ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆąŠą╣ PWM ą▓ ą░ąĮą│ą╗ąĖą╣čüą║ąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąŠą▒ąŠąĘąĮą░čćą░čÄčé ą©ąśą£ (čłąĖčĆąŠčéąĮąŠ-ąĖą╝ą┐čāą╗čīčüąĮą░čÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ). PWM (Pulse-Width Modulation) ąĖą╗ąĖ PDM (Pulse-Duration Modulation) čŹč鹊 ą╝ąĄč鹊ą┤ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ čüčĆąĄą┤ąĮąĄą╣ ą╝ąŠčēąĮąŠčüčéąĖ 菹╗ąĄą║čéčĆąĖč湥čüą║ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐čāč鹥ą╝ čĆą░ąĘą┤ąĄą╗ąĄąĮąĖčÅ ąĄą│ąŠ ąĮą░ ą┤ąĖčüą║čĆąĄčéąĮčŗąĄ čćą░čüčéąĖ (ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐ąŠčĆčåąĖąĖ). ąĪčĆąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (ąĖ č鹊ą║ą░), ą┐ąŠčüčéčāą┐ą░čÄčēąĄą│ąŠ ą▓ ąĮą░ą│čĆčāąĘą║čā, čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠčéą║čĆčŗčéąĖąĄą╝ ąĖ ąĘą░ą║čĆčŗčéąĖąĄą╝ 菹╗ąĄą║čéčĆąŠąĮąĮąŠą│ąŠ ą║ą╗čÄčćą░ ąĮą░ ą▓čŗčüąŠą║ąŠą╣ čćą░čüč鹊č鹥. ą¦ąĄą╝ ą┤ąŠą╗čīčłąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ą║ą╗čÄčć ąŠčéą║čĆčŗčé ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą▓čĆąĄą╝ąĄąĮąĄą╝, ą║ąŠą│ą┤ą░ ąĘą░ą║čĆčŗčé, č鹥ą╝ ą▒ąŠą╗čīčłąĄ ą╝ąŠčēąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ąĮą░ą│čĆčāąĘą║čā. ąÆą╝ąĄčüč鹥 čü MPPT (maximum power point tracking), čŹč鹊 ąŠą┤ąĖąĮ ąĖąĘ ąŠčüąĮąŠą▓ąĮčŗčģ ą╝ąĄč鹊ą┤ąŠą▓ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ 菹ĮąĄčĆą│ąĖąĖ čü čüąŠą╗ąĮąĄčćąĮčŗčģ ą┐ą░ąĮąĄą╗ąĄą╣, čćč鹊ą▒čŗ ąĮąĄ ą┐ąĄčĆąĄą│čĆčāąČą░čéčī ąĘą░čĆčÅąČą░ąĄą╝čŗąĄ ą▒ą░čéą░čĆąĄąĖ [2]. PWM čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮąĄčĆčåąĖąŠąĮąĮčŗą╝ąĖ ąĮą░ą│čĆčāąĘą║ą░ą╝ąĖ, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ ą╝ąŠč鹊čĆčŗ ąĖą╗ąĖ ąĮą░ą│čĆąĄą▓ą░č鹥ą╗ąĖ. ą¦ą░čüč鹊čéą░ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ PWM ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒ąŠą╗čīčłąŠą╣, čćč鹊ą▒čŗ ąĮąĄ ą▓ą╗ąĖčÅčéčī ąĮą░ ąĮą░ą│čĆčāąĘą║čā, čé. ąĄ. čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēą░čÅ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░, ą▓ąŠčüą┐čĆąĖąĮąĖą╝ą░ąĄą╝ą░čÅ ąĮą░ą│čĆčāąĘą║ąŠą╣ (ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ), ą┤ąŠą╗ąČąĮą░ ą┐ąŠą╗čāčćąĖčéčīčüčÅ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ąŠą╗ąĄąĄ ą│ą╗ą░ą┤ą║ąŠą╣.
ąØą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą©ąśą£ ąĮą░ ąĖą┤ąĄą░ą╗čīąĮąŠą╣ ąĖąĮą┤čāą║čéąĖą▓ąĮąŠčüčéąĖ, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (čüąĖąĮąĖą╣ čüąĖą│ąĮą░ą╗), ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐ąŠčģąŠąČąĖą╣ ąĮą░ čüąĖąĮčāčüąŠąĖą┤čā č鹊ą║ (ą┐ąŠą║ą░ąĘą░ąĮ ą║čĆą░čüąĮčŗą╝). ążąŠčĆą╝ą░ čüąĖąĮčāčüąŠąĖą┤čŗ ą┤ą░ą╗ąĄą║ą░ ąŠčé ąĖą┤ąĄą░ą╗čīąĮąŠą╣, ąŠą┤ąĮą░ą║ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą╗čāčćčłąĄąĮą░ čü ą┐ąŠą▓čŗčłąĄąĮąĖąĄą╝ čćą░čüč鹊čéčŗ ąĖą╝ą┐čāą╗čīčüąŠą▓. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 č乊čĆą╝ą░ č鹊ą║ą░ čŹč鹊 ą┐ąŠ čüčāčéąĖ ąĖąĮč鹥ą│čĆą░ą╗ ąŠčé č乊čĆą╝čŗ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
ąĪą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ (ąĖą╗ąĖ čćą░čüč鹊čéą░) ą╝ąŠąČąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą╝ąĄąĮčÅčéčīčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░ą│čĆčāąĘą║ąĖ ąĖ ąŠčé ąŠą▒ą╗ą░čüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ 菹╗ąĄą║čéčĆąĖč湥čüą║ąŠą╣ ą┐ąĄčćąĖ ą╝ąŠąČąĮąŠ ą▓ą║ą╗čÄčćą░čéčī ąĖ ą▓čŗą║ą╗čÄčćą░čéčī ąĮą░ą│čĆąĄą▓ą░č鹥ą╗čīąĮčŗą╣ 菹╗ąĄą╝ąĄąĮčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą▓ ą╝ąĖąĮčāčéčā. ą¦ą░čüč鹊čéą░ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ 120 ąōčå ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą┤ąĖą╝ą╝ąĄčĆąĄ ą╗ą░ą╝ą┐čŗ. ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▒čŗčüčéčĆčŗą╝ čüąĄčĆą▓ąŠą┐čĆąĖą▓ąŠą┤ąŠą╝ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čćą░čüč鹊čéčŗ ąŠčé ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ąĖą╗ąŠą│ąĄčĆčå (ą║ąōčå) ąĖą╗ąĖ ą┤ąĄčüčÅčéą║ąŠą▓ ą║ąĖą╗ąŠą│ąĄčĆčå. ąÆ čāčüąĖą╗ąĖč鹥ą╗čÅčģ ąĘą▓čāą║ą░ ąĖčé ą▒ą╗ąŠą║ą░čģ ą┐ąĖčéą░ąĮąĖčÅ ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą▓ ą┐čĆąĖą╝ąĄąĮčÅčÄčé čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąŠčé 44 ą║ąōčå ąĖ ą▓čŗčłąĄ. ą×čüąĮąŠą▓ąĮąŠąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā PWM ą▓ č鹊ą╝, čćč鹊 ą┐ąŠč鹥čĆąĖ ą╝ąŠčēąĮąŠčüčéąĖ ąĮą░ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą▓ 菹╗ąĄą║čéčĆąŠąĮąĮčŗčģ ą║ą╗čÄčćą░čģ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ąĮą░ą╝ąĮąŠą│ąŠ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą▓čŗčģąŠą┤ąĮą░čÅ ą╝ąŠčēąĮąŠčüčéčī, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ą░čÅ ą▓ ąĮą░ą│čĆčāąĘą║čā, ąĖ ąÜą¤ąö čüąĖčüč鹥ą╝čŗ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠč湥ąĮčī ą▓čŗčüąŠą║ąŠą╣. PWM čéą░ą║ąČąĄ čģąŠčĆąŠčłąŠ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čüąĖčüč鹥ą╝ą░čģ čåąĖčäčĆąŠą▓ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą▓ą║ą╗čÄč湥ąĮąŠ/ą▓čŗą║ą╗čÄč湥ąĮąŠ (čüą║ą▓ą░ąČąĮąŠčüčéčī ą┐ąĄčĆąĖąŠą┤ą░ ąĖą╝ą┐čāą╗čīčüąŠą▓) čģąŠčĆąŠčłąŠ čüąŠą│ą╗ą░čüčāąĄčéčüčÅ čü čćąĖčüą╗ą░ą╝ąĖ, ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗąĄ ą▓ čåąĖčäčĆąŠą▓čŗčģ čüąĖčüč鹥ą╝ą░čģ. PWM čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čüąĖčüč鹥ą╝ą░čģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣, ą│ą┤ąĄ čüą║ą▓ą░ąČąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄąĮąŠčüą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą║ą░ąĮą░ą╗čā čüą▓čÅąĘąĖ.
ą£ąĮąŠą│ąĖąĄ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ (MCU) čüąŠą┤ąĄčƹȹ░čé ą▓ čüąĄą▒ąĄ ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ PWM-ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ, ą▓čŗčģąŠą┤čŗ ą║ąŠč鹊čĆčŗčģ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą║ąŠčĆą┐čāčüą░ MCU. ąŁč鹊 čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠč鹊čĆą░ą╝ąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░ ą▓ čüąĖčüč鹥ą╝ą░čģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąŠą▒ąŠčéą░ą╝ąĖ ąĖ ą┤čĆčāą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, PWM ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, ą┐čāč鹥ą╝ ą┐čĆčÅą╝ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╗ąŠą│ąĖč湥čüą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ MCU.
ąĪą║ą▓ą░ąČąĮąŠčüčéčī (duty cycle). ąóąĄčĆą╝ąĖąĮ čüą║ą▓ą░ąČąĮąŠčüčéčī ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ą┐čĆąŠą┐ąŠčĆčåąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ąŠą▒čēąĖą╝ ą┐ąĄčĆąĖąŠą┤ąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ą║ą╗čÄč湥ąĮąŠ/ą▓čŗą║ą╗čÄč湥ąĮąŠ. ą£ą░ą╗ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╝ą░ą╗ą░čÅ ą▓čŗčģąŠą┤ąĮą░čÅ ą╝ąŠčēąĮąŠčüčéčī, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮą░ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ čåąĖą║ą╗ą░ PWM ąĖąĮč鹥čĆą▓ą░ą╗ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą║ą╗čÄč湥ąĮąŠ ąĘą░ąĮąĖą╝ą░ąĄčé ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ, č湥ą╝ ą▓ą║ą╗čÄč湥ąĮąŠ. ąĪą║ą▓ą░ąČąĮąŠčüčéčī čćą░čüč鹊 ą▓čŗčĆą░ąČą░čÄčé ą▓ ą┐čĆąŠčåąĄąĮčéą░čģ, ą│ą┤ąĄ 100% ąŠąĘąĮą░čćą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą▓čŗčģąŠą┤ąĮčāčÄ ą╝ąŠčēąĮąŠčüčéčī, ą║ąŠą│ą┤ą░ ą║ą╗čÄčć ą┐ąŠčüč鹊čÅąĮąĮąŠ ąĘą░ą╝ą║ąĮčāčé. ąÜąŠą│ą┤ą░ čā čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠą╗ąŠą▓ąĖąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĖąŠą┤ą░ ą╗ąŠą│. 1 (ą▓ą║ą╗čÄč湥ąĮąŠ), ąĖ ą┤čĆčāą│ą░čÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ ą▓ ą╗ąŠą│. 0 (ą▓čŗą║ą╗čÄč湥ąĮąŠ), č鹊 ąĄą│ąŠ čüą║ą▓ą░ąČąĮąŠčüčéčī 50% (ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗). ąÜąŠą│ą┤ą░ čåąĖčäčĆąŠą▓ąŠą╣ čüąĖą│ąĮą░ą╗ ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1, č湥ą╝ ą▓ ą╗ąŠą│. 0, čüą║ą▓ą░ąČąĮąŠčüčéčī ą┐ąŠą╗čāčćą░ąĄčéčüčÅ > 50%, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé, ą║ąŠą│ą┤ą░ ą╝ąĄąĮčīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą╗ąŠą│. 1, č湥ą╝ ą╗ąŠą│. 0, č鹊 čüą║ą▓ą░ąČąĮčüčéčī < 50%. ą¤čĆąĖą╝ąĄčĆčŗ čüąĖą│ąĮą░ą╗ąŠą▓ čĆą░ąĘąĮąŠą╣ čüą║ą▓ą░ąČąĮąŠčüčéąĖ:
[ą£ą░č鹥ą╝ą░čéąĖč湥čüą║ąĖąĄ ąĖ čäąĖąĘąĖč湥čüą║ąĖąĄ ąŠčüąĮąŠą▓čŗ ą©ąśą£ ]
ą©ąśą£ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĖą╝ą┐čāą╗čīčüąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ, ą▓ ą║ąŠč鹊čĆąŠą╝ čłąĖčĆąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ ą╝ąŠą┤čāą╗ąĖčĆčāąĄčéčüčÅ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ čüčĆąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ą╝ąĄąĮčÅąĄčéčüčÅ. ąĢčüą╗ąĖ ą╝čŗ ą▓čŗčĆą░ąĘąĖą╝ čäčāąĮą║čåąĖčÄ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ ą║ą░ą║ f(t), čā ą║ąŠč鹊čĆąŠą╣ ą┐ąĄčĆąĖąŠą┤ T, ąĘąĮą░č湥ąĮąĖąĄ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ymin, ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ymax ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī D (čüą╝. čĆąĖčü. 1 ąĮąĖąČąĄ), č鹊 čüčĆąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗčĆą░ąČąĄąĮą░ ąĖąĮč鹥ą│čĆą░ą╗ąŠą╝:
{\displaystyle {\bar {y}}={\frac {1}{T}}\int _{0}^{T}f(t)\,dt}
image/svg+xml Produced by GNUPLOT 4.5 patchlevel 0 y min y max 0 D.T T (T+D.T) 2T (2T+D.T) 3T (3T+D.T) ąÆčĆąĄą╝čÅ gnuplot_plot_1 ąÉą╝ą┐ą╗ąĖčéčāą┤ą░
ąĀąĖčü. 1. ąśą╝ą┐čāą╗čīčüąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą©ąśą£. ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ymin , ymax ąĖ D.
ą¤ąŠčüą║ąŠą╗čīą║čā f(t) ąĖą╝ą┐čāą╗čīčüąĮčŗą╣ čüąĖą│ąĮą░ą╗, ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ymax ą▒čāą┤čāčé {\displaystyle 0<t<D\cdot T} ąĖ ymin ą┤ą╗čÅ {\displaystyle D\cdot T<t<T} . ąóąŠą│ą┤ą░ ą▓čŗčĆą░ąČąĄąĮąĖąĄ čü ąĖąĮč鹥ą│čĆą░ą╗ąŠą╝ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
{\displaystyle {\begin{aligned}{\bar {y}}&={\frac {1}{T}}\left(\int _{0}^{DT}y_{\text{max}}\,dt+\int _{DT}^{T}y_{\text{min}}\,dt\right)\\&={\frac {1}{T}}\left(D\cdot T\cdot y_{\text{max}}+T\left(1-D\right)y_{\text{min}}\right)\\&=D\cdot y_{\text{max}}+\left(1-D\right)y_{\text{min}}\end{aligned}}}
ąŁč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ ą▓čŗčĆą░ąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ čāą┐čĆąŠčēąĄąĮąŠ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ čüą╗čāčćą░čÅčģ, ą│ą┤ąĄ ymin = 0, ą║ą░ą║ {\displaystyle {\bar {y}}=D\cdot y_{\text{max}}} . ą¤ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 čüčĆąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĮą░ą┐čĆčÅą╝čāčÄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą║ą▓ą░ąČąĮąŠčüčéąĖ D.
ąĪą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ ą╝ąĄč鹊ą┤ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą©ąśą£ ąĖąĘ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮčŗ - ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░ ą┤ą╗čÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čŹč鹊ą╣ ą▓ąĄą╗ąĖčćąĖąĮčŗ čü ą┐ąĖą╗ąŠąŠą▒čĆą░ąĘąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝. ąØą░ čĆąĖčü. 2 ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ čüąĖą│ąĮą░ą╗ ą©ąśą£. ąÜąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ ą║čĆą░čüąĮčŗą╝ čåą▓ąĄč鹊ą╝) ą▒ąŠą╗čīčłąĄ, č湥ą╝ čāčĆąŠą▓ąĄąĮčī ą╝ąŠą┤čāą╗ąĖčĆčāčÄčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐ąĖą╗čŗ (ą┐ąŠą║ą░ąĘą░ąĮą░ čüąĖąĮąĖą╝ čåą▓ąĄč鹊ą╝), čüąĖą│ąĮą░ą╗ ą©ąśą£ (ą┐ąŠą║ą░ąĘą░ąĮ čĆąŠąĘąŠą▓čŗą╝ čåą▓ąĄč鹊ą╝) ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī, ąĖąĮą░č湥 ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī.
ąĀąĖčü. 2. ą¤čĆąŠčüč鹊ą╣ ą╝ąĄč鹊ą┤ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą©ąśą£ čü ą┐ąŠą╝ąŠčēčīčÄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐ąĖą╗čŗ ąĖ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░.
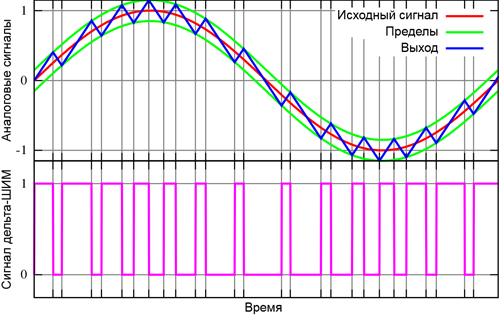
ąöąĄą╗čīčéą░-ą╝ąŠą┤čāą╗čÅčåąĖčÅ (delta-PWM, ╬ö-PWM). ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┤ąĄą╗čīčéą░-ą╝ąŠą┤čāą╗čÅčåąĖąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą©ąśą£ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą┐čĆąŠąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮ, ąĖ čĆąĄąĘčāą╗čīčéą░čé ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ą┐čĆąĄą┤ąĄą╗ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĖčüčģąŠą┤ąĮąŠą╝čā čüąĖą│ąĮą░ą╗čā, čüą╝ąĄčēąĄąĮąĮąŠą╝čā ąĮą░ ą║ąŠąĮčüčéą░ąĮčéčā [3]. ąÆčüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĖąĮč鹥ą│čĆą░ą╗ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ąŠčüčéąĖą│ą░ąĄčé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą┐čĆąĄą┤ąĄą╗ąŠą▓, čüąĖą│ąĮą░ą╗ ą©ąśą£ ą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, čüą╝. čĆąĖčü. 3.
ąÆčŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ (ą┐ąŠą║ą░ąĘą░ąĮ čüąĖąĮąĖą╝) čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ą┐čĆąĄą┤ąĄą╗ą░ą╝ąĖ (ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĘąĄą╗ąĄąĮčŗą╝). ąŁčéąĖ ą┐čĆąĄą┤ąĄą╗čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĖčüčģąŠą┤ąĮąŠą╝čā čüąĖą│ąĮą░ą╗čā (ą┐ąŠą║ą░ąĘą░ąĮ ą║čĆą░čüąĮčŗą╝), ą║ąŠč鹊čĆčŗą╣ ą╝ąŠą┤čāą╗ąĖčĆčāąĄčéčüčÅ, ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĄą│ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ąĄčĆčģąĮąĖą╣ ąĖ ąĮąĖąČąĮąĖą╣ ą┐čĆąĄą┤ąĄą╗čŗ, čüą╝ąĄčēąĄąĮąĮčŗąĄ ąĮą░ ąĘą░ą┤ą░ąĮąĮčāčÄ ą▓ąĄą╗ąĖčćąĖąĮčā. ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ (čüąĖąĮąĖą╣) ą┤ąŠčüčéąĖą│ą░ąĄčé ą┐čĆąĄą┤ąĄą╗ąŠą▓, čüąĖą│ąĮą░ą╗ ą©ąśą£ ą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ąĀąĖčü. 3. ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ╬ö-PWM.
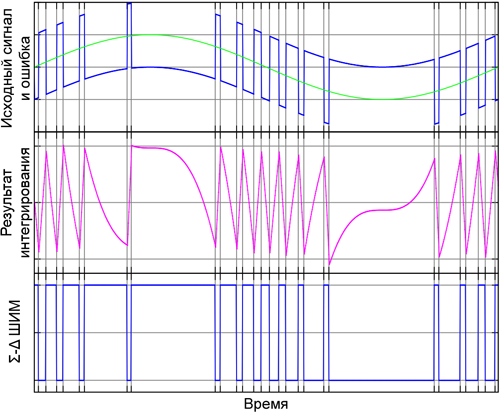
ąöąĄą╗čīčéą░-čüąĖą│ą╝ą░ ą╝ąŠą┤čāą╗čÅčåąĖčÅ (delta-sigma, ╬ö╬Ż-PWM). ąÆ ą┤ąĄą╗čīčéą░-čüąĖą│ą╝ą░ ą╝ąŠą┤čāą╗čÅčåąĖąĖ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą▓čŗčćąĖčéą░ąĄčéčüčÅ ąĖąĘ ąĖčüčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąŠčłąĖą▒ą║ąĖ [4]. ąŁčéą░ ąŠčłąĖą▒ą║ą░ ąĖąĮč鹥ą│čĆąĖčĆčāąĄčéčüčÅ, ąĖ ą║ąŠą│ą┤ą░ ąĖąĮč鹥ą│čĆą░ą╗ ąŠčłąĖą▒ą║ąĖ ą▓čŗčģąŠą┤ąĖ ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ, ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą©ąśą£ ą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, čüą╝. čĆąĖčü. 4.
ąśčüčģąŠą┤ąĮčŗą╣ čüąĖą│ąĮą░ą╗ (ą┐ąŠą║ą░ąĘą░ąĮ ąĘąĄą╗ąĄąĮčŗą╝) ą▓čŗčćąĖčéą░ąĄčéčüčÅ ąĖąĘ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ (ą┐ąŠą║ą░ąĘą░ąĮ čüąĖąĮąĖą╝ ą▓ąĮąĖąĘčā) ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąŠčłąĖą▒ą║ąĖ (ą┐ąŠą║ą░ąĘą░ąĮ čüąĖąĮąĖą╝ ą▓ą▓ąĄčĆčģčā). ąŁčéą░ ąŠčłąĖą▒ą║ą░ ąĖąĮč鹥ą│čĆąĖčĆčāąĄčéčüčÅ, ąĖ čĆąĄąĘčāą╗čīčéą░čé ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖčÅ (čĆąŠąĘąŠą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠčüąĄčĆąĄą┤ąĖąĮąĄ) čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ą┐čĆąĄą┤ąĄą╗ą░ą╝ąĖ. ąÜąŠą│ą┤ą░ ąĖąĮč鹥ą│čĆą░ą╗ ąŠčłąĖą▒ą║ąĖ ą▓čŗčģąŠą┤ąĖčé ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ, ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą©ąśą£ ą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ąĀąĖčü. 4. ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ╬ö╬Ż-PWM.
ą¤čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄąĮąĮąŠ-ą▓ąĄą║č鹊čĆąĮą░čÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ . ąŁč鹊čé ą░ą╗ą│ąŠčĆąĖčéą╝ ą©ąśą£ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą╝ąĮąŠą│ąŠčäą░ąĘąĮąŠą│ąŠ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ č鹊ą║ą░. ąŚą┤ąĄčüčī ąĖčüčģąŠą┤ąĮčŗą╣ čüąĖą│ąĮą░ą╗ ąŠčåąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ čü ąĘą░ą┤ą░ąĮąĮąŠą╣ ą┐ąĄčĆąĖąŠą┤ąĖčćąĮąŠčüčéčīčÄ. ąØą░ ą║ą░ąČą┤ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĄ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąĖčĆą░čÄčé ąĮąĄąĮčāą╗ąĄą▓čŗąĄ ą░ą║čéąĖą▓ąĮčŗąĄ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčēąĖąĄ ą▓ąĄą║č鹊čĆčŗ, čüą╝ąĄąČąĮčŗąĄ čü ąĖčüčģąŠą┤ąĮčŗą╝ ą▓ąĄą║č鹊čĆąŠą╝, ąĖ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ ąĮčāą╗ąĄą▓čŗčģ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčēąĖčģ ą▓ąĄą║č鹊čĆąŠą▓ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą┤ąŠą╗ąĖ ą┐ąĄčĆąĖąŠą┤ą░ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ, čćč鹊ą▒čŗ čüąĖąĮč鹥ąĘąĖčĆąŠą▓ą░čéčī ąĖčüčģąŠą┤ąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą║ą░ą║ čüčĆąĄą┤ąĮąĄąĄ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ąĄą║č鹊čĆąŠą▓ [5].
ą¤čĆčÅą╝ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║čĆčāčéčÅčēąĖą╝ ą╝ąŠą╝ąĄąĮč鹊ą╝ (direct torque control, DTC). DTC ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠč鹊čĆą░ą╝ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ č鹊ą║ą░ [6]. ąŁč鹊čé ą╝ąĄč鹊ą┤ ą©ąśą£ č鹥čüąĮąŠ čüą▓čÅąĘą░ąĮ čü ą┤ąĄą╗čīčéą░-ą╝ąŠą┤čāą╗čÅčåąĖąĄą╣ (čüą╝. ą▓čŗčłąĄ). ąÜčĆčāčéčÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą╝ąŠč鹊čĆą░ ąĖ ą╝ą░ą│ąĮąĖčéąĮčŗą╣ ą┐ąŠč鹊ą║ ąŠčåąĄąĮąĖą▓ą░čÄčéčüčÅ ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąŠąĮąĖ ąŠčüčéą░ą▓ą░ą╗ąĖčüčī ą▓ ąĘą░ą┤ą░ąĮąĮčŗčģ ą┐čĆąĄą┤ąĄą╗ą░čģ ą│ąĖčüč鹥čĆąĄąĘąĖčüą░, ą┐čāč鹥ą╝ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĮąŠą▓ąŠą╣ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ą┐ąŠą╗čāą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓čŗčģ ą║ą╗čÄč湥ą╣ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą╗čÄą▒ąŠą╣ čüąĖą│ąĮą░ą╗ ą┐čŗčéą░ąĄčéčüčÅ ąŠčéą║ą╗ąŠąĮąĖčéčīčüčÅ ąŠčé čüą▓ąŠąĄą│ąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
ą©ąśą£ čü čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą▓čĆąĄą╝ąĄąĮąĖ . ą£ąĮąŠąČąĄčüčéą▓ąŠ čåąĖčäčĆąŠą▓čŗčģ čüčģąĄą╝ ą╝ąŠą│čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ ą©ąśą£ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ąĖą╝ąĄčÄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ą▒ą╗ąŠą║ąĖ ą©ąśą£, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▓čŗą▓ąŠą┤ąĖčéčī čüąĖą│ąĮą░ą╗ ą©ąśą£ ąĮą░ čüą▓ąŠąĖ ą▓čŗą▓ąŠą┤čŗ). ą×ą▒čŗčćąĮąŠ ą▓ čéą░ą║ąĖčģ čüčģąĄą╝ą░čģ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüč湥čéčćąĖą║, ą║ąŠč鹊čĆčŗą╣ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą▓ čĆą░ą▓ąĮčŗąĄ ą┐čĆąŠą╝ąĄąČčāčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (čéą░ą║čéčŗ ą┤ą╗čÅ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ čüč湥čéčćąĖą║ą░ ąŠą▒čŗčćąĮąŠ ą▓čŗčĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ąĖąĘ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░), ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£. ąÜąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąŠą╗čīčłąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ą▓čŗčģąŠą┤ ą©ąśą£ ą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ čü ą╗ąŠą│. 1 ąĮą░ ą╗ąŠą│. 0 (ąĖą╗ąĖ čü ą╗ąŠą│. 0 ąĮą░ ą╗ąŠą│. 1). ą¤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£ ą▓čŗčģąŠą┤ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ąĖčüčģąŠą┤ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ - ąŠą▒čĆą░čéąĮąŠ ą▓ ą╗ąŠą│. 1 (ąĖą╗ąĖ ą▓ ą╗ąŠą│. 0). ąŁčéą░ č鹥čģąĮąĖą║čā ąĖąĮąŠą│ą┤ą░ ąĮą░ąĘčŗą▓ą░čÄčé ą©ąśą£ čü čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¤ąŠą▓č鹊čĆčÅčÄčēąĖąĄčüčÅ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ čüč湥čéčćąĖą║ą░ ąĖ ąĄą│ąŠ čüą▒čĆąŠčüą░ čüąŠčüčéą░ą▓ą╗čÅčÄčé čåąĖčäčĆąŠą▓čāčÄ ą▓ąĄčĆčüąĖčÄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ąĖą╗ąŠąŠą▒čĆą░ąĘąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąĪčģąĄą╝ą░ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ ą░ ąĘą░ą┤ą░ąĮąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮąŠą╣ čüčéą░ąĮąŠą▓ąĖčéčüčÅ čåąĖčäčĆąŠą▓ąŠą╣ ą▓ąĄčĆčüąĖąĄą╣ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░. ąĪą║ą▓ą░ąČąĮąŠčüčéčī ą©ąśą£ ą▓ čåąĖčäčĆąŠą▓ąŠą╣ ą▓ąĄčĆčüąĖąĖ ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ą┤ąĖčüą║čĆąĄčéąĮčŗą╝ąĖ čłą░ą│ą░ą╝ąĖ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗą╝ąĖ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčīčÄ čüč湥čéčćąĖą║ą░. ą×ą┤ąĮą░ą║ąŠ čüč湥čéčćąĖą║ čü ą▒ąŠą╗čīčłąŠą╣ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčīčÄ ą╝ąŠąČąĄčé ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čŗčüąŠą║čāčÄ č鹊čćąĮąŠčüčéčī ą©ąśą£.
[ąóąĖą┐čŗ ą©ąśą£ ąĖ čüą┐ąĄą║čéčĆ ]
ąæčŗą▓ą░ąĄčé 2 čéąĖą┐ą░ ą╝ąĄč鹊ą┤ą░ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ ą©ąśą£:
1 . ą×ą▒čŗčćąĮčŗą╣ ą©ąśą£. ą¤ąĄčĆąĄą┤ąĮąĖą╣ čüčĆąĄąĘ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ ą╝ąŠąČąĄčé čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ąĮą░čćą░ą╗ąĄ ąŠą║ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĖąŠą┤ą░, ą░ ąĘą░ą┤ąĮąĖą╣ čüčĆąĄąĘ ą╝ąŠąČąĄčé ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ.
2 . ąĪąĖą╝ą╝ąĄčéčĆąĖčćąĮčŗą╣ ą©ąśą£. ąĪąĄčĆąĄą┤ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čäąĖą║čüąĖčĆąŠą▓ą░ąĮą░ ą▓ ąŠą║ąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĖąŠą┤ą░, ą┐čĆąĖ čŹč鹊ą╝ ąŠą▒ą░ ą┐ąĄčĆąĄą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ ą©ąśą£ čüą╝ąĄčēą░čÄčéčüčÅ ą▓ą╗ąĄą▓ąŠ ąĖ ą▓ą┐čĆą░ą▓ąŠ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čŹč鹊ą╣ čüąĄčĆąĄą┤ąĖąĮčŗ ą┤ą╗čÅ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ąĖ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ. ąóą░ą║ąŠą╣ ą╝ąĄč鹊ą┤ ą┤ą░ąĄčé ą▒ąŠą╗ąĄąĄ čćąĖčüčéčŗą╣ čüą┐ąĄą║čéčĆ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐čĆąĖ čüąĖąĮč鹥ąĘąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, ąŠą┤ąĮą░ą║ąŠ ąŠąĮ ąĮąĄą╝ąĮąŠą│ąŠ čüą╗ąŠąČąĮąĄąĄ ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ, ąĖ čéčĆąĄą▒čāąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ (ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ čüąĖą╝ą╝ąĄčéčĆąĖčćąĮčŗą╣ ą©ąśą£ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ).
ąĪą┐ąĄą║čéčĆ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą©ąśą£ ą╝ąĄč鹊ą┤ąŠą▓ 1 ąĖ 2 ą┐čĆąĖą╝ąĄčĆąĮąŠ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣, ąĖ čüąŠą┤ąĄčƹȹĖčé ą┐ąŠčüč鹊čÅąĮąĮčāčÄ čüąŠčüčéą░ą▓ą╗čÅčÄčēčāčÄ, ą╝ąŠą┤čāą╗ąĖčĆčāąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗ ąĖ čäą░ąĘąŠ-ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĮąĄčüčāčēąĖąĄ ąĮą░ ą║ą░ąČą┤ąŠą╣ ą│ą░čĆą╝ąŠąĮąĖą║ąĄ čćą░čüč鹊čéčŗ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą©ąśą£. ąÉą╝ą┐ą╗ąĖčéčāą┤čŗ ą│čĆčāą┐ą┐ ą│ą░čĆą╝ąŠąĮąĖą║ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÄčéčüčÅ ąŠą│ąĖą▒ą░čÄčēąĄą╣ čäčāąĮą║čåąĖąĖ čüąĖąĮčāčüą░, ąĖ ą┐čĆąŠčüčéąĖčĆą░čÄčéčüčÅ ą┤ąŠ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠčüčéąĖ. ąæąĄčüą║ąŠąĮąĄčćąĮą░čÅ ą┐ąŠą╗ąŠčüą░ ą▓čŗąĘą▓ą░ąĮą░ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠą╣ čĆą░ą▒ąŠč鹊ą╣ ą╝ąŠą┤čāą╗čÅč鹊čĆą░ ą©ąśą£. ąśąĘ-ąĘą░ čŹč鹊ą│ąŠ čåąĖčäčĆąŠą▓ąŠą╣ ą©ąśą£ čüčéčĆą░ą┤ą░ąĄčé ąŠčé ąĖčüą║ą░ąČąĄąĮąĖą╣ ąĮą░ą╗ąŠąČąĄąĮąĖčÅ čüą┐ąĄą║čéčĆą░ (ą░ą╗ąĖą░čüąĖąĮą│ą░), čćč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮąĖąČą░ąĄčé ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠčüčéčī ą©ąśą£ ą▓ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ čüą▓čÅąĘąĖ. ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄą╝ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ čÅą┤čĆą░ ą©ąśą£ čŹčäč乥ą║č鹊ą▓ ą░ą╗ąĖą░čüąĖąĮą│ą░ ą╝ąŠąČąĮąŠ ąĖąĘą▒ąĄąČą░čéčī.
ąöąĄą╗čīčéą░-ą╝ąŠą┤čāą╗čÅčåąĖčÅ, ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ ą©ąśą£, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮčŗą╝ ą┐čĆąŠčåąĄčüčüąŠą╝, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ čüą┐ąĄą║čéčĆ ą▒ąĄąĘ čĆą░ąĘą╗ąĖčćą░ąĄą╝čŗčģ ą│ą░čĆą╝ąŠąĮąĖą║.
[ąóąĄąŠčĆąĄą╝ą░ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ ą©ąśą£ ]
ą¤čĆąŠčåąĄčüčü č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą©ąśą£ ąĮąĄą╗ąĖąĮąĄą╣ąĮčŗą╣, ąĖ ąŠą▒čŗčćąĮąŠ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ, čćč鹊 ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ążąØą¦ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮąĄ ąĖą┤ąĄą░ą╗čīąĮčŗą╝. ąóąĄąŠčĆąĄą╝ą░ [7] ą©ąśą£-ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą©ąśą£-ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠą▓ąĄčĆčłąĄąĮąĮčŗą╝. ąóąĄąŠčĆąĄą╝ą░ čāčéą▓ąĄčƹȹ┤ą░ąĄčé, čćč鹊 "ąøčÄą▒ąŠą╣ čüąĖą│ąĮą░ą╗ ą┐ąŠą╗ąŠčüčŗ čćą░čüč鹊čé ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ┬▒ 0,637 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ č乊čĆą╝ąŠą╣ čüąĖą│ąĮą░ą╗ą░ čłąĖčĆąŠčéąĮąŠ-ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą╝ąŠą┤čāą╗čÅčåąĖąĖ (ą©ąśą£) čü ąĄą┤ąĖąĮąĖčćąĮąŠą╣ ą░ą╝ą┐ą╗ąĖčéčāą┤ąŠą╣. ą¦ąĖčüą╗ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓ č乊čĆą╝ąĄ čüąĖą│ąĮą░ą╗ą░ čĆą░ą▓ąĮąŠ čćąĖčüą╗čā ą▓čŗą▒ąŠčĆąŠą║ ąØą░ą╣ą║ą▓ąĖčüčéą░, ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ą┐ąĖą║ą░ ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé č鹊ą│ąŠ, čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ ą┤ą▓čāčģčāčĆąŠą▓ąĮąĄą▓ąŠą╣ ąĖą╗ąĖ čéčĆąĄčģčāčĆąŠą▓ąĮąĄą▓ąŠą╣".
ąóąĄąŠčĆąĄą╝ą░ ą┤ąĖčüčĆąĄčéąĖąĘą░čåąĖąĖ ąØą░ą╣ą║ą▓ąĖčüčéą░-ą©ąĄąĮąĮąŠąĮą░ ą│ą╗ą░čüąĖčé [8]: "ąĢčüą╗ąĖ ąĄčüčéčī čüąĖą│ąĮą░ą╗, ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ ą┐ąŠ čüą┐ąĄą║čéčĆčā čćą░čüč鹊č鹊ą╣ f0, č鹊 ą╝ąŠąČąĮąŠ čüąŠą▒čĆą░čéčī ąĖ čüąŠčģčĆą░ąĮąĖčéčī ą▓čüčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą▓ čŹč鹊ą╝ čüąĖą│ąĮą░ą╗ąĄ, ąĄčüą╗ąĖ ąŠčåąĖčäčĆąŠą▓ą░čéčī ąĄą│ąŠ čü čćą░čüč鹊č鹊ą╣ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ ą▒ąŠą╗čīčłąĄ 2f0".
[ąĪčüčŗą╗ą║ąĖ ]
1 . Pulse-width modulation site:wikipedia.org.2 . What is Maximum Power Point Tracking (MPPT) site:solar-electric.com.3 . Delta modulation site:wikipedia.org.4 . ąöąĄą╗čīčéą░-čüąĖą│ą╝ą░ ą╝ąŠą┤čāą╗čÅčåąĖčÅ .5 . Space vector modulation site:wikipedia.org.6 . Direct torque control site:wikipedia.org.7 . "The sampling theorem with constant amplitude variable width pulses" J. Huang, K. Padmanabhan, and O. M. Collins.8 . Sampling: What Nyquist DidnŌĆÖt Say, and What to Do About It site:wescottdesign.com.9 . XPS Delta-Sigma ą”ąÉą¤ .