|
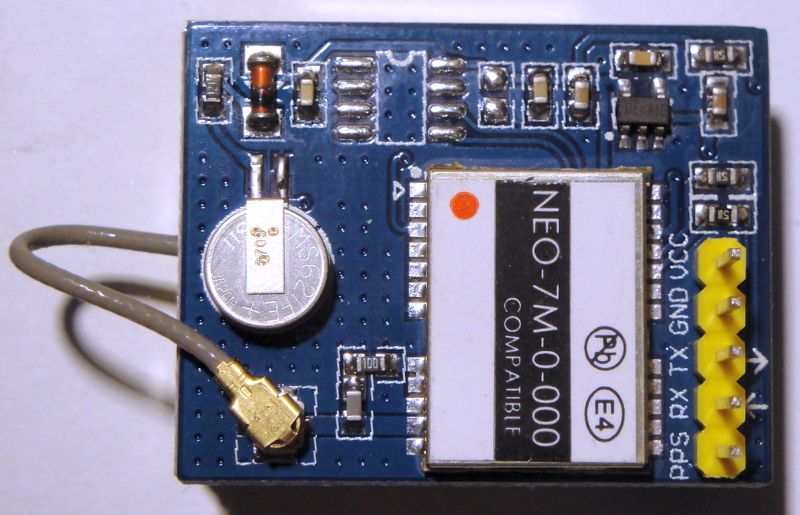
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ąĖąĮč鹥čĆąĄčüąĮąŠą╣ čüčéą░čéčīąĖ [1], ą│ą┤ąĄ ąŠą┐ąĖčüą░ąĮ ą┐čĆąŠčüč鹊ą╣ čüčéą░ąĮą┤ą░čĆčé čćą░čüč鹊čéčŗ, čüąŠą▒čĆą░ąĮąĮčŗą╣ ąĖąĘ ą╝ąŠą┤čāą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ GPS. ąÉą▓č鹊čĆ čüąŠą▒ąĖčĆą░ą╗ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą╝ąŠą┤ąĄą╗ąĄą╣ NEO-6M (čéąĖą┐ NEO-6M-0-001) ąĖ NEO-7M (čéąĖą┐ NEO-7M-0-000) ą║ąŠą╝ą┐ą░ąĮąĖąĖ "u-blox AG". ąŁčéąĖ ą╝ąŠą┤čāą╗ąĖ ą╝ąŠąČąĮąŠ ą┤ąŠą▓ąŠą╗čīąĮąŠ ąĮąĄą┤ąŠčĆąŠą│ąŠ ą║čāą┐ąĖčéčī ąĮą░ AliExpress.
ą£ąŠą┤čāą╗čī NEO-6M-0-001 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ąŠą┐ąŠčĆąĮčāčÄ čćą░čüč鹊čéčā 1 ą║ąōčå, ą▒ąŠą╗ąĄąĄ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ą╝ąŠą┤čāą╗čī NEO-7M-0-000 ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čćą░čüč鹊čéčŗ ą┤ąŠ 10 ą£ąōčå čü ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéčīčÄ ąĮą░čüčéčĆąŠą╣ą║ąĖ 1 ąōčå (100 ppm) ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéčīčÄ 2┬Ę10-8. ą£ąŠąČąĮąŠ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čéą░ą║ąČąĄ ąĖ čćą░čüč鹊čéčŗ ą▓čŗčłąĄ 10 ą£ąōčå čåąĄąĮąŠą╣ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą┤ąČąĖčéč鹥čĆą░ ą▓ ą▓čŗčģąŠą┤ąĮąŠą╝ čüąĖą│ąĮą░ą╗ąĄ. ą¤ąŠą╗čāčćą░ąĄčéčüčÅ č鹊čćąĮčŗą╣ RF-ą│ąĄąĮąĄčĆą░č鹊čĆ, ąŠčéą╗ąĖčćąĮąŠ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą┤ą╗čÅ ą▓čüąĄčģ ą▓ąĖą┤ąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, čüąĖą│ąĮą░ą╗ čŹč鹊ą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ čćąĖčüčéčŗą╣ ą┐ąŠ čüą┐ąĄą║čéčĆčā, čćč鹊ą▒čŗ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ VFO ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ (č鹊čćąĮąĄąĄ ą│ąŠą▓ąŠčĆčÅ, ą║ą░č湥čüčéą▓ąŠ čüą┐ąĄą║čéčĆą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą╣ čćą░čüč鹊čéčŗ, čüą╝. [7]).
Ayoma Gayan Wijethunga ąŠą┐ąĖčüą░ą╗ ą▓ čüą▓ąŠąĄą╝ ą▒ą╗ąŠą│ąĄ, ą║ą░ą║ čŹč鹊čé GPS-ą╝ąŠą┤čāą╗čī ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ Arduino Nano, čćč鹊ą▒čŗ ą║ąŠą╝ą┐čīčÄč鹥čĆ PC ą╝ąŠą│ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ čü ąĮąĖą╝ ą┤ą░ąĮąĮčŗą╝ąĖ. ą×č湥ąĮčī ą┐čĆąŠčüčéą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ Arduino ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą║ąŠą╝ą░ąĮą┤čŗ ąŠčé PC ą║ GPS-ą╝ąŠą┤čāą╗čÄ ąĖ ą┐ąŠą╗čāčćą░ąĄčé ąŠčé ąĮąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ ąŠą▒čĆą░čéąĮąŠ. ą¤ąŠą╗čāčćą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ IDE Arduino ą╝ąŠąĮąĖč鹊čĆą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (ąŠą║ąĮąŠ Serial Monitor), ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą╗čÄą▒ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ č鹥čĆą╝ąĖąĮą░ą╗ą░ (SecureCRT, Putty, TerraTerm ąĖ čé. ą┐.). ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊 čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą┤ą░ą╗ąĄąĄ. ąĪčģąĄą╝ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ GPS-ą╝ąŠą┤čāą╗čÅ NEO-7M-0-000 ą║ Arduino Nano (ą╝ąŠą┤čāą╗ąĖ NEO-6M-0-001 ąĖ NEO-7M-0-000 ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ):
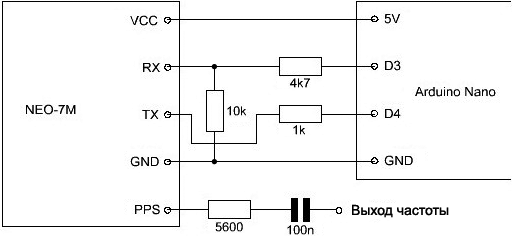
ąśąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā ą╝ąŠą┤čāą╗ąĄą╝ GSM ąĖ Arduino Nano ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝čā ą┐ąŠčĆčéčā TTL UART. ą¤čĆąĖąĄą╝ąĮąĖą║ GPS čĆą░ą▒ąŠčéą░ąĄčé čü čāčĆąŠą▓ąĮčÅą╝ąĖ ą╗ąŠą│ąĖą║ąĖ 3.3V, ą┐ąŠčŹč鹊ą╝čā ą┤ą╗čÅ čüąŠą│ą╗ą░čüąŠą▓ą░ąĮąĖčÅ čü čāčĆąŠą▓ąĮčÅą╝ąĖ ą╗ąŠą│ąĖą║ąĖ 5V Arduino Nano ąĮčāąČąĮą░ ą╗ąĖą▒ąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čāčĆąŠą▓ąĮąĄą╣ (GTL2003 ąĖ čé. ą┐.), ą╗ąĖą▒ąŠ čåąĄą┐ąŠčćą║ą░ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čüąŠčüčéą░ą▓ą╗ąĄąĮąĮą░čÅ ąĖąĘ čĆąĄąĘąĖčüč鹊čĆąŠą▓ 4,7 ą║ą×ą╝ ąĖ 10 ą║ą×ą╝, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ ą╝ąĄąČą┤čā ą▓čŗčģąŠą┤ąŠą╝ TX Arduino Nano ąĖ ą▓čģąŠą┤ąŠą╝ RX ą╝ąŠą┤čāą╗čÅ GSM. ąŻčĆąŠą▓ąĄąĮčī 3.3V ąĮą░ ą▓čŗčģąŠą┤ąĄ TX ą╝ąŠą┤čāą╗čÅ GSM ą┤ąŠčüčéą░č鹊č湥ąĮ, čćč鹊ą▒čŗ ąĄą│ąŠ ą┐ąŠą┤ą░čéčī ąĮą░ ą▓čģąŠą┤ RX Arduino Nano. ąÉą▓č鹊čĆ ą┤ą╗čÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ą┤ąŠą▒ą░ą▓ąĖą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ TX ą╝ąŠą┤čāą╗čÅ GSM čĆąĄąĘąĖčüč鹊čĆ 1 ą║ą×ą╝.
ąÜąŠąĮąĄčćąĮąŠ, ą╝čŗ ąĮąĄ ą╝ąŠąČąĄą╝ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą▓čŗčģąŠą┤ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ (ąĮąŠąČą║ą░ PPS ą╝ąŠą┤čāą╗čÅ GSM) ąĮą░ą┐čĆčÅą╝čāčÄ ą║ąŠ ą▓čüąĄą╝ ą▓ąĖą┤ą░ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ąØą░ ą▓čŗčģąŠą┤ PPS ą▒čŗą╗ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ čĆąĄąĘąĖčüč鹊čĆ 5.6 ą║ą×ą╝ ąĖ ąĄą╝ą║ąŠčüčéčī 0.1 ą╝ą║ąż, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖąĘą▒ąĄąČą░čéčī ą║ąŠčĆąŠčéą║ąĖčģ ąĘą░ą╝čŗą║ą░ąĮąĖą╣ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąĖ čāą┤ą░ą╗čÅąĄčé ą┐ąŠčüč鹊čÅąĮąĮčāčÄ čüąŠčüčéą░ą▓ą╗čÅčÄčēčāčÄ. ąÆą░ąČąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé - čĆąĄąĘąĖčüč鹊čĆ čüą╗ąĄą┤čāąĄčé ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ ą▓čŗą▓ąŠą┤čā, čćč鹊ą▒čŗ ą▓ ą░ąĮč鹥ąĮąĮčā ąĮąĄ ą┐ąŠą┐ą░ą┤ą░ą╗ čüąĖą│ąĮą░ą╗ ą┐ąŠą╝ąĄčģąĖ, ąĮą░ą▓ąŠą┤ąĖą╝čŗą╣ ą▓čŗą▓ąŠą┤ąŠą╝ PPS. ąÆ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ ą│ą░čĆą╝ąŠąĮąĖą║ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ ą╝ąŠą│čāčé ąĮą░čĆčāčłąĖčéčī ą┐čĆąĖąĄą╝ čüąĖą│ąĮą░ą╗ą░ GPS.
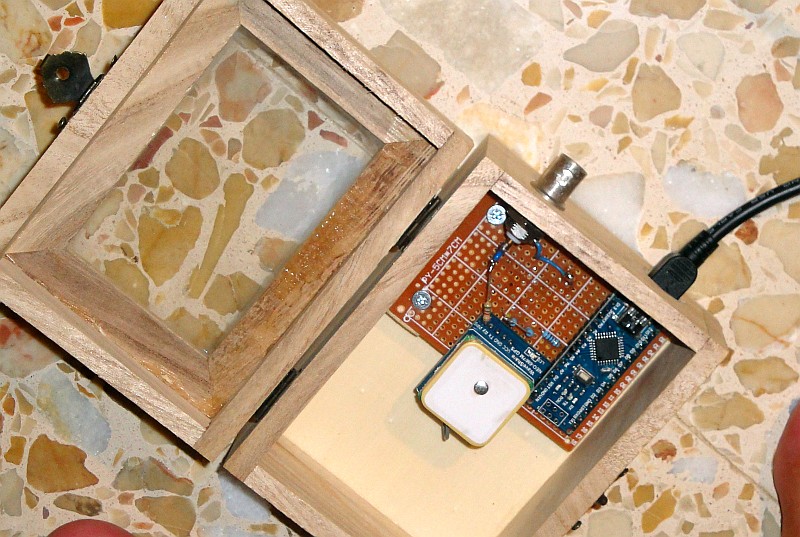
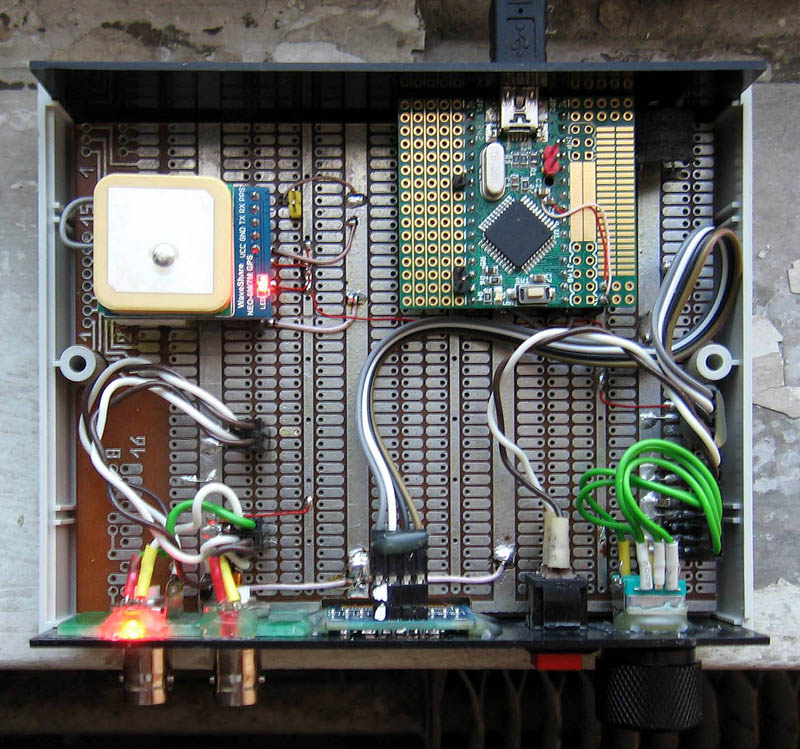
ąÆčüčÅ ąĮąĄčģąĖčéčĆą░čÅ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅ ą▒čŗą╗ą░ čüąŠą▒čĆą░ąĮą░ ą▓ ą┤ąĄčĆąĄą▓čÅąĮąĮąŠą╣ ą║ąŠčĆąŠą▒ąŠčćą║ąĄ ąĖąĘ-ą┐ąŠą┤ ą┐ą░ą║ąĄčéąĖą║ąŠą▓ čćą░čÅ. ąÆ ą▓ąĄčĆčģąĮąĄą╣ ą║čĆčŗčłą║ąĄ ą▓čŗą┐ąĖą╗ąĄąĮąŠ ąŠą║ąŠčłą║ąŠ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą▓ąĖą┤ąĄčéčī ą╝ąĄčĆčåą░ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓.
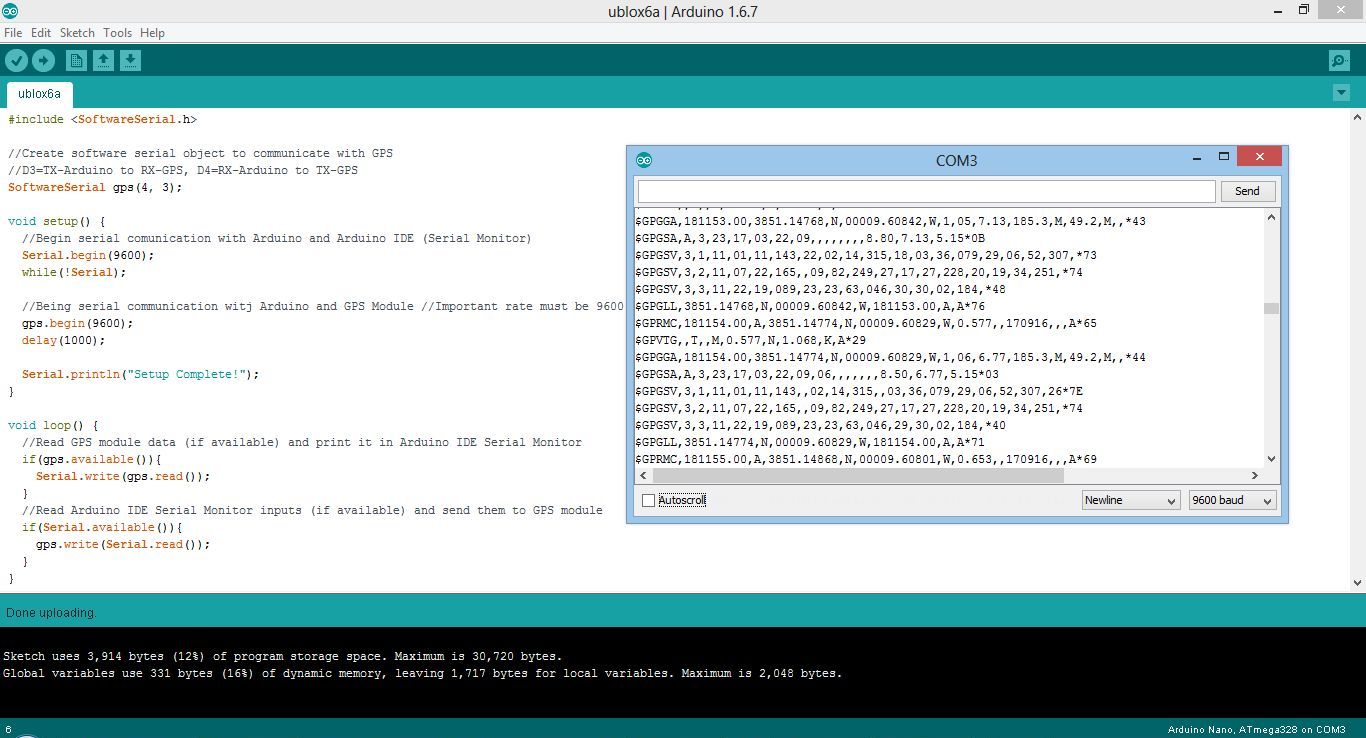
[ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ Arduino Nano]
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ čüč鹊ąĖčé ąĮą░ ą┐ą╗ą░čéą║ąĄ Arduino Nano, ą┤ąĄą╗ą░ąĄčéčüčÅ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊, ą▓čüąĄą│ąŠ ąĘą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĖąĮčāčé! ąŚą░ą│čĆčāąĘąĖč鹥 čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE čü čüą░ą╣čéą░ arduino.cc ąĖ čāčüčéą░ąĮąŠą▓ąĖč鹥. ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 ą┐ą╗ą░čéą║čā Arduino Nano ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā. ąÆčŗą▒ąĄčĆąĖč鹥 čéąĖą┐ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą┐ą╗ą░čéčŗ (ą╝ąĄąĮčÄ ąĪąĄčĆą▓ąĖčü -> ą¤ą╗ą░čéą░ -> Arduino Nano), ą▓čŗą▒ąĄčĆąĖč鹥 COM-ą┐ąŠčĆčé, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ą║ąŠą╝ą┐čīčÄč鹥čĆ ą▓ąĖą┤ąĖčé Arduino Nano (ąĪąĄčĆą▓ąĖčü -> ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé). ą×čéą║čĆąŠą╣č鹥 čüą║ąĄčéčć ublox6a.ino (ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░čĆčģąĖą▓ąĄ [12]). ąÆčŗą▒ąĄčĆąĖč鹥 ą▓ ą╝ąĄąĮčÄ ąĪą║ąĄčéčć -> ą¤čĆąŠą▓ąĄčĆąĖčéčī / ąÜąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī (Ctrl+R). ą¦ąĄčĆąĄąĘ ą╝ąĄąĮčÄ ążą░ą╣ą╗ -> ąŚą░ą│čĆčāąĘąĖčéčī (Ctrl+U) ąĘą░ą│čĆčāąĘąĖč鹥 čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
#include < SoftwareSerial.h>
// ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ serial-ąŠą▒čŖąĄą║čéą░ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ
// čü ą╝ąŠą┤čāą╗ąĄą╝ GPS. ąØąŠąČą║ą░ ą┐ąŠčĆčéą░ D3 Arduino ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║
// čüąĖą│ąĮą░ą╗ TX, ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ ą┤ą░ąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čā RX ą╝ąŠą┤čāą╗čÅ GPS,
// ąĖ ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ D4 Arduino čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ RX, ą┐ąŠą╗čāčćą░čÄčēąĖą╣
// čüąĖą│ąĮą░ą╗ ąŠčé ą▓čŗčģąŠą┤ą░ TX ą╝ąŠą┤čāą╗čÅ GPS.
SoftwareSerial gps(4, 3);
void setup()
{
// ąŚą░ą┐čāčüą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą╝ąĄąČą┤čā ą┐ą╗ą░č鹊ą╣ Arduino
// ąĖ Arduino IDE (Serial Monitor). ąÆą╝ąĄčüč鹊 Serial Monitor
// čüčĆąĄą┤čŗ Arduino IDE ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā
// ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ č鹥čĆą╝ąĖąĮą░ą╗ą░ (SecureCRT, Putty, TerraTerm).
Serial.begin(9600);
while(!Serial);
// ąŚą░ą┐čāčüą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą╝ąĄąČą┤čā ą┐ą╗ą░č鹊ą╣ Arduino
// ąĖ ą╝ąŠą┤čāą╗ąĄą╝ GPS. ąĪą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī 9600 ą▒ąŠą┤.
gps.begin(9600);
delay(1000);
Serial.println("Setup Complete!");
}
void loop()
{
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą╝ąŠą┤čāą╗čÅ GPS (ąĄčüą╗ąĖ ąŠąĮąĖ ą┤ąŠčüčéčāą┐ąĮčŗ) ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ąĖčģ
// ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé
// ąĮą░ą┐ąĄčćą░čéą░ąĮčŗ ą▓ ąŠą║ąĮąĄ Arduino IDE Serial Monitor.
if(gps.available())
{
Serial.write(gps.read());
}
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ąŠą║ąĮą░ Arduino IDE Serial Monitor (ąĄčüą╗ąĖ
// čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ, čé. ąĄ. ąĄčüą╗ąĖ ąĖčģ ą▓ą▓ąĄą╗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī)
// ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ąĖčģ ą╝ąŠą┤čāą╗čÄ GPS.
if(Serial.available())
{
gps.write(Serial.read());
}
}
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ Arduino čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ ąŠčüąĮąŠą▓ąĮčŗčģ čćą░čüč鹥ą╣. ążčāąĮą║čåąĖčÅ void setup () čüąŠą┤ąĄčƹȹĖčé ą║ąŠą┤ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, čé. ąĄ. ąĘą┤ąĄčüčī ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ, ą║ą░ą║ąĖąĄ ą┐ąŠčĆčéčŗ Arduino Nano čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čŗčģąŠą┤čŗ, ą║ą░ą║ąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮčŗ. ąÆč鹊čĆą░čÅ čćą░čüčéčī čŹč鹊 čäčāąĮą║čåąĖčÅ void loop (), čüąŠą┤ąĄčƹȹ░čēą░čÅ čüą░ą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝čā. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ čŹčéą░ ą▓čüčÅ čüąĖčüč鹥ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé, ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ąĮą░ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╝ čüą░ą╣č鹥 Arduino (čéą░ą║ąČąĄ čüą╝. [4]).
ą¤ąŠčüą╗ąĄ ąĘą░ą│čĆčāąĘą║ąĖ ąĖ ąĘą░ą┐čāčüą║ą░ čŹč鹊ą╣ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ ą┐ą╗ą░č鹥 Arduino Nano ąŠčéą║čĆąŠą╣č鹥 ąŠą║ąĮąŠ Serial Monitor, čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą╝ąĄąĮčÄ ąĪąĄčĆą▓ąĖčü -> ą£ąŠąĮąĖč鹊čĆ ą┐ąŠčĆčéą░ (Ctrl+Shift+M). ąÆ ąŠą║ąĮąĄ Serial Monitor ąÆčŗ čāą▓ąĖą┤ąĖč鹥 ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą╝ąŠą┤čāą╗čī GPS.
[ą¤ą× ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ GPS]
ą£čŗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ą╗ąĖ ą┐ą╗ą░čéčā Arduino Nano ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ąĖ čü ąĄčæ ą┐ąŠą╝ąŠčēčīčÄ ą╝ąŠą┤čāą╗čī GPS ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā PC č湥čĆąĄąĘ ą┐ąŠčĆčé USB. ąŚą░ą║čĆąŠą╣č鹥 čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE, ąŠąĮą░ ą▒ąŠą╗čīčłąĄ ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ. ą¤ą╗ą░čéą░ Arduino Nano č鹥ą┐ąĄčĆčī čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ą░ USB-UART.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ą╝ąĄčüč鹊 ą┐ą╗ą░čéčŗ Arduino Nano ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą│ąŠč鹊ą▓čŗą╣ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ USB-TTL-UART, ą┐ąĄčĆąĄą║ą╗čÄčćąĖą▓ ąĄą│ąŠ ą▓ čĆąĄąČąĖą╝ čāčĆąŠą▓ąĮąĄą╣ 3.3V. ąóą░ą║ąĖąĄ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ąĖ čéą░ą║ąČąĄ ą┐čĆąŠą┤ą░čÄčéčüčÅ ą▓ ą▒ąŠą╗čīčłąŠą╝ čĆą░ąĘąĮąŠąŠą▒čĆą░ąĘąĖąĖ ąĮą░ čüą░ą╣č鹥 AliExpress, ąĖ čüč鹊čÅčé ąŠč湥ąĮčī ą┤ąĄčłąĄą▓ąŠ.
ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą┤čāą╗ąĄą╝ GPS ą░ą▓č鹊čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝čā u-center, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī čü čüą░ą╣čéą░ www.u-blox.com [2]. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓čŗą▒ąĄčĆąĖč鹥 ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ąĮąŠą╝ąĄčĆ COM-ą┐ąŠčĆčéą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ u-center ą╝ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ ąĖąĮč鹥čĆąĄčüąĮčŗčģ ą┤ąĄą╣čüčéą▓ąĖą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī ą╝ąŠčēąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░, ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą│ąŠ čüąŠ čüą┐čāčéąĮąĖą║ąŠą▓, ąÆą░čłąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ąĮą░ ą║ą░čĆč鹥 Google Maps. ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓.
ąöą╗čÅ ą╝ąŠą┤čāą╗čÅ NEO-6M ą╝čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ "TP (Timepulse)" ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ. ąØąŠ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ NEO-7M čŹč鹊 ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé, ąĖ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī "TP5 (Timepulse)". ąÉą║čéąĖą▓ąĖčĆčāą╣č鹥 čĆą░ą┤ąĖąŠą║ąĮąŠą┐ą║ąĖ "Frequency" ąĖ "Duty Cycle" (čüą╝. čüą║čĆąĖąĮčłąŠčé).
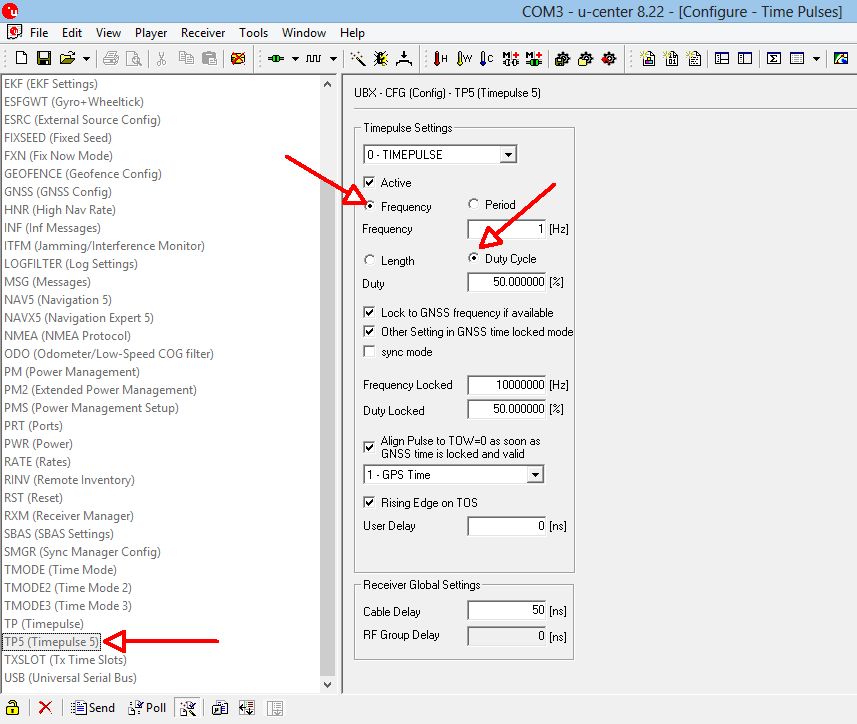
ąÆą░ą╝ ąĮčāąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī 2 čćą░čüč鹊čéčŗ, ąŠą┤ąĮčā 1 ąōčå, čćč鹊ą▒čŗ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą╝ąĄčĆčåą░ą╗, ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ, ąĖ ą▓č鹊čĆčāčÄ, ą║ąŠč鹊čĆą░čÅ ąĮčāąČąĮą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą┐ąŠčĆąĮąŠą╣. ą×ą┐ąŠčĆąĮą░čÅ čćą░čüč鹊čéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą▓ ąŠą▒ą╗ą░čüčéąĖ "Frequency Locked". ąŚą┤ąĄčüčī ą╝ąŠąČąĮąŠ ą▓ą▓ąĄčüčéąĖ ą╗čÄą▒čāčÄ čćą░čüč鹊čéčā ą┤ąŠ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 10 ą£ąōčå. ą£ąŠą╣ ą╝ąŠą┤čāą╗čī ą╝ąŠą│ ą▓čŗą┤ą░ą▓ą░čéčī čćą░čüč鹊čéčŗ ą┤ąŠ 16 ą£ąōčå, ą┐čĆąĖ čŹč鹊ą╝ čćą░čüč鹊čéą░ ą┐ąŠą╗čāčćą░ą╗ą░ ąĮąĄą║ąŠč鹊čĆčŗą╣ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą┤ąČąĖčéč鹥čĆ.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą╝ąŠąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą▓čŗą▒ąŠčĆąŠą╝ čäčāąĮą║čåąĖą╣ "BBR-0" ąĖ "3-I2C-EEPROM", čćč鹊 čüąŠčģčĆą░ąĮčÅąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą▓ ą┐ą░ą╝čÅčéąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą╣ ą▒ą░čéą░čĆąĄą╣ą║ąŠą╣, ąĖ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ EEPROM. ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ąĮą░ ą╝ąŠąĄą╝ ą╝ąŠą┤čāą╗ąĄ ąĮąĄ ą▒čŗą╗ąŠ ą┐ą░ą╝čÅčéąĖ EEPROM, ąĖ ą┐čĆąĖčģąŠą┤ąĖą╗ąŠčüčī ą┐ąŠą▓č鹊čĆčÅčéčī ąĮą░čüčéčĆąŠą╣ą║čā ą┐čĆąĖ čĆą░ąĘčĆčÅą┤ąĄ ą▒ą░čéą░čĆąĄą╣ą║ąĖ.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī Mark VK6WV čüą┤ąĄą╗ą░ą╗ čüą╗ąĄą┤čāčÄčēąĄąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: "ąÜąŠą│ą┤ą░ čÅ ą┐ąŠą┐čŗčéą░ą╗čüčÅ čüąŠčģčĆą░ąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║čā, ą║ą░ą║ čüąŠą▓ąĄč鹊ą▓ą░ą╗ą░ ąÆą░čłą░ čüčéą░čéčīčÅ, č鹊 čŹč鹊 ąĮąĄ čüčĆą░ą▒ąŠčéą░ą╗ąŠ. ą¤ąŠčüą╗ąĄ ąĖąĘčāč湥ąĮąĖčÅ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ čÅ ąŠą▒ąĮą░čĆčāąČąĖą╗ čäčāąĮą║čåąĖčÄ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ GNSS ą▓ ą╝ąĄąĮčÄ Tools. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ TP5 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GNSS ą▒čŗą╗ą░ ą┐čĆąŠčćąĖčéą░ąĮą░ ąĖ ąĘą░ą┐ąĖčüą░ąĮą░ ą▓ čäą░ą╣ą╗. ąŚą░č鹥ą╝ čŹč鹊čé čäą░ą╣ą╗ ą▒čŗą╗ąŠ ąĘą░ą┐ąĖčüą░ąĮ ąŠą▒čĆą░čéąĮąŠ ą▓ ą╝ąŠą┤čāą╗čī GPS čäčāąĮą║čåąĖą╣ "Store Configuration into BBR/Flash". ąŁč鹊 čĆą░ą▒ąŠčéą░ąĄčé."
[ą¤čĆą░ą║čéąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ]
ąÆ ą┐ąŠą╝ąĄčēąĄąĮąĖąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ GPS ąĖąĮąŠą│ą┤ą░ čü čéčĆčāą┤ąŠą╝ ąĮą░čģąŠą┤ąĖčé čüą┐čāčéąĮąĖą║ąĖ ą┤ą╗čÅ ą┐čĆąĖą▓čÅąĘą║ąĖ čüą▓ąŠąĄą╣ ą┐ąŠąĘąĖčåąĖąĖ (FIX). ąÆčŗąĮąĄčüąĖč鹥 GPS-ą╝ąŠą┤čāą╗čī ąĮą░ čāą╗ąĖčåčā, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąŠąĮ ąĮą░čģąŠą┤ąĖčé FIX, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą╝ąŠąČąĮąŠ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī čĆą░ą▒ąŠčéčā ą▓ ą┐ąŠą╝ąĄčēąĄąĮąĖąĖ.
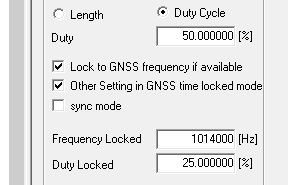
ą£ąŠą┤čāą╗čī ą▓ ą┤ąĄčĆąĄą▓čÅąĮąĮąŠą╝ čÅčēąĖčćą║ąĄ ąĖąĘą╗čāčćą░ąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąŠčēąĮčŗą╣ čüąĖą│ąĮą░ą╗, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī ą┐čĆąĖąĄą╝ąĮąĖą║ QRSS. ąŻ čćą░čüč鹊čéčŗ 10140 ą║ąōčå ąĄčüčéčī ą┤ą░ąČąĄ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąŠčēąĮčŗąĄ ą│ą░čĆą╝ąŠąĮąĖą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé čüąŠąĘą┤ą░ą▓ą░čéčī ą┐ąŠą╝ąĄčģąĖ čüąĖą│ąĮą░ą╗čā GPS. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüą░ą╝ąŠą│ąŠ ą╝ąŠčēąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ą╣č鹥čüčī ą║ ą▓čŗčģąŠą┤ąĮąŠą╝čā ą║ąŠąĮąĮąĄą║č鹊čĆčā. ąĢčüą╗ąĖ ąĮčāąČąĄąĮ čüą╗ą░ą▒čŗą╣ čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĮą░čüčéčĆąŠą╣č鹥 ą▓čŗčģąŠą┤ąĮčāčÄ čćą░čüč鹊čéčā ą▓ 2 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ čćą░čüč鹊čéčŗ ą┐čĆąĖąĄą╝ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ 5070000 ąōčå), ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčī 25% (ą┐ą░čĆą░ą╝ąĄčéčĆ Duty Cycle). ąöą╗čÅ ąĄčēąĄ ą▒ąŠą╗ąĄąĄ čüą╗ą░ą▒čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüą║ą▓ą░ąČąĮąŠčüčéčī 50% ąĖ ąĮąĄč湥čéąĮčŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ (1/5, 1/7, 1/9 ąŠčé čćą░čüč鹊čéčŗ ą┐čĆąĖąĄą╝ą░, ąĖ čé. ą┤.). ąöą╗čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ QRSS ą░ą▓č鹊čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą┤ąĄą╗ąĄąĮąĖąĄ čćą░čüč鹊čéčŗ ąĮą░ 10 čüąŠ čüą║ą▓ą░ąČąĮąŠčüčéčīčÄ 25% (1014000 Hz).
ą¤čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ QRSS, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī 10-čÅ ą│ą░čĆą╝ąŠąĮąĖą║ą░ čćą░čüč鹊čéčŗ 1014000 ąōčå:
ąÆąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 čüąĄą╣čćą░čü ą┐ąŠčÅą▓ąĖą╗ąĖčüčī ą▒ąŠą╗ąĄąĄ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą╝ąŠą┤ąĄą╗ąĖ ą╝ąŠą┤čāą╗ąĄą╣ GPS, čüą╝. [3].
[ą£ąŠčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░]
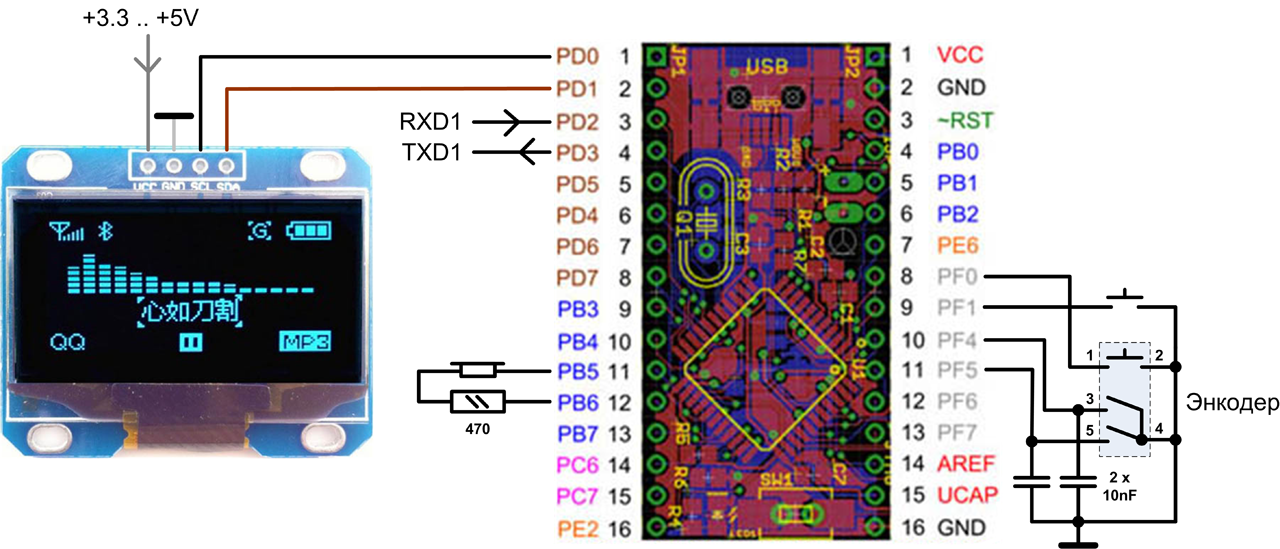
ąØą░ ąŠčüąĮąŠą▓ąĄ ą╝ąŠą┤čāą╗čÅ NEO-7M0-0-000 ą║ąŠą╝ą┐ą░ąĮąĖąĖ U-blox [8], ąĖąĮą┤ąĖą║ą░č鹊čĆą░ OLED ąĖ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ AVR-USB32U4 [9] čüąŠą▒čĆą░ą╗ ą│ąĄąĮąĄčĆą░č鹊čĆ čŹčéą░ą╗ąŠąĮąĮčŗčģ čćą░čüč鹊čé (čüą╝. č乊č鹊 ąĮąĖąČąĄ).

ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖ ąŠčüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░:
1. ąÆčŗčģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ čĆąĄą│čāą╗ąĖčĆčāąĄčéčüčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 1..10 ą£ąōčå čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąŠą▓ąŠčĆąŠčéąĮąŠą│ąŠ 菹Įą║ąŠą┤ąĄčĆą░.
2. ąÆ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 10 .. 24 ą£ąōčå čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗, ąĮąŠ ą▓ ąĮąĄą╝ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ąĮąŠą│ąŠ ą┐ąŠčüč鹊čĆąŠąĮąĮąĖčģ ą│ą░čĆą╝ąŠąĮąĖą║.
3. ą¦ą░čüč鹊čéą░ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1 ąōčå .. 99 ą║ąōčå čĆąĄą│čāą╗ąĖčĆčāąĄčéčüčÅ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ čłą░ą│ąŠą╝ 1 ąōčå. ąÆ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░čģ čłą░ą│ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą│čĆą░ąĮąĖč湥ąĮ 5 ąĘąĮą░čćą░čēąĖą╝ąĖ ą┤ąĄčüčÅčéąĖčćąĮčŗą╝ąĖ čĆą░ąĘčĆčÅą┤ą░ą╝ąĖ čćą░čüč鹊čéčŗ.
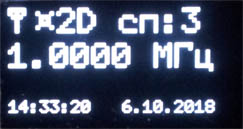
4. ą¦ą░čüč鹊čéą░, ą║ąŠč鹊čĆą░čÅ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆąĄ, č鹊čćąĮąŠ ą▓čŗą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ 2D ąĖ 3D čäąĖą║čüą░čåąĖąĖ.
5. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčāčÄ čćą░čüč鹊čéčā ą╝ąŠąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ, čćč鹊ą▒čŗ ąŠąĮą░ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ą░čüčī ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ.
6. ąÆ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ čüąŠą▒čĆą░ąĮ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī ą▓ąĮąĄčłąĮąĖąĄ ą│ąĄąĮąĄčĆą░č鹊čĆčŗ ąĖą╗ąĖ ąŠčåąĄąĮąĖą▓ą░čéčī ąĖčģ čćą░čüč鹊čéčā.
7. ąśąĮč鹥čĆč乥ą╣čü USB ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ 5V ąĖ ą┤ą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą╝ąŠčüčéą░ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ u-center.
ąĀąĄą│čāą╗ąĖčĆąŠą▓ą║ą░ čćą░čüč鹊čéčŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 ą┐ąŠą▓ąŠčĆąŠčé 菹Įą║ąŠą┤ąĄčĆą░ ą▓ą╗ąĄą▓ąŠ ąĖ ą▓ą┐čĆą░ą▓ąŠ ą╝ąĄąĮčÅąĄčé čāą╝ąĄąĮčīčłą░ąĄčé ąĖ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ čåąĖčäčĆčŗ čćą░čüč鹊čéčŗ, ąĮą░ą┐čĆąŠčéąĖą▓ ą║ąŠč鹊čĆąŠą╣ čüč鹊ąĖčé ą║čāčĆčüąŠčĆ. ąÜąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ č鹥ą║čāčēąĄą╣ čåąĖčäčĆčŗ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ą┤ąŠ 0 čü ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą║ čåąĖčäčĆąĄ 9, ą╗ąĄą▓čŗą╣ čüąŠčüąĄą┤ąĮąĖą╣ čĆą░ąĘčĆčÅą┤ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ąĮą░ ąĄą┤ąĖąĮąĖčåčā. ąś ąĮą░ąŠą▒ąŠčĆąŠčé, ą┐čĆąĖ čāą▓ąĄą╗ąĖč湥ąĮąĖąĖ ąĘąĮą░č湥ąĮąĖčÅ čåąĖčäčĆčŗ čü ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ąŠčé 9 ą║ 0 ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą╗ąĄą▓ąŠą╣ čüąŠčüąĄą┤ąĮąĄą╣ čåąĖčäčĆčŗ čéą░ą║ąČąĄ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ. ą¤ąŠą╗ąŠąČąĄąĮąĖąĄ ą║čāčĆčüąŠčĆą░ ą╝ąŠąČąĮąŠ ą╝ąĄąĮčÅčéčī ą║ąŠčĆąŠčéą║ąĖą╝ąĖ ąĮą░ąČą░čéąĖčÅą╝ąĖ ąĮą░ čĆčāčćą║čā 菹Įą║ąŠą┤ąĄčĆą░. ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ čćą░čüč鹊čéčŗ čüą┤ąĄą╗ą░ąĮąŠ ą┐ąŠ ą┐čĆą░ą▓ąĖą╗čā "ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘąĮą░čćą░čēąĖčģ čĆą░ąĘčĆčÅą┤ąŠą▓". ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ąŠą│ą┤ą░ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ąĘąĮą░čćą░čēąĖąĄ čĆą░ąĘčĆčÅą┤čŗ čćą░čüč鹊čéčŗ ąĮąĄ ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ąĮą░ 菹║čĆą░ąĮąĄ, č乊čĆą╝ą░čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ čćą░čüč鹊čéčŗ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čŹčéąĖą╝ ą┐čĆą░ą▓ąĖą╗ąŠą╝. ąó. ąĄ. ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą┐ąŠąĘąĖčåąĖčÅ ą┤ąĄčüčÅčéąĖčćąĮąŠą╣ č鹊čćą║ąĖ, ą╝ąĄąĮčÅčÄčéčüčÅ ąĄą┤ąĖąĮąĖčåčŗ čćą░čüč鹊čéčŗ čü ąōčå ąĮą░ ą║ąōčå ąĖ čü ą║ąōčå ąĮą░ ą£ąōčå. ąś ąĮą░ąŠą▒ąŠčĆąŠčé, ą║ąŠą│ą┤ą░ ą┐čĆąĖ čāą╝ąĄąĮčīčłąĄąĮąĖąĖ čćą░čüč鹊čéčŗ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓čŗą▓ąĄčüčéąĖ ąĮąĄ ąŠč鹊ą▒čĆą░ąČą░ąĄą╝čŗą╣ ąĮą░ 菹║čĆą░ąĮąĄ ą╝ą╗ą░ą┤čłąĖą╣ ą┤ąĄčüčÅčéąĖčćąĮčŗą╣ čĆą░ąĘčĆčÅą┤, č鹊 č乊čĆą╝ą░čé ą▓čŗą▓ąŠą┤ą░ čćą░čüč鹊čéčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą╝ąĄąĮčÅąĄčéčüčÅ.
ąÆčŗą▓ąŠą┤ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆ. ą» ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą╝ąŠąĮąŠčģčĆąŠą╝ąĮčŗą╣ ąĖąĮą┤ąĖą║ą░č鹊čĆ OLED 128x64 čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C. ąöą╗čÅ ąĄą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü TWI ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega32U4 ąĖ ą│čĆą░čäąĖč湥čüą║ąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ Adafruit. ąæąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą▒čŗą╗ąĖ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ Arduino, ąĖ ą▓ čåąĄą╗čÅčģ ąĖčģ ąŠą▒ą╗ąĄą│č湥ąĮąĖčÅ ą╝ąĮąĄ ą┐čĆąĖčłą╗ąŠčüčī ąĖčģ ą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī ąĮą░ čćąĖčüčéčŗą╣ C, čćč鹊 ą▒čŗą╗ąŠ ą┤ąŠą▓ąŠą╗čīąĮąŠ ąĮąĄčüą╗ąŠąČąĮąŠ. ąĀčāčüčüą║ąĖą╣ čłčĆąĖčäčé čéą░ą║ąČąĄ ąĮą░čłąĄą╗čüčÅ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒čŗčüčéčĆąŠ. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąĖčłą╗ąŠčüčī ą┐ąŠą▓ąŠąĘąĖčéčīčüčÅ čü čāčüą║ąŠčĆąĄąĮąĖąĄą╝ ą▓čŗą▓ąŠą┤ą░ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Adafruit ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░ ą┐čĆąĖ ą▓čŗą▓ąŠą┤ąĄ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║čā ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čéą░, čé. ąĄ. čĆą░ą▒ąŠčéą░ą╗ą░ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ąŠą┐čĆąŠčüą░ ąĖąĮč鹥čĆč乥ą╣čüą░ TWI, ą▒ąĄąĘ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąŁč鹊 čüąĖą╗čīąĮąŠ č鹊čĆą╝ąŠąĘąĖą╗ąŠ čĆą░ą▒ąŠčéčā ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ, ąĘą░čéčĆčāą┤ąĮčÅą╗ąŠ ąŠą┐čĆąŠčü 菹Įą║ąŠą┤ąĄčĆą░ ąĖ čüąĮąĖąČą░ą╗ąŠ ąŠčéąĘčŗą▓čćąĖą▓ąŠčüčéčī čüąĖčüč鹥ą╝čŗ ąĮą░ ą▓ąĮąĄčłąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ. ą¤čĆąĖčłą╗ąŠčüčī ą┐ąĄčĆąĄą┤ąĄą╗ą░čéčī ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą▓čŗą▓ąŠą┤ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆ ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ TWI, ą┤ą╗čÅ č湥ą│ąŠ ąĘą░ ąŠčüąĮąŠą▓čā ą▓ąĘčÅą╗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā avr-i2c-master.
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą┐čĆąĖąĄą╝ąĮąĖą║čā NEO-7M0-0-000. ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠąČąĖą┤ą░ąĄčéčüčÅ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ąĖ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐ąŠčüčŗą╗ą░ąĄčé ą▓ ąĮąĄą│ąŠ ąĮą░čüčéčĆąŠąĄčćąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐čĆąĄčēą░čÄčé ąĮąĄ ąĮčāąČąĮčŗąĄ čüą┐čāčéąĮąĖą║ąŠą▓čŗąĄ ą║ą░ąĮą░ą╗čŗ (ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ disableUnnecessaryChannels) ąĖ čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ąĮą░ą▓ąĖą│ą░čåąĖąŠąĮąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ UBX (ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ enableNavPvt). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ ą▓čŗą▓ąŠą┤ą░ ąĮą░ ąĮąŠąČą║čā TIMEPULSE0 čćą░čüč鹊čéčŗ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠčćąĖčéą░ąĮą░ ąĖąĘ EEPROM ATmega32U4 (ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ sendCFG_TP5). ąÜąŠą╝ą░ąĮą┤čŗ ą┐čĆąĖąĄą╝ąĮąĖą║čā ąĖ ą┐ąŠą╗čāč湥ąĮąĖąĄ ąŠčé ąĮąĄą│ąŠ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą┐ąŠčĆčé UART ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąÆąĖčĆčéčāą░ą╗čīąĮčŗą╣ COM-ą┐ąŠčĆčé. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą║čĆąŠą╝ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ č湥čĆąĄąĘ UART čéą░ą║ąČąĄ ąŠčĆą│ą░ąĮąĖąĘčāąĄčé ą┐čĆąŠąĘčĆą░čćąĮčŗą╣ ą╝ąŠčüčé ą╝ąĄąČą┤čā UART ąĖ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╝ ąĪą×ą£-ą┐ąŠčĆč鹊ą╝ (USB CDC), ą║ąŠč鹊čĆčŗą╣ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ LUFA ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ USB ATmega32U4. ąŁč鹊 ąŠč湥ąĮčī ą┐ąŠą╗ąĄąĘąĮą░čÅ čäčāąĮą║čåąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą╝ąŠąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī čü ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ č湥čĆąĄąĘ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝čŗ u-center. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĖąĄą╝ąĮąĖą║ č湥čĆąĄąĘ ą┐čĆąŠč鹊ą║ąŠą╗ NMEA ą▓čŗą▓ąŠą┤ąĖčé ą╝ąĮąŠąČąĄčüčéą▓ąŠ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹥ą║čāčēąĄą╝ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ, č鹊čćąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ą┤ąŠčüčéčāą┐ąĮčŗčģ čüą┐čāčéąĮąĖą║ąŠą▓, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ą┤ą▓ąĖąČąĄąĮąĖčÅ ąĖ čé. ą┐. ąĪąĮą░čćą░ą╗ą░ čā ą╝ąĄąĮčÅ čéą░ą║ąČąĄ ą▒čŗą╗ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąŠčéą║ą╗čÄč湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā NMEA, čćč鹊ą▒čŗ čŹč鹊čé ą▓čŗą▓ąŠą┤ ąĮąĄ ą╝ąĄčłą░ą╗ ą┐ą░čĆčüąĖąĮą│čā ą┐čĆąŠč鹊ą║ąŠą╗ą░ UBX. ąØąŠ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą┐ą░čĆčüąĄčĆ ą┐ą░ą║ąĄč鹊ą▓ UBX ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąŠčéčäąĖą╗čīčéčĆąŠą▓čŗą▓ą░ąĄčé ą┐ą░ą║ąĄčéčŗ NMEA, čéą░ą║ čćč鹊 čÅ ąĮąĄ čüčéą░ą╗ ąŠčéą║ą╗čÄčćą░čéčī ą┐čĆąŠč鹊ą║ąŠą╗ NMEA, ąĖ čŹč鹊 ą┤ąŠą▒ą░ą▓ąĖą╗ąŠ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗. ąśąĮč鹥čĆč乥ą╣čü USB čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ąĖ č湥čĆąĄąĘ ąĮąĄą│ąŠ ą╝ąŠąČąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą║ą░ą║ ą┐čĆąĖąĄą╝ąĮąĖą║ą░, čéą░ą║ ąĖ ATmega32U4.
ąÜąŠą╝ą┐ą░čĆą░č鹊čĆ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ. ąØą░ ą┐ąĄčĆąĄą┤ąĮąĄą╣ ą┐ą░ąĮąĄą╗ąĖ ą▓ ą╗ąĄą▓ąŠą╣ čćą░čüčéąĖ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ą┤ą▓ą░ BNC-čĆą░ąĘčŖąĄą╝ą░. ąØą░ ą╗ąĄą▓čŗą╣ ąĖąĘ ąĮąĖčģ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ čćą░čüč鹊čéą░ čü ą▓čŗčģąŠą┤ą░ TIMEPULSE0 ą┐čĆąĖąĄą╝ąĮąĖą║ą░, ą░ ąĮą░ ą┐čĆą░ą▓čŗą╣ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą░čéčī čüąĖą│ąĮą░ą╗ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąÜąŠą╝ą┐ą░čĆą░č鹊čĆ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčé čŹčéąĖ ą┤ą▓ąĄ čćą░čüč鹊čéčŗ, ąĖ čāą┐čĆą░ą▓ą╗čÅąĄčé čüą▓ąĄč湥ąĮąĖąĄą╝ ą┤ą▓čāčģ ą║čĆą░čüąĮčŗčģ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ ąĮą░ą┤ ą║ąŠąĮąĮąĄą║č鹊čĆą░ą╝ąĖ. ąĢčüą╗ąĖ čćą░čüč鹊čéą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ TIMEPULSE0 ą▒ąŠą╗čīčłąĄ, č鹊 ąĘą░ąČąČąĄčéčüčÅ ą╗ąĄą▓čŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤, ą┐čĆą░ą▓čŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐ąŠą│ą░čüąĮąĄčé. ąĢčüą╗ąĖ ąČąĄ ą▒ąŠą╗čīčłąĄ čćą░čüč鹊čéą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, č鹊 ąĘą░ąČąČąĄčéčüčÅ ą┐čĆą░ą▓čŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤. ąÜąŠą╝ą┐ą░čĆą░č鹊čĆ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ čüąŠą▒čĆą░ąĮ ąĮą░ ąÜą£ą×ą¤-čéčĆąĖą│ą│ąĄčĆą░čģ (čüą╝. čüčģąĄą╝čā ąĖąĘ čüčéą░čéčīąĖ [10]).
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ UBX. ąÉąĮą░ą╗ąĖąĘ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą▓ č乊čĆą╝ą░č鹥 ą┐čĆąŠč鹊ą║ąŠą╗ą░ UBX čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ Brian R Taylor bolderflight/UBLOX ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā UBX [11]. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┐ąĄčĆąĄą┤ąĄą╗ą░ąĮą░ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐ą░ą║ąĄčéčŗ ąĮą░ ą╗ąĄčéčā, ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą▒ą░ą╣čéčā, ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĘą░ą┤ą░ąĮąĮčŗą╝ čłą░ą▒ą╗ąŠąĮąŠą╝ ą┐ą░ą║ąĄčéą░.
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠąĄą║čéą░ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [12].
UPD181006. ąöąŠą▒ą░ą▓ąĖą╗ ą▓čŗą▓ąŠą┤ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆ č鹊čćąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┤ą░čéčŗ.
[ąÜą░ą║ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐ąŠčÅčü ą▓čĆąĄą╝ąĄąĮąĖ]
ą¦ą░čüąŠą▓ąŠą╣ ą┐ąŠčÅčü ąČąĄčüčéą║ąŠ ąĘą░ą┤ą░ąĮ ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ, čüą╝. ą╝ąŠą┤čāą╗čī screenapp.c, ą┐čĆąŠčåąĄą┤čāčĆčā ScreenHandler, ą▓ąĄčéą║čā if (updateflags & SCRUPD_DATATIME):
...
if (updateflags & SCRUPD_DATATIME)
{
...
if ((valid & 0x02) || !blank)
{
// ą£ąŠčüą║ąŠą▓čüą║ąŠąĄ ą▓čĆąĄą╝čÅ +3:
oledprintf("%2u:%02u:%02u", (hour+3)%24, min, sec);
}
...
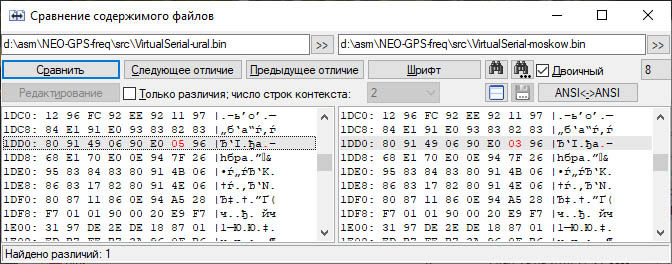
ąÜą░ą║ ą▓ą░čĆąĖą░ąĮčé, čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čĆąĄą┤ą░ą║č鹊čĆą░ ą╝ąŠąČąĮąŠ ą▓čĆčāčćąĮčāčÄ ąŠčéčĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čäą░ą╣ą╗ VirtualSerial.bin, ą║ąŠąĮčüčéą░ąĮčéą░ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ čüą╝ąĄčēąĄąĮąĖčÅ ą▓ čćą░čüą░čģ ą║ UTC ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x1DD6 (ąĮą░ čüą║čĆąĖąĮčłąŠč鹥 čüą╗ąĄą▓ą░ čāčĆą░ą╗čīčüą║ąŠąĄ ą▓čĆąĄą╝čÅ +5, čüą┐čĆą░ą▓ą░ ą╝ąŠčüą║ąŠą▓čüą║ąŠąĄ +3):
[ąÜą░ą║ ąĖ č湥ą╝ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī]
ą¦ą░čüč鹊 ąĘą░ą┤ą░čÄčé ą▓ąŠą┐čĆąŠčü, ą║ą░ą║ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĖąĘ ą░čĆčģąĖą▓ą░ [12]. ąĢčüą╗ąĖ ą║čĆą░čéą║ąŠ, č鹊 ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĮčāąČąĄąĮ čéčāą╗č湥ą╣ąĮ avr-gcc ąĖ ą║ą░čéą░ą╗ąŠą│ čü ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ LUFA. ąÜąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ą┐čĆąŠąĄą║čé čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤ make clean ąĖ make, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮčŗčģ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ src ą┐čĆąŠąĄą║čéą░ (ą▓ čŹč鹊ą╝ ą║ą░čéą░ą╗ąŠą│ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ čäą░ą╣ą╗ makefile ąĖ ąŠčüąĮąŠą▓ąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░).
ą¤ąŠčłą░ą│ąŠą▓ą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ:
1. ąÆąŠčüčüčéą░ąĮąŠą▓ąĖč鹥 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą║ą░čéą░ą╗ąŠą│ą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ LUFA. ą¤ąŠą╗ąĮčŗą╣ ą┐čāčéčī ą┤ąŠ ą║ą░čéą░ą╗ąŠą│ą░ ą╝ąŠąČąĮąŠ čāąĘąĮą░čéčī ąĖąĘ čäą░ą╣ą╗ą░ src\makefile (LUFA_PATH = c:/asm/lufa-LUFA-170418/LUFA).
2. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 čéčāą╗č湥ą╣ąĮ. ąöą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī WinAVR ąĖą╗ąĖ Atmel Studio. ą» čāčüčéą░ąĮąŠą▓ąĖą╗ WinAVR-20100110. ąØčāąČąĮąŠ čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ą░čéčć, čāčüčéčĆą░ąĮčÅčÄčēąĖą╣ ą┐čĆąŠą▒ą╗ąĄą╝čā čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ WinAVR čü ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗą╝ąĖ čüąĖčüč鹥ą╝ą░ą╝ąĖ Windows 8.1 ąĖ Windows 10. ąĪą╝. ą░čĆčģąĖą▓ [13], ą▓ ąĮąĄą╝ ąĖąĮčüčéą░ą╗ą╗čÅč鹊čĆ WinAVR ąĖ ą┐ą░čéčć.
3. ą¤čĆąŠą▓ąĄčĆčīč鹥 ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąŠą║čĆčāąČąĄąĮąĖčÅ PATH, ą▓ ąĮąĄą╣ ą┐ąĄčĆą▓čŗą╝ ą┤ąŠą╗ąČąĄąĮ ąĖą┤čéąĖ ą║ą░čéą░ą╗ąŠą│ bin, ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ čāčéąĖą╗ąĖčéčŗ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ (gcc, make ąĖ čé. ą┐.). ą¤ąĄčĆą▓ąŠą╣ ąĘą░ą┐ąĖčüčīčÄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čāčéčī C:\WinAVR-20100110\bin;C:\WinAVR-20100110\utils\bin. ąÜą░ą║ ą▓ą░čĆąĖą░ąĮčé, ą╝ąŠąČąĮąŠ ą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ąŠą╝ą░ąĮą┤čā (ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ PATH ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ čŹč鹊ą╣ čüąĄčüčüąĖąĖ ą║ąŠąĮčüąŠą╗ąĖ):
set PATH="c:\Program Files (x86)\Atmel\Studio\7.0\shellutils\";%PATH%
4. ąŚą░ą╣ą┤ąĖč鹥 ą▓ ą║ą░čéą░ą╗ąŠą│ src, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅą╣č鹥 ą▓ ąĮąĄą╝ ą║ąŠą╝ą░ąĮą┤čŗ make clean ąĖ make. ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ make ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ src ą┐ąŠčÅą▓čÅčéčüčÅ čäą░ą╣ą╗čŗ VirtualSerial.hex ąĖ VirtualSerial.bin.
ą£ąŠąČąĮąŠ čéą░ą║ąČąĄ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą┐čĆąŠąĄą║čé ą▓ čüčĆąĄą┤ąĄ Visual Studio. ą×čéą║čĆąŠą╣č鹥 čäą░ą╣ą╗ čĆąĄčłąĄąĮąĖčÅ project.sln, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅą╣č鹥 ą║ąŠą╝ą░ąĮą┤čŗ ą¤ąŠčüčéčĆąŠąĄąĮąĖąĄ -> ą×čćąĖčüčéąĖčéčī čĆąĄčłąĄąĮąĖąĄ (ą░ąĮą░ą╗ąŠą│ make clean) ąĖ ą¤ąŠčüčéčĆąŠąĄąĮąĖąĄ -> ą¤ąŠčüčéčĆąŠąĖčéčī čĆąĄčłąĄąĮąĖąĄ F6 (ą░ąĮą░ą╗ąŠą│ make).
[ąĪą╗ąŠą▓ą░čĆąĖą║]
FIX FIXation, ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤čā ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ ą░ą▒čüąŠą╗čÄčéąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ ąĮą░ ą║ą░čĆč鹥 ą▓ čüąĖčüč鹥ą╝ąĄ GPS.
GPS Global Positionong System, čüą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüąĖčüč鹥ą╝ą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.
VFO Voltage-controlled Frequency Oscillator, ą│ąĄąĮąĄčĆą░č鹊čĆ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ (ą│ąĄč鹥čĆąŠą┤ąĖąĮ), čćą░čüč鹊čéą░ ą║ąŠč鹊čĆąŠą│ąŠ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓čģąŠą┤ąĮčŗą╝ ą┐ąŠčüč鹊čÅąĮąĮčŗą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝.
[ąĪčüčŗą╗ą║ąĖ]
1. SIMPLE 10 MHZ GPS FREQUENCY STANDARD AND RF GENERATOR site:qsl.net.
2. U-center GNSS evaluation software for Windows site:u-blox.com.
3. Positioning chips and modules site:u-blox.com.
4. Arduino: čćč鹊 čéą░ą╝ ą▓ąĮčāčéčĆąĖ?
5. 180614GPS-freq-reference.zip - čüą║ąĄčéčć, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ U-center, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ.
6. u-blox: ą┐ąŠą╗čāč湥ąĮąĖąĄ č鹊čćąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ čćą░čüč鹊čéčŗ.
7. uBlox NEO-7M: GPSDO ąĖą╗ąĖ ą┐čāčéčī ą║ GPSDO? site:ra3apw.ru.
8. NEO-7: ą╝ąŠą┤čāą╗ąĖ GPS/GNSS.
9. ą£ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ AVR-USB32U4.
10. ąŁą║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮčŗą╣ DDS-ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░ AVR ąĖ PLL.
11. ą¤čĆąŠč鹊ą║ąŠą╗ UBX ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ą░čģ u-blox 7.
12. 181006NEO-GPS-freq-public.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤.
13. 201005WinAVR.zip - WinAVR-20100110 ąĖ ą┐ą░čéčć ą║ ąĮąĄą╝čā. |





ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ, čā ą╝ąĄąĮčÅ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ čŹčéąĖą╝ ąĘą░ąĮąĖą╝ą░čéčīčüčÅ.
microsin: ą║ą░ą║ ą▒čāą┤ąĄčé čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą▓čĆąĄą╝čÅ, ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĘą░ą╣ą╝čāčüčī.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ