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā čäčĆąŠąĮč鹊ą╝ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čģąŠą┤ąĄ TI1 čéą░ą╣ą╝ąĄčĆą░ ąĖ čäčĆąŠąĮč鹊ą╝ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą┐ąŠą┤čüčćąĖčéčŗą▓ą░ąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ CK_CNT. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čĆąĄą│ąĖčüčéčĆ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ TIMx_PSC čĆą░ą▓ąĄąĮ null, ą┐ąŠčŹč鹊ą╝čā čüąĖą│ąĮą░ą╗ CK_CNT čéą░ą║ąŠą╣ ąČąĄ, ą║ą░ą║ ąĖ čüąĖą│ąĮą░ą╗ CK_PSC (CK_CNT = CK_PSC).
ąśąĘ-ąĘą░ ą║ą░čüą║ą░ą┤ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ čćą░čüč鹊čéą░ ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓ ą▒čŗą╗ą░ ą▓ 3 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čćą░čüč鹊čéčŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąŠą╣:
TIMxCLKfreq Ōēź 3 x ITxfreq
ąĀąĄąČąĖą╝ 2 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÜąŠą│ą┤ą░ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ čĆąĄąČąĖą╝ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ą▒čāą┤ąĄčé ąŠą▒ąĮąŠą▓ą╗čÅčéčīčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčéčŗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ čüąĖą│ąĮą░ą╗ą░, ą┐ąŠčüčéčāą┐ą░čÄčēąĄą│ąŠ ąĮą░ ą▓čģąŠą┤ ETR čéą░ą╣ą╝ąĄčĆą░. ąöą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąĄą╝ąĄą╣čüčéą▓ STM32 ą▓čģąŠą┤ ETR ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▓ąĄą┤ąĄąĮ ąĮą░čĆčāąČčā ąĖąĘ ą║ąŠčĆą┐čāčüą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąöą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ETR ą▓čģąŠą┤ ąĮąĄ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤čŗ IO ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ą░ą║ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ. ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆą░čģ ą▓čģąŠą┤ ETR čéą░ą╣ą╝ąĄčĆą░ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāąĄčéčüčÅ čüąŠ ą▓čģąŠą┤ąŠą╝ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░.
ąōą╗ą░ą▓ąĮąŠąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ 2 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ (external clock-source mode 2) ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü čĆąĄąČąĖą╝ąŠą╝ 1 ą▓ č鹊ą╝, čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▓ąĮąĄčłąĮąĖą╣ čüąĖą│ą░ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ą▓ąĮčŗą╝ ąĖą╗ąĖ ą┤ą░ąČąĄ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░ (čéą░ą║ą░čÅ ą║ą░ą║ čćą░čüč鹊čéą░ čłąĖąĮčŗ APB). ąŁč鹊 ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮ čü čćą░čüč鹊č鹊ą╣ ą▓čŗčłąĄ, č湥ą╝ čćą░čüč鹊čéą░ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čćą░čüč鹊čéą░ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░, ąĄčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čüč湥čéą░ ą▓ą▓ąĄčĆčģ).
ąóąŠą╗čīą║ąŠ čā ą▓čģąŠą┤ą░ ETR čéą░ą╣ą╝ąĄčĆą░ ą║ą░čüą║ą░ą┤ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąĄčĆąĄą┤ ą║ą░čüą║ą░ą┤ąŠą╝ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąŁč鹊čé ą║ą░čüą║ą░ą┤ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░čüąĖąĮčģčĆąŠąĮąĄąĮ, ąĖ ą╝ąŠąČąĄčé ą┐ąŠą┤ąĄą╗ąĖčéčī ą░čüąĖąĮčģčĆąŠąĮąĮčāčÄ ą▓čģąŠą┤ąĮčāčÄ čćą░čüč鹊čéčā ąĮą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąŠ 8 čĆą░ąĘ.
ąĪąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą║ą░čüą║ą░ą┤ą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čü ąĖą╝ąĄąĮąĄą╝ ETRP ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą║ą░čüą║ą░ą┤ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąĄčĆąĄą┤ ą┐ąŠą┤ą░č湥ą╣ ąĄą│ąŠ ą▓ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░. ąÆčŗčģąŠą┤ čüčģąĄą╝čŗ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ ETRF. ąĪąĖą│ąĮą░ą╗ ETRP ąĖą╝ąĄąĄčé č鹊 ąČąĄ čüą░ą╝ąŠąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ąĮą░ ą╗čÄą▒čŗąĄ ą░čüąĖąĮčģčĆąŠąĮąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ, ą┐ąŠą┤ą░ą▓ą░ąĄą╝čŗąĄ ąĮą░ čéą░ą╣ą╝ąĄčĆ, čé. ąĄ. ąĄą│ąŠ čćą░čüč鹊čéą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ 3 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░.
ąĀąĄąČąĖą╝ 2 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąŠą╣ ąĖąĮč鹥čĆąĄčü ą▓ąŠ ą╝ąĮąŠą│ąĖčģ čüą╗čāčćą░čÅčģ ą┐čĆą░ą║čéąĖč湥čüą║ąŠą│ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĮčāąČąĮąŠ ą┐ąŠą┤čüčćąĖčéčŗą▓ą░čéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓, ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ąŠčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┤ą░čéčćąĖą║ą░, ąĮąŠ čćą░čüč鹊čéą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ čŹč鹊ą│ąŠ ą┤ą░čéčćąĖą║ą░ ą▒ąŠą╗čīčłąĄ, č湥ą╝ čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ čüąĮąĖąĘąĖčéčī čćą░čüč鹊čéčā ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝, čćč鹊ą▒čŗ čćą░čüč鹊čéą░ čüčéą░ą╗ą░ čüąŠą▓ą╝ąĄčüčéąĖą╝ą░ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄą╝ ą║ą░čüą║ą░ą┤ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗą╝ ąĮą░ ąĄą│ąŠ ą▓čģąŠą┤ąĮčāčÄ čćą░čüč鹊čéčā čüąĖą│ąĮą░ą╗ą░. ą¤čĆąĖ ąĖąĮč鹥čĆą┐čĆąĄčéą░čåąĖąĖ ą┐ąŠą┤čüčćąĖčéą░ąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮčāąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą▓ąĮąĄčüąĄąĮ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝.
ąĀąĖčü. 11 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ, ą│ą┤ąĄ čéą░ą╣ą╝ąĄčĆ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ 2 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖ ą│ą┤ąĄ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ čéą░ą╣ą╝ąĄčĆ č湥čĆąĄąĘ ą▓čģąŠą┤ ETR. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čüąĖą│ąĮą░ą╗ ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓ ą▓čŗčłąĄ, č湥ą╝ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░ (čćą░čüč鹊čéą░ čłąĖąĮčŗ APB). ąÉčüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ETR ą▒čŗą╗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┤ąĄą╗ąĄąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ 4 ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ ETPS = 10 ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_SMCR.
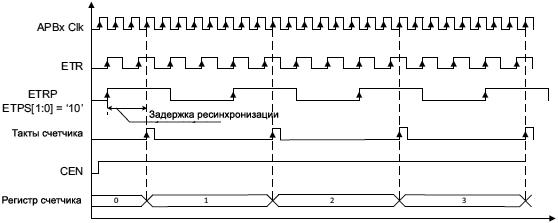
ąĀąĖčü. 11. ąśąĮą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ (external clock mode 2).
ąóą░ą║ąČąĄ čĆąĖčü. 11 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘą░ą┤ąĄčƹȹ║čā ą╝ąĄąČą┤čā ą▓čŗčģąŠą┤ąŠą╝ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ (čüąĖą│ąĮą░ą╗ąŠą╝ ETRP) ąĖ čüąĖą│ąĮą░ą╗ąŠą╝ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ CK_CNT, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░. ąŁčéą░ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ą║ą░čüą║ą░ą┤ąŠą╝ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ čéąĖą┐ąŠą▓ą░čÅ ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą▓ external clock-source mode 2:
1. ąÆčŗčćąĖčüą╗ąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čćą░čüč鹊čéčā ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓, ąĖ ą▓čŗą▒čĆą░čéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. ąĢčüą╗ąĖ čćą░čüč鹊čéą░ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ 3 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░, č鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, ąĖ ąŠąĮ ą╝ąŠąČąĄčé ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ. ąÆ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ ETPS ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮąŠ (čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░).
2. ąĢčüą╗ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ, čćč鹊ą▒čŗ ą▓čŗčĆąĄąĘą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ čéą░ą║č鹊ą▓, ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ąŠč鹊čĆčŗčģ ą╝ąĄąĮčīčłąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ ąĮą░čüčéčĆąŠąĖčéčī čäčāąĮą║čåąĖčÄ čäąĖą╗čīčéčĆą░čåąĖąĖ, čüą╝. čüąĄą║čåąĖčÄ "ąÜą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░čåąĖąĖ" ą▓čŗčłąĄ ą▓ čŹč鹊ą╣ čüčéą░čéčīąĄ.
3. ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąæąĖčé ETP čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé, ąĮą░ ą║ą░ą║ąŠą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą▒čāą┤ąĄčé čĆąĄą░ą│ąĖčĆąŠą▓ą░čéčī čüč湥čéčćąĖą║ ą▓ external clock-source mode 2. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ETP = 0, čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą░ą║čéąĖą▓ąĮčŗą╣ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ (čé. ąĄ. ą┐ąĄčĆąĄą┐ą░ą┤ ą╗ąŠą│. 0 -> ą╗ąŠą│. 1 ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░).
4. ąĀą░ąĘčĆąĄčłąĖčéčī external clock-source mode 2 čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ECE =1.
5. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąĮčāąČąĮąŠ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_CR1.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓čģąŠą┤ ETR ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čéą░ą║ąČąĄ ą║ą░ą║ ą▓čģąŠą┤ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą║ąŠą│ą┤ą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ external clock-source mode 1. ą£ąŠąČąĮąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī external clock-source mode 1 ąĖ external clock-source mode 2, ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖčģ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ETR. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖąŠčĆąĖč鹥čé ąŠčéą┤ą░ąĄčéčüčÅ external clock-source mode 2, ąĖ ąŠąĮ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ čéą░ą║č鹊ą▓ ąĮą░ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░.
ą×čéą╗ąĖčćąĖčÅ čĆąĄąČąĖą╝ą░ 1 ąĖ čĆąĄąČąĖą╝ą░ 2 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąØą░ ą┐ąĄčĆą▓čŗą╣ ą▓ąĘą│ą╗čÅą┤ ą║ą░ąČąĄčéčüčÅ, čćč鹊 čäčāąĮą║čåąĖąŠąĮą░ą╗ čĆąĄąČąĖą╝ąŠą▓ 1 ąĖ 2 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣, ąŠą┤ąĮą░ą║ąŠ čéčēą░č鹥ą╗čīąĮąŠąĄ ąĖąĘčāč湥ąĮąĖąĄ ąĖčģ čĆą░ąĘą╗ąĖčćąĖą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┤ąĄą╗ąĖčéčī ąĖąĘ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ąĄą╗ą░čÄčé ą║ą░ąČą┤čŗą╣ čĆąĄąČąĖą╝ ą▒ąŠą╗čīčłąĄ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝ ą┤ą╗čÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čüą╗čāčćą░ąĄą▓ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąŠčüąĮąŠą▓ąĮčŗąĄ ąŠčéą╗ąĖčćąĖčÅ ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ą░ą╝ąĖ 1 ąĖ 2:
ŌĆó ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī external source clock mode 1 ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠ ąŠą▒ąŠąĖą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąöą╗čÅ external clocksource mode 2 čŹč鹊 ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ.
ŌĆó ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ external clock-source mode 2, ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą░ą▓ą░čéčī čéą░ą║čéčŗ ąĮą░ čéą░ą╣ą╝ąĄčĆ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░. ą¤čĆąĖ čŹč鹊ą╝ ą▓čüąĄ ąĄčēąĄ ą╝ąŠąČąĮąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čéą░ą╣ą╝ąĄčĆ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ slave-čĆąĄąČąĖą╝ąŠą▓. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ čüčćąĖčéą░čéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą┤ą░čéčćąĖą║ąŠą╝ ą▓ ąĘą░ą┤ą░ąĮąĮčŗą╣ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ, čü ą┐ąŠą▓č鹊čĆąĄąĮąĖčÅą╝ąĖ:
ŌĆō ąŠą┤ąĖąĮ ąĖąĘ čéą░ą╣ą╝ąĄčĆąŠą▓, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ TIMy, ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą┐ąŠą┤čüč湥čé ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓ external clock-source mode 2, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ą┤ą░čéčćąĖą║ąŠą╝.
ŌĆō ą▓č鹊čĆąŠą╣ čéą░ą╣ą╝ąĄčĆ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ TIMz, ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÄ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéčĆąĖą│ą│ąĄčĆą░ (trigger-out signal, TRGO), ą┐ąŠą▓č鹊čĆčÅčÅ ąĄą│ąŠ č湥čĆąĄąĘ ąĘą░ą┤ą░ąĮąĮčŗą╣ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ.
ŌĆō ą┐ąĄčĆą▓čŗą╣ čéą░ą╣ą╝ąĄčĆ (TIMy) čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ slave reset mode, ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ TRGO ą▓č鹊čĆąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (TIMz) ą▓ ą║ą░č湥čüčéą▓ąĄ čéčĆąĖą│ą│ąĄčĆą░ ą┤ą╗čÅ čüą▒čĆąŠčüą░.
ąĢčüčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čüą┐ąŠčüąŠą▒ ąĮą░čüčéčĆąŠąĖčéčī čéą░ą╣ą╝ąĄčĆ ąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÄ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ TRGO ą▓ čĆąĄą│čāą╗čÅčĆąĮčŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ - čāčüčéą░ąĮąŠą▓ąĖčéčī čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░ TIMx_ARR ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, čćč鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗ąŠčüčī ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠąĄ čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (update event).
ąĪąŠą▒čŗčéąĖąĄ "update event" ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī ąĖą╝ą┐čāą╗čīčü ąĮą░ čüąĖą│ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ TRGO, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ master-mode čéą░ą╣ą╝ąĄčĆą░ ąĮą░ "update value" (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_CR2 ą┐ąŠą╗ąĄ ą▒ąĖčé MMS[2:0] čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 010).
ąóą░ą╣ą╝ąĄčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ slave-čĆąĄąČąĖą╝ąĄ čüą▒čĆąŠčüą░ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┐ąŠą╗ąĄ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čĆąĄąČąĖą╝ąŠą╝ (slave mode selection, SMS) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_SMCR (ąĮą░ą┐čĆąĖą╝ąĄčĆ SMS[2:0] = 100).
ąÆčŗą▒ąŠčĆ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ čéčĆąĖą│ą│ąĄčĆą░ ą┤ą╗čÅ slave-čĆąĄąČąĖą╝ą░ čüą▒čĆąŠčüą░ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ ą▓čŗą▒ąŠčĆą░ čéčĆąĖą│ą│ąĄčĆą░ TS[2:0]. ąŚąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ TS[2:0] ąĘą░ą▓ąĖčüąĖčé ąŠčé č鹊ą│ąŠ, ą║ą░ą║ąŠą╣ ą▓čģąŠą┤ ITR ą┐ąĄčĆą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (TIMy) čüąŠąĄą┤ąĖąĮąĄąĮ ą▓ąĮčāčéčĆąĖ ą║čĆąĖčüčéą░ą╗ą╗ą░ čü ą▓čŗčģąŠą┤ąŠą╝ TRGO ą▓č鹊čĆąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (TIMz). ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā STM32 ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ą▓čüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą╝ąĄąČą┤čā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ čéą░ą╣ą╝ąĄčĆą░.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąŠą┐ąĖčüą░ąĮ ąŠą┤ąĖąĮ ąĖąĘ čüą╗čāčćą░ąĄą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ external clock-source mode 2, ąŠą┤ąĮą░ą║ąŠ ąŠąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ą┐ąĄčĆąĄą┤ąĄą╗ą░ąĮąŠ ąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ external clock mode 1.
ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ čüą┤ąĄą╗ą░ąĮą░ ą▒ą░ąĘąŠą▓ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čüč湥čéčćąĖą║ą░ čćą░čüč鹊čéčŗ, čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ čćą░čüč鹊čé ąĖ č鹊čćąĮąŠčüčéąĖ. ą¤čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ:
ŌĆō ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüą▓ąŠą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ (high-speed internal oscillator, HSI).
ŌĆō ąŁč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ, ą│ą┤ąĄ ąĄčüčéčī č鹊čćąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ 10 ą£ąōčå (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ čü ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝ čćą░čüč鹊čéčŗ 10 ą£ąōčå).
ŌĆō ąŁč鹊 ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą┤ąĄą╗ąĄąĮąŠ ąĮą░ 2 čćą░čüčéąĖ. ą¤ąĄčĆą▓ą░čÅ čćą░čüčéčī - čćą░čüč鹊č鹊ą╝ąĄčĆ, čéą░ą║čéąĖčĆčāąĄą╝čŗą╣ č鹊ą╗čīą║ąŠ ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ HSI. ąÆč鹊čĆą░čÅ čćą░čüčéčī - čćą░čüč鹊č鹊ą╝ąĄčĆ ąĖą╝ąĄąĄčé ą┤ąŠčüčéčāą┐ ą║ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▒ąŠą╗ąĄąĄ č鹊čćąĮąŠą╝čā ąĖčüč鹊čćąĮąĖą║čā čéą░ą║č鹊ą▓ 10 ą£ąōčå, čüąĖą│ąĮą░ą╗ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ ą▓čģąŠą┤ ETR.
ąÆč鹊čĆą░čÅ čćą░čüčéčī ą┐ąŠą┤č湥čĆą║ąĖą▓ą░ąĄčé čāč鹊čćąĮąĄąĮąĖąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ čćą░čüč鹊č鹊ą╝ąĄčĆą░ ą┐čĆąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ ąĮą░ ą▒ąŠą╗ąĄąĄ č鹊čćąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
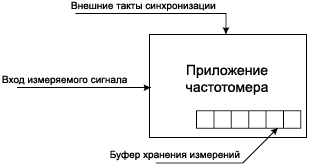
ąĀąĖčü. 12. ą×ą▒čēąĖą╣ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ čćą░čüč鹊č鹊ą╝ąĄčĆą░.
ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čéčĆąĄą▒čāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ:
ŌĆō ą¤ą╗ą░čéą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STM32F302 Nucleo (NUCLEO-F302R8).
ŌĆō ąÜą░ą▒ąĄą╗čī USB ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┐ą╗ą░čéčŗ Nucleo ą║ PC čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ (č湥čĆąĄąĘ ą║ą░ą▒ąĄą╗čī USB čéą░ą║ąČąĄ ą┐ąŠą┤ą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ą╗ą░čéčā).
ŌĆō ą×ą┤ąĖąĮ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ čćą░čüč鹊čéčŗ.
ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĖ ąŠčéą╗ą░ą┤ąĖčéčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓ čĆą░ąĘąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ, ąĮčāąČąĄąĮ čéą░ą║ąČąĄ ąĮą░ą▒ąŠčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ:
ŌĆō ąĪčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēą░čÅ ąŠčéą╗ą░ą┤čćąĖą║ ST-LINK.
ŌĆō ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ ą▓ąĄčĆčüąĖčÅ čāčéąĖą╗ąĖčéčŗ STM32CubeMX (ą▓ ą╝ąŠą╝ąĄąĮčé čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ą▓ąĄčĆčüąĖčÅ v4.10.1).
ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ čéą░ą╣ą╝ąĄčĆ TIM2, ą┐ąŠč鹊ą╝čā čćč鹊 čā ąĮąĄą│ąŠ čüą░ą╝ą░čÅ ą▒ąŠą╗čīčłą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüč湥čéčćąĖą║ą░ (32 ą▒ąĖčéą░), čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▒ąŠą╗čīčłąĄ ą▓čüąĄą│ąŠ ąĮą░ą║ąŠą┐ąĖčéčī ą▓čŗą▒ąŠčĆąŠą║ PPM. ąæčŗą╗ ą▓čŗą▒čĆą░ąĮ ą║ą░ąĮą░ą╗ 2 ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ ąĘą░čģą▓ą░čéą░ ą┐ąŠ ą▓čģąŠą┤čā (input capture), ą┐ąŠč鹊ą╝čā čćč鹊 ą▓čŗą▓ąŠą┤ ETR ąŠč鹊ą▒čĆą░ąČąĄąĮ ąĮą░ ą║ą░ąĮą░ą╗ 1 čéą░ą╣ą╝ąĄčĆą░ TIM2.
ąśą┤ąĄčÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ č鹊ą╝, čćč鹊ą▒čŗ ą▓čŗčćąĖčüą╗ąĖčéčī ą┐ąĄčĆąĖąŠą┤ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čĆą░ąĘąĮąŠčüčéąĖ ą┤ą▓čāčģ čüąŠčüąĄą┤ąĮąĖčģ ąĘąĮą░č湥ąĮąĖą╣ čĆąĄą│ąĖčüčéčĆą░ CCR2, čāą╝ąĮąŠąČąĄąĮąĮąŠą╣ ąĮą░ ą┐ąĄčĆąĖąŠą┤ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ čüč湥čéčćąĖą║ą░ TIM2, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą▓čŗą▓ąĄčüčéąĖ čćą░čüč鹊čéčā ąĖ PPM.
df x 106
ppm = ---------------
f
ąŚą┤ąĄčüčī df = fm - f, fm čŹč鹊 ąĖąĘą╝ąĄčĆąĄąĮąĮą░čÅ čćą░čüč鹊čéą░, f ąĮąŠą╝ąĖąĮą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ]
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖąĖ main čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ SystemClock_Config() ą┐ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ HAL (HAL_Init).
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ DMA. DMA ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖą╣ CCR2 ą▓ ą▒čāč乥čĆ, čćč鹊ą▒čŗ ą▓čŗčćąĖčüą╗ąĖčéčī čćą░čüč鹊čéčā ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░. DMA ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó DMA_Stream = DMA1_Stream6
ŌĆó DMA_Channel = DMA_Channel_3
ŌĆó Direction (ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ) = ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┐ą░ą╝čÅčéčī
ŌĆó Incrementation memory = enable (čĆą░ąĘčĆąĄčłąĖčéčī ąĖąĮą║čĆąĄą╝ąĄąĮčé ą░ą┤čĆąĄčüą░ ąĘą░ą┐ąŠą╗ąĮčÅąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ)
ŌĆó Peripheral data alignment = alignment word (ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┐ąŠ čüą╗ąŠą▓ą░)
ŌĆó Memory data alignment = alignment word (ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā čüą╗ąŠą▓ą░)
ŌĆó Mode = normal (ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ DMA)
ŌĆó FIFO mode = enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ čüč鹥ą║ą░ FIFO).
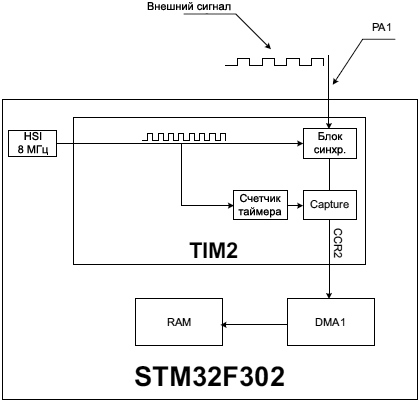
ąĀąĖčü. 13. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ čćą░čüč鹊č鹊ą╝ąĄčĆą░, čéą░ą║čéąĖčĆčāąĄą╝ąŠą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝ HSI.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čéą░ą╣ą╝ąĄčĆ čéą░ą║čéąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ HSI čü čćą░čüč鹊č鹊ą╣ 8 ą£ąōčå. ąśąĘą╝ąĄčĆčÅąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗ ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ ą▒ą╗ąŠą║ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą║č鹊ą▓. ąŚą░č鹥ą╝ ąĮą░ ą║ą░ąČą┤ąŠą╝ čäčĆąŠąĮč鹥 ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÅ ąĘą░čģą▓ą░čéą░ čéą░ą╣ą╝ąĄčĆą░, ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ (ą┤ąŠčüčéčāą┐ąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CCR2) čüąŠčģčĆą░ąĮčÅąĄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ RAM čü ą┐ąŠą╝ąŠčēčīčÄ DMA. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ąŠ č乊čĆą╝čāą╗ąĄ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ čćą░čüč鹊čéą░ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
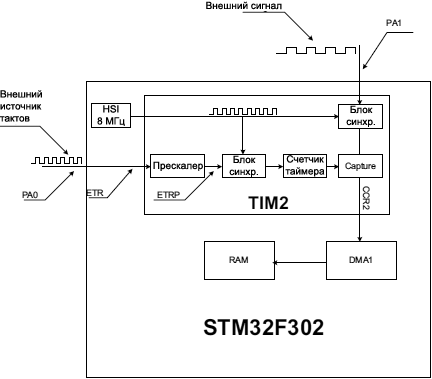
ąĀąĖčü. 14. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ čćą░čüč鹊č鹊ą╝ąĄčĆą░, čéą░ą║čéąĖčĆčāąĄą╝ąŠą│ąŠ ą▓ąĮąĄčłąĮąĖą╝ ąĖčüč鹊čćąĮąĖą║ąŠą╝ čéą░ą║č鹊ą▓ (external clock-source mode 2).
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čéą░ą╣ą╝ąĄčĆ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮčŗą╝ ą▓ąĮąĄčłąĮąĖą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝ čü čćą░čüč鹊č鹊ą╣ 10 ą£ąōčå. ąŁč鹊čé čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖą╣ čāčüą╗ąŠą▓ąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čŹč鹊ą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čü ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čćą░čüč鹊č鹊ą╣ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░.
ąśąĘą╝ąĄčĆąĄąĮąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą┐čĆąŠčģąŠą┤ąĖčé čüąĮą░čćą░ą╗ą░ č湥čĆąĄąĘ ą▒ą╗ąŠą║ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░, ąĖ ąĘą░č鹥ą╝ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā ą┐ąĄčĆąĄą┐ą░ą┤čā 0 -> 1 čüąĖą│ąĮą░ą╗ą░ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CCR2. ąŚą░č鹥ą╝ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ RAM čü ą┐ąŠą╝ąŠčēčīčÄ DMA. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ąŠ č乊čĆą╝čāą╗ąĄ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ čćą░čüč鹊čéą░ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
[ążčāąĮą║čåąĖčÅ ąĘą░čģą▓ą░čéą░ input capture]
ąöą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąĘą░čģą▓ą░čéą░ ą┐ąŠ ą▓čģąŠą┤čā (input capture mode). ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄčĆąĖčéčī 32-ą▒ąĖčéąĮčŗą╝ čéą░ą╣ą╝ąĄčĆąŠą╝, ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ TIM2CLK.
ą¦ą░čüč鹊čéą░ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ, ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąŠąĮą░ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ ą║ąŠą╗ąĖč湥čüčéą▓čā ąĖą╝ą┐čāą╗čīčüąŠą▓, ą┐ąŠą┤čüčćąĖčéą░ąĮąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą╝ ąĘą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ (ą┐ąŠ čéą░ą║ąŠą╝čā ąČąĄ ą┐čĆąĖąĮčåąĖą┐čā čĆą░ą▒ąŠčéą░čÄčé ąŠą▒čŗčćąĮčŗąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čćą░čüč鹊č鹊ą╝ąĄčĆčŗ, ą┐ąŠčüčéčĆąŠąĄąĮąĮčŗąĄ ąĮą░ ąČąĄčüčéą║ąŠą╣ ą╗ąŠą│ąĖą║ąĄ). ąöą╗čÅ čéą░ą║ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ąŠč湥ąĮčī č鹊čćąĮą░čÅ ąŠą┐ąŠčĆąĮą░čÅ čćą░čüč鹊čéą░.
ą¤ąŠčüą╗ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ ą┐čĆąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╣ čäčĆąŠąĮčé ąŠą┐ąŠčĆąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ąĖ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CC2R. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ čéą░ą║ąČąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ą▒čāč乥čĆ čü ą┐ąŠą╝ąŠčēčīčÄ DMA, čćč鹊ą▒čŗ ąŠąĮąŠ ąĮąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ą╗ąŠčüčī ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠčé čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čäčĆąŠąĮčéą░ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĖąĘą╝ąĄčĆčÅąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.

ąĀąĖčü. 15. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░čģą▓ą░čéą░ ą┐ąŠ ą▓čģąŠą┤čā (input capture).
ą¤čĆąŠčłąĄą┤čłąĄąĄ ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čüąŠčüąĄą┤ąĮąĖą╝ąĖ čäčĆąŠąĮčéą░ą╝ąĖ ąĖąĘą╝ąĄčĆčÅąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ CC2Rtn - CC2Rtn-1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąĄčĆąĖąŠą┤ą░ ąĖąĘą╝ąĄčĆčÅąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ą¤ąŠčüą║ąŠą╗čīą║čā čéą░ą╣ą╝ąĄčĆ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ HSI), ąĖąĘą╝ąĄčĆąĄąĮąĮą░čÅ čćą░čüč鹊čéą░ FąĖąĘą╝ ą▒čāą┤ąĄčé ą▓čŗčćąĖčüą╗čÅčéčīčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ Fref:
FąĖąĘą╝ = (CC2Rtn - CC2Rtn-1 ) * Fref
ą×čłąĖą▒ą║ą░ (ą▓ ąōčå) ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą║ą░ą║ ą░ą▒čüąŠą╗čÄčéąĮą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░ čĆą░ąĘąĮąŠčüčéąĖ ą╝ąĄąČą┤čā ąĖąĘą╝ąĄčĆąĄąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ąĖ čéąĖą┐ąŠą▓čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ąŠčłąĖą▒ą║ą░ čćą░čüč鹊čéčŗ ą▓čŗčĆą░ąČą░ąĄčéčüčÅ č乊čĆą╝čāą╗ąŠą╣:
Error(ąōčå) = | FąĖąĘą╝ - typicalvalue |
ą¤ąŠčüą╗ąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąŠą▒čĆąĄąĘą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ppm ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
Error x 106
ppm = ----------------
typicalvalue
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čéą░ą╣ą╝ąĄčĆ čéą░ą║čéąĖčĆčāąĄčéčüčÅ čćą░čüč鹊č鹊ą╣ 8 ą£ąōčå (TIM2CLK = 8 ą£ąōčå), ą┐ąŠčŹč鹊ą╝čā ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄčĆąĄąĮą░ ą▒ąĄąĘ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ ą▒čāą┤ąĄčé čĆą░ą▓ąĮą░:
TIM2CLK 8 x 106
F = ----------- = ------------ = 0.002 ąōčå
ARR 0xFFFFFFFF
ąÆčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄčĆąĄąĮ ąŠčé ą│ąĄąĮąĄčĆą░č鹊čĆą░ 1 ą║ąōčå. ąĀąĄąČąĖą╝ input capture ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆō ąÆąĮąĄčłąĮąĖą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓čŗą▓ąŠą┤čā CH2 čéą░ą╣ą╝ąĄčĆą░ TIM2 (ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ PA01).
ŌĆō ąÆ ą║ą░č湥čüčéą▓ąĄ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ą▓čŗą▒čĆą░ąĮ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ.
ŌĆō ąĀąĄą│ąĖčüčéčĆ CCR2 čéą░ą╣ą╝ąĄčĆą░ TIM2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ čćą░čüč鹊čéčŗ.
ą£ąŠą┤čāą╗čī input capture ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░čģą▓ą░čéą░ ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ ą┐ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ ą║ą░ąĮą░ą╗ą░ 2. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĖąŠą┤ą░ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░, ąĮčāąČąĮčŗ ą┤ą▓ą░ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąĘą░čģą▓ą░čéą░. ą¤ąĄčĆąĖąŠą┤ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ ą▓čŗčćąĖčéą░ąĮąĖčÅ čŹčéąĖčģ ą┤ą▓čāčģ čüąŠčüąĄą┤ąĮąĖčģ ąĘąĮą░č湥ąĮąĖą╣ CCR2.
ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ąĘą░čģą▓ą░čéą░, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé CC2IF ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIM2_SR. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ DMA, č鹊 ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ąĘą░ą┐čĆąŠčü DMA. ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ąĘą░čģą▓ą░čé, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ CC2IF, ąĘą░č鹥ą╝ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ over sampling CC2OF.
ąÜąŠą│ą┤ą░ ą┐ąŠčüčéčāą┐ą░ąĄčé ą┐ąĄčĆąĄą┐ą░ą┤ 0 -> 1, č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ (TIM2_CNT) ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ TIM2_CCR2. ą¤ąŠčüą╗ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ 0 -> 1 ąĘą░ą┐ąĖčłąĄčéčüčÅ ąĄčēąĄ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ TIM2_CNT. ą¤ąŠ ą┤ą▓čāą╝ čŹčéąĖą╝ ąĘąĮą░č湥ąĮąĖčÅą╝ ą┤ą░ąĮąĮčŗčģ ą╝čŗ ąĘą░č鹥ą╝ ą╝ąŠąČąĄą╝ ą▓čŗčćąĖčüą╗ąĖčéčī ą┐ąĄčĆąĖąŠą┤ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ external clock-source mode 2]
ąÆč鹊čĆą░čÅ čćą░čüčéčī čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī čŹčéčā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĖ ą┐ąŠą╝ąĄąĮčÅčéčī ąĖčüč鹊čćąĮąĖą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąĮą░ ą▓ąĮąĄčłąĮąĖą╣ (external source mode 2), ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ETR ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░.
ąÆąĮąĄčłąĮąĖą╣ čüąĖą│ąĮą░ą╗ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ ą┤ąŠą╗ąČąĄąĮ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī čāčüą╗ąŠą▓ąĖčÄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (ąĘą┤ąĄčüčī fETRP čŹč鹊 čćą░čüč鹊čéą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ETR):
TIM2Clk Ōēź 3 x fETRP
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čćą░čüč鹊čéą░ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░ TIM2 čĆą░ą▓ąĮą░ čćą░čüč鹊č鹥 čłąĖąĮčŗ APB1 ąĖ čĆą░ą▓ąĮą░ 8 MHz, č鹊ą│ą┤ą░:
1
fETR = --- x 8 ą£ąōčå = 2.66 ą£ąōčå.
3
ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ 8 ą£ąōčå ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą┤ąĄą╗ąĖč鹥ą╗čÅ čćą░čüč鹊čéčŗ fETR ąĮą░ 4, ą┐ąŠą╗čāčćąĖčéčüčÅ čćą░čüč鹊čéą░ fETRP = 2 ą£ąōčå, čćč鹊 čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čāčüą╗ąŠą▓ąĖčÄ, čćč鹊ą▒čŗ ą▓čģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ą▒čŗą╗ą░ ą▓ 3 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ čćą░čüč鹊čéčŗ čÅą┤čĆą░ čéą░ą╣ą╝ąĄčĆą░ 8 ą£ąōčå.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ TIM2]
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ TIM2:
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ 8 ą£ąōčå
// ą▓ ą║ą░č湥čüčéą▓ąĄ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░:
Prescaler = (uint16_t) (SystemCoreClock / 8000000) - 1;
// ąĪą▒čĆąŠčü čĆąĄą│ąĖčüčéčĆą░ SMCR:
TIM2->SMCR = RESET;
#ifdef USE_ETR
/*----------------------*/
/* ąÆąĮąĄčłąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ */
/*----------------------*/
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ETR ąĮą░ ą║ąŠčŹčäčä. ą┤ąĄą╗ąĄąĮąĖčÅ 4:
TIM2->SMCR |= TIM_ETRPRESCALER_DIV4 |
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ, ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ąĮą░čĆą░čüčéą░ąĮąĖąĄ:
TIM_ETRPOLARITY_NONINVERTED |
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖčüč鹊čćąĮąĖą║ąŠą╝ čéą░ą║č鹊ą▓ ETR:
TIM_SMCR_ECE;
#else
/*-------------------------*/
/* ąÆąĮčāčéčĆąĄąĮąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ */
/*-------------------------*/
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ:
TIM2->SMCR &= ~TIM_SMCR_SMS;
#endif
// ąÆčŗą▒ąŠčĆ čüč湥čéą░ ą▓ą▓ąĄčĆčģ:
TIM2->CR1 &= ~(TIM_CR1_DIR | TIM_CR1_CMS);
/*--------------------------------*/
/* ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ input capture */
/*--------------------------------*/
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ DMA1:
DMA1_Channel7->CCR |= DMA_CCR_EN;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĘą░ą┐čĆąŠčüą░ DMA ą┤ą╗čÅ TIM Capture/Compare ą║ą░ąĮą░ą╗ą░ 2:
TIM2->DIER |= TIM_DMA_CC2;
TIM2->CCER |= TIM_CCER_CC2E;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ TIM2:
TIM2->CR1 |= TIM_CR1_CEN;
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ:
while ((DMA1->ISR & DMA_ISR_TCIF7) == RESET) {}
ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ 1000 ą▓čŗą▒ąŠčĆąŠą║ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ PPM ąĖ čüčéčĆąŠąĖčéčüčÅ ą│ąĖčüč鹊ą│čĆą░ą╝ą╝ą░ (čüą╝. ąĮąĖąČąĄ).

ąĀąĖčü. 16. ąĀąĄąĘčāą╗čīčéą░čé PPM ą┐čĆąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüč湥čéčćąĖą║ą░.
ąĀą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖą╣ PPM ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé 0, ąĖ ąĖą╝ąĄąĄčé čüčéą░čéąĖč湥čüą║ąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ (čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ) ąĖ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ (čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé č鹊čćąĮąŠčüčéąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣). ąĪčéą░čéąĖč湥čüą║ąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĖąĘ-ąĘą░ ąĮąĄčüčéą░ą▒ąĖą╗čīąĮąŠčüčéąĖ HSI (ąĄą│ąŠ čćą░čüč鹊čéą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąŠčéą║ą╗ąŠąĮąĄąĮąĖą╣ č鹥čģą┐čĆąŠčåąĄčüčüą░ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ą║čĆąĖčüčéą░ą╗ą╗ą░ MCU). ąŁč鹊 čüąĖčüč鹥ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠčłąĖą▒ą║ą░, ąĖ ąŠąĮą░ ą▓ą░čĆčīąĖčĆčāąĄčéčüčÅ ąŠčé ąŠą┤ąĮąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ ą┤čĆčāą│ąŠą╝čā. ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĖąĘ-ąĘą░ čĆą░ą▒ąŠčćąĖčģ čāčüą╗ąŠą▓ąĖą╣, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖ ą┐ąŠą╝ąĄčģąĖ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ.
ąøčÄą▒ą░čÅ ąŠčłąĖą▒ą║ą░ ąĖąĘ-ąĘą░ čĆą░ąĘąĮąŠčüčéąĖ ą╝ąĄąČą┤čā ą░ą║čéčāą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ąĮą░ą┐čĆčÅą╝čāčÄ čéčĆą░ąĮčüą╗ąĖčĆčāąĄčéčüčÅ ą▓ ąŠčłąĖą▒ą║čā ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ. ąŁčéą░ čĆą░ąĘąĮąŠčüčéčī ąĮąŠčüąĖčé ą║čāą╝čāą╗čÅčéąĖą▓ąĮčŗą╣ čŹčäč乥ą║čé ąŠčé ą▓čüąĄčģ ąŠčéą┤ąĄą╗čīąĮčŗčģ ąŠčłąĖą▒ąŠą║ čćą░čüč鹊čéčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
ąöą╗čÅ ą▓č鹊čĆąŠą╣ čćą░čüčéąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ čü ą▓ąĮąĄčłąĮąĖą╝ ą▒ąŠą╗ąĄąĄ č鹊čćąĮčŗą╝ ąĖčüč鹊čćąĮąĖą║ąŠą╝ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ą│ąĖčüč鹊ą│čĆą░ą╝ą╝ą░ ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ čüąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ 1000 ą▓čŗą▒ąŠčĆąŠą║ ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ PPM.

ąĀąĖčü. 17. ąĀąĄąĘčāą╗čīčéą░čé PPM ą┐čĆąĖ ą▓ąĮąĄčłąĮąĄą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüč湥čéčćąĖą║ą░.
ąŚą┤ąĄčüčī ą▓ąĖą┤ąĮąŠ, čćč鹊 PPM ą┐ąŠą┐ą░ą┤ą░čÄčé ą▓ 0, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓čüąĄ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā čäčĆąŠąĮčéą░ą╝ąĖ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗ. ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮąĄčé ą▓ąĖą┤ąĖą╝čŗčģ ąŠčłąĖą▒ąŠą║ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čćą░čüč鹊čéčŗ, ą┐ąŠč鹊ą╝čā čćč鹊 čŹčéą░ą╗ąŠąĮąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąŠą┐ąŠčĆąĮčŗčģ čéą░ą║č鹊ą▓ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮ.
[Firmware]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (firmware) ą▒čŗą╗ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ą▓ čüčĆąĄą┤ą░čģ Keil ╬╝Vision, IAR Embedded workbench ąĖ SYSTEM WORKBENCH. ą¤čĆąŠąĄą║čé firmware ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ZIP-ą░čĆčģąĖą▓ą░ [4] (ą╝ąŠąČąĮąŠ ą┐čĆąĖ ąČąĄą╗ą░ąĮąĖąĖ ąĮą░ą╣čéąĖ ąĮą░ čüą░ą╣č鹥 st.com) ąĖ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ ąĖ čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ (čäą░ą╣ą╗čŗ .h ąĖ .c), ą║ąŠč鹊čĆčŗąĄ čüąŠčüčéą░ą▓ą╗čÅčÄčé čÅą┤čĆąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąĀąĖčü. 18. ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐čĆąŠąĄą║čéą░.
Firmware čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąĖčüčģąŠą┤ąĮčŗąĄ čäą░ą╣ą╗čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ ą┐ą░ą┐ą║ą░ą╝ ą┐čĆąŠąĄą║čéą░:
ŌĆó ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ STM32 MCU HAL (ą╝ąŠą┤čāą╗ąĖ ą▓ ą┐ą░ą┐ą║ą░čģ Drivers / STM32F3xx_HAL_Driver ąĖ Drivers / CMSIS)
ŌĆó ążą░ą╣ą╗ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ čÅą┤čĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ą┐ą░ą┐ą║ą░ Application / MDK-ARM, ą╝ąŠą┤čāą╗čī ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ startup_stm32f302x8.s)
ŌĆó ąĪą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ą┐ą░ą┐ą║ą░ Application / User, ą╝ąŠą┤čāą╗ąĖ stm32f3xx_hal_msp.c, stm32f3xx_it.c, main.c).
[ąōąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ N ąĖą╝ą┐čāą╗čīčüąŠą▓ čü ą┐ąŠą╝ąŠčēčīčÄ OPM]
ąĀąĄąČąĖą╝ ąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░, one-pulse mode (OPM) ą▓ čéą░ą╣ą╝ąĄčĆąĄ STM32 čŹč鹊 čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą▓ą╝ąĄčüč鹥 čü ą║ą░ąĮą░ą╗ą░ą╝ąĖ čéą░ą╣ą╝ąĄčĆą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą▓ čĆąĄąČąĖą╝ ą▓čŗą▓ąŠą┤ą░. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čéą░ą╣ą╝ąĄčĆčā ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĖą╝ą┐čāą╗čīčü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ ą┐ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĮą░ ą║ą░ąĮą░ą╗ą░čģ čéą░ą╣ą╝ąĄčĆą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą▓ čĆąĄąČąĖą╝ą░čģ PWM1 ąĖą╗ąĖ PWM2 output compare.
ąĀąĄąČąĖą╝ ąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ OPM ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_CR1. ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ąĖčé OPM ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░, čüą▒čĆąŠčüąĖčéčüčÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░, ąĖ čüč湥čéčćąĖą║ ąĘą░ą╝ąŠčĆąŠąĘąĖčé čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ čüąŠą▒čŗčéąĖąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąÆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüč湥čéą░ ą▓ą▓ąĄčĆčģ čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą╝ąŠčĆąŠąĘąĖčéčüčÅ ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ 0. ąöą╗čÅ ą┤čĆčāą│ąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüč湥čéą░, čéą░ą║ąŠą╣ ą║ą░ą║ čĆąĄąČąĖą╝ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ą┐ąŠ čåąĄąĮčéčĆčā ąĖ čĆąĄąČąĖą╝ čüč湥čéą░ ą▓ąĮąĖąĘ, čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĘą░ą╝ąŠčĆąŠąČąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüč湥čéčćąĖą║ą░.
ąĢčüą╗ąĖ čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą║ą░ą║ąĖą╝-č鹊 ąŠą▒čĆą░ąĘąŠą╝ ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ, č鹊 ą╝ąĄčģą░ąĮąĖąĘą╝ one-pulse ąĮąĄ čüą╝ąŠąČąĄčé čüą▒čĆąŠčüąĖčéčī ą▒ąĖčé CEN, ąĖ čüč湥čéčćąĖą║ ą┐čĆąŠą┤ąŠą╗ąČąĖčé čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā. ąÆčŗčģąŠą┤čŗ čéą░ą╣ą╝ąĄčĆą░ ą▒čāą┤čāčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą▓čŗą▓ąŠą┤ąĖčéčī čüą▓ąŠąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ.
ą£ąŠąČąĮąŠ ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░čéčī čŹčäč乥ą║čé čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ąĖčéą░ UDIS. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą┐ąŠ čŹč鹊ą╝čā ą▒ąĖčéčā čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąöčĆčāą│ąŠą╣ čüą┐ąŠčüąŠą▒ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ - čüą┤ąĄą╗ą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ (repetition counter) ąĮąĄ čĆą░ą▓ąĮčŗą╝ 0. ąØąĄ ą▓čüąĄ čéą░ą╣ą╝ąĄčĆčŗ STM32 ąŠą▒ą╗ą░ą┤ą░čÄčé čüč湥čéčćąĖą║ąŠą╝ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣.
ąĪ čāč湥č鹊ą╝ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ čāčüą╗ąŠą▓ąĖčÅ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čüčćąĖčéą░čÅ, čćč鹊 ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (čü čŹčäč乥ą║č鹊ą╝ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ) čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ąĮą░ 1, č鹊 čŹč鹊 ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĄčĆąĖąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓.
ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĄčĆąĖčÄ ąĖąĘ 5 ąĖą╝ą┐čāą╗čīčüąŠą▓, čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 4. ą¤ąĄčĆą▓čŗąĄ 4 čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▒čāą┤čāčé ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮčŗ, čéą░ą║ ą║ą░ą║ čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ ąĮąĄ čĆą░ą▓ąĄąĮ 0. ąŁčéąĖ 4 ą┐ąĄčĆą▓čŗčģ čüąŠą▒čŗčéąĖą╣ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĮąĄ čüą▒čĆąŠčüčÅčé ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ CEN, ąĮąŠ ą▒čāą┤čāčé ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣, ą┐ąŠą║ą░ ąŠąĮ ąĮąĄ ą┤ąŠą╣ą┤ąĄčé ą┤ąŠ 0. ą¤čÅč鹊ąĄ čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čüą▒čĆąŠčüąĖčé ą▒ąĖčé CEN, ą┐ąŠč鹊ą╝čā čćč鹊 čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ čĆą░ą▓ąĄąĮ 0. ąÆ čŹč鹊ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮ 5 čĆą░ąĘ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĖąĘ 5 ąĖą╝ą┐čāą╗čīčüąŠą▓.
ąĪ ą┐ąŠą╗čÅčĆąĮąŠčüčéčīčÄ ą▓čŗčģąŠą┤ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ PWM2 output mode ą▓čŗą┤ą░čüčé čéąĖą┐ąŠą▓čāčÄ č乊čĆą╝čā ąĖą╝ą┐čāą╗čīčüą░, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĮą░ ąĘą░ą┤ą░ąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ, ąĘą░č鹥ą╝ ąĖą╝ą┐čāą╗čīčü čü ąĘą░ą┤ą░ąĮąĮąŠą╣ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ. ąöą╗čÅ ąĖąĮą▓ąĄčĆčüąĮąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą╗ąĖą▒ąŠ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮą░ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī ą▓čŗčģąŠą┤ą░, ą╗ąĖą▒ąŠ ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ PWM1 output mode.
ą¤ąĄčĆą▓čŗą╣ čüčåąĄąĮą░čĆąĖą╣ čü ą┐ąŠą╗čÅčĆąĮąŠčüčéčīčÄ ą▓čŗčģąŠą┤ą░ ą║ą░ąĮą░ą╗ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ąĘčÅčé ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░, ąĖ ą┐ąŠą║ą░ąĘą░ąĮ ąĮąĖąČąĄ ąĮą░ čĆąĖčü. 19. ąÆčŗą▓ąŠą┤ąĖą╝ą░čÅ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ čģą░čĆą░ą║č鹥čĆąĖąĘčāąĄčéčüčÅ ą┤ą▓čāą╝čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ: ą┤ą╗ąĖąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüą░ ąĖ ą┤ą╗ąĖąĮąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ.

ąĀąĖčü. 19. ą¤čĆąĖą╝ąĄčĆ čĆą░ą▒ąŠčéčŗ one-pulse mode.
ąśąĮč鹥čĆą▓ą░ą╗ TDelay ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝, ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ ą▓ čĆąĄą│ąĖčüčéčĆ TIM_CCRx capture/compare čéą░ą╣ą╝ąĄčĆą░. ąśąĮč鹥čĆą▓ą░ą╗ TPulse ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čĆą░ąĘąĮąŠčüčéčīčÄ ą╝ąĄąČą┤čā ąĘąĮą░č湥ąĮąĖąĄą╝, ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ ą▓ čĆąĄą│ąĖčüčéčĆ ą░ą▓č鹊ąĘą░ą│čĆčāąĘą║ąĖ (auto-reload register, TIMx_ARR) ąĖ ąĘąĮą░č湥ąĮąĖąĄą╝ TDelay. ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé TIMx_ARR ŌĆō TIMx_CCRx + 1.
ą”ąĄą╗čī čŹč鹊ą│ąŠ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ - ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗, čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą╣ą╝ąĄčĆą░. ąŁč鹊 ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąĄąČąĖą╝ą░ ąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ (one-pulse mode, OPM) ąĖ čäčāąĮą║čåąĖąĖ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ (repletion counter) čéą░ą╣ą╝ąĄčĆą░ STM32.
ąæčŗą╗ ą▓čŗą▒čĆą░ąĮ čéą░ą╣ą╝ąĄčĆ TIM1, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝.
ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čéčĆąĄą▒čāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ:
ŌĆō ą¤ą╗ą░čéą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STM32F302 Nucleo (NUCLEO-F302R8).
ŌĆō ąÜą░ą▒ąĄą╗čī USB ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┐ą╗ą░čéčŗ Nucleo ą║ PC čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ (č湥čĆąĄąĘ ą║ą░ą▒ąĄą╗čī USB čéą░ą║ąČąĄ ą┐ąŠą┤ą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ą╗ą░čéčā).
ŌĆō ą×čüčåąĖą╗ą╗ąŠą│čĆą░čä ą┤ą╗čÅ ąĮą░ą▒ą╗čÄą┤ąĄąĮąĖčÅ ąĘą░ č乊čĆą╝ąĖčĆčāąĄą╝čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝.
ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĖ ąŠčéą╗ą░ą┤ąĖčéčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓ čĆą░ąĘąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ, ąĮčāąČąĄąĮ čéą░ą║ąČąĄ ąĮą░ą▒ąŠčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ:
ŌĆō ąĪčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēą░čÅ ąŠčéą╗ą░ą┤čćąĖą║ ST-LINK.
ŌĆō ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ ą▓ąĄčĆčüąĖčÅ čāčéąĖą╗ąĖčéčŗ STM32CubeMX (ą▓ ą╝ąŠą╝ąĄąĮčé čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ą▓ąĄčĆčüąĖčÅ v4.10.1).

ąĀąĖčü. 20. ą¤čĆąĖą╝ąĄčĆ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ čéą░ą╣ą╝ąĄčĆ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝ HSI. ąöą╗čÅ ą░ą║čéąĖą▓ą░čåąĖąĖ čĆąĄąČąĖą╝ą░ ąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé OPM ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_CR1. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĮą░ ą▓čŗčģąŠą┤ą░čģ N ąĖą╝ą┐čāą╗čīčüąŠą▓, ą▓ čĆąĄą│ąĖčüčéčĆ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ TIMx_RCR ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ (N-1).
[ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓]
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čéą░ą║č鹊ą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖąĖ main ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ SystemClock_Config() čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ HAL (ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ HAL_Init). ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą║ąŠą┤ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ:
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓.
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ TIM1:
RCC->APB2ENR |= RCC_APB2ENR_TIM1EN;
// ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ
// čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ čüč湥čéčćąĖą║ą░ 1 ą£ąōčå:
Prescaler = (uint16_t) (SystemCoreClock / 1000000) - 1;
// ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čüč湥čéą░ ą▓ą▓ąĄčĆčģ:
TIM1->CR1 &= ~(TIM_CR1_DIR | TIM_CR1_CMS);
TIM1->CR1 |= TIM_COUNTERMODE_UP;
TIM1->CR1 &= ~TIM_CR1_CKD;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓ ąĮą░ 1:
TIM1->CR1 |= TIM_CLOCKDIVISION_DIV1;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą░ą▓č鹊ąĘą░ą│čĆčāąĘą║ąĖ čüč湥čéčćąĖą║ą░:
TIM1->ARR = PERIOD;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüą░:
TIM1->CCR1 = PULSE;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░:
TIM1->PSC = Prescaler;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣:
TIM1->RCR = PULSE_NUMBER - 1;
// ąōąĄąĮąĄčĆą░čåąĖčÅ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠą╣
// ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąĖ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣:
TIM1->EGR = TIM_EGR_UG;
// ąĪą▒čĆąŠčü čĆąĄą│ąĖčüčéčĆą░ SMCR:
TIM1->SMCR = RESET;
// ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ OPM:
TIM1->CR1 |= TIM_CR1_OPM;
TIM1->CCMR1 &= (uint16_t)~TIM_CCMR1_OC1M;
TIM1->CCMR1 &= (uint16_t)~TIM_CCMR1_CC1S;
TIM1->CCMR1 |= TIM_OCMODE_PWM2;
// ąÆčŗą▒ąŠčĆ ą║ą░ąĮą░ą╗ą░ 1 ąĖ čĆąĄąČąĖą╝ą░ Output Compare:
TIM1->CCER &= (uint16_t)~TIM_CCER_CC1P;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ Output Compare:
TIM1->CCER |= TIM_OCPOLARITY_HIGH;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗčģąŠą┤ą░ Compare ą║ą░ąĮą░ą╗ą░ 1:
TIM1->CCER = TIM_CCER_CC1E;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ čéą░ą╣ą╝ąĄčĆą░:
TIM1->BDTR |= TIM_BDTR_MOE;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čéą░ą╣ą╝ąĄčĆą░:
TIM1->CR1 |= TIM_CR1_CEN;
[Firmware]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (firmware) ą▒čŗą╗ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ą▓ čüčĆąĄą┤ą░čģ Keil ╬╝Vision, IAR Embedded workbench ąĖ SYSTEM WORKBENCH. ą¤čĆąŠąĄą║čé firmware ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ZIP-ą░čĆčģąĖą▓ą░ [4] ąĖ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ ąĖ čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ (čäą░ą╣ą╗čŗ .h ąĖ .c), ą║ąŠč鹊čĆčŗąĄ čüąŠčüčéą░ą▓ą╗čÅčÄčé čÅą┤čĆąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.

ąĀąĖčü. 21. ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐čĆąŠąĄą║čéą░.
Firmware čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąĖčüčģąŠą┤ąĮčŗąĄ čäą░ą╣ą╗čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ ą┐ą░ą┐ą║ą░ą╝ ą┐čĆąŠąĄą║čéą░:
ŌĆó ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ STM32 MCU HAL (ą╝ąŠą┤čāą╗ąĖ ą▓ ą┐ą░ą┐ą║ą░čģ Drivers / STM32F3xx_HAL_Driver ąĖ Drivers / CMSIS)
ŌĆó ążą░ą╣ą╗ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ čÅą┤čĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ą┐ą░ą┐ą║ą░ Application / MDK-ARM, ą╝ąŠą┤čāą╗čī ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ startup_stm32f302x8.s)
ŌĆó ąĪą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ą┐ą░ą┐ą║ą░ Application / User, ą╝ąŠą┤čāą╗ąĖ stm32f3xx_hal_msp.c, stm32f3xx_it.c, main.c).
[ą©ąśą£-čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čģąŠą┤ą░ break]
ążčāąĮą║čåąĖčÅ Break ą┤ąŠčüčéčāą┐ąĮą░ ą▓ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗčģ čéą░ą╣ą╝ąĄčĆą░čģ, čéą░ą║ąĖčģ ą║ą░ą║ TIM1 ąĖ TIM8, ą░ čéą░ą║ąČąĄ ą▓ ąŠą▒ą╗ąĄą│č湥ąĮąĮčŗčģ čéą░ą╣ą╝ąĄčĆą░čģ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ TIM15, TIM16 ąĖ TIM17. ążčāąĮą║čåąĖčÅ Break ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┤ą╗čÅ ąĘą░čēąĖčéčŗ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čüąĖą╗ąŠą▓ąŠą│ąŠ ąĖąĮą▓ąĄčĆč鹊čĆą░, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠčé ą▓čŗčģąŠą┤ąŠą▓ čéą░ą╣ą╝ąĄčĆą░; čäčāąĮą║čåąĖčÅ ąĘą░ą┐čĆąĄčēą░ąĄčé čŹčéąĖ ą▓čŗčģąŠą┤čŗ, ąĖą╗ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ąĖčģ ą▓ ąĘą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ čćč鹊-č鹊 ą┐ąŠčłą╗ąŠ ąĮąĄ čéą░ą║ ą▓ čüąĖą╗ąŠą▓ąŠą╝ ą▒ą╗ąŠą║ąĄ ąĖą╗ąĖ čü čüą░ą╝ąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝.
ąöą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ ąĘą░ą┐čĆąŠčüąŠą▓ ąŠčüčéą░ąĮąŠą▓ą║ąĖ (ąĮą░ ą▓čģąŠą┤ąĄ break), čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĖą╗ąŠą▓čŗą╝ ą║ą░čüą║ą░ą┤ąŠą╝, čäčāąĮą║čåąĖčÅ break čüą▓čÅąĘą░ąĮą░ čü ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╝ ą▓čģąŠą┤ąŠą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ BKIN ąĖą╗ąĖ BKIN2), ą║ąŠč鹊čĆčŗą╣ ąŠč鹊ą▒čĆą░ąČąĄąĮ ą║ą░ą║ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ ąĮą░ ąŠą┤ąĮčā ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąĮąŠąČąĄą║ IO ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąæčāą┤čāčćąĖ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą╣, čäčāąĮą║čåąĖčÅ break ąĘą░ą┐čĆąĄčēą░ąĄčé ą▓čŗčģąŠą┤čŗ PWM, ąĖą╗ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ąĖčģ ą▓ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ break, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ ą░čüąĖąĮčģčĆąŠąĮąĮąŠ ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī ą▓čŗčģąŠą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖą╗ąŠą▓čŗą╝ ą╝ąŠčüč鹊ą╝.
ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ čüąŠą┤ąĄčƹȹĖčé ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┤ą╗čÅ ą▓čŗčģąŠą┤ąŠą▓ čéą░ą╣ą╝ąĄčĆą░.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ čüąŠą▒čŗčéąĖąĄ break, ą░čüąĖąĮčģčĆąŠąĮąĮąŠ ąŠčćąĖčüčéąĖčéčüčÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ąĖčé MOE ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_BDTR. ą×ąĮ ą┤ąĄą╣čüčéą▓čāąĄčé č鹊ą╗čīą║ąŠ ąĮą░ č鹥čģ ą║ą░ąĮą░ą╗ą░čģ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ čĆąĄąČąĖą╝ ą▓čŗą▓ąŠą┤ą░. ą¦č鹊ą▒čŗ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą▓ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé MOE, ąĖą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé AOE, čćč鹊ą▒čŗ ą▓čŗčģąŠą┤čŗ čéą░ą╣ą╝ąĄčĆą░ ą┐ąĄčĆąĄčłą╗ąĖ ą▓ čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĖ ąĮą░čćą░ą╗čüčÅ ąĮąŠą▓čŗą╣ čåąĖą║ą╗ ą©ąśą£.
ąØąĄą║ąŠč鹊čĆčŗąĄ čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32 (ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąĄą╝ąĄą╣čüčéą▓ąŠ STM32F303) ąĖą╝ąĄčÄčé ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą┤ą▓ą░ ą▓čģąŠą┤ą░ break: BKIN ąĖ BKIN2. ąöą╗čÅ čéą░ą║ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓ ą▓čģąŠą┤ BRK2 ąĖą╝ąĄąĄčé ą╝ąĄąĮčīčłąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, č湥ą╝ ą▓čģąŠą┤ BRK. ąÆčģąŠą┤čŗ BKIN ąĖ BKIN2 ą╝ąŠą│čāčé ąĘą░ą┐čĆąĄčéąĖčéčī ą▓čŗčģąŠą┤čŗ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮčŗą╝ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ ąĖčģ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąŠ (Hi-Z), ąĖ ąŠąĮąĖ ąĮąĄ ą╝ąŠą│čāčé ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ąĖčģ ą▓ ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ąĪčĆą░ą▓ąĮąĄąĮąĖąĄ ą▓čģąŠą┤ąŠą▓ Break čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ OCxRef-clear. ąÜą░ą║ ą▒čŗą╗ąŠ čāą┐ąŠą╝čÅąĮčāč鹊 ą▓čŗčłąĄ, ąŠčüąĮąŠą▓ąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ą░ break - čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗčģąŠą┤ą░ą╝ąĖ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ čéą░ą║, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░čéčī ą░ą▓ą░čĆąĖą╣ąĮčŗąĄ čüąĖčéčāą░čåąĖąĖ. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ ą│ąĖą▒ą║ąŠą╝čā ą┤ąĖąĘą░ą╣ąĮčā ą▓čģąŠą┤ break čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą┤čĆčāą│ąĖčģ čüą╗čāčćą░čÅčģ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ č鹊ą║ą░ ą▓ ą║ą░ąČą┤ąŠą╝ čéą░ą║č鹥. ąÜąŠąĮčåąĄą┐čéčāą░ą╗čīąĮąŠ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ č鹊ą║ą░ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐ąĄčĆąĖąŠą┤ąĄ ą©ąśą£ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ OCxRef-clear čéą░ą╣ą╝ąĄčĆąŠą▓ STM32.
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ OCxRef-clear ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ č鹊ą║ą░ ą▓ ą║ą░ąČą┤ąŠą╝ čåąĖą║ą╗ąĄ ą©ąśą£. ąŁč鹊 ą▓čüą╗ąĄą┤čüčéą▓ąĖąĄ č鹊ą│ąŠ, čćč鹊 ą▓čģąŠą┤ čéą░ą╣ą╝ąĄčĆą░ ETR, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čŹč鹊ą╣ čäčāąĮą║čåąĖąĄą╣, ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ąŠąĮą║čāčĆąĄąĮčéąĮčŗą╝ čü ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĄą╣ čéą░ą╣ą╝ąĄčĆą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ąĮąĄčłąĮčÅčÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čģąŠą┤ ETR ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓). ąÆ čéą░ą║ąŠą╣ čüąĖčéčāą░čåąĖąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĄąĘąĮčŗą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ Break ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ č鹊ą║ą░ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐ąĄčĆąĖąŠą┤ąĄ ą©ąśą£.
ąĪ ąŠą┤ąĮąŠą╣ čüč鹊čĆąŠąĮčŗ, čäčāąĮą║čåąĖčÅ OCxRef clear ą┤ąĄą╣čüčéą▓čāąĄčé ąĮą░ ą▓čŗčģąŠą┤ą░čģ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ (čćč鹊 čéą░ą║ąČąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ čäčāąĮą║čåąĖąĖ Break); čü ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, čäčāąĮą║čåąĖčÅ OCxRef ą╝ąŠąČąĄčé ą▒čŗčéčī ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą║ą░ąĮą░ą╗ąĄ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą░ą║čéąĖą▓ą░čåąĖčÅ čäčāąĮą║čåąĖąĖ OCxRef clear ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą║ą░ąĮą░ą╗čīąĮąŠ č湥čĆąĄąĘ čāčüčéą░ąĮąŠą▓ą║čā čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ąĖčéą░ OCxCE ą┤ą╗čÅ čĆąĄą│čāą╗ąĖčĆčāąĄą╝čŗčģ ą║ą░ąĮą░ą╗ąŠą▓). ąÆ čŹč鹊ą╣ ą▓č鹊čĆąŠą╣ čüąĖčéčāą░čåąĖąĖ čäčāąĮą║čåąĖčÅ Break ą┤ąĄą╣čüčéą▓čāąĄčé ąĮą░ ą▓čüąĄčģ ą▓čŗčģąŠą┤ą░čģ ą║ą░ąĮą░ą╗ąŠą▓ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĮąĄčé čüą┐ąŠčüąŠą▒ą░ čāą┐čĆą░ą▓ą╗čÅčéčī, ąĮą░ ą║ą░ą║ąŠą╣ ą║ą░ąĮą░ą╗ ą▓ą╗ąĖčÅąĄčé čüąŠą▒čŗčéąĖąĄ break).
ąÜąŠąĮčåąĄą┐čåąĖčÅ ą┐ąŠčåąĖą║ą╗ąŠą▓ąŠą│ąŠ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ č鹊ą║ą░ ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ čäą░ą║č鹥, čćč鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ čĆąĄą│čāą╗ąĖčĆčāąĄą╝ą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░ č鹊ą║ą░ čüčéą░ąĮąĄčé ą▒ąŠą╗čīčłąĄ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░, čüąĖą│ąĮą░ą╗ PWM (ą©ąśą£) čüčéą░ąĮąĄčé ąĮąĖąĘą║ąĖą╝ ą┤ąŠ ąĮą░čćą░ą╗ą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čåąĖą║ą╗ą░ PWM. ąŁč鹊 ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ OCxREf-clear, čćč鹊 ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčéčüčÅ ąĮą░ čĆąĖčü. 22.

ąĀąĖčü. 22. ąóą░ą╣ą╝ąĖąĮą│ ąŠčćąĖčüčéą║ąĖ OCxREF čéą░ą╣ą╝ąĄčĆą░ TIMx.
ąöą╗čÅ čäčāąĮą║čåąĖąĖ Break ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ AOE. ąĢčüą╗ąĖ ą▒ąĖčé AOE čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čüą▓ąŠąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░), č鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ čĆąĄą│čāą╗ąĖčĆčāąĄą╝čŗą╣ č鹊ą║ ą┐ąĄčĆąĄčüąĄč湥čé ąĘą░ą┤ą░ąĮąĮčŗą╣ ą┐ąŠčĆąŠą│, ą▓čŗčģąŠą┤čŗ čéą░ą╣ą╝ąĄčĆą░ ą┐ąĄčĆąĄą╣ą┤čāčé ąĮą░ ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī. ąóą░ą╣ą╝ąĄčĆ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą┐ąŠą║ą░ ą▒ąĖčé MOE ąĮąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, čćč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čéąĖą┐ąĖčćąĮąŠą│ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ ą╗ąŠą│ąĖą║ąĖ ą┐ąŠčåąĖą║ą╗ąŠą▓ąŠą│ąŠ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ AOE ą┐ąĄčĆąĄą┤ ą░ą║čéąĖą▓ą░čåąĖąĄą╣ čäčāąĮą║čåąĖąĖ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ Break ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮąŠą▓ąĖčé čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▒ąĖčé MOE ąĮą░ ąĮą░čćą░ą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ąĮąŠą▓ąŠą│ąŠ čåąĖą║ą╗ą░ PWM. ąĀą░ąĮąĄąĄ ąŠą┐ąĖčüą░ąĮąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ Break ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ą▒ąĖčéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ AOE ąĖą╗ą╗čÄčüčéčĆąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ čĆąĖčü. 23, ą│ą┤ąĄ ą┐ąŠčüčéčĆąŠąĄąĮą░ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ąŠą┤ąĮąŠą╝ ą▓čŗčģąŠą┤ąĄ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░.
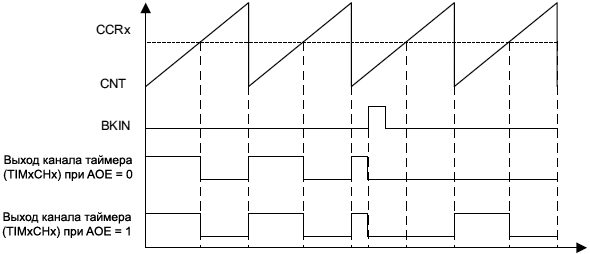
ąĀąĖčü. 23. ąóą░ą╣ą╝ąĖąĮą│ čäčāąĮą║čåąĖąĖ Break.
ąóą░ą║ąČąĄ čĆąĖčü. 23 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆą░ąĘąĮąĖčåčā ą▓ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĖ ą▓čŗčģąŠą┤ą░ čéą░ą╣ą╝ąĄčĆą░ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅą╝ąĖ ą▒ąĖčéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ AOE.
ŌĆó ąĢčüą╗ąĖ AOE = 0, č鹊 ą▓čŗčģąŠą┤ PWM ą▒čāą┤ąĄčé ąĘą░ą┐čĆąĄčēąĄąĮ ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą▓čģąŠą┤ break ą▒ąŠą╗čīčłąĄ ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ (ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÄ ąĘą░čēąĖčéčŗ, ą║ąŠč鹊čĆčāčÄ ąĮčāąČąĮąŠ čüą▒čĆąŠčüąĖčéčī ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ).
ŌĆó ąĢčüą╗ąĖ AOE = 1, č鹊 ą▓čŗčģąŠą┤ PWM čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čüąŠą▒čŗčéąĖąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ąĄčüą╗ąĖ ą▓čģąŠą┤ break ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ (čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąŠčåąĖą║ą╗ąŠą▓ąŠą╝čā ą©ąśą£-čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÄ č鹊ą║ą░, čé. ąĄ. ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÄ č鹊ą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£).
ąĀąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ ą║ą░ąČą┤ąŠą╝ čéą░ą║č鹥 ą©ąśą£ čŹč鹊 ąŠą┤ąĮą░ ąĖąĘ ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗčģ č鹥čģąĮąĖą║ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą┐ąŠ č鹊ą║čā ą▓ ą▓čŗčģąŠą┤ąĮčŗčģ ą║ą░čüą║ą░ą┤ą░čģ ąĖą╝ą┐čāą╗čīčüąĮčŗčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗ąĄą╣ ą╝ąŠčēąĮąŠčüčéąĖ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé č鹊ą║, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠč鹥ą║ą░ąĄčé ą▓ čüąĖą╗ąŠą▓ąŠą╝ ą╝ąŠčüč鹥 ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ. ąÜą░ą║ č鹊ą╗čīą║ąŠ č鹊ą║ ą┐čĆąĄą▓čŗčüąĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆąŠą│ (IRef), čüąĖą│ąĮą░ą╗ PWM (ą©ąśą£) ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī, čćč鹊ą▒čŗ ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ čāą╝ąĄąĮčīčłąĖą╗čüčÅ, č湥ą╝ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čŹčäč乥ą║čé čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ (ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ) č鹊ą║ą░.
ąĪąĖą│ąĮą░ą╗čā PWM ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī čüą▓ąŠčÄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčāčÄ čüą║ą▓ą░ąČąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüąŠą▓ ą┤ąŠ ąĮą░čćą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ PWM. ąĢčüą╗ąĖ č鹊ą║ ą▓čüąĄ ąĄčēąĄ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą┐ąŠčĆąŠą│ IRef, č鹊 čüąĖą│ąĮą░ą╗ PWM ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ ą┤ąŠ ąĮą░čćą░ą╗ą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ PWM. ąś čéą░ą║ ą┤ą░ą╗ąĄąĄ, ą┐ąŠą║ą░ č鹊ą║ ąĮąĄ čüąĮąĖąĘąĖčéčüčÅ ą┤ąŠ čāčĆąŠą▓ąĮčÅ ąĮąĖąČąĄ IRef.
ąĪčĆą░ą▓ąĮąĄąĮąĖąĄ č鹊ą║ą░ ą▓ čüąĖą╗ąŠą▓ąŠą╝ ą║ą░čüą║ą░ą┤ąĄ čü ąĘą░ą┤ą░ąĮąĮčŗą╝ ą┐ąŠčĆąŠą│ąŠą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą░čéčćąĖą║ą░ č鹊ą║ą░ ąĖ čüčģąĄą╝čŗ 菹╗ąĄą║čéčĆąŠąĮąĮąŠą│ąŠ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░. ąĪą░ą╝ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ą░ąČąĄ ą▓čüčéčĆąŠąĄąĮ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą╝ą┐ą░čĆą░č鹊čĆąŠą╝ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM32F302 ąĖ STM32F303). ąÆčŗčģąŠą┤ čüčģąĄą╝čŗ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą░ą▓ą░čéčīčüčÅ ąĮą░ ą▓čģąŠą┤ break, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ąĮą░ ą▓čģąŠą┤ ETR ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ OCxRef-clear.
ąĀąĖčü. 24 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ break, ą║ąŠą│ą┤ą░ ąŠąĮą░ čĆą░ąĘčĆąĄčłąĄąĮą░. ąŚą┤ąĄčüčī ą┤ą╗čÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆąĄą░ą╗čīąĮąŠ ą▓čŗą▓ąŠą┤ąĖą╝čŗą╣ čüąĖą│ąĮą░ą╗ PWM (čüą┐ą╗ąŠčłąĮą░čÅ ą╗ąĖąĮąĖčÅ) ąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ PWM (čłčéčĆąĖčģąŠą▓ą░čÅ ą╗ąĖąĮąĖčÅ).
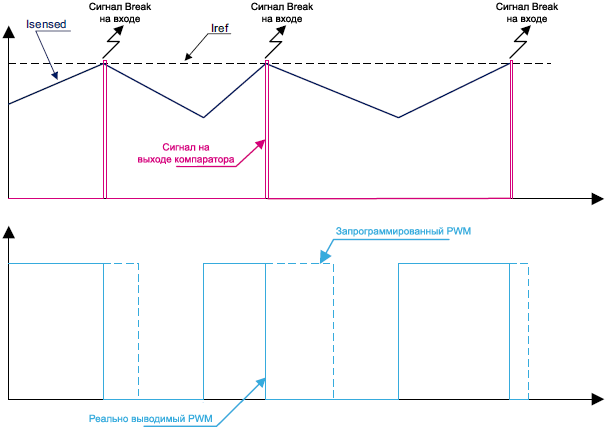
ąĀąĖčü. 24. ąóą░ą╣ą╝ąĖąĮą│ ą┐ąŠčåąĖą║ą╗ąŠą▓ąŠą│ąŠ ą©ąśą£-čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ążčāąĮą║čåąĖčÅ break ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓čŗčģąŠą┤ ą║ą░ąĮą░ą╗ą░ ą▓ ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī (čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗą║ą╗čÄč湥ąĮąĖčÄ ą╝ąŠčēąĮąŠčüčéąĖ), ą║ąŠą│ą┤ą░ ą┐ąŠčüčéčāą┐ąĖčé ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čģąŠą┤ BRK_ACTH (čüčĆą░ą▒ąŠčéą░ąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ č鹊ą║ą░ ąĘą░ čüč湥čé čāą╝ąĄąĮčīčłąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą©ąśą£). ąÆčŗčģąŠą┤ ą║ą░ąĮą░ą╗ą░ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ (ą╝ąŠčēąĮąŠčüčéčī ą▓čŗą║ą╗čÄč湥ąĮą░) ą┤ąŠ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (čé. ąĄ. ą┤ąŠ ąĮą░čćą░ą╗ą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čåąĖą║ą╗ą░ PWM), ą┐ąŠč鹊ą╝čā čćč鹊 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ AOE.
ąĀąĖčü. 25 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 菹╝čāą╗čÅčåąĖčÄ čĆąĄą░ą╗čīąĮąŠą╣ čüčģąĄą╝čŗ ą┐ąŠčåąĖą║ą╗ąŠą▓ąŠą│ąŠ ą©ąśą£-čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ Break. ąöą╗čÅ čŹą╝čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ą┐ąŠ č鹊ą║čā čĆąĄą░ą╗čīąĮąŠą│ąŠ čüąĖą╗ąŠą▓ąŠą│ąŠ ąĖąĮą▓ąĄčĆč鹊čĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ ąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ.
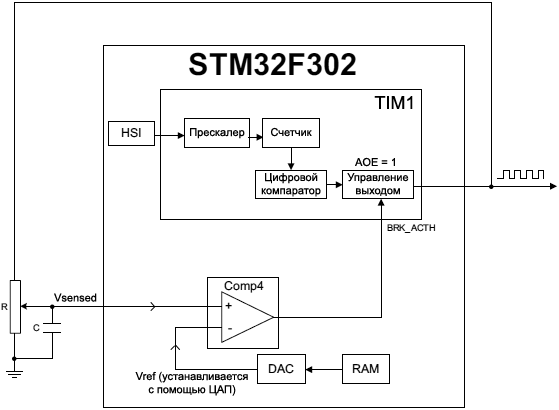
ąĀąĖčü. 25. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┐ąŠčåąĖą║ą╗ąŠą▓ąŠą│ąŠ ą©ąśą£-čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 25, čéą░ą╣ą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ PWM, ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ Vref ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą”ąÉą¤ (ąĄą│ąŠ čāčĆąŠą▓ąĄąĮčī čüąŠčģčĆą░ąĮąĄąĮ ą▓ RAM), ąĖ ąŠąĮąŠ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ "ą┤ą░čéčćąĖą║ą░ č鹊ą║ą░" (Vsensed) čü ą┐ąŠą╝ąŠčēčīčÄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░. ąÆčŗčģąŠą┤ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮ ą▓ąĮčāčéčĆąĖ ą║čĆąĖčüčéą░ą╗ą╗ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮą░ čüąĖą│ąĮą░ą╗ BRK_ACTH, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄą╝ PWM.
ąĀąĖčü. 26 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ PWM ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ Vsensed ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ąŠą┐ąŠčĆąĮąŠą╝čā Vref.
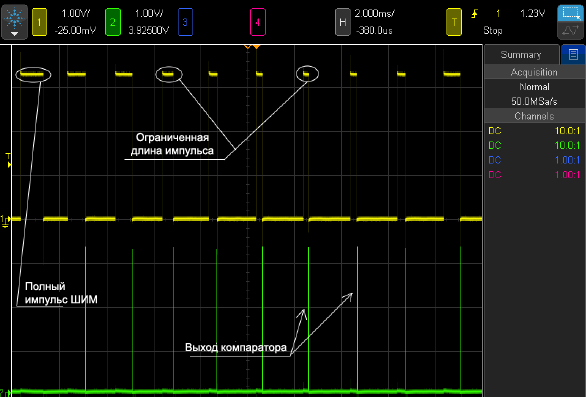
ąĀąĖčü. 26. ąĪą║čĆąĖąĮčłąŠčé ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░ čü ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ č乊čĆą╝ąŠą╣ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£.
ąØą░ čĆąĖčü. 26 ą┐ąŠą║ą░ąĘą░ąĮąŠ, čćč鹊 ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆą▓ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ PWM ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ąŠčüčéąĖą│ą╗ąŠ ą┐čĆąĄą┤ąĄą╗ą░ Vref ą┤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüą░ PWM. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą▓čŗčģąŠą┤ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčü PWM ą▓čŗą║ą╗čÄčćąĖą╗čüčÅ čĆą░ąĮčīčłąĄ (ą┤ą╗ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ ąŠą│čĆą░ąĮąĖčćąĖą╗ą░čüčī). ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąĄčĆąĖąŠą┤ą░čģ PWM ą┤ą╗ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ čéą░ą║ąČąĄ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ą╗ą░čüčī ą┤ąŠ čāčĆąŠą▓ąĮčÅ, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ čüčĆąĄą┤ąĮčÅčÅ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ą░čÅ ą╝ąŠčēąĮąŠčüčéčī ą░ą║čéąĖą▓ąĮąŠą╣ čćą░čüčéąĖ ą┐ąĄčĆąĖąŠą┤ą░ PWM čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ Vsense.
ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čéčĆąĄą▒čāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ:
- ą¤ą╗ą░čéą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STM32F302 Nucleo (NUCLEO-F302R8).
- ąÜą░ą▒ąĄą╗čī USB ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┐ą╗ą░čéčŗ Nucleo ą║ PC čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ (č湥čĆąĄąĘ ą║ą░ą▒ąĄą╗čī USB čéą░ą║ąČąĄ ą┐ąŠą┤ą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ą╗ą░čéčā).
- ą×čüčåąĖą╗ą╗ąŠą│čĆą░čä ą┤ą╗čÅ ąĮą░ą▒ą╗čÄą┤ąĄąĮąĖčÅ ąĘą░ č乊čĆą╝ąĖčĆčāąĄą╝čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝.
- ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ (10k .. 100ą║) ąĖ ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ čüčāčģąŠą╣ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ (10 ąĮąż .. 0.1 ą╝ą║ąż).
ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĖ ąŠčéą╗ą░ą┤ąĖčéčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓ čĆą░ąĘąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ, ąĮčāąČąĄąĮ čéą░ą║ąČąĄ ąĮą░ą▒ąŠčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ:
ŌĆō ąĪčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēą░čÅ ąŠčéą╗ą░ą┤čćąĖą║ ST-LINK.
ŌĆō ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ ą▓ąĄčĆčüąĖčÅ čāčéąĖą╗ąĖčéčŗ STM32CubeMX (ą▓ ą╝ąŠą╝ąĄąĮčé čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ą▓ąĄčĆčüąĖčÅ v4.10.1).
[ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓]
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ čéą░ą╣ą╝ąĄčĆ TIM1 čéą░ą║čéąĖčĆčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝ HSI. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čéą░ą║č鹊ą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖąĖ main ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ SystemClock_Config() čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ HAL (ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ HAL_Init). ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą║ąŠą┤ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ:
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓.
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ TIM1:
RCC->APB2ENR |= RCC_APB2ENR_TIM1EN;
// ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ
// čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ čüč湥čéčćąĖą║ą░ 500 ą║ąōčå:
Prescaler = (uint16_t) (SystemCoreClock / 500000) - 1;
// ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čüč湥čéą░ ą▓ą▓ąĄčĆčģ:
TIM1->CR1 &= ~(TIM_CR1_DIR | TIM_CR1_CMS);
TIM1->CR1 |= TIM_COUNTERMODE_UP;
TIM1->CR1 &= ~TIM_CR1_CKD;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓ ąĮą░ 1:
TIM1->CR1 |= TIM_CLOCKDIVISION_DIV1;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą░ą▓č鹊ąĘą░ą│čĆčāąĘą║ąĖ čüč湥čéčćąĖą║ą░:
TIM1->ARR = PERIOD;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüą░
// ą▓ čĆąĄą│ąĖčüčéčĆąĄ Capture Compare:
TIM1->CCR1 = PULSE;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░:
TIM1->PSC = Prescaler;
// ąōąĄąĮąĄčĆą░čåąĖčÅ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠą╣
// ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąĖ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣:
TIM1->EGR = TIM_EGR_UG;
// ąĪą▒čĆąŠčü čĆąĄą│ąĖčüčéčĆąŠą▓ SMCR ąĖ BDTR:
TIM1->SMCR = RESET;
TIM1->BDTR = RESET;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą╝ąĄčĆčéą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ 0:
TIM1->BDTR |= DEAD_TIME;
// ąŚą░ą┐čĆąĄčé čāčĆąŠą▓ąĮčÅ Lock:
TIM1->BDTR |= TIM_LOCKLEVEL_OFF;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ Output idle:
TIM1->BDTR |= TIM_OSSI_ENABLE;
// ąŚą░ą┐čĆąĄčé čĆąĄąČąĖą╝ą░ Output run:
TIM1->BDTR |= TIM_OSSR_DISABLE;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čģąŠą┤ą░ Break:
TIM1->BDTR |= TIM_BREAK_ENABLE;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ Break:
TIM1->BDTR |= TIM_BREAKPOLARITY_HIGH;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą▓čŗčģąŠą┤ą░ (ą▒ąĖčé AOE):
TIM1->BDTR |= TIM_AUTOMATICOUTPUT_ENABLE;
// ąÆčŗą▒ąŠčĆ Output Compare ąĖ čĆąĄąČąĖą╝ą░ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ 1:
TIM1->CCMR1 &= ~TIM_CCMR1_OC1M;
TIM1->CCMR1 &= ~TIM_CCMR1_CC1S;
TIM1->CCMR1 |= TIM_OCMODE_PWM1;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ Output Compare:
TIM1->CCER &= ~TIM_CCER_CC1P;
TIM1->CCER |= TIM_OCPOLARITY_HIGH;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗčģąŠą┤ą░ Compare ą║ą░ąĮą░ą╗ą░ 1:
TIM1->CCER |= TIM_CCER_CC1E;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čéą░ą╣ą╝ąĄčĆą░ TIM1:
TIM1->CR1 |= TIM_CR1_CEN;
[Firmware]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (firmware) ą▒čŗą╗ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ą▓ čüčĆąĄą┤ą░čģ Keil ?vision, IAR Embedded workbench ąĖ SYSTEM WORKBENCH. ą¤čĆąŠąĄą║čé firmware ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ZIP-ą░čĆčģąĖą▓ą░ [4] ąĖ čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ ąĖ čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ (čäą░ą╣ą╗čŗ .h ąĖ .c), ą║ąŠč鹊čĆčŗąĄ čüąŠčüčéą░ą▓ą╗čÅčÄčé čÅą┤čĆąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąĀąĖčü. 27. ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐čĆąŠąĄą║čéą░.
Firmware čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąĖčüčģąŠą┤ąĮčŗąĄ čäą░ą╣ą╗čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ ą┐ą░ą┐ą║ą░ą╝ ą┐čĆąŠąĄą║čéą░:
ŌĆó ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ STM32 MCU HAL (ą╝ąŠą┤čāą╗ąĖ ą▓ ą┐ą░ą┐ą║ą░čģ Drivers / STM32F3xx_HAL_Driver ąĖ Drivers / CMSIS)
ŌĆó ążą░ą╣ą╗ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ čÅą┤čĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ą┐ą░ą┐ą║ą░ Application / MDK-ARM, ą╝ąŠą┤čāą╗čī ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ startup_stm32f302x8.s)
ŌĆó ąĪą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ą┐ą░ą┐ą║ą░ Application / User, ą╝ąŠą┤čāą╗ąĖ stm32f3xx_hal_msp.c, stm32f3xx_it.c, main.c).
[ąōąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ą░ą║ąĄčéąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć DMA čéą░ą╣ą╝ąĄčĆą░]
ą¤čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ (DMA) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖčģ, ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗčģ ą┐ąĄčĆąĄčüčŗą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖ ą╝ąĄąČą┤čā ąŠą▒ą╗ą░čüčéčÅą╝ąĖ ą┐ą░ą╝čÅčéąĖ. DMA ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé čÅą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąŠčé ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖčÅ č鹥čģ ąČąĄ čüą░ą╝čŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ, čĆą░ąĘą│čĆčāąČą░čÅ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć.
ąÜą░ąČą┤ą░čÅ čéčĆą░ąĮąĘą░ą║čåąĖčÅ DMA čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ čüčéą░ą┤ąĖą╣:
ŌĆó ąØą░ ą┐ąĄčĆą▓ąŠą╣ čüčéą░ą┤ąĖąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ąĖąĘ ąĖčüč鹊čćąĮąĖą║ą░.
ŌĆó ąØą░ ą▓č鹊čĆąŠą╣ čüčéą░ą┤ąĖąĖ ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą╝ąĄčüč鹊, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ąŠąĮąĖ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ.
ąöą▓čāčģčüčéą░ą┤ąĖą╣ąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čüą▓čÅąĘą░ąĮą░ čü ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ ąĖąĮą┤ąĄą║čüąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ DMA; čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ, čüą║ąŠą╗čīą║ąŠ ą┤ą░ąĮąĮčŗčģ ąŠčüčéą░ą╗ąŠčüčī ą┐ąĄčĆąĄą┤ą░čéčī.
ąÆ čüąĄą╝ąĄą╣čüčéą▓ą░čģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32 ąĄčüčéčī ą┤ą▓ą░ ą▓ą░čĆąĖą░ąĮčéą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ DMA:
ŌĆó ążčāąĮą║čåąĖčÅ DMA burst transfer (ą┐ą░ą║ąĄčéąĮčŗą╣ ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ) ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ ą▓ą░čĆąĖą░ąĮč鹥 čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ, ą│ą┤ąĄ DMA ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą╝ąĄčēą░čéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąŠą┤ąĖąĮąŠčćąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą×ą┤ąĮąŠą╝čā čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÄ čéčĆąĖą│ą│ąĄčĆą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ čåąĄą╗ąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą┤ą░ąĮąĮčŗčģ.
ŌĆó ąÆ ą┤čĆčāą│ąŠą╝ ą▓ą░čĆąĖą░ąĮč鹥, ą║ą░ą║ ą▓ ąŠą┤ąĮąŠą╣ ąĖąĘ čĆą░ąĘąĮąŠą▓ąĖą┤ąĮąŠčüč鹥ą╣ STM32F1, DMA ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ čéčĆą░ąĮąĘą░ą║čåąĖčÄ; čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠ ąŠą┤ąĮąŠą╝čā čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÄ čéčĆąĖą│ą│ąĄčĆą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ą┤ą░ąĮąĮčŗčģ, ąĮąĄ ą▒ą╗ąŠą║.
ą¤ą░čĆą░ą│čĆą░čä ą▓čŗčłąĄ ąĮąĄ ą┐čĆąĄč鹥ąĮą┤čāąĄčé ąĮą░ ą┐ąŠą╗ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ STM32 DMA-burst feature, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą╣ ą╝ąĮąŠą│ąĖą╝ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ STM32. ąŁč鹊 ą┐čĆąŠčüč鹊 ąŠą▒čēą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮą░čÅ ą┤ą╗čÅ čāčüčéčĆą░ąĮąĄąĮąĖčÅ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ ą┐ą░ą║ąĄčéąĮąŠą│ąŠ DMA. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ DMA STM32 ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ą╝, ą░ čéą░ą║ąČąĄ ą░ą┐ąĮąŠčāčéčā AN4013 [2].
DMA-burst čéą░ą╣ą╝ąĄčĆą░. ąŻ čéą░ą╣ą╝ąĄčĆą░ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąĘą░ą┐čĆąŠčüąŠą▓ DMA, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ ą┐ąŠčüą╗ąĄ ąŠą┤ąĮąŠ čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆą░. ą×čüąĮąŠą▓ąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ - ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüčĆą░ą▒ąŠčéą░ąĄčé čüąŠą▒čŗčéąĖąĄ čŹč鹊ą│ąŠ čéą░ą╣ą╝ąĄčĆą░. ąŁč鹊 ą╝ąŠąČąĮąŠ ą┤ąĄą╗ą░čéčī ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░ čéą░ą╣ą╝ąĄčĆą░ (ą┐ąĄčĆąĄą║ą╗čÄčćą░čÅčüčī ąĖąĘ ąŠą┤ąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą▓čŗą▓ąŠą┤ą░ ą▓ ą┤čĆčāą│ąŠą╣, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĖąĘ čĆąĄąČąĖą╝ą░ PWM2 ą▓ čĆąĄąČąĖą╝ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ, force-active-level mode), ąĖą╗ąĖ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čĆą░ą▒ąŠčćąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ (ą╝ąĄąĮčÅčÅ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüą║ą▓ą░ąČąĮąŠčüčéąĖ čüčĆą░ąĘčā ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓ čéą░ą╣ą╝ąĄčĆą░).
ąŁčéą░ ąČąĄ čäčāąĮą║čåąĖčÅ DMA-burst čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą▒čāč乥čĆ ą┐ą░ą╝čÅčéąĖ.
DMA ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĮą░ ą╗ąĄčéčā ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą▓čŗą▓ąŠą┤ąĖą╝čāčÄ čéą░ą╣ą╝ąĄčĆąŠą╝ č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░ ą┐čāč鹥ą╝ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, čŹč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒ąĮąŠą▓ą╗čÅčéčī čĆąĄą│ąĖčüčéčĆ TIMx_ARR, čćč鹊ą▒čŗ ą┐ąŠą┤čüčéčĆąŠąĖčéčī čćą░čüč鹊čéčā ą▓čŗą▓ąŠą┤ąĖą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĖą╗ąĖ ąŠą▒ąĮąŠą▓ą╗čÅčéčī čĆąĄą│ąĖčüčéčĆ TIMx_CCRx ą┤ą╗čÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ čüąĖą│ąĮą░ą╗ą░.
ą¦č鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ DMA-burst, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ą┤ąŠą╗ąČąĄąĮ čĆą░ą▒ąŠčéą░čéčī čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ čéą░ą╣ą╝ąĄčĆą░:
ŌĆō ąĀąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░ DMA (TIMx_DMAR): čŹč鹊 čĆąĄą│ąĖčüčéčĆ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ąĮą░ čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī.
ŌĆō ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA (TIMx_DCR): čŹč鹊 čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ą░čłąĖąĮąŠą╣ čüąŠčüč鹊čÅąĮąĖčÅ burst-čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ŌĆō ąĀąĄą│ąĖčüčéčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA.
TIMx_DMAR. ąĀąĄą│ąĖčüčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆą░ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠą│ą┤ą░ DMA ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą▓ čéą░ą╣ą╝ąĄčĆ. ą×ąĮ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ ąĖčüč鹊čćąĮąĖą║ą░, ą║ąŠą│ą┤ą░ DMA ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĘ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą┐ą░ą╝čÅčéčī.
ąÉą┐ą┐ą░čĆą░čéčāčĆą░ DMA ą┤ąŠą╗ąČąĮą░ ąŠą▒ąĮąŠą▓ą╗čÅčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüąĄčĆąĖąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąĖąĘ ą▒čāč乥čĆą░ ą┐ą░ą╝čÅčéąĖ, ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ąĘą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąĖą╗ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĮąŠ čŹč鹊 ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą░ą┤čĆąĄčü čéčĆą░ąĮąĘą░ą║čåąĖąĖ, čāą║ą░ąĘą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆąŠą╝ ą░ą┤čĆąĄčüą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠčüčé-ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ DMA ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąĀąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░ TIMx_DMAR.
ąĀąĄą│ąĖčüčéčĆ TIMx_DMAR čéą░ą╣ą╝ąĄčĆą░ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝. ąøčÄą▒ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ čŹč鹊ą╝čā čĆąĄą│ąĖčüčéčĆčā ą▒čāą┤ąĄčé ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮ ą╗ąŠą│ąĖą║ąŠą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ąĮą░ ąŠą┤ąĖąĮ ąĖąĘ čäąĖąĘąĖč湥čüą║ąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░.
ąöąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆčā TIMx_DMAR ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ ąĮą░ čćč鹥ąĮąĖąĄ, ą╗ąĖą▒ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī. ą¤ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā TIMx_DMAR ąĮą░ ą┤čĆčāą│ąŠą╣ čäąĖąĘąĖč湥čüą║ąĖą╣ čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ TIMx_DCR ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ DMA-burst. ąóą░ą║ąČąĄ čŹč鹊 ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆąĄą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣ (finite-state machine, FSM), čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ DMA burst čéą░ą╣ą╝ąĄčĆą░.
ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą░ą┤čĆąĄčüą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA. ąĀąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ DMA ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąĄčüčéą░ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┐ą░ą╝čÅčéąĖ, ą║ąŠą│ą┤ą░ DMA ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čĆą░ą▒ąŠčéą░ąĄčé čéą░ą╣ą╝ąĄčĆ) ą▓ ą┐ą░ą╝čÅčéčī. ąóą░ą║ąČąĄ čĆąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą░ą┤čĆąĄčü čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ ąĖčüč鹊čćąĮąĖą║ą░, ą║ąŠą│ą┤ą░ DMA čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą▓ čĆąĄą│ąĖčüčéčĆčŗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA ą┤ąŠą╗ąČąĄąĮ ąŠą▒ąĮąŠą▓ą╗čÅčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüąĄčĆąĖąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ ąĖąĘ ą▒čāč乥čĆą░ ą┐ą░ą╝čÅčéąĖ. ąÉą┤čĆąĄčü, ąĮą░ ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░ DMA, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąŠčüčé-ąĖąĮą║čĆąĄą╝ąĄąĮčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ DMA ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ.
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░. ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ą░čłąĖąĮąŠą╣ čüąŠčüč鹊čÅąĮąĖą╣ čäčāąĮą║čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ DMA burst, TIMx_DCR, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠčĆčåąĖą╣ ą┤ą░ąĮąĮčŗčģ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ burst-čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąóą░ą║ąČąĄ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čåąĄą╗ąĄą▓ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čéą░ą╣ą╝ąĄčĆą░ ąĖą╗ąĖ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĄčĆą▓ąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ą¤ąŠą╗ąĄ ą▒ąĖčé DBL [4:0] čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠčĆčåąĖą╣ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┤ąĮąŠą╣ burst-ą┐ąĄčĆąĄą┤ą░čćąĖ, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓čā čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░, ą▓ąŠą▓ą╗ąĄą║ą░ąĄą╝čŗčģ ą▓ ą┐čĆąŠčåąĄčüčü (ąĘą░ą┐ąĖčüąĖ ąĖą╗ąĖ čćč鹥ąĮąĖčÅ) burst-čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗čÅ ą▒ąĖčé DBA [4:0] ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ąĮą░čćą░ą╗čīąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ, ą▓ąŠą▓ą╗ąĄč湥ąĮąĮčŗą╣ ą▓ burst-ą┐ąĄčĆąĄą┤ą░čćčā čüą╗ąĄą┤ąĖ ą┤čĆčāą│ąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░.
ą¤ąŠą╗ąĄ ą▒ąĖčé DBA[4:0] ą╝ąŠąČąĄčé ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą┤ąŠ 32 čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąŠ ąĖą╝ąĄąĄčé ą┤ą╗ąĖąĮčā 5 ą▒ąĖčé. ąśą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ąĮąŠą╝ąĄčĆ čĆąĄą│ąĖčüčéčĆą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ą┤ąĄą╗ąĄąĮąĖčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆą░ ą▓ ą║ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ ąĮą░ 4. ąØą░ą┐čĆąĖą╝ąĄčĆ, čā čĆąĄą│ąĖčüčéčĆą░ TIMx_CR1 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ąĮą░ ą║ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ 0x00, ą┐ąŠčŹč鹊ą╝čā ąĄą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ąĮąŠą╝ąĄčĆ 0.
ą¦č鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī burst-čéčĆą░ąĮąĘą░ą║čåąĖčÄ čü ąĮą░čćą░ą╗ąŠą╝ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ TIMx_CR1, ą┐ąŠą╗ąĄ ą▒ąĖčé DBA[4:0] ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0. ą¦č鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī burst-čéčĆą░ąĮąĘą░ą║čåąĖčÄ čü ąĮą░čćą░ą╗ą░ą╝ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ TIMx_ARR, ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ DBA[4:0] ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 11 (ą┤ąĄčüčÅčéąĖčćąĮą░čÅ č乊čĆą╝ą░ čćąĖčüą╗ą░), ą┐ąŠč鹊ą╝čā čćč鹊 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ TIMx_ARR 0x2C, čćč鹊 ą▓ ą┤ąĄčüčÅčéąĖčćąĮąŠą╣ č乊čĆą╝ąĄ čĆą░ą▓ąĮąŠ 44. ąöąĄą╗ąĄąĮąĖąĄą╝ 44 ąĮą░ 4 ą┐ąŠą╗čāčćąĖą╝ 11, čćč鹊 ą▒čāą┤ąĄčé ąĖąĮą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąŠąĮąĮčŗą╝ ąĖąĮą┤ąĄą║čüąŠą╝ čĆąĄą│ąĖčüčéčĆą░ TIMx_ARR ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ čéčĆą░ąĮąĘą░ą║čåąĖąĖ DMA.
ą¦č鹊ą▒čŗ ąĘą░ą▓ąĄčĆčłąĖčéčī ąŠą┤ąĮčā ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ DMA-burst čéą░ą╣ą╝ąĄčĆą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 28, ą┤ąŠą╗ąČąĮčŗ čüąŠą▓ą╝ąĄčüčéąĮąŠ čĆą░ą▒ąŠčéą░čéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ čéą░ą╣ą╝ąĄčĆą░. ąŚąĮą░č湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą│ą┤ąĄ-ąĮąĖą▒čāą┤čī ą▓ ą┐ą░ą╝čÅčéąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą×ąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéąĖ SRAM, ąĄčüą╗ąĖ čłą░ą▒ą╗ąŠąĮ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ ą┤ąŠą╗ąČąĄąĮ ąŠą▒ąĮąŠą▓ą╗čÅčéčīčüčÅ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą©ąśą£, ąĖą╗ąĖ ą▓ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ FLASH, ąĄčüą╗ąĖ čłą░ą▒ą╗ąŠąĮ čĆą░čüčüčćąĖčéą░ąĮ čéą░ą║, čćč鹊 ąŠąĮ ąĮąĄ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ.

ąĀąĖčü. 28. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ DMA-burst čéą░ą╣ą╝ąĄčĆą░.
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĮą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī DMA ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ ąĮą░ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░; čéą░ą║ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ čāą║ą░ąĘą░čéčī čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░ TIMx_DMAR ą▓ ą║ą░č湥čüčéą▓ąĄ ą╝ąĄčüčéą░ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąś ąĮą░ą║ąŠąĮąĄčå, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ ąĮą░čüčéčĆąŠąĄą║ ą▓ čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░ TIMx_DCR.
ą¤ą░čĆą░ą│čĆą░čäčŗ ą▓čŗčłąĄ ą┤ą░ą▓ą░ą╗ąĖ ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ č鹊ą│ąŠ, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ DMA burst čéą░ą╣ą╝ąĄčĆą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, ą▓čüą╗ąĄą┤ ąĘą░ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ą┐ąŠč鹊ą║ DMA ąĖą╗ąĖ ą║ą░ąĮą░ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
ąæčāą┤čāčćąĖ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝, čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą╗ąĖą▒ąŠ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄą╝, ą╗ąĖą▒ąŠ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄą╝. ą¦ąĄčĆąĄąĘ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓ DMA čéą░ą╣ą╝ąĄčĆą░, ą░ą┐ą┐ą░čĆą░čéčāčĆą░ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĘą░ą┐čĆąŠčüą░ DMA. ąŚą░ą┐čĆąŠčü DMA ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ čćąĖą┐ą░ ąĮą░ čéą░ą╣ą╝ąĄčĆ čü ą┐ąŠą╝ąŠčēčīčÄ ą╗ąŠą│ąĖą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░.
ąØą░ ąŠčüąĮąŠą▓ąĄ ąĘąĮą░č湥ąĮąĖčÅ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐ąŠą╗ąĄą╝ ą┤ą╗ąĖąĮčŗ DMA-burst (DBL[4:0], čŹč鹊 ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMx_DCR čéą░ą╣ą╝ąĄčĆą░), ąĘą░ą┐čĆąŠčü DMA ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA ąŠą┤ąĮąŠą║čĆą░čéąĮąŠ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ. ąĢčüą╗ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ DBL[4:0] ąĮčāą╗ąĄą▓ąŠąĄ, č鹊 ąĘą░ą┐čĆąŠčü DMA ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą║ą░ą║ ąĄčüčéčī; ąĖąĮą░č湥 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐čĆąŠčüąŠą▓ DMA čāą╝ąĮąŠąČą░ąĄčéčüčÅ ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ DBL + 1.
ąĢčüą╗ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ DBL[4:0] čĆą░ą▓ąĮąŠ 2, č鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĘą░ą┐čĆąŠčü DMA čéą░ą╣ą╝ąĄčĆą░, ą╗ąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA burst čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠčłą╗ąĄčé ą┐ąĄčĆą▓čŗą╣ ąĘą░ą┐čĆąŠčü DMA ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA ą┐ąĄčĆąĄčłą╗ąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ą░ą╝čÅčéąĖ ą▓ čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░; ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĖčüč鹊čćąĮąĖą║ą░ TIMx_DMAR čéą░ą╣ą╝ąĄčĆą░. ąŚą░č鹥ą╝ čāą║ą░ąĘą░č鹥ą╗čī ąĖčüč鹊čćąĮąĖą║ą░ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ DMA, ąĖ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčéčüčÅ ąĘą░ą┐čĆąŠčü DMA.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĮčÅč鹊 ą┐ąĄčĆą▓ąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ DMA, čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą╗ąŠą│ąĖą║ą░ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠčüčŗą╗ą░ąĄčé ą▓č鹊čĆąŠą╣ ąĘą░ą┐čĆąŠčü DMA. ąŁč鹊čé ąĘą░ą┐čĆąŠčü DMA čüąĮąŠą▓ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ DMA, ąĖ čüąĮąŠą▓ą░ čéą░ą╣ą╝ąĄčĆčā ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąĘą░ą┐čĆąŠčüą░.
ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓č鹊čĆąŠą│ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ DMA, ą╗ąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠčüčŗą╗ą░ąĄčé čéčĆąĄčéąĖą╣ ąĘą░ą┐čĆąŠčü DMA. ąŁč鹊čé čéčĆąĄčéąĖą╣ ąĘą░ą┐čĆąŠčü čüąĮąŠą▓ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ DMA.
ąÜą░ą║ č鹊ą╗čīą║ąŠ čéą░ą╣ą╝ąĄčĆ ą┐ąŠą╗čāčćąĖą╗ čéčĆąĄčéčīąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ čüčćąĖčéą░ąĄčéčüčÅ čāčüą┐ąĄčłąĮąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĮąŠą╣. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╗ąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ą│ąŠč鹊ą▓ą░ ą║ ąĮąŠą▓ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ DMA.
ąöą╗čÅ čĆą░ąĮąĄąĄ ąŠą┐ąĖčüą░ąĮąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, čāą║ą░ąĘą░ąĮąĮčŗą╣ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA, ąŠčüčéą░ąĄčéčüčÅ č鹥ą╝ ąČąĄ čüą░ą╝čŗą╝ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čüąĄą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąóąŠą│ą┤ą░ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąŠčüčéą░ąĄčéčüčÅ čĆą░ą▓ąĮčŗą╝ čĆąĄą│ąĖčüčéčĆčā čéą░ą╣ą╝ąĄčĆą░ TIMx_DMAR.
ąøąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ TIMx_DMAR ąĮą░ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ čäąĖąĘąĖč湥čüą║ąĖą╣ čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░.
ąöą╗čÅ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ ą┐čĆąĖą╝ąĄčĆą░, ąĖ ąĄčüą╗ąĖ ą┐ąŠą╗ąĄ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░ DBA[4:0] čĆąĄą│ąĖčüčéčĆą░ TIMx_DCR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 11 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ), ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄąĄ:
ŌĆó ą¤ąĄčĆą▓čŗą╣ DMA-ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░ TIMx_DMAR ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░ TIMx_ARR. ąĀąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░ TIMx_ARR ą▓čŗą▒čĆą░ąĮ ą▒ą░ąĘąŠą▓čŗą╝ ą░ą┤čĆąĄčüąŠą╝ ą┤ą╗čÅ burst-čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ŌĆó ąÆč鹊čĆąŠą╣ ą┤ąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆčā TIMx_DMAR čéą░ą╣ą╝ąĄčĆą░ čüąŠ čüč鹊čĆąŠąĮčŗ DMA ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ TIMx_RCR čéą░ą╣ą╝ąĄčĆą░ (ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ, č鹊 čéą░ą╣ą╝ąĄčĆ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░, ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮ čĆąĄą│ąĖčüčéčĆąŠą╝ TIMx_RCR).
ŌĆó ąóčĆąĄčéąĖą╣ ą┤ąŠčüčéčāą┐ DMA ą║ čĆąĄą│ąĖčüčéčĆčā TIMx_DMAR ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ TIMx_CCR1 čéą░ą╣ą╝ąĄčĆą░.
ŌĆó ą¤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čéčĆąĄčéčīąĄą│ąŠ ą┤ąŠčüčéčāą┐ą░ DMA ą║ čĆąĄą│ąĖčüčéčĆčā TIMx_DMAR, čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą╗ąŠą│ąĖą║ą░ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąŠą▒čĆą░čéąĮąŠ ą╝ą░čłąĖąĮčā čüąŠčüč鹊čÅąĮąĖą╣ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░. ą×ąĮą░ čāą║ą░ąĘčŗą▓ą░ąĄčé čüąĮąŠą▓ą░ ąĮą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą▒ą░ąĘąŠą▓čŗą╣ čĆąĄą│ąĖčüčéčĆ ą┤ą╗čÅ burst-čéčĆą░ąĮąĘą░ą║čåąĖąĖ (čĆąĄą│ąĖčüčéčĆ TIMx_ARR čéą░ą╣ą╝ąĄčĆą░ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ).
ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĮąŠą▓ąŠą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĘą░ą┐čĆąŠčüą░ DMA, čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆąŠą╝, ąŠą┐ąĖčüą░ąĮąĮą░čÅ ą▓čŗčłąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąŠą┐ąĄčĆą░čåąĖą╣ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ.
ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ DMA burst čéą░ą╣ą╝ąĄčĆą░ čü čåąĄą╗čīčÄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ čćč鹥ąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▒čāč乥čĆ ą▓ ą┐ą░ą╝čÅčéąĖ, ąŠą┐ąĖčüą░ąĮąĮą░čÅ ą▓čŗčłąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒čāą┤ąĄčé čéą░ą║ąČąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĮą░. ąśąĘą╝ąĄąĮčÅčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ DMA, ą░ą┤čĆąĄčü ąĖčüč鹊čćąĮąĖą║ą░ ąĖ ą░ą┤čĆąĄčü ąĮą░ąĘąĮą░č湥ąĮąĖčÅ.
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé ąŠą┤ąĮąŠ ąĖąĘ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ STM32 ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▒ąĄąĘ ąĘą░ą│čĆčāąĘą║ąĖ čÅą┤čĆą░ CPU. ąóąĄčüč鹊ą▓ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ąĮą░ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ NUCLEO-F302R8 ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F302x8. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ čŹč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ ą╗čÄą▒ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą╗ą░čéč乊čĆą╝čŗ STM32.
ąØą░ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ Nucleo ą▓čüčéčĆąŠąĄąĮ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ąŠčéą╗ą░ą┤čćąĖą║ ST-Link/V2. ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā, ą┐čĆąŠčłąĖą▓ą║ąĖ FLASH-ą┐ą░ą╝čÅčéąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ ąĮčāąČąĄąĮ č鹊ą╗čīą║ąŠ ą║ą░ą▒ąĄą╗čī USB.
ąĀąĖčü. 29 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāą┐čĆąŠčēąĄąĮąĮčāčÄ ą┤ąĖą░ą│čĆą░ą╝ą╝čā ą│ąĄąĮąĄčĆą░č鹊čĆą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąōąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ č湥čĆąĄąĘ ąĮąŠąČą║čā IO ą┐ąŠčĆčéą░ PA.08 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F302, ą║ąŠč鹊čĆą░čÅ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ 8 ą║ąŠąĮąĮąĄą║č鹊čĆą░ CN9 ą┐ą╗ą░čéčŗ Nucleo.
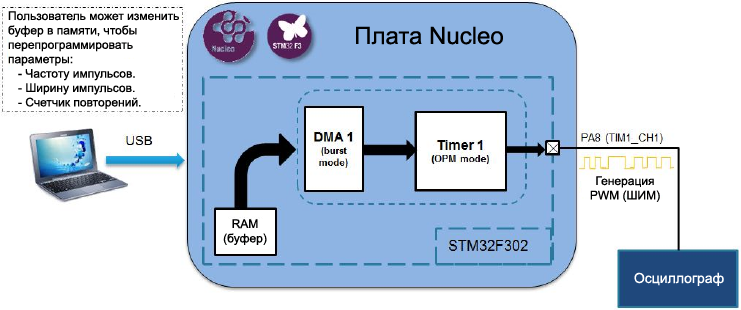
ąĀąĖčü. 29. ąĪčģąĄą╝ą░ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ DMA-burst.
ąōąĄąĮąĄčĆą░č鹊čĆ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ, ąŠą┐ąĖčüą░ąĮąĮčŗą╣ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 30. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĮąŠ ą╗ąĄą│ą║ąŠ ą┐ąĄčĆąĄąĮą░čüčéčĆąŠąĖčéčī ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┤čĆčāą│ąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓, ąĮąŠ ą▓ čåąĄą╗čÅčģ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓čŗą▓ąŠą┤ čüąĖą│ąĮą░ą╗ą░ ąĮą░ čĆąĖčü. 4.

ąĀąĖčü. 30. ąōąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ čåąĄą╗ąĄą▓ąŠą╣ čüąĖą│ąĮą░ą╗.
ą”ąĄą╗ąĄą▓ą░čÅ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ čĆąĖčüčāąĮą║ą░ 30 čüąŠčüčéą░ą▓ą╗ąĄąĮą░ ąĖąĘ čéčĆąĄčģ ą┐ąŠčĆčåąĖą╣:
ŌĆó ą¤ąĄčĆą▓ą░čÅ ą┐ąŠčĆčåąĖčÅ čüąŠčüčéą░ą▓ą╗ąĄąĮą░ ąĖąĘ ą┤ą▓čāčģ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąĖą╝ą┐čāą╗čīčüąŠą▓, čā ą║ąŠč鹊čĆčŗčģ ąĘą░ą┤ą░ąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ: t1_on ąĖ t1_off.
ŌĆó ąÆč鹊čĆą░čÅ ą┐ąŠčĆčåąĖčÅ ą┐ąŠčüčéčĆąŠąĄąĮą░ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ čü ą┤čĆčāą│ąĖą╝ąĖ ą▓čĆąĄą╝ąĄąĮą░ą╝ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ: t2_on ąĖ t2_off.
ŌĆó ąóčĆąĄčéčīčÅ ą┐ąŠčĆčåąĖčÅ ą┐ąŠčüčéčĆąŠąĄąĮą░ ąĖąĘ čéčĆąĄčģ ąĖą╝ą┐čāą╗čīčüąŠą▓, ą│ą┤ąĄ ąĘą░ą┤ą░ąĮ čéčĆąĄčéąĖą╣ ą▓ą░čĆąĖą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ: t3_on ąĖ t3_off.
ą¦č鹊ą▒čŗ čéą░ą╣ą╝ąĄčĆ ą▓čŗą▓ąŠą┤ąĖą╗ čŹč鹊čé čüąĖą│ąĮą░ą╗, ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ (repetition counter). ąÆ čéą░ą╣ą╝ąĄčĆąĄ ąĄčüčéčī čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ TIMx_RCR ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ čéą░ą╣ą╝ąĄčĆ TIM1, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ ąĮąĄą╝ ąĄčüčéčī 4 ą║ą░ąĮą░ą╗ą░, ą░ čéą░ą║ąČąĄ čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣.
ąÜą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ PWM čü ą┐ąŠčüč鹊čÅąĮąĮčŗą╝ąĖ, ąĘą░ą┤ą░ąĮąĮčŗą╝ąĖ ąĘą░čĆą░ąĮąĄąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ čćą░čüč鹊čéčŗ ąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ. ą¤ą░čĆą░ą╝ąĄčéčĆ čćą░čüč鹊čéčŗ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ ą░ą▓č鹊ąĘą░ą│čĆčāąĘą║ąĖ TIMx_ARR. ąÆ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ ą┐ą░čĆą░ą╝ąĄčéčĆ čüą║ą▓ą░ąČąĮąŠčüčéąĖ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ (TIM1_CCR1). ą¦č鹊ą▒čŗ ąĘą░čüčéą░ą▓ąĖčéčī ą║ą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ ą▓čŗą▓ąŠą┤ąĖčéčī ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čāčÄ č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░ (čüą╝. čĆąĖčü. 4), čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹčéąĖčģ ą┤ą▓čāčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠą╗ąČąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅčéčīčüčÅ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ ą║ą░ąČą┤ąŠą│ąŠ čåąĖą║ą╗ą░ PWM.
ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, čéčĆąĄą▒čāąĄčéčüčÅ ąŠą▒ąĮąŠą▓ą╗čÅčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹčéąĖčģ ą┤ą▓čāčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čüąĖąĮčģčĆąŠąĮąĮąŠ čü ą║ą░ąČą┤čŗą╝ čüąŠą▒čŗčéąĖąĄą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (update event) čéą░ą╣ą╝ąĄčĆą░. ąśąĮčéčāąĖčéąĖą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą┤ąŠą▒ąĖčéčīčüčÅ čŹč鹊ą│ąŠ - ąĮą░ą┐ąĖčüą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā, ą║ąŠč鹊čĆą░čÅ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹčéąĖčģ ą┤ą▓čāčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé "update event". ą¤ąŠąĮčÅčéąĮąŠ, čćč鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čćčĆąĄąĘą╝ąĄčĆąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĄ ąĮą░ CPU, ąĖ ą┤ą░ąČąĄ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą║ą░č湥čüčéą▓ąĄąĮąĮąŠ ą▓čŗą▓ąŠą┤ąĖą╝ąŠą╣ č乊čĆą╝ąĄ čüąĖą│ąĮą░ą╗ą░. ąĀąĄčłąĖčéčī čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā ą║ą░ą║ čĆą░ąĘ ą┐ąŠą╝ąŠą│ą░ąĄčé čäčāąĮą║čåąĖčÅ DMA, ą║ąŠč鹊čĆą░čÅ čāčüčéčĆą░ąĮčÅąĄčé ąĮą░ą│čĆčāąĘą║čā CPU ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ čüčéčĆąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ č乊čĆą╝čŗ.
ą¦č鹊ą▒čŗ ąŠą▒ąĮąŠą▓ąĖčéčī čĆąĄą│ąĖčüčéčĆčŗ čéą░ą╣ą╝ąĄčĆą░ TIMx_ARR ąĖ TIMx_CCR1 ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čüčĆą░ąĘčā ąĘą░ ąŠą┤ąĮąĖą╝ čüąŠą▒čŗčéąĖąĄą╝ čéą░ą╣ą╝ąĄčĆą░ "update event", ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ąŠą┤ąĮąŠą╝čā ą║ą░ąĮą░ą╗čā ąĖą╗ąĖ ą┐ąŠč鹊ą║čā DMA. ąÜą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ DMA-burst čéą░ą╣ą╝ąĄčĆą░ ąŠą┐ąĖčüą░ąĮąŠ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čüąĄą║čåąĖčÅčģ čŹč鹊ą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░.
ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą│ąĄąĮąĄčĆą░čåąĖčÄ ąĮą░ ą║ą░ąĮą░ą╗ąĄ čéą░ą╣ą╝ąĄčĆą░ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĖąĘ-ąĘą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čéą░ą╣ą╝ąĄčĆą░ STM32.
ą¦č鹊ą▒čŗ ąĘą░čüčéą░ą▓ąĖčéčī ą║ą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ ą▓čŗą▓ąŠą┤ąĖčéčī ą┐ąŠą▓č鹊čĆčÅčÄčēąĖąĄčüčÅ ąĖą╝ą┐čāą╗čīčüčŗ čü ąŠą┤ąĮąĖą╝ąĖ ąĖ č鹥ą╝ąĖ ąČąĄ ą▓čĆąĄą╝ąĄąĮą░ą╝ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ t_on ąĖ t_off, ąĖ ą▒ąĄąĘ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĖ čŹč鹊ą╝ "update event" ąĮą░ ą║ą░ąČą┤ąŠą╝ čåąĖą║ą╗ąĄ PWM, ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ (repetition counter).
ą¦č鹊ą▒čŗ ą▓čŗą▓ąĄčüčéąĖ č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░, ą┐ąŠą║ą░ąĘą░ąĮąĮčāčÄ ąĮą░ čĆąĖčü. 29, č湥čĆąĄąĘ ą║ą░ąĮą░ą╗ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮčŗ 3 čĆąĄą│ąĖčüčéčĆą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó TIM1_ARR: čüąŠą┤ąĄčƹȹĖčé čüčāą╝ą╝čā ą┐ąĄčĆąĖąŠą┤ąŠą▓ t_on ąĖ t_off ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░.
ŌĆó TM1_RCR: čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ č乊čĆą╝ąĖčĆčāąĄą╝čŗčģ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąŠą┤ąĮąŠą╣ ąĖąĘ ą┐ąŠčĆčåąĖą╣ čüąĖą│ąĮą░ą╗ą░ ą╝ąĖąĮčāčü 1 (ąĮą░ą┐čĆąĖą╝ąĄčĆ, TIM1_RCR = Number_of_pulses_per_portion ŌĆō 1).
ŌĆó TIM1_CCR1: čüąŠą┤ąĄčƹȹĖčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĖąŠą┤ą░ t_on ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĖąĘ čéčĆąĄčģ ą┐ąŠčĆčåąĖą╣ čüąĖą│ąĮą░ą╗ą░ čĆąĖčü. 29. ąöą╗čÅ ą┐ąĄčĆą▓ąŠą╣ ą┐ąŠčĆčåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüą╗ąĄą┤čāčÄčēą░čÅ:
ŌĆó TIM1_ARR = t1_on + t1_off, TIM1_RCR = 1 (ą┤ą▓ą░ ą┐ąŠą▓č鹊čĆą░), TIM1_CCR1= t1_on;
ąöą╗čÅ ą▓č鹊čĆąŠą╣ ą┐ąŠčĆčåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüą╗ąĄą┤čāčÄčēą░čÅ:
ŌĆó TIM1_ARR = t2_on + t2_off, TIM1_RCR = 0 (ą▒ąĄąĘ ą┐ąŠą▓č鹊čĆąŠą▓), TIM1_CCR1= t2_on;
ąöą╗čÅ čéčĆąĄčéčīąĄą╣ ą┐ąŠčĆčåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüą╗ąĄą┤čāčÄčēą░čÅ:
ŌĆó TIM1_ARR = t3_on + t3_off , TIM1_RCR = 2 (ą┤ą▓ą░ ą┐ąŠą▓č鹊čĆą░), TIM1_CCR1= t3_on;
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒čāč乥čĆą░ ą┐ą░ą╝čÅčéąĖ. ą¤ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓čŗčłąĄ ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ TIM1_ARR, TIM1_RCR ąĖ TIM1_CCR1 čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ čéą░ą▒ą╗ąĖčåčā, čģčĆą░ąĮčÅčēčāčÄčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 31.
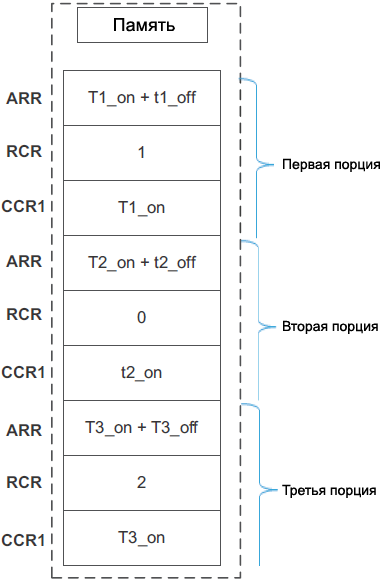
ąĀąĖčü. 31. ą©ą░ą▒ą╗ąŠąĮčŗ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ ą┐ą░ą╝čÅčéąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠčĆčÅą┤ąŠą║ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ ą▓ čéą░ą▒ą╗ąĖčåąĄ čéą░ą║ąŠą╣ ąČąĄ, ą║ą░ą║ čā čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ ąĮą░ ą║ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą¤čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī TIM1_ARR, TIM1_RCR ąĖ ąĘą░č鹥ą╝ TIM1_CCR1.
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĮą░ čÅąĘčŗą║ąĄ C ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĮąŠą╣ čéą░ą▒ą╗ąĖčåčŗ ą┐ąŠą║ą░ąĘą░ąĮ ąĮąĖąČąĄ ą▓ ą▓ąĖą┤ąĄ ą╝ą░čüčüąĖą▓ą░ 32-ą▒ąĖčéąĮčŗčģ ą║ąŠąĮčüčéą░ąĮčé aSRC_Buffer. ąÜą╗čÄč湥ą▓ąŠąĄ čüą╗ąŠą▓ąŠ const ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čéą░ą▒ą╗ąĖčåčŗ ąĮąĄ ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāąĄčéčüčÅ ąĮą░ ą╗ąĄčéčā ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠą│ą┤ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąĖą│ąĮą░ą╗.
uint32_t const aSRC_Buffer[9] =
{
t1_on+t1_off,
1,
t1_on,
t2_on+t2_off,
0,
t2_on,
t3_on+t3_off,
2,
t3_on
};
ąŁč鹊čé ą╝ą░čüčüąĖą▓ čģčĆą░ąĮąĖčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ FLASH ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ą┐ąŠčüč鹊čÅąĮąĮą░čÅ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝). ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░ run-time (ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ), č鹊 ąĮąĄ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą╗čÄč湥ą▓ąŠąĄ čüą╗ąŠą▓ąŠ const. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ą░čüčüąĖą▓ čü čéą░ą▒ą╗ąĖčåąĄą╣ ą▒čāą┤ąĄčé čĆą░ąĘą╝ąĄčēąĄąĮ ą▓ ą┐ą░ą╝čÅčéąĖ SRAM.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░. ą¦č鹊ą▒čŗ ą▓čŗą▓ąĄčüčéąĖ čüąĖą│ąĮą░ą╗ čéčĆąĄą▒čāąĄą╝ąŠą╣ č乊čĆą╝čŗ, čäčāąĮą║čåąĖčÅ DMA-burst čéą░ą╣ą╝ąĄčĆą░ TIM1 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó ą¤ąŠčüą║ąŠą╗čīą║čā ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ 3 čĆąĄą│ąĖčüčéčĆą░ čéą░ą╣ą╝ąĄčĆą░, č鹊 ą┤ą╗ąĖąĮą░ ą┐ą░ą║ąĄčéą░ DMA čéčĆą░ąĮąĘą░ą║čåąĖąĖ (burst transfer length) čĆą░ą▓ąĮčÅąĄčéčüčÅ 3. ą¤ąŠą╗ąĄ ą▒ąĖčé DBL[4:0] ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIM1_DCR ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 2. ąÜą░ąČą┤ąŠąĄ čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (update event) ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ 3 čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ, ąĖ ą┤ą╗čÅ čéčĆąĄčģ ą┐ąŠčĆčåąĖą╣ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé 3 čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ.
ŌĆó ąĪčĆąĄą┤ąĖ ąŠą▒ąĮąŠą▓ą╗čÅąĄą╝čŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ TIM1_ARR ą▒čāą┤ąĄčé ą┐ąĄčĆą▓čŗą╝ ąĮą░ ą║ą░čĆč鹥 čĆąĄą│ąĖčüčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ TIM1, ą┐ąŠčŹč鹊ą╝čā ąŠąĮ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą▒ą░ąĘąŠą▓čŗą╝ ą┤ą╗čÅ DMA čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąóąŠą│ą┤ą░ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ DBA[4:0] ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ čéą░ą║, čćč鹊ą▒čŗ ąŠąĮąŠ čāą║ą░ąĘčŗą▓ą░ą╗ąŠ ąĮą░ čĆąĄą│ąĖčüčéčĆ TIM1_ARR. (ą▓ ą┐ąŠą╗ąĄ DBA[4:0] = ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 11. ąŁč鹊 čćąĖčüą╗ąŠ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┤ąĄą╗ąĄąĮąĖąĄą╝ ąĮą░ 4 čüą╝ąĄčēąĄąĮąĖčÅ ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆą░ TIM1_ARR. ąŁč鹊 čüą╝ąĄčēąĄąĮąĖąĄ čĆą░ą▓ąĮąŠ 44, čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓ ą┐ąŠą╗ąĄ DBA[4:0] ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ 44 / 4 = 11).
ąĀąĖčü. 28 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▒ą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝čā ąŠą┐ąĖčüą░ąĮąĮąŠą╣ ą▓čŗčłąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ, čćč鹊ą▒čŗ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ TIM1 čĆą░ą▒ąŠčéą░ą╗ ąĮą░ čćą░čüč鹊č鹥 32 ą£ąōčå, ą┤ąĄą╗ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ:
ŌĆó ąÆčģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ TIM1 (TIM1CLK) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ čéą░ą║čéčŗ APB2 (PCLK2):
TIM1CLK = PCLK2, ąĖ PCLK2 = HCLK => TIM1CLK = HCLK = SystemCoreClock.
ŌĆó ą¤čĆąĄčüą║ą░ą╗ąĄčĆ TIM1 ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
Prescaler = (TIM1CLK / čćą░čüč鹊čéą░ čüč湥čéčćąĖą║ą░ TIM1) - 1
Prescaler = (SystemCoreClock / 32 ą£ąōčå) ŌĆō 1
ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ čćą░čüč鹊čé ąĖ čüą║ą▓ą░ąČąĮąŠčüč鹥ą╣. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čłą░ą▒ą╗ąŠąĮ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▒čāą┤ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╣:
uint32_t aSRC_Buffer[9] = {4000, 1, 800, 10000, 0, 8500, 4000, 2, 200};
ą¤ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅčģ. ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ čćą░čüč鹊čéčŗ TIM1 (F1,F2):
TIM1counterclock 32 ą£ąōčå
TIM1Frequency(F1) = ------------------ = ---------- = 8.0 ą║ąōčå
TIMARR 4000
TIM1counterclock 32 ą£ąōčå
TIM1Frequency(F2) = ------------------ = ---------- = 3.2 ą║ąōčå
TIMARR 10000
ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą║ą░ąĮą░ą╗ą░ 1 (D1, D2, D3):
TIM1CCR1 800
TIM1dutycycle(D1) = ---------- x 100 = ------ x 100 = 20%
TIMARR 4000
TIM1CCR1 8500
TIM1dutycycle(D2) = ---------- x 100 = ------ x 100 = 85%
TIMARR 10000
TIM1CCR1 200
TIM1dutycycle(D3) = ---------- x 100 = ------ x 100 = 50%
TIMARR 4000
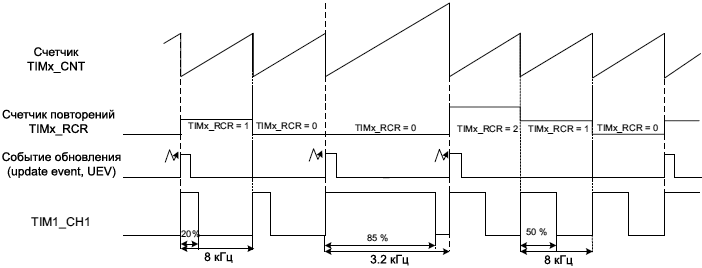
ąĀąĖčü. 33. ąōąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ ąĮą░ ą║ą░ąĮą░ą╗ąĄ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1.
[Firmware]
ą¦č鹊ą▒čŗ ąĘą░čĆą░ą▒ąŠčéą░ą╗ą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ, ąŠą┐ąĖčüą░ąĮąĮą░čÅ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čüąĄą║čåąĖčÅčģ, ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
ŌĆó ąØą░čüčéčĆąŠą╣ą║ą░ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (System clock).
ŌĆō PLL čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ 64 ą£ąōčå.
ŌĆō HSI ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (ąĮąĄ ąĮčāąČąĮąŠ ąĘą░ą┐ą░ąĖą▓ą░čéčī HSE ąĮą░ ą┐ą╗ą░č鹥 Nucleo).
ŌĆō AHB div = 1 / APB1 div = 2 / APB2 div = 1.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ DMA1 čü čéą░ą╣ą╝ąĄčĆąŠą╝ TIM1.
ŌĆó ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ DMA:
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║č鹊ą▓ DMA1:
RCC->AHBENR |= RCC_AHBENR_DMA1EN;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ DMA1 Channel5.
// ąĪą▒čĆąŠčü čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ DMA1 Channel5:
DMA1_Channel5->CCR = 0;
// ąæąĖčéčŗ CHSEL čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü DMA Channel 5.
// ąæąĖčéčŗ DIR čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąŠčé ą┐ą░ą╝čÅčéąĖ
// ą▓ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (ąĘą┤ąĄčüčī čŹč鹊 čéą░ą╣ą╝ąĄčĆ).
// ąæąĖčé PINC čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ DMA Peripheral Increment Disable.
// ąæąĖčé MINC čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ DMA Memory Increment Enable.
// ąæąĖčéčŗ PSIZE čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┤ą╗čÅ Peripheral DataSize = Word.
// ąæąĖčéčŗ MSIZE čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┤ą╗čÅ Memory DataSize = Word.
// ąæąĖčé CIRC čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ čĆąĄąČąĖą╝ą░.
// ąæąĖčéčŗ PL čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┤ą╗čÅ ąŠč湥ąĮčī ą▓čŗčüąŠą║ąŠą│ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░.
// ąæąĖčéčŗ MBURST čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┤ą╗čÅ ąŠą┤ąĖąĮąŠčćąĮąŠą╣ burst-ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą╝čÅčéąĖ.
// ąæąĖčéčŗ PBURST čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┤ą╗čÅ ąŠą┤ąĖąĮąŠčćąĮąŠą╣ burst-ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąĄčĆąĖč乥čĆąĖąĖ.
DMA1_Channel5->CCR |= DMA_MEMORY_TO_PERIPH |
DMA_PINC_DISABLE | DMA_MINC_ENABLE |
DMA_PDATAALIGN_WORD | DMA_MDATAALIGN_WORD |
DMA_CIRCULAR | DMA_PRIORITY_HIGH;
// ąŚą░ą┐ąĖčüčī ą▓ DMA1 Channel5 ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░:
DMA1_Channel5->CNDTR = 9;
// ąŚą░ą┐ąĖčüčī ą▓ DMA1 Channel5 ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ:
DMA1_Channel5->CPAR = (uint32_t)TIM1_DMAR_ADDRESS;
// ąŚą░ą┐ąĖčüčī ą▓ DMA1 Channel5 čĆąĄą│ąĖčüčéčĆ ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ. ąŚą┤ąĄčüčī
// čŹč鹊 ą░ą┤čĆąĄčü ą▒čāč乥čĆą░ aSRC_Buffer:
DMA1_Channel5->CMAR = (uint32_t)aSRC_Buffer;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ DMA1 Channel5:
DMA1_Channel5->CCR |= (uint32_t)DMA_CCR_EN;
ŌĆó ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░ TIM1:
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░:
Tim1Prescaler = (uint16_t) (SystemCoreClock / 32000000) - 1;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░:
TIM1->ARR = 0xFFFF;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░:
TIM1->PSC = Tim1Prescaler;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čłąĖčĆąĖąĮčŗ ąĖą╝ą┐čāą╗čīčüą░:
TIM1->CCR1 = 0xFFF;
// ąÆčŗą▒ąŠčĆ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ 1. ąĪą▒čĆąŠčü ą┐ąŠą╗čÅ
// clockDivision:
TIM1->CR1 &= ~ TIM_CR1_CKD;
// ąÆčŗą▒ąŠčĆ DIV1 ą▓ ą║ą░č湥čüčéą▓ąĄ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓:
TIM1->CR1 |= TIM_CLOCKDIVISION_DIV1;
// ąĪą▒čĆąŠčü ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ čĆąĄąČąĖą╝ą░:
TIM1->CR1 &= ~( TIM_CR1_DIR | TIM_CR1_CMS);
// ąÆčŗą▒ąŠčĆ čüč湥čéą░ ą▓ą▓ąĄčĆčģ:
TIM1->CR1 |= TIM_COUNTERMODE_UP;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ PWM1. ąĪą▒čĆąŠčü ą▒ąĖčé Output Compare Mode:
TIM1->CCMR1 &= ~TIM_CCMR1_OC1M;
TIM1->CCMR1 &= ~TIM_CCMR1_CC1S;
// ąÆčŗą▒ąŠčĆ output compare mode 1:
TIM1->CCMR1 |= TIM_OCMODE_PWM1;/
/ ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ output compare 1 Preload:
TIM1->CCMR1 |= TIM_CCMR1_OC1PE;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą░ą▓č鹊ąĘą░ą│čĆčāąĘą║ąĖ Preload:
TIM1->CR1 |= TIM_CR1_ARPE;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ TIM1 DMA Update:
TIM1->DIER |= TIM_DMA_UPDATE;
// ąĪą▒čĆąŠčü ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣ DBA ąĖ DBL:
TIM1->DCR &= ~TIM_DCR_DBA;
TIM1->DCR &= ~TIM_DCR_DBL;
// ąÆčŗą▒ąŠčĆ ą▒ą░ąĘąŠą▓ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ DMA ąĖ ą┤ą╗ąĖąĮčŗ DMA burst:
TIM1->DCR = TIM_DMABase_ARR | TIM_DMABurstLength_3Transfers;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ UEV čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ UG ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ
// ą▒čāč乥čĆą░ ą▓ čĆąĄą│ąĖčüčéčĆčŗ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ:
TIM1->EGR |= TIM_EGR_UG;
// ą×ąČąĖą┤ą░ąĮąĖąĄ čüą▒čĆąŠčüą░ ą▒ąĖčéą░ UG:
while((TIM1->EGR & TIM_EGR_UG) == SET){}
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ UEV čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ UG ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗčģ
// ąĖąĘ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ ą▓ ą░ą║čéąĖą▓ąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ:
TIM1->EGR |= TIM_EGR_UG;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ TIM1:
TIM1->BDTR |= TIM_BDTR_MOE;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ CC1:
TIM1->CCER |= TIM_CCER_CC1E;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ TIM1:
TIM1->CR1 |= TIM_CR1_CEN;
ŌĆó GPIO:
ŌĆō ąÆčŗą▓ąŠą┤ PA8 ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ TIM1 (TIM1_ch1_output).
ŌĆō ąĀąĄąČąĖą╝ ą▓čŗčģąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ push pull (ą┤ą▓čāčģčéą░ą║čéąĮčŗą╣ ą▓čŗčģąŠą┤).
ŌĆō ą¤ąŠą┤čéčÅąČą║ą░: pull-up.
ŌĆō ąĪą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░: high.
ŌĆō ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ: GPIO_AF6_TIM1.
[ąōąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ N-ąĖą╝ą┐čāą╗čīčüąŠą▓ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░]
ą¤čĆąĖą╝ąĄčĆčŗ ą▓ čŹč鹊ą╣ ą│ą╗ą░ą▓ąĄ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ ąĮą░ 2 čćą░čüčéąĖ, ą▓ ą║ąŠč鹊čĆčŗčģ ąŠą┐ąĖčüą░ąĮčŗ 2 ą┐ąŠčģąŠąČąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą×ą▒ą░ ą┐čĆąĖą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čéą░ą╣ą╝ąĄčĆąŠą▓ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ N-ąĖą╝ą┐čāą╗čīčüąŠą▓, čü ąĮąĄą▒ąŠą╗čīčłąĖą╝ ąŠčéą╗ąĖčćąĖąĄą╝ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░:
ŌĆó ąÆ ą┐ąĄčĆą▓ąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ (čüą╝. ą▓čĆąĄąĘą║čā "ą¤čĆąĖą╝ąĄčĆ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ N-ąĖą╝ą┐čāą╗čīčüąŠą▓, čćą░čüčéčī 1"), čüąĖą│ąĮą░ą╗ ąĖąĘ N-ąĖą╝ą┐čāą╗čīčüąŠą▓ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąĖ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮąŠą╝ ą▓čŗčģąŠą┤ąĄ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1. ą¤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ ą│ąĄąĮąĄčĆą░čåąĖąĖ N-ąĖą╝ą┐čāą╗čīčüąŠą▓ ą║ą░ąĮą░ą╗ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1 ą▓čŗą▓ąŠą┤ąĖčé čüą▓ąŠąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą║ą░ąĮą░ą╗ą░ 1 ą╗ąŠą│. 0, ąĖ ąĮą░ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮąŠą╝ ą▓čŗčģąŠą┤ąĄ ą╗ąŠą│. 1.
ŌĆó ąÆąŠ ą▓č鹊čĆąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ (čüą╝. ą▓čĆąĄąĘą║čā "ą¤čĆąĖą╝ąĄčĆ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ N-ąĖą╝ą┐čāą╗čīčüąŠą▓, čćą░čüčéčī 2"), čüąĖą│ąĮą░ą╗ ąĖąĘ N-ąĖą╝ą┐čāą╗čīčüąŠą▓ čéą░ą║ąČąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąĖ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮąŠą╝ ą▓čŗčģąŠą┤ąĄ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1. ą¤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ ą│ąĄąĮąĄčĆą░čåąĖąĖ N-ąĖą╝ą┐čāą╗čīčüąŠą▓ ąŠą▒ą░ ą▓čŗčģąŠą┤ą░ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ ą╗ąŠą│. 0. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāč鹊 čäčāąĮą║čåąĖąĄą╣ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ, ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą▓ čéą░ą╣ą╝ąĄčĆčŗ STM32. ąŁč鹊 čäčāąĮą║čåąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüą░ąĮą░ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĄą╣ čćą░čüčéčī 2 ą┐čĆąĖą╝ąĄčĆąŠą▓.
ą×ą▒ąĘąŠčĆ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░. ąØąĄą║ąŠč鹊čĆčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ STM32 čüą▓čÅąĘą░ąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĄą╣ (chaining). ąóą░ą╣ą╝ąĄčĆčŗ STM32, ą│ą┤ąĄ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆąŠą▓, ąĖą╝ąĄčÄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▓čŗą▓ąŠą┤ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čü ąĖą╝ąĄąĮąĄą╝ TRGO (ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ "Trigger Out"). ąóą░ą╣ą╝ąĄčĆčŗ čéą░ą║ąČąĄ ąĖą╝ąĄčÄčé 4 ą▓čģąŠą┤ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ ITRx, ą│ą┤ąĄ x čćąĖčüą╗ąŠ ąŠčé 1 ą┤ąŠ 4), ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ ą║ ą▓čŗčģąŠą┤ą░ą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32. ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32 ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą╝ą░čéčĆąĖčåčā ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆąŠą▓.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 č鹊ą╗čīą║ąŠ č鹥 čéą░ą╣ą╝ąĄčĆčŗ, ą▓ ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą▒ą╗ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čéą░ą╣ą╝ąĄčĆąŠą▓ (č鹊ą╗čīą║ąŠ čü ąĮąĄą╝ąĮąŠą│ąĖą╝ąĖ ąĖčüą║ą╗čÄč湥ąĮąĖčÅą╝ąĖ). ąØą░ą┐čĆąĖą╝ąĄčĆ, čéą░ą╣ą╝ąĄčĆ TIM2 čüąŠą┤ąĄčƹȹĖčé ą▒ą╗ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave, ąĖ ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮ čü ą┤čĆčāą│ąĖą╝ąĖ čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ STM32.
TIM2 ą╝ąŠąČąĄčé ą▓čŗąĘčŗą▓ą░čéčī čüąŠą▒čŗčéąĖčÅ čéčĆąĖą│ą│ąĄčĆą░ ą▓ąĮčāčéčĆąĖ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓ č湥čĆąĄąĘ ą▓čŗčģąŠą┤ čüą▓ąŠąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ TRGO. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čéą░ą╣ą╝ąĄčĆ TIM2 ą┤ąĄą╣čüčéą▓čāąĄčé ą║ą░ą║ master-čéą░ą╣ą╝ąĄčĆ. ąóą░ą╣ą╝ąĄčĆ TIM2 čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ąŠčé ą▓čŗčģąŠą┤ąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓; ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ TIM2 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ slave-čéą░ą╣ą╝ąĄčĆ. ąóą░ą╣ą╝ąĄčĆ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖ ą║ą░ą║ slave-čéą░ą╣ą╝ąĄčĆ, ąĖ ą║ą░ą║ master-čéą░ą╣ą╝ąĄčĆ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą┤čĆčāą│ąĖą╝ čéą░ą╣ą╝ąĄčĆą░ą╝.
ąóą░ą╣ą╝ąĄčĆ TIM11 čŹč鹊 ą┐čĆąĖą╝ąĄčĆ čéą░ą╣ą╝ąĄčĆą░, čā ą║ąŠč鹊čĆąŠą│ąŠ ąĮąĄčé ą▒ą╗ąŠą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ master/slave. ąŻ ąĮąĄą│ąŠ ąĮąĄčé čäčāąĮą║čåąĖąĖ ą▓čŗą▓ąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ TRGO, ąĮąŠ TIM11 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ master-čéą░ą╣ą╝ąĄčĆ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓. ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ č湥čĆąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čŗčģąŠą┤ą░ ą║ą░ąĮą░ą╗ą░ TIM11 ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ ą▓čŗą▓ąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąÆčŗčģąŠą┤ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ TIM11 ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą▓čģąŠą┤ą░ą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ master-čéą░ą╣ą╝ąĄčĆą░. ąÜąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ master, ą║ąŠą│ą┤ą░ ąĄą│ąŠ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ TRGO ą╝ąŠąČąĄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ ą╗čÄą▒čŗą╝ ąĖąĘ čüąŠą▒čŗčéąĖą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗą╝ ąĮąĖąČąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ čüą┐ąĖčüąŠą║ ąĮąĄ ąĖčüč湥čĆą┐čŗą▓ą░čÄčēąĖą╣, ąĖ ą▓ ąĮąĄą╝ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ č鹊ą╗čīą║ąŠ ąĮą░ąĖą▒ąŠą╗ąĄąĄ ąŠą▒čēąĖąĄ čĆąĄąČąĖą╝čŗ. ąĪą┐ąĖčüąŠą║ master-čĆąĄąČąĖą╝ąŠą▓ ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ąŠčé ąŠą┤ąĮąŠą│ąŠ čüąĄą╝ąĄą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą║ ą┤čĆčāą│ąŠą╝čā:
ŌĆó Reset: ą▒ąĖčé UG čĆąĄą│ąĖčüčéčĆą░ EGR ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čŗčģąŠą┤ą░ čéčĆąĖą│ą│ąĄčĆą░ (TRGO).
ŌĆó Enable: čüąĖą│ąĮą░ą╗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ (TRGO). ąŁčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓, ąĖą╗ąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą║ąĮąŠą╝, ą▓ ą║ąŠč鹊čĆąŠą╝ čĆą░ąĘčĆąĄčłąĄąĮ slave-čéą░ą╣ą╝ąĄčĆ.
ŌĆó Update: čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▒čĆą░ąĮąŠ ą║ą░ą║ ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ (TRGO). ąØą░ą┐čĆąĖą╝ąĄčĆ, master-čéą░ą╣ą╝ąĄčĆ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┤ą╗čÅ slave-čéą░ą╣ą╝ąĄčĆą░.
ŌĆó Compare pulse: ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ ą┐ąŠčüčŗą╗ą░ąĄčé ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ CC1IF (ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąŠąĮ čāąČąĄ ą▓ ą╗ąŠą│. 1), ą║ąŠą│ą┤ą░ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░čģą▓ą░čé (capture) ąĖą╗ąĖ čüąŠą▒čŗčéąĖąĄ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ (compare match).
ŌĆó OC1Ref: čüąĖą│ąĮą░ą╗ OC1REF ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ (TRGO).
ŌĆó OC2Ref: čüąĖą│ąĮą░ą╗ OC2REF ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ (TRGO).
ŌĆó OC3Ref: čüąĖą│ąĮą░ą╗ OC3REF ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ (TRGO).
ŌĆó OC4Ref: čüąĖą│ąĮą░ą╗ OC4REF ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ (TRGO).
ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąĖą╗ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čŗčģąŠą┤ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą┐ąŠą╗ąĄ MMS (master mode selection) čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ TIMx_CR2.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ slave-čéą░ą╣ą╝ąĄčĆą░. ąÜą░ąČą┤čŗą╣ čéą░ą╣ą╝ąĄčĆ, ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĮčŗą╣ master/slave ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝, ąĖą╝ąĄąĄčé 4 ą▓čģąŠą┤ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą│ąŠč鹊ą▓čŗčģ ą║ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÄ ą║ ą▓čŗčģąŠą┤ą░ą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▓čģąŠą┤ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą░ą║čéąĖą▓ąĄąĮ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ TS (trigger selection) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░, ą║ą░ą║ąŠą╣ ą▓čģąŠą┤ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▒čāą┤ąĄčé ą░ą║čéąĖą▓ąĄąĮ.
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąŠą┤ąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī ąŠą┤ąĮąŠ čüąŠą▒čŗčéąĖąĄ čéą░ą╣ą╝ąĄčĆą░ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (update event, UEV) ąĖ čüą▒čĆąŠčüą░ čüč湥čéčćąĖą║ą░, ąĖą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ čüč湥čéčćąĖą║ą░. ąŁč鹊 ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┐ąŠą╗ąĄ ą▒ąĖčé SMS (slave mode selection) ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą▓čŗą▒ąŠčĆą░ slave-čĆąĄąČąĖą╝ą░ čéą░ą╣ą╝ąĄčĆą░ TIMx_SMCR.
ąöą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą▓čģąŠą┤ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ slave-čéą░ą╣ą╝ąĄčĆ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ master-čéą░ą╣ą╝ąĄčĆčā č湥čĆąĄąĘ ą▓čģąŠą┤ąĮąŠą╣ čéčĆąĖą│ą│ąĄčĆ. ąÜą░ąČą┤čŗą╣ čéčĆąĖą│ą│ąĄčĆ ITRx ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ ą║ ą┤čĆčāą│ąŠą╝čā čéą░ą╣ą╝ąĄčĆčā, ąĖ čŹč鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖčäąĖčćąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠą┤čāą║čéą░ STM32.
ążčāąĮą║čåąĖčÅ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ STM32. ążčāąĮą║čåąĖčÅ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü čäčāąĮą║čåąĖąĄą╣ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ (preload) ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░ ą▓ č湥čéą║ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čüąŠą▒čŗčéąĖčÅą╝ąĖ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüčéčāą┐ą░čÄčé ąĮą░ ąĮąĄą│ąŠ č湥čĆąĄąĘ ąŠą┤ąĖąĮ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĖčģ ą▓čģąŠą┤ąŠą▓ čéą░ą╣ą╝ąĄčĆą░. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ, ą║ ą║ąŠč鹊čĆąŠą╣ čŹč鹊 ąŠčéąĮąŠčüąĖčéčüčÅ, ą╝ąŠąČąĄčé ą▒čŗčéčī, ąĮą░ą┐čĆąĖą╝ąĄčĆ, čĆąĄąČąĖą╝ąŠą╝ ą▓čŗą▓ąŠą┤ą░ ą║ą░ąĮą░ą╗ą░, čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ/ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ ą║ą░ąĮą░ą╗ą░ ąĖą╗ąĖ ą┤čĆčāą│ąŠąĄ. ąÆčģąŠą┤čŗ ITRx čÅą▓ą╗čÅčÄčéčüčÅ ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓čģąŠą┤ąŠą▓, ąĖ ETR, TI1 ąĖą╗ąĖ TI2 čŹč鹊 ą┐čĆąĖą╝ąĄčĆčŗ ą▓ąĮąĄčłąĮąĖčģ ą▓čģąŠą┤ąŠą▓.
ąÜą░ą║ ą▒čŗą╗ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ ą▒ą░ąĘąŠą▓čŗčģ čĆąĄąČąĖą╝ąŠą▓ GP-čéą░ą╣ą╝ąĄčĆąŠą▓ (čüą╝. ąĮą░čćą░ą╗ąŠ čüčéą░čéčīąĖ), čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą▒ąĖčéčŗ OCxM, CCxE ąĖ CCxNE ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čäčāąĮą║čåąĖčÄ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ (preload). ąÜąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ čŹčéąĖą╝ąĖ ą┐ąŠą╗čÅą╝ąĖ, ą╗čÄą▒ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ąĮąĖą╝ ąĮą░ ąĘą░ą┐ąĖčüčī ąĮąĄ ą╝ąĄąĮčÅąĄčé čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮą░ą┤ č鹥ąĮąĄą▓čŗą╝ąĖ ą┐ąŠą╗čÅą╝ąĖ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ. ąÆ ą░ą║čéąĖą▓ąĮčŗąĄ ą┐ąŠą╗čÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čāą┐čĆą░ą▓ą╗čÅčÄčé čĆą░ą▒ąŠč鹊ą╣ ą▓čŗčģąŠą┤ą░ čéą░ą╣ą╝ąĄčĆą░, ąŠčüčéą░čÄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ąĖ.
ąÜą░ą║ č鹊ą╗čīą║ąŠ čüąŠą▒čŗčéąĖąĄ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ ą▒čŗą╗ąŠ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą▓ąĮčāčéčĆąĖ čéą░ą╣ą╝ąĄčĆą░, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ č鹥ąĮąĄą▓čŗčģ preload-ą┐ąŠą╗ąĄą╣ ą▒čāą┤čāčé ą┐ąĄčĆąĄąĮąĄčüąĄąĮčŗ ą▓ ą░ą║čéąĖą▓ąĮčŗąĄ ą┐ąŠą╗čÅ, ąĖ čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ čĆąĄąČąĖą╝ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ.
ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ CCUS control ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ TIMx_CR2, čüąŠą▒čŗčéąĖąĄ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ čüąĖą│ąĮą░ą╗ąĄ ą▓čģąŠą┤ą░ čéčĆąĖą│ą│ąĄčĆą░ (timer trigger input, TRGI). ąÆ čćą░čüčéąĮąŠčüčéąĖ, ąŠąĮąŠ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čéą░ą╣ą╝ąĄčĆą░ ITRx (ą▓čģąŠą┤čŗ ITRx čÅą▓ą╗čÅčÄčéčüčÅ čćą░čüčéčīčÄ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čüąĖą│ąĮą░ą╗ą░ TRGI).
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą┤ąĮąĖą╝ čéą░ą╣ą╝ąĄčĆąŠą╝, ą║ąŠą│ą┤ą░ čüčĆą░ą▒ąŠčéą░ą╗ąŠ čüąŠą▒čŗčéąĖąĄ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ ąĮą░ ą┤čĆčāą│ąŠą╝ čéą░ą╣ą╝ąĄčĆąĄ, č湥čĆąĄąĘ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ ą╝ąĄąČą┤čā čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ COMG ą▓ čĆąĄą│ąĖčüčéčĆąĄ čéą░ą╣ą╝ąĄčĆą░ TIMx_EGR.
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆąŠą▓ STM32 ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓ ą║ą░ąČą┤ąŠą╝ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠą╝ ą┐ąĄčĆąĖąŠą┤ąĄ.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ąĮą░ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ NUCLEO-F302R8, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čüč鹊ąĖčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ STM32F302x8. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ čŹč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ ą╗čÄą▒ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą╗ą░čéč乊čĆą╝čŗ STM32. ąØą░ ą┐ą╗ą░č鹥 Nucleo ą▓čüčéčĆąŠąĄąĮ čüą▓ąŠą╣ ąŠčéą╗ą░ą┤čćąĖą║ ST-Link/V2. ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā, ą┐čĆąŠčłąĖą▓ą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ąŠ FLASH-ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ ąĮčāąČąĄąĮ č鹊ą╗čīą║ąŠ ą║ą░ą▒ąĄą╗čī USB (č湥čĆąĄąĘ čŹč鹊čé ąČąĄ ą║ą░ą▒ąĄą╗čī ą┐ąŠą┤ą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ą╗ą░čéčā Nucleo).
ąĀąĖčü. 34 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāą┐čĆąŠčēąĄąĮąĮčāčÄ ą┤ąĖą░ą│čĆą░ą╝ą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐čĆąĖą╝ąĄčĆą░, ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé N ąĖą╝ą┐čāą╗čīčüąŠą▓. ąōąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ č湥čĆąĄąĘ ąĮąŠąČą║čā PA.08 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F302, ą║ąŠč鹊čĆą░čÅ ą▓čŗą▓ąĄą┤ąĄąĮą░ ąĮą░ ą▓čŗą▓ąŠą┤ 8 ą║ąŠąĮąĮąĄą║č鹊čĆą░ CN9.

ąĀąĖčü. 34. ąĪčģąĄą╝ą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ N-ąĖą╝ą┐čāą╗čīčüąŠą▓.
ąóą░ą╣ą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó TIM2 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ master-čéčĆąĖą│ą│ąĄčĆą░ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ ąĮą░ TIM1.
ŌĆó TIM1 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ slave-ąĘą░ą┐čāčüą║ą░, ą▓ čĆąĄąČąĖą╝ąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ (one pulse mode, OPM).
ąĀąĖčü. 35 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čåąĄą╗ąĄą▓čāčÄ č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░, ą║ąŠč鹊čĆčāčÄ ą╝čŗ čģąŠčéąĖą╝ ą┐ąŠą╗čāčćąĖčéčī ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ: ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ą░čÅ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čÅčéąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ (N=5).
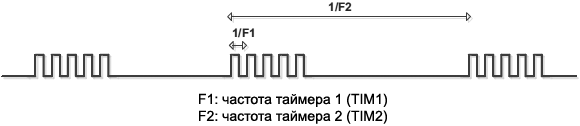
ąĀąĖčü. 35. ążąŠčĆą╝ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ążąŠčĆą╝ą░ čüąĖą│ąĮą░ą╗ą░, ąŠą┐ąĖčüą░ąĮąĮą░čÅ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ 6 ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓ ą║ą░ąČą┤ąŠą╝ čåąĖą║ą╗ąĄ PWM, ą┐ąŠą┤ąŠą▒ąĮąŠ čüąĖą│ąĮą░ą╗čā, ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╝čā ąĮą░ čĆąĖčü. 35. ąĪąĖą│ąĮą░ą╗ ą┐ąŠčüčéčĆąŠąĄąĮ ąĖąĘ ą┤ą▓čāčģ čćą░čüč鹊čé čü ą┤ą▓čāą╝čÅ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą┐ąĄčĆąĖąŠą┤ą░ą╝ąĖ: T2 čŹč鹊 ą┐ąĄčĆąĖąŠą┤ čéą░ą╣ą╝ąĄčĆą░ TIM2, ąĖ T1 čŹč鹊 ą┐ąĄčĆąĖąŠą┤ čéą░ą╣ą╝ąĄčĆą░ TIM1. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ą┐ąĄčĆąĄą┤ąĄą╗ą░ąĮ ą┐ąŠą┤ ą┤čĆčāą│ąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ, ąĮąŠ ą▓ čåąĄą╗čÅčģ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 37.
[ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ]
ąÜą░ą║ ą▓ąĖą┤ąĮąŠ ąĮą░ čĆąĖčü. 35, čåąĄą╗ąĄą▓ą░čÅ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ PWM ą┐ąŠčüčéčĆąŠąĄąĮą░ ą┤ą╗čÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ N-ąĖą╝ą┐čāą╗čīčüąŠą▓ (ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ 5 ąĖą╝ą┐čāą╗čīčüąŠą▓). ąśą╝ą┐čāą╗čīčüčŗ čüąŠčüč鹊čÅčé ąĖąĘ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ: t1_on ąĖ t1_off, t2_on ąĖ čüčāą╝ą╝čŗ, čĆą░ą▓ąĮąŠą╣ T1. ąÜą░ąČą┤čŗą╣ ą┐ąĄčĆąĖąŠą┤ T2, ąĖą╝ą┐čāą╗čīčüčŗ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ čüąĮąŠą▓ą░, ąĖ ąŠčüčéą░ą╗čīąĮą░čÅ čćą░čüčéčī čåąĖą║ą╗ą░ PWM čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąĮą░ čāčĆąŠą▓ąĮąĄ ą╗ąŠą│. 0.
ą¦č鹊ą▒čŗ ą▓čŗą▓ąŠą┤ąĖčéčī čŹčéąĖ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ ąĖą╝ą┐čāą╗čīčüčŗ, čüąŠąĄą┤ąĖąĮčÅčÄčéčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą┤ą▓ą░ čéą░ą╣ą╝ąĄčĆą░: TIM1 ąĖ TIM2. ąóą░ą╣ą╝ąĄčĆ TIM1 ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ PWM čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ TIM1_CCR1 čüą║ą▓ą░ąČąĮąŠčüčéčīčÄ T1_on, ąĖ ą┐ąĄčĆąĖąŠą┤ T1 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ TIM1_ARR. ąóą░ą╣ą╝ąĄčĆ TIM2 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖčćąĮąŠčüčéčī ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ą░čćą║ąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ čü ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ T2, čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ TIM2_ARR.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 36, čéą░ą╣ą╝ąĄčĆčŗ TIM2 ąĖ TIM1 čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą║ą░ą║ master (ą│ą╗ą░ą▓ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ) ąĖ slave (ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ) čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
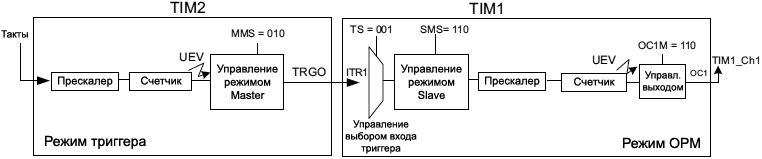
ąĀąĖčü. 36. ąĪčģąĄą╝ą░ ą│ąĄąĮąĄčĆą░čåąĖąĖ N-ąĖą╝ą┐čāą╗čīčüąŠą▓.
ąóą░ą╣ą╝ąĄčĆ TIM2 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ master-čéčĆąĖą│ą│ąĄčĆą░ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ čéčĆąĖą│ą│ąĄčĆą░ ąĮą░ čéą░ą╣ą╝ąĄčĆ TIM1. ąĪąĖą│ąĮą░ą╗ TRGO ąŠčé TIM2 ą┐čĆąĖčģąŠą┤ąĖčé ąĮą░ ą▓čģąŠą┤ ITR1 čéą░ą╣ą╝ąĄčĆą░ TIM1 ąĮą░ ą║ą░ąČą┤ąŠą╝ čüąŠą▒čŗčéąĖąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TIM2. ąÆčĆąĄą╝čÅ ą╝ąĄąČą┤čā čüąŠčüąĄą┤ąĮąĖą╝ąĖ čüąŠą▒čŗčéąĖčÅą╝ąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TIM2 čĆą░ą▓ąĮąŠ ąĖąĮč鹥čĆą▓ą░ą╗čā T2 ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
ąóą░ą╣ą╝ąĄčĆ TIM1 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣ (slave) ą▓ čĆąĄąČąĖą╝ąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąŠą┤ąĮąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ (OPM), čćč鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĖą╝ą┐čāą╗čīčü ą┐ąŠ čüąĖą│ąĮą░ą╗čā ąŠčé čéą░ą╣ą╝ąĄčĆą░ TIM2.
ąÜąŠą│ą┤ą░ ą┐ąŠčÅą▓ąĖčéčüčÅ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĖą│ą│ąĄčĆą░ ITR1, čüč湥čéčćąĖą║ TIM1 ąĮą░čćąĮąĄčé čüčćąĖčéą░čéčī ą▓ą▓ąĄčĆčģ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą┤ąŠčüčéąĖą│ąĮąĄčé čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ (TIM1_CCR1), čĆą░ą▓ąĮąŠą│ąŠ 1/F1, ąĘą░č鹥ą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (UEV).
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ąŠą▓č鹊čĆąŠą▓ ąĖą╝ą┐čāą╗čīčüą░ (ą┐čĆąĖ čüč湥č鹥 ą▓ą▓ąĄčĆčģ) ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ čüč湥čéčćąĖą║ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣ (repetition counter) čéą░ą╣ą╝ąĄčĆą░ TIM1, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą╝ąĖąĮčāčü 1 (TIM1_RCR = number_of_pulses_per_portion ŌĆō 1 = 5 - 1). UEV ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ TIM1_RCR + 1.
ąöąĖą░ą│čĆą░ą╝ą╝ą░ ąĮą░ čĆąĖčü. 37 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāčÄčéčüčÅ čéą░ą╣ą╝ąĄčĆčŗ čü ąŠą┐ąĖčüą░ąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąČąĄą╗ą░ąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗.
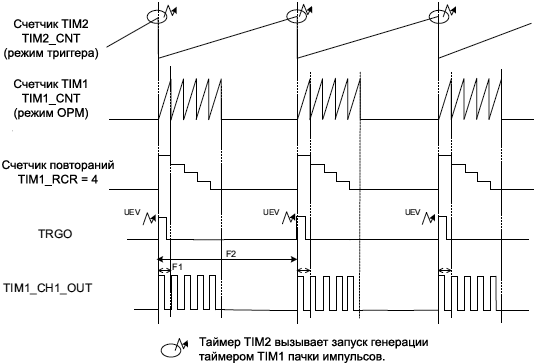
ąĀąĖčü. 37. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ N ąĖą╝ą┐čāą╗čīčüąŠą▓.
[Firmware]
ŌĆó ąĪąĖčüč鹥ą╝ąĮčŗąĄ čéą░ą║čéčŗ (System clock)
ŌĆō PLL ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ: 64 ą£ąōčå.
ŌĆō ąÆ ą║ą░č湥čüčéą▓ąĄ ąĘą░ą┤ą░čÄčēąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ HSI (ąĮąĄ ąĮčāąČąĮąŠ ąĘą░ą┐ą░ąĖą▓ą░čéčī HSE ąĮą░ ą┐ą╗ą░č鹥 Nucleo).
ŌĆō AHB div = 1 / APB1 div = 2 / APB2 div = 1
ŌĆó TIM1
ą£čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą║ą░ąĮą░ą╗ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1 ą▓ čĆąĄąČąĖą╝ąĄ output compare, čćč鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ PWM1.
ŌĆō ą¤čĆąĄčüą║ą░ą╗ąĄčĆ APB2 = 64 - 1 (čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ 1 ą£ąōčå).
ŌĆō ą¤ąĄčĆąĖąŠą┤ (ARR) = 50 ą╝ą║čü -> čćą░čüč鹊čéą░ F1 = 20 ą║ąōčå.
ŌĆō ąśą╝ą┐čāą╗čīčü (CCR1) = ą┐ąĄčĆąĖąŠą┤ / 2 (čüą║ą▓ą░ąČąĮąŠčüčéčī 50%).
ŌĆō RCR = 5-1 -> ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą▓č鹊čĆą░ 5 ąĖą╝ą┐čāą╗čīčüąŠą▓.
ŌĆō ąÆčŗą▒čĆą░ąĮ čĆąĄąČąĖą╝ OPM.
ŌĆō ąÆčŗą▒čĆą░ąĮ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ ąĘą░ą┐čāčüą║ą░ (slave mode trigger).
ŌĆō ąÆčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░: ITR1.
ŌĆō ąĀąĄąČąĖą╝ PWM: mode1.
ŌĆō ąĀąĄąČąĖą╝ čüč湥čéą░ ą▓ą▓ąĄčĆčģ.
ŌĆō ą¤čĆąĄą┤ąĘą░ą│čĆčāąĘą║ą░ Output Compare čĆą░ąĘčĆąĄčłąĄąĮą░.
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, čćč鹊ą▒čŗ
// čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ čüąŠčüčéą░ą▓ąĖą╗ą░ 1 ą£ąōčå:
Tim1Prescaler= (uint16_t) (SystemCoreClock / 1000000) - 1;
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░ PWM ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ 20 ą║ąōčå
// ąĖąĘ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ 1 ą£ąōčå:
Period = 1000000 / 20000;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ TIM1:
TIM1->PSC = Tim1Prescaler;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░:
TIM1->ARR = Period-1;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą┐ąŠą▓č鹊čĆąĄąĮąĖą╣:
TIM1->RCR = ((uint32_t) 5) - 1;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čłąĖčĆąĖąĮčŗ ąĖą╝ą┐čāą╗čīčüą░:
TIM1->CCR1 = Period / 2;
// ąÆčŗą▒ąŠčĆ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ Clock Division 1.
// ąĪą▒čĆąŠčü ą┐ąŠą╗čÅ ą▒ąĖčé ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓:
TIM1->CR1 &= ~ TIM_CR1_CKD;
// ąÆčŗą▒ąŠčĆ DIV1 ą▓ ą║ą░č湥čüčéą▓ąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ:
TIM1->CR1 |= TIM_CLOCKDIVISION_DIV1;
// ąÆčŗą▒ąŠčĆ čüč湥čéą░ ą▓ą▓ąĄčĆčģ ą┤ą╗čÅ TIM1. ąĪą▒čĆąŠčü ą┐ąŠą╗ąĄą╣ ą▓čŗą▒ąŠčĆą░ čĆąĄąČąĖą╝ą░:
TIM1->CR1 &= ~(TIM_CR1_DIR | TIM_CR1_CMS);
// ąÆčŗą▒ąŠčĆ čüč湥čéą░ ą▓ą▓ąĄčĆčģ:
TIM1->CR1 |= TIM_COUNTERMODE_UP;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ PWM1. ąĪą▒čĆąŠčü ą▒ąĖčé čĆąĄąČąĖą╝ą░ Output Compare:
TIM1->CCMR1 &= ~TIM_CCMR1_OC1M;
TIM1->CCMR1 &= ~TIM_CCMR1_CC1S;
// ąÆčŗą▒ąŠčĆ output compare mode 1:
TIM1->CCMR1 |= TIM_OCMODE_PWM1;
/****************** ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ OPM ********************/
// ąÆčŗą▒ąŠčĆ One Pulse Mode (OPM):
TIM1->CR1 |= TIM_CR1_OPM;
/********************************************************/
/********* ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ slave-čĆąĄąČąĖą╝ą░ ąĘą░ą┐čāčüą║ą░ ************/
// ąÆčŗą▒ąŠčĆ čüąĖą│ąĮą░ą╗ą░ TIM_TS_ITR1 ą▓ ą║ą░č湥čüčéą▓ąĄ čéčĆąĖą│ą│ąĄčĆą░ ą┤ą╗čÅ TIM1:
TIM1->SMCR &= ~TIM_SMCR_TS;
TIM1->SMCR |= TIM_TS_ITR1;
// ąÆčŗą▒ąŠčĆ Slave Mode:
TIM1->SMCR &= ~TIM_SMCR_SMS;
TIM1->SMCR |= TIM_SLAVEMODE_TRIGGER;
/********************************************************/
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ Output Compare:
TIM1->CCMR1 |= TIM_CCMR1_OC1PE;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ UG, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī UEV:
TIM1->EGR |= TIM_EGR_UG;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ TIM1:
TIM1->BDTR |= TIM_BDTR_MOE;
// ąÆčŗą▒ąŠčĆ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ąĮčāą╗čÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ.
// ąĪą▒čĆąŠčü čāčĆąŠą▓ąĮčÅ Output Polarity:
TIM1->CCER &= ~TIM_CCER_CC1P;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▓čŗčģąŠą┤ą░ ąĮą░ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ:
TIM1->CCER |= TIM_OCPOLARITY_LOW;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗčģąŠą┤ą░ CC1 ąĮą░ ą▓čŗčüąŠą║ąŠą╝ čāčĆąŠą▓ąĮąĄ:
TIM1->CCER |= TIM_CCER_CC1E;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ TIM1:
TIM1->CR1 |= TIM_CR1_CEN;
ŌĆó TIM2
ą£čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą║ą░ąĮą░ą╗ 1 čéą░ą╣ą╝ąĄčĆą░ TIM2 ą▓ čĆąĄąČąĖą╝ąĄ Output Compare ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ PWM1.
ŌĆō APB1 ą┐čĆąĄčüą║ą░ą╗ąĄčĆ = 64 -1 (ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ 1 ą£ąōčå).
ŌĆō ą¤ąĄčĆąĖąŠą┤ (ARR) = 20000 ą╝ą║čü -> čćą░čüč鹊čéą░ F2 = 50 ąōčå.
ŌĆō ąśą╝ą┐čāą╗čīčü (CCR1) = ą┐ąĄčĆąĖąŠą┤ / 2 (čüą║ą▓ą░ąČąĮąŠčüčéčī 50%).
ŌĆō ąÆčŗą▒čĆą░ąĮ čĆąĄąČąĖą╝ master: ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ TRGO.
ŌĆō ąĪč湥čé ą▓ą▓ąĄčĆčģ.
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī
// čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ 1 ą£ąōčå:
Tim2Prescaler= (uint16_t) ((SystemCoreClock ) / 1000000) - 1;
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąĄčĆąĖąŠą┤ą░ PWM ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ 50 ąōčå
// ąĖąĘ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ 1 ą£ąōčå:
Period = 1000000 / 50;
// ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░:
TIM2->ARR = Period-1;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░:
TIM2->PSC = Tim2Prescaler;
// ąÆčŗą▒ąŠčĆ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓ (Clock Divison) = 1.
// ąĪą▒čĆąŠčü ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓:
TIM2->CR1 &= ~ TIM_CR1_CKD;
// ąÆčŗą▒ąŠčĆ DIV1 ą▓ ą║ą░č湥čüčéą▓ąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓:
TIM2->CR1 |= TIM_CLOCKDIVISION_DIV1;
// ąÆčŗą▒ąŠčĆ čüč湥čéą░ ą▓ą▓ąĄčĆčģ. ąĪą▒čĆąŠčü ą┐ąŠą╗ąĄą╣ ą▓čŗą▒ąŠčĆą░ čĆąĄąČąĖą╝ą░ čéą░ą╣ą╝ąĄčĆą░:
TIM2->CR1 &= ~(TIM_CR1_DIR | TIM_CR1_CMS);
// ąĀąĄąČąĖą╝ čüč湥čéą░ ą▓ą▓ąĄčĆčģ:
TIM2->CR1 |= TIM_COUNTERMODE_UP;
/***** ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ Master ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čéčĆąĖą│ą│ąĄčĆą░ ****/
// ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ čéčĆąĖą│ą│ąĄčĆą░ TIM2 ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TIM1 Slave:
TIM1->CR2 &= ~ TIM_CR2_MMS;
TIM2->CR2 |= TIM_TRGO_UPDATE;
/*************************************************************/
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ TIM2:
TIM2->CR1 |= TIM_CR1_CEN;
ŌĆó GPIO
ŌĆō ąÆčŗą▓ąŠą┤ PA8: ą▓čŗčģąŠą┤ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ 1 (TIM1_ch1_output).
ŌĆō ąĀąĄąČąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą▓čāčģčéą░ą║čéąĮčŗą╣ (push pull).
ŌĆō ą¤ąŠą┤čéčÅąČą║ą░: pull-up.
ŌĆō ąĪą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓čŗčüąŠą║ą░čÅ.
ŌĆō ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ: GPIO_AF6_TIM1.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ ąĮą░ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ NUCLEO-F302R8, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čüč鹊ąĖčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ STM32F302x8. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ čŹč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ ą╗čÄą▒ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą╗ą░čéč乊čĆą╝čŗ STM32. ąØą░ ą┐ą╗ą░č鹥 Nucleo ą▓čüčéčĆąŠąĄąĮ čüą▓ąŠą╣ ąŠčéą╗ą░ą┤čćąĖą║ ST-Link/V2. ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā, ą┐čĆąŠčłąĖą▓ą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ąŠ FLASH-ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ ąĮčāąČąĄąĮ č鹊ą╗čīą║ąŠ ą║ą░ą▒ąĄą╗čī USB (č湥čĆąĄąĘ čŹč鹊čé ąČąĄ ą║ą░ą▒ąĄą╗čī ą┐ąŠą┤ą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ą╗ą░čéčā Nucleo).
ąĀąĖčü. 38 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāą┐čĆąŠčēąĄąĮąĮčāčÄ ą┤ąĖą░ą│čĆą░ą╝ą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐čĆąĖą╝ąĄčĆą░, ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé N ąĖą╝ą┐čāą╗čīčüąŠą▓. ąÜąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ą▓čŗą▓ąŠą┤čÅčéčüčÅ č湥čĆąĄąĘ ą┐ąŠčĆčéčŗ PA.08 ąĖ PA.07 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F302, ąŠč鹊ą▒čĆą░ąČąĄąĮąĮčŗąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ąĮą░ ą▓čŗą▓ąŠą┤ 8 ą║ąŠąĮąĮąĄą║č鹊čĆą░ CN9 ąĖ ą▓čŗą▓ąŠą┤ 26 ą║ąŠąĮąĮąĄą║č鹊čĆą░ CN10.
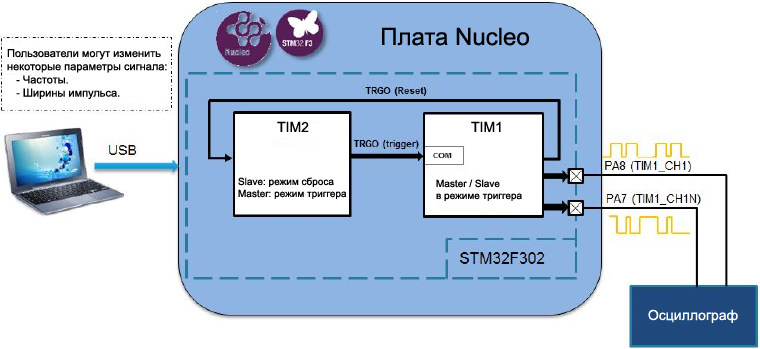
ąĀąĖčü. 38. ąĪčģąĄą╝ą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ N-ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗčģ ą▓čŗčģąŠą┤ą░čģ.
ąóą░ą╣ą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó TIM2 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ slave-reset ąĖ ą║ą░ą║ master-čéčĆąĖą│ą│ąĄčĆ.
ŌĆó TIM1 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ slave ąĖ master ą▓ čĆąĄąČąĖą╝ąĄ čéčĆąĖą│ą│ąĄčĆą░.
ąØą░ ą┤ą▓ą░ ą▓čŗčģąŠą┤ą░ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĖąĘ N ąĖą╝ą┐čāą╗čīčüąŠą▓, ąĖ čā čŹčéąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ čüą┤ąĄą╗ą░ąĮąŠ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ ą║ąŠąĮąĄčćąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąĀąĄąĘčāą╗čīčéą░čé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ąŠą▒ąĄąĮ ą▓čŗčģąŠą┤ąĮčŗą╝ čüąĖą│ąĮą░ą╗ą░ą╝, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 39. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄąĮą░čüčéčĆąŠąĖčéčī ąĮą░ ą┤čĆčāą│ąĖąĄ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓, ą┐čĆąŠčüč鹊 ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▓ čåąĄą╗čÅčģ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĖą╝ąĄąĮąĮąŠ č乊čĆą╝ą░ ą║ą░ą║ ąĮą░ čĆąĖčü. 39.
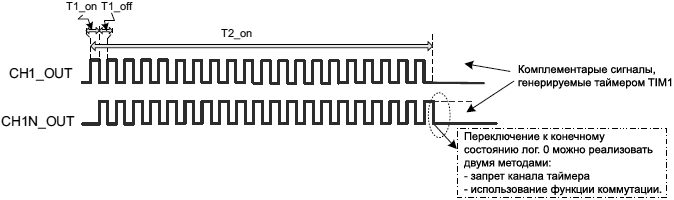
ąĀąĖčü. 39. ążąŠčĆą╝ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
[ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ]
ążąŠčĆą╝ą░ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 39, čüąŠčüč鹊ąĖčé ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ ąĖąĘ 20 ąĖą╝ą┐čāą╗čīčüąŠą▓ PWM. ąśą╝ą┐čāą╗čīčüčŗ čüąŠčüč鹊čÅčé ąĖąĘ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (on-time ąĖ off-time), t1_on ąĖ t1_off. T2_on čŹč鹊 ą░ą║čéąĖą▓ąĮąŠąĄ ą▓čĆąĄą╝čÅ čäčĆąĄą╣ą╝ą░ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓. ą×ą▒ą░ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗčģ čüąĖą│ąĮą░ą╗ą░ ąĘą░ą║ą░ąĮčćąĖą▓ą░čÄčéčüčÅ ą▓ ąŠą┤ąĮąŠą╝ ąĖ č鹊ą╝ ąČąĄ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0.
ą¦č鹊ą▒čŗ STM32 ą▓čŗą▓ąŠą┤ąĖą╗ čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ PWM, ąĮčāąČąĮąŠ čüąŠąĄą┤ąĖąĮąĖčéčī ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą┤ą▓ą░ čéą░ą╣ą╝ąĄčĆą░. ą×ą┤ąĖąĮ ąĖąĘ ąĮąĖčģ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ PWM, ąĖ ą┤čĆčāą│ąŠą╣ ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ąŠą║ąŠąĮčćą░ąĮąĖąĄą╝ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ą░čćą║ąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓.
ą¤ąĄčĆą▓čŗą╣ čéą░ą╣ą╝ąĄčĆ ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ąĮą░čćą░ą╗ąŠą╝ ąĖ ąŠą║ąŠąĮčćą░ąĮąĖąĄą╝ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖą╝ą┐čāą╗čīčüąŠą╝ ą┐čāč鹥ą╝ ą┐ąŠą┤čüč湥čéą░ T2_on ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą│ąĄąĮąĄčĆąĖčĆčāčÄčēąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ PWM. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą▒ą░ čéą░ą╣ą╝ąĄčĆą░ ąĮą░čćąĖąĮą░čÄčé čüčćąĖčéą░čéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čāč鹥ą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĮą░čćą░ą╗ą░ čüč湥čéą░.
ąśąĮčéčāąĖčéąĖą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čŹč鹊 - čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čéą░ą╣ą╝ąĄčĆ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▓ čĆąĄąČąĖą╝ąĄ master-čéčĆąĖą│ą│ąĄčĆą░, ąĖ ą┤čĆčāą│ąŠą╣ čéą░ą╣ą╝ąĄčĆ ą▓ čĆąĄąČąĖą╝ąĄ slave reset, ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčé čüč湥čéčćąĖą║ ą┐ąĄčĆą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čĆą░ąĘčĆąĄčłąĄąĮ. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ čéą░ą╣ą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ slave-čéčĆąĖą│ą│ąĄčĆą░, ąĖ ą┐ąĄčĆą▓čŗą╣ čéą░ą╣ą╝ąĄčĆ ą▓ čĆąĄąČąĖą╝ąĄ master-čéčĆąĖą│ą│ąĄčĆą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ ą▓čĆąĄą╝čÅ čüč湥čéą░ T2_on, č湥ą╝ ąŠčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą│ąĄąĮąĄčĆą░čåąĖčÅ PWM.
ąÜąŠą│ą┤ą░ T2_on ąĘą░ą▓ąĄčĆčłąĖčé čüč湥čé, ąĖ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čéčĆąĖą│ą│ąĄčĆ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ąĄčüčéčī ą┤ą▓ą░ čüą┐ąŠčüąŠą▒ą░ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą│ąĄąĮąĄčĆą░čåąĖčÄ čüąĖą│ąĮą░ą╗ąŠą▓ PWM ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR): ą╗ąĖą▒ąŠ ąĘą░ą┐čĆąĄčéąĖčéčī ąŠą▒ą░ ą▓čŗčģąŠą┤ą░ capture/compare, ąĖą╗ąĖ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą▓čŗčģąŠą┤čŗ ą▓ ąĮąĄą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄąČąĖą╝ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ ą▓ čéą░ą╣ą╝ąĄčĆąĄ TIM1 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ, ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ą▓čģąŠą┤čā TRGI ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ ą▒ąĖčé CCUS ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIM1_CR2. ąśčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ COMIE ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIM1_DIER. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čłą░ą│ą░ čüąŠą▒čŗčéąĖčÅ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ (COM) ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ąĘą░čĆą░ąĮąĄąĄ, ąĖ čŹčéą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčī ą║ ąĮąĄą░ą║čéąĖą▓ąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ OC1M[2:0] čĆąĄą│ąĖčüčéčĆą░ TIM1_CCMR1 ą▓ ąĘąĮą░č湥ąĮąĖąĄ 4.
ąÜąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ TIM2 ą▓čŗą┤ą░čüčé čüąĖą│ąĮą░ą╗ čéčĆąĖą│ą│ąĄčĆą░ ąĮą░ ą▓čģąŠą┤ąĄ TRGI čéą░ą╣ą╝ąĄčĆą░ TIM1, čüčĆą░ą▒ąŠčéą░ąĄčé čüąŠą▒čŗčéąĖąĄ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ (COM) ą┐čāč鹥ą╝ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čäčĆąŠąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ. ąŚą░č鹥ą╝ ą┐ąŠą╗ąĄ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ OC1M ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▓ č鹥ąĮąĄą▓čŗąĄ ą▒ąĖčéčŗ ąĮą░ čüąŠą▒čŗčéąĖąĖ COM. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą▓čŗčģąŠą┤čŗ TIM1 ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▒čāą┤čāčé ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮčŗ ą▓ ą╗ąŠą│. 0.
ą×ą▒ą░ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ čĆąĄąČąĖą╝ąĄ master/slave, ąĖ ą▓ čéą░ą╣ą╝ąĄčĆąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗąĄ ą▓čŗčģąŠą┤čŗ. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ čéą░ą╣ą╝ąĄčĆ TIM1 čģąŠčĆąŠčłąĖą╣ ą║ą░ąĮą┤ąĖą┤ą░čé ąĮą░ čĆąŠą╗čī ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą┐ąŠč鹊ą╝čā čćč鹊 čā ąĮąĄą│ąŠ ąĄčüčéčī ą║ą░ą║ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗąĄ ą▓čŗčģąŠą┤čŗ, čéą░ą║ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čüąŠą▒čŗčéąĖčÅ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ. ąśčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓čŗčģąŠą┤čŗ channel1 ąĖ channel1N ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1. ąÆ ą║ą░č湥čüčéą▓ąĄ ą┤čĆčāą│ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ TIM2.
ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą║ą░ąĮą░ą╗ čéą░ą╣ą╝ąĄčĆą░ ąŠčé ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĖąĘ-ąĘą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ąĮą░ą╗ą░ čéą░ą╣ą╝ąĄčĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ capture compare preload čéą░ą╣ą╝ąĄčĆą░ STM32.
ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąŠč鹥čĆąĖ čåąĖą║ą╗ąŠą▓ ą┐ąĄčĆąĄą┤ čéą░ą╣ą╝ąĄčĆąŠą╝ TIM1, čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠčüą╗ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ąĮą░ą╗ą░, ą┤ą╗čÅ č湥ą│ąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▒ąĖč鹊ą▓ąŠąĄ ą┐ąŠą╗ąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ (update generation, UG) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIM1_EGR. ąŁč鹊 čüą┤ąĄą╗ą░ąĄčé ą▒ąŠą╗ąĄąĄ č鹊čćąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ čéą░ą╣ą╝ąĄčĆąŠą▓.
ąöą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░, ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą│ąŠ ąĮą░ čĆąĖčü. 39, č湥čĆąĄąĘ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗąĄ ą▓čŗčģąŠą┤čŗ ą║ą░ąĮą░ą╗ą░ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1, ą┤ą▓ą░ čéą░ą╣ą╝ąĄčĆą░ TIM1 ąĖ TIM2 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąóą░ą╣ą╝ąĄčĆ TIM1, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ master trigger-reset mode / slave-trigger. TIM1 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ master trigger-reset, čćč鹊ą▒čŗ ą┐ąŠą┤ą░čéčī čüąĖą│ąĮą░ą╗ čéčĆąĖą│ą│ąĄčĆą░ ąĮą░ čéą░ą╣ą╝ąĄčĆ TIM2 ąĖ čüą▒čĆąŠčüąĖčéčī ąĄą│ąŠ čüč湥čéčćąĖą║. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąŠą╝ąĄąĮčéą░ ąĮą░čćą░ą╗ą░ čüč湥čéą░ ąŠą▒ąŠąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓. TIM1 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čéą░ą║ąČąĄ ą▓ čĆąĄąČąĖą╝ąĄ slave-trigger, čćč鹊ą▒čŗ čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TIM2 ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ čüč湥čéą░ ą┐ąĄčĆąĖąŠą┤ą░ T2_on ą┐ąĄčĆąĄą▓ąŠą┤ąĖą╗ąŠ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ą▓ ą╗ąŠą│. 0.
ŌĆó TIM1_ARR: čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĖąŠą┤ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą┐ą░čćą║ąĖ, čĆą░ą▓ąĮčŗą╣ čüčāą╝ą╝ąĄ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ t1_on ąĖ t1_off.
ŌĆó TIM1_CCR1: čüąŠą┤ąĄčƹȹĖčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖąĮč鹥čĆą▓ą░ą╗ą░ t1_on ąĖą╝ą┐čāą╗čīčüą░.
ŌĆó TIM1 ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ master trigger-update / slave-trigger reset.
TIM2 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ master trigger mode, čćč鹊ą▒čŗ čüą▓ąŠąĖą╝ čüąŠą▒čŗčéąĖąĄą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ąŠ ąĖčüč鹥č湥ąĮąĖąĖ ą┐ąĄčĆąĖąŠą┤ą░ T2_on ą┐ąŠą┤ą░čéčī čüąĖą│ąĮą░ą╗ čéčĆąĖą│ą│ąĄčĆą░ ąĮą░ TIM1 č湥čĆąĄąĘ ą▓čŗčģąŠą┤ TRGO. TIM2 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čéą░ą║ąČąĄ ą▓ čĆąĄąČąĖą╝ąĄ slave-trigger reset, čćč鹊ą▒čŗ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮąĮčŗą╝ ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĖ TIM1.
ŌĆó TIM2_ARR: čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĖąŠą┤ ą┐ą░čćą║ąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ T2_on.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓. ąÆ čŹč鹊 ą┐čĆąĖą╝ąĄčĆąĄ čéą░ą╣ą╝ąĄčĆčŗ TIM1 ąĖ TIM2 ą▓ąĄą┤čāčé čüč湥čé ąĮą░ čćą░čüč鹊č鹥 1 ą£ąōčå.
ŌĆó ąÆčģąŠą┤ąĮčŗąĄ čéą░ą║čéčŗ TIM1 (TIM1CLK) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąŠčé čćą░čüč鹊čéčŗ APB2 (PCLK2):
TIM1CLK = PCLK2 ąĖ PCLK2 = HCLK => TIM1CLK = HCLK = SystemCoreClock = 64 ą£ąōčå.
ŌĆó ąÆčģąŠą┤ąĮčŗąĄ čéą░ą║čéčŗ TIM2 (TIM2CLK) čéą░ą║ąČąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąŠčé čćą░čüč鹊čéčŗ APB2 (PCLK2):
TIM2CLK = PCLK2, ąĖ PCLK2 = HCLK => TIM2CLK = HCLK = SystemCoreClock = 64 ą£ąōčå.
ŌĆó ą¤čĆąĄčüą║ą░ą╗ąĄčĆ TIM1. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ TIM1 čĆą░ą▓ąĮąŠą╣ 1 ą£ąōčå, ą▓ąĄą╗ąĖčćąĖąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ čéą░ą║:
Prescaler = (TIM1CLK / TIM1 counter clock) - 1
Prescaler = (SystemCoreClock /1 MHz) ŌĆō 1
ŌĆó ą¤čĆąĄčüą║ą░ą╗ąĄčĆ TIM2. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ TIM2 čĆą░ą▓ąĮąŠą╣ 1 ą£ąōčå, ą▓ąĄą╗ąĖčćąĖąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ čéą░ą║:
Prescaler = (TIM2CLK / TIM2 counter clock) - 1
Prescaler = (SystemCoreClock /1 MHz) ŌĆō 1
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čéą░ą╣ą╝ąĄčĆ TIM1 ą┤ąŠą╗ąČąĄąĮ ą▓čŗą▓ąĄčüčéąĖ 20 ąĖą╝ą┐čāą╗čīčüąŠą▓, ą║ą░ąČą┤čŗą╣ ąĖą╝ą┐čāą╗čīčü ąĖą╝ąĄąĄčé ą┐ąĄčĆąĖąŠą┤ (t1_on + t1_off) čĆą░ą▓ąĮčŗą╣ 500 ą╝ą║čü, ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī (t1_on) 50%. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čéą░ą╣ą╝ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ čéą░ą║:
ŌĆó ą¤ąĄčĆąĖąŠą┤ TIM1. TIM1_ARR = T1_on+T1_off = 500 ą╝ą║čü.
ŌĆó ąĪą║ą▓ą░ąČąĮąŠčüčéčī TIM1. TIM1_CCR1 = 250 ą╝ą║čü.
ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ ąĮą░ TIM2, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī č鹊čćąĮąŠ 20 ąĖą╝ą┐čāą╗čīčüąŠą▓:
ŌĆó ą¤ąĄčĆąĖąŠą┤ TIM2. TIM2_ARR = T2_ON = 500 x 20 = 10000 ą╝ą║čü.
ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ čĆąĖčü. 40 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐ąŠą╗čāčćąĖčéčī ąĮčāąČąĮčāčÄ č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░.
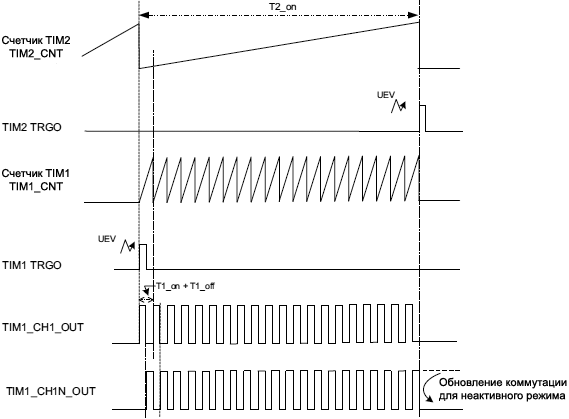
ąĀąĖčü. 40. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗčģ N ąĖą╝ą┐čāą╗čīčüąŠą▓ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą║ąŠąĮąĄčćąĮčŗą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝.
[Firmware]
ŌĆó ąĪąĖčüč鹥ą╝ąĮčŗąĄ čéą░ą║čéčŗ (System clock)
ŌĆō PLL ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ: 64 ą£ąōčå.
ŌĆō ąÆ ą║ą░č湥čüčéą▓ąĄ ąĘą░ą┤ą░čÄčēąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ HSI (ąĮąĄ ąĮčāąČąĮąŠ ąĘą░ą┐ą░ąĖą▓ą░čéčī HSE ąĮą░ ą┐ą╗ą░č鹥 Nucleo).
ŌĆō AHB div = 1 / APB1 div = 2 / APB2 div = 1
ŌĆó TIM1
ąÜą░ąĮą░ą╗ 1 čéą░ą╣ą╝ąĄčĆą░ TIM1 ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ PWM1 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ output-compare.
ŌĆō ą¤čĆąĄčüą║ą░ą╗ąĄčĆ APB2 = 64 - 1 (čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ 1 ą£ąōčå).
ŌĆō ą¤ąĄčĆąĖąŠą┤ (ARR) = 500. 500 ą╝ą║čü -> čćą░čüč鹊čéą░ F1 = 2 ą║ąōčå.
ŌĆō ąśą╝ą┐čāą╗čīčü (CCR1) = ą┐ąĄčĆąĖąŠą┤ / 2 (čüą║ą▓ą░ąČąĮąŠčüčéčī 50%).
ŌĆō ąĀąĄąČąĖą╝ 1 PWM.
ŌĆō Output compare preload: čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ŌĆō ąŻčüčéą░ąĮąŠą▓ą║ą░ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ.
ŌĆō ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ.
ŌĆō ąĀąĄąČąĖą╝ čüč湥čéą░ ą▓ą▓ąĄčĆčģ.
ŌĆō ąÆčŗą▒čĆą░ąĮ čĆąĄąČąĖą╝ master trigger reset.
ŌĆō ąÆčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ ITR1.
ŌĆō ąÆčŗą▒čĆą░ąĮ čĆąĄąČąĖą╝ slave-mode trigger.
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą▓ąĄą╗ąĖčćąĖąĮčŗ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░, čćč鹊ą▒čŗ
// ą┐ąŠą╗čāčćąĖčéčī 1 ą£ąōčå ą▓ ą║ą░č湥čüčéą▓ąĄ čéą░ą║č鹊ą▓ čüč湥čéčćąĖą║ą░ ą┐čĆąĖ čćą░čüč鹊č鹥
// čÅą┤čĆą░ SystemCoreClock = 64 ą£ąōčå:
Tim1Prescaler= (uint16_t) (SystemCoreClock / 1000000) - 1;
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░ PWM ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čćą░čüč鹊čéčŗ 2 ą║ąōčå:
Period = 1000000 / 2000;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░:
TIM1->PSC = Tim1Prescaler;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░:
TIM1->ARR = Period-1;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čłąĖčĆąĖąĮčŗ ąĖą╝ą┐čāą╗čīčüą░:
TIM1->CCR1 = Period / 2;
// ąÆčŗą▒ąŠčĆ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓ Clock Divison = 1.
// ąĪą▒čĆąŠčü ą┐ąŠą╗čÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ:
TIM1->CR1 &= ~ TIM_CR1_CKD;
// ąÆčŗą▒ąŠčĆ DIV1 ą▓ ą║ą░č湥čüčéą▓ąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓:
TIM1->CR1 |= TIM_CLOCKDIVISION_DIV1;
// ąÆčŗą▒ąŠčĆ čüč湥čéą░ ą▓ą▓ąĄčĆčģ ą┤ą╗čÅ TIM1. ąĪą▒čĆąŠčü ą┐ąŠą╗ąĄą╣ ą▓čŗą▒ąŠčĆą░ čĆąĄąČąĖą╝ą░:
TIM1->CR1 &= ~(TIM_CR1_DIR | TIM_CR1_CMS);
// ąØą░čüčéčĆąŠą╣ą║ą░ čüč湥čéą░ ą▓ą▓ąĄčĆčģ:
TIM1->CR1 |= TIM_COUNTERMODE_UP;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ PWM1. ąĪą▒čĆąŠčü ą▒ąĖčé čĆąĄąČąĖą╝ą░ Output Compare:
TIM1->CCMR1 &= ~TIM_CCMR1_OC1M;
TIM1->CCMR1 &= ~TIM_CCMR1_CC1S;
// ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ 1 ą┤ą╗čÅ output compare PWM:
TIM1->CCMR1 |= TIM_OCMODE_PWM1;
// ąÆčŗą▒ąŠčĆ ą╗ąŠą│. 1 ą▓ ą║ą░č湥čüčéą▓ąĄ ą░ą║čéąĖą▓ąĮąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą▓čŗčģąŠą┤ą░.
// ąĪą▒čĆąŠčü čāčĆąŠą▓ąĮčÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą▓čŗčģąŠą┤ą░:
TIM1->CCER &= ~TIM_CCER_CC1P;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą╗ąŠą│. 1 ą┤ą╗čÅ Output Compare Polarity:
TIM1->CCER |= TIM_OCPOLARITY_HIGH;
// ąĀą░ąĘčĆąĄčłąĖčéčī ą▓čŗą▓ąŠą┤ CC1 ąĮą░ ą▓čŗčüąŠą║ąŠą╝ čāčĆąŠą▓ąĮąĄ:
TIM1->CCER |= TIM_CCER_CC1E;
// ąÆčŗą▒ąŠčĆ ą░ą║čéąĖą▓ąĮąŠą╣ ą╗ąŠą│. 1 ą▓ ą║ą░č湥čüčéą▓ąĄ čāčĆąŠą▓ąĮčÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ
// ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░. ąĪą▒čĆąŠčü ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ N:
TIM1->CCER &= ~TIM_CCER_CC1NP;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą▓čŗčģąŠą┤ą░ N ąĮą░ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī:
TIM1->CCER |= TIM_OCNPOLARITY_HIGH;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ CC1 ąĮą░ ą▓čŗčüąŠą║ąŠą╝ čāčĆąŠą▓ąĮąĄ:
TIM1->CCER |= TIM_CCER_CC1NE;
/*********** ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ COM **********/
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐čĆąĄą┤ąĘą░ą│čĆčāąĘą║ąĖ Capture Compare:
TIM1->CR2 |= TIM_CR2_CCPC;
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ CCUS ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ COM
// ą┐ąŠ ą▓čģąŠą┤čā čéčĆąĖą│ą│ąĄčĆą░ TRGI:
TIM1->CR2 |= TIM_CR2_CCUS;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ:
TIM1->DIER |= TIM_IT_COM;
/******* ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ Master: Trigger Reset mode ******/
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąĄ TIM1 ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ
// čüąĖą│ąĮą░ą╗ą░ ąĮą░ TIM2:
TIM1->CR2 &= ~ TIM_CR2_MMS;
TIM1->CR2 |= TIM_TRGO_RESET;
/******* ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ Slave: Trigger mode *************/
// ąÆčŗą▒ąŠčĆ čüąĖą│ąĮą░ą╗ą░ TIM_TS_ITR1 ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░:
TIM1->SMCR &= ~TIM_SMCR_TS;
TIM1->SMCR |= TIM_TS_ITR1;
// ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ Slave:
TIM1->SMCR &= ~TIM_SMCR_SMS;
TIM1->SMCR |= TIM_SLAVEMODE_TRIGGER;
/*************************************************************/
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ UG ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ UEV:
TIM1->EGR |= TIM_EGR_UG;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ TIM1:
TIM1->BDTR |= TIM_BDTR_MOE;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ TIM1:
TIM1->CR1 |= TIM_CR1_CEN;
ŌĆó TIM2
ąÜą░ąĮą░ą╗ 1 čéą░ą╣ą╝ąĄčĆą░ TIM2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ output-compare ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ PWM1.
ŌĆō ą¤čĆąĄčüą║ą░ą╗ąĄčĆ APB1 = 64 - 1 (ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ 1 ą£ąōčå ą▓ ą║ą░č湥čüčéą▓ąĄ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░).
ŌĆō ą¤ąĄčĆąĖąŠą┤ (ARR) = 10000 ą╝ą║čü.
ŌĆō ąĀąĄąČąĖą╝ čüč湥čéą░ ą▓ą▓ąĄčĆčģ.
ŌĆō ąÆčŗą▒čĆą░ąĮ čĆąĄąČąĖą╝ master trigger update ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ TRGO.
ŌĆō ąÆčģąŠą┤ąĮąŠą╣ čéčĆąĖą│ą│ąĄčĆ ITR0.
ŌĆō ąÆčŗą▒čĆą░ąĮ čĆąĄąČąĖą╝ slave trigger reset.
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī
// čćą░čüč鹊čéčā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ 1 ą£ąōčå ąĖąĘ čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ
// SystemCoreClock = 64 ą£ąōčå:
Tim2Prescaler = (uint16_t) ((SystemCoreClock) / 1000000) - 1;
// ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čćą░čüč鹊čéčŗ ą┐ąĄčĆąĖąŠą┤ą░ PWM
// 100 ąōčå ą┐čĆąĖ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░ 1 ą£ąōčå:
Period = 1000000 / 100;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░:
TIM2->ARR = Period-1;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░:
TIM2->PSC = Tim2Prescaler;
// ąÆčŗą▒ąŠčĆ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ Clock Divison = 1.
// ąĪą▒čĆąŠčü ą▒ąĖč鹊ą▓ąŠą│ąŠ ą┐ąŠą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ:
TIM2->CR1 &= ~ TIM_CR1_CKD;
// ąÆčŗą▒ąŠčĆ DIV1 ą▓ ą║ą░č湥čüčéą▓ąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ:
TIM2->CR1 |= TIM_CLOCKDIVISION_DIV1;
// ąÆčŗą▒ąŠčĆ čüč湥čéą░ ą▓ą▓ąĄčĆčģ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆą░ TIM1.
// ąĪą▒čĆąŠčü ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣ ą▓čŗą▒ąŠčĆą░ čĆąĄąČąĖą╝ą░:
TIM2->CR1 &= ~(TIM_CR1_DIR | TIM_CR1_CMS);
// ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čüč湥čéą░ ą▓ą▓ąĄčĆčģ:
TIM2->CR1 |= TIM_COUNTERMODE_UP;
/***** ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ Master: ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čéčĆąĖą│ą│ąĄčĆą░ ******/
// ąóčĆąĖą│ą│ąĄčĆ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TIM2 ą┐ąŠą┤ą░ąĄčé čüąĖą│ąĮą░ą╗ ąĮą░ TIM1 Slave:
TIM2->CR2 &= ~TIM_CR2_MMS;
TIM2->CR2 |= TIM_TRGO_UPDATE;
/******* ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ Slave: Trigger mode ************/
// ąÆčŗą▒ąŠčĆ čüąĖą│ąĮą░ą╗ą░ TIM_TS_ITR0 ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░
// čéčĆąĖą│ą│ąĄčĆą░ ą┤ą╗čÅ TIM2:
TIM2->SMCR &= ~TIM_SMCR_TS;
TIM2->SMCR |= TIM_TS_ITR0;
// ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ Slave, čéčĆąĖą│ą│ąĄčĆ čüą▒čĆąŠčüą░:
TIM2->SMCR &= ~TIM_SMCR_SMS;
TIM2->SMCR |= TIM_SLAVEMODE_RESET;
/************************************************************/
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ TIM1:
TIM2->CR1 |= TIM_CR1_CEN;
ŌĆó GPIO
ŌĆō ąÆčŗą▓ąŠą┤ PA8: ą▓čŗčģąŠą┤ TIM1_CH1.
ŌĆō ąÆčŗą▓ąŠą┤ PA7: ą▓čŗčģąŠą┤ TIM1_CH1N.
ŌĆō ąĀąĄąČąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓čŗčģąŠą┤ą░ push-pull.
ŌĆō ą¤ąŠą┤čéčÅąČą║ą░: pull-up.
ŌĆō ąĪą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ: ą▓čŗčüąŠą║ą░čÅ.
ŌĆō ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ: GPIO_AF6_TIM1.
ŌĆó ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ ą║ąŠą╝ą╝čāčéą░čåąĖąĖ
// ąĪą▒čĆąŠčü ą▒ąĖčé OC1M ą▓ čĆąĄą│ąĖčüčéčĆąĄ CCMR1:
TIM1->CCMR1 &= TIM_CCMR1_OC2M;
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąĖčé OC1M ą▓ ąĮąĄą░ą║čéąĖą▓ąĮčŗą╣ čĆąĄąČąĖą╝:
TIM1->CCMR1 |= TIM_OCMODE_FORCED_INACTIVE;
[ąĪčüčŗą╗ą║ąĖ]
1. AN4776 General-purpose timer cookbook site:st.com.
2. AN4013 STM32 cross-series timer overview site:st.com.
3. AN4277 Using STM32 device PWM shut-down features for motor control and digital power conversion site:st.com.
4. 190614AN4776-cube-timcooker.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠąĄą║č鹊ą▓, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ.
5. STM32: ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčŗ ąĖ č鹥čĆą╝ąĖąĮčŗ.
6. STM32F4xx: ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ TIM1 ąĖ TIM8. |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ą╗ąĄą│ą║ąŠ ąŠą▒čŖčÅčüąĮčÄ. ąóą░ą╣ą╝ąĄčĆčŗ STM32F4xx ą╝ąŠą│čāčé ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé STM32F1xx. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čéą░ą╣ą╝ąĄčĆčŗ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ąŠčéą╗ąĖčćą░čéčīčüčÅ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą┤ą░ąČąĄ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą┤ąĮąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą░. ąś ą║ąŠąĮąĄčćąĮąŠ, čüčéąĖą╗čī API čĆą░ąĘąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ č鹊ąČąĄ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ. ą¤ąŠčŹč鹊ą╝čā čā ąÆą░čü 2 čüą┐ąŠčüąŠą▒ą░ čĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝čŗ: čüą╗ąŠąČąĮčŗą╣ ąĖ ą┐čĆąŠčüč鹊ą╣. ąĪą╗ąŠąČąĮčŗą╣: ą▓ąĘčÅčéčī ą▓ čĆčāą║ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ (ą┤ą░čéą░čłąĖčé ąĖ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║), ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠ ą▓čüąĄ ąĖąĘčāčćąĖčéčī ąĖ ą╝ąĄč鹊ą┤ąŠą╝ ą┐čĆąŠą▒ ąĖ ąŠčłąĖą▒ąŠą║ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ, ą│ą┤ąĄ ąĮą░ą║ąŠčüčÅčćąĖą╗ąĖ. ą¤čĆąŠčüč鹊ą╣: čéčāą┐ąŠ ą▓ąĘčÅčéčī ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖ čÅ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ STM32F1xx, ąĖ ą╝ąĄč鹊ą┤ąŠą╝ copy/paste ą▓ąĘčÅčéčī ąŠčéčéčāą┤ą░ ą│ąŠč鹊ą▓čŗą╣ ą║ąŠą┤.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ