| Что такое PWM (ШИМ)? |
|
| Добавил(а) microsin |
|
Аббревиатурой PWM в английской документации обозначают ШИМ (широтно-импульсная модуляция). PWM (Pulse-Width Modulation) или PDM (Pulse-Duration Modulation) это метод уменьшения средней мощности электрического сигнала путем разделения его на дискретные части (отдельные порции). Среднее значение напряжения (и тока), поступающего в нагрузку, управляется открытием и закрытием электронного ключа на высокой частоте. Чем дольше время, когда ключ открыт в сравнении с временем, когда закрыт, тем больше мощность передается в нагрузку. Вместе с MPPT (maximum power point tracking), это один из основных методов уменьшения выхода энергии с солнечных панелей, чтобы не перегружать заряжаемые батареи [2]. PWM хорошо подходит для управления инерционными нагрузками, такими как моторы или нагреватели. Частота переключения PWM выбирается достаточно большой, чтобы не влиять на нагрузку, т. е. результирующая форма сигнала, воспринимаемая нагрузкой (и изменение мощности), должна получиться как можно более гладкой. На рисунке ниже показан пример ШИМ на идеальной индуктивности, управляемый импульсами напряжения (синий сигнал), в результате чего получается похожий на синусоиду ток (показан красным). Форма синусоиды далека от идеальной, однако может быть значительно улучшена с повышением частоты импульсов. Обратите внимание, что форма тока это по сути интеграл от формы импульсов напряжения.
Скорость переключения (или частота) может значительно меняться в зависимости от нагрузки и от области применения. Например, в электрической печи можно включать и выключать нагревательный элемент несколько раз в минуту. Частота переключения 120 Гц можно использовать в диммере лампы. Для управления быстрым сервоприводом можно использовать частоты от нескольких килогерц (кГц) или десятков килогерц. В усилителях звука ит блоках питания компьютеров применяют частоты переключения от 44 кГц и выше. Основное достоинство регулирования по принципу PWM в том, что потери мощности на переключение в электронных ключах оказываются намного меньше, чем выходная мощность, передаваемая в нагрузку, и КПД системы регулирования получается очень высокой. PWM также хорошо работает в системах цифрового управления, потому соотношение включено/выключено (скважность периода импульсов) хорошо согласуется с числами, применяемые в цифровых системах. PWM также используется в некоторых системах коммуникаций, где скважность сигнала используется для переноса информации по каналу связи. Многие современные микроконтроллеры (MCU) содержат в себе встроенные аппаратные PWM-контроллеры, выходы которых могут быть соединены с внешними выводами корпуса MCU. Это широко используется для управления моторами постоянного тока в системах управления роботами и других приложениях. Кроме того, PWM может быть реализована программно, путем прямого управления логическим уровнем ножки порта MCU. Скважность (duty cycle). Термин скважность обозначает пропорцию времени включения и общим периодом времени включено/выключено. Малое значение скважности соответствует малая выходная мощность, потому что на интервале цикла PWM интервал состояния выключено занимает больше времени, чем включено. Скважность часто выражают в процентах, где 100% означает максимальную выходную мощность, когда ключ постоянно замкнут. Когда у цифрового сигнала половина времени периода лог. 1 (включено), и другая половина в лог. 0 (выключено), то его скважность 50% (прямоугольный сигнал). Когда цифровой сигнал больше времени находится в лог. 1, чем в лог. 0, скважность получается > 50%, и наоборот, когда меньше времени лог. 1, чем лог. 0, то скважнсть < 50%. Примеры сигналов разной скважности:
[Математические и физические основы ШИМ] ШИМ использует импульсный сигнал прямоугольной формы, в котором ширина импульса модулируется, в результате чего среднее значение сигнала меняется. Если мы выразим функцию сигнала ШИМ как f(t), у которой период T, значение низкого уровня ymin, значение высокого уровня ymax и скважность D (см. рис. 1 ниже), то среднее значение сигнала может быть выражена интегралом: Рис. 1. Импульсный сигнал ШИМ. Здесь показаны параметры ymin, ymax и D. Поскольку f(t) импульсный сигнал, его значения ymax будут и ymin для . Тогда выражение с интегралом преобразуется следующим образом: Это последнее выражение может быть справедливо упрощено во многих случаях, где ymin = 0, как . Получается, что среднее значение сигнала напрямую зависит от скважности D. Самый простой метод генерации ШИМ из аналоговой величины - использование компаратора для сравнения этой величины с пилообразным сигналом. На рис. 2 приведен пример преобразования аналогового синусоидального сигнала в сигнал ШИМ. Когда уровень синусоидального сигнала (показан на рисунке красным цветом) больше, чем уровень модулирующего сигнала пилы (показана синим цветом), сигнал ШИМ (показан розовым цветом) переходит в высокий уровень, иначе переходит в низкий уровень.
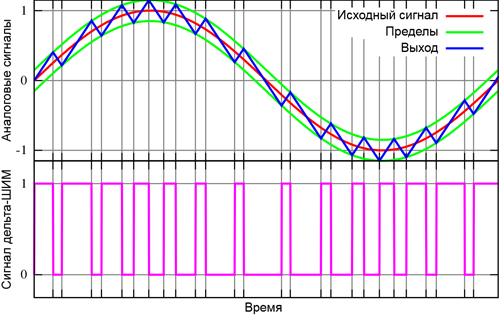
Рис. 2. Простой метод формирования ШИМ с помощью генератора пилы и компаратора. Дельта-модуляция (delta-PWM, Δ-PWM). При использовании дельта-модуляции для управления ШИМ выходной сигнал проинтегрирован, и результат интегрирования сравнивается с пределами, которые соответствуют исходному сигналу, смещенному на константу [3]. Всякий раз, когда интеграл выходного сигнала достигает одного из пределов, сигнал ШИМ меняет свое состояние, см. рис. 3. Выходной сигнал (показан синим) сравнивается с пределами (показаны зеленым). Эти пределы соответствуют исходному сигналу (показан красным), который модулируется, относительно него установлены верхний и нижний пределы, смещенные на заданную величину. Каждый раз, когда выходной сигнал (синий) достигает пределов, сигнал ШИМ меняет свое состояние.
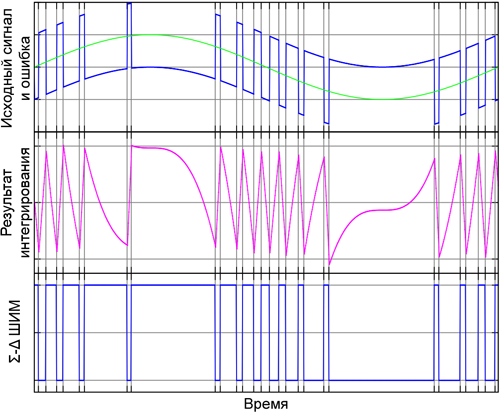
Рис. 3. Принцип работы Δ-PWM. Дельта-сигма модуляция (delta-sigma, ΔΣ-PWM). В дельта-сигма модуляции выходной сигнал вычитается из исходного сигнала для формирования сигнала ошибки [4]. Эта ошибка интегрируется, и когда интеграл ошибки выходи за пределы, выходной сигнал ШИМ меняет свое состояние, см. рис. 4. Исходный сигнал (показан зеленым) вычитается из выходного сигнала ШИМ (показан синим внизу) для формирования сигнала ошибки (показан синим вверху). Эта ошибка интегрируется, и результат интегрирования (розовый сигнал посередине) сравнивается с пределами. Когда интеграл ошибки выходит за пределы, выходной сигнал ШИМ меняет свое состояние.
Рис. 4. Принцип работы ΔΣ-PWM. Пространственно-векторная модуляция. Этот алгоритм ШИМ применяется для генерации многофазного переменного тока. Здесь исходный сигнал оцифровывается с заданной периодичностью. На каждой выборке сигнала выбирают ненулевые активные переключающие векторы, смежные с исходным вектором, и один или более нулевых переключающих векторов для соответствующей доли периода дискретизации, чтобы синтезировать исходный сигнал как среднее из используемых векторов [5]. Прямое управление крутящим моментом (direct torque control, DTC). DTC используется для управления моторами переменного тока [6]. Этот метод ШИМ тесно связан с дельта-модуляцией (см. выше). Крутящий момент мотора и магнитный поток оцениваются и управляются таким образом, чтобы они оставались в заданных пределах гистерезиса, путем включения новой комбинации полупроводниковых ключей каждый раз, когда любой сигнал пытается отклониться от своего допустимого уровня. ШИМ с распределением времени. Множество цифровых схем могут генерировать сигналы ШИМ (например, большинство микроконтроллеров имеют аппаратные блоки ШИМ, которые могут выводить сигнал ШИМ на свои выводы). Обычно в таких схемах используется счетчик, который инкрементируется в равные промежутки времени (такты для инкремента счетчика обычно вырабатываются из тактовой частоты микроконтроллера), и сбрасывается по окончании каждого периода ШИМ. Когда значение счетчика становится больше определенного значения, выход ШИМ меняет свое состояние с лог. 1 на лог. 0 (или с лог. 0 на лог. 1). По окончании периода ШИМ выход возвращается в исходное состояние - обратно в лог. 1 (или в лог. 0). Эта технику иногда называют ШИМ с распределением времени. Повторяющиеся интервалы инкремента счетчика и его сброса составляют цифровую версию генерации пилообразного сигнала. Схема сравнения значения счетчика а заданной величиной становится цифровой версией аналогового компаратора. Скважность ШИМ в цифровой версии может меняться дискретными шагами, определяемыми разрядностью счетчика. Однако счетчик с большой разрядностью может обеспечить достаточно высокую точность ШИМ. [Типы ШИМ и спектр] Бывает 2 типа метода реализации периодического ШИМ: 1. Обычный ШИМ. Передний срез сигнала ШИМ может удерживаться в начале окна времени периода, а задний срез может модулироваться по длительности для изменения скважности. 2. Симметричный ШИМ. Середина импульса может быть фиксирована в окне времени периода, при этом оба перепада уровня ШИМ смещаются влево и вправо относительно этой середины для уменьшения и увеличения скважности. Такой метод дает более чистый спектр на выходе при синтезе аналоговых сигналов, однако он немного сложнее в реализации, и требует специальной аппаратуры (во многих микроконтроллерах симметричный ШИМ поддерживается). Спектр на выходе ШИМ методов 1 и 2 примерно одинаковый, и содержит постоянную составляющую, модулируемый сигнал и фазо-модулированные несущие на каждой гармонике частоты импульсов ШИМ. Амплитуды групп гармоник ограничиваются огибающей функции синуса, и простираются до бесконечности. Бесконечная полоса вызвана нелинейной работой модулятора ШИМ. Из-за этого цифровой ШИМ страдает от искажений наложения спектра (алиасинга), что значительно снижает применимость ШИМ в современных системах связи. Ограничением полосы пропускания ядра ШИМ эффектов алиасинга можно избежать. Дельта-модуляция, в отличие от периодического ШИМ, является псевдослучайным процессом, который производит непрерывный спектр без различаемых гармоник. [Теорема дискретизации ШИМ] Процесс формирования сигнала с помощью ШИМ нелинейный, и обычно предполагается, что восстановление аналогового сигнала с помощью ФНЧ получается не идеальным. Теорема [7] ШИМ-дискретизации показывает, что ШИМ-преобразование может быть совершенным. Теорема утверждает, что "Любой сигнал полосы частот в пределах ± 0,637 может быть представлен формой сигнала широтно-импульсной модуляции (ШИМ) с единичной амплитудой. Число импульсов в форме сигнала равно числу выборок Найквиста, и ограничение пика не зависит от того, является ли форма сигнала двухуровневой или трехуровневой". Теорема дисретизации Найквиста-Шеннона гласит [8]: "Если есть сигнал, ограниченный по спектру частотой f0, то можно собрать и сохранить всю информацию в этом сигнале, если оцифровать его с частотой дискретизации больше 2f0". [Ссылки] 1. Pulse-width modulation site:wikipedia.org. |