|
ąśąĮč鹥čĆč乥ą╣čü ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O interface) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĄčģą░ąĮąĖąĘą╝ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ ą╝ąĄąČą┤čā ą▓ąĮąĄčłąĮąĖą╝ ąŠą║čĆčāąČąĄąĮąĖąĄą╝ ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ VDK. ąÆ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ VisualDSP++ 5.0 ą┤ą╗čÅ ą║ąŠąĮčüčéčĆčāąĖčĆąŠą▓ą░ąĮąĖčÅ I/O ąĖąĮč鹥čĆč乥ą╣čüą░ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąŠą▒čŖąĄą║čéčŗ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (device driver).
ąöą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin ą╝ąŠą┤ąĄą╗čī ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ (VDK device driver model) čāčüčéą░čĆąĄą╗ą░ ą▓ ą┐ąŠą╗čīąĘčā ą╝ąŠą┤ąĄą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čüąĖčüč鹥ą╝ąĮčŗčģ čüą╗čāąČą▒ (system services device driver model). ą£ąŠą┤ąĄą╗čī VDK device driver model ą▓čüąĄ ąĄčēąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ I/O ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ SHARC, ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ą╝ąĄąČą┤čā čÅą┤čĆą░ą╝ąĖ ą╝ąĮąŠą│ąŠą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą╣ čüąĖčüč鹥ą╝čŗ (ą┤ą▓čāčģčÅą┤ąĄčĆąĮčŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ADSP-BF561).
[I/O Templates]
ą©ą░ą▒ą╗ąŠąĮčŗ I/O (I/O templates) ą░ąĮą░ą╗ąŠą│ąĖčćąĮčŗ čéąĖą┐ą░ą╝ ą┤ą╗čÅ ą┐ąŠč鹊ą║ąŠą▓ (thread types). I/O templates ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ąĖąĮčüčéą░ąĮčåąĖą░čåąĖąĖ ąŠą▒čŖąĄą║č鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O objects). ąÆ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ VisualDSP++ 5.0 ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ čéąĖą┐čŗ čłą░ą▒ą╗ąŠąĮąŠą▓ I/O (čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ ą║ą╗ą░čüčüčŗ ąŠą▒čŖąĄą║č鹊ą▓ I/O). ą¦č鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ą▓ ą┐čĆąŠąĄą║čé VDK ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ ąŠą▒čŖąĄą║čé ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąĘą░ą│čĆčāąĘą║ąĖ (boot I/O object) čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čłą░ą▒ą╗ąŠąĮą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (device driver template). ąÆčŗ ą╝ąŠąČąĄč鹥 ąŠčéą╗ąĖčćą░čéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ 菹║ąĘąĄą╝ą┐ą╗čÅčĆčŗ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "Init".
[ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Drivers)]
ąĀąŠą╗čī ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (device driver) čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą░ą▒čüčéčĆą░ą│ąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčé ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄčé čäąĖą╗čīčéčĆ čü ą║ąŠąĮąĄčćąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąŠą╣ (Finite Impulse Response, FIR), ąĖ ąĄą╝čā ąĮąĄ ąĮčāąČąĮąŠ ą┐ąŠąĮąĖą╝ą░čéčī ąĘą░ą┐čāčéą░ąĮąĮąŠčüčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÄ čüąĖą│ąĮą░ą╗ąŠą▓ (ąÉą”ą¤), čćč鹊ą▒čŗ čüąŠčüčĆąĄą┤ąŠč鹊čćąĖčéčīčüčÅ ąĮą░ ą░ą╗ą│ąŠčĆąĖčéą╝ąĄ FIR. ąĪ čéą░ą║ąĖą╝ ą╝ąĄč鹊ą┤ąŠą╝ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┐ąŠč鹊ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ąĮą░ čĆą░ąĘąĮčŗčģ ą┐ą╗ą░čéč乊čĆą╝ą░čģ, ą│ą┤ąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą╝ąŠąČąĄčé ąŠčéą╗ąĖčćą░čéčīčüčÅ.
ą£ąĄąĮąĄą┤ąČąĄčĆ ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ (Communication Manager) čāą┐čĆą░ą▓ą╗čÅąĄčé ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ ą▓ VDK. ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ Communication Manager API ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čāčĆąŠą▓ąĮąĖ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ą╝ąĄąČą┤čā ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓, ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ. ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮ Communication Manager.
ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ (Execution). ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠč湥ąĮčī čüąĖą╗čīąĮąŠ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ čüą▓čÅąĘą░ąĮčŗ. ą×ą▒čŗčćąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ DSP ą┐čĆąĄą┤ą┐ąŠčćąĖčéą░čÄčé ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą║čĆąĖčéąĖčćąĮčŗą╣ ą║ąŠą┤ ą┐ąĖčüą░čéčī ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ. Communication Manager čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čéą░ą║, čćč鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 čüąŠčģčĆą░ąĮąĖčéčī čüą▓ąŠąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ (ąĖčģ čćą░čüčéąĖ, ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą║čĆąĖčéąĖčćąĮčŗąĄ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ), ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄčüčāčĆčüą░ą╝ąĖ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čüą┤ąĄą╗ą░čéčī ąĮą░ čÅąĘčŗą║ąĄ ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ, ąĮąĄ ąČąĄčĆčéą▓čāčÅ čüą║ąŠčĆąŠčüčéčīčÄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ. Communication Manager ą┐čŗčéą░ąĄčéčüčÅ čüą▓ąĄčüčéąĖ ą║ ą╝ąĖąĮąĖą╝čāą╝čā ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖą╣ ą║ąŠąĮč鹥ą║čüčéą░, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ ą┐ąŠą┤čģąŠą┤čÅčēąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ čüąŠčģčĆą░ąĮąĖčéčī ą┐ąŠčĆčÅą┤ąŠą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą┐ąŠč鹊ą║ąŠą▓, ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą×ą┤ąĮą░ą║ąŠ ąÆą░ą╝ ąĮčāąČąĮąŠ č湥čéą║ąŠ ą┐ąŠąĮąĖą╝ą░čéčī ą░čĆčģąĖč鹥ą║čéčāčĆčā Communication Manager, čćč鹊ą▒čŗ ąÆčŗ ą╝ąŠą│ą╗ąĖ ąĮą░ą┐ąĖčüą░čéčī čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ.
ąśą╝ąĄąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ - č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ ą┤ąĖčüą┐ąĄčéč湥čĆą░. ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ, ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ (ąŠčéą║čĆčŗą▓ą░ąĄčé/ąĘą░ą║čĆčŗą▓ą░ąĄčé (open/close), čćąĖčéą░ąĄčé/ą┐ąĖčłąĄčé (read/write), čāą┐čĆą░ą▓ą╗čÅąĄčé (control)), ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ISR ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╗ąĖ ąĖąĘ ąĮąĄą│ąŠ. ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą▓ąŠąĘą▓čĆą░čé. ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ (pend), ą║ąŠą│ą┤ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčé ąĘą░ą┐čĆąŠčü ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĖą╗ąĖ ąĘą░ą┐čĆąŠčü ąĮą░ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ ąŠčé ISR. ą×ą┤ąĮą░ą║ąŠ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║čā, ą║ąŠą│ą┤ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĘą░ą┐čĆąŠčü ą┐ąŠč鹊ą║ą░, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čĆąĄčüčāčĆčü ą┐ąŠą║ą░ ąĮąĄ ą│ąŠč鹊ą▓ ąĖą╗ąĖ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ. ąŚą░ą┐čĆąŠčłąĄąĮąĮčŗąĄ čÅą┤čĆąŠą╝ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĘą░ą┐čĆąŠčüčŗ ISR, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čĆąĄą│ąĖąŠąĮą░čģ, čéą░ą║ čćč鹊 ąĖčģ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮčŗą╝ (reentrant). ąŚą░ą┐čĆąŠčü čāčĆąŠą▓ąĮčÅ ą┐ąŠč鹊ą║ą░ ą┤ąŠą╗ąČąĄąĮ ąĘą░čēąĖčéąĖčéčī ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą║čĆąĖčéąĖč湥čüą║ąĖčģ ąĖą╗ąĖ ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗčģ čĆąĄą│ąĖąŠąĮąŠą▓.
ą¤ą░čĆą░ą╗ą╗ąĄą╗čīąĮą░čÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą║ą░ ą┤ąŠą╝ąĄąĮąŠą▓ (Parallel Scheduling Domains). ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą▒čüčāąČą┤ąĄąĮąĖąĄ čüč乊ą║čāčüąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ čāąĮąĖą║ą░ą╗čīąĮąŠą╣ čĆąŠą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ ą▓ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ VDK. ą¤ąŠąĮąĖą╝ą░ąĮąĖąĄ čüčāčēąĮąŠčüčéąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ čéčĆąĄą▒čāąĄčé ąĮąĄą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą╝ąĄč鹊ą┤ą░, čü ą║ąŠč鹊čĆčŗą╝ ą▓ąŠą▓ą╗ąĄą║ą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ VDK ą╝ąŠą│čāčé ą▓ą║ą╗čÄčćą░čéčī 2 ą┤ąŠą╝ąĄąĮą░ ą║ąŠą┤ą░ - ą┤ąŠą╝ąĄąĮ ą┐ąŠč鹊ą║ąŠą▓ (thread domain) ąĖ ą┤ąŠą╝ąĄąĮ ISR (ą┤ąŠą╝ąĄąĮ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čüą╝. čĆąĖčü. 3-18). ąŁč鹊 čĆą░ąĘą┤ąĄą╗ąĄąĮąĖąĄ ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ ąĖą╗ąĖ ąĮąĄąĮčāąČąĮąŠą╣ ą░ą▒čüčéčĆą░ą║čåąĖąĄą╣. ąÉą┐ą┐ą░čĆą░čéąĮą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą║ą░ą║ ąĖ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ kernel ą▒ąĄčĆčāčé ąĮą░ ą▓ąŠąŠčĆčāąČąĄąĮąĖąĄ čŹč鹊 čĆą░ąĘą┤ąĄą╗ąĄąĮąĖąĄ ą║ąŠą┤ą░. ąÆčŗ ą┤ąŠą╗ąČąĮčŗ čāčćąĖčéčŗą▓ą░čéčī čŹč鹊 čĆą░ąĘą┤ąĄą╗ąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄč鹥 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčÅąĄč鹥 ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ąŠ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čćą░čüčéčÅą╝ ą║ąŠą┤ą░.
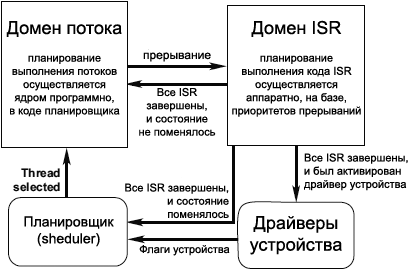
ąĀąĖčü. 3-18. ąöąŠą╝ąĄąĮčŗ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą│ąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░.
ą¤ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą▓ ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ ąĖčģ ą┐čĆąĖąŠčĆąĖč鹥čéą░čģ, ąĖ ąĮą░ ą┐ąŠčĆčÅą┤ą║ąĄ, ą▓ ą║ąŠč鹊čĆąŠą╝ ąŠąĮąĖ ą┐ąŠą┐ą░ą╗ąĖ ą▓ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ready queue). ą¤ą╗ą░ąĮąĖčĆčāčÄčēą░čÅ čćą░čüčéčī čÅą┤čĆą░ (ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║, scheduler) ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą▓čŗą▒ąŠčĆ ą┐ąŠč鹊ą║ą░ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░. ą×ą┤ąĮą░ą║ąŠ čā ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ąĮąĄčé ą┐ąŠą╗ąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ ąĘą░ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčŗą╝ čĆąĄčüčāčĆčüąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąĀą░ą▒ąŠčéą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą▓čŗč鹥čüąĮąĄąĮą░ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗą╝ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ąŠą╝ - ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ (exception). ąÜąŠą│ą┤ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖą╗ąĖ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ, ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ą┐ąŠč鹊ą║ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮąĄ čāčćąĖčéčŗą▓ą░čÄčéčüčÅ. ą¤ąŠąĘąĖčåąĖčÅ ą┐ąŠč鹊ą║ąŠą▓ ą▓ ąŠč湥čĆąĄą┤ąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ čüąĮąŠą▓ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĘąĮą░čćąĖą╝ąŠą╣ č鹊ą╗čīą║ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ą┐ąĄčĆąĄą┤ą░ąĄčé ąŠą▒čĆą░čéąĮąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝čā ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║čā.
ąŻ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą┤ąŠą╝ąĄąĮąŠą▓ ąĄčüčéčī čüą▓ąŠąĖ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ą░ ąĖ ąĮąĄą┤ąŠčüčéą░čéą║ąĖ, ą┤ąĖą║čéčāčÄčēąĖąĄ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ č鹊ą│ąŠ ąĖą╗ąĖ ąĖąĮąŠą│ąŠ ą║ąŠą┤ą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čüčĆąĄą┤ąĄ. ą¤ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┤ąŠą╝ąĄąĮą░ ą┐ąŠč鹊ą║ąŠą▓ ą▓ąŠą▓ą╗ąĄą║ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ąĖ ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ą▓ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ąĖą╗ąĖ ąĖąĘą▓ą╗ąĄą║ą░čÄčéčüčÅ ąŠčéčéčāą┤ą░. ąÜą░ąČą┤čŗą╣ ą┐ąŠč鹊ą║ ąĖą╝ąĄąĄčé čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čüč鹥ą║, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮ ąĮą░ ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╝ čÅąĘčŗą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ą¤ąŠč鹊ą║ąĖ ą▓čüąĄą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ "čüčāą┐ąĄčĆą▓ąĖąĘąŠčĆą░" (supervisor), ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ čÅą┤čĆą░ (kernel mode) - ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ čĆą░čüą┐ąŠąĘąĮą░ąĄčé čéą░ą║ąĖąĄ čĆą░ąĘą╗ąĖčćąĖčÅ. ą¤ąŠč鹊ą║ąĖ čĆąĄą░ą╗ąĖąĘčāčÄčé ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ čĆą░čüą┐ąŠčĆčÅąČą░čÄčéčüčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĄčĆą▓ąŠąŠč湥čĆąĄą┤ąĮąŠą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą░ą╝ąŠą│ąŠ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ.
ą¤ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąŠą╝ąĄąĮą░ ą┐ąŠč鹊ą║ąŠą▓ č鹥ą╝, čćč鹊 ą▓ ą┤ąŠą╝ąĄąĮąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĄčüčéčī čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓ ą╝ą░čüčłčéą░ą▒ąĄ ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ. ąøčÄą▒ąŠą╣ ąĮą░čģąŠą┤čÅčēąĖą╣čüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ready) ISR ą┐ąŠą╗čāčćą░ąĄčé ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ ą┐ąĄčĆąĄą┤ ą╗čÄą▒čŗą╝ ą┐ąŠč鹊ą║ąŠą╝, ąĮą░čģąŠą┤čÅčēąĖą╝čüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ąĄčüą╗ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąĮąĄ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│ąĖąŠąĮą░), ąĖ čŹčéą░ č乊čĆą╝ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠ. ąĢčüą╗ąĖ ISR ąĮą░ą┐ąĖčüą░ąĮ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ, č鹊 ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▓čĆčāčćąĮčāčÄ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī (ąĮą░ ą▓čŗčģąŠą┤ąĄ ISR) ą╗čÄą▒čŗąĄ čĆąĄą│ąĖčüčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą║ąŠą┤ąĄ ISR. ISR ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą░čüąĖąĮčģčĆąŠąĮąĮčŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ č鹊ą╗čīą║ąŠ ąĮą░ čüą░ą╝ąŠą╝ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ. ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ISR ą┤ąŠą╗ąČąĮą░ ą▓čŗą┐ąŠą╗ąĮčÅčéčī č鹊ą╗čīą║ąŠ čüą░ą╝čŗąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ, ą║čĆąĖčéąĖčćąĮčŗąĄ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┐ąŠč鹥čĆčī ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą▒čŗčéčī, ąĄčüą╗ąĖ ą▒čŗ ą║ąŠą┤ ą▓čŗą┐ąŠą╗ąĮčÅą╗čüčÅ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒čŗčüčéčĆąŠ. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮčŗ ą▓ ą┤ąŠą╝ąĄąĮ ą┐ąŠč鹊ą║ąŠą▓, ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ čÅą┤čĆą░, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╝ąĖ ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ.
ą¤ąĄčĆąĄčģąŠą┤ ąĖąĘ ą┤ąŠą╝ąĄąĮą░ ą┐ąŠč鹊ą║ąŠą▓ ą▓ ą┤ąŠą╝ąĄąĮ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐čĆąŠčüčé ąĖ ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮ, ąĮąŠ ą▓ąŠąĘą▓čĆą░čé ą▓ ą┤ąŠą╝ąĄąĮ ą┐ąŠč鹊ą║ąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗą╝. ąĢčüą╗ąĖ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ready queue) ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ąŠą╝ąĄąĮą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĮąĄ ą┐ąŠą╝ąĄąĮčÅą╗ą░čüčī, č鹊 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ąĘą░ą┐čāčüą║ą░čéčī ąĮąĄ ąĮčāąČąĮąŠ, ą║ąŠą│ą┤ą░ ąĄą╝čā ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ą┤ čüąĖčüč鹥ą╝ąŠą╣. ą¤čĆąĄčĆą▓ą░ąĮąĮčŗą╣ ą┐ąŠč鹊ą║ ą╝ąŠąČąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī čüą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. ąĢčüą╗ąĖ ąČąĄ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┐ąŠą╝ąĄąĮčÅą╗ą░čüčī, č鹊 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┤ąŠą╗ąČąĄąĮ ą┤ą░ą╗ąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĖąĘą╝ąĄąĮąĖą╗čüčÅ ą╗ąĖ čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗą╣ ą┐ąŠč鹊ą║. ąĢčüą╗ąĖ ąŠąĮ ą┐ąŠą╝ąĄąĮčÅą╗čüčÅ, č鹊 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┤ąŠą╗ąČąĄąĮ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ (ąĘą░ą┐čāčüčéąĖčéčī ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┤čĆčāą│ąŠą╣ ą┐ąŠč鹊ą║).
ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░ą┐ąŠą╗ąĮčÅčÄčé ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ ą┐ą╗ą░ąĮąĖčĆčāąĄą╝čŗą╝ąĖ ą┤ąŠą╝ąĄąĮą░ą╝ąĖ. ąśčģ ą║ąŠą┤ ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĖ ą║ąŠą┤ąŠą╝ ą┐ąŠč鹊ą║ą░, ąĮąĖ ą║ąŠą┤ąŠą╝ ISR, ąĖ ąĖčģ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮąĄ ą┐ą╗ą░ąĮąĖčĆčāąĄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ąĮąĖ čÅą┤čĆąŠą╝, ąĮąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą║ą░ą║ ąŠą▒čŖąĄą║čéčŗ C++, ąĖ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čüč鹥ą║ąĄ č鹥ą║čāčēąĄą│ąŠ ąĘą░ą┐čāčēąĄąĮąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░. ą×ą┤ąĮą░ą║ąŠ ąŠąĮąĖ ąĮąĄ ąĘą░čģą▓ą░č湥ąĮčŗ ą▓ąŠ ą▓ą╗ą░ą┤ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝, ąĖ ą╝ąŠą│čāčé ą║ąŠąĮą║čāčĆąĄąĮčéąĮąŠ ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ ąĄčüčéčī 5 čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą┤ąŠ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░: OpenDevice(), CloseDevice(), SyncRead(), SyncWrite() ąĖ DeviceIOCtl(). ąśą╝ąĄąĮą░ ą▓čŗąĘąŠą▓ąŠą▓ API čüą░ą╝ąĖ ąŠą▒čŖčÅčüąĮčÅčÄčé čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, čéą░ą║ ą║ą░ą║ ą┐ąŠč鹊ą║ąĖ čĆą░ą▒ąŠčéą░čÄčé čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ą░ą║ čü č湥čĆąĮčŗą╝ąĖ čÅčēąĖą║ą░ą╝ąĖ. ąØą░ čĆąĖčü. 3-19 ą┐ąŠą║ą░ąĘą░ąĮ ąĖąĮč鹥čĆč乥ą╣čü ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
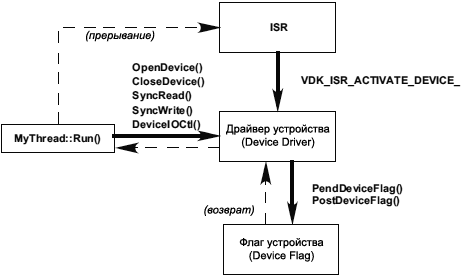
ąĀąĖčü. 3-19. Device Driver API.
ą¤ąŠč鹊ą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čāč鹥ą╝ ąĄą│ąŠ ąŠčéą║čĆčŗčéąĖčÅ (open), ąĄą│ąŠ čćč鹥ąĮąĖčÅ (read) ąĖ/ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ (writing) ą▓ ąĮąĄą│ąŠ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĘą░ą║čĆčŗą▓ą░ąĄčéčüčÅ ą┐ąŠč鹊ą║ąŠą╝ (close). ążčāąĮą║čåąĖčÅ DeviceIOCtl() ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣, čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜą░ąČą┤čŗą╣ ą▓čŗąĘąŠą▓ API čŹč鹊 čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ čäčāąĮą║čåąĖčÅ C/C++, ą║ąŠč鹊čĆą░čÅ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čüč鹥ą║ąĄ ą▓čŗąĘčŗą▓ą░čÄčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░, ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ą▓čŗąĘčŗą▓ą░čÄčēąĖą╣ ą┐ąŠč鹊ą║, ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłą░ąĄčé čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā. ą×ą┤ąĮą░ą║ąŠ ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ čā ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ čĆąĄčüčāčĆčüą░, ąŠą┤ąĮą░ ąĖąĘ čŹčéąĖčģ čäčāąĮą║čåąĖą╣ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą┐ąŠč鹊ą║ ą║ ą▓čŗą▓ąŠą┤čā ąĖąĘ ąŠč湥čĆąĄą┤ąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ čü čåąĄą╗čīčÄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ čüąĖą│ąĮą░ą╗ą░, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüąĄą╝ą░č乊čĆą░ (semaphore) ąĖą╗ąĖ čüąŠą▒čŗčéąĖčÅ (event), ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠą│ąŠ čäą╗ą░ą│ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ (device flag).
ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ISR ąĖą╝ąĄčÄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▓čŗąĘąŠą▓ API, čüą▓čÅąĘą░ąĮąĮčŗą╣ čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░: VDK_ISR_ACTIVATE_DEVICE_(). ąŁč鹊čé ą╝ą░ą║čĆąŠčü ąĮąĄ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ, ąĖ ą┐ąŠč鹊ą║ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ąĮąĄ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĖąĘ ISR ą▓ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąŠą▒čĆą░čéąĮąŠ. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą╝ą░ą║čĆąŠčü čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäą╗ą░ą│, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ "ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąĖčÅ" ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤čāčé ąŠą▒čüą╗čāąČąĄąĮčŗ ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ą×čüčéą░ą▓čłąĖąĄčüčÅ ą┤ą▓ąĄ čäčāąĮą║čåąĖąĖ API, PendDeviceFlag() ąĖ PostDeviceFlag(), ąŠą▒čŗčćąĮąŠ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ ąĖąĘ čüą░ą╝ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓čŗąĘąŠą▓ ąĖąĘ ą┐ąŠč鹊ą║ą░ SyncRead() ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗąĘąŠą▓ąĄčé PendDeviceFlag() ąĄčüą╗ąĖ ą┐ąŠą║ą░ ąĮąĄčé ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ąĘą░čüčéą░ą▓ąĖą╗ąŠ ą▒čŗ ą┐ąŠč鹊ą║ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĄąĮąĖąĄ ąĮą░ čäą╗ą░ą│ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą║ą░ čŹč鹊čé čäą╗ą░ą│ ąĮąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤čĆčāą│ąĖą╝ čäčĆą░ą│ą╝ąĄąĮč鹊ą╝ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą░ąĮąĮčŗąĄ.
ąÜą░ą║ ą┤čĆčāą│ąŠą╣ ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą▒čāč乥čĆ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┐ąŠą╗ąĮąĄąĮ, ISR ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčī čāą║ą░ąĘą░č鹥ą╗čī čéą░ą║, čćč鹊ą▒čŗ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░čćą░ą╗ąŠ ąĘą░ą┐ąŠą╗ąĮčÅčéčī ą┐čāčüč鹊ą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ VDK_ISR_ACTIVATE_DEVICE_(). ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą░ą║čéąĖą▓ą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ąŠčéą▓ąĄčéąĖčéčī ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą┐ąŠč鹊ą║ą░ ą▓ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ, čéą░ą║ čćč鹊ą▒čŗ ąĘą░ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░čéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐ąŠčüčéčāą┐ąĖą▓čłąĖčģ ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ.
ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ (Dispatch Function). ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čÅą▓ą╗čÅąĄčéčüčÅ čÅą┤čĆąŠą╝ ą╗čÄą▒ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé void* (čüą╝čŗčüą╗ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▓čģąŠą┤ąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣). ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ A dispatch ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ąöą╗čÅ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮą░ čÅąĘčŗą║ąĄ C:
void* MyDevice_DispatchFunction(VDK_DispatchID inCode,
VDK_DispatchUnion inData);
ąöą╗čÅ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮą░ čÅąĘčŗą║ąĄ C++:
void* MyDevice::DispatchFunction(VDK::DispatchID inCode,
VDK::DispatchUnion &inData);
ą¤ąĄčĆą▓čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ čŹč鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ą░čÅ čäčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░:
enum VDK_DispatchID
{
VDK_kIO_Init,
VDK_kIO_Activate,
VDK_kIO_Open,
VDK_kIO_Close,
VDK_kIO_SyncRead,
VDK_kIO_SyncWrite,
VDK_kIO_IOCtl
};
ąÆč鹊čĆąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ čŹč鹊 ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖąĄ, ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ:
union VDK_DispatchUnion
{
struct OpenClose_t
{
void **dataH;
char *flags; /* ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ kIO_Open */
};
struct ReadWrite_t
{
void **dataH;
VDK_Ticks timeout;
unsigned int dataSize;
int *data;
};
struct IOCtl_t
{
void **dataH;
void *command;
char *parameters;
};
struct Init_t
{
void *pInitInfo;
};
};
ąŚąĮą░č湥ąĮąĖčÅ ą▓ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĖ (union) čÅą▓ą╗čÅčÄčéčüčÅ ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ąĖ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čäčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ ąĖąĘ ą┤ąŠą╝ąĄąĮą░ ą┐ąŠč鹊ą║ąŠą▓ (kIO_Open, kIO_Close, kIO_SyncRead, kIO_SyncWrite, kIO_IOCtl).
ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüčéčĆčāą║čéčāčĆąĖčĆąŠą▓ą░ąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ąØą░ čÅąĘčŗą║ąĄ C:
void* MyDevice_DispatchFunction (VDK_DispatchID inCode,
VDK_DispatchUnion inData)
{
switch(inCode)
{
case VDK_kIO_Init:
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ */
case VDK_kIO_Activate:
/* ą¤ąŠą╗čāč湥ąĮąĖąĄ ą┤ą╗čÅ ISR ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą│ąŠč鹊ą▓čŗčģ ą┤ą░ąĮąĮčŗčģ */
case VDK_kIO_Open:
/* ą¤ąŠč鹊ą║ čģąŠč鹥ą╗ ą▒čŗ ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ... */
/* ąÆčŗą┤ąĄą╗ąĖčéčī ą┐ą░ą╝čÅčéčī ąĖ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī čćč鹊-č鹊 ąĄčēąĄ */
case VDK_kIO_Close:
/* ą¤ąŠč鹊ą║ ąĘą░ą║čĆčŗą▓ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝...*/
/* ą¤čĆąŠąĖčüčģąŠą┤ąĖčé ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ą▓čüąĄą╣ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čÅčéčüčÅ ą║ą░ą║ąĖąĄ-ąĮąĖą▒čāą┤čī ą┤čĆčāą│ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ */
case VDK_kIO_SyncRead:
/* ą¤ąŠč鹊ą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čćč鹥ąĮąĖąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ */
/* ąÆąŠąĘą▓čĆą░čé unsigned int ą┤ą╗čÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé */
case VDK_kIO_SyncWrite:
/* ą¤ąŠč鹊ą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĘą░ą┐ąĖčüčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ */
/* ąÆąŠąĘą▓čĆą░čé unsigned int ą┤ą╗čÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé */
case VDK_kIO_IOCtl:
/* ą¤ąŠč鹊ą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ą░ą║ąĖąĄ-č鹊 čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąĄą╣čüčéą▓ąĖčÅ: */
default:
/* ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą║ąŠą┤ DispatchID */
return 0;
}
}
ąØą░ čÅąĘčŗą║ąĄ C++:
void* MyDevice::DispatchFunction (VDK::DispatchID inCode,
VDK::DispatchUnion &inData)
{
switch(inCode)
{
case VDK::kIO_Init:
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ */
case VDK::kIO_Activate:
/* ą¤ąŠą╗čāč湥ąĮąĖąĄ ą┤ą╗čÅ ISR ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą│ąŠč鹊ą▓čŗčģ ą┤ą░ąĮąĮčŗčģ */
case VDK::kIO_Open:
/* ą¤ąŠč鹊ą║ čģąŠč鹥ą╗ ą▒čŗ ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ... */
/* ąÆčŗą┤ąĄą╗ąĖčéčī ą┐ą░ą╝čÅčéčī ąĖ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī čćč鹊-č鹊 ąĄčēąĄ */
case VDK::kIO_Close:
/* ą¤ąŠč鹊ą║ ąĘą░ą║čĆčŗą▓ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝...*/
/* ą¤čĆąŠąĖčüčģąŠą┤ąĖčé ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ą▓čüąĄą╣ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čÅčéčüčÅ ą║ą░ą║ąĖąĄ-ąĮąĖą▒čāą┤čī ą┤čĆčāą│ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ */
case VDK::kIO_SyncRead:
/* ą¤ąŠč鹊ą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čćč鹥ąĮąĖąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ */
/* ąÆąŠąĘą▓čĆą░čé unsigned int ą┤ą╗čÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé */
case VDK::kIO_SyncWrite:
/* ą¤ąŠč鹊ą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĘą░ą┐ąĖčüčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ */
/* ąÆąŠąĘą▓čĆą░čé unsigned int ą┤ą╗čÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą▒ą░ą╣čé */
case VDK::kIO_IOCtl:
/* ą¤ąŠč鹊ą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ą░ą║ąĖąĄ-č鹊 čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąĄą╣čüčéą▓ąĖčÅ: */
default:
/* ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą║ąŠą┤ DispatchID */
return 0;
}
}
ąØąĖąČąĄ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ ąĖąĘ ąŠčéą┤ąĄą╗čīąĮčŗčģ čüą╗čāčćą░ąĄą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░.
Init (ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ). ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ VDK_kIO_Init ą┤ą╗čÅ ą║ąŠą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čüčéąĖą╗čÅ C ąĖ VDK::kIO_Init ą┤ą╗čÅ ą║ąŠą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čüčéąĖą╗čÅ C++ - ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą│čĆčāąĘą║ąĖ čüąĖčüč鹥ą╝čŗ (system boot time). ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮčŗ ą▓čüąĄ ąĘą░ą▓ąĖčüčÅčēąĖąĄ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ ąĖ čüąĖčüč鹥ą╝ąĮčŗąĄ čĆąĄčüčāčĆčüčŗ. ążčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│ąĖąŠąĮą░ ą║ąŠą┤ą░, ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą┤ąĄą╗ą░čéčī ą╗čÄą▒čŗąĄ ą▓čŗąĘąŠą▓čŗ API, ą║ąŠč鹊čĆčŗąĄ ą┤ąĖčüą┐ąĄčéč湥čĆąĖąĘčāčÄčé ąŠčłąĖą▒ą║čā ąĖą╗ąĖ ą╝ąŠą│čāčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖčÄ. ąÆčüąĄ čäčāąĮą║čåąĖąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮ ą╗čÄą▒ąŠą╣ ąĖąĘ ą┐ąŠč鹊ą║ąŠą▓, ąŠąĮąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą╗čÄą▒ąŠą╣ čéčĆąĄą▒čāąĄą╝čŗą╣ ą║ąŠą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ. ąŁč鹊 čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ ą┤ą░ąČąĄ ąĄčüą╗ąĖ čéąĖą┐ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĄąĮ (ąĘą░ą│ą╗čāčłą║ą░), ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ č鹊ą╗čīą║ąŠ ą╗ąĖčłčī čüąŠą┤ąĄčƹȹ░čéčī ąĮąĄą║ąĖą╣ ą║ąŠą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ.
ą¤ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ ą▓ čäčāąĮą║čåąĖčÄ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą║ą░ą║ Init_t ąĖąĘ VDK_DispatchUnion. Init_t ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
struct Init_t
{
void *pInitInfo;
};
Init_t.pInitInfo: čāą║ą░ąĘą░č鹥ą╗čī (čéąĖą┐ void*) ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▓ ą┐ąŠą╗ąĄ Initializer ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Kernel ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓ I/O ąĘą░ą│čĆčāąĘą║ąĖ (čüą╝. čĆą░ąĘą┤ąĄą╗ "ą¤ą░čĆą░ą╝ąĄčéčĆąĖąĘą░čåąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░").
Open ąĖ Close. ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ąŠčéą║čĆčŗą▓ą░ąĄčé ąĖą╗ąĖ ąĘą░ą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čŗąĘąŠą▓ąŠą╝ OpenDevice() ąĖą╗ąĖ CloseDevice(), čäčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čü VDK_kIO_Open ąĖą╗ąĖ VDK_kIO_Close. ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ ą┤ąŠą╝ąĄąĮą░ ą┐ąŠč鹊ą║ą░, čéą░ą║ čćč鹊 ą╗čÄą▒čŗąĄ ąŠčüąĮąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ čüč鹥ą║ąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą╗ąŠą║ą░ą╗čīąĮčŗą╝ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠč鹊ą║ą░. ąöąŠčüčéčāą┐ ą║ ąŠą▒čēąĖą╝ ą┤ą░ąĮąĮčŗą╝ (č鹥ą╝ ą┤ą░ąĮąĮčŗą╝, ą║ ą║ąŠč鹊čĆčŗą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮ ą┤ąŠčüčéčāą┐ ąĖąĘ ą┐ąŠč鹊ą║ąŠą▓ ąĖ/ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąĖ/ąĖą╗ąĖ ąĖąĘ čäčāąĮą║čåąĖą╣ ą░ą║čéąĖą▓ą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░) ą┤ąŠą╗ąČąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘą░čēąĖčēąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗčģ čĆąĄą│ąĖąŠąĮąŠą▓ ą║ąŠą┤ą░ (unscheduled region), ą║čĆąĖčéąĖč湥čüą║ąĖčģ čĆąĄą│ąĖąŠąĮąŠą▓ ą║ąŠą┤ą░ (critical region), ąĖą╗ąĖ ą┤čĆčāą│ąĖą╝ąĖ čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ.
ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ ą┤ąĖčüą┐ąĄčéč湥čĆą░, ą┐čŗčéą░čÅčüčī ąŠčéą║čĆčŗčéčī ąĖą╗ąĖ ąĘą░ą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ, API ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ union ą▓ čäčāąĮą║čåąĖčÄ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą║ą░ą║ OpenClose_t ąĖąĘ VDK_DispatchUnion. OpenClose_t ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
struct OpenClose_t
{
void **dataH;
char *flags; /* ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ kIO_Open */
};
OpenClose_t.dataH: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĘą░ą▓ąĖčüčÅčēąĄąĄ ąŠčé ą┐ąŠč鹊ą║ą░ ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆąŠąĄ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą╗čÄą▒čŗčģ ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ą┐ąŠč鹊ą║čā čĆąĄčüčāčĆčüąŠą▓. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠč鹊ą║ ą╝ąŠąČąĄčé ą▓čŗą┤ąĄą╗ąĖčéčī ą┐ą░ą╝čÅčéčī (č湥čĆąĄąĘ ą▓čŗąĘąŠą▓ malloc) ą┤ą╗čÅ čüčéčĆčāą║čéčāčĆčŗ, ą║ąŠč鹊čĆą░čÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹊ą║ą░, čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮ ą▓ *dataH, ą║ąŠč鹊čĆčŗą╣ ąĘą░č鹥ą╝ ą▒čāą┤ąĄčé ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ą┤čĆčāą│ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ ą┤ąĖčüą┐ąĄčéč湥čĆą░, ą▓ąŠą▓ą╗ąĄč湥ąĮąĮąŠą│ąŠ čŹčéąĖą╝ ą┐ąŠč鹊ą║ąŠą╝. ąöčĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čŹč鹊 ą╝ąĄčüč鹊, ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ąŠą╝ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ CloseDevice().
OpenClose_t.flags: ą▓č鹊čĆąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ą▓ ą▓čŗąĘąŠą▓ OpenDevice(), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ąĘąĮą░č湥ąĮąĖąĄ OpenClose_t.flags. ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╗čÄą▒ąŠą╣ ąĘą░ą▓ąĖčüčÅčēąĄą╣ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čäą╗ą░ą│ąŠą▓, ąŠčéąĮąŠčüčÅčēąĄą╣čüčÅ ą║ ąŠčéą║čĆčŗčéąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹčéą░ čćą░čüčéčī ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖčÅ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą▓čŗąĘąŠą▓ąĄ CloseDevice().
ąÆ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą║čĆčŗč鹊 ąĮąĄ ą▒ąŠą╗ąĄąĄ 8 čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ ą┐ąŠč鹊ą║.
Read ąĖ Write. ą¤ąŠč鹊ą║, ą║ąŠč鹊čĆąŠą╝čā ąĮčāąČąĮąŠ čćąĖčéą░čéčī ą▓ ąŠčéą║čĆčŗč鹊ąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╗ąĖ ą┐ąĖčüą░čéčī ą▓ ąĮąĄą│ąŠ, ą▓čŗąĘčŗą▓ą░ąĄčé SyncRead() ąĖą╗ąĖ SyncWrite() čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą┐ąŠč鹊ą║ą░ ąĖ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čüč鹥ą║ąĄ ą┐ąŠč鹊ą║ą░. ąŁčéąĖ ą▓čŗąĘąŠą▓čŗ čäčāąĮą║čåąĖą╣ ą▓čŗąĘčŗą▓ą░čÄčé čäčāąĮą║čåąĖčÄ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╝ąĖ API ą▓ VDK_DispatchUnion, ąĖ čäą╗ą░ą│ąĖ VDK_kIO_SyncRead ąĖą╗ąĖ VDK_kIO_SyncWrite. ąĪčéčĆčāą║čéčāčĆą░ ReadWrite_t ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
struct ReadWrite_t
{
void **dataH;
VDK::Ticks timeout;
unsigned int dataSize;
int *data;
};
ReadWrite_t.dataH: ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ, ąĘą░ą▓ąĖčüčÅčēąĄąĄ ąŠčé ą┐ąŠč鹊ą║ą░, ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą┐čĆąĖ ąŠčéą║čĆčŗčéąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą▓čŗąĘąŠą▓ąĄ OpenDevice(). ąŁčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čüčéčĆčāą║čéčāčĆčā ą┤ą░ąĮąĮčŗčģ, čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹊ą║ą░, ą║ąŠą│ą┤ą░ ąŠąĮ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ąŠą▒ą╝ąĄąĮ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ReadWrite_t.timeout: ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ čéąĖą║ą░čģ čüąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠč鹊ą║ ą│ąŠč鹊ą▓ ąŠąČąĖą┤ą░čéčī ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čŗąĘąŠą▓ąŠą▓ SyncRead() ąĖą╗ąĖ SyncWrite(). ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ čéą░ą║ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čü čéą░ą╣ą╝ą░čāč鹊ą╝, č鹊 ąŠąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĘąĮą░č湥ąĮąĖčÅ ReadWrite_t.timeout ą║ą░ą║ ą░čĆą│čāą╝ąĄąĮčéą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▓čŗąĘąŠą▓ą░ PendDeviceFlag() ą▓ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░.
ReadWrite_t.dataSize: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠč鹊ą║ čćąĖčéą░ąĄčé ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ReadWrite_t.data: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą┐ąŠč鹊ą║ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ (ą┐čĆąĖ čćč鹥ąĮąĖąĖ), ąĖą╗ąĖ ąŠčéą║čāą┤ą░ ą▒ąĄčĆąĄčé ą┤ą░ąĮąĮčŗąĄ (ą┐čĆąĖ ąĘą░ą┐ąĖčüąĖ).
ąØą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą▓čŗąĘąŠą▓ąŠą▓ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ ąŠčéą║čĆčŗčéąĖčÅ ąĖ ąĘą░ą║čĆčŗčéąĖčÅ, ą▓čŗąĘąŠą▓čŗ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ąĮąĄ ąĘą░čēąĖčēąĄąĮčŗ ą║čĆąĖčéąĖč湥čüą║ąĖą╝ ąĖą╗ąĖ ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗą╝ čĆąĄą│ąĖąŠąĮąŠą╝ ą║ąŠą┤ą░. ąĢčüą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠą▒čĆą░čēą░ąĄčéčüčÅ ą║ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╝ čüčéčĆčāą║čéčāčĆą░ą╝ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ čćč鹥ąĮąĖąĖ ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ, č鹊 ą┤ąŠčüčéčāą┐ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮ ą║čĆąĖčéąĖč湥čüą║ąĖą╝ ąĖą╗ąĖ ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗą╝ čĆąĄą│ąĖąŠąĮąŠą╝ ą║ąŠą┤ą░. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā čĆąĄą│ąĖąŠąĮąŠą▓ ąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ čüą╝. čĆą░ąĘą┤ąĄą╗ "ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Drivers)".
IOCtl. VDK ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠč鹊ą║ą░ą╝ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą┐ąŠą╝ąŠčēčīčÄ DeviceIOCtl() API. ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą▓čŗąĘčŗą▓ą░ąĄčé DeviceIOCtl(), čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ VDK_kIO_IOCtl ąĖ VDK_DispatchUnion, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╝ ą║ą░ą║ IOCtl_t. IOCtl_t ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
struct IOCtl_t
{
void **dataH;
void *command;
char *parameters;
};
IOCtl_t.dataH: ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ, ąĘą░ą▓ąĖčüčÅčēąĄąĄ ąŠčé ą┐ąŠč鹊ą║ą░, ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą┐čĆąĖ ąŠčéą║čĆčŗčéąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗąĘąŠą▓ąŠą╝ OpenDevice(). ąŁčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ąŠčéąĮąŠčüčÅčēčāčÄčüčÅ ą║ ą┐ąŠč鹊ą║čā čüčéčĆčāą║čéčāčĆčā ą┤ą░ąĮąĮčŗčģ, ą┤ąĄčéą░ą╗ąĖąĘąĖčĆčāčÄčēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ čüąŠčüč鹊čÅąĮąĖčÄ ą┐ąŠč鹊ą║ą░, ą║ąŠą│ą┤ą░ ąŠąĮ ąŠą▒čēą░ąĄčéčüčÅ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
IOCtl_t.command: ąŠčéąĮąŠčüčÅčēąĖą╣čüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓čā čāą║ą░ąĘą░č鹥ą╗čī (ą▓č鹊čĆąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ DeviceIOCtl()).
IOCtl_t.parameters: ąŠčéąĮąŠčüčÅčēąĖą╣čüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓čā čāą║ą░ąĘą░č鹥ą╗čī (čéčĆąĄčéąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ DeviceIOCtl()).
ąØą░ą┐ąŠą┤ąŠą▒ąĖąĄ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ąĖ ąŠčéą║čĆčŗčéąĖčÅ/ąĘą░ą║čĆčŗčéąĖčÅ, ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą┤ą╗čÅ IOCtl ąĮąĄ ąĘą░čēąĖčēąĄąĮ ą║čĆąĖčéąĖč湥čüą║ąĖą╝ ąĖą╗ąĖ ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗą╝ čĆąĄą│ąĖąŠąĮąŠą╝ ą║ąŠą┤ą░. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą▒čĆą░čēą░ąĄčéčüčÅ ą║ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╝ čüčéčĆčāą║čéčāčĆą░ą╝ ą┤ą░ąĮąĮčŗčģ, č鹊 ą┤ąŠčüčéčāą┐ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮ ą║čĆąĖčéąĖč湥čüą║ąĖą╝ ąĖą╗ąĖ ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗą╝ čĆąĄą│ąĖąŠąĮąŠą╝ ą║ąŠą┤ą░.
Activate. ą¦ą░čüč鹊 ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄč鹥 ąĮą░ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮčŗ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ą╝ąĖ ISR. ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ VDK_kIO_Activate ą▓ ąĮąĄą║ąŠč鹊čĆčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ISR ą▓čŗąĘą▓ą░ą╗ ą╝ą░ą║čĆąŠčü VDK_ISR_ACTIVATE_DEVICE_().
ąÜąŠą│ą┤ą░ ISR ą▓čŗąĘčŗą▓ą░ąĄčé VDK_ISR_ACTIVATE_DEVICE_(), čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čäą╗ą░ą│, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čŗą╗ąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąŠ, ąĖ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĮą░ ąĘą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čü ąĮąĖąĘą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ ą┐čĆąĖąŠčĆąĖč鹥čéą░ (čüą╝. čĆą░ąĘą┤ąĄą╗ "Reschedule ISR" [2]). ąÜąŠą│ą┤ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┐ąŠą╗čāčćą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░, č鹊 ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ VDK_kIO_Activate.
ą¦ą░čüčéčī čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░, ąŠčéąĮąŠčüčÅčēą░čÅčüčÅ ą║ ą░ą║čéąĖą▓ą░čåąĖąĖ, ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą┐čāą▒ą╗ąĖą║ą░čåąĖčÄ čüąĖą│ąĮą░ą╗ąŠą▓, čéą░ą║ čćč鹊ą▒čŗ ą┐ąŠč鹊ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠąČąĖą┤ą░čÄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣ čāčüčéčĆąŠą╣čüčéą▓ą░, ą╝ąŠą│ą╗ąĖ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā. ąØą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ISR čåąĖčäčĆąŠ-ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ ą┤ąŠčłąĄą╗ ą┤ąŠ ą║ąŠąĮčåą░ čüą▓ąŠąĄą│ąŠ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗčģ. ISR ą▓čŗąĘčŗą▓ą░ąĄčé VDK_ISR_ACTIVATE_DEVICE_() čü IOID ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čü VDK_kIO_Activate, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čāą▒ą╗ąĖą║čāąĄčé čäą╗ą░ą│ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆ, ą║ąŠč鹊čĆčŗą╣ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą╗čÄą▒čŗčģ ą┐ąŠč鹊ą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąŠąČąĖą┤ą░čÄčé čüąŠą▒čŗčéąĖčÅ ą┤ą╗čÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▒čāč乥čĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓čŗąĘąŠą▓čŗ API-čäčāąĮą║čåąĖą╣ PostDeviceFlag(), PostSemaphore(), PushCriticalRegion() ąĖ PopCriticalRegion() ąŠčéąĮąŠčüčÅčéčüčÅ č鹊ą╗čīą║ąŠ ą║ VDK API, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī ąĖąĘ čäčāąĮą║čåąĖąĖ ą░ą║čéąĖą▓ą░čåąĖąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆąĖąĘą░čåąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Driver Parameterization). ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, č鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ initializer ą▓ ą║ą░ąČą┤čŗą╣ ąŠą▒čŖąĄą║čé ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąĘą░ą│čĆčāąĘą║ąĖ (boot I/O object), čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ąĮąŠą╝ąĄčĆ čŹą║ąĘąĄą╝ą┐ą╗čÅčĆą░ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąöą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąŠą╗ąĄ Initializer ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Kernel čüą▓ąŠą╣čüčéą▓ ą┐čĆąŠąĄą║čéą░, čćč鹊ą▒čŗ ąĮą░ąĘąĮą░čćąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąĘą░ą│čĆčāąĘą║ąĖ (ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ online Help). ąŚąĮą░č湥ąĮąĖąĄ initializer ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ č湥čĆąĄąĘ Init_t.pInitInfo. ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī (čéąĖą┐ą░ void*) ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▓ ą┐ąŠą╗ąĄ Initializer.
ąŚąĮą░č湥ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮąŠ čéą░ą║:
int initializer = *((int *)inUnion.Init_t.pInitInfo);
ąŚąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ ą┐čĆąĖą▓ą░čéąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĖąĮą░ą┤ą╗ąĄąČą░čēąĖčģ čāčüčéčĆąŠą╣čüčéą▓čā; ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ čćą╗ąĄąĮąĄ ą║ą╗ą░čüčüą░.
[ążą╗ą░ą│ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Flags)]
ążą╗ą░ą│ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ čŹč鹊 ą┐čĆąĖą╝ąĖčéąĖą▓čŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą┐ąŠą┤ąŠą▒ąĮąŠ čüąĄą╝ą░č乊čĆą░ą╝ (semaphore), čüąŠą▒čŗčéąĖčÅą╝ (event) ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ (message), ąĮąŠ čäą╗ą░ą│ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╝ąĄčÄčé čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ čüą▓čÅąĘčī čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜą░ą║ ąĖ čü čüąĄą╝ą░č乊čĆą░ą╝ąĖ ąĖ čüąŠą▒čŗčéąĖčÅą╝ąĖ, ą┐ąŠč鹊ą║ ą╝ąŠąČąĄčé ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (pend) ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠč鹊ą║ ąČą┤ąĄčé, ą┐ąŠą║ą░ čäą╗ą░ą│ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗčüčéą░ą▓ą╗ąĄąĮ (post, ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮ) ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤čāą▒ą╗ąĖą║ą░čåąĖčÅ ąŠą▒čŗčćąĮąŠ čüą╗čāčćą░ąĄčéčüčÅ ąĖąĘ čäčāąĮą║čåąĖąĖ ą░ą║čéąĖą▓ą░čåąĖąĖ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą×ąČąĖą┤ą░ąĮąĖąĄ ąĮą░ čäą╗ą░ą│ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (Pending on a Device Flag). ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ (pend) čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé čüąĄą╝ą░č乊čĆąŠą▓, čüąŠą▒čŗčéąĖą╣ ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣), č鹊 ą┐ąŠč鹊ą║ ą▓čüąĄą│ą┤ą░ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ. ą¤ąŠč鹊ą║ ąČą┤ąĄčé, ą┐ąŠą║ą░ ą▓čŗąĘąŠą▓ąŠą╝ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗčüčéą░ą▓ą╗ąĄąĮ ąĮčāąČąĮčŗą╣ čäą╗ą░ą│. ąÜąŠą│ą┤ą░ čäą╗ą░ą│ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮ, č鹊 ą▓čüąĄ ą┐ąŠč鹊ą║ąĖ, ąŠąČąĖą┤ą░čÄčēąĖąĄ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąĄčĆąĄą╝ąĄčēą░čÄčéčüčÅ ą▓ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ VDK (ready queue). ąØą░čćąĖąĮą░čÅ čü ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ čäą╗ą░ą│ą░ č湥čĆąĄąĘ PostDeviceFlag() API čü ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄą╝ ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠč鹊ą║ąŠą▓ ą▓ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ, ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░ ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ąĮą░ čäą╗ą░ą│ąĄ ą┐ąŠč鹊ą║ą░ č鹊čćąĮąŠ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ čäą╗ą░ą│ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ čüą╝. čĆą░ąĘą┤ąĄą╗ "Posting a Device Flag".
ą¤čĆą░ą▓ąĖą╗ą░ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ čäą╗ą░ą│ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ čüčéčĆąŠą│ąĖ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ą┤čĆčāą│ąĖčģ čéąĖą┐ąŠą▓ čüąĖą│ąĮą░ą╗ąŠą▓. "ąĪč鹥ą║" ą║čĆąĖčéąĖč湥čüą║ąĖčģ čĆąĄą│ąĖąŠąĮąŠą▓ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą│ą╗čāą▒ąĖąĮąŠą╣ č鹊čćąĮąŠ ą▓ 1 čāčĆąŠą▓ąĄąĮčī, ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ąČą┤ąĄčé čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆą░ąĘčĆąĄčłąĄąĮčŗ, ą▓čŗąĘąŠą▓ PushCriticalRegion() ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮ č鹊čćąĮąŠ č鹊ą╗čīą║ąŠ 1 čĆą░ąĘ ą┤ąŠ ą▓čŗąĘąŠą▓ą░ PendDeviceFlag() ąĖąĘ ą┐ąŠč鹊ą║ą░. ą¤čĆąĖčćąĖąĮą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčüą╗ąŠą▓ąĖčÅ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠąĮčÅčéąĮąŠą╣, ąĄčüą╗ąĖ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą┐čĆąĖčćąĖąĮčā ąŠąČąĖą┤ą░ąĮąĖčÅ. ą¤ąŠč鹊ą║ ąČą┤ąĄčé ąĮą░ čäą╗ą░ą│ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠą│ą┤ą░ ąŠąĮ ąČą┤ąĄčé čāčüą╗ąŠą▓ąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ąĖąĘ ISR. ą×ą┤ąĮą░ą║ąŠ ąÆčŗ ą┤ąŠą╗ąČąĮčŗ ą▓ąŠą╣čéąĖ ą▓ ą║čĆąĖčéąĖč湥čüą║ąĖą╣ čĆąĄą│ąĖąŠąĮ ą║ąŠą┤ą░ ą┐ąĄčĆąĄą┤ ą┐čĆąŠą▓ąĄčĆą║ąŠą╣ ą╗čÄą▒ąŠą│ąŠ čāčüą╗ąŠą▓ąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠą│ą╗ąŠ ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮąŠ ąĖąĘ ISR, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą┐čĆąŠčćąĖčéą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čÅą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, PendDeviceFlag() ą▓čŗčéą░ą╗ą║ąĖą▓ą░ąĄčé ąŠą┤ąĖąĮ čĆą░ąĘ ąĖąĘ čüč鹥ą║ą░ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čĆąĄą│ąĖąŠąĮąŠą▓, čŹčäč乥ą║čéąĖą▓ąĮąŠ ą▒ą░ą╗ą░ąĮčüąĖčĆčāčÅ ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ ą▓čŗąĘąŠą▓čŗ PushCriticalRegion().
ąØą░ą┐čĆąĖą╝ąĄčĆ, čéąĖą┐ąĖčćąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čäą╗ą░ą│ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
VDK_PushCriticalRegion();
while(should_loop != 0)
{
/* ... */
/* ą┤ąŠčüčéčāą┐ ą║ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╝ čüčéčĆčāą║čéčāčĆą░ą╝ ą┤ą░ąĮąĮčŗčģ */
/* ... */
/* ąŠąČąĖą┤ą░ąĮąĖąĄ ąĮąĄą║ąŠč鹊čĆąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ */
VDK_PendDeviceFlag();
/* ąöąŠą╗ąČąĄąĮ čüąĮąŠą▓ą░ ą▓ąŠą╣čéąĖ ą▓ ą║čĆąĖčéąĖč湥čüą║ąĖą╣ čĆąĄą│ąĖąŠąĮ ą║ąŠą┤ą░ */
VDK_PushCriticalRegion();
}
VDK_PopCriticalRegion();
ąØą░ čĆąĖčü. 3-20 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąŠčåąĄčüčü ąŠąČąĖą┤ą░ąĮąĖčÅ čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
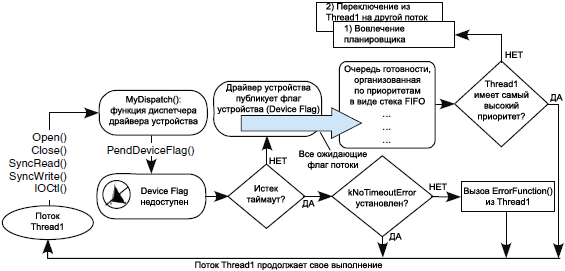
ąĀąĖčü. 3-20. ą×ąČąĖą┤ą░ąĮąĖąĄ čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Flag).
ą¤čāą▒ą╗ąĖą║ą░čåąĖčÅ čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (Posting a Device Flag). ąóąŠčćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ čüąĄą╝ą░č乊čĆčŗ ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą╝ąŠąČąĮąŠ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░čéčī čäą╗ą░ą│ čāčüčéčĆąŠą╣čüčéą▓ą░ (post). ążčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čāą▒ą╗ąĖą║čāąĄčé čäą╗ą░ą│ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ PostDeviceFlag(). ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé čüąĄą╝ą░č乊čĆąŠą▓ ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣, ą▓čŗąĘąŠą▓ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčé ą▓čüąĄ ą┐ąŠč鹊ą║ąĖ, ąŠąČąĖą┤ą░čÄčēąĖąĄ čäą╗ą░ą│ čāčüčéčĆąŠą╣čüčéą▓ą░, ą▓ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ, ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓ąŠąĘą▓čĆą░čé ąĖąĘ PostDeviceFlag(), ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▓čŗąĘąŠą▓čŗ PendDeviceFlag() ą┐čĆąĖą▓ąĄą┤čāčé ą║ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĄ ą┐ąŠč鹊ą║ą░ (ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ čüą┤ąĄą╗ą░ąĮąŠ čĆą░ąĮąĄąĄ).
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 PostDeviceFlag() API ąĮąĄ ą┤ąĖčüą┐ąĄčéč湥čĆąĖąĘąĖčĆčāąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą╗čÄą▒čŗčģ ąŠčłąĖą▒ąŠą║. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 čŹčéą░ čäčāąĮą║čåąĖčÅ API ąŠą▒čŗčćąĮąŠ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ čäčāąĮą║čåąĖąĖ ą┤ąĖčüą┐ąĄčéč湥čĆą░, ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ čü VDK_kIO_Activate. ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠč鹊ą╝čā, čćč鹊 čäčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čüč鹥ą║ąĄ kernel, ą║ąŠą│ą┤ą░ ąŠąĮą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čü VDK_kIO_Activate, ą░ ąĮąĄ ąĮą░ čüč鹥ą║ąĄ ą┐ąŠč鹊ą║ą░.
ąØą░ čĆąĖčü. 3-21 ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąŠčåąĄčüčü ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
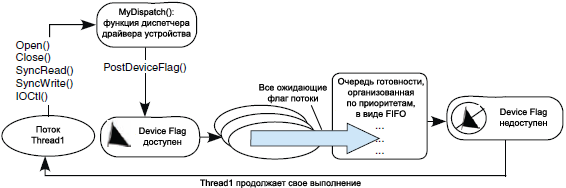
ąĀąĖčü. 3-21. ą¤čāą▒ą╗ąĖą║ą░čåąĖčÅ (posting) čäą╗ą░ą│ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (Device Flag).
[ą×čüąĮąŠą▓ąĮčŗąĄ ąĘą░ą╝ąĄčćą░ąĮąĖčÅ]
ą¤čĆąĖą┤ąĄčƹȹĖą▓ą░ą╣č鹥čüčī čüą╗ąĄą┤čāčÄčēąĖčģ čüąŠą▓ąĄč鹊ą▓, ą║ąŠą│ą┤ą░ ą┐ąĖčłąĄč鹥 ą║ąŠą┤ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░. ąźąŠčéčÅ ą╝ąĮąŠą│ąĖąĄ ąĖąĘ čüąŠą▓ąĄč鹊ą▓ čéą░ą║ąČąĄ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ ą┐ąŠč鹊ą║ą░ą╝, ąŠąĮąĖ ąĘą░čüą╗čāąČąĖą▓ą░čÄčé ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ čāą┐ąŠą╝ąĖąĮą░ąĮąĖčÅ ą▓ čüą▓čÅąĘąĖ čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ. ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ISR č鹥čüąĮąŠ čüą▓čÅąĘą░ąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝. ą¤ąŠčüą║ąŠą╗čīą║čā ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ISR čäčāąĮą║čåąĖčÅ ą┤ąĖčüą┐ąĄčéč湥čĆą░ ąŠą▒čĆą░čēą░čÄčéčüčÅ ą║ ąŠą┤ąĮąĖą╝ ąĖ č鹥ą╝ ąČąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝, ą┤ąĄą║ą╗ą░čĆąĖčĆčāą╣č鹥 čŹčéąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą▓ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ C/C++ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ąĮąĖą╝ ą▓ ą║ąŠą┤ąĄ ISR ą║ą░ą║ ą║ ą▓ąĮąĄčłąĮąĖą╝ (č湥čĆąĄąĘ ą┤ąĄą║ą╗ą░čĆą░čåąĖčÄ extern) ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝. ąÜąŠą│ą┤ą░ čŹčéąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą┤ąĄą║ą╗ą░čĆąĖčĆčāčÄčéčüčÅ ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ čäą░ą╣ą╗ąĄ C/C++, č鹊 ąĮčāąČąĮąŠ ąĖčģ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░čéčī čü ą║ą╗čÄč湥ą▓čŗą╝ čüą╗ąŠą▓ąŠą╝ volatile, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ąŠą┐čéąĖą╝ąĖąĘą░č鹊čĆ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ ąĘąĮą░ąĄčé: ąĘąĮą░č湥ąĮąĖąĄ čŹčéąĖčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮąŠ ą▓ąĮąĄčłąĮąĖą╝ ą║ąŠą┤ąŠą╝ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čüą╗ąĄą┤čāąĄčé ą┐ąŠąĘą░ą▒ąŠčéąĖčéčīčüčÅ ąŠ č鹊ą╝, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓ ą║ąŠą┤ąĄ C/C++, ą║ąŠčĆčĆąĄą║čéąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čāą┐ąŠą╝čÅąĮčāčéčŗ ą▓ ą║ąŠą┤ąĄ ISR ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┤ąĄą║ąŠčĆą░čåąĖąĖ ąĖą╝ąĄąĮ (decorated/mangled name).
ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ / ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗąĄ čĆąĄą│ąĖąŠąĮčŗ ą║ąŠą┤ą░ (Critical/Unscheduled Regions). ą¤ąŠčüą║ąŠą╗čīą║čā ą╝ąĮąŠą│ąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą┤čĆčāą│ąĖą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ ąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ą╝ąĖ ISR, č鹊 ą┤ąŠčüčéčāą┐ ą║ ąĮąĖą╝ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮ ą║čĆąĖčéąĖč湥čüą║ąĖą╝ąĖ čĆąĄą│ąĖąŠąĮą░ą╝ąĖ ąĖ ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗą╝ąĖ čĆąĄą│ąĖąŠąĮą░ą╝ąĖ. ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ čĆąĄą│ąĖąŠąĮčŗ ąĮąĄ ą┤ą░čÄčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ą╝ ISR ąĮąĄąŠąČąĖą┤ą░ąĮąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ, ąĖ ąĮąĄąŠą▒čüą╗čāąČąĖą▓ą░ąĄą╝čŗąĄ čĆąĄą│ąĖąŠąĮčŗ ąĘą░čēąĖčēą░čÄčé ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÄ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ čüąŠ čüč鹊čĆąŠąĮčŗ ą┤čĆčāą│ąĖčģ ą┐ąŠč鹊ą║ąŠą▓.
ąÜąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąŠąČąĖą┤ą░ąĮąĖąĄ čäą╗ą░ą│ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮčāąČąĮąŠ ą┐ąŠąĘą░ą▒ąŠčéąĖčéčīčüčÅ ąŠ č鹊ą╝, čćč鹊 ą║ąŠą┤ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ąŠčĆčĆąĄą║čéąĮąŠą╝ čĆąĄą│ąĖąŠąĮąĄ. ążą╗ą░ą│ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąŠą╗ąČąĮčŗ ąŠąČąĖą┤ą░čéčīčüčÅ ąĖąĘ ą▓ ąĮąĄ ą▓ą╗ąŠąČąĄąĮąĮąŠą│ąŠ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│ąĖąŠąĮą░, ą║ą░ą║ čŹč鹊 ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ą×ąČąĖą┤ą░ąĮąĖąĄ ąĮą░ čäą╗ą░ą│ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░".
[ąĪčüčŗą╗ą║ąĖ]
1. VDK I/O Interface site:analog.com.
2. VDK: ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ISR). |



