ąÆ čŹč鹊ą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ (ą┐ąĄčĆąĄą▓ąŠą┤ [1]) ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖąĮč鹥ąĘą░č鹊čĆą░ Si53xx. ąŁč鹊 ą┐ąŠą┤ąŠą╣ą┤ąĄčé ą┤ą╗čÅ čüąĖąĮč鹥ąĘą░č鹊čĆąŠą▓ ąĮą░ ąŠčüąĮąŠą▓ąĄ DSPLLŌäó (Any-Frequency Precision Clocks, ąĮą░ą┐čĆąĖą╝ąĄčĆ Si5326 ąĖ Si5368), ą░ čéą░ą║ąČąĄ ąĮą░ ąŠčüąĮąŠą▓ąĄ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ MultiSynth Any-Frequency, ą│ąĄąĮąĄčĆą░č鹊čĆčŗ Any-Output Clock (ąĮą░ą┐čĆąĖą╝ąĄčĆ Si5338, Si5351, Si5356). ą¤čĆąĖą╝ąĄąĮąĄąĮ čüčéą░čĆč鹥čĆ-ą║ąĖčé JumpStart ą║ąŠą╝ą┐ą░ąĮąĖąĖ Silicon Labs, ąŠą┤ąĮą░ą║ąŠ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮ ąĖ ąĮą░ ą┤čĆčāą│ąĖąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ.
[2. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ JumpStart ]
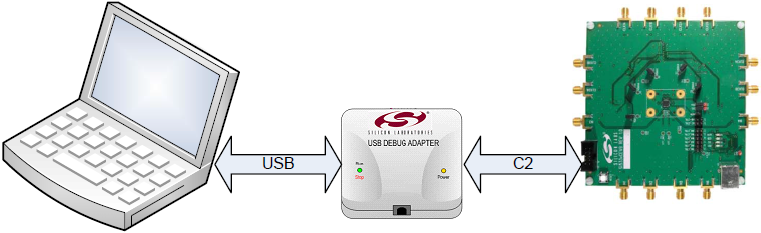
1 . ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠčåąĄąĮąŠčćąĮčāčÄ ą┐ą╗ą░čéčā čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ąĖ ą¤ą× ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┤ą░ą╝ą┐ čĆąĄą│ąĖčüčéčĆąŠą▓ (register map) ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ čüąĖąĮč鹥ąĘą░č鹊čĆą░.
2 . ąśčüą┐ąŠą╗čīąĘčāčÅ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ Silicon Labs MCU Integrated Development Environment (IDE), ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÄ čüąŠąĘą┤ą░ąĮąĮąŠą╣ register map ą▓ą╝ąĄčüč鹥 MCU firmware, ąĮą░ą┐ąĖčüą░ąĮąĮąŠą╝ ąĮą░ čÅąĘčŗą║ąĄ C, ąĖ ąĘą░ą│čĆčāąĘąĖč鹥 ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą┤ą▓ąŠąĖčćąĮčŗą╣ ą║ąŠą┤ firmware ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (MCU).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: C2 čŹč鹊 ą┤ą▓čāčģą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ąŠą▒ą╝ąĄąĮą░ Silicon Labs ą┤ą╗čÅ ą▓ąĮčāčéčĆąĖčüčģąĄą╝ąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Silicon Labs. ąÆą╝ąĄčüč鹥 čü ą║ąĖčéą░ą╝ąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ MCU ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą░ą┤ą░ą┐č鹥čĆ USB čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ C2.
ąĀąĖčü. 2. ą©ą░ą│ 2: ą┐ąĄčĆąĄą┤ą░čćą░ Register Map ą▓ MCU.
3 . ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ MCU ąĘą░ą┐ąĖčłąĄčé ą┤ą░ąĮąĮčŗąĄ register map ą▓ ą┐ą░ą╝čÅčéčī čåąĄą╗ąĄą▓ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüąĖąĮč鹥ąĘą░č鹊čĆ Si53xx), ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąŠąĮąŠ čüčéą░ąĮąĄčé ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ąĖ ąĮą░čćąĮąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čćą░čüč鹊čéčŗ. ąöą╗čÅ MCU ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, ą┐ąŠčŹč鹊ą╝čā MCU ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé, ą║ąŠč鹊čĆčŗąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čåąĄą╗ąĄą▓ąŠąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ąĀąĖčü. 3. ą©ą░ą│ 3: ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą░ąĮąĮčŗą╝ąĖ Register Map.
4 . ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠą╗čāč湥ąĮą░ ąĮčāąČąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ firmware, ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüą░ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ąŠą┐čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ MCU. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą▓čÅąČąĖč鹥čüčī čü Silicon Labs, ąĖą╗ąĖ ąŠąĘąĮą░ą║ąŠą╝čīč鹥čüčī čü ą┤ąŠą║čāą╝ąĄąĮč鹊ą╝ [2], ą│ą┤ąĄ ąŠą┐ąĖčüą░ąĮčŗ čĆą░ąĘąĮčŗąĄ ąŠą┐čåąĖąĖ, ą▓ą║ą╗čÄčćą░čÅ ą╝ąĄč鹊ą┤čŗ ą▓ąĮčāčéčĆąĖčüčģąĄą╝ąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (ISP) č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čüčŗ C2 ąĖą╗ąĖ JTAG, ąĖ ą║ą░ą║ ą┐ąŠą╗čāčćąĖčéčī ąĘą░čĆą░ąĮąĄąĄ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ MCU. ąÆ čåąĄą╗čÅčģ čāą┐čĆąŠčēąĄąĮąĖčÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ ą┐čĆąŠą┤čāą║čåąĖąĖ ąĮą░čüčéčĆąŠąĄąĮąĮčŗąĄ ąĮą░ ąĘą░ą▓ąŠą┤ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╣ ą┐čĆąŠčłąĖą▓ą║ąŠą╣ MCU ą┐ąŠą╗čāčćą░čÄčé čāąĮąĖą║ą░ą╗čīąĮčŗąĄ ąŠą▒ąŠąĘąĮą░čćą░ąĄą╝čŗąĄ part number.
[3. ąÆčŗą▒ąŠčĆ MCU ]
ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ JumpStart čĆą░čüčüą╝ąŠčéčĆąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ MCU:
ŌĆó ążąĖąĘąĖč湥čüą║ąĖą╣ čĆą░ąĘą╝ąĄčĆ ą║ąŠčĆą┐čāčüą░.
ąĢčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąĄčĆąĄą╣čéąĖ ąĮą░ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ MCU (one-time programmable, OTP) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą║ąŠą┤ ą▒čāą┤ąĄčé ą┐ąŠą╗ąĮąŠčüčéčīčÄ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ąĖ ąŠčéą╗ą░ąČąĄąĮ ąĮą░ ą┐ąĄčĆąĄčłąĖą▓ą░ąĄą╝čŗčģ MCU (čü ą┐ą░ą╝čÅčéčīčÄ FLASH). OTP MCU ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą┤ąĄčłąĄą▓ą╗ąĄ.
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠąĮą╗ą░ą╣ąĮ-ą┐ąŠąĖčüą║ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ [3] ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĮčāąČąĮąŠą│ąŠ MCU.
[4. ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ C8051F30 ]
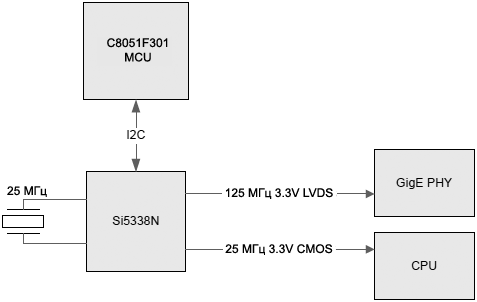
Silicon Labs C8051F301 (F301) MCU (čü čĆą░ąĘą╝ąĄčĆąŠą╝ ą║ąŠčĆą┐čāčüą░ 3x3 ą╝ą╝) ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ Any-Frequency, Any-Output Clock Generator (Si5338N), ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ č湥čĆąĄąĘ I2C, ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ gigabit Ethernet (GigE). ą¦ą░čüč鹊čéąĮčŗą╣ ą┐ą╗ą░ąĮ čéčĆąĄą▒čāąĄčé ą▓čģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ ą║ą▓ą░čĆčåą░ 25 ą£ąōčå ąĖ ą┤ą▓čāčģ čćą░čüč鹊čé 25 ą£ąōčå čü čāčĆąŠą▓ąĮčÅą╝ąĖ 3.3V CMOS ąĮą░ ą▓čŗčģąŠą┤ąĄ CLK0 ąĖ 125 ą£ąōčå čāčĆąŠą▓ąĮąĄą╣ čüčéą░ąĮą┤ą░čĆčéą░ 3.3V LVDS ąĮą░ CLK1.
ąĀąĖčü. 4. ąæą╗ąŠą║ čüčģąĄą╝ą░ ą┐čĆąĖą╝ąĄčĆą░.
4.1. ą×ą┐ąĖčüą░ąĮąĖąĄ firmware
ą¤ąŠą╗ąĮčŗą╣ ą╗ąĖčüčéąĖąĮą│ ą║ąŠą┤ą░ čüą╝. ą▓ ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĖ (ą▓čĆąĄąĘą║ą░ ą▓ ą║ąŠąĮčåąĄ čüčéą░čéčīąĖ), ąĖ ąĄą│ąŠ čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī čü čüą░ą╣čéą░. ą¦č鹊ą▒čŗ ąĮą░ą╣čéąĖ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░, ą▓ą▓ąĄą┤ąĖč鹥 ą▓ čüčéčĆąŠą║ąĄ ą┐ąŠąĖčüą║ą░ "AN428", ąĖ ąĘą░ą│čĆčāąĘąĖč鹥 AN428 Jumpstart Software, ą▓čŗą▒čĆą░ą▓ ąĄą│ąŠ ą▓ čĆąĄąĘčāą╗čīčéą░čéą░čģ ą┐ąŠąĖčüą║ą░.
1 . ąöą░čéą░čłąĖčé Si5338 [4] čüąŠą┤ąĄčƹȹĖčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąĘą░ą┐ąĖčüąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ RAM čāčüčéčĆąŠą╣čüčéą▓ą░ Si5338 (čüą╝. čüąĄą║čåąĖčÄ 3.5.3 ą┤ą░čéą░čłąĖčéą░).2 . ąŻ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ F301 ąĄčüčéčī 8 ąĮąŠąČąĄą║ čåąĖčäčĆąŠą▓čŗčģ ą┐ąŠčĆčéą░ I/O, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ ą║ ąĮąĖą╝ čüą╗ą░ą▒čŗą╝ąĖ ą▓ąĄčĆčģąĮąĖą╝ąĖ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╝ąĖ čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ (weak pull-up). ąśąĘąĮą░čćą░ą╗čīąĮąŠ ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1.3 . ą£ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ I2C master ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮą░ ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░ "AN141: SMBUS Communication for Small Form Factor Device Families" ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü F301 (čüą╝. čĆą░ąĘą┤ąĄą╗ "6.3 EEPROM Example" ą▓ AN141). SDA ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ P0.0, ąĖ SCL ą║ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ P0.1 MCU ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ SMBus (ą┤čĆčāą│ąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ čłąĖąĮčŗ I2C). Timer 1 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ SMBus, ąĖ čŹčéą░ čćą░čüč鹊čéą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ čüą║ąŠčĆąŠčüčéčī 400 kbps. Timer 2 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ą░čāčéą░, ą║ąŠč鹊čĆąŠąĄ SMBus ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓ čĆą░ą▒ąŠč鹥 čüą▓ąŠąĄą╣ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊čé čéą░ą╣ą╝ąĄčĆ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮą░ (ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čüąĄą║čåąĖčÄ 13.4.1 ą▓ ą┤ą░čéą░čłąĖč鹥 C8051F30x ąĖ čüąĄą║čåąĖčÄ 3.1.2 ą┤ą░čéą░čłąĖčéą░ AN141).4 . ąÉą┤čĆąĄčü I2C Si5338 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0x70 (čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮčŗą╣ č乊čĆą╝ą░čé). ążčāąĮą║čåąĖąĖ I2C čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą╗ąĄą▓čŗą╣ čüą┤ą▓ąĖą│ ą░ą┤čĆąĄčüą░ ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒ąĖčéą░ I2C R/W.
4.2. ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ Register Map
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąĖčé Si5338-EVB ąĖ čāčéąĖą╗ąĖčéą░ ClockBuilder Desktop ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ą╗ą░ąĮą░ čćą░čüč鹊čé ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĄą│ąŠ ą▓ č鹥ą║čüč鹊ą▓čŗą╣ čäą░ą╣ą╗ register map. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čäą░ą╣ą╗ čü čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ *.txt, ą│ą┤ąĄ ą║ą░ąČą┤ą░čÅ čüčéčĆąŠą║ą░ ąĖą╝ąĄąĄčé č乊čĆą╝ą░čé:
address,datah
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▒ąŠą╗ąĄąĄ ąĮąŠą▓ą░čÅ ą▓ąĄčĆčüąĖčÅ ClockBuilder Pro 2.23 (čĆąĄą╗ąĖąĘ 10 ą░ą┐čĆąĄą╗čÅ 2018 ą│.) ą▓čŗą┤ą░ąĄčé ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮčŗą╣ č鹥ą║čüč鹊ą▓čŗą╣ čäą░ą╣ą╗ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ č乊čĆą╝ą░čéą░:
Setting Name Location Start Address Start Bit Num Bits NVM Type
-------------- ------------ ------------- --------- -------- --- ----
SYS_INIT 0x0000[7] 0x0000 7 1 No R/O
LOL_B 0x0000[6] 0x0000 6 1 No R/O
LOL_A 0x0000[5] 0x0000 5 1 No R/O
CLK_LOS 0x0000[4] 0x0000 4 1 No R/O
XO_LOS 0x0000[3] 0x0000 3 1 No R/O
REVID 0x0000[1:0] 0x0000 0 2 No R/O
SYS_INIT_STKY 0x0001[7] 0x0001 7 1 No R/W
ąĪč鹊ą╗ą▒ąĄčå "Setting Name" ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╝ąĮąĄą╝ąŠąĮąĖą║čā ą▒ąĖčéą░ ąĖą╗ąĖ ą│čĆčāą┐ą┐čŗ ą▒ąĖčé ąĮą░čüčéčĆąŠąĄą║, "Location" ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ ąĖ ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠąĘąĖčåąĖąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ, čćč鹊 ą┤čāą▒ą╗ąĖčĆčāąĄčéčüčÅ ą▓ čüč鹊ą╗ą▒čåą░čģ "Start Address", "Start Bit", "Num Bits". ąĪč鹊ą╗ą▒ąĄčå "NVM" ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą╗ąĖ čŹčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ (No ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮą░čüčéčĆąŠą╣ą║ąĖ čģčĆą░ąĮčÅčéčüčÅ ą▓ RAM, Yes ą▓ NNM, čé. ąĄ. Non-Volatile Memory). "Type" ąŠąĘąĮą░čćą░ąĄčé čéąĖą┐ ą┤ąŠčüčéčāą┐ą░ (R/O č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, R/W čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī).
ą£ą░čüčüąĖą▓ register map ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ MCU firmware ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
{address,0xdata,0xmask},
ą¤ąŠą╗ąĄ address ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ ą▓ ą┐ą░ą╝čÅčéąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┤ąĄčüčÅčéąĖčćąĮąŠą╝ č乊čĆą╝ą░č鹥. ą¤ąŠą╗ąĄ data čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ, ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆ ą┐ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝čā ą░ą┤čĆąĄčüčā. ą¤ąŠą╗ąĄ mask ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąĖąĄ ą▒ąĖčéčŗ ą▓ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░ ą┤ąŠą╗ąČąĮčŗ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčīčüčÅ. ąøčÄą▒ąŠą╣ ą▒ąĖčé, ą▓ ą╝ą░čüą║ąĄ ą║ąŠč鹊čĆąŠą│ąŠ čüč鹊ąĖčé ą╗ąŠą│. 1, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖ ą┐ąŠą┤ą╗ąĄąČąĖčé ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ, ąĖ ą╗čÄą▒ąŠą╣ ą▒ąĖčé, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą╗ąŠą│. 0 ą▓ ą╝ą░čüą║ąĄ, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮ, ą║ą░ą║ ąŠąĮ ą▒čŗą╗ čĆą░ąĮąĄąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ. ą¤ąŠą╗čÅ data ąĖ mask čāą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ą▓ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą╝ č乊čĆą╝ą░č鹥. ąÆčüąĄ 3 ą┐ąŠą╗čÅ čŹč鹊 8-ą▒ąĖčéąĮčŗąĄ čåąĄą╗čŗąĄ čćąĖčüą╗ą░ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0 .. 255.
ą¤ąŠčüą╗ąĄ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ą╣ą╗ąŠą▓ ąŠčéą║čĆąŠą╣č鹥 register_map.h ą▓ ą┐čĆąŠąĄą║č鹥 JumpStart, ąĖ ą▓čüčéą░ą▓čīč鹥 ą┤ą░ąĮąĮčŗąĄ register map ą▓ ą┤ąĄą║ą╗ą░čĆą░čåąĖčÄ ą╝ą░čüčüąĖą▓ą░ Reg_Store ą╝ąĄąČą┤čā ąĄą│ąŠ čäąĖą│čāčĆąĮčŗą╝ąĖ čüą║ąŠą▒ą║ą░ą╝ąĖ. ą×ą▒ąĮąŠą▓ąĖč鹥 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą║ąŠąĮčüčéą░ąĮčéčŗ NUM_REGS_MAX, čćč鹊ą▒čŗ ąŠąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░ą╗ą░ čĆąĄą░ą╗čīąĮąŠą╝čā ą║ąŠą╗ąĖč湥čüčéą▓čā ą▒ą░ą╣čé ą▓ ą╝ą░čüčüąĖą▓ąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĄ ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ Si5338, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĄčæ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ čäčāąĮą║čåąĖą╣. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čĆąĄą│ąĖčüčéčĆą░ą╝ ąĖ ąĖčģ ą▒ąĖč鹊ą▓čŗą╝ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ čüą╝. ą┤ą░čéą░čłąĖčé Si5338.
4.3. ążčāąĮą║čåąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čäą░ą╣ą╗ą░ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░
ąØą░čćąĖąĮą░čÅ čü ą▓ąĄčĆčüąĖąĖ 2.5 ClockBuilder Desktop ą┐ąŠčÅą▓ąĖą╗ą░čüčī čäčāąĮą║čåąĖčÅ "Header File Generation", ąŠąĮą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠčģčĆą░ąĮąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ register map ą▓ č乊čĆą╝ą░č鹥 ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą│ąŠ čäą░ą╣ą╗ą░ ąĮą░ čÅąĘčŗą║ąĄ C. ąŁč鹊čé čäą░ą╣ą╗ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą┐čĆąŠąĄą║č鹥 firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ Si53xx. ą¦č鹊ą▒čŗ čüąŠąĘą┤ą░čéčī čŹč鹊čé čäą░ą╣ą╗, ą║ą╗ąĖą║ąĮąĖč鹥 Options -> Save C Code Header File.
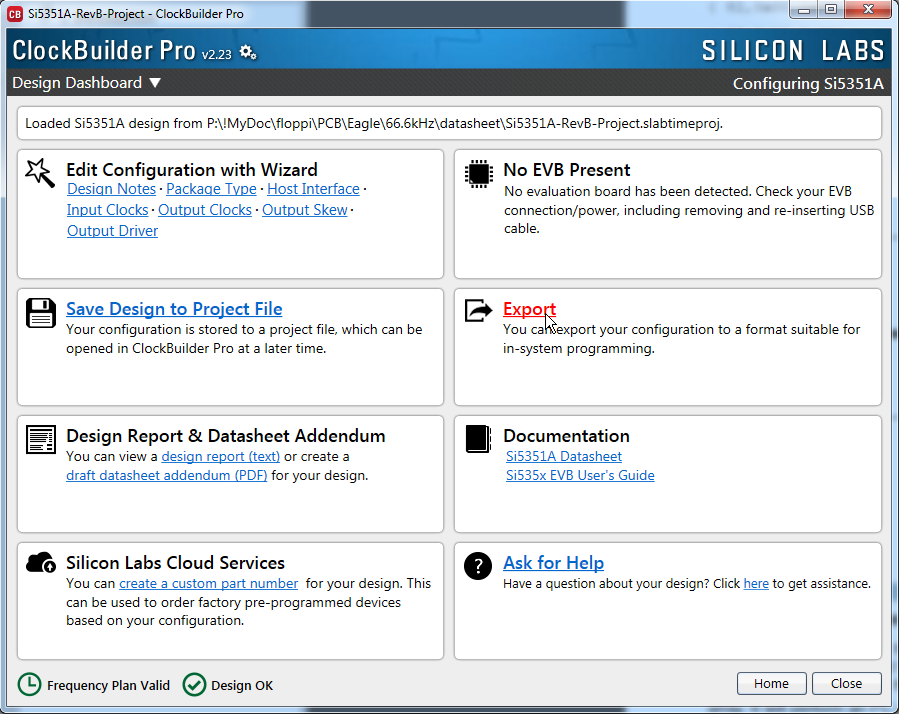
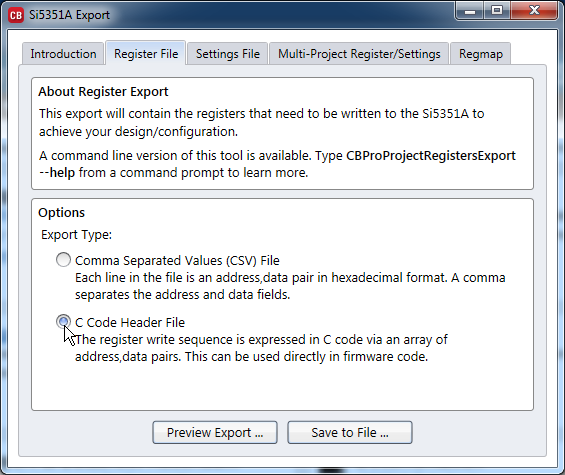
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ ą▓ąĄčĆčüąĖąĖ ClockBuilder Pro 2.23 čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą│ąŠ čäą░ą╣ą╗ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ-ą┤čĆčāą│ąŠą╝čā. ą¤ąŠčüą╗ąĄ ąŠčéą║čĆčŗčéąĖčÅ ą┐čĆąŠąĄą║čéą░ ą▓čŗą▒ąĄčĆąĖč鹥 Export, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą▓ ąŠą║ąĮąĄ ą┤ąĖą░ą╗ąŠą│ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Register File ą▓čŗą▒ąĄčĆąĖč鹥 Options Export Type: C Code Header File ąĖ ąĮą░ąČą╝ąĖč鹥 ą║ąĮąŠą┐ą║čā "Save to File...".
ąĀąĖčü. 5. ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą│ąŠ čäą░ą╣ą╗ą░ ąĮą░ čÅąĘčŗą║ąĄ C.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čäą░ą╣ą╗ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮ ą▓ą╝ąĄčüč鹥 čü ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą▓ąĄčĆčüąĖąĄą╣ JumpStart firmware ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ MCU, ą┤ą╗čÅ č湥ą│ąŠ čäą░ą╣ą╗ register_map.h ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ ąĮąŠą▓čŗą╣.
ąĪą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čäą░ą╣ą╗ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ąĖą╝ąĄąĄčé ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ čüąĖąĮčéą░ą║čüąĖčü C, ąĖ čüąŠą┤ąĄčƹȹĖčé čüą╗ąĄą┤čāčÄčēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ:
ŌĆó ąÆčüčÄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą┐ąŠą┤čüąĖčüč鹥ą╝ Multisynth, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą▓čģąŠą┤ąŠą▓, čĆą░čüčłąĖčĆąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüą┐ąĄą║čéčĆą░, ą░ čéą░ą║ąČąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čćą░čüč鹊čéčŗ ąĖ čäą░ąĘčŗ č乊čĆą╝ąĖčĆčāąĄą╝čŗčģ ą▓čŗčģąŠą┤ąĮčŗčģ čéą░ą║č鹊ą▓.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ąĮąĄ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮ ą┐ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą╝čā ą▓ čü čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą┤ą░ąĮąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠąĄą║, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą▒čŗčéčī čüąŠąĘą┤ą░ąĮčŗ ą▓čĆčāčćąĮčāčÄ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠąĄ ą┐ąŠą┤ą╝ąĮąŠąČąĄčüčéą▓ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą╝ąĄąĮčÅčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆą░čüčłąĖčĆąĄąĮąĖčÅ čüą┐ąĄą║čéčĆą░ ąĖ čäą░ąĘčŗ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čäą░ą╣ą╗ ą▒čāą┤ąĄčé ąĘą░ąĮąĖą╝ą░čéčī ą▒ąŠą╗čīčłąĄ ą╝ąĄčüčéą░ ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝, č湥ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ.
4.4. ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ čü ą┤ą░ąĮąĮčŗą╝ąĖ Register Map
// Register map ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü ą░ą┐ąĮąŠčāč鹊ą╝ AN428 (JumpStart)
// http://www.silabs.com/products/clocksoscillators/pages/default.aspx
// Copyright 2010 Silicon Laboratories
// ąĪą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ClockBuilder Desktop software version 2.7
// ąöą░čéą░ čüąŠąĘą┤ą░ąĮąĖčÅ: čüčĆąĄą┤ą░, 15 čüąĄąĮčéčÅą▒čĆčÅ 2010 ą│ąŠą┤ą░, 9:56 AM
// ąÆčģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ čüąĖąĮč鹥ąĘą░č鹊čĆą░ Si5338 (ą£ąōčå): 25.000000000
#define NUM_REGS_MAX 350
typedef struct Reg_Data
{
unsigned char Reg_Addr;
unsigned char Reg_Val;
unsigned char Reg_Mask;
} Reg_Data;
Reg_Data const code Reg_Store[NUM_REGS_MAX] =
{
{ 0 ,0x00 ,0x00 },
{ 1 ,0x00 ,0x00 },
{ 2 ,0x00 ,0x00 },
{ 3 ,0x00 ,0x00 },
{ 4 ,0x00 ,0x00 },
{ 5 ,0x00 ,0x00 },
{ 6 ,0x08 ,0x1D },
{ 7 ,0x00 ,0x00 },
{ 8 ,0x70 ,0x00 },
{ 9 ,0x0F ,0x00 },
{ 10 ,0x00 ,0x00 },
{ 11 ,0x00 ,0x00 },
{ 12 ,0x00 ,0x00 },
{ 13 ,0x00 ,0x00 },
{ 14 ,0x00 ,0x00 },
{ 15 ,0x00 ,0x00 },
{ 16 ,0x00 ,0x00 },
{ 17 ,0x00 ,0x00 },
{ 18 ,0x00 ,0x00 },
{ 19 ,0x00 ,0x00 },
{ 20 ,0x00 ,0x00 },
{ 21 ,0x00 ,0x00 },
{ 22 ,0x00 ,0x00 },
{ 23 ,0x00 ,0x00 },
{ 24 ,0x00 ,0x00 },
{ 25 ,0x00 ,0x00 },
{ 26 ,0x00 ,0x00 },
{ 27 ,0x70 ,0x80 },
{ 28 ,0x16 ,0xFF },
{ 29 ,0x90 ,0xFF },
{ 30 ,0xA0 ,0xFF },
{ 31 ,0xC0 ,0xFF },
{ 32 ,0xC0 ,0xFF },
{ 33 ,0xE3 ,0xFF },
{ 34 ,0xE3 ,0xFF },
{ 35 ,0x00 ,0xFF },
{ 36 ,0x06 ,0x1F },
{ 37 ,0x03 ,0x1F },
{ 38 ,0x06 ,0x1F },
{ 39 ,0x06 ,0x1F },
{ 40 ,0xE3 ,0xFF },
{ 41 ,0x0E ,0x7F },
{ 42 ,0x23 ,0x3F },
{ 43 ,0x00 ,0x00 },
{ 44 ,0x00 ,0x00 },
{ 45 ,0x00 ,0xFF },
{ 46 ,0x00 ,0xFF },
{ 47 ,0x14 ,0x3F },
{ 48 ,0x3A ,0xFF },
{ 49 ,0x00 ,0xFF },
{ 50 ,0xC4 ,0xFF },
{ 51 ,0x07 ,0xFF },
{ 52 ,0x10 ,0x7F },
{ 53 ,0x00 ,0xFF },
{ 54 ,0x08 ,0xFF },
{ 55 ,0x00 ,0xFF },
{ 56 ,0x00 ,0xFF },
{ 57 ,0x00 ,0xFF },
{ 58 ,0x00 ,0xFF },
{ 59 ,0x01 ,0xFF },
{ 60 ,0x00 ,0xFF },
{ 61 ,0x00 ,0xFF },
{ 62 ,0x00 ,0x3F },
{ 63 ,0x10 ,0x7F },
{ 64 ,0x00 ,0xFF },
{ 65 ,0x30 ,0xFF },
{ 66 ,0x00 ,0xFF },
{ 67 ,0x00 ,0xFF },
{ 68 ,0x00 ,0xFF },
{ 69 ,0x00 ,0xFF },
{ 70 ,0x01 ,0xFF },
{ 71 ,0x00 ,0xFF },
{ 72 ,0x00 ,0xFF },
{ 73 ,0x00 ,0x3F },
{ 74 ,0x10 ,0x7F },
{ 75 ,0x00 ,0xFF },
{ 76 ,0x00 ,0xFF },
{ 77 ,0x00 ,0xFF },
{ 78 ,0x00 ,0xFF },
{ 79 ,0x00 ,0xFF },
{ 80 ,0x00 ,0xFF },
{ 81 ,0x00 ,0xFF },
{ 82 ,0x00 ,0xFF },
{ 83 ,0x00 ,0xFF },
{ 84 ,0x00 ,0x3F },
{ 85 ,0x10 ,0x7F },
{ 86 ,0x00 ,0xFF },
{ 87 ,0x00 ,0xFF },
{ 88 ,0x00 ,0xFF },
{ 89 ,0x00 ,0xFF },
{ 90 ,0x00 ,0xFF },
{ 91 ,0x00 ,0xFF },
{ 92 ,0x00 ,0xFF },
{ 93 ,0x00 ,0xFF },
{ 94 ,0x00 ,0xFF },
{ 95 ,0x00 ,0x3F },
{ 96 ,0x10 ,0x00 },
{ 97 ,0x00 ,0xFF },
{ 98 ,0x30 ,0xFF },
{ 99 ,0x00 ,0xFF },
{100 ,0x00 ,0xFF },
{101 ,0x00 ,0xFF },
{102 ,0x00 ,0xFF },
{103 ,0x01 ,0xFF },
{104 ,0x00 ,0xFF },
{105 ,0x00 ,0xFF },
{106 ,0x80 ,0xBF },
{107 ,0x00 ,0xFF },
{108 ,0x00 ,0x7F },
{109 ,0x00 ,0xFF },
{110 ,0x40 ,0xFF },
{111 ,0x00 ,0xFF },
{112 ,0x00 ,0x7F },
{113 ,0x00 ,0xFF },
{114 ,0x40 ,0xFF },
{115 ,0x00 ,0xFF },
{116 ,0x80 ,0xFF },
{117 ,0x00 ,0xFF },
{118 ,0x40 ,0xFF },
{119 ,0x00 ,0xFF },
{120 ,0x00 ,0xFF },
{121 ,0x00 ,0xFF },
{122 ,0x40 ,0xFF },
{123 ,0x00 ,0xFF },
{124 ,0x00 ,0xFF },
{125 ,0x00 ,0xFF },
{126 ,0x00 ,0xFF },
{127 ,0x00 ,0xFF },
{128 ,0x00 ,0xFF },
{129 ,0x00 ,0x0F },
{130 ,0x00 ,0x0F },
{131 ,0x00 ,0xFF },
{132 ,0x00 ,0xFF },
{133 ,0x00 ,0xFF },
{134 ,0x00 ,0xFF },
{135 ,0x00 ,0xFF },
{136 ,0x00 ,0xFF },
{137 ,0x00 ,0xFF },
{138 ,0x00 ,0xFF },
{139 ,0x00 ,0xFF },
{140 ,0x00 ,0xFF },
{141 ,0x00 ,0xFF },
{142 ,0x00 ,0xFF },
{143 ,0x00 ,0xFF },
{144 ,0x00 ,0xFF },
{145 ,0x00 ,0x00 },
{146 ,0xFF ,0x00 },
{147 ,0x00 ,0x00 },
{148 ,0x00 ,0x00 },
{149 ,0x00 ,0x00 },
{150 ,0x00 ,0x00 },
{151 ,0x00 ,0x00 },
{152 ,0x00 ,0xFF },
{153 ,0x00 ,0xFF },
{154 ,0x00 ,0xFF },
{155 ,0x00 ,0xFF },
{156 ,0x00 ,0xFF },
{157 ,0x00 ,0xFF },
{158 ,0x00 ,0x0F },
{159 ,0x00 ,0x0F },
{160 ,0x00 ,0xFF },
{161 ,0x00 ,0xFF },
{162 ,0x00 ,0xFF },
{163 ,0x00 ,0xFF },
{164 ,0x00 ,0xFF },
{165 ,0x00 ,0xFF },
{166 ,0x00 ,0xFF },
{167 ,0x00 ,0xFF },
{168 ,0x00 ,0xFF },
{169 ,0x00 ,0xFF },
{170 ,0x00 ,0xFF },
{171 ,0x00 ,0xFF },
{172 ,0x00 ,0xFF },
{173 ,0x00 ,0xFF },
{174 ,0x00 ,0xFF },
{175 ,0x00 ,0xFF },
{176 ,0x00 ,0xFF },
{177 ,0x00 ,0xFF },
{178 ,0x00 ,0xFF },
{179 ,0x00 ,0xFF },
{180 ,0x00 ,0xFF },
{181 ,0x00 ,0x0F },
{182 ,0x00 ,0xFF },
{183 ,0x00 ,0xFF },
{184 ,0x00 ,0xFF },
{185 ,0x00 ,0xFF },
{186 ,0x00 ,0xFF },
{187 ,0x00 ,0xFF },
{188 ,0x00 ,0xFF },
{189 ,0x00 ,0xFF },
{190 ,0x00 ,0xFF },
{191 ,0x00 ,0xFF },
{192 ,0x00 ,0xFF },
{193 ,0x00 ,0xFF },
{194 ,0x00 ,0xFF },
{195 ,0x00 ,0xFF },
{196 ,0x00 ,0xFF },
{197 ,0x00 ,0xFF },
{198 ,0x00 ,0xFF },
{199 ,0x00 ,0xFF },
{200 ,0x00 ,0xFF },
{201 ,0x00 ,0xFF },
{202 ,0x00 ,0xFF },
{203 ,0x00 ,0x0F },
{204 ,0x00 ,0xFF },
{205 ,0x00 ,0xFF },
{206 ,0x00 ,0xFF },
{207 ,0x00 ,0xFF },
{208 ,0x00 ,0xFF },
{209 ,0x00 ,0xFF },
{210 ,0x00 ,0xFF },
{211 ,0x00 ,0xFF },
{212 ,0x00 ,0xFF },
{213 ,0x00 ,0xFF },
{214 ,0x00 ,0xFF },
{215 ,0x00 ,0xFF },
{216 ,0x00 ,0xFF },
{217 ,0x00 ,0xFF },
{218 ,0x00 ,0x00 },
{219 ,0x00 ,0x00 },
{220 ,0x00 ,0x00 },
{221 ,0x0D ,0x00 },
{222 ,0x00 ,0x00 },
{223 ,0x00 ,0x00 },
{224 ,0xF4 ,0x00 },
{225 ,0xF0 ,0x00 },
{226 ,0x00 ,0x00 },
{227 ,0x00 ,0x00 },
{228 ,0x00 ,0x00 },
{229 ,0x00 ,0x00 },
{231 ,0x00 ,0x00 },
{232 ,0x00 ,0x00 },
{233 ,0x00 ,0x00 },
{234 ,0x00 ,0x00 },
{235 ,0x00 ,0x00 },
{236 ,0x00 ,0x00 },
{237 ,0x00 ,0x00 },
{238 ,0x14 ,0x00 },
{239 ,0x00 ,0x00 },
{240 ,0x00 ,0x00 },
{242 ,0x00 ,0x02 },
{243 ,0xF0 ,0x00 },
{244 ,0x00 ,0x00 },
{245 ,0x00 ,0x00 },
{247 ,0x00 ,0x00 },
{248 ,0x00 ,0x00 },
{249 ,0xA8 ,0x00 },
{250 ,0x00 ,0x00 },
{251 ,0x84 ,0x00 },
{252 ,0x00 ,0x00 },
{253 ,0x00 ,0x00 },
{254 ,0x00 ,0x00 },
{255 ,1 ,0xFF }, // ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ čüčéčĆą░ąĮąĖčåčŗ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 1.
{ 0 ,0x00 ,0x00 },
{ 1 ,0x00 ,0x00 },
{ 2 ,0x00 ,0x00 },
{ 3 ,0x00 ,0x00 },
{ 4 ,0x00 ,0x00 },
{ 5 ,0x00 ,0x00 },
{ 6 ,0x00 ,0x00 },
{ 7 ,0x00 ,0x00 },
{ 8 ,0x00 ,0x00 },
{ 9 ,0x00 ,0x00 },
{ 10 ,0x00 ,0x00 },
{ 11 ,0x00 ,0x00 },
{ 12 ,0x00 ,0x00 },
{ 13 ,0x00 ,0x00 },
{ 14 ,0x00 ,0x00 },
{ 15 ,0x00 ,0x00 },
{ 16 ,0x00 ,0x00 },
{ 17 ,0x01 ,0x00 },
{ 18 ,0x00 ,0x00 },
{ 19 ,0x00 ,0x00 },
{ 20 ,0x90 ,0x00 },
{ 21 ,0x31 ,0x00 },
{ 22 ,0x00 ,0x00 },
{ 23 ,0x00 ,0x00 },
{ 24 ,0x01 ,0x00 },
{ 25 ,0x00 ,0x00 },
{ 26 ,0x00 ,0x00 },
{ 27 ,0x00 ,0x00 },
{ 28 ,0x00 ,0x00 },
{ 29 ,0x00 ,0x00 },
{ 30 ,0x00 ,0x00 },
{ 31 ,0x00 ,0xFF },
{ 32 ,0x00 ,0xFF },
{ 33 ,0x01 ,0xFF },
{ 34 ,0x00 ,0xFF },
{ 35 ,0x00 ,0xFF },
{ 36 ,0x90 ,0xFF },
{ 37 ,0x31 ,0xFF },
{ 38 ,0x00 ,0xFF },
{ 39 ,0x00 ,0xFF },
{ 40 ,0x01 ,0xFF },
{ 41 ,0x00 ,0xFF },
{ 42 ,0x00 ,0xFF },
{ 43 ,0x00 ,0x0F },
{ 44 ,0x00 ,0x00 },
{ 45 ,0x00 ,0x00 },
{ 46 ,0x00 ,0x00 },
{ 47 ,0x00 ,0xFF },
{ 48 ,0x00 ,0xFF },
{ 49 ,0x01 ,0xFF },
{ 50 ,0x00 ,0xFF },
{ 51 ,0x00 ,0xFF },
{ 52 ,0x90 ,0xFF },
{ 53 ,0x31 ,0xFF },
{ 54 ,0x00 ,0xFF },
{ 55 ,0x00 ,0xFF },
{ 56 ,0x01 ,0xFF },
{ 57 ,0x00 ,0xFF },
{ 58 ,0x00 ,0xFF },
{ 59 ,0x00 ,0x0F },
{ 60 ,0x00 ,0x00 },
{ 61 ,0x00 ,0x00 },
{ 62 ,0x00 ,0x00 },
{ 63 ,0x00 ,0xFF },
{ 64 ,0x00 ,0xFF },
{ 65 ,0x01 ,0xFF },
{ 66 ,0x00 ,0xFF },
{ 67 ,0x00 ,0xFF },
{ 68 ,0x90 ,0xFF },
{ 69 ,0x31 ,0xFF },
{ 70 ,0x00 ,0xFF },
{ 71 ,0x00 ,0xFF },
{ 72 ,0x01 ,0xFF },
{ 73 ,0x00 ,0xFF },
{ 74 ,0x00 ,0xFF },
{ 75 ,0x00 ,0x0F },
{ 76 ,0x00 ,0x00 },
{ 77 ,0x00 ,0x00 },
{ 78 ,0x00 ,0x00 },
{ 79 ,0x00 ,0xFF },
{ 80 ,0x00 ,0xFF },
{ 81 ,0x00 ,0xFF },
{ 82 ,0x00 ,0xFF },
{ 83 ,0x00 ,0xFF },
{ 84 ,0x90 ,0xFF },
{ 85 ,0x31 ,0xFF },
{ 86 ,0x00 ,0xFF },
{ 87 ,0x00 ,0xFF },
{ 88 ,0x01 ,0xFF },
{ 89 ,0x00 ,0xFF },
{ 90 ,0x00 ,0xFF },
{ 91 ,0x00 ,0x0F },
{ 92 ,0x00 ,0x00 },
{ 93 ,0x00 ,0x00 },
{ 94 ,0x00 ,0x00 },
{255 ,0 ,0xFF } // ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ čüčéčĆą░ąĮąĖčåčŗ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0.
};
ąĪą╝. čäą░ą╣ą╗ Si5351A-proj\Si5351A-RevB-Regmap.h ąĖąĘ ą░čĆčģąĖą▓ą░ [6].
4.5. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ Si5338
MCU ąĖ Si5338 ą▓ ą╝ąŠą╝ąĄąĮčé čüčéą░čĆčéą░ ą┐ąŠą╗čāčćą░čÄčé ą┐ąĖčéą░ąĮąĖąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, ą┐čĆąĖ čŹč鹊ą╝ ą▓ čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒ąĄčüą┐ąĄč湥ąĮčŗ ą▓čģąŠą┤ąĮčŗąĄ čéą░ą║č鹊ą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ ą┤ą╗čÅ MCU ąĖ Si5338. MCU ą▓čŗą┐ąŠą╗ąĮąĖčé čüą▓ąŠčÄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ Si5338; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ firmware MCU čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĘą░ą┤ąĄčƹȹ║ą░, čćč鹊ą▒čŗ ą┐ąŠčüčéą░ą▓ąĖčéčī ąĮą░ ą┐ą░čāąĘčā ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ą┐čĆąĖą╝ąĄčĆąĮąŠ ąĮą░ 12 ą╝čü. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ MCU ąĮą░čćąĮąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą╝ą░čüčüąĖą▓ą░ Reg_Store. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 č湥čĆąĄąĘ I2C ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą┐čĆčÅą╝ą░čÅ ąĘą░ą┐ąĖčüčī ąĘąĮą░č湥ąĮąĖą╣ ą▓ č鹥 čĆąĄą│ąĖčüčéčĆčŗ, čā ą║ąŠč鹊čĆčŗčģ ą╝ą░čüą║ą░ ą┤ą░ąĮąĮčŗčģ čĆą░ą▓ąĮą░ 0xFF, ąĖ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą╝ą░čüąŠą║ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ąŠą┐ąĄčĆą░čåąĖčÅ read-modify-write, čćč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖčé čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▒ąĖčé. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ C8051F301, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čŹčéąĖ ą┤ąĄą╣čüčéą▓ąĖčÅ, čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
[5. ą¦č鹊 ą╝ąŠąČąĮąŠ čāą╗čāčćčłąĖčéčī ]
ŌĆó ąØą░čüčéčĆąŠą╣ą║ą░ čģąŠą╗ąŠą┤ąĮąŠą│ąŠ čüčéą░čĆčéą░ Si5338. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ Si5338 čüąŠą┤ąĄčƹȹĖčé 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī (non-volatile memory, NVM), ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ Si5338. ąŁčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī Si5338 ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ MCU, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čüąĮąĖąČą░ąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĮą░čüčéčĆąŠąĄą║, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą┤ąĄą╗ą░čéčī MCU ą┐čĆąĖ čüą▓ąŠąĄą╝ čüčéą░čĆč鹥. ąØą░čüčéčĆąŠą╣ą║ąĖ čģąŠą╗ąŠą┤ąĮąŠą│ąŠ čüčéą░čĆčéą░ Si5338 ą┐čĆąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ąĮą░ ąĘą░ą▓ąŠą┤ąĄ, ą┤ą╗čÅ č湥ą│ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüą▓čÅąĘą░čéčīčüčÅ čü Silicon Labs.
ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čŹč鹊ą╝čā ą┐čĆąĖą╝ąĄčĆčā ą║ąŠą┤ą░:
ŌĆó C8051F300DK development kit, ą║ąŠč鹊čĆčŗą╣ ąĖą╝ąĄąĄčé ą▓ čüą▓ąŠąĄą╝ čüąŠčüčéą░ą▓ąĄ Silabs IDE, ąŠčåąĄąĮąŠčćąĮčāčÄ ą▓ąĄčĆčüąĖčÄ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ Keil ąĖ USB Debug Adapter.
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ą░čÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ:
ŌĆó C8051F30x Data Sheet
//-----------------------------------------------------------------------------
// F300_JumpStart.c
//-----------------------------------------------------------------------------
// Copyright 2010 Silicon Laboratories, Inc.
// http://www.silabs.com
//
// ą×ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ:
//
// - ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čłąĖąĮčŗ SMBus ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣
// - ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ čüąŠčüč鹊čÅąĮąĖčÅ č鹊ą╗čīą║ąŠ master (ąĮąĄčé ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą╗ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ
// čüąŠčüč鹊čÅąĮąĖčÅ slave)
// - Timer1 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ SMBus
// - Timer2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ SMBus ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ą░čāčéą░ ą╗ąŠą│. 0 SCL
// - ą¦ą░čüč鹊čéą░ SCL ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą║ąŠąĮčüčéą░ąĮč鹊ą╣ < SMB_FREQUENCY>
// - ąÉą┤čĆąĄčü ą┤ą╗čÅ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ I2C ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ąŠąĮčüčéą░ąĮč鹊ą╣ SLAVE_ADDR
// - ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ARBLOST
// - ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┐ąŠčĆčéčŗ (ą▓čüąĄ ą┤čĆčāą│ąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ ąĮąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ):
// P0.0 -> SDA (SMBus)
// P0.1 -> SCL (SMBus)
//
// ą”ąĄą╗ąĄą▓ąŠą╣ MCU: C8051F301
// Tool chain: Keil 7.20
//
// Release 1.0
// - ąØą░čćą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ (ACA)
// - ąśčÄąĮčī 2009
//
// Release 1.1
// - ąÉą┤čĆąĄčü I2C ą┐ąĄčĆąĄąĮąĄčüąĄąĮ ą▓ čŹč鹊čé čäą░ą╣ą╗ ąĖąĘ register_map.h
// - ąŁč鹊čé ą┐čĆąŠąĄą║čé čĆą░ą▒ąŠčéą░ąĄčé čü ąĮąŠą▓ąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čäą░ą╣ą╗ą░ register_map.h
// ą▓ čāčéąĖą╗ąĖč鹥 Multisynth Clock Programmer
//
// Release 1.2 (ą░ą▓ą│čāčüčé 2010)
// - ąöąŠą▒ą░ą▓ą╗ąĄąĮ č鹥čüčé ą┤ą╗čÅ čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ mask = 0x00, čćč鹊ą▒čŗ ą┐čĆąŠą┐čāčüčéąĖčéčī
// ąŠą▒čĆą░čēąĄąĮąĖąĄ ą║ čŹč鹊ą╝čā čĆąĄą│ąĖčüčéčĆčā.
// - ą×ą▒ąĮąŠą▓ą╗ąĄąĮ čüą┐ąĖčüąŠą║ ą╝ą░čüąŠą║ čĆąĄą│ąĖčüčéčĆąŠą▓ Si5338 ą▓ čäą░ą╣ą╗ąĄ register_map.h
//
// Release 1.3 (čüąĄąĮčéčÅą▒čĆčī 2010)
// - ą×ą▒ąĮąŠą▓ą╗ąĄąĮ čäą░ą╣ą╗ register_map.h ąĖ main(), čćč鹊ą▒čŗ ąŠčéčĆą░ąĘąĖčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ
// ą▓ ą┤ą░čéą░čłąĖč鹥 Si5338
//
//-----------------------------------------------------------------------------
// ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ čäą░ą╣ą╗čŗ
//-----------------------------------------------------------------------------
#include < compiler_defs.h>
#include < c8051F300_defs.h> // ą┤ąĄą║ą╗ą░čĆą░čåąĖąĖ SFR
#include < register_map.h>
//-----------------------------------------------------------------------------
// ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą║ąŠąĮčüčéą░ąĮčéčŗ
//-----------------------------------------------------------------------------
// ąÉą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (7 ą▒ąĖčé) ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C.
// ąöą╗čÅ Si5338 ą░ą┤čĆąĄčü ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0x70, ą┤ą╗čÅ Si5351 ą░ą┤čĆąĄčü ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0x60.
#define SLAVE_ADDR 0x70
#define SYSCLK 24500000 // ąĪąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą▓ ąōčå.
#define SMB_FREQUENCY 400000 // ąĪą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ I2C (čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SCL)
// ą╝ąŠąČąĄčé ą▒čŗčéčī 100 ą║ąōčå ąĖą╗ąĖ 400 ą║ąōčå.
#define WRITE 0x00 // ąÜąŠą╝ą░ąĮą┤ą░ SMBus WRITE
#define READ 0x01 // ąÜąŠą╝ą░ąĮą┤ą░ SMBus READ
// ąÆąĄą║č鹊čĆ čüčéą░čéčāčüą░ - č鹊ą╗čīą║ąŠ 4 čüčéą░čĆčłąĖąĄ ą▒ąĖčéą░
#define SMB_MTSTA 0xE0 // (MT) ą┐ąĄčĆąĄą┤ą░ąĮ start
#define SMB_MTDB 0xC0 // (MT) ą┐ąĄčĆąĄą┤ą░ąĮ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ
#define SMB_MRDB 0x80 // (MR) ą┐čĆąĖąĮčÅčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ
// ąÜąŠąĮąĄčå ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ ą▓ąĄą║č鹊čĆą░ čüąŠčüč鹊čÅąĮąĖčÅ
//#define SI5338_DELAY 4800 //2 ą╝čü
//#define SI5338_DELAY 24000 //10 ą╝čü
#define SI5338_DELAY 28800 //12 ą╝čü
#define LOCK_MASK 0x15
#define LOS_MASK 0x04
//-----------------------------------------------------------------------------
// ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ
//-----------------------------------------------------------------------------
U8* pSMB_DATA_IN; // ąōą╗ąŠą▒ą░ą╗čīąĮčŗą╣ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ SMBus.
// ąĪčÄą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓čüąĄ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
U8 SMB_SINGLEBYTE_OUT; // ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠą│ąŠ ą▒ą░ą╣čéą░.
U8* pSMB_DATA_OUT; // ąōą╗ąŠą▒ą░ą╗čīąĮčŗą╣ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ SMBus.
// ą×čéčüčÄą┤ą░ ą▒ąĄčĆčāčéčüčÅ ą▓čüąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
U8 SMB_DATA_LEN; // ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ
// ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ą▓ č鹥ą║čāčēąĄą╣ ą┐ąĄčĆąĄčüčŗą╗ą║ąĄ ą┤ą░ąĮąĮčŗčģ SMBus.
U8 WORD_ADDR; // ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ čüą╗ąŠą▓ą░ ą░ą┤čĆąĄčüą░, ą║ ą║ąŠč鹊čĆąŠą╝čā
// ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą┤ąŠčüčéčāą┐ ą┐čĆąĖ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ąĄčĆąĄčüčŗą╗ą║ąĄ.
U8 TARGET; // ąÉą┤čĆąĄčü čåąĄą╗ąĄą▓ąŠą│ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SMBus.
volatile bit SMB_BUSY = 0 ; // ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čäą╗ą░ą│, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĄ
// čäčāąĮą║čåąĖą╣ I2C_ByteRead() ąĖą╗ąĖ I2C_ByteWrite()
// čłąĖąĮąŠą╣ SMBus.
bit SMB_RW; // ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čäą╗ą░ą│, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ
// č鹥ą║čāčēąĄą│ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
bit SMB_SENDWORDADDR; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ
// ą▓ ą║ąŠą┤ąĄ ISR 8-ą▒ąĖčéąĮąŠą│ąŠ < WORD_ADDR> ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ
// ą░ą┤čĆąĄčüą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
bit SMB_RANDOMREAD; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ ą║ąŠą┤ąŠą╝ ISR
// čüąĖą│ąĮą░ą╗ą░ START ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čüą╗ąŠą▓ą░ ą░ą┤čĆąĄčüą░.
// ISR ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čŹč鹊 ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ
// ą▒ąĖčé < SMB_RANDOMREAD>.
bit SMB_ACKPOLL; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ ą║ąŠą┤ąŠą╝ ISR
// ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ START ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ
// ąĮąĄ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčé čüą▓ąŠą╣ ą░ą┤čĆąĄčü.
SBIT(SDA, SFR_P0, 0 ); // SMBus ąĮą░ P0.0
SBIT(SCL, SFR_P0, 1 ); // ąĖ P0.1
SBIT (P0_5, SFR_P0, 5 );
SBIT (P0_6, SFR_P0, 6 );
//-----------------------------------------------------------------------------
// ą¤čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣
//-----------------------------------------------------------------------------
void SMBus_Init (void );
void Timer1_Init (void );
void Timer2_Init (void );
void Port_Init (void );
INTERRUPT_PROTO(SMBus_ISR, INTERRUPT_SMBUS0);
INTERRUPT_PROTO(Timer2_ISR, INTERRUPT_TIMER2);
void I2C_ByteWrite (U8 addr, U8 dat);
U8 I2C_ByteRead (U8 addr);
//-----------------------------------------------------------------------------
// ą×čüąĮąŠą▓ąĮąŠąĄ č鹥ą╗ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ
//-----------------------------------------------------------------------------
void main (void )
{
U16 counter;
U8 curr_chip_val, clear_curr_val, clear_new_val, combined, reg;
Reg_Data curr;
U8 i; // ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą▓ čåąĖą║ą╗ą░čģ.
PCA0MD &= ~0x40 ; // WDTE = 0 (ąĘą░ą┐čĆąĄčé čéą░ą╣ą╝ąĄčĆą░ watchdog)
OSCICN |= 0x03 ; // ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ ąĄą│ąŠ
// ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čćą░čüč鹊čéčā (24.5 ą£ąōčå).
// ą”ąĖą║ą╗, ąĄčüą╗ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čāą┤ąĄčƹȹĖą▓ą░ąĄčé SDA=0 ąĖąĘ-ąĘą░ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ
// čüą▒čĆąŠčüą░ SMBus reset ąĖą╗ąĖ ąŠčłąĖą▒ą║ąĖ:
while (! SDA)
{
// ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą╝čā
// čāčüčéčĆąŠą╣čüčéą▓čā ą▓čŗą╣čéąĖ ąĖąĘ čüą▓ąŠąĄą│ąŠ č鹥ą║čāčēąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ąĖ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī SDA.
XBR1 = 0x40 ; // Enable Crossbar
SCL = 0 ; // ą¤ąĄčĆąĄą▓ąĄčüčéąĖ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą▓ 0
for (i = 0 ; i < 255 ; i++ ); // ąŻą┤ąĄčƹȹ░ąĮąĖąĄ ą▓ ąĮčāą╗ąĄ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓
SCL = 1 ; // ą×čüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ čéą░ą║č鹊ą▓.
while (! SCL); // ą×ąČąĖą┤ą░ąĮąĖąĄ čĆą░ąĘą╝čŗą║ą░ąĮąĖčÅ ąŠčéą║čĆčŗč鹊ą│ąŠ čüč鹊ą║ą░ čéą░ą║č鹊ą▓,
// čćč鹊ą▒čŗ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄčłąĄą╗ ą▓ ą╗ąŠą│. 1.
for (i = 0 ; i < 10 ; i++ ); // ąŻą┤ąĄčƹȹ░ąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ ąĮąĄą║ąŠč鹊čĆąŠąĄ
// ą▓čĆąĄą╝čÅ ą▓ ą╗ąŠą│. 1.
XBR1 = 0x00 ; // Disable Crossbar
}
Port_Init (); // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ Crossbar ąĖ GPIO.
CKCON = 0x10 ; // Timer 1 čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé sysclk.
// Timer 2 čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé sysclk/12 (čüą╝. TMR2CN).
Timer1_Init (); // ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ Timer1 ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░
// čéą░ą║č鹊ą▓ ą┤ą╗čÅ SMBus.
Timer2_Init () // ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ Timer2 ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░
// čéą░ą║č鹊ą▓ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ą░čāčéą░ SMBus.
SMBus_Init (); // ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ SMBus.
EIE1 |= 0x01 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SMBus.
EA = 1 ; // ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ
// ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝!).
//----------------------------------------------------------------
// ąĪą╝. čĆąĖčü. 9 ąĖąĘ ą┤ą░čéą░čłąĖčéą░ Si5338, ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▒ąŠą╗čīčłąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ
// ą┐ąŠ ąĘą░ą┤ąĄčƹȹ║ąĄ čŹč鹊ą╣ ą┐čĆąŠčåąĄą┤čāčĆčŗ, čćč鹊ą▒čŗ ą┐ąŠą┤ąŠąČą┤ą░čéčī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ Si5338
// ą║ ąŠą▒ą╝ąĄąĮčā ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
counter = 0 ;
while (counter < SI5338_DELAY) { counter++ ; }
I2C_ByteWrite(230 , 0x10 ); //OEB_ALL = 1
I2C_ByteWrite(241 , 0xE5 ); //DIS_LOL = 1
// ąöą╗čÅ ą▓čüąĄčģ ąĘąĮą░č湥ąĮąĖą╣ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▓ ą╝ą░čüčüąĖą▓ąĄ Reg_Store ą▒čāą┤ąĄčé ą▓čŗą▒čĆą░ąĮąŠ
// value ąĖ mask, ąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąŠ ą║ Si5338:
for (counter=0 ; counter < NUM_REGS_MAX; counter++ )
{
curr = Reg_Store[counter];
if (curr.Reg_Mask != 0x00 )
{
if (curr.Reg_Mask == 0xFF )
{
// ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĘą░ą┐ąĖčüąĖ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą▓
// ą╝ą░čüą║ąĄ ą▓čüąĄ ąĄą┤ąĖąĮąĖčåčŗ:
do a write transaction only since the mask is all ones
I2C_ByteWrite(curr.Reg_Addr, curr.Reg_Val);
}
else
{
// ąśąĮą░č湥 ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąŠą┐ąĄčĆą░čåąĖčÅ read-modify-write:
curr_chip_val = I2C_ByteRead(curr.Reg_Addr);
clear_curr_val = curr_chip_val & ~ curr.Reg_Mask;
clear_new_val = curr.Reg_Val & curr.Reg_Mask;
combined = clear_new_val | clear_curr_val;
I2C_ByteWrite(curr.Reg_Addr, combined);
}
}
}
// ą¤čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ą║ąĖ LOS ą┤ą╗čÅ ą▓čģąŠą┤ą░ XTAL ąĮą░ IN1 ąĖ IN2 (ąĖ IN3, ąĄčüą╗ąĖ
// čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ) - ą┐ąŠą╝ąĄąĮčÅą╣č鹥 čŹčéčā ą╝ą░čüą║čā, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥
// ą▓čģąŠą┤čŗ ąĮą░ IN4, IN5, IN6:
reg = I2C_ByteRead(218 ) & LOS_MASK;
while (reg != 0 )
reg = I2C_ByteRead(218 ) & LOS_MASK;
I2C_ByteWrite(49 , I2C_ByteRead(49 ) & 0x7F ); //FCAL_OVRD_EN = 0
I2C_ByteWrite(246 , 2 ); //soft reset
I2C_ByteWrite(241 , 0x65 ); //DIS_LOL = 0
// ą×ąČąĖą┤ą░ąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ Si5338 ą┐ąŠčüą╗ąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ
// (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓čŗąĘą▓ą░ąĮąĮąŠą╣ soft reset):
counter = 0 ;
while (counter < SI5338_DELAY) { counter++ ; }
counter = 0 ;
while (counter < SI5338_DELAY) { counter++ ; }
// ąŻą▒ąĄą┤ąĖą╝čüčÅ, čćč鹊 ą┐čĆąŠąĖąĘąŠčłąĄą╗ ąĘą░čģą▓ą░čé ążąÉą¤ą¦ ą┐čĆąŠą▓ąĄčĆą║ąŠą╣ PLL_LOL ąĖ SYS_CAL:
reg = I2C_ByteRead(218 ) & LOCK_MASK;
while (reg != 0 )
reg = I2C_ByteRead(218 ) & LOCK_MASK;
// ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖą╣ FCAL:
I2C_ByteWrite(45 , I2C_ByteRead(235 ));
I2C_ByteWrite(46 , I2C_ByteRead(236 ));
// ą×čćąĖčüčéą║ą░ ą▒ąĖčé 0 ąĖ 1 ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ 47, ąĖ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖčģ
// čü ą▒ąĖčéą░ą╝ąĖ 0 ąĖ 1 ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ 237:
reg = (I2C_ByteRead(47 ) & 0xFC ) | (I2C_ByteRead(237 ) & 3 );
I2C_ByteWrite(47 , reg);
I2C_ByteWrite(49 , I2C_ByteRead(49 ) | 0x80 ); // FCAL_OVRD_EN = 1
I2C_ByteWrite(230 , 0x00 ); // OEB_ALL = 0
//------------------------------------------------------------
// ąæąĄčüą║ąŠąĮąĄčćąĮąŠąĄ ąŠąČąĖą┤ą░ąĮąĖąĄ:
while (1 ); // ąŚą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥 čŹčéčā čüčéčĆąŠą║čā ąĖ čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥 ą║ąŠą┤ ąĮąĖąČąĄ,
// ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┐čåąĖčÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (power-down) MCU.
/*
// ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ MCU:
while(SMB_BUSY); // ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖą╣ I2C.
EA = 0; // ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
SMB0CF &= ~0x80; // ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ SMBus.
RSTSRC = 0x00; // ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ ąĖčüč鹊čćąĮąĖą║ą░ čüą▒čĆąŠčüą░ MCD.
PCON = 0x02; // ą×čüčéą░ąĮąŠą▓ą║ą░ MCU - ąĖąĘ čŹč鹊ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ąĄą│ąŠ ą▓čŗą▓ąĄą┤ąĄčé č鹊ą╗čīą║ąŠ reset.
*/
}
//-----------------------------------------------------------------------------
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ
//-----------------------------------------------------------------------------
//-----------------------------------------------------------------------------
// SMBus_Init
//-----------------------------------------------------------------------------
// ąŚąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░: ąĮąĄčé
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ: ąĮąĄčé
//
// ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ SMBus ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
// - ąĀą░ąĘčĆąĄčłą░ąĄčéčüčÅ SMBus.
// - ąŚą░ą┐čĆąĄčēą░ąĄčéčüčÅ čĆąĄąČąĖą╝ Slave.
// - Timer1 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░
// SCL ą▒čāą┤ąĄčé ą┐čĆąĖą╝ąĄčĆąĮąŠ 1/3 ąŠčé čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ Timer1.
// - ąĀą░ąĘčĆąĄčłą░čÄčéčüčÅ čĆą░čüčłąĖčĆąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ čāą┤ąĄčƹȹ░ąĮąĖčÅ (setup and hold time).
// - ąĀą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ SMBus ąĖ čéą░ą╣ą╝ą░čāčéą░ SCL==0.
void SMBus_Init (void )
{
SMB0CF = 0x5D ; // ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ Timer1 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čéą░ą║č鹊ą▓ SMBus;
// ąŚą░ą┐čĆąĄčé slave mode;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░čüčłąĖčĆąĄąĮąĖą╣ ą▓čĆąĄą╝ąĄąĮąĖ setup & hold;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ SMBus Free timeout detect;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ SCL low timeout detect;
SMB0CF |= 0x80 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ SMBus;
}
//-----------------------------------------------------------------------------
// Timer1_Init
//-----------------------------------------------------------------------------
// ąŚąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░: ąĮąĄčé
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ: ąĮąĄčé
//
// Timer1 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ SMBus čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
// - Timer1 ą▓ čĆąĄąČąĖą╝ąĄ 8-bit auto-reload.
// - SYSCLK / 12 ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ ą┤ą╗čÅ Timer1.
// - ą¦ą░čüč鹊čéą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ Timer1 => 3 * SMB_FREQUENCY
// - ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SCL ą▒čāą┤ąĄčé ą┐čĆąĖą╝ąĄčĆąĮąŠ ~1/3 ąŠčé čćą░čüč鹊čéčŗ
// ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ Timer1.
// - ąĀą░ąĘčĆąĄčłą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ Timer1.
void Timer1_Init (void )
{
// ąōą░čĆą░ąĮčéąĖčĆčāąĄą╝, čćč鹊 Timer1 ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ čćą░čüč鹊čéčā ą▓ 8-ą▒ąĖčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ.
// ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ SMBus čćą░čüč鹊čéčŗ ą╗ąĄąČą░čé ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 10 .. 100 ą║ąōčå. ą£ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ
// ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ąŠą║ CKCON, ą┤ą╗čÅ čćą░čüč鹊čé ą▓ąĮąĄ čŹč鹊ą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░.
TMOD = 0x20 ; // Timer1 ą▓ čĆąĄąČąĖą╝ąĄ 8-bit auto-reload.
TH1 = 0xFF - (SYSCLK/ SMB_FREQUENCY/3 ) + 1 ; // 100 ą║ąōčå ąĖą╗ąĖ 400 ą║ąōčå ą┤ą╗čÅ SCL.
TL1 = TH1; // ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ Timer1.
TR1 = 1 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ Timer1.
}
//-----------------------------------------------------------------------------
// Timer2_Init
//-----------------------------------------------------------------------------
// ąŚąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░: ąĮąĄčé
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ: ąĮąĄčé
//
// Timer2 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ą░čāčéą░ SCL==0 čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
// - Timer2 ą▓ čĆąĄąČąĖą╝ąĄ 16-bit auto-reload
// - SYSCLK/12 ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ Timer2
void Timer2_Init (void )
{
TMR2CN = 0x00 ; // Timer2 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ 16-bit auto-reload,
// ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░.
// Timer2 ąĖčüą┐ąŠą╗čīąĘčāąĄčé SYSCLK/12 (čüą╝. CKCON).
TMR2RLL = 0x5F ;
TMR2RLH = 0x88 ;
TMR2L = TMR2RLL;
TMR2H = TMR2RLH;
TF2LEN = 0 ;
TF2H = 0 ;
TF2L = 0 ;
ET2 = 1 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Timer2.
TR2 = 1 ; // ąŚą░ą┐čāčüą║ Timer2.
}
//-----------------------------------------------------------------------------
// Port_Init
//-----------------------------------------------------------------------------
// ąŚąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░: ąĮąĄčé
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ: ąĮąĄčé
//
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ Crossbar ąĖ ą┐ąŠčĆč鹊ą▓ GPIO.
//
// P0.0 čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠčĆčé čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ SMBus SDA
// P0.1 čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠčĆčé čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ SMBus SCL
//
// ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ.
void Port_Init (void )
{
P0MDOUT = 0x00 ; // ąÆčüąĄ ą▓čŗą▓ąŠą┤čŗ P0 čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čŗčģąŠą┤čŗ čü ąŠą▒čēąĖą╝ čüč鹊ą║ąŠą╝.
XBR1 = 0x04 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ SMBus.
XBR2 = 0x40 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ Crossbar ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ "čüą╗ą░ą▒čŗčģ" ą▓ąĄčĆčģąĮąĖčģ
// ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (pull-up).
P0 = 0xFF ; // ą»ą▓ąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą▓čüąĄčģ ą▓čŗčģąŠą┤ąŠą▓ ą▓ ą╗ąŠą│. 1.
}
//-----------------------------------------------------------------------------
// ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SMBus (Interrupt Service Routine, ISR)
//-----------------------------------------------------------------------------
// ą£ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖčÅ SMBus ISR
// - ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ č鹊ą╗čīą║ąŠ čĆąĄąČąĖą╝ Master - ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ čüąŠčüč鹊čÅąĮąĖčÅ slave ąĖą╗ąĖ ą░čĆą▒ąĖčéčĆą░ąČą░.
// - ąÆčüąĄ ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ, ąĮą░čćąĖąĮą░čÅ čü ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ < pSMB_DATA_IN>.
// - ąÆčüąĄ čāčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą▒ąĄčĆčāčéčüčÅ ąĖąĘ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ < pSMB_DATA_OUT>.
INTERRUPT(SMBus_ISR, INTERRUPT_SMBUS0)
{
bit FAIL = 0 ; // ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ISR ą┤ą╗čÅ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ.
static char i; // ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ISR ą┤ą╗čÅ ą┐ąŠą┤čüč湥čéą░ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ
// ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
static bit SEND_START = 0 ; // ą×čéą┐čĆą░ą▓ą║ą░ start.
switch (SMB0CN & 0xF0 ) // ąÉąĮą░ą╗ąĖąĘ ą▓ąĄą║č鹊čĆą░ čüąŠčüč鹊čÅąĮąĖčÅ
{
case SMB_MTSTA:
// Master Transmitter/Receiver: ą┐ąĄčĆąĄą┤ą░ąĮ čüąĖą│ąĮą░ą╗ START.
SMB0DAT = TARGET; // ąŚą░ą│čĆčāąĘą║ą░ ą░ą┤čĆąĄčüą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
SMB0DAT &= 0xFE ; // ą×čćąĖčüčéą║ą░ LSB ą▓ ą░ą┤čĆąĄčüąĄ ą┤ą╗čÅ ą▒ąĖčéą░ R/W.
SMB0DAT |= SMB_RW; // ąŚą░ą│čĆčāąĘą║ą░ ą▒ąĖčéą░ R/W.
STA = 0 ; // ąĀčāčćąĮą░čÅ ąŠčćąĖčüčéą║ą░ ą▒ąĖčéą░ START.
i = 0 ; // ąĪą▒čĆąŠčü čüč湥čéčćąĖą║ą░ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
break ;
case SMB_MTDB:
// Master Transmitter: ą┐ąĄčĆąĄą┤ą░ąĮ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ (ąĖą╗ąĖ ą░ą┤čĆąĄčü Slave).
if (ACK) // Slave Address ąĖą╗ąĖ Data Byte
{ // ąæčŗą╗ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ?
if (SEND_START)
{
STA = 1 ;
SEND_START = 0 ;
break ;
}
if (SMB_SENDWORDADDR) // ą£čŗ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ ą░ą┤čĆąĄčü čüą╗ąŠą▓ą░?
{
SMB_SENDWORDADDR = 0 ; // ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ą░
SMB0DAT = WORD_ADDR; // ą×čéą┐čĆą░ą▓ą║ą░ čüą╗ąŠą▓ą░ ą░ą┤čĆąĄčüą░
if (SMB_RANDOMREAD)
{
SEND_START = 1 ; // ą×čéą┐čĆą░ą▓ą║ą░ START ą┐ąŠčüą╗ąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čåąĖą║ą╗ą░ ACK
SMB_RW = READ;
}
break ;
}
if (SMB_RW== WRITE) // WRITE?
{
if (i < SMB_DATA_LEN) // ąĢčüčéčī ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ?
{
// ąŠčéą┐čĆą░ą▓ą║ą░ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ
SMB0DAT = * pSMB_DATA_OUT;
// ąĖąĮą║čĆąĄą╝ąĄąĮčé čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čāčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ
pSMB_DATA_OUT++ ;
// ąĖąĮą║čĆąĄą╝ąĄąĮčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ
i++ ;
}
else
{
STO = 1 ; // ąŻčüčéą░ąĮąŠą▓ą║ą░ STO, čćč鹊ą▒čŗ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā
SMB_BUSY = 0 ; // ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ąĘą░ąĮčÅč鹊čüčéąĖ
}
}
else {} // ąĢčüą╗ąĖ čŹč鹊 READ, č鹊 ąĮąĄ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ
// ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣. ąæčŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ ą░ą┤čĆąĄčü Slave.
// ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąŠčéą┤ąĄą╗čīąĮą░čÅ ą▓ąĄčéą║ą░ case ą┤ą╗čÅ
// ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▒ą░ą╣čéą░.
}
else // ą¤ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą▓ąĄčéąĖą╗ąŠ NACK
{
if (SMB_ACKPOLL)
{
STA = 1 ; // ą¤ąĄčĆąĄąĘą░ą┐čāčüą║ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ
}
else
{
FAIL = 1 ; // ą¤ąŠą║ą░ąĘą░čéčī ąŠčłąĖą▒ą║čā ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ
} // ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓ ą║ąŠąĮčåąĄ ISR.
}
break ;
case SMB_MRDB:
// Master Receiver: ą┐čĆąĖąĮčÅčé ą▒ą░ą╣čé
if ( i < SMB_DATA_LEN ) // ąØčāąČąĮąŠ ąĄčēąĄ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ?
{
* pSMB_DATA_IN = SMB0DAT; // ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▒ą░ą╣čéą░.
pSMB_DATA_IN++ ; // ąśąĮą║čĆąĄą╝ąĄąĮčé čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
i++ ; // ąśąĮą║čĆąĄą╝ąĄąĮčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐čĆąĖąĮčÅčéčŗčģ ą▒ą░ą╣čé.
ACK = 1 ; // ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ ACK (ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠąĘąČąĄ
// ąŠčćąĖčēąĄąĮ ą▓ čŹč鹊ą╝ ą║ąŠą┤ąĄ).
}
if (i == SMB_DATA_LEN) // ąŁč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé
{
ACK = 0 ; // ą×čéą┐čĆą░ą▓ą║ą░ NACK, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé
// čŹč鹊ą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ.
STO = 1 ; // ą×čéą┐čĆą░ą▓ą║ą░ STOP ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ.
SMB_BUSY = 0 ; // ą×čüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ SMBus.
}
break ;
default:
FAIL = 1 ; // ą¤ąŠą║ą░ąĘą░čéčī ąŠčłąĖą▒ą║čā, čćč鹊ą▒čŗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čŹč鹊
// ą▓ ą║ąŠąĮčåąĄ ISR.
break ;
}
if (FAIL) // ąĢčüą╗ąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠč鹥čĆą┐ąĄą╗ąŠ ąŠčłąĖą▒ą║čā,
{
SMB0CF &= ~0x80 ; // ąĪą▒čĆąŠčü ąŠą▒ą╝ąĄąĮą░.
SMB0CF |= 0x80 ;
STA = 0 ;
STO = 0 ;
ACK = 0 ;
FAIL = 0 ;
SMB_BUSY = 0 ; // ą×čüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ SMBus.
}
SI = 0 ; // ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
}
//-----------------------------------------------------------------------------
// ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ Timer2 (Interrupt Service Routine, ISR)
//-----------------------------------------------------------------------------
// ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéą░ą╣ą╝ą░čāčé SMBus čüąŠą▒čŗčéąĖčÅ SCL==0.
// ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čŹč鹊čé čéą░ą╣ą╝ą░čāčé, č鹊 SMBus ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ ąĖ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĘą░ąĮąŠą▓ąŠ.
INTERRUPT(Timer2_ISR, INTERRUPT_TIMER2)
{
SMB0CF &= ~0x80 ; // ąŚą░ą┐čĆąĄčé SMBus.
SMB0CF |= 0x80 ; // ą¤ąŠą▓č鹊čĆąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ SMBus.
TF2H = 0 ; // ą×čćąĖčüčéą║ą░ čäą╗ą░ą│ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Timer2.
SMB_BUSY = 0 ; // ą×čüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ čłąĖąĮčŗ.
}
//-----------------------------------------------------------------------------
// ążčāąĮą║čåąĖąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ
//-----------------------------------------------------------------------------
//-----------------------------------------------------------------------------
// I2C_ByteWrite
//-----------------------------------------------------------------------------
// ąŚąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░: ąĮąĄčé
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
// 1) unsigned char addr - ą░ą┤čĆąĄčü ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ č湥čĆąĄąĘ I2C
// (ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0 .. 255).
//
// 2) unsigned char dat - ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠ ą░ą┤čĆąĄčüčā < addr>
// (ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0 .. 255).
//
// ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ dat ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠ ą░ą┤čĆąĄčüčā addr,
// ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┐ąŠą║ą░ ąĘą░ą┐ąĖčüčī ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ.
void I2C_ByteWrite (U8 addr, U8 dat)
{
while (SMB_BUSY); // ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ SMBus.
SMB_BUSY = 1 ; // ąŚą░ąĮčÅčéąĖąĄ SMBus (čāčüčéą░ąĮąŠą▓ą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ąĮčÅč鹊čüčéąĖ)
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SMBus ą┤ą╗čÅ ISR
TARGET = SLAVE_ADDR << 1 ; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čåąĄą╗ąĄą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░
SMB_RW = WRITE; // ą¤ąŠą╝ąĄčéą║ą░ čüą╗ąĄą┤čāčÄčēąĄą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą║ą░ą║ ąĘą░ą┐ąĖčüąĖ.
SMB_SENDWORDADDR = 1 ; // ą×čéą┐čĆą░ą▓ą║ą░ Word Address ą┐ąŠčüą╗ąĄ Slave Address.
SMB_RANDOMREAD = 0 ; // ąØąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī čüąĖą│ąĮą░ą╗ START ą┐ąŠčüą╗ąĄ Word Address.
SMB_ACKPOLL = 1 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠą┐čĆąŠčüą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (ISR ą▒čāą┤ąĄčé
// ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░čéčī čéčĆą░ąĮąĘą░ą║čåąĖčÄ, ąĄčüą╗ąĖ
// ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖą╗ąŠ čüą▓ąŠą╣ ą░ą┤čĆąĄčü).
// ąŻą║ą░ąĘą░ąĮąĖąĄ ąĖčüčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ
WORD_ADDR = addr; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čåąĄą╗ąĄą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝
// ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ą┐ą░ą╝čÅčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
SMB_SINGLEBYTE_OUT = dat; // ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ dat (ą╗ąŠą║ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ) ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮčāčÄ
// ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ, čćč鹊ą▒čŗ ISR čüą╝ąŠą│ ą┐čĆąŠčćąĖčéą░čéčī ąĄčæ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ,
// ą║ą░ą║ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čŗčģąŠą┤ ąĖąĘ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ.
// ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čāčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ dat
pSMB_DATA_OUT = & SMB_SINGLEBYTE_OUT;
SMB_DATA_LEN = 1 ; // ąŻą║ą░ąĘą░čéčī ą┤ą╗čÅ ISR, čćč鹊 čüą╗ąĄą┤čāčÄčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░
// ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī 1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
// ąśąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖąĄ SMBus Transfer
STA = 1 ;
}
//-----------------------------------------------------------------------------
// I2C_ByteRead
//-----------------------------------------------------------------------------
// ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
// 1) unsigned char data - ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┐ąŠ ą░ą┤čĆąĄčüčā addr ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ.
//
// ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
// 1) unsigned char addr - ą░ą┤čĆąĄčü ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.
// ą£ąŠąČąĄčé ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0 .. 255.
//
// ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé 1 ą▒ą░ą╣čé ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠ ą░ą┤čĆąĄčüčā addr,
// ą║ąŠą│ą┤ą░ čäą╗ą░ą│ < SMB_BUSY> ą┐ąŠą║ą░ąČąĄčé ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čćč鹥ąĮąĖčÅ.
U8 I2C_ByteRead (U8 addr)
{
U8 return_val; // ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ.
while (SMB_BUSY); // ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ SMBus.
SMB_BUSY = 1 ; // ąŚą░ąĮčÅčéąĖąĄ SMBus (čāčüčéą░ąĮąŠą▓ą║ą░ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ąĮčÅč鹊čüčéąĖ).
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SMBus ą┤ą╗čÅ ISR
TARGET = SLAVE_ADDR << 1 ; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čåąĄą╗ąĄą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░
SMB_RW = WRITE; // ą¦č鹥ąĮąĖąĄ ą┐ąŠ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą║ą░ą║ ąĘą░ą┐ąĖčüčī,
// ąĘą░č鹥ą╝ ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ čćč鹥ąĮąĖąĄ ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ
// start. ISR ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čŹč鹊 ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ, ąĄčüą╗ąĖ
// čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé < SMB_RANDOMREAD>.
SMB_SENDWORDADDR = 1 ; // ą×čéą┐čĆą░ą▓ą║ą░ Word Address ą┐ąŠčüą╗ąĄ Slave Address.
SMB_RANDOMREAD = 1 ; // ą×čéą┐čĆą░ą▓ą║ą░ START ą┐ąŠčüą╗ąĄ Word Address.
SMB_ACKPOLL = 1 ; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠą┐čĆąŠčüą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ.
// ąŻą║ą░ąĘą░ąĮąĖąĄ ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ
WORD_ADDR = addr; // ąŻčüčéą░ąĮąŠą▓ą║ą░ čåąĄą╗ąĄą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ
// čāčüčéčĆąŠą╣čüčéą▓ą░.
pSMB_DATA_IN = & return_val;// ąŻą║ą░ąĘą░č鹥ą╗čī ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ
// return_val.
SMB_DATA_LEN = 1 ; // ąŻą║ą░ąĘčŗą▓ą░ąĄčé ISR, čćč鹊 čüą╗ąĄą┤čāčÄčēąĄąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ
// ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī 1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
// ąśąĮąĖčåąĖą░čåąĖčÅ SMBus Transfer
STA = 1 ;
while (SMB_BUSY); // ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
return return_val;
}
[ąĪčüčŗą╗ą║ąĖ ]
1 . AN428 site:silabs.com.2 . AN136: Production Programming Options for Silicon Labs Devices site:silabs.com.3 . Parametric Search site:silabs.com.4 . Si5338 site:silabs.com.5 . Si5351: ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░ ą╗čÄą▒čāčÄ čćą░čüč鹊čéčā .6 . 180524an428.ZIP - ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ ClockBuilder Pro 2.23, ą┐čĆąĖą╝ąĄčĆ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą│ąŠ čäą░ą╣ą╗ą░ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Si5351A (ą┐čĆąŠąĄą║čé ClockBuilder Pro).