|
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ąŠą┐ąĖčüą░ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI ąĖąĘ ą┤ą░čéą░čłąĖč鹊ą▓ [1, 2].
[29. Serial Peripheral Interface (SPI)]
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čüą░ (serial peripheral interface, SPI) čÅą▓ą╗čÅąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗą╝ ą║ą░ąĮą░ą╗ąŠą╝ čüą▓čÅąĘąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖą╝ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą╝ąĮąŠą│ąĖą╝ąĖ SPI-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąæą░ąĘąŠą▓ąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI čÅą▓ą╗čÅąĄčéčüčÅ čüąĖąĮčģčĆąŠąĮąĮčŗą╝, 4-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ čü 2 ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (ą▓čģąŠą┤ ąĖ ą▓čŗčģąŠą┤), 1 ą▓čŗą▓ąŠą┤ ą▓čŗą▒ąŠčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĄčēąĄ 1 ą▓čŗą▓ąŠą┤ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ čéą░ą║č鹊ą▓ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ. 2 ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą┐ąŠą╗ąĮąŠ-ą┤čāą┐ą╗ąĄą║čüąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠ ą┐ąĄčĆąĄą┤ą░č湥 ą┐čĆąĖ ąŠą▒ą╝ąĄąĮąĄ čü ą┤čĆčāą│ąĖą╝ąĖ SPI-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąöą▓ą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ SPI ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čĆą░ą▒ąŠčéčŗ quad SPI. ąóą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čéą░ą║ąĖąĄ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čĆąĄąČąĖą╝čŗ, ą║ą░ą║ flow control (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ), fast mode (ą▒čŗčüčéčĆčŗą╣ čĆąĄąČąĖą╝), čĆąĄąČąĖą╝ ą┤ą▓ąŠą╣ąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (dual-I/O mode, DIOM). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄą╝ čü ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝. ąĪ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗą╝ąĖ ąŠą┐čåąĖčÅą╝ąĖ ą┐ąŠčĆčéčŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐čĆąŠąĘčĆą░čćąĮąŠąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą┤čĆčāą│ąĖą╝ąĖ SPI-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (master mode), ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (slave mode), ąĖ ą▓ čĆąĄąČąĖą╝ąĄ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą╝ą░čüč鹥čĆą░ą╝ąĖ (multimaster). ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ą▓ą║ą╗čÄčćą░ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čāčÄ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░, ą┐ąŠą┤čüčéčĆąŠą╣ą║čā čäą░ąĘčŗ ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ čéą░ą║č鹊ą▓. ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ąŠą║čĆčāąČąĄąĮąĖąĖ multimaster, čĆą░ą▒ąŠčéą░čÅ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┤čĆčāą│ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą┤ąĄą╣čüčéą▓čāčÅ ą╗ąĖą▒ąŠ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ master, ą╗ąĖą▒ąŠ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave. ąÆ ąŠą║čĆčāąČąĄąĮąĖąĖ multimaster, ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čŗčģąŠą┤čŗ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą║ąŠąĮčäą╗ąĖą║č鹊ą▓ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▓čŗčģąŠą┤ąŠą▓ ąĮą░ čłąĖąĮąĄ, čüąŠąĄą┤ąĖąĮąĄąĮąĮčŗčģ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ. ążčāąĮą║čåąĖčÅ flow control čĆą░ąĘčĆąĄčłą░ąĄčé ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ čĆą░ą▒ąŠčéą░čéčī čü ą▒čŗčüčéčĆčŗą╝ąĖ master-čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ą▓čŗą▓ąŠą┤ SPI ready, ą║ąŠč鹊čĆčŗą╣ ą│ąĖą▒ą║ąŠ čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ.
[ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ SPI]
ą£ąŠą┤čāą╗čī SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ:
ŌĆó ą¤ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗą╣, čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü.
ŌĆó ąĀą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī 8, 16 ąĖ 32 ą▒ąĖčéą░.
ŌĆó ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ čüą║ąŠčĆąŠčüčéčī ą▒ąĖčé (baud rate), čäą░ąĘą░ čéą░ą║č鹊ą▓ ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓.
ŌĆó ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓ąĮčāčéčĆąĖ čäčĆąĄą╣ą╝ą░.
ŌĆó ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (Flow control).
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓ Fast ąĖ DIOM.
ŌĆó ąĀąĄąČąĖą╝čŗ Quad (čüč湥čéą▓ąĄčĆąĄąĮąĮčŗą╣) ąĖ memory-mapped (ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ąĮą░ ą┐ą░ą╝čÅčéčī), ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ č鹊ą╗čīą║ąŠ SPI2.
ŌĆó ąØąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ ą║ą░ąĮą░ą╗čŗ DMA ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ŌĆó ą¤ą░ą║ąĄčéąĮčŗą╣ čĆąĄąČąĖą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ (Burst transfer mode) ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ąŠą▓ ąĘą░ą┐ąĖčüąĖ ąĮąĄ DMA.
[ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ SPI]
ąĀąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░. ąÆ čüčāčēąĮąŠčüčéąĖ SPI čŹč鹊 čüą┤ą▓ąĖą│ąŠą▓čŗą╣ čĆąĄą│ąĖčüčéčĆ, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĄčé ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ą▓ ą┤čĆčāą│ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖąĘ ąĮąĖčģ ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ. ąÆąŠ ą▓čĆąĄą╝čÅ ąŠą▒ą╝ąĄąĮą░ SPI ą┤ą░ąĮąĮčŗąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ (ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ) ąĖ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ (ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ). ąĪąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčé čüą┤ą▓ąĖą│ ąĖ ąŠčåąĖčäčĆąŠą▓ą║čā čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą┤ą▓čāčģ ą╗ąĖąĮčÅčģ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (ą▓čŗčģąŠą┤ ąĖ ą▓čģąŠą┤).
ążčāąĮą║čåąĖąŠąĮą░ą╗ ą│ą╗ą░ą▓ąĮąŠą│ąŠ (master) ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ (slave) čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąŠą┤ąĮą░ čüąĖčüč鹥ą╝ą░ SPI ą┤ąĄą╣čüčéą▓čāąĄčé ą║ą░ą║ master ą║ą░ąĮą░ą╗ą░ čüą▓čÅąĘąĖ, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ. ąöčĆčāą│ą░čÅ čüąĖčüč鹥ą╝ą░ ą┤ąĄą╣čüčéą▓čāąĄčé ą║ą░ą║ slave, ą║ąŠč鹊čĆą░čÅ ą▓ą┤ą▓ąĖą│ą░ąĄčé ąĖ ą▓čŗą┤ą▓ąĖą│ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čéą░ą║čéą░ą╝ čüąĖčüč鹥ą╝čŗ master. ąĀą░ąĘąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠą│čāčé ą▒čĆą░čéčī ąĮą░ čüąĄą▒čÅ čĆąŠą╗čī master, ąŠą┤ąĮą░ą║ąŠ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ąĮą░ čłąĖąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ master, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓ą┤ą▓ąĖą│ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ (čĆąĄąČąĖą╝ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖčÅ, broadcast). ąóą░ą║ąČąĄ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗčģąŠą┤ąŠą╝, ą┐ąŠą┤ą░ą▓ą░čÅ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ master. ąŁč鹊 ą┐čĆą░ą▓ąĖą╗ąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ broadcast. ąØąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮčŗ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ, ąĮąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą╝čā slave čĆą░ąĘčĆąĄčłąĄąĮąŠ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą┤ą░ąĮąĮčŗąĄ ąŠą▒čĆą░čéąĮąŠ čāčüčéčĆąŠą╣čüčéą▓čā master.
ąĀą░čüčłąĖčĆąĄąĮąĮčŗąĄ čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ. SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čéą░ą║ąĖąĄ čĆąĄąČąĖą╝čŗ, ą║ą░ą║ fast mode, DIOM ąĖ Quad-SPI. ąóą░ą║ąČąĄ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ čüąŠ čüč鹊čĆąŠąĮčŗ slave-čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆ čĆąĄąČąĖą╝ąĄ fast ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą░ąĮą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ąĮą░ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ čéą░ą║čéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ą╝ąĄčüč鹊 čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ą┐čĆąĖąĄą╝ą░ (ą▓ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┐ą░ą┤ čéą░ą║čéą░ ą┐čĆąĖąĄą╝ą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĄąĮ ą┐ąĄčĆąĄą┐ą░ą┤čā ą┐ąĄčĆąĄą┤ą░čćąĖ), čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ full-cycle path (ąĮą░čüą║ąŠą╗čīą║ąŠ čÅ ą┐ąŠąĮčÅą╗, ą╝ąŠąČąĮąŠ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ąŠą▒ąŠąĖą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ čéą░ą║č鹊ą▓). ąÆ čĆąĄąČąĖą╝ąĄ DIOM, ąŠą▒ą░ čüąĖą│ąĮą░ą╗ą░ MOSI ąĖ MISO ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤čŗ ąĖą╗ąĖ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ, ąĖ 2 ą▒ąĖčéą░ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĖą╗ąĖ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÆ čĆąĄąČąĖą╝ąĄ Quad-SPI ą▓čüąĄ ą▓čŗą▓ąŠą┤čŗ SPI_D3:0 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤ ąĖą╗ąĖ ą║ą░ą║ ą▓čŗčģąŠą┤, ąĖ 4 ą▒ąĖčéą░ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĖą╗ąĖ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąæąŠą╗ąĄąĄ ą╝ąĄą┤ą╗ąĄąĮąĮąŠąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ąŠč鹊ą║ąŠą╝, ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÅ čüą╗ąĖčłą║ąŠą╝ ą▒čŗčüčéčĆąŠąĄ master-čāčüčéčĆąŠą╣čüčéą▓ąŠ, čü ą┐ąŠą╝ąŠčēčīčÄ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (SPI0_RDY).
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ master. SPI ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ čĆą░ą▒ąŠč湥ą╝ ąŠą║čĆčāąČąĄąĮąĖąĖ, ą│ą┤ąĄ ąĖą╝ąĄąĄčéčüčÅ ą║ą░ą║ 1 master, čéą░ą║ ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ master (čāčüą╗ąŠą▓ąĖčÅ čĆą░ą▒ąŠčéčŗ multi-master). ąĪąĖą│ąĮą░ą╗čŗ SPI_MOSI, SPI_MISO ąĖ SPI_CLK čüąŠąĄą┤ąĖąĮčÅčÄčéčüčÅ čā ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą▓ ą╗čÄą▒ąŠą╣ ąĖąĘ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣. ą¤ąĄčĆąĄą┤ą░čćą░ ąĖ ą┐čĆąĖąĄą╝ SPI ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖą╗ąĖ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░čüčéčĆąŠąĄą║ čĆąĄą│ąĖčüčéčĆąŠą▓ SPI_RXCTL ąĖ SPI_TXCTL. ąÆ čĆąĄąČąĖą╝ąĄ čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖčÅ (broadcast), ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ slaves ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ą┐čĆąĖąĄą╝, ąĮąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░č湥, čāą┐čĆą░ą▓ą╗čÅčÅ čüą▓ąŠąĄą╣ ą╗ąĖąĮąĖąĄą╣ SPI_MISO.
[ąĪą┐ąĖčüąŠą║ SPI-čĆąĄą│ąĖčüčéčĆąŠą▓ ADSP-BF70x]
ąóą░ą▒ą╗ąĖčåą░ 29-1. ąĀąĄą│ąĖčüčéčĆčŗ SPI ADSP-BF70x.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| SPI_CLK |
Clock Rate Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊ą╣ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čéą░ą║č鹊ą▓) |
| SPI_CTL |
Control Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ) |
| SPI_DLY |
Delay Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┤ąĄčƹȹ║ąĖ) |
| SPI_ILAT |
Masked Interrupt Condition Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ) |
| SPI_ILAT_CLR |
Masked Interrupt Clear Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčćąĖčüčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
| SPI_IMSK |
Interrupt Mask Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
| SPI_IMSK_CLR |
Interrupt Mask Clear Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ąŠčćąĖčüčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
| SPI_IMSK_SET |
Interrupt Mask Set Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) |
| SPI_MMRDH |
Memory Mapped Read Header (ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ ą┐čĆąĖą▓čÅąĘą░ąĮąĮąŠą│ąŠ ą║ ą┐ą░ą╝čÅčéąĖ čćč鹥ąĮąĖčÅ) |
| SPI_MMTOP |
SPI Memory Top Address (ą▓ąĄčĆčģąĮąĖą╣ ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ SPI) |
| SPI_RFIFO |
Receive FIFO Data Register (čĆąĄą│ąĖčüčéčĆ FIFO ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░) |
| SPI_RWC |
Received Word Count Register (čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ą┐čĆąĖąĮčÅčéčŗčģ čüą╗ąŠą▓) |
| SPI_RWCR |
Received Word Count Reload Register (čĆąĄą│ąĖčüčéčĆ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ čüč湥čéčćąĖą║ą░ ą┐čĆąĖąĮčÅčéčŗčģ čüą╗ąŠą▓) |
| SPI_RXCTL |
Receive Control Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąŠą╝) |
| SPI_SLVSEL |
Slave Select Register (čĆąĄą│ąĖčüčéčĆ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░) |
| SPI_STAT |
Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ) |
| SPI_TFIFO |
Transmit FIFO Data Register (čĆąĄą│ąĖčüčéčĆ FIFO ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
| SPI_TWC |
Transmitted Word Count Register (čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ čüą╗ąŠą▓) |
| SPI_TWCR |
Transmitted Word Count Reload Register (čĆąĄą│ąĖčüčéčĆ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ čüč湥čéčćąĖą║ą░ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ čüą╗ąŠą▓) |
| SPI_TXCTL |
Transmit Control Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░č湥ą╣) |
ąóą░ą▒ą╗ąĖčåą░ 29-2. ąĪą┐ąĖčüąŠą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ SPI ADSP-BF70x.
| Interrupt ID |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¦čāą▓čüčéą▓. |
ąÜą░ąĮą░ą╗ DMA |
| 36 |
SPI0_ERR |
SPI0 Error (ąŠčłąĖą▒ą║ą░ SPI0) |
čāčĆąŠą▓ąĄąĮčī |
|
| 37 |
SPI0_STAT |
SPI0 Status (čüąŠčüč鹊čÅąĮąĖąĄ SPI0) |
čāčĆąŠą▓ąĄąĮčī |
|
| 38 |
SPI0_TXDMA |
SPI0 TX DMA Channel (ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ DMA SPI0) |
čāčĆąŠą▓ąĄąĮčī |
4 |
| 39 |
SPI0_RXDMA |
SPI0 RX DMA Channel (ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ DMA SPI0) |
čāčĆąŠą▓ąĄąĮčī |
5 |
| 40 |
SPI1_ERR |
SPI1 Error (ąŠčłąĖą▒ą║ą░ SPI1) |
čāčĆąŠą▓ąĄąĮčī |
|
| 41 |
SPI1_STAT |
SPI1 Status (čüąŠčüč鹊čÅąĮąĖąĄ SPI1) |
čāčĆąŠą▓ąĄąĮčī |
|
| 42 |
SPI1_TXDMA |
SPI1 TX DMA Channel (ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ DMA SPI1) |
čāčĆąŠą▓ąĄąĮčī |
6 |
| 43 |
SPI1_RXDMA |
SPI1 RX DMA Channel (ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ DMA SPI1) |
čāčĆąŠą▓ąĄąĮčī |
7 |
| 44 |
SPI2_ERR |
SPI2 Error (ąŠčłąĖą▒ą║ą░ SPI2) |
čāčĆąŠą▓ąĄąĮčī |
|
| 45 |
SPI2_STAT |
SPI2 Status (čüąŠčüč鹊čÅąĮąĖąĄ SPI2) |
čāčĆąŠą▓ąĄąĮčī |
|
| 46 |
SPI2_TXDMA |
SPI1 TX DMA Channel (ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ DMA SPI1) |
čāčĆąŠą▓ąĄąĮčī |
8 |
| 47 |
SPI2_RXDMA |
SPI1 RX DMA Channel (ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ DMA SPI1) |
čāčĆąŠą▓ąĄąĮčī |
9 |
ąóą░ą▒ą╗ąĖčåą░ 29-3. ąĪą┐ąĖčüąŠą║ čéčĆąĖą│ą│ąĄčĆąŠą▓ ADSP-BF70x SPI master-čāčüčéčĆąŠą╣čüčéą▓.
| Trigger ID |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¦čāą▓čüčéą▓. |
| 18 |
SPI0_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI0 |
ą┐ąĄčĆąĄą┐ą░ą┤ |
| 19 |
SPI0_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI0 |
ą┐ąĄčĆąĄą┐ą░ą┤ |
| 20 |
SPI1_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI1 |
ą┐ąĄčĆąĄą┐ą░ą┤ |
| 21 |
SPI1_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI1 |
ą┐ąĄčĆąĄą┐ą░ą┤ |
| 22 |
SPI2_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI2 |
ą┐ąĄčĆąĄą┐ą░ą┤ |
| 23 |
SPI2_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI2 |
ą┐ąĄčĆąĄą┐ą░ą┤ |
ąóą░ą▒ą╗ąĖčåą░ 29-4. ąĪą┐ąĖčüąŠą║ čéčĆąĖą│ą│ąĄčĆąŠą▓ ADSP-BF70x SPI slave-čāčüčéčĆąŠą╣čüčéą▓.
| Trigger ID |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¦čāą▓čüčéą▓. |
| 28 |
SPI0_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI0 |
ąĖą╝ą┐čāą╗čīčü |
| 29 |
SPI0_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI0 |
ąĖą╝ą┐čāą╗čīčü |
| 30 |
SPI1_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI1 |
ąĖą╝ą┐čāą╗čīčü |
| 31 |
SPI1_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI1 |
ąĖą╝ą┐čāą╗čīčü |
| 32 |
SPI2_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI2 |
ąĖą╝ą┐čāą╗čīčü |
| 33 |
SPI2_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI2 |
ąĖą╝ą┐čāą╗čīčü |
ąóą░ą▒ą╗ąĖčåą░ 29-5. ąĪą┐ąĖčüąŠą║ ą║ą░ąĮą░ą╗ąŠą▓ DMA ąĖąĮč鹥čĆč乥ą╣čüą░ SPI ą┐čĆąŠčåąĄčüčüąŠčĆą░ ADSP-BF70x.
| DMA ID |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| DMA4 |
SPI0_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI0 |
| DMA5 |
SPI0_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI0 |
| DMA6 |
SPI1_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI1 |
| DMA7 |
SPI1_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI1 |
| DMA8 |
SPI2_TXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ SPI2 |
| DMA9 |
SPI2_RXDMA |
ąÜą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ SPI2 |
[ąæą╗ąŠą║-čüčģąĄą╝ą░ SPI]
ąæą╗ąŠą║-čüčģąĄą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ SPI ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą▒ą╗ąŠą║ąĖ ą╝ąŠą┤čāą╗čÅ SPI. ą£ąŠą┤čāą╗čī ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ 3 ąŠčüąĮąŠą▓ąĮčŗąĄ čćą░čüčéąĖ:
ŌĆó ą»ą┤čĆąŠ SPI, čüąŠą┤ąĄčƹȹ░čēąĄąĄ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ FIFO ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĖą╝ąĖ čĆąĄą│ąĖčüčéčĆčŗ čüą┤ą▓ąĖą│ą░.
ŌĆó ąæą╗ąŠą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░č鹊čĆ ąĖ ą╗ąŠą│ąĖą║čā ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą║ąŠąĮą▓ąĄą╣ąĄčĆčŗ.
ŌĆó ąæą╗ąŠą║ čĆąĄą│ąĖčüčéčĆąŠą▓.
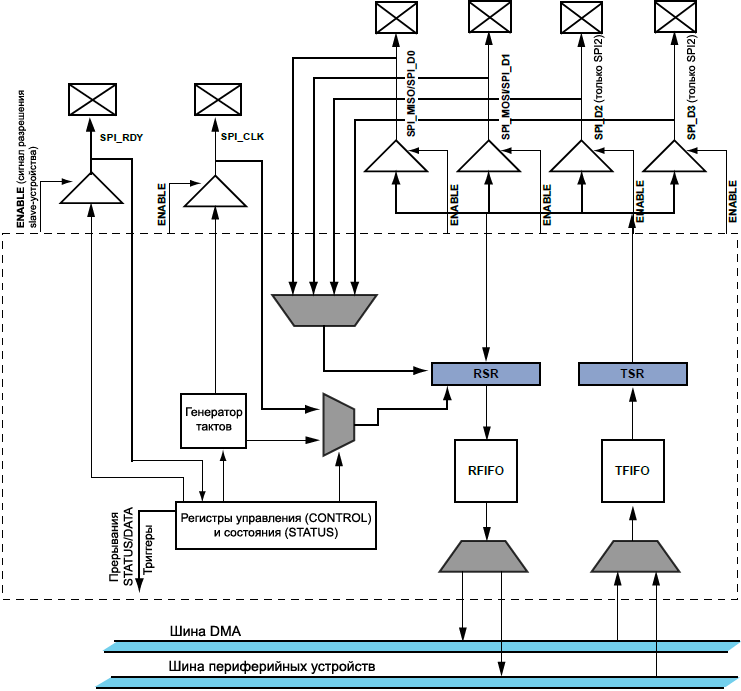
ąĀąĖčü. 29-1. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ SPI, Quad Mode (čüč湥čéą▓ąĄčĆąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝).
ą¤čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą£ąŠą┤čāą╗čī SPI čĆąĄą░ą╗ąĖąĘčāąĄčé 2 ą║ą░ąĮą░ą╗ą░, ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ (ą┐ąŠčćčéąĖ) - ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ąĖ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÆčŗą┤ąĄą╗ąĄąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ SPI_RXCTL ąĖ SPI_TXCTL čĆą░ąĘą┤ąĄą╗čīąĮąŠ čāą┐čĆą░ą▓ą╗čÅčÄčé čŹčéąĖą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ. ąŚą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čĆąĄąČąĖą╝ąŠą▓ dual ąĖ quad, SPI ą╝ąŠąČąĄčé čĆą░ąĘčĆąĄčłąĖčéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹčéąĖčģ ąŠą▒ąŠąĖčģ ą║ą░ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ ą┤čāą┐ą╗ąĄą║čüąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ.
ą¤čĆąŠč鹊ą║ąŠą╗ SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 4 čĆą░ąĘąĮčŗčģ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čĆą░ą▒ąŠčéčŗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čéą░ą║č鹊ą▓, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ ąĖčģ čäą░ąĘčā ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą┤ą░ąĮąĮčŗą╝. ąŁčéąĖ 4 ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ą▓čŗą▒ąĖčĆą░čÄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ SPI_CTL.CPOL and SPI_CTL.CPHA (ą┐ąŠą┤ąŠą▒ąĮčŗąĄ ąŠą┐čåąĖąĖ ąĖą╝ąĄčÄčéčüčÅ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą╗čÄą▒ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ąĖą╝ąĄčÄčēąĖą╣ ąĮą░ ą▒ąŠčĆčéčā ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü SPI).
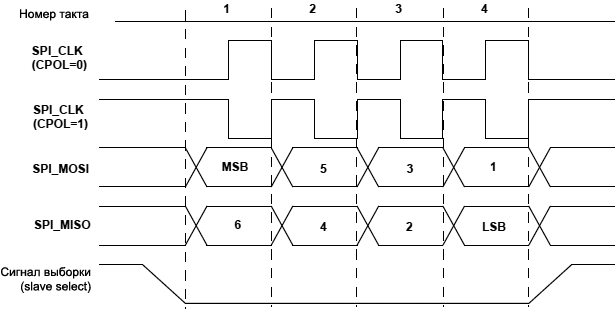
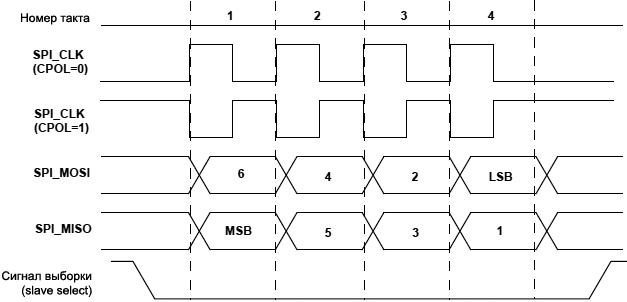
ąĀąĖčüčāąĮą║ąĖ 29-2, 29-3 čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčé 2 ą▒ą░ąĘąŠą▓čŗčģ č乊čĆą╝ą░čéą░, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗąĄ ą▒ąĖč鹊ą╝ CPHA (ą▒ąĖčé čäą░ąĘčŗ čéą░ą║č鹊ą▓). ą¤ąŠą║ą░ąĘą░ąĮčŗ 2 ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ SPI_CLK, ąŠą┤ąĮą░ ą┤ą╗čÅ SPI_CTL.CPOL=0, ąĖ ą┤čĆčāą│ą░čÅ ą┤ą╗čÅ SPI_CTL.CPOL=1. ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ master ąĖą╗ąĖ slave, ą┐ąŠčüą║ąŠą╗čīą║čā čüąĖą│ąĮą░ą╗čŗ SPI_CLK, SPI_MISO ąĖ SPI_MOSI ąĮą░ą┐čĆčÅą╝čāčÄ čüąŠąĄą┤ąĖąĮčÅčÄčé master ąĖ slave. ąĪąĖą│ąĮą░ą╗ SPI_MISO čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗčģąŠą┤ąŠą╝ ą┤ą╗čÅ slave (ą┐ąŠ ąĮąĄą╝čā slave ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ), ąĖ čüąĖą│ąĮą░ą╗ SPI_MOSI čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗčģąŠą┤ąŠą╝ master (ą┐ąŠ ąĮąĄą╝čā master ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ). Master ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ SPI_CLK. ąĪąĖą│ąĮą░ą╗ ~SPI_SS čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗą▒ąŠčĆą║ąŠą╣ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą│ą╗ą░ą▓ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (ą┤ą╗čÅ slave čŹč鹊 ą▓čģąŠą┤, ą┤ą╗čÅ master čŹč鹊 ą▓čŗčģąŠą┤). ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą┐ąĄčĆąĄą┤ą░čćčā 8-ą▒ąĖčéąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ (SPI_CTL.SIZE=0), ą║ąŠą│ą┤ą░ čüčéą░čĆčłąĖą╣ ą▒ąĖčé (MSB) ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝ (SPI_CTL.LSBF=0). ąĀą░ąĘčĆąĄčłąĄąĮą░ ą╗čÄą▒ą░čÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą▒ąĖč鹊ą▓ SPI_CTL.SIZE ąĖ SPI_CTL.LSBF. ąØą░ą┐čĆąĖą╝ąĄčĆ, 16-ą▒ąĖčéąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą╝ą╗ą░ą┤čłąĖą╝ ą▒ąĖč鹊ą╝ (LSB) ą▓ą┐ąĄčĆąĄą┤ čÅą▓ą╗čÅąĄčéčüčÅ ą┤čĆčāą│ąŠą╣ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣.
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ ąĖ čäą░ąĘą░ čéą░ą║č鹊ą▓ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĖą┤ąĄąĮčéąĖčćąĮąŠ ąĮą░čüčéčĆąŠąĄąĮčŗ ąĮą░ čüč鹊čĆąŠąĮąĄ master-čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĮą░ čüč鹊čĆąŠąĮąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░, ą▓ąŠą▓ą╗ąĄč湥ąĮąĮčŗčģ ą▓ ą╗ąĖąĮą║ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ążąŠčĆą╝ą░čé ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčé master ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ, čćč鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ čĆą░ąĘąĮčŗčģ slave-čāčüčéčĆąŠą╣čüčéą▓.
ą£ąŠą┤čāą╗čī SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčé SPI_CTL.ASSEL čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ SPI_SEL[n] - ą░ą┐ą┐ą░čĆą░čéąĮąŠ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąÜąŠą│ą┤ą░ SPI_CTL.ASSEL=1, čüąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ slave ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą┐ąŠą╗ąĄą╝ SPI_CTL.SELST ą╝ąĄąČą┤čā ą║ą░ąČą┤ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣. ąĀąĄą░ą╗čīąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ SPI_SEL[n] čéą░ą║ąČąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ ą▓ čĆąĄą│ąĖčüčéčĆ SPI_DLY. ąøąŠą│ąĖą║ą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ SPI ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą┐čĆą░ą▓ą╗čÅąĄčé čŹčéąĖą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝. ąÜąŠą│ą┤ą░ SPI_CTL.ASSEL=0, SPI_SEL[n] ą╝ąŠąČąĄčé ą╗ąĖą▒ąŠ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą╝ąĄąČą┤čā čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ, ą╗ąĖą▒ąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄ ą░ą║čéąĖą▓ąĮčŗą╝ąĖ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čŹč鹊ą╣ ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ ą┐čāč鹥ą╝ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ SPI_SLVSEL.
ą¤ą░čĆą░ čĆąĖčüčāąĮą║ąŠą▓ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SPI ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüą╗čāčćą░ą╣, ą║ąŠą│ą┤ą░ SPI_CTL.ASSEL = 1, ąĖ čüąĖą│ąĮą░ą╗ SPI_SEL[n] ąĮąĄą░ą║čéąĖą▓ąĄąĮ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ. ąĢčüą╗ąĖ ASSEL = 0, č鹊 ą╗ąĖąĮąĖčÅthe SPI_SEL[n] ą╝ąŠąČąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą░ą║čéąĖą▓ąĮąŠą╣ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ; ąŠą┤ąĮą░ą║ąŠ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ SPI_CLK.

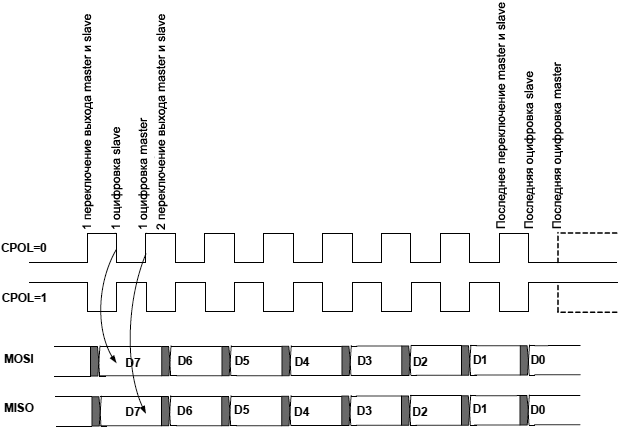
ąĀąĖčü. 29-2. ą¤čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ SPI ą┤ą╗čÅ CPHA=0.
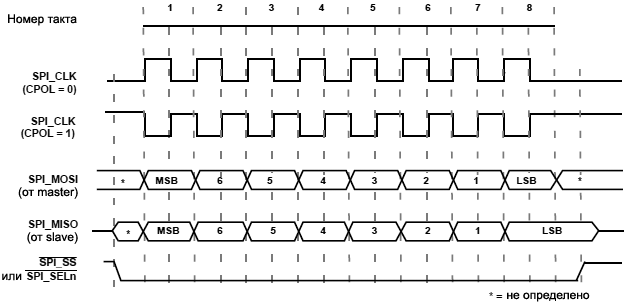
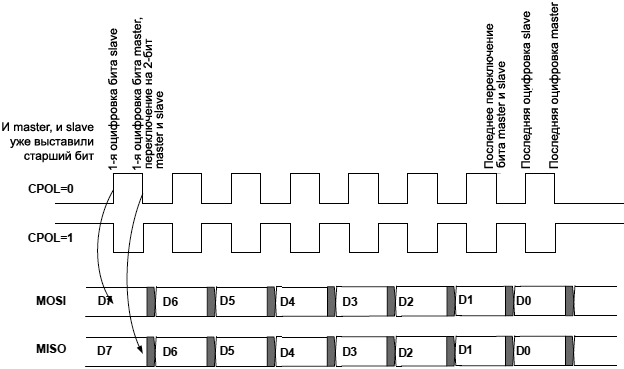
ąĀąĖčü. 29-3. ą¤čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ SPI ą┤ą╗čÅ CPHA=1.
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ. ąĪąĖą│ąĮą░ą╗ SPI_CLK čŹč鹊 čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ čéą░ą║čéčŗ, ą║ąŠč鹊čĆčŗąĄ ą░ą║čéąĖą▓ąĮčŗ č鹊ą╗čīą║ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čć ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ. ąÆ ąŠą▒čŗčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (normal mode) ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ čĆą░ą▓ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓čā ą▒ąĖčé, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ. ąÆ čĆąĄąČąĖą╝ąĄ ą┤ą▓ąŠą╣ąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (dual-I/O mode) ą┐ąŠą╗ąŠą▓ąĖąĮą░ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čéą░ą║č鹊ą▓ č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░, ąĖ ą▓ čüč湥čéą▓ąĄčĆąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (quad-SPI mode) ąŠą┤ąĮą░ č湥čéą▓ąĄčĆčéą░čÅ. ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą╝ąŠąČąĄčé čéą░ą║ąŠą╣ ąČąĄ, ą║ą░ą║ ąĖ čćą░čüč鹊čéą░ SCLK0, ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąŠą▒ą░ ą┤ąĄą╗ąĖč鹥ą╗čÅ SCLK0 - č湥čéąĮčŗą╣ ąĖ ąĮąĄč湥čéąĮčŗą╣.
ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ master SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ SPI_CLK ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ slave-čāčüčéčĆąŠą╣čüčéą▓.
ąÜąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master, čüąĖą│ąĮą░ą╗ SPI_CLK čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗčģąŠą┤ąŠą╝. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ, SPI_CLK čÅą▓ą╗čÅąĄčéčüčÅ ą▓čģąŠą┤ąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝. Slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą│ąĮąŠčĆąĖčĆčāčÄčé čéą░ą║čé SPI, ą║ąŠą│ą┤ą░ ąĖčģ ą▓čģąŠą┤ ą▓čŗą▒ąŠčĆą║ąĖ (slave select) ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ ąĮąĄą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĖą│ąĮą░ą╗ SPI_CLK ą┤ą╗čÅ ą▓čŗą┤ą▓ąĖą│ą░ąĮąĖčÅ ąĮą░čĆčāąČčā ąĖ ą▓ą┤ą▓ąĖą│ą░ąĮąĖčÅ ą▓ąĮčāčéčĆčī ą┤ą░ąĮąĮčŗčģ, ą┐ąŠčÅą▓ą╗čÅčÄčēąĖčģčüčÅ ąĮą░ čüąĖą│ąĮą░ą╗ą░čģ SPI_MISO ąĖ SPI_MOSI. ąöą░ąĮąĮčŗąĄ ą▓čüąĄą│ą┤ą░ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąĖąĘ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ čéą░ą║č鹊ą▓ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤), ąĖ ą░ąĮą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ čéą░ą║č鹊ą▓ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą▓čŗą▒ąŠčĆą║ąĖ, sampling edge). ą¤ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ ąĖ čäą░ąĘą░ čéą░ą║č鹊ą▓ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ SPI_CTL, ąĖ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé č乊čĆą╝ą░čé ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ čäčĆąĄą╣ą╝ą░.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ║ą░ą╝ąĖ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ. ąöąĖą░ą│čĆą░ą╝ą╝ą░ SPI ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ąĘą░ą┤ąĄčƹȹ║ą░ą╝ąĖ Lead ąĖ Lag (ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ ąŠčé SPI_CTL.CPHA čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčé SPI_DLY.LEADX and SPI_DLY.LAGX). ąØą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ SPI čü čŹčéąĖą╝ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčéčŗ SPI_DLY.LAGX ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ ą╝ąĄąČą┤čā ą░ą║čéąĖą▓ą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ą░ slave select (~SPI_SS) ąĖ ą┐ąĄčĆą▓čŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ SPI_CLK. ąóą░ą║ąČąĄ SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčé SPI_DLY.LEADX ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ ą╝ąĄąČą┤čā ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ SPI_CLK ąĖ ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ą░ ~SPI_SS.
ąśąĮč鹥čĆą▓ą░ą╗čŗ lead ąĖ lag ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮčŗ ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 1 SPI_CLK ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čü čāč湥č鹊ą╝ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠ čüč鹊čĆąŠąĮčŗ slave-čāčüčéčĆąŠą╣čüčéą▓ą░.

ąĀąĖčü. 29-4. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ Lead ąĖ Lag (ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ SPI_CTL.CPHA).
ąĀąĖčü. 29-5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą┐čĆąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ SPI_DLY.STOP (ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĮą░čüčéčĆąŠą╣ą║ąĖ SPI_CTL.CPHA). ą£ąŠą┤čāą╗čī SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹč鹊čé ąĖąĮč鹥čĆą▓ą░ą╗ ą┤ą╗čÅ ą▓čüčéą░ą▓ą║ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąĘą░ą┤ąĄčƹȹĄą║ ą┐ąĄčĆąĖąŠą┤ą░ SPI_CLK ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ. ąĪąĖą│ąĮą░ą╗ ~SPI_SS ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī, čāą║ą░ąĘą░ąĮąĮčāčÄ ą▒ąĖč鹊ą▓čŗą╝ ą┐ąŠą╗ąĄą╝ SPI_DLY.STOP, ą┐čĆąĖ čŹč鹊ą╝ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą▒ąĖčé SPI_CTL.SELST ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĖ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ.
ąĢčüą╗ąĖ SPI_DLY.STOP bit=0, č鹊 master čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ (continuous mode). ąŁč鹊čé čĆąĄąČąĖą╝ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠą╝čā čüčéą░čĆčéčā ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓č鹊čĆąŠą│ąŠ čüą╗ąŠą▓ą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüą╗ąŠą▓ąŠ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłą░čÄčēąĄą│ąŠ ą▒ąĖčéą░ ą┐ąĄčĆą▓ąŠą│ąŠ čüą╗ąŠą▓ą░. ąÆąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ čüąĖą│ąĮą░ą╗ slave select ą░ą║čéąĖą▓ąĄąĮ ą┐ąŠčüč鹊čÅąĮąĮąŠ.

ąĀąĖčü. 29-5. ąśąĮč鹥čĆą▓ą░ą╗čŗ SPI čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ SPI_DLY.STOP (ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ SPI_CTL.CPHA).
ąÜąŠą│ą┤ą░ SPI_DLY.STOP bit=0, ąĖ ąĮą░čćą░ą╗čīąĮčŗąĄ čāčüą╗ąŠą▓ąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ, ąĖąĮč鹥čĆč乥ą╣čü ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĮą░ ą┐ą░čāąĘčā ą┐ąĄčĆąĄą┤ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣. ąÆąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą╣ ą┐ą░čāąĘčŗ SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčé SPI_CTL.SELST, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ slave select. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčéčŗ SPI_DLY.LEADX ąĖ SPI_DLY.LAGX, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ąĖ SPI_CLK ąĖ čüąĖą│ąĮą░ą╗ąŠą╝ ą▓čŗą▒ąŠčĆą║ąĖ slave select.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (Flow Control). ąÆ čĆąĄąČąĖą╝ąĄ master čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ą┤ąŠą╗ąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗą▓ąŠą┤ąŠą╝ SPI_RDY. ąŁč鹊čé ą▓čŗą▓ąŠą┤ čā master čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤. Slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ SPI_RDY, čćč鹊ą▒čŗ ąŠčüčéą░ąĮąŠą▓ąĖčéčī master-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░čåąĖąĖ ą╗čÄą▒ąŠą╣ ąĮąŠą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĢčüą╗ąĖ SPI_RDY ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ ą┐ąŠčüąĄčĆąĄą┤ąĖąĮąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, č鹊 č鹥ą║čāčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ, ąĖ čüą╗ąĄą┤čāčÄčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ąĮąĄ ąĮą░čćąĖąĮą░ąĄčéčüčÅ, ą┐ąŠą║ą░ slave ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ SPI_RDY. ąÆčüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ slave ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčé SPI_RDY ąĖ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé master-čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI master ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ, ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé SPI_STAT.FCS. ąÜąŠą│ą┤ą░ slave ą░ą║čéąĖą▓ąĖčĆčāąĄčé SPI_RDY, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI master ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĖ ą▒ąĖčé SPI_STAT.FCS ąŠčćąĖčēą░ąĄčéčüčÅ.
ąÆ čĆąĄąČąĖą╝ąĄ slave ą▓čŗą▓ąŠą┤ SPI_RDY čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą╗ąĖą▒ąŠ ą┐ąŠ ą║ą░ąĮą░ą╗čā TX, ą╗ąĖą▒ąŠ RX. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčé SPI_CTL.FCCH ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣. ąĢčüą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ą░ TX, č鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ čüčéą░čéčāčü SPI_TFIFO ą┐čĆąĖą▒ą╗ąĖąČą░ąĄčéčüčÅ ą║ čüąŠą▒čŗčéąĖčÄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ (empty condition), čüąĖą│ąĮą░ą╗ SPI_RDY ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ. ąĢčüą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą║ą░ąĮą░ą╗čā RX, č鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ čüčéą░čéčāčü SPI_RFIFO ą┐čĆąĖą▒ą╗ąĖąČą░ąĄčéčüčÅ ą║ čüąŠą▒čŗčéąĖčÄ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ (full condition), čüąĖą│ąĮą░ą╗ SPI_RDY ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčéčŗ SPI_CTL.FCWM ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ FIFO čü čāčćą░čüčéąĖąĄą╝ čüąĖą│ąĮą░ą╗ą░ ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĖ SPI_RDY. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ą▓ čĆąĄąČąĖą╝ąĄ slave ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠčüąĮąŠą▓ą░ąĮąŠ ąĮą░ čüąŠčüč鹊čÅąĮąĖąĖ FIFO, ąĖ ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüč湥čéčćąĖą║ąŠą▓ čüą╗ąŠą▓. ąĀąĖčüčāąĮąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ master-čāčüčéčĆąŠą╣čüčéą▓ą░ SPI Flow ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé čŹčéąĖ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ.

ąĀąĖčü. 29-6. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ SPI ą▓ čĆąĄąČąĖą╝ąĄ master.
ąĀą░ą▒ąŠčéą░ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (Slave Select). ąĢčüą╗ąĖ SPI čĆą░ą▒ąŠčéą░ąĄčé ą▓ slave mode čüąĖą│ąĮą░ą╗ ~SPI_SS ą┤ąĄą╣čüčéą▓čāąĄčé ą║ą░ą║ ą▓čģąŠą┤ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (slave select). ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą║ą░ą║ master, ~SPI_SS ą╝ąŠąČąĄčé ąŠą▒čüą╗čāąČąĖą▓ą░čéčī čäčāąĮą║čåąĖčÄ ą▓čģąŠą┤ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ multi-master. ąæąĖčé SPI_CTL.PSSE čĆą░ąĘčĆąĄčłą░ąĄčé čŹčéčā čäčāąĮą║čåąĖčÄ. ąÜąŠą│ą┤ą░ SPI_CTL.PSSE=1, ą▓čģąŠą┤ ~SPI_SS čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ ąŠčłąĖą▒ą║ąĖ čĆąĄąČąĖą╝ą░ master. ąśąĮą░č湥 ~SPI_SS ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ.
ąĪąĖą│ąĮą░ą╗ ~SPI_SS ąĖą╝ąĄąĄčé ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. Master ą░ą║čéąĖą▓ąĖčĆčāąĄčé čŹč鹊čé čüąĖą│ąĮą░ą╗ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĪąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮčÅčé ąĖą╗ąĖ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ. ąÜąŠą│ą┤ą░ ~SPI_SS ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ, SPI_CLK ąĖ ą▓čģąŠą┤čŗ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ, ą▓čŗčģąŠą┤čŗ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ.
ąæąĖčéčŗ ą▓čŗą▒ąŠčĆą║ąĖ (SPI_SLVSEL.SSE1 .. SPI_SLVSEL.SSEL7) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĖą╝ąĄąĄčéčüčÅ 8 čāčüčéčĆąŠą╣čüčéą▓ SPI ą▓ čüąĖčüč鹥ą╝ąĄ, ą▓ą║ą╗čÄčćą░čÅ master, č鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ master ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ čĆąĄąČąĖą╝ą░ SPI čüąŠ ą▓čüąĄą╝ąĖ čüąĄą╝čīčÄ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąŁčéąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéčĆąĄą▒čāčÄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ master.
ąöą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ SPI čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ master. ąæąĖčéčŗ SPI_SLVSEL.SSE1 .. SPI_SLVSEL.SSEL7 ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ čü ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą▓čŗą▒ąŠčĆą║ąĖ slave select ą║ą░ąČą┤ąŠą│ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą▒ąĖčéčŗ slave select ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čéčĆąĄą╝čÅ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ąÆ ą▓ą░čĆąĖą░ąĮčéą░čģ 1 ąĖ 2, ą┐čĆąŠčåąĄčüčüąŠčĆ čÅą▓ą╗čÅąĄčéčüčÅ master-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ąĖ 7 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ąĖą╗ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čü SPI-ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ čÅą▓ą╗čÅčÄčéčüčÅ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ą¤čĆąŠčåąĄčüčüąŠčĆ ą╝ąŠąČąĄčé čüą┤ąĄą╗ą░čéčī ąŠą┤ąĮąŠ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ:
1. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą╗čÅ ą▓čüąĄčģ 7 ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ SPI ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ broadcast. ąŚą┤ąĄčüčī ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮčŗ ą▓čüąĄ ą▒ąĖčéčŗ slave select.
2. ą¤čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ čü ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄą╝ č鹊ą╗čīą║ąŠ čü ąŠą┤ąĮąĖą╝ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ.
3. ąĢčüą╗ąĖ ą▓čüąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ čéą░ą║ąČąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ą╝ąĖ, č鹊 ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĖą╣ ą╝ąŠąČąĄčé ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ č鹊ą╗čīą║ąŠ ąŠčé ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (čŹčéą░ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąŠčćąĖčüčéą║ąŠą╣ ą▒ąĖčéą░ SPI_CTL.EMISO ą▓ čłąĄčüčéąĖ ą┤čĆčāą│ąĖčģ slave-ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ). ąŚą░ą┐čĆą░čłąĖą▓ą░čÄčēąĖą╣ ą╝ąŠąČąĄčé čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮąŠ čĆą░čüčüčŗą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. ążčāąĮą║čåąĖčÅ EMISO ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéčāą┐ąĮą░ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┤čĆčāą│ąĖčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąĖą╝ąĄąĮčÅčéčī čäčāąĮą║čåąĖčÄ EMISO čü ą╗čÄą▒čŗą╝ ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ SPI, ą║ąŠč鹊čĆąŠąĄ ąĖą╝ąĄąĄčé čéą░ą║čāčÄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī.
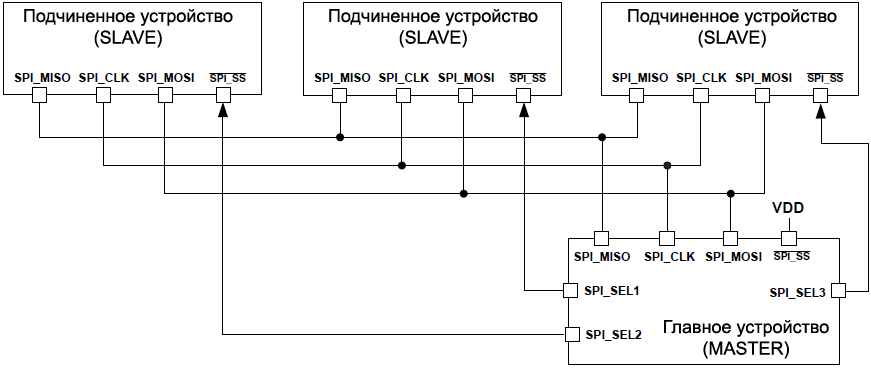
ąĀąĖčü. 29-7. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąŠą┤ąĖąĮ master, ąĮąĄčüą║ąŠą╗čīą║ąŠ slave.
ąØą░čćą░ą╗ąŠ ąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ SPI ą▒ąĄąĘ DMA. ąĪčéą░čĆčé ąĖ čäąĖąĮąĖčł non-DMA SPI ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą╗ąĄą┤čāčÄčēąĖčģ čāčüčéą░ąĮąŠą▓ąŠą║:
1. ąÜą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ - ą║ą░ą║ master ąĖą╗ąĖ ą║ą░ą║ slave.
2. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ SPI_CTL.ASSEL, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą▒ąĖčĆą░ąĄčé ą╝ąĄąČą┤čā ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ SPI_SLVSEL.
ąÜąŠą│ą┤ą░ SPI_CTL.CPHA=0, čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčī ą▓ ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗčģąŠą┤čŗ slave select. ą×ą┤ąĮą░ą║ąŠ čüąĖą│ąĮą░ą╗ SPI_CLK ąŠčüčéą░ąĄčéčüčÅ ąĮąĄą░ą║čéąĖą▓ąĮčŗą╝ ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą╣ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ čåąĖą║ą╗ą░ SPI_CLK. ąöą╗čÅ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ čü SPI_CTL.CPHA=0 ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą║ą░ą║ č鹊ą╗čīą║ąŠ ~SPI_SS ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 0.
ąÜąŠą│ą┤ą░ SPI_CTL.CPHA=1, ą┐ąĄčĆąĄą┤ą░čćą░ čüčéą░čĆčéčāąĄčé čü ą┐ąĄčĆą▓čŗą╝ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ SPI_CLK ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čāčüčéčĆąŠą╣čüčéą▓ - slave ąĖ master. ąöą╗čÅ master-čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮ ąŠčéą┐čĆą░ą▓ąĖčé ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ ą┤ą░ąĮąĮčŗąĄ ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čĆąĖą╝ąĄčé ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą╗čÅ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ą▓čŗą▒ąŠčĆą║ąĖ (sampling edge) čüąĖą│ąĮą░ą╗ą░ SPI_CLK. ąĢčüą╗ąĖ SPI_CTL.ASSEL=0, ą░ą┐ą┐ą░čĆą░čéčāčĆą░ čüąŠčģčĆą░ąĮčÅąĄčé čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ~SPI_SS ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ. ąĢčüą╗ąĖ SPI_CTL.ASSEL=1, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čāą┐čĆą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ąŠą╝ ~SPI_SS, č鹊 ą╝ąŠąČąĮąŠ čāą┤ąĄčƹȹĖą▓ą░čéčī čŹč鹊čé čüąĖą│ąĮą░ą╗ ą░ą║čéąĖą▓ąĮčŗą╝ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ.
ąæąĖčé SPI_STAT.RFE ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ, čćč鹊 SPI_RFIFO ąĮąĄ ą┐čāčüčé. ąæąĖčé SPI_STAT.TFF ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī, ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ, čćč鹊 SPI_TFIFO ąĮąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ. ą×ą║ąŠąĮčćą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą┤ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, ą║ąŠą│ą┤ą░ ąŠčćąĖčēą░ąĄčéčüčÅ ą▒ąĖčé SPI_STAT.RFE. ąĪčéą░čéčāčü ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĮąŠą▓ąŠąĄ čüą╗ąŠą▓ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčÅč鹊 ąĖ ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ FIFO ą┐čĆąĖąĄą╝ą░. ąæąĖčé SPI_STAT.RFE ąŠčüčéą░ąĄčéčüčÅ ąŠčćąĖčēąĄąĮąĮčŗą╝, ą┐ąŠą║ą░ ą▓ FIFO ą┐čĆąĖąĄą╝ą░ ąĖą╝ąĄčÄčéčüčÅ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ą¦č鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčāčÄ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü ą┤čĆčāą│ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ SPI, ą▒ąĖčé SPI_STAT.SPIF čéą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░. ąŁč鹊čé ą▒ąĖčé ą╝ąŠąČąĄčé čüą╗ąĄą│ą║ą░ ąŠčéą╗ąĖčćą░čéčīčüčÅ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝ ąŠčé ą┤čĆčāą│ąĖčģ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓.
ąÆ čĆąĄąČąĖą╝ąĄ master čü ąŠčćąĖčēąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝ SPI_CTL.ASSEL ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čĆčāčćąĮčāčÄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čéčĆąĄą▒čāąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗ slave select ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą¤ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓čüąĄčģ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąŠą▒čŗčćąĮąŠ ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ slave select.
ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ čüč湥čéčćąĖą║ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ čüą╗ąŠą▓ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ SPI_TXCTL ąĖą╗ąĖ SPI_RXCTL, SPI ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čäąĖąĮąĖčłą░ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁč鹊 ą┐ąŠą┤ą░ąĄčé čüąĖą│ąĮą░ą╗ ąŠą▒ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą▓čüąĄčģ ą┐ąĄčĆąĄą┤ą░čć, čüą▓čÅąĘą░ąĮąĮčŗą╣ čü čŹč鹊ą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĄą╣.
ąĀą░ą▒ąŠčéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĄąĘ DMA. ąĀą░ą▒ąŠčéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ąĮąĄ-DMA čĆąĄąČąĖą╝ąĄ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ č湥čĆąĄąĘ ą▒ąĖčé SPI_TXCTL.TEN. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąŠą┐ąĄčĆą░čåąĖąĖ ą┐čĆąĖąĄą╝ą░, ąĖ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠąČąĄčé čüčéą░čéčī ąĖąĮąĖčåąĖąĖčĆčāčÄčēąĖą╝ ą║ą░ąĮą░ą╗ąŠą╝ ąĮą░ ąŠčüąĮąŠą▓ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ SPI_TXCTL.TTI.
ąØąĄą┤ąŠą│čĆčāąĘą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (underrun) ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮą░, ą┐ąŠčüą║ąŠą╗čīą║čā ąĮąĄčé ąĖąĮąĖčåąĖą░čåąĖąĖ ąĮąŠą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐ąŠą║ą░ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ FIFO ąĮąĄ ą┐čāčüčé (ą▓ čüą╗čāčćą░ąĄ SPI_TXCTL.TTI=1). ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ (overflow) ą┐čĆąĖąĄą╝ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ąĮąŠą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ąĘą░ą╝ąĄąĮčÅčÄčé ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠą╝ FIFO ą┐čĆąĖąĄą╝ą░. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ, ąĄčüą╗ąĖ SPI_TXCTL.TTI=1, ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą▓ čĆąĄąČąĖą╝ąĄ ąĮąĄ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖčÅ.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ SPI čüčĆą░ą▒ąŠčéą░ąĄčé, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ čĆą░ąĘčĆąĄčłąĄąĮ ąĖ ą▒čāč乥čĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄ ą┐ąŠą╗ąŠąĮ. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāčüčéą░ąĮąŠą▓ą║čā ą▒ąĖčéą░ SPI_TXCTL.TDR ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊č鹊ą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĀą░ą▒ąŠčéą░ ą┐čĆąĖąĄą╝ą░ ą▒ąĄąĘ DMA. ą¤čĆąĖąĄą╝ ą▓ čĆąĄąČąĖą╝ąĄ ą▒ąĄąĘ DMA čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ č湥čĆąĄąĘ ą▒ąĖčé SPI_RXCTL.REN. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čĆą░ą▒ąŠčéčŗ ą┐čĆąĖąĄą╝ą░, ąĖ ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĖąĮąĖčåąĖąĖčĆčāčÄčēąĖą╝ ąĮą░ ą▒ą░ąĘąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ SPI_RXCTL.RTI.
ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┐ąŠčüą║ąŠą╗čīą║čā ąĮąŠą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ąĮąĄ ąĮą░čćąĮąĄčéčüčÅ, ą┐ąŠą║ą░ ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮ (ą▓ čüą╗čāčćą░ąĄ SPI_RXCTL.RTI=1). ąØąĄą┤ąŠą│čĆčāąĘą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit underrun) ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ (ą▒ąĖčé SPI_TXCTL.TDU), ą║ąŠą│ą┤ą░ ąĮąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_TFIFO, ą║ąŠą│ą┤ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░. ąóą░ą║ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ, ąĄčüą╗ąĖ SPI_RXCTL.RTI=1, ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ čü ąĮąĄ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ SPI čüčĆą░ą▒ąŠčéą░ąĄčé, ą║ą░ą║ č鹊ą╗čīą║ąŠ čĆą░ąĘčĆąĄčłąĄąĮ ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ąĖ ą┤ą░ąĮąĮčŗąĄ ąŠąČąĖą┤ą░čÄčé čćč鹥ąĮąĖčÅ. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāčüčéą░ąĮąŠą▓ą║čā ą▒ąĖčéą░ SPI_RXCTL.RDR ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊č鹊ą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąÆ čĆąĄąČąĖą╝ąĄ dual I/O ą▓čŗą▓ąŠą┤čŗ SPI_MISO ąĖ SPI_MOSI ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ, čü čāą┤ą▓ąŠąĄąĮąĮąŠą╣ ą┐ąŠą╗ąŠčüąŠą╣. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčé SPI_CTL.SOSI ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ. ąÜąŠą│ą┤ą░ ą▒ąĖčé SPI_CTL.SOSI čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SPI_MOSI, ąĖ ą▓č鹊čĆąŠą╣ ą▒ąĖčé ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SPI_MISO. ąĢčüą╗ąĖ ą▒ąĖčé SPI_CTL.SOSI ąŠčćąĖčēąĄąĮ, ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąŠą▒čĆą░čéąĮčŗą╝. ą¤ąŠčüą║ąŠą╗čīą║čā dual I/O mode ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą▒ą░ ą▓čŗą▓ąŠą┤ą░ čüčĆą░ąĘčā ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ, č鹊 čĆą░ąĘčĆąĄčłąĄąĮ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗ (ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĄą╝, ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čćą░), ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SPI_RDY ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ. ąØą░ ą│ąĄąĮąĄčĆą░čåąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čĆąĄąČąĖą╝ dual I/O ąĮąĄ ą▓ą╗ąĖčÅąĄčé, ąŠą┤ąĮą░ą║ąŠ ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čäčĆąĄą╣ą╝ą░ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ą▓ 2 čĆą░ąĘą░.
ąĀąĖčü. 29-8. ą¤čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ Dual I/O Mode ą┤ą╗čÅ CPHA=0, SOSI=1, čäčĆąĄą╣ą╝ 8 ą▒ąĖčé, LSBF=0.
ąĀąĖčü. 29-9.ą¤čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ Dual I/O Mode ą┤ą╗čÅ CPHA=1, SOSI=0, čäčĆąĄą╣ą╝ 8 ą▒ąĖčé, LSBF=0.
ąÆ čĆąĄąČąĖą╝ąĄ SPI ą▓čŗą▓ąŠą┤čŗ SPI_MISO ąĖ SPI_MOSI ą▓ą╝ąĄčüč鹥 čü ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ SPI_D2 ąĖ SPI_D3 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčé SPI_CTL.SOSI ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠčĆčÅą┤ąŠą║ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą▒ąĖčé ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ. ąÜąŠą│ą┤ą░ ą▒ąĖčé SPI_CTL.SOSI čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄą┤ą░ąĄčé:
ŌĆó ą¤ąĄčĆą▓čŗą╣ ą▒ąĖčé ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SPI_MOSI.
ŌĆó ąÆč鹊čĆąŠą╣ ą▒ąĖčé ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SPI_MISO.
ŌĆó ąóčĆąĄčéąĖą╣ ą▒ąĖčé ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SPI_D2.
ŌĆó ą¦ąĄčéą▓ąĄčĆčéčŗą╣ ą▒ąĖčé ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SPI_D3.
ąÜąŠą│ą┤ą░ ą▒ąĖčé SPI_CTL.SOSI ąŠčćąĖčēąĄąĮ, ą┐ąŠčĆčÅą┤ąŠą║ ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ ąŠą▒čĆą░čéąĮčŗą╣. ą¤ąŠčüą║ąŠą╗čīą║čā quad SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čüąĄ 4 ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ, č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ - ą╗ąĖą▒ąŠ ą┐ąĄčĆąĄą┤ą░čćą░, ą╗ąĖą▒ąŠ ą┐čĆąĖąĄą╝. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ą▓čŗą▓ąŠą┤ąŠą╝ SPI_RDY. ąØą░ ą│ąĄąĮąĄčĆą░čåąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ quad SPI ąĮąĄ ą▓ą╗ąĖčÅąĄčé.
ą¤ąĄčĆąĄčģąŠą┤ ą║ čĆąĄąČąĖą╝čā quad SPI ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮ, ą║ąŠą│ą┤ą░ SPI ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ "ą╝ąŠą╗čćą░ąĮąĖčÅ".

ąĀąĖčü. 29-10. ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ Quad Mode ą┤ą╗čÅ CPHA=0, SOSI=1, 16-ą▒ąĖčéąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░, LSBF=0.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: SPI ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé quad SPI 8-ą▒ąĖčéąĮčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā ą▓ čĆąĄąČąĖą╝ąĄ continuous čāčüčéčĆąŠą╣čüčéą▓ą░ slave, čü čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄą╝ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé SCLK:SPI_CLK ą╝ąĄąĮčīčłąĄ 1:2. ą£ąĖąĮąĖą╝čāą╝ 2 čåąĖą║ą╗ą░ 2 SCLK čéčĆąĄą▒čāąĄčéčüčÅ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ ą▓ 8-ą▒ąĖčéąĮąŠą╝ quad SPI slave mode, čü čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄą╝ SCLK:SPI_CLK ą╝ąĄąĮčīčłąĄ 1:2.
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą┤ą▓ąŠąĄąĮąĮčŗą╣ (dual) ąĖą╗ąĖ čüč湥čéą▓ąĄčĆąĄąĮąĮčŗą╣ (quad) čĆąĄąČąĖą╝ I/O ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ flash, ą▒ąĖčéčŗ SPI_CTL.CPHA ąĖ SPI_CTL.CPOL=1. ąŁč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖąĘą▒ąĄą│ą░ąĄčé ą║ąŠąĮčäą╗ąĖą║čéą░ ąĮą░ čłąĖąĮąĄ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ flash ąĮą░čćąĖąĮą░ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą▒ąĖčéčŗ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠčüą╗ąĄ ą┐čāčüčéčŗčģ čåąĖą║ą╗ąŠą▓ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ą║ąĄ čćč鹥ąĮąĖčÅ.
ąæčŗčüčéčĆčŗą╣ čĆąĄąČąĖą╝ (fast mode) ą┐ąŠą┤ąŠą▒ąĄąĮ ąŠą▒čŗčćąĮąŠą╝čā čĆąĄąČąĖą╝čā (normal mode) čĆą░ą▒ąŠčéčŗ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥. ąÜąŠą│ą┤ą░ ąĖą┤ąĄčé ą┐čĆąĖąĄą╝, ą┤ą░ąĮąĮčŗąĄ ą░ąĮą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą┐ąĄčĆąĄą┐ą░ą┤čā ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą┐ąŠą╗ąĮčŗą╣ čåąĖą║ą╗ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ą┐čĆąĖąĄą╝ą░. ąŁč鹊čé čĆąĄąČąĖą╝ ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ master. ąÜąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą▓ fast mode, čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ą▓čŗą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠą╗ąĮąŠą│ąŠ čéą░ą║čéą░.
ąĀąĖčü. 29-11. ą¤čĆąŠč鹊ą║ąŠą╗ SPI ą▓ Fast Mode ą┤ą╗čÅ SPI_CTL.CPHA=0.
ąĀąĖčü. 29-12. ą¤čĆąŠč鹊ą║ąŠą╗ SPI ą▓ Fast Mode ą┤ą╗čÅ SPI_CTL.CPHA=1.
ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčéčüčÅ ą┐čĆčÅą╝čŗąĄ, ąŠč鹊ą▒čĆą░ąČąĄąĮąĮčŗąĄ ąĮą░ ą┐ą░ą╝čÅčéčī ą┤ąŠčüčéčāą┐čŗ čćč鹥ąĮąĖčÅ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI, čćč鹊 čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ SPI_CTL.MMSE. ąŁč鹊čé čĆąĄąČąĖą╝ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆčÅą╝ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĖąĮčüčéčĆčāą║čåąĖą╣ ąĖąĘ ą┐ą░ą╝čÅčéąĖ SPI ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, čéą░ą║ ą║ą░ą║ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ą▒ąĄčĆąĄčé ąĮą░ čüąĄą▒čÅ ą▓čüčÄ ąĮą░ą│čĆčāąĘą║čā ą┐ąŠ čŹč鹊ą╣ ąĘą░ą┤ą░č湥 (čé. ąĄ. ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ čćč鹥ąĮąĖčÅ, ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ ąĖ ą┐čĆąĖąĄą╝ čĆą░ąĘą╝ąĄčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ). SPI ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗąĄ ąŠą┐čåąĖąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ą┐čĆąĖą▓čÅąĘą║ąĖ ą║ ą┐ą░ą╝čÅčéąĖ (memory-mapped read header register, SPI_MMRDH), čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü čłąĖčĆąŠą║ąĖą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ ą┐ą░ą╝čÅčéąĖ SPI.
ąÆ čĆąĄąČąĖą╝ąĄ ą▒ąĄąĘ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĮą░ ą┐ą░ą╝čÅčéčī (non-memory-mapped mode) ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĖ čéčĆąĄą▒čāąĄą╝čŗčģ ą┐čāčüčéčŗčģ čüą╗ąŠą▓ ą┤ą╗čÅ ąŠčéą▓ąĄčéą░ čćč鹥ąĮąĖčÅ (read response), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą▓čüąĄ čŹč鹊 ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą▓ memory-mapped mode. ą¤ą░ą╝čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ SPI ą┤ąŠčüčéčāą┐ąĮą░ ąĮą░ą┐čĆčÅą╝čāčÄ č湥čĆąĄąĘ čćč鹥ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░. ąöąŠčüčéčāą┐čŗ ąĮą░ čćč鹥ąĮąĖąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą║ ą║ąŠą┤čā ąĖą╗ąĖ ą║ ą┤ą░ąĮąĮčŗą╝ ą▓ čĆąĄąČąĖą╝ąĄ čÅą┤čĆą░ ąĖą╗ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ DMA ą┐ąŠ ą┐ą░ą╝čÅčéąĖ (memory DMA, MDMA). ąŁč鹊čé ą┤ąŠčüčéčāą┐ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐čāčüą║ą░čéčī ą║ąŠą┤ ąĮą░ą┐čĆčÅą╝čāčÄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ ą┐ą░ą╝čÅčéąĖ SPI (čĆąĄą░ą╗čīąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ eXecute-In-Place, čé. ąĄ. ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆčÅą╝ąŠ ą┐ąŠ ą╝ąĄčüčéčā), ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą╣ ą┐ą░ą╝čÅčéąĖ SPI ą╝ąŠąČąĄčé ą▒čŗčéčī ą║čŹčłąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ. ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąŠą▒čĆą░čēąĄąĮąĖąĄ ąĮąĖ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗčģ SPI, ąĮąĖ ąŠą┐čĆąŠčü ą▒ąĖč鹊ą▓ čüąŠčüč鹊čÅąĮąĖčÅ SPI; ąŠą┤ąĮą░ą║ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮąĖ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ DMA, ąĮąĖ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ SPI.
ąóą░ą▒ą╗ąĖčåą░ čéąĖą┐ąŠą▓ ąŠą┐ąĄčĆą░čåąĖą╣ 29-6 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüčĆą░ą▓ąĮąĄąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą▓ čĆąĄąČąĖą╝ą░čģ non-memory-mapped ąĖ memory-mapped, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ SPI.
ąóą░ą▒ą╗ąĖčåą░ 29-6. ąóąĖą┐čŗ ąŠą┐ąĄčĆą░čåąĖą╣.
| ą×ą┐ąĄčĆą░čåąĖčÅ SPI |
Non-Memory-Mapped Mode |
Memory-Mapped Mode |
| Core data write: ąĘą░ą┐ąĖčüčī ą┤ą░ąĮąĮčŗčģ čÅą┤čĆąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
ąöąÉ |
ąĮąĄčé |
| Core data read: čćč鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čÅą┤čĆąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
ąöąÉ |
ąöąÉ |
| Code fetch: Execute-In-Place (XIP). ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ąĮą░ą┐čĆčÅą╝čāčÄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ SPI. |
ąĮąĄčé |
ąöąÉ |
| ąöąŠčüčéčāą┐čŗ ąĮą░ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ SPI Peripheral DMA. |
ąöąÉ |
ąĮąĄčé |
| ąöąŠčüčéčāą┐čŗ ąĮą░ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī ą┤čĆčāą│ąĖą╝ąĖ ą║ą░ąĮą░ą╗ą░ą╝ąĖ ą┐ąĄčĆąĖč乥čĆąĖąĖ DMA. |
ąĮąĄčé |
ąĮąĄčé |
| MDMA read: čćč鹥ąĮąĖąĄ DMA ą┐ąŠ ą┐ą░ą╝čÅčéąĖ. |
ąĮąĄčé |
ąöąÉ |
| MDMA write: ąĘą░ą┐ąĖčüčī DMA ą┐ąŠ ą┐ą░ą╝čÅčéąĖ. |
ąĮąĄčé |
ąĮąĄčé |
[ą×ą┐ąĖčüą░ąĮąĖąĄ čĆą░ą▒ąŠčéčŗ Memory-Mapped SPI]
ąĀąĄąČąĖą╝ ą┐čĆąĖą▓čÅąĘą║ąĖ ą║ ą░ą┤čĆąĄčüąĮąŠą╝čā ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓čā ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (Memory-mapped mode) čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ SPI_CTL.MMSE. ąÜąŠą│ą┤ą░ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ, SPI (ąĄčüą╗ąĖ ą│ąŠč鹊ą▓) ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ čćč鹥ąĮąĖčÅ č湥čĆąĄąĘ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ slave-ąĖąĮč鹥čĆč乥ą╣čü. ą¤ąŠą┤čüąĖčüč鹥ą╝ą░ ą┐ą░ą╝čÅčéąĖ master-čāčüčéčĆąŠą╣čüčéą▓ą░ čāą┐čĆą░ą▓ą╗čÅąĄčé čŹčéąĖą╝ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ č湥čĆąĄąĘ čäą░ą▒čĆąĖą║čā SCB.
ąÆ čéąĖą┐ąŠą▓ąŠą╝ čüčåąĄąĮą░čĆąĖąĖ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ ą┐ą░ą╝čÅčéąĖ master-čāčüčéčĆąŠą╣čüčéą▓ą░ čćąĖčéą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ ą┤ą╗čÅ čäą░ą▒čĆąĖą║ąĖ, ąĖ čäą░ą▒čĆąĖą║ą░ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčé čŹčéąĖ ąĘą░ą┐čĆąŠčüčŗ ą▓ slave-ą┐ąŠčĆčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ master ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┤ąŠčüčéčāą┐ čćč鹥ąĮąĖčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĮąĄą║ąŠč鹊čĆąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, čéą░ą║ąĖčģ ą║ą░ą║ ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü, čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ čéąĖą┐ą░ ą┐ą░ą║ąĄčéą░ (burst type). SPI ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ čŹč鹊čé ąĘą░ą┐čĆąŠčü čćč鹥ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąŠąĮ ą│ąŠč鹊ą▓ ą║ ąĮąŠą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥. ą×ąĮ ąĘą░ą│čĆčāąČą░ąĄčé ą║ąŠą┤ ąŠą┐ąĄčĆą░čåąĖąĖ (opcode), čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░ ąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▒ą░ą╣čé čĆąĄąČąĖą╝ą░ ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ. ą£ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ SPI ąĮą░čćąĮąĄčé čĆą░ą▒ąŠčéčā, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ ąŠą▒ą░ ą║ą░ąĮą░ą╗ą░, ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ SPI:
ŌĆó čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_TXCTL.TTI=1), ąĖ
ŌĆó ąŠčćąĖčēąĄąĮ ą▒ąĖčé ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐čĆąĖąĄą╝ą░ (SPI_RXCTL.RTI=0).
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čćč鹥ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ SPI ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą░ą║čéąĖą▓ą░čåąĖąĖ ą▓čŗą▒ąŠčĆą║ąĖ SPI_SEL1. ąĢčüą╗ąĖ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ SPI ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░, ąŠąĮą░ ąČą┤ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ. ąóąŠą│ą┤ą░ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ SPI ą┐ąŠčüčŗą╗ą░ąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ 8-ą▒ąĖčéąĮčāčÄ ą║ąŠą╝ą░ąĮą┤čā čćč鹥ąĮąĖčÅ (ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą┐čĆąŠą┐čāčēąĄąĮą░), ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ą░ą┤čĆąĄčü čćč鹥ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ SPI. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓čüčéą░ą▓ą╗čÅąĄčéčüčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą┐čāčüč鹊ą╣ ą┐ąĄčĆąĖąŠą┤ (dummy period) ą▓ ą║ąŠč鹊čĆąŠą╝ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ą░ą╣čé čĆąĄąČąĖą╝ą░ (mode byte), ąĖ ą▓čŗą▓ąŠą┤čŗ čāą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąĮą░ ą▓čĆąĄą╝čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čāčüč鹊ą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░.
ąŚąÉą£ąĢą¦ąÉąØąśąĢ: čŹč鹊čé ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ čćč鹥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤čŗ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SPI (SPI_CLK, SPI_MOSI, SPI_MISO, SPI_SEL1) ąĖą╗ąĖ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤čŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SPI (SPI_CLK, SPI_MOSI, SPI_MISO, SPI_D2, SPI_D3, SPI_SEL1), ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮą░čüčéčĆąŠąĄą║ ą▒ąĖčé SPI_MMRDH.CMDPINS, SPI_MMRDH.ADRPINS ąĖ SPI_CTL.MIOM. ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI ąŠą▒čŗčćąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąŠą▒ą╝ąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ MSB-first (čüčéą░čĆčłąĖą╣ ą▒ąĖčé ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝). ąÆ dual mode SPI ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé SPI_MISO ą║ą░ą║ IO1, ąĖ SPI_MOSI ą║ą░ą║ IO0. ąÆ quad mode SPI ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé SPI_D3 ą║ą░ą║ IO3, SPI_D2 ą║ą░ą║ IO2, SPI_MISO ą║ą░ą║ IO1 ąĖ SPI_MOSI ą║ą░ą║ IO0.
ąÜąŠą│ą┤ą░ ą▓čüąĄ ąĮąŠąČą║ąĖ I/O ą┤ą░ąĮąĮčŗčģ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ, SPI ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SPI, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąŠą┤ąĖ ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ ą░ą┤čĆąĄčüąŠą▓ą░ąĮąĮąŠą╝čā ą╝ąĄčüčéčā, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ ą▓čüąĄ ą▒ą░ą╣čéčŗ. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SPI čćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ čéą░ą║, ą║ą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ą▒ąĖčéą░ SPI_CTL.MIOM. ą¤čĆąĖ ą┐čĆąĖąĄą╝ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą▒ą░ą╣čéą░ SPI ąŠą▒čŗčćąĮąŠ ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčé ą▓čŗą▓ąŠą┤ SPI_SEL1, čćč鹊ą▒čŗ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī čüą╗ąĄą┤čāčÄčēąĖą╣ ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ čćč鹥ąĮąĖčÅ.
ąÜąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ opcode ą║ąŠąĮčüąĖčüč鹥ąĮč鹥ąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ą╝ąĮąŠąČąĄčüčéą▓ąĄąĮąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, ąĖ čćč鹊 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, čāą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ memory-mapped čĆąĄą│ąĖčüčéčĆąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ čćč鹥ąĮąĖčÅ ą║ąŠąĮčüąĖčüč鹥ąĮčéąĮčŗ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ąŠčüčéčāą┐ą░ čćč鹥ąĮąĖčÅ flash.
ąØą░ čĆąĖčü. 29-13 ą┐ąŠą║ą░ąĘą░ąĮą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ąŠą┐ąĄčĆą░čåąĖą╣ čü čĆąĄą│ąĖčüčéčĆąŠą╝ SPI Memory-Mapped, ą║ą░ą║ ą┐ąŠą╗čÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_MMRDH ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ čćč鹥ąĮąĖčÅ ą┐čĆąĖ ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čć ą▓ čĆąĄąČąĖą╝ąĄ memory-mapped.
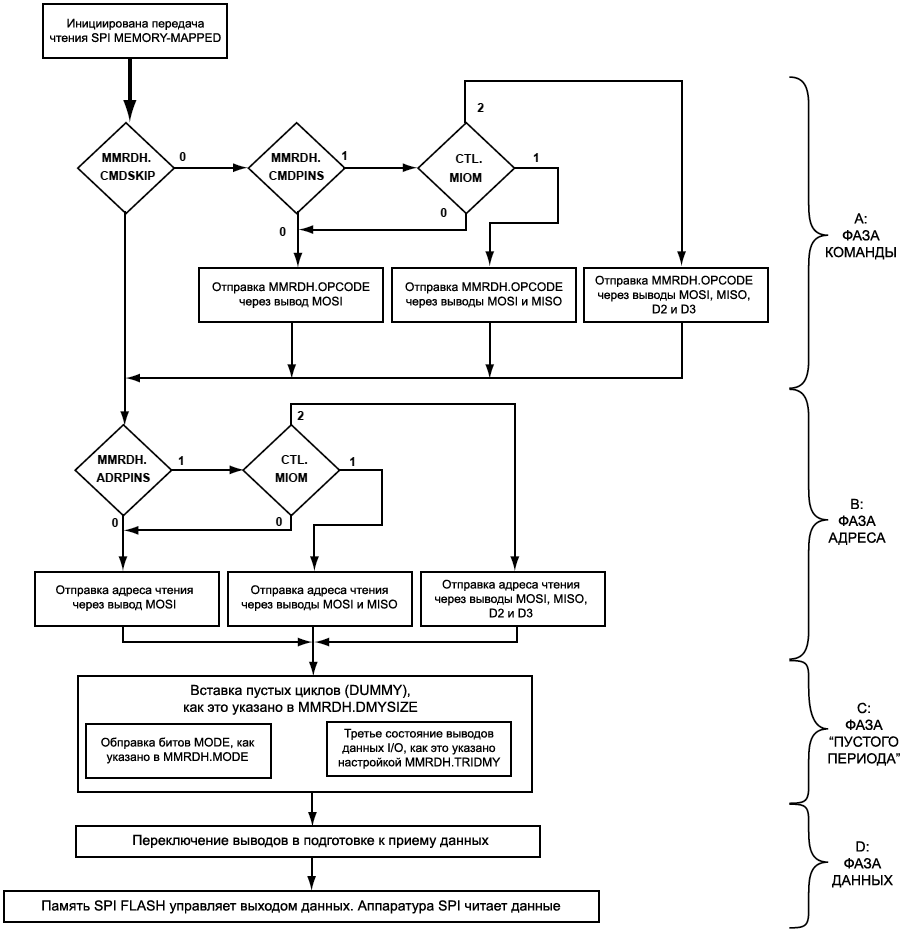
ąĀąĖčü. 29-13. ą¤ąŠč鹊ą║ ąŠą┐ąĄčĆą░čåąĖą╣ čĆąĄą│ąĖčüčéčĆąŠą▓ čĆąĄąČąĖą╝ą░ SPI Memory-Mapped.
[ąÉčĆčģąĖč鹥ą║čéčāčĆąĮčŗąĄ ą║ąŠąĮčåąĄą┐čåąĖąĖ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ Memory-Mapped]
ąÆ čĆąĄąČąĖą╝ąĄ memory-mapped SPI ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĘą░ą┐čĆąŠčüčŗ čćč鹥ąĮąĖčÅ č湥čĆąĄąĘ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ slave-ąĖąĮč鹥čĆč乥ą╣čü. SPI (ąĄčüą╗ąĖ ąŠąĮ ą│ąŠč鹊ą▓) ą┐čĆąĖąĮąĖą╝ą░ąĄčé čŹčéąĖ ąĘą░ą┐čĆąŠčüčŗ ąĖ ąĮą░čćąĖąĮą░ąĄčé ą┐čĆąŠčåąĄčüčü čüą▒ąŠčĆą║ąĖ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ čćč鹥ąĮąĖčÅ, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ ą░čéčĆąĖą▒čāčéą░čģ, ąŠą┐ąĖčüą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_MMRDH ąĖ ąĘą░ą┐čĆąŠčüąĄ ą┐ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čłąĖąĮąĄ. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ čćč鹥ąĮąĖčÅ, ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐ąĄčĆąĖąŠą┤ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░, ąĖ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. SPI ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SPI, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ ąŠčé ąĮąĄą│ąŠ ą▓čüąĄ ą▒ą░ą╣čéčŗ.
ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SPI memory-mapped ą┐ąŠą┤čģąŠą┤ąĖčé ą║ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą┐ą░ą╝čÅčéąĖ čü čĆą░ąĘąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ. ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą▓ą║ą╗čÄčćą░čÄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░, ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą┐čāčüč鹊ą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čéčĆąĄčéčīąĖą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝, ą║ą░ą║ čŹč鹊 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_MMRDH.
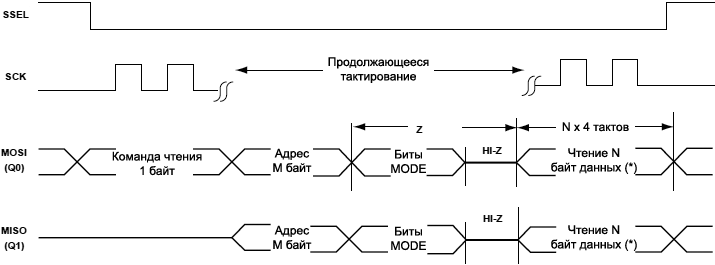
ąØą░ čĆąĖčü. 29-14 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąŠč鹊ą║ąŠą╗ Memory-Mapped ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ SPI, ąĮą░čģąŠą┤čÅčēąĄą│ąŠčüčÅ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ.

ąĀąĖčü. 29-14. ą¤čĆąŠč鹊ą║ąŠą╗ Memory-Mapped ąĖąĮč鹥čĆč乥ą╣čüą░ SPI.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ, ą┐ąŠą╗ąĄ ą║ąŠą╝ą░ąĮą┤čŗ COMMAND (SPI_MMRDH.OPCODE) ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐čĆąĖ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ SPI_SEL[n]. ą¤ą░ą╝čÅčéčī SPI ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé čŹč鹊 8-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą║ą░ą║ ą║ąŠą╝ą░ąĮą┤čā čćč鹥ąĮąĖčÅ. ąĀą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą╗čÄą▒ąŠą╣ 8-ą▒ąĖčéąĮčŗą╣ ą║ąŠą┤ ąŠą┐ąĄčĆą░čåąĖąĖ (opcode), ą║ąŠč鹊čĆčŗą╣ ą┐ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠą▓ą╝ąĄčüčéąĖą╝ čü SPI ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ čĆą░čüčüčćąĖčéą░ąĮ ąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčāčÄ ą░ą┐ą┐ą░čĆą░čéčāčĆčā memory-mapped, čćą░čēąĄ ą▓čüąĄą│ąŠ ąŠąĮ ą▒čāą┤ąĄčé:
ŌĆó Standard Read, čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ čćč鹥ąĮąĖąĄ (0x03)
ŌĆó Fast Read, ą▒čŗčüčéčĆąŠąĄ čćč鹥ąĮąĖąĄ (0x0B)
ŌĆó Fast Read Dual Output, ą▒čŗčüčéčĆąŠąĄ čćč鹥ąĮąĖąĄ čü ą┤ą▓ąŠą╣ąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝ (0x3B)
ŌĆó Fast Read Dual I/O, ą▒čŗčüčéčĆąŠąĄ čćč鹥ąĮąĖąĄ čü ą┤ą▓ąŠą╣ąĮčŗą╝ ą▓ą▓ąŠą┤ąŠą╝/ą▓čŗą▓ąŠą┤ąŠą╝ (0x6B)
ŌĆó Fast Read Quad Output, ą▒čŗčüčéčĆąŠąĄ čćč鹥ąĮąĖąĄ čüąŠ čüč湥čéą▓ąĄčĆąĄąĮąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝ (0xBB)
ŌĆó Fast Read Quad I/O, ą▒čŗčüčéčĆąŠąĄ čćč鹥ąĮąĖąĄ čüąŠ čüč湥čéą▓ąĄčĆąĄąĮąĮčŗą╝ ą▓ą▓ąŠą┤ąŠą╝/ą▓čŗą▓ąŠą┤ąŠą╝ (0xEB)
ŌĆó Word Read Quad I/O, čćč鹥ąĮąĖąĄ čüą╗ąŠą▓ą░ čüąŠ čüč湥čéą▓ąĄčĆąĄąĮąĮčŗą╝ ą▓ą▓ąŠą┤ąŠą╝/ą▓čŗą▓ąŠą┤ąŠą╝ (0xE7)
ŌĆó Octal Word Read Quad I/O, ą▓ąŠčüčīą╝ąĄčĆąĖčćąĮąŠąĄ čćč鹥ąĮąĖąĄ čüą╗ąŠą▓ą░ čüąŠ čüč湥čéą▓ąĄčĆąĄąĮąĮčŗą╝ ą▓ą▓ąŠą┤ąŠą╝/ą▓čŗą▓ąŠą┤ąŠą╝ (0xE3)
ąŚąÉą£ąĢą¦ąÉąØąśąĢ: ą░ą┐ą┐ą░čĆą░čéčāčĆą░ SPI ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗čÅ SPI_MMRDH.OPCODE ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄą┤ą░č湥ą╣.
DMYSIZE (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čāčüčéčŗčģ ą▒ą░ą╣čé). ąÜąŠą│ą┤ą░ ąĖą┤ąĄčé čĆą░ą▒ąŠčéą░ ąĮą░ ą▓čŗčüąŠą║ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 ą▓ čĆąĄąČąĖą╝ą░čģ multi-IO, ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ flash čéčĆąĄą▒čāčÄčé ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čāčüčéčŗčģ čéą░ą║č鹊ą▓ ą┐ąŠčüą╗ąĄ ą▒ąĖč鹊ą▓ ą░ą┤čĆąĄčüą░. ąŁčéąĖ ą┐čāčüčéčŗąĄ čéą░ą║čéčŗ (dummy clock cycles) ą┤ą░čÄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čüčģąĄą╝ą░ą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░. ąŁčéąĖ ą▒ąĖčéčŗ ąĘą░ą┤ą░čÄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąŠčéą┤ąĄą╗čÅčÄčēąĖčģ ą┐ąĄčĆąĄą┤ą░čćčā ą░ą┤čĆąĄčüą░ ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ čćč鹥ąĮąĖčÅ.
ąóčĆąĄą▒čāąĄą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ dummy cycles ą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ čćč鹥ąĮąĖčÅ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ąŠčüčéčāą┐ą░ SPI. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SPI ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī dummy cycles ą▓ ą▒ą░ą╣čéą░čģ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąŠą╗čÅ SPI_MMRDH.DMYSIZE, ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ čÅą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▓čŗą▓ąŠą┤ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą░ą┤čĆąĄčüą░ (SPI_MMRDH.ADRPINS), ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 29-7.
ąóą░ą▒ą╗ąĖčåą░ 29-7. ąÆčŗą▓ąŠą┤čŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą░ą┤čĆąĄčüą░ (ADRPINS).
| |
ą¤čāčüčéčŗąĄ čéą░ą║č鹊ą▓čŗąĄ čåąĖą║ą╗čŗ |
| SPI_MMRDH.DMYSIZE |
(SPI_MMRDH.ADRPINS=0, SPI_CTL.MIOM=x) Dummy-ą▒ą░ą╣čéčŗ, ą┐čĆąŠčģąŠą┤čÅčēąĖąĄ č湥čĆąĄąĘ 1 ą▓čŗą▓ąŠą┤ |
(SPI_MMRDH.ADRPINS=1, SPI_CTL.MIOM=1) Dummy-ą▒ą░ą╣čéčŗ, ą┐čĆąŠčģąŠą┤čÅčēąĖąĄ č湥čĆąĄąĘ 2 ą▓čŗą▓ąŠą┤ą░ |
(SPI_MMRDH.ADRPINS=1, MIOM=2) Dummy-ą▒ą░ą╣čéčŗ, ą┐čĆąŠčģąŠą┤čÅčēąĖąĄ č湥čĆąĄąĘ 4 ą▓čŗą▓ąŠą┤ą░ |
| 000 |
0 |
0 |
0 |
| 001 |
8 |
4 |
2 |
| 010 |
16 |
8 |
4 |
| 011 |
24 |
12 |
6 |
| 100 |
32 |
16 |
8 |
| 101 |
40 |
20 |
10 |
| 110 |
48 |
24 |
12 |
| 111 |
56 |
28 |
14 |
ąŁč鹊čé ą┐ąĄčĆąĖąŠą┤ ą┐čāčüč鹊ą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą┤ą░čéčī ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░, ą┐ąĄčĆąĄą╣čéąĖ ą▓čŗą▓ąŠą┤ą░ą╝ ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ąĖ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓čŗą▓ąŠą┤ą░ą╝ ą║ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĄ ą║ ą┐čĆąĖąĄą╝čā ą┤ą░ąĮąĮčŗčģ.
[Memory-Mapped ą┤ąŠčüčéčāą┐ čćč鹥ąĮąĖčÅ]
ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮą░ąĖą▒ąŠą╗ąĄąĄ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ.
ŌĆó 2 čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čćč鹥ąĮąĖčÅ SPI (čćč鹥ąĮąĖąĄ ąĖ ą▒čŗčüčéčĆąŠąĄ čćč鹥ąĮąĖąĄ), ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ SPI_MOSI ąĖ SPI_MISO ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ SPI_SEL[n] ąĖ SPI_CLK.
ŌĆó 4 čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ čćč鹥ąĮąĖčÅ SPI čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (extended SPI multiple I/O reads): dual output, quad output, dual I/O ąĖ quad I/O.
ąóą░ą▒ą╗ąĖčåą░ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ SPI 29-8 ąĖ čĆąĖčüčāąĮą║ąĖ 29-15 .. 29.19 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé čéąĖą┐čŗ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 ą║ą░ąČą┤čāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ čćč鹥ąĮąĖčÅ čüą┐ąŠčüąŠą▒ąŠą╝, ą║ąŠč鹊čĆčŗą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĖą╝ąĄčÄčēąĄą╣čüčÅ SPI flash.
ąóą░ą▒ą╗ąĖčåą░ 29-8. ą×ą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ SPI.
| ą×ą┐ąĄčĆą░čåąĖčÅ |
ąÜąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ (opcode) |
CMDPIN |
ADRPIN |
DMYSIZE |
ąóčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ |
Multiple I/O Mode |
ąÆčŗą▓ąŠą┤čŗ ą┤ą░ąĮąĮčŗčģ |
| Read |
0x03 |
1 |
1 |
0 |
ąĮąĄčé |
ąĮąĄčé |
1 |
| Fast Read |
0x0B |
1 |
1 |
ąĮąĄ 0 |
ąöąÉ |
ąĮąĄčé |
1 |
| Dual Output Read |
0x3B |
1 |
1 |
ąĮąĄ 0 |
ąöąÉ |
ąöąÉ (IO0-1) |
2 |
| Quad Output Read |
0x6B |
1 |
1 |
ąĮąĄ 0 |
ą┤ą░ |
ąöąÉ (IO0-3) |
4 |
| Dual Output Read |
0xBB |
1, 2 |
2 |
ąĮąĄ 0 |
ąöąÉ |
ąöąÉ (IO0-1) |
2 |
| Quad Output Read |
0xEB |
1, 4 |
4 |
ąĮąĄ 0 |
ą┤ą░ |
ąöąÉ (IO0-3) |
4 |
ąØąĄą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąŠą┐ąĄčĆą░čåąĖąĖ čüą╗ąŠą▓ą░ quad I/O read (0xE7) ąĖ octal quad I/O read (0xE3). ąŁčéąĖ ąŠą┐ąĄčĆą░čåąĖąĖ čéčĆąĄą▒čāčÄčé ą╝ąĄąĮčīčłąĄ čéą░ą║č鹊ą▓ dummy, č湥ą╝ ąŠą▒čŗčćąĮčŗąĄ čüč湥čéą▓ąĄčĆąĄąĮąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ čćč鹥ąĮąĖčÅ (normal quad I/O read).

ąĀąĖčü. 29-15. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī SPI Flash Fast Read.
M = 1, 2, 3, 4 (ą▒ą░ą╣čéčŗ ą░ą┤čĆąĄčüą░)
N = 4, 8, 16, 32 (ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ)
Z = 0, 8, 16, 24, ..., 56 (čåąĖą║ą╗čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čłąĖąĮčŗ)
* = 1 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ąĮą░ 1 ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄčüčŗą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ MISO
ąĀąĖčü. 29-16. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī SPI Flash Fast Read (Dual Output).
M = 1, 2, 3, 4 (ą▒ą░ą╣čéčŗ ą░ą┤čĆąĄčüą░)
N = 4, 8, 16, 32 (ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ)
Z = 0, 4, 12, ..., 28 (čåąĖą║ą╗čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čłąĖąĮčŗ)
* = 2 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ 1 ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄčüčŗą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą▓čŗčģąŠą┤čŗ [1:0]
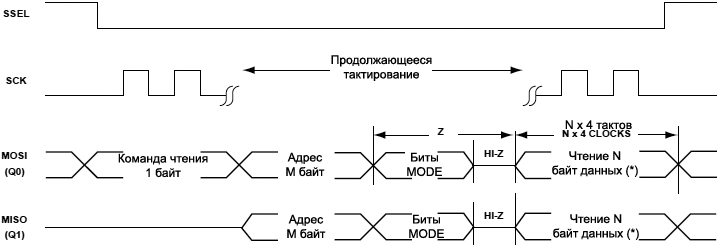
ąĀąĖčü. 29-17. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī SPI Flash Fast Read (Dual I/O).
M = 1, 2, 3, 4 (ą▒ą░ą╣čéčŗ ą░ą┤čĆąĄčüą░)
N = 4, 8, 16, 32 (ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ)
Z = 0, 4, 12, ..., 28 (čåąĖą║ą╗čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čłąĖąĮčŗ)
* = 2 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ 1 ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄčüčŗą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą▓čŗčģąŠą┤čŗ [1:0]
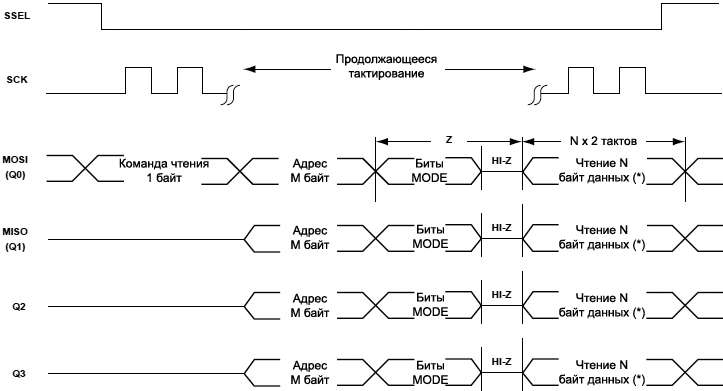
ąĀąĖčü. 29-18. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī SPI Flash Quad Output Read.
M = 1, 2, 3, 4 (ą▒ą░ą╣čéčŗ ą░ą┤čĆąĄčüą░)
N = 4, 8, 16, 32 (ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ)
Z = 0, 2, 4, ..., 14 (čåąĖą║ą╗čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čłąĖąĮčŗ)
* = 4 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ 1 ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄčüčŗą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą▓čŗčģąŠą┤čŗ [3:0]

ąĀąĖčü. 29-19. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī SPI Flash Quad I/O Read.
M = 1, 2, 3, 4 (ą▒ą░ą╣čéčŗ ą░ą┤čĆąĄčüą░)
N = 4, 8, 16, 32 (ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ)
Z = 0, 2, 4, ..., 14 (čåąĖą║ą╗čŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čłąĖąĮčŗ)
* = 4 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ 1 ą┐ąĄčĆąĖąŠą┤ąĄ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĄčüčŗą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą▓čŗčģąŠą┤čŗ [3:0]
ą¦č鹥ąĮąĖčÅ SPI memory-mapped ą╝ąŠą│čāčé ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮčŗ ą║čŹčłąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ čÅą┤čĆą░ ą┐čāč鹥ą╝ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄą│ąĖąŠąĮą░ ą║ą░ą║ ą║čŹčłąĖčĆčāąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą▒ąĄąĘ ą┐čĆąŠą┐čāčüą║ą░ (without bypass, ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÄ ą║čŹčłą░). ąØą░ čĆąĖčüčāąĮą║ą░čģ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ čćč鹥ąĮąĖčÅ (N) ąŠčüąĮąŠą▓ą░ąĮąŠ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝:
ŌĆó ąöą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ ąĖąĮčüčéčĆčāą║čåąĖąĖ čÅą┤čĆąŠą╝ (ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé čĆąĄąČąĖą╝ XIP); ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ąĖąĮčüčéčĆčāą║čåąĖąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ąĘą╝ąĄčĆą░ čüčéčĆąŠą║ąĖ ą║čŹčłą░.
ŌĆó ąöą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ ą┤ą░ąĮąĮčŗčģ čÅą┤čĆąŠą╝ (data read), ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą▓čŗą▒ąŠčĆą║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ąĘą╝ąĄčĆą░ čüčéčĆąŠą║ąĖ ą║čŹčłą░.
ąźąŠčéčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄąĮąŠčüą░ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ memory-mapped čüąŠčüčéą░ą▓ą╗čÅąĄčé 4 ą▒ą░ą╣čéą░, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī 1 ą▒ą░ą╣čé ąĖą╗ąĖ 2 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠąĮąŠ ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī unsigned char ąĖą╗ąĖ short ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ąŠą┤ą░ C). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗čÅ čÅą┤čĆą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ č鹊ą╗čīą║ąŠ čéčĆąĄą▒čāąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ, ąĖ ą┤čĆčāą│ąĖąĄ ą▒ą░ą╣čéčŗ ą║čŹčłąĖčĆčāčÄčéčüčÅ.
ąÆčüčéčĆąŠąĄąĮąĮą░čÅ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ ą┐ą░ą╝čÅčéąĖ master ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ą┤ą╗čÅ ą┐ą░ą║ąĄčéą░ (burst) ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ SPI ą▓čŗą┤ą░ąĄčé čŹč鹊čé ą░ą┤čĆąĄčü ą║ą░ą║ čćą░čüčéčī ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ čćč鹥ąĮąĖčÅ (read header). ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą░ą┤čĆąĄčü ą▓čŗčĆąŠą▓ąĮąĄąĮ ą┐ąŠ N ą▒ą░ą╣čéą░ą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čćč鹥ąĮąĖčÅ 30-ą│ąŠ ą▒ą░ą╣čéą░ ąĖąĘ ą┐ą░ą╝čÅčéąĖ SPI čéąĖą┐ąĖčćąĮčŗą╣ ą░ą┤čĆąĄčü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ:
ŌĆó 28 (0x0000_001C) ą┤ą╗čÅ 32-ą▒ąĖčéąĮąŠą╣ čüčéčĆąŠą║ąĖ ą║čŹčłą░
ŌĆó 24 (0x0000_0018) ą┤ą╗čÅ 64-ą▒ąĖčéąĮąŠą╣ čüčéčĆąŠą║ąĖ ą║čŹčłą░
ŌĆó 16 (0x0000_0010) ą┤ą╗čÅ 128-ą▒ąĖčéąĮąŠą╣ čüčéčĆąŠą║ąĖ ą║čŹčłą░
ŌĆó 0 (0x0000_0000) ą┤ą╗čÅ 256-ą▒ąĖčéąĮąŠą╣ čüčéčĆąŠą║ąĖ ą║čŹčłą░
ąöą░ąĮąĮčŗąĄ čćč鹥ąĮąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░čÄčéčüčÅ ą▓ ą┐ąŠą┤čüąĖčüč鹥ą╝čā ą┐ą░ą╝čÅčéąĖ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝ ą┐ą░ą╝čÅčéčīčÄ SPI. ąŚą┤ąĄčüčī ą╝ąŠąČąĄčé ą▒čŗčéčī čāčćąĖčéčŗą▓ą░ąĄą╝ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗčģ ą┤ą╗čÅ master.
ŌĆó ąöą╗čÅ čćč鹥ąĮąĖą╣ MDMA ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čćąĖčéą░ąĄą╝čŗčģ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ (N) ą▓čüąĄą│ą┤ą░ čĆą░ą▓ąĮąŠ 4 ą▒ą░ą╣čéą░ą╝. ą¦č鹥ąĮąĖąĄ MDMA ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą║čŹčłą░. ąöą╗čÅ čćč鹥ąĮąĖą╣ MDMA ą┐čĆąĄą┤ąĄą╗ ą┐ąŠą╗čÅ DMA_CFG.MSIZE 1, 2 ąĖą╗ąĖ 4 ą▒ą░ą╣čéą░. ąÉą┤čĆąĄčü, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠą┤čüąĖčüč鹥ą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ master ą┤ą╗čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ SPI, ą▓čüąĄą│ą┤ą░ ą▓čŗčĆąŠą▓ąĮąĄąĮ ąĮą░ 4 ą▒ą░ą╣čéą░.
[ążčāąĮą║čåąĖąĖ ą▓čŗčüąŠą║ąŠą│ąŠ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ čćč鹥ąĮąĖčÅ Memory-Mapped]
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą░ą▓č鹊ą╝ą░čéąĖąĘą░čåąĖąĖ ą┤ąŠčüčéčāą┐ąŠą▓ čćč鹥ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ SPI, ą░ą┐ą┐ą░čĆą░čéčāčĆą░ memory-mapped čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ ą▓čŗą▒ąŠčĆąŠą║ ąĖąĘ ą┐ą░ą╝čÅčéąĖ SPI ąĖ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ čüąĖčüč鹥ą╝čŗ. ąŁčéąĖ čäčāąĮą║čåąĖąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ.
Execute-In-Place (XIP, č鹊ą╗čīą║ąŠ ą┤ą╗čÅ SPI2). ąóąĄčģąĮąŠą╗ąŠą│ąĖčÅ Execute-In-Place, čćą░čēąĄ ąĖąĘą▓ąĄčüčéąĮą░čÅ ą║ą░ą║ XIP, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą║ąŠą┤ ą┐čĆčÅą╝ąŠ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI flash ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĘą░ą│čĆčāąĘąĖčéčī ą║ąŠą┤ ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĄą│ąŠ ąĖąĘ RAM. XIP, čéą░ą║ąČąĄ ąĖąĘą▓ąĄčüčéąĮčŗą╣ ą║ą░ą║ čĆąĄąČąĖą╝ Command Skip, čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒čēąĖą╝ ą┐ąŠąĮčÅčéąĖąĄą╝, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮ čéą░ą║ąČąĄ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ ą┤ą░ąĮąĮčŗčģ.
ąĢčüčéčī čĆą░ąĘą╗ąĖčćąĖąĄ ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ąŠą╝ XIP ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ čĆąĄąČąĖą╝ąŠą╝. ąÆ čĆąĄąČąĖą╝ąĄ XIP ą┐ąŠčüą╗ąĄ ą▓čŗą▒ąŠčĆą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI (CS#=LOW), čŹč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ąĮąĄ ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčé ą┐ąĄčĆą▓čŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą▒ą░ą╣čé ą║ą░ą║ ą║ąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąŠąĮąŠ ąŠąČąĖą┤ą░ąĄčé, čćč鹊 read header ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĮą░čćąĮąĄčéčüčÅ čü ą▒ą░ą╣č鹊ą▓ ą░ą┤čĆąĄčüą░. ąÆ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐ą░ą╝čÅčéčī ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčé ą┐ąĄčĆą▓čŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą▒ą░ą╣čé ą║ą░ą║ ą║ąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ.
ąĀąĄąČąĖą╝ XIP ą┤čĆą░ą╝ą░čéąĖč湥čüą║ąĖ čüąĮąĖąČą░ąĄčé ą▓čĆąĄą╝čÅ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé ą▒čŗčüčéčĆąŠą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ą▒ąĄąĘ ąĘą░č鹥ąĮąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ ą▓ RAM. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SPI memory-mapped ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ SPI_MMRDH.CMDSKIP ą┤ą╗čÅ ą┐čĆąŠą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĖąĘ read header.
ąØąĄą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI čéčĆąĄą▒čāčÄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüą▓ąŠąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ XIP, ąĖčüą┐ąŠą╗čīąĘčāčÅ ąĮąĄ memory-mapped čĆąĄąČąĖą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ SPI. ą×ą▒čŗčćąĮąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░ ą┐čāčüčéčŗčģ čåąĖą║ą╗ąŠą▓ (dummy cycle period) ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ XIP ąĖ ą┐ąŠą╗ąĄ SPI_MMRDH.MODE ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ą£ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ dummy memory mapped ą┤ąŠčüčéčāą┐ ą┐ąĄčĆąĄą┤ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ SPI_MMRDH.CMDSKIP, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SPI ą▓ čĆąĄąČąĖą╝ Command Skip.
ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SPI ą▓ čĆąĄąČąĖą╝ XIP, ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┤ą░čéą░čłąĖčéčā čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
[ąæąĖčéčŗ čüčéą░čéčāčüą░ ąŠčłąĖą▒ą║ąĖ čĆąĄąČąĖą╝ą░ Memory-Mapped]
ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SPI memory-mapped ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_STAT ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ. ąŁčéąĖ ą▒ąĖčéčŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĖ ąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ąŠą┐ąĄčĆą░čåąĖąĖ SPI. ąŁčéąĖ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ "ą╗ąĖą┐ą║ąĖąĄ" (sticky), ąĖčģ ąŠčćąĖčēą░ąĄčé ąŠą┐ąĄčĆą░čåąĖčÅ W1C (write-1-to-clear, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ 1 ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ).
ŌĆó Memory-Mapped Write Error (SPI_STAT.MMWE). ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ (=1), ąĄčüą╗ąĖ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ąĘą░ą┐ąĖčüą░čéčī ą▓ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ memory-mapped SPI. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SPI memory-mapped ąĮą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ąĘą░ą┐ąĖčüąĖ ą▓ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ SPI.
ŌĆó Memory-Mapped Read Error (SPI_STAT.MMRE). ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ (=1), ąĄčüą╗ąĖ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ čćč鹥ąĮąĖčÅ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ memory-mapped SPI, ą║ąŠą│ą┤ą░ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ (SPI_CTL.MMSE=0).
ŌĆó Memory-Mapped Access Error (SPI_STAT.MMAE). ąŁč鹊čé ą▒ąĖčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ (=1), ąĄčüą╗ąĖ ą▒čŗą╗ą░ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ą┤ąŠčüčéčāą┐ą░ ą║ ą╗ąĖą▒ąŠ TX, ą╗ąĖą▒ąŠ RX FIFO, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ ą┤ąŠčüčéčāą┐ memory-mapped ą║ ą┐ą░ą╝čÅčéąĖ SPI. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▒ą╗ąŠą║ąĖčĆčāčÄčéčüčÅ ą┐ąŠą┐čŗčéą║ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ SPI č湥čĆąĄąĘ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ, ąĖ čäą░ą▒čĆąĖą║ą░ ą┐čĆąĖąĄą╝ą░ ąŠčéą▓ąĄčéąĖčé ąŠčłąĖą▒ą║ąŠą╣. ąĪčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą▓ą║ą╗čÄčćą░čÄčé ą╗čÄą▒čŗąĄ ą╝ąĄč鹊ą┤čŗ ą┐čĆčÅą╝ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą▒čāč乥čĆą░ą╝ FIFO TX b RX FIFO, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčéą║čāą┤ą░ čŹč鹊čé ą┤ąŠčüčéčāą┐ ą┐čĆąŠąĖąĘąŠčłąĄą╗ - ąŠčé DMA ąĖą╗ąĖ ąŠčé MMR ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ŌĆó Memory-Mapped Write Error Mask (SPI_CTL.MMWEM). ąŁč鹊čé ą▒ąĖčé čāą║ą░ąĘčŗą▓ą░ąĄčé, ą▒čŗą╗ ą╗ąĖ čäą░ą▒čĆąĖą║ąĄ ą▓ąŠąĘą▓čĆą░čēąĄąĮ ąŠčéą▓ąĄčé ąŠčłąĖą▒ą║ąĖ ąĮą░ ą┐ąŠą┐čŗčéą║čā ąĘą░ą┐ąĖčüąĖ ą▓ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┤ą╗čÅ čćč鹥ąĮąĖą╣ memory-mapped ą┐ą░ą╝čÅčéąĖ SPI. ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą▒čŗą╗ ą╗ąĖ ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮ ąŠčéą▓ąĄčé ąŠčłąĖą▒ą║ąĖ ąĘą░ą┐ąĖčüąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą│ąŠ ą▒ąĖčéą░, ą▓čüąĄ čĆą░ą▓ąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ sticky-ą▒ąĖčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ąĘą░ą┐ąĖčüąĖ memory-mapped (SPI_STAT.MMWE).
ąŚąÉą£ąĢą¦ąÉąØąśąĢ: ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą┤čĆčāą│ąĖčģ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ SPI_STAT čŹčéąĖ ą▒ąĖčéčŗ ąŠčłąĖą▒ą║ąĖ čĆąĄąČąĖą╝ą░ memory-mapped ąĮąĄ ąĖą╝ąĄčÄčé čüą▓čÅąĘą░ąĮąĮčŗčģ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ SPI (SPI_IMSK) ąĖ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SPI (SPI_ILAT).
ąĀąĄą│ąĖčüčéčĆ ą▓ąĄčĆčģąĮąĄą╣ ą│čĆą░ąĮąĖčåčŗ (memory-mapped top register, SPI_MMTOP) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ąĘą░ą┤ą░čéčī ą▓ąĄčĆčģąĮąĖą╣ ą┐čĆąĄą┤ąĄą╗ ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ SPI. Memory-mapped ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ SPI ą┐ąŠ ą░ą┤čĆąĄčüčā, čĆą░ą▓ąĮąŠą╝čā ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄą╝čā čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ, čüčćąĖčéą░ąĄčéčüčÅ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╝. ąóą░ą║ąŠą╣ ą┤ąŠčüčéčāą┐ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąŠčéą▓ąĄčé ąŠčłąĖą▒ą║ąĖ čłąĖąĮčŗ.
ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ą┐ąŠą╗ąĄąĘąĄąĮ ą┤ą╗čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą┤ąŠčüčéčāą┐ą░ ą║ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╝ ą░ą┤čĆąĄčüą░ą╝ ą┐ą░ą╝čÅčéąĖ SPI. ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĖ ą┐ą░ą╝čÅčéąĖ SPI ąĮąĄ č湥čéą║ąŠ ąĘą░ą┤ą░čÄčé (ą▒ąĄąĘ ą│ą░čĆą░ąĮčéąĖąĖ) ą┐čĆąĄą▓čŗčłąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčé ą░ą┤čĆąĄčüą░, čćč鹊ą▒čŗ čéą░ą║ąŠą╣ ą░ą┤čĆąĄčü ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ą╗čüčÅ, čéą░ą║ čćč鹊 ąĄčüčéčī ąŠą┐ą░čüąĮąŠčüčéčī ą┐ąĄčĆąĄčüą║ąŠą║ą░ ą┤ąŠčüčéčāą┐ą░ ą▓ ąĮą░čćą░ą╗ąŠ ą┐ą░ą╝čÅčéąĖ ą┐čĆąĖ ą┐čĆąĄą▓čŗčłąĄąĮąĖąĖ ąĘąĮą░č湥ąĮąĖčÅ ą░ą┤čĆąĄčüą░.
[ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ Memory-Mapped]
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ SPI_CTL.MMSE čĆą░ąĘčĆąĄčłą░ąĄčé čĆąĄąČąĖą╝ SPI memory-mapped. ąÜąŠą│ą┤ą░ čŹč鹊čé čĆąĄąČąĖą╝ čĆą░ąĘčĆąĄčłąĄąĮ, ąĖąĮč鹥čĆč乥ą╣čü SPI ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖčÅ čü čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ ą┐ą░ą╝čÅčéąĖ SPI, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čāčüčéą░ąĮąŠą▓ąŠą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąÆ čüą╗ąĄą┤čāčÄčēąĖčģ čéą░ą▒ą╗ąĖčåą░čģ ą┐ąŠą║ą░ąĘą░ąĮčŗ čéąĖą┐ąĖčćąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ SPI ą▓ čĆąĄąČąĖą╝ąĄ memory-mapped:
ąóą░ą▒ą╗ąĖčåą░ 29-9. ąĀąĄą│ąĖčüčéčĆ SPI Control (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ SPI_CTL).
| ąæąĖčéčŗ |
ąóąĖą┐ąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ |
| SPI_CTL.MSTR |
1 |
Master mode enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░) |
|
| SPI_CTL.PSSE |
0 |
Protected slave select enable (ąĘą░čēąĖčēąĄąĮąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░) |
|
| SPI_CTL.ODM |
0 |
Open-drain mode enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą▓ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝) |
|
| SPI_CTL.CPHA, SPI_CTL.CPOL |
00 ąĖą╗ąĖ 11 |
ąĀąĄąČąĖą╝ ąŠą▒ą╝ąĄąĮą░ SPI (č乊čĆą╝ą░čé čäčĆąĄą╣ą╝ą░) |
ąŚą░ą▓ąĖčüąĖčé ąŠčé ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FLASH, ąŠą▒čŗčćąĮąŠ SPI flash ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé mode-0 (CPHA=CPOL=0) ąĖ mode-3 (CPHA=CPOL=1). |
| SPI_CTL.ASSEL |
1 |
ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąŠą╣ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ |
|
| SPI_CTL.SELST |
1 |
ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ |
|
| SPI_CTL.EMISO |
1 |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ MISO |
|
| SPI_CTL.SIZE |
2 |
32-ą▒ąĖčéąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░čćąĖ |
|
| SPI_CTL.LSBF |
0 |
ąĀąĄąČąĖą╝, ą║ąŠą│ą┤ą░ čüčéą░čĆčłąĖą╣ ą▒ąĖčé (MSB) ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝ |
ąŚą░ą▓ąĖčüąĖčé ąŠčé ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ąĮąŠ ąŠą▒čŗčćąĮąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ SPI ą▓ąĄą┤ąĄčé ąŠą▒ą╝ąĄąĮ, ą║ąŠą│ą┤ą░ čüčéą░čĆčłąĖą╣ ą▒ąĖčé ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝. |
| SPI_CTL.FCEN, SPI_CTL.FCCH, SPI_CTL.FCPL, SPI_CTL.FCWM |
0 |
ąæąĖčéčŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝čā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą┐ąŠč鹊ą║ąŠą╝ (flow control) |
|
| SPI_CTL.FMODE |
1 |
FAST mode enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▒čŗčüčéčĆąŠą│ąŠ čĆąĄąČąĖą╝ą░) |
ą×ą▒čŗčćąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 1 ą┤ą╗čÅ čéą░ą╣ą╝ąĖąĮą│ą░ ą┐ąŠą╗ąĮąŠą│ąŠ čåąĖą║ą╗ą░, 0 č鹊ą╗čīą║ąŠ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ąĮąĖąĘą║ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. |
| SPI_CTL.SOSI |
0 |
SPI_MOSI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗą▓ąŠą┤ IO0. |
|
ąóą░ą▒ą╗ąĖčåą░ 29-10. ąĀąĄą│ąĖčüčéčĆ SPI Receive Control (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąŠą╝).
| ąæąĖčéčŗ |
ąóąĖą┐ąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| SPI_RXCTL.REN |
1 |
Receive channel enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ ą┐čĆąĖąĄą╝ą░) |
| SPI_RXCTL.RTI |
0 |
Receive transfer initiation disable (ąĘą░ą┐čĆąĄčé ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮą░ ą║ą░ąĮą░ą╗ąĄ ą┐čĆąĖąĄą╝ą░) |
| SPI_RXCTL.RWCEN |
0 |
Receive word counter disable (ąĘą░ą┐čĆąĄčé čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓ ą┐čĆąĖąĄą╝ą░) |
| SPI_RXCTL.RDR |
0 |
Receive data request disable (ąĘą░ą┐čĆąĄčé ąĘą░ą┐čĆąŠčüą░ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░) |
| SPI_RXCTL.RDO |
0 |
ą×čéą▒čĆą░čüčŗą▓ą░čéčī ą▓čģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ąĄčüą╗ąĖ ą▒čāč乥čĆ RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ |
| SPI_RXCTL.RRWM |
0 |
Receive FIFO regular watermark (ąŠą▒čŗčćąĮą░čÅ ą│čĆą░ąĮąĖčåą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░) |
| SPI_RXCTL.RUWM |
0 |
Receive FIFO urgent watermark disable (ąĘą░ą┐čĆąĄčé čüčĆąŠčćąĮąŠą╣ ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░) |
ąóą░ą▒ą╗ąĖčåą░ 29-11. ąĀąĄą│ąĖčüčéčĆ SPI Transmit Control (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░č湥ą╣).
| ąæąĖčéčŗ |
ąóąĖą┐ąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| SPI_TXCTL.TEN |
1 |
Transmit channel enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
| SPI_TXCTL.TTI |
1 |
Transmit transfer initiation disable (ąĘą░ą┐čĆąĄčé ąĖąĮąĖčåąĖą░čåąĖąĖ ąĮą░ ą║ą░ąĮą░ą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
| SPI_TXCTL.TWCEN |
0 |
Transmit word counter disable (ąĘą░ą┐čĆąĄčé čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
| SPI_TXCTL.TDR |
0 |
Transmit data request disable (ąĘą░ą┐čĆąĄčé ąĘą░ą┐čĆąŠčüą░ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ) |
| SPI_TXCTL.TDU |
0 |
ą×čéą┐čĆą░ą▓ą║ą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čüą╗ąŠą▓ą░, ą║ąŠą│ą┤ą░ TFIFO ą┐čāčüčé |
| SPI_TXCTL.TRWM |
0 |
Transmit FIFO regular watermark (ąŠą▒čŗčćąĮą░čÅ ą│čĆą░ąĮąĖčåą░ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ) |
| SPI_TXCTL.TUWM |
0 |
Transmit FIFO urgent watermark disable (ąĘą░ą┐čĆąĄčé čüčĆąŠčćąĮąŠą╣ ą│čĆą░ąĮąĖčåčŗ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ) |
ąóą░ą▒ą╗ąĖčåą░ 29-12. ąĀąĄą│ąĖčüčéčĆ SPI DLY Control (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĘą░ą┤ąĄčƹȹ║ą░ą╝ąĖ).
| ąæąĖčéčŗ |
ąóąĖą┐ąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ* |
| SPI_DLY.LAGX |
1 |
Extended LAG timing (ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ LAG) |
|
| SPI_DLY.LEADX |
1 |
Extended LEAD timing (ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ LEAD) |
|
| SPI_DLY.STOP |
3 |
ąæąĖčé STOP ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ |
ą£ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 1 ą┤ą╗čÅ ą┐ąŠąĮąĖąČąĄąĮąĮčŗčģ čćą░čüč鹊čé SPI. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ *: čüą╝. ą┤ą░čéą░čłąĖčé ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ SPI Flash ą┤ą╗čÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą▒ąŠčĆą║ąĖ CS (ąĮą░ą┐čĆąĖą╝ąĄčĆ SSEL).
ąæąĖčéčŗ multiple I/O mode (SPI_CTL.MIOM) čćą░čüčéąĖčćąĮąŠ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ:
ŌĆó ąÜąŠą╝ą░ąĮą┤ą░ (opcode) ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą╗ąĖą▒ąŠ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┤ąĮąŠą│ąŠ, ą╗ąĖą▒ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ą░ą║ čŹč鹊 čāą║ą░ąĘą░ąĮąŠ ą▒ąĖčéą░ą╝ąĖ SPI_CTL.MIOM, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāčüčéą░ąĮąŠą▓ąŠą║ ą▒ąĖčé SPI_MMRDH.CMDPINS.
ŌĆó ąŚą░č鹥ą╝ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą░ą┤čĆąĄčü čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą│ąŠ, ą╗ąĖą▒ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ą░ą║ čŹč鹊 čāą║ą░ąĘą░ąĮąŠ ą▒ąĖčéą░ą╝ąĖ SPI_CTL.MIOM, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░čüčéčĆąŠąĄą║ ą▒ąĖčé SPI_MMRDH.ADRPINS.
ŌĆó ąöą░ąĮąĮčŗąĄ ą▓čüąĄą│ą┤ą░ čćąĖčéą░čÄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ, ą║ą░ą║ čŹč鹊 čāą║ą░ąĘą░ąĮąŠ ą▒ąĖčéą░ą╝ąĖ SPI_CTL.MIOM.
ąŚąÉą£ąĢą¦ąÉąØąśąĢ: čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ SPI (ą▒ąĖčé SPI_CTL.EN) ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝, ą┐ąŠčüą╗ąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓.
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čüąŠą▓ąĄčéčŗ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ą▓ čĆąĄąČąĖą╝ąĄ memory-mapped:
ŌĆó ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SPI memory-mapped ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüčéą░čéčāčü flash ą┐ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░čåąĖąĄą╣ ą┤ąŠčüčéčāą┐ą░. ą×ąĮą░ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ą┐ą░ą╝čÅčéčī ą▓čüąĄą│ą┤ą░ ą│ąŠč鹊ą▓ą░ ąŠčéą▓ąĄčéąĖčéčī ąĮą░ ą┤ąŠčüčéčāą┐ čćč鹥ąĮąĖčÅ. ą¤ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ čĆąĄąČąĖą╝ą░ memory-mapped (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĄą┤ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ SPI_CTL.MMSE) čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 SPI flash ą│ąŠč鹊ą▓ą░ ą║ ą┤ąŠčüčéčāą┐čā čćč鹥ąĮąĖčÅ. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ ąĮąĄ memory-mapped, ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ čüčéą░čéčāčü ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ (write-complete) ą┐ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐ą░ą╝čÅčéąĖ SPI ą▓ čĆąĄąČąĖą╝ąĄ memory-mapped (čüą╝. ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗą╣ ą▒ąĖčé, čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāčÄčēąĖą╣ ąŠ ą┐čĆąŠčåąĄčüčüąĄ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ SPI flash). ąóą░ą║ąČąĄ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄą┤ąŠčüčéčāą┐ąĮčŗ ąĮąĄ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čī čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI.
ŌĆó ąÜąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ memory-mapped, ą┐ąŠą┐čŗčéą║ąĖ ąŠą▒čŗčćąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā SPI ą▒ą╗ąŠą║ąĖčĆčāčÄčéčüčÅ. ąóčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą┤ąŠčüčéčāą┐ą░ ą▓ą║ą╗čÄčćą░čÄčé ą╗čÄą▒čŗąĄ ą┐čĆčÅą╝čŗąĄ ą┤ąŠčüčéčāą┐čŗ ą║ ą▒čāč乥čĆą░ą╝ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮąĖ ą▒čŗą╗ąĖ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮčŗ - DMA ąĖą╗ąĖ ą┤ąŠčüčéčāą┐ąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą║ MMR.
ŌĆó ą¦č鹊ą▒čŗ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ čäčāąĮą║čåąĖąĖ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ SPI, ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą╝ąŠą│čāčé čüąĮą░čćą░ą╗ą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SPI čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ čüą╗ąŠą▓ą░ ąĖą╗ąĖ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĮąĄą║ąŠč鹊čĆčŗčģ ą║ąŠą╝ą░ąĮą┤. ąóą░ą║ ą║ą░ą║ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ SPI memory-mapped ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą╗čÄą▒čŗąĄ čéąĖą┐čŗ ąŠą┐ąĄčĆą░čåąĖą╣ ąĘą░ą┐ąĖčüąĖ SPI, ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SPI ą▓ ąŠą▒čŗčćąĮąŠą╝, ąĮąĄ memory-mapped čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī čĆąĄąČąĖą╝ memory-mapped.
ŌĆó ąÉą┐ą┐ą░čĆą░čéčāčĆą░ memory-mapped ąĮąĄ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé opcode. ą×ąĮą░ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠčüčéčī ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_MMRDH, ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā opcode. ą¤čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ąŠą╗ąČąĮčŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ SPI_MMRDH ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą▓čŗą▒čĆą░ąĮąĮčŗą╝ čéąĖą┐ąŠą╝ čćč鹥ąĮąĖčÅ.
ŌĆó ąÜąŠą│ą┤ą░ čÅą┤čĆąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖą╗ąĖ ąĖąĮčüčéčĆčāą║čåąĖčÄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ SPI, ą┐ąĄčĆąĄą┤ą░čćą░ memory-mapped ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░čüčéčĆąŠąĄą║ ą║čŹčłą░. ąĀąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║čŹčłą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą┐ą░ą╝čÅčéąĖ SPI ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┐ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ čĆąĄąČąĖą╝ą░ memory-mapped.
ŌĆó ą¦č鹥ąĮąĖčÅ MDMA ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI memory-mapped ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ ą░ą┤čĆąĄčüą░. ąöą╗čÅ čćč鹥ąĮąĖą╣ MDMA ąĘą░ą┤ą░ą╣č鹥 ą┐čĆąĄą┤ąĄą╗ ą┐ąŠą╗čÅ DMA_CFG.MSIZE ą▓ 1, 2 ąĖą╗ąĖ 4 ą▒ą░ą╣čéą░.
ŌĆó ąØąĄ ą▓čüąĄą│ą┤ą░ ąĖą╝ąĄąĄčéčüčÅ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╗čīąĮą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĖčéčī ąĮą░ ą╗ąĄčéčā ąĮą░čüčéčĆąŠą╣ą║ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ SPI memory-mapped ąĖą╗ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║čŹčłą░.
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čŹčéąĖčģ ąĮą░čüčéčĆąŠąĄą║ ą╝ąŠąČąĄčé ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čĆą░čēą░ąĄčéčüčÅ ą║ ą┐ą░ą╝čÅčéąĖ SPI ą▓ čĆąĄąČąĖą╝ąĄ memory-mapped. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐ą░ą╝čÅčéčī SPI, ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI, ąĖ ą║čŹčł ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ ą▓ ąŠą┤ąĖąĮ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ ąĮą░čüčéčĆąŠąĄą║ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ čåąĄą╗ąŠą╝. ą£ąŠą│čāčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ą┐čĆąŠčäąĖą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖą╗ąĖ ą░ąĮą░ą╗ąĖąĘ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ čĆą░ą▒ąŠčéą░čÄčé ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ.
[ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ SPI Memory Mapped Mode (ą┐ą░ą╝čÅčéčī Winbond W25Q32)]
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĮą░čüčéčĆąŠąĖčéčī XIP ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ Quad I/O ą┐ą░ą╝čÅčéąĖ Winbond W25Q32 SPI flash (ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ čüąĮą░čĆčāąČąĖ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ SPI0).
////////////////////////////////////////////////////////////////////////
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ XIP (ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā Volatile)
////////////////////////////////////////////////////////////////////////
/* ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SPI Flash ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ XIP ąĖ Quad mode
* ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖčéą░ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą│ąŠ ą▒ąĖčéą░ QE čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ flash.
* ąĀą░ąĘčĆąĄčłąĖč鹥 ą╝ąŠą┤čāą╗čī SPI ą▓ čĆąĄąČąĖą╝ąĄ memory-mapped, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ ąĮąĖąČąĄ.
* ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░ (Mode bits) čĆą░ą▓ąĮčŗ 0x00.
* ą¦č鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆąĄąČąĖą╝ ą┐čĆąŠą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ (command skip, XIP) čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčéčŗ
* MODE čĆąĄą│ąĖčüčéčĆą░ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ čćč鹥ąĮąĖčÅ (SPI Memory mapped Read Header register)
* ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą┐čāčüč鹊ą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ SPI flash. */
*pREG_SPI2_MMRDH |= ((0x20 << BITP_SPI_MMRDH_MODE) & BITM_SPI_MMRDH_MODE );
unsigned int* pSPI_MEM;
pSPI_MEM = (unsigned int*) 0x40000000;
int temp = *pSPI_MEM;
/* ą¤ąŠčüą╗ąĄ ą┐čāčüč鹊ą│ąŠ ą┤ąŠčüčéčāą┐ą░ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖčé ą┐čĆąŠą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ (Command Skip)
* ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ čćč鹥ąĮąĖčÅ (SPI Memory Mapped Read Header register) */
*pREG_SPI0_MMRDH |= BITM_SPI_MMRDH_CMDSKIP;
/* ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓čüąĄ ą┤ąŠčüčéčāą┐čŗ ą║ čćč鹥ąĮąĖčÄ SPI flash ą▒čāą┤čāčé ą▓ čĆąĄąČąĖą╝ąĄ XIP. */
////////////////////////////////////////////////////////////////////////
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ SPI
////////////////////////////////////////////////////////////////////////
/* ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 čüąĖčüč鹥ą╝ąĮčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā. ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāą╣č鹥 ą╗ąŠą│ąĖą║čā
* ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (Pin Mux), čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī
* čĆą░ą▒ąŠčéčā ą▓čŗą▓ąŠą┤ąŠą▓ SPI */
Init_SPI_PinMux();
/* ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ SPI ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ SPI.
* ąĀąĄą│ąĖčüčéčĆ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ SPI: SPI_CLK = SCLK / (BAUD + 1) */
*pREG_SPI0_CLK = ( (0x01 << BITP_SPI_CLK_BAUD) & BITM_SPI_CLK_BAUD );
/* ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┤ąĄčƹȹ║ąĖ SPI: STOP = 3; LEAD = 1; LAG = 1 */
*pREG_SPI0_DLY = (((3 << BITP_SPI_DLY_STOP) & BITM_SPI_DLY_STOP) |
((1 << BITP_SPI_DLY_LEADX ) & BITM_SPI_DLY_LEADX)|
((1 << BITP_SPI_DLY_LAGX ) & BITM_SPI_DLY_LAGX ));
/* ąĀą░ąĘčĆąĄčłąĖč鹥 čĆąĄąČąĖą╝ Memory Mapped ąĖąĮč鹥čĆč乥ą╣čüą░ SPI čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ:
* Master mode, čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░čćąĖ 32 ą▒ąĖčéą░, ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ ą▓čŗą▒ąŠčĆą║ą░ Slave,
* čüčéą░čĆčłąĖą╣ ą▒ąĖčé ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╣, Quad Multi-IO mode, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ FAST.
* ąØą░čüčéčĆąŠą╣ą║ąĖ CPHA-CPOL ąĘą░ą▓ąĖčüčÅčé ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI FLASH. */
*pREG_SPI0_CTL = (ENUM_SPI_CTL_MM_EN |
ENUM_SPI_CTL_MASTER |
ENUM_SPI_CTL_SIZE32 |
ENUM_SPI_CTL_HW_SSEL|
ENUM_SPI_CTL_ASSRT_SSEL |
ENUM_SPI_CTL_MSB_FIRST |
ENUM_SPI_CTL_FAST_EN |
ENUM_SPI_CTL_MIO_QUAD |
((CPHA << BITP_SPI_CTL_CPHA) & BITM_SPI_CTL_CPHA)|
((CPOL << BITP_SPI_CTL_CPOL) & BITM_SPI_CTL_CPOL));
/* ąĀą░ąĘčĆąĄčłąĖč鹥 ą▒ą╗ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ SPI čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ TTI=1; ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī
* čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ąĘąĮą░č湥ąĮąĖčÅčģ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. */
*pREG_SPI0_TXCTL = (BITM_SPI_TXCTL_TTI | BITM_SPI_TXCTL_TEN);
/* ąĀą░ąĘčĆąĄčłąĖč鹥 ą▒ą╗ąŠą║ ą┐čĆąĖąĄą╝ą░ SPI čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ RTI=0; ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī
* čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ąĘąĮą░č湥ąĮąĖčÅčģ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. */
*pREG_SPI0_RXCTL = (BITM_SPI_RXCTL_REN );
/* ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ čćč鹥ąĮąĖčÅ (Memory Mapped Read Header) čüąŠą│ą╗ą░čüąĮąŠ
* ą▓čŗą▒čĆą░ąĮąĮąŠą╝čā čĆąĄąČąĖą╝čā čćč鹥ąĮąĖčÅ. */
*pREG_SPI0_MMRDH = (((0xE7<< BITP_SPI_MMRDH_OPCODE)& BITM_SPI_MMRDH_OPCODE)|
((3 << BITP_SPI_MMRDH_ADRSIZE) & BITM_SPI_MMRDH_ADRSIZE)|
((1 << BITP_SPI_MMRDH_ADRPINS) & BITM_SPI_MMRDH_ADRPINS)|
((2 << BITP_SPI_MMRDH_DMYSIZE) & BITM_SPI_MMRDH_DMYSIZE)|
((0 << BITP_SPI_MMRDH_MODE ) & BITM_SPI_MMRDH_MODE)|
((1 << BITP_SPI_MMRDH_TRIDMY ) & BITM_SPI_MMRDH_TRIDMY) |
((0 << BITP_SPI_MMRDH_CMDSKIP) & BITM_SPI_MMRDH_CMDSKIP)|
((0 << BITP_SPI_MMRDH_CMDPINS) & BITM_SPI_MMRDH_CMDPINS));
/* ąØą░čüčéčĆąŠą╣ą║ą░ ą▓ąĄčĆčģąĮąĄą│ąŠ ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI Flash: */
*pREG_SPI0_MMTOP = 0x40000000 + (FLASH_BLOCK_SIZE * FLASH_BLOCK_COUNT);
/* ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Slave Select: */
*pREG_SPI0_SLVSEL = ENUM_SPI_SLVSEL_SSEL1_HI | ENUM_SPI_SLVSEL_SSEL1_EN;
/* ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ SPI: */
*pREG_SPI0_CTL |= BITM_SPI_CTL_EN;
[ąĪąĖą│ąĮą░ą╗čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SPI]
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 3 čéąĖą┐ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé čüąŠą▒čŗčéąĖčÅą╝ ą┤ą░ąĮąĮčŗčģ, čüąŠčüč鹊čÅąĮąĖčÅ ąĖ ąŠčłąĖą▒ą║ąĖ.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (Data Interrupts). ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 2 ą║ą░ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ ŌĆō ą┐čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░. ąŁčéąĖ čüąĖą│ąĮą░ą╗čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮčŗ ą▓ čüąĖą│ąĮą░ą╗čŗ ąĘą░ą┐čĆąŠčüą░ DMA. ą¤ąŠčüą║ąŠą╗čīą║čā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ čü čĆą░ąĘą┤ąĄą╗čīąĮčŗą╝ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ DMA, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗ. ąÜąŠą│ą┤ą░ ą║ą░ąĮą░ą╗čŗ DMA ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆčÅą╝ąŠ ąĮą░ą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą▓ čüąĖčüč鹥ą╝ąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüąŠą▒čŗčéąĖą╣ (system event controller). ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ąĮąĖą╝ą░čÄčé č鹥 ąČąĄ čüą░ą╝čŗąĄ ą╝ąĄčüčéą░ ą▓ąĄą║č鹊čĆąŠą▓, čćč鹊 ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą║ą░ąĮą░ą╗čŗ DMA.
ąÜą░ąČą┤ąŠąĄ ąĖąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 ą▒ąĖč鹊ą▓čŗąĄ ą┐ąŠą╗čÅ SPI_RXCTL.RDR ąĖ SPI_TXCTL.TDR čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ RX čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą▓ ą▓ąĄčéą║ąĄ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░ (čŹč鹊 čüąŠą▒čŗčéąĖąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ SPI_RXCTL.RDR). ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćą░ čĆą░ąĘčĆąĄčłąĄąĮą░, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ TX čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ąĄčéą║ą░ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ (čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ SPI_TXCTL.TDR). ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ DMA čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠ čü ą▓č鹊čĆąĖčćąĮąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ DMA, čćč鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čüčĆąŠčćąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čäąĖąĮąĖčłą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║čĆąŠą╝ąĄ ąŠą▒čŗčćąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĘą░ą┐čĆąŠčüą░ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čĆą░ą▒ąŠčéą░čÄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_TWC.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ (Status Interrupts). ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüčéą░čéčāčüą░, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī čĆą░ąĘąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░. ąÆčüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüčéą░čéčāčüą░ ą╝ąŠąČąĮąŠ ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░čéčī (ąŠčéą╝ąĄąĮąĖčéčī). ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüčéą░čéčāčüą░ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ č湥čĆąĄąĘ ąŠą┤ąĮčā ą╗ąĖąĮąĖčÄ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüčéą░čéčāčüą░ (SPI status IRQ line). ąŁčéą░ ą╗ąĖąĮąĖčÅ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮą░ čü ą╗ąĖąĮąĖąĄą╣ SPI error IRQ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓. ąóą░ą▒ą╗ąĖčåą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüčéą░čéčāčüą░ SPI 29-13 ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ SPI.
ąóą░ą▒ą╗ąĖčåą░ 29-13. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ SPI.
| ąæąĖčé SPI_STAT |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| SPI_STAT.RUWM |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ FIFO čüčĆąŠčćąĮąŠąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖąĄ ą┐čĆąĄą┤ąĄą╗ą░ (urgent watermark). ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī RFIFO ąĮą░čĆčāčłąĖčé ą╝ąĄčéą║čā ą┐čĆąĄą┤ąĄą╗ą░ (watermark), čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčāčÄ ą┐ąŠą╗ąĄą╝ SPI_RXCTL.RUWM. ą×čćąĖčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī RFIFO ą┤ąŠčüčéąĖą│ą░ąĄčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąĄčéą║ąĖ watermark ą▓ ą┐ąŠą╗ąĄ SPI_RXCTL.RRWM. ąĢčüą╗ąĖ ą║ą░ąĮą░ą╗ RX čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ DMA, SPI_RXCTL.RUWM ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāąĄčéčüčÅ čü ąĘą░ą┐čĆąŠčüąŠą╝ ą┤ą░ąĮąĮčŗčģ. |
| SPI_STAT.TUWM |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ FIFO čüčĆąŠčćąĮąŠą│ąŠ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ą┐čĆąĄą┤ąĄą╗ą░ (urgent watermark). ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī TFIFO ąĮą░čĆčāčłąĖčé ą╝ąĄčéą║čā ą┐čĆąĄą┤ąĄą╗ą░ (watermark), čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčāčÄ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖčé SPI_TXCTL.TUWM. ą×čćąĖčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī TFIFO ą┤ąŠčüčéąĖą│ą░ąĄčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ SPI_TXCTL.TRWM. ąĢčüą╗ąĖ ą║ą░ąĮą░ą╗ TX čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ DMA, č鹊 SPI_STAT.TUWM ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāąĄčéčüčÅ čü ąĘą░ą┐čĆąŠčüąŠą╝ ą┤ą░ąĮąĮčŗčģ. |
| SPI_STAT.TS |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüčéą░čĆčé ą┐ą░ą║ąĄčéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čāč鹥ą╝ ąĘą░ą│čĆčāąĘą║ąĖ čĆąĄą│ąĖčüčéčĆą░ SPI_TWC čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ SPI_TWCR. |
| SPI_STAT.RS |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ą░. ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüčéą░čĆčé ą┐ą░ą║ąĄčéąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ą┐čāč鹥ą╝ ąĘą░ą│čĆčāąĘą║ąĖ SPI_RWC čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ SPI_RWCR. |
| SPI_STAT.TF |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ą┐ą░ą║ąĄčéąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ (ą┤ąĄą║čĆąĄą╝ąĄąĮčéčŗ SPI_TWC ą┤ąŠčüčéąĖą│ą░čÄčé 0). |
| SPI_STAT.RF |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ą┐ą░ą║ąĄčéąĮčŗą╣ ą┐čĆąĖąĄą╝ (ą┤ąĄą║čĆąĄą╝ąĄąĮčéčŗ SPI_RWC ą┤ąŠčüčéąĖą│ą░čÄčé 0). |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖą╣ ąŠčłąĖą▒ą║ąĖ (Error Conditions). ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆą░ąĘą╗ąĖčćąĮčŗčģ čüąŠą▒čŗčéąĖčÅčģ ąŠčłąĖą▒ą║ąĖ. ąÆčüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠąČąĮąŠ ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░čéčī (ąĘą░ą┐čĆąĄčéąĖčéčī). ąśąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗąĄ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ąŠą╝ą▒ąĖąĮąĖčĆčāčÄčéčüčÅ ą▓ ąŠą┤ąĮąŠą╝ čüąĖą│ąĮą░ą╗ąĄ SPI error IRQ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮ ąĮąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ čü ą░ą│čĆąĄą│ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ čüąŠčüč鹊čÅąĮąĖčÅ SPI (SPI status IRQ signal). ąóą░ą▒ą╗ąĖčåą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčłąĖą▒ąŠą║ SPI 29-14 ą┤ąĄčéą░ą╗ąĖąĘąĖčĆčāąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąŠčłąĖą▒ą║ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 29-14. SPI Error Interrupts.
| ąæąĖčé SPI_STAT |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| SPI_STAT.MF |
ą×čéą║ą░ąĘ čĆąĄąČąĖą╝ą░ (Mode Fault). ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ą┤čĆčāą│ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čéą░ą║ąČąĄ ą┐čŗčéą░ąĄčéčüčÅ čüčéą░čéčī master ą▓ čüąĖčüč鹥ą╝ąĄ multi-master, ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓čģąŠą┤ ~SPI_SS ą▓ ą╗ąŠą│. 0. ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéčŗ master. |
| SPI_STAT.TUR |
ą×čłąĖą▒ą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmission error). ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (underflow). ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĮąŠą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░, ąĮąŠ ą┐čĆąĖ čŹč鹊ą╝ ą┐čāčüčé SPI_TFIFO. ąŁčéą░ ąŠčłąĖą▒ą║ą░ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ąĄ ąĖąĮąĖčåąĖą░čåąĖąĖ čüąŠ čüč鹊čĆąŠąĮčŗ master, ą┐ąŠčüą║ąŠą╗čīą║čā ąĮąĄ ą┐čāčüč鹊čéą░ SPI_TFIFO čÅą▓ą╗čÅąĄčéčüčÅ ąŠą┤ąĮąĖą╝ ąĖąĘ čāčüą╗ąŠą▓ąĖą╣ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| SPI_STAT.ROR |
ą×čłąĖą▒ą║ą░ ą┐čĆąĖąĄą╝ą░ (reception error). ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ą▓ ą║ą░ąĮą░ą╗ąĄ ą┐čĆąĖąĄą╝ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ (overflow). ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ ąĮąŠą▓ąŠąĄ čüą╗ąŠą▓ąŠ ą┤ą░ąĮąĮčŗčģ, ąĮąŠ SPI_RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ (ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ąŠčéčéčāą┤ą░ ą┐čĆąŠčćąĖčéą░ąĮčŗ). ąŁč鹊 čāčüą╗ąŠą▓ąĖąĄ ąŠčłąĖą▒ą║ąĖ ąĮąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐čĆąĖąĄą╝ą░ master, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐čāčüč鹊čéą░ SPI_RFIFO čÅą▓ą╗čÅąĄčéčüčÅ ąŠą┤ąĮąĖą╝ ąĖąĘ čāčüą╗ąŠą▓ąĖą╣ ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐čĆąĖąĄą╝ą░. |
| SPI_STAT.TC |
ą×čłąĖą▒ą║ą░ ą║ąŠą╗ą╗ąĖąĘąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit Collision error). ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▒ą╗ąĖąĘą║ąŠ čü ą┐ąĄčĆą▓čŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ SPI_CLK. ąÆ čĆąĄąČąĖą╝ąĄ slave ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ąĮąĄ ąĘąĮą░ąĄčé, ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüčéąĖčéčüčÅ čüą╗ąĄą┤čāčÄčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░. ąŚą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐ąŠčćčéąĖ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, ą║ąŠą│ą┤ą░ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄ ą▓čüčéčĆąĄčćą░ąĄčéčüčÅ čü ą┐ąĄčĆą▓čŗą╝ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╝ ą▒ąĖč鹊ą╝. ą¤ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą▓čĆąĄąČą┤ą░čÄčéčüčÅ. ąÆ čĆąĄąČąĖą╝ąĄ SPI_CTL.CPHA=1 ą┐ąĄčĆą▓čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ SPI_CLK ą▒ąĄčĆąĄčéčüčÅ ą║ą░ą║ ą┐ąĄčĆą▓čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĢčüą╗ąĖ SPI_CTL.CPHA=0, č鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┐ąĄčĆąĄą┐ą░ą┤ SPI_CLK ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_CTL.SELST =1) ąĖą╗ąĖ čüąĮčÅčéąĖąĄ slave select (SPI_CTL.SELST =0) ą▓ąĘčÅčéčŗ ą║ą░ą║ ą┐ąĄčĆą▓čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁčéą░ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ slave. ąÆ čĆąĄąČąĖą╝ąĄ master ąĘą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą┤ ą┐ąĄčĆą▓čŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ SPI_CLK. |
ąĪąŠą▒čŗčéąĖčÅ ąŠčłąĖą▒ą║ąĖ ąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĘą░ą▓ąĖčüčÅčé ąŠčé čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ (ą┐ąĄčĆąĄą┤ą░čćą░ ąĖą╗ąĖ ą┐čĆąĖąĄą╝). ąĢčüą╗ąĖ ą║ą░ąĮą░ą╗ ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 ą▓čüąĄ ąŠčłąĖą▒ą║ąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čŹčéąĖą╝, ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ. ąÜąŠą│ą┤ą░ ąŠą▒ą░ ą║ą░ąĮą░ą╗ą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ, čĆą░ąĘčĆąĄčłąĄąĮčŗ ąŠčłąĖą▒ą║ąĖ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ąŠą▒ąŠąĖčģ ą║ą░ąĮą░ą╗ąŠą▓.
[ąÜąŠąĮčåąĄą┐čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ SPI]
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čüąĄą║čåąĖąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ąŠčüąĮąŠą▓ąĮčŗąĄ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐čĆąŠčåąĄą┤čāčĆčŗ.
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ. ąöąŠą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆčŗ SPI_RXCTL ąĖ SPI_TXCTL ą┐ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ SPI_CTL. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 čĆąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░ ąĖąĮąĖčåąĖą░čåąĖąĖ ąĖ čĆąĄą│ąĖčüčéčĆčŗ čüč湥čéčćąĖą║ąŠą▓, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮąŠ, ą┐ąŠčüą╗ąĄ ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čĆąĄąČąĖą╝ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą▓ čĆąĄąČąĖą╝ąĄ ąĖąĮąĖčåąĖą░čåąĖąĖ, ąĖ čĆąĄąČąĖą╝ ą┐čĆąĖąĄą╝ą░ ą▓ čĆąĄąČąĖą╝ąĄ ąĮąĄ ąĖąĮąĖčåąĖą░čåąĖąĖ, č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 čĆąĄą│ąĖčüčéčĆčŗ SPI_RXCTL ąĖ SPI_RWC ą┐ąĄčĆąĄą┤ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ SPI_TXCTL ąĖ SPI_TWC. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ ąŠą▒ą░ čĆąĄąČąĖą╝ą░ ąĖąĮąĖčåąĖą░čåąĖąĖ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ą┐čĆąĖąĄą╝ą░, č鹊 čĆą░ąĘčĆąĄčłą░ą╣č鹥 čĆąĄą│ąĖčüčéčĆ SPI_CTL ą┐ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒ąŠąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ SPI_RXCTL ąĖ SPI_TXCTL.
ąŁčéąĖ čāą║ą░ąĘą░ąĮąĖčÅ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéčÅčé ąŠčé ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ SPI ą┤ąŠ ą┐ąŠą╗ąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ SPI.
ąóą░ą║ąČąĄ čĆą░ąĘčĆąĄčłąĄąĮčŗ ą┤čĆčāą│ąĖąĄ čüą┐ąŠčüąŠą▒čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐ąŠą║ą░ čāčüą╗ąŠą▓ąĖčÅ ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░čÄčé ąĘą░ą┐čāčüą║ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ SPI.
ą¤čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░ą╣č鹥 ą╝ąĄčĆčŗ, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠą┤čāą╗čÅ SPI. ąØąĄ ą╝ąĄąĮčÅą╣č鹥 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ąĄąĮčÅą╣č鹥 ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąĮąĄ ą▓čŗą▒čĆą░ąĮąŠ ąĮąĖ ąŠą┤ąĮąŠ ąĖąĘ slave-čāčüčéčĆąŠą╣čüčéą▓. ą×ą┤ąĮą░ą║ąŠ ąĖąĘ čŹč鹊ą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░ ąĄčüčéčī ąĖčüą║ą╗čÄč湥ąĮąĖąĄ. ąÜąŠą│ą┤ą░ ą╗ąĖąĮą║ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ SPI čüąŠčüč鹊ąĖčé ąĖąĘ ąŠą┤ąĮąŠą│ąŠ master ąĖ ąŠą┤ąĮąŠą│ąŠ slave, SPI_CTL.ASSEL=0. ąÆčģąŠą┤ ą▓čŗą▒ąŠčĆą║ąĖ slave select čāčüčéčĆąŠą╣čüčéą▓ą░ slave ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐čĆąĖčéčÅąĮčāčé ą║ ą╗ąŠą│. 0. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čŗą▒čĆą░ąĮąŠ ą▓čüąĄą│ą┤ą░. ąśąĘą▒ąĄą│ą░ą╣č鹥 ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░, master ąĖ slave.
ą£ąŠą┤čāą╗čī ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆą░ąĘą╝ąĄčĆčŗ čüą╗ąŠą▓ čäčĆąĄą╣ą╝ą░ 8, 16 ąĖ 32 ą▒ąĖčéą░. ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą║ąŠčĆčĆąĄą║čéąĮčāčÄ čĆą░ą▒ąŠčéčā, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░, master ąĖ slave, ąĮą░ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░.
Master ą▒ąĄąĘ DMA. ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ SPI ą▓ ą║ą░č湥čüčéą▓ąĄ master, ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ DMA.
1. ąŚą░ą┐ąĖčłąĖč鹥 čĆąĄą│ąĖčüčéčĆ SPI_SLVSEL, čāčüčéą░ąĮąŠą▓ąĖą▓ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé SPI select enable. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ąĮčāąČąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤čāčé ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ąĄą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮčŗ (ąĮąĄ ą▓čŗą▒čĆą░ąĮčŗ) ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ master-čāčüčéčĆąŠą╣čüčéą▓ą░.
2. ąæąĖčéčŗ SPI_RXCTL.RTI ąĖ SPI_TXCTL.TTI ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čĆąĄąČąĖą╝ ąĖąĮąĖčåąĖą░čåąĖąĖ SPI. ąĀąĄąČąĖą╝ ąĖąĮąĖčåąĖą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą│ą╗ą░ą▓ąĮčŗą╣ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ čéą░ą║ąČąĄ čāčüą╗ąŠą▓ąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
3. ąŚą░ą┐ąĖčłąĖč鹥 čĆąĄą│ąĖčüčéčĆčŗ SPI_CLK, SPI_CTL, SPI_RXCTL ąĖ SPI_TXCTL. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ čĆą░ąĘčĆąĄčłą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ ą║ą░č湥čüčéą▓ąĄ master, ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čüąĖčüč鹥ą╝čā SPI. ą×ąĮą░ ąĘą░ą┤ą░ąĄčé čĆąĄąČąĖą╝čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą║ą░ąĮą░ą╗čŗ, ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ą┤ą╗ąĖąĮčā čüą╗ąŠą▓ą░, č乊čĆą╝ą░čé ą┐ąĄčĆąĄą┤ą░čćąĖ, čüą║ąŠčĆąŠčüčéčī ąĖ ą┤čĆčāą│čāčÄ čāą┐čĆą░ą▓ą╗čÅčÄčēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ.
ąöą×ą¤ą×ąøąØąśąóąĢąøą¼ąØąÉą» ąśąØążą×ąĀą£ąÉą”ąśą»: ąĄčüą╗ąĖ SPI_RXCTL.RTI čĆą░ąĘčĆąĄčłąĄąĮ, ąĖ SPI_TXCTL.TTI ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮ, ąĘą░ą┐ąĖčłąĖč鹥 ą▓ čĆąĄą│ąĖčüčéčĆ SPI_RXCTL ą┐ąŠčüą╗ąĄ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆčŗ SPI_CTL, SPI_TXCTL ąĖ SPI_TFIFO, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ąĮąĄą┤ąŠą│čĆčāąĘą║čā ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit underrun) ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ.
4. ąĢčüą╗ąĖ SPI_CTL.ASSEL=0, ą░ą║čéąĖą▓ąĖčĆčāą╣č鹥 ąĮčāąČąĮčŗąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ ąŠą┤ąĮąŠą│ąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé čäą╗ą░ą│ąŠą▓ SPI_SLVSEL. ąśąĮą░č湥 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ SPI ą▓čŗą┐ąŠą╗ąĮąĖčé ą░ą║čéąĖą▓ą░čåąĖčÄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░.
5. ąŚą░č鹥ą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ čéą░ą║č鹊ą▓ ąĮą░ ąĮąŠąČą║ąĄ SPI_CLK, ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čüą┤ą▓ąĖą│ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĮą░čĆčāąČčā č湥čĆąĄąĘ SPI_MOSI, ą▓ą┤ą▓ąĖą│ą░čÅ ą┐čĆąĖ čŹč鹊ą╝ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┤ą░ąĮąĮčŗąĄ čü ąĮąŠąČą║ąĖ SPI_MISO. ą¤ąĄčĆąĄą┤ čüą┤ą▓ąĖą│ąŠą╝ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ SPI_TFIFO. ą¤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆ SPI_RFIFO.
6. ąÆčüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčéčüčÅ čāčüą╗ąŠą▓ąĖąĄ ąĖąĮąĖčåąĖą░čåąĖąĖ, SPI ą┐čĆąŠą┤ąŠą╗ąČąĖčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī čüą╗ąŠą▓ą░. ąĢčüą╗ąĖ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčüčéą░ąĄčéčüčÅ ą┐čāčüčéčŗą╝, ąĖą╗ąĖ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ąŠčüčéą░ąĄčéčüčÅ ą┐ąŠą╗ąĮčŗą╝, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ ą▒ąĖč鹊ą▓ SPI_TXCTL.TDU ąĖ SPI_RXCTL.RDO.
7. ą£ąŠąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą▓č鹊čĆąŠą╣ ą║ą░ąĮą░ą╗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą║ ąĖąĮąĖčåąĖąĖčĆčāčÄčēąĄą╝čā ą║ą░ąĮą░ą╗čā. ąŁčéą░ čäčāąĮą║čåąĖčÅ čĆą░ąĘčĆąĄčłąĖčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ąŠčüčéčāą┐ąĮčŗąĄ čĆąĄčüčāčĆčüčŗ ą║ą░ąĮą░ą╗ą░ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čü ąĖąĮąĖčåąĖąĖčĆčāčÄčēąĖą╝ ą║ą░ąĮą░ą╗ąŠą╝.
Slave ą▒ąĄąĘ DMA. ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą║ą░ą║ slave ą▓ čĆąĄąČąĖą╝ąĄ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ DMA, ą┐ąĄčĆąĄčģąŠą┤ čüąĖą│ąĮą░ą╗ą░ ~SPI_SS ą▓ ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ (ą╗ąŠą│. 0) ą▓čŗąĘčŗą▓ą░ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ąĮą░čćą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąśą╗ąĖ ą┐ąĄčĆą▓čŗą╣ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ SPI_CLK ą▓čŗąĘčŗą▓ą░ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖčéą░ SPI_CTL.CPHA. ąśąĮč鹥čĆč乥ą╣čü čĆą░ą▒ąŠčéą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
1. ą»ą┤čĆąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé čĆąĄą│ąĖčüčéčĆčŗ SPI_CTL, SPI_RXCTL ąĖ SPI_TXCTL. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┤ą░ąĄčé čĆąĄąČąĖą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą╗ąĖąĮą║ą░ ą▓ čéą░ą║čāčÄ ąČąĄ ąĮą░čüčéčĆąŠą╣ą║čā, ą║ą░ą║ čüą┤ąĄą╗ą░ąĮą░ čā SPI master.
2. ą¦č鹊ą▒čŗ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ, čÅą┤čĆąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ SPI_TFIFO.
3. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüą┐ą░ą┤ ~SPI_SS, čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ąĮą░čćąĮąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ SPI_CLK, ąĖ ą┤ąĄą╗ą░čéčī ą▓čŗą▒ąŠčĆą║čā ą┤ą░ąĮąĮčŗčģ ąĮą░ ąĮąĄą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ SPI_CLK.
4. ą¤čĆąĖąĄą╝ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčīčüčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ~SPI_SS ąĮąĄ ą▒čāą┤ąĄčé ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮ (ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ ą╗ąŠą│. 1) ąĖą╗ąĖ ą┐ąŠą║ą░ slave ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓.
5. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ slave ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čü ą║ą░ąČą┤čŗą╝ ąĮąŠą▓čŗą╝ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ ą╗ąŠą│. 0 ąĮą░ ~SPI_SS ąĖą╗ąĖ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ SPI_CLK. ąĢčüą╗ąĖ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčüčéą░ąĄčéčüčÅ ą┐čāčüčé, ąĖą╗ąĖ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ąŠčüčéą░ąĄčéčüčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╝, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ ą▒ąĖčé SPI_TXCTL.TDU ąĖ SPI_RXCTL.RDO.
ąĀąĄąČąĖą╝ DMA Master. ąśąĮč鹥čĆč乥ą╣čü SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą║ą░ąĮą░ą╗ DMA ąĘą░ą┐ąĖčüąĖ ąĖ ą║ą░ąĮą░ą╗ DMA čćč鹥ąĮąĖčÅ. ą×ąĮ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéąĖ čäčāąĮą║čåąĖąĖ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ąĖą╗ąĖ ąČąĄčüčéą║ąŠ čĆąĄą│ą╗ą░ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą┤čāą┐ą╗ąĄą║čüą░ (SPI_TXCTL.TTI = SPI_RXCTL.RTI = 1).
1. ąŚą░ą┐ąĖčłąĖč鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ DMA, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą║ą░ąĮą░ą╗ SPI DMA ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čĆą░ą▒ąŠčćąĖąĄ ąĄą┤ąĖąĮąĖčåčŗ ą┤ą░ąĮąĮčŗčģ, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠčüčéčāą┐ą░, čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓, ąĖ čé. ą┤.
2. ąŚą░ą┐ąĖčłąĖč鹥 čĆąĄą│ąĖčüčéčĆ SPI_SLVSEL, čāčüčéą░ąĮąŠą▓ąĖą▓ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čäą╗ą░ą│ąŠą▓ ą▓čŗą▒ąŠčĆą░ slave-čāčüčéčĆąŠą╣čüčéą▓ SPI.
3. ąŚą░ą┐ąĖčłąĖč鹥 čĆąĄą│ąĖčüčéčĆčŗ SPI_CLK ąĖ SPI_CTL, čĆą░ąĘčĆąĄčłąĖą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ą░ą║ master, ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 čüąĖčüč鹥ą╝čā SPI čāą║ą░ąĘą░ąĮąĖąĄą╝ ą┐ąŠą┤čģąŠą┤čÅčēąĄą╣ ą┤ą╗ąĖąĮčŗ čüą╗ąŠą▓ą░, č乊čĆą╝ą░čéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, čüą║ąŠčĆąŠčüčéąĖ, ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ąĖ čäą░ąĘčŗ čéą░ą║č鹊ą▓.
4. ąŚą░ą┐ąĖčłąĖč鹥 SPI_RXCTL ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąĄą╝ą░ SPI master, ąĖą╗ąĖ ąĘą░ą┐ąĖčłąĖč鹥 SPI_TXCTL ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ SPI master.
5. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąĘą░ą┐ąĖčłąĖč鹥 ą▒ąĖčé SPI_RXCTL.REN, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░, ąĖą╗ąĖ ąĘą░ą┐ąĖčłąĖč鹥 ą▒ąĖčé SPI_TXCTL.TEN ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ.
6. ąĢčüą╗ąĖ ą▒ąĖčé SPI_RXCTL.RTI čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ą┐čĆąĖąĄą╝ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą▒ąĖčéą░ SPI_CTL.EN. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ čüč湥čéčćąĖą║ čüą╗ąŠą▓ ą┐čĆąĖąĄą╝ą░ (SPI_RXCTL.RWCEN), č鹊 čĆąĄą│ąĖčüčéčĆ SPI_RWC ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮąĄ čĆą░ą▓ąĄąĮ 0 ą┤ą╗čÅ ąĖąĮąĖčåąĖą░čåąĖąĖ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░.
ąöą×ą¤ą×ąøąØąśąóąĢąøą¼ąØąÉą» ąśąØążą×ąĀą£ąÉą”ąśą»: ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłą░čÄčéčüčÅ ąŠą▒ą░ ą║ą░ąĮą░ą╗ą░ - ąĖ ą┐čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░, ąĮąŠ ąĮąĄ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ SPI_TXCTL.TTI, č鹊 ąĘą░ą┐ąĖčłąĖč鹥 ą▓ čĆąĄą│ąĖčüčéčĆ SPI_RXCTL ą┐ąŠčüą╗ąĄ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ SPI_CTL ąĖ SPI_TXCTL. ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą╝ąŠąČąĮąŠ ąĘą░čēąĖčéąĖčéčīčüčÅ ąŠčé ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĮąĖčåąĖąĖčĆčāčÄčéčüčÅ ą║ą░ą║ čćč鹥ąĮąĖčÅ ą┐čĆąĖąĮčÅčéčŗčģ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą┐čĆąĖąĄą╝ą░ ąĖ ąĘą░ą┐ąĖčüąĖ ąĄą│ąŠ ą▓ ą┐čĆąĖąĄą╝ąĮčŗą╣ ą▒čāč乥čĆ FIFO SPI. ąóąŠą│ą┤ą░ SPI ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ąĘą░ą┐ąĖčüčī ąĖąĘ DMA ą▓ ą┐ą░ą╝čÅčéčī. ąĪąŠą│ą╗ą░čüąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÄ DMA, čāąĘąĄą╗ DMA čćąĖčéą░ąĄčé čüą╗ąŠą▓ąŠ ąĖąĘ SPI FIFO ą┐čĆąĖąĄą╝ą░, ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĄą│ąŠ ą▓ ą┐ą░ą╝čÅčéčī. ąØąŠą▓čŗąĄ ąĘą░ą┐čĆąŠčüčŗ ą▒čāą┤čāčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčīčüčÅ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčīčüčÅ, ą┐ąŠą║ą░ FIFO ą┐čĆąĖąĄą╝ą░ ąĮąĄ ą┐ąĄčĆąĄčüčéą░ąĮąĄčé ąĘą░ą┐ąŠą╗ąĮčÅčéčīčüčÅ, ą║ąŠą│ą┤ą░ SPI_RWC ąĮąĄ ą┐ąĄčĆąĄčłąĄą╗ ą▓ 0 ą┐čĆąĖ SPI_RXCTL.RWCEN=1.
7. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą▒ąĖčé SPI_TXCTL.TTI, č鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čćč鹥ąĮąĖčÅ DMA ąĖąĘ ą┐ą░ą╝čÅčéąĖ, ą┐ąŠą║ą░ ąĄčēąĄ ąĖą╝ąĄčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą▓ ą║ą░ąĮą░ą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤čĆąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĖ DMA čāąĘąĄą╗ DMA čćąĖčéą░ąĄčé čüą╗ąŠą▓ąŠ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĄą│ąŠ ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤ąŠą║ą░ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ FIFO, ąĖ čĆąĄą│ąĖčüčéčĆ SPI_TWC ąĮąĄ ąŠą▒ąĮčāą╗ąĖą╗čüčÅ ą┐čĆąĖ SPI_TXCTL.TWCEN=1, čüąĖčüč鹥ą╝ą░ SPI ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐ąŠą║ą░ čŹč鹊 ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
8. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ ąŠą▒ą░ ą▒ąĖčéą░ SPI_TXCTL.TTI ąĖ SPI_RXCTL.RTI, č鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čćč鹥ąĮąĖąĄ DMA ąĖąĘ ą┐ą░ą╝čÅčéąĖ. ą×ą┤ąĮą░ą║ąŠ ąĘą┤ąĄčüčī ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄčüč鹊 ą┤ą╗čÅ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ą░ąĮą░ą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą▓ SPI čüą╗ąŠą▓ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ SPI_TWC, ąĄčüą╗ąĖ SPI_TXCTL.TWCEN=1. ą¤čĆąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĖ DMA čāąĘąĄą╗ DMA čćąĖčéą░ąĄčé čüą╗ąŠą▓ąŠ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĄą│ąŠ ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąöą×ą¤ą×ąøąØąśąóąĢąøą¼ąØąÉą» ąśąØążą×ąĀą£ąÉą”ąśą»: ą┐ąŠčüą║ąŠą╗čīą║čā SPI ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, čŹč鹊 ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ąĮą░ ą╗ąĖąĮą║ąĄ SPI. ą¤čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄčēą░čÄčéčüčÅ SPI čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą┐čĆąĖąĄą╝ą░ ą▓ čĆąĄą│ąĖčüčéčĆ FIFO ą┐čĆąĖąĄą╝ą░. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SPI ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ąĘą░ą┐ąĖčüčī ąĖąĘ DMA ą▓ ą┐ą░ą╝čÅčéčī. ą¤čĆąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĖ DMA čāąĘąĄą╗ DMA čćąĖčéą░ąĄčé čüą╗ąŠą▓ąŠ ąĖąĘ FIFO ą┐čĆąĖąĄą╝ą░ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĄą│ąŠ ą▓ ą┐ą░ą╝čÅčéčī. ą¤ąĄčĆąĄą┤ą░čćą░ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčīčüčÅ, ą┐ąŠą║ą░ ąŠą▒ą░ ą║ą░ąĮą░ą╗ą░ - ąĖ ą┐čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ - ą╝ąŠą│čāčé ą┐ąŠą┐ąŠą╗ąĮčÅčéčīčüčÅ ąĮąŠą▓čŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ.
9. ąĢčüą╗ąĖ ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĖąĘ-ąĘą░ ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ DMA, ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ąĘą░ą║ąŠąĮčćą░čéčüčÅ. ąĢčüą╗ąĖ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┐ąŠą╗ąĮąĖčéčüčÅ, č鹊 SPI ąŠčüčéą░ąĮąŠą▓ąĖčé ąĘą░ą┐čĆąŠčüčŗ ąĘą░ą┐ąĖčüąĄą╣ DMA. ąĢčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ SPI_RWC ąĖčüč鹥ą║ą╗ąŠ, č鹊 čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘą░ą┐čĆąŠčüčŗ ąĘą░ą┐ąĖčüąĖ ąŠčüčéą░ąĮąŠą▓čÅčé DMA. ą×ą┤ąĮą░ą║ąŠ čāąČąĄ ąĘą░ą┐ąĖčüą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ, ąĖ ąĘą░ą┐čĆąŠčüčŗ čćč鹥ąĮąĖčÅ ą║ DMA ą┐čĆąŠą┤ąŠą╗ąČą░čéčīčüčÅ, ą┐ąŠą║ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓čŗčćąĖčéčŗą▓ą░čÄčéčüčÅ ąĖąĘ FIFO ą┐čĆąĖąĄą╝ą░.
10. ąŚą░č鹥ą╝ SPI ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ SPI_CLK ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓čŗą┤ą▓ąĖą│ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĮą░čĆčāąČčā č湥čĆąĄąĘ SPI_MOSI ą┐čĆąĖ ą▓ą┤ą▓ąĖą│ą░ąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ ą▓ąĮčāčéčĆčī ąĖąĘ SPI_MISO. ąöą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüą┤ą▓ąĖą│ą░ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ SPI_RFIFO ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čŹč鹊ą│ąŠ ą┐ąĄčĆąĄąĮąŠčüą░. ąöą╗čÅ ą┐ąĄčĆąĄą┤ą░čć ą┤ą░ąĮąĮčŗčģ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ SPI_TFIFO ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐čĆąĖ čüčéą░čĆč鹥 ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąĀąĄąČąĖą╝ DMA Slave. ąŁč鹊čé čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéą░ąĄčé, ą║ąŠą│ą┤ą░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave, ąĖ čüąĖčüč鹥ą╝ą░ DMA čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ. ą¤ąĄčĆąĄčģąŠą┤ čüąĖą│ąĮą░ą╗ą░ ~SPI_SS ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą╗ąŠą│. 0 ą▓čŗąĘąŠą▓ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ. ąśą╗ąĖ ą┐ąĄčĆą▓čŗą╣ ą░ą║čéąĖą▓ąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ SPI_CLK ą▓čŗąĘąŠą▓ąĄčé čüčéą░čĆčé ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖčéą░ SPI_CTL.CPHA. ąĪą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ ąĖą╗ą╗čÄčüčéčĆąĖčĆčāčÄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ SPI ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ DMA ą▓ čĆąĄąČąĖą╝ąĄ SPI slave (ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā čāčüčéčĆąŠą╣čüčéą▓ą░ master). SPI ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą║ą░ąĮą░ą╗ DMA ą┐čĆąĖąĄą╝ą░ ąĖ ą║ą░ąĮą░ą╗ DMA ą┐ąĄčĆąĄą┤ą░čćąĖ.
1. ąŚą░ą┐ąĖčłąĖč鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ DMA, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą║ą░ąĮą░ą╗ SPI DMA, ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ąĄą┤ąĖąĮąĖčåčŗ ą┤ą░ąĮąĮčŗčģ, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠčüčéčāą┐ą░, čüč湥čéčćąĖą║ čüą╗ąŠą▓ ąĖ čé. ą┤.
2. ąŚą░ą┐ąĖčłąĖč鹥 čĆąĄą│ąĖčüčéčĆčŗ SPI_CTL, SPI_RXCTL ąĖ SPI_TXCTL, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čĆąĄąČąĖą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą╗ąĖąĮą║ą░, čćč鹊ą▒čŗ ąŠąĮ čüąŠą▓ą┐ą░ą┤ą░ą╗ čü čĆąĄąČąĖą╝ąŠą╝, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą▓ SPI master.
3. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ (ą▓čŗčüčéą░ą▓ą╗ąĄąĮ SPI_RXCTL.REN), č鹊 ą┐čĆąŠąĖčüčģąŠą┤čÅčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ:
a. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čģąŠą┤ slave select čüčéą░ąĮąĄčé ą░ą║čéąĖą▓ąĮčŗą╝ (ą╗ąŠą│. 0), čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ąĮą░čćąĮąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ SPI_CLK (ą║ąŠč鹊čĆčŗąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé master).
b. ąŚąĮą░č湥ąĮąĖąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüą┤ą▓ąĖą│ą░ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ SPI_RFIFO ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čäčĆąĄą╣ą╝ą░ ą┐čĆąĖąĄą╝ą░.
c. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓ SPI_RFIFO ą┐ąŠčÅą▓ąĖą╗ąĖčüčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, čŹč鹊 ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ąĘą░ą┐ąĖčüčī ąĖąĘ DMA ą▓ ą┐ą░ą╝čÅčéčī.
d. ą¤čĆąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĖ DMA čāąĘąĄą╗ DMA čćąĖčéą░ąĄčé čüą╗ąŠą▓ąŠ ąĖąĘ FIFO ą┐čĆąĖąĄą╝ą░ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĄą│ąŠ ą▓ ą┐ą░ą╝čÅčéčī.
e. ą¤ąŠą║ą░ ą┐ąŠčüčéčāą┐ą░čÄčé ą┤ą░ąĮąĮčŗąĄ ą▓ FIFO ą┐čĆąĖąĄą╝ą░, čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI slave ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ąĘą░ą┐čĆą░čłąĖą▓ą░čéčī DMA ąĘą░ą┐ąĖčüčŗą▓ą░čéčī čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐ą░ą╝čÅčéčī. ąĪąĖčüč鹥ą╝ą░ DMA ą┐čĆąŠą┤ąŠą╗ąČąĖčé čćąĖčéą░čéčī čüą╗ąŠą▓ąŠ ąĖąĘ FIFO ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąĄą│ąŠ ą▓ ą┐ą░ą╝čÅčéčī, ą┐ąŠą║ą░ ąĮąĄ ąŠą▒ąĮčāą╗ąĖčéčüčÅ čüč湥čéčćąĖą║ SPI_RWC. SPI slave ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą┐čĆąĖąĮąĖą╝ą░čéčī čüą╗ąŠą▓ą░ ąĮą░ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ SPI_CLK, ą┐ąŠą║ą░ ą░ą║čéąĖą▓ąĄąĮ ą▓čģąŠą┤ ą▓čŗą▒ąŠčĆą║ąĖ ~SPI_SS (ą╗ąŠą│. 0).
f. ąĢčüą╗ąĖ čüąŠą▒čĆą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ ą║ą░ąĮą░ą╗ąĄ ą┐čĆąĖąĄą╝ą░ ą┐čĆąĄą▓čŗčüčÅčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī, ąĖ čüąĖčüč鹥ą╝ą░ DMA ąĮąĄ čüą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ░čéčī ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗą╣ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ čü ąĮčāąČąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ, čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ą╝ąŠąČąĄčé čüąĮčÅčéčī čüąĖą│ąĮą░ą╗ SPI_RDY. ąŁč鹊 ą┤ą░ąĄčé čüąĖą│ąĮą░ą╗ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ master. ąÜą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ąŠą╗ąĄą╝ SPI_CTL.FCWM. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čüąĮąĖą╝ą░ąĄčéčüčÅ, ą║ą░ą║ č鹊ą╗čīą║ąŠ DMA ąŠą┐čāčüč鹊賹░ąĄčé FIFO ą┐čĆąĖąĄą╝ą░. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ SPI ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒ąĖčé SPI_RXCTL.RDO, čćč鹊ą▒čŗ čĆąĄčłąĖčéčī, ą║ąŠą│ą┤ą░ ą▓čģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ąŠčéą▒čĆąŠčłąĄąĮčŗ ąĖą╗ąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ ą▒čāč乥čĆąĄ FIFO ą┐čĆąĖąĄą╝ą░ (ą║ąŠą│ą┤ą░ ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ SPI_CTL.FCEN).
4. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ (ą▓čŗčüčéą░ą▓ą╗ąĄąĮ SPI_TXCTL.TEN), č鹊 ą┐čĆąŠąĖčüčģąŠą┤čÅčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ:
a. SPI ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čćč鹥ąĮąĖąĄ DMA ąĖąĘ ą┐ą░ą╝čÅčéąĖ.
b. ą¤čĆąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĖ DMA čāąĘąĄą╗ DMA čćąĖčéą░ąĄčé čüą╗ąŠą▓ąŠ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĄą│ąŠ ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ.
c. ąŚą░č鹥ą╝ SPI čćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ DMA ąĖąĘ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĖčģ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąŠąČąĖą┤ą░čÅ ąĘą░ą┐čāčüą║ą░ ąĮąŠą▓ąŠą│ąŠ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ.
d. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čģąŠą┤ slave select čüčéą░ąĮąĄčé ą░ą║čéąĖą▓ąĮčŗą╝, čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ąĮą░čćąĮąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ SPI_CLK.
e. ą¤ąŠą║ą░ ąĄčüčéčī ą╝ąĄčüč鹊 ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ, čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI slave ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ąĘą░ą┐čĆą░čłąĖą▓ą░čéčī čćč鹥ąĮąĖčÅ DMA ąĖąĘ ą┐ą░ą╝čÅčéąĖ. ąĪąĖčüč鹥ą╝ą░ DMA ą┐čĆąŠą┤ąŠą╗ąČąĖčé čćąĖčéą░čéčī čüą╗ąŠą▓ąŠ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąĄą│ąŠ ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐ąŠą║ą░ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüč湥čéčćąĖą║ą░ SPI_TWC ąĮąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ 0. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ SPI slave ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čüą╗ąŠą▓ą░ ą┐ąŠ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ SPI_CLK, ą┐ąŠą║ą░ ą▓čģąŠą┤ ~SPI_SS ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ (ą╗ąŠą│. 0).
f. ąĢčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčüčéą░ą▓čłąĖčģčüčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ą║ą░ąĮą░ą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąĄčĆąĄą╣ą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī, ąĖ DMA ąĮąĄ čüą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ░čéčī ą┐ąŠč鹊ą║ ą┐ąĄčĆąĄą┤ą░čćąĖ čü ąĮčāąČąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ, čāčüčéčĆąŠą╣čüčéą▓ąŠ slave čüąĮąĖą╝ą░ąĄčé čüąĖą│ąĮą░ą╗ SPI_RDY. ąŁč鹊 ą┤ą░ąĄčé čüąĖą│ąĮą░ą╗ čāčüčéčĆąŠą╣čüčéą▓čā master ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā. ąŻčĆąŠą▓ąĄąĮčī ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ąŠą╗ąĄą╝ SPI_CTL.FCWM. ąĪąĖą│ąĮą░ą╗ čüąĮąĖą╝ą░ąĄčéčüčÅ, ą┐ąŠą║ą░ DMA ąĮąĄ ąĮą░ą┐ąŠą╗ąĮąĖčé FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą▒ąĖčé SPI_TXCTL.TDU ąŠą┐čĆąĄą┤ąĄą╗čÅčé čüąŠčüč鹊čÅąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ (ą║ąŠą│ą┤ą░ čüąĮčÅčé SPI_CTL.FCEN).
5. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ ąŠą▒ą░ ą║ą░ąĮą░ą╗ą░ - ąĖ ą┐čĆąĖąĄą╝, ąĖ ą┐ąĄčĆąĄą┤ą░čćą░, č鹊 čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐čĆąŠąĖąĘąŠą╣ą┤čāčé ą┐ąŠčüą╗ąĄ ą┤ąĄą╣čüčéą▓ąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ą¤ąĄčĆąĄą┤ą░čćąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čéčüčÅ, ą┐ąŠą║ą░ ą▓ ąŠą▒ą░ ą║ą░ąĮą░ą╗ą░ - ąĖ ą┐čĆąĖąĄą╝ą░, ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą╝ąŠą│čāčé ą┐ąŠčüčéčāą┐ą░čéčī ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
a. ąĢčüą╗ąĖ ąĘą░ą┐ąŠą╗ąĮąĖčéčüčÅ ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ąĖąĘ-ąĘą░ ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ DMA, č鹊 ąĖąĮč鹥čĆč乥ą╣čü SPI ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ master čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗą▓ąŠą┤ą░ SPI_RDY. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čüąĮąĖą╝ą░ąĄčéčüčÅ, ą┐ąŠą║ą░ DMA ąĮąĄ ąŠą┐čāčüč鹊賹Ėčé FIFO ą┐čĆąĖąĄą╝ą░. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčé SPI_RXCTL.RDO, čćč鹊ą▒čŗ čĆąĄčłąĖčéčī, ą┤ąŠą╗ąČąĮčŗ ą╗ąĖ ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗčéčī ąŠčéą▒čĆąŠčłąĄąĮčŗ ąĖą╗ąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ FIFO ą┐čĆąĖąĄą╝ą░ (ą║ąŠą│ą┤ą░ čüąĮčÅčé SPI_CTL.FCEN).
b. ąĢčüą╗ąĖ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮ, SPI ąŠčüčéą░ąĮąŠą▓ąĖčé ąĘą░ą┐čĆąŠčüčŗ ąĘą░ą┐ąĖčüąĖ DMA, ą┐ąŠą║ą░ ą║ą░ąĮą░ą╗ ąĮąĄ ąŠčćąĖčüčéąĖčéčüčÅ.
c. ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąŠą▒ą╗ąĄą╝ą░ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą▓ ą║ą░ąĮą░ą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčé čāčüčéčĆąŠą╣čüčéą▓ąŠ master čüąĮčÅčéąĖąĄą╝ čüąĖą│ąĮą░ą╗ą░ SPI_RDY, ą║ąŠą│ą┤ą░ DMA ąĘą░ą┐ąŠą╗ąĮčÅąĄčé FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ąĖčé SPI_TXCTL.TDU čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüąŠčüč鹊čÅąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ (ą║ąŠą│ą┤ą░ čüąĮčÅčé SPI_CTL.FCEN).
[SPI0]
| ąĪąĖą│ąĮą░ą╗ |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ |
ą¤ąŠčĆčé |
SPI0_CLK
|
SPI0 Clock |
PB_00 |
| PC_04 |
| SPI0_D2 |
SPI0 Data 2 |
PB_03 |
| PC_08 |
| SPI0_D3 |
SPI0 Data 3 |
PB_07 |
| PC_09 |
| SPI0_MISO |
SPI0 Master In, Slave Out |
PB_01 |
| PC_06 |
| SPI0_MOSI |
SPI0 Master Out, Slave In |
PB_02 |
| PC_07 |
| SPI0_RDY |
SPI0 Ready |
PA_06 |
| SPI0_SEL1 |
SPI0 Slave Select Output 1 |
PA_05 |
| SPI0_SEL2 |
SPI0 Slave Select Output 2 |
PA_06 |
| SPI0_SEL3 |
SPI0 Slave Select Output 3 |
PC_11 |
| SPI0_SEL4 |
SPI0 Slave Select Output 4 |
PB_04 |
| SPI0_SEL5 |
SPI0 Slave Select Output 5 |
PB_05 |
| SPI0_SEL6 |
SPI0 Slave Select Output 6 |
PB_06 |
| SPI0_SS |
SPI0 Slave Select Input |
PA_05 |
[SPI1]
| ąĪąĖą│ąĮą░ą╗ |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ |
ą¤ąŠčĆčé |
| SPI1_CLK |
SPI1 Clock |
PA_00 |
| SPI1_MISO |
SPI1 Master In, Slave Out |
PA_01 |
| SPI1_MOSI |
SPI1 Master Out, Slave In |
PA_02 |
| SPI1_RDY |
SPI1 Ready |
PA_03 |
| SPI1_SEL1 |
SPI1 Slave Select Output 1 |
PA_04 |
| SPI1_SEL2 |
SPI1 Slave Select Output 2 |
PA_03 |
| SPI1_SEL3 |
SPI1 Slave Select Output 3 |
PC_10 |
| SPI1_SEL4 |
SPI1 Slave Select Output 4 |
PA_14 |
| SPI1_SS |
SPI1 Slave Select Input |
PA_04 |
[SPI2]
| ąĪąĖą│ąĮą░ą╗ |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ |
ą¤ąŠčĆčé |
| SPI2_CLK |
SPI2 Clock |
PB_10 |
| SPI2_D2 |
SPI2 Data 2 |
PB_13 |
| SPI2_D3 |
SPI2 Data 3 |
PB_14 |
| SPI2_MISO |
SPI2 Master In, Slave Out |
PB_11 |
| SPI2_MOSI |
SPI2 Master Out, Slave In |
PB_12 |
| SPI2_RDY |
SPI2 Ready |
PA_04 |
| SPI2_SEL1 |
SPI2 Slave Select Output 1 |
PB_15 |
| SPI2_SEL2 |
SPI2 Slave Select Output 2 |
PB_08 |
| SPI2_SEL3 |
SPI2 Slave Select Output 3 |
PB_09 |
| SPI2_SS |
SPI2 Slave Select Input |
PB_15 |
[ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ SPI]
ą×ą▒čēąĖą╣ čüą┐ąĖčüąŠą║ čĆąĄą│ąĖčüčéčĆąŠą▓ SPI ADSP-BF70x čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 29-1. ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ R/W ą▓ąŠąĘą╗ąĄ ąĖą╝ąĄąĮąĖ ą┐ąŠą╗čÅ ąĖą╗ąĖ ą▒ąĖčéą░ ąŠąĘąĮą░čćą░ąĄčé ą┤ąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī, R ąŠąĘąĮą░čćą░ąĄčé ą┤ąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ, W1C ąŠąĘąĮą░čćą░ąĄčé ą┤ąŠčüčéčāą┐ čéąĖą┐ą░ "ąĘą░ą┐ąĖčüčī 1 ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ", R/NW ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▒ąĖčé ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī, ąĮąŠ ąĮąĄą╗čīąĘčÅ ąĘą░ą┐ąĖčüą░čéčī, W1S ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ ą╝ą░čüą║ąĖ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ čŹč鹊čé ą▒ąĖčé 1. ąĪąĄčĆčŗą╝ čåą▓ąĄč鹊ą╝ ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ (ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ) ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆąŠą▓, čåąĖčäčĆą░ą╝ąĖ 0 ąĖ 1 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▒ąĖčéą░ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ (ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ) ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ąĀąĄą│ąĖčüčéčĆ SPI_CLK ą▓čŗą▒ąĖčĆą░ąĄčé čüą║ąŠčĆąŠčüčéčī čĆą░ą▒ąŠčéčŗ (baud rate) ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ SPI. ą¤ą░čĆą░ą╝ąĄčéčĆ ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ ąĘą░ą┤ą░ąĄčé čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖą╣ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (SPI clock), ą┐čĆąĖą▓čÅąĘčŗą▓ą░čÅčüčī ą║ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (SCLK0).
ąĀąĖčü. 29-20. ąĀąĄą│ąĖčüčéčĆ SPI_CLK.
ą¤ąŠą╗ąĄ ą▒ąĖčé BAUD čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéčī SPI ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąŠą╣:
BAUD = (SCLK0 / SPI Clock) - 1
ąĀąĄą│ąĖčüčéčĆ SPI_CTL čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā SPI ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ąŠą▓, ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ąĖ ąŠą┐ąĄčĆą░čåąĖą╣ čü ą▒čāč乥čĆą░ą╝ąĖ.
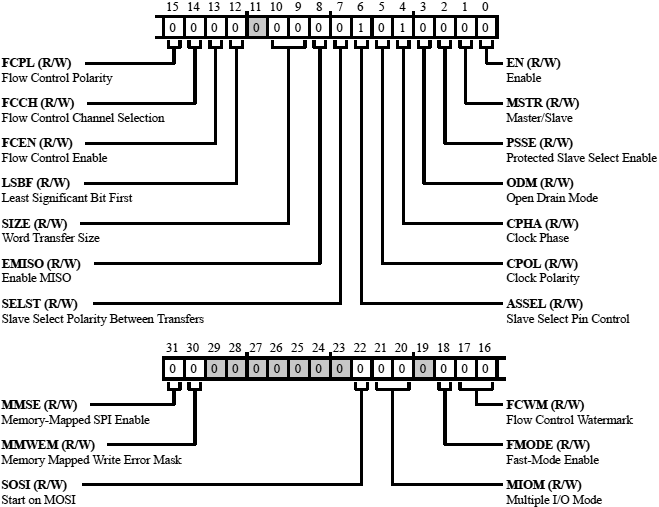
ąĀąĖčü. 29-21. ąĀąĄą│ąĖčüčéčĆ SPI_CTL.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 31 (R/W) |
MMSE |
Memory-Mapped SPI Enable. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąŠą▒ą╝ąĄąĮ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą┐ą░ą╝čÅčéąĖ SPI ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆčāąĄčéčüčÅ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 čŹčéą░ ą▓ąĮąĄčłąĮčÅčÅ ą┐ą░ą╝čÅčéčī SPI čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┤ąŠčüčéčāą┐ąĮąŠą╣ č湥čĆąĄąĘ ą┐čĆčÅą╝ąŠąĄ čćč鹥ąĮąĖąĄ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (memory-mapped read access). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąŠą│ą┤ą░ čéą░ą║ąŠą╣ ą┤ąŠčüčéčāą┐ čĆą░ąĘčĆąĄčłąĄąĮ, ą┐ąŠą┐čŗčéą║ąĖ ąŠą▒ą╝ąĄąĮą░ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ SPI čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▒čāą┤čāčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ, ąĖ ą▒čāą┤čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčłąĖą▒ą║ąĖ čäą░ą▒čĆąĖą║ąĖ ą┐čĆąĖąĄą╝ą░. ąóčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą▓ą║ą╗čÄčćą░čÄčé ą╗čÄą▒ąŠą╣ ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ą▒čāč乥čĆą░ą╝ FIFO TX ąĖ RX, ąĮąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą║ąĄą╝ čŹč鹊čé ą┤ąŠčüčéčāą┐ ą▒čŗą╗ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮ - DMA ąĖą╗ąĖ MMR-ą┤ąŠčüčéčāą┐ąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮ ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐čĆąŠąĘčĆą░čćąĮčŗą╣ ą┤ąŠčüčéčāą┐ čü ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ ą░ą┤čĆąĄčüąĮąŠą╝čā ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓čā čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮ ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐čĆąŠąĘčĆą░čćąĮčŗą╣ ą┤ąŠčüčéčāą┐ čü ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ ą░ą┤čĆąĄčüąĮąŠą╝čā ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓čā čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ SPI. |
| 30 (R/W) |
MMWEM |
Memory Mapped Write Error Mask. ąŁč鹊čé ą▒ąĖčé čāą║ą░ąĘčŗą▓ą░ąĄčé, ą▒čāą┤ąĄčé ą╗ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮ ąŠčéą▓ąĄčé ąŠčłąĖą▒ą║ąĖ čäą░ą▒čĆąĖą║ąĄ ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ąĘą░ą┐ąĖčüąĖ ą▓ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┤ą╗čÅ memory-mapped čćč鹥ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ SPI. |
| 0 |
ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ąŠčłąĖą▒ą║ą░ ąĮą░ ą┐ąŠą┐čŗčéą║ąĖ ąĘą░ą┐ąĖčüąĖ memory-mapped ą┐ą░ą╝čÅčéąĖ SPI. |
| 1 |
ą×čéą▓ąĄčé ąŠčłąĖą▒ą║ąĖ ą┐ąŠą┐čŗčéą║ąĖ ą┤ąŠčüčéčāą┐ą░ ąĘą░ą┐ąĖčüąĖ ą║ memory-mapped ą┐ą░ą╝čÅčéąĖ SPI ą╝ą░čüą║ąĖčĆčāąĄčéčüčÅ (ąŠąĮ ąĮąĄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ). |
| 22 (R/W) |
SOSI |
Start on MOSI. ąĀą░ą▒ąŠčéą░ ą▒ąĖčéą░ SOSI ą┤ąŠą┐čāčüčéąĖą╝ą░ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ SPI_CTL.MIOM ą╗ąĖą▒ąŠ ą┤ą╗čÅ DIOM (Dual I/O Mode) ąĖą╗ąĖ QIOM (Quad I/O Mode), ąĖ čŹč鹊čé ą▒ąĖčé ą▓čŗą▒ąĖčĆą░ąĄčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą▓čŗą▓ąŠą┤ ąĖ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆą░ąĘčĆčÅą┤ąŠą▓ ą▓ čŹčéąĖčģ čĆąĄąČąĖą╝ą░čģ.
ąÆ DIOM ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (SPI_CTL.SOSI=0) ą┐ąŠčüčŗą╗ą░ąĄčé ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé č湥čĆąĄąĘ SPI_MISO, ąĖ ą▓č鹊čĆąŠą╣ ą▒ąĖčé č湥čĆąĄąĘ SPI_MOSI. ąÆ QIOM ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ SPI ą┐ąŠčüčŗą╗ą░ąĄčé ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé č湥čĆąĄąĘ SPI_D3, ą▓č鹊čĆąŠą╣ č湥čĆąĄąĘ SPI_D2, čéčĆąĄčéąĖą╣ č湥čĆąĄąĘ SPI_MISO, ąĖ č湥čéą▓ąĄčĆčéčŗą╣ č湥čĆąĄąĘ SPI_MOSI. ąŁč鹊čé ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ ąĮą░ ąŠą▒čĆą░čéąĮčŗą╣ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ SOSI. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, SPI ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SPI_MOSI. ąÜą░ą║ąŠą╣ ą▒čāą┤ąĄčé ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé (MSB ąĖą╗ąĖ LSB), ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ SPI_CTL.LSBF. |
| 0 |
ąØą░čćą░ą╗ąŠ ą▒ąĖčé ąĮą░ MISO (ą▓ čĆąĄąČąĖą╝ąĄ DIOM), ąĖą╗ąĖ ąĮą░čćą░ą╗ąŠ ąĮą░ SPI_D3 (QIOM). |
| 1 |
ąØą░čćą░ą╗ąŠ ąĮą░ MOSI. |
| 21:20 (R/W) |
MIOM |
Multiple I/O Mode. ąæąĖčé MIOM čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā SPI ą▓ dual I/O mode (DIOM) ąĖą╗ąĖ quad I/O mode (QIOM). ąŁčéąĖ ą▒ąĖčéčŗ ą╝ąŠąČąĮąŠ ą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI ąĘą░ą┐čĆąĄčēąĄąĮ (SPI_CTL.EN =0). |
| 0 |
ąØąĄčé ą╝ąĮąŠą│ąŠą▓čŗą▓ąŠą┤ąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░. |
| 1 |
ąĀą░ą▒ąŠčéą░ąĄčé DIOM. |
| 2 |
ąĀą░ą▒ąŠčéą░ąĄčé QIOM. |
| 3 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
| 18 (R/W) |
FMODE |
Fast-Mode Enable. ąæąĖčé FMODE čĆą░ąĘčĆąĄčłą░ąĄčé ą▒čŗčüčéčĆčŗą╣ čĆąĄąČąĖą╝ ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ SPI. ąĀą░ą▒ąŠčéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą▒čŗčüčéčĆąŠą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄ čāčüą║ąŠčĆčÅąĄčéčüčÅ ąĖ čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ ą▓ ąŠą▒čŗčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 17:16 (R/W) |
FCWM |
Flow Control Watermark (ą╝ąĄčéą║ą░ ą┐čĆąĄą┤ąĄą╗ą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ FIFO ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ). ąæąĖčéčŗ FCWM ą▓čŗą▒ąĖčĆą░čÄčé čāčĆąŠą▓ąĄąĮčī ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ FIFO ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą│čĆą░ąĮąĖčåčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ (ą▒čāč乥čĆ SPI_TFIFO) ąĖą╗ąĖ ą║ą░ąĮą░ą╗ą░ ą┐čĆąĖąĄą╝ą░ (ą▒čāč乥čĆ SPI_RFIFO), ą┐čĆąĄą▓čŗčłąĄąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą▓čŗąĘčŗą▓ą░ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ (flow control). ąŁčéąĖ ą▒ąĖčéčŗ ą┐čĆąĖą╝ąĄąĮąĖą╝čŗ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (slave, SPI_CTL.MSTR=0), ąĖ čĆą░ąĘčĆąĄčłąĄąĮ flow control (SPI_CTL.FCEN=1). ąÜąŠą│ą┤ą░ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčéčüčÅ čāčüą╗ąŠą▓ąĖąĄ watermark, čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI slave čüąĮąĖą╝ą░ąĄčé čüąĖą│ąĮą░ą╗ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ SPI_RDY. |
| 0 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĖą╗ąĖ RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ. |
| 1 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 75% ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ, ąĖą╗ąĖ RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ąĮą░ 75% ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ. |
| 2 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 50% ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ, ąĖą╗ąĖ RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ąĮą░ 50% ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ. |
| 3 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
| 15 (R/W) |
FCPL |
Flow Control Polarity. ąŁč鹊čé ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ SPI_RDY, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control). ąÜąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ SPI_RDY ą░ą║čéąĖą▓ąĄąĮ, č鹊 SPI slave ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą│ąŠč鹊ą▓ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ. |
| 0 |
ąøąŠą│. 0 ąĮą░ SPI_RDY ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą│ąŠč鹊ą▓ąĮąŠčüčéčī ą║ ąŠą▒ą╝ąĄąĮčā. |
| 1 |
ąøąŠą│. 1 ąĮą░ SPI_RDY ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą│ąŠč鹊ą▓ąĮąŠčüčéčī ą║ ąŠą▒ą╝ąĄąĮčā. |
| 14 (R/W) |
FCCH |
Flow Control Channel Selection. ąæąĖčé FCCH ą▓čŗą▒ąĖčĆą░ąĄčé, ąĮą░ ą║ą░ą║ąŠą╝ ą║ą░ąĮą░ą╗ąĄ čĆą░ą▒ąŠčéą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ - ąĮą░ ą║ą░ąĮą░ą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ (ą▒čāč乥čĆ SPI_TFIFO) ąĖą╗ąĖ ąĮą░ ą║ą░ąĮą░ą╗ąĄ ą┐čĆąĖąĄą╝ą░ (ą▒čāč乥čĆ SPI_RFIFO). ąŁč鹊čé ą▒ąĖčé čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĖ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control). |
| 0 |
Flow control čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą▒čāč乥čĆąĄ RX. |
| 1 |
Flow control čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą▒čāč乥čĆąĄ TX. |
| 13 (R/W) |
FCEN |
Flow Control Enable. ąæąĖčé FCEN čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ SPI. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąĄą┤ą╗ąĄąĮąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā slave ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ąĖąĮč鹥čĆč乥ą╣čü ą▒čŗčüčéčĆčŗčģ čāčüčéčĆąŠą╣čüčéą▓ master. ąæąĖčé FCEN čāą┐čĆą░ą▓ą╗čÅąĄčé čĆą░ą▒ąŠč鹊ą╣ ą▓čŗą▓ąŠą┤ą░ SPI_RDY. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮą░ čĆą░ą▒ąŠčéčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ ą▓ą╗ąĖčÅčÄčé ą▒ąĖčéčŗ SPI_CTL.FCCH, SPI_CTL.FCPL ąĖ SPI_CTL.FCWM. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 12 (R/W) |
LSBF |
Least Significant Bit First. ąæąĖčé LSBF ą▓čŗą▒ąĖčĆą░ąĄčé, ą▓ ą║ą░ą║ąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ - ą║ąŠą│ą┤ą░ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé (LSB) ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝ (č乊čĆą╝ą░čé little endian), ąĖą╗ąĖ ą║ąŠą│ą┤ą░ čüčéą░čĆčłąĖą╣ ą▒ąĖčé (MSB) ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝ (big endian). ąæąĖčé LSBF ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ SPI ąĘą░ą┐čĆąĄčēąĄąĮ. |
| 0 |
ą¤ąĄčĆą▓čŗą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ/ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ MSB (big endian). |
| 1 |
ą¤ąĄčĆą▓čŗą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ/ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ LSB (little endian). |
| 10:9 (R/W) |
SIZE |
Word Transfer Size. ąæąĖčéčŗ SIZE ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čĆą░ąĘą╝ąĄčĆ ąĄą┤ąĖąĮąĖčåčŗ ą┤ą░ąĮąĮčŗčģ (čüą╗ąŠą▓ą░, ąĖą╗ąĖ čäčĆąĄą╣ą╝ą░). ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĖ master ąĖ slave ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░. ąæąĖčéčŗ SIZE ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ SPI ąĘą░ą┐čĆąĄčēąĄąĮ (SPI_CTL.EN=0). |
| 0 |
ąĀą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ 8 ą▒ąĖčé (1 ą▒ą░ą╣čé). |
| 1 |
ąĀą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ 16 ą▒ąĖčé (2 ą▒ą░ą╣čéą░). |
| 2 |
ąĀą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ 32 ą▒ąĖčéą░ (4 ą▒ą░ą╣čéą░). |
| 3 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
| 8 (R/W) |
EMISO |
Enable MISO. ąæąĖčé EMISO čĆą░ąĘčĆąĄčłą░ąĄčé čĆąĄąČąĖą╝ master-in-slave-out (MISO). ąŁč鹊čé čĆąĄąČąĖą╝ ą┐čĆąĖą╝ąĄąĮąĖą╝ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ slave. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 7 (R/W) |
SELST |
Slave Select Polarity Between Transfers. ąæąĖčé SELST ą▓čŗą▒ąĖčĆą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ (ą┐ąŠą╗čÅčĆąĮąŠčüčéčī) ą▓čŗą▓ąŠą┤ą░ ~SPI_SEL[n] ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ SPI, ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master, ąĖ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▒ąŠčĆą║ąŠą╣ slave select (SPI_CTL.ASSEL=1). ąÆ čĆąĄąČąĖą╝ąĄ slave čŹč鹊čé ą▒ąĖčé ą▓ą╗ąĖčÅąĄčé ąĮą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą╗ą╗ąĖąĘąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_STAT.TC) ąĖ ąŠčłąĖą▒ą║ąĖ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ (SPI_STAT.TUR). |
| 0 |
ąĪąĮčÅčéčī čüąĖą│ąĮą░ą╗ slave select (ą╗ąŠą│. 1). |
| 1 |
ąŻčüčéą░ąĮąŠą▓ąĖčéčī čüąĖą│ąĮą░ą╗ slave select (ą╗ąŠą│. 0). |
| 6 (R/W) |
ASSEL |
Slave Select Pin Control. ąæąĖčé ASSEL ą▓čŗą▒ąĖčĆą░ąĄčé, ą▒čāą┤ąĄčé ą╗ąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ SPI čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą▓čŗą▓ąŠą┤ ~SPI_SEL[n] (ąĖą│ąĮąŠčĆąĖčĆčāčÅ ą▒ąĖčéčŗ SPI_SLVSEL.SSEL1 .. SPI_SLVSEL.SSEL7), ąĖą╗ąĖ ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčé ą▓čŗčģąŠą┤ąŠą▓ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ~SPI_SEL[n]. ąŁčéą░ čäčāąĮą║čåąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master.
ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą▓čŗą▓ąŠą┤čŗ ~SPI_SEL[n] čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čć, ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ SPI_CTL.SELST.
ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą▓čŗą▓ąŠą┤ SPI_SEL[n] ą▓čŗą▓ąŠą┤ąĖčé ąĘąĮą░č湥ąĮąĖąĄ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠąĄ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▒ąĖčéą░ą╝ąĖ slave select, ąĖ ą┐ąŠčŹč鹊ą╝čā čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ ą╝ąŠą│čāčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ ą╗čÄą▒ąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ (ą┤ą░ąČąĄ ą░ą║čéąĖą▓ąĮąŠą╝) ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ. |
| 0 |
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ slave select. |
| 1 |
ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ slave select. |
| 5 (R/W) |
CPOL |
Clock Polarity. ąæąĖčé CPOL ą▓čŗą▒ąĖčĆą░ąĄčé, ą║ą░ą║ąŠą╣ ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čéą░ą║č鹊ą▓ SPI (SPI_CLK), ą╗ąŠą│. 0 ąĖą╗ąĖ ą╗ąŠą│. 1. ąæąĖčé CPOL ą▓ą╝ąĄčüč鹥 čü ą▒ąĖč鹊ą╝ SPI_CTL.CPHA ą▓čŗą▒ąĖčĆą░ąĄčé č乊čĆą╝ą░čé čäčĆąĄą╣ą╝ą░, čé. ąĄ. čäą░ąĘčā ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┤ą░ąĮąĮčŗčģ. ąŁčéąĖ ą▒ąĖčéčŗ ą╝ąŠąČąĮąŠ ą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI ąĘą░ą┐čĆąĄčēąĄąĮ. |
| 0 |
ąŻ čüąĖą│ąĮą░ą╗ą░ SPI_CLK ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1. |
| 1 |
ąŻ čüąĖą│ąĮą░ą╗ą░ SPI_CLK ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. |
| 4 (R/W) |
CPHA |
Clock Phase. ąæąĖčé CPHA ą▓čŗą▒ąĖčĆą░ąĄčé, ą║ą░ą║ ą┤ąŠą╗ąČąĮčŗ ąĮą░čćą░čéčī ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ čéą░ą║čéčŗ SPI (SPI_CLK) ąŠčé ąĮą░čćą░ą╗ą░ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ąŠčé čüąĄčĆąĄą┤ąĖąĮčŗ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ. ąæąĖčé CPHA ą▓ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü ą▒ąĖč鹊ą╝ SPI_CTL.CPOL ąĘą░ą┤ą░čÄčé čäą░ąĘčā ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▓ąŠą┤ą░ čéą░ą║č鹊ą▓ SPI_CLK. ąŁčéąĖ ą▒ąĖčéčŗ ą╝ąŠąČąĮąŠ ą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI ąĘą░ą┐čĆąĄčēąĄąĮ. |
| 0 |
SPI_CLK ąĮą░čćąĖąĮą░ąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ąŠčé čüąĄčĆąĄą┤ąĖąĮčŗ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ąĖčéą░. |
| 1 |
SPI_CLK ąĮą░čćąĖąĮą░ąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ąŠčé ąĮą░čćą░ą╗ą░ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ąĖčéą░. |
| 3 (R/W) |
ODM |
Open Drain Mode. ąæąĖčé ODM ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą▓čŗą▓ąŠą┤čŗ ą▓čŗčģąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ (SPI_MOSI ąĖ SPI_MISO) ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą╗ą╗ąĄą║č鹊čĆąŠą╝. ąŁč鹊čé čĆąĄąČąĖą╝ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą║ąŠąĮčäą╗ąĖą║čé, čüą║ą▓ąŠąĘąĮčŗąĄ č鹊ą║ąĖ ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠąĄ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čĆą░ą▒ąŠčéą░ ą▓ ąŠą║čĆčāąČąĄąĮąĖąĖ multi-master ąĖą╗ąĖ multi-slave SPI. ąÜąŠą│ą┤ą░ ODM čĆą░ąĘčĆąĄčłąĄąĮ, ąĖ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master, č鹊 ą▓čŗčģąŠą┤ SPI_MOSI ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ąŠčéą║ą╗čÄč湥ąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąĮą░ MOSI ą┐ąŠčüčéčāą┐ą░ąĄčé ą╗ąŠą│. 1. ąÆčŗą▓ąŠą┤ SPI_MOSI ąĮąĄ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖ ą▓čŗą▓ąŠą┤ąĄ ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ ODM čĆą░ąĘčĆąĄčłąĄąĮ, ąĖ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ slave, č鹊 ą▓čŗą▓ąŠą┤ SPI_MISO ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ (ąŠčéą║ą╗čÄč湥ąĮąĮąŠąĄ) čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąĮą░ ąĮąĄą│ąŠ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ą╗ąŠą│. 1. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĄčĆčģąĮąĖą╣ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ (pull-up) ąĖ ą┤ą╗čÅ SPI_MOSI, ąĖ ą┤ą╗čÅ SPI_MISO, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ ą▒ąĖčé ODM. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 2 (R/W) |
PSSE |
Protected Slave Select Enable. ąæąĖčé PSSE čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤čā ~SPI_SS ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī ą▓čģąŠą┤ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą▓ ąŠą║čĆčāąČąĄąĮąĖąĖ multi-master, ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master. ąĢčüą╗ąĖ ą║ą░ą║ąŠąĄ-č鹊 ą┤čĆčāą│ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čüąĖčüč鹥ą╝ąĄ ą▓čŗčüčéą░ą▓ą╗čÅąĄčé ą▓čŗą▓ąŠą┤ ~SPI_SS, ą║ą╗賹ȹ░ SPI čĆą░ąĘčĆąĄčłąĄąĮ ą║ą░ą║ master (ąĖ PSSE čĆą░ąĘčĆąĄčłąĄąĮ), čŹč鹊 čāčüą╗ąŠą▓ąĖąĄ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÄ ąŠčłąĖą▒ą║ąĖ čĆąĄąČąĖą╝ą░ (mode fault error). |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 1 (R/W) |
MSTR |
Master/Slave. ąæąĖčé MSTR ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé SPI ą╝ąĄąČą┤čā čĆąĄąČąĖą╝ąŠą╝ master ąĖ čĆąĄąČąĖą╝ąŠą╝ slave. ąŁč鹊čé ą▒ąĖčé ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI ąĘą░ą┐čĆąĄčēąĄąĮ. |
| 0 |
Slave. |
| 1 |
Master. |
| 0 (R/W) |
EN |
Enable. ąæąĖčé EN čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā SPI. |
| 0 |
ąŚą░ą┐čĆąĄčé ą╝ąŠą┤čāą╗čÅ SPI. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ. |
ąĀąĄą│ąĖčüčéčĆ SPI_DLY ą▓čŗą▒ąĖčĆą░ąĄčé ąĘą░ą┤ąĄčƹȹ║čā ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ ąĖ ąĖąĮč鹥čĆą▓ą░ą╗čŗ lead/lag ą╝ąĄąČą┤čā čüąĖą│ąĮą░ą╗ą░ą╝ąĖ slave select ąĖ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ čéą░ą║č鹊ą▓ SPI.

ąĀąĖčü. 29-22. ąĀąĄą│ąĖčüčéčĆ SPI_DLY.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 9 (R/W) |
LAGX |
Extended SPI Clock Lag Control. ąæąĖčé LAGX čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čüčéą░ą▓ą║čā ąŠą┤ąĮąŠą│ąŠ čéą░ą║čéą░ SPI_CLK ąĘą░ą┤ąĄčƹȹ║ąĖ (čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ lag) ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą░ą║čéąĖą▓ą░čåąĖąĄą╣ slave select (~SPI_SEL[n]) ąĖ ą┐ąĄčĆą▓čŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ čéą░ą║č鹊ą▓ SPI. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 8 (R/W) |
LEADX |
Extended SPI Clock Lead Control. ąæąĖčé LEADX čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čüčéą░ą▓ą║čā ąŠą┤ąĮąŠą│ąŠ čéą░ą║čéą░ SPI_CLK ąĘą░ą┤ąĄčƹȹ║ąĖ (čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ lead) ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĄą╣ slave select (~SPI_SEL[n]) ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ čéą░ą║č鹊ą▓ SPI. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 7:0 (R/W) |
STOP |
Transfer Delay Time in Multiples of SPI Clock Period. ąæąĖčéčŗ STOP ą▓čŗą▒ąĖčĆą░čÄčé ąĘą░ą┤ąĄčƹȹ║čā (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ stop-ą▒ąĖč鹊ą▓, čāą╝ąĮąŠąČąĄąĮąĮąŠąĄ ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čéą░ą║č鹊ą▓ SPI) ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ SPI. ąŚą░ą┤ąĄčƹȹ║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čŹč鹊 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĄąĮąĖčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ SPI (ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 1 ą▒ąĖčéą░). ąæąĖčéčŗ STOP ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ ąĄčēąĄ ą╝ąĄąĮčīčłąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćąĖčéčüčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ (continuous operation, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĄčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ stop-ą▒ąĖč鹊ą▓ =0). |
ąĀąĄą│ąĖčüčéčĆ SPI_ILAT ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčé (latch) čäą╗ą░ą│ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čüčéą░ą▓čÅ ą▓ ąŠč湥čĆąĄą┤čī ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÜąŠą│ą┤ą░ čāčüą╗ąŠą▓ąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▒ąĖč鹊ą╝ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_STAT, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ (ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ) ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_IMSK, č鹊 SPI ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčé ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT.

ąĀąĖčü. 29-23. ąĀąĄą│ąĖčüčéčĆ SPI_ILAT.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 11 (R/NW) |
TF |
Transmit Finish Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 10 (R/NW) |
RF |
Receive Finish Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 9 (R/NW) |
TS |
Transmit Start Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 8 (R/NW) |
RS |
Receive Start Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 7 (R/NW) |
MF |
Mode Fault Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ąŠčłąĖą▒ą║ąĖ čĆąĄąČąĖą╝ą░. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 6 (R/NW) |
TC |
Transmit Collision Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą║ąŠą╗ą╗ąĖąĘąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 5 (R/NW) |
TUR |
Transmit Underrun Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 4 (R/NW) |
ROR |
Receive Overrun Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 2 (R/NW) |
TUWM |
Transmit Urgent Watermark Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
| 1 (R/NW) |
RUWM |
Receive Urgent Watermark Interrupt Latch. ążą╗ą░ą│ ąĘą░čēąĄą╗ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ. |
| 1 |
ąŚą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. |
ąĀąĄą│ąĖčüčéčĆ SPI_ILAT_CLR čĆą░ąĘčĆąĄčłą░ąĄčé ąŠčćąĖčüčéą║čā ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé ą╝ą░čüą║ąĖ čĆąĄą│ąĖčüčéčĆą░ SPI_ILAT ą▒ąĄąĘ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ čüąŠčüč鹊čÅąĮąĖąĄ ą┤čĆčāą│ąĖčģ ą▒ąĖčé ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ. ąöą╗čÅ ąŠčćąĖčüčéą║ąĖ ąĮčāąČąĮąŠą│ąŠ ą▒ąĖčéą░ SPI_ILAT ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠą┐ąĄčĆą░čåąĖčÄ write-1-to-clear (W1C, ąĘą░ą┐ąĖčüčī ąĄą┤ąĖąĮąĖčćą║ąĖ ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ) ąĮą░ą┤ čĆąĄą│ąĖčüčéčĆąŠą╝ SPI_ILAT_CLR.

ąĀąĖčü. 29-24. ąĀąĄą│ąĖčüčéčĆ SPI_ILAT_CLR.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 11 (R/W1C) |
TF |
Clear Transmit Finish. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 10 (R/W1C) |
RF |
Clear Receive Finish. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 9 (R/W1C) |
TS |
Clear Transmit Start. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 8 (R/W1C) |
RS |
Clear Receive Start. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 7 (R/W1C) |
MF |
Clear Mode Fault. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 6 (R/W1C) |
TC |
Clear Transmit Collision. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 5 (R/W1C) |
TUR |
Clear Transmit Underrun. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 4 (R/W1C) |
ROR |
Clear Receive Overrun. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 2 (R/W1C) |
TUWM |
Clear Transmit Urgent Watermark. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 1 (R/W1C) |
RUWM |
Clear Receive Urgent Watermark. ą×čćąĖčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT. |
| 0 |
ąØąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
ąĀąĄą│ąĖčüčéčĆ SPI_IMSK ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé (čĆą░ąĘčĆąĄčłą░ąĄčé) ąĖą╗ąĖ ą╝ą░čüą║ąĖčĆčāąĄčé (ąĘą░ą┐čĆąĄčēą░ąĄčé) ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SPI. ąÜąŠą│ą┤ą░ čāčüą╗ąŠą▓ąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▒ąĖč鹊ą╝ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_STAT, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_IMSK, č鹊 SPI ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčé ą▒ąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT, čüčéą░ą▓čÅ ą▓ ąŠč湥čĆąĄą┤čī ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░/ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ) ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮčŗ (ąĘą░ą┐čĆąĄčēąĄąĮčŗ), ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ąŠ ą▓čüąĄčģ ą▒ąĖčéą░čģ čĆąĄą│ąĖčüčéčĆą░ SPI_IMSK ąĘą░ą┐ąĖčüą░ąĮčŗ ąĮčāą╗ąĖ.

ąĀąĖčü. 29-25. ąĀąĄą│ąĖčüčéčĆ SPI_IMSK.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 11 (R/NW) |
TF |
Transmit Finish. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 10 (R/NW) |
RF |
Receive Finish. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 9 (R/NW) |
TS |
Transmit Start. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 8 (R/NW) |
RS |
Receive Start. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 7 (R/NW) |
MF |
Mode Fault. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ čĆąĄąČąĖą╝ą░. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 6 (R/NW) |
TC |
Transmit Collision. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ąŠą╗ą╗ąĖąĘąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 5 (R/NW) |
TUR |
Transmit Underrun. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 4 (R/NW) |
ROR |
Receive Overrun. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 2 (R/NW) |
TUWM |
Transmit Urgent Watermark. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 (R/NW) |
RUWM |
Receive Urgent Watermark. ąĀą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąŚą░ą┐čĆąĄčēą░ąĄčé (ą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 1 |
ąĀą░ąĘčĆąĄčłą░ąĄčé (ą┤ąĄą╝ą░čüą║ąĖčĆčāąĄčé) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
ąĀąĄą│ąĖčüčéčĆ SPI_IMSK_CLR čĆą░ąĘčĆąĄčłą░ąĄčé ąŠčćąĖčüčéą║čā ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_IMSK ą▒ąĄąĘ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠą┐ąĄčĆą░čåąĖčÄ write-1-to-clear (W1C, ąĘą░ą┐ąĖčüčī ąĄą┤ąĖąĮąĖčåčŗ ą▓ ą▒ąĖčé ą┤ą╗čÅ ąĄą│ąŠ ąŠčćąĖčüčéą║ąĖ) ąĮą░ą┤ čĆąĄą│ąĖčüčéčĆąŠą╝ SPI_IMSK_CLR, čćč鹊ą▒čŗ ąŠčćąĖčüčéąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ SPI_IMSK.
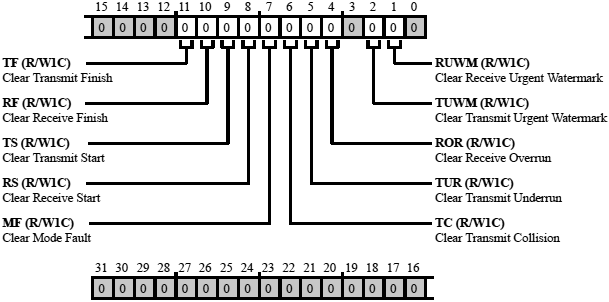
ąĀąĖčü. 29-26. ąĀąĄą│ąĖčüčéčĆ SPI_IMSK_CLR.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 11 (R/W1C) |
TF |
Clear Transmit Finish. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 10 (R/W1C) |
RF |
Clear Receive Finish. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 9 (R/W1C) |
TS |
Clear Transmit Start. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 8 (R/W1C) |
RS |
Clear Receive Start. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 7 (R/W1C) |
MF |
Clear Mode Fault. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ąŠčłąĖą▒ą║ąĖ čĆąĄąČąĖą╝ą░. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 6 (R/W1C) |
TC |
Clear Transmit Collision. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ą║ąŠą╗ą╗ąĖąĘąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 5 (R/W1C) |
TUR |
Clear Transmit Underrun. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 4 (R/W1C) |
ROR |
Clear Receive Overrun. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 2 (R/W1C) |
TUWM |
Clear Transmit Urgent Watermark. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 1 (R/W1C) |
RUWM |
Clear Receive Urgent Watermark. ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ą×čćąĖčēą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
ąĀąĄą│ąĖčüčéčĆ SPI_IMSK_SET čĆą░ąĘčĆąĄčłą░ąĄčé čāčüčéą░ąĮąŠą▓ą║čā ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_IMSK ą▒ąĄąĘ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ ąŠčüčéą░ą╗čīąĮčŗąĄ ą▒ąĖčéčŗ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠą┐ąĄčĆą░čåąĖčÄ write-1-to-set (W1S) ąĮą░ą┤ čĆąĄą│ąĖčüčéčĆąŠą╝ SPI_IMSK_SET, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_IMSK.

ąĀąĖčü. 29-27. ąĀąĄą│ąĖčüčéčĆ SPI_IMSK_SET.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 11 (R/W1S) |
TF |
Set Transmit Finish. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 10 (R/W1S) |
RF |
Set Receive Finish. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 9 (R/W1S) |
TS |
Set Transmit Start.ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 8 (R/W1S) |
RS |
Set Receive Start. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 7 (R/W1S) |
MF |
Set Mode Fault. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ąŠčłąĖą▒ą║ąĖ čĆąĄąČąĖą╝ą░. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 6 (R/W1S) |
TC |
Set Transmit Collision. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ą║ąŠą╗ą╗ąĖąĘąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 5 (R/W1S) |
TUR |
Set Transmit Underrun. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 4 (R/W1S) |
ROR |
Set Receive Overrun. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 2 (R/W1S) |
TUWM |
Set Transmit Urgent Watermark. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
| 1 (R/W1S) |
RUWM |
Set Receive Urgent Watermark. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 0 |
ąØąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. |
| 1 |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▒ąĖčé ą╝ą░čüą║ąĖ. |
ąĀąĄą│ąĖčüčéčĆ SPI_MMRDH čĆą░ąĘčĆąĄčłą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąČąĖą╝ memory-mapped. ąŁč鹊čé čĆąĄąČąĖą╝ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆčÅą╝ąŠą╣, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗą╣ ą║ ą░ą┤čĆąĄčüąĮąŠą╝čā ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓čā ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą┤ąŠčüčéčāą┐ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą┐ą░ą╝čÅčéąĖ SPI, ąĖ čŹč鹊 ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ ąĖąĘ ą┐ą░ą╝čÅčéąĖ SPI FLASH ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąÆčüąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĘą░ą┤ą░čćąĖ ą┐ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÄ čŹč鹊ą│ąŠ ą┤ąŠčüčéčāą┐ą░, čéą░ą║ąĖąĄ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ čćč鹥ąĮąĖčÅ, ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ SPI ąĖ ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ąĮčāąČąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ą▒ąĄčĆąĄčé ąĮą░ čüąĄą▒čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ SPI.
ąĀąĄąČąĖą╝ ą┤ąŠčüčéčāą┐ą░ memory-mapped čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ SPI_CTL.MMSE. ążčāąĮą║čåąĖąĖ čĆąĄą│ąĖčüčéčĆą░ SPI_MMRDH ą▓ą║ą╗čÄčćą░čÄčé ąĮą░čüčéčĆąŠą╣ą║čā čĆąĄąČąĖą╝ą░ ą┐čĆąŠą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ SPI-čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ (command skip mode), ą▒ą░ą╣čé ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ ą░ą┤čĆąĄčüą░čåąĖąĖ ąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ą░čÅ ą╝ąĮąŠą│ąŠą▓čŗą▓ąŠą┤ąĮą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ, ą░ą┤čĆąĄčüą░ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ opcod ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ą▒ą░ą╣čéčŗ čĆąĄąČąĖą╝ą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ.
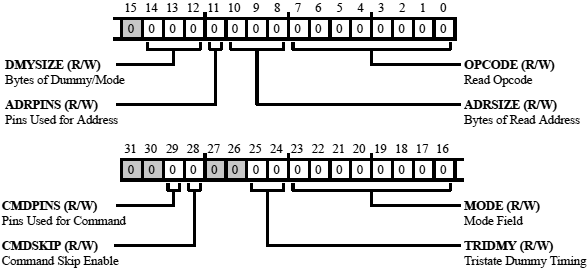
ąĀąĖčü. 29-28. ąĀąĄą│ąĖčüčéčĆ SPI_MMRDH.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 29 (R/W) |
CMDPINS |
Pins Used for Command. ąæąĖčé SPI_MMRDH.CMDPINS ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅą╝ąĖ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ą║ąŠą╝ą░ąĮą┤ąŠą╣ čćč鹥ąĮąĖčÅ (read opcode). ąÉą┐ą┐ą░čĆą░čéčāčĆą░ ąĮąĄ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé SPI_MMRDH.OPCODE, ąĮąŠ ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ąĮą░ čŹč鹊čé ą▒ąĖčé ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé ąŠčćąĖčēąĄąĮ, ąŠčéą╝ąĄąĮčÅąĄčéčüčÅ ą┤ąĄą╣čüčéą▓ąĖąĄ ą▒ąĖč鹊ą▓ SPI_CTL.MIOM. ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ą▒ąĖčé SPI_CTL.MIOM. |
| 0 |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ 1 ą▓čŗą▓ąŠą┤: MOSI (ą┤ąĄą╣čüčéą▓ąĖąĄ ą▒ąĖčé SPI_CTL.MIOM ąŠčéą╝ąĄąĮčÅąĄčéčüčÅ). |
| 1 |
ąśčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓čŗą▓ąŠą┤čŗ, čāą║ą░ąĘą░ąĮąĮčŗąĄ ą▒ąĖčéą░ą╝ąĖ SPI_CTL.MIOM. |
| 28 (R/W) |
CMDSKIP |
Command Skip Enable. ąæąĖčé SPI_MMRDH.CMDSKIP čĆą░ąĘčĆąĄčłą░ąĄčé čĆąĄąČąĖą╝ ą┐čĆąŠą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ (command skip mode), ą║ąŠą│ą┤ą░ ą░ą┤čĆąĄčü ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝ ąĖ ą┐ąŠą╗ąĄ OPCODE ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ (SPI_MMRDH.CMDSKIP=1). ąŁč鹊čé čĆąĄąČąĖą╝ ą┐ąŠą╗ąĄąĘąĄąĮ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ XIP (Execute-In-Place, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆčÅą╝ąŠ ąĖąĘ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ SPI), ą║ąŠą│ą┤ą░ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą░ą┤čĆąĄčü, ąĖ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čéą░ ąČąĄ ą║ąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ SPI flash ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮąŠ ąĮą░čćą░ą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ čćč鹥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé SPI_MMRDH.CMDSKIP. |
| 0 |
ą¤ąŠą╗ąĄ OPCODE ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝, ąĘą░ ąĮąĖą╝ ąĖą┤ąĄčé ą░ą┤čĆąĄčü. |
| 1 |
ą¤ąŠą╗ąĄ OPCODE ąĮąĄ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ; ą┐ąĄčĆą▓čŗą╝ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą░ą┤čĆąĄčü. |
| 25:24 (R/W) |
TRIDMY |
Tristate Dummy Timing. ąæąĖčéčŗ SPI_MMRDH.TRIDMY ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ą║ą░ą║ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī (ąĖ ą▒čāą┤ąĄčé ą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ąŠąŠą▒čēąĄ) čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą┐ąĄčĆąĖąŠą┤ ą┐čāčüč鹊ą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▓čŗą▓ąŠą┤čŗ SPI ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čāčÄ ą▒ąĖčéą░ą╝ąĖ SPI_MMRDH.DMYSIZE. ąÆčŗčģąŠą┤ąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ, ą┐ąĄčĆąĄčģąŠą┤čÅčēąĖąĄ ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓ą║ą╗čÄčćą░čÄčé ą▓čüąĄ ą▓čŗą▓ąŠą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą░ą┤čĆąĄčüą░. |
| 0 |
ąÆčŗčģąŠą┤čŗ ą┐ąĄčĆąĄčģąŠą┤čÅčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ. |
| 1 |
ąÆčŗčģąŠą┤čŗ ą┐ąĄčĆąĄčģąŠą┤čÅčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄ 4 ą▒ąĖčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čāčüč鹊ą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░/čĆąĄąČąĖą╝ą░ (dummy/mode). |
| 2 |
ąÆčŗčģąŠą┤čŗ ą┐ąĄčĆąĄčģąŠą┤čÅčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄ 8 ą▒ąĖčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čāčüč鹊ą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░/čĆąĄąČąĖą╝ą░ (dummy/mode). |
| 3 |
ąÆčŗčģąŠą┤čŗ ąĮąĄ ą┐ąĄčĆąĄčģąŠą┤čÅčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ (čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą▓). |
| 23:16 (R/W) |
MODE |
Mode Field. ąŁčéąĖ ą▒ąĖčéčŗ čāą║ą░ąĘčŗą▓ą░čÄčé ą╗ąĖą┤ąĖčĆčāčÄčēąĖą╣ ą▒ą░ą╣čé ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░č湥 ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ, ąĘą░ą┤ą░ąĮąĮčŗą╣ ą┐ąŠą╗ąĄą╝ ą▒ąĖčé SPI_MMRDH.DMYSIZE. ąŁč鹊čé ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ąĖą╗ąĖ ąĄą│ąŠ čćą░čüčéčī ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░, ą║ąŠą│ą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą║ąŠą┤čŗ ąŠą┐ąĄčĆą░čåąĖą╣ (opcode) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ SPI. ąæąĖčéčŗ MODE ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ č鹊ą│ąŠ ąČąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą░ą┤čĆąĄčüą░. ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓čŗčģąŠą┤ąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą▒čāą┤čāčé čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ čüą▓ąŠąĄą╝ ą║ąŠąĮąĄčćąĮąŠą╝ čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┤ąŠ ąĮą░čüčéčāą┐ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ą┐čāčüč鹊ą│ąŠ ą▒ą░ą╣čéą░ (dummy byte periods), ąĄčüą╗ąĖ ąĮąĄ ąĘą░ą┤ą░ąĮ ą┐ąĄčĆąĄčģąŠą┤ ą▓čŗčģąŠą┤ąŠą▓ ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ą╝ąĖ SPI_MMRDH.TRIDMY. |
| 14:12 (R/W) |
DMYSIZE |
Bytes of Dummy/Mode. ą¤ąŠą╗ąĄ ą▒ąĖčé SPI_MMRDH.DMYSIZE ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ "ą┐čāčüčéčŗčģ" ą▒ą░ą╣čé, ąŠčéą┤ąĄą╗čÅčÄčēąĖčģ ą┐ąĄčĆąĄą┤ą░čćčā ą░ą┤čĆąĄčüą░ ąĖ ą▓ąŠąĘą▓čĆą░čé čćąĖčéą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐čāčüčéčŗąĄ ą▒ą░ą╣čéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č湥čĆąĄąĘ č鹊 ąČąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą░ą┤čĆąĄčüą░. ąŚąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé (ąŠčé 0 ą┤ąŠ 7). |
| 11 (R/W) |
ADRPINS |
Pins Used for Address. ąæąĖčé SPI_MMRDH.ADRPINS ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą░ą┤čĆąĄčüą░. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ read opcode. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ ąĮąĄ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé SPI_MMRDH.OPCODE, ąĮąŠ ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹč鹊čé ą▒ąĖčé ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ. |
| 0 |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▓čŗą▓ąŠą┤: MOSI (ąŠčéą╝ąĄąĮčÅąĄčéčüčÅ ą┤ąĄą╣čüčéą▓ąĖąĄ ą▒ąĖč鹊ą▓ SPI_CTL.MIOM). |
| 1 |
ąśčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓čŗą▓ąŠą┤čŗ, ąĘą░ą┤ą░ąĮąĮčŗąĄ ą▒ąĖčéą░ą╝ąĖ SPI_CTL.MIOM. |
| 10:8 (R/W) |
ADRSIZE |
Bytes of Read Address. ą¤ąŠą╗ąĄ ą▒ąĖčé SPI_MMRDH.ADRSIZE ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┤ą╗čÅ ą░ą┤čĆąĄčüą░ čćč鹥ąĮąĖčÅ. ąÉą┤čĆąĄčü čćč鹥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĘą░ ą┐ąĄčĆąĄą┤ą░č湥ą╣ opcode. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą▒ąĖč鹊ą▓ opcode ą▒ąĖčéčŗ ą░ą┤čĆąĄčüą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╗ąĖą▒ąŠ ąŠą┤ąĮąŠą│ąŠ, ą╗ąĖą▒ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖčéą░ SPI_MMRDH.ADRPINS. ąÉą┤čĆąĄčü ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SPI čÅą▓ą╗čÅąĄčéčüčÅ čŹčģąŠą╝ ą░ą┤čĆąĄčüą░ čćč鹥ąĮąĖčÅ, ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą┐ąŠ slave-ą┐ąŠčĆčéčā ą┐ąĄčĆąĖč乥čĆąĖąĖ SPI. ą£ą╗ą░ą┤čłąĖąĄ ą▒ą░ą╣čéčŗ ą░ą┤čĆąĄčüą░ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▓ąĄčüčī ą░ą┤čĆąĄčü ą▓ąĄčüčī ą░ą┤čĆąĄčü ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ. |
| 0 |
1 ą▒ą░ą╣čé. |
| 1 |
1 ą▒ą░ą╣čé. |
| 2 |
2 ą▒ą░ą╣čéą░. |
| 3 |
3 ą▒ą░ą╣čéą░. |
| 4 |
4 ą▒ą░ą╣čéą░. |
| 7:0 (R/W) |
OPCODE |
Read Opcode. ą¤ąŠą╗ąĄ ą▒ąĖčé SPI_MMRDH.OPCODE ąĘą░ą┤ą░ąĄčé ąĮą░čćą░ą╗čīąĮčŗąĄ ą▒ąĖčéčŗ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą▒čĆąŠčü čćč鹥ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ SPI. ąźąŠčéčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą╗čÄą▒ąŠą╣ opcode, ąĘąĮą░č湥ąĮąĖčÅ 0x03, 0x0B, 0x3B, 0x6B, 0xBB ąĖ 0xEB ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒ąŠą╗čīčłąĄ ą▓čüąĄą│ąŠ. SPI_MMRDH.OPCODE ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ SPI ą▒ąĄąĘ ąĖąĮč鹥čĆą┐čĆąĄčéą░čåąĖąĖ; čüąŠčüč鹊čÅąĮąĖąĄ čŹčéąĖčģ ą▒ąĖčé ąĮąĄ ąĖą╝ąĄąĄčé čŹčäč乥ą║čéą░ ą▓ąĮąĄ č鹊ą│ąŠ, čćč鹊 ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI. |
ąĀąĄą│ąĖčüčéčĆ SPI_MMTOP čāą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąĄčĆčģąĮąĖą╣ ą░ą┤čĆąĄčü, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą┐ą░ą╝čÅčéąĖ SPI.
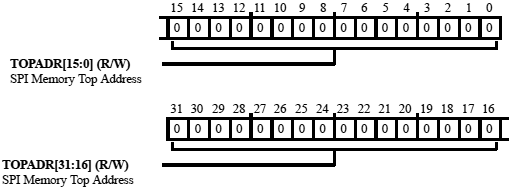
ąĀąĖčü. 29-29. ąĀąĄą│ąĖčüčéčĆ SPI_MMTOP.
ąæąĖčéčŗ 31:0 TOPADR (R/W) ąĘą░ą┤ą░čÄčé ą▓ąĄčĆčģąĮąĖą╣ ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ SPI. ą¤ąŠą┐čŗčéą║ąĖ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ SPI ąĮąĄ ą▒ą╗ąŠą║ąĖčĆčāčÄčéčüčÅ, ąĄčüą╗ąĖ ąĮąĄ ą┐čĆąĄą▓čŗčłąĄąĮ čŹč鹊čé čāą║ą░ąĘą░ąĮąĮčŗą╣ ą░ą┤čĆąĄčü. ąÆ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ ą║ą░ą║ čćą░čüčéčī ąŠčéą▓ąĄčéą░ čćč鹥ąĮąĖčÅ.
ąĀąĄą│ąĖčüčéčĆ SPI_RFIFO čüą╗čāąČąĖčé ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā čüą┤ą▓ąĖą│ą░ ą┐čĆąĖąĄą╝ą░, č湥čĆąĄąĘ ąĮąĄą│ąŠ ąŠąĮ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ čłąĖąĮąĄ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąØą░ ą▓ąĄčĆčģąĮąĄą╝ čāčĆąŠą▓ąĮąĄ ą▒čāč乥čĆ ą▓ąĖą┤ąĄąĮ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą║ą░ą║ 32-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ SPI_RFIFO, ąĮąŠ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čÅč湥ąĄą║ ą▓ ą▒čāč乥čĆąĄ FIFO) ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą│ąĖą▒ą║ąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ąĘą╝ąĄčĆą░ čüą╗ąŠą▓ą░. ąĢčüą╗ąĖ ą┤ą╗ąĖąĮą░ čüą╗ąŠą▓ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 8 ą▒ąĖčé, č鹊 ą│ą╗čāą▒ąĖąĮą░ FIFO čĆą░ą▓ąĮą░ 8 čüą╗ąŠą▓, ąĄčüą╗ąĖ čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ 16 ą▒ąĖčé, č鹊 ą│ą╗čāą▒ąĖąĮą░ FIFO čĆą░ą▓ąĮą░ 4, ąĖą╗ąĖ ąĄčüą╗ąĖ čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ 32 ą▒ąĖčéą░, č鹊 ą│ą╗čāą▒ąĖąĮą░ FIFO čĆą░ą▓ąĮą░ 2.
ąÜą░ą║ master, čéą░ą║ ąĖ slave ą╝ąŠąČąĄčé ąŠčüčéą░ąĮąŠą▓ąĖčéčī ąĖą╗ąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąĖąĄą╝ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ FIFO. ąÜąŠą│ą┤ą░ FIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ, SPI master ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖąĮąĖčåąĖą░čåąĖčÄ ąĮąŠą▓čŗčģ ą┐ąĄčĆąĄą┤ą░čć SPI, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą▒ąĖčé SPI_RXCTL.RTI. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ slave ą╝ąŠąČąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī ąĖąĮč鹥čĆč乥ą╣čü SPI, ą║ąŠą│ą┤ą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ FIFO ą┐ąĄčĆąĄčüąĄą║ą░ąĄčé ą▓čŗą▒čĆą░ąĮąĮčāčÄ ą│čĆą░ąĮąĖčåčā (watermark). ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ SPI_RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ, ą┤ą░ąĮąĮčŗąĄ ą▓ ą┐čĆąĖąĄą╝ąĮąŠą╝ FIFO čüčéą░ąĮąŠą▓čÅčéčüčÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝ąĖ. SPI ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹč鹊 čüąŠą▒čŗčéąĖąĄ ąŠčłąĖą▒ą║ąŠą╣ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░(receive overrun, ą▒ąĖčé SPI_STAT.ROR). ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą║ąŠą│ą┤ą░ SPI_RXCTL.RTI=0 ąĖ SPI_RXCTL.REN=1 ą┤ą╗čÅ master, ąĖą╗ąĖ ą┤ą╗čÅ slave, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control).
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 FIFO ą┐čĆąĖąĄą╝ą░ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ (ąŠčćąĖčēą░ąĄčéčüčÅ), ą║ąŠą│ą┤ą░ SPI ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮ ą▒čŗą╗ čĆą░ąĘčĆąĄčłąĄąĮ.

ąĀąĖčü. 29-30. ąĀąĄą│ąĖčüčéčĆ SPI_RFIFO.
ąæąĖčéčŗ 31:0 DATA (R/NW) Receive FIFO Data. ą¤ąŠą╗ąĄ ą▒ąĖčé SPI_RFIFO.DATA čüąŠą┤ąĄčƹȹĖčé ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāč乥čĆą░ FIFO.
ąĀąĄą│ąĖčüčéčĆ SPI_RWC čüąŠą┤ąĄčƹȹĖčé čüč湥čéčćąĖą║ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąŠčüčéą░ą▓čłąĖčģčüčÅ čüą╗ąŠą▓ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░. ą¦č鹊ą▒čŗ ąĮą░čćą░čéčī ą┤ąĄą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓ ą▓ SPI_RWC, čĆą░ąĘčĆąĄčłąĖč鹥 čŹč鹊čé čüč湥čéčćąĖą║ (SPI_RXCTL.RWCEN=1). SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüč湥čéčćąĖą║ čüą╗ąŠą▓ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą┐ąĄčĆąĄą┤ą░čć ąĖ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄčéą░ ą┤ą░ąĮąĮčŗčģ (burst) čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čäąĖąĮąĖčłą░ ą┐čĆąĖąĄą╝ą░ (SPI_ILAT.RF). ąÆ čĆąĄąČąĖą╝ąĄ DMA, SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čĆąĄą│ąĖčüčéčĆ SPI_RWC ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąĮčÅčéčŗčģ čäčĆąĄą╣ą╝ąŠą▓ č湥čĆąĄąĘ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ DMA čĆą░ą▓ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠą▓, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ą▓ ą║ą░ąĮą░ą╗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA. ąŚąĮą░č湥ąĮąĖčÅ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ SPI_RWC, ą┤ąŠą╗ąČąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čüč湥čéčćąĖą║čā čüą╗ąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ DMA. ąĀąĄą│ąĖčüčéčĆ SPI_RWC čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čäčĆąĄą╣ą╝ąŠą▓, ą║ąŠč鹊čĆąŠąĄ ąĮčāąČąĮąŠ ą┐čĆąĖąĮčÅčéčī. SPI_RWC ą┤ąŠą╗ąČąĄąĮ ą╝ąĄąĮčÅčéčīčüčÅ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čŹč鹊čé čüč湥čéčćąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ.
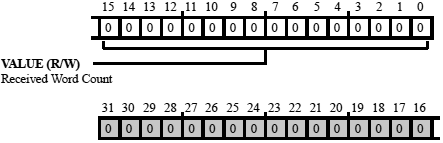
ąĀąĖčü. 29-31. ąĀąĄą│ąĖčüčéčĆ SPI_RWC.
15:0 VALUE (R/W) Received Word Count. ąæąĖčéčŗ SPI_RWC.VALUE čüąŠą┤ąĄčƹȹ░čé čüč湥čéčćąĖą║ čüą╗ąŠą▓ ą┐čĆąĖąĄą╝ą░.
ąĀąĄą│ąĖčüčéčĆ SPI_RWCR čģčĆą░ąĮąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠą▓ čüč湥čéčćąĖą║ą░, ą║ąŠč鹊čĆąŠąĄ SPI ąĘą░ą│čĆčāąĘąĖčé ą▓ čĆąĄą│ąĖčüčéčĆ SPI_RWC, ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ ą┐čĆąĖąĄą╝ą░ ą┤ąŠčüčéąĖą│ą░ąĄčé ąĮčāą╗čÅ. ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║čā čüč湥čéčćąĖą║ą░, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 0 ą┤ą╗čÅ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ. ąĀąĄą│ąĖčüčéčĆ SPI_RWCR ą┤ąŠą╗ąČąĄąĮ ą╝ąĄąĮčÅčéčīčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ čüč湥čéčćąĖą║ą░ ąĘą░ą┐čĆąĄčēąĄąĮą░.
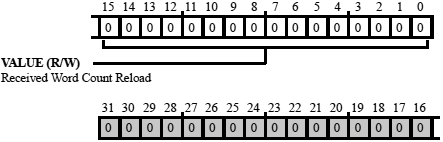
ąĀąĖčü. 29-32. ąĀąĄą│ąĖčüčéčĆ SPI_RWCR.
15:0 VALUE (R/W) Received Word Count Reload. ąæąĖčéčŗ SPI_RWCR.VALUE čüąŠą┤ąĄčƹȹ░čé ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓ ą┐čĆąĖąĄą╝ą░.
ąĀąĄą│ąĖčüčéčĆ SPI_RXCTL čĆą░ąĘčĆąĄčłą░ąĄčé ą║ą░ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ SPI ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ą│čĆą░ąĮąĖčåčŗ (watermark) ą▒čāč乥čĆą░ SPI_RFIFO.

ąĀąĖčü. 29-33. ąĀąĄą│ąĖčüčéčĆ SPI_RXCTL.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 18:16 (R/W) |
RUWM |
Receive FIFO Urgent Watermark. ąæąĖčéčŗ RUWM ą▓čŗą▒ąĖčĆą░čÄčé ą│čĆą░ąĮąĖčåčā (watermark) ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░ (SPI_RFIFO) ą┤ą╗čÅ čüčĆąŠčćąĮčŗčģ (urgent) ąĘą░ą┐čĆąŠčüąŠą▓ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ. SPI čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéčā watermark ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SPI_ILAT.RUWM. ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ urgent SPI_RFIFO watermark ą▒ąĖčéą░ą╝ąĖ RUWM, čŹčéąĖ ą▒ąĖčéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ čāčüą╗ąŠą▓ąĖčÅ čüąĮčÅčéąĖčÅ ą┤ą╗čÅ ą╗čÄą▒čŗčģ ąĘą░čģą▓ą░č湥ąĮąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ SPI_ILAT.RUWM. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąØą░ 25% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 2 |
ąØą░ 50% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 3 |
ąØą░ 75% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 4 |
ąŚą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 5..7 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
| 13:12 (R/W) |
RRWM |
Receive FIFO Regular Watermark. ąæąĖčéčŗ RRWM bits ą▓čŗą▒ąĖčĆą░čÄčé čāčĆąŠą▓ąĄąĮčī ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ FIFO ą┐čĆąĖąĄą╝ą░ (SPI_RFIFO) ą┤ą╗čÅ ąŠą▒čŗčćąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ urgent SPI_RFIFO watermark ą▒ąĖčéą░ą╝ąĖ SPI_RXCTL.RUWM, ą▓čŗą▒ąŠčĆ SPI_RXCTL.RRWM ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ čāčüą╗ąŠą▓ąĖąĄ čüąĮčÅčéąĖčÅ ą┤ą╗čÅ ą╗čÄą▒čŗčģ ąĘą░čģą▓ą░č湥ąĮąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ SPI_ILAT.RUWM. |
| 0 |
ą¤čāčüč鹊ą╣ RFIFO. |
| 1 |
RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĮą░ 25%. |
| 2 |
RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĮą░ 50%. |
| 3 |
RFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĮą░ 75%. |
| 6:4 (R/W) |
RDR |
Receive Data Request. ąæąĖčéčŗ RDR ą▓čŗą▒ąĖčĆą░čÄčé čāčüą╗ąŠą▓ąĖąĄ ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ FIFO ą┐čĆąĖąĄą╝ą░ (SPI_RFIFO), ą║ąŠč鹊čĆąŠąĄ ąĮą░ą┐čĆčÅą╝čāčÄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĘą░ą┐čĆąŠčü ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░ SPI. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąØąĄ ą┐čāčüč鹊ą╣ RFIFO. |
| 2 |
ąØą░ 25% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 3 |
ąØą░ 50% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 4 |
ąØą░ 75% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 5 |
ąŚą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 6, 7 |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. |
| 3 (R/W) |
RWCEN |
Receive Word Counter Enable. ąæąĖčé RWCEN čĆą░ąĘčĆąĄčłą░ąĄčé ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüč湥čéčćąĖą║ą░ SPI_RWC, ą║ąŠą│ą┤ą░ čŹč鹊čé čüč湥čéčćąĖą║ ąĮąĄ čĆą░ą▓ąĄąĮ 0, ąĖ čĆą░ąĘčĆąĄčłąĄąĮ ą▒ąĖčé SPI_RXCTL.RTI. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ SPI_RXCTL.RWCEN ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. ąæąĖčé SPI_RXCTL.RWCEN ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 2 (R/W) |
RTI |
Receive Transfer Initiate. ąæąĖčé SPI_RXCTL.RTI čĆą░ąĘčĆąĄčłą░ąĄčé ąĖąĮąĖčåąĖą░čåąĖčÄ ą┐ąĄčĆąĄąĮąŠčüąŠą▓ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░, ąĄčüą╗ąĖ FIFO ą┐čĆąĖąĄą╝ą░ (SPI_RFIFO) ąĮąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ. ąŁč鹊čé ą▒ąĖčé čéą░ą║ąČąĄ čĆą░ąĘčĆąĄčłą░ąĄčé ąĖąĮąĖčåąĖą░čåąĖčÄ, ąĄčüą╗ąĖ SPI_RWC ąĮąĄ čĆą░ą▓ąĄąĮ 0, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ SPI_RXCTL.RWCEN. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ RTI ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. ąæąĖčé RTI ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 0 (R/W) |
REN |
Receive Enable. ąæąĖčé SPI_RXCTL.REN čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā ą║ą░ąĮą░ą╗ą░ ą┐čĆąĖąĄą╝ą░ SPI. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
ąĀąĄą│ąĖčüčéčĆ SPI_SLVSEL čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤čŗ SPI_SEL[n] ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ąĮą░ ą▓čŗčģąŠą┤, ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ (ą╗ąŠą│. 1 ąĖą╗ąĖ ą╗ąŠą│. 0) čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠą│ą┤ą░ čŹčéą░ čäčāąĮą║čåąĖčÅ čĆą░ąĘčĆąĄčłąĄąĮą░.
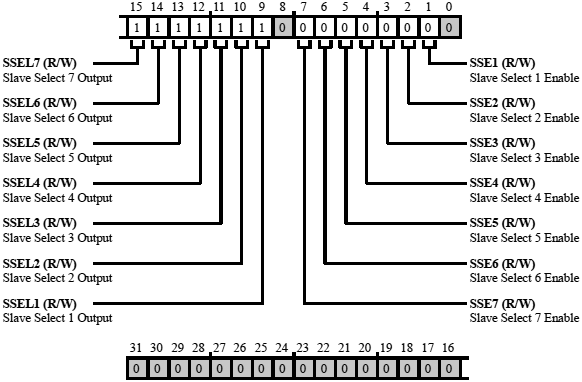
ąĀąĖčü. 29-34. ąĀąĄą│ąĖčüčéčĆ SPI_SLVSEL.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 15 (R/W) |
SSEL7 |
Slave Select 7 Output. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ SSEL7 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čŗą▓ąŠą┤ąĄ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 14 (R/W) |
SSEL6 |
Slave Select 6 Output. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ SSEL6 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čŗą▓ąŠą┤ąĄ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 13 (R/W) |
SSEL5 |
Slave Select 5 Output. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ SSEL5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čŗą▓ąŠą┤ąĄ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 12 (R/W) |
SSEL4 |
Slave Select 4 Output. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ SSEL4 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čŗą▓ąŠą┤ąĄ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 11 (R/W) |
SSEL3 |
Slave Select 3 Output. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ SSEL3 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čŗą▓ąŠą┤ąĄ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 10 (R/W) |
SSEL2 |
Slave Select 2 Output. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ SSEL2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čŗą▓ąŠą┤ąĄ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 9 (R/W) |
SSEL1 |
Slave Select 1 Output. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ SSEL1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čŗą▓ąŠą┤ąĄ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 7 (R/W) |
SSE7 |
Slave Select 7 Enable. ąæąĖčé SPI_SLVSEL.SSE7 čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ~SPI_SEL[n] ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░. ąĢčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, SPI ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 6 (R/W) |
SSE6 |
Slave Select 6 Enable. ąæąĖčé SPI_SLVSEL.SSE6 čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ~SPI_SEL[n] ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░. ąĢčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, SPI ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 5 (R/W) |
SSE5 |
Slave Select 5 Enable. ąæąĖčé SPI_SLVSEL.SSE5 čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ~SPI_SEL[n] ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░. ąĢčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, SPI ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 4 (R/W) |
SSE4 |
Slave Select 4 Enable. ąæąĖčé SPI_SLVSEL.SSE4 čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ~SPI_SEL[n] ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░. ąĢčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, SPI ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 3 (R/W) |
SSE3 |
Slave Select 3 Enable. ąæąĖčé SPI_SLVSEL.SSE3 čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ~SPI_SEL[n] ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░. ąĢčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, SPI ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 2 (R/W) |
SSE2 |
Slave Select 2 Enable. ąæąĖčé SPI_SLVSEL.SSE2 čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ~SPI_SEL[n] ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░. ąĢčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, SPI ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
| 1 (R/W) |
SSE1 |
Slave Select 1 Enable. ąæąĖčé SPI_SLVSEL.SSE1 čĆą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ ~SPI_SEL[n] ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░. ąĢčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, SPI ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ ~SPI_SEL[n]. |
| 0 |
ąøąŠą│. 0. |
| 1 |
ąøąŠą│. 1. |
ąĀąĄą│ąĖčüčéčĆ SPI_STAT ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ SPI ą▓ą║ą╗čÄčćą░čÅ čüąŠčüč鹊čÅąĮąĖąĄ FIFO, čüąŠą▒čŗčéąĖčÅ ąŠčłąĖą▒ą║ąĖ ąĖ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÜąŠą│ą┤ą░ čāčüą╗ąŠą▓ąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ (čĆą░ąĘčĆąĄčłąĄąĮąŠ) čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą▒ąĖč鹊ą╝ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_IMSK, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPI_ILAT.
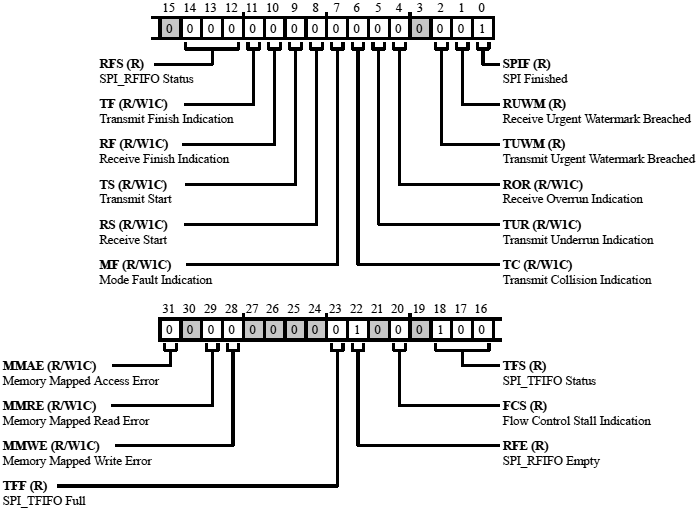
ąĀąĖčü. 29-35. ąĀąĄą│ąĖčüčéčĆ SPI_STAT.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 31 (R/W1C) |
MMAE |
Memory Mapped Access Error. ąæąĖčé MMAE=1, ąĄčüą╗ąĖ ą▒čŗą╗ą░ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ą┤ąŠčüčéčāą┐ą░ ą╗ąĖą▒ąŠ ą║ TX, ą╗ąĖą▒ąŠ ą║ RX FIFO, ą║ąŠą│ą┤ą░ ą▒čŗą╗ čĆą░ąĘčĆąĄčłąĄąĮ ą┤ąŠčüčéčāą┐ memory-mapped ą║ ą┐ą░ą╝čÅčéąĖ SPI (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖčéą░ SPI_CTL.MMSE). ąæąĖčé MMAE=0, ą║ąŠą│ą┤ą░ ą▓ ąĮąĄą│ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ 1. ąæąĖčé MMAE ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ. ąĢą│ąŠ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ čŹčäč乥ą║čéą░. |
| 29 (R/W1C) |
MMRE |
Memory Mapped Read Error. ąæąĖčé SPI_STAT.MMRE bit=1, ąĄčüą╗ąĖ ą▒čŗą╗ą░ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ą┐čĆąŠčćąĖčéą░čéčī ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ memory-mapped SPI, ą║ąŠą│ą┤ą░ memory mapping ąĘą░ą┐čĆąĄčēąĄąĮ (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖčéą░ SPI_CTL.MMSE). ąæąĖčé MMRE=0, ą║ąŠą│ą┤ą░ ą▓ ąĮąĄą│ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ 1. ąŁč鹊čé ą▒ąĖčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ. ąĢą│ąŠ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ čŹčäč乥ą║čéą░. |
| 28 (R/W1C) |
MMWE |
Memory Mapped Write Error. ąæąĖčé MMWE=1, ąĄčüą╗ąĖ ą▒čŗą╗ą░ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ąĘą░ą┐ąĖčüąĖ ą▓ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┤ą╗čÅ memory-mapped ą┐ą░ą╝čÅčéąĖ SPI. ąæąĖčé MMWE=0, ą║ąŠą│ą┤ą░ ą▓ ąĮąĄą│ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ 1. ąŁč鹊čé ą▒ąĖčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ. ąĢą│ąŠ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ čŹčäč乥ą║čéą░. |
| 23 (R/NW) |
TFF |
SPI_TFIFO Full. ąæąĖčé TFF ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ąĘą░ą┐ąŠą╗ąĮąĄąĮ SPI_TFIFO, ąĖą╗ąĖ ąĮąĄčé. |
| 0 |
TX FIFO ąĮąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ. |
| 1 |
TX FIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ. |
| 22 (R/NW) |
RFE |
SPI_RFIFO Empty. ąæąĖčé RFE ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą┐čāčüčé SPI_RFIFO, ąĖą╗ąĖ ąĮąĄ ą┐čāčüčé. |
| 0 |
RX FIFO ąĮąĄ ą┐čāčüčé. |
| 1 |
RX FIFO ą┐čāčüčé. |
| 20 (R/NW) |
FCS |
Flow Control Stall Indication. ąæąĖčé FCS ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ čüąĮčÅą╗ąŠ čüąĖą│ąĮą░ą╗ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ SPI_RDY, čćč鹊ą▒čŗ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī SPI master, ą║ąŠą│ą┤ą░ slave ąĮąĄ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĘą░ą┐čĆąŠčü SPI master. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master (SPI_CTL.MSTR=1), ąĖ čĆą░ąĘčĆąĄčłąĄąĮąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (SPI_CTL.FCEN=1). |
| 0 |
No Stall, ąĮąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SPI_RDY ą▓čŗčüčéą░ą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ). |
| 1 |
Stall, ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ (čü ą▓čŗą▓ąŠą┤ą░ SPI_RDY čüąĮčÅčé čüąĖą│ąĮą░ą╗ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ). |
| 18:16 (R/NW) |
TFS |
SPI_TFIFO Status. ąæąĖčéčŗ TFS ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé čüąŠčüč鹊čÅąĮąĖąĄ SPI_TFIFO. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹč鹊čé čüčéą░čéčāčü, ą║ąŠą│ą┤ą░ ą▓čŗčćąĖčüą╗čÅąĄčé čüąŠą▒čŗčéąĖčÅ ąĮą░čĆčāčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit watermark). |
| 0 |
TFIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ. |
| 1 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 25%. |
| 2 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 50%. |
| 3 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 75%. |
| 4 |
ą¤čāčüč鹊ą╣ TFIFO. |
| 14:12 (R/NW) |
RFS |
SPI_RFIFO Status. ąæąĖčéčŗ RFS ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé čüąŠčüč鹊čÅąĮąĖąĄ SPI_RFIFO. SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéąĖ ą▒ąĖčéčŗ, ą║ąŠą│ą┤ą░ ą▓čŗčćąĖčüą╗čÅąĄčé čüąŠą▒čŗčéąĖčÅ ąĮą░čĆčāčłąĄąĮąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ FIFO ą┐čĆąĖąĄą╝ą░ (receive watermark). |
| 0 |
ą¤čāčüč鹊ą╣ RFIFO. |
| 1 |
ąØą░ 25% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 2 |
ąØą░ 50% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 3 |
ąØą░ 75% ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 4 |
ąŚą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ RFIFO. |
| 11 (R/W1C) |
TF |
Transmit Finish Indication. ąæąĖčé TF ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 SPI ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ą░ą║ąĄčéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (ą┤ąĄą║čĆąĄą╝ąĄąĮčéčŗ čüč湥čéčćąĖą║ą░ SPI_TWC ą┤ąŠčüčéąĖą│ą╗ąĖ 0). ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ SPI_TXCTL.TTI ąĖ SPI_TXCTL.TWCEN. |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ą░ą║ąĄčéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 10 (R/W1C) |
RF |
Receive Finish Indication. ąæąĖčé RF ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 SPI ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ą░ą║ąĄčéąĮąŠą│ąŠ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĄą╝ą░ (ą┤ąĄą║čĆąĄą╝ąĄąĮčéčŗ čüč湥čéčćąĖą║ą░ SPI_RWC ą┤ąŠčüčéąĖą│ą╗ąĖ 0). ąŁč鹊 čāčüą╗ąŠą▓ąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ SPI_RXCTL.RTI ąĖ SPI_RXCTL.RWCEN. |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ą░ą║ąĄčéą░ ą┐čĆąĖąĄą╝ą░. |
| 9 (R/W1C) |
TS |
Transmit Start. ąæąĖčé TS ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 SPI ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ąĮą░čćą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄčéą░ (burst transfer). ą¤ąĄčĆąĄą┤ą░čćą░ ą┐ą░ą║ąĄčéą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąĘą░ą│čĆčāąĘą║ąĖ SPI_TWC ąĖąĘ SPI_TWCR. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ SPI_TXCTL.TTI ąĖ SPI_TXCTL.TWCEN. |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüčéą░čĆčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄčéą░. |
| 8 (R/W1C) |
RS |
Receive Start. ąæąĖčé RS ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 SPI ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ąĮą░čćą░ą╗ą░ ą┐čĆąĖąĄą╝ą░ ą┐ą░ą║ąĄčéą░ (burst transfer). ą¤čĆąĖąĄą╝ ą┐ą░ą║ąĄčéą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąĘą░ą│čĆčāąĘą║ąĖ SPI_RWC ąĖąĘ SPI_RWCR. ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ SPI_RXCTL.RTI ąĖ SPI_RXCTL.RWCEN. |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüčéą░čĆčé ą┐čĆąĖąĄą╝ą░ ą┐ą░ą║ąĄčéą░. |
| 7 (R/W1C) |
MF |
Mode Fault Indication. ąæąĖčé MF, ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master, ąĖ čĆą░ąĘčĆąĄčłąĄąĮ SPI_CTL.PSSE, ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ master ą▓čŗčüčéą░ą▓ąĖą╗ąĖ ą▓čģąŠą┤čŗ slave select. |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ą¤čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ čĆąĄąČąĖą╝ą░ (Mode Fault). |
| 6 (R/W1C) |
TC |
Transmit Collision Indication. ąæąĖčé TC, ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ slave, ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĘą░ą│čĆčāąĘą║ą░ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą┐čĆąŠąĖąĘąŠčłą╗ą░ čüą╗ąĖčłą║ąŠą╝ ą▒ą╗ąĖąĘą║ąŠ ą║ ą┐ąĄčĆą▓ąŠą╝čā ą┐ąĄčĆąĄą┐ą░ą┤čā ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ čéą░ą║čéą░ SPI. |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ą¤čĆąŠąĖąĘąŠčłą╗ą░ ą║ąŠą╗ą╗ąĖąĘąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 5 (R/W1C) |
TUR |
Transmit Underrun Indication. ąæąĖčé TUR, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_TFIFO) ą┐čāčüčé, ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüą╗ąŠą▓ąŠ ą▓ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒čŗą╗ąŠ ą┐ąŠą▓č鹊čĆąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ čŹč鹊čé ą▒ąĖčé ą╝ąŠąČąĄčé ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ą▓ą╝ąĄčüč鹊 čŹčéąĖčģ ą┤ą░ąĮąĮčŗčģ ąŠčéą┐čĆą░ą▓ąĖą╗ąĖčüčī ąĮčāą╗ąĖ (ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░čüčéčĆąŠąĄąĮąĮąŠą╣ čĆąĄą░ą║čåąĖąĖ ąĮą░ ąĮąĄą┤ąŠą│čĆčāąĘą║čā ą┐ąĄčĆąĄą┤ą░čćąĖ, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖčéą░ SPI_TXCTL.TDU). |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ą¤čĆąŠąĖąĘąŠčłą╗ą░ ąĮąĄą┤ąŠą│čĆčāąĘą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| 4 (R/W1C) |
ROR |
Receive Overrun Indication. ąæąĖčé ROR ą║ąŠą│ą┤ą░ ąĘą░ą┐ąŠą╗ąĮąĄąĮ ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░ (SPI_RFIFO), ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čüą╗ąŠą▓ąŠ ą▓ FIFO ą┐čĆąĖąĄą╝ą░ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ ą┐čĆąĖčłąĄą┤čłąĖą╝ąĖ ą┐čĆąĖąĮčÅčéčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ čŹč鹊čé ą▒ąĖčé ą╝ąŠąČąĄčé ą┐ąŠą║ą░ąĘą░čéčī, čćč鹊 ą┐čĆąĖąĮčÅčéčŗąĄ ą▒ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ąŠčéą▒čĆąŠčłąĄąĮčŗ (ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░čüčéčĆąŠąĄąĮąĮąŠą╣ čĆąĄą░ą║čåąĖąĖ ąĮą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąĖąĄą╝ą░). |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ą¤čĆąŠąĖąĘąŠčłą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąĖąĄą╝ą░. |
| 2 (R/NW) |
TUWM |
Transmit Urgent Watermark Breached. ąæąĖčé TUWM ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┤ąŠčüčéąĖą│ąĮčāčéą░ ą│čĆą░ąĮąĖčåą░ čüčĆąŠčćąĮąŠą╣ ąĮąĄą┤ąŠą│čĆčāąČąĄąĮąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit urgent watermark, SPI_TXCTL.TUWM). ąŁč鹊 čāčüą╗ąŠą▓ąĖąĄ ąŠčćąĖčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮ, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī transmit regular watermark (SPI_TXCTL.TRWM). |
| 0 |
ąöąŠčüčéąĖą│ąĮčāčéą░ TX regular watermark. |
| 1 |
ąØą░čĆčāčłąĄąĮą░ TX urgent watermark. |
| 1 (R/NW) |
RUWM |
Receive Urgent Watermark Breached. ąæąĖčé RUWM ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĮą░čĆčāčłąĄąĮą░ ą│čĆą░ąĮąĖčåą░ čüčĆąŠčćąĮąŠą╣ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ ą▒čāč乥čĆą░ FIFO ą┐čĆąĖąĄą╝ą░ (receive urgent watermark, SPI_RXCTL.RUWM). ąŁč鹊 čāčüą╗ąŠą▓ąĖąĄ ąŠčćąĖčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ą┐čĆąĖąĄą╝ą░ ąŠą┐čāčüč鹊賹ĖčéčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī receive regular watermark (SPI_RXCTL.RRWM). |
| 0 |
ąöąŠčüčéąĖą│ąĮčāčéą░ RX regular watermark. |
| 1 |
ąØą░čĆčāčłąĄąĮą░ RX urgent watermark. |
| 0 (R/NW) |
SPIF |
SPI Finished. ąæąĖčé SPI_STAT.SPIF ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐ąĄčĆąĄą┤ą░čćą░ ąŠą┤ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ą▒čŗą╗ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░. |
| 0 |
ąØąĄčé čüčéą░čéčāčüą░. |
| 1 |
ąŚą░ą▓ąĄčĆčłąĄąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąŠą┤ąĮąŠą│ąŠ čüą╗ąŠą▓ą░. |
ąĀąĄą│ąĖčüčéčĆ SPI_TFIFO čüą╗čāąČąĖčé ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ ą╝ąĄąČą┤čā čĆąĄą│ąĖčüčéčĆąŠą╝ čüą┤ą▓ąĖą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ čłąĖąĮąŠą╣ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąØą░ ą▓ąĄčĆčģąĮąĄą╝ čāčĆąŠą▓ąĮąĄ ą▒čāč乥čĆ ą▓ąĖą┤ąĄąĮ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ą░čģ ą║ą░ą║ 32-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ SPI_TFIFO, ąĮąŠ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ (ą│ą╗čāą▒ąĖąĮą░ FIFO, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čÅč湥ąĄą║ čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓ čüą╗ąŠą▓ąŠ) FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą│ąĖą▒ą║ąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ąĘą╝ąĄčĆą░ čüą╗ąŠą▓ą░. ąĀą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ FIFO čĆą░ą▓ąĄąĮ 8 ą┤ą╗čÅ ą┤ą╗ąĖąĮčŗ čüą╗ąŠą▓ą░ 8 ą▒ąĖčé, ąĖą╗ąĖ 4 ą┤ą╗čÅ ą┤ą╗ąĖąĮčŗ čüą╗ąŠą▓ą░ 16 ą▒ąĖčé, ąĖą╗ąĖ 2 ą┤ą╗čÅ čĆą░ąĘą╝ąĄčĆą░ čüą╗ąŠą▓ą░ 32 ą▒ąĖčéą░.
ąś master, slave ą╝ąŠąČąĄčé ąŠčüčéą░ąĮąŠą▓ąĖčéčī ąĖą╗ąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüąŠčüč鹊čÅąĮąĖčÅ FIFO. ąÜąŠą│ą┤ą░ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐čāčüčé, SPI master ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖąĮąĖčåąĖą░čåąĖčÄ ąĮąŠą▓čŗčģ ą┐ąĄčĆąĄą┤ą░čć ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ SPI_TXCTL.TTI. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ slave ą╝ąŠąČąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī ąĖąĮč鹥čĆč乥ą╣čü SPI, ą║ąŠą│ą┤ą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ FIFO ą┐ąĄčĆąĄčüąĄą║ą░ąĄčé ą▓čŗą▒čĆą░ąĮąĮčāčÄ ą│čĆą░ąĮąĖčåčā (watermark). ąĢčüą╗ąĖ ąĘą░ą┐čĆąŠčüčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠą┤ąŠą╗ąČą░čÄčé ą┐ąŠčüčéčāą┐ą░čéčī ą┐ąŠčüą╗ąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ SPI_TFIFO, č鹊 ą┤ą░ąĮąĮčŗąĄ, ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ ąĖąĘ FIFO, čüčéą░ąĮąŠą▓čÅčéčüčÅ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝ąĖ, ąĖ SPI ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹč鹊 čüąŠą▒čŗčéąĖąĄ ąŠčłąĖą▒ą║ąŠą╣ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ transmit underrun (ą▒ąĖčé SPI_STAT.TUR). ąŁč鹊 čüąŠą▒čŗčéąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą║ąŠą│ą┤ą░ SPI_TXCTL.TTI=0 ąĖ SPI_TXCTL.TEN=1 ą┤ą╗čÅ master, ąĖą╗ąĖ ą┤ą╗čÅ slave, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (flow control).
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ (ąŠčćąĖčēą░ąĄčéčüčÅ), ą║ąŠą│ą┤ą░ SPI ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ąŠ čĆą░ąĘčĆąĄčłąĄąĮ.
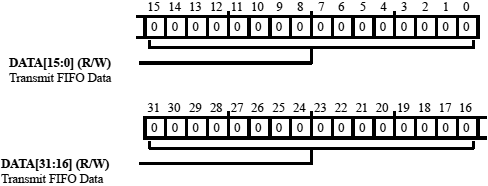
ąĀąĖčü. 29-36. ąĀąĄą│ąĖčüčéčĆ SPI_TFIFO.
31:0 DATA (R/W) Transmit FIFO Data. ą¤ąŠą╗ąĄ ą▒ąĖčé SPI_TFIFO.DATA čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ FIFO.
ąĀąĄą│ąĖčüčéčĆ SPI_TWC čüąŠą┤ąĄčƹȹĖčé čüč湥čéčćąĖą║ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąŠčüčéą░ą▓čłąĖčģčüčÅ čüą╗ąŠą▓ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¦č鹊ą▒čŗ ąĮą░čćą░čéčī ą┤ąĄą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓ ą▓ SPI_TWC, čĆą░ąĘčĆąĄčłąĖč鹥 čŹč鹊čé čüč湥čéčćąĖą║ (SPI_TXCTL.TWCEN=1). SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüč湥čéčćąĖą║ čüą╗ąŠą▓ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą┐ąĄčĆąĄą┤ą░čć ąĖ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄčéą░ ą┤ą░ąĮąĮčŗčģ (burst) čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čäąĖąĮąĖčłą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_ILAT.TF). ąÆ čĆąĄąČąĖą╝ąĄ DMA, SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čĆąĄą│ąĖčüčéčĆ SPI_TWC ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ čäčĆąĄą╣ą╝ąŠą▓ č湥čĆąĄąĘ DMA čĆą░ą▓ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠą▓, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ą▓ ą║ą░ąĮą░ą╗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DMA. ąŚąĮą░č湥ąĮąĖčÅ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ SPI_TWC, ą┤ąŠą╗ąČąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čüč湥čéčćąĖą║čā čüą╗ąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ DMA. ąĀąĄą│ąĖčüčéčĆ SPI_TWC čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čäčĆąĄą╣ą╝ąŠą▓, ą║ąŠč鹊čĆąŠąĄ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī. SPI_TWC ą┤ąŠą╗ąČąĄąĮ ą╝ąĄąĮčÅčéčīčüčÅ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čŹč鹊čé čüč湥čéčćąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ.
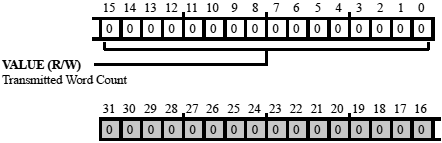
ąĀąĖčü. 29-37. ąĀąĄą│ąĖčüčéčĆ SPI_TWC.
15:0 VALUE (R/W) Transmitted Word Count. ąæąĖčéčŗ SPI_TWC.VALUE čüąŠą┤ąĄčƹȹ░čé čüč湥čéčćąĖą║ čüą╗ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąĀąĄą│ąĖčüčéčĆ SPI_TWCR čģčĆą░ąĮąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąŠą▓ čüč湥čéčćąĖą║ą░, ą║ąŠč鹊čĆąŠąĄ SPI ąĘą░ą│čĆčāąĘąĖčé ą▓ čĆąĄą│ąĖčüčéčĆ SPI_TWC, ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠčüčéąĖą│ą░ąĄčé ąĮčāą╗čÅ. ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║čā čüč湥čéčćąĖą║ą░, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 0 ą┤ą╗čÅ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ. ąĀąĄą│ąĖčüčéčĆ SPI_TWCR ą┤ąŠą╗ąČąĄąĮ ą╝ąĄąĮčÅčéčīčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ čüč湥čéčćąĖą║ą░ ąĘą░ą┐čĆąĄčēąĄąĮą░.
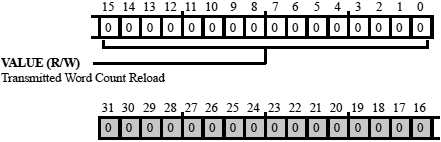
ąĀąĖčü. 29-38. ąĀąĄą│ąĖčüčéčĆ SPI_TWCR.
15:0 VALUE (R/W) Transmitted Word Count Reload. ąæąĖčéčŗ SPI_TWCR.VALUE čüąŠą┤ąĄčƹȹ░čé ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąĀąĄą│ąĖčüčéčĆ SPI_TXCTL čĆą░ąĘčĆąĄčłą░ąĄčé ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ SPI, ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą│čĆą░ąĮąĖčåčā ą▒čāč乥čĆą░ (watermark) SPI_TFIFO.
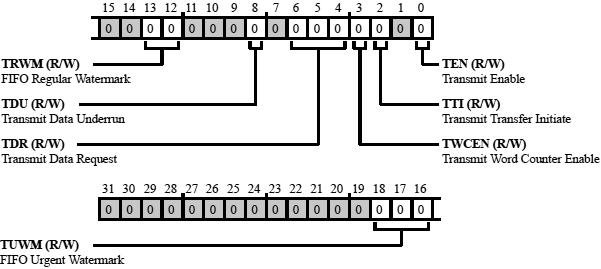
ąĀąĖčü. 29-39. ąĀąĄą│ąĖčüčéčĆ SPI_TXCTL.
ąæąĖčé
(ą┤ąŠčüčéčāą┐) |
ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 18:16 (R/W) |
TUWM |
FIFO Urgent Watermark. ąæąĖčéčŗ TUWM ą▓čŗą▒ąĖčĆą░čÄčé čāčĆąŠą▓ąĄąĮčī ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ ą▒čāč乥čĆą░ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_TFIFO) ą┤ą╗čÅ čüčĆąŠčćąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ (urgent data bus requests). SPI čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹč鹊čé čāčĆąŠą▓ąĄąĮčī ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ SPI_ILAT.TUWM. ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ urgent SPI_TFIFO watermark čü ą┐ąŠą╝ąŠčēčīčÄ TUWM, ą▓čŗą▒ąŠčĆ SPI_TXCTL.TRWM ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąĮčÅčéąĖčÅ čāčüą╗ąŠą▓ąĖčÅ ą╗čÄą▒čŗčģ ąĘą░čģą▓ą░č湥ąĮąĮčŗčģ SPI_ILAT.TUWM ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 25%. |
| 2 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 50%. |
| 3 |
TFIFO ąŠą┐čāčüč鹊賹ĄąĮ ąĮą░ 75%. |
| 4 |
ą¤čāčüč鹊ą╣ TFIFO. |
| 13:12 (R/W) |
TRWM |
FIFO Regular Watermark. ąæąĖčéčŗ TRWM ą▓čŗą▒ąĖčĆą░čÄčé čāčĆąŠą▓ąĄąĮčī ą│čĆą░ąĮąĖčåčŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠčüčéąĖ ą▒čāč乥čĆą░ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_TFIFO) ą┤ą╗čÅ ąŠą▒čŗčćąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓ čłąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ urgent SPI_TFIFO watermark čü ą┐ąŠą╝ąŠčēčīčÄ SPI_TXCTL.TUWM, ą▓čŗą▒ąŠčĆ TRWM ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ čāčüą╗ąŠą▓ąĖąĄ čüąĮčÅčéąĖčÅ ą╗čÄą▒čŗčģ ąĘą░čģą▓ą░č湥ąĮąĮčŗčģ SPI_ILAT.TUWM ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. |
| 0 |
ąŚą░ą┐ąŠą╗ąĮąĄąĮąĮčŗą╣ TFIFO. |
| 1 |
TFIFO ą┐čāčüčé ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĮą░ 25%. |
| 2 |
TFIFO ą┐čāčüčé ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĮą░ 50%. |
| 3 |
TFIFO ą┐čāčüčé ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĮą░ 75%. |
| 8 (R/W) |
TDU |
Transmit Data Underrun. ąæąĖčé TDU ą▓čŗą▒ąĖčĆą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_TFIFO) ą┐čāčüčé. ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé =1, ąĖ SPI_TFIFO ą┐čāčüčé, č鹊 SPI ą┐ąĄčĆąĄą┤ą░ąĄčé ąĮčāą╗ąĄą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé =0, ąĖ SPI_TFIFO ą┐čāčüčé, č鹊 SPI ą┐ąĄčĆąĄą┤ą░ąĄčé ą▓ ą║ą░č湥čüčéą▓ąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüą╗ąŠą▓ąŠ. |
| 0 |
ąæčāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüą╗ąŠą▓ąŠ, ą║ąŠą│ą┤ą░ SPI_TFIFO ą┐čāčüčé. |
| 1 |
ąæčāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ąĮčāą╗ąĖ, ą║ąŠą│ą┤ą░ SPI_TFIFO ą┐čāčüčé. |
| 6:4 (R/W) |
TDR |
Transmit Data Request. ąæąĖčé TDR ą▓čŗą▒ąĖčĆą░ąĄčé čāčüą╗ąŠą▓ąĖčÅ ą│čĆą░ąĮąĖčåčŗ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_TFIFO), ą║ąŠč鹊čĆą░čÅ čāą║ą░ąĘčŗą▓ą░ąĄčé SPI ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüčéą░čéčāčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| |
|
0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| |
|
1 |
TFIFO ąĮąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ. |
| |
|
2 |
TFIFO ą┐čāčüčé ąĮą░ 25%. |
| |
|
3 |
TFIFO ą┐čāčüčé ąĮą░ 50%. |
| |
|
4 |
TFIFO ą┐čāčüčé ąĮą░ 75%. |
| |
|
5 |
ą¤čāčüč鹊ą╣ TFIFO. |
| 3 (R/W) |
TWCEN |
Transmit Word Counter Enable. ąæąĖčé TWCEN čĆą░ąĘčĆąĄčłą░ąĄčé ą┤ąĄą║čĆąĄą╝ąĄąĮčé čĆąĄą│ąĖčüčéčĆą░ čüč湥čéčćąĖą║ą░ čüą╗ąŠą▓ (SPI_TWC), ą║ąŠą│ą┤ą░ ąŠąĮ ąĮąĄ čĆą░ą▓ąĄąĮ 0, ąĖ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ SPI_TXCTL.TTI. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ TWCEN ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ąŠčłąĖą▒ąŠą║ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąæąĖčé ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 2 (R/W) |
TTI |
Transmit Transfer Initiate. ąæąĖčé TTI čĆą░ąĘčĆąĄčłą░ąĄčé ąĖąĮąĖčåąĖą░čåąĖčÄ ą┐ąĄčĆąĄą┤ą░čć, ąĄčüą╗ąĖ ą▒čāč乥čĆ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ (SPI_TFIFO) ąĮąĄ ą┐čāčüčé. ąŁč鹊čé ą▒ąĖčé čéą░ą║ąČąĄ čĆą░ąĘčĆąĄčłą░ąĄčé čéą░ą║čāčÄ ąĖąĮąĖčåąĖą░čåąĖčÄ, ąĄčüą╗ąĖ SPI_TWC ąĮąĄ 0, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ SPI_TXCTL.TWCEN. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ TTI ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ąŠčłąĖą▒ąŠą║ ąĮąĄą┤ąŠą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąæąĖčé TTI ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ SPI čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ master. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
| 0 (R/W) |
TEN |
Transmit Enable. ąæąĖčé TEN čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ SPI. |
| 0 |
ąŚą░ą┐čĆąĄčēąĄąĮąŠ. |
| 1 |
ąĀą░ąĘčĆąĄčłąĄąĮąŠ. |
[ąöąĖą░ą│čĆą░ą╝ą╝čŗ SPI]
ąóą░ą▒ą╗ąĖčåą░ 54 ąĖ čĆąĖčü. 31 ąŠą┐ąĖčüčŗą▓ą░čÄčé ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠčĆčéą░ SPI master. ą¤čĆąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ ą▓ąĮčāčéčĆąĖ ą║čĆąĖčüčéą░ą╗ą╗ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SPI (fSPICLKPROG) ą▓ ą£ąōčå čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ą▓čŗčĆą░ąČąĄąĮąĖąĄą╝, ą│ą┤ąĄ BAUD čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĄą╝ čĆąĄą│ąĖčüčéčĆą░ SPI_CLK, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0 .. 65535:
fSCLK0
fSPICLKPROG = ----------
(BAUD+1) |
|
1
tSPICLKPROG = -----------
fSPICLKPROG |
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā:
ŌĆó ąÆ ą┤ą▓ąŠą╣ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (dual mode) čüąĖą│ąĮą░ą╗ SPI_MISO čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ąČąĄ ą║ą░ą║ ą▓čŗčģąŠą┤ (ąĖ MOSI, ąĖ MISO čĆą░ą▒ąŠčéą░čÄčé ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ).
ŌĆó ąÆ čüč湥čéą▓ąĄčĆąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (quad mode) čüąĖą│ąĮą░ą╗čŗ SPI_MISO, SPI_D2 ąĖ SPI_D3 čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čŗčģąŠą┤čŗ.
ŌĆó ąÆ ą┤ą▓ąŠą╣ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ SPI_MOSI čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ (ąĖ MOSI, ąĖ MISO čĆą░ą▒ąŠčéą░čÄčé ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ).
ŌĆó ąÆ čüč湥čéą▓ąĄčĆąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čüąĖą│ąĮą░ą╗čŗ SPI_MOSI, SPI_D2 ąĖ SPI_D3 čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ.
ŌĆó ąöą╗čÅ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čäčĆąĄą╣ą╝ąŠą▓ ąĘą░ą┤ąĄčƹȹ║ąĖ čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą┐ąŠ čĆąĄą│ąĖčüčéčĆčā SPI_DLY ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą┐ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ (hardware reference manual [2]).
ąóą░ą▒ą╗ąĖčåą░ 54. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčĆčéą░ SPI ą▓ čĆąĄąČąĖą╝ąĄ Master.
ą¤ą░čĆą░ą╝ąĄčéčĆ
|
ą×ą┐ąĖčüą░ąĮąĖąĄ
|
VDD_EXT 1.8V
|
VDD_EXT 3.3V
|
ąĢą┤.
|
| MIN |
MAX |
MIN |
MAX |
| ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ |
| tSSPIDM |
ąÆčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ ą┤ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ SPI_CLK (ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ) |
6.5 |
|
5.5 |
|
ąĮčü |
| tHSPIDM |
ąśąĮč鹥čĆą▓ą░ą╗ ąŠčé ą┐ąĄčĆąĄą┐ą░ą┤ą░ ą▓čŗą▒ąŠčĆą║ąĖ SPI_CLK ą┤ąŠ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
1 |
|
1 |
|
ąĮčü |
| ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ |
| tSDSCIM |
ąśąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ~SPI_SEL=0 ą┤ąŠ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ SPI_CLK |
(0.5 x tSCLK0) ŌĆō 2.5 |
|
(0.5 x tSCLK0) ŌĆō 1.5 |
|
ąĮčü |
tSPICHM
|
ąśąĮč鹥čĆą▓ą░ą╗ SPI_CLK=1 1 |
(0.5 x tSPICLKPROG) ŌĆō 1.5 |
|
(0.5 x tSPICLKPROG) ŌĆō 1.5 |
|
ąĮčü |
| tSPICLM |
ąśąĮč鹥čĆą▓ą░ą╗ SPI_CLK=0 1 |
| tSPICLK |
ą¤ąĄčĆąĖąŠą┤ SPI_CLK 1 |
tSPICLKPROG ŌĆō 1.5 |
|
tSPICLKPROG ŌĆō 1.5 |
|
ąĮčü |
| tHDSM |
ąśąĮč鹥čĆą▓ą░ą╗ ąŠčé ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ SPI_CLK ą┤ąŠ ~SPI_SEL=1 |
(0.5 x tSCLK0) ŌĆō 2.5 |
|
(0.5 x tSCLK0) ŌĆō 1.5 |
|
ąĮčü |
| tSPITDM |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ2 |
(STOP x tSPICLK) ŌĆō 1.5 |
|
(STOP x tSPICLK) ŌĆō 1.5 |
|
ąĮčü |
| tDDSPIDM |
ąśąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ SPI_CLK ą┤ąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ (ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ) |
|
2.5 |
|
2 |
ąĮčü |
| tHDSPIDM |
ąśąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ SPI_CLK ą┤ąŠ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ (čāą┤ąĄčƹȹ░ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ) |
-4.5 |
|
-3.5 |
|
ąĮčü |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą┐ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╝čā ą┐ąĄčĆąĖąŠą┤čā, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ tSPICLKPROG, čüą╝. čéą░ą▒ą╗ąĖčåčā 18 čĆą░ąĘą┤ąĄą╗ą░ "Clock Related Operating Conditions" ąĖąĘ ą┤ą░čéą░čłąĖčéą░ .
2. ąŚąĮą░č湥ąĮąĖąĄ STOP čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ SPI_DLY.STOP.
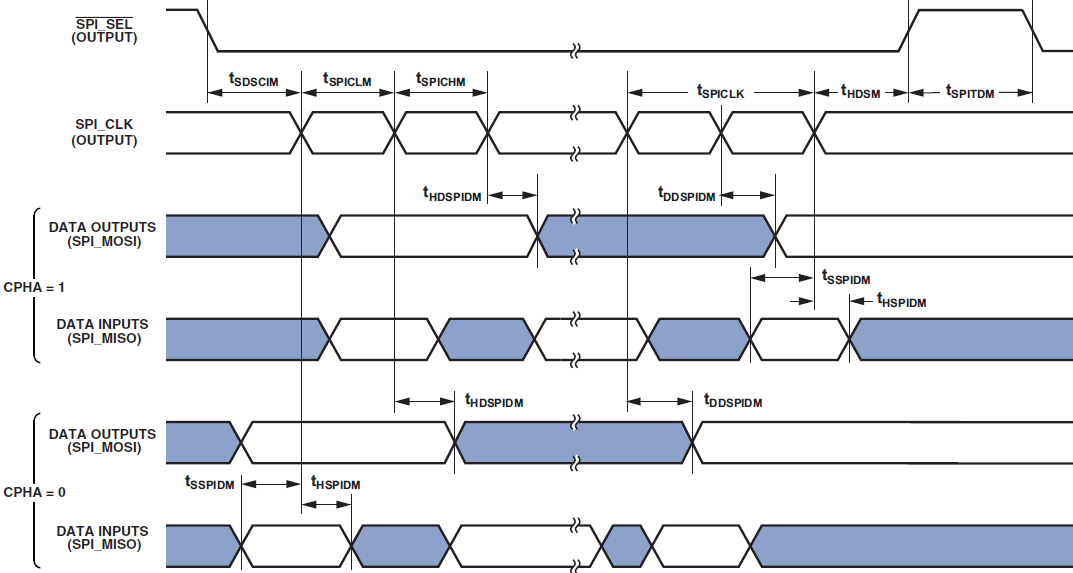
ąóą░ą▒ą╗ąĖčåą░ 55 ąĖ čĆąĖčü. 32 ąŠą┐ąĖčüčŗą▓ą░čÄčé ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠčĆčéą░ SPI slave. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā:
ŌĆó ąÆ ą┤ą▓ąŠą╣ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (dual mode) čüąĖą│ąĮą░ą╗ SPI_MISO čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ąČąĄ ą║ą░ą║ ą▓čŗčģąŠą┤ (ąĖ MOSI, ąĖ MISO čĆą░ą▒ąŠčéą░čÄčé ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ).
ŌĆó ąÆ čüč湥čéą▓ąĄčĆąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (quad mode) čüąĖą│ąĮą░ą╗čŗ SPI_MISO, SPI_D2 ąĖ SPI_D3 čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čŗčģąŠą┤čŗ.
ŌĆó ąÆ ą┤ą▓ąŠą╣ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ SPI_MOSI čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤ (ąĖ MOSI, ąĖ MISO čĆą░ą▒ąŠčéą░čÄčé ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ).
ŌĆó ąÆ čüč湥čéą▓ąĄčĆąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čüąĖą│ąĮą░ą╗čŗ SPI_MOSI, SPI_D2 ąĖ SPI_D3 čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čģąŠą┤čŗ.
ŌĆó ąÆ čĆąĄąČąĖą╝ąĄ SPI slave čéą░ą║čéčŗ SPI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ master, ąĖ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ fSPICLKEXT:
1
tSPICLKEXT = ----------
fSPICLKEXT
ąóą░ą▒ą╗ąĖčåą░ 55. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčĆčéą░ SPI ą▓ čĆąĄąČąĖą╝ąĄ Slave.
ą¤ą░čĆą░ą╝ąĄčéčĆ
|
ą×ą┐ąĖčüą░ąĮąĖąĄ
|
VDD_EXT 1.8V
|
VDD_EXT 3.3V
|
ąĢą┤.
|
| MIN |
MAX |
MIN |
MAX |
| ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ |
tSPICHS
|
ąśąĮč鹥čĆą▓ą░ą╗ SPI_CLK=1 1 |
(0.5 x tSPICLKEXT) ŌĆō 1.5 |
|
(0.5 x tSPICLKEXT) ŌĆō 1.5 |
|
ąĮčü |
| tSPICLS |
ąśąĮč鹥čĆą▓ą░ą╗ SPI_CLK=0 1 |
| tSPICLK |
ą¤ąĄčĆąĖąŠą┤ SPI_CLK 1 |
tSPICLKEXT ŌĆō 1.5 |
|
tSPICLKEXT ŌĆō 1.5 |
|
ąĮčü |
| tHDS |
ąśąĮč鹥čĆą▓ą░ą╗ ąŠčé ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ SPI_CLK ą┤ąŠ ąĮąĄ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ~SPI_SS |
5 |
|
5 |
|
ąĮčü |
| tSPITDS |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ (ąĮąĄ SPIHP) |
1.5 x tSCLK0 |
|
1.5 x tSCLK0 |
|
ąĮčü |
| tSPITDS |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ (SPIHP) |
3 x tSCLK0 |
|
3 x tSCLK0 |
|
ąĮčü |
| tSDSCI |
ąśąĮč鹥čĆą▓ą░ą╗ ąŠčé ą░ą║čéąĖą▓ą░čåąĖąĖ ~SPI_SEL ą┤ąŠ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ SPI_CLK |
11.5 |
|
11.5 |
|
ąĮčü |
| tSSPID |
ąśąĮč鹥čĆą▓ą░ą╗ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ SPI_CLK (čāčüčéą░ąĮąŠą▓ą║ą░ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ) |
1.5 |
|
1 |
|
ąĮčü |
| tHSPID |
ąśąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ SPI_CLK ą┤ąŠ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▓čģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
3.3 |
|
3 |
|
ąĮčü |
| ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ |
| tDSOE |
ąśąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą░ą║čéąĖą▓ą░čåąĖąĄą╣ ~SPI_SS ą┤ąŠ ą░ą║čéąĖą▓ą░čåąĖąĖ ą▓čŗčģąŠą┤ą░ |
0 |
17.5 |
0 |
14.5 |
ąĮčü |
| tDSDHI |
ąśąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ą┤ąĄą░ą║čéąĖą▓ą░čåąĖąĄą╣ ~SPI_SS ą┤ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą▓čŗčģąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ |
0 |
13 |
0 |
11.5 |
ąĮčü |
| tDDSPID |
ąśąĮč鹥čĆą▓ą░ą╗ ąŠčé ą┐ąĄčĆąĄą┐ą░ą┤ą░ SPI_CLK ą┤ąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ (ąĘą░ą┤ąĄčƹȹ║ą░ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ) |
|
17.5 |
|
14.5 |
ąĮčü |
| tHDSPID |
ąśąĮč鹥čĆą▓ą░ą╗ ąŠčé ą┐ąĄčĆąĄą┐ą░ą┤ą░ SPI_CLK ą┤ąŠ ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗčģ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ (ą▓čĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ) |
2.5 |
|
2.5 |
|
ąĮčü |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: čŹčéą░ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčāčÄ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčāčÄ čłąĖčĆąĖąĮčā ąĖą╗ąĖ ą┐ąĄčĆąĖąŠą┤, ąĮą░ ą║ąŠč鹊čĆčŗą╣ ąĖą╝ąĄąĄčéčüčÅ ą┤ąŠą┐čāčüą║, čāčćąĖčéčŗą▓ą░čÄčēąĖą╣ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ čéą░ą║č鹊ą▓ ąĖą╗ąĖ ąĖčģ ą┤čĆąŠąČą░ąĮąĖąĄ ąĮą░ ą▓ąĮąĄčłąĮąĄą╝ čüąĖą│ąĮą░ą╗ąĄ SPI_CLK. ąöą╗čÅ ą▓ąĮąĄčłąĮąĄą│ąŠ SPI_CLK ąĖą┤ąĄą░ą╗čīąĮčŗą╣ ą╝ą░ą║čüąĖą╝čāą╝ čćą░čüč鹊čéčŗ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ fSPICLKTEXT ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ 18 čĆą░ąĘą┤ąĄą╗ą░ "Clock Related Operating Conditions" ą┤ą░čéą░čłąĖčéą░ [1].

ąöčĆčāą│ąĖąĄ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ (čüąĖą│ąĮą░ą╗ SPI_RDY čĆąĄąČąĖą╝ąŠą▓ Master ąĖ Slave, čĆąĄąČąĖą╝ ą▓čŗčģąŠą┤ą░ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ Master ąĖ Slave ąĖ čé. ą┤.) čüą╝. ą▓ ą┤ą░čéą░čłąĖč鹥 [1].
[ąĪčüčŗą╗ą║ąĖ]
1. Blackfin+ Core Embedded Processor ADSP-BF700/701/702/703/704/705/706/707 site:analog.com.
2. ADSP-BF70x Blackfin+ Processor Hardware Reference site:analog.com.
3. ąśąĮč鹥čĆč乥ą╣čü SPI. |



