AD7731 čŹč鹊 ą╝ą░ą╗ąŠčłčāą╝čÅčēąĖą╣, ą▓čŗčüąŠą║ąŠą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮčŗą╣ 24-ą▒ąĖčéąĮčŗą╣ čüąĖą│ą╝ą░-ą┤ąĄą╗čīčéą░ ąÉą”ą¤. AD7731 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠą╗ąĮąŠąĄ čĆąĄčłąĄąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą│ą┤ąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. ąÆ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ą┐čĆąĖąĮąĖą╝ą░čéčī čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą▓čģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, ą▓ą║ą╗čÄčćą░čÅ čüąĖą│ąĮą░ą╗čŗ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ sigmadelta ąÉą”ą¤ čüąŠčüč鹊ąĖčé ąĖąĘ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čåąĖčäčĆąŠą▓ąŠą│ąŠ ążąØą¦, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĄą│ąŠ ąĮą░čüčéčĆąŠąĖčéčī čćą░čüč鹊čéčā čüčĆąĄąĘą░ čäąĖą╗čīčéčĆą░, čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ ą▓čĆąĄą╝čÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┐čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą║ą░ąĮą░ą╗ąŠą▓.
ąÆ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ 3 ą▒čāč乥čĆąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą▓čģąŠą┤ą░ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝ (ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą║ą░ą║ 5 ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą▓čģąŠą┤ąŠą▓), ą░ čéą░ą║ąČąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ +5V, ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 7 ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░: 0 .. +20 mV, +40 mV, +80 mV, +160 mV, +320 mV, +640 mV ąĖ +1.28 V, ąĖ 7 ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓: ┬▒20 mV, ┬▒40 mV, ┬▒80 mV, ┬▒160 mV, ┬▒320 mV, ┬▒640 mV ąĖ ┬▒1.28 V. ąöąŠčüčéąĖą│ą░ąĄčéčüčÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą╝ąĄąČą┤čā ą┐ąĖą║ą░ą╝ąĖ čüąĖą│ąĮą░ą╗ą░ 16 ą▒ąĖčé ą┐čĆąĖ čćą░čüč鹊č鹥 ąŠčåąĖčäčĆąŠą▓ą║ąĖ 800 ąōčå. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ą║ą░ąĮą░ą╗čŗ ąĘą░ ą▓čĆąĄą╝čÅ 1 ą╝čü, ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ąĘą░čÅą▓ą╗ąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĮą░ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ 13 ą▒ąĖčé.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ 3-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠą╝ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ą╝ąĖ DSP. AD7731 čüąŠą┤ąĄčƹȹĖčé čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĖ ąŠą┐čåąĖąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ąĖ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čāčģąŠą┤ čüą╝ąĄčēąĄąĮąĖčÅ ą╝ąĄąĮčīčłąĄ 5 nV/┬░C, ąĖ čāčģąŠą┤ čāčüąĖą╗ąĄąĮąĖčÅ ą╝ąĄąĮčīčłąĄ 2 ppm/┬░C.
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą┤ąŠčüčéčāą┐ąĮą░ ą▓ 24-ą▓čŗą▓ąŠą┤ąĮąŠą╝ ą┐ą╗ą░čüčéąĖą║ąŠą▓ąŠą╝ ą║ąŠčĆą┐čāčüąĄ DIP, 24-ą▓čŗą▓ąŠą┤ąĮąŠą╝ SOIC ąĖ 24-ą▓čŗą▓ąŠą┤ąĮąŠą╝ TSSOP.
ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ:
ŌĆó 24-ą▒ąĖčéąĮčŗą╣ Sigma-Delta ąÉą”ą¤
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ *: FASTStep čŹč鹊 č鹊čĆą│ąŠą▓ą░čÅ ą╝ą░čĆą║ą░ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices.
ą×čüąĮąŠą▓ąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌĆó ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░ą╝ąĖ
COMPARABLE PARTS . ą¤ą░čĆą░ą╝ąĄčéčĆąĖč湥čüą║ąĖą╣ ą┐ąŠąĖčüą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ čüąŠ čüčĆą░ą▓ąĮąĖą╝čŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ.
EVALUATION KITS . ąĪą╝. AD7731 Evaluation Kit.
DOCUMENTATION , ą┤ąŠčüčéčāą┐ąĮčŗ ą░ą┐ąĮąŠčāčéčŗ:
ŌĆó AN-202: An IC Amplifier UserŌĆÖs Guide to Decoupling, Grounding, and Making Things Go Right for a Change
TOOLS AND SIMULATIONS . ąśąĮčüčéčĆčāą╝ąĄąĮčéčŗ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ čüąĖą╝čāą╗čÅčåąĖąĖ:
ŌĆó AD7730/AD7730L/AD7731 Digital Filter Model
REFERENCE MATERIALS . ąóąĄčģąĮąĖč湥čüą║ąĖąĄ čüčéą░čéčīąĖ:
ŌĆó Delta-Sigma Rocks RF, As ADC Designers Jump On Jitter
DESIGN RESOURCES , čĆąĄčüčāčĆčüčŗ ą┤ą╗čÅ ą┐ąŠą╝ąŠčēąĖ ą▓ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ
ŌĆó AD7731 Material Declaration
DISCUSSIONS , ąŠą▒čüčāąČą┤ąĄąĮąĖčÅ AD7731 ąĮą░ EngineerZone Discussions.
SAMPLE AND BUY , ą┐ąŠčüąĄčéąĖč鹥 čüčéčĆą░ąĮąĖčćą║čā ą┐čĆąŠą┤čāą║čéą░, čćč鹊ą▒čŗ čāąĘąĮą░čéčī čåąĄąĮčŗ.
TECHNICAL SUPPORT , ąĘą░ą┤ą░ą╣č鹥 č鹥čģąĮąĖč湥čüą║ąĖą╣ ą▓ąŠą┐čĆąŠčü ąĖą╗ąĖ ąĮą░ą╣ą┤ąĖč鹥 ąĮąŠą╝ąĄčĆ č鹥čģą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ čĆąĄą│ąĖąŠąĮą░.
ąśąĘ-ąĘą░ čüą▓ąŠąĄą│ąŠ ą▒ąŠą╗čīčłąŠą│ąŠ ąŠą▒čŖąĄą╝ą░ ąĘą┤ąĄčüčī ąĮąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ čéą░ą▒ą╗ąĖčåčŗ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, čüą╝. ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗą╣ ą┤ą░čéą░čłąĖčé [1].
Ōä¢ ąśą╝čÅ ążčāąĮą║čåąĖčÅ
1
SCLK
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ čéą░ą║čéčŗ, ą▓čģąŠą┤ čü čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░. ąØą░ čŹč鹊čé ą▓čģąŠą┤ ą┐ąŠą┤ą░čÄčéčüčÅ ą▓ąĮąĄčłąĮąĖąĄ čéą░ą║čéčŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ AD7731 ąĖą╗ąĖ ąĖąĘ ąĮąĄčæ. ąŁč鹊čé čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╝, č鹊ą│ą┤ą░ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą░ąĮčŗ ą┐ą░čćą║ą░ą╝ąĖ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ą▒ą╗ąŠą║ą░čģ.
2
MCLK IN
ąōą╗ą░ą▓ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ (Master Clock). ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░, ąĖą╗ąĖ ą┐ąŠą┤ą░ąĮą░ čüąĮą░čĆčāąČąĖ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąĀąĄąĘąŠąĮą░č鹊čĆ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ MCLK IN ąĖ MCLK OUT, č鹊ą│ą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé čüčģąĄą╝ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (čüą╝. čĆąĖčü. [15]). ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▓čģąŠą┤ MCLK IN ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ CMOS-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ ą▓čŗčģąŠą┤ąŠą╝, ąĖ č鹊ą│ą┤ą░ MCLK OUT ąŠčüčéą░ąĄčéčüčÅ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓ ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖąĘ čŹč鹊ą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┤ą░ąĮčŗ ą┤ą╗čÅ čĆą░ą▒ąŠč湥ą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ 4.9152 ą£ąōčå.
3
MCLK OUT
ąÆčŗčģąŠą┤ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą║čāą┤ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓č鹊čĆąŠą╣ ą║ąŠąĮčéą░ą║čé čĆąĄąĘąŠąĮą░č鹊čĆą░, ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą│ąŠ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ MCLK IN ąĖ MCLK OUT. ąĢčüą╗ąĖ ąĮą░ MCLK IN ą┐ąŠą┤ą░ąĄčéčüčÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, č鹊 čĆąĄąĘąŠąĮą░č鹊čĆ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ, ąĖ ą▓čŗčģąŠą┤ MCLK OUT ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗. ąŁč鹊čé ą▓čŗčģąŠą┤ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓, ą┐čĆąĖ čŹč鹊ą╝ MCLK OUT ąĖą╝ąĄąĄčé ąĮą░ą│čĆčāąĘąŠčćąĮčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ąŠą┤ąĮąŠą│ąŠ ą▓čģąŠą┤ą░ CMOS.
4
POL
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓, ą╗ąŠą│ąĖč湥čüą║ąĖą╣ ą▓čģąŠą┤. ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ SCLK. ąĢčüą╗ąĖ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąŠčé ą╗ąŠą│. 1 ą║ ą╗ąŠą│. 0 ąĮą░ SCLK, č鹊 čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐ąŠą╗čāčćą░čéčī čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ AD7731 ą▓čŗą▓ąŠą┤ąĖčé ą┤ą░ąĮąĮčŗąĄ ąĮą░ čüąĖą│ąĮą░ą╗ DATA OUT ą┐čĆąĖ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ ąŠčé ą╗ąŠą│. 0 ą║ ą╗ąŠą│. 1, ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą▓čģąŠą┤ąĄ DATA IN ąĘą░čēąĄą╗ą║ąĖą▓ą░čÄčéčüčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ ąŠčé ą╗ąŠą│. 1 ą║ ą╗ąŠą│. 0 SCLK. ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą│ą┤ąĄ čéą░ą║čéčŗ SCLK č乊čĆą╝ąĖčĆčāčÄčéčüčÅ ąĮąĄ ą┐ąŠčüč鹊čÅąĮąĮąŠ (ąŠą▒čŗčćąĮąŠ čéą░ą║ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü SPI [3]), čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ čéą░ą║čéčŗ ą▓ ąĮąĄą░ą║čéąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ (ą▓ ą┐ą░čāąĘą░čģ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ) ą┤ąŠą╗ąČąĮčŗ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ čāčĆąŠą▓ąĮąĄ ą╗ąŠą│. 0. ąĢčüą╗ąĖ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĮą░ SCLK ąŠčé ą╗ąŠą│. 0 ą║ ą╗ąŠą│. 1, č鹊 čŹč鹊čé ą▓čģąŠą┤ POL ą┤ąŠą╗ąČąĄąĮ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐ąŠą╗čāčćą░čéčī ą╗ąŠą│. 1. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠ ą╗ąŠą│ąĖč湥čüą║ąĖą╝ čāčĆąŠą▓ąĮčÅą╝ čüąĖą│ąĮą░ą╗ąŠą▓ DATA OUT, DATA IN, SCLK ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗą╣ č鹊ą╗čīą║ąŠ čćč鹊 ąŠą┐ąĖčüą░ąĮąĮąŠą╝čā ą┐čĆąĖ POL=0.
5
~SYNC
ąøąŠą│ąĖč湥čüą║ąĖą╣ ą▓čģąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čåąĖčäčĆąŠą▓čŗčģ čäąĖą╗čīčéčĆąŠą▓ ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą╝ąŠą┤čāą╗čÅč鹊čĆąŠą▓, ą║ąŠą│ą┤ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ AD7731 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. ąÜąŠą│ą┤ą░ SYNC ą▓ ą╗ąŠą│. 0, čāąĘą╗čŗ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░, ą╗ąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäąĖą╗čīčéčĆąŠą╝ ąĖ ą╗ąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆ čéą░ą║ąČąĄ čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░. SYNC ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü, ąŠą┤ąĮą░ą║ąŠ čüą▒čĆą░čüčŗą▓ą░ąĄčé RDY ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1, ąĄčüą╗ąĖ ąŠąĮ ąĮą░čģąŠą┤ąĖą╗čüčÅ ą▓ ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī ąĮą░ SYNC ą▓čŗčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą╗ąŠą│. 1, ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░ (Mode Bits) ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ ąŠą┐ąĄčĆą░čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąĮą░čćąĮąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ SYNC ą▒čāą┤ąĄčé čüąĮčÅčé.
6
~RESET
ąøąŠą│ąĖč湥čüą║ąĖą╣ ą▓čģąŠą┤ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0, ą║ąŠč鹊čĆčŗą╣ čüą▒čĆą░čüčŗą▓ą░ąĄčé ą╗ąŠą│ąĖą║čā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą╗ąŠą│ąĖą║čā ąĖąĮč鹥čĆč乥ą╣čüą░, čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ, ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆ ąĖ ą▓čüąĄ ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā čĆąĄą│ąĖčüčéčĆčŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą▓ ą║ąŠč鹊čĆąŠą╝ ąŠąĮąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ. ąŁčäč乥ą║čéąĖą▓ąĮąŠ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ąŠąŠą▒čēąĄ ą▓čüąĄ, ą║čĆąŠą╝ąĄ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čüą▓ąŠčÄ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčāčÄ čĆą░ą▒ąŠčéčā ą┤ą░ąČąĄ ą┐čĆąĖ ą░ą║čéąĖą▓ą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ RESET.
7
NC
No Connect, ąĮąĖą║čāą┤ą░ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ. ąØąĄ čüą╗ąĄą┤čāąĄčé ąĮąĖą║čāą┤ą░ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī čŹč鹊čé ą▓čŗą▓ąŠą┤.
8
AGND
ą×ą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤ ą┤ą╗čÅ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüčģąĄą╝ AD7731, ą╝ąĖąĮčāčü ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ.
9
AVDD
ą¤ą╗čÄčü ą┐ąĖčéą░ąĮąĖčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüčģąĄą╝. ą£ąĄąČą┤čā AVDD ąĖ AGND ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĖčüčāčéčüčéą▓ąŠą▓ą░čéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ 5V.
10
AIN1
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 1 (Analog Input Channel 1). ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣, ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ą╝ąĄčüč鹥 čü AIN6, ąĖą╗ąĖ ą║ą░ą║ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą▓ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆąĄ ą▓ą╝ąĄčüč鹥 čü AIN2.
11
AIN2
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 2 (Analog Input Channel 2). ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣, ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ą╝ąĄčüč鹥 čü AIN6, ąĖą╗ąĖ ą║ą░ą║ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą▓ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆąĄ ą▓ą╝ąĄčüč鹥 čü AIN1.
12
AIN3/D1
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 3 (Analog Input Channel 3). ąŁčéą░ ąĮąŠąČą║ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ ą║ą░ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ ą║ą░ą║ čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤ ą┐ąŠčĆčéą░ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčéą░ DEN Mode Register. ąÜąŠą│ą┤ą░ ą▓čŗą▒čĆą░ąĮą░ čĆą░ą▒ąŠčéą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝, ąŠąĮ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą▓ą╝ąĄčüč鹥 čü AIN6, ąĖą╗ąĖ ą║ą░ą║ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą▓ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆąĄ ą▓ą╝ąĄčüč鹥 čü AIN4. ąÜąŠą│ą┤ą░ ą▓čŗą▒čĆą░ąĮą░ čĆą░ą▒ąŠčéą░ ą║ą░ą║ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠčĆčéą░, č鹊 ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī čŹč鹊ą│ąŠ ą▓čŗčģąŠą┤ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖč鹊ą╝ D1 Mode Register.
13
AIN4/D0
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 4 (Analog Input Channel 4). ąŁčéą░ ąĮąŠąČą║ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ ą║ą░ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ ą║ą░ą║ čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤ ą┐ąŠčĆčéą░ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčéą░ DEN Mode Register. ąÜąŠą│ą┤ą░ ą▓čŗą▒čĆą░ąĮą░ čĆą░ą▒ąŠčéą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝, ąŠąĮ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą▓ą╝ąĄčüč鹥 čü AIN6, ąĖą╗ąĖ ą║ą░ą║ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą▓ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆąĄ ą▓ą╝ąĄčüč鹥 čü AIN3. ąÜąŠą│ą┤ą░ ą▓čŗą▒čĆą░ąĮą░ čĆą░ą▒ąŠčéą░ ą║ą░ą║ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠčĆčéą░, č鹊 ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī čŹč鹊ą│ąŠ ą▓čŗčģąŠą┤ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖč鹊ą╝ D0 Mode Register.
14
REF IN(+)
ą¤ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆčŗ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąÉą”ą¤. ąŻčĆąŠą▓ąĄąĮčī REF IN(+) ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒čŗą╝ ą╝ąĄąČą┤čā čāčĆąŠą▓ąĮčÅą╝ąĖ AVDD ąĖ AGND. ąØąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, čé. ąĄ. ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╝ąĄąČą┤čā REF IN(+) ąĖ REF IN(ŌĆō), ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī +2.5V, ą║ąŠą│ą┤ą░ ą▒ąĖčé HIREF ą▓ Mode Register čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 0, ąĖ +5V, ą║ąŠą│ą┤ą░ ą▒ąĖčé HIREF ą▓ Mode Register čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1.
15
REF IN(ŌĆō)
ą×čéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆčŗ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąÉą”ą¤. ąŻčĆąŠą▓ąĄąĮčī REF IN(-) ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒čŗą╝ ą╝ąĄąČą┤čā čāčĆąŠą▓ąĮčÅą╝ąĖ AVDD ąĖ AGND.
16
AIN5
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 5 (Analog Input Channel 5). ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą▓ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆąĄ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü AIN6.
17
AIN6
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ ą║ą░ąĮą░ą╗ą░ 6 (Analog Input Channel 6). ą×ą┐ąŠčĆąĮą░čÅ č鹊čćą║ą░ ą┤ą╗čÅ ą▓čģąŠą┤ąŠą▓ AIN1..AIN4, ą║ąŠą│ą┤ą░ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ąĖą╗ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą▓ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆąĄ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü AIN5.
18
~STANDBY
ąøąŠą│ąĖč湥čüą║ąĖą╣ ą▓čģąŠą┤. ąøąŠą│. 0 ąĮą░ čŹč鹊ą╝ ą▓čģąŠą┤ąĄ ą▓čŗą║ą╗čÄčćą░ąĄčé ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ąĖ čåąĖčäčĆąŠą▓čŗąĄ čüčģąĄą╝čŗ, čüąĮąĖąČą░čÅ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą┤ąŠ 10 ą╝ą║ąÉ (čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, standby mode). ąÆąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ čüąŠčģčĆą░ąĮčÅčÄčé ą▓čüąĄ čüą▓ąŠąĖ ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ standby mode.
19
~CS
Chip Select, ą▓čŗą▒ąŠčĆą║ą░ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąÆčģąŠą┤ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖ ą╗ąŠą│. 0 ąĮą░ ąĮąĄą╝ čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā AD7731, čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü SCLK, DIN ąĖ DOUT čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝. CS ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čüąĖčüč鹥ą╝ą░čģ, ą│ą┤ąĄ ąĮą░ ąŠą┤ąĮčā čåąĖčäčĆąŠą▓čāčÄ čłąĖąĮčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąĪąĖą│ąĮą░ą╗ ~CS ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćą░čéčī čāčĆąŠą▓ąĮąĖ ąŠčé čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ čåąĖčäčĆąŠą▓ąŠą╣ čłąĖąĮčŗ, ą┐čĆąĖ čŹč鹊ą╝ SCLK ą╝ąŠąČąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ.
20
~RDY
ąøąŠą│ąĖč湥čüą║ąĖą╣ ą▓čŗčģąŠą┤, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą╗ąŠą│. 0 ąĮą░ čŹč鹊ą╝ ą▓čŗčģąŠą┤ąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ AD7731 ą┤ąŠčüčéčāą┐ąĮąŠ ą┤ą╗čÅ čüčćąĖčéčŗą▓ą░ąĮąĖąĄ ąĮąŠą▓ąŠąĄ čüą╗ąŠą▓ąŠ ąŠčåąĖčäčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąÆčŗą▓ąŠą┤ RDY ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ ą╗ąŠą│. 1 ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ, č鹊 RDY ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ą╗ąŠą│. 1 ą┐ąĄčĆąĄą┤ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ ą▓čŗčģąŠą┤ą░, ąŠčüčéą░ą▓ą░čÅčüčī ą▓ ą╗ąŠą│. 1 ą┤ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░, ąĖ ą┐ąŠ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0 čüąĮąŠą▓ą░. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┤ą░ąĄčé ąĖąĮą┤ąĖą║ą░čåąĖčÄ, ą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąĖąĮąĖčåąĖą░čåąĖąĖ čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ ą▓ č鹊čé ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ąŠąĮ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ. ąÆ čĆąĄąČąĖą╝ąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ RDY ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░. ąØąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘąĮčŗčģ čüąŠą▒čŗčéąĖą╣ AD7731 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé RDY ą▓ ą╗ąŠą│. 1, čćč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ XVII.
21
DOUT
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą▓čŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ, čćąĖčéą░ąĄą╝čŗčģ ąĖąĘ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąŁč鹊čé ą▓čŗčģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čĆąĄą│ąĖčüčéčĆą░ čĆąĄąČąĖą╝ą░, čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ, čĆąĄą│ąĖčüčéčĆą░ čäąĖą╗čīčéčĆą░ ąĖą╗ąĖ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčé ą▓čŗą▒ąŠčĆą░ čĆąĄą│ąĖčüčéčĆą░ ą▓ Communications Register.
22
DIN
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąöą░ąĮąĮčŗąĄ ąĖąĘ čŹč鹊ą│ąŠ ą▓čģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ą┐ąĄčĆąĄą╝ąĄčēą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čĆąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░, čĆąĄą│ąĖčüčéčĆ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ąĖą╗ąĖ čĆąĄą│ąĖčüčéčĆ čäąĖą╗čīčéčĆą░ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčé ą▓čŗą▒ąŠčĆą░ čĆąĄą│ąĖčüčéčĆą░ ą▓ Communications Register.
23
DVDD
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ čåąĖčäčĆąŠą▓čŗčģ čāąĘą╗ąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ +3V ąĖą╗ąĖ +5V.
24
DGND
ą×ą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤ ą┤ą╗čÅ ą▓čüąĄčģ ą╗ąŠą│ąĖč湥čüą║ąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖ ą╝ąĖąĮčāčü ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čåąĖčäčĆąŠą▓čŗčģ čāąĘą╗ąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
ąśąĮč鹥ą│čĆą░ą╗čīąĮą░čÅ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī (INTEGRAL NONLINEARITY, INL). ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą┤ąĄą▓ąĖą░čåąĖčÄ ą╗čÄą▒ąŠą│ąŠ ą║ąŠą┤ą░ ąŠčé ą┐čĆčÅą╝ąŠą╣ ą╗ąĖąĮąĖąĖ, ą┐čĆąŠčģąŠą┤čÅčēąĄą╣ č湥čĆąĄąĘ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ ąÉą”ą¤. ąÜąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ ąĖą╝ąĄčÄčé ąĮčāą╗ąĄą▓ąŠą╣ ą╝ą░čüčłčéą░ą▒ (ąĮąĄ ą┐ąĄčĆąĄą┐čāčéą░ą╣č鹥 čü ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗą╝ ąĮčāą╗ąĄą╝), č鹊čćą║ą░ 0.5 LSB ąĮąĖąČąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą║ąŠą┤ą░ (ą┐ąĄčĆąĄčģąŠą┤ ą║ąŠą┤ą░ ąŠčé 000...000 ą║ 000...001), ą┐ąŠą╗ąĮą░čÅ čłą║ą░ą╗ą░, č鹊čćą║ą░ 0.5 LSB ą▓čŗčłąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą║ąŠą┤ą░ (ą┐ąĄčĆąĄčģąŠą┤ ą║ąŠą┤ą░ ąŠčé 111...110 ą║ 111...111). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą▓čŗčĆą░ąČą░ąĄčéčüčÅ ą║ą░ą║ ą┐čĆąŠčåąĄąĮčéąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ąŠčé ąŠą▒čēąĄą╣ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ.
ą¤ąŠą╗ąŠąČąĖč鹥ą╗čīąĮą░čÅ ąŠčłąĖą▒ą║ą░ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ (POSITIVE FULL-SCALE ERROR). ąŁč鹊 ą┤ąĄą▓ąĖą░čåąĖčÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą║ąŠą┤ą░ (111...110 -> 111...111) ąŠčé ąĖą┤ąĄą░ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ AIN(+) (AIN(ŌĆō) + VREF/GAIN ŌĆō 3/2 LSB). ą¤ą░čĆą░ą╝ąĄčéčĆ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ąŠą▒ąŠąĖą╝ ą▓čģąŠą┤ąĮčŗą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ą╝ - ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝čā ąĖ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝čā.
ą×čłąĖą▒ą║ą░ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ (UNIPOLAR OFFSET ERROR). ąŁč鹊 ą┤ąĄą▓ąĖą░čåąĖčÅ ą┐ąĄčĆą▓ąŠą│ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ąŠčé ąĖą┤ąĄą░ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ AIN(+) (AIN(ŌĆō) + 0.5 LSB), ą║ąŠą│ą┤ą░ ąÉą”ą¤ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ.
ą×čłąĖą▒ą║ą░ ą┤ą▓čāą┐ąŠą╗čÅčĆąĮąŠą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ (BIPOLAR ZERO ERROR). ąŁč鹊 ą┤ąĄą▓ąĖą░čåąĖčÅ čüčĆąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą║ąŠą┤ą░ (0111...111 -> 1000...000) ąŠčé ąĖą┤ąĄą░ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ AIN(+) (AIN(ŌĆō) ŌĆō 0.5 LSB), ą║ąŠą│ą┤ą░ ąÉą”ą¤ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą┤ą▓čāą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ.
ą×čłąĖą▒ą║ą░ čāčüąĖą╗ąĄąĮąĖčÅ (GAIN ERROR). ąŁč鹊 čģą░čĆą░ą║č鹥čĆąĖąĘčāąĄčé ąŠčłąĖą▒ą║čā ąŠčģą▓ą░čéą░ (span error) ąÉą”ą¤. ąśąĘą╝ąĄčĆčÅąĄčéčüčÅ ą┐ąŠ čĆą░ąĘąĮąŠčüčéąĖ ą╝ąĄąČą┤čā ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╝ ąĖ ąĖą┤ąĄą░ą╗čīąĮčŗą╝ ąŠčģą▓ą░č鹊ą╝ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ č鹊čćą║ą░ą╝ąĖ ąĮą░ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ. ąŁčéąĖ ą┤ą▓ąĄ č鹊čćą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ (gain error) ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╣ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ.
ąæąĖą┐ąŠą╗čÅčĆąĮą░čÅ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮą░čÅ ąŠčłąĖą▒ą║ą░ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ (BIPOLAR NEGATIVE FULL-SCALE ERROR). ąŁč鹊 ą┤ąĄą▓ąĖą░čåąĖčÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą║ąŠą┤ą░ ąŠčé ąĖą┤ąĄą░ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ AIN(+) (AIN(ŌĆō) ŌĆō VREF/GAIN + 0.5 LSB), ą║ąŠą│ą┤ą░ ąÉą”ą¤ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ą×čéčĆąĖčåą░č鹥ą╗čīąĮą░čÅ ąŠčłąĖą▒ą║ą░ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ čÅą▓ą╗čÅąĄčéčüčÅ čüčāą╝ą╝ąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĮčāą╗čÅ (zero error) ąĖ ąŠčłąĖą▒ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ (gain error).
ą¤ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ą┐čĆąĄą▓čŗčłąĄąĮąĖąĄ čĆą░ą▒ąŠč湥ą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ (POSITIVE FULL-SCALE OVERRANGE). ąÆąĄą╗ąĖčćąĖąĮą░ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▒ąŠą╗čīčłąĄ č湥ą╝ AIN(ŌĆō) + VREF/GAIN (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĖą║ąĖ čłčāą╝ą░ ąĖą╗ąĖ čćčĆąĄąĘą╝ąĄčĆąĮąŠ ą▓čŗčüąŠą║ąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖąĘ-ąĘą░ ąŠčłąĖą▒ąŠą║ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ čāčüąĖą╗ąĄąĮąĖčÅ ą▓ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░čģ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüąĖčüč鹥ą╝čŗ) ą▒ąĄąĘ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░.
ą×čéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ą┐čĆąĄą▓čŗčłąĄąĮąĖąĄ čĆą░ą▒ąŠč湥ą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ (NEGATIVE FULL-SCALE OVERRANGE). ąÆąĄą╗ąĖčćąĖąĮą░ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣, ą║ąŠą│ą┤ą░ AIN(+) ąĮąĖąČąĄ AIN(ŌĆō) ŌĆō VREF/GAIN, ą▒ąĄąĘ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░.
ąöąĖą░ą┐ą░ąĘąŠąĮ čüą╝ąĄčēąĄąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (OFFSET CALIBRATION RANGE). ąÆ čĆąĄąČąĖą╝ą░čģ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ AD7731 ą║ą░ą╗ąĖą▒čĆčāąĄčé čüą▓ąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā ą▓čģąŠą┤čā. ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ Offset Calibration Range ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą▓čģąŠą┤ąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ AD7731 ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ąĖ ą▓čüąĄ ąĄčēąĄ č鹊čćąĮąŠ ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī čüą╝ąĄčēąĄąĮąĖąĄ.
ą¤ąŠą╗ąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (FULL-SCALE CALIBRATION RANGE). ąŁč鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ AD7731 ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ą▓ čĆąĄąČąĖą╝ąĄ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ąĖ ą▓čüąĄ ąĄčēąĄ ą┐čĆąĖ čŹč鹊ą╝ č鹊čćąĮąŠ ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī ą┐ąŠą╗ąĮčāčÄ čłą║ą░ą╗čā.
ąöąĖą░ą┐ą░ąĘąŠąĮ ąĘą░čģą▓ą░čéą░ ą┐ąŠ ą▓čģąŠą┤čā (INPUT SPAN). ąÆ čüčģąĄą╝ą░čģ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┤ą▓ą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐čĆąĖą╗ąŠąČąĄąĮąĮčŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā ą▓čģąŠą┤čā AD7731, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣. ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ input span ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ąĖąĮąĖą╝čāą╝ ąĖ ą╝ą░ą║čüąĖą╝čāą╝ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠčé ąĮčāą╗čÅ ą┤ąŠ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ, ą║ąŠč鹊čĆčŗąĄ AD7731 ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ąĖ ą▓čüąĄ ąĄčēąĄ č鹊čćąĮąŠ ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī čāčüąĖą╗ąĄąĮąĖąĄ.
RMS Root Mean Square, čüčĆąĄą┤ąĮąĄąĄ ą║ą▓ą░ą┤čĆą░čéąĖč湥čüą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
P2P peak-topeak, čĆą░ąĘą╝ą░čģ čüąĖą│ąĮą░ą╗ą░, čĆą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā ą┐ąĖą║ąŠą╝ ą╝ą░ą║čüąĖą╝čāą╝ą░ ąĖ ą┐ąĖą║ąŠą╝ ą╝ąĖąĮąĖą╝čāą╝ą░.
ąŻ AD7731 ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓ čĆą░ą▒ąŠčéčŗ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ čäąĖą╗čīčéčĆą░ ąĖ č湊ą┐ą┐ąĖąĮą│ą░. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čŹčéąĖ ąŠą┐čåąĖąĖ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ą╗ąĖą▒ąŠ ą┤ą╗čÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐čĆąŠą┐čāčüą║ąĮąŠą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ, ą╗ąĖą▒ąŠ ą┤ą╗čÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąŠ čłčāą╝čā ąĖ čāčģąŠą┤čā ąĘąĮą░č湥ąĮąĖą╣. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ čéą░ą▒ą╗ąĖčåčŗ čłčāą╝ą░ ą┤ą╗čÅ ą┤ą▓čāčģ ąŠčüąĮąŠą▓ąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓ čĆą░ą▒ąŠčéčŗ, čćč鹊 ą┐ąŠą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ ą▓čĆąĄą╝ąĄąĮą░ čāčüčéą░ąĮąŠą▓ą║ąĖ. ąÆ ą┐ąĄčĆą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ, ą│ą┤ąĄ AD7731 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ čü CHP = 0 ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ čĆąĄąČąĖą╝ąŠą╝ SKIP, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▒čŗčüčéčĆąŠąĄ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĖ ą▓čŗčüąŠą║ąŠą╣ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ. ąÆąŠ ą▓č鹊čĆąŠą╝ čĆąĄąČąĖą╝ąĄ, ą│ą┤ąĄ CHP=1 ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą┐ąŠą╗ąĮčŗą╣ ą▓č鹊čĆąŠą╣ čäąĖą╗čīčéčĆ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ąŠč湥ąĮčī ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī čłčāą╝ą░ čü ą╝ą░ą╗čŗą╝ąĖ čüą║ąŠčĆąŠčüčéčÅą╝ąĖ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ. ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ąĮąĖą╝ą░ąĄčé 100% čāčüčéą░ąĮąŠą▓ą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠčüą╗ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą║ą░ąĮą░ą╗ą░ ąĖą╗ąĖ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖčÅ SYNC.
ąÆčŗčģąŠą┤ąĮąŠą╣ čłčāą╝ ą┤ą╗čÅ CHP = 0, SKIP = 1 . ąóą░ą▒ą╗ąĖčåą░ I ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé RMS-čłčāą╝ ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čéąĖą┐ąŠą▓čŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ŌĆō3 dB čćą░čüč鹊čéą░čģ, ą║ąŠą│ą┤ą░ AD7731 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮąĄ ą▓ ą┤čĆąŠą▒ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (nonchop mode, CHP Filter Register = 0) ąĖ ąŠčéą║ą╗čÄč湥ąĮąĮąŠą╝ ą▓č鹊čĆčŗą╝ čäąĖą╗čīčéčĆąŠą╝ (SKIP Filter Register = 1). ąŁčéą░ čéą░ą▒ą╗ąĖčåą░ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ąŠčüąĮąŠą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąÉą”ą¤ 4.9152 ą£ąōčå. ąŁčéąĖ ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ąŠą▓čŗąĄ, ąĖ ą┐ąŠą╗čāč湥ąĮčŗ ąĮą░ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝ ą▓čģąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ 0V. ąĪą║ąŠčĆąŠčüčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ SF0 .. SF11 Filter Register. ąóą░ą▒ą╗ąĖčåą░ II ą╝ąĄąČą┤čā č鹥ą╝ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čŗčģąŠą┤ąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ P2P ą▓ ą▒ąĖčéą░čģ (ąŠą║čĆčāą│ą╗ąĄąĮąĮąŠąĄ ą║ ą▒ą╗ąĖąČą░ą╣čłąĄą╝čā 0.5 LSB) ą┤ą╗čÅ č鹥čģ ąČąĄ čüą░ą╝čŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąÆą░ąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 čćąĖčüą╗ą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ II ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ąĮąĄčé čüą║ą░čćą║ąŠą▓ ą║ąŠą┤ą░ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čüčāą╝ą╝čŗ 6 (six-sigma limit). ąŁč鹊 ąĮąĄ ą▓čŗčćąĖčüą╗ąĄąĮąŠ ąĮąĄ ąĮą░ čłčāą╝ąĄ RMS, ą░ ąĮą░ čłčāą╝ąĄ P2P.
ą¦ąĖčüą╗ą░ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą┤ą▓čāą┐ąŠą╗čÅčĆąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓. ąÜąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą▓čŗčģąŠą┤ąĮąŠą╣ čłčāą╝ ą▒čāą┤ąĄčé č鹊čé ąČąĄ, ą║ą░ą║ ąĖ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąĘąĮą░č湥ąĮąĖčÅ ą▓ čéą░ą▒ą╗ąĖčåąĄ I ąŠčüčéą░ąĮčāčéčüčÅ č鹥ą╝ąĖ ąČąĄ ą┤ą╗čÅ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓. ąöą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čćąĖčüąĄą╗ čéą░ą▒ą╗ąĖčåčŗ II ą┤ą╗čÅ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ ą┐čĆąŠčüč鹊 ąŠčéąĮąĖą╝ąĖč鹥 1 ąĖąĘ čćąĖčüą╗ą░ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ P2P ą▓ ą▒ąĖčéą░čģ.
ąóą░ą▒ą╗ąĖčåą░ I. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čłčāą╝ą░ ąŠčé ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąĖ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (CHP = 0, SKIP = 1). ąóąĖą┐ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čłčāą╝ą░ ą┤ą░ąĮąŠ ą▓ ą╝ąĖą║čĆąŠą▓ąŠą╗čīčéą░čģ RMS.
ą¦ą░čüč鹊čéą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ąĪą┐ą░ą┤ ą┐ąŠ čāčĆąŠą▓ąĮčÄ -3dB SF ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąÆčģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ, mV
┬▒1280 ┬▒640 ┬▒320 ┬▒160 ┬▒80 ┬▒40 ┬▒20
150 ąōčå
39.3 ąōčå
2048
20 ą╝čü
2.6
1.45
0.87
0.6
0.43
0.28
0.2
200 ąōčå
52.4 ąōčå
1536
15 ą╝čü
3.0
1.66
1.02
0.69
0.48
0.32
0.22
300 ąōčå
78.6 ąōčå
1024
10 ą╝čü
3.7
2
1.26
0.84
0.58
0.41
0.28
400 ąōčå
104.8 ąōčå
768
7.5 ą╝čü
4.2
2.3
1.46
1.0
0.69
0.46
0.32
600 ąōčå
157 ąōčå
512
5 ą╝čü
5.2
2.9
1.78
1.2
0.85
0.58
0.41
800 ąōčå
209.6 ąōčå
384
3.75 ą╝čü
6
3.3
2.1
1.4
0.98
0.66
0.47
1200 ąōčå
314 ąōčå
256
2.5 ą╝čü
7.8
4.3
2.6
1.8
1.27
0.82
0.57
1600 ąōčå
419.2 ąōčå
192
1.87 ą╝čü
10.9
5.4
3.5
2.18
1.51
0.94
0.64
2400 ąōčå
629 ąōčå
128
1.25 ą╝čü
27.1
13.9
7.3
3.5
2.22
1.24
0.83
3200 ąōčå
838.4 ąōčå
96
0.94 ą╝čü
47
24.4
11.4
5.3
3.1
1.9
1.0
4800 ąōčå
1260 ąōčå
64
0.625 ą╝čü
99
50.3
24.5
12.5
6.5
3.3
1.7
6400 ąōčå
1676 ąōčå
48
0.47 ą╝čü
193
97
48
24
11.8
6.6
3.0
ąóą░ą▒ą╗ąĖčåą░ II. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ P2P ąŠčé ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąĖ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (CHP = 0, SKIP = 1). ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī P2P čāą║ą░ąĘą░ąĮą░ ą▓ ą▒ąĖčéą░čģ.
ą¦ą░čüč鹊čéą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ąĪą┐ą░ą┤ ą┐ąŠ čāčĆąŠą▓ąĮčÄ -3dB SF ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąÆčģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ, mV
┬▒1280 ┬▒640 ┬▒320 ┬▒160 ┬▒80 ┬▒40 ┬▒20
150 ąōčå
39.3 ąōčå
2048
20 ą╝čü
17.5
17
17
16.5
16
15.5
15
200 ąōčå
52.4 ąōčå
1536
15 ą╝čü
17
17
16.5
16.5
16
15.5
15
300 ąōčå
78.6 ąōčå
1024
10 ą╝čü
17
16.5
16.5
16
15.5
15
14.5
400 ąōčå
104.8 ąōčå
768
7.5 ą╝čü
16.5
16.5
16
15.5
15.5
15
14.5
600 ąōčå
157 ąōčå
512
5 ą╝čü
16.5
16
16
15.5
15
14.5
14
800 ąōčå
209.6 ąōčå
384
3.75 ą╝čü
16
16
15.5
15
14.5
14.5
14
1200 ąōčå
314 ąōčå
256
2.5 ą╝čü
15.5
15.5
15.5
15
14.5
14
13.5
1600 ąōčå
419.2 ąōčå
192
1.87 ą╝čü
15
15.5
15
14.5
14
14
13.5
2400 ąōčå
629 ąōčå
128
1.25 ą╝čü
14
14
14
14
13.5
13.5
13
3200 ąōčå
838.4 ąōčå
96
0.94 ą╝čü
13
13
13
13
13
13
12.5
4800 ąōčå
1260 ąōčå
64
0.625 ą╝čü
12
12
12
12
12
11.5
12
6400 ąōčå
1676 ąōčå
48
0.47 ą╝čü
11
11
11
11
11
11
11
ąÆčŗčģąŠą┤ąĮąŠą╣ čłčāą╝ ą┤ą╗čÅ CHP = 1, SKIP = 0 . ąóą░ą▒ą╗ąĖčåą░ III ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čŗčģąŠą┤ąĮąŠą╣ čłčāą╝ RMS ą┤ą╗čÅ čéąĖą┐ąŠą▓čŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ŌĆō3 dB čćą░čüč鹊čé, ą║ąŠą┤ą░ AD7731 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą┤čĆąŠą▒ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (chopping mode, CHP Filter Register = 1) ąĖ ą▓ą║ą╗čÄč湥ąĮąĮčŗą╝ ą▓ čåąĖą║ą╗ ą▓č鹊čĆčŗą╝ čäąĖą╗čīčéčĆąŠą╝. ą¦ąĖčüą╗ą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ ą┐čĆąĖ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 ąÉą”ą¤ 4.9152 ą£ąōčå. ąŁčéąĖ čćąĖčüą╗ą░ čéąĖą┐ąŠą▓čŗąĄ, čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝ ą▓čģąŠą┤ąĮąŠą╝ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ 0V. ąĪą║ąŠčĆąŠčüčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ SF0 .. SF11 Filter Register. ąóą░ą▒ą╗ąĖčåą░ IV ą╝ąĄąČą┤čā č鹥ą╝ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čŗčģąŠą┤ąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ P2P ą▓ ą▒ąĖčéą░čģ (ąŠą║čĆčāą│ą╗ąĄąĮąĮąŠąĄ ą║ ą▒ą╗ąĖąČą░ą╣čłąĄą╝čā 0.5 LSB) ą┤ą╗čÅ č鹥čģ ąČąĄ čüą░ą╝čŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąÆą░ąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 čćąĖčüą╗ą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ II ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ąĮąĄčé čüą║ą░čćą║ąŠą▓ ą║ąŠą┤ą░ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čüčāą╝ą╝čŗ 6 (six-sigma limit). ąŁč鹊 ąĮąĄ ą▓čŗčćąĖčüą╗ąĄąĮąŠ ąĮąĄ ąĮą░ čłčāą╝ąĄ RMS, ą░ ąĮą░ čłčāą╝ąĄ P2P.
ą¦ąĖčüą╗ą░ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓. ąÜąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą▓čŗčģąŠą┤ąĮąŠą╣ čłčāą╝ ą▒čāą┤ąĄčé č鹊čé ąČąĄ, ą║ą░ą║ ąĖ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąĘąĮą░č湥ąĮąĖčÅ ą▓ čéą░ą▒ą╗ąĖčåąĄ III ąŠčüčéą░ąĮčāčéčüčÅ č鹥ą╝ąĖ ąČąĄ ą┤ą╗čÅ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓. ąöą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čćąĖčüąĄą╗ čéą░ą▒ą╗ąĖčåčŗ IV ą┤ą╗čÅ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ ą┐čĆąŠčüč鹊 ąŠčéąĮąĖą╝ąĖč鹥 1 ąĖąĘ čćąĖčüą╗ą░ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ P2P ą▓ ą▒ąĖčéą░čģ.
ąóą░ą▒ą╗ąĖčåą░ III. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čłčāą╝ą░ ąŠčé ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąĖ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (CHP = 1, SKIP = 0). ąóąĖą┐ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čłčāą╝ą░ ą┤ą░ąĮąŠ ą▓ nV (ąĮą░ąĮąŠą▓ąŠą╗čīčéą░čģ) RMS.
ą¦ą░čüč鹊čéą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ąĪą┐ą░ą┤ ą┐ąŠ čāčĆąŠą▓ąĮčÄ -3dB SF ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąÆčģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ, mV
Normal Fast Step ┬▒1280 ┬▒640 ┬▒320 ┬▒160 ┬▒80 ┬▒40 ┬▒20
50 ąōčå
1.97 ąōčå
2048
440 ą╝čü
40 ą╝čü
700
425
265
170
120
85
55
100 ąōčå
3.95 ąōčå
1024
220 ą╝čü
20 ą╝čü
980
550
330
230
190
115
90
150 ąōčå
5.92 ąōčå
683
147 ą╝čü
13.3 ą╝čü
1230
700
445
270
210
140
100
200 ąōčå
7.9 ąōčå
512
110 ą╝čü
10 ą╝čü
1260
840
500
340
245
170
105
400 ąōčå
15.8 ąōčå
256
55 ą╝čü
5 ą╝čü
2000
1230
690
430
335
215
160
800 ąōčå
31.6 ąōčå
128
27.5 ą╝čü
2.5 ą╝čü
3800
2100
1400
760
590
345
220
ąóą░ą▒ą╗ąĖčåą░ IV. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ P2P ąŠčé ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąĖ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (CHP = 1, SKIP = 0). ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī P2P čāą║ą░ąĘą░ąĮą░ ą▓ ą▒ąĖčéą░čģ.
ą¦ą░čüč鹊čéą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ąĪą┐ą░ą┤ ą┐ąŠ čāčĆąŠą▓ąĮčÄ -3dB SF ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąÆčģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ, mV
Normal Fast Step ┬▒1280 ┬▒640 ┬▒320 ┬▒160 ┬▒80 ┬▒40 ┬▒20
50 ąōčå
1.97 ąōčå
2048
440 ą╝čü
40 ą╝čü
19
19
18.5
18.5
18
17.5
17
100 ąōčå
3.95 ąōčå
1024
220 ą╝čü
20 ą╝čü
19
18.5
18.5
18
17
17
16
150 ąōčå
5.92 ąōčå
683
147 ą╝čü
13.3 ą╝čü
18.5
18
18
17.5
17
16.5
16
200 ąōčå
7.9 ąōčå
512
110 ą╝čü
10 ą╝čü
18.5
18
17.5
17.5
17
16.5
16
400 ąōčå
15.8 ąōčå
256
55 ą╝čü
5 ą╝čü
17.5
17.5
17
17
16.5
16
15.5
800 ąōčå
31.6 ąōčå
128
27.5 ą╝čü
2.5 ą╝čü
17
16.5
16
16
15.5
15
15
[ąĀąĄą│ąĖčüčéčĆčŗ AD7731 ]
AD7731 čüąŠą┤ąĄčƹȹĖčé 12 ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓, ą║ ą║ąŠč鹊čĆčŗą╝ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 4 ąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ V, ąĖ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ.
ąĀąĖčü. 4. ąĀąĄą│ąĖčüčéčĆčŗ AD7731.
ąóą░ą▒ą╗ąĖčåą░ V. ą×ą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ AD7731.
ąØą░ąĘą▓ą░ąĮąĖąĄ ąóąĖą┐* ąæąĖčé Reset* ążčāąĮą║čåąĖčÅ
Communications Register
WO
8
-
ąĀąĄą│ąĖčüčéčĆ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ. ąÆčüąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čü ą┤čĆčāą│ąĖą╝ąĖ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ ąĖąĮąĖčåąĖąĖčĆčāčÄčéčüčÅ č湥čĆąĄąĘ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ. ąŁč鹊 čāą┐čĆą░ą▓ą╗čÅąĄčé č鹥ą╝, ą║ą░ą║ą░čÅ ą▒čāą┤ąĄčé ąŠą┐ąĄčĆą░čåąĖčÅ (čćč鹥ąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī, ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ čćč鹥ąĮąĖąĄ) ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą░ą┤čĆąĄčüčāąĄčé čĆąĄą│ąĖčüčéčĆ. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║ čĆąĄą│ąĖčüčéčĆčā ąŠą▒ą╝ąĄąĮą░, ą║čĆąŠą╝ąĄ čĆą░ą▒ąŠčéčŗ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ čćč鹥ąĮąĖčÅ.
Status Register
RO
8
Cxh
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čāčüčéą░ąĮąŠą▓ą║ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą▓čģąŠą┤ąŠą▓, čĆą░ą▒ąŠčéčā ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéčī čāčĆąŠą▓ąĮčÅ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
Data Register
RO
16 ąĖą╗ąĖ 24
000000h
ąĀąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čĆąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ (ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░). ąöą╗ąĖąĮą░ čĆąĄą│ąĖčüčéčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ąĮą░ 16 ąĖą╗ąĖ 24 ą▒ąĖčéą░.
Mode Register
R/W
16
0174h
ąĀąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░. ąŻą┐čĆą░ą▓ą╗čÅąĄčé čéą░ą║ąĖą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ, ą║ą░ą║ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ, ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠąĄ/ą┤ą▓čāą┐ąŠą╗čÅčĆąĮąŠąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ, čäčāąĮą║čåąĖčÅ ąĮąŠąČąĄą║ AIN3/D1 ąĖ AIN4/D0, č鹊ą║ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ, ą┤ą╗ąĖąĮą░ čüą╗ąŠą▓ą░ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ. ąóą░ą║ąČąĄ ąĘą┤ąĄčüčī čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▒ąĖčé ą▓čŗą▒ąŠčĆą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą▒ąĖčéčŗ ą▓čŗą▒ąŠčĆą░ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖ ą▒ąĖčéčŗ ą▓čŗą▒ąŠčĆą░ ą║ą░ąĮą░ą╗ą░.
Filter Register
R/W
16
2002h
ąĀąĄą│ąĖčüčéčĆ čäąĖą╗čīčéčĆą░. ąŻą┐čĆą░ą▓ą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čāčüčĆąĄą┤ąĮąĄąĮąĖą╣ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░ (čćč鹊 ą▓ą╗ąĖčÅąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ), ą▓čŗą▒ąĖčĆą░ąĄčé čĆąĄąČąĖą╝ FASTStep ąĖ čĆąĄąČąĖą╝ ą┐čĆąŠą┐čāčüą║ą░ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░, ąĖ čéą░ą║ąČąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé čĆąĄąČąĖą╝ą░ą╝ąĖ č湊ą┐ą┐ąĖąĮą│ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
Offset Register
R/W
24
?
ąĀąĄą│ąĖčüčéčĆ čüą╝ąĄčēąĄąĮąĖčÅ. ąÆčüąĄą│ąŠ ąĖčģ čéčĆąĖ čłčéčāą║ąĖ, ą┐ąŠ čćąĖčüą╗čā ą║ą░ąĮą░ą╗ąŠą▓ (čüą╝. čéą░ą▒ą╗ąĖčåčā XIII). ąĪąŠą┤ąĄčƹȹĖčé 24-ą▒ąĖčéąĮąŠąĄ čüą╗ąŠą▓ąŠ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčēąĄąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ąŠčćąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čüą╝ąĄčēąĄąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░.
Gain Register
R/W
24
?
ąĀąĄą│ąĖčüčéčĆ čāčüąĖą╗ąĄąĮąĖčÅ. ąÆčüąĄą│ąŠ ąĖčģ čéčĆąĖ čłčéčāą║ąĖ, ą┐ąŠ čćąĖčüą╗čā ą║ą░ąĮą░ą╗ąŠą▓ (čüą╝. čéą░ą▒ą╗ąĖčåčā XIII). ąĪąŠą┤ąĄčƹȹĖčé 24-ą▒ąĖčéąĮąŠąĄ čüą╗ąŠą▓ąŠ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčēąĄąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ąŠčćąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčüąĖą╗ąĄąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ąĖąĘ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░.
Test Register
R/W
24
000000h
ąĀąĄą│ąĖčüčéčĆ ą┐čĆąŠą▓ąĄčĆą║ąĖ. ąŻą┐čĆą░ą▓ą╗čÅąĄčé čĆąĄąČąĖą╝ą░ą╝ąĖ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ, čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ *: ą▓ čüč鹊ą╗ą▒čåąĄ "ąóąĖą┐" ą┐ąŠą║ą░ąĘą░ąĮ čéąĖą┐ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā: WO č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ, RO č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, R/W ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ. ąÆ čüč鹊ą╗ą▒čåąĄ "Reset" ą┐ąŠą║ą░ąĘą░ąĮąŠ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ.
8-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ąŠą▒ą╝ąĄąĮą░ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ. ąÆčüąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ą┤ąŠą╗ąČąĮčŗ ąĮą░čćą░čéčīčüčÅ čü ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register. ąöą░ąĮąĮčŗąĄ, ąĘą░ą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ Communications Register, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čüą╗ąĄą┤čāčÄčēčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ, ą║ą░ą║ą░čÅ ąŠąĮą░ ą▒čāą┤ąĄčé - čćč鹥ąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī, čéąĖą┐ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ, čü ą║ą░ą║ąĖą╝ čĆąĄą│ąĖčüčéčĆąŠą╝ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖčÅ. ąöą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ąĖą╗ąĖ ąŠą┤ąĖąĮąŠčćąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąŠą┐ąĄčĆą░čåąĖčÅ čü čĆąĄą│ąĖčüčéčĆąŠą╝, ąĖąĮč鹥čĆč乥ą╣čü ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ąŠąČąĖą┤ą░ąĮąĖčÄ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register. ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ (ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüą░), ą▓ ą║ąŠč鹊čĆąŠą╝ AD7731 ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register. ąÆ čüąĖčéčāą░čåąĖčÅčģ, ą║ąŠą│ą┤ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąŠčüčéčāą┐ą░ ą║ ąĖąĮč鹥čĆč乥ą╣čüčā ą┐ąŠč鹥čĆčÅąĮą░, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ąŠą┐ąĄčĆą░čåąĖčÄ ąĘą░ą┐ąĖčüąĖ čü ą▓čŗą┤ą░č湥ą╣ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 32 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓ ą┐čĆąĖ ą┐ąŠą┤ą░č湥 ąĮą░ ą▓čģąŠą┤ DIN ąĄą┤ąĖąĮąĖčå, čćč鹊 ą▓ąŠąĘą▓čĆą░čéąĖčé AD7731 ą▓ čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąóą░ą▒ą╗ąĖčåą░ VI ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▒ąĖčéčŗ Communications Register ąŠčé čüčéą░čĆčłąĄą│ąŠ ą║ ą╝ą╗ą░ą┤čłąĄą╝čā.
ąóą░ą▒ą╗ąĖčåą░ VI. ąæąĖčéčŗ Communications Register.
7
6
5
4
3
2
1
0
~WEN ZERO RW1 RW0 ZERO RS2 RS1 RS0
~WEN ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ. ąÆ čŹč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ 0, čćč鹊ą▒čŗ ą▒čŗą╗ą░ ąĘą░ą┤ą░ąĮą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ. ąĢčüą╗ąĖ ąĘą░ą┐ąĖčüą░čéčī čüčÄą┤ą░ 1, č鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓ą▓ąŠą┤ąĖčéčī ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▒ąĖčéčŗ ą▓ čüą▓ąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░. ąæąĖčé ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī čüą▓ąŠąĄ ąĄą┤ąĖąĮąĖčćąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą┐ąĖčüą░čéčī čüčÄą┤ą░ 0. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓ čŹč鹊čé ą▒ąĖčé ąĘą░ą┐ąĖčüą░ąĮ 0, ąŠčüčéą░ą╗čīąĮčŗąĄ 7 ą▒ąĖčé ą▒čāą┤čāčé ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓ Communications Register.
ZERO ą▓ čŹč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ 0, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ AD7731.
RW1 , RW0 ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ. ąÆ čéą░ą▒ą╗ąĖčåąĄ VII ą┐ąŠą║ą░ąĘą░ąĮčŗ čüąŠčüč鹊čÅąĮąĖčÅ čŹčéąĖčģ ą▒ąĖčé, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖčģ ą▓ąĖą┤ ąŠą┐ąĄčĆą░čåąĖąĖ.
ąóą░ą▒ą╗ąĖčåą░ VII. ąĀąĄąČąĖą╝čŗ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ.
RW1 RW0 ąĀąĄąČąĖą╝ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ
0
0
ą×ą┤ąĖąĮąŠčćąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāą║ą░ąĘą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ.
0
1
ą×ą┤ąĖąĮąŠčćąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ąĖąĘ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░.
1
0
ąŚą░ą┐čāčüą║ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░.
1
1
ą×čüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ.
ąÜąŠą│ą┤ą░ ą▓ čŹčéąĖ ą▒ąĖčéčŗ ąĘą░ą┐ąĖčüą░ąĮąŠ 00, č鹊 čüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čŹč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆ, ąĮą░ ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé RS2, RS1, RS0. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāą║ą░ąĘą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register.
ąÜąŠą│ą┤ą░ ą▓ čŹčéąĖ ą▒ąĖčéčŗ ąĘą░ą┐ąĖčüą░ąĮąŠ 01, č鹊 čüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čŹč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░, ąĮą░ ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé RS2, RS1, RS0. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register.
ąÜąŠą│ą┤ą░ ą▓ čŹčéąĖ ą▒ąĖčéčŗ ąĘą░ą┐ąĖčüą░ąĮąŠ 10, čŹč鹊 čāčüčéą░ąĮąŠą▓ąĖčé ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą▓ čĆąĄąČąĖą╝ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░, ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą▒ąĖčéą░ą╝ąĖ RS2, RS1, RS0. ą¦ą░čēąĄ ą▓čüąĄą│ąŠ ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ąĘą░ą┤ą░ąĄčéčüčÅ Data Register (ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čĆąĄąĘčāą╗čīčéą░čéą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ) ąĖ Status Register (ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąŠą╝ąĄąĮčéą░ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ). ąÆčüąĄ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ą▒čāą┤čāčé čüąŠčüč鹊čÅčéčī ąĖąĘ čćč鹥ąĮąĖą╣ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░, ą▒ąĄąĘ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗčģ ąĘą░ą┐ąĖčüąĄą╣ ą▓ Communications Register. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčüčÅ čüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ, ą║ąŠą│ą┤ą░ ąŠąČąĖą┤ą░ąĄčéčüčÅ ą┤čĆčāą│ąŠąĄ čćč鹥ąĮąĖąĄ ąĖąĘ čŹč鹊ą│ąŠ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░, čé. ąĄ. ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ čüą╗ąĄą┤čāčÄčé ąŠą┤ąĮą░ ąĘą░ ą┤čĆčāą│ąŠą╣. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ 30h ą▓ čĆąĄą│ąĖčüčéčĆ, čćč鹊 čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčéčŗ RW1 ąĖ RW0, ąĖ č鹥ą╝ čüą░ą╝čŗą╝ ąŠčüčéą░ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā čĆąĄąČąĖą╝ą░ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ.
ąÜąŠą│ą┤ą░ ą▓ čŹčéąĖ ą▒ąĖčéčŗ ąĘą░ą┐ąĖčüą░ąĮąŠ 11 (ąĖ ąĘą░ą┐ąĖčüą░ąĮčŗ ąĮčāą╗ąĖ ą▓ ą▒ąĖčéčŗ 3..0), ąŠą┐ąĄčĆą░čåąĖčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ą▒čāą┤ąĄčé ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐čĆąŠą┤ąŠą╗ąČąĖčé čüčćąĖčéčŗą▓ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ DIN ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ SCLK ą▓ čĆąĄąČąĖą╝ąĄ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ąŠą│ą┤ą░ ąŠčüčéą░ąĮąŠą▓ąĖčéčī čĆąĄąČąĖą╝ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ ą▒čŗčéčī ąŠčüč鹊čĆąŠąČąĮčŗą╝, čćč鹊ą▒čŗ čüą╗čāčćą░ą╣ąĮąŠ ąĮąĄ ą▓čŗą╣čéąĖ ąĖąĘ čĆąĄąČąĖą╝ą░ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ąĖą╗ąĖ čćč鹊ą▒čŗ ąĮąĄ čüą▒čĆąŠčüąĖčéčī ą╝ąĖą║čĆąŠčüčģąĄą╝čā ąĘą░ą┐ąĖčüčīčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĄą┤ąĖąĮąĖč湥ą║. ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ąĖąĘą▒ąĄąČą░čéčī čŹč鹊ą│ąŠ - ą┐ąŠą╝ąĄčüčéąĖčéčī ą╗ąŠą│. 0 ąĮą░ DIN, ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ.
RS2 , RS1 , RS0 ą▒ąĖčéčŗ ą▓čŗą▒ąŠčĆą░ čĆąĄą│ąĖčüčéčĆą░, RS2 čüčéą░čĆčłąĖą╣ ąĖąĘ čŹčéąĖčģ ą▒ąĖčé. ąŚąĮą░č湥ąĮąĖčÅ ą▓ RS2..RS0 ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, čü ą║ą░ą║ąĖą╝ ąĖąĘ 8 čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┤ąŠą╗ąČąĮą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ VIII.
ąóą░ą▒ą╗ąĖčåą░ VIII. ąÆčŗą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆą░.
RS2 RS1 RS0 ąĀąĄąČąĖą╝ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ
0
0
0
Communications Register (ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ)
0
0
0
Status Register (ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ)
0
0
1
Data Register
0
1
0
Mode Register
0
1
1
Filter Register
1
0
0
ąØąĄčé ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā
1
0
1
Offset Register
1
1
0
Gain Register
1
1
1
Test Register
8-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ Status Register, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī 000 ą▓ ą▒ąĖčéčŗ RS2..RS0 Communications Register čü ą▓čŗą▒ąŠčĆąŠą╝ ą╗ąĖą▒ąŠ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ, ą╗ąĖą▒ąŠ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ. ąóą░ą▒ą╗ąĖčåą░ IX ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čĆą░ąĘą╝ąĄčēąĄąĮąĖąĄ ą▒ąĖčé ą┐ąŠ čĆą░ąĘčĆčÅą┤ą░ą╝. ąĀąĖčü. 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ AD7731. ąŚąĮą░č湥ąĮąĖąĄ ą▓ čüą║ąŠą▒ą║ą░čģ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▒ąĖčéą░ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüą░.
ąóą░ą▒ą╗ąĖčåą░ IX. ąæąĖčéčŗ Status Register.
7
6
5
4
3
2
1
0
~RDY ~STDY STBY NOREF MS3 MS2 MS1 MS0
~RDY ą▒ąĖčé ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ. ąĪąŠčüč鹊čÅąĮąĖąĄ ąĖ čäčāąĮą║čåąĖčÅ čŹč鹊ą│ąŠ ą▒ąĖčéą░ čéą░ą║ą░čÅ ąČąĄ, ą║ą░ą║ ą▓ąĮąĄčłąĮąĄą│ąŠ ą▓čŗčģąŠą┤ą░ ~RDY. ąĪąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą▒ąĖčé ~RDY, ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ XVII.
~STDY ą▒ąĖčé čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ čüąŠčüč鹊čÅąĮąĖčÅ. ąŁč鹊čé ą▒ąĖčé ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé čĆąĄąĘčāą╗čīčéą░čé ą▓ Data Register. ąĢčüą╗ąĖ čäąĖą╗čīčéčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ FASTStepŌäó (čüą╝. ą▓čĆąĄąĘą║čā Filter Register), ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆąĄą░ą│ąĖčĆčāąĄčé ąĮą░ čĆąĄąĘą║ąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ, č鹊 ą▒ąĖčé ~STDY ąŠčüčéą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1 ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ čüčéą░ąĮąĄčé ą┤ąŠčüčéčāą┐ąĄąĮ čĆąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ąÆčŗčģąŠą┤ ~RDY ąĖ ą▒ąĖčé ~RDY čāčüčéą░ąĮąŠą▓čÅčéčüčÅ ą▓ ą╗ąŠą│. 0, ąĮą░ čŹčéąĖčģ ąĮą░čćą░ą╗čīąĮčŗčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅčģ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī čĆąĄąĘčāą╗čīčéą░čéą░. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ~STDY == 1, č鹊 čŹč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ čĆąĄąĘčāą╗čīčéą░čé ąĮąĄ ą┐ąŠą╗čāč湥ąĮ ąĖąĘ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čāčüčéą░ąĮąŠą▓ąĖą▓čłąĄą│ąŠčüčÅ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ FIR-čäąĖą╗čīčéčĆą░. ąÜąŠą│ą┤ą░ čüąŠčüč鹊čÅąĮąĖąĄ FIR-čäąĖą╗čīčéčĆą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čāčüčéą░ąĮąŠą▓ąĖą╗ąŠčüčī, č鹊 ą▒ąĖčé ~STDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0 ą▓ą╝ąĄčüč鹥 čü ~RDY. ąĢčüą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ čĆąĄąČąĖą╝ FASTStepŌäó, ą▒ąĖčé STDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0 ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╝ čćč鹥ąĮąĖąĖ Data Register, ąĖ ąĮąĄ ąŠčćąĖčēą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ąĖ čćč鹥ąĮąĖčÅą╝ąĖ Data Register.
ąĪąŠą▒čŗčéąĖčÅ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčēąĖąĄ ą▒ąĖčé ~STDY, ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ XVII. ~STDY čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1 ą▓ą╝ąĄčüč鹥 čü ~RDY ą┐čĆąĖ ą▓čüąĄčģ čüąŠą▒čŗčéąĖčÅčģ ą▓ čŹč鹊ą╣ čéą░ą▒ą╗ąĖčåąĄ, ą║čĆąŠą╝ąĄ čćč鹥ąĮąĖčÅ Data Register.
STBY Standby Bit, ą▒ąĖčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ. ąøąŠą│. 1 ą▓ ąĮąĄą╝ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 AD7731 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Standby Mode, čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ, ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ą╝ą░ą╗ąŠ 菹ĮąĄčĆą│ąĖąĖ), ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą╗ąŠą│. 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮą░ ą▓ čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗą▓ąŠą┤ą░ ą▓čģąŠą┤ą░ ~STANDBY ąĖą╗ąĖ ąĘą░ą┐ąĖčüčīčÄ 011 ą▓ ą▒ąĖčéčŗ MD2..MD0 Mode Register. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▒ąĖčéą░ STBY čĆą░ą▓ąĮąŠ 0, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ~STANDBY=1 (ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ).
NOREF No Reference Bit, ą▒ąĖčé ąŠčéčüčāčéčüčéą▓ąĖčÅ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╝ąĄąČą┤čā REF IN(+) ąĖ REF IN(ŌĆō) ą╝ąĄąĮčīčłąĄ 0.5V, ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ ąĖąĘ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ, č鹊 ą▒ąĖčé NOREF ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1. ąĢčüą╗ąĖ NOREF=1 ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, č鹊 ą▓ Data Register ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĄą┤ąĖąĮąĖčćą║ą░ą╝ąĖ. ąĢčüą╗ąĖ NOREF=1 ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, č鹊 ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
MS3..MS0 čŹčéąĖ ą▒ąĖčéčŗ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ ąĘą░ą▓ąŠą┤čüą║ąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ąĪąŠčüč鹊čÅąĮąĖąĄ čŹčéąĖčģ ą▒ąĖčé ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░/ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĘą░ą▓ąĖčüąĖčé čćąĖčüą╗ą░, ąĘą░ą┐ąĖčüą░ąĮąĮąŠą│ąŠ ąĮą░ ąĘą░ą▓ąŠą┤ąĄ.
ąĀąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ čŹč鹊 čĆąĄą│ąĖčüčéčĆ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ AD7731. ąĀąĖčü. 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ AD7731. ąĀąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┤ą╗ąĖąĮčā 16 ąĖą╗ąĖ 24 ą▒ąĖčé, čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčéą░ WL ą▓ Mode Register. ąÆčŗčģąŠą┤ ~RDY ąĖ ą▒ąĖčé ~RDY ą▓ Status Register čāčüčéą░ąĮąŠą▓čÅčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ Data Register ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ąĮąŠą▓čŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ. ąÆčŗčģąŠą┤ ~RDY ąĖ ą▒ąĖčé ~RDY ą▓ąĄčĆąĮčāčéčüčÅ ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą▒čŗą╗ąŠ ą┐čĆąŠčćąĖčéą░ąĮąŠ ą▓čüąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ (16 ąĖą╗ąĖ 24 ą▒ąĖčéą░). ąĢčüą╗ąĖ Data Register ąĮąĄ ą▒čŗą╗ ą┐čĆąŠčćąĖčéą░ąĮ ą┐ąŠčüą╗ąĄ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ąŠč湥čĆąĄą┤ąĮąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, č鹊 ą▓čŗą▓ąŠą┤ ~RDY ąĖ ą▒ąĖčé ~RDY ą┐ąĄčĆąĄą╣ą┤čāčé ą▓ ą╗ąŠą│. 1 ąĮą░ ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 158.5 x tCLK IN , ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ čŹčéąĖą╝, čćč鹊 čćč鹥ąĮąĖąĄ Data Register ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąŠ, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖąĘ Data Register, ą┐ąŠą║ą░ ąŠąĮ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ Data Register, ~RDY ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ą╗ąŠą│. 0.
ąĢčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ Communications Register ąĮą░čüčéčĆąŠąĖą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ, č鹊 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ čĆąĄą░ą╗čīąĮą░čÅ ąĘą░ą┐ąĖčüčī, čćč鹊ą▒čŗ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮčāą╗ą░čüčī ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register (čé. ąĄ. ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░). ą×ą┤ąĮą░ą║ąŠ čŹčéąĖ ąĘą░ą┐ąĖčüą░ąĮąĮčŗąĄ 16 ąĖą╗ąĖ 24 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤čāčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčīčüčÅ AD7731.
ąĀąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░ 16-ą▒ąĖčéąĮčŗą╣, ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ą░ą║ čćč鹥ąĮąĖąĄ, čéą░ą║ ąĖ ąĘą░ą┐ąĖčüčī ąĄą│ąŠ ą▒ąĖčé. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ AD7731, ą▓čŗą▒ąŠčĆ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣, ą▓čŗą▒ąŠčĆ ą║ą░ąĮą░ą╗ą░ ąĖ ą┤ą╗ąĖąĮčā čüą╗ąŠą▓ą░ Data Register. ąÆ čéą░ą▒ą╗ąĖčåąĄ X ą┐ąŠą║ą░ąĘą░ąĮąŠ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą▒ąĖčé ą┐ąŠ čĆą░ąĘčĆčÅą┤ą░ą╝ Mode Register. ą¦ąĖčüą╗ąŠ ą▓ čüą║ąŠą▒ą║ą░čģ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčéą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆąŠąĄ ą▒ąĖčé ą┐ąŠą╗čāčćą░ąĄčé ą┐čĆąĖ čüą▒čĆąŠčüąĄ ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ. ąĀąĖčü. 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠčåąĄčüčü čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ AD7731, ąĖ čĆąĖčü. 6 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠčåąĄčüčü ąĖčģ ąĘą░ą┐ąĖčüąĖ.
ąóą░ą▒ą╗ąĖčåą░ X. ąæąĖčéčŗ Mode Register.
15
14
13
12
11
10
9
8
MD2 MD1 MD0 ~B/U DEN D1 D0 WL
7
6
5
4
3
2
1
0
HIREF RN2 RN1 RN0 BO CH2 CH1 CH0
MD2 , MD1 , MD0 ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ čĆą░ą▒ąŠčéčā AD7731, ąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ąĖ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ XI. ąŁčéąĖ čĆąĄąČąĖą╝čŗ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ, ą┐ąŠčŹč鹊ą╝čā ąĘą░ą┐ąĖčüčī ąĮąŠą▓ąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą▓ čŹčéąĖ ą▒ąĖčéčŗ Mode Register ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗčģąŠą┤čā ąĖąĘ čĆąĄąČąĖą╝ą░, ą▓ ą║ąŠč鹊čĆąŠą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ą╗ą░, ąĖ ą┐ąĄčĆąĄą▓ąŠą┤čā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓ ąĮąŠą▓čŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ Mode Register.
ąóą░ą▒ą╗ąĖčåą░ XI. ąĀą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ.
MD2 MD1 MD0 ąĀąĄąČąĖą╝ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ
0
0
0
Sync (Idle) Mode (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░/ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą╝ąŠą┤čāą╗čÅč鹊čĆ ąĖ čäąĖą╗čīčéčĆ čāą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░, ąĖ AD7731 ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąĖąĄ ąĮąŠą▓čŗąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą╝ąĄčēąĄąĮąĖąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓ čŹč鹊čé čĆąĄąČąĖą╝ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ ą┐ąŠą┤ą░čćąĖ čüąĮą░čĆčāąČąĖ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗą▓ąŠą┤ ~SYNC. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠą┤ą░čćą░ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ~SYNC ąĮąĄ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ čŹčéąĖ ą▒ąĖčéčŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 000. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čŹč鹊čé čĆąĄąČąĖą╝ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ (Single Conversion Mode). 000 čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▒ąĖčé MD2..MD0 ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
0
0
1
Continuous Conversion Mode (čĆąĄąČąĖą╝ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ AD7731 ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čĆąĄąĘčāą╗čīčéą░čéčŗ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą▓ Data Register čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣ (ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ Filter Register). ąöą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čŹč鹊 ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ AD7731.
0
1
0
Single Conversion Mode (čĆąĄąČąĖą╝ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ AD7731 ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąŠą┤ąĮąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ čåąĖčäčĆąŠą▓čāčÄ č乊čĆą╝čā, ąŠą▒ąĮąŠą▓ą╗čÅąĄčé čŹčéąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ Data Register, ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ Sync Mode ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčé čŹčéąĖ ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 000. ąĀąĄąĘčāą╗čīčéą░čé ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ AD7731 ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ, ą┐ąŠą║ą░ ąĮąĄ ąĖčüč鹥č湥čé ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čäąĖą╗čīčéčĆą░.
0
1
1
Power-Down (Standby) Mode (čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ AD7731 ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ąĖą╗ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ. ą¤ąŠą╝ąĄčēąĄąĮąĖąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓ čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ ą┐ąŠą┤ą░č湥 ą░ą║čéąĖą▓ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ ~STANDBY. ą×ą┤ąĮą░ą║ąŠ ą░ą║čéąĖą▓ą░čåąĖčÅ ~STANDBY ąĮąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠą╝čā ą┐ąĄčĆąĄčģąŠą┤čā čŹčéąĖčģ ą▒ąĖčé čĆąĄąČąĖą╝ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 011.
1
0
0
Zero-Scale Self-Calibration Mode (čĆąĄąČąĖą╝ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮčāą╗čÅ). ąÉą║čéąĖą▓ąĖąĘąĖčĆčāąĄčé ą┐čĆąŠčåąĄčüčü čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮčāą╗čÅ ą║ą░ąĮą░ą╗ą░, ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą▒ąĖčéą░ą╝ąĖ CH2, CH1 ąĖ CH0 ą▓ Mode Register. ąŁčéą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĮčāą╗čÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ čāčüąĖą╗ąĄąĮąĖąĖ, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤čŗ ą║ą░ąĮą░ą╗ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄ ąĘą░ą╝ą║ąĮčāčéčŗ ą┤čĆčāą│ ąĮą░ ą┤čĆčāą│ą░. ąÜąŠą│ą┤ą░ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĮčāą╗čÅ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąŠą▒ąĮąŠą▓ąĖčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ Offset Calibration Register ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ Sync Mode, ą║ąŠą│ą┤ą░ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 000. ąÆčŗčģąŠą┤ ~RDY ąĖ ą▒ąĖčé ą┐ąĄčĆąĄą╣ą┤čāčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░, ąĖ ą▓ąĄčĆąĮčāčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, čćč鹊ą▒čŗ č鹥ą╝ čüą░ą╝čŗą╝ ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮčāą╗ą░čüčī ąŠą▒čĆą░čéąĮąŠ ą▓ čĆąĄąČąĖą╝ Sync Mode ąĖ ą│ąŠč鹊ą▓ą░ ą║ ą┤čĆčāą│ąĖą╝ ąŠą┐ąĄčĆą░čåąĖčÅą╝.
1
0
1
Full-Scale Self-Calibration Mode (čĆąĄąČąĖą╝ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ). ąÉą║čéąĖą▓ąĖąĘąĖčĆčāąĄčé ą┐čĆąŠčåąĄčüčü čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ ą║ą░ąĮą░ą╗ą░, ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą▒ąĖčéą░ą╝ąĖ CH2, CH1 ąĖ CH0 ą▓ Mode Register. ąŁčéą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ čāčüąĖą╗ąĄąĮąĖąĖ, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤čŗ ą║ą░ąĮą░ą╗ą░ ą┐ąŠą┤ą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄ č乊čĆą╝ąĖčĆčāąĄą╝ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ. ąÜąŠą│ą┤ą░ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąŠą▒ąĮąŠą▓ąĖčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ Gain Calibration Register ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ Sync Mode, ą║ąŠą│ą┤ą░ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 000. ąÆčŗčģąŠą┤ ~RDY ąĖ ą▒ąĖčé ą┐ąĄčĆąĄą╣ą┤čāčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░, ąĖ ą▓ąĄčĆąĮčāčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, čćč鹊ą▒čŗ č鹥ą╝ čüą░ą╝čŗą╝ ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮčāą╗ą░čüčī ąŠą▒čĆą░čéąĮąŠ ą▓ čĆąĄąČąĖą╝ Sync Mode ąĖ ą│ąŠč鹊ą▓ą░ ą║ ą┤čĆčāą│ąĖą╝ ąŠą┐ąĄčĆą░čåąĖčÅą╝.
1
1
0
Zero-Scale System Calibration Mode (čĆąĄąČąĖą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮčāą╗čÅ čüąĖčüč鹥ą╝čŗ). ąÉą║čéąĖą▓ąĖčĆčāąĄčé čüąĖčüč鹥ą╝ąĮčāčÄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĮčāą╗čÅ ą║ą░ąĮą░ą╗ą░, ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą▒ąĖčéą░ą╝ąĖ CH2, CH1 ąĖ CH0 ą▓ Mode Register. ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ čāčüąĖą╗ąĄąĮąĖąĖ, ą┐čĆąĖ čŹč鹊ą╝ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ąĮčāą╗čÄ, ą┐ąŠą┤ą░ąĄčéčüčÅ čüąĮą░čĆčāąČąĖ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ. ąŁč鹊 ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąŠčüčéą░ą▓ą░čéčīčüčÅ čüčéą░ą▒ąĖą╗čīąĮčŗą╝ ąĮą░ ą▓čüąĄ ą▓čĆąĄą╝čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮčāą╗čÅ čüąĖčüč鹥ą╝čŗ. ąÜąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĮčāą╗čÅ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąŠą▒ąĮąŠą▓ąĖčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ Offset Calibration Register ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ Sync Mode, ą║ąŠą│ą┤ą░ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 000. ąÆčŗčģąŠą┤ ~RDY ąĖ ą▒ąĖčé ą┐ąĄčĆąĄą╣ą┤čāčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░, ąĖ ą▓ąĄčĆąĮčāčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, čćč鹊ą▒čŗ č鹥ą╝ čüą░ą╝čŗą╝ ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮčāą╗ą░čüčī ąŠą▒čĆą░čéąĮąŠ ą▓ čĆąĄąČąĖą╝ Sync Mode ąĖ ą│ąŠč鹊ą▓ą░ ą║ ą┤čĆčāą│ąĖą╝ ąŠą┐ąĄčĆą░čåąĖčÅą╝.
1
1
1
Full-Scale System Calibration Mode (čĆąĄąČąĖą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ čüąĖčüč鹥ą╝čŗ). ąÉą║čéąĖą▓ąĖčĆčāąĄčé čüąĖčüč鹥ą╝ąĮčāčÄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ ą║ą░ąĮą░ą╗ą░, ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą▒ąĖčéą░ą╝ąĖ CH2, CH1 ąĖ CH0 ą▓ Mode Register. ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ čāčüąĖą╗ąĄąĮąĖąĖ, ą┐čĆąĖ čŹč鹊ą╝ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗ąĄ, ą┐ąŠą┤ą░ąĄčéčüčÅ čüąĮą░čĆčāąČąĖ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ. ąŁč鹊 ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąŠčüčéą░ą▓ą░čéčīčüčÅ čüčéą░ą▒ąĖą╗čīąĮčŗą╝ ąĮą░ ą▓čüąĄ ą▓čĆąĄą╝čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ čüąĖčüč鹥ą╝čŗ. ąÜąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąŠą▒ąĮąŠą▓ąĖčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ Gain Calibration Register ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ Sync Mode, ą║ąŠą│ą┤ą░ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 000. ąÆčŗčģąŠą┤ ~RDY ąĖ ą▒ąĖčé ą┐ąĄčĆąĄą╣ą┤čāčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░, ąĖ ą▓ąĄčĆąĮčāčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, čćč鹊ą▒čŗ č鹥ą╝ čüą░ą╝čŗą╝ ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮčāą╗ą░čüčī ąŠą▒čĆą░čéąĮąŠ ą▓ čĆąĄąČąĖą╝ Sync Mode ąĖ ą│ąŠč鹊ą▓ą░ ą║ ą┤čĆčāą│ąĖą╝ ąŠą┐ąĄčĆą░čåąĖčÅą╝.
~B/U Bipolar/Unipolar Bit. 0 ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 ą▓čŗą▒ąĖčĆą░ąĄčé ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ, ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą▓ 00...000 ą┤ą╗čÅ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ, 10...000 ą┤ą╗čÅ ąĮčāą╗čÅ ąĮą░ ą▓čģąŠą┤ąĄ ąĖ 11...111 ą┤ą╗čÅ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ. 1 ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 ą▓čŗą▒ąĖčĆą░ąĄčé ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ, ą║ąŠą│ą┤ą░ 00...000 ą║ąŠą┤ąĖčĆčāąĄčé ąĮčāą╗ąĄą▓ąŠą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čģąŠą┤ąĄ, ąĖ 11...111 ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ.
DEN Digital Output Enable Bit, ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą▓čŗčģąŠą┤ąŠą▓. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, ąĮąŠąČą║ąĖ AIN3/D1 ąĖ AIN4/D0 čĆą░ą▒ąŠčéą░čÄčé čåąĖčäčĆąŠą▓čŗąĄ ą▓čŗčģąŠą┤čŗ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┐ąŠą╗čāčćą░ąĄčé ą┤ą▓ą░ ą┐ąŠčĆčéą░ ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü.
D1 , D0 ą▒ąĖčéčŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čåąĖčäčĆąŠą▓čŗą╝ąĖ ą▓čŗčģąŠą┤ą░ą╝ąĖ. ąŚąĮą░č湥ąĮąĖčÅ ą▓ čŹčéąĖčģ ą▒ąĖčéą░čģ ąŠą┐čĆąĄą┤ąĄą╗čÅčé ą▓čŗčģąŠą┤ąĮčŗąĄ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ čāčĆąŠą▓ąĮąĖ ąĮą░ ąĮąŠąČą║ą░čģ AIN3/D1 ąĖ AIN4/D0, ą║ąŠą│ą┤ą░ DEN=1.
WL ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ą╗ąĖąĮčā čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ Data Register. 0 ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 ąĘą░ą┤ą░ąĄčé 16-ą▒ąĖčéąĮčāčÄ ą┤ą╗ąĖąĮčā čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ, 1 ąĘą░ą┤ą░ąĄčé 24-ą▒ąĖčéąĮčāčÄ ą┤ą╗ąĖąĮčā čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ.
HIREF High Reference Bit. ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąŠą┐ąŠčĆąĮčŗą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝, čü ą║ąŠč鹊čĆčŗą╝ čĆą░ą▒ąŠčéą░ąĄčé ą╝ąĖą║čĆąŠčüčģąĄą╝ą░. ąĢčüą╗ąĖ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 2.5V, č鹊 HIREF ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 0. ąĢčüą╗ąĖ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 5V, č鹊 HIREF ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1. ąÜąŠą│ą┤ą░ ą▒ąĖčé HIREF ą║ąŠčĆčĆąĄą║čéąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ ą▓čģąŠą┤ąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą▒čāą┤čāčé ąŠčé 0 mV ą┤ąŠ +20 mV, +40 mV, +80 mV, +160 mV, +320 mV, +640 mV ąĖ +1.28 V ą┤ą╗čÅ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ąĖ ┬▒20 mV, ┬▒40 mV, ┬▒80 mV, ┬▒160 mV, ┬▒320 mV, ┬▒640 mV ąĖ ┬▒1.28 V ą┤ą╗čÅ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ.
ą£ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé HIREF ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 2.5V. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąŠčé ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 2.5V, ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÅ, čćč鹊 čŹč鹊 5V. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą▓čüąĄčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ ą┐ąŠą▓čŗčüąĖčéčüčÅ ą▓ą┤ą▓ąŠąĄ. ąó. ąĄ. ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čŹč鹊 ą▒čāą┤čāčé ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ ąŠčé 0 mV .. +10 mV ą┤ąŠ 0 mV .. +640 mV, ąĖ ą▓ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ąŠčé ┬▒10 mV ą┤ąŠ ┬▒640 mV. ą×ą┤ąĮą░ą║ąŠ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┐ąŠ čłčāą╝čā (ą▓ nV) ąŠčüčéą░ąĮąĄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮąŠą╣, ą░ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čāą╝ąĄąĮčīčłąĖčéčüčÅ ąĮą░ 1 čĆą░ąĘčĆčÅą┤ LSB.
RN2 , RN1 , RN0 čŹčéąĖ ą▒ąĖčéčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą▓čģąŠą┤ąĮąŠą╣ čĆą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čāčĆąŠą▓ąĮąĄą╣ čüąĖą│ąĮą░ą╗ąŠą▓. ą×ąĮąĖ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ XII ą┤ą╗čÅ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 2.5V, ą║ąŠą│ą┤ą░ HIREF=0, ąĖą╗ąĖ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 5V, ą║ąŠą│ą┤ą░ HIREF=1.
ąóą░ą▒ą╗ąĖčåą░ XII. ąÆčŗą▒ąŠčĆ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą▓čģąŠą┤ąĮčŗčģ čāčĆąŠą▓ąĮąĄą╣.
RN2 RN1 RN0 ąÆčŗą▒ąŠčĆ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ ą▓čģąŠą┤ą░čģ
~B/U=0 ~B/U=1
0
0
0
-20 mV .. +20 mV
0 mV .. +20 mV
0
0
1
-20 mV .. +20 mV
0 mV .. +20 mV
0
1
0
-40 mV .. +40 mV
0 mV .. +40 mV
0
1
1
-80 mV .. +80 mV
0 mV .. +80 mV
1
0
0
-160 mV .. +160 mV
0 mV .. +160 mV
1
0
1
-320 mV .. +320 mV
0 mV .. +320 mV
1
1
0
-640 mV .. +640 mV
0 mV .. +640 mV
1
1
1
-1.28 V .. +1.28 V
0 V .. + 1.28V
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüąŠčüč鹊čÅąĮąĖąĄ 111 ą┤ą╗čÅ ą▒ąĖčé RN2..RN0 čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░/ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
BO Burnout Current Bit, ą▒ąĖčé č鹊ą║ą░ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ. 1 ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 ą░ą║čéąĖą▓ąĖčĆčāąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą│ąĄąĮąĄčĆą░č鹊čĆčŗ č鹊ą║ąŠą▓ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ, ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ ąĮą░ ą▓čģąŠą┤čŗ. ąÜąŠą│ą┤ą░ čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠ, ąĮą░ ą┐ą░čĆčā ą▓čģąŠą┤ąŠą▓ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ąĖčüč鹊čćąĮąĖą║ąĖ č鹊ą║ą░ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ ą┤ą░čéčćąĖą║ą░. ąØą░ ą▓čģąŠą┤ AIN(+) ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą│ąĄąĮąĄčĆą░č鹊čĆ ą▓čŗč鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░, ąĖ ąĮą░ ą▓čģąŠą┤ AIN(ŌĆō) ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą│ąĄąĮąĄčĆą░č鹊čĆ ą▓č鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░. 0 ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 ą▓čŗą║ą╗čÄčćą░ąĄčé č鹊ą║ąĖ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ.
CH2 , CH1 , CH0 ą▒ąĖčéčŗ ą▓čŗą▒ąŠčĆą░ ą║ą░ąĮą░ą╗ą░. ąŁčéąĖ 3 ą▒ąĖčéą░ ą▓čŗą▒ąĖčĆą░čÄčé ą╗ąĖą▒ąŠ ą║ą░ąĮą░ą╗ ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, ą╗ąĖą▒ąŠ ą┤ąŠčüčéčāą┐ ą║ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ XIII. ąÆ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ąĄčüčéčī 3 ą┐ą░čĆčŗ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąÆ ą┐ąŠą╗ąĮąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖą╝ąĄąĄčé 3 ą▓čģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ą░, ą║ą░ąČą┤ąŠą╝čā ąĖąĘ ąĮąĖčģ ąĮą░ąĘąĮą░č湥ąĮą░ čüą▓ąŠčÅ ą┐ą░čĆą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąÆ ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čā AD7731 ą┐čÅčéčī ą▓čģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ą░ čü ąĮąĄą║ąŠč鹊čĆčŗą╝ąĖ ą▓čģąŠą┤ąĮčŗą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čĆąĄą│ąĖčüčéčĆčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąÜąŠą│ą┤ą░ ą▓ąŠ ą▓čüąĄ ą▒ąĖčéčŗ CH2, CH1 ąĖ CH0 ąĘą░ą┐ąĖčüą░ąĮą░ ą╗ąŠą│. 1, ą£ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▒čāą┤č鹊 ąĄčæ ą▓čŗą▒čĆą░ąĮąĮčŗąĄ ą▓čģąŠą┤čŗ ąĘą░ą╝ą║ąĮčāčéčŗ ąĮą░ AIN6 (ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čĆą░ą▓ąĮąŠ 0). ąÆ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą▓čģąŠą┤ AIN6 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓ąĮąĄčłąĮąĄą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ, ąĮą░čģąŠą┤čÅčēąĄą╝čāčüčÅ ą▓ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╝ ąŠą▒čēąĄą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ čŹčéąĖčģ ą▒ąĖčé ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░/ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čĆą░ą▓ąĮąŠ 100.
ąóą░ą▒ą╗ąĖčåą░ XIII. ąÆčŗą▒ąŠčĆ ą║ą░ąĮą░ą╗ą░.
CH2 CH1 CH0 AIN(+) AIN(-) ąóąĖą┐ ą▓čģąŠą┤ą░ ą¤ą░čĆą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ
0
0
0
AIN1
AIN6
ą¤čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣
ą¤ą░čĆą░ 0
0
0
1
AIN2
AIN6
ą¤čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣
ą¤ą░čĆą░ 1
0
1
0
AIN3
AIN6
ą¤čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣
ą¤ą░čĆą░ 2
0
1
1
AIN4
AIN6
ą¤čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣
ą¤ą░čĆą░ 2
1
0
0
AIN1
AIN2
ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣
ą¤ą░čĆą░ 0
1
0
1
AIN3
AIN4
ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣
ą¤ą░čĆą░ 1
1
1
0
AIN5
AIN6
ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣
ą¤ą░čĆą░ 2
1
1
1
AIN6
AIN6
ąóąĄčüč鹊ą▓čŗą╣ čĆąĄąČąĖą╝
ą¤ą░čĆą░ 2
ąĀąĄą│ąĖčüčéčĆ čäąĖą╗čīčéčĆą░ 16-ą▒ąĖčéąĮčŗą╣, ą▓ ąĮąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ, ąĖ ąĖąĘ ąĮąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé čćąĖčéą░čéčīčüčÅ. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čāčüčĆąĄą┤ąĮąĄąĮąĖąĄ, ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠąĄ ą┐ąĄčĆą▓čŗą╝ ą║ą░čüą║ą░ą┤ąŠą╝ čäąĖą╗čīčéčĆą░, ąĖ čéą░ą║ąČąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čĆą░ą▒ąŠčéčā ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░. ąóą░ą║ąČąĄ ąĘą┤ąĄčüčī ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ čĆąĄąČąĖą╝ č湊ą┐ą┐ąĖąĮą│ą░. ąóą░ą▒ą╗ąĖčåą░ XIV ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą▒ąĖčé ą┐ąŠ čĆą░ąĘčĆčÅą┤ą░ą╝ ą▓ Filter Register. ą¦ąĖčüą╗ąŠ ą▓ čüą║ąŠą▒ą║ą░čģ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▒ąĖčéą░, ą║ąŠč鹊čĆąŠąĄ ąŠąĮ ą┐ąŠą╗čāčćą░ąĄčé ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüąĄ. ąĀąĖčü. 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓, ą░ čĆąĖčü. 6 ą░ą╗ą│ąŠčĆąĖčéą╝ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆčŗ AD7731.
ąóą░ą▒ą╗ąĖčåą░ XIV. ąæąĖčéčŗ Filter Register.
15
14
13
12
11
10
9
8
SF11 SF10 SF9 SF8 SF7 SF6 SF5 SF4
7
6
5
4
3
2
1
0
SF3 SF2 SF1 SF0 ZERO CHP SKIP FAST
SF11-SF0 ą▒ąĖčéčŗ ą▓čŗą▒ąŠčĆą░ čäąĖą╗čīčéčĆą░ Sinc3 . AD7731 čüąŠą┤ąĄčƹȹĖčé 2 čäąĖą╗čīčéčĆą░, Sinc3 ąĖ FIR. 12 ą▒ąĖčé, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ ą▓ ą▒ąĖčéčŗ ąŠčé SF11 ą┤ąŠ SF0 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ ą┤ą╗čÅ čāčüčĆąĄą┤ąĮąĄąĮąĖčÅ, čćč鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čäąĖą╗čīčéčĆ Sinc3 . ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čćąĖčüą╗ąŠ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą▓ čŹčéąĖ 12 ą▒ąĖčé, ą▓ą╗ąĖčÅčÄčé ąĮą░ čćą░čüč鹊čéčā ŌĆō3 dB ąĖ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ (čüą╝. čüąĄą║čåąĖčÄ "ąÉčĆčģąĖč鹥ą║čéčāčĆą░ čäąĖą╗čīčéčĆą░"). ąöąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ čüą╗ąŠą▓ą░ SF ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▒ąĖčéą░ CHP ąĖ ą▒ąĖčéą░ SKIP. ąÆ čéą░ą▒ą╗ąĖčåąĄ XV ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ čüą▓ąŠą┤ą║ą░ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ ąĘąĮą░č湥ąĮąĖą╣ SF ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ąĮą░čüčéčĆąŠąĄą║ (ą┤ą╗čÅ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ 4.9152 ą£ąōčå).
ąóą░ą▒ą╗ąĖčåą░ XV. ąöąĖą░ą┐ą░ąĘąŠąĮčŗ ąĘąĮą░č湥ąĮąĖą╣ SF.
CHP SKIP ąöąĖą░ą┐ą░ąĘąŠąĮ SF ą¦ą░čüč鹊čéą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ąĮčŗčģ ą▓čŗą▒ąŠčĆąŠą║
0
0
2048 .. 150
150 .. 2048 ąōčå
1
0
2048 .. 75
50 .. 1365 ąōčå
0
1
2048 .. 40
150 .. 7600 ąōčå
1
1
2048 .. 20
50 .. 5120 ąōčå
ZERO ą▓ čŹč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ 0, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ AD7731.
CHP Chop Enable Bit, ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ č湊ą┐ą┐ąĖąĮą│ą░. 1 ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 čĆą░ąĘčĆąĄčłą░ąĄčé č湊ą┐ą┐ąĖąĮą│, ą┐čĆąĖ čŹč鹊ą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé čü ą┐ąŠčüč鹊čÅąĮąĮčŗą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓ ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖąĮą▓ąĄčĆčüąĖąĖ ąĮą░ ą▓čŗčģąŠą┤ąĄ 1 ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░ Sinc3 , ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č湥ą╝čā čāčüčéčĆą░ąĮčÅčÄčéčüčÅ ą▓čüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą┐ąŠčüč鹊čÅąĮąĮčŗąĄ čüą╝ąĄčēąĄąĮąĖčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĖ ą┤čĆąĄą╣čä čŹč鹊ą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠčüč鹊čÅąĮčüčéą▓ą░ čüą╝ąĄčēąĄąĮąĖčÅ čü č鹥č湥ąĮąĖąĄą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąŠč湥ąĮčī ą▓ą░ąČąĮčŗ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░, ą┐ąŠčŹč鹊ą╝čā ą▓ čéą░ą║ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čĆą░ąĘčĆąĄčłąĖčéčī č湊ą┐ą┐ąĖąĮą│.
SKIP ą▒ąĖčé ą┐čĆąŠą┐čāčüą║ą░ FIR-čäąĖą╗čīčéčĆą░. ąÜąŠą│ą┤ą░ ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 0, AD7731 ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┤ą▓čāčģą║ą░čüą║ą░ą┤ąĮčāčÄ čäąĖą╗čīčéčĆą░čåąĖčÄ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čéčī čĆąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ ą▓čŗčģąŠą┤. ąÆ ą┐ąĄčĆą▓ąŠą╝ ą║ą░čüą║ą░ą┤ąĄ čĆą░ą▒ąŠčéą░ąĄčé čāčüčĆąĄą┤ąĮčÅčÄčēąĖą╣ (Sinc3 ) čäąĖą╗čīčéčĆ, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé 22-tap FIR-čäąĖą╗čīčéčĆ. ąÜąŠą│ą┤ą░ ą▓ čŹč鹊čé ą▒ąĖčé ąĘą░ą┐ąĖčüą░ąĮą░ 1, FIR-čäąĖą╗čīčéčĆ ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ, ąĖ ą▓čŗčģąŠą┤ čäąĖą╗čīčéčĆą░ Sinc3 ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ąĮą░ ą▓čŗčģąŠą┤ AD7731 (čüą╝. čüąĄą║čåąĖčÄ "ąÉčĆčģąĖč鹥ą║čéčāčĆą░ čäąĖą╗čīčéčĆą░", ą│ą┤ąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüą░ąĮą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čäąĖą╗čīčéčĆą░čåąĖąĖ).
FAST ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ FASTStepŌäó. 1 ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā čĆąĄąČąĖą╝ą░ FASTStepŌäó AD7731. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ, ąĄčüą╗ąĖ ą▒čŗą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ, č鹊 ą┐ąŠčĆčåąĖčÅ FIR-ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĖ ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ ą▓čŗčģąŠą┤ąŠą╝ čäąĖą╗čīčéčĆą░ Sinc3 . ąśąĘąĮą░čćą░ą╗čīąĮąŠ 2 ą▓čŗčģąŠą┤ąĮčŗąĄ ą▓čŗą▒ąŠčĆą║ąĖ čäąĖą╗čīčéčĆą░ sinc3 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ AD7731. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ sinc3 , ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ, čĆą░čüč鹥čé ą┐čĆąĖ ą┐ąŠą▓čŗčłąĄąĮąĖąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čāčüčĆąĄą┤ąĮąĄąĮąĖą╣(ąŠčé 2 ą║ 4, ąĘą░č鹥ą╝ ą║ 8 ąĖ ąĘą░č鹥ą╝ ą║ 16), ą┐ąŠą║ą░ ą▒ąĖčé ~STDY ąĮąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0. ąóąŠą│ą┤ą░ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čłą░ą│ą░ FIR-čäąĖą╗čīčéčĆ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆčāąĄčéčüčÅ, ą▒ąĖčé ~STDY čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝, ąĖ FIR-čäąĖą╗čīčéčĆ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čåąĖą║ą╗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ (čüą╝. čüąĄą║čåąĖčÄ "ąÉčĆčģąĖč鹥ą║čéčāčĆą░ čäąĖą╗čīčéčĆą░" ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ FASTStepŌäó).
AD7731 čüąŠą┤ąĄčƹȹĖčé čéčĆąĖ 24-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ, ą┐ąŠą╝ąĄč湥ąĮąĮčŗčģ ąĖą╝ąĄąĮą░ą╝ąĖ ąŠčé Offset Calibration Register 0 ą┤ąŠ Offset Calibration Register 2, ą▓ ąĮąĖčģ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ, ąĖ čéą░ą║ąČąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ąŠčéčéčāą┤ą░. ąŁčéąĖ čéčĆąĖ čĆąĄą│ąĖčüčéčĆą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░, ąĖ ą▓ ą┐ąŠą╗ąĮąŠčåąĄąĮąĮąŠą╝ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą║ą░ąČą┤čŗą╣ ąĖąĘ 3 ą▓čģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čĆą░ą▒ąŠčéą░ąĄčé čüąŠ čüą▓ąŠąĖą╝ čĆąĄą│ąĖčüčéčĆąŠą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ čĆąĄą│ąĖčüčéčĆąŠą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ (Gain Calibration Register), č乊čĆą╝ąĖčĆčāčÅ ą┐ą░čĆčā čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąŁčéą░ ą┐ą░čĆą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ čäąĖą╗čīčéčĆą░, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ XIII. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ąĮčāąČąĮąŠą╝čā Offset Calibration Register, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ čüąĮą░čćą░ą╗ą░ ąĘą░ą┐ąĖčüą░čéčī ą▓ Mode Register ąĮą░čüčéčĆąŠą╣ą║čā ą┤ą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ ą▓ ą▒ąĖčéčŗ CH2 .. CH0.
ąĀąĄą│ąĖčüčéčĆ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (ą▓ ą▒ąĖčéčŗ MD2, MD1, MD0 Mode Register ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ 100 ąĖą╗ąĖ 110). ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą▓čŗčćąĖčéą░ąĄčéčüčÅ ąĖąĘ ą▓čŗčģąŠą┤ą░ čäąĖą╗čīčéčĆą░ ą┐ąĄčĆąĄą┤ ąĮą░ą╗ąŠąČąĄąĮąĖąĄą╝ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ. ąĀąĖčü. 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠčåąĄčüčü čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓, ą░ čĆąĖčü. 6 ą┐čĆąŠčåąĄą┤čāčĆčā ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆčŗ AD7731.
AD7731 čüąŠą┤ąĄčƹȹĖčé čéčĆąĖ 24-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ, ą┐ąŠą╝ąĄč湥ąĮąĮčŗčģ ąĖą╝ąĄąĮą░ą╝ąĖ ąŠčé Gain Calibration Register 0 ą┤ąŠ Gain Calibration Register 2, ą▓ ąĮąĖčģ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ, ąĖ čéą░ą║ąČąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ąŠčéčéčāą┤ą░. ąŁčéąĖ čéčĆąĖ čĆąĄą│ąĖčüčéčĆą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░, ąĖ ą▓ ą┐ąŠą╗ąĮąŠčåąĄąĮąĮąŠą╝ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą║ą░ąČą┤čŗą╣ ąĖąĘ 3 ą▓čģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ čĆą░ą▒ąŠčéą░ąĄčé čüąŠ čüą▓ąŠąĖą╝ čĆąĄą│ąĖčüčéčĆąŠą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ čĆąĄą│ąĖčüčéčĆąŠą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ (Offset Calibration Register), č乊čĆą╝ąĖčĆčāčÅ ą┐ą░čĆčā čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąŁčéą░ ą┐ą░čĆą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ čäąĖą╗čīčéčĆą░, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ XIII. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ąĮčāąČąĮąŠą╝čā Gain Calibration Register, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ čüąĮą░čćą░ą╗ą░ ąĘą░ą┐ąĖčüą░čéčī ą▓ Mode Register ąĮą░čüčéčĆąŠą╣ą║čā ą┤ą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ ą▓ ą▒ąĖčéčŗ CH2 .. CH0.
ąĀąĄą│ąĖčüčéčĆ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ (ą▓ ą▒ąĖčéčŗ MD2, MD1, MD0 Mode Register ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ 101 ąĖą╗ąĖ 111). ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐ąŠ čüą╝ąĄčēąĄąĮąĖčÄ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ (čüą╝ąĄčēąĄąĮąĖąĄ ą║ąŠčĆčĆąĄą║čéąĖčĆčāąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ ąĖąĘ Offset Calibration Register). ąĀąĖčü. 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠčåąĄčüčü čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓, ą░ čĆąĖčü. 6 ą┐čĆąŠčåąĄą┤čāčĆčā ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆčŗ AD7731.
AD7731 čüąŠą┤ąĄčƹȹĖčé 24-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą┐čĆąŠą▓ąĄčĆą║ąĖ, ą┤ą░ąĮąĮčŗąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠąČąĮąŠ čäąĖąĘąĖč湥čüą║ąĖ čćąĖčéą░čéčī ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą╝ąĄąĮčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĖą║ą░ą║ąĖčģ ą▒ąĖčé čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąŠčé ąĘąĮą░č湥ąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąŠąĮąĖ ą┐ąŠą╗čāčćąĖą╗ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüą░), ąĖąĮą░č湥 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ąŠčĆčĆąĄą║čéąĮąŠ. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąŠčłą╗ąŠ ą▓ ąŠą┤ąĖąĮ ąĖąĘ čüą▓ąŠąĖčģ č鹥čüč鹊ą▓čŗčģ čĆąĄąČąĖą╝ąŠą▓, č鹊 ą▓čŗą┤ą░ą╣č鹥 čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░ ~RESET, ąĖą╗ąĖ ąĘą░ą┐ąĖčłąĖč鹥 32 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąĄą┤ąĖąĮąĖč湥ą║, čćč鹊ą▒čŗ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓čŗčłą╗ą░ ąĖąĘ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ ąĖ ą▓ąĄčĆąĮčāą╗ą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čü čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░/ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▒čŗą╗ą░ ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮą░ ą▓ ąŠą┤ąĖąĮ ąĖąĘ čüą▓ąŠąĖčģ čĆąĄąČąĖą╝ąŠą▓ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ, č鹊 ąĮąĄą╗čīąĘčÅ ą┐čĆąŠčćąĖčéą░čéčī ąŠą▒čĆą░čéąĮąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ Test Register ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ č鹥čüč鹊ą▓ąŠą│ąŠ čĆąĄąČąĖą╝ą░, ą▓ ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄčłą╗ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī čĆąĄą│ąĖčüčéčĆąŠą▓ . ąÆčüąĄ 12 čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ąŠčüčéčāą┐ąĮčŗ č湥čĆąĄąĘ 3-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą░ą┤čĆąĄčüą░čåąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ąŠą┐ąĄčĆą░čåąĖčÄ ąĘą░ą┐ąĖčüąĖ ą▓ čüą░ą╝čŗą╣ ą▓ąĄčĆčģąĮąĖą╣ čĆąĄą│ąĖčüčéčĆ Communications Register. ąĀąĖčü. 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ čćč鹥ąĮąĖčÅ ąĖąĘ čĆą░ąĘąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ą│ą┤ąĄ čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąŠčüčéčāą┐ą░ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ čüą╗ąŠą▓ą░, čćč鹊ą▒čŗ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą║ą░ąČą┤ąŠą╝čā čĆąĄą│ąĖčüčéčĆčā. ąĀąĖčü. 6 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ ąĘą░ą┐ąĖčüąĖ čĆą░ąĘąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓, ą│ą┤ąĄ ą┤ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąĄą╣čüčéą▓ąĖą╣ ąĖ čüą╗ąŠą▓ą░, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą▓ AD7731.
ąĀąĖčü. 5. ą¦č鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ AD7731.
ąĀąĄą│ąĖčüčéčĆ ąæą░ą╣čé W (HEX) ąæą░ą╣čé Y (HEX) ąæą░ą╣čé Z (Hex)
Status Register
10
20
30
Data Register
11
21
30
Mode Register
12
22
30
Filter Register
13
N/A*
N/A*
Offset Register
15
N/A*
N/A*
Gain Register
16
N/A*
N/A*
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ *: N/A ąŠąĘąĮą░čćą░ąĄčé Not Applicable (ąĮąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ). ąØąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ čćč鹥ąĮąĖąĄ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĮąĄ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ą░, čéą░ą║ ą║ą░ą║ ąĖčģ ąĘąĮą░č湥ąĮąĖčÅ ąĮąĄ ą┐ąŠą╝ąĄąĮčÅčÄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮčŗ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣ ąĘą░ą┐ąĖčüąĖ.
ąĀąĖčü. 6. ąŚą░ą┐ąĖčüčī čĆąĄą│ąĖčüčéčĆąŠą▓ AD7731.
ąĀąĄą│ąĖčüčéčĆ ąæą░ą╣čé Q (HEX)
Communications Register
00
Data Register
ąĀąĄą│ąĖčüčéčĆ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ
Mode Register
02
Filter Register
03
Offset Register
05
Gain Register
06
Test Register
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą╝ąĄąĮčÅčéčī
[ą×ą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ]
AD7731 čüąŠą┤ąĄčƹȹĖčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐čåąĖą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąóą░ą▒ą╗ąĖčåą░ XVI čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéąĖą┐čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĄą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ąĖ ąĖčģ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī. ąĢčüčéčī 2 ą╝ąĄč鹊ą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą¤ąĄčĆą▓čŗą╣ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ąŠą┐čĆąŠčüąĄ ą▓čŗą▓ąŠą┤ą░ ~RDY ą╗ąĖą▒ąŠ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ, ą╗ąĖą▒ąŠ ą▓ čåąĖą║ą╗ąĄ. ąÆč鹊čĆąŠą╣ ą╝ąĄč鹊ą┤ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝ ąŠą┐čĆąŠčüąĄ ą▒ąĖčéą░ ~RDY ą▓ čĆąĄą│ąĖčüčéčĆą░ Status Register. ąŁč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą┤ąŠčüčéąĖčćčī ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓ čĆąĄąČąĖą╝ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ Status Register, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▒čŗą╗ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░. ąÆčŗą▓ąŠą┤ ~RDY ąĖ ą▒ąĖčé RDY ą┐ąĄčĆąĄą╣ą┤čāčé ą▓ ą╗ąŠą│. 1 ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ąĖ ą▓ąŠąĘą▓čĆą░čéčÅčéčüčÅ ą▓ ą╗ąŠą│. 0 ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąÆ č鹥č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéčŗ MD2, MD1, MD0 čĆąĄą│ąĖčüčéčĆą░ Mode Register ą▓ąŠąĘą▓čĆą░čéčÅčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 000. ąæąĖčéčŗ FAST ąĖ SKIP ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ą░ą║ 0 ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čćč鹊ą▒čŗ ą┤ą╗čÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą┐ąŠą╗ąĮčŗą╣ čäąĖą╗čīčéčĆ. ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čüą╝. ą▓ čüąĄą║čåąĖąĖ "ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░".
ąóą░ą▒ą╗ąĖčåą░ XVI. ą×ą┐ąĄčĆą░čåąĖąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ąóąĖą┐ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ MD2..MD0 ąÆčĆąĄą╝čÅ ą┤ąŠ ~RDY ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ
CHP=1 CHP=0
Internal Zero-Scale
100
22 x 1/Output Rate
24 x 1/Output Rate
ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ ąĘą░ą╝ą║ąĮčāč鹊ą╝čā ą▓ąĮčāčéčĆąĖ ą▓čģąŠą┤čā čü PGA, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ. Offset Calibration Register ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąŠą▒ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čŹč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąöą╗čÅ ą┐ąŠą╗ąĮąŠą╣ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čŹč鹊ą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĄ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą┤čłąĄčüčéą▓ąŠą▓ą░čéčī Internal Full-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░. ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé ą║ą░ą╗ąĖą▒čĆąŠą▓ąŠą║ Internal Zero-Scale ąĖ System Full Scale čŹčéą░ Internal Zero-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąĄčĆą▓ąŠą╣.
Internal Full-Scale
101
44 x 1/Output Rate
48 x 1/Output Rate
ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą╝čā ą▓ąĮčāčéčĆąĖ ą▓čģąŠą┤ąĮąŠą╝čā čüąĖą│ąĮą░ą╗čā ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ čü PGA, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ. Gain Calibration Register ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą▒čāą┤ąĄčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čŹč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮą░ čĆą░ą▒ąŠč湥ą╝ ą▓čģąŠą┤ąĄ ą║čĆąŠą╝ąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ 20 mV ąĖ 40 mV, ą│ą┤ąĄ ąŠą┐čéąĖą╝ą░ą╗čīąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ą▒čāą┤čāčé ą┤ąŠčüčéąĖą│ąĮčāčéčŗ ą┐čĆąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮą░ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 80 mV. ąŚą░ čŹč鹊ą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąŠą╣ ą┤ąŠą╗ąČąĮą░ ąĖą┤čéąĖ Internal Zero-Scale ąĖą╗ąĖ System Zero-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░. This calibration should be followed by either an Internal Zero-Scale or System Zero-Scale calibration. ąŁčéą░ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąĮą░ čĆą░ą▒ąŠč湥ą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą▓čģąŠą┤ą░.
System Zero-Scale
110
22 x 1/Output Rate
24 x 1/Output Rate
ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĮąŠą╝čā čüąĮą░čĆčāąČąĖ ą▓čģąŠą┤ąĮąŠą╝čā ąĮčāą╗ąĄą▓ąŠą╝čā čāčĆąŠą▓ąĮčÄ čü PGA, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐ąŠą┤ą░ąĮąĮąŠąĄ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮčāą╗ąĄą▓ąŠą╝čā čāčĆąŠą▓ąĮčÄ ą┤ą╗čÅ čüąĖčüč鹥ą╝čŗ. ąöą╗čÅ ą┐ąŠą╗ąĮąŠą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čŹčéą░ System Zero-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąĄčĆą▓ąŠą╣. ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé System Zero-Scale ąĖ Internal Full Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ąŠą║, čŹč鹊ą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĄ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą┤čłąĄčüčéą▓ąŠą▓ą░čéčī Internal Full-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░. Offset Calibration Register ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą▒čāą┤ąĄčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čŹč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
System Full-Scale
111
22 x 1/Output Rate
24 x 1/Output Rate
ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ ą┐ąŠą┤ą░ąĮąĮąŠą╝čā čüąĮą░čĆčāąČąĖ ą▓čģąŠą┤ąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ čü PGA, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐ąŠą┤ą░ąĮąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗ąĄ čüąĖčüč鹥ą╝čŗ. ąŁč鹊ą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąĄą┤čłąĄčüčéą▓ąŠą▓ą░čéčī System Zero-Scale ąĖą╗ąĖ Internal Zero-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░. Gain Calibration Register ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą▒čāą┤ąĄčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ čŹč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
[ą×ą┐ąĖčüą░ąĮąĖąĄ čüčģąĄą╝čŗ ]
AD7731 čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ sigma-delta A/D, čüąŠ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ čüąĖčüč鹥ą╝ąŠą╣ čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮąŠą╣ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą▓ čłąĖčĆąŠą║ąŠą╝ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąĮąĖąĘą║ąŠčćą░čüč鹊čéąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ąĮąĘąŠą┤ą░čéčćąĖą║, ą┤ą░čéčćąĖą║ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ, ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąÆ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ sigma-delta (ąĖą╗ąĖ čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ą▒ą░ą╗ą░ąĮčüąĖčĆąŠą▓ą║ąĖ ąĘą░čĆčÅą┤ą░) ADC, ą║ą░ą╗ąĖą▒čĆčāčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ čüčéą░čéąĖč湥čüą║ąŠą╣ RAM, ą│ąĄąĮąĄčĆą░č鹊čĆ čéą░ą║č鹊ą▓, čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ ąĖ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé 13.5 ą╝ąÉ ąŠčé ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ, ąĖ ą▓ čĆąĄąČąĖą╝ąĄ standby č鹊ą╗čīą║ąŠ 20 ą╝ą║ąÉ. ąöą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ ąĮčāąČąĮąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ąĖčüč鹊čćąĮąĖą║ +5V. ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą┐ąŠčüčéčāą┐ą░čéčī čüąĮą░čĆčāąČąĖ ąĖą╗ąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ąŠčé ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐čāč鹥ą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ MCLK IN ąĖ MCLK OUT.
ąÆ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ čéčĆąĖ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ą░ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą║ą░ą║ 5 ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą▓čģąŠą┤ąŠą▓. 7 ą┤ąŠčüčéčāą┐ąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čüąĄčģ ą║ą░ąĮą░ą╗ą░čģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ č湥čĆąĄąĘ ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ. ą×ą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ čĆą░ą▒ąŠčéą░čÄčé ąŠčé 0 mV .. +20 mV ą┤ąŠ 0 V .. +1.28 V, ąĖ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ čĆą░ą▒ąŠčéą░čÄčé ąŠčé ┬▒20 mV ą┤ąŠ ┬▒1.28 V.
ąóąĄčģąĮąĖą║ą░ sigma-delta ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ AD7731 čĆąĄą░ą╗ąĖąĘčāąĄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī 24 ą▒ąĖčéą░ ą▒ąĄąĘ ą║ąŠą┤ąŠą▓ ą┐čĆąŠą┐čāčüą║ą░. ą£ąŠą┤čāą╗čÅč鹊čĆ sigma-delta ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ąĘą░čģą▓ą░č湥ąĮąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čåąĖčäčĆąŠą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓, ą▓ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą║ąŠč鹊čĆčŗčģ ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮą░ čåąĖčäčĆąŠą▓ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ. ą”ąĖčäčĆąŠą▓ąŠą╣ ążąØą¦ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ sigmadelta ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ąĖ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ čüąŠ čüą║ąŠčĆąŠčüčéčīčÄ, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü. ąÆčŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąÉą”ą¤ ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü. ą¦ą░čüč鹊čéą░ čüčĆąĄąĘą░ ąĖ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ čŹč鹊ą│ąŠ čäąĖą╗čīčéčĆą░ čéą░ą║ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆčŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ą©čāą╝ąŠą▓čŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąĖ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī P2P ąĘą░ą▓ąĖčüąĖčé ąŠčé čāčüąĖą╗ąĄąĮąĖčÅ ąĖ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåą░čģ I .. IV.
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ ąĖą╝ąĄčÄčé ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▒čāč乥čĆ, ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č湥ą╝čā ąĄčæ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ ąĖčüč鹊čćąĮąĖą║čā čüąĖą│ąĮą░ą╗ą░ čüąŠ ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, č鹊 ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą▓ąĮąĄčłąĮąĖąĄ čäąĖą╗čīčéčĆčāčÄčēąĖąĄ RC-čåąĄą┐ąŠčćą║ąĖ (ą┤ą╗čÅ čüčĆąĄąĘą░ čłčāą╝ą░ ąĖ čüąĮąĖąČąĄąĮąĖčÅ ą▓ą╗ąĖčÅąĮąĖčÅ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗčģ ą┐ąŠą╝ąĄčģ). ąöąĖą░ą┐ą░ąĘąŠąĮ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ąŠą▒čēąĄą│ąŠ čĆąĄąČąĖą╝ą░ ą┤ą╗čÅ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ AGND + 1.2V ąĖ AVDD - 0.95V. ąÆčģąŠą┤ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čéą░ą║ąČąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣, ąĖ ą▓ ąŠą▒čēąĖčģ čĆąĄąČąĖą╝ą░čģ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ AGND .. AVDD.
AD7731 čüąŠą┤ąĄčƹȹĖčé čäą╗ą░ą│ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ čüąŠą▒čŗčéąĖą╣ ąĖ ąĮą░ą▒ąŠčĆ čäą╗ą░ą│ąŠą▓ čüąŠčüč鹊čÅąĮąĖčÅ ąĖ čüą▒čĆąŠčüą░. ąóą░ą▒ą╗ąĖčåą░ XVII čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▒ą╗ąŠą║ąĖ ąĖ čäą╗ą░ą│ąĖ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ ą▓ą╗ąĖčÅčÄčé čĆą░ąĘąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ XVII. ąĪąŠą▒čŗčéąĖčÅ čüą▒čĆąŠčüą░ (Reset Events).
ąĪąŠą▒čŗčéąĖąĄ ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄą│ąĖčüčéčĆčŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąæąĖčéčŗ Mode ąĪą▒čĆąŠčü čäąĖą╗čīčéčĆą░ ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüčģąĄą╝ ąĪą▒čĆąŠčü SPI ąŻčüčéą░ąĮąŠą▓ą║ą░ ~RDI ąŻčüčéą░ąĮąŠą▓ą║ą░ ~STDY
Power-On Reset
ąöąÉ
000
ąöąÉ
ąöąÉ
ąöąÉ
ąöąÉ
ąöąÉ
ąĪąĖą│ąĮą░ą╗ ~RESET
ąöąÉ
000
ąöąÉ
ąĮąĄčé
ąöąÉ
ąöąÉ
ąöąÉ
ąĪąĖą│ąĮą░ą╗ ~STANDBY
ąĮąĄčé
ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ
ąöąÉ
ąöąÉ
ąĮąĄčé
ąöąÉ
ąöąÉ
ąŚą░ą┐ąĖčüčī 011 ą▓ Mode
ąĮąĄčé
011
ąöąÉ
ąöąÉ
ąĮąĄčé
ąöąÉ
ąöąÉ
ąĪąĖą│ąĮą░ą╗ ~SYNC
ąĮąĄčé
ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ
ąöąÉ
ąĮąĄčé
ąĮąĄčé
ąöąÉ
ąöąÉ
ąŚą░ą┐ąĖčüčī 000 ą▓ Mode
ąĮąĄčé
000
ąöąÉ
ąĮąĄčé
ąĮąĄčé
ąöąÉ
ąöąÉ
ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī ą▓ Mode ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ
ąĮąĄčé
ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
ąĮą░čćą░ą╗čīąĮčŗą╣ čüą▒čĆąŠčü
ąĮąĄčé
ąĮąĄčé
ąöąÉ
ąöąÉ
ąÆą┤ą▓ąĖą│ą░ąĮąĖąĄ 32 ąĄą┤ąĖąĮąĖč湥ą║
ąĮąĄčé
ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ
ąĮąĄčé
ąĮąĄčé
ąöąÉ
ąöąÉ
ąöąÉ
ą¦č鹥ąĮąĖąĄ Data Register
ąĮąĄčé
ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ
ąĮąĄčé
ąĮąĄčé
ąĮąĄčé
ąöąÉ
ąöąÉ
[ąÉąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ ]
ąÆčģąŠą┤ąĮčŗąĄ ą║ą░ąĮą░ą╗čŗ . ąŻ AD7731 ąĄčüčéčī 6 ąĮąŠąČąĄą║ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓ (ą┐ąŠą╝ąĄč湥ąĮąĮčŗąĄ ąŠčé AIN1 ą┤ąŠ AIN6), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą╗ąĖą▒ąŠ ą║ą░ą║ 3 ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ą░, ą╗ąĖą▒ąŠ ą║ą░ą║ 5 ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ą░. ąæąĖčéčŗ CH0, CH1 ąĖ CH2 Mode Register ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčé ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÄ ą▓čģąŠą┤ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąĖ ą▓čŗą▒ąŠčĆ ą║ą░ąĮą░ą╗ą░, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ XIII (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ Mode Register). ą¤ą░čĆčŗ ą▓čģąŠą┤ąŠą▓ (ą╗ąĖą▒ąŠ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ, ą╗ąĖą▒ąŠ ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓čģąŠą┤ąĮčŗąĄ ą║ą░ąĮą░ą╗čŗ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝, ą║ąŠč鹊čĆčŗą╝ąĖ ą╝ąŠąČąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą╗ąĖą▒ąŠ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗąĄ, ą╗ąĖą▒ąŠ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ. ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ąŠčéčüčćąĖčéčŗą▓ą░čÄčéčüčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▓čģąŠą┤ą░ AIN(ŌĆō) ą┐ą░čĆčŗ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓čģąŠą┤ą░. ąÆčŗą▓ąŠą┤čŗ AIN3 ąĖ AIN4 ą╝ąŠą│čāčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą┤ą▓ą░ ą▒ąĖčéą░ čåąĖčäčĆąŠą▓čŗčģ ą▓čŗčģąŠą┤ąŠą▓, čéą░ą║ąČąĄ čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ č湥čĆąĄąĘ Mode Register.
ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé ąŠą┤ąĖąĮ ąĖą╗ąĖ ą┤ą▓ą░ ą▓čģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ą░ ąĮą░ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▒čāč乥čĆąĮčŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī. ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą║ą░ąĮą░ą╗, ą▓čŗčģąŠą┤ ~RDY ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1 ąĖ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą╣čéąĖ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąĮąŠą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖąĘ Data Register (ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ~RDY ą▓ ą╗ąŠą│. 0).
ąæčāč乥čĆčŗ ąĮą░ ą▓čģąŠą┤ą░čģ . ąÆčŗčģąŠą┤ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆą░ ą┐ąĄčĆąĄą┤ą░ąĄčé čüąĖą│ąĮą░ą╗ ąĮą░ ą║ą░čüą║ą░ą┤ ą▒čāč乥čĆąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ čü ą▒ąŠą╗čīčłąĖą╝ ą▓čģąŠą┤ąĮčŗą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ ąĖą╝ąĄčÄčé ą▒ąŠą╗čīčłąŠąĄ ą▓čģąŠą┤ąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ. ąŁč鹊čé ą▒čāč乥čĆąĮčŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī ąĖą╝ąĄąĄčé ą▓čģąŠą┤ąĮąŠą╣ č鹊ą║ čüą╝ąĄčēąĄąĮąĖčÅ 50 nA (CHP = 1) ąĖ 60 nA (CHP = 0). ąŁč鹊čé č鹊ą║ ą▓č鹥ą║ą░ąĄčé ą▓ ą║ą░ąČą┤čāčÄ ąĮąŠąČą║čā ą┐ą░čĆčŗ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░. ąóąŠą║ čüą╝ąĄčēąĄąĮąĖčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čĆą░ąĘąĮąŠčüčéčīčÄ ą╝ąĄąČą┤čā ą▓čģąŠą┤ąĮčŗą╝ąĖ čüą╝ąĄčēąĄąĮąĖčÅą╝ąĖ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓čģąŠą┤ąĮąŠą╣ ą┐ą░čĆčŗ. ąŁč鹊čé č鹊ą║ čüą╝ąĄčēąĄąĮąĖčÅ ą╝ąĄąĮčīčłąĄ 10 nA (CHP = 1) ąĖ 25 nA (CHP = 0). ąæąŠą╗čīčłąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĖą▓ąŠą┤čÅčé ą║ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ čüą╝ąĄčēąĄąĮąĖčÅ, ąŠą▒čĆą░ąĘčāčÄčēąĄą╝čāčüčÅ ąĮą░ ą▓čģąŠą┤ąĮąŠą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĖ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░, ąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą▓čģąŠą┤ąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ čāą╝ąĄąĮčīčłą░čÄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čüą╝ąĄčēąĄąĮąĖčÅ, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠąĄ ą▓čģąŠą┤ąĮčŗą╝ č鹊ą║ąŠą╝ čüą╝ąĄčēąĄąĮąĖčÅ.
ąöąĖą░ą┐ą░ąĘąŠąĮčŗ čāčĆąŠą▓ąĮąĄą╣ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓ . ąöąĖą░ą┐ą░ąĘąŠąĮ ą░ą▒čüąŠą╗čÄčéąĮąŠą│ąŠ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠą│čĆą░ąĮąĖč湥ąĮ čāčĆąŠą▓ąĮčÅą╝ąĖ ąŠčé AGND + 1.2V ą┤ąŠ AVDD ŌĆō 0.95V, čćč鹊 čéą░ą║ąČąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┤ą╗čÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąŠą▒čēąĄą│ąŠ čĆąĄąČąĖą╝ą░. ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüąŠą▒ą╗čÄą┤ą░čéčī ąŠčüč鹊čĆąŠąČąĮąŠčüčéčī ą▓ čāčüčéą░ąĮąŠą▓ą║ąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠą▒čēąĄą│ąŠ čĆąĄąČąĖą╝ą░ ąĖ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ąĮąĄ ą┐čĆąĄą▓čŗčüąĖčéčī čŹčéąĖ ą┐čĆąĄą┤ąĄą╗čŗ, ąĖąĮą░č湥 čüąĮąĖąĘąĖčéčüčÅ ą╗ąĖąĮąĄą╣ąĮąŠčüčéčī ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓.
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą▓čģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą╝ąĄčēąĄąĮ ą╗ąĖą▒ąŠ ąŠą║ąŠą╗ąŠ čāčĆąŠą▓ąĮčÅ ąĘąĄą╝ą╗ąĖ čüąĖčüč鹥ą╝čŗ, ą╗ąĖą▒ąŠ ąĮąĄą╝ąĮąŠą│ąŠ ąĮąĖąČąĄ čŹč鹊ą│ąŠ čāčĆąŠą▓ąĮčÅ. ąÆ čéą░ą║ąĖčģ čüą╗čāčćą░čÅčģ ą▓čŗą▓ąŠą┤ AGND AD7731 ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą╗čāčćąĖčéčī ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĘąĄą╝ą╗ąĖ, čćč鹊ą▒čŗ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ ąÉą”ą¤ ąĮąĄ ąŠą┐čāčüčéąĖą╗ąŠčüčī ąĮąĖąČąĄ 1.2V ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ AGND. ąĪą╗ąĄą┤čāąĄčé ąŠą▒čĆą░čéąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą│ą░čĆą░ąĮčéąĖčÄ, čćč鹊 čĆą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā ą╗ąĖą▒ąŠ AVDD, ą╗ąĖą▒ąŠ DVDD ąĖ čŹčéąĖą╝ čüą╝ąĄčēąĄąĮąĮčŗą╝ AGND ąĮąĄ ą┐čĆąĄą▓čŗčłą░ą╗ą░ 5.5V. ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ čŹč鹊 ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▓ čüąĄą║čåąĖąĖ "ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ".
ąŻčüąĖą╗ąĖč鹥ą╗čī čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ čāčüąĖą╗ąĄąĮąĖčÅ . ąÆčŗčģąŠą┤ ą▒čāč乥čĆąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą▓čģąŠą┤ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ čāčüąĖą╗ąĄąĮąĖčÅ (programmable gain amplifier, PGA). PGA ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī 7 čĆą░ąĘąĮčŗčģ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą▓čģąŠą┤ąĮčŗčģ čāčĆąŠą▓ąĮąĄą╣ ąĖ 7 ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░. ąÜąŠą│ą┤ą░ ą▒ąĖčé HIREF Mode Register čüą▒čĆąŠčłąĄąĮ ą▓ ą╗ąŠą│. 0, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ +2.5V (ąĖą╗ąĖ ą▒ąĖčé HIREF čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1 ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ +5V), ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ čüąŠčüčéą░ą▓ą╗čÅčÄčé 0 mV .. +20 mV, 0 mV .. +40 mV, 0 mV .. +80 mV, 0 mV .. +160 mV, 0 mV .. +320 mV, 0 mV .. +640 mV ąĖ 0 V .. +1.28 V, ą░ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ ┬▒20 mV, ┬▒40 mV, ┬▒80 mV, ┬▒160 mV, ┬▒320 mV, ┬▒640 mV ąĖ ┬▒1.28 V. ąŁč鹊 ąĮąŠą╝ąĖąĮą░ą╗čīąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ąĮą░ ą▓čģąŠą┤ą░čģ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ PGA.
ąæąĖą┐ąŠą╗čÅčĆąĮčŗąĄ/ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗąĄ ą▓čģąŠą┤čŗ . ąÉąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ AD7731 ą╝ąŠą│čāčé ą┐čĆąĖąĮąĖą╝ą░čéčī ą╗ąĖą▒ąŠ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗąĄ, ą╗ąĖą▒ąŠ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ ą▓čģąŠą┤ąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣. ąæąĖą┐ąŠą╗čÅčĆąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ ąĮąĄ ąŠąĘąĮą░čćą░čÄčé, čćč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĮą░ čüą▓ąŠąĖčģ ą▓čģąŠą┤ą░čģ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĘąĄą╝ą╗ąĖ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ AGND čéą░ą║ąČąĄ ą┐ąŠą╗čāčćąĖą╗ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ąĮąĖąČąĄ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĘąĄą╝ą╗ąĖ. ą×ą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗąĄ ąĖ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĮą░ ą▓čģąŠą┤ąĄ AIN(+) ąĖąĘą╝ąĄčĆčÅčÄčéčüčÅ ą┐ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▓čģąŠą┤ą░ AIN(ŌĆō). ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĮą░ AIN(ŌĆō) +2.5 V, ąĖ AD7731 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ 0 mV .. +20 mV, č鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ čĆą░ą▒ąŠčćąĖčģ ą▓čģąŠą┤ąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ąĮą░ AIN(+) ą▒čāą┤ąĄčé +2.5 V .. +2.52 V. ąĢčüą╗ąĖ ąĮą░ AIN(ŌĆō) +2.5 V, ąĖ AD7731 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą▓čģąŠą┤ąĮčŗčģ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ┬▒1.28 V, č鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ąĮą░ ą▓čģąŠą┤ąĄ AIN(+) ą▒čāą┤ąĄčé +1.22 V .. +3.78 V (čé. ąĄ. 2.5 V ┬▒1.28 V).
ą×ą┐čåąĖčÅ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗą╣/ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╣ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▒ąĖč鹊ą╝ B/U (čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé Bipolar/Unipolar) Mode Register. ąŁč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą║ą░ąĮą░ą╗ ąĮą░ čĆą░ą▒ąŠčéčā ą╗ąĖą▒ąŠ ą▓ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝, ą╗ąĖą▒ąŠ ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ ąĮąĖą║ą░ą║ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ą▓čģąŠą┤ąĮąŠą│ąŠ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, čŹč鹊 č鹊ą╗čīą║ąŠ ą╝ąĄąĮčÅąĄčé ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ č鹊čćą║ąĖ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ, ą│ą┤ąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░. ąÜąŠą│ą┤ą░ AD7731 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╣ čĆą░ą▒ąŠčéčŗ, ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗčģąŠą┤ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĮą░čéčāčĆą░ą╗čīąĮčŗą╝ąĖ (ą┐čĆčÅą╝čŗą╝ąĖ) ą┤ą▓ąŠąĖčćąĮčŗą╝ąĖ čćąĖčüą╗ą░ą╝ąĖ, ą║ąŠą│ą┤ą░ ąĮčāą╗ąĄą▓ąŠąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą░čüčé ą║ąŠą┤ 000...000, čüčĆąĄą┤ąĮąĄąĄ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą░čüčé ą║ąŠą┤ 100...000, ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą┤ą╗čÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą░čüčé ą║ąŠą┤ 111...111. ąÜąŠą│ą┤ą░ AD7731 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╣ čĆą░ą▒ąŠčéčŗ, ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ čüą░ą╝ąŠą│ąŠ ą▒ąŠą╗čīčłąŠą│ąŠ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą░čüčé ą║ąŠą┤ 000...000, ąĮčāą╗ąĄą▓ąŠąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą░čüčé ą║ąŠą┤ 100...000, ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą░čüčé ą║ąŠą┤ 111...111.
ą¤čĆąŠą▓ąĄčĆąŠčćąĮčŗąĄ č鹊ą║ąĖ . AD7731 čüąŠą┤ąĄčƹȹĖčé ą┤ą▓ą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░ 100 nA, ąŠą┤ąĖąĮ ą┤ą░ąĄčé č鹊ą║ ą▓čŗč鹥ą║ą░ąĮąĖčÅ ąŠčé AVDD ą║ AIN(+), ąĖ ąĄčēąĄ ąŠą┤ąĖąĮ č鹊ą║ ą▓č鹥ą║ą░ąĮąĖčÅ ąŠčé AIN1(ŌĆō) ą║ AGND. ąŁčéąĖ č鹊ą║ąĖ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą┐ą░čĆčŗ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓. ą×ą▒ą░ č鹊ą║ą░ ą╗ąĖą▒ąŠ ą▓ą║ą╗čÄč湥ąĮčŗ, ą╗ąĖą▒ąŠ ą▓čŗą║ą╗čÄč湥ąĮčŗ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčéą░ BO Mode Register. ąŁčéąĖ č鹊ą║ąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ą░čéčćąĖą║ą░ ą┐ąĄčĆąĄą┤ ą┐ąŠą┐čŗčéą║ąŠą╣ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ ą║ą░ąĮą░ą╗ąĄ. ąĢčüą╗ąĖ č鹊ą║ąĖ ą▓ą║ą╗čÄč湥ąĮčŗ, č鹊 ąŠąĮąĖ ą▓č鹥ą║ą░čÄčé ą▓ ą┤ą░čéčćąĖą║, ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ąĮą░ ą▓čģąŠą┤ąĄ ą┤ą░čüčé ąĘą░čłą║ą░ą╗ąĖą▓ą░ąĮąĖąĄ ą┐ąŠ ą▓čģąŠą┤čā, čćč鹊 ą┐ąŠą║ą░ąČąĄčé ąŠčéą║ą╗čÄč湥ąĮąĖąĄ ą┤ą░čéčćąĖą║ą░ ąŠčé ą▓čģąŠą┤ą░. ąĢčüą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▒čāą┤ąĄčé 0V, č鹊 čŹč鹊 ą┐ąŠą║ą░ąČąĄčé čćč鹊 ą┤ą░čéčćąĖą║ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ. ąÆąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ čŹčéąĖ č鹊ą║ąĖ ą▓čŗą║ą╗čÄčćą░čÄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą╗ąŠą│. 0 ą▓ ą▒ąĖčé BO. ąŁčéąĖ ąĖčüč鹊čćąĮąĖą║ąĖ č鹊ą║ą░ ą┐ąĄčĆąĄą║čĆčŗą▓ą░čÄčé ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ ą░ą▒čüąŠą╗čÄčéąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ąĘą░ą┤ą░ąĮąĮčŗąĄ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ.
[ąÆčģąŠą┤ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ]
ąÆčģąŠą┤čŗ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ REF IN(+) ąĖ REF IN(ŌĆō) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą┤ą░čéčī ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ. ą×ą▒čēąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą┤ą╗čÅ čŹčéąĖčģ ą▓čģąŠą┤ąŠą▓ ąĮą░čģąŠą┤ąĖčéčüčÅ ą╝ąĄąČą┤čā AGND ąĖ AVDD. ąØąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ VREF (REF IN(+) ŌĆō REF IN(ŌĆō)) čüąŠčüčéą░ą▓ą╗čÅąĄčé +2.5 V ą┐čĆąĖ ą▒ąĖč鹥 HIREF = 0 ąĖ +5 V ą┐čĆąĖ HIREF = 1. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ čéą░ą║ąČąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░ čü VREF = +2.5 V, ą║ąŠą│ą┤ą░ ą▒ąĖčé HIREF = 1. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čŹč鹊 čāą╝ąĄąĮčīčłąĖčé ą▓ą┤ą▓ąŠąĄ ą▓čüąĄ ą▓čģąŠą┤ąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ. ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą▓ nV ąŠčüčéą░ąĮąĄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮąŠą╣, ąĮąŠ čāą╝ąĄąĮčīčłąĖčéčüčÅ ąĮą░ 1 ą▒ąĖčé ą┤ą╗čÅ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ P2P.
ą×ą▒ą░ ą▓čģąŠą┤ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą░čÄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║čāčÄ ąĮą░ą│čĆčāąĘą║čā čü ą▓čŗčüąŠą║ąĖą╝ ą▓čģąŠą┤ąĮčŗą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝. ąóąĖą┐ąĖčćąĮčŗą╣ čüčĆąĄą┤ąĮąĖą╣ ą▓čģąŠą┤ąĮąŠą╣ ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ č鹊ą║ čāč鹥čćą║ąĖ ą▓ čĆą░ą▒ąŠč湥ą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ čüąŠčüčéą░ą▓ą╗čÅąĄčé 4.5 mA ą┐čĆąĖ HIREF = 0 ąĖ 8 mA ą┐čĆąĖ HIREF = 1. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą▓čģąŠą┤ąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▓čģąŠą┤ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ, ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą▒ąĖąĮą░čåąĖą╣ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ/ąĄą╝ą║ąŠčüčéčī ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąŠčłąĖą▒ą║ą░ą╝ čāčüąĖą╗ąĄąĮąĖčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čłčāą╝ą░, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ čéą░ą▒ą╗ąĖčåą░čģ I .. IV, ą┤ą░ąĮčŗ ą┤ą╗čÅ 0V ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ą▓čģąŠą┤ąĄ, ąĖ ąĮą░ ąĮąĖčģ ą▓ą╗ąĖčÅąĄčé čłčāą╝ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī č鹥 ąČąĄ čüą░ą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåą░čģ čłčāą╝ą░, ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą▓čģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, čéčĆąĄą▒čāąĄčéčüčÅ ą┤ąŠą▒ąĖčéčīčüčÅ ąĮąĖąĘą║ąŠą│ąŠ čłčāą╝ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ AD7731. ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą│ą┤ąĄ ą▓ąŠąĘą▒čāąČą┤ą░čÄčēąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą░čéčćąĖą║ą░ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ą▓čģąŠą┤ąĄ čéą░ą║ąČąĄ ą┤ą░ąĄčé ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, čŹčäč乥ą║čé ąĮąĖąĘą║ąŠčćą░čüč鹊čéąĮąŠą│ąŠ čłčāą╝ą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ ą▒čāą┤ąĄčé čāą┤ą░ą╗ąĄąĮ, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓ čŹč鹊ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ AD7731 ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ ą┤ą░čéčćąĖą║ą░ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ. ąæąĖčé HIREF Mode Register ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1.
ąĢčüą╗ąĖ AD7731 ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ, ą│ą┤ąĄ ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ, č鹊 ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖčüč鹊čćąĮąĖą║ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čü ąĮąĖąĘą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ čłčāą╝ą░. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ AD7731 ą▓ą║ą╗čÄčćą░čÄčé AD780, REF43 ąĖ REF192. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą╗čÄą▒ąŠą╣ ąĖąĘ čŹčéąĖčģ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ ąŠą┐ąŠčĆąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣, č鹊 ą▒ąĖčé HIREF ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą▓ ą╗ąŠą│. 0. ą×ą▒čŗčćąĮą░čÅ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅ - ą┐čĆąĖą╝ąĄąĮąĖčéčī čłčāąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ą╝ąĖ ą▓čŗčģąŠą┤ą░ čŹčéąĖčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ čüąĮąĖąĘąĖčéčī čāčĆąŠą▓ąĄąĮčī čłčāą╝ą░.
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ . ąÆ AD7731 ą▓čüčéčĆąŠąĄąĮą░ čüčģąĄą╝ą░ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ą╗ąĖčćąĖčÅ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖą╗ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ąŠą║. ąĢčüą╗ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ REF IN(+) ąĖ REF IN(ŌĆō) čüąĮąĖąĘąĖčéčüčÅ ąĮąĖąČąĄ 0.3 V ąĖą╗ąĖ ą▓čģąŠą┤čŗ REF IN(+) ąĖą╗ąĖ REF IN(ŌĆō) ą▒čāą┤čāčé ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ, č鹊 AD7731 ąŠą┐čĆąĄą┤ąĄą╗ąĖčé, čćč鹊 ąĮąĄčé ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▒ąĖčé NOREF Status Register čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1.
ąĢčüą╗ąĖ AD7731 ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąŠą▒čŗčćąĮčŗąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░, ąĖ NOREF ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, č鹊 ą▓ Data Register ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą╗ąŠą│. 1 ą▓ąŠ ą▓čüąĄ ą▒ąĖčéčŗ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ NOREF ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣. ąóą░ą║čāčÄ ą┐čĆąŠą▓ąĄčĆą║čā ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī, ąĄčüą╗ąĖ čĆąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗą╣ ąĖąĘ Data Register, čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ąĄą┤ąĖąĮąĖčćą║ąĖ.
ąĢčüą╗ąĖ AD7731 ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ą╗ąĖą▒ąŠ čüą╝ąĄčēąĄąĮąĖąĄ, ą╗ąĖą▒ąŠ čāčüąĖą╗ąĄąĮąĖčÅ, ąĖ ą▒ąĖčé NOREF ą┐ąĄčĆąĄčłąĄą╗ ą▓ ą╗ąŠą│. 1, č鹊 ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ąĘą░ą│čĆčāąĘą║čā ąĮąĄą║ąŠčĆčĆąĄą║čéąĮčŗčģ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ. ąĢčüą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąŠą▒ąĄčüą┐ąŠą║ąŠąĄąĮ ą┐čĆąŠą▓ąĄčĆą║ąŠą╣, čćč鹊 ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, č鹊 ąĮčāąČąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ NOREF ą▓čüčÅą║ąĖą╣ čĆą░ąĘ ą┐ąŠčüą╗ąĄ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čåąĖą║ą╗ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ą£ąŠą┤čāą╗čÅč鹊čĆ SIGMA-DELTA . ąĪąĖą│ą╝ą░-ą┤ąĄą╗čīčéą░ ąÉą”ą¤ ąŠą▒čŗčćąĮąŠ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ ąŠčüąĮąŠą▓ąĮčŗčģ ą▒ą╗ąŠą║ąŠą▓, ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ąĖ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░. ąÆ čüą╗čāčćą░ąĄ AD7731 ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ, ą▒ą╗ąŠą║ą░ ąĖąĮč鹥ą│čĆą░č鹊čĆą░, ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░ ąĖ ą”ąÉą¤ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 7. ąÆąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą▓čŗą▒ąŠčĆą║ą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī ą▓ą╝ąĄčüč鹥 čü ą▓čŗčģąŠą┤ąŠą╝ ą”ąÉą¤ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ. ąĀą░ąĘąĮąŠčüčéčī ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ąĖąĮč鹥ą│čĆąĖčĆčāąĄčéčüčÅ ąĖ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆ. ąÆčŗčģąŠą┤ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą”ąÉą¤ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ, čéą░ą║ čćč鹊 čüąĖčüč鹥ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┐ąĄčéą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ, ą║ąŠč鹊čĆą░čÅ ą┐čŗčéą░ąĄčéčüčÅ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗. ą”ąĖčäčĆąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠąĄ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, čüąŠą┤ąĄčƹȹ░čéčüčÅ ą▓ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓, ą┐ąŠčÅą▓ą╗čÅčÄčēąĖčģčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░. ąŁčéą░ čüą║ą▓ą░ąČąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą║ą░ą║ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ čü ą┐ąŠą╝ąŠčēčīčÄ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░. ą¦ą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ą┐ąĄčéą╗ąĖ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą▓čŗčłąĄ ą┐ąŠą╗ąŠčüčŗ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąśąĮč鹥ą│čĆą░č鹊čĆ ą▓ ą╝ąŠą┤čāą╗čÅč鹊čĆąĄ čüą│ą╗ą░ąČąĖą▓ą░ąĄčé čłčāą╝ ą║ą▓ą░ąĮč鹊ą▓ą░ąĮąĖčÅ (ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĖ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ č乊čĆą╝čŗ ą▓ čåąĖčäčĆąŠą▓čāčÄ) čéą░ą║, čćč鹊ą▒čŗ čłčāą╝ ą▒čŗą╗ čüą┤ą▓ąĖąĮčāčé ą║ ą┐ąŠą╗ąŠą▓ąĖąĮąĄ čćą░čüč鹊čéčŗ ą╝ąŠą┤čāą╗čÅč鹊čĆą░. ąŚą░č鹥ą╝ čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé ą┐ąŠą╗ąŠčüčā ą║ čćą░čüč鹊č鹥, ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąĮąĖąČąĄ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ čćą░čüč鹊čéčŗ ą╝ąŠą┤čāą╗čÅč鹊čĆą░. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 1-ą▒ąĖčéąĮčŗą╣ ą▓čŗčģąŠą┤ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░ čéčĆą░ąĮčüą╗ąĖčĆčāąĄčéčüčÅ ą▓ ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ ą┐ąŠ ą┐ąŠą╗ąŠčüąĄ, ą╝ą░ą╗ąŠčłčāą╝čÅčēąĖą╣ ą▓čŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ ąĖąĘ AD7731.
ąĀąĖčü. 7. ąæą╗ąŠą║-čüčģąĄą╝ą░ Sigma-Delta ą╝ąŠą┤čāą╗čÅč鹊čĆą░.
[ą”ąĖčäčĆąŠą▓ą░čÅ čäąĖą╗čīčéčĆą░čåąĖčÅ ]
ąÉčĆčģąĖč鹥ą║čéčāčĆą░ čäąĖą╗čīčéčĆą░ . ąÆčŗčģąŠą┤ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ. ąŁč鹊čé čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ čćą░čüč鹥ą╣: ą┐ąĄčĆą▓čŗą╣ ą║ą░čüą║ą░ą┤ ąĖ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤. ą¦ą░čüč鹊čéą░ čüčĆąĄąĘą░ ąĖ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ čäąĖą╗čīčéčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ. ą¤ąĄčĆą▓čŗą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ążąØą¦ čü čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąŠą╣ sinc3 ąĖą╗ąĖ (sinx/x)3 , ąĖ ąĄą│ąŠ ą│ą╗ą░ą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ čüąŠčüč鹊ąĖčé ą▓ čāą┤ą░ą╗ąĄąĮąĖąĖ čłčāą╝ą░ ą║ą▓ą░ąĮč鹊ą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą▓ą▓ąŠą┤ąĖčéčüčÅ ą╝ąŠą┤čāą╗čÅč鹊čĆąŠą╝. ąÆč鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░ ąĖą╝ąĄąĄčé 3 čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ. ą¤ąĄčĆą▓ą░čÅ ąŠą┐čåąĖčÅ - ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ ąĮą░ čŹč鹊ą╝ ą║ą░čüą║ą░ą┤ąĄ ąĮąĖą║ą░ą║ ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ (ą┐čĆąŠčģąŠą┤ąĖčé ąĮą░ą┐čĆčÅą╝čāčÄ), ąĖ čäąĖą╗čīčéčĆą░čåąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓čŗą╝ ą║ą░čüą║ą░ą┤ąŠą╝ ążąØą¦ sinc3 . ąÆč鹊čĆą░čÅ ąŠą┐čåąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąÜąśąź ążąØą¦, čäąĖą╗čīčéčĆ čü ą║ąŠąĮąĄčćąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąŠą╣ (22-tap FIR), ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĖą╣ ą▓čŗčģąŠą┤ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░. ąóčĆąĄčéčīčÅ ąŠą┐čåąĖčÅ čĆą░ąĘčĆąĄčłą░ąĄčé čĆąĄąČąĖą╝ FASTStepŌäó. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĄčüą╗ąĖ ą▒čŗą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čüą╝ąĄąĮą░ čłą░ą│ą░, č鹊 ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓čģąŠą┤ąĮąŠą╣ ą║ą░ąĮą░ą╗, ąĖ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░ ą▓čģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝, ą│ą┤ąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčĆąĄą┤ąĮąĄąĮąĖą╣ ąĘą░ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄ čüą╝ąĄąĮčŗ čłą░ą│ą░, ąĖ ąĘą░č鹥ą╝ čäąĖą╗čīčéčĆ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ FIR-čäąĖą╗čīčéčĆą░.
AD7731 ąĖą╝ąĄąĄčé ą┤ą▓ą░ ą│ą╗ą░ą▓ąĮčŗčģ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ: chop mode (CHP = 1) ąĖ nonchop mode (CHP = 0). ąÜąŠą│ą┤ą░ čĆąĄąČąĖą╝ č湊ą┐ą┐ąĖąĮą│ą░ ą░ą║čéąĖą▓ąĄąĮ (CHP = 1) AD7731 ą╝ąĄąĮčÅąĄčé ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čüą▓ąŠąĖčģ ą▓čģąŠą┤ąŠą▓ ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░, ą┐ąŠčüčéčāą┐ą░čÄčēąĄą│ąŠ ąĮą░ ą┐ąĄčĆą▓čŗą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░. ą¤čĆąĖ CHP = 0 ą┐ąŠą╗čÅčĆąĮąŠčüčéčī ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ.
ąŁč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ, ąŠą▒čŗčćąĮąŠ ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ą░čÅ ą▓ čüąĖą│ą╝ą░-ą┤ąĄą╗čīčéą░ ąÉą”ą¤. ą×ąĮą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāčüčéčĆą░ąĮąĖčéčī ąŠčłąĖą▒ą║čā ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ, ą▓ąŠąĘąĮąĖą║ą░čÄčēčāčÄ ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ą░čüą║ą░ą┤ą░čģ čāčüąĖą╗ąĖč鹥ą╗ąĄą╣. ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ chopping ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ą▒čŗčüčéčĆąŠą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą║ą░ą║ ą▓čģąŠą┤ąŠą▓ ąÉą”ą¤, čéą░ą║ ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą┐ąŠčüčéčāą┐ą░čÄčēąĄą│ąŠ ąĮą░ ą▓čģąŠą┤ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░, ą║ąŠč鹊čĆčŗą╣ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüčéą░ą▓ čüąĖą│ą╝ą░-ą┤ąĄą╗čīčéą░ ąÉą”ą¤. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąŠčłąĖą▒ą║ą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆčāąĄčéčüčÅ.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ č湊ą┐ą┐ąĖąĮą│ą░ čüą╝. ą░ą┐ąĮąŠčāčé AN-609 [2] "Chopping on sigma-delta ADCs" ąĮą░ čüą░ą╣č鹥 Analog Devices.
ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ ą┤ą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ. ąæąĖčé CHP ąŠą▒čŗčćąĮąŠ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, ą║ąŠą│ą┤ą░ AD7731 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čü ą▓čŗčüąŠą║ąĖą╝ąĖ čüą║ąŠčĆąŠčüčéčÅą╝ąĖ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ąĖą╗ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą│ą┤ąĄ ąĮąĄ ąĖą╝ąĄąĄčé ą▒ąŠą╗čīčłąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāčĆąŠą▓ąĄąĮčī čüą╝ąĄčēąĄąĮąĖčÅ ąĖ chopping-čćą░čüč鹊čéą░ ą╝ąŠąČąĄčé čüąŠąĘą┤ą░ą▓ą░čéčī ą┐čĆąŠą▒ą╗ąĄą╝čā. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī čü CHP = 1, ą║ąŠą│ą┤ą░ čüą░ą╝čŗą╝ ą▓ą░ąČąĮčŗą╝ ą║čĆąĖč鹥čĆąĖąĄą╝ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ čÅą▓ą╗čÅčÄčéčüčÅ čüąĮąĖąČąĄąĮąĖąĄ čüą╝ąĄčēąĄąĮąĖčÅ, ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖąĄ čłčāą╝ą░ ąĖ 菹╗ąĄą║čéčĆąŠą╝ą░ą│ąĮąĖčéąĮčŗčģ ą┐ąŠą╝ąĄčģ (EMI).
ąĪą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ AD7731 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ SF Filter Register. ą¤čĆąĖ ąĘą░ą┐čĆąĄčēąĄąĮąĮąŠą╝ č湊ą┐ą┐ąĖąĮą│ąĄ (CHP=0), čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ č乊čĆą╝čāą╗ąŠą╣:
fMOD Output Rate = ---- SF
ąŚą┤ąĄčüčī SF čŹč鹊 ą┤ąĄčüčÅčéąĖčćąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé ą┤ą░ąĮąĮčŗčģ, ąĘą░ą│čĆčāąČąĄąĮąĮčŗčģ ą▓ ą▒ąĖčéčŗ SF, ąĖ fMOD čŹč鹊 čćą░čüč鹊čéą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░, čĆą░ą▓ąĮą░čÅ 1/16 ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
ą¤čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą╝ č湊ą┐ą┐ąĖąĮą│ąĄ (CHP=1), čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ č乊čĆą╝čāą╗ąŠą╣:
fMOD Output Rate = ------ 3 * SF
ąŚą┤ąĄčüčī SF čŹč鹊 ą┤ąĄčüčÅčéąĖčćąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé ą┤ą░ąĮąĮčŗčģ, ąĘą░ą│čĆčāąČąĄąĮąĮčŗčģ ą▓ ą▒ąĖčéčŗ SF, ąĖ fMOD čŹč鹊 čćą░čüč鹊čéą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░, čĆą░ą▓ąĮą░čÅ 1/16 ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐čĆąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ čüą╗ąŠą▓ąĄ SF čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ 3 čĆą░ąĘą░ ą▓čŗčłąĄ, ą║ąŠą│ą┤ą░ CHP = 0, č湥ą╝ ą║ąŠą│ą┤ą░ CHP = 1.
ąĀą░ąĘąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą░čüą║ą░ą┤ąŠą▓ ąĖ ąŠą┐čåąĖą╣ čäąĖą╗čīčéčĆą░ ąŠą▒čüčāąČą┤ą░čÄčéčüčÅ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ.
ą¤ąĄčĆą▓čŗą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ ą┐čĆąŠą┐čāčüą║ą░ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░. ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ SKIP, čäąĖą╗čīčéčĆą░čåąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąĄčĆą▓ąŠą╝ ą║ą░čüą║ą░ą┤ąĄ čäąĖą╗čīčéčĆą░. ą¦ą░čüč鹊čéąĮą░čÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ (ąŠčéą║ą╗ąĖą║) čŹč鹊ą│ąŠ ą║ą░čüą║ą░ą┤ą░ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 8. ą×čéą║ą╗ąĖą║ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ą┐ąŠą┤ąŠą▒ąĄąĮ čäąĖą╗čīčéčĆčā čāčüčĆąĄą┤ąĮąĄąĮąĖčÅ, ąĮąŠ čü ą▒ąŠą╗ąĄąĄ čĆąĄąĘą║ąĖą╝ čüą┐ą░ą┤ąŠą╝. ą¤čĆąĖ CHP = 0 čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą▓čŗčģąŠą┤ąĄ čäąĖą╗čīčéčĆą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąĄčĆą▓ąŠą╣ ą║čĆąĖą▓ąŠą╣ čćą░čüč鹊čéąĮąŠą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čäąĖą╗čīčéčĆą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą│čĆą░čäąĖą║ čĆąĖčü. 8, ą│ą┤ąĄ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čüąŠčüčéą░ą▓ą╗čÅąĄčé 600 ąōčå (fCLK IN = 4.9152 ą£ąōčå ąĖ SF = 512), ą┐ąĄčĆą▓ą░čÅ ą║čĆąĖą▓ą░čÅ čäąĖą╗čīčéčĆą░ (ą│ąŠčĆą▒ ąÉą¦ąź) ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ čćą░čüč鹊č鹥 600 ąōčå. ą¤čĆąĖ CHP = 1, ą│čĆą░čäąĖą║ čćą░čüč鹊čéąĮąŠą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą▒čāą┤ąĄčé čéą░ą║ąŠą╣ ąČąĄ, ąĮąŠ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą▒čāą┤ąĄčé ą▓ 3 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ, ąĖ ą┐ąĄčĆą▓ą░čÅ ą║čĆąĖą▓ą░čÅ ąĮą░ ą│čĆą░čäąĖą║ąĄ ą▒čāą┤ąĄčé ąĘą░ą║ą░ąĮčćąĖą▓ą░čéčīčüčÅ ąĮą░ 200 ąōčå. ąōąŠčĆą▒čŗ ąÉą¦ąź čŹč鹊ą│ąŠ sinc3 -čäąĖą╗čīčéčĆą░ ą┐ąŠą▓č鹊čĆčÅčÄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ čüčĆąĄąĘą░ ą┐ąĄčĆą▓ąŠą│ąŠ ą│ąŠčĆą▒ą░. ążąĖą╗čīčéčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāą╝ąĄąĮčīčłąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ą╗čāčćčłąĄ 100 dB ą▓ čüą┐ą░ą┤ą░čģ ą╝ąĄąČą┤čā ą│ąŠčĆą▒ą░ą╝ąĖ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čĆą░ąĘąĮčŗčģ čćą░čüč鹊čé čüčĆąĄąĘą░ ą▒ąĖčéą░ą╝ąĖ SF0 ŌĆō SF11 ąĮąĄ ą╝ąĄąĮčÅąĄčé č乊čĆą╝čā ąÉą¦ąź čäąĖą╗čīčéčĆą░; ą╝ąĄąĮčÅčÄčéčüčÅ č鹊ą╗čīą║ąŠ čćą░čüč鹊čéčŗ čüą┐ą░ą┤ąŠą▓ ą│ąŠčĆą▒ąŠą▓ ąÉą¦ąź. ą¤ąŠą╗ąŠčüą░ čćą░čüč鹊čé čüąŠ čüą┐ą░ą┤ąŠą╝ ŌĆō3 dB ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čĆąĄąČąĖą╝ąŠą▓ Chop ąĖ Nonchop ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
0.262 * fMOD f3dB = ------------ SF
Nonchop Mode čü ą┐čĆąŠą┐čāčüą║ąŠą╝ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ążąØą¦ (SKIP = 1, CHP = 0). ą¤čĆąĖ CHP = 0 č湊ą┐ą┐ąĖąĮą│ ą▓čģąŠą┤ą░ AD7731 ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖ ą╗čÄą▒čŗąĄ čüą╝ąĄčēąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ą▓ ą▓čŗą▒ąŠčĆą║ą░čģ čüąĖą│ąĮą░ą╗ą░, ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ ąĮą░ ą┐ąĄčĆą▓čŗą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░, ą▒čāą┤čāčé ąĖą╝ąĄčéčī ą▓čüąĄą│ą┤ą░ ąŠą┤ąĮčā ąĖ čéčā ąČąĄ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī. ąÜąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ SKIP (ą┐čĆąŠą┐čāčüą║ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░), ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą╗čāčćąĖčéčī ą▓čŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ AD7731. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓čĆąĄą╝čÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ čüąŠčüčéą░ą▓ą╗čÅąĄčé 3 x 1/Output Rate (Output Rate čŹč鹊 čćą░čüč鹊čéą░ ą▓čŗą┤ą░čćąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ). ąóą░ą▒ą╗ąĖčåą░ XVIII ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēčāčÄ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓.
ąĀąĖčü. 8. ą¦ą░čüč鹊čéąĮą░čÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą┐čāčüą║ą░ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░ (SKIP = 1, SF = 512, fCLK IN = 4.9152 ą£ąōčå).
Chop Mode čü ą┐čĆąŠą┐čāčüą║ąŠą╝ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ążąØą¦ (SKIP = 1, CHP = 1). ą¤čĆąĖ CHP = 1 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ AD7731 čåąĖą║ą╗ąĖč湥čüą║ąĖ ą╝ąĄąĮčÅąĄčé ą┐ąŠą╗čÅčĆąĮąŠčüčéčī ą▓čģąŠą┤ąŠą▓ ąÉą”ą¤, ą┐čĆąĖ čŹč鹊ą╝ ą┐ąŠčüč鹊čÅąĮąĮąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ą╗ąĖą▒ąŠ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗, ą╗ąĖą▒ąŠ ą▓čŗčćąĖčéą░ąĄčéčüčÅ ąĖąĘ ąĮąĄą│ąŠ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥, ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ ąĖą┤ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ SKIP, čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┤ą▓ą░ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▓čŗčģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ AD7731, čāčüčĆąĄą┤ąĮąĄąĮąĖąĄą╝ ą║ąŠč鹊čĆčŗčģ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ čü ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░. ąźąŠčéčÅ čĆą░ą▒ąŠčéą░ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┤ą░ąĄčé ą▓čŗą│ąŠą┤čā č湊ą┐ą┐ąĖąĮą│ą░ ą▒ąĄąĘ ą┤ąŠą╗ą│ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čäąĖą╗čīčéčĆą░ 22-tap FIR, čüą╗ąĄą┤čāąĄčé ą▒čŗčéčī ąŠčüč鹊čĆąŠąČąĮčŗą╝, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą▒ą╗ąĖąĘąŠą║ ą║ ą║čĆą░ą╣ąĮąĄą╝čā ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╝čā ąĖą╗ąĖ ą║čĆą░ą╣ąĮąĄą╝čā ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ (ą▒ą╗ąĖąĘąŠą║ ą║ 0 ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ). ą¤ąŠčüą║ąŠą╗čīą║čā ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ čāčüčĆąĄą┤ąĮąĄąĮąĮąŠą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ, ąĖ ąĮąĄ ą┤ą╗čÅ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗčģ čüą╝ąĄčēąĄąĮąĖą╣, ą┐čĆąĖčüčāčéčüčéą▓čāčÄčēąĖčģ ą▓ ą║ą░ąČą┤ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĄ, ąŠą┤ąĮą░ ąĖąĘ ą┤ą▓čāčģ ą▓čŗą▒ąŠčĆąŠą║ ą▓ ą┐ą░čĆąĄ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ą▓čüąĄ ąĄą┤ąĖąĮąĖčåčŗ ąĖą╗ąĖ ą▓čüąĄ ąĮčāą╗ąĖ. ąĢčüą╗ąĖ čŹč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, č鹊 ą▒čŗą╗ą░ ąŠčłąĖą▒ą║ą░ čāčüčĆąĄą┤ąĮčÅčÄčēąĄą│ąŠ čćč鹥ąĮąĖčÅ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓čĆąĄą╝čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 1/Output Rate. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠčüą║ąŠą╗čīą║čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĮčāąČąĮąŠ ą┤ą▓ąĄ čüąŠčüąĄą┤ąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ, čćč鹊ą▒čŗ ą▓čŗčćąĖčüą╗ąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ čĆąĄąĘčāą╗čīčéą░čé č湊ą┐ą┐ąĖąĮą│ą░, č鹊 ą▓čĆąĄą╝čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čĆąĄąĘčāą╗čīčéą░čéą░ ąĖąĘ ą┤ą▓čāčģ čāčüčĆąĄą┤ąĮčÅąĄą╝čŗčģ ą▓čŗą▒ąŠčĆąŠą║ čüąŠčüčéą░ą▓ąĖčé 2 x 1/Output Rate. ąóą░ą▒ą╗ąĖčåą░ XVIII ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēčāčÄ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓. ąĢčüą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī čģąŠč湥čé ą┐ąŠą╗čāčćąĖčéčī ą▓čŗą│ąŠą┤čā č湊ą┐ą┐ąĖąĮą│ą░ ą▒ąĄąĘ ą┤ąŠą╗ą│ąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ 22-tap FIR čäąĖą╗čīčéčĆą░, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą▓ čĆąĄąČąĖą╝ąĄ FASTStepŌäó.
ąÆč鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░ . ąÜąŠą│ą┤ą░ čĆąĄąČąĖą╝ SKIP ąĘą░ą┐čĆąĄčēąĄąĮ, ą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ čüąĖą│ąĮą░ą╗ą░ čāčćą░čüčéą▓čāąĄčé ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤. ąŁč鹊čé ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ ą┤ą░ąĄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ąÉą¦ąź ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčé CHP ąĖ FAST.
ą×ą▒čŗčćąĮčŗą╣ FIR ą▒ąĄąĘ ą┐čĆąŠą┐čāčüą║ą░ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ążąØą¦ (SKIP = 0). ąØąŠčĆą╝ą░ą╗čīąĮą░čÅ čĆą░ą▒ąŠčéą░ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░, ą║ąŠą│ą┤ą░ ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ 22-tap FIR ążąØą¦. ąÆč鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čŗčģąŠą┤ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░, ą┐ąŠčŹč鹊ą╝čā ąŠą▒čēąĖą╣ čĆąĄąĘčāą╗čīčéą░čé ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮą░ą╗ąŠąČąĄąĮąĖąĄą╝ ąÉą¦ąź ąŠą▒ąŠąĖčģ čäąĖą╗čīčéčĆąŠą▓, čü ą│ą░čĆą░ąĮčéąĖąĄą╣ ąŠčéčüčāčéčüčéą▓ąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░.
Chop Mode ą▒ąĄąĘ ą┐čĆąŠą┐čāčüą║ą░ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ążąØą¦ (SKIP = 0, CHP = 1). ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ č湊ą┐ą┐ąĖąĮą│ą░ ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ čĆąĄąČąĖą╝ ą┐čĆąŠą┐čāčüą║ą░, čäąĖą╗čīčéčĆ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čĆąĄąĘčāą╗čīčéą░čé ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░. ą¤čĆąĖ čŹč鹊ą╝ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą┤ą▓ąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ. ą×ą┤ąĮą░ čüąŠčüč鹊ąĖčé ą▓ čāčüčéą░ąĮąŠą▓ą║ąĄ ą┐ąŠą╗ąĮąŠą╣ čćą░čüč鹊čéąĮąŠą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ąĖ ą▓č鹊čĆą░čÅ ą▓ čāčüčéčĆą░ąĮąĄąĮąĖąĖ čŹčäč乥ą║čéą░ ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓čĆąĄą╝čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 22 x 1/Output Rate. ąóą░ą▒ą╗ąĖčåą░ XVIII ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēčāčÄ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓.
ąĀąĖčü. 9 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą╗ąĮčāčÄ čćą░čüč鹊čéąĮčāčÄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā AD7731, ą║ąŠą│ą┤ą░ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ FIR. ąŁč鹊 ąÉą¦ąź ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą│ąŠ č湊ą┐ą┐ąĖąĮą│ą░, ą║ąŠą│ą┤ą░ ą▓ ą▒ąĖčéčŗ SF ąĘą░ą┐ąĖčüą░ąĮ ą┤ą▓ąŠąĖčćąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé čćąĖčüą╗ą░ 512, ąĖ ąŠčüąĮąŠą▓ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čĆą░ą▓ąĮą░ 4.9152 ą£ąōčå. ą×čéą▓ąĄčé ą╝ą░čüčłčéą░ą▒ąĖčĆčāąĄčéčüčÅ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠ čćą░čüč鹊č鹥 ą│ą╗ą░ą▓ąĮąŠą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą▓ ą┤ą░ąĮąĮąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ąÉą¦ąź ąŠčé ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░ ą┤ąŠ 100 ąōčå. ąĀąĄąČąĄą║čåąĖčÅ ąĮą░ čćą░čüč鹊čéą░čģ 50 ┬▒ 1 ąōčå ąĖ 60 ┬▒ 1 ąōčå ą╗čāčćčłąĄ 88 dB.
ąĪą┐ą░ą┤ ŌĆō3 dB AD7731 ą┐čĆąĖ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĖ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░ ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ FIR ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ č湊ą┐ą┐ąĖąĮą│ą░ (CHP=1) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ č乊čĆą╝čāą╗ąŠą╣:
0.0395 * fMOD f3dB = ------------- 3 * SF
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ f3 dB = 7.9 ąōčå. ą¤ąŠą╗ąŠčüą░ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ čü čĆąĄąČąĄą║čåąĖąĄą╣ ą╗čāčćčłąĄ 64.5 dB ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
0.14 * fMOD fSTOP = ----------- 3 * SF
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ fSTOP = 28 ąōčå.
ąĀąĖčü. 9. ąÉą¦ąź AD7731, ą║ąŠą│ą┤ą░ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ FIR-čäąĖą╗čīčéčĆą░ (SKIP = 0, CHP = 1, SF = 512, fCLK IN = 4.9152 ą£ąōčå).
ąĀąĖčü. 10 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąÉą¦ąź ą┤ą╗čÅ č鹥čģ ąČąĄ čāčüą╗ąŠą▓ąĖą╣, čćč鹊 ąĖ ąĮą░ čĆąĖčü. 9, č鹊ą╗čīą║ąŠ ąÉą¦ąź ą┐čĆąŠą┤ąŠą╗ąČąĄąĮą░ ą┤ąŠ 600 ąōčå. ąŚą┤ąĄčüčī ą▓ąĖą┤ąĮąŠ, čćč鹊 čĆąĄąČąĄą║čåąĖčÅ ąĮą░ čćą░čüč鹊čéą░čģ, ą▒ą╗ąĖąĘą║ąĖčģ ą║ 200 ąĖ 400 ąōčå, ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąĮąĖąČąĄ, č湥ą╝ ąĮą░ ą┤čĆčāą│ąĖčģ čćą░čüč鹊čéą░čģ. ąŁčéąĖ "ą┐ąĖą║ąĖ" ąÉą¦ąź ą┐ąŠą╗čāčćą░čÄčéčüčÅ ąĖąĘ-ąĘą░ č湊ą┐ą┐ąĖąĮą│ą░ ą▓čģąŠą┤ą░. ąÜčĆąĖą▓ą░čÅ čĆąĖčü. 10 čŹč鹊 ą░ą╝ą┐ą╗ąĖčéčāą┤ą░ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ čćą░čüč鹊čé. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čćą░čüč鹊čéą░ ą▓čŗą┤ą░čćąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé 200 ąōčå, ąÉą¦ąź ąĖčüą║ą░ąČą░ąĄčéčüčÅ, ąĖ ąĄčæ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ čüąŠčüč鹊ąĖčé ąĖąĘ ąĘąĄčĆą║ą░ą╗čīąĮčŗčģ ą║ąŠą┐ąĖą╣ ąÉą¦ąź ąŠčé ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░ ą┤ąŠ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ čćą░čüč鹊čéčŗ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
ąśąĘ-ąĘą░ čŹč鹊ą│ąŠ čŹčäč乥ą║čéą░ čüą╗ąĄą┤čāąĄčé čéčēą░č鹥ą╗čīąĮąŠ ą┐ąŠą┤ą▒ąĖčĆą░čéčī čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, čćč鹊ą▒čŗ ąŠąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░ą╗ą░ ą╗ąĖąĮąĄą╣ą║ąĄ čĆą░ą▒ąŠčćąĖčģ čćą░čüč鹊čé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čĆą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 50 ąōčå, č鹊 ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮą░ čćą░čüč鹊čéą░ ą▓čŗą┤ą░čćąĖ 50 ąōčå, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮąĖąĘąĖčé čĆąĄąČąĄą║čåąĖčÄ (50 ąōčå ą▒čāą┤ąĄčé ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ą║ą░ą║ ą┐ąŠčüč鹊čÅąĮąĮą░čÅ čüąŠčüčéą░ą▓ą╗čÅčÄčēą░čÅ č鹊ą╗čīą║ąŠ čü čĆąĄąČąĄą║čåąĖąĄą╣ 6 dB). ą×ą┤ąĮą░ą║ąŠ ą▓čŗą▒ąŠčĆ 60 ąōčå ą┤ą╗čÅ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (SF = 1707) ą┤ą░čüčé čĆąĄąČąĄą║čåąĖčÄ ą╗čāčćčłąĄ 90 dB. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ą╗ąĖąĮąĄą╣ąĮą░čÅ čćą░čüč鹊čéą░ 60 ąōčå, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čŗą▒čĆą░čéčī čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ 50 ąōčå (SF = 2048).
ąĀąĖčü. 10. ąĀą░čüčłąĖčĆąĄąĮąĮą░čÅ ą┐ąŠą╗ąĮą░čÅ ąÉą¦ąź AD7731 (SKIP = 0, CHP = 1, SF = 512, fCLK IN = 4.9152 ą£ąōčå).
ąóą░ą║ąČąĄ čüą╗ąĄą┤čāąĄčé ąĖąĘą▒ąĄą│ą░čéčī ą║čĆą░čéąĮčŗčģ ą╗ąĖąĮąĄą╣ąĮčŗčģ čćą░čüč鹊čé, ą┐ąŠč鹊ą╝čā čćč鹊 ą│ą░čĆą╝ąŠąĮąĖą║ąĖ čćą░čüč鹊čé ą▓čŗą┤ą░čćąĖ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüčĆąĄąĘą░ąĮčŗ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą▓čŗą▒ąŠčĆ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą▒ąŠčĆąŠčéčīčüčÅ čü čŹč鹊ą╣ ą┐čĆąŠą▒ą╗ąĄą╝ąŠą╣. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąŠą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓ nonchop-čĆąĄąČąĖą╝ąĄ.
Nonchop Mode (SKIP = 0, CHP = 0). ąÜąŠą│ą┤ą░ č湊ą┐ą┐ąĖąĮą│ ąŠčéą║ą╗čÄč湥ąĮ ąĖ ą┐čĆąŠą┐čāčüą║ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░ ąŠčéą║ą╗čÄč湥ąĮ, ąŠą▒čēčāčÄ čćą░čüč鹊čéąĮčāčÄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā ą┤ą░ąĄčé č鹊ą╗čīą║ąŠ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░. ąĀąĖčü. 11 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąÉą¦ąź AD7731, ą║ąŠą│ą┤ą░ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ FIR, č湊ą┐ą┐ąĖąĮą│ ąĘą░ą┐čĆąĄčēąĄąĮ, ą▓ ą▒ąĖčéčŗ SF ąĘą░ą┐ąĖčüą░ąĮ ą┤ą▓ąŠąĖčćąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé čćąĖčüą╗ą░ 1536, ąĖ ąŠčüąĮąŠą▓ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čĆą░ą▓ąĮą░ 4.9152 ą£ąōčå. ąÉą¦ąź ą░ąĮą░ą╗ąŠą│ąĖčćąĮą░ čĆąĖčü. 9, ą║ąŠą│ą┤ą░ čüą╗ąŠą▓ąŠ SF ą▓ 3 čĆą░ąĘą░ ą▒ąŠą╗čīčłąĄ ąĮą░ č鹊ą╣ ąČąĄ čüą░ą╝ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ 200 ąōčå. ąŚą┤ąĄčüčī čéą░ą║ąČąĄ ąÉą¦ąź ą╝ą░čüčłčéą░ą▒ąĖčĆčāąĄčéčüčÅ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥. ąØą░ čĆąĖčü. 10 ą┐ąŠą║ą░ąĘą░ąĮą░ ą┐ąŠą╗ąŠčüą░ čćą░čüč鹊čé ąŠčé ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░ ą┤ąŠ 100 ąōčå. ąĪčĆąĄąĘ ąĮą░ čćą░čüč鹊čéą░čģ 50 ┬▒ 1 ąōčå ąĖ 60 Hz ┬▒ 1 ąōčå čüąŠčüčéą░ą▓ą╗čÅąĄčé ą╗čāčćčłąĄ 88 dB.
ąĪą┐ą░ą┤ ŌĆō3 dB ą┤ą╗čÅ ąÉą¦ąź ą▓č鹊čĆąŠą│ąŠ čäąĖą╗čīčéčĆą░, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ąĮą░ ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ FIR-čäąĖą╗čīčéčĆ, čü ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╝ č湊ą┐ą┐ąĖąĮą│ąŠą╝ (CHP=0) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
0.039 * fMOD f3dB = ------------ SF
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ąŠą╗ąŠčüą░ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ f3 dB = 7.8 Hz, ąĖ ą┐ąŠą╗ąŠčüą░ čüčĆąĄąĘą░ čü ąŠčüą╗ą░ą▒ą╗ąĄąĮąĖąĄą╝ ą▒ąŠą╗ąĄąĄ 64.5 dB ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
0.14 * fMOD fSTOP = ----------- SF
ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ fSTOP = 28 Hz.
ąĀąĖčü. 11. ąÉą¦ąź AD7731, ą║ąŠą│ą┤ą░ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ FIR-čäąĖą╗čīčéčĆą░ (SKIP = 0, CHP = 0, SF = 1536, fCLK IN = 4.9152 ą£ąōčå).
ąĀąĖčü. 12 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąÉą¦ąź ą┤ą╗čÅ č鹥čģ ąČąĄ čāčüą╗ąŠą▓ąĖą╣, ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĮčāčÄ ą┤ąŠ 600 ąōčå. ąĪčĆą░ą▓ąĮąĖč鹥 čŹčéčā ąÉą¦ąź čü ąÉą¦ąź čĆąĖčü. 10. ąĪą░ą╝ąŠąĄ ą▒ąŠą╗čīčłąŠąĄ ąŠčéą╗ąĖčćąĖąĄ - ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┐ąĖą║ąŠą▓ ąĮą░ čćą░čüč鹊čéą░čģ 200 ąĖ 400 ąōčå. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąĖąĮč鹥čĆč乥čĆąĄąĮčåąĖčÅ čŹčéąĖčģ čćą░čüč鹊čé ą▒čāą┤ąĄčé čŹčäč乥ą║čéąĖą▓ąĮąŠ čāčüčéčĆą░ąĮąĄąĮą░.
ąóą░ą▒ą╗ąĖčåą░ XVIII ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēčāčÄ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓.
ąĀąĖčü. 12. ąĀą░čüčłąĖčĆąĄąĮąĮą░čÅ ą┐ąŠą╗ąĮą░čÅ ąÉą¦ąź AD7731 (SKIP = 0, CHP = 0, SF = 1536, fCLK IN = 4.9152 ą£ąōčå).
FASTStepŌäó Mode (SKIP = 0, FAST = 1). ąöčĆčāą│ąŠą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░ - čĆąĄąČąĖą╝ FASTStepŌäó, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ą▒čŗčüčéčĆąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčī ą▓čģąŠą┤čŗ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ čäąĖą╗čīčéčĆą░. ąĀąĄąČąĖą╝ FASTStepŌäó ąĮąĄčāą╝ąĄčüč鹥ąĮ, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ SKIP. ąĀąĄąČąĖą╝ FASTStepŌäó čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą╗ąŠą│. 1 ą▓ ą▒ąĖčé FAST Filter Register. ąĢčüą╗ąĖ ą▒ąĖčé FAST = 0, č鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą▓čģąŠą┤čŗ čłą░ą│ą░ čü ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╝ FIR-čäąĖą╗čīčéčĆąŠą╝, čĆą░ą▒ąŠčéą░čÄčēąĄą╝ ąĮą░ ą▓č鹊čĆąŠą╝ ą║ą░čüą║ą░ą┤ąĄ. ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ FASTStepŌäó (FAST = 1), čäąĖą╗čīčéčĆ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą▓čģąŠą┤ąŠą▓ ą║ą░ą║ ąŠą▒čŗčćąĮčŗą╣ FIR-čäąĖą╗čīčéčĆ. ą×ą┤ąĮą░ą║ąŠ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą╝ąŠąĮąĖč鹊čĆąĖčé ą▓čŗčģąŠą┤ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čäąĖą╗čīčéčĆą░, čüčĆą░ą▓ąĮąĖą▓ą░čÅ ąĄą│ąŠ čüąŠ ą▓č鹊čĆčŗą╝ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ą▓čŗą▓ąŠą┤ąŠą╝. ąĢčüą╗ąĖ čĆą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą▒ąŠą╗čīčłąĄ ąĘą░čĆą░ąĮąĄąĄ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░(1% ąŠčé ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ), č鹊 čäąĖą╗čīčéčĆ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą┐čĆąŠčüč鹊ą╝čā ą▓čŗčćąĖčüą╗ąĄąĮąĖčÄ čāčüčĆąĄą┤ąĮąĄąĮąĖčÅ. ąŁč鹊 čéą░ą║ąČąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, ą║ąŠą│ą┤ą░ ą╝ąĄąĮčÅčÄčéčüčÅ ą║ą░ąĮą░ą╗čŗ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ ąĮą░čüą║ąŠą╗čīą║ąŠ ą▒ą╗ąĖąĘą║ąŠ čāčĆąŠą▓ąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ čā čŹčéąĖčģ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝čŗčģ ą║ą░ąĮą░ą╗ąŠą▓. ąÜąŠą│ą┤ą░ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ, ą▒ąĖčé STDY Status Register ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1.
ąØą░čćą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčĆąĄą┤ąĮąĄąĮąĖą╣ ą▓ ą┐ąĄčĆąĄčģąŠą┤ąĄ ą║ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖčÄ ą╗ąĖą▒ąŠ 2 (č湊ą┐ą┐ąĖąĮą│ čĆą░ąĘčĆąĄčłąĄąĮ) ąĖą╗ąĖ 1 (č湊ą┐ą┐ąĖąĮą│ ąĘą░ą┐čĆąĄčēąĄąĮ). ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčĆąĄą┤ąĮąĄąĮąĖą╣ ą▒čāą┤ąĄčé čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ, ą┐ąŠą║ą░ ąĄčüčéčī ą┐čĆąĄą▓čŗčłąĄąĮąĖąĄ ą┐ąŠčĆąŠą│ą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠčĆąŠą│ ą▒ąŠą╗čīčłąĄ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ąĄčéčüčÅ (ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ą▓čģąŠą┤ąĄ čāčüčéą░ąĮąŠą▓ąĖą╗ąŠčüčī), čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĖ čāčüčĆąĄą┤ąĮąĄąĮąĖčÅ. ą¤ąĄčĆą▓ą░čÅ ąĖ ą▓č鹊čĆą░čÅ ą▓čŗą▒ąŠčĆą║ąĖ čäąĖą╗čīčéčĆą░ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░, ą│ą┤ąĄ ą┐ąŠčĆąŠą│ ą▒ąŠą╗čīčłąĄ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ąĄčéčüčÅ, ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ čāčüčĆąĄą┤ąĮąĄąĮąĖąĄą╝ 2 ą▓čŗą▒ąŠčĆąŠą║, ąĘą░č鹥ą╝ 4 ą▓čŗą▒ąŠčĆąŠą║, 8 ą▓čŗą▒ąŠčĆąŠą║ čü čāčüčĆąĄą┤ąĮąĄąĮąĖąĄą╝ 8 ąĖ 6 ą▓čŗą▒ąŠčĆąŠą║ čü čāčüčĆąĄą┤ąĮąĄąĮąĖąĄą╝ 16. ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé čäąĖą╗čīčéčĆ ą▓č鹊čĆąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą║ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ FIR. ąÜąŠą│ą┤ą░ ą▓č鹊čĆąŠą╣ ą║ą░čüą║ą░ą┤ ą▓ąĄčĆąĮčāą╗čüčÅ ą║ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝čā FIR, ą▒ąĖčé STDY Status Register ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0.
ąĀąĖčü. 13 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆą░ąĘąĮčŗąĄ ąŠčéą▓ąĄčéčŗ ąĮą░ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓čģąŠą┤ą░ ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą╝ ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čĆąĄąČąĖą╝ąĄ FASTStepŌäó. ąÆąĄčĆčéąĖą║ą░ą╗čīąĮą░čÅ ąŠčüčī ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāčüčéą░ąĮąŠą▓ą║čā ą▓čŗčģąŠą┤ą░ ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ ą▓čģąŠą┤ą░, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮą░čÅ ąŠčüčī ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čüą║ąŠą╗čīą║ąŠ ą▓čŗą▒ąŠčĆąŠą║ čāčćą░čüčéą▓čāąĄčé ą▓ čāčüčéą░ąĮąŠą▓ą║ąĄ. ą¤ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮą░ ą▓čģąŠą┤ąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąŠ ą▓čĆąĄą╝čÅ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ čü ą┐čÅč鹊ą╣ ą▓čŗą▒ąŠčĆą║ąŠą╣.
ąĀąĖčü. 13. ą×čéą▓ąĄčé ąĮą░ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┤ą╗čÅ čĆąĄąČąĖą╝ąŠą▓ FASTStepŌäó ąĖ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░.
ąÆ čĆąĄąČąĖą╝ąĄ FASTStepŌäó ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ą╝ąĮąŠą│ąŠ ą▒čŗčüčéčĆąĄąĄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖ CHP = 1 čĆąĄąČąĖą╝ FASTStepŌäó čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ 2 ą▓čŗą▒ąŠčĆą║ąĖ ąĮą░ ą▓čŗčģąŠą┤ąĄ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▓čŗčģąŠą┤ą░ ąĘą░ 23 ą▓čŗą▒ąŠčĆą║ąĖ. ą£ąĄąČą┤čā 2-ą╣ ąĖ 23-ąĄą╣ ą▓čŗą▒ąŠčĆą║ą░ą╝ąĖ čĆąĄąČąĖą╝ FASTStepŌäó ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ čĆąĄąĘčāą╗čīčéą░čé čü ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╝ čłčāą╝ąŠą╝. ąŁč鹊čé čāčĆąŠą▓ąĄąĮčī čłčāą╝ą░ ąĮą░čćąĖčéą░ąĄčéčüčÅ čü čāčĆąŠą▓ąĮčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ ą▓ 3 čĆą░ąĘą░ ą▓čŗčłąĄ ą║ąŠąĮąĄčćąĮąŠą│ąŠ čłčāą╝ą░, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆąĄąČąĖą╝čā FIR. ą¤ąŠą╗ąĮąŠąĄ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ, ąĘą░ ą║ąŠč鹊čĆąŠąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą║ čāą║ą░ąĘą░ąĮąĮąŠą╝čā čłčāą╝čā, ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ FASTStepŌäó ąĖ ąŠą▒čŗčćąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░. ą¤čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą║ą░ąĮą░ą╗ąŠą▓ ą┐čĆąŠčäąĖą╗čī čĆąĖčü. 13 ąĮąĄ ą▒čāą┤ąĄčé ą▓ąĖą┤ąĄąĮ. ą¤ąŠčüą║ąŠą╗čīą║čā ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮą░, ą║ąŠą│ą┤ą░ ą╝ąĄąĮčÅąĄčéčüčÅ ą║ą░ąĮą░ą╗, ąŠąĮą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┤ą░ą▓ą░čéčī ą▓čŗčģąŠą┤ ą┐ąŠą║ą░ čäąĖą╗čīčéčĆ (ą╗ąĖą▒ąŠ FASTStepŌäó, ą╗ąĖą▒ąŠ FIR) ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ. ąóą░ą▒ą╗ąĖčåą░ XVIII ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ čāčüą║ąŠčĆąĄąĮąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ čĆąĄąČąĖą╝ą░ FASTStepŌäó.
ąÜą░ą║ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ XVIII, čĆąĄąČąĖą╝ FASTStepŌäó ą┤ą░ąĄčé ąĖąĮą┤ąĖą║ą░čåąĖčÄ ąĮą░ą╝ąĮąŠą│ąŠ čĆą░ąĮčīčłąĄ, ą║čāą┤ą░ ą┐ąĄčĆąĄčłąĄą╗ čāčĆąŠą▓ąĄąĮčī ą▓čŗčģąŠą┤ą░ ąĖ ą║ą░ą║ąŠąĄ ąĮą░ ąĮąĄą╝ ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠč湥ąĮčī ą┐ąŠą╗ąĄąĘąĮą░ ą┐čĆąĖ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓, ą│ą┤ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąČą┤ą░čéčī ą▓čĆąĄą╝ąĄąĮąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čäąĖą╗čīčéčĆą░ FIR, čćč鹊ą▒čŗ čāą▓ąĖą┤ąĄčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąĮą░ CHP = 1, SKIP = 0 ąĖ FAST = 1. ąŁč鹊 ą┤ą░ąĄčé ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ąĮąĖąĘą║ąŠą│ąŠ ą┤čĆąĄą╣čäą░ ąĖ ą╗čāčćčłąĄą╣ čüč鹊ą╣ą║ąŠčüčéąĖ ą║ ą▓ą╗ąĖčÅąĮąĖčÄ čłčāą╝ą░ čĆąĄąČąĖą╝ą░ č湊ą┐ą┐ąĖąĮą│ą░. ąÜąŠą│ą┤ą░ ąĖą╝ąĄąĄčé ą╝ąĄčüč鹊 čüą╝ąĄąĮą░ ą║ą░ąĮą░ą╗ąŠą▓, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓čģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ FASTStepŌäó, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čŗčģąŠą┤ąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĘą░ ą▓čĆąĄą╝čÅ 2 x 1/Output Rate.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé FAST, ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, č鹊 AD7731 ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą▓čŗą┤ą░ą▓ą░čéčī čĆąĄąĘčāą╗čīčéą░čéčŗ, ą┐ąŠą║ą░ ą▒ąĖčé STDY ąĮąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą║ ą╗ąŠą│. 0.
ąóą░ą▒ą╗ąĖčåą░ XVIII. ąÆčĆąĄą╝čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆą▓ąŠą│ąŠ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą▓čŗčģąŠą┤ąŠą▓ ą┐ąŠčüą╗ąĄ čüą╝ąĄąĮčŗ ą║ą░ąĮą░ą╗ą░. SF čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé SF ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäąĖą╗čīčéčĆą░ (čŹčéąĖ ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗čÅčÄčé Sample Frequency, čé. ąĄ. čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║), fMOD čŹč鹊 čćą░čüč鹊čéą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░.
SKIP CHP FAST ąÆčĆąĄą╝čÅ ą┤ąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆą▓ąŠą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ1 ąÆčĆąĄą╝čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą▓čŗčģąŠą┤ąĮčŗčģ ą▓čŗą▒ąŠčĆąŠą║
0
0
0
24 x SF/fMOD
SF/fMOD
0
1
0
66 x SF/fMOD
3 x SF/fMOD
1
0
X2
3 x SF/fMOD
SF/fMOD
1
1
X
3 x SF/fMOD
3 x SF/fMOD
0
0
1
3 x SF/fMOD
SF/fMOD
0
1
1
6 x SF/fMOD
3 x SF/fMOD
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1 . ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ąĖčüčī.2 . ąØąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ.
[ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ]
AD7731 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐čåąĖą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą▒ąĖčéą░ą╝ąĖ MD2, MD1 ąĖ MD0 Mode Register. ąĀą░ąĘąĮąĖčåą░ ąŠą┐čåąĖą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ čüąĄą║čåąĖčÅčģ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ Mode Register ąĖ ąŠą┐ąĄčĆą░čåąĖą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą”ąĖą║ą╗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüčīčÄ čŹčéąĖčģ ą▒ąĖčé Mode Register. ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ AD7731 čāčüčéčĆą░ąĮčÅąĄčé ąŠčłąĖą▒ą║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ ąĖ čāčüąĖą╗ąĄąĮąĖčÅ.
AD7731 ą┤ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┤ąŠčüčéčāą┐ ą║ąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ čĆąĄą│ąĖčüčéčĆą░ą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą▓ąĮąĄčłąĮąĄą╝čā čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╝čā ą╝ąĖą║čĆąŠą┐čĆąŠčåąĄčüčüąŠčĆčā ą┐čĆąŠčćąĖčéą░čéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ąĖ čéą░ą║ąČąĄ ąĘą░ą┐ąĖčüą░čéčī ą▓ ąĮąĖčģ čüą▓ąŠąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čćč鹊ą▒čŗ ą▓ąĄčĆąĮčāčéčī ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā čüąŠčüč鹊čÅąĮąĖčÄ (ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą╝ąŠą│čāčé čģčĆą░ąĮąĖčéčīčüčÅ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ čüąĖčüč鹥ą╝čŗ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠ FLASH ąĖą╗ąĖ EEPROM). ąŁč鹊 ą┤ą░ąĄčé ą▒ąŠą╗čīčłąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą┐čĆąŠčåąĄą┤čāčĆąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ AD7731. ąóą░ą║ąČąĄ čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą┐čāč鹥ą╝ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮąŠčüčéčī č鹊ą╗čīą║ąŠ čćč鹊 ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąŚąĮą░č湥ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖą╝ąĄčÄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 24 ą▒ąĖčéą░. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮčŗ ąŠčģą▓ą░čé ąĖ čüą╝ąĄčēąĄąĮąĖąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
ąÆąĮčāčéčĆąĖ AD7731 čŹčéąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ąĮąŠčĆą╝ą░ą╗ąĖąĘčāčÄčéčüčÅ, ą┐ąĄčĆąĄą┤ č鹥ą╝ ą║ą░ą║ ąŠąĮąĖ ą▒čāą┤čāčé ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ ą┤ą╗čÅ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╗ąŠą▓ą░, ą┐ąŠčüčéčāą┐ą░čÄčēąĄą│ąŠ ąĖąĘ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░. ąĀąĄą│ąĖčüčéčĆ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĖ ąĮąŠčĆą╝ą░ą╗ąĖąĘą░čåąĖąĖ ą▓čŗčćąĖčéą░ąĄčéčüčÅ ąĖąĘ ą▓čüąĄčģ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ąĀąĄą│ąĖčüčéčĆ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĖ ąĮąŠčĆą╝ą░ą╗ąĖąĘą░čåąĖąĖ čāą╝ąĮąŠąČą░ąĄčéčüčÅ ąĮą░ ą▓čüąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ąÜąŠčŹčäčäąĖčåąĖąĄąĮčé čüą╝ąĄčēąĄąĮąĖčÅ ą▓čŗčćąĖčéą░ąĄčéčüčÅ ąĖąĘ čĆąĄąĘčāą╗čīčéą░čéą░ ą┐ąĄčĆąĄą┤ čāą╝ąĮąŠąČąĄąĮąĖąĄą╝ ąĮą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčüąĖą╗ąĄąĮąĖčÅ.
AD7731 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĖą╗ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā čü čāčćą░čüčéąĖąĄą╝ čüąĖčüč鹥ą╝čŗ. ąöą╗čÅ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ ą║ą░ąĮą░ą╗ąĄ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī ą▓čŗčģąŠą┤ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ą┤ą╗čÅ ą┤ą▓čāčģ čĆą░ąĘąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣. ąŁč鹊 č鹊čćą║ąĖ ąĮčāą╗čÅ (zero-scale) ąĖ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ (fullscale). ąŁčéąĖ č鹊čćą║ąĖ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą┐čāč鹥ą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ čĆą░ąĘąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅčģ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą┐čĆąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░. ąĀąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ "zero-scale" čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ Calibration Register čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą║ą░ąĮą░ą╗ą░. ąĀąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ "full-scale" čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ Gain Calibration Register čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą║ą░ąĮą░ą╗ą░. ą¤čāč鹥ą╝ čćč鹥ąĮąĖčÅ čŹčéąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ą▓čŗčćąĖčüą╗ąĖčéčī čüą╝ąĄčēąĄąĮąĖąĄ ąĖ čāčüąĖą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄčģąŠą┤ąĮąŠą╣ čäčāąĮą║čåąĖąĖ ą▓čģąŠą┤-ą▓čŗčģąŠą┤ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░. ąÆąĮčāčéčĆąĖ čüąĄą▒čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī 33 ą▒ąĖčéą░, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüą▓ąŠą╣ čĆąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą╗ąĖą▒ąŠ 16 ą▒ąĖčé, ą╗ąĖą▒ąŠ 24 ą▒ąĖčéą░.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī, čü ą║ąŠč鹊čĆąŠą╣ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ zero-scale ąĖ full-scale, ąĘą░ą▓ąĖčüąĖčé ąŠčé čéąĖą┐ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ full-scale. ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ full-scale čüąŠčüč鹊ąĖčé ąĖąĘ 2 čłą░ą│ąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ ą╝ąĄąĮčÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ Offset Calibration Register. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā zero-scale (ą╗ąĖą▒ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ, ą╗ąĖą▒ąŠ čü čāčćą░čüčéąĖąĄą╝ čüąĖčüč鹥ą╝čŗ) ą┐ąŠčüą╗ąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą║ąŠčĆčĆąĄą║čéąĮčŗą╝ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ Offset Calibration Register. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĖčüč鹥ą╝ąĮą░čÅ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čüąĮą░čćą░ą╗ą░ ą▓čŗą┐ąŠą╗ąĮąĖčéčī zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā (ą╗ąĖą▒ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ, ą╗ąĖą▒ąŠ čü čāčćą░čüčéąĖąĄą╝ čüąĖčüč鹥ą╝čŗ).
ąÆčĆąĄą╝čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé SKIP ąĖą╗ąĖ ąĮąĄčé. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ą▒ąĖčé SKIP ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ, ąĖ ą▓č鹊čĆąŠą╣ čäąĖą╗čīčéčĆ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čåąĖą║ą╗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▒ąŠą╗ąĄąĄ č鹊čćąĮčŗčģ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąĢčüą╗ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéą░ąĄčé čü CHP = 0, č鹊 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā čüą╗ąĄą┤čāąĄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčī čü CHP = 0, čćč鹊ą▒čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░ą╗ąĖ ą┤čĆčāą│ ą┤čĆčāą│čā ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüą╝ąĄčēąĄąĮąĖčÅ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čüą╝ąĄčēąĄąĮąĖčÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣. ą¤ąŠčüą║ąŠą╗čīą║čā ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą┐čāč鹥ą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, č鹊čćąĮąŠčüčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī č鹊čćąĮąŠą╣ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╣ čüč鹥ą┐ąĄąĮąĖ, ąĮą░čüą║ąŠą╗čīą║ąŠ čģąŠčĆąŠčł čāčĆąŠą▓ąĄąĮčī čłčāą╝ą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ąöą╗čÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ č鹊čćąĮąŠčüčéąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī ą╝ąĖą║čĆąŠčüčģąĄą╝čā čü čüą░ą╝ąŠą╣ ąĮąĖąĘą║ąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī čłčāą╝ą░ čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣. ąÜąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ, čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ ą╗čÄą▒ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ą▒čāą┤čāčé ą┤ąŠą┐čāčüčéąĖą╝čŗ ą┤ą╗čÅ ą▓čüąĄčģ ą▓čŗą▒čĆą░ąĮąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąĪčģąĄą╝ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĘą░ą╣ą╝ąĄčé ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĮčāą╗čÅ . ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ zero-scale ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą▓ AD7731 ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ąĘąĮą░č湥ąĮąĖą╣ (100) ą▓ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 Mode Register. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čü ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą╝ ą▓čģąŠą┤ą░ č鹊čćą║ą░ zero-scale ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤čŗ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆčŗ ąĘą░ą╝ą║ąĮčāčéčŗ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ AIN[+] = AIN[ŌĆō] = ą┐čĆąĖą╗ąŠąČąĄąĮąĮąŠąĄ čüąĮą░čĆčāąČąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ AIN[ŌĆō]). PGA čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠąĄ čāčüąĖą╗ąĄąĮąĖąĄ (ą┐ąŠ ą▒ąĖčéą░ą╝ RN2, RN1, RN0 Mode Register) ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ zero-scale.
ąÆčĆąĄą╝čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▒ąĖčéą░ CHP Filter Register. ąÜąŠą│ą┤ą░ CHP = 1, ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąŠčüčéą░ą▓ą╗čÅąĄčé 22 x 1/Output Rate; ą┐čĆąĖ CHP = 0 ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąŠčüčéą░ą▓ą╗čÅąĄčé 24 x 1/Output Rate. ąŚą░ čŹč鹊 ą▓čĆąĄą╝čÅ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 Mode Register ą▓ąĄčĆąĮčāčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 000 (Sync ąĖą╗ąĖ Idle Mode ą┤ą╗čÅ AD7731). ąĪąĖą│ąĮą░ą╗ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░, ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ; ąŠąĮą░ ą┐čĆąŠčüč鹊 ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĖ ąŠą▒ąĮąŠą▓ąĖą╗ą░ Offset Calibration Register ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī 001 ąĖą╗ąĖ 010 ą▓ ą▒ąĖčéčŗ MD2, MD1, MD0 Mode Register, čćč鹊ą▒čŗ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ. ąĢčüą╗ąĖ ~RDY ąĮą░čģąŠą┤ąĖą╗čüčÅ ą▓ ą╗ąŠą│. 0 ą┐ąĄčĆąĄą┤ (ąĖą╗ąĖ ą┐ąĄčĆąĄčłąĄą╗ ą▓ąŠ ą▓čĆąĄą╝čÅ) ąĘą░ą┐ąĖčüčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓ Mode Register, č鹊 ą╝ąŠąČąĄčé ą┐čĆąŠą╣čéąĖ ą┤ąŠ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ (MCLK IN/16) ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ, čćč鹊 ąĖą┤ąĄčé ą┐čĆąŠčåąĄčüčü ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ~RDY ąĮčāąČąĮąŠ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ą▓ č鹥č湥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé ą║ąŠą╝ą░ąĮą┤čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ Mode Register.
ąöą╗čÅ ą┤ą▓čāą┐ąŠą╗čÅčĆąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ ą▓ čĆąĄąČąĖą╝ąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąŠčćčéąĖ čéą░ą║ą░čÅ ąČąĄ, ą║ą░ą║ č鹊ą╗čīą║ąŠ čćč鹊 ąŠą┐ąĖčüą░ąĮąĮą░čÅ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ č鹊čćą║ą░ zero-scale č鹊čćąĮąŠ čéą░ą║ą░čÅ ąČąĄ, ąĮąŠ ą┐ąŠčüą║ąŠą╗čīą║čā ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╣ čĆą░ą▒ąŠčéčŗ, ą▓čŗčģąŠą┤ąĮąŠą╣ ą║ąŠą┤ ą┤ą╗čÅ ąĮčāą╗čÅ ąĮą░ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝ ą▓čģąŠą┤ąĄ ą▒čāą┤ąĄčé 800000 ą▓ 24-ą▒ąĖčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ.
ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą║ą░ą║ čćą░čüčéčī ą┤ą▓čāčģčłą░ą│ąŠą▓ąŠą╣ ą┐ąŠą╗ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą×ą┤ąĮą░ą║ąŠ, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąŠą╗ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čćč鹊ą▒čŗ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ą╝ąĖą║čĆąŠčüčģąĄą╝čā č鹊ą╗čīą║ąŠ ą║ ąĮčāą╗ąĄą▓ąŠą╣ č鹊čćą║ąĄ. ąÜąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┤ą▓čāčģčłą░ą│ąŠą▓ą░čÅ ą┐ąŠą╗ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, čüą╗ąĄą┤čāąĄčé ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠ ąŠčéąĮąĄčüčéąĖčüčī ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čłą░ą│ąŠą▓. ąĢčüą╗ąĖ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ čÅą▓ą╗čÅąĄčéčüčÅ ąŠą┤ąĮąŠą╣ ąĖąĘ čćą░čüč鹥ą╣ ą┐ąŠą╗ąĮąŠą╣ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, č鹊 ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ ą┐ąŠčüą╗ąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąĢčüą╗ąĖ čŹč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ čüą▓čÅąĘąĖ čü čüąĖčüč鹥ą╝ąĮąŠą╣ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąŠą╣, č鹊 ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą┐ąĄčĆą▓ąŠą╣.
ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ Full-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ . ąŁčéą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ 101 ą▓ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 Mode Register. ąóąŠčćą║ą░ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čü ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╝ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ. ąŁč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ ą▒ąĄčĆąĄčéčüčÅ ąĖąĘ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ AD7731, ąĖ PGA čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠąĄ čāčüąĖą╗ąĄąĮąĖąĄ (ą▒ąĖčéą░ą╝ąĖ RN2, RN1, RN0 Mode Register), čćč鹊ą▒čŗ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ą×ą▒čŗčćąĮąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮą░ čéčĆąĄą▒čāąĄą╝ąŠą╝ čĆą░ą▒ąŠč湥ą╝ ą▓čŗčģąŠą┤ąĮąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ. ąÜąŠą│ą┤ą░ čĆą░ą▒ąŠčćąĖą╣ ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ 20 mV ąĖą╗ąĖ 40 mV, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▒čŗą╗ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ąĮą░ ą▓čģąŠą┤ąĮąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 80 mV.
ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ čüąŠčüč鹊ąĖčé ąĖąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┤ą▓čāčģ čłą░ą│ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ ą┐čĆąĖ ąĘą░ą┐ąĖčüąĖ ą▓ AD7731 ą║ąŠą╝ą░ąĮą┤čŗ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą×ą┤ąĮą░ čćą░čüčéčī čŹč鹊ą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čŹč鹊 zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, ąĖ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ Offset Calibration Register ą▒čāą┤ąĄčé ąĖąĘą╝ąĄąĮąĄąĮąŠ ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ čŹč鹊ą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ Full-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮąĖčéčī zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā (ą╗ąĖą▒ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ, ą╗ąĖą▒ąŠ čüąĖčüč鹥ą╝ąĮčāčÄ) ą¤ą×ąĪąøąĢ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ą░ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮą░ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ąŠčéą┤ąĄą╗čīąĮąŠ.
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čŹč鹊ą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▒ąĖčéą░ CHP Filter Register. ą¤čĆąĖ CHP = 1 ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 44 x 1/Output Rate; ą┐čĆąĖ CHP = 0 ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 48 x 1/Output Rate. ąŚą░ čŹč鹊 ą▓čĆąĄą╝čÅ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 Mode Register ą▓ąĄčĆąĮčāčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 000 (Sync ąĖą╗ąĖ Idle Mode ą┤ą╗čÅ AD7731). ąĪąĖą│ąĮą░ą╗ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░, ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī 001 ąĖą╗ąĖ 010 ą▓ ą▒ąĖčéčŗ MD2, MD1, MD0 Mode Register, čćč鹊ą▒čŗ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ. ąĢčüą╗ąĖ ~RDY ąĮą░čģąŠą┤ąĖą╗čüčÅ ą▓ ą╗ąŠą│. 0 ą┐ąĄčĆąĄą┤ (ąĖą╗ąĖ ą┐ąĄčĆąĄčłąĄą╗ ą▓ąŠ ą▓čĆąĄą╝čÅ) ąĘą░ą┐ąĖčüčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓ Mode Register, č鹊 ą╝ąŠąČąĄčé ą┐čĆąŠą╣čéąĖ ą┤ąŠ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ (MCLK IN/16) ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ, čćč鹊 ąĖą┤ąĄčé ą┐čĆąŠčåąĄčüčü ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ~RDY ąĮčāąČąĮąŠ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ą▓ č鹥č湥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé ą║ąŠą╝ą░ąĮą┤čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ Mode Register.
ąĪąĖčüč鹥ą╝ąĮą░čÅ Zero-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ . ąĪąĖčüč鹥ą╝ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé AD7731 ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī ąŠčłąĖą▒ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ ąĖ čüą╝ąĄčēąĄąĮąĖčÅ ą║ą░ą║ čüąĖčüč鹥ą╝čŗ, čéą░ą║ ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ čüą░ą╝ąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ AD7731. ąĪąĖčüč鹥ą╝ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé č鹥 ąČąĄ čüą░ą╝čŗąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓, čćč鹊 ąĖ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, ąŠčéą╗ąĖčćąĖąĄ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝, čćč鹊 ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐čĆąĖčüčāčéčüčéą▓čāčÄčēąĖąĄ ąĮą░ ą▓ąĮąĄčłąĮąĖčģ ą▓čģąŠą┤ą░čģ AIN ą┤ą╗čÅ ąĮčāą╗ąĄą▓ąŠą╣ č鹊čćą║ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖ ą┤ą╗čÅ č鹊čćą║ąĖ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ.
ąĪąĖčüč鹥ą╝ąĮą░čÅ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą▓ AD7731 ąĘą░ą┐ąĖčüčīčÄ 110 ą▓ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 Mode Register. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čü ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╝ ą▓čģąŠą┤ąĮčŗą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą╝ č鹊čćą║ą░ ąĮčāą╗čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮąĖąČąĮąĄą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ. ąØčāą╗ąĄą▓ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čüąĖčüč鹥ą╝čŗ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąŠą┤ą░ąĮąŠ ąĮą░ ą▓čģąŠą┤čŗ AIN ą┐ąĄčĆąĄą┤ čŹčéąĖą╝ čłą░ą│ąŠą╝ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ąĖ ą┤ąŠą╗ąČąĮąŠ ąŠčüčéą░ą▓ą░čéčīčüčÅ čüčéą░ą▒ąĖą╗čīąĮčŗą╝ ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐čĆąŠčåąĄą┤čāčĆčŗ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. PGA čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠąĄ čāčüąĖą╗ąĄąĮąĖąĄ (ą▒ąĖčéą░ą╝ąĖ RN2, RN1, RN0 Mode Register) ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąöąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┤ą╗čÅ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ zero-scale ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▓ čüąĄą║čåąĖąĖ "ą¤čĆąĄą┤ąĄą╗čŗ ąŠčģą▓ą░čéą░ ąĖ čüą╝ąĄčēąĄąĮąĖčÅ".
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čŹč鹊ą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▒ąĖčéą░ CHP Filter Register. ą¤čĆąĖ CHP = 1 ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĘą░ąĮąĖą╝ą░ąĄčé 22 x 1/Output Rate; ą┐čĆąĖ CHP = 0, ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 24 x 1/Output Rate. ąŚą░ čŹč鹊 ą▓čĆąĄą╝čÅ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 Mode Register ą▓ąĄčĆąĮčāčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 000 (Sync ąĖą╗ąĖ Idle Mode ą┤ą╗čÅ AD7731). ąĪąĖą│ąĮą░ą╗ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░, ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ; ąŠąĮą░ ą┐čĆąŠčüč鹊 ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĖ ąŠą▒ąĮąŠą▓ąĖą╗ą░ Offset Calibration Register ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī 001 ąĖą╗ąĖ 010 ą▓ ą▒ąĖčéčŗ MD2, MD1, MD0 Mode Register, čćč鹊ą▒čŗ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ. ąĢčüą╗ąĖ ~RDY ąĮą░čģąŠą┤ąĖą╗čüčÅ ą▓ ą╗ąŠą│. 0 ą┐ąĄčĆąĄą┤ (ąĖą╗ąĖ ą┐ąĄčĆąĄčłąĄą╗ ą▓ąŠ ą▓čĆąĄą╝čÅ) ąĘą░ą┐ąĖčüčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓ Mode Register, č鹊 ą╝ąŠąČąĄčé ą┐čĆąŠą╣čéąĖ ą┤ąŠ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ (MCLK IN/16) ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ, čćč鹊 ąĖą┤ąĄčé ą┐čĆąŠčåąĄčüčü ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ~RDY ąĮčāąČąĮąŠ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ą▓ č鹥č湥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé ą║ąŠą╝ą░ąĮą┤čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ Mode Register.
ąöą╗čÅ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ čĆąĄąČąĖą╝ą░ čüąĖčüč鹥ą╝ąĮąŠą╣ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒čāą┤ąĄčé čéą░ą║ą░čÅ ąČąĄ, ą║ą░ą║ č鹊ą╗čīą║ąŠ čćč鹊 ąŠą┐ąĖčüą░ąĮą░. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ č鹊čćą║ą░ zero-scale čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüčĆąĄą┤ąĮąĄą╣ č鹊čćą║ąĖ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ AD7731.
ąĪąĖčüč鹥ą╝ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ zero-scale ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą║ą░ą║ čćą░čüčéčī ą┐ąŠą╗ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čüąŠčüč鹊čÅčēąĄą╣ ąĖąĘ ą┤ą▓čāčģ čćą░čüč鹥ą╣. ą×ą┤ąĮą░ą║ąŠ ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠą╗ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▒čŗą╗ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮą░, ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čćč鹊ą▒čŗ ą┐ąŠą┤čüčéčĆąŠąĖčéčī čüąĖčüč鹥ą╝čā č鹊ą╗čīą║ąŠ ą║ č鹊čćą║ąĄ ąĮčāą╗čÅ. ąÜąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠą╗ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĘ 2 čłą░ą│ąŠą▓, čüą╗ąĄą┤čāąĄčé čāą┤ąĄą╗ąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čŹčéąĖčģ ą┤ą▓čāčģ čłą░ą│ąŠą▓. ąĢčüą╗ąĖ čüąĖčüč鹥ą╝ąĮą░čÅ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ ą┐ąŠą╗ąĮąŠą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, č鹊 zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąĄčĆąĄą┤ čüąĖčüč鹥ą╝ąĮąŠą╣ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąŠą╣. ąĢčüą╗ąĖ čŹč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ čüą▓čÅąĘąĖ čü ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąŠą╣, č鹊 čüąĖčüč鹥ą╝ąĮą░čÅ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ąĪąĖčüč鹥ą╝ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ Full-Scale . ąŁčéą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą▓ AD7731 ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ 111 ą▓ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 Mode Register. ąĪąĖčüč鹥ą╝ąĮą░čÅ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗ąĄ ąÉą”ą¤. ąŁč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┐ąŠą┤ą░ąĮąŠ ąĮą░ ą▓čģąŠą┤ ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ čéą░ą║ąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĖ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą┐ąŠčüč鹊čÅąĮąĮčŗą╝ ą▓ č鹥č湥ąĮąĖąĄ ą▓čüąĄą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąĪąĖčüč鹥ą╝ąĮą░čÅ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ čāčüąĖą╗ąĄąĮąĖąĖ (čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ąŠą╝ ą▒ąĖčéą░ą╝ąĖ RN2, RN1, RN0 Mode Register).
ąÆčĆąĄą╝čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▒ąĖčéą░ CHP Filter Register. ą¤čĆąĖ CHP = 1 ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé 22 x 1/Output Rate; ą┐čĆąĖ CHP = 0 ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 24 x 1/Output Rate. ąŚą░ čŹč鹊 ą▓čĆąĄą╝čÅ ą▒ąĖčéčŗ MD2, MD1 ąĖ MD0 Mode Register ą▓ąĄčĆąĮčāčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 000 (Sync ąĖą╗ąĖ Idle Mode ą┤ą╗čÅ AD7731). ąĪąĖą│ąĮą░ą╗ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░, ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ; ąŠąĮą░ ą┐čĆąŠčüč鹊 ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĖ ąŠą▒ąĮąŠą▓ąĖą╗ą░ Gain Calibration Register ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐ąĖčüą░čéčī 001 ąĖą╗ąĖ 010 ą▓ ą▒ąĖčéčŗ MD2, MD1, MD0 Mode Register, čćč鹊ą▒čŗ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ. ąĢčüą╗ąĖ ~RDY ąĮą░čģąŠą┤ąĖą╗čüčÅ ą▓ ą╗ąŠą│. 0 ą┐ąĄčĆąĄą┤ (ąĖą╗ąĖ ą┐ąĄčĆąĄčłąĄą╗ ą▓ąŠ ą▓čĆąĄą╝čÅ) ąĘą░ą┐ąĖčüčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▓ Mode Register, č鹊 ą╝ąŠąČąĄčé ą┐čĆąŠą╣čéąĖ ą┤ąŠ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ (MCLK IN/16) ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ, čćč鹊 ąĖą┤ąĄčé ą┐čĆąŠčåąĄčüčü ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ~RDY ąĮčāąČąĮąŠ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī ą▓ č鹥č湥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé ą║ąŠą╝ą░ąĮą┤čŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▓ Mode Register.
ąĪąĖčüč鹥ą╝ąĮčāčÄ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ą░ą║ ąŠą┤ąĮčā ąĖąĘ ą┤ą▓čāčģ čćą░čüč鹥ą╣ ą┐ąŠą╗ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ą×ą┤ąĮą░ą║ąŠ ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąŠą╗ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąŠčéą┤ąĄą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, čćč鹊ą▒čŗ ą┐ąŠą┤čüčéčĆąŠąĖčéčī č鹊ą╗čīą║ąŠ č鹊čćą║čā ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ čāčüąĖą╗ąĄąĮąĖčÅ. ąÜąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┤ą▓čāčģčłą░ą│ąŠą▓ą░čÅ ą┐ąŠą╗ąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, čüą╗ąĄą┤čāąĄčé ąŠą▒čĆą░čéąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī, ą▓ ą║ąŠč鹊čĆąŠą╣ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ čŹčéąĖ čłą░ą│ąĖ. ąĪąĖčüč鹥ą╝ąĮą░čÅ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ, ą┐ąŠą║ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ ą┐ąŠą╗čāčćąĖčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ąĮčāą╗ąĄą▓ąŠą╣ čłą║ą░ą╗čŗ (zero-scale). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ zero-scale calibration ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ąĖą╗ąĖ čüąĖčüč鹥ą╝ąĮą░čÅ zero-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąĄčĆąĄą┤ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąŠą╣, ą║ąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┤ą▓čāčģčłą░ą│ąŠą▓ą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąŠą╗ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ą¤čĆąĄą┤ąĄą╗čŗ ąŠčģą▓ą░čéą░ ąĖ čüą╝ąĄčēąĄąĮąĖčÅ . ąÆčüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ąĄčüčéčī ą┐čĆąĄą┤ąĄą╗čŗ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā čüą╝ąĄčēąĄąĮąĖčÅ ąĖ ąŠčģą▓ą░čéą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą┤čüčéčĆąŠąĖčéčī. ąÆą░ąČąĮąĄą╣čłąĄąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖąĄ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ą▓ąĄą╗ąĖčćąĖąĮčŗ čüą╝ąĄčēąĄąĮąĖčÅ ąĖ čāčüąĖą╗ąĄąĮąĖčÅ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ąŠą▒čĆą░ąĮąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖąĄą╝, čćč鹊 ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą┐čĆąĄą┤ąĄą╗ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ < = 1.05 x FS, ą│ą┤ąĄ FS (Full Scale, ą┐ąŠą╗ąĮą░čÅ čłą║ą░ą╗ą░) čŹč鹊 ą▓ąĄą╗ąĖčćąĖąĮčŗ ąŠčé 20 mV ą┤ąŠ 1.28 V, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖčé RN2, RN1, RN0 Mode Register. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čģąŠą┤ąĮąŠą╝čā ą┤ąĖą░ą┐ą░ąĘąŠąĮčā ą┐čĆąĄą▓čŗčüąĖčéčī čāčĆąŠą▓ąĄąĮčī ąĮą░ 5% ą▒ąŠą╗čīčłąĄ ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░. ąÆąĄčĆčģąĮąĖą╣ ą┐čĆąĄą┤ąĄą╗ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ AD7731 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓čüąĄ ąĄčēąĄ ą▒čāą┤ąĄčé ą║ąŠčĆčĆąĄą║čéąĮąŠ čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ ąŠą║ąŠą╗ąŠ 5% ą▓čŗčłąĄ ąĮąŠą╝ąĖąĮą░ą╗ą░.
ąöąĖą░ą┐ą░ąĘąŠąĮ ą▓čģąŠą┤ąĮąŠą│ąŠ ąŠčģą▓ą░čéą░ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čĆąĄąČąĖą╝ąŠą▓ - ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą│ąŠ ąĖ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą│ąŠ - čüąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĖąĮąĖą╝čāą╝ 0.8 x FS ąĖ ą╝ą░ą║čüąĖą╝čāą╝ 2.1 x FS. ą×ą┤ąĮą░ą║ąŠ ąĘą░čģą▓ą░čé (ą║ąŠč鹊čĆčŗą╣ čÅą▓ą╗čÅąĄčéčüčÅ čĆą░ąĘąĮąĖčåąĄą╣ ą╝ąĄąČą┤čā ąĮąĖąČąĮąĖą╝ ą▓čģąŠą┤ąĮčŗą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą╝ ąĖ ą▓ąĄčĆčģąĮąĖą╝ ą▓čģąŠą┤ąĮčŗą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą╝) čüą╗ąĄą┤čāąĄčé čāč湥čüčéčī ą┐čĆąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĖ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ. ąÆąĄą╗ąĖčćąĖąĮą░ čüą╝ąĄčēąĄąĮąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ąŠą▒čĆą░ąĮą░, ąĘą░ą▓ąĖčüąĖčé ąŠčé ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą│ąŠ ąĖą╗ąĖ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čĆąĄąČąĖą╝ą░. ąś ąŠą┐čÅčéčī, čüą╝ąĄčēąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčćč鹥ąĮąŠ ą┐čĆąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĖ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ. ąÆ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ąĄčüčéčī ąĘąĮą░čćąĖč鹥ą╗čīąĮą░čÅ ą│ąĖą▒ą║ąŠčüčéčī ą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗčģ (ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ AIN[ŌĆō]) čüą╝ąĄčēąĄąĮąĖą╣. ąÆ ąŠą▒ąŠąĖčģ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ ąĖ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ą░čģ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗčģ čüą╝ąĄčēąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ąŠčģą▓ą░čéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐čĆąĄą┤ąĄą╗ąŠą▓ ą┤ą╗čÅ čüąĖčüč鹥ą╝ąĮčŗčģ zero-scale ąĖ full-scale ą║ą░ą╗ąĖą▒čĆąŠą▓ąŠą║, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüą╝ąĄčēąĄąĮąĖčÅ ą┐ą╗čÄčü ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčģą▓ą░čéą░ ąĮąĄ ą┐čĆąĄą▓čŗčłą░čÄčé 1.05 x FS. ąŁč鹊 ą╗čāčćčłąĄ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐čĆąĖą╝ąĄčĆą░čģ.
ąĢčüą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čü čéčĆąĄą▒čāąĄą╝čŗą╝ ąŠčģą▓ą░č鹊ą╝ 0.8 x FS, ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüą╝ąĄčēąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ ąŠčé ŌĆō1.05 x FS ą┤ąŠ +0.25 x FS. ąĢčüą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čü čéčĆąĄą▒čāąĄą╝čŗą╝ ąŠčģą▓ą░č鹊ą╝ FS, č鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüą╝ąĄčēąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ąŠčé ŌĆō1.05 x FS ą┤ąŠ +0.05 x FS. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, č鹊 ąĮčāąČąĮąŠ čāčüčéčĆą░ąĮąĖčéčī čüą╝ąĄčēąĄąĮąĖąĄ 0.2 x FS, č鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī 0.85 x FS.
ąĢčüą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čü čéčĆąĄą▒čāąĄą╝čŗą╝ ąĘą░čģą▓ą░č鹊ą╝ ┬▒0.4 x FS, č鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüą╝ąĄčēąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ąŠčé ŌĆō0.65 x FS ą┤ąŠ +0.65 x FS. ąĢčüą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čü čéčĆąĄą▒čāąĄą╝čŗą╝ ąĘą░čģą▓ą░č鹊ą╝ ┬▒FS, č鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüą╝ąĄčēąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ąŠčé ŌĆō0.05 x FS ą┤ąŠ +0.05 x FS. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ąĖ čéčĆąĄą▒čāąĄčéčüčÅ čāčüčéčĆą░ąĮąĖčéčī čüą╝ąĄčēąĄąĮąĖąĄ ┬▒0.2 x FS, č鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī ┬▒0.85 x FS. ąĀąĖčü. 14 čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ ąŠčģą▓ą░čéą░ ąĖ čüą╝ąĄčēąĄąĮąĖčÅ.
ąĀąĖčü. 14. ą¤čĆąĄą┤ąĄą╗čŗ Span ąĖ Offset.
ąÆą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ . ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ AD7731 ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüą▒čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▓ ąĘą░čĆą░ąĮąĄąĄ ąĖąĘą▓ąĄčüčéąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĘą░ą│čĆčāąČą░ąĄą╝čŗąĄ ą▓ąŠ ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüą░. ąŚąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüąŠą┤ąĄčƹȹ░čé ąĮąŠą╝ąĖąĮą░ą╗čīąĮčŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą×ą┤ąĮą░ą║ąŠ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą║ąŠčĆčĆąĄą║čéąĮčāčÄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ąĀą░čüčüąĄąĖą▓ą░ąĄą╝ą░čÅ ą╝ąŠčēąĮąŠčüčéčī ą┐ąĖčéą░ąĮąĖčÅ ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ AD7731 ąĮąĖąĘą║ąĖąĄ, ąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗą┤ąĄčƹȹĖą▓ą░čéčī ą▓čĆąĄą╝čÅ ąĮą░ ą┐čĆąŠą│čĆąĄą▓ ą┐ąĄčĆąĄą┤ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ąĮą░čćą░ą╗čīąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, čŹč鹊 ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░čåąĖąĄą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ. ą¤ąŠ č鹊ą╣ ąČąĄ ą┐čĆąĖčćąĖąĮąĄ ąĄčüą╗ąĖ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąŠčé ą║ą▓ą░čĆčåą░ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤čŗ MCLK, ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą╣čéąĖ čéčĆąĄą▒čāąĄą╝ąŠąĄ ą▓čĆąĄą╝čÅ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ čćą░čüč鹊čéčŗ čüčģąĄą╝čŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝ąŠąČąĄčé ąĮą░čćą░čéčīčüčÅ ąĮą░čćą░ą╗čīąĮą░čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ (čüą╝. ąĮąĖąČąĄ).
ąöčĆąĄą╣čä ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ . AD7731 ąĖčüą┐ąŠą╗čīąĘčāąĄčé chopper-č鹥čģąĮąĖą║ąĖ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ, čćč鹊ą▒čŗ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą┤čĆąĄą╣čä čüą╝ąĄčēąĄąĮąĖčÅ ą┐ąŠ ą▓čģąŠą┤čā. ąśąĮąČąĄą║čåąĖčÅ ąĘą░čĆčÅą┤ą░ ą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąĄ ąĖą╗ąĖ ą┐ąŠčüč鹊čÅąĮąĮčŗąĄ č鹊ą║ąĖ čāč鹥čćą║ąĖ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ą▓čģąŠą┤ąĄ čŹč鹊 ą│ą╗ą░ą▓ąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ ą┤čĆąĄą╣čäą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ. ąÆčģąŠą┤ąĮąŠą╣ ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ č鹊ą║ čāč鹥čćą║ąĖ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čāčüąĖą╗ąĄąĮąĖčÅ. ąöčĆąĄą╣čä čāčüąĖą╗ąĄąĮąĖčÅ ą▓ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗ąĄ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘą░ą▓ąĖčüąĖčé ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ąĄą╝ą║ąŠčüčéąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓. ąØą░ čŹč鹊 ąĮąĄ ą▓ą╗ąĖčÅčÄčé č鹊ą║ąĖ čāč鹥čćą║ąĖ.
ąÜąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ č湊ą┐ą┐ąĖąĮą│ą░ (CHP = 1), čåąĄą┐ąŠčćą║ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ą░ ą▓ą║ą╗čÄčćą░ąĄčé č湊ą┐ą┐ąĖąĮą│ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░. ąŁč鹊čé č湊ą┐ą┐ąĖąĮą│ čüą╝ąĄčēą░ąĄčé ąŠą▒čēąĖą╣ ą┤čĆąĄą╣čä čüą╝ąĄčēąĄąĮąĖčÅ ą┤ąŠ čāčĆąŠą▓ąĮčÅ 5 nV/┬░C. ą¤čĆąĖ čĆą░ą▒ąŠč鹥 ą▓ čĆąĄąČąĖą╝ąĄ č湊ą┐ą┐ąĖąĮą│ą░ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī AD7731 č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüą░, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ ą║ąŠčĆčĆąĄą║čåąĖąĖ čüą╝ąĄčēąĄąĮąĖčÅ. ą×čłąĖą▒ą║ąĖ ąĖąĮč鹥ą│čĆą░ą╗čīąĮąŠą╣ ąĖ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéąĖ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą╝ąĄąĮčÅčÄčéčüčÅ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
ąĪą╗ąĄą┤čāąĄčé čéą░ą║ąČąĄ čāą┤ąĄą╗ąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą▓ąĮąĄčłąĮąĖą╝ čŹčäč乥ą║čéą░ą╝ ą┤čĆąĄą╣čäą░, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ąŠą┐čéąĖą╝ą░ą╗čīąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ. ą×čüąŠą▒ąĄąĮąĮąŠ ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čüą╗ąĄą┤čāąĄčé ąĖąĘą▒ąĄą│ą░čéčī čŹčäč乥ą║č鹊ą▓ č鹥čĆą╝ąŠą┐ą░čĆčŗ ą┐čĆąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ čĆą░ąĘąĮčŗčģ ą╝ą░č鹥čĆąĖą░ą╗ąŠą▓. ą£ąĖą║čĆąŠčüčģąĄą╝čā ąĮąĄ čüą╗ąĄą┤čāąĄčé ą┐ąŠą╝ąĄčēą░čéčī ą▓ čüąŠą║ąĄčé, ą║ąŠą│ą┤ą░ ąŠčåąĄąĮąĖą▓ą░ąĄčéčüčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤čĆąĄą╣čä, ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮąĖą║ą░ą║ąĖčģ ą╗ąĖčłąĮąĖčģ čĆą░ąĘąĮąŠčĆąŠą┤ąĮčŗčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ ąĮą░ ą▓čģąŠą┤ąĄ, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą▓čģąŠą┤ąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąĀąĄą░ą╗čīąĮčŗą╣ ą┤čĆąĄą╣čä čüą╝ąĄčēąĄąĮąĖčÅ čüą░ą╝ąŠą╣ AD7731 ą╝ąŠąČąĮąŠ ąŠčåąĄąĮąĖčéčī č鹥čüčéą░ą╝ąĖ ąĮą░ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ą║ąŠą│ą┤ą░ ą▓ č鹥čüč鹊ą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ ąĘą░ą╝ą║ąĮčāčéčŗ ą▓čģąŠą┤čŗ ą┤čĆčāą│ ąĮą░ ą┤čĆčāą│ą░ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
[ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ AD7731 ]
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ čüčģąĄą╝ą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ . AD7731 čéčĆąĄą▒čāąĄčé ąĮą░ ą▓čģąŠą┤ąĄ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą┐ąŠčüčéčāą┐ą░čéčī ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čü čāčĆąŠą▓ąĮčÅą╝ąĖ CMOS, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ą▓čŗą▓ąŠą┤čā MCLK IN (ą┐čĆąĖ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ MCLK OUT ąŠčüčéą░ąĄčéčüčÅ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝). ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ą▓ą░čĆčå ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╣ čĆąĄąĘąŠąĮą░č鹊čĆ ąĮą░ ąĮčāąČąĮčāčÄ čćą░čüč鹊čéčā ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ MCLK IN ąĖ MCLK OUT. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čĆą░ą▒ąŠčéą░ąĄčé ą▓čüčéčĆąŠąĄąĮąĮą░čÅ čüčģąĄą╝ą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ą¦ą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ą┐ąŠ ą▓čģąŠą┤čā, čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ą╝ąŠą┤čāą╗čÅč鹊čĆą░, čćą░čüč鹊čéą░ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┐ąŠ čāčĆąŠą▓ąĮčÄ ŌĆō3 dB, čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ ą▓čĆąĄą╝čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ - ą▓čüąĄ čŹč鹊 ąĮą░ą┐čĆčÅą╝čāčÄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, fCLK IN. ąŻą╝ąĄąĮčīčłąĄąĮąĖąĄ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą▓ 2 čĆą░ąĘą░ čéą░ą║ąČąĄ ąĮą░ą┐ąŠą╗ąŠą▓ąĖąĮčā čüąĮąĖąĘčÅčé ą▓čüąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ čćą░čüč鹊čéčŗ ąĖ ą▓ą┤ą▓ąŠąĄ čāą▓ąĄą╗ąĖčćą░čé ą▓čĆąĄą╝čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ąØą░ čĆąĖčü. 15 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ MCLK IN ąĖ MCLK OUT. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą│ą╗ą░ą▓ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ 4.9152 ą£ąōčå, ąŠą▒ą░ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ C1 ąĖ C2 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮąŠą╝ąĖąĮą░ą╗ą░ 33 ą┐ąż.
ąĀąĖčü. 15. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüąŠą▒čüčéą▓ąĄąĮąĮą░čÅ ąĄą╝ą║ąŠčüčéčī ą▓čŗą▓ąŠą┤ąŠą▓ čüąŠčüčéą░ą▓ą╗čÅąĄčé 5 ą┐ąż ą┤ą╗čÅ MCLK IN ąĖ 13 ą┐ąż ą┤ą╗čÅ MCLK OUT.
ąĪčģąĄą╝ą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖą╝ąĄąĄčé ą▓čĆąĄą╝čÅ ąĘą░ą┐čāčüą║ą░ (start-up time), čüą▓čÅąĘą░ąĮąĮąŠąĄ čü ą┤ąŠčüčéąĖąČąĄąĮąĖąĄą╝ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ čćą░čüč鹊čéčŗ ąĖ ą║ąŠčĆčĆąĄą║čéąĮčŗčģ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąóąĖą┐ąŠą▓ąŠąĄ ą▓čĆąĄą╝čÅ ąĘą░ą┐čāčüą║ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 6 ą╝čü ą┐čĆąĖ DVDD +5 V ąĖ 8 ą╝čü ą┐čĆąĖ DVDD +3 V.
ąōą╗ą░ą▓ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ AD7731 ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ MCLK OUT ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▓čŗčģąŠą┤ą░ - ąŠą┤ąĖąĮ ą▓čŗą▓ąŠą┤ ą▓čģąŠą┤ą░ CMOS. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą▓ą░čĆčåąĄą▓čŗą╣ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╣ čĆąĄąĘąŠąĮą░č鹊čĆ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ AD7731, ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čćą░čüč鹊čéčā ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐čĆąŠą┐čāčüą║ą░čéčī čüąĖą│ąĮą░ą╗ MCLK OUT č湥čĆąĄąĘ ą▒čāč乥čĆ CMOS ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ąĮą░ ąŠčüčéą░ą╗čīąĮčāčÄ čćą░čüčéčī čüčģąĄą╝čŗ.
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ . ąÆčģąŠą┤ ~SYNC ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüą▒čĆą░čüčŗą▓ą░čéčī ą╝ąŠą┤čāą╗čÅč鹊čĆ ąĖ čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ ą▒ąĄąĘ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ ąĮą░čüčéčĆąŠą╣ą║čā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąŁč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮą░čćą░čéčī ąĘą░čģą▓ą░čéčŗą▓ą░čéčī ą▓čŗą▒ąŠčĆą║ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░ ą▓ ąĖąĘą▓ąĄčüčéąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, čé. ąĄ. ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ~SYNC.
ąĢčüą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ AD7731 čĆą░ą▒ąŠčéą░ąĄčé ąŠčé ąŠą▒čēąĄą╣ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čüą▓ąŠąĖčģ ą▓čŗčģąŠą┤ąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ąĪą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ ą▓čģąŠą┤ą░ ~SYNC čüą▒čĆą░čüčŗą▓ą░ąĄčé čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆ, ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé AD7731 ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ, ąĖąĘą▓ąĄčüčéąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ą¤ąŠą║ą░ ą▓čģąŠą┤ ~SYNC čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0, AD7731 ąŠčüčéą░ąĄčéčüčÅ ą▓ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ. ą¤ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ~SYNC ą╝ąŠą┤čāą╗čÅč鹊čĆ ąĖ čäąĖą╗čīčéčĆ ą▓čŗčģąŠą┤čÅčé ąĖąĘ čŹč鹊ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čüą▒čĆąŠčüą░, ąĖ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░čćąĮąĄčé ąĘą░čģą▓ą░čéčŗą▓ą░čéčī ą▓čģąŠą┤ąĮčŗąĄ ą▓čŗą▒ąŠčĆą║ąĖ. ąÆ čüąĖčüč鹥ą╝ąĄ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄą╣ ąĮąĄčüą║ąŠą╗čīą║ąŠ AD7731, ąŠą▒čēąĖą╣ čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ ąĖčģ ą▓čģąŠą┤ąŠą▓ ~SYNC ą▒čāą┤ąĄčé čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī čĆą░ą▒ąŠčéčā čŹčéąĖčģ ą╝ąĖą║čĆąŠčüčģąĄą╝. ąŁč鹊 ąŠą▒čŗčćąĮąŠ ą┤ąĄą╗ą░ą╗ąŠčüčī ą▒čŗ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą║ą░ąČą┤ą░čÅ AD7731 ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ čüą▓ąŠčÄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▓ ą║ą░ąČą┤čāčÄ AD7731 ą▒čŗą╗ąĖ ąĘą░ą│čĆčāąČąĄąĮčŗ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ. ąóąŠą│ą┤ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą▓čŗčģąŠą┤ą░ ą▒čāą┤ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąŠ, ą║ąŠą│ą┤ą░ ąŠčéą┤ąĄą╗čīąĮčŗąĄ AD7731 ą┐ąŠą╗čāčćą░čÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čģąŠą┤ąĄ MCLK IN.
ą×ą┤ąĖąĮąŠčćąĮčŗąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ . ąÆčģąŠą┤ ~SYNC ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ čĆą░ą▒ąŠčéą░čéčī AD7731 ą▓ čāą┤ąŠą▒ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ą¤čĆąĖ ąŠą┤ąĖąĮąŠčćąĮąŠą╝ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĖ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ~SYNC ąĘą░ą┐čāčüą║ą░ąĄčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ, ąĖ čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ~RDY ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ. ąØąĄą┤ąŠčüčéą░č鹊ą║ čŹč鹊ą╣ čüčģąĄą╝čŗ ą▓ č鹊ą╝, čćč鹊 ąĮčāąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠčüč鹊čÅąĮąĖčÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ.
ąŚą░ą┐ąĖčüčī 010 ą▓ ą▒ąĖčéčŗ MD2, MD1, MD0 Mode ą┤ą░ąĄčé č鹊čé ąČąĄ čŹčäč乥ą║čé. ąŁč鹊 ąĖąĮąĖčåąĖąĖčĆčāąĄčé ąŠą┤ąĖąĮąŠčćąĮąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĮą░ AD7731, čü ą▓ąŠąĘą▓čĆą░č鹊ą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓ čĆąĄąČąĖą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle mode) ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ą¤čĆąĖ čéą░ą║ąŠą╝ ą╝ąĄč鹊ą┤ąĄ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čéą░ą║ąČąĄ ąĮčāąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠčüč鹊čÅąĮąĖčÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüą╗ąĖ ą▒ąĖčé FAST čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, č鹊 AD7731 ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą▓čŗą┤ą░ą▓ą░čéčī ą▓čŗčģąŠą┤ąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ, ą┐ąŠą║ą░ ą▒ąĖčé ~STDY ąĮąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0.
ąÆčģąŠą┤ čüą▒čĆąŠčüą░ . ąÆčģąŠą┤ ~RESET AD7731 čüą▒čĆą░čüčŗą▓ą░ąĄčé ą▓čüčÄ ą╗ąŠą│ąĖą║čā, čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ, ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆ ąĖ ą▓čüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ąĖ AD7731 ąĖą│ąĮąŠčĆąĖčĆčāąĄčé ą▓čüąĄ ą┐ąŠą┐čŗčéą║ąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ąĄčæ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ, ą┐ąŠą║ą░ ą▓čģąŠą┤ ~RESET čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ ą▓čģąŠą┤ ~RESET ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1, AD7731 ąĮą░čćąĖąĮą░ąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ, ąĖ ~RDY ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ ą╗ąŠą│. 0 ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čäąĖą╗čīčéčĆ čāčüčéą░ąĮąŠą▓ąĖčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ, čćč鹊 ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąŠą▓ąŠąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ čüą╗ąŠą▓ąŠ ąŠčåąĖčäčĆąŠą▓ą░ąĮąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ AD7731 čĆą░ą▒ąŠčéą░ąĄčé čüąŠ čüą▓ąŠąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĖ ąĮčāąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą▓čüąĄ ąĄčæ čĆąĄą│ąĖčüčéčĆčŗ, ą░ čéą░ą║ąČąĄ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā.
ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ AD7731 ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čĆą░ą▒ąŠčéą░čéčī ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą▓čģąŠą┤ ~RESET ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0. ąĪąĖą│ąĮą░ą╗ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą▓čŗčģąŠą┤ąĖčéčī č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ MCLK OUT. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą│ą┤ąĄ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠčé čéą░ą║č鹊ą▓ AD7731, ą▓čüąĄ ąĄčēąĄ ą▒čāą┤čāčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ą┐ąŠą╗čāčćą░čéčī ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą░ąĮą┤ čüą▒čĆąŠčüą░.
ąĀąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (Standby Mode). ąÆčģąŠą┤ ~STANDBY AD7731 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą▓ čĆąĄąČąĖą╝ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĮąĄ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī čĆąĄąĘčāą╗čīčéą░čéčŗ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣. ąóą░ą║ąČąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą▓ standby mode ąĘą░ą┐ąĖčüčīčÄ 011 ą▓ ą▒ąĖčéčŗ MD2, MD1, MD0 Mode Register. ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ AD7731 ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą▓čüąĄčģ čüą▓ąŠąĖčģ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ (ą▓ą║ą╗čÄčćą░čÅ Data Register). ąöą░ąĮąĮčŗąĄ ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ą▓ Standby Mode. ąæąĖčé STBY Status Register ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą▓ ą║ą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ standby ąĖą╗ąĖ ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝. ąÜąŠą│ą┤ą░ ą▓čģąŠą┤ ~STANDBY ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą║ čĆą░ą▒ąŠč鹥, ą║ č鹊ą╝čā čüąŠčüč鹊čÅąĮąĖčÄ, ą▓ ą║ąŠč鹊čĆąŠą╝ ąŠąĮą░ ą▒čŗą╗ą░ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▓čģąŠą┤ ~STANDBY ą┐ąĄčĆąĄčłąĄą╗ ą▓ ą╗ąŠą│. 0.
ąÆčģąŠą┤ ~STANDBY (ąĖą╗ąĖ 011 ą▓ ą▒ąĖčéą░čģ MD2, MD1, MD0) ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü. ą×ą┤ąĮą░ą║ąŠ ąŠąĮ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé ąĖ ą▓čŗą▓ąŠą┤ ~RDY ą▓ ą╗ąŠą│. 1, ąĖ čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčé ą▓ ą╗ąŠą│. 1 ą▒ąĖčé ~STDY. ąÜąŠą│ą┤ą░ ~STANDBY čüąĮąŠą▓ą░ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ~RDY ąĖ ~STDY ąŠčüčéą░ąĮčāčéčüčÅ ą▓ ą╗ąŠą│. 1, ą┐ąŠą║ą░ ąĮąĄ ą┐ąĄčĆąĄą╣ą┤čāčé ą▓ ą╗ąŠą│. 0 ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝ ą║ąŠąĮą▓ąĄčĆčüąĖąĖ ąĖą╗ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ą¤ąĄčĆąĄą▓ąŠą┤ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓ standby mode čüąĮąĖąČą░ąĄčé ąŠą▒čēąĖą╣ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą┤ąŠ ą┐čĆąĖą╝ąĄčĆąĮąŠ 10 ą╝ą║ąÉ, ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ąŠčé ą▓ąĮąĄčłąĮąĄą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ. ąĢčüą╗ąĖ ą▓ąĮąĄčłąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ standby mode ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ, č鹊 č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čāą▓ąĄą╗ąĖčćąĖčéčüčÅ ą┤ąŠ ą┐čĆąĖą╝ąĄčĆąĮąŠ 400 ą╝ą║ąÉ. ąĢčüą╗ąĖ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą▓ą░čĆčåąĄą▓čŗą╣ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╣ čĆąĄąĘąŠąĮą░č鹊čĆ, č鹊 ąŠą▒čēąĖą╣ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ standby mode čéą░ą║ąČąĄ čüąŠčüčéą░ą▓ąĖčé 400 ą╝ą║ąÉ. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 čāąĘą╗čŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą║č鹊ą▓ ą┐čĆąŠą┤ąŠą╗ąČą░čÄčé čĆą░ą▒ąŠčéą░čéčī, ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ standby mode. ąŁč鹊 ą▓ą░ąČąĮąŠ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ąŠčé čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ AD7731, ą┐ąŠč鹊ą╝čā čćč鹊 AD7731 ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ standby mode.
ą”ąĖčäčĆąŠą▓čŗąĄ ą▓čŗčģąŠą┤čŗ . ąŻ AD7731 ąĄčüčéčī ą┤ą▓ąĄ ąĮąŠąČą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ čåąĖčäčĆąŠą▓čŗąĄ ą▓čŗčģąŠą┤čŗ D0 ąĖ D1. ąÜąŠą│ą┤ą░ ą▒ąĖčé DEN Mode Register čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1, čŹčéąĖ čåąĖčäčĆąŠą▓čŗąĄ ą▓čŗčģąŠą┤čŗ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčé D0 ąĖ D1 Mode Register. ąŁč鹊 ą┤ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą┤ąŠčüčéčāą┐ ą║ ą┤ą▓čāą╝ ąĮąŠąČą║ą░ą╝ čåąĖčäčĆąŠą▓čŗčģ ą┐ąŠčĆč鹊ą▓, ą║ąŠč鹊čĆčŗą╝ąĖ ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü AD7731. ąŁčéąĖ ą┤ą▓ą░ ą▓čŗčģąŠą┤ą░ ą┐ąŠą╗čāčćą░čÄčé ą┐ąĖčéą░ąĮąĖčÅ ąŠčé AVDD, ą┐ąŠčŹč鹊ą╝čā ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ čāčĆąŠą▓ąĮčÅčģ 5V, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą┐ąĖčéą░ąĮąĖąĄ DVDD = +3V.
ąśčüč鹊čćąĮąĖą║ąĖ ą┐ąĖčéą░ąĮąĖčÅ . ąØąĄčé ąĮąĖą║ą░ą║ąŠą╣ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ, ą▓ ą║ąŠč鹊čĆąŠą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓ą║ą╗čÄč湥ąĮąŠ ą┐ąĖčéą░ąĮąĖąĄ AD7731, ą╗čÄą▒ąŠą╣ ąĖąĘ ą▓čŗą▓ąŠą┤ąŠą▓ AVDD ąĖ DVDD ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą┐ąĖčéą░ąĮąĖčÄ ą┐ąĄčĆą▓čŗą╝. ą¤ąŠčüą║ąŠą╗čīą║čā ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐ąŠ ą▓čģąŠą┤ą░ą╝ AD7731 ąŠč湥ąĮčī čģąŠčĆąŠčłą░čÅ, č鹊 ą▓ą░ąČąĮąŠ, čćč鹊ą▒čŗ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ AD7731 ą▒čŗą╗ąŠ ą┐ąŠą┤ą░ąĮąŠ ą┐ąĄčĆąĄą┤ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ REF IN, AIN ąĖą╗ąĖ ąĮą░ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ ą▓čģąŠą┤ąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ, čćč鹊ą▒čŗ ąĮąĄ ą▒čŗą╗ąŠ čćčĆąĄąĘą╝ąĄčĆąĮąŠą│ąŠ ą▓č鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ č湥čĆąĄąĘ ą▓čģąŠą┤čŗ. ąĢčüą╗ąĖ čŹč鹊 ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ, č鹊 ą▓č鹥ą║ą░čÄčēąĖą╣ ą▓ čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ č鹊ą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą│čĆą░ąĮąĖč湥ąĮ ąĘąĮą░č湥ąĮąĖąĄą╝ 30 ą╝ąÉ ąĮą░ ą▓čŗą▓ąŠą┤ ąĖ ąŠą▒čēąĖą╣ č鹊ą║ č湥čĆąĄąĘ ą▓čüąĄ ą▓čŗą▓ąŠą┤čŗ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą▓čŗčłą░čéčī 100 ą╝ąÉ. ąĢčüą╗ąĖ ą┤ą╗čÅ AD7731 ąĖ čüąĖčüč鹥ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čĆą░ąĘąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ ą┐ąĖčéą░ąĮąĖčÅ, č鹊 AD7731 ą┤ąŠą╗ąČąĮą░ ą┐ąĄčĆą▓ąŠą╣ ą┐ąŠą╗čāčćąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ. ąĢčüą╗ąĖ čŹč鹊 ąĮąĄą╗čīąĘčÅ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, ą┤ąŠ ąĮą░ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ ą▓čģąŠą┤čŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ čĆąĄąĘąĖčüč鹊čĆčŗ ą┤ą╗čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ č鹊ą║ą░ ąĘąĮą░č湥ąĮąĖąĄą╝ ą╝ąĄąĮčīčłąĄ 30 ą╝ąÉ, ąĖ ąŠą▒čēąĖą╣ č鹊ą║ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤čŗ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą▓čŗčłą░čéčī 100 ą╝ąÉ.
ąŚą░ąĘąĄą╝ą╗ąĄąĮąĖąĄ ąĖ čĆą░ąĘą▓ąŠą┤ą║ą░ . ą¤ąŠčüą║ąŠą╗čīą║čā ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ ąĖ ą▓čģąŠą┤čŗ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ, ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝ ą╝ąŠą┤čāą╗čÅč鹊čĆąĄ ąŠą▒čēąĖąĄ. ą¦ąĄą╝ ą╗čāčćčłąĄ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░ąĮąŠ ą┐ąĖčéą░ąĮąĖąĄ, č鹥ą╝ ą╝ąĄąĮčīčłąĄ ą▒čāą┤ąĄčé ąŠą▒čēąĖčģ ą┐ąŠą╝ąĄčģ ąĮą░ čŹčéąĖčģ ą▓čģąŠą┤ą░čģ. ąÉąĮą░ą╗ąŠą│ąŠą▓ąŠąĄ ąĖ čåąĖčäčĆąŠą▓ąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ AD7731 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ, ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą▓čŗą▓ąŠą┤ą░ą╝, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ąĖ čåąĖčäčĆąŠą▓ąŠą╣ čüąĄą║čåąĖčÅą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ą”ąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ ą▒čāą┤ąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī čüčĆąĄąĘą░ąĮąĖąĄ čłąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮąŠą│ąŠ čłčāą╝ą░ ąĮą░ ąĖčüč鹊čćąĮąĖą║ą░čģ ą┐ąĖčéą░ąĮąĖčÅ, ą║čĆąŠą╝ąĄ čćą░čüč鹊čé, ą║čĆą░čéąĮčŗčģ čćą░čüč鹊č鹥 ą▓čŗą▒ąŠčĆąŠą║ ą╝ąŠą┤čāą╗čÅč鹊čĆą░. ą”ąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ čéą░ą║ąČąĄ čāą┤ą░ą╗čÅąĄčé čłčāą╝ ąĖąĘ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓ ąĖ ą▓čģąŠą┤ąŠą▓ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ čŹčéąĖ čłčāą╝čŗ ąĮąĄ ą┐čĆąĖą▓ąĄą╗ąĖ ą║ ąĮą░čüčŗčēąĄąĮąĖčÄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅč鹊čĆą░. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 AD7731 ą╝ąĄąĮąĄąĄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮą░ ą║ ą▓ą╗ąĖčÅąĮąĖčÄ čłčāą╝ąŠą▓, č湥ą╝ ąŠą▒čŗčćąĮčŗąĄ ąÉą”ą¤ ą▓čŗčüąŠą║ąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ ąĖąĘ-ąĘą░ ą▓čŗčüąŠą║ąŠą╣ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ AD7731 ą┤ą░ąČąĄ ą┐čĆąĖ ąĮąĖąĘą║ąĖčģ čāčĆąŠą▓ąĮčÅčģ čłčāą╝ą░ čüą╗ąĄą┤čāąĄčé ąŠčüąŠą▒ąŠąĄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ čāą┤ąĄą╗ąĖčéčī ą║ą░č湥čüčéą▓ąĄąĮąĮąŠą╣ čĆą░ąĘą▓ąŠą┤ą║ąĄ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ ąĖ ąĘą░ąĘąĄą╝ą╗ąĄąĮąĖčÄ.
ą¤ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ AD7731, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ čéą░ą║, čćč鹊ą▒čŗ ą░ąĮą░ą╗ąŠą│ąŠą▓ą░čÅ ąĖ čåąĖčäčĆąŠą▓ą░čÅ čćą░čüčéčī čüčģąĄą╝čŗ ą▒čŗą╗ąĖ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ąĮą░ ąŠčéą┤ąĄą╗čīąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čćą░čüčéčÅčģ ą┐ą╗ą░čéčŗ. ąŁč鹊 čāą┐čĆąŠčēą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĘą░ą╗ąĖą▓ąŠą║ ą╝ąĄą┤ąĖ čłąĖąĮ ąĘąĄą╝ą╗ąĖ (ground plane), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ąŠčéą┤ąĄą╗ąĄąĮčŗ. ąóąĄčģąĮąĖą║ą░, ą║ąŠą│ą┤ą░ ą▓čüčÅ čüą▓ąŠą▒ąŠą┤ąĮą░čÅ ą┐ą╗ąŠčēą░ą┤čī ą┐ą╗ą░čéčŗ ąĘą░ą╗ąĖčéą░ čłąĖąĮąŠą╣ ąĘąĄą╝ą╗ąĖ (minimum etch technique) ąŠą▒čŗčćąĮąŠ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ąĘą░ą╗ąĖą▓ąŠą║ ą╝ąĄą┤ąĖ, čéą░ą║ ą║ą░ą║ ą┤ą░ąĄčé čüą░ą╝ąŠąĄ ą╗čāčćčłąĄąĄ 菹║čĆą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčé ą┐ąŠą╝ąĄčģ. ąŚą░ą╗ąĖą▓ą║ąĖ ą╝ąĄą┤ąĖ čåąĖčäčĆąŠą▓ąŠą╣ ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ąĘąĄą╝ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ, ąĖ čüąŠąĄą┤ąĖąĮčÅčéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╣ č鹊čćą║ąĄ. ąĢčüą╗ąĖ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ AD7731 čéčĆąĄą▒čāąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ AGND ąĖ DGND, č鹊 ąĘą░ą╗ąĖą▓ą║ąĖ ą╝ąĄą┤čīčÄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ąĮą░ ą▓čŗą▓ąŠą┤čŗ AGND ąĖ DGND AD7731. ąĢčüą╗ąĖ AD7731 ą┐čĆąĖą╝ąĄąĮąĄąĮą░ ą▓ čüąĖčüč鹥ą╝ąĄ, ą│ą┤ąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ čéčĆąĄą▒čāčÄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ AGND ąĖ DGND, č鹊 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓čüąĄ ąĄčēąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮąŠ č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╣ č鹊čćą║ąĄ, čüčģąĄą╝ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ ąĘąĄą╝ą╗ąĖ ą┤ąŠą╗ąČąĮą░ ąĖą╝ąĄčéčī ą▓ąĖą┤ ąĘą▓ąĄąĘą┤čŗ, ąĖ čŹčéą░ č鹊čćą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąĘąĄą╝ąĄą╗čī ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ AD7731.
ąśąĘą▒ąĄą│ą░ą╣č鹥 ą┐čĆąŠą║ą╗ą░ą┤ą║ąĖ čåąĖčäčĆąŠą▓čŗčģ čåąĄą┐ąĄą╣ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠą┤ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ą▒čāą┤čāčé ą┤ą░ą▓ą░čéčī ą┐ąŠą╝ąĄčģąĖ ąĮą░ ą║čĆąĖčüčéą░ą╗ą╗. ąÉąĮą░ą╗ąŠą│ąŠą▓ą░čÅ ąĘąĄą╝ą╗čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąŠą╗ąŠąČąĄąĮą░ ą┐ąŠą┤ AD7731, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąĮą░ą▓ąŠą┤ąŠą║ ą┐ąŠą╝ąĄčģ. ą¤čĆąŠą▓ąŠą┤ą░ ą┐ąĖčéą░ąĮąĖčÅ ą║ AD7731 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čłąĖčĆąŠą║ąĖąĄ, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┐čāčéąĖ ąĮąĖąĘą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖčÅ č鹊ą║ą░ ąĖ čāą╝ąĄąĮčīčłąĖčéčī ą▓čŗą▒čĆąŠčüčŗ ąŠčé ąĖą╝ą┐čāą╗čīčüąŠą▓ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░. ąæčŗčüčéčĆąŠ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčēąĖąĄčüčÅ čüąĖą│ąĮą░ą╗čŗ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čéą░ą║č鹊ą▓ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą║čĆčāąČąĄąĮčŗ čåąĖčäčĆąŠą▓ąŠą╣ ąĘąĄą╝ą╗ąĄą╣, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī čłčāą╝ ąĖąĘą╗čāč湥ąĮąĖčÅ, ąĮą░ą▓ąŠą┤ą║ąĖ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠą┐ą░ą┤čāčé ąĮą░ ą┤čĆčāą│ąĖąĄ čüąĄą║čåąĖąĖ ą┐ą╗ą░čéčŗ, ąĖ čåąĄą┐ąĖ čéą░ą║č鹊ą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠčģąŠą┤ąĖčéčī čĆčÅą┤ąŠą╝ čü ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╝ąĖ ą▓čģąŠą┤ą░ą╝ąĖ. ąśąĘą▒ąĄą│ą░ą╣č鹥 ą┐ąĄčĆąĄčüąĄč湥ąĮąĖą╣ čåąĖčäčĆąŠą▓čŗčģ ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. ą¤čĆąŠą▓ąŠą┤ąĮąĖą║ąĖ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗčģ čüč鹊čĆąŠąĮą░čģ ą┐ą╗ą░čéčŗ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠčģąŠą┤ąĖčéčī ą┐ąŠą┤ ą┐čĆčÅą╝čŗą╝ čāą│ą╗ąŠą╝ ą┤čĆčāą│ ą║ ą┤čĆčāą│čā. ąŁč鹊 čüąĮąĖąĘąĖčé čŹčäč乥ą║čéčŗ ą┐ąĄčĆąĄą║čĆąĄčüčéąĮčŗčģ ą┐ąŠą╝ąĄčģ č湥čĆąĄąĘ ą┐ą╗ą░čéčā. ąóąĄčģąĮąĖą║ą░ ąŠą║čĆčāąČąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ąĘąĄą╝ą╗ąĄą╣ (microstrip technique) ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ ą┐ąŠą╝ąĄčģ, ąŠą┤ąĮą░ą║ąŠ ąĄčæ ą┤ą░ą╗ąĄą║ąŠ ąĮąĄ ą▓čüąĄą│ą┤ą░ ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĮą░ ą┤ą▓čāčģčüč鹊čĆąŠąĮąĮąĄą╣ ą┐ą╗ą░č鹥. ąĪ čŹč鹊ą╣ č鹥čģąĮąĖą║ąŠą╣ čüč鹊čĆąŠąĮą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ ą┐ąŠą┤ ąĘą░ą╗ąĖą▓ą║ąĖ ąĘąĄą╝ą╗ąĖ (ąĖąĮąŠą│ą┤ą░ ąĖ ą┐ąĖčéą░ąĮąĖčÅ), ąĖ ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ ą┐čĆąŠą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą▒čĆą░čéąĮąŠą╣ čüč鹊čĆąŠąĮąĄ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠą╣ čüč鹊čĆąŠąĮąĄ ą┐ą░ą╣ą║ąĖ čłčéčŗčĆąĄą▓čŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓).
ąźąŠčĆąŠčłą░čÅ čĆą░ąĘą▓čÅąĘą║ą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ ą▓ą░ąČąĮą░ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąÉą”ą¤ ą▓čŗčüąŠą║ąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ. ąÆčüąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ čåąĄą┐ąĖ ą┐ąĖčéą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą▓čÅąĘą░ąĮčŗ ąĮą░ AGND čéą░ąĮčéą░ą╗ąŠą▓čŗą╝ąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ą╝ąĖ 10 ą╝ą║ąż, ą║ ą║ąŠč鹊čĆčŗą╝ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ 0.1 ą╝ą║ąż. ą¦č鹊ą▒čŗ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ čĆą░ą▒ąŠčéą░ą╗ąĖ čŹčéąĖ čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ, ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ, ąĖą┤ąĄą░ą╗čīąĮąŠ čüčĆą░ąĘčā ą▓ąŠąĘą╗ąĄ ąĄčæ ą║ąŠčĆą┐čāčüą░. ą¤ąĖčéą░ąĮąĖąĄ ą▓čüąĄčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą╗ąŠą│ąĖą║ąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘą▓čÅąĘą░ąĮąŠ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╝ąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ą╝ąĖ 0.1 ą╝ą║ąż ąĮą░ čłąĖąĮčā DGND. ąÆ čüąĖčüč鹥ą╝ą░čģ, ą│ą┤ąĄ ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą▒čēą░čÅ čłąĖąĮą░ ąĘąĄą╝ą╗ąĖ ą┤ą╗čÅ AVDD ąĖ DVDD AD7731, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ čüąĖčüč鹥ą╝ą░ ą┐ąĖčéą░ą╗ą░čüčī ąŠčé AVDD. ąöąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ čĆą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ ą╝ąĄąČą┤čā AVDD ąĖ AGND ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ąĖ DVDD ąĖ DGND ą▓čŗą▓ąŠą┤ą░ą╝ąĖ AD7731.
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čāčÄ čĆą░ąĘą▓ąŠą┤ą║čā ą┐ą╗ą░čéčŗ ą┤ą╗čÅ AD7731 ą╝ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░č鹥 AD7731. ąÆą╝ąĄčüč鹥 čü ąĮąĄą╣ ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą╗ą░č鹊ą╣ č湥čĆąĄąĘ ą┐ąŠčĆčé ą┐čĆąĖąĮč鹥čĆą░ PC ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ PC ą┤ą╗čÅ ąŠčåąĄąĮą║ąĖ čĆą░ą▒ąŠčéčŗ AD7731. ą×čåąĄąĮąŠčćąĮą░čÅ ą┐ą╗ą░čéą░ ąĖą╝ąĄąĄčé ąĮąŠą╝ąĄčĆ ą┤ą╗čÅ ąĘą░ą║ą░ąĘą░ EVAL-AD7731EB.
ąŻčĆąŠą▓ąĮąĖ čłčāą╝ą░, ą┐ąŠą┐ą░ą┤ą░čÄčēąĖąĄ ąĮą░ čüąĖą│ąĮą░ą╗čŗ AD7731, čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▓ą╗ąĖčÅčéčī ąĮą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. AD7731 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖą╝ąĄąĮąĖčéčī č鹥čģąĮąĖą║čā ą┤ą╗čÅ ąŠčåąĄąĮą║ąĖ ąĄčæ čĆąĄą░ą╗čīąĮąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąŁčéą░ čüčģąĄą╝ą░ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ąŠčüą╗ąĄ ą┐čĆąŠą▓ąĄą┤ąĄąĮąĖčÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ą¤ąĄčĆą▓čŗą╣ ą╝ąĄč鹊ą┤ čüąŠčüč鹊ąĖčé ą▓ ą▓čŗą▒ąŠčĆąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ AIN6/AIN6, č鹊ą│ą┤ą░ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗąĄ ą▓čģąŠą┤čŗ ą▒čāą┤čāčé ąĘą░ą╝ą║ąĮčāčéčŗ ą┤čĆčāą│ ąĮą░ ą┤čĆčāą│ą░ ą▓ąĮčāčéčĆąĖ AD7731, ąĖ ą▒čāą┤ąĄčé ą┐ąŠą┤ą░ąĮąŠ ąĮčāą╗ąĄą▓ąŠąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆ. ąĪąĮą░čĆčāąČąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ ą▓čģąŠą┤ AIN6 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąŠą┤ą░ąĮąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ąĮą░čģąŠą┤čÅčēąĄąĄčüčÅ ą┐ąŠ čāčĆąŠą▓ąĮčÄ ą▓ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ą╗čÅ ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ ą┐ąŠąĘą▓ąŠą╗ąĖčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čāą▓ąĖą┤ąĄčéčī čāčĆąŠą▓ąĄąĮčī čłčāą╝ą░ ą▓ ą▒ąĖčéą░čģ ąĖą╗ąĖ nV. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī čāčüčéą░ąĮąŠą▓ąĖčé, čćč鹊 ą║ą░č湥čüčéą▓ąŠ ą┐ąŠ čāčĆąŠą▓ąĮčÄ čłčāą╝ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖč鹥ą╗čīąĮąŠąĄ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą░ąĮąŠ ą▓ąĮąĄčłąĮąĄąĄ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čćč鹊ą▒čŗ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠ ą▓čüąĄą╣ čåąĄą┐ąŠčćą║ąĄ.
[ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ čäčāąĮą║čåąĖąĖ AD7731 čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ ąĮą░ą▒ąŠčĆ ąĄčæ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ąöąŠčüčéčāą┐ ą║ čŹčéąĖą╝ čĆąĄą│ąĖčüčéčĆą░ą╝ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüąĖą│ąĮą░ą╗ą░ čüą▒čĆąŠčüą░ ąŠčé ~RESET, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąŠąČąĖą┤ą░ąĄčé ąĘą░ą┐ąĖčüąĖ ą▓ čüą▓ąŠą╣ Communications Register. ąöą░ąĮąĮčŗąĄ, ąĘą░ą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ą║ą░ą║ą░čÅ čüą╗ąĄą┤čāčÄčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ - čćč鹥ąĮąĖąĄ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī, ąĖ čéą░ą║ąČąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠą╣ čĆąĄą│ąĖčüčéčĆ ą▒čāą┤ąĄčé čćąĖčéą░čéčīčüčÅ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ ąŠą┤ąĖąĮ ąĖąĘ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ąĘą░ą┐ąĖčüčī ą▓ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ. ą¦č鹥ąĮąĖąĄ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┤ąĖąĮąŠčćąĮąŠąĄ, ąĖą╗ąĖ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ ą┐čĆąŠą┤ąŠą╗ąČąĖč鹥ą╗čīąĮąŠąĄ. ą×ą┤ąĖąĮąŠčćąĮąŠąĄ čćč鹥ąĮąĖąĄ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊ąĖčé ąĖąĘ ąĘą░ą┐ąĖčüąĖ ą▓ Communications Register RW1 = 0 ąĖ RW0 = 1, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé čćč鹥ąĮąĖąĄ ąĖąĘ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░. ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐ąŠą▓č鹊čĆčÅčÄčēąĖąĄčüčÅ čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ąĘą░ą┐ąĖčüčī ą▓ Communications Register RW1 = 1 ąĖ RW0 = 0, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą▓ čĆąĄąČąĖą╝ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ (continuous read mode). ąŻą║ą░ąĘą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ąĘą░č鹥ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮą░ ąĘą░ą┐ąĖčüčī ą▓ Communications Register RW1 = 1 ąĖ RW0 = 1, ą║ąŠč鹊čĆą░čÅ ą▓čŗą▓ąĄą┤ąĄčé ą╝ąĖą║čĆąŠčüčģąĄą╝čā ąĖąĘ čĆąĄąČąĖą╝ą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ. ąÜąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ ąĖą┤ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą╝ąŠąĮąĖč鹊čĆąĖčé čüąĖą│ąĮą░ą╗ DIN. ą¤ąŠčŹč鹊ą╝čā DIN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠčüč鹊čÅąĮąĮąŠ ą▓ ą╗ąŠą│. 0, čćč鹊ą▒čŗ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąŠčüčéą░ą▓ą░ą╗ą░čüčī ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ. ąĀąĖčü. 5 ąĖ 6, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ čĆą░ąĮąĄąĄ, ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčé ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ AD7731.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü AD7731 čüąŠčüč鹊ąĖčé ąĖąĘ 5 čüąĖą│ąĮą░ą╗ąŠą▓: ~CS, SCLK, DIN, DOUT ąĖ ~RDY. ąĪąĖą│ąĮą░ą╗ DIN ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆčŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čüąĖą│ąĮą░ą╗ DOUT ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą┤ą░ąĮąĮčŗą╝ ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ. SCLK čŹč鹊 čéą░ą║č鹊ą▓čŗą╣ ą▓čģąŠą┤, ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ čāčĆąŠą▓ąĮčÅ ą║ąŠč鹊čĆąŠą│ąŠ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčéčüčÅ ą▓čüąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (č湥čĆąĄąĘ DIN ąĖą╗ąĖ DOUT).
ą×ą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ . ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č湥čĆąĄąĘ ąĄčæ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░. ą¤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ čāą║ą░ąĘą░ąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ. ąŁč鹊 ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▓čģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąŠčüą╗ąĄ 8 ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ DAC Register, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▓čģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ąŠčüčāčēąĄčüčéą▓ąĖčéčüčÅ č湥čĆąĄąĘ 24 ą┐ąĄčĆąĄą┐ą░ą┤ą░ čéą░ą║č鹊ą▓ ą┐čĆąĖ ąĘą░ą┐ąĖčüąĖ ą▓ Filter Register. ąĀąĖčü. 16 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąĖą░ą│čĆą░ą╝ą╝čā ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ AD7731. ąÜąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ POL ą┐ąŠą┤ą░ąĮą░ ą╗ąŠą│. 1, ą┤ą░ąĮąĮčŗąĄ ąĘą░čēąĄą╗ą║ąĖą▓ą░čÄčéčüčÅ ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ SCLK. ąÜąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ POL ą╗ąŠą│. 0, ą┤ą░ąĮąĮčŗąĄ ąĘą░čēąĄą╗ą║ąĖą▓ą░čÄčéčüčÅ ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ SCLK.
ąĀąĖčü. 16 čéą░ą║ąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ą░ ~CS ą┤ą╗čÅ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ AD7731. ą×ą┤ąĮą░ą║ąŠ čŹč鹊čé ą▓čģąŠą┤ ~CS ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ąĢčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ą▒ąŠčéą░čéčī ą▓ 3-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą║ąŠą│ą┤ą░ ~CS ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐čĆąĖčéčÅąĮčāčé ą║ ą╗ąŠą│. 0. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüąĖą│ąĮą░ą╗ SCLK ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│. 1 ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ POL ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąŠą│. 1, ąĖ ą┤ąŠą╗ąČąĄąĮ SCLK ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ą┐ą░čāąĘą░čģ ą┐ąĄčĆąĄą┤ą░čć ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ POL ą╗ąŠą│. 0. ąöą╗čÅ POL = 1 ą┐ąĄčĆą▓čŗą╣ čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ SCLK ą▓čŗą┤ą▓ąĖą│ą░ąĄčé ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▓ąĮąĄčłąĮąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮą░ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ DIN AD7731. ąŚą░č鹥ą╝ ąŠąĮ ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčéčüčÅ ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ SCLK. ąöą╗čÅ POL = 0 ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╝ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╝ čéą░ą║č鹊ą▓ąŠą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ SCLK ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄčģąŠą┤čÅčé ąĖąĘ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮą░ čüąĖą│ąĮą░ą╗ DIN AD7731. ąŚą░č鹥ą╝ ąŠąĮąĖ ąĘą░čēąĄą╗ą║ąĖą▓ą░čÄčéčüčÅ ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ SCLK.
ąĀąĖčü. 16. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐čĆąĖ ąĘą░ą┐ąĖčüąĖ.
ąöčĆčāą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą║ąŠą│ą┤ą░ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ąŠčüčéčāą┐ą░ ą║ AD7731, čüąĖą│ąĮą░ą╗ ~CS ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ąĮąŠąČą║ąŠą╣ ą┐ąŠčĆčéą░ ą▓ąĮąĄčłąĮąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ~CS ą▒čŗą╗ ą▒čŗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 0 ą┤ąŠ ą┐ąĄčĆą▓ąŠą│ąŠ čüą┐ą░ą┤ą░ SCLK (POL = 1) ąĖą╗ąĖ ą┐ąĄčĆą▓ąŠą│ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ SCLK (POL = 0). ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ čéą░ą║ ąČąĄ,, ą║ą░ą║ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ čćč鹊 ąŠą┐ąĖčüą░ąĮąŠ.
ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ DSP čüąĖą│ąĮą░ą╗ SCLK ąŠą▒čŗčćąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ. ąÆ čŹčéąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ~CS ą┤ą╗čÅ AD7731 ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĖąĘ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ DSP. ąöą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą│ą┤ąĄ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ 0 -> 1 čüąĖą│ąĮą░ą╗ą░ SCLK čÅą▓ą╗čÅąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝, ąĮą░ ą▓čģąŠą┤ POL ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠą┤ą░ąĮą░ ą╗ąŠą│. 1. ąöą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą│ą┤ąĄ čüą┐ą░ą┤ 1 -> 0 čüąĖą│ąĮą░ą╗ą░ SCLK čÅą▓ą╗čÅąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝, ą▓čģąŠą┤ POL ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčé ą║ ą╗ąŠą│. 0. ąÆ čŹčéąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą┐ąĄčĆą▓čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ SCLK ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄčģąŠą┤ą░ ~CS ą▓ ą╗ąŠą│. 0 ą▒čāą┤ąĄčé ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝. ąĪčéą░čĆčłąĖą╣ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ (MSB), ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ą┤ą▓ąĖąĮčāčé ą▓ AD7731, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ čŹč鹊ą│ąŠ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░.
ą×ą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ . ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą▓čŗčģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░. ą¤čĆąĖ ąĖąĮąĖčåąĖą░čåąĖąĖ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąĖąĘ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą▓ ą▓čŗčģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░, čŹčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čĆąŠąĘčĆą░čćąĮąŠ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąĀąĖčü. 16 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąĖą░ą│čĆą░ą╝ą╝čā ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ ąĖąĘ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ AD7731. ąÜąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ POL ą┐ąŠą┤ą░ąĮą░ ą╗ąŠą│. 1, ą┤ą░ąĮąĮčŗąĄ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüą┤ą▓ąĖą│ą░ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ SCLK. ąÜąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ POL ą┐ąŠą┤ą░ąĮ ą╗ąŠą│. 0, ą┤ą░ąĮąĮčŗąĄ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĖąĘ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ SCLK.
ąĀąĖčü. 17 čéą░ą║ąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čģąŠą┤ą░ ~CS ą┤ą╗čÅ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ AD7731. ą×ą┤ąĮą░ą║ąŠ čŹč鹊čé ą▓čģąŠą┤ ~CS ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ą£ąŠąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ą▓ čéčĆąĄčģą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤ ~CS ą┐čĆąĖčéčÅąĮčāčé ą║ ą╗ąŠą│. 0 ą┐ąŠčüč鹊čÅąĮąĮąŠ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮąŠąČą║ą░ SCLK ą▓ ą┐ą░čāąĘą░čģ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅą╝ąĖ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮą░ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ POL ą╗ąŠą│. 1, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ POL ą╗ąŠą│. 0, č鹊 SCLK ą▓ ą┐ą░čāąĘą░čģ ą┤ąŠą╗ąČąĮą░ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│. 0. ąöą╗čÅ POL = 1 ą┐ąĄčĆą▓čŗą╣ čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ SCLK ą▓čŗą▓ąŠą┤ąĖčé ąĮą░ čüąĖą│ąĮą░ą╗ DOUT ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ AD7731. ąŚą░č鹥ą╝ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ąĘą░čēąĄą╗ą║ąĖą▓ą░čÄčéčüčÅ ą▓ąŠ ą▓ąĮąĄčłąĮąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ SCLK. ąöą╗čÅ POL = 0 ą┐ąĄčĆą▓čŗą╝ čéą░ą║č鹊ą▓čŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ SCLK, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą▓ąŠą┤ąĖčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ AD7731 ąĮą░ čüąĖą│ąĮą░ą╗ DOUT, ą▒čāą┤ąĄčé čäčĆąŠąĮčé čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ. ąöą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ą▓ą┤ą▓ąĖą│ą░čéčīčüčÅ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ SCLK.
ąĀąĖčü. 17. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ čćč鹥ąĮąĖčÅ.
ąÆ ą┤čĆčāą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, ą│ą┤ąĄ ąĮčāąČąĮąŠ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░čéčī ą┤ąŠčüčéčāą┐ ą║ AD7731 (ą║ąŠą│ą┤ą░ ą║ ą┐čĆąĖą╝ąĄčĆčā, ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą┐ąŠčĆčéčā SPI ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠčćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąŠą┤ąĮąĖą╝ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čÅą▓ą╗čÅąĄčéčüčÅ ąÉą”ą¤ AD7731), ~CS ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ąĮąŠąČą║ąŠą╣ ą┐ąŠčĆčéą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (GPIO). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ~CS ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄą╣čéąĖ ą▓ ą╗ąŠą│. 0 ą┐ąĄčĆąĄą┤ ą┐ąĄčĆą▓čŗą╝ čüą┐ą░ą┤ąŠą╝ čāčĆąŠą▓ąĮčÅ SCLK ą┐čĆąĖ POL = 1 ąĖą╗ąĖ ą┐ąĄčĆą▓čŗą╝ ąĮą░čĆą░čüčéą░ąĮąĖąĄą╝ čāčĆąŠą▓ąĮčÅ SCLK ą┐čĆąĖ POL = 0. ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▒ąĖčéą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čéą░ą║ ąČąĄ, ą║ą░ą║ č鹊ą╗čīą║ąŠ čćč鹊 ą▒čŗą╗ąŠ ąŠą┐ąĖčüą░ąĮąŠ.
ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ DSP čüąĖą│ąĮą░ą╗ SCLK ąŠą▒čŗčćąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ. ąÆ čŹčéąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ~CS ą┤ą╗čÅ AD7731 ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĖąĘ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ DSP. ąÆ čŹčéąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą┐ąĄčĆą▓čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ SCLK ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄčģąŠą┤ą░ ~CS ą▓ ą╗ąŠą│. 0 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝. ąĪčéą░čĆčłąĖą╣ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ (MSB) ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčÅą▓ąĖčéčüčÅ čŹč鹊čé ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝, DSP ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąĄčĆąĄą┐ą░ą┤ čéą░ą║č鹊ą▓ ą┤ą╗čÅ MSB, ą▓čŗą▓ąŠą┤ąĖą╝ąŠą│ąŠ ąĖąĘ AD7731. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ~CS AD7731 ą┐ąŠą╝ąĄčēą░ąĄčé MSB ąĮą░ čüąĖą│ąĮą░ą╗ DOUT. ąöą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą│ą┤ąĄ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ SCLK čÅą▓ą╗čÅąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝, ąĮą░ ą▓čģąŠą┤ POL ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠą┤ą░ąĮą░ ą╗ąŠą│. 1. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąŠą╗čāčćą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ. ąĢčüą╗ąĖ ~CS ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĮą░ SCLK ą╗ąŠą│. 0, č鹊 MSB ą▓čŗą┤ą▓ąĖą│ą░ąĄčéčüčÅ ąĮą░ čüąĖą│ąĮą░ą╗ DOUT ąŠčé ~CS. ą¤ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ SCLK. ąöą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą│ą┤ąĄ čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ SCLK čÅą▓ą╗čÅąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝, ąĮą░ ą▓čģąŠą┤ POL ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą░ąĮ ą╗ąŠą│. 0. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąŠą╗čāčćą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ. ąĢčüą╗ąĖ ~CS ą┐ąĄčĆąĄčłąĄą╗ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ąĮą░ SCLK ą╗ąŠą│. 1, č鹊 MSB ą▓čŗą┤ą▓ąĖą│ą░ąĄčéčüčÅ ąĮą░ čüąĖą│ąĮą░ą╗ DOUT ąŠčé ~CS. ą¤ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ SCLK.
ąĪąĖą│ąĮą░ą╗ ~RDY ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ąŠčåąĖčäčĆąŠą▓ą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ - ą║ąŠą│ą┤ą░ ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ AD7731. ~RDY ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ ą┤ąŠčüčéčāą┐ąĮąŠ ąĮąŠą▓ąŠąĄ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ. ~RDY ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąŠą▒čĆą░čéąĮąŠ ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ. ąóą░ą║ąČąĄ ~RDY ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1 ą┐ąĄčĆąĄą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī, ą║ąŠą│ą┤ą░ ąĮąĄą╗čīąĘčÅ ą┤ąĄą╗ą░čéčī ąĖąĮąĖčåąĖą░čåąĖčÄ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą┐ąĄčĆąĄąĮąŠčü ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓ ą╝ąŠą╝ąĄąĮčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ. ą£ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┤ą▓ąŠą╣ąĮąŠąĄ čćč鹥ąĮąĖąĄ ąŠą┤ąĮąĖčģ ąĖ č鹥čģ ąČąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąČąĄ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ~RDY ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1 ą┐ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé čüąŠą▒ą╗čÄą┤ą░čéčī ąŠčüč鹊čĆąŠąČąĮąŠčüčéčī ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ąĮąĄ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą▓ č鹊čé ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ čüą╗ąĄą┤čāčÄčēąĄąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ.
ąöą╗čÅ čüąĖčüč鹥ą╝ čü ąŠą┤ąĮąŠą╣ ą╗ąĖąĮąĖąĄą╣ ą┤ą░ąĮąĮčŗčģ čüąĖą│ąĮą░ą╗čŗ DIN ąĖ DOUT AD7731 ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝. ąØąŠ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮąĄą╗čīąĘčÅ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ AD7731 ą▓ čĆąĄąČąĖą╝ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā AD7731 ą╝ąŠąĮąĖč鹊čĆąĖčé DIN ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ DOUT, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąĮąĄą╗čīąĘčÅ ą▓čŗą▓ąĄčüčéąĖ AD7731 ąĖąĘ čĆąĄąČąĖą╝ą░ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ.
[ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ AD7731 ]
ąĀąĖčü. 5 ąĖ 6 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą░ą╗ą│ąŠčĆąĖčéą╝ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓. ąóą░ą▒ą╗ąĖčåą░ XIX ąĖ XX ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą┐čüąĄą▓ą┤ąŠą║ąŠą┤ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ čćą░čēąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓. ąóčĆąĄą▒čāąĄą╝čŗąĄ čĆą░ą▒ąŠčćąĖąĄ čāčüą╗ąŠą▓ąĖčÅ ą┤ąĖą║čéčāčÄčé ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ čĆąĄą│ąĖčüčéčĆčŗ čĆąĄąČąĖą╝ą░ (Mode Register) ąĖ čäąĖą╗čīčéčĆą░ (Filter Register). ąŚąĮą░č湥ąĮąĖčÅ, ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮčŗąĄ ąĘą┤ąĄčüčī, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░.
ąóą░ą▒ą╗ąĖčåą░ XIX. ą¤čüąĄą▓ą┤ąŠą║ąŠą┤ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĖąĮąĖčåąĖą░čåąĖąĖ čüą░ą╝ąŠą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ / čüą▒čĆąŠčüą░.
Write 03 Hex to Serial Port* /* ąŚą░ą┐ąĖčüčī ą▓ Communications Register, ą║ąŠč鹊čĆą░čÅ čāčüčéą░ąĮąŠą▓ąĖčé
čüą╗ąĄą┤čāčÄčēčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ Filter Register */
Write 1332 Hex to Serial Port* /* ąŚą░ą┐ąĖčüčī ą▓ Filter Register, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčēą░čÅ čćą░čüč鹊čéčā ą▓čŗą▒ąŠčĆąŠą║ ąĮą░ ą▓čŗčģąŠą┤ąĄ 1 ą║ąōčå, č湊ą┐ą┐ąĖąĮą│ ą▓čŗą║ą╗čÄč湥ąĮ */
Write 02 Hex to Serial Port /* ąŚą░ą┐ąĖčüčī ą▓ Communications Register, ą║ąŠč鹊čĆą░čÅ čāčüčéą░ąĮąŠą▓ąĖčé čüą╗ąĄą┤čāčÄčēčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ Mode Register */
Write B174 Hex to Serial Port /* ąŚą░ą┐ąĖčüčī ą▓ Mode Register, ąĖąĮąĖčåąĖąĖčĆčāčÄčēą░čÅ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ Full-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ą┤ą╗čÅ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ 0V .. +1.28V ąĮą░ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╣ ą┐ą░čĆąĄ ą▓čģąŠą┤ąŠą▓ AIN1/AIN2 */ Wait for ~RDY Low /* ą×ąČąĖą┤ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ ąŠą║ąŠąĮčćą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ */
Write 02 Hex to Serial Port /* ąŚą░ą┐ąĖčüčī ą▓ Communications Register, ą║ąŠč鹊čĆą░čÅ čāčüčéą░ąĮąŠą▓ąĖčé čüą╗ąĄą┤čāčÄčēčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ Mode Register */
Write 9174 Hex to Serial Port /* ąŚą░ą┐ąĖčüčī ą▓ Mode Register, ąĖąĮąĖčåąĖąĖčĆčāčÄčēą░čÅ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ Zero-Scale ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ą┤ą╗čÅ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ 0V .. +1.28V */ Wait for ~RDY Low /* ą×ąČąĖą┤ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ ąŠą║ąŠąĮčćą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ */ /* ąóąĄą┐ąĄčĆčī ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąÉą”ą¤ AD7731 ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ. */
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ *: čŹčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĮąĄ ąĮčāąČąĮą░, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäąĖą╗čīčéčĆą░ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ąóą░ą▒ą╗ąĖčåą░ XX. ą¤čüąĄą▓ą┤ąŠą║ąŠą┤ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čéčĆąĄčģ ą┐ąŠą╗ąĮąŠčåąĄąĮąĮčŗčģ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ AD7731.
CHANNEL = 4 Hex /* ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ CHANNEL*/
CH_LOOP := 2177 Hex /* ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ MODE */
MODE = MODE AND CHANNEL /* ąøąŠą│ąĖč湥čüą║ąŠąĄ ąś ąĮą░ą┤ ąŠą▒ąŠąĖą╝ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ąĖ */
Write 02 Hex to Serial Port /* ąŚą░ą┐ąĖčüčī ą▓ Communications Register, ą║ąŠč鹊čĆą░čÅ čāčüčéą░ąĮąŠą▓ąĖčé čüą╗ąĄą┤čāčÄčēčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ Mode Register */
Write MODE to Serial Port /* ąŚą░ą┐ąĖčüčī ą▓ Mode Register, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčēą░čÅ čĆąĄąČąĖą╝ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ (Continuous Conversion Mode) ą┤ą╗čÅ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ 0V .. +1.28V ąĮą░ ą║ą░ąĮą░ą╗ąĄ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝ąŠą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ CHANNEL */ Wait for ~RDY Low /* ą×ąČąĖą┤ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ~RDY ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 0, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ */
Write 11 Hex to Serial Port /* ąŚą░ą┐ąĖčüčī ą▓ Communications Register, ą║ąŠč鹊čĆą░čÅ čāčüčéą░ąĮąŠą▓ąĖčé čüą╗ąĄą┤čāčÄčēčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ ąĮą░ čćč鹥ąĮąĖąĄ ąĖąĘ Data Register */
Read 24- Bit Data From Serial Port/* ą¦č鹥ąĮąĖąĄ čĆąĄąĘčāą╗čīčéą░čéą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗčģ (Data Register) AD7731 */
Increment CHANNEL /* ąśąĮą║čĆąĄą╝ąĄąĮčé ą░ą┤čĆąĄčüą░ ą║ą░ąĮą░ą╗ą░ */
If CHANNEL = 7 Hex Then Set CHANNEL = 4 Hex /* ąĪą▒čĆąŠčü ą░ą┤čĆąĄčüą░ ą║ą░ąĮą░ą╗ą░ */
Loop to CH_LOOP
[ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ]
ąŻ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąÉą”ą¤ AD7731 ąĖą╝ąĄąĄčéčüčÅ ą│ąĖą▒ą║ąĖą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ą╗ąĄą│ą║ąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĄčæ ą║ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ MCU ąĖ DSP. ą¤čüąĄą▓ą┤ąŠą║ąŠą┤ ąĖąĘ čéą░ą▒ą╗ąĖčå XVIII ąĖ XIX ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé čéąĖą┐ąŠą▓čŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║ AD7731. ąĀąĖčü. 18, 19 ąĖ 20 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ čéąĖą┐ąŠą▓čŗąĄ čüčģąĄą╝čŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü AD7731 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ ą┐ąŠ 3 ą┐čĆąŠą▓ąŠą┤ą░ą╝, čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠ čü ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ąĖ ąŠą▒ą╝ąĄąĮą░ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI [3]. ąŁč鹊čé čéčĆąĄčģą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ąĖą┤ąĄą░ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ąĖąĘąŠą╗ąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĖčüč鹥ą╝, ą│ą┤ąĄ ą▓ čüąĖčüč鹥ą╝ąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĖą╝ąĄčéčī ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą│ąĮą░ą╗ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ čüąĮą░ą▒ąČą░čéčī ą│ą░ą╗čīą▓ą░ąĮąĖč湥čüą║ąŠą╣ čĆą░ąĘą▓čÅąĘą║ąŠą╣ ąŠą┐čéčĆąŠąĮą░ą╝ąĖ.
ąöą╗ąĖąĮą░ čĆąĄą│ąĖčüčéčĆąŠą▓ AD7731 ą╝ąĄąĮčÅąĄčéčüčÅ, ąŠąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī 8, 16 ąĖ 24. 8-ą▒ąĖčéąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé SPI ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą╗čÄą▒čŗą╝ąĖ čŹčéąĖą╝ąĖ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ ąĘą░ ąŠą┤ąĮčā, ą┤ą▓ąĄ ąĖą╗ąĖ čéčĆąĖ 8-ą▒ąĖčéąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤čĆąŠčåąĄčüčüąŠčĆčŗ DSP ąĖ ą╝ąĖą║čĆąŠą┐čĆąŠčåąĄčüčüąŠčĆčŗ ąŠą▒čŗčćąĮąŠ ą┐ąĄčĆąĄą┤ą░čÄčé 16 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ąĘą░ ąŠą┤ąĮčā ąŠą┐ąĄčĆą░čåąĖčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░. ąöą╗čÅ čéą░ą║ąĖčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓, ą║ą░ą║ ADSP-2105, ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąŠą│čĆą░ąĮąĖčćąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą▓ ą╗čÄą▒ąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥 čéą░ą║, čćč鹊ą▒čŗ ąŠąĮąŠ čüąŠą▓ą┐ą░ą┤ą░ą╗ąŠ čü ą┤ą╗ąĖąĮąŠą╣ čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ AD7731. ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ąĘą░ą┐ąĖčüčī 32 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ą▓ 24-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ąĮąĄ ą▓čŗąĘąŠą▓ąĄčé ą┐čĆąŠą▒ą╗ąĄą╝čā, ąĄčüą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ 8 ą▒ąĖčé čüą╗ąŠą▓ą░ ą▒čāą┤čāčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ą╗ąŠą│. 1. ąŁč鹊 ą┐ąŠč鹊ą╝čā, čćč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ čĆąĄą│ąĖčüčéčĆčā ąŠą▒ą╝ąĄąĮą░ (Communications Register) ą┐ąŠčüą╗ąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ.
ąśąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD7731 ąĖ 68HC11 . ąĀąĖčü. 18 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ AD7731 ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā 68HC11. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü (3 čüąĖą│ąĮą░ą╗čīąĮčŗčģ ą╗ąĖąĮąĖąĖ), ą║ąŠą│ą┤ą░ ~CS AD7731 ąČąĄčüčéą║ąŠ ąĘą░ą╝ą║ąĮčāčé ąĮą░ ą╗ąŠą│. 0. ąÆ čŹč鹊ą╣ čüčģąĄą╝ąĄ ą▒ąĖčé RDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░ (Status Register) ą╝ąŠąĮąĖč鹊čĆąĖčéčüčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ąŠą│ą┤ą░ ąŠą▒ąĮąŠą▓ąĖą╗čüčÅ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ (Data Register). ą¤čĆąĖ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠą╣ čüčģąĄą╝ąĄ, ą║ąŠą│ą┤ą░ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ąŠ č湥čéčŗčĆąĄčģ, ą╝ąŠąĮąĖč鹊čĆąĖčéčüčÅ čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ ~RDY AD7731. ąŁč鹊čé ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ ą╝ąŠąČąĮąŠ ą┤ąĄą╗ą░čéčī ą┤ą▓čāą╝čÅ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ą¤ąŠ ą┐ąĄčĆą▓ąŠą╝čā čüą┐ąŠčüąŠą▒čā ~RDY ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ ąŠą┤ąĮąŠą╝čā ąĖąĘ čĆą░ąĘčĆčÅą┤ąŠą▓ ą┐ąŠčĆč鹊ą▓ 68HC11 (čéą░ą║ąŠą╝čā ą║ą░ą║ PC0), čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ą║ą░ą║ ą▓čģąŠą┤. ąóąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčīčüčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĄą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ ą▓ ą╗ąŠą│. 0, čćč鹊 čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠ ą▓č鹊čĆąŠą╝čā čüą┐ąŠčüąŠą▒čā ~RDY ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ čüąĖą│ąĮą░ą╗ ą┐ąŠą┤ą░čćąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, č鹊ą│ą┤ą░ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ąŠ ą▓čģąŠą┤čā IRQ 68HC11. ąöą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, ą│ą┤ąĄ čéčĆąĄą▒čāąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čģąŠą┤ąŠą╝ ~CS AD7731, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĖąĮ ąĖąĘ ą▒ąĖč鹊ą▓ ą┐ąŠčĆčéą░ 68HC11 (čéą░ą║ąŠą╣ ą║ą░ą║ PC1), čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ą░ą║ ą▓čŗčģąŠą┤, ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ ąĮą░ ą▓čģąŠą┤ ~CS.
68HC11 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ master, ą║ąŠą│ą┤ą░ ą▒ąĖčé CPOL čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 0, ąĖ ą▒ąĖčé CPHA čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1. ąÜąŠą│ą┤ą░ 68HC11 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┐ąŠ čéą░ą║ąŠą╣ čüčģąĄą╝ąĄ, čüąĖą│ąĮą░ą╗ SCLK ą▓ ą┐ą░čāąĘą░čģ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čģąŠą┤ POL AD7731 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ą┐čĆčÅą╝čāčÄ ąĘą░ą╝ą║ąĮčāčé ąĮą░ ą╗ąŠą│. 0. ąöą╗čÅ čüąĖčüč鹥ą╝, ą│ą┤ąĄ ąČąĄą╗ą░č鹥ą╗čīąĮą░ ąŠą▒čĆą░čéąĮą░čÅ ą╗ąŠą│ąĖą║ą░ čü ą╗ąŠą│. 1 ąĮą░ SCLK ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ, ą▒ąĖčé CPOL 68HC11 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╗ąŠą│. 1, ąĖ ą▓čģąŠą┤ POL AD7731 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐ąŠą┤čéčÅąĮčāčé ą║ ą╗ąŠą│. 1.
AD7731 ąĮąĄ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ ą┤čāą┐ą╗ąĄą║čüą░, ą║ą░ą║ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąĄą╗ą░čéčī SPI. ąĢčüą╗ąĖ AD7731 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ, č鹊 ąĮą░ DATA OUT ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą▓čģąŠą┤ SCLK ą░ą║čéąĖą▓ąĄąĮ. ą×ą┤ąĮą░ą║ąŠ, ą║ąŠą│ą┤ą░ AD7731 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ, č鹊 ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ąĮą░ DATA IN, ą╝ąŠąĮąĖč鹊čĆčÅčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ ą▓čŗą╣čéąĖ ąĖąĘ čĆąĄąČąĖą╝ą░ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ.
ąĀąĖčü. 18. ąśąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD7731 ąĖ 68HC11.
ąśąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD7731 ąĖ 8051 . ąĀąĖčü. 19 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ AD7731 ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā 8XC51. ą¤ąŠą║ą░ąĘą░ąĮą░ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ čüčģąĄą╝ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣, ą║ąŠą│ą┤ą░ ~CS ąĮą░ą▓čüąĄą│ą┤ą░ ą┐čĆąĖčéčÅąĮčāčé ą║ ą╗ąŠą│. 0. ąÆ čüą╗čāčćą░ąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ čü 8XC51 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąŠąĄą┤ąĖąĮąĖč鹥ą╗čīąĮčŗčģ ą┐čĆąŠą▓ąŠą┤ąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī č鹊ą╗čīą║ąŠ 2. ą¤ąŠ čéą░ą║ąŠą╣ čüčģąĄą╝ąĄ ą▒ąĖčé ~RDY ą▓ Status Register ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą╝ąŠą╝ąĄąĮčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ Data Register. ąÆ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠą╣ čüčģąĄą╝ąĄ, ą║ąŠą│ą┤ą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖą│ąĮą░ą╗ąŠą▓ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ą┤ąŠ čéčĆąĄčģ, ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ ą▓čŗčģąŠą┤ą░ ~RDY AD7731. ą£ąŠąĮąĖč鹊čĆąĖąĮą│ čüąĖą│ąĮą░ą╗ą░ ~RDY ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮ ą┤ą▓čāą╝čÅ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ - ą┐ąŠčüč鹊čÅąĮąĮčŗą╝ ąŠą┐čĆąŠčüąŠą╝ ąĖ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ. ą¤čĆąĖ ą┐ąĄčĆą▓ąŠą╝ čüą┐ąŠčüąŠą▒ąĄ ~RDY ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą╗čÄą▒ąŠą╣ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ GPIO 8XC51 (čéą░ą║ąŠą│ąŠ ą║ą░ą║ P1.0) ą║ąŠč鹊čĆčŗą╣ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čģąŠą┤. ąÆč鹊čĆąŠą╣ čüą┐ąŠčüąŠą▒ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĖčüč鹥ą╝čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, č鹊ą│ą┤ą░ ~RDY ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ąŠ ą▓čģąŠą┤čā INT0 ąĖą╗ąĖ INT1 8XC51. ąöą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, čéčĆąĄą▒čāčÄčēąĖčģ ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čģąŠą┤ąŠą╝ ~CS AD7731, ąŠą┤ąĖąĮ čĆą░ąĘčĆčÅą┤ ą┐ąŠčĆčéą░ GPIO 8XC51 (čéą░ą║ąŠą╣ ą║ą░ą║ P1.1), ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ąŠ ą▓čģąŠą┤čā ~CS AD7731 ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĄčæ ą▓čŗą▒ąŠčĆą║ąŠą╣.
8XC51 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ Mode 0 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░. ąŁč鹊čé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┤ąĖąĮ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą▓čŗą▓ąŠą┤čŗ DATA OUT ąĖ DATA IN AD7731 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 AD7731 ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ, ą║ąŠą│ą┤ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čéą░ą║ąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ 8XC51. ąóą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ 8XC51 ą▓ ą┐ą░čāąĘą░čģ ą┐ąĄčĆąĄą┤ą░čć ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1, ą┐ąŠčŹč鹊ą╝čā ąĮą░ ą▓čģąŠą┤ POL AD7731 ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠą┤ą░ąĮą░ ą╗ąŠą│. 1. 8XC51 ą▓čŗą▓ąŠą┤ąĖčé ą┤ą░ąĮąĮčŗąĄ ą╝ą╗ą░ą┤čłąĖą╝ ą▒ąĖč鹊ą╝ (LSB) ą▓ą┐ąĄčĆąĄą┤, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ AD7731 ąŠąČąĖą┤ą░ąĄčé ąŠą▒čĆą░čéąĮčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčé, ą║ąŠą│ą┤ą░ čüčéą░čĆčłąĖą╣ ą▒ąĖčé (MSB) ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝. ą¤ąŠčŹč鹊ą╝čā ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄčüčéą░ą▓ą╗ąĄąĮčŗ, ą┐ąĄčĆąĄą┤ ąĖčģ ąĘą░ą┐ąĖčüčīčÄ ą▓ ą▓čŗčģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░. ą¤ąŠą┤ąŠą▒ąĮčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ ąĮčāąČąĮąŠ ą┐čĆąŠą▓ąĄčüčéąĖ ąĖ čü čćąĖčéą░ąĄą╝čŗą╝ąĖ ąĖąĘ AD7731 ą┤ą░ąĮąĮčŗą╝ąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮą░ ą▓čŗą▓ąŠą┤ąĖčé ą┐ąĄčĆą▓čŗą╝ ą▒ąĖčé MSB, ą░ 8XC51 ąŠąČąĖą┤ą░ąĄčé ą┐ąĄčĆą▓čŗą╝ ą▒ąĖčé LSB.
ąĀąĖčü. 19. ąśąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD7731 ąĖ 8XC51.
ąśąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD7731 ąĖ ADSP-2103/ADSP-2105 . ąĀąĖčü. 20 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĄąČą┤čā AD7731 ąĖ DSP-ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ADSP-2105. ąæąĖčé ~RDY ą▓ Status Register ą┐ąŠčüč鹊čÅąĮąĮąŠ ą╝ąŠąĮąĖč鹊čĆąĖčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąŠą╝ąĄąĮčéą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ Data Register. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čüčģąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĖčüč鹥ą╝čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ ~RDY ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ, ą║ ą┐čĆąĖą╝ąĄčĆčā, ą║ąŠ ą▓čģąŠą┤čā ~IRQ2 ADSP-2105. ąÆčŗą▓ąŠą┤čŗ ~RFS ąĖ ~TFS ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ čā ADSP-2105 ą║ą░ą║ ą▓čŗčģąŠą┤čŗ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0, ąĖ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ SCLK čéą░ą║ąČąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤. ąÆčģąŠą┤ POL AD7731 ąĮą░ą║ąŠčĆąŠčéą║ąŠ čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ čü ą╗ąŠą│. 0. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 SCLK ąĖąĘ ADSP-2105 ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ, ~CS AD7731 ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┤ąĄą╣čüčéą▓ąĖčÅ čéą░ą║č鹊ą▓. ą¤ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ~CS ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ ą╗ąŠą│. 0, ąĖ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ ~CS ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ąŠą▒čĆą░čéąĮąŠ ą▓ ą╗ąŠą│. 1. ąĪąĖą│ąĮą░ą╗ ~CS ą┤ą╗čÅ AD7731 čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝, ą║ąŠą│ą┤ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąĖą▒ąŠ ą▓čŗčģąŠą┤ ~RFS, ą╗ąĖą▒ąŠ ą▓čŗčģąŠą┤ ~TFS ADSP-2105. ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SCLK ADSP-2105 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą│čĆą░ąĮąĖč湥ąĮą░ 3 ą£ąōčå, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ AD7731.
ąĀąĖčü. 20. ąśąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā AD7731 ąĖ ADSP-2105.
[ą¤čĆą░ą║čéąĖč湥čüą║ąĖąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ]
ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ AD7731 čāčüąĖą╗ąĖč鹥ą╗čī čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ čāčüąĖą╗ąĄąĮąĖčÅ (PGA) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 20 mV ą┤ąŠ 1.28 V. ąŁč鹊 ą┤ąĄą╗ą░ąĄčé AD7731 ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝ ą▓čŗą▒ąŠčĆąŠą╝ ą┤ą╗čÅ čłąĖčĆąŠą║ąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣. ą£ąŠąČąĮąŠ čüąĮąĖą╝ą░čéčī čüąĖą│ąĮą░ą╗ ąĮą░ą┐čĆčÅą╝čāčÄ čü ą┤ą░čéčćąĖą║ą░, ą▒ąĄąĘ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čüčģąĄą╝. ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ ąŠą▒čüčāąČą┤ą░čÄčéčüčÅ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ čéą░ą║ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣.
AD7731 ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ą░ą║ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗąĄ, čéą░ą║ ąĖ ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ. ąÆąŠ ą╝ąĮąŠą│ąĖčģ čüą╗čāčćą░čÅčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┤ąĖąĮ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗąĄ ą▓čģąŠą┤čŗ, čüą╝ąĄčēąĄąĮąĮčŗąĄ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ, ą┐ąŠą┤čģąŠą┤čÅčēąĄą╝čā ą┐ąŠą┤ čĆą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ AD7731. ą×ą┤ąĮą░ą║ąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čéčĆąĄą▒čāčÄčé ą▒ąŠą╗čīčłąĄą╣ ą│ąĖą▒ą║ąŠčüčéąĖ ą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗčģ ą▓čģąŠą┤ąŠą▓. ąĀąĖčü. 25 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī AD7731, čćč鹊ą▒čŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī čéą░ą║ąŠą╣ čéąĖą┐ čüąĖą│ąĮą░ą╗ą░.
ąĪą╗ąĄą┤čāąĄčé ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆą░ą╝ąĖ, ą│ą┤ąĄ ą┐ąŠ ą▓čģąŠą┤čā ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ (čāčĆąŠą▓ąĄąĮčī ą╗ąĖą▒ąŠ ą▒ąŠą╗čīčłąĄ AVDD + 0.3V ąĖą╗ąĖ ą╝ąĄąĮčīčłąĄ AGND ŌĆō 0.3V), ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║, čćč鹊 ąĮąĄ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą║ą░ąĮą░ą╗ ą▓ą╗ąĖčÅąĄčé ąĮą░ čĆąĄąĘčāą╗čīčéą░čé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ąĪčģąĄą╝ą░ čüąĖčüč鹥ą╝čŗ ą┤ąŠą╗ąČąĮą░ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą▓čüąĄčģ ą║ą░ąĮą░ą╗ą░čģ, ą│ą┤ąĄ ą▓čģąŠą┤čŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮąĄąĖčüą┐čĆą░ą▓ąĮąŠčüčéčī, ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čāą║ą░ąĘą░ąĮąĮčŗčģ ą▓čŗčłąĄ ą┐čĆąĄą┤ąĄą╗ą░čģ.
ąÆ AD7731 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čĆą░ąĘąĮčŗąĄ čĆąĄąČąĖą╝čŗ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▓ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤čĆąŠą▒ą╗ąĄą╝ą░ čäąĖą╗čīčéčĆą░čåąĖąĖ, ą▓čĆąĄą╝ąĄąĮąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ čüą║ąŠčĆąŠčüč鹥ą╣ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ą▓ ą╝ąĮąŠą│ąŠą║ą░ąĮą░ą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▓ čüąĄą║čåąĖąĖ "ąÉčĆčģąĖč鹥ą║čéčāčĆą░ čäąĖą╗čīčéčĆą░".
ąĪąĖčüč鹥ą╝ą░ čüą▒ąŠčĆą░ ą┤ą░ąĮąĮčŗčģ . AD7731 čü ąĄčæ čéčĆąĄą╝čÅ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ (ąĖą╗ąĖ čü ą┐čÅčéčīčÄ ą┐čüąĄą▓ą┤ąŠą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ) ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čüąĖčüč鹥ą╝, ą│ą┤ąĄ ą▓ą░ąČąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ, čü ąĮąĖąĘą║ąŠą╣ ą┐ąŠą╗ąŠčüąŠą╣ čćą░čüč鹊čé (ąĮąĖąĘą║ąĖąĄ čćą░čüč鹊čéčŗ ąĘą▓čāą║ą░, ą▓ą┐ą╗ąŠčéčī ą┤ąŠ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░). ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čéčĆąĄčģą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčåąĖčäčĆąŠą▓ą║čā ą┤ą░ąĮąĮčŗčģ čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ ą│ą░ą╗čīą▓ą░ąĮąĖč湥čüą║ąŠą╣ čĆą░ąĘą▓čÅąĘą║ąĖ, ą│ą┤ąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ č鹊ą╗čīą║ąŠ 3 ąŠą┐č鹊ąĖąĘąŠą╗čÅč鹊čĆą░. ąÆčüčÅ čüąĖčüč鹥ą╝ą░ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ +5V, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ AD7731 ąĖą╝ąĄčÄčé ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ čüą╝ąĄčēąĄąĮąĖąĄ ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī. ąĀąĖčü. 21 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖąĘąŠą╗ąĖčĆąŠą▓ą░ąĮąĮčāčÄ čüąĖčüč鹥ą╝čā AD7731 čü čéčĆąĄą╝čÅ ą║ą░ąĮą░ą╗ą░ą╝ąĖ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 21. ąóčĆąĄčģą║ą░ąĮą░ą╗čīąĮą░čÅ čüąĖčüč鹥ą╝ą░ čüą▒ąŠčĆą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ AD7731 čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ ąŠą┐čéčĆąŠąĮąĮąŠą╣ ąĖąĘąŠą╗čÅčåąĖąĖ.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ. AD7731 čéą░ą║ąČąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą▓ PLC (Programmable Logic Controller). ąÆ čéą░ą║ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ąÉą”ą¤ ą┤ąŠą╗ąČąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┤ą░čéčćąĖą║ąŠą▓. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ą░čéčćąĖą║ąŠą▓ čāą┐čĆąŠčēą░ąĄčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 AD7731 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą▓čŗčüąŠą║čāčÄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖ čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ą▓čüčéčĆąŠąĄąĮąĮąŠą╝čā čāčüąĖą╗ąĖč鹥ą╗čÄ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ čāčüąĖą╗ąĄąĮąĖčÅ (PGA). ą¤ąŠčŹč鹊ą╝čā ą┤ą░čéčćąĖą║ąĖ ą┤ą░ąČąĄ čü ąĮąĖąĘą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ čüąĖą│ąĮą░ą╗ą░ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĮą░ą┐čĆčÅą╝čāčÄ, čüčģąĄą╝ą░ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčéčüčÅ. ąÆčŗčüąŠą║ą░čÅ čüą║ąŠčĆąŠčüčéčī ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąĖ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ čéą░ą║ąČąĄ ą▓ą░ąČąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ ą▓čĆąĄą╝čÅ ąŠčéą║ą╗ąĖą║ą░ čćą░čüč鹊 čÅą▓ą╗čÅąĄčéčüčÅ ą║čĆąĖčéąĖč湥čüą║ąĖą╝. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ AD7731 ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ PLC ą┐ąŠą┤ąŠą▒ąĮą░ ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╣ ąĮą░ čĆąĖčü. 21.
ąśąĘą╝ąĄčĆąĄąĮąĖąĄ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ . ąóąĖą┐ąŠą▓ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ AD7731, ą║ąŠą│ą┤ą░ ą┤ą░čéčćąĖą║ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĮą░ą┐čĆčÅą╝čāčÄ - ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ. ąĀąĖčü. 22 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ AD7731 ą║ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą╝čā ą╝ąŠčüčéčā ą┤ą░čéčćąĖą║ą░ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ. ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ ą▓čŗčģąŠą┤ ąĖąĘ ą┤ą░čéčćąĖą║ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ąŠ ą▓čģąŠą┤ąĮąŠą╝čā ą║ą░ąĮą░ą╗čā AIN1/AIN2. ąÆčüčÅ čüčģąĄą╝ą░ ą┐ąĖčéą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ +5V, čŹč鹊 ąČąĄ ą┐ąĖčéą░ąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ ą┤ą░čéčćąĖą║ą░ ąĖ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą╗čÅ AD7731. ąŁč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖąĘą╝ąĄčĆčÅąĄčé čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣, ą┐ąŠčŹč鹊ą╝čā ą▓ą░čĆąĖą░čåąĖčÅ ą░ą▒čüąŠą╗čÄčéąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ č鹊čćąĮąŠčüčéčī ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ.
ąĀąĖčü. 22. ąśąĘą╝ąĄčĆąĄąĮąĖąĄ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ AD7731.
ąśąĘą╝ąĄčĆąĄąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ . ąöčĆčāą│ą░čÅ ąŠą▒ą╗ą░čüčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ, ą│ą┤ąĄ ą┤ą░čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ AD7731. ąĀąĖčü. 23 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ č鹥čĆą╝ąŠą┐ą░čĆčŗ čü AD7731. ą¦č鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą▓čģąŠą┤ąĄ AD7731 čü ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝ čüą╝ąĄčēąĄąĮąĖąĄą╝, ąĮą░ ą▓čģąŠą┤ AIN2 ą┐ąŠą┤ą░ąĮ čāčĆąŠą▓ąĄąĮčī ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ +2.5 V.
ąĀąĖčü. 23. ąśąĘą╝ąĄčĆąĄąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čü ą┐ąŠą╝ąŠčēčīčÄ AD7731.
ąĀąĖčü. 24 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤čĆčāą│ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĮą░ AD7731. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ą░čéčćąĖą║ čéąĖą┐ą░ RTD (Resistive Temperature Device, č鹥čĆą╝ąŠčüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ), PT100. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ą░čéčćąĖą║ą░ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąŠ 4 čüąĖą│ąĮą░ą╗ą░ą╝ąĖ. ą¤ą░ą┤ąĄąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ąĮą░ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĖ ą┐čĆąŠą▓ąŠą┤ąŠą▓ RL1 ąĖ RL4 ą┐čĆąĖ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĖ č鹊ą║ą░ č湥čĆąĄąĘ R2 ą┐čĆąŠčüč鹊 čüą┤ą▓ąĖą│ą░ąĄčé ąŠą▒čēąĄąĄ čĆą░ą▒ąŠč湥ąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ. ąĀąĄąĘąĖčüč鹊čĆ R2 čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čĆą░ą▒ąŠč湥ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ čāčĆąŠą▓ąĄąĮčī, ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą┤ą╗čÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ AD7731. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą▓ąĮąŠčüąĖą╝ąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅą╝ąĖ RL2 ąĖ RL3 ąĮą░ č鹊ą║ąĄ čüą╝ąĄčēąĄąĮąĖčÅ AD7731 ąĮąĖčćč鹊ąČąĮąŠ, ąĖ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĮąĄ čāčćąĖčéčŗą▓ą░čéčī.
ąĀąĖčü. 24. ąśąĘą╝ąĄčĆąĄąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą┤ą░čéčćąĖą║ąŠą╝ RTD čü ą┐ąŠą╝ąŠčēčīčÄ AD7731.
ąÆ ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╝ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĖ ą▓ąĮąĄčłąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ č鹊ą║ą░ 400 ą╝ą║ąÉ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé č鹊ą║ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ PT100, ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą╗čÅ AD7731 čü ą┐ąŠą╝ąŠčēčīčÄ čĆąĄąĘąĖčüč鹊čĆą░ R1. ąśąĘą╝ąĄąĮąĄąĮąĖčÅ č鹊ą║ą░ ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖčÅ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čüčģąĄą╝čā, čéą░ą║ ą║ą░ą║ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĖ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮčŗ ą┤čĆčāą│ ą┤čĆčāą│čā. ą×ą┤ąĮą░ą║ąŠ R1 ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ąĮąĖąĘą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąŠčłąĖą▒ąŠą║ čāčģąŠą┤ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
ąæąĖą┐ąŠą╗čÅčĆąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ . ąÜą░ą║ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī čĆą░ąĮąĄąĄ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čéčĆąĄą▒čāčÄčé, čćč鹊ą▒čŗ AD7731 ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ą╗ą░ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠč鹥ąĮčåąĖą░ą╗ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą┐ąŠč鹥ąĮčåąĖą░ą╗čā ąĘąĄą╝ą╗ąĖ čüąĖčüč鹥ą╝čŗ. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ, ąĮąŠ čü ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄą╝ ąĮąĄą║ąŠč鹊čĆąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ AD7731 ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ąĖ čéą░ą║ąĖąĄ čüąĖą│ąĮą░ą╗čŗ. ąĀąĖčü. 25 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠą┤ąĖąĮ ąĖąĘ čüą┐ąŠčüąŠą▒ąŠą▓ čĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą▓čāą┐ąŠą╗čÅčĆąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓.
ąĀąĖčü. 25. ą¤ąŠą┤ą░čćą░ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čģąŠą┤ AD7731 (ą▓čüąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĘąĄą╝ą╗ąĖ).
ą¤čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąĖčüč鹥ą╝čā, ą║ąŠč鹊čĆą░čÅ ą┐ąĖčéą░ąĄčéčüčÅ ąŠčé ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐ąĖčéą░ąĮąĖčÅ ┬▒5V. ąÆ čéą░ą║ąŠą╣ čüčģąĄą╝ąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆąĄčłąĄąĮčŗ 2 ą┐čĆąŠą▒ą╗ąĄą╝čŗ. ą¤ąĄčĆą▓ą░čÅ ą║ą░ą║ ą┐ąŠą┤ą░čéčī ąĮą░ AD7731 čüąĖą│ąĮą░ą╗ čü čāčĆąŠą▓ąĮčÅą╝ąĖ ąĮąĖąČąĄ ąĘąĄą╝ą╗ąĖ, ąĖ ą▓č鹊čĆą░čÅ ą║ą░ą║ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą╗čÅ AD7731. ąĪčģąĄą╝ą░ 25 ą┐čŗčéą░ąĄčéčüčÅ čĆąĄčłąĖčéčī ąŠą▒ąĄ čŹčéąĖ ąĘą░ą┤ą░čćąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
ąŻ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ AD7731 ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠąĄ ąĖ čåąĖčäčĆąŠą▓ąŠąĄ ą┐ąĖčéą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘą┤ąĄą╗ąĄąĮąŠ, čéą░ą║ čćč鹊 AVDD ąĖ DVDD ą╝ąŠą│čāčé ąĖą╝ąĄčéčī ąŠčéą╗ąĖčćą░čÄčēąĖąĄčüčÅ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą┐ąŠč鹥ąĮčåąĖą░ą╗čŗ, ąĖ AGND ąĖ DGND čéą░ą║ąČąĄ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī čĆą░ąĘąĮčŗąĄ ą┐ąŠč鹥ąĮčåąĖą░ą╗čŗ. ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ - AVDD ąĖą╗ąĖ DVDD ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąĄą▓čŗčłą░čéčī AGND ą▒ąŠą╗čīčłąĄ č湥ą╝ ąĮą░ 5.5V. ąØą░ čĆąĖčü. 25 DVDD čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ +3V, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąĮąĖąĘąĖčéčī čāčĆąŠą▓ąĄąĮčī AGND ą▓ąĮąĖąĘ ą┤ąŠ ŌĆō2.5V ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĘąĄą╝ą╗ąĄ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓čüąĄ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąĄą▓čŗčłą░čéčī 3V ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĘąĄą╝ą╗ąĄ. AVDD čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čāčĆąŠą▓ąĮąĄ +2.5V ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĘąĄą╝ą╗ąĄ.
ą”ąĄą┐ąŠčćą║ą░ čĆąĄąĘąĖčüč鹊čĆąŠą▓ R1, R2 ąĖ R3 ą▒ąĄčĆąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ┬▒5V, ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮąŠą╝ąĖąĮą░ą╗ąŠą╝ 5V. ąŻčüąĖą╗ąĖč鹥ą╗ąĖ A1 ąĖ A2 ą▒čāč乥čĆąĖčĆčāčÄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čåąĄą┐ąŠčćą║ąĖ čĆąĄąĘąĖčüč鹊čĆąŠą▓, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ AVDD ąĖ AGND, ą░ čéą░ą║ąČąĄ ąŠą┐ąŠčĆąĮčŗąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ REF IN(+) ąĖ REF IN(ŌĆō) ą┤ą╗čÅ AD7731. ą×ą┐ąŠčĆąĮąŠąĄ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ +5V. ąĢčüą╗ąĖ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┐ąŠčüčéčāą┐ą░čÄčēąĄąĄ čü ą┤ą░čéčćąĖą║ą░, ą▓čŗčģąŠą┤ąĖčé ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ ┬▒5V, AD7731 čüąŠčģčĆą░ąĮčÅąĄčé čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┐ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÄ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ čü čŹčéąĖą╝ ąŠą┐ąŠčĆąĮčŗą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝, ą║ąŠč鹊čĆąŠąĄ ą▓ą░čĆčīąĖčĆčāąĄčéčüčÅ čüąŠą│ą╗ą░čüąĮąŠ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā ą▓čģąŠą┤ąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ.
ąŚąĮą░č湥ąĮąĖčÅ čåąĄą┐ąŠčćą║ąĖ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ą▓čŗą▒čĆą░ąĮčŗ čéą░ą║, čćč鹊ą▒čŗ ą║ AD7731 ą┐ąŠą┤ą░ą▓ą░ą╗čüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüąĖą│ąĮą░ą╗ą░ ┬▒1.28V. ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ 1.2 V ą▓čŗčłąĄ ą┐ąŠč鹥ąĮčåąĖą░ą╗ą░ AGND AD7731, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░ 0.95V ąĮąĖąČąĄ ą┐ąŠč鹥ąĮčåąĖą░ą╗ą░ AVDD AD7731. ąöą╗čÅ ą╝ąĄąĮčīčłąĖčģ ą┐ąŠ čāčĆąŠą▓ąĮčÄ ą▓čģąŠą┤ąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą▓ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ ą▓ čåąĄą┐ąŠčćą║ąĄ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒ąŠą╗čīčłąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ DVDD. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ R1 = 3 ą║ą×ą╝, R2 = 10 ą║ą×ą╝ ąĖ R3 = 6.8 ą║ą×ą╝, č鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ AVDD ąĖ AGND čüčéą░ąĮčāčé +3.49V ąĖ ŌĆō1.56V čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé AD7731 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čü ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ +3.6V DVDD, ą┐čĆąĖ čŹč鹊ą╝ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čāčĆąŠą▓ąĮąĄą╣ čüąŠčüčéą░ą▓ąĖčé ┬▒320 mV ąĖ ąĮąĖąČąĄ.
ą£ąŠąČąĮąŠ ą┐čĆąĖą╝ąĄąĮąĖčéčī ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčāčÄ čüčģąĄą╝čā ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ AVDD ąĖ AGND ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆą░čģ ąĖą╗ąĖ ą┤ąĖąŠą┤ą░čģ ąŚąĄąĮąĄčĆą░ (čüčéą░ą▒ąĖą╗ąĖčéčĆąŠąĮą░čģ), ą┐ąĖčéą░čÄčēąĖčģčüčÅ ąŠčé ąĖčüč鹊čćąĮąĖą║ąŠą▓ čü čāčĆąŠą▓ąĮčÅą╝ąĖ ąŠčé +5V ąĖ ŌĆō5V čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ą×ą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčé ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ AD780, ą│ą┤ąĄ ąĄą│ąŠ ą▓čŗą▓ąŠą┤ GND ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓čŗą▓ąŠą┤čā AGND AD7731.
[ąĪčüčŗą╗ą║ąĖ ]
1 . AD7731 Low Noise, High Throughput 24-Bit Sigma-Delta ADC site:analog.com.2 . ą¦ąŠą┐ą┐ąĖąĮą│ ą▓ čüąĖą│ą╝ą░-ą┤ąĄą╗čīčéą░ ąÉą”ą¤ .3 . ąśąĮč鹥čĆč乥ą╣čü SPI .



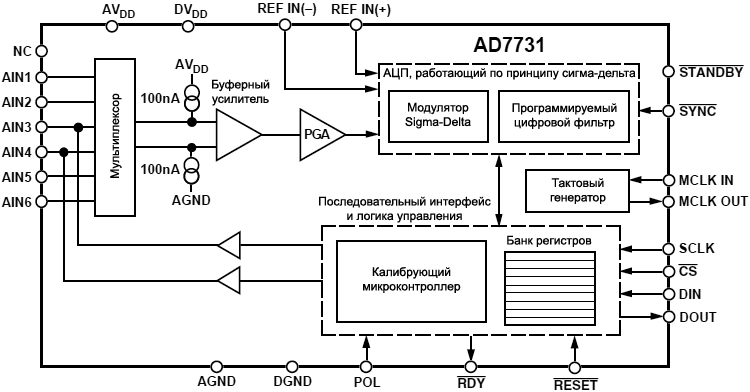


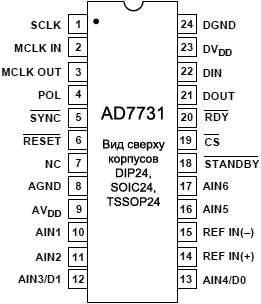

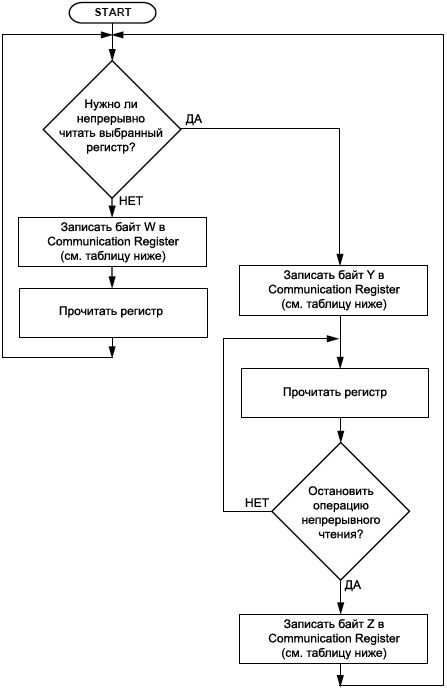
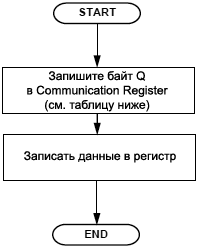
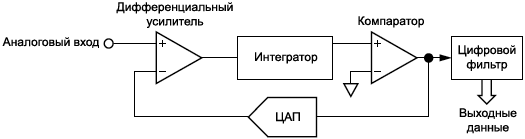
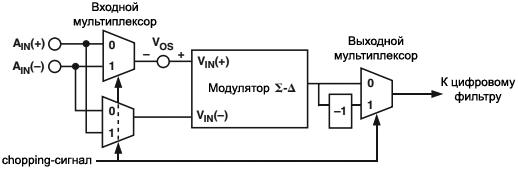
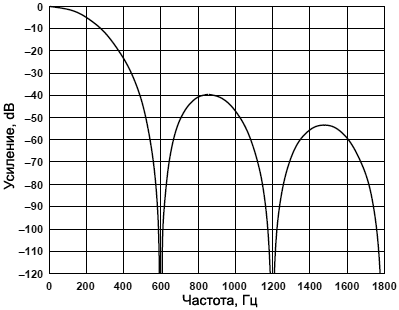
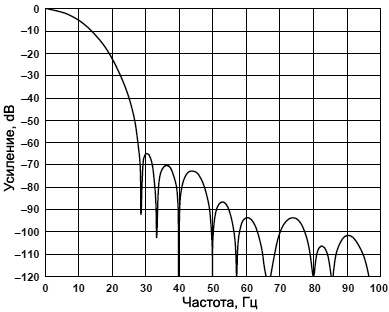

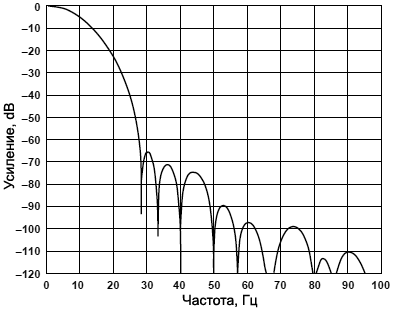

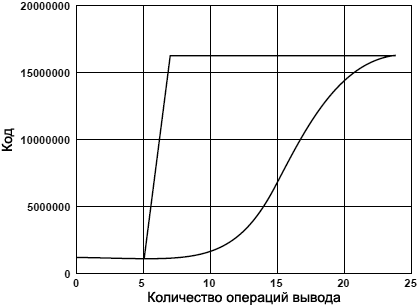


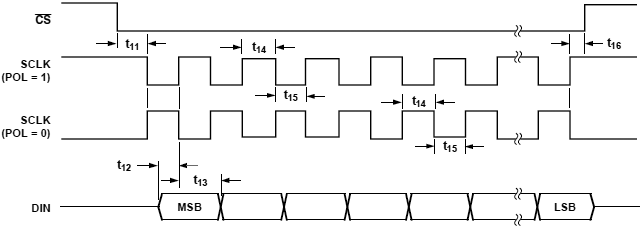


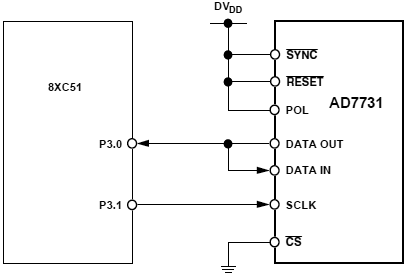
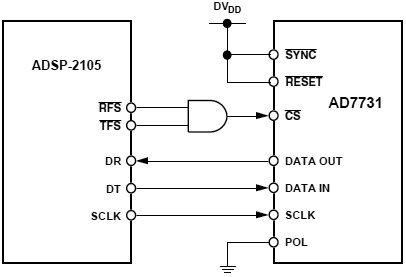
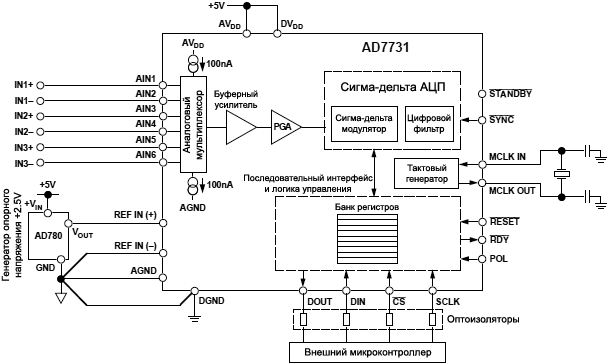
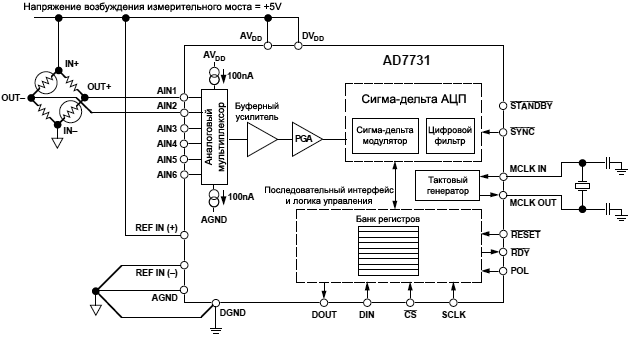

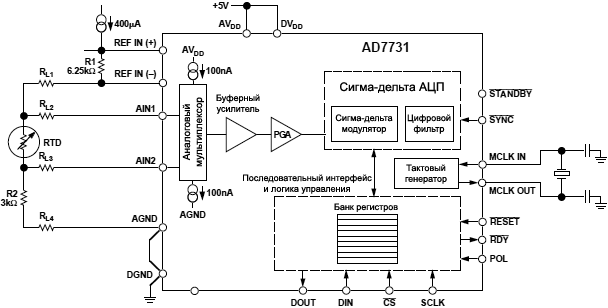
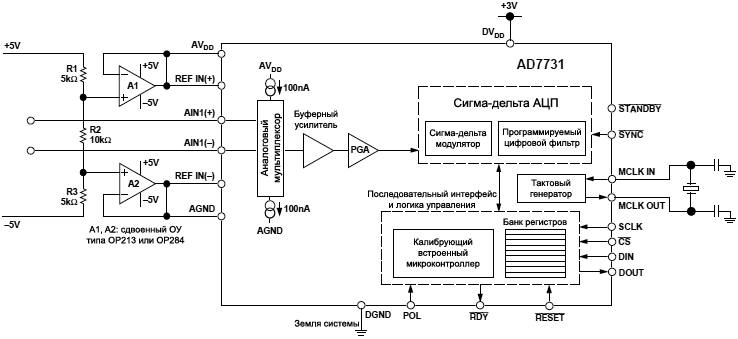
")
")
")
